





Idiomas
Páginas
Jurídico


SISTEMA DE LOCOMOCIÓN TRICICLO
FCC BUAP
4/16/2016 1Locomoción triciclo

Consideraciones de diseño
• Maniobrabilidad• Controlabilidad• Tracción• Capacidad de subir pendientes• Estabilidad• Mantenimiento• Impacto ambiental• Consideraciones de navegabilidad
4/16/2016 2Locomoción triciclo

Triciclo,I• La rueda delantera sirve
p a r a l a t r a c c i ó n , y direccionamiento
• El eje trasero, con dos r u e d a s l a t e r a l e s , e s pasivo y sus ruedas se mueven libremente
d1
d2
ⱷ
4/16/2016 3Locomoción triciclo

Triciclo,II• La rueda trasera sirve
p a r a l a t r a c c i ó n , y direccionamiento
• El eje delantero, con dos r u e d a s l a t e r a l e s , e s pasivo y sus ruedas se mueven libremente
d1
d2
ⱷ
4/16/2016 4Locomoción triciclo
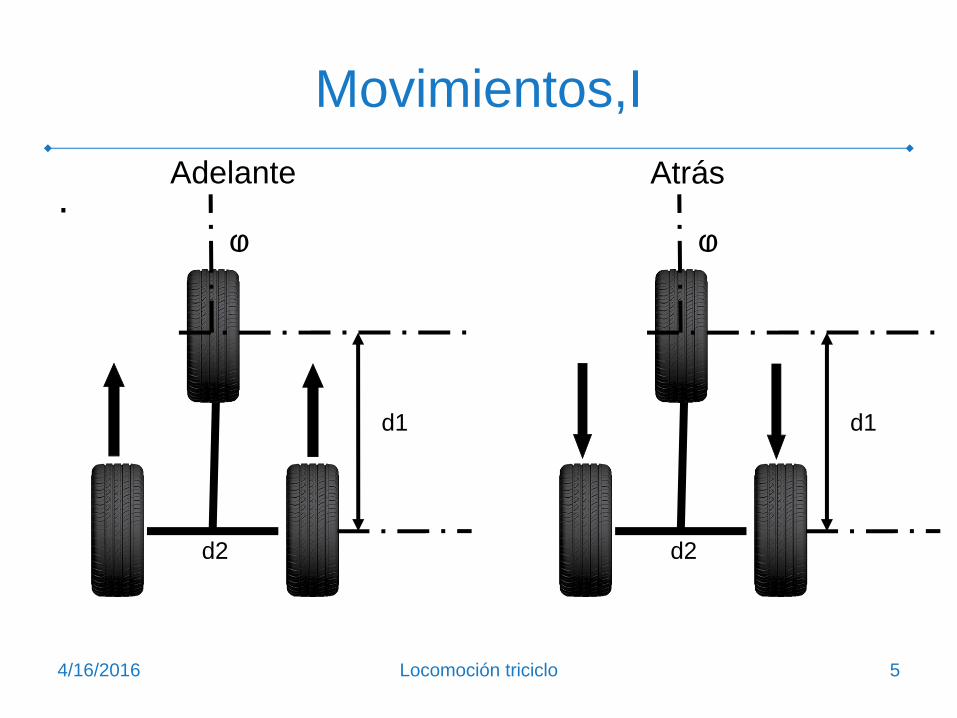
Movimientos,I
.
d1
d2
ⱷ
d1
d2
ⱷ
Adelante Atrás
4/16/2016 5Locomoción triciclo

Movimientos,II
d1
d2
ⱷ
d1
d2
ⱷ
Giro derecha Giro izquierda
4/16/2016 6Locomoción triciclo

• Puede presentar problemas de estabilidad en terrenos dificiles
• Requiere guiado no holónomo
Desventajas
4/16/2016 7Locomoción triciclo

Desventajas
• Restricciones no holónomas– El robor puede moverse adelante y atras,
pero no lateralmente por deslizamiento de las ruedas
4/16/2016 8Locomoción triciclo

Desventajas
4/16/2016 9Locomoción triciclo

Cinemática
• Se adoptan las siguientes hipótesis:
– El robot se mueve sobre una superficie plana
– Los ejes guiados son perpendiculares al suelo
– No hay deslizamiento en las llantas
– El robot no tiene partes flexibles
4/16/2016 10Locomoción triciclo

Cinemática
– El vehículo se moverá de un punto a otro a lo largo de un arco de circunferencia
– El robot se comporta como un sólido rigido, de forma que si existen partes moviles(ruedas de dirección), estas se situarán en la posición adecuada mediante el sistema de control
4/16/2016 11Locomoción triciclo

Cinemática
El modelo se reduce al del monociclo conv=w*radiov= v*cos(α)α=α
El cambio de dirección del vehículoѳ= ѳ+ W
v= velocidad lineal del vehiculow= velocidad angular del vehiculo
X
Y
y
x
d2
d1
ѳ
α
vt
w*α
4/16/2016 12Locomoción triciclo

Referencias• Diseño y contruccion de un robot movil autónomo contra incendios,
Jose Miguel Sánchez Bautista, junio 2003, puebla. Tesis.
4/16/2016 13Locomoción triciclo
Top Related
