1. Análisis de Sistemas Realimentadosmaterias.fi.uba.ar/7609/material/Clase 04/04 b Analisis...
31
04 b Análisis.doc 1 1. Análisis de Sistemas Realimentados 1. ANÁLISIS DE SISTEMAS REALIMENTADOS................................................ 1 1.1. INTRODUCCIÓN .......................................................................................................... 2 1.2. ESTRUCTURAS DE REALIMENTACIÓN........................................................................ 3 1.3. ENFOQUE CLÁSICO .................................................................................................... 6 1.4. FUNCIONES DE SENSIBILIDAD NOMINALES .............................................................15 1.5. ESTABILIDAD DE LAZO CERRADO EN BASE AL POLINOMIO CARACTERÍSTICO........18 1.6. ESTABILIDAD RELATIVA: MÁRGENES DE ESTABILIDAD ..........................................20 1.6.1. Márgenes de ganancia y fase ..........................................................................21 1.6.2. Pico de sensibilidad.........................................................................................22 1.6.3. Márgenes de estabilidad y diagramas de Bode ..............................................26 1.7. 1.6. ROBUSTEZ .........................................................................................................27 1.7.1. Error de modelado ..........................................................................................27 1.7.2. Estabilidad Robusta ........................................................................................30
Transcript of 1. Análisis de Sistemas Realimentadosmaterias.fi.uba.ar/7609/material/Clase 04/04 b Analisis...

04 b Análisis.doc 1
1. Análisis de Sistemas Realimentados 1. ANÁLISIS DE SISTEMAS REALIMENTADOS................................................1
1.1. INTRODUCCIÓN..........................................................................................................2
1.2. ESTRUCTURAS DE REALIMENTACIÓN........................................................................3
1.3. ENFOQUE CLÁSICO....................................................................................................6
1.4. FUNCIONES DE SENSIBILIDAD NOMINALES.............................................................15
1.5. ESTABILIDAD DE LAZO CERRADO EN BASE AL POLINOMIO CARACTERÍSTICO........18
1.6. ESTABILIDAD RELATIVA: MÁRGENES DE ESTABILIDAD..........................................20
1.6.1. Márgenes de ganancia y fase..........................................................................21
1.6.2. Pico de sensibilidad.........................................................................................22
1.6.3. Márgenes de estabilidad y diagramas de Bode..............................................26
1.7. 1.6. ROBUSTEZ.........................................................................................................27
1.7.1. Error de modelado ..........................................................................................27
1.7.2. Estabilidad Robusta ........................................................................................30

04 b Análisis.doc 2
1.1. Introducción Dado un controlador y una planta conectados en realimentación, vamos a plan-
tear y contestar las siguientes preguntas: ¿Es el lazo cerrado estable? ¿Cuáles son las sensibilidades a distintas perturbaciones? ¿Cuál es el impacto de errores de modelado? ¿Es capaz de seguir referencias? Visión Clásica: respuesta a un cambio en la referencia o márgenes de fase y
ganancia Visión Moderna: La Banda de los Seis (según Astrom)

04 b Análisis.doc 3
1.2. Estructuras de Realimentación Realimentación: reduce el efecto de perturbaciones disminuye la sensibilidad a errores de modelado estabiliza sistemas inestable pero... puede inestabilizar un sistema estable oscilaciones en una respuesta previamente suave generar alta sensibilidad a ruido de medición. Sistema SISO de un grado de libertad transferencia modificable: controlador ( )K s . planta nominal ( )0G s .

04 b Análisis.doc 4
donde ( )R s : Referencia ( )iD s , ( )oD s y ( )mD s : Perturbaciones
0x : Estado inicial de la planta ( )Y s : Salida ( )U s : Control
( )K s : Controlador ( )0G s : Modelo nominal de la planta
( )( )
( )
P sK sL s
= , ( )( )
( )
00
0
B sG s
A s= [1.1]

04 b Análisis.doc 5
Señales de interés (ignorando el estado inicial)
( )( )
( ) ( )( ) ( ) ( ) ( )[ ]0
01 m iK sU s R s D s G s D s
G s K s= − −
+ [1.2]
( )( ) ( )
( ) ( ) ( ) ( )( ) ( ) ( ) ( )[ ]0 0 00
11 m iY s G s K s R s D s D s G s D s
G s K s= − + +
+ [1.3]

04 b Análisis.doc 6
1.3. Enfoque Clásico Se basa en el análisis de algunas relaciones No es completo Es importante por ser tradicional

04 b Análisis.doc 7
- Respuesta al escalón - sobrepico - tiempo de establecimiento, de crecimiento, retardo

04 b Análisis.doc 8
- Respuesta a una rampa - ideal para describir seguimiento de señales lentas - importante para control de movimientos

04 b Análisis.doc 9
- Respuesta a una carga Se puede medir - máximo error - tiempo en que se produce el máximo error - tiempo de reestablecimiento - integral del error o del valor absoluto del error

04 b Análisis.doc 10
- Respuesta en Frecuencia - ancho de banda - pico de resonancia

04 b Análisis.doc 11
- Diagrama de Nyquist Se grafica polarmente ( ) ( )0G s K s

04 b Análisis.doc 12
- Diagrama de Bode

04 b Análisis.doc 13
- Ubicación de Polos y Ceros

04 b Análisis.doc 14
- Sistema de Segundo Orden
( )2
2 22n
n n
G ss s
ωξω ω
=+ +

04 b Análisis.doc 15
1.4. Funciones de Sensibilidad Nominales Función de sensibilidad
( )( ) ( )
( ) ( )
( ) ( ) ( ) ( )
00
0 0 0
11
A s L sS s
G s K s A s L s B s P s= =
+ + [1.4]
Función de sensibilidad complementaria
( )( ) ( )
( ) ( )
( ) ( )
( ) ( ) ( ) ( )
0 00
0 0 01G s K s B s P s
T sG s K s A s L s B s P s
= =+ +
[1.5]
Función de sensibilidad a perturbación de entrada
( )( )
( ) ( )
( ) ( )
( ) ( ) ( ) ( )
0 00
0 0 01iG s B s L s
S sG s K s A s L s B s P s
= =+ +
[1.6]
Función de sensibilidad de control
( )( )
( ) ( )
( ) ( )
( ) ( ) ( ) ( )
00
0 0 01uA s P sK sS s
G s K s A s L s B s P s= =
+ + [1.7]
04 b Análisis.doc 16
Las funciones de sensibilidad están relacionadas algebraicamente: ( ) ( )0 0 1S s T s+ = [1.8]
( ) ( ) ( )( )
( )
00 0 0i
T sS s S s G sK s
= = [1.9]
( ) ( ) ( )( )
( )
00 0
0u
T sS s S s K sG s
= = [1.10]

04 b Análisis.doc 17
Con las funciones de sensibilidad y bajo condiciones iniciales nulas, se pueden construir la forma compacta
( )
( )
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
( ) ( )
( )
( )
( )
( )
0 0 0
0
0 0
1
1i
m
R sG s K s G s G s K sY s D sK s G s K s K s K s
G s K sU s D s
D s
− − − − = +
[1.11]
( )
( )
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( )
( )
( )
( )
0 0 0 0
0 0 0 0 0
i i
u u u
m
R s
Y s T s S s S s T s D s
U s S s T s S s S s D s
D s
− = − − −
[1.12]

04 b Análisis.doc 18
1.5. Estabilidad de lazo cerrado en base al Polinomio Característico El Lazo nominal es el resultante de conectar un controlador al modelo nominal
de la planta. Estabilidad interna: El lazo nominal es internamente estable si las ocho funcio-
nes transferencia en [1.11] son estables. Todas las señales en el lazo acotadas para cada conjunto de entradas ( )r t ,
( )id t , ( )od t y ( )md t acotadas.
Teorema. [Estabilidad interna nominal] Dado el lazo cerrado de la Figura 1 con el controlador y modelo definidos por [1.1]. Entonces el lazo cerrado es internamen-te estable si y sólo si todas las raíces de la ecuación característica a lazo cerrado
( ) ( ) ( ) ( )0 0 0A s L s B s P s+ = [1.13]
tienen parte real negativa. La estabilidad interna implica más que la estabilidad de la referencia a la salida. No debe haber cancelaciones de polos inestables entre planta y controlador. La ecuación característica [1.13] es de la forma ( ) 0p s = , donde ( )p s es el
polinomio característico del lazo cerrado.

04 b Análisis.doc 19
Ejemplo 1.1. Sistema de Segundo Orden
( )
( )( )03
4 2G s
s s=
+ − +, ( )
2sK ss
− += [1.14]
puede verse que la función de sensibilidad complementaria nominal
( )0 234 3
T ss s
=+ +
[1.15]
es estable. Sin embargo, la sensibilidad a perturbación de entrada nominal
( )
( )( )0 23
2 4 3isS s
s s s=
− + + + [1.16]
es inestable. Por el Teorema de estabilidad interna nominal, el lazo cerrado no es interna-
mente estable, ya que ( ) ( ) ( ) ( ) ( )( )20 0 2 4 3A s L s B s P s s s s+ = − + + + .

04 b Análisis.doc 20
1.6. Estabilidad relativa: Márgenes de estabilidad A menudo se necesita obtener alguna medida cuantitativa de cuan lejos de ser
inestable está un lazo nominal. El punto crítico de estabilidad es cuando
( ) ( )01 0G s K s+ = [1.17]
o ( ) ( )0 1 0G s K s j= − + [1.18]
Se puede medir la distancia de la respuesta en frecuencia nominal al punto de estabilidad crítica 1 0j− + .

04 b Análisis.doc 21
1.6.1. Márgenes de ganancia y fase En un diagrama polar (Nyquist), el sistema es inestable si encierra al 1 0j− + .
Definimos margen de ganancia gM y margen de fase fM
( )1020 loggM a= −
fM φ=
El margen de ganancia marca la ganancia adicional que llevaría el lazo cerra-
do a la condición de estabilidad crítica. El margen de fase cuantifica el retardo de fase puro que debería agregarse pa-
ra alcanzar la misma condición de estabilidad crítica.

04 b Análisis.doc 22
1.6.2. Pico de sensibilidad Indicador alternativo de estabilidad relativa es el pico de la función de sensibili-
dad. Recordar que
( ) ( ) ( )10 01 G j K j S jω ω ω−+ = [1.19]
El radio η del círculo tangente al gráfico de ( ) ( )0G j K jω ω es la recíproca del pico de la sensibilidad nominal. Cuanto mayor sea este pico, más cerca de la ines-tabilidad estará el lazo.
04 b Análisis.doc 23
El pico de sensibilidad es un indicador de estabilidad relativa más confiable que los márgenes de fase y ganancia: un sistema puede tener buenos márgenes de fase y ganancia y aún estar cerca de ser inestable.
Por otro lado, un bajo valor del pico de sensibilidad garantiza márgenes de ga-nancia y fase mínimos.

04 b Análisis.doc 24
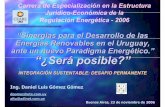
g=tf(10,poly([-1 -1 -1])); m=1/(1+g); bode(m,g)
Frequency (rad/sec)
Pha
se (d
eg);
Mag
nitu
de (d
B)
Bode Diagrams
-150
-100
-50
0
50From: U(1)
10-1 100 101 102-400
-300
-200
-100
0
100
200
300
400
To: Y
(1)
G
1/(1+GK)
1/(1+GK)
G

04 b Análisis.doc 25
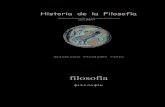
g=tf(10,poly([-1 -1 -1])); m=1/(1+g); nyquist(m,g)
Real Axis
Imag
inar
y A
xis
Nyquist Diagrams
-8 -6 -4 -2 0 2 4 6 8 10-10
-8
-6
-4
-2
0
2
4
6
8
10From: U(1)
To: Y
(1)
1/(1+GK)
GK
04 b Análisis.doc 26
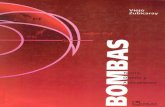
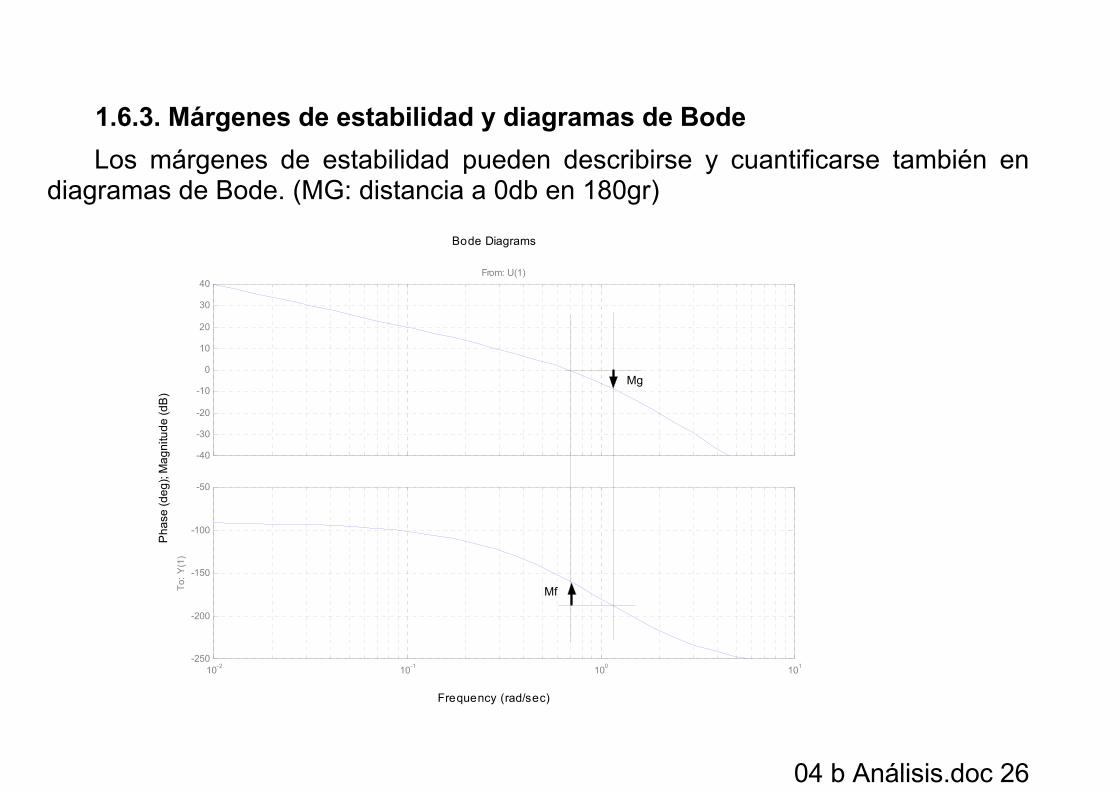
1.6.3. Márgenes de estabilidad y diagramas de Bode Los márgenes de estabilidad pueden describirse y cuantificarse también en
diagramas de Bode. (MG: distancia a 0db en 180gr)
Frequency (rad/sec)
Pha
se (d
eg);
Mag
nitu
de (d
B)
Bode Diagrams
-40
-30
-20
-10
0
10
20
30
40From: U(1)
10-2 10-1 100 101-250
-200
-150
-100
-50
To: Y
(1)
Mf
Mg

04 b Análisis.doc 27
1.7. 1.6. Robustez
Analiza el efecto de variaciones de la planta respecto a su valor nominal. Se utilizan las funciones de sensibilidad nominal.
1.7.1. Error de modelado La función de transferencia real se puede expresar como ( ) ( ) ( )( )0 1G s G s G s∆= + [1.20]
donde ( )G s∆ es el modelo de error multiplicativo (MEM)
( )( )
( )01G sG s
G s∆ = − [1.21]
este error es desconocido pero generalmente acotable ( ) ( )G jω ε ω∆ < [1.22]

04 b Análisis.doc 28
Ahora las funciones de sensibilidad serán
( )( ) ( )
( ) ( )
( ) ( ) ( ) ( )
11
A s L sS sG s K s A s L s B s P s
= =+ +
[1.23]
( )( ) ( )
( ) ( )
( ) ( )
( ) ( ) ( ) ( )1G s K s B s P sT s
G s K s A s L s B s P s= =
+ + [1.24]
( )( )
( ) ( )
( ) ( )
( ) ( ) ( ) ( )1iG s B s L sS s
G s K s A s L s B s P s= =
+ + [1.25]
( )( )
( ) ( )
( ) ( )
( ) ( ) ( ) ( )1uK s A s P sS s
G s K s A s L s B s P s= =
+ + [1.26]
Se define
( )( )
( )01G sG s
G s∆ = − [1.27]
( )( ) ( )0
11
S sT s G s∆
∆=
+ [1.28]

04 b Análisis.doc 29
quedando ( ) ( ) ( )
0S s S s S s∆= [1.29]
( ) ( ) ( )( ) ( )0 1T s T s G s S s∆ ∆= + [1.30]
( ) ( ) ( )( ) ( )0 1i iS s S s G s S s∆ ∆= + [1.31]
( ) ( ) ( )0u uS s S s S s∆= [1.32]

04 b Análisis.doc 30
1.7.2. Estabilidad Robusta Se dice que un sistema es robustamente estable si es internamente estable
con la planta real. Teorema. [Estabilidad robusta] Sea una planta con modelo nominal ( )0G s y
transferencia real ( )G s ; sea ( )K s un controlador que estabiliza internamente la planta nominal y si ( ) ( )G s K s y ( ) ( )0G s K s tienen el mismo número de polos in-estables.
Entonces, el controlador ( )K s logra la estabilidad del lazo real si se cumple: ( ) ( )0 1T j G jω ω∆ < [1.33]
o
( ) ( ) ( ) ( ) ( )0 01G j K j G j G j K jω ω ω ω ω∆ < + [1.34]
La estabilidad es robusta frente a un dado error ( )G jω∆ si el punto de estabili-dad crítica 1 0j− + se encuentra fuera del disco de centro en ( ) ( )0G j K jω ω y ra-dio ( ) ( ) ( )0G j K j G jω ω ω ω∆ ∀ .

04 b Análisis.doc 31
Vemos que un pico elevado de sensibilidad hace pequeño ( ) ( )01 G j K jω ω+ en [1.34], disminuyendo la tolerancia a error de modelado MEM para preservar es-tabilidad robusta.