Cap´ıtulo 2 - matematicas.uniandes.edu.co · 2 Curvas sobre superficies Una t´ecnica para...
21
Transcript of Cap´ıtulo 2 - matematicas.uniandes.edu.co · 2 Curvas sobre superficies Una t´ecnica para...


Capıtulo 2Curvas
1 Curvas parametrizadas
Definicion 2.1. Supongamos el espacio tridimensional R3 dotado del sistemade coordenadas (x,y,z). Una curva C parametrizada en este espacio es la re-presentacion grafica de una funcion del tipo:
r(t) = (x(t),y(t),z(t)) (1)
donde t se le denomina el parametro, t ∈ I ⊆ R. La estructura de la curvadependera de las funciones x(t), y(t), y z(t). Diremos que C es de clase C r(I),si su parametrizacion r(t) lo es, es decir si las funciones componentes x(t),y(t) y z(t) son de clase Cr(I).
Nota 2.1. Las funciones componentes x(t), y(t) y z(t) son funciones de valor realy variable real, x(t),y(t),z(t) : I −→ R. Tales funciones se estudiaron en cursosanteriores. Para cada valor permisible del parametro t obtenemos un punto en R 3.
Ejemplo 2.1. Consideremos la curva con ecuaciones parametricas,
x(t) = t
y(t) = t2
z(t) = t3
1 ≤ t ≤ 1 (2)
Dado que y(t) no toma valores negativos, la grafica no puede estar en los octan-tes III, IV y los que estan “debajo”de estos, VII y VIII. Cuando eliminamos elparametro t y relacionamos dos coordenadas de los puntos estamos obteniendo laproyeccion de la curva sobre el plano generado por esas dos variables. Por ejemplo,de las ecuaciones parametricas dadas obtenemos que y = x 2, lo cual significa que la
17
18
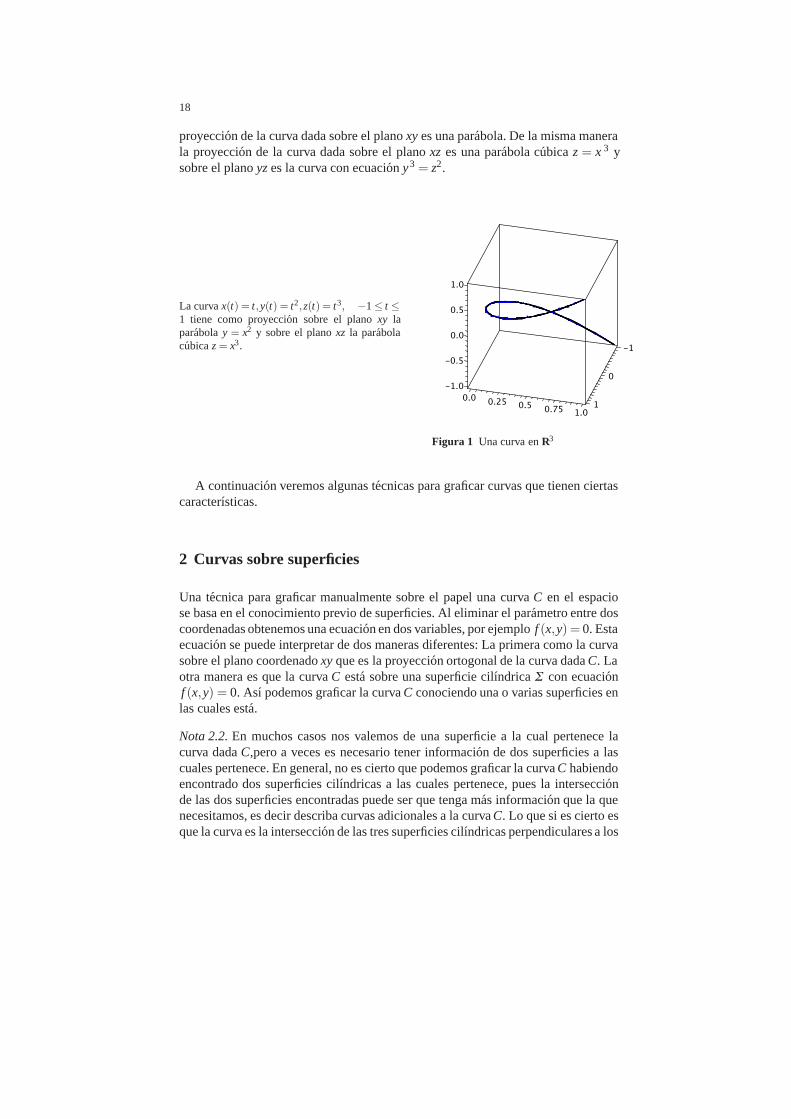
proyeccion de la curva dada sobre el plano xy es una parabola. De la misma manerala proyeccion de la curva dada sobre el plano xz es una parabola cubica z = x 3 ysobre el plano yz es la curva con ecuacion y3 = z2.
La curva x(t) = t,y(t) = t2, z(t) = t3, −1 ≤ t ≤1 tiene como proyeccion sobre el plano xy laparabola y = x2 y sobre el plano xz la parabolacubica z = x3. -1
0-1.0
0.0 0.25
-0.5
0.5 0.75 1
0.0
1.0
0.5
1.0
Figura 1 Una curva en R3
A continuacion veremos algunas tecnicas para graficar curvas que tienen ciertascaracterısticas.
2 Curvas sobre superficies
Una tecnica para graficar manualmente sobre el papel una curva C en el espaciose basa en el conocimiento previo de superficies. Al eliminar el parametro entre doscoordenadas obtenemos una ecuacion en dos variables, por ejemplo f (x,y) = 0. Estaecuacion se puede interpretar de dos maneras diferentes: La primera como la curvasobre el plano coordenado xy que es la proyeccion ortogonal de la curva dada C. Laotra manera es que la curva C esta sobre una superficie cilındrica Σ con ecuacionf (x,y) = 0. Ası podemos graficar la curva C conociendo una o varias superficies enlas cuales esta.
Nota 2.2. En muchos casos nos valemos de una superficie a la cual pertenece lacurva dada C,pero a veces es necesario tener informacion de dos superficies a lascuales pertenece. En general, no es cierto que podemos graficar la curva C habiendoencontrado dos superficies cilındricas a las cuales pertenece, pues la interseccionde las dos superficies encontradas puede ser que tenga mas informacion que la quenecesitamos, es decir describa curvas adicionales a la curva C. Lo que si es cierto esque la curva es la interseccion de las tres superficies cilındricas perpendiculares a los
19
planos coordenados cuando eliminamos el parametro t por parejas de coordenadas,pero es mas difıcil de visualizar la situacion.
Ejemplo 2.2. En el ejemplo (1.1) la curva x(t) = t,y(t) = t 2,z(t) = t3,−1 ≤ t ≤ 1esta sobre la superficies cilındricas Σ1 : y = x2, Σ2 : z = x3. En esta caso es suficienteesta informacion, la curva es la interseccion de este par de superficies cilındricas.La primera superficie cilındrica Σ1 se dibuja, dibujando primero la curva y = x2
sobre el plano xy, luego un deslizamiento de esta curva a lo largo el eje z en ambasdirecciones. Similarmente la segunda superficie cilındrica Σ 2 se dibuja, dibujandoprimero la curva z = x3 sobre el plano xz, luego un deslizamiento de esta curva a lolargo el eje y solo en la direccion positiva.
Ejemplo 2.3. Consideremos la curva C con ecuaciones parametricas,
x(t) = cos t
y(t) = sin t
z(t) = t
, −2π ≤ t ≤ 2π (3)
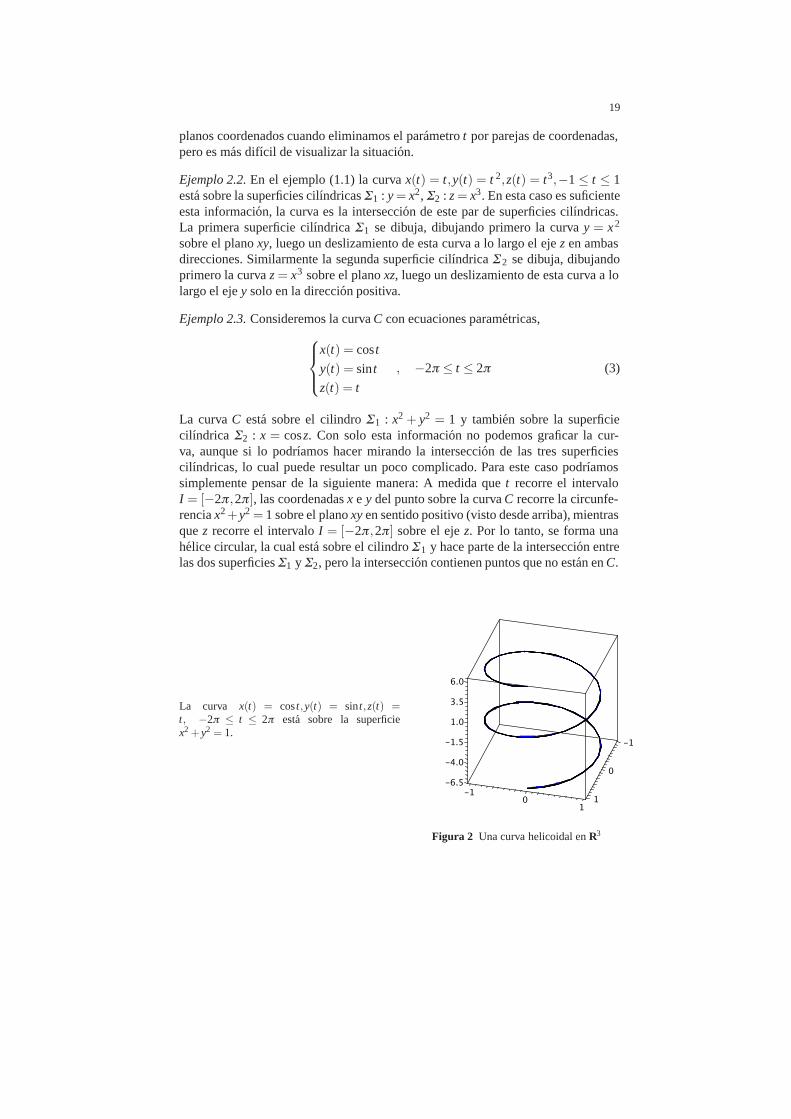
La curva C esta sobre el cilindro Σ1 : x2 + y2 = 1 y tambien sobre la superficiecilındrica Σ2 : x = cosz. Con solo esta informacion no podemos graficar la cur-va, aunque si lo podrıamos hacer mirando la interseccion de las tres superficiescilındricas, lo cual puede resultar un poco complicado. Para este caso podrıamossimplemente pensar de la siguiente manera: A medida que t recorre el intervaloI = [−2π ,2π ], las coordenadas x e y del punto sobre la curva C recorre la circunfe-rencia x2 +y2 = 1 sobre el plano xy en sentido positivo (visto desde arriba), mientrasque z recorre el intervalo I = [−2π ,2π ] sobre el eje z. Por lo tanto, se forma unahelice circular, la cual esta sobre el cilindro Σ1 y hace parte de la interseccion entrelas dos superficies Σ1 y Σ2, pero la interseccion contienen puntos que no estan en C.
La curva x(t) = cos t,y(t) = sin t, z(t) =t, −2π ≤ t ≤ 2π esta sobre la superficiex2 + y2 = 1.
-1
0-6.5
-1
-4.0
0
-1.5
11
1.0
3.5
6.0
Figura 2 Una curva helicoidal en R3

20
Reparametrizacion
Definicion 2.2. Dada una curva C con ecuacion vectorial
r1(t) = (x(t),y(t),z(t)) , t ∈ I1 ⊆ R (4)
y una funcion biyectiva f , y por lo tanto invertible, f : I 2 −→ I1, donde I2 ⊆R. Podemos reparametrizar la curva y dar una expresion en terminos de sdefiniendo r2(s) como sigue:
r2(s) � (r1 ◦ f )(s) = r1( f (s)) = r1(t) (5)
Podemos recodar esta definicion, mediante el siguiente cuadro:
f (s) = t ∈ I1r1(t)−−−−→ R3
f
�(1−1)
s ∈ I2r2(s)−−−−→ R3
(6)
r2(s) � (r1 ◦ f )(t) = r1( f (s)) = r1(t) (7)
Nota 2.3. Debe ser claro que s = f −1(t).
Ejemplo 2.4. Sea C definida mediante la funcion vectorial
r1(t) = sin ti+ exptj−√1− tk−5, t ∈ I1 = (−∞,1] (8)
Ahora consideremos la funcion
t = f (s) = 1− s3, (9)
la cual es biyectiva en todo el conjunto de los numeros reales, R. Pero para construirla reparametrizacion en terminos de s debemos estar seguros que la funcion com-puesta este bien definida. Para esto debemos encontrar el dominio correcto para stal que el rango de la funcion f sea I1 = (−∞,1]. Este proceso se hace usando laexpresion para la funcion inversa,
s = f−1(t) = 3√
1− t (10)
Por lo tanto, el dominio de f lo debemos restringir a I2 = [0,∞) para que su rangosea exactamente I1 = (−∞,1]. Los extremos del intervalo I2 se encuentran evaluandolos extremos del intervalo I1 en (10).

21
3 Derivada de r(t)
El concepto de una funcion vectorial y su derivada lo trataremos en el capıtulo 1, sinembargo aquı daremos una primera vision al respecto. Las parametrizaciones de lascurvas, que hemos visto hasta el momento son un ejemplo de funciones vectoriales.
Definicion 2.3. Dada una funcion vectorial r(t),
r : I ⊂ R −→ Rn (11)
t �→ (x1(t),x2(t), . . . ,xn(t)) (12)
su derivada la cual denotaremos por p(t) la definimos como otra funcion vec-torial ası:
r : I ⊂ R −→ Rn (13)
t �→(
dx1(t)dt
,dx2(t)
dt, . . . ,
dxn(t)dt
)(14)
Propiedades basicas
Usando la definicion anterior, se pueden probar las siguientes propiedades basicas:
1. Regla de la cadena. Si tenemos dos parametrizaciones de una misma funcion,r(t) y r(s), entonces
v(t) = v(s)dsdt
(15)
2. Regla de Leibniz para el producto escalar. Si tenemos dos funciones vectoria-les r1(t) y r2(t), entonces,
ddt
r1(t) · r2(t) = r1(t) · r2(t)+ r1(t) · r2(t) = (16)
3. Regla de Leibniz para el producto vectorial. Si tenemos dos funciones vecto-riales r1(t) y r2(t), entonces,
ddt
r1(t)× r2(t) = r1(t)× r2(t)+ r1(t)× r2(t) = (17)

22
4 Parametro natural
Definicion 2.4. Sea C una curva suave, con ecuacion vectorial
r1(t) = (x(t),y(t),z(t)) , t ∈ I1 ⊆ R (18)
donde a ≤ t ≤ b. Supongamos que la curva C es recorrida una sola vez amedida que t aumenta entre a y b. Definimos la funcion longitud de arco dela siguiente manera,
s(t) =t∫
a
‖r1(τ)‖dτ , τ ∈ [a,b] (19)
Despejando t en terminos de s y reemplazando en la ecuacion que define lacurva obtenmos una reparametrizacion de la curva en terminos del parametrolomgitu de arco s.
r2(s) = (x(s),y(s),z(s)) , s ∈ I2 ⊆ R (20)
En este caso al parametro s le llamaremos parametro natural y a la parame-trizacion parametrizacion natural.
Nota 2.4. En este caso conocemos la expresion para s = g(t), g = f −1. La funciong es biyectiva, por ser estrictamente creciente, dado que la funcion que esta en elintegrando es una funcion real positiva, las cuales se trataron en cursos anteriores.Por lo tanto para hallar para f debemos integrar y hallar la expresion para la funcioninversa. Este proceso puede ser simple o un poco largo dependiendo de la funciona integrar. En caso que la integral no se pueda expresar en terminos de funcionessimples no podremos reparametrizar la funcion del parametro natural.
Proposition 2.1. Sea r(s) la parametrizacion natural de una curva C. Entonces,
∥∥r(s)ds
∥∥ = 1 (21)
Demostracion. Sea r(t) cualquier parametrizacion de la curva C. Usando la reglade la cadena y tomando magnitudes, tenemos
r(t) = r(s)dsdt
=⇒‖r(t)‖ = ‖r(s)‖|dsdt
| (22)

23
La expresion | dsdt
| es el valor absoluto de la funcion s = s(t) la cual es positiva
por definicion, por lo tanto | dsdt
| = dsdt
. Ahora usando el Teorema Fundamental del
Calculo en la ecuacion (??) de la definicion tenemos que
dsdt
= ‖r(t)‖ (23)
Simplificando tenemos lo que nos piden demostrar.
Proposition 2.2. Sea h(t) la funcion definida por h(t) = ‖p(t)‖ para alguna funci onvectorial p(t). Si h(t) es constante, entonces los vectores p(t) y p(t) son ortogona-les.
Demostracion. Recordemos la propiedad del producto escalar
‖a‖2 = a ·a (24)
Por lo tanto, elevando al cuadrado, derivando y usando la regla de Leibniz tenemos,
‖p(t)‖= c =⇒‖p(t)‖2 = c2 =⇒ ddt‖p(t)‖2 = 0 =⇒ 2p(t)· p(t)= 0 =⇒ p(t)·p(t)= 0
(25)
Lemma 2.1. Sea C una curva en R3 parametrizada naturalmente. Entonces, losvectores r(s) y r(s) son ortogonales.
Demostracion. Por la proposicion (1.1), tenemos
‖r(s)‖ = 1 =⇒‖r(s)‖2 = 1 =⇒ dds
r(s) · r(s) = 0 =⇒ 2r(s) · r(s) = 0 (26)
Lo cual muestra lo pedido.
Ejemplo 2.5. Reparametrizar en termino del parametro natural la curva dada por lafuncion vectorial,
r(t) = (cos t,sin t,t), t ∈ [0,2π ] (27)
Usando (??), tenemos que
s = s(t) =∫ t
0
√sin2 t + cos2 t +1dt =
√2t =⇒ s =
√2t =⇒ t =
s√2
(28)
Por lo tanto, la expresion pedida es,
r(s) =(
coss√2,sin
s√2,
s√2
), s ∈ [0,2
√2π ] (29)
Ejemplo 2.6. Una helice tiene un radio de 10cm, y sube 20cm en cada vuelta. Entotal ella gira 30 veces. Encuentre la parametrizacion natural.

24
SOLUCION.Una helice en general se puede expresar mediante una funcion vectorial,
r(t) = (acos t,asint,bt) (30)
donde a es el radio del cilindro que la contiene y g(t) es la funcion que determinacomo ella se enrolla en este cilindro. Conocemos que a = 10 y una vuelta estadeterminada por el recorrido de t en el intervalo [0,2π ] por lo tanto,
r(0) = (1,0,0), r(2π) = (1,0,2bπ) =⇒ 2bπ = 20 =⇒ b10π
(31)
La segunda informacion es para definir exactamente el dominio, el cual es [0,60π ],dado que si en una vuelta es [0,2π ] en 30 vueltas sera [0,60π ]. Una parametrizacionsera,
r(t) =(
10cost,10sint,10π
t
), t ∈ [0,60π ] (32)
Usando la funcion longitud de arco (19) y luego despejando t en terminos de s,
hallamos t =πs
10√π2 +1
. Por lo tanto, la parametrizacion en terminos del parametro
natural s es:
r(s) =(
10cosπs
10√π2 +1
,10sinπs
10√π2 +1
,s√
π2 +1
), s ∈ [0,600
√π2 +1]
(33)
5 Rectas
Ecuacion vectorial
Definicion 2.5. La ecuacion vectorial de una recta en R3 que pasa por el pun-to P y tiene vector director v es:
r(t) = OP+ tv, donde O es el origen del sistema. (34)
Ecuaciones parametricas
25
Definicion 2.6. Las ecuaciones parametricas de una recta en R3 que pasapor el punto P con coordenadas P(p1, p2, p3) y tiene vector director v concomponentes v = (a,b,c) son:
x(t) = p1 +at
y(t) = p2 +bt
z(t) = p3 + ct
(35)
Nota 2.5. Las ecuaciones parametricas se obtienen simplemente escribiendo la ecua-cion vectorial (34) en terminos de las componentes de los vectores indicados, su-mando e igualando componentes. Veamos esto en detalle. Sea M(x,y,z) cualquierpunto sobre la recta, el origen del sistema O(0,0,0), por lo tanto OP = (p 1, p2, p3),v = (a,b,c), y v(t) = (x(t),y(t),z(t)), donde observamos que para cada valor de tse obtiene un punto sobre la recta. De esta manera,
r(t) = (x(t),y(t),z(t)) = (p1, p2, p3)+ t(a,b,c) (36)
sumando vectores y luego igualando componente a componente obtenemos (35).
Ecuaciones simetricas
Definicion 2.7. Las ecuaciones simetricas de una recta en R3 que pasa por elpunto P(p1, p2, p3) y tiene vector director v = (a,b,c), donde ninguna de suscomponentes es cero, son:
x− p1
a=
y− p2
b=
z− p3
c(37)
Nota 2.6. Las ecuaciones simetricas (37), se obtienen despejando el parametro t encada una de las ecuaciones (35) e igualando estas expresiones. En este caso ya noescribiremos la dependencia de t pues hemos eliminado el parametro.
Las ecuaciones simetricas en realidad son tres a saber:
x− p1
a=
y− p2
b,
x− p1
a=
z− p3
c,
y− p2
b=
z− p3
c(38)
cada una de las cuales, como ya lo hemos visto, representa un plano en R 3. En otraspalabras la recta es la interseccion de los tres planos anteriores.

26
En caso que una de las componentes del vector director v = (a,b,c) sea cero,por ejemplo tomemos c = 0, es decir este vector director no tiene componente enz y es por lo tanto paralelo al plano xy, diremos que la recta es la obtenida por lainterseccion de los dos planos.
x− p1
a=
y− p2
b, z− p3 = 0 (39)
el segundo de los cuales es precisamente el plano paralelo al plano xy.En caso que dos de las componentes del vector director v = (a,b,c) sean cero, por
ejemplo tomemos b = 0, y c = 0, es decir este vector director no tiene componentesni en z ni en y, solamente tiene componente en x, y por lo tanto paralelo al eje x,diremos que la recta es la obtenida por la interseccion de los dos planos.
y− p2 = 0, z− p3 = 0 (40)
el segundo de los cuales es precisamente el plano paralelo al plano xy.
Ejemplo 2.7. Hallar las ecuaciones parametricas de la recta � que es la interseccionde los planos
4x−3y−2z = 1 y x+2y−3z = 4. (41)
SOLUCION:Debemos hallar dos objetos que determinan la recta: Un punto cualquiera P por
donde pasa � y un vector director v de �.Para hallar P resolvemos el sistema 41. Este sistema es un sistema de 2 ecua-
ciones con 3 incognitas, por lo tanto tenemos 1 grado de libertad. Observamos queambos planos intersectan el plano xy, por lo tanto podemos dar el valor z = 0 yresolver sobre el plano xy el punto de interseccion del par de rectas resultantes:{
4x−3y = 1
x+2y = 4=⇒ P
(1411
,1511
,0
)(42)
Como vector director podemos tomar el producto cruz de los vectores normales alos planos:
v = n1 ×n2 = (4,−3,−2)× (1,2,−3) = (13,10,11) (43)
Nota 2.7. El porque hemos tomado como vector director de la recta el producto cruzde los vectores normales es por que la recta interseccion � debe pertenecer a ambosplanos, por lo tanto el vector director elegido v debe ser ortogonal a cada uno de losvectores normales n1 y n2. Podemos comprobar que v ·n1 = 0, y v ·n2 = 0.
La ecuacion de la recta pedida es:

27
x(t) =1411
+13t
y(t) =1511
+10t
z(t) = 11t
(44)
Ejemplo 2.8. Hallar la ecuacion cartesiana del plano que contiene las rectas:
�1 : r1(t) = (−1,3,4)+ t(−2,2,3) (45)
�2 : r2(t) = (2,3,2)+ s(1,2,1) (46)
SOLUCION
Nota 2.8. En general no existe un plano que contenga dos rectas cualesquiera. Ne-cesitamos que las dos rectas satisfagan dos condiciones:
1. Que las rectas sean paralelas y no tengan puntos de interseccion. Es decir quesus vectores directores escogidos sean uno multiplo del otro v 1 = λv2, λ ∈ R∗ =R\{0}, �1 ‖ �2, �1 ∩ �2 = /0.
2. Que las rectas �1 y �2 no sean paralelas pero tengan un punto de interseccionP = �1 ∪ �2. Es decir que sus vectores directores escogidos no sean uno multiplodel otro y ademas que las rectas se intersecten solamente en un punto.
En este ejemplo tenemos el segundo caso, por lo tanto necesitamos el punto P deinterseccion de las rectas, P = �1 ∩ �2 y un vector normal al plano el cual podemosescoger como el producto cruz de los dos vectores directores de las rectas dadas.
Recordemos que para cada valor del parametro en las ecuaciones parametricas deuna recta produce un punto. Por lo tanto para un valor de t = t 0 producira un puntoP1 ∈ �1, y para otro valor de s = s0 producira un punto P2 ∈ �2. Lo que buscamos sonesos valores especiales para t y para s para los cuales P1 = P2. Por lo tanto tenemosel sistema
−1−2t = 2+ s
3+2t = 3+2s
4+3t = 2+ s
=⇒ s = t = −1 =⇒ P(1,1,1) (47)
n = v1 ×v2 = −(4,−5,6) (48)
La ecuacion del plano que contiene al par de rectas es:
4x−5y+6z = 5 (49)
6 El marco de Frenet
28
Definicion 2.8. Dada una curva C, r(t) = (x(t),y(t),z(t)) en R3 de claseCr(I), r ≥ 1, donde I ⊆ R definimos el vector tangente unitario como
T(t) =r′(t)
‖r′(t)‖ =(x′(t),y′(t),z′(t))
‖(x′(t),y′(t),z′(t))‖ (50)
donde las primas representan las derivadas de las funciones correspondientes
respecto a t, por ejemplo x′(t) =ddt
x(t).El vector normal unitario se define como,
N(t) =T′(t)
‖T′(t)‖ (51)
El vector binormal unitario se define como
B(t) = T(t)×N(t) (52)
La triada de vectores {T(t),N(t),B(t)} se le denomina el marco ortonormalde Frenet.
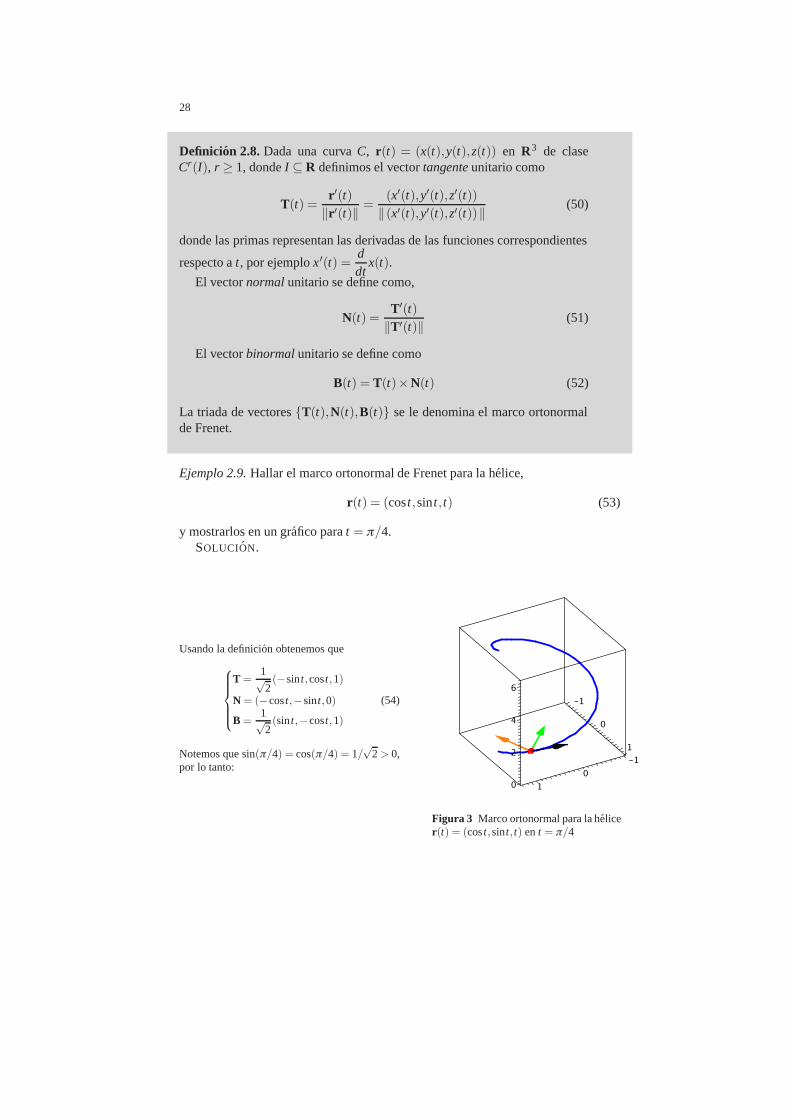
Ejemplo 2.9. Hallar el marco ortonormal de Frenet para la helice,
r(t) = (cos t,sin t, t) (53)
y mostrarlos en un grafico para t = π/4.SOLUCION.
Usando la definicion obtenemos que
T =1√2(−sin t,cos t,1)
N = (−cos t,−sint,0)
B =1√2(sin t,−cost,1)
(54)
Notemos que sin(π/4) = cos(π/4) = 1/√
2 > 0,por lo tanto:
-1
0
1-1
0
10
2
4
6
Figura 3 Marco ortonormal para la helicer(t) = (cos t, sint, t) en t = π/4

29
Vector x-comp. hacia y-comp. hacia z-comp. hacia
T(π/4) < 0 atras > 0 derecha > 0 arribaN(π/4) < 0 atras < 0 izquierda = 0 paralela plano xyB(π/4) > 0 adelante > 0 izquierda > 0 arriba
Formulas de Frenet naturales
Las formulas de Frenet para una parametrizacion natural d una curva C, r(s), son:
T(s) = s
N(s) =r(s)
‖r(s)‖B(s) = T(s)×N(s)
(55)
Nota 2.9. Ahora, probar que efectivamente la triada o marco de Frenet {T,N,B} esortonormal es mucho mas facil. Dado que ‖T‖= 1, entonces por la proposicion (1.2)los vectores T y N son ortogonales. El resto se deduce de las definiciones y de unapropiedad del producto cruz, ‖a×b‖ = ‖a‖‖b‖|sinθ |, donde θ es el angulo entrelos dos vectores. Dejamos al lector la prueba rigurosa de este hecho. (Ver ejercicio(??))
Curvatura y Torsion
En la seccion anterior vimos dos cosas importantes:
1. Para cada valor del parametro t el marco de Frenet se puede hallar en el puntosobre la curva que t determina.
2. El marco de Frenet {T,N,B} es ortonormal en cualquier punto de la curva r(t).Lo cual nos dice que si ninguno de ellos se anula formarıan una base de R 3.
En general, puede suceder que al variar el parametro t cada uno de estos vectorescambie. Podrıamos expresar este nuevo vector de cambio en la base usual {i, j,k},pero lo haremos mejor en la propia base de Frenet.
Dada una funcion vectorial que define una curva en el espacio R 3 y sea r(s) suparametrizacion natural. Los cambios de cada uno de los vectores de la triada deFrenet {T(s),N(s),B(s)} a medida que cambia el parametro s, los podemos repre-sentar mediante el siguiente sistema de ecuaciones,

30
dT(s)ds
= a11T(s)+a12N(s)+a13B(s)dN(s)
ds= a21T(s)+a22N(s)+a23B(s)
dB(s)ds
= a31T(s)+a32N(s)+a33B(s)
(56)
donde ai j son nuestras incognitas y en general tambien son funciones del parametronatural s, es decir ai j = ai j(s). Sin escribir la dependencia de s el sistema anteror(56), lo podemos escribir en forma matricial:
(1) T = a11T+a12N+a13B
(2) N = a21T+a22N+a23B(3) B = a31T+a32N+a33B
⇒T
NB
=
a11 a12 a13
a21 a22 a23
a31 a32 a33
T
NB
(57)
Para hallar las funciones ai j del sistema (57), usaremos las propiedades mismasdel marco de Frenet.
Como hallar ai j.
Resulta ser que de las nueve funciones ai j hay cinco de ellas que son cero y lascuatro restantes dos de ellas son el opuesto de la otra, es decir que de las nueve solonos quedan dos las cuales les llamaremos a una de ellas la curvatura y a la otra latorsion. Veamos esto en detalle.
1. Que representan ai j. Cada funcion ai j representa la componente de uno de lostres vectores derivados en terminos del marco de Frenet. Por ejemplo, a 11 es lacomponente de T en la direccion T, a12 es la componente de T en la direccionN, a13 es la componente de T en la direcion B, a21 es la componente de N en ladireccion T, y similarmente los demas.
2. Mostremos que aii = 0. Multiplicando escalarmente por T, o por N o por Bcada una de las ecuaciones de (57) obtenemos las funciones a i j. Por ejemplo, simultiplicamos la ecuacion (1) de (57) por T tenemos,
(1) T = a11T+a12N+a13B
⇒ T · T = a11T ·T+a12T ·N+a13T ·B⇒ 0 = a11T · T = a11
⇒ a11 = 0
De manera similar, si multplicamos escalarmente la ecuacion (2) de (57) por Ntenemos a22=0 y finalmente su multiplicamos escalarmente la ecuacion (1) de(57) por B tenemos que a33 = 0.
3. Mostremos que ai j =−a ji. Sabemos que T y N son ortogonales, por lo tanto T ·N = 0. De modo que si derivamos y usamos la regla de Leibniz (Ver 3), tenemos

31
que,
T ·N = 0
⇒ T ·N+T · N = 0
⇒ a12 +a21 = 0
⇒ a12 = −a21 (58)
De manera similar si tomamos las otras condiciones de ortogonalidad del marcode Frenet T ·B = 0 y N ·B = 0 y derivamos obtenemos que ai j = −a ji, es decirla matriz asociada al sistema (57) es una matriz anti-simetrica. De las nuevecomponentes ai j solo quedan entonces por ahora cuatro sustanciales.
4. Mostremos que a13 = 0. Debemos mostrar que T ·B = 0. Por definicion delvector normal tenemos,
N =T‖T‖
⇒ T = ‖T‖N
⇒ T ·B = ‖T‖N ·B = 0
⇒ a13 = 0
Definicion 2.9. Dada una curva en R3, con representacion parametrica naturalr(s), definimos la curvatura, como
κ(s) = ‖T(s)‖ (59)
Definicion 2.10. Dada una curva en R3, con representacion parametrica natu-ral r(s), definimos la torsion, como
τ(s) = −B(s) ·N(s) (60)
Nota 2.10. Si incluir las expresiones de la curvatura κ(s) y de la torsion τ(s) en laecuaciones 57, debemos tener en cuenta lo siguiente:
1. En general el marco de Frenet puede ser que no exista o mejor que se compongade un solo vector, del vector T, este es el caso de una recta. Puede ocurrir que secomponga solo de dos vectores T y N, y que el vector binormal B sea cero, comoen el caso por ejemplo de la circinferencia r(s) = cossi+ sinsj.
32
2. Geometricamente la curvatura κ nos dice como esta cambiando el vector normalunitario en terminos absolutos, es decir si el vetor tangente T es constante (nodepende del parametro s), entonces esa curva no tiene curvatura, es una recta.
3. La torsion τ nos esta hablando de una proyeccion. De la proyeccion de la varia-cion del vector normal N en la direccion del vector binormal. Es claro que si latorsion es cero, de la propia definicion tendrıamos tres casos a saber: El vectornormal N permanece constante, el vector binormal B es cero, o la tercera opcionque la variacion del vector normal N, en caso que este no sea cero, sea colinealcon el vector tangente T. Se puede demostrar que para que una curva sea planaes suficiente mostrar que su torsion sea cero.
De las ecuaciones (57) sabemos que T = a12N. Tomando modulo de los vectores encada uno de los lads de esta expresion tendrıamos que κ = |a 12|. Por definicion κ esuna cantidad no negativa, por lo tanto si decimos que a 12 lo tomamos como el valorde la curvatura κ estamos tomando un caso muy especial. A este caso especial de laecuaciones (57) cuando se toma a12 = κ y a32 = −τ se le conoce con el nombre deformulas de Frenet. Ellas tiene la forma:
TNB
=
0 κ 0−κ 0 τ0 −τ 0
T
NB
(61)
Ejemplo 2.10. Hallar la curvatura y la tosion para la helice x(t) = acos t,y(t) =asin t,z(t) = bt, 0 ≤ t ≤ 2π , donde a > 0, y b > 0 son constantes.
SOLUCION.
r(t) = acos ti+asintj+bk
⇒ s =∫ t
0
√a2 +b2dτ
⇒ s =√
a2 +b2t ⇒ t =sc, dondec =
√a2 +b2
⇒ r(s) = acos( s
c
)i+asin
( sc
)j+b
( sc
)k
⇒ κ =ac2 ⇒ κ =
aa2 +b2
⇒ N(s) = −cos( s
c
)i−asin
( sc
)j
⇒ B(s) =bc
sin( s
c
)i− b
ccos
( sc
)j+
ac
k
⇒ B(s) =bc2 cos
( sc
)i+
bc2 sin
( sc
)j
⇒ τ = −B ·N =bc2 ⇒ τ =
ba2 +b2
(62)

33
Formulas de Frenet en cualquier parametrizacion
Proposition 2.3. Dada una curva regular, es decir una curva cuyo vector tangenteexiste en cualquier t de su dominio, entonces
T(t) =
r′(t)‖r′(t)‖
B(t) =r′(t)× r′′(t)
‖r′(t)× r′′(t)‖N(t) = B(t)×T(t)
(63)
κ(t) =
‖r′(t)× r′′(t)‖‖r′(t)‖3
τ(t) =r′(t)× r′′(t) · r′′′(t)‖r′(t)× r′′(t)‖2
(64)
T′
N′
B′
= ν
0 κ 0
−κ 0 τ
0 −τ 0
T
NB
(65)
donde ν =dsdt
= ‖r′(t)‖
Ejemplo 2.11. Dada la curva x = sinh t, y = cosh t, z = t, encuentre la curvatura y latorsion en el punto (0,1,0).
SOLUCION.Debemos conocer primero para que valor o valores de t ,r(t) = (0,1,0). El valor det es t = 0 y es unico. Por lo tanto,
r′(0) = (1,0,1);r′′(0) = (0,1,0);r′′′(0) = (1,0,0);
=⇒ r′(0)× r′′(0) = (−1,0−1) =⇒ ‖r′(0)× r′′(0)‖ =√
2
κ =12
τ = −12
(66)
R/: κ =12
τ = −12
Ejemplo 2.12. Mostrar que la curva interseccion de los dos cilindros x 2 + z2 = 1,y2 + z2 = 1, ubicada en el primer octante, es una curva plana.
SOLUCION.

34
De las dos ecuaciones de los cilindros podemosdeducir que su interseccion se encuentra en losplanos y = x, y =−x. Tomamos la primera opciondado que nos dicen que esta en el primer octante.Por lo tanto la curva se puede parametrizar como:
r(t) = (cos t,cos t, sint), t ∈ [0,π/2] (67)
Dado que r′(t)=−r′′′(t), entonces τ = 0. Lo cualnos dice que la curva es plana justamente.Por otro lado ‖r′(t)× r′′(t)‖ =
√2, entonces
κ =√
2(2sin2 t + cos2 t
)3/2(68)
-1.5
-0.5
x0.5-1.0
-1.5
-0.5
z 0.0
-0.5
0.5
0.5 1.5
1.0
1.5y
Figura 4 Curva interseccion cilindrosx2 + z2 = 1, y2 + z2 = 1
Ejemplo 2.13. Considere la curva interseccion entre las superficies z = x 2 −y2, x2 +y2 = 1.
1. Encuentre los puntos sobre esta curva que tienen mınima curvatura.2. Encuentre los puntos sobre esta curva que tienen maxima curvatura.3. Encuentre los puntos sobre esta curva que tienen mınima torsion.4. Encuentre los puntos sobre esta curva que tienen maxima torsion.
SOLUCION.
De las dos ecuaciones de los cilindros podemosdeducir que su interseccion se encuentra en losplanos y = x, y =−x. Tomamos la primera opciondado que nos dicen que esta en el primer octante.Por lo tanto la curva se puede parametrizar como:
r(t) = (cos t,cos t, sint), t ∈ [0,π/2] (69)
Dado que r′(t)=−r′′′(t), entonces τ = 0. Lo cualnos dice que la curva es plana justamente.Por otro lado ‖r′(t)× r′′(t)‖ =
√2, entonces
κ =√
2(2sin2 t + cos2 t
)3/2(70)
Figura 5 Curva interseccion cilindrox2 + y2 = 1, y silla z = x2 − y2

35
7 Aplicaciones: Velocidad y Aceleracion
8 Ejercicios Capıtulo 1
2.1. Considere la ecuacion de segundo gradoxy− z = 0. Muestre que la grafica de esta ecua-cion en 3D es un paraboloide hiperbolico en suforma estandar z = x2 − y2. Ayuda: Use una ro-tacion alrededor del eje z, de la siguiente mane-ra:
x = x′ cosθ − y′ sinθy = x′ sinθ + y′ cosθz = z′
reemplace en la ecuacion dada y encuentre elangulo θ para el cual la nueva ecuacion no con-tenga el elemento cruzado x′y′.
2.2. Muestre que el hiperboloide de un solomanto,
x2 + y2 − z2 = 1
es una superficie reglada. Es decir si fijamoscualquier punto P sobre la superficie siemprepodemos encontrar otro punto Q sobre ella talque la recta
OP+λPQ, λ ∈ R,
tambien pertenece a la superficie.
2.3. Mostrar que si el punto A(a,b,c)esta sobreel paraboloide hiperbolico (silla de montar),
z = y2 − x2,
entonces la recta con ecuaciones parametricas:
x = a+ t
y = b+ t
z = c+(b−a)t
y recta con ecuaciones parametricas:
x = a+ t
y = b− t
z = c− (b+a)t
ambas estan completamente contenidas en elparaboloide hiperbolico. Es decir el paraboloidehiperbolico tambien es una superficie reglada.
2.4. Hallar la ecuacion cartesiana del plano quecontiene las rectas:
�1 : r1(t) = (1,1,1)+ t(1,2,1)
�2 : r2(t) = (1,−1,1)+ s(1,2,1)
Ayuda: Encuentre primero tres puntos no coli-neales.
2.5. Encuentre el punto donde la recta
x(t) = 1− t
y(t) = 3t
z(t) = 1+ t
intersecta al plano
2x− y+3z = 6.
2.6. Halle la ecuacion del plano que contiene larecta
� : r(t) = (2+3t)i+(1−2t)j+(−1+ t)k
y el punto P(1,3,1).
2.7. Muestre que efectivamente el marco deFrenet {T,N,B} es ortonormal. Escriba todoslos detalles. Ayuda: Use la parametrizacion na-tural y la proposicion (1.2).
2.8. Encuentre la curvatura y la torsion de lahelice hiperbolica,
r(t) = (cosh t, sinht, t).
2.9. Encuentre la ecuacion del plano que pasapor el origen y que tiene vector normal parale-lo a la recta que es interseccion de los planos2x+ y+ z = 4 y x+3y+ z = 2.
2.10. La interseccion de las dos superficies
x2 +y2
2= 1, y z2 +
y2
2= 1 consiste en dos cur-
vas.
(a) Halle una parametrizacion para cada unade estas curvas en la forma vectorial r(t) =〈x(t),y(t), z(t)〉.
36
(b) Plantee la integral que repreenta la fun-cion longitud de arco.
(c) Encuentre la longitud de arco de cada unade estas curvas.
2.11. (a) Encuentre la curvatura1 κ(t) de lacurva r(t) = 〈−cos t, sint,−2t〉 en el puntor(0).
(b) Encuentre la curvatura de la curva r(t) =〈−cos(5t), sin(5t),−10t〉 en el punto r(0).Si lo dese no es necesario volver hacercalculos, pero si una justificacion de su res-puesta.
2.12. (a) Encuentre una parametrizacion dela recta interseccion de los planos 3x−2y+z = 7 y x+2y+3z = −3.
(b) Encuentre sus ecuaciones simetricas de la
formax− x0
a=
y− y0
b=
z− z0
c.
2.13. (a) Encuentre el area del paralelo-gramo �PQRS con vertices en P(1,0,0),Q(0,2,0), R(0,0,3) y S(−1,2,3).
(b) Verifique el triple producto escalar2, tie-ne la propiedad [u + v,v + w,w + u] =2[u,v,w].
(b) Verifique el triple producto escalar tienela propiedad |[u,v,w]| � ‖u‖‖v‖‖w‖.
2.14. Encuentre la distancia entre las rectas:r1(t) = 〈t,2t,−t〉, r2(t) = 〈1+ t, t, t〉.
1 κ(t) =|r′(t)× r′′(t)|
|r(t)|32 [u,v, [w]] = (u×v) ·w