Control II Unidad i
39
S.E.P. S.N.E.S.T. D.G.E.S.T. INSTITUTO TECNOLÓGICO del Istmo MATERIA: CONTROL II TITULAR: ING. RUIZ CHINAS FRANCISCO BERNARDO CARRERA: INGENIERÍA ELÉCTRICA PRESENTA: Martínez García Héctor SEMESTRE: 7° GRUPO: “6 K” HCA. CD. DE JUCHITÁN DE ZARAGOZA, OAX., A OCTUBRE DE 2014 MATERIA: CONTROL I TITULAR: ING. EFRAÍN DE LA CRUZ SÁNCHEZ CARRERA: INGENIERÍA ELÉCTRICA PRESENTA: JIMÉNEZ SOLAR JARED SALVADOR SÁNCHEZ CASTILLO ISAAC SEMESTRE: 5° GRUPO: “L” HCA. CD. DE JUCHITÁN DE ZARAGOZA, OAX., A NOVIEMBRE DE 2013
-
Upload
hector-martinez-garcia -
Category
Documents
-
view
236 -
download
3
description
principios fundamentales de control
Transcript of Control II Unidad i

S.E.P. S.N.E.S.T. D.G.E.S.T.INSTITUTO TECNOLÓGICO
del Istmo
MATERIA:CONTROL II
TITULAR:ING. RUIZ CHINAS FRANCISCO BERNARDO
CARRERA:INGENIERÍA ELÉCTRICA
PRESENTA:Martínez García Héctor
SEMESTRE: 7° GRUPO: “6 K”
HCA. CD. DE JUCHITÁN DE ZARAGOZA, OAX., A OCTUBRE DE 2014
MATERIA:CONTROL I
TITULAR:ING. EFRAÍN DE LA CRUZ SÁNCHEZ
CARRERA:INGENIERÍA ELÉCTRICA
PRESENTA:JIMÉNEZ SOLAR JARED SALVADOR
SÁNCHEZ CASTILLO ISAAC
SEMESTRE: 5° GRUPO: “L”
HCA. CD. DE JUCHITÁN DE ZARAGOZA, OAX., A NOVIEMBRE DE 2013

CONTENIDO
1.1 INTRODUCCIÓN A LA RESPUESTA A LA FRECUENCIA
La respuesta en frecuencia, nos referimos a la respuesta de un sistema en estado estable a una entrada senoidal. En los métodos de la respuesta en frecuencia, la frecuencia de la señal de entada se varía en un cierto rango, para estudiar la respuesta resultante.
El criterio de estabilidad de Nyquist nos permite averiguar la estabilidad relativa y absoluta de los sistemas lineales en lazo cerrado a partir del conocimiento de sus características de frecuencia en lazo abierto. Una ventaja del enfoque de la respuesta en frecuencia es que las pruebas de la respuesta en frecuencia son, general, sencillas y pueden ser muy precisas con el uso de generadores de señales senoidal que se obtienen con facilidad y un equipo de medición preciso. Por lo común las funciones de transferencia de los componentes complicados se determinan experimentalmente mediante pruebas de la respuesta de frecuencia. Además, este enfoque tiene la ventaja de que permite diseñar un sistema en el que se desprecian los efectos inconvenientes del ruido así como extender este análisis y diseño a ciertos sistemas de control no lineal.
Aunque la respuesta en frecuencia de un sistema de control presenta una imagen cualitativa de la respuesta transitoria, la correlación entre las respuestas en frecuencia y transitoria es indirecta, excepto en el caso de los sistemas de segundo orden. Al diseñar un sistema en lazo cerrado, las características de la respuesta en frecuencia de la función de transferencia en lazo abierto se ajustan mediante varios criterios de diseño, a fin de obtener características aceptables de respuesta transitoria para el sistema.
Salida en estado estable para una entrada senoidal. Considere el sistema lineal e invariable con el tiempo. Para este sistema
Y (s)X (s)
=G(s)
La estrada X(t) es senoidal y se obtiene mediante
y (t )=Xsenωt
Tal como se presento, si el sistema es estable, la salida y(t) se obtiene a partir de
y (t )=Ysen(ωt+∅ )
Donde
Y=X|G ( jω )|

Y
∅=G ( jω )=tan−1[ parteimaginaria deG( jω)parte rela deG( jω) ]
Un sistema estable, lineal e invariante con el tiempo, sujeto a una entrada senoidal, tendrá, en estado estable, una salida senoidal de la misma frecuencia que la entrada. Pero, en general, la amplitud y la fase de la salida será diferentes de las de la entrada. De hecho, la
amplitud de la salida se obtiene del producto de la amplitud de la entrada y|G( jω)|, en
tanto que el ángulo de fase difiere del de la entrada en una cantidad ∅=G ( jω ) . Un ejemplo de las señales senoidales de entrada y salida.
Observe que para las entradas senoidales,
|G ( jω )|=|Y ( jω )X ( jω )|=cociente de amplitud entre lasenoide desalida y la senoide de entrada
G ( jω )= Y ( jω )X ( jω )
= corrimiento de fase de la senoide de salida con respecto a la senoide de entrada
Por lo tanto, la características de respuesta de un sistema para una entrada senoidal se obtiene directamente de
Y ( jω)X ( jω)
=G( jω)

La función de transferencia senoidal G( jω), cociente entre Y ( jω ) y X ( jω), es una cantidad compleja y se representa mediante la magnitud y el ángulo de fase con la frecuencia como parámetro. La función de transferencia senoidal de cualquier sistema lineal se obtiene sustituyendo s por jω en la función de transferencia del sistema.
En este capítulo analizaremos estas representaciones con detalle y discutiremos el enfoque de MATLAB para obtener las trazas de Bode y las de Nyquist.
1.2.- USO DE LOS FASORES PARA DETERMINAR LA RESPUESTA A UNA FRECUENCIA DE UN SISTEMA
Trazas de Bode o trazas logarítmicas. Una función de transferencia senoidal puede representarse mediante dos gráficas distintas: una que ofrece la magnitud contra la frecuencia y otra que muestra el ángulo de fase (en grados) contra la frecuencia. Las trazas de Bode están formadas por dos gráficas: una es el logaritmo de la magnitud de una función de transferencia senoidal y la otra es el ángulo de fase. Ambas se grafican contra la frecuencia en la escala logarítmica.
La representación común de la magnitud logarítmica de G (jw) es 20 , en donde la base del logaritmo es 10. La unidad que se usa en esta representación de la magnitud es el decibel, por lo general abreviado dB. En la representación logarítmica, se trazan las curvas sobre papel semilogarftmico, con la escala logarítmica para la frecuencia y la escala lineal para cualquier magnitud (en decibeles) o el ángulo de fase (en grados). (El rango de frecuencia de interés determina la cantidad de ciclos logarítmicos que se requieren en la abscisa.)
La ventaja principal de usar la traza de Bode es que la multiplicación de magnitudes se convierte en adición. Además, cuenta con un método simple para trazar una curva aproximada de magnitud logarítmica. Se basa en aproximaciones asintóticas. Esta aproximación, mediante asíntotas (líneas rectas), es suficiente si sólo se necesita información general sobre la característica de la respuesta en frecuencia. Si se desea obtener curvas exactas, es fácil corregir las curvas asintóticas. Las curvas de ángulo de fase se dibujan con facilidad si se cuenta con una plantilla de la curva de ángulo de fase de 1 + jw mica (log 0 = -∞), esto no significa un problema serio. Observe que la determinación experimental de una función de transferencia se hace simplemente si se presentan datos de la respuesta en frecuencia en la forma de una traza de Bode.
Factores básicos de . Como se plante6 antes, la ventaja principal de usar una traza logarítmica es la facilidad relativa de graficar las curvas de la respuesta en frecuencia. Los factores básicos que suelen ocurrir en una función de transferencia arbitraria
son:
1. La ganancia K
2. Los factores de integral y de derivada
3. Los factores de primer orden 4. Los factores cuadráticos
Una vez que nos familiarizamos con las trazas logarítmicas de estos factores básicos, es posible utilizarlas con el fin de construir una traza logarítmica compuesta para cualquier
forma de , trazando las curvas para cada factor y agregando curvas individuales en forma gráfica, ya que agregar los logaritmos de las ganancias corresponde a multiplicarlos entre sí.El proceso de obtener la traza logarítmica se simplifica todavía más mediante aproximaciones asintóticas para las curvas de cada factor. (Si es necesario, es fácil hacer correcciones a una traza aproximada, con el fin obtener una precisa.)
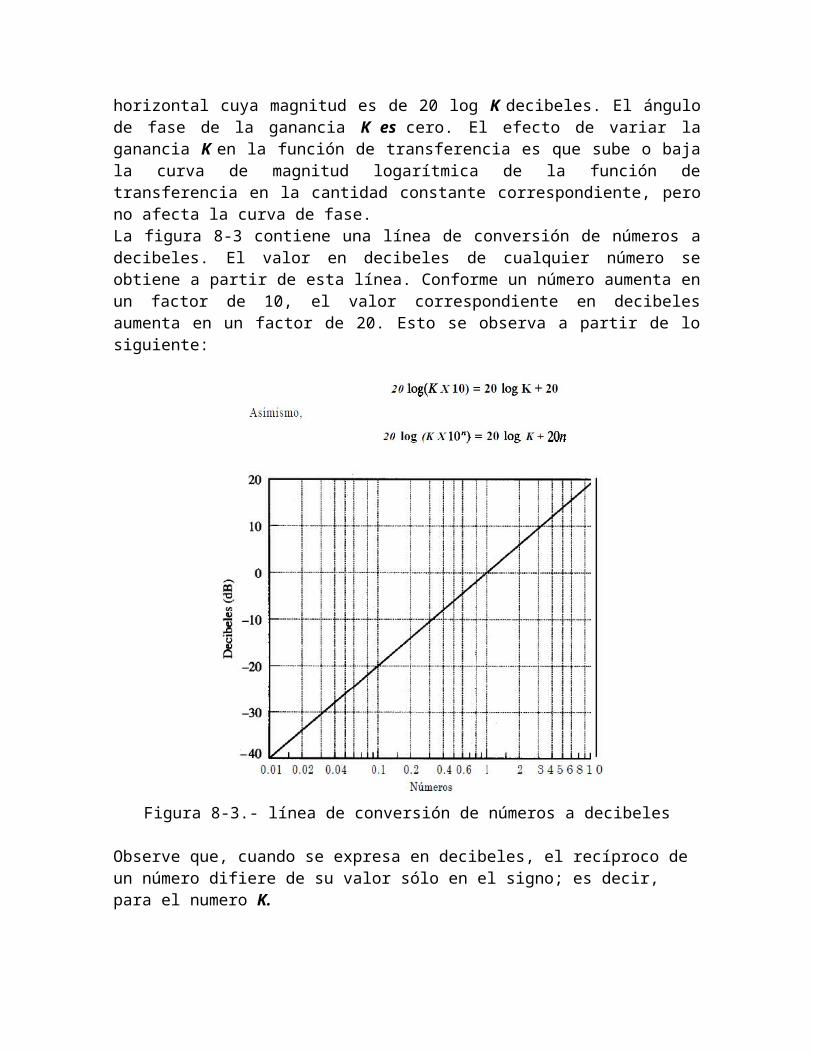
La ganancia K. Un número mayor que la unidad tiene un valor positivo en decibeles, en tanto que un número menor que la unidad tiene un valor negativo. La curva de magnitud logarítmica para una ganancia constante K es una recta horizontal cuya magnitud es de 20 log K decibeles. El ángulo de fase de la ganancia K es cero. El efecto de variar la ganancia K en la función de transferencia es que sube o baja la curva de magnitud logarítmica de la función de transferencia en la cantidad constante correspondiente, pero no afecta la curva de fase. La figura 8-3 contiene una línea de conversión de números a decibeles. El valor en decibeles de cualquier número se obtiene a partir de esta línea. Conforme un número aumenta en un factor de 10, el valor correspondiente en decibeles aumenta en un factor de 20. Esto se observa a partir de lo siguiente:
Figura 8-3.- línea de conversión de números a decibeles
Observe que, cuando se expresa en decibeles, el recíproco de un número difiere de su valor sólo en el signo; es decir, para el numero K.
Factores de integral y de derivada (polos y ceros en el origen). La magnitud logarítmica de
en decibeles es
El ángulo de fase de es constante e igual a -90º.En las trazas de Bode, las razones de frecuencia se expresan en términos de octavas o décadas. Una octava es una banda de frecuencia de w1 a 2w1, en donde w1 es cualquier frecuencia. Una década es una banda de frecuencia de w1 a 10w1, en donde, otra vez, w1 es cualquier frecuencia. (En la escala logarítmica del papel semilogaritmico, cualquier razón de frecuencia determinada se representa mediante la misma distancia horizontal.
Por ejemplo, la distancia horizontal de w = 1 a w = 10 es igual a la de w = 3 a w = 30.)Si se grafica la magnitud logarítmica de -20 log w dB contra w en una escala logarítmica, se obtiene una recta. Para trazar esta recta, necesitamos ubicar un punto (0 dB, w = 1) en ella. Dado que
La pendiente de la recta es -20 dB/década (w -6 dB/octava).De la misma manera, la magnitud logarítmica de jw en decibeles es
El ángulo de fase de jw es constante e igual a 90º. La curva de magnitud logarítmica es una recta con una pendiente de 20 dB/década. Las figuras 8-4(a) y (b) muestran curvas de respuesta en frecuencia de los factores y jo, respectivamente. Es fácil observar que las diferencias en las respuestas en frecuencia de los factores y jw estriban en los signos de las pendientes de las curvas de magnitud logarítmica y en los signos de los ángulos de fase. Ambas magnitudes logarítmicas se vuelven iguales a 0 dB en w = 1.
Si la función de transferencia contiene el factor o , la magnitud logarítmica se convierte, respectivamente, en
O bien
Por tanto, las pendientes de las curvas de magnitud logarítmica para los factores y
son -20n dB/década y 20n dB/década, respectivamente. El ángulo de fase de (
es igual a -9º X n durante todo el rango de frecuencia, en tanto que el de es igual a 90º X n en todo el rango de frecuencia. Las curvas de magnitud pasarán por el punto (0 dB, w = 1).
Factores de primer orden La magnitud logarítmica del factor de primer orden es
Para frecuencias bajas, tales que la magnitud logarítmica se aproxima mediante
Por tanto, la curva de magnitud logarítmica para frecuencias bajas es la línea 0 dB constante. Para
frecuencias altas, tales que
Ésta es una expresión aproximada para el rango de altas frecuencias. En w = 1/T, la magnitud logarítmica es igual a 0 dB; en w = l0/T, la magnitud logarítmica es de -20 dB. Por tanto, el valor de -20 log wT dB disminuye en 20 dB para todas las décadas de w. De
esta forma, Para , la curva de magnitud logarítmica es una línea recta con una pendiente de -20 dB/década (o -6 dB/octava).
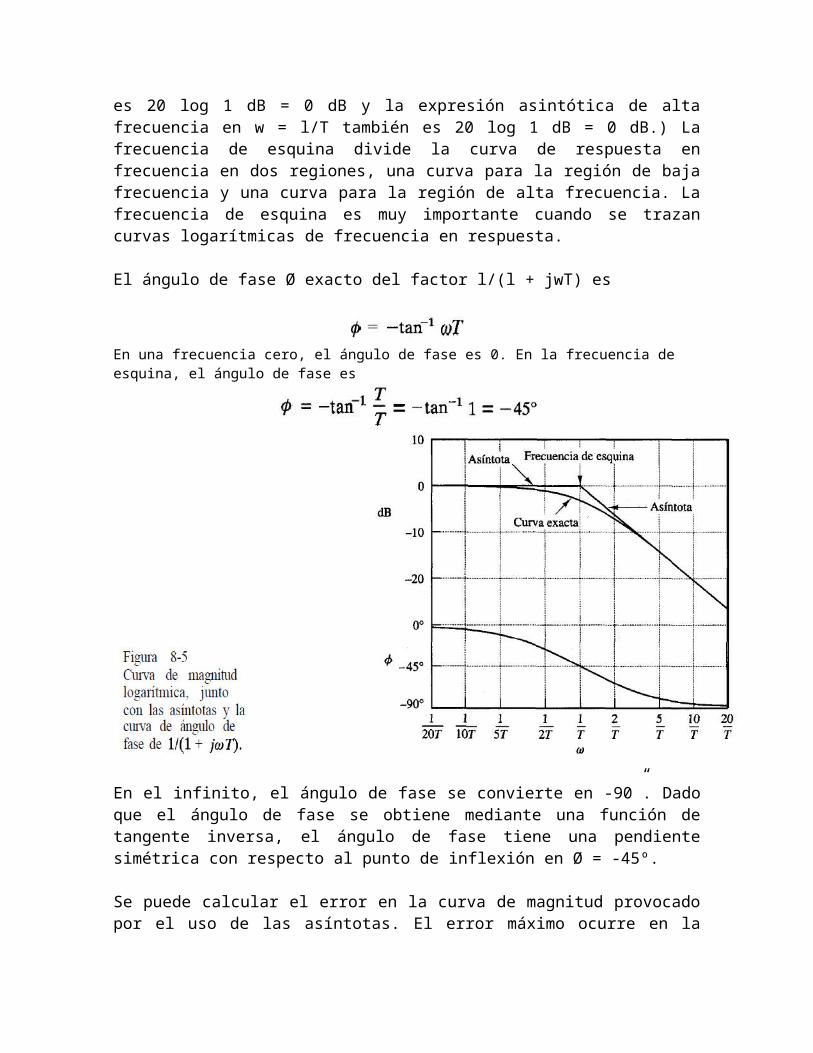
Nuestro análisis muestra que la representación logarítmica de la curva de respuesta en frecuencia del factor l/(l + jwT) se aproxima mediante dos asíntotas (líneas rectas), una de las cuales es una recta de 0 dB para el rango de frecuencia 0 < w < UT y la otra es una recta con una pendiente de -20 dB/década (o -6 dB/octava) para el rango de frecuencia l/T < w < ∞. La curva de magnitud logarítmica exacta, las asíntotas y la curva de ángulo de fase exacta aparecen en la figura 8-5.
La frecuencia en la cual las dos asíntotas se encuentran se denomina frecuencia de esquina o frecuencia de corte. Para el factor l/(l + jwT), la frecuencia w = l/T es la frecuencia de esquina, dado que en w = 1/T, ambas asíntotas tienen el mismo valor. (La expresión asintótica de baja frecuencia en w = 1/T es 20 log 1 dB = 0 dB y la expresión asintótica de alta frecuencia en w = l/T también es 20 log 1 dB = 0 dB.) La frecuencia de esquina divide la curva de respuesta en frecuencia en dos regiones, una curva para la región de baja frecuencia y una curva para la región de alta frecuencia. La frecuencia de esquina es muy importante cuando se trazan curvas logarítmicas de frecuencia en respuesta.
El ángulo de fase Ø exacto del factor l/(l + jwT) es
En una frecuencia cero, el ángulo de fase es 0. En la frecuencia de esquina, el ángulo de fase es

En el infinito, el ángulo de fase se convierte en -90”. Dado que el ángulo de fase se obtiene mediante una función de tangente inversa, el ángulo de fase tiene una pendiente simétrica con respecto al punto de inflexión en Ø = -45º.
Se puede calcular el error en la curva de magnitud provocado por el uso de las asíntotas. El error máximo ocurre en la frecuencia de esquina y es aproximadamente igual a -3 dB dado que
El error en la frecuencia una octava abajo de la frecuencia de esquina, es decir, en w = 1/(2T), es
El error en la frecuencia una octava arriba de la esquina de frecuencia, es decir, en w = 2/T, es
Por tanto, el error en una octava abajo o arriba de la frecuencia de esquina es aproximadamente igual a -1 dB. Asimismo, el error en una década abajo o arriba de la frecuencia de esquina es aproximadamente -0.04 dB. El error en decibeles implícito al usar
la expresión asintótica para la curva de respuesta en frecuencia de l/(l + jwT) aparece en la figura S-6. El error es simétrico con respecto a la frecuencia de esquina.Dado que las asíntotas se trazan con facilidad y están suficientemente cerca de la curva exacta, su uso es conveniente para dibujar las trazas de Bode con el fin de establecer con rapidez y con un mínimo de cálculos la naturaleza general de las características de la respuesta en frecuencia, y significa una ayuda en gran parte del trabajo de diseño preliminar.Si se desea obtener curvas de respuesta en frecuencia precisas, es fácil hacer correcciones remitiéndonos a la curva obtenida en la figura 8-6. En la práctica, para dibujar una curva de respuesta en frecuencia precisa se introduce una corrección de 3 dB en la frecuencia de esquina y una corrección de 1 dB en los puntos una octava abajo y arriba de la frecuencia de esquina, y después se conectan estos puntos mediante una curva regular.Observe que variar la constante de tiempo T mueve la frecuencia de esquina a la izquierda o a la derecha, aunque las formas de las curvas de magnitud logarítmica y de ángulo de fase no cambian.
La función de transferencia l/(l + jwT) tiene la característica de un filtro paso-bajas.Para frecuencias arriba de w = 1/T, la magnitud logarítmica disminuye rápidamente hacia -∞. Esto se debe, en esencia, a la presencia de la constante de tiempo. En el filtro pasobajas, la salida sigue fielmente una entrada senoidal a frecuencias bajas. Pero, conforme aumenta la frecuencia de entrada, la salida no puede seguir la entrada debido a que se requiere de cierta cantidad de tiempo para que el sistema aumente en magnitud. Por tanto, para frecuencias altas, la amplitud de la salida tiende a cero y el ángulo de fase de la salida tiende a -90”. En este caso, si la función de entrada contiene muchos armónicos, los componentes de baja frecuencia se reproducen fielmente en la salida, en tanto que los componentes de alta frecuencia se atenúan en amplitud y cambian en fase. Por tanto, un elemento de primer orden produce una duplicación exacta, o casi exacta, solo para fenómenos constantes 0 que varían lentamente.Una ventaja de las trazas de Bode es que, para factores recíprocos, por ejemplo, el factor 1 + jwT, las curvas de magnitud logarítmica y de ángulo de fase sólo necesitan cambiar de signo. Dado que
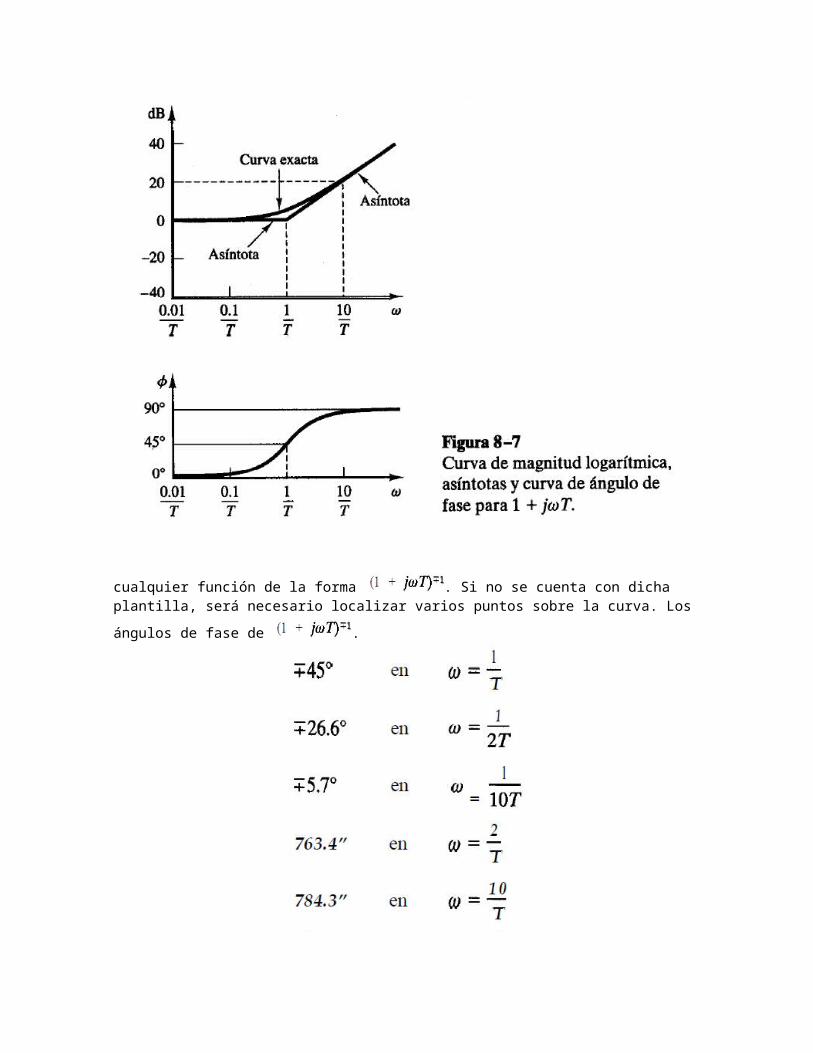
la frecuencia de esquina es igual para ambos casos. La pendiente de la asíntota de alta frecuencia de 1 + jo T es 20 dB/década, y el ángulo de fase varía de 0º a 90º conforme la frecuencia w se incrementa de cero a infinito. La curva de magnitud logarítmica, junto con las asíntotas y la curva del ángulo de fase para el factor 1 + jw T, aparece en la figura 8-7.La forma de las curvas del ángulo de fase es la misma para cualquier factor de la forma
. Por tanto, es conveniente tener una plantilla para la curva de ángulo de fase.Esta plantilla puede usarse repetidas veces para construir curvas de ángulo de fase para
cualquier función de la forma . Si no se cuenta con dicha plantilla, será necesario localizar
varios puntos sobre la curva. Los ángulos de fase de .
1.3.- GRAFICAS RECTANGULARES Y POLARES
TRAZAS POLARES
La traza polar de una función de transferencia senoidal G(jω) es una gráfica de la magnitud de G(jω) contra el ángulo de fase de G(jω) en coordenadas polares, conforme ω varia de cero a infinito. Por tanto, la traza polar es el lugar geométrico de los vectores │G(jω)│G(jω) conforme ω varia de cero a infinito. Obsérvese que, en las gráficas polares, los ángulos de fase son positivos (negativos) si se miden en el sentido contrario de las manecillas del reloj (en el sentido de las manecillas) a partir del eje real positivo, la traza polar se denomina con frecuencia traza de Nyquist. La figura 8-27 contiene un ejemplo de dicha traza. Todos los puntos de la traza polar de G(jω) en los ejes real e imaginario son sus componentes real e imaginaria la magnitud │G(jω)│ y el ángulo de fase ∕G(jω) deben calcularse directamente para cada frecuencia ω con el propósito ω con el propósito de construir trazas polares. Sin embargo polar deben obtenerse directamente de la traza logarítmica si esta se traza primero y los decibeles se convierten a una magnitud ordinaria. O bien por supuesto puede usarse MATLAB para obtener una traza polar G(jω) o para obtener │G(jω) con precisión para diversos valores de ω en el rango de frecuencia que interesa ( véase la sección 8-5.)
Una ventaja de usar una traza polar es que representa, en una sola gráfica, las características de la respuesta en frecuencia de un siete en el rango de frecuencia completo. Una desventaja es que la traza no indica en forma clara la contribución de todos los factores individuales de la función de transferencia en lazo abierto.

Factores de integral y de derivada (jω)±1. La traza polar de G(jω) = 1/jω es el eje imaginario negativo dado que
G(jω)=1jω
= - j 1ω
= 1ω
= -90
la traza polar de G(jω) = Jω es el eje imaginario positivo.
Factores de primer orden (1+ jωT) ±. Par la función de transferencia senoidal
G(jω)= 1
1+ jωT =
1
√1+ω2T 2 −tan−1 ωT
Los valores de G(jω) en ω=0 y ω= 1/T son, respectivamente,
G(j0) = 1¿0 y G ( j1T
) = 1
√ 2 ¿45
Si ω tiende a infinito, la magnitud de G(jω) tiende a cero y el ángulo de fase tiende a -90”. La traza polar de esta función de transferencia es un sentido conforme la frecuencia ω varia de cero a infinito, como se aprecia en la figura 8-28 (a). Centro se ubica en 0.5 sobre el eje real y el radio es igual a 0.5.
Para probar que la traza polar es un semicírculo, defina

G(jω) = X + Jy
En donde
X= 1
1+ω2 T2 = parte real de G(jω)
Y= −ωT
1+w2 T2 = parte imaginaria de G(jω)
Por tanto, en el plano X-Y G(jω) es un circulo con centro en X= ½, Y=0 y con radio de ½ . Como se aprecia en la figura 8-28(b). El semicírculo inferior corresponde a 0 ≤ω ≤∞ y el semicírculo superior corresponde a -∞ ≤ω 0.
La traza polar de la función de transferencia 1 + jωT es simplemente la mitad superior de la recta que pasa por un punto (1,0), en el plano complejo y paralelo al eje imaginario, como se observa en la figura 8.29. la traza polar de 1+ jωT tiene un aspecto completamente diferente del d 1/(1+jωT).
Factores cuadráticos [ 1 + 2 (jω/ωn)ێ + (jω∕ωn¿2 ¿± 1. Las partes de
frecuencia baja y alta de la traza polar de la función de transferencia senoridal.
G(jω) = 1
1+2δ ( jwn
ω )+( jωn
ω )2 paraδ <0
Se obtiene respectivamente, mediante
lim G ( jω )=1<0 ° Y lim❑
G ( jω )=0/ -180’’
La traza polar de esta función de transferencia senoidal empieza en 1/0° y termina en 0/-180° conforme ω aumenta de cero a infinito. Por tanto la parte de frecuencia alta de G(jω) es tangente al eje real negativo. Los valores de G(jω) en el rango de frecuencia que interesa se calcula directamente, mediante las trazas de bode o MATLAB.
La figura 8-30 contiene ejemplos de las trazas polares de la función de transferencia que se acaba de considerar. La forma exacta de una traza polar depende del valor del factro de amortiguamiento relativo ێ, pero la forma general de la traza es igual tanto para el caso subamortiguado (1 ¿0<ێ¿ como para el caso sobreamortiguado (1¿ێ¿.
Para el caso subamortiguado en ω = ωn, tenemos que G(jωn) = 1/(j2ێ), y el angulo de fase en ω=
ωn es de -90°. Por tanto, se observa que la frecuencia en la que el lugar GEO
Dado que la parte imaginaria de G(jω) es positiva para ω ¿ 0 y aumenta en forma mono tónica, además de que la parte real de G(jω) se derementa en forma mono tónica a partir de la unidad, la forma general de la traza polar de G(jω) es la que aparece en la figura 8-32, el ángulo de fase está entre 0’’ y 180’’.
Formas generales de las trazas polares. Las trazas polares de una función de transferencia de la forma.

En donde n¿m , o el grado del polinomio del denominador es mayor que el del numerador, tendrá las formas generales siguientes:
1. Para λ= 0 sistemas del tipo 0: el punto inicial de la traza polar (que corresponde a ω=0) es finito y esta sobre el eje real positivo. La tangente para la traza polar en ω=0 es perpendicular al eje real. El punto terminal, que corresponde a ω = ∞, está en el origen y la curva es tangente a uno de los ejes.
2. Para λ= 1 o sistemas de tipo 1: el termino (jω) del denominador contribuye -90 º al ángulo de fase total de G(jω) para 0≤ ω≤ ∞.En ω=0, la magnitud de G(jω) es infinita y el ángulo de fase es igual a -180’’. En frecuencias bajas, la traza polar es asintótica para una línea paralela al eje real negativo. En ω= ∞, la magnitud se vuelve cero y las curva es tangente a uno de los ejes.
3. Para λ=2 o sistemas de tipo 2: el termino (jω¿2 del denominador contribuye -180’’ al angulo de fase total de G(jω) para 0≤ ω ≤ ∞. En ω=0, las magnitud de G(jω) es infinita y el angulo de fase es igual a -180’’. En frecuencias bajas, la traza polar es asintonica para una línea paralela al eje real negativo. En ω = ∞, la magnitud se vuelve cero y la curva es tangente a uno de los ejes.
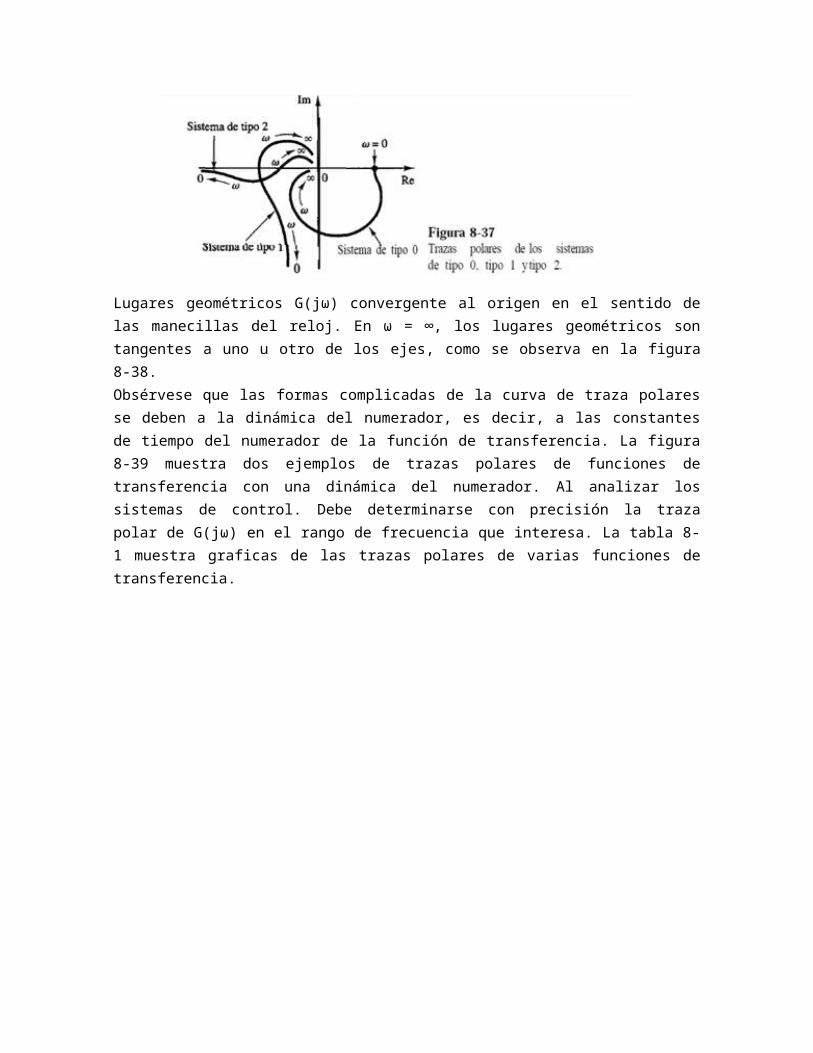
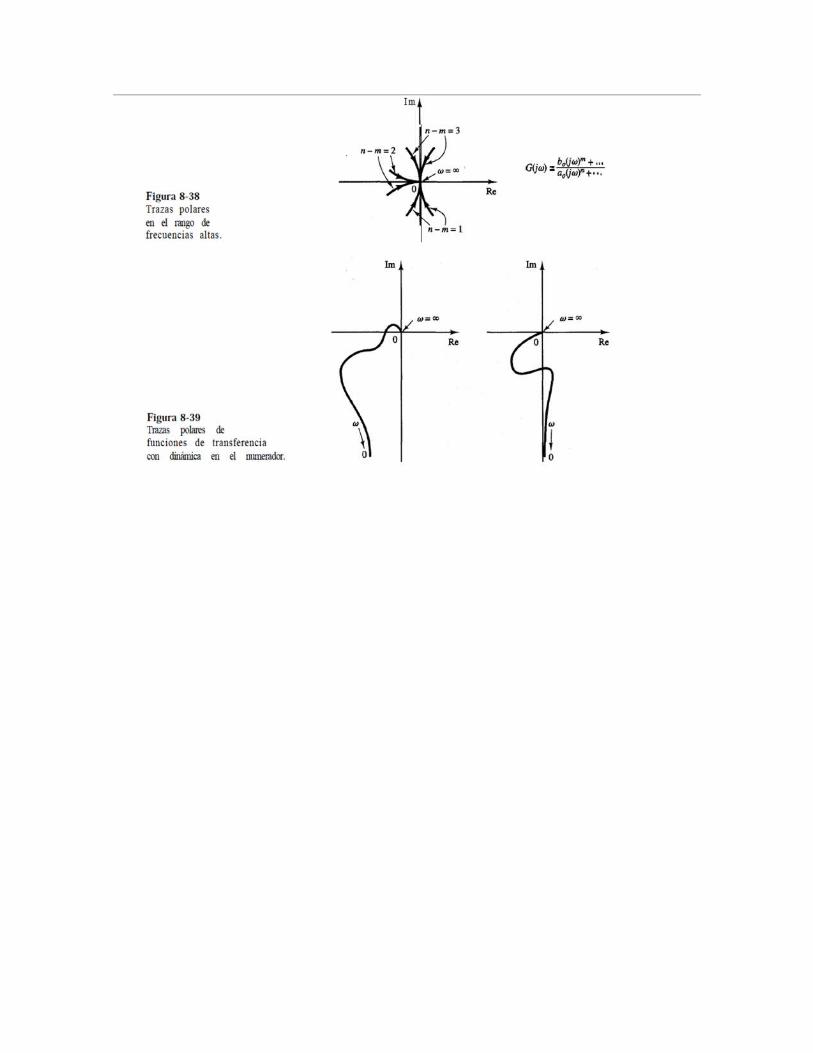
Las formas generales de las partes de frecuencia baja de las trazas polares de los sistemas de tipo 0, tipo 1 y tipo 2 aparecen en la figura 8-37. Se observa que, si el grado del polinomio del denominador de G(jω) es mayor que el del denominador.

Lugares geométricos G(jω) convergente al origen en el sentido de las manecillas del reloj. En ω = ∞, los lugares geométricos son tangentes a uno u otro de los ejes, como se observa en la figura 8-38.Obsérvese que las formas complicadas de la curva de traza polares se deben a la dinámica del numerador, es decir, a las constantes de tiempo del numerador de la función de transferencia. La figura 8-39 muestra dos ejemplos de trazas polares de funciones de transferencia con una dinámica del numerador. Al analizar los sistemas de control. Debe determinarse con precisión la traza polar de G(jω) en el rango de frecuencia que interesa. La tabla 8-1 muestra graficas de las trazas polares de varias funciones de transferencia.


1.4 RESPUESTA A LA FRECUENCIA A PARTIR DE POLOS Y CEROS
La respuesta en frecuencia es la respuesta de un sistema en estado estacionario a una señal senoidal
para el estudio del mismo sistema, la señal de salida es diferente de la de entrada solamente en
amplitud y ángulo de fase.
A continuación se muestran los cuatro diferentes factores de un sistema
* Ganancia constante Kb La curva de ganancia es una línea horizontal en el diagrama de bode, si es
negativa la ganancia - Kb la ganancia logarítmica es 20log Kb. este signo negativo se toma en
cuenta el ángulo de fase -180°
* Polos o ceros en el origen (jω): un polo en el origen tiene una magnitud logarítmica 20log|1jω |=-
20log ω dB y un ángulo de fase ɸω=-90°
La pendiente de la cuerva de magnitud es -20dB/década para un polo
* Polos o ceros en el eje real: 20log|11+jωτ |=-10log(1+ω2τ2) el ángulo de fase es ɸω=-tan-1ωτ
para el factor del denominador
* Polos o ceros complejos conjugados: Para un sistema con una par de polos complejos conjugados
el máximo valor de la respuesta de frecuencia se presenta en la frecuencia de resonancia cuando la
relación de amortiguamiento tiende a cero y wr se aproxima a wn. La frecuencia de resonancia se
presenta por la relación wr=wn1-2ζ2 ζ=0.7071
Tomando en cuenta que en un sistema de lazo cerrado hay dominio de polos complejos conjugados
las curvas de frecuencia en resonancia en función de la relación de amortiguamiento es útil para
estimar la relación de amortiguamiento de un sistema a partir de una respuesta en frecuencia.
Existen sistemas que a la hora de graficar los ceros se encuentran ubicados en la parte izquierda o
derecha del plano s si estos ceros se encuentran en la parte izquierda su FT se le llama mínima de lo
contrario si los ceros se ubican en la parte derecha del plano se llama FT no mínima
La respuesta en frecuencia es la característica de un sistema medido cuando se le aplica una señal
de entrada conocida para saber el comportamiento del sistema de la misma manera la respuesta en
frecuencia pude analizarse de dos maneras, con diagramas de bode y con los diagramas de nyquist,
con la única diferencia entre los dos diagramas que presentan la información de diferente manera.
Es muy importante destacar que en un diagrama de bode la frecuencia se presenta en escala
logarítmica, la fase se presenta en grados y la magnitud en decibeles.
En un sistema donde K sea la ganancia y G(s) es la planta a considera el margen de ganancia es
rango de ganancia a lazo abierto en que el sistema se puede estabilizarse, los sistemas que tienen
mayor margen de ganancia toleran mayores cambios en los parámetros del sistema antes de que sea
inestable a lazo cerrado.

* Propiedades de algunos sistemas que se deben de cumplir cuando el sistema es estable o inestable
Cuando un sistema es estable
Margen de fase=180°+∠Ljω>0 y Margen de Ganancia =0dB-|L(jω)|>0
Cuando un sistema es inestable
Margen de ganancia = 0dB-|L(jω)|<0 y Margen de fase = 180°+∠Ljω<0
Existe una relación entre la respuesta transitoria en lazo cerrado y en frecuencia en lazo cerrado
(factor de amortiguamiento relativo y respuesta en frecuencia en lazo cerrado)
Se toma en cuenta un sistema de control de segundo orden como ejemplo y de sus características se
relacionan con el factor de amortiguamiento relativo.
La ecuación Mp= 12ζ1-ζ muestra que la magnitud máxima sobre la curva de respuesta en
frecuencia está directamente relacionada con el factor de amortiguamiento no relativo y por lo tanto
el sobrepaso en porcentaje.
Si el gráfico de magnitud tiene un valor pico en alguna frecuencia, ésta se llama frecuencia de
resonancia. El valor pico en decibeles se llama pico de resonancia.
Otra característica de interés de la traza de ganancia es el ancho de banda, que se define como el
rango de frecuencias para las cuales la ganancia decrece hasta 3 db por debajo de su valor de
directa.
Las características de la respuesta en frecuencia dan indicaciones cualitativas de su
comportamiento.
Mr indica la estabilidad relativa de un sistema estable en lazo cerrado. Un valor grande de Mr
corresponde a un sobrepaso máximo grande
El ancho de banda indica el comportamiento de la respuesta transitoria del sistema. Un ancho de
banda grande implica tiempos transitorios cortos, y viceversa.
La razón de cambio puede determinar diferencias de comportamiento entre dos sistemas que tienen
mismo ancho de banda y pico de resonancia.

1.5 GRAFICA LOGARÍTMICA DE BODE
Un diagrama de Bode es una representación gráfica que sirve para caracterizar la respuesta
en frecuencia de un sistema. Normalmente consta de dos gráficas separadas, una que corresponde
con la magnitud de dicha función y otra que corresponde con la fase. Recibe su nombre del
científico estadounidense que lo desarrolló, Hendrik Wade Bode.
Es una herramienta muy utilizada en el análisis de circuitos en electrónica, siendo fundamental para
el diseño y análisis de filtros y amplificadores.
El diagrama de magnitud de Bode dibuja el módulo de la función de transferencia (ganancia)
en decibelios en función de la frecuencia (o la frecuencia angular) en escala logarítmica. Se suele
emplear en procesado de señal para mostrar la respuesta en frecuencia de un sistema lineal e
invariante en el tiempo.
El diagrama de fase de Bode representa la fase de la función de transferencia en función de la
frecuencia (o frecuencia angular) en escala logarítmica. Se puede dar en grados o en radianes.
Permite evaluar el desplazamiento en fase de una señal a la salida del sistema respecto a la entrada
para una frecuencia determinada. Por ejemplo, tenemos una señal Asin(ωt) a la entrada del sistema
y asumimos que el sistema atenúa por un factor x y desplaza en fase −Φ. En este caso, la salida del
sistema será (A/x) sin (ωt − Φ). Generalmente, este desfase es función de la frecuencia (Φ= Φ(f));
esta dependencia es lo que nos muestra el Bode. En sistemas eléctricos esta fase deberá estar
acotada entre -90° y 90°.
La respuesta en amplitud y en fase de los diagramas de Bode no pueden por lo general cambiarse de
forma independiente: cambiar la ganancia implica cambiar también desfase y viceversa. En
sistemas de fase mínima (aquellos que tanto su sistema inverso como ellos mismos son causales y
estables) se puede obtener uno a partir del otro mediante la transformada de Hilbert.
Si la función de transferencia es una función racional, entonces el diagrama de Bode se puede
aproximar con segmentos rectilíneos. Estas representaciones asintóticas son útiles porque se pueden
dibujar a mano siguiendo una serie de sencillas reglas (y en algunos casos se pueden predecir
incluso sin dibujar la gráfica).
Esta aproximación se puede hacer más precisa corrigiendo el valor de las frecuencias de corte
(“diagrama de Bode corregido”).
El uso de cálculo logarítmico nos va a permitir simplificar funciones del tipo
a un simple sumatorio de los logaritmos de polos y ceros:
Supongamos que la función de transferencia del sistema objeto de estudio viene dada por la
siguiente transformada de Laplace:
donde , e son constantes.
Las normas a seguir para dibujar la aproximación del Bode son las siguientes
en los valores de pulsación correspondientes a un cero ( ) se tiene
que aumentar la pendiente de la recta un valor de por década.
en los valores de pulsación correspondientes a un polo ( ) se tiene
que disminuir la pendiente de la recta un valor de por década.
el valor inicial se obtiene poniendo el valor de frecuencia angular inicial ω en la
función y calculando el módulo |H(jω)|.
el valor de pendiente de la función en el punto inicial depende en el número y
orden de los ceros y polos en frecuencias inferiores a la inicial; se aplican las dos
primeras reglas.
Para poder manejar polinomios irreducibles de segundo grado ( ) se
puede en muchos casos aproximar dicha expresión por .
Nótese que hay ceros y polos cuando ω es igual a un determinado o . Eso
ocurre porque la función en cuestión es el módulo de H(jω), y como dicha función es
compleja,
.
Por ello, en cualquier lugar en el que haya un cero o un polo asociado a un término
, el módulo de dicho término será
.
Diagrama de Bode de un filtro pasó bajo Butterworth de primer orden (con un polo).
1.6 MARGEN DE FASE Y MARGEN DE GANANCIA
Digamos que tenemos el siguiente sistema:
donde K es una ganancia variable (constante) y G(s) es la planta en consideración. El margen de ganancia se define como el cambio en la ganancia a lazo abierto necesario para inestabilizar el sistema. Los sistemas con márgenes de ganancia grandes pueden tolerar mayores cambios en los parámetros del sistema antes de hacerse inestable a lazo cerrado.
Tenga en cuenta que una ganancia unitaria en magnitud es igual a ganancia de cero en dB.
El margen de fase se define como el cambio a lazo abierto en la fase necesario para inestabilizar el sistema a lazo cerrado.
El margen de fase mide también el la tolerancia del sistema a retardos. Si hay un retardo mayor que 180/Wpc en el lazo (donde Wpc es la frecuencia donde el cambio de fase es 180 grados), el sistema se inestabilizará a lazo cerrado. El retardo puede pensarse como un bloque extra en el camino directo del diagrama en bloque que adiciona fase al sistema pero no tiene efecto en la ganancia. Esto es, un retardo puede representarse como un bloque con magnitud de 1 y fase w*tiempo_retardo (en radianes/segundo ).
Por ahora, no nos preocupemos por saber de donde viene todo esto y concentrémonos en identificar los márgenes de ganancia y fase en el diagrama de Bode:
El margen de fase es la diferencia de fase entre curva de la fase y -180 grados en el punto correspondiente a la frecuencia que nos da una ganancia de 0dB (la frecuencia de cruce de ganancia, Wgc). Del mismo modo, el margen de ganancia es la diferencia entre la curva de magnitud y 0dB en el punto correspondiente a la frecuencia que nos da una fase de -180 grados (la frecuencia de cruce de fase, Wpc).

Algo interesante acerca del margen de fase es que no es necesario volver a graficar el d. de Bode para hallar el nuevo margen de fase cuando cambiamos las ganancias. Si recuerda, el agregado de ganancia solo desplaza la línea de magnitud en sentido vertical. Esto es equivalente a cambiar el eje y en el gráfico de magnitud. Hallar el margen de fase es simplemente cuestión de encontrar la nueva frecuencia de cruce y leer el margen de fase. Por ejemplo, suponga que ingresa el comando bode(50,[1 9 30 40]). Obtendrá el siguiente diagrama de Bode:
Debería verse que el margen de fase es alrededor de 100 grados. Suponga que ahora adiciona una ganancia de 100, mediante el comando bode(100*50,[1 9 30 40]). Debería obtenerse la figura siguiente (note que se han cambiado los ejes de modo que la escala será la misma que la de la figura anterior, el diagrama de Bode podría no tener exactamente la misma forma, ya que esto dependerá de la escala usada):

Como puede ver la línea de la fase es exactamente la misma que antes, y el gráfico de magnitud se corrió para arriba en 40dB (ganancia de 100). El margen de fase es ahora acerca de -60 grados. Puede lograrse idéntico resultado si el eje y del gráfico de magnitud fuese bajado 40dB. Experimente: observe el primer diagrama de Bode, encuentre la frecuencia donde la curva cruza la línea de -40dB, y saque el margen de fase. Debería ser cerca de -60 grados, lo mismo que el segundo Diagrama de Bode.
Podemos hallar los márgenes de ganancia y fase de un sistema directamente, usando Matlab. Ingrese el comando margin. Este comando devuelve los márgenes de ganancia y fase, las frecuencias de cruce de ganancia y fase, y una representación gráfica de ellas en el diagrama de Bode.
1.7 ESTABILIDAD UTILIZANDO EL CRITERIO DE NYQUISTSe puede resumir el siguiente criterio de estabilidad de Nyquist, basado en el análisis previo, analizando los rodeos del punto - 1 + j0 por el lugar de G(jω)H(jω): Criterio de estabilidad de Nyquist [para un caso especial en que G(s)H(s) no tiene ni polos ni ceros sobre el eje jω]: en el sistema que se presenta en la Fig. 1, si la función transferencia de lazo abierto G(s)H(s) tiene k polos en el semiplano s positivo y
Para que el lugar G(jω)H(jω) tenga estabilidad, a variar ω desde -∞ a ∞, debe rodearse k veces el punto - 1 + j0 en sentido anti horario.Observaciones sobre el criterio de estabilidad de Nyquist1. Se puede expresar este criterio como
Z = N + PDondeZ = cantidad de ceros de 1 + G(s)H(s) en el semiplano derecho de sN = cantidad de circunscripciones del punto - 1 + j0 en sentido horarioP = cantidad de polos de G(s)H(s), en el semiplano derecho de sSi P no es cero, para un sistema de control estable se debe tener Z=0, o N=-P lo que significa que hay que tener P rodeos antihorarios del punto - 1 + j0.Si G(s)H(s) no tiene polos en el semiplano derecho de s, Z = N.
Por tanto, para que haya estabilidad, no debe haber rodeos del punto - 1 + j0 por el lugar de G(s)H(s). En este caso no es necesario considerar el lugar en todo el eje jω, pues basta la porción de frecuencia positiva. Se puede determinar la estabilidad del sistema viendo si el punto - 1 + j0 esta rodeado por el diagrama de Nyquist de G(jω)H(jω). En la Fig. 5, se ve la regiσn incluida en el

diagrama de Nyquist. Para tener estabilidad, el punto - 1 + j0 debe quedar fuera de la zona sombreada.2. Hay que ser muy cuidadoso al verificar la estabilidad de sistemas de lazo múltiple pues pueden incluir polos en el semiplano s derecho. (Se hace notar que si bien un lazo interior puede ser inestable, se puede hacer estable todo el sistema de lazo cerrado con un diseño adecuado.) No basta con la simple inspección de los rodeos del punto - 1 + j0 por el lugar de G(jω)H(jω), para detectar inestabilidad en sistemas de lazo mϊltiple. Sin embargo, en esos casos se puede determinar fácilmente si hay o no algún polo en el semiplano derecho de s, aplicando el criterio de estabilidad de Routh al denominador de G(s)H(s).Si hay incluidas funciones trascendentes, como retardo de transporte e-Ts en G(s)H(s), se las puede aproximar por una expansión en serie antes de aplicar el criterio de estabilidad de Routh. Una forma de expansión en serie de e-Ts puede ser :
e-Ts = Como primera aproximación, se toman en numerador y denominador, solamente los dos primeros términos, o sea,
e-Ts = Esto da una buena aproximación al retardo de transporte para el rango de frecuencias 0<ω<(0,5/T). [Se hace notar que el valor de (2 - jωT)/(2 + jωT) es siempre la unidad y que el retardo de fase de (2 - jωT)/(2 + jωT) se aproxima mucho al retardo de transporte dentro del rango de frecuencias indicado.]3. Si el lugar de G(jω)H(jω) pasa por el punto - 1 + j0, hay ceros de la ecuación característica o polos de lazo cerrado sobre el eje jω. Esto no es deseable en sistemas de control en la práctica. En un sistema de lazo cerrado bien diseñado ninguna de las raíces de la ecuación característica debe estar sobre el eje jω.Caso especial en que G(s) H(s) involucra polos y/o ceros sobre el eje jωEn el análisis previo se supuso que la función transferencia de lazo abierto G(s) H(s) no tiene ni polos ni ceros en el origen. Ahora se ha de considerar el caso en que G(s) H(s) tiene polos y/o ceros sobre el eje jω.Como el recorrido de Nyquist no debe pasar por polos o ceros de G(s) H(s), si la función G(s) H(s) tiene polos o ceros en el origen (o en puntos del eje, jω distintos al origen), hay que modificar el contorno en el plano s. El modo habitual de hacerlo, es modificar el contorno en la vecindad del origen utilizando un semicírculo de radio infinitesimal є, como se ve en la Fig.у. Se mueve un punto representativo s a lo largo del eje jω negativo desde –j∞ hasta j0-. Desde s = j0- hasta s = j0+, el punto se desplaza sobre el semicírculo de radio є (donde є << 1) y finalmente se desplaza a lo largo del eje jω positivo desde j0+, hasta j∞.
Desde s = j∞, el contorno recorre un semicírculo de radio infinito y el punto representativo retorna al punto de partida. El área que el contorno modificado elude es muy pequeña y tiende a cero al hacerlo el radio є. Por tanto, todos los polos y ceros, si los hay en el semiplano derecho s, están contenidos en el contorno. Sea, por ejemplo, un sistema de lazo cerrado cuya función transferencia de lazo abierto esta dada por
G(S) H(s) = Los puntos correspondientes a s = j0+, y s = j0- en el lugar de G(s)H(s) tienen en el plano G(s)H(s), -j∞ y j∞, respectivamente. En la porción semicircular de radio є (donde є << 1), se puede escribir la variable compleja s
S = єejθDonde θ varνa de - 90' a +90. Entonces G(s)H(s) es :
G(єejθ)H(єejθ) = K/(єejθ) = El valor de K/є tiende a infinito al tender є a cero, y -θ varia desde 90' a - 90' cuando el punto representativo s recorre el semicírculo. Entonces los puntos G (j0-) H (j0-) = j∞ y G(j0+)H(j0+) = -j∞ están unidos por un semicírculo de radio infinito en el semiplano derecho de GH. El desvió semicircular infinitesimal alrededor del origen se transforma en el plano GH en un semicírculo de radio infinito. En la Fig. 7 se ve un contorno en el plano s transformado en el lugar de G(s)H(s) en el plano GH. Los puntos A, B y C del contorno en el plano s, se representan por los puntos A' B' y C en el lugar de G(s)H(s). Como se ve en la Figura 7, los puntos D, E y F que están en el semicírculo de radio infinito en el plano s, se transforman en el origen en el plano GH. Como no hay polo en el semiplano derecho s y el lugar de G(s)H(s) no encierra el punto - 1 + j0, no hay ceros de la función 1 + G(s)H(s) en el semiplano derecho de s. Por tanto, el sistema es estable.Para una función transferencia de lazo abierto G(s)H(s) con un factor 1/sn (con n = 2, 3 .... ), el diagrama de G(s)H(s) tiene n semicírculos de radio infinito, en sentido horario, en derredor del origen cuando el punto representativo s recorre el semicírculo de radio є (con є << 1). Por ejemplo, si la funciуn transferencia de lazo abierto siguiente.
G(S) H(s) = Entonces
G(s)H(s) = K/(є2e2jθ) = Al variar θ desde - 90' a 90' en el plano s, el αngulo de G(s)H(s) varia desde 180' a - 180', como se ve en la Fig. 8. Como no hay polo en el semiplano derecho de s y el lugar rodea dos veces en sentido horario al punto -1+ j0 para cualquier valor positivo de K, hay dos ceros de 1 + G(s)H(s) en el semiplano derecho de s. Por tanto, este sistema es siempre inestable. Se puede efectuar un análisis similar si G(s)H(s) tiene polos y/o ceros en el eje jω. Se puede generalizar el criterio de estabilidad de Nyquist como sigue:Criterio de estabilidad de Nyquist [Para un caso general en que G(s)H(s) tiene polos y/o ceros sobre el eje jω]: en el sistema que se ve en la Fig. 1, si la funciσn transferencia de lazo abierto G(s)H(s) tiene k polos en el semiplano derecho de s, para que haya estabilidad, a medida que el punto representativo recorre el diagrama de Nyquist modificado en sentido horario, el lugar G(s)H(s) debe incluir k veces el punto -1 + j0 en sentido anti horario.

BIBLIOGRAFÍA
Ingeniería de control moderna
Katsuhiko Ogata
Sistemas de control para ingeniería Tercera edición
Norman S. NISE
Sistemas de control moderno10° edición
Richard C. DorfRobert H. Bishop
http://www.ib.cnea.gov.ar/~instyctl/Tutorial_Matlab_esp/freq.html* http://www.dliengineering.com/vibman-spanish/respuestadefrecuencia1.htm