





Idiomas
Páginas
Jurídico


Ondas viajeras para algunos modelos
dispersivos no lineales
Gilberto Arenas Dıaz
Universidad del Valle
Facultad de Ciencias Naturales y Exactas
Departamento de Matematicas
Santiago de Cali
2019

Ondas viajeras para algunos modelos
dispersivos no lineales
Gilberto Arenas Dıaz
Tesis presentada como cumplimiento de los requisitos
para el grado de Doctor en Ciencias Matematicas.
Ph. D. Jose Raul Quintero HenaoDirector
Universidad del ValleFacultad de Ciencias Naturales y Exactas
Departamento de MatematicasSantiago de Cali
2019

Aceptado
Ph. D. Jose Raul Quintero HenaoDirector
Xavier Carvajal Paredes Ph. D.Jurado evaluador internacional
Juan Carlos Cordero Ceballos Ph. D.Jurado evaluador nacional
Juan Carlos Muoz Grajales Ph. D.Jurado evaluador interno
Santiago de Cali, Junio de 2019

A mi esposa e hijos.

Agradecimientos
Quiero iniciar agradeciendo a Dios que me ha permitido alcanzar esta meta.
Expresar mis sinceros agradecimientos al profesor Jose Raul Quintero, por tener la
capacidad de ofrecerme problemas interesantes para esta tesis, ademas de abrir mi
mente con nuevas ideas, animandome constantemente a alcanzar lo mejor de mi, ‘a
tener fe’, ademas, por la amistad brindada. A el, muchas gracias.
Quiero agradecer a las personas mas importantes de mi vida: mi familia, mi esposa Doris
y mis hijos Daniela Sofıa y Santiago Jose, quienes soportaron mi ausencia, ellos siempre
fueron mi soporte para cumplir esta meta. A quienes siempre llevo en mis pensamientos,
mis abuelos Jose del Carmen y Mariquita quienes me criaron y educaron con mucho
carino y amor. A mi madre Marıa del Carmen, a mis hermanos, tıos y primos, todos
ellos quienes siempre estuvieron pendientes de mi para brindar su apoyo durante esta
etapa. A mi padre matematico: mi amigo Claudio Mendoza, mi profesor de matematicas
en el colegio, fue quien me motivo a iniciar este camino por las matematicas. A todos
muchas gracias.
Agradezco a mi amigo y colega Elder, quien siempre estuvo atento a animarme y
apoyarme para realizar esta meta.
A mis profesores en los diferentes cursos que tome en el doctorado: Dr. Guillermo
Restrepo (QEPD), Dra. Angelica Caicedo, Dra. Ivonne Rivas, Dr. Guillermo Ortiz,
Dr. Juan Carlos Munoz, Dr. Jaime Arango quiero agradecer por sus innumerables
contribuciones matematicas en mi vida academica.
A la profesora Doris Hinestroza (QEPD), directora del posgrado durante la mayor parte
de mi doctorado. Muchas gracias por su animo y motivacion. Siempre la recordare.
A los amigos y companeros con los que compartı durante estos anos de doctorado:
Luis Fernando, Carlos Andres, Felipe, Erica, Heliana, Marıa Fernanda, Deissy, Marıa
Alejandra, Rafael, Gerardo, Jhonny, Tello, Karime, Edwin, Doris, Jenifer, Carlos
Ramırez, Cesar, Diana Ximena, Andres Ramırez, Andres Lerma, Lilian, Oscar, Eric,
v

vi Agradecimientos
Johan, Jhon, Jorge, Yilber y Luisa, muchas gracias por todo.
A los funcionarios del Departamento de Matematicas y del Posgrado en Ciencias de
la Universidad del Valle, por todas las veces que necesite y rapidamente fuı atendido,
muchas gracias.
Quiero agradecer a quienes me apoyaron financieramente en estos anos de doctorado: a
la Universidad Industrial de Santander quien me apoyo con la comision de estudios, al
posgrado en Ciencias Matematicas y al proyecto de investigacion “Estudio analıtico
de algunos modelos y sistemas para ondas de agua largas de pequena amplitud”,
Colciencias – Universidad del Valle (C.I. 71007), quienes apoyaron mi participacion
en las pasantıas y los diferentes eventos, al ICM2018 que apoyo mi participacion en el
evento “ICM satellite conference on Nonlinear Dispersive Equations”.
Quiero tambien expresar mis sinceros agradecimientos a quienes confiaron en mı y
fueron mis fiadores para poder asumir mi comision de estudios: mi amigo y colega
Javier Enrique Camargo, y mis primos Anibal y Robert Villamizar.

Contenido
Resumen XI
Introduccion XIII
1. Resultados preliminares 1
1.1. Algunas generalidades . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2. Espacios de Banach con norma tipo Bielecki . . . . . . . . . . . . . . . 6
1.3. Sobre un subconjunto de funciones continuas . . . . . . . . . . . . . . . 7
1.4. Teorıa de operadores positivos . . . . . . . . . . . . . . . . . . . . . . . 11
1.5. Positividad de la transformada de Fourier . . . . . . . . . . . . . . . . 15
1.6. Criterio de Routh-Hurwitz . . . . . . . . . . . . . . . . . . . . . . . . . 17
2. Derivacion de un sistema tipo Benjamin-Ono 21
2.1. Ecuaciones que describen el problema . . . . . . . . . . . . . . . . . . . 23
2.2. Derivacion del modelo . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3. Ondas solitarias para un sistema tipo Benjamin-Ono 33
3.1. Planteamiento del problema . . . . . . . . . . . . . . . . . . . . . . . . 33
3.2. Positividad y decrecimiento de los nucleos ki,c . . . . . . . . . . . . . . 37
3.3. Existencia de ondas solitarias . . . . . . . . . . . . . . . . . . . . . . . 43
4. Soluciones periodicas para un sistema tipo Benjamin-Ono 57
4.1. El espacio apropiado . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.2. Analisis del operador A . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.3. Resultados de existencia de soluciones . . . . . . . . . . . . . . . . . . . 67
5. El problema de Cauchy para el sistema tipo Benjamin-One 71
vii

viii Contenido
5.1. Existencia local de solucion . . . . . . . . . . . . . . . . . . . . . . . . 71
5.1.1. Buen planteamiento local para el problema de Cauchy . . . . . 73
5.1.2. El problema no lineal . . . . . . . . . . . . . . . . . . . . . . . . 78
5.2. Existencia local para el problema de Cauchy en el caso periodico . . . . 86
5.2.1. Buen planteamiento local en el caso periodico . . . . . . . . . . 88
5.2.2. El problema no lineal en el caso periodico . . . . . . . . . . . . 92
6. Soluciones positivas para una ecuacion no lineal de segundo orden 99
6.1. Existencia de soluciones positivas . . . . . . . . . . . . . . . . . . . . . 103
6.2. Aplicacion del resultado de existencia . . . . . . . . . . . . . . . . . . . 115
6.3. Sobre los modelos dispersivos . . . . . . . . . . . . . . . . . . . . . . . 117
Referencias bibliograficas 127

Productos basados en esta tesis
Artıculos
• Jose R. Quintero & Gilberto Arenas-Dıaz, “On the existence of solitary waves for an internal
system of the Benjamin-Ono type”, Submitted.
Artıculos en preparacion
• Gilberto Arenas-Dıaz & Jose R. Quintero, “Well-posedness of solutions for an internal
system of the Benjamin-Ono type”.
• Gilberto Arenas-Dıaz & Jose R. Quintero, “The Cauchy problem for an internal system of
the Benjamin-Ono type”.
• Gilberto Arenas-Dıaz, Jose R. Quintero & Felipe A. Pipicano, “On the existence of periodic
travelling wave for an internal system of the Benjamin-Ono type”.
Ponencias
• “On travelling wave solutions for a general class of KdV-Burger type equation”, XI Simposio
Nororiental de Matematicas, Bucaramanga, diciembre 5 al 7 de 2018.
http://matematicas.uis.edu.co/xsimposio
• “Solitary waves for an internal water wave model”, ICM satellite conference on Nonlinear
Dispersive Equations, July 27 – 30, 2018, Florianopolis, Santa Catarina, Brasil. (Poster).
https://impa.br/en_US/eventos-do-impa/eventos-2018/nonlinear-dispersive-equations/
• “On the existence of travelling wave solutions for an internal wave model”, VIII Encuentro
Nacional de Matematicas y Estadıstica, Ibague, 2 al 4 de mayo de 2018.
http://academia.ut.edu.co/presentacion2
ix

x Productos basados en esta tesis
• “Solitary waves for the cBKdV equation”, ICAMI 2017, San Andres Islas, 26 de noviembre
al 1 de diciembre de 2017.
http://www.icami2017.org/
• “A new Benjamin-One type system for internal wave”, XXI Congreso Colombiano de
Matematicas, Bogota, junio 5 al 9 de 2017.
http://www.scm.org.co/eventos/ccm2017/
Estancias
• Estancia de investigacion, invitado por el profesor Felipe Linares, IMPA - Instituto de
Matematica Pura e Aplicada, Rio de Janeiro, Brasil, enero-febrero de 2017 [25 dıas].
• Estancia de investigacion, invitado por el profesor Felipe Linares, IMPA - Instituto de
Matematica Pura e Aplicada, Rio de Janeiro, Brasil, julio-agosto de 2017 [28 dıas].
Participacion en proyectos
• “Estudio analıtico de algunos modelos y sistemas para ondas de agua largas de pequena
amplitud”, Colciencias – Universidad del Valle, C.I. 71007, 2015–2018.
Investigadores principales: Jose Raul Quintero y Alex M. Montes.

Resumen
En este trabajo de tesis se aborda inicialmente la deduccion de un nuevo modelo
fısico, un sistema de tipo Benjamin-Ono con mayor dispersion que modelos de tipo
Benjamin-Ono ya conocidos. Trabajando sobre este modelo se realiza un estudio sobre
la existencia de las ondas solitarias usando tecnicas de operadores positivos debida a
Krasnosell’skii. Se demuestra tambien la existencia de ondas solitarias periodicas para
el modelo encontrado de tipo Benjamin-Ono siguiendo ideas de Chen. Posteriormente
se demuestra la buena colocacion local del problema de valor inicial asociado con el
sistema deducido en los casos periodico y no periodico. Finalmente siguiendo ideas de
Zima y resultados de puntos fijo de Krasnosel’skii sobre conos se demuestra la existencia
de soluciones positivas para un tipo de ecuaciones diferenciales de segundo orden.
xi

.

Introduccion
Desde el descubrimiento hace mas de 170 anos de la “onda permanente” (conocida
actualmente como onda solitaria) en el canal Union en Hermiston (Edimburgo - Escocia)
por parte del ingeniero escoces y arquitecto naval John Scott Russell (1808-1882),
cuando trabajaban experimentalmente en un diseno mas eficiente de embarcaciones
usadas para viajar por canales estrechos, las soluciones de ondas solitarias han jugado
un papel importante en el estudio de algunos modelos dispersivos de evolucion dado que
este tipo de soluciones son dominantes en la propagacion del movimiento ondulatorio no
lineal y dispersivo. Como resultado del estudio de este fenomeno, y de las investigaciones
de J. Boussinesq y Lord Rayleigh, los matematicos holandeses Diederik Johannes
Korteweg (1848-1941) y su estudiante Gustav de Vries (1866-1934), obtuvieron una
ecuacion satisfactoria que describe el perfil de la onda. Esta ecuacion estaba basada
en la suposicion de que la profundidad del agua es pequena en comparacion con la
anchura de las ondas y relaciona la amplitud de la onda y sus cambios en el espacio
con el cambio de la amplitud en el tiempo. La ecuacion propuesta por D. Korteweg y
G. de Vries (denominada ecuacion Korteweg-de Vries o simplemente ecuacion KdV) es
uno de los modelos clasicos no lineales mas relevantes en el estudio de ondas de agua
de gran elongacion y de pequena amplitud.
En las ultimas cinco decadas, este hecho ha sido un generador de una gran actividad
investigativa alrededor de la existencia y estabilidad de ondas viajeras (solitarias y
periodicas), sobre el problema de Cauchy asociado con modelos dispersivos, y otras
propiedades, desde el punto de vista analıtico, numerico y experimental.
Es importante resaltar que una gran parte del esfuerzo relacionado con la teorıa de
la existencia de ondas viajeras (solitarias y periodicas) se ha desarrollado en modelos
para la propagacion unidireccional de ondas en medios no lineales, dispersivos, o con
las ecuaciones completas de Euler para las ondas superficiales e internas, aunque en
los ultimos anos han habido contribuciones de mucho interes como los trabajos de J.F.
Toland ([38], [39]) sobre el sistema de ecuaciones derivadas por J.L. Bona y R. Smith en
xiii

xiv Introduccion
el trabajo [7] en el caso de la propagacion de ondas de agua, el trabajo de M. Chen [11]
sobre clases mas generales de sistemas de Boussinesq, el trabajo de T.B. Benjamin, J.L.
Bona y D.K. Bose [4] sobre algunos problemas no lineales, el trabajo de J.L. Bona y H.
Chen [6] sobre algunos sistemas dispersivos y el trabajo de R.L. Pego y J.R. Quintero
[33] sobre la ecuacion Benney-Luke. Mas recientemente encontramos los trabajos de
J.C. Munoz y F.A. Pipicano sobre existencia de ondas viajeras periodicas [35], y J.R.
Quintero y J.C. Munoz sobre la existencia de solitones [36], para el caso de un sistema
dispersivo que describe la propagacion de una onda interna debilmente no lineal que
se propaga en la interfaz de dos lıquidos con densidades constantes que no se mezclan,
los cuales estan contenidos en reposo en un canal largo con una parte superior y fondo
horizontales y rıgidos, suponiendo que la densidad del lıquido superior es inferior a la
del lıquido inferior.
La evolucion de las ondas solitarias de fluidos no viscosos e incompresibles descritas
mediante una ecuacion dispersiva ha sido de gran interes para muchos investigadores
en matematicas y fısica por mas de un siglo. Varios modelos dispersivos relacionados
con la evolucion de ondas en distintos medios se pueden enmarcar en la forma
∂tL1(u) + ∂xL2(u) + P (u, ux) = 0, (1)
donde u : I → Rn con I = R o I = [0, T ], Li para i = 1, 2 representa un operador
lineal definido vıa sımbolos de Fourier sobre un espacio de Hilbert apropiado y P es
una funcion no lineal, en general suave.
En particular, J. Bona y H. Chen en [6] estudian un modelo generalizado para describir
la propagacion bidireccional de ondas de pequena amplitud y gran elongacion en
superficies de agua que se puede escribir en la forma general
∂tL1
(ξv
)+ ∂xL2
(ξv
)= ∂xG
(ξv
)(2)
donde Li son operadores matriciales 2× 2 y G = (g1, g2)t tales que g1, g2 : R
2 → R son
funciones reales, suaves y no lineales, que satisfacen que gi(ξ, v) ≥ 0 para ξ ≥ 0, v ≥ 0,
i = 1, 2, especıficamente consideran que las funciones gi son polinomios cuadraticos
para i = 1, 2. Bajo esto supuestos, J. Bona y H. Chen en [6] muestran la existencia de
soluciones de tipo onda solitaria para algunos sistemas tipo Boussinesq.
Como ya se menciono, un fenomeno de interes, y que esta relacionado con el fenomeno
de ondas de agua, es el de ondas internas. Las ondas internas son ondas de gravedad
que oscilan dentro de un medio fluido, en lugar de hacerlo en su superficie. Para existir,

Introduccion xv
el fluido debe estratificarse: la densidad debe disminuir de forma continua o discontinua
con la profundidad (o altura) debido a los cambios, por ejemplo, en la temperatura o
la salinidad del fluido.
En este sentido, J.A. Gear y R. Grimshaw en [18], interesados en el estudio del
fenomeno asociado con modelos de ondas internas presentes en la interfaz de dos fluidos
estratificados confinados en el fondo y la parte superior que no se mezclan debido a la
diferencia de densidades, derivaron el siguiente modelo dispersivo
ut + uux + uxxx + a3vxxx + a1vvx + a2(uv)x = 0,
b1vt + rvx + vvx + vxxx + b2a3uxxx + b2a2uux + b2a1(uv)x = 0,(3)
donde a1, a2, a3, b1, b2 y r son numeros reales con b1 y b2 positivos, determinados por
las densidades de las capas fluidas y sus extensiones verticales. Este sistema dispersivo
describe la interaccion de ondas internas que tienen diferentes estructuras verticales,
pero velocidades de fase casi identicas. Es de observar que el sistema (3) puede escribirse
en la forma general (1).
Mas recientemente, J.C. Munoz en [30] deriva un modelo tipo Benjamin-Ono para
describir la interfaz entre dos fluidos estratificados que no se mezclan en el caso lımite
en que la profundidad sea infinita. Este modelo dispersivo viene dado por
ζt − ((1− αζ)u)x =ǫ2
6ζxxt,
ut + αu ux + (1− ρ0) ζx = ρ0ǫH(uxt) +ǫ2
6uxxt,
(4)
donde H denota la transformada de Hilbert, las constantes ρ1 y ρ2 representan la
densidad de los fluidos y ρ0 = ρ2/ρ1 > 1, las constantes α y ǫ son pequenos numeros
reales positivos tales que α = O(ǫ2) con α = ah1
y ǫ = h1L, los cuales miden la intensidad
de los efectos no lineales y dispersivos, donde h1 denota el grosor de la capa fluida
superior y los parametros L y a corresponden a la longitud de onda caracterıstica y la
amplitud caracterıstica de la onda, la funcion u = u(x, t) es la velocidad controlada a
la profundidad normalizada z0 y ζ = ζ(x, t) es la amplitud de la onda en el punto x y
el tiempo t, medida con respecto al nivel de reposo de la interfaz de los dos fluidos.
Algunas variantes del sistema (4) fueron derivadas por W. Choi y R. Camassa en [13],
[12] y [14] para diferentes regımenes de escala del problema, donde son descartados los
terminos de orden O(ǫ2) y se toma que α = O(ǫ), en contraste con el modelo (4) donde

xvi Introduccion
α = O(ǫ2) y se han despreciado los terminos de orden O(ǫ3). El modelo
ζt − ((1− αζ)u)x = 0,
ut + αu ux + (1− ρ0) ζx = ρ0ǫH(ζtt),(5)
es una de las variantes mencionadas. Puede observarse que el sistema (4) es mas general
que el sistema (5) y ademas no se encuentra incluido en la clase general (2) considera
por J. Bona y H. Chen en [6].
Para el sistema deducido por J.C. Munoz en [30], J.R. Quintero y J.C. Munoz en [36]
mostraron la existencia de ondas viajeras internas, y J.C. Munoz y F.A. Pipicano en
[35] mostraron la existencia de ondas viajeras internas periodica, para ello utilizaron la
teorıa de operadores positivos (ver J.L. Bona, T. Benjamin y D.K. Bose [4]).
En este sentido, el primer problema que abordaremos en esta tesis esta relacionado
con el fenomeno de ondas internas, y consiste en la derivacion de un sistema tipo
Benjamin-Ono con una mayor dispersion a los propuestos por W. Choi y R. Camassa
en [13], [12], [14] y J.C. Munoz en [30], para describir la interfaz de dos fluidos confinados
en el fondo y en la parte superior, cuando consideremos el caso lımite de profundidad
infinita. Este tipo de derivacion requiere de una expasion de Taylor de orden mayor
con respecto a los parametros de no linealidad y amplitud. Para este analisis hemos
adaptando los trabajos de W. Choi y R. Camassa en [13], [12], [14] y J.C. Munoz en
[30]. A diferencia de los trabajo anteriores, si se descartan los terminos de orden O(αǫ2)
y se toma que α = O(ǫσ), σ ∈ (0, 1), hemos obtenido un sistema tipo Benjamin-Ono
con mayor dispersion de la forma(A1∂tξ
A2∂tv
)−(
0 A3
A4 0
)(∂xξ
∂xv
)= ∂xF
(ξ
v
), (6)
donde los operadores Ai con 1 ≤ i ≤ 4 son operadores lineales diferenciales y
F = (f1, f2)t tales que f1, f2 : R
2 → R son funciones reales y no lineales que satisfacen
f1(0, 0) = 0, f2(0, 0) = 0, f1(ξ, v) ≤ 0 y f2(ξ, v) ≥ 0 cuando (ξ, v) ∈ R− × R+, como
ocurre en los sistemas tipo Benjamin-Ono derivados por W. Choi y R. Camassa, y
J.C. Munoz. Concretamente, el sistema tipo Benjamin-Ono que se deduce es el siguiente
ξt − ǫ2β1∂2xξt + ǫ4β2∂
4xξt + ǫ2α5∂
3xu− ǫ4α6∂
5xu = (u− αξu)x,
ut − ǫ2α3∂2xut + ǫ4α4∂
4xut − ǫρ0H(∂xut) + ǫ3ρ0α1H(∂3xut) =
((ρ0 − 1) ξ − α
2u2)x.
Para el sistema tipo Benjamin-Ono derivado, consideramos el estudio de la existencia
de ondas solitarias y ondas viajeras periodicas, para ello hemos utilizado la teorıa

Introduccion xvii
de operadores positivos desarrollada por M.A. Krasnosell’skii ([26], [27]) que ha sido
aplicada en el contexto de ondas dispersivas no lineales por J.L. Bona, T. Benjamin
y D.K. Bose [4], J.L. Bona y H. Chen [6], H. Chen [9], H. Chen, M. Chen y N.V.
Nguyen [10], J.C. Munoz y F.A. Pipicano [35], y J.R. Quintero y J.C. Munoz [36]. Es
importante resaltar que la tecnica expuesta es apropiada para tratar distintos tipos
de no linealidades. La teorıa de operadores positivos requiere solo la suposicion de
superlinealidad sobre la no linealidad. Dado que la teorıa esta basada en el grado
topologico, ella tiene ventajas cuando es necesario utilizar argumentos de perturbacion.
Por ejemplo, para el estudio de la existencia de ondas solitarias, fue necesario reformular
el problema de existencia de ondas viajeras como un problema de punto fijo definido en
un cono de un espacio de Frechet apropiado. Es importante senalar que este resultado
exige un analisis muy detallado y delicado, pues se requiere la positividad de los
sımbolos de Fourier de los operadores diferenciales Ai, para ello fue necesario utilizar un
resultado de Tuck (ver [42]) asociado con la positividad de la transformada de Fourier.
La estrategia en el caso del estudio de la existencia de ondas solitarias fue adaptar las
tecnicas usadas por J.R. Quintero y J.C. Munoz en [36] y J.L. Bona, T. Benjamin y
D.K. Bose en [4]. Para el caso de la existencia de ondas viajeras periodicas la estrategia
se baso en adaptar las tecnicas usadas por J.C. Munoz y F.A. Pipicano en [35] y H.
Chen en [9].
Tambien para el sistema tipo Benjamin-Ono derivado, abordamos el problema de la
buena colocacion local en un espacio apropiado. Para ello utilizamos resultados de
punto fijo para mostrar la existencia de soluciones, utilizando la representacion vıa
transformada o series de Fourier, en el caso periodico.
Otro problema del que nos ocupamos en este trabajo esta relacionado con la existencia
de soluciones positivas para las ecuaciones diferenciales de segundo orden
−cu+ αux + βuxx + f (x, u(x)) = 0, (7)
donde α ≥ 0, β > 0, c > 0, x ∈ R y f es una funcion continua no negativa bajo
algunos supuestos. El interes en este modelo surge por su relacion con otro modelos
muy conocido como la ecuacion de Burgers, la ecuacion de Burgers con viscosidad, la
ecuacion KdV, la ecuacion de KdV-Burgers, la ecuacion de KdV-Burgers modificada
y la ecuacion KdV-Burgers cuadrada-cubica. Ası como tambien con la ecuacion KdV
generalizada (α = 0, β > 0 y f(u) = up+1) y la ecuacion p-Gardner generalizada (α = 0,
β > 0 y f(u) = up+1 + u2p+1).
Esta tesis es organizada como sigue: En el primer capıtulo incluimos algunas

xviii Introduccion
definiciones, notaciones estandares y resultados que utilizamos en el desarrollo de la
tesis.
En el segundo capıtulo hacemos la deduccion de un sistema tipo Benjamin-Ono
para describir un fenomeno de ondas internas. El sistema deducido tiene una
mayor dispersion a los propuestos por W. Choi y R. Camassa en [12], [13], [14] y
J.C. Munoz en [30].
En el tercer capıtulo, siguiendo las ideas de T.B. Benjamin, J.L. Bona y D.K. Bose [4] en
el marco de soluciones de ondas solitarias de algunas ecuaciones dispersivas, aplicamos
la teorıa de operadores positivos introducida originalmente por Krasnosel’skii [26], [27]
en la exploracion de la existencia de soluciones de ondas solitarias del sistema deducido.
Inicialmente se construye un espacio de Frechet apropiado donde aplicar la teorıa,
posteriormente se reformula el problema para verlo como un problema de punto fijo
de un operador positivo, para pasar luego a verificar que los operadores y kerneles que
aparecen satisfacen las hipotesis necesarias para aplicar los resultados de operadores
positivos en conos, y ası garantizar la existencia de soluciones de ondas solitarias.
En el cuarto capıtulo, basados en el enfoque introducido inicialmente por H. Chen en
[9], el cual aplica la teorıa del operador positivo a ecuaciones de tipo dispersivo en un
dominio periodico, estudiamos la existencia de soluciones de ondas solitarias periodicas
para el sistema tipo Benjamin-Ono deducido.
En el quinto capıtulo el objetivo principal es demostrar que el problema de Cauchy
asociado al sistema tipo Benjamin-Ono es localmente bien puesto, tanto en el caso
periodico, como en el caso no periodico. Para ello utilizamos los resultados de punto
fijo clasicos para demostrar la existencia de solucion.
Por ultimo, en el sexto capıtulo se presenta el estudio relacionado con las soluciones
positivas para la ecuacion diferencial de segundo orden de la forma (7). Para este analisis
se sigue el enfoque utilizado por M. Zima en [44]. El resultado principal es consecuencia
de la caracterizacion de las soluciones como puntos fijos de algunos funcionales, definidos
mediante la funcion de Green asociada al problema lineal, y el teorema de punto fijo
de Krasnosel’skii bajo una norma tipo Bielecki (ver [22] y [44]).

Capıtulo 1
Resultados preliminares
Para la comodidad del lector, incluimos en este capıtulo algunas definiciones, notaciones
estandares y resultados que utilizamos en nuestro trabajo. El material de este capıtulo es
organizado de la siguiente manera: en la primera seccion incluimos algunas generalidades
basicas sobre notaciones y conjuntos sobre los cuales trabajaremos en nuestra tesis,
como son ℓp el espacio de Banach de todas las sucesiones complejas p-sumables, Lp (−l, l)el espacio de Banach de la funciones Lebesgue-medibles, ası como la definicion y algunas
propiedades de la transformada de Hilbert. Para esta primera seccion nos hemos basada
en las recopilaciones presentadas en [9, 29, 34, 35]. En la segunda seccion incluimos los
concepto necesarios sobre espacios de Banach con norma tipo Bielecki, esta seccion es
basada en [43]. En la tercera seccion presentamos algunos resultados generales discutidos
en [4] sobre un subconjunto especial del espacio C(R) de las funciones continuas de valor
real definidas en R. En la cuarta seccion se presentan algunos resultados de puntos fijos
sobre conos que garantizan la existencia de ondas solitarias. Esta teorıa de puntos fijos
en conos para operadores positivos fue adaptada para obtener la existencia de ondas
viajeras para una clase de modelo dispersivo por T. Benjamin, J. Bona y D. Bose
[4]. En la quinta seccion se demuestra un resultado que garantiza la positividad de la
transformada de Fourier debido a E.O. Tuck [42]. Este resultado sera utilizado para
demostrar la positividad de los kerneles que surgen cuando estudiamos la existencia de
ondas solitarias para el sistema tipo Benjamin-Ono. En la sexta seccion se presenta el
criterio de Routh-Hurwitz, criterio utilizado para encontrar la ubicacion de los ceros de
un polinomio a partir de una tabla que se construye en base a sus coeficientes (ver N.S.
Nise [31]).
1

2 1. Resultados preliminares
1.1. Algunas generalidades
Como es usual, el conjunto de los numeros naturales sera denotado por N, el conjunto
de los numero enteros por Z, el campo de los numeros reales por R y el campo de los
numero complejo por C. El espacio de todos los vectores n-dimensionales sera denotado
por Rn, y su norma euclidiana se denotara por ‖ · ‖. El espacio de todas las matrices
reales de tamano n×n lo denotamos porMn×n. Dada una matrizD ∈ Mn×n, el elemento
en la posicion (i, j) de la matriz D se denotara por D(i, j). Una norma usual definida
en este espacio es la dada por
‖D(i, j)‖∞ := max1≤i≤n
n∑
j=1
|D(i, j)|.
En un espacio de Banach E con norma ‖ · ‖E, x ∈ E, Ω ⊂ E y r > 0, la bola abierta
en E, con centro en x y radio r, sera denotada por
Br(x) := y ∈ E : ‖x− y‖E < r.
Se dira que el conjunto Ω es convexo si para todo x, y ∈ Ω, el segmento de recta
que une a x e y esta contenido en Ω. La frontera y adherencia de Ω seran denotados
respectivamente por ∂Ω y Ω. Se dira que el conjunto Ω es compacto si para todo
recubrimiento abierto de Ω se puede extraer un subrecubrimiento abierto finito, y se
dira que Ω es relativamente compacto, si Ω es compacto. Recordemos que en espacios
de Banach de dimension finita, un conjunto es compacto si y solamente si, es cerrado y
acotado. En general, en espacios de Banach de dimension infinita esta equivalencia no
se cumple.
Dados Ω ⊂ Rn abierto, k ∈ N y una funcion f : Ω → Rn. Se dice que f es de clase Ck o
que esta en Ck(Ω), si f es k veces continuamente diferenciable en Ω. f ∈ C(Ω) denotara
que f es continua en Ω. Se dira que f es de clase C∞ o f ∈ C∞(Ω), si f ∈⋂∞k=1C
k(Ω).
f ∈ Ck(Ω) denota que f ∈ Ck(Ω) ∩ C(Ω).Para 1 ≤ p < ∞, ℓp denota el espacio de todas las sucesiones complejas p-sumables,
esto es,
ℓp =
u = (un)n∈Z : un ∈ C,
∑
n∈Z|un|p <∞
.
La norma usual definida en ℓp es dada por
‖u‖p :=(∑
n∈Z|un|p
)1/p
.

1. Resultados preliminares 3
Para p = ∞, el espacio ℓ∞ se define por
ℓ∞ =
u = (un)n∈Z : un ∈ C, sup
n∈Z|un| <∞
con la norma
‖u‖∞ := supn∈Z
|un| .
Los dos espacios, ℓp y ℓ∞, son espacios de Banach. Observese que para 1 ≤ p ≤ ∞ y
u, v ∈ ℓp se satisface que
‖u+ v‖p ≤ ‖u‖p + ‖v‖p . (1.1)
Tambien, para 1 ≤ p < q < ∞, ℓp ⊂ ℓq, y para cualquier u = (un)n ∈ ℓp, se cumple el
estimativo ‖u‖q ≤ ‖u‖p. Ademas, si 1 ≤ p, q ≤ ∞ satisfacen 1p+ 1
q= 1 y u ∈ ℓp, v ∈ ℓq,
entonces w = (wn)n = u ∗ v ∈ ℓ∞, donde wn =∑∞
k=−∞ ukvn−k, y
‖w‖∞ ≤ ‖u‖p ‖v‖q . (1.2)
Denotemos por Lp (−l, l) con p ≥ 1, el espacio de Banach de la funciones
Lebesgue-medibles sobre R las cuales son 2l-periodicas y p-integrables sobre el intervalo
[−l, l]. La norma usual definida sobre Lp (−l, l) es
‖f‖Lp:=
(∫ l
−l|f (x)|p dx
)1/p
.
De manera analoga, para p = ∞, L∞ (−l, l) es el espacio de Banach de todas las
funciones medibles, 2l-periodicas y esencialmente acotadas con la norma usual
‖f‖L∞
= ess supx∈[−l,l]
|f (x)| .
Ademas, cualquier sucesion (fn)n ∈ ℓ2 define una funcion f 2l-periodica, donde
f(x) =∑
n∈Zfn e
inπlx. (1.3)
Por otra parte, si f ∈ L2(−l, l), entonces f puede representarse como una serie en la
forma (1.3), donde
fn =1
2l
∫ l
−lf (x) e−
inπlx dx. (1.4)
En este sentido, cualquier f ∈ L2(−l, l) puede identificarse con la sucesion de sus
coeficientes de Fourier (fn)n donde fn se define como en (1.4).
Para un estudio mas amplio acerca del Analisis de Fourier remitimos al lector al texto
de R. Iorio [25].

4 1. Resultados preliminares
Definicion 1.1. La transformada de Hilbert de una funcion f(x), denotada por H(f),
se define para todo x ∈ R por la integral
H(f)(x) =1
πp.v.
∫ ∞
−∞
f(τ)
τ − xdτ, (1.5)
siempre que esta exista. La expresion p.v.∫
indica que la integral es en el sentido del
valor principal.
Debido al polo en x = τ , no siempre es posible calcular la transformada de Hilbert
como una integral impropia ordinaria. Sin embargo, al tomar la integral en el sentido
del valor principal se incrementa la clase de funciones para las cuales la integral de la
Definicion 1.1 existe.
Como consecuencia directa de la Definicion 1.1 se obtiene que la transformada de Hilbert
es lineal. Tambien, a partir de un calculo sencillo se puede ver que para α ∈ R, δ(x) =
f(αx) y τα(f)(x) = f(x− α), se tiene que
H(δ)(x) = sign(α)H(f)(αx) y H(τα(f))(x) = τα(H(f))(x). (1.6)
Aquı, sign(α) denota la funcion sign : R → −1, 0, 1 que se define por
sign(x) :=
1 si x > 0,
0 si x = 0,
−1 si x < 0.
La ultima igualdad en (1.6) muestra que la transformada de Hilbert y las traslaciones
conmutan. Usando esta conmutatividad, que
∫ ∞
−∞
sin τ
τdτ = π y que la expresion
cos τ
τes impar, podemos obtener que
H(cos(x)) = − sin(x) y H(sin(x)) = cos(x). (1.7)
En efecto,
H(cos(x)) =1
πv.p.
∫ ∞
−∞
cos(τ)
τ − xdτ =
1
πv.p.
∫ ∞
−∞
cos(τ + x)
τdτ
=cos(x)
πv.p.
∫ ∞
−∞
cos(τ)
τdτ − sin(x)
πv.p.
∫ ∞
−∞
sin(τ)
τdτ
= − sin(x).
Ahora, por la conmutatividad tenemos
H(sin(x)) = H(cos(x− π/2)) = − sin(x− π/2) = sin(π/2− x) = cos(x).

1. Resultados preliminares 5
Por otra parte, usando la linealidad de la transformada de Hilbert, la ecuacion (1.7), y
que
eiαx = cos(αx) + i sin(αx),
tenemos que
H(eiαx)(x) = H(cos(αx) + i sin(αx))(x)
= H(cos(αx))(x) + iH(sin(αx))(x)
= −sign(α) sin(αx) + i sing(α) cos(αx)
= i sign(α) (cos(αx) + i sin(αx))
= i sign(α) eiαx. (1.8)
Recordemos la regla de Leibniz para integrales, la cual establece que
d
dc
∫ b(c)
a(c)
f(y, c) dy =
∫ b(c)
a(c)
∂
∂cf(y, c) dy + f(b, c)
d
dcb(c)− f(a, c)
d
dca(c).
En particular, si a y b son lımites definidos (independientes de c), obtenemos que
d
dc
∫ b(c)
a(c)
f(y, c) dy =
∫ b(c)
a(c)
∂
∂cf(y, c) dy.
Utilizando la regla de Leibniz para integrales obtenemos que la transformada de Hilbert
de la derivada de una funcion es la derivada de la transformada de Hilbert. En efecto,
d
dxH(f)(x) =
1
πv.p.
d
dx
∫ ∞
−∞
f(τ)
τ − xdτ
=1
πv.p.
d
dx
∫ ∞
−∞
f(τ + x)
τdτ
=1
πv.p.
d
dx
∫ ∞
−∞
f ′(τ + x)
τdτ
=1
πv.p.
d
dx
∫ ∞
−∞
f ′(τ)
τ − xdτ
= H(f ′)(x), (1.9)
donde f ′(x) =d
dxf(x).
Es de mencionar tambien, que la transformada de Hilbert se puede definir vıa la
transformada de Fourier por
H(f)(x) = i sing(x)f(x). (1.10)
Para un estudio mas amplio acerca de la transformada de Hilbert remitimos al lector
al texto de J. Duoandikoetxea [16].

6 1. Resultados preliminares
1.2. Espacios de Banach con norma tipo Bielecki
Sea v una funcion a valores reales, continua y positiva, definida sobre R y denote por
E el conjunto de las funciones continuas u definidas sobre R tales que
supx∈R
|u(x)| v(x) <∞.
No es difıcil ver que E es un espacio lineal normado con norma
‖u‖v = supx∈R
|u(x)| v(x). (1.11)
Sin dificultad se puede demostrar que el espacio 〈E, ‖ · ‖v〉 es un espacio de Banach
dado que para cualquier sucesion de Cauchy un ⊂ 〈E, ‖ · ‖v〉, entonces la sucesion
un ⊂ 〈Cb(R), | · |∞〉, donde un = unv tambien es una sucesion de Cauchy. Entonces,
existe un ∈ Cb(R) tal que un → u en Cb(R), ası si suponemos que un = un/v, vemos
que un → u en 〈E, ‖ · ‖v〉.Es de mencionar que el espacio E fue introducido por M. Zima en [43] y corresponde
a una generalizacion de un espacio introducido por A. Bielecki en [5]. Es importante
senalar que a pesar de que el teorema de Arzela-Ascoli no funciona en el espacio E,
existen condiciones suficientes de compacidad (ver [2]).
Se dira que la familia Ω ⊂ E es casi-equicontinua sobre R, si la familia Ω ⊂ E es
equicontinua en cada intervalo [a, b] con −∞ < a < b < ∞. Ası, establecemos un
criterio de compacidad el cual es una modificacion del resultado analogo obtenido por
K. Zima en [43].
Proposicion 1.2. Sea q una funcion continua y positiva sobre R tal que
lım|x|→∞
v(x)
q(x)= 0.
Si la familia Ω ⊂ E es casi-equicontinua sobre R y uniformemente acotada en el sentido
de la norma
‖u‖q = supx∈R
|u(x)|q(x),
entonces Ω es relativamente compacto en 〈E, ‖ · ‖v〉.

1. Resultados preliminares 7
1.3. Sobre un subconjunto de funciones continuas
Consideramos en el espacio C(R) de las funciones continuas de valor real definidas en
R el conjunto K ⊂ C(R) definido como
K = w ∈ C(R) : w(x) = w(−x) ≥ 0; w es no creciente para x ≥ 0 .
Asociado con este conjunto, presentamos a continuacion algunos resultados generales
discutidos en [4].
Lema 1.3. Sea k ∈ C(R)∩L1(R) una funcion par, positiva y no creciente para x ≥ 0,
tal que k ∈ L1(R) es una funcion par, positiva y no creciente para x ≥ 0. Entonces el
operador B definido por
B(f)(x) = (k ∗ f)(x) =∫
R
k(x− r)f(r) dr
aplica K en K.
Demostracion. Notemos primero que B(f)(x) es acotado debido a que k ∈ L1(R) y
tambien de la desigualdad de Young, dado que
maxR
|k ∗ f | ≤ f(0)||k||L1(R), f ∈ K.
Ahora, tambien tenemos que B(f) ≥ 0 para f ∈ K. En efecto,
B(f)(x) =∫
R
k(x− y)f(y) dy ≥ 0,
dado que k ≥ 0 y f ≥ 0. Por otra lado, B(f) es tambien una funcion par para f ∈ K.
En efecto,
B(f)(−x) =∫
R
k(−x− y)f(y) dy
=
∫
R
k(x+ y)f(y) dy
=
∫
R
k(x− z)f(z) dz
= B(f)(x).

8 1. Resultados preliminares
Afirmamos ahora que B(f) para f ∈ K es una funcion continua sobre R. De hecho,
primero note que 0 ≤ f(y) ≤ f(0) para cualquier y ∈ R.
|B(f)(x+ h)− B(f)(x)| ≤∫
R
|(k(x+ h− y)f(y)− (k(x− y)f(y)| dy
≤ f(0)
∫
R
|k(x+ h− y)− k(x− y)| dy
≤ f(0)
∫
R
|k(y + h)− k(y)| dy. (1.12)
Usando que k ∈ L1(R) y el teorema de convergencia dominada, concluimos que
lımh→0
|B(f)(x+ h)− B(f)(x)| = 0,
lo que significa que B(f) es una funcion continua sobre R, siempre que f ∈ K.
Finalmente, necesitamos establecer que B(f) es una funcion no creciente para x ≥ 0 y
para f ∈ K. Ası, sea f ∈ K fijo y considere x ≥ 0 y h > 0. Entonces, tenemos para
cualquier r ∈ R que
B(f)(x) =∫
R
k(x− y)f(y) dy
=
∫ r
−∞k(x− y)f(y) dy+
∫ ∞
r
k(x− y)f(y) dy
=
∫ ∞
0
k(x− r − z)f(z + r) dz +
∫ ∞
0
k(x− r − z)f(z + r) dz
y por tanto, tenemos que
B(f)(x+ h) =
∫ ∞
0
k(x+ h− z − r)f(z + r) dz +
∫ ∞
0
k(x+ h+ z − r)f(z − r) dz
Usando r = −h2en la primer formula y r = h
2en la segunda, obtenemos que
B(f)(x)− B(f)(x+ h)
=
∫ ∞
0
(k
(z − x− 1
2h
)− k
(x+
1
2h+ z
))(f
(z − 1
2h
)− f
(z +
1
2h
))dz
Notemos ahora que∫ ∞
x+ 12h
(k
(z − x− 1
2h
)− k
(x+
1
2h + z
))(f
(z − 1
2h
)− f
(z +
1
2h
))dz ≥ 0,
dado que z ≥ x + 12h ≥ 1
2h, y el hecho de que k y f son no crecientes para w ≥ 0.
Ahora, para el resto de la integral, usamos un argumento similar, despues de senalar
que k y f son funciones pares. De hecho, notemos que para z ≥ 0
f
(1
2h− z
)− f
(z +
1
2h
)= f
(z − 1
2h
)− f
(z +
1
2h
)≥ 0,

1. Resultados preliminares 9
para z ≥ 12h o z ≤ 1
2h, dado que f es una funcion par y no creciente para w ≥ 0. Ası,
a partir de este hecho, tenemos que∫ x+ 1
2h
0
(k
(x+
1
2h− z
)− k
(x+
1
2h+ z
))(f
(1
2h− z
)− f
(z +
1
2h
))dz ≥ 0,
dado que 0 ≤ z ≤ x + 12h, y el hecho de que k es una funcion par y no creciente para
w ≥ 0. En otras palabras, hemos demostrado que
B(f)(x)− B(f)(x+ h) ≥ 0
para cualquier x ≥ 0 y h > 0, lo cual significa que B(f)(x) es una funcion no creciente
para x ≥ 0.
Lema 1.4. Sea k ∈ C(R)∩L1(R) una funcion par, positiva y no creciente para x ≥ 0.
Entonces la funcion k(x) =∑
m∈Z k(x− 2m) es periodica, ademas
max−1≤x≤1
k(x) =∑
m∈Zk(2m). (1.13)
Demostracion. Dado que k ∈ C(R)∩L1(R) es una funcion par, positiva y no creciente
para x ≥ 0, entonces es claro que la serie∑
m∈Z k(2m) es convergente. Observese que
k(x+ 2) =∑
m∈Zk(x+ 2− 2m) =
∑
m∈Zk(x+ 2(1−m)) = k(x),
implicando que k es periodica de perıodo 2.
Ahora, sea 0 ≤ x ≤ 1 y m ∈ Z−. Entonces tenemos que
k(x− 2m) ≤ k(−2m).
Usando que k es no creciente sobre R+, tenemos que
−∞∑
m=−1
k(x− 2m) ≤−∞∑
m=−1
k(−2m) =∞∑
m=1
k(2m).
De forma completamente analoga, sea −1 ≤ x ≤ 0 y m ∈ Z+0 .
k(x− 2m) ≤ k(−2m).
Usando que k es no decreciente sobre R−, tenemos que
∞∑
m=0
k(x− 2m) ≤∞∑
m=0
k(−2m) =
−∞∑
m=0
k(2m)
Por lo tanto, concluimos que
max−1≤x≤1
k(x) =∑
m∈Zk(2m).

10 1. Resultados preliminares
Lema 1.5. Sean k ∈ C(R) ∩ L1(R) una funcion par, positiva y no creciente para
x ≥ 0 y f una funcion par, continua y no creciente para x > 0. Si α =∫ 2
0k(y) dy y
k0 = max−1≤x≤1 k(x), entonces tenemos que
∫ 1
0
∫
R
k(x− y)f(y) dx dy ≥∫ 1
0
(∫ 2
0
k(x) dx
)f(y) dy ≥ α
∫ 1
0
f(y) dy, (1.14)
∫
R
k(x− y)f(y) dy ≤ 2k0
∫ 1
0
f(y) dy. (1.15)
Demostracion. Usando que k ∈ C(R) ∩ L1(R) es una funcion par, tenemos que
∫ 1
−1
k(x− y) dx =
∫ 0
−1
k(x− y) dx+
∫ 1
0
k(x− y) dx =
∫ 1
0
(k(x− y) + k(x+ y)) dx,
De otro lado, usando que k es no creciente para x > 0 y que 0 ≤ y ≤ 1 concluimos que
∫ 1
0
k(x+ y) dx ≥∫ 1
0
k(x+ 1) dx ≥∫ 2
1
k(z) dz.
Ademas, usando que k es par, no decreciente para x < 0 y que 0 ≤ y ≤ 1 concluimos
que
∫ 1
0
k(x− y) dx ≥∫ 0
−1
k(−x− y) dx
≥∫ 0
−1
k(−x− 1) dx =
∫ 0
−1
k(x+ 1) dx =
∫ 1
0
k(z) dz.
Por lo tanto, utilizando estimativos anteriores y que k y f son positivas,
∫ 1
0
∫
R
k(x− y)f(y) dy dx ≥∫ 1
0
(∫ 1
0
(k(x− y) + k(x+ y)) dx
)f(y)dy
≥(∫ 2
0
k(z) dz
)∫ 1
0
f(y) dy
≥ α
∫ 1
0
f(y) dy.
Por otra parte, se tiene que
∫
R
k(x− y)f(y) dy =
∞∑
m=−∞
∫ 1+2m
−1+2m
k(x− y)f(y) dy
=∞∑
m=−∞
∫ 1
−1
k(x− y − 2m)f(y + 2m) dy.

1. Resultados preliminares 11
Ahora, para m ≤ −1 tenemos que y + 2m ≤ y ≤ 0 para −1 ≤ y ≤ 0 . Ahora para
0 ≤ y ≤ 1 tenemos que y +m ≤ 0, y por tanto
y + 2m ≤ −y ≤ 0.
Por lo tanto, como f es no decreciente en R− y par concluimos que f(y + 2m) ≤ f(y).
Por otro lado, para m ≥ 1, tenemos que y + 2m ≥ y ≥ 0 para 0 ≤ y ≤ 1 . Ahora para
−1 ≤ y ≤ 0 tenemos que y +m ≥ 0, y por tanto
y + 2m ≥ −y ≥ 0.
Utilizando ahora que f es no creciente en R+ y par concluimos que f(y + 2m) ≤ f(y).
Usando los estimativos anteriores y el Lema 1.4 obtenemos que
∫
R
k(x− y)f(y) dy ≤∫ 1
−1
∞∑
m=−∞k(x− y − 2m)f(y) dy
≤∫ 1
−1
k(x− y)f(y) dy
≤ 2k0
∫ 1
0
f(y) dy.
1.4. Teorıa de operadores positivos
El objetivo principal de esta seccion es establecer algunos resultados de puntos
fijos sobre conos que garanticen la existencia de ondas solitarias. Inicialmente,
consideraremos que el cono es un subconjunto de un espacio Frechet. Posteriormente,
presentaremos otro resultado cuando el cono es subconjunto de un espacio de Banach.
En el primer caso el resultado sera una consecuencia directa de la aplicacion de la teorıa
de operadores positivos en espacios de Frechet desarrollado por Krasnosel’skii [26], [27]
y la nocion topologica de ındice introducida por A. Granas [20]. Esta teorıa de puntos
fijos en conos para operadores positivos fue adaptada para obtener la existencia de
ondas viajeras para una clase de modelo dispersivo por T. Benjamin, J. Bona y D. Bose
[4] para el caso de una ecuacion KdV generalizada, por J. Bona y H. Chen en el caso de
algunos sistemas dispersivos [6] (ver tambien trabajos de J. Quintero y J. Munoz [36])
en el caso de un sistema Benjamin-Ono, y H. Chen, M. Chen y N. Nguyen [10] para
soluciones a los sistemas Boussinesq. Para una revision completa, sugerimos al lector
que revise los siguientes trabajos: [4], [20], [26] y [27].
Comenzamos introduciendo algunos conceptos que vamos a utilizar.

12 1. Resultados preliminares
Definicion 1.6. Se dice que X es un espacio de Frechet, si X es un espacio metrizable
y completo, localmente convexo y lineal topologico (sobre los numeros reales).
Si X es un espacio de Frechet es posible definir en el una sucesion (pn)n de semi-normas
de tal manera que pn+1(x) ≥ pn(x) para cada x ∈ X y cada n = 1, 2, 3, . . . y que la
formula
d(x, y) =
∞∑
j=1
1
2j
(pj(x− y)
1 + pj(x− y)
), x, y ∈ X, (1.16)
proporciona una metrica que genera una topologıa que coincide con la topologıa original
en X . En este caso, decimos que X es un espacio Frechet con la familia generadora de
semi-normas (pn)n.
De aquı en adelante, utilizamos la notacion
Br = x ∈ X : d(x, 0) < r, Bjr = x ∈ X : pj(x) < r, j ∈ N.
Claramente de (1.16) tenemos que X = B1.
Definicion 1.7. Un cono en X es un subconjunto cerrado K de un espacio de Frechet
que satisface las siguientes condiciones:
(a) λK = λu : u ∈ K ⊂ K, para todo λ ≥ 0.
(b) K +K = u+ v : u, v ∈ K ⊂ K.
(c) K ∩ −K = K ∩ −u : u ∈ K = 0.
De (a) y (c) tenemos que K debe ser convexo.
Por otro lado, tambien tenemos un orden parcial en K dado por
x ≺ y ⇔ y − x ∈ K.
Para cualquier 0 < r < R <∞, denotemos
Kr = K ∩ Br, ∂Kr = K ∩ ∂Br y KRr = u ∈ K : r < d(u, 0) < R.
Definicion 1.8. Un operador A definido sobre K se dice que es positivo, si A(K) ⊂ K.
Por otro lado, decimos que un operador positivo A sobre K es K-compacto, si el
conjunto A(Kr) tiene un clausura compacta, para cada r ≥ 0.
Debemos tener en cuenta que el operador A no necesariamente es lineal. De hecho, los
operadores positivos A que se presentan en el trabajo son no lineales.

1. Resultados preliminares 13
Definicion 1.9. Se dice que una terna (K,A, U) es admisible, si
1. K es un subconjunto convexo de X,
2. U ⊂ K es abierto en la topologıa relativa a K,
3. A es continuo y K-compacto,
4. no existen puntos fijos de A en ∂U , la frontera del conjunto abierto U en la
topologıa relativa a K.
Definicion 1.10. Sean (K,A, U) una terna admisible y A una aplicacion constante,
es decir, existe un punto a ∈ K tal que Au = a para todo u ∈ K. El ındice del punto
fijo del operador positivo A en U se define como
i(K,A, U) =
1, si a ∈ U,
0, si a /∈ U.
El ındice del punto fijo del operador positivo A en U , i(K,A, U) satisface varias
propiedades, mencionamos a continuacion tres que consideramos son de destacar. En
todos los casos (K,A, U), (K,B, U) y (K,A, Uj) representan ternas admisibles.
a) Homotopıa invariante: i(K,A, U) = i(K,B, U) para operadores homotopicos A y Bsobre U ⊂ K.
b) Propiedad de punto fijo: si i(K,A, U) 6= 0, entonces A tiene al menos un punto fijo
en U .
c) Aditividad: si Uj , j = 1, 2, . . . , n, es una coleccion de subconjuntos abierto de U
mutuamente disjuntos, tales que Au 6= u para todo u ∈ U \⋃nj=1Uj , entonces
i(K,A, U) =n∑
j=1
i(K,A, Uj).
Los siguientes resultados fueron tomados de Benjamin et al. [4] y seran utiles para
desarrollar la teorıa en la investigacion actual. El operador A es positivo, continuo y
K-compacto en el cono K. Para mas detalles, referimos al lector al trabajo de Benjamin
et al. [4].
Lema 1.11. Supongamos que 0 < ρ < 1 y que
(a1) Ax− x /∈ K para todo x ∈ ∂Kρ, o

14 1. Resultados preliminares
(b1) tAx 6= x para todo x ∈ ∂Kρ y todo t ∈ [0, 1].
Entonces i(K,A, Kρ) = 1.
Lema 1.12. Supongamos que 0 < ρ < 1 y que
(a2) x−Ax /∈ K para todo x ∈ ∂Kρ, o
(b2) existe x ∈ K con x 6= 0 tal que x−Ax 6= λx para todo x ∈ ∂Kρ y todo λ ≥ 0.
Entonces i(K,A, Kρ) = 0.
Lema 1.13. Sea (K,A, U) una terna admisible. Si existe x ∈ K con x 6= 0 tal que
x−Ax 6= λx para todo x ∈ ∂U y todo λ ≥ 0, entonces i(K,A, U) = 0.
El siguiente teorema es una consecuencia de los dos primeros lemas.
Teorema 1.14 ([4]). Si (a1) o (b1) se satisfacen para r tal que 0 < r < 1 y si (a2) o
(b2) se satisfacen para R tal que r < R < 1. Entonces, A tiene al menos un punto fijo
en KRr . Ademas, i(K,A, KR
r ) = −1.
Dado que a partir de la metrica introducida sobre el espacio de Frechet X se vio que
X = B1, implico que en los resultados anteriores ρ, r, R ∈ (0, 1). H. Chen en [9] logra
adaptar esta teorıa en espacios de Banach, en dichos casos los resultados anteriores son
validos tomando ρ, r, R ∈ (0,∞). A partir del trabajo de H. Chen sobre espacios de
Banach, han surgido otras investigaciones que han seguido ese mismo enfoque, como
por ejemplo: H. Chen, M. Chen y N.V. Nguyen en [10], J.C. Munoz en [29], y F.A.
Pipicano y J.C. Munoz en [35].
Como podemos apreciar, los teoremas de punto fijo de Krasnosel’skii representan una
buena herramienta para establecer la existencia de soluciones no triviales de problemas
no lineales para ecuaciones integrales, ecuaciones diferenciales ordinarias y ecuaciones
diferenciales parciales. Los resultados del punto fijo de Krasnosel’skii para operadores
positivos se utilizan no solo para demostrar la existencia de soluciones, sino tambien
para localizar soluciones en un anillo u otros dominios de este tipo, evitando tener
puntos fijos triviales.
A continuacion, presentamos otro interesante resultado debido tambien a Krasnosel’skii
y tambien relacionado con la existencia de puntos fijos no triviales de un operador
completamente continuo en un espacio de Banach (vease [26]).

1. Resultados preliminares 15
Definicion 1.15. Un operador F : E → E es completamente continuo, si F es continuo
y aplica conjuntos acotados en conjuntos precompactos.
Teorema 1.16 ([26]). Sean X un espacio de Banach y K ⊂ X un cono en X. Para
i = 1, 2, sean Ωi dos conjuntos abiertos y acotados en X con 0 ∈ Ω1 y Ω1 ⊂ Ω2. Sea
F : K ∩ (Ω2 \ Ω1) → K un operador completamente continuo tal que se satisface una
de las siguientes condiciones:
1. ‖Fx‖ ≤ ‖x‖ para x ∈ K ∩ ∂Ω1 y ‖Fx‖ ≥ ‖x‖ para x ∈ K ∩ ∂Ω2.
2. ‖Fx‖ ≥ ‖x‖ para x ∈ K ∩ ∂Ω1 y ‖Fx‖ ≤ ‖x‖ para x ∈ K ∩ ∂Ω2.
Entonces F tiene al menos un punto fijo en K ∩ (Ω2 \ Ω1).
El anterior resultado ha sido empleado ampliamente en el estudio de problemas de valor
de frontera con condiciones de frontera separadas (vease por ejemplo [3, 17, 21, 24] y
sus referencias), ası como para problemas periodicos [28, 32, 40].
1.5. Positividad de la transformada de Fourier
A continuacion presentamos algunas propiedades elementales de la transformada de
Fourier en la recta para funciones pares. En particular, buscamos condiciones para una
funcion real u(y) con y > 0, que garanticen que su transformada de Fourier-coseno
k(x) = Fcos(u(y))(x) =
∫ ∞
0
u(y) cos(xy) dy
sea positiva. Particularmente, estamos interesados en funciones que son positivas, pares
y decrecen a cero cuando y → ∞. Demostramos que la convexidad de u(y) es suficiente
para garantizar la positividad de k(x) para todo x > 0.
Teorema 1.17 (E.O. Tuck [42]). Sean u, u′ ∈ L1(R) tal que u es una funcion
par y positiva tal que para y > 0 es dos veces diferenciable y u′′(y) > 0, entonces
Fcos(u(y))(x) > 0 para todo x > 0.
Demostracion. Haciendo integracion por partes tenemos que
k (x) =
∫ ∞
0
cos (xy) u (y) dy, dv = cos (xy) dy
=1
xu (y) sin (xy)
∣∣∣∣∞
0
− 1
x
∫ ∞
0
sin (xy) u′ (y) dy
= −1
x
∫ ∞
0
sin (xy) u′ (y) dy = −1
xg (x) .

16 1. Resultados preliminares
Note que el termino que se anulo se debe a que u(y) → 0 cuando y → ∞, y
que u (y) sin (xy) → 0 cuando y → 0+. Lo anterior indica, que la transformada de
Fourier-coseno de u(y) es −1
xveces la transformada de Fourier-seno de su derivada
u′(y).
Analicemos el signo de la funcion g(x):
g (x) =
∫ ∞
0
sin (xy) u′ (y) dy
=
(∫ 2π/x
0
+
∫ 4π/x
2π/x
+ · · ·+∫ 2π(j+1)/x
2πj/x
+ · · ·)sin (xy) u′ (y) dy
=∞∑
j=0
∫ 2π(j+1)/x
2πj/x
sin (xy) u′ (y) dy.
Haciendo aquı la sustitucion y =2πj + θ
xobtenemos que
dy =1
xdθ, xy = 2πj + θ, y (0) =
2πj
x, y (2π) =
2π (j + 1)
x.
En consecuencia tenemos que
g (x) =1
x
∞∑
j=0
∫ 2π
0
sin (2πj + θ) u′(2πj + θ
x
)dθ
=1
x
∞∑
j=0
∫ 2π
0
sin (θ) u′(2πj + θ
x
)dθ
=1
x
∞∑
j=0
(∫ π
0
+
∫ 2π
π
)sin (θ) u′
(2πj + θ
x
)dθ.
Ahora, si en la segunda integral anterior consideramos
θ = v + π, dv = dθ v (π) = 0, v (2π) = π,
obtenemos que
∫ 2π
π
sin (θ) u′(2πj + θ
x
)dθ =
∫ π
0
sin (v + π) u′(2πj + v + π
x
)dv
= −∫ π
0
sin (v) u′(2πj + v
x+π
x
)dv
= −∫ π
0
sin (θ) u′(2πj + θ
x+π
x
)dθ.

1. Resultados preliminares 17
Por lo tanto,
g (x) =1
x
∞∑
j=0
∫ π
0
sin (θ)
(u′(2πj + θ
x
)− u′
(2πj + θ
x+π
x
))dθ,
pero dado que u′ es creciente (u′′(y) > 0) entonces tenemos que
u′(2πj + θ
x
)− u′
(2πj + θ
x+π
x
)< 0, para cada j,
por lo tanto, como la funcion sin (θ) es positiva en (0, π), obtenemos que g (x) < 0. En
consecuencia, k (x) = − 1xg (x) es positiva para todo x > 0.
Observese que la convexidad es una condicion suficiente, mas no necesaria para la
positividad de su transformada de Fourier. Considere por ejemplo
u1 (y) = e−|y| y u2(y) =1
1 + y2.
Las respectivas transformadas de Fourier son
k1 (x) =1
1 + x2y k2(x) =
π
2e−|x|.
Note que u′′(y) > 0 para y > 0 es verdadero para u1(y) pero no es verdadero para u2(y),
sin embargo, k2(x) la transformada de Fourier de u2(y) tambien es positiva para todo
x > 0. Para mas detalles relacionados con la positividad de la transformada de Fourier
se recomienda al lector ver la referencia [42].
1.6. Criterio de Routh-Hurwitz
A continuacion se presenta un metodo que proporciona informacion sobre la ubicacion
de los ceros de un polinomio. Usando este metodo, podemos decir cuantos ceros del
polinomio estan en el semiplano izquierdo, en el semiplano derecho y en el eje imaginario.
Observese que decimos cuantos, no donde. Es decir, el criterio decide la ubicacion de
los ceros, mas no sus coordenadas. El metodo se denomina criterio de Routh-Hurwitz.
El metodo requiere dos pasos: (1) Generar una tabla de datos llamada tabla de Routh
y (2) interpretar la tabla de Routh para indicar cuantos ceros del polinomio hay en el
plano izquierdo, en el plano derecho o en el eje imaginario. El poder del metodo reside
en el diseno mas que en el analisis. Por ejemplo, si tiene un parametro desconocido

18 1. Resultados preliminares
entre los coeficientes del polinomio, es difıcil determinar a traves de una calculadora
el posible valor de las raıces. Mientras que con el criterio esto depende de determinar
simplemente el cambio de signo de unos valores.
Presentamos la version mas sencilla del metodo, dado que el polinomio que debemos
analizar es de cuarto grado. Para un analisis mas detallado del metodo invitamos al
lector a ver el texto de N.S. Nise [31].
Generando una tabla basica de Routh.
Nos interesamos en los coeficientes del polinomio. Comenzamos etiquetando las filas con
las potencias de x desde la mas alta hasta x0. Luego comenzamos ubicando en la primera
fila el coeficiente de la potencia mas alta de x, seguido del coeficiente de esa potencia
mas alta menos dos y ası sucesivamente; en la siguiente fila se pone ordenadamente,
comenzando con la siguiente potencia mas alta de x, cada coeficiente que se omitio
en la primera fila, completando con un ceros de ser necesario. Las entradas restantes
se completan de la siguiente manera. Cada entrada es un determinante negativo de
las entradas en las dos filas anteriores dividida por la entrada en la primera columna
directamente sobre la fila calculada. La columna de la izquierda del determinante es
siempre la primera columna de las dos filas anteriores, y la columna de la derecha son
los elementos de la columna de arriba y a la derecha. La tabla esta completa cuando
todas las filas se completan hasta x0.
Para el caso particular del polinomio p(x) = a4x4 + a3x
3 + a2x2 + a1x+ a0 la tabla de
Routh es como sigue:
x4 a4 a2 a0
x3 a3 a1 0
x2
−∣∣∣∣∣a4 a2
a3 a1
∣∣∣∣∣a3
= b1
−∣∣∣∣∣a4 a0
a3 0
∣∣∣∣∣a3
= b2
−∣∣∣∣∣a4 0
a3 0
∣∣∣∣∣a3
= 0
x1
−∣∣∣∣∣a3 a1
b1 b2
∣∣∣∣∣b1
= c1
−∣∣∣∣∣a3 0
b1 0
∣∣∣∣∣b1
= 0
−∣∣∣∣∣a3 0
b1 0
∣∣∣∣∣b1
= 0
x0
−∣∣∣∣∣b1 b2
c1 0
∣∣∣∣∣c1
= d1
−∣∣∣∣∣b1 0
c1 0
∣∣∣∣∣c1
= 0
−∣∣∣∣∣b1 0
c1 0
∣∣∣∣∣c1
= 0

1. Resultados preliminares 19
Ahora que sabemos como generar la tabla de Routh, veamos como interpretarla. El
criterio de Routh-Hurwitz declara que el numero de raıces del polinomio que estan en el
semiplano derecho es igual al numero de cambios de signo en la primera columna de la tabla
de Routh. Esto implica que si no hay cambios de signo, todas las raıces tienen parte
real negativa.

.

Capıtulo 2
Derivacion de un sistema tipo
Benjamin-Ono
En este capıtulo, nos interesa deducir un modelo que describe la propagacion de una
onda interna debilmente no lineal que evoluciona en la interfaz de dos fluidos inmiscibles
con densidades constantes, que en reposo estan contenidas en un canal largo con un
fondo y una parte superior rıgidos horizontales, y se supone que el espesor de la capa
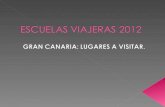
inferior es efectivamente infinito, conocida como el lımite de aguas profundas (vease la
Figura 2.1).
Las ondas internas son ondas de gravedad que oscilan dentro de un medio fluido, en
lugar de hacerlo en su superficie. Para existir, el fluido debe estratificarse: la densidad
debe disminuir de forma continua o discontinua con la profundidad (o altura) debido
a los cambios, por ejemplo, en la temperatura o la salinidad del fluido. Si la densidad
cambia en una pequena distancia vertical (como en el caso de lagos y oceanos con las
capas termicas, o el caso de la atmosfera cuando ocurre una desviacion del cambio
normal de una propiedad atmosferica con respecto a la altitud), las ondas se propagan
horizontalmente como las ondas superficiales, pero lo hacen a velocidades mas lentas
segun lo determinado por la diferencia de densidad del fluido por debajo y por encima de
la interfaz. Si la densidad cambia continuamente, las ondas pueden propagarse vertical
y horizontalmente a traves del fluido (para leer mas sobre los conceptos relacionados
con el fenomeno de ondas internas se recomienda al lector ver [19] y las referencias allı
mencionada).
En el presente estudio, nos enfocamos en lo que posiblemente sea la configuracion mas
simple capaz de soportar un movimiento de ondas internas de amplitud arbitraria,
21

22 2. Derivacion de un sistema tipo Benjamin-Ono
el de un fluido inviscible e incompresible de dos capas de densidades homogeneas
entre dos placas de extension horizontal infinita. A pesar de su larga historia en la
literatura, la atencion que se le ha prestado desde el punto de vista matematico,
mediante investigaciones experimentales y teoricas, es relativamente reciente (ver [8]
y referencias allı citadas).
Pared solida
Pared solida
x
zh1
h2
ρ1
ρ2
ζ(x, t)
a
L Interfaz
u(x, t)Z0
Figura 2.1: Una onda solitaria tıpica que se propaga en la interfaz entre dos fluidos
incompresibles de densidad homogenea que llenan un dominio bidimensional limitado
por dos planos rıgidos horizontales.
Es importante mencionar que recientemente J. C. Munoz [30] introdujo un sistema
dispersivo tipo Benjamin-Ono regularizado, que esta relacionado con la ecuacion rBO,
de la forma
ζt − ((1− αζ)u)x=ǫ2
6ζxxt
ut + αuux + (1− ρ0) ζx= ρ0ǫH(uxt) +ǫ2
6uxxt,
(2.1)
donde Hf(x) denota el operador transformada de Hilbert definido por la ecuacion
(1.5), y ρ0 = ρ2ρ1
con ρ1 y ρ2 representando las densidades de los fluidos y sujeto a
que ρ0 > 1 (para una estratificacion estable). Las constantes α y ǫ son pequenos
numeros reales positivos que miden la intensidad de los efectos no lineales y dispersivos,
respectivamente. Aquı h1 denota el grosor de la capa superior del fluido y los parametros
L y a corresponden a la longitud de onda caracterıstica y la amplitud de onda
caracterıstica, respectivamente. La funcion u = u(x, t) es la velocidad monitorizada

2. Derivacion de un sistema tipo Benjamin-Ono 23
a la profundidad normalizada z0, y ζ = ζ(x, t) es la amplitud de onda en el punto x y
el tiempo t, medido con respecto al nivel de reposo de la interfaz de los dos fluidos.
Para este sistema, J.C. Munoz establecio en [30] la existencia y unicidad de las soluciones
en el caso no periodico. J. Quintero y J.C. Munoz mostraron la existencia de ondas
solitarias (ver [36]), y J.C. Munoz y F.A. Pipicano mostraron la existencia de ondas
viajeras periodicas para un perıodo grande (ver [35]). Senalamos que en el caso que se
descartan los terminos de orden ǫ2 en el sistema (2.1) y se toma α = O(ǫ), se obtiene
un sistema conocido, derivado por W. Choi y R. Camassa en [12], [13], [14], de la forma
ζt − ((1− αζ)u)x= 0,
ut + αu ux + (1− ρ0) ζx= ρ0ǫH(ζtt).(2.2)
A continuacion abordaremos la derivacion de un sistema tipo Benjamin-Ono con una
mayor dispersion a los propuestos por W. Choi y R. Camassa en [12], [13], [14] (ver
ecuacion (2.2)) y J.C. Munoz en [30] (ver ecuacion (2.1)), para describir la interfaz entre
dos fluidos incompresibles de densidad homogenea que llenan un dominio bidimensional
limitado por dos planos rıgidos horizontales, cuando consideremos el caso lımite de
profundidad infinita. El tipo de derivacion que abordamos requiere de una expasion
de Taylor de orden mayor con respecto a los parametros de no linealidad y amplitud.
Para este analisis hemos adaptando los trabajos de W. Choi y R. Camassa en [12], [13],
[14] y J.C. Munoz en [30]. A diferencia de los trabajo anteriores, hemos descartado los
terminos de orden O(αǫ2), y se ha tomado que α = O(ǫ2+σ), σ ∈ (0, 1), para obtener
un sistema tipo Benjamin-Ono con mayor dispersion.
2.1. Ecuaciones que describen el problema
Como lo mencionamos antes, consideramos dos fluidos contenidos en reposo en un canal
largo con partes superior e inferior rıgidas horizontales, de modo que la densidad ρ1 para
el fluido superior y la densidad ρ2 para el fluido inferior satisfagan que ρ2 > ρ1, para
tener una estratificacion estable. Tambien asumimos que el espesor de la capa inferior
se supone que es efectivamente infinito (lımite de aguas profundas).
Observese que debemos acoplar la solucion de dos problemas que pueden ser descritos
por las ecuaciones de Euler en el caso de fluidos inviscidos e incompresibles en dos

24 2. Derivacion de un sistema tipo Benjamin-Ono
dimensiones: vt + (v · ∇)v = −1
ρgrad p− g,
divv = 0, g = −gk.(2.3)
Aquı v = (ui(x, z, t), wi(x, z, t)), p = pi y ρ = ρi para i = 1, 2, g representa la aceleracion
gravitacional y k el vector unitario en la direccion del eje z. Aquı, cuando i = 1 surgen
las ecuaciones que describen el fluido en la parte superior y las ecuaciones para el fluido
en la parte inferior se toma i = 2.
Desarrollando las ecuaciones de Euler (2.3), tenemos que la velocidad (ui, wi), la
densidad ρi y la presion pi (i = 1, 2) en el punto (x, z, t) deben satisfacer el sistema
∂xui + ∂zwi = 0, (2.4)
∂tui + ui∂xui + wi∂zui = − 1
ρi∂xpi, (2.5)
∂twi + ui∂xwi + wi∂zwi = − 1
ρi∂zpi − g, (2.6)
Las condiciones de contorno en la interfaz del fluido son
∂tξ + ui∂xξ = wi, p1 = p2, en z = ξ(x, t). (2.7)
Si definimos h1 y h2 como el espesor no perturbado de las capas del fluido superior e
inferior, respectivamente, entonces las condiciones de contorno en las superficies rıgidas
superior e inferior estan dadas por
w1(x, h1, t) = w2(x,−h2, t) = 0, t ≥ 0, (2.8)
respectivamente. El parametro de dispersion esta dado por ǫ = h1L
y el parametro de
no linealidad esta dado por α = ah1, donde los parametros L y a corresponden a la
longitud y amplitud caracterısticas, respectivamente. Ahora, en el caso de tener fluidos
irrotacionales, las ecuaciones (2.4)–(2.8) para la capa superior se pueden escribir en
terminos del potencial de velocidad φ = φ1 definido por (∂xφ1, ∂zφ1) = (u1, w1) que
satisface la no linealidad
φxx + φzz = 0, para ξ(x, t) < z < h1, (2.9)
φz(x, h1, t) = 0, (2.10)
ξt + ξxφx = φz, para z = ξ(x, t), (2.11)
φt +1
2(φ2
x + φ2z) + gξ +
p1ρ1
= C(t), para z = ξ(x, t), (2.12)

2. Derivacion de un sistema tipo Benjamin-Ono 25
donde C(t) solo depende de t. Para encontrar modelos que tengan soluciones con
pequena amplitud, introducimos la siguiente escala,
x = Lx, z = h1z, t =L√gh1
y las funciones de escala
ξ = aξ, φ1 = a
√g
h1Lφ1, p1 = gh1ρ1p1,
con el fin de adimensionar las variables fısicas en las ecuaciones anteriores. Si eliminamos
sombreros, las ecuaciones en variables adimensionales para el fluido de la capa superior
se pueden escribir como
ǫ2φxx + φzz = 0, para αξ(x, t) < z < 1, (2.13)
φz(x, 1, t) = 0, (2.14)
ξt + αξxφx =1
ǫ2φz, para z = αξ(x, t), (2.15)
φt +α
2
(φ2x +
1
ǫ2φ2z
)+ ξ +
p1α
= C(t), para z = αξ(x, t). (2.16)
2.2. Derivacion del modelo
Ahora, con la finalidad de deducir el sistema tipo Benjamin-Ono, suponemos que todos
los calculos se pueden hacer de manera formal, para ello, consideramos una expansion
en serie alrededor del lımite superior z = 1 para el potencial de velocidad
φ(x, z, t) =∞∑
n=0
(1− z)nfn(x, t), (2.17)
donde f0 = f . Derivando con respecto a z en la expresion (2.17) obtenemos que
φz (x, z, t) = −∞∑
n=1
n (1− z)n−1 fn (x, t) .
Usando la condicion de frontera (2.14) obtenemos que f1 = 0. Reemplazando φz en
la ecuacion (2.13) y usando (2.14) se obtiene que ǫ2φzxx (x, 1, t) = −φzzz (x, 1, t) =
0, lo cual implica que f3 = 0. Repitiendo este proceso obtenemos que f2n+1 = 0.
Ahora, utilizando la ecuacion (2.13) y que φzz (x, 1, t) = 0 se obtiene que f2 = − ǫ2
2∂2xf .
Repitiendo este proceso se obtiene que f2n =(−ǫ2)
n
(2n)!∂2nx f . Por lo tanto, obtenemos que
φ(x, z, t) = f − ǫ2(1− z)2
2∂2xf +
ǫ4(1− z)4
4!∂4xf − ǫ6(1− z)6
6!∂6xf +O(ǫ8).

26 2. Derivacion de un sistema tipo Benjamin-Ono
Si sustituimos φ(x, z, t) en las ecuaciones (2.15) y (2.16), obtenemos manteniendo los
terminos de orden O(α, ǫ4) y descartando los terminos de orden O(αǫ2) que
ξt − ∂2xf +ǫ2
6∂4xf − ǫ4
5!∂6xf + α(ξfx)x = 0, (2.18)
ft −ǫ2
2∂2x∂tf +
ǫ4
4!∂4x∂tf +
α
2(∂xf)
2 + ξ +p1α
= C(t), para z = αξ(x, t). (2.19)
Ahora, tambien sabemos que en la capa inferior φ = φ2 y la presion p2 satisfacen el
siguiente sistema
φxx + φzz = 0, para −h2 < z < ξ(x, t), (2.20)
φz(x,−h2, t) = 0, (2.21)
ξt + ξxφx = φz, para z = ξ(x, t), (2.22)
φt +1
2(φ2
x + φ2z) + gξ +
p2ρ2
= C(t), para z = ξ(x, t), (2.23)
donde C(t) es una funcion que solo depende de t. Como se menciono anteriormente, para
buscar modelos que tengan soluciones con pequena amplitud, introducimos la siguiente
escala,
x = Lx, z = Lz, t =L√gh1
y las funciones de escala
ξ = aξ, φ2 = aǫ
√g
h1Lφ2, p2 = gh1ρ1p2.
Ası, eliminando los sombreros, las ecuaciones en variables adimensionales para el fluido
de la capa inferior se pueden escribir como
φxx + φzz = 0, para −h2L< z < αǫξ(x, t), (2.24)
φz
(x,−h2
L, t
)= 0, (2.25)
ξt + αǫξxφx = φz, para z = αǫξ(x, t), (2.26)
αǫφt +α2ǫ2
2(φ2
x + φ2z) + αξ +
ρ1ρ2p2 = C(t), para z = αǫξ(x, t). (2.27)
Si diferenciamos la ecuacion (2.27) con respecto a x, obtenemos la siguiente expresion
para la presion en la interfaz del fluido z = αǫξ(x, t)
∂xp2 = ∂xp1 = −ρ2αρ1
(∂xξ + ǫ∂x∂tφ). (2.28)

2. Derivacion de un sistema tipo Benjamin-Ono 27
Por otro lado, si expandimos el potencial alrededor de z = 0, obtenemos que
φx(x, αǫξ(x, t), t) = φx(x, 0, t) +O(αǫ).
Ademas, por la ecuacion (2.26) vemos que
φz = ξt +O(αǫ), cuando z = 0.
Ahora, si definimos el operador T por
T (f)(x) := p.v.
(1
2h
∫
R
f(w) coth
(π(w − x)
2h
))dw,
entonces vemos que la solucion de la ecuacion de Laplace (2.24) sujeta a la condicion
de frontera tipo Newman (2.25) nos permite escribir
φx(x, 0, t) = T (φz(x, 0, t)) +O(αǫ) = T (ξt +O(αǫ)).
Ası, al diferenciar con respecto a t, obtenemos formalmente que
∂x∂tφ(x, 0, t) = T (ξtt +O(αǫ)),
lo cual implica que
∂xp2 = ∂xp1 = −ρ2αρ1
(∂xξ + ǫT (ξtt +O(αǫ))).
Si diferenciamos la ecuacion del momentum (2.19) con respecto a x y sustituimos la
expresion por la presion dada en la formula (2.28), entonces despues de descartar los
correspondientes terminos, tenemos que
∂x∂tf − ǫ2
2∂3x∂tf +
ǫ4
4!∂5x∂tf +
α
2(∂xf)
2x + ξx −
ρ2ρ1
(∂xξ + ǫT (ξtt +O(αǫ)))) = 0.
Ahora, consideramos la velocidad monitoreada en el nivel z = Z0 con αξ < Z0 < 1.
Vemos que
u(x, t) = φx(x, Z0, t)
= fx −ǫ2(1− Z0)
2
2∂3xf +
ǫ4(1− Z0)4
4!∂5xf − ǫ6(1− Z0)
6
6!∂7xf +O(ǫ8). (2.29)

28 2. Derivacion de un sistema tipo Benjamin-Ono
De los hechos anteriores, vemos directamente que
fx = u+ǫ2(1− Z0)
2
2∂3xf − ǫ4(1− Z0)
4
4!∂5xf +O(ǫ6)
fxt = ut +ǫ2(1− Z0)
2
2∂3x∂tf − ǫ4(1− Z0)
4
4!∂5x∂tf +O(ǫ6)
∂2xf = ux +ǫ2(1− Z0)
2
2∂4xf − ǫ4(1− Z0)
4
4!∂6xf +O(ǫ6)
∂4xf = ∂3xu+ǫ2(1− Z0)
2
2∂6xf − ǫ4(1− Z0)
4
4!∂8xf +O(ǫ6)
∂6xf = ∂5xu+ǫ2(1− Z0)
2
2∂8xf − ǫ4(1− Z0)
4
4!∂10x f +O(ǫ6)
ǫ2∂4xf = ǫ2∂3xu+ǫ4(1− Z0)
2
2∂6xf +O(ǫ6)
ǫ4∂6xf = ǫ4∂5xu+O(ǫ6)
De estas ecuaciones, descartando los terminos de orden O(αǫ2) y O(α, ǫ6), concluimos
que
ξt − ((1− αξ)u)x + ǫ2α1∂3xu+ ǫ4α2∂
5xu = 0, (2.30)
ut − ǫ2α3∂2xut + ǫ4α4∂
4xut + αu ux + ξx +
∂xp1α
= 0, (2.31)
donde los αi son dados por
α1 =1
6− θ2
2> 0, α2 = − 1
5!(1− 5θ2)
2< 0,
α3 =1
2(1− θ2) > 0, α4 =
1
4!(1− θ2)(1− 5θ2) > 0,
(2.32)
donde 0 < θ := 1− Z0 <1√5. Ademas, para β1 > 0 y β2 > 0, tenemos que
ξt − ǫ2β1∂2xξt + ǫ4β2∂
4xξt − ((1− αξ)u)x + ǫ2
(α1∂
3xu+ β1∂
2xξt)
+ ǫ4(α2∂
5xu− β2∂
4xξt)= 0,
ut − ǫ2α3∂2xut + ǫ4α4∂
4xut + αu ux + ξx +
∂xp1α
= 0.
Ahora, a partir de la ecuacion (2.30) vemos que
ξt = ux +O(α, ǫ2), ξt = ux − ǫ2α1∂3xu+O(α, ǫ4). (2.33)
Reemplazando esto en las ecuaciones anteriores, obtenemos que
ξt − ǫ2β1∂3xξt + ǫ4β2∂
2xξt + ǫ2
(α1∂
3xu+ β1∂
2x
(ux − ǫ2α1∂
3xu))
+ ǫ4(α2∂
5xu− β2∂
5xu)= ((1− αξ)u)x +O(α, ǫ4),

2. Derivacion de un sistema tipo Benjamin-Ono 29
lo cual implica que
ξt − ǫ2β1∂3xξt + ǫ4β2∂
3xξt + ǫ2 (α1 + β1) ∂
3xu+ ǫ4 (α2 − β2 − α1β1) ∂
5xu
= ((1− αξ)u)x +O(α, ǫ4).
Ademas, tambien tenemos que
∂2t ξ = utx − ǫ2α1∂3xut +O(α, ǫ4),
lo cual implica que
∂xp2 = ∂xp1 = −ρ2αρ1
(ξx + ǫT
(utx − ǫ2α1∂
3xut +O(ǫ4) +O(αǫ)
)). (2.34)
Ası, al juntar las estimaciones, obtenemos despues de descartar los terminos de orden
O(αǫ2) y O(α, ǫ6) el siguiente sistema,
ξt − ǫ2β1∂3xξt + ǫ4β2∂
3xξt + ǫ2 (α1 + β1) ∂
3xu+ ǫ4 (α2 − β2 − α1β1) ∂
5xu
= ((1− αξ)u)x, (2.35)
ut + (1− ρ0) ξx + αuux = ǫ2α3∂2xut − ǫ4α4∂
4xut +
ρ2ρ1
(ǫT(utx − ǫ2α1∂
3xut)), (2.36)
donde ρ0 =ρ2ρ1. Ahora, en el regimen del lımite de aguas profundas, tenemos para h = h2
L
que
lımh→∞
T (f) = H(f).
Luego, si consideramos la velocidad u medida a una profundidad Z0 satisfaciendo las
condiciones (2.32), entonces en el regimen del lımite de aguas profundas, obtenemos el
siguiente sistema tipo Benjamin-Ono
ξt − ǫ2β1∂2xξt + ǫ4β2∂
4xξt + ǫ2α5∂
3xu− ǫ4α6∂
5xu = (u− αξu)x,
ut − ǫ2α3∂2xut + ǫ4α4∂
4xut − ǫρ0H(∂xut) + ǫ3ρ0α1H(∂3xut) =
((ρ0 − 1) ξ − α
2u2)x,
(2.37)
donde tenemos que
α5 = α1 + β1 > 0 y α6 = −α2 + β2 + α1β1 > 0.
Es de senalar que si formalmente, consideramos α = O(ǫσ), σ ∈ (0, 1), y descartamos los
terminos de orden O(αǫ) y tenemos en cuenta la relacion (2.33), recuperamos el sistema
(2.2) derivado por W. Choi y R. Camassa en [12], [13], [14]. Ahora, si consideramos

30 2. Derivacion de un sistema tipo Benjamin-Ono
α = O(ǫ1+σ), σ ∈ (0, 1), y descartamos los terminos de orden O(αǫ2) y tenemos en
cuenta la relacion (2.33), recuperamos el sistema (2.1) derivado por J.C. Munoz en [30].
Notemos que ǫ puede ser reescalado por el siguiente argumento
ξ(x, t) = σζ(bx, bt), u(x, t) = σv(bx, bt), bǫ = ασ = 1.
En efecto, si (ξ, u) es solucion del sistema tipo Benjamin-Ono (2.37), entonces (ζ, v) es
solucion del sistema tipo Benjamin-Ono
ζt − β1∂2xζt + β2∂
4xζt − vx + α5∂
3xv − α6∂
5xv = −(ζ v)x,
vt − α3∂2xvt + α4∂
4xvt − ρ0H(vtx) + ρ0α1H(∂3xvt) = (ρ0 − 1)ζx − 1
2(v2)x.
(2.38)
Consideremos ahora la linealizacion del sistema tipo Benjamin-Ono (2.37):
ζt − ǫ2β1∂
2xζt + ǫ4β2∂
4xζt − vx + ǫ2α5∂
3xv − ǫ4α6∂
5xv = 0,
vt − ǫ2α3∂2xvt + ǫ4α4∂
4xvt − ǫρ0H(vtx) + ǫ3ρ0α1H(∂3xvt) = (ρ0 − 1)ζx.
(2.39)
Para este sistema, tomemos soluciones de tipo onda plana
ζ (x, t) = Aei(kx−ωt) y v (x, t) = Bei(kx−ωt).
Reemplazando en el sistema (2.39), factorizando el termino −iei(kx−ωt) y agrupando
apropiadamente, obtenemos el sistema((
1 + ǫ2β1k2 + ǫ4β2k
4)ω
(1 + ǫ2α5k
2 + ǫ4α6k4)k
(ρ0 − 1)k(1 + ǫ2α3k
2 + ǫ4α4k4 + ǫρ0|k|+ ǫ3ρ0α1|k|3
)ω
)(A
B
)=
(0
0
).
Este sistema tiene solucion no trivial si
(A
B
)6= 0 cuando
∣∣∣∣∣(1 + ǫ2β1k
2 + ǫ4β2k4)ω (1 + ǫ2α5k
2 + ǫ4α6k4) k
(ρ0 − 1)k (1 + ǫ2α3k2 + ǫ4α4k
4 + ǫρ0|k|+ ǫ3ρ0α1|k|3)ω
∣∣∣∣∣ = 0.
Lo cual implica que
(1 + ǫ2β1k
2 + ǫ4β2k4) (
1 + ǫ2α3k2 + ǫ4α4k
4 + ǫρ0|k|+ ǫ3ρ0α1|k|3)ω2
− (ρ0 − 1)k2(1 + ǫ2α5k
2 + ǫ4α6k4)= 0,
o equivalentemente, que
ω2 =(ρ0 − 1)k2 (1 + ǫ2α5k
2 + ǫ4α6k4)
(1 + ǫ2β1k2 + ǫ4β2k4) (1 + ǫ2α3k2 + ǫ4α4k4 + ǫρ0|k|+ ǫ3ρ0α1|k|3).

2. Derivacion de un sistema tipo Benjamin-Ono 31
Por lo tanto, la relacion de dispersion es dada por
ω = |k|√
(ρ0 − 1) (1 + ǫ2α5k2 + ǫ4α6k4)
(1 + ǫ2β1k2 + ǫ4β2k4) (1 + ǫ2α3k2 + ǫ4α4k4 + ǫρ0|k|+ ǫ3ρ0α1|k|3)
y la velocidad de fase es dada por
ω
k= ±
√(ρ0 − 1) (1 + ǫ2α5k2 + ǫ4α6k4)
(1 + ǫ2β1k2 + ǫ4β2k4) (1 + ǫ2α3k2 + ǫ4α4k4 + ǫρ0|k|+ ǫ3ρ0α1|k|3).
Claramente la ecuacion es dispersiva dado qued2ω
dk26= 0.

.

Capıtulo 3
Ondas solitarias para un sistema
tipo Benjamin-Ono
En este capıtulo, siguiendo las ideas de T.B. Benjamin, J.L. Bona y D.K. Bose [4] en el
marco de soluciones de ondas solitarias de algunas ecuaciones dispersivas, aplicaremos
la teorıa de operadores positivos introducida originalmente por Krasnosel’skii [26],
[27] en la exploracion de la existencia de soluciones de ondas solitarias al sistema
(2.38). Inicialmente construimos el espacio de Frechet apropiado donde aplicar la teorıa,
posteriormente reformulamos el problema para verlo como un problema de punto fijo
de un operador positivo, pasamos luego a verificar que los operadores y kerneles que
aparecen satisfacen las hipotesis necesarias para aplicar los resultados de operadores
positivos en conos, y ası garantizar la existencia de soluciones de ondas solitarias del
sistema (2.38).
3.1. Planteamiento del problema
El espacio de Frechet
Consideramos el espacio C(R) de las funciones continuas de valor real definidas en R
con la topologıa de convergencia uniforme en intervalos acotados y cerrados bajo las
semi-normas
pk(w) = max−k≤x≤k
|w(x)|, k = 1, 2, . . . .
33

34 3. Ondas solitarias para un sistema tipo Benjamin-Ono
En este caso, la distancia es dada por
d(f, g) =∞∑
k=1
1
2k
(dk(f, g)
dk(f, g) + 1
), dk(f, g) = sup
x∈[−k,k]|f(x)− g(x)|.
La bola abierta de radio r < 1 centrada en cero y su frontera son dadas respectivamente
por
Br(0) = u ∈ C(R) : d(0, u) < r y ∂Br(0) = u ∈ C(R) : d(0, u) = r .
En este espacio de Frechet, definimos el cono K ⊂ C(R) como
K = w ∈ C(R) : w(x) = w(−x) ≥ 0; w es no creciente para x ≥ 0 .
Notese que para j = 1, 2, 3, . . . , tenemos que para todo w ∈ K
pj(w) = p1(w),
lo cual significa que K es p1-acotado. Ademas, tenemos que
d(w, 0) =∞∑
k=1
1
2k
(pk(w)
pk(w) + 1
)=
w(0)
1 + w(0).
Por lo tanto, para 0 < r < 1, tener d(w, 0) < r, es equivalente a
w(0)
1 + w(0)< r ⇔ w(0) <
r
1− r. (3.1)
En particular, para cualquier 0 < r < 1 y w ∈ K ∩ ∂Br(0), tenemos que
w(0) =r
1− r.
Notemos que el espacio Y = C(R) × C(R) es un espacio de Frechet con la familia
generadora de semi-normas
Pj(f, g) = maxx∈[−j,j]
|f(x)|, |g(x)|.
Ahora, definamos en este nuevo espacio el cono K ⊂ C(R)×C(R) mediante K = −K×K.
Tambien podemos ver que
Br(0) =(f, g) ∈ C(R)× C(R) : d((f, g), 0) < r
,
y su frontera es
∂Br(0) =(f, g) ∈ C(R)× C(R) : d((f, g), 0) = r
,

3. Ondas solitarias para un sistema tipo Benjamin-Ono 35
donde d es definida por
d ((f, g), 0) =max−f(0), g(0)
1 + max−f(0), g(0) .
Observemos que si (f, g) ∈ K ∩ ∂Br(0), en otras palabras, d((f, g), 0) = r, entonces
tenemos que
max−f(0), g(0) =r
1− r. (3.2)
Notese que en este caso, tenemos que K es cerrado y P1-acotado, donde
P1(f, g) = maxx∈[−1,1]
|f(x)|, |g(x)|.
Por lo tanto, de acuerdo con la notacion introducida en la seccion 1.4, tenemos que
para r > 0, el conjunto Kr = K ∩ Br(0) es convexo.
Planteamiento del problema
A partir del sistema tipo Benjamin-Ono (2.38) deducido en la seccion 2.2, para ν ≥ 0,
consideremos el sistema tipo Benjamin-Ono modificado de la forma
A1ζt −A3∂xv= (νζ2 − ζv)x,
A2vt= −(12v2 − (1− ρ0)ζ
)x,
(3.3)
donde los operadores lineales Ai para 1 ≤ i ≤ 3 son definidos por
A1 = I − β1∂2x + β2∂
4x, (3.4)
A2 = I − ρ0H∂x − α3∂2x + ρ0α1H∂3x + α4∂
4x, (3.5)
A3 = I − α5∂2x + α6∂
4x. (3.6)
Lo primero a observar, es que el sımbolo de Fourier de Ai en la variable dual y es dado
por
A1(y) = 1 + β1y2 + β2y
4, (3.7)
A2(y) = 1 + ρ0|y|+ α3y2 + ρ0α1|y|y2 + α4y
4, (3.8)
A3(y) = 1 + α5y2 + α6y
4. (3.9)
Claramente, Ai es una funcion par y positiva.
Supongamos que (ξ, w) es una solucion de (3.3) del tipo onda viajera solitaria con
velocidad de onda c > 0. Es decir,
ξ(x, t) = ζ(z), w(x, t) = v(z), z = x− ct,

36 3. Ondas solitarias para un sistema tipo Benjamin-Ono
donde ζ(z), v(z) → 0 cuando |z| → ∞. Por lo tanto ξt = −cζx y wt = −cvx. Mas aun,
∂jxξ = ∂jxζ y ∂jxw = ∂jxv. Al reemplazar lo anterior en el sistema (3.3), obtenemos que
(ζ, v) satisface el sistema
cA1ζ +A3v= ζv − νζ2,
cA2v=12v2 − (ρ0 − 1)ζ.
(3.10)
Ademas, aplicando la transformada de Fourier, denotada por F o · , vemos que(ζ , v)
satisface el sistema(cA1(y) A3(y)
0 cA2(y)
)(ζ
v
)=
(F(ζv − νζ2)
F(12v2 − (ρ0 − 1)ζ)
)
cuya solucion esta dada por
(ζ
v
)=
1
c2A1(y)A2(y)
(cA2(y) −A3(y)
0 cA1(y)
)(F(ζv − νζ2)
F(12v2 − (ρ0 − 1)ζ)
).
Explıcitamente tenemos que
ζ =1
cA1(y)F(ζ v − νζ2)− A3(y)
c2A1(y)A2(y)F(1
2v2 − (ρ0 − 1)ζ
),
v =1
cA2(y)F(1
2v2 − (ρ0 − 1)ζ
).
Si consideremos ki como la funcion definida en R a traves de su transformada de Fourier
dada por
ki,c(y) =1
cAi(y), (i = 1, 2), k3,c(y) =
A3(y)
c2A1(y)A2(y)
entonces, despues de aplicar la inversa de la transformada de Fourier, vemos que (ζ, v)
tiene la forma
(ζ
v
)=
k1,c ∗ (ζ v − νζ2)− k3,c ∗(1
2v2 − (ρ0 − 1)ζ
)
k2,c ∗(1
2v2 − (ρ0 − 1)ζ
)
.
De esta representacion de la solucion, tenemos que mostrar la existencia de ondas
viajeras para el sistema perturbado (3.3) es equivalente a establecer la existencia de un
punto fijo para la ecuacion en la variable U = (ζ, v)t
U = Ac(U), (3.11)

3. Ondas solitarias para un sistema tipo Benjamin-Ono 37
donde las componentes de Ac estan dadas por
A1,c(U) = A1(c)−1(ζv − νζ2
)−A3(c)
−1
(1
2v2 − (ρ0 − 1) ζ
), (3.12)
A2,c(U) = A2(c)−1
(1
2v2 − (ρ0 − 1) ζ
). (3.13)
3.2. Positividad y decrecimiento de los nucleos ki,c
Para aplicar la teorıa de puntos fijos para operadores positivos en un cono, debemos
de alguna manera calcular explıcitamente la transformada de Fourier inversa para ki,c
o al menos establecer su positividad y decrecimiento. Definamos primero las funciones
ki,c =1cki para i = 1, 2 y k3,c =
1c2k3.
Positividad y decrecimiento del nucleo k1,c
Para k1, consideremos b > a > 0 y tomemos β2 = a2b2, β1 = a2 + b2, lo cual se
puede obtener despues de tomar β21 > 4β2 con β2 > 0 pero lo suficientemente pequeno.
Entonces tenemos que
β2y4 + β1y
2 + 1 =(a2y2 + 1
) (b2y2 + 1
)= a2b2
(y2 +
1
a2
)(y2 +
1
b2
).
Ahora, por el Manuscrito de Bateman [1, formula (18), p. 9], tenemos para α > β > 0
y x ≥ 0 que
F−1cos
1
(y2 + α2) (y2 + β2)
(x) =
π
2 (α2 − β2)
(e−βx
β− e−αx
α
).
Usando esta formula, concluimos que para x ≥ 0
k1 (x) =1
a2b2F−1
cos
1(
y2 + 1a2
) (y2 + 1
b2
)(x) (3.14)
=π
2 (b2 − a2)
(be−
xb − ae−
xa
).
Notemos que k1 puede ser extendida a R como una funcion par. Tambien tenemos que
k1 es una funcion positiva y no creciente para x > 0 y k1 ∈ L1(R).
Antes de continuar, observese que debemos verificar para cada i = 2, 3 que ki(y) es
una funcion positiva, no creciente y convexa para x ≥ 0. Observese que para i = 2, 3,
tenemos que ki(y) → 0 cuando y → ∞.

38 3. Ondas solitarias para un sistema tipo Benjamin-Ono
Positividad y decrecimiento del nucleo k2,c
Analicemos k2(y) para y > 0,
k2 (y) =1
α4y4 + ρ0α1y3 + α3y2 + ρ0y + 1=
1
p (y)> 0.
Entonces, tenemos que para x > 0
k′2 (y) = − p′ (y)
(p (y))2= − ρ0 + 2α3y + 3ρ0α1y
2 + 4α4y3
(α4y4 + ρ0α1y3 + α3y2 + ρ0y + 1)2< 0,
dado que ρ0, 2α3, 3ρ0α1 y 4α4 son positivos, lo cual significa que k2 es decreciente para
x > 0. Ahora, note que
k′′2 (y) =2 (p′ (y))2 − p′′ (y) p (y)
(p (y))3.
Un calculo directo muestra que
2 (p′ (y))2 − p′′ (y) p (y) = 20α2
4y6 + 30α4α1ρ0y
5 + 2(9α3α4 + 6α2
1ρ20
)y4
+ 4ρ0 (4α3α1 + α4) y3 + 6
(α1ρ
20 + α2
3 − 2α4
)y2 + 6ρ0 (α3 − α1) y + 2
(ρ20 − α3
).
Por otro lado, tenemos que para 0 < θ < 1
α1ρ20 + α2
3 − 2α4 = α1ρ20 +
(1
2
(1− θ2
))2
− 2
(1
4!(1− θ2)(1− 5θ2)
)
= α1ρ20 +
1
6
(1 + θ2
) (1− θ2
)> 0,
α3 − α1 =1
2
(1− θ2
)+
1
2
(θ2 − 1
3
)=
1
3> 0
ρ20 − α3 = ρ20 −1
2
(1− θ2
)> 1− 1
2
(1− θ2
)=
1
2+ θ2 > 0.
De estas estimaciones y del hecho de que los otros coeficientes son positivos, concluimos
para x > 0 que
2 (p′ (y))2 − p′′ (y) p (y) > 0,
lo cual implica que k2 es convexa para x > 0. Ası, por el resultado de Tuck (ver
seccion 1.5), tenemos que k2(x) > 0 para x ≥ 0. Por otro lado, la tabla de Routh para
el polinomio
p (y) = α4y4 + ρ0α1y
3 + α3y2 + ρ0y + 1
es dada por

3. Ondas solitarias para un sistema tipo Benjamin-Ono 39
y4 α4 α3 1
y3 ρ0α1 ρ0 0
y2 b1 1 0
y1 c1 0 0
y0 1 0 0
donde, para 0 < θ2 < 15se tiene que
α4 > 0, ρ0α1 > 0, b1 =α1α3 − α4
α1
> 0 y c1 =ρ0(α1α3 − α4 − α2
1)
α1α3 − α4
> 0.
Segun el criterio de Routh-Hurwitz (ver seccion 1.6) tenemos que todas las raıces
del polinomio p(y) tienen parte real negativa, adicionalmente, por la condicion sobre
ρ0, α1, α3, α4 tenemos que dos raıces son reales y negativas, y las otras dos son complejas
(una conjugada de la otra), por lo tanto tenemos que
p (y) = α4
(y2 + A1y +B1
) (y2 + A2y +B2
)= α4q1(y)q2(y),
lo cual significa que
k2 (y) =1
p (y)=
1
α4q1 (y) q2 (y)=
1
α4k2,1 (y) k2,2 (y) .
Sin perdida de generalidad, tomemos k0 como siendo definido por su transformada de
Fourier
k0 (y) =1
y2 + Ay +B=
1
r1 − r2
(1
y + r2− 1
y + r1
),
con r1 + r2 = A > 0 y r1r2 = B > 0, donde r1 > r2 > 0 o r2 = r1 con ℜ(ri) > 0. Por el
Manuscrito de Bateman [1, formula (7), p. 8] tenemos que
F−1cos
(1
y + r
)(x) =
1
π
∫ ∞
0
cos (xy)
y + rdy
=1
π(−si (rx) sin (rx)− Ci (rx) cos (rx)) , |arg r| < π.
Notemos que si (rx) = Si (rx)− π2. Aquı Ci y Si representan las funciones coseno integral
y seno integral, respectivamente (ver [1, p. 386]). Usando esto, concluimos que
k0 (x) = C(r1, r2)
∫ ∞
0
(cos (xy)
y + r2− cos (xy)
y + r1
)dy
= C(r1, r2) (si (r1x) sin (r1x)− si (r2x) sin (r2x)
+Ci (r1x) cos (r1x)− Ci (r2x) cos (r2x)) .

40 3. Ondas solitarias para un sistema tipo Benjamin-Ono
Ademas, k0(x) > 0 y k′0(x) < 0 para x > 0. De este hecho, concluimos que k2,1, k2,2 ∈ K,
y ası por el Lema 1.3, usando k = k2,1 y f = k2,2, obtenemos que k2 = C k2,1 ∗ k2,2,C > 0, es una funcion no creciente para x > 0. En otras palabras, k2 es una funcion
continua, positiva y no creciente para x ≥ 0 tal que k2 ∈ L1(R).
Positividad y decrecimiento del nucleo k3,c
Finalmente, analicemos la funcion k3 definida por
k3(y) =α6y
4 + α5y2 + 1
(β2y4 + β1y2 + 1) (α4y4 + ρ0α1y3 + α3y2 + ρ0y + 1)
la cual es positiva porque los coeficientes son positivos. Por otra parte, tambien tenemos
que k3(y) → 0 cuando y → ∞. Ahora, consideremos
α6y4 + α5y
2 + 1 =(ry2 + 1
) (sy2 + 1
)
donde r, s > 0 son definidas por
r =α5 −
√α25 − 4α6
2, s =
α5 +√α25 − 4α6
2.
Primero debemos asegurarnos de que α25 − 4α6 > 0. Para lograr esto, notemos que
α25 − 4α6 = (α1 + β1)
2 − 4 (β2 − α2 + α1β1)
= β21 − 2α1β1 + α2
1 − 4β2 + 4α2
= (β1 − β−1 )(β1 − β+
1 ),
donde β±1 es dado por β±
1 = α1±2√β2 − α2. Vemos directamente que β+
1 > 0. Por otro
lado, tenemos que α21 > −4α2 para 15−2
√30
105< θ2 < 1
5. Por lo tanto, podemos tomar
β2 > 0, pero lo suficientemente pequeno tal que
β−1 = α1 − 2
√β2 − α2 > 0.
Ası, si escogemos 0 < β1 < β−1 , significa que en este caso α2
5 − 4α6 > 0, para
15− 2√30
105< θ2 <
1
5y β2 > 0,
pero lo suficientemente pequeno. De esta factorizacion, vemos que
k3 (y) = k4 (y) · k5 (y) ,

3. Ondas solitarias para un sistema tipo Benjamin-Ono 41
donde k4 y k5 son definidos por
k4 (y) =sy2 + 1
β2y4 + β1y2 + 1= (sy2 + 1)k1 (y)
k5 (y) =ry2 + 1
α4y4 + ρ0α1y3 + α3y2 + ρ0y + 1.
Ası, tenemos de (3.14) que
k4 (x) =(1− s∂2x
)k1 (x)
=π
2 (b2 − a2)
(1− s∂2x
) (be−
xb − ae−
xa
)
=π
2 (b2 − a2)
((b− s
b
)e−
xb −
(a− s
a
)e−
xa
)> 0,
dado que b − sb> 0 > a − s
ay e−
xb > e−
xa para b > a. Por otro lado, tambien tenemos
que
k′4 (x) =π
2 (b2 − a2)
(( sb2
− 1)e−
xb −
( sa2
− 1)e−
xa
)< 0.
Por lo tanto, concluimos que k4 es una funcion positiva y no creciente para x > 0,
ademas k4 ∈ L1(R).
Por otro lado, tambien tenemos que
k′5 (y) =2ry (1+ρ0y+α3y
2+ρ0α1y3+α4y
4)−(1+ry2) (ρ0+2α3y+3ρ0α1y2+4α4y
3)
(1 + ρ0y + α3y2 + ρ0α1y3 + α4y4)2
= −ρ0 + 2 (α3 − r) y + ρ0 (3α1 − r) y2 + 4α4y3 + rα1ρ0y
4 + 2rα4y5
(1 + ρ0y + α3y2 + ρ0α1y3 + α4y4)2 .
Entonces, tenemos que k5 es no creciente para α3 > r y 3α1 > r, asumiendo que
β1 < mın(α1, α3, β−1 ) y usando que 2r < α5, dado que
α3−r > α3−1
2α5 =
1
2(α3 − α1 + α3 − β1) > 0, 3α1−r > 3α1−
1
2α5 =
5
2α1−
1
2β1 > 0.
Por otra parte, tambien tenemos que
k′′5 (y) =2q (y)
(1 + ρ0y + α3y2 + ρ0α1y3 + α4y4)3 ,
donde q es el polinomio dado por
q (y) =(ρ20 + r − α3
)+ 3ρ0 (α3 − α1) y + 3
(α1ρ
20 + α2
3 − rα3 − 2α4
)y2
+ρ0 (8α1α3 − 7rα1 − rα3 + 2α4) y3 + 3
(2ρ20α
21 + 3α3α4 − rρ20α1 − 4rα4
)y4
+3ρ0α4 (5α1 − 2r) y5 +(rρ20α
21 − rα3α4 + 10α2
4
)y6 + 3ρ0rα1α4y
7 + 3rα24y
8
=8∑
i=0
ciyi.

42 3. Ondas solitarias para un sistema tipo Benjamin-Ono
Es sencillo ver que los coeficientes c0, c1, c7 y c8 son positivos. Ahora, analizamos el
coeficiente c2. En este caso, tenemos que
α23 − 2α4 =
(1
2
(1− θ2
))2
− 2
(1
4!(1− θ2)(1− 5θ2)
)=
1
6
(1− θ2
) (1 + θ2
)> 0.
Pero sabemos que α5 > 2r. Por lo tanto, solo necesitamos tomar ρ0 > 1 lo
suficientemente grande como para que 2α1ρ20 > α3α5. Por lo tanto, tenemos que
α1ρ20 + α2
3 − rα3 − 2α4 > 0 ⇔ c2 > 0.
Ademas, si α1ρ20 > 8α4α5, entonces tenemos que
2ρ20α21 + 3α3α4 − rρ20α1 − 4rα4 > ρ20α1
(3
2α1 − r
)+ 3α3α4 +
1
2rρ20α
21 − 4α5α4 > 0.
De donde obtenemos que c4 > 0.
Por otro lado, si escogemos β1 < mın(α1, α3, β
−1
), concluimos que
8α1α3 − 7rα1 − rα3 + 2α4 >1
2(7α1(2α3 − α5) + α3(2α1 − α5)) + 2α4
>1
2(7α1(α3 − α1 + α3 − β1) + α3(α1 − β1))) + 2α4
> 0,
lo cual significa que c3 > 0. Por otra parte, tambien tenemos que
5α1 − 2r > 5α1 − α5 = 4α1 − β1 +√α25 − 4α6 > 0 ⇔ c5 > 0.
Finalmente, usando que ρ0 > 1, tenemos para θ2 < 15que c6 > 0 dado que,
rρ20α21 − rα3α4 + 10α2
4 > r(α21 − α3α4) + 10α2
4 >r
144(1− 9θ2)(1− 5θ2) + 10α2
4 > 0.
De esta forma, hemos mostrado para ρ0 > 1 lo suficientemente grande, β2 > 0 lo
suficientemente pequeno, y β1 < mın(α1, α3, β−1 ) que k5 es una funcion convexa y no
creciente para y > 0. Luego, a partir del resultado de Tuck (ver seccion 1.5), llegamos a
la conclusion de que k5(x) > 0 para x ≥ 0. Al realizar un analisis similar, establecemos
que k′′′5 < 0 para ρ0 > 1 y β2 > 0, pero pequeno. Entonces, nuevamente, del resultado
de Tuck, tenemos que k′5(x) < 0 para x ≥ 0, ya que −k′5 es una funcion convexa para
x > 0. Entonces, al usar las afirmaciones anteriores y el Lema 1.3 tomando k = k4 y
f = k5, concluimos que k3 > 0 para x > 0 y que k3 es no creciente para x ≥ 0. Ademas,
k3 ∈ L1(R).

3. Ondas solitarias para un sistema tipo Benjamin-Ono 43
3.3. Existencia de ondas solitarias
En esta seccion, asumiremos que ρ > 1, β1, β2 y θ satisfacen las condiciones obtenidas
en la seccion anterior. Ası, tenemos que
Lema 3.1. El operador Ac definido por (3.11) aplica continuamente K en K. Para cada
0 < r < 1, el conjunto Ac(Kr) es un subconjunto relativo compacto de K.
Demostracion. Probar la primera declaracion es equivalente a establecer que los
operadores A1(c), A2(c) y A3(c) aplican continuamente K en −K y K, respectivamente.
Primero definimos las funciones ki,c en terminos de su transformada de Fourier ki,c por
k1,c(y) =1
c(1 + β1y2 + β2y4)= A−1
1 (c), (3.15)
k2,c(y) =1
c(1 + ρ0|y|+ α3y2 + ρ0α1|y|y2 + α4y4)= A−1
2 (c), (3.16)
k3,c(y) =1 + α5y
2 + α6y4
c2(1 + ρ0|y|+ α3y2 + ρ0α1|y|y2 + α4y4)(1 + β1y2 + β2y4)= A−1
3 (c). (3.17)
Por otra parte, tambien tenemos que las funciones ki,c para i = 1, 2, 3 son positivas,
pares, monotonas decrecientes en (0,∞), y ki,c(y) = O(|y|−4) cuando |y| → ∞. Entonces
concluimos que ki,c ∈ L1(R). Ademas, las funciones ki,c = F−1ki,c para i = 1, 2, 3 son a
valores reales, pares, acotadas, continuas y decaen a cero cuando |x| → ∞.
Observemos que las funciones k1,c, k2,c, k3,c ∈ L1(R) son positivas y tambien por la
desigualdad de Young tenemos que
maxR
|ki,c ∗ f | ≤ f(0)||ki,c||L1(R), f ∈ K.
Si consideramos Bi,c(f) = ki,c ∗ f , entonces del Lema 1.3, tenemos que Bi,c(f) ∈ Kpara cualquier f ∈ K. En otras palabras, Bi,c(f) es una funcion positiva, acotada, par,
continua, no creciente. Ahora, sea (ξ, w) ∈ K, entonces tenemos que
νξ2 − ξw, (ρ0 − 1) ξ − 1
2w2 ∈ K,
y tambien tenemos que
A1,c(ξ, w) = −A1(c)−1(νξ2 − ξw
)− A3(c)
−1
(1
2w2 − (ρ0 − 1) ξ
), (3.18)
A2,c(ξ, w) = A2(c)−1
(1
2w2 − (ρ0 − 1) ξ
), (3.19)

44 3. Ondas solitarias para un sistema tipo Benjamin-Ono
lo cual significa por el Lema 1.3 que
A1,c(ξ, w) ≤ 0, A2,c(ξ, w) ≥ 0,
y tambien que Ac(ξ, w) para (ξ, w) ∈ K es continua sobre R.
Ademas, tambien tenemos que para (ξ, w) ∈ K y x ≥ 0, A1(c)(ξ, w) no decrece y
A2(c)(ξ, w) no aumenta. En otras palabras, hemos establecido que Ac(K) ⊂ K.
Finalmente, queremos demostrar que Ac = (A1,c,A2,c) aplica continuamente K en K,
donde
A1,c(ξ, w) = −B1,c(νξ2 − ξw)− B3,c
(1
2w2 − (ρ0 − 1)ξ
),
A2,c(ξ, w) = B2,c
(1
2w2 − (ρ0 − 1)ξ
).
Para ver esto, debemos recordar que la convergencia en (C(R)×C(R), d) es equivalentea la convergencia uniforme sobre intervalos acotados y cerrados I ⊂ R. Suponga que
(ξn, wn) → (ξ0, w0) en (C(R)×C(R), d), cuando n→ ∞. Sea I = [a, b] ⊂ R un intervalo
acotado y cerrado fijo. Para ǫ > 0 dado, elegimos α > 0 suficientemente grande tal que
∫ b−α
−∞ki,c(r) dr +
∫ ∞
a+α
ki,c(r) dr < ǫ.
Usando este hecho, vemos facilmente que
maxx∈I
∫
|r|≥αki,c(x− r) dr ≤
∫ b−α
−∞ki,c(r) dr +
∫ ∞
a+α
ki,c(r) dr < ǫ. (3.20)
Por otro lado, debido a la convergencia ξn → ξ0 y wn → w0 en (C(R), d), tenemos que
ξn → ξ0 y wn → w0 convergen uniformemente en Iα = [−α, α], lo cual significa que
existe un n0 ∈ N tal que
|ξn(y)− ξ0(y)|+ |wn(y)− w0(y)| < ǫ, para todo y ∈ Iα.
Debido al hecho de que ξn → ξ0 y wn → w0 en (C(R), d), dado 0 < r < 1 (fijo), existe
un n1 ∈ N tal que para n ≥ n1, tenemos que
||ξn − ξ0||C(Iα) + ||wn − w0||C(Iα) < r < 1,
y ası, dado que ξn, wn, ξ0, w0 ∈ K, tenemos de (3.2) que para y ∈ R y n ≥ n1,
|ξn(y)− ξ0(y)|+ |wn(y)− w0(y)| < ξn(0) + ξ0(0) + wn(0) + w0(0) <4r
1− r= L.

3. Ondas solitarias para un sistema tipo Benjamin-Ono 45
Ahora, note que
|A2,c(ξn, wn)(x)−A2,c(ξ0, w0)(x)|
≤(∫
|y|≤α+
∫
|y|≥α
)k2,c(x− y)
(1
2|w2
n(y)− w20(y)|+ (ρ0 − 1)|ξn(y)− ξ0(y)|
)dy.
Ahora, utilizando las estimaciones anteriores, tenemos para n ≥ maxn0, n1 que∫
|y|≤αk2,c(x− y)
(1
2|w2
n(y)− w20(y)|+ (ρ0 − 1)|ξn(y)− ξ0(y)|
)dy
≤ L(||ξn − ξ0||C(Iα) +1
2(L+H0)||wn − w0||C(Iα))
∫
R
k2,c(r) dr
≤ ǫC1
∫
R
k2,c(r) dr,
donde H0 es definido como
H0 = ||ξ0||C(Iα) + ||w0||C(Iα).
Por otro lado, sabemos que existe C2 > 0 tal que
|wn(y)− w0(y)|+ |wn(y) + w0(y)|+ |ξn(y)− ξ0(y)|≤ 2|wn(y)|+ 2|w0(y)|+ |ξn(y)|+ |ξ0(y)| < C2.
Entonces, usando este hecho y la estimacion (3.20), concluimos para n ≥ maxn0, n1que
∫
|y|≥αk2,c(x− y)
(1
2|w2
n(y)− w20(y)|+ (ρ0 − 1)|ξn(y)− ξ0(y)|
)dy
≤ C1
∫
|y|≥αk2,c(y) dy < C1ǫ.
En otras palabras, hemos mostrado que A2,c(ξn, wn) → A2,c(ξ0, w0) en (C(R)×C(R), d),ya que tenemos que
|A2,c(ξn, wn)(x)−A2,c(ξ0, w0)(x)| < ǫC(L), para todo x ∈ Iα y n ≥ maxn0, n1.
El mismo argumento se aplica al operador A1,c, dado que
|A1,c(ξn, wn)(x)−A1,c(ξ0, w0)(x)|
≤(∫
|y|≤α+
∫
|y|≥α
)k1,c(x− y)
(|wn(y)− w0(y)|(1 + |ξn(y)|) + |ξn(y)− ξ0(y)||w0(y)|
+ ν|ξn(y) + ξ0(y)||ξn(y)− ξ0(y)|)dy.

46 3. Ondas solitarias para un sistema tipo Benjamin-Ono
En otras palabras, Ac aplica continuamente K en K.
A continuacion demostremos que Ac(Kr) es un subconjunto relativo compacto de K,
lo cual es equivalente a que Ai,c(Kr) es un subconjunto relativo compacto de K. Para
ver esto, utilizamos el teorema de Arzela-Ascoli para establecer la compacidad de las
familias Mi en C(R), donde
M1 =v ∈ C(R) : v = −B1,c(ξw − νξ2), (ξ, w) ∈ Kr
,
M2 =
v ∈ C(R) : v = B2,c
(1
2w2 − (ρ0 − 1)ξ
), (ξ, w) ∈ Kr
,
M3 =
v ∈ C(R) : v = B3,c
(1
2w2 − (ρ0 − 1)ξ
), (ξ, w) ∈ Kr
.
Sea (ξ, w) ∈ Kr tal que v = Bi,c(fi) con f1 = −(ξw−νξ2) y f2 = w2
2−(ρ0−1)ξ. Primero
notemos que para fi ∈ C(R), tenemos que Bi,c(fi) : R → R es una funcion continua tal
que (ver Lema 1.3),
|Bi,c(f)(x+ h)− Bi,c(f)(x)| ≤∫
R
|ki,c(x+ h− y)− ki,c(x− y)||f(y)| dy
≤ f(0)
∫
R
|ki,c(z + h)− ki,c(z)| dz → 0,
cuando h→ 0 (uniformemente en h), lo cual significa que Bi,c(f) es equicontinua en R
debido a la uniformidad de las ultimas estimaciones en h. Ademas, las familias Mi son
equicontinuas en R, dado que Bi,c(fi) son equicontinuas en R, y la estimacion uniforme
para f(0) en (3.1). Por otro lado, para cada x ∈ R, el conjunto
Mi(x) = v(x) : v ∈ Mi
tiene soporte compacto en R dado que Mi(x) ⊂ [0, Ci(r)] para cualquier x ∈ R. Aquı
Ci(r), i = 1, 2 son constantes que solo dependen r. Del Teorema de Arzela-Ascoli,
las familias Mi son normales (ver [15]). En otras palabras, hemos demostrado que el
conjunto Ac(Kr) es un subconjunto relativo compacto de K.
Lema 3.2. Sean 0 < ν < 1 y 0 < r < c−r0c
< R < 1, donde r0 = max3, ρ0 − 1. Sic > r0 y ρ0 >
32son suficientemente grandes, entonces
a) U 6= tAc(U) para cada U ∈ K ∩ ∂Br(0) y t ∈ [0, 1].
b) U − Ac(U) 6= aV para cada U ∈ K ∩ ∂BR(0) y a ≥ 0, donde V es una funcion
constante sobre R dada por V = (−1, 1)t.

3. Ondas solitarias para un sistema tipo Benjamin-Ono 47
Demostracion. a) Argumentemos por contradiccion. Supongamos que existen (ξ, w) =
U ∈ K ∩ ∂Br(0) y t ∈ [0, 1] tales que d(U, 0) = r y U = tAc(U). Entonces tenemos que
νξ2 − wξ ∈ K y 12w2 − ξ(ρ0 − 1) ∈ K, y ası
0 ≤ −w(y)ξ(y) + νξ2(y) ≤ −w(0)ξ(0) + νξ2(0),
0 ≤ 1
2w2(y)− (ρ0 − 1)ξ(y) ≤ 1
2w2(0)− (ρ0 − 1)ξ(0).
De estos hechos, tenemos que
−ξ(0) = t
∫
R
[k1,c(−y)(−w(y)ξ(y) + νξ2(y)) + k3,c(−y)
(1
2w2(y)− (ρ0 − 1)ξ(y)
)]dy
≤ (−w(0)ξ(0) + νξ2(0))
∫
R
k1,c(y) dy +
(1
2w2(0)− (ρ0 − 1)ξ(0)
)∫
R
k3,c(y) dy
≤ 1
c(−w(0)ξ(0) + νξ2(0)) +
1
c2
(1
2w2(0)− (ρ0 − 1)ξ(0)
)
y
w(0) = t
∫
R
k2,c(−y)(1
2w2(y)− (ρ0 − 1)ξ(y)
)dy
≤(1
2w2(0)− (ρ0 − 1)ξ(0)
)∫
R
k2,c(y) dy
≤ 1
c
(1
2w2(0)− (ρ0 − 1)ξ(0)
),
donde estamos usando (ver la transformada de Fourier) que∫
R
k1,c(y) dy =
∫
R
k2,c(y) dy =1
cy
∫
R
k3,c(y) dy =1
c2.
Ası, usando la estimacion (3.1) y que c > 1, concluimos que
−ξ(0) ≤(1 + ν
c+
1
c2
)(r
1− r
)2
+(ρ0 − 1)
c2
(r
1− r
),
w(0) ≤ 1
c
((ρ0 − 1)
(r
1− r
)+
1
2
(r
1− r
)2).
Ademas, dado que
max−ξ(0), w(0) =r
1− r,
tenemos para 0 < ν < 1 y r0 = max3, ρ0 − 1 que
c ≤ r0
(1 +
r
1− r
)⇔ r >
c− r0c
,

48 3. Ondas solitarias para un sistema tipo Benjamin-Ono
lo cual es una contradiccion, ya que asumimos que r < c−r0c
.
b) Supongamos que existen (ξ, w) = U ∈ K y a ≥ 0 tales que d(U, 0) = R y
U = a
(−1
1
)+Ac(U). (3.21)
Para i = 1, 2, 3, definamos αi como
αi =
∫ 2
0
ki(y) dy.
Sea f1 = −ξw + νξ2 y f2 = w2
2− (ρ0 − 1)ξ, entonces de las condiciones sobre U y V ,
tenemos que
a−∫ 1
0
A1,c(ξ, w)(x) dx = −∫ 1
0
ξ(x) dx, (3.22)
a+
∫ 1
0
A2,c(ξ, w)(x) dx =
∫ 1
0
w(x) dx ≤(∫ 1
0
w2(x) dx
)1/2
. (3.23)
Por otra parte, de (1.14) en el Lema 1.5 notemos que para i = 1, 2
−∫ 1
0
A1,c(ξ, w)(x) dx =
∫ 1
0
∫
R
(k1,c(x− y)f1(y) + k3,c(x− y)f2(y)) dy dx
≥∫ 1
0
(α1
cf1(y) +
α3
c2f2(y)
)dy,
≥ α1
c
∫ 1
0
f1(y) dy,
∫ 1
0
A2,c(ξ, w)(x) dx ≥ α2
c
∫ 1
0
f2(y) dy.
Entonces, reemplazando estas desigualdades en las ecuaciones previas, concluimos que
a+
∫ 1
0
(α1
c(−ξ(x)w(x) + νξ2(x)) +
α3
c2
(1
2w2(x)− (ρ0 − 1)ξ(x)
))dx
≤ −∫ 1
0
ξ(x) dx, (3.24)
a+α2
c
∫ 1
0
(1
2w2(x)− (ρ0 − 1)ξ(x)
)dx ≤
(∫ 1
0
w2(x) dx
)1/2
. (3.25)
Como consecuencia de ξ(x) ≤ 0 y de las desigualdades (3.24) y (3.25), tenemos que
S1 ≤(
c
α2(ρ0 − 1)
)S2 y α2S
22 − 2cS2 + 2ac ≤ 0,

3. Ondas solitarias para un sistema tipo Benjamin-Ono 49
donde S1 y S2 son definidas como
S1 =
∫ 1
0
−ξ(y) dy y S22 =
∫ 1
0
w2(y) dy.
De las desigualdades anteriores, concluimos que
S1 ≤2c2
α22(ρ0 − 1)
, S2 ≤2c
α2y a ≤ c
2α2. (3.26)
Por otro lado, dado que ki,c = 1cki para i = 1, 2 y k3,c = 1
c2k3 (ver ecuaciones
(3.15)–(3.17)), son funciones no crecientes para x ≥ 0, entonces por Lema 1.4, existe
una funcion periodica ki,c de periodo 2 tal que
ki,c(x) =
∞∑
m=−∞ki,c(x− 2m) =
1
cτ
∞∑
m=−∞ki(x− 2m), (3.27)
satisfaciendo que
k0,i,c = max−1≤x≤1
ki,c(x) =1
cτ
∞∑
m=−∞ki(2m) =
1
cτk0,i,
donde τ = 1 para i = 1, 2 y τ = 2 para i = 3. Ahora, por (1.15) en el Lema 1.5, tenemos
que
−A1,c(ξ, w) =
∫
R
k1,c(x− y)fi(y) + k3,c(x− y)f2(y)) dy
≤ 2k0,1c
∫ 1
0
f1(y) dy +2k0,3c2
∫ 1
0
f2(y) dy
≤ 2(k0,1 + k0,3)
∫ 1
0
(α1
cf1(y) +
α3
c2f2(y)
)dy,
A2,c(ξ, w) ≤2k0,2c
∫ 1
0
f2(y) dy.
Usando las estimaciones previas, concluimos que
−ξ(x) ≤ a +2(k0,1 + k0,3)
c
∫ 1
0
(−w(y)ξ(y) + νξ2(y) +
1
2w2(y) + (ρ0 − 1)ξ(y)
)dy
≤ a +
∫ 1
0
(−ξ(y)) dy
≤ c
2α2+ 2(k0,1 + k0,3)S1
≤ c
2α2+
4(k0,1 + k0,3)c2
α22(ρ0 − 1)
≤ γ2c2,

50 3. Ondas solitarias para un sistema tipo Benjamin-Ono
para algun γ1 > 1. De manera similar, tambien tenemos que
w(x) ≤ a+2k0,2c
∫ 1
0
(1
2w2(y) + (ρ0 − 1)ξ(y)
)dy
≤ c
2α2+
2k0,2c
(1
2S22 − (ρ0 − 1)S1
)
≤ c
2α2+ 2k0,2
(c
α22
+c
α22(ρ0 − 1)
)
≤ γ2c2.
Como consecuencia de estos hechos, tenemos que para γ = maxγ1, γ2 > 1
max−ξ(0), w(0) =R
1−R≤ γc2.
Ahora, si R > γc2
1+γc2, concluimos que d((ξ, w), 0) > R, lo cual significa que (ξ, w) 6∈
K ∩ ∂BR(0).
Notamos que las estimaciones en el lema anterior no dependen de ν > 0, y que γ es
independiente de ν y c. Ademas, tambien tenemos que γc2
1+γc2> c−r0
cpara cualesquiera
γ > 1 y r0 > 1.
Teorema 3.3. Sean 0 < ν < 1/c, ρ0, r0, r y R como en el Lema 3.2 y sea c >
max1,√ρ0 − 1 suficientemente grande. Entonces el operador Ac tiene un punto fijo
no trivial en el cono K. Equivalentemente, existe una solucion onda viajera solitaria no
trivial del sistema (3.10). Ademas, el ındice del punto fijo del operador Ac sobre KRr es
i(K,Ac, KRr ) = −1.
Demostracion. Del Teorema 1.14, hay al menos un punto fijo en KRr . Queremos mostrar
que este punto fijo no es trivial (punto fijo constante). Tenga en cuenta que las soluciones
constantes (ξ, w) ∈ K del sistema (3.10) para c > 1 deben satisfacer el sistema
νξ2 + (c− w)ξ + w = 0, (3.28)
w2 − 2cw − 2 (ρ0 − 1) ξ = 0. (3.29)
Usando que w > 0 y ξ < 0, concluimos a partir de la primera ecuacion que w < c.
Entonces, resolviendo para w en la primera ecuacion, obtenemos que
w =νξ2 + cξ
ξ − 1,

3. Ondas solitarias para un sistema tipo Benjamin-Ono 51
y reemplazando esto en la segunda ecuacion, vemos que q(ξ) = 0 donde
q(ξ) = ν2ξ3 − 2(ρ0 − 1)ξ2 + (4(ρ0 − 1) + 2νc− c2)ξ + 2(c2 − (ρ0 − 1)).
Notemos que hay una raız negativa ξ(c) < 0 para q dado que q(0) = 2(c2−(ρ0−1)) > 0.
Por otro lado, usando el criterio de Routh-Hurwitz (ver seccion 1.6), hay dos raıces con
parte real positiva, lo cual significa que este polinomio tiene solo una raız negativa.
Ahora para c suficientemente grande, el polinomio
q′(ξ) = 3ν2ξ2 − 4(ρ0 − 1)ξ + (4(ρ0 − 1) + 2νc− c2)
tiene dos raıces reales ξ−(c) < 0 < ξ+(c) dadas por
ξ±(c) =1
6ν2
(4(ρ0 − 1)±
√12ν2(c2 − 2cν − 4(ρ0 − 1)) + 16(ρ0 − 1)2
).
Ademas, vemos directamente que
q′(ξ+(c)) = −(
8
9ν2(ρ0 − 1) +
2
3(c2 − 4(ρ0 − 1)− 2νc)
)ξ+
+ 2
(c2 − (ρ0 − 1)− 1
9ν2(c2 − 4(ρ0 − 1)− 2νc)
).
Bajo la condicion cν < 1, concluimos que para c lo suficientemente grande
c2 − 4(ρ0 − 1)− 2νc > c2 − 4(ρ0 − 1)− 2 > 0,
y tambien que
1
ν2(c2 − 4(ρ0 − 1)− 2νc) > c2(c2 − 4(ρ0 − 1)− 2) > 0,
lo cual significa que para c suficientemente grande, q(ξ+(c)) < 0 y q(ξ−(c)) > 0. De
esto, tenemos que q en realidad tiene tres raıces reales, una negativa y dos positiva.
Ademas, tambien tenemos que la raız negativa ξ(c) de q es tal que
ξ(c) < ξ−(c) = − 2(c2 − 2− 4(ρ0 − 1))
4(ρ0 − 1) +√
12ν2(c2 − 2cν − 4(ρ0 − 1)) + 16(ρ0 − 1)2
< − 2(c2 − 2− 4(ρ0 − 1))
4(ρ0 − 1) +√
12 + 16(ρ0 − 1)2,
implicando que
lımc→∞
ξ(c) = −∞, cuando c→ ∞.

52 3. Ondas solitarias para un sistema tipo Benjamin-Ono
De este hecho, concluimos directamente que
d((ξ(c), w(c)), 0) =max−ξ(c), w(c)
1 + max−ξ(c), w(c) → 1, cuando c→ ∞.
Por lo tanto, si c es lo suficientemente grande y r, R se seleccionan como en Lema 3.2,
estas soluciones constantes (ξ(c), w(c)) no pertenecen al anillo
KRr = U ∈ K : r < d(U, 0) < R.
Por lo tanto, hemos demostrado que la existencia de un punto fijo no trivial del operador
Ac en este conjunto es una consecuencia de Lema 3.2 y el Teorema 1.14.
Ahora, analicemos el caso ν = 0. Consideremos Ac,0 y Ai(c, 0) como los operadores
Ac y Ai,c, respectivamente. Tenga en cuenta que al usar argumentos similares a los del
Lema 3.1 con ν = 0, tenemos que para ρ0 > 1 el operador Ac,0 aplica continuamente
K en K y tambien que para cada 0 < r < 1, el conjunto Ac,0(Kr) es un subconjunto
relativo compacto de K.
Teorema 3.4. Sean ρ0, c, r0, r y R como en el Teorema 3.3 y sea ν = 0. Existe una
solucion onda viajera solitaria no trivial del sistema (3.10). Ademas, el ındice del punto
fijo del operador Ac,0 sobre KRr es i(K,Ac,0, KR
r ) = −1.
Demostracion. Sea n0 ∈ N tal que c ≤ n0. Para n ≥ n0, consideremos νn = 1n< 1
cy
sea (ξn, wn) ∈ KRr un punto fijo para Ac garantizado por el Teorema 3.3. Usando que
Ac(KRr ) es relativamente compacto en K, existe una subsucesion (denotada de la mismo
forma) (ξn, wn) y (ξ0, w0) ∈ KRr tal que (ξn, wn) → (ξ0, w0) con respecto a la metrica d.
Ademas, (ξ0, w0) es un punto fijo para el operador Ac,0 en KRr . De hecho, para cualquier
(ξ, w) ∈ K, tenemos que
|A2(c, 0)(ξ, w)−A2,c(ξ, w)| = 0
|A1(c, 0)(ξ, w)−A1,c(ξ, w)| = ν
∫
R
k1,c(x− y)ξ2(y) dy
≤ νMξ2(0),
donde M =∫Rk1,c(x− y) dy. Entonces, tambien tenemos que
|A1,c(ξn, wn)−A1(c, 0)(ξ0, w0)|≤ |A1,c(ξn, wn)−A1(c, 0)(ξn, wn)|+ |A1(c, 0)(ξn, wn)−A1(c, 0)(ξ0, w0)| .

3. Ondas solitarias para un sistema tipo Benjamin-Ono 53
Luego, usando que (ξn, wn) → (ξ0, w0) con respecto a la metrica d, que Ai(c, 0) es
continuo sobre K y de las estimaciones anteriores, concluimos, despues de tomar el
lımite cuando n→ ∞, para i = 1, 2, que
lımn→∞
|Ai(c, 0)(ξ0, w0)−Ai,c(ξn, wn)| = 0,
y ası,
Ac,0(ξ0, w0) = (ξ0, w0).
En otras palabras, (ξ0, w0) es una solucion onda solitaria del sistema (3.10) con ν = 0.
Como se hizo para ν 6= 0, observemos que hay dos soluciones constantes triviales
ξ = w = 0 y ξ = ξ0(c), w = w0(c) del sistema no modificado (3.10) dadas por
w0(c) =3c−
√c2 + 8(ρ0 − 1)
2y ξ0(c) =
w0(c)
w0(c)− c.
Notemos que w0(c) > 0 y ξ0(c) < 0 para c > 1, dado que
w0(c)− c =c−
√c2 + 8(ρ0 − 1)
2< 0.
En otras palabras, las funciones constantes (0, 0) y (ξ0(c), w0(c)) son puntos fijos del
operador Ac,0. Sin embargo, observemos que w0(c) → ∞, cuando c → ∞, y en
consecuencia,
d((ξ0(c), w0(c))), 0) =max−ξ0(c), w0(c)
1 + max−ξ0(c), w0(c)→ 1, c→ ∞.
De este hecho, concluimos que para c > 1 suficientemente grande y r, R escogidos como
en Lema 3.2, estas soluciones constantes no pertenecen al anillo
KRr = U ∈ K : r < d(U, 0) < R,
y por lo tanto hemos demostrado que la existencia de un punto fijo no trivial del
operador Ac en este conjunto es consecuencia de Lema 3.2 y el Teorema 1.14.
Finalmente, necesitamos establecer que esta solucion es, de hecho, una onda viajera.
Teorema 3.5. Sean ρ0, c, r0, r y R como en el Teorema 3.3 para ν > 0 o como en el
Teorema 3.4 para ν = 0. Entonces existe un U = (ξ, w) ∈ KRr tal que U = AcU y
lım|x|→∞
ξ (x) = 0 y lım|x|→∞
w (x) = 0.

54 3. Ondas solitarias para un sistema tipo Benjamin-Ono
Demostracion. Sea ν > 0. Por el Teorema 3.3, existe U = (ξ, w) ∈ KRr tal que U = AcU .
Ası, tenemos que existen una constante no positiva ℓ1 y una constante no negativa ℓ2
tales que ξ (x) ≤ ℓ1 ≤ 0 y w (x) ≥ ℓ2 ≥ 0, y que
lım|x|→∞
ξ (x) = ℓ1 y lım|x|→∞
w (x) = ℓ2.
Un simple calculo muestra que los valores de ℓ1 y ℓ2 son necesariamente ℓ1 = ℓ2 = 0, o
ℓ1 < 0 y ℓ2 > 0 satisfaciendo el sistema (ver el sistema (3.28)-(3.29))
νℓ21 + (c− ℓ2)ℓ1 + ℓ2 = 0,
ℓ22 − 2cℓ2 − 2 (ρ0 − 1) ℓ1 = 0.(3.30)
En efecto, note que para cualquier x ∈ R,
ξ (x+ n)− ℓ1 → 0, w (x+ n)− ℓ2 → 0, n→ ∞.
Usando esto, concluimos que
ξ (n) =
∫
R
(k1,c (x)
(ξ (x+ n)w (x+ n)− νξ2 (x+ n)
)
− k3,c (x)(12w2 (x+ n)− (ρ0 − 1) ξ (x+ n)
) )dx,
w (n) =
∫
R
k2,c (x)(12w2 (x+ n)− (ρ0 − 1) ξ (x+ n)
)dx.
Despues de tomar lımite cuando n → ∞ y usando el Teorema de la convergencia
dominado, tenemos que
ℓ1 =1
c
(ℓ1ℓ2 − νℓ21
)− 1
c2
(1
2ℓ22 − (ρ0 − 1) ℓ1
)y ℓ2 =
1
c
(1
2ℓ22 − (ρ0 − 1) ℓ1
).
Claramente, (0, 0) es una solucion. Ahora, si ℓ2 = 0, entonces ℓ1 = 0, y si ℓ1 = 0,
entonces ℓ2 = 0 o ℓ2 = 2c, pero la ultima opcion no es posible ya que en este caso
ℓ1 > 0. Entonces, tomemos que ℓ1 < 0 y ℓ2 > 0. Recordemos que w,−ξ ∈ K, ası que
tenemos
ξ ≤ ℓ1 < 0, 0 < ℓ2 ≤ w.
Siguiendo el enfoque de Benjamin et. al. en [4], consideremos (ξ1, w1) dados por
(ξ1, w1) =1
c2((ξ, w)− (ℓ1, ℓ2)) ∈ K.

3. Ondas solitarias para un sistema tipo Benjamin-Ono 55
Veamos que
ξ1(y) =
∫
R
(k1,c (x− y)
(c2ξ1 (x)w1 (x) + ℓ1w1 (x) + (1− 2ν) ℓ2ξ1 (x)
)
− k3,c (x− y)(12c2w2
1 (x) + ℓ2w1 (x)− (ρ0 − 1) ξ1 (x)) )dx (3.31)
w1(y) =
∫
R
k2,c (x− y)(12c2w2
1 (x) + ℓ2w1 (x)− (ρ0 − 1) ξ1 (x))dx. (3.32)
Por otro lado, tenemos que ∫
R
k1,c (x) dx =1
c.
Entonces, existe un numero finito positivo m tal que
c
∫ m
−mk1,c (x) dx >
3
4,
lo cual implica que
c
∫ 4m
−4m
k1,c (x− y) dx >3
4, si − 3m < y < 3m.
Ademas, tambien tenemos que para cualquier v ∈ K∫ 3m
−3m
v (x) dx ≥ 3
4
∫ 4m
−4m
v (x) dx.
Del hecho que −ξ1 ∈ K y w1 ≥ ℓ2, se sigue que
−∫ 4m
−4m
ξ1 (x) dx ≥ −c2∫ 4m
−4m
(∫
R
k1,c (x− y) ξ1 (y)w1 (y) dy
)dx
≥ −cℓ2∫ 4m
−4m
∫ 3m
−3m
ck1,c (x− y) ξ1 (y) dy dx
≥ − 9
16cℓ2
∫ 4m
−4m
ξ1 (y) dy
lo cual significa que
1 >9
16cℓ2,
pero sabemos del analisis de la forma de las soluciones constantes fijas en (3.28)-(3.29)
que ℓ2(c) → ∞, para c > 1 lo suficientemente grande, luego tenemos una contradiccion.
Por lo tanto debemos tener que
lım|x|→∞
ξ (x) = lım|x|→∞
w (x) = 0,
como se afirma. El caso ν = 0 se sigue de un argumento similar ya que los calculos son
independientes de ν.

.

Capıtulo 4
Soluciones periodicas para un
sistema tipo Benjamin-Ono
En este capıtulo queremos establecer si el sistema tipo Benjamin-One (2.38) tiene
soluciones de ondas viajeras periodicas de la forma
ξ(x, t) = ζc (x− ct) y w(x, t) = vc (x− ct) ,
donde las nuevas funciones ζc y vc son periodicas y el parametro c es la velocidad de onda.
Para este analisis nos basaremos en el enfoque seguido por H. Chen en [9], H. Chen,
M. Chen y N.V. Nguyen en [10], J.C. Munoz en [29], y F.A. Pipicano y J.C. Munoz en
[35]. El enfoque de estos autores esta basado en aplicar la teorıa del operador positivo
introducida por Krasnosel’skii en [26], [27] al problema formulado en las variables de
la transformadas de Fourier, en lugar de las variables fısicas originales, lo cual permite
obtener una teorıa con menos hipotesis que en el trabajo de T.B. Benjamin, J.L. Bona
y D.K. Bose [4]. El avance principal en la aplicacion de este metodo a ecuaciones
de tipo dispersivo en un dominio periodico fue desarrollado inicialmente por H. Chen
en [9]. Es de senalar tambien que se encuentra que este enfoque topologico esta libre
de restricciones en la amplitud de onda y solo depende de los parametros que aparecen
en los terminos de dispersion lineal del sistema.
Para iniciar, denotamos ζ = ζc y v = vc. Por lo tanto, las ecuaciones para soluciones de
ondas viajeras del sistema (2.38) toman la forma
−cζ ′ + cβ1ζ
′′′ − cβ2ζ′′′′′ − v′ + α5 v
′′′ − α6 v′′′′′ = −(ζ v)′,
−cv′ + cα3v′′′ − cα4v
′′′′′ + cρ0H(v′′)− cρ0α1H(v′′′′) = (ρ0 − 1)ζ ′ − 12(v2)′.
(4.1)
57

58 4. Soluciones periodicas para un sistema tipo Benjamin-Ono
Usando (1.9) e integrando a ambos lados del ultimo sistema de ecuaciones, y tomando
las constantes de integracion iguales a cero, obtenemos
c (ζ − β1ζ′′ + β2ζ
′′′′) + (v − α5 v′′ + α6 v
′′′′) = ζ v,
(ρ0 − 1)ζ + c (v − α3v′′ + α4v
′′′′ − ρ0H(v′) + ρ0α1H(v′′′)) = 12v2.
(4.2)
Note que (ζ, v) = (0, 0) es una solucion trivial del sistema (4.2). Otra solucion constante
(ζ, v) = (p0, q0) puede obtenerse resolviendo el sistema
cp0 + q0 − p0 q0 = 0,
12q0
2 − (ρ0 − 1)p0 − cq0 = 0.(4.3)
Eliminando la variable p0 en (4.3) se obtiene
1
2q20 −
3
2cq0 + c2 − (ρ0 − 1) = 0,
de donde obtenemos que
q0 =1
2
(3c−
√c2 + 8 (ρ0 − 1)
)
y p0 se puede obtener de la ecuacion
p0 =q0
q0 − c=
3c−√c2 + 8 (ρ0 − 1)
c−√c2 + 8 (ρ0 − 1)
.
Note que p0 ≤ 0 y q0 ≥ 0. Es sencillo demostrar que c2 > ρ0 − 1 implica que
−cp0 > q0 > c− 1 > 0. (4.4)
4.1. El espacio apropiado
Estamos interesados en encontrar soluciones no constantes de las ecuaciones de onda
viajera (4.2). Estas soluciones 2l-periodicas ζ(ξ), v(ξ) se pueden expandir en series de
Fourier como
ζ(ξ) =∑
n
ζn eiwnξ y v(ξ) =
∑
n
vn eiwnξ, wn =
nπ
l. (4.5)
Sustituyendo las expresiones (4.5) en las ecuaciones (4.2), se sigue que
((ζ × v)n12(v × v)n
)=
(c∆1,1(wn) ∆1,2(wn)
ρ0 − 1 c∆2,2 (wn)
)(ζn
vn
), n ∈ Z.

4. Soluciones periodicas para un sistema tipo Benjamin-Ono 59
En la ecuacion anterior, (ζ × v)n y (v × v)n son definidas por
(ζ × v)n =∑
k
ζk vn−k y (v × v)n =∑
k
vk vn−k, (4.6)
y las funciones ∆1,1, ∆1,2, ∆2,2 son definidas por
∆1,1 (x) = 1 + β1x2 + β2x
4, ∆1,2 (x) = 1 + α5x2 + α6x
4
y
∆2,2 (x) = 1 + ρ0 |x|+ α3x2 + ρ0α1 |x|3 + α4x
4.
Denotemos
An =
(c∆1,1(wn) ∆1,2(wn)
ρ0 − 1 c∆2,2 (wn)
).
Luego tenemos que (ζn
vn
)= A−1
n
((ζ × v)n12(v × v)n
), (4.7)
donde
A−1n =
1
detAn
(c∆2,2(wn) −∆1,2(wn)
− (ρ0 − 1) c∆1,1 (wn)
).
Observese que
detAn = c2(β2α4w
8n + ρ0β2α1 |wn|7 + (β1α4 + β2α3)w
6n + ρ0 (α1β1 + β2) |wn|5
)
+(c2(β1α3 + β2 + α4)− (ρ0 − 1)α6)w4n + c2ρ0(α1 + β1) |wn|3
+(c2(β1 + α3)− (ρ0 − 1)α5)w2n + c2ρ0 |wn|+ c2 − (ρ0 − 1).
Notese que la matriz An es invertible para todo n ∈ Z dado que α5 ≤ β1 + α3,
α6 ≤ β1α3 + β2 + α4 y c2 > ρ0 − 1.
Consideremos el espacio ℓ2 equipado con la norma usual ‖·‖2. Con esta norma ℓ2 es un
espacio de Banach. Entonces se puede verificar que el conjunto K ⊂ ℓ2 definido por
K := vn ∈ ℓ2 : vn = v−n, v0 ≥ v1 ≥ v2 ≥ · · · ≥ 0
es un cono en ℓ2. Tambien podemos verificar que si consideramos el espacio X = ℓ2 × ℓ2
equipado con la norma usual
‖(ζ, v)‖2X = ‖(ζn, vn)‖2X := ‖ζ‖22 + ‖v‖22 ,
entonces K = −K ×K ⊂ X es un cono en X , donde −K = −vn ∈ ℓ2 : vn ∈ K.

60 4. Soluciones periodicas para un sistema tipo Benjamin-Ono
Finalmente, observese que para una sucesion w = (ζ, v) = (ζn, vn) ∈ X , podemos definir
el operador no lineal
(Aw)n = A−1n
((ζ × v)n12(v × v)n
).
El problema de encontrar solucion del sistema (4.2) se reduce a la busqueda de puntos
fijos del operador A en un espacio apropiado. Tenga en cuenta que (0, 0) y (p∗, q∗)
donde p∗ = (. . . , 0, 0, p0, 0, 0, . . . ) y q∗ = (. . . , 0, 0, q0, 0, 0, . . . ) son puntos fijos triviales
del operador A. En la siguiente seccion estableceremos que el operador A tiene un punto
fijo no trivial en el cono K.
4.2. Analisis del operador A
Sea w = (ζ, v) un elemento en K. Luego, utilizando la igualdad (4.6) podemos definir
zn y ϑn de la siguiente manera:
zn := (v × ζ)n =∑
k
ζk vn−k y ϑn := (v × v)n =∑
k
vk vn−k.
Por lo tanto, para todo n ∈ Z tenemos que
z−n =∑
k
ζk v−n−k =∑
k
ζ−k v−(n+k) =∑
k
ζk vn−k = zn y ϑ−n = ϑn.
Similarmente,
−zn = −∑
k
ζk v−n−k ≥ −∑
k
ζk vn−k+1 = −zn+1 y ϑn ≥ ϑn+1. (4.8)
La ecuacion (1.2) implica que
0 ≤ −zn ≤ ‖ζ‖2 ‖v‖2 y 0 ≤ ϑn ≤ ‖v‖22 . (4.9)
Por otro lado, teniendo en cuenta que wn = nπlentonces se obtiene sin dificultad, para
n 6= 0, que ‖A−1n ‖∞ ≤ C
n4 , donde
∥∥A−1n
∥∥∞ = max
1≤j≤2
2∑
i=1
∣∣A−1n (i, j)
∣∣ ,
y A−1n (i, j) representa el elemento en la posicion (i, j) de A−1
n . Por lo tanto, tenemos
que ∑
n
∥∥A−1n
∥∥2∞ ≤ c20 + C
∑
n 6=0
1
n8<∞, (4.10)

4. Soluciones periodicas para un sistema tipo Benjamin-Ono 61
donde c0 = max
1c−1
, c+ρ0−1c2+1
. Note que las entradas de la matriz A−1
n son decrecientes
en |n|, y A−1n = A−1
−n para todo n ≥ 0.
Lema 4.1. El operador A es una aplicacion continua, positiva y K-compacta sobre K.
Demostracion. Suponga que w = (ζ, v) ∈ K. Las desigualdades (4.9) y (4.10) implican
que
‖Aw‖2X =
∥∥∥∥A−1n (1, 1)(ζ × v)n +
1
2A−1n (1, 2)(v × v)n
∥∥∥∥2
2
+
∥∥∥∥A−1n (2, 1)(ζ × v)n +
1
2A−1n (2, 2)(v × v)n
∥∥∥∥2
2
=∑
n
∣∣∣∣A−1n (1, 1)(ζ × v)n +
1
2A−1n (1, 2)(v × v)n
∣∣∣∣2
+∑
n
∣∣∣∣A−1n (2, 1)(ζ × v)n +
1
2A−1n (2, 2)(v × v)n
∣∣∣∣2
≤ 2∑
n
(∥∥A−1n
∥∥∞ ‖ζ‖2 ‖v‖2 +
1
2
∥∥A−1n
∥∥∞ ‖v‖22
)2
≤ 2
(‖ζ‖2 ‖v‖2 +
1
2‖v‖22
)2∑
n
∥∥A−1n
∥∥2∞ <∞.
Ası, el operador A esta bien definido sobre K. Para demostrar que A es positivo primero
notemos que
(Aw)n = A−1n
((ζ × v)n12(v × v)n
)= A−1
−n
((ζ × v)−n12(v × v)−n
)= (Aw)−n.
La desigualdad (4.8) y el hecho de que las entradas de la matriz A−1n son decrecientes
en |n| implican que
−(Aw)n(1, 1) ≥ −(Aw)n+1(1, 1) y (Aw)n(2, 1) ≥ (Aw)n+1(2, 1).
Concluimos que el operador A es positivo.

62 4. Soluciones periodicas para un sistema tipo Benjamin-Ono
Por otro lado, sean w = (ζ, v) y w = (ζ , v) elementos en K. Observe que
∣∣(ζ × v)n − (ζ × v)n∣∣ =
∣∣∣∣∣∑
k
ζk vn−k − ζk vn−k
∣∣∣∣∣
=
∣∣∣∣∣∑
k
ζk (vn−k − vn−k) +(ζk − ζk
)vn−k
∣∣∣∣∣
≤∑
k
(|ζk| |vn−k − vn−k|+
∣∣ζk − ζk∣∣ |vn−k|
)
≤ ‖ζ‖2 ‖v − v‖2 +∥∥ζ − ζ
∥∥2‖v‖2 .
Similarmente,
|(v × v)n − (v × v)n| = ‖v − v‖2 (‖v‖2 + ‖v‖2) .
Con las desigualdades anteriores en mente, obtenemos que
‖Aw −Aw‖2X
=∑
n
∣∣∣∣A−1n (1, 1)
((ζ × v)n − (ζ × v)n
)+
1
2A−1n (1, 2) ((v × v)n − (v × v)n)
∣∣∣∣2
+∑
n
∣∣∣∣A−1n (2, 1)
((ζ × v)n − (ζ × v)n
)+
1
2A−1n (2, 2) ((v × v)n − (v × v)n)
∣∣∣∣2
≤2∑
n
(∥∥A−1n
∥∥∞(‖ζ‖2 ‖v − v‖2 +
∥∥ζ − ζ∥∥2‖v‖2
)
+1
2
∥∥A−1n
∥∥∞ ‖v − v‖2 (‖v‖2 + ‖v‖2)
)2
=2
((‖ζ‖2 ‖v − v‖2 +
∥∥ζ − ζ∥∥2‖v‖2
)+
1
2‖v − v‖2 (‖v‖2 + ‖v‖2)
)2∑
n
∥∥A−1n
∥∥2∞
=2
(∥∥ζ − ζ∥∥2‖v‖2 +
1
2‖v − v‖2 (2 ‖ζ‖2 + ‖v‖2 + ‖v‖2)
)2∑
n
∥∥A−1n
∥∥2∞ .
Por lo tanto, el operador A es continuo en el punto w = (ζ , v).
Para mostrar que el operador A es K-compacto, sea M un conjunto acotado en X , es
decir,
M ⊂ w = (ζ, v) ∈ X : ‖w‖X ≤ B .
Para cada N ∈ N, definamos
(ANw)n =
(ANw)n para −N ≤ n ≤ N,
0 para |n| > N.

4. Soluciones periodicas para un sistema tipo Benjamin-Ono 63
Encontramos que para cada N , AN es compacto dado que A es continuo y AN tiene
rango finito 2N + 1.
Por otra parte, si w = (ζ, v) ∈M y (zn, ϑn) := (Aw)n, entonces
|zn| =∣∣∣∣A−1
n (1, 1) (ζ × v)n +1
2A−1n (1, 2) (v × v)n
∣∣∣∣ ≤∥∥A−1
n
∥∥∞
(‖ζ‖2 ‖v‖2 +
1
2‖v‖22
)
y
|ϑn| ≤∥∥A−1
n
∥∥∞
(‖ζ‖2 ‖v‖2 +
1
2‖v‖22
).
Por lo tanto, para todo n ∈ Z tenemos que
‖ANw −Aw‖2X =∥∥∥(zn)|n|>N
∥∥∥2
2+∥∥∥(ϑn)|n|>N
∥∥∥2
2
=∑
|n|>N|zn|2 +
∑
|n|>N|ϑn|2
≤ 2
(‖ζ‖2 ‖v‖2 +
1
2‖v‖22
)2 ∑
|n|>N
∥∥A−1n
∥∥2∞ .
Ahora, si
γ :=
(∑
n
∥∥A−1n
∥∥2∞
)1/2
y γN :=
∑
|n|>N
∥∥A−1n
∥∥2∞
1/2
, (4.11)
entonces
‖ANw −Aw‖2X ≤ 2
(B2 +
1
2B2
)2∑
|n|>N
∥∥A−1n
∥∥2∞
≤ 9
2B4γ2N .
Dado que γN → 0 cuando N → ∞, se sigue que supw∈M ‖ANw −Aw‖2X → 0 cuando
N → ∞, y ası A es compacto dado que el lımite uniforme de operadores compactos en
un conjunto acotado.
Lema 4.2. Sea γ definido como en (4.11) y sea r suficientemente pequeno tal que
0 < r < r0 := mın
√2
3γ, ‖(p∗, q∗)‖X
.
Se sigue que w 6= tAw para todo w ∈ ∂Kr y para todo t ∈ [0, 1].

64 4. Soluciones periodicas para un sistema tipo Benjamin-Ono
Demostracion. Suponga que w = (ζ, v) = (ζn, vn) ∈ ∂Kr y t ∈ [0, 1], tal que w = tAw.Entonces,
r2 = ‖w‖2X = ‖tAw‖2X ≤ ‖Aw‖2X = ‖(zn)‖22 + ‖(ϑn)‖22 ,
donde (Aw)n = (zn, ϑn). Por lo tanto
r2 ≤∑
n
(|zn|2 + |ϑn|2
)
≤ 2
(‖ζ‖2 ‖v‖2 +
1
2‖v‖22
)2∑
n
∥∥A−1n
∥∥2∞
≤ 2
(r2 +
1
2r2)γ2 =
9
2r4γ2,
o equivalentemente, r ≥√2
3γ, contradiciendo la escogencia de r.
Lema 4.3. Para cualquier R satisfaciendo
R > R0 := max
√8 (c2 − (ρ0 − 1))2
c2
[c2 − (ρ0 − 1)
c0γ + β
], ‖(p∗, q∗)‖X
con γ como en (4.11) y β =(∑
n1
(1+n2)2
)1/2, entonces existe w ∈ K, tal que w 6= 0 y
w −Aw = λw para todo w ∈ ∂KR y λ ≥ 0.
Demostracion. Sea w = (ζ , v) = (ζn, vn) dado por
(ζn
vn
)=
1
1 + n2
(−1
1
).
Claramente w ∈ K. Suponga que existe w = (ζ, v) ∈ ∂KR y λ ≥ 0 tal que para todo
n ∈ Z, se cumple que w −Aw = λw, entonces
(ζn
vn
)= A−1
n
((ζ × v)n12(v × v)n
)+ λ
(ζn
vn
).
En particular para n = 0,
(ζ0
v0
)=
1
detA0
(c −1
− (ρ0 − 1) c
)((ζ × v)012(v × v)0
)+ λ
(−1
1
)
=
(1
detA0
(c (ζ × v)0 − 1
2(v × v)0
)− λ
1detA0
(− (ρ0 − 1) (ζ × v)0 +
12c (v × v)0
)+ λ
).

4. Soluciones periodicas para un sistema tipo Benjamin-Ono 65
Equivalentemente,
−ζ0 =1
c2 − (ρ0 − 1)
(−c∑
k
ζkv−k +1
2
∑
k
vkv−k
)+ λ,
v0 =1
c2 − (ρ0 − 1)
(−(ρ0 − 1)
∑
k
ζkv−k +1
2c∑
k
vkv−k
)+ λ.
Note que si ζ0 = 0 entonces ζn = 0 para todo n ∈ Z y la ecuacion para ζ0 toma la forma
0 =1
c2 − (ρ0 − 1)
(1
2
∑
k
v2k
)+ λ,
y tenemos que vk = 0 para todo k ∈ Z dado que λ ≥ 0 y v0 ≥ 0. Analogamente, si
v0 = 0 entonces vn = 0 para todo n ∈ Z. Ademas, la ecuacion para v0 implica que
λ = 0, y la ecuacion para ζ0 implica que ζ0 = 0, y ası ζn = 0 para todo n ∈ Z. Por lo
tanto, dado que w = 0 /∈ ∂KR, concluimos que ζ0 6= 0 y v0 6= 0.
Por otra parte, como una consecuencia de la ecuacion para v0, tenemos que
v0 ≥1
c2 − (ρ0 − 1)
(1
2cv20
).
Se sigue que
1 ≥ cv02 (c2 − (ρ0 − 1))
.
La ecuacion para v0 implica que v0 ≥ λ, entonces
0 ≤ λ ≤ v0 ≤2 (c2 − (ρ0 − 1))
c. (4.12)
Ademas, la ecuacion para v0 implica que
v0 ≥−(ρ0 − 1)
c2 − (ρ0 − 1)ζ0v0.
Se sigue que
0 ≤ −ζ0 ≤c2 − (ρ0 − 1)
(ρ0 − 1).
Del hecho que −(ζ × v)n ≥ −(ζ × v)n+1 y (v × v)n ≥ (v × v)n+1, se sigue que
−ζn = −A−1n (1, 1)(ζ × v)n +
1
2A−1n (1, 2)(v × v)n +
λ
1 + n2
≤∥∥A−1
n
∥∥∞
(−(ζ × v)n +
1
2(v × v)n
)+
λ
1 + n2
≤∥∥A−1
n
∥∥∞
(−(ζ × v)0 +
1
2(v × v)0
)+
λ
1 + n2. (4.13)

66 4. Soluciones periodicas para un sistema tipo Benjamin-Ono
Similarmente, tenemos que
vn ≤∥∥A−1
n
∥∥∞
(−(ζ × v)0 +
1
2(v × v)0
)+
λ
1 + n2. (4.14)
Note que de
v0 ≥1
c2 − (ρ0 − 1)
(−(ρ0 − 1) (ζ × v)0 +
1
2c (v × v)0
),
obtenemos que
1
c2 − (ρ0 − 1)
(−(ρ0 − 1) (ζ × v)0 +
1
2c (v × v)0
)≤ v0 ≤
2 (c2 − (ρ0 − 1))
c.
Ası
−(ρ0 − 1) (ζ × v)0 +1
2c (v × v)0 ≤
2 (c2 − (ρ0 − 1))2
c.
Sea c0 = mın ρ0 − 1, c, entonces
− (ζ × v)0 +1
2(v × v)0 ≤
2 (c2 − (ρ0 − 1))2
c c0.
Ahora, tenemos de las ecuaciones (4.13), (4.14) y (4.12) que
−ζn ≤∥∥A−1
n
∥∥∞
(2 (c2 − (ρ0 − 1))
2
c c0
)+
2 (c2 − (ρ0 − 1))
c
1
1 + n2(4.15)
y
vn ≤∥∥A−1
n
∥∥∞
(2 (c2 − (ρ0 − 1))
2
c c0
)+
2 (c2 − (ρ0 − 1))
c
1
1 + n2. (4.16)
Del hecho que w = (ζ, v) ∈ ∂KR, deducimos que
R2 =∑
n
(|ζn|2 + |vn|2
)
≤ 2
∑
n
(∥∥A−1
n
∥∥∞
(2 (c2 − (ρ0 − 1))
2
c c0
)+
2 (c2 − (ρ0 − 1))
c
1
1 + n2
)2 .
Por lo tanto, de la desigualdad de Minkowsky para sumatorias se tiene que
R2 ≤ 8 (c2 − (ρ0 − 1))2
c2
c
2 − (ρ0 − 1)
c0
(∑
n
∥∥A−1n
∥∥2∞
)1/2
+
(∑
n
1
(1 + n2)2
)1/2
≤ 8 (c2 − (ρ0 − 1))2
c2
[c2 − (ρ0 − 1)
c0γ + β
],
la cual contradice la escogencia de R.

4. Soluciones periodicas para un sistema tipo Benjamin-Ono 67
Teorema 4.4. Sean r y R como en los Lemas 4.2 y 4.3 respectivamente. Entonces el
ındice del punto fijo de A sobre KRr es i(K,A, KR
r ) = −1. Por lo tanto debe haber al
menos un punto fijo de A en KRr .
Demostracion. Esto es consecuencia de los Lemas 4.2 y 4.3, y el Teorema 1.14.
4.3. Resultados de existencia de soluciones
Es importante notar que el punto fijo trivial (p∗, q∗) pertenece a KRr y es independiente
de la eleccion del semiperiodo l. En el siguiente lema, estableceremos la existencia de
un punto fijo no trivial del operador A en KRr . Definamos los conjuntos
Kδ(p∗, q∗) :=
w = (ζ, v) ∈ K : ‖(ζ, v)− (p∗, q∗)‖X < δ
,
∂Kδ(p∗, q∗) :=
w = (ζ, v) ∈ K : ‖(ζ, v)− (p∗, q∗)‖X = δ
,
para δ > 0.
Lema 4.5. Si (p∗, q∗) es el unico punto fijo de A en KRr , entonces cuando el semiperiodo
l > 0 es escogido suficientemente grande, i(K, A, Kδ(p∗, q∗)) = 0.
Demostracion. Debido al Lema 1.12, es suficiente demostrar que los conjuntos
(I −A)∂Kδ(p∗, q∗) y λw : λ ≥ 0
son disjuntos, donde w ∈ K se define como en el Lema 4.3. Supongamos que existe un
w = (ζ, v) ∈ ∂Kδ(p∗, q∗) y un λ ≥ 0 tal que w −Aw = λw.
Por la ecuacion (4.7) tenemos que para todo n ∈ Z
(ζn
vn
)=
1
detAn
(c∆2,2(wn) −∆1,2(wn)
− (ρ0 − 1) c∆1,1 (wn)
)((ζ × v)n12(v × v)n
)+
λ
1 + n2
(−1
1
),
(4.17)
donde wn es como en (4.5). Para n = 1, la ecuacion anterior toma la forma
−ζ1 =1
detA1
(−c∆2,2 (w1) (ζ × v)1 +
1
2∆1,2 (w1) (v × v)1
)+λ
2,
v1 =1
detA1
(− (ρ0 − 1) (ζ × v)1 +
1
2c∆1,1 (w1) (v × v)1
)+λ
2.

68 4. Soluciones periodicas para un sistema tipo Benjamin-Ono
Por lo tanto
−ζ1 ≥ 1
detA1
(−c(1 + α3w
21
)(ζ0v1 + ζ1v0) + v0v1
)+λ
2,
v1 ≥ 1
detA1
(− (ρ0 − 1) (ζ0v1 + ζ1v0) + c
(1 + β1w
21
)v0v1
)+λ
2.
Sea τ = mın α3, β1 y dado que ρ0 − 1 > 1, entonces
−ζ1 ≥ 1
detA1
(−c(1 + τw2
1
)(ζ0v1 + ζ1v0) + v0v1
)+λ
2,
v1 ≥ 1
detA1
(−(ζ0v1 + ζ1v0) + c
(1 + τw2
1
)v0v1
)+λ
2.
Si
T =c (1 + τw2
1)
detA1y E =
1
detA1,
entonces
−ζ1 ≥ −T (ζ0v1 + ζ1v0) + Ev0v1 +λ
2, (4.18)
v1 ≥ −E(ζ0v1 + ζ1v0) + Tv0v1 +λ
2. (4.19)
Por lo tanto
−ζ1 + v1 ≥ −(T + E)(ζ0v1 + ζ1v0) + (T + E)v0v1 + λ
= (T + E)(−ζ0v1 − ζ1v0 + v0v1) + λ
= (T + E)((v1 − ζ1)v0 − ζ0v1) + λ.
Como w = (ζ, v) ∈ ∂Kδ(p∗, q∗), entonces (ζ, v) = (p∗, q∗)+δ(ζ , v), donde
∥∥(ζ , v)∥∥X= 1.
Notemos que para n = 0 tenemos que
ζ0 = p0 + δζ0 y v0 = q0 + δv0,
y para |n| ≥ 1 tenemos que
ζn = δζn y vn = δvn.
Entonces
δ(−ζ1 + v1
)≥ (T + E)(δ(v1 − ζ1)(q0 + δv0)− (p0 + δζ0)δv1) + λ. (4.20)
Ahora, notemos que
T + E =c (1 + τw2
1) + 1
detA1
y detA1 = c2 − (ρ0 − 1) +R(αi, βi, w1).

4. Soluciones periodicas para un sistema tipo Benjamin-Ono 69
Por lo tanto
(T + E)−1 ≤ detA1
c+ 1
≤ c2 − (ρ0 − 1)
c+ 1+R(αi, βi, w1)
c+ 1
≤ c2 − 1
c+ 1+R(αi, βi, w1)
c+ 1
≤ c− 1 +R(αi, βi, w1)
c+ 1.
Si el semiperiodo l > 0 es escogido lo suficientemente grande para asegurar que w1 → 0,
entonces R(αi, βi, w1) → 0. Por lo tanto, se sigue que
−cp0 > q0 > c− 1 +R(αi, βi, w1)
c+ 1≥ (T + E)−1 > 0.
Ademas, el numero δ > 0 se puede escoger lo suficientemente pequeno para garantizar
que
−ζ0 = −(p0 + δζ0
)> (T + E)−1 > 0,
v0 = q0 + δv0 > (T + E)−1 > 0,
Esto, junto con la ecuacion (4.20) implica que
δ(−ζ1 + v1
)≥ (T + E)(δ(v1 − ζ1) (T + E)−1 + δ (T + E)−1 v1) + λ
= δ(v1 − ζ1) + δv1 + λ.
Ası δv1 + λ ≤ 0. Dado que v1 ≥ 0 y λ ≥ 0, concluimos ası que v1 = λ = 0, y entonces
vn = 0 para todo n 6= 0. Por lo tanto la ecuacion (4.17) para n = 0 se transforma en
(ζ0
v0
)=
1
c2 − (ρ0 − 1)
(c −1
− (ρ0 − 1) c
)((ζ × v)012(v × v)0
).
Como v1 = λ = 0 tenemos que
(ζ × v)0 =∑
n
ζnv−n = ζ0v0 y (v × v)0 =∑
n
vnv−n = v20.
Como consecuencia, tenemos que
ζ0 =c
c2 − (ρ0 − 1)ζ0v0 −
1
2 (c2 − (ρ0 − 1))v20, (4.21)
v0 = − (ρ0 − 1)
c2 − (ρ0 − 1)ζ0v0 +
c
2 (c2 − (ρ0 − 1))v20. (4.22)

70 4. Soluciones periodicas para un sistema tipo Benjamin-Ono
Al sustituir la expresion (4.21) en la ecuacion (4.22), se sigue que
v0 + cζ0 − ζ0v0 = 0. (4.23)
Usando que v0 + cζ0 = ζ0v0, sustituyendo en (4.22), obtenemos que
1
2v20 − (ρ0 − 1)ζ0 − cv0 = 0. (4.24)
Observemos que las ecuaciones (4.23) y (4.24) implican que ζ0 y v0 satisfacen las mismas
ecuaciones que p0 y q0 respectivamente. Por lo tanto, debemos tener
ζ0 = p0 < 0, v0 = q0 > 0 y ζ0 = v0 = 0.
Por otra parte, la ecuacion (4.19) implica que
0 = v1 = δv1 ≥ −E ζ1v0 y − ζ1 ≥ −ζn = 0
para todo n 6= 0, dado que T , E y v0 son positivos. Esto implica que δζ1 = ζ1 = 0 y por
lo tanto −ζ1 ≥ −ζn = 0 para todo n 6= 0. Con esto hemos demostrado que vn = ζn = 0
para todo n ∈ Z, contradiciendo el hecho que
w = (ζ, v) = (p∗, q∗) + δ(ζ , v) ∈ ∂Kδ(p∗, q∗).
Teorema 4.6. Si c2 > ρ0−1 y el semiperiodo l > 0 es escogido suficientemente grande,
entonces el operador A tiene un punto fijo no trivial w = (ζ , v) en el segmento de cono
KRr .
Demostracion. La existencia del punto fijo no trivial del operador A es consecuencia
del Teorema 4.4 y el Lema 4.5. Podemos tambien mostrar que las funciones
ξ(x, t) = ξ(x− ct) =∑
n
ξneiwn(x−ct) y v(x, t) = v(x− ct) =
∑
n
vneiwn(x−ct),
con wn = nπl, son infinitamente suaves y ası ellas corresponden a una solucion tipo onda
viajera periodica no trivial del sistema original (4.1). Notese tambien, que el rango de
la velocidad para la existencia de ondas viajeras del sistema (4.1) debe cumplir que
c2 > ρ0 − 1.

Capıtulo 5
El problema de Cauchy para el
sistema tipo Benjamin-One
El sistema tipo Benjamin-Ono deducido en la seccion 2.2 puede escribirse en la forma
A1ζt = A3∂xv − ∂x(ζv),
A2vt = ∂x((ρ0 − 1)ζ − 1
2v2),
(5.1)
donde los operadores lineales Ai para i = 1, 2, 3 son definidos por (3.4), (3.5) y (3.6), y
donde los sımbolos de Fourier para Ai en la variable dual y son dados por (3.7), (3.8) y
(3.9). Es importante notar que los operadores lineales Ai son invertibles y los sımbolo
de Fourier Ai, para i = 1, 2, 3, son funciones pares. Denotemos U = (ζ, v)t. Usando
esto, podemos escribir el sistema (5.1) como
Ut = A(U) +G(U), (5.2)
donde A es un operador lineal y G corresponde a la parte no lineal,
A =
(0 A−1
1 A3∂x
(ρ0 − 1)A−12 ∂x 0
)y G(U) = −
(A−1
1 ∂x (ζv)12A−1
2 ∂x (v2)
).
5.1. Existencia local de solucion
En esta seccion consideramos el problema de Cauchy asociado al sistema (5.2) con la
condicion inicial
ζ(0, ·) = ζ0, v(0, ·) = v0. (5.3)
71

72 5. El problema de Cauchy para el sistema tipo Benjamin-One
El objetivo principal es demostrar que el problema de Cauchy para el sistema (5.2) es
localmente bien puesto.
Recordemos que el espacio de Sobolev Hs(R) es definido como la clausura del espacio
Schwartz S(R) con respecto a la norma dada por
‖f‖2Hs =∥∥∥(1 + |ξ|2
) s2 f∥∥∥2
L2(R)=
∫
R
(1 + |ξ|2)s|f(ξ)|2dξ,
donde la transformada de Fourier de una funcion w definida sobre R es dada por
(Fw)(ξ) = w(ξ) =1
(2π)12
∫
R
e−ix·ξw(x) dx.
Denotaremos con X s el espacio tipo Sobolev Hs × Hs+2. Es facil demostrar que la
expresion
‖U‖X s = ‖(ζ, v)‖X s = (‖ζ‖2Hs + ‖v‖2Hs+2)12
define una norma en X s con U = (ζ, v)t. A veces tambien usaremos la norma equivalente
‖(ζ, v)‖X s = ‖ζ‖Hs + ‖v‖Hs+2 .
Inicialmente podemos demostrar un resultado relacionado con la linealidad y acotacion
del operador A.
Lema 5.1. Para s ∈ R, tenemos que A : X s−1 → X s es un operador lineal acotado.
Demostracion. Para s ∈ R y (ζ, v) ∈ X s−1 tenemos que
A(ζ, v) = (A−11 A3∂xv, (ρ0 − 1)A−1
2 ∂xζ).
Por lo tanto
∥∥A−11 A3∂xv
∥∥2Hs ≤
∫
R
ξ2(1 + ξ2
)s∣∣∣∣∣A3(ξ)
A1(ξ)
∣∣∣∣∣
2
|v(ξ)|2dξ
≤ K1
∫
R
(1 + ξ2
)s+1 |v(ξ)|2 dξ
≤ K1‖v‖2Hs+1.
De manera similar tenemos
∥∥(ρ0 − 1)A−12 ∂xζ
∥∥2Hs+2 =
∫
R
ξ2(1 + ξ2)s+2
∣∣∣∣∣(ρ0 − 1)
A2(ξ)
∣∣∣∣∣
2
|ζ(ξ)|2 dξ
≤ K2
∫
R
(1 + ξ2)s−1|ζ(ξ)|2 dξ
≤ K2‖ζ‖2Hs−1.

5. El problema de Cauchy para el sistema tipo Benjamin-One 73
De estos dos hechos concluimos que
‖A(ζ, v)‖2X s =∥∥A−1
1 A3∂xv∥∥2Hs +
∥∥(ρ0 − 1)A−12 ∂xζ
∥∥2Hs+2
≤ K(‖ζ‖2Hs−1 + ‖v‖2Hs+1
)
≤ K ‖(ζ, v)‖2X s−1 .
donde K = maxK1, K2, y por lo tanto A es un operador lineal acotado.
Dado que X s ⊂ X s−1, para los propositos de este documento, consideramos al operador
A de X s en X s, s ≥ 0.
5.1.1. Buen planteamiento local para el problema de Cauchy
Para abordar el problema de Cauchy, necesitamos describir el semigrupo S(t) asociado
con el problema lineal Ut = AU
U(0) = U0 ∈ X s.(5.4)
Notemos que la solucion de (5.4) viene dada por
U(t) = (ζ(t), v(t)) = S(t)U0.
Por lo tanto, tomando transformada de Fourier formalmente, tenemos que
U(t) = S(t)U0 = S(t)U0.
En consecuencia, formalmente la solucion tiene la forma
U(t) = F−1(U(t)) = (F−1S(t)F)U0,
donde
S(t) = (F−1S(t)F), con S(t) = eAt.
Vamos a ver que
S(t) = eAt =
cos (yΛ(y)t) isin(yΛ(y)t)
ψ (y)
i ψ (y) sin (yΛ(y)t) cos (yΛ(y)t)
, (5.5)
donde Λ, ψ : R → R son la funciones dadas por
Λ2(y) =(ρ0 − 1)A3 (y)
A1 (y) A2 (y)y ψ (y) =
A1 (y) Λ (y)
A3 (y). (5.6)

74 5. El problema de Cauchy para el sistema tipo Benjamin-One
En particular, ψ (y) ∼ 1
1 + y2. En efecto, es claro que los sımbolos de Fourier Ai (y),
i = 1, 2, 3 son todos de orden (1 + y2)2. Ahora
ψ2 (y) =
(A1 (y)
)2Λ2 (y)
(A3 (y)
)2
=
(A1 (y)
)2(ρ0 − 1)A3 (y)
(A3 (y)
)2A1 (y) A2 (y)
=A1 (y) (ρ0 − 1)
A3 (y) A2 (y)≤ C
(1
(1 + y2)2
).
Vamos a ver que S(t) tiene la forma (5.5). En efecto, tomando transformada de Fourier
al operador A tenemos que
A =
0 A3(y)
A1(y)(iy)
(ρ0−1)(iy)
A2(y)0
.
Notemos que
A2 = −y2 (ρ0 − 1)A3(y)
A1(y)A2(y)· I = −y2Λ2(y)I ≡ −y2Λ2I y A3 = −y2Λ2A.
Entonces, por induccion, se tiene que
A2n = (−1)ny2nΛ2n(y) I y A2n+1 = (−1)ny2nΛ2n(y) A.
Por consiguiente,
S(t) = eAt =∞∑
n=0
tnAn
n!
= I
∞∑
n=0
(−1)n(yΛ(y)t)2n
(2n)!+
A
yΛ
∞∑
n=0
(−1)n(yΛ(y)t)2n+1
(2n+ 1)!
= I cos (yΛt) +A
yΛsin (yΛt) .
Ahora,
A
yΛ=
0 A3(y)
y A1(y)Λ(y)(iy)
(ρ0−1)(iy)
y A2(y)Λ(y)0
=
(0 i 1
ψ(y)
i ψ(y) 0
),

5. El problema de Cauchy para el sistema tipo Benjamin-One 75
dado que por (5.6) es claro que
A3(y)
A1(y)Λ(y)=
1
ψ(y)
y
(ρ0 − 1)
A2(y)Λ(y)=
√(ρ0 − 1)A1(y)
A2(y)A3(y)=
A1(y)
A3(y)
√(ρ0 − 1)A3(y)
A1(y)A2(y)= ψ(y).
Entonces obtenemos que
S(t) = eAt =
(1 0
0 1
)cos (yΛt) +
(0 i 1
ψ(y)
i ψ(y) 0
)sin (yΛt)
=
cos (yΛ(y)t) isin(yΛ(y)t)
ψ (y)
i ψ (y) sin (yΛ(y)t) cos (yΛ(y)t)
.
Es conveniente establecer que
Q(t)(U) = (Q1(t), Q2(t)) (U),
donde U = (ζ , v) y
Q1(t)(U)(y) = cos (yΛ(y)t) ζ(y) + isin(yΛ(y)t)
ψ (y)v(y), (5.7)
Q2(t)(U)(y) = i ψ (y) sin (yΛ (y) t) ζ(y) + cos (yΛ(y)t) v(y). (5.8)
Entonces tenemos que
S(t)(U) =(F−1
(Q1(t)(U)
),F−1
(Q2(t)(U)
)).
Presentamos a continuacion dos resultados relacionados con el semigrupo S(t).
Lema 5.2. Supongamos que s ∈ R. Entonces para todo t ∈ R, S(t) es un operador
lineal acotado de X s en X s. Ademas, existe K > 0 tal que para todo t ∈ R,
‖S(t)U‖X s ≤ K‖U‖X s .

76 5. El problema de Cauchy para el sistema tipo Benjamin-One
Demostracion. Tenemos que
∥∥∥F−1(Q1(t)(U))∥∥∥2
Hs≤
∫
R
(1 + ξ2
)s |cos(ξΛ(ξ)t)|2 |ζ(ξ)|2dξ
+
∫
R
(1 + ξ2
)s | sin (ξΛ(ξ)t) |2|(ψ (ξ))2
v(ξ)|2dξ
≤∫
R
(1 + ξ2
)s |ζ(ξ)|2 dξ + k1
∫
R
(1 + ξ2
)s+2 |v(ξ)|2 dξ
≤ K1
(‖ζ‖2Hs + ‖v‖2Hs+2
).
De manera similar, vemos que
∥∥∥F−1(Q2(t)(U))∥∥∥2
Hs+2≤
∫
R
(1 + ξ2)s+2(ψ (ξ))| sin (ξΛ(ξ)t) |2|ζ(ξ)|2 dξ
+
∫
R
(1 + |ξ|2)s+2| cos(ξΛ(ξ)t)|2|v(ξ)|2 dξ
≤ k2
∫
R
(1 + ξ2)s|ζ(ξ)|2 +∫
R
(1 + ξ2
)s+2 |v(ξ)|2 dξ
≤ K2
(‖ζ‖2Hs + ‖v‖2Hs+2
).
Entonces obtenemos que
‖S(t)(U)‖2X s =∥∥∥F−1(Q1(t)(U))
∥∥∥2
Hs+∥∥∥F−1(Q2(t)(U)
∥∥∥2
Hs+2
≤ K(‖ζ‖2Hs + ‖v‖2Hs+2
)= K‖U‖2X s ,
donde K = maxK1, K2, y por lo tanto S(t) es un operador lineal acotado.
Teorema 5.3. El operador lineal A : X s → X s, con s ≥ 0, es el generador infinitesimal
del semigrupo (S(t))t≥0.
Demostracion. Recordemos que Q1(t)(U)(y) y Q2(t)(U)(y) son definidos por (5.7) y
(5.8). Entonces∥∥∥∥1
t[S(t)(U)− U ]−A(U)
∥∥∥∥X s
=∥∥(1 + y2)
s2ϕ1(y, t)
∥∥L2 +
∥∥∥(1 + y2)s+22 ϕ2(y, t)
∥∥∥L2,
donde
ϕ1(y, t) =cos (yΛ(y)t)− 1
tζ(y) + i
(sin(yΛ(y)t)
t ψ (y)− y
A3(y)
A1(y)
)v(y)
y
ϕ2(y, t) =cos (yΛ(y)t)− 1
tv(y) + i
(ψ (y)
sin (yΛ (y) t)
t− y
(ρ0 − 1)
A2(y)
)ζ(y).

5. El problema de Cauchy para el sistema tipo Benjamin-One 77
Notemos que los terminos
cos (yΛ(y)t)− 1
t,
sin(yΛ(y)t)
t ψ (y)− y
A3(y)
A1(y)y ψ (y)
sin (yΛ (y) t)
t− y
(ρ0 − 1)
A2(y)
se encuentran controlados por constantes. Esto implica que
|ϕ1(y, t)|2 ≤ K(|ζ(y)|2 + v(y)|2)
y
|ϕ2(y, t)|2 ≤ K(ζ(y)|2 + |v(y)|2).
Ademas,
lımt→0+
(cos (yΛ(y)t)− 1
t
)= 0,
y dado que por (5.6) tenemos que
Λ(y)
ψ(y)=
A3(y)
A1(y)y ψ(y) Λ(y) =
(ρ0 − 1)
A2(y),
entonces
lımt→0+
(ψ (y)
sin (yΛ (y) t)
t− y
(ρ0 − 1)
A2(y)
)= y
(ρ0 − 1)
A2(y)lımt→0+
(sin(yΛ(y)t)
yΛ(y)t− 1
)= 0
y
lımt→0+
(sin(yΛ(y)t)
t ψ (y)− y
A3(y)
A1(y)
)= y
A3(y)
A1(y)lımt→0+
(sin(yΛ(y)t)
yΛ(y)t− 1
)= 0.
Por lo tanto, el teorema de la convergencia dominada implica que
lımt→0+
∥∥(1 + y2)s2ϕ1(y, t)
∥∥L2 =
∥∥∥∥ lımt→0+(1 + y2)
s2ϕ1(y, t)
∥∥∥∥L2
= 0
y
lımt→0+
∥∥∥(1 + y2)s+22 ϕ2(y, t)
∥∥∥L2
=
∥∥∥∥ lımt→0+(1 + y2)
s+22 ϕ2(y, t)
∥∥∥∥L2
= 0.
Entonces
lımt→0+
∥∥∥∥1
t[S(t)(U)− U ]−A(U)
∥∥∥∥X s
= 0.
Por lo tanto,
A(U) = lımt→0+
(S(t)− I
t
)(U)
para cualquier U ∈ X s, lo que demuestra que el operadorA es el generador infinitesimal
del semigrupo (S(t))t≥0.

78 5. El problema de Cauchy para el sistema tipo Benjamin-One
Por otro lado, se sabe que el principio de Duhamel implica que si U es una solucion de
(5.4), entonces esta solucion satisface la ecuacion integral
U(t) = S(t)U0 +
∫ t
0
S(t− τ)G(U(τ)) dτ. (5.9)
De aquı en adelante, nos referimos a U ∈ C([0, T ],X s) que satisface la ecuacion integral
(5.9) como una solucion integral del problema de Cauchy asociado con el sistema (5.2)
con condicion inicial U0 ∈ X s.
5.1.2. El problema no lineal
A continuacion, estudiaremos la existencia y unicidad de las soluciones del problema
de Cauchy Ut = AU +G(U)
U(0) = U0 ∈ X s.(5.10)
Para analizar las estimativas no lineales utilizaremos el siguiente resultado general, que
corresponde a una generalizacion del caso m = 2 presentado por D. Roumegoux en [37,
Lemma 3.1] (ver Lema 5.12).
Teorema 5.4. Sean m ≥ 2 y A un operador lineal tal que su transformada de Fourier
tenga la forma
A(y) = 1 + α1|y|+ α2y2 + · · ·+ αm|y|m,
donde αi ≥ 0 para todo i = 1, 2, . . . , m con α2 > 0. Para cada s ≥ 0,
∥∥∂xA−1(uv)∥∥Hs ≤ K ‖u‖Hs ‖v‖Hs .
Demostracion. Por definicion,
∥∥∂xA−1(uv)∥∥2Hs =
∥∥∥∥∥(1 + y2)
s2 (iy)
A(y)uv
∥∥∥∥∥
2
L2
.
Por el teorema de representacion de Riesz, f ∈ L2 si y solo si para todo g ∈ L2 se
satisface que ∫
R
fg ≤ C ‖g‖L2 .
En particular ‖f‖L2 ≤ C.

5. El problema de Cauchy para el sistema tipo Benjamin-One 79
Consideremos
I =
∫
R
(1 + y2)s2 |y|
A(y)uv(y) g(y) dy =
∫
R
∫
R
(1 + y2)s2 |y|
A(y)u(y − x)v(x) g(y) dy dx.
Podemos notar que dado que
(1 + y2)s2 ≤ (1 + |y − x|2) s
2 (1 + x2)s2 para todo s ≥ 0,
entonces
I =
∫
R
∫
R
(1 + y2)s2 |y|(1 + |y − x|2) s
2 (1 + x2)s2
A(y)(1 + |y − x|2) s2 (1 + x2)
s2
u(y − x)v(x) g(y) dy dx
≤∫
R
(1 + x2)s2 v(x)
∫
R
|y|A(y)
(1 + |y − x|2) s2 u(y − x) g(y) dy dx,
Si definimos
h(x) =
∫
R
|y|A(y)
(1 + |y − x|2) s2 u(y − x) g(y) dy,
entonces tenemos que
I ≤∫
R
(1 + x2)s2 v(x)h(x) dx
≤(∫
R
(1 + x2)sv2(x) dx
) 12(∫
R
h2(x) dx
) 12
= ‖v‖Hs
(∫
R
h2(x) dx
) 12
.
Ahora, por la desigualdad de Minkowski para integrales tenemos que
(∫
R
h2(x) dx
) 12
=
∫
R
(∫
R
|y|A(y)
(1 + |y − x|2) s2 u(y − x) g(y) dy
)2
dx
12
≤∫
R
∫
R
(1 + |y − x|2)s u2(y − x)
(|y|
A(y)g(y)
)2
dx
12
dy
≤∫
R
|y|A(y)
g(y)
(∫
R
(1 + |y − x|2)s u2(y − x) dx
) 12
dy
≤ ‖u‖Hs
∫
R
|y|A(y)
g(y) dy
≤ ‖u‖Hs
∫
R
(|y|
A(y)
)2
dy
12 (∫
R
|g(y)|2 dy)1
2
≤ C2 ‖u‖Hs ‖g‖L2 ,

80 5. El problema de Cauchy para el sistema tipo Benjamin-One
Dado que ∫
R
(|y|
A(y)
)2
dy
12
≤(∫
R
(C1
1 + y2
)2
dy
) 12
≤ C2.
Por consiguiente
I ≤ C2 ‖v‖Hs ‖u‖Hs ‖g‖L2 .
En consecuencia tenemos que
∥∥∂xA−1(uv)∥∥Hs ≤ C2 ‖u‖Hs ‖v‖Hs .
A partir del anterior resultado obtenemos el siguiente estimativo para la parte no lineal.
Lema 5.5. Sean U = (ζ, v) y G = (G1, G2), con G1 : X s → Hs y G2 : X s → Hs+2
definidos por
G1(U) = A−11 ∂x (ζv) y G2(U) =
1
2A−1
2 ∂x(v2).
Entonces existe una constante K > 0 tal que
‖G1(U)‖Hs ≤ K‖U‖2X s y ‖G2(U)‖Hs+2 ≤ K‖U‖2X s.
Por lo tanto
(1) ‖G(U)‖X s ≤ K‖U‖2X s .
(2) ‖G(U)−G(U)‖X s ≤ K‖U − U‖X s
(‖U‖X s + ‖U‖X s
).
Demostracion. Por el Teorema 5.4 tenemos que
‖G1(U)‖Hs = ‖A−11 ∂x (ζv) ‖Hs
≤ K1‖ζ‖Hs‖v‖Hs
≤ K1
(‖ζ‖2Hs + ‖v‖2Hs
)
= K1‖U‖2X s .
De manera similar obtenemos que
‖G2(U)‖Hs+2 =
∥∥∥∥1
2A−1
2 ∂x(v2)∥∥∥∥
Hs+2
≤ K2‖v‖2Hs+2 ≤ K2‖U‖2X s.

5. El problema de Cauchy para el sistema tipo Benjamin-One 81
En otras palabras, hemos obtenido la estimacion (1). Probamos ahora la estimacion
(2). En efecto,
‖G1(U)−G1(U)‖Hs ≤ ‖A−11 ∂x
(ζv − ζ v
)‖Hs
≤ ‖A−11 ∂x(ζ(v − v) + v(ζ − ζ))‖Hs
≤ ‖A−11 ∂x(ζ(v − v))‖Hs + ‖A−1
1 ∂x(v(ζ − ζ))‖Hs
≤ K1
(‖ζ‖Hs‖v − v‖Hs + ‖v‖Hs‖ζ − ζ‖Hs
)
≤ K1 (‖ζ‖Hs + ‖v‖Hs)(‖v − v‖Hs + ‖ζ − ζ‖Hs
)
≤ K1
(‖U‖X s + ‖U‖X s
)‖U − U‖X s.
Siguiendo un procedimiento analogo obtenemos que
‖G2(U)−G2(U)‖Hs+2 =1
2‖A−1
2 ∂x(v2 − v2
)‖Hs+2
=1
2‖A−1
2 ∂x ((v + v)(v − v)) ‖Hs+2
≤ K2‖v + v‖Hs+2‖v − v‖Hs+2
≤ K2
(‖U‖X s + ‖U‖X s
)‖U − U‖X s .
En consecuencia, si tomamos K = maxK1, K2 podemos concluir que
‖G(U)−G(U)‖X s ≤ K(‖G1(U)−G1(U)‖Hs + ‖G2(U)−G2(U)‖Hs+2
)
≤ K(‖U‖X s + ‖U‖X s
)‖U − U‖X s.
Con lo cual hemos demostrado el teorema.
A continuacion, establecemos la buena postura local para el sistema (5.2) en el espacio
X s = Hs×Hs+2. Para esto demostraremos la existencia de una solucion para la ecuacion
integral (5.9) utilizando el Teorema del punto fijo de Banach.
Teorema 5.6. Si U ∈ C([0, T ];X s) con s ≥ 0 es una solucion del problema (5.10),
entonces U satisface la ecuacion integral
U(t) = S(t)U0 +
∫ t
0
S(t− r)G(U(r))dr. (5.11)
Analogamente, si U ∈ C([0, T ];X s), s ≥ 0, es una solucion de (5.11), entonces U ∈C1([0, T ];X s) y satisface (5.10) en el siguiente sentido:
lımh→0+
∥∥∥∥U(t + h)− U(t)
h−A(U(t))−G(U(t))
∥∥∥∥X s
= 0.

82 5. El problema de Cauchy para el sistema tipo Benjamin-One
Demostracion. Sea U(t) ∈ C([0, T ];X s) una solucion del problema de valor inicial
(5.10). Entonces, para 0 ≤ r ≤ t tenemos que
S(t− r)U ′(r) = S(t− r)A(U(r)) + S(t− r)G(U(r)).
Podemos notar que
d
dr(S(t− r)U(r)) = S(t− r)U ′(r)− S(t− r)A(U(r)).
En consecuencia,d
dr(S(t− r)U(r)) = S(t− r)G(U(r)). (5.12)
Al integrar en ambos lados de la ecuacion (5.12), obtenemos que U satisface la ecuacion
integral
U(t) = S(t)U0 +
∫ t
0
S(t− r)G(U(r))dr.
Por otro lado, supongamos que U(t) ∈ C([0, T ];X s) es una solucion de la ecuacion
integral (5.11). De la desigualdad triangular tenemos que∥∥∥U(t + h)− U(t)
h−A(U(t))−G(U(t))
∥∥∥X s
≤∥∥∥∥S(t)
(S(h)− I
h
)U0 − S(t)A(U0)
∥∥∥∥X s
+
∥∥∥∥[S(h)− I
h−A
] ∫ t
0
S(t− r)G(U(r))dr
∥∥∥∥X s
+
∥∥∥∥1
h
∫ t+h
t
S(t+ h− r)G(U(r))dr −G(U(t))
∥∥∥∥X s
.
Notemos que
lımh→0+
∥∥∥∥S(t)(S(h)− I
h
)U0 − S(t)A(U0)
∥∥∥∥X s
= 0,
lımh→0+
∥∥∥∥[S(h)− I
h−A
] ∫ t
0
S(t− r)G(U(r))dr
∥∥∥∥X s
= 0.
Usando el teorema del valor medio podemos controlar el ultimo termino de la siguiente
manera:∥∥∥∥1
h
∫ t+h
t
S(t+ h− r)G(U(r))dr −G(U(t))
∥∥∥∥X s
≤ 1
h
∫ t+h
t
‖S(t+ h− r)G(U(r))−G(U(t))‖X s dr
= ‖S(t+ h− τ)G(U(τ)) −G(U(t))‖X s
≤ ‖S(t+ h− τ) [G(U(τ))−G(U(t))]‖X s + ‖[S(t+ h− τ)− I]G(U(t))‖X s , (5.13)

5. El problema de Cauchy para el sistema tipo Benjamin-One 83
para algun t ≤ τ ≤ t+ h. Observese que el ultimo termino en (5.13) satisface
lımh→0+
‖[S(t+ h− τ)− I]G(U(t))‖X s = 0,
dado que h → 0+ implica que t + h − τ → 0+. Ademas, usando la afirmacion (1) del
Lema 5.5, tenemos que el primer termino de la expresion (5.13) puede ser acotado de
la siguiente forma∥∥∥S(t+ h− τ) [G(U(τ))−G(U(t))]
∥∥∥X s
≤ K ‖G(U(τ))−G(U(t))‖X s
≤ K(‖U(τ)‖X s + ‖U(t)‖X s) ‖U(τ)− U(t)‖X s → 0,
cuando h→ 0+. Por lo tanto,
lımh→0+
∥∥∥∥U(t + h)− U(t)
h−A(U(t))−G(U(t))
∥∥∥∥X s
= 0.
Teorema 5.7. Sea U0 ∈ X s, s ≥ 0. Entonces existe T ∗ > 0 y U ∈ C([0, T ];X s) que
satisfacen la ecuacion integral (5.11).
Demostracion. Definamos el conjunto
DM =
U = (ζ, v) ∈ C([0, T ];X s) : sup
t∈[0,T ]‖U(t)− S(t)U0‖X s ≤M
,
con la norma
‖U‖C([0,T ],X s) = supt∈[0,T ]
(‖ζ(t)‖Hs + ‖v(t)‖Hs+2) .
Notemos que DM es un conjunto completo en C([0, T ];X s) y que G es continuo en DM
como consecuencia del Lema 5.5. Ahora, para U ∈ DM , definamos el operador
Ψ(U(t)) = S(t)U0 +
∫ t
0
S(t− r)G(U(r))dr.
Observemos que
∥∥Ψ(U(t + h))−Ψ(U(t))∥∥X s
=∥∥∥S(t+ h)U0 +
∫ t+h
0
S(t + h− r)G(U(r))dr − S(t)U0 −∫ t
0
S(t− r)G(U(r))dr∥∥∥X s
≤ ‖(S(t+ h)− S(t))U0‖X s +
∥∥∥∥∫ t
0
(S(t + h− r)− S(t− r))G(U(r))dr
∥∥∥∥X s
+
∥∥∥∥∫ t+h
t
S(t+ h− r)G(U(r))dr
∥∥∥∥X s
.

84 5. El problema de Cauchy para el sistema tipo Benjamin-One
Notemos ahora que el primer termino en el lado derecho de la ecuacion anterior satisface
que
lımh→0+
‖(S(t+ h)− S(t))U0‖X s = 0,
dado que (S(t))t≥0 es un C0-semigrupo en X s. Por otra parte, el segundo y el tercero
termino en el lado derecho de la ecuacion se controlan utilizando el teorema de la
convergencia dominada de Lebesgue. Tenga en cuenta que t + h − r → t − r cuando
h → 0, por lo tanto, S(t + h − r) − S(t − r) → 0 cuando h → 0+. De esta manera
tenemos que
lımh→0+
∥∥∥∥∫ t
0
(S(t+ h− r)− S(t− r))G(U(r))dr
∥∥∥∥X s
≤ lımh→0+
∫ t
0
∥∥∥(S(t+ h− r)− S(t− r))G(U(r))∥∥∥X sdr = 0.
Por otra parte, dado que tenemos la estimacion
‖U(t)‖X s = ‖U(t)− S(t)U0 + S(t)U0‖X s
≤ ‖U(t)− S(t)U0‖X s + ‖S(t)U0‖X s
≤M +K ‖U0‖X s ,
podemos obtener que
‖S(t+ h− r)G(U(r))‖X s ≤ K ‖G(U(r))‖X s
≤ K ‖U‖2X s
≤ K(M +K ‖U0‖X s)2.
En consecuencia
lımh→0+
‖S(t+ h− r)G(U(r))‖X s ≤ (M +K ‖U0‖X s)2,
de donde se sigue que
lımh→0+
∥∥∥∥∫ t+h
t
S(t+ h− r)G(U(r))dr
∥∥∥∥X s
≤ lımh→0+
∫ t+h
t
‖S(t+ h− r)G(U(r))‖X s dr = 0.
Por lo tanto, si U ∈ DM , entonces Ψ(U) ∈ C([0, T ];X s). Por otra parte,
‖Ψ(U(t))− S(t)U0‖X s =
∥∥∥∥∫ t
0
S(t− r)G(U(r))dr
∥∥∥∥X s
≤∫ t
0
K(M +K ‖U0‖X s)2dr.
≤ TK(M +K ‖U0‖X s)2.

5. El problema de Cauchy para el sistema tipo Benjamin-One 85
Si escogemos
T1 =M
K(M +K ‖U0‖X s)2,
obtenemos que Ψ(U(t)) ∈ DM , siempre que U(t) ∈ DM .
Para ver que existe un T2 tal que Ψ es una contraccion en DM para T < T2, observemos
que para U, V ∈ DM ,
‖Ψ(U(t))−Ψ(V (t))‖X s =
∥∥∥∥∫ t
0
S(t− r) [G(U(r))−G(V (r))] dr
∥∥∥∥X s
≤ TK(M +K ‖U0‖X s) supr∈[0,T ]
‖U(r)− V (r)‖X s .
Ası, escogiendo
T2 =1
K(M +K ‖U0‖X s),
obtenemos que Ψ es una contraccion en DM . Por lo tanto, con T ∗ < mınT1, T2 y
aplicando el Teorema de punto fijo de Banach en DM , obtenemos el resultado deseado.
Teorema 5.8. La solucion obtenida en el Teorema 5.7 es unica y depende
continuamente de la condicion inicial U0.
Demostracion. Sean U y V elementos en C([0, T ];X s) soluciones de la ecuacion integral
(5.11) con dato inicial U0 y V0, respectivamente. Entonces
∥∥U(t)− V (t)∥∥X s =
∥∥∥∥S(t)(U0 − V0) +
∫ t
0
S(t− r) [G(U(r))−G(V (r))] dr
∥∥∥∥X s
≤ K ‖U0 − V0‖X s +
∫ t
0
K(‖U(r)‖X s + ‖V (r)‖X s) ‖U(r)− V (r)‖X s dr
≤ K
(‖U0 − V0‖X s + (‖U(r)‖X s + ‖V (r)‖X s)
∫ t
0
‖U(r)− V (r)‖X s dr
).
Sea R := supt∈[0,T ](‖U(r)‖X s + ‖V (r)‖X s). La desigualdad de Gronwall implica que
‖U(t)− V (t)‖X s ≤ K ‖U0 − V0‖X s eRt ≤ K ‖U0 − V0‖X s e
RT ,
para todo t ∈ [0, T ]. Por lo tanto, hemos obtenido la unicidad y dependencia continua
de las soluciones con respecto a los datos iniciales.

86 5. El problema de Cauchy para el sistema tipo Benjamin-One
5.2. Existencia local para el problema de Cauchy en
el caso periodico
El objetivo a continuacion es estudiar el problema de Cauchy para el sistema (5.2) en
el caso periodico
En el caso periodico tenemos que la coleccion de todas las funciones f : R → C las
cuales son C∞ y periodicas con periodo k > 0 sera denotado por C∞k . Diremos que
T : C∞k → C define una distribucion periodica, es decir, T ∈ (C∞
k )′, si T es lineal y
existe una sucesion (un)n∈N ⊂ C∞k tal que
T (φ) = lımn→∞
∫ k
0
un(x)φ(x)dx, ∀φ ∈ C∞k .
Sea s ∈ R. El espacio de Sobolev, denotado por Hsk = Hs
k(R), es definido como
Hsk =
f ∈ (C∞
k )′ : ‖f‖2Hs :=
∞∑
n=−∞(1 + n2)s
∣∣∣f(n)∣∣∣2
<∞,
donde f : Z → C representa el coeficiente de la transformada de Fourier de f definido
por
f(n) =1
k
⟨f, e−2πinx/k
⟩.
Si f ∈ C∞k , f(n) podemos escribirlo como
f(n) =1
k
∫ k
0
f(x)e−2πinx/kdx, n ∈ Z.
Recordemos que para s > 1/2, el espacio Hsk es un algebra, es decir,
‖fg‖Hs ≤ K ‖f‖Hs ‖g‖Hs .
Para un estudio mas amplio acerca del Analisis de Fourier remitimos al lector al texto
de R. Iorio [25].
Para el siguiente estudio consideraremos el espacio tipo Sobolev X sk = Hs
k × Hs+2k . Se
puede demostrar que la expresion
‖U‖X sk= ‖(ζ, v)‖X s
k= (‖ζ‖2Hs
k+ ‖v‖2Hs+2
k)12
define una norma en X sk con U = (ζ, v)t. En algunas ocasiones usaremos tambien la
norma equivalente
‖(ζ, v)‖X sk= ‖ζ‖Hs
k+ ‖v‖Hs+2
k.

5. El problema de Cauchy para el sistema tipo Benjamin-One 87
Formalmente, queremos estudiar el problema de Cauchy asociado con (5.2) con
condiciones iniciales
(ζ(0, ·), v(0, ·)) = (ζ0, v0) = U0 ∈ X sk . (5.14)
Es decir, vamos a analizar el problema de valor inicial
∂tU = A(U) +G(U),
U(0) = U0 = (ζ0, v0)t ∈ X s
k .(5.15)
Observese que podemos definir los operadores L1 = A−11 A3 y L2 = (ρ0 − 1)A−1
2 vıa
series de Fourier como
L1u(n) =1 + α5n
2 + α6n4
1 + β1n2 + β2n4u(n),
L2u(n) =(ρ0 − 1)
(1 + ρ0|n|+ α3n2 + ρ0α1|n|n2 + α4n4)2u(n).
Inicialmente podemos demostrar que en el caso periodico tambien se tiene que A es un
operador lineal acotado.
Lema 5.9. Para s ∈ R, tenemos que A : Xks−1 → X s
k es un operador lineal acotado.
Demostracion. Para s ∈ R y (ζ, v) ∈ Xks−1 tenemos que
A(ζ, v) = (A−11 A3∂xv, (ρ0 − 1)A−1
2 ∂x).
Por lo tanto
∥∥A−11 A3∂xv
∥∥2Hs
k
=∑
n∈Zn2(1 + n2)s
(1 + α5n2 + α6n
4)2
(1 + β1n2 + β2n4)2|v(n)|2
≤ K1
∑
n∈Z(1 + n2)s+1 |v(n)|2
≤ K1 ‖v‖2Hs+1k
.
Siguiendo un procedimiento analogo tenemos que
∥∥(ρ0 − 1)A−12 ∂xζ
∥∥2Hs+2
k
=∑
n∈Z
n2(1 + n2)s+2 (ρ0 − 1)2
(1 + ρ0|n|+ α3n2 + ρ0α1|n|n2 + α4n4)2
∣∣∣ζ(n)∣∣∣2
≤ K2
∑
n∈Z(1 + n2)s−1
∣∣∣ζ(n)∣∣∣2
≤ K2 ‖ζ‖2Hs−1k
.

88 5. El problema de Cauchy para el sistema tipo Benjamin-One
De las dos ecuaciones anteriores y tomando K = maxK1, K2, obtenemos que
‖A(ζ, v)‖2X sk
=∥∥A−1
1 A3∂xv∥∥2Hs
k
+∥∥(ρ0 − 1)A−1
2 ∂xζ∥∥2Hs+2
k
≤ K(‖ζ‖2Hs−1
k+ ‖v‖2Hs+1
k
)
≤ K ‖(ζ, v)‖2Xks−1 .
como se afirmo.
Dado que X sk ⊂ Xk
s−1, para el objetivo de este estudio, consideraremos el operador A
definido de X sk en X s
k , s ≥ 0.
5.2.1. Buen planteamiento local en el caso periodico
El objetivo principal es demostrar que el problema de Cauchy (5.15) es localmente bien
puesto.
Como ya lo dijimos, para considerar el problema de Cauchy, necesitamos describir el
semigrupo S(t) asociado con el problema lineal Ut = A(U). Tenemos que la solucion
unica del problema lineal Ut = A(U) con la condicion inicial (5.14) es dada por
U(t) = (ζ(t), v(t)) = S(t)U0.
Por lo tanto, tomando transformada de Fourier formalmente, tenemos que
U(t) = S(t)U0 = S(t)U0.
En consecuencia, formalmente la solucion tiene la forma
U(t) = F−1(U(t)) = (F−1S(t)F)U0,
donde
S(t) = (F−1S(t)F), con S(t) = eAt.
De forma analoga al caso no periodico obtenemos que
S(t) = eAt =
cos (nΛ(n)t) isin(nΛ(n)t)
ψ (n)
i ψ (n) sin (nΛ(n)t) cos (nΛ(n)t)
,

5. El problema de Cauchy para el sistema tipo Benjamin-One 89
donde las funciones Λ, ψ son dadas por
Λ2(n) =(ρ0 − 1)A3 (n)
A1 (n) A2 (n)y ψ (n) =
A1 (n) Λ (n)
A3 (n)∼ 1
1 + n2. (5.16)
En este caso es conveniente introducir la siguiente notacion
Q(t)(U) = (Q1(t), Q2(t)) (U),
donde U = (ζ , v) y
Q1(t)(U)(n) = cos (nΛ(n)t) ζ(n) + isin(nΛ(n)t)
ψ (n)v(n), (5.17)
Q2(t)(U)(n) = i ψ (n) sin (nΛ (n) t) ζ(n) + cos (nΛ(n)t) v(n). (5.18)
En consecuencia, tenemos que
S(t)(U) =(F−1
(Q1(t)(U)
),F−1
(Q2(t)(U)
)).
A continuacion se demuestran dos resultados relacionados con la linealidad y acotacion
del semigrupo S(t) en el caso periodico.
Lema 5.10. Supongamos que s ∈ R, U = (ζ, v) y U = (ζ , v). Entonces para todo t ∈ R,
S(t) es un operador lineal acotado de X sk en X s
k . Ademas, existe K > 0 tal que para
todo t ∈ R,
‖S(t)U‖X sk≤ K‖U‖X s
k.
Demostracion. A partir de las ecuaciones (5.17) y (5.18) que definen a Q1(t)(U)(n) y
Q2(t)(U)(n), tenemos que
∥∥∥F−1(Q1(t)(U)(n))∥∥∥2
Hsk
≤∑
n∈Z
(1 + n2
)s |cos(nΛ(n)t)|2 |ζ(n)|2
+∑
n∈Z
(1 + n2
)s | sin (nΛ(n)t) |2(ψ (n))2
|v(r)|2
≤ k1∑
n∈Z
(1 + n2
)s |ζ(n)|2 + k2∑
n∈Z
(1 + n2
)s+2 |v(n)|2
≤ K1
(‖ζ‖2Hs
k+ ‖v‖2
Hs+2k
).

90 5. El problema de Cauchy para el sistema tipo Benjamin-One
Analogamente vemos que
∥∥∥F−1(Q2(t)(U)(n))∥∥∥2
Hs+2k
=∑
n∈Z(1 + n2)s+2(ψ (n))| sin (nΛ(n)t) |2|ζ(n)|2
+∑
n∈Z(1 + n2)s+2| cos(nΛ(n)t)|2|v(n)|2
≤ k1∑
n∈Z(1 + n2)s|ζ(n)|2 + k2
∑
n∈Z
(1 + n2
)s+2 |v(n)|2
≤ K2
(‖ζ‖2Hs
k+ ‖v‖2
Hs+2k
).
Por lo tanto obtenemos que
‖S(t)(U)‖2X sk=∥∥∥F−1(Q1(t)(U))
∥∥∥2
Hsk
+∥∥∥F−1(Q2(t)(U)
∥∥∥2
Hs+2k
≤ K(‖ζ‖2Hs
k+ ‖v‖2
Hs+2k
)= K‖U‖2X s
k,
donde K = maxK1, K2, y en consecuencia concluimos que S(t) es un operador lineal
acotado.
Teorema 5.11. El operador lineal A : X sk → X s
k , con s ≥ 0, es el generador
infinitesimal del semigrupo (S(t))t≥0.
Demostracion. Recordemos que Q1(t)(U)(n) y Q2(t)(U)(n) son definidos por (5.17) y
(5.18). Entonces
∥∥∥∥1
t[S(t)(U)− U ]−A(U)
∥∥∥∥X s
k
=
∥∥∥∥∥∑
n∈Z(1 + n2)
s2ϕ1(n, t)
∥∥∥∥∥ℓ2
+
∥∥∥∥∥∑
n∈Z(1 + n2)
s+22 ϕ2(n, t)
∥∥∥∥∥ℓ2
,
donde
ϕ1(n, t) =cos (nΛ(n)t)− 1
tζ(n) + i
(sin(nΛ(n)t)
t ψ (n)− n A3(n)
A1(n)
)v(n)
y
ϕ2(n, t) =cos (nΛ(n)t)− 1
tv(n) + i
(ψ (n)
sin (nΛ (n) t)
t− (ρ0 − 1)n
A2(n)
)ζ(n).
Notese que los terminos
cos (nΛ(n)t)− 1
t,
sin(nΛ(n)t)
t ψ (n)− n A3(n)
A1(n)y ψ (n)
sin (nΛ (n) t)
t− (ρ0 − 1)n
A2(n)

5. El problema de Cauchy para el sistema tipo Benjamin-One 91
son controlados por constantes. Esto implica que
|ϕ1(n, t)|2 ≤ K(|ζ(n)|2 + |v(n)|2)
y
|ϕ2(n, t)|2 ≤ K(|ζ(n)|2 + |v(n)|2).Ademas,
lımt→0+
(cos (nΛ(n)t)− 1
t
)= 0,
y dado que por (5.16) tenemos que
Λ(n)
ψ(n)=
A3(n)
A1(n)y ψ(n) Λ(n) =
(ρ0 − 1)
A2(n),
entonces
lımt→0+
(ψ (n)
sin (nΛ (n) t)
t− n
(ρ0 − 1)
A2(n)
)= n
(ρ0 − 1)
A2(n)lımt→0+
(sin(nΛ(n)t)
nΛ(n)t− 1
)= 0
y
lımt→0+
(sin(nΛ(n)t)
t ψ (n)− n
A3(n)
A1(n)
)= n
A3(n)
A1(n)lımt→0+
(sin(nΛ(n)t)
nΛ(n)t− 1
)= 0.
Por lo tanto, el teorema de la convergencia dominada para sumas implica que
lımt→0+
∥∥∥∥∥∑
n∈Z(1 + n2)
s2ϕ1(n, t)
∥∥∥∥∥ℓ2
=
∥∥∥∥∥∑
n∈Zlımt→0+
(1 + n2)s2ϕ1(n, t)
∥∥∥∥∥ℓ2
= 0
y
lımt→0+
∥∥∥∥∥∑
n∈Z(1 + n2)
s+22 ϕ2(n, t)
∥∥∥∥∥ℓ2
=
∥∥∥∥∥∑
n∈Zlımt→0+
(1 + n2)s+22 ϕ2(n, t)
∥∥∥∥∥ℓ2
= 0.
En consecuencia
lımt→0+
∥∥∥∥1
t[S(t)(U)− U ]−A(U)
∥∥∥∥X s
k
= 0.
Por lo tanto,
A(U) = lımt→0+
(S(t)− I
t
)(U)
para cualquier U ∈ X sk , lo cual demuestra que el operadorA es el generador infinitesimal
del semigrupo (S(t))t≥0.
Como ya lo dijimos, se sabe que el principio de Duhamel implica que si U ∈ X sk es una
solucion del problema de valor inicial (5.15), entonces esta solucion satisface la ecuacion
integral
U(t) = S(t)U0 +
∫ t
0
S(t− τ)G(U)(τ) dτ. (5.19)

92 5. El problema de Cauchy para el sistema tipo Benjamin-One
5.2.2. El problema no lineal en el caso periodico
En este seccion estudiaremos la existencia y unicidad de solucion para el problema de
Cauchy (5.15), ası como el comportamiento de la solucion dependiendo de los datos
iniciales.
Inicialmente debemos analizar el termino no lineal, para ellos presentamos una serie
de resultados asociado con estimativos de operadores relacionados con el sımbolo de
Fourier. Inicialmente tenemos un resultado debido a D. Roumegoux [37].
Lema 5.12 ([37]). Sea ϕ(n) = n1+n2 y ϕ(D) el sımbolo de Fourier del operador definido
por ϕ(D)u(n) = ϕ(n)u(n). Sean u ∈ Hr y v ∈ Hr′ con 0 ≤ r ≤ s, 0 ≤ r′ ≤ s y
0 ≤ 2s− r − r′ ≤ 14. Entonces
‖ϕ(D)(uv)‖Hs ≤ Cr,r′,s ‖u‖Hr ‖v‖Hr′ ,
donde Cr,r′,s es una constante que depende de r, r′, s.
Demostracion. Se quiere demostrar que
∥∥∥∥〈n〉s n
1 + n2uv(k)
∥∥∥∥ℓ2k
≤ C ‖u‖Hr ‖v‖Hr′ ,
donde 〈n〉s = (1 + n2)s2 . Por un argumento de dualidad es suficiente demostrar que
⟨〈n〉s n
1 + n2uv, w
⟩
ℓ2≤ C ‖u‖Hr ‖v‖Hr′ ‖w‖L2 .
Esto es,
I =∑
n∈Z〈n〉s n
1 + n2uv(k) w(k) ≤ C ‖u‖Hr ‖v‖Hr′ ‖w‖L2 .
Sean f(n) = 〈n〉r u(n), g(n) = 〈n〉r′ v(n) y h(n) = n 〈n〉−2(1+r+r′−2s) w(n). Dado que
uv(n) =∑
l∈Zu(l) v(n− l),
se tiene que
I =∑
n∈Z
∑
l∈Z
〈n〉−3s+2r+2r′
〈l〉r 〈n− l〉r′f(l)g(n− l)h(n).
Pero tambien se tiene que −2s+ r + r ≤ 0, −s + r ≤ 0 y −s + r′ ≤ 0, ası que
−3s + 2r + 2r′ = −2s + r + r′ + (−s + r′) + r ≤ r y − 3s+ 2r + 2r′ ≤ r′.

5. El problema de Cauchy para el sistema tipo Benjamin-One 93
Por lo tanto〈n〉−3s+2r+2r′
〈l〉r 〈n− l〉r′es acotado para n y l en Z. Luego por las desigualdades de
Cauchy-Schwarz y de Young se tiene que
I ≤ K∑
n∈Z
∑
l∈Zf(l)g(n− l)h(n)
≤ K ‖f‖ℓ2 ‖g ∗ h(−·)‖ℓ2≤ K ‖f‖ℓ2 ‖g‖ℓ2 ‖h‖ℓ1
≤ K ‖u‖Hr ‖v‖Hr′ ‖w‖L2
∥∥∥∥n
(1 + n2)1+r+r′−2s
∥∥∥∥ℓ2k
.
Dado que 2s− r − r′ < 14se obtiene que 1 + r + r′ − 2s > 3
4. Por consiguiente
∥∥∥∥n
(1 + n2)1+r+r′−2s
∥∥∥∥ℓ2k
< +∞.
Este lema lo usaremos en el caso particular r = r′ = s ≥ 0, esto es
‖ϕ(D)(uv)‖Hs ≤ Cs ‖u‖Hs ‖v‖Hs .
El siguiente resultado corresponde a una version mas general del Lema 5.12.
Lema 5.13. Sean p(n) = n
(1+n2)m2, m ≥ 2 y p(D) el sımbolo de Fourier del operador
definido por p(D)u(n) = p(n)u(n). Sean u ∈ Hrk y v ∈ Hr′
k con 0 ≤ r ≤ s, 0 ≤ r′ ≤ s y
0 ≤ 2s− r − r′ < 14. Entonces,
‖p(D)(uv)‖Hsk≤ Cr,r′,s‖u‖Hr
k‖v‖Hr′
k,
donde Cr,r′,s es una constante que depende de r, r′, s.
La demostracion es analoga a la del Lema 5.12, basta con considerar
h(n) = n(1 + n2)−(m2+r+r′−2s)
y notar que m ≥ 2.
A partir de los dos lemas anteriores obtenemos el siguiente resultado relacionado con
los operadores A−11 A3∂x y (ρ0 − 1)A−1
2 ∂x.
Lema 5.14. Sean L1 = A−11 A3∂x y L2 = (ρ0 − 1)A−1
2 ∂x, con u ∈ Hrk y v ∈ Hr′
k para
0 ≤ r ≤ s, 0 ≤ r′ ≤ s y 0 ≤ 2s− r − r′ < 14. Entonces,
‖L1(uv)‖Hsk≤ Cr,r′,s‖u‖Hr
k‖v‖Hr′
k

94 5. El problema de Cauchy para el sistema tipo Benjamin-One
y
‖L2(uv)‖Hsk≤ Cr,r′,s‖u‖Hr
k‖v‖Hr′
k,
donde los Cr,r′,s representan constantes que dependen de r, r′, s.
Demostracion. Tenemos que
L1u(n) =i n
1 + β1n2 + β2n4u(n)
y
L2u(n) =i n
1 + ρ0|n|+ α3n2 + ρ0α1|n|n2 + β2n4u(n).
Notemos ahora que|i n|
1 + β1n2 + β2n4≤ C|n|
(1 + n2)2
y|i n|
1 + ρ0|n|+ α3n2 + ρ0α1|n|n2 + β2n4≤ C|n|
(1 + n2)2.
Por lo tanto, la demostracion se sigue del Lema 5.13 con m = 4.
A partir del anterior resultado se obtienen estimaciones para el termino no lineal
analogas a las obtenidas en el Lema 5.5, pero en el espacio X sk .
Lema 5.15. Sean U = (ζ, v) y G = (G1, G2), con G1 : X sk → Hs
k y G2 : X sk → Hs+2
k
definidos por
G1(U) = A−11 ∂x (ζv) y G2(U) =
1
2A−1
2 ∂x(v2).
Entonces existe una constante K > 0 tal que
‖G1(U)‖Hsk≤ K‖U‖2X s
ky ‖G2(U)‖Hs+2
k≤ K‖U‖2X s
k.
En consecuencia tenemos que
(1) ‖G(U)‖X sk≤ K‖U‖2X s
k.
(2) ‖G(U)−G(V )‖X sk≤ K‖U − V ‖X s
k
(‖U‖X s
k+ ‖V ‖X s
k
).
La demostracion se sigue de manera analoga a la del Lema 5.5, pero usando en este
caso el Lema 5.14.
A partir del analisis que hemos realizado hasta el momento para el problema de Cauchy
en el caso periodico podemos estableces resultado analogos a los teoremas 5.6, 5.7 y 5.8,
pero en este caso, en el espacio X sk = Hs
k ×Hs+2k .
Compactamos estos resultados en el siguiente teorema.

5. El problema de Cauchy para el sistema tipo Benjamin-One 95
Teorema 5.16. Para todo (ζ0, v0) = U0 ∈ X sk existe un tiempo T > 0 el cual depende
solo de ‖U0‖X sktal que el problema (5.2) con condicion inicial (5.14) tiene unica solucion
(ζ, v) = U tal que
(ζ, v) ∈ C ([0, T ],X sk ) ∩ C1
([0, T ],X s−1
k
).
Ademas, para todo 0 < T ′ < T existe una vecindad V de U0 en X sk tal que la
correspondencia (ζ0, v0) −→ (ζ(·), v(·)), que asocia a (ζ0, v0) la solucion (ζ(·), v(·))del problema (5.2) con condicion inicial (ζ0, v0) es una aplicacion Lipschitz de V en
C ([0, T ],X sk ).
Demostracion. Consideremos T > 0 y definamos el espacio C([0, T ],X sk ), equipado con
la norma definida por
‖V ‖C([0,T ],X sk )
= maxt∈[0,T ]
‖V (·, t)‖X sk.
Es facil ver que C([0, T ],X sk ) es un espacio de Banach. Sea BR(T ) la bola cerrada de
radio R centrada en el origen en C([0, T ],X sk ), es decir,
BR(T ) =V ∈ C([0, T ],X s
k ) : ‖V ‖C([0,T ],X sk )
≤ R.
Para U0 = (ζ0, v0) ∈ X sk fijo, definamos la aplicacion
ϕ(U(t)) = S(t)U0 −∫ t
0
S(t− τ)G(U(τ)) dτ,
donde U = (ζ, v) ∈ C([0, T ],X sk ). Demostremos que la correspondencia U(t) 7→ ϕ(U(t))
aplica BR(T ) en si mismo y es una contraccion si R y T son escogidos apropiadamente.
En efecto, si t ∈ [0, T ] y U ∈ BR(T ), entonces usando el Lema 5.10 y la afirmacion (1)
del Lema 5.15 tenemos que
‖ϕ(U(t))‖X sk≤ K1
(‖U0‖X s
k+K2
∫ t
0
‖U(τ)‖2X skdτ
)
≤ K1
(‖U0‖X s
k+K2R
2T).
Escogiendo R = 2K1‖U0‖X sky T > 0 tal que
4K21K2‖U0‖X s
kT ≤ 1, (5.20)
obtenemos que
‖ϕ(U(t))‖X sk≤ K1 ‖U0‖X s
k
(1 + 4K2
1K2‖U0‖X skT)≤ 2K1‖U0‖X s
k= R.

96 5. El problema de Cauchy para el sistema tipo Benjamin-One
Ası que ϕ aplica BR(T ) en si mismo. Demostremos ahora que ϕ es una contraccion. En
efecto, si U, V ∈ BR(T ), entonces por la definicion de ϕ tenemos que
ϕ(U(t))− ϕ(V (t)) = −∫ t
0
S(t− τ)[G(U(τ))−G(V (τ))
]dτ.
Entonces usando la afirmacion (2) del Lema 5.15 vemos que para t ∈ [0, T ],
‖ϕ(U(t))− ϕ(V (t))‖X sk≤ K1K2
∫ t
0
(‖U(τ)‖X s
k+ ‖V (τ)‖X s
k
)‖U(τ)− V (τ)‖X s
kdτ
≤ K1K2(2R)T‖U − V ‖C([0,T ],X sk)
≤ 4K21K2‖U0‖X s
kT‖U − V ‖C([0,T ],X s
k).
Escojamos T suficientemente pequeno de tal forma que se cumpla (5.20) y que
α = 4K21K2‖U0‖X s
kT ≤ 1
2.
De esta forma concluimos que
‖ϕ(U)− ϕ(V )‖C([0,T ],X sk) ≤ α‖U − V ‖C([0,T ],X s
k).
Por lo tanto ϕ es una contraccion. Por consiguiente, existe un unico punto fijo de ϕ en
BR(T ), el cual es solucion de la ecuacion integral (5.19).
Definamos ahora la funcion Φ ∈ C([0, T ],X sk ) por Φ(t) = G(U(t)). Por la afirmacion
(1) en Lema 5.15, tenemos que Φ ∈ L1([0, T ] : X sk ) dado que
‖G(U(t))‖Cb(R) ≤ K3‖G(U)‖X sk≤ K3K1‖U‖2X s
k,
donde Cb(R) denota el espacio de las funciones continuas y acotadas definidas sobre
R. De este hecho y de las propiedades de suavidad del semigrupo S, concluimos que la
funcion definida en [0, T ] por
U1(t) =
∫ t
0
S(t− τ)G(U(τ)) dτ,
es tal que U1 ∈ C([0, T ],X sk ). Por otra parte, tambien tenemos que
1
h(U1(t + h)− U1(t))
=S(h)− I
h
∫ t
0
S(t− τ)G(U(τ)) dτ +1
h
∫ t+h
t
S(t− τ + h)G(U(τ)) dτ.

5. El problema de Cauchy para el sistema tipo Benjamin-One 97
Tomando lımite cuando h→ 0 y usando la continuidad de Φ, obtenemos que
U ′1(t) = A(U1(t)) +G(U(t)),
y esto implica que U(t) = S(t)U0 + U1(t) es tal que
U ∈ C([0, T ] : X sk ) ∩ C1([0, T ] : X s−1
k )
es una solucion local clasica de Ut = A(U). En otras palabras, U es una solucion
clasica local del problema de Cauchy (5.15). La unicidad y la dependencia continua de
la solucion son obtenidas por argumentos estandares.

.

Capıtulo 6
Soluciones positivas para una
ecuacion no lineal de segundo orden
En este capıtulo estamos interesados en establecer resultados de existencia de soluciones
positivas para ecuaciones diferenciales de segundo orden relacionadas con soluciones de
onda viajera para algunas modelos de tercer orden. Con el proposito de ilustrar lo
anterior, consideremos la ecuacion generalizada KdV (gKdV)
ut + βuxxx + up ux = 0, t, x ∈ R.
En este caso las soluciones de ondas viajeras u(x, t) = u(x− ct) satisfacen la ecuacion
−cu+ βu′′ +1
p+ 1up+1 = 0,
de la cual es bien conocido que tiene una solucion explıcita de la forma
u (x) =
(c(p+ 1)(p+ 2)
2
) 1p
sech2p
(p
2
√c
βx
).
Observemos que
1
p+ 1up+1(x) =
1
p+ 1uσ(x)up+1−σ(x) = uσ(x)a(x),
donde a(x) = 1p+1
up+1−σ(x), lo cual significa que u satisface la ecuacion
−cu(x) + βu′′(x) + uσa(x) = 0, x ∈ R.
De forma analoga, si consideremos la ecuacion p-Gardner generalizada
ut + βuxxx + bupux + au2pux = 0, t, x ∈ R,
99

100 6. Soluciones positivas para una ecuacion no lineal de segundo orden
entonces la solucion de onda viajera u(x, t) = u(x− ct) satisface la ecuacion
−cu+ βu′′ +b
p+ 1up+1 +
a
2p+ 1u2p+1 = 0.
En este caso, S. Hamdi, B. Morse, B. Halpen y B. Schiesser en [23], usando computacion
simbolica, obtuvieron una solucion exacta u(x) para la ecuacion p-Gardner de la forma
u(x) =
((p+ 1)(p+ 2)c
b
) 1p
(1 +
√1 +
ac(p+ 1)(p+ 2)2
(2p+ 1)b2cosh
(p
√c
βx
))− 1p
. (6.1)
Como en el caso de la gKdV, la parte nolineal se puede expresar como
b
p+ 1up+1p +
a
2p+ 1u2p+1p = b(x) + d(x)u,
donde
b(x) =b
p+ 1(u (x))p+1, d(x) =
a
2p+ 1(u (x))2p.
En este caso, u satisface la ecuacion
−cu + βu′′ +b
p+ 1up+1 + b(x) + a(x)u = 0.
En este capıtulo estamos interesados en la existencia de soluciones positivas para la
ecuacion diferencial de segundo orden
−cu+ αux + βuxx + f(x, u(x)) = 0, (6.2)
donde α ≥ 0, β > 0, c > 0, x ∈ R y f es una funcion continua no negativa tal que
f(x, u) ≤ b(x) + a(x)|u|σ,
donde σ ≥ 1 y a, b son funciones no negativas que satisfacen algunos requerimientos.
De la discusion arriba, el modelo no lineal (6.2) esta relacionado con las ecuaciones de
onda viajera para la ecuacion de Burgers (α = β = 0 y f(u) = u2), la ecuacion de
Burgers con viscosidad (α 6= 0, β = 0 y f(u) = u2), la ecuacion generalizada KdV
(α = 0, β 6= 0 y f(u) = 1p+1
up+1), la ecuacion KdV-Burgers (β 6= 0 y f(u) = u2),
la ecuacion KdV-Burgers modificada (β 6= 0 y f(u) = u3), la ecuacion KdV-Burgers
cuadrada-cubica (α 6= 0, β 6= 0 y f(u) = au2+bu3) y la ecuacion p-Gardner generalizada
(α = 0, β 6= 0 y f(u) = bp+1
up+1 + a2p+1
u2p+1). En cierto sentido, vamos a mostrar que
las soluciones de onda viajera para algunos de estos modelos son capturadas por la
ecuacion (6.2).

6. Soluciones positivas para una ecuacion no lineal de segundo orden 101
Una de las principales tecnicas para establecer la existencia de soluciones para el
problema de Cauchy asociadas con una ecuacion diferencial es el conocido teorema
de punto fijo en conos de espacios de Banach debido a Krasnosel’skii (ver, por ejemplo,
[3, 17, 21, 24, 28, 32, 40, 44] y sus referencias). En particular, M. Zima en [44] mostro
la existencia de soluciones positivas para el siguiente problema de valor en la frontera
para ecuaciones diferenciales de segundo orden
u′′(x) + k2u(x) + g (x, u(x)) = 0,
u(0) = 0, lımx→∞
u(x) = 0,(6.3)
donde x ∈ [0,∞), y g es una funcion continua no negativa. En este caso, el resultado de
existencia de soluciones positivas para el problema de Cauchy asociado con la ecuacion
(6.3) se obtiene al caracterizar las soluciones a traves de la funcion de Green en un
espacios de funcion apropiados equipado con una norma de Bielecki y utilizando el
teorema de punto fijo de Krasnosel’skii sobre un cono (ver [5, 22]).
Por otro lado, utilizando el teorema de punto fijo de Krasnosel’skii junto con un criterio
de compacidad debido a M. Zima (ver [44]), P. Torres en [41], establecio la existencia
de soluciones para la ecuacion diferencial no lineal del tipo
−u′′(x) + a(x)u(x) = b(x)f(u(x)),
donde a, b ∈ L∞(R) son no negativas en casi todas partes y f es una funcion continua
dada, bajo el supuesto de que
lım|x|→∞
|u(x)|+ |u′(x)| = 0.
La importancia de este modelo radica en que, bajo las hipotesis apropiadas, modela la
propagacion de las ondas electromagneticas a traves de un medio formado por capas de
material dielectrico.
A continuacion, establecemos la existencia de soluciones positivas para la ecuacion
diferencial de segundo orden (6.2), siguiendo el enfoque utilizado por M. Zima en [44],
donde x ∈ R y f es una funcion continua no negativa que tiene la forma
f(x, u) ≤ b(x) + a(x)|u|σ,
donde σ ≥ 1 y a, b son funciones continuas no negativas con algunas propiedades. El
resultado principal es consecuencia de la caracterizacion de las soluciones como puntos
fijos de algunos funcionales, definidos mediante la funcion de Green asociada al problema

102 6. Soluciones positivas para una ecuacion no lineal de segundo orden
lineal, y el teorema de punto fijo de Krasnosel’skii, siguiendo lo hecho por M. Zima en
[44] en el caso de la existencia de soluciones para el problema de Cauchy con la ecuacion
(6.3).
Es importante senalar que en el caso α = 0 y f(u) = aup + buq con p, q ≥ 1, el
modelo (6.2) tiene soluciones explıcitas. Aunque no estableceremos la existencia de
tales soluciones explıcitas utilizando el argumento de punto fijo, podemos demostrar de
alguna manera que esas soluciones pueden capturarse en la configuracion considerada
en nuestro modelo, como lo mostraremos mas adelante.
La funcion de Green
Aquı discutimos algunas propiedades de la funcion de Green asociada con la ecuacion
(6.2). Primero si suponemos que
lım|x|→∞
(|u(x)|+ |u′(x)|+ |u′′(x)|) = 0,
entonces la funcion f debe satisfacer
lım(|x|,u)→(∞,0)
f(x, u) = 0.
Si consideramos ∆ = α2+4βc, entonces las raıces del polinomio caracterıstico asociado
con la parte lineal de la ecuacion (6.2) son dadas por
m1 =−α +
√∆
2βy m2 = −α +
√∆
2β. (6.4)
Notemos que en el caso particular α = 0, tenemos que
m1 =
√c
β= −m2. (6.5)
Observemos que
0 < m1 ≤ −m2 y m1 −m2 =
√∆
β. (6.6)
De (6.4), vemos que la funcion de Green asociada con la ecuacion (6.2) esta dada por
G(x, s) =
em1(x−s), −∞ ≤ x ≤ s ≤ ∞,
em2(x−s), −∞ ≤ s ≤ x ≤ ∞.(6.7)
Usando (6.6), vemos directamente que para cualquier s ∈ R,
lım|x|→∞
G(x, s) = 0.

6. Soluciones positivas para una ecuacion no lineal de segundo orden 103
Por otra parte, tenemos que una solucion positiva u ∈ Cb(R,R) de (6.2) debe satisfacer
la ecuacion de punto fijo
u(x) =
∫G(x, s)f(s, u(s)) ds := Au(x). (6.8)
6.1. Existencia de soluciones positivas
En esta seccion, establecemos la existencia de soluciones positivas para el modelo (6.2),
mediante la imposicion de algunas hipotesis sobre el termino no lineal f . El resultado
sera una consecuencia del teorema de punto fijo de Krasnosel’skii y compacidad en
un espacio de Banach 〈E, ‖ · ‖v〉, donde la funcion v viene dado por v(x) = e−η|x| con
η > −m2 ≥ m1 y equipado con la norma
‖u‖v = supx∈R
e−η|x||u(x)|. (6.9)
Para este espacio 〈E, ‖ · ‖v〉 tenemos el siguiente criterio de compacidad.
Proposicion 6.1. Sea q la funcion definida por
q(x) =
e−m1x, x ≥ 0,
e−m2x, x < 0.(6.10)
Si la familia Ω ⊂ E es casi equicontinua sobre R y uniformemente acotada en el sentido
de la norma
‖u‖q = supx∈R
q(x)|u(x)|, (6.11)
entonces la familia Ω es relativamente compacta en 〈E, ‖ · ‖v〉.
Demostracion. La demostracion es consecuencia directa de la Proposicion 1.2, dado que
la funcion q es positiva y continua sobre R. Del hecho que η > −m2 ≥ m1, concluimos
que
lımx→−∞
eηx
e−m2x= 0 y lım
x→∞
e−ηx
e−m1x= 0,
lo cual significa que
lım|x|→∞
v(x)
q(x)= 0.
La existencia de soluciones positivas de (6.2) sera consecuencia del resultado de
compacidad contenido en la Proposicion 6.1 en el espacio de Banach 〈E, ‖ · ‖v〉 donde

104 6. Soluciones positivas para una ecuacion no lineal de segundo orden
v(x) = e−η|x|, y η > −m2 ≥ m1. Imponemos algunas restricciones en la funcion no
lineal f para verificar las hipotesis del teorema de punto fijo de Krasnosel’skii (ver
Teorema 1.16),
(H1) f : R× R → R es una funcion continua no negativa tal que
f(x, u) ≤ b(x) + a(x)|u|σ, (6.12)
donde σ ≥ 1 y a, b son funciones continuas no negativas;
(H2) las integrales
M− =
∫ 0
−∞e−m2sb(s) ds y M+ =
∫ ∞
0
e−m1sb(s) ds, (6.13)
son convergentes;
(H3) las integrales
M−σ,i =
∫ 0
−∞e−(mi+ησ)sa(s) ds y M+
σ,i =
∫ ∞
0
e−(mi−ησ)sa(s) ds, (6.14)
son convergentes para i = 1, 2 y σ ≥ 1.
Acotacion del operador A
Consideremos primero la acotacion del operador A en el caso:
b(x) = 0 y σ > 1.
Lema 6.2. Sean G la funcion de Green definida en (6.7) y σ > 1. Si f satisface la
hipotesis (H1) con b(x) = 0 y M±σ,i con i = 1, 2 satisface la hipotesis (H3), entonces el
operador integral A satisface
supx∈R
|(Au)(x)| e−η|x| <∞.
Ademas, tambien tenemos el estimativo
|Au(x)| q(x) ≤ ‖u‖σq ·maxM−
σ,1 +M+σ,1,M
−σ,2 +M+
σ,2
.

6. Soluciones positivas para una ecuacion no lineal de segundo orden 105
Demostracion. Primero consideremos x ≥ 0, entonces
|(Au)(x)| e−ηx ≤ e−ηx[∫ x
−∞G(x, s)f(s, u(s)) ds+
∫ ∞
x
G(x, s)f(s, u(s)) ds
]
≤ e−ηx[∫ x
−∞em2(x−s)a(s)(u(s))σ ds+
∫ ∞
x
em1(x−s)a(s)(u(s))σ ds
]
= e−ηx [I1 + I2] .
Ası, por hipotesis (H1) (6.12) cuando b(x) = 0 y σ > 1, tenemos
I1 = em2x
[∫ 0
−∞e−m2sa(s)(u(s))σ ds+
∫ x
0
e−m2sa(s)(u(s))σ ds
]
= em2x
[∫ 0
−∞e−m2se−ησsa(s)(eηsu(s))σ ds+
∫ x
0
e−m2seησsa(s)(e−ηsu(s))σ ds
]
≤ em2x[(
supr≤0
eηru(r))σ ∫ 0
−∞e−(m2+ησ)sa(s) ds
+(supr≥0
e−ηru(r))σ ∫ x
0
e−(m2−ησ)sa(s) ds]
≤ ‖u‖σv em2x
[∫ 0
−∞e−(m2+ησ)sa(s) ds+
∫ x
0
e−(m2−ησ)sa(s) ds
]
e
I2 = em1x
∫ ∞
x
e−m1sa(s)(u(s))σ ds
= em1x
∫ ∞
x
e−m1seησsa(s)(e−ηsu(s))σ ds
≤ em1x
(supr≥0
e−ηru(r)
)σ ∫ ∞
x
e−(m1−ησ)sa(s) ds
≤ ‖u‖σv em1x
∫ ∞
x
e−(m1−ησ)sa(s) ds.
Por otra parte, como 0 < m1 ≤ −m2 < η, entonces −η + m1 < 0, −η + m2 < 0 y
m1 −m2 > 0. Ası, para x ≥ 0 y s ≥ 0 tenemos el estimativo
e(−η+m1)x ≤ 1, e(−η+m2)x ≤ 1 y e−(m1−ησ)s ≤ e−(m2−ησ)s.

106 6. Soluciones positivas para una ecuacion no lineal de segundo orden
De estas estimaciones, tenemos que
|(Au)(x)| e−ηx ≤ ‖u‖σv e−ηx(em2x
[∫ 0
−∞e−(m2+ησ)sa(s) ds+
∫ x
0
e−(m2−ησ)sa(s) ds
]
+em1x
∫ ∞
x
e−(m1−ησ)sa(s) ds)
≤ ‖u‖σv(∫ 0
−∞e−(m2+ησ)sa(s) ds+
∫ x
0
e−(m2−ησ)sa(s) ds
+
∫ ∞
x
e−(m1−ησ)sa(s) ds)
≤ ‖u‖σv(M−
σ,2 +M+σ,2
). (6.15)
Siguiendo un procedimiento analogo en el caso x ≤ 0, tenemos que
|(Au)(x)| eηx ≤ eηx[∫ x
−∞G(x, s)f(s, u(s)) ds+
∫ ∞
x
G(x, s)f(s, u(s)) ds
]
≤ eηx[∫ x
−∞em2(x−s)a(s)(u(s))σ ds+
∫ ∞
x
em1(x−s)a(s)(u(s))σ ds
]
= eηx [I1 + I2] .
Nuevamente, por la hipotesis (H1) (6.12) cuando b(x) = 0 y σ > 1, tenemos
I1 = em2x
[∫ x
−∞e−m2sa(s)(u(s))σ ds
]
= em2x
[∫ x
−∞e−m2se−ησsa(s)(eηsu(s))σ ds
]
≤ em2x
(supr≤0
eηru(r)
)σ ∫ x
−∞e−(m2+ησ)sa(s) ds
≤ ‖u‖σv em2x
∫ x
−∞e−(m2+ησ)sa(s) ds
e
I2 = em1x
[∫ 0
x
e−m1sa(s)(u(s))σ ds+
∫ ∞
0
e−m1sa(s)(u(s))σ ds
]
= em1x
[∫ 0
x
e−m1se−ησsa(s)(eηsu(s))σ ds+
∫ ∞
0
e−m1seησsa(s)(e−ηsu(s))σ ds
]
≤ em1x[(
supr≤0
eηru(r)
)σ ∫ 0
x
e−(m1+ησ)sa(s) ds
+
(supr≥0
e−ηru(r)
)σ ∫ ∞
0
e−(m1−ησ)sa(s) ds]
≤ ‖u‖σv em1x
[∫ 0
x
e−(m1+ησ)sa(s) ds+
∫ ∞
0
e−(m1−ησ)sa(s) ds
].

6. Soluciones positivas para una ecuacion no lineal de segundo orden 107
Por otro lado, como 0 < m1 ≤ −m2 < η, entonces η+m1 > 0, η+m2 > 0 ym1−m2 > 0.
Ası, para x ≤ 0 y s ≤ 0 tenemos que
e(η+m1)x ≤ 1, e(η+m2)x ≤ 1 y e−(m2+ησ)s ≤ e−(m1+ησ)s.
Por lo tanto
|(Au)(x)| eηx ≤ ‖u‖σv eηx(em2x
∫ x
−∞e−(m2+ησ)sa(s) ds
+em1x
[∫ 0
x
e−(m1+ησ)sa(s) ds+
∫ ∞
0
e−(m1−ησ)sa(s) ds
])
≤ ‖u‖σv(∫ x
−∞e−(m2+ησ)sa(s) ds+
∫ 0
x
e−(m1+ησ)sa(s) ds
+
∫ ∞
0
e−(m1−ησ)sa(s) ds)
≤ ‖u‖σv(M−
σ,1 +M+σ,1
). (6.16)
Entonces, de las estimaciones anteriores (veanse las ecuaciones (6.15) y (6.16)) tenemos
que para x ∈ R, b(x) = 0 y σ > 1,
|(Au)(x)| e−η|x| ≤ ‖u‖σv ·maxM−
σ,1 +M+σ,1,M
−σ,2 +M+
σ,2
, (6.17)
lo cual implica que
supx∈R
|(Au)(x)| e−η|x| <∞.
Procediendo de manera analoga, vemos que el operador integral A tambien satisface
|(Au)(x)| q(x) ≤ ‖u‖σq ·maxM−
σ,1 +M+σ,1,M
−σ,2 +M+
σ,2
.
Del anterior Lema 6.2, tenemos que la familia (Au)u∈E es uniformemente acotado con
respecto a las normas ‖ · ‖v y ‖ · ‖q, respectivamente (veanse las ecuaciones (6.9) y
(6.11)).
Ahora, consideramos la acotacion del operador A en el caso:
σ = 1.
Lema 6.3. Sean G la funcion de Green definida por (6.7) y σ = 1. Si f satisface
la hipotesis (H1), M± satisface la hipotesis (H2), y M±1,i para i = 1, 2 satisface la
hipotesis (H3), entonces el operador integral A satisface
supx∈R
|(Au)(x)| e−η|x| <∞.
Por otra parte, tambien tenemos la estimacion
|(Au)(x)| q(x) ≤M− +M+ + ‖u‖q ·maxM−
1,1 +M+1,1, M
−1,2 +M+
1,2
.

108 6. Soluciones positivas para una ecuacion no lineal de segundo orden
Demostracion. Primero, tenemos que
|(Au)(x)| e−η|x| ≤ e−η|x|∫ ∞
−∞G(x, s)f(s, u(s)) ds
≤ e−η|x|[∫ ∞
−∞G(x, s)b(s) ds+
∫ ∞
−∞G(x, s)a(s)u(s) ds
]
= e−η|x| [I0 + I] .
Consideremos x ≥ 0, entonces por (6.7) tenemos que
I0 =
∫ x
−∞em2(x−s)b(s) ds+
∫ ∞
x
em1(x−s)b(s) ds
≤∫ 0
−∞em2(x−s)b(s) ds+
∫ x
0
em2(x−s)b(s) ds+
∫ ∞
x
em1(x−s)b(s) ds
≤∫ 0
−∞em2(x−s)b(s) ds+
∫ x
0
em1(x−s)b(s) ds+
∫ ∞
x
em1(x−s)b(s) ds
≤ em2x
∫ 0
−∞e−m2sb(s) ds+ em1x
∫ ∞
0
e−m1sb(s) ds.
Entonces,
e−ηxI0 ≤ e(m2−η)x∫ 0
−∞e−m2sb(s) ds+ e(m1−η)x
∫ ∞
0
e−m1sb(s) ds ≤M− +M+. (6.18)
Ahora, en el caso x ≤ 0, tenemos que
I0 =
∫ x
−∞em2(x−s)b(s) ds+
∫ ∞
x
em1(x−s)b(s) ds
≤∫ x
−∞em2(x−s)b(s) ds+
∫ 0
x
em1(x−s)b(s) ds+
∫ ∞
0
em1(x−s)b(s) ds
≤∫ x
−∞em2(x−s)b(s) ds+
∫ 0
x
em2(x−s)b(s) ds+
∫ ∞
0
em1(x−s)b(s) ds
≤ em2x
∫ 0
−∞e−m2sb(s) ds+ em1x
∫ ∞
0
e−m1sb(s) ds.
Entonces,
eηxI0 ≤ e(m2+η)x
∫ 0
−∞e−m2sb(s) ds+ e(m1+η)x
∫ ∞
0
e−m1sb(s) ds ≤M− +M+. (6.19)
Por lo tanto, por (6.18) y (6.19), tenemos que
e−η|x|I0 ≤M− +M+. (6.20)

6. Soluciones positivas para una ecuacion no lineal de segundo orden 109
Ahora, siguiendo un procedimiento similar al de la prueba del Lema 6.2 con σ = 1,
obtenemos que
e−η|x|I = ‖u‖v ·maxM−
1,1 +M+1,1, M
−1,2 +M+
1,2
. (6.21)
Entonces, de las estimaciones anteriores (veanse las ecuaciones (6.20) y (6.21)) tenemos
que para x ∈ R y σ = 1,
|(Au)(x)| e−η|x| ≤M− +M+ + ‖u‖v ·maxM−
1,1 +M+1,1, M
−1,2 +M+
1,2
, (6.22)
lo cual implica que
supx∈R
|(Au)(x)| e−η|x| <∞.
Procediendo de manera analoga, vemos que el operador integral A tambien satisface,
cuando σ = 1, que
|(Au)(x)| q(x) ≤M− +M+ + ‖u‖q ·maxM−
1,1 +M+1,1, M
−1,2 +M+
1,2
.
Del anterior Lema 6.3, tenemos que cuando σ = 1, la familia (Au)u∈E es uniformemente
acotada con respecto a las normas ‖ · ‖v y ‖ · ‖q, respectivamente (veanse las ecuaciones
(6.9) y (6.11)).
Ahora, consideremos δ > γ > 0, m = em2δ y el conjunto
K =
u ∈ E : u(x) ≥ 0 sobre R y mın
x∈[γ,δ]u(x) ≥ m ‖u‖v
⊂ E. (6.23)
La primera observacion es que K es un cono en E. En efecto, si k > 0 y u ∈ K, entonces
k u(x) ≥ 0 y mınx∈[γ,δ]
k u(x) ≥ m ‖k u‖v ,
por lo tanto ku ∈ K.
Lema 6.4. Sean δ > γ > 0 y m = em2δ. Entonces
mınx∈[γ,δ]
(Au)(x) ≥ m ‖Au‖v .
Demostracion. Sea τ ≥ 0. Consideremos primero el caso x ≤ τ . Ası que tenemos
(Au)(x) =
∫ x
−∞G(x, s)f(s, u(s)) ds+
∫ ∞
x
G(x, s)f(s, u(s)) ds
= em2x
∫ x
−∞e−m2sf(s, u(s)) ds+ em1x
∫ ∞
x
e−m1sf(s, u(s)) ds = I1 + I2.

110 6. Soluciones positivas para una ecuacion no lineal de segundo orden
Usando que −∞ ≤ s ≤ x ≤ τ , concluimos que
I1 = em2x
∫ x
−∞e−m2sf(s, u(s)) ds
= em2x
∫ x
−∞e−m2se−m2(τ−s)G(τ, s)f(s, u(s)) ds
= e−m2(τ−x)∫ x
−∞G(τ, s)f(s, u(s)) ds.
Ahora, dividimos la integral I2 de x a ∞ en las integrales de x a τ y de τ a ∞:
I2 = em1x
[∫ τ
x
e−m1sf(s, u(s)) ds+
∫ ∞
τ
e−m1sf(s, u(s)) ds
]
= em1x[ ∫ τ
x
e−m1se−m2(τ−s)G(τ, s)f(s, u(s)) ds
+
∫ ∞
τ
e−m1se−m1(τ−s)G(τ, s)f(s, u(s)) ds]
= em1x
[e−m2τ
∫ τ
x
e−(m1−m2)sG(τ, s)f(s, u(s)) ds+ e−m1τ
∫ ∞
τ
G(τ, s)f(s, u(s)) ds
]
≥ em1x
[e−m2τe−(m1−m2)τ
∫ τ
x
G(τ, s)f(s, u(s)) ds+ e−m1τ
∫ ∞
τ
G(τ, s)f(s, u(s)) ds
]
≥ em1x
[e−m1τ
∫ ∞
x
G(τ, s)f(s, u(s)) ds
]= e−m1(τ−x)
∫ ∞
x
G(τ, s)f(s, u(s)) ds.
Concluimos para x ∈ [γ, δ] y x ≤ τ que
(Au)(x) ≥ e−m2(τ−x)∫ x
−∞G(τ, s)f(s, u(s)) ds+ e−m1(τ−x)
∫ ∞
x
G(τ, s)f(s, u(s)) ds.
Supogamos ahora que τ ≤ x. Dividimos la integral I1 de −∞ a x en las integrales de
−∞ a τ y de τ a x:
I1 = em2x
[∫ τ
−∞e−m2sf(s, u(s)) ds+
∫ x
τ
e−m2sf(s, u(s)) ds
]
= em2x[ ∫ τ
−∞e−m2se−m2(τ−s)G(τ, s)f(s, u(s)) ds
+
∫ x
τ
e−m2se−m1(τ−s)G(τ, s)f(s, u(s)) ds]
= em2x
[e−m2τ
∫ τ
−∞G(τ, s)f(s, u(s)) ds+ e−m1τ
∫ x
τ
e(m1−m2)sG(τ, s)f(s, u(s)) ds
]
≥ em2x
[e−m2τ
∫ τ
−∞G(τ, s)f(s, u(s)) ds+ e−m1τe(m1−m2)τ
∫ x
τ
G(τ, s)f(s, u(s)) ds
]
≥ em2xe−m2τ
∫ x
−∞G(τ, s)f(s, u(s)) ds = e−m2(τ−x)
∫ x
−∞G(τ, s)f(s, u(s)) ds

6. Soluciones positivas para una ecuacion no lineal de segundo orden 111
e
I2 = em1x
∫ ∞
x
e−m1sf(s, u(s)) ds
= em1x
∫ ∞
x
e−m1se−m1(τ−s)G(τ, s)f(s, u(s)) ds
= e−m1(τ−x)∫ ∞
x
G(τ, s)f(s, u(s)) ds.
Concluimos para x ∈ [γ, δ] y τ ≤ x que
(Au)(x) ≥ e−m2(τ−x)∫ x
−∞G(τ, s)f(s, u(s)) ds+ e−m1(τ−x)
∫ ∞
x
G(τ, s)f(s, u(s)) ds.
Por lo tanto, hemos mostrado que para cualquier x y τ
(Au)(x) ≥ e−m2(τ−x)∫ x
−∞G(τ, s)f(s, u(s)) ds+ e−m1(τ−x)
∫ ∞
x
G(τ, s)f(s, u(s)) ds.
Ahora, para x ∈ [γ, δ], tenemos que
em2x ≥ em2δ y em1x ≥ em1γ.
Ası, concluimos que
(Au)(x) ≥ m
(e−m2τ
∫ x
−∞G(τ, s)f(s, u(s)) ds+ e−m1τ
∫ ∞
x
G(τ, s)f(s, u(s)) ds
),
donde m = mınem2δ, em1γ = em2δ. Ahora, recordemos que 0 < m1 ≤ −m2 < η,
entonces para τ ≥ 0 tenemos que
e(η−m2)τ ≥ 1 y e(η−m1)τ ≥ 1,
lo que significa que
(Au)(x) ≥ m(e(η−m2)τe−ητ
∫ x
−∞G(τ, s)f(s, u(s)) ds
+e(η−m1)τe−ητ∫ ∞
x
G(τ, s)f(s, u(s)) ds)
≥ me−η|τ |∫ ∞
−∞G(τ, s)f(s, u(s)) ds.
Ahora, para τ ≤ 0 tenemos que
(Au)(x) ≥ m(e−(η+m2)τeητ
∫ x
−∞G(τ, s)f(s, u(s)) ds
+e−(η+m1)τeητ∫ ∞
x
G(τ, s)f(s, u(s)) ds)
≥ me−η|τ |∫ ∞
−∞G(τ, s)f(s, u(s)) ds.

112 6. Soluciones positivas para una ecuacion no lineal de segundo orden
Note que como 0 < m1 ≤ −m2 < η, entonces m1 + η > 0 y m2 + η > 0, entonces para
τ ≤ 0 tenemos que
e−(η+m2)τ ≥ 1 y e−(η+m1)τ ≥ 1.
Por lo tanto, tenemos que
mınx∈[γ,δ]
(Au)(x) ≥ em2δ ‖Au‖v .
De la misma manera, podemos establecer un resultado analogo al Lema 6.4.
Lema 6.5. Sea δ > γ > 0. Entonces
mınx∈[−δ,−γ]
(Au)(x) ≥ e−m1δ ‖Au‖v .
El siguiente resultado presenta una propiedad importante que satisface el operador A
definido por (6.8).
Teorema 6.6. Sean G la funcion de Green definida por (6.7), f satisface la hipotesis
(H1), M± satisface la hipotesis (H2), M±σ,i satisface la hipotesis (H3) para i = 1, 2 y
σ ≥ 1, y K el conjunto definido por (6.23). Entonces, dado un conjunto acotado Ω ⊂ E,
tenemos que A : Ω ∩K → K es completamente continuo.
Demostracion. Sea Ω ⊂ E un conjunto acotado. Demostremos primero que A aplica
Ω∩K en K. A partir de la hipotesis (H1) y dado que G(x, s) ≥ 0 para x, s ∈ R, vemos
que
(Au)(x) ≥ 0, u ∈ Ω ∩K. (6.24)
Ahora, por el Lema 6.2 en le caso σ > 1 y el Lema 6.3 en el caso σ = 1, sabemos que
para cualquier u ∈ Ω ∩K, supx∈R
|(Au)(x)| e−η|x| <∞. Ası,
Au ∈ E, ∀u ∈ Ω ∩K. (6.25)
Ademas, el Lema 6.4 implica que para x ∈ [γ, δ], m = em2δ y u ∈ Ω ∩K
mınx∈[γ,δ]
(Au)(x) ≥ m ‖Au‖v , ∀u ∈ Ω ∩K. (6.26)
Las ecuaciones (6.24), (6.25) y (6.26) implican que A(Ω ∩K) ⊂ K como se desea.
Ahora demostremos que A : Ω ∩K → K es completamente continuo. Por el Lema 6.2
en el caso σ > 1, y el Lema 6.3 en el caso σ = 1, tenemos que ‖Au‖v ≤ k1‖u‖v y
‖Au‖q ≤ k2‖u‖q, es decir, el operador A es continuo con respecto a las normas ‖ · ‖v y

6. Soluciones positivas para una ecuacion no lineal de segundo orden 113
‖ · ‖q, respectivamente (veanse las ecuaciones (6.9) y (6.11)). Sea u ∈ Ω ∩K. Tambien
tenemos que las funciones Au son uniformemente acotadas con respecto a la norma
‖ · ‖q. Ademas, para cualquier T > 0, el hecho que G y f son continuas, implica que
Au : u ∈ Ω∩K son equicontinuas en cada intervalo compacto [−T, T ] de R. Ası, porla Proposicion 6.1, A(Ω∩K) es un conjunto precompacto en E (relativo compacto), es
decir, el operador A aplica conjuntos acotado en conjunto precompactos. Por lo tanto,
el operador A es completamente continuo.
Definamos Mσ como
Mσ = maxM−
σ,1 +M+σ,1, M
−σ,2 +M+
σ,2
.
A partir de las hipotesis (H1)-(H3), tenemos el siguiente resultado de existencia de
soluciones positivas.
Teorema 6.7. Sean G, f , M± y M±σ,i para i = 1, 2 y σ ≥ 1 como en el Teorema 6.6.
Si existe λ > 0, δ > γ > 0, y x0 > 0 tal que para x ∈ [γ, δ] y u ∈[mλ, λeηδ
], tenemos
que (∫ δ
γ
G(x0, s) ds
)f(x, u) ≥ λeηx0 , (6.27)
entonces existe una solucion positiva para la ecuacion (6.2), siempre que λ1−σ 6= Mσ
en el caso b(x) = 0, σ > 1, y λ 6= M− +M+
1−M1, en el caso σ = 1.
Demostracion. Note que cada punto fijo del operador integral A dado por (6.8), es
solucion de (6.2). Mostraremos que A satisface las hipotesis del Teorema 1.16. Del
Teorema 6.6 sabemos que A : Ω ∩K → K es completamente continuo para cualquier
conjunto acotado Ω ⊂ E. Ahora, consideramos el caso b(x) = 0 y σ > 1. Fijemos
r1−σ =Mσ y R = λ
asumiendo sin perdida de generalidad que r < R, y definamos
Ω1 = u ∈ E : ‖u‖v < r y Ω2 = u ∈ E : ‖u‖v < R .
Si u ∈ K ∩ ∂Ω1 entonces de (6.15) y (6.16) tenemos que
|(Au)(x)| e−η|x| ≤ rσMσ = r,
por lo tanto ‖Au‖v ≤ ‖u‖v. Ahora, si u ∈ K ∩ ∂Ω2 entonces
mınx∈[γ,δ]
u(x) ≥ mλ y supx∈R
u(x)e−η|x| = λ.

114 6. Soluciones positivas para una ecuacion no lineal de segundo orden
Ası, para x ∈ [γ, δ], tenemos que mλ ≤ u(x) ≤ λ eηδ. Por (6.27),
(Au)(x0) =
∫ ∞
−∞G(x0, s)f(s, u(s)) ds ≥
∫ δ
γ
G(x0, s)f(s, u(s)) ds
≥∫ δ
γ
G(x0, s)
(∫ δ
γ
G(x0, y) dy
)−1
λ eηx0 ds = λ eηx0 ,
lo cual implica que (Au)(x0) e−ηx0 ≥ λ. Esto implica que ‖Au‖v ≥ ‖u‖v para u ∈
K∩∂Ω2. Por el Teorema 1.16, el operador A tiene al menos un punto fijo en el conjunto
K ∩ (Ω2 \ Ω1), lo cual significa que el problema (6.2) tiene una solucion positiva u tal
que r ≤ ‖u‖v ≤ R.
Finalmente, en el caso σ = 1 es necesario considerar
r =M− +M+
1−M1, R = λ,
completando ası la demostracion del teorema. Tenga en cuenta que bajo las condiciones
del Teorema 6.7 no existen soluciones constantes. En efecto, supongamos que u(x) = k
para todos x ∈ R, con 0 < k < ∞, luego reemplazando en la ecuacion (6.2) tenemos
que
−ck + f(x, k) = 0.
Ahora, para σ > 1 y b(x) = 0, f(x, k) satisface (6.12), entonces para cualquier x ∈ R,
ck ≤ a(x)kσ ⇔ c ≤ a(x)kσ−1,
pero tambien tenemos que a(x) → 0 cuando x → ∞. Entonces llegamos a una
contradiccion. Ahora, para σ = 1, f(x, k) satisface (6.12), luego para cualquier x ∈ R,
ck ≤ b(x) + a(x)k ⇔ 0 ≤ b(x) + (a(x)− c)k,
Pero tambien tenemos que a(x) → 0 y b(x) → 0 cuando x → ∞. Entonces llegamos a
una contradiccion.
Notemos que el Teorema 6.7 tambien se satisface en el caso que exista un x0 < 0, en
este caso x ∈ [−δ,−γ] y u ∈[e−m1δλ, e−ηγ
], y tenemos que
f(x, u) ≥ λe−ηx0(∫ −γ
−δG(x0, s) ds
)−1
.

6. Soluciones positivas para una ecuacion no lineal de segundo orden 115
6.2. Aplicacion del resultado de existencia
A continuacion presentamos algunos ejemplos basicos para ilustrar la aplicabilidad de
nuestro resultado principal.
Ejemplo 6.8. Consideremos el siguiente problema
−cu(x) + αu′(x) + βu′′(x) + e−ρ|x||u(x)|σ = 0, x ∈ R, (6.28)
con α ≥ 0, β, c > 0 y σ > 1. Para que la hipotesis (H3) se satisfaga sobre M±σ,i, es
necesario que
ρ > max m1 + ησ,m2 + ησ, ησ −m1, ησ −m2 .Bajo estas condiciones, tenemos que
M−σ,1 =
1
ρ− (m1 + ησ), M−
σ,2 =1
ρ− (m2 + ησ),
M+σ,1 =
1
ρ+ (m1 − ησ), M+
σ,2 =1
ρ+ (m2 − ησ).
Consideremos entonces Mσ = maxM−
σ,1 +M+σ,1, M
−σ,2 +M+
σ,2
. Ahora, sean γ = x0 >
0 y δ > γ, entonces m = mınem2δ, em1γ = em2δ y∫ δ
γ
G(x0, s)ds =
∫ δ
γ
em1(γ−s)ds =1
m1
(1− em1(γ−δ)) .
Por otra parte, para x ∈ [γ, δ] y mλ ≤ u ≤ λ eηδ, tenemos(∫ δ
γ
G(x0, s) ds
)f(x, u) ≥ 1
m1
(1− em1(γ−δ)) e−ρδ (mλ)σ
≥ 1
m1
(1− em1(γ−δ)) e−ρδem2σδλσ
≥ λ eηx0 ≥ λ eηγ.
Ası, si tomamos σ > 1, entonces
λσ−1 ≥ m1e(m1+ρ−m2σ)δ+ηγ
em1δ − em1γ.
Por lo tanto, la funcion
f(x, u) = e−ρt||u|σ
satisface los supuestos del Teorema 6.7 con λσ−1 =m1e
(m1+ρ−m2σ)δ+ηγ
em1δ − em1γ. Note que λσ−1 6=
M−1σ . Por el Teorema 6.7, el problema (6.28) tiene una solucion positiva u tal que
M1
1−σσ ≤ ‖u‖v ≤
(m1e
(m1+ρ−m2σ)δ+ηγ
em1δ − em1γ
) 1σ−1
.

116 6. Soluciones positivas para una ecuacion no lineal de segundo orden
Ejemplo 6.9. Consideremos el siguiente problema
−cu(x) + αu′(x) + βu′′ + b(x) + a(x)|u(x)| = 0, x ∈ R. (6.29)
donde α ≥ 0, β, c > 0, b(x) = e−ρ1|x| y a(x) = e−ρ2|x| son funciones continuas no
negativas para x ∈ R. Para que las hipotesis (H2) y (H3) se satisfagan sobre M± y
M±1,i, es necesario que
−ρ1 < max m1,−m2 = −m2
y
ρ2 > max m1 + η,m2 + η, η −m1, η −m2 = η −m2.
Bajo estas condiciones, tenemos que
M− =1
ρ1 −m2, M−
1,1 =1
ρ2 − (m1 + η), M−
1,2 =1
ρ2 − (m2 + η),
M+ =1
ρ1 +m1, M+
1,1 =1
ρ2 + (m1 − η), M+
1,2 =1
ρ2 + (m2 − η).
Consideremos entonces M1 = maxM+
1,1 +M−1,1,M
+1,2 +M−
1,2
. Necesitamos que
M1 < 1, esto es,
1
ρ2 − (m2 + η)+
1
ρ2 + (m2 − η)=
2(ρ2 − η)
(ρ2 − η)2 −m22
< 1.
Esto implica que
ρ2 > 1 + η +√1 +m2
2.
Ahora, sean γ = x0 > 0 y δ > γ, entonces m = mınem2δ, em1γ = em2δ y
∫ δ
γ
G(x0, s)ds =
∫ δ
γ
em1(γ−s)ds =1
m1
(1− em1(γ−δ)) .
Por lo tanto, para x ∈ [γ, δ] y mλ ≤ u ≤ λ eηδ tenemos que(1− em1(γ−δ)
)e−ρ1δ
m1eηγ − (1− em1(γ−δ)) e(m2−ρ2)δ ≥ λ.
Por lo tanto, la funcion
f(x, u) = e−ρ1|x| + e−ρ2|x||u|
satisface las suposiciones del Teorema 6.7 con λ =(1−em1(γ−δ))e−ρ1δ
m1eηγ−(1−em1(γ−δ))e(m2−ρ2)δ. Note que
λ < M−+M+
1−M1. Por el Teorema 6.7, el problema (6.29) tiene una solucion no trivial u tal
que (1− em1(γ−δ)
)e−ρ1δ
m1eηγ − (1− em1(γ−δ)) e(m2−ρ2)δ ≤ ‖u‖v ≤M− +M+
1−M1
.

6. Soluciones positivas para una ecuacion no lineal de segundo orden 117
6.3. Sobre los modelos dispersivos
Como senalamos anteriormente, existen algunos modelos dispersivos con soluciones
de ondas viajeras explıcitas. Veremos que, en cierto sentido, esas soluciones pueden
capturarse en nuestro modelo.
Ejemplo 6.10. Consideremos la ecuacion generalizada KdV (gKdV)
ut + βuxxx + up ux = 0, t, x ∈ R.
Como lo mencionamos al iniciar este capıtulo, suponiendo decaimiento en el infinito,
las soluciones de ondas viajeras u(x, t) = u(x− ct) satisfacen la ecuacion
−cu+ βu′′ +1
p+ 1up+1 = 0, (6.30)
de la cual es bien conocido que tiene una solucion explıcita de la forma
u (x) =
(c(p+ 1)(p+ 2)
2
) 1p
sech2p
(p
2
√c
βx
).
Observemos que
up+1 = uσup+1−σ = uσa, con a =1
p+ 1up+1−σ,
lo cual significa que u satisface la ecuacion (6.2) donde f(x, u) = uσa(x) y α = 0. En
este caso, del estimativo (6.5), tenemos que m1 =
√c
β= −m2.
Tambien tenemos que
u (x) ∼ e−m1|x|, a(x) = 1p+1
up+1−σ(x) ∼ e−m1(p+1−σ)|x|.
Ahora, tenga en cuenta que para que se cumpla la hipotesis (H3) sobreM±σ,i, es necesario
que
m1 (p+ 1− σ) = ρ > max m1 + ησ,m2 + ησ= m1 + ησ > m1 +m1σ = m1 (1 + σ) ,
es decir, p + 1− σ > 1 + σ > 2, por lo tanto p > 2. Ası, escogemos p = 3 para exhibir
un ejempo. Tomemos entonces σ = 54y η = 6
5m1, por ejemplo. De esto, tenemos que
m1 + ησ = 52m1 y m2 + ησ = 1
2m1.

118 6. Soluciones positivas para una ecuacion no lineal de segundo orden
Para verificar las hipotesis sobre M±σ,i, notemos que
∫ ∞
0
eαs sech2q (βx) ds =
(22q
2βq − α
)2F1
[2q, q − α
2β, q − α
2β+ 1,−1
],
donde las funcion hipergeometrica 2F1[a, b, c, z] es definida por
2F1 [a, b, c, z] =Γ (c)
Γ (b) Γ (c− b)
∫ 1
0
tb−1 (1− t)c−b−1 (1− tz)−a dt,
donde Γ (z) es la funcion Gamma (vease [1]).
Ahora, tenemos que en este caso a(x) = 14u4−σ(x) = 1
4(10c)
1112 sech
116
(32m1x
). Por lo
tanto, como m1 = −m2 y a(x) es par, tenemos que
M−σ,1 =M+
σ,2 =
∫ ∞
0
e(m1+ησ)sa(s) ds
=(10c)
1112
4
(2
236
m1
)2F1
[116, 112, 1312,−1
]≈ 26,9316
c1112
m1,
M−σ,2 =M+
σ,1 =
∫ ∞
0
e(−m1+ησ)sa(s) ds
=(10c)
1112
4
(2
236
9m1
)2F1
[116, 34, 74,−1
]≈ 1,9018
c1112
m1.
Consideremos entonces
Mσ = maxM+
σ,1 +M−σ,1,M
+σ,2 +M−
σ,2
≈ 28,8334
c1112
m1
= 28,8334 c512
√β.
Ahora, sean γ = x0 = 1 y δ = 2, entonces
m = mınem2δ, em1γ = mıne2m2 , em1 = e−2m1
y ∫ 2
1
G(1, s)ds =
∫ 2
1
em1(1−s)ds =1
m1
(1− e−m1
).
Por lo tanto, para x ∈ [γ, δ] y mλ ≤ u ≤ λ eηδ = λ e2,4m1, tenemos
(1− e−m1)
4m1
(e−2m1λ
)4=
(1− e−m1) e−8m1
4λ4 ≥ λ e1,2m1 ,
esto implica que,
λ3 ≥ 4m1e10,2m1
em1 − 1.

6. Soluciones positivas para una ecuacion no lineal de segundo orden 119
Por lo tanto, la funcion
f (x, u) = a(x)|u|σ,
con a(x) = 14(u (x))4−σ, u (x) = (10c)
13 sech
23
(32
√cβx
)y σ = 5
4, satisfacen los
supuestos del Teorema 6.7 con λ =
(4m1e
10,2m1
em1 − 1
) 13
. Note que λ1−σ 6=Mσ, para σ = 54.
En efecto,
mınc>0,β>0
4√
cβe10,2
√cβ
1− e−√
cβ
13
−(28,8334 c
512
√β)−4
> 0,
entonces λ 6= M−4σ . Ası, por el Teorema 6.7, el problema (6.30) tiene una solucion no
trivial u tal que
c−53β−2
(28,8333)4≤ ‖u‖v ≤
(4m1e
10,2m1
1− e−m1
) 13
, con v(x) = e−65m1|x|.
Ejemplo 6.11. Consideremos ahora la ecuacion p-Gardner generalizada
ut + βuxxx + bupux + au2pux = 0, t, x ∈ R.
Como antes, asumiendo decaimiento en el infinito, la solucion de onda viajera u(x, t) =
u(x− ct) satisface la ecuacion
−cu+ βu′′ +b
p+ 1up+1 +
a
2p+ 1u2p+1 = 0. (6.31)
S. Hamdi, B. Morse, B. Halpen y B. Schiesser en [23], usando computacion simbolica
para una ecuacion elıptica de Riccati, obtuvieron una solucion exacta u(x) para la
ecuacion p-Gardner generalizada (6.31) de la forma
u(x) =
((p+ 1)(p+ 2)c
b
) 1p
(1 +
√1 +
ac(p + 1)(p+ 2)2
(2p+ 1)b2cosh
(p
√c
βx
))− 1p
. (6.32)
Recordemos que la ecuacion (6.31) es un caso particular de la ecuacion (6.2) cuando
α = 0 y
f (x, u) =b
p+ 1up+1 +
a
2p+ 1u2p+1.
En este caso tenemos que m1 =
√c
β= −m2. Observemos tambien que
b
p+ 1up+1 +
a
2p+ 1u2p+1 = b(x) + a(x)u,

120 6. Soluciones positivas para una ecuacion no lineal de segundo orden
donde
b(x) =b
p+ 1(u (x))p+1, a(x) =
a
2p+ 1(u (x))2p.
Ahora, por la definicion de u conseguimos que
u (x) ∼ e−m1|x|, b(x) ∼ e−(p+1)m1|x|, a(x) ∼ e−2pm1|x|.
Note que la hipotesis (H2) sobre M± se satisface, dado que
e−m2sb(s) ∼ e(p+2)m1s → 0, s→ −∞,
y
e−m1sb(s) ∼ e−(p+2)m1s → 0, s→ ∞.
Para que se cumpla la hipotesis (H3) sobre M±1,i, necesitamos que
2pm1 > max m1 + η,m2 + η, η −m2, η −m1 = m1 + η.
Por lo tanto
(2p− 1)m1 > η y η > m1 =⇒ p > 1.
Ası, para ilustrar el analisis, consideremos el caso p = 2. Para simplificar los calculos
considerese a = b = c = 1 y tomemos η = 2m1. Entonces
m1 + η = 3m1 y m2 + η = m1, donde m1 =1√β.
En consecuencia, tenemos que
u (x) = (12)12
(1 +
√1 +
48
5cosh (2m1x)
)− 12
,
b(x) =1
3(u (x))3 = 4
√12
(1 +
√53
5cosh (2m1x)
)− 32
,
y
a(x) =1
5(u (x))4 =
144
5
(1 +
√53
5cosh (2m1x)
)−2
.
Entonces, tenemos que
M− =
∫ 0
−∞e−m2sb(s) ds =
5√12m1
√
24
√53
5−
√
1 +
√53
5
,
M+ =
∫ ∞
0
e−m1sb(s) ds =5√12m1
√
24
√53
5−
√
1 +
√53
5
.

6. Soluciones positivas para una ecuacion no lineal de segundo orden 121
Como m1 = −m2 y a(s) es par, tenemos que
M−1,1 =M+
1,2 =
∫ ∞
0
e(m1+η)sa(s) ds ≈ 0,24
m1
,
M−1,2 =M+
1,1 =
∫ ∞
0
e(−m1+η)sa(s) ds ≈ 0,048
m1.
De las estimaciones anteriores, concluimos que
M− +M+ ≈ 1,4111
m1, M1 = maxM+
1,1 +M−1,1,M
+1,2 +M−
1,2 ≈ 0,288
m1.
Ahora, sean γ = x0 = 1 y δ = 2, entonces
m = mınem2δ, em1γ = mıne2m2 , em1 = e−2m1
y ∫ 2
1
G(1, s)ds =
∫ 2
1
em1(1−s)ds =1
m1
(1− e−m1
).
Por lo tanto, para x ∈ [γ, δ] y mλ = e−2m1λ ≤ u(x) ≤ λ eηδ = λ e4m1 tenemos que
λ ≤4√12 (1− e−m1)
(1 +
√535cosh (4m1)
)− 32
m1e2m1 − 1445(1− e−m1) e−2m1
(1 +
√535cosh (4m1)
)−2 = r.
Por lo tanto, vemos que la funcion f que toma la forma
f (x, u) = b+ au
satisface las hipotesis del Teorema 6.7 con λ = r. Note que r 6= M−+M+
1−M1= 1,4111
m1−0,288
(para 0 < β . 12,056). Ası, por el Teorema 6.7, el problema (6.31) tiene una solucion
no trivial u tal que
r ≤ ‖u‖v ≤1,4111
m1 − 0,288, con v(x) = e−2m1|x|.

.

Conclusiones
En este trabajo de tesis abordamos inicialmente la deduccion de un sistema tipo
Benjamin-Ono con una mayor dispersion a los propuestos por W. Choi y R. Camassa
en [12], [13], [14] (ver ecuacion (2.2)) y J.C. Munoz en [30] (ver ecuacion (2.1)),
para describir la interfaz entre dos fluidos incompresibles de densidad homogenea que
llenan un dominio bidimensional limitado por dos planos rıgidos horizontales, cuando
consideremos el caso lımite de profundidad infinita.
Para el modelo deducido, siguiendo las ideas de T.B. Benjamin, J.L. Bona y D.K.
Bose [4] en el marco de soluciones de ondas solitarias de algunas ecuaciones dispersivas,
aplicamos la teorıa de operadores positivos introducida originalmente por Krasnosel’skii
[26], [27] en la exploracion de la existencia de soluciones de ondas solitarias del sistema.
Inicialmente se construyo el espacio de Frechet apropiado donde aplicar la teorıa,
posteriormente se reformulo el problema para verlo como un problema de punto fijo
de un operador positivo, para pasar luego a verificar que los operadores y kerneles que
aparecen satisfacen las hipotesis necesarias para aplicar los resultados de operadores
positivos en conos, y ası garantizar la existencia de soluciones de ondas solitarias.
Posteriormente, basado en el enfoque introducido inicialmente por H. Chen en [9], el
cual aplica la teorıa del operador positivo a ecuaciones de tipo dispersivo en un dominio
periodico, estudiamos la existencia de soluciones de ondas solitarias periodicas para el
sistema tipo Benjamin-Ono deducido.
Tambien, siguiendo un analisis clasico se demostro que el problema de Cauchy asociado
al sistema tipo Benjamin-Ono deducido, era localmente bien puesto en el caso periodico
y en el caso no periodico.
Por ultimo abordamos el estudio relacionado con la existencia de soluciones positivas
para ecuaciones diferenciales de segundo orden relacionadas con soluciones de onda
viajera para algunas modelos de tercer orden de la forma
ut + αuxx + βuxxx + (f (x, u(x)))x = 0,
123

124 Conclusiones
donde α ≥ 0, β, c > 0, t, x ∈ R y f es una funcion continua no negativa que tiene la
forma
f(x, u) ≤ b(x) + a(x)|u|σ,
donde σ ≥ 1 y a, b son funciones continuas no negativas con algunas propiedades. Para
este analisis se sigue el enfoque utilizado por M. Zima en [44]. El resultado principal de
este capıtulo es consecuencia de la caracterizacion de las soluciones como puntos fijos
de algunos funcionales, definidos mediante la funcion de Green asociada al problema
lineal, y el teorema de punto fijo de Krasnosel’skii bajo una norma tipo Bielecki (ver
[22] y [44]).

Futuros estudios
En trabajos futuros podemos considerar el estudio de diferentes aspectos del sistema
tipo Benjamin-Ono deducido. En particular, queremos analizar algunos de los temas
relacionados con:
⊲ Ilustrar la geometrıa de las soluciones tipo ondas viajeras periodicas del
sistema aproximandolas numericamente. Para lograr esta aproximacion numerica se
involucrara el metodo de Newton junto con una discretizacion espectral de la variable
espacial.
⊲ Abordar el estudio de la teorıa de control asociado con este sistema tipo
Benjamin-Ono.
⊲ Establecer un resultado general para sistemas tipo Benjamin-Ono, similar al resultado
de Bona y Chen para sistemas tipo KdV.
⊲ Analisis de estabilidad de las ondas viajeras.
⊲ Extender el resultado de existencia de soluciones positiva al caso de no linealidades
de la forma f(x, u(x), ux(x)) o inclusive ecuaciones de orden superior.
⊲ Estudio del problema de valor inicial (U(x, 0) = U0(x), con x > 0) con condiciones
de frontera (U(0, t) = G(t), t > 0).
125

.

Bibliografıa
[1] The Bateman Manuscript Project. California Institute of Technology, Ed. A. Erdeelyi,
McGraw-Hill, New York, 1954.
[2] J. Banas and K. Goebel. Measures of Noncompactness in Banach Spaces. Dekker, New
York/Basel, 1980.
[3] J. V. Baxley and J. C. Martin. Positive solutions of singular nonlinear boundary value
problems. Journal of computational and applied mathematics, 113(1-2):381–399, 2000.
[4] T.B. Benjamin, J.L. Bona, and D.K. Bose. Solitary-wave solutions of nonlinear problems.
Philos. Trans. Roy. Soc. London A: Math., Phys. Eng. Sci., 331(1617):195–244, 1990.
[5] A. Bielecki. Une remarque sur la methode de Banach–Cacciopoli–Tichonov dans la
theorie des equations differentielles ordinaires. Bull. Acad. Polon. Sci., 4:261–264, 1956.
[6] J.L. Bona and H. Chen. Solitary waves in nonlinear dispersive systems. Discrete Contin.
Dyn. Syst. Ser. B, 2(3):313–378, 2002.
[7] J.L. Bona and R. Smith. The initial-value problem for the Korteweg-de Vries equation.
Phil. Trans. R. Soc. Lond. A, 278(1287):555–601, 1975.
[8] R. Camassa, P.-O. Rusas, A. Saxena, and R. Tiron. Fully nonlinear periodic internal
waves in a two-fluid system of finite depth. J. Fluid Mech., 652:259–298, 2010.
[9] H. Chen. Existence of periodic travelling-wave solutions of nonlinear, dispersive wave
equations. Nonlinearity, 17:2041–2056, 2004.
[10] H. Chen, M. Chen, and N.V. Nguyen. Cnoidal wave solutions to Boussinesq systems.
Nonlinearity, 20(6):1443–1461, 2007.
[11] M. Chen. Exact traveling-wave solutions to bidirectional wave equations. Internat. J.
Theoret. Phys., 37(5):1547–1567, 1998.
127

128 Bibliografıa
[12] W. Choi and R. Camassa. Long internal waves of finite amplitude. Physical Review
Letter, 77(9):1759–1762, 1996.
[13] W. Choi and R. Camassa. Weakly nonlinear internal waves in a two-fluid system. J.
Fluid Mech., 313:83–103, 1996.
[14] W. Choi and R. Camassa. Fully nonlinear internal waves in a two-fluid system. J. Fluid
Mech., 396:1–36, 1999.
[15] J. Conway. Functions of one Complex Variable. Number 2ed. Graduate Texts in
Mathematics, Springer, New York, 2008.
[16] Z.J. Duoandikoetxea. Fourier analysis, volume 29. American Mathematical Soc., 2001.
[17] L. H. Erbe and H. Wang. On the existence of positive solutions of ordinary differential
equations. Proc. Amer. Math. Soc., 120:743–748, 1994.
[18] J.A. Gear and R. Grimshaw. Weak and strong interactions between internal solitary
waves. Stud. Appl. Math., 70(3):235–258, 1984.
[19] T. Gerkema and J.T.F. Zimmerman. An introduction to internal waves. NIOZ: Texel.,
2008.
[20] A. Granas. The Leray-Schauder index and fixed point theory for arbitrary ANRs. Bull.
Soc. Math. Fr., 100:209–228, 1972.
[21] D. Guo and V. Lakshmikantham. Multiple solutions of two-point boundary value
problems of ordinary differential equations in Banach spaces. J. Math. Anal. Appl.,
129:211–222, 1988.
[22] D. Guo and V. Lakshmikantham. Nonlinear Problems in Abstract Cones. Academic
Press, New York, 1988.
[23] S. Hamdi, B. Morse, B. Halpen, and W. Schiesser. Analytical solutions of long nonlinear
internal waves: Part i. Nat Hazards, 5(7):597–607, 2011.
[24] J. Henderson and H. Wang. Positive solutions for nonlinear eigenvalue problems. J.
Math. Anal. Appl., 208:252–259, 1997.
[25] R. Iorio, Jr and V. Iorio. Fourier Analysis and Partial Differential Equations. Cambridge
Studies in Advanced Mathematics. Cambridge University Press, 2001.

Bibliografıa 129
[26] M.A. Krasnosel’skii. Positive solutions of operator equations. ed. L.F. Boron: P. Noordhok
Ltd., Groningen, 1964.
[27] M.A. Krasnosel’skii. Topological methods in the theory of nonlinear integral equations.
ed. J. Burlak, NY, USA: Pergamon Press., 1964.
[28] F. Merdivenci-Atici and G. Sh. Guseinov. On the existence of positive solutions
for nonlinear differential equations with periodic boundary conditions. Journal of
Computational and Applied Mathematics, 132(2):341–356, 2001.
[29] J.C. Munoz-Grajales. Existence and computation of periodic travelling-wave solutions
of a dispersive system. Commun. Math. Sci., 10(3):917–944, 2012.
[30] J.C. Munoz-Grajales. Existence and numerical approximation of solutions of an improved
internal wave model. Math. Model. Anal., 19(3):309–333, 2014.
[31] N.S. Nise. Control systems engineering. California State Polytechnic University, Pomona,
Welly, Seventh edition, 2015.
[32] R. Olach. Positive periodic solutions of delay differential equations. Applied Mathematics
Letters, 26(12):1141–1145, 2013.
[33] R.L. Pego and J.R. Quintero. Two-dimensional solitary waves for a Benney-Luke
equation. Phys. D, 132(4):476–496, 1999.
[34] F.A. Pipicano. Ondas viajeras periodicas para un sistema Benjamin-Ono regularizado.
Master’s thesis, Universidad del Valle, Cali, Colombia, 2015.
[35] F.A. Pipicano and J.C. Munoz-Grajales. Existence of periodic travelling wave solutions
for a regularized Benjamin-Ono system. J. Diff. Eq., 259(12):7503–7528, 2015.
[36] J.R. Quintero and J.C. Munoz-Grajales. Solitary waves for an internal wave model.
Discrete Contin. Dyn. Syst., 36(10):5721–5741, 2016.
[37] D. Roumegoux. A symplectic non-squeezing theorem for BBM equation. Dyn. Partial
Differ. Equ., 7(4):289–305, 2010.
[38] J.F. Toland. Solitary wave solutions for a model of the two-way propagation of water
waves in a channel. Math. Proc. Cambridge Philos. Soc., 90(2):343–360, 1981.
[39] J.F. Toland. Uniqueness and a priori bounds for certain homoclinic orbits of a Boussinesq
system modelling solitary water waves. Comm. Math. Phys., 94(2):239–254, 1984.

130 Bibliografıa
[40] P. J. Torres. Existence of one-signed periodic solutions of some second-order
differential equations via a Krasnoselskii fixed point theorem. J. Differential Equations,
190(2):643–662, 2003.
[41] P. J. Torres. Guided waves in a multi-layered optical structure. Nonlinearity,
19(9):2103–2113, 2006.
[42] E.O. Tuck. On positivity of Fourier transforms. Bull. Austral. Math. Soc., 74:133–138,
2006.
[43] K. Zima. Sur l’existence des solutions d’une equation integro-differentielle. Ann. Polon.
Math., 27:181–187, 1973.
[44] M. Zima. On positive solutions of boundary value problems on the half-line. Journal of
Mathematical Analysis and Applications, 259:127–136, 2001.
Top Related