ESTRUC-U-6

of 12
-
Upload
cristhian-gonzalez -
Category
Documents
-
view
391 -
download
9
description
CLASES
Transcript of ESTRUC-U-6
MTODOS DE CLCULOS PARA ESTRUCTURAS ESTTICAMENTE INDETERMINADAS.6.1. Cadena abierta.6.2. Solucin de la cadena abierta.6.3. Segunda forma de solucin de cadena abierta.6.4. Vigas continas mtodos de fuerzas o flexibilidades.6.5. Ecuacin general de los tres momentos.
MTODOS DE CLCULOS PARA ESTRUCTURAS ESTTICAMENTE INDETERMINADAS.INTRODUCCIN.Las estructuras estticamente indeterminadas pueden estudiarse, utilizando distintas teoras de deformaciones elsticas. Cualquier estructura estticamente indeterminada puede convertirse en una estticamente determinada y estable, al suprimir las ligaduras adicionales llamadas acciones sobrantes o hiperestticas, o simplemente hiperestticas, esto es, aquellas fuerzas que exceden del mnimo necesario para que la estructura este en equilibrio esttico.Las estructuras indeterminadas tienen ms reacciones en los apoyos o miembros, o ambas cosas, que los requeridos por la estabilidad esttica, las ecuaciones de equilibrio por si solas no son suficientes para la determinacin de las reacciones y las fuerzas internas de esas estructuras y deben complementarsepor medio derelacionesbasadasenlaconfiguracin geomtrica de la deformacin de las estructuras. Una estructura esinternamente hiperestticasi las ecuaciones de la esttica no son suficientes para determinar los esfuerzos internos de la misma. Una estructura esexternamente hiperestticasi las ecuaciones de la esttica no son suficientes para determinar fuerzas de reaccin de la estructura al suelo o a otra estructura. Una estructura escompletamente hiperestticasi es internamente y externamente hiperesttica.MTODOS DE CLCULO PARA ESTRUCTURAS HIPERESTTICAS Mtodo matricial de la rigidez Mtodo de Cross Teoremas de Castigliano Teoremas de Mohr Teorema de los tres momentos Principio de los trabajos virtuales
Se dice que una estructura estticamente indeterminada cuando el nmero de incgnitas (NI) es mayor que el nmero de ecuaciones de equilibrio (NEE).El grado de indeterminacin (GI) ser el nmero de incgnitas menos el nmero de ecuaciones de equilibrio. GI = NI - NEE
TENEMOS: FM= 0GI= 6-3NEE= FY= 0 GI= 3 EM=0NI= 6 Es una estructura determinada de grado 3
NEE= 3GI= 5- 3NI= 5 GI= 2 Estructura indeterminada de grado 2 En la viga hiperesttica representada en la figura existen cuatro reacciones para determinar las fuerzas que la viga transmite a sus tres apoyos, tres componentes verticalesVA,VB,VCy una componente horizontalHA(Frepresenta aqu la fuerza exterior).
Tenemos 2 metodos grandes para el calculo de estructuras indeterminadas:1.- metodo de las fuerzas o metodos de las flexibilidades.2.- metodo de las rigidez.En el primer metodo las magnitudes son las fuerzas, reacciones o momentos.En el segundo metodo de las rigidez, las incognitad seran los desplazamientos y pueden ser giros o desplazamientos propiamentes dichos.A.- para el calculo de vigas se usa el metodo de flexibilidades.B.- para el calculo de porticos se usa el metodo de las rigidez.
GRADOS DE LIBERTAD:Los grados de libertad corresponden a las posibles formas de moverse que tiene una estructura, con ellos se puede describir la figura deformada de una estructura. Estos se miden en los puntos de unin de elementos (nudos) o en los apoyos. En apoyos sabemos determinar cundo un grado de libertad es libre o restringido, en nudos tambin podemos identificar los grados de libertad libres.
MTODO DE FLEXIBILIDADElMtodo de flexibilidades elclsicomtodo consistente en deformacin para calcular fuerzas en miembros y desplazamientos en sistemas estructurales. Su versin moderna formulada en trminos de la matriz de flexibilidad de los miembros tambin tiene el nombre deMtodo de Matriz de Fuerzadebido al uso de las fuerzas en los miembros como las primariamente conocidas.MTODO DE LOS DESPLAZAMIENTOS O DE LA RIGIDEZElmtodo matricial de la rigidezes un mtodo de clculo aplicable aestructuras hiperestticasde barras que se comportan de formaelsticaylineal.En este mtodo se trabaja con los tres tipos de ecuaciones mencionados aplicadas a los nudos de la estructura dejando como incgnitas los desplazamientos de los grados de libertad libres.Notamos que es una forma completamente distinta de trabajar, pero que analizando ms detenidamente es simplemente el mtodo de los nudos.6.1 CADENA ABIERTA Se conoce como cadena abierta a una seccin de nudo donde cada nudo tiene una magnitud diferente que lo independiza de los otros nudos.Las magnitudes (A) se llama caracterstica entre nudos tenemos un elemento que los une (Z) se llama constante de reciprocidad por efecto de las acciones externas tenemos que sobre cada uno acta un desequilibrante (U) magnitud que se llama desequilibrante inicial. Para que el nudo este en equilibrio hay que calcular X1, X2, X3, X4 XN
La constante inicial (A) y la contante de reciprocidad (Z) depende nicamente de las propiedades geomtricas de la estructura (longitud, momento de inercia, momento de elasticidad).El desequilibrante inicial (U) y las tangentes (X) depende de las propiedades geomtricas, depende de las cargas externas y momentos, una cadena abierta se utiliza en la ecuacin de los tres momentos.
6.2 SOLUCIN DE LA CADENA ABIERTA
U= Desequilibrante inicialX= IncgnitaS= Caracterstica normal de nudo
6.3 SEGUNDA FORMA DE SOLUCION DE CADENA ABIERTACon la utilizacin de la Teora de la Cadena Abierta y sus tres fases principales de trabajo. Transformacin de caractersticas inciales en normales, etapa preparatoria y etapa complementaria, escribimos las expresiones siguientes considerando la primera ecuacin matricial del sistema. A1X1 + Z1X2 +U1 = 0 pero sabemos que: S1 = A1 0 y: 0 U1S =U1 Que son la matriz caracterstica normal del primer piso y el vector desequilibrante normal del mismo piso, para tener as:S1X1 + Z1X2 +U1S = 0, o primero ecuacin de la matriz reducida y a la que Pre multiplicamos por S1-1 o inversa de S1 para tener:Si tomamos la segunda ecuacin matricial del sistema:
6.4 VIGAS CONTINAS MTODOS DE FUERZAS O FLEXIBILIDADES.
El Mtodo de flexibilidad es el clsico mtodo consistente en deformacin para calcular fuerzas en miembros y desplazamientos en sistemas estructurales. Su versin moderna formulada en trminos de la matriz de flexibilidad de los miembros tambin tiene el nombre de Mtodo de Matriz de Fuerza debido al uso de las fuerzas en los miembros como las primariamente conocidas.
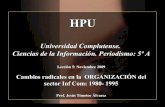
En esta imagen representa una viga continua de 4 claros soportando cargas vivas distribuidas. En la cual se inducen liberaciones en los apoyos A,B,C,D,E, ocasionando que la viga se cuelgue y asumamos la forma mostrada por la curva de trazo continuo.
Las lneas tangenciales al perfil deformado dan los cambios de pendiente en los apoyos. As
es el cambio de pendiente de AB, es el cambio de pendiente de BA, y asi sucesivamente.
Para eliminar estos cambios angulares se aplican momentos en los extremos de los claros. Estos, mostrados y denotados como ,,, etc., son aplicados en una direccin que cerrara las discontinuidades y restaurara la viga a su alineamiento original.Se toma el primer tramo como elemento de referencia de las propiedades bsicas, E, I, y L.Debido a que E es constante para todos los tramos. Podemos describir el comportamiento de la viga en flexin por medio de la deformacin de flexibilidad.
Coeficiente de la flexibilidadLoscoeficientesdelaflexibilidadguardanunaestrecharelacinconloscoeficientesdelarigidezlacualsebasaenelmtododelosdesplazamientos.Enel mtododelosdesplazamientos haysiempretantas ecuaciones deequilibrio comodesplazamientos desconocidos yaque acada coordenada de carga le corresponde una coordenada de desplazamiento, sin tener en cuenta la naturaleza de la estructura. Para comparar ambos casos, se plantearn las ecuaciones necesarias segn los procedimientos descritos anteriormente. Es importante destacar que uno de los procedimientos representan el inversodelotroyviceversa,conloquepodemosafirmarqueexisteunarelacinconocida entre flexibilidad y rigidez. Para comparar las ecuaciones resultantes enambosmtodos, seignorar ladeformacin axialdelas barrasy slose consideraremos una incgnita por nudo, para obtener sistemas de ecuaciones posibles para poder compararlos .Para el mtodo de flexibilidad, la suma de desplazamientos en cada apoyo los cuales sufrieron alteracin, debe ser nula.
6.5 ECUACION DE LOS TRES MOMENTOSEsta ecuacin relaciona los momentos internos de una viga continua en tres puntos de soporte con las cargas que actan entre los soportes. Por aplicacin sucesiva de esta ecuacin a segmentos de la viga, se obtiene un conjunto de ecuaciones que pueden resolverse simultneamente para los momentos internos desconocidos en los soportes.La ecuacin de los tres momentos fue desarrollada por el ingeniero francs Clapeyron en 1957. Esta ecuacin relaciona los momentos internos de una viga continua en tres puntos de soporte con las cargas que actan entre los soportes. Por aplicacin sucesiva de esta ecuacin a segmentos de la viga, se obtiene un conjunto de ecuaciones que pueden resolverse simultneamente para los momentos internos desconocidos en los soportes.Una forma general de la ecuacin de los tres momentos puede obtenerse al considerar un segmento de una viga continua, figura 9-19 a, que pasa sobre los soportes izquierdo, central y derecho ,L,C y R. Las cargas entre los soportes son arbitrarias y a los momentos internos desconocidos en los soportes se les llamara,y. Adems, la parte izquierda de la viga tiene propiedades geomtricasy; la parte derecha tiene propiedades y. Se supone que los soportes no sufren asentamientos. Queremos determinar los momentos internos en L,C y R, que actan e las direcciones definidas como positivas sobre la viga en la figura 9-19 a. La derivacin se basara en el mtodo de la viga conjugada.Como la viga real es continua sobre los soportes, la viga conjugada tiene articulaciones en L,C y R. Mediante el principio de la superposicin, los diagramas M/EI para las cargas aplicadas y para cada uno de los momentos internos se muestran, para mayor claridad, separados en las figuras 9-19 b y 9-19 c. En particular,/EI y/EI representan el rea total bajo sus respectivos diagramas M/EI, y,localizan sus centroides. Como la pendiente de la viga real es continua sobre el soporte central, se requiere que las fuerzas cortantes=-() para la viga conjugada. Sumando momentos respecto al puntopara los segmentos izquierdos, tenemos:
Sumamos ahora momentos respecto al punto R' para el segmento derecho, y obtenemos
Al igualar=-y simplificar, se obtiene
Las sumatorias se han agregado a los trminos del miembro derecho de la ecuacin para que los diagramas M/EI para cada tipo de carga aplicada puedan tratarse por separado. En la prctica, los tipos ms comunes de cargas so las concentradas y las distribuidas, como se muestra en la figura 9-20.si las areas y distancias centroidales para sus diagramas M/EI se calculan y sustituyen en la ecuacin anterior, tenemos. EC(9-4)
DONDE,,=Momentos de inercia y longitudes de claros izquierdo y derecha sobre la viga; se supone que actan e el sentido positivo, como se muestra en la figura 9-19(a).,,,, = cargas concentradas y cargas uniformes distribuidas izquierda y derecha sobre la viga; se supone que actan en el sentido positivo, como se muestra en la figura 9-19(a).,= fraccin de la longitud del claro donde acta la carga concentrada, desde el soporte izquierdo o derecho, figura9-20.Como caso espacial, si el momento de inercia es constante para el claro entero, esto es,=, tenemos. EC(9-5)
La aplicacin de las ecuaciones (9-3) a la (9-5) es bastante directa, aunque debe tenerse cuidado de respetar la conveccin de signo positivo para los terminos de momento y carga. Adems, debe usarse un conjunto de unidades que sea consistente.