Tipo de Amortiguadores
16
RESUMEN DE TESIS Introducción Las vibraciones mecánicas no deseadas son un problema que se presenta en la mayoría de las maquinarias. En el sector automotriz las vibraciones producidas tanto por los elementos giratorios del motor como por las irregularidades del camino por el cual circula el automóvil, generando oscilaciones que afectan a la carrocería y a los ocupantes del mismo. Estas oscilaciones en primera instancia son atenuadas por el sistema de suspensión del automóvil que hace las vibraciones no sean tan bruscas, pero el tiempo en que se mantienen estas oscilaciones no es el deseado. Para atenuar las vibraciones en el menor tiempo posible se utiliza el amortiguador, y en el mercado se encuentra una variedad que satisfacen la mayoría de las necesidades de confort y seguridad. En los últimos años se ha estado desarrollando los amortiguadores magnetoreológicos, cuyas aplicaciones no están limitadas al área automotriz, también se los diseña para las construcciones civiles, robótica. En nuestro país casi no se tiene conocimiento de lo que es un fluido magnetoreológico, y por consiguiente, un amortiguador magnetoreológico. El propósito de esta tesis es dar a conocer este tipo de fluido, como obtenerlo y aplicación que se ha hecho en el diseño y construcción de un prototipo de amortiguador magnetoreológico, que este al alcance de la mayoría del mercado ecuatoriano, ya que, el precio de este tipo de dispositivos es excesivo y solo se lo encuentre para marcas de automóviles de lujo. CAPITULO I GENERALIDADES El amortiguador es un dispositivo mecánico, cuya función es transformar los movimientos vibratorios producidos por alguna fuente en otros más lentos, y al mismo tiempo de menor amplitud y duración. Todo el sistema de suspensión del vehículo tiene como función el absorber o atenuar las reacciones producidas en las ruedas por las irregularidades del terreno, asegurando la comodidad de los pasajeros, la protección de la carga y los componentes mecánicos del vehículo. El amortiguador atenúa las perturbaciones experimentadas por el auto al desplazarse por la carretera, manteniendo las ruedas en contacto con la misma, asegurando el confort en la marcha y la estabilidad del vehículo. Se pueden diferenciar tres tipos de oscilaciones (producidas por las irregularidades del terreno o por una conducción defectuosa, y a una carga unilateralmente distribuida): 1. Oscilaciones de empuje, que son producidas al pasar sobre un terreno ondulado. 2. Oscilaciones de cabeceo, producidas en los frenados bruscos. 3. Oscilaciones de bamboleo, producidas al tomar las curvas a alta velocidad. El término vibraciones se usa normalmente en referencia a vibraciones táctiles y visuales, mientras que las vibraciones audibles se definen como ruido. El espectro de vibraciones se puede dividir de acuerdo con la frecuencia y clasificarlas como vibraciones (0-25 Hz) y ruido (25- 2500 Hz). Para entender el entorno de vibración del vehículo hay que analizar las fuentes de excitación de las vibraciones, la respuesta del vehículo, la percepción humana y tolerancia a las vibraciones, ya que el ambiente generado por las vibraciones es uno de los criterios más importantes por lo que la gente juzga el diseño y la calidad de construcción del auto.
-
Upload
jesus-lopez -
Category
Documents
-
view
42 -
download
1
Transcript of Tipo de Amortiguadores

RESUMEN DE TESIS
Introducción
Las vibraciones mecánicas no deseadas son un problema que se presenta en la mayoría de las maquinarias. En el sector automotriz las vibraciones producidas tanto por los elementos giratorios del motor como por las irregularidades del camino por el cual circula el automóvil, generando oscilaciones que afectan a la carrocería y a los ocupantes del mismo. Estas oscilaciones en primera instancia son atenuadas por el sistema de suspensión del automóvil que hace las vibraciones no sean tan bruscas, pero el tiempo en que se mantienen estas oscilaciones no es el deseado.Para atenuar las vibraciones en el menor tiempo posible se utiliza el amortiguador, y en el mercado se encuentra una variedad que satisfacen la mayoría de las necesidades de confort y seguridad. En los últimos años se ha estado desarrollando los amortiguadores magnetoreológicos, cuyas aplicaciones no están limitadas al área automotriz, también se los diseña para las construcciones civiles, robótica. En nuestro país casi no se tiene conocimiento de lo que es un fluido magnetoreológico, y por consiguiente, un amortiguador magnetoreológico. El propósito de esta tesis es dar a conocer este tipo de fluido, como obtenerlo y aplicación que se ha hecho en el diseño y construcción de un prototipo de amortiguador magnetoreológico, que este al alcance de la mayoría del mercado ecuatoriano, ya que, el precio de este tipo de dispositivos es excesivo y solo se lo encuentre para marcas de automóviles de lujo.
CAPITULO I
GENERALIDADES
El amortiguador es un dispositivo mecánico, cuya función es transformar los movimientos vibratorios producidos por alguna fuente en otros más lentos, y al mismo tiempo de menor amplitud y duración.
Todo el sistema de suspensión del vehículo tiene como función el absorber o atenuar las reacciones producidas en las ruedas por las irregularidades del terreno, asegurando la comodidad de los pasajeros, la protección de la carga y los componentes mecánicos del vehículo. El amortiguador atenúa las perturbaciones experimentadas por el auto al desplazarse por la carretera, manteniendo las ruedas en contacto con la misma, asegurando el confort en la marcha y la estabilidad del vehículo.
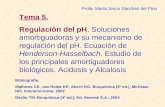
Se pueden diferenciar tres tipos de oscilaciones (producidas por las irregularidades del terreno o por una conducción defectuosa, y a una carga unilateralmente distribuida):
1. Oscilaciones de empuje, que son producidas al pasar sobre un terreno ondulado.2. Oscilaciones de cabeceo, producidas en los frenados bruscos.3. Oscilaciones de bamboleo, producidas al tomar las curvas a alta velocidad.
El término vibraciones se usa normalmente en referencia a vibraciones táctiles y visuales, mientras que las vibraciones audibles se definen como ruido. El espectro de vibraciones se puede dividir de acuerdo con la frecuencia y clasificarlas como vibraciones (0-25 Hz) y ruido (25-2500 Hz).
Para entender el entorno de vibración del vehículo hay que analizar las fuentes de excitación de las vibraciones, la respuesta del vehículo, la percepción humana y tolerancia a las vibraciones, ya que el ambiente generado por las vibraciones es uno de los criterios más importantes por lo que la gente juzga el diseño y la calidad de construcción del auto.
Figura 1.1 Oscilaciones del cuerpo del vehículo
PERCEPCIÓN Y TOLERANCIA DEL CUERPO HUMANO ALAS VIBRACIONES.
Existen muchos estudios e investigaciones realizadas para determinar el rango de frecuencias de vibraciones a las que el cuerpo humano responden con síntomas de fatiga, malestar, etc. al conducir o circular en un vehículo.
El cabeceo produce sensación de náuseas y alteraciones en el laberinto auditivo que modifica el sentido del equilibrio. Si el aparato vestibular y el líquido coclear del oído interno están sometidos de forma continua a aceleraciones lineales y/o angulares de frecuencias entre 0.5 y 0.75 Hz, se produce vértigo y mareo. Las frecuencias de 5 - 6 Hz causan fatiga general, debida a la resonancia de los músculos. Los objetos de la región visceral se ven afectados por frecuencias entre 5 y 7 Hz. La entrada en resonancia del diafragma (4-8 Hz) o la cara

frontal del tórax (10-50 Hz) produce dificultades respiratorias. La cabeza y el cuello son muy sensibles a las vibraciones que varían entre los 18 y 20 Hz, y las frecuencias del orden de los 20 Hz son perjudiciales para las vértebras cervicales.
En función de los experimentos realizados, se ha llegado a unas frecuencias de resonancias para otras partes del cuerpo que son:
Pierna flexionada (sentado): 2 HzPierna rígida: 20 HzTorso superior (hombro): 4-5 HzAntebrazo: 5-10 HzColumna vertebral (axial): 10-12 HzBrazo: 16-30 HzMano: 30-50 HzGlobo ocular: 20-90 Hz La vibración transmitida al globo ocular produce una pérdida de agudeza en la visión.En general, parece que las frecuencias verticales que resultan más incómodas para el ser humano se encuentran entre 20 y 200 Hz, aunque la fatiga aparece más rápidamente cuando las vibraciones están entre 4 y 8 Hz o por debajo de 0.75 Hz, y en ellas pueden aparecer vértigo y mareo. Las frecuencias laterales o longitudinales en el mismo rango también molestan porque alteran el mecanismo de equilibrio del oído interno.
En conclusión se ha determinado que las frecuencias aceptables están entre 1 y 2 Hz, jugando el asiento un papel fundamental en la sensación de confort, cuyos muelles deben tener sus frecuencias naturales alejadas de las solicitaciones transmitidas al casco de la carrocería, para evitar problemas de resonancias.
AMORTIGUADORES.
El peso del automóvil que descansa sobre un muelle sin amortiguador, continua oscilando de arriba hacia abajo después de una sacudida. El sacudimiento se detendrá gradualmente por la fricción en el sistema de suspensión. Un automóvil bajo sacudimiento es muy difícil de controlar, por que el peso efectivo sobre las llantas cambia de forma permanente. Los amortiguadores se instalan sobre un sistema de suspensión para detener rápidamente el sacudimiento natural de los muelles del automóvil, lo cual mejora el desplazamiento, control y manejo. El muelle controla el peso del automóvil y el amortiguador controla el sacudimiento o la oscilación.
En la actualidad y desde hace muchos años atrás se ha impuesto en la industria el uso de los amortiguadores hidráulicos. En estos, la fuerza amortiguadora es función creciente con la velocidad de desplazamiento del pistón del amortiguador.
Los amortiguadores más empleados actualmente en los automóviles son los amortiguadores hidráulicos telescópicos de doble efecto, que pueden ser:
a. bitubo.b. monotubo con gas.c. Amortiguadores magnetoreológicos (poco difundidos en el mercado).
Amortiguador bitubo.º
Amortiguadores monotubo.
Amortiguadores magnetoreológicos.

Se trata de amortiguadores semiactivos que en vez de aceite llevan un fluido magnetoreológico, prescindiendo de válvulas electromecánicas. Este fluido esta compuesto de partículas metálicas flotando en él.
Al magnetizarse, según si lo hace mucho o poco, modifica su viscosidad, consiguiendo variar la dureza del amortiguador. A medida que aumenta el campo magnético, el fluido se vuelve fibroso y su estructura llega a ser casi plástica. Las reacciones del fluido al pasar por los orificios del amortiguador cambian con la diferencia de viscosidad. Cuando no esta magnetizado, hay una gran diferencia de velocidad entre las partículas que están próximas a las paredes del orificio, y las que fluyen rodeadas de otras partículas del fluido. Gracias a esa diferencia de velocidad, el caudal puede ser grande y, por tanto, el amortiguador es suave. Cuando el fluido esta magnetizado, la velocidad de todas las partículas es muy semejante. El flujo es más lento y, por tanto, la dureza del amortiguador aumenta.
El amortiguador se endurece cuando es preciso limitar más los rebotes del muelle para aumentar el contacto con el suelo, bien por razones de estabilidad o por frenada. También actúa para frenar movimientos como balanceo o cabeceo, auque la amplitud de esos movimientos depende de los muelles y las barras estabilizadoras, no de los amortiguadores.
La desventaja con los amortiguadores tradicionales, es que generalmente las propiedades del fluido son constantes y en consecuencia el coeficiente amortiguamiento y el valor de la fuerza generada. La principal ventaja de este sistema frente a los tradicionales es la rapidez de variación del tipo de amortiguación, y las infinitas posibilidades de regulación que permite.En el desarrollo de los siguientes capítulos de esta tesis se explicará con más detalle lo que es un fluido magnetoreológico y su aplicación en la construcción de un prototipo de amortiguador magnetoreológico.
TIPOS DE FLUIDOS
Los fluidos se pueden clasificar en tres grupos que son: Fluidos Newtonianos, Fluidos No-newtonianos y Viscoelásticos.
FLUIDOS NEWTONIANOS.Un fluido newtoniano se caracteriza por cumplir la Ley de Newton para fluidos, es decir, que existe una relación lineal entre el esfuerzo cortante y la velocidad de deformación V/n. Si por ejemplo se triplica el esfuerzo cortante, la velocidad de deformación se va a triplicar también. Esto es debido a que el término (viscosidad) es constante para este tipo de fluidos y no depende del esfuerzo cortante aplicado.
FLUIDOS NO-NEWTONIANOSLos fluidos no newtonianos son aquellos en los que la relación entre esfuerzo cortante y la velocidad de deformación no es lineal. Estos fluidos a su vez se diferencian en:
Independientes del tiempo de aplicación Dependientes del tiempo de aplicación.
Independientes del tiempo de aplicación. Estos fluidos se pueden clasificar dependiendo de si tienen o no esfuerzo umbral, es decir, si necesitan un mínimo valor de esfuerzo cortante para que el fluido se ponga en movimiento.
Fluidos sin esfuerzo umbral

Fluidos pseudoplásticos (SHEAR-THINNING)
Ejemplos de este tipo de fluidos pueden ser algunos tipos de salsas de tomate, mostazas, algunos tipos de pintura, etc.
Fluidos dilatantes (Shear-thickening)
Ejemplos de los fluidos dilatantes son: las harinas de maíz (maicenas), almidones concentrados, arena mojada, etc.
Fluidos con esfuerzo umbral, llamados plásticosEste tipo de fluido se comporta como un sólido hasta que sobrepasa un esfuerzo cortante mínimo (esfuerzo umbral) y a partir de dicho valor se comporta como un líquido.La razón por la que se comportan así los fluidos plásticos es la gran interacción existente entre las partículas suspendidas en su interior . Están formados por dos fases, con una fase dispersa formada por sólidos y burbujas distribuidos en una fase continua.
Los fluidos plásticos, a su vez, se diferencian en la existencia de proporcionalidad entre el esfuerzo cortante y la velocidad de deformación, a partir de su esfuerzo umbral. Si existe proporcionalidad, se denominan fluidos plásticos de Bingham y si no la hay, se denominan solo plásticos.

Fluidos dependientes del tiempo de aplicaciónEste tipo de fluidos se clasifican en dos tipos: los fluidos tixotrópicos, en los que su viscosidad disminuye al aumentar el tiempo de aplicación del esfuerzo cortante, recuperando su estado inicial después de un reposo prolongado, y los fluidos reopécticos, en los cuales su viscosidad aumenta con el tiempo de aplicación de la fuerza y vuelven a su estado anterior tras un tiempo de reposo.
FLUIDO VISCOELÁSTICOLos fluidos viscoelásticos se caracterizan por presentar a la vez tanto propiedades viscosas como elásticas. Esta mezcla de propiedades puede ser debida a la existencia en el líquido de moléculas muy largas y flexibles o también a la presencia de partículas líquidas o sólidos dispersos. Ejemplos de los fluidos viscoelásticos son la nata, la gelatina, los helados.
MATERIALES INTELIGENTES
Los materiales inteligentes o activos, son materiales capaces de responder de forma controlable ante diferentes estímulos exteriores tanto físicos como químicos, modificando sus propiedades.Existen diferentes tipos o clases de materiales inteligentes, su clasificación se da de acuerdo al estímulo o comportamiento que recibe o produce respectivamente el material. Para intereses de este estudio se centra en una de las clasificaciones.
MATERIALES ELECTRO Y MAGNETOACTIVOSSon materiales que actúan o reaccionan ante estímulos eléctricos o magnéticos exteriores, se puede subdividirlos en los siguientes:
a.- Materiales magnetostrictivos y electrostrictivos.b.- Materiales piezoeléctricos.c.- Materiales electroreológicos y magnetoreológicos.
Materiales magnetostrictivos y electrostrictivosLos materiales magnetostrictivos y electrostrictivos cambian sus dimensiones al estar sometidos a un campo magnético o eléctrico respectivamente, por lo que son aptos para ser utilizados en sensores y actuadores. Sus aplicaciones más comunes son a modo de sonar, motores lineales, sensores de medida de tensiones mecánicas, medidas del par en ejes, sensores de posición y antirrobo.
Materiales piezoeléctricosLos materiales piezoeléctricos, poseen la capacidad de convertir la energía mecánica en energía eléctrica y viceversa, son ampliamente aplicados como sensores y actuadores, vibradores, zumbadores, micrófonos, etc.Materiales electroreológicos y magnetoreológicosLos materiales electroreológicos y magnetoreológicos son capaces de alterar sus propiedades reológicas ante la presencia de un campo magnético o eléctrico exterior respectivamente.

FLUIDOS MAGNETOREOLÓGICOS
El descubrimiento y desarrollo de los fluidos magnetoreológicos puede acreditarse a Jacob Rabinow. Estos fluidos se componen de partículas magnetizables muy pequeñas suspendidas en un adecuado líquido portador. Normalmente los fluidos MR son líquidos de consistencia similar a los aceites de motor, pero, cuando se aplica un campo magnético exterior se produce un momento dipolar en las partículas de hierro, formando una cadena paralela al campo como se muestra en la figura.
La alineación de las partículas de hierro suspendidas en el líquido provoca que se pueda restringir el movimiento del fluido, en consecuencia, se desarrolla una fuerza en el fluido que depende de la magnitud del campo magnético aplicado, lo interesante es que esto ocurre en pocos milisegundos.
40Un fluido MR típico contiene del 20 al 40% de partícula de hierro del volumen total neto, dichas partículas son suspendidas generalmente en aceite mineral, aceite sintético, etc. Los aceites hidrocarburos son preferidos porque son muy buenos lubricantes, durables, estables, los aditivos evitan la sedimentación de las partícula de hierro y existen en el mercado un gran variedad de fluidos con diferentes viscosidades. Otro factor que interviene en el desarrollo de la fuerza en el fluido es la curva de saturación magnética de las partículas suspendidas. Es recomendable que el nivel de saturación magnética de las partículas sea grande para así obtener un buen fluido MR. Las aleaciones de hierro y cobalto tienen una de las mejores niveles de saturación magnética, esto es alrededor de 2.4 teslas, pero, el precio de este tipo dematerial es muy alto, por lo que no es muy utilizado para aplicaciones prácticas y comerciales; podemos utilizar entonces partículas de hierro carbono que tienen una saturación magnética de 2.15 teslas. El tamaño de las partículas influye en la suspensión de las mismas en el fluido, esto es, mientras menor sea el tamaño de las partículas la suspensión en el fluido s mucho mejor, favoreciendo la regulación de la dureza de amortiguación; caso contrario mientras mayor sea el tamaño de las partículas se torna difícil la suspensión de las mismas en el fluido y por consiguiente la regulación de la amortiguación.
Modelado del Fluido magnetoreológicoPara representar matemáticamente el comportamiento de un fluido MR a menudo se utiliza el modelado de un plástico Bingham como se muestra en la figura 1.27; este describe satisfactoriamente las características del fluido magnetoreológico. En este modelo el esfuerzo cortante esta dado por:
Donde:0(H) = esfuerzo cortante dependiente del campo magnético.= coeficiente de viscosidad.V/n = velocidad de deformación del fluido.
De lo anterior se deduce que la densidad de energía en los fluidos MR esta limitado por la saturación magnética de las partículas de hierro. Un fluido MR tiene por lo general un valor máximo de densidad de energía de 0.1 Joule/cm3. Para tener una idea de la significativa ventaja de los fluidos MR en lo referente a la densidad de energía que puede proporcionar respecto a otros fluidos como por ejemplo los fluidos electroreológicos ER, dichos fluidos tienen una densidad de energía máxima de solo 0.001 Joule/cm3; teniendo en consideración que en ambos fluidos la viscosidad es casi la misma. Esta una de las razones más importantes por las que la utilización de los fluidos MR ha tenido

una gran aceptación en la construcción de dispositivos amortiguadores. Otra ventaja es el esfuerzo cortante que se puede obtener de los fluidos MR con partículas suspendidas de hierro, que aproximadamente es de 100 kPa, y que, si comparamos con el esfuerzo cortante que puede proporcionar un fluido ER que es de 2 a 5 kPa, esta claro los beneficios que obtenemos al utilizar los fluidos MR.
Si consideramos la gran densidad magnética que nos ofrecen los fluidos MR podemos construir dispositivos de menores dimensiones con un gran rango de servicio. Los fluidos MR pueden operar en un rango de temperatura comprendidas entre -40 º a 150 ºC teniendo una ligera variación en su esfuerzo cortante (Carlson y Weiss 1994). Esto se produce porque la polarización magnética de las partículas de hierro suspendidas en el fluido no es afectada considerablemente por la temperatura. Además, los fluidos MR no son afectados por las impurezas que por lo general se producen durante el proceso de fabricación y el uso del dispositivo. Cabe mencionar que la polarización magnética tampoco es afectada por los aditivos, al contrario, esto facilita la estabilidad en los fluidos MR contra la separación de las partículas, aunque las partículas y el líquido portador tengan una gran diferencia en sus densidades.
PROPIEDADES FÍSICO-QUÍMICASPropiedades reológicasLas propiedades reológicas de este tipo de fluidos están determinadas por lo siguiente:
Concentración y densidad de las partículas.Distribución de forma y tamaño de las partículas.Las propiedades del fluido portador.Aditivos adicionales.La intensidad de campo magnético aplicado.La temperatura.Otros factores.
Propiedades magnéticasEs muy importante conocer las propiedades magnéticas de los fluidos magnetoreológicos para tener una visión de los posibles diseños de dispositivos en base a estos fluidos. 45En varios de los dispositivos, el fluido representa la mayor reluctancia en el circuito magnético. Los materiales super-paramagnéticos son los ideales para la construcción de este tipo de fluidos magnetoreológicos, su comportamiento en presencia de un campo magnético es muy conveniente para el funcionamiento esperado de este tipo de amortiguadores. Una vez aplicado un campo magnético a un fluido magnetoreológico, la primera reacción es la alineación de las partículas suspendidas en la dirección del campo magnético aplicado, formando una estructura fibrosa que cambia las características del fluido. Cuando quitamos el campo magnético, y debido a que los materiales super-paramagnéticos no tienen remanencia ni histéresis magnética, es decir, al quitar el campo magnético las partículas suspendidas en el fluido no que dan magnetizadas, el fluido magnetoreológico se comporta como un fluido
Propiedades MagnitudMáximo esfuerzo cortante 0(H) 50 a 100 kPaMáximo campo magnético 250 kA/mViscosidad plástica aparente 0.1 a 10 Pa-sRango temperatura de operación -40 a 150 ºCEstabilidad Insensible a la mayoría de impurezasDensidad 3 a 4 g/cm3Máxima densidad de energía 0.1 Joule/cm3Suministro de energía 2 a 50 V, 1 a 2 A
APLICACIONESLas áreas de aplicaciones de los fluidos magnetoreológicos son muy diversas, entre ellas se puede mencionar las siguientes: RobóticaEl sistema nervioso de los futuros robots puede utilizar fluidos magnetoreológicos para mover las articulaciones y extremidades de forma semejante a los seres vivos.Automotriz En el área automotriz se lo aplica en la atenuación de las vibraciones esto es en el sistema de suspensión, específicamente en los amortiguadores. El confort en los vehículos se a segura con estos amortiguadores magnetoreológicos, porque mediante un control electrónico se puede ajustar en una fracción de segundo la rigidez del amortiguador garantizando así un viaje cómodo y seguro. Construcciones civilesComo se indicó anteriormente una aplicación importante de los fluidos magnetoreológicos es la atenuación de las vibraciones. Una de las aplicaciones importantes en el mundo de la construcción es la atenuación de los movimientos producidos por los terremotos y las ráfagas de viento.

Dispositivos y amortiguadores magnetoreológicos.La máxima fuerza que un amortiguador MR puede dar depende de las propiedades del fluido MR, su diseño de circulación y el tamaño del amortiguador. Casi todos los dispositivos que usan fluidos MR pueden ser clasificados de acuerdo a su función en (Carlson y Spencer 1996):
a.- válvulas.b.- esfuerzo cortante directo.c.- compresión.d.- combinación de todos los anteriores.
Dispositivos que se encuentran dentro de un funcionamiento a modo de válvula pueden ser: servo-válvulas, amortiguadores y actuadores. Dispositivos basados en el esfuerzo cortante directo pueden ser: embragues, frenos, compuertas, amortiguadores y compuestos para la construcción. Dispositivos basados en la compresión se han usado en algunos amortiguadores para vibraciones de pequeña amplitud.
CAPITULO II
OBTENCIÓN DEL FLUIDO MAGNETOREOLÓGICO.
Un fluido MR básico debe tener tres características: partículas magnéticamente polarizables, líquido portador, y aditivos estabilizadores que ayudan a que las partículas de hierro se mantengan en suspensión y así evitar la sedimentación de las mismas.
Se pueden obtener las partículas magnéticas de distintos procesos con arranque de viruta como son: roscado, taladrado, limado, fresado, etc. En los mismos, el tamaño de las limallas es variado. Para el caso de estas tesis se ha utilizado la limalla se obtiene del proceso de una limadora automática figura 2.1. El material del cual se obtiene las partículas en este caso es de una placa de hierro que tiene muy buenas características magnéticas. En el proceso se utiliza refrigerante el cual humedece las limallas como se muestra en la figura 2.2.
Aproximadamente se obtiene un 60% de limalla útil, es decir, una limalla del tamaño requerido; hay que considerar que del proceso de filtrado también se obtiene óxido que se puede eliminar mediante un proceso de tamizado con gasolina, claro esta que en el mismo se obtienen partículas mas pequeñas que se puede aprovechar secándolas al sol y así no desperdiciar limallas. Concluido con todos estos pasos se ha obtenido las partículas de hierro magnético que sirve para conseguir el fluido MR que se quiere.
MEZCLA DEL FLUIDO Y DE LAS PARTÍCULAS DELMATERIAL MAGNÉTICO.
Como se menciona en los temas anteriores la viscosidad es una de las más importantes características en un aceite y por consiguiente en el fluido MR. En general, una baja viscosidad es preferida en los fluidos MR cuando este aún no es energizado. Otra importante propiedad de los aceites es la baja presión de vaporización, es decir, el fluido no se vaporizará y el gran rango de temperatura de trabajo.Los agentes estabilizadores son aditivos en primer lugar ayudan a que las partículas de hierro no desciendan o se sedimenten muy rápido y se endurezcan en el fondo del cilindro exterior del amortiguador, dificultando la mezcla del mismo. Entonces, estos agentes estabilizadores ayudan a inhibir las inevitables leyes de la gravedad y suavizan los sedimentos producidos facilitando así la mezcla del mismo. Otras características de los agentes es proveer durabilidad y resistencia a la corrosión.

PROCESO DE MEZCLADO.
PRUEBAS DE FUNCIONAMIENTO DEL FLUIDOMAGNETOREOLÓGICO.Las pruebas de funcionamiento del fluido MR se la realiza de forma visual en este capitulo, ya que, en el capítulo IV es donde se realiza las pruebas del amortiguador; se obtiene los valores de viscosidad para los diferentes valores de corriente o campo magnético.Para probar el funcionamiento basta colocar un imán o electroimán dentro del fluido MR, vemos que las partículas suspendidas se alinean paralelamente a las líneas del campo magnético cambiando claramente las propiedades del fluido como lo es la viscosidad. En la figura 2.7 a, b y c se muestra el proceso donde se observa que el fluido se adhiere a la culata del electroimán cuando este es energizado, para mayor aclaración del funcionamiento del fluido, se adjunta un video con esta prueba en un CD.
CAPITULO III
DISEÑO Y CONSTRUCCION DE UN PROTOTIPO DEAMORTIGUADOR MAGNETOREOLÓGICO
DISEÑO PARA LA ADAPTACIÓN DE UN AMORTIGUADORCOMERCIAL ESTÁNDAR.Para comenzar con el diseño se debe considerar las diferentes áreas en las cuales se realizará algún cambio en el amortiguador para alcanzar los objetivos planteados de esta tesis, es decir, transformarlo en un amortiguador magnetoreológico. Siendo así, los cambios se harán en la parte mecánica, de fluidos, y por último se adicionará la parte electromecánica (electroimán).
ADAPTACIÓNES MECANICAS EN EL AMORTIGUADOR.Una vez que se tiene el amortiguador al cual se realizará la adaptación, lo primero que debe investigarse son los catálogos, para buscar las características del amortiguador, en caso de no encontrar la información necesaria, se puede seguir el siguiente procedimiento:
Abrir el amortiguador.-
Medidas de los componentes.-
Trabajos en el torno.-
Generalmente el pistón del amortiguador no se queda centrado durante el funcionamiento del mismo. Este problema puede ser debido un error de construcción o a sobrepeso a uno de los lados debido a inapropiada instalación que produce un cabeceo. Para solucionar este tipo de problema se coloca unos cojinetes de bronce alrededor de la cabeza del pistón, que nos sirve como núcleo para la bobina del electroimán como se muestra en la figura
Mecanismo de sellado.-
DISEÑO Y CONSTRUCCION DEL ELECTROIMÁN.Para completar el diseño, que en la sección anterior ya se realizó un adelanto, nos centrearemos específicamente en lo que se refiere al circuito magnético.Un circuito magnético típico para un amortiguador MR usa acero con bajo contenido carbono, el cual contiene una alta permeabilidad y saturación magnética, así como también un conducto de flujo magnético para guiar y focalizar el flujo magnético. En el trabajo de diseño del circuito magnético lo más apropiado es el determinar el valor de los amperios-vuelta (NI) necesarios para el circuito magnético. Uno de los objetivos más importantes en el diseño es el maximizar la energía del campo magnético en el fluido y minimizar las pérdidas de flujo en el hierro y las regiones donde no se realice trabajo.

Debido a que no se cuenta con la curva B-H del fluido magnetoreológico, y por consiguiente, el valor de Hg para un determinado Bg. En primera instancia se puede suponer el valor de la permeabilidad magnética del fluido magnetoreológico, como un valor promedio entre la permeabilidad de las limallas de hierro y el aceite que se considerara como si fuese igual a la permeabilidad magnética del aire. Partiendo de este supuesto se realiza el cálculo para el dimensionamiento del electroimán utilizando las ecuaciones anteriormente descritas.Imponiendo un valor de inducción magnética de 0.7 T y tomando un valor de permeabilidad magnética del fluido próximo a la del aceite hidráulico que es 1.26 x 10-6 Wb/ A-m. Después de construido el electroimán, se realizará las correcciones de estos valores supuestos para obtener una medida más aproximada a la realidad de el fluido magnetoreológico obtenido en el desarrollo de esta tesis;
Para la construcción del electroimán se siguen los pasos recomendados por los textos o manuales de electromecánica, eso si, hay que tener en consideración que se debe sellar todos los espacios por donde pueda filtrarse el fluido hacia el interior del electroimán o a través del agujero que sirve para introducir los conductores de alimentación, una solución es utilizar macilla epoxica.
LLENADO DEL FLUIDO MAGNETOREOLÓGICO DENTRODEL AMORTIGUADOR.
Para el interés de esta tesis se realizará tres llenados que contengan un 20%, 30% y 40% de partículas de hierro del volumen total útil de la cámara del amortiguador.
PRUEBAS Y MEDICIONES.En este capítulo se realiza las mediciones de algunos datos que sirven para el cálculo de los diferentes factores, que permiten determinar y comprender el comportamiento del amortiguador magnetoreológico.Los datos que se miden en este capítulo son:
Corrientes. Voltajes. Tiempo de desplazamiento. Pesos de carga, Distancia recorrida. Densidad de los diferentes fluidos utilizados. Área de fricción.
Con estos datos se puede calcular las diferentes variables que muestran el comportamiento del amortiguador y del fluido magnetoreológico para los diferentes porcentajes de mezcla entre aceite y limallas. Se obtiene también las curvas de relaciones existentes entre las diferentes variables.
Un valor muy importante es la viscosidad de cada una de las mezclas, para esto realizamos un procedimiento sencillo que consiste en tomar un recipiente con escala que generalmente viene en mililitros, se llena de fluido hasta 300 ml, y se pesa el mismo. Se aplica luego la ecuación:

Como se puede observar en las curva 4.7 y 4.8, las mismas muestran que el fluido magnetoreológico se comporta como un fluido Plástico de Bingham vista en el capítulo 1 (figura 1.27). En las curvas se mira que en primer lugar se tiene que vencer un esfuerzo umbral producido por la aplicación del campo magnético. Una vez vencido este esfuerzo umbral, el fluido MR se comporta como un fluido newtoniano, con una viscosidad diferente para cada valor de voltaje o corriente.
CONCLUSIONES Y RECOMENDACIONES.
Conclusiones.
Después de haber finalizado la presente tesis se llega a la conclusión de que es posible el desarrollo de tecnologías en nuestro país tomando como punto de partida los estudios y avances ya existentes.
Es posible la manipulación de los nuevos materiales llamados inteligentes y realizar un sinnúmero de aplicaciones industriales o comerciales.
Los campos magnéticos se pueden utilizar para cambiar la reología de los materiales, en el caso de los fluidos magnetoreológicos, al aplicar un acampo magnético podemos variar la viscosidad del mismo.
Un fluido magnetoreológico se comporta como un plástico de Bingham, donde se necesita vencer en primer lugar el esfuerzo umbral producido por la alineación de las partículas de hierro con el campo magnético generado por el electroimán. Superado este umbral comienza a comportarse como una fluido newtoniano con una viscosidad dinámica mayor a la que se tiene sin la presencia del campo magnético.
Un amortiguador magnetoreológico tiene mejores prestaciones de servicio de los amortiguadores convencionales, ya que se puede regular la viscosidad y por ende el coeficiente de amortiguamiento de acuerdo a las necesidades, es decir, la amortiguación será variable.
La magnitud de esfuerzo que soporta el amortiguador está determinada tanto por la magnitud de campo magnético aplicado como por el porcentaje en volumen de partículas de hierro en la mezcla con el aceite. Mientras mayor sea el porcentaje de partículas de hierro mayor esfuerzo soportará el amortiguador.
Al observar el fluido magnetoreológico se concluye que las partículas de hierro más pequeñas se suspenden mejor y más tiempo en el aceite que las contiene, mientras que las más grandes se precipitan hacia la parte inferior del cilindro del amortiguador. Esto nos lleva a la conclusión de que mientras más pequeñas y homogéneas sean las partículas de hierro suspendidas se evita la sedimentación de las mismas y por consiguiente se puede manejar o manipular de mejor manera las características reológicas del fluido MR.
En lo referente a la parte eléctrica, se observó que el consumo es razonable ya que necesita de una potencia máxima de 24 W para cada amortiguador, es decir es muy viable la adaptación en lo referente al consumo de energía eléctrica.
El peso del amortiguador MR obviamente va a ser mayor que los amortiguador convencionales por motivos tales como las partículas de hierro al aceite, el peso de la bobinas del electroimán, esto dependerá del número de espiras y el porcentaje de limallas de hierro que tengan el electroimán y el fluido MR respectivamente.
Al realizar un agujero a través de émbolo del pistón del amortiguador se afecta negativamente la resistencia mecánica del mismo ante la aplicación de fuerzas de tracción y compresión que se producen en el funcionamiento del amortiguador, es decir, el área transversal del émbolo debe ser mayor para que pueda soportar los mismos esfuerzos para los que fue diseñado con un émbolo sin agujero.
Recomendaciones.
En el desarrollo de este proyecto se encontró múltiples circunstancias que sirven para realizar ciertas recomendaciones que se detallan a continuación:
El primer paso en la obtención del fluido magnetoreológico es conseguir las partículas mas pequeñas posibles de hierro, de esto depende el buen funcionamiento del fluido MR, supongo que se lo puede hacer mediante un proceso químico.
Determinar cual es el mínimo y máximo esfuerzo al que estará expuesto el amortiguador, para determinar que porcentaje de volumen de partículas de hierro será el óptimo para satisfacer las necesidades del sistema.
El tipo de amortiguador que se recomienda utilizar para el diseño mecánico es el monotubo debido a que un amortiguador bitubo se puede presentar problemas de presión interna al producirse una sedimentación
Debido a que la permeabilidad del fluido MR es muy pequeña es recomendable que la intensidad de campo magnético que genere el electroimán sea lo más elevada posible para obtener el máximo valor de esfuerzo cortante y por consiguiente mayor dureza del amortiguador. Hay considerando las limitaciones inherentes en el consumo de energía eléctrica del electro imán, esta es una de las razones por la que es indispensable obtener un fluido MR con partículas de hierro suspendidas que ofrezcan la mayor permeabilidad magnética posible.
Sería muy importante que se siga desarrollando este proyecto para la aplicación del amortiguador magnetoreológico sobre todo en el área automotriz, donde se debe tomar en consideración el efecto que produce el peso del amortiguador en el sistema de

suspensión y las variables que debe medir para controlar la amortiguación. A continuación explico en un diagrama de bloques las posibles variables a medir y controlar como es la corriente que recibirá el electroimán del amortiguador que a su vez generará el campo magnético necesario para variar la viscosidad del fluido MR y por ende la dureza del mismo.
CONTROLADOR
Se puede utilizar un microprocesador para realizar el control de la amortiguación en el vehículo.
Se aconseja construir íntegramente todo el amortiguador ya que es más conveniente que adaptar uno por la razones de diseño mecánico y que ya se explico en algunos puntos anteriores.