






Idiomas
Páginas
Jurídico


1
Transformada Z
Temas a tratar
• Definición.
• Relación entre TL y TZ.
• Relación entre TF y TZ.
• Mapeos s-z.
• Representación de sistemas de tiempo discreto.
• Función de transferencia en z.
• Respuesta en frecuencia de sistemas de tiempo discreto.
Objetivos
• Utilizar la transformada Z como herramienta para obtener la función de transferencia de un sistema de tiempo discreto.
• Obtener la respuesta en frecuencia de sistemas de tiempo discreto.
• Analizar las limitaciones de las transformaciones conformes utilizadas.
Papel de la TZ
• La Transformada Z juega un papel muy importante en la representación y el análisis de sistemas de tiempo discreto y coeficientes constantes (LTI).
Notas históricas
• 1744: la idea básica de la TZ era ya conocida por Laplace.
• 1947: es re-introducida por W. Hurewicz para resolver ecuaciones en diferencias lineales con coeficientes constantes.
• 1952: Ragazzini y Zadeh, de la Universidad de Columbia, la bautizan con su denominación actual.
HurewicZ
• Función de transferencia.
• Respuesta en frecuencia.
• Análisis de estabilidad.
x
x Re
Plano S
Im
Repaso conceptos generales Transformada de Laplace
2
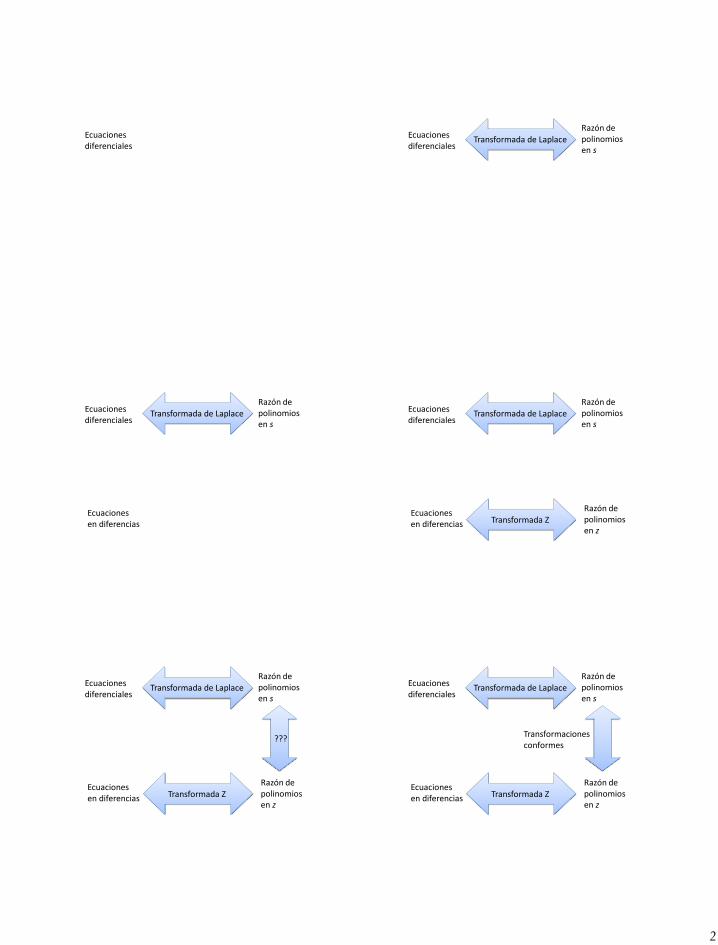
Ecuaciones diferenciales
Ecuaciones diferenciales
Razón de polinomios en s
Transformada de Laplace
Ecuaciones diferenciales
Razón de polinomios en s
Ecuaciones en diferencias
Transformada de Laplace Ecuaciones diferenciales
Razón de polinomios en s
Ecuaciones en diferencias
Razón de polinomios en z
Transformada de Laplace
Transformada Z
Ecuaciones diferenciales
Razón de polinomios en s
Ecuaciones en diferencias
Razón de polinomios en z
Transformada de Laplace
Transformada Z
???
Ecuaciones diferenciales
Razón de polinomios en s
Ecuaciones en diferencias
Razón de polinomios en z
Transformada de Laplace
Transformada Z
Transformaciones conformes

3
La transformada Z nos permite
• Trabajar las ecuaciones en diferencias como ecuaciones algebraicas.
• Representar las funciones de transferencia de sistemas discretos como diagramas de polos y ceros en el plano z.
• Transformar secuencias, representen o no respuestas impulsivas de sistemas.
Definición
• La TZ de una secuencia x[n] se define como:
donde z ϵ C
( ) [ ] n
n
X z x n z
Notación
( ) [ ]X z Z x n
Ejemplo 1: Secuencia general
n
1 1 2 3 4( ) 1.5 1 2 2 2 1.5X z z z z z z
0
x[n]
1
2 2 2
1.5 1.5
[ ] [ 0 1.5 1 2 2 2 1.5 0 ]x n
Ejemplo 2: secuencia causal
• Dado:
• Su transformada Z será:
[ ] [1 2 3 0 4 1]x n
1 2 4 5( ) 1 2 3 4 1X z z z z z
¿Y si no partimos de la definición? Otro Enfoque
(más intuitivo)

4
TF TL
TDF
Relación con otras transformadas...
TF TL
Relación con otras transformadas...
TF TL
TDF
Relación con otras transformadas...
TF TL
TDF TZ
Relación con otras transformadas...
Otro enfoque...
• Un muestreador es un dispositivo esencial en sistemas discretos. Consta de un interruptor que se cierra a intervalos generalmente regulares "leyendo“ la entrada en determinados instantes t = nT
x(t) x(nT)
Muestreador
Otro enfoque...
• Si se toma la salida del muestreador como un tren de impulsos ponderados entonces podemos escribir:
*( ) ( ) ( ) con ( ) ( )T T
n
x t t x t t t nT

5
Otro enfoque...
• Se puede considerar al muestreador como un modulador del tren de impulsos unitarios mediante la entrada x(t):
*( ) ( ) ( ) ( ) ( )n n
x t x t t nT x nT t nT
Otro enfoque...
• Tomando la transformada de Laplace de la ecuación del muestreador:
* *( ) L{ ( )} ( ) nTs
n
X s x t x nT e
Otro enfoque...
• Tomando la transformada de Laplace de la ecuación del muestreador:
•
*( ) { ( )} ( ) n
n
X z Z x t x nT z
* *( ) L{ ( )} ( ) nTs
n
X s x t x nT e
Y definiendo e-sT = z-1 (Retardo en el dominio temporal)
Otro enfoque...
*( ) { ( )} [ ] n
n
X z Z x t x n z
Relación entre TZ y TL...
• La TZ, X(z), de una secuencia x(nT) no es otra cosa que la TL de la señal muestreada x*(t) con esT sustituida por la variable z.
• Esto define un mapeo entre el plano S y el plano Z denominado mapeo ideal:
s = ln(z/T)
Plano S Plano Z
Im(s) Im(z)
Re(s) Re(z)
1
Relación entre TZ y TL...
z = esT
fm /2
fm =1/T

6
Relación con la TF...
• La TZ de x[n] es función de z compleja:
( ) { [ ]} [ ] n
n
X z Z x n x n z
z e j f 2
Relación con la TF...
• La TZ de x[n] es función de z compleja:
2 2( ) [ ]n
j f j f
n
X e x n e
( ) { [ ]} [ ] n
n
X z Z x n x n z
Relación con la TF...
• En forma equivalente.
2
2
( )
[ ]
j f
n j fn
n
X e
x n e
Relación con la TF...
• En forma equivalente:
[ ]. nTF x n
2 2( ) [ ]j f n j fn
n
X e x n e
Relación con la TF...
• En forma equivalente
Exponencial real
¿Qué ocurre para distintos valores de ?
[ ] nTF x n
2 2( ) [ ]j f n j fn
n
X e x n e
Relación con la TF...
• Como caso particular, cuando =1 o en forma equivalente |z|=1:
2( ) [ ]j fz eX z TF x n

7
Re
Im
Plano S
Re
Im
Plano Z
S = j z = ej
Definición Relación con la TF... Definición Relación con la TF...
Definición
Transformada de Laplace de x(t)
s = j
Transformada de Fourier de x(t)
z = esT Transformada Z de x[n]
z = ej
Transformada de Fourier de x[n]
- < <
= k2 / N, k = 0..(N-1)
TDF de x[n]
Resumen de las relaciones entre transformadas
t ≈ nT
θ ≈ k2π/N
Convergencia
• La convergencia depende de ya que puede forzar a la secuencia original a convertirse en otra que tenga TF.
• Si para x(n) no existe la TF, puede existir la TF de -n x(n) para determinados valores de y tener TZ.
• Puede decirse también que depende de los valores de z. Esto nos permite hablar de regiones de convergencia.
• Causal: plano Z excepto z = 0.
• No causal: plano Z excepto z = .
• Bilateral: plano Z excepto z = 0 y z = . Señales de duración finita
• Causal: |z| > r2.
• No causal: |z| < r1.
• Bilateral: r2 < |z| < r1.
Señales de duración infinita
Definición Región de convergencia
Transformada Z unilateral
Para secuencias causales…

8
TZ unilateral...
• Cuando la suma converge, define una función de z
• A la función X(z) así formada se la denomina Transformada Z unilateral de x[n].
0
( ) [ ] n
n
X z x n z
Sea por ejemplo, la secuencia:
x[n] = [n-2],
entonces x[2] = [0] =1, y x[n] = 0 para n ≠ 2;
luego, X(z) = z-2 y, en general:
[n – k] z-k
TZ unilateral...
Propiedades de la TZ
• Unicidad:
– Para cada secuencia x[n] corresponde una única transformada X(z).
Propiedades de la TZ
• Linealidad:
– Para una secuencias x[n] y y[n] con transformadas X(z) y Y(z), entonces a a x[n] + b y[n] le corresponde una transformada a X(z) + b Y(z) con a, b R.
Propiedades de la TZ
• Convolución:
– Si X(z), Y(z) y H(z) son las TZ de x[n], y[n] y h[n]
entonces la TZ de:
y[n] = x[n]*h[n], es Y(z) = X(z)H(z)
Teorema del Desplazamiento

9
• Dada x[n], se forma la secuencia x1[n] = x[n - 1] obtenida desplazando x[n] en una unidad
• Expresando la TZ de x1[n] en función de la TZ de x[n]:
X1(z) = x1[0] + x1[1]z-1 +...+ x1[1]z-n +...
= x[-1] + x[0]z-1 + x[1]z-2+...
= x[-1] + z-1{x[0] + x[1]z-1+...}
Teorema del desplazamiento
Es decir que:
X1(z)= x[-1] + z-1 {x[0] + x[1] z-1+...}
Teorema del desplazamiento
• Es decir que:
X(z)
• Entonces:
X1(z) = x[-1] + z-1X(z)
Teorema del desplazamiento
X1(z)= x[-1] + z-1 {x[0] + x[1] z-1+...}
Resumiendo
x[n] X(z)
x[n-1] z-1 X(z) + x[-1]
Generalizando
Siempre que x[n] sea causal
x[n] X(z)
x[n-m] z-m X(z)
Ecuaciones diferenciales
Razón de polinomios en s
Ecuaciones en diferencias
Razón de polinomios en z
Transformada de Laplace
Transformada Z
Transformaciones conformes

10
Encuentro la transferencia en Z
B2d2y(t)/dt2 + B1dy(t)/dt + B0y(t) = A0 x(t)
Aproximamos derivados con incrementos finitos:
B2 D2y[n]/T 2 + B1 Dy[n]/T + B0 y[n] = A0 x[n]
Multiplicamos ambos miembros por T 2 :
B2 D2y[n] + B1Dy[n]T + B0 y[n] T 2 = AoT 2 x[n]
Despejamos D2y[n] :
D2y[n] = -(B1/B2)Dy[n]T - (B0/B2) y[n]T 2 + (A0/B2) T 2 x[n]
Recordamos…
Dx[n] = x[n] - x[n-1]
D2x[n] = Dx[n] - Dx[n-1] = x[n] - 2x[n-1] + x[n-2]
y[n] – 2y[n - 1] - y[n-2] =
-(B1/B2) T (y[n] - y[n-1]) - (B0/B2) T 2 y[n]+ (A0/B2) T 2 x[n]
Agrupamos y nos queda la ecuación de recurrencia:
y[n] = b1 y[n-1] + b2 y[n-2] + a0 x[n]
Aplicamos el teorema del desplazamiento:
Y(z) {1- b1 z-1- b2 z
-2}= a0 X(z)
Expresamos como secuencias… Con lo que hallamos la
función de transferencia en Z
0
1 2
1 2
( )( )
( ) 1
aY zH z
X z b z b z
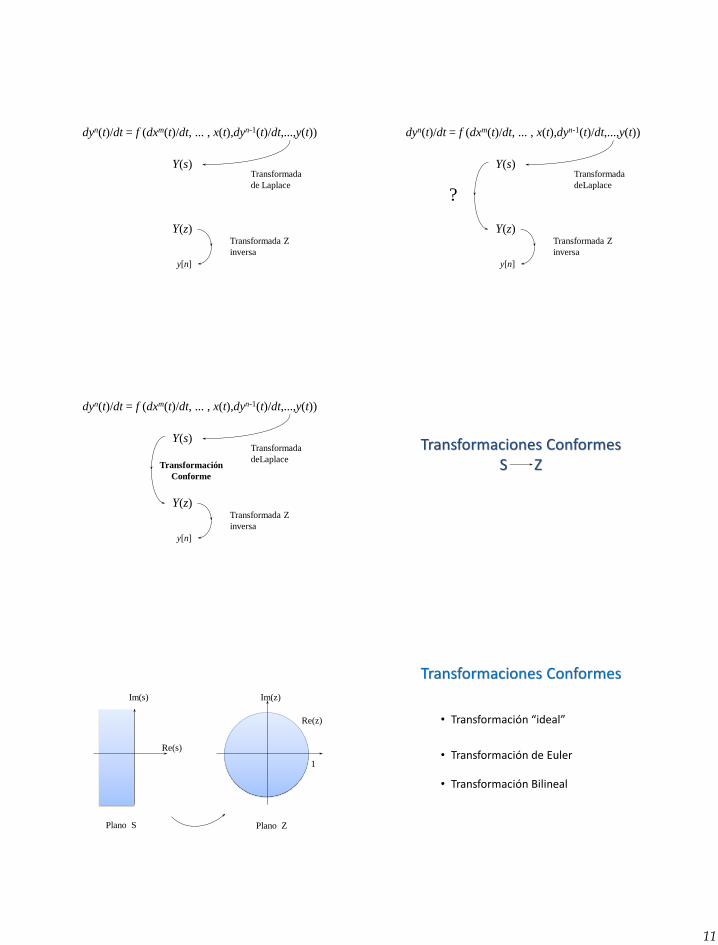
dyn(t)/dt = f (dxm(t)/dt, ... , x(t),dyn-1(t)/dt,...,y(t))
Y(s)
Y(z)
y[n]
ECUACION DIFERENCIAL
ECUACION DE RECURRENCIA
Transformada
de Laplace
dyn(t)/dt = f (dxm(t)/dt, ... , x(t),dyn-1(t)/dt,...,y(t))
Y(s)
Y(z)
y[n]
11
Transformada
de Laplace
Transformada Z
inversa
dyn(t)/dt = f (dxm(t)/dt, ... , x(t),dyn-1(t)/dt,...,y(t))
Y(s)
Y(z)
y[n]
Transformada
deLaplace
Transformada Z
inversa
?
dyn(t)/dt = f (dxm(t)/dt, ... , x(t),dyn-1(t)/dt,...,y(t))
Y(s)
Y(z)
y[n]
Transformada
deLaplace
Transformada Z
inversa
Transformación
Conforme
dyn(t)/dt = f (dxm(t)/dt, ... , x(t),dyn-1(t)/dt,...,y(t))
Y(s)
Y(z)
y[n]
Transformaciones Conformes S Z
Re(z)
Plano S Plano Z
Im(s) Im(z)
Re(s)
1
Transformaciones Conformes
• Transformación “ideal”
• Transformación de Euler
• Transformación Bilineal

12
Transformación de Euler
• La transformación de Euler aproxima la derivada de una función continua dy/dt por un cociente incremental:
dy
dt
y n y n
T
1
T: período de muestreo
De modo que:
Ldy
dtsY s
( )
Z
dy
dtZ
y n y n
T
z Y z
T
1 1 1
se transforma en:
Transformación de Euler
De lo anterior se deduce que el mapeo entre el plano S y el plano Z queda definido por:
s
z
T
1 1
Transformación de Euler
s
z
T
1 1
• Esta transformación puede ser utilizada únicamente en el mapeo de sistemas tipo pasa bajo, con frecuencias de corte bajas, ya que no cumple con todas las condiciones de mapeo.
Transformación de Euler
11 zs
T
Plano S Plano Z
Re
Im
1
Transformaciones conformes
Re
Im
Transformación de Euler
fm /2
Transformación Bilineal
sz
T z
2 1
1
1
1

13
1
1
12
1
zs
T z
Plano S
Re
Im
Re
Im
Plano Z
1
Transformaciones conformes Transformación Bilineal
∞ -500 -400 -300 -200 -100 0 100 200 300 400 500 -4
-2
0
2
4
f [Hz]
tita
[ra
d]
Transformación de Euler
-500 -400 -300 -200 -100 0 100 200 300 400 500 -3
-2
-1
0
1
2
3
f [Hz]
tita
[ra
d]
Transformación Bilineal
= T
)tan(.T 2
θ2ω
fm = 1 kHz
Transformaciones conformes Transformación Bilineal
|H(j)|
|H(ej)|
Transformaciones conformes Transformación Bilineal
Aplicación
¿Cuando usar una transformación u otra?
Consideraciones prácticas
-4 -3 -2 -1 0 1 2 3 4 0
1
2
3
4
5
6
[Hz]
Ma
gn
itu
d
Respuesta en frecuencia del sistema analógico
2
1 0,1( )
0,2 9,01
sH s
s s
Consideraciones prácticas
Aplicación
-4 -3 -2 -1 0 1 2 3 4 0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
[rad]
Magnitud
-0.25 -0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 0.2 0.25 0
0.5
1
1.5
2
2.5
3
[rad]
Magnitud
fm = 5 Hz
fm = 100 Hz
Respuesta en frecuencia del sistema discreto
(Azul: Euler, Rojo: Bilineal)
Consideraciones prácticas
Aplicación

14
fm = 100 Hz fm = 5 Hz
Euler
Bilineal
-1 -0.5 0 0.5 1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Real Part
Imagin
ary
Part
Lugar de raices: Transformacion de Euler
-1 -0.5 0 0.5 1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Real Part
Imagin
ary
Part
Lugar de raices: Transformacion Bilineal
-1 -0.5 0 0.5 1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Real Part
Imagin
ary
Part
Lugar de raices: Transformacion de Euler
-1 -0.5 0 0.5 1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Real Part
Imagin
ary
Part
Lugar de raices: Transformacion Bilineal
Consideraciones prácticas
Aplicación
Ecuaciones de Recurrencia
• Cualquier ecuación diferencial ordinaria y de coefs constantes :
An y(n)(t)+...+A1y'(t)+Ao y(t) = Bm x(m)(t) +...+ Bo x(t)
donde y(t) es la salida frente a un estímulo x(t), puede expresarse mediante una ecuación de recurrencia de la forma:
1 0
[ ] [ ] [ ]N M
i j
i j
y n a y n i b x n j
• Partiendo la función de transferencia del
sistema, esta se puede expresar en términos de la transformada Z:
0
1
( )
1
M-j
j
j
N-i
i
i
b z
H z
a z
0
1
( )( )
( )1
M-j
j
j
N-i
i
i
b zY z
H zX z
a z
1 0
( ) ( ) ( )N M
-i -j
i j
i j
Y z a Y z z b X z z
1 0
( ) ( ) ( )N M
-i -j
i j
i j
Y z a Y z z b X z z
• Si anti-transformamos la ecuación:
• Obtenemos:
1 0
( ) ( ) ( )N M
-i -j
i j
i j
Y z a Y z z b X z z
1 0
[ ] [ ] [ ]N M
i j
i j
y n a y n i b x n j

15
Solución ecuaciones de recurrencia por TZ
• Los sistemas LTI pueden representarse mediante una ecuación de recurrencia de la forma:
y[n] + b1 y[n-1] + ... + bM y[n-M] =
ao x[n] + ... + aN x[n-N]
y[n] + b1 y[n-1] + ... + bM y[n-M] =
ao x[n] + ... + aN x[n-N]
• x[n] es una secuencia de entrada conocida, y[n] la secuencia de salida a esa entrada y h[n] la secuencia de la respuesta impulsional.
x[n] y[n]
h[n]
Condiciones inciales
• Para iniciar la recurrencia se necesitan los valores iniciales de y[n] con n variando entre -1 y –m
y[-1] = y-1, y[-2] = y-2, ...
• Si se especifican las condiciones iniciales, la ecuación de recurrencia tiene solución única.
• La respuesta en estado cero es la solución y[n] de la ecuación, con condiciones iniciales nulas
y-1 = 0; y-2 = 0; ...
• La respuesta en régimen libre es la solución de la ecuación cuando x[n] = 0 (ecuación homogénea)
Condiciones inciales
Resolución de la ecuación usando TZ
1- Obtener la transformada de ambos miembros:
{y[n] +...+ bm y[n-m] } z-n = { ao x[n] + ... + am x[n-m]} z-n
Por el teorema del desplazamiento, el segundo miembro es:
(a0 +...+ am z-m) X(z)
y el primero se puede expresar en función de la
transformada Y(z) de y[n] y de las condiciones iniciales.
2-Resolver la ecuación algebraica que resulta para Y(z).
3-Determinar la transformada inversa de Y(z).
Funciones de Transferencia de Sistemas Discretos

16
Sistemas Discretos
• Sistemas Autorregresivos(AR)
• Sistemas Moving Average (MA)
• Sistemas ARMA
Sistemas AR
• Su salida en un instante depende del valor actual de la entrada y de los valores anteriores de la propia salida
0
1
0 1
( )( )
( ) ... m
m
aY zH z
X z b b z b z
Sistemas MA
• Su salida depende solamente del valor actual de la señal de entrada y sus valores anteriores.
1
0 1
( )( ) ...
( )
n
n
Y zH z a a z a z
X z
Sistemas ARMA
• Son los más generales, donde la salida depende de valores anteriores de la entrada y de la propia salida.
1
0 1
1
0 1
...( )( )
( ) ...
n
n
m
m
a a z a zY zH z
X z b b z b z
Sistemas ARMA
• Estos sistemas son causales si, siendo bm es el primer coeficiente no nulo en el denominador (b0= b1=...= bm-1=0), entonces a0= a1=...= am-1=0 en el numerador.
• De otra manera la salida dependería de los valores futuros de la entrada y de la propia salida.
Sistemas ARMA

17
Dada una X(z):
¿Cómo hallar la secuencia x[n] asociada?
El Problema de la Inversión
• Fórmula de Inversión
• Desarrollo en serie de potencias
• Uso de tablas
El Problema de la Inversión
Fórmula de Inversión
• La secuencia x[n] se obtiene resolviendo una integral de contorno por aplicación del teorema de los residuos.
• Frecuentemente esta metodología es muy compleja y por lo tanto poco utilizada.
11[ ]
2
n
c
x n X z z dzj
Desarrollo en serie e inspección
• Se desarrolla
• y se obtienen los valores de x[n] por inspección
0
1 2
( ) ( )
[0] [ ] [2 ] ...
n
n
X z x nT z
x x T z x T z
Tablas
• En este método se intenta expresar la función X(z)
como una suma:
X(z) = X1(z) + ... + Xk(z)
donde X1(z), …, Xk(z) son funciones con transformadas inversas conocidas:
x1[n], ... , xk[n]
• Si X(z) puede expresarse así, su transformada inversa x[n] será la suma:
X[n] = x1[n] + ... + xk[n]
Bibliografía recomendada
• Oppenheim, A. V. and R. W. Schafer, Discrete-Time Signal Processing, Prentice-Hall, 1989.
• Kwakernaak: Cap. 8
• Sinha: Cap. 6
Top Related