
Desarrollo de un sistema bikefit de bajo costo mediante un ...
33
Desarrollo de un sistema bikefit de bajo costo mediante un análisis biomecánico Proyecto de grado Karen Paola Sánchez Melo Andrés Leonardo Gonzáles Mancera Profesor asesor Universidad de los Andes Facultad de ingeniería Departamento de ingeniería mecánica Bogotá D.C, Colombia
Transcript of Desarrollo de un sistema bikefit de bajo costo mediante un ...

Desarrollo de un sistema bikefit de bajo costo mediante un análisis biomecánico
Proyecto de grado
Karen Paola Sánchez Melo
Andrés Leonardo Gonzáles Mancera
Profesor asesor
Universidad de los Andes
Facultad de ingeniería
Departamento de ingeniería mecánica
Bogotá D.C, Colombia

2
Tabla de contenido
RESUMEN ............................................................................................................................................ 4
Resumen .......................................................................................................................................... 4
Project´s outline .............................................................................................................................. 4
CAPÍTULO I, Introducción .................................................................................................................... 5
CAPÍTULO II, Biomecánica del ciclismo ............................................................................................... 6
¿Qué es la biomecánica? ................................................................................................................. 6
Análisis dinámico simple de una bicicleta ....................................................................................... 6
Bikefit y anatomía ........................................................................................................................... 8
Ángulos del tren inferior ............................................................................................................... 11
Ángulos del tren superior .............................................................................................................. 12
Sistemas de bikefitting empleados hoy en día .............................................................................. 13
Problemática actual de bikefitting ................................................................................................ 14
CAPÍTULO III, Herramientas tecnológicas ......................................................................................... 16
Lenguaje de programación ............................................................................................................ 16
Código 1 – Talla de la bicicleta ...................................................................................................... 16
Código 2 – Sistema de seguimiento .............................................................................................. 20
Código 3 – Cálculo de ángulos ....................................................................................................... 24
CAPÍTULO IV, Estudio de caso ........................................................................................................... 27
Diseño de la prueba ...................................................................................................................... 27
Resultados ..................................................................................................................................... 28
Conclusiones ................................................................................................................................. 32
Referencias ........................................................................................................................................ 33

3
Ilustraciones
Ilustración 1 Diagrama de fuerzas de una bicicleta ............................................................................ 6
Ilustración 2 Principales músculos involucrados en el ciclismo [4] ..................................................... 9
Ilustración 3 a. Modelo espacial del plano sagital utilizado para evaluar el movimiento en bicicleta
de las extremidades inferiores. b Junta y ángulos de segmento comúnmente utilizados para
describir la cinemática durante el movimiento del ciclista [5] ......................................................... 11
Ilustración 4 Relación entrepierna - standover [8] ........................................................................... 17
Ilustración 5 Ventana 1 del código 1 ................................................................................................. 18
Ilustración 6 Ventana 2 del código 1 ................................................................................................. 19
Ilustración 7 Ventana 3, código 1 ...................................................................................................... 20
Ilustración 8 Preguntas de decisión .................................................................................................. 20
Ilustración 9 Escala de colores BGR [9] ............................................................................................. 21
Ilustración 10 Test de identificación del color .................................................................................. 21
Ilustración 11 Corrección de criterios ............................................................................................... 22
Ilustración 12 Prueba de funcionamiento ......................................................................................... 23
Ilustración 13 Referencia de eventos ................................................................................................ 24
Ilustración 14 Ángulos conocidos ...................................................................................................... 25
Ilustración 15 Resultado del cálculo de ángulos mediante el código 3 ............................................ 26
Ilustración 16 Porcentaje de error de los ángulos calculados ........................................................... 26
Ilustración 17 Ejemplo visual del montaje ........................................................................................ 28
Ilustración 18 Usuario de prueba, Camila Sánchez ........................................................................... 28
Ilustración 19 Resultados presentados por el código 1 .................................................................... 29
Ilustración 20 Identificación de colores ............................................................................................ 30
Ilustración 21 Ángulos de pedaleo A. Cuando se presenta oscilaciones atípicas B. Cuando se
presentan oscilaciones típicas ........................................................................................................... 32
Gráficas
Gráfica 1 Recorrido realizado por el cuadro azul, prueba de funcionamiento ................................. 23
Gráfica 2 Movimiento del tobillo en el eje Y vs Tiempo ................................................................... 30
Gráfica 3 Movimiento del tobillo en el eje X vs Tiempo ................................................................... 31
Tablas
Tabla 1 Ángulos de los tobillos .......................................................................................................... 12
Tabla 2 Ángulos de las rodillas .......................................................................................................... 12

4
Tabla 3 Ángulos de la cadera ............................................................................................................. 13
Tabla 4 Porcentajes de error en cada coordenada ........................................................................... 24
Tabla 5 Datos bicicleta del usuario .................................................................................................... 29
RESUMEN
Resumen Este proyecto está enfocado en el desarrollo de una aplicación que permita obtener datos
biomecánicos de un ciclista, los cuales serán empleados para determinar la configuración
adecuada de su bicicleta. Para ello, se empleará OpenCV una librería de visión artificial que
permite generar análisis de video y crear eventos en imágenes, útiles para la obtención del
movimiento de articulaciones y sus respectivos ángulos dinámicos. El proyecto probará la
utilidad de esta herramienta tecnológica mediante un estudio de caso, donde se realiza un
análisis de las oscilaciones del tobillo de una ciclista quien presenta un cambio de posición
del pie en el pedaleo a medida que incrementa su velocidad.
Project´s outline This project is focused on the development of an application to obtain biomechanical data
from a cyclist, which will be used to determine the proper configuration of his bicycle. For
this, OpenCV will be used, an artificial vision library that allows to generate video analysis
and create image events, useful for obtaining the movement of joints and their respective
dynamic angles. The project will test the usefulness of this technological tool by means of
a case study, where an analysis of the oscillations of the ankle of a cyclist who presents a
change of position of the foot in the pedaling as she increases her speed.

5
CAPÍTULO I Introducción
El ciclismo ha crecido con gran rapidez la última década, debido a factores deportivos,
ecológicos y de transporte. Por lo anterior, no es de sorprender que en el año 2019 en
Colombia aumentó la importación de bicicletas un 56%. [1]
Si acotamos el foco al ciclismo deportivo, específicamente a la modalidad de ruta, se
observa un incremento en su práctica. De hecho, en una encuesta de la Secretaria de
Movilidad se estimó que cada día se hacen más de 1,2 millones de viajes mediante bicicletas
en Bogotá y municipios aledaños. [1]
El auge del deporte amateur y profesional del ciclismo de ruta también ha traído diversos
inconvenientes y más si se está iniciando en la cultura ciclística. Uno de los más importantes
es el desconocimiento de la configuración de las bicicletas, esta problemática se ve desde
la adquisición hasta el ajuste de la misma.
Hoy en día existe una solución a esta cuestión: el bikefit. El bikefit es un proceso que permite
adaptar la bicicleta al ciclista mediante un análisis biomecánico, generando así una mayor
eficiencia y evitando lesiones a largo y corto plazo. Sin embargo, el costo de este estudio es
elevado; en Bogotá su precio varía entre 500.000 y 800.000 COP.
Por lo anterior, surge el interés de desarrollar un sistema bikefit de bajo costo. Una
herramienta que permitirá a sus usuarios realizar un análisis biomecánico en sus hogares.
Este tipo de análisis es sumamente importante, puesto que no todos los cuerpos son iguales
y poseen una mecánica diferente. La biomecánica en este caso particular permite estudiar
la interacción de nuestro cuerpo con la bicicleta y hallar así la mejor opción para el usuario
según sus prioridades (ergonomía, eficiencia, potencia, entre otras.).
Para lograr el desarrollo de esta idea, se usará Python y librerías libres para programar un
sistema de seguimiento de imagen, un detector de ángulos y una interfaz gráfica. Todo esto
con el objetivo de obtener los datos de movimiento del ciclista y hallar previamente el
marco ideal de su bicicleta.
Se escoge este lenguaje principalmente por su versatilidad, librerías y documentación.
Además, Python al ser de código libre permite ser descargado sin restricciones, una
condición importante si se quiere reducir costos para los usuarios finales.

6
CAPÍTULO II Biomecánica del ciclismo
¿Qué es la biomecánica? La biomecánica es una ciencia que estudia y analiza los movimientos del cuerpo humano.
Cuando se habla de biomecánica deportiva se refiere a la caracterización y análisis de la
técnica en pro de su mejora en base a conocimientos científicos (cinemática, dinamometría,
electromiografía y antropometría) para así mejorar el desempeño y prevenir lesiones. [2]
Análisis dinámico simple de una bicicleta En este análisis dinámico simple se realizará un diagrama de fuerzas para hallar los
momentos y fuerzas que interactúan en una bicicleta.
Ilustración 1 Diagrama de fuerzas de una bicicleta
Este diagrama es basado en los fundamentos de dinámica vehicular de Thomas Gillespie
[3]. En donde se plantean las fuerzas y distancias de la ilustración 1.
Variables

7
𝛼𝑥 Aceleración en x (m/sˆ2)
𝜌 Densidad del aire (kg/mˆ3)
θ Inclinación (°)
A Área frontal proyectada (mˆ2)
b Distancia entre 𝑊𝑟 y el centro de gravedad (m)
c Distancia entre 𝑊𝑓 y el centro de gravedad (m)
𝐶𝑑 Coeficiente aerodinámico
𝐷𝑎 Fuerza de fricción del aire (N)
𝐹𝑥 Fuerza de tracción (N)
g Constante aceleración de gravedad (m/sˆ2)
h Altura entre el suelo y el centro de gravedad (m)
𝐻𝑎 Altura entre el Suelo y 𝐷𝑎 (m)
L Distancia entre 𝑊𝑟 y 𝑊𝑓 (m)
m Masa bicicleta + ciclista (Kg)
T Fuerza inercial equivalente (N)
v Velocidad relativa ciclista-aire (m/s)
W Peso (N)
𝑊𝑟 Fuerza normal rueda trasera (N)
𝑊𝑓 Fuerza normal rueda delantera (N)
Tanto el peso del ciclista y el de la bicicleta actúan en el centro de gravedad, este es dado
por:
𝑊 = 𝑚 ∗ 𝑔 (1)
Debido a que el ciclista se encuentra en inclinación el peso posee dos componentes
dependientes de θ.
𝑊𝑥 = 𝑊 ∗ sin(𝜃) (2)
𝑊𝑦 = 𝑊 ∗ cos(𝜃) (3)
Las fuerzas normales se encuentran situadas en las ruedas de la bicicleta, las cuales (en
cargas estáticas) se hallan al realizar una suma de momentos respecto los puntos A y B.
El termino T es relacionado con la fuerza inercial equivalente que se calcula:
𝑇 =𝑊
𝑔∗ 𝛼𝑥
(4)
El termino Da es una función de la velocidad del ciclista, el aire y el área frontal proyectada
(ciclista y bicicleta), que representa la fuerza de fricción:
𝐷𝑎 =1
2∗ 𝐶𝑑 ∗ 𝐴 ∗ 𝜌 ∗ 𝑣
2 (5)
Ahora se realizará una suma de momentos para hallar las fuerzas normales:

8
∑𝑀𝐴 = 0 (6)
𝑊𝑟 ∗ 𝐿 +𝑊𝑦 ∗ 𝑐 +𝑊𝑥 ∗ ℎ + 𝐷𝑎 ∗ 𝐻𝑎 + 𝑇 ∗ ℎ = 0 (7)
𝑊𝑟 =𝑊𝑦 ∗ 𝑐 +𝑊𝑥 ∗ ℎ + 𝐷𝑎 ∗ 𝐻𝑎 + 𝑇 ∗ ℎ
𝐿
(8)
∑𝑀𝐵 = 0 (9)
𝑊𝑓 ∗ 𝐿 −𝑊𝑦 ∗ 𝑏 +𝑊𝑥 ∗ ℎ + 𝐷𝑎 ∗ 𝐻𝑎 + 𝑇 ∗ ℎ = 0 (10)
𝑊𝑓 =𝑊𝑥 ∗ ℎ + 𝐷𝑎 ∗ 𝐻𝑎 + 𝑇 ∗ ℎ −𝑊𝑦 ∗ 𝑏
𝐿
(11)
En caso de que el mecanismo se encuentre en estado estático los valores de las normales
serían:
𝑊𝑓 = 𝑊 ∗𝑏
𝐿
(12)
𝑊𝑟 = 𝑊 ∗𝑐
𝐿 (13)
Ahora para hallar la fuerza de tracción se realiza el siguiente cálculo:
𝐹𝑥 = 𝑚 ∗ 𝛼𝑥 (14)
Bikefit y anatomía El bikefit es una herramienta que nos permite hallar una óptima posición en una bicicleta,
lo cual es fundamental para el desempeño, ergonomía y prevención de lesiones. Sin
embargo, no hay una posición correcta, ni un estándar único para hallar este bikefit.
Es por ello que el bikefit está relacionado estrechamente con la anatomía del cuerpo,
debido a que en la locomoción en el ciclismo es posible gracias a la coordinación de una
serie de elementos contráctiles (músculos) creando una fuerza, que se transfiere a través
de una serie de palancas (huesos) a través de juntas para crear torque en los pedales.
Se puede dividir el cuerpo para su análisis anatómico en el ciclismo en tres grades partes:
tren inferior, tren superior y puntos de contacto.

9
Ilustración 2 Principales músculos involucrados en el ciclismo [4]
Tren inferior
Cadera
La cadera hace parte de la pelvis y es la que da inicio a la cadena de torsión a la hora de
pedalear. La pelvis posee una cavidad llamada acetábulo la cual sostiene la cabeza del fémur
para así formar la articulación de la cadera.
Esta articulación permite y guía movimientos de flexión, extensión y rotación cuando se
anda en bicicleta. Las irregularidades del movimiento limitan la capacidad de a cadera (y
por lo tanto la pierna) lo cual puede afectar directamente el pedaleo.
Pelvis
La pelvis se compone de dos regiones óseas: el isquion y el ilion; estos huesos se articulan
entre el sacro y la base de la columna vertebral en lo que llamamos articulación sacroilíaca.
El isquion es parte importante del ciclismo debido a que los isquiotibiales se originan allí
además de otros grupos musculares que forman los flexores de cadera como las iliopsoas.
Por lo anterior, están relacionados directamente con el movimiento de las piernas, además
de ha de resaltar que un gran número de lesiones ciclísticas se concentran en la zona de la
pelvis.
Rodilla y pierna superior

10
La rodilla consta de tres huesos: el fémur, la tibia y la rótula. Por una parte, el fémur está
relacionado con la palanca producida a la hora de pedalear. La rótula por su parte es un
punto de apoyo a través del cual la fuerza producida por los cuádriceps y los glúteos es
transferida a la tibia y finalmente al pedal.
Articulación rótulo-femoral
Es la articulación de la cual más frecuentemente se habla en el ciclismo debido a su papel
como el fulcro de transferencia y empuje al pedal. Esta articulación es un punto de unión
de los músculos principales productores de torque (cuádriceps y glúteos). Por lo anterior,
una buena estabilidad de esta unión es clave a la hora del rendimiento ciclístico.
Cuádriceps
Estos se ubican en la parte delantera del muslo y están compuestos por 4 músculos: el vasto
lateral, el vasto medial y el vasto intermedio. Esta serie de músculos están involucrados con
la extensión de la rodilla además se ha de tener en cuenta que estos cruzan la cadera y la
rodilla por lo cual se consideran músculos biarticulares.
Teniendo en cuenta sus excentricidades, se puede denotar el cuádriceps parte importante
en la biomecánica del pedaleo.
Isquiotibiales
Está compuesto por el bíceps femoral, los semimembranosos y las semitendinosas. Este se
encarga de es estabilizar la rodilla durante la parte inferior de la carrera del pedal y dirigir
la pierna a través de la parte trasera del pedal.
Pierna inferior
En el ciclismo esta se encarga de la transmisión de la fuerza de los cuádriceps y glúteos a el
pedal. La pierna inferior consiste en la tibia, peroné, tobillo y pie.
Por un lado, el pie se divide generalmente en tres regiones: trasero, medio y antepié. Un
correcto posicionamiento de ellos, influye en el correcto apoyo sobre el pedal.
Se ha de resaltar que los músculos de la pierna inferior no agregan significativamente fuerza
a comparación de la pierna superior, sin embargo, ayudan a mantener una posición de
mejor transferencia de potencia al pedal de manera efectiva.
Por lo anterior, la parte de la pierna inferior ayuda más a la estabilidad durante el pedaleo
y la transmisión de la fuerza producida por la parte superior.
Tren superior
El tren superior consta de diversos músculos esenciales para el ciclismo. Por una parte,
encontramos en la espalda baja los músculos multífidos y el cuadrado lumbar. Estos
músculos ayudan a estabilizar la columna vertebral bajo cargas laterales y rotacionales.

11
La siguiente capa de músculos son los longísimos, estos músculos son extensores de
múltiples segmentos de la espalda y ayudan a mantener la postura y estabilidad durante el
ejercicio. Mientras tanto la musculatura abdominal ayuda a mantener el tronco estable en
momentos de alta fuerza y para la contracción del diafragma en la respiración, un claro
ejemplo de ello es en condiciones anaeróbicas durante el ejercicio.
Si seguimos subiendo encontramos el trapecio y el dorsal ancho. Estos son estabilizadores
de los brazos y el cuerpo general. Los bíceps por su parte también funcionan como
estabilizadores contrarrestando la producción de torque de las piernas.
Puntos de contacto
Estos son los puntos donde el cuerpo toca la bicicleta, los tres puntos de contacto
anatómicos principales pueden ser las fuentes donde se encuentran con más recurrencia
dolores y lesiones. Estos puntos son: pie-pedal, mano-manubrio, pelvis-silla.
[4]
Ángulos del tren inferior El tren inferior es el encargado de la locomoción de la bicicleta, debido a que la transmisión
de potencia se da por medio de las piernas. Este se puede representar por medio de
elementos rígidos y articulaciones en el plano sagital.
Ilustración 3 a. Modelo espacial del plano sagital utilizado para evaluar el movimiento en bicicleta de las extremidades inferiores. b Junta y ángulos de segmento comúnmente utilizados para describir la cinemática durante el movimiento del
ciclista [5]
La ventana de ajuste de la bicicleta se puede expresar en términos de medición física de
distancias como la altura del sillín, geometría del marco o alcance del manillar. Los
parámetros de interacción pueden ser expresados cómo los ángulos de las articulaciones.
En la ilustración 3, se observan los ángulos de interés en el tren superior.

12
Hoy en día no se puede determinar ángulos ideales, puesto que el desempeño mecánico es
diferente en cada cuerpo. Además, se debe tener en cuenta el objetivo del bikefit para
encontrar el rango de ángulos ideales.
En este caso en particular, se realizará el análisis de ángulos en pro de aumentar eficiencia
de pedaleo.
Tras la consulta de varias fuentes se obtienen las siguientes tablas:
Tabla 1 Ángulos de los tobillos
Tabla 2 Ángulos de las rodillas
El rango de ángulos presentado en las tablas, son los ángulos mínimos y máximos recomendados para cualquier configuración, debido a que en caso de sobrepasarlos puede dar paso a lesiones en estas articulaciones.
Es importante resaltar que la mayoría de autores coinciden en el rango de ángulos, esto se
genera gracias al estudio dinámico y cinemático del ciclismo en donde su fin es encontrar la
posición más óptima y de mayor eficiencia en el pedaleo.
Ángulos del tren superior El tren superior tiene diversos roles en el ciclismo, entre los más importantes la estabilidad,
dirección y aerodinámica. En este trabajo solo nos enfocaremos en la estabilidad
presentada por los ángulos de la cadera durante el pedaleo.
Tal y como se explicó en los ángulos del tren inferior, no se puede predeterminar ángulos
ideales sino un rango de estos. Tras consultar en diversas fuentes, se realiza la siguiente
tabla:
Min Max
Burt 15 30
Bini 30 38
Bikechaser 15 30
Bikefit 27 37
Promedio 21,8 33,8
Tobillo (°)Autor
Min Max
Burt 35 40
Bini 36,5 39,5
Bikechaser 30 40
Millour 30 40
Promedio 32,9 39,9
Autor Rodilla (°)

13
Tabla 3 Ángulos de la cadera
Sistemas de bikefitting empleados hoy en día Actualmente según Phil Burt en su libro “Bike fit” nos menciona 4 métodos de ajuste:
1. Tradicional
Este método se rige mediante el uso del manual CONI, un libro italiano de ciclismo que se
concentra en la posición de montura y el posicionamiento del pie.
Ventajas: Fácil y rápido.
Desventajas: No toma en cuenta biotipos individuales, por lo cual fuerza al cuerpo a
adaptarse a la cicla.
2. Observacional
Se basa en las creencias del corredor respecto a cómo se debería ver y cómo se debería
sentir.
Ventajas: Mejora respecto al tradicional debido a que se observa al individuo a la hora de
realizar el ajuste.
Desventajas: No son datos objetivos, por lo cual la mayoría de los ciclistas terminan
luciendo igual
3. Genérico
Este método se basa en ecuaciones de ajuste (de la CONI y Bioracer) basadas en medidas
de segmentos de cuerpos.
Ventajas: Mejora respecto al observacional debido a que en este caso se reconocen
proporciones, un elemento importante a la hora del bikefit.
Desventajas: Son mediciones estáticas, por lo anterior no se tiene en cuenta la interacción
del corredor con la bicicleta.
4. Ajuste individual
4.1. Estático
Min Max
Burt 55 70
Bini 65,2 68,8
Bikechaser 55 70
Carranco 60,4 80
Promedio 58,9 72,2
Autor Cadera (°)

14
En este método se emplea una plumb bob (una cuerda con un peso al final que permite
encontrar posiciones verticales) y goniometría
Ventajas: Se tienen en cuenta ángulos de las articulaciones, lo cual optimiza el ajuste.
Desventajas: Se posee una naturaleza estática, por lo cual solo se emplea una posición
teórica, la cual muchas veces no es una posición real de un ciclista en movimiento.
4.2. Dinámico
En este método se emplea un video o un análisis de movimiento el cual permite ajusta la
bicicleta al corredor mientras este está montando.
Ventajas: Posee datos objetivos debido a que se tiene en cuenta al ciclista en movimiento
y su biotipo
Desventajas: Posee un alto costo
[4]
Problemática actual de bikefitting Hoy en día se encuentran tres problemáticas respecto al bikefit:
1. Las personas no saben cómo realizar un bikefit adecuado
2. La configuración realizada no se acomoda a las necesidades del usuario
3. Un bikefit a la medida del ciclista posee un alto valor monetario
Es gracias a estos problemas, hoy en día se observa una pérdida de eficiencia y lesiones
deportivas en el ciclismo amateur y profesional. Sin embargo, aquellos que desean una
configuración adecuada se enfrentan a pagar altos costos por un análisis biomecánico.
Para comprender más a fondo esta problemática, se consultarán dos servicios y su precio.
Biomecánica 3D
Precio: 150 € (576.000 COP aproximadamente)
Servicio: Se analizan capacidades físicas (flexibilidad, asimetrías y lesiones), posteriormente
se emplean 8 sensores LED en los ejes de las articulaciones (4 en el lado derecho, 4 en el
izquierdo). De esta manera se determina la posición óptima para el ciclista y se realiza una
medición digital para las cotas de la bicicleta (una únicamente).
[6]
Colombia en bicicleta
Precio: 120.000 COP

15
Servicio: Se da una introducción de cómo realizar un bikefit amateur (observacional-
genérico), para ello es necesario llevar ropa para montar bicicleta y la bicicleta a la cual se
le quiere realizar el fit. Se entregan tablas de medidas para ruta y MTB.
[7]
Teniendo en cuenta estos servicios, se observa el elevado costo del bikefitting. Es por ello
que se corrobora la necesidad de realizar un programa que permita realizar un bikefit de
bajo costo y además que pueda realizarse con regularidad teniendo en cuenta los objetivos
de configuración.

16
CAPÍTULO III Herramientas tecnológicas
Lenguaje de programación Para escoger el lenguaje de programación adecuado primero se debe pensar en las
características del código. Hoy en día existen diversos lenguajes como Python, Matlab, R,
C++, entre otros. Cada uno de estos lenguajes se emplean según sus facilidades, por
ejemplo, R suele emplearse como una herramienta estadística.
En este caso necesitamos que nuestro lenguaje posea librerías de visión artificial, interfaz
gráfica y operaciones básicas. Además, como condición adicional, se necesita que este sea
de software libre para cumplir con el objetivo de que el programa sea de bajo costo.
Ahora bien, teniendo las condiciones planteadas en el párrafo anterior, se llega a la
determinación de emplear Python para desarrollar el código. Esto se debe a que Python es
de software libre y posee diversidad de librerías que pueden ser empleadas en este
proyecto.
Código 1 – Talla de la bicicleta El primer paso del bikefitting es hallar la talla ideal para el usuario, dependiendo de sus
medidas antropométricas. Esto se debe a que gran parte de la configuración de la bicicleta
depende directamente del marco.
Por esta razón, se elige realizar como primer código una aplicación con interfaz que permita
al usuario conocer su talla ideal en cualquier referencia o marca que desee. Para ello,
previamente el ciclista debe brindar cierta información para el cálculo.
Los primeros datos son dos medidas antropométricas: la altura del individuo y de su
entrepierna. Estos son requeridos debido a una relación directa entre estas medidas y la
geometría del marco.
Por un lado, la altura de la entrepierna posee relación directa con el standover del marco,
tal y como se observa en la ilustración 4. Se debe procurar que esta medida de la bicicleta
siempre sea menor a la medida de la entrepierna.

17
Ilustración 4 Relación entrepierna - standover [8]
Por otro lado, la altura total permite saber la proporción del cuerpo. Esta permite definir el
marco con mayor exactitud, gracias a la relación entre el torso y la longitud del tubo superior
del marco.
Una vez se tengan las medidas, es necesario que el usuario posea la geometría de la
bicicleta. En dado caso que no la posea, se hallará la talla en una cicla predeterminada
(SuperSix Evo de Cannondale).
Posteriormente, se hará el cálculo de la talla teniendo en cuenta las medidas previas y la
geometría de la bicicleta. Si se está entre dos tallas, se harán una serie de preguntas para
determinar la talla ideal.
Ahora bien, conociendo las funciones deseadas se prosigue a buscar las librerías a emplear.
En el código solo se usarán 3 librerías de acceso libre que poseen las siguientes funciones:
- Tkinter: interfaz gráfica de usuario para Python
- Pillow: soporte para abrir, manipular y guardar diversos formatos de imagen
- Math: operadores matemáticos
Teniendo en cuenta los requerimientos y funciones a desempeñar, se decide generar 3
ventanas de interacción que tienen la siguiente disposición:

18
Figura 1 Disposición de las ventanas (código 1)
Como se observa en la figura 1, en la primera ventana se obtendrá la información básica.
Esta información se va obtener como Entry y Checkbutton, o sea un recuadro que debe ser
llenado por el usuario y una caja de chequeo. Adicionalmente se emplearán unas
instrucciones para rellenar estas casillas y cajas.
Ilustración 5 Ventana 1 del código1

19
Posteriormente, dependiendo de la respuesta de la caja de chequeo seguirá la ventana 2 (si
la respuesta del botón es negativa) o la ventana 3 (si la respuesta del botón es afirmativa).
La ventana 2 calcula directamente la talla en la bicicleta predeterminada, tal y como se
observa en la ilustración 6.
Ilustración 6 Ventana 2 del código 1
Por otro lado, en la ventana 3 se encontrarán inicialmente unas casillas que deben ser
rellenadas con información básica de la bicicleta (número de tallas, marco y marca).
Dependiendo del número de tallas indicada, se generará un espacio para completar
información del standover según la talla, como se puede observar en la ilustración 7.
20
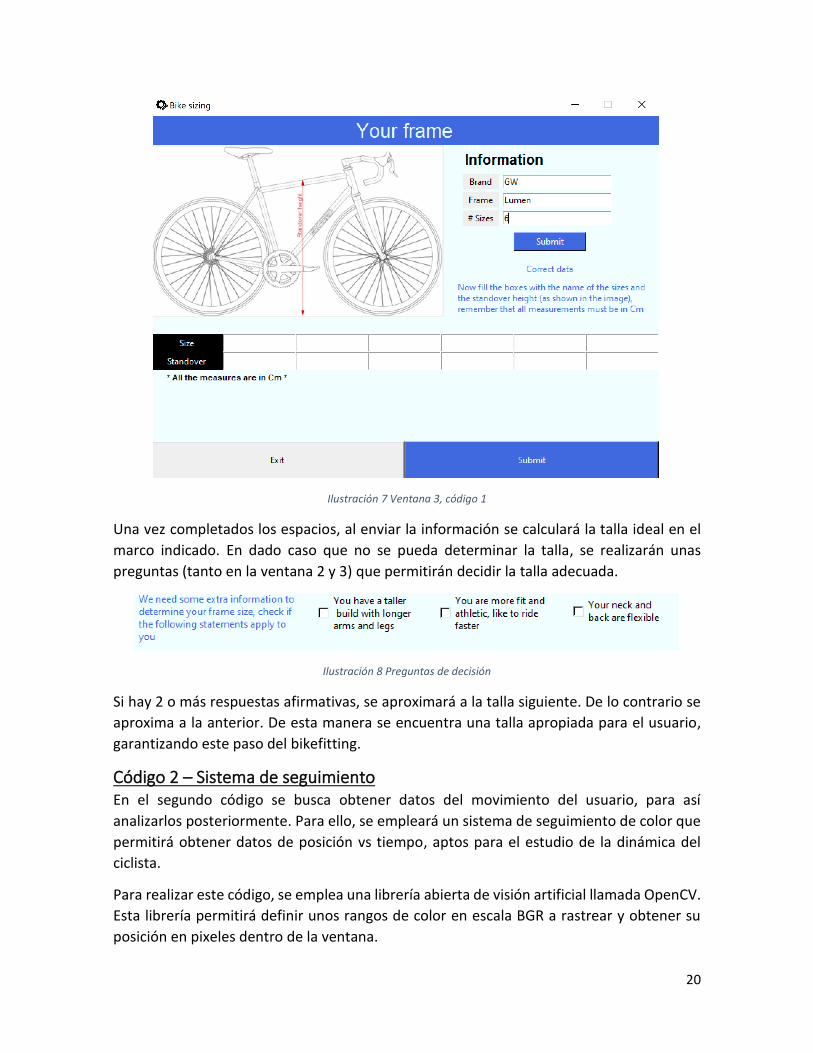
Ilustración 7 Ventana 3, código 1
Una vez completados los espacios, al enviar la información se calculará la talla ideal en el
marco indicado. En dado caso que no se pueda determinar la talla, se realizarán unas
preguntas (tanto en la ventana 2 y 3) que permitirán decidir la talla adecuada.
Ilustración 8 Preguntas de decisión
Si hay 2 o más respuestas afirmativas, se aproximará a la talla siguiente. De lo contrario se
aproxima a la anterior. De esta manera se encuentra una talla apropiada para el usuario,
garantizando este paso del bikefitting.
Código 2 – Sistema de seguimiento En el segundo código se busca obtener datos del movimiento del usuario, para así
analizarlos posteriormente. Para ello, se empleará un sistema de seguimiento de color que
permitirá obtener datos de posición vs tiempo, aptos para el estudio de la dinámica del
ciclista.
Para realizar este código, se emplea una librería abierta de visión artificial llamada OpenCV.
Esta librería permitirá definir unos rangos de color en escala BGR a rastrear y obtener su
posición en pixeles dentro de la ventana.

21
Ilustración 9 Escala de colores BGR [9]
Como se observa en la ilustración 9, se poseen diversos espectros de colores, unos más
amplios que otros. Se requiere que el espectro de color sea amplio, debido a que es más
fácil de identificar; sin embargo, no se busca que esté dividido, puesto que esto representa
tener dos rangos para un mismo color.
Por lo anterior, de descartan colores como el rojo o el violeta. Ahora con los colores
restantes (amarillo, verde, naranja y fucsia) se realiza un test para evidenciar que colores
son identificados con mayor facilidad. Los resultados arrojaron que el azul y el amarillo son
los que poseen esta característica.
Ilustración 10 Test de identificación del color
Ya al tener los colores seleccionados, se busca perfeccionar el código en base a lo observado
en los testeos previos. Se encontraron los siguientes criterios a mejorar:
1. Optimizar el borde de identificación del color

22
2. Disminución de ruido causado por objetos del mismo color
3. Generar una herramienta de seguimiento visible
Para el primer criterio, se investiga respecto a los bordes generados por OpenCV. Tras la
búsqueda se encuentra que el borde más optimo es el del comando convexHull, debido a
que genera un límite convexo ajustado alrededor de los puntos identificados, lo cual es ideal
puesto que las figuras a emplear en el programa poseen geometrías sencillas.
Por otro lado, la disminución de ruido se puede realizar mediante dos métodos. El primero
es evitar usar un fondo que posea objetos del color a rastrear, mientras que el segundo es
producir una restricción de área el cual permita ignorar objetos que posean un área mínima.
Finalmente, el tercer criterio se soluciona hallando el centroide del objeto a rastrear y
anexando las coordenadas de este punto. Esto permite que el usuario observe el
seguimiento en tiempo real y así a su vez poder identificar errores en el programa.
Ilustración 11 Corrección de criterios
Teniendo ya los criterios corregidos el siguiente paso es probar el código y determinar su
funcionalidad. Para la prueba, se diseña un recorrido donde el sistema debe rastrear un
cuadrado. Una vez obtenidos los datos, se comparan las distancias teóricas y
experimentales.

23
Ilustración 12 Prueba de funcionamiento
En la ilustración 12 se observa la prueba de funcionamiento, en el encontramos tres
recuadros, donde los amarillos nos permitirán generar un sistema de referencia mientras
que el azul es cuadro a rastrear.
Tras la grabación y el uso del código se obtienen los siguientes resultados:
Gráfica 1 Recorrido realizado por el cuadro azul, prueba de funcionamiento

24
Tabla 4 Porcentajes de error en cada coordenada
Tal y como se observa en la gráfica 1, el recorrido seguido por visión artificial coincide con
las distancias dispuestas en la prueba. Esto nos permite inferir el correcto funcionamiento
del código, el cual es corroborado por el mínimo porcentaje de error calculado en la tabla
4.
Código 3 – Cálculo de ángulos Este último código tiene como funcionalidad el cálculo de ángulos indicando 3 puntos. Esto
permitirá conocer los ángulos entre las articulaciones de interés y así determinar si la
posición del ciclista es correcta.
Al igual que le código 2 se va a emplear la librería OpenCV, la cual nos permitirá generar
eventos en una imagen. En este caso el evento va a ser una serie de tres clics, donde se
guardarán su posición y por medio de cálculos básicos se hallará el ángulo entre estos
puntos.
Ilustración 13 Referencia de eventos
Para el código se decide poner una condición en el orden de los eventos, el primer punto
en donde se debe dar clic es el vértice de las líneas que conforman el ángulo, o sea el punto
naranja en el caso de la ilustración 13. Por otro lado, los puntos 2 y 3 son indiferentes en su
orden.
El cálculo del ángulo se realizará por medio de gradientes, de la siguiente manera:
𝑃1 = (𝑥1, 𝑦1) (15)
Coordenada Error (%)
X 0,02%
Y 0,04%
% de error

25
𝑃2 = (𝑥2, 𝑦2) (16)
𝑃3 = (𝑥3, 𝑦3) (17)
𝑚1 =𝑦2 − 𝑦1𝑥2 − 𝑥1
(18)
𝑚2 =𝑦3 − 𝑦1𝑥3 − 𝑥1
(19)
𝜃 = tan−1 (𝑚2 −𝑚1
1 + (𝑚2 ∗ 𝑚1)) (20)
Donde 𝜃 es el ángulo a calcular. También, se ha de tener en cuenta que, si en m1 o m2 el
denominador es igual a cero, este se remplaza por -1.
Ya al tener el código desarrollado, se procede a probarlo. Para esto se toma una imagen con
una serie de ángulos conocidos (ilustración 14) y se calculará el ángulo con el programa para
así comprobar que tan similar es el resultado de esta herramienta.
Ilustración 14 Ángulos conocidos
Tras el uso de la herramienta, se presentan los siguientes resultados, presentados en la
ilustración 15.

26
Ilustración 15 Resultado del cálculo de ángulos mediante el código 3
Se observa que los ángulos calculados, en la mayoría de los casos, coinciden con los ángulos
presentados y los que presentan ángulos erróneos, se aproximan a los ángulos reales. Por
lo anterior, se puede afirmar que es una herramienta con un bajo índice de error, tal y como
se confirma en la siguiente tabla:
Ilustración 16 Porcentaje de error de los ángulos calculados
Sin embargo, se ha de tener en cuenta que estos porcentajes de error pueden varias de una
manera significativa entre usuarios, debido a que esta herramienta se ve directamente
afectada por errores de tipo humano. Sin embargo, si este se realiza de una manera
cuidadosa y precisa el porcentaje puede disminuir.
Ángulo real (°) Ángulo calculado (°) Error (%)
62 62 0,00%
48 47 0,02%
71 71 0,00%
54 54 0,00%
12 12 0,00%
67 65 0,03%

27
CAPÍTULO IV Estudio de caso
Diseño de la prueba Se realizará un proceso de evaluación y validación de los códigos tomando un sujeto de
prueba. En donde inicialmente se rectificará la talla del marco de la bicicleta que posee el
usuario y posteriormente se realizará el análisis biomecánico.
El análisis biomecánico se enfocará netamente en el comportamiento del tobillo derecho
durante el pedaleo, donde el sujeto prueba aumentará progresivamente su cadencia hasta
llegar a su 70% y posteriormente disminuirá hasta parar. Si se encuentran puntos de interés
durante la cadencia, se analizarán los ángulos del tobillo en estos momentos.
Las herramientas a emplear son las siguientes:
- Rodillo para bicicleta
- Trípode para celular o cámara
- Marca de color azul
- Marcas de color amarillo con una distancia conocida
- Cámara de video o celular
Por un lado, las marcas permitirán realizar un correcto seguimiento y generar un sistema
de conversión pixeles-cm. Donde la marca azul es el punto a seguir y los puntos amarillos
poseen una distancia conocida que ayudará a la conversión de unidades deseada.
El rodillo de la bicicleta permitirá un análisis dinámico dentro de un espacio cerrado, lo cuál
es necesario para optimizar el funcionamiento del código. Además, el trípode permitirá dar
estabilidad al dispositivo de video y mejorar el análisis sin interferencias.
El montaje debe se realizará de la siguiente manera y se deben tener las siguientes
condiciones:
- Buscar un fondo monocromático que no posea los colores azul o amarillo.
- El sitio debe tener buena iluminación
- Se posiciona el rodillo a dos metros de la cámara
- En la bicicleta se adhieren dos marcas amarillas con una distancia conocida en una
zona visible del marco
- Se adhiere una marca azul en el centro del tobillo del ciclista
- El ciclista debe procurar evitar el uso de los colores azul o amarillo en su ropa

28
- El dispositivo de video estará sujeto a un trípode para brindar estabilidad en la
grabación, además debe haber un enfoque en el tobillo.
Ilustración 17 Ejemplo visual del montaje
Resultados Usuario: Camila Sánchez, ciclista juvenil de ruta y pista del club Krieger
Ilustración 18 Usuario de prueba, Camila Sánchez

29
Talla del marco
Tabla 5 Datos bicicleta del usuario
En la tabla 5 se observa la información de la bicicleta de Camila, ahora empleando el primer
código se va a comprobar si la talla que posee es correcta para su antropometría. Para esto,
se consulta la geometría del marco en el catálogo de GW y se ingresa la información
correspondiente al programa. [10]
Tras ingresar la información al programa se obtienen los siguientes resultados:
Ilustración 19 Resultados presentados por el código 1
Teniendo en cuenta la tabla 5 y la ilustración 19, se corrobora la buena elección del marco
usando como criterio la altura de usuario y de su entrepierna. Por lo anterior, se asegura el
primer paso de bikefitting respecto a la elección del marco de bicicleta ideal.
Análisis de movimiento
Para el análisis de movimiento se realiza el montaje diseñado con anterioridad y se verifica
la correcta identificación de colores por el programa previamente.
Marca GW
Marco Covadonga
Talla XS

30
Ilustración 20 Identificación de colores
Una vez rectificado el funcionamiento del código se prosigue a grabar y obtener los datos
de análisis. En este caso se observarán las oscilaciones generadas por el tobillo en los ejes
XY para buscar cambios abruptos o anomalías.
Tras el procesamiento de los datos, el cual consiste en la conversión de unidades y el
correcto orden de la información se obtienen las siguientes gráficas:
Gráfica 2 Movimiento del tobillo en el eje Y vs Tiempo
31
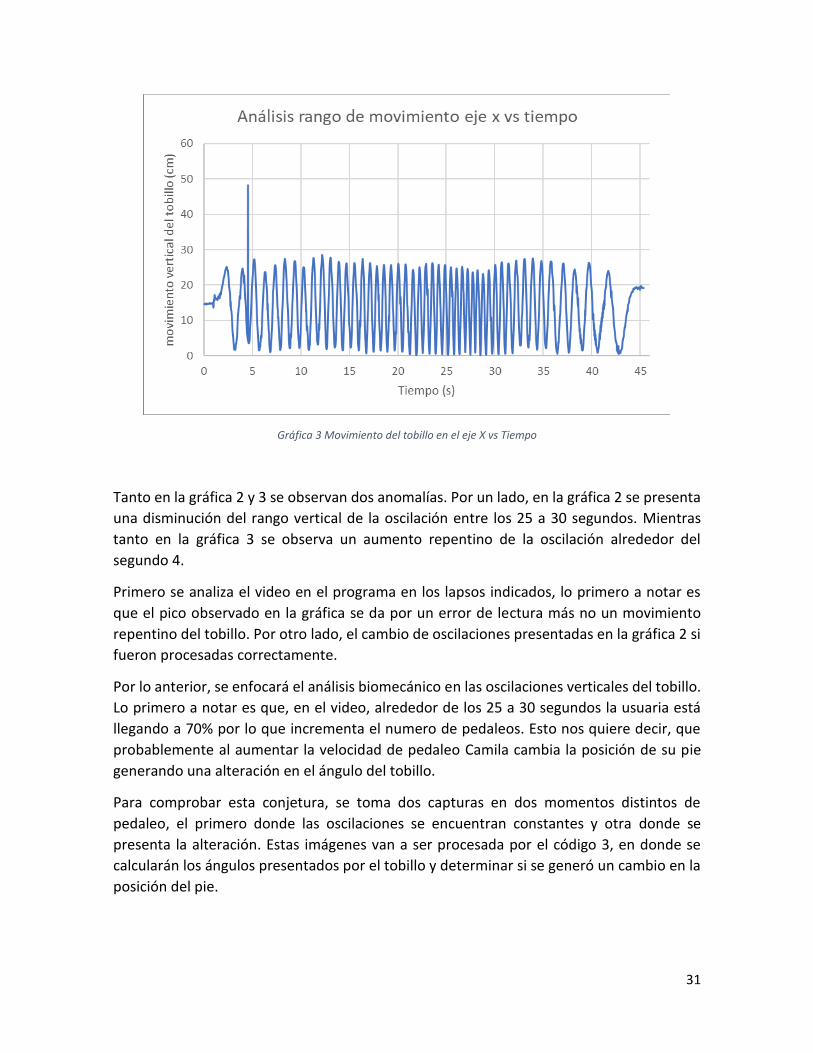
Gráfica 3 Movimiento del tobillo en el eje X vs Tiempo
Tanto en la gráfica 2 y 3 se observan dos anomalías. Por un lado, en la gráfica 2 se presenta
una disminución del rango vertical de la oscilación entre los 25 a 30 segundos. Mientras
tanto en la gráfica 3 se observa un aumento repentino de la oscilación alrededor del
segundo 4.
Primero se analiza el video en el programa en los lapsos indicados, lo primero a notar es
que el pico observado en la gráfica se da por un error de lectura más no un movimiento
repentino del tobillo. Por otro lado, el cambio de oscilaciones presentadas en la gráfica 2 si
fueron procesadas correctamente.
Por lo anterior, se enfocará el análisis biomecánico en las oscilaciones verticales del tobillo.
Lo primero a notar es que, en el video, alrededor de los 25 a 30 segundos la usuaria está
llegando a 70% por lo que incrementa el numero de pedaleos. Esto nos quiere decir, que
probablemente al aumentar la velocidad de pedaleo Camila cambia la posición de su pie
generando una alteración en el ángulo del tobillo.
Para comprobar esta conjetura, se toma dos capturas en dos momentos distintos de
pedaleo, el primero donde las oscilaciones se encuentran constantes y otra donde se
presenta la alteración. Estas imágenes van a ser procesada por el código 3, en donde se
calcularán los ángulos presentados por el tobillo y determinar si se generó un cambio en la
posición del pie.

32
Ilustración 21 Ángulos de pedaleo A. Cuando se presenta oscilaciones atípicas B. Cuando se presentan oscilaciones típicas
Como se nota en la ilustración 21, se presentan cambios en el ángulo del tobillo en los dos
puntos. Por un lado, cuando la oscilación es constante, el tobillo tiende a presentar un
ángulo de 30° aproximadamente. Sin embargo, cuando aumenta el ritmo de pedaleo este
ángulo disminuye a 18°.
Si comparamos estos ángulos con los rangos presentados en la tabla 1, se observa que
cuando nuestro sujeto de prueba posee una oscilación atípica sale del rango de ángulos
establecidos. Por lo anterior, al adoptar esta posición del pie puede dar paso a una lesión o
baja eficiencia mecánica, teniendo en cuenta los criterios de los autores consultados.
Conclusiones Se comprueba la utilidad de los códigos programados para el uso del bikefitting, debido a
que permiten encontrar anomalías en la dinámica de pedaleo de un ciclista. Al encontrar
estos datos, se pueden prevenir lesiones a largo y corto plazo además de mejorar la
eficiencia mecánica del ciclista.
Adicionalmente, estos tres códigos en conjunto ayudan a tener una ventana de
configuración más amplia. Esto permite al usuario conocer su marco ideal además de
modificar su bicicleta hasta encontrar la posición ideal en esta.
Sin embargo, estos programas pueden mejorarse de diversas maneras. Inicialmente se cree
conveniente compactar todos los códigos en uno y presentarlos en una interfaz de
interacción. Por otro lado, se podrían agregar funciones tras el análisis para generar una
configuración más optima, por ejemplo, indicar la altura recomendada del sillín o del
manillar de la bicicleta.
También se ha de tomar en cuenta que el desarrollo de los códigos no presentó ningún
costo monetario, lo cual cumple con el objetivo de desarrollar un programa de bikefit de
bajo costo. Pero se debe tener presente que el valor monetario del rodillo, el trípode o de
la cámara de video pueden representar un costo significativo para el usuario.
A B

33
Referencias
[1] La República, «Este año aumentó 56% la importación de bicicletas en Colombia,» La
República, 23 Diciembre 2019. [En línea]. Available:
https://www.larepublica.co/especiales/mis-documentos-final-2019/este-ano-aumento-56-
la-importacion-de-bicicletas-en-colombia-2947079.
[2] W. Soares, «Biomecánica aplicada al deporte:,» efeportes, Julio 2012. [En línea]. Available:
https://www.efdeportes.com/efd170/biomecanica-aplicada-al-
deporte.htm#:~:text=La%20Biomec%C3%A1nica%20es%20una%20disciplina,los%20movimi
entos%20del%20cuerpo%20humano.&text=En%20lo%20referente%20a%20la,%2C%20dina
mometr%C3%ADa%2C%20electromiograf%C3%ADa%20y.
[3] T. Gillespie, Fundamentals of vehicle dynamics, Warrandale, 1992.
[4] P. Burt, Bike fit, Bloomsbury, 2014.
[5] R. Bini, Biomechanics of cycling, Springer, 2014.
[6] Biomecánica 3D, «Cita online,» Biomecánica 3D, [En línea]. Available:
https://www.biomecanica3d.com/cita-online-contacto/. [Último acceso: 21 Mayo 2020].
[7] Colombia en bicicleta, [En línea]. Available:
https://www.colombiaenbicicleta.com/fitting.php. [Último acceso: 21 Mayo 2020].
[8] REI, «Conceptos básicos de montaje de bicicletas de montaña,» [En línea]. Available:
https://www.rei.com/learn/expert-advice/mountain-bike-fit.html. [Último acceso: 15
Diciembre 2020].
[9] Solano, Gabriela, «Detección de colores en OpenCV,» [En línea]. Available: https://omes-
va.com/deteccion-de-colores/.
[10] HA Bicicletas, «CATÁLOGOS - BICICLETAS,» [En línea]. Available:
https://www.habicicletas.com/bicicletas/catalogos-bicicletas/367-catalogo-gw-2016.


















