DESARROLLO DE TÉCNICAS AVANZADAS DE CONTROL PARA LA ...
157
DESARROLLO DE TÉCNICAS AVANZADAS DE CONTROL PARA LA ESTABILIZACIÓN DE UN GIMBAL (2DOF) JULIAN ANDRES GOMEZ GOMEZ UNIVERSIDAD AUTÓNOMA DE BUCARAMANGA FACULTAD DE INGENIERÍA PROGRAMA DE INGENIERÍA MECATRÓNICA BUCARAMANGA 2020
Transcript of DESARROLLO DE TÉCNICAS AVANZADAS DE CONTROL PARA LA ...

DESARROLLO DE TÉCNICAS AVANZADAS DE CONTROL PARA LA
ESTABILIZACIÓN DE UN GIMBAL (2DOF)
JULIAN ANDRES GOMEZ GOMEZ
UNIVERSIDAD AUTÓNOMA DE BUCARAMANGA
FACULTAD DE INGENIERÍA
PROGRAMA DE INGENIERÍA MECATRÓNICA
BUCARAMANGA
2020

DESARROLLO DE TÉCNICAS AVANZADAS DE CONTROL PARA LA
ESTABILIZACIÓN DE UN GIMBAL (2DOF)
JULIAN ANDRES GOMEZ GOMEZ
Trabajo De Grado Para Optar El Título De Ingeniero Mecatrónico
Director
Camilo Enrique Moncada Guayazán
Codirector
Sebastian Roa Prada
UNIVERSIDAD AUTÓNOMA DE BUCARAMANGA
FACULTAD DE INGENIERÍA
PROGRAMA DE INGENIERÍA MECATRÓNICA
BUCARAMANGA
2020

3
Proyecto de grado titulado “desarrollo de
técnicas avanzadas de control para la
estabilización de un Gimbal (2DOF)”,
presentado por el estudiante Julian Gomez
para optar por el título de Ingeniero
Mecatrónico
Firma M.Sc. Camilo Moncada (Director)
Firma M.Sc. Hernando Gonzalez (Evaluador)
Firma Ing. Fabian Gonzalez (Evaluador)
Bucaramanga, 17 de diciembre del 2020.

4
AGRADECIMIENTOS A mi DIOS, primeramente, por sus principios y concejos que me permiten alcanzar este logro en mi área profesional. A toda mi familia, en especial, mis abuelos, mi mamá y mi hermano, quienes fueron, durante todo este proceso, un apoyo imprescindible. A cada uno de mis profesores que con esfuerzo y dedicación aportaron sus conocimientos. Por último, al cuerpo pastoral del Centro Familiar de Adoración que mediante sus sermones se dejaron usar por DIOS para aconsejarme y exhórtame a hacer lo correcto.

5
DEDICATORIA A mi DIOS y toda mi familia, especialmente y con gran cariño, a mi Abuelo Carlos Manuel Gomez, mi Abuela Irene Hernández de Gomez, mi Mamá Nelly Gomez Hernández y mi hermano Josué Andrés García Gomez.

6
CONTENIDO
Pág.
1 INTRODUCCIÓN. ............................................................................................. 20
2 PLANTEAMIENTO DEL PROBLEMA. ............................................................ 21
3 JUSTIFICACIÓN. ............................................................................................. 22
4 OBJETIVOS. .................................................................................................... 23
4.1 GENERAL ..................................................................................................... 23 4.2 ESPECÍFICOS............................................................................................... 23
5 ESTADO DEL ARTE. ....................................................................................... 24
6 MARCO TEÓRICO. .......................................................................................... 25
6.1 UNIDAD DE MEDICIÓN INERCIAL (IMU) ..................................................... 25 6.1.1 FILTRO COMPLEMENTARIO .................................................................... 27
6.1.2 SIMPLE KALMAN FILTER .......................................................................... 28 6.1.3 ESTIMADOR DE KALMAN ......................................................................... 28
6.2 COMUNICACIÓN I2C .................................................................................... 30 6.3 FUERZA CONTRA ELECTROMOTRIZ (BEMF) ........................................... 30 6.4 ECUACIÓN DE LAGRANGE ........................................................................ 31
6.5 GIMBAL ........................................................................................................ 31 6.5.1 MOTOR SIN ESCOBILLAS (BRUSHLESS) ................................................ 32
6.5.1.1 FUNCIONAMIENTO ................................................................................ 34
6.5.1.2 TÉCNICAS DE CONMUTACIÓN ............................................................. 38
6.5.1.3 MODELO MATEMÁTICO ........................................................................ 44
6.5.2 ESTRUCTURA MECÁNICA........................................................................ 46
6.5.2.1 MODELO MATEMÁTICO ........................................................................ 47
6.6 PWM .............................................................................................................. 50
6.7 CONTROLADOR 𝑯 ∞ LINEAL ..................................................................... 50
6.8 LQG ............................................................................................................... 53
6.9 PID ................................................................................................................. 56

7
7 PLATAFORMA DE PRUEBAS. ....................................................................... 57
7.1 DISEÑO MECÁNICO ..................................................................................... 57 7.2 DISEÑO ELECTRÓNICO .............................................................................. 66
7.3 CONSTRUCCIÓN ......................................................................................... 67 7.4 INTERFAZ DE CONTROL ............................................................................. 68
8 TARJETA DE CONTROL. ............................................................................... 70
8.1 DISEÑO ......................................................................................................... 70 8.2 CONSTRUCCIÓN ......................................................................................... 74
9 SISTEMA GIMBAL. .......................................................................................... 76
9.1 VALIDACIÓN MODELO ESTRUCTURA MECÁNICA .................................. 77
9.2 VALIDACIÓN MODELO MOTOR SIN ESCOBILLAS ................................... 79 9.3 MODELO SISTEMA GIMBAL ....................................................................... 83
10 PRUEBAS EXPERIMENTALES PREVIAS. ................................................... 86
10.1 FILTRADO .................................................................................................... 86 10.2 MOTORES .................................................................................................... 95
10.2.1 PWM SENOIDAL ........................................................................................ 95
10.2.2 CORRIENTE............................................................................................... 96 10.2.3 TEMPERATURA ....................................................................................... 100 10.3 SECUENCIA DE PERTURBACIÓN ............................................................ 101
10.4 MODELO MATEMÁTICO Y SISTEMA FÍSICO ........................................... 103
11 DISEÑO DE CONTROLADORES. ............................................................... 107
11.1 LINEALIZACIÓN ......................................................................................... 107
11.2 PID ............................................................................................................... 109 11.3 LQG ............................................................................................................. 109 11.4 SENSIBILIDAD MIXTA H∞ ......................................................................... 112
12 IMPLEMENTACIÓN DE CONTROLADORES. ............................................ 116
12.1 PID ............................................................................................................... 116 12.2 LQG ............................................................................................................. 118 12.3 SENSIBILIDAD MIXTA H∞ ......................................................................... 123 12.4 COMPARACIÓN SIMULADA Y EXPERIMENTAL...................................... 126

8
12.4.1 INDUCTANCIA EN EL MODELO .............................................................. 126 12.4.2 PID ............................................................................................................ 135 12.4.3 LQG .......................................................................................................... 140
12.4.4 SENSIBILIDAD MIXTA H∞ ....................................................................... 142 12.4.5 COMPARACIÓN DE LAS ESTRATEGIAS ............................................... 144
CONCLUSIONES ................................................................................................ 148
REFERENCIAS ................................................................................................... 150
ANEXO A: ALGORITMOS .................................................................................. 154
ANEXO B: ESQUEMÁTICOS ............................................................................. 155
ANEXO C: MODELO CAD A BLOQUES SIMMECHANICS ............................... 156
ANEXO D: CARACTERÍSTICAS DEL SENSOR AS5145 .................................. 157

9
LISTA DE FIGURAS
Pág. Figura 1. Ejes respectivos de la MPU6050. [7] .................................................... 25 Figura 2. Estructura Filtro complementario .......................................................... 27 Figura 3. Ecuaciones Filtro Kalman ..................................................................... 29 Figura 4. Protocolo I2C [12] ................................................................................. 30
Figura 5. Gimbal FPV de 2 ejes [13] .................................................................... 32 Figura 6. Secuencia de activación de las bobinas en un motor BLDC [6] ............ 33 Figura 7. Sección de los tipos de rotores en motores BLDC [15] ......................... 33 Figura 8. Representación BLDC motor trifásico de un par de polos. [19] ............. 35
Figura 9. Diferentes arreglos en un motor BLDC (De izquierda a derecha. Uno, dos y cuatro pares de polos) [19] ................................................................................. 35 Figura 10. Fuerza contra electromotriz (BEMF) de un motor BLDC y PMSM, realizado en Matlab – Simulink .............................................................................. 36 Figura 11. Motor trifásico BLDC [19] ..................................................................... 36
Figura 12. Alineación de los polos al campo magnético del estator [19] ............... 37 Figura 13. Alineaciones posibles del rotor a las líneas de fuerza (Líneas punteadas) del campo magnético en el estator [19] ................................................................. 37
Figura 14. Diagrama para la conmutación de un motor sin escobillas ................. 38 Figura 15. Puente de tres fases [26] .................................................................... 39
Figura 16. Señales de los sensores de efecto hall (Hall sensor Output), fuerza contra electromotriz (BEMF), torque en el rotor (Output Torque), y corrientes en cada una de las tres fases (Phase Current) [28]. ........................................................... 41 Figura 17. Relación del torque (Par Motor) con respecto a la velocidad del rotor, conmutación senoidal [18]. .................................................................................... 43
Figura 18. Ciclo útil del PWM (a) generando un perfil de voltaje característico con respecto a tierra (b) que resulta en voltaje y corrientes senoidales con respecto a fase (c) [32] ............................................................................................................ 43 Figura 19. Gimbal seccionado en eslabones ....................................................... 47 Figura 20. Sistemas de referencia fijos en cada uno de los eslabones ................ 48
Figura 21. Onda PWM [6] ..................................................................................... 50
Figura 22. Esquema de la estrategia de control 𝐻 ∞ [37] ................................... 51
Figura 23. Planta del enfoque de sensibilidad mixta [37] ..................................... 52 Figura 24. Estructura LQG .................................................................................... 53 Figura 25. Controlador PID [39] ............................................................................ 56
Figura 26. Bosquejo Plataforma ............................................................................ 57 Figura 27. Plataforma CAD preliminar .................................................................. 60
Figura 28. Plataforma CAD ................................................................................... 60 Figura 29. Esquema de bloques Simulación Simmechanics ................................ 61 Figura 30. Posición, Velocidad y Torque en el Eslabón 1 .................................... 61 Figura 31. Posición, Velocidad y Torque en el Eslabón 2 .................................... 62 Figura 32. Posición, Velocidad y Torque en el Eslabón 3 .................................... 62 Figura 33. Pieza crítica del Eslabón 1 .................................................................. 64

10
Figura 34. Esfuerzo de Von Mises de la Pieza de estudio del Eslabón 1 ............. 64 Figura 35. Deformación de la Pieza de estudio del Eslabón 1 .............................. 64 Figura 36. Esfuerzo de Von Mises soporte Gimbal ............................................... 65
Figura 37. Deformación soporte Gimbal ............................................................... 65 Figura 38. Esquema eléctrico de la plataforma .................................................... 66 Figura 39. Conexionado eléctrico plataforma de pruebas .................................... 67 Figura 40. Plataforma de pruebas construida ...................................................... 68 Figura 41. Pruebas en la Plataforma. ................................................................... 68
Figura 42. Interfaz para la plataforma .................................................................. 69 Figura 43. PCB tarjeta de control y potencia ......................................................... 70 Figura 44. Plano eléctrico de la tarjeta electrónica ............................................... 71 Figura 45. Esquemático L6234 [46] ...................................................................... 72
Figura 46. Niveles lógicos para la conmutación del driver [46] ............................ 73 Figura 47. Tarjeta de control construida ............................................................... 74 Figura 48. Conexiones tarjeta de control construida ............................................ 74
Figura 49. Gimbal FPV de 2 ejes adquirido [47].................................................... 76 Figura 50. Modelo CAD Estructura mecánica [48] ................................................ 77
Figura 51. Bloques Simmechanics del Gimbal ..................................................... 78 Figura 52. Comparación entre el modelo matemático de la estructura mecánica y Simmechanics ........................................................................................................ 79
Figura 53. Simulación Motor sin escobillas .......................................................... 81 Figura 54. Entrada de voltajes RMS .................................................................... 82
Figura 55. Resultados de las salidas del motor BLDC ......................................... 83 Figura 56. Diagrama de bloques sistema Gimbal modelado ................................ 85
Figura 57. Ángulos obtenidos con el código base del Filtro Complementario ...... 86
Figura 58. Respuesta Filtro complementario eje X ( 𝑘1 = 0.92, 𝑘2 = 0.02 ) ......... 87
Figura 59. Respuesta Filtro complementario eje Y ( 𝑘1 = 0.92, 𝑘2 = 0.02 ) ......... 87
Figura 60. Estructura Filtro complementario eje X ( 𝑘1 = 0.8, 𝑘2 = 0.2 ) .............. 88
Figura 61. Estructura Filtro complementario eje Y ( 𝑘1 = 0.8, 𝑘2 = 0.2 ) .............. 88
Figura 62. Comparación Filtro complementario y Kalman eje X (eMean = 1.1, q = 0.01) ....................................................................................................................... 89 Figura 63. Comparación Filtro complementario y Kalman eje Y (eMean = 1, q = 0.01) ....................................................................................................................... 89
Figura 64. Estimador de Kalman para 𝜃1 ............................................................. 91
Figura 65. Estimador de Kalman para 𝜃2 ............................................................. 91
Figura 66. Eje Z de la IMU alineado con el vector gravedad ................................ 93 Figura 67. Eje Y de la IMU alineado con el vector gravedad ............................... 93
Figura 68. Eje X de la IMU alineado con el vector gravedad ............................... 94 Figura 69. Valores de Duty Cycle para diferentes amplitudes.............................. 95 Figura 70. Duty Cycle vs Voltaje para cada uno de los driver L6234 ................... 96
Figura 71. Indexado del Array PWM con diferentes Amplitudes .......................... 97 Figura 72. Voltaje vs Amplitud máxima de Duty Cycle para un Ángulo Eléctrico determinado en el Motor Uno................................................................................. 98

11
Figura 73. Corriente vs Amplitud máxima de Duty Cycle para un Ángulo Eléctrico determinado en la Conmutación Senoidal del Motor Uno ...................................... 98 Figura 74. Voltaje vs Amplitud máxima de Duty Cycle para un Ángulo Eléctrico determinado en el Motor Dos ................................................................................. 99 Figura 75. Corriente vs Amplitud máxima de Duty Cycle para un Ángulo Eléctrico determinado en la Conmutación Senoidal del Motor Dos .................................... 100 Figura 76. Sujeción Sonda para medir la temperatura del Motor ....................... 100 Figura 77. Montaje para medir la temperatura del Motor ................................... 101
Figura 78. Temperatura vs Duty Cycle Máximo ................................................. 101 Figura 79. Posición de los eslabones del Gimbal a cero grados ........................ 102 Figura 80. Perturbaciones en el eslabón 1 del Gimbal ....................................... 103 Figura 81. Perturbaciones en el eslabón 2 del Gimbal ....................................... 103
Figura 82. Simulación Modelo No Lineal del Sistema Gimbal 2DOF [13] .......... 104 Figura 83. Comparación de la respuesta simulada del eslabón 1 con los datos experimentales ..................................................................................................... 104
Figura 84. Comparación de la respuesta simulada del eslabón 2 con los datos experimentales ..................................................................................................... 105
Figura 85. Respuesta del Eslabón 1 en modelo lineal y no lineal ...................... 108 Figura 86. Respuesta del Eslabón 2 en modelo lineal y no lineal ...................... 109 Figura 87. Respuesta de las variables reguladas mediante el controlador LQG para un escalón unitario como referencia .................................................................... 110 Figura 88. Respuesta de las acciones de control del controlador LQG frente para un escalón unitario como referencia .................................................................... 111
Figura 89. Respuesta de las variables reguladas mediante el controlador 𝐻∞ para un escalón unitario como referencia .................................................................... 113
Figura 90. Respuesta de las acciones de control del controlador 𝐻∞ frente para un escalón unitario como referencia ......................................................................... 114
Figura 91. Respuesta del Eslabón 1 en la implementación del controlador PID 116 Figura 92. Respuesta ampliada del Eslabón 1 en la implementación del controlador PID ....................................................................................................................... 117
Figura 93. Respuesta del Eslabón 2 en la implementación del controlador PID 118 Figura 94. Respuesta del Eslabón 1 en la implementación del controlador LQG ............................................................................................................................. 119 Figura 95. Respuesta ampliada del Eslabón 1 en la implementación del controlador LQG ..................................................................................................................... 119
Figura 96. Respuesta del Eslabón 2 en la implementación del controlador LQG ............................................................................................................................. 120
Figura 97. Prueba impulso-rampa en lazo abierto para el eslabón 1 ................. 121 Figura 98. Prueba impulso-rampa en lazo abierto para el eslabón 2 ................. 122
Figura 99. Prueba impulso-rampa en lazo abierto para el eslabón 1 aumentando la potencia ............................................................................................................... 122
Figura 100. Respuesta del Eslabón 1 en la implementación del controlador 𝐻∞ ............................................................................................................................. 123

12
Figura 101. Respuesta ampliada del Eslabón 1 en la implementación del controlador 𝐻∞ .................................................................................................... 124
Figura 102. Respuesta del Eslabón 2 en la implementación del controlador 𝐻∞ ............................................................................................................................. 125 Figura 103. Modelo No lineal con inductancia simulado .................................... 127 Figura 104. Modelo No lineal sin inductancia simulado ..................................... 128 Figura 105. Comparación modelo no lineal con y sin inductancia ...................... 130
Figura 106. Comparación de la respuesta del eslabón 1 en el modelo con y sin inductancia ........................................................................................................... 130 Figura 107. Ampliación 1 comparación de la respuesta del eslabón 1 en el modelo con y sin inductancia ............................................................................................ 131 Figura 108. Ampliación 2 comparación de la respuesta del eslabón 1 en el modelo con y sin inductancia ............................................................................................ 132 Figura 109. Comparación de la respuesta del eslabón 2 en el modelo con y sin inductancia ........................................................................................................... 133
Figura 110. Comparación de la respuesta del eslabón 1 en el modelo con y sin inductancia teniendo en cuenta la perturbación de torque ................................... 134 Figura 111. Comparación de la respuesta del eslabón 2 en el modelo con y sin inductancia teniendo en cuenta la perturbación de torque ................................... 135 Figura 112. Controlador PID Simulink ................................................................ 136
Figura 113. Respuesta simulada Eslabón 1 Controlador PID ............................ 137 Figura 114. Respuesta simulada Eslabón 2 Controlador PID ............................ 138 Figura 115. Respuesta simulada Eslabón 1 Controlador PID ajustando ganancias ............................................................................................................................. 138
Figura 116. Respuesta experimental Eslabón 1 Controlador PID ...................... 139
Figura 117. Respuesta experimental Eslabón 2 Controlador PID ...................... 140 Figura 118. Comparación de las respuestas simuladas y experimentales del Controlador LQG para el Eslabón 1 ..................................................................... 141 Figura 119. Comparación de las respuestas simuladas y experimentales del Controlador LQG para el Eslabón 2 ..................................................................... 142
Figura 120. Comparación de las respuestas simuladas y experimentales del Controlador 𝐻∞ para el Eslabón 1 ....................................................................... 143
Figura 121. Comparación de las respuestas simuladas y experimentales del Controlador 𝐻∞ para el Eslabón 2 ....................................................................... 144
Figura 122. Comparación de las respuestas experimentales de cada una de las estrategias de control para el Eslabón 1 .............................................................. 145 Figura 123. Ampliación comparación de las respuestas experimentales de cada una de las estrategias de control para el Eslabón 1 ............................................ 146 Figura 124. Comparación de las respuestas experimentales de cada una de las estrategias de control para el Eslabón 2 .............................................................. 147 Figura 122. Características principales del sensor magnético AS5145 [53] ...... 157

13
LISTA DE TABLAS
Pág. Tabla 1. Registros relevantes para el funcionamiento básico de la MPU6050 ...... 26 Tabla 2. Comparación de los tres métodos de conmutación [33] .......................... 44 Tabla 3. Comparación de los tres materiales para la estructura............................ 58 Tabla 4. Comparación Motor Paso a Paso y Servo Motor RC. ............................. 59
Tabla 5. Componentes empleados en la tarjeta de control ................................... 75 Tabla 6. Parámetros de la estructura mecánica .................................................... 78 Tabla 7. Parámetros del motor brushless .............................................................. 82 Tabla 8. Parámetros utilizados en el modelo del sistema Gimbal 2DOF ............. 106
Tabla 9. Ganancias controlador PID .................................................................... 109 Tabla 10. Valores de las variables reguladas mediante el controlador LQG para un escalón unitario como referencia ......................................................................... 111
Tabla 11. Valores de las acciones de control del controlador LQG para un escalón unitario como referencia ...................................................................................... 112
Tabla 12. Valores de las variables reguladas mediante el controlador 𝐻∞ para un escalón unitario como referencia ......................................................................... 113
Tabla 13. Valores de las acciones de control del controlador 𝐻∞ para un escalón unitario como referencia ...................................................................................... 115 Tabla 14. Parámetros utilizados en la comparación del modelo sistema Gimbal 2DOF con y sin inductancia ................................................................................. 129

14
GLOSARIO 2DOF: Dos grados de libertad.
3D: Tres dimensiones.
3DOF: Tres grados de libertad.
AC: Corriente Alterna.
BEMF: Fuerza contra electro motriz.
BLDCM: Motor sin escobillas de corriente directa.
BOM: Lista de materiales.
CAD: Diseño asistido por computador.
DC: Corriente directa.
DEC Número de base decimal.
DERIVA: Desvió a causa del error.
DRIVER: Integrado electrónico de potencia.
DRONE: Vehículo aéreo no tripulado.
DUTY CYCLE: Ciclo útil de PWM.
FOC: Técnica de conmutación de campo orientado.
FPV: Vista en primera persona.
I2C: Protocolo Inter-Integrado.
IMU: Unidad de medición inercial.
LAGRANGE: Apellido del Matemático Joseph Louis.
LQG: Controlador lineal cuadrático gaussiano.
MATLAB: Software de ingeniería.
PID: Controlador proporcional integral derivativo.
PMSM: Motor síncrono de imanes permanentes.
PWM: Modulación por ancho de pulso.
RC: Radio control.
RMS: Valor Eficaz.
SCL: Reloj en el protocolo I2C.
SDA: Datos en el protocolo I2C.
SETPOINT: Referencia.

15
SIMMECHANICS: Herramienta de Simulink para simular sistemas físicos.
SIMULINK: Entorno de programación gráfica del software Matlab.
SPWM: Modulación por ancho de pulso senoidal.
STEADICAM: Estabilizador de cámaras mecánico.
ZOOM: Ampliación o disminución de la imagen.

16
NOMENCLATURA 𝜃1 Posición angular del eslabón 1. 𝜃2 Posición angular del eslabón 2. 𝜃1𝑎𝑐𝑐 Posición angular del eslabón 1 calculado mediante los datos del
acelerómetro. 𝜃2𝑎𝑐𝑐 Posición angular del eslabón 2 calculado mediante los datos del
acelerómetro. 𝜃1𝐺𝑦𝑟𝑜 Posición angular del eslabón 1 calculado mediante los datos del Giróscopo.
𝜃2𝐺𝑦𝑟𝑜 Posición angular del eslabón 2 calculado mediante los datos del Giróscopo.
𝜔𝑥 Velocidad angular del Giróscopo en el eje x fijo en la IMU. 𝜔𝑦 Velocidad angular del Giróscopo en el eje y fijo en la IMU.
𝑎𝑥 Aceleración del Acelerómetro en el eje x fijo en la IMU. 𝑎𝑦 Aceleración del Acelerómetro en el eje y fijo en la IMU.
𝑎𝑧 Aceleración del Acelerómetro en el eje z fijo en la IMU.
𝑎𝑧 Aceleración del Acelerómetro en el eje z fijo en la IMU. 𝑇𝑚 Tiempo de muestreo. [𝑘] Muestra 𝑘. 0 Eje Z del sistema de referencia fijo en el eslabón 0 del Gimbal.
0 Eje X del sistema de referencia fijo en el eslabón 0 del Gimbal. 0 Eje Y del sistema de referencia fijo en el eslabón 0 del Gimbal. 1 Eje Z del sistema de referencia fijo en el eslabón 1 del Gimbal. 1 Eje X del sistema de referencia fijo en el eslabón 1 del Gimbal.
1 Eje Y del sistema de referencia fijo en el eslabón 1 del Gimbal. 2 Eje Z del sistema de referencia fijo en el eslabón 2 del Gimbal. 2 Eje X del sistema de referencia fijo en el eslabón 2 del Gimbal. 2 Eje Y del sistema de referencia fijo en el eslabón 2 del Gimbal.
𝑥1 Distancia del centro de masa del eslabón 1 a lo largo del eje 1. 𝑦1 Distancia del centro de masa del eslabón 1 a lo largo del eje 1. 𝑧1 Distancia del centro de masa del eslabón 1 a lo largo del eje 1. 𝑥2 Distancia del centro de masa del eslabón 2 a lo largo del eje 2. 𝑦2 Distancia del centro de masa del eslabón 2 a lo largo del eje 2. 𝑧2 Distancia del centro de masa del eslabón 2 a lo largo del eje 2. 𝑇01 Matriz de transformación de cualquier punto medido en el sistema de
referencia fijo en el eslabón 1 del Gimbal al eslabón 0. 𝑇12 Matriz de transformación de cualquier punto medido en el sistema de
referencia fijo en el eslabón 2 del Gimbal al eslabón 1. 𝑇02 Matriz de transformación de cualquier punto medido en el sistema de
referencia fijo en el eslabón 2 del Gimbal al eslabón 0. 𝑟𝑐1 Centro de masa del eslabón 1 del Gimbal medido desde el sistema de
referencia fijo en este. 𝑟𝑐2 Centro de masa del eslabón 2 del Gimbal medido desde el sistema de
referencia fijo en este.

17
01 Velocidad lineal del punto 𝑟𝑐1 medido desde el sistema de referencia fijo del eslabón 0.
02 Velocidad lineal del punto 𝑟𝑐2 medido desde el sistema de referencia fijo del eslabón 0.
𝑣1 Producto punto de 01. 𝑣2 Producto punto de 02.
1 Velocidad angular del eslabón 1 del Gimbal.
2 Velocidad angular del eslabón 2 del Gimbal 01 Velocidad angular del eslabón 1 del Gimbal medido desde el sistema de
referencia fijo en el eslabón 0. 02 Velocidad angular del eslabón 2 del Gimbal medido desde el sistema de
referencia fijo en el eslabón 0. 𝜔1 Producto punto de 01. 𝜔2 Producto punto de 02. 01 Desplazamiento del punto 𝑟𝑐1 medido desde el sistema de referencia en el
eslabón 0. 02 Desplazamiento del punto 𝑟𝑐2 medido desde el sistema de referencia en el
eslabón 0. T Energía cinética total de la estructura mecánica del Gimbal. T1 Energía cinética del eslabón 1 del Gimbal.
T2 Energía cinética del eslabón 2 del Gimbal. I1 Momento de inercia del eslabón 1 del Gimbal en relación al eje 1. m1 Masa del eslabón 1 del Gimbal. I2 Momento de inercia del eslabón 2 del Gimbal en relación al eje 0. m2 Masa del eslabón 2 del Gimbal. U Energía potencial total de la estructura mecánica del Gimbal. U1 Energía potencial del eslabón 1 del Gimbal. U2 Energía potencial del eslabón 2 del Gimbal.
𝑝01(0) Desplazamiento del punto 𝑟𝑐1 a lo largo del eje 0.
𝑝02(0) Desplazamiento del punto 𝑟𝑐2 a lo largo del eje 0.
𝑔 Aceleración de la gravedad de la tierra.
ℓ Lagrangiano. 𝜏1 Torque producido por el Motor 1. 𝜏2 Torque producido por el Motor 2. 𝑏1 Coeficiente de amortiguamiento en el eje del Motor 1.
𝑏2 Coeficiente de amortiguamiento en el eje del Motor 2.
𝑣𝑎𝑏 Diferencia entre el voltaje en las fases a y b. 𝑣𝑏𝑐 Diferencia entre el voltaje en las fases b y c. 𝑣𝑐𝑎 Diferencia entre el voltaje en las fases c y a.
𝑉𝑓 Voltaje aplicado a los motores.
𝑀 Amplitud máxima de la corriente. 𝑖𝑎 Corriente en la fase a. 𝑖𝑏 Corriente en la fase b.

18
𝑖𝑐 Corriente en la fase c. 𝑒𝑎 Fuerza contra electromotriz en la fase a. 𝑒𝑏 Fuerza contra electromotriz en la fase b. 𝑒𝑐 Fuerza contra electromotriz en la fase c.
𝑅 Resistencia en la fase. 𝑃 Numero de polos en el rotor. 𝐿 Inductancia en la fase. 𝐽 Momento de inercia del eje.
𝑘𝑓 Coeficiente de amortiguamiento del eje.
𝜔𝑚 Velocidad angular del eje. 𝑇𝑒 Torque en el eje del motor. 𝑇𝑙 Torque de perturbación en el eje.
𝑘𝑡 Constante de torque en el motor. 𝑘𝑣1 Constante de escalado del voltaje RMS en el Motor 1.
𝑘𝑣2 Constante de escalado del voltaje RMS en el Motor 2.
𝑉𝑚 Voltaje de alimentación DC en los motores. 𝑉𝑎1 Voltaje RMS en la fase a del motor 1.
𝑉𝑏1 Voltaje RMS en la fase b del motor 1.
𝑉𝑐1 Voltaje RMS en la fase c del motor 1.
𝑉𝑎2 Voltaje RMS en la fase a del motor 2.
𝑉𝑏2 Voltaje RMS en la fase b del motor 2.
𝑉𝑐2 Voltaje RMS en la fase c del motor 2.
𝑘𝑒 Constante de la fuerza contra electromotriz del motor. 𝐹(𝜃𝑒) Forma de la fuerza contra electromotriz.
𝜃𝑒 Posición angular del campo magnético en las bobinas.
𝜃𝑚 Posición angular del eje del motor. 𝐾𝑖 Matriz de ganancia integral. 𝐾𝑠 Matriz de ganancias de los estados. 𝐾𝑜 Matriz de ganancias del observador.
𝑄𝑐 Matriz que agrega peso a la minización del error. 𝑅𝑐 Matriz que agrega peso a la minización de las acciones de control. 𝑄𝑛 Ruido gaussiano en la señal de control. 𝑅𝑛 Ruido gaussiano en la variable a ser medida en el proceso.
𝑊1 Función de ponderación para la función de sensibilidad. 𝑊2 Función de ponderación para la función de sensibilidad de esfuerzo al control.
𝑊3 Función de ponderación para la función de sensibilidad complementaria. 𝑢1 Variable de control del Motor 1. 𝑢2 Variable de control del Motor 2.
𝑇𝐿1 Torque de perturbación eslabón 1. 𝑇𝐿2 Torque de perturbación eslabón 2. 𝑘𝑏1 Contante BEMF del motor 1 en el modelo del sistema Gimbal 2DOF.
𝑘𝑏2 Contante BEMF del motor 2 en el modelo del sistema Gimbal 2DOF.

19
𝐻1 Inductancia del motor 1 en el modelo del sistema Gimbal 2DOF. 𝐻2 Inductancia del motor 1 en el modelo del sistema Gimbal 2DOF.

20
1 INTRODUCCIÓN. Alrededor del mundo existen diferentes dispositivos que permiten realizar captura de imágenes, cómo lo son, computadores personales, Televisores inteligentes, Cascos para deportes extremos, Celulares, Drones, entre muchos otros. Estos dispositivos cuentan con cámaras que, cada vez más, permiten mayores resoluciones, diferentes tipos de zoom y variedad de efectos. A pesar de sus grandes avances tecnológicos, existe un grave problema que afecta a todos estos dispositivos por igual, y es el no poder corregir las perturbaciones externas producto de su manipulación. Al existir estos movimientos en el dispositivo, se genera un deterioro en la captura de la imagen, llevando a que la toma salga borrosa, con algunos solapamientos gráficos o sencillamente sin uso alguno, dependiendo de la intensidad del movimiento. Hoy en día suele emplearse un sistema electromecánico denominado Gimbal, el cual permite minimizar los movimientos indeseados, manteniendo la captura de imagen con la mejor calidad posible. Comúnmente, lo realiza mediante un controlador clásico PID, por lo que en el presente trabajo se mostrará el desarrollo de técnicas de control más avanzadas, específicamente para la estabilización de una cámara deportiva ubicada en un Gimbal FPV de 2DOF, el cual se pretende instalar en un Drone. Inicialmente, en el capítulo 9, se muestra el modelado matemático del Gimbal el cual se obtiene por el método de Lagrange y la teoría de circuitos eléctricos. Posteriormente, en el capítulo 11, se presenta el diseño de tres controladores, uno clásico PID y dos avanzados en la estrategia LQG y sensibilidad mixta 𝐻∞. Por último, en el capítulo 12, se validan cada una de las estrategias de control, mediante una plataforma electromecánica que permite simular la orientación del Drone en 3D. El diseño y construcción de la plataforma se muestra en el capítulo 7. En el modelado matemático se muestran las ecuaciones de manera secuencial, las cuales parten desde las matrices de transformación homogénea del sistema Gimbal, hasta llegar a establecer la igualdad que relaciona el PWM para los motores y la dinámica de la estructura mecánica. Al validar el modelo matemático se muestran los pasos para obtener el modelo de bloques en la interfaz Simmechanics, partiendo de un modelo CAD. La estrategia de control PID se diseña de forma empírica, mientras que la LQG y Loop shaping, se realiza partiendo del modelo matemático linealizado. Para simular las perturbaciones producto de los cambios en la orientación del Drone, se diseña una secuencia para la plataforma en el entorno Simulink, la cual se ejecuta para cada uno de los controladores anteriormente mencionados. Finalizando, se muestran los resultados obtenidos, de manera gráfica, para cada una de las estrategias, su discusión y conclusiones respectivas. Cabe a aclarar que, la validación no solamente es gráfica, sino que también se realiza captura de imagen mediante la cámara.

21
2 PLANTEAMIENTO DEL PROBLEMA. Los movimientos indeseados en las cámaras son problemas que suelen suceder en aplicaciones sencillas, cómo grabaciones domésticas, hasta aplicaciones más complejas, cómo la grabación de cine y televisión. Actualmente, se está viendo con mayor frecuencia que la captura de imagen se realice mediante el uso de vehículos aéreos no tripulados, debido a las ventajas que estos aportan en las diferentes tomas aéreas que pueden obtener, sin embargo, al utilizarse esta clase de vehículos, los movimientos indeseables son inherentes ya que estos sistemas se desplazan mediante actuadores que producen vibraciones, generan cambios en la orientación del vehículo (lugar en donde se encuentra el dispositivo de captura) y son afectados por factores climáticos, cómo el viento. Hoy en día estos inconvenientes pueden ser mitigados mediante un dispositivo denominado Gimbal. Este es un sistema mecatrónico que permite estabilizar el dispositivo de captura frente a movimientos imprevistos. Por lo general, se suelen encontrar, de manera comercial, Gimbal de dos y tres grados de libertad. Esto significa que, respectivamente, el Gimbal puede mitigar perturbaciones en dos y tres ejes de rotación. Para generar la estabilización o mitigación de la perturbación, es usual encontrar controladores clásicos, proporcional, integral, derivativo, también conocidos como reguladores PID. ¿Aunque estos reguladores ofrecen una buena respuesta, que diferencia habrá con respecto a estrategias de control más avanzadas? ¿mejorará sus prestaciones? Al final de este trabajo se pretende resolver estas preguntas.

22
3 JUSTIFICACIÓN. Este proyecto se realiza con el fin de responder las preguntas realizadas en el planteamiento del problema. Su finalidad será desarrollar y comparar dos técnicas avanzadas de control, óptimo y robusto, con respecto al controlador clásico PID. De esta manera se podrá conocer si es posible generar mejores prestaciones al momento de estabilizar dispositivos de grabación que se encuentren instalados en lugares que cuenten con movimientos indeseados. Los reguladores óptimo y robusto son descritos por la teoría de control avanzado y se espera que obtengan una mejor respuesta, en tiempos de establecimiento angular, frente a la estrategia de control clásico PID. Esta mejora en la respuesta se verá reflejada en la mitigación de las perturbaciones y, por ende, en la calidad de las imágenes capturadas. Con relación al controlador PID, el controlador Óptimo basa su diseño en una función de costo que incluye tanto la dinámica de la planta cómo la acción de control, buscando el mejor desempeño de estas dos sin dejar de alcanzar el valor de referencia solicitado. Por otra parte, el controlador Robusto, puede tener en cuenta las variaciones en los parámetros desconocidos en el modelo. De esta manera, se espera que la implementación de estos dos controladores permita tener una mejora considerable en la mitigación de las perturbaciones. De igual manera, se espera aportar a la universidad competencias en el modelado y control de posición para motores brushless, pues con base en lo consultado con algunos docentes, no se ha realizado algún proyecto similar. Adicionalmente, este proyecto también contribuirá en la mejora de la captura de imágenes en el proyecto Kondor Map – Innóvate 2017.

23
4 OBJETIVOS. 4.1 GENERAL Desarrollar técnicas avanzadas de control para estabilizar un Gimbal (2DOF) de uso comercial. 4.2 ESPECÍFICOS
• Desarrollar el modelo dinámico de un sistema Gimbal de dos grados de libertad (2DOF).
• Validar el modelo dinámico del Gimbal (2DOF) mediante la plataforma Simmechanics de Matlab.
• Desarrollar el modelo matemático de un motor brushless trifilar.
• Desarrollar controladores basados en las técnicas de control Óptimo y robusto para la estabilización del Gimbal (2DOF).
• Implementar las estrategias de control en un Gimbal (2DOF) de uso comercial con base en las técnicas de control previamente diseñadas.
• Validar experimentalmente las estrategias de control para la estabilización del Gimbal (2DOF) evaluando las variables angulares respecto a un controlador comercial (línea base).

24
5 ESTADO DEL ARTE. Después de la de la Segunda Guerra Mundial, gracias a la competitividad permanente que se vivió en la postguerra, se comenzaron a desarrollar sistemas tecnológicos de estabilización que cambiaría el modo de grabaciones de la industria cinematográfica, como lo fue el Steadicam [1]. Luego de la creciente aceleración en la evolución de la electrónica a finales del siglo XX y comienzos del siglo XXI, de los sistemas de control en la región de Asia, Europa y Norteamérica, y con la integración de los dispositivos mecánicos con la electrónica, se desarrollaron dispositivos estabilizadores de cámaras, cuyo tamaño se vio reducido. La reducción del tamaño no sólo se debió al crecimiento acelerado de la electrónica, sino también surgió como una necesidad ante la proliferación del uso masivo de los smartphones para contenido en redes sociales y el empleo de los drones en la captura de imágenes. Continuando con [1], en la década del 2010, diferentes países, como Estados Unidos, China y Noruega han desarrollado y comercializado Gimbals, los cuales en su mayoría cuentan con tres grados de libertad y son enfocados para cámaras de alta resolución (Industria cinematográfica), smartphones y Drones. Algunos de ellos, como el Gimbal Ronin-S de la marca DJI [2], se le puede modificar parámetros, desde el celular, cómo velocidades, bandas muertas, puntos finales, entre otros, de manera que el usuario no necesite conocimientos en el área de control para su uso. Otros, cómo los Gimbal basados en la tarjeta de control de Basecam electronics [3], permiten la posibilidad de configurar, mediante software, las ganancias del controlador, además de visualizar gráficas en el tiempo de los datos de la IMU. Hoy en día, se han realizado diferentes trabajos en el área de la investigación, que van desde el desarrollo del diseño y el control, hasta la implementación y validación de las estrategias de control en Gimbals comerciales. A continuación, se mencionan algunos de estos trabajos ordenados por año de publicación. Chin E. Lin [4], en el año 2014 describe la integración de un Gimbal de uso comercial en un vehículo aéreo no tripulado, allí se muestra de manera experimental la frecuencia adecuada en la modulación de ancho de pulso para los motores sin escobillas. Erhan Poyrazoglu [5], en el año 2017 muestra el modelado de la dinámica en un Gimbal de dos grados de libertad que tiene motores con escobillas y, desarrolla el diseño y comparación de la respuesta de dos estrategias de control, proporcional integral en cascada e integral lineal cuadrático. Ali Algoz [6], en el 2018 muestra el diseño del driver de potencia para los motores sin escobillas y la implementación de un controlador PID, para la estabilización del Gimbal comercial Feiyu Tech G4S de tres grados de libertad. Por último, en el mismo año, Alonso Ramos Fernández [1]. expone el diseño, construcción y control de un dispositivo Gimbal de tres grados de libertad para Smartphons, el cual emplea motores de corriente directa sin escobillas y un sensor de referencia de posición angular espacial (AHRS).

25
6 MARCO TEÓRICO. 6.1 UNIDAD DE MEDICIÓN INERCIAL (IMU) Dispositivo empleado para adquirir datos inerciales, cómo velocidades angulares y aceleraciones traslacionales. Por lo general, cuentan con diferentes sensores, como acelerómetros, giroscopios, magnetómetros, entre otros. Para el proyecto se pretende implementar la IMU MPU6050 la cual viene con el Gimbal. Esta IMU cuenta con dos sensores un Acelerómetro y un Giroscopio de tres ejes, cada uno. Dispone de conversores analógicos digitales (ADC) de 16bits. El rango del acelerómetro puede ser ajustado a ±2g, ±4g, ±8g, y ±16g, el del giroscopio a ±250, ±500, ±1000, y ±2000°/s. Los datos se envían a la unidad controladora por medio del protocolo I2C. A continuación, se muestra el dispositivo.
Figura 1. Ejes respectivos de la MPU6050. [7]
A continuación, se presentan las direcciones de los registros más relevantes [8].
Dirección (Hexadecimal)
Descripción Unidad Observaciones
68 Dirección de la IMU en el
bus I2C - Por Default
6B
Permite salir del modo
hibernación (Sleep) Y Ajusta el oscilador interno
- Escribir con ‘0’ para salir del modo hibernación (Sleep) y
ajustar el reloj interno a 8 MHz.
3B,3C Datos del
acelerómetro en el eje X
Decimal 16 Bits (Según rango)
Los datos se dividen en dos registros, en donde 3B (Alto) es el
más significativo y 3C (Bajo) el menos significativo

26
3D,3E Datos del
acelerómetro en el eje Y
Decimal 16 Bits (Según rango)
Los datos se dividen en dos registros, en donde 3D (Alto) es el
más significativo y 3E (Bajo) el menos significativo
3F,40 Datos del
acelerómetro en el eje Z
Decimal 16 Bits (Según rango)
Los datos se dividen en dos registros, en donde 3F (Alto) es el
más significativo y 40 (Bajo) el menos significativo
43,44 Datos del
giróscopo en el eje X
Decimal 16 Bits (Según rango)
Los datos se dividen en dos registros, en donde 43 (Alto) es el
más significativo y 44 (Bajo) el menos significativo
45,46 Datos del
giróscopo en el eje Y
Decimal 16 Bits (Según rango)
Los datos se dividen en dos registros, en donde 45 (Alto) es el
más significativo y 46 (Bajo) el menos significativo
47,48 Datos del
giróscopo en el eje Z
Decimal 16 Bits (Según rango)
Los datos se dividen en dos registros, en donde 47 (Alto) es el
más significativo y 48 (Bajo) el menos significativo
1B Configuración
del rango giróscopo
°/s Por default ± 250
1C Configuración
del rango Acelerómetro
G Por default ± 2
Tabla 1. Registros relevantes para el funcionamiento básico de la MPU6050
Para calcular la orientación a partir de los datos obtenidos de este dispositivo, se emplean las siguientes ecuaciones, en donde 𝑇𝑚 es el periodo de muesteo, el cual se define como el tiempo entre muestras consecutivas 𝑘 y 𝑘 − 1 [7].
𝜃2𝑎𝑐𝑐[𝑘] = tan−1
(
𝑎𝑥[𝑘]
√𝑎𝑦2[𝑘] + 𝑎𝑧2[𝑘])
(1)
𝜃1𝑎𝑐𝑐[𝑘] = tan−1
(
𝑎𝑦[𝑘]
√𝑎𝑥2[𝑘] + 𝑎𝑧2[𝑘])
(2)

27
𝜃1𝐺𝑦𝑟𝑜[𝑘] = 𝜃1𝐺𝑦𝑟𝑜[𝑘−1] + 𝜔𝑥[𝑘]𝑇𝑚 (3)
𝜃2𝐺𝑦𝑟𝑜[𝑘] = 𝜃2𝐺𝑦𝑟𝑜[𝑘−1] + 𝜔𝑦[𝑘]𝑇𝑚 (4)
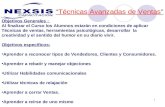
Con base en estas ecuaciones, el ángulo puede ser calculado por medio de los datos del acelerómetro o del giróscopo. Sin embargo, al calcularlo mediante el giróscopo, debido a la integración que se realiza, se produce una deriva que, en el tiempo, irá sumando y dando un cálculo erróneo del ángulo. Por otra parte, al calcularse con los datos del acelerómetro, no se produce deriva, pues los ángulos se calculan teniendo como referencia la gravedad de la tierra, la cual es un vector con magnitud y dirección constante. A pesar de ello, si la MPU6050 se encuentra en un lugar con vibraciones mecánicas, el acelerómetro medirá las aceleraciones producidas por ellas y, por ende, el cálculo del ángulo se verá afectado; contrario a esto, el Giróscopo será afectado muy levemente. Con el fin de dar solución a cada uno de los inconvenientes anteriormente mencionados, a continuación, se presentan las opciones, Filtro complementario, Simple Kalman Filter (Librería) y el Estimador de Kalman. 6.1.1 FILTRO COMPLEMENTARIO Este filtro posee la estructura mostrada en la Figura 2.
Figura 2. Estructura Filtro complementario
Emplea un filtro pasa altas para el Giróscopo y uno pasa bajas para el acelerómetro. Fusiona los datos del Giróscopo y el Acelerómetro mediante las ganancias 𝑘1 y 𝑘2. A medida que 𝑘1 aumenta, 𝑘2 disminuye y, por ende, el filtrado aumenta. En caso

28
contrario, cuando 𝑘1 disminuye, 𝑘2 aumenta y el filtrado disminuye. Un código base para implementar este filtro se encontró en la internet en la página de Luis Llamas [9]. 6.1.2 SIMPLE KALMAN FILTER En la internet, se encuentra una librería denominada SimpleKalmanFilter [10], la cual permite filtrar señales basadonse en la teoría del estimador de Kalman. Esta librería parametriza el filtro solicitando tres valores mediante la siguiente sintaxis SimpleKalmanFilter Name(eMean, eEst, q), en dónde.
Name: Es el nombre que se le quiere dar al filtro. eMean: La medida incierta (Cuanto espera que la medida varié). eEst: La Estimación incierta, la cual puede ser inicializada con el
mismo valor de eMean ya que el mismo filtro ajustará este valor. q: Varianza del proceso. Usualmente un valor pequeño entre
0.001 y 1 (Cuan rápido se mueve la medida). 6.1.3 ESTIMADOR DE KALMAN El estimador de Kalman es muy conocido por su robustez frente al ruido, basados en [11], a continuación se establecen las ecuaciones del filtro en un modelo de
espacio de estados, en donde, 𝜃1 y 𝜃2 son los ángulos a estimar que, en este caso, serían los ángulos de los eslabones 1 y 2, respectivamente. 𝜔1 y 𝜔2 son las velocidades angulares entregadas por el Giróscopo, 𝑡𝑚 es el periodo de muestreo o el tiempo transcurrido entre la muestra [𝑘] y la muestra [𝑘 − 1].
[𝑘]− = 𝐴[𝑘−1] + 𝐵 [
𝜔1𝜔2][𝑘]
𝐴 = [1 00 1
] ; 𝐵 = [𝑡𝑚 00 𝑡𝑚
] ; [𝑘−1] = [𝜃1𝜃2][𝑘−1]
(5)
[𝑘] = 𝐻[𝑘]
− (6)
El vector [𝑘]
− contiene los ángulos estimados a priori (el símbolo – significa a priori
y, ^ significa estimado). [𝑘] contiene los estados estimados que se quieren obtener
luego de aplicar el filtro, como en este proyecto son 𝜃1 y 𝜃2 , entonces 𝐻 = 𝐴. Posteriormente, se establece la matriz de covarianza del error en la estimación a priori.
𝑃[𝑘]− = 𝐴𝑃[𝑘−1]𝐴
𝑇 + 𝑄𝑓 (7)

29
En donde 𝑄𝑓 es la matriz de covarianza del ruido en la estimación con el modelo
teórico. A las ecuaciones (5), (6) y (7), se les conoce como las ecuaciones de predicción. Una vez desarrolladas, se procede a calcular las ecuaciones, denominadas, de actualización, en donde 𝐾[𝑘], representa la matriz de ganancias
de Kalman que corrige los estados y, 𝑅𝑓 la matriz de covarianza del ruido en las
observaciones, es decir, el ruido en el ángulo calculado por los datos del acelerómetro.
𝐾[𝑘] = 𝑃[𝑘]− 𝐻𝑇(𝐻𝑃[𝑘]
− 𝐻𝑇 + 𝑅𝑓)−1
(8)
El vector [𝑘], representa los estados estimados.
[𝑘] = [𝑘]
− + 𝐾[𝑘] ( 𝑧[𝑘] − [𝑘]) (9)
El vector 𝑧[𝑘], representa las observaciones que, para este caso se obtienen con
(10), en donde 𝑎𝑥, 𝑎𝑦 y 𝑎𝑧 son las lecturas relazadas con el acelerómetro.
𝑧[𝑘] = [𝑎𝑡𝑎𝑛2(𝑎𝑦, √𝑎𝑥2 + 𝑎𝑧2)
𝑎𝑡𝑎𝑛2(−𝑎𝑥, √𝑎𝑦2 + 𝑎𝑧2)]
[𝑘]
(10)
Por último, se actualiza la matriz de covarianza del error en la estimación mediante (11), en donde 𝐼 representa la matriz identidad.
𝑃[𝑘] = (𝐼 − 𝐾[𝑘]𝐻)𝑃[𝑘]−
(11)
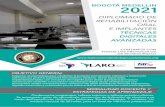
A continuación, se muestra un resumen de las ecuaciones del filtro, anteriormente mencionadas.
Figura 3. Ecuaciones Filtro Kalman
𝑥[𝑘]− = 𝐴𝑥[𝑘−1] +𝐵 [
𝜔1𝜔2][𝑘]
[𝑘] = 𝐻𝑥[𝑘]
−
𝑃[𝑘]− = 𝐴𝑃[𝑘−1]𝐴
𝑇 + 𝑄𝑓
𝑥[𝑘−1]
𝑃[𝑘−1]
𝑥[𝑘]
𝐾[𝑘] = 𝑃[𝑘]− 𝐻𝑇(𝐻𝑃[𝑘]
− 𝐻𝑇 + 𝑅𝑓)−1
𝑥[𝑘] = 𝑥[𝑘]− + 𝐾[𝑘] ( 𝑧[𝑘] − [𝑘])
𝑃[𝑘] = (𝐼 − 𝐾[𝑘]𝐻)𝑃[𝑘]−
Predicción Actualización
Condiciones iniciales
Estimación

30
6.2 COMUNICACIÓN I2C I2C significa Circuito Inter-Integrado (Por sus siglas en Inglés Inter-Integrated Circuit) es un protocolo de comunicación serial desarrollado por Phillips Semiconductors en la década de los 80s. Con el protocolo I2C podemos tener a varios maestros controlando uno o múltiples esclavos. Esto puede ser de gran ayuda cuando se van a utilizar varios microcontroladores para manipular un registro de datos hacia una sola memoria o cuando se va a mostrar información en una sola pantalla. El protocolo I2C utiliza sólo dos vías o cables de comunicación, así como también lo hace el protocolo UART [12]. A continuación en la Figura 4 se muestra el conexionado.
Figura 4. Protocolo I2C [12]
SDA – Serial Data. Es la vía de comunicación entre el maestro y el esclavo para enviarse información. SCL – Serial Clock. Es la vía por donde viaja la señal de reloj. Cabe aclarar que, este protocolo también tiene dos líneas adicionales, la alimentación y tierra, las cuales dependiendo la aplicación pueden requerir elementos pasivos o activos para reducir el ruido. 6.3 FUERZA CONTRA ELECTROMOTRIZ (BEMF) También conocido como BEMF por sus siglas en ingles. Este es un fenómeno que se presenta en los motores eléctricos y se rige por las leyes electromagnéticas de Lenz y Faraday. Produce un voltaje en dirección contraria al de la fuente de la alimentación del motor (Fuerza contra electromotriz) al cambiar la dirección del flujo magnético de los imanes permanentes del rotor sobre los bobinados del estator, de esta manera, es dependiente de la velocidad a la que gira el rotor y, por lo tanto, si el rotor no gira, no existe Back EMF. Este fenómeno afecta directamente al motor, ya que el voltaje neto en sus terminales disminuye debido a que el voltaje Back EMF se encuentra en dirección contraria.

31
6.4 ECUACIÓN DE LAGRANGE La ecuación de Lagrange permiten modelar un sistema mediante la energía cinética y potencial. A continuación, se presenta la ecuación general que describe este método.
𝑑
𝑑𝑡(𝜕ℓ
𝜕𝑖) −
𝜕ℓ
𝜕𝑞𝑖= 𝑄𝑖 (12)
El símbolo ℓ, representa la diferencia entre la energía cinética y potencial. A esta diferencia se le denomina el Lagrangiano (En inglés, Lagrangian). El símbolo 𝑞𝑖 representa las coordenadas generalizadas. Estas coordenadas son aquellas variables que permiten determinar de manera unívoca la configuración del sistema en el tiempo. Se les denominada generalizadas porque pueden ser medidas en cualquier sistema de referencia, cómo, por ejemplo, cartesiano, polar, etc. Es necesario que el número de coordenadas generalizadas sea igual al número de grados de libertad del sistema, de esta manera se dice que el sistema es Holonómico y puede ser modelado a través de estas ecuaciones. El símbolo 𝑄𝑖 representa las fuerzas generalizadas. Estas fuerzas son aquellas denominadas no conservativas y pueden calcularse mediante la siguiente ecuación (13), en donde 𝐹𝑘, representa las fuerzas no conservativas, 𝑀𝑗 los momentos aplicados al sistema, 𝑟𝑘
los vectores posición de 𝐹𝑘 y, 𝜔𝑗 las velocidades angulares en la dinámica del
sistema.
𝑄𝑖 =∑𝐹𝑘 ∙𝜕𝑟𝑘𝜕𝑞𝑖
+∑𝑀𝑗 ∙𝜕𝑗
𝜕𝑖
𝑚
𝑗=1
𝑛
𝑘=1
(13)
6.5 GIMBAL Es un sistema mecatrónico que se emplea para la estabilización de cámaras cuyo emplazamiento suele tener movimientos bruscos. Actualmente, los más usados son de 2 y 3 grados de libertad (Pueden encontrarse de más grados de libertad con el fin de asegurar movimientos repetitivos programables, como, por ejemplo, cuando se desea que la cámara también se desplace) y suelen emplearse en sistemas aéreos y terrestres. Para el presente trabajo se ha utilizado un Gimbal de dos grados de libertad el cual se muestra a continuación en la Figura 5.

32
Figura 5. Gimbal FPV de 2 ejes [13]
Este sistema se compone de dos motores sin escobillas 2208 [14] y una estructura mecánica en aluminio, las cuales se describen a más profundidad en las siguientes secciones. 6.5.1 MOTOR SIN ESCOBILLAS (BRUSHLESS) Referenciado en inglés, como BLDC motor (Brushless Direct Current motor), también son conocidos, cómo un motor de corriente directa síncrono y son alimentados por una corriente eléctrica de alterna que se produce al conmutar una fuente de alimentación continua o un inversor. Generalmente, son motores de 3 bobinas en conexión estrella, aunque también se pueden encontrar en conexión tipo delta. Las ventajas de un motor BLDC son su eficiencia y el torque constante que el motor entrega a la salida, además de la durabilidad y el bajo peso con relación a otro tipo de motores de las mismas prestaciones. El motor BLDC se compone de un rotor y un estator. El rotor está compuesto de imanes permanentes y el estator consta de varias bobinas. Al aplicar alimentación de corriente continua a cada una de las bobinas dada una secuencia predefinida, las bobinas crearán un campo eléctrico giratorio que hará girar el rotor. Un motor BLDC típico, requiere de una secuencia de conmutación de 6 pasos para una revolución eléctrica. La secuencia de activación de las bobinas para un ciclo eléctrico (Rotación de 360 grados del campo magnético en el estator) se muestra a continuación, en donde U, W Y V, pueden verse, respectivamente, como fases A, B y C.

33
Figura 6. Secuencia de activación de las bobinas en un motor BLDC [6]
Para el control de la secuencia de alimentación, frecuentemente se emplea un sistema de retroalimentación para determinar la posición del rotor. Generalmente en la conmutación de 6 pasos, se hace uso de sensores de efecto Hall. En lo que destaca al momento de emplearse, es que pueden existir dos tipos de rotor, interno (Inrunner motor) y externo (Outrunner motor). En los motores de rotor interno, los imanes permanentes (rotor) se posicionan en el núcleo o centro y los bobinados (estator) alrededor, mientras que, en los motores de rotor externo, los bobinados (estator) se encuentran en el centro o núcleo y los imanes permanentes (rotor) alrededor. Por lo general, se encuentran de tres fases o terminales y, con el bobinado en conexión tipo estrella como se aprecia en la Figura 6. A continuación, se puede apreciar en la Figura 7 los dos tipos de rotores.
Figura 7. Sección de los tipos de rotores en motores BLDC [15] A pesar de que existen dos tipos de construcción, para cualquiera, los imanes permanentes siempre permanecen intercalados en la polaridad (N-S) con el fin de lograr la rotación. La principal diferencia de los rotores externos radica en que pueden generar mayor torque que los internos, sin embargo, poseen mayor inercia y menor velocidad en relación con estos últimos.

34
Actualmente, debido a sus grandes ventajas, los motores sin escobillas están extendiéndose a múltiples aplicaciones, cómo, por ejemplo, en vehículos y la industria de construcción de casas [16]. Dentro de las ventajas más relevantes con respecto al motor con escobillas se encuentra que, los motores sin escobillas:
• Son más eficientes ya que su velocidad es determinada por la frecuencia a la que la corriente es aplicada y no por el voltaje.
• Al no tener escobillas, las pérdidas de energía mecánica debido a la fricción son menores, lo que mejora la eficiencia.
• No producen chispas ni ruidos excesivos durante su funcionamiento, además de que incrementa las horas de trabajo, alrededor de 10.000 horas, y conlleva a menores paradas por reemplazo de componentes o reparaciones.
• Pueden operar a altas velocidades con o sin carga. Alrededor de 10.000 RPM.
• Aceleraran, desaceleraran y cambiar el giro fácilmente al tener baja inercia en el rotor, especialmente en los de tipo interno.
• Cuentan con el torque más alto por metro cúbico que cualquier motor de corriente directa en un amplio rango de velocidades.
• Por lo general, su enfriamiento es por conducción y no se requiere flujo de aire para el enfriamiento interior.
A pesar de las excelentes ventajas anteriormente mencionadas, se debe tener en cuenta que los motores sin escobillas son más costosos que los motores con escobillas. Además, requieren mayor inversión de tiempo y dinero en la etapa del control y potencia. Los motores brushless se definen habitualmente como máquinas síncronas de imanes permanentes (PMSM, por sus siglas en inglés) pero que muestran una fuerza contra electromotriz de forma trapezoidal debido a la concentración de los arrollamientos de estator. Esto diferencia los motores BLDC de los motores PMSM, cuya fuerza contra electromotriz es de forma sinusoidal debido a la forma en que los arrollamientos del estator están distribuidos ( [17], [18] ). 6.5.1.1 FUNCIONAMIENTO Los motores sin escobillas tienen un funcionamiento similar a los motores con escobillas. Funcionan gracias a la atracción y repulsión de los imanes permanentes en el rotor (Polos) y las bobinas (electro imanes) del estator a través de la ley de Faraday; la atracción y repulsión se produce al conmutar las fases de alimentación. En un motor con escobillas, esta conmutación se realiza gracias al contacto de las escobillas, sin embargo, en el motor sin escobillas, el suicheo de las fases debe realizarse de manera electrónica. Para entender mejor el funcionamiento del motor brushless, a continuación, se muestra su estructura para un par de polos (dos imanes en el rotor) en la Figura 8, en donde se puede apreciar el rotor (Rotor), en el cual se encuentran los imanes permanentes (Permanent magnet) , y el estator

35
(Stator), en donde está ubicado el bobinado (Coil Windings). A, B y C hacen referencia a las Fases del motor. La línea fucsia hace referencia al campo magnético de los imanes.
Figura 8. Representación BLDC motor trifásico de un par de polos. [19]
Como se ve observa en la Figura 8, es posible interpretar al motor BLDC, cómo una variante del motor con escobillas, en el que las bobinas ahora se encuentran en el estator y no en el rotor. Hay motores con diferentes arreglos, en donde el estator puede tener más de una bobina y el rotor más de un par de polos, cómo se observa a continuación en la Figura 9.
Figura 9. Diferentes arreglos en un motor BLDC (De izquierda a derecha. Uno,
dos y cuatro pares de polos) [19] Además, de la configuración de estos arreglos, también se pueden encontrar motores con estructuras similares denominadas, máquinas síncronas de imanes permanentes o, por sus siglas en inglés, PMSM [19]. Los motores BLDC y PMSM son definidos cómo motores síncronos, con los imanes permanentes en el rotor, sin embargo, su diferenciador clave, como se mencionó anteriormente, se encuentra en la forma de onda de la fuerza contra electromotriz (BEMF). Para el caso de los motores BLDC, la forma de onda es trapezoidal, mientras que, en los PMSM, es senoidal. A continuación en la Figura 10, se muestran las ondas obtenidas mediante

36
simulación de los bloques Brushless DC motor y PMSM del software Matlab-Simulink [19].
Figura 10. Fuerza contra electromotriz (BEMF) de un motor BLDC y PMSM, realizado en Matlab – Simulink
La fuerza contra electromotriz (BEMF) es una característica importante del motor, pues al ver su forma de onda, podremos saber qué tipo de motor tenemos, y también que tipo de algoritmo de control se puede emplear. Como se puede observar en la anterior figura, la fuerza contra electromotriz (BEMF) del motor BLDC, incluye regiones en donde el voltaje permanece plano o constante, esto nos indica que el motor puede controlarse usando voltaje de corriente directa (DC) [19]. A continuación, se explicará en detalle el funcionamiento interno del motor BLDC, para ello, en la Figura 11 se presenta la estructura de un motor con tres terminales (A, B, C), que se encuentran conectadas a 3 bobinas (estator) y, posee un rotor con 2 polos (North, South).
Figura 11. Motor trifásico BLDC [19]
Como se puede observar en la Figura 11, ninguna de las fases (A, B, C) se encuentra energizada y, por lo tanto, el rotor está estacionario. Suponiendo que se suministra voltaje en las fases A y C, se generará un campo magnético en las bobinas del estator, ya que estas se encuentran conectadas a las fases A, B y C,

37
respectivamente. De esta manera, las líneas de fuerza del campo en el estator fluirán en el sentido de la línea punteada, cómo se puede ver en la Figura 12.
Figura 12. Alineación de los polos al campo magnético del estator [19] Como resultado, los imanes permanentes en el rotor lo giraran hasta alinearlo con las líneas de fuerza. En este sentido, existen 6 diferentes formas de energizar las tres fases (CB, AB, AC, BC, BA, CA) y, por lo tanto, 6 diferentes maneras de alinear los polos del rotor a las líneas de fuerza producidas por los campos magnéticos de las bobinas en el estator, respectivamente. A continuación, en la Figura 13, se muestra la posición angular final del rotor en grados, una vez se alinea (alignment) a las líneas de fuerza del campo en el estator (líneas punteadas), partiendo del estado estacionario de 0 grados, medidos desde el eje horizontal.
Figura 13. Alineaciones posibles del rotor a las líneas de fuerza (Líneas punteadas) del campo magnético en el estator [19]

38
En la Figura 13, cada una de estas alineaciones, de izquierda a derecha, están entre ellas a 60 grados, lo que significa que, si se logra conmutar las fases en el orden correcto es posible hacer que el rotor gire. Este tipo de conmutación se le conoce cómo, conmutación de seis pasos (Six-Step commutation) o control trapezoidal. Hay que tener en cuenta que, con base en la Figura 9, para más pares de polos, la conmutación ocurre más frecuentemente, por lo que, para un par de polos, una conmutación ocurre cada 60 grados, para dos pares de polos, una conmutación ocurre cada 30 grados y, para cuatro pares de polos, 15 grados. De esta manera, la relación entre ángulo que forman las líneas de fuerza (ángulo eléctrico) y el ángulo de la posición del rotor (ángulo mecánico), a medida que aumentan los pares de polos, es la siguiente, en donde 𝜃𝑒, es el ángulo eléctrico, 𝜃𝑚, es el ángulo mecánico y, 𝑃, es el número de polos en el rotor [20].
𝜃𝑚 =2 ∗ 𝜃𝑒𝑃
(14)
6.5.1.2 TÉCNICAS DE CONMUTACIÓN Debido a que el diseño mecánico del motor sin escobillas no le permite conmutar automáticamente una vez se energiza, se requiere realizar la conmutación de forma electrónica. Para lograr la conmutación de forma electrónica es necesario de tres etapas: control, potencia y medición.
Figura 14. Diagrama para la conmutación de un motor sin escobillas
En la etapa de medición se monitorea la posición del rotor en el tiempo ( [21], [22], [23]). Esta medición se puede realizar de forma dos formas. Sin sensor (Sensorless) o con sensor.
• Sin sensor (Sensorless): Se monitorea la posición del rotor a través de un circuito analógico que mide la fuerza contra electromotriz (BEMF) o las corrientes en las fases.
Secuencia de conmutación
Potencia BLDC Motor
Medición

39
• Sensor: Por lo general, se monitorea la posición del rotor a través de un enconder (pulsos en cuadratura), resolver (señales análogas), sensores de efecto hall (pulsos) o unidades de medición inercial (protocolo de comunicación), las cuales son poco comunes.
La etapa de potencia se encarga de manipular los sentidos y magnitudes de corrientes adecuados para el funcionamiento del motor BLDC, con base en las señales de activación enviadas por la etapa de control. Para lograrlo, por general, esta etapa posee un triple puente en H o puente de tres fases, como se muestra en la Figura 15. Este dispositivo convierte una entrada de corriente directa a una salida de corriente alterna, de forma estática, es decir, sin necesidad de máquinas rotativas o contactos mecánicos, utilizando en su lugar elementos semiconductores de potencia los cuales son conmutados en un orden específico ( [24], [25] ).
Figura 15. Puente de tres fases [26] En la Figura 15, de SW1 a SW6, son las señales provenientes de la etapa de control para activación respectiva de U, V, W, las cuales son las fases del motor brushless (Three-phase Brushless DC Motor). Nunca se debe activar al mismo tiempo transistores de la misma fase, por ejemplo, SW1 y SW2, debido a que se producirá un corto eléctrico. El bloque de secuencia de conmutación genera las señales en el orden correcto para la activación del bloque de potencia. A continuación, se muestran las tres secuencias o técnicas de conmutación más comunes. 6.5.1.2.1 TRAPEZOIDAL (SIX STEP COMMUTATION) Es el más fácil de realizar debido a su simple algoritmo de control. En la mayoría de las aplicaciones en donde se implementa esta secuencia, la posición del rotor es determinada por tres sensores de efecto hall que son montados en el estator,

40
separados 120 grados entre ellos. Cuando el rotor pasa sobre los sensores, ellos producen señales de alto o bajo para indicar que polos del rotor están pasando. El cambio de alto a bajo (o bajo a alto) de los tres sensores entrega la información de la posición del rotor cada 60 grados eléctricos, lo que significa que 6 pasos son necesarios para completar un ciclo eléctrico (360 grados eléctricos). Por esta razón también se le conoce cómo conmutación de seis pasos. La correcta secuencia de conmutación es determinada por la combinación lógica de las señales del sensor de efecto hall [27]. Esta secuencia también puede ser realizada sin sensores, basándose en el Back EMF, ya que un típico motor BLDC de tres fases con corriente trapezoidal, una bobina es positiva, una es negativa, y la otra está abierta. La bobina abierta puede ser usada para detectar el paso por cero del back EMF, lo cual correspondería a un cambio en la señal del sensor de efecto hall, para la conmutación anteriormente mencionada. Sin embargo, como el Back EMF es proporcional a la velocidad del motor, a bajas velocidades, el Back EMF será muy bajo, por lo que el motor estará en modo lazo abierto hasta que haya suficiente velocidad [27]. A continuación, en la Figura 16 se muestra una secuencia trapezoidal para un motor BLDC trifásico, en donde se puede apreciar las señales de los sensores de efecto hall (Hall sensor Output), la fuerza contra electromotriz (BEMF), el torque en el rotor (Output Torque), y las corrientes en cada una de las tres fases (Phase Current).

41
Figura 16. Señales de los sensores de efecto hall (Hall sensor Output), fuerza contra electromotriz (BEMF), torque en el rotor (Output Torque), y corrientes en
cada una de las tres fases (Phase Current) [28]. La técnica de control mediante Conmutación Trapezoidal se caracteriza por su fácil implementación, sin embargo, entre las desventajas más relevantes se encuentran los errores de posicionamiento provocados por las seis posiciones discretas que puede tomar el campo magnético inducido y las ondulaciones en el par entregado por el motor (también conocido como rizado), especialmente durante los cambios en la conmutación. El rizado es especialmente visible a bajas velocidades, además, las variaciones de par pueden provocar vibraciones durante el funcionamiento, y estas a su vez pueden provocar ruidos y una reducción de la vida útil del motor. Por lo tanto, se desaconseja su uso en aplicaciones que precisen un control exacto de posición y de par [29]. 6.5.1.2.2 SENOIDAL Anteriormente se mencionó que el BEMF de un motor BLDC es trapezoidal, sin embargo, en la práctica, esta onda no es puramente trapezoidal, pues la inductancia en el motor suaviza el BEMF y la convierte en una onda con forma senoidal [27]. De esta manera, dado que la forma de onda es más senoidal que trapezoidal, es posible usar una conmutación senoidal, la cual se explica en mayor detalle a continuación.
La premisa básica de esta secuencia de conmutación es proveer a cada una de las bobinas en el motor, mediante PWM, corrientes que varían senoidalmente a medida que el rotor gira [30]. La conmutación sinusoidal es vista como un control más

42
avanzado y exacto que el trapezoidal, ya que intenta controlar la posición del rotor continuamente [31]. Esta continuidad se consigue aplicando simultáneamente tres corrientes sinusoidales desfasadas 120º a los tres bobinados del motor. La fase de estas corrientes se escoge de forma que el vector de corrientes resultante siempre esté en cuadratura con la orientación del rotor y tenga un valor constante. Como consecuencia de este procedimiento se obtiene un par más preciso y sin el rizado típico de la conmutación trapezoidal. No obstante, para poder generar dicha modulación sinusoidal es necesario una medición precisa de la posición del rotor [31]. Para entender cómo, al aplicar esta técnica, se elimina el rizado típico de la conmutación trapezoidal, se necesita analizar la ecuación de torque (15) para las tres fases del motor [30].
𝑇𝑒 = 𝐾𝑡 ∗ (𝑖𝑎 ∗ sin(𝜃𝑒) + 𝑖𝑏 ∗ sin(𝜃𝑒 + 120) + 𝑖𝑐 ∗ sin(𝜃𝑒 + 240)) (15)
Donde, 𝐾𝑡, es la constante de torque, 𝑖𝑎, 𝑖𝑏, 𝑖𝑐, son las corrientes de fase y, 𝜃𝑒, el ángulo eléctrico. A causa de que las corrientes de fase son senoidales, se pueden representar de la siguiente manera, en donde, 𝑀, es la magnitud de la corriente.
𝑖𝑎 = 𝑀 ∗ sin(𝜃𝑒) 𝑖 = 𝑀 ∗ sin(𝜃𝑒 + 120) 𝑖𝑐 = 𝑀 ∗ sin(𝜃𝑒 + 240)
(16)
Substituyendo, las corrientes senoidales (16) en la ecuación de torque (15), se obtiene.
𝑇𝑒 = 𝐾𝑡 ∗ 𝑀(sin2(𝜃𝑒) + sin
2(𝜃𝑒 + 120) + sin2(𝜃𝑒 + 240)) (17)
Resolviendo las funciones trigonométricas en (17), se obtiene (18).
𝑇𝑒 = 1.5 ∗ 𝐾𝑡 ∗ 𝑀(sin2(𝜃𝑒) + 𝑐𝑜𝑠
2(𝜃𝑒)) 𝑇𝑒 = 1.5 ∗ 𝐾𝑡 ∗ 𝑀
(18)
Esto demuestra que al emplear esta estrategia el torque es independiente del ángulo, por lo que elimina el rizado visto en la conmutación trapezoidal [32]. La desventaja de la conmutación senoidal es que se vuelve ineficiente a altas velocidades. Cuanto más rápido gira el motor, mayor es la frecuencia de las señales senoidales, y los controladores tienen dificultades para rastrear estas señales de alta frecuencia. Las velocidades más altas del motor también hacen que aumente el BEMF tanto en amplitud, cómo en frecuencia, lo que hace más difícil para el motor superarlo [30]. Cualquiera de estas condiciones resulta en perturbaciones para el lazo de control de corriente (si se desea controlar), además de que causa retrasos de fase y errores en las corrientes [30]. El resultado final es que el vector espacial de corriente se mueve fuera de la posición ideal (Ortogonal) relativa a la del rotor,

43
por lo que menos torque es producido por las misma cantidad de corriente [30]. A continuación, en la Figura 17, se muestra la relación del torque (Par motor) con respecto a la velocidad del rotor [31].
Figura 17. Relación del torque (Par Motor) con respecto a la velocidad del rotor, conmutación senoidal [18].
Con base en [32], los voltajes de accionamiento senoidales puros suenan muy bien en la teoría, pero raramente son usados en diseños prácticos. La opción preferida es generar tres voltajes senoidales entre las tres fases. Esto se realiza variando el ciclo útil (Duty Cycle) de una señal PWM (PWM output) relativa a tierra, usando características de perfil mostradas en la parte (b) de la figura a continuación, en vez de senoidales puros. U, V y W, pueden verse, respectivamente, como las fases A, B y C.
Figura 18. Ciclo útil del PWM (a) generando un perfil de voltaje característico
con respecto a tierra (b) que resulta en voltaje y corrientes senoidales con respecto a fase (c) [32]

44
6.5.1.2.3 CAMPO ORIENTADO (FOC) También conocido como control vectorial. Es la técnica más sofisticada y compleja de implementar, ya que demanda altos requerimientos computacionales. Así mismo, corrige los problemas presentes en la conmutación sinusoidal, ya que controla las corrientes de manera directa en un espacio de referencia ortogonal y rotacional, este espacio es llamado espacio d-q (Direct-Quadrature) y, comúnmente, se encuentra alineado con la posición del rotor, de manera que permite controlar el flujo y el par del motor de forma independiente [20]. Cuando la conmutación senoidal se basa en un sistema trifásico que depende del tiempo y la velocidad, el control orientado de campo (FOC) transforma este sistema en el sistema de dos coordenadas, d-q (Direct – Quadrature), que no dependen del tiempo. El Control Vectorial ha experimentado una rápida progresión principalmente gracias a los avances que se han producido en electrónica, electrónica de potencia y procesamiento de señales; los cuales han permitido la aparición de microcontroladores, microprocesadores y procesadores digitales de señal. Estas mejoras tecnológicas han permitido diseñar controladores electrónicos de motor cada vez más precisos y eficaces, logrando reducir su consumo de energía al mínimo. Al igual que en la conmutación senoidal es importante conocer la posición del rotor con exactitud. Un error en la estimación de ésta provocará que la componente directa y la componente cuadratura no estén totalmente desacopladas [27]. A continuación, se muestra un resumen de las secuencias de conmutación anteriormente mencionadas.
Método de Conmutación
Control de
velocidad
Control de torque Dispositivos de retroalimentación
requeridos
Complejidad del
algoritmo Baja
velocidad Alta
velocidad
Trapezoidal Excelente Torque Rizado
Eficiente Hall Bajo
Senoidal Excelente Excelente Ineficiente Encoder,
Resolver, IMU Medio
FOC Excelente Excelente Excelente Sensor de corriente, Encoder
Alto
Tabla 2. Comparación de los tres métodos de conmutación [33]
6.5.1.3 MODELO MATEMÁTICO

45
Con base en la Figura 6, el modelo de un motor brushless ( [6], [34], [35] ) puede ser descrito por las ecuaciones (19) a (22).
𝑣𝑎𝑏 = 𝑅(𝑖𝑎 − 𝑖𝑏) + 𝐿𝑑(𝑖𝑎 − 𝑖𝑏)
𝑑𝑡+ 𝑒𝑎 − 𝑒𝑏 (19)
𝑣𝑏𝑐 = 𝑅(𝑖𝑏 − 𝑖𝑐) + 𝐿𝑑(𝑖𝑏 − 𝑖𝑐)
𝑑𝑡+ 𝑒𝑏 − 𝑒𝑐 (20)
𝑣𝑐𝑎 = 𝑅(𝑖𝑐 − 𝑖𝑎) + 𝐿𝑑(𝑖𝑐 − 𝑖𝑎)
𝑑𝑡+ 𝑒𝑐 − 𝑒𝑎 (21)
𝑇𝑒 = 𝑘𝑓 𝜔𝑚 + 𝐽 𝑑𝜔𝑚𝑑𝑡
+ 𝑇𝑙 (22)
El cálculo se realiza de manera fasorial en donde los símbolos 𝑣, 𝑖 y 𝑒, representan los voltajes, corrientes y fuerzas contra electromotriz, respectivamente, en las tres fases 𝑎, 𝑏 y 𝑐. La resistencia 𝑅 y la inductancia 𝐿 son valores por fase. 𝑇𝑒 y 𝑇𝑙 , son
el torque eléctrico y el torque de carga, respectivamente. 𝐽 es la inercia del rotor, 𝑘𝑓
es una constante de fricción y 𝜔𝑚 es la velocidad angular del rotor. La fuerza contra electromotriz y el torque eléctrico pueden ser expandidos de la siguiente manera.
𝑇𝑒 =𝑘𝑡2[𝐹(𝜃𝑒)𝑖𝑎 + 𝐹(𝜃𝑒 −
2𝜋3)𝑖𝑏 + 𝐹(𝜃𝑒 −
4𝜋3)𝑖𝑐] (23)
𝑒𝑎 =𝑘𝑒2𝜔𝑚𝐹(𝜃𝑒)
(24)
𝑒𝑏 =𝑘𝑒2𝜔𝑚𝐹(𝜃𝑒 −
2𝜋3) (25)
𝑒𝑐 =𝑘𝑒2𝜔𝑚𝐹(𝜃𝑒 −
4𝜋3) (26)
Donde 𝑘𝑒 y 𝑘𝑡 son las constantes contra electromotriz y de torque y la función 𝐹(𝜃𝑒)
puede ser una función trapezoidal o senoidal acorde con las ecuaciones (27) y (28).

46
𝐹(𝜃𝑒) =
1, 0 ≤ 𝜃𝑒 <
2𝜋
3
1 −6
𝜋(𝜃𝑒 −
2𝜋
3) ,
2𝜋
3≤ 𝜃𝑒 < 𝜋
−1, 𝜋 ≤ 𝜃𝑒 <5𝜋
3
−1 +6
𝜋(𝜃𝑒 −
5𝜋
3) ,
5𝜋
3≤ 𝜃𝑒 < 2𝜋
(27)
𝐹(𝜃𝑒) = sin(𝜃𝑒) , 0 ≤ 𝜃𝑒 ≤ 2𝜋 (28)
Cabe aclarar que, el ángulo eléctrico 𝜃𝑒 (ángulo del campo magnético producido por las bobinas en el estator) y el ángulo mecánico 𝜃𝑚 (ángulo del rotor) están relacionados por el número de polos de acuerdo con la ecuación (14). Debido a que la configuración de las bobinas se encuentran en estrella, como se puede observar en la Figura 6, la suma de las corrientes de fase es igual a cero, por lo que, cada ecuación de voltaje, de (19) a (21), puede describirse como una combinación lineal de las otras dos. De esta manera, solo dos ecuaciones de voltaje son requeridas, tal y como se muestra en las ecuaciones (29) a (31).
𝑖𝑎 + 𝑖𝑏 + 𝑖𝑐 = 0 (29)
𝑣𝑎𝑏 = 𝑅(𝑖𝑎 − 𝑖𝑏) + 𝐿𝑑(𝑖𝑎 − 𝑖𝑏)
𝑑𝑡+ 𝑒𝑎 − 𝑒𝑏 (30)
𝑣𝑏𝑐 = 𝑅(𝑖𝑏 − 𝑖𝑐) + 𝐿𝑑(𝑖𝑏 − 𝑖𝑐)
𝑑𝑡+ 𝑒𝑏 − 𝑒𝑐 (31)
6.5.2 ESTRUCTURA MECÁNICA La estructura mecánica está hecha en aluminio y se compone de ocho eslabones, sin embargo, al suponer rígidos [36], se puede definir la estructura con solo tres eslabones, tal y como se observa en la Figura 19.

47
Figura 19. Gimbal seccionado en eslabones
6.5.2.1 MODELO MATEMÁTICO Basado en la definición de los sistemas de referencia presentados en la Figura 20, las matrices de transformación homogénea del sistema son obtenidas:
𝑇01 = [
0 0 1 −𝑙2−sin (𝜃1) −𝑐𝑜𝑠 (𝜃1) 0 𝑙1sin (𝜃1)
𝑐𝑜𝑠 (𝜃1) −sin (𝜃1) 0 −𝑙1sin (𝜃1)0 0 0 1
] (32)
𝑇12 = [
0 0 1 0−cos(𝜃2) sin(𝜃2) 0 −𝑙3 sin(𝜃2)
− sin(𝜃2) − cos(𝜃2) 0 𝑙3 sin(𝜃2)0 0 0 1
] (33)
𝑇02 = 𝑇01 ∗ 𝑇12 (34)
Los centros de masa de los eslabones 1 y 2, respectivamente, medidos en sus sistemas de referencia locales (fijos en cada eslabón), son definidos de acuerdo a la ecuación (35).
𝑟𝑐1 = [
𝑥1𝑦1𝑧11
]; 𝑟𝑐2 = [
𝑥2𝑦2𝑧21
] (35)
Eslabón 0
Eslabón 1
Eslabón 2
Cámara
Motor 2 Motor 1
IMU MPU6050

48
Figura 20. Sistemas de referencia fijos en cada uno de los eslabones Con base en los sistemas de referencia de la Figura 20, según [36] las velocidades lineales de los centros de masa, de los eslabones 1 y 2, pueden ser calculadas por medio de la ecuación (36).
01 = (01 ∗ 𝑇01−1) ∗ (𝑇01 ∗ 𝑟𝑐1)
02 = (02 ∗ 𝑇02−1) ∗ (𝑇02 ∗ 𝑟𝑐2)
(36)
El cuadrado de las velocidades lineales (36) que se requieren más adelante en el método de Lagrange, son obtenidas por la ecuación (37).
𝑣12 = 01 ∙ 01
𝑣22 = 02 ∙ 02
(37)
Similarmente, el cuadrado de la velocidad angular de cada eslabón (39), y el desplazamiento de los centros de masa (40), cómo se observa a continuación.
01 = [𝜃100
] (38)
𝒚ෝ𝟎
𝟎
𝒙ෝ𝟏
𝒚ෝ𝟏
𝒙ෝ𝟐
𝟐
𝜽𝟏
𝜽𝟐
𝒍𝟏 𝒍𝟐 𝒍𝟑

49
02 = [
𝜃1−𝜃2sin (𝜃2)
𝜃2cos (𝜃2)
]
La ecuación (38) fue obtenida por la matriz de velocidad angular anti-simétrica, respectivamente, según [36].
𝜔12 = 01 ∙ 01
𝜔22 = 02 ∙ 02
(39)
01 = 𝑇01 ∗ 𝑟𝑐1
02 = 𝑇02 ∗ 𝑟𝑐2 (40)
Usando los resultados de las ecuaciones (36) a (39), la energía cinética total del sistema mecánico es definida por la ecuación (41).
𝑇 = 𝑇1 + 𝑇2 (41)
En donde la energía cinética total de los eslabones, 𝑇1y 𝑇2, son calculados por medio de la ecuación (42).
𝑇1 =1
2𝑚1 ∗ 𝑣1
2 +1
2𝐼1 ∗ 𝜔1
2
𝑇2 =1
2𝑚2 ∗ 𝑣2
2 +1
2𝐼2 ∗ 𝜔2
2
(42)
Además, la energía potencial total de los eslabones es definida como la suma de las energías en los eslabones 1 y 2, como se indica en la ecuación (43).
𝑈 = 𝑈1 + 𝑈2 (43)
Cada término en la ecuación (43) es calculado con base en los desplazamientos correspondientes de los centros de masa en la dirección vertical, usando (40), mostrado en la ecuación (44).
𝑈1 = 𝑚1 ∗ 𝑔 ∗ 𝑝01(0)
𝑈2 = 𝑚2 ∗ 𝑔 ∗ 𝑝02(0)
(44)
Los resultados previos pueden ser sustituidos en la ecuación de Lagrange para obtener el modelo matemático del sistema mecánico, como se puede ver en las

50
ecuaciones (45) y (46). 𝑇𝐿1 y 𝑇𝐿2 son los torques de perturbación aplicados en los eslabones 1 y 2, respectivamente.
𝑑
𝑑𝑡(𝜕ℓ
𝜕1) −
𝜕ℓ
𝜕𝜃1= 𝜏1 − 𝑏1 ∗ 1 + 𝑇𝐿1 (45)
𝑑
𝑑𝑡(𝜕ℓ
𝜕2) −
𝜕ℓ
𝜕𝜃2= 𝜏2 − 𝑏2 ∗ 2 + 𝑇𝐿2 (46)
El Lagrangiano del sistema,ℓ, es calculado por la ecuación (72).
ℓ = 𝑇 − 𝑈 (47)
6.6 PWM La modulación por ancho de pulso, en inglés (Pulse width modulation), generalmente, es una onda cuadrada dependiente de la frecuencia, esta onda está limitada a un estado encendido o apagado (ON-OFFF state), frecuentemente, cómo alto o bajo. El ciclo de trabajo de una señal PWM (Duty-Cycle) describe la relación entre cuanto tiempo la señal está en alto o en bajo y puede estar entre 0% y 100%, donde 100% es la máxima ciclo de trabajo posible a la salida. La onda cuadrada PWM es frecuentemente generada al usar un microcontrolador que puede manipular el ciclo de trabajo. A continuación, en la Figura 21 se muestra una señal PWM cuadrada para diferentes ciclos de trabajo a un periodo constante (Period).
Figura 21. Onda PWM [6] 6.7 CONTROLADOR 𝑯 ∞ LINEAL Con base en [37], la idea de la técnica de control 𝐻 ∞ es encontrar una ley de control, 𝐾, que atenúe la relación entre la energía del vector objetivo, 𝑧, y la energía del

51
vector de perturbaciones, 𝑤, siendo 𝛾 la atenuación conseguida, como se muestra en la Figura 22.
Figura 22. Esquema de la estrategia de control 𝐻 ∞ [37]
En función de cómo se diseñe la planta generalizada, 𝐺, se conseguirán no solo cotas de comportamiento, sino que además cotas de robustez. A continuación, se procede a la síntesis de controladores 𝐻 ∞ lineales siguiendo el enfoque de sensibilidad mixta. En la teoría de control clásica, la sensibilidad mixta trata de moldear varias funciones de sensibilidad simultáneamente, la función de sensibilidad (𝑆), la función de
sensibilidad al control o esfuerzo de control (𝐾𝑆) y la función de sensibilidad complementaria (𝑇) con un mismo controlador, en donde 𝑆 = 𝐼 + 𝐺𝐾 y 𝑇 = 𝐼 − 𝑆. Para moldear dichas funciones se utilizan sus ponderaciones correspondientes a modo de especificaciones del sistema. Estas ponderaciones actuarán como filtros (𝑊1, 𝑊2, 𝑊3). Para conseguir esta ponderación, se utiliza la norma infinito, de manera que se obtenga la siguiente desigualdad:
‖𝑊1𝑆𝑊2𝐾𝑆𝑊3𝑇
‖
∞
< 1 (48)
Para la elección de las funciones de ponderación es conveniente tener en cuenta ciertas limitaciones, entre las que se destacan las siguientes:
• La habilidad para mantener la salida dentro de unos márgenes determinados depende de las propiedades de la planta. Además, será difícil de controlar si el sistema es inestable o/y si tiene grandes perturbaciones siendo el sistema no lineal.
• Es conveniente realizar un escalado previo del sistema a controlar.
• El desconocimiento relativo del sistema suele aumentar a medida que aumenta la frecuencia y, por consiguiente, no se puede controlar un sistema a frecuencias en las que no se conoce. De alguna manera se debe tener una cota superior en el ancho de banda de control.
𝐺
𝐾

52
Para el caso de sensibilidad mixta, la planta generalizada mostrada en la Figura 22 tiene la forma particular mostrada en la Figura 23, conocida como planta ampliada.
Figura 23. Planta del enfoque de sensibilidad mixta [37]
El problema de síntesis que se plantea es encontrar un controlador 𝐾 tal que se cumpla la siguiente expresión, en donde 𝛾 es la relación de energía conseguida.
‖𝑊1𝑆𝑊2𝐾𝑆𝑊3𝑇
‖
∞
< 𝛾 (49)
Con base en [38], para la ganancia de bucle 𝐿 = 𝐺𝐾, con el fin de lograr buen seguimiento de la referencia y rechazo de perturbaciones, típicamente se desea una ganancia de bucle alta a bajas frecuencias. Para lograr robustez y la atenuación del ruido de la medición, se desea que la ganancia de bucle se reduzca a alta frecuencia. Esta forma de bucle es equivalente a una pequeña 𝑆 a bajas frecuencias y una pequeña 𝑇 a altas frecuencias. Para la forma de bucle de sensibilidad mixta, como se mencionó anteriormente, se eligen funciones de ponderación, 𝑊1, 𝑊2 y 𝑊3, para especificar esas formas de
objetivo para 𝑆 y 𝑇, así como el esfuerzo de control o sensibilidad al control 𝐾𝑆. De esta manera, con base en la ecuación (51), significa que las ponderaciones que se establecen son iguales a los recíprocos de las formas deseadas 𝑆, 𝐾𝑆 y 𝑇, como se muestran en la ecuación (50).
‖𝑆‖∞ < 𝛾|𝑊1−1|
‖𝐾𝑆‖∞ < 𝛾|𝑊2−1|
‖𝑇‖∞ < 𝛾|𝑊3−1|
(50)

53
En particular:
• Para un buen seguimiento de la referencia y rechazo de perturbaciones, se elige una 𝑊1 grande dentro del ancho de banda de control con el fin de
obtener una 𝑆 pequeña.
• Para robustez y atenuación del ruido, se elige 𝑊3 grande fuera del ancho de banda de control con el fin de obtener una 𝑇 pequeña.
• Para limitar el esfuerzo de control, en una banda de frecuencia específica, se aumenta la magnitud de 𝑊2 en esa banda de frecuencia con el fin de obtener un 𝐾𝑆 pequeño.
• Si no se desea restringir el esfuerzo de control o sensibilidad al control, se puede omitir 𝑊2.
6.8 LQG El control óptimo se basa en la utilización de variables de control que permiten maximizar o minimizar una función objetivo (índice de comportamiento), ecuación (51), sujeta a restricciones o condiciones dadas. Las variables de estado son utilizadas como instrumento en la optimización, estas serán medidas y usadas como una señal de control, cuando se ha logrado esto, se conocerá la trayectoria óptima de las variables de estado, a partir de la relación que las une. El diseño LQG, en ingles Linear Quadratic Gaussian, es una estrategia utilizada en el control óptimo y consta de un controlador LQR y un estimador o filtro Kalman. A continuación, se muestra su estructura en la Figura 24.
Figura 24. Estructura LQG 𝐾𝑖, 𝐾𝑠 y 𝐾𝑜 son las matrices de ganancia integral, de estados y de observador, respectivamente. El primer paso para diseñar un controlador LQG es determinar la
matriz de ganancias que minimiza la función de costo (72).
𝜉 𝜉
𝑟 𝑢𝑒
𝑥 𝑦

54
𝐽(𝑢) = ∫ (𝑒𝑇𝑄𝑐𝑒 + 𝑢𝑇𝑅𝑐𝑢𝑒) 𝑑𝑡
∞
0
(51)
En esta función, 𝑅𝑐 y 𝑄𝑐 son las constantes que agregan pesos para la minimización
de 𝑢𝑒 y 𝑒, respectivamente. 𝑒 y 𝑢𝑒 son halladas suponiendo que en la entrada de referencia 𝑟 se aplica un escalón unitario en 𝑡 = 0, en ese caso para 𝑡 > 0:
[ℎ(𝑡)
(𝑡)] = [
𝐴 0−𝐶 0
] [ℎ(𝑡)𝜉(𝑡)
] + [𝐵0]𝑢𝑒(𝑡) + [
01] 𝑟(𝑡) (52)
Debido a que se pretende diseñar un sistema asintóticamente estable, de tal forma que, ℎ(∞), 𝜉(∞) y 𝑢(∞) tiendan a valores constantes, respectivamente, en esta
manera, reemplazando el estado estacionario (𝑡) = 0 y 𝑦(∞) = 𝑟 en la ecuación (52),
se obtiene.
[ℎ(∞)
(∞)] = [
𝐴 0−𝐶 0
] [ℎ(∞)𝜉(∞)
] + [𝐵0]𝑢𝑒(∞) + [
01] 𝑟(∞) (53)
Considerando que 𝑟(𝑡) es una entrada escalón unitario, se tiene que 𝑟(∞) = 𝑟(𝑡) = 𝑟
(constante) para 𝑡 > 0. Sustrayendo (72) de (52) se obtiene (54).
[ℎ𝑒(𝑡)
𝜉(𝑡)] = [
𝐴 0−𝐶 0
] [ℎ𝑒(𝑡)𝜉𝑒(𝑡)
] + [𝐵0] 𝑢𝑒(𝑡)
ℎ(𝑡) − ℎ(∞) = ℎ𝑒(𝑡)
𝜉(𝑡) − 𝜉(∞) = 𝜉𝑒(𝑡)
𝑢(𝑡) − 𝑢(∞) = −𝐾𝑠ℎ𝑒(𝑡) + 𝐾𝑖𝜉𝑒(𝑡) = 𝑢𝑒(𝑡)
(54)
En esta manera, la ecuación (54) puede ser rescrita, tomando en cuenta un nuevo vector de entradas 𝑒(𝑡), como se aprecia en (55)
= 𝑒 + 𝑢𝑒
𝑒(𝑡) = [ℎ𝑒(𝑡)𝜉𝑒(𝑡)
]
= [𝐴 𝑧𝑒𝑟𝑜𝑠(𝑛,𝑟)−𝐶 𝑧𝑒𝑟𝑜𝑠(𝑟,𝑟)
]
= [𝐵
𝑧𝑒𝑟𝑜𝑠(𝑟,𝑝)]
𝑢𝑒 = −𝐾𝑒
(55)

55
𝐾 = [𝐾𝑠−𝐾𝑖
]
𝑟 = 𝑁ú𝑚𝑒𝑟𝑜 𝑑𝑒 𝑠𝑎𝑙𝑖𝑑𝑎𝑠 𝑑𝑒 𝑙𝑎 𝑝𝑙𝑎𝑛𝑡𝑎 𝑛 = 𝑁ú𝑚𝑒𝑟𝑜 𝑑𝑒 𝑒𝑠𝑡𝑎𝑑𝑜𝑠 𝑑𝑒 𝑙𝑎 𝑝𝑙𝑎𝑛𝑡𝑎
𝑝 = 𝑁ú𝑚𝑒𝑟𝑜 𝑑𝑒 𝑒𝑛𝑡𝑟𝑎𝑑𝑎𝑠 𝑑𝑒 𝑙𝑎 𝑝𝑙𝑎𝑛𝑡𝑎 La minimización de la función de costo 𝐽(𝑢), trae la necesidad de resolver la ecuación
algebraica de Riccati. Para estimar los estados, se usa un estimador de Kalman quien asume la presencia de ruido gaussiano en la señal de control y la variable a ser medida en el proceso. Una vez las varianzas del ruido en estas dos señales son conocidas, respectivamente, 𝑄𝑛 y 𝑅𝑛, se determina un vector de ganancias que
minimiza la estimación del error (ℎ − ℎ). Usando la ecuación de Riccati,
matemáticamente, los estados son calculados por la ecuación (56).
ℎ = 𝐴ℎ + 𝐵𝑢 + 𝐾𝑜(𝑚 −𝑚ෝ) (56)
En donde, ℎ es el vector de estados estimados, 𝑚 es el vector de salidas que son medidas y 𝐾𝑜 la matriz de ganancias del observador. Esta último, es encuentra a través de un índice de desempeño que minimiza el error de covarianza en la estimación. Con base en la ecuación (56), finalmente el Controlador LQG puede ser unificado en una representación de estados, como se observa en (57).
𝐴𝑐 = [𝑎11 𝑎12𝑎21 𝑎22
]
𝐵𝑐 = [𝑧𝑒𝑟𝑜𝑠(𝑟,𝑝) 𝐾𝑜𝐼(𝑟,𝑟) −𝐼(𝑟,𝑟)
]
𝐶𝑐 = [−𝐾𝑠 𝐾𝑖]
𝑎11 = 𝐴 − 𝐵 ∗ 𝐾𝑠 − 𝐾𝑜 ∗ 𝐶 + 𝐾𝑜 ∗ 𝐷 ∗ 𝐾𝑠 𝑎12 = 𝐵 ∗ 𝐾𝑖 − 𝐾𝑜 ∗ 𝐷 ∗ 𝐾𝑖
𝑎21 = 𝑧𝑒𝑟𝑜𝑠(𝑟,𝑛)
𝑎22 = zeros(r,r)
𝑟 = 𝑁ú𝑚𝑒𝑟𝑜 𝑑𝑒 𝑠𝑎𝑙𝑖𝑑𝑎𝑠 𝑑𝑒 𝑙𝑎 𝑝𝑙𝑎𝑛𝑡𝑎 𝑛 = 𝑁ú𝑚𝑒𝑟𝑜 𝑑𝑒 𝑒𝑠𝑡𝑎𝑑𝑜𝑠 𝑑𝑒 𝑙𝑎 𝑝𝑙𝑎𝑛𝑡𝑎 𝑝 = 𝑁ú𝑚𝑒𝑟𝑜 𝑑𝑒 𝑒𝑛𝑡𝑟𝑎𝑑𝑎𝑠 𝑑𝑒 𝑙𝑎 𝑝𝑙𝑎𝑛𝑡𝑎
(57)

56
6.9 PID Es una extensión del controlador ON/OFF y es suficiente para muchos problemas de control. Utiliza la retroalimentación para rechazar las perturbaciones, elimina el error estacionario con la acción integral y puede anticipar el futuro con la acción derivativa. Esta combinación de las tres acciones, proporcional, integral y derivativa, se representan mediante la siguiente ecuación, en donde 𝑢 hace referencia a la acción de control PID, 𝑢𝑝, a la acción proporcional, 𝑢𝑖 a la acción integral y 𝑢𝑑 a la
acción derivativa. Cabe a aclarar que cada una de las variables está en función del tiempo [39]. La salida 𝑢 se encuentra definida por (58) .
𝑢 = 𝑢𝑝 + 𝑢𝑖 + 𝑢𝑑 (58)
En donde cada término en (58) depende del error 𝑒 en la señal a controlar, tal y como se muestra a continuación en donde 𝑘𝑝, 𝑘𝑖 y 𝑘𝑑, respectivamente, representan las
ganancias proporcional, integral y derivativa.
𝑢𝑝 = 𝑘𝑝𝑒 (59)
𝑢𝑖 = 𝑘𝑖∫ 𝑒𝑡
0
𝑑𝑡 (60)
𝑢𝑑 = 𝑘𝑑𝑑𝑒
𝑑𝑡 (61)
A continuación, en la Figura 25, se pueden observar las tres componentes del controlador PID.
Figura 25. Controlador PID [39]

57
7 PLATAFORMA DE PRUEBAS.
Con el fin de generar las perturbaciones al sistema Gimbal de manera controlada, se diseña y construye una plataforma de tres grados de libertad. A pesar de que el Gimbal solo puede controlar dos grados libertad, la plataforma se diseñó de esta manera con el fin de conocer cómo es afectado el Gimbal al no poder controlar uno de los ejes. 7.1 DISEÑO MECÁNICO El diseño parte del siguiente bosquejo, el cual permite orientar el Gimbal con tres grados de libertad, y en donde el movimiento se produce por medio de tres actuadores, 𝑀1, 𝑀2 y 𝑀3, que desplazan de manera angular a tres eslabones, 1, 2 y 3, respectivamente.
Figura 26. Bosquejo Plataforma
Tres posibles materiales para la estructura son el Aluminio, la Madera y el Acrílico ya que se pueden conseguir fácilmente en la ciudad de Bucaramanga. Con el fin de seleccionar el material más viable en relación precio - funcionabilidad, basado de [40], a continuación se presenta una tabla comparativa con algunas de sus ventajas y desventajas.
Material Aluminio Acrílico Madera
Ventajas
Es ligero (Puede reducir el peso de algún objeto en un 40% comparado con el acero).
Puede trabajarse fácilmente con herramientas clásicas. Existen diferentes grosores y colores que
Buen asilamiento eléctrico. Cierta facilidad para trabajar.
𝑀1
𝑀3
𝑀2
𝐺𝑖𝑚𝑏𝑎𝑙 2𝐷𝑂𝐹
0
1
2
3

58
Fácil de trabajar, producir, cortar y taladrar. Permite crear estructuras sólidas. Inversión en una vida útil de servicio más larga. Se encuentra de forma variada (perfiles, barras, tubos)
pueden mejorar la solidez y estética de la estructura. Maleable y resistente. Aislante eléctrico.
Presenta gran resistencia al pandeo. Más económico.
Desventajas
Requiere herramientas específicas como sierras mecánicas o eléctricas. En pequeñas cantidades puede resultar bastante caro. Conductor eléctrico.
Su precio es mayor en comparación con el aluminio. Se encuentra en láminas. Flexible (Dependiendo de su grosor).
Pesado. No se puede mojar. Sensible a perforaciones. Se encuentra en láminas.
Tabla 3. Comparación de los tres materiales para la estructura
Con base en la Tabla 3, el acrílico sería la mejor opción debido a que es maleable, resistente y un buen aislante eléctrico, sin embargo, su precio más elevado y su venta por láminas, no lo hacen viable. Debido a que la madera no se puede mojar y es sensible a perforaciones, se selecciona el aluminio, pues además de ser la última opción es más económico que el acrílico, se puede adquirir en muchas formas y tamaños, permite tener una estructura más sólida. De ser necesario, en algunas partes de la estructura podría emplearse la madera con fines estéticos o apoyos con esfuerzos leves. Para mover la estructura se necesitan de actuadores que tengan el torque adecuado, además de tener la posibilidad de controlarse en lazo abierto de forma confiable y sencilla. De esta manera, los actuadores asequibles para la tarea anteriormente mencionada son los motores paso a paso y los Servomotores RC. A continuación, se muestra una tabla en la que se comparan sus principales ventajas y desventajas; basado de [41].

59
Motor Paso a Paso Servo
Ventajas
Funcionan en un circuito abierto. Sin límite de rotación. Mayor resolución. Alto Par a pequeñas velocidades. Alto Par de retención. Construcción del motor es simple y robusto
Mayor Precisión. Par dependiendo de la caja reductora. Respuesta rápida. Suelen tener un tamaño pequeño. Gran fuerza angular (par) en comparación con su tamaño. Funcionan en un circuito cerrado, y por lo tanto son muy precisos (Disponen de un circuito de controlador interno).
Desventajas
El Par baja a medida que disminuye la resolución en los pasos. Mayor costo. Propensos a errores. Si el control es incorrecto, es fácil generar resonancia. Pierden para a altas velocidades.
Menor costo. Necesita de caja reductora. Rango de rotación limitado. Requieren modificaciones físicas y eléctricas con el fin de ser capaz de moverse 360 grados
Tabla 4. Comparación Motor Paso a Paso y Servo Motor RC.
Con base en la Tabla 4, se selecciona el Servo Motor RC debido a su menor precio en comparación con el Motor Paso a Paso, además de tener mayor precisión a causa de su control interno en lazo cerrado. De acuerdo a las elecciones anteriormente descritas, el diseño preliminar de la estructura se realiza eligiendo perfiles de aluminio de tipo ángulo, platinas y dos láminas de madera, tal y como se puede observar a continuación. Las láminas de madera se emplean con el fin de permitir la rodadura de dos ruedas locas CY-15A.

60
Figura 27. Plataforma CAD preliminar Esta estructura de la Figura 27 implementa Servo motores RC estándar, basados en la referencia MG996R de engranajes metálicos. A pesar de que la estructura permite de forma exitosa moverse en los tres grados de libertad, posteriormente, se detecta que la estructura podría presentar, con gran probabilidad, fallas en las articulaciones que son manipuladas por los actuadores 𝑀1 y 𝑀2, debido a que el peso de los eslabones 1 y 2, respectivamente, descansan sobre los accesorios plásticos circulares que, por lo general, traen por defecto estos servomotores. De esta manera se modifica el diseño anterior, empleando chapas de aluminio con el fin de dar mayor solides a las articulaciones, tal y como se muestra a continuación en la Figura 28.
Figura 28. Plataforma CAD Una vez diseñada la estructura, con el fin de conocer el torque requerido por los servomotores en cada articulación, se procede a ingresar el modelo CAD en la herramienta de Simmechanics. Una vez allí, se dejan como entradas, las posiciones angulares deseadas para cada eslabón (1, 2 y 3) y, cómo salidas, su posición
𝑀1
𝑀2
𝑀3
𝑀1
𝑀2
𝑀3
Chapas

61
angular actual, su velocidad, y el torque requerido para alcanzar el valor de entrada. A continuación, en la Figura 29 se muestra el esquema de bloques para la simulación, en donde para cada entrada se ingresan valores aleatorios en el rango de -10 a 10 grados y cambios cada 0.5 segundos con el fin emular perturbaciones.
Figura 29. Esquema de bloques Simulación Simmechanics
Los bloques constantes de 90 y 180 son con el fin de empezar la simulación en una condición inicial. Una vez simulado, se obtienen los siguientes resultados en el software de Simulink.
Figura 30. Posición, Velocidad y Torque en el Eslabón 1

62
Figura 31. Posición, Velocidad y Torque en el Eslabón 2
Figura 32. Posición, Velocidad y Torque en el Eslabón 3

63
El torque para mover los eslabones 2 y 3 se encuentra, aproximadamente, en los rangos de -0.25 a 0.25 N*m, mientras que para el eslabón 1, de -0.9 a 0.9 N*m, aproximadamente. El torque para mover el eslabón 3 es mucho mayor que los requeridos en los eslabones 2 y 3, esto se debe a que el eslabón 1 mueve las masas de los eslabones 2 y 3, además de que debe contrarrestar las perturbaciones generadas por estos mismos cuando se encuentran en movimiento. Con base en su hoja de datos [42], el Servo Motor MG996R que se empleó en el diseño, puede utilizarse para la aplicación ya que puede generar torques de 0.922 N*m a 4.8 Voltios y de 1.08 N*m a 6 Voltios, los cuales se encuentran por encima del rango de trabajo anteriormente simulado. Cabe aclarar que, el servomotor que moverá el eslabón 1 estaría muy cercano a su límite, sin embargo, no es de preocupar, ya que este trabajará esporádicamente, pues el fin de este proyecto es el de validar las estrategias de control para dos grados libertad; los cuales se perturban mediante el movimiento de los eslabones 2 y 3. Por otra parte, se espera que las posiciones se alcancen en el tiempo correcto debido que, para los 4.8 Voltios, el Servo Motor cuenta con una velocidad de operación aproximada de 2 ms por grado. Por último, para conocer si el aluminio puede soportar los esfuerzos producidos por los torques y pesos a los que será sometido, se hace un estudio estático a la pieza del Eslabón 1 que estará sometida al mayor torque y que tendrá que soportar todo el peso de la estructura. Esta pieza será la más crítica y, por lo tanto, es razonable intuir que, si esta pieza soporta los esfuerzos producidos por los torques y los pesos, el resto de las piezas en la estructura podrán soportar los esfuerzos a los que serán sometidos, pues serán menores debido a que tendrán que soportar menor peso y, cómo se vio anteriormente, se someterán a torques más bajos. A continuación, se muestra la pieza crítica del Eslabón 1 y los resultados obtenidos en la simulación para un aluminio en aleación 5052-H32 (serie 5000), el cual suele emplearse en adornos decorativos y para usos Ornamentales y arquitectónicos [43].
𝑀1
𝑀2
𝑀3
Pieza crítica Eslabón 1.

64
Figura 33. Pieza crítica del Eslabón 1
Figura 34. Esfuerzo de Von Mises de la Pieza de estudio del Eslabón 1
Figura 35. Deformación de la Pieza de estudio del Eslabón 1 Los resultados muestran que la pieza se verá sometida a un esfuerzo máximo de Von Mises de aproximadamente 4.5 MPa y una deformación máxima de 8 μm al
aplicarse un torque por arriba, pero cercano a lo visto en la simulación de Simmechanics en la Figura 30 (3 N*m) y un peso de 14 N (Peso aproximado de la estructura). Con base en lo consultado [44], el Aluminio serie 5000, para sus diferentes aleaciones, tiene un rango de límite elástico entre aproximadamente 60 MPa y 110 MPa, por lo que su mínimo límite elástico queda muy por encima de los esfuerzos que tendrá que soportar la pieza, esto quiere decir, en otras palabras, que la pieza se verá muy levemente afectada por los esfuerzos y que existirá un factor de seguridad aproximado de 13.3 (60/4.5). De esta manera se concluye que la estructura en aluminio es capaz de soportar los esfuerzos producidos por los torques y los pesos, y es viable para emplear en la construcción de la plataforma. Por otra parte, debido a que el soporte que une el Gimbal a la plataforma de pruebas se planea imprimir en material PLA, se requiere analizar los esfuerzos sobre él. Para

65
esto se crea un nuevo estudio estático en donde se somete el soporte a una fuerza vertical de 3 N*m que emularán el peso vertical del Gimbal y que se distribuye en los 4 apoyos de forma simétrica (Debido a la geometría del soporte), tal y cómo se muestra a continuación.
Figura 36. Esfuerzo de Von Mises soporte Gimbal
Figura 37. Deformación soporte Gimbal Esta simulación arroja que la pieza será sometida a esfuerzos máximos de Von Mises de aproximadamente 1.12 MPa y deformaciones máximas de 0.2 mm. Con base en lo consultado [45], el límite elástico del PLA se encuentra entre 55 y 72 MPa, por lo que al igual que el estudio anterior, el mínimo límite elástico se encuentra muy por encima del esfuerzo de Von Mises y por lo tanto el soporte podrá tolerar los esfuerzos debidos al peso del Gimbal. Esto quiere decir, en otras palabras, que la pieza se verá muy levemente afectada por los esfuerzos y que existirá un factor de seguridad aproximado de 45.83 (55/1.2).

66
Una vez se realizan los estudios anteriores, se concluye que el diseño es viable y se puede construir. Al soporte de material UHM que sujeta el rodamiento el cual permite girar al Eslabón 1 no se le realiza un estudio estático ya que los factores de seguridad tan elevados en los materiales anteriores, lo hace innecesario, especialmente con relación al PLA que también es un polímero. 7.2 DISEÑO ELECTRÓNICO El diseño electrónico de la plataforma es algo sencillo debido a que las señales de control se pueden conectar directamente a los servomotores, los cuales internamente ya cuentan con la electrónica respectiva para acoplar la señal de control a la de potencia. Por otra parte, se simplifica aún más debido a que la interacción con la plataforma se realizará de manera virtual por medio del Software Matlab - Simulink. A continuación, en la Figura 38 se encuentra el esquemático diseñado.
Figura 38. Esquema eléctrico de la plataforma
Las conexiones se realizan con base en la siguiente gráfica en donde se agregó un Suiche que interrumpe la alimentación y, dos leds indicadores, que permiten visualizar la interrupción.
LAPTOP
Matlab-Simulink
Serial USB

67
Figura 39. Conexionado eléctrico plataforma de pruebas
7.3 CONSTRUCCIÓN Validados los diseños mecánicos y de control, en la Figura 40 se presenta la plataforma construida.
𝑀2
𝑀1
𝑀3
𝐺𝑖𝑚𝑏𝑎𝑙 2𝐷𝑂𝐹
Alimentación 5-6VDC
GND servos
Control servos
Alimentación servos
Alimentación GND
No se usa
LEDs indicadores de encendido
Switch de Encendido

68
Figura 40. Plataforma de pruebas construida Concluida la parte estructural, se realiza el conexionado del circuito eléctrico y se realizan las pruebas pertinentes como se observa en la Figura 41.
Figura 41. Pruebas en la Plataforma.
Se observa que la estructura permanece sólida y los Servomotores logran mover los tres eslabones (los tres grados de libertad) con el Gimbal instalado. De esta manera se concluye que la plataforma de pruebas es apta para transmitir las perturbaciones al Gimbal. 7.4 INTERFAZ DE CONTROL Con el fin de interactuar con la plataforma desde el computador, se diseña a través el software Matlab - Simulink la interfaz mostrada en la Figura 42. Esta interfaz permite generar la secuencia de perturbación y mover de manera manual cada uno de los eslabones. Se compone de tres indicadores que facilitan visualizar los valores enviados a los servomotores, tres “slider” y tres “entries” que dan acceso para cambiar los valores de dos formas diferentes, un botón que activa el modo manual o de secuencia y, por último, tres botones que activan o desactivan los motores, respectivamente. En el bloque en donde se aprecia el logo de Arduino se encuentra la lógica del funcionamiento.

69
Figura 42. Interfaz para la plataforma

70
8 TARJETA DE CONTROL. Debido a que no fue posible emplear la tarjeta original (software cerrado), se diseñó y construyó una tarjeta electrónica con el fin de adquirir los datos del sensor (IMU), procesar los datos con base en las estratégicas de control y conmutar los motores (Brushless). 8.1 DISEÑO En este sentido, a continuación, se muestra la tarjeta realizada. El diseño de la tarjeta fue hecho en el Software EasyEDA v6.
Figura 43. PCB tarjeta de control y potencia Para la etapa de control, se seleccionó el módulo ESP32 DEVKITV1 de 30 pines, ya que, para este proyecto, tiene altas prestaciones respecto a funcionalidad-precio. Este módulo cuesta aproximadamente $ 35.000 y entre lo que destaca para el proyecto, puede generar PWM en cualquiera de sus pines a través de 16 canales internos (se requieren seis), cuenta con 2 puertos para comunicación UART (se requiere 1), 1 puerto para comunicación I2C (se necesita 1) y 2 puertos para comunicación SPI, además, posee Wifi 802.11 b/g/n 2.4GHz (soporta WFA/WPA/WPA2/WAPI) junto con Bluetooth 4.2 BLE. Respecto a la capacidad de procesamiento, tiene un procesador dual core Xtensa® LX6 de 32 bits el cual puede trabajar a 160 MHz o 240 MHz. También cuenta con 4 Timers internos de 64 Bits con pre-escaladores de 16 bits (Se requiere por lo menos 1). Por último, puede ser programado por medio los siguientes lenguajes: Esp-Idf, micropython, lua, Arduino,

71
CForth, JavaScript y Hybrid C/Pyton. De esta manera, este módulo es perfecto para el proyecto ya que emplea el protocolo de la IMU (I2C), puede generar las señales PWM para la conmutación del motor y logra procesar datos de manera rápida gracias a su frecuencia de trabajo, además, puede ser programado desde el Arduino IDE, el cual es de licencia libre. Para la etapa de potencia, se seleccionó el driver L6234PD013TR, el cual puede soportar corrientes de manera continua de hasta 4 Amperios, y picos de hasta 5 Amperios [46], además, puede alimentarse entre 7 a 42 Voltios y su activación puede realizarse por medio de lógica TTL/CMOS a frecuencias de hasta 150 kHz. De esta manera, este driver es el adecuado para la tarea ya que el motor consume aproximadamente una corriente de 1 A, a 12 Voltios, con base en pruebas experimentales. A continuación, se muestra el plano eléctrico de la tarjeta.
Figura 44. Plano eléctrico de la tarjeta electrónica El esquemático se dividió en cuatro partes principales, Driver motor 1, Driver motor 2, Headers y Controlador. En la sección de Headers se encuentran los pines, respectivos para, conectar la alimentación externa, los motores y el sensor (IMU), también se encuentra un jumper el cual permite alimentar el módulo ESP32 con la

72
misma fuente de alimentación externa (Se recomienda no conectar el jumper si el ESP32 está siendo alimentado por el cable micro USB). En la sección de Controlador, se encuentra el módulo ESP32 DEVKITV1 de 30 pines. Por último, en las secciones Driver motor 1 y 2, se encuentra un L6234PD013TR y su circuito de funcionamiento, respectivamente, para cada motor. A continuación, se describe el circuito de funcionamiento para el componente L6234PD013TR. Con base en [46], este driver está compuesto por tres canales. Cada canal está conformado por un medio puente con dos DMOS suiches de potencia tipo Rdson de 300mW a 25°C y diodos para contracorriente intrínsecos. Cada canal incluye dos comparadores compatibles con TTL/CMOS, y un bloque lógico para interconectar las entradas con los controladores de disparo. A continuación, se muestra.
Figura 45. Esquemático L6234 [46]
Para funcionar, el dispositivo cuenta con una referencia interna de banda prohibida (internal bandgap reference) de 1.22 V, una referencia de voltaje de 10 V para alimentar la circuitería interna, una bomba de carga central (central charge pump) con el fin de activar el transistor DMOS superior, una protección de apagado térmico y una función de histéresis interna que apaga el dispositivo cuando la temperatura de la unión excede aproximadamente 160 grados Celsius. La histéresis es de aproximadamente 20 grados Celsius. Con base en Figura 45, el condensador de 1uF, C5, en el pin VREF asegura la estabilidad del circuito de accionamiento DMOS. Este pin puede ser externamente cargado hasta con 5 mA. Los diodos 1N4148, D1 y D2, el condensador C3 de 10nF

73
y el condensador C4 de 220nF, son empleados para el funcionamiento de la bomba de carga central (central charge pump) de la siguiente manera: en el pin VCP por medio de un oscilador interno se genera una frecuencia de 1.2 MHz con una amplitud máxima típica de 10 V. Cuando la salida del oscilador se encuentra a tierra, C3 es cargado por VS, voltaje de alimentación externa, a través de D1. Cuando este alcanza los 10 V, D1 es inversamente sesgado y la carga fluye de C3 a C4 a través de D2, de esta manera el pin VBOOT después de unos pocos ciclos alcanza un voltaje máximo de Vs + 10 V – VD1 – VD2, en donde VD1 y VD2 son las caídas de tensión en los diodos, respectivamente. De esta manera, una vez el pin VBOOT alcanza el voltaje máximo, es posible accionar todos los DMOS superiores de los tres medios puentes (T1, T3 y T5) cuando sea requerido. Los condensadores C1 y C2, de 100 uF y 100 nF, respectivamente, se emplean para reducir el sobre voltaje debido a las bajadas de corrientes y a las inductancias parásitas. Por último, la lógica de control para cada uno de los medio puentes (Superior e inferior) se realiza a través de los pines IN (IN1, IN2, IN3) y En (EN1, EN2, EN3), respectivamente, cómo se muestra a continuación en la Figura 46, en donde, INPUT, representa a los pines IN y, ENABLE, a los pines EN, cada uno para su n-esimo respectivo. La corriente consumida por los pines IN y EN es de aproximadamente 30 uA, si el voltaje de estos pines es menor a 1 V.
Figura 46. Niveles lógicos para la conmutación del driver [46]
Las frecuencias de conmutación pueden llegar hasta 150 kHz. Se debe tener en cuenta que, altas frecuencias de conmutación permiten la reducción del rizado de la corriente de salida, pero incrementa la disipación de energía del dispositivo, sin embargo, bajas frecuencias de conmutación ocasionan un alto rizado de la corriente de salida. La frecuencia de conmutación debe ser mayor a 16 kHz para evitar ruidos acústicos.

74
8.2 CONSTRUCCIÓN Una vez establecido el diseño de la tarjeta de control, se muestra su construcción final en la Figura 47.
Figura 47. Tarjeta de control construida
Las conexiones de la tarjeta se muestran en la Figura 48.
Figura 48. Conexiones tarjeta de control construida
En listado completo de los componentes se puede encontrar en la tabla a continuación.
Motor 1
Alimentación GND
Alimentación 12 V
Motor 2
Jumper Alimentación ESP32
Serial
Sensor MPU6050

75
Componente Observación Cantidad
Header Macho 4 pines 2.54 mm 1
Condensador 220nF SMD 0805 2
Condensador 1uF SMD 0805 2
Header Macho 3 pines 2.54 mm 2
Condensador 100uF SMD 0805 2
Driver L6234PD013TR 2
Diodo Referencia 1N4148WS, encapsulado
SOD-323 4
Condensador 100nF SMD 0805 2
Header Macho 2 pines 2.54 mm 1
Condensador 10nF SMD 0805 2
Tabla 5. Componentes empleados en la tarjeta de control

76
9 SISTEMA GIMBAL.
Como se vio en 6.5, el sistema Gimbal de dos grados libertad (2DOF) a trabajar es el FPV 2 Axis Brushless Gimbal que, comercialmente se distribuye con una tarjeta BCG V2 [3], estabilizando mediante un control clásico PID. Este puede ser adquirido en tiendas, cómo Amazon, eBay o Banggood. A continuación, se muestra en la Figura 49.
Como se puede observar en la anterior Figura 49, el Gimbal se compone de una estructura de aleación, dos motores sin escobillas (BLDC motor) trifásicos, una tarjeta controladora (BGC) y una unidad de medición inercial (IMU) MPU6050. Los datos consultados [14] para tener una referencia al momento validar el modelo del motor son los siguientes:
• Rango de la cámara: 100-200 gramos.
• Polos: 14
• Bobinas: 12
• Kv: 114.
• Corriente sin carga: 0.03 Amperios.
• Voltaje: 6-14 Voltios (2-3 celdas Lipo).
• Resistencia: 23 Ohmios.
• Inductancia: 0.023 Henrios.
Figura 49. Gimbal FPV de 2 ejes adquirido [47]
Manual
Motor 2
Motor 1
Tarjeta controladora
Accesorios
Estructura mecánica
IMU

77
9.1 VALIDACIÓN MODELO ESTRUCTURA MECÁNICA El modelo CAD de la estructura mecánica se obtuvo en [48], este puede apreciarse en la Figura 50.
Figura 50. Modelo CAD Estructura mecánica [48]
Cabe aclarar que, la estructura mecánica tiene en cuenta los dos motores. Una vez, verificado el modelo CAD, se procede a exportar, desde Solidworks, a la interfaz de Simmechanics. Los pasos de exportación se encuentran en el ANEXO C: MODELO CAD A BLOQUES SIMMECHANICS. A continuación, en la Figura 51 se muestra el diagrama de bloques, resultado de la exportación de del diseño CAD al entorno Simmechanics. A este se le agregan los bloques S PS y PS S, con el fin de ingresar señales de entrada y obtener señales de salida, respectivamente.

78
Figura 51. Bloques Simmechanics del Gimbal
Posteriormente, se comprime todo en un solo bloque y se procede a simular en el entorno con el fin de conocer la dinámica de los eslabones. Los parámetros empleados en la simulación se observan a continuación.
Tabla 6. Parámetros de la estructura mecánica Con base en las ecuaciones (45) y (46) que representan al modelo No lineal de la estructura mecánica, se realiza la comparación de las respuestas transitorias de los eslabones con los resultados obtenidos en Simmechanics. Los resultados obtenidos en la simulación se muestran en la Figura 52.
Parametro Valor Unidad
𝜃1 40*𝜋/180 𝑟𝑎𝑑
𝜃2 270*𝜋/180 𝑟𝑎𝑑
𝑏1 0.0007 𝑁𝑚/(𝑟𝑎𝑑/𝑠) 𝑏2 0.0007 𝑁𝑚/(𝑟𝑎𝑑/𝑠) I1 0.00005182988 𝑘𝑔𝑚2
I2 0.00001912189 𝑘𝑔𝑚2
𝑥1 -0.01062 𝑚
𝑦1 0 𝑚
𝑧1 0.0047 𝑚
𝑥2 0.00065 𝑚
𝑦2 0.01834 𝑚
𝑧2 0.03146 𝑚
𝑚1 0.062 𝑘𝑔
𝑚2 0.0777 𝑘𝑔
𝑙1 0.01625 𝑚
𝑙2 0.03475 𝑚
𝑙3 0.02275 𝑚
𝜏1 0.002 𝑁𝑚
𝜏2 −0.001 𝑁𝑚

79
Figura 52. Comparación entre el modelo matemático de la estructura mecánica
y Simmechanics La Figura 52 demuestra que los resultados para el comportamiento de la estructura mecánica obtenida con el modelo matemático, son conforme con los resultados generados en Simmechanics. Esto brinda confianza para el uso posterior del modelo o en el proceso de diseño del sistema de control. Las ecuaciones de la estructura mecánica se encuentran en el script “ModeloEstructuraMecanica.m” en el ANEXO A: ALGORITMOS. 9.2 VALIDACIÓN MODELO MOTOR SIN ESCOBILLAS Con base en la ecuaciones (23) a (72), (30) y (31), a continuación, se establece el modelo no lineal en espacio de estados.
= 𝐴𝑥 + 𝐵𝑢
𝑦 = 𝐶𝑥 + 𝐷𝑢 (62)
𝑦 =
[ 𝑦1𝑦2𝑦3𝑦4𝑦5]
=
[ 𝑖𝑎𝑖𝑏𝑖𝑐𝜔𝑚𝜃𝑚 ]
(63)

80
𝑥 = [
𝑥1𝑥2𝑥3𝑥4
] = [
𝑖𝑎𝑖𝑏𝜔𝑚𝜃𝑚
] (64)
= [
1234
] =
[ 𝑑𝑖𝑎𝑑𝑡𝑑𝑖𝑏𝑑𝑡𝑑𝜔𝑚𝑑𝑡𝑑𝜃𝑚𝑑𝑡 ]
(65)
𝐴 =
[ −𝑅/𝐿 0 −
𝑘𝑒𝑠𝑖𝑛(ℎ)
2𝐿 −
𝑘𝑒𝑃𝑥3 cos(ℎ)
4𝐿
0 −𝑅/𝐿𝑘𝑒𝑠𝑖𝑛 (ℎ +
𝜋3)
2𝐿
𝑥3𝑘𝑒𝑃𝑐𝑜𝑠 (ℎ +𝜋3)
4𝐿
−√3𝑘𝑡𝑐𝑜𝑠 (ℎ +
𝜋3)
2𝐽 −
√3𝑘𝑡𝑐𝑜𝑠(ℎ)
2𝐽−𝑘𝑓
𝐽𝑎34
0 0 1 0 ]
ℎ =𝑥4𝑃
2
𝑎34 =𝑘𝑡𝑃(3𝑥1 cos(ℎ) + √3𝑥1 sin(ℎ) + 2√3𝑥2 sin(ℎ))
8𝐽
(66)
𝐵 =
[ 2
3𝐿−1
3𝐿−1
3𝐿 0
−1
3𝐿
2
3𝐿−1
3𝐿 0
0 0 0 −1
𝐽0 0 0 0 ]
(67)

81
𝐶 =
[ 1 0 0 00 1 0 0−1 −1 0 00 0 1 00 0 0 1]
(68)
𝐷 =
[ 0 0 0 00 0 0 00 0 0 00 0 0 00 0 0 0]
(69)
En donde para calcular el torque eléctrico 𝑇𝑒, se calcula con (70) (halladas las salidas
𝑦1, 𝑦2 y 𝑦5).
𝑇𝑒 =
−𝑘𝑡 (𝑦1√3cos (ℎ)
2 +3𝑦1𝑠𝑖𝑛 (ℎ)
2 + 𝑦2√3cos (ℎ))
2
ℎ =𝑦5𝑃
2
(70)
El modelo en espacio de estados del motor sin escobillas es introducido al software de Matlab – Simulink tal y como se muestra en Figura 53.
Figura 53. Simulación Motor sin escobillas
Posteriormente, es simulado con los parámetros de la Tabla 7.

82
Parametro Valor Unidad
𝑘𝑓 0.0001 𝑁𝑚/(𝑟𝑎𝑑/𝑠)
J 0.000001 𝑘𝑔𝑚2
𝑘𝑡 0.0001 𝑁𝑚/𝐴
𝑘𝑒 0.08 𝑉/(𝑟𝑎𝑑/𝑠) 𝑃 14 -
𝑅 15.445 Ω
𝐿 0.003665 H
𝑇𝑙 0 𝑁𝑚
Tabla 7. Parámetros del motor brushless
La simulación se realiza introduciendo los voltajes RMS mostrados en la Figura 54. Cada señal está retrasada 120 grados con respecto a la otra.
Figura 54. Entrada de voltajes RMS
Las correspondientes señales de salida en respuesta a las señales de entrada en la Figura 54, se muestran en Figura 55 .

83
Figura 55. Resultados de las salidas del motor BLDC
Con base en la teoría de motores sin escobillas mostrada en 6.5.1.1, debido a que el motor cuenta con 7 pares de polos, cuando se introducen 7 ciclos eléctricos de voltaje, el eje del motor solamente girará un ciclo. Esto puede ser verificado en la Figura 55 entre el segundo 1 y 8. Al inicio, debido a que la entrada de voltaje es abrupta, los valores de torque y velocidad adquieren picos. Se considera que el modelo del motor cumple con la teoría y es confiable para usarse. Las ecuaciones anteriormente simuladas se encuentran en el archivo “ModeloBLDCMotor.m”, en el ANEXO A: ALGORITMOS. 9.3 MODELO SISTEMA GIMBAL Verificados ambos subsistemas, estructura mecánica y motor sin escobillas, a continuación, se establece el modelo del sistema Gimbal. En este modelo la fuerza contra electromotriz se asume nula debido a las bajas revoluciones a las que trabaja el sistema, sin embargo, cabe aclarar que, si se desea tener en cuenta la fuerza contra electromotriz, ya se encuentra definida por las ecuaciones vistas en 6.5.1.3. A causa de que la relación entre el voltaje y el PWM es lineal, como se verá más adelante en 10.2, se establece la relación entre los voltajes de ambos motores y las variables de control 𝑢1 y 𝑢2, respectivamente, tal y como se muestra en las ecuaciones a continuación.

84
𝑉𝑎1 = 0.5𝑉𝑚 [𝑘𝑣1 sin (2𝜋
256𝑢1) + 1]
𝑉𝑏1 = 0.5𝑉𝑚 [𝑘𝑣1 sin (2𝜋
256𝑢1 +
2𝜋
3) + 1]
𝑉𝑐1 = 0.5𝑉𝑚 [𝑘𝑣1 sin (2𝜋
256𝑢1 +
4𝜋
3) + 1]
(71)
𝑉𝑎2 = 0.5𝑉𝑚 [𝑘𝑣2 sin (2𝜋
256𝑢2) + 1]
𝑉𝑏2 = 0.5𝑉𝑚 [𝑘𝑣2 sin (2𝜋
256𝑢2 +
2𝜋
3) + 1]
𝑉𝑐2 = 0.5𝑉𝑚 [𝑘𝑣2 sin (2𝜋
256𝑢2 +
4𝜋
3) + 1]
(72)
En donde 𝑘𝑣1 y 𝑘𝑣2 son las constantes de escalado del voltaje RMS en los motores
1 y 2, respectivamente y, 𝑉𝑚 es el Voltaje de alimentación DC en los motores. Las ecuaciones (71) y (72), se obtienen asumiendo señales senoidales puras y muestreando el ángulo eléctrico a 256 muestras como puede verse en la Figura 71, sin embargo, debido a que en [32] se sugiere que en la práctica se implemente una señal senoidal denominada “saddle sine wave” como se mostró en la Figura 18 (b), se realiza el cálculo que relaciona el voltaje senoidal puro y saddle, a través de la ecuación general del valor eficaz [49] para un ciclo de la señal, respectivamente. De esta manera se obtiene que la relación entre el voltaje RMS senoidal y saddle es de 1.3288. Si se desea ver el cálculo, en el ANEXO A: ALGORITMOS, abrir el programa “SaddleSineWave.m”. Para finalizar, se iguala el torque 𝑇𝑒 de la ecuación (23), respectivamente, con los torques 𝜏1 y 𝜏2 de las ecuaciones (45) y (46), obteniendo así la relación entre la dinámica de los eslabones y las corrientes en los motores. Con esta igualdad, finalmente, se logra establecer el modelo del sistema Gimbal con dos entradas 𝑢1 y 𝑢2 , y dos salidas 𝜃1 y 𝜃2, tal y como se muestra en la Figura 56. Las ecuaciones, desarrolladas anteriormente, del sistema Gimbal se encuentran en el archivo “ModeloSistemaGimbal2DOF.m”, en el ANEXO A: ALGORITMOS.

85
Figura 56. Diagrama de bloques sistema Gimbal modelado
El modelo completo del sistema, teniendo en cuenta las perturbaciones de torque y la inductancia, puede encontrarlo, de forma detallada, en el archivo ModeloSistemaGimbal2DOF_Inductancia.m el cual está en el ANEXO A: ALGORITMOS.
𝒗𝒄𝟏
𝒗𝒂𝟏
𝒗𝒃𝟏
𝒗𝒃𝟐
𝒗𝒂𝟐
𝒖𝟏
𝒖𝟐
𝜽
𝜽
𝒗𝒄𝟐

86
10 PRUEBAS EXPERIMENTALES PREVIAS. 10.1 FILTRADO A continuación, se muestran las implementaciones realizadas mediante el filtro complementario y la librería SimpleKalmanFilter, en donde “Ángulo Eje X” hace referencia al Eslabón 2 y, el “Ángulo Eje Y” hace referencia al Eslabón 1. Inicialmente se implemente el algoritmo del filtro complementario encontrado en la internet [9], como se puede apreciar en la Figura 57. En el tiempo de muestreo es de 5 ms y se mueven cada uno de los eslabones entre 90 y -90 grados respectivamente.
Figura 57. Ángulos obtenidos con el código base del Filtro Complementario
Se observó que los ángulos tenían un leve retraso, y un pico en la señal cada vez que se producía un cambio brusco en el ángulo, además, se observó un desfase de entre 3° a 5°, cuando la plataforma se mantuvo estática (lo más cercano a cero grados). Debido a los inconvenientes presentados, se graficaron los datos del ángulo calculado por el acelerómetro, el cual es el referente del ángulo correcto (pues se calcula mediante el vector de la gravedad de la tierra, el cual es constante en magnitud y dirección), y el ángulo obtenido mediante el filtro complementario.

87
Figura 58. Respuesta Filtro complementario eje X ( 𝑘1 = 0.92, 𝑘2 = 0.02 )
Figura 59. Respuesta Filtro complementario eje Y ( 𝑘1 = 0.92, 𝑘2 = 0.02 )
En la Figura 59 y Figura 60, se observa que el filtro complementario no sigue lo suficientemente de cerca al ángulo del acelerómetro. De esta manera, se modificaron las constantes, 𝑘1 y 𝑘2, hasta encontrar una mejor respuesta. También se calibro el Giróscopo tomando 3000 muestras en estado estacionario y, posteriormente, se sustrajo el resultado a cada una de las lecturas que entregaba el Giróscopo.

88
Figura 60. Estructura Filtro complementario eje X ( 𝑘1 = 0.8, 𝑘2 = 0.2 )
Con el cambio de constantes, se encuentra que la señal filtrada sigue a la del acelerómetro con un retardo de 10 ms.
Figura 61. Estructura Filtro complementario eje Y ( 𝑘1 = 0.8, 𝑘2 = 0.2 )
De manera muy similar sucede con el ángulo en el eje Y. Con base en los cambios en las constantes, se concluye que, aumentando 𝑘1, y, por ende, disminuyendo 𝑘2, el filtrado se vuelve más robusto frente a las vibraciones mecánicas, pero se desfasa de la señal original. De esta manera, sería posible mejorar el filtrado a cambio de retardar la señal.

89
Una vez instalada la librería SimpleKalmanFilter, se implementa y se compara con la respuesta del filtro complementario, anteriormente ajustado.
Figura 62. Comparación Filtro complementario y Kalman eje X (eMean = 1.1, q
= 0.01) Se observa que el desfase producido es el mismo que el filtro complementario, sin embargo, el filtrado es mucho mejor. De manera similar sucede con el eje Y.
Figura 63. Comparación Filtro complementario y Kalman eje Y (eMean = 1, q =
0.01)

90
De esta manera se concluye que, al filtrar las señales mediante los filtros, complementario y Kalman simplificado, el desfase en las señales no se puede evitar, sin embargo, la mejor opción para el filtrado es la de Kalman, pues reduce mayormente el ruido, para un mismo desfase. Lamentablemente, al implementar ambos filtros con el controlador más básico, el controlador PID, no fue posible obtener una regulación adecuada para la aplicación, pues a pesar de que alcanzaba el Set Point, no lo hacía en el tiempo adecuado. Se observó que, luego de diferentes pruebas con ambos filtros, en el que se partía de las ganancias anteriormente mostradas y, posteriormente, modificadas, el controlador era afectado por el desfase, cuando la señal era filtrada fuertemente y, por picos, producidos por el ruido del acelerómetro, cuando la señal era levente filtrada. De esta manera, después, se consultó en la internet un mejor filtrado, encontrado el estimador de Kalman [11] y, teniendo en cuenta el aprendizaje previo, también se decidió adicionar un promedio entre lecturas del Giroscopio. Este promedio lo puede encontrar en cualquiera de los códigos PID, LQG y MixSyn en el ANEXO A: ALGORITMOS. De acuerdo con las ecuaciones mostradas en la Figura 3, a continuación, en la Figura 64 y Figura 65, se muestran las respuestas obtenidas en el estimador de Kalman para los eslabones 1 y 2, respectivamente. Las ganancias utilizadas y los valores de condición inicial se presentan en (73), (74) y (75), (76), respectivamente.
𝑄𝑓 = [
0.000005 0 0 00 0.00000000000000001 0 00 0 0.000007 00 0 0 0.00000000007
] (73)
𝑅𝑓 = [0.05 00 0.1
] (74)
[𝑘−1] = [
0000
] (75)
𝑃[𝑘−1] = [
1 0 0 00 1 0 00 0 1 00 0 0 1
] (76)
Con base en las anteriores ganancias y condiciones iniciales, se obtuvo la siguiente respuesta en el estimador de Kalman para el eslabón 1.

91
Figura 64. Estimador de Kalman para 𝜃1
Para el eslabón 2, se obtuvo se muestra a continuación.
Figura 65. Estimador de Kalman para 𝜃2

92
Como se puede observar en la Figura 64 y Figura 65, el estimador de Kalman se compara con el ángulo calculado mediante los datos del acelerómetro (Acc). Este cálculo se realiza con (10) y, como se mencionó anteriormente es un valor absoluto, pues se obtiene del vector gravedad. A pesar de que el ángulo no presenta errores en su cálculo, se puede ver que, entre los segundos 8 y 10, las fuerzas externas como vibraciones, producen aceleraciones que afectan la medida del acelerómetro y, por ende, el ángulo. El estimador de Kalman corrige estos defectos usa el ángulo calculado mediante el giróscopo, el cual se calcula con (5) y, teniendo en cuenta un ruido estimado, definido mediante las ganancias 𝑄𝑓 y 𝑅𝑓. La mejora puede verse en
ambas figuras mediante la señal naranja (Kalman). Cabe aclarar que, el ángulo obtenido mediante el giróscopo también tiene un problema, como se dijo anteriormente en el marco teórico, y es que tiende a desviarse del valor correcto debido a la integración que se realiza (diferentes factores, como el ruido en la señal, producen un error que, al integrarse, desvían el valor de ángulo. En ingles, este fenómeno se le conoce como Drift y en español deriva). Este inconveniente, el estimador de Kalman lo corrige al hacer la diferencia 𝑧[𝑘] − [𝑘] en (9). Es por esta
razón que el estimador Kalman también se le conoce como un método para fusión de sensores. Posteriormente, implementado el estimador de Kalman con el controlador PID, se obtuvo una regulación exitosa. Lamentablemente, más adelante, hubo un accidente con el sensor y se debió cambiar por uno nuevo. Este sensor tenía lecturas de aceleración diferentes en cada uno de sus ejes para 1 G, por lo que la medida del ángulo del eslabón 1 y 2 se desfasaba, respectivamente, en aproximadamente 4 y -2 grados. Para solucionar, se calibraron cada uno de los ejes del acelerómetro, llevando la IMU a alinear sus ejes, de forma paralela, con el vector gravedad, respectivamente, para tres posiciones distintas. Cada una de las posiciones se mantuvieron fijas durante 15 segundos y, posteriormente, se adquirieron los datos del acelerómetro. A continuación, se muestran los resultados obtenidos en donde, Acc, representa las lecturas del acelerómetro. Las letras “X, Y, Z” respectivamente, equivalen a las lecturas en cada uno de los ejes.

93
Figura 66. Eje Z de la IMU alineado con el vector gravedad
Figura 67. Eje Y de la IMU alineado con el vector gravedad

94
Figura 68. Eje X de la IMU alineado con el vector gravedad
Con base en la Figura 66, Figura 67 y Figura 68, se tomaron los promedios de cada una de las lecturas, obteniendo así 9 promedios, 𝑥, 𝑦, 𝑧, 𝑥, 𝑦, 𝑧, 𝑧, 𝑧,
𝑧, en donde, los subíndices 𝑥, 𝑦, 𝑧, referencian la alineación del eje de la IMU con el vector gravedad y, las variables , , 𝑧, los promedios de las tres posiciones, respectivamente, para cada eje. Teniendo en cuenta los anteriores promedios, se obtuvo el siguiente modelo, en donde, 𝑎𝑥, 𝑎𝑦, 𝑎𝑧, son las aceleraciones calibradas
en fuerza G, respectivamente para cada eje de la IMU y, 𝑥𝑎, 𝑦𝑎, 𝑧𝑎, los datos que envía el acelerómetro, respectivamente por cada eje.
𝑧0 =𝑧 + 𝑧
2
𝑦0 =𝑥 + 𝑧2
𝑥0 =𝑦 + 𝑧
2
(77)
𝑎𝑥 = 𝑥𝑎 (1
𝑥 − 𝑥0) − (
𝑥0𝑥 − 𝑥0
) (78)
𝑎𝑦 = 𝑦𝑎 (1
𝑦 − 𝑦0) − (
𝑦0𝑦 − 𝑦0
) (79)

95
𝑎𝑧 = 𝑧𝑎 (1
𝑧 − 𝑧0) − (
𝑧0𝑧 − 𝑧0
) (80)
10.2 MOTORES Como se mencionó en 9.3, en la práctica se suele emplear una señal senoidal tipo Saddle, sin embargo, para facilitar el análisis, en las pruebas realizadas a los motores, se empleó una señal senoidal pura, cómo se verá a continuación. 10.2.1 PWM SENOIDAL Al emplear la conmutación senoidal, sea saddle o pura, existe la posibilidad de modificar la amplitud máxima en la corriente y su valor instantáneo en el tiempo. De esta manera, puede modificarse el torque y la posición mecánica del rotor, respectivamente. Para lograrlo, se empleó la técnica PWM, en donde un aumento del Duty Cycle incrementa la amplitud del voltaje y, por lo tanto, de manera proporcional, se produce un aumento en la corriente. A continuación, se muestra una gráfica en donde se generan tres Duty Cicles con forma senoidal, en función del ángulo eléctrico y para cinco diferentes amplitudes máximas de PWM, 51, 102, 153, 204 y 255.
Figura 69. Valores de Duty Cycle para diferentes amplitudes

96
En este sentido, a medida que el ángulo eléctrico aumenta, los Duty Cicles varían de forma senoidal y con una amplitud máxima determinada. Con esta configuración, es posible modificar el torque y la posición angular, a medida que la amplitud máxima y el valor instantáneo del Duty Cycle varían, respectivamente. Para conocer el voltaje real producido por un Duty Cycle determinado, se alimentó la tarjeta electrónica a 11.93 Voltios DC. Posteriormente, se realizaron saltos de Duty Cycle de 17 en el Microcontrolador ESP32 y, mediante un multímetro, se midieron los voltajes en cada una de las salidas del Driver que, respectivamente, van a cada una de las fases. Una vez adquiridos los datos, se graficaron, obteniendo los siguientes resultados.
Figura 70. Duty Cycle vs Voltaje para cada uno de los driver L6234
En la Figura 70, se comprueba que el comportamiento del Duty Cycle y el voltaje en las salidas del Driver (Out) tiende a ser lineal, con algunos ligeros cambios de pendiente al inicio y al final. 10.2.2 CORRIENTE Comprobada la relación entre el Duty Cycle y el voltaje, se procede a analizar la misma respuesta, para diferente ángulos eléctricos y amplitudes de la conmutación senoidal. Para lograrlo, se toman 256 muestras (0 a 255) de las señales senoidales anteriormente mostradas y se guardan en un Array (Array PWM) en donde, a medida que aumenta la indexación del array (Array PWM), se producen las ondas senoidales, de la siguiente manera.

97
Figura 71. Indexado del Array PWM con diferentes Amplitudes
Los resultados obtenidos se pueden observar en la Figura 72, en donde el valor máximo de PWM puede verse como la amplitud de la onda senoidal de la Figura 71.

98
Figura 72. Voltaje vs Amplitud máxima de Duty Cycle para un Ángulo Eléctrico
determinado en el Motor Uno En la Figura 72 se observa que el voltaje en la Fase 1 tiende a mantener un valor constante para los ángulos de 0° y 180°, sin importar la variación en el Máximo PWM. Esto se debe ya que el seno de estos ángulos es cero y, por lo tanto, el valor debe ser constante con base en las ecuaciones (71) y (72). Posteriormente, se observa que en los ángulos 90° y 270°, el voltaje en la Fase 1 tiende a variar proporcionalmente a medida que el Máximo PWM es modificado, con pendiente positiva y negativa, respectivamente. Para las otras dos Fases ocurre de manera similar, pero con un desfase de 120° grados en la señal senoidal, respectivamente. La corriente consumida por el motor aumenta al incrementar el Máximo PWM, como se puede ver en la Figura 73. Esto conlleva a que exista un cambio en el torque, es decir, a medida que aumente el Máximo PWM, habrá un mayor torque en el rotor, sin embargo, los devanados del estator estarán expuestos a una mayor intensidad corriente y esto puede producir que el motor se sobrecaliente. Cabe resaltar que, cuando el Ángulo eléctrico es 0° y 180°, se producirá un mayor torque en el rotor. Esto puede deberse a la simetría en los voltajes de cada Fase tal y como se pudo observar en la Figura 72. La corriente graficada es el valor que suministra la fuente de alimentación (valor mostrado en el display), respectivamente, para cada motor.
Figura 73. Corriente vs Amplitud máxima de Duty Cycle para un Ángulo
Eléctrico determinado en la Conmutación Senoidal del Motor Uno

99
De manera muy similar sucede en el motor dos, como se puede observar en la Figura 74 y Figura 75.
Figura 74. Voltaje vs Amplitud máxima de Duty Cycle para un Ángulo Eléctrico
determinado en el Motor Dos

100
Figura 75. Corriente vs Amplitud máxima de Duty Cycle para un Ángulo Eléctrico determinado en la Conmutación Senoidal del Motor Dos
10.2.3 TEMPERATURA Con el fin de conocer la variación de la temperatura del motor conforme el Duty Cycle máximo aumenta (Amplitud Onda Duty Cycle Senoidal), se instaló la sonda (termopar), que trae por defecto los multímetros digitales, en la parte trasera del casco del motor. Esta sonda se colocó en la ranura del tornillo del casco y se sujetó mediante el tornillo, además, para mayor estabilidad, se abrazó con cinta aislante negra, tal y cómo se muestra a continuación.
Figura 76. Sujeción Sonda para medir la temperatura del Motor
Esta medición solo se realizó para el Motor que moverá al Eslabón 1 debido a que este es el que mayor carga tendrá. Se realizaron pruebas a 40%, 60% y 80% de amplitud de duty cycle constante ya que, a menores porcentajes, el motor no podía mover la carga y, a mayores, se explicará más adelante. La toma de datos de la temperatura se realizó durante un lapso máximo de 30 minutos o hasta que la temperatura llegará a los 50 grados Celsius, lo que primero ocurriera. A continuación, en la Figura 77 se muestra el montaje.

101
Figura 77. Montaje para medir la temperatura del Motor Los 30 minutos se debe a que los drones comerciales actuales tienen una autonomía de vuelo de entre 20 a 30 minutos [50] y, los 50 grados Celsius, a que el manual de Usuario SimpleBGC Software 2.2 [51] advierte que no se debe sobrepasar una temperatura de 80 grados Celsius ya que se podrían acarrear daños en el funcionamiento del motor, pues al sobrepasarse esa temperatura los imanes en el rotor perderán sus propiedades magnéticas. La diferencia de 30 grados con respecto al manual es con el fin de mantener un margen de seguridad, ya que la sonda no se encuentra directamente sobre los imanes del rotor. Una vez terminada la toma de datos, a continuación, en la Figura 78 se muestran los resultados obtenidos.
Figura 78. Temperatura vs Duty Cycle Máximo
Cómo se puede observar en la gráfica anterior, a mayores porcentajes, la temperatura en el motor tenderá a incrementar a temperaturas mayores de 50 grados en, aproximadamente, menos de 7 minutos, lo cual, cómo se mencionó previamente, no es viable para el funcionamiento del motor. Por tal razón, para duties cycles constantes, mayores a 80%, no se siguen tomando datos. De esta manera, se concluye que la mejor zona para trabajar la amplitud del Duty Cycle senoidal estará entre valores constantes de 40% a 60%. 10.3 SECUENCIA DE PERTURBACIÓN Con el fin de aplicar perturbaciones controladas al Gimbal, mediante la interfaz mostrada en la Figura 42, se implementó una secuencia en cada uno de los ejes de la plataforma construida. La secuencia tiene una duración de 20 segundos en

102
donde, durante los primeros 10 segundos, con base en la Figura 26, se mueven los eslabones 2 y 3 de la plataforma y, después de los 10 segundos, se mueven los tres eslabones. Para adquirir los datos, se lleva en lazo abierto los eslabones del Gimbal a la posición de trabajo tal y como se muestra en Figura 79 y se inicia la secuencia programada en la interfaz al oprimirse el botón “selector”.
Figura 79. Posición de los eslabones del Gimbal a cero grados
La posición de la Figura 79 supondría un ambiente en el que la cámara estuviese fija en el Drone. De esta manera, las perturbaciones aplicadas a cada uno de los eslabones del Gimbal, durante la secuencia, pueden verse a continuación.

103
Figura 80. Perturbaciones en el eslabón 1 del Gimbal
Figura 81. Perturbaciones en el eslabón 2 del Gimbal
En ambas figuras, puede verse las perturbaciones angulares en el Gimbal, filtradas (Kalman) y sin filtrar (Acc). 10.4 MODELO MATEMÁTICO Y SISTEMA FÍSICO Basado en las ecuaciones del sistema Gimbal, resumido en la Figura 56, se estableció el bloque no lineal en la interfaz de Simulink, como se observa en Figura 82.

104
Figura 82. Simulación Modelo No Lineal del Sistema Gimbal 2DOF [13]
Los parámetros utilizados en el bloque se muestran en la Tabla 8. En la Figura 83 y Figura 84 se observan las respuestas del modelo y del sistema físico en lazo abierto. Se observa que, el Eslabón 1 tiene una respuesta muy similar a la de los datos experimentales. Un cambio en la acción de control de 256 unidades, es decir, 1 ciclo eléctrico en los voltajes como se muestra en la ecuación (71), produce que el eslabón 1 se mueva aproximadamente -51.43 grados (-360/7). Esto es lo esperado con base en la teoría mostrada en 6.5.1.1, funcionamiento del motor Brushless. Para el eslabón 2 se observa una respuesta muy parecida al del eslabón 1, sin embargo, entre los segundos 12 y 16, cuando ambos eslabones se mueven al mismo tiempo, los datos experimentales se desvían de la respuesta esperada y se mantienen en aproximadamente -30 grados. Esto sucede debido a que la IMU mide el ángulo con base en el vector de la gravedad, mientras que el modelo, en relación al eslabón anterior. De esta manera, se concluye que, el modelo matemático del sistema Gimbal 2DOF es válido y puede ser empleado para el diseño de las estrategias de control, teniendo en cuenta la limitante de aproximadamente ± 30 grados en el eslabón 2, debido al sensor.
Figura 83. Comparación de la respuesta simulada del eslabón 1 con los datos
experimentales

105
Figura 84. Comparación de la respuesta simulada del eslabón 2 con los datos
experimentales
Parametro Valor Unidad
𝜃1 -90*𝜋/180 𝑟𝑎𝑑
𝜃2 90*𝜋/180 𝑟𝑎𝑑
𝑅 15.445 Ω
𝑃 14 -
𝑘𝑡1 0.11 𝑁𝑚/𝐴
𝑘𝑡2 0.11 𝑁𝑚/𝐴
𝑘𝑣1 90/255 -
𝑘𝑣2 80/255 -
𝑏1 0.0007 𝑁𝑚/(𝑟𝑎𝑑/𝑠) 𝑏2 0.0007 𝑁𝑚/(𝑟𝑎𝑑/𝑠) I1 0.00005182988 𝑘𝑔 ∗ 𝑚2
I2 0.00001912189 𝑘𝑔 ∗ 𝑚2
𝑥1 -0.01062 𝑚
𝑦1 0 𝑚
𝑧1 0.0047 𝑚
𝑥2 0.00065 𝑚
𝑦2 0.01834 𝑚
𝑧2 0.03146 𝑚

106
Tabla 8. Parámetros utilizados en el modelo del sistema Gimbal 2DOF
𝑚1 0.062 𝑘𝑔
𝑚2 0.0777 𝑘𝑔
𝑙1 0.01625 𝑚
𝑙2 0.03475 𝑚
𝑙3 0.02275 𝑚
𝑉𝑓 12 𝑉

107
11 DISEÑO DE CONTROLADORES. 11.1 LINEALIZACIÓN Validado el modelo del sistema Gimbal 2DOF, se linealizó teniendo en cuenta el
punto de equilibrio 𝜃1 = −𝜋
2 y 𝜃2 =
𝜋
2 . Este punto es el lugar de trabajo de la cámara.
Para alcanzar el punto de equilibrio, el modelo requiere en sus entradas los valores de 𝑢1 = 512 y 𝑢2 = −384. Estos valores son obtenidos con una relación entre el ángulo eléctrico, ángulo mecánico y los vectores de voltaje. A continuación, en la ecuación (81), se muestra la relación 𝜃1 y 𝑢1, en donde 𝜃1 se mide con respecto al sistema de referencia en el eslabón 0.
𝑢1 = (−7 ∗ 𝜃1 + 90) ∗256
360 (81)
La relación (81) puede ser utilizada para 𝜃2 y 𝑢2, respectivamente, teniendo en cuenta que, 𝜃2 se mide con respecto al sistema de referencia en el eslabón 1. El modelo linealizado del sistema Gimbal 2DOF se muestra en (82) y (83).
[ 1122]
= [
0 1 0 0−1393 −6.031 1200 5.8050 0 0 1
1341 5.805 −8141 −39.46
]
[ 𝜃11𝜃22]
+ [
0 04.784 −4.0930 0
−4.605 27.82
] [𝑢1𝑢2] (82)
[𝜃1𝜃2] = [
57.3 0 0 00 0 57.3 0
]
[ 𝜃11𝜃22]
(83)
A continuación, en la Figura 85 y Figura 86, se encuentran las respuestas del sistema lineal y no lineal. En ambas figuras se observa un buen comportamiento del modelo lineal, siguiendo muy de cerca al no lineal. El seguimiento del modelo lineal se cumple exitosamente en ambos eslabones hasta valores máximos de aproximadamente 160 y 240 para 𝑢1 y 𝑢2, respectivamente.

108
Figura 85. Respuesta del Eslabón 1 en modelo lineal y no lineal

109
Figura 86. Respuesta del Eslabón 2 en modelo lineal y no lineal 11.2 PID Discretizando la ecuación (53) para [𝑘] muestras se obtiene el diseño del controlador PID.
𝑢𝑝[𝑘] = 𝑘𝑝𝑒[𝑘] (84)
𝑒𝑠𝑢𝑚[𝑘] = 𝑒[𝑘] + 𝑒𝑠𝑢𝑚[𝑘−1] (85)
𝑢𝑖[𝑘] = 𝑘𝑖𝑒𝑠𝑢𝑚[𝑘] (86)
𝑢𝑑[𝑘] = 𝑘𝑑(𝑒[𝑘] − 𝑒[𝑘−1]) (87)
𝑢[𝑘] = 𝑢𝑝[𝑘] + 𝑢𝑑[𝑘] + 𝑢𝑖[𝑘]
(88)
Las ganancias 𝑘𝑝, 𝑘𝑖 y 𝑘𝑑, respectivamente, para controlar los eslabones 1 y 2
fueron las siguientes.
Tabla 9. Ganancias controlador PID
Estas ganancias fueron halladas, de forma empírica, graficando en tiempo real las variables reguladas. De esta manera, luego de varias pruebas, en donde se fueron modificando las ganancias hasta encontrar la menor mitigación de las perturbaciones generadas por la plataforma de pruebas, mostradas 10.3, secuencia de perturbación. 11.3 LQG Partiendo del modelo linealizado, representando por las ecuaciones (82) y (83), se diseña el controlador LQG con base en la teoría mostrada en 6.8. A continuación, se muestran las ganancias establecidas.
Ganancia Controlador
PID Eslabón 1 Controlador
PID Eslabón 2
𝒌𝒑 80 30
𝒌𝒊 6 5
𝒌𝒅 7 17

110
𝑄𝑐 = 1012
[ 0.5 0 0 0 0 00 0.00001 0 0 0 00 0 0.5 0 0 00 0 0 0.00001 0 00 0 0 0 7 00 0 0 0 0 5]
(89)
𝑅𝑐 = [7000 00 2000
] (90)
𝑄𝑛 = 10−12 [1 00 1
] (91)
𝑅𝑛 = [0.01 00 0.01
] (92)
La respuesta al escalón unitario de un grado mecánico para este controlador, discretizado a 1ms, fue la siguiente.
Figura 87. Respuesta de las variables reguladas mediante el controlador LQG
para un escalón unitario como referencia

111
Con base en la Figura 87, se observa que ambos eslabones alcanzan la referencia exitosamente con un leve acoplamiento entre ellos. En la Tabla 10 se detallan los valores de sobrepaso y tiempo de establecimiento, respectivamente, para cada eslabón.
Eslabón Lazo Sobrepaso [%] Tiempo de
establecimiento [s] Valor en estado
estable [°]
1 𝜃1𝑒1
1.18 0.0222 1
2 𝜃2𝑒2
0.162 0.0237 1
Tabla 10. Valores de las variables reguladas mediante el controlador LQG para
un escalón unitario como referencia Para lograr los valores mostrados en la Tabla 10, se requirieron las acciones de control mostradas a continuación en la Figura 88.
Figura 88. Respuesta de las acciones de control del controlador LQG frente
para un escalón unitario como referencia

112
Como se observa en la Figura 88, al discretizar el controlador a 1 ms se mantiene muy de cerca la respuesta continua. Los sobrepasos en ambas acciones de control son altos, como se puede observar en la Tabla 11, alcanzando picos de 40.5 y 12.6 unidades, respectivamente, para alcanzar la referencia en cada eslabón. Estos valores se mantienen dentro de valores razonables debido a que, por ejemplo, el pico de 40.5 significa que para alcanzar una referencia delta de 1 grado mecánico, en 0.0222 segundos, se requiere vencer la inercia del sistema haciendo tender, al inicio, el eslabón 1 a, aproximadamente, 8.136 (43.5*360/256/7) grados mecánicos.
Eslabón Lazo Amplitud Pico
[Dec] Tiempo de
establecimiento [s] Valor en estado
estable [Dec]
1 𝑢1𝑒2
40.5 0.0313 5.06
2 𝑢2𝑒2
12.6 0.0306 5.07
Tabla 11. Valores de las acciones de control del controlador LQG para un
escalón unitario como referencia 11.4 SENSIBILIDAD MIXTA H∞ Con base en la teoría mostrada en 6.7, se establecen las funciones de ponderación para cada una de las sensibilidades.
𝑊1 =0.23333 (𝑠 + 150)
(𝑠 + 0.35) (93)
𝑊2 = 0.1 (𝑠 + 100)
(𝑠 + 1 ∗ 104) (94)
𝑊3 =0.1 (𝑠 + 1)
(𝑠 + 1 ∗ 104) (95)
La respuesta al escalón unitario para este controlador, discretizado a 1ms, fue la siguiente.

113
Figura 89. Respuesta de las variables reguladas mediante el controlador 𝐻∞
para un escalón unitario como referencia En la Figura 91, se observa que la respuesta en tiempo discreto se separa de la continua durante un pequeño instante. Esto se debe a que el tiempo de muestreo de 1 ms no es suficiente para muestrear la dinámica de la acción de control y, por ende, la posición es levemente afectada. Sin embargo, como se puede apreciar, al ocurrir esto, el tiempo de establecimiento mejora a cambio de un pequeño sobrepaso. A continuación, en la Tabla 12 se detallan los valores de sobrepaso y tiempo de establecimiento, respectivamente, para cada eslabón.
Eslabón Lazo Sobrepaso [%] Tiempo de
establecimiento [s] Valor en estado
estable [°]
1 𝜃1𝑒1
1.32 0.0224 0.996
2 𝜃2𝑒2
0.036 0.0227 0.996
Tabla 12. Valores de las variables reguladas mediante el controlador 𝐻∞ para un
escalón unitario como referencia

114
Los valores respectivos de las acciones de control se muestran en la Tabla 13. A continuación, en la Figura 90, se encuentran las respuestas obtenidas.
Figura 90. Respuesta de las acciones de control del controlador 𝐻∞ frente para
un escalón unitario como referencia En la Figura 90, como se mencionó anteriormente, al discretizar el controlador a 1 ms, la señal en tiempo discreto, durante un pequeño momento, no sigue a la continua. Los sobrepasos en ambas acciones de control también son altos, como se puede observar en la Tabla 13, alcanzando picos de 41.5 y 11.2, respectivamente, para alcanzar la referencia en cada eslabón. Sin embargo, se mantienen dentro de valores razonables debido a que, por ejemplo, el pico de 41.5 significa que, para alcanzar una referencia delta de 1 grado, en 0.0224 segundos, se requiere vencer la inercia del sistema llevando, al inicio, el eslabón 1 a, aproximadamente, 8.33 (43.5*360/256/7) grados mecánicos.
Eslabón Lazo Amplitud Pico
[Dec] Tiempo de
establecimiento [s] Valor en estado
estable [Dec]
1 𝑢1𝑒2
41.5 0.0309 5.03
2 𝑢2𝑒2
11.2 0.0299 5.05

115
Tabla 13. Valores de las acciones de control del controlador 𝐻∞ para un escalón
unitario como referencia Claramente, al aumentar el tiempo de establecimiento en este controlador, se notará que la señal discreta será más parecida a la continua. Sin embargo, debido a la mejora que se obtuvo en el tiempo de establecimiento a cambio de un ligero sobrepaso, no se realizó ningún cambió. Se observa que este controlador, en comparación del LQG, logró mejores tiempos de establecimiento para menores amplitudes pico en la señal de control, aunque estabilizando un poco más lento el
lazo interno (𝜃2
𝑒2).
Durante el proceso de diseño-implementación, debido a que el controlador no regulaba el eslabón 1 correctamente, se aumentó un poco la potencia en los
motores, respectivamente, 𝑘𝑣1 =132
255 y 𝑘𝑣2 =
126
255 (teniendo en cuenta la relación
mencionada en 9.3), con el fin de minimizar vibraciones y, se modificó la constante 𝑏1 a 0.011 en el modelo lineal para disminuir un poco las oscilaciones en la respuesta al escalón unitario.

116
12 IMPLEMENTACIÓN DE CONTROLADORES. 12.1 PID Debido a que el controlador PID del Gimbal es de código cerrado, el diseño del controlador partió de la estructura empleada en la tarjeta, muy similar a la BGC, Martínez. El código del proyecto se puede encontrar aquí [52]. Con base en las ecuaciones (84) a (88), para ganancias de 𝑘𝑝 = 80, 𝑘𝑖 = 6, 𝑘𝑑 = 7, respectivamente,
para el control del eslabón 1 y, 𝑘𝑝 = 30, 𝑘𝑖 = 5 y 𝑘𝑑 = 17, respectivamente, para el
control del eslabón 2, se muestran los datos experimentales obtenidos en la implementación del controlador PID. Los valores de amplitud máxima en el PWM para el motor 1 y 2, fueron 95 y 85, respectivamente. Tal y como se vio en 10.3, la
secuencia de perturbación que se introdujo al sistema tiene una duración de aproximadamente 20 segundos en donde, para los primeros diez segundos, se mueven los eslabones 2 y 3 de la plataforma y, luego, los tres eslabones.
Figura 91. Respuesta del Eslabón 1 en la implementación del controlador PID
En la Figura 91, se grafica la perturbación aplicada en el Gimbal (Fijo) y su reducción al implementar el controlador PID (PID). Antes del segundo 10, se realiza una secuencia para llevar el Gimbal al punto de equilibrio. A continuación, en la Figura 92, se amplían los datos en la posición del eslabón 1.

117
Figura 92. Respuesta ampliada del Eslabón 1 en la implementación del
controlador PID Con base en la Figura 92, se valida que el controlador PID asegura una reducción de la perturbación hasta aproximadamente una amplitud de 0.5 grados, lo cual es aceptable para la aplicación. Sobre el segundo 26 se observa que, al generar perturbaciones en el eje que no puede regular el Gimbal, el controlador es afectado, haciendo que se generen picos indeseables en la amplitud de la posición. También se observa algo de ruido en la acción de control, sin embargo, los rangos se encuentran dentro de valores razonables. Estos valores, en la acción de control y la reducción de la perturbación, serán los que se tendrán de referencia para ser mejorados por los controladores óptimo y robusto. Para el eslabón 2, en la Figura 93, se observan respuestas similares, sin embargo, luego del segundo 30, se puede apreciar notablemente como el controlador mitiga el desvío de la referencia. Este movimiento en la señal fija se debe a que, al final de la secuencia, esta se detiene abruptamente.

118
Figura 93. Respuesta del Eslabón 2 en la implementación del controlador PID
12.2 LQG Implementado el controlador diseñado en 11.3, se obtuvieron las siguientes respuestas. Tal y como se vio en 10.3, la secuencia de perturbación que se introdujo al sistema tiene una duración de aproximadamente 20 segundos en donde, para los primeros diez segundos, se mueven los eslabones 2 y 3 de la plataforma y, luego, los tres eslabones. En la Figura 94, se observa la perturbación aplicada en el Gimbal (Fijo) y la mitigación de esta al implementar el controlador LQG (LQG). Antes del segundo 10, se realiza una secuencia para llevar el Gimbal al punto de equilibrio. En la Figura 95 se amplían los datos en la posición del eslabón 1, en donde se valida que el controlador LQG asegura una reducción de la perturbación hasta aproximadamente 1 grado, lo cual no es aceptable para la aplicación. Se observa algo de ruido en la acción de control, sin embargo, los rangos se encuentran dentro de valores razonables. Cabe resaltar que, en este controlador, al generar perturbaciones en el eje que no puede regular el Gimbal, se observa que, es levemente afectado ya que los picos de la señal LQG se mantienen muy parecidos a lo largo de toda la gráfica, a excepción, sobre el segundo 30 que es cuando la secuencia finaliza de manera abrupta.

119
Figura 94. Respuesta del Eslabón 1 en la implementación del controlador LQG
Figura 95. Respuesta ampliada del Eslabón 1 en la implementación del
controlador LQG

120
Para el eslabón 2 la respuesta es muy similar a la del eslabón 1.
Figura 96. Respuesta del Eslabón 2 en la implementación del controlador LQG
Luego de diferentes pruebas, modificando las ganancias 𝑄𝑐, 𝑅𝑐, 𝑄𝑛 y 𝑅𝑛, se logró disminuir en el diseño a casi 0 % los sobrepasos de la posición en ambos en eslabones, sin embargo, en la implementación práctica, las respuestas siguieron siendo muy similares a las mostradas anteriormente. De esta manera, se deicidio realizar nuevamente una prueba en lazo abierto similar a la mostrada en la Figura 85 y Figura 86, pero esta vez, para un impulso-rampa, graficando el ángulo calculado mediante el acelerómetro (Acc) y mediante el filtro Kalman (Kalman), tal y como se puede observar en la Figura 97 y Figura 98.

121
Figura 97. Prueba impulso-rampa en lazo abierto para el eslabón 1

122
Figura 98. Prueba impulso-rampa en lazo abierto para el eslabón 2
Con base en la Figura 97 y Figura 98, se valida que el filtrado Kalman afecta el valor de la posición para movimientos bruscos, pues la señal es desfasada y que, con un valor delta de aproximadamente 150 unidades en la acción de control, se espera que los eslabones se posicionen a un delta aproximado de 30 grados. Como se observa en ambas figuras, las señales filtradas no alcanzan este valor, sin embargo, se puede ver que, en el caso del eslabón 2, el ángulo calculado con los datos del acelerómetro (Acc) si alcanza este delta, pero luego lo sobre pasa debido al torque abrupto al inicio del movimiento. En el eslabón 1, no se alcanza, porque el motor que mueve este eslabón, tiene que mover la masa del eslabón 1 junto con la del eslabón 2. Esto se valida en la Figura 99, en donde, al aumentar la potencia del motor que mueve el eslabón 1, mediante 𝑘𝑣1, se observa que la señal Acc si alcanza el delta.
Figura 99. Prueba impulso-rampa en lazo abierto para el eslabón 1
aumentando la potencia Con base en lo mostrado anteriormente, se concluye que existe un “cuello de botella” a causa del filtrado, ya que, al disminuir el filtrado o aumentarlo, la medición se ve afectada y, por ende, el controlador también. De esta manera a pesar de tener una buena respuesta en el diseño del controlador, al implementarlo en la práctica,

123
el filtrado afecta los tiempos de establecimiento, haciendo que se tenga un error en la estabilización, en ciertos momentos, de hasta aproximadamente 1.8 y 2.5 grados, respectivamente, para el eslabón 2 y 1. La mejor manera de solucionar el anterior inconveniente es medir el ángulo a través de sensores magnéticos de final de eje como, por ejemplo, el sensor AS5145, el cual aporta una precisión de 0.0879 grados y permitiría medir el ángulo de forma relativa al eslabón anterior, como se tiene en el modelo matemático. Sin embargo, esta solución no se implementa debido a que va más allá de los alcances de este proyecto. 12.3 SENSIBILIDAD MIXTA H∞ Con base en el controlador diseñado en 11.4, a continuación, se presentan las respuestas obtenidas en su implementación. Tal y como se vio en 10.3, la secuencia de perturbación que se introdujo al sistema tiene una duración de aproximadamente 20 segundos en donde, para los primeros diez segundos, se mueven los eslabones 2 y 3 de la plataforma y, luego, los tres eslabones.
Figura 100. Respuesta del Eslabón 1 en la implementación del controlador 𝐻∞
En la Figura 100, se observa que el controlador mitiga en gran manera las perturbaciones, sin embargo, como se muestra a continuación, en la Figura 101,al igual que LQG, no es suficientemente aceptable para la aplicación. Sin embargo,

124
cabe resaltar que, este controlador reduce un poco más las perturbaciones, incluso, sobre el segundo 30, que es cuando la secuencia finaliza de manera abrupta.
Figura 101. Respuesta ampliada del Eslabón 1 en la implementación del
controlador 𝐻∞ Los rangos en la acción de control se encuentran dentro de valores razonables, aunque con un poco de ruido. Similarmente, como el controlador LQG, al generar perturbaciones en el eje que no puede regular el Gimbal, se observa que, es levemente afectado ya que los picos de la señal 𝐻∞ se mantienen muy parecidos a lo largo de toda la gráfica. Para el eslabón 2 la respuesta es muy similar a la del eslabón 1 como se observa en la Figura 102.

125
Figura 102. Respuesta del Eslabón 2 en la implementación del controlador 𝐻∞
Luego de diferentes pruebas, modificando las funciones de ponderación 𝑊1, 𝑊2 y 𝑊3, no fue posible mejorar la mitigación de las perturbaciones, intuyendo una vez más, como se mencionó en 12.2, que el filtrado afecta los tiempos de establecimiento de las señales a controlar. Al observar en el diseño que, tanto el controlador LQG y 𝐻∞, pueden estabilizar la planta en aproximadamente 20 ms, lo cual suficiente para mitigar las perturbaciones a niveles aceptables para la aplicación y, teniendo en cuenta las respuestas obtenidas en la Figura 98 y Figura 99, se concluye que, la respuesta de los controladores es modificada por los datos enviados desde el sensor y su posterior necesario procesamiento. Esto se debe a que los controladores se diseñan partiendo del modelo lineal, el cual no tiene en cuenta el efecto del filtrado o de los picos producidos por los datos del acelerómetro, por lo que, al implementarse cada uno de estos controladores, estabilizan, pero no el tiempo diseñado. En el controlador PID este problema pudo mitigarse de manera empírica al modificar, luego de muchas pruebas, las constantes del filtro, las ganancias del controlador y la potencia en los motores, cosa que es muy complicado de realizar, y que no se logró, con los controladores LQG y 𝐻∞, pues, con relación al controlador PID, poseen ganancias matriciales, las cuales se calculan con el modelo linealizado.

126
Con base en lo anteriormente mencionado, el controlador PID tuvo el mejor desempeño, aunque, lo más probable es que, al implementar los controladores LQG y 𝐻∞, con otro tipo de sensor, como se mencionó en 12.2, mejoren drásticamente la respuesta con relación al PID. Se menciona que, el controlador PID, a pesar de tener la mejor respuesta de los tres controladores, solo permite cambios en la referencia en forma de rampa, es decir, que los cambios bruscos en la referencia, como escalones, lo saturan, lo cual no sucede con el LQG y 𝐻∞. 12.4 COMPARACIÓN SIMULADA Y EXPERIMENTAL 12.4.1 INDUCTANCIA EN EL MODELO Con el fin de comprar las dinámicas experimentales, de cada una de las estrategias de control, con las respuestas simuladas, primero, se validó si la inductancia del modelo del sistema Gimbal afectaba notablemente la respuesta del sistema. Para ello, se establecieron dos modelos, uno con inductancia y otro sin inductancia. El primer modelo, al tener en cuenta la inductancia, produce que los estados del sistema lleguen a ocho, como se puede observar a continuación.
𝑥 =
[ 𝜃11𝜃22𝑖𝑎1𝑖𝑏1𝑖𝑎2𝑖𝑏2]
(96)
De esta manera las variables para tener en cuenta en la simulación son 12, ocho para los estados, dos para las entradas y dos para los torques de perturbación. A continuación, en la Figura 103, se muestra el modelo no lineal de este sistema en la interfaz Simulink. El sumador en la entrada 𝑢2 se utiliza para llevar el eslabón 2 al punto de equilibrio el cual es el punto de referencia para comparar con las respuestas experimentales. Para el eslabón 1 no fue necesario debido a la orientación del sistema de referencia fijo del eslabón 0. Las gráficas del lado derecho hacen referencia a los estados y, de manera individual para cada motor, las corrientes de fase.

127
Figura 103. Modelo No lineal con inductancia simulado
El modelo sin inductancia anula la razón de cambio de la corriente, haciendo que los estados del sistema se reduzcan a solo cuatro.
𝑥 =
[ 𝜃11𝜃22]
(97)
De esta manera las variables para tener en cuenta en la simulación son 8, cuatro para los estados y dos para las entradas y dos para los torques de perturbación. A continuación, en la Figura 104, se muestra el modelo no lineal de este sistema en la interfaz Simulink.
Sumador

128
Figura 104. Modelo No lineal sin inductancia simulado
Al igual que el modelo anterior, el sumador en la entrada 𝑢2 se utiliza para llevar el eslabón 2 al punto de equilibrio el cual es el punto de referencia para comparar con las respuestas experimentales. Como se mencionó anteriormente, para el eslabón 1 no fue necesario debido a la orientación del sistema de referencia fijo del eslabón 0. La gráfica del lado derecho hace referencia a los estados. Luego de establecer ambos modelos, con y sin inductancia, se compararon mediante dos subsistemas como se muestra a continuación en la Figura 105, en donde se realizaron dos simulaciones, una con torques de perturbación igual a cero y otra en donde se establecieron torques de perturbación variables, cada 0.1 s. Los parámetros utilizados fueron los siguientes.
Parametro Valor Unidad
𝜃1 -90*𝜋/180 𝑟𝑎𝑑
𝜃2 90*𝜋/180 𝑟𝑎𝑑
𝑅 15.445 Ω
𝑃 14 -
𝑘𝑡1 0.11 𝑁𝑚/𝐴
𝑘𝑡2 0.11 𝑁𝑚/𝐴
𝑘𝑣1 126 /255 -
𝑘𝑣2 112.88 /255 -
Sumador

129
Tabla 14. Parámetros utilizados en la comparación del modelo sistema Gimbal
2DOF con y sin inductancia
𝑏1 0.0007 𝑁𝑚/(𝑟𝑎𝑑/𝑠) 𝑏2 0.0007 𝑁𝑚/(𝑟𝑎𝑑/𝑠) I1 0.00005182988 𝑘𝑔 ∗ 𝑚2
I2 0.00001912189 𝑘𝑔 ∗ 𝑚2
𝑥1 -0.01062 𝑚
𝑦1 0 𝑚
𝑧1 0.0047 𝑚
𝑥2 0.00065 𝑚
𝑦2 0.01834 𝑚
𝑧2 0.03146 𝑚
𝑚1 0.062 𝑘𝑔
𝑚2 0.0777 𝑘𝑔
𝑙1 0.01625 𝑚
𝑙2 0.03475 𝑚
𝑙3 0.02275 𝑚
𝑉𝑓 12 𝑉
𝑘𝑏1 0.05 𝑉/(𝑟𝑎𝑑/𝑠)
𝑘𝑏2 0.05 𝑉/(𝑟𝑎𝑑/𝑠)
𝐻1 0.003665 𝐻
𝐻2 0.003665 𝐻

130
Figura 105. Comparación modelo no lineal con y sin inductancia A continuación, se muestran las respuestas de ambos sistemas frente a torques de perturbación nulos. La simulación tuvo una duración de 10 segundos en donde se generaron acciones de control tipo rampa y escalón. Cabe a clara que, como se mencionó anteriormente, cada eslabón inicialmente partió desde el punto de equilibrio, es decir, 𝜃1 = −90° y 𝜃2 = 90 °.
Figura 106. Comparación de la respuesta del eslabón 1 en el modelo con y sin
inductancia Como se puede observar en la Figura 106, la diferencia entre los modelos con y sin inductancia es casi imperceptible, por lo que se realiza algo de zoom, entre los segundos 7 y 8, que es en donde sucede el cambio de amplitud con mayor pendiente. A continuación, se muestra la respuesta en ese periodo.

131
Figura 107. Ampliación 1 comparación de la respuesta del eslabón 1 en el
modelo con y sin inductancia Con base en la Figura 107, se observa que la diferencia entre ambos modelos sigue siendo muy baja. Sin embargo, con base en la Figura 108, se observa un leve desfase entre ambos modelos al energizar por primera vez el motor, es decir, en el segundo 0. Se deduce que el modelo sin inductancia alcanza más rápido la oscilación debido a que no existe resistencia al cambio de corriente en los devanados del motor 1. De esta manera, para el motor 1 se concluye que la inductancia si afecta la dinámica, pero de forma muy leve, por lo que puede ser omitida.

132
Figura 108. Ampliación 2 comparación de la respuesta del eslabón 1 en el modelo con y sin inductancia
Teniendo en cuenta las respuestas obtenidas en el eslabón 1, se observa en la Figura 109 que las respuestas del eslabón 2 son muy similares, por lo que no se muestran ampliaciones de esta. Luego de analizar la respuesta del eslabón 2 para diferentes ampliaciones, se concluye que la inductancia puede ser omitida en el modelo matemático del sistema Gimbal 2DOF.

133
Figura 109. Comparación de la respuesta del eslabón 2 en el modelo con y sin
inductancia A continuación, se muestran las respuestas de ambos sistemas frente a torques de perturbación variables. La simulación tuvo una duración de 10 segundos en donde se generaron acciones de control tipo rampa y escalón. A partir de los 1.5 segundos los torques de perturbación empezaron a variar con amplitudes de ± 0.08 N*m para el eslabón 1 y ± 0.015 N*m para el eslabón 2, cada 0.1 s respectivamente. Cabe a clara que, como se mencionó anteriormente, cada eslabón inicialmente partió desde el punto de equilibrio, es decir, 𝜃1 = −90° y 𝜃2 = 90 °.

134
Figura 110. Comparación de la respuesta del eslabón 1 en el modelo con y sin inductancia teniendo en cuenta la perturbación de torque
En la Figura 110 se observa que al aplicar el torque de perturbación al eslabón 1, a partir de los 1.5 segundos, la posición del eslabón, para ambos modelos, con y sin inductancia, se ve afectada por variaciones significativas, sin embargo, ambos modelos tienden a seguir el movimiento que produce la acción de control, mostrando a lo largo de su respuesta una diferencia casi nula entre ellos. Para el movimiento del Eslabón 2 sucede muy similar, a continuación, se muestra su respuesta en la Figura 111.

135
Figura 111. Comparación de la respuesta del eslabón 2 en el modelo con y sin
inductancia teniendo en cuenta la perturbación de torque De esta manera se comprueba que la inductancia en el modelo puede ser omitida y, por ende, en la comparación de respuestas, simulada con experimental, puede utilizarse el modelo sin inductancia, sin embargo, a continuación, se presenta la comparación haciendo uso del modelo con inductancia con el propósito de que las respuestas simuladas sean lo más cercano a la realidad. 12.4.2 PID Se estableció en la interfaz de Simulink el controlador diseñado en la sección 11.2. A continuación, se muestra el bloque junto con el algoritmo que contiene al controlador.

136
Figura 112. Controlador PID Simulink
Al agregar las ganancias ajustadas, de forma empírica, en la sección 11.2, y finalizar la simulación en donde se le ingresaba una señal de referencia, tipo rampa entre los segundos 2 y 4 y, escalón, entre los segundos 5 y 9, se observo que las respuestas de las acciones de control se saturaban al instante en que las señales de referencia, respectivamente para cada eslabón, se movían por primera vez. A continuación, se muestran las respuestas obtenidas en la simulación para los eslabones 1 y 2, empleando el controlador PID.

137
Figura 113. Respuesta simulada Eslabón 1 Controlador PID

138
Figura 114. Respuesta simulada Eslabón 2 Controlador PID Esta saturación puede deberse a que el modelo no contempla los desfases y vibraciones involucradas en la medición y posterior procesamiento de las variables a controlar, por lo que las ganancias establecidas anteriormente no satisfacen el lazo de control; ya que fueron ajustadas en tiempo real (teniendo en cuenta, de forma indirecta, el efecto de la medición) tal y como se mencionó en la sección 11.2. Al modificar las ganancias 𝑘𝑝, 𝑘𝑖 y 𝑘𝑑 en el controlador PID del eslabón 1,
respectivamente a 3, 0.05 y 0.1, se observó que es si posible estabilizar el lazo de control en la simulación. A continuación, en la Figura 116, se muestra la respuesta del eslabón.
Figura 115. Respuesta simulada Eslabón 1 Controlador PID ajustando ganancias Con base en lo anteriormente dicho, se concluye que el diseño del controlador PID es correcto y que las ganancias obtenidas de forma experimental no pueden ser empleadas en la simulación y, por lo tanto, no es posible comparar las respuestas simuladas con las experimentales, sin embargo, a continuación, se presentan los resultados experimentales obtenidos para el controlador PID.

139
Figura 116. Respuesta experimental Eslabón 1 Controlador PID Con base en la Figura 116, se observa que la acción de control es fuerte (esto permite validar la conclusión expuesta anteriormente para el controlador PID simulado). Debido a este comportamiento en la acción de control, solamente es posible estabilizar cambios de referencia suaves como lo es la rampa que se observa entre los segundos 8 y 12, mientras que cambios de referencia abruptos como sucede entre los segundos 12 y 15, producen que el controlador se sature. Para el eslabón 2 se observa un comportamiento muy similar al del eslabón 1, tal y como se muestra a continuación en la Figura 117.

140
Figura 117. Respuesta experimental Eslabón 2 Controlador PID
Los resultados anteriormente mostrados para el controlador PID están en el archivo PID_Simulink.slx, el cual se encuentra en el ANEXO A: ALGORITMOS. 12.4.3 LQG Se estableció en la interfaz de Simulink el controlador LQG diseñado en la sección 11.3, en donde, contrario al controlador PID, durante la simulación, los eslabones estabilizaron con éxito, ya que las ganancias del controlador fueron determinadas teniendo en cuenta el modelo matemático linealizado. De esta manera, fue posible realizar la comparación entre las respuestas simuladas y experimentales, las cuales se presentan a continuación. Al comparar ambas respuestas, se generaron cambios de referencia para cada uno de los eslabones. Los cambios fueron en forma de rampa y escalón.

141
Figura 118. Comparación de las respuestas simuladas y experimentales del
Controlador LQG para el Eslabón 1 Con base en la Figura 118, se observa que las respuestas experimentales y simuladas son muy parecidas cuando el cambio de la referencia (Set Point) tiene pendientes pequeñas, como sucede entre los segundos 7 y 12. Cuando las pendientes son más pronunciadas, como acontece entre los segundos 12 y 15, con el cambio de referencia en forma de escalón, se observa que ambas respuestas, simulada y experimental, tienen acciones de control más fuertes, haciendo que la variable regulada estabilice con algunas oscilaciones, mayormente, en la respuesta experimental debido al efecto de la medición, mencionado previamente. Para cambios de referencia abruptos, mayores a 5 grados, como se observa entre los segundos 13 y 14, la respuesta experimental no logra alcanzar la referencia. La respuesta del eslabón 2, mostrada en la Figura 119, se observa un comportamiento similar al del eslabón 1, en ambas respuestas, simulada y experimental, sin embargo, con mayores oscilaciones durante la estabilización, posiblemente, al acoplamiento entre los eslabones.

142
Figura 119. Comparación de las respuestas simuladas y experimentales del
Controlador LQG para el Eslabón 2 Los resultados anteriormente mostrados para el controlador LQG están en el archivo LQG_Simulink.slx, el cual se encuentra en el ANEXO A: ALGORITMOS. 12.4.4 SENSIBILIDAD MIXTA H∞ Se estableció en la interfaz de Simulink el controlador de sensibilidad mixta diseñado en la sección 11.4, en donde, al igual que el controlador LQG y contrario al controlador PID, durante la simulación, los eslabones estabilizaron con éxito, ya que las ganancias del controlador fueron determinadas teniendo en cuenta el modelo matemático linealizado. De esta manera, fue posible realizar la comparación entre las respuestas simuladas y experimentales, las cuales se presentan a continuación. Al comparar ambas respuestas, se generaron cambios de referencia para cada uno de los eslabones. Los cambios fueron en forma de rampa y escalón.

143
Figura 120. Comparación de las respuestas simuladas y experimentales del
Controlador 𝐻∞ para el Eslabón 1 Con base en la Figura 120, se observan respuestas similares al del controlador LQG, en donde ambas respuestas, experimentales y simuladas, son muy parecidas cuando el cambio de la referencia (Set Point) tiene pendientes pequeñas, como sucede entre los segundos 7 y 12 y. cuando las pendientes son más pronunciadas, como acontece entre los segundos 12 y 15, con el cambio de referencia en forma de escalón, se observa que ambas respuestas tienen acciones de control más fuertes, haciendo que la variable regulada estabilice con algunas oscilaciones, mayormente, en la respuesta experimental debido al efecto de la medición, mencionado previamente. Para cambios de referencia abruptos, mayores a 5 grados, como se observa entre los segundos 13 y 14, la respuesta experimental no logra alcanzar la referencia, sin embargo, con base en la respuesta experimental LQG mostrada anteriormente en la Figura 118, el controlador 𝐻∞ reduce el sobrepaso. Al igual que sucedió con el controlador LQG, las respuestas del controlador 𝐻∞ para el eslabón 2 mostradas en la Figura 121, tienen un comportamiento similar al del eslabón 1, con mayores oscilaciones durante la estabilización, probablemente, al acoplamiento que existe entre los eslabones.

144
Figura 121. Comparación de las respuestas simuladas y experimentales del
Controlador 𝐻∞ para el Eslabón 2 Los resultados anteriormente mostrados para el controlador de sensibilidad mixta están en el archivo MIX_Simulink.slx, el cual se encuentra en el ANEXO A: ALGORITMOS. 12.4.5 COMPARACIÓN DE LAS ESTRATEGIAS Por último, con el fin de comparar de una mejor manera el comportamiento de las estrategias de control frente a cambios de referencia, se insertaron en una sola gráfica cada una de las respuestas experimentales mostradas anteriormente. Cabe aclarar que, para hacer la comparación, se debió realizar un ajuste de tiempo de 0.03 y 0.08 segundos, respectivamente, para la respuesta LQG y de sensibilidad mixta con respecto al PID. Este ajuste se debe a que los tiempos en alcanzar el punto de trabajo, mostrado en la Figura 79, fue diferente para cada una de las estrategias. Este proceso se realizó previamente y es la razón por la cual cada una de las respuestas experimentales mostradas en esta sección comienzan luego de los 5 segundos, aproximadamente.

145
Figura 122. Comparación de las respuestas experimentales de cada una de las
estrategias de control para el Eslabón 1 Con base en la Figura 122, para el eslabón 1, se valida que la estrategia de control de sensibilidad mixta es la que mejor responde frente a los cambios de referencia repentinos, como se puede ver entre los segundos 12 y 14, caso contrario, la estrategia PID, no permite cambios de referencia repentinos, haciendo que la acción de control se sature, sin embargo, como se aprecia en la Figura 123, la respuesta PID es la que sigue más rápido los cambios de referencia, entre los segundos 8 y 8.7, razón por lo cual se satura la acción de control al existir un cambio abrupto en la referencia.

146
Figura 123. Ampliación comparación de las respuestas experimentales de cada
una de las estrategias de control para el Eslabón 1 En el caso del eslabón 2, se observa que la respuesta PID logra estabilizar el primer cambio de referencia ocurrido a partir del segundo 12, tal y como se muestra en la Figura 124, sin embargo, posteriormente, a causa del acoplamiento de los eslabones, al igual que el eslabón 1, la acción de control también es saturada, provocando que no se alcance la siguiente referencia. Este acoplamiento también afecta cada una de las estrategias, generando sobrepasos más altos antes de poder alcanzar la referencia establecida, tal y como se puede apreciar a lo largo de toda la gráfica, particularmente, luego del segundo 12. Cabe resltar que, la estrategia 𝐻∞ es la que mejor mitiga los sobrepasos productos del acoplamiento de los eslabones.

147
Figura 124. Comparación de las respuestas experimentales de cada una de las
estrategias de control para el Eslabón 2 En conclusión, con base en las respuestas experimentales mostradas previamente, la estrategia PID es la que mejor comportamiento tiene frente a los cambios de referencia con pendientes pequeñas, como, por ejemplo, rampas. Para cambios de referencia fuertes, como, por ejemplo, escalones, el mejor comportamiento lo obtuvo la estrategia de control 𝐻∞. Los resultados anteriormente mostrados para las respuestas experimentales están en el archivo Comparacion_experimental_estrategias.m , el cual se encuentra en el ANEXO A: ALGORITMOS.

148
CONCLUSIONES A lo largo de este trabajo se desarrollaron los modelos matemáticos, estructura mecánica y motor brushless, involucrados en un sistema Gimbal comercial de dos grados libertad, los cuales fueron validados a través de la comparación con el sistema físico y mediante simulaciones. Se observó que, la mejor manera de trabajar el modelo del sistema Gimbal 2DOF, es uniendo la matemática de la estructura mecánica con la del motor brushless en un solo modelo en espacio de estados y no de forma desacoplada, ya que cuando se trabaja de forma desacoplada, se debe tener muy bien calculados los diferentes parámetros del modelo del motor con el fin de que el torque que entregue al sistema mecánico cuente con la dinámica requerida para mover los eslabones adecuadamente. Para unir estos dos modelos y encontrar la matemática que representa el sistema Gimbal, se debe igualar los diferentes torques involucrados en cada uno de los eslabones, con los torques producidos por los motores, respectivamente, es decir, se debe tomar el torque 𝑇𝑒 de la ecuación (23) e igualar, respectivamente, con los torques 𝜏1 y 𝜏2 de las ecuaciones (45) y (46). Similarmente, en lugar de trabajar con voltajes fasoriales, para efectos de control, es más fácil hacerlo discretizando el ángulo eléctrico de los voltajes senoidales tal y como se realizó en la sección 9.3, por medio de las ecuaciones (71) y (72). Luego de diferentes simulaciones, se comprobó que, para que el modelo del sistema Gimbal pueda llegar a ser controlable y observable, se debe omitir el efecto de la inductancia en las fases de los motores o, probamente, otra opción, sea el medir las corrientes fasoriales, juntamente con la posición de los eslabones. Con base en los en los datos obtenidos en la Figura 83 y Figura 84, se valida la confiabilidad del modelo del sistema Gimbal 2DOF, en donde se concluye que, el seguimiento al sistema físico no solo depende del tipo de sensor que se emplea para medir el ángulo sino también de la potencia que se suministra a los motores. Luego de implementar diferentes pruebas con el sensor MPU6050, se observó que el mejor filtrado lo realiza el estimador de Kalman; aunque en este trabajo solamente se mostró el filtro complementario y el estimador de Kalman, también se hicieron pruebas con el Filtro Mahony. Posteriormente, se diseñaron tres controladores, PID, LQG y 𝐻∞, en donde, el PID, se diseñó partiendo de la estructura de programación que viene en la tarjeta Martínez [52] mientras que, el LQG y 𝐻∞, partiendo del modelo Gimbal 2DOF linealizado en el lugar de trabajo de la cámara, como se mostró en 11.1. Durante el diseño de los controladores, se observó que las acciones de control deben de tener sobre pasos fuertes con el fin de poder vencer la inercia en cada uno de los eslabones, mayormente, en el control para el eslabón 1, ya que este acopla al eslabón 2. Al variar parámetros del modelo linealizado, la respuesta en los controladores es modificada, por lo que es muy importante tener los valores lo más cercano posible a la realidad.

149
Por último, para validar la implementación de cada uno de estos controladores, se diseñó y construyó una plataforma de pruebas con el fin de generar una secuencia de perturbaciones controlada. De igual manera, se desarrolló una tarjeta de control debido a que la tarjeta que venía con el Gimbal tenía software cerrado. Luego de implementar cada uno de los controladores, se observó que la mejor respuesta la obtuvo el controlador PID, mitigando las perturbaciones de, aproximadamente, 10° a 0.25° y, de 5° a 0.25°, respectivamente, para los eslabones 1 y 2. Sin embargo, se concluye que, esto ocurrió debido a que la respuesta de los controladores LQG y 𝐻∞, se ve modificada por los datos enviados desde el sensor MPU6050 y su posterior procesamiento tal y como se mostró en la Figura 97 y Figura 98, y se validó en 12.2 y 12.3, durante la implementación de los controladores LQG y 𝐻∞, respectivamente. De esta manera, con base en los resultados obtenidos en el diseño de los controladores LQG y 𝐻∞, se considera que, al implementar estos controladores con otro tipo de sensor, como, por ejemplo, el sensor magnético de final de eje AS5145, se puede mejorar, en gran manera, la respuesta obtenida con el controlador PID.

150
REFERENCIAS
[1] A. Ramos Fernández y R. Flores Flores, «Diseño, construcción y control de un sistema estabilizador para smartphone: gimbal,» México, 2018.
[2] dji, «dji,» 20 09 2018. [En línea]. Available: https://dl.djicdn.com/downloads/Ronin-S/20180920/Ronin_S_User_Manual_v1.2.pdf. [Último acceso: 8 8 2019].
[3] basecamelectronics, « basecamelectronics,» [En línea]. Available: https://www.basecamelectronics.com/company/. [Último acceso: 8 8 2019].
[4] S.-K. Y. Chin E. Lin, C. E. Lin y S. Kai Yang, «Camera Gimbal Tracking from UAV Fligth Control,» de Internation Automatic Control Conference, Taiwan, 2014.
[5] E. Poyrazoglu, «Detailed Modeling and Control of a 2-DOF Gimbal System,» 2017.
[6] A. Algoz y A. Asef Hasnain, «A control system for a 3-Axis camera stabilizer,» Uppsala University, Upsala, 2018.
[7] Tutoriales, «Naylamp Mechatronics,» [En línea]. Available: https://naylampmechatronics.com/blog/45_Tutorial-MPU6050-Aceler%C3%B3metro-y-Giroscopio.html. [Último acceso: 5 8 2019].
[8] InvenSense.inc, «InvenSense,» [En línea]. Available: https://www.invensense.com/wp-content/uploads/2015/02/MPU-6000-Register-Map1.pdf. [Último acceso: 6 11 2019].
[9] A. Alomar, «Sinaptec,» 15 10 2017. [En línea]. Available: http://www.sinaptec.alomar.com.ar/2017/10/tutorial-23-esp8266-obtener-inclinacion.html. [Último acceso: 6 11 2019].
[10] Denyssene, «Github,» 01 06 2016. [En línea]. Available: https://github.com/denyssene/SimpleKalmanFilter. [Último acceso: 06 11 2019].
[11] Pozo, Sotomayor, Rosero y Morales, «Medición de Ángulos de Inclinación por Medio de Fusión Sensorial Aplicando Filtro de Kalman,» Quito, 2014.
[12] M. Morales, «T°Beam,» 4 2 2017. [En línea]. Available: https://teslabem.com/nivel-intermedio/fundamentos-del-protocolo-i2c-aprende/. [Último acceso: 5 8 2019].
[13] C. Zepeda, «Pinterest,» [En línea]. Available: https://images.app.goo.gl/5khKSurpVu73wsWSA. [Último acceso: 1 8 2019].
[14] hobbyking, «hobbyking,» [En línea]. Available: https://hobbyking.com/en_us/quanum-2208-precision-brushless-gimbal-motor-gopro-size-100-200g.html?___store=en_us. [Último acceso: 14 11 2019].

151
[15] L. Eitel, «Motion Control Tips,» 05 06 2018. [En línea]. Available: https://www.motioncontroltips.com/motors-industrial-power-tools-comparison-of-brushless-dc-options-including-slotless-motor-variations/. [Último acceso: 25 10 2019].
[16] electrical4u, «electrical4u,» 25 04 2019. [En línea]. Available: https://www.electrical4u.com/brushless-dc-motors/. [Último acceso: 25 10 2019].
[17] MathWorks, «MathWorks,» [En línea]. Available: https://la.mathworks.com/solutions/power-electronics-control/bldc-motor-control.html?s_eid=PSM_15028. [Último acceso: 26 10 2019].
[18] S. Lee y L. Tom , «A comparison study of the commutation methods for the three-phase permanent magnet brushless DC motor».
[19] M. Ulusoy, «MathWorks,» [En línea]. Available: https://la.mathworks.com/videos/brushless-dc-motors-introduction-1564728874059.html. [Último acceso: 26 10 201].
[20] S. A. Reyes Sierra, «Control híbrido de motores DC sin escobillas usando FPGA,» Puebla, 2013.
[21] S. ME, S. Priyadharshini y S. Saranya, «Sensorless Control of a Brushless DC Motor».
[22] I. G. Raza, «Sensorless Rotor Position Estimation For Brushless DC Motor,» 2016.
[23] C. J. Gamazo Real, E. Vázquez Sánchez y J. Gomez Gil, «Position and Speed Control of Brushless DC Motors Using Sensorless Techniques and Application Trends,» España, 2010.
[24] J. Hernádez Coyotzi, «Diseño e implementación de un driver y un controlador para un motor BLDC,» Mexico, 2016.
[25] O. F. Becerra Angarita, «Control de motor sin escobillas,» Bucaramanga, 2011.
[26] J. Zhao y Y. Yu, «Brushless DC Motor Fundamentals,» 2011.
[27] D. Collins, «Motion Control Tips,» 28 04 2016. [En línea]. Available: https://www.motioncontroltips.com/faq-trapezoidal-back-emf/. [Último acceso: 4 11 2019].
[28] Y. Padmaraja, «Brushless DC (BLDC) Motor Fundamentals».
[29] P. Flores Hornero, «Driver basado en procesador ARM 32 Bits para un motor DC Brushless de tres fases empleando la técnica de campo orientado,» Madrid.
[30] D. Collins, «Motion Control Tips,» 6 11 2016. [En línea]. Available: https://www.motioncontroltips.com/what-is-sinusoidal-commutation-for-dc-motors/. [Último acceso: 4 11 2019].

152
[31] R. Juanpere Tolrà, «Técnicas de control para motores Brushless Comparativa entre conmutación trapezoidal, conmutación Sinusoidal y Control Vectorial,» Barcelona.
[32] P. Pickering, «Electronic Desing,» 12 02 2018. [En línea]. Available: https://www.electronicdesign.com/automotive/sine-times-bldc-motors. [Último acceso: 04 11 2019].
[33] F. Berk Cakar, «Optimal BLDC Motor Control for Autonomous Driving of RC Cars,» Viena, 2017.
[34] J. J. González Cárdenas, «Modelado y Control de una Plataforma Inercial estabilizadora,» Sevilla, 2015.
[35] K.-J. Seong, H.-G. Kang, B.-Y. Yeo y H.-P. lee, «The Stabilization Loop Design for a Two-Axis Gimbal System Using LQG/LTR Controller,» Korea, 2006.
[36] R. N. Jazar, Theory of Applied Robotics, 2010.
[37] C. Albea Sanchez, M. G. Ortega, F. Salas y F. Rubio, «Aplicación del control H infinito al PPCar,» 2011.
[38] I. The MathWorks, «la.mathworks,» [En línea]. Available: https://la.mathworks.com/help/robust/gs/using-mixsyn-for-h-infinity-loop-shaping.html. [Último acceso: 12 10 2020].
[39] L. Llamas, «Luis Llamas, Ingeniería, informática y diseño.,» 29 04 2019. [En línea]. Available: https://www.luisllamas.es/teoria-de-control-en-arduino-el-controlador-pid/.
[40] B. UDLAP, «catarina,» [En línea]. Available: http://catarina.udlap.mx/u_dl_a/tales/documentos/lep/arreortua_n_a/capitulo2.pdf. [Último acceso: 28 12 2019].
[41] L. T. e. e. b. d. tiempo, «Lirtex,» [En línea]. Available: http://www.lirtex.com/. [Último acceso: 28 12 2019].
[42] electronicoscaldas, «electronicoscaldas,» [En línea]. Available: https://www.electronicoscaldas.com/datasheet/MG996R_Tower-Pro.pdf. [Último acceso: 29 12 2019].
[43] M. I. d. P. S.A., «mipsa,» [En línea]. Available: https://www.mipsa.com.mx/dotnetnuke/Sabias-que/Clasificacion-de-aluminio. [Último acceso: 30 12 2019].
[44] ingemecánica, «ingemecanica,» [En línea]. Available: https://ingemecanica.com/tutorialsemanal/tutorialn110.html. [Último acceso: 30 12 2019].
[45] U. Jaume, «Google Sites,» [En línea]. Available: https://sites.google.com/view/poliacidolactico-coma/poli%C3%A1cido-l%C3%A1ctico/propiedades-del-pla. [Último acceso: 30 12 2019].
[46] D. Arrigo, «STMicroelectronics, L6234 THREE PHASE MOTOR DRIVER.,» [En línea]. Available: https://www.st.com/content/ccc/resource/technical/document/application_not

153
e/78/44/47/d5/a8/63/4a/8e/CD00004062.pdf/files/CD00004062.pdf/jcr:content/translations/en.CD00004062.pdf. [Último acceso: 24 10 2019].
[47] e. inc., «eBay,» 11 08 2019. [En línea]. Available: https://www.ebay.com/itm/HOT-CNC-FPV-Quadcopter-BGC-2-Axis-Brushless-Gimbal-w-Controller-for-DJI-L4A2-/253963530334. [Último acceso: 06 09 2019].
[48] Giorgio, «Grabcad,» 26 02 2014. [En línea]. Available: https://grabcad.com/library/gimbal-brushless-gopro-1. [Último acceso: 07 09 2019].
[49] Sweber, «Stack Exchange,» 27 05 2015. [En línea]. Available: https://electronics.stackexchange.com/questions/172614/how-to-calculate-the-rms-of-an-ac-pwm.
[50] F. y. Drones, «fotografiaydrones,» [En línea]. Available: https://fotografiaydrones.com/nuevo-dron-con-2-horas-de-autonomia.
[51] B. Electronics, «BaseCam Electronics,» [En línea]. Available: https://www.basecamelectronics.com/downloads/32bit/. [Último acceso: 06 09 2019].
[52] j. alois61, «sourceforge,» [En línea]. Available: https://sourceforge.net/projects/brushless-gimbal-brugi/. [Último acceso: 16 10 2020].
[53] A. Microsystems, «datasheetspdf,» [En línea]. Available: https://datasheetspdf.com/pdf-file/666500/austriamicrosystemsAG/AS5145/1. [Último acceso: 16 10 2020].

154
ANEXO A: ALGORITMOS Para facilitar el acceso a los algoritmos y demás archivos del proyecto se creó un repositorio. A continuación, se muestra el link para que pueda ingresar. https://gitlab.com/jgomez109/gimbal2dof.git

155
ANEXO B: ESQUEMÁTICOS
B1. ESQUEMÁTICO DE LA TARJETA DE CONTROL

156
ANEXO C: MODELO CAD A BLOQUES SIMMECHANICS Para llevar el modelo CAD al entorno Simmechanics se deben seguir los pasos a continuación.
1. Descargar el archivo .zip de: https://ch.mathworks.com/campaigns/offers/download_smlink.html y al archivo "install_addon.m" dar click, luego copiar el script que allí se encuentra.
2. Abrir Matlab como ADMINISTRADOR, posteriormente, en el "browser folder" buscar la ruta donde descargo el .zip, después, crear un nuevo script y pegar el script anteriormente copiado, luego guardar con el nombre install_addon.
3. Escribir en el command window de Matlab (para instalar el archivo .zip): install_addon('Nombre del archivo .zip que descargo, incluyendo al final .zip')
4. Una vez instale el archivo .zip, escribir en el command window (para registrar): regmatlabserver
5. Escribir en el command window (para habilitar el complemento para los sotware CAD): smlink_linksw
6. Abrir, normalmente, el Software de Solidworks y vaya a herramientas - complementos - active Simscape Multibody Link.
7. Abrir su ensamble (Recuerde que los sistemas de referencias que contenga allí, se exportarán a Simmechanics), luego diríjase a herramientas - Simscape Multibody Link - Exportar (Le quedará como formato.xml)
8. Cuando lo haya exportado, con el fin de crear el archivo SimMechanics-simulink, diríjase al command windows de Matlab y escriba: smimport('Nombre del archivo .xml que exportó, incluyendo al final .xml'), [el archivo .xml debe encontrarse dentro de la carpeta que usted designo en la ruta "browser folder]

157
ANEXO D: CARACTERÍSTICAS DEL SENSOR AS5145 A continuación, se anexa una imagen que contiene las características principales del sensor magnético AS5141, para más información ir aquí.
Figura 125. Características principales del sensor magnético AS5145 [53]