Historias de amor - imagenes bonitas - imagenes de amor - imagenes lindas - imageneslindas.info
Upload
maria-elenaCategory
view
71download
2
INTRODUCCIÓN
Una de las principales técnicas que componen elprocesamiento digital de imágenes es la de realceo mejora de imágenes. Esta técnica comprende unconjunto de operaciones tendentes a mejorar lacalidad visual de una imagen. Estas operacionespermiten realzar las características de brillo y con-traste de una imagen, reducir su contenido deruido, o agudizar o intensificar detalles presentesen ella.
En esta técnica, tal como en otras operaciones deprocesamiento digital de imágenes, intervienen unaimagen de entrada (input image) y una imagen desalida (output image). La primera constituye la ima-gen cuyos datos serán procesados, es decir, someti-dos al realce, y la segunda es la resultante de talprocesamiento.
Las operaciones que componen la técnica de real-ce pueden dividirse en dos tipos:
a) operaciones de procesamiento puntual o pixelpor pixel
b) operaciones de procesamiento por grupo depixeles o sobre vecindades.
Las operaciones mencionadas en a) tienden amejorar el contraste tonal en la imagen, esto es, ladiferencia entre los valores más oscuros y más cla-ros que se visualizan en un monitor. El procesa-miento puntual altera los niveles de gris de los pixe-les de una imagen. El nivel de gris de cada pixel enla imagen de entrada es modificado por un nuevovalor mediante operaciones matemáticas o relacio-nes lógicas. El valor resultante es ubicado en laimagen de salida en la misma posición espacial,esto es, en la misma posición (x, y) del arreglo rec-tangular de pixeles correspondiente a la imagen deentrada, donde x indica columna e y fila. Esto serealiza pixel por pixel, de manera individual, y lospixeles vecinos no tienen influencia.
Revista de Teledetección. 2002. 17: 31-42.
N.º 17 - Junio 2002 31
Realce de imágenes: filtrado espacial
B. Aldalur1 y M. Santamaría.2
1Depto de Ingeniería – 2Depto de MatemáticaUniversidad Nacional del Sur
Bahía Blanca, Argentina
RESUMEN
El realce de imágenes es una de las principales téc-nicas de procesamiento digital de imágenes. Las ope-raciones que componen esta técnica se dividen enoperaciones de procesamiento pixel por pixel y ope-raciones de procesamiento por grupo de pixeles.
El presente trabajo consiste en una descripción teó-rica de la operación de procesamiento por grupo depixeles conocida como Filtrado Espacial y su aplica-ción a imágenes satelitales. Tal descripción incluye lacaracterización e implementación de los filtros espa-ciales lineales y no lineales más comunes: paso bajo,paso alto y realce de bordes. La aplicación de estosfiltros permitió conocer el funcionamiento y las bon-dades de cada uno de ellos.
PALABRAS CLAVE: filtros espaciales lineales,núcleo, máscara de convolución, filtros espaciales nolineales.
ABSTRACT
Image enhacement is one of the main techniques ofdigital image processing. This technique comprisestwo kind of operations, pixel point processing opera-tions and pixel group processing operations.
The present work consists in a theoretical descrip-tion of pixel group processing operation known asSpatial Filtering and its application to remotely sen-sed image data.
The description includes the characterization andimplementation of the most commonly used linearand nonlinear spatial filters: low pass, high pass andedge enhacement. The application of these filtersallowed to know the performance and the goodnessesof each one of them.
KEY WORDS: linear spatial filters, kernel, convolu-tion mask, nonlinear spatial filters.
Las operaciones del tipo b) mejoran el contrasteespacial en la imagen, es decir, la diferencia entre elvalor digital de brillo de un determinado pixel y elde sus vecinos. Pretenden suavizar o reforzar estoscontrastes espaciales de forma tal que, los valoresde brillo en cada pixel de la imagen se asemejen odiferencien más de los correspondientes a los pixe-les que los rodean. El procesamiento por grupo depixeles opera sobre un grupo de pixeles de entradaque circundan a un pixel central. Los pixeles veci-nos proveen información valiosa sobre las tenden-cias del brillo en el área bajo procesamiento.
En procesamiento digital de imágenes satelitales,las operaciones incluídas en a) se conocen comotécnicas de realce radiométrico mientras que lasincluídas en b), técnicas de realce geométrico(Richards, 1995).
Este trabajo presenta una descripción teórica delas operaciones mencionadas en b) y su aplicacióna imágenes satelitales con distintas característicaspara comparar y establecer las bondades de las mis-mas. Puesto que estas operaciones permiten mejo-rar la calidad visual de una imagen, su aplicacióncomo paso previo a otras técnicas de procesamien-to digital es necesaria para explorar y detectar losdistintos rasgos presentes en la imagen.
Las imágenes LANDSAT 5-TM (ThematicMapper), fueron cedidas por la Comisión Nacionalde Actividades Espaciales (CONAE) mediante elconvenio de colaboración existente con la Uni-versidad Nacional de Sur (UNS).
PROCESAMIENTO POR GRUPO DEPIXELES. FILTRADO ESPACIAL
El procesamiento por grupo de pixeles opera sobreun grupo de pixeles de entrada que rodean a un pixelcentral. Por lo tanto, los pixeles adyacentes propor-cionan información importante sobre la tendencia delbrillo en el área que se está procesando. El uso y aná-lisis de estas tendencias del brillo en una imagen,motivan las operaciones de filtrado espacial.
Todas las imágenes contienen detalles, algunasdetalles marcados y otras detalles no tan marcados.Estos detalles están compuestos por transiciones debrillo que varían en ciclos que van del oscuro alclaro y vuelta al oscuro. La tasa a la cual el brillovaría completando un ciclo es su frecuencia espa-cial. Las frecuencias espaciales pueden orientarsehorizontalmente, verticalmente o en cualquiera delas diagonales.
Una imagen está formada por componentes de fre-cuencia que varían de bajas frecuencias a altas fre-cuencias. Donde prevalecen transiciones rápidas debrillo, hay altas frecuencias espaciales, mientras quetransiciones de brillo que cambian lentamente repre-sentan bajas frecuencias. Las altas frecuencias en unaimagen aparecen toda vez que están presentes bordesabruptos o puntos, como una transición del blanco alnegro dentro de uno o dos pixeles de distancia.
Una imagen puede filtrarse para acentuar o elimi-nar una banda de frecuencias espaciales, tales comolas altas frecuencias o las bajas frecuencias. Estasoperaciones de procesamiento digital de imágenesse conocen como operaciones de filtrado espacial ofiltros en el dominio del espacio. Otras operacionesde filtrado espacial permiten resaltar solamente lastransiciones abruptas en la imagen, tales como bor-des de objetos. Estas constituyen un subconjunto delas operaciones de filtrado espacial y se conocencomo operaciones de realce de bordes.
IMPLEMENTACIÓN DE FILTROS ESPACIA-LES LINEALES
Los filtros espaciales se implementan medianteun proceso llamado convolución espacial. Es unmétodo matemático utilizado en procesamiento yanálisis de señales, y se conoce también como filtrode respuesta finita al impulso (finite impulse res-ponse filter).
El proceso de convolución espacial se mueve através de la imagen de entrada, pixel por pixel, ubi-cando los pixeles resultantes en la imagen de salida.El valor digital de brillo de cada pixel en la imagende salida depende de un grupo de pixeles de entra-da que rodean al pixel que se está procesando. Alutilizar la información del brillo de los pixeles veci-nos a un pixel central, la convolución espacial cal-cula la actividad de frecuencia espacial en ese área,y por lo tanto, es capaz de filtrar en base al conte-nido de frecuencia espacial existente.
El proceso de convolución espacial utiliza unpromedio ponderado del pixel de entrada y de susvecinos inmediatos para calcular el valor de brillodel pixel de salida. El grupo de pixeles utilizadosen el cálculo del promedio ponderado se conocecomo núcleo (kernel). El núcleo es una matrizmóvil, generalmente cuadrada, con un númeroimpar de valores en cada dimensión. Si la dimen-sión del núcleo es 1 x 1 se trata del procesamientodigital punto por punto; las dimensiones usuales en
B. Aldalur y M. Santamaría
32 N.º 17 - Junio 2002

procesamiento por grupo son 3 x 3 y 5 x 5. Cuantomayor es el tamaño del núcleo de pixeles que seemplea en el cálculo, más grados de libertad poseeel filtro espacial.
Un cálculo de promedio ponderado es un procesolineal puesto que involucra la suma de elementosmultiplicados por valores constantes. En la convo-lución espacial los elementos son los valores digita-les de brillo de los pixeles del núcleo y los valoresconstantes son los pesos, llamados coeficientes deconvolución. En el caso más simple donde todos lospesos son iguales a 1 / n° de elementos del núcleo,el proceso consiste en un cálculo de promedio con-vencional, es decir, se promedian los valores de bri-llo de los pixeles del núcleo. Si los pesos se alteran,algunos pixeles tendrán más o menos influencia enel promedio general. La elección de estos pesosdetermina directamente la acción del filtrado espa-cial, por ejemplo, filtrado de paso alto, filtrado depaso bajo o filtrado para realce de bordes.
La mecánica de la convolución espacial consisteen aplicar junto con el núcleo de convolución, loscoeficientes de convolución en forma de arreglo omatriz; esta matriz se conoce con el nombre demáscara de convolución. El pixel correspondienteal centro del núcleo y sus vecinos se multiplican porsus respectivos coeficientes de convolución y luegoestos valores se suman. El resultado se ubica en laimagen de salida en la misma posición del pixelcentral. Este proceso ocurre pixel por pixel, paracada pixel en la imagen de entrada. Dado que elárea filtrada se limita a los pixeles centrales, lospixeles de los bordes no se afectan por el procesopuesto que no tienen los vecinos necesarios pararealizar el cálculo.
Las máscaras de convolución pueden tomar cual-quier valor numérico. Sin embargo, cuando se eje-cuta el proceso de convolución el valor final resul-tante debe hallarse entre 0 y 255 (para imagen desalida de 8-bits). Para ello, generalmente suelenreemplazarse por 255 los valores mayores a 255 ypor 0 los valores menores a 0.
Si se considera un núcleo de pixeles de dimen-sión 3 x 3 y una máscara de convolución cuyosnueve coeficientes son:
a b cd e fg h i
entonces la ecuación para el proceso de convolu-ción espacial resulta:
O(x, y) = a I(x -1, y -1) + b I(x, y -1) + c I(x +1, y -1)+ d I(x -1, y) + e I(x, y) + f I(x +1, y) + g I(x -1, y +1)+ h I(x, y +1) + i I(x +1, y +1)
donde los prefijos I y O indican imagen de entradae imagen de salida respectivamente (Baxes, 1994).
Filtros de Paso Bajo
Tienen por objeto suavizar los contrastes espacia-les presentes en una imagen. Un filtro espacial depaso bajo tiene por efecto dejar pasar o mantenerintocables los componentes de baja frecuenciaespacial de una imagen. Los componentes de altafrecuencia están atenuados o virtualmente ausentesen la imagen de salida.
Un filtro de paso bajo muy utilizado es aquelcuya máscara de convolución tiene dimensión 3 x 3y sus nueve coeficientes son iguales a 1/9, es decir:
1/9 1/9 1/91/9 1/9 1/91/9 1/9 1/9
Esta máscara produce un simple promedio de losvalores de brillo de los pixeles y se conoce como fil-tro de la media. La suma de sus coeficientes es iguala 1 y todos ellos son positivos. Estas dos caracterís-ticas son válidas para todas las máscaras de filtrospasabajos. Si este filtro se aplica a una región de unaimagen donde cada pixel del núcleo tiene el mismovalor de brillo, es decir, un área de baja frecuenciaespacial, el resultado es ese mismo valor de brillo.Esto es, el valor de brillo resultante en una región depixeles con valor de brillo constante es el mismo deentrada. Esto se corresponde con el hecho de que noexiste actividad espacial en la región (falta de cam-bios en los niveles de gris), lo que indica que existefrecuencia espacial 0. Si se aplica en una regióndonde los valores de brillo de los pixeles cambianrápidamente del blanco al negro y viceversa, esdecir, un área de alta frecuencia espacial, el resulta-do será un valor medio de gris entre los negros y losblancos. Esto produce una imagen de salida com-puesta por valores medios de gris que varían leve-mente. Las transiciones de altas frecuencias, blancoa negro, de la imagen de entrada son atenuadas atransiciones mínimas de valores de gris.
En imágenes satelitales, el filtro de paso bajo seutiliza para restaurar errores aleatorios que puedenpresentarse en los niveles de brillo de la imagen,
Realce de imágenes: filtrado espacial
N.º 17 - Junio 2002 33

producto de un defecto en la adquisición o recep-ción de los datos. Se emplea también para reducir lavariabilidad espacial de algunas categorías comopaso previo y/o posterior a la clasificación. En estecaso, se pretende atenuar el llamado “ruido de laescena” producido en las zonas altamente heterogé-neas en relación con la resolución espacial del sen-sor (zonas donde se mezclan distintos tipos decubiertas en un espacio reducido).
Filtros de Paso Alto
Este tipo de filtros pretende aislar los componen-tes de alta frecuencia en una imagen. El filtro depaso alto tiene un efecto opuesto al filtro pasabajos,acentúa los componentes de alta frecuencia espacialmientras que deja sin tocar los componentes de bajafrecuencia espacial.
Una máscara de paso alto muy común, de dimen-sión 3 x 3, es aquella que contiene un 9 en la posi-ción del centro y -1 en las posiciones que lo rodean,es decir:
-1 -1 -1-1 +9 -1-1 -1 -1
La suma de los coeficientes es 1 y los coeficien-tes más pequeños rodean al coeficiente del centroque es positivo y el más grande. Esta disposiciónde los coeficientes indica que el pixel central delgrupo de pixeles de entrada que se procesan apor-ta una alta influencia, mientras que los pixeles quelo rodean actúan oponiéndose a él. Si el pixel cen-tral posee un valor de brillo muy diferente al desus vecinos inmediatos, entonces el efecto de estosúltimos es despreciable y el valor de salida es unaversión acentuada del valor original del pixel delcentro. Esa diferencia grande indica una marcadatransición en los niveles de gris, lo que indica lapresencia de componentes de altas frecuencias.Por consiguiente, en la imagen de salida se esperaque la transición aparezca acentuada. Por el con-trario, si los valores de brillo de los pixeles veci-nos son suficientemente grandes para contrarrestarel peso del pixel del centro, entonces el resultadofinal se basa más en un promedio de los pixelesinvolucrados.
Si el valor de brillo de todos los pixeles de unnúcleo 3 x 3 son iguales, el resultado es simple-mente el mismo valor. Es decir, produce la misma
respuesta que el filtro de paso bajo aplicado sobreregiones constantes. Esto significa que el filtro depaso alto no atenúa los componentes de bajas fre-cuencias espaciales. Más precisamente enfatiza loscomponentes de altas frecuencias mientras que dejasin tocar los de bajas frecuencias.
Los filtros de paso alto permiten destacar cual-quier rasgo fronterizo de una imagen, independien-temente de su orientación.
Los filtros de paso bajo y paso alto constituyenla base de la mayor parte de las operaciones de fil-trado espacial. Estos filtros proveen la parte adap-tativa de la operación de procesamiento puntualconocida como umbral adaptativo (adaptativethresholding).
Realce y Detección de Bordes
El realce de bordes transforma una imagen demanera que exhibe sólo el detalle de bordes o fron-teras. Los bordes aparecen como las líneas de con-torno de los objetos dentro de la imagen. Estos con-tornos pueden utilizarse en posteriores operacionesde análisis de imágenes para el reconocimiento deobjetos o rasgos.
Los realces de bordes son implementados a tra-vés de filtros espaciales. Los más utilizados son:desplazamiento y sustracción, filtros Laplacianospara bordes, gradiente de Prewitt, Roberts, Sobel yKirsch.
El método de desplazamiento y sustracción oresta permite realzar información de bordes ver-ticales u horizontales. Desplazando una imagen ala izquierda en un pixel y restando esta nuevaimagen de la original, se resaltarán los bordesverticales. Esto se debe a que el valor de brillo decada pixel de entrada es restado de su vecinohorizontal, dando un valor de la diferencia de bri-llo entre ambos, conocida como pendiente en elcontexto de una imagen. Si dos pixeles adyacen-tes tienen brillos muy diferentes (existencia deborde), la diferencia resultará grande. Por el con-trario, si dos pixeles adyacentes tienen valoressimilares de brillo (no existencia de borde), ladiferencia de brillos resultante será pequeña. Elefecto es una imagen donde aparecen los contor-nos direccionales.
Análogamente, el realce de borde horizontal seimplementa desplazando la imagen un pixel haciaarriba y restando.
La operación de desplazamiento y sustracción selleva a cabo utilizando las siguientes máscaras:
B. Aldalur y M. Santamaría
34 N.º 17 - Junio 2002
0 0 0 0 -1 0-1 1 0 0 1 00 0 0 0 0 0vertical horizontal
La suma de los coeficientes es igual a 0. Esto signi-fica que a medida que la máscara pasa sobre regionesde la imagen con valores de brillo constantes (no bor-des), el resultado que se produce es 0, lo que repre-senta una pendiente de brillo igual a 0 (Baxes, 1994).
La operación del gradiente de Prewitt determinaun realce de borde direccional. Si se utiliza unnúcleo de dimensión 3 x 3, pueden generarse ochoimágenes de gradientes a partir de una imagen ori-ginal. Cada una resalta los bordes orientados en unade las siguientes ocho direcciones: norte, sur, este,oeste, sureste, noroeste, suroeste y noreste. Lasmáscaras de convolución correspondientes son(Chuvieco, 1996):
1 1 1 -1 -1 -1 -1 1 1 1 1 -11 -2 1 1 -2 1 -1 -2 1 1 -2 -1
-1 -1 -1 1 1 1 -1 1 1 1 1 -1norte sur este oeste
-1 -1 1 1 1 1 1 -1 -1 1 1 1-1 -2 1 1 -2 -1 1 -2 -1 -1 -2 11 1 1 1 -1 -1 1 1 1 -1 -1 1sureste noroeste suroeste noreste
La suma de los coeficientes es igual a 0. Tal comoen el filtro tratado anteriormente, a medida que lamáscara pasa sobre regiones de la imagen con valo-res de brillo constantes, el resultado es 0, indicandopendiente de brillo igual a 0.
En aquellas regiones donde el gradiente dePrewitt genera resultados negativos, el valor desalida se establece igual a 0 porque brillos negati-vos no están definidos.
La imagen de gradiente aparece como negra todavez que los valores de brillo son constantes.Aquellos bordes con la orientación direccionalcorrecta en la imagen original, aparecen como blan-cos en la imagen de gradiente.
El realce de borde Laplaciano es una operaciónomnidireccional que resalta todos los bordes en unaimagen, independientemente de sus orientaciones.Esta operación está basada en la tasa de cambio dela pendiente del brillo dentro de un núcleo de pixe-les de dimensión 3 x 3. La máscara Laplaciana máscomún está formada por un 8 en la posición centraly -1 en las posiciones que la rodean
-1 -1 -1-1 +8 -1-1 -1 -1
Los coeficientes suman 0 y como en el caso deuna máscara de filtro de paso alto, coeficientes convalores negativos rodean al coeficiente del centroque es un valor positivo grande.
La operación de realce Laplaciano genera picosmás marcados o abruptos en los bordes que la ope-ración de gradiente. Cualquier pendiente de brillo,ya sea positiva o negativa, es acentuada, dando alLaplaciano su carácter omnidireccional.
En una región de una imagen que es uniforme enbrillo o con gradiente de brillo uniforme, el resulta-do de aplicar la máscara anterior es reducir el nivelde gris a 0. Cuando una discontinuidad está presen-te dentro de una vecindad en forma de punto, líneao borde, el resultado del Laplaciano es un valor nonulo, negativo o positivo dependiendo de donde seencuentre el punto central con respecto al borde.
A fin de exhibir el resultado cuando surgen valo-res de pixeles tanto positivos como negativos, escomún sumar un valor medio de gris (128 para elcaso de imágenes con 1 sólo bit por pixel con valo-res de gris en el rango de 0 a 255) de modo que lospuntos con valor 0 son gris medio, y los valores bri-llantes y oscuros producidos por el Laplaciano pue-dan visualizarse.
El filtro Laplaciano no es la mejor herramientapara demarcar bordes. En muchos casos, fronteras obordes aparecen, al menos localmente, como enescalón de brillos dispersos sobre varios pixeles. ElLaplaciano da una mejor respuesta a una línea quea un escalón y a un punto que a una línea. En unaimagen que contiene ruido, que se presenta demanera típica como puntos que varían en brillo, elLaplaciano mostrará tales puntos más fuertementeque los bordes o fronteras de interés.
A efectos de resaltar aún más puntos, líneas y bor-des se puede cambiar el coeficiente del centro de lamáscara por +9 (Russ, 1998), resultando precisa-mente la máscara mencionada en filtros de paso alto.
Otro enfoque para localización de bordes utilizael cálculo de derivada primera (Richards, 1995).
Si la imagen es una función continua del brillo enun par de coordenadas continuas x e y, es decirΦ(x,y), entonces el vector gradiente se define en laimagen como:
Realce de imágenes: filtrado espacial
N.º 17 - Junio 2002 35
( ) ( ) (y
iy,xx
y,x Φ∂∂+Φ
∂∂=Φ∇ ( ) y,x( )j

donde i, j forman un par de vectores unitarios. Ladirección del vector gradiente es la dirección demáxima pendiente ascendente y su amplitud es elvalor de pendiente. Para operaciones de detecciónde bordes se utiliza, generalmente, sólo la magnituddel gradiente definida por:
donde (1)
Algunas imágenes son esencialmente unidimen-sionales, por lo tanto la aplicación de la derivadaprimera a tales imágenes, en la dirección de varia-ción más importante demarca las fronteras y realzala visibilidad de pequeños escalones y otros detalles.
A continuación figuran las máscaras más comu-nes para la detección de bordes en distintas direc-ciones:
+1 0 -1 +1 0 -1 +1 -1 -1+1 0 -1 +2 0 -2 +2 +1 -1+1 0 -1 +1 0 -1 +1 -1 -1
+1 +1 0 -2 +1 0 +2 +1 -1+1 0 -1 +1 0 -1 +1 +1 -1
0 -1 -1 0 -1 -2 -1 -1 -1
+1 +1 +1 +1 +2 +1 +1 +2 +10 0 0 0 0 0 -1 +1 -1
-1 -1 -1 -1 -2 -1 -1 -1 -1
y de manera similar se construyen las restantespara obtener las ocho rotaciones (Russ, 1998).
Para datos de imágenes digitales, no es posiblecalcular la derivada continua. En su lugar, puedecalcularse, en el caso unidireccional, el valor de ladiferencia entre dos pixeles adyacentes como deri-vada finita (se hizo mención en el método de des-plazamiento y sustracción).
Es posible extender los mismos principios relati-vos a la derivada primera unidireccional, para loca-lizar fronteras con orientaciones arbitrarias en imá-genes bidimensionales. Esta constituye una de lasoperaciones más comunes entre todas las operacio-nes de realce de imágenes.
Tal como en el caso unidireccional, en orienta-ciones arbitrarias las derivadas continuas (1) endatos de imágenes digitales son reemplazadas pordiferencias pero en este caso con 2 diferencias de
pixeles que representan una aproximación finita alas derivadas del brillo.
El operador de Sobel es una de las técnicas máscomúnmente utilizadas y es equivalente a la aplica-ción simultánea de las siguientes máscaras:
-1 0 1 1 2 1P1 = -2 0 2 P2 = 0 0 0
-1 0 1 -1 -2 -1
El operador de Kirsch aplica cada una de las ochoorientaciones de una máscara direccional y retieneel valor máximo. Se obtienen resultados similares aSobel en la detección de bordes.
FILTROS ESPACIALES NO LINEALES
Existen otros filtros espaciales que no son fun-ción lineal de los valores de brillo de los pixeles deuna imagen. Es decir, no se calculan como unasuma lineal de elementos (brillo de los pixeles)multiplicados por pesos constantes (coeficientes dela máscara). Estos filtros se conocen como filtrosespaciales no lineales. Constituyen también técni-cas de procesamiento por grupo de pixeles, operan-do sobre un núcleo de pixeles de entrada que rode-an a un pixel central. La diferencia es que en lugarde utilizar un promedio ponderado, emplean otrastécnicas que combinan los valores de brillo delgrupo de pixeles de entrada.
Un ejemplo de este tipo de filtros es el filtro de lamediana (Baxes, 1994, Richards, 1995). Se basa ensustituir el valor de brillo del pixel central delnúcleo por la mediana de todos los valores de brillode los pixeles que forman dicho núcleo. Se empleapara eliminar valores anómalos aislados, productode ruidos aleatorios en la adquisición de los datos.
Otro filtro espacial no lineal es el filtro de lamoda. Se basa en sustituir el valor de brillo delpixel central del núcleo por la moda (valor de brilloque más se repite) de todos los valores de brillo delos pixeles que forman dicho núcleo.
RESULTADOS
Para el tratamiento de las imágenes, se trabajócon el software Idrisi for Windows, versión 2.
La Figura 1a) corresponde a una ventana de unaimagen satelital (banda 3) de la zona de SalinasChicas, provincia de Buenos Aires, Argentina. Esta
B. Aldalur y M. Santamaría
36 N.º 17 - Junio 2002
22
21 ∇+∇=∇
( )y,xx1 Φ
∂∂=∇ y ( )y,x
y2 Φ∂∂=∇

imagen fue contaminada con ruido tipo impulso, losvalores de brillo de 18 pixeles fueron reemplazadospor un valor de brillo 0 y los de otros 18 pixeles porun valor de brillo 150, visualizándose como puntosnegros y blancos en la imagen. Se aplicaron los fil-tros de media y mediana, 3 x 3, para ver su efectosobre tales puntos aislados.
El filtro de la media, Figura 1b), produce unamodificación de los valores de brillo originales,principalmente en los grupos de pixeles vecinos aaquellos cuyo brillo es 0 o 150. Esto se debe a queestos valores son incluidos en el cálculo del prome-
dio, disminuyendo o aumentando los valores de bri-llo. Visualmente este filtro no elimina totalmentelos puntos correspondientes al ruido, sólo atenúa elcontraste con sus vecinos.
El filtro de la mediana, Figura 1c), elimina total-mente los puntos de ruido de la imagen puesto quepor tratarse de puntos extremos aislados no afectan elvalor mediano de brillo. Es menos sensible a valoresextremos y produce una menor modificación de losdatos originales que el filtro de la media aritmética.
Por otra parte, en el interior de la salina se visua-lizan líneas de contornos que luego de aplicar el fil-
Realce de imágenes: filtrado espacial
N.º 17 - Junio 2002 37
a)
c)
b)
d)
Figura 1. a) Imagen original, b) Imagen con filtro de la media, c) Imagen con filtro de mediana, d) Imagen con filtro Laplaciano.
tro de media resultan confusas o imperceptiblesmientras que esto no ocurre al aplicar el filtro de lamediana. Es decir, este último filtro como técnicade suavizado preserva mejor bordes o contornosque el filtro de media.
Las siguientes submatrices muestran el efectoproducido, por la aplicación de los filtros mencio-nados, en los valores de brillo de los pixeles querodean al 0 y al 150:
Imagen original
Imagen con filtro de media
Imagen con filtro de mediana
A la misma imagen se aplicó el filtro Laplaciano,3 x 3, con centro 9 y vecinos -1 para comprobar queeste filtro da una mejor respuesta a un punto que auna línea. La imagen filtrada fue posteriormenteconvertida a una escala entre 0 y 255.
Efectivamente esto puede observarse tanto en laimagen filtrada, Figura 1d), como en las submatri-ces de valores de brillo (de la imagen filtrada sin
cambio de escala entre 0 y 255) correspondientes apunto y línea que figuran a continuación:
Imagen original
Imagen con filtro Laplaciano (sin cambo de escala)
En el caso de punto aislado existe una marcadadiferencia entre su valor de brillo luego del filtradoy el de sus vecinos, motivo por el cual apareceresaltado en la imagen filtrada. En el caso de líneatambién existe esa diferencia pero no resulta tanmarcada. Esas diferencias se exhiben en las subma-trices mediante la presencia de valores negativosrodeados de positivos y viceversa. En la aplicaciónde este filtro no se utilizaron umbrales, debido a estofiguran valores negativos o positivos muy altos.
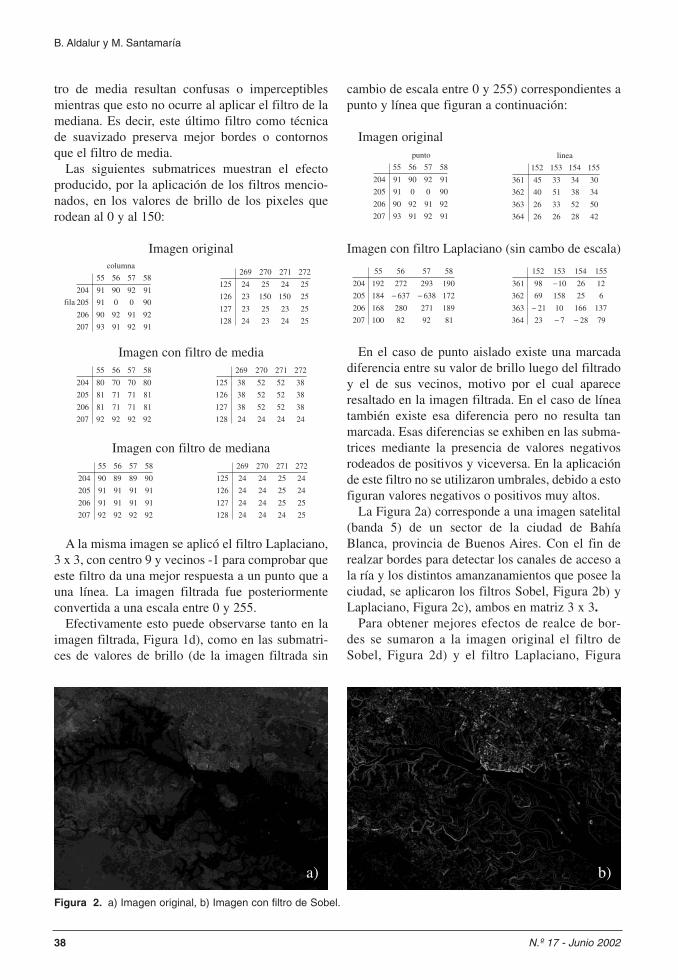
La Figura 2a) corresponde a una imagen satelital(banda 5) de un sector de la ciudad de BahíaBlanca, provincia de Buenos Aires. Con el fin derealzar bordes para detectar los canales de acceso ala ría y los distintos amanzanamientos que posee laciudad, se aplicaron los filtros Sobel, Figura 2b) yLaplaciano, Figura 2c), ambos en matriz 3 x 3.
Para obtener mejores efectos de realce de bor-des se sumaron a la imagen original el filtro deSobel, Figura 2d) y el filtro Laplaciano, Figura
B. Aldalur y M. Santamaría
38 N.º 17 - Junio 2002
91929193207
92919290206
900091205
91929091204
58575655
fila
columna
25242324128
25232523127
2515015023126
25242524125
272271270269
92929292207
81717181206
81717181205
80707080204
58575655
24242424128
38525238127
38525238126
38525238125
272271270269
92929292207
91919191206
91919191205
90898990204
58575655
25242424128
25252424127
24252424126
24252424125
272271270269
91929193207
92919290206
900091205
91929091204
58575655
punto
42282626364
50523326363
34385140362
30343345361
155154153152
linea
819282100207
189271280168206
172638637184205
190293272192204
58575655
−−
7928723364
1371661021363
62515869362
12261098361
155154153152
−−−
−
Figura 2. a) Imagen original, b) Imagen con filtro de Sobel.
a) b)
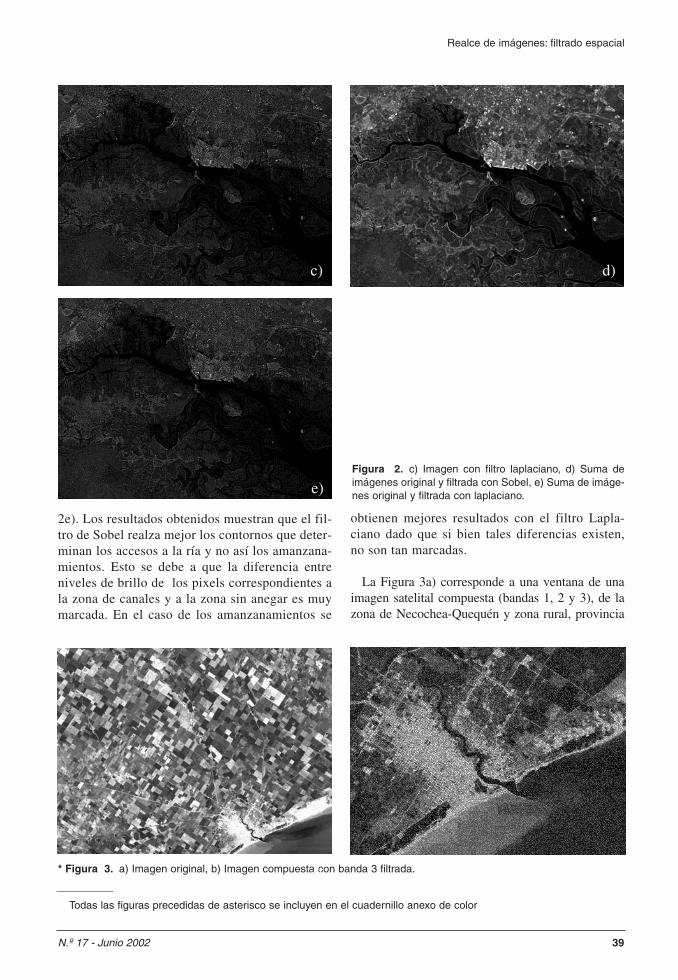
2e). Los resultados obtenidos muestran que el fil-tro de Sobel realza mejor los contornos que deter-minan los accesos a la ría y no así los amanzana-mientos. Esto se debe a que la diferencia entreniveles de brillo de los pixels correspondientes ala zona de canales y a la zona sin anegar es muymarcada. En el caso de los amanzanamientos se
obtienen mejores resultados con el filtro Lapla-ciano dado que si bien tales diferencias existen,no son tan marcadas.
La Figura 3a) corresponde a una ventana de unaimagen satelital compuesta (bandas 1, 2 y 3), de lazona de Necochea-Quequén y zona rural, provincia
Realce de imágenes: filtrado espacial
N.º 17 - Junio 2002 39
c) d)
e)
* Figura 3. a) Imagen original, b) Imagen compuesta con banda 3 filtrada.a) b)
Figura 2. c) Imagen con filtro laplaciano, d) Suma deimágenes original y filtrada con Sobel, e) Suma de imáge-nes original y filtrada con laplaciano.
Todas las figuras precedidas de asterisco se incluyen en el cuadernillo anexo de color
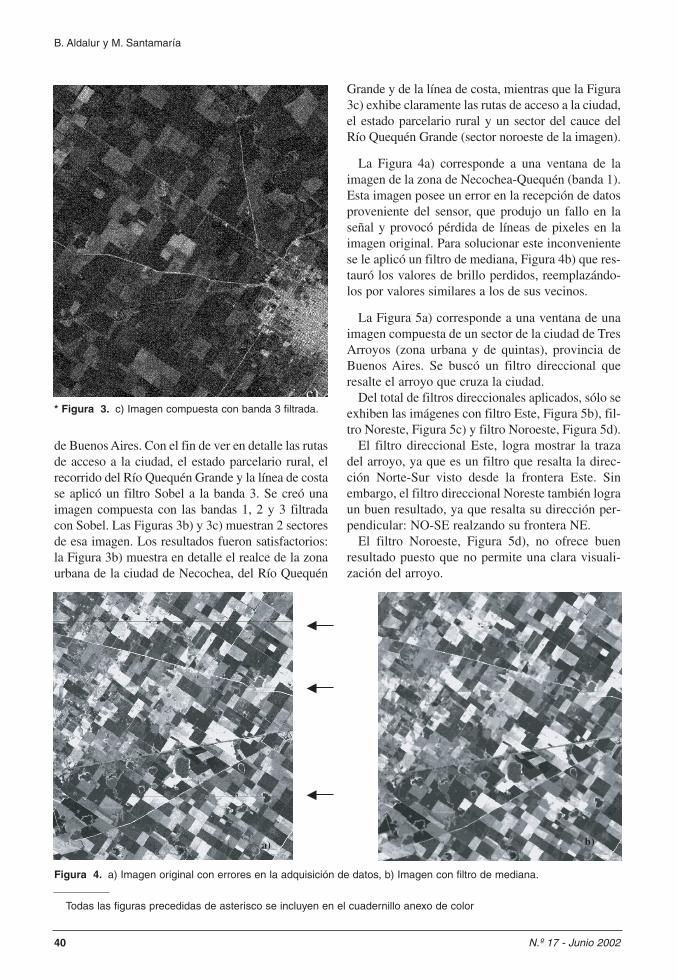
de Buenos Aires. Con el fin de ver en detalle las rutasde acceso a la ciudad, el estado parcelario rural, elrecorrido del Río Quequén Grande y la línea de costase aplicó un filtro Sobel a la banda 3. Se creó unaimagen compuesta con las bandas 1, 2 y 3 filtradacon Sobel. Las Figuras 3b) y 3c) muestran 2 sectoresde esa imagen. Los resultados fueron satisfactorios:la Figura 3b) muestra en detalle el realce de la zonaurbana de la ciudad de Necochea, del Río Quequén
Grande y de la línea de costa, mientras que la Figura3c) exhibe claramente las rutas de acceso a la ciudad,el estado parcelario rural y un sector del cauce delRío Quequén Grande (sector noroeste de la imagen).
La Figura 4a) corresponde a una ventana de laimagen de la zona de Necochea-Quequén (banda 1).Esta imagen posee un error en la recepción de datosproveniente del sensor, que produjo un fallo en laseñal y provocó pérdida de líneas de pixeles en laimagen original. Para solucionar este inconvenientese le aplicó un filtro de mediana, Figura 4b) que res-tauró los valores de brillo perdidos, reemplazándo-los por valores similares a los de sus vecinos.
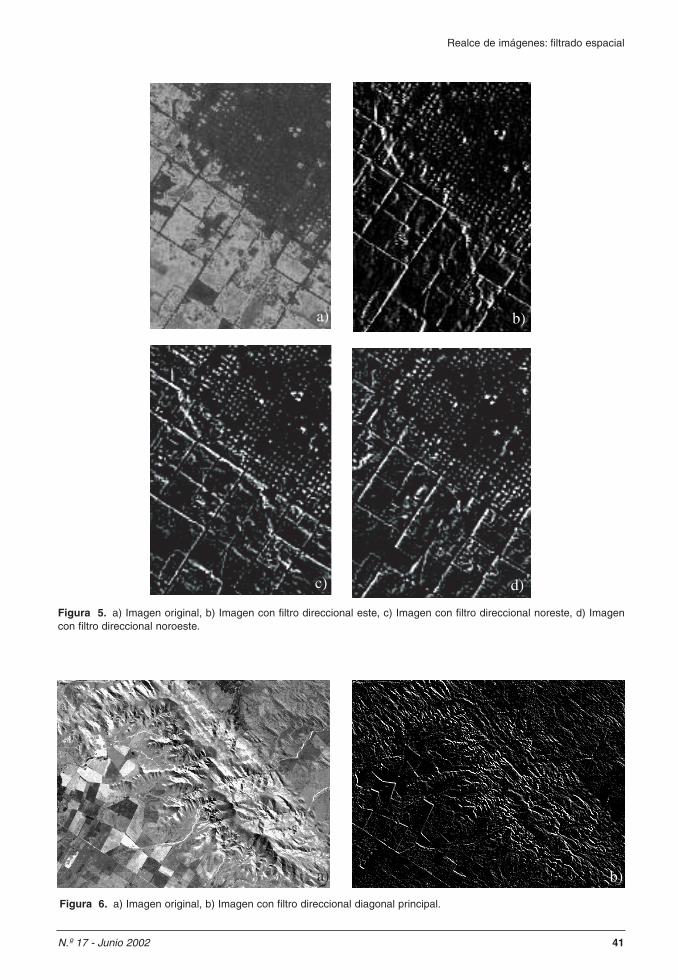
La Figura 5a) corresponde a una ventana de unaimagen compuesta de un sector de la ciudad de TresArroyos (zona urbana y de quintas), provincia deBuenos Aires. Se buscó un filtro direccional queresalte el arroyo que cruza la ciudad.
Del total de filtros direccionales aplicados, sólo seexhiben las imágenes con filtro Este, Figura 5b), fil-tro Noreste, Figura 5c) y filtro Noroeste, Figura 5d).
El filtro direccional Este, logra mostrar la trazadel arroyo, ya que es un filtro que resalta la direc-ción Norte-Sur visto desde la frontera Este. Sinembargo, el filtro direccional Noreste también lograun buen resultado, ya que resalta su dirección per-pendicular: NO-SE realzando su frontera NE.
El filtro Noroeste, Figura 5d), no ofrece buenresultado puesto que no permite una clara visuali-zación del arroyo.
B. Aldalur y M. Santamaría
40 N.º 17 - Junio 2002
* Figura 3. c) Imagen compuesta con banda 3 filtrada.c)
a) b)
Figura 4. a) Imagen original con errores en la adquisición de datos, b) Imagen con filtro de mediana.
Todas las figuras precedidas de asterisco se incluyen en el cuadernillo anexo de color
Realce de imágenes: filtrado espacial
N.º 17 - Junio 2002 41
Figura 6. a) Imagen original, b) Imagen con filtro direccional diagonal principal.
Figura 5. a) Imagen original, b) Imagen con filtro direccional este, c) Imagen con filtro direccional noreste, d) Imagencon filtro direccional noroeste.
a) b)
c) d)
a) b)

La Figura 6a) corresponde a una ventana de unaimagen compuesta de la zona de Sierra de laVentana, provincia de Buenos Aires donde seexhibe parte del cordón serrano. Se aplicaron fil-tros direccionales, en la dirección de ambas dia-gonales. En la Figura 6b) se observa la zona ocu-pada por el cordón y su límite con la zona de usorural, cuyo parcelamiento está resaltado por poli-gonales en la dirección de la diagonal correspon-diente. La Figura 6c) exhibe netamente las líneasde drenaje.
CONCLUSIONES
Los distintos filtros espaciales aplicados permi-tieron extraer las siguientes conclusiones:
En presencia de ruido tipo impulso, o pérdida delíneas de pixeles en una imagen, el filtro de media-na permitió una mejor corrección de estas fallas queel filtro de la media.
El filtro de Sobel ofreció buenos resultados antela existencia de diferencias de brillo muy marcadasen una imagen (existencia de contornos), siendo de
mayor utilidad el filtro Laplaciano cuando las mis-mas no son tan acentuadas.
La incorporación de la banda 3 filtrada con Sobelen la composición de una imagen contribuyó endestacar los detalles buscados. Esto sugiere unaforma alternativa en el uso de las imágenes filtra-das, empleando en cada caso particular aquellabanda que resulta más apropiada.
El uso de filtros direccionales permitió resaltardetalles de líneas (traza del arroyo, cordón serrano,líneas de drenaje) según la dirección particular decada filtro utilizado.
BIBLIOGRAFÍA
BAXES, G. A. 1994. Digital Image Processing -Principles and Applications. U.S.A. John Wiley& Sons.
CHUVIECO, E. 1996. Fundamentos de Telede-tección Espacial. Madrid. Rialp.
RICHARDS, J. A. 1995. Remote Sensing Digital ImageAnalysis - An Introduction. Berlín. Springer-Verlag.
RUSS, J. C. 1998. The Image ProcessingHandbook. Piscataway. CRC Press - IEEE Press.
B. Aldalur y M. Santamaría
42 N.º 17 - Junio 2002
a) Figura 6. c) Imagen con filtro direccional diagonalsecundaria.
c)