
Lecciones Calculo Vectorial

of 172
-
Upload
javier-contreras -
Category
Documents
-
view
268 -
download
4
Transcript of Lecciones Calculo Vectorial
-
7/21/2019 Lecciones Calculo Vectorial
1/172
DOCE LECCIONES DE C ALCULO VECTORIAL
Ernesto Acosta GempelerBernarda Aldana G omez
Escuela Colombiana de Ingeniera Julio Garavito
-
7/21/2019 Lecciones Calculo Vectorial
2/172
ii
-
7/21/2019 Lecciones Calculo Vectorial
3/172
Indice general
1. Vectores en R 2 y R 3 1
2. Ecuaciones de supercies en el espacio 17
3. Funciones vectoriales 35
4. Funciones de varias variables 59
5. Diferenciaci on Parcial 73
6. Regla de la cadena 89
7. Extremos de funciones 101
8. Integrales m ultiples 113
9. Integrales m ultiples 129
10.Campos vectoriales 139
11.Divergencia y rotacional 151
12.Teoremas Fundamentales 163
iii
-
7/21/2019 Lecciones Calculo Vectorial
4/172
iv INDICE GENERAL
-
7/21/2019 Lecciones Calculo Vectorial
5/172
LECCION 1
Vectores en R 2 y R 3
Hacemos un recuento muy r apido de los conceptos fundamentales de coordenadas depuntos en el plano y en el espacio y de vectores bidimensionales y tridimensionales,as como de las operaciones entre vectores.
Para localizar puntos en el plano, se introducen dos ejes numericos perpendicularesentre s, cuyo punto O de intersecci on es el origen de los ejes numericos, es decir, elpunto con coordenada cero en cada eje numerico. A uno de estos ejes lo designamoseje X y al otro eje Y . Estos dos ejes numericos denen en el plano un sistema de coordenadas cartesianas rectangulares . Las coordenadas ( x, y ) de un punto P en elplano se obtienen proyect andolo ortogonalmente sobre los ejes X y Y , siendo x la
coordenada de la proyeccion sobre el eje X y y la coordenada de la proyeccion sobreel eje Y . La notaci on P (x, y ) signica el punto P de coordenadas ( x, y ).
1
-
7/21/2019 Lecciones Calculo Vectorial
6/172
2 LECCI ON 1. VECTORES EN R 2 Y R 3
(x, y)y
x X
Y
Figura 1.1
Dada una pareja de n umeros reales ( x, y ), se ubica en el eje X el punto P x de coor-
denada x y en el eje Y el punto P y de coordenada y. La recta perpendicular al ejeX que contiene al punto P x y la recta perpendicular al eje Y que contiene al puntoP y se intersectan en un punto P del plano. Este punto tiene coordenadas ( x, y ), yaque las proyecciones de P sobre los ejes numericos X y Y son los puntos P x y P ycon coordenadas x y y respectivamente.
P (x, y)P y
P x X
Y
Figura 1.2
El mismo procedimiento se puede emplear para introducir un sistema de coordenadascartesianas rectangulares en el espacio. En este caso tendremos tres ejes numericos
X , Y , Z , perpendiculares entre si. Las coordenadas ( x,y,z ) de un punto P en elespacio, se obtienen con el mismo procedimiento.
-
7/21/2019 Lecciones Calculo Vectorial
7/172
3
(x,y,z )y
x
z
Y
Z
X
Figura 1.3
Dos puntos P y Q denen los segmentos de recta dirigidos PQ y QP . Estos dossegmentos de recta se diferencian unicamente por su orientaci on. Es decir, el seg-mento dirigido PQ se supone recorrido desde P hasta Q, y el segmento dirigido QPse supone recorrido desde Q hasta P .
Si introducimos un sistema de coordenadas en el espacio y ( x1 , y1, z1), (x2, y2, z2)son las coordenadas de P y Q, respectivamente, los tres n umeros x2 x1, y2 y1y z2 z1 , son las componentes escalares del segmento dirigido PQ . Observese quecada una de las componentes del segmento dirigido QP es el opuesto de la com-ponente correspondiente del segmento dirigido PQ , de aqu la importancia de laorientaci on de los segmentos dirigidos. Dos segmentos dirigidos son equivalentes sisus componentes escalares correspondientes son iguales. No es difcil mostrar que siP , Q, R y S son cuatro puntos no colineales, los segmentos dirigidos PQ y RS sonequivalentes si, y solamente si, el cuadril atero P QSR es un paralelogramo.
La igualdad de las componentes escalares correspondientes entre segmentos dirigidoses una relaci on de equivalencia y cada clase de equivalencia es un vector geometrico .Es decir, un vector (en este caso tridimensional) est a representado por un segmen-to dirigido PQ , o por cualquier otro segmento dirigido PQ equivalente. As, unvector est a completamente determinado por las componentes escalares de cualquier
segmento dirigido que lo representa. Se usa frecuentemente la notaci on a,b,c paradenotar el vector con componentes escalares a, b y c y para notar los vectores lasletras con tipo negrita, por ejemplo, u , v , etc. En adelante para decir que el vector
-
7/21/2019 Lecciones Calculo Vectorial
8/172
4 LECCI ON 1. VECTORES EN R 2 Y R 3
v tiene componentes escalares x,y,z , escribiremos v = x,y,z .
Sea v el vector representado por el segmento dirigido OP , donde O es el origen delsistema de coordenadas cartesianas. Si ( x,y,z ) son las coordenadas del punto P , en-tonces x,y,z son las componentes escalares del vector v , ya que las coordenadasdel punto O son (0, 0, 0). El punto P dene un paraleleppedo rectangular de carasparalelas a los planos coordenados, donde una de sus diagonales es el segmento OP .Las dimensiones de esta caja rectangular son |x|, |y| y |z| y por consiguiente la lon-gitud del segmento OP es |OP | = x2 + y2 + z2 . Este ultimo n umero representaadem as la magnitud v del vector v y la distancia d( O, P ) del punto O al puntoP . Ahora bien, si el vector v est a representado por el segmento dirigido RS , sien-do R(x1, y1, z1) y S (x2, y2, z2), entonces el vector v tendr a componentes escalares
x2 x1, y2 y1, z2 z1 y en consecuencia su magnitud ser av = (x2 x1)2 + ( y2 y1)2 + ( z2 z1)2, (1.1)
este n umero representa tambien la longitud |RS | del segmento RS y la distanciad(R, S ) entre los puntos R y S .
Usando las componentes escalares de los vectores se denen las operaciones de adi-cion, producto escalar y producto vectorial de vectores, as como multiplicaci on porescalar de la siguiente manera: Sean u = u1 , u2 , u3 y v = v1, v2 , v3 dos vectorestridimensionales y a un numero real. La suma de u y v es
u + v = u1 + v1, u2 + v2 , u3 + v3 , (1.2)el producto escalar de u y v es
u v = u1v1 + u2v2 + u3v3, (1.3)el producto vectorial de u y v es
u v = u2v3 u3v2, u3v1 u1v3, u1v2 u2v1 (1.4)
y la multiplicaci on del escalar a por el vector u es
au = au 1 , au 2, au 3 . (1.5)
-
7/21/2019 Lecciones Calculo Vectorial
9/172
5
Veremos m as adelante una formula mnemotecnica para recordar el producto vecto-rial.
Estas operaciones tienen propiedades bien conocidas, que se deducen de las propiedadesde la adici on y multiplicacion de los numeros reales, que son las que las denen. Porejemplo, es claro que la adicion de vectores es asociativa, conmutativa, que hayun elemento neutro (vector nulo) y que cada vector tiene su opuesto. Adem as, lamultiplicaci on por escalar distribuye sobre la adici on de vectores, entre otras. El pro-ducto escalar de vectores es conmutativo y distribuye sobre la adici on de vectores.En cambio, aunque el producto vectorial distribuye sobre la adici on de vectores noes conmutativo.
Dividir un vector por un escalar no nulo consiste en multiplicar el vector por elinverso multiplicativo de dicho escalar. Por ejemplo, podemos dividir a un vector nonulo por su magnitud para obtener un vector de magnitud 1, con la misma direcci ony sentido. Los vectores de longitud 1 se denominan vectores unitarios . Los ejemplosmas conocidos de vectores unitarios en R 3 son los vectores i = 1, 0, 0 , j = 0, 1, 0 ,y k = 0, 0, 1 .
Otra forma de denir el producto escalar de dos vectores, que normalmente se usacuando no estan referidos a un sistema de coordenadas es:
u v = u v cos (1.6)donde es el menor angulo formado por los dos vectores. De aqu podemos deducirque si = / 2 se tiene que cos = 0 y por consiguiente u v = 0, y que si u y v sonvectores no nulos y u v = 0 entonces = / 2 . Es decir, dos vectores no nulos son ortogonales si, y solo si, su producto escalar es cero .
Al proyectar ortogonalmente el vector u sobre el vector v se obtiene un vector de-nominado el vector proyeccion, este vector tiene la misma direcci on del vector v , sumagnitud es | u cos | y el sentido depende del angulo , si 0 < < / 2 tiene elmismo sentido de v y si / 2 < < tiene el sentido opuesto. As el vector proyecci onde u sobre v es
proy v u = u cos vv
= u v
v 2v, (1.7)
-
7/21/2019 Lecciones Calculo Vectorial
10/172
6 LECCI ON 1. VECTORES EN R 2 Y R 3
u
v v
u
proy v uproy v u
Figura 1.4
al escalar u cos se le denomina la componente escalar de u en la direcci on de vcomp v u = u cos =
u vv
. (1.8)
Otro hecho geometrico muy util: Claramente el area del paralelogramo generadopor los vectores u y v es u v sen , donde es el angulo entre u y v , y es facilmostrar que
u v = u v sen , (1.9)de aqu se deduce que dos vectores no nulos son paralelos si y s olo si su productovectorial es el vector nulo , que es el unico vector cuya magnitud es cero. Adem assi recordamos que u v es ortogonal tanto a u como a v y que el volumen de unparaleleppedo es igual al area de la base multiplicada por la altura , podemos
calcular el volumen del paraleleppedo formado por tres vectores u , v y w como:
vol(u , v , w) = u v w cos = ( u v) w
(1.10)
siendo el angulo entre u v y w .Uno de los papeles m as importantes de los sistemas de coordenadas es que nos per-miten escribir de manera algebraica las condiciones geometricas que denen lugaresde puntos en el plano o en el espacio. Un lugar geometrico de puntos es un conjuntode puntos que esta denido por una, o varias condiciones, por lo general de car actergeometrico. La escritura de las condiciones geometricas en terminos de las coorde-
nadas de los puntos del lugar permite asignarle ecuaciones o inecuaciones que debenser satisfechas por las coordenadas de los puntos que los conforman.
-
7/21/2019 Lecciones Calculo Vectorial
11/172
7
Por ejemplo, la recta que pasa por un punto P y es paralela a a un vector v es ellugar geometrico de puntos Q tales que el segmento dirigido PQ es paralelo a v . Enotras palabras, un punto Q esta en esta recta si, y s olo si, su vector posici on es lasuma de OP y un multiplo escalar de v . As, la recta que pasa por P y tiene vectordirector v es el lugar geometrico de puntos Q tales que para alg un n umero real t setiene que
OQ = OP + tv
Si P tiene coordenadas ( a,b,c) y v = v1, v2 , v3 , un punto Q de coordenadas ( x,y,z )estar a en la recta si, y s olo si, sus coordenadas satisfacen la ecuaci on
x,y,z = a,b,c + t v1, v2 , v3para alg un n umero real t. Esta ultima es la ecuaci on vectorial de la recta que pasapor P y tiene vector director v. Las ecuaciones parametricas de esta recta son lastres ecuaciones que se obtienen de la igualdad de los dos vectores en la ecuaci onanterior
x = a + tv1, y = b + tv2, z = c + tv3.
De las ecuaciones parametricas se pueden escribir las ecuaciones simetricas al es-tablecer las relaciones que se obtienen entre las coordenadas de los puntos de la rectaal eliminar el par ametro. Estas son
x av1
= y b
v2=
z cv3
.
En realidad, estas son tres ecuaciones (cu ales?) que corresponden a planos quecontienen a la recta, dos a dos, sus intersecciones son la recta.
-
7/21/2019 Lecciones Calculo Vectorial
12/172
8 LECCI ON 1. VECTORES EN R 2 Y R 3
EJERCICIOS
1. Para cada par de puntos P y Q determine las componentes escalares de los
segmentos dirigidos PQ y QP .
a ) P (1, 2, 1) y Q(3, 1, 2).
b) P (1, 3, 4) y Q(6, 4, 7).c ) P (2, 5) y Q(1, 2).
2. En un plano con coordenadas cartesianas represente los puntos P (3, 5) yQ(2, 1) y dibuje:
a ) El segmento dirigido PQ .
b) Un segmento dirigido equivalente a PQ con punto inicial en el origen.
c ) Un segmento dirigido equivalente a QP con punto inicial en el origen.
d ) Un segmento dirigido equivalente a PQ con punto inicial en R(7, 2).3. En cada numeral determine si los segmentos PQ y RS son equivalentes, jus-
tique su respuesta.
a ) P (1, 1, 1), Q(2, 2, 2), R(2, 0, 1), S (3, 1, 2).b) P (0, 0, 0), Q(1, 3, 2), R(1, 0, 1), S (2, 3, 4).
4. Dados los puntos P (
1, 3), Q(2,
1) y R(
6, 5), determine todos los puntos
S del plano tales que P, Q, R y S sean los vertices de un paralelogramo.
5. Dados los puntos P ( p1 , p2, p3), Q(q 1, q 2, q 3) y R(r 1, r 2 , r 3), determine todos lospuntos S tales que P,Q, R y S sean los vertices de un paralelogramo.
6. Muestre que la suma de vectores es conmutativa.
7. Muestre que el producto escalar de dos vectores es conmutativo.
8. Muestre que el producto vectorial no es conmutativo ni asociativo. Que relaci onexiste entre los vectores u v y v u ?
9. Calcule la magnitud de cada uno de los siguientes vectores:(a) v = 2, 1 . (b) v = 2, 1, 0 . (c) v = 3, 2, 2 .(d) v = 0, 0, 1 . (e) v = 6, 4, 4 .
-
7/21/2019 Lecciones Calculo Vectorial
13/172
9
10. Sean v = 1, 5, 2 y w = 3, 1, 1 . Calcule(a) v w. (b) v + w. (c)
vv .
(d) 12 (v w). (e)
12 (v + w). (f ) 2 v + 4 w.(g) v 2 w.
11. Abrir la mano derecha, doblar los dedos me nique y anular, poner el dedopulgar perpendicular al ndice y al coraz on. As se ponen los dedos ndice,corazon y pulgar (en ese orden), orientados de acuerdo con la regla de la manoderecha. Una tripla de vectores ( u , v , w) en R 3 est an orientados de acuerdocon la regla de la mano derecha, si sus posiciones relativas est an de acuerdocon las posiciones relativas de los dedos ndice, coraz on y pulgar de la manoderecha descritas anteriormente. Por ejemplo, la tripla de vectores ( i, j, k),
representados en un sistema cartesiano dextr ogiro, est an orientados de acuerdocon la regla de la mano derecha. Pero si intercambiamos el orden de i y j,tendremos que cambiar a k por k, para que la nueva tripla este orientada porla regla de la mano derecha. Este cambio en el signo de k sugiere la utilizaci onde determinantes para vericar la orientaci on de una tripla de vectores, yaque cuando se intercambian dos las de una matriz su determminante cambiade signo. Observese que det( i, j, k) = 1 > 0 y que det( j, i, k) = 1 > 0. Estomuestra que basta encontrar el signo de det( u , v , w) para decidir si la tripla devectores ( u , v , w) est a orientada de acuerdo con la regla de la mano derecha. Esdecir, si det( u , v , w) > 0 entonces la tripla ( u , v , w) est a orientada de acuerdo
con la regla de la mano derecha, y, en caso contrario, no lo est a.El producto vectorial de dos vectores tambien se dene como: Un vector quees perpendicular a los dos vectores dados, que tiene la orientaci on dada porla regla de la mano derecha y cuya norma es el producto de las normas delos vectores y el seno del menor angulo formado por ellos. Muestre que estadenicion es equivalente a la dada en este texto.
12. Dados el punto C (1, 2, 5), determine las coordenadas de 3 puntos del espaciotales que la distancia de cada uno de ellos al punto C sea 4 unidades. Exis-ten m as puntos del espacio que cumplan la condici on? Existe un punto con
primera coordenada 3 que cumpla la condici on? Existe un punto con primeracomponente 8 que cumpla la condici on? C omo sabra usted si un punto decoordenadas ( x,y,z ) satisface la condici on?
-
7/21/2019 Lecciones Calculo Vectorial
14/172
10 LECCI ON 1. VECTORES EN R 2 Y R 3
13. Dado el punto C (a,b,c), determine las condiciones que deben satisfacer lascoordenadas de todos los puntos S (x,y,z ) del espacio para que CS = 4.Describa el lugar geometrico de dichos puntos.
14. Dados los puntos P (3, 1, 4), Q(9, 2, 3), R(1, 4, 7), determine 4 puntos talesque el vector PQ sea paralelo al vector cuyo punto inicial es R y punto nalel punto determinado. Existe alg un punto con primera coordenada 3 quecumpla la condici on? Existe alg un punto con primera coordenada 20 quecumpla la condici on? Existe alg un punto con primera coordenada 3 y segundacoordenada 5 que cumpla la condici on? Existen mas puntos del espacio quecumplan la condicion? Como sabra usted si un punto de coordenadas ( x,y,z )satisface la condici on?
15. Dados los puntos P (x1, y1, z1), Q(x2, y2, z2), R(a,b,c), determine las condi-ciones que deben satisfacer las coordenadas de todos los puntos S (x,y,z ) delespacio para que los vectores PQ y RS sean paralelos. Describa el lugar ge-ometrico de dichos puntos.
16. Dados los puntos P (x1, y1, z1), Q(x2, y2, z2), R(a,b,c), determine las condi-ciones que deben satisfacer las coordenadas de todos los puntos S (x,y,z ) delespacio para que los vectores PQ y RS sean perpendiculares. Describa el lugargeometrico de dichos puntos.
17. Determine el area del paralelogramo generado por los vectores u =
2, 1,
1
y v = 1, 1, 4 .18. Determine el area del paralelogramo que tiene vertices en los puntos (0 , 7, 4),
(2, 3, 6) y (1, 4, 5).19. Determine el area del triangulo que tiene vertices en los puntos (0 , 7, 4), (2, 3, 6)
y (1, 4, 5) .20. Determine el volumen del paraleleppedo generado por los vectores u = 2, 1, 1 ,
v = 1, 1, 4 y w = 1, 3, 2 .
21. Cuantos paraleleppedos diferentes pueden tener cuatro de sus vertices en lospuntos (1 , 2, 1), (5, 2, 2), (3, 1, 4) y (1, 1, 3)? Determine el volumen depor lo menos dos de ellos y justique por que se puede armar que todos tienen
-
7/21/2019 Lecciones Calculo Vectorial
15/172
11
el mismo volumen. Es alguno de estos paraleleppedos un paraleleppedo rec-to?
22. Sea P el paraleleppedo en R 3 denido por
P = {(x,y,z ) : 0 x a, 0 y b, 0 z c}.a ) Dibuje el paraleleppedo en un sistema de coordenadas cartesianas.
b) Determine los cosenos de los angulos entre la diagonal principal de P ysus lados y encuentre una identidad que los relacione.
c ) Determine los angulos entre la diagonal principal de P y sus caras (C omose dene el angulo entre un vector y un plano?).
d ) Determine los cosenos de los angulos formados por la diagonal principaly el segmento dirigido que va del origen al punto medio de cada una delas caras opuestas a los planos coordenados.
e ) Si el paraleleppedo no fuera recto, c omo determinara los cosenos delos angulos de sus lados con la diagonal?, Que relaci on existe entre ladiagonal, los cosenos de los angulos formados por la diagonal y las caras,el area de las caras y el volumen del paraleleppedo?
f ) Cu antos paraleleppedos diferentes pueden tener la misma diagonal?
23. En que posicion se encontrara un objeto si a partir del punto P (4, 7) se hadesplazado 7 unidades en la direcci on del vector
1, 3 ?
24. En que posicion se encontrara un objeto si a partir del punto P (2, 6, 4) seha desplazado 4 unidades en la direcci on del vector 2, 3, 6 ?
25. Ejemplos tpicos de vectores unitarios son los vectores i = 1, 0, 0 , j = 0, 1, 0 yk = 0, 0, 1 , que forman una base ortonormal del espacio de vectores tridimen-sionales, conocida como la base canonica. Como consecuencia de lo anteriortodo vector de R 3 se puede escribir como una combinaci on lineal de los vec-tores i, j y k , esto es v = a,b,c = ai + b j + ck. Se puede escribir todo vectorde R 3 como una combinacion de i y j unicamente? Justique su respuesta.
26. Sean v = 1, 5, 2 y w = 3, 1, 1 .a ) Determine el vector u tal que u + v + w = i.
-
7/21/2019 Lecciones Calculo Vectorial
16/172
12 LECCI ON 1. VECTORES EN R 2 Y R 3
b) Determine el vector u tal que u + v + w = 2 j + k .
c ) Existe un escalar m tal que m(v + 2 w) = k?
27. Calcule v w, v w, la componente escalar de v en la direccion de w y laproyecci on ortogonal de v sobre w, para cada uno de los pares de vectores vy w siguientes:
a ) v = 5, 1, 2 , w = 4, 4, 3 . b) v = i+2 j+ k, w = 3 i+6 j+3 k.c ) v = 1, 3, 2 , w = 7, 2, 10 . d ) v = i, w = 3 i + 2 j + 4 k.
28. Para cada par de vectores determine el angulo formado por ellos:
a ) v = 5, 1, 2 , w = 4, 4, 3 . b) v = 7, 2, 10 , w = 2, 6, 4 .c ) v = 2, 1, 4 , w = 1, 2, 0 . d ) v = i, w = 3 i + 2 j + 4 k
29. En cada numeral determine si v y w son o no perpendiculares. Justique surespuesta:
a ) v = 8, 4, 3 y w = 2, 1, 4 .b) v = 6, 0, 4 y w = 0, 2, 1 .
30. Demuestre cada una de las siguientes armaciones verdaderas o de un contrae- jemplo de las que son falsas:
a ) Si u v = u w, entonces v = w.b) Si v w = 0 para todo v, entonces w = 0.c ) Si u v = u w para todo u, entonces v = w.d ) v w v w para todo v y w.e ) Si v w = 0 para todo w en R 3, entonces v = 0.
31. Sean , y los angulos entre un vector no nulo v en R 3 y los vectores i, j,
y k, respectivamente. Muestre que cos2
+ cos2
+ cos2
= 1.(Nota: , , son los angulos directores de v, y cos , cos , cos son loscosenos directores de v.)
-
7/21/2019 Lecciones Calculo Vectorial
17/172
13
32. En cada numeral calcule u (v w) y u (v w)a ) u = 1, 1, 1 , v = 3, 0, 2 , w = 2, 2, 2 .b) u = 1, 0, 2 , v = 1, 0, 3 , w = 2, 0, 2 .
33. Calcule (u v) (w z) si u = 1, 1, 1 , v = 3, 0, 2 , w = 2, 2, 2 , z = 2, 1, 4 .34. Si v y w son vectores unitarios en R 3, bajo que condiciones se tendra que
v w fuera tambien un vector unitario en R 3 ? Justique su respuesta.35. Demuestre que, para todo v y w en R 3 se tiene que:
a ) v w 2 + |v w |2 = v 2 w 2.b) Si v
w = 0 y v
w = 0, entonces v = 0 o w = 0.
c ) Los vectores u = v w + w v y z = v w w v son ortogonales.d ) El vector u = v w + w v biseca al angulo formado por los dos vectores.
36. Encuentre todas las soluciones de la ecuaci on vectorial a x = b en R 3,donde a = 0.
37. Muestre que para todos los vectores u y v en R 3, se tiene que
u (v u ) = ( u u )v (u v)u .
38. Demuestre la identidad de Jacobi :
u (v w) + v (w u ) + w (u v) = 0.
39. Se dice que tres vectores u , v, w estan en un mismo plano si los puntos P , Q yR que tienen respectivamente a u , v, w como vectores posici on, son coplanares junto con el origen O. Demuestre que u, v, w estan en un mismo plano si, ysolo si, u , v, w son linealmente dependientes.
40. Muestre que u , v, w estan en un mismo plano en R 3 si y solo si u (v w) = 0.41. Muestre que para todos los vectores u, v, w , z en R 3,
(u v) (w z) = ( z (u v))w (w (u v))z
-
7/21/2019 Lecciones Calculo Vectorial
18/172
14 LECCI ON 1. VECTORES EN R 2 Y R 3
y que(u v) (w z) = ( u (w z))v (v (w z))u
Tienen signicado geometrico estas propiedades?
42. Muestre que si u , v , w , z son vectores no nulos en R 3 que est an en un mismoplano entonces ( u v) (w z) = 0
43. Es verdad que si u , v, w, z son vectores no nulos en R 3 y (u v)(w z) = 0entonces estan en el mismo plano? Justique su respuesta.
44. Use vectores para demostrar que:
a ) Los puntos medios de los lados de cualquier cuadril atero son vertices deun paralelogramo.
b) Si A, B y C son los vertices de un tri angulo, A, B y C son los puntosmedios de los lados del tri angulo y P es un punto exterior del tri anguloentonces PA + P B + PC = PA + PB + PC .
c ) Las diagonales de un rombo son perpendiculares.
45. Use vectores para demostrar la ley de los cosenos y la ley de los senos.
46. Determine el trabajo realizado por la fuerza F = 3i j +2 k al mover un objetoa lo largo del segmento dirigido OP = i + 2 j + ek
47. Cuales son los subespacios vectoriales propios de R 2? Cu ales son los de R 3?Nota. No siempre somos concientes de la dualidad presente en R 2 y R 3, ya quealgunas veces son los conjuntos de puntos, del plano o del espacio, respectiva-mente, y algunas veces son los espacios vectoriales de vectores bidimensionalesy tridimensionales, respectivamente. Podramos en esta circunstancia, hacerun paralelo con lo que acontece en el libro El extra no caso del Dr. Jekyll y Mr.Hide del escritor ingles Robert Louis Stevenson.
48. Encuentre la matriz asociada a la transformaci on lineal de R 3 en R 3 , quecorresponde a la reexion con respecto al plano de ecuacion x = y. Encuentre la
que corresponde a la reexion con respecto al plano de ecuacion ax + by+ cz = 0.Es la reexi on con respecto al plano de ecuacion ax + by+ cz = d, d = 0, unatransformacion lineal de R 3 en R 3? Recuerde a Dr. Jekyll y a Mr. Hide.
-
7/21/2019 Lecciones Calculo Vectorial
19/172
15
49. En cada numeral escriba la ecuaci on vectorial, las ecuaciones parametricas ylas ecuaciones simetricas de la recta L que contiene el punto P y es paralelaal vector v:
a ) P (2, 3, 2), v = (5 , 4, 3)b) P (3, 1, 2), v = (2 , 8, 1)c ) P (2, 1, 3), v = (1 , 0, 1)
d ) P (0, 0, 0), v = (7 , 2, 10)50. Escriba las ecuaciones parametricas de la recta L que contiene los puntos P 1
y P 2:
a ) P 1(1,
2,
3), P 2(3, 5, 5)
b) P 1(4, 1, 5), P 2(2, 1, 3)51. Explique claramente el procedimiento solicitado en cada uno de los siguientes
numerales, suponiendo que se tiene las ecuaciones correspondientes:
a ) C omo de determina la distancia de un punto a una recta?
b) C omo se determina la distancia entre dos rectas paralelas?
c ) C omo se determina la distancia entre dos rectas que no son paralelas yno se cortan?
d ) C omo se determina la intersecci on entre dos rectas?52. Calcule la distancia del punto P a la recta L.
a ) P (1, 1, 1), L : x = 2 2t, y = 4t, z = 7 + tb) P (0, 0, 0), L : x = 3 + 2 t, y = 4 + 3 t, z = 5 + 4 t
53. Determine las coordenadas del punto de intersecci on (si lo hay) de las rectasdadas.
a ) x = 7+3 s, y = 43s, z = 75s y x = 1+6 t, y = 2+ t, z = 32tb) x 64 = y + 3 = z y x 113 = y 146 = z + 92
54. Determine la distancia entre las rectas dadas.
-
7/21/2019 Lecciones Calculo Vectorial
20/172
16 LECCI ON 1. VECTORES EN R 2 Y R 3
a ) x = 6 + s, y = 23s, z = 4 5s y x = 1+ 2 t, y = 2 + t, z = 3 4tb)
x 64
= y + 3 = z y x 3
8 =
y 62
= y 1
2z + 9
2
-
7/21/2019 Lecciones Calculo Vectorial
21/172
LECCION 2
Ecuaciones de supercies en el espacio
La introduccion de un sistema de coordenadas permite representar algebraicamentelugares geometricos de puntos mediante ecuaciones e inecuaciones. El procedimientoconsiste en encontrar las condiciones algebraicas que deben satisfacer las coordenadasde un punto para pertenecer al lugar. La representaci on algebraica de un lugargeometrico de puntos del espacio se puede hacer mediante ecuaciones, inecuacioneso un sistema de ecuaciones e inecuaciones con tres inc ognitas (las coordenadas de
los puntos). M as precisamente, una ecuaci on con tres inc ognitas representa un lugargeometrico de puntos del espacio si, y s olo si, las coordenadas de cada punto dellugar satisfacen la ecuacion y cada tripla de numeros reales que satisface la ecuaci onson las coordenadas de un punto del lugar.
Por ejemplo, el plano que pasa por un punto Q y tiene vector normal v , es ellugar geometrico de todos los puntos P del espacio para los que los vectores QP yv son ortogonales. Si las coordenadas de Q son (x0, y0, z0), las de P son (x,y,z ) yv = a,b,c , la condicion de ortogonalidad, es decir, el que QP v= 0, se escribe encoordenadas as:
a(x
x0) + b(y
y0) + c(z
z0) = 0 (2.1)
que es la ecuaci on que representa al plano que contiene a Q(x0, y0, z0) y tiene vectornormal v = a,b,c .
17
-
7/21/2019 Lecciones Calculo Vectorial
22/172
18 LECCI ON 2. ECUACIONES DE SUPERFICIES EN EL ESPACIO
El lugar geometrico de todos los puntos P (x,y,z ) del espacio cuya distancia a unpunto jo Q(x0, y0, z0) es un numero real positivo r , es la supercie de una esferade radio r y centro Q. Como lo vimos en la leccion anterior, la condicion geometricala distancia de P a Q es r, se escribe algebraicamente as:
(x x0)2 + ( y y0)2 + ( z z0)2 = r, o, (x x0)2 + ( y y0)2 + ( z z0)2 = r 2(2.2)Esta es precisamente la ecuaci on que representa dicha supercie.
X
Y
Z
Figura 2.1
Sea una curva en un plano , la uni on de todas las rectas perpendiculares alplano que intersectan a la curva es la supercie cilndrica recta(o cilndro) condirectriz C . En otras palabras, la supercie cilndica recta denida por es el lugargeometrico de puntos P del espacio cuya proyecci on ortogonal sobre el plano est a en la curva . Por ejemplo, dada la circunferencia en el plano XY con centroen el origen y radio r , la union de todas las rectas perpendiculares al plano XY queintersectan la circunferencia es una supercie cilndrica circular recta. Un punto
P (x,y,z ) pertenece a esta supercie si, y solamente si, su proyecci on ortogonal sobreel plano XY es un punto de la circunferencia. Esto sucede unicamente cuando lascoordenadas x y y del punto P satisfacen la ecuaci on de la circunferencia . As, el
-
7/21/2019 Lecciones Calculo Vectorial
23/172
19
punto P (x,y,z ) est a en la supercie cilndrica recta denida por si y solamentesi, x2 + y2 = r2, que es precisamente la ecuacion que representa a la supercieen cuesti on. Observese que esta ecuaci on no impone ninguna restricci on sobre lacoordenada z del punto P .La supercie de la esfera y la supercie cilndrica circular recta son superciescuadr aticas (o cu adricas) ya que las ecuaciones que las representan son cuadr aticas.En general, si la ecuaci on de una supercie tiene forma
Ax2 + By 2 + Cz 2 + Dxy + Exz + F yz + Gx + Hy + Iz + J = 0 , (2.3)
donde las letras mayusculas son n umeros reales jos con la condici on de que A,B,C,D,E,F no sean todos nulos, se dice que la supercie es una supercie cuadr atica.Escogiendo convenientemente los ejes de coordenadas, es decir, transladando y rotan-
do los ejes de coordenadas originales, se puede demostrar que cualquier superciecuadr atica admite una de las dos formas de ecuaci on siguientes:
ax 2 + by2 + cz2 = d, con d = 1 , 1, o 0 (2.4)o
ax 2 + by2 = dz, con d = 1, 1, o 0. (2.5)Por ejemplo, xy1 = 0 es la ecuaci on de una supercie cilndrica recta cuya directrizes la hiperbola en el plano XY de igual ecuaci on, pero rotando 45 grados los ejes X y Y en el sentido contrario al movimiento de las manecillas del reloj y dejando joel eje Z , la ecuacion de la misma supercie es x2
y2 = 2, en la nuevas coordenadas
X Y Z . Se ha usado la sustitucion x = x2 y2 2 , y = x2 + y2 2 , que nos d a las nuevas
coordenadas a partir de las primeras.Estas supercies se clasican segun los signos de los coecientes. Por ejempo, si loscoecientes en (2.4) son todos distintos de cero, la supercie ser a un elipsoide si a, b,c y d son positivos; un hiperboloide elptico de una sola hoja , si a, b y d son positivosy c es negativo; un hiperboloide elptico de dos hojas , si a y b son positivos y c y dson negativos; una supercie conica si a y b son positivos, c es negativo y d es cero.Si los coecientes en (2.5) son distintos de cero, la supercie ser a un paraboloide elptico si a y b tienen el mismo signo y un paraboloide hiper olico si a y b son de
signos contrarios. Que supercies ser an aquellas en las que coecientes en (2.4) y(2.5) se anulan?
-
7/21/2019 Lecciones Calculo Vectorial
24/172
20 LECCI ON 2. ECUACIONES DE SUPERFICIES EN EL ESPACIO
Una forma de representar gr acamente una supercie a partir de su ecuaci on, es bus-cando informacion de los cortes de la supercie con planos (frecuentemente paralelosa los planos coordenados). Por ejemplo, si se intersecta la supercie cuadr atica deecuacion z = x2 + y2 con un plano de ecuacion z = k, k > 0, se obtiene la ecuaci onx2 + y2 = k que para cada valor de k es la ecuacion de una circunferencia en el planoz = k con centro en el punto (0 , 0, k). Por otro lado, si se intersecta la superciecon un plano de ecuacion x = k, se obtiene z = y2 + k2 que para cada valor de kes la ecuacion de una parabola en el plano x = k. Es decir, la interseccion de lasupercie con el plano x = k es una parbola que abre en el sentido positivo del ejeZ , al intersectar la supercie con un plano de ecuaci on y = k tambien se obtieneuna parabola. Dibujando simultaneamente estas circunferencias y par abolas paradiferentes valores de k, se obtiene un bosquejo de la supercie en el espacio, que es
un paraboloide circular con eje de simetra el eje Z .
Las curvas de interseccion obtenidas con este procedimiento se conocen como trazas .Las trazas que se obtienen con planos paralelos a los planos coordenados se suelenllamar trazas paralelas a los planos coordenados , las paralelas al plano XY , trazas horizontales y las paralelas a los plano XZ o a Y Z , se suelen llamar trazas verticales .Las trazas horizontales de la supercie de ecuaci on z = x2 + y2 est an determinadaspor el siguiente sistema de ecuaciones:
x2 + y2 = k,
z = k. (2.6)
k = 14
k = 1k = 2k = 3k = 4
X
Y
Figura 2.2
-
7/21/2019 Lecciones Calculo Vectorial
25/172
21
Las trazas verticales est an determinadas por los siguiente sistemas de ecuaciones:
z = k2 + y2,
x = k, y y
z = x2 + k2,
y = k, (2.7)
respectivamente.
k = 0
k = 1
k = 2
k = 3
X
Z
Figura 2.3
k = 0
k = 1
k = 2
k = 3
Y
Z
Figura 2.4
X
Y
Z
C
Figura 2.5
Coordenadas cilndricas y coordenadas esfericas
-
7/21/2019 Lecciones Calculo Vectorial
26/172
22 LECCI ON 2. ECUACIONES DE SUPERFICIES EN EL ESPACIO
Ademas del sistema de coordenadas cartesianas para el espacio, com unmente se usanel sistema de coordenadas cilndricas y el sistema de coordenadas esfericas.
Un sistema de coordenadas cilndricas se introduce jando un plano en el espacioen el que se considera un sistema de coordenadas polares y un eje numerico W perpendicular a ese plano de tal forma que el origen del eje coincida con el polo delas coordenadas polares. Las coordenadas cilndricas de un punto P seran ( r,,w )donde ( r, ) son las coordenadas polares de la proyecci on ortogonal de P sobre elplano, y w es la coordenada de la proyeccion ortogonal de P sobre el eje numerico.
e j e c
i l n d r
i c o
e j e p o l a r
(r,,w )
r
w
W
Figura 2.6
Obviamente, la representaci on algebraica de un conjunto de puntos en el espacio,depende del sistema de coordenadas que se escoge, por ejemplo si se ha introducidoun sistema de coordenadas cartesianas en el espacio para representar un conjunto depuntos, y se quiere determinar la representaci on usando un sistema de coordenadascilndricas se puede hacer escogiendo cualquiera de los planos XY , XZ o Y Z paraponer coordenadas polares (de manera conveniente) y el eje numerico restante, Z , Y o X , respectivamente, para la tercera coordenada. En el primer caso, por ejemplo,haciendo coincidir el eje polar con el eje positivo X , se puede establecer la relacion
existente entre las coordenadas ( x,y,z ) y las coordenadas ( r,,w ) de un punto P .En efecto, basta recordar la relaci on que existe entre las coordenadas cartesianas ylas coordenadas polares de un punto en el plano, bajo las condiciones establecidas.
-
7/21/2019 Lecciones Calculo Vectorial
27/172
23
As, se tiene que
x = r cos , r [0, )y = r sen , [0, 2)z = w, w (, + )
yr = x2 + y2 = arctan y
xw = z.
(2.8)
Teniendo en cuenta esta equivalencia entre las coordenadas de los puntos en los dossistemas , la ecuaci on cartesiana de la supercie de la esfera con centro en el punto(0, 0, 0) (origen del sistema) y radio a, que es x2 + y2 + z2 = a2 corresponde a laecuacion cilndrica de la supercie de la esfera r 2 + z2 = a2.
Por otro lado, si se escoge poner el sistema polar en el plano XZ y el eje polar conel semieje positivo X , se tiene que
x = r sen y = wz = r cos .
(2.9)
En este caso la ecuaci on cilndrica de la supercie de la esfera es y2 + r 2 = a2.
Un sistema de coordenadas esfericas en el espacio se introduce jando un semiplano,el semiplano esferico , delimitado por una recta numerica, eje esferico , cuyo origenes el punto O. Las coordenadas esfericas ( ,,) de un punto P , se obtienen de-terminando la distancia del origen O al punto P , el angulo diedro (en sentido
dextr ogiro) formado por el semiplano esferico y el semiplano delimitado por el ejeesferico y que contiene al punto P , y el angulo que forma el segmento dirigido OPcon el semieje esferico positivo.
-
7/21/2019 Lecciones Calculo Vectorial
28/172
24 LECCI ON 2. ECUACIONES DE SUPERFICIES EN EL ESPACIO
e j e e s f
e r
i c o
P (,,)
O
s e m i p l
a n o e
s f e r i c
o
Figura 2.7
Al igual que en el caso anterior, se puede establecer una equivalencia entre las coor-denadas cilndricas y las coordenadas esferica de un punto en el espacio. Escogiendo,por ejemplo, el eje W como eje esferico, el semiplano delimitado por el eje W quecontiene el eje polar como semiplano esferico y el origen del sistema como el polo O,la relaci on entre las coordenadas ( r,, ) y las coordenadas ( ,,) de un punto P se obtiene de la siguiente manera. De acuerdo con la siguiente gr aca
P (,,)
O
Q
w
r
W
Figura 2.8
-
7/21/2019 Lecciones Calculo Vectorial
29/172
25
el tri angulo OQP es rectangulo y el angulo QOP es por lo tanto w = |OQ | = cos , y r = |QP | = sen . Observese que en estas circunstancias el angulo esel mismo en los dos sistemas de coordenadas. En resumen,
r = sen , [0, ) = , [0, 2)w = cos , [0, ]
y = r 2 + w2 = = arctan
rw
.(2.10)
Teniendo en cuenta lo establecido antes entre los sistemas de coordenadas cilndri-cas y cartesianas obtenemos la siguiente relaci on entre las coordenadas esfericas ycartesianas:
x = sen cos ,
y = sen sen ,z = cos ,
y
=
x2 + y2 + z2
= arctan y
x = arctan x2 + y2z . (2.11)
-
7/21/2019 Lecciones Calculo Vectorial
30/172
26 LECCI ON 2. ECUACIONES DE SUPERFICIES EN EL ESPACIO
EJERCICIOS
1. Determine la ecuaci on de la supercie de la esfera con centro en el origen yradio 2.
2. Determine la ecuacion de la supercie de la esfera con centro en el puntoC (3, 2, 4) y radio 5.
3. Determine la ecuacion de la supercie de la esfera con centro en el puntoC (1, 2, 5) y que contiene al origen.
4. Determine la ecuacion de la supercie de la esfera con centro en el punto(1, 3, 2) y tangente al plano X Y .
5. Determine la ecuacion de la supercie de la esfera con centro en el punto(1, 3, 2) y tangente al plano Y Z .6. Determine la ecuacion de la supercie de la esfera con centro en el punto
(1, 3, 2) y tangente a la supercie de la esfera de ecuaci on x2 2x + y2 + 4 y +z2 + 2 z + 2 = 0.
7. En cada numeral determine si la ecuaci on corresponde o no a la supercie deuna esfera. Si lo hace, encuentre su centro y su radio:
a ) x2 + y2 + z2 4x 6y 10z + 37 = 0b) x
2+ y
2+ z
2+ 2 x 2y 8z + 19 = 0c ) 2x2 + 2 y2 + 2 z2 + 4 x + 4 y + 4 z 44 = 0
d ) x2 + y2 z2 + 12 x + 2 y 4z + 32 = 0e ) x2 + y2 + z2 4x + 6 z = 3. f ) 2x2 + 2 y2 + 2 z2 + 4 x y + 3 z = 0.
8. En cada numeral escriba una ecuaci on del plano que contiene al punto Q y esperpendicular al vector n:
a ) Q(5, 1,
2), n =
4,
4, 3 b) Q(6,
2, 0), n =
2, 6, 4
9. En cada numeral escriba una ecuaci on del plano que contiene los puntos dados:
-
7/21/2019 Lecciones Calculo Vectorial
31/172
27
a ) (1, 0, 3), (1, 2, 1), (6, 1, 6) b) (3, 1, 3), (4, 4, 3), (0, 0, 1)10. Determine la ecuacion del plano paralelo al plano de ecuacion x
2y + 7 z = 4
y que contiene al punto (7 , 3, 4).11. Es posible determinar la ecuaci on de un plano que contiene al punto (2 , 1, 3),
es perpendicular al plano de ecuaci on x y + 2 z = 5 y al vector 1, 8, 4 ?12. Determine la ecuacion del plano que contiene al punto (2 , 1, 3), es perpen-
dicular al plano de ecuacion x y + 2 z = 5 y al vector 0, 8, 4 .13. Calcule la distancia del punto Q al plano P .
a ) Q(4, 1, 2), P : 3x y 5z + 8 = 0b) Q(0, 2, 0), P : 5x + 2 y 7z + 1 = 0
14. Determine la ecuaci on vectorial de la recta de intersecci on (si la hay) de losplanos dados:
a ) x + 3 y + 2 z 6 = 0, 2x y + z + 2 = 0b) 3x + y 5z = 0, x + 2 y + z + 4 = 0
15. Determine las coordenadas de los puntos de intersecci on (si los hay) de la rectax 6
4 = y + 3 = z con el plano x + 3 y + 2 z 6 = 0.
16. Las siguientes ecuaciones representan supercies cuadr aticas, para cada unadibuje las trazas y a partir de ellas haga un bosquejo de la gr aca. De lossiguientes nombres deduzca cu al le corresponde a cada ecuacion: Elipsoide,Paraboloide, Paraboloide Hiperb olico, Hiperboloide de una hoja, Hiperboloidede dos hojas, Cono de doble hoja.
a ) z = x2 + y2.
b) x2 + y2 = z2
c ) x2 + y2 = z2 1d ) x2 + y2 = z2 + 1
e ) x2 y2 = z f )
x2
a2 +
y2
b2 +
z2
c2 = 1
-
7/21/2019 Lecciones Calculo Vectorial
32/172
28 LECCI ON 2. ECUACIONES DE SUPERFICIES EN EL ESPACIO
17. Determine las coordenadas de los puntos de intersecci on de la esfera (x 3)2 +(y + 1) 2 + ( z 3)2 = 9 y la recta x = 1 + 2 t, y = 2 3t, z = 3 + t.
18. Describa la interseccion de las supercies de las esferas ( x 4)2 + ( y + 2) 2 +(z 4)2 = 9 y x2 + y2 + z2 = 9.19. Describa la interseccion de la supercie de la esfera x2 + y2 + z2 = 9 y el
cilindro x2 + y2 = 4, representela mediante ecuaciones.
20. Determine la traza del hiperboloide de una hoja x2
a 2 + y2
b2 z2
c2 = 1 en el planox = a, y la traza en el plano y = b.
21. Determine la traza del paraboloide hiperb olico x2
a 2 y2
b2 = zc en el plano XY .
22. Describa un procedimiento para encontrar la ecuaci on de la supercie de unaesfera que pasa por cuatro puntos no coplanares dados. Encuentre la ecuaci onde la supercie de la esfera que pasa por los puntos (0 , 0, 0), (0, 0, 2), (1, 4, 3)y (0, 1, 3).
23. Muestre que el hiperboloide de una sola hoja es una supercie doblementereglada, es decir, cada punto de la supercie est a en dos rectas contenidascompletamente en la supercie.
24. Muestre que el paraboloide hiperb olico es una supercie doblemente reglada.
25. Sea S la supercie de la esfera con radio 1 y centro (0 , 0, 1), y sea S , la su-
percie de la esfera S sin el punto N (0, 0, 2). Sea P (a,b,c) un punto arbitrarioen S . La recta que pasa por N y por P intersecta el plano xy en algun puntoQ(x,y, 0). Encuentre este punto Q en terminos de a, b y c. El punto Q es laproyecci on estereogr aca de P . Esta correspondencia identica S con R 2.
26. Cuando se est a acostumbrado a trabajar exclusivamente en sistemas de coorde-nadas cartesianas se diculta pensar en otros sistemas independientemente delos primeros y se tiende a pasar de forma mec anica, por ejemplo, de un sistemade coordenadas polares a un sistema de coordenadas cartesianas y viceversa,sin apreciar potencial del sistema de coordenadas polares para resover proble-
mas particulares. Se propone hacer los siguientes ejercicios sin cambiar a otrosistema de coordenadas, para darle sentido al sistema de coordenadas polaresindependientemente de los sistemas de coordenadas cartesianas.
-
7/21/2019 Lecciones Calculo Vectorial
33/172
29
a ) Que condicion deben satisfacer las coordenadas polares r y de un puntoP para estar en la recta perpendicular al eje polar que pasa por el puntode coordenadas polares (3 , 0)?
b) Que condicion deben satisfacer las coordenadas polares r y de un puntoP para estar en la recta paralela al eje polar que pasa por el punto decoordenadas poplares (1 , / 4)?
c ) Que condicion deben satisfacer las coordenadas polares r y de unpunto P para estar en la circunferencia de radio a y cuyo centro tienecoordenadas polares ( a, 0)?
d ) Que condicion deben satisfacer las coordenadas polares r y de unpunto P para estar en la circunferencia de radio a y cuyo centro tienecoordenadas polares ( a,/ 2)?
e ) Que condicion deben satisfacer las coordenadas polares r y de unpunto P para estar en la circunferencia de radio b y cuyo centro tienecoordenadas polares ( a, ), con b < a?
27. Encuentre las coordenadas (a) cilndricas y (b) esfericas de los puntos cuyascoordenadas cartesianas se dan, explicando de que manera hizo coincidir losdos sistemas:
a ) (2, 2 3, 1) b) (5, 5, 6)
c ) ( 21, 7, 0) d ) (0, 2, 2)28. Dado un sistema de coordenadas en el espacio donde las coordenadas de un
punto son ( ,, ), las supercies de ecuaci on = c1, = c2 o = c3se denominan supercies coordenadas y la intersecci on entre dos superciescoordenadas se denominan curvas coordenadas . Para cada uno de los sistemasestudiados describa las supercies coordenadas y las curvas coordenadas yhaga un bosquejo de sus gracas.
29. Describa el lugar geometrico representado por cada una de las siguientes ecua-ciones, en un sistema de coordenadas rectangulares, y haga un bosquejo de lagraca:
a ) x = 2
-
7/21/2019 Lecciones Calculo Vectorial
34/172
30 LECCI ON 2. ECUACIONES DE SUPERFICIES EN EL ESPACIO
b) y = / 4
c ) z = 1d ) x = y
30. Describa el lugar geometrico representado por cada una de las siguientes ecua-ciones, en un sistema de coordenadas cilndricas, y haga un bosquejo de lagraca:
a ) r = 2
b) = / 4
c ) w = 1d ) w = r
e ) r = cos f ) r = sen
31. Describa el lugar geometrico representado por cada una de las siguientes ecua-ciones, en un sistema de coordenadas esfericas, y haga un bosquejo de la gr aca:
a ) = 2
b) = / 4
c ) = 1
d ) = cos
e ) = sen
f ) = cos
g ) = sen
32. En cada uno de los siguientes numerales, describa el lugar geometrico de todoslos puntos Q que satisfacen la condicion dada y, para cada lugar geometrico,de una ecuacion utilizando un sistema de coordenadas tridimensional adecua-do.
a ) Para un punto P jo, la magnitud de PQ es 2.b) Para un punto P jo y una recta ja l, la distancia de P a Q es igual a
la distancia de Q a l (en el espacio).
-
7/21/2019 Lecciones Calculo Vectorial
35/172
31
c ) Para puntos P y A diferentes y jos, el angulo formado por los vectoresPA y PQ es 6 .
d ) Para puntos P , R y S jos, PQ es paralelo a RS .e ) Para puntos P , R y S jos, PQ es perpendicular a RS .
f ) Para puntos P y R jos, P , Q y R son vertices de un tri angulo equil atero.
g ) Para puntos P y R jos, P , Q y R son vertices de un tri angulo isosceles.
h ) Para puntos P y R jos tales que la magnitud de PR es 5 unidades, P ,Q y R son vertices de un tri angulo de area 10 unidades cuadradas.
i ) Dada una recta ja L y un puto P de la recta. el angulo formado por larecta y PQ es 6 .
j ) Dado un plano
P y una recta L perpendicular al plano, la distancia de Q
a la recta es igual a la distancia de Q al plano.
k ) Dado un plano P y una recta L perpendicular al plano, la distancia de Qa la recta es el doble de la distancia de Q al plano.
l ) Dado un plano P y un punto P exterior al plano, la distancia de P a Qes igual a la distancia de Q al plano.
m ) Dados dos puntos jos P y R y una constante K > PR la suma de lasdistancias de P a Q y de Q a R es igual a K .
33. En un sistema de coordenadas cartesianas determine una ecuaci on para el
conjunto de todos los puntos P (x,y,z ) del espacio tales que la suma de lasdistancias a los puntos F 1(2, 0, 0) y F 2(2, 0, 0) es 6.
34. En un sistema de coordenadas cartesianas determine una ecuaci on para elconjunto de todos los puntos P (x,y,z ) del espacio tales que la distancia de P al punto F (0, 0, 3) es igual a la distancia de P al plano de ecuacin z = 3.
35. En un sistema de coordenadas cilndricas determine una ecuaci on para elconjunto de todos los puntos P (r,,w ) tales que la distancia de P al pun-to F (0, 0, 3) es igual a la distancia de P al plano w = 5.
36. En un sistema de coordenadas cilndricas determine una ecuaci on para el con- junto de todos los puntos P (r,,w ) que pertenecen al plano perpendicular aleje polar, que contiene al punto Q(5, 0, 0).
-
7/21/2019 Lecciones Calculo Vectorial
36/172
32 LECCI ON 2. ECUACIONES DE SUPERFICIES EN EL ESPACIO
37. En un sistema de coordenadas cilndricas determine una ecuaci on para el con- junto de todos los puntos P (r,,w ) que pertenecen al plano paralelo tanto aleje polar como al eje W y que contiene al punto Q(5,
2, 0).
38. En un sistema de coordenadas cilndricas determine una ecuaci on para el con- junto de todos los puntos P (r,,w ) que pertenecen a la supercie de la esferacon centro en el polo y radio 3.
39. En un sistema de coordenadas cilndricas determine una ecuaci on para el con- junto de todos los puntos P (r,,w ) que pertenecen a la supercie de la esferacon centro en el punto C (4, 4 , 5) y radio 3.
40. En un sistema de coordenadas esfericas determine una ecuaci on para el con-
junto de todos los puntos P (,,) que pertenecen a la supercie c onica quetiene como eje de simetra el semieje esferico y angulo de la generatriz 6 .
41. En un sistema de coordenadas esfericas determine una ecuaci on para el con- junto de todos los puntos P (,,) que pertenecen a la supercie de la esferacon centro en el origen y radio 3.
42. En un sistema de coordenadas esfericas determine una ecuaci on para el con- junto de todos los puntos P (,,) que pertenecen a la supercie de la esferacon centro en el punto C (5, 2 ,
3 ) y radio 3.
43. En un sistema de coordenadas esfericas determine una ecuaci on para el con- junto de todos los puntos P (,,) que pertenecen al plano perpendicular aleje esferico y que contiene al punto Q(4, 0, 0).
44. Escriba las ecuaciones dadas en coordenadas (a) cilndricas, haciendo corre-sponder el eje Z con el eje W y el eje polar con el semieje positivo X y (b)esfericas, haciendo corresponder el eje Z con el eje esferico y el semiplanoesferico con el semiplano X Z en el cual x 0:
a ) x2 + y2 + z2 = 25 b) x2 + y2 = 2 y c ) x2 + y2 + 9 z2 = 36
45. Describa la interseccion de las supercies cuyas ecuaciones en coordenadasesfericas son = 2 y =
4 .
-
7/21/2019 Lecciones Calculo Vectorial
37/172
33
46. Muestre que para a = 0, la ecuaci on = 2a sin cos en coordenadas esfericasdescribe la supercie de una esfera con centro ( a, 0, 0) y radio |a|.
47. Sea P (a,, ) un punto en coordenadas esfericas, con a > 0 y 0 < < .Entonces P esta en la supercie de la esfera = a. Como 0 < < , elsegmento de recta desde el origen hasta P se puede extender hasta intersectar elcilindro dado por r = a en coordenadas cilndricas. Encuentre las coordenadascilndricas del punto de intersecci on.
48. Describa el tetrahedro s olido de vertices (0 , 0, 0), (2, 0, 0), (0, 3, 0), y (0, 0, 5)usando coordenadas cartesianas.
49. Represente el s olido en el espacio, de puntos con coordenadas cilndricas ( r,,w )tales que 1
r
2, / 6
/ 4 y 1
w
2.
50. Los siguientes solidos est an encerrados por supercies en el espacio. Describalosusando coordenadas cilndricas.
a ) Un cubo s olido de arista 1.
b) Un cilindro circular recto de altura 5 y radio 3.
c ) La supercie de una esfera de radio 4.
d ) La supercie de una esfera de radio 4 perforada simetricamente por uncilndro de radio 2.
e ) El solido dentro de la supercie de una esfera de radio 4 y fuera de lasupercie de la esfera de radio 2 de igual centro que la primera.
51. Sean P 1 y P 2 puntos cuyas coordenadas esfericas son ( 1, 1, 1) y (2, 2, 2),respectivamente. Sea v1 el vector desde el origen hasta P 1, y sea v2 el vectordesde el origen hasta P 2. Para el angulo entre v1 y v 2, muestre que
cos = cos 1 cos2 + sin 1 sin 2 cos( 2 1 ).
52. Muestre que la distancia d entre los puntos P 1 y P 2 con coordenadas cilndricas
(r 1 , 1, z1) y (r 2, 2, z2), respectivamente, es
d = r 21 + r 22 2r 1 r 2 cos( 2 1 ) + ( z2 z1)2 .
-
7/21/2019 Lecciones Calculo Vectorial
38/172
34 LECCI ON 2. ECUACIONES DE SUPERFICIES EN EL ESPACIO
53. Muestre que la distancia d entre los puntos P 1 y P 2 con coordenadas esfericas(1 , 1, 1) y (2, 2, 2), respectivamente, es
d = 21 + 22 21 2[sin 1 sin 2 cos( 2 1 ) + cos 1 cos2] .
-
7/21/2019 Lecciones Calculo Vectorial
39/172
LECCION 3
Funciones vectoriales
En esta lecci on estudiaremos funciones denidas en conjuntos especiales de R n de-nominados celdas.
Una 1-celda I es un intervalo cerrado [ a, b] de numeros reales 1, es decir,
I = [a, b] = {x R : a x b}. (3.1)Una 2-celda R es el producto cartesiano de dos 1-celdas [ a, b] y [c, d], es decir
R = [a, b] [c, d] = {(x, y) : a x b, c y d}. (3.2)Una 3-celda P es el producto cartesiano de tres 1-celdas [ a, b], [c, d] y [e, h ], es decir,
P = {(x,y,z ) : a x b, c y d, e z h} = [a, b] [c, d] [e, h ] . (3.3)1 Las 1-celdas seran los dominios de funciones vectoriales de una sola variable. Aunque, en los
libros de c alculo se consideran las funciones vectoriales denidas en dominios m as generales, enesta lecci on consideraremos los dominios de funciones vectoriales de una variable como 1-celdas.En algunos casos permitiremos tambien que las 1-celdas sean de las siguientes formas: ( a, b ), (a, b ],[a, b ), [a, b ], [a, + ), (a, + ), ( , b], ( , b) o ( , + ).
35
-
7/21/2019 Lecciones Calculo Vectorial
40/172
36 LECCI ON 3. FUNCIONES VECTORIALES
Una funci on vectorial 2 es una funci on denida en alguna celda y que toma valoresen el espacio de vectores bidimensionales o tridimensionales 3. La funcion vectoriales de una variable si su dominio es una 1-celda, de dos variables si su dominio esuna 2-celda y de tres variables si su dominio es una 3-celda.
Una funci on vectorial tridimesional de una variable es una funci on denida en una1-celda I que toma valores en R 3:
r : I R 3, dada por r(t) = x(t), y(t), z(t) (3.4)Por ser una funcion que toma valores en R 3, tiene tres funciones componentes, asaber, x, y, z. Cada una de estas es una funci on escalar denida en un intervaloI y que toma valores en R . Debido a esto, los conceptos estudiados en los cursos
de calculo diferencial e integral, para funciones reales de valor real se extiendennaturalmente a estas funciones vectoriales. Por ejemplo, si los lmites lm ta x(t),lm ta y(t) y lm ta z(t) existen, el lmite lm ta r (t) existe y
lmta
r (t) = lmta
x(t), lmta
y(t), lmta
z(t) . (3.5)
Como consecuencia de lo anterior la funci on vectorial r = r (t) es diferenciable en I si
cada una de sus componentes escalares lo es. Adem as, si las derivadas dxdt
(a), dydt
(a)
y dzdt
(a) existen, la derivada de la funci on vectorial r = r (t) en t = a es
drdt
(a) = dxdt
(a), dydt
(a), dzdt
(a) (3.6)
y, si las funciones componentes son continuas en a, la funcion r es continua en a.
Por otro lado, si cada una de las componentes escalares de r son integrables sobre[a, b], entonces r es integrable sobre [ a, b] y
ba r (t)dt = ba x(t)dt, ba y(t)dt, ba z(t)dt . (3.7)2 En realidad, una funci on vectorial es una funci on denida en algun conjunto y que toma valores
en algun espacio vectorial. Sin embargo, en estas lecciones trabajaremos con funciones vectorialesdenidas en celdas y con valores en R 2 o en R 3 .
3 En casos especiales podramos considerar tambien espacios de vectores unidimensionales
-
7/21/2019 Lecciones Calculo Vectorial
41/172
37
A partir de dos funciones vectoriales r (t) = x(t), y(t), z(t) y s(t) = x(t), y(t), z(t)denidas en un intervalo I se denen naturalmente en dicho intervalo las funcionesvectoriales
(r + s)( t) = x(t) + x(t), y(t) + y(t), z(t) + z(t) , (3.8)(r s)( t) = x(t) x(t), y(t) y(t), z(t) z(t) , (3.9)(r s)( t) = y(t)z(t) z(t)y(t), z(t)x(t) x(t)z(t), x(t)y(t) y(t)x(t) , (3.10)
la funcion escalar
(r s)( t) = x(t)x(t) + y(t)y(t) + z(t)z(t), (3.11)si f es una funci on escalar denida en el mismo intervalo, la funci on vectorial
f r (t) = f (t)x(t), f (t)y(t), f (t)z(t) , (3.12)si r es derivable en I , la funcion vectorial
r (t) = x(t), y(t), z (t) , (3.13)
y si existen las antiderivadas de las componentes, la familia de funciones vectoriales
r(t)dt = x(t)dt, y(t)dt, z(t)dt . (3.14)Supongamos ahora que r es diferenciable en su dominio. Para cada valor de t, el vec-
tor r (t) = x(t), y(t), z(t) se puede interpretar como el vector posici on de un puntoP de coordenadas ( x(t), y(t), z(t)). As, cuando t recorre la 1-celda I , el punto P describe una curva en el espacio, se dice en este caso que las ecuaciones parametricas de la curva son
x = x(t), y = y(t), z = z(t) (3.15)
o que r es una parametrizaci on de la curva.En otras palabras, el conjunto
P (x,y,z ) R 3 : OP = x(t), y(t), z(t) , t I , (3.16)
que es el conjunto de puntos que la funci on vectorial r se nala a partir del origencuando t recorre la 1-celda I , representa una curva en el espacio.
-
7/21/2019 Lecciones Calculo Vectorial
42/172
38 LECCI ON 3. FUNCIONES VECTORIALES
Por ejemplo, consideremos el segmento de recta AB, que es el conjunto de puntosP (x,y,z ) de la recta que pasa por A(a0, b0, c0) y B (a1, b1, c1) y que est an entre A yB . Esta recta tiene vector director
a1
a0, b1
b0, c1
c0 y por consiguiente las
coordenadas de P deben satisfacer las ecuaciones parametricas de la recta
x = a0 + t(a1 a0), y = b0 + t(b1 b0), z = c0 + t(c1 c0),o
x = (1 t)a0 + ta 1, y = (1 t )b0 + tb1, z = (1 t)c0 + tc1,imponiendo la condicion de que t este en [0 , 1] para garantizar que P este entre A y B.
Podemos as decir que la funci on vectorial
r (t) = (1 t)a0 + ta 1, (1 t)b0 + tb1, (1 t)c0 + tc1= (1 t) a0 , b0, c0 + t a1, b1 , c1= (1 t)OA + tOB
(3.17)
t [0, 1], parametriza el segmento de recta AB.
Parametricemos ahora la curva de intersecci on de dos supercies. Considerese lacurva de interseccion de la supercie cilndrica recta circular, de ecuaci on x2 + y2 =4, con el plano de ecuaci on z = x + 3. En otras palabras = {(x,y,z ) : x2 + y2 =4 z = x + 3 }. Si para alg un t [0, 2], (x,y,z ) satisface las ecuaciones x = 2 cos t,y = 2sen t, el punto P (x,y,z ) pertenecera a la supercie x
2+ y
2= 4, ya que, en
este caso, x2 + y2 = 4cos 2 t + 4 sen 2 t = 4. Si adem as, si z = (2cos t) + 3, el puntoP (x,y,z ) pertenecera al plano z = x + 3. As,
x = 2 cos t, y = 2 sen t, z = 2 cos t + 3 ,
con t [0, 2], son ecuaciones parametricas de y
r (t) = 2cos t, 2sen t, 2cos t + 3con t [0, 2], parametriza a .
Es de anotar que una curva no tiene una unica parametrizaci on; existen muchas fun-ciones vectoriales que recorren una curva determinada. Por ejemplo, las funcionesvectoriales r1(t) = cos ti + sen t j, con t [0, 2], y r2(t) = cos2 ti + sen2 t j, con
-
7/21/2019 Lecciones Calculo Vectorial
43/172
39
t [0, ], parametrizan la circunferencia con centro en (0 , 0) y radio 1.
Una funci on vectorial tridimesional 4 de dos variables es una funci on denida en una2-celda R que toma valores en R 3 :
r : R R 3, dada por r (u, v) = x(u, v), y(u, v), z(u, v) (3.18)Si R = [a, b] [c, d], para cada valor u0 [a, b] y cada valor v0 [c, d] se obtienenfunciones vectoriales de una sola variable
r 1 : [c, d] R 3, (3.19)y
r 2 : [a, b]
R 3, (3.20)
denidas por r1(v) = r(u0 , v) y r2(u) = r(u, v0), respectivamente. Si para todo(u0 , v0) R, las funciones r 1 y r 2 son diferenciables, el conjunto
P (x,y,z ) R 3 : OP = x(u, v), y(u, v), z(u, v) , (u, v) R , (3.21)que es el conjunto de puntos que la funci on vectorial r se nala desde el origen cuan-do (u, v) recorre R, representa una supercie en el espacio y se dice que r es unaparametrizacion de la supercie.
Para ilustrar lo dicho, parametricemos la supercie del plano limitada por lasgracas de las funciones f (x) = x2 y g(x) = x2 + 2 x + 4 (haga una graca de ).En este caso como la supercie es un subconjunto de R 2, la funcion vectorial quebuscamos toma valores en R 2, y por lo tanto tendr a solamente dos componentes.Procedemos de la siguiente manera:
1. Los puntos de interseccion de las gracas son (1, 1) y (2, 4). Todos los puntosde tienen abscisa x entre -1 y 2, por lo que podemos tomar como primerpar ametro u = x con 1 u 2.
2. Para cada u [1, 2] consideramos los puntos A(u, f (u)) en la gr aca de f yB (u, g(u)) en la gr aca de g.
4 Pueden considerarse tambien funciones vectoriales bidimensionales de dos variables, es decirdenidas en 2-celdas y que toman valores en R 2
-
7/21/2019 Lecciones Calculo Vectorial
44/172
40 LECCI ON 3. FUNCIONES VECTORIALES
2
1
A
B
Figura 1.3
3. El segmento AB, que est a contenido en la regi on, se puede parametrizar me-diante la funcion vectorial (ver (3.17))
r (u, v) = (1 v) u, f (u) + v u, g(u)= (1 v) u, u 2 + v u, u2 + 2 u + 4= u, u 2 2vu2 + 2 vu + 4 v
con 0 v 1, lo que nos da una parametrizaci on de limitada por las curvasdadas.
4. Observese que el dominio de r es [1, 2][0, 1]Parametricemos ahora la supercie que es la parte del paraboloide de ecuaci onz = x2+ y2 que se encuentra dentro del cilindro circular recto de ecuaci on x2+ y2 = 4,en otras palabras = (x,y,z ) : x2 + y2 4 z = x2 + y2 . Procedemos de lasiguiente manera:Para cada u R + , x = u cos v, y = u sen v con v variando entre 0 y 2 parametrizauna circunferencia con centro en el origen y radio u. Por lo tanto, si ademas de variarv, hacemos variar a u entre 0 y 2, x = u cos v, y = u sen v parametriza el disco en elplano XY con centro en el origen y radio 2. As, para cada punto ( x,y,z ) de existeun valor de u entre 0 y 2 y uno de v entre 0 y 2 tales que x = u cos v, y = u sen v y,
como z = x2 + y2 , entonces z = u2. En consecuencia, una parametrizaci on de es
r : [0, 2] [0, 2] R 3
-
7/21/2019 Lecciones Calculo Vectorial
45/172
41
denida porr (u, v) = u cos v, u sen v, u 2 .
Al igual que en la parametrizaci on de curvas, la parametrizaci on de una supercieno es unica, ya que existen muchas funci ones vectorial de dos variables que recorrenuna supercie determinada.
Una funci on vectorial tridimesional de tres variables es una funci on denida en una3-celda P que toma valores en R 3:
r : P R 3, dada por r (u,v,w ) = x(u,v,w ), y(u,v,w ), z(u,v,w ) (3.22)Si P = [a, b] [c, d] [e, h ], para cada valor u0 [a, b], cada valor v0 [c, d] y cadavalor w0 [e, h ] se obtienen funciones vectoriales de una sola variable
r 1 : [e, h ] R 3, (3.23)r 2 : [c, d] R 3 (3.24)
yr 3 : [a, b] R 3, (3.25)
denidas por r 1(w) = r (u0, v0, w), r 2(v) = r (u0 , v,w0) y r 3(u) = r (u, v0, w0), respec-tivamente. Si para todo ( u0 , v0, w0) P las funciones r 1 , r 2 y r 3 son diferenciables,el conjunto
P (x,y,z ) R 3 : OP = x(u,v,w ), y(u,v,w ), z(u,v,w ) , (u,v,w ) P , (3.26)que es el conjunto de puntos que la funci on vectorial r se nala desde el origen, rep-resenta una solido en el espacio.
En muchos casos es posible encontrar una funci on vectorial de tres variables querecorra un s olido determinado. Dicha funci on vectorial es una parametrizaci on de. Por ejemplo, la funci on vectorial r : [0, 2][0, 2] [0, ] R 3 denida por
r (u,v,w ) = u cos v sen w, u sen v sen w, u cos w , (3.27)es una parametrizaci on de la esfera solida = (x,y,z ) : x2 + y2 + z2 4 . Es claroque
= {(u cos v sen w, u sen v sen w, u cos w) : (u ,v,w ) [0, 2][0, 2] [0, ]}.(3.28)
-
7/21/2019 Lecciones Calculo Vectorial
46/172
42 LECCI ON 3. FUNCIONES VECTORIALES
Las funciones vectoriales y su calculo se usan frecuentemente en dos contextos queestudiaremos a continuaci on.
Geometra de las curvas y supercies
Supongamos que la curva est a parametrizada por la funci on vectorial diferenciable
r : I R 3, r(t) = x(t), y(t), z(t) . (3.29)Diremos que es regular si r (t) = 0, para todo t I y, en este caso, que el vector
T (t) = r (t)r (t)
, (3.30)
es el vector tangente unitario 5 a unitario en el punto P (x(t), y(t), z(t)). ComoT (t) y r (t) son paralelos, entonces r (t) tambien es un vector tangente a en elpunto P (x(t), y(t), z(t)). Una propiedad interesante de los vectores T (t) y T (t) esque son perpendiculares para todo t. Este hecho se deduce f acilmente al calcular laderivada de la funcion constante ( T T )(t) = 1. En efecto,
0 = ddt
[T (t) T (t)] = 2T (t) T (t) (3.31)Fijemos un punto P sobre una curva junto con una orientaci on determinada ytomemos otro punto Q sobre ella. El procedimiento que consiste en escribir lascoordenadas de Q en terminos de la longitud del arco de curva desde P hasta Q, seconoce como parametrizaci on por longitud de arco de la curva . La longitud de estearco es precisamente la distancia que hay que recorrer sobre la curva partiendo de P y llegando a Q. Encontrar directamente la parametrizaci on por longitud de arco deuna curva es muy difcil (si no imposible) por lo que se recurre a encontrar primerouna parametrizaci on conveniente y utilizarla para calcular la longitud del arco queparte de P y llega a Q. En cursos de c alculo anteriores se dedujo una f ormula para
5 En realidad, hay dos vectores tangentes unitarios. El otro se obtiene recorriendo en sentidocontrario mediante una parametrizaci on conveniente. Sin embargo, podramos preguntarnos si conotra parametrizaci on no sera posible obtener otros vectores tangentes unitarios. Podra ser?
-
7/21/2019 Lecciones Calculo Vectorial
47/172
43
calcular la longitud de estos arcos para curvas en el plano. De manera similar sepuede deducir una formula para calcular longitudes de curvas en el espacio.
Recordemos que la longitud de arco entre P (x(a), y(a)) y Q(x(t0), y(t0)) de unacurva en el plano, parametrizada por
x = x(t), y = y(t), t I , (3.32)
es
t0a x( )2 + y( )2d, (3.33)y para el caso de una curva en el espacio, haciendo un razonamiento an alogo,al que se hace para obtener esta f ormula, se tiene que la longitud de arco entre
P (x(a), y(a), z(a)) y Q(x(t0), y(t0), z(t0)) de una curva en el espacio parametriza-da por
x = x(t), y = y(t) z = z(t) t I . (3.34)
es
t0a x( )2 + y( )2 + z( )2d. (3.35)Observese que, siendo la funci on vectorial r (t) = x(t), y(t), z(t) una parametrizaci onde , la integral anterior se puede escribir en la forma
t0
a r ( ) d. (3.36)
Evidentemente el valor de esta integral depende de la posici on del punto Q sobre lacurva y por lo tanto es en realidad una funci on s = s(t):
s(t) = ta r ( ) d. (3.37)En el caso en que esta funci on fuese invertible (por lo general lo es), podemos escribirlas coordenadas del punto Q en terminos de la longitud de arco as:Q(x(t(s)) , y(t(s)) , z(t(s))), donde t = t(s) es la inversa de s. Se obtienen as la
parametrizacion por longitud de arco de :
x = x(s) = x(t(s)) , y = y(s) = y(t(s)) z = z(s) = z(t(s)) t I . (3.38)
-
7/21/2019 Lecciones Calculo Vectorial
48/172
44 LECCI ON 3. FUNCIONES VECTORIALES
La funci on vectorial que parametriza a es ahora
r (s) =
x(s), y(s), z(s) .
Tenemos entonces que r (t) = r (s(t)) y por lo tanto,
r (t) = ddt
[r (s(t))] = drds
(s(t))dsdt
(t) = drds
(s(t)) r (t)
ya que la derivada de s es precisamente r (t) , por el Teorema Fundamental delCalculo. De aqu que
drds
(s(t)) = r (t)
r (t) = T (t), (3.39)
lo que muestra que el vector tangente que se obtiene mediante parametrizaciones
por longitud de arco es unitario.
La direcci on de la curva en cada punto Q(x(t), y(t), z(t)) est a representada porel vector T (t). La curvatura de es una medida de la rapidez con que cambiala direccion de la curva con respecto al desplazamiento sobre ella. Esta medidaest a dada por
=dT (t(s))
ds (3.40)
donde s es el parametro de longitud de arco. Si desarrollamos la derivada dT (t(s))
dsusando la regla de la cadena obtenemos.
dT (t(s))ds
= dT
dt (t(s))
dtds
(s) = dT
dt (t(s))
1dsdt
(t(s))=
dTdt
(t(s))
r (t(s)).
De aqu se obtiene la relaci on
dTdt
(t(s)) = r (t(s)) (3.41)
que necesitaremos mas adelante.
La formula que dene a es dispendiosa de calcular, porque involucra el c alculodel vector tangente unitario y la reparametrizaci on por longitud de arco. Hay otras
-
7/21/2019 Lecciones Calculo Vectorial
49/172
45
maneras de calcular la curvatura sin necesidad de hacer esto. Como r = r T =dsdt
T , entonces
r = dsdt T + d2sdt2 T
y por lo tanto,
r r = (dsdt
)2T T = r 2 T T .
Calculando la norma de este producto, teniendo en cuenta que T y T son perpen-diculares y que T = r se obtiene
r r = r 2 T T = r
2 T = r 3 .
Despejando obtenemos una formula para calcular la curvatura de a partir de r ,r y r :
= r r r 3
. (3.42)
Consideremos ahora el vector N(t) = T (t)
T (t), que es un vector unitario perpen-
dicular a T (t). Es decir, N es un vector unitario perpendicular a en el puntoP (x(t), y(t), z(t)) que se conoce como vector normal unitario . Este vector indica ladireccion en la que se dobla curva. El plano que contiene al punto P (x(t), y(t), z(t))y es paralelo a T (t) y a N (t), se denomina plano osculador de en el puntoP (x(t), y(t), z(t)). Un vector normal a este plano es
B = T N , (3.43)que tambien es unitario y que se conoce como vector binormal de en el punto P .
En el plano osculador, la circunferencia que pasa por el punto P , tiene los mismovector tangente unitario y normal unitario que en P y tiene radio r = 1/ sedenomina circunferencia osculadora y es la que mejor aproxima a en el punto P ,esto ultimo quiere decir que la curva y la circunferencia tienen la misma curvaturaen el punto P .
Sea una supercie en R 3 parametrizada por una funci on vectorial de dos va-riables r : [a, b] [c, d] R 3 dada por r(u, v) = x(u, v), y(u, v), z(u, v) , y
-
7/21/2019 Lecciones Calculo Vectorial
50/172
46 LECCI ON 3. FUNCIONES VECTORIALES
P (x(u0, v0), y(u0 , v0), z(u0 , v0)) un punto de la supercie. Observese que las fun-ciones vectoriales
r 1 : [c, d]
R 3
yr 2 : [a, b] R 3
denidas por r 1(v) = r (u0 , v) y r 2(u) = r (u, v0), respectivamente, parametrizan doscurvas u 0 y v0 contenidas en la supercie y que se cortan en P . Al calcular lasderivadas de r 1 y r 2 en v0 y u0, respectivamente, obtenemos dos vectores tangentes au 0 y v0 , respectivamente, en el punto P . Explcitamente, estos vectores tangentesestan dados por
r 1(v0) = r v(u0 , v0) = xv(u0 , v0), yv(u0, v0), zv(u0 , v0) (3.44)y
r 2(u0) = r u (u0 , v0) = xu (u0, v0), yu (u0, v0), zu (u0, v0) (3.45)donde el subndice v indica que se ha derivado con respecto a la variable v, y elsubndice u indica que se ha derivado con respecto a la variable u. Como r v(u0, v0)y ru (u0 , v0) son tangentes a u 0 y v0 , respectivamente, en el punto P , tambien loson a la supercie en el punto P . Por consiguiente, el vector r v(u0 , v0) r u (u0, v0)es perpendicular a en el punto P , siempre y cuando rv(u0 , v0) r u (u0, v0) = 0.Diremos que es regular en P si r v(u0 , v0)
r u (u0 , v0)
= 0, y que es regular , si lo
es en todos sus puntos.
Si es una supercie regular parametrizada por una funci on vectorial de dos va-riables r : [a, b] [c, d] R 3 y P (x(u0 , v0), y(u0, v0), z(u0 , v0)) es un punto de ,entonces tiene plano tangente en P y cuya ecuaci on es
(r v(u0 , v0) r u (u0, v0)) x x(u0, v0), y y(u0, v0), z z(u0, v0) = 0 . (3.46)Al igual que en el caso de curvas en el espacio, se tiene el concepto de curvatura
de una supercie. En realidad hay dos conceptos de curvatura que se conocen comocurvatura gaussiana K (P ) de en P y la curvatura media H (P ) de en P . Enel contexto de este curso no profundizaremos m as en la geometra de supercies,
-
7/21/2019 Lecciones Calculo Vectorial
51/172
47
pero si daremos las expresiones explcitas de estas dos curvaturas en terminos de laparametrizacion de la supercie en los ejercicios.
Movimiento en el espacio
En el contexto de la cinematica la posici on de un objeto que se mueve en el espacio sepuede modelar mediante una funci on vectorial r = r (t), t I , tomando el parametrot como el transcurrir del tiempo.
As, la derivada r (t) = v(t) representa la velocidad del objeto que es la raz on decambio instant aneo de la posici on en el instante de tiempo t y contiene la informa-cion de la direcci on de su movimiento y la rapidez v(t) con que lo hace en cadainstante de tiempo t.
La derivada v(t) = a(t), representa la aceleraci on del objeto que es la raz on decambio instant aneo de la velocidad en cada instante de tiempo t y contiene la infor-macion de como cambian la direccion de movimiento y la rapidez con el transcurrirdel tiempo en cada punto P (x(t), y(t), z(t)) en el que se encuentra.
La raz on de cambio instant aneo de la direcci on del movimiento se denomina acel-eraci on normal aN y la razon de cambio instant aneo de la rapidez del movimientose denomina aceleraci on tangencial aT .
Para encontrar la descomposici on de la aceleraci on en terminos de la aceleraci onnormal y la tangencial, se escribe la aceleraci on a como combinaci on lineal de T yN . Es decir, debemos encontrar aT y aN tales que
a = aT T + aN N .
Resulta que aT y aN van a depender de la rapidez con que se mueve el objeto y dela curvatura de la curva. Esta descomposici on se deja como ejercicio.
-
7/21/2019 Lecciones Calculo Vectorial
52/172
48 LECCI ON 3. FUNCIONES VECTORIALES
EJERCICIOS
1. Sabiendo que drdt
(a) = lmh
0
r (a + h) r (a)h
, utilice las propiedades de la suma
de vectores, la multiplicaci on por escalar y (3.5) para demostrar (3.6).
2. Muestre que si las funciones vectoriales r y s son derivables en a entonces
a ) d(r s)
dt (a) =
drdt
(a) s(a) + r (a) dsdt
(a)
b) d(r s)
dt (a) =
drdt
(a) s(a) + r (a) dsdt
(a)
c ) d(f r )
dt (a) =
df dt
(a)r (a) + f (a)drdt
(a)
3. El Teorema del Valor Medio no se satisface en general para funciones vecto-
riales. Muestre que para r(t) = cos t, sin t, t , no existe un t en el intervalo(0, 2) tal quer (t) = r(2) r (0)
2 0 .
4. Para un vector c = 0, la funcion r(t) = tc parametriza una recta paralela a cque contiene al origen.
a ) Que clase de curva representa p (t) = t3c? Explique.
b) Que clase de curva representa q (t) = et c? Explique.
c ) Compare r (0) y p (0). Como explica la diferencia en las dos derivadas?
5. Muestre que ddt
r drdt = r d2rdt2
.
6. Muestre que ddt
(r (p q)) = drdt (p q) + r
dpdt q + r p
dqdt
.
7. Determine la derivada de cada una de las siguientes funciones en t = 3/ 2.
a ) r(t) = t2, ln t, t .
b) r(t) = t2 4, t, 1/t .8. Determine la integral de la funcion r (t) = t2, 2sen t, ln t en el intervalo [1, ]
9. Determine una funcion vectorial r tal que r (t) = sen t, cos t, t y r(/ 3) =2, 5, 1 .
-
7/21/2019 Lecciones Calculo Vectorial
53/172
49
10. Determine una funcion vectorial r tal que r (t) = t3 + 2 , t t2 + 9 , t , r (3) =2, 3, 0 y r(0) = 1, 1, 4 .
11. Determine tres parametrizaciones diferentes del segmento RS si las coorde-nadas de R y de S son (1, 1, 0) (5, 5, 10), respectivamente. Sugerencia: usetres parametrizaciones diferentes de la recta que pasa por los puntos R y S .
12. Determine tres parametrizaciones diferentes del segmento RS si las coorde-nadas de R y de S son (1, 1, 7) (3, 1, 4), respectivamente.
13. Describa la curva de interseccion de la esfera de centro en el origen y radio 3con el plano z = 2 y determine una parametrizaci on de la misma.
14. Describa la curva de interseccion de las supercies cilndricas de ecuaciones
x2 + y2 = 4 y y2 + z2 = 4 y determine una parametrizaci on de la misma.
15. Determine una parametrizaci on para la recta de intersecci on de los planosx + y = 5 y z y = 2.
16. Determine una parametrizaci on para la recta de intersecci on de los planosx + y 3z = 5 y x 3y + z = 2.
17. Realice la siguiente construccion: Trace dos circunferencias con centro en elorigen O de un plano cartesiano, una de radio a y otra de radio b con a > b,ubique un punto B sobre la circunferencia de radio b y trace la semirrecta
OB . Nombre A el punto de interseccion de la semirrecta con la circunferenciade radio a y el angulo formado por el semieje positivo X y la semirrectaOB medido en sentido positivo y en radianes. Trace la recta paralela al eje X que contiene al punto B y la recta paralela al eje Y que contiene al punto A,nombre P al punto de interseccion de las dos rectas. Dibuje el lugar geometricogenerado por el punto P al variar el angulo . Describa este lugar geometrico yparametrcelo usando como par ametro el angulo . Muestre que efectivamentees el lugar geometrico que describi o.
18. Realice la siguiente construccion: Trace una circunferencia con centro en el
punto (0 , a ) y radio a, los puntos de interseccion entre la circunferencia y eleje Y son el origen O y el punto A. Trace la recta L1, paralela al eje X por elpunto A, trace una semirrecta con origen el punto O y que forme un angulo
-
7/21/2019 Lecciones Calculo Vectorial
54/172
50 LECCI ON 3. FUNCIONES VECTORIALES
con el semieje positivo X , Sea C la intersecci on entre la semirrecta y la rectaL1. Trace la recta L2 paralela al eje Y por el punto C . Sea B la intersecci onde la semirrecta con la circunferencia, trace la recta L3 paralela al eje X porel punto B . Sea P el punto de interseccion de L2 y L3. La curva generada porel punto P al variar entre 0 y se conoce como Bruja de Agnesi .
a ) Parametrice la curva.
b) Muestre que la ecuacion rectangular de la curva es y = 8a3
x2 + 4 a2.
19. Dadas una recta y una circunferencia de radio a, coplanares, tales que el centrode la circunferencia se encuentra a una distancia b de la recta.
a ) Describa la supercie 6 que genera la circunferencia al ser rotada tomando
como eje la recta si:1) Si b > a2) Si b = a3) Si b < a
b) Si se introduce un sistema de coordenadas rectangulares de tal maneraque la recta coincida con el eje Z , parametrice la supercie generada paracada uno de los casos del numeral anterior.
c ) Parametrice el solido interior a la supercie 7 generada para el caso en queb > a .
20. Parametrice la region del plano limitada por las curvas dadas, de manera queel dominio de la parametrizaci on sea una 2-celda.
a ) y = x, y = 0, x = 2
b) y = x2, x = 0, y = 4
c ) y = 0, y = 1 x2d ) x = 1 y2, x = 0e ) y = 3x + 2, y = x + 4, x = 0 f ) y = x
2, y = x6 Esta supercie se denomina torus
7 este s olido se denomina toroide
-
7/21/2019 Lecciones Calculo Vectorial
55/172
51
g ) x + y = 3, x + y = 7, x y = 4, x y = 1.21. Sea la supercie de la esfera con centro en el origen y radio 2 y la supercie
conica de ecuacion z = x2 + y2, parametrice cada una de las siguientes
regiones del espacio de manera que el dominio de los par ametros sea una 1-celda (intervalo), una 2-celda o una 3-celda, dependiendo de la naturaleza dela region8 .
a ) La supercie .
b) El solido limitado por , es decir, la esfera.
c ) La parte de la supercie que est a dentro de la supercie conica .d ) La parte de la supercie conica que se encuentra dentro de la supercie
.e ) La curva de interseccion de las dos supercies, y . f ) El solido que est a dentro de y fuera de .
22. Siendo la parte del plano de ecuacion 2x + 4 y + 3 z = 6 que se encuentra enel primer octante, parametrice cada una de las siguientes regiones del espaciode manera que el dominio de la parametrizaci on sea una 1-celda, una 2-celdao una 3-celda, dependiendo de la naturaleza de la regi on.
a ) La supercie .
b) El solido limitado por la supercie y los planos coordenados.c ) El borde de .
23. Usando las parametrizaciones de las supercies del ejercicio 21 encuentre laecuacion del plano tangente en los siguientes puntos:
a ) El punto (2 3/ 3, 2 3/ 3, 2 3/ 3) de la supercie .b) El punto ( 2/ 2, 2/ 2, 1) de la parte de la supercie .
24. Sea la elipse de ecuacion cartesiana x2
4 +
y2
9 = 1.
8 no tiene dentro ni fuera porque no es una supercie cerrada. En este ejercicio, fuera sereere a los puntos de coordenadas ( x,y,z ) que satisfacen la condici on z < x 2 + y2 y dentro hacereferencia a los puntos de coordenadas ( x,y,z ) que satisfacen la condici on z > x 2 + y2
-
7/21/2019 Lecciones Calculo Vectorial
56/172
52 LECCI ON 3. FUNCIONES VECTORIALES
a ) Determine una parametrizaci on de .
b) Determine las ecuaciones de las circunferencias osculadoras de en los
puntos (2 , 0) y (1, 27/ 4)c ) Dibuje y las circunferencias osculadoras del literal anterior.25. Determine las ecuaciones parametricas de la recta tangente a cada una de las
curvas parametrizadas por r en el punto en el que t = 0.
a ) r(t) = t + 1 , t2 + 1 , t3 + 1 b) r(t) = et + 1 , e2t + 1 , et2
+ 1
c ) r(t) = cos2t, sin2t, t d ) r(t) = sin2t, 2sin2 t, 2cos t26. Calcule la velocidad v(t) y la aceleraci on a(t) de un objeto con el vector posi-
cion r(t) dado:
a ) r(t) = t, t sin t, 1 cos t b) r(t) = 3cos t, 2sin t, 127. Si v representa la velocidad de un objeto en movimiento, podemos escribir
v(t) = v vv
= dsdt
(t)T (t), para explicitar la rapidez dsdt
y la direccion de
movimiento T (t). Use la expresi on v(t) = dsdt
(t)T (t) para calcular la derivada
de v y muestre que a(t) = d2sdt2
(t)T (t) +dsdt
(t)2
N (t) donde = (t) es
la curvatura de la curva que sigue el objeto en su camino y N(t) es el vectornormal de la curva en el instante de tiempo t. Esto muestra que aceleraci onnormal est a dada por
a N = ( s)2N ,
y la aceleraci on tangencial esta dada por
a T = sT .
28. Sea r (t) = cos t
1 + a2t2 , sin t 1 + a2t2 ,
at 1 + a2t2 , con a = 0.
a ) Muestre que r (t) = 1 para todo t.b) Muestre directamente que r (t) r (t) = 0 para todo t.
-
7/21/2019 Lecciones Calculo Vectorial
57/172
53
29. Si r (t) = 0 para todo t en algun intervalo ( a, b), muestre que r (t) es constanteen (a, b).
30. Considere una partcula de masa constante m con vector posici on r(t), ve-locidad v(t), aceleraci on a(t) y momento p(t) en el instante t. El momentoangular L(t) de la partcula con respecto al origen en el instante t se denecomo L(t) = r (t) p(t). Si F (t) es una fuerza actuando sobre la partcula enel instante t , se dene el torque N(t) con respecto al origen, actuando sobre lapartcula por N (t) = r (t) F (t). Muestre que L (t) = N (t).
31. Sea r(t) el vector posici on de una partcula que se mueve en R 3. Muestre que
ddt
(r (v r)) = r 2a + ( r v)v ( v 2 + r a)r .
32. Sea r(t) el vector posici on en R 3 de una partcula que se mueve con rapidezconstante c > 0 en una circunferencia de radio a > 0 en el plano XY . Muestreque a (t) tiene sentido contrario al de r (t) para todo t .
33. Calcule la longitud de arco de la curva parametrizada por r (t) sobre el intervalodado:
a ) r(t) = 3cos2t, 3sin2t, 3t en [0, / 2]b) r(t) = (t2 + 1) cos t, (t2 + 1)sin t, 2 2t en [0, 1]c ) r(t) = 2cos3t, 2sin3t, 2t3/ 2 en [0, 1]
34. Determine la trayectoria r(t) de un punto P del borde de un disco de radio aque rueda a lo largo de una recta L con una velocidad constante v.
35. Suponga que un objeto que sigue la trayectoria r (t) = ti +sin t j +cos tk se salepor la tangente en t = 73 . Determinar la posicion de la partcula en t = 12.
36. Suponga que sobre el objeto, al que se hace referencia en el ejercicio anterior,se ejerce una fuerza F = 10mi (donde m es la masa del objeto) a partir delmomento en que se sale por la tangente, determine la posici on del objeto encada instante de tiempo, la altura m axima del objeto sobre el plano x = 0, elpunto de impacto con el plano x = 0.
-
7/21/2019 Lecciones Calculo Vectorial
58/172
54 LECCI ON 3. FUNCIONES VECTORIALES
37. Determine la posici on, en cada instante de tiempo, de un objeto de masa mque se mueve con rapidez constante v, siguiendo una trayectoria circular deradio a.
38. Dado que la fuerza centrpeta es el producto de la masa por la aceleraci on de unobjeto que semueve con rapidez constante siguiendo una trayectoria circular,determine la fuerza centrpeta de un objeto de 2 kg de masa que sigue unatrayectoria circular de radio 9 m con una frecuendia de 4 revoluciones porsegundo.
39. Si T , N y B son respectivamente los vectores tangente unitario, normal ybinormal, muestre que
a ) dB
dt B = 0b)
dBdt T = 0
c ) dB
dt es multiplo escal




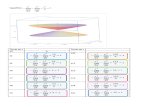







![[Claudio.pita.Ruiz] Calculo Vectorial](https://static.fdocuments.mx/doc/165x107/557211fd497959fc0b8fd7da/claudiopitaruiz-calculo-vectorial.jpg)


