






Idiomas
Páginas
Jurídico

1
Pasos:
» Selección del tipo de controlador (P, PI, PID)» Selección de parámetros (Kc, Ti, Td) y
el tipo de actuación (directa/inversa) del controlador
Para ello es necesario:
» Conocer el comportamiento dinámico del proceso» Especificar las características de respuesta en bucle cerrado
Sintonía Empírica de Sintonía Empírica de PIDsPIDs
2
Sintonía de PIDs
Factores que condicionan la respuesta:
» Implementación del algoritmo en el regulador comercial» El modelo dinámico del proceso es aproximado» La variable de control no debe sufrir cambios bruscos» La calidad de la respuesta puede referirse a cambios en la
consigna o en la perturbación
Criterios de calidad de respuesta:
» basados en características puntuales de la respuesta» basados en toda la respuesta (desde t=0 hasta t→∞)
3
Sintonía de PIDs
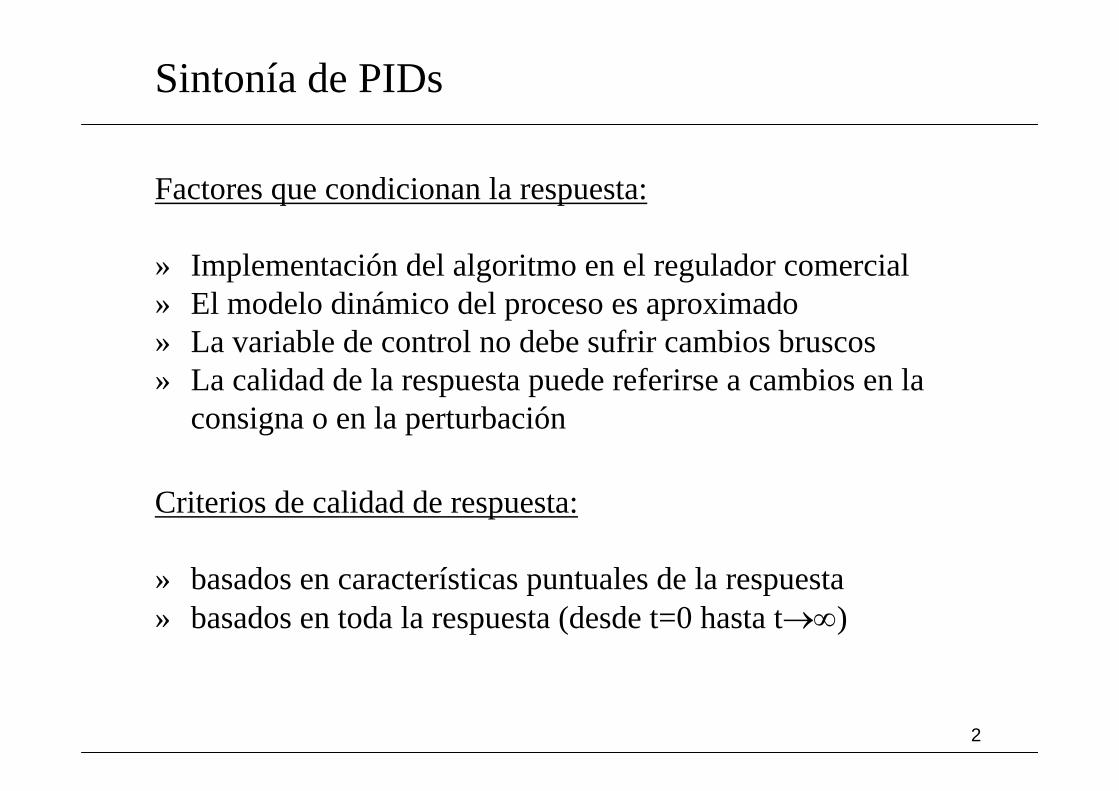
Criterios de calidad de respuesta:
» basados en características puntuales de la respuesta• Relación de amortiguamiento 1/4 (respuesta sub-amortiguada en la que el
primer pico es cuatro veces el segundo. No suele ser aceptable para cambios en la consigna)
» basados en toda la respuesta (desde t=0 hasta t→∞) (normalmente función de la integral del error). Los parámetros que se eligen son los que minimizan el criterio seleccionado:
• integral del cuadrado del error penaliza los erroresiniciales
• integral del valor absoluto del errorcaracterísticas de respuesta entre las dos
• integral del valor absoluto del error por tpenaliza los errores en el tiempo
dtteISE ∫∞
=0
2 )(
dtteIAE ∫∞
=0
)(
dttetITAE ∫∞
=0
)(
4
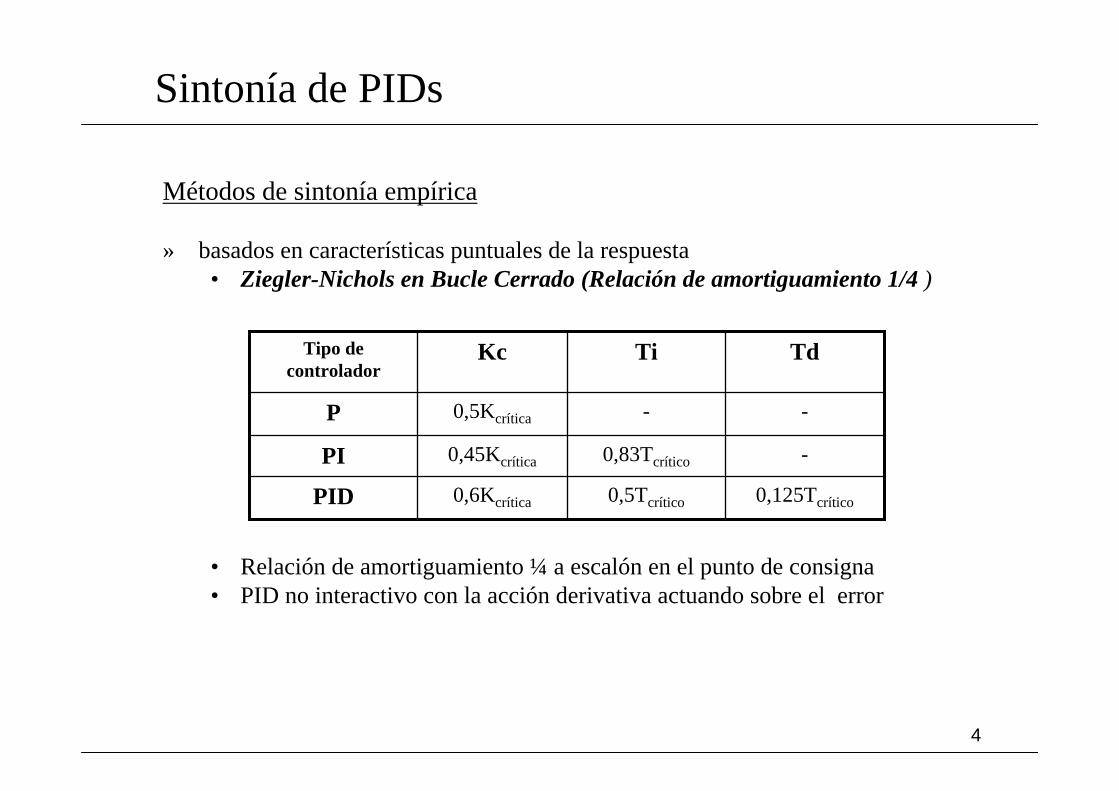
Sintonía de PIDs
Métodos de sintonía empírica
» basados en características puntuales de la respuesta• Ziegler-Nichols en Bucle Cerrado (Relación de amortiguamiento 1/4 )
• Relación de amortiguamiento ¼ a escalón en el punto de consigna• PID no interactivo con la acción derivativa actuando sobre el error
0,125Tcrítico0,5Tcrítico0,6KcríticaPID
-0,83Tcrítico0,45KcríticaPI
--0,5KcríticaP
TdTiKcTipo de controlador
5
Métodos de sintonía empírica
» basados en características puntuales de la respuesta• Ziegler-Nichols en Bucle Abierto (Relación de amortiguamiento 1/4 )
• Relación de amortiguamiento ¼ a escalón en el punto de consigna• PID no interactivo• Rango de utilización:
TsKesG
st
p
m
+=
−
1)(
11,0 <=<Tt
Y m
Sintonía de PIDs
PID
-PI
--P
TdTiKcTipo de controlador
1
m
TK t⎛ ⎞⎜ ⎟⎝ ⎠
0.9
m
TK t
⎛ ⎞⎜ ⎟⎝ ⎠
1.2
m
TK t
⎛ ⎞⎜ ⎟⎝ ⎠
3.33 mt
2 mt 3.33 mt
6
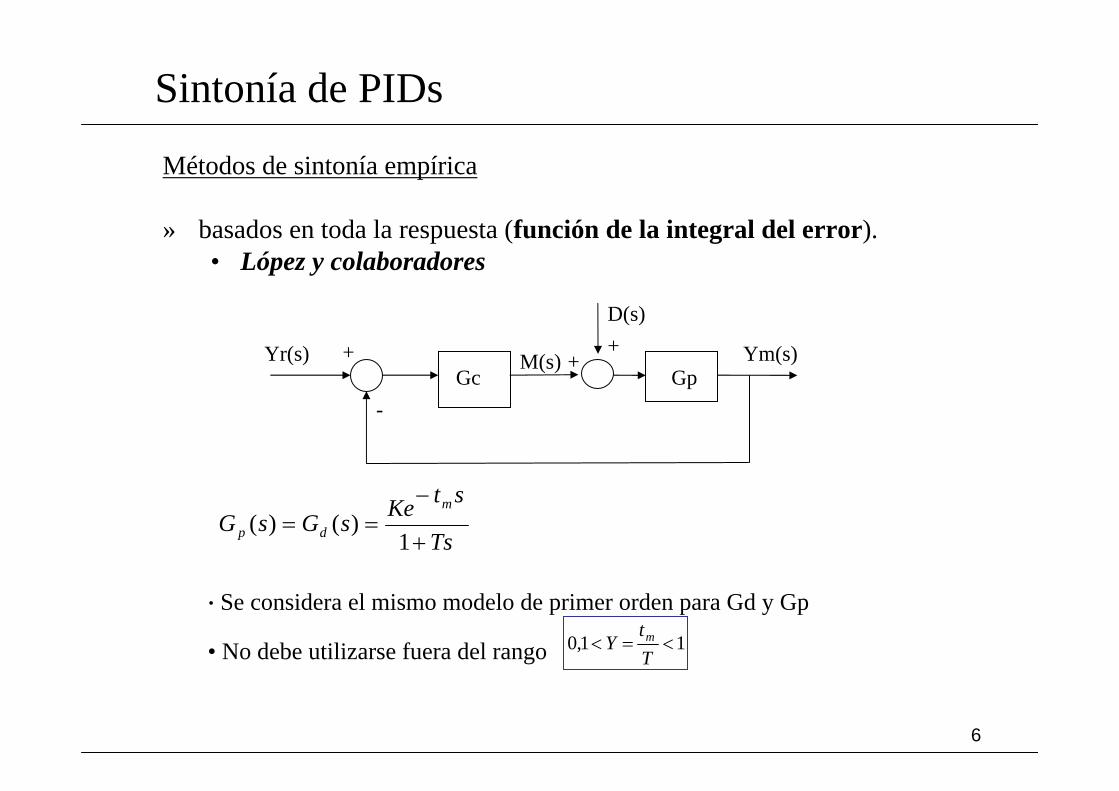
Métodos de sintonía empírica
» basados en toda la respuesta (función de la integral del error). • López y colaboradores
Ts
stKesGsGm
dp +
−==
1)()(
11,0 <=<Tt
Y m
+ ++
-
Yr(s) Ym(s)
D(s)
M(s)Gc Gp
• Se considera el mismo modelo de primer orden para Gd y Gp
• No debe utilizarse fuera del rango
Sintonía de PIDs
7
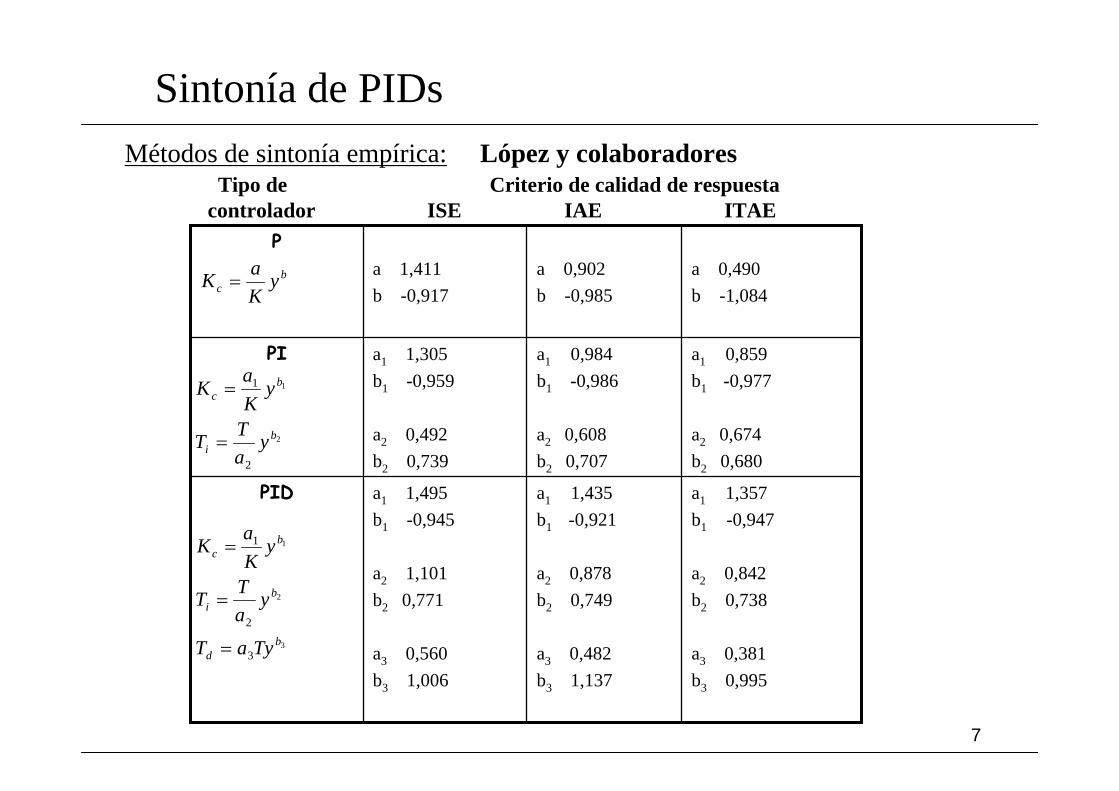
Tipo de Criterio de calidad de respuestacontrolador ISE IAE ITAE
Métodos de sintonía empírica: López y colaboradores
a1 1,357b1 -0,947
a2 0,842b2 0,738
a3 0,381b3 0,995
a1 1,435b1 -0,921
a2 0,878b2 0,749
a3 0,482b3 1,137
a1 1,495b1 -0,945
a2 1,101b2 0,771
a3 0,560b3 1,006
PID
a1 0,859b1 -0,977
a2 0,674b2 0,680
a1 0,984b1 -0,986
a2 0,608b2 0,707
a1 1,305b1 -0,959
a2 0,492b2 0,739
PI
a 0,490b -1,084
a 0,902b -0,985
a 1,411b -0,917
Pb
c yKaK =
2
1
2
1
bi
bc
yaTT
yKa
K
=
=
3
2
1
3
2
1
bd
bi
bc
TyaT
yaTT
yKa
K
=
=
=
Sintonía de PIDs
8
Métodos de sintonía empírica
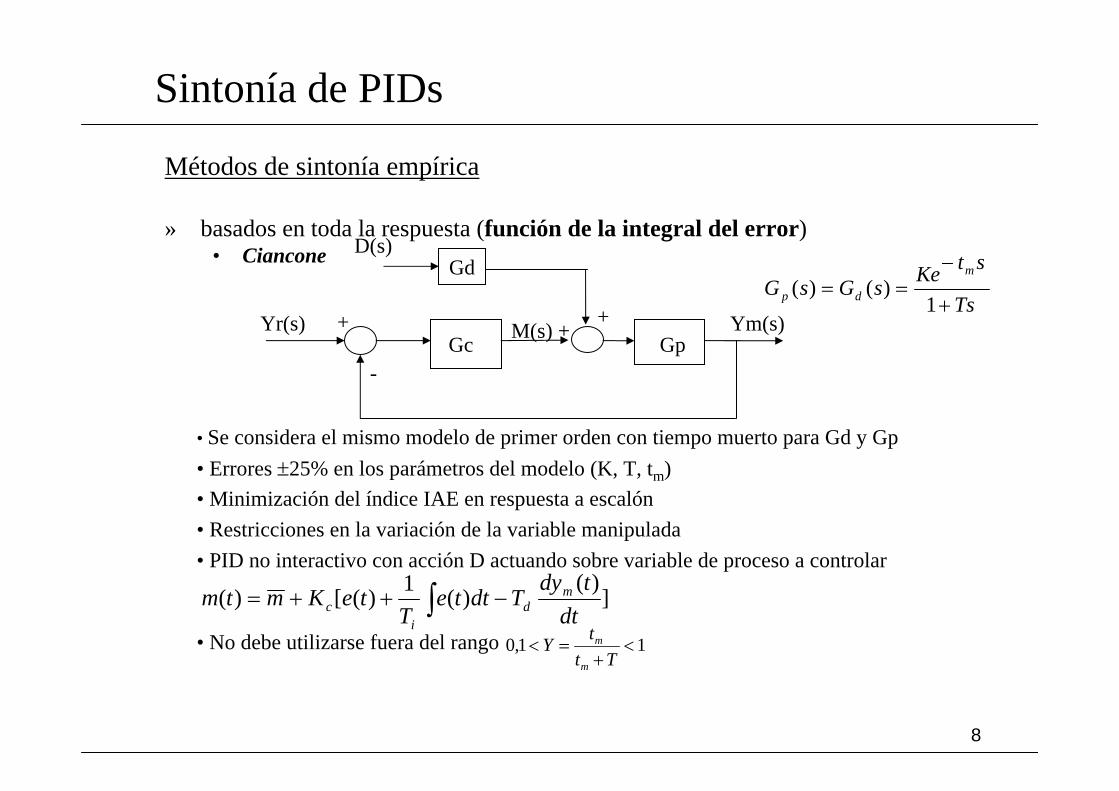
» basados en toda la respuesta (función de la integral del error) • Ciancone
Ts
stKesGsGm
dp +
−==
1)()(
+ ++
-
Yr(s) Ym(s)
D(s)
M(s)Gc Gp
Gd
• Se considera el mismo modelo de primer orden con tiempo muerto para Gd y Gp• Errores ±25% en los parámetros del modelo (K, T, tm)• Minimización del índice IAE en respuesta a escalón• Restricciones en la variación de la variable manipulada • PID no interactivo con acción D actuando sobre variable de proceso a controlar
• No debe utilizarse fuera del rango 11,0 <+
=<Tt
tYm
m
])(
)(1)([)( ∫ −++=dt
tdyTdtte
TteKmtm m
di
c
Sintonía de PIDs
9
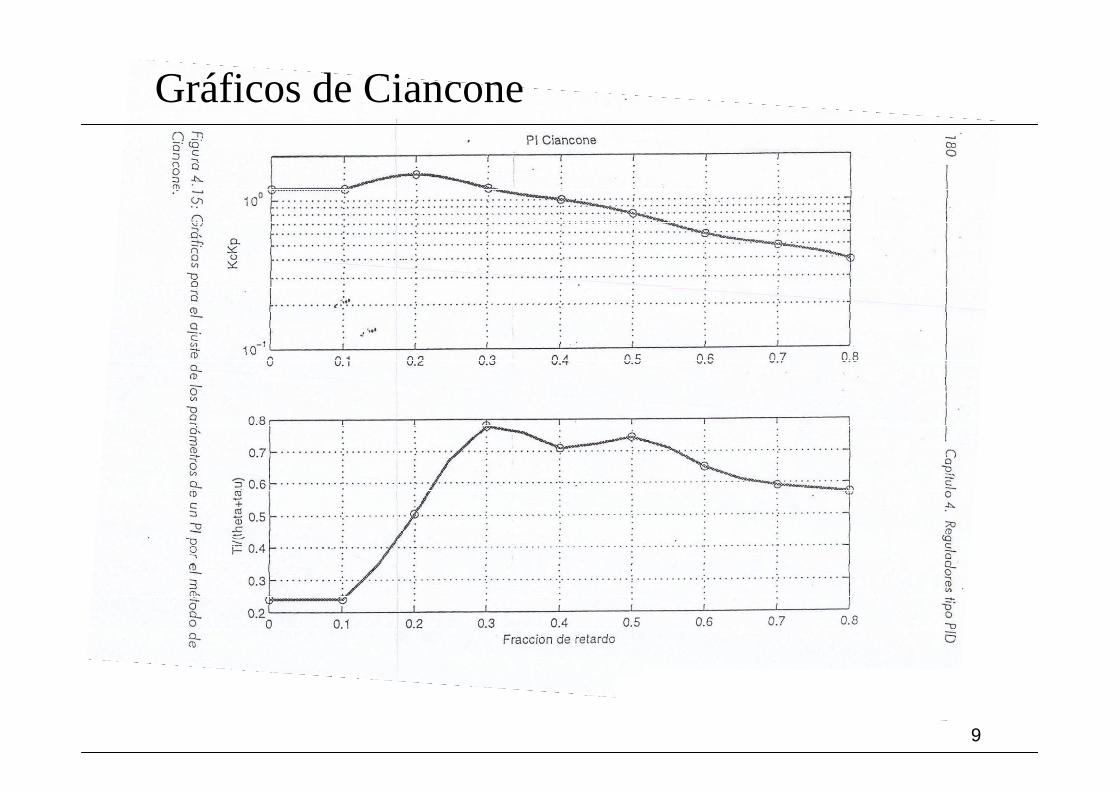
Gráficos de Ciancone

10
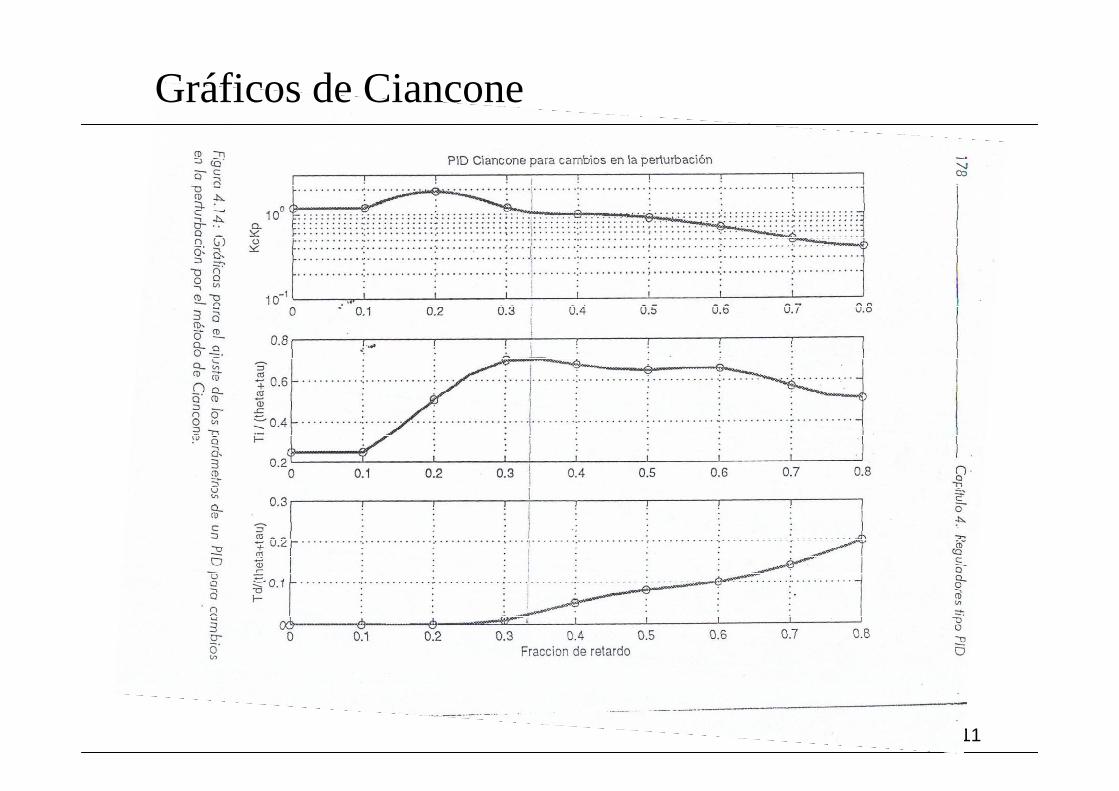
Gráficos de Ciancone
11
Gráficos de Ciancone
12
Selección de las acciones de control
• Utilizar P:» cuando sea tolerable un error en régimen permanente» el sistema sea de tipo 1 (no autorregulado)» ejemplos típicos: control de nivel en tanques de líquido, control de presión en
tanques de gas• Utilizar PI:
» error estacionario inaceptable y dinámica de proceso rápida» ejemplo típico: bucles de control de caudal (no error, dinámica rápida no se puede
utilizar D por ruidos en sensor)• Utilizar PID:
» si no hay ruido y se desea incrementar la velocidad de respuesta» si la dinámica es lenta, la acción I produce respuestas más lentas con grandes
oscilaciones. La acción D estabiliza permitiendo elevar Kc» procesos lentos con múltiples capacidades (retardos de primer orden) en serie» bucles de temperatura y presión de vapor (en equilibrio térmico con un líquido)» bucles de composición» No se debe utilizar en procesos con grandes tiempos muertos
13
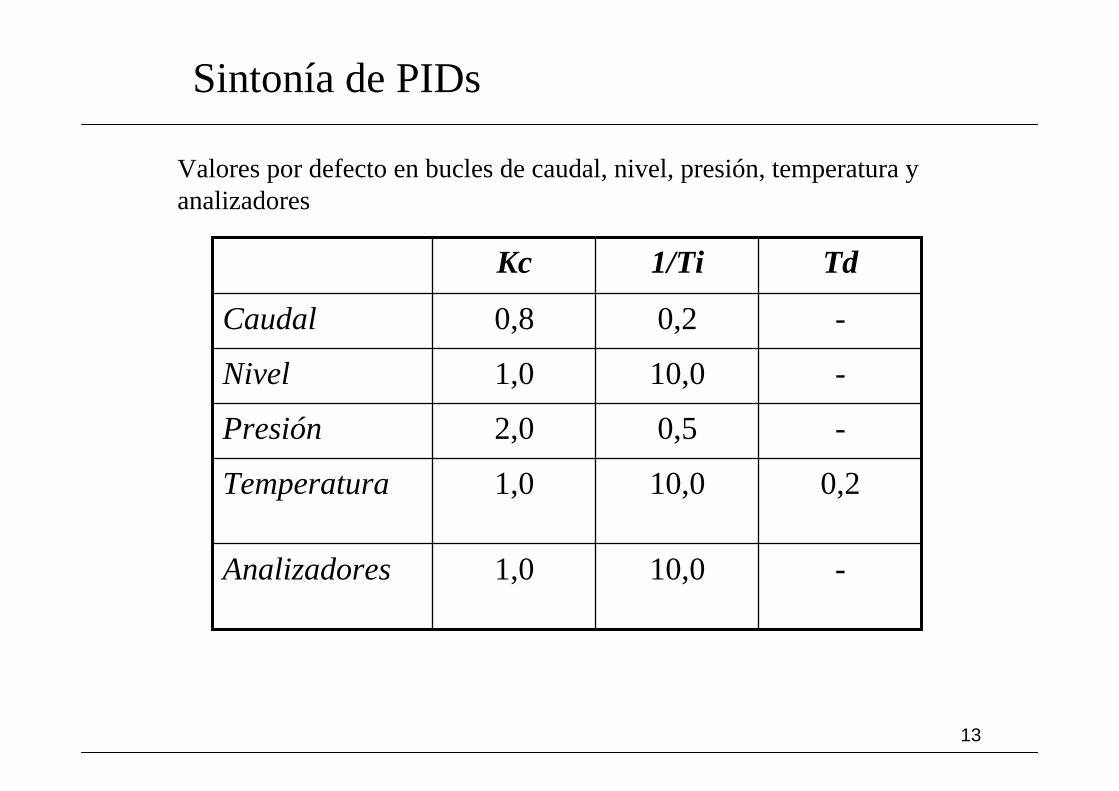
Valores por defecto en bucles de caudal, nivel, presión, temperatura y analizadores
-10,01,0Analizadores
0,210,01,0Temperatura
-0,52,0Presión
-10,01,0Nivel
-0,20,8Caudal
Td1/TiKc
Sintonía de PIDs
Top Related