
Manual de Practicas Analisis Numerico_2015
32
UNIVERSIDAD DE SOTAVENTO INGENIERIA INDUSTRIAL Manual de prácticas de Análisis Numérico Portada: Nombre y número de la práctica: “ Evaluación de Funciones ” Nombre del alumno (a): Soto Guillen Ricardo Profesor: Alicia Enriqueta Pérez Yebra Facultad: Ingeniería Industrial Semestre: Cuarto Grupo: 4010-M Fecha de entrega: Elaboro: Ing. Virginia Arias Márquez Fecha: Enero 2011 Actualizó: Alicia Enriqueta Pérez Yebra Fecha: Enero 2015 Autorizo: Ing. Virginia Arias Márquez Fecha: Enero 2015 No de Revisión:3 Frecuencia: 1 vez cada año Pagina: 1 de 32 1
-
Upload
ricardo-soto-guillen -
Category
Documents
-
view
232 -
download
1
description
resolución de analisis
Transcript of Manual de Practicas Analisis Numerico_2015
UNIVERSIDAD DE SOTAVENTO
INGENIERIA INDUSTRIAL
Manual de prácticas de Análisis Numérico
Portada:
Nombre y número de la práctica:
“ Evaluación de Funciones ”
Nombre del alumno (a): Soto Guillen Ricardo
Profesor: Alicia Enriqueta Pérez Yebra
Facultad: Ingeniería Industrial
Semestre: Cuarto
Grupo: 4010-M
Fecha de entrega:
Observaciones: ___________________________________________________________________________________________________________________________________________________________________________________________________________________________
Elaboro: Ing. Virginia Arias MárquezFecha: Enero 2011
Actualizó: Alicia Enriqueta Pérez YebraFecha: Enero 2015
Autorizo: Ing. Virginia Arias MárquezFecha: Enero 2015
No de Revisión:3 Frecuencia: 1 vez cada año Pagina: 1 de 21
1
UNIVERSIDAD DE SOTAVENTO
INGENIERIA INDUSTRIAL
Manual de prácticas de Análisis Numérico
ÍNDICE
Página
Practica No.1 Evaluación de Funciones…………………..………………………3
Practica No.2 Métodos de Interpolación Lineal……..……………………………7
Practica No.3 Sistemas de ecuaciones lineales, método de Gauss Jordan………10
Practica No.4 Método de Gauss-Seidel…………………………………………..13
Practica No.5 Polinomio de Lagrange……………………………………………15
Practica No.6 Ecuaciones diferenciales por el método de la serie Taylor………..17
Practica No.7 Ecuaciones diferenciales por el método de Euler modificado…….19
Bibliografía………………………………………………………………………..21
Práctica No 1Evaluación de Funciones
ObjetivoElaboro: Ing. Virginia Arias MárquezFecha: Enero 2011
Actualizó: Alicia Enriqueta Pérez YebraFecha: Enero 2015
Autorizo: Ing. Virginia Arias MárquezFecha: Enero 2015
No de Revisión:3 Frecuencia: 1 vez cada año Pagina: 2 de 21
2
UNIVERSIDAD DE SOTAVENTO
INGENIERIA INDUSTRIAL
Manual de prácticas de Análisis Numérico
Ofrecer al alumno una breve introducción a algunas actividades de programación con macros escritos en VBA (Visual Basic for Applications), definidos desde una hoja electrónica de Excel. Determinar los errores comunes en el desarrollo de las formulas.
Materiales Equipos Computadoras
IntroducciónMicrosoft Excel es un software para el manejo de hojas electrónicas agrupadas en libros para cálculos de casi cualquier índole. Entre muchas otras aplicaciones, es utilizado en el tratamiento estadístico de datos, así como para la presentación grafica de los mismos. La hoja electrónica Excel es ampliamente conocida, en forma generalizada, por profesionales y estudiantes en proceso de formación, pero hay una gran cantidad de usuarios que no conocen a profundidad su gran potencial y adaptabilidad a los diferentes campos del conocimiento.Para científicos e ingenieros, el Excel constituye una herramienta computacional muy poderosa. También tiene gran utilidad para ser utilizado en la enseñanza de las ciencias y la Ingeniería, particularmente, en la enseñanza de los métodos numéricos. Pese a que existen en el mercado programas computacionales muy sofisticados, tales como MATLAB, MATHEMATICA, etc., no están tan disponibles como Excel, que usualmente forma parte del paquete básico de software instalado en las computadoras que funcionan bajo el sistema Windows de Microsoft.
DesarrolloA manera de ejemplo, vamos a evaluar la función:
f ( x )=2 x3+ln x− cos x
e x+sen (x)
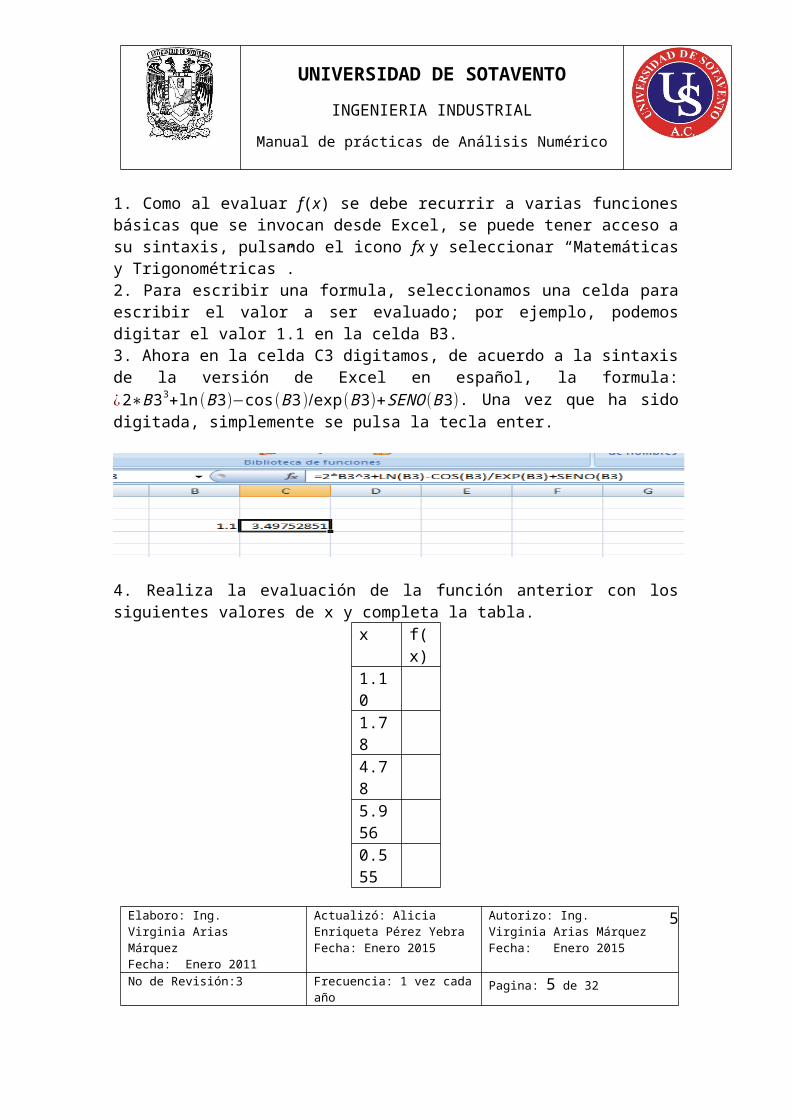
1. Como al evaluar f(x) se debe recurrir a varias funciones básicas que se invocan desde Excel, se puede tener acceso a su sintaxis, pulsando el icono fx y seleccionar “Matemáticas y Trigonométricas”.2. Para escribir una formula, seleccionamos una celda para escribir el valor a ser evaluado; por ejemplo, podemos digitar el valor 1.1 en la celda B3.3. Ahora en la celda C3 digitamos, de acuerdo a la sintaxis de la versión de Excel en español, la formula:¿2∗B 33+ ln(B 3)−cos(B 3)/exp(B 3)+SENO(B 3). Una vez que ha sido digitada, simplemente se pulsa la tecla enter.
Elaboro: Ing. Virginia Arias MárquezFecha: Enero 2011
Actualizó: Alicia Enriqueta Pérez YebraFecha: Enero 2015
Autorizo: Ing. Virginia Arias MárquezFecha: Enero 2015
No de Revisión:3 Frecuencia: 1 vez cada año Pagina: 3 de 21
3
UNIVERSIDAD DE SOTAVENTO
INGENIERIA INDUSTRIAL
Manual de prácticas de Análisis Numérico
4. Realiza la evaluación de la función anterior con los siguientes valores de x y completa la tabla.
x f(x)1.101.784.785.9560.55510.44
4. Realiza en Winplot la gráfica de la función.a) Doble click en Winplot
b) Menú Ventana, en submenú seleccionar 2 dim
c) Seleccionar el menú Ecua, explicita, se abrirá un cuadro de dialogo para
introducir la función.
d) Introducir la función f ( x )=√x2−9 ;de la siguiente ^2-9)
e) Seleccionar color y ancho de lápiz, dar ok
Elaboro: Ing. Virginia Arias MárquezFecha: Enero 2011
Actualizó: Alicia Enriqueta Pérez YebraFecha: Enero 2015
Autorizo: Ing. Virginia Arias MárquezFecha: Enero 2015
No de Revisión:3 Frecuencia: 1 vez cada año Pagina: 4 de 21
4
UNIVERSIDAD DE SOTAVENTO
INGENIERIA INDUSTRIAL
Manual de prácticas de Análisis Numérico
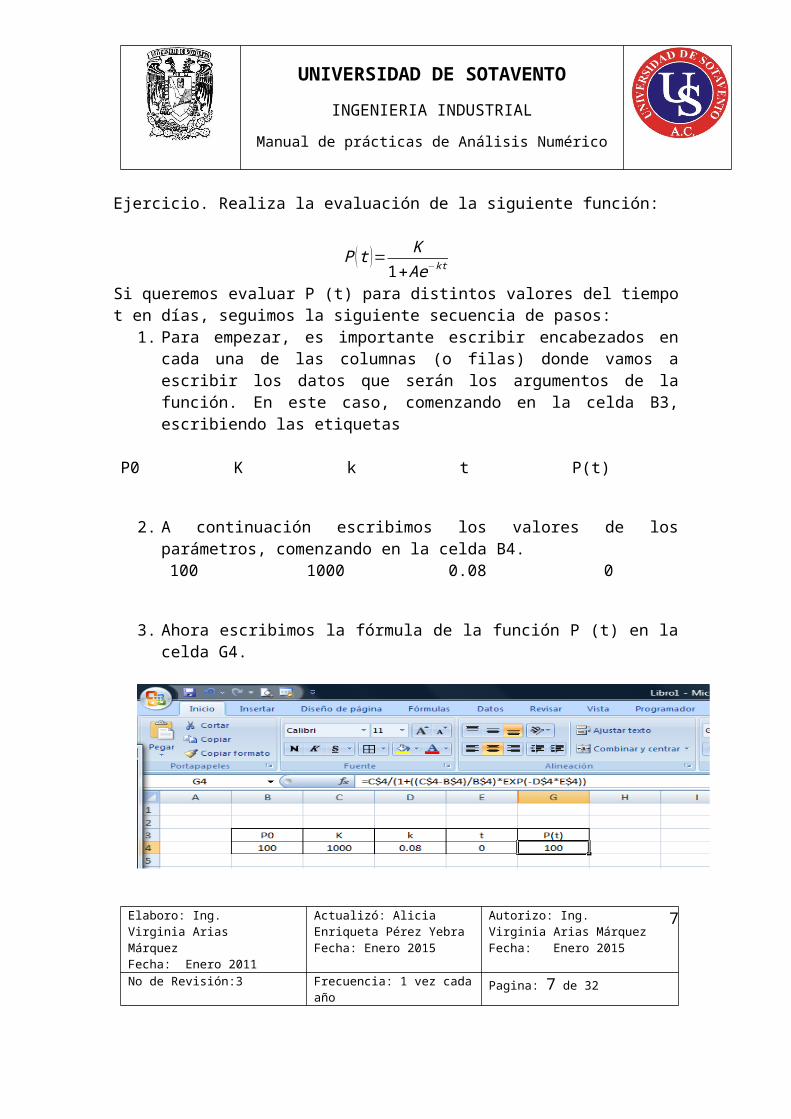
Ejercicio. Realiza la evaluación de la siguiente función:
P ( t )= K
1+ Ae−kt
Si queremos evaluar P (t) para distintos valores del tiempo t en días, seguimos la siguiente secuencia de pasos:
1. Para empezar, es importante escribir encabezados en cada una de las columnas (o filas) donde vamos a escribir los datos que serán los argumentos de la función. En este caso, comenzando en la celda B3, escribiendo las etiquetas
P0 K k t P(t)
2. A continuación escribimos los valores de los parámetros, comenzando en la celda B4.
100 1000 0.08 0
3. Ahora escribimos la fórmula de la función P (t) en la celda G4.
Elaboro: Ing. Virginia Arias MárquezFecha: Enero 2011
Actualizó: Alicia Enriqueta Pérez YebraFecha: Enero 2015
Autorizo: Ing. Virginia Arias MárquezFecha: Enero 2015
No de Revisión:3 Frecuencia: 1 vez cada año Pagina: 5 de 21
5

UNIVERSIDAD DE SOTAVENTO
INGENIERIA INDUSTRIAL
Manual de prácticas de Análisis Numérico
4. Completa la siguiente tabla, seleccionamos la celda G4 y arrastramos para evaluar P (t) en el resto de valores de t.
t P(t)
0
5
6
10
15
17
20
21
30
45
5. Realiza en Winplot la gráfica de la función.
6. Conclusiones
Elaboro: Ing. Virginia Arias MárquezFecha: Enero 2011
Actualizó: Alicia Enriqueta Pérez YebraFecha: Enero 2015
Autorizo: Ing. Virginia Arias MárquezFecha: Enero 2015
No de Revisión:3 Frecuencia: 1 vez cada año Pagina: 6 de 21
6
UNIVERSIDAD DE SOTAVENTO
INGENIERIA INDUSTRIAL
Manual de prácticas de Análisis Numérico
Práctica No 2Métodos de Interpolación Lineal
ObjetivoEl alumno conocerá los métodos de interpolación lineal desde perspectivas analíticas y geométricas.
Materiales Equipos Computadoras
Introducción
Métodos de interpolación lineal
El método de la secante
Supóngase que se asume que f (x)es lineal en la vecindad de la raíz x. Luego se elige otro punto,x1 , próximo a x0, y también a x (que todavía no se conoce) y se traza una recta que pasa por ambos puntos. Si f (x) fuese verdaderamente lineal, la recta cortaría el eje x en la raíz. Pero f (x)nunca es exactamente lineal porque un método para encontrar raíces jamás se aplicaría a una función lineal. Esto significa que la intersección de la recta con el eje x no es en x=xsino que debe estar próxima a este.
Y con base en esto:
x2=x1−f ( x1 )( x1−x0 )
f ( x1)−f ( x0 )
Elaboro: Ing. Virginia Arias MárquezFecha: Enero 2011
Actualizó: Alicia Enriqueta Pérez YebraFecha: Enero 2015
Autorizo: Ing. Virginia Arias MárquezFecha: Enero 2015
No de Revisión:3 Frecuencia: 1 vez cada año Pagina: 7 de 21
7
UNIVERSIDAD DE SOTAVENTO
INGENIERIA INDUSTRIAL
Manual de prácticas de Análisis Numérico
De manera general:
x i+1=x i−f ( x i )( x i−x i−1 )
f ( x i )−f ( x i−1 )
Interpolación lineal (falsa posición)Cuando se asegura que la raíz este comprendida entre los dos valores iniciales y permanezca entre los pares sucesivos. Cuando se hace lo anterior el método se denomina interpolación lineal o, más a menudo, método de falsa posición. Esta técnica es semejante a la bisección, salvo que la siguiente iteración se toma en la intersección de una recta entre el par de valores x y el eje x, en vez de en el punto medio. Al proceder así se obtiene convergencia más rápida que con la bisección, pero a expensas de un algoritmo más complicado.
Desarrollo
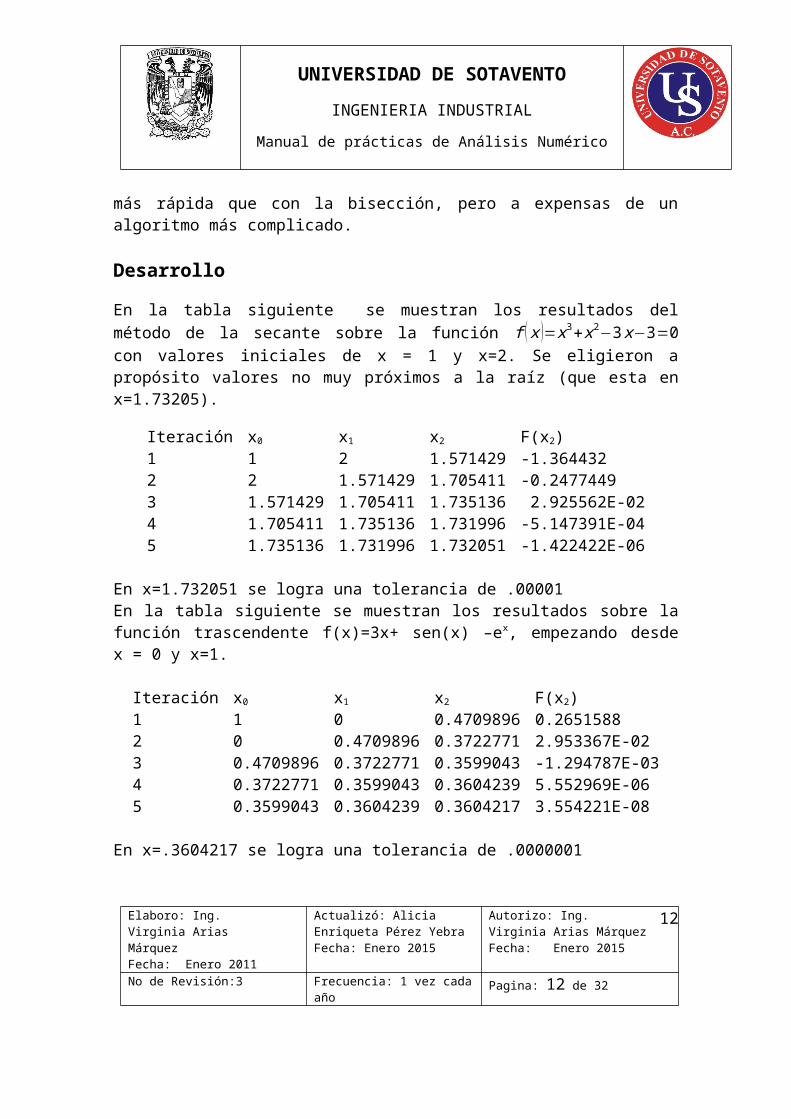
En la tabla siguiente se muestran los resultados del método de la secante sobre la función f ( x )=x3+x2−3 x−3=0 con valores iniciales de x = 1 y x=2. Se eligieron a propósito valores no muy próximos a la raíz (que esta en x=1.73205).
Iteración x0 x1 x2 F(x2)1 1 2 1.571429 -1.3644322 2 1.571429 1.705411 -0.24774493 1.571429 1.705411 1.735136 2.925562E-024 1.705411 1.735136 1.731996 -5.147391E-045 1.735136 1.731996 1.732051 -1.422422E-06
En x=1.732051 se logra una tolerancia de .00001En la tabla siguiente se muestran los resultados sobre la función trascendente f(x)=3x+ sen(x) –ex, empezando desde x = 0 y x=1.
Iteración x0 x1 x2 F(x2)1 1 0 0.4709896 0.26515882 0 0.4709896 0.3722771 2.953367E-023 0.4709896 0.3722771 0.3599043 -1.294787E-034 0.3722771 0.3599043 0.3604239 5.552969E-065 0.3599043 0.3604239 0.3604217 3.554221E-08
En x=.3604217 se logra una tolerancia de .0000001
Elaboro: Ing. Virginia Arias MárquezFecha: Enero 2011
Actualizó: Alicia Enriqueta Pérez YebraFecha: Enero 2015
Autorizo: Ing. Virginia Arias MárquezFecha: Enero 2015
No de Revisión:3 Frecuencia: 1 vez cada año Pagina: 8 de 21
8

UNIVERSIDAD DE SOTAVENTO
INGENIERIA INDUSTRIAL
Manual de prácticas de Análisis Numérico
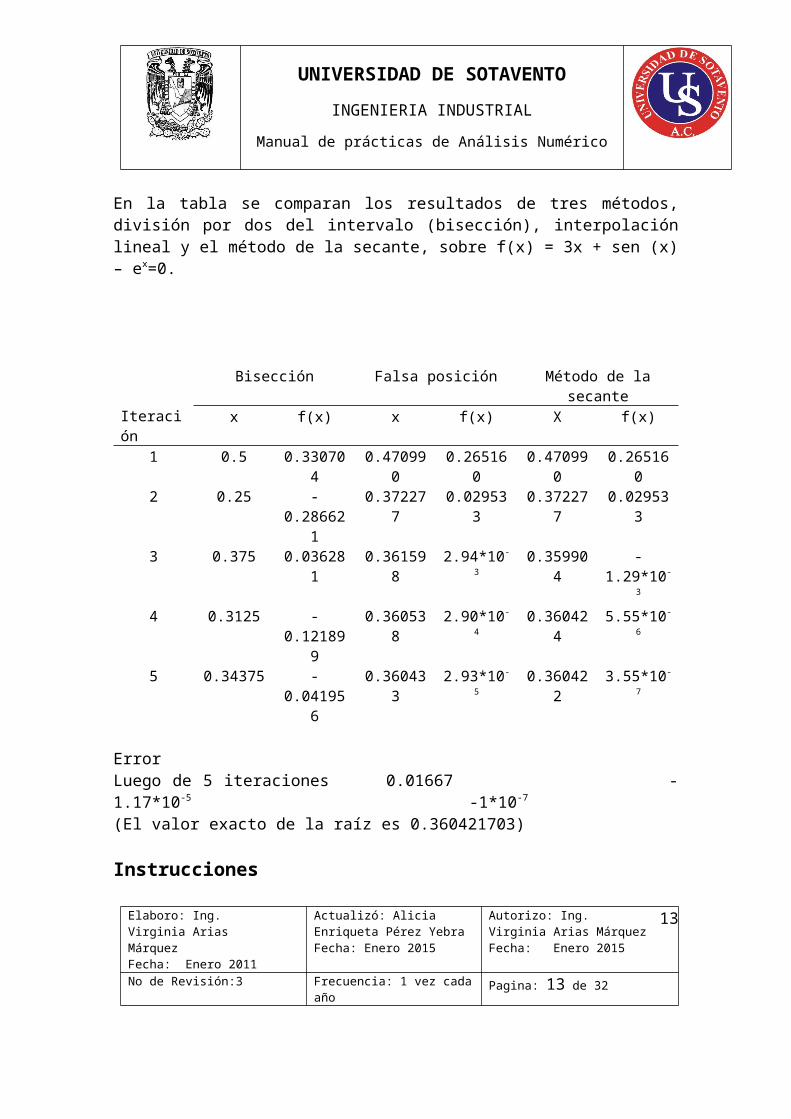
En la tabla se comparan los resultados de tres métodos, división por dos del intervalo (bisección), interpolación lineal y el método de la secante, sobre f(x) = 3x + sen (x) – ex=0.
Iteración
Bisección Falsa posición Método de la secantex f(x) x f(x) X f(x)
1 0.5 0.330704 0.470990 0.265160 0.470990 0.2651602 0.25 -0.286621 0.372277 0.029533 0.372277 0.0295333 0.375 0.036281 0.361598 2.94*10-3 0.359904 -1.29*10-3
4 0.3125 -0.121899 0.360538 2.90*10-4 0.360424 5.55*10-6
5 0.34375 -0.041956 0.360433 2.93*10-5 0.360422 3.55*10-7
Error Luego de 5 iteraciones 0.01667 -1.17*10-5 -1*10-7
(El valor exacto de la raíz es 0.360421703)
Instrucciones1. En una hoja de cálculo de Excel, hallar la raíz real aproximada de la siguiente función,
con ε=0 .0000001
f ( x )=2 x3+x2−x+12. En una hoja de cálculo de Excel, hallar la raíz real aproximada de la siguiente función
f ( x )=3 x2−ex
con ε=0 .0000001
Elaboro: Ing. Virginia Arias MárquezFecha: Enero 2011
Actualizó: Alicia Enriqueta Pérez YebraFecha: Enero 2015
Autorizo: Ing. Virginia Arias MárquezFecha: Enero 2015
No de Revisión:3 Frecuencia: 1 vez cada año Pagina: 9 de 21
9
UNIVERSIDAD DE SOTAVENTO
INGENIERIA INDUSTRIAL
Manual de prácticas de Análisis Numérico
Práctica No 3
Sistemas de ecuaciones lineales, método de Gauss Jordan
Objetivo
El alumno conocerá el método de Gauss Jordan para la solución de sistemas de ecuaciones lineales.
Materiales Equipos Computadoras
Introducción
Un gran número de problemas de ingeniería se reduce al problema de resolver un sistema de ecuaciones lineales. Por ejemplo la aproximación polinomial, la solución de ecuaciones diferenciales parciales, entre otros.
Un sistema de ecuaciones lineales en n incógnitas tiene la forma general:
a11x1+ a12 x2 + …+ a1n xn= b1
a21x1+ a22x2 + …+ a2nxn= b2
. . . . . . . . . . . .am1x1+ am2 x2 + …+ amn xn= bm
Se puede escribir como:
a11 a12 … a1n x1 b1
a21 a22 … a2n x2 b2
. . . . = .
. . . . .
. . . . .am1 am2 … amn xm bm
Elaboro: Ing. Virginia Arias MárquezFecha: Enero 2011
Actualizó: Alicia Enriqueta Pérez YebraFecha: Enero 2015
Autorizo: Ing. Virginia Arias MárquezFecha: Enero 2015
No de Revisión:3 Frecuencia: 1 vez cada año Pagina: 10 de 21
10

UNIVERSIDAD DE SOTAVENTO
INGENIERIA INDUSTRIAL
Manual de prácticas de Análisis Numérico
y concretamente como Ax=b
donde A es la matriz coeficiente del problema, x es el vector incógnita y b es el vector de términos independientes.
Dados A y B, se entiende por resolver el sistema, encontrar los vectores x que lo satisfagan. Una de las técnicas más usadas es el Método de Gauss-Jordan.
Procedimiento
Si consideramos un sistema de tres ecuaciones lineales con tres incógnitas. a11x1+ a12 x2 + a13 x3= b1
a21x1+ a22x2 + a23x3= b2
a31x1+ a32x2 + a33x3= b3
Como primer paso, se reemplaza la segunda ecuación con lo que resulte de sumarle la primera ecuación multiplicada por (-a21/a11). Similarmente se sustituye la tercera ecuación con el resultado de sumarle la primera ecuación multiplicada por (-a31/a11).
Esto da lugar a un nuevo sistema, con nuevos elementos que se obtienen de las operaciones ya mencionadas.
Ahora multiplicando la segunda ecuación por (-a32/a22) y sumando el resultado a la tercera ecuación, se obtiene el sistema triangular. Este proceso se conoce como triangularización.El sistema se resuelve despejando de su última ecuación x3, sustituyendo x3 en la segunda ecuación y despejando x2 de ella. Por último con x3 y x2 sustituidas en la primera ecuación se obtiene x1. A esta parte del proceso se le llama sustitución regresiva
Elaboro: Ing. Virginia Arias MárquezFecha: Enero 2011
Actualizó: Alicia Enriqueta Pérez YebraFecha: Enero 2015
Autorizo: Ing. Virginia Arias MárquezFecha: Enero 2015
No de Revisión:3 Frecuencia: 1 vez cada año Pagina: 11 de 21
11
UNIVERSIDAD DE SOTAVENTO
INGENIERIA INDUSTRIAL
Manual de prácticas de Análisis Numérico
Cuestionario
1. ¿Para qué se utiliza el método de Gauss-Jordan?
2. ¿A qué se le llama Triangularización?
3. ¿A qué se le llama Sustitución regresiva?
4. Utilizar algún software para la resolución del Método de Gauss-Jordan
5. Resolver el sistema de ecuaciones por Método de Gauss-Jordan 4 x1−9 x2+2 x3=52 x1−4 x2+6 x3=3
x1−x2+3x3=4
6. Resolver el sistema de ecuaciones x1+ x2−x3=−3
6 x1+2 x2+2 x3=2
−3 x1+4 x2+x3=1
7. Investigar estrategias de pivoteo
Practica No 4Elaboro: Ing. Virginia Arias MárquezFecha: Enero 2011
Actualizó: Alicia Enriqueta Pérez YebraFecha: Enero 2015
Autorizo: Ing. Virginia Arias MárquezFecha: Enero 2015
No de Revisión:3 Frecuencia: 1 vez cada año Pagina: 12 de 21
12
UNIVERSIDAD DE SOTAVENTO
INGENIERIA INDUSTRIAL
Manual de prácticas de Análisis Numérico
Método de Gauss-Seidel
Objetivo
El alumno aprenderá a resolver un sistema de ecuaciones utilizando un método iterativo.
Materiales Equipos Computadoras
Introducción
Al resolver un sistema de ecuaciones lineales por eliminación, la memoria de máquina requerida es proporcional al cuadrado del orden A, y el trabajo computacional es proporcional al cubo del orden de la matriz coeficiente A.Debido a esto, la solución de sistemas lineales grandes (n>=50), con matrices coeficiente densas (pocos ceros como elementos), se vuelve costoso y difícil en una computadora con los métodos de eliminación, ya que se requiere amplia memoria; además como el número de operaciones que se debe ejecutar es muy grande , se pueden producir errores de redondeo también muy grandes, sin embargo, se han resuelto sistemas de orden 1000 y aún mayor, con los métodos iterativos como lo es el método de Gauss-Seidel.
Este método se caracteriza porque tiene pocos elementos distintos de cero y posee ciertas propiedades (simétricas, bandeadas, diagonal dominantes) que permiten garantizar el éxito en la aplicación de este método.
Los métodos iterativos más sencillos y conocidos son el de Jacobi y Gauss-Seidel, son una generalización del método del punto fijo.
Elaboro: Ing. Virginia Arias MárquezFecha: Enero 2011
Actualizó: Alicia Enriqueta Pérez YebraFecha: Enero 2015
Autorizo: Ing. Virginia Arias MárquezFecha: Enero 2015
No de Revisión:3 Frecuencia: 1 vez cada año Pagina: 13 de 21
13
UNIVERSIDAD DE SOTAVENTO
INGENIERIA INDUSTRIAL
Manual de prácticas de Análisis Numérico
Procedimiento
En este método los valores que se van calculando en la (k+1)-ésima iteración se emplean para calcular los valores faltantes de esa misma iteración; es decir, con x (k)
se calcula x(k+1) .
¡-1 n
X¡k+1 = 1 - b¡ + Σ a ¡j xj
k+1 + Σ a ¡j xjk , para 1 ≤ ¡ ≤ n
A j=1 j=¡ + 1
Cuestionario
1. 1. ¿Para qué se utiliza el método de Gauss Seidel?
2. ¿Cuándo se debe de utilizar este método?
3. ¿Características de este método?
4. Resolver el siguiente sistema de ecuaciones por el método de Gauss Seidel.2 x1+x2−x3=1
5 x1+2 x2+2x3=−4
3 x1+x2+x3=5
5. Utilizar un software que permita la solución de un sistema de ecuaciones.
Practica No 5Polinomio de Lagrange
Elaboro: Ing. Virginia Arias MárquezFecha: Enero 2011
Actualizó: Alicia Enriqueta Pérez YebraFecha: Enero 2015
Autorizo: Ing. Virginia Arias MárquezFecha: Enero 2015
No de Revisión:3 Frecuencia: 1 vez cada año Pagina: 14 de 21
14
UNIVERSIDAD DE SOTAVENTO
INGENIERIA INDUSTRIAL
Manual de prácticas de Análisis Numérico
ObjetivoEl alumno estudiará la aproximación de funciones en forma discreta (puntos tabulados) con funciones analíticas sencillas como lo es el polinomio de Lagrange.
Materiales Equipos Computadoras
Introducción
Existen métodos de aproximación polinomial que requieren la solución de un sistema de ecuaciones algebraicas lineales, que cuando el grado del polinomio es alto presenta inconvenientes. Existen otros métodos de aproximación polinomial que no requieren resolver un sistema de ecuaciones y los cálculos se realizan directamente; entre estos se encuentra el de aproximación polinomian de Lagrange.
Procedimiento
Se inicia con una función f (x ) dada en forma tabular y se asume que un polinomio de primer grado (ecuación de una línea recta ) puede escribirse como :
p(x)= a0 (x-x1) + a1 (x-x0)
en forma compacta y útil se obtiene polinomios de n–ésimo grado, quedando como se indica a continuación :
n
Pn(x)= Σ L ¡(x) f (xi) i=0
Al combinarse linealmente con f (xi), los polinomios L ¡(x), denominados polinomios de Lagrange, generan la aproximación polinomial de Lagrange a la información dada en forma tabular.
Cuestionario
Elaboro: Ing. Virginia Arias MárquezFecha: Enero 2011
Actualizó: Alicia Enriqueta Pérez YebraFecha: Enero 2015
Autorizo: Ing. Virginia Arias MárquezFecha: Enero 2015
No de Revisión:3 Frecuencia: 1 vez cada año Pagina: 15 de 21
15
UNIVERSIDAD DE SOTAVENTO
INGENIERIA INDUSTRIAL
Manual de prácticas de Análisis Numérico
1. Para la tabla que se presenta a continuación
a) Obtenga la aproximación polinomial de Lagrange con todos los puntosb) Interpole el valor de la función f(x) para x=1.8
i 0 1 2 3f(xi) -3 0 5 7xi 0 1 3 6
2. ¿Para qué se utiliza el Método de aproximación polinomial de Lagrange?
3. Ventaja de este método.
4. Utilizar algún software apropiado para resolver o aproximar funciones utilizando el método de Lagrange.
5. Investigar concepto de Interpolación.
Practica No 6Ecuaciones diferenciales por el método de la serie Taylor
Elaboro: Ing. Virginia Arias MárquezFecha: Enero 2011
Actualizó: Alicia Enriqueta Pérez YebraFecha: Enero 2015
Autorizo: Ing. Virginia Arias MárquezFecha: Enero 2015
No de Revisión:3 Frecuencia: 1 vez cada año Pagina: 16 de 21
16
UNIVERSIDAD DE SOTAVENTO
INGENIERIA INDUSTRIAL
Manual de prácticas de Análisis Numérico
ObjetivoConocer algunos métodos de aproximación numérica para resolver ecuaciones diferenciales.
Materiales Equipos Computadoras
Introducción
Se llama ecuación diferencial aquella ecuación que contiene una variable dependiente y sus derivadas con respecto a una o más variables independientes. Muchas de las leyes generales de la naturaleza se expresan en el lenguaje de las ecuaciones diferenciales;Es un proceso sencillo, si se tiene la función y=f(x), su derivada dy/dx puede interpretarse como la velocidad de cambio de y con respecto a x, el resultado de expresar en símbolos matemáticos cualquier proceso natural, a menudo es una ecuación diferencial.
Procedimiento
Este método es uno de los más usados para resolver un problema de valor inicial (PVI), y en general se aplica la siguiente ecuación:
y i+1= y i +h f (xi,yi) + h 2 d f (x,y) \xi,yi
2 ! dx
Cuestionario
1. ¿Qué es una ecuación diferencial?Elaboro: Ing. Virginia Arias MárquezFecha: Enero 2011
Actualizó: Alicia Enriqueta Pérez YebraFecha: Enero 2015
Autorizo: Ing. Virginia Arias MárquezFecha: Enero 2015
No de Revisión:3 Frecuencia: 1 vez cada año Pagina: 17 de 21
17

UNIVERSIDAD DE SOTAVENTO
INGENIERIA INDUSTRIAL
Manual de prácticas de Análisis Numérico
2. ¿Para qué se utilizan los Métodos de la serie Taylor?
3. Ventaja de este método.
4. Resuelva el PVI por el método de Taylor de 2do orden.
Se tiene:h= 0.2 X0=0.0 X1=0.2X2=0.4 X3=0.6 X4=0.8 X5=1.0
5. Utilizar algún software apropiado para resolver ecuaciones diferenciales utilizando los Métodos de la serie Taylor.
Practica No 7Ecuaciones diferenciales por el método de Euler modificado
Elaboro: Ing. Virginia Arias MárquezFecha: Enero 2011
Actualizó: Alicia Enriqueta Pérez YebraFecha: Enero 2015
Autorizo: Ing. Virginia Arias MárquezFecha: Enero 2015
No de Revisión:3 Frecuencia: 1 vez cada año Pagina: 18 de 21
18

UNIVERSIDAD DE SOTAVENTO
INGENIERIA INDUSTRIAL
Manual de prácticas de Análisis Numérico
ObjetivoConocer algunos métodos de aproximación numérica para resolver ecuaciones diferenciales. Euler Modificado
Materiales Equipos Computadoras
Introducción
En el método de Euler se toma como válida para todo el intervalo la derivada encontrada en un extremo de éste. Para obtener una exactitud razonable se utiliza un intervalo muy pequeño, a cambio de un error de redondeo mayor (ya que se realizan más cálculos).El método de Euler modificado trata de evitar este problema utilizando un valor promedio de la derivada tomada en los dos extremos del intervalo, en lugar de la derivada tomada en un solo extremo.
Procedimiento
El método de Euler modificado consta de dos pasos básicos :
Se parte de (x0,y0) y se utiliza el método de Euler a fin de calcular el valor de y correspondiente a x1. Este valor de y se denotará como y1’, ya que solo es un valor transitorio para y1. esta parte del proceso se conoce como predictor.
El segundo paso se llama corrector , pues trata de corregir la predicción. En el nuevo punto obtenido (x1,y1’) se evalúa la derivada f(x1,y1’) usando la ecuación diferencial ordinaria del PVI que se esté resolviendo; se obtiene la media aritmética de esta derivada y la derivada en el punto inicial (x0,y0).
Cuestionario
1. ¿Explica la diferencia entre el método sencillo de Euler y el método modificado?
Elaboro: Ing. Virginia Arias MárquezFecha: Enero 2011
Actualizó: Alicia Enriqueta Pérez YebraFecha: Enero 2015
Autorizo: Ing. Virginia Arias MárquezFecha: Enero 2015
No de Revisión:3 Frecuencia: 1 vez cada año Pagina: 19 de 21
19
UNIVERSIDAD DE SOTAVENTO
INGENIERIA INDUSTRIAL
Manual de prácticas de Análisis Numérico
2. ¿Para qué se utiliza el método de Euler?
3. Explica, ¿en qué consiste el proceso predictor?
4. Ventaja de este método.
5. Resuelva por el método de Euler modificado
Se tiene:
dy/dx= (x-y)y(0)=2y(1)=?
6. Utilizar algún software apropiado para resolver ecuaciones diferenciales utilizando el método de Euler modificado.
BIBLIOGRAFIA
Elaboro: Ing. Virginia Arias MárquezFecha: Enero 2011
Actualizó: Alicia Enriqueta Pérez YebraFecha: Enero 2015
Autorizo: Ing. Virginia Arias MárquezFecha: Enero 2015
No de Revisión:3 Frecuencia: 1 vez cada año Pagina: 20 de 21
20
UNIVERSIDAD DE SOTAVENTO
INGENIERIA INDUSTRIAL
Manual de prácticas de Análisis Numérico
BURDEN, Richard L. y FAIRES , J. Douglas Análisis Numérico con Aplicaciones7ª. Edición MéxicoThomson Learning 2002
GERALD, Curtis F. y WHEATLEY, Patrick O.Análisis Numérico con Aplicaciones6ª. Edición MéxicoPrentice Hall/Pearson Educación, 2000
CHAPRA, Steven C. y CANALE, Raymond P.Métodos Numéricos para Ingenieros3ª. Edición MéxicoPrentice Hall, 1999
MATHEWS, John H. y FINK, Kurtis D.Métodos Numéricos con MATLAB3ª. Edición MéxicoPrentice Hall, 2000
Elaboro: Ing. Virginia Arias MárquezFecha: Enero 2011
Actualizó: Alicia Enriqueta Pérez YebraFecha: Enero 2015
Autorizo: Ing. Virginia Arias MárquezFecha: Enero 2015
No de Revisión:3 Frecuencia: 1 vez cada año Pagina: 21 de 21
21








![Manual de Practicas Analisis II Qfb[1]](https://static.fdocuments.mx/doc/165x107/5572141d497959fc0b93cbe5/manual-de-practicas-analisis-ii-qfb1.jpg)









