Tema-4.pdf
56
Capítulo 4 EL ESPACIO TRIDIMENSIONAL En el capítulo anterior hemos estudiado las principales teorías que tratan de explicar cómo el sistema visual alcanza una representación bidimensional de la escena visual a partir de las diferencias en luminancia. Sin embargo, nuestra visión cotidiana está claramente configurada en tres dimensiones. El espacio visual tiene altura, anchura y profundidad. El problema que se plantea en este capítulo es explicar la forma en que el sistema visual consigue una represen- tación de espacio tridimensional, cómo se logra recuperar la profundidad de la escena visual. Esta forma de plantear el problema que vamos a tratar en este capítulo no es neutral desde un punto de vista teórico. Está hecha desde una perspectiva constructivista que, como explicábamos en el Capítulo 1, concibe la percep- ción visual como un conjunto de procesos que, a partir de la información que proporciona la luz, trata de construir una representación de la escena que permita reconocer los objetos y guiar la acción del organismo. Para este modo de entender la percepción, la forma de abordar el procesamiento de la pro- fundidad consiste en buscar en la escena bidimensional las claves, indicadores o indicios que permiten alcanzar una representación tridimensional. Una importante alternativa al constructivismo es la representada por la perspectiva ecológica ligada sobre todo a las investigaciones de James Gibson. Desde este punto de vista no tiene sentido buscar claves en una represen- tación bidimensional porque la percepción visual no está mediada por una representación sino que es directa. La percepción consiste en la extracción por el observador de la información presente en el estímulo y la información acerca de la profundidad está tan presente en la información proporcionada por el patrón general de estimulación como cualquier otra. En este capítulo abordaremos en primer lugar el tratamiento de las distin- tas claves de profundidad. Incluiremos en este tratamiento algunos indicado-
-
Upload
jose-lorenzo -
Category
Documents
-
view
32 -
download
0
Transcript of Tema-4.pdf

Capítulo 4
EL ESPACIO TRIDIMENSIONAL
En el capítulo anterior hemos estudiado las principales teorías que tratan de explicar cómo el sistema visual alcanza una representación bidimensional de la escena visual a partir de las diferencias en luminancia. Sin embargo, nuestra visión cotidiana está claramente configurada en tres dimensiones. El espacio visual tiene altura, anchura y profundidad. El problema que se plantea en este capítulo es explicar la forma en que el sistema visual consigue una representación de espacio tridimensional, cómo se logra recuperar la profundidad de la escena visual.
Esta forma de plantear el problema que vamos a tratar en este capítulo no es neutral desde un punto de vista teórico. Está hecha desde una perspectiva constructivista que, como explicábamos en el Capítulo 1, concibe la percepción visual como un conjunto de procesos que, a partir de la información que proporciona la luz, trata de construir una representación de la escena que permita reconocer los objetos y guiar la acción del organismo. Para este modo de entender la percepción, la forma de abordar el procesamiento de la profundidad consiste en buscar en la escena bidimensional las claves, indicadores o indicios que permiten alcanzar una representación tridimensional.
Una importante alternativa al constructivismo es la representada por la perspectiva ecológica ligada sobre todo a las investigaciones de James Gibson. Desde este punto de vista no tiene sentido buscar claves en una representación bidimensional porque la percepción visual no está mediada por una representación sino que es directa. La percepción consiste en la extracción por el observador de la información presente en el estímulo y la información acerca de la profundidad está tan presente en la información proporcionada por el patrón general de estimulación como cualquier otra.
En este capítulo abordaremos en primer lugar el tratamiento de las distintas claves de profundidad. Incluiremos en este tratamiento algunos indicado-

146 PERCEPCIÓN VISUAL
res que han sido descubiertos por Gibson. Aunque hay que reconocer que la categoría de clave no es el marco más adecuado para el tratamiento de estos indicadores, procuraremos que su tratamiento haga justicia a las intencio· nes de la aproximación ecológica. En la segunda parte estudiaremos las dos posturas teóricas que acabamos de mencionar tomando como referencia el fenómeno de constancia del tamaño. De esta forma tendremos oportunidad de conocer el funcionamiento de cada una de las dos teorías ante la explicación de un fenómeno perceptivo concreto. En la tercera y última parte, nos preguntaremos por la posible reconciliación de las dos posturas antagónicas y estudiaremos una interesante y reciente propuesta que puede llegar a conseguir la integración que muchos desean.
1. LAS CLAVES DE PROFUNDIDAD
Se han propuesto diferentes esquemas de clasificación de las distintas claves de profundidad. El esquema que nosotros adoptamos aquí tratará en primer lugar las claves monoculares, que están disponibles para cada uno de los ojos con independencia del otro, y después las binoculares, que resultan de la integración de la información de los dos ojos, como es el caso de la convergencia y de la estereoscopia. Dentro de las claves monoculares, que forman el grupo más numeroso, consideraremos por un lado las claves estáticas, provenientes de una escena visual sin movimiento y, por otro, las claves dinámicas provenientes de una escena visual en movimiento, bien sea porque hay movimiento en los objetos o porque se mueva el observador. Finalmente, dentro de las claves estáticas distinguiremos aquellas que tienen su origen en el funcionamiento mecánico de la musculatura ocular, llamadas claves oculares y las que proporcionan información óptica. Estas últimas constituyen un conjunto de claves que por su estrecha relación con el mundo de la pintura y del dibujo se conocen con el nombre de claves pictóricas.
1.1. Claves monoculares
1.1.1. Claves estáticas
Pueden ser de dos tipos, oculares y pictóricas.
1.1.1.1. Claves oculares
Acomodación. Es un cambio en la forma del cristalino necesario para mantener la imagen del objeto focalizada sobre la retina. Cuando el objeto se encuentra alejado del observador el cristalino tiende a disminuir de grosor y a hacerse más plano con el fin de facilitar el enfoque de los rayos que desde

146 PERCEPCIÓN VISUAL
res que han sido descubiertos por Gibson. Aunque hay que reconocer que la categoría de clave no es el marco más adecuado para el tratamiento de estos indicadores, procuraremos que su tratamiento haga justicia a las intenciones de la aproximación ecológica. En la segunda parte estudiaremos las dos posturas teóricas que acabamos de mencionar tomando como referencia el fenómeno de constancia del tamaño. De esta forma tendremos oportunidad de conocer el funcionamiento de cada una de las dos teorías ante la explicación de un fenómeno perceptivo concreto. En la tercera y última parte, nos preguntaremos por la posible reconciliación de las dos posturas antagónicas y estudiaremos una interesante y reciente propuesta que puede llegar a conseguir la integración que muchos desean.
1. LAS CLAVES DE PROFUNDIDAD
Se han propuesto diferentes esquemas de clasificación de las distintas claves de profundidad. El esquema que nosotros adoptamos aquí tratará en primer lugar las claves monoculares, que están disponibles para cada uno de los ojos con independencia del otro, y después las binoculares, que resultan de la integración de la información de los dos ojos, como es el caso de la convergencia y de la estereoscopia. Dentro de las claves monoculares, que forman el grupo más numeroso, consideraremos por un lado las claves estáticas, provenientes de una escena visual sin movimiento y, por otro, las claves dinámicas provenientes de una escena visual en movimiento, bien sea porque hay movimiento en los objetos o porque se mueva el observador. Finalmente, dentro de las claves estáticas distinguiremos aquellas que tienen su origen en el funcionamiento mecánico de la musculatura ocular, llamadas claves oculares y las que proporcionan información óptica. Estas últimas constituyen un conjunto de claves que por su estrecha relación con el mundo de la pintura y del dibujo se conocen con el nombre de claves pictóricas.
1.1. Claves monoculares
1.1.1. Claves estáticas
Pueden ser de dos tipos, oculares y pictóricas.
1.1.1.1. Claves oculares
Acomodación. Es un cambio en la forma del cristalino necesario para mantener la imagen del objeto focalizada sobre la retina. Cuando el objeto se encuentra alejado del observador el cristalino tiende a disminuir de grosor y a hacerse más plano con el fin de facilitar el enfoque de los rayos que desde

PERCEPCIÓN VISUAL
~ue hay que reconocer que la 1 para el tratamiento de estos haga justicia a las intencio
la parte estudiaremos las dos ~omando como referencia el · a tendremos oportunidad
dos teorías ante la explicatercera y última parte, nos dos posturas antagónicas y que puede llegar a conse-
ión de las distintas claves aquí tratará en primer
para cada uno de los ojos que resultan de la inte
el caso de la convergencia lares, que forman el grupo ves estáticas, provenientes
las claves dinámicas provesea porque hay movimiento
Finalmente, dentro de las su origen en el funciona
claves oculares y las que constituyen un conjunto de
, de la pintura y del dibujo se
necesano para mantina. Cuando el objeto se de a disminuir de grosor y ue de los rayos que desde
EL ESPACIO TRIDIMENSIONAL 147
el objeto llegan al cristalino en paralelo. Sin embargo, cuando un objeto se aproxima al observador, los rayos procedentes del mismo divergen a medida que se acercan al ojo. En este caso el cristalino aumenta su convexidad aumentando de grosor y de esta forma facilita el enfoque de la imagen sobre la retina. Este proceso de cambio en la forma del cristalino se lleva a cabo mediante la acción de los músculos ciliares cuya contracción provoca el aumento de grosor y cuya relajación lo disminuye. Si el sistema visual tiene información sobre la tensión de los músculos ciliares, entonces también puede tener información sobre la distancia a la que se encuentra el objeto focalizado.
Las investigaciones sobre el valor de la acomodación como indicador de distancia han mostrado que solamente es efectivo en distancias cortas, inferiores a los dos metros y medio aproximadamente. Incluso dentro de este rango de distancia, los observadores no utilizan la información sobre distancia que proporciona la acomodación cuando tienen que hacer juicios directos sobre la distancia de un objeto sino al hacer juicios sobre el tamaño de los objetos (Wallach & Floor, 1971). Parece que el sistema visual calcula el tamaño de los objetos tomando en cuenta la información proporcionada por la acomodación.
Un aspecto interesante de este indicador es que proporciona información sobre la distancia absoluta a la que se encuentra un objeto. La mayor parte de los indicadores monoculares de profundidad proporcionan información sobre la distancia relativa de los objetos señalándonos cual de dos o más objetos se encuentra más próximo a nosotros pero no nos informan de la distancia a la que esos objetos están de nosotros. El conocimiento de la distancia absoluta a la que se encuentran los objetos es necesario para poder alcanzarlos con precisión y para moverse en su entorno sin tropezar con ellos.
1.1.1.2. Claves pictóricas
1.1.1.2.1. Perspectiva lineal. En el uso común del lenguaje, se entiende por perspectiva lineal el conjunto de reglas que permite a los artistas crear proyecciones bidimensionales precisas de las formas esquemáticas de objetos tridimensionales. El plano sobre el que se llevan a cabo esas proyecciones se llama plano de proyección y está situado perpendicularmente a la línea de visión que va del observador al objeto. En el estudio de la percepción visual, el término perspectiva lineal hace referencia a las relaciones existentes dentro de la escena visual que subyacen a ese conjunto de reglas y también en parte a la percepción de la distribución espacial.
Una de las reglas más básicas de la perspectiva lineal es la convergencia de paralelas según la cual las líneas paralelas en el espacio tridimensional se representan en dos dimensiones por líneas que convergen hacia un único punto llamado punto de fuga. La Figura 4.1 muestra un ejemplo de perspectiva lineal. La experiencia común de convergencia de las vías de un tren cuando estando entre ellas miramos a lo lejos es también un ejemplo de perspectiva lineal.

148 PERCEPCIÓN VISUAL
Punto de fuga ~
FIGURA 4.1. Ejemplo de perspectiva lineal.
Obsérvese que en la Figura 4.1 el punto de fuga está situado en la línea del horizonte de la superficie que sirve de punto de referencia para dividir el espacio visual en dos zonas, una superior y otra inferior. En general, la línea del horizonte de una superficie es la línea que pasa por dos o más puntos de fuga de conjuntos de líneas paralelas que se extienden en la superficie.
La perspectiva lineal basada en la convergencia de paralelas produce una compresión lateral de las superficies implicadas. La Figura 4.2 muestra el
A B
FIGURA 4.2. En (B) se representa la proyección de la superficie cuadrada (A) inclinada con respecto al eje horizontal .

PERCEPCIÓN VISUAL
( Horizonte
fuga está situado en la línea de referencia para dividir el inferior. En general, la línea
por dos o más puntos de den en la superficie.
cia de paralelas produce una La Figura 4.2 muestra el
B
EL ESPACIO TRIDIMENSIONAL 149
contorno de una superficie cuadrada que está inclinada con respecto a un eje horizontal en el plano frontal.
La inclinación produce en el observador una proyección trapezoidal de la superficie de forma que el borde que se inclina hacia el observador aparece más largo que el que se inclina lejos del observador provocando una compresión lateral que tiende a concentrarse en el punto de fuga.
La convergencia de paralelas propia de la perspectiva lineal nos permite entender la relación entre el punto de fuga y la orientación de los bordes de una superficie. Si se mide la orientación de un borde por referencia a un marco fijo del medio ambiente, entonces todos los bordes que tienen la misma orientación son paralelos entre sí y la proyección de este conjunto de bordes paralelos en el plano de proyección es un conjunto de líneas que convergen en un único punto de fuga. El punto de fuga de un borde puede concebirse como el término final de la proyección de un borde cuando se extiende infinitamente en la distancia. Existe, por tanto, una relación uno a uno entre el punto de fuga y la orientación de un determinado conjunto de bordes, de forma que para cada orientación determinada de un borde existe un correspondiente punto de fuga y cada punto en el plano de proyección es el punto de fuga de un conjunto de bordes paralelos que tienen la misma orientación. El punto de fuga de un borde contiene, por tanto, información específica sobre su orientación. Esta relación entre punto de fuga y orientación de los bordes no varía aunque cambie el punto de observación; cada punto de fuga permanece fijo en su posición de correspondencia con las orientaciones fijas de los bordes en el medio ambiente. La correspondencia entre los distintos puntos de fuga y la orientación de los bordes, cuyas proyecciones convergen en esos puntos, contribuye a estructurar un entramado de relaciones altamente informativas sobre la organización tridimensional de una escena.
1.1.1.2.2. Altura relativa. La posición de los objetos en relación con la línea del horizonte es un importante indicador de profundidad incluso en escenas en las que la convergencia de paralelas en un punto de fuga no está presente. Generalmente aquellos objetos que se encuentran próximos a la línea del horizonte de una superficie bidimensional son percibidos como más lejanos. La potencia de la altura relativa como clave de profundidad o de distancia depende de la presencia de un marco de referencia que, por lo general, es la línea del horizonte. El efecto de profundidad se acentúa por la presencia de textura dentro del marco de referencia. En ausencia de un marco de referencia, el efecto de profundidad queda prácticamente anulado.
1.1.1.2.3. Perspectiva aérea. Hace referencia a los cambios en contraste y en color que experimenta la percepción de los objetos cuando se encuentran a gran distancia del observador. El contraste tiende a reducirse haciendo que la imagen de los objetos aparezca más borrosa debido a la dispersión de la luz que provocan las partículas de polvo y agua suspendidas en la atmósfera. Con

150 PERCEPCIÓN VISUAL
respecto al color, la lejanía de los objetos tiende a acentuar las tonalidades azuladas debidas también a que las longitudes de onda cortas son más fácilmente perturbadas por las partículas suspendidas en la atmósfera que las longitudes de onda largas y por lo tanto experimentan una dispersión mayor.
1.1.1.2.4. Tamaño relativo. Por lo general, si dos objetos son presentados en el campo visual simultáneamente o en próxima sucesión, aquel que produce una imagen retiniana mayor, parecerá estar más cerca. En la Figura 4.2 la influencia de la perspectiva lineal para producir profundidad en la percepción, se ve reforzada por el tamaño relativo de los dos segmentos horizontales que forman parte del trapezoide. El segmento largo aparece más cercano al observador que el segmento corto. En este ejemplo, los dos segmentos están conectados, pero no es preciso que exista conexión para que esta clave de profundidad tenga efecto.
1.1.1.2.5. Tamaño familiar. Experimentos que han utilizado objetos familiares para los participantes, tales como cartas de una baraja o monedas de uso corriente, han puesto de manifiesto que, si se conoce el tamaño real de un objeto, el tamaño de la imagen proyectada sobre el observador es un buen indicador de la distancia a la que se encuentra el objeto. El tamaño familiar es un ejemplo claro de la influencia que la experiencia puede tener sobre los procesos de percepción.
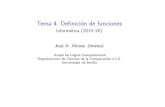
1.1.1.2.6. Gradiente de textura. Casi todas las superficies tienen una estructura que consta de unidades o elementos, relativamente homogéneos en tamaño y forma, distribuidos por la superficie con relativa regularidad. A la cualidad producida por este tipo de estructura se le da el nombre de textura. La distribución de granos de arena en una playa, la de las piedras en la orilla de un río y la de las baldosas de un cuarto de baño son ejemplos de superficies con texturas diferentes. Por otra parte, podemos definir el término gradiente como la proporción en que una determinada propiedad cambia a lo largo de un continuo. El gradiente de textura hace referencia al cambio gradual que la percepción de la textura de una superficie experimenta a medida que ésta se encuentra más alejada del observador. Los principales cambios afectan al tamaño de los elementos, que se hacen progresivamente más pequeños, y a la densidad de los mismos, que aumenta a medida que la superficie se aleja. La Figura 4.3 muestra en A un ejemplo de superficie en la que el gradiente de textura proporciona una fuerte sensación de profundidad.
Además de informar sobre la profundidad, el gradiente de textura también puede proporcionar información sobre otras características de la superficie, como su orientación en profundidad o su curvatura. En la figura anterior, imagen B, se muestra cómo un cambio en el gradiente puede informar sobre la existencia de una esquina, mientras que en e, la ruptura entre los dos gradientes proporciona información sobre la existencia de un borde. James
EL ES
FIGL
Gib con la e por den la q
fue la e do1
cor sol: bn un dir de ca1
COl
150 PERCEPCIÓN VISUAL
respecto al color, la lejanía de los objetos tiende a acentuar las tonalidades azuladas debidas también a que las longitudes de onda cortas son más fácilmente perturbadas por las partículas suspendidas en la atmósfera que las longitudes de onda largas y por lo tanto experimentan una dispersión mayor.
1.1.1.2.4. Tamaño relativo. Por lo general, si dos objetos son presentados en el campo visual simultáneamente o en próxima sucesión, aquel que produce una imagen retiniana mayor, parecerá estar más cerca. En la Figura 4.2 la influencia de la perspectiva lineal para producir profundidad en la percepción, se ve reforzada por el tamaño relativo de los dos segmentos horizontales que forman parte del trapezoide. El segmento largo aparece más cercano al observador que el segmento corto. En este ejemplo, los dos segmentos están conectados, pero no es preciso que exista conexión para que esta clave de profundidad tenga efecto.
1.1.1.2.5. Tamaño familiar. Experimentos que han utilizado objetos familiares para los participantes, tales como cartas de una baraja o monedas de uso corriente, han puesto de manifiesto que, si se conoce el tamaño real de un objeto, el tamaño de la imagen proyectada sobre el observador es un buen indicador de la distancia a la que se encuentra el objeto. El tamaño familiar es un ejemplo claro de la influencia que la experiencia puede tener sobre los procesos de percepción.
1.1.1.2.6. Gradiente de textura. Casi todas las superficies tienen una estructura que consta de unidades o elementos, relativamente homogéneos en tamaño y forma, distribuidos por la superficie con relativa regularidad. A la cualidad producida por este tipo de estructura se le da el nombre de textura. La distribución de granos de arena en una playa, la de las piedras en la orilla de un río y la de las baldosas de un cuarto de baño son ejemplos de superficies con texturas diferentes. Por otra parte, podemos definir el término gradiente como la proporción en que una determinada propiedad cambia a lo largo de un continuo. El gradiente de textura hace referencia al cambio gradual que la percepción de la textura de una superficie experimenta a medida que ésta se encuentra más alejada del observador. Los principales cambios afectan al tamaño de los elementos, que se hacen progresivamente más pequeños, y a la densidad de los mismos, que aumenta a medida que la superficie se aleja. La Figura 4.3 muestra en A un ejemplo de superficie en la que el gradiente de textura proporciona una fuerte sensación de profundidad.
Además de informar sobre la profundidad, el gradiente de textura también puede proporcionar información sobre otras características de la superficie, como su orientación en profundidad o su curvatura. En la figura anterior, imagen B, se muestra cómo un cambio en el gradiente puede informar sobre la existencia de una esquina, mientras que en e, la ruptura entre los dos gradientes proporciona información sobre la existencia de un borde. James
EL E~
FIGU e
Gibs cons la es porq dens la qL
fu en la ca do1 1
com sobr brea un e dire1 de b cant
come

PERCEPCIÓN VISUAL
nde a acentuar las tonalidades . de onda cortas son más fácilhs en la atmósfera que las lon:ntan una dispersión mayor.
si dos objetos son presentados [)Cima sucesión, aquel que pro·ar más cerca. En la Figura 4.2 ucir profundidad en la percep!os dos segmentos horizontales largo aparece más cercano al
los dos segmentos están para que esta clave de
que han utilizado objetos fade una baraja o monedas de
se conoce el tamaño real de el observador es un buen
el objeto. El tamaño familiar · encia puede tener sobre los
las superficies tienen una es·vamente homogéneos en
on relativa regularidad. A la le da el nombre de textura. la de las piedras en la orilla
o son ejemplos de superficies definir el término gradiente
dad cambia a lo largo de ia al cambio gradual que
ta a medida que ésta es cambios afectan al te más pequeños, y a
ida que la superficie se aleja. · en la que el gradiente de
fundidad. el gradiente de textura tam
características de la superfira. En la figura anterior,
ente puede informar sobre e, la ruptura entre los dos · tencia de un borde. James
EL ESPACIO TRIDIMENSIONAL 151
FIGURA 4.3. Ejemplos de la información que puede proporcionar el gradiente de densidad de textura sobre la profundidad y la forma de la escena visual.
Gibson, que formuló la aproximación ecológica al estudio de la percepción, consideró que el gradiente de densidad de textura es uno de los aspectos de la estimulación que mayor información proporciona sobre la profundidad porque afecta a la estructura general del patrón estimular. El gradiente de densidad de textura proporciona una escala absoluta de distancia respecto a la que se puede medir toda otra distancia.
1.1.1.2. 7. Sombreado y sombras. La posición relativa existente entre la fuente de la iluminación, las superficies iluminadas y el observador, determina la cantidad de luz que acaba llegando al ojo del último. El término sombreado1 hace referencia a los cambios en el patrón de luminancia que se produce como consecuencia de la variación en el ángulo que forman la luz que incide sobre una superficie y la superficie misma. Existen diferentes tipos de sombreado. El sombreado especular es el propio de superficies brillantes como un espejo y depende fundamentalmente de la posición del observador y de la dirección de la iluminación. El sombreado difuso o Lambertiano es el propio de las superficies mate cuya reflectancia es igual en todas las direcciones. La cantidad de luz reflejada por cada punto de la superficie depende de su orien-
L Utilizamos el término sombreado como traducción de shading, y el término sombra como traducción de shade.
152 PERCEPCIÓN VISUAL
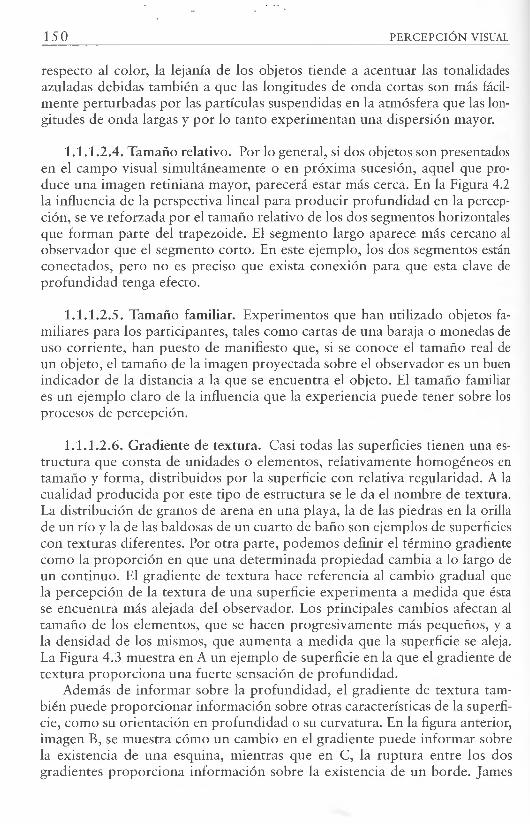
ración respecto a la fuente de luz, siendo máxima en los puntos en que la luz incide perpendicularmente sobre la superficie. Por ello, cuando superficies de la misma reflectancia presentan ángulos diferentes respecto a la misma fuente de iluminación, pueden dar lugar a bordes de iluminación2 • El sombreado es un potente indicador de los aspectos volumétricos de las formas, en particular sus concavidades y convexidades. Gibson (1950) fue uno de los primeros investigadores que llamó la atención sobre el hecho de que la percepción de una escena tiende a organizarse como si estuviera iluminada por una sola fuente de luz y desde arriba. Probablemente este supuesto interpretativo actúa como una constricción en el sistema perceptivo y es el resultado de un largo proceso evolutivo de adaptación al medio terrestre. La Figura 4.4 ilustra la fuerza de este supuesto en un caso relativamente simple.
Los objetos circulares de la fila superior aparecen como bultos convexos que se aproximan hacia el observador, mientras que los de la fila inferior aparecen como pequeñas concavidades que tienden a alejarse del observador. El efecto es perfectamente reversible si el lector da la vuelta a la página. Este cambio se debe al supuesto que estamos comentando de que los objetos circulares están recibiendo la luz de una misma fuente situada sobre ellos. Los objetos circulares iluminados en su parte superior y obscurecidos en su inferior
FIGURA 4.4. El sombreado de los círculos superiores hace que se perciban como objetos esféricos convexos. El sombreado de los círculos inferiores hace que se perciban como oquedades cóncavas. En ambos casos el sistema visual asume que están iluminados desde la parte superior por una única fuente de iluminación. Fuente: Stephen E. Palmer. Vision Science: Photons to Phenomeno/ogy. © 1999. Cambridge,
MA: The MIT Press, p . 245, fig . 5.5.28.
2. Recuérdese la distinción entre bordes de iluminación y bordes de reflectancia que se explicó en el tema del colo r al trata r el tema de la constancia de la claridad .

PERCEPCIÓN VISUAL
en los puntos en que la luz ello, cuando superficies de respecto a la misma fuente inación2
• El sombreado es de las formas, en particular fue uno de los primeros inde que la percepción de una
ada por una sola fuente interpretativo actúa como ltado de un largo proceso ra 4.4 ilustra la fuerza de
como bultos convexos que los de la fila inferior a alejarse del observador. la vuelta a la página. Este
de que los objetos circusituada sobre ellos. Los ob-
y bordes de reflectancia que se de la claridad.
EL ESPACIO TRIDIMENSIONAL 153
son percibidos como convexos, ya que su patrón de sombreado corresponde al de un objeto esférico iluminado desde arriba. En los obscurecidos en su parte superior e iluminados en su inferior, el patrón de sombreado corresponde al de una concavidad iluminada desde arriba y en consecuencia son percibidos como una oquedad. Ramachandran (1988) ha puesto de manifiesto que el supuesto que parece realmente enraizado en nuestro sistema visual es el de la existencia de una sola fuente de luz. La localización de la fuente depende para su determinación de diferentes factores que interactúan entre sí. La Figura 4.5 presenta un interesante ejemplo proporcionado por este autor.
FIGURA 4.5. Máscaras de Ramachandran. Fotografiadas por su lado cóncavo e iluminadas desde arriba. El sistema visua l las percibe como máscaras presentadas por su lado convexo e iluminadas desde abajo. Fuente : Vilayanur S. Ramachan-
dran. Perceiving Shape from Shading. Scientific American, 259, 2, 76-83.
Las máscaras que aparecen en la figura son en efecto máscaras, pero fo tografiadas por su lado cóncavo, el que se ajusta a la cara de la persona que se la pone, e iluminadas desde arriba. Sin embargo son claramente percibidas como máscaras vistas por su lado convexo e iluminadas desde abajo. El efecto pone de manifiesto la importancia que factores tales como la experiencia previa y el contexto pueden tener en la determinación de nuestra percepción. En este caso, ante un estímulo extraño como es el lado cóncavo de una máscara, nuestro sistema visual prefiere ver caras normales convexas aunque para ello tenga que asumir que la luz viene de abajo. El efecto del contexto puede comprobarse si fijamos nuestra atención sobre los dos círculos que aparecen entre

154 PERCEPCIÓN VISUAL
las dos máscaras. Si aislamos su percepción del influjo de las caras tapándolas, el círculo de la izquierda tiende a percibirse como cóncavo y el de la derecha como convexo, de acuerdo con una percepción que asume que la fuente de luz viene de arriba. Sin embargo, cuando los dos círculos se incluyen en las caras, donde predomina la percepción de la iluminación desde abajo, el cír· culo de la izquierda aparece convexo, parecido a un bulto en la cara, y el de la derecha cóncavo.
Una sombra es una zona de la escena a la que no llega la iluminación por haber sido ésta bloqueada. Cuando un objeto se interpone entre una fuente de iluminación y una superficie, proyecta sobre ésta una sombra que proporciona información sobre la escena tridimensional. La forma de la sombra depende de varios factores: la proximidad de la fuente de iluminación, su dirección, la forma del objeto que proyecta la sombra, el relieve de la superficie sobre la que es proyectada y la posición relativa entre la fuente, el objeto y la superficie. La sombra puede estar unida al objeto o separada del mismo. Las sombras unidas al objeto indican que el objeto está apoyado sobre la superficie.
La Figura 4.6 muestra dos escenas iguales en todo, excepto en la posición de las sombras respecto al objeto que las produce. En A, las sombras están unidas al objeto, lo que provoca la percepción de las esferas como si estuvieran descansando sobre la superficie y alineadas diagonalmente en profundidad de izquierda a derecha. En B las sombras se van separando de los objetos y permanecen alineadas en dirección perpendicular a la línea de visión dando ocasión a una percepción de las esferas como si estuvieran a diferentes alturas respecto de la superficie pero todas ellas situadas en el mismo plano frontal.
B
FIGURA 4.6. Información proporcionada por la sombra proyectada por los objetos. En A las sombras están unidas a los objetos, en B están separadas y su alineación modifica la percepción en profundidad de los objetos. Fuente: Stephen E. Palmer. Vision Science: Photons to Phenomenology. © 1999. Cambridge, MA: The
MIT Press, p. 246, fig. 5.5.30.

PERCEPCIÓN VISUAL
6flujo de las caras tapándolas, rro cóncavo y el de la derecha 1 que asume que la fuente de os círculos se incluyen en las minación desde abajo, el círa un bulto en la cara, y el de
e no llega la iluminación por terpone entre una fuente de
una sombra que proporciona de la sombra depende
iluminación, su dirección, de la superficie sobre la
ente, el objeto y la superfidel mismo. Las sombras
sobre la superficie. do, excepto en la posición
En A, las sombras están las esferas como si estuvie
¡.ua¡;vJL!alll"'"te en profundiseparando de los objetos
a la línea de visión dando vieran a diferentes alturas
en el mismo plano frontal.
proyectada por los objen separadas y su alinea
objetos. Fuente: Stephen E. 1999. Cambridge, MA: The
EL ESPACIO TRIDIMENSIONAL 155
1.1.1.2.8. Interposición. Los objetos que se encuentran más alejados pueden quedar total o parcialmente ocultos a un observador por la presencia de otros objetos interpuestos en la línea de visión. Cuando un objeto aparece parcialmente encubierto, nuestro sistema visual tiende a percibir como más alejado al objeto tapado y como más cercano al objeto interpuesto. La interposición es uno de los más potentes indicadores de profundidad aunque se limita a proporcionarnos información ordinal sobre la distancia de los objetos en relación al observador. Si el objeto A oculta al objeto B y éste, a su vez, oculta a C entonces C es el más alejado del observador y A es el más cercano. La interposición no nos informa de la magnitud de las distancias entre los objetos y el observador.
1.1.2. Claves dinámicas
Las claves que hemos estudiado son indicios que proporcionan información sobre la profundidad en situaciones estáticas, cuando tanto el objeto observado como el observador están quietos. Sin embargo nuestra percepción cotidiana tiene lugar en un medio en el que con frecuencia nosotros nos movemos en relación a los objetos y los objetos se mueven en relación a distintos marcos de referencia incluidos nosotros mismos. El movimiento del observador y de los objetos da lugar a nuevas claves de profundidad y de distancia que vamos a estudiar a continuación. El estudio de la percepción del movimiento tiene una gran importancia en sí mismo y por ello le dedicamos un capítulo en este libro.
1.1.2.1. Paralaje3 de movimiento. Cuando un observador se mueve en dirección lateral, por ejemplo de derecha a izquierda, con respecto a su campo de visión, los objetos que se encuentran a distancias diferentes proyectan unas imágenes en la retina que se mueven en sentido y a velocidades diferentes. De forma más precisa, podemos definir paralaje de movimiento como el desplazamiento diferencial de las imágenes, proyectadas por distintos objetos, debido a un cambio lateral en la posición del observador y a la distancia relativa de los objetos con respecto al punto de fijación.
Una forma sencilla de entender esta clave de distancia consiste en colocar el dedo pulgar de cada mano a distintas distancias en la línea de visión y alinearlos con un tercer objeto más alejado que sirva de referencia. Si en esa situación, con los dedos y el objeto a distintas distancias en la misma línea de visión y el punto de fijación situado en el objeto más alejado, movemos la cabeza hacia la derecha, notaremos que los dos dedos se mueven hacia la
3. El término paralaje se utiliza con un significado ligeramente diferente en distintos contextos: militar, topográfico, de la astronomía, etc. Algunas veces se utiliza como sinónimo de ángulo visual. El uso que se hace en psicología de la percepción está relacionado con el concepto topográfico en el que paralaje se define como la diferencia en la dirección o emplazamiento en la posición aparente de un objeto debido a una variación del punto de observación.
156 PERCEPCIÓN VISUAL
izquierda en relación con el tercer objeto pero que el dedo más cercano se mueve más lejos y más rápidamente. Si movemos la cabeza hacia la izquierda, el movimiento de los dedos respecto al objeto cambiará de sentido pero, de nuevo, el dedo más cercano se moverá más lejos y más rápidamente. En general, los objetos más cercanos parecen desplazarse más lejos y a mayor velocidad mientras que para los más alejados el desplazamiento es menor y más lento. Sin embargo, el sentido del movimiento no depende únicamente de la distancia a la que se encuentran los objetos sino también de la posición del punto de fijación. Los objetos que están situados en una posición más cercana al observador que aquella en la que cae el punto de fijación, se mueven en sentido contrario al observador, mientras que los situados en una posición más alejada que el punto de fijación se mueven en el mismo sentido que el observador. Si no ha bajado usted los dedos, compruebe este efecto fijando ahora la mirada en el dedo que está entre el objeto que antes servía de punto de referencia y el dedo más cercano a usted. Observe cómo el objeto más alejado se desplaza en el sentido del movimiento de su cabeza, mientras que el dedo más cercano a usted lo hace en sentido contrario.
El paralaje de movimiento es una clave de profundidad muy efectiva a grandes distancias incluso cuando no están presentes otras claves de profundidad. No obstante, su efectividad aumenta cuando la información espacial es rica y proporciona varios puntos de referencia.
1.1.2.2. Flujo óptico. Para Gibson (1950,1966) el análisis de la clave que hemos llamado paralaje de movimiento no es más que una consideración parcial de un patrón global de estimulación que él denominó flujo óptico. Con este término Gibson quiso poner el énfasis en la necesidad de tomar en consideración las transformaciones del patrón global de estimulación cuando un observador se mueve en el medio ambiente. Como vimos anteriormente en el estudio de la textura, también en este contexto Gibson acentuó la importancia de los gradientes de movimiento refiriéndose a los cambios graduales en velocidad y dirección que tienen lugar en la escena visual4
•
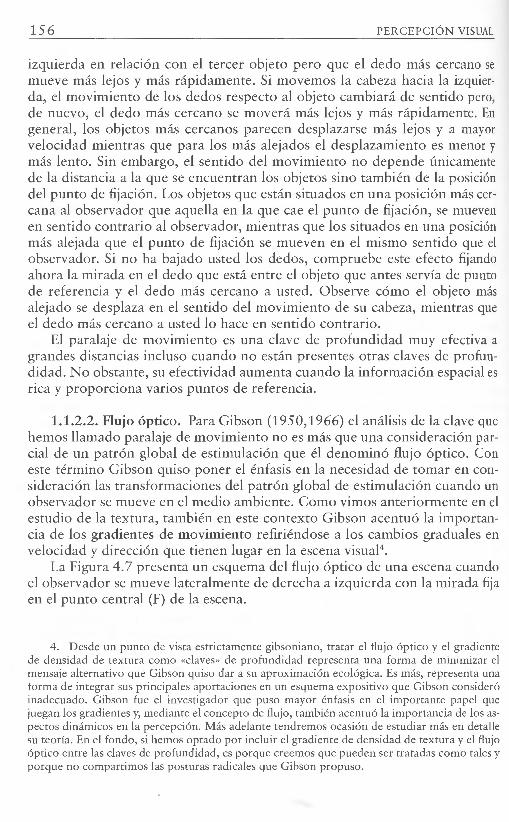
La Figura 4. 7 presenta un esquema del flujo óptico de una escena cuando el observador se mueve lateralmente de derecha a izquierda con la mirada fija en el punto central (F) de la escena.
4. Desde un punto de vista estrictamente gibsoniano, tratar el flujo óptico y el gradiente de densidad de textura como «claves» de profundidad representa una forma de minimizar el mensaje alternativo que Gibson quiso dar a su aproximación ecológica. Es más, representa una forma de integrar sus principales aportaciones en un esquema expositivo que Gibson consideró inadecuado. Gibson fue el investigador que puso mayor énfasis en el importante papel que juegan los gradientes y, mediante el concepto de flujo, también acentuó la importancia de los aspectos dinámicos en la percepción. Más adelante tendremos ocasión de estudiar más en detalle su teoría. En el fondo, si hemos optado por incluir el gradiente de densidad de textura y el flujo óptico entre las claves de profundidad, es porque creemos que pueden ser tratadas como tales y porque no compartimos las posturas radicales que Gibson propuso.
El
Fl' zc di
d, tl
d rr p o d 1< V
p
r; d V
f¡
d u t• e e e ¡: f e e ¡.
PERCEPCIÓN VISUAL
que el dedo más cercano se ) S la cabeza hacia la izquiero cambiará de sentido pero, ejos y más rápidamente. En
zarse más lejos y a mayor desplazamiento es menor y
no depende únicamente sino también de la posición , s en una posición más cer
ro de fijación, se mueven situados en una posición el mismo sentido que el
e este efecto fijando que antes servía de punto
cómo el objeto más de su cabeza, mientras que trario.
ndidad muy efectiva a otras claves de profun
la información espacial es
el análisis de la clave que una consideración par
nominó flujo óptico. Con ·dad de tomar en con
e estimulación cuando un vimos anteriormente en el bson acentuó la importan
los cambios graduales en visual4
•
· co de una escena cuando uierda con la mirada fija
el fluj o óptico y el gradiente una forma de minimizar el
¡~v•• v¡;''~" · Es más, representa una <>vn. nc " -" ' 0 que Gibson consid eró
s en el importante papel que ó la importancia de los as-
ón de estudiar más en detalle densidad de textura y el flujo
eden ser tratadas como tales y
EL ESPACIO TRIDIMENSIONAL 157
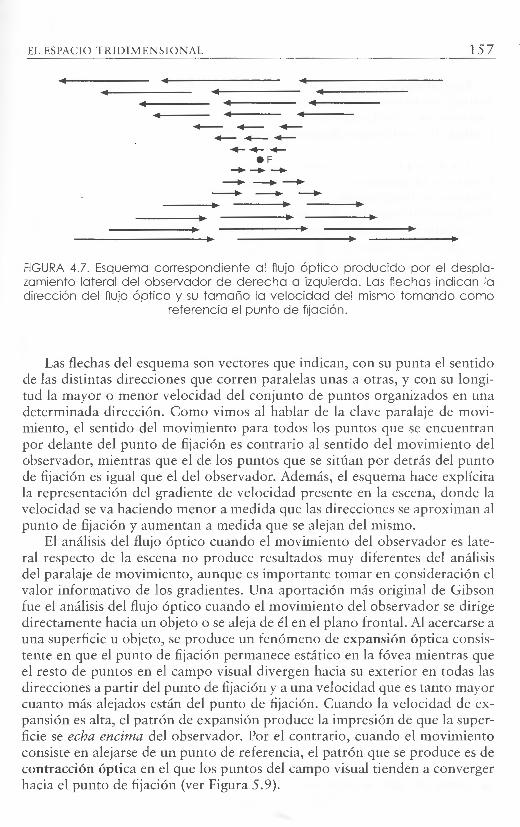
-------- ....... eF ---------FIGURA 4.7. Esquema correspondiente al flujo óptico producido por el desplazamiento lateral del observador de derecha a izquierda. Las flechas indican la dirección del flujo óptico y su tamaño la velocidad del mismo tomando como
referencia el punto de fijación.
Las flechas del esquema son vectores que indican, con su punta el sentido de las distintas direcciones que corren paralelas unas a otras, y con su longitud la mayor o menor velocidad del conjunto de puntos organizados en una determinada dirección. Como vimos al hablar de la clave paralaje de movimiento, el sentido del movimiento para todos los puntos que se encuentran por delante del punto de fijación es contrario al sentido del movimiento del observador, mientras que el de los puntos que se sitúan por detrás del punto de fijación es igual que el del observador. Además, el esquema hace explícita la representación del gradiente de velocidad presente en la escena, donde la velocidad se va haciendo menor a medida que las direcciones se aproximan al punto de fijación y aumentan a medida que se alejan del mismo.
El análisis del flujo óptico cuando el movimiento del observador es lateral respecto de la escena no produce resultados muy diferentes del análisis del paralaje de movimiento, aunque es importante tomar en consideración el valor informativo de los gradientes. Una aportación más original de Gibson fue el análisis del flujo óptico cuando el movimiento del observador se dirige directamente hacia un objeto o se aleja de él en el plano frontal. Al acercarse a una superficie u objeto, se produce un fenómeno de expansión óptica consistente en que el punto de fijación permanece estático en la fóvea mientras que el resto de puntos en el campo visual divergen hacia su exterior en todas las direcciones a partir del punto de fijación y a una velocidad que es tanto mayor cuanto más alejados están del punto de fijación. Cuando la velocidad de expansión es alta, el patrón de expansión produce la impresión de que la superficie se echa encima del observador. Por el contrario, cuando el movimiento consiste en alejarse de un punto de referencia, el patrón que se produce es de contracción óptica en el que los puntos del campo visual tienden a converger hacia el punto de fijación (ver Figura 5 .9).

158 PERCEPCIÓN VISUAL
Los patrones de flujo óptico pueden resultar muy complejos y difíciles de analizar en términos matemáticos. Los ejemplos que acabamos de estudiar permiten entender la naturaleza de estas claves de carácter global, que forman parte de la contribución de Gibson al estudio de la percepción espacial.
1.1.2.3. El Efecto de profundidad cinética. No sólo resultan informativos respecto a la distancia o a la profundidad los cambios en el flujo óptico pro· ducidos por el movimiento del observador, también los cambios en el patrón de estimulación producido por el movimiento de un objeto pueden propor· cionar información sobre la profundidad. Un efecto que ha sido muy investigado en la psicología de la percepción visual y que ejemplifica lo que acabamos de afirmar es el efecto de profundidad cinética que Wallach y O'Connell (1953) mostraron por primera vez. Lo entenderemos mejor por referencia a la Figura 4.8
p
1 1 /
1 / / 1 / //
1 / / 1 /
/¡ / o¿¡ /
FIGURA 4.8. Efecto de profundidad cinética. La fuente de iluminación L proyecta sobre la pantalla P la sombra del objeto en forma de T. El observador O, situado por delante de la pantalla, sólo es estimulado por la sombra del objeto y sus trans-
formaciones bidimensionales al rotar.
La situación que genera la estimulación es parecida a la utilizada para producir sombras chinescas. Un objeto, en este caso un palo, colocado perpendicularmente sobre un eje vertical, que puede hacerse rotar, se sitúa entre una fuente de iluminación y una pantalla traslúcida sobre la que se proyecta la sombra del objeto. El observador se encuentra al otro lado de la pantalla de forma que sólo es capaz de ver las sombras del objeto proyectadas en la
E
p
r
S

PERCEPCIÓN VISUAL
uy complejos y difíciles de que acabamos de estudiar arácter global, que forman . percepción espacial.
sólo resultan informativos rios en el flujo óptico pron los cambios en el patrón un objeto pueden proporo que ha sido muy investi: ejemplifica lo que acaba[ que Wallach y O'Connell ws mejor por referencia a
de iluminación L proyecta El observador O, situado bra del objeto y sus trans-
cicla a la utilizada para un palo, colocado per
rotar, se sitúa entre sobre la que se proyecta otro lado de la pantalla bjeto proyectadas en la
EL ESPACIO TRIDIMENSIONAL 159
pantalla. Cuando el objeto está estático, no se percibe profundidad alguna, solamente la sombra bidimensional del palo. Cuando se hace rotar el objeto en torno al eje vertical, la sombra del palo aparece rotando también en profundidad. Lo realmente curioso en este efecto es que el patrón bidimensional de cambios en la sombra proyectada en la pantalla consiste en una sucesión de líneas que varían en longitud y en orientación pero lo que el observador percibe no son las deformaciones bidimensionales de un conjunto de líneas sino la forma invariante de un palo que rota en profundidad sobre un eje. El hecho es que, de entre las distintas interpretaciones perceptivas que la estimulación puede tener, el sistema visual impone una determinada: la de una forma rígida rotando en profundidad. Parece como si el sistema visual estuviera sesgado a favor de esa forma de percibir mientras los datos que proporciona la estimulación sean consistentes con ella.
Se han dado varias explicaciones de carácter general a este fenómeno. Los psicólogos de orientación empirista opinan que el sesgo está determinado por la experiencia ya que la rotación de formas rígidas es más frecuente en el medio ambiente que las deformaciones plásticas bidimensionales. Los psicólogos de la Gestalt opinan que la interpretación en términos de una forma rígida que rota es más simple. La verdad es que no tenemos un por qué satisfactorio para este efecto, pero el efecto es robusto y demuestra sin lugar a dudas que el sistema visual es capaz de recuperar la forma y el movimiento en profundidad de los objetos a partir de los cambios en longitud y en orientación de formas bidimensionales. El efecto de profundidad cinética es un buen ejemplo del carácter constructivo de la percepción a partir de una estimulación ambigua.
1.2. Las Claves binoculares
Son aquellas que proporcionan información sobre la distancia combinando información procedente de cada uno de los ojos. En este apartado estudiaremos la convergencia binocular y la profundidad estereoscópica.
1.2.1. Convergencia binocular. Cuando fijamos la vista en un objeto, las líneas de visión de cada uno de los ojos convergen en el punto de fijación. Al ángulo formado por estas líneas con vértice en el punto de fijación se le llama ángulo de convergencia. La importancia que este ángulo tiene para la percepción de la profundidad radica en el hecho de que su tamaño varía en función de la distancia a la que se encuentra el punto de fijación. Si el objeto se aproxima a nosotros, el ángulo de convergencia tiende a hacerse mayor, y si el objeto se aleja, el ángulo de convergencia tiende a disminuir.
La convergencia binocular, al igual que la acomodación, es una clave fisiológica porque el tipo de información que proporciona se refiere a los ajustes oculomotores que controlan la posición de los ojos. La Figura 4.9 proporciona ayuda para entender la forma en que la desviación de los ojos necesaria

160 PERCEPCIÓN VISUAL
< C;
FIGURA 4.9. Características geométricas del ángulo de convergencia binocular.
para producir la convergencia binocular puede proporcionar información sobre la distancia a la que se encuentra un objeto.
En la figura, el punto de fijación está en el punto P donde convergen las líneas de visión del ojo derecho D e izquierdo l. La distancia a la que se encuentra el objeto está representada por la línea discontinua (d), mientras que la distancia 1- D corresponde a la distancia interpupilar que en el adulto medio es de unos 65 milímetros. Sobre la base de las relaciones angulares que aparecen en la figura puede calcularse la distancia a la que se encuentra el objeto. De una forma sencilla, pero suficientemente aproximada, puede considerarse la distancia interpupilar como el arco de un círculo y la distancia (d) como su radio, con lo cual resulta que el valor del ángulo e:
e= 651 d
cuando e se expresa en radianes. Obsérvese que el valor de e en esa ecuación puede conocerse ya que es igual a la suma de los ángulos e¡ + ed que son los ángulos correspondientes a la desviación de cada ojo al converger sobre el punto de fijación.
La ecuación que acabamos de ver muestra que el ángulo de convergencia puede ser utilizado por el sistema visual para determinar la distancia al punto de fijación. Ahora cabe preguntarse si de hecho el sistema visual utiliza esa información. La respuesta es afirmativa pero solamente para distancias cortas
PERCEPCIÓN VISUAL
de convergencia binocular.
porcionar información so-
punto P donde convergen I. La distancia a la que se discontinua (d), mientras
upilar que en el adulto e las relaciones angulares ncia a la que se encuentra
te aproximada, puede de un círculo y la distancia del ángulo C:
valor de e en esa ecuación los ci + cd que son los
ojo al converger sobre el
el ángulo de convergencia · r la distancia al punto sistema visual utiliza esa te para distancias cortas
EL ESPACIO TRIDIMENSIONAL 161
porque la variación en el ángulo de convergencia sólo tiene lugar en distancias no superiores a uno o dos metros. Más allá de los tres metros de distancia la posición de los ojos no cambia por mucho que el objeto se aleje.
Normalmente la convergencia binocular actúa conjuntamente con la acomodación, clave que hemos estudiado anteriormente. A medida que un objeto se aleja, tanto la convergencia como la acomodación varían por eso resulta difícil estudiar el papel de una de las claves y mantener constante la otra. Podría parecer que tapando un ojo al observador anularíamos la influencia de la convergencia y aislaríamos el efecto de la acomodación pero incluso en una situación así continúa funcionando el mecanismo de convergencia. Al parecer, la información proporcionada por la acomodación del cristalino del ojo no tapado es suficiente para guiar al mecanismo de convergencia. En conclusión, tanto la convergencia como la acomodación son claves útiles en distancias cortas y además tienen el valor añadido de proporcionar información sobre la distancia absoluta a la que se encuentra un objeto, cosa que pocas claves de distancia proporcionan.
1.2.2. La estereoscopia
La estereoscopia es una clave que nos proporciona información acerca de la distancia relativa de los objetos sobre la base del desplazamiento lateral que la proyección de un objeto experimenta en las retinas de los dos ojos. En este apartado, primero explicaremos los conceptos que nos ayudarán a caracterizar esta clave, posteriormente expondremos los procedimientos utilizados en su estudio y terminaremos con una aproximación a los mecanismos que la producen. La estereoscopia ha sido una de las claves cuyo estudio ha atraído en mayor medida el interés de los investigadores, por ello merece la pena que le dediquemos una atención especial.
1.2.2.1. Conceptos fundamentales
En la Figura 4.9 la imagen del punto de fijación (P) se proyecta en el centro de la fóvea de cada una de las dos retinas, la derecha y la izquierda. Los puntos de cada retina sobre los que cae la proyección se llaman puntos correspondientes porque, si superpusiéramos la retina de un ojo sobre la retina del otro, los puntos coincidirían. En general, un punto a en la retina derecha y un punto b en la retina izquierda son puntos correspondientes cuando ambos tienen la misma posición en su respectiva retina. No sólo son puntos correspondientes los que, situados en las fóveas, reciben estimulación del punto de fijación, cada punto de una retina tiene su correspondiente punto en la otra. La estimulación de puntos correspondientes en las dos retinas provoca fusión binocular puesto que el objeto es visto como un único objeto en el espacio a pesar de ser dos los puntos estimulados en las retinas.

162 PERCEPCIÓN VISUAL
Horópter. Recibe este nombre el conjunto de puntos en el espacio visual que, dada una determinada fijación ocular, proyectan su imagen en puntos correspondientes de las dos retinas. Hay que notar que el horópter se define en relación al punto de fijación y por lo tanto cambia cuando cambia el punto de fijación. Aún así, desde el siglo diecisiete los investigadores han tratado de estudiar la forma que tiene.
Desde una aproximación teórica, basada en la óptica geométrica, suponiendo que los ojos son esferas perfectas y que rotan en torno a ejes que solamente pasan por el punto nodal de cada ojo5, el horópter longitudinal, que se define en el plano horizontal, está constituido por una circunferencia que pasa por el punto de fijación y por el punto nodal de cada ojo. Esta circunferencia suele conocerse como circunferencia de Vieth-Müller en honor de quienes la propusieron por primera vez. En el plano vertical, el horópter vertical está definido por la recta perpendicular al plano de visión.
Cuando se determina empíricamente el conjunto de puntos del espacio visual que, para una determinada fijación ocular, proyectan su imagen en puntos correspondientes de las dos retinas, los resultados muestran desviaciones sistemáticas respecto a la posición de los puntos determinada teóricamente. La Figura 4.10 muestra con líneas discontinuas las desviaciones tanto para el horópter longitudinal como para el vertical.
Como puede verse, el horópter vertical tiende a estar inclinado en la dirección de la línea de visión, alejándose del observador por encima del punto
Horópter teórico vertical
Punto de fijación
Horópter empirico
Horópter teórico horizontal
FIGURA 4.1 O. Horópter teórico y empírico en los planos horizontal y vertical. Fuente: Stephen E. Palmer. Vision Science: Photons to Phenomenology. © 1999.
Cambridge, MA: The MIT Press, p. 209, fig. 5.3.4.
5. El punto nodal es el punto en que el rayo principal -o no desviado- de luz proveniente de un objeto corta al eje óptico. El punto nodal se encuentra a una distancia de la imagen formada en la retina de aproximadamente 17 mm. En realidad, el ojo humano, como todo sistema general de lentes, tiene dos puntos nodales, pero como la distancia entre ell os es muy pequeña, son tratados como un solo punto.

PERCEPCIÓN VISUAL
) de puntos en el espacio visual royectan su imagen en puntos notar que el horópter se define :ambia cuando cambia el punto s investigadores han tratado de
la óptica geométrica, supoe rotan en torno a ejes que o5
, el horópter longitudinal, tuido por una circunferencia
nodal de cada ojo. Esta cirde Vieth-Müller en honor
el plano vertical, el horópter al plano de visión.
de puntos del espacio viproyectan su imagen en puntados muestran desviaciones s determinada teóricamente. las desviaciones tanto para el
por encima del punto
Horópter teórico horizontal
planos horizontal y vertical. to Phenomenology . © 1999.
209, fig. 5.3.4.
-o no desviado- de luz provetra a una distancia de la imagen
·dad, el ojo humano, como todo la distancia entre ellos es muy
EL ESPACIO TRIDIMENSIONAL 163
de fijación y acercándose a él por debajo del punto de fijación. El horópter longitudinal tampoco se ajusta a la predicción sino que tiende a quedarse en una posición próxima a la circunferencia de Vieth-Muller pero desviada en dirección a la línea que pasa por el punto de fijación y es paralela a la distancia interocular6
•
Disparidad Binocular. Cuando un punto en el espacio visual no proyecta su imagen en puntos correspondientes de las dos retinas, las imágenes del objeto en cada uno de los dos ojos resultan tanto más diferentes cuanto mayor es el desplazamiento lateral de una proyección respecto de la otra. Este desplazamiento relativo de las dos proyecciones recibe el nombre de disparidad binocular7. El fenómeno puede hacerse patente si repetimos el ejercicio que realizamos al estudiar el fenómeno de paralaje de movimiento. De nuevo podemos alinear nuestros dos pulgares con un tercer objeto más lejano que nos sirva de punto de fijación pero esta vez lo hacemos cerrando el ojo izquierdo y apuntando con el ojo derecho. En estas condiciones, cuando los dedos y el objeto están bien alineados, cerramos el ojo derecho y abrimos el izquierdo. Veremos que los tres objetos han dejado de estar alineados y que los dedos se han desplazado hacia la derecha de la línea de visión, siendo el desplazamiento del dedo más cercano mayor que el del dedo en posición intermedia. La ligera diferencia entre la visión de la escena proporcionada por el ojo derecho y por el izquierdo está ocasionada por las distintas proyecciones que reciben debido a la separación existente entre ellos. Si repetimos el ejercicio pero situando el punto de fijación en el dedo más próximo a nosotros veremos que al cerrar el ojo derecho y abrir el izquierdo tanto el dedo en posición intermedia como el objeto lejano se desplazan a la izquierda de la línea de visión y en este caso el desplazamiento del objeto lejano es mayor que el del dedo en posición intermedia.
El fenómeno de la disparidad binocular es parecido al fenómeno de paralaje de movimiento; de hecho fue denominado paralaje binocular en los comienzos de la psicología experimental. No obstante se diferencian en que el desplazamiento de la imagen en la disparidad binocular está fijado por la distancia interocular, mientras que en la clave de paralaje de movimiento el desplazamiento de la imagen depende de la amplitud del movimiento lateral que realice el observador. Además, en la disparidad binocular el desplazamiento de las imágenes es simultáneo mientras que en la clave de paralaje de movimiento el desplazamiento de las imágenes es sucesivo. Obsérvese, por tanto, que el ejemplo que estamos utilizando de alineamiento de los dedos pulgares con un objeto alejado es, en sentido estricto, un ejemplo de paralaje de movimiento
6. Esta línea es la definición de horópter, propuesta por Aguilonius en 1613, que tuvo vigencia hasta que Vieth primero y Mul ler después propusieron de forma independiente la definición circular aceptada en la actualidad.
7. La disparidad binocular que estudiamos ahora se limita a disparidad en el plano horizontal que es la que puede producir información respecto a la distancia. La disparidad vertical no da lugar a visión en profundidad aunque puede degradar la profundidad proporcionada por la disparidad horizontal.

164 PERCEPCIÓN VISUAL
que produce sucesivamente un desplazamiento de la imagen igual al desplazamiento simultáneo producido por la disparidad binocular.
La disparidad binocular puede proporcionarnos información respecto a la posición de los objetos en el espacio tridimensional, tanto por medio del sentido del desplazamiento que produce, como por la magnitud del mismo. El sentido de la disparidad nos informa de la posición del objeto respecto al punto de fijación. Si repetimos el ejercicio que hemos realizado anteriormente, de alineación de los dedos con un objeto alejado, apuntado ahora la mirada hacia el dedo situado en posición intermedia, veremos que al cerrar el ojo derecho y abrir el izquierdo el objeto lejano se desplaza a la izquierda de la línea de visión mientras que el dedo más cercano se desplaza a la derecha. En general, el desplazamiento de los objetos más próximos que el punto de fijación se produce en sentido contrario al desplazamiento de las imágenes producido por nuestro abrir y cerrar de ojos, y por ello se le da el nombre de disparidad cruzada. Por el contrario, los objetos más alejados de nosotros que el punto de fijación se desplazan en el mismo sentido que el del desplazamiento de las imágenes y por ello la disparidad que producen se denomina no cruzada. La Figura 4.11 presenta la situación de desplazamiento simultáneo de la imagen propia de la disparidad binocular.
En la figura, el punto de fijación está situado en P. Los puntos más cercanos al observador que el punto de fijación, que dan origen a una disparidad cruzada, como es el caso del punto C, producen el desplazamiento de sus proyecciones hacia la zona lateral de las retinas. Por otra parte, los puntos más
F
Ojo izquierdo Ojo derecho
FIGURA 4.11. Desplazamiento de la imagen en la disparidad binocular.
PERCEPCIÓN VISUAL
[a imagen igual al desplazanocular. os información respecto a ional, tanto por medio del or la magnitud del mismo. sición del objeto respecto hemos realizado anterior-
· lejado, apuntado ahora la ta, veremos que al cerrar el desplaza a la izquierda de se desplaza a la derecha.
próximos que el punto de .zamiento de las imágenes or ello se le da el nombre s más alejados de nosotros entido que el del desplazaproducen se denomina no esplazamiento simultáneo
f P. Los puntos más cercan ongen a una disparidad lesplazamiento de sus pro, tra parte, los puntos más
e
disparidad binocular.
EL ESPACIO TRIDIMENSIONAL 165
alejados del observador que el punto de fijación, que dan origen a disparidad no cruzada, como es el caso del punto F, producen el desplazamiento de sus proyecciones hacia la zona nasal de las retinas.
Finalmente, la magnitud del desplazamiento es un indicador cuantitativo de la distancia a la que se encuentra un objeto: a medida que un objeto se aleja del punto de fijación aproximándose al observador, su disparidad cruzada aumenta, y a medida que un objeto se aleja del punto de fijación alejándose también del observador, su disparidad no cruzada aumenta. El aumento de la disparidad cruzada está, por tanto, asociado con una aproximación del objeto al observador y el aumento de la disparidad no cruzada está asociado con un alejamiento del objeto respecto al observador. Y, a la inversa, la disminución de la disparidad cruzada está asociada con un alejamiento del objeto respecto al observador mientras que la disminución de la disparidad no cruzada está asociada con un acercamiento del objeto al observador.
La disparidad binocular puede producir dos efectos perceptivos diferentes dependiendo de su magnitud. Puede producir estereoscopia o puede producir imágenes dobles que ponen en marcha un proceso de rivalidad binocular. Cuando la disparidad es pequeña, las imágenes de los dos ojos se fusionan en una sola pero situada a una distancia del observador diferente de la distancia que corresponde al horópter. Esta diferencia en profundidad es lo que se denomina estereoscopia. En pocas palabras, podemos definir estereoscopia como la percepción de la profundidad producida por la disparidad binocular. Dependiendo de la dirección de la disparidad los objetos aparecen por delante o por detrás del horópter longitudinal. La disparidad cruzada produce la percepción del objeto por delante del horópter mientras que la disparidad no cruzada produce la percepción del objeto por detrás del horópter. En ambos casos, la dirección de la línea de visión al objeto fusionado es el promedio de las direcciones visuales predichas a partir de las dos imágenes monoculares.
1.2.2.2. Procedimientos estereoscópicos. La investigación de la estereoscopia ha estado relacionada con la invención y utilización de estereogramas, que son pares de imágenes prácticamente iguales pero que difieren en el desplazamiento lateral de sus elementos. Cada imagen del par recibe el nombre de media-imagen. Cuando cada media-imagen estimula un ojo diferente al mismo tiempo, la imagen fusionada produce una ineludible sensación de profundidad. Los estereogramas fueron inventados hacia 1838 por Wheatstone, que también inventó el estereoscopio, aparato que permitía la presentación a cada ojo por separado de los componentes de un estereograma. La Figura 4.12 presenta un ejemplo de estereograma tradicional en el que las dos medias-imágenes están desplazadas hacia el exterior.
Si cada media-imagen es presentada simultáneamente a un ojo diferente8,
se producirá la segregación de la imagen fusionada en tres planos diferentes
8. La percepción estereoscópica de la imagen en la Figura 4,12 puede conseguirse me-
166 PERCEPCIÓN VISUAL
A ~~ • •
B ~ ~ e ~~
• •
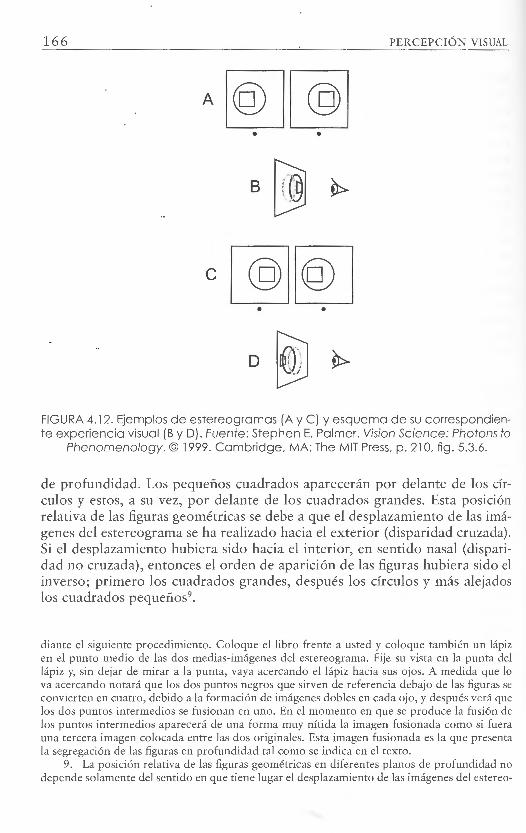
D ~ ~ FIGURA 4.12. Ejemplos de estereogramas (A y C) y esquema de su correspondiente experiencia visual (By D). Fuente: Stephen E. Palmer. Vision Science: Photons to
Phenomenology. © 1999. Cambridge, MA: The MIT Press, p. 21 O, fig. 5.3.6.
de profundidad. Los pequeños cuadrados aparecerán por delante de los círculos y estos, a su vez, por delante de los cuadrados grandes. Esta posición relativa de las figuras geométricas se debe a que el desplazamiento de las imágenes del estereograma se ha realizado hacia el exterior (disparidad cruzada). Si el desplazamiento hubiera sido hacia el interior, en sentido nasal (disparidad no cruzada), entonces el orden de aparición de las figuras hubiera sido el inverso; primero los cuadrados grandes, después los círculos y más alejados los cuadrados pequeños9•
diante el siguiente procedimiento. Coloque el libro frente a usted y coloque también un lápiz en el punto medio de las dos medias-imágenes del estereograma. Fije su vista en la punta del lápiz y, sin dejar de mirar a la punta, vaya acercando el lápiz hacia sus ojos. A medida que lo va acercando notará que los dos puntos negros que sirven de referencia debajo de las figuras se convierten en cuatro, debido a la formación de imágenes dobles en cada ojo, y después verá que los dos puntos intermedios se fusionan en uno. En el momento en que se produce la fusión de los puntos intermedios aparecerá de una forma muy nítida la imagen fusionada como si fuera una tercera imagen colocada entre las dos originales. Esta imagen fusionada es la que presenta la segregación de las figuras en profundidad tal como se indica en el texto.
9. La posición relativa de las figuras geométricas en diferentes planos de profundidad no depende solamente del sentido en que tiene lugar el desplazamiento de las imágenes del estereo-
E
d q d o e t(
d
e f L e
r
PERCEPCIÓN VISUAL
esquema de su correspondienVision Science: Photons to Press, p. 210, fig. 5.3.6.
n por delante de los cír-os grandes. Esta posición
desplazamiento de las imá·or (disparidad cruzada).
r, en sentido nasal (disparilas figuras hubiera sido el
los círculos y más alejados
usted y coloque también un lápiz . Fije su vista en la punta del
hacia sus ojos. A medida que lo · referencia debajo de las figuras se
en cada ojo, y después verá que en que se produce la fusión de
imagen fusionada como si fuera fusionada es la que presenta el texto.
planos de profundidad no iento de las imágenes del estereo-
EL ESPACIO TRIDIMENSIONAL 167
Hasta los años sesenta del siglo pasado, se utilizaron estereogramas tradicionales como el que aparece en la Figura 4.12. Hasta entonces se pensaba que la percepción estereoscópica de la profundidad era la consecuencia de la disparidad retiniana del contorno y de los bordes de cada media-imagen. En consecuencia, se pensaba también que la percepción monocular de la forma era un requisito previo para que tuviera lugar la fusión binocular. Para el sistema visual, el problema fundamental a resolver, que es el llamado problema de la correspondencia, quedaba así muy simplificado.
1.2.2.3. El problema de la correspondencia. Uno de los problemas principales que tiene que resolver el sistema visual para poder llevar a cabo la fusión de las dos imágenes monoculares es determinar qué puntos o partes de la imagen de un ojo corresponden a qué puntos o partes de la imagen del otro ojo. Este es el llamado problema de la correspondencia.
Para la concepción tradicional de la estereoscopia este problema estaba relativamente simplificado por el hecho de que -se suponía- la forma y los bordes de la imagen monocular podían guiar el proceso de fusión de la imagen estereoscópica. La gran revolución en el estudio de la estereoscopia se produjo cuando Bela Julesz (1971) demostró que se podía producir estereoscopia utilizando estereogramas de puntos aleatorios.
1.2.2.4. Estereogramas de puntos aleatorios. Este tipo de estereograma consiste en una pareja de medias-imágenes, cada una de las cuales consiste en miles de puntos colocados aleatoriamente, cuyo desplazamiento lateral produce una fuerte sensación de profundidad cuando las dos medias-imágenes se ven estereoscópicamente. La forma en que Julesz construyó sus primeros estereogramas fue la siguiente. Generó por medio de un ordenador un patrón de puntos en una matriz bidimensional de 100 x 100. Cada celda de la matriz estaba ennegrecida (esto generaba un punto) o se dejaba en blanco de acuerdo con una secuencia puramente aleatoria. Esta matriz era la media-imagen de uno de los ojos, supongamos que el derecho. La correspondiente al otro ojo era idéntica a la anterior excepto que los puntos correspondientes a una pequeña submatriz rectangular situada en el centro habían sido desplazados
grama, también depende del método de convergencia ocular utilizado para fusionar las imágenes. La experiencia perceptiva descrita en el texto en relación con la Figura 4, 12 corresponde al método de convergencia ocular cruzada que se describe en la nota anterior y que consigue la fusión de las imágenes mediante el cruzamiento de los ojos focalizados en un punto de fijación que se aproxima al observador. Con el método de convergencia ocular no cruzada se comienza por aproximar a la cara la imagen en la Figura 4,12 hasta que la nariz toca la página del libro. Con los ojos relajados y sin cruzarlos se va alejando lentamente el libro de la cara. De nuevo se verán cuatro puntos, correspondientes a las imágenes dobles de cada ojo, que posteriormente se fusionan en tres. En ese momento la imagen fusionada situada en medio de las otras dos aparecerá en profundidad pero los planos de profundidad se presentarán en orden inverso al obtenido mediante el método de convergencia ocular cruzada.

168 PERCEPCIÓN VISUAL
FIGURA 4.13. Estereograma de puntos aleatorios.
una columna en sentido lateral. Este procedimiento tiene la virtud de mantener las propiedades relacionales de los puntos de la matriz grande inalterados mientras que proporciona a los puntos de la submatriz una disparidad retiniana correspondiente a una columna. La visión estereoscópica de este este· reograma provoca la percepción de una superficie rectangular (la submatriz) situada a distinto nivel de profundidad que la matriz grande.
La Figura 4.13 presenta un estereograma de puntos aleatorios construido en la forma que acabamos de describir. Si se utiliza un procedimiento de convergencia ocular cruzada para conseguir la fusión de las imágenes, se verá un cuadrado pequeño que se destaca por delante de un fondo formado por el resto de puntos.
Los estereogramas de puntos aleatorios demostraron que la forma y los bordes de la imagen monocular no son necesarios para guiar la resolución del problema de la correspondencia. Es suficiente una mera disparidad de puntos para que se produzca la segregación de una imagen o de una escena en diferentes planos de profundidad. Por otra parte, estos estereogramas también ponen de manifiesto que la estereoscopia no es un resultado tardío en el procesamiento de información visual, que necesite un procesamiento previo de la forma de las imágenes monoculares. Más bien, la estereoscopia, al menos en sus primeras fases, aparece como un proceso que tiene lugar relativamente pronto y que incluso proporciona información sobre la forma de los objetos10 .
1.2.2.5. Características de la estereoscopia humana. La sensibilidad estereoscópica de nuestro sistema visual es muy grande 11 • La investigación expe-
10. La moderna investigación computacional de la visión ha ideado gran cantidad de mode· los para explicar la forma en que el sistema visual puede resolver el problema de la correspondencia a partir de la disparidad binocular de puntos. Esta problemática queda fuera de los límites de este libro. El lector interesado puede encontrar una introducción asequible en R. M . Ruiz (1992).
11. La medición del umbral de estereoscopia puede hacerse de formas muy diversas. Tí pi-

PERCEPCIÓN VISUAL
aleatorios.
tiene la virtud de mantenatriz grande inalterados
·z una disparidad retireoscópica de este este
lar (la submatriz) grande.
aleatorios construiun procedimiento de
de las imágenes, se verá un fondo formado por
que la forma y los guiar la resolución del
ra disparidad de puntos e una escena en diferen
mas también ponen tardío en el procesa. previo de la for
ia, al menos en sus relativamente pronto
de los objetos 10•
La sensibilidad este. La investigación expe-
gran cantidad de mode-lema de la corresponden
queda fuera de los límites de en R. M . Ruiz (1992).
formas muy diversas. Típi-
EL ES PACIO TRIDIMENSIONAL 169
rimental coincide en afirmar que, bajo las mejores condiciones perceptivas, la agudeza estereoscópica se encuentra en el rango de los dos a los seis segundos de ángulo. También se ha encontrado que la sensibilidad es mayor para la disparidad cruzada que para la no cruzada. Con todo, la sensibilidad estereoscópica depende de factores espaciales tales como la excentricidad de los estímulos y la distancia entre los estímulos y el punto de fijación. Para las dos variables, excentricidad y distancia, la sensibilidad disminuye cuando aumentan sus valores.
En el otro extremo, la magnitud de disparidad dentro de la cual se produce estereoscopia está limitada a un área en torno al horópter que se conoce con el nombre de área de fusión de Panum12 . El tamaño de esta área de fusión no es igual para todo el horópter sino que es menor en el entorno del punto de fijación que en la periferia. Es de algo menos de 10 minutos de ángulo para la visión central y alcanza valores por encima de los 30 minutos de ángulo a partir de una distancia de unos 15 grados en la periferia. La Figura 4.14 muestra el área de fusión de Panum y su relación con el horópter.
l Área de Pan u m
Ojo izquierdo Ojo derecho
FIGURA 4.14. Área de fusión de Panum y su relación con el horópter. Obsérvense las proyecciones de distintos puntos en el espacio. Fuente: Margaret W. Matlin & Hugh J. Foley. Sensation and Perception {4. 0 ed.), p. 184, fig. 6.14.a . Publicado por Allyn and Bacon, Boston, MA. © 1997, Pearson Education. Reproducido con
autorización del editor.
camente se pide a los participantes que, con su mirada centrada en un punto de fijación, hagan juicios acerca de la profundidad relativa de dos estímulos situados fuera del horópter.
12. Panum fue un psicólogo alemán que en 1858 aplicó a la percepción del espacio visual la idea de los círculos sensoriales correspondientes que Weber había formulado para la sensibilidad cutánea. De la misma manera que en la piel la estimulación de dos puntos dentro de círculos sensoriales correspondientes producía una única sensación, así la doble estimulación en las retinas dentro de círculos correspondientes daba lugar a fusión binocular.

170 PERCEPCIÓN VISUAL
La figura también muestra las proyecciones de dos puntos en el horópter, uno (F) corresponde al punto de fijación y el otro (A) se encuentra en el horópter pero proyecta fuera de la fóvea_ Obsérvese que las proyecciones de A, que son a y a', proyectan sobre puntos correspondientes en las dos retinas. No ocurre así con el punto B cuyas proyecciones (by b') muestran una considerable disparidad cruzada.
La interpretación clásica del área de Panum ha considerado, siguiendo a este autor, que el área representaba propiedades fijas de una región determinada de la retina. Hoy sabemos que esta concepción es errónea pues tanto el tamaño como la forma del área de Panum dependen tanto de las características del estímulo como del procedimiento utilizado para medirla. Por ejemplo, Schor, Word y Ogawa (1984) encontraron que los objetos grandes tenían áreas mayores que los pequeños y lo mismo ocurría con las imágenes borrosas comparadas con las más nítidas. El área de Panum presenta unas características dinámicas considerables y depende de mecanismos perceptivos de considerable complejidad. Por tanto, las cifras que hemos dado anteriormente sobre sus dimensiones deben tomarse únicamente como una orientación referida a condiciones típicas de medición. En este capítulo no nos detendremos a estudiar los diferentes procedimientos utilizados para su medición.
1.2.2.6. Mecanismos fisiológicos de la estereoscopia. El hallazgo de neuronas en la corteza visual primaria (V1) que respondían de forma selectiva a la disparidad binocular tuvo lugar en 1967 y se debió a las investigaciones de Barlow, Blakemore, y Pettigrew. Con posterioridad se han encontrado células selectivas a la disparidad en otras áreas de la corteza cerebral como V2 y V3 . Como su mismo nombre indica, estas neuronas muestran alta tasa de disparo cuando un determinado estímulo incide en puntos de las dos retinas que no son correspondientes. Unas células responden preferentemente a niveles de disparidad bajos, mientras que otras lo hacen a niveles de disparidad altos. De forma parecida unas responden preferentemente a la disparidad cruzada mientras que otras lo hacen a la no cruzada. De entre las múltiples investigaciones psicofisiológicas sobre la estereoscopia merece la pena destacar, por su cuidadoso carácter cuantitativo, las realizadas recientemente por DeAngelis, Cumming y Newsome (1998, 2000) en el área temporal medial (MT) de monos. Descubrieron que en esta zona existía una clara organización funcional de la estereoscopia que presentaba tres características fundamentales :
l. Las neuronas selectivas a la disparidad estaban organizadas en columnas de acuerdo con valores particulares de disparidad, de forma que las neuronas que mostraban preferencia para una determinada disparidad binocular formaban parte de la misma columna.
2. Las neuronas selectivas a la disparidad estaban agrupadas a lo largo de MT formando como una especie de parches intercalados con otros que no mostraban selectividad a la disparidad.

PERCEPCIÓN VISUAL
dos puntos en el horópter, (A) se encuentra en el ho
f.1Ue las proyecciones de A, dientes en las dos retinas. ' y b') muestran una consi-
1 considerado, siguiendo a as de una región determin es errónea pues tanto el
tanto de las característiJara medirla. Por ejemplo, )S objetos grandes tenían a con las imágenes borro-um presenta unas carac
ecanismos perceptivos de emos dado anteriormente ) ffiO una orientación refe[tulo no nos detendremos
El hallazgo de neuan de forma selectiva a a las investigaciones de han encontrado células
cerebral como V2 y V3. alta tasa de disparo
las dos retinas que no r' ~""-'"'-"'L'- a ni veles de
de disparidad altos. a la disparidad cruzada las múltiples investiga
la pena destacar, por su temente por DeAngelis,
l medial (MT) de moorganización funcional fundamentales:
organizadas en colum' de forma que las
disparidad
EL ESPACIO TRIDIMENSIONAL 171
3. Finalmente, en los parches con buena selectividad a la disparidad, la disparidad preferida variaba de forma gradual y continua de columna a columna a lo largo de la superficie de MT
Estos resultados indicaban que el área MT contenía un mapa de disparidad binocular, pero DeAngelis y sus colaboradores quisieron comprobar que efectivamente las neuronas pertenecientes a este mapa estaban implicadas en la percepción de la profundidad y para ello estimularon eléctricamente grupos de neuronas mientras los monos realizaban una tarea de discriminación de la profundidad utilizando estereogramas de puntos aleatorios estáticos. El uso de estereogramas estáticos era importante porque MT es un área que también contiene neuronas especializadas en el procesamiento del movimiento. Los resultados mostraron que la microestimulación provocaba un sesgo sistemático en los juicios perceptivos de los monos en la dirección de la disparidad preferida por las neuronas que eran estimuladas. Parece claro, por tanto, que en el área MT se originan señales relevantes para la percepción de la profundidad estereoscópica.
1.2.3. Rivalidad binocular
Hemos visto que la disparidad binocular, siempre que no sobrepase la magnitud indicada por el área de Panum, produce estereoscopia. Cuando la disparidad es grande y sobrepasa los valores de dicha área se producen imágenes dobles aunque por lo general la experiencia consciente de las dos imágenes, fenómeno que se denomina diplopía, no llega a producirse. La razón de que no se produzca se debe a que las imágenes dobles provocan un fenómeno de rivalidad binocular en el que ambas imagen parecen competir por acceder a la consciencia. Cuando los estímulos son pequeños, produciendo un ángulo visual igual o menor a un grado, la rivalidad es total de forma que una imagen domina sobre la otra durante un periodo de tiempo que oscila entre 1 y 4 segundos y durante ese periodo es la única imagen percibida conscientemente. Después la experiencia consciente cambia y la imagen que antes estaba suprimida accede a la consciencia y la que se percibía es suprimida. Así se produce una continua alternancia entre las dos imágenes que se debe probablemente a la fatiga de las neuronas responsables de su respectiva percepción consciente. Cuando los estímulos son grandes, la rivalidad binocular produce una imagen consciente compuesta de trozos o partes pertenecientes a cada una de las dos imágenes.
La visión binocular normal implica tanto estereoscopia como rivalidad binocular. Si en nuestra experiencia visual habitual consciente el campo visual aparece bien unificado, es debido a la acción conjunta de los mecanismos que subyacen a estos dos fenómenos. La estereoscopia fusiona los puntos que se encuentran dentro del área de Panum y la rivalidad binocular resuelve la competición entre imágenes dobles.

172 PERCEPCIÓN VISUAL
1.3. Relación entre las claves de profundidad
Hasta este momento en la exposición de este capítulo, hemos estudiado la aportación de las distintas claves de profundidad considerando cada una de ellas de forma aislada. Obviamente en la percepción ordinaria, todas estas claves actúan de forma conjunta integrando la información que cada una de ellas aporta para lograr una percepción consistente del espacio tridimensio· nal. La percepción de la profundidad está sobredeterminada por el conjunto de factores que hemos estudiado de forma que la ausencia de una clave no es un obstáculo para que el sistema visual pueda obtener una adecuada adapta· ción a la situación estimular tridimensional. Esta sobredeterminación es también un indicador de la importancia que la percepción de la tercera dimensión tiene para la supervivencia del organismo.
Cómo se lleva a cabo la integración de las distintas claves para producir la percepción de la profundidad es un tema poco investigado aún. Las investigaciones de laboratorio han tratado de comparar unas claves con otras con el fin de observar el resultado que las distintas manipulaciones experimentales producen en la percepción visual. Los resultados de estas investigaciones han puesto de manifiesto que las distintas claves pueden relacionarse entre sí de tres formas diferentes: dominancia, compromiso e interacción.
1.3.1. Dominancia. Se produce dominancia de una clave sobre otra cuando el sistema visual ignora la información proporcionada por una clave en favor de la proporcionada por otra clave de profundidad. Un ejemplo conocido que muestra este efecto es la habitación de Ames 13 • En esta habitación, Ames opone la información proporcionada por la perspectiva y la proporcionada por el tamaño familiar. Se trata de una habitación distorsionada de forma trapezoidal como aparece en el esquema de la Figura 4.15 .b.
El observador sólo puede mirar dentro de la habitación a través de un orificio situado estratégicamente en una de las paredes de la habitación. Desde ese punto de vista, la habitación parece rectangular a pesar de que no lo es. Cuando personas de la misma estatura se colocan en distintas posiciones a lo largo de la pared del fondo, el observador inevitablemente percibe a las personas como si estuvieran a la misma distancia y tuvieran estaturas muy diferentes (Figura 4.15 .a). En el caso de esta ilusión, la percepción del observador está dominada por la información que proporciona la perspectiva, que desde el punto de observación predeterminado hace parecer la habitación como rectangular. A pesar de que el tamaño familiar debería igualar el tamaño de
13. Adelbert Ames fue un investigador americano de la percepción visual en la primera mitad del siglo veinte. Realizó numerosas demostraciones perceptivas encaminadas a poner de manifiesto la forma en que las distintas claves perceptivas interactúan con los supuestos que el perceptor aporta en una situación determinada. Perteneció al grupo de los transaccionalistas, investigadores muy influenciados por las ideas de John Dewey y Arthur Bentley.

PERCEPCIÓN VISUAL
idad
ítulo, hemos estudiado la siderando cada una de
· ón ordinaria, todas estas rmación que cada una de del espacio tridimensiorminada por el conjunto
" "'cuu.,a de una clave no es una adecuada adapta-
bredeterminación es tamn de la tercera dimensión
claves para producir la do aún. Las investí-
ulaciones experimentales estas investigaciones han
relacionarse entre sí de
clave sobre otra cuanpor una clave en fa
Un ejemplo conocido En esta habitación, Ames
·va y la proporcionada distorsionada de forma 4.15.b.
a través de un oride la habitación. Desde a pesar de que no lo es. distintas posiciones a lo
ente percibe a las per. ran estaturas muy dife
.,,r,-,.,r,· n del observador la perspectiva, que desde
r la habitación como ría igualar el tamaño de
hceoc:ión visual en la primera encaminadas a poner de con los supuestos que el
de los transaccionalistas, Arthur Bentley.
EL ESPACIO TRIDIMENS IONAL
(a)
• Posición y tamaño real del hombre "mas pequeño"
e Posición y tamaño aparantes del hombre "más pequeño"
O Posición y tamaño real del nombre "mediano"
O Posición y tamaño aparantes del hombre "mediano"
D Hombre "mas grande"
173
\>::¡.,~¿-Paredes -.:., ·. : ,.C:;J aparentes 1 ··:-. \: : :' d 1 1 ••..•• e a sa a .... \~/:'
Mirilla para un ojo (b)
FIGURA 4.15. Habitación distorsionada de Ames. Cuando personas de la misma estatura se colocan en distintas posiciones a lo largo de la pared del fondo, el observador inevitablemente percibe a las personas como si estuvieran a la misma distancia y tuvieran estaturas muy diferentes. Fuente : Stephen E. Palmer. Vision Science: Photons to Phenomenology. © 1999. Cambridge, MA: The MIT Press,
p. 247, fig. 5.5.32.
las personas, esta información es ignorada y el tamaño de las personas queda determinado por el tamaño de la imagen proyectada en la retina, provocando así la ilusión de tamaño que caracteriza a la habitación de Ames.
1.3.2. Compromiso. No siempre se produce el predominio de una clave respecto de otra. A veces, la resultante del conflicto entre las informaciones proporcionadas por las distintas claves es un valor intermedio entre los valores de profundidad proporcionados por cada clave. Por ejemplo, Bruno y Cutting (1988) manipularon valores de cuatro claves diferentes: tamaño relativo, posición respecto al horizonte, oclusión y paralaje de movimiento. Construyeron diferentes estímulos que combinaban los valores de esas claves y solicitaron a los participantes que para cada estímulo evaluaran en una escala de O a 99 la magnitud de la profundidad percibida. Encontraron que el grado de profundidad percibida era el resultado de sumar la información proporcionada por cada una de las claves. En este caso, por tanto, los observadores no se guiaban por una clave ignorando las otras, como ocurre en los casos de dominancia, sino que integraban la información de las claves de acuerdo con una simple regla aditiva. Parece como si la información proporcionada por cada clave fuera independiente de la información proporcionada por las otras y el resultado final se produjera sin ningún tipo de interacción entre las claves.
1.3.3. Interacción. Aunque el compromiso actúa en algunas ocasiones, no puede descartarse la existencia de interacciones entre la información proporcionada por las distintas claves. En el caso de las claves que solamente producen información relativa sobre la profundidad, parece lógico pensar que

174 PERCEPCIÓN VISUAL
necesitan interactuar con alguna clave que proporcione información absoluta sobre la distancia a la que se encuentran los objetos para poder dar lugar a un mapa métrico de profundidad. Por ejemplo, piénsese en la disparidad binocular que es una potente clave de profundidad pero solamente de profundidad relativa respecto al punto de fijación. Considerada de forma aislada la disparidad binocular no proporciona información absoluta de la distancia a los objetos sino que informa sobre las proporciones entre las distancias de los objetos situados en diferentes planos de profundidad. Piénsese también en la convergencia que proporciona información sobre la distancia absoluta pero únicamente de la distancia al objeto que se encuentra en el punto de fijación. La interacción de estas dos claves permite generar un mapa métrico de la profundidad de los objetos en la escena ya que la convergencia binocular proporciona el valor de distancia real a que se encuentra el objeto en el que se fija la vista, y a partir de esta medida se pueden escalar las proporciones de disparidad de profundidad relativa. De esta forma el sistema visual puede conseguir las distancias absolutas a todos los objetos de la escena.
La investigación de la integración entre claves de profundidad casi se ha limitado a constatar la existencia de los tres tipos de procesos que acabamos de estudiar. Aún sabemos muy poco sobre las condiciones que determinan el predominio de un proceso sobre los otros
2. TEORÍAS DE LA PERCEPCIÓN ESPACIAL
Dos aproximaciones teóricas han determinado la investigación sobre percepción espacial en psicología. Las diferencias entre estas aproximaciones no se han limitado a la percepción del espacio sino que responden a discrepancias profundas respecto a los procesos perceptivos en general, sin embargo encuentran su confrontación más clara en el terreno de la percepción espacial y por ello resulta conveniente profundizar su estudio en el contexto de este capítulo. Las dos aproximaciones que vamos a estudiar han recibido nombres diferentes en distintos contextos pero posiblemente la forma más general de denominarlas sea la de aproximación constructivista para una de ellas y aproximación ecológica para la otra. A continuación presentaremos estas dos aproximaciones y para poder contrastar de una forma concreta las diferencias entre los dos puntos de vista, estudiaremos el modo en que cada una de ellas aborda la explicación de un fenómeno relacionado con la percepción de la distancia como es la constancia del tamaño.
2.1. La aproximación constructivista
Es la más antigua de las dos y, aunque hunde sus raíces en el empirismo filosófico, suele considerarse a Helmholtz como padre de la primera formulación científica de la misma. Con posterioridad otros investigadores, como Boring,

PERCEPCIÓN VISUAL
rcione información absoluta ~jetos para poder dar lugar D, piénsese en la disparidad aad pero solamente de proonsiderada de forma aislada ·ión absoluta de la distancia iones entre las distancias de [undidad. Piénsese también 1 sobre la distancia absoluta e encuentra en el punto de te generar un mapa métrico e la convergencia binocular
entra el objeto en el que escalar las proporciones
el sistema visual puede s de la escena. de profundidad casi se ha de procesos que acabamos iciones que determinan el
investigación sobre percepestas aproximaciones no se responden a discrepancias general, sin embargo ende la percepción espacial
dio en el contexto de este diar han recibido nom
ente la forma más general ·vista para una de ellas y
presentaremos estas dos concreta las diferencias
o en que cada una de ellas con la percepción de la
raíces en el empirismo filode la primera formulación
ores, como Boring,
EL ESPACIO TRIDIMENSIONAL 175
Epstein, Hochberg y Rack entre otros, han contribuido a reformular las ideas centrales que caracterizan esta concepción. Aquí nos centraremos en el estudio de estas ideas centrales sin prestar especial atención a los matices que diferencian a los distintos autores.
Una idea central de la aproximación constructivista es que la percepción tiene lugar por fases que se complementan unas a otras y que de forma conjunta contribuyen a proporcionar la información necesaria. Inicialmente, la información proporcionada por la imagen retiniana o estímulo próximo no es adecuada para determinar por sí sola la percepción. El estímulo próximo es ambiguo y necesita la aportación de información por parte de otros procesos psicológicos, tales como el aprendizaje y la memoria, para resolver esa ambigüedad y proporcionar una percepción adecuada al estímulo distante. En el caso del espacio tridimensional, que ahora nos ocupa, como la retina es una superficie bidimensional, la percepción de un espacio tridimensional no puede ser un fenómeno perceptivo primario sino derivado a partir de la imagen retiniana bidimensional. De ahí la importancia que para la aproximación constructivista tiene el análisis de las claves de profundidad que hemos estudiado. Las claves de profundidad actúan como un contexto interpretativo que nos permite recuperar las características tridimensionales del estímulo distante a partir del núcleo de información proporcionado por la imagen retiniana bidimensional. La forma en que la concepción constructivista explica la constancia del tamaño, nos ayudará a concretar el conocimiento de esta forma de pensar.
2.1.1. La constancia del tamaño
Recordemos las relaciones geométricas que se han explicado en la Figura 3.8 entre el tamaño de los objetos, su distancia respecto al observador, el ángulo visual y el tamaño de la imagen retiniana. Allí veíamos que el ángulo visual, y por consiguiente el tamaño de la imagen retiniana, varía directamente con el tamaño del objeto e inversamente con la distancia a la que se encuentra el objeto. A igual distancia, cuanto mayor es un objeto mayor es el ángulo visual que su imagen proyecta en la retina. Por otra parte, el ángulo visual proyectado por un objeto disminuye a medida que el objeto se aleja del observador.
Si la percepción del tamaño de un objeto estuviera determinada por el tamaño del ángulo visual, los objetos variarían en tamaño percibido cuando variase su distancia al observador. Esto es lo que ocurre cuando la distancia respecto a los objetos percibidos es muy grande. Por ejemplo, si contemplamos el tráfico de una ciudad desde un edificio muy alto, podemos tener la impresión de que el tamaño de los coches es el equivalente al de coches de juguete. Sin embargo, cuando la distancia de los objetos al observador no es muy grande, el desplazamiento en profundidad de los objetos no provoca un cambio en su tamaño percibido a pesar de que el ángulo visual que proyectan disminuye. Por ejemplo, si el lector está en una habitación, puede observar
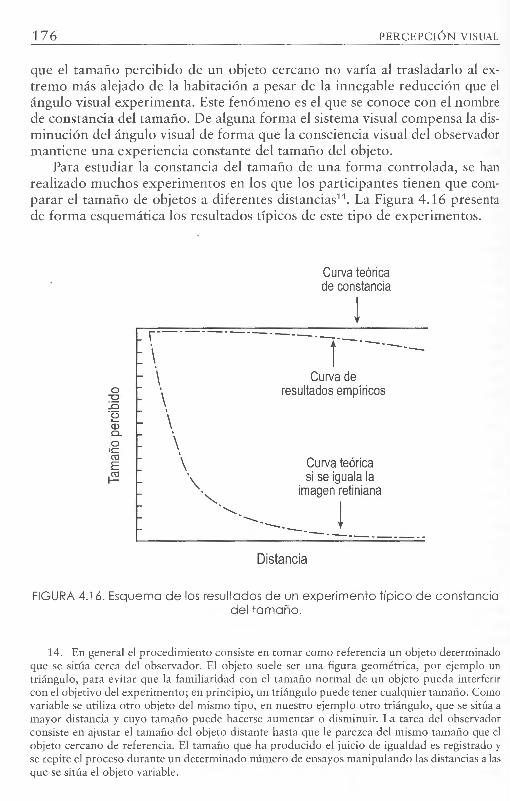
176 PERCEPCIÓN VISUAL
que el tamaño percibido de un objeto cercano no varía al trasladarlo al extremo más alejado de la habitación a pesar de la innegable reducción que el ángulo visual experimenta. Este fenómeno es el que se conoce con el nombre de constancia del tamaño. De alguna forma el sistema visual compensa la disminución del ángulo visual de forma que la consciencia visual del observador mantiene una experiencia constante del tamaño del objeto.
Para estudiar la constancia del tamaño de una forma controlada, se han realizado muchos experimentos en los que los participantes tienen que comparar el tamaño de objetos a diferentes distancias14
• La Figura 4.16 presenta de forma esquemática los resultados típicos de este tipo de experimentos.
o "O :0 -~ Q) 0..
o u:: ro E ~
Curva teórica de constancia
------¡·-----
---
Curva de resultados empíricos
Curva teórica si se iguala la
imagen retiniana
¡
--
--------------
Distancia
FIGURA 4.16. Esquema de los resultados de un experimento típico de constancia del tamaño.
14. En general el procedimiento consiste en tomar como referencia un objeto determinado que se sitúa cerca del observador. El objeto suele ser una figura geométrica, por ejemplo un triángulo, para evitar que la familiaridad con el tamaño normal de un objeto pueda interferir con el objetivo del experimento; en principio, un triángulo puede tener cualquier tamaño. Como variable se utiliza otro objeto del mismo tipo, en nuestro ejemplo otro triángulo, que se sitúa a mayor distancia y cuyo tamaño puede hacerse aumentar o disminuir. La tarea del observador consiste en ajustar el tamaño del objeto distante hasta que le parezca del mismo tamaño que el objeto cercano de referencia. El tamaño que ha producido el juicio de igualdad es registrado y se repite el proceso durante un determinado número de ensayos man ipulando las distancias a las que se sitúa el objeto variable.
EL
a L: dis me la<
2.:
La el , se Slll
fue dis COl
la inf Pa1 ob.
hir lm
bic do ob
tin pe
PERCEPCIÓN VISUAL
o varía al trasladarlo al exinnegable reducción que el ue se conoce con el nombre
ma visual compensa la disiencia visual del observador lel objeto. a forma controlada, se han rticipantes tienen que com-14. La Figura 4.16 presenta
tipo de experimentos.
-~-·--·--
de
típico de constancia
ferencia un objeto determinado geométrica, por ejemplo un
de un objeto pueda interferir tener cualquier tamaño. Como
otro triángulo, que se sitúa a · . La tarea del observador
del mismo tamaño que el ·cio de igualdad es registrado y manipulando las distanci as a las
EL ESPACIO TRIDIMENSIONAL 177
En la figura se representa el tamaño percibido en función de la distancia a la que se sitúa el objeto variable. Como puede verse, el tamaño aparente no disminuye en función de la distancia de acuerdo con la variación que experimenta el tamaño de la imagen retiniana, sino que se aproxima mucho más a la curva teórica de constancia.
2.1.2. Tomar en consideración la distancia
La explicación constructivista de la constancia del tamaño ha puesto siempre el énfasis en que el sistema visual evalúa el tamaño de un objeto basándose no sólo en el tamaño del ángulo visual o tamaño de la imagen retiniana sino también en la distancia a que el objeto se encuentra situado. Helmholtz fue el primero en postular que el sistema visual tomaba en consideración la distancia a la que se encontraba un objeto por medio de una inferencia inconsciente. Según Helmholtz, el sistema visual primero registra el tamaño de la imagen retiniana y después modifica esta información de acuerdo con la información disponible acerca de la distancia a la que se encuentra el objeto. Para Helmholtz esta operación tenía lugar de forma inconsciente, sin que el observador cayera en la cuenta de la misma.
La formulación moderna de esta misma idea se conoce con el nombre de hipótesis de la invarianza tamaño-distancia, que se limita a suponer que la imagen retiniana guarda la misma relación con el tamaño y la distancia percibidos que con el tamaño y la distancia fisicos. Si el ángulo visual (a) proyectado por un objeto sobre la retina es directamente proporcional al tamaño del objeto (h) e inversamente proporcional a la distancia (d) a la que el objeto se encuentra, podemos establecer que 15 :
h tan(a) = -
d
La hipótesis de la invarianza tamaño-distancia supone que la imagen retiniana guarda la misma relación con el tamaño percibido (hP) y la distancia percibida (dP) de modo que:
tan(a)
De lo que se deduce que:
15. Esta relación trigonométrica se entenderá mejor tomando como referencia la Figura 3.8.

178 PERCEPCIÓN VISUAL
h P = d P • tan (a) [ 1 ]
Es decir, el tamaño percibido es igual a la distancia percibida multiplicada por la tangente del ángulo visual. Dicho en otros términos, el tamaño percibido es igual al producto de la distancia percibida por el tamaño de la imagen retiniana. En una situación cotidiana, a medida que un objeto se aleja del observador, el ángulo visual producido por el objeto disminuye pero el tamaño percibido permanece constante debido a la relación expresada en la ecuación [1] .
2.1.3. Evidencia a favor de la hipótesis de la invarianza tamaño-distancia
2.1.3.1. La ley de Emmert
La relación que acabamos de ver entre tamaño y distancia percibidos y tamaño de la imagen retiniana predice que, si el tamaño de la imagen retiniana permanece constante, entonces el tamaño percibido es proporcional a la distancia percibida. La comprobación de esta predicción no es fácil porque todo cambio en la distancia a la que se encuentra un objeto conlleva un cambio en ángulo visual y por tanto en el tamaño de la imagen retiniana. Sin embargo existe un fenómeno perceptivo que permite mantener constante el tamaño de la imagen retiniana y cambiar la distancia a la que se percibe un objeto. Se trata del fenómeno de las posimágenes que ya hemos visto en capítulos anteriores.
Observe la Figura 4.17 y fije su vista en el círculo negro del marco izquierdo durante medio minuto. A continuación cambie su vista al cuadrado de la derecha, fije su vista en el punto central y percibirá un círculo del mismo tamaño que el anterior pero de color blanco intenso. Debido a la prolongada
• •
FIGURA 4.17. Posefecto de claridad que ilustra la Ley de Emmert.
PERCEPCIÓN VISUAL
distancia percibida multipliotros términos, el tamaño
ercibida por el tamaño de la dida que un objeto se aleja
el objeto disminuye pero el a la relación expresada en la
de la invarianza
distancia percibidos y tamade la imagen retiniana
ido es proporcional a la disno es fácil porque todo conlleva un cambio en
agen retiniana. Sin embargo r constante el tamaño de
se percibe un objeto. Se trata visto en capítulos anteriores. círculo negro del marco iz
' cambie su vista al cuadrado ·birá un círculo del mismo
Debido a la prolongada
la Ley de Emmert.
EL ESPACIO TRIDIMENSIONAL 179
exposición al estímulo negro, su visión ha perdido sensibilidad a ese color y ha aumentado la sensibilidad para el color oponente, el blanco. Repita ahora la observación del círculo negro de la izquierda y, después de treinta segundos, fije su mirada en alguna superficie blanca lejana como puede ser una pared de la habitación en que se encuentra. Observará que sobre esa superficie se proyecta un círculo blanco de mayor tamaño que el que vio anteriormente en la parte derecha de la Figura 4.17. Si tiene la oportunidad de repetir la experiencia con superficies de proyección situadas en distintos planos de profundidad desde su posición de observación, comprobará que el tamaño del círculo proyectado en la posimagen aumenta a medida que la superficie sobre la que se proyecta está más alejada de usted. Esta experiencia ilustra la ley enunciada por Emmert en 18 81 que establece que el tamaño aparente de una posimagen es directamente proporcional a su distancia percibida desde el observador.
La ley de Emmert expresa un hecho que se refiere a la variación en tamaño percibido con el cambio de la distancia. Es el fenómeno opuesto a la situación normal en la que un cambio en distancia va acompañado de una constancia en el tamaño percibido. Sin embargo ambas experiencias son la expresión de un mismo principio. Si el sistema visual se comporta como una calculadora que multiplica el tamaño retiniano por la distancia percibida para producir el tamaño percibido, entonces cuando el ángulo visual decrece al aumentar la distancia el producto resultará en la constancia del tamaño. Sin embargo, cuando el ángulo visual permanece constante y se aumenta la distancia, el tamaño aparente aumentará como indica la ley de Emmert para las posimágenes.
2.1.3.2. Percepción del tamaño e indicadores de profundidad
Una forma de estudiar el papel que la distancia aparente juega en la percepción del tamaño consiste en estudiar la relación entre esta percepción y los indicadores de profundidad que hemos estudiado en la primera parte de este tema. Holway y Boring (1941) realizaron una serie de experimentos, que aún hoy se consideran clásicos en este tema, y que proporcionaron interesante información sobre esa relación.
En la situación experimental ideada por Holway y Boring, el observador estaba situado en la intersecciórrde dos largos pasillos que se extendían en forma de L. En uno de los pasillos había un disco de luz que era ajustable en tamaño y que se colocaba a una distancia fija del observador (unos tres metros). El observador tenía el control del tamaño de este disco. En el segundo pasillo se colocaba otro disco de referencia y, en cada ensayo, se variaba la distancia, entre 3 y 36,5 metros, a la que era presentado. Lo peculiar respecto a este segundo disco consistía en que su tamaño era elegido por el experimentador en cada ocasión de forma que el ángulo visual que proyectaba sobre la retina fuera siempre de un grado de ángulo visual. De esta forma el
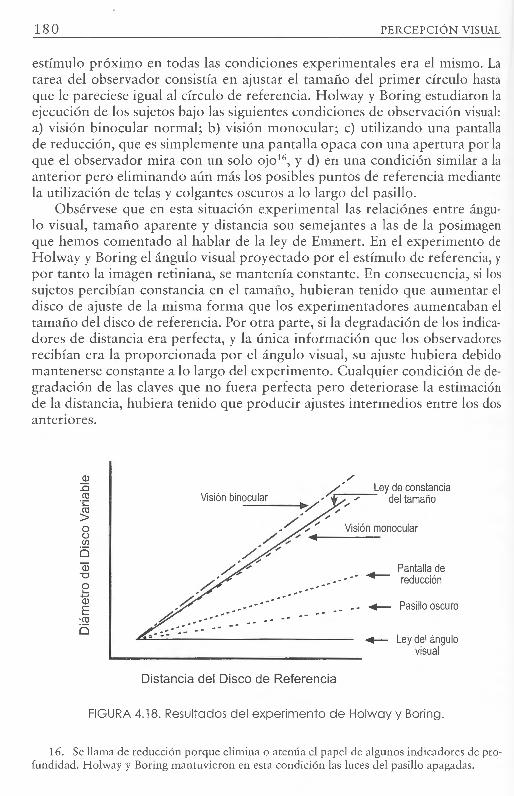
180 PERCEPCIÓN VISUAL
estímulo próximo en todas las condiciones experimentales era el mismo. La tarea del observador consistía en ajustar el tamaño del primer círculo hasta que le pareciese igual al círculo de referencia. Holway y Boring estudiaron la ejecución de los sujetos bajo las siguientes condiciones de observación visual: a) visión binocular normal; b) visión monocular; e) utilizando una pantalla de reducción, que es simplemente una pantalla opaca con una apertura por la que el observador mira con un solo ojo 16, y d) en una condición similar a la anterior pero eliminando aún más los posibles puntos de referencia mediante la utilización de telas y colgantes oscuros a lo largo del pasillo.
Obsérvese que en esta situación experimental las relaciónes entre ángulo visual, tamaño aparente y distancia son semejantes a las de la posimagen que hemos comentado al hablar de la ley de Emmert. En el experimento de Holway y Boring el ángulo visual proyectado por el estímulo de referencia, y por tanto la imagen retiniana, se mantenía constante. En consecuencia, si los sujetos percibían constancia en el tamaño, hubieran tenido que aumentar el disco de ajuste de la misma forma que los experimentadores aumentaban el tamaño del disco de referencia. Por otra parte, si la degradación de los indicadores de distancia era perfecta, y la única información que los observadores recibían era la proporcionada por el ángulo visual, su ajuste hubiera debido mantenerse constante a lo largo del experimento. Cualquier condición de degradación de las claves que no fuera perfecta pero deteriorase la estimación de la distancia, hubiera tenido que producir ajustes intermedios entre los dos anteriores.
Visión binocular -----+
-·· -·· -·· -·· -·· -·· -·· -·· ... .........
Distancia del Disco de Referencia
Ley de constancia del tamaño
Visión monocular
-·· Pantalla de
..._ reducción
• • ....__ Pasillo oscuro
-+-- Ley del ángulo visual
FIGURA 4.18. Resultados del experimento de Holway y Boring.
16. Se llama de reducción porque elimina o atenúa el papel de algunos indicadores de profundidad. Holway y Boring mantuvieron en esta condición las luces de l pasillo apagadas.
PERCEPCIÓN VISUAL
rimentales era el mismo. La ño del primer círculo hasta flway y Boring estudiaron la iones de observación visual: ~ e) utilizando una pantalla
ca con una apertura por la una condición similar a la
de referencia mediante del pasillo.
las relaciónes entre ángutes a las de la posimagen
ert. En el experimento de el estímulo de referencia, y
En consecuencia, si los tenido que aumentar el tadores aumentaban el
degradación de los indica'ón que los observadores
1, su ajuste hubiera debido ualquier condición de dedeteriorase la estimación intermedios entre los dos
Ley de constancia del tamaño
Visión monocular
Pantalla de . · · · +-- reducción
. . +- Pasillo oscuro
+-- Ley del ángulo visual
Holway y Boring.
de algunos indicadores de proluces del pasillo apagadas.
EL ESPACIO TRIDIMENSIONAL 181
La Figura 4.18 muestra los resultados experimentales de Holway y Boring. Como puede observarse, bajo las condiciones de observación a) y b) el ajuste efectuado estaba próximo al necesario para mantener la constancia en el tamaño aparente, e incluso la condición a) tendía a exagerar ligeramente el ajuste. En la condición e) el aumento del disco de ajuste, a medida que aumentaba la distancia del disco de referencia, era mucho menor que en las condiciones a) y b). En la condición d), en la que la degradación de las claves de distancia era mayor, la tendencia presente en e) se acentuaba aún más y la función se aproximaba a la constancia típica de una situación en la que el único indicio disponible para el observador era el ángulo visual.
En otros experimentos que se realizaron con posterioridad a los de Holway y Boring, en los que se controló más cuidadosamente la supresión de los indicadores de distancia producidos por la pantalla de reducción (Lichten y Lurie, 1950), se llegó a obtener una función constante de acuerdo con el tamaño del ángulo visual.
Aunque los resultados experimentales que acabamos de comentar ponen de manifiesto la importancia que tiene la consideración de la distancia en la percepción del tamaño, otros experimentos han mostrado también que, a la hora de juzgar el tamaño de los objetos, las personas pueden tomar en consideración varios factores diferentes. Por ejemplo, se ha puesto de manifiesto que las instrucciones respecto al punto de referencia que el observador debe adoptar para emitir sus juicios, pueden influir en la percepción del tamaño. Gilinsky (1955) realizó un experimento en el que presentó a los participantes un triángulo de referencia a diferentes distancias. Les pidió que ajustaran el tamaño de otro triángulo de acuerdo con el tamaño percibido. La manipulación fundamental que Gilinsky introdujo fue las instrucciones bajo las que los observadores realizaron la tarea. Unas instrucciones, que llamaremos objetivas, solicitaban el ajuste del triángulo variable de forma que igualara el tamaño del triángulo de referencia como si ambos fueran medidos con una regla. Otras instrucciones, que llamaremos retinianas, pedían a los observadores imaginar que se tomaban fotografías de los dos triángulos y, por lo tanto, si un triángulo era más distante que otro, produciría una imagen más pequeña. Los resultados mostraron que bajo instrucciones retinianas, el tamaño del triángulo variable disminuía a medida que aumentaba la distancia del triángulo de referencia. Sin embargo, bajo instrucciones objetivas tendían a exagerar la constancia del tamaño. Este fenómeno, que también Holway y Boring encontraron en el experimento expuesto anteriormente, se ha denominado sobreconstancia y ha sido replicado en numerosas ocasiones (Carlson, 1962; Epstein, 1963). Una explicación general bastante aceptada de este fenómeno es que bajo instrucciones objetivas la respuesta del observador está mediada por procesos cognitivos de cálculo e inferencia que llevan a sobreestimar la constancia, mientras que bajo instrucciones retinianas el juicio no está influido por estos factores cognitivos sino que es de naturaleza más directamente perceptiva (Gogel y Da Silva, 1987).
182 PERCEPCIÓN VISUAL
No nos vamos a detener ahora en explorar este problema en detalle. Lo expuesto hasta ahora ilustra de forma bastante extensa cómo se ha llevado a cabo la investigación de la constancia del tamaño desde una perspectiva constructivista y el valor de una explicación de esta constancia mediante la toma en consideración de la distancia percibida. Pasaremos ahora a exponer el punto de vista alternativo representado por la perspectiva ecológica.
2.2. La aproximación ecológica
Este punto de vista es conocido también con el nombre de percepción directa. Fue formulado por James J. Gibson en una serie de escritos (1950, 1966, 1979) y representa una forma de entender la percepción frontalmente en oposición a la postura constructivista que acabamos de exponer.
Para Gibson, el planteamiento clásico del problema de la percepción tridimensional, consistente en buscar claves de profundidad en la superficie bidimensional de la retina, está equivocado y lleva necesariamente a un empobrecimiento del estudio de la percepción. La investigación perceptiva debe tomar en consideración el patrón total de estimulación, no la proyección geométrica de aspectos parciales del estímulo en la retina. La ambigüedad del estímulo, que es para los constructivistas un supuesto fundamental, es fruto de un análisis inadecuado del patrón total de estimulación y no de una insuficiencia del patrón para determinar la percepción.
Gibson pensaba que la óptica geométrica no era el instrumento adecuado para describir el estímulo y las relaciones entre medio ambiente y patrón de estimulación. En su lugar, trató de crear una óptica ecológica cuyo principio fundamental es que la luz del medio ambiente transmite, no sólo energía, sino también información, que es más importante. La luz puede proporcionar información porque está estructurada de una forma determinada en cada uno de los múltiples puntos de vista que el medio ambiente ofrece al observador. Para Gibson el concepto de información está íntimamente ligado al de estructura. La estructuración de la luz en un punto de vista concreto consiste en el conjunto de perspectivas de los objetos que el observador es capaz de captar desde ese punto de vista, incluyendo también las perspectivas cambiantes de los objetos que se mueven. Gibson siempre pensó que la estimulación que continuamente llega a nuestros sentidos es muy rica en información y proporciona continuamente de forma suficiente todo lo necesario para que se produzca la percepción.
Para Gibson, por tanto, el estímulo carece de ambigüedad. Toda la información está presente en la estimulación o, como Gibson prefiere llamarla, la conformación óptica (optic array). En consecuencia, no es necesario recurrir a procesos constructivos de carácter no perceptivo, tales como memoria o aprendizaje, para entender o explicar la percepción. La percepción para Gibson es directa en cuanto que consiste sencillamente en captar la información disponible en la conformación óptica. Ninguna secuencia de procesos es ne-

PERCEPCIÓN VISUAL
:ste problema en detalle. Lo extensa cómo se ha llevado 1año desde una perspectiva esta constancia mediante la Pasaremos ahora a exponer perspectiva ecológica.
ombre de percepción direcrie de escritos (1950 1966
' ' >ercepción frontalmente en os de exponer. blema de la percepción triofundidad en la superficie 'a necesariamente a un emvestigación perceptiva debe mlación, no la proyección 1 retina. La ambigüedad del testo fundamental, es fruto nulación y no de una insu-
~a el instrumento adecuado edio ambiente y patrón de :a ecológica cuyo principio ;mite, no sólo energía, sino uz puede proporcionar in-determinada en cada uno
iente ofrece al observador. amente ligado al de estrucsta concreto consiste en el ervador es capaz de captar Jerspectivas cambiantes de S que la estimulación que ica en información y pro' lo necesario para que se
mbigüedad. Toda la infor~i bson prefiere llamarla, la a, no es necesario recurrir o, tales como memoria o 1. La percepción para Gib: en captar la información :uencia de procesos es ne-
EL ESPACIO TRIDIMENSIONAL 183
cesaría para construir una representación de los objetos. Lo único necesario para percibir es atender a la información que está en el medio ambiente.
En resumen, la teoría de Gibson es ecológica en cuanto que pone el acento en la riqueza informativa de la estimulación ordinaria por oposición a la estimulación propia de las situaciones experimentales que, por lo general, restringen la información. En una situación estimular propia de la vida cotidiana la totalidad del patrón de estimulación especifica de forma necesaria y suficiente lo que un observador percibe. La teoría de Gibson es una teoría de la percepción directa porque refiere todo lo percibido a la información proporcionada por la estimulación. Evita toda referencia a procesos no perceptivos que puedan completar o interpretar un posible estímulo ambiguo. La información presente en los estímulos nunca es ambigua. Por eso, la tarea de los psicólogos que estudian la percepción debe ser analizar a fondo la estimulación hasta dar con la información particular que determina un fenómeno perceptivo. Veamos como Gibson aplicó esta forma de pensar al análisis de la constancia del tamaño.
2.2.1. La constancia del tamaño desde una perspectiva ecológica
Para Gibson, explicar las constancias perceptivas no es otra cosa que descubrir en la estimulación la información invariante que determina la percepción de esa constancia. No acepta ningún tipo de inferencia inconsciente o proceso mental llevado a cabo por el observador que complemente la información proporcionada por la estimulación.
En el caso de la constancia del tamaño, no considera necesario que el observador tome en consideración la distancia percibida, sino que es el gradiente de densidad de textura el que proporciona la escala absoluta de distancia que va a explicar la constancia. Para Gibson, la percepción del tamaño de los objetos es una función de la cantidad de textura que el objeto oculta al observador. Los elementos de la textura de una superficie que son ocultados por los objetos, proporcionan una escala efectiva de tamaños con respecto a la cual puede percibirse el tamaño de un objeto. Siempre que dos objetos oculten la misma cantidad de elementos de la textura de una superficie, se percibirán como iguales en tamaño. La Figura 4.19 puede ilustrar la idea central de la explicación de Gibson.
El suelo, y su correspondiente gradiente de textura, que se hace más denso a medida que aumenta la distancia, es la escala respecto a la cual se valora el tamaño de los objetos. Los objetos se perciben como iguales en tamaño, a pesar de la distancia, porque cada uno de ellos oculta la misma cantidad de textura. La relación entre el tamaño del objeto y la cantidad de elementos de textura ocultados por el objeto no cambia y es este invariante el responsable de la constancia del tamaño.

184 PERCEPCIÓN VISUAL
FIGURA 4.19 . Explicación de la constancia del tamaño según Gibson.
2.2.2. Resultados experimentales
El tipo de experimentación que Gibson aduce en favor de su teoría ha consistido en demostrar la constancia del tamaño en situaciones fuera del laboratorio y poco propicias a facilitar los cálculos que supone la teoría constructivista. Por ejemplo, en uno de sus experimentos (Gibson, 1950) colocó estacas a distintas distancias del observador en un campo de unos 800 metros de largo. La altura de las estacas podía variar entre 39 y 257 centímetros. La tarea de los observadores consistía en escoger, de entre un conjunto de estacas graduadas que tenía detrás, aquella que más se aproximara a la que en cada ensayo tenía que estimar. En estas condiciones, y sobre todo para las distancias más alejadas, el tamaño de la imagen retiniana es tan pequeño que el cálculo del tamaño percibido, tal como propone la teoría constructivista, resulta prácticamente imposible. A pesar de ello, Gibson encontró que los observadores mantenían la constancia del tamaño incluso en los casos en que las estacas estaban más alejadas. A partir de datos como estos, Gibson concluyó que la explicación de la constancia del tamaño no necesita complicados cálculos basados en la distancia percibida sino que es mucho más simple suponer que los observadores prestan atención a la cantidad de elementos de la textura del terreno que cada objeto cubre y que responden directamente a esta característica.
Aunque no cabe duda de que la explicación de la constancia del tamaño que Gibson propone, resalta un aspecto importante del problema, no parece

PERCEPCIÓN VISUAL
tamaño según Gibson.
favor de su teoría ha consituaciones fuera del !abo
que supone la teoría caostos (Gibson, 1950) colocó campo de unos 800 metros
39 y 257 centímetros. de entre un conjunto de
más se aproximara a la que · nes, y sobre todo para las tiniana es tan pequeño que e la teoría constructivista,
, Gibson encontró que los incluso en los casos en que como estos, Gibson con-
no necesita complicaque es mucho más simple
la cantidad de elementos de e responden directamente a
la constancia del tamaño te del problema, no parece
EL ESPACIO TRIDIMENSIONAL 185
que pueda adoptarse como una explicación general del fenómeno. Para que la oclusión de la textura pueda informar sobre el tamaño relativo de los objetos, se necesitan unas condiciones bastantes restrictivas que por lo general no se dan en la percepción ordinaria. Por ejemplo, es necesario que los objetos cuyos tamaños se van a comparar se presenten sobre la textura de la misma superficie. Si no es así, o si la superficie no presenta una marcada textura, no es posible establecer una comparación entre los objetos. Además, los elementos que componen la textura de la superficie sobre la que están situados los objetos, deben ser del mismo tamaño. Si la textura es irregular, con unos elementos mayores que otros, no es posible percibir constancia del tamaño sobre la base del número de elementos que los objetos ocultan. En la percepción ordinaria es frecuente que estas condiciones no se cumplan, sin embargo el fenómeno de constancia del tamaño sigue produciéndose.
En resumen, no parece que las relaciones que Gibson descubrió entre el tamaño de los objetos y la oclusión de la textura de la superficie sobre la que los objetos aparecen, sea una explicación general del fenómeno de constancia del tamaño. Hay que tomar en consideración otros factores entre los que probablemente se encuentra la distancia percibida que tanto ha interesado a los constructivistas.
En esta sección del capítulo, no pretendemos estudiar a fondo todos los problemas relacionados con la constancia del tamaño. Más bien, hemos utilizado la polémica suscitada en torno a la constancia del tamaño como un ejemplo concreto que nos ha permitido entender la forma en que las dos principales teorías de la percepción del espacio tratan de explicar un fenómeno perceptivo. De este modo es posible entender mejor las teorías mismas. Ahora nos interesa volver sobre esas teorías para preguntarnos si son necesariamente tan antagónicas como a veces son presentadas en los textos de psicología de la percepción.
3. POSIBLE RECONCILIACIÓN
Son muchos los investigadores de la percepción que han considerado muy importante conseguir armonizar las dos posturas que acabamos de exponer (e.g. Haber, 1985; Hatfield, 1988). Neisser (1994) propuso la existencia de tres sistemas perceptivos diferentes. Un sistema especialmente dedicado al control de la acción del organismo en el medio ambiente. Un segundo sistema especializado en la discriminación e identificación de objetos y situaciones familiares. Y un tercer sistema encargado de la percepción interpersonal, de las situaciones de interacción social con otros seres humanos.
El primero de los sistemas propuestos por Neisser presenta unas características similares a las que Gibson propuso para el sistema perceptivo visual en general. Y el segundo tiene unas características similares a las que los cons-

186 PERCEPCIÓN VISUAL
tructivistas han propuesto como propias de la percepción visuaP7• Si la pro· puesta de Neisser fuera correcta nos encontraríamos con que las dos teorías, que estamos estudiando en este capítulo, podrían tener razón, en cuanto que cada una de ellas estaría acentuando las características propias de uno de los sistemas de percepción visual. Ambas teorías, a su vez, estarían equivocadas en cuanto que pretenden generalizar para un único sistema de percepción visual las características propias de uno de los subsistemas.
Obsérvese que la propuesta de Neisser no carece de antecedentes en la historia de la investigación perceptiva. En el capítulo sobre el color veíamos que durante casi un siglo la teoría tricromática y la teoría de los procesos opo· nentes pugnaron por prevalecer en la explicación de la percepción del color. Durante ese tiempo todos los investigadores se veían más o menos impelidos a elegir entre una u otra teoría. Hoy existe prácticamente un acuerdo general sobre la validez de ambas teorías. El problema se resolvió cuando se pudo es· tablecer que en el procesamiento del color había varias fases y que, mientras que la teoría tricromática tenía razón al describir el procesamiento en el nivel de los receptores, la teoría de los procesos oponentes la tenía si se tomaba en consideración el tipo de procesamiento que tenía lugar en las células ganglio· nares y en el núcleo geniculado del tálamo. ¿Hay razones para pensar que en el caso de la percepción del espacio podemos estar en una situación semejante? ¿Hay razones para pensar que el sistema visual procesa la información espacial de forma diferente dependiendo de que el acto perceptivo vaya dirigido al control de la acción o a la discriminación e identificación de los objetos?
Joel Norman, de la Universidad de Haifa en Israel, ha propuesto recientemente (Norman, 2002) que las vías visuales dorsal y ventral, que la fisiología ha descrito (Ungerleider & Mishkin, 1982), corresponden a dos sistemas visuales con características similares a los postulados por Neisser, de forma que la vía dorsal formaría un sistema especializado en el control visual de la conducta motora, mientras que la vía ventral sería un sistema preferentemente dedicado al reconocimiento e identificación de los objetos. Norman ha elaborado también de forma articulada el paralelismo entre la aproximación ecológica y el funcionamiento del sistema visual dorsal, por una parte, y, por otra parte, el de la aproximación constructivista y el funcionamiento del sistema visual ventral. En la última parte de este capítulo nos detendremos a exponer con un poco más de detalle la propuesta de Norman.
3.1. Los sistemas visuales dorsal y ventral
Ungerleider y Mishkin (1982) fueron los primeros investigadores que presentaron evidencia experimental a favor de la existencia de dos vías funcio-
17. Aunque la hipótesis de un tercer sistema relacionado con la percepción social es realmente interesante y merece atención, su tratamiento queda fuera de los límites impuestos a este libro.

PERCEPCIÓN VISUAL
1ercepción visuaP 7• Si la pro~mos con q~e las dos teorías, ~ tener razon, en cuanto que lísticas propias de uno de los su vez, estarían equivocadas fmico sistema de percepción tbsistemas. :arece de antecedentes en la IÍtulo sobre el color veíamos la teoría de los procesos opon de la percepción del color. ·eían más o menos impelidos icamente un acuerdo general resolvió cuando se pudo es
. varias fases y que, mientras el procesamiento en el nivel
·mes la tenía si se tomaba en . lugar en las células gangliorazones para pensar que en
en una situación semejanprocesa la información es-
acto perceptivo vaya dirigientificación de los objetos?
1, ha propuesto recien-1 y ventral, que la fisiolo
onden a dos sistemas os por Neisser, de forma en el control visual de la
un sistema preferentemenlos objetos. Norman ha o entre la aproximación
dorsal, por una parte, y, y el funcionamiento del ítulo nos detendremos a
de Norman.
investigadores que preia de dos vías funcio-
con la percepción social es realde los límites impuestos a este
EL ESPACIO TRID IMENSIONAL 187
nalmente diferenciadas en la corteza visual del mono. La vía ventral que proyectaba desde la corteza occipital hasta la corteza temporal inferior, y la vía dorsal que proyectaba también desde la corteza occipital hasta la corteza parietal posterior. La lesión de la corteza temporal inferior izquierda del mono, le incapacitaba para discriminar entre objetos sobre la base de la forma . Por otra parte, la lesión de la corteza parietal posterior izquierda impedía que los animales discriminaran sobre la base de la posición. Ungerleider y Mishkin sugirieron que la vía ventral era una vía preferentemente dedicada a la discriminación e identificación de objetos, mientras que la vía dorsal estaba especializada en la localización de los mismos. A partir de entonces ha sido frecuente llamar a las dos vías visuales la vía del <<que» y la vía del <<donde» para referirse a la vía ventral y a la dorsal respectivamente.
Desde la propuesta inicial de Ungerleider y Mishkin, la investigación tanto con personas como con monos ha obligado a reinterpretar la función de las dos vías. Una de las reinterpretaciones que mayor influencia tiene en la actualidad es la propuesta por Milner y Goodale (1995). Para estos autores, tanto la vía ventral como la vía dorsal procesan información sobre las características de los objetos y sobre sus relaciones espaciales. Lo que diferencia a las dos vías es el uso que hacen de esa información. La vía ventral se especializa en el procesamiento de las características permanentes de los objetos y de sus relaciones, permitiendo así la formación de representaciones perceptivas a largo plazo. Estas representaciones cumplen una función básica para poder identificar los objetos y para poder clasificarlos. La finalidad primaria del procesamiento que tiene lugar por esta vía es la acumulación de conocimiento acerca de los objetos que nos rodean.
A su vez, el procesamiento que tiene lugar en la vía dorsal tiene que ver preferentemente con la información cambiante momento a momento acerca de la localización y de la disposición de los objetos con respecto a los efectores que el sujeto utiliza. Su función básica tiene que ver con el control visual on-line de las habilidades motoras, como pueden ser, por ejemplo, los movimientos de la mano a la hora de alcanzar o coger un objeto. Este sistema dorsal puede considerarse como una extensión cortical de los módulos que controlan los movimientos guiados visualmente en los vertebrados y que implican estructuras subcorticales tales como los colículos superiores y el núcleo pulvinar del tálamo.
La Figura 4.20 presenta un esquema de las estructuras corticales principalmente implicadas en cada una de las dos vías en el cerebro del mono. A partir de V1, la vía ventral incorpora a V4 y termina en las zonas temporales TE y TEO, mientras que la vía dorsal se encamina hacia la corteza parietal implicando zonas temporales mediales como MT y MST y las zonas parietales posteriores.
Milner y Goodale han proporcionado gran cantidad de información experimental a favor de la diferenciación funcional de estos sistemas. Experimentos con ratas y monos han mostrado una clara disociación entre los dos sistemas.
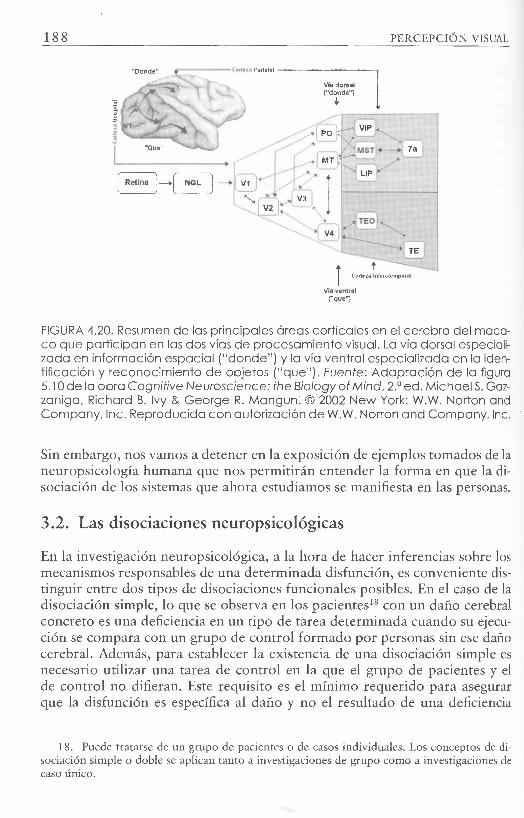
188 PERCEPCIÓN VISUAL
r c . .. .,:. ..... .... , .... ,
V1a ventral ("que")
FIGURA 4.20. Resumen de las principales áreas corticales en el cerebro del macaco que participan en las dos vías de procesamiento visual. La vía dorsal especializada en información espacial ("donde") y la vía ventral especializada en la identificación y reconocimiento de objetos ("que"). Fuente: Adaptación de la figura 5.1 O de la obra Cognitive Neuroscience: the Biology of Mind, 2. 0 ed. Michael S. Gazzaniga, Richard B. lvy & George R. Mangun. © 2002 New York: W.W. Norton and Company, lnc. Reproducida con autorización de W.W. Norton and Company, lnc.
Sin embargo, nos vamos a detener en la exposición de ejemplos tomados de la neuropsicología humana que nos permitirán entender la forma en que la disociación de los sistemas que ahora estudiamos se manifiesta en las personas.
3.2. Las disociaciones neuropsicológicas
En la investigación neuropsicológica, a la hora de hacer inferencias sobre los mecanismos responsables de una determinada disfunción, es conveniente distinguir entre dos tipos de disociaciones funcionales posibles. En el caso de la disociación simple, lo que se observa en los pacientes18 con un daño cerebral concreto es una deficiencia en un tipo de tarea determinada cuando su ejecución se compara con un grupo de control formado por personas sin ese daño cerebral. Además, para establecer la existencia de una disociación simple es necesario utilizar una tarea de control en la que el grupo de pacientes y el de control no difieran. Este requisito es el mínimo requerido para asegurar que la disfunción es específica al daño y no el resultado de una deficiencia
18. Puede tratarse de un grupo de pacientes o de casos individuales. Los conceptos de disociación simple o doble se aplican tanto a investigaciones de grupo como a investigaciones de caso único.

PERCEPCIÓN VISUAL
les en el cerebro del macavisual . La vía dorsal especiali
especializada en la idente: Adaptación de la figura
f Mind, 2. 0 ed. Michael S. GazNew York: W.W. Norton and . Norton and Company, lnc.
de ejemplos tomados de la la forma en que la di
manifiesta en las personas.
hacer inferencias sobre los ,~~·~""'' es conveniente dis
posibles. En el caso de la S
18 con un daño cerebral inada cuando su ejecu-
por personas sin ese daño una disociación simple es
grupo de pacientes y el requerido para asegurar
o de una deficiencia
'duales. Los conceptos de dipo como a investigaciones de
EL ESPACIO TRIDIMENSIONAL 189
generalizada producida por el mismo. Por ejemplo, la Figura 4.2l.A ilustra el caso que ahora estamos tratando. En ella se compara un paciente o grupo de pacientes con daño en la zona occipito-parietal, con un grupo de control en dos tareas, una de carácter perceptivo y otra de coordinación visomotora. Los resultados probablemente mostrarán que los grupos no difieren en la tarea perceptiva pero sí en la tarea de coordinación, en la que el grupo de pacientes será inferior al grupo de control.
A. Disociación Simple Tareas
(% Correctas)
Grupos Perceptiva Coordinación v-m
• Lesión en zona occipito-parietal
90%
• Control 90%
B. Disociación Doble Tareas
(%Correctas)
65%
95%
Grupos Perceptiva Coordinación v-m
• Lesión en zona occipito-parietal
• Lesión en zona occipito-temporall
·Control
90%
55%
90%
65%
95%
95%
FIGURA 4.21. Patrón de datos característico de una disociación simple (A) y de una disociación doble (B).
Las disociaciones simples nos pueden poner en la pista de una determinada asociación entre un área determinada del cerebro y una función psicológica concreta. Sin embargo, la disociación simple no puede establecer de forma clara la existencia de esa asociación. La razón fundamental para ello es que tiene problemas de interpretación inevitables. Uno de los más importantes radica en el supuesto de que las dos tareas son igualmente sensibles a las diferencias entre el grupo de pacientes y el grupo de control. Este supuesto suele fallar en muchas ocasiones porque no es fácil igualar las tareas en nivel de dificultad o en grado de sensibilidad para los dos grupos. Por ejemplo, la tarea de coordinación visomotora puede requerir mayor capacidad

190 PERCEPCIÓN VISUAL
de concentración que la perceptiva. Si el daño en la zona parietal posterior produce una deficiencia en concentración, los pacientes pueden mostrar un patrón de ejecución semejante al de la Figura 4.2l.A, pero no debido a un problema específico de coordinación sino debido a un problema más general de concentración.
Los problemas interpretativos que presenta la disociación simple quedan prácticamente resueltos si se logra establecer una disociación doble. En el caso de la disociación doble es necesario encontrar un paciente o grupo de pacientes que presente un patrón de disociación opuesto al encontrado en el primer grupo de pacientes. La Figura 4.2l.B ilustra el caso de disociación doble que ahora nos interesa tratar. En la figura vemos que el nuevo grupo de pacientes con lesiones en la zona occipito-temporal, no difiere de los controles en la tarea de coordinación pero sí en la perceptiva. En resumen, en un caso de disociación doble, la comparación de los dos grupos de pacientes añade evidencia a favor de la especificidad de la disfunción ya que en la tarea en la que el primer grupo fracasa, el otro no difiere de los controles y, al revés, donde fracasa el segundo grupo, el primero no presenta deficiencia alguna.
Ahora podemos preguntarnos si de hecho existe una doble disociación entre grupos de pacientes con lesiones en la vía ventral, pero no en la vía dorsal, y pacientes con lesiones en la vía dorsal, pero no en la vía ventral, cuando comparamos su ejecución en tareas perceptivas y en tareas de coordinación visomotora. La respuesta es afirmativa.
3.2.1. Percepción sin coordinación visomotora
Es un hecho bien conocido en la literatura clínica neuropsicológica que los pacientes con daño en la corteza parietal posterior pueden presentar problemas para dirigir visualmente acciones tales como coger un objeto o dirigir un movimiento hacia una posición determinada del espacio. El término ataxia óptica es el utilizado para describir este tipo de deficiencia. Los pacientes con problemas de ataxia óptica, sin embargo, no suelen presentar problemas para describir la posición relativa de los objetos en el espacio. Por eso, no parece que la deficiencia tenga que ver con la percepción del espacio en sí misma sino con la interacción visomotora.
Algunos de estos pacientes son también incapaces de girar sus manos para alcanzar un objeto o de acertar con la apertura adecuada de sus dedos cuando tratan de coger un objeto. A pesar de ello, son perfectamente capaces de describir el tamaño de esos objetos o su orientación. De nuevo, el problema no reside en describir el tamaño o la orientación sino en utilizar de forma adecuada la información. Estos síntomas también muestran que el problema no está exclusivamente ligado al espacio sino que afecta a otras características de los objetos como son su tamaño, forma y orientación.
Además de presentar una clara disociación entre una percepción preservada y una coordinación alterada, los problemas de coordinación, que pueden
PERCEPCIÓN VISUAL
·n la zona parietal posterior acientes pueden mostrar un .2 l.A, pero no debido a un >a un problema más general
a disociación simple quedan ha disociación doble. En el :rar un paciente o grupo de il opuesto al encontrado en ustra el caso de disociación vemos que el nuevo grupo
poral, no difiere de los con-erceptiva. En resumen, en
los dos grupos de pacientes isfunción ya que en la tarea e de los controles y, al revés, resenta deficiencia alguna.
una doble disociación pero no en la vía dor-
o en la vía ventral, cuando en tareas de coordinación
neuropsicológica que los r pueden presentar proble
un objeto o dirigir un espacio. El término ataxia
"'"-''-'·''-'."· Los pacientes con presentar problemas para
io. Por eso, no parece
a otras características ón.
una percepción preservacoordinación, que pueden
EL ESPACIO TRIDIMENSIONAL 191
presentar los pacientes con daño parietal posterior, también presentan un alto grado de disociación entre sí. Algunos pacientes son incapaces de utilizar información visual para controlar la postura de sus manos pero no presentan problema alguno a la hora de controlar la dirección en que inician un movimiento de alcance de un objeto. Otros pacientes presentan el patrón opuesto. Algunos pacientes no son capaces de dirigir la mirada hacia un objeto de forma precisa pero no tienen problema en calibrar la apertura de sus dedos al intentar cogerlo. Otros pueden no tener problemas oculomotores concretos pero son incapaces de guiar visualmente su mano hacia un objeto. En general, existen buenas razones para pensar que los mecanismos de control motor están altamente especializados Qeannerod, 1997) pero ahora nos basta con acentuar la fuerte disociación que estos pacientes muestran entre el daño de una coordinación visomotora determinada y la preservación de la percepción visual de la información que debería guiar la acción.
3.2.2. Coordinación visomotora sin percepción
El lado contrario de la doble disociación ha tardado más en ser detectado pero está hoy bien documentado gracias a las investigaciones de Milner, Goodale y colaboradores. Particularmente interesante es el caso de la paciente DF que vamos a analizar con más detalle.
DF es una mujer que, a la edad de 34 años, sufrió un daño cerebral irreversible como consecuencia de un casi total envenenamiento por inhalación de monóxido de carbono. Después de recobrar el conocimiento, DF era incapaz de reconocer las caras de sus familiares y amigos, y tampoco podía reconocer la forma de objetos familiares. Era incluso incapaz de percibir la diferencia entre un cuadrado y un triángulo. Al mismo tiempo, no tenía problemas para reconocer a las personas por la voz o los objetos mediante el tacto. Su problema era exclusivamente visual.
El diagnóstico de agnosia perceptiva visual en el caso de DF está reforzado por características adicionales. No es capaz de dibujar un objeto que se le presenta visualmente pero puede hacerlo si se le pide que lo dibuje de memoria. Que no se trata de un problema sensorial, lo demuestra el hecho de que DF puede discriminar colores, y puede detectar objetivos definidos por cambios en luminancia que aparezcan incluso a una distancia de 30 grados en la periferia visual. Una característica básica que DF ha perdido es la capacidad para detectar la orientación de los objetos. Ante una prueba de discriminación de enrejados no es capaz de diferenciar su orientación aunque sí es capaz de discriminar su frecuencia espacial; de hecho, su función de sensibilidad al contraste es normal por encima de los 5 c/gav aunque es ligeramente inferior a la sensibilidad normal para las bajas frecuencias. El problema con la orientación no parece tener su origen en la corteza visual primaria porque todas las pruebas que se le han hecho mediante el uso de potenciales corticales muestran que el procesamiento en esta área permanece intacto.

192 PERCEPCIÓN VISUAL
Las primeras pruebas neuroanatómicas que se hicieron a DF mostraron que el daño cerebral que padecía era bastante difuso, característica bastante frecuente en casos de anoxia. No obstante, estudios posteriores que utilizaron resonancia magnética mostraron que las zonas ventrolaterales de la corteza occipital estaban particularmente afectadas mientras que la corteza visual primaria estaba bien preservada. Parece, por tanto, que el problema fundamental de DF es de naturaleza perceptiva y está preferentemente relacionado con la percepción de la forma. A pesar de que es capaz de procesar la luminancia y el color, no es capaz de percibir formas cuyos contornos estén definidos por diferencias en luminancia o en color. Lo mismo ocurre si los contornos están definidos por diferencias en la dirección del movimiento o en los planos de profundidad. Los principios gestálticos fundamentales de proximidad o semejanza tampoco están operativos en el sistema visual de DF.
Lo más notable en el comportamiento visual de DF es que, a pesar de su profunda deficiencia en la visión de la forma, es capaz de utilizar la información basada en el tamaño, la forma y la orientación de los objetos para controlar una amplia gama de movimientos guiados visualmente. DF es capaz de elevar la mano para estrechar la de la persona a la que es presentada. Muestra una aptitud perfecta para alcanzar la manilla de la puerta que quiere abrir, aunque se trate de una situación nueva. Puede andar fácilmente sin ayuda por una habitación o un patio sorteando los obstáculos que encuentra en su camino. Más aún, puede alcanzar y agarrar con gran precisión un objeto situado delante de ella, a pesar de que poco antes era incapaz de identificar ese objeto. En una prueba tipificada a la que fue sometida, DF se situó a una distancia desde la que una persona sin daño cerebral podía ver perfectamente una ranura grande, parecida a la de un buzón de correos, cuya orientación podía variar. El examinador dio a DF una tarjeta grande y le pidió que, desde el lugar donde se encontraba, girara la tarjeta hasta hacerla coincidir con la orientación de la ranura. DF no pudo llevar a cabo esta tarea. A continuación, el examinador le pidió que insertara la tarjeta por la ranura y DF lo realizó sin problema alguno.
Otras muchas pruebas, parecidas a la que se acaba de exponer, han demostrado claramente que DF puede utilizar información para controlar su comportamiento a pesar de que no es capaz de discriminar o identificar esa información cuando se le pide que la describa.
En resumen, casos como el de DF y casos como los de ataxia óptica muestran entre sí las características propias de una doble disociación. DF, cuyas lesiones se centran en la zona ventrolateral de la corteza occipital, muestra claros problemas perceptivos mientras que su capacidad para utilizar la información visual para controlar sus acciones permanece intacta. En el caso contrario, las personas con ataxia óptica, y de forma general los pacientes con daño en la corteza parietal posterior, no muestran problemas perceptivos cuando tienen que describir los objetos que se les presentan, pero tienen graves problemas para actuar sobre esos objetos guiados por la información que parecen percibir.
PERCEPCIÓN VISUAL
se hicieron a DF mostraron ~fuso, característica bastante .os posteriores que utilizaron ventrolaterales de la corteza tras que la corteza visual prique el problema fundamen'rentemente relacionado con az de procesar la luminancia Dntornos estén definidos por ~curre si los contornos están vimiento o en los planos de !ntales de proximidad o seisual de DF. de DF es que, a pesar de su :apaz de utilizar la informaón de los objetos para conisualmente. DF es capaz de que es presentada. Muestra la puerta que quiere abrir,
fácilmente sin ayuda por que encuentra en su cami
un objeto situado de identificar ese objeto.
se situó a una distancia des-perfectamente una ranura "-".a'-•vu podía variar. El
' que, desde el lugar donde con la orientación de la
uación, el examinador le sin problema alguno. de exponer, han de
ación para controlar su riminar o identificar esa
los de ataxia óptica muesdisociación. DF, cuyas
rteza occipital, muestra dad para utilizar la in
intacta. En el caso general los pacientes
problemas perceptivos ' sentan, pero tienen gra
par la información que
EL ESPACIO TRIDIMENSIONAL 193
Sobre la base del estudio de casos clínicos como los que acabamos de ver, y de experimentos con animales que han producido disociaciones similares, Milner y Goodale han propuesto la existencia de vías visuales especializadas que ofrecen un serio apoyo a las propuestas de Neisser y de Norman.
3.3. La propuesta de Norman
A partir de los trabajos de Milner y Goodale, Joel Norman ha dado un paso más proponiendo una diferenciación más explícita de los dos sistemas de percepción visual y relacionando los dos sistemas con las teorías constructivista y ecológica.
3.3 .1. Características de los dos sistemas
Norman ha enumerado una serie de características que permiten contrastar las diferencias de los dos sistemas perceptivos. Son las siguientes:
a) Función. Aunque los dos sistemas analizan la estimulación visual, difieren en el objetivo de sus respectivos análisis. Mientras el sistema ventral analiza la información para reconocer e identificar los estímulos, el sistema dorsal lo hace para guiar visualmente el comportamiento del organismo.
b) Sensibilidad. Los dos sistemas muestran una sensibilidad diferente para las frecuencias espaciales y temporales. El sistema ventral es más sensible a las frecuencias espaciales altas, mientras que el sistema dorsal lo es a las frecuencias temporales altas. Dicho de otra forma, el sistema ventral está más preparado para procesar los detalles de una escena mientras que el dorsal es más sensible a los aspectos globales que proporcionan las frecuencias espaciales bajas. En compensación, el sistema dorsal es mejor a la hora de percibir el movimiento.
e) Memoria. El sistema ventral mantiene una estrecha relación con el sistema de memoria con el fin de poder llevar a cabo el reconocimiento y la identificación de los objetos y de los acontecimientos. El sistema dorsal no dispone de una memoria a largo plazo, simplemente necesita una memoria de corta duración que permita la integración de la información on line.
d) Velocidad. El sistema dorsal es más rápido. Este hecho es debido a que este sistema recibe preferentemente proyecciones del sistema magnocelular, mientras que el sistema ventral recibe preferentemente proyecciones parvocelulares que son de conducción más lenta.
e) Consciencia. El sistema ventral está más directamente relacionado con la toma de consciencia de la información que el sistema dorsal. Como hemos visto anteriormente, la paciente DF es capaz de utilizar para con-
194 PERCEPCIÓN VISUAL
trolar sus actos información visual que no es capaz de percibir de forma consciente. Parece, por tanto, que el sistema dorsal puede funcionar con bastante precisión de forma inconsciente, mientras que la identificación y la discriminación requieren un nivel de consciencia más alto.
f) Marco de referencia y métrica. Para reconocer e identificar objetos el sistema ventral necesita un marco de referencia alocéntrico. El procesamiento de la información que lleva a cabo este sistema necesita, por tanto, alcanzar una representación del objeto centrada en el objeto mismo. Sin embargo, para alcanzar, agarrar y, en general, interactuar con los objetos, necesitamos marcos de referencia centrados en el sujeto que nos permitan calcular, por ejemplo, cuanto tenemos que alargar el brazo, o cual debe ser la separación entre los dedos pulgar e índice si queremos alcanzar una taza, etc. Por eso, el sistema visual dorsal necesita marcos de referencia egocéntricos. De forma parecida, el sistema dorsal necesita tener información sobre la distancia absoluta a la que se encuentran los objetos, mientras que al sistema ventral le es suficiente con tener información relativa de las posiciones de los objetos.
g) Input visual. Norman incluye otros dos aspectos que diferencian a los dos sistemas. Por una parte, el sistema ventral está especializado en la visión central controlada por la fóvea, mientras que el sistema dorsal lo está para la visión periférica. Estas características están ligadas a las proyecciones magno y parvo celulares mencionadas anteriormente. Por otra parte, los dos sistemas también difieren en su grado de dependencia respecto a distintas claves a la hora de procesar la profundidad. Mientras que el sistema dorsal sufre considerablemente cuando se ve obligado a trabajar exclusivamente con claves monoculares, el sistema ventral no se ve tan disminuido por este hecho.
A pesar de las diferencias que acabamos de enumerar, debe tenerse en cuenta que ambos sistemas llevan a cabo operaciones semejantes en el sentido de que ambos operan con formas, tamaños y distancias de los objetos. Lo importante es caer en la cuenta de que la finalidad de los respectivos procesamientos es diferente, de ahí que la primera diferencia enumerada, la que hace referencia a la función es la más determinante de todas. Obviamente en las personas en las que la visión funciona normalmente, estos dos sistemas actúan de forma integrada e intercambian continuamente la información entre sí. Son las situaciones experimentales o clínicas, que nos permiten observar la disociación de los dos sistemas, las que proporcionan información acerca de la especialización característica de cada uno de ellos.
3.3 .2. Relación entre los dos sistemas y las teorías perceptivas
Después de haber explicitado las características de los dos sistemas visuales, estamos en mejores condiciones para entender la propuesta de Joel Norman.
S
r S
t
e 1-t

PERCEPCIÓN VISUAL
o es capaz de percibir de forma stema dorsal puede funcionar iente, mientras que la identifinivel de consciencia más alto. onocer e identificar objetos el ferencia alocéntrico. El proce:abo este sistema necesita, por objeto centrada en el objeto rar y, en general, interactuar
eferencia centrados en el sujeo, cuanto tenemos que alargar ntre los dedos pulgar e índice
el sistema visual dorsal ne-e forma parecida, el sistema distancia absoluta a la que se
ventral le es suficiente de los objetos.
<l~LJ\..\..LV~ que diferencian a los está especializado en la
ntras que el sistema dorsal rísticas están ligadas a
mencionadas anteriormente. en su grado de depen
de procesar la profundidad. rablemente cuando se ve
enumerar, debe tenerse en semejantes en el sentido
de los objetos. Lo de los respectivos procesaia enumerada, la que hace
e todas. Obviamente en las estos dos sistemas actúan la información entre sí.
e nos permiten observar la onan información acerca de
las teorías perceptivas
de los dos sistemas visuales, · propuesta de Joel Norman.
EL ESPACIO TRIDIMENSIONAL 195
La propuesta fundamental que hace es que una teoría completa de la percepción visual necesita una aproximación dual que incorpore las características diferenciales tanto del sistema ventral como del sistema dorsal. Para Norman, el problema de las aproximaciones constructivista y ecológica es que han tomado la parte por el todo. El constructivismo ha entendido la percepción como un proceso de construcción progresiva de una representación encaminada a reconocer e identificar objetos. Como acabamos de ver, estas parecen ser funciones especializadas del sistema ventral. Por otra parte, la postura ecológica de Gibson ha entendido la percepción como un proceso de extracción directa de la información que proporciona el medio con el fin de dirigir la actividad del organismo. También hemos visto que estas parecen ser las funciones especializadas del sistema dorsal. Otras características de los sistemas que hemos enumerado anteriormente también encajan con los principales supuestos de cada una de las teorías. Por ejemplo, la teoría de Gibson trata de evitar a la hora de explicar los fenómenos perceptivos, la implicación de la memoria y de otros procesos cognitivos, mientras que para los constructivistas el papel de la memoria es esencial para subsanar la pobreza del estímulo. También en este punto ambas posiciones pueden tener razón si tenemos en cuenta que el reconocimiento e identificación de objetos que lleva a cabo el sistema ventral exige una activa participación de la memoria, mientras que el control on-line de la acción que caracteriza al sistema dorsal no necesita la implicación de la memoria.
A la luz de la información proporcionada por casos neuropsicológicos como el de la paciente DF, merece la pena señalar la verosimilitud que el concepto de propiedad funcional (affordance) propuesto por Gibson, adquiere como realidad estimular. Como vimos en el Capítulo 1, según Gibson, las propiedades funcionales de los objetos del medio ambiente son propiedades que el sistema visual extrae directamente de la estimulación para controlar su comportamiento. Para Gibson la captación de esas propiedades funcionales no requiere la categorización previa de un objeto sino que es independiente de ella. En el caso de DF hemos visto que su sistema dorsal intacto le permitía actuar adecuadamente respecto a objetos que su sistema ventral dañado era incapaz de reconocer.
No podemos analizar en detalle todas las implicaciones de la propuesta de Norman. Sí creemos que su propuesta es muy interesante y que merece una seria consideración. La propuesta de Norman no sólo proporciona un posible marco de unificación de teorías fuertes pero aparentemente irreconciliables, sino que sugiere interesantes hipótesis que pueden guiar la investigación futura en distintos campos de la percepción visual. Terminaremos este capítulo considerando en mayor detalle su aportación concreta a los problemas que hemos tratado en este capítulo, las claves de profundidad y la constancia del tamaño.
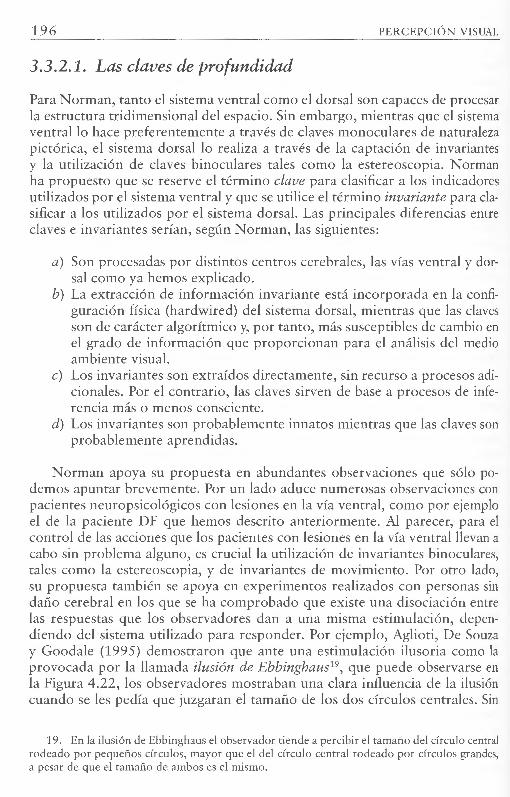
196 PERCEPCIÓN VISUAL
3.3.2.1. Las claves de profundidad
Para Norman, tanto el sistema ventral como el dorsal son capaces de procesar la estructura tridimensional del espacio. Sin embargo, mientras que el sistema ventral lo hace preferentemente a través de claves monoculares de naturaleza pictórica, el sistema dorsal lo realiza a través de la captación de invariantes y la utilización de claves binoculares tales como la estereoscopia. Norman ha propuesto que se reserve el término clave para clasificar a los indicadores utilizados por el sistema ventral y que se utilice el término invariante para clasificar a los utilizados por el sistema dorsal. Las principales diferencias entre claves e invariantes serían, según Norman, las siguientes:
a) Son procesadas por distintos centros cerebrales, las vías ventral y dorsal como ya hemos explicado.
b) La extracción de información invariante está incorporada en la configuración física (hardwired) del sistema dorsal, mientras que las claves son de carácter algorítmico y, por tanto, más susceptibles de cambio en el grado de información que proporcionan para el análisis del medio ambiente visual.
e) Los invariantes son extraídos directamente, sin recurso a procesos adicionales. Por el contrario, las claves sirven de base a procesos de inferencia más o menos consciente.
d) Los invariantes son probablemente innatos mientras que las claves son probablemente aprendidas.
Norman apoya su propuesta en abundantes observaciones que sólo podemos apuntar brevemente. Por un lado aduce numerosas observaciones con pacientes neuropsicológicos con lesiones en la vía ventral, como por ejemplo el de la paciente DF que hemos descrito anteriormente. Al parecer, para el control de las acciones que los pacientes con lesiones en la vía ventral llevan a cabo sin problema alguno, es crucial la utilización de invariantes binoculares, tales como la estereoscopia, y de invariantes de movimiento. Por otro lado, su propuesta también se apoya en experimentos realizados con personas sin daño cerebral en los que se ha comprobado que existe una disociación entre las respuestas que los observadores dan a una misma estimulación, dependiendo del sistema utilizado para responder. Por ejemplo, Aglioti, De Souza y Goodale (1995) demostraron que ante una estimulación ilusoria como la provocada por la llamada ilusión de Ebbinghaus 19
, que puede observarse en la Figura 4.22, los observadores mostraban una clara influencia de la ilusión cuando se les pedía que juzgaran el tamaño de los dos círculos centrales. Sin
19. En la ilusión de Ebbinghaus el observador tiende a percibir el tamaño del círculo central rodeado por pequeños círculos, mayor que el de l círculo central rodeado por círcu los grandes, a pesar de que el tamaúo de ambos es el mismo.

PERCEPCIÓN VISUAL
[Sal son capaces de procesar rgo, mientras que el sistema ¡ monoculares de naturaleza la captación de invariantes
J la estereoscopia. Norman a clasificar a los indicadores término invariante para claDrincipales diferencias entre uientes:
rales, las vías ventral y dor-
stá incorporada en la confirsal, mientras que las claves
susceptibles de cambio en para el análisis del medio
sin recurso a procesos adibase a procesos de infe-
mientras que las claves son
bservaciones que sólo poerosas observaciones con
ventral, como por ejemplo mente. Al parecer, para el
en la vía ventral llevan a de invariantes binoculares, ovimiento. Por otro lado,
izados con personas sin una disociación entre estimulación, depen
' Aglioti, De Souza ulación ilusoria como la
, que puede observarse en ara influencia de la ilusión dos círculos centrales. Sin
ibir el tamaño del círculo central rodeado por círculos grandes,
EL ESPACIO TRIDIMENSIONAL 197
embargo, si se les pedía que cogieran los círculos centrales, y se medía la amplitud de la apertura de los dedos al cogerlos, se podía comprobar que la ilusión de tamaño no producía efecto alguno. Mientras que la emisión del juicio de tamaño estaba probablemente mediada por la información consciente proporcionada por el sistema ventral, el control de la acción de coger lo estaba por la información no consciente proporcionada por el sistema dorsal. Era como si la ilusión pudiera engañar al ojo pero no a la mano.
o 000 o o
o
FIGURA 4.22. Ilusión de Ebbinghaus.
3.3.2.2. La percepción del tamaño
El experimento que acabamos de mencionar ilustra también el hecho de que los factores que determinan la percepción del tamaño pueden ser diferentes según intervenga en su percepción el sistema ventral o el dorsal. Aunque no se conocen bien los factores que determinan una ilusión como la de Ebbinghaus, es probable que se deba a procesos de inferencia que toman en consideración diferentes aspectos de la escena visual tal como postulan los constructivistas. En la medida en que el sistema dorsal no se ve afectado por estos factores, la ilusión tampoco tiene efecto sobre la acción de coger los círculos.
Norman ha puesto mayor énfasis en la importancia que tiene una concepción dual como la que él propone para explicar el fenómeno de sobreconstancia que expusimos en el apartado 2.1.3.2. Vimos que un factor importante en la producción de este fenómeno eran las instrucciones objetivas dadas al observador, que ponen en juego mayor cantidad de procesos cognitivos de inferencia, estimación y familiaridad. Cuanto mayor es la influencia de estos procesos, mayor es la implicación del sistema visual ventral. Sin embargo, bajo instrucciones retinianas, más directamente relacionadas con lo percibido
198 PERCEPCIÓN VISUAL
y con menos implicación cognitiva, es probable que la estimación del tamaño dependa de la información más directamente proporcionada por los invariantes. En este caso, la constancia es más precisa y no se produce un efecto de sobreconstancia.
Aún es pronto para poder valorar una propuesta como la de Norman. Sin embargo hemos visto que hay razones para tomarla en consideración e investigar su alcance. Como ya dijimos anteriormente no sería la primera vez que teorías aparentemente opuestas cuando son propuestas como teorías generales de un determinado campo de investigación perceptual, resultan compatibles cuando se acierta a delimitar el campo de aplicación de cada teoría. En lo referente a la percepción visual del espacio, la propuesta de Norman aparece como una corriente de aire fresco que puede ayudar a integrar posiciones vividas durante décadas como irreconciliables.


















