UNIDAD 5 Estrategias de Control CONTROL E INSTRUMENTACIÓN DE PROCESOS TEMA 2 Control de Procesos.
Upload
chriss-carvajalCategory
view
219download
0
7/23/2019 Estrategias de Control de Procesos
http://slidepdf.com/reader/full/estrategias-de-control-de-procesos 1/6
1.1. ESTRATEGIAS DE CONTROL DE PROCESOS
Desde el punto de vista de la teoría de control, un sistema o proceso está
formado por un conjunto de elementos relacionados entre sí que ofrecen
señales de salida en función de señales o datos de entrada. Es importanteresaltar el hecho de que no es necesario conocer el funcionamiento interno, o
cómo actúan entre sí los diversos elementos, para caracterizar el sistema. Para
ello, sólo se precisa conocer la relación que eiste entre la entrada ! la salida
del proceso que realiza el mismo "principio de caja ne#ra$.
El aspecto más importante de un sistema es el conocimiento de su
dinámica, es decir, cómo se comporta la señal de salida frente a una variación
de la señal de entrada. %n conocimiento preciso de la relación entrada&salida
permite predecir la respuesta del sistema ! seleccionar la acción de control
adecuada para mejorarla. De esta manera, el diseñador, conociendo cuál es la
dinámica deseada, ajustará la acción de control para conse#uir el o'jetivo final
frente a pertur'aciones eternas del sistema.
En vista de todo lo epuesto, se puede definir un sistema de control como
el conjunto de elementos que interactúan para conse#uir que la salida de un
proceso se comporte tal ! como se desea, mediante una acción de control.
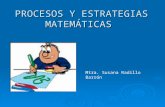
(l controlador in#resan las señales del valor deseado "set)point$ ! del
sensor "medición de la varia'le controlada$, *stas se comparan #enerando la
señal de error, *sta a su vez es modificada de al#una forma por la transferencia
del controlador ! finalmente el resultado es la varia'le controlada. El al#oritmo
matemático que se ejerce so're el error es la llamada acción de control. El
controlador requiere una retroalimentación de la varia'le controlada ! por ello el
sistema se denomina lazo de control cerrado. "+- colla#e, /01$

7/23/2019 Estrategias de Control de Procesos
http://slidepdf.com/reader/full/estrategias-de-control-de-procesos 2/6
Figura 1.1: Diagrama de bloques de u la!o de "o#rol realime#ado.
1.1.1. CONTROL PROPORCIONAL INTEGRAL DERI$ATI$O
2a acción de control proporcional inte#ral derivativa "P3D$ #enera una
señal resultado de la com'inación de la acción proporcional, la acción inte#ral !
la derivativa conjuntamente.
2a ecuación de un controlador con esta acción com'inada se o'tiene mediante4
u ( t )= Kp∗e (t )+ Kp
Ti
∗∫0
t
e (t )∗dt + Kp∗Td∗de (t )
dt
Donde Kp es la #anancia proporcional, Ti es el tiempo inte#ral !
Td es el tiempo derivativo.
2a acción de control proporcional inte#ral derivativa permite eliminar el error
en estado estacionario, lo#rando una 'uena esta'ilidad relativa del sistema decontrol. 2a mejora de esta'ilidad relativa implica una respuesta transitoria con
mejores tiempos de adquisición ! un valor de so'reimpulso pequeño.
Este control puede usarse en cualquier proceso 'ajo cualquier condición4
• 2a acción proporcional corri#e la salida del controlador en una cantidad
proporcional a la desviación.• 2a acción inte#ral corri#e la salida del controlador en una cantidad
proporcional a la inte#ración de la desviación.

7/23/2019 Estrategias de Control de Procesos
http://slidepdf.com/reader/full/estrategias-de-control-de-procesos 3/6
• 2a acción derivativa corri#e a la salida del controlador en una cantidad
proporcional a la del cam'io del error.• El efecto que tiene este control es que adelanta la respuesta, mejora la
esta'ilidad ! no modifica el estado estacionario.
Figura 1.%: Co#rolador PID
+(5(+-E567-3+(7 DE 2( (++389 DE2 +89-582 P3D
• Efecto Proporcional4 :ejora la dinámica del sistema.• Efecto 3nte#ral4 Elimina el error ante entradas en nivel.• Efecto derivativo4 :ejora la esta'ilidad relativa del sistema.
"D37(, /0/$
1.1.%. CONTROL L&GICO DIF'SO
2a ló#ica difusa puede ser descrita como un sistema interpretativo, en el
cual los o'jetos o elementos son relacionados con conjuntos de fronteras no
nítidamente definidas, otor#ándoles un #rado de pertenecía relativa o #raduada
! o estricta como es de costum're en la ló#ica tradicional. En un sentido más
amplio se podría decir que eiste una especie de interpolación entre una
frontera ! otra, o 'ien, ente un conjunto ! otro.
El control difuso, puede ser epresado mejor como un control a trav*s depala'ras que interpretan el sentido común, en lu#ar de números, o 'ien

7/23/2019 Estrategias de Control de Procesos
http://slidepdf.com/reader/full/estrategias-de-control-de-procesos 4/6
sentencias en lu#ar de ecuaciones. 7in em'ar#o, las varia'les de los procesos
no se miden en sentido común, sino en números. Por lo tanto se hace
necesario realizar una adaptación previa antes de introducir el estado de la
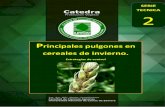
varia'le al controlador. Esta etapa es llamada fuzificación. En la ;i#ura 0.< se
aprecian las distintas transformaciones que sufren las varia'les ! los datos en
un lazo de control difuso.
Figura 1.(: La!o de "o#rol di)uso
2a etapa de fuzificación, le otor#a a los datos de entrada un #rado de
mem'resía dentro de las distintas epresiones posi'les, para ello 'usca lacorrespondencia entre el estado de las varia'les, ! las funciones de
pertenencia definidas para tal propósito. Desde lue#o, para un determinado
valor de una varia'le, su #rado de pertenencia será ma!or en una epresión
que en las demás. %na vez que se tienen epresados los estados de las
varia'les en forma lin#=ística se pueden esta'lecer relaciones ló#icas entre
ellas, típicamente a trav*s de re#las tales como si...entonces "3;)->E9$. 7e
definen una serie de relaciones que interpretan el sentido común, ! permiten#enerar una actuación deseada "en estado lin#=ístico$, que de'e ser aplicada a
la planta. 2ue#o esta de'e ser traducida a número "defuzificación$, para que
lue#o el conversor di#ital)análo#o la convierta a señal de tal modo que pueda
ser aplicada a la planta. "?ouro @ :usalem, //$
1.%. A*'STE DE CONTROLADORES CON$ENCIONALES

7/23/2019 Estrategias de Control de Procesos
http://slidepdf.com/reader/full/estrategias-de-control-de-procesos 5/6
Para ajustar los controladores, el m*todo práctico es o'tener una respuesta
real del proceso, lo que puede efectuarse de tres maneras principales.
• :*todo de tanteo "lazo cerrado$•
:*todo de #anancia límite "lazo cerrado$• :*todo de curva de reacción "lazo a'ierto$
1.%.1. +,TODO DE TANTEO
7e provocan cam'ios de car#a en el proceso, moviendo el punto de
consi#na arri'a ! a'ajo en am'as direcciones, lo suficiente para lo#rar una
pertur'ación considera'le, pero no demasiado #rande que pueda dañar el
proceso.
+on el tiempo derivativo en / ! el inte#ral en A, se aumenta la #anancia
proporcional hasta o'tener una relación de amorti#uamiento de /,1. 7e
aumenta lentamente el tiempo inte#ral en la forma indicada antes hasta
acercarse al punto de esta'ilidad.
7e aumenta la 'anda derivativa en pequeños incrementos, creando al
mismo tiempo desplazamientos en el mismo punto de consi#na hasta o'tener
en el proceso un comportamiento cíclico, reduciendo li#eramente la última
'anda derivativa. Despu*s de estos ajustes puede aumentarse normalmente la
#anancia proporcional con mejores resultados en el control. "+reus 7ole, //B$.
1.%.%. +,TODO DE GANANCIA L-+ITE
Para que este m*todo "Cie#ler 9ichols$ se pueda aplicar, la respuesta
transitoria de'e poder alcanzar la esta'ilidad crítica en función de un aumento
de #anancia .El procedimiento a se#uir es4
1. %tilizar solo el control proporcional, comenzar con un valor de #anancia
pequeño, incrementar la #anancia hasta que el lazo comience a oscilar.
9otar que se requieren oscilaciones lineales ! que estas de'en ser
o'servadas en la salida del controlador.

7/23/2019 Estrategias de Control de Procesos
http://slidepdf.com/reader/full/estrategias-de-control-de-procesos 6/6
%. 5e#istrar la #anancia crítica del controlador Kp= Kc ! el período de
oscilación de la salida del controlador, Tc .
(. (justar los parámetros del controlador se#ún la -a'la 0.0.
Tabla 1.1 Cos#a#es ara los "o#roladores P/ PI 0 PID "o el m#odo de
gaa"ia l2mi#e.
Co#rol Kp Ti Td
P /.1 Kc ∞ /
PI /.1 Kc 0&0." Tc $ /
PID /. Kc /.1 Tc /.01 Tc
"2FPEC, //B$
1.%.(. +,TODO DE LA C'R$A DE REACCI&N 3CO4EN 5 COON6
BibliografíaCBT collage. (26 de Mayo de 2015). Obtenido de http://www.bt.ed!/bt"
onnet/bt"for!#/$"h%a"for!#/&2$"#odo'"de"ontrol"a!to#atio
re!' ole* +. (200,). Instrumentos industriales, su ajuste y calibración. Barelona: Maro#bo .+.
-+. (2010). Departamento de Ingeniería de Sistemas y Automática. Obtenido dehttp://www.di'a.bi.eh!.e'/'pani'h/ftp/#ateriala'ignat!ra'/ngi'te#a'/ran'parenia'20de20la'e/e#a200620"20+ione'20B1'ia'20de20ontrol.pdf
3o!ro* . 4.* M!'ale#* 4. M. (2002). ontrol Mediante 7gia -if!'a.Tcnicas !odernas en Automática.
89* . (200,). SI"T#"IA D$ %$&'(AD#%$S )ID. http://web.!'al.e'/;'eba'/94++/94++20$.pdf.