
Laboratorio de Sistemas de Controlprof.usb.ve/.../Laboratorio_de_Sistemas_de_Control.pdf ·...
27
Laboratorio de Sistemas de Control Objetivos El laboratorio de sistemas de control tiene como finalidad consolidar los conocimientos adquiridos en la teoría a través de prácticas experimentales. Con la realización de la asignatura Laboratorio de Sistemas de Control (TI-2284), el estudiante podrá: Analizar con propiedad las características más resaltantes de un lazo de control clásico. Diseñar un controlador PID que cumpla con ciertas especificaciones básicas.
Transcript of Laboratorio de Sistemas de Controlprof.usb.ve/.../Laboratorio_de_Sistemas_de_Control.pdf ·...

Laboratorio de Sistemas de Control
Objetivos
El laboratorio de sistemas de control tiene como finalidad consolidar los conocimientos adquiridos en la teoría a través de prácticas experimentales. Con la realización de la asignatura Laboratorio de Sistemas de Control (TI-2284), el estudiante podrá:
Analizar con propiedad las características más resaltantes de un lazo de control clásico.
Diseñar un controlador PID que cumpla con ciertas especificaciones básicas.
Ficha del Laboratorio
Título: Laboratorio de Sistemas de Control.
Descripción: Presenta las actividades que se realizarán en el Laboratorio de Sistemas de Control con la finalidad de fortalecer los conocimientos adquiridos en la Asignatura de Control.
Palabras claves: Sistemas de Control, Realimentación, Variables Manipuladas, Variables Controladas, Lazo Abierto, Lazo Cerrado, Estabilidad.
Tabla de contenido:
Unidades de Aprendizajes Práctica nº 1: Introducción a Scilab. Práctica nº 2: Simplificación de Diagramas de Bloques. Práctica nº 3: Análisis de la respuesta transitoria de Sistemas Lineales e
Invariantes en el Tiempo. Práctica nº 4: Análisis del Lugar Geométrico de las Raíces de Sistemas
Lineales e Invariantes en el Tiempo. Práctica nº 5: Análisis de la respuesta frecuencial de Sistemas Lineales e
Invariantes en el Tiempo. Práctica nº 6: Sintonización de compensadores utilizando el criterio de
Ziegler-Nichols. Práctica nº 7: Identificación de procesos reales. Práctica nº 8a: Control de un Sistema de Temperatura. Práctica nº 8b: Control de un Sistema de Presión. Práctica nº 8c: Control de un sistema de Velocidad y Posición. Practica nº 9: Control utilizando un Autómata Programable. Créditos. Referencias Bibliográficas.
Fecha de Creación: 25/10/2013
Licencia: Este Objeto de Aprendizaje de Contenido Abierto será reconocido bajo la Licencia Creative Commons con las siguientes condiciones: Reconocimiento, No Comercial, Compartir Igual. Esto permite la reutilización de dicho recurso, pudiendo generarse obras derivadas (adaptaciones y/o traducciones) siempre y cuando se reconozca la autoría (pero no de una manera que sugiera que tiene el apoyo del autor en el uso que hace de su obra), no se permita la comercialización y los productos obtenidos se distribuyan con igual licencia que el recurso original.

Unidades de Aprendizajes
TEMA Nº 1: Uso del modelaje matemático y la simulación mediante herramienta computacional para la evaluación de la rapidez, exactitud y estabilidad de la respuesta de los sistemas de control clásico.
o Práctica N°1: Uso de una herramienta computacional para el modelaje y la simulación de sistemas lineales e invariantes en el tiempo.
o Práctica Nº2: Simplificación de Diagramas de Bloques. o Práctica N°3: Análisis computacional de la respuesta en tiempo de
sistemas. o Práctica N°4: Análisis computacional de la respuesta en frecuencia de
sistemas. o Práctica N°5: Análisis computacional de la estabilidad de los sistemas
mediante la prueba de Routh- Hurwitz, el método del lugar geométrico de las raíces.
TEMA Nº 2: Estudio de los efectos de cada controlador: proporcional (P), proporcional derivativo (PD), Proporcional Integral (PI), Proporcional Integral Derivativo (PID) , sobre la rapidez, la exactitud y la estabilidad de la respuesta de un sistema real.
o Práctica N°6: Estudio de la acciones de control en Sistemas Lineales, empleando el método de Ziegler-Nichols.
o Práctica N°7: Identificación de Sistemas Reales. o Práctica N°8: Control de Velocidad y Posición Angular de un motor de
corriente continua. (Módulo G36A/EV); Control de Presión. (Módulo G35/EV); Control de Temperatura. (Módulo G34/EV).
Tema N° 3: Diseño, modelaje y simulación del control de un proceso ó sistema real, en el cual se especifiquen los parámetros de los dispositivos requeridos (sensores, transductores, amplificadores, controladores, planta, etc) y se verifiquen las condiciones de operación deseadas mediante simulaciones y/o mediciones en tiempo real.

Práctica nº 1
Introducción a SciLab
Objetivos
SciLab es un software matemático de uso libre para diferentes sistemas operativos. SciLab posee un ambiente de trabajo como y se puede utilizar meta-programación para realizar cálculos numéricos. Scilab es un software matemático, con un lenguaje de programación de alto nivel, para cálculo científico, interactivo de libre uso y disponible en múltiples sistemas operativos (Mac OS X, GNU/Linux, Windows). Desarrollado por INRIA (Institut National de Recherche en Informatique et en Automatique) y la ENPC (École Nationale des Ponts et Chaussées) desde 1990, por Scilab Consortium dentro de la fundación Digiteo desde 2008, Scilab es ahora desarrollado por Scilab Enterprises desde julio 2012.
En esta práctica conoceremos al programa y algunas funciones que se utilizaran durante el desarrollo del Laboratorio de Sistema de control.
Laboratorio
Instalación
Se puede descargar el programa en el siguiente link Scilab Enterprises. Luego de descargado e instalado se ejecuta el programa apareciendo el siguiente entorno de trabajo ( Para este ejemplo se utilizó SciLab 5.4.0):
En este entorno podemos observar tres espacios. El espacio "Consola Scilab" es donde podemos ejecutar los comandos. El espacio "Explorador de variables" es el lugar donde podemos observar las características de las variables creadas. El espacio "Historial de comando" tiene como objetivo recordar los últimos comandos ejecutados en el programa. Como cualquier otro programa, Scilab posee un menú principal donde se puede ejecutar o configurar el funcionamiento del programa. Un comando Importante es la ayuda el cual se encuentra en el siguiente ícono.
La ayuda será la mejor herramienta para conocer el funcionamiento de este programa.
Variables
Las Variables en Scilab se crean automáticamente cuando se ejecuta una función o cuando se hace una asignación. Por ejemplo, si en la consola de Scilab se escribe el siguiente comando:
--> a=12;
Automáticamente aparecerá en el explorador de variable la variable "a" definida como un "double", si la línea de comando no posee el punto y coma (;) al final la consola imprimirá el resultado de la ejecución, por ejemplo:
También se puede crear vectores o matrices de datos, para ello se deben colocar entre corchetes [], si los datos se separan con espacio o coma (,) el vector será del tipo fila, mientras que si los datos son separados con punto y coma (;) entonces el vector será del tipo columna.
Para crear una variable del tipo texto "string" solo se debe definir el dato de la variable entre comilla simple o doble.
Actividad
Investigue en la ayuda como crear una variable que complete automáticamenteun vector fila desde 0 hasta 1 con un espaciado de 0.01. ejemplo t=[0 0.01 0.02 ... 0.99 1].
Cree un vector fila con los siguientes valores |1 2 3 4|. Cree un vector columna con los siguientes valores |5 6 7 8|. Investigue las operaciones de suma, recta y multiplicación de vectores en Scilab,
utilice los vectores anteriores para demostrar cada operación.
Funciones
Scilab posee una serie de funciones elementales que pueden ser ejecutadas desde la consola, además posee funciones equivalentes a MatLab, software comercial equivalente y muy utilizado en la Ingeniería. a continuación se presenta un listado de estas funciones. Desde la herramienta de ayuda se puede aprender cómo utilizar cada una de ellas.
Elementary Functions
Bitwise operations o bitand — bitwise AND o bitcmp — bitwise complement o bitget — bit at specified position o bitor — bitwise OR o bitset — set bit at specified position o bitxor — bitwise XOR o isequalbitwise — bitwise comparison of variables
Complex o complex — Create a complex number. o conj — Complex conjugate o imag — imaginary part o imult — multiplication by i the imaginary unitary o isreal — check if a variable has real or complex entries o real — real part
Discrete mathematics o binomial — binomial distribution probabilities o factor — factor function o factorial — The factorial function o gcd — Greatest Common Divisor o lcm — least common multiple
o perms — all permutations of vector components o primes — primes function o rat — Floating point rational approximation
Elementary matrices o diag — diagonal including or extracting o eye — identity matrix o ind2sub — linear index to matrix subscript values o linspace — linearly spaced vector o logspace — logarithmically spaced vector o meshgrid — create matrices or 3-D arrays o ndgrid — arrays for multidimensional function evaluation on grid o ones — matrix made of ones o rand — Random numbers o squarewave — generates a square wave with period 2*%pi o sub2ind — matrix subscript values to linear index o toeplitz — Toeplitz matrix o zeros — matrix made of zeros
Log - exp - power o exp — element-wise exponential o expm — square matrix exponential o log — natural logarithm o log10 — base 10 logarithm o log1p — computes with accuracy the natural logarithm of its argument
added by one o log2 — base 2 logarithm o logm — square matrix logarithm o polar — polar form o sqrt — square root o sqrtm — matrix square root
Floating point o ceil — round up o clean — cleans matrices (round to zero small entries) o double — conversion from integer to double precision representation o fix — round towards zero o floor — round down o format — number printing and display format o frexp — dissect floating-point numbers into base 2 exponent and
mantissa o ieee — set floating point exception mode o int — round towards zero o isinf — check for infinite entries o isnan — check for "Not a Number" entries o nearfloat — get previous or next floating-point number o nextpow2 — next higher power of 2. o number_properties — determine floating-point parameters o round — round to nearest integer
Radix conversions o base2dec — convert from base b to decimal o bin2dec — convert from binary to decimal o dec2base — Convert decimal to base N number in string
o dec2bin — convert from decimal to binary o dec2hex — convert from decimal to hexadecimal o dec2oct — convert from decimal to octal o hex2dec — convert from hexadecimal to decimal o oct2dec — convert from octal to decimal
Matrix manipulation o flipdim — flip x components along a given dimension o matrix — reshape a vector or a matrix to a different size matrix o permute — permute the dimensions of an array o pertrans — simultaneous permutation and transposition o repmat — Replicate and tile an array o resize_matrix — create a new matrix with a different size o squeeze — removes singleton dimensions of a hypermatrix
Matrix operations o abs — absolute value, magnitude o cumprod — cumulative product of array elements o cumsum — cumulative sum of array elements o kron — Kronecker product (.*.) o max — maximum o min — minimum o norm — matrix norm o prod — product of array elements o signm — matrix signum function o sum — sum of array elements o tril — lower triangular part of matrix o triu — upper triangle
Search and sort o dsearch — search in ordered sets o gsort — sorting by quick sort algorithm o lex_sort — lexicographic matrix rows sorting o vectorfind — finds in a matrix rows or columns matching a vector
Set operations o intersect — returns the vector of common values of two vectors o setdiff — returns components of a vector which do not belong to another
one o union — extract union components of a vector o unique — extract unique components of a vector or matrices
Signal processing o bloc2exp — Conversion of a block-diagram to its symbolic expression o bloc2ss — block-diagram to state-space conversion o pen2ea — pencil to E,A conversion o ssrand — random system generator o sysconv — system conversion o sysdiag — block diagonal system connection o syslin — linear system definition o trfmod — poles and zeros display
Symbolic o addf — symbolic addition o cmb_lin — symbolic linear combination o ldivf — left symbolic division
o mulf — symbolic multiplication o rdivf — right symbolic division o solve — symbolic linear system solver o subf — symbolic subtraction o trianfml — symbolic triangularization o trisolve — symbolic linear system solver
Trigonometry o acos — element wise cosine inverse (radians) o acosd — element wise cosine inverse, result in degree. o acosh — hyperbolic cosine inverse o acoshm — matrix hyperbolic inverse cosine o acosm — matrix wise cosine inverse o acot — computes the element-wise inverse cotangeant of the argument. o acotd — computes the element-wise inverse cotangeant of the argument,
result in degree. o acoth — element wise hyperbolic cotangeant inverse. o acsc — computes the element-wise inverse cosecant of the argument. o acscd — computes the element-wise inverse cosecant of the argument,
results in degree. o acsch — computes the element-wise inverse hyperbolic cosecant of the
argument. o asec — computes the element-wise inverse secant of the argument. o asecd — computes the element-wise inverse secant of the argument,
results in degree. o asech — computes the element-wise inverse hyperbolic secant of the
argument. o asin — sine inverse (radians) o asind — sine inverse, results in degree o asinh — hyperbolic sine inverse o asinhm — matrix hyperbolic inverse sine o asinm — matrix wise sine inverse o atan — 2-quadrant and 4-quadrant inverse tangent o atand — 2-quadrant and 4-quadrant element-wise inverse tangent, result
in degree. o atanh — hyperbolic tangent inverse o atanhm — matrix hyperbolic tangent inverse o atanm — square matrix tangent inverse o cos — cosine function o cosd — element-wise cosine function, argument in degree o cosh — hyperbolic cosine o coshm — matrix hyperbolic cosine o cosm — matrix cosine function o cotd — element-wise cotangent function, argument in degree o cotg — cotangent o coth — hyperbolic cotangent o cothm — matrix hyperbolic cotangent o csc — Computes the element-wise cosecant of the argument. o cscd — Computes the element-wise cosecant of the argument given in
degree. o csch — Computes the element-wise hyperbolic cosecant of the argument.
o csgn — Returns the sign of a vector of real of complex values. o sec — Compute the element-wise secant of the argument. o secd — Compute the element-wise secant of the argument given in
degree. o sech — Compute the element-wise hyperbolic secant of the argument. o sin — sine function o sinc — sinc function o sind — sine function, argument in degree. o sinh — hyperbolic sine o sinhm — matrix hyperbolic sine o sinm — matrix sine function o tan — tangent o tand — tangent, argument in degree. o tanh — hyperbolic tangent o tanhm — matrix hyperbolic tangent o tanm — matrix tangent
and — logical AND of the elements of an array and_op — logical AND operator cat — concatenate several arrays cell2mat — converts a cell array into a matrix cellstr — converts strings vector (or strings matrix) into a cell array of strings isempty — check if a variable is an empty matrix or an empty list isequal — objects comparison isvector — check if a variable is a vector lstsize — list, tlist, mlist numbers of entries modulo — positive arithmetic remainder modulo m ndims — number of dimensions of an array nthroot — Real nth root of real numbers or — logical OR of the elements of an array or_op — logical OR operator sign — signum function size — size of objects
Actividad
Investigue sobre las constantes definidas de Scilab, por ejemplo π. Investigue sobre las funciones trigonométricas, dado un vector entre [π y -π]
halle los valores de la función seno y tangente.
Gráficos
Scilab posee una serie de funciones para graficar, dependiendo de las necesidades que se tengan.

Gráficas 2D:
Función plot(x,y,<LineSpec>,<GlobalProperty>) donde el conjunto de datos x e y representan los datos de los dos ejes. <LineSpec> contienen las especificaciones de la línea que se desea representar; por ejemplo, el color, forma y grosor de la línea. <GlobalProperty> debe contener las propiedades globales de la figura, como lo son los ejes y escalas.
Ejemplo:
t = [0 : 0.001 : 2 * %pi]; y = sin(t); xlabel("eje X"); ylabel("Eje y"); title("Título del gráfico"); plot(t, y,'r.->');
Actividad
Grafique los valores de la tangente entre [-π, π]. Investigue las especificaciones de LineSpec y GlobalPropety. Haga cambio en
la figura anterior.
Polinomios
Scilab puede definir polinomios de forma simbólica, utilizando un vector con los coeficientes y la siguiente función:
p=poly(a,vname, ["flag"])

donde: "a" es el vector con las raíces o coeficientes dependiendo de parámetro flag. "vname" el nombre de la variable, por ejemplo "x".
Ejemplo
Observe que los coeficiente van desde el grado menor al mayor, y cuando se utiliza las raíces, está por defecto en flag, es como multiplicar x(x-2)(x-1).
Un polinomio que utilizaremos durante este curso es la definición del operador de Laplace "s" que se definirá de la siguiente manera:
Actividad
Cree una función de transferencia de un sistema de 2º orden con ganancia 1, coeficiente de amortiguamiento de 0.5 y frecuencia natural de 4 radianes por segundo.
Investigue la función "roots()", "numer()" y "denom()".
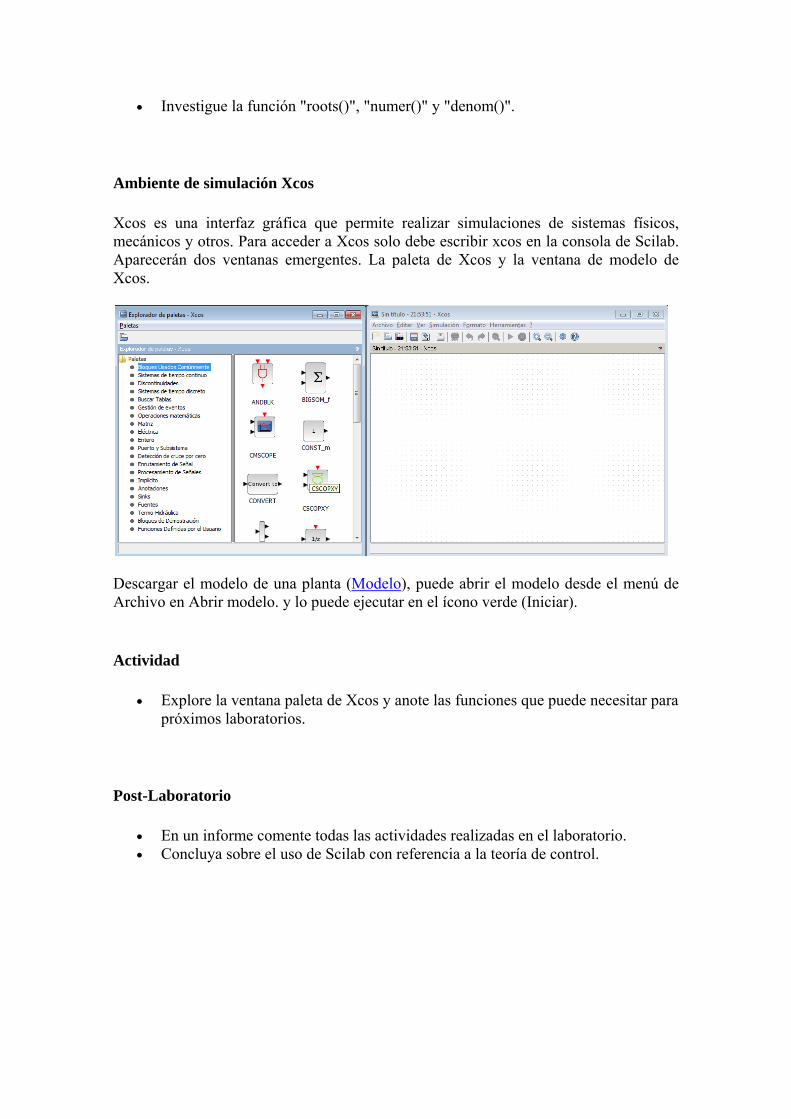
Ambiente de simulación Xcos
Xcos es una interfaz gráfica que permite realizar simulaciones de sistemas físicos, mecánicos y otros. Para acceder a Xcos solo debe escribir xcos en la consola de Scilab. Aparecerán dos ventanas emergentes. La paleta de Xcos y la ventana de modelo de Xcos.
Descargar el modelo de una planta (Modelo), puede abrir el modelo desde el menú de Archivo en Abrir modelo. y lo puede ejecutar en el ícono verde (Iniciar).
Actividad
Explore la ventana paleta de Xcos y anote las funciones que puede necesitar para próximos laboratorios.
Post-Laboratorio
En un informe comente todas las actividades realizadas en el laboratorio. Concluya sobre el uso de Scilab con referencia a la teoría de control.
Práctica nº 2
Simplificación de Diagramas de Bloques
Objetivos
Obtener diagramas de bloques simplificados y verificar su funcionamiento. o Simplificar algebraicamente diagramas de bloques. o Verificar el funcionamiento del diagrama simplificado obtenido
utilizando la herramienta Xcox.
Pre-Laboratorio
Actividad
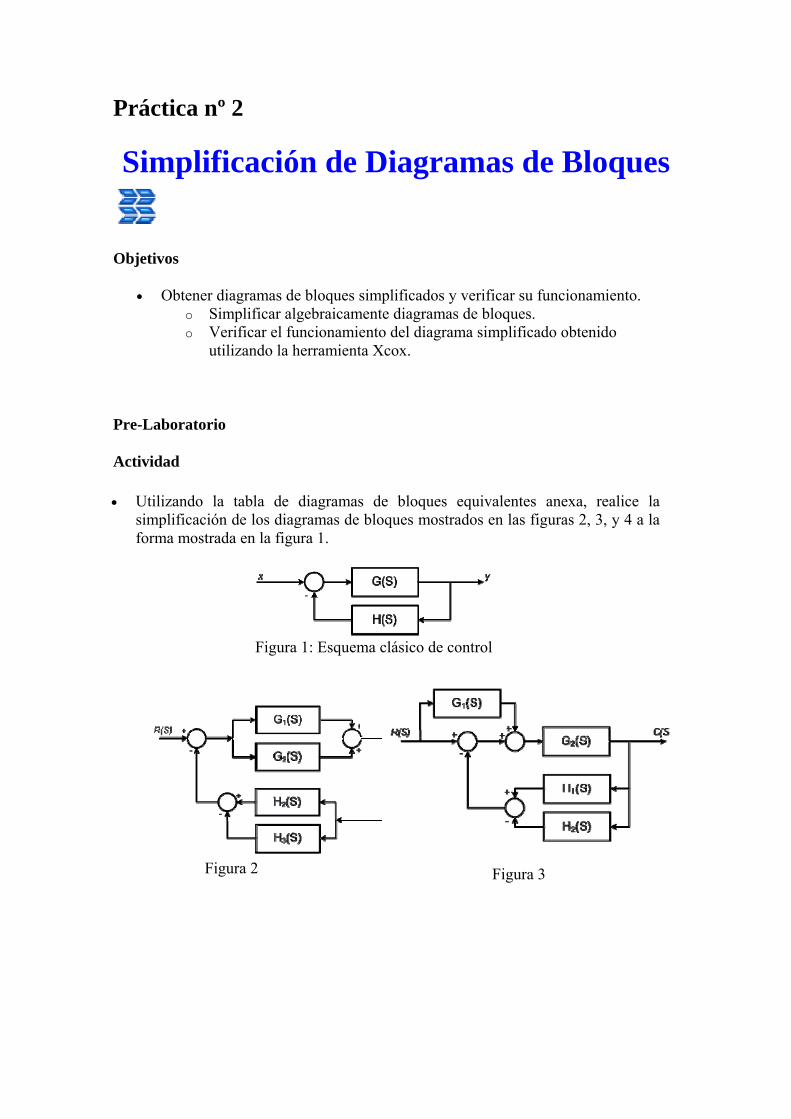
Utilizando la tabla de diagramas de bloques equivalentes anexa, realice la simplificación de los diagramas de bloques mostrados en las figuras 2, 3, y 4 a la forma mostrada en la figura 1.
Figura 1: Esquema clásico de control
Figura 2 Figura 3
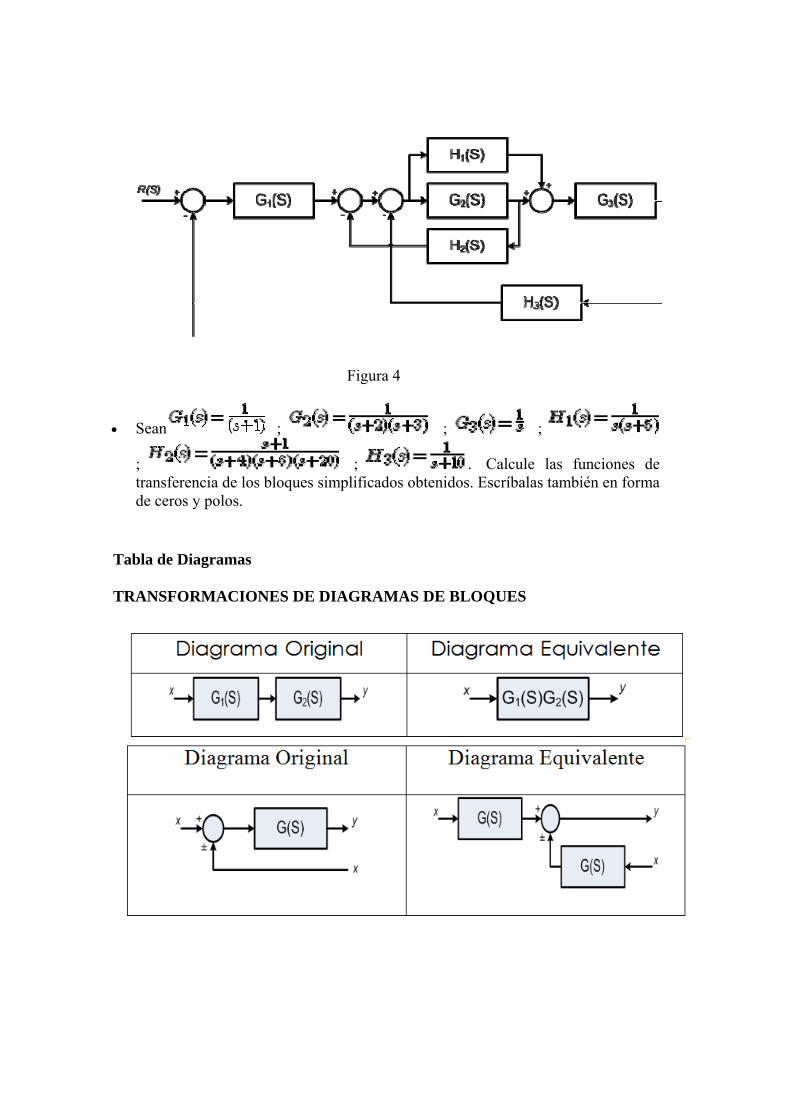
Figura 4
Sean ; ; ;
; ; . Calcule las funciones de transferencia de los bloques simplificados obtenidos. Escríbalas también en forma de ceros y polos.
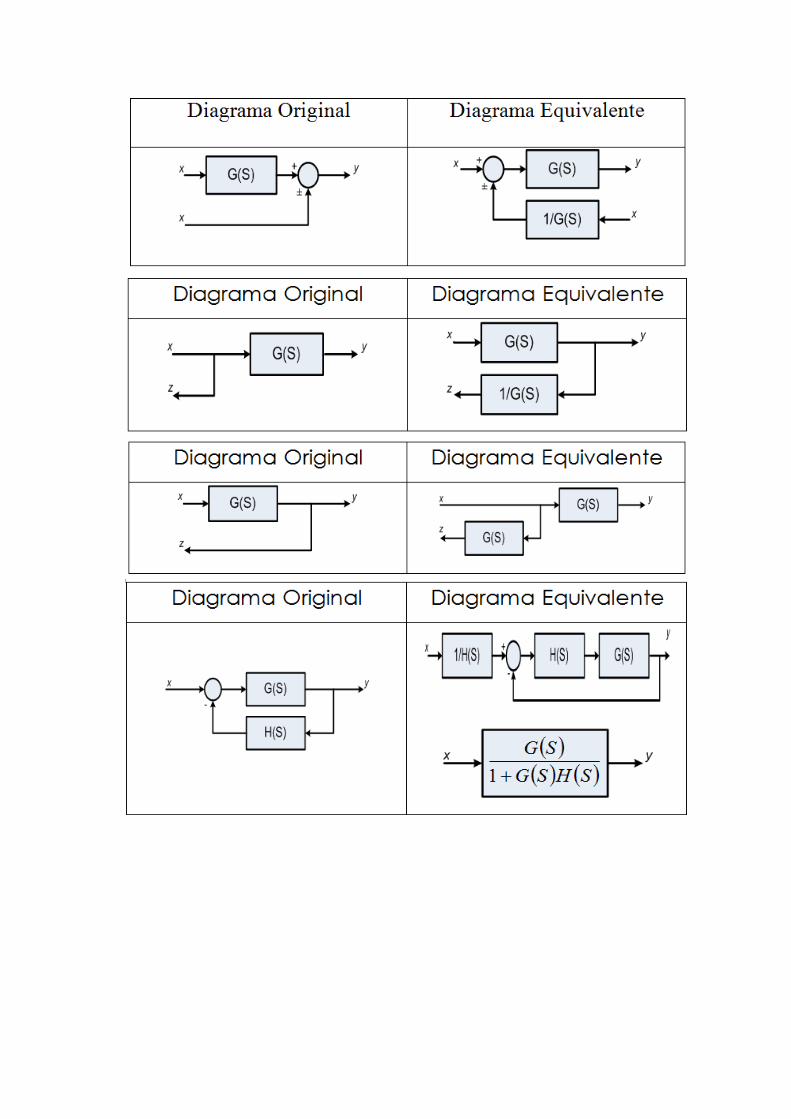
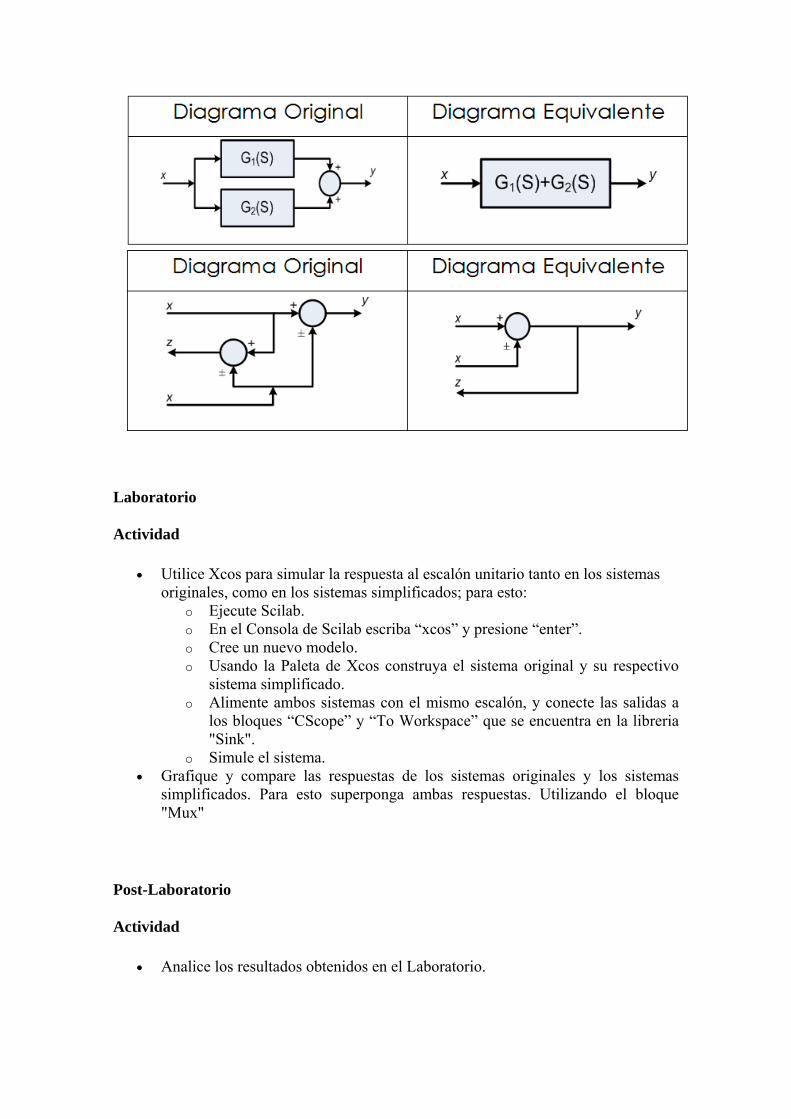
Tabla de Diagramas
TRANSFORMACIONES DE DIAGRAMAS DE BLOQUES
Laboratorio
Actividad
Utilice Xcos para simular la respuesta al escalón unitario tanto en los sistemas originales, como en los sistemas simplificados; para esto:
o Ejecute Scilab. o En el Consola de Scilab escriba “xcos” y presione “enter”. o Cree un nuevo modelo. o Usando la Paleta de Xcos construya el sistema original y su respectivo
sistema simplificado. o Alimente ambos sistemas con el mismo escalón, y conecte las salidas a
los bloques “CScope” y “To Workspace” que se encuentra en la libreria "Sink".
o Simule el sistema. Grafique y compare las respuestas de los sistemas originales y los sistemas
simplificados. Para esto superponga ambas respuestas. Utilizando el bloque "Mux"
Post-Laboratorio
Actividad
Analice los resultados obtenidos en el Laboratorio.
Práctica nº 3
Análisis de la respuesta transitoria de Sistemas Lineales e invariante en
el Tiempo
Objetivos
Analizar la respuesta transitoria de sistemas lineales e invariantes en el tiempo. o Utilizar las herramientas de MatLab para simular la respuesta de sistemas
LIT a estímulos tipo escalón, rampa e impulso. o Clasificar sistemas LIT según su respuesta transitoria. o Graficar e identificar puntos de interés de la respuesta transitoria de
sistemas LIT.
Pre-Laboratorio
Actividad
Investigue que es una función escalón, impulso y rampa, e indique que información nos suministra el conocer la respuesta de un sistema a cada una de estas señales.
Investigue que es respuesta a lazo abierto y respuesta a lazo cerrado y como se obtiene.
Indique que herramientas proporciona Scilab para el análisis de la respuesta transitoria de sistemas LIT. (Vea la librería CACSD "Computer Aided Control Systems Design" en la ayuda de Scilab).
Calcule la función de transferencia en el dominio de Laplace de la siguiente ecuación diferencial.
Laboratorio
Actividad
Considere el sistema mostrado en la figura 1.

Figura 1
o Para K=1, obtenga la respuesta al escalón unitario a lazo abierto de la planta sin el bloque de control. Indique lo ocurrido.
o Cierre el lazo y verifique la respuesta del sistema al escalón unitario. Compare con el punto anterior.
o Obtenga la respuesta al escalón unitario a lazo cerrado incluyendo el bloque de control. Indique en que cambio la respuesta.
o Grafique en una misma ventana la respuesta al escalón unitario del sistema para K=1, 2 y 4. Comente lo ocurrido. ¿Cuál respuesta es mejor? Justifique su respuesta.
Considere un sistema descrito por la siguiente función de transferencia:
. o Grafique la respuesta al escalón del sistema a lazo cerrado para K=1, 5,
10 y 12,5. o Indique lo ocurrido y concluya. o Grafique la respuesta al impulso del sistema a lazo cerrado para K=1.
Indique el significado del grafico obtenido.
o Para K=1, multiplique la función de transferencia a lazo cerrado por y obtenga la respuesta al escalón. ¿Qué gráfico se ha obtenido?
Pregunta: ¿Por qué modificar la ganancia del sistema modifica su comportamiento?
Sea un sistema descrito por la siguiente ecuación:
donde x(t) es la entrada del sistema e y(t) la salida del sistema.
o Obtenga la respuesta al escalón unitario a lazo cerrado del sistema, haciendo uso de la función de transferencia obtenida en el pre-laboratorio.
o Clasifique el sistema en base a su respuesta al escalón unitario.
o Considere los siguientes controladores: ,
. Obtenga la respuesta al escalón unitario a lazo cerrado del sistema, incluyendo cada uno de los controladores.

Explique cuáles son los efectos de incluir los controladores.
Post-Laboratorio
Actividad
Analice los resultados obtenidos haciendo referencia en cada caso y según corresponda a los elementos que caracterizan la respuesta transitoria de los sistemas, tales como: tiempo de establecimiento, máximo pico, tiempo pico, tiempo de retardo, etc.
Práctica nº 4
Análisis del Lugar Geométrico de las Raíces de Sistemas lineales e Invariantes
en el Tiempo
Objetivos
Analizar la estabilidad de sistemas lineales e invariantes en el tiempo mediante el análisis de su lugar geométrico de las raíces.
o Obtener el lugar geométrico de las raíces utilizando Scilab. o Analizar la estabilidad de un sistema haciendo uso de su lugar
geométrico de las raíces.
Pre-Laboratorio
Actividad
Defina que es el lugar geométrico de las raíces, e indique el significado del mismo.
Investigue el procedimiento para trazar el lugar geométrico de las raíces de un sistema.
Investigue que función de Scilab representa el lugar geométrico de las raíces. Trace el lugar geométrico de las raíces de los siguientes sistemas:
; ;
Laboratorio
Actividad
Considere un sistema definido por la siguiente función de
transferencia: o Obtenga el lugar geométrico de las raíces del sistema considerado para
K=1. o Explique qué significa el gráfico obtenido.
o Indique gráficamente el rango de K para que el sistema permanezca estable.
Modifique el sistema de la siguiente manera: o Grafique el lugar de las raíces del nuevo sistema. o Indique el rango de K para que el sistema permanezca estable. o Grafique la respuesta al escalón del sistema a lazo cerrado para K=1, 5,
10 y 12,5. o Indique lo ocurrido y concluya. ¿Cuál respuesta es mejor? Justifique su
respuesta.
Considere un sistema descrito por la siguiente función de transferencia:
o Obtenga el lugar geométrico de las raíces del sistema. o ¿Es posible llevar el sistema a estabilidad crítica? Indique cómo.
Post-Laboratorio
Actividad
Analice los resultados obtenidos haciendo referencia en cada caso y según corresponda a los elementos que caracterizan la respuesta transitoria de los sistemas, tales como: tiempo de establecimiento, máximo pico, tiempo pico, tiempo de retardo, etc.

Práctica nº 5
Análisis de la respuesta frecuencial de Sistemas Lineales e Invariantes en el
Tiempo
Objetivos
Analizar la estabilidad de sistemas lineales e invariantes en el tiempo mediante el análisis de su respuesta en frecuencia.
o Obtener diagramas de Bode y Nyquist de sistemas LIT utilizando las herramientas de Scilab.
o Analizar la estabilidad de sistemas LIT en función de su respuesta en frecuencia.
Pre-Laboratorio
Actividad
Defina diagrama de magnitud y fase de Bode. Indique el procedimiento para obtenerlo.
Defina diagrama de Nyquist. Indique cómo se determina la estabilidad de unsistema en base a este.
Grafique los diagramas de magnitud y fase de los siguientes
sistemas: ;
. Estudie los siguientes comandos de Scilab: evans, nyquist, bode, gainplot,
phaseplot, roots y damp.
Laboratorio
Actividad
Considere un sistema definido por la siguiente función de transferencia a lazo
abierto: o Grafique el diagrama de magnitud y fase para K=1.

o Explique brevemente el significado de este gráfico. o Determine en base a la información del margen de magnitud y el margen
de fase si el sistema es estable. o Calcule las raíces del sistema a lazo cerrado. ¿Qué información nos
suministran? o Grafique el diagrama de magnitud y fase para K=5. Indique lo ocurrido.
Sea un sistema definido por la siguiente función de transferencia:
o Grafique el diagrama de magnitud y fase para K=1. o ¿Qué significan los márgenes de magnitud y fase obtenidos? o Calcule las raíces del sistema a lazo cerrado. ¿Qué nos indican estas?
Para los sistemas considerados anteriormente: o Obtenga el diagrama de Nyquist. o Usando el criterio de Nyquist indique si los sistemas son estables.
Compare los resultados obtenidos con el estudio de estabilidad realizado anteriormente.
o En caso de que un sistema resultase inestable, indique que cambios ocasionarían que el sistema se haga estable.
Post-Laboratorio
Actividad
Analice los resultados obtenidos haciendo referencia en cada caso y según corresponda a los elementos que caracterizan la respuesta frecuencial de los sistemas. Hable de los criterios de estabilidad según el método usado.
Práctica nº 6
Sintonización de Controladores utilizando el criterio de Ziegler-Nichols
Objetivos
Diseñar compensadores utilizando el método empírico de Ziegler-Nichols. o Aplicar los métodos empíricos diseñados por Ziegler y Nichols para el
diseño de compensadores en sistemas sobre-amortiguados y sistemas sub-amortiguados.
o Simular sistemas utilizando la herramienta Xcos.
Pre-Laboratorio
Actividad
Para las plantas, cuyas funciones de transferencia a lazo abierto se muestran a
continuación:
; ; . o Verifique la respuesta al escalón unitario a lazo cerrado de cada sistema. o Determine en cada que se puede mejor la respuesta temporal del sistema.
Justifique su respuesta. o Diseñe el controlador PI o PID que cumpla con las mejoras propuestas
por usted en cada caso.
Laboratorio
Actividad
Realice la simulación de cada uno de los sistemas con sus respectivos controladores utilizando Xcos. Para esto se sugiere que utilice el siguiente esquema para su simulación:
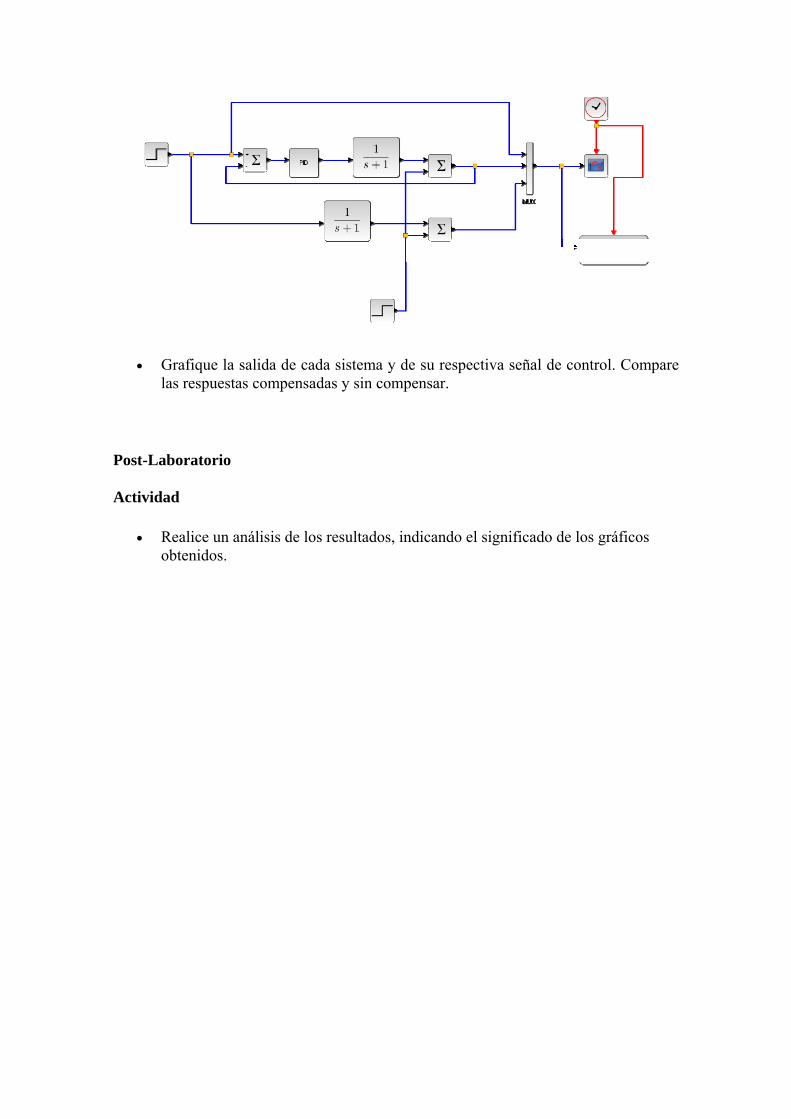
Grafique la salida de cada sistema y de su respectiva señal de control. Compare las respuestas compensadas y sin compensar.
Post-Laboratorio
Actividad
Realice un análisis de los resultados, indicando el significado de los gráficos obtenidos.

Créditos
Asesoría Pedagógica-Ensamblaje de Recursos
Miguel Rodríguez -Asdrubal Aguilera - Henrry Sierra
Diseño Instruccional Web Diseño Gráfico
Miguel Rodríguez
Revisión y Estilo
Miguel Rodríguez
Programación Miguel Rodríguez
Referencia Bibliográfica
GOMIS, Pedro. Sistemas de Regulación y Control. Guía de la Unidad Curricular. Núcleo Universitario del Litoral. Valle de Camurí Grande.
OGATA, Katsuhiko. Ingeniería de Control Moderna. Editorial Prentice Hall Internacional.
OGATA, Katsuhiko. Problemas de Ingeniería de Control utilizando MATLAB Ò. Editorial Prentice-Hall, 1999.
Manuales de los Módulos de Control de velocidad , presión y temperatura. Electrónica Venetta.
o Temperatura o Presión o Velocidad y Posición
Obra colocada bajo licencia GNU Free Documentation License


















