Competencia y Predacion

of 155
-
Upload
sebastian-gomez -
Category
Documents
-
view
219 -
download
0
Transcript of Competencia y Predacion
-
8/17/2019 Competencia y Predacion
1/155
-
8/17/2019 Competencia y Predacion
2/155
r = r(t, x)
-
8/17/2019 Competencia y Predacion
3/155
-
8/17/2019 Competencia y Predacion
4/155
n
-
8/17/2019 Competencia y Predacion
5/155
-
8/17/2019 Competencia y Predacion
6/155
-
8/17/2019 Competencia y Predacion
7/155
dx
dt = rx
x
t
r
r > 0
r 0
x0 > 0
x(t) = 0
r < 0
x(t) = 0
x(t)
x
t
x0
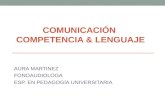
Crecimiento exponencial, r
0
2 4 6 8 10t
2
4
6
8
x
Decrecimiento exponencial, r
0
2 4 6 8 10t
2
4
6
8
x
-
8/17/2019 Competencia y Predacion
8/155
r
f (x)
x
x(t)
dx
dt = f (x) x
dx
dt
= r 1 − x
K x
r > 0
K > 0
x(t)
x(t) = K
K x0
− 1
e−rt + 1, x0 = 0
x(t)
x = 0
x = K
x K
x 0
Comportamiento decreciente de las soluciones
Comportamiento creciente de las soluciones
2 4 6 8t
0.5
1.0
1.5
2.0
x
-
8/17/2019 Competencia y Predacion
9/155
x(t) = 0
x(t) = K
x(t)
x0 2.0
x0 10.0
x0 0.02
2 4 6 8t
0.5
1.0
1.5
x K
x
x(t)
x
dx
dt = −r
1 − x
T
1 − x
K
x
T > 0
K
K > T
x |x − K |T
K−
T |x − T |− K
K−
T = x0 |x0 − K |T
K−
T |x0 − T |− K
K−
T e−rt
-
8/17/2019 Competencia y Predacion
10/155
x0
• x0 < T
• T < x0 < K
• x0 > K
x = 0
x = T
x = K
x Π
x 0
x K
Comportamiento decreciente de las soluciones
Comportamiento creciente de las soluciones
Comportamiento decreciente de las soluciones
2 4 6 8t
0.5
1.0
1.5
2.0
2.5
x
x = 0
x = K
x = T
T = 1
K = 2
x(t)
xt K
xt T
1 2 3 4 5 6 7t
0.5
1.0
1.5
2.0
2.5
3.0
x
-
8/17/2019 Competencia y Predacion
11/155
h(t)
h
x(t)
dx
dt = r
1 − x
K
x − h(t)
h(t) = H
H
dx
dt = r 1 − xK x − H
x1 =K −
K 2 − 4HK
r
2 ; x2 =
K +
K 2 − 4HK r
2
K 2 − 4HK
r rK 4
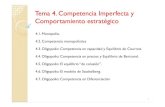
x0 r = 1
K = 1 H = 0,3 > 14
2 4 6 8 10 12t
0.5
1.0
1.5
x
H > rK 4
H = rK 4 x1 =
K 2 x0 >
K 2
dxdt
-
8/17/2019 Competencia y Predacion
12/155
xt x1 K
2
2 4 6 8 10 12
t
0.2
0.4
0.6
0.8
1.0
1.2
1.4
x
H = rK 4
H < rK 4 x1 x2
• x0 < x1 dx
dt 0
x2
• x0 > x2 dx
dt
x2
x0 r = 1
K = 1 H = 0,2
x1 = 0,276 x2 = 0,724
x 2
x 1
2 4 6 8 10 12
t
0.2
0.4
0.6
0.8
1.0
1.2
x
H < rK 4
x1
x2
-
8/17/2019 Competencia y Predacion
13/155
x0 < x1
x0 H c = rK 4
H
H H c
x∞ H > H c
H H c
H H c
H H c
2 4 6 8 10 12
t
0.5
1.0
1.5
2.0
2.5
x
H > H c
h(t)
h = h(t, x)
h(t) = H
∆y = yn+1 − yn = r 1 − ynK yn
-
8/17/2019 Competencia y Predacion
14/155
yn n
r
K (1 + r)yn = xn;
r
K (1 + r)yn+1 = xn+1
xn+1 = (1 + r)xn(1 − xn)
1 + r = R
xn+1 = Rxn(1 − xn)
R
x −→ f (x) = Rx(1 − x)
R
x
x ∈ [0, 1]
x
x < 0
1 − x > 0 Rx(1 − x)
xn+1 = Rxn(1 − xn)
[0, 1]
x > 1
1−x 4 x
[0, 1]
R
f (x)
x
xn f (xn)
f (xn)
xn+1
xn n
• 0 R 1 x −→ Rx(1 − x) x = 0
R = 0,5
x
[0, 1]
-
8/17/2019 Competencia y Predacion
15/155
R 0.5
1 2 3 4 5 6n
0.1
0.2
0.3
0.4
0.5
0.6
xn
• 1 < R 0
xn+1 = Rε(1 − ε)
ε
R(1 − ε) > 1
R
xn+1 > ε
xn x0
xf = 1
−1R
f (x) =R(1− 2x) f (xf ) = 2 −R |f (xf )|
-
8/17/2019 Competencia y Predacion
16/155
R 2.8
5 10 15 20n
0.2
0.4
0.6
0.8
1.0
xn
xf = 1 − 1R
R = 2,8
R > 3
x
• R = 3
R
x = 1 − 1R
x1 x2
R = 3,1
R 3.1
10 20 30 40 50n
0.2
0.4
0.6
0.8
1.0
xn
• R
x1 x2
R = 3,44
R = 3,5
-
8/17/2019 Competencia y Predacion
17/155
x0
R 3.5
10 20 30 40 50 60n
0.2
0.4
0.6
0.8
1.0
xn
•
R = 3,54
R = 3,564
R 3.564
100 200 300 400 500 600n
0.2
0.4
0.6
0.8
1.0
xn
• R
R = 3,5699457 · · ·
R = 3,6786
R = 1 +√ 8 =
-
8/17/2019 Competencia y Predacion
18/155
3,8284 · · · R = 3,62
R = 4
R 3.62
500 1000 1500 2000 n
0.2
0.4
0.6
0.8
1.0
xn
R 4
500 1000 1500 2000 n
0.2
0.4
0.6
0.8
1.0
xn
-
8/17/2019 Competencia y Predacion
19/155
dxdt
r
r = r(t)
r(t)
x(t)
dx
dt = r(t) x
r(t)
r(t) = n(t) − m(t)
• n(t)
• m(t)
• r(t)
x(0) = x0
x(t) = x0e´ t0 r(s)ds
r(t) r0 > 0 t > t0
x(t) = x0e´ t0 r(s)ds x0e
´ t0 r0ds = x0e
r0t −→ ∞
t → ∞
r(t) = log(t + 3)
t > 0
1 2 3 4t
0.5
1.0
1.5
x
-
8/17/2019 Competencia y Predacion
20/155
r(t) −r1 t0
0 x(t) = x0e´ t0 r(s)ds
x0e´ t0 −
r1ds
= x0e−r1t
−→ 0 t → ∞
r(t) = −0,5log(t + 3)
1 2 3 4t
0.5
1.0
1.5
x
r(t) → 0 ´ ∞0 |r(s)|ds < ∞
x(t)
a =´ ∞0 |r(s)|ds
ĺımt→∞
x(t) = x0e´ ∞
0 r(s)ds x0e
´ ∞
0 |r(s)|ds = x0ea < ∞
r(t)
r(t)
T
r(t + T ) = r(t)
R =
ˆ T 0
r(s)ds
x(t) → ∞ R > 0 k
[0, t)
[0, t) = [0, kT ) ∪ [kT,t)
x(t) = x0e´ t0 r(s)ds = x0e
´ kT 0
r(s)dse´ tkT
r(s)ds = x0ekRe
´ tkT
r(s)ds
r(t)
´ tkT
r(s)ds =´ t−kT 0 r(s)ds
t1 = t − kT t1 ∈ [0, T )
x(t) = ekR
x0e´ t10 r(s)ds
= ekR
x(t1)
-
8/17/2019 Competencia y Predacion
21/155
∞ t → ∞ k → ∞ x(t1) > 0 t1
x(t) → 0 R < 0
R = 0
x(t)
2π
r(t) =
(sen t)2,5
t ∈ [0, π)
−(sen t)2,5 t ∈ [π, 2π)
R =
´ 2π0 r(s)ds = 0
2 4 6 8 10 12t
1
2
3
4
5
6
x
r = r(t, x)
r
x
n(t, x)
m(t, x)
x
∂n(t, x)
∂x 0
r(t, x) = n(t, x) − m(t, x)
∂r(t, x)
∂x
-
8/17/2019 Competencia y Predacion
22/155
x
1
px
d( px)
dt =
1
x
dx
dt
p > 0
r(t, x) = r(t,px)
xmax
r(t, x) = r
t,
x
xmax
; xmax > 0
r(t, x)
x
r(t, x) = r
t, x
xmax
x = 0
r(t, x) = r0(t) + r1(t)
x
xmax
+ r2(t)
x
xmax
2+ · · ·
r0(t) > 0 x
(t, x)
r(t, x)
x
xxmax
1
r(t, x) = r0(t) + r1(t)
x
xmax
= r0(t)
1 +
r1(t)
r0(t) xmaxx
∂r(t,x)∂x
-
8/17/2019 Competencia y Predacion
23/155
T
dxdt = r(t)1 − xK x
x(t) = K
K x0
− 1
e−´ t0 r(s)ds + 1
r(t)
t = nT +t1 t1 ∈ [0, T ) r(t) = r(t1)
R =
´ T 0 r(s)ds
´ t0 r(s)ds = nR +
´ t10 r(s)ds
x(t) = x(nR + t1) = K
e−nR
K x0
− 1
e−´ t10
r(s)ds + 1
• R > 0 x(t) → K t → ∞•
R 0
-
8/17/2019 Competencia y Predacion
24/155
dxdt = r1 − xK (t) x; K (t) > 0
y = x−1
dy
dt = −ry + r
K (t)
y(t)
µ(t) = ert
y
y(t) = e−rt
r
ˆ t0
ers
K (s)ds + y0
x
x(t) = x0e
rt
x0r´ t0
ers
K (s)ds + 1
x(t)
K (t)
T
t = nT + t1 t1 ∈ [0, T )
ˆ t0
ers
K (s)ds =
n
j=1ˆ jT ( j
−1)T
ers
K (s)ds
I 1
+
ˆ nT +t1nT
ers
K (s)ds
I 2
I 1 v = s − ( j − 1)T
I 1 =
ˆ jT ( j−1)T
ers
K (s)ds =
ˆ T 0
er(v+( j−1)T )
K (v + ( j − 1)T ) dv = er( j−1)T
ˆ T 0
erv
K (v)dv
K (t)
T
K (v + ( j − 1)T ) = K (v)
´ T 0
erv
K (v)dv = pr
p
I 1 = p
rer( j−1)T
n j=1
p
rer( j−1)T =
p
r
n j=1
erT
j−1=
p
r
1 − ernT 1 − erT
I 2 v = s − nT
I 2 =
ˆ nT +t1nT
ers
K (s)ds =
ˆ t10
er(v+nT )
K (v + nT )dv = ernT
ˆ t10
erv
K (v)dv
p
r
1 − ernT 1 − erT
+ ernT ˆ t1
0
erv
K (v)dv
-
8/17/2019 Competencia y Predacion
25/155
x(t) = x(nT + t1) = x0e
rnT ert1
x0 p1−ernT 1−erT + rernT ́ t10 ervK (v)dv + 1=
x0ert1
x0
p e−rnT −11−erT + r
´ t10
erv
K (v)dv
+ e−rnT
x(nT + t1) n → ∞
x(t)
t → ∞
x∞ : R+ → R+
ĺımt→∞ |x(t) − x∞(t)| = 0
x∞ t1 ∈ [0, T ) x(t) nT + t1
t1
ĺımn→∞x(nT + t1)
x∞(t1)
x∞ : [0, T ) → R+ t ∈ [(k − 1)T,kT )
x∞(t) = x∞(t − kT ) x∞
R+
|x(t) − x∞(t)| → 0 t → ∞
tk → ∞ |x(tk) − x∞(tk)| → 0 tk = nkT + sk nk → ∞ sk
T
2πS
1
S1
[0, T )
[0, T ]
T ≡ 0
|x(tk) − x∞(tk)| = |x(nkT + sk) − x∞(nkT + sk)| = |x(nkT + sk) − x∞(sk)|
x∞
x(nkT +sk) → x∞(sk) k → ∞ sk k
x∞ t1
sk → s∗ s∗ ∈ [0, T )
|x(nkT + sk) − x∞(sk)| |x(nkT + sk) − x(nkT + s∗)|+ |x(nkT + s∗) − x∞(s∗)|
→0
x∞
+ |x∞(s∗) − x∞(sk)| →0
x∞
x
0 < K 1 K (t) K 2 K 1 K 2
dxdt
rx1 − x
K 1 dx
dt rx1 −
x
K 2
-
8/17/2019 Competencia y Predacion
26/155
x
L
sup
dxdt
|x(a) − x(b)| L |a − b|
|x(nkT + sk) − x(nkT + s∗)| L
|nkT + sk
−nkT
−s∗
|= L
|sk
−s∗
| →0
sk
→s∗
sk
s∗
sk
s∗
x∞(t) = x∞(nT + t1) = x∞(t1) = ert1
perT −1 + r
´ t10
erv
K (v)dv
x∞(t) T
x0
K =´ T 0 K (t)dt K (t) T
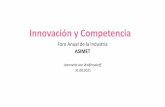
r = 0,5
K (t) =
2+s en2t
dx
dt = 0,5
1 − x
2 + sen 2t
x
x(0) = 1,0
x(0) = 2,2
x
t
K t
2 4 6 8 10t
0.5
1.0
1.5
2.0
2.5
3.0
x
-
8/17/2019 Competencia y Predacion
27/155
x∞(t)
x∞(t)
x∞ = 1T
ˆ T 0
x∞(t)dt ≈ 1,747
K (t)
K (t)
x(t)
-
8/17/2019 Competencia y Predacion
28/155
•
•
•
dx
dt = f (x)
x ∈ Rn f : Rn → Rn f
-
8/17/2019 Competencia y Predacion
29/155
t → x(t)
I ⊂ R
Rn
dx(t)dt
= f (x(t))
x(t)
t = 0
x(0) = x0 x0 ∈ Rn
G ⊂ Rn
f : G → Rn
x ∈ G x0 ∈ G
ẋ = f (x)
x(t0) = x0 x : I → U
I
t0
f
x1 f (x1) = 0
x(t) = x1
Rn
x(t)
n = 2
{t, x(t)} ∈ Rn+1
z
dxdt
= f (x)
U
W
W
U
x0 ∈ W x(t) ∈ U t 0
z
W
z
x(t) → z t → ∞ x0 ∈ W
x0 x(t) → z z
x0 W
z
x0 U y ∈ U
y(t)
y(0) = y0 w ∈ W
x(t)
y0 t0
y(t) = x(t + t0) y(0) = y0 y(t) → z
t → ∞
x(t) → z
t → ∞
-
8/17/2019 Competencia y Predacion
30/155
z
x
y
dxdt
= x(a − by)dydt
= y(−c + dx)
a
b
c
d
dx
dt = ẋ
• y = 0 dxdt =ax,
a
x
• x = 0 dydt
=
−cy
c
y
• b > 0 −bxy
xy
• d > 0 dxy
dxdt
dydt
x y 1x dxdt 1y dydt
1x
dxdt
= a − by1y
dydt
= −c + dx
x y
x
y