Idiomas
Páginas
Jurídico

“Respuesta Transitoria”
Maturín, Julio2014
Alumnos:
Rafael Chalo C.I 13.814.213
Gregori Rondón C.I: 14.508.742
Laura Brito C.I 19.257.973
Ing. Electrica Seccion “C” 43
Profesora:
ING: Mariangel Pollonais
República Bolivariana de Venezuela
Instituto Universitario Politécnico
“Santiago Mariño”
Extensión Maturín

Respuesta Transitoria
La señal de entrada para un sistema de control no se conoce con
anticipación, pero es de naturaleza aleatoria, y la entrada instantánea
no puede expresarse en forma analítica. Sólo en algunos casos
especiales se conoce con anticipación la señal de entrada y se puede
expresar en forma analítica o mediante curvas; tal es el caso del
control automático de herramientas de corte.
En el análisis y diseño de sistemas de control, debemos tener una
base de comparación del desempeño de diversos sistemas de control.
Esta base se configura especificando las señales de entrada de
prueba particulares y comparando las respuestas de varios sistemas
a estas señales de entrada.
Muchos criterios de diseño se basan en tales señales o en la
respuesta del sistema a los cambios en las condiciones iníciales (sin
señales de prueba). El uso de señales de prueba se justifica porque
existe una correlación entre las características de respuesta de un
sistema para una señal de entrada de prueba común y la capacidad
del sistema de manejar las señales de entrada reales.
Respuesta transitoria y respuesta en estado estable.
La respuesta en el tiempo de un sistema de control consta de dos
partes: la respuesta transitoria y la respuesta en estado estable. Por
respuesta transitoria nos referimos a la que va del estado inicial al
estado final. Por respuesta en estado estable, nos referimos a la
manera en la cual se comporta la salida del sistema conforme t tiende
a infinito.
Régimen transitorio.
Un circuito antes de llegar a una situación estacionaria o régimen permanente pasa por un periodo de transición durante el cual tensiones y corrientes varían hasta llegar a la condición de equilibrio impuesta por la red.
En general, cualquier proceso de conexión/descone-xión hará que existan fenómenos transitorios. Éstos, aunque generalmente son de corta duración, pueden producir problemas serios en el funcionamiento de los circuitos.
Este régimen transitorio viene condicionado por los componentes que almacenan energía: bobinas y condensadores.
El análisis se realiza resolviendo las ecuaciones diferenciales que resultan de aplicar las leyes de Kirchhoff y determinando las constantes de integración que resultan de las condiciones iniciales del circuito.
Este método es sencillo de aplicar en circuitos simples, 1er orden y 2º orden, pero es complicado para circuitos de orden superior (Transformada de Laplace).
Ecuación diferencial y condiciones iniciales.
Tras aplicar las leyes de Kirchhoff a los circuitos de 1º y 2º orden obtendremos ecuaciones como estas:
Donde a,b,c=ctes.
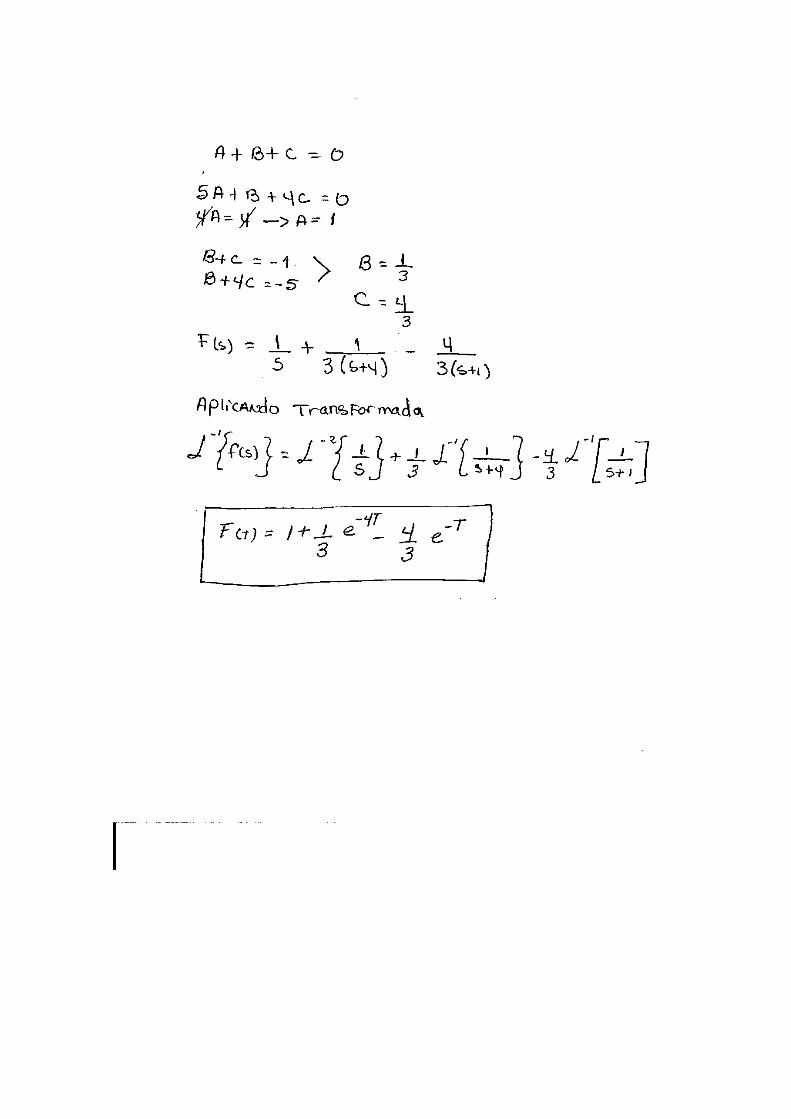
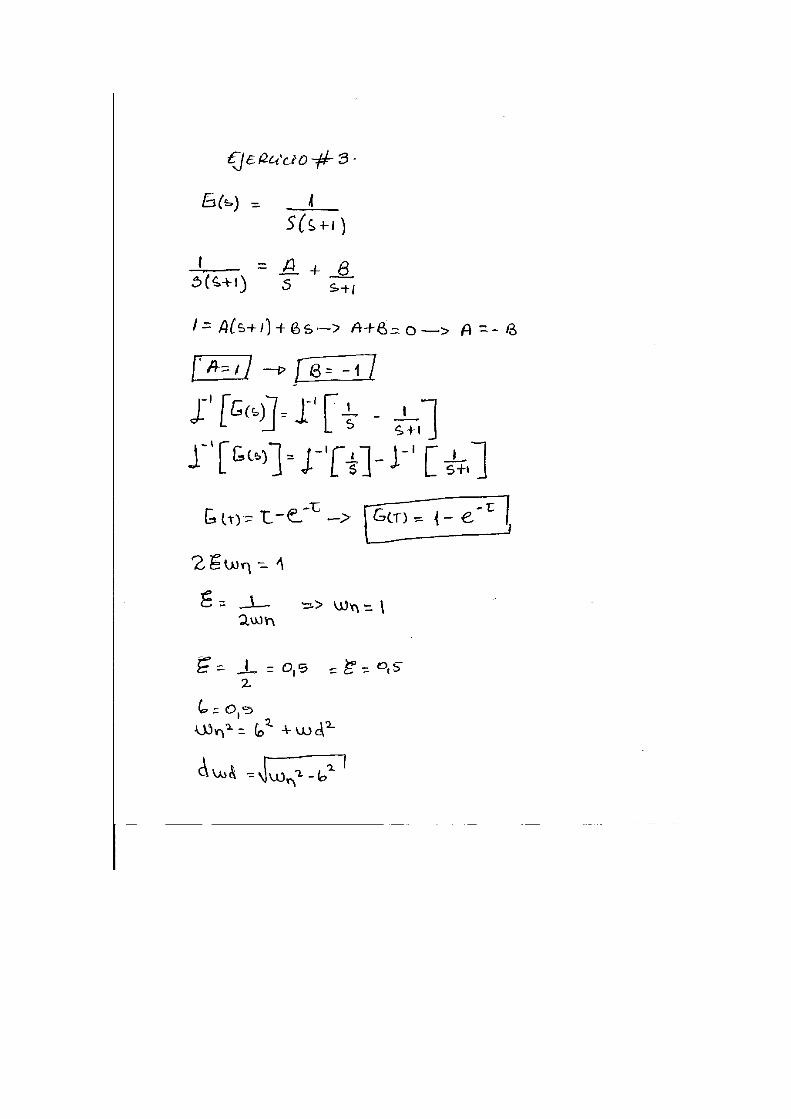
La solución completa de una ecuación diferencial lineal (con coeficientes ctes.) se compone de dos sumandos:
Solución general (de la ec. homogénea):
Se obtiene resolviendo la ecuación cuando g(t) se hace cero, es decir cuando se anula la excitación del circuito (se considera únicamente la energía almacenada en los elementos reactivos). Esta solución se conoce comorespuesta natural, propia o libre, fn(t).
Solución particular:
Depende del tipo de excitación del circuito. Esta solución se conoce como respuesta forzada, ff(t).
Solución completa = sol. general + sol. particular
Condiciones iníciales de los elementos
Para determinar las constantes de integración es necesario conocer el estado del circuito en un instante de tiempo determinado. En la práctica este instante se hace coincidir con la conexión o desconexión de los interruptores. Por conveniencia se toma t=0, de tal forma que t=0- representa el instante inmediatamente anterior a la conmutación y t=0+ el inmediato posterior.
El estado del circuito en t=0- se define con la tensión en bornes de capacidades e intensidades por las bobinas. Estas condiciones se conocen como condiciones iniciales.
Para evaluar las constantes de integración en t=0+ hay que tener en cuenta que variables son continuas en t=0 (es decir f(0-)=f(0+)).
Resistencia:
La tensión sigue instantáneamente las variaciones de la corriente.
Condensador:
La tensión no puede variar de forma instantánea (i(t)→∞), entonces vC(0-)=vC(0+)=vC(0).
En c.c., régimen permanente t=∞, C= circuito abierto.

Inductancia:
La corriente no puede variar de forma instantánea (v(t)→∞), entonces iL(0-)=iL(0+)= iL(0).
En c.c., régimen permanente t=∞, L= cortocircuito.
Circuitos de 2º orden
Son circuitos con dos elementos "irreducibles" que almacenan energía.
Estudiaremos sólo las configuraciones RLC serie y paralelo.
4.1 Respuesta natural de un circuito RLC paralelo
Objetivo: Calcular la evolución de la tensión v(t) en el circuito cuando desconectamos la alimentación.
Condiciones iniciales ( ):
Aplicando KCL al circuito para :

derivando y dividiendo por C:
Es una ec. dif. ordinaria de 2º orden con coeficientes ctes. Solución del tipo de 1er orden:
Cálculo de s: (31)→(30)
descartando la solución trivial A=0:
Dependiendo de los valores de α y ω0 la respuesta natural variará.

Se distinguen 3 tipos de respuesta en circuitos de 2º orden:
Respuesta sobreamortiguada.
Respuesta subamortiguada.
Respuesta con amortiguamiento crítico.
Cálculo de las constantes (aplicando condiciones iniciales y continuidad):
De la ec. (28) en t=0+ deducimos:

Particularizando para cada respuesta:
Respuesta sobreamortiguada:
Respuesta subamortiguada:
Respuesta con amortiguamiento crítico:
Respuesta al escalón de un circuito RLC paralelo
Calcular la evolución de la tensión v(t) en el circuito cuando conectamos la alimentación.

Condiciones iniciales ( ): I0,v0→ energía almacenada
Aplicamos KCL para :
derivando y dividiendo por C:
Ec. idéntica a la respuesta natural (29). Solo cambia el cálculo de las constantes.
De la ec. (36) en t=0+ deducimos:
Particularizando para cada respuesta:
Respuesta sobreamortiguada:
Respuesta subamortiguada:

Respuesta con amortiguamiento crítico:
Respuesta natural de un circuito RLC serie
Calcular la evolución de la corriente i(t) en el circuito cuando desconectamos la alimentación.
Condiciones iniciales ( ):
Aplicando KVL al circuito para :
derivando y dividiendo por L:
Es una ec. dif. ordinaria de 2º orden con coeficientes ctes. Solución del tipo de 1er orden:

Cálculo de s: (41)→(40)
descartando la solución trivial A=0.
Calculamos las raíces del polinomio característico:
El tipo de respuesta se calcula igual al caso paralelo.
Cálculo de las constantes (utilizando condiciones iniciales y continuidad)
De la ec. (39) en t=0+ deducimos:

Particularizando para cada respuesta:
Respuesta sobreamortiguada:
Respuesta subamortiguada:
Respuesta con amortiguamiento crítico:
Respuesta a un escalón de un circuito RLC serie
Calcular la evolución de la corriente i(t) en el circuito cuando conectamos la alimentación.
Condiciones iniciales ( ): I0,v0→ energía almacenada
Aplicando KVL para :

derivando y dividiendo por L:
idéntica a la respuesta natural del circuito RLC serie.
El cálculo de las constantes varía:
De la ec. (44) en t=0+ deducimos:
Particularizando para cada respuesta:
Respuesta sobreamortiguada:
Respuesta subamortiguada:

Respuesta con amortiguamiento crítico:
RESOLUCIÓN DE CIRCUITOS DE 2º ORDEN
Resumiendo los pasos a seguir para encontrar la respuesta transitoria en circuitos de 2º orden:
Encontrar la ec. diferencial de 2º orden que corresponde al circuito problema:
x(t) = v(t) en circuitos RLC paralelo
x(t) = i(t) en circuitos RLC serie
Identificar los coeficientes de (49) para obtener α y ωo. Elegir el tipo de respuesta comparando los valores de α y ωo. Utilizar las condiciones iniciales para calcular los coeficientes de
la solución.
En la teoría de control, la caracterización de la respuesta temporal de
un sistema se suele hacer mediante lo que se conoce como
especificaciones del sistema. Las especificaciones más empleadas
son:
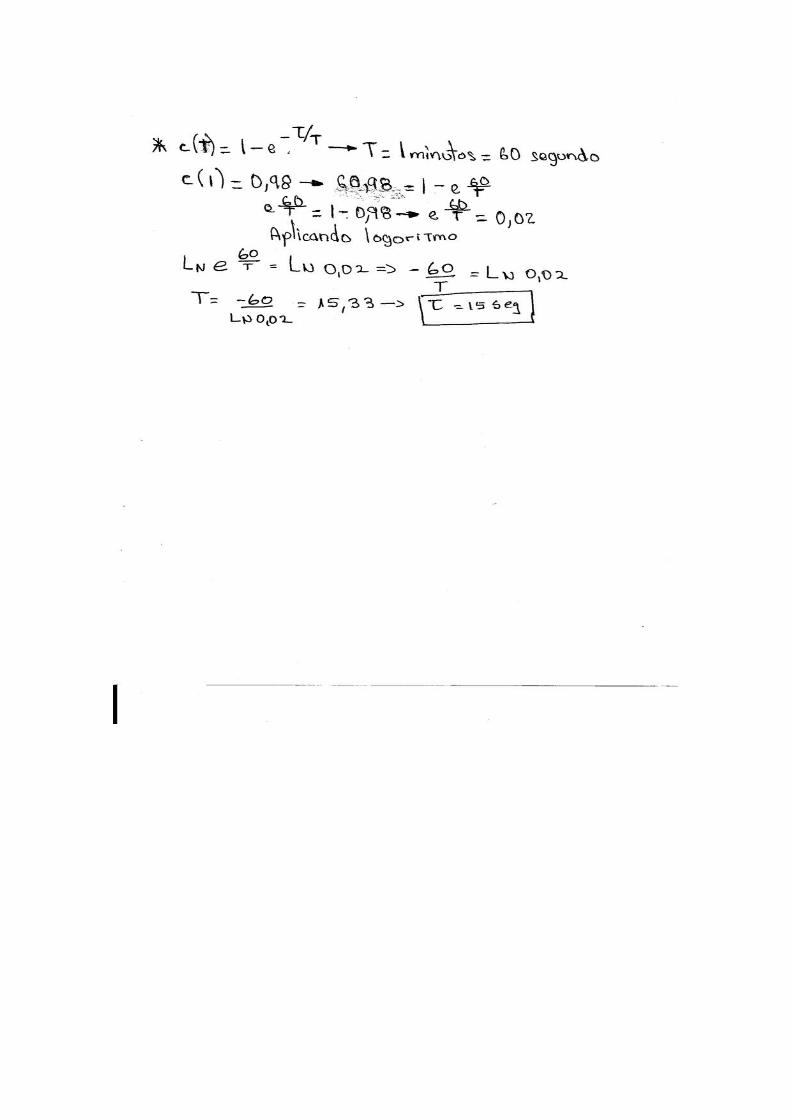
Tiempo de retraso (delay time). Es el tiempo necesario para que
la respuesta alcance el 50% del valor final.
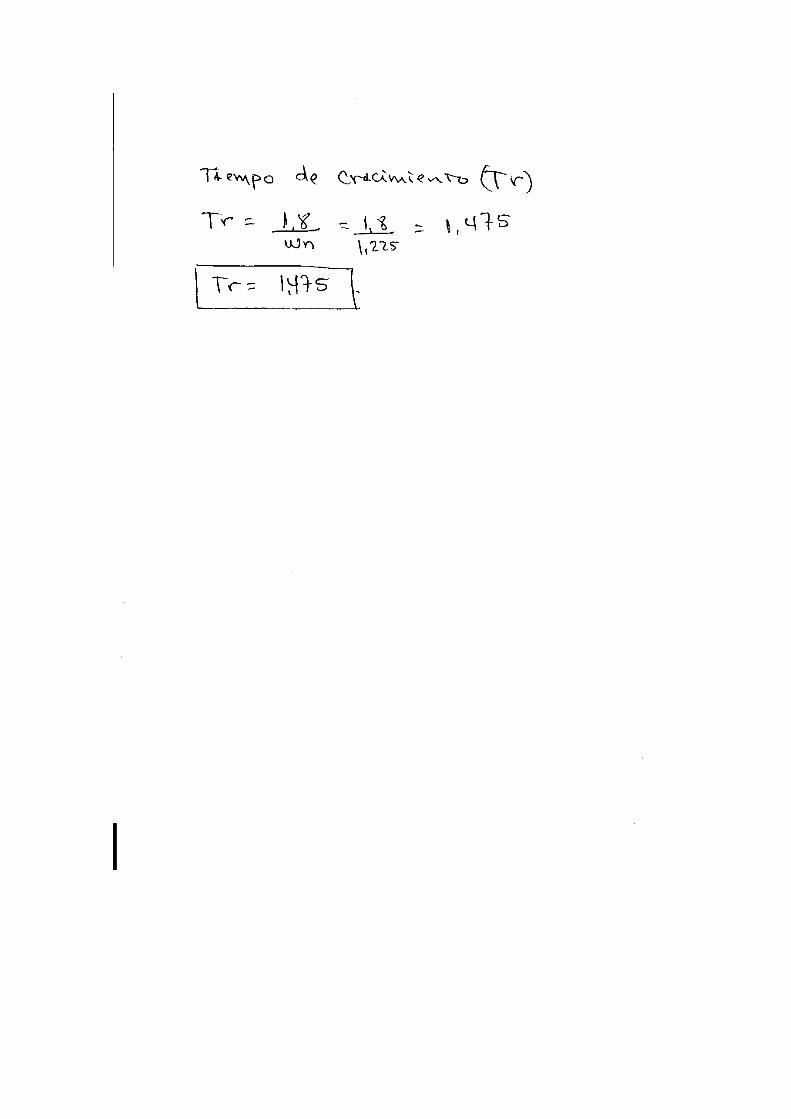
Tiempo de subida (rise time). Es el tiempo requerido para que la
respuesta pase del 10 al 90% del valor final. También puede

definirse como el tiempo de paso del 5% al 95% o del 0% al
100%.
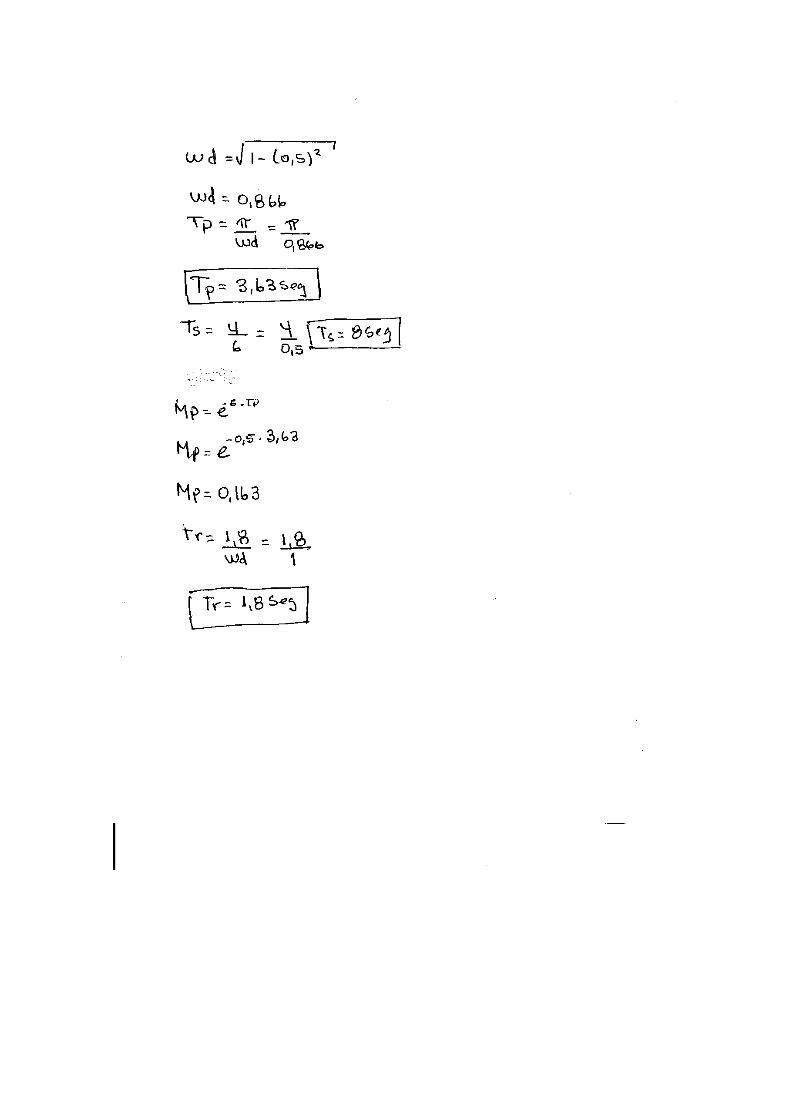
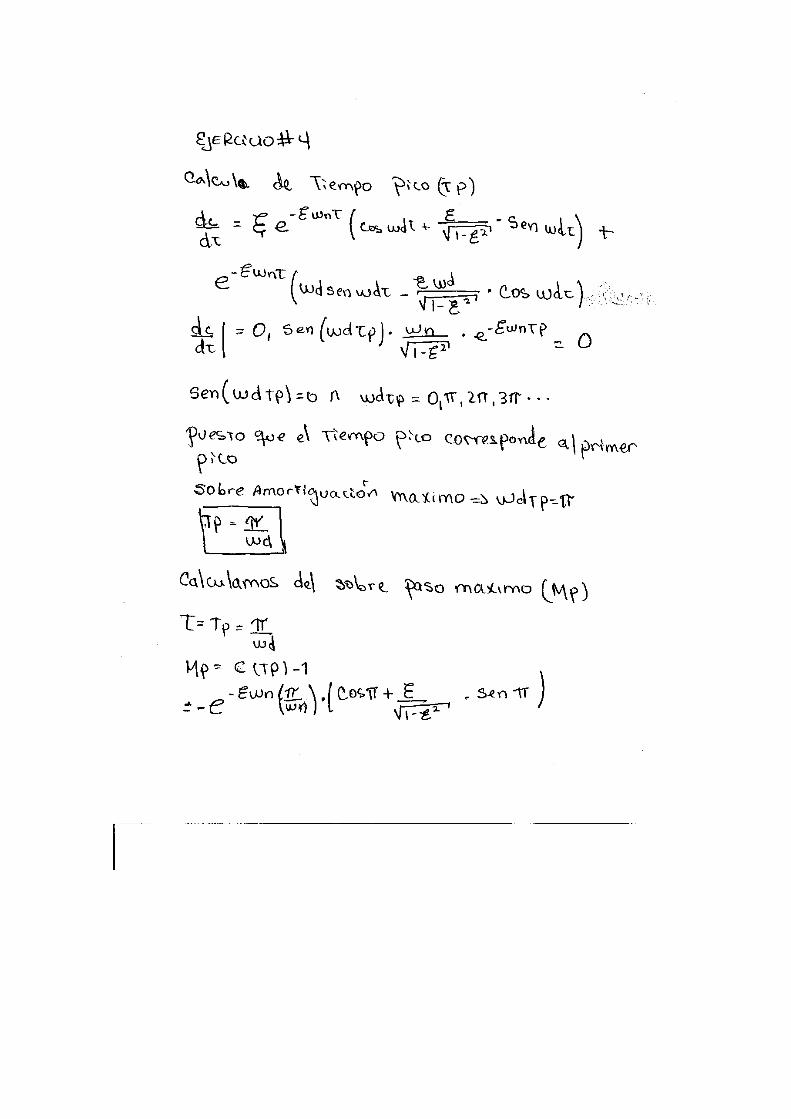
Tiempo de pico: Es el tiempo que pasa hasta alcanzarse el
primer pico de sobrepasamiento.
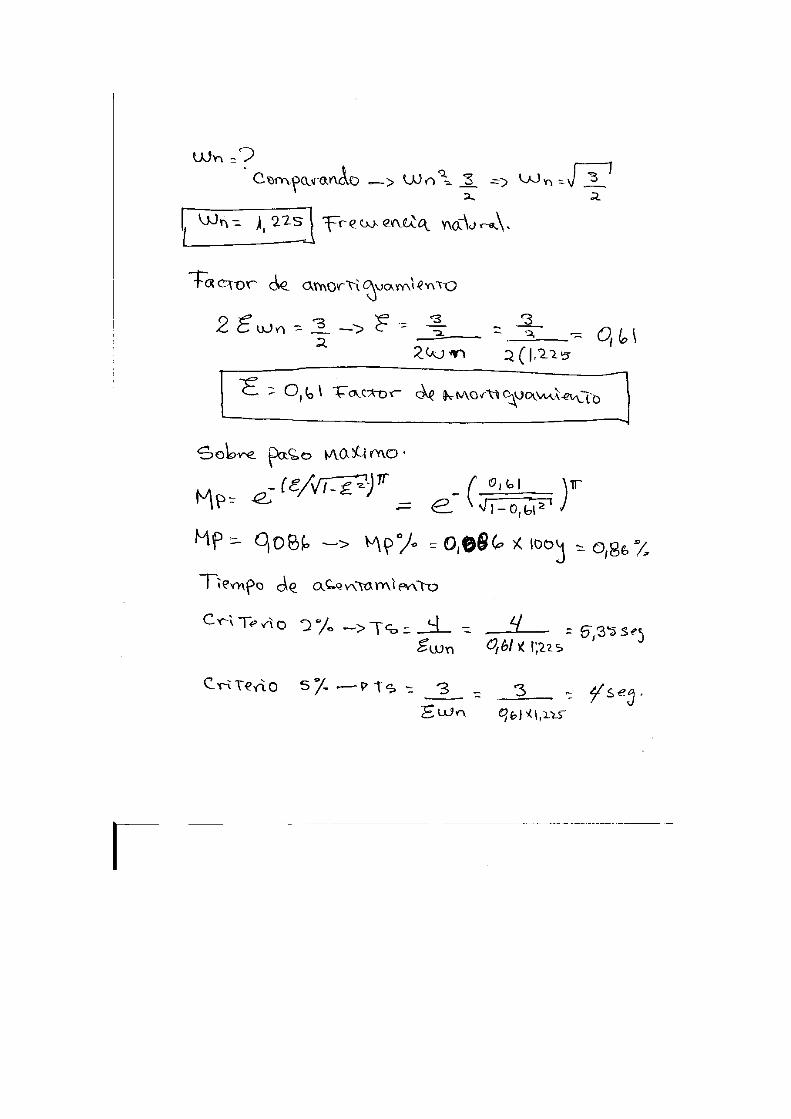
Máximo sobrepasamiento: Es el valor de pico máximo por
unidad. Se suele expresar en porcentaje.
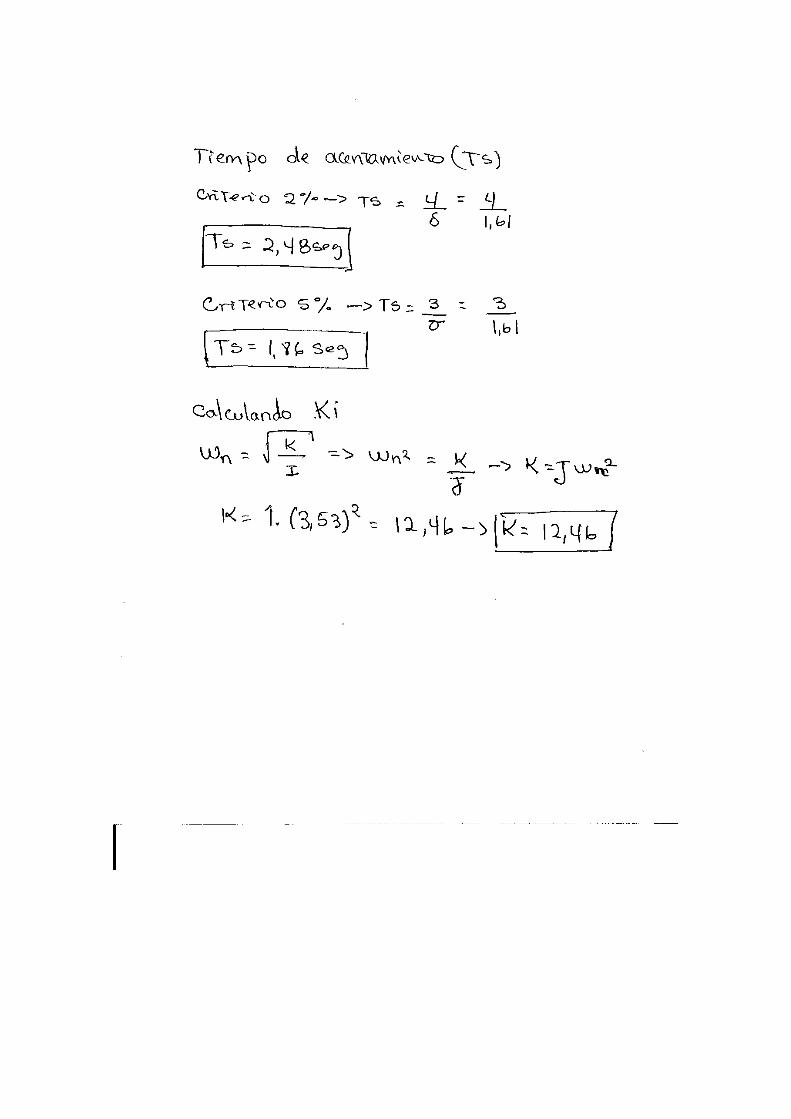
Tiempo de establecimiento: Es el tiempo necesario para que la
respuesta del sistema esté dentro de un porcentaje (sobre el
5%, aunque es variable según el autor) del valor final

ANEXOELERCICIOS