Apunte Control Avanzado Unidad 1 Fundamentos de Control Optimo 21-03-13
61
Apunte de Control Avanzado de Sistemas EL4105 UNIDAD 1: FUNDAMENTOS DEL CONTROL ÓPTIMO Departamento de Ingeniería Eléctrica Versión 21/03/13 Santiago, Chile Autor: Dra. Doris Saez H. Agradecimientos: Dr. Guillermo González R. Dr. Marcos Orchard C. Colaborador: Patricio J. Santis T.
Transcript of Apunte Control Avanzado Unidad 1 Fundamentos de Control Optimo 21-03-13
Apunte de Control Avanzado de Sistemas
EL4105
UNIDAD 1: FUNDAMENTOS DEL CONTROL ÓPTIMO
Departamento de Ingeniería Eléctrica
Versión 21/03/13
Santiago, Chile
Autor: Dra. Doris Saez H.
Agradecimientos: Dr. Guillermo González R.
Dr. Marcos Orchard C.
Colaborador: Patricio J. Santis T.
i
Índice General
1. Fundamentos del Control Óptimo de Sistemas .......................................................... 1
1.1. Clasificación del Control Óptimo de Sistemas ..................................................... 1
1.2. Control Óptimo en Equilibrio determinístico ...................................................... 1
1.3. Control Óptimo Dinámico determinístico ........................................................... 2
1.3.1. Principio del Mínimo (Máximo) de Pontryagin ......................................... 3
1.3.2. Índice J con terminal funcional .................................................................. 3
1.3.3. Controlador LQ .......................................................................................... 4
1.3.4. Controlador LQR ....................................................................................... 5
1.3.4.1. LQR tiempo continuo ............................................................................ 5
1.3.4.2. LQR tiempo discreto ............................................................................. 6
1.3.4.3. LQR con seguimiento de referencia ....................................................... 6
1.4. Control Óptimo Dinámico estocástico ................................................................. 7
1.4.1. Controlador LQG ....................................................................................... 7
1.4.2. Controlador LQGR .................................................................................... 8
1.5. Problemas Resueltos ............................................................................................ 9
2. Introducción al Control Predictivo ............................................................................11
2.1. Control Predictivo basado en modelos (MBPC) ................................................11
2.1.1. Estrategia el MBPC ..................................................................................12
2.1.2. Estructura Básica del Control MBPC .......................................................13
2.1.3. Elementos del MBPC ................................................................................14
2.1.3.1. Modelo de predicción ............................................................................14
2.1.3.1.1. Modelo de respuesta al impulso ..................................................14
2.1.3.1.2. Modelo de respuesta al escalón. ..................................................15
2.1.3.1.3. Modelo función de transferencia ..................................................16
2.1.3.1.4. Modelo en espacio de estados ......................................................16
2.1.3.1.5. Modelo de perturbaciones ...........................................................16
2.1.4.1.6. Modelos Estocásticos ...................................................................17
2.1.3.2. Función objetivo ...................................................................................18
2.1.3.3. Obtención de la ley de control ..............................................................19
2.2. Trayectoria de referencia ....................................................................................20
2.3. Predicciones para diferentes tipos de modelos ....................................................21
ii
2.3.1. Modelo respuesta al escalón ......................................................................21
2.3.2. Modelo función de transferencia ................................................................22
2.3.2.1. Predicción de la salida ..........................................................................24
2.3.3. Predicción con modelo en variables de estado ...........................................29
2.4. Estructura de los predictores ..............................................................................31
2.5. Control de Varianza Mínima ..............................................................................31
2.5.1. Varianza Mínima con Minimización de Energía de Control ......................33
2.6. Control por Matriz Dinámica (DMC) ................................................................35
2.7. Control Predictivo Generalizado (GPC.) ...........................................................36
2.8. Control Predictivo con Restricciones ..................................................................42
2.8.1. Tipos de restricciones ................................................................................43
2.8.2. Consideraciones: Control predictivo con restricciones ...............................46
2.9. Algoritmo de Programación Cuadrática .............................................................47
2.10. Problemas Resueltos ...........................................................................................49
1
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Capítulo 1
1. Fundamentos del Control Óptimo de
Sistemas
En esta sección se expone un resumen de los contenidos. Se encuentran
disponibles en u-cursos los apuntes de Control Óptimo del Profesor Guillermo
González R.
1.1. Clasificación del Control Óptimo de Sistemas
El control óptimo se basa en la definición de un criterio de desempeño. Además,
se pueden incluir también restricciones. Se genera una acción de control óptima
según el criterio establecido.
El Control Óptimo puede clasificarse según
DeterminísticoEn equilibrio
EstocásticoControl Óptimo
DeterminísticoDinámico
Estocástico
Determinístico: Modelo y señal conocida.
Estocástico: Modelo conocido y señal estocástica; Modelo incierto y señal
estocástica.
1.2. Control Óptimo en Equilibrio determinístico
Un sistema dinámico
( , )
( , )
x f x u
y h x u

2
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Esta en equilibrio ssi x 0 , lo que genera puntos de equilibrio en función de la
entrada u . Entonces, se generan los estados de equilibrio:
( )ex u
Reemplazando es posible expresar el sistema en equilibrio:
( , ) ( ( ), ) ( )e ey u uh x u h h u
Se desea encontrar el u* tal que resuelva el problema para la siguiente función
de costo:
( , ) ,
min ( , )
. . ( )
( , ) ,
, ...,
, ...,
i
i
u y
u y i v n
J J u y
s a y h u
g i v
g
0 1
10
Entonces, para resolver el problema anterior se utiliza el teorema de Karush-
Kuhn-Tucker, el cual es una generalización de los multiplicadores de Lagrange,
el cual dice que existen n multiplicadores ,...,i n 1
tales que:
, (restricciones )
(restricciones )
, (restriccio
, ..., de desigualdad
, , ..., de desigualdad
, ..., de igualdane ds )
i
i i
i
i v
J
x
g i v
i
x
v n
g
0 1
0
1
1
0
Donde ... . .y .nng g gg
x x x x
12
21
1.3. Control Óptimo Dinámico determinístico
Se tiene una planta modelada por la ecuación de estado:
( , )x f x u
Con ( )x t x0 0 y ( ) Tx T x dados. Se desea encontrar el control óptimo ,u t T0
entre el periodo ,t T0 que minimice el funcional o índice de rendimiento del
sistema (o que lo maximice):
( ( )) ( , )T
t
x T L x uJ dt 0
Sujeto a ciertas restricciones.

3
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Formalmente se considere el siguiente problema:
min
( , ), ,
( ) ,
, )
(
(
.
)
.
T
t
r n
T
J
x f x u u x
x t
L x u d
x
t
s a
x T x
0
0 0
Para resolver el problema se introduce la función Hamiltoniana:
( , , )( , , , ) ( , , ) TH x u t L x u t f x u t
Con ... , ( )n
n nC T 1
1 2 multiplicadores de Lagrange. Las
ecuaciones que resuelven este problema de optimización son:
, , ,( ) ( ), , ,( , , ), , , ,
T H Hdx f x u t t T
x u t x u
dt x
tt
u
00
Donde, ( ), , ,T T Tx uHd
dt x
t f L
x x
se denomina ecuación de
coestado.
1.3.1. Principio del Mínimo (Máximo) de Pontryagin
El principio del mínimo de Pontryagin, explicita que el proceso admisible
( * ( ), * ( ), * ( ))x t u t t es óptimo si se cumple:
0( *, *, *, ) ( ) ( * , , ,, *, )H x u t H x u t t Tt
es decir, u* resuelve el problema de control óptimo si minimiza el Hamiltoniano
sobre todo el conjunto de señales de control admisible en ,t t T 0.
1.3.2. Índice J con terminal funcional
En este caso el funcional a minimizar es:
( ( )) ( , )T
t
x T L x uJ dt 0
La diferencia con el caso anterior es que el vector de estado final ( )x T no está
dado, sino que es variable de optimización. Con esta formulación, el coestado al
instante T cumple: ( ( ))
( )x T
Tx
También las ecuaciones de Hamiltoniano y la ecuación de coestado.

4
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Como se vio anteriormente, en el caso de que no existan restricciones para u, se
tiene que:
,( ), ,
, ,x u tt
Ht T
u
00
Si existen las restricciones ...T
mg g g g 1 2 , la minimización del
Hamiltoniano debe ser vista con las ecuaciones:
,
, ...,
, , ..
,
.
,
,j
j
j
Ht T
u
j m
g
gt
u
j m
0
1
0 1
0
0
Donde ... m 1 2 son los multiplicadores de Lagrange
correspondientes.
1.3.3. Controlador LQ
El control lineal cuadrático LQ consiste en regular un sistema lineal mediante la
minimización de un funcional cuadrático.
Sea el sistema línea:
,n m
x Ax Bu
y Cx
x u
Se desea llevar el sistema de ( )x t x0 0 a una vecindad del origen, con una señal
de control simple. Notar que ( ) Tx T x es libre y por lo tanto es una variable de
optimización.
Para lograr lo anterior se debe minimizar
min ( ) ( ) ( ( ) ( ) ( ) ( ))
. .
( )
ft
t
T T T
f f fJ x t S x t x t Qx t u t Ru t dt
s a x Ax Bu
x t x
0
0 0
1 1
2 2
Donde las matrices , , fQ R S son matrices definidas positivas. Las matrices
anteriores pueden considerarse simétricas, sin pérdida de generalidad.

5
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Para resolver el problema anterior, se considera el Hamiltoniano:
( ( ) ( ) ( ) ( )) ( ( ) ( ))T T TH x t Qx t u t Ru t Ax t Bu t 1
2
Entonces, con las condiciones del Hamiltoniano anteriormente mencionadas se
resuelve este problema de control óptimo.
Se asume que el coestado, puede ser escrito como ( ) ( ) ( )t S t x t
( ) ( ) ( ) ( )( )T Tu t tR B u t R B S t x t 1 1
Donde la ecuación diferencial de Riccati, viene dada por:
( )
T T
f f
S SA A S SBR B S Q
S t S
1
1.3.4. Controlador LQR
El LQR pretende mantener el estado dentro de una vecindad que contenga el
origen, por lo que no existe el concepto de tiempo final ft , y tampoco el de
estado final ( )fx t .
1.3.4.1. LQR tiempo continuo
Se considera el sistema definido por:
,n m
x Ax Bu
y Cx
x u
Se desea resolver el problema:
min ( ( ) ( ) ( ) ( ))
. .
( )
T
t
TJ x t Qx t u t Ru t dt
s a x Ax Bu
x t x
0
0 0
1
2
Donde Q y R son matrices constantes. El término ( ) ( )T
f f fx t S x t1
2 no aparece,
pues no existe un estado final.
Resolviendo el problema anterior con el Hamiltoniano:
( ( ) ( ) ( ) ( )) ( ( ) ( ))T T TH x t Qx t u t Ru t Ax t Bu t 1
2

6
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Se considera que el coestado es el mismo que en el control LQ. Resolviendo lo
anterior, se tiene que el control viene dado por
( ) ( ) ( )Tu t R B S t x t 1
Dado que en ft t 0
S(t) alcanza el régimen permanente, se tendrá que la
ecuación de Riccati se transforma en una algebraica, es decir:
T TSA A S SBR B S Q 1 0
1.3.4.2. LQR tiempo discreto
Sea el sistema definido por:
( ) ( ) ( )x k Ax k Bu k 1
Se desea resolver el problema:
min [ ( ) ( ) ( ) ( )]
. . ( ) ( ) ( )
( )
T T
k
J x k Qx k u k Ru k
s a x k Ax k Bu k
x t x
0
0 0
1
2
1
Resolviendo el problema anterior, se llega a que el controlador viene dado por:
( ) ( )u t Kx k
Donde:
( )T TK R B PB B PA 1
La ecuación de Riccati viene dada por:
( )T T T TP Q A PA A PB R B PB B PA 1
1.3.4.3. LQR con seguimiento de referencia
Sea el sistema:
,n mx Ax Bu
x uy Cx
Se desea resolver el problema:
min (( * ) ( * ) ( ) ( ))
. .
ft
y y
T T
t
J y Cx Q y Cx u t Ru t dt
s a x Ax Bu
0
1
2
Donde Q y R son matrices definidas positivas (simétricas, sin pérdida de
generalidad).

7
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Sea el Hamiltoniano dado por:
(( * ) ( * ) ( ) ( )) ( ( ) ( ))T TH y Cx Q y Cx u t Ru t Ax t Bu t 1
2
Resolviendo el problema, se llega al controlador de la forma:
( )
( )
T T
K H
u t R B Sx R B G
u t Kx H
1 1
Donde:
( ) *
( )( ) ,
T T T
T T T
f f
S SA A S SBR B S C QC
G A SBR B G C Q
G t
y
S t
1
1
0
0
0 0
1.4. Control Óptimo Dinámico estocástico
Cuando el sistema presenta perturbaciones estocásticas se requiere la
introducción de un estimador de estado óptimo para sistemas estocásticos.
1.4.1. Controlador LQG
Sea el sistema
,n m
x Ax Bu w
y Cx v
x u
Donde los ruidos blancos w y v tienen covarianzas:
( ( ) ( )) ( ) ( )
( ( ) ( )) ( ) ( )
w t w t W t
v t v t V t
Para realizar el control, se minimiza el siguiente funcional:
( ) ( ( ) ( ) ( ) ( ))( )f
T T T
f f f
t
t
S x t x t Qx t u tJ x Ru t dtt
0
2
1
2
1
Debido a que los estados son variables aleatorias.
El problema consiste en encontrar una estimación óptima del estado (a través
de un filtro de Kalman) y determinar el control LQ asociado.
Por lo anterior, el control LQ está dado por:
ˆ( ) ( )u t Kx t

8
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Donde K es la misma ganancia de un LQ determinístico y ˆ( )x t es el estado
estimado a través de Kalman.
Las ecuaciones del filtro de Kalman vienen dadas por:
ˆˆ ˆ( )
ˆ ˆ ˆ( )
ˆ[ ]
dxAx Bu y Cx
dt
Ax BKx y Cx
A BK C x y
, ( )
T
T T
V
dPAP PA PC
P
V CP W tdt
C
P P
1
1
0 0
1.4.2. Controlador LQGR
Al igual que en el caso determinístico, es posible implementar un regulador para
el estado estimado. Considerar el sistema definido en variables de estado:
,n m
x Ax Bu w
y Cx v
x u
Para realizar el control, se minimiza el siguiente funcional:
( ( ) ( ) ( ) ( ))f
T T
t
t
x t Qx t u t Ru t dtJ
0
1
2
Al igual que lo anterior el problema consiste en encontrar una estimación del
estado y el controlador LQR ˆ( ) ( )u t Kx t , K es la misma ganancia.
El filtro de Kalman en el proceso estacionario, se convierte en una ecuación de
Riccati para P, se tiene que:
ˆˆ ˆ( )
ˆ ˆ ˆ( )
ˆ[ ]
dxAx Bu y Cx
dt
Ax BKx y Cx
A BK C x y
T
T T
V
AP PA PC V
C
CP W
P
1
10

9
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
1.5. Problemas Resueltos
Problema 1.1
Sea el sistema definido por y
xy
, donde y u ; dado 2
00( )x x y que
1( )u t . Se desea encontrar el mínimo tiempo necesario para que 0( )x T .
Solución
Dado que y u , el sistema se puede escribir en variables de estado como:
0 1 0
0 0 1x x u
En el problema de tiempo mínimo ( 0min ( )T x T ∣ ) se resuelve mediante el
índice de rendimiento definido por:
0
1
1
0
( ) ( , ) ( , )
. ( )
( )
.
T
J t L x u dt T L x u
s a u t
x T
Se considera el Hamiltoniano ( 1
2
):
1 2 2
0 1 01
0 0 1
1
1
min ( ) ( , ) ( , ),
. . ( )
, T TH L x u f x u x u
x u
s a u t
x u
El control minimizara solo 2u (principio del mínimo de Pontryagin), se
resuelve:
2
1
in
. . ( )
m u
s a u t
Por lo tanto
Si 2 0 1( )t u
Si 2 0 1( )t u
La ecuación del coestado, viene dada por T Tf L
x x
0
, ( )T

10
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
2
1 1 1
2 1 21
0 0
1 0
0 c
c t c
Graficamente
Gráfico 1.1: Posibilidades de realizar el control.
Es decir el control cambiara a lo mas una vez.
Volviendo a las ecuaciones de estado:
1 2
2
0 1 0
0 0 1
x xx x u
x u
Por simplicidad se supone 0 0( )x
Si 1( )u t
2 2
2 2 1 1 2
1 11
2 2( ) ( ) ( )x x t t x t t x t x
Si 1( )u t
2 2
2 2 1 1 2
1 11
2 2( ) ( ) ( )x x t t x t t x t x
Para el control hay que cambiar u (de -1 a 1 o viceversa)
Propuesto: Estudiar los diagramas de fases y calcular el tiempo mínimo.
0 0.5 1 1.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
22( )t
2 0 0( )
t
2 0 0( )
1u
1u
1u
1u
1u
1u
11
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Capítulo 2
2. Introducción al Control Predictivo
El control predictivo tiene por objetivo resolver de forma efectiva,
problemas de control y automatización de procesos que se caracterizan por
presentar comportamientos dinámicos complejos, multivariable y/o inestable. El
control predictivo permite abordar problemas estocásticos, procesos con retardo
de tiempo, multivariables e incluir restricciones.
2.1. Control Predictivo basado en modelos (MBPC)
El control predictivo basado en modelos (MBPC o MPC, por su nombre
en inglés “Model (Based) Predictive Control”) se presenta actualmente como
una atractiva herramienta de control que permite incorporar criterios
operacionales a través de la utilización de una función objetivo y restricciones
para el cálculo de las acciones de control. Además, estas estrategias de control
han alcanzado un nivel muy significativo de aceptabilidad industrial en
aplicaciones prácticas de control de procesos. MBPC se basa principalmente en
los siguientes elementos:
El uso de un modelo matemático del proceso que se utiliza para predecir
la evolución futura de las variables controladas sobre un horizonte de
predicción.
El establecimiento de una trayectoria deseada futura, o referencia, para
las variables controladas.
El cálculo de las variables manipuladas optimizando una cierta función
objetivo o función de costos.
La aplicación del control siguiendo una política de horizonte móvil.
12
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
2.1.1. Estrategia el MBPC
La metodología de los controladores MBPC consiste en los siguientes pasos:
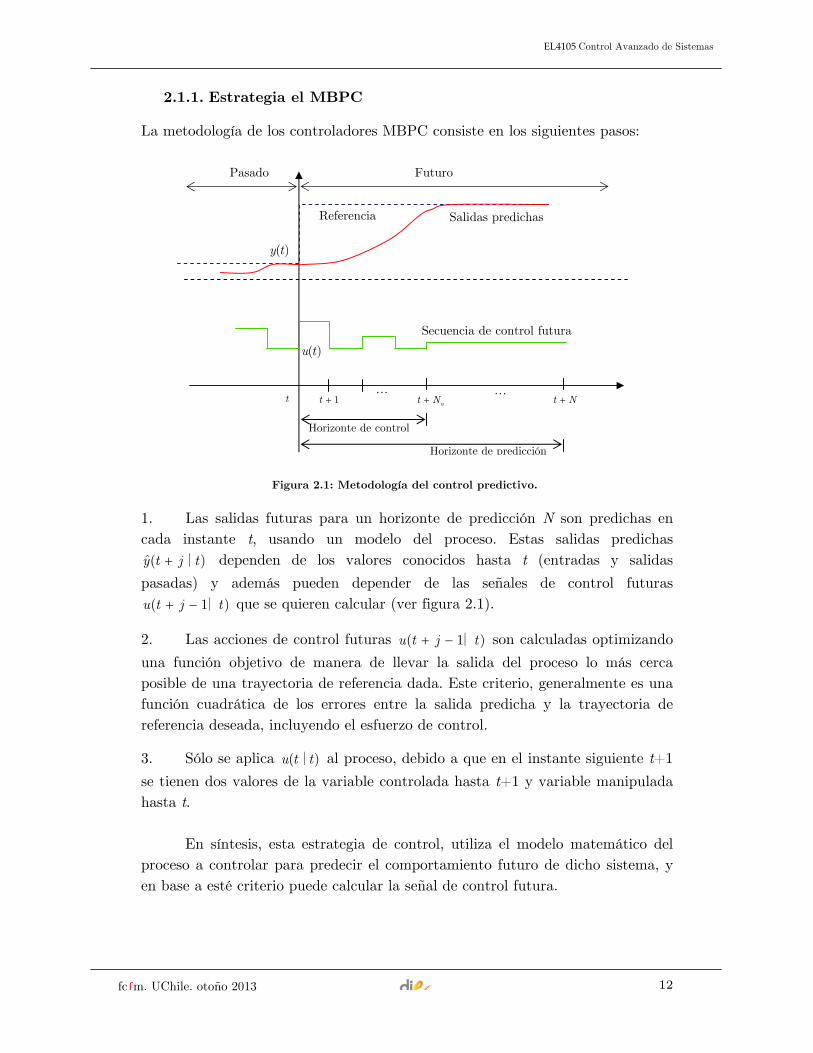
1. Las salidas futuras para un horizonte de predicción N son predichas en
cada instante t, usando un modelo del proceso. Estas salidas predichas
( )y t j t ∣ dependen de los valores conocidos hasta t (entradas y salidas
pasadas) y además pueden depender de las señales de control futuras
( )u t j t 1∣ que se quieren calcular (ver figura 2.1).
2. Las acciones de control futuras 1( )u t j t ∣ son calculadas optimizando
una función objetivo de manera de llevar la salida del proceso lo más cerca
posible de una trayectoria de referencia dada. Este criterio, generalmente es una
función cuadrática de los errores entre la salida predicha y la trayectoria de
referencia deseada, incluyendo el esfuerzo de control.
3. Sólo se aplica ( )u t t∣ al proceso, debido a que en el instante siguiente t+1
se tienen dos valores de la variable controlada hasta t+1 y variable manipulada
hasta t.
En síntesis, esta estrategia de control, utiliza el modelo matemático del
proceso a controlar para predecir el comportamiento futuro de dicho sistema, y
en base a esté criterio puede calcular la señal de control futura.
Figura 2.1: Metodología del control predictivo.
Horizonte de control
Horizonte de predicción
… …t Nt 1 ut N
Secuencia de control futura
Pasado Futuro
( )u t
Referencia Salidas predichas
( )y t
t
13
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
+
Modelo
Optimizador
Función
de costo Restricciones
Errores futuros
Salidas
predichas
Entradas
futuras
Entradas y Salidas pasadas
Trayectoria
de referencia
-
2.1.2. Estructura Básica del Control MBPC
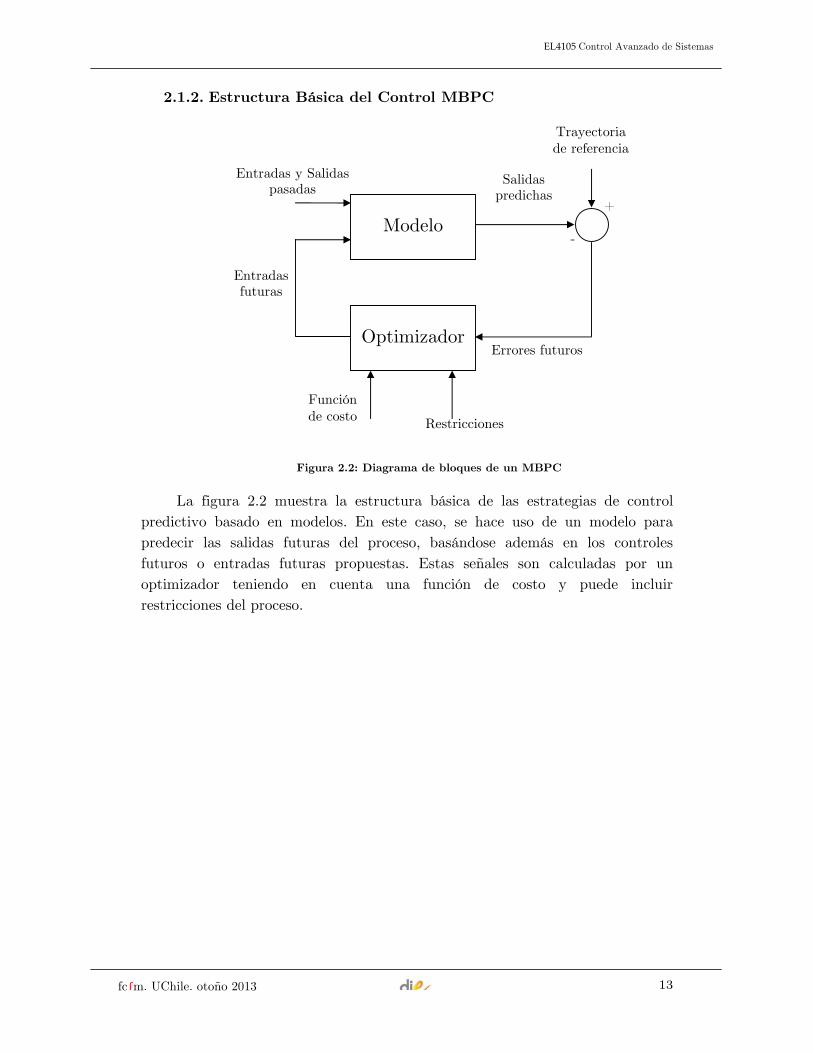
La figura 2.2 muestra la estructura básica de las estrategias de control
predictivo basado en modelos. En este caso, se hace uso de un modelo para
predecir las salidas futuras del proceso, basándose además en los controles
futuros o entradas futuras propuestas. Estas señales son calculadas por un
optimizador teniendo en cuenta una función de costo y puede incluir
restricciones del proceso.
Figura 2.2: Diagrama de bloques de un MBPC
14
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
2.1.3. Elementos del MBPC
Los elementos principales del control predictivo son:
Modelos de predicción
Función objetivo
Obtención de la ley de control
2.1.3.1. Modelo de predicción
El modelo de predicción debe ser capaz de capturar la dinámica del
proceso para poder predecir las salidas futuras, al mismo tiempo es
recomendable que sea sencillo de usar y comprender, y además permitir un
análisis teórico.
Las estrategias de MBPC utilizan diferentes modelos del proceso para
representar la relación de las salidas con las entradas medibles (variables
manipuladas y perturbaciones medibles). Además, se considera un modelo de
perturbaciones que intenta incluir las entradas no medibles, el ruido y los
errores de modelación.
A continuación se presentarán los principales modelos de proceso y
modelos de perturbaciones utilizados para las formulaciones del control
predictivo.
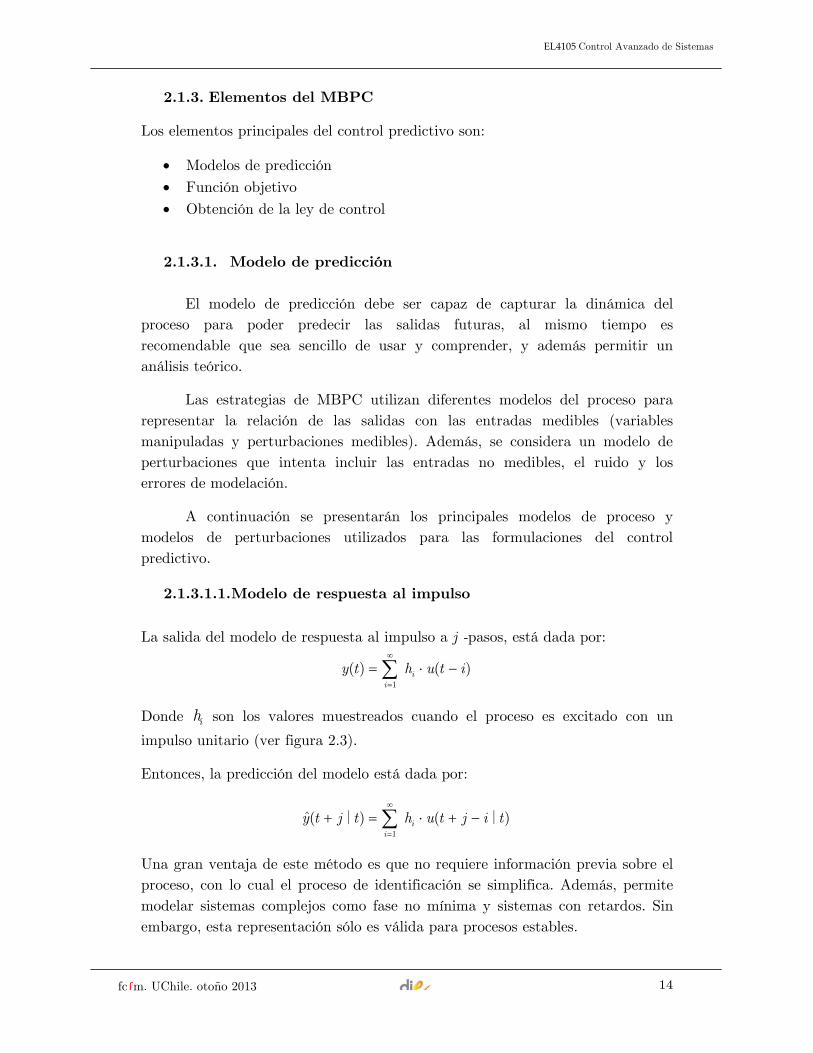
2.1.3.1.1. Modelo de respuesta al impulso
La salida del modelo de respuesta al impulso a j -pasos, está dada por:
( ) ( )i
i
hy t u t i
1
Donde ih son los valores muestreados cuando el proceso es excitado con un
impulso unitario (ver figura 2.3).
Entonces, la predicción del modelo está dada por:
( ) ( )i
i
y t j t u t j i th
1
∣ ∣
Una gran ventaja de este método es que no requiere información previa sobre el
proceso, con lo cual el proceso de identificación se simplifica. Además, permite
modelar sistemas complejos como fase no mínima y sistemas con retardos. Sin
embargo, esta representación sólo es válida para procesos estables.

15
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
2.1.3.1.2. Modelo de respuesta al escalón.
La salida del modelo respuesta al escalón está dada por:
1
( ) ( )i
i
y t g u t i
Donde ig son los valores muestreadas cuando el proceso es excitado con un
escalón (ver figura 2.4).
Entonces, la predicción del modelo a j -pasos, está dada por:
1
( ) ( )i
i
y t j g u t j it t
∣ ∣
Este modelo presenta las mismas ventajas e inconvenientes del modelo de
respuesta al impulso.
y(t)
t t 1 t 2 ...
h2
ihNh
h1
t N
Figura 2.3: Respuesta al impulso de cierto proceso.
y( t )
t t 1 t 2 ...
g2
ig Ng
g1
t N
Figura 2.4: Respuesta al escalón de cierto proceso.

16
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
2.1.3.1.3. Modelo función de transferencia
Este modelo está dado por la siguiente ecuación:
( ) ( ) ( ) ( )1 1A z y t B z u t
Con los polinomios A y B dados por:
( ) ...
( ) ...
na
na
nb
nb
A z a z a z a z
B z b z b z b z
1 1 2
1 2
1 1 2
1 2
1
Entonces, la predicción del modelo es:
( ) ( )( )
( )
B z w t j ty t j t
A z
1
1
∣∣
Esta representación es también válida para procesos inestables.
2.1.3.1.4. Modelo en espacio de estados
Las ecuaciones en variables de estados están dadas por:
1( ) ( ) ( )
( ) ( )
x t Ax t Bu t
y t Cx t
Donde x(t) es un vector de estado, y A, B y C son las matrices del sistema. Para
este modelo la predicción es:
1
1
ˆ ˆ( ) ( ) ( ) ( )jj
i
i
y t j t C x t j t C A x t A Bu t j i t
∣ ∣ ∣
Esta representación sirve para procesos multivariables. Sin embargo, se hace
necesario disponer de un observador cuando los estados no son medibles.
2.1.3.1.5. Modelo de perturbaciones
Uno de los modelos más utilizados para representar las perturbaciones, está
dado por:
( ) ( )( )
( )
1
1
C z e tn t
D z
Donde 1( )D z
es un polinomio que incluye al integrador 11 z , ( )e t es un
ruido blanco y generalmente el polinomio C es igual a 1.

17
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
2.1.4.1.6. Modelos Estocásticos
Con la representación del modelo de función de transferencia y moldeo de
perturbaciones es posible definir:
AR (Auto Regressive)
( ) ( ) ( )A z y t e t 1
ARX (Auto Regressive with eXogenous Input)
( ) ( ) ( ) ( ) ( )A z y t B z u t e t 1 1
ARMA (Auto Regressive Moving Average)
( ) ( ) ( ) ( )A z y t C z e t 11
ARMAX (Auto Regressive with Moving Average and eXogenous Input)
( ) ( ) ( ) ( ) ( ) ( )A z y t B z u t C z e t 1 1 1
ARIX (Auto Regressive Invegrated with eXogenous Input)
( )( ) ( ) ( ) ( )
e tA z y t B z u t
1 1
ARIMAX (Auto Regressive Integrated with Moving Average and eXogenous
Input)
( ) ( )( ) ( ) ( ) ( )
C z e tA z y t B z u t
11 1
ARARX (Auto Regressive Auto Regressive eXternal Input)
( )( ) ( ) ( ) ( )
( )
e tA z y t B z u t
D z
1
1
1
ARARMAX (Auto Regressive Auto Regressive Moving Average eXternal
Input)
( )( ) ( ) ( ) ( ) ( )
( )
C zA z y t B z u t e t
D z
1
1 11
Output error
( )( ) ( ) ( )
( )
B zy t u t e t
F z
1
1

18
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Box — Jenkins
( ) ( )( ) ( ) ( )
( ) ( )
B z C zy t u t e t
F z D z
1 1
1 1
Caso General
( ) ( )( ) ( ) ( ) ( )
( ) ( )
B z C zA z y t u t e t
F z D z
11
1 1
1
NARMAX (Nonlinear ARMAX)
1 1 1( ) ( ),..., ( ), ( ), ..., ( ), ( ), ..., ( ) ( )a b cy t f y t y t n u t u t n e t e t n e t
Con f una función no lineal.
Es importante destacar que los modelos ARIX y ARIMAX son los más
utilizados en el control predictivo. En cambio los modelos ARX y ARMAX son
más utilizados en diagnóstico de fallas.
2.1.3.2. Función objetivo
Los diferentes algoritmos de control predictivo utilizan diferentes funciones
objetivo o de costo para la obtención de la ley de control.
En primer lugar se considera la función objetivo está dada por:
ˆ( ) ( )J w t y t t ∣2
1 1
Donde 1( )w t es la referencia o salida deseada en el instante t+1 y 1ˆ( )y t t ∣ es
la salida predicha en el instante t+1. Nótese que utilizando esta función objetivo
y un modelo ARIX, se obtiene un controlador de varianza mínima.
Para reducir las variaciones en la variable manipulada o sobreactuaciones se
puede utilizar la siguiente función objetivo, que además incluye acción integral.
2 21 1ˆ( ) ( ) ( )J w t y t t u t ∣

19
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
A continuación, para considerar sistemas de fase no mínima y sistemas
inestables se utiliza la siguiente función objetivo que incluye horizontes de
predicción y control mayores:
2
1 1
2 21ˆ( ) ( ) ( ) ( ) ( )
uN N
j N i
J j w t j y t j t i u t i
∣
Donde
( )j y ( )i son coeficientes que ponderan el comportamiento futuro,
( )y t j t ∣ es la salida predicha en el instante t+ j ,
1( )u t i t ∣ es la variación de control en el instante t+i -1,
( )w t j representa la trayectoria de referencia deseada,
1N y N2
son los horizontes mínimo y máximo de predicción,
uN es el horizonte de control
2.1.3.3. Obtención de la ley de control
Para obtener los valores 1( )tu t i ∣ es necesario minimizar la
función de objetivo planteada anteriormente. Para ello se calculan los valores de
las salidas predichas ˆ( )ty t j ∣ en función de los valores pasados de las entradas
y salidas, y de las señales de control futuras, haciendo uso de un modelo de
predicción.
Además se ha encontrado que una estructuración de la ley de control
produce una mejora en la robustez del sistema. Esta estructura de la ley de
control se basa en el uso del concepto de horizonte de control (uN ), que consiste
en considerar que tras un cierto intervalo uN < N2
no hay variación en las
señales de control propuestas, es decir, 1 0( )u t i , para ui N .
20
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
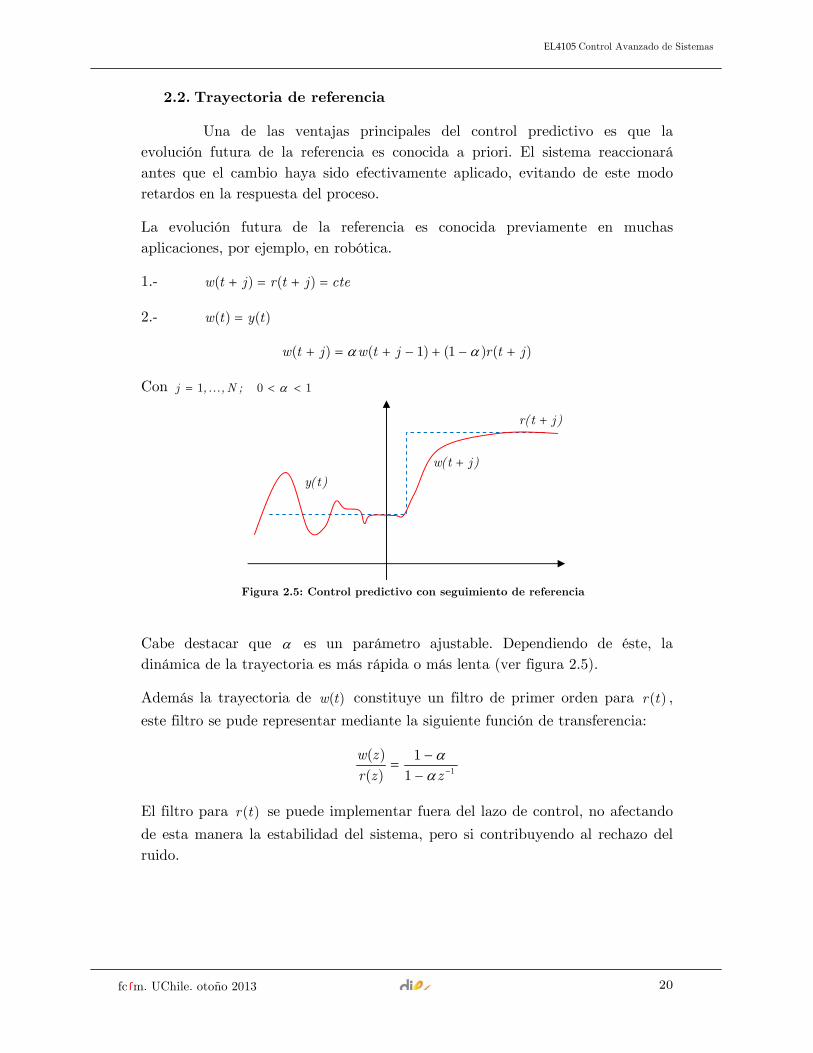
2.2. Trayectoria de referencia
Una de las ventajas principales del control predictivo es que la
evolución futura de la referencia es conocida a priori. El sistema reaccionará
antes que el cambio haya sido efectivamente aplicado, evitando de este modo
retardos en la respuesta del proceso.
La evolución futura de la referencia es conocida previamente en muchas
aplicaciones, por ejemplo, en robótica.
1.- ( ) ( )w t j r t j cte
2.- ( ) ( )w t y t
( ) ( ) )) (( w tt j j jw r t 1 1
Con j , ..., N ; 1 0 1
Cabe destacar que es un parámetro ajustable. Dependiendo de éste, la
dinámica de la trayectoria es más rápida o más lenta (ver figura 2.5).
Además la trayectoria de ( )w t constituye un filtro de primer orden para ( )r t ,
este filtro se pude representar mediante la siguiente función de transferencia:
1
1
1
( )
( )
w z
r z z
El filtro para ( )r t se puede implementar fuera del lazo de control, no afectando
de esta manera la estabilidad del sistema, pero si contribuyendo al rechazo del
ruido.
w(t j)
r(t j)
y(t)
Figura 2.5: Control predictivo con seguimiento de referencia

21
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
2.3. Predicciones para diferentes tipos de modelos
Para cada modelo se puede establecer una predicción distinta, tal como se
explica:
2.3.1. Modelo respuesta al escalón
Las perturbaciones se consideran constantes a lo largo del horizonte de
predicción e iguales al valor en el instante t, es decir:
ˆ ˆ ˆ( ) ( ) ( ) ( )mn t j t n t t y t y t t ∣ ∣ ∣
Donde ( )my t son los valores medidos de la salida e ( )y t t∣ es el valor estimado
para el modelo en el instante t.
La predicción está dada por:
i
i
y t j t g u t j i t n t j tˆ ˆ( ) ( ) ( )·
1
∣ ∣ ∣
Entonces, la predicción está dada por
j
i i
i i j
y t j t g u t j i t g u t j i n t j tˆ ˆ( ) ( ) ( ) ( )
1 1
acciones de acciones decontrol futuras control pasadas
∣ ∣ ∣
Reemplazando la predicción de la perturbación en esta ecuación y el modelo
para ( )y t t∣ en ella, se tiene:
j
i i
i i j
m i
i
y t j t g u t j i t g u t j i
y t g u t i
( ) ( ) ( )
( ) ( )
1 1
1
∣ ∣
(**)
Entonces, se define la respuesta libre del sistema como los valores conocidos
hasta el instante t, es decir:
( ) ( ) ( )
( ) ( )
j i i
i j i
j j i
m
mi
i
p g u t j i y t g u t i
p g g u t i y t
1 1
1

22
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Suponiendo un proceso asintóticamente estable, j i ig g 0 para i N , se
tiene que 1
( ) ( )N
j j i i m
i
p g g u t i y t
Por lo tanto, la ecuación (**) se puede reescribir como:
( ) ( )j
i j
i
y t j t g u t j i t p
1
∣ ∣
Entonces, las predicciones en el intervalo N1 y N2 están dadas por:
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
N N
N N
N N
y t N t g u t N t g u t t p
y t N t g u t N t g u t t p
y t N t g u t N t g u t t p
1 1
1 1
2 2
1 1 1
1 1 1 1 1
2 1 2
1
1
1
∣ ∣ ∣
∣ ∣ ∣
∣ ∣ ∣
Matricialmente, y considerando que 1 0( )u t j para j > uN , se tiene:
y G u p
Donde
ˆ ˆ ˆ ˆ( ) ( ) ( )T
y y t N t y t N t y t N t 1 1 21 ∣ ∣ ∣
u
N
N
N N N
g g
g g
G
g g
1
1
2 2
1
1 1
1
0 0
0 0
0
1 1 21
1 1( ) ( ) ( )
, , ,
T
u
N N N
u u t t u t t u t N t
p p p p
∣ ∣ ∣
2.3.2. Modelo función de transferencia
Modelo ARMAX
1 1( ) ( ) ( ) ( ) ( )A z y t B z u t d n t
Donde 1( ) ( ) ( )n t C z w t , con tw un Ruido Blanco Discreto ( 0( )w t y
2 2( ( ) ) ww t ) y d es el retardo del sistema.
Sin embargo, esta modelación no considera procesos no estacionarios.

23
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Modelo ARIMAX
Para representar procesos no estacionarios, se considera el siguiente modelo
ARIMAX: 1 1( ) ( ) ( ) ( ) ( )A z y t B z u t d n t
Donde 1( ) ( )
( )C z w t
n t
, z 11
Entonces, se tiene que:
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
n t C z w t n t n t
n t n t C z w t
1
1
1
1
Sea 1( ) ( ) ( )x t C z w t , entonces,
0
0
0
1
1
1 1
2 1 2
( ) ( ) ( )
( ) ( )
( ) ( ) ( )
( ) ( )t
i
n t n t x t
n n x
n n x x
n t n x i
Por lo tanto, ( )n t es un sumador y n0 es la condición inicial.
A continuación, se calcula el valor medio de ( )nt , es decir:
0
1
1( ) ( ) ( )
( )t
i
n t n t x t
n x i
Entonces, se tiene que a menos que 0( )x i x , ( )n t no es estacionario aunque
x lo sea.
Así, si ( )x i x , entonces 0( )n t n tx , además si 1C , ( ) ( )x t w t y como
( )w t es Ruido Blanco Discreto se tiene que 0( )w t , entonces 0( )x t . Por lo
tanto 0( )n t n
Sin embargo, el proceso ( )n t no es estacionario en sentido amplio porque 2
( )n t
no es constante como se demuestra a continuación.

24
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
n t n t n t
n t x t n t x t
n t n t E x t x t n t n t x t x t
( ) ( ) ( )
( ( ) ( )) ( ( ) ( ))
( ) ( ) ( ) ( ) ( ( ) ( ))( ( ) ( ))
22
2
2 2
1 1
1 1 2 1 1
Además, 1( ) ( ) ( )x t C z w t
Si ( )C z 1 1 entonces ( ) t t tC z w x w 1 , 0t tx w
De esta manera,
( )t t tn n w 1 1 0
pues 1( ) ( ) ( )n t n t w t y ( )w t es Ruido Blanco Discreto con 0( )w t
Por lo tanto,
t t tn n w n n wt
1 0
2 2 2 2 2 2
tn n 0
2.3.2.1. Predicción de la salida
Para calcular la predicción a j -pasos de y( t ) , se considera un modelo
ARIMAX, con C 1 por simplicidad.
w tAy t Bu t d n t Bu t d
A
w tBy t u t d
A A
w t jBy t j u t d j
A At
( )( ) ( ) ( ) ( ) /
( )( ) ( )
( )( ) ( )
1
∣
donde
j j
j
FE z
A A
CuocienteResto
1
(jF y
jG notación en ARMAX)
La división 1
A se realiza hasta que
jE sea un polinomio de grado j 1 , de
modo que ( )jE w t j
tenga los valores futuros de ( )w t , es decir,
1 2( ), ( ), , ( )w t w t w t j

25
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Además,
A z a z a z 1 1 2
1 11
entonces A es mónico y por ende jE también.
En consecuencia,
j
j
w t w tw t w t
FBy t j u t d j E w t j w t
A A( ( ), ( ), )
( ( ), ( ), )
#( ) ( ) ( ) ( )
1 21
Para la determinación de 1( ), ( ), ...w t w t , se utiliza el modelo ARIMAX, es
decir
w tAy t Bu t d
( )( ) ( )
w t A y t B u t d( ) ( ) ( )
Entonces, reemplazando ( )w t en la ecuación (#), se obtiene:
j j
j
j j j
F FBy t j u t d j E w t j A y t B u t d
A A A
B Bu t d j F y t F u t d E w t j
A A
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
j 1
jF es de grado 1n (n orden del sistema) considerando que jE tiene grado
1j .
A continuación,
j
j j j
u t d
j
j j j
B By t j u t d j E w t j F y t F u t d j z
A A
Bu t d j F z E w t j F y t
A
( )
( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
1
donde según la ecuación diofántica j
j jF z E A 1
Entonces,
j j j
j j j
By t j u t d j E A E w t j F y t
A
BE u t d j E w t j F y t
( ) ( ) ( ) ( )
( ) ( ) ( )
Se define j jG BE
j j jy t j G u t d j E w t j F y t( ) ( ) ( ) ( )

26
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Por lo tanto, la predicción a j pasos de ( )y t está dada por:
j jy t j y t j Gt u t d j F y tˆ( ) ( ) ( ) ( ) ∣ (*)
pues ( )jE w t j genera sólo valores futuros de ruido blanco 1 2( ( ), ( ), ...)w t w t .
Casos especiales
1d
j jty t j G u t j F y t( ) ( ) ( ) 1∣
j d
d dy t d G u tt F y tˆ( ) ( ) ( ) ∣
Valores futuros de u t() (u t u t 1 2( ), ( ), ...)
j jG u t d j BE z u t d j
b u t d j u t d j
( ) ( ) ( )
( ) ( )
1
0 1
1
1
Para j d , la predicción depende de términos hasta t, es decir:
j
j
F y t y t y t
G t d j u t tu u
( ) ( ), ( ),...
( ) ( ), ( ),...
1
1
Para j d , la predicción además depende de los valores de control por aplicarse
(no conocidos), dados por:
1 2( ) ( ), ( ),..., ( )jG t d j u t uu t u t d j
Entonces, ( )jG tu d j contiene términos conocidos en t 1 2( ), ( ),...u t u t
y términos desconocidos (o por determinarse) 1 2( ), ( ), ( ),...u t u t u t
Además, como j jG BE , entonces
( )j j j jG z g g z g z 1 1 2
0 1 2
Predicción con modelo ARIMAX con C 1
d e tA z y t B z z u t C z
( )( ) ( ) ( ) ( ) ( )
1 1 11
donde ( )e t es ruido blanco.

27
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
En este caso, la ecuación diofántica está dada por:
j
j jC z E z A z z F z( ) ( ) ( ) ( ) 1 1 1 1
donde ( )e t es de grado 1j y jF es de grado na .
j
j
j
z F zC zE z
A z A z
( )( )( )
( ) ( )
111
1 1
A partir del modelo ARIMAX, se tiene:
d
j
j
B z C zy t j z u t j e t j
A z A z
FBy t j u t j d E e t j e t
A A
( ) ( )( ) ( ) ( )
( ) ( )
( ) ( ) ( ) ( )
1 1
1 11
1
El ruido ( )e t en instantes previos está dado por:
1
1( ) ( )( )
( )
A y t B u t de t
C z
Entonces, la salida a j pasos es:
j
j
j
j j
j jj
j
j j
j
j
j
F A y t B u t dBy t j u t j d E e t j
A A C
FB Bu t j d E e t j y t F u t d
A C AC
F FBz u t j d E e t j y t
A C C
E A FBu t j d E e t j y t
A C C
BEu t j d E e
C
( ) ( )( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( )
11
1 1
1 1
1
1j
j j
j
Ft j y t
C
BE Fu t j d E e t j y t
C C
( ) ( )
( ) ( ) ( )
1
Por lo tanto, la predicción de la salida es:
y t j y t jt( ) ( ) ∣
j jBE Fy t j u t j d y t
C Ct( ) ( ) ( ) 1∣
Esta ecuación representa una expresión recursiva para la predicción.

28
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Para separar las acciones de control futuras de las pasadas, se considera la
siguiente ecuación diofántica:
j
j j jE z B z C z H z z K z( ) ( ) ( ) ( ) ( ) 1 1 1 1 1
con jH de grado 1j .
Por lo tanto, la predicción está dada por:
j
j j j
j j
j
CH z K Fy t j u t j d y t
C C
K Fy t j H u t j d u t d y t
C C
t
t
( ) ( ) ( )
( ) ( ) ( ) ( )
1
1 1
∣
∣
Donde ( )jH u t j d 1 incluye las acciones de control futuras y
( )jK
u t dC
1 las acciones de control pasadas.
Predicción con modelo ARIMAX con C 1 (Método 2)
Considerar las siguientes señales filtradas de la planta:
1
f y ty t
C z ( )
( )( )
, 1
f u tu t
C z ( )
( )( )
Se sigue que el nuevo modelo queda dado por:
( )( ) ( ) ( ) ( )f d f e t
A z y t B z z u t
1 1 1
La predicción se calcula utilizando el procedimiento para ruido blanco. Luego, la
señal obtenida ˆ ( )fy t j es filtrada por ( )C z 1 para obtener la predicción de la
salida original ( )y t j .
Predicción con modelo ARIMAX con C 1 (Método 3)
1 1 11( )
( ) ( ) ( ) ( ) ( )d e tA z y t B z z u t C z
(*)
donde ( )e t es ruido blanco y 0d por simplicidad.
En este caso, la ecuación diofántica está dada por:
( ) ( ) ( ) ( )j
j jC z E z A z z F z 1 1 1 1 (**)
donde jE es de grado 1j y jF es de grado na.

29
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Multiplicando la ecuación (*) por 1 j
jE z z y usando la ecuación (**), se
tiene:
1 1 1 1 11j j jC z y t j E z e t j E z B z u t j F z y t ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
Considerando el valor esperado, se tiene:
1 1 1
jC z y t j E z e t j C z y t j t ˆ( ) ( ) ( ) ( ) ( ) ( )
Entonces,
1 1 1 11j jC z y t j t E z B z u t j F z y t ˆ( ) ( ) ( ) ( ) ( ) ( ) (***)
Esta predicción es recursiva y para obtener una expresión explícita se utiliza la
siguiente ecuación diofántica:
1 1 11 j
j jC z M z z N z ( ) ( ) ( )
Donde el grado de jM es 1j y grado de jN es el grado de 1C .
Multiplicando la ecuación (***) por 1
jM z ( ) , se tiene:
1 1 1 1 11j j j j jy t j t M E z B z u t j M z F z y t N z y t ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
Entonces,
1 1
1 1 1
1 1p
j j j
y t j G z u t j G z u t j
M z F z
t
N z y t
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
∣
con grado de 1G z j
2.3.3. Predicción con modelo en variables de estado
Se considera el siguiente modelo en variables de estado:
( ) ( ) ( ) ( )
( ) ( ) ( )
x t Ax t B u t Gw t
y t Dx t w t
1
donde ( )w t es ruido blanco.

30
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
El estado a j -pasos, está dado por:
jj j i
i
jj i j
i
x t Ax t B u t Gw t
A x t AB u t AGw t B u t Gw t
x t A x t A B u t A Gw t
AB u t AGw t B u t Gw t
x t j A x t A B u t i
A Gw t i A Gw t
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( )
( ) ( )
2
3 2 2
1
1
2
2 1 1 1
1 1
3
1 1 2 2
1
1
Donde ( )j
j i
i
A Gw t i
2
1 agrupa las perturbaciones futuras.
El ruido en instantes siguientes, desde t hacia atrás es conocido y está dado por:
( ) ( ) ( )w t y t Dx t
Por lo tanto, el estado a j -pasos es:
( ) ( ) ( )
( ) ( ) ( )
jj j i
i
jj i j
i
x t j A x t A B u t i
A Gw t i A G y t Dx t
1
1
2
1
1
Entonces, la predicción de la salida es:
y t j t Dx t j t w t j tˆ ˆ( ) ( ) ( ) ∣ ∣ ∣
donde ( )w t j t 0 ∣ pues ( )w t es ruido blanco.
jj j i
i
jj i j
i
A x t A B u t i
y t j t D
A Gw t i A G y t Dx t
( ) ( )
( )
( ) ( ) ( )
1
1
2
1
1
∣ .
Además, se tiene x t t x t tˆ( ) ( )∣ ∣
Si el estado no es medible se requerirá de un observador de estado. También,
w t i i( ) 2 1 0

31
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Finalmente, la predicción de la salida es:
j
j j i j
i
y t j t DA x t t A BD u t i DA G y t Dx t tˆ ˆ ˆ( ) ( ) ( ) ( ) ( )
1
1
1∣ ∣ ∣
2.4. Estructura de los predictores
Tipo de modelo Futuro Pasado
Modelo
respuesta al
escalón
j
i
i
g u t j i( )
1
N
j i i
i
g g u t i y t( ) ( )
1
Modelo
ARIMAX
C1
jH u t j i( ) j jK Fu t y t
C C( ) ( ) 1
Modelo en
variables de
estado
jj i
i
A BD u t i( )
1
1 j jDA A GD x t t DA Gy t( ) ( ) 1 1∣
Respuesta forzada
f ty t j( ) ∣
Respuesta libre
l ty t j( ) ∣
Tabla 2.1: Estructura de los predictores.
Por lo tanto, la predicción se puede escribir de la forma:
ˆ ˆ ˆ( ) ( ) ( )f lt t ty t j y t j y t j ∣ ∣ ∣
ˆ ( )f ty t j ∣ es la respuesta forzada que depende de las futuras acciones de
control ˆ ( )l ty t j ∣ es la respuesta libre, suponiendo que no hay futuras acciones
de control y por lo tanto, el control permanece en el valor que tiene en el
instante t, 1 0 1( ) ,u t i i .
2.5. Control de Varianza Mínima
Se considera el siguiente criterio para determinar la acción de control:
2in m ( )J y t d
Donde d es el tiempo muerto; el modelo utilizado está dado por:
( ) ( ) ( ) ( ) ( ) ( )A z y t B z u t d C z e t 1 1 1

32
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Para determinar la predicción ( )y t d , se utiliza la siguiente ecuación
diofántica:
( ) ( ) ( ) ( ) dC z F z A z G z z 1 1 1 1
Entonces ( ) ( ) ( )B C
y t d u t e t dA A
Utilizando la ecuación diofántica, se tiene:
( ) ( ) ( ) ( )
( ) ( ) ( )
dB Gy t d u t Fe t d z e t d
A A
B Gu t Fe t d e t
A A
Además, se tiene que el ruido ( )e t en instantes anteriores 1 2t , t ,... se
puede calcular como ( ) ( )
( )Ay t Bu t d
e tC
En efecto,
d
Ay t Bu t dB Gy t d u t Fe t d
A A C
B G GBu t Fe t d y t u t d
A C AC
B G Gz u t Fe t d y t
A C C
B FA Gu t Fe t d y t
A C C
( ) ( )( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
1
G BFy t d y t u t Fe t d
C C( ) ( ) ( ) ( )
Continuando con el problema de varianza mínima, se tiene:
G BFJ y t d y t u t Fe t d
C C
G BFy t u t Fe t d
C C
( ) ( ) ( ) ( )
( ) ( ) ( )
2
2
22
m
in

33
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Se sabe qué ( ), ( ), ..., ( ), ( ), ...y t y t u t u t 1 1 y ( ), ..., ( )e t d e t 1 son independientes
entre sí, luego al calcular la esperanza del término cruzado:
G BFy t u t Fe t d
C C
G BFy t u t F e t d
C C
( ) ( ) ( )
( ) ( ) ( )
2
2 0
Pues e(t) es ruido blanco y su esperanza es cero.
Por lo tanto, la condición necesaria es:
BFu t
J G BF Cy t u t
u t C C u t
( )
( ) ( )( ) ( )
0 2 0
donde
B Fu t h u t h u t
C( ) ( ) ( ) ...
0 1 1
G BFy t u t h
C C( ) ( )
02 0
De donde se llega al controlador optimo, dado por:
Gu t y t
BF
*( ) ( )
2.5.1. Varianza Mínima con Minimización de Energía de Control
Se considera el siguiente criterio:
( ( ) ( )) ( )J w t d y t d u t 2 2 min
con w t d( ) es la trayectoria de referencia y es un factor de ponderación.
El modelo utilizado está dado por:
( ) ( ) ( ) ( ) ( )A z y t B z u t d e t 1 1
Para determinar la predicción y t d( ) , se utiliza lo de la sección 2.5 y se tiene
que:
( ) ( ) ( ) ( )y t d BFu t Gy t Fe t d

34
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Por lo tanto,
( ( ) ( ) ( ) ( )) ( )
( ) ( ) ( ) ( ) ( )
J w t d BFu t Gy t Fe t d u t
w t d BFu t Gy t Fe t d u t
2
2
2 2
2
min
Los términos cruzados se anulan por lo mismo que en la sección 2.5.
La condición necesaria está dada por:
( ( ))( ( ) ( ) ( )) ( )
( ) ( )
B Fu tJw t d B Fu t Gy t u t
u t u t
2 2 0
Además,
1 1 1
0 1 1 11nb d
nb dB Fu t b b z b z f z f z u t
( ) ( )
Entonces,
0
B Fu tb
u t
( )
( )
Por lo tanto,
( ( ) ( ) ( )) ( )w t d B Fu t Gy t b u t 0
0
La acción de control óptima está dada por:
*( ) ( )
( )b w t d Gy t
u tBFb
0
0

35
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
2.6. Control por Matriz Dinámica (DMC)
Este algoritmo (“Dynamic Matrix Control”) utiliza el modelo repuesta al escalón
para la predicción. Asumiendo que el proceso es estable.
1
1
( ) ( )
ˆ ˆ( ) ( ) ( )
i
i
N
i
N
i
y t g u t i
y t j g u n jt t tj i t
∣ ∣
Además,
ˆ ˆ ˆ( ) ( ) ( ) ( )mn t j t n t t y t y t t ∣ ∣ ∣
De la sección 2.3.1, la predicción está dada por:
( ) ( )j
i ji
y t j t g u t j i t p
1
∣ ∣
Con 1
( ) ( )N
j j i i mi
p g g u t i y t
Entonces, las predicciones en el intervalo 1N y
2N están dadas por:
N N
N N
N N
y t N t g u t N t g u t t p
y t N t g u t N t g u t t p
y t N t g u t N t g u t t p
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
1 1
1 1
2 2
1 1 1
1 1 1 1 1
2 1 2
1
1
1
∣ ∣ ∣
∣ ∣ ∣
∣ ∣ ∣
Matricialmente, y considerando que ( )u t j 1 0 para uj N , se tiene:
y G u p
Donde T
y y t N t y t N t y t N tˆ ˆ ˆ ˆ( ) ( ) ( ) 1 1 21 ∣ ∣ ∣
u
N
N
N N N
g g
g g
G
g g
1
1
2 2
1
1 1
1
0 0
0 0
0
1 1 21
1 1( ) ( ) ( )
, , ,
T
u
N N N
u u t t u t t u t N t
p p p p
∣ ∣ ∣

36
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Por otra parte, el controlador por matriz dinámica utiliza la función objetivo
general del MBPC con 1 , la cual matricialmente está dada por:
T Tˆ ˆJ w y w y u u
Reemplazando en esta ecuación la predicción y , se tiene
T TJ w G w Gu p u p u u
Minimizando esta función objetivo se obtiene:
1
( )T Tu G G I G w p
donde sólo se aplica ( )u t t ∣ de acuerdo a la estrategia de control de horizonte
móvil definida. Esto es,
( ) ( )tu t K w p ∣
Donde K es la primera fila de matriz TG G I G
1
.
(ver problema resuelto 2.4).
2.7. Control Predictivo Generalizado (GPC.)
Para el diseño de Controladores Predictivos Generalizados GPC. (“Generalized
Predictive Control”) se utiliza el siguiente modelo ARIMAX:
11 1 ( ) ( )
( ) ( ) ( ) ( )C z w t
A z y t B z u t d
Donde d es el retardo del sistema. Además se supone 1 1( )C z por
simplicidad.
Por lo anteriormente mencionado en la sección 2.3.2.1 se tiene que la predicción
viene dada por:
( ) ( ) ( ) ( )j jy t j y t j t G ut t d j F y t ∣ ∣ (*)
con j jG BE y
j
j
j
z FE
A A
1
(Ecuación diofántica).
Problema. Demostrar que jG es igual a los primeros j términos de la respuesta
a escalón unitario de la planta ( ) ( )Ay t Bu t d

37
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
De este modo, como jG representa los j primeros términos de la respuesta
escalón, entonces ji ig g para 1 2 3i , , ,... j . Es decir,
j k
ji ji ki i
g g g g
g g g g
0 10 0 0
Por lo tanto, se tiene
( )
( )
( )
b
b
b
b
b
b
b
b
n
n
n
n
n
n
n j
j n j
G g g z g z
G g g z g z
G g g z g z
G g g z g z
1
1 0 1
1 1
2 0 1 1
1 2
3 0 1 2
1 1
0 1 1
Por otra parte,
( ) ( ) ( )j jy t j G u t dt j F y t ∣
y si 1d , 1 1N y
2N N , se tiene
1 1
2 2
1
2 1
1
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )N N
y t G u t F y t
y t G u t F y t
y t N G u t N F y
t
t
t
t
∣
∣
∣
A continuación, se agrupan los términos conocidos hasta t en el vector f
( 1), ( 2),..., ( ), ( 1),...u t u t y t y t , es decir
1
1 0 1
1 1
2 1 0 2
1
2 1
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
f t G z g u t F y t
f t G z g z g u t F y t
(*)
Entonces, la expresión (*) se puede expresar de manera matricial como
y Gu f
Donde ˆ ˆ ˆ ˆ( ), ( ), , ( )y y t y tt Ntt yt 1 2∣ ∣ ∣ son las predicciones desde el
horizonte de predicción 1 1N hasta
2N N .

38
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
N N N N
g
g g
G
g g g
0
1 0
1 2 0
0 0
0
1 2 1( ), ( ), ..., ( ), ...., ( )T
u u t u t u t u t N son las acciones de control
futuras. Por lo tanto, Gu contiene términos desconocidos por determinar
u t u t u t N( ), ( ), ..., ( ) 1 1 y f agrupa los términos conocidos
u t u t y t y t( ), ( ), ..., ( ), ( ), ... 1 2 1
Para el cálculo de las acciones de control futuras, el algoritmo de Control
Predictivo Generalizado G.P.C. se minimiza la siguiente función de costos:
2
1
2 2
1
1( ) ( ) ( )uN N
ij N i
J y t j r t tt j u i
∣
(**)
En general,
1N horizonte predictivo mínimo. (N d1
, retardo, por defecto)
N2 es del orden del tiempo de estabilización (Ts) del sistema y es el
horizonte de predicción máximo.
uN : hasta el orden de la planta.
: Parámetro de ponderación de control.
Por otra parte, para una planta con n polos se necesitan n cambios de u t( )
para llegar a valor de y t r t( ) ( ) dado, entonces 0u t ( ) paraut N . Por lo
tanto, u t( ) queda fijo para. Además, la función de costo definida anteriormente
(ecuación (**)) se puede expresar en forma más compacta por (u u )
ˆ ˆ( ) ( )T TJ y r y r u u
donde
y Gu f
1 2( ), ( ),..., ( )T
r r t r t r t N
(con N ,N N 1 21 )

39
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
u u
uu
N N
N N N NN N
g
g g
Gg g g
g g g
0
1 0
1 2 0
1 2
0 0
0
pues ( )u t j 0 parauj N .
Entonces,
( ) ( )T TJ Gu f r Gu f r u u
Para la minimización de esta función de costos, se tiene 0( )
J
u t
Entonces,
( ) /()
( )
( )
TT T
T
T T
Gu f r G u
G Gu f r u
G Gu u G r f
0
0
Por lo tanto las acciones de control vienen dadas por:
( ) ( )T Tu G G I G r f 1
De este modo, se tiene
( )
u
Tt
Tt
t N
u H
u Hr f
u
1
1 2
1
Sin embargo, sólo se utiliza ( )u t , dado que en el siguiente instante se
desplazan los horizontes de predicción y control, siendo posible calcular una
nueva acción de control para ese instante.
La acción de control en t está dada por: 1( ) ( )Tu t H r f , con TH1 la primera
fila de( )T TG G I G 1
Notar que: 1( ) ( ) ( )u t u t u t
11( ) ( ) ( )Tu t u t H r f

40
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Caso
Se considera el caso en que 2uN N , 1 1N , para la función
2
1
2 2
1
1( ) ( ) ( )uN N
ij N i
J y t j r t tt j u i
∣
Matricialmente se tiene
ˆ ˆ( ) ( )T TJ y r y ur u
Donde ( )y t G u f
Además
21
1 1
2( ) ( )
( ) ( )
ˆ ˆ ˆ ˆ( ) ...
... ( )
T
u
y y y t y t N
u u u u t
t
t t N
Entonces,
( ) ( )T TG u f G u fJ r r u u
Como la dimensión de y u , es decir, la multiplicación de G u no calza, por
lo cual se crea un vector u “ficticio” tal que cumpla con la relación u M u ,
con
2 2 12
1 0 0 0 0 0
0 1 0 0 0 0 1
0 0 1 0 0 0
0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0
1
0 1
( )
( )
( )
( )
,
u
u
NN N
u
u t
M
t
uu t N
u t N
Donde M tiene tantos unos como las componentes de u .
Reemplazando en la función de costos, dada por:
( ) ( )T TGu f GuJ r r M Mf u u
Para la minimización, se tiene 0J
u
Entonces,
( ) /()
( )
( )
T T
T
T T
T
T
T
Gu f r G u M
G Gu f r M u
G Gu M u G r f
0
0
uN N 2

41
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Por lo tanto el controlador u viene dado por la primera fila de:
( ) ( )T TTu G G M G r f 1
2.7.1. Control predictivo en variables de estado
Considere que un proceso con n salidas y m estados puede ser descrito por el
siguiente modelo en variables de estado:
1( ) ( ) ( ) ( )
( ) ( ) ( )
x t Ax t B u t Gw t
y t Dx t w t
De la sección 2.3.3 se tiene que la predicción viene dada por:
1
1
1ˆ ˆ ˆ( ) ( ) ( ) ( ) ( )j
j j i j
i
y t j t DA x t t A BD u t i DA G y t Dx t t
∣ ∣ ∣
donde la repuesta libre es: 1 1ˆ( ) ( )j jDA A GD x t t DA Gy t ∣ y la repuesta
forzada es: ( )j
j i
i
A BD u t i
1
1
Entonces, las predicciones sobre el horizonte de predicción son:
- -
( )
( )( ) ( )
( )
( )
( )
N N
N N
D Dy t t
DA DAy t tA GD x t t Gy t
DA DAy t N t
DB u t
DAB DB
DA B DA B DB u t N
1 1
1 2
1
2
1
∣
∣∣
∣
Matricialmente, se tiene:
NY S U F
donde
ˆ ˆ ˆ ˆ( ) ( ) ( )T
Y y t t y t t y t N t 1 2∣ ∣ ∣
( ) ( ) ( )T
U u t u t u t N 1 1

42
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
N
N - N -
DB
DAB DBS
DA B DA B DB
1 2
( ) ( )
N
D
DAF A GD x t t Gy t
DA
1
∣
Matricialmente, la función objetivo del control predictivo se puede expresar
como:
T
e uJ Y R Y R U Uˆ ˆ
Minimizando esta función objetivo se obtiene que el vector de acciones futuras
está dado por:
T T
N e N u N eU S S S R F
1
con R es la matriz de referencia y u e, son las matrices de ponderación.
2.8. Control Predictivo con Restricciones
En la práctica, se requiere mantener las variables del proceso en rangos
que aseguren el buen comportamiento de los equipos y evitar situaciones
críticas. Por ejemplo, los actuadores tienen restricciones de límite y velocidad,
existen restricciones ambientales en los procesos, válvulas, seguridad, etc.
Además, los puntos de operación del proceso están determinados por objetivos
económicos, que usualmente llevan al proceso a operar cerca de las restricciones.
En especial, los sistemas de control predictivo se anticipan a estas restricciones
y corrigen las acciones de control.

43
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
2.8.1. Tipos de restricciones
Restricciones de rango en las variables manipuladas
min máx( ) , , uu u t i u i N 11
En general, se pueden saturar las variables manipuladas pero la solución
obtenida no es óptima con respecto a la función objetivo predictiva. No
considerar restricciones en las variables manipuladas, puede provocar que
alcance valores muy elevados en la función objetivo, en el peor de los casos.
Violar los límites de las variables manipuladas puede ser muy costoso y
peligroso, ya que puede cause daño a los equipos y pérdidas de producción.
En forma matricial, la restricción de rango en las variables manipuladas está
dada por:
u
u t
u tu u
u t N
min max
( )
( )
( )
1 1
1 1 1
1 1 1
min maxu u u 1 1
Esta misma restricción en función de ( )u t , se puede expresar como:
u u t u u u tmin max( ) ( )
1 1 0 0 1
1 1 1 11 1
1 1 1 1 1
u u t T u u u tmin max( ) ( ) 1 11 1
Con Tuu u t u t u t N( ), ( ), , ( ) 1 1
Restricciones de variación de las variables manipuladas
Los actuadores generalmente no responden con una rapidez adecuada, por lo
cual es usual que se establezcan restricciones sobre las variaciones de las
variables manipuladas.
uu u t i Nu imin máx) , ,( 11

44
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Matricialmente, se tiene
u u umin máx
1 1 0 0 1
1 0 1 1
0
1 0 0 1 1
u u umin máx 1 I 1
Restricciones de rango en las variables controladas
En muchos procesos productivos, por problemas de seguridad o costos, se debe
limitar las variables controladas a rangos de operación establecidos.
y y t j t j Nymin máxˆ( ) , , 21∣
Utilizando el predictor del GPC, se tiene:
y G u f
Con ( ), ( ), , ( )T
uu u t u t u t N 1 1 e 21ˆ ˆ ˆ( ) ( )T
y y , , N tytt t ∣ ∣ y
f agrupa los términos conocidos hasta t.
Matricialmente, las restricciones de rango en las variables controladas están
dadas por:
min máxy G u f y 1 1
fmin máxy G u y f 1 1

45
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Restricciones de variación en las variables controladas
y y t j yt j Nmin máxˆ( ) , , 21∣
Matricialmente, expresando estas restricciones en función de u , se tiene:
y t y t y t
y
y t N y t N y t N
y t
y y t
y t N
y
t t t
t
y
y
t
tt
t
t
N
t
t
ˆ ˆ ˆ( ) ( ) ( )
ˆ
ˆ ˆ ˆ( ) ( ) ( )
( )
ˆ ( )
( )
( )
ˆ
( )
2 2 2
2
2
1 1
1
1 11
1 1 0
0 0
1 0
1
∣ ∣ ∣
t∣ ∣ ∣
∣
∣
∣
∣
D y t( )
01
y G u f
y G u f y(t)
0D D 1
Entonces,
y f y t G u y f y tmin máx ( ) ( )0 0D 1 D - D 1
Restricciones para asegurar el comportamiento monotónico
Algunos sistemas de control presentan oscilaciones en las variables controladas
antes de alcanzar una condición de régimen. En general, estas oscilaciones no
son deseables, pues entre otras razones pueden dar origen a perturbaciones sobre
otros procesos.
Para evitar el comportamiento monotónico y en caso que y( t ) w( t ) , se tiene:
y t j y t j y t w t
y t j y t j y t w
t
t
t
t t
ˆ ˆ( ) ( ), ( ) ( )
ˆ ˆ( ) ( ), ( ) ( )
1
1
∣ ∣
∣ ∣

46
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Matricialmente, se tiene:
y tG u f u y t w t
G f
y tG u f u y t w t
G f
( ), ( ) ( )
' '
( ), ( ) ( )
' '
0
0
con G' se compone de las primeras 1N filas de G y f ' se compone de las
primeras 1N componentes de f .
Restricciones para evitar comportamiento de fase no mínima
Existen procesos que presentan un comportamiento de fase no mínima, es
decir, cuando son excitados responden inicialmente en sentido inverso a como lo
hacen finalmente.
Para evitar este comportamiento, que en ciertos procesos es muy
perjudicial, se incorporan las siguientes restricciones cuando ( ) ( )y t w t .
y t j y t y t w t
y t j y t y t w t
t
t
( ) ( ), ( ) ( )
( ) ( ), ( ) ( )
∣
∣
Matricialmente,
G u f y t y t w t
G u f y t y t w t
( ), ( ) ( )
( ), ( ) ( )
1
1
2.8.2. Consideraciones: Control predictivo con restricciones
1. Si no existen restricciones o si éstas no se consideran, la minimización de la
función objetivo genera una solución analítica.
2. Si se consideran restricciones, la solución, en general, se obtiene utilizando
un algoritmo numérico de optimización con restricciones. Para esta clase de
problemas, en que la función objetivo es cuadrática, se cumple:
Para que exista solución al problema sin restricciones, la función
objetivo debe ser convexa.
Para que exista solución al problema de optimización con
restricciones, debe haber al menos un valor para el cual las variables
de optimización cumplan todas las restricciones impuestas.
Para asegurar la existencia de una solución única, el espacio de
restricciones debe ser convexo.

47
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
2.9. Algoritmo de Programación Cuadrática
La implementación de GPC con restricciones requiere la solución de un
problema de programación cuadrática.
T TJ G f
A u
r G r u
b
f u
min
s.a.
Donde A y b se explicaron anteriormente.
Programación cuadrática (QP): Función objetivo cuadrática y
restricciones lineales.
Restricciones de igualdad
T TJ u H u b u
A u
f
a
0
1min
2
s.a.
con A matriz de m n . Si A u a , entonces:
u Ya Zv
donde Y , Z son matrices de n m y ( )n n m respectivamente tales que
0AY I AZ ,
Entonces, la función objetivo queda expresada como:
T T
T T T T T T T T
J v Ya Zv H Ya Zv b Ya Zv f
J v v Z H Zv b a Y Zv b a Y H Ya f
( )
( )
0
0
1
2
1 1
2 2
Entonces, el óptimo global se encuentra resolviendo:
T TZ HZv Z b HYa
Nótese que ku es un punto que satisface la restricción kA u a . Cualquier
otro punto u que satisface la restricción se puede expresar como:
k
k k
u u Zv
A u A u AZv A u
Entonces, el vector v se puede expresar como la solución de:
( )T T kZ HZv Z g u
48
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
con ( )k kg u H u b , que es el gradiente de ( )J u en ku . Obtenido v, se
encuentra *u Ya Zv

49
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
2.10. Problemas Resueltos
Problema 2.1
Considerar el siguiente modelo ARIMAX
( ) . ( ) . ( ) . ( ) . ( ) ( )y t y t y t u t u t w t 1 7 1 0 7 2 0 9 1 0 6 2
donde ( )w t es ruido blanco. Calcular las predicciones ˆ ˆ ˆ( ), ( ), ( )y t y t y t 1 2 3
Solución
Se debe notar que para el modelo quede como un ARIMAX, se le debe restar a
( )y t 1 toda la ecuación, es decir,
1 7 1 0 7 2 0 9 1 0 6 2 1
1 1 7 1 1 0 7 2 0 9 1 0 6 2
0 7 1 0 7 2 0 9 1 0 6 2
( ) . ( ) . ( ) . ( ) . ( ) ( ) / ( )
( ) ( ) . ( ) ( ) . ( ) . ( ) . ( ) ( )
( ) . ( ) . ( ) . ( ) . ( ) ( )
y t y t y t u t u t w t y t
y t y t y t y t y t u t u t w t
y t y t y t u t u t w t
En efecto, para formar el modelo ARIMAX, se hace lo siguiente:
y t y t u t u t w t
w ty t y t u t u t
( ) . ( ) . ( ) . ( ) ( ) /
( )( ) . ( ) ( ) )
·
. . (
1
0 7 1 0 9 1 0 6 2
0 7 1 0 9 1 0 6 2
Donde se concluye que:
A z z B z z( ) . , ( ) . . 1 11 11 0 7 0 9 0 6 y d 1
En primer lugar, se calcularan las salidas predichas por sustitución.
y t y t y t u tt u t( ) . ( ) . ( ) . ( ) . ( ) 1 1 7 0 7 1 0 9 0 6 1∣
y t y t y t u t u t
y t y t u t u t u t
t t
ˆ ˆ( ) . ( ) . ( ) . ( ) . ( )
.19 ( ) . ( ) . ( ) . ( ) . ) (
2 1 7 1 0 7 0 9 1 0 6
2 1 19 1 0 9 1 0 93 1 02 1
∣ ∣
y t y t y t u t u t
y
t t t
t y t u t u t
u t u t
ˆ ˆ ˆ( . ( ) . ( ) . ( ) . ( )
. ( ) . ( ) . ( ) . ( )
. ( ) . ( )
)
3 1 7 2 0 7 1 0 9 2 0 6 1
2 533 1 533 1 0 9 2 0 93 1
0 951 1 314 1
∣ ∣ ∣

50
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Por otra parte, utilizando la ecuación diofántica también se pueden predecir las
salidas. Para j 1 , se tiene
E A z F 1
1 11
donde 1 y E F f f z 1
1 10 111 . Entonces igualando polinomios
. z z z f f z 1 1 1 1
10 111 1 1 0 7 1
Se obtiene que: 1 y E F . . z 1
1 1 1 7 0 7
Similarmente, se obtiene
y
y
E . z F . . z
E . z . z F . . z
1 1
2 2
1 2 1
3 3
1 1 7 2 19 1 19
1 1 7 2 19 2 533 1 533
Se debe mencionar que el polinomio jE repite sus coeficientes, agregando uno
nuevo en cada predicción.
Entonces,
G E B . . z
G E B . . z . z
G E B . . z . z . z
1
1 1
1 2
2 2
1 2 3
3 3
0 9 0 6
0 9 0 93 1 02
0 9 0 93 0 951 1 314
Así, como la predicción está dada por ( ) ( ) ( )j jy t j G u t yt j F t 1∣ , se
tiene que:
( ) . . ( ) ( . . ) ( )
( ) . . . ( ) ( . . ) ( )
( ( . .) ( ) ( .. ) .. ) ( )
y t z u t z y t
y t z z
t
t
t u t
u t z y t
y t z z yz z t
1 1
1 2 1
1 2 3 1
1 0 9 0 6 1 7 0 7
2 0 9 0 93 1 02 1 2 19
2 2 533
1 19
3 0 9 1 5330 93 0 951 1 314
∣
∣
∣
Además, en forma vectorial, la predicción está dada por:
51
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
( ) . ( )
( ) . . ( )
( ) . . . ( )
ˆ
. ( ) . ( ) . ( )
. ( ) . ( ) . ( )
. ( ) .
y t u t
y t u t
y t u t
uGy
y t y t u t
y
t
t y t u t
y t
t
t
1 0 9 0 0
2 0 93 0 9 0 1
3 0 951 0 93 0 9 2
1 7 0 7 1 0 6 1
2 19 1 19 1 1 02 1
2 533 1 5
∣
∣
∣
( ) . ( )y t u t
f
33 1 1 314 1
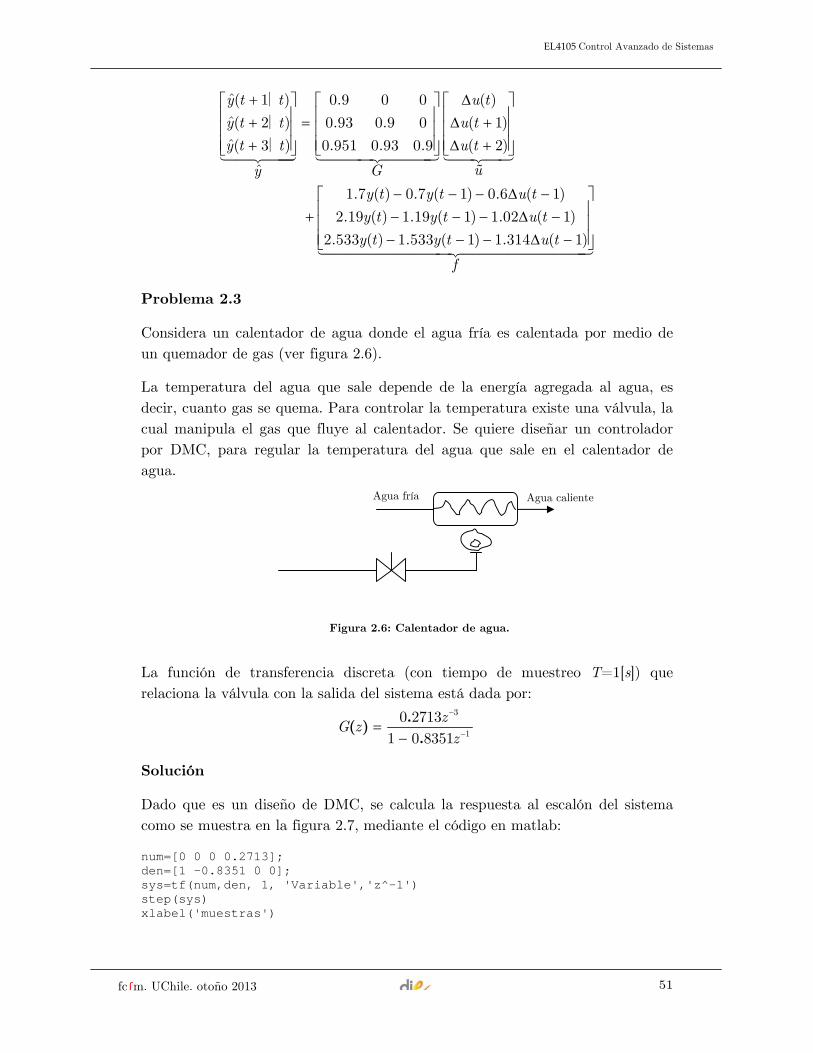
Problema 2.3
Considera un calentador de agua donde el agua fría es calentada por medio de
un quemador de gas (ver figura 2.6).
La temperatura del agua que sale depende de la energía agregada al agua, es
decir, cuanto gas se quema. Para controlar la temperatura existe una válvula, la
cual manipula el gas que fluye al calentador. Se quiere diseñar un controlador
por DMC, para regular la temperatura del agua que sale en el calentador de
agua.
La función de transferencia discreta (con tiempo de muestreo T=1[s]) que
relaciona la válvula con la salida del sistema está dada por:
3
1
0 2713
1 0 8351
zG z
z
.
( ).
Solución
Dado que es un diseño de DMC, se calcula la respuesta al escalón del sistema
como se muestra en la figura 2.7, mediante el código en matlab:
num=[0 0 0 0.2713]; den=[1 -0.8351 0 0]; sys=tf(num,den, 1, 'Variable','z^-1') step(sys) xlabel('muestras')
Figura 2.6: Calentador de agua.
Agua fría Agua caliente

52
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Figura 2.7: Respuesta al escalón del sistema.
Es fácil ver en la figura 2.7, que la salida del sistema se estabiliza después de los
30 periodos, así que el modelo de la respuesta al escalón está dado por:
30
1
i
i
y t g u t i
( ) ( )
Los coeficientes ig se muestran a continuación:
1g : 0 2g : 0 3g : 0.271 4g : 0.498
5g : 0.687 6g : 0.84
7g : 0.977 8g : 1.087 9g : 1.179 10g : 1.256 11g : 1.32 12g : 1.74
13g : 1.42 14g : 1.45615g : 1.487 16g : 1.513 17g : 1.535 18g : 1.553
19g : 1.565 20g : 1.581 21g : 1.59 22g : 1.6 23g : 1.608 24g : 1.614
25g : 1.619 26g : 1.623 27g : 1.627 28g : 1.63 29g : 1.633 30g : 1.635
Cabe notar que los coeficientes son obtenidos de la respuesta grafica del sistema.
Otra forma de obtener los coeficientes es mediante los coeficientes de la función
de transferencia dada por la expresión: 1
1 0
00j j
ii
ii
j i j ka gg g b k
, ,
Donde los coeficientes ,ii
a b son los coeficientes del denominador y numerador
respectivamente (comenzando en 0i ).
En este ejemplo los primeros dos coeficientes de la respuesta al escalón son cero,
eso se debe a que el sistema tiene dos periodos de muestreo que corresponden al
retardo del sistema.
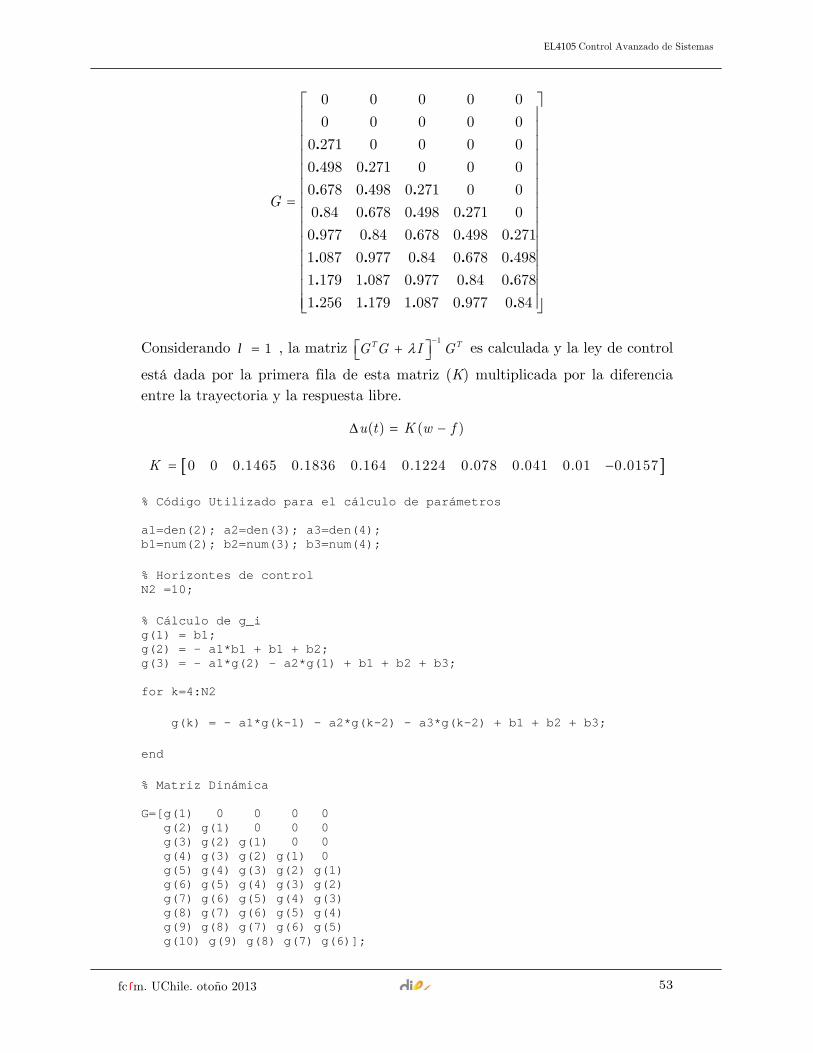
Considerando un horizonte de predicción de 10 y un horizonte de control de 5,
la matriz dinámica viene dada por:
5 10 15 20 25 30 35 40 45 50
0
0.5
1
1.5
Muestras
53
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
0 0 0 0 0
0 0 0 0 0
0 271 0 0 0 0
0 498 0 271 0 0 0
0 678 0 498 0 271 0 0
0 84 0 678 0 498 0 271 0
0 977 0 84 0 678 0 498 0 271
1 087 0 977 0 84 0 678 0 498
1 179 1 087 0 977 0 84 0 678
1 256 1 179 1 087 0 977 0 84
G
.
. .
. . .
. . . .
. . . . .
. . . . .
. . . . .
. . . . .
Considerando 1l , la matriz
1T TG G I G
es calculada y la ley de control
está dada por la primera fila de esta matriz (K) multiplicada por la diferencia
entre la trayectoria y la respuesta libre.
( ) ( )u t K w f
0 0 0 1465 0 1836 0 164 0 1224 0 078 0 041 0 01 0 0157. . . . . . . .K
% Código Utilizado para el cálculo de parámetros a1=den(2); a2=den(3); a3=den(4); b1=num(2); b2=num(3); b3=num(4); % Horizontes de control N2 =10; % Cálculo de g_i g(1) = b1; g(2) = - a1*b1 + b1 + b2; g(3) = - a1*g(2) - a2*g(1) + b1 + b2 + b3; for k=4:N2 g(k) = - a1*g(k-1) - a2*g(k-2) - a3*g(k-2) + b1 + b2 + b3; end % Matriz Dinámica G=[g(1) 0 0 0 0 g(2) g(1) 0 0 0 g(3) g(2) g(1) 0 0 g(4) g(3) g(2) g(1) 0 g(5) g(4) g(3) g(2) g(1) g(6) g(5) g(4) g(3) g(2) g(7) g(6) g(5) g(4) g(3) g(8) g(7) g(6) g(5) g(4) g(9) g(8) g(7) g(6) g(5) g(10) g(9) g(8) g(7) g(6)];

54
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Problema 2.3
Considere un proceso descrito por:
( ) ( ) ( ) ( )y t ay t bu t e t 1 1
Con ( )e t ruido blanco de varianza unitaria.
a) Encontrar el controlador de varianza mínima con control de energía.
b) Resolver el problema de a) considerando que la variable manipulada esta
en un rango entre 0 y 1 y el límite máximo de la variable controlada es 2
(suponer 0, ,a b y referencia positiva).
c) Resolver el problema dado por:
( ) , ,
ˆ( ( ) )
..
( )
.
)
,
j
J y t j r u t j
u t i i
0
1
2 21
0 1 1 1
min 1
s.a. 0 1
Solución
a) Propuesto, el controlador viene dado por 2
b a y t ru t
b
* ( ( ) )( )
b) Se debe resolver el problema dado por:
ˆ( ( ) ) ( )
( ) ( ) ( )
(
)
(
)
J y t r u t
y t ay t bu t
u t
y t
2 2
min 1
s.a. 1
0 1
2
Aplicando las condiciones de KKT, dado que J es convexa, se tiene que el
problema queda dado por:
( ( ) ( ) ) ( )
( )
( )
(
)
J ay t bu t r u t
u t
u t
y t
2 2min
s.a. 0
1 0
2 0
Resolviendo para u , la función a considerar:
2 2
1 2 31 2ay t bu t t u t ur u t y t ( ) (( ( ) ( ) ( )) ( ( ) ) ( ( ) ))
Resolviendo el Lagrangeano y aplicando las condiciones de complementariedad y
no negatividad:

55
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
1
3 3
1
2 2
2
1
2 2
0
1 0
0
02 0
0
ay t bu t r bu t
u t
u t
y t
u t
( ( ) ( ) )( )
( ( )) ,
( ( ) ) ,
( ( ) ) ,
( )
Si 1 2 3
0 , se tiene que el control no está limitado por
restricciones, por lo cual esta solución no tiene sentido analizarla.
Si 1 2 3
0 0 , se tiene que 0u t ( ) y 1u t ( ) , contradicción;
análogo al caso 1 2 3
0
Si 1 2 3
0 0 , se tiene que el controlador 1u t ( ) e 2y t ( ) , por
lo tanto se tiene que:
1 2
2 2
2
2
2 2 0
2 2 2 0
2 2 2 0
2
0
2
ay t bu t r b
a b r b
a b r b
ab
u t
b
a b b
b
b
r
r
( ( ) ( )
(
))
) ,
(
(
)
Lo anterior es equivalente
2
21
( )
( )
u t
b a r
b
Por lo tanto cumple con la restricción, posible solución del problema y el
controlador viene dado por 1u t *( ) .
Si 2 1 3
0 0 , se tiene que el controlador 0u t ( ) e 2y t ( ) ,
por lo tanto se tiene que:
1 2
1 1
1
2 2 0
2 2 0
2
0
0
2 2 0
2
ay t bu t r b
a r b
t
a r
a r
u
( ( ) ( ) )
( ) ,
)
( )
( )
(
Resolviendo la primera ecuación,
2 2
20
b a y t r b a ru t
b b
* ( ( ) ) ( )( )

56
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Por lo tanto el optimo viene dado por 0u t *( ) (ya que 0b , )
Analizar los demás casos y comprobar que el mínimo de la función objetivo
viene dado para 0u t *( ) e 2*( )y t .
c) Las variables de optimización vienen dadas por
1 1 10u t j jy t j ( ) ,ˆ ) ...,( ,
Aplicando el método de programación cuadrática:
min
s.a.
T T TJ x Hx p x f f
Ax b
Donde
1
10
9
y t
y tx
u t
u t
( )
( )
( )
( )
,
1
1H
,
2
2
0
0
r
rp
, 0
0
r
rf
Si suponemos Ax b x x x inf sup
Para calcular las predicciones, se hace mediante recursividad:
1
10 9 9
y t ay t bu t
y t ay t bu t
( ) ( ) ( )
ˆ ˆ( ) ( ) ( )
1
1
1
b
aA
a b
,
0
0
0
0
ay t
b
( )
, 0
0
x
inf,
1
1
x
sup
Los valores de x son infinitos, ya que no hay restricción sobre y.
Propuesto, resolver el problema en algún programa computacional para algún
valor de a y b.

57
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
Anexos
En esta sección se agregaran contenidos ya visto en otros ramos de control.
Linealización
Considerar el sistema no lineal representado por la ecuación:
( ) ( ( ), ( )), , nx t f x t u t x u
La linealización del sistema puede realizarse mediante una expansión en serie de
Taylor en torno a un punto de operación. Sean los puntos de operación 0 0( , )x u ,
realizando la expansión:
0 0 0 0
0 0 0
1 1
0
, ,
( ) ( ( ), ( )) ( ) ( )i ii j j j j
j jx x
n n
i
j ju u
f fx t f x t u t x x u u
x u
Para 1 2, , ...i n
Tomando
0
0
i i i
i i i
x x
u
x
u u
Entonces 0i i ix x x
Donde 0 0 0( ) ( ( ), ( ))i ix t f x t u t , entonces la ecuación puede ser escrita:
0 0 0 01 1
, ,
( ) ( ) ( )i ii j j
j jx x
n n
j ju u
f fx t x u
x u
Matricialmente
x A x B u
Con

58
EL4105 Control Avanzado de Sistemas
fc∫m, UChile, otoño 2013
1 1
2
2
1
1
1
1
n n
n
n
f f f
x x x
f
xA
f f
x x
,
1 1
2
2
1
1
1
1
n n
n
n
f f f
u u u
f
uB
f f
u u
Controlabilidad y observabilidad
Una planta es controlable si en cada instante dado, es posible controlar cada
estado de modo que un resultado deseado se puede alcanzar.
Sea un sistema lineal, con parámetros invariantes en el tiempo:
( ) ( ) ( )x t Ax t Bu t
Es completamente controlable ssi la matriz de controlabidad n nm :
1nB AB BA
Tiene rango completo (n ), donde A es n n de y B es de n m .
Una planta es observable si los estados pueden ser determinados de las
mediciones de la salida.
Sea un sistema lineal, con parámetros invariantes en el tiempo:
( ) ( ) ( )
( ) ( )
x t Ax t Bu t
y t Cx t
Es completamente observable ssi la matriz de observabilidad nr n :
1T
nC CA CA
Tiene rango completo (n ), donde A es n n de y C es de n r .