






Idiomas
Páginas
Jurídico

INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA Y ARQUITECTURA
UNIDAD ZACATENCO
LA TEORÍA DE BLOQUES APLICADA
A LA MECÁNICA DE ROCAS
TESIS
QUE PARA OBTENER EL TÍTULO DE
INGENIERO CIVIL
PRESENTA:
C. JUAN CARLOS AYES ZAMUDIO
ASESOR:
ING. MAGDALENO MARTÍNEZ GOVEA
MÉXICO D.F. MARZO DE 2011

ÍNDICE GENERAL
Agradecimientos i
Resumen ii
Introducción iv
Marco teórico v
Metodología xiv
Capítulo I Descripción de la geometría y estabilidad de los bloques utilizando
métodos vectoriales 1
I.1 Ecuaciones de líneas y planos 2
I.2 Descripción de un bloque 7
I.3 Ángulos en el espacio 14
I.4 Block Pyramid (BP) 15
I.5 Ecuaciones de fuerzas 17
I.6 Cálculo de las direcciones de deslizamiento 19
I.7 Ejemplos 22
Capítulo II El uso de las proyecciones hemisféricas 36
II.1 Enfoque tradicional 36
II.2 Enfoque aplicado a la teoría de bloques 50
II.3 Ejemplos 73
Capítulo III La removilidad de los bloques 88
III.1 Tipos de bloques 88
III.2 Teorema de finitud 92
III.3 El teorema de finitud aplicado en las proyecciones estereográficas 95
III.4 Teorema de la removilidad de un bloques convexo y finito 99
III.5 Aplicación del teorema de la removilidad en tres dimensiones
utilizando la proyección estereográfica 101
Capítulo IV Joint Blocks (JB) 104
IV.1 Joint Blocks en tres dimensiones 107
IV.2 Solución estereográfica para los joint blocks 108
Capítulo V Teoría de bloques para excavaciones superficiales 113
V.1 Conceptos básicos 113
V.2 Modos de falla 114
V.3 Análisis de la cuña clave 117
V.4 Diseño 118
V.5 Condiciones para la removilidad de bloques que intersecan a
superficies de excavación 119
V.6 Identificación de las potenciales cuñas claves usando la
proyección estereográfica 123
V.7 Bloques removibles con un conjunto de discontinuidades repetido 129
V.8 Bloques removibles con dos conjuntos de discontinuidades repetidos 133
V.9 Evaluación de la finitud y removilidad de los bloques utilizando
métodos vectoriales 134
V.10 Número de bloques de diferentes tipos en una excavación superficial 139
V.11 Procedimientos para el diseño de taludes en roca 139
V.12 Bloques removibles en una cara excavada, utilizando un levantamiento
geológico 152

Capítulo VI La teoría de bloques aplicada a cámaras subterráneas 160
VI.1 Cuñas claves en el techo, piso y paredes 161
VI.2 Bloques removibles en el techo 161
VI.3 Bloques removibles en el piso 162
VI.4 Bloques removibles en las paredes 162
VI.5 Bloques removibles en dos planos simultáneamente: bordes
cóncavos 163
VI.6 Bloques removibles simultáneamente en 3 planos: esquinas
cóncavas 168
VI.7 Ejemplo: Análisis de Cuña Clave para una Cámara Subterránea 172
Capítulo VII Teoría de bloques para túneles y lumbreras 183
VII.1 Bloques con caras curvas 186
VII.2 Sistemas de coordenadas locales para puntos en el cilindro del túnel 187
VII.3 EP para bloques curvos 189
VII.4 Teorema del eje del túnel 191
VII.5 Tipos de bloques en los túneles 191
VII.6 Número de bloques infinitos de un túnel 193
VII.7 Número de bloques removibles de un túnel 193
VII.8 La cuña clave máxima 193
VII.9 Teorema de la máxima área removible en la sección del túnel 194
VII.10 Cálculo de la cuña clave máxima utilizando métodos estereográficos 196
VII.11 Determinación del área máxima removible mediante el uso de las
proyecciones estereográficas 202
Capítulo VIII Estabilidad y cinemática de bloques removibles 220
VIII.1 Modos de deslizamiento 221
VIII.2 La fuerza de deslizamiento 226
VIII.3 Condiciones cinemáticas para desprendimiento/levantamiento y
deslizamiento 231
VIII.4 Solución vectorial para el JP correspondiente a una dirección de
deslizamiento dada 235
VIII.5 Proyección estereográfica para el JP correspondiente a una
dirección de deslizamiento dada 237
VIII.6 Encontrar la dirección de deslizamiento para un JP dado 250
Análisis de resultados xvi
Conclusiones xvii
Recomendaciones xviii
Bibliografía xix
Anexo I Ejemplos de aplicación xxi
Diseño de talud xxi
Diseño de túnel xxviii
Índice de tablas lvi
Índice de figuras lviii
Índice de ejemplos lxv

i
Agradecimientos
Agradezco a mis Padres por ser la luz que ha guiado mi vida, siempre buscando mi
bienestar, aunque yo me oponga. Gracias por su fuerza y amor, los cuales siempre me
guiarán y me dieron (a mi ver) el segundo regalo más grande que alguien puede dar, mi
educación. Gracias por pensar en su hijo, incluso en aquellos momentos en los que sólo
pensaba en mí, espero que estén orgullosos de su hijo, los amo.
Agradezco a mi madre María, por entregar su vida a nosotros sus hijos, por anteponer
nuestros deseos a los suyos; siempre te he agradeceré por ser tan buena con nosotros, por tu
trabajo, perseverancia y esfuerzo…
A mi padre Juan, por estar conmigo en cada paso o tropiezo que doy, por ser la guía que me
enseñó el amor y el aprecio al estudio, por su dedicación, por su esfuerzo de alimentarnos
en cada una de las facetas que hacen de una persona, un mejor ser humano…
A mis hermanos, aunque lejanos física o emocionalmente, siempre recuerdo con agrado los
momentos que hemos pasado juntos y siempre los querré.
A ti mi bebé, por ser el motor de mi vida; quizá no lo sepas pero el sólo mirarte me da
fuerzas, gracias por existir. Perdóname…
A ti Diego, me hace inmensamente feliz tu presencia en mi vida y al igual que tu hermana
los amo, más allá de lo que se puedan imaginar algún día…
A mi familia (tías, tíos y primos), que siempre ha querido lo mejor para nosotros….
A ustedes (ILI), LA…
A las personas que de alguna manera me han ayudado a ser mejor persona, mejor
estudiante, mejor profesionista, quizá nunca se dieron cuenta, pero en cada ayuda, cada
felicitación, cada regaño, hacen de mí un mejor ser humano…
Al Ingeniero Magdaleno Martínez Govea, mi asesor de tesis, por su tiempo y dedicación,
gracias…
A mis profesores, que dejaron una huella indeleble…
A mi País, por darme la oportunidad de estudiar, por brindarme las herramientas necesarias
para mejorar, día a día intento retribuírtelo…
A mi Alma Mater…

ii
Resumen
“Quien nada hace, no yerra y, quien no yerra, no aprende”
Fray Luca Pacioli (Paciolo di Borgo)
a Teoría de Bloques es una herramienta poderosa para valuar la estabilidad de
excavaciones subterráneas y de taludes en masas rocosas duras y fisuradas. Su
objetivo primordial es conocer el grado de estabilidad del conjunto de bloques
formados por las distintas discontinuidades presentes en el macizo rocoso, antes y después
de que un sistema de soporte (ademe) sea aplicado. El principio fundamental de la Teoría
de Bloque es que la falla del macizo rocoso se inicia por el movimiento de ciertos bloques
expuestos en una superficie de excavación. Por lo tanto, si estos bloques denominados
cuñas claves, se mantienen en su lugar, se previene el movimiento de otros bloques y por
ende se evita una posible falla en cadena.
Las posibles aplicaciones de la teoría son:
En Estabilidad de taludes:
Vertedores de presas y cimentaciones
Cortes permanentes en vías de
comunicación
Taludes naturales en zonas
residenciales
Etc.
En Obras Subterráneas:
Túneles de drenaje
Cámaras subterráneas
Túneles carreteros
Portales de minas
Etc.
Debido a la casi nula bibliografía referente al tema (a excepción de artículos diseminados
en diferentes congresos y simposios internacionales), se ha tenido que traducir gran parte
del texto original (Goodman & Shi, Block theory and its application to rock engineering,
1985), adicionalmente se ha extendido y detallado los problemas y se hizo hincapié en
llevar de la mano en el cálculo de cada uno de los ejemplos; lo anterior con el fin de
minimizar al máximo el tiempo de estudio de aquellas personas que deseen conocer y
aprender la teoría. Para conocer la validez matemática de los diferentes teoremas se remite
al lector al texto original.
Se espera que el presente trabajo, permita que aquellos lectores que no les sea posible leer
el texto original, por no tener acceso al libro o por no comprender/leer en inglés, tengan
posibilidad de adentrarse y conocer esta teoría.
Para aquellos que deseen aprender los procedimientos de las proyecciones estereográficas,
se recomienda leer (Priest, 1985), aunque en el capítulo II se presentan algunos ejemplos de
construcciones básicas mediante el uso de la proyección estereográfica, además, en el
mismo capítulo se dan a conocer expresiones que permiten dibujar y obtener de manera
rápida y precisa las representaciones ortográficas de planos, vectores y diversas relaciones
necesarias en muchos métodos empleados en la mecánica de rocas, esto mediante la ayuda
L

iii
de algún programa de dibujo asistido por computadora (CAD), evitando, así el uso manual
de la bien conocida estereored de ángulos iguales.
Es de importancia recalcar, que el hemisferio utilizado en la solución de los problemas a lo
largo del texto, es el superior, se hace énfasis en esto, para evitar confusión al lector con
conocimientos en las proyecciones estereográficas, ya que los dibujos parecerán invertidos,
por lo que se pide leer el capítulo referente a las construcciones geométricas.
Se utilizó con gran éxito, paquetería comercial de dibujo técnico asistido por computadora
(CAD) y hojas de cálculo, que aunque no son imprescindibles para desarrollar
numericamente los diversos teoremas, si son de gran ayuda para mejorar el tiempo de
resolución.
Finalmente, en caso de necesitar ayuda para interpretar o entender conceptos relacionados
al presente trabajo, se proporciona el siguiente correo electrónico personal del autor, para
contactarlo en caso de ser necesario. Email: [email protected]

iv
INTRODUCCIÓN
ste trabajo tiene como objetivo principal, el proporcionar al interesado en el tema,
las herramientas básicas necesarias para aplicar la teoría de bloques, además de que
se proporciona una fuente de consulta en español sobre el tema.
La presente tesis está organizada en 8 capítulos y un anexo; los cuales se recomiendan ser
estudiados de manera secuencial, para lograr entender la teoría.
El capítulo I, presenta los bases matemáticas de la teoría de bloques, las cuales se basan
principalmente en sistemas vectoriales sencillos de resolver, por lo que se espera que el
lector no tenga problemas para comprenderlos, asimismo se presenta una sección de
ejemplos los cuales están resueltos a detalle.
El capítulo II, presenta lo relacionado a las proyecciones estereográficas, sus aplicaciones
en la teoría de bloques y ejemplos de aplicación.
El capítulo III, presenta los teoremas medulares de la teoría de bloques, así como su
aplicación utilizando métodos vectoriales y métodos estereográficos.
El capítulo IV, presenta una aplicación de la teoría de bloques, la cual es aplicable a los
problemas o trabajos de dinamiteo.
El capítulo V, presenta la aplicación formal de la teoría a excavaciones superficiales, es
decir, a taludes en roca.
El capítulo VI, presenta la aplicación de la teoría a excavaciones subterráneas,
específicamente a las cámaras subterráneas prismáticas.
El capítulo VII presenta la aplicación de la teoría a túneles y/o lumbreras.
El capítulo VIII, presenta los problemas relacionados con la estabilidad y cinemática de los
bloques removibles, así como las expresiones utilizadas para obtener las fuerzas y
direcciones de deslizamiento.
El anexo I, presenta dos ejemplos de aplicación, en los cuales se guía de manera secuencial
al lector para su fácil entendimiento.
E

v
MARCO TEÓRICO
La teoría es el lenguaje por medio de la cual pueden expresarse claramente lecciones de experiencia.
Cuando no hay ninguna teoría, como en las obras de tierra, no existe sabiduría
adquirida, únicamente fragmentos incompresibles. Karl Terzaghi, 1919
SUPOSICIONES DE LA TEORÍA DE BLOQUE
La finalidad de esta teoría es producir técnicas para especificar la formación de las cuñas
críticas que intersecan a una excavación; la cual es aplicable a la ingeniería de rocas,
especialmente en excavaciones en roca dura donde el movimiento de los bloques
predefinidos precipitan la falla.
El problema tiene limitaciones en cuanto a alcances: encontrar las cuñas críticas creadas
por las intersecciones de las discontinuidades en una masa rocosa que ocurren en una
superficie definida. Aún así, el problema es suficientemente difícil, por lo que es necesario
adoptar una serie de suposiciones simplificadoras para obtener soluciones trabajables, y
éstas son:
Considerar que todas las superficies de las discontinuidades son perfectamente
planas. Esto ocurre en la mayoría de las juntas y fallas, pero no en todas y esta
suposición puede estar completamente mal aplicada en los miembros de los
plegamientos. Se asume la perfecta planicidad con el fin de describir la morfología
del bloque a través de ecuaciones con vectores lineales.
Asumir que las superficies de las discontinuidades, se extienden totalmente a través
del volumen de interés, esto es, ninguna discontinuidad se terminará dentro de la
región de un cuña clave.
Estas simplificaciones son para presuponer que todos los bloques están completamente
definidos por las superficies de discontinuidades preexistentes, de tal manera, que no se
suponen nuevas grietas en el análisis del movimiento del bloque estudiado. En vista de lo
anterior, esto limita la aplicación a un sólo tipo de modo de falla, excluyendo fallas con
nuevas grietas como en la figura i.1.

vi
Nuevo Fisuramiento
Figura i. 1. Creación de nuevos bloques por la introducción de nuevas fallas
Los bloques definidos por el sistema de superficies de discontinuidades se
consideran cuerpos rígidos. Esto significa que la deformación y distorsión del
bloque no serán introducidas en el análisis generado por la teoría de bloque. El
problema de la cuña clave es formulado entonces, enteramente a través de
geometría básica y manipulaciones vectoriales.
En la examinación subsecuente de la estabilidad de las cuñas claves, la cual es
encontrada a través de la teoría de bloque, se introducirá las propiedades de
resistencia para las discontinuidades. Debido al desarrollo de la resistencia
(fricción) a lo largo de las caras de las cuñas claves, se supone una deformación a lo
largo de las superficies de los bloques, lo que implica acumulación de esfuerzos y
deformaciones dentro de los bloques.
Se asume que las discontinuidades y las superficies de excavación son parámetros
de entrada para iniciar cualquier intento de análisis; si el conjunto de
discontinuidades están dispersas en torno a una tendencia central, alguna dirección
deberá ser tomada como representativa del conjunto. En la práctica esto se hace a
través de análisis estadísticos, los cuales proporcionan los puntos de mayor
concentración de un determinado conjunto de datos. Figura i.2.

vii
Figura i. 2. Análisis estadístico para encontrar las concentraciones de un conjunto de datos geológicos, con
los cuales puede definirse el conjunto de discontinuidades principales en un macizo rocoso.
A través de técnicas de simulación de Monte Carlo, debería ser posible examinar la
influencia de las variaciones de los diversos ángulos presentes en el conjunto y relacionar
los resultados estadísticos en términos de probabilidades.
En resumen, la teoría de bloque, se desarrollará con base en la información geométrica
derivada de la geología estructural y de cálculos relativos al equilibrio, usando simple
estática. Se asume que la discontinuidad mecánica está relevada al segundo plano en
importancia, en referencia al cálculo y descripción de los bloques claves. Solamente los
movimientos del los bloques son considerados.
COMPARACIÓN DE LA TEORÍA DE BLOQUE CON OTROS ENFOQUES
ANALÍTICOS
Un vasto número de herramientas analíticas están disponibles para cálculos ingenieriles
relacionados a excavaciones. Éstas incluyen métodos numéricos (análisis por elemento
finito, análisis por diferencias finitas y análisis por elementos discretos), técnicas usando
modelos físicos, etc. La mayoría de las decisiones ingenieriles relacionadas a las
excavaciones en roca están condicionadas de igual manera al buen criterio empírico
(experiencia), como a los juicios basados en informes técnicos.
viii
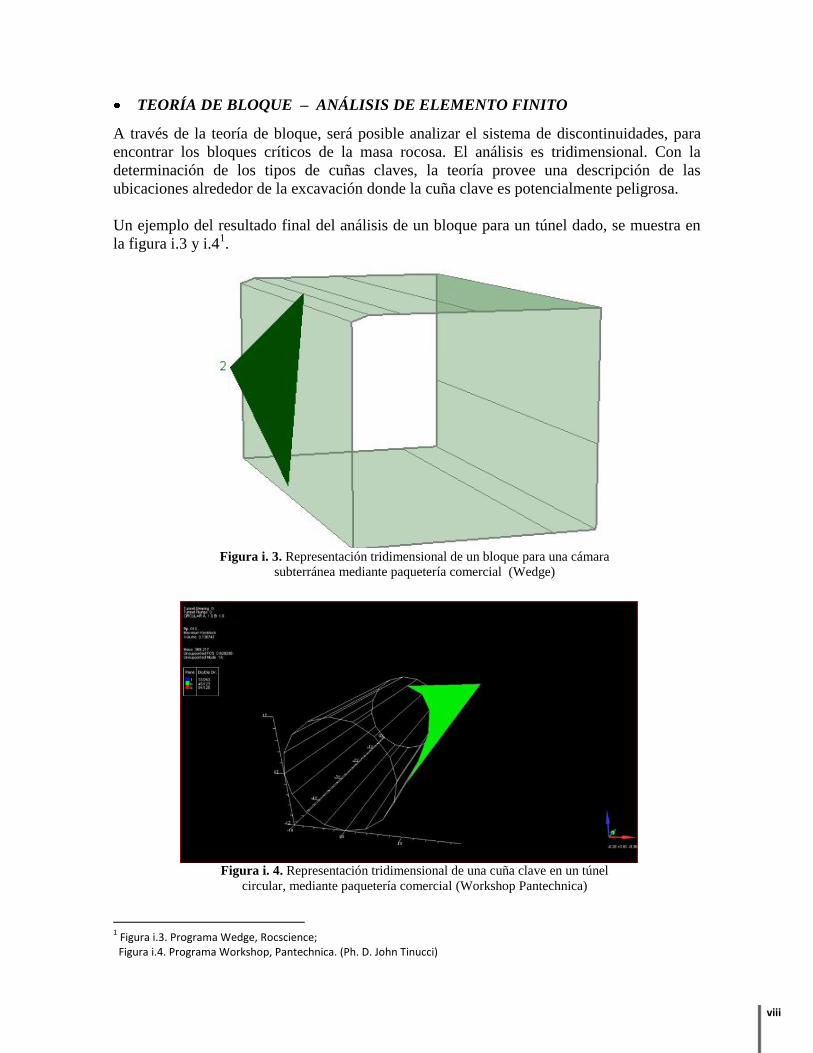
TEORÍA DE BLOQUE – ANÁLISIS DE ELEMENTO FINITO
A través de la teoría de bloque, será posible analizar el sistema de discontinuidades, para
encontrar los bloques críticos de la masa rocosa. El análisis es tridimensional. Con la
determinación de los tipos de cuñas claves, la teoría provee una descripción de las
ubicaciones alrededor de la excavación donde la cuña clave es potencialmente peligrosa.
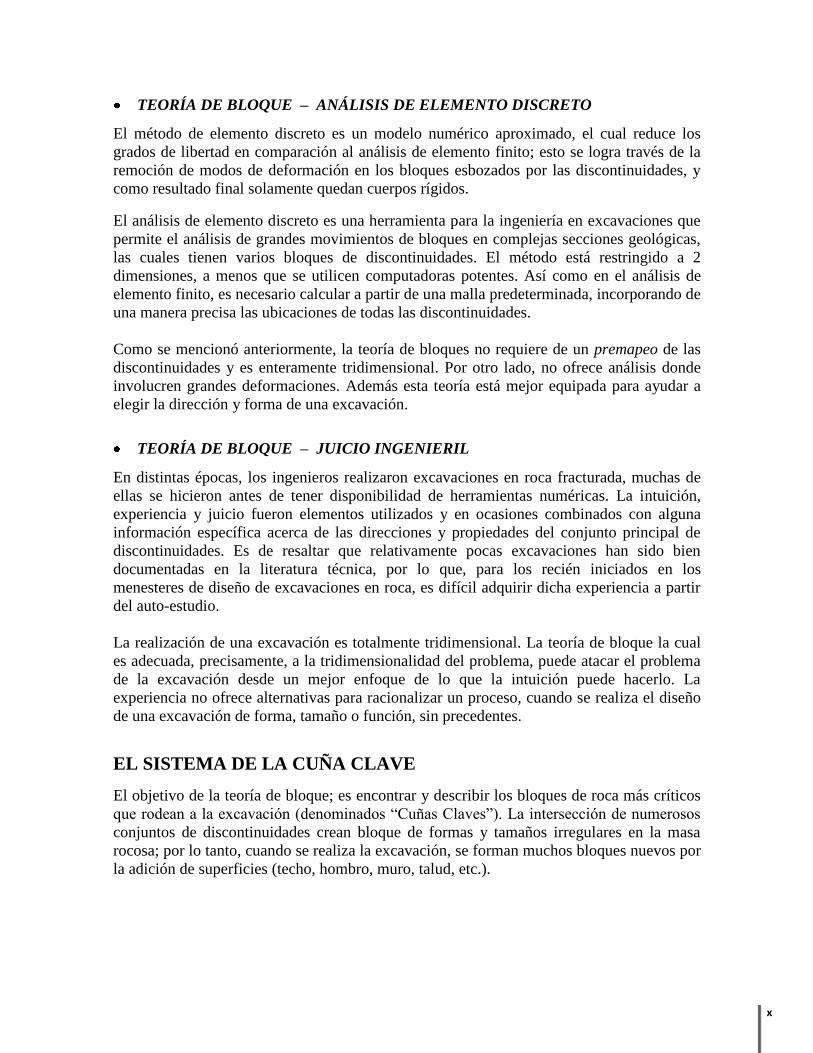
Un ejemplo del resultado final del análisis de un bloque para un túnel dado, se muestra en
la figura i.3 y i.41.
Figura i. 3. Representación tridimensional de un bloque para una cámara
subterránea mediante paquetería comercial (Wedge)
Figura i. 4. Representación tridimensional de una cuña clave en un túnel
circular, mediante paquetería comercial (Workshop Pantechnica)
1 Figura i.3. Programa Wedge, Rocscience;
Figura i.4. Programa Workshop, Pantechnica. (Ph. D. John Tinucci)

ix
El bloque más grande; --definido por el conjunto de discontinuidades, la sección del túnel y
la dirección del mismo--; es dibujada en relación con el túnel. El siguiente paso será
proveer soporte, para prevenir el movimiento de este bloque o analizar para conocer si la
fricción disponible en las caras mantendrá al bloque en un estado seguro. Alternativamente,
la teoría puede modificar la dirección del túnel como la forma del mismo (sección
transversal), para encontrar la combinación más favorable.
Las diferencias entre la teoría de bloque y el análisis de elemento finito, son
fundamentalmente las siguientes:
El análisis de elemento finito determina deformaciones y desplazamientos a través
del modelo, mientras que la teoría de bloque no determina en ningún momento
deformaciones o desplazamientos. A lo mucho determina una lista de bloques
peligrosos o potencialmente peligrosos detrás de la superficie de excavación.
Figura i. 5. Distribución de Desplazamientos Verticales Utilizando FEM
El análisis de elemento finito determina esfuerzos y con dificultad, estos pueden
ser manipulados para encontrar regiones de potencial peligro. La teoría de bloque
inmediatamente localiza puntos o zonas peligrosas y provee un estimado de la
fuerza necesaria para prevenir la falla. La teoría de bloque no encuentra esfuerzos
dentro o entre los elementos estudiados.
El análisis de elemento finito puede ser utilizado paramétricamente; una vez que
un modelo ha sido preparado para encontrar la forma más viable de una
excavación. Pero no puede proporcionar mucha ayuda para recomendar la mejor
dirección de una excavación. La teoría de bloque, en cambio, puede manejar
ambas tareas de una muy buena manera.
El análisis de elemento finito siempre debe calcularse a partir de una malla
específica, con dirección y espaciamiento de las discontinuidades predefinidas. En
contraste la teoría de bloque proporciona un sistema de discontinuidades sin
necesidad de utilizar un mapa de discontinuidades específico. Así, en una etapa
posterior, la teoría puede ser aplicada a un punto de discontinuidad elegida
previamente (si hay información específica).En general, el análisis de elemento
finito es un procedimiento de cálculo mucho más largo que el necesitado por la
teoría de bloque y siempre necesitará una computadora. En cambio, la teoría de
bloque puede ser aplicada enteramente a través de cálculos manuales y métodos
gráficos.
x
TEORÍA DE BLOQUE – ANÁLISIS DE ELEMENTO DISCRETO
El método de elemento discreto es un modelo numérico aproximado, el cual reduce los
grados de libertad en comparación al análisis de elemento finito; esto se logra través de la
remoción de modos de deformación en los bloques esbozados por las discontinuidades, y
como resultado final solamente quedan cuerpos rígidos.
El análisis de elemento discreto es una herramienta para la ingeniería en excavaciones que
permite el análisis de grandes movimientos de bloques en complejas secciones geológicas,
las cuales tienen varios bloques de discontinuidades. El método está restringido a 2
dimensiones, a menos que se utilicen computadoras potentes. Así como en el análisis de
elemento finito, es necesario calcular a partir de una malla predeterminada, incorporando de
una manera precisa las ubicaciones de todas las discontinuidades.
Como se mencionó anteriormente, la teoría de bloques no requiere de un premapeo de las
discontinuidades y es enteramente tridimensional. Por otro lado, no ofrece análisis donde
involucren grandes deformaciones. Además esta teoría está mejor equipada para ayudar a
elegir la dirección y forma de una excavación.
TEORÍA DE BLOQUE – JUICIO INGENIERIL
En distintas épocas, los ingenieros realizaron excavaciones en roca fracturada, muchas de
ellas se hicieron antes de tener disponibilidad de herramientas numéricas. La intuición,
experiencia y juicio fueron elementos utilizados y en ocasiones combinados con alguna
información específica acerca de las direcciones y propiedades del conjunto principal de
discontinuidades. Es de resaltar que relativamente pocas excavaciones han sido bien
documentadas en la literatura técnica, por lo que, para los recién iniciados en los
menesteres de diseño de excavaciones en roca, es difícil adquirir dicha experiencia a partir
del auto-estudio.
La realización de una excavación es totalmente tridimensional. La teoría de bloque la cual
es adecuada, precisamente, a la tridimensionalidad del problema, puede atacar el problema
de la excavación desde un mejor enfoque de lo que la intuición puede hacerlo. La
experiencia no ofrece alternativas para racionalizar un proceso, cuando se realiza el diseño
de una excavación de forma, tamaño o función, sin precedentes.
EL SISTEMA DE LA CUÑA CLAVE
El objetivo de la teoría de bloque; es encontrar y describir los bloques de roca más críticos
que rodean a la excavación (denominados “Cuñas Claves”). La intersección de numerosos
conjuntos de discontinuidades crean bloque de formas y tamaños irregulares en la masa
rocosa; por lo tanto, cuando se realiza la excavación, se forman muchos bloques nuevos por
la adición de superficies (techo, hombro, muro, talud, etc.).

xi
Cuña Clave
Figura i.6. Arco, donde el principio de cuña clave es aplicable
Algunos de estos bloques no serán capaces de moverse hacia el espacio libre de la
excavación, quizá debido a sus formas, tamaños u orientaciones, o quizá porque les impida
moverse otros bloques adyacentes; Sin embargo, unos pocos bloques (figura i.6) están
inmediatamente en condición de moverse, tan rápido como se forman, es decir, al mismo
instante del trabajo de excavación; de tal forma que otros bloques que anteriormente
estaban restringidos al movimiento, ahora no lo están.
La figura i.7, muestra dos arcos de cimentación de un acueducto romano que se mantiene y
soporta cargas sin pernos o tornillos. En este arco de mampostería cada bloque, es una cuña
clave, debido a que la pérdida de una sola cuña, causaría el colapso de toda la estructura.
Cuñas Claves
Figura i. 7. Arco donde cada bloque puede ser considerado como una cuña clave
Otro tipo de arco de mampostería es el bosquejado en la figura i.7a; donde el bloque
sombreado, con forma diferente al resto, está sostenido por tornillos. Mientras el bloque se
mantenga en su lugar, el arco funcionará como conjunto.

xii
Cuña Clave
a)
5
4
2
34
2
1
1
b)
4
1
1
2
2
2
2
3Cuña Clave
c) d)
p
1234
Figura i. 8. Diversos modelos donde se aplica el concepto de cuña clave
Este modelo es el más aproximado a una excavación que el arco romano Voissor de la
figura i.7, debido a que los bloques alrededor de la excavación, no son perfectamente
similares en forma. La figura i.8b, muestra una cuña clave alrededor de una sección
transversal de un túnel, la pérdida de los bloques 1 permitirían el movimiento de los
bloques 2, estos a su vez permitirían el movimiento de los bloques 3 hasta la destrucción
de la estructura proyectada.
Los taludes en excavaciones superficiales, muestran, similarmente, dependencia en una
pequeña porción de bloques críticamente localizados figura i.8c.
La figura i.8d, muestra cuñas claves en la cimentación de una presa; el plano P debajo de la
presa parecería ser una posible superficie de deslizamiento. Sin embargo, la roca arriba de P
no podrá moverse mientras el bloque 1 se mantenga en su lugar. Aún después, la gran masa
de cimentación arriba de la superficie no podrá moverse, ni levantar la presa, pero podría
ser destruida por un acción regresiva, primero con el movimiento de 1, después de 2,
después de 3, hasta llegar a un estado de falla.

xiii
Todos estos ejemplos, intentan mostrar en dos dimensiones lo que en ocasiones sólo es
comprensible mediante el uso de tres dimensiones. La figura i.9, muestra un ejemplo más
realista, de una cuña clave en una cimentación y su relación con el diseño de las anclas. El
levantamiento del bloque mostrado está restringido, de las presiones posiblemente causadas
por el agua y fuerzas sísmicas, mediante las fuerzas que generan los cables anclados debajo
de la cuña clave. El bloque dibujado es el más grande en su tipo que puede caber en el
espacio de la excavación o del valle natural donde la estructura está localizada.
Figura i. 9. Ejemplo tridimensional de una cuña clave

xiv
METODOLOGÍA
Justificación del Tema
La elección del presente tema de investigación, se finalizó mediante un procedimiento
deductivo, es decir, de lo general a lo particular y los motivos que lo causaron fueron:
Al autor así como al asesor de tesis, vieron un campo real de aplicación así
como un tema poco trabajado, especialmente en la bibliografía disponible en
español.
Existe poca información documental o bibliografía referente al tema, además
la información disponible, se encuentra en inglés además de que es poca.
Planteamiento del Problema
Aunque el análisis de un teoría, puede brindar un sinnúmero de trabajos como el aquí
presentado, el problema a resolver se basa principalmente en la falta de un documento que
proporcione, escudriñe y plasme en idioma español, los pormenores de la teoría analizada.
Por lo anterior, el problema principal a resolver es la falta de bibliografía en español sobre
el tema en cuestión, así como un desarrollo pormenorizado de las soluciones numéricas que
involucran a la Teoría de Bloque.
Objetivos de la Investigación
Cumplir con el requisito de la parte escrita del examen profesional para obtener el
título de ingeniero civil.
Incrementar los conocimientos propios en el área específica.
Proporcionar al gremio ingenieril y/o estudiantil del área, un documento que detalle
y presente la teoría de bloques como una teoría utilizable –principalmente- en la
práctica profesional.
Tipo de Investigación
Antes de plantear las hipótesis de trabajo, se realizó una extensa revisión
documental, utilizando para ello diversas fuentes impresas.
La investigación fue en su totalidad documental.
Hipótesis de Trabajo
El empleo de la Teoría de Bloque, es una herramienta de moderadamente fácil
aplicación.
La teoría de bloque, es al día de hoy, una herramienta de gran utilidad para el
ingeniero diseñador de obras subterráneas como superficiales en roca.
La omisión en la enseñanza de la presente teoría, es por una falta de apreciación de
la Academia y no por una dificultad intrínseca del tema.

xv
Delimitaciones y Limitaciones
Crear un documento de fácil lectura y acceso para el ingeniero/estudiante
interesado.
Las limitaciones teóricas, se presentan en el Marco Teórico.
Técnicas de Investigación
Técnicas Documentales
Bibliográfica
Documental

1
Capítulo I
Descripción de la Geometría y Estabilidad de
los Bloques Utilizando Métodos Vectoriales
"If I have seen farther than other men, it is because I have stood on the shoulders of giants." Isaac Newton
n este capítulo se desarrollarán ecuaciones vectoriales, que permitirán encontrar
soluciones a los problemas básicos de la Teoría de Bloques. Los métodos de análisis
vectorial proveen formulaciones simples de todos los aspectos relacionados a la
morfología del bloque, incluyendo: el volumen de un joint block (JP)1, el área de cada una
de sus caras, la posición de sus vértices y las posiciones y posturas de sus caras y bordes. El
uso de vectores, también permite llevar a cabo análisis sobre el estado cinemático y estático
de las cuñas claves.
La información fundamental requerida por la Teoría de Bloques, es la descripción de la
orientación de cada plano de discontinuidad. Las discontinuidades se agrupan en conjuntos,
cuyas orientaciones promedios (ponderados o no) están descritas por 2 parámetros; el
echado y la dirección del echado .
La figura I.1 explica estos términos y su relación con los términos geológicos denominados
rumbo (strike) y echado (dip). Un plano inclinado, interseca al plano horizontal xy a lo
largo de la línea de rumbo y se inclina en la dirección del echado, la cual es perpendicular
al rumbo del plano.
La dirección del echado es definida mediante el ángulo a partir de y hacia x. A través del
presente trabajo se adoptará la convención de que y es el norte y que x es el este, con z
hacia arriba. El echado, es medido a partir del ángulo vertical entre la dirección del
echado y el trazo de la discontinuidad en un plano horizontal.
El rumbo de un plano es la traza de la intersección de este plano con una superficie
horizontal y la mayoría de los geólogos utilizan el término para definir la orientación de un
plano. Para eliminar toda ambigüedad posible cuando se habla de rumbo es necesario
definir la dirección en que se echa un plano. Por lo tanto, un plano queda totalmente
definido si se registra con un rumbo de N 40º W y un echado de 20º SW. Si hubiera sido
reportado con un echado de 20º, no quedaría claro si se echa hacia el suroeste o al noroeste.
Los ingenieros geotecnistas, sobre todo aquellos que utilizan mucho las computadoras para
su análisis, han preferido emplear la dirección del echado más que la del rumbo como
manera para definir la orientación de los planos. Si la dirección del echado y el echado de
un plano se reportan como 240/20, no puede haber confusión sobre la orientación y la
1 En el presente trabajo, ciertos términos como Joint Block (JP) no serán traducidos, con la finalidad de evitar confusiones al lector que esté familiarizado con la teoría o para aquel que consulte la obra en el idioma original u haga estudios adicionales en otras referencias bibliográficas.
E

2
inclinación de ese plano y esa anotación es más concisa que la de rumbo y echado, factor
importante cuando se tiene que procesar grandes cantidades de datos geológicos por
computadora.
z
y norte
x
vector echado
Lín
ea d
e R
um
bo = echado
Dirección del Echado
N
Echado
Dirección del Echado a
b
Figura I. 1. Términos que describen las características de un plano: echado y dirección del echado
ECUACIONES DE LÍNEAS Y PLANOS
Ecuación de una Línea
Siendo 1x el vector radio, que parte del origen al punto , ,i i iX Y Z . Una línea con
dirección 1x a través del punto 0 0 0, ,X Y Z , está definida por el conjunto de puntos a lo
largo de los vectores de una familia de vectores radio, de tal manera que:
1ox t xx (I.1)
Donde 0x es el vector radio que inicia en el origen al punto 0 0 0, ,X Y Z figura I.3. El
parámetro t toma cualquier valor negativo o positivo. La ecuación (I.1) puede ser
transformada a una forma de coordenadas cartesianas, remplazando cada vector radio, por
las coordenadas de su punta. Sustituyendo:
0 0 0 0 1 1 1 1, , , , , ,X Y Z X Y Z X Y Zx x x (I.2)
Con la ecuación 1.1, se generan 3 ecuaciones paramétricas:
0 1 0 1 0 1X t Y t Z tx x y y z z (I.3)
3
sen cos
cos
sen
sen
co
s
Y
Norte
X
Este
Z
n^
m
O
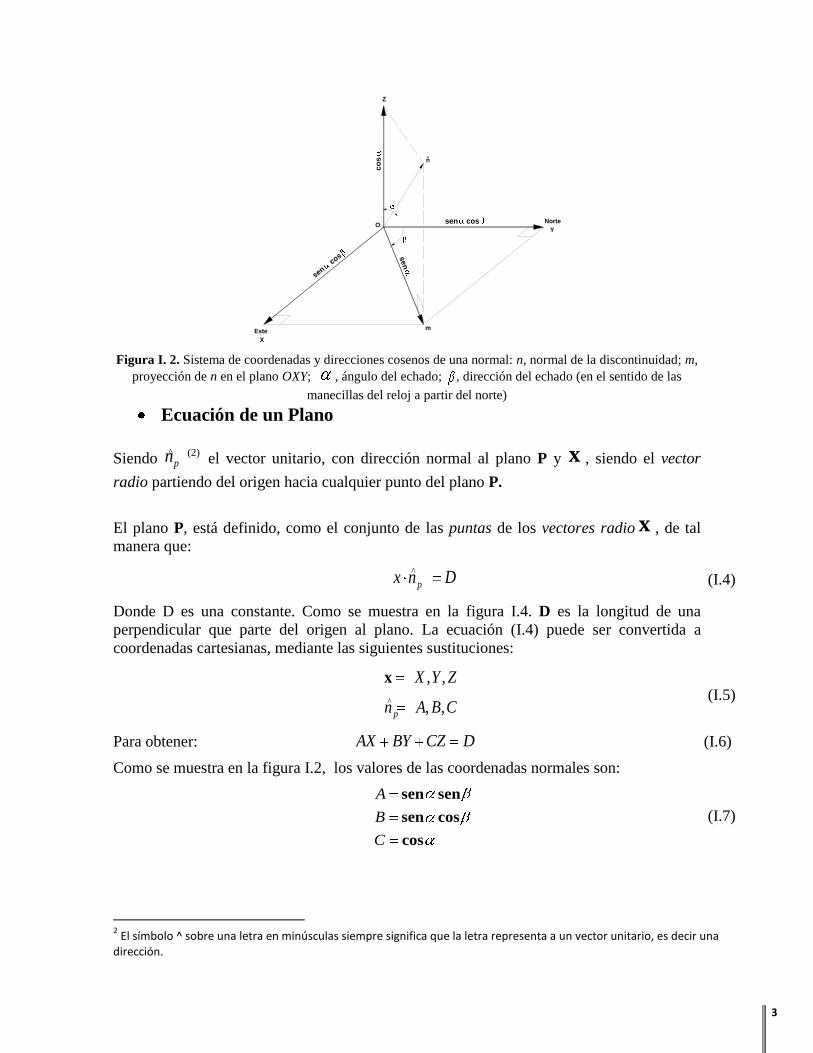
Figura I. 2. Sistema de coordenadas y direcciones cosenos de una normal: n, normal de la discontinuidad; m,
proyección de n en el plano OXY; , ángulo del echado; , dirección del echado (en el sentido de las
manecillas del reloj a partir del norte)
Ecuación de un Plano2
Siendo ^pn (2)
el vector unitario, con dirección normal al plano P y x , siendo el vector
radio partiendo del origen hacia cualquier punto del plano P.
El plano P, está definido, como el conjunto de las puntas de los vectores radio x , de tal
manera que:
^
px n D (I.4)
Donde D es una constante. Como se muestra en la figura I.4. D es la longitud de una
perpendicular que parte del origen al plano. La ecuación (I.4) puede ser convertida a
coordenadas cartesianas, mediante las siguientes sustituciones:
^
, ,
, ,p
X Y Z
n A B C
x (I.5)
Para obtener: AX BY CZ D (I.6)
Como se muestra en la figura I.2, los valores de las coordenadas normales son:
A
B
C
sen sen
sen cos
cos
(I.7)
2 El símbolo ^ sobre una letra en minúsculas siempre significa que la letra representa a un vector unitario, es decir una
dirección.

4
O
Z
X
Y
xo
x
1t x
t x1
Figura I. 3. Ecuación de una línea recta
La Intersección de un Plano y una Línea
Un punto como C (figura I.4), donde una línea penetra un plano, puede ser descrito
resolviendo simultáneamente las ecuaciones (I.3) y (I.6).
Siendo 0 0 0, ,X Y Z un punto en una línea que tiene una dirección de un vector radio
1 1 1, ,X Y Z ; y sustituyendo los valores para X, Y y Z de la ecuación (I.3) en la ecuación de
un plano (I.6) y resolviendo para t.
Desarrollando matemáticamente:
0 1
0 1
0 1
X t
Y t
Z t
x x
y y
z z;
AX BY CZ D ;
0 1 0 1 0 1
0 1 0 1 0 1
1 1 0 0 1
1 1 1 0 0 1
Despejando a :
A X tX B X tX C X tX D
AX AtX BY BtY CZ CtZ D
AtX BtY CtZ D AX BY CtZ
t AX BY CZ D AX BY CtZ
t
0 0 1
1 1 1
D AX BY CtZt
AX BY CZ (I.8)
Y el vector radio partiendo del origen al
punto de intersección de la línea y el
plano tiene su punta en el punto , ,X Y Z
dado por:
1
1
1
o o
o o
oo
X x t x
Y y t y
Z z t z
(I.9)
Y
X
Z
O
^np
D
x
C
Figura I. 4. Ecuación de un plano

5
La Intersección de Dos Planos
La intersección de 2 planos de discontinuidades, crea un borde común. Considérese los
planos 1P y 2P (figura I.5) con una línea de intersección 12I . Siendo ^
1n y ^2n las normales
unitarias a los planos 1P y 2P .
Debido a que la línea de intersección está contenida en cada plano, y como cada plano
contiene únicamente las líneas perpendiculares a su normal, entonces 12I es perpendicular a
ambos vectores normales unitarios ( ^1n y ^
2n ). Por definición, una línea que es perpendicular
a otros dos líneas, se puede generar por el arreglo vectorial cruz. De esta manera, la línea de
intersección entre 1P y 2P es paralela a:
^ ^12 1 2n nI (I.10)
Para transformar esta ecuación a coordenadas cartesianas, se convertirá ^ ^1 1 1 1 2 2 2 2, , , ,n X Y Z y n X Y Z y siendo ^x , ^y y ^z los vectores unitarios paralelos a los
ejes coordenadas, por lo tanto:
^ ^ ^
^ ^1 2 1 1 1
2 2 2
x y z
n n X Y Z
X Y Z
(I.11)
1 1 1 1 1 1^ ^^
12
2 2 2 2 2 2
Y Z X Z X Yx y z
Y Z X Z X YI
En forma cartesiana, tenemos:
12 1 2 2 1 2 1 1 2 1 2 2 1, ,Y Z Y Z X Z X Z X Y X YI (I.12)
1n^n2^
2I1
p1
2p
Figura I. 5. Línea de intersección de dos planos
6
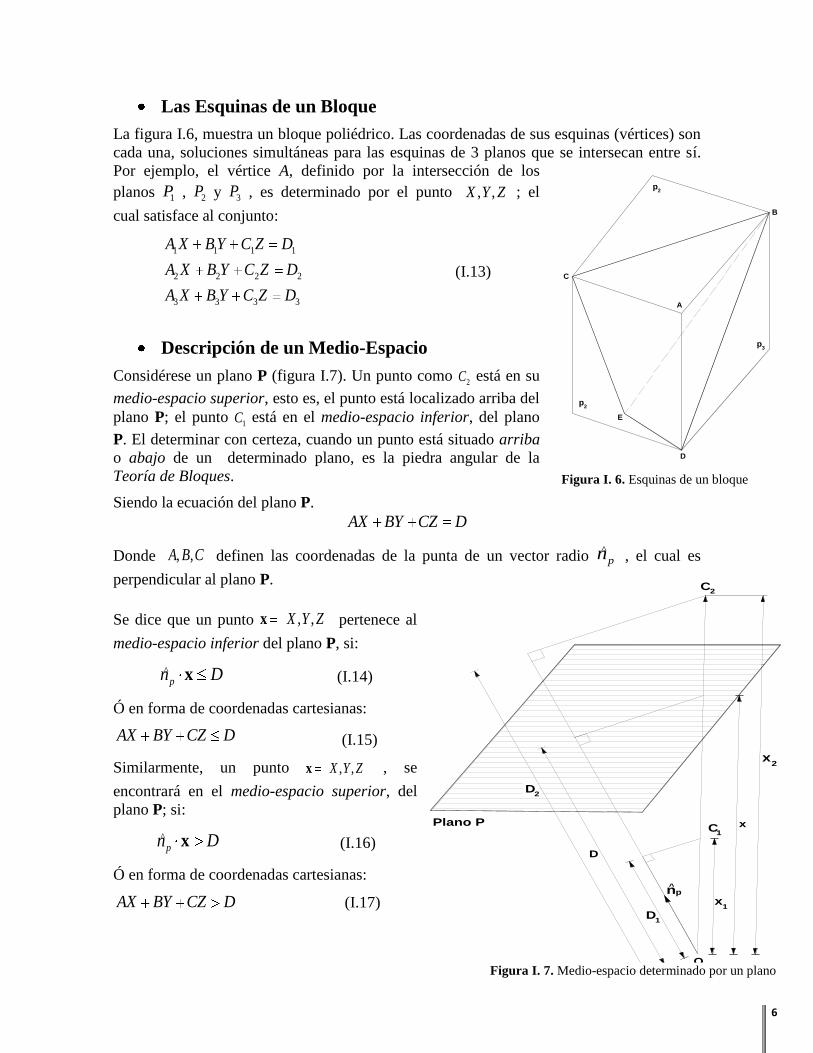
Las Esquinas de un Bloque
La figura I.6, muestra un bloque poliédrico. Las coordenadas de sus esquinas (vértices) son
cada una, soluciones simultáneas para las esquinas de 3 planos que se intersecan entre sí.
Por ejemplo, el vértice A, definido por la intersección de los
planos 1P , 2P y 3P , es determinado por el punto , ,X Y Z ; el
cual satisface al conjunto:
1 1 1 1
2 2 2 2
3 3 3 3
A X B Y C Z D
A X B Y C Z D
A X B Y C Z D
(I.13)
Descripción de un Medio-Espacio
Considérese un plano P (figura I.7). Un punto como 2C está en su
medio-espacio superior, esto es, el punto está localizado arriba del
plano P; el punto 1C está en el medio-espacio inferior, del plano
P. El determinar con certeza, cuando un punto está situado arriba
o abajo de un determinado plano, es la piedra angular de la
Teoría de Bloques.
Siendo la ecuación del plano P.
AX BY CZ D
Donde , ,A B C definen las coordenadas de la punta de un vector radio ^
pn , el cual es
perpendicular al plano P.
Se dice que un punto , ,X Y Zx pertenece al
medio-espacio inferior del plano P, si:
^pn Dx (I.14)
Ó en forma de coordenadas cartesianas:
AX BY CZ D (I.15)
Similarmente, un punto , ,X Y Zx , se
encontrará en el medio-espacio superior, del
plano P; si:
^pn Dx (I.16)
Ó en forma de coordenadas cartesianas:
AX BY CZ D (I.17)
D
1
pn^
D
2D
C2
1x
x
x2
1C
O
Plano P
Figura I. 7. Medio-espacio determinado por un plano
A
C
D
E
B
p2
2p
p3
Figura I. 6. Esquinas de un bloque

7
DESCRIPCIÓN DE UN BLOQUE
Después de lograr describir y definir matemáticamente todas las propiedades relevantes de
un bloque; ahora estamos en posición de cuantificar las características de un bloque, como
son: El número, ubicación y áreas de sus caras, la ubicación de sus esquinas y su volumen.
El volumen de un Bloque Tetraédrico
Un bloque de 4 lados puede ser idealizado como una parte de la división de un
paralelípedo, que se ha dividido en 6 partes, como se muestra en la figura I.8. Considérese
el paralelípedo dibujado en la figura I.8a, con esquinas 1 2 3 4 5 6 7 8, , , , , ,a a a a a a a y a . Primero
se puede dividir en dos prismas triangulares de igual volumen, cortando a lo largo del plano
2 3 5 6, , ,a a a a , a su vez, cada uno de estos primas puede ser dividido en tres tetraedros
iguales, como se muestra en la figura I.8b.
a3
1a
a2
7a
a4
6a
a8
5a
ÁreaS
h
a5
8a
a6
4a
a7
2a
a1
3a
2a
5a
6a
1a(
2a
3a
7a
4a
5a
6a
8a )
Volumen = hS
1a(
2a
3a
4a
5a
6a )
Volumen = hS12
2a(
3a
7a
5a
6a
8a )
Volumen = hS12
a)
Figura I. 8. Subdivisión de un paralelípedo en seis tetraedros de igual volumen. a) Subdivisión en dos
prismas triangulares; b) División de cada primas en tres tetraedros

8
1a
a4
6a
a2
a5
5a
a6
4a
a3
a3
3a
2a
4a
a1
3a
5a
2a
4a
b)
2a
3a
4a
5a )(
Volumen = hS16
1a(
2a
3a
4a
5a
6a )
3a
4a
5a
6a )(
Volumen = hS16
1a
2a
3a
4a )(
Volumen = hS16
Figura I.8. (Continuación)
Esto, finalmente, lleva a tetraedros con esquinas 1 2 3 4 2 3 5 6 3 4 5 6, , , , , , , , , ,a a a a a a a a y a a a a . Por
definición, el volumen de un paralelípedo es igual al producto del área (S) de su base (por
ejemplo, el área 1 2 3 4, , ,a a a a de la figura I.8a) multiplicada por su altura (h), esto finalmente
conduce al hecho, de que cada tetraedro debe tener un volumen 16
S h ; lo cual se puede
expresar en forma vectorial como:
1
6tetraédroV a b c (I.18)
Donde, como se muestra en la figura I.9, a, b, y c, son los 3 vectores límites (o bordes) que
irradian desde cualquier vértice del tetraedro.
Siendo 1 2 3 4, ,a a a y a , las 4 esquinas de un tetraedro; y tomando 1a como el vértice desde
el cual irradian los vectores a, b y c.

9
1a
a4
a3
a2
c a
b
b x c
(x ,y ,z )2 2 2
444(x ,y ,z )
(x ,y ,z )3 3 3
111(x ,y ,z )
Figura I. 9. Denominación de los vectores para los bordes de un tetraedro
2 1 2 1 2 1
3 1 3 1 3 1
4 1 4 1 4 1
, ,
, ,
, ,
X X Y Y Z Z
X X Y Y Z Z
X X Y Y Z Z
a
b
c
(I.19)
Sustituyendo (I.19) en (I.18), el volumen del tetraedro expresado en forma de coordenadas
cartesianas; se puede expresar como:
2 1 2 1 2 1
3 1 3 1 3 1
4 1 4 1 4 1
1
6
X X Y Y Z Z
V X X Y Y Z Z
X X Y Y Z Z
(I.20)
O alternativamente,
1 1 1 1 1 1
2 2 2 2 2 2
3 3 3 3 3 3
4 4 4 4 4 4
1 1
1 11 1Det
1 16 6
1 1
X Y Z X Y Z
X Y Z X Y ZV
X Y Z X Y Z
X Y Z X Y Z (I.21)
X, Y, Z son las coordenadas de los vértices
El volumen, bordes y esquinas de un bloque poliédrico con n caras
La intersección de varios planos de discontinuidad crea bloques de varias formas, la
mayoría de las cuales, en general, tendrán más de 4 caras. El procedimiento para calcular el
volumen de cualquier bloque parecido, es subdividirlo en varios tetraedros y hacer uso de la
formula (I.20).
Considérese un bloque tridimensional con n caras formado por porciones de n planos.
Cada plano (i) divide el espacio entero en un medio-espacio superior, denotado por i
U , y un
medio-espacio inferior, denotado por iL . La intersección de uno o del otro de los medios-
espacios de cada plano ( 1i a n ) determina las dimensiones y la morfología del bloque.
Por ejemplo, un bloque puede ser creado por 1 2 3 4 5 6, , , ,L U L L U y L . En capítulos subsecuentes
se mostrará cómo elegir cuales de las muchas combinaciones posibles de L’s y U’s definirán
los bloques críticos. Por el momento se asumirá que esto ha sido dado.

10
1. Para cada plano i, 1i a n , determínese las constantes , ,i i i iA B C y D .
a. Los coeficientes ,i i iA B y C son calculados a partir del echado y de la
dirección del echado de plano i, utilizando (I.7).
A
B
C
sen sen
sen cos
cos
El ángulo del echado siempre se encuentra entre 0 y 90º, además de
que iC siempre es positivo, lo que significa que de las dos posibles
direcciones para la normal, la dirigida hacia arriba será la elegida3.
b. El coeficiente iD debe ser ingresado. Un ejemplo de cálculo de
, ,i i i iA B C y D utilizando datos de campo se presentan posteriormente.
2. Calcúlese las coordenadas de todas las posibles esquinas del bloque. Una esquina
ijkC se calcula como el punto de intersección de los tres planos i, j y k, como se
describe en (I.13).
1 1 1 1
2 2 2 2
3 3 3 3
A X B Y C Z D
A X B Y C Z D
A X B Y C Z D
Ahora se debe determinar cuáles de las esquinas pertenecen al bloque (e.g. son reales). El
número de esquinas calculadas en el paso 2 iguala al número de combinaciones de n
objetos tomados en 3 al mismo tiempo 3
nC , lo que es igual a !
3 ! 3!
n
n. Para un
paralelípedo (i.e. n=6) existen por lo tanto 20 posibles esquinas; pero sólo 8 pueden ser
reales. El procedimiento para realizar esta selección, es presentado en los pasos 3 y 4.
3. Considere a la cara m. Examine a cada posible esquina ijkC por turno y manténgala
como una candidata real a ser esquina, si sus coordenadas ,ijk ijk ijkX Y y Z ,
satisfacen:
m ijk m ijk m ijk mA X B Y C Z D (I.22)a
(1.22a) es para el caso, si el bloque está definido con mU , ó
m ijk m ijk m ijk mA X B Y C Z D (I.22)b
Si el bloque está definido con iL .
3 En el caso de un plano vertical, la normal es determinada como positiva en una dirección.

11
4. Repítase el paso 3 para cada cara en turno (i.e. 1m a n ). Las esquinas verdaderas
son aquellas candidatas que sobrevivan al paso 3 para cada cara.
En este punto, un ejemplo bidimensional será de gran ayuda. La figura I.10 muestra los
polígonos creados por 5 líneas, 1 5P hasta P . Por lo tanto;
!
# ! #!
n
n, #= dimensionalidad 5
5!10
5 2 ! 2 !C , en este caso #, es 2 , porque es un ejemplo
bidimensional
Hay 10 intersecciones de estas líneas, etiquetadas como 15 25,C C …(el orden de los índices
no tienes importancia). Ahora considérese un bloque específico: 1 2 3 4 5, , ,U L L U y U . (En este
caso U significa el medio-plano arriba de la línea y L el medio-plano debajo de la línea.)
Considerando, primero, el medio-plano 1U , los vértices reales ijC deben satisfacer:
1 1 1ij ijA X B Y D 4
Ahora eliminando las esquinas que están fuera de
1 2 3 4 5, , ,U L L U y U (La parte con tramado en figura
I.10). Eliminando lo que está del otro medio-
plano de 1U , es decir, en 1L , se elimina a 34C .
Considerando lo que no está en el medio-plano
2L , se elimina a 35C ; siguiendo este
procedimiento se llegará a eliminar a
12 42 15,C C y C .
Así las esquinas reales, son identificadas como
41 45 25 23 13, , ,C C C C y C .
Ahora que se ha logrado identificar las coordenadas de todas las esquinas ijkC de un
bloque poliédrico. Como paso siguiente, se encontrará todas las caras reales de un poliedro.
Considérese nuevamente el ejemplo bidimensional de la figura I.10, las intersecciones de
las cinco líneas produjeron polígonos de 3, 4 y 5 caras. En tres dimensiones, los bloques
creados por intersecciones de n planos pueden tener desde 4 a n caras.
4 La ecuación original para la descripción de un medio-espacio es AX BY CZ ó D ; pero en
este caso no hay CZ , porque es un ejemplo bidimensional, y el signo es , porque es un medio-plano
superior. (El ejemplo).
C12
P1
P2
P4
P3
C13
C34
C41
C15
5
C45
C42
C25
C35
C23
Y
X0
Figura I. 10. Esquinas reales de un polígono dado

12
5. Determínese cuáles caras pertenecen a un bloque dado. Una cara verdadera está
definida por cualquier subconjunto de tres o más vértices reales (esquinas del
bloque) que tienen un índice en común. Por ejemplo, la cara m (del plano m) es la
región triangular existente entre las esquinas 1 2 34 25,m m mC C y C .
6. Determínese todos los bordes de un bloque. Un borde real es una línea entre un par
de vértices reales ijkC que tienen dos índices en común. Por ejemplo, un borde es la
línea conectando las esquinas 3 4ij ijC y D . Esta línea es paralela a la línea de
intersección ijI de los planos i y j.
Los siguientes pasos dividirán, primero, al poliedro en pirámides poligonales, y después en
tetraedros mediante la subdivisión de las bases poligonales en triángulos.
7. Escoja una esquina real ijkC como un ápice (la cima de una pirámide poligonal). La
elección de una esquina es arbitraria y únicamente una esquina será seleccionada.
ijkC es el punto de intersección de los planos cara i, j y k. Excluyendo estas tres,
subdivida cada una de las otras 3n caras del
bloque en triángulos como a continuación se
indica:
Cada cara, m, es en general un polígono con t esquinas.
Las esquinas de la cara m son el subconjunto de las
esquinas reales t del poliedro que tiene m como uno de
sus índices. Ahora subdivídase la cara m en triángulos,
seleccionando una esquina y conectándola en turno
con los puntos finales de cada borde de m. (Los bordes
del polígono m son el subconjunto de todos los bordes,
encontrados en el paso 6, que tienen a m como uno de
los índices en común).
La figura I.11, ilustra el procedimiento descrito arriba.
Escogiendo a la esquina 1a como el vértice de todos
los triángulos, el polígono 1 2 3 4 5 6a a a a a a es
dividido en los triángulos
1 2 3 1 3 4 1 4 5 1 5 6, ,a a a a a a a a a y a a a .
8. Finalmente, conéctese las esquinas de cada
triangulo para todas 3n caras (excluyendo las caras i, j y k) con el ápice, esquina
ijkC . Esto crea el conjunto de tetraedros, la suma de volúmenes de la cual es el
volumen del poliedro.
2a
1a
3
4a
6a
5a
1a
6a
5a6
a
'
b
c
1a
2a
3a
4a
5a
6a
1a
1a
1a
1a
2a
3a
3a
4a
4a
5a
5a
6a
Área1
a(5
a6
a )6
a ' = b x c
Figura I. 11. Subdivisión de polígonos en triángulos

13
La figura I.12 proporciona un ejemplo de los procedimientos descritos en los pasos 7 y 8.
Se subdividirá, en tetraedros, el bloque de cinco lados mostrado en la figura I.12a.
Primero, arbitrariamente se seleccionará la esquina 135C como el ápice. Esto excluye a las
caras 1 3 5,P P y P a partir de la descomposición de los triángulos. Las caras 2 4P y P
permanecen. El primero es mostrado en la figura I.12b, y se divide en los triángulos:
235 234 124, ,C C CI y 124 235 125, ,C C CII . La cara 4P ya es un triángulo 134 124 234, ,C C C . El
bloque de cinco lados es dividido en 3 tetraedros conectando estos triángulos con el ápice
135C . Estos volúmenes tetraédricos son mostrados en las figuras I.13c, (d) y (e).
234C
134C
135C
125C
235C
124CP4
P1
P2
P3
P5
234C 125C
235C
124CBorde 24 Borde 12
Borde 23
Bo
rde 2
5
I II
Cara 2
234C
134C
135C
124C
a)
b)
c)
234C
135C
235C
124C
d)135C
125C
235C
124C
e)
Figura I. 12. Subdivisión del poliedro en tetraedro
LAS CARAS DE UN BLOQUE POLIÉDRICO
Las esquinas, bordes y las áreas de cada cara de un bloque general de n-caras pueden
calcularse utilizando los métodos descritos en la sección precedente. Una cara poligonal
está definida como una región planar entre todas las esquinas ijkC que comparten
cualquier índice. Cada polígono es, entonces, dividido en triángulos mediante el
procedimiento de la figura I.11.
Considérese a un triángulo con esquinas 1 2 3, ,a a a y lados 1 2a aa y 1 3a ab . El área del
triángulo es:
12
A a b (I.23)

14
De forma vectorial con 1 1 1 1 2 2 2 2 3 3 3 3, , , , , , ,a X Y Z a X Y Z y a X Y Z :
2 1 2 1 2 1
3 1 3 1 3 1
, ,
, ,
X X Y Y Z Z
X X Y Y Z Z
a
b
Lo que resulta en:
12 2 2 2
2 1 2 1 2 1 2 1 2 1 2 112
3 1 3 1 3 1 3 1 3 1 3 1
Y Y Z Z Z Z X X X X Y YA
Y Y Z Z Z Z X X X X Y Y (I.24)
ÁNGULOS EN EL ESPACIO
El ángulo entre líneas, entre planos o entre una línea y un plano será requerido de manera
rutinaria en el cálculo de la resistencia al deslizamiento de los bloques.
El ángulo entre líneas. Considérese dos vectores que se intersecan, 1 2yn n en el espacio.
1 1 1 1 2 2 2 2, , , ,X Y Z X Y Zn n
El ángulo entre 1 2yn n está dado por:
1 2
1 2
.cos
n n
n n (I.25)
n2
1
P2
n2
Proyección de n 1
a)
n2n1
b)P1
P2
Figura I. 13. Ángulos entre líneas y planos: a) La proyección ortográfica de una
línea en un plano, b) el ángulo entre dos planos
O, en formato de coordenadas:
1 2 1 2 1 2
2 2 2 2 2 2
1 1 2 2 21
cosX X Y Y Z Z
X Y Z X Y Z (I.26)
Si ^ ^
1 1 2 2n y nn n (vectores unitarios).
^^
1 2 1 2 1 2 1 2cos .n n X X Y Y Z Z (I.27)
El ángulo entre una línea y un plano. Está definido en términos del ángulo entre la línea
y su proyección ortográfica en el plano (figura I.13a). Siendo 1n un vector inclinado con
respecto al plano 2P , cuya normal es 2n . El ángulo entre 1n y su línea de proyección en
2P es el complemento del ángulo entre 1 2yn n .

15
90 (I.28)
El ángulo entre dos planos. Como se muestra en la figura I.13b, el ángulo entre dos
planos 1 2P y P es el ángulo entre sus normales 1 2yn n .
1 2,n n (I.29)
BLOCK PYRAMID (BP)5
Considérese un bloque real formado con cada uno de las n diferentes caras, esto es, un
bloque rodeado por n superficies no paralelas. Recuérdese que un bloque particular es
creado por la intersección de los medios-espacios tanto superior como inferior
correspondiente a cada una de sus caras. Por ejemplo, un bloque podría estar dado por
1 2 3 4 5U U U L L .
Ahora, permitiendo que cada medio-espacio sea desplazado, de tal manera que su superficie
pase a través del origen. El conjunto de medio-espacios movidos 0 0 0 0 0
1 2 3 4 5U U U L L crearán
una pirámide, el block pyramid (BP) con ápice en el origen, como se muestra en la figura
I.14. El superíndice significa que el plano en cuestión ha sido desplazado para pasar a
través de 0,0,0 .
La importancia de esta construcción será aparente en el capítulo IV. Pero en esta sección
será apropiado el describir el BP utilizando las formulas establecidas anteriormente.
Líneas a través del origen. Todos los bordes de un block pyramid (BP) son líneas que
pasan a través del origen (i.e. , , 0,0,0o o o oX Y Zx ). Por lo tanto, las ecuaciones de los
bordes, obtenidas a partir de (I.1) y (I.3), son:
1tx x (I.30)
1
1
1
X t X
Y t Y
Z t Z
(I.31)
Caras a través del origen. Cualquier plano i del block pyramid (BP), incluirá al origen.
Por lo tanto, 0iD , debido a que iD es la distancia perpendicular a partir del origen. Las
ecuaciones de un plano, (I.4) y (I.6), se simplifican a:
0ix n (I.32)
0i i iA X BY C Z (I.33)
5 Como se mencionó anteriormente, algunos términos no se traducirán, éste es uno de esos pocos casos.

16
Donde , ,i i i iA B Cn es la normal al plano de discontinuidad i.
(0, 0, 0)
51e
12e
23e
45e
34e
1P
5P
4P
3P
2P
Figura I. 14. Block Pyramid (BP) 0 0 0 0 0
1 2 3 4 5U U U L L
Descripción de 00
i iL y U . Cuando el plano i corta a través del origen, su medio-espacio
inferior 0
iL está determinado por (2.14), como:
0in x (I.34)
Ó 0i i iA X BY C Z (I.35)
Similarmente, el medio-espacio superior 0
iU del plano i está determinado por (1.16),
como:
0in x (I.36)
Ó 0i i iA X BY C Z (I.37)
Bordes de un block pyramid (BP). La normal al plano 1iP i a n es:
, ,i i i iA B Cn (I.38)
Siendo 0 0 0
1 2 ... nF F F el block pyramid correspondiente a un conjunto particular de
medios-espacios superiores como inferiores 00
i iL ó U , Cada par de índices de
0F i y j i define un potencial vector de borde ijI .
ij i jI n n (I.39)
De acuerdo a la regla del producto cruz,
ji j i ijI n n I (I.40)

17
Con un bloque de n caras piramidales ( n planos), el número total de posibles bordes es
igual a 2 22 nC n n .
De hecho, un block pyramid (BP) tiene menos bordes, los cuales se determinan de la
manera siguiente. Para ser un borde de un block pyramid 0 0 0
1 2 ... nF F F ,
, ,ij ij ij ijI X Y Z (I.41)
Debe satisfacer, para cada cara piramidal (m) 1m a n
,
0 00m ij m ij m ij m mA X B Y C Z cuando F U (I.42)a
0 00m ij m ij m ij m mA X B Y C Z cuando F U (I.42)b
Los vectores intersección ijI que satisface todas las n ecuaciones simultaneas de (I.42) son
verdaderos bordes del block pyramid (BP). No hay más de n soluciones. La secuencia de
estos bordes alrededor de la pirámide es determinada por la secuencia numérica de índices
(i, j) debido a que cada cara piramidal yace entre dos bordes que comparte un índice en
común. Por ejemplo, en la figura I.14 los bordes en orden son 12 51 45 34 23, , , yI I I I I .
ECUACIONES DE FUERZAS
El análisis vectorial facilita el análisis de estabilidad de bloque bajo el peso propio,
presiones hidrostáticas, fuerzas debido a los sistemas de contención, fuerzas de inercia,
fricción y cohesión.
Representación de una fuerza mediante un vector. Se representará, tanto la magnitud
como la dirección de una fuerza F, mediante el símbolo F . Sus componentes son sus
valores coordenados.
, ,X Y ZF (I.43)
La magnitud de F es: 2 2 2X Y ZF
(I.44)
Y la dirección de F está dada por:
^
2 2 2 2 2 2 2 2 2, ,
X Y Zf
X Y Z X Y Z X Y Z (I.45)
La resultante de dos o más fuerzas. Una serie de fuerzas que se intersecan 1 2, ... nF F F,
pueden ser reemplazadas mediante la resultante R;
1 1 1 1
, ,n n n n
i i i i
i i i i
R X Y ZF
La figura I.15a muestra la solución gráfica para la suma en dos dimensiones.

18
3F
1F2F
4FR
1F
2F
4F 3F5F
b)a)
Figura I. 15. Fuerzas como vectores: a) la resultante de varias fuerzas, b) Equilibrio bajo varias fuerzas
El equilibrio de fuerzas. Si el sistema de n fuerzas 1 2, ... nF F F están en equilibrio, su
resultante R tiene una magnitud de cero (figura I.15b), por lo tanto:
1
0n
i
i
F (I.46)
Ó 1
, , 0n
i i i
i
X Y Z (I.47)
Fuerzas de fricción. La fricción provee una fuerza resistente que se opone a la dirección de
movimiento o al movimiento incipiente. Al primer término se le denominará “dirección de
deslizamiento s ”. Por lo tanto, la dirección de todas las fuerzas de fricción es s . Siendo
B, un potencial bloque de roca deslizable y supóngase que , 1,...,iN i n son las magnitudes
de las fuerzas de reacción normales, de cada cara de deslizamiento , 1...iP i n de B.
Entonces la fuerza resultante de fricción es:
1
tann
f i i
i
N sR (I.48)
Donde i es el ángulo de fricción para la dirección de deslizamiento s en la cara i.
La Gravedad y otras fuerzas en el cuerpo. La gravedad actúa vagamente y su fuerza es
proporcional a la masa. Su dirección está dirigida verticalmente hacia abajo z . Las
fuerzas de inercia actúan en dirección opuesta a la aceleración aplicada y también son
proporcionales a la masa. Si el peso de un bloque es W, la fuerza de inercia del bloque que
es acelerado por k g a es:
I kW aF (I.49)

19
Donde g es la magnitud de la aceleración de la gravedad. Si la dirección de aceleración a
es incierta, la sumatoria de IF con otras fuerzas conocidas producen un cono circular en el
espacio que contiene a todas las posibles resultantes.
Fuerza hidrostática y fuerzas cohesivas. La integración de la presión debida al agua 2FL actuando sobre la cara de un bloque produce una fuerza en la dirección de la
normal (dirigida hacia el interior) del bloque. La cohesión 2FL produce una resistencia
adicional al movimiento. Si la cohesión es constante sobre una cara, la fuerza total es
calculada con el área conocida de la cara. El procedimiento para calcular el área de
cualquier cara de un bloque poliédrico fue dado con anterioridad en este capítulo.
Las presiones debidas al agua en roca, producidas por estructuras hidráulicas (presas, etc.)
tienen a variar con el tiempo. Supóngase que iP representa a las caras de un bloque
poliédrico, cada una con área iA y un vector normal (dirigido hacia el interior) in . Entonces
la resultante wr de todas las fuerzas hidráulicas es:
1
n
w i i
i
S nr (I.50)
Donde iS es la integral de la presión debida al agua actuando sobre la cara i. En muchos
casos es suficientemente preciso el sustituir:
i i iS P A (I.51)
Donde iP es la presión debido al agua actuando en el centroide de la cara i.
CÁLCULO DE LAS DIRECCIONES DE DESLIZAMIENTO
La dirección del movimiento incipiente de un bloque es determinado por el modo de falla.
El levantamiento ó desprendimiento ocurre cuando un bloque pierde su contacto inicial
roca/roca en todas las caras para moverse hacia el espacio libre. El deslizamiento puede
ocurrir en cualquier cara o en dos caras no paralelas a lo largo de su línea de intersección.
Levantamiento o Desprendimiento. La acción de las presiones hidráulicas, del empuje
estructural o de la fuerza de inercia, puede “botar” a un bloque como se muestra en la figura
I.16. Si el bloque existe en el techo, puede caer bajo la acción única de la gravedad. En
ambos casos, la dirección del movimiento inicial del bloque coincide con la dirección r
de la fuerza resultante (R) actuando en el bloque.
s r (I.52)

20
Figura I. 16. Levantamiento o desprendimiento
Deslizamiento en una cara. Un bloque puede tender a deslizarse a lo largo sólo una de sus
caras, como se muestra en la figura I.17. En este caso la dirección de deslizamiento inicial
es paralela a la dirección de la proyección ortográfica de la fuerza resultante (r) en el plano
de deslizamiento iP . Denotándose la normal al plano de deslizamiento mediante in . La
proyección de r se encuentra a lo largo de la línea de intersección del plano i y un plano
común a r y in .
s
Figura I. 17. Deslizamiento en una cara
Por lo tanto, la dirección de deslizamiento s es:
i is n nr (I.53)
Donde el símbolo significa “está en la misma dirección a”. El doble uso del producto
cruz está justificado en la figura I.18.

21
R
iP
ni sxh
n x R^=h
n^i
Figura I. 18. Dirección de deslizamiento bajo el modo de deslizamiento en una cara
Deslizamiento en dos planos simultáneamente. Si un bloque se desliza en dos caras no
paralelas simultáneamente (figura I.19), la dirección de deslizamiento es paralela a su línea
de intersección. Siendo 1 2yn n los vectores normales a cada cara de deslizamiento
1 2P y P . La dirección de deslizamiento (s) es uno de los dos, la misma que 1 2n n o su
opuesto 1 2n n . La actual dirección de deslizamiento es aquella que tiene el menor
ángulo (i.e. menor a 90º) con r (figura I.20). Siendo signo(f) +1 si f es positivo, -1 si f es
negativo y 0 si f es cero. Entonces la dirección (s) de deslizamiento a lo largo de la
intersección de los planos i y j es:
i j i js signo n n r n n (I.54)
La dirección de deslizamiento bajo la fuerza resultante debido a la gravedad
únicamente. El análisis de la estabilidad de bloques bajo la acción única del peso propio es
examinado como un caso especial. Sin otras fuerzas, la fuerza resultante en el bloque es:
0, 0, Wr (I.55)
Donde W es el peso del bloque (W > 0).
Para el desprendimiento de un bloque, la dirección de deslizamiento debe ser, por lo tanto:
0, 0,s W (I.56)
Figura I. 20. Deslizamiento en dos caras
n2n1 x
s n2n1 x R
n1
n2
Figura I. 19. Dirección de deslizamiento para el
modo de deslizamiento en dos caras

22
Para el deslizamiento en una cara iP , debemos sustituir r de (I.55) junto con,
, ,i i i in A B C
En (I.53). Obteniendo:
, , 0
0 0
i i i i i i
x y z
n A B C W B A
W
r
y 0i i i i
i i i
x y z
n r n B W AW
A B C
Por lo tanto:
2 2, ,i i i i i is W A C B C A B (I.57)
Para deslizamiento simultáneo en los planos i y j, se sustituye en (I.54):
i j i i i
i i i
x y z
n n A B C
A B C
Dando,
, ,j i i j i j j i j i i i i j j is signo A B A B B C B C A C AC A B A B (I.58)
EJEMPLOS
Ejemplo I.1. La ecuación de un plano
Considérese un plano con echado 30º y dirección del echado 320º . El plano
pasa a través del punto 1, 2, 1 . La ecuación del plano es:
AX BY CZ D
A partir de (I.7), cos
cos
A sen sen
B sen
C
Debido a que 1, 2, 1 , se encuentra en este plano, satisface su ecuación, por lo tanto,
2A B C D
Sustituyendo los valores de A, B y C, se obtiene que 1.31068D (Recordar que D es la
longitud de una línea perpendicular al plano, nacida en el origen). Conociendo lo anterior,
se tiene que la ecuación del plano P es:
0.32139 0.38302 0.86607 1.31068X Y Z

23
Ejemplo I.2. La intersección de un plano y una línea
Considérese al plano P, cuya ecuación es: 2 3 4X Y Z y una línea recta pasa a través
de 0 0 0, , 1, 1, 2X Y Z en dirección 1 1 1, , 2, 2, 3X Y Z . Resolviendo la ecuación (I.3);
0 1
0 1
0 1
1 2
1 2
2 3
X X t X X t
Y Y tY Y t Ecuación de una línea
Z Z t Z Z t
El punto de intersección de la línea en el plano, se encuentra utilizando (I.9) y sustituyendo
los siguientes valores.
0 0 1 0 0 1 0 0 1X X t X Y Y t Y Z Z t Z
(Vector radio cuya punta se encuentra en el punto descrito por , ,X Y Z y que parte desde el
origen al punto de intersección de la línea y el plano.)
Y donde:
0 1
0 1
0 1
2 1 2
3 1 2
1 2 3
4
A X X
B Y Y
C Z Z
D
0
0
0
1 2
1 2
2 3
X t
Y t
Z t
A partir de (I.8),
0 0 0
0
1 1 1
0 1
D A X BY X Zt t
A X BY C Z
t t
; Sustituyendo,
3
1
1
X
Y
Z
Ejemplo I.3. El vector de intersección de 2 planos
Asúmase que: 1 1 1
2 2 2
: 20º , 280º
: 60º , 150º
P
P
A partir de (I.7) sus vectores unitarios normales 1 2n y n son:
1 20.336824,0.059391,0.939693 0.433013, 0.7500,0.5000n n
El vector 2112 n nI es paralelo a la línea de intersección de 1 2P y P . A partir de (I.12),
2112 0.3368 0.0594 0.9397 0.7345,0.5753,0.2269
0.43301 0.7500 0.5000
x y z
n nI
Ejemplo I.4. Un tetraedro creado por los planos 1 2 3 4, ,P P P y P
Asúmase que un tetraedro es la región común de las intersecciones de 1 2 3 4, ,L L L y U , donde
1 2 3, ,L L L son los medios-espacios debajo de los planos 1, 2, y 3; y 4U es el medio-espacio
arriba del plano 4. Estos planos están definidos por los siguientes valores:

24
Plano α β
1 45 90
2 45 330
3 45 210
4 0 90 Tabla I.1.- Datos geométricos de los planos de discontinuidades
Los vectores unitarios normales a cada plano son:
1 2
3 4
0.7071,0.0000,0.7071 0.3536,0.6124,0.7071
0.3536, 0.6124,0.7071 0.0000,0.0000, 1.0000
n n
n n
Obteniendo las ecuaciones que describen un medio-espacio, utilizando (I.14) ó (I.16),
según sea el caso:
1
2
3
4
0.7071 0.0000 0.7071 0.7071
0.3536 0.6124 0.7071 0.7071
0.3536 0.6124 0.7071 0.7071
0 0 1 0
L X Y Z
L X Y Z
L X Y Z
U X Y Z
Ahora, se debe calcular las coordenadas de cada esquina ijkC del bloque (I.13). 123C es el
punto de intersección de los planos 1, 2 y 3. Este punto es encontrado mediante la solución
simultánea de:
0.7071 0.0000 0.7071 0.7071
0.3536 0.6124 0.7071 0.7071
0.3536 0.6124 0.7071 0.7071
X Y Z
X Y Z
X Y Z
Cuya solución es 1230,0,1 0,0,1C .
Similarmente, 124C es el punto de intersección de los planos 1, 2 y 4; resolviendo
simultáneamente sus correspondientes ecuaciones obtenemos;
124 0,1.73204,0C
Realizando lo mismo con las otras esquinas,
134
234
1,1.73204,0
2,0,1
C
C
En este caso particular, con únicamente 4 planos, el bloque tiene exactamente 4 esquinas,
por lo que no es necesario hacer una “prueba de selección” (como se describe en el
apartado, volumen, bordes y esquinas de bloques poliédricos con n caras, inciso 3 y 4).
El volumen del bloque puede ser calculado mediante las coordenadas de
123 124 134 234, ,C C C y C y (2.21):

25
1 1 1 1
2 2 2
3 3 3
4 4 4
1 1 0 0
1 1 1 1.732 01 10.3920det
1 1 1 1.732 06 6
1 1 2 0 0
1.7320
X Y Z Z
X Y ZV
X Y Z
X Y Z
V
Ejemplo I.5. El área de cada cara Continúese considerando el tetraedro del ejemplo I.4. El área de la cara en el plano 1, es el
área del triángulo con esquinas ijkC que comparten el subíndice 1. Estas esquinas son
123 124 134, ,C C C . De acuerdo a (I.23). El procedimiento para realizarlo es:
De las esquinas reales, vea cuales comparten un subíndice
Acomódese en orden ascendente, por ejemplo, si se tiene 123 134 124, , ,C C C acomódelos
de la siguiente manera 123 124 134, ,C C C.
El vector a será igual a 123 124 123 134C C y C Ca b
La resta se realizará como: 124 123 134 124C C y C Ca b , es decir (en subíndices) el
mayor menos el menor. 124 123
134 123
, ,
, ,
a a a
b b b
C C X Y Z
C C X Y Z
a
a
Calcúlese el área de cada cara mediante: 1
2 2 2 21
2
a a a a a a
i
b b b b b b
Y Z X Z X YA
Y Z X Z X Ya b 6
Para 1A
123 124 124 123
123 134 134 123
1, 1.732, 0 0, 0, 1 1, 1.732, 1 , ,
1, 1.732,0 0, 0, 1 1, 1.732, 1 , ,
a a a
b b b
C C C C X Y Z
C C C C X Y Z
a
b
12 2 2 2
1
1
1.7320 1 1 1 1 1.73201
1.7320 1 1 1 1 1.73202
2.4494
A
A
a b
Para el área 2A de la cara en el plano 2, es el área triangular entre aquellas esquinas que
comparten el subíndice 2; es decir; 123 124 234, ,C C C .
123 124 124 123
123 234 234 123
1, 1.732, 0 0, 0, 1 1, 1.732, 1
2,0,0 0, 0, 1 2,0, 1
C C C C
C C C C
a
b
6 En realidad, está no es la nomenclatura utilizada en el texto ecuación (2.23), pero el autor cree que es más
fácil entender el concepto, de esta manera.

26
12 2 2 2
2
2
1.7320 1 1 1 1 1.73201
0 1 2 1 2 02
2.4494
A
A
a b
El área 3A de la cara en el plano 3, es el área triangular entre 123 134 234,C C y C .
123 134 134 123
123 234 234 123
1, 1.732, 0 0, 0, 1 1, 1.732, 1
2,0,0 0, 0, 1 2,0, 1
C C C C
C C C C
a
b
12 2 2 2
3
3
1.7320 1 1 1 1 1.73201
0 1 2 1 2 02
2.4494
A
A
a b
Y finalmente, 4A es el área triangular bajo 124 134 234,C C y C
124 134 134 124
124 234 234 124
1, 1.732, 0 1, 1.732, 0 0, 3.4640, 0
2,0,0 1, 1.732, 0 3,1.7320,0
C C C C
C C C C
a
b
12 2 2 2
4
4
3.4640 0 0 0 0 3.46401
1.7320 0 3 0 3 1.73202
5.1960
A
A
a b
Figura I.21. Isométrico del bloque
Ejemplo I.6. El ángulo entre dos vectores
Dados dos vectores 1 2n y n ,
1 1 1 1
2 2 2 2
, , 9, 8, 7
, , 1, 2, 1
n X Y Z
n X Y Z
EL ángulo existente entre 1 2n y n , puede calcularse mediante (I.25).

27
1 2
1 2
cosn n
n n
1 2
0.52 2 2
1
0.52 2 2
2
9, 8, 7 1, 2, 1 9 16 7 32
9 8 7 13.9284
1 2 1 2.4495
n n
n
n
32cos 0.937932 20.2929º
2.4495 13.9284
Ejemplo I.7. El ángulo entre dos planos
Dado 1 2: 30º 320º : 50º 160ºP y P . Calcúlese el ángulo entre los dos planos.
Como se explicó en el cuerpo del texto, el ángulo entre dos planos es el ángulo entre sus
normales, por lo tanto, primero se debe de obtener los vectores normales 1 2n y n .
1 20.321394, 0.383022, 0.866025 0.262003, 0.719846, 0.642788n n
Y utilizando (I.25) o (I.26), obténgase
1 2
1 2
0.321394, 0.383022, 0.866025 0.262003, 0.719846, 0.642788 0.196746
0.890737 0.99
n n
n n
0.1968cos 0.22095
0.8907 0.99
77.24º
Ejemplo I.8. El ángulo entre un plano iP y su vector v
Dada un plano P con 30º , 320º , y un vector 1, 2, 1v .Utilizando (I.7), calcúlese
la normal n del plano P.
0.3214, 0.3830, 0.8660n
El ángulo entre n y v es calculado mediante (1.26).
1 2 1 2 1 2
2 2 2 2 2 2 2 2 2 2 2 21 1 1 2 2 2
0.3214 1 0.3830 2 0.8660 1cos
0.3214 0.3830 0.8660 1 2 1
X X Y Y Z Z
X Y Z X Y Z
cos 0.535306
57.6353º
Sin embargo, el ángulo es el complemento del ángulo deseado, el cual es el existente
entre v y P,
90º 32.349º

28
Ejemplo I.9. Encontrar el block pyramid (BP) con 4 planos
Dados 4 planos. Calcular el block pyramid (BP) creado por la intersección de los medios-
espacios 1 2 3 4, ,U L L y U .
Planos α β
1P
30 90
2P
40 320
3P
50 190
4P
10 80
Tabla I.2.- Datos geométricos de los planos
Utilizando (I.7), se calcularán los vectores unitarios de estos planos.
1 2
3 4
0.5000, 0.0000, 0.8660 0.4132, 0.4924, 0.7660
0.1330, 0.7544, 0.6428 0.17101, 0.030154, 0.9848
n n
n n
Las ecuaciones de los planos 1 2 3 4, ,P P P y P en el block pyramid (BP) son:
1
2
3
4
: 0.5 0 0.8660 0
: 0.4132 0.4924 0.7660 0
: 0.1330 0.7544 0.6428 0
: 0.1710 0.0302 0.9848 0
P X Y Z
P X Y Z
P X Y Z
P X Y Z
Los términos a la derecha del signo igual, son cero porque los planos 1 2 3 4, ,P P P y P pasan a
través del origen 0, 0, 0 .
Las ecuaciones de los medios-espacios 1 2 3 4, ,U L L y U son:
1
2
3
4
: 0.5 0 0.8660 0
: 0.4132 0.4924 0.7660 0
: 0.1330 0.7544 0.6428 0
: 0.1710 0.0302 0.9848 0
U X Y Z
L X Y Z
L X Y Z
U X Y Z
a)
b)
c)
d)
Calculando todos los vectores de intersección:
1 2 , 1,2,3,4ijI n n i j i j
29
12
12
0.5 0 0.8660 0 0.7660 0.4132 0.8660 ,
0.4132 0.4924 0.7660
0.4132 0.8660 0.5 0.7660 ,
0.5 0.7660 0.4132 0.8660
0.4264, 0.7408, 0.2462
x y z
I
I
13 0.5 0 0.8660 0.6533, 0.4366, 0.3772
0.1330 0.7544 0.6428
x y z
I
14 0.5 0 0.8660 0.0262, 0.3443, 0.0151
0.1710 0.0302 0.9848
x y z
I
23 0.4132 0.4924 0.7660 0.8944, 0.1637, 0.3772
0.1330 0.7544 0.6428
x y z
I
24 0.4132 0.4924 0.7660 0.4618, 0.5379, 0.0967
0.1710 0.03015 0.9848
x y z
I
34 0.1330 0.7544 0.6428 0.7623, 0.2409, 0.1250
0.1710 0.03015 0.9848
x y z
I
Finalmente, se prueban todos los vectores de intersección,
12 13 14 23 24 34, , , , yI I I I I I , uno a uno, sustituyendo las coordenadas
, ,ij X Y ZI en las ecuaciones a), b), c) y d) simultáneamente.

30
Para 12I
0.5 0.42643 0 0.74084 0.8660 0.2462 0.00006 0 0
0.41317 0.42643 0.4924 0.74084 0.7660 0.2462 0.00002 0 0
0.13302 0.42643 0.75440 0.74084 0.64278 0.2462 0.7739 0
0.17
ok cumple
ok cumple
no NO cumple
a)
b)
c)
d) 101 0.42643 0.030153 0.74084 0.98480 0.2462 0.1472 0 ok cumple
Para 12I
0.00000087 0 0
0.0000025 0 0
0.7738 0
0.1472 0
ok
ok
ok
no
a)
b)
c)
d)
Para 13I
0.0000023 0 0
0.7739 0
0.00000092 0 0
0.27291 0
ok
ok
ok
no
a)
b)
c)
d)
Para 13I
0.0000023 0 0
0.7739 0
0.00000092 0 0
0.27291 0
ok
no
ok
ok
a)
b)
c)
d)
Para 14I
0.00000012 0 0
0.1472 0
0.2729 0
0.00000025 0 0
ok
ok
no
ok
a)
b)
c)
d)
Para 14I
0.00000012 0 0
0.1472 0
0.2729 0
0.00000025 0 0
ok
no
ok
ok
a)
b)
c)
d)
Para 23I
0.7739 0
0.0000011 0 0
0.00000067 0 0
0.5294 0
ok
ok
ok
ok
a)
b)
c)
d)
Para 23I
0.7739 0
0.0000011 0 0
0.00000067 0 0
0.5294 0
no
ok
ok
no
a)
b)
c)
d)
Para 24I
0.1472 0
0.0000033 0 0
0.5294 0
0.00000043 0 0
no
ok
ok
ok
a)
b)
c)
d)
Para 24I
0.1472 0
0.0000033 0 0
0.5294 0
0.00000043 0 0
no
ok
no
ok
a)
b)
c)
d)
Para 34I
0.2729 0
0.5294 0
0000013 0 0
0.00000012 0 0
no
ok
ok
ok
a)
b)
c)
d)
Para 34I
0.2729 0
0.5294 0
0000013 0 0
0.00000012 0 0
ok
ok
ok
ok
a)
b)
c)
d)
Como se puede observar los vectores de intersección que satisfacen simultáneamente todas
las desigualdades a), b), c) y d), son 23 24 34, yI I I .
Por lo tanto el joint pyramid (JP) creado por 1 2 3 4, ,U L L y U tiene únicamente 3 bordes y
son:

31
23
24
34
, 0.8444,0.1637,0.37720
0.4618,0.53790, 0.0967
0.7623, 0.2409, 0.1250
I
I
I
Estos 3 “vectores de borde”, definen completamente el correspondiente joint pyramid.
Ejemplo I.10. Determinación de que un block pyramid (BP) está “vacío”
En los siguientes capítulos se aprenderá que un block pyramid (BP) “vacío” (i.e. sin bordes
en el espacio), significa que la intersección de esto medios-espacios, siempre crean un
bloque finito. El método de este ejemplo será utilizado frecuentemente para juzgar la
finitud de los bloques de roca.
Dados 4 planos, 1 2 3 4, ,P P P y P cuyas características son (mismos planos del ejemplo I.9):
Planos Α β
1P 30 90
2P 40 320
3P 50 190
4P 10 80
Al igual que en el ejemplo I.9, se calcula el block pyramid (BP) que se crea por
1 2 3 4, ,L L L y U ; es decir:
1 2
3 4
0.5000, 0.0000, 0.8660 0.4132, 0.4924, 0.7660
0.1330, 0.7544, 0.6428 0.17101, 0.030154, 0.9848
n n
n n
Las ecuaciones de los planos 1 2 3 4, ,P P P y P en el block pyramid (BP) son:
1
2
3
4
: 0.5 0 0.8660 0
: 0.4132 0.4924 0.7660 0
: 0.1330 0.7544 0.6428 0
: 0.1710 0.0302 0.9848 0
P X Y Z
P X Y Z
P X Y Z
P X Y Z
Las ecuaciones de medios-espacios 1 2 3 4, ,L L L y U , son:
1
2
3
4
: 0.5 0 0.8660 0
: 0.4132 0.4924 0.7660 0
: 0.1330 0.7544 0.6428 0
: 0.1710 0.0302 0.9848 0
L X Y Z
L X Y Z
L X Y Z
U X Y Z
a)
b)
c)
d)
Calculando todos los vectores de intersección. (Son los mismos del ejemplo I.9)

32
1 2 , 1,2,3,4ijI n n i j i j
12
13
14
23
24
34
0.4264, 0.7408, 0.2462
0.6533, 0.4366, 0.3772
0.0262, 0.3443, 0.0151
0.8944, 0.1637, 0.3772
0.4618, 0.5379, 0.0967
0.7623, 0.2409, 0.1250
I
I
I
I
I
I
Finalmente, se prueban todos los vectores 12 13 14 23 24 34, , , , yI I I I I I , uno a uno,
sustituyendo las coordenadas de , ,ij X Y ZI en las ecuaciones a), b), c) y d)
simultáneamente.
Para 12I
0 0
0 0
0.7738 0
0.1472 0
ok
ok
no
ok
a)
b)
c)
d)
Para 12I
0 0
0 0
0.7738 0
0.1472 0
ok
ok
ok
no
a)
b)
c)
d)
Para 13I
0 0
0.7739 0
0 0
0.2729 0
ok
ok
ok
no
a)
b)
c)
d)
Para 13I
0 0
0.7739 0
0 0
0.2729 0
ok
no
ok
ok
a)
b)
c)
d)
Para 14I
0 0
0.1471 0
0.2729 0
0 0
ok
ok
no
ok
a)
b)
c)
d)
Para 14I
0 0
0.1471 0
0.2729 0
0 0
ok
no
ok
ok
a)
b)
c)
d)
Para 23I
0.7739 0
0 0
0 0
0.5294 0
no
ok
ok
ok
a)
b)
c)
d)
Para 23I
0.7739 0
0 0
0 0
0.5294 0
ok
ok
ok
no
a)
b)
c)
d)
Para 24I
0.1472 0
0 0
0.5294 0
0 0
no
ok
ok
ok
a)
b)
c)
d)

33
24Para
0.1472 0
0 0
0.5294 0
0 0
ok
ok
no
ok
I
a)
b)
c)
d)
34Para
0.2729 0
0.5293 0
0 0
0 0
ok
no
ok
ok
I
a)
b)
c)
d)
34Para
0.2729 0
0.5293 0
0 0
0 0
no
ok
ok
ok
I
a)
b)
c)
d)
Como se aprecia, ninguno de los vectores ijI satisfacen simultáneamente las ecuaciones a), b),
c) y d). Por lo tanto, el block pyramid (BP) formado por 1 2 3 4, ,L L L y U , no tiene bordes, así, a
dicha pirámide se le denomina “Vacía o Empty”.
Ejemplo I.11. Cálculo de la resultante de fuerzas
Supóngase que hay tres fuerzas actuando en un bloque de roca,
por el peso propio 0, 0, 5
por el agua 4, 1, 0
por la inercia 2, 2, 1
w
p
e
Entonces la fuerza resultante r de las fuerzas w, p, y e, es:
6, 3, 4
r w p e
r
Ejemplo I.12. Cálculo de la dirección de deslizamiento por desprendimiento/levantamiento
Asúmase conocida la fuerza resultante que tiende a causar desprendimiento/levantamiento.
Supóngase que la resultante r es:
0, 3, 4r
Entonces a partir de (I.52): 0.5
2 2 20 3 4 5
0 3 4, ,
5 5 5
rs r r
r
0, 0.6, 0.8s r

34
Ejemplo I.13. Cálculo de la dirección de deslizamiento para el caso de deslizamiento en una
cara
Supóngase que la resultante es:
1, 2, 1r
El plano de deslizamiento es P, con 50º , 290º .
El vector unitario del plano P es:
^0.7198,0.2620,0.6428n
De la ecuación (I.53), sabemos que la dirección de deslizamiento del vector unitario ^s es:
^ ^s n nr
0.7198 0.2620 0.6428 1.0236, 1.3626, 1.7016
1 2 1
x y z
n r
1.0236 1.3626 1.7016 1.3217, 1.8828, 0.7126
0.7198 0.2620 0.6428
x y z
n nr
s es el vector unitario de n nr , por lo tanto:
1.3217 1.8828 0.7126, ,
2.4082 2.4082 2.4082
0.5488, 0.7818, 0.2959
n n
s
n n
s
r
r
Ejemplo I.14. Cálculo de la dirección de deslizamiento para el caso de deslizamiento
simultáneo en dos caras
Supóngase que las caras donde ocurre el deslizamiento son los planos 1 2P y P . Las orientaciones
de estas caras están dadas por,
1 1 1
2 2 2
: 20º , 280º
: 60º , 150º
P
P
La fuerza resultante está dada como: 0, 1, 1r

35
Los vectores unitarios de los planos1 2P y P son:
1
2
0.3368, 0.0594, 0.9397
0.4330, 0.7500, 0.5000
n
n
De la ecuación (I.54) se sabe que el vector unitario de la dirección de deslizamiento s es:
1 2 1 2s signo n n n nr
Y s es calculado de la siguiente manera
1 2
1 2
1 2
1 2 1 2
0.3368 0.0594 0.9397 0.7345, 0.5753, 0.2269
0.4330 0.7500 0.5000
0.3484
1
0.7345, 0.5753, 0.2229
x y z
n n
n n
signo n n
signo n n n n
r
r
r
s es el vector unitario de: 1 2 1 2signo n n n nr ; por lo tanto:
1 2 1 2
1 2 1 2
1 2 1 2 0.9602
0.7345 0.5753 0.2269, ,
0.9602 0.9602 0.9602
0.7650, 0.5992, 0.2363
signo n n n n
s
signo n n n n
signo n n n n
s
s
r
r
r

36
Capítulo II
El Uso de las Proyecciones Hemisféricas La inteligencia es como un río: cuanto más profunda, menos ruidosa.
Desconocido
ENFOQUE TRADICIONAL
Introducción
a proyección hemisférica es un método gráfico; en donde los datos con una
orientación tridimensional pueden ser representados y analizados en dos
dimensiones en una hoja de papel. El método es comúnmente conocido como
proyección estereográfica, el cual literalmente significa “proyección de sólidos o dibujos
tridimensionales”. La proyección hemisférica es ampliamente utilizada en estudios de
mecánica de rocas para analizar discontinuidades; como son: fracturas, fallas y fisuras; que
ocurren en varias orientaciones dentro del macizo rocoso; tales análisis pueden incluir no
solamente la recolección y agrupamiento de datos; sino además la determinación de la
estabilidad de bloques rocosos.
Los métodos de proyección hemisférica son de gran valor en los estudios de mecánica de
rocas porque presentan los datos estructurales como una representación gráfica más allá de
la mera abstracción matemática.
El uso del análisis vectorial para describir y analizar bloques permite soluciones rápidas
para problemas reales a través del uso de computadoras, o de programas computacionales
comerciales. Un método de solución alternativo incorporando las proyecciones
estereográficas es presentado en este capítulo. Las técnicas discutidas en este capítulo
pueden ser utilizadas completamente para obtener una solución y servir como un sustituto
de la teoría previamente presentada. Aunque, estas soluciones pueden ser adoptadas como
un complemento del análisis vectorial para proveer una solución semi-gráfica. El uso de
gráficos para examinar las relaciones geométricas en las proyecciones en cualquier etapa de
cálculo ofrece una percepción más clara de las relaciones geométricas y físicas.
Aunque, la mayoría de la información esencial está disponible en la literatura, será repetida
aquí, pero la mayoría de la información es nueva. El hilo que conecta las secciones de este
capítulo es que los procedimientos de proyección estereográfica pueden ser refinados y
mejorados mediante el uso de pequeños y fáciles cálculos.
TIPOS DE PROYECCIONES
Las proyecciones pueden ser organizadas en dos grupos, paralelas y perspectivas. La bien
conocida proyección ortográfica pertenece al primer grupo, en la cual las líneas de
construcción transfieren los puntos del objeto a la superficie de proyección. La segunda
clase de técnica de proyección -en la cual la proyección estereográfica es un ejemplo-
coloca todas las líneas de construcción juntas en uno o más puntos detrás de la superficie de
proyección.
L

37
PROYECCIÓN DE DISTANCIAS
ORTOGRÁFICA: Un ejemplo de la proyección ortográfica de un objeto tridimensional se
da en la figura II.1. Esta técnica es probablemente la base de la mayoría de los dibujos
ingenieriles. Las líneas y planos definiendo un objeto son transferidos al dibujo mediante
rayos dibujados perpendicularmente al plano de proyección. En la figura II.1, un bloque
poliédrico es determinado en tamaño, forma y posición por tres planos de proyección
ortográficos (vistas).
D
B
A
C
1 2
6
7
8
9
4
3
A
A
AA
SUPERFICIE "A"
B
SUPERFICIE "B"
B
B B
SUPERFICIE "C"
C
C
C
C
SUPERFICIE "D"
D
D
D
D
1 2
6, 7 5 4, 3
1, 9
6, 7 5, 2
7 8, 9
4, 3
5, 6 2
34
8, 7 9
SUPERIOR
ENFRENTE
LADO DERECHO
Figura II. 1. Proyección ortográfica de un objeto tridimensional utilizando múltiples vistas
OBLICUA: La figura II.2, muestra una técnica de proyección paralela en la cual los rayos
de construcción son oblicuos al plano de proyección. Este método prueba su utilidad
cuando se usa en conjunto con la proyección ortográfica, para proveer vistas inclinadas de
objetos.
PROYECCIóN
PLANO DE
LOS LÁPICES MUESTRAN LAS
DIRECCIONES DE PROYECCIÓN
OBLíCUA
ORTOGRÁFICA
Figura II.2. Proyección ortográfica y oblicua

38
LA RED ESTEREOGRÁFICA
La red estereográfica es un nomograma que permite calcular valores angulares; constituye
un patrón de comparación, en el cual, se valoran las relaciones angulares entre planos,
entre rectas y entre planos y rectas. Los elementos geométricos susceptibles de ser
graficados en la proyección estereográfica (planos y rectas) tienen siempre, como lugar
común, el centro de la esfera. Las proyecciones estereográficas de planos o de rectas que
intersecan el hemisferio inferior de una esfera tienen como punto de vista el cenit de la
esfera y se obtienen al intersecar las rectas proyectantes con el plano de proyección ubicado
en el horizonte.
Para que la utilización de los datos geológicos resulte efectiva para un ingeniero depende de
su habilidad para comprenderlos, digerirlos e incorporarlos en su diseño.
En casos en que las características estructurales como las fallas, fisuras, etc. afectan la
estabilidad del macizo rocoso; la relación geométrica tridimensional entre las
características, el techo y las paredes de la excavación es muy importante ya que esta
relación es la que determina la posibilidad que tengan los bloques para caer o resbalar.
La mayoría de los geólogos se han familiarizado con el uso de proyecciones esféricas para
la representación y el análisis de la geología estructural, pero puede ser que muchos
ingenieros desconozcan esta técnica. Es para estos para quienes se reseñarán los principios
y usos de las proyecciones estereográficas. Además se presentará un método para la
construcción de vistas isométricas de las características estructurales. El uso del análisis
vectorial, para describir y analizar bloques, permite obtener soluciones rápidas de
problemas reales, a través del uso de las computadoras. Un método alternativo el cual
incorpora a la proyección estereográfica; se presenta en el siguiente capítulo.
Está técnica; puede ser utilizada por sí sola, para resolver completamente un problema de la
teoría de bloque, sin necesidad de incorporar al análisis vectorial. Sin embargo, es posible
utilizar ambas soluciones para proveer una solución semi-gráfica, y así ofrecer una
percepción más clara de las relaciones geométricas y físicas del problema.
Aunque el método de la proyección estereográfica puede ser tratado de la manera
convencional, como se muestra en el enfoque clásico; el método puede ser mejorado,
aplicando algunos cálculos iniciales. Así, el uso de la estereored no será requerido, aunque
se recomienda el aprender el enfoque tradicional, para tener mayor claridad y percepción.
Tipos de Proyecciones
Proyección Ortográfica
Esta técnica, es probablemente la base de la mayoría de los dibujos realizados por los
ingenieros. Las líneas y planos que definen a un objeto son transferidos al dibujo a través
de rayos dibujados perpendicularmente al plano de proyección.

39
Proyección Ortográfica de Relaciones Angulares
A
A0R sen
R
B0
B
OA0 =R sen
a) Figura II.3. Proyección ortográfica de una esfera de referencia a) Bases para la proyección
b) red de proyección de líneas de longitud y latitud
La proyección ortográfica puede se utilizada para mostrar las relaciones entre líneas y
planos en el espacio y además medir los ángulos existentes entre ellos. Imagínese una
infinidad de vectores unitarios, los cuales irradian de un punto central. El conjunto de
vectores unitarios producen una esfera y la punta de cada una de ellos, se localiza en un
punto específico en la superficie de la esfera.
La proyección ortográfica produce la vista en planta de un plano diametral de la esfera, a
través de la construcción de rayos (líneas) dirigidas perpendicularmente al plano diametral.
Así el vector unitario OA es proyectado al punto Ao. Una serie de planos inclinados con una
línea de intersección común a través del centro de la esfera crean una familia de grandes
círculos en la esfera de referencia. Esto se proyecta en el plano de proyección diametral
como una familia de curvas elípticas, como se muestra en la figura II.3.b. Estas líneas son
análogas a las líneas de longitud de un globo terráqueo. Los círculos pequeños de la esfera
de referencia que son generados a partir de una familia de conos alrededor del eje de los
grandes círculos, se proyectarán al plano diametral como líneas rectas (líneas de latitud),
como se muestra en la figura II.3.b.
La proyección ortográfica de una esfera es utilizada comúnmente en cartografía. Esta
técnica tiene la desventaja, que ángulos iguales pueden producir áreas con gran distorsión
entre si en la proyección. Además, debido al congestionamiento de las líneas de longitud
cerca de los bordes de la proyección, la medición de ángulos entre planos puede ser
inexacta. Una razón más para desechar la proyección ortográfica de la esfera para el
desarrollo de los gráficos utilizados en la Teoría de Bloque; es su falla para distinguir
puntos simétricos en los hemisferios superior e inferior. Por ejemplo, si la línea OA tiene
una inclinación α con la vertical superior o inferior, la distancia OAo a partir del centro de
la proyección a su representación gráfica, punto Ao, tendrá el mismo valor, R sen , donde
R es el radio de la esfera de referencia. Por lo tanto, una técnica de proyección perspectiva,
será requerida para diferenciar puntos simétricos en los hemisferios superior como inferior.
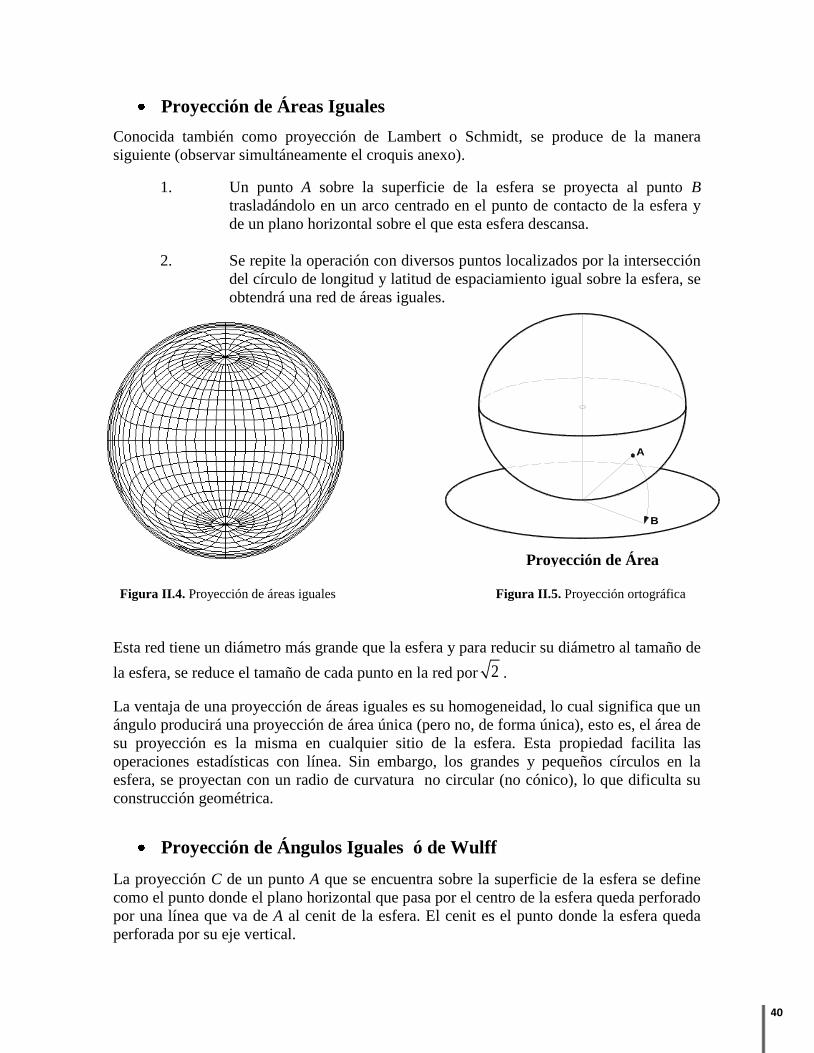
40
Proyección de Áreas Iguales
Conocida también como proyección de Lambert o Schmidt, se produce de la manera
siguiente (observar simultáneamente el croquis anexo).
1. Un punto A sobre la superficie de la esfera se proyecta al punto B
trasladándolo en un arco centrado en el punto de contacto de la esfera y
de un plano horizontal sobre el que esta esfera descansa.
2. Se repite la operación con diversos puntos localizados por la intersección
del círculo de longitud y latitud de espaciamiento igual sobre la esfera, se
obtendrá una red de áreas iguales.
Figura II.4. Proyección de áreas iguales Figura II.5. Proyección ortográfica
Esta red tiene un diámetro más grande que la esfera y para reducir su diámetro al tamaño de
la esfera, se reduce el tamaño de cada punto en la red por 2 .
La ventaja de una proyección de áreas iguales es su homogeneidad, lo cual significa que un
ángulo producirá una proyección de área única (pero no, de forma única), esto es, el área de
su proyección es la misma en cualquier sitio de la esfera. Esta propiedad facilita las
operaciones estadísticas con línea. Sin embargo, los grandes y pequeños círculos en la
esfera, se proyectan con un radio de curvatura no circular (no cónico), lo que dificulta su
construcción geométrica.
Proyección de Ángulos Iguales ó de Wulff
La proyección C de un punto A que se encuentra sobre la superficie de la esfera se define
como el punto donde el plano horizontal que pasa por el centro de la esfera queda perforado
por una línea que va de A al cenit de la esfera. El cenit es el punto donde la esfera queda
perforada por su eje vertical.
A
B
Proyección de Área
Iguales
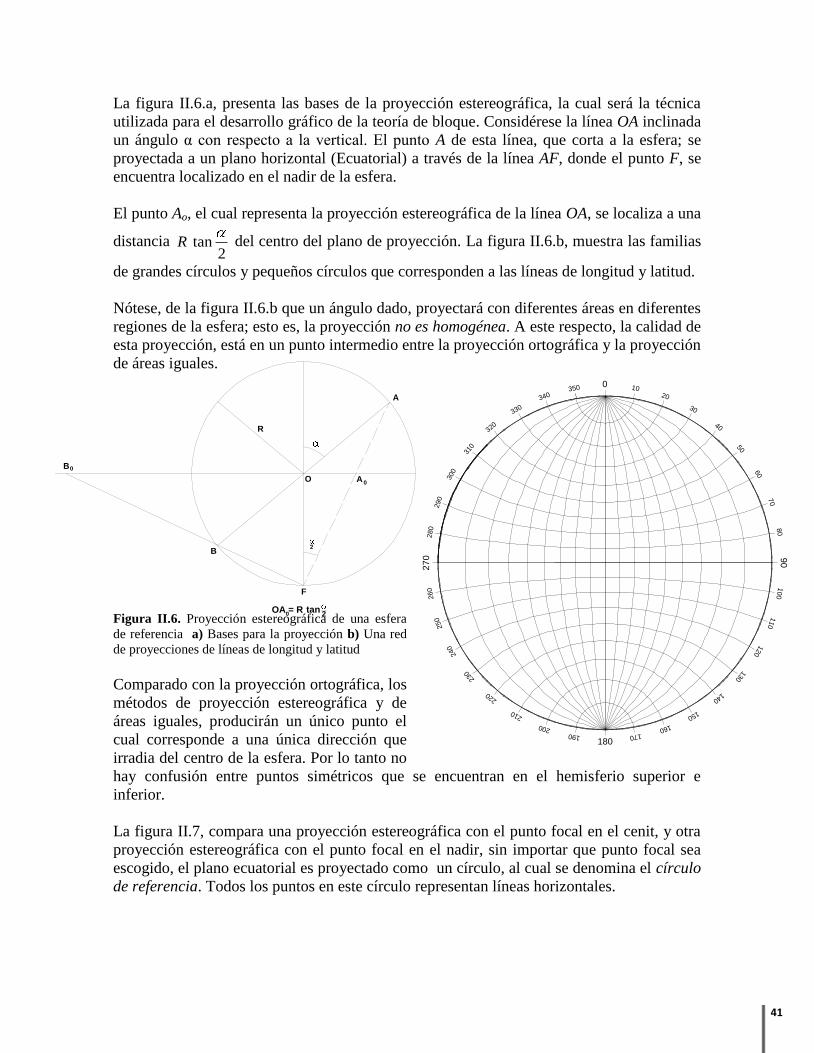
41
O
B
F
B0
2
A0
R
A
OA = R 0
tan2
La figura II.6.a, presenta las bases de la proyección estereográfica, la cual será la técnica
utilizada para el desarrollo gráfico de la teoría de bloque. Considérese la línea OA inclinada
un ángulo α con respecto a la vertical. El punto A de esta línea, que corta a la esfera; se
proyectada a un plano horizontal (Ecuatorial) a través de la línea AF, donde el punto F, se
encuentra localizado en el nadir de la esfera.
El punto Ao, el cual representa la proyección estereográfica de la línea OA, se localiza a una
distancia tan2
R del centro del plano de proyección. La figura II.6.b, muestra las familias
de grandes círculos y pequeños círculos que corresponden a las líneas de longitud y latitud.
Nótese, de la figura II.6.b que un ángulo dado, proyectará con diferentes áreas en diferentes
regiones de la esfera; esto es, la proyección no es homogénea. A este respecto, la calidad de
esta proyección, está en un punto intermedio entre la proyección ortográfica y la proyección
de áreas iguales.
Figura II.6. Proyección estereográfica de una esfera
de referencia a) Bases para la proyección b) Una red
de proyecciones de líneas de longitud y latitud
Comparado con la proyección ortográfica, los
métodos de proyección estereográfica y de
áreas iguales, producirán un único punto el
cual corresponde a una única dirección que
irradia del centro de la esfera. Por lo tanto no
hay confusión entre puntos simétricos que se encuentran en el hemisferio superior e
inferior.
La figura II.7, compara una proyección estereográfica con el punto focal en el cenit, y otra
proyección estereográfica con el punto focal en el nadir, sin importar que punto focal sea
escogido, el plano ecuatorial es proyectado como un círculo, al cual se denomina el círculo
de referencia. Todos los puntos en este círculo representan líneas horizontales.
0350
340
330
320
310
300
290
280
27
0260
250
240
230
220
210
200
190
180
170
160
150
140
130
120
110
100
90
80
70
60
50
40
30
20
10

42
0A
A
O A0
O
B
B0A0
a) b)
d)c)
Dirección de
Observación
Círculo deReferencia
ReferenciaCírculo de
Norte
Norte
Dirección de
Observación
Figura II.7. Proyecciones estereográficas con el punto focal en la parte superior e inferior, de una línea y un
plano.
a.- Sección de la esfera de referencia b.- Plano de Proyección
c.- Sección de la esfera de referencia d.- Plano de Proyección
y b) dan la proyección con punto focal inferior de una línea
y d) dan la proyección con punto focal superior de una línea
Si el punto focal se encuentra en el nadir de la esfera de referencia, como se muestra en la
figura II.7.a, una línea OA que toca a la esfera en su mitad superior, se proyectará en un
punto, que se encuentra dentro del círculo de referencia. Figura II.7.b. Si la parte superior
de la esfera (cenit) es tomado como el punto focal, un punto como OB (figura II.7.c) que
toca a la esfera en su mitad inferior, se proyectará dentro del círculo de referencia, como se
muestra en la figura II.7.d.
Es de hacer notar, que en el uso de la teoría de bloque, se ha adoptado el uso de
proyecciones hemisféricas con el punto focal en el nadir, es decir, se utiliza el hemisferio
superior.
Ambos tipos de proyección (ángulos iguales y áreas iguales) se emplean para el análisis de
datos geológicos estructurales. En términos generales los geólogos prefieren la proyección
de áreas iguales ya que como lo indica su nombre, la red queda dividida en unidades de
áreas iguales, lo que permite la interpretación estadística de los datos estructurales. Los
ingenieros tienden a dar su preferencia a la proyección de ángulos iguales, ya que las
construcciones geométricas que se necesitan para dar solución a los problemas de
ingeniería son más sensibles y precisas de lograr con esta proyección que con la otra.

43
Polo
Vertical
Gran Círculo
Las técnicas para el uso de estas proyecciones son idénticas y no habrá ninguna dificultad
para pasar de un sistema a otro. La única limitación que existe es que el mismo tipo de
proyección debe usarse durante todo un análisis determinado. El pretender analizar datos
originalmente marcados sobre una red de áreas iguales como si lo fueran en una red de
ángulos iguales o viceversa, resultará un completo fracaso.
PROYECCIÓN ESTEREOGRÁFICA DE UN PLANO Y SU POLO
Imagínese una esfera que se mueve libremente en el espacio y que pueda centrarse sobre un
plano inclinado como lo muestra la figura en la derecha. La intersección del plano y de la
superficie de la esfera es un gran círculo, mismo que está sombreado en la figura. Una
recta que pasa por el centro de la esfera,
perpendicularmente al plano, sale de la esfera en dos
puntos diametralmente opuestos que se llaman los
polos del gran círculo que representa el plano.
Debido a que la información que aparece tanto en la
parte superior como la inferior de la esfera es la
misma, no se necesita más que una sola hemiesfera
para la representación de los datos de geología
estructural. La figura anexa muestra el método de
construcción de la proyección estereográfica de un
gran círculo y su polo, la figura muestra la apariencia
de estas proyecciones. La inclinación y la orientación
de un plano inclinado se definen únicamente por el
gran círculo o por el polo del plano.
Figura II.7.a.- Vista lateral del concepto de polo y gran círculo
Generalmente se marcan los polos en el campo al recabarse los datos geológicos y los
grandes círculos correspondientes se usan por regla general cuando se analizan estos datos
para fines de ingeniería. Para ayudar a visualizar una proyección estereográfica de planos,
imagine un tazón (figura inferior), coloque la mano de tal manera que pase por el centro de
la hemiesfera e interseque la superficie interior del tazón. Desde este punto de vista, la
intersección de su mano con el tazón corresponde a una proyección estereográfica de su
mano.

44
Cenit
Proyección
del gran círculo
Estereográfica
Gran Círculo
Polo
Gran Círculo
Figura II.7.b.- Vista lateral y en planta del concepto de polo y gran círculo
Mientras coloca la mano más inclinada, el trazo ciclográfico de su mano se acerca al centro
del tazón y comienza a parecerse a una línea recta. Y mientras su mano tiene una menor
inclinación, el trazo ciclográfico de su mano se acerca más al borde del tazón y comienza a
parecerse a un círculo.
DEFINICIÓN DE TÉRMINOS GEOLÓGICOS
Un plano geológico inclinado se define por su inclinación con respecto a la horizontal,
denominado echado (dip o plunge) y por su orientación con respecto al Norte, lo que se
denomina rumbo o dirección del echado. La relación entre estos términos se ilustra en el
esquema siguiente:
N
Echado
Dirección del Echado a
b
Figura II.7.c.- Esquema ilustrativo del echado y dirección del echado
El rumbo de un plano es la traza de la intersección de este plano con una superficie
horizontal y la mayoría de los geólogos utilizan el término para definir la orientación de un
plano. Para eliminar toda ambigüedad posible cuando se habla de rumbo es necesario
definir la dirección en que se echa un plano. Por lo tanto, un plano queda totalmente
definido si se registra con un rumbo N 40º W y un echado de 20º SW. Si hubiera sido
reportado con un echado de 20º, no quedaría claro si se echa hacia el suroeste o el noroeste.

45
Los geólogos utilizan varios convencionalismos para eliminar este problema al hablar de
echado y rumbo. El geólogo empleará aquella norma con la que se haya familiarizado más,
pero deberá tener en cuidado de incluir en sus notas la información suficiente para que
cualquier persona que trabaje con sus reportes sepa cual norma se ha empleado.
Los ingenieros geotécnistas, sobre todo aquellos que utilizan mucho las computadoras para
su análisis, han preferido emplear la dirección del echado más que la del rumbo como
manera para definir la orientación de los planos. Si la dirección del echado y el echado de
un plano se reportan como 240º/20º, no puede haber confusión sobre la orientación y a la
inclinación de ese plano y esa anotación es más concisa que la de rumbo y echado, factor
importante cuando se tiene que procesar grandes cantidades de datos geológicos por
computadora.
Además se muestran las normas que se utilizan en la proyección estereográfica sobre el
hemisferio de referencias inferior en relación con el echado, la dirección del echado y el
rumbo. Se notará que la dirección del echado siempre se mide en el sentido de las
manecillas del reloj a partir del norte y que la línea del rumbo se encuentra a 90º con
respecto a la dirección del echado de un plano.
EJEMPLOS DE CONSTRUCCIONES GEOMÉTRICAS
Construcción de un Gran Círculo para Representar un Plano
1) Considere un plano definido por una dirección de echado de 130º y un echado de
50º. Esto se puede anotar como 130º/50º.Como alternativa, el plano se define con
rumbo N 40º E y echado de 50º SE. El gran círculo que represente este plano se
construye de la siguiente manera:
1020
30
40
50
60
70
80
90
100
110
120
130
140
150
160170
180
190200
210
220
230
240
250
260
27
0280
290
300
310
320
330
340350
0
W
130º
Figura II.7.d.- Obtención de un echado y rumbo determinado

46
2) Se coloca un pedazo de papel de dibujo sobre la red meridiana por medio de un
alfiler de centro. Se marca el norte y el centro y la red sobre el papel de dibujo. Si se
tienen que realizar varios análisis estereográficos será útil tener a la mano una serie
de hojas de papel de dibujo en las que la circunferencia de la red, el norte y el centro
ya se encuentran marcados.
3) Se mide 130º en el sentido de las manecillas del reloj a partir del norte siguiendo la
circunferencia de la red y se marca este punto sobre el papel de dibujo. Como
alternativas se miden 40º y se marca la línea del rumbo, misma que se indica con
guiones en el esquema siguiente.
4) Se gira el papel de dibujo de 40º alrededor del alfiler central hasta que la marca de
130º queda sobre el eje oeste-este de la red, o sea hasta que esta marca coincida con
la marca de 90º de la red. Se cuentan 50º sobre el eje este-oeste, a partir de la
circunferencia de la red, y se traza el gran círculo de este punto.
El polo que representa el plano se localiza contando otros 90º sobre el eje oeste-este,
mientras la marca de los 130º sobre el papel de dibujo sigue alineada con este eje.
N
W
S
50°90°
Polo
EGran Círculo

47
Figura II.7.e.- Obtención del polo
W
50°
90°
Polo
EGran Círculo
Figura II.7.f.- Representación del gran círculo y polo para una dirección dada
5) Se quita el papel de dibujo de la red que se colocará nuevamente con el norte a la
vertical. La proyección estereográfica del gran círculo y de su polo se verá
finalmente como lo muestra el esquema que sigue.

48
Determinación de la Línea de Intersección de Dos Planos
N
W
S
E
250
130
Figura II.7.g.- Vista estereográfica de dos planos que intersecan entre sí
1) El plano definido por una dirección del echado y un echado de 130/50 ( o rumbo y
echado de N 40 E y 50 SE). Se quiere saber el buzamiento y la tendencia de la línea
de intersección de estos dos planos.
2) Vuélvase a colocar el papel de dibujo sobre la red con el alfiler de centro y mídase
250º en el sentido de las manecillas del reloj a partir del norte; gírese el papel de
dibujo otros 20º hasta que la marca de 250º que indica el papel coincida con la marca
de los 270º de la red.
3) Descuéntese 30 divisiones de grados a partir de la marca de 270º sobre la red hacia
adentro, rumbo al centro de la red. Trácese el gran círculo que se ubica en esta
posición. Cuéntese otros 90º sobre el eje oeste-este y márquese la posición del polo
del segundo plano. Gírese el papel de dibujo hasta que la intersección de los dos
grandes círculos, que define la línea del intersección de los dos planos, se encuentre

49
201º
W E
21º
sobre el eje oeste-este de la red. Se verá que el norte marcado sobre el papel de
dibujo se localiza ahora en la posición de 70º sobre la red.
E
W
21°
Figura II.7.h.- Rotación de la red estereográfica
4) El buzamiento de la línea de intersección será de 21º al contarse
divisiones de grados a partir de la circunferencia de la red
hacia la intersección de los grandes círculos. Esta marca
se da a partir de la marca de los 270 de la
circunferencia rumbo al centro de la red por el eje
oeste-este rumbo al punto de intersección.
5) Nótese que, con el papel de dibujo en esta
posición, los polos de los dos planos se
encuentran sobre el mismo gran círculo. Este
hecho proporciona una alternativa para
localizar la línea de intersección de dos
planos, ya que esto indica el polo del gran
círculo pasando por los polos de los dos planos.
Se gira ahora el papel de dibujo hasta que el
norte del papel de dibujo coincida con el norte de
la red. Se verá que la tendencia de la línea de
intersección es de 201º, medidos a partir de norte en
el sentido de las manecillas del reloj. Figura II.7.i.- Construcción final

50
Enfoque Aplicado a la Teoría de Bloques
Proyección Estereográfica de Líneas y Planos
Como se ha visto, la proyección estereográfica de una esfera permite la construcción de
puntos y lugares geométricos, que representan líneas y planos en el espacio. Recuérdese
que se asume que todas estas líneas y planos pasan a través del centro de la esfera de
referencia. Por lo tanto una línea se proyectará como un punto en algún sitio del plano de
proyección y un plano que atraviese a la esfera a través del centro; se proyectará como un
círculo. En el siguiente texto, se describirán varios procedimientos para hacer lo anterior.
Proyección Estereográfica de un vector
Considérese al vector v con las siguientes coordenadas:
, ,X Y Zv (II.1)
La proyección ortográfica de v en un plano horizontal (XY) da un vector v’ con dirección β
a partir de Y; v hace un ángulo α con respecto a la vertical (Z). La proyección estereográfica
de v es construida a través de una sección vertical que atraviesa a la esfera de referencia a
lo largo de la dirección de v’. Esta sección se muestra en la figura II.8.a. Arbitrariamente se
le ha asignado un radio R, a la esfera de referencia. Por lo tanto la distancia OV al punto de
proyección de v, está dado por:
Método 1 OV,βtan2
OV R (II.2)
Donde, α es el ángulo entre v y ^z . El punto V, el cual representa al vector v, es dibujado
en el plano de proyección (figura II.8.b) a través de sus coordenadas polares (OV, β);
donde β es medido en dirección de las manecillas del reloj a partir del norte ^y .
Alternativamente, V puede ser dibujado a partir de sus coordenadas cartesianas ,o oX Y .
En una sección vertical de la esfera de referencia a lo largo del eje X (figura II.8.c), se
muestra OV’’, la cual es la proyección ortográfica de v en este plano (XY); y a partir de
triángulos semejantes tenemos que:
o
R Z R
X X (II.3).a.
Similarmente, al hacer una sección vertical en la esfera de referencia a la largo YZ,
tendremos que:
o
R Z R
Y Y (II.3).b.

51
c)
O
X
x
Z^
o
oY
V
Nortex
Coordenadas Polares
(OV, )
Z
F
R
v''
O
a)
oX
X
z
Ov'': Proyección ortográficade v en el plano xz
b)
O v0
v
R
F
2
Z^
Figura II.8. Proyección estereográfica de un vector
Dado un punto , ,X Y Z en la superficie de una esfera 2 2 2 2R X Y Z , podemos
determinar la proyección estereográfica del punto a partir de sus coordenadas cartesianas
0 0,X Y en el plano de proyección, a través de:
0 0
RX RYX Y
R Z R Z
Si tomamos a ,X Y
X YR R
y Z
ZR
. Entonces las coordenadas 0 0,X Y de la
proyección estereográfica de un vector unitario , ,X Y Z , están dados por:
01
R XX
Z (II.4).a
01
RYY
Z (II.4).b.
Si el vector v, establece un punto , ,X Y Z , pero no está en la superficie de la esfera
2 2 2 2R X Y Z . Entonces la representación de v en la proyección estereográfica
estará dada por:
02 2 2
R XX
X Y Z Z (II.5).a
0
2 2 2
R YY
X Y Z Z
(II.5).b
Como método alternativo, para realizar la proyección de un vector cuya “punta”, no está en
la esfera, se puede dibujar su proyección a partir de las coordenadas polares ,OV con:
2 2
2 2 2
R X YOV
X Y Z Z (II.6).a
1tan
Y
X (II.6).b

52
Proyección estereográfica del opuesto de un vector
Un vector , ,X Y Zv tiene un vector opuesto , ,X Y Zv . En la figura II.9, la
proyección estereográfica de v es el punto V, y la proyección estereográfica de v es V’.
A partir de la figura II.9(a),
Método 1 OV,βtan2
OV R (II.2)
Y ' tan 902
OV R
Por lo tanto, 2'OV OV R (II.7)
Dado un vector cualquiera v , a través del centro de la esfera de referencia, es posible
calcular OV a partir de (II.2) y después determinar OV’ a partir de (II.7).
CORTE A ESFERA
x
Z
x, y
v
v'
V
R
V'
VISTA EN PLANTA
X
Y
V'
V
Figura II.9. Proyección estereográfica del vector opuesto de un vector

53
Proyección estereográfica de un plano
Un plano que pasa a través del centro de la esfera de referencia, se proyecta como un
verdadero círculo en una proyección estereográfica, y para construir este círculo se debe
encontrar su centro y radio.
Considérese un plano inclinado con un echado α debajo de la horizontal, con dirección β,
medido a partir del eje x. La figura II.10(a) es la sección vertical a través de la esfera de
referencia a lo largo del echado, esto es, a lo largo de la dirección OC en la proyección del
plano. (figura II.10(b)). La línea POP’ en la figura II.10(a) es un borde del plano inclinado,
y OP’ es su vector “echado”.
La proyección estereográfica de OP es el punto p y la proyección estereográfica de OP’ es
p’. Por lo tanto, la línea pp’ en la figura II.10(b) es un diámetro del círculo requerido y su
bisector; el punto C es su centro. Las relaciones angulares en la figura II.10(a) ofrecen
formulas simples para encontrar el centro y el radio del circulo.
Primero nótese que; ' ' 'POp P O p
Por lo tanto, 45º2
OFP
También, la distancia ' distancia distancia p C Cp CF porque el triángulo p’Fp es un
ángulo recto y la línea FC biseca su hipotenusa, haciendo triángulos isósceles p’CF y pCF.
Por lo tanto, como 'P FC es igual a 45º2
, por lo tanto CFO . La proyección
estereográfica del plano inclinado es un círculo cuyo centro, en C, y cuyo radio, r, son:
tanOC R (II.8)
cos
Rr (II.9)
P'
F
p' p
P
OF = r
CF = p'C = Cp = r
rr
a) b)
X
r
C
OC = R tan
r = R cos
Y
Figura II.10. Proyección estereográfica de un plano
Distancia medida del origen (O) al centro (C)
del sistema de coordenadas
Radio de la proyección estereográfica

54
Las coordenadas del centro del círculo que representa al plano con echado α y dirección del
echado β, son:
tan senxC R (II.10).a
tan cosyC R (II.10).b
Debe acentuarse, que estas formulas son aplicables para un punto focal inferior (nadir)
(hemisferio superior). Si se desea utilizar un punto focal superior (hemisferio inferior); las
coordenadas tendrán que ser ,x yC C .
Siendo ^ , ,n X Y Z , el vector unitario con dirección hacia arriba y normal al plano
inclinado con echado α y dirección del echado β, tendremos que:
sen senX (II.11).a.
sen cosY (II.11).b
cosZ (II.11).c
Desde que _ 0Z y 2 2 2 1X Y Z ; se puede manipular a II.11.c con ayuda de la figura
II.10(c); para determinar las relaciones trigonométricas siguientes:
2 2 21
tanX Y Z
Z Z (II.12).a
Y 2 2sen X Y (II.12).b
Por consiguiente II.11.a y II.11.b dan:
2 2
cosY
X Y (II.12).c
2 2
senX
X Y (II.12).d
Sustituyendo II.12 en II.8, II.9 y II.10, se obtiene las siguientes igualdades para calcular el
centro (C) y el radio (r) de la proyección estereográfica de un plano dado:
Rr
Z (II.13).a
21R ZOC
Z (II.13).b
x
R XC
Z (II.13).c
y
RYC
Z (II.13).d
La figura II.11, resume las diversas maneras para construir la proyección estereográfica de
un plano, dado su echado y su dirección de echado y el radio del círculo de referencia (R).

55
Resumen de métodos para construir proyecciones
estereográficas
1. Calcule, r, con II.9 o II.13a. Después encuentre la línea de rumbo y en ella los
puntos A y B (Figura II.11a), a través de 90o. Encuentre el centro C con AC =
BC = R. Finalmente dibuje un círculo con radio r a partir de C.
2. Calcule OC con II.8 o II.13b y dibuje el centro C con una dirección a partir de Y
(Figura II.11b). Calcule r usando II.9 o II.13a y dibuje el círculo.
3. Calcule las coordenadas del centro C, con II.10 o II.13c y II.13d, y calcúlese r a
partir de II.9 ó II.13a; después dibuje el círculo a partir de C con un radio r.
a)
A
B
C
Y
X
+90
-90
AC = BC = r = R/cos
X
Y
C
b)
r
OC = R tan
C
Y
X
Cy
x
C
r
c) Figura II.11. Métodos alternativos para construir grandes círculos

56
La línea de intersección de 2 planos
Debido a que todos los planos considerados, pasan a través del centro de la esfera de
referencia, cualquier par de planos tendrán, una línea en común.
Un ejemplo de esto se muestra en la figura II.12(c), donde el plano 1 1P tiene un ángulo
de echado (α) igual a 60º y una dirección de echado (β) de 100º y el plano 22P tiene
50 260o oy .
La proyección estereográfica de estos planos (figura II.12b); son dos círculos, cuyos puntos
de intersección I y I’ representan las dos direcciones a lo largo de la línea d intersección de
1P y 2P .
Como I se encuentra dentro del círculo de referencia; entonces está dirigido hacia el
hemisferio superior; en cambio, como I’, está fuera del círculo de referencia, esto significa
que está dirigido hacia el hemisferio inferior y por supuesto, es opuesto a I.
Figura II.12. Línea de intersección de dos planos
1P
P2
I'
IP
12P
I'
I
Círculo deReferencia
b)

57
UN PEQUEÑO CÍRCULO
El punto común de cierto número de líneas que hacen un ángulo igual con una dirección
dada a través del origen, es un cono. Este cono penetra a una esfera a lo largo de un círculo,
esta construcción geométrica es denominada como circulo pequeño (small circle) porque
puede ser generada también por la intersección de la esfera de referencia con un plano que
no contiene al origen. Por la propiedad fundamental de una proyección estereográfica,
cualquier pequeño círculo en la esfera de referencia se convierte en un círculo en el plano
de proyección.
Considérese a un vector unitario ^n a partir del origen con coordenadas
^, ,n X Y Z . Se
podría construir una proyección estereográfica de un pequeño círculo representando el
lugar común de las líneas que hacen un ángulo con ^n . Figura II.13(a).
Z
a)x
y
n^
O
R
F
2
Z
n^
Eje del cono
b
a
BA CX, Y
b) Figura II.13. Proyección estereográfica de un cono
La figura II.13(b) muestra una sección de la esfera de referencia a lo largo de un plano
vertical a través de ^n . Los limites comunes superiores e inferiores son las líneas Oa y Ob,
con proyección estereográfica en los puntos A y B. AB es el diámetro del pequeño círculo
en la proyección estereográfica y C, el bisector de AB, es su centro.
Por lo que el radio del pequeño círculo es:
r AC BC
Debido a que 2
OFA
Y 2
OFB
tan2
OA R (II.14).a. tan2
OB R
(II.14).b
Entonces 1
2r OB OA (II.15)
58
Sustituyendo (I.14) en (II.15) y simplificando se obtiene:
cos cos
R senr (II.16)
La distancia del origen al centro de la proyección es:
1
2r OB OA (II.17)
Sustituyendo (I.14) en (II.17) y simplificando se obtiene:
cos cos
R senOC (II.18)
Las coordenadas del centro de un pequeño círculo es:
cos cosx
R sen senC (II.19).a
cos
cos cosy
R senC (II.19).b
Debido a que ^n es la normal unitaria al plano P con echado y dirección del echado
figura II.13(a), las ecuaciones (II.11), (II.12) y (II.13) son aplicables aquí. Sustituyendo
estas ecuaciones (II.16), (II.18) y (II.19) se obtiene las siguientes formulas para el radio r y
centro C del pequeño círculo de líneas que hacen un ángulo de alrededor de
^, ,n X Y Z .
cos
R senr
Z (II.20)
2 2
cos
X YOC
Z (II.21)
cosx
XC
Z (II.22).a
cosy
YC
Z (II.22).b
Resumiendo, es posible proyectar el punto común de las líneas equidistante a partir de una
normal ^n al plano P de la siguiente manera.
Conociendo el echado y la dirección del echado del plano P, calcúlese OC a partir
de (II.18) y dibújese una línea con esa distancia con un ángulo con x. Figura
II.14(a).
Después utilice (II.16) para calcular r y dibuje el círculo con C como su centro.
O utilice las ecuaciones (II.16) y (II.19) ó (II.20) y (II.22). Figura II.14(b).

59
Y
X
r
a)
Y
X
b)
Cx
Cy
r
CC
Figura II.14. Métodos alternativos para construir un pequeño círculo
EJEMPLO DE CONSTRUCCIÓN DE UNA ESTEREORED
Una estereored es una proyección de las líneas longitudinales de la mitad de la esfera de
referencia. La red es utilizada para obtener lecturas aproximadas de los ángulos entre líneas
y planos mediante el trazado de grandes círculos y la rotación del trazo alrededor del centro
de la proyección. Algunos procedimientos para hacer lo anterior se presentan en la presente
obra, sin embargo, se aconseja ver Phillips (1971), Hoek y Bray (1977) y Goodman (1980).
Se discutirá la construcción de una estereored como un ejemplo de los procedimientos
vistos en las secciones precedentes. En la estereored, uno encuentra dos tipos de círculos,
los grandes círculos, los cuales representan la proyección de una familia de planos con una
intersección común; y los pequeños círculos, los cuales representan a la proyección de una
familia de conos alrededor de la línea de intersección de grandes círculos.
Siendo d el ángulo entre cada gran círculo sucesivo. Entonces los planos tienen un echado
igual a kd donde 0, ,2 ,....,90º.kd d d Sustituyendo estos valores, juntos con 90º , 270º en (II.9) y (II.10) lleva a:
cos
tan
0
x
y
Rr
kd
C R kd
C
(II.23)
Los pequeños círculos son una serie de conos alrededor de ^ ^
0, , 0 0, , 0n R o n R .
El incremento angular es kd , por lo que ,2 ,....,90ºd d ; sustituyendo estos valores en
(II.20) y (II.22) se obtiene:
tan
0
cos
x
y
r R kd
C
RC
kd
(II.24)

60
Después de calcular y tabular los datos, se puede obtener una figura como la II.15(a), la
cual es una proyección estereográfica construida con 10ºd , utilizando las formulas
anteriores para encontrar únicamente aquellos puntos dentro de la esfera de referencia. La
figura II.15(b) es una representación más completa de la esfera.
0350
340
330
320
310
300
290
280
270
260
250
240
230
220
210
200
190180
170
160
150
140
130
120
110
100
90
80
70
60
50
40
30
20
10
a)Figura II.15(a).- Estereored

61
Figura II.15(b). Una estereored, mostrando las líneas de longitud y latitud de una esfera de referencia:
Para un hemisferio únicamente
Para la esfera entera

62
Proyección estereográfica de un joint pyramid (JP)
Proyección estereográfica de un medio-espacio
En el capítulo I, se definió a una joint pyramid como el conjunto de puntos comunes a todos los
medios espacios limitados por el plano de cada cara de un bloque de roca cuando estos planos son
movidos para pasar a través de un origen en común. Todos los planos de discontinuidad
representados en una proyección estereográfica satisfacen el requerimiento de que ellos
contienen el centro de la esfera de referencia. Por lo tanto, la proyección estereográfica puede
servir para representar varias joint pyramid (JP).
Asúmase que iP es el plano de discontinuidad que pasa a través del punto 0, 0, 0 . Cualquier
vector que parta de 0, 0, 0 pero que no esté contenido en el plano iP esta en un lado u en el
otro de iP , esto es, yace en cualquier de los dos medios-espacios creados por iP . Si iP tiene un
echado 0 90º en dirección 0 360º , el vector unitario normal al plano iP es:
^ , cos , cosin sen sen sen (II.25)
Ahora adhiriéndonos a la regla de que cos 0 . Por lo tanto, ^
in siempre estará dirigido hacia
arriba o es horizontal. Debido a que iP contiene al punto 0,0,0 , su ecuación es ^ 0in x
(II.32).
Definiremos el medio-espacio superior iU de iP como todo el conjunto de vectores x que
obedecen a:
^ 0in x (II.26)
El medio-espacio inferior iL de iP es el conjunto de todos los vectores x que obedecen a:
^ 0in x (II.27)
Cuando iP es un plano vertical, los términos “superior” e “inferior” pueden sonar arbitrarios.
Pero aún así, son adecuados para (II.26) y (II.27) cuando ^
in es determinado por una de las dos
líneas horizontales normales a iP .
La proyección estereográfica de un plano iP , es un gran círculo. En la proyección con foco
inferior (hemisferio superior) que hemos adoptado, el medio-espacio iU de todos los vectores a
partir de 0,0,0 a los puntos arriba de iP es la región dentro del circulo del plano iP (figura
II.16). Similarmente, el medio-espacio debajo del plano iP es toda la región fuera del gran
círculo del plano iP .

63
X
Y
Ui
L i PlanoPi
Círculo de Referencia
Figura II.16. Proyección estereográfica con punto focal inferior de los medios-espacio del plano iP .
La intersección de medios-espacios para formar joint pyramids
Supóngase que existen n conjuntos de discontinuidades no paralelas, cada una determinada por la
orientación de un plano, iP , pasando a través del origen 0,0,0 . El sistema de planos iP , 1i a
n , corta a la esfera en un número de pirámides todos teniendo su ápice en 0,0,0 .
Cada uno de estos planos está representado por un gran círculo en la esfera de referencia y por lo
tanto por un gran círculo en la proyección estereográfica. La intersección de todos estos círculos,
como se muestra en la figura II.17(a), genera una serie de regiones en el plano de proyección. En
la figura, estas regiones son numeradas arbitrariamente. El circulo de referencia. El círculo con
línea punteada, no tiene injerencia en los límites de las regiones, pero se muestra por claridad.
Cada región enumerada en la proyección estereográfica puede ser imaginada como un conjunto
de vectores radiales dentro de un particular joint pyramid.
Las esquinas de una región son por lo tanto las proyecciones estereográficas de las esquinas o
bordes del correspondiente joint pyramid y los límites con forma de arcos circulares son las
proyecciones de las caras de la pirámide.
Por ejemplo la región 1 en la figura II.17(a) es la joint pyramid formada por la intersección de los
medios-espacios 1 2 3 4, ,U U U y U . Sus esquinas son las proyecciones de las cuatro líneas de
intersección 13 23 24 41, ,I I I y I , y estas formas los bordes de la pirámide como se muestra en la
figura II.17(b).
Se ha encontrado que es más fácil dibujar todas las regiones de la esfera a partir desde un único
punto focal localizado al en la parte inferior de la esfera de referencia.

64
Esto es, la figura II.17(a) es una proyección estereográfica de las joint pyramid utilizando el
hemisferio superior. Una representación alternativa puede realizarse a través de la separación de
los hemisferios superior e inferior.
La figura II.17(c) es la porción superior del hemisferio, proyectada desde el punto focal inferior,
y la figura II.17(d) es la porción inferior del hemisferio, proyectada desde el punto focal superior
de la esfera de referencia. En la figura II.17(d), la región dentro del circulo del plano iP
pertenece al medio-espacio iL mientras que en la figura II.17(c) la región dentro del circulo iP
pertenece al medio espacio iU . Esto puede causar confusión innecesaria, por eso en esta obra se
prefiere el proyectar desde un único punto focal.
a)
10
9
3
41 5
8
7
6
2
14
13
12
11
Círculo de Referencia
JP 1 = U1 U2 U3 U4
P1
P3
P2 P4
P4
P2
P3
P1
I14
I24I23
I13
b)O

65
c)
9
3
4
1 5
8
7
62
P1
P3
P2
P4
12
d)
9
3
10
135
8
76
P1
P3
P2
P4
12
1411
Figura II.17. Proyección estereográfica de varias joint pyramid
a) Proyección desde un punto focal inferior de la esfera entera
b) Proyección de 1 2 3 4, , ,U U U U (región 1)
c) El hemisferio superior, utilizando una proyección con punto focal inferior
d) El hemisferio inferior, utilizando una proyección con punto focal superior.
CONSTRUCCIONES ADICIONALES PARA LAS
PROYECCIONES ESTEREOGRÁFICAS
Varios procedimientos adicionales que harán posible el llevar a cabo los métodos requeridos
eventualmente para la aplicación práctica en la teoría de bloques.
LA NORMAL DE UN PLANO DADO
Dado un plano P , se desea encontrar la proyección de su normal ^n . En la figura II.18(a), se
muestra una sección vertical a través de la esfera de referencia a lo largo de la dirección del
echado de P , el plano es visto como el diámetro PP’, inclinado con respecto a la horizontal.
Debido a que 2
OFN ,
1 cos
tan2 1 cos
ON d R R (II.28)
De (II.9), cosR
r. Insertando esto en (II.28) tenemos que:
r R
ON d Rr R
(II.29)

66
Supóngase, que se tiene un gran círculo en la proyección y se quiere dibujar la normal figura
II.18(b). Primero dibújese el diámetro del gran círculo que pasa a través de O al centro del círculo
de referencia. Este diámetro es AB y el radio del gran círculo 2
ABr . La normal se encuentra en
el punto N, cuya distancia es d desde O a lo largo de OB.
D
Z
n^
d
p'
B
F
A
P
N
OFB = 45º+
OFB = 45º-
O
Círculo de Referencia
A
O
N
d
C
B
Figura II.18. Normal a un plano
EL PLANO NORMAL A UNA LÍNEA DADA
El procedimiento descrito arriba puede ser revertido, es decir, dibujar la la proyección de un
plano conociéndose su normal. Supóngase que se ha proporcionado el punto N (figura II.18(b)),
por lo tanto se conoce d ON . Resolviendo (II.29) para r en términos de d, se obtiene,
2 2
2 2
R dr R
R d (II.30)
A partir de (2.8), 2
2 tan2
tan
1 tan2
OC R R
Y de (2.28), tan2
d
R. Combinando estas dos relaciones se obtiene que,
2
2 2
2 R dOC
R d (II.31)
Por lo tanto el conocer d, permite calcular el radio r, y la distancia al centro OC, del gran círculo.
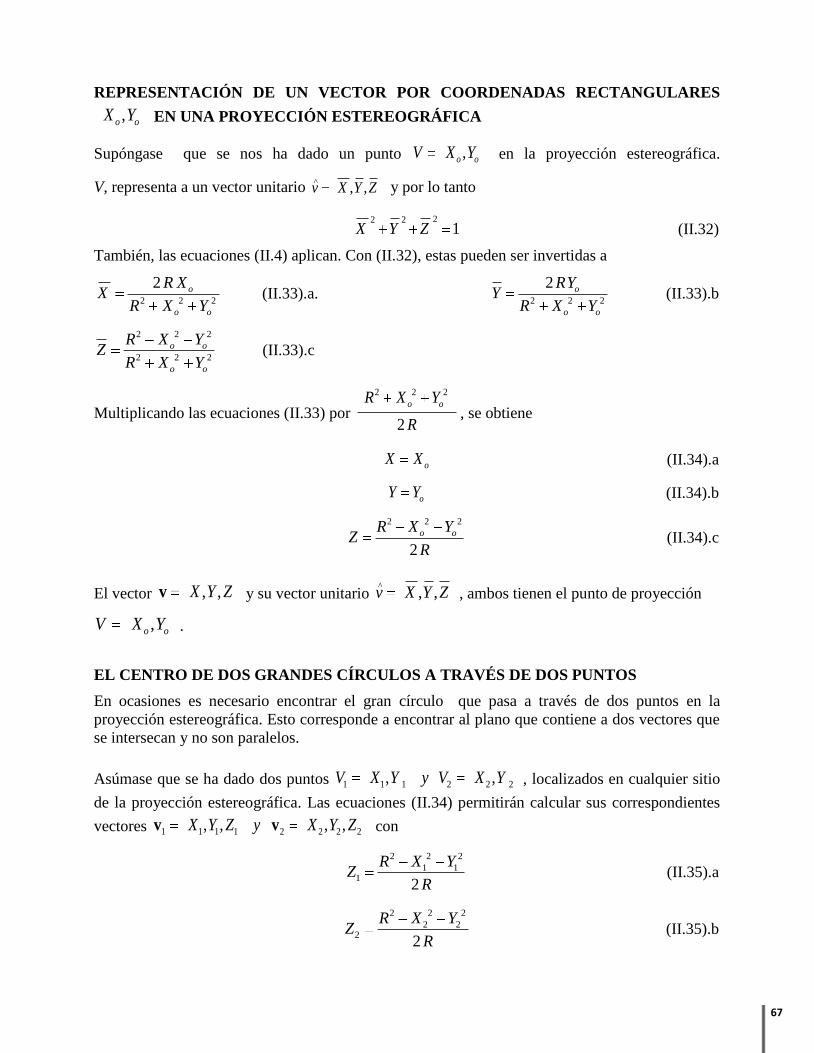
67
REPRESENTACIÓN DE UN VECTOR POR COORDENADAS RECTANGULARES
,o oX Y EN UNA PROYECCIÓN ESTEREOGRÁFICA
Supóngase que se nos ha dado un punto ,o oV X Y en la proyección estereográfica.
V, representa a un vector unitario ^
, ,v X Y Z y por lo tanto
22 2
1X Y Z (II.32)
También, las ecuaciones (II.4) aplican. Con (II.32), estas pueden ser invertidas a
2 2 2
2 o
o o
R XX
R X Y (II.33).a.
2 2 2
2 o
o o
RYY
R X Y (II.33).b
2 2 2
2 2 2
o o
o o
R X YZ
R X Y (II.33).c
Multiplicando las ecuaciones (II.33) por
2 2 2
2
o oR X Y
R, se obtiene
oX X (II.34).a
oY Y (II.34).b
2 2 2
2
o oR X YZ
R (II.34).c
El vector , ,X Y Zv y su vector unitario ^
, ,v X Y Z , ambos tienen el punto de proyección
,o oV X Y .
EL CENTRO DE DOS GRANDES CÍRCULOS A TRAVÉS DE DOS PUNTOS
En ocasiones es necesario encontrar el gran círculo que pasa a través de dos puntos en la
proyección estereográfica. Esto corresponde a encontrar al plano que contiene a dos vectores que
se intersecan y no son paralelos.
Asúmase que se ha dado dos puntos 1 1 1 2 2 2, ,V X Y y V X Y , localizados en cualquier sitio
de la proyección estereográfica. Las ecuaciones (II.34) permitirán calcular sus correspondientes
vectores 1 1 1 1 2 2 2 2, , , ,X Y Z y X Y Zv v con
2 2 2
1 11
2
R X YZ
R (II.35).a
2 2 2
2 22
2
R X YZ
R (II.35).b

68
La normal ^n al plano común de 1v y 2v tiene coordenadas dadas por
1 2 1 2 2 1 2 1 1 2 1 2 2 1, ,Y Z Y Z X Z X Z X Y X Yn v v (II.36)
Las ecuaciones (II.13c) y (II.13d) dan las coordenadas ( x yC y C ) del centro de un gran círculo el
cual representa a un plano con vector unitario normal , ,X Y Z . La relación de dos coordenadas de
un vector unitario iguala a la relación de las respectivas dos coordenadas de cualquier vector
paralelo a ellos y con la misma dirección del vector unitario.
Por lo tanto, es posible reescribir (II.13c) y (II.13d) como sigue:
x
R XC
Z (II.37).a y
RYC
Z (II.37).b
Sustituyendo las coordenadas de ^n de (2.36) y (2.37) da
1 2 2 1
1 2 2 1
x
Y Z Y ZC
X Y X Y (II.38).a 2 1 1 2
1 2 2 1
y
X Z X ZC
X Y X Y (II.38).b
En resumen, para encontrar el centro del gran círculo a través de los puntos
1 1 1 2 2 2, ,V X Y y V X Y en la proyección estereográfica, calcúlese 1Z y 2Z a partir de
(II.35) y calcúlese las coordenadas del centro a partir de (II.38).
Como método grafico alternativo para construir el gran círculo a través de dos puntos es el
encontrar el punto opuesto a uno de ellos. En la figura II.19, 1'V es el punto opuesto al punto
1V .
Por lo tanto el circulo es construido a partir 1V , 2V y 1'V .
Círculo de Referencia
v1
v1'
v2
O
Figura II.19. Gran círculo a través de dos puntos

69
LA PROYECCIÓN ORTOGRÁFICA DE UN VECTOR EN UN PLANO
Dándose un plano P y una línea v , se encontrará el trazo de la línea proyectada en el plano
mediante una proyección ortográfica paralela. Este trazo es la línea de intersección del plano P
con el plano que contiene a v y a la normal a P.
En la figura II.20, el punto V representa a la línea v y el círculo para el plano P se muestra en ella.
Para encontrar la proyección ortográfica de v en P, se debe hacer lo siguiente:
1. Dibuje la normal (N) al plano P.
2. Dibuje un gran círculo a través de V y N.
Este gran círculo interseca al círculo del plano P en los puntos Q y Q’. La proyección ortográfica
de v en el plano P es el punto Q y Q’ es su opuesto.
Plano P
V
V'
Q
Q'
NCírculo de Referencia
Figura II.20. Proyección estereográfica de la proyección ortográfica de una línea en un plano
MEDICIÓN DE UN ÁNGULO ENTRE DOS VECTORES
Dándose la proyección de los puntos 1 2V y V de los dos vectores 1 2yv v , por lo que el
procedimiento para encontrar el ángulo existente entre ellos es:
1. Mida las coordenadas de 1 2V y V : 1 1 1 2 2 2, ,o o o oV X Y y V X Y
2. Utilice las ecuaciones (II.33) calcule el vector unitario ^1 1 11 , ,v X Y Z y ^
2 2 22 , ,v X Y Z .
3. Calcule a partir de
1 2 1 2 1 2cos X X Y Y Z Z (II.39)

70
EL ÁNGULO EXISTENTE ENTRE DOS PLANOS O ENTRE UNA LÍNEA Y UN PLANO
En la figura II.21(a), V es la proyección de un vector v y P es la proyección de un plano.
Constrúyase la normal N al plano P. Después determínese el ángulo entre N y V utilizando (II.33)
y (II.39). El ángulo requerido es el complemento de NV .
En la figura II.21(b), 1 2P y P son dos planos. El ángulo entre ellos es el ángulo entre sus
normales, 1 2N y N . Además hay otro método más simple para medir el ángulo entre los planos. La
proyección estereográfica tiene la propiedad que un ángulo entre dos planos es exactamente igual
al ángulo entre dos tangente en las proyecciones de los grandes círculos de los planes,
construidos en sus intersecciones. En la figura II.21(b) los dos planos son representados por los
grandes círculos 1 2P y P . El ángulo entre ellos puede leerse con un compas entre las tangentes a
1 2P y P en cada punto de intersección, como se muestra en la figura .
Plano P
N
V
Círculo de Referencia
Círculo de Referencia
Plano P2
N
N1
2
Plano P1
Figura II.21. Ángulos entre planos y líneas
PROYECCIÓN DE LAS DIRECCIONES DE DESLIZAMIENTO
La dirección de deslizamiento de un bloque bajo un conjunto de fuerzas, fue discutida en la
sección del análisis vectorial, en el capítulo I. Esta dirección puede determinarse mediante
procedimientos utilizando la proyección estereográfica.

71
Desprendimiento/Levantamiento. Supóngase que la dirección de ^r de la fuerza resultante
aplicada al bloque está orientada de tal manera que desprende o levanta al bloque de cada plano
de discontinuidad. La dirección de deslizamiento ^s es por lo tanto idéntica a la dirección de ^r .
Deslizamiento En Una Cara. Si la fuerza resultante r actúa en una dirección tal que un bloque
tienda a deslizarse a lo largo de una de sus caras, la dirección de deslizamiento es paralela a la
proyección ortográfica de r en el plano de esa cara. En la figura II.22(a) ^r es la dirección de la
fuerza resultante y el deslizamiento es a lo largo del plano P.
Constrúyase la normal N al plano P.
Después constrúyase el plano común entre N y ^r , el cual interseca al plano P, en 1 2
s y s .
Ahora constrúyase el plano rP el cual es perpendicular ^r .
La dirección de deslizamiento, ^s , es la elección entre 1 2
s y s , el cual es aquella
intersección que está contenida en el medio-espacio de rP como lo está el punto ^r . En
esta figura la dirección de deslizamiento es 1s .
N
r^
Pr
N
s = s1
s 2
P
Círculo de Referencia
a)
P
C
s
O
b)
Extensión delsegmento OC
Círculo de Referencia
en este caso, es igual a Pr
Figura II.22. Dirección de deslizamiento para deslizamiento en una cara
En el caso especial, pero frecuente, donde la dirección de la fuerza resultante es debida a la
gravedad 0,0, 1 , ^r no puede ser representada (dibujada). Sin embargo, se conoce que el
medio-espacio del circulo de rP que contiene a ^r es la región fuera del circulo de referencia.

72
También, la normal de P yace a lo largo del circulo de referencia extendido a través del punto C,
el cual es el centro del plano P. Figura II.22(b). El plano común a ^r y N es vertical y por lo tanto
es una línea recta en dirección OC. La dirección, s, es la intersección de la extensión de OC y el
circulo del plano P.
Deslizamiento En Dos Caras. En la figura II.23(a), ^r es la proyección de la dirección de la fuerza
resultante. El deslizamiento ocurre en los plano 1 2P y P , cuyas líneas de intersección son los dos
puntos de intersección 12 12I y I de los círculos 1 2P y P .
Constrúyase el plano rP el cual es normal a ^r .
La dirección de deslizamiento es la elección entre 12 12I y I que yace en el medio espacio
de 12P que contiene a ^r . En la Figura s es 12I .
En la condición de peso propio, ^r está dirigida hacia abajo y no puede ser representada
(dibujada). Pero rP es el circulo de referencia y el medio-espacio de rP que contiene a ^r es la
región fuera del circulo de referencia, esto es, el hemisferio inferior. Por lo tanto, s es la línea de
intersección de los planos 1 y 2 que se dibuja fuera del círculo de referencia. Figura II.23(b).
O
a)
r s I12= -I12
P2
P1
Círculo de Referencia
^
O
b)
s
P2
P1
Círculo de Referencia = P r
Figura II.23. Dirección de deslizamiento para deslizamiento en dos caras

73
V=(0.28989, 0.57975)
Círculo de Referencia
R=1
V=(0.21903, 0.29068)
OV=0.3640
53°
Círculo de Referencia
R=1
Círculo de Referencia
R=1
EJEMPLOS
Ejemplo II.1. Proyección estereográfica de un vector unitario
Dado un vector unitario ^ 0.38683, 0.51335, 0.76604
1
v
R
Utilizando las formulas (II.4) con: 0.38683 0.51335 0.76604X Y Z
0 03.4. 3.4.1 1
R X RYX a Y b
Z Z
Se calculan las coordenadas de la proyección del punto V del vector unitario ^v , se tiene que:
0.219038, 0.290679V
Con esos valores, se está en condiciones para
dibujar el vector ^v en una proyección
estereográfica. Un método alterno para dibujar
el punto V es el utilizar las ecuaciones (II.6),
mediante las cuales se obtiene lo siguiente:
0.3640
53º
OV
Figura II.24. Proyección estereográfica de un vector unitario
Ejemplo II.2. Proyección estereográfica de un vector
Dado un vector 1, 2, 1v
y el radio del circulo de referencia 1R ,
Utilizando las formulas (II.5) con: 1, 2, 1, 1X Y Z R
Las coordenadas de la proyección del punto V del vector v son:
0 02 2 2 2 2 2
.5. .5.R X R Y
X II a Y II bX Y Z Z X Y Z Z
0.289898, 0.579796V
Con esto podemos dibujar la proyección del punto V de v en
el plano de proyección.
Figura II.25. Proyección estereográfica de un vector
Proyección estereográfica de
un vector unitario
, ,X Y Z
Proyección estereográfica de un vector v
pero que no llega a la superficie de la esfera
Punto que no está sobre la esfera 2 2 2 2R X Y Z

74
Ejemplo II.3 Proyección estereográfica de un plano a partir de su echado y dirección del echado
Dado un plano P con 42º
. 144º
echado
Dir del echado
Y siendo el radio del círculo de referencia 1R . A partir de (II.9),
cos
Rr ; 1.34563r
A partir de (II.8) la distancia desde el origen (O) y el centro (C) del circulo de proyección del
plano P es,
tanOC R ; 0.9004OC
Alternativamente, utilizando las ecuaciones (II.10) es posible calcular las coordenadas del centro
del círculo de proyección del plano P.
tan sen
tan cos
x
y
C R
C R;
0.5292
0.72844
x
y
C
C
Recapitulando los métodos para dibujar la proyección de un plano, se recordará que es posible
hacerlo mediante:
1. Utilizando 144º 1.3456y r
2. Utilizando 144º , 1.3456 0.90040r y OC
3. Utilizando 0.52924, 0.72844 1.3456x yC C y r
Círculo de Referencia
R=1
C =-0.72844
C =0.52924x
y
Plano P
Círculo de Referencia
R=1
Plano P
144°
0,9004
OC = 0.90040= 244º
r = 1.3456
Figura II.26. Proyección estereográfica de un plano a partir de su echado y dirección del echado

75
Ejemplo II.4. Proyección estereográfica de un plano a partir de su normal
Dadas las coordenadas de un vector unitario normal ^n del plano P
^0.61237, 0.35355, 0.70710n y 1R .
Es posible calcular los datos de la proyección del círculo del plano P como sigue. Utilizando la
ecuación (II.13).
2
1.41423 0.86603
11.00002 0.5000
x x
y y
R R Xr r C C
Z Z
R Z RYOC OC C C
Z Z
Círculo de Referencia
R=1
C =0.5000
C =0.8660x
y
Plano P
r =1.41423
Figura II.27. Proyección estereográfica de un plano a partir de su normal
Ejemplo II.5. Dibuje un pequeño círculo que representa la proyección estereográfica de un
cono alrededor de la normal a un plano
Dado ^n el cual es el vector normal a un plano con 116º y 50º , además el cono hace un
ángulo de 20º con respecto a ^n y con 1R .
Utilizando (II.16) se determina el radio del pequeño círculo cos cos
R senr , con lo que
obtenemos 0.682237r , y con (II.18) se obtiene la distancia del centro (O) de la esfera de
referencia al centro del pequeño círculo (C), cos cos
R senOC y se obtiene 1.79285OC .
Alternativamente, las coordenadas de C son determinadas mediante las ecuaciones (II.19)
1.3734cos cos
x x
R sen senC C
cos1.1524
cos cosy y
R senC C

76
Círculo de Referencia
R=1
C =3.04
C =0.00x
y
r =1.4705
Figura II.29. Construcción de una red
estereográfica (Red de ángulos iguales)
Círculo de Referencia
R=1
50°1,7
929
r =0.68223
Círculo de Referencia
R=1
C =1.1524
C =1.3734x
y
r =0.68223
Figura II.28. Pequeño círculo que representa la proyección estereográfica de un cono alrededor de la normal a un plano
Ejemplo II.6. Dibuje un pequeño círculo representando a un cono alrededor del vector v
Dado un vector 0, 1, 1v , 1R y 20º . El vector unitario
correspondiente a ^
0, 0.7071, 0.7071es vv . Con 1R ,
0, 0.7071, 0.7071X Y Z y sustituyéndolos en la
ecuación (II.22) tenemos que:
0.00cos
x
XC
Z
3.04cos
y
YC
Z
Y a partir de (II.20) cos
R senr
Z, 1.4705r .
Ejemplo II.7. Construcción de una red estereográfica (Red de
ángulos iguales)
Se calcularán los centros y radios de todos los círculos de la
estereored como se muestra en la figura II.15. Asúmase que el
radio del círculo de referencia es 1R y el grado de cada “paso”
es 10º. Utilizando (II.23):

77
tancos
0
x
y
Rr C R kd
kd
C
Con: 10º , 1,2,3,4,5,6,7,8d k , se obtiene el radio r y las coordenadas x yC y C de
los grandes círculos, tenemos la siguiente tabla.
k r xC yC
1 1.0154 0.17632 0
2 1.0641 0.36397 0
3 1.1547 0.57735 0
4 1.3054 0.83910 0
5 1.5557 1.1917 0
6 2.0000 1.7320 0
7 2.9238 2.7474 0
8 5.7587 5.6712 0
Tabla II.1.- Coordenadas de los grandes círculos
Similarmente, a partir de (II.24), con 10ºd , los valores de los radios r y las coordenadas
x yC y C de los centros de los pequeños círculos son:
k r xC yC
1 0.17632 0 1.0154
2 0.36397 0 1.0641
3 0.57735 0 1.1547
4 0.83910 0 1.3054
5 1.1917 0 1.5557
6 1.7320 0 2.0000
7 2.7474 0 2.9238
8 5.6712 0 5.7587
Tabla II.2.- Coordenadas de los pequeños círculos

78
Ejemplo II.8. Proyección estereográfica de un joint pyramid
Dado el siguiente conjunto de discontinuidades
Plano Echado Dirección
del echado
1P
60 70
2P
50 260
3P
80 0
4P
20 150
Tabla II.3.- Datos de ejemplo
Asúmase que el radio del círculo de referencia es 1R . Utilizando (II.9) y (II.10) es posible
calcular el radio r y las coordenadas x yC y C para cada proyección del círculo de los planos
1 2 3 4, ,P P P y P .
.9cos
Rr II
tan sen .10.
tan cos .10.
x
y
C R II a
C R II b
Plano r yC xC
1P
2.0000 0.5924 1.6276
2P
1.5557 -0.2069 -1.1736
3P
5.7587 5.6712 0.0000
4P
1.0641 -0.3152 0.1820
Tabla II.4.- Radios y coordenadas de los grandes círculos
Después construyese todas las proyecciones de los círculos como se muestra en la figura
siguiente, cada región es la proyección de un joint pyramid.
Por ejemplo:
Región 1 es la Joint Pyramid (JP) 1 2 3 4, , ,U U U U (0000)
Región 2 es la Joint Pyramid (JP) 1 2 3 4, , ,U U L U (0010)
Región 3 es la Joint Pyramid (JP) 1 2 3 4, , ,U U U L (0001)
Región 10 es la Joint Pyramid (JP) 1 2 3 4, , ,L U L L (1011)
Región 14 es la Joint Pyramid (JP) 1 2 3 4, , ,L L L L (1011)
Figura II.30. Proyección estereográfica de un joint pyramid
a)
10
9
3
41 5
8
7
6
2
14
13
12
11
Círculo de Referencia
JP 1 = U1 U2 U3 U4
P1
P3
P2 P4

79
Donde iL se refiere al medio-espacio inferior del plano iP y iU se refiere al medio-espacio
superior del plano iP .
Ejemplo II.9. Un plano común a dos líneas
Dados dos puntos en la proyección estereográfica con 1R .
0.88,2.3
2.2,0.6
A
B
El ejercicio es el dibujar el gran círculo que pasa a través de los puntos A y B. Siendo
0.88 2.3o oX y Y . Utilizando las formulas (II.34)
oX X oY Y
2 2 2
2
o oR X YZ
R
Se determina el vector ( , , )X Y Za correspondiente al punto A.
0.88, 2.30, 2.53a
Similarmente, para el punto B, 2.2 0.64o oX y Y y utilizando (II.34) se puede definir el vector
b correspondiente al punto B.
2.2,0.64, 2.12b
Después utilizando las ecuaciones (II.38) se obtienen las coordenadas del centro (C) del círculo
de proyección para el plano común a a y b.
1 2 2 1
1 2 2 1
0.72639x
Y Z Y ZC
X Y X Y
2 1 1 2
1 2 2 1
0.82303y
X Z X ZC
X Y X Y
0.72639, 0.82303C
a=(-0.88, 2.30)
b=(-2.2, 0.64)
O=(0, 0)
C=(-0.72639, 0.82303
Plano P común entre dos puntos
Figura II.31. Un plano común a dos líneas

80
Ejemplo II.10. Encontrar la normal de un plano dado P en la proyección del plano
Dada una proyección circular de un plano P como se muestra en la figura. Se debe medir la
distancia AB, la línea AB es el diámetro del circulo a lo largo de la línea que pasa a través del
origen (O).
Suponiendo un ejemplo, el radio es: 1.11442
ABr
Asumiendo 1R . Utilizando (II.29) r R
ON d Rr R
y calculando 0.23260d ON , la
posición de la proyección de N de la normal al plano P, ahora es conocida.
Círculo de Referencia
A
O
N
d
B
Figura II.32. Normal de un plano dado P en la proyección del plano

81
Ejemplo II.11. Encontrar el plano P, normal a un vector dado en la proyección
estereográfica
Se ha dado un punto N en la proyección estereográfica como se muestra en la figura II.18(b)
Supóngase 1R . Podemos medir 0.23260d ON . Considerando N como la proyección de
un vector n, se calcula r y OC (II.30) y (II.31) respectivamente. (
2 2
2 2
R dr R
R d,
2
2 2
2 R dOC
R d)
Obteniendo 1.1143 0.4918r y OC . Ahora es posible localizar C y dibujar el plano P
como el circulo de radio r alrededor de C.
Círculo de Referencia
A
O
N
d
C
B
Figura II.33. Plano P, normal a un vector dado en la proyección estereográfica
Ejemplo II.12. Proyección estereográfica de la proyección ortográfica de un vector v en un plano
Dado un plano P con normal ^
pn y vector v. EL problema es encontrar la proyección
estereográfica de v en el plano P. La construcción se muestra en la figura. Siendo 1R y siendo
la proyección estereográfica de ^
pn igual a 0.24, 0.15N . El vector v es representado por
0.42,0.44V .
Por lo tanto siendo 1 1, 0.24, 0.15X Y y 2 2, 0.42,0.44X Y , utilizando las ecuaciones
(II.35) para calcular 1 2Z y Z ;
2 2 2
1 11
2
R X YZ
R (II.35a)
2 2 2
2 22
2
R X YZ
R
(II.35b)
Finalmente sustituyendo 1 1 1 2 2 2, , , ,X Y Z X Y y Z en la (II.38), es posible calcular x yC y C ,
coordenadas del centro del gran círculo que pasa por V y N.
1 2 2 1
1 2 2 1
x
Y Z Y ZC
X Y X Y (II.38a) 2 1 1 2
1 2 2 1
y
X Z X ZC
X Y X Y (II.38b)
1.4805 0.69738x yC C

82
Construyendo este círculo, se encuentran los puntos de intersección 'Q y Q , los cuales son las
proyecciones ortográficas de v en el plano P.
Ejemplo II.13. Medición del ángulo existente entre dos vectores
Dados dos puntos: 1`
2
1,1
0.5,0
V
V
En el plano de la proyección estereográfica, los cuales son las proyecciones de los vectores
1 2yv v . Utilizando las formulas (II.34), las coordenadas de los vectores 1 2V y V son 1R :
oX X (II.34a) oY Y (II.34b)
2 2 2
2
o oR X YZ
R (II.34c)
1 21, 1, 0.5 0.5,0,0.375v v
Convirtiendo 1 2yv v en vectores unitarios ^ ^1 2v y v dividiendo cada componente por su
longitud.
^ ^1 2
1 1 0.5 0.5 0 0.375, , , ,
1.50 1.50 1.50 0.625 0.625 0.625v v
Después utilizando (II.39) 1 2 1 2 1 2cos X X Y Y Z Z el ángulo entre los vectores 1 2V y V
es:
137º

83
Ejemplo II.14. Medición del ángulo entre un vector v y un plano P
Observando la figura II.21(a), siendo 1R . Dado la proyección del círculo del plano P, mida el
radio r y la dirección del echado de este círculo. Como ejemplo, supóngase
1.15 205ºr y . Utilizando (II.29);
0.26413r R
ON d Rr R
Las coordenadas de N son: , cos 0.11162, 0.23938N d sen d
Dada la proyección V del vector v, 0.29,0.37V
Utilizando (II.33), se calculan los vectores unitarios de ^ ^n y v ;
2 2 2
2 o
o o
R XX
R X Y(II.33a) 2 2 2
2 o
o o
RYY
R X Y(II.33b)
2 2 2
2 2 2
o o
o o
R X YZ
R X Y(II.33c)
^ ^0.20868, 0.44753,0.86957 0.47502,0.60606,0.63800n v
A partir de (II.39) 1 2 1 2 1 2cos X X Y Y Z Z ,
^^ , 67.50ºn v
El ángulo entre P y V es:
90º 67.50º 22.50º
Ejemplo II.15. Medición del ángulo entre dos planos
Siendo 1R . Dadas las proyecciones de los planos 1 2P y P como se muestra en la figura
II.21(b). Midiendo el radio y la dirección del echado para esos dos círculos:
1 1 1 2 2 2: 1.15, 205º : 1.55, 0ºP r P r
A partir de (II.29), r R
ON d Rr R
;
1 1 2 20.26413 0.46442d ON d ON
Donde 1 2N y N son las proyecciones de los vectores normales ^ ^
1 2n y n de los planos 1 2P y P ,
respectivamente.
1 1 1 1 1 2 2 2 2 2, cos 0.11162, 0.23938 , cos 0, 0.46442N d sen d N d sen d
A partir de (II.29), 2 2 2
2 o
o o
R XX
R X Y, 2 2 2
2 o
o o
RYY
R X Y,
2 2 2
2 2 2
o o
o o
R X YZ
R X Y;

84
^ ^
1 20.20868, 0.44753, 0.86957 0, 0.76404, 0.64516n n
A partir de (II.39), 1 2 1 2 1 2cos X X Y Y Z Z ,
^^ , 77.345ºn v
El cual es el ángulo entre los planos 1 2P y P . Además se puede calcular mediante el
método gráfico, explicado anteriormente y mostrado en la siguiente figura.
Círculo de Referencia
R=1
77°
77°
Figura II.34. Ángulo entre dos planos
Ejemplo II.16. Encontrar la dirección de deslizamiento en una simple cara
Véase la figura II.22(a). Dada la proyección circular plano P y la proyección r de la fuerza
resultante R. 1R . Mídase el radio y la dirección del echado del plano P. Suponiendo un radio
de 1.55r y la dirección del echado 210º . A partir de (II.29), r R
ON d Rr R
, se
calcula:
0.46442
, cos 0.23221, 0.40220
d ON
N d sen d
Mídase las coordenadas de r en la proyección estereográfica. 0.24,0.13r
Utilizando (II.35),2 2 2
1 11
2
R X YZ
R,
2 2 2
2 22
2
R X YZ
R, y (II.38) 1 2 2 1
1 2 2 1
x
Y Z Y ZC
X Y X Y
2 1 1 2
1 2 2 1
y
X Z X ZC
X Y X Y
Se calcula en centro de C del círculo que pasa a través de N y r : 1.8711, 0.10525C
Después dibújese este círculo, el cual interseca al círculo P en los puntos 1 2S y S .

85
Calcúlese 2 2
0.24 0.13 0.27295rd O
Después utilizando (II.30) 2 2
2 2
R dr R
R d y (2.31)
2
2 2
2 R dOC
R d, es posible calcular el radio or y
el centro oOC del plano normal a r .
1.1609 0.58983o or OC
Dibújese el circulo oP con radio or y centro oOC , el cual es perpendicular a r ., es decir. r es su
normal (ecuación II.13) ( 0.24,0.13r ), por lo tanto 0.24, 0.13, 0.4628r
0.518639 0.280929x x y y
R X RYC C C C
Z Z
Nótese que los puntos 1S y r están en el mismo lado de oP ; por lo tanto,
1S es la proyección de
la dirección de deslizamiento.
El procedimiento resumido para encontrar la dirección de deslizamiento en una cara es el
siguiente:
1. Dibujar el plano P, mediante alguno de los métodos antes mencionados; calcúlese o
mídase el radio r.
2. A partir de (II.29) r R
ON d Rr R
y , cosN d sen d , obténgase la distancia d
(distancia entre el centro del circulo de referencia y la normal del plano N) y las coordenadas de la
proyección de la normal N, respectivamente.
3. Mídase o calcúlese, en caso de que esté como vector, se usará tal cual las coordenadas de
r , en caso contrario, (en forma de proyección (X, Y)), se deberá usar las ecuaciones
(II.35) 2 2 2
1 11
2
R X YZ
R,
2 2 2
2 22
2
R X YZ
R.
Después se calcularán las coordenadas del centro C, del círculo que pasa a través de N y
de y r , utilizando (II.38) 1 2 2 1
1 2 2 1
x
Y Z Y ZC
X Y X Y
2 1 1 2
1 2 2 1
y
X Z X ZC
X Y X Y. Dibújese este círculo y se
encontrarán los puntos 1 2S y S , puntos de intersección con el plano P.
4. Calcúlese los siguientes elementos correspondientes al vector unitario r
a. 2 2
rd O X Y (coordenadas de la proyección en el plano)

86
b.
2 2
2 2
R dr R
R d (II.30) y
2
2 2
2 R dOC
R d (II.31) (radio y distancia al centro del plano normal a r )
c. En caso de que se tengan los valores de r , en formato de vector , ,X Y Z se
calcularan las coordenadas del centro del circulo Pr, mediante x y
R X RYC C
Z Z.
En caso contrario (en forma de proyección en el plano ,X Y ), se deberá
encontrar los valores en x,y,z de la proyección mediante (II.34). (Ver ejemplo).
oX X oY Y
2 2 2
2
o oR X YZ
R
d. La dirección de deslizamiento, será la elección entre los puntos 1 2S u S , que está
contenida en el mismo medio-espacio de oP que or .
e. En caso de que la resultante de la fuerza activa ser únicamente la gravedad, el
procedimiento se simplifica, por lo que basta ver la sección que trata sobre el
tema, en páginas anteriores.
N
^r
N
P
S1
S2
Pr
Figura II.35. Dirección de deslizamiento en una simple cara

87
Ejemplo II.17. Encontrar la dirección de deslizamiento en dos caras simultáneamente
Véase la figura II.23(a). Siendo 1R . Dado los círculos de proyección de 1 2P y P ,
respectivamente y dada la proyección r de la fuerza resultante r. Además se ha medido,
0.25rO .
Utilizando (II.30) y (II.30) con:
0.25rd O
Calculándose el radio or y la distancia cO del círculo de proyección del plano oP , el cual es
normal al vector r .
2 2
2 21.1333o
R dr R
R d y
2
2 2
20.5333o
R dOC
R d
Dibújese el círculo oP . El punto de intersección 12I y r yacen en el mismo medio-espacio del
círculo oP , por lo tanto 12I es la proyección del vector de deslizamiento.

88
Capítulo III
La Removilidad de los Bloques
"El que se enorgullece de sus conocimientos es como si estuviera ciego en plena luz." Benjamin Franklin
TIPOS DE BLOQUES
e recordará que un bloque está determinado por las intersecciones de conjunto
particular de n medios-espacios. Ahora, considerando únicamente a las orientaciones,
existen 2n únicas intersecciones de medios-espacios y de estas intersecciones no
todas definen potenciales bloques críticos.
Antes de iniciar con la metodología para encontrar a estos bloques críticos, se establecerán
criterios para conocer la relativa importancia de los bloques.
Una cuña clave es potencialmente crítico para la estabilidad de una excavación debido a
que por definición, es finita, removible y potencialmente inestable. La tabla III.1 utiliza
estos términos para reconocer cinco tipos de bloques.
Tabla III.1.- Clasificación de tipos de bloques
Bloque Infinito: (tipo V), como se muestra en la figura III.1a, es un bloque que no daña a
una excavación mientras no sea posible, que sufra fracturamiento interno, recuérdese que
el fracturamiento interno se ha considerado dentro de las hipótesis básicas de la teoría de
bloque. Como se verá, la mayoría de las 2n intersecciones de los medios-espacios, producen
bloques infinitos.
TIPOS DE BLOQUES
V
INFINITOFINITO
NO REMOVIBLE
IV
EstreñidoREMOVIBLE
III
Estable aún sin fricción
II
Estable con suficiente fricción
POTENCIAL CUÑA CLAVE
I
Inestable sin soporte artificial
CUÑA CLAVE
S
89
Bloques Finitos. Pueden ser divididos en no removibles y removibles. Un bloque infinito
que no tiene fracturamiento interno, obviamente no puede removerse de la masa rocosa; sin
embargo, un bloque finito puede ser también no removible debido a su forma geométrica
estreñida. Más adelante se probará que cualquier bloque finito intersecado por la superficie
de una excavación, de tal manera que el número de caras se incremente, la geometría del
bloque se tornará estreñido y no podrá ser removido de la masa rocosa. Figura III.1b, se
muestra un ejemplo de un bloque estreñido, recuérdese que todos los bloques estreñidos son
no removibles, a menos que causas externas lo muevan.
Los bloques no estreñidos y finitos, son removibles pero no todos son bloques críticos para
el buen comportamiento de una excavación bajo un conjunto de condiciones de carga. Así,
es posible distinguir tres clases de bloques removibles.
Un bloque Tipo III, tiene una orientación favorable con respecto a la fuerza resultante, por
lo que se mantiene estable sin necesidad de movilizar la fuerza friccionante en sus caras.
Figura III.1c. Aunque sea posible levantar este bloque de su lugar, el bloque no es de
interés bajo la condición de carga debido a la gravedad, ya que su virtual movimiento está
fuera del espacio excavado.
En la figura III.1.d se muestra un bloque del tipo II, y este es definido como un bloque que
es potencialmente inestable, pero con pocas posibilidades de convertirse en un problema, a
menos que la resistencia friccionante en la potencial cara de deslizamiento sea
extremadamente pequeña ó que hayan tras fuerzas aplicadas al bloque, además del peso
propio. Un bloque de este tipo, es considerado una Potencial Cuña Clave.
Una Verdadera Cuña Clave (tipo I), como el de la figura III.1e. no es únicamente
removible, sino que además está orientado de manera insegura por lo que es probable que
se mueva, a manos que se le proporcione restricciones . En el caso de la figura III.1e., la
restricción deberá ser construida antes de que la excavación muestre descubra totalmente al
bloque.

90
V
a) b)
IV
d)c)III
IIe)
I
Figura III. 1. Tipos de bloques: a) Infinito, b) Estreñido, c) Estable, d) Potencial cuña clave, e) Cuña clave
Aunque se ha mencionado que la geometría de un bloque está gobernado por el número y
orientaciones relativas de los planos que forman sus caras, también está geometría obedece
al número de planos que están repetidos, es decir que son paralelos (lo cual depende del
espaciamiento, etc.), así un bloque puede estar formado por cada una de las n
discontinuidades, o puede tener uno o más conjuntos de caras construidos con un mismo
plano. La figura III.2 ilustra un ejemplo bidimensional de un bloque de este tipo. En la
figura III.2a, está formado por la intersección de tres medios-planos definidos por tres
discontinuidades no paralelas, si se repitiera una de estas discontinuidades se crea un
bloque como el de la figura III.2b; ahora repitiendo todos las discontinuidades, se forma un
bloque como el de la figura III.2c.
Los bloques con caras paralelas tienden a ser más estables que aquellos bloques que
carecen de caras paralelas, esto es, porque el rango de direcciones de posibles movimientos
han disminuido.
a) b) c)
Figura III. 2. La influencia del número de lados paralelos en la forma de un bloque
a) Sin lados paralelos, b) Un conjunto de lados paralelos, c) Todos los lados son paralelos

91
Algunos posibles bloques estreñidos bidimensionales son mostrados en la figura III.3. En la
figura III.3a, un bloque triangular será cortado por una superficie de excavación, el bloque
de 4 caras creado tendrá una forma tal que no le permitirá moverse al espacio excavado,
esto es, cualquier desplazamiento del bloque hacia un punto en el interior de la excavación
generará un ancho mayor, por lo que el bloque no podrá caber y pasar a través del espacio
disponible. Este razonamiento es también válido para el bloque creado por 4
discontinuidades no paralelas. Figura III.3b, cuando el bloque es excavado como se
muestra en la figura, el bloque resultante de 5 lados se convierte en un bloque estreñido.
Ahora, si la superficie de excavación elimina más de una esquina al bloque original, de tal
manera de que el número de caras resultantes se vean disminuidas, es decir, no se
incrementen, el bloque resultante podría no ser estreñido. Lo anterior se muestra en la
figura III.3c, donde dos esquinas del bloque original han sido removidos y en la figura
III.3e donde tres esquina han sido excavadas. Véase que los bloques resultantes no son
estreñidos. Aunque lo anterior, es un caso bidimensional, su aplicación es similar a bloques
tridimensionales.
a)
b)
c)d)
e)
Se elimina una esquinase aumenta el núm. de caras a 4
Bloque Estreñido
Se elimina una esquinase aumenta el núm. de caras a 5
Bloque Estreñido
Se eliminan dos esquinasse mantiene el número de caras
Bloque removible
Se eliminan dos esquinasse mantiene el número de caras
Bloque removible
Se eliminan tres esquinasse mantiene el número de caras
Bloque removible
Figura III. 3. Bloques constreñidos bidimensionales

92
TEOREMA DE FINITUD
Uno de los dos teoremas ejes de la teoría de bloque, será presentado a continuación, el cual
permitirá, utilizando los métodos gráficos o vectoriales, el conocer si un bloques es finito.
Considérese a un bloque definido por las intersecciones de los medios-espacios definidos
por los planos 1, 2 …, n; y recordando la terminología del capítulo 1, donde se definió a un
block pyramid mediante la traslación de cada plano de tal manera que pasaran por un punto
común (el origen), es decir:
Un bloque convexo es finito si su block pyramid (BP) se encuentra vacío. De manera
análoga, un bloque convexo es infinito si su block pyramid no se encuentra vacío.
El término vacío, se refiere a que un BP no tiene bordes1. En el ejemplo I.9, se observó
como determinar si un BP se encuentra o no vacío, mediante el uso del álgebra vectorial
(métodos vectoriales). En este apartado se mostrará como conocer la misma información
mediante el uso de las proyecciones estereográficas. Sin embargo, antes de proceder de
lleno en la demostración de lo anterior, será de gran ayuda el realizar unos ejemplos
bidimensionales.
La figura III.4.a, muestra una superficie libre (3) y dos planos de discontinuidad. Ahora
considérese al bloque formado por la intersección de los medios-espacios 1 2 3,U L y L , es
decir arriba del plano 1, debajo del plano 2 y debajo del plano 3. Por simple inspección el
bloque es infinito. Sin embargo, la finalidad del ejercicio es aplicar formalmente el
Teorema de Finitud; por lo que para determinar el block pyramid correspondiente a
1 2 3, ,U L L , será necesario realizar lo siguiente:
1. Mueva los medios-espacios, sin rotarlos, de tal manera que se intersequen entre sí
en un punto común. Figura 3.4b. En esta figura además se han colocado flechas que
indican varios términos necesarios, que ocuparemos en secciones posteriores.
2. Ahora encuéntrese la región común entre 1 2 3, ,o p oU L L (el superíndice oU , significa
que el plano ha sido movido) en el diagrama. En la figura III.4c, se han trazado
líneas paralelas a cada plano de discontinuidad como a la superficie libre, de tal
manera de que si hay una región en común estas líneas se intersecarán entre sí.
1 Recuérdese, que un block pyramid (BP) está formado por las discontinuidades y superficies de excavación,
en cambio un joint pyramid (JP) está formado por únicamente planos de discontinuidades.

93
U2
2L
Plano 2
L1
1U
Plano 1
Plano 33
U
L3
Superficie Libre
Superficie Libre
Plano 3
Plano 1
Plano 2
Space Pyra
mid
Excavation P
yram
id
SP
EP
1U
2L y L
3,0 0 0
Área común
Figura III. 4. Aplicación del teorema de la finitud a bloque infinito: Ejemplo bidimensional
Como se observa en III.4c, existe una región común entre 1 2 3, ,o o oU L L , por lo que el
bloque 1 2 3, ,U L L es un bloque infinito.
El caso contrario, se muestra en la figura III.5, el bloque 1 2 3, ,U U L en la figura III.5a. es
finito por inspección. Pero para determinar esto formalmente utilizando el teorema, se
seguirán los pasos anteriormente mostrados. Muévase los planos 1, 2 y 3 sin rotarlos de tal
manera de que pasen por un punto común. Así, como se ve en la figura III.5c, no existe una
región común entre los tres planos y el único lugar común es el origen. Por lo tanto, no
existen bordes en el block pyramid (BP) 1 2 3, ,o o oU U L , es decir, es un BP vacío y por el
Teorema de Finitud el bloque 1 2 3, ,U U L es finito.

94
Superficie Libre
3L
U3
Plano 3
Plano 1
U11
L
Plano 2
L2
2U
Bloque expuesto
Área común000,3
LyU2
U1
U1 1
L
Plano 1
Plano 3
3U
L3
Superficie Libre
Plano 2
L2
2U
SPSpace P
yram
id
EP
Excavation P
yram
id
0 0
0
0
0
0
U1 1
L
Plano 1
Plano 3
3U
L3
Superficie Libre
Plano 2
L2
2U
0 0
0
0
0
0
a)
b)
c)
Figura III. 5. Aplicación del teorema de finitud a un bloque finito: Ejemplo bidimensional
En estos ejemplos bidimensionales, la finitud de los bloques considerados fue obvia por
simple inspección; pero en casos reales, es decir tridimensionales, dicha inspección no es
tan sencilla. Sin embargo la aplicación formal del Teorema de Finitud permite una
determinación directa de la finitud y cuando se utiliza la proyección estereográfica, el
método para conocer la finitud es sumamente sencillo.
En cada ejemplo, el bloque fue definido en parte por los medios-espacios de los planos de
discontinuidad y en parte por los medios-espacios de las superficies libres. Por lo tanto cada
block pyramid (BP) fue formado por planos paralelos a las discontinuidades y las
superficies libres. (Ver nota 1).

95
Denominando como joint pyramid (JP) al subconjunto de únicamente los medios-espacios
de los planos de discontinuidad (esto es, sin las superficies libres) y denominando como
excavation pyramid (EP) al conjunto de medios-espacios de los planos de excavación. Por
lo tanto, el block pyramid (BP) es la intersección del joint pyramid (JP) y del
excavation pyramid (EP) de un bloque en particular, así que:
BP JP EP ( II.1)
Para que un bloque sea finito, su block pyramid (BP) debe estar vacío, de tal manera, que
un bloque es finito si y sólo si:
JP EP ( II.2)
Una declaración alternativa es posible si se define al space pyramid (SP), como el conjunto
de direcciones que es complementaria al EP, esto es:
SP EP
Por lo tanto la ecuación III.2, es equivalente a decir que un bloque es finito si y sólo si su
joint pyramid está enteramente contenida en el space pyramid, esto es, si y sólo si:
JP SP ( II.3)
Teniendo lo anterior como referencia, reexamínese los ejemplos anteriores.
En la figura III.4b, 1 2,o oU L definen al joint pyramid (JP),
3
oL es el excavation pyramid
(EP) y 3
oU es el space pyramid. Debido a que el JP no está incluido dentro del SP, el
bloque es infinito.
Ahora considerando el ejemplo de la figura III.5b, el JP es 1 2,o oU U , el EP es
3
oL y el SP es
3
oU , como se puede observar JP está completamente dentro del SP, por lo tanto el bloque
es finito.
El Teorema de Finitud Aplicado en las Proyecciones Estereográficas
Dado un conjunto de planos de discontinuidad y superficies libres, es posible realizar una
proyección estereográfica del conjunto de planos, esto, colocando en posición a cada plano
de tal manera de que pasen a través del centro de la esfera de referencia de radio R, así,
cada plano se proyecta como un círculo que atraviesa a la esfera de referencia. (Ver
ejemplos del capítulo II).
Como ejemplo, se construirá una proyección estereográfica para los bloques definidos por 3
planos de discontinuidades y una única superficie de excavación, cuyas propiedades se
muestran en la tabla III.2.

96
Planos Echado
α
Dirección
del Echado
β
Propiedades Geométricas2
xC yC r
1 30 90 0.5774 0 1.1547
2 65 50 1.6428 1.3785 2.3662
3 65 130 1.6428 -1.3785 2.3662
Plano libre (excavación) 15 90 0.2679 0 1.0353
TABLA III.2.- Ejemplo de aplicación
En la figura III.6a, se muestra la proyección estereográfica de los 4 planos utilizando una
proyección con el punto focal inferior, es decir, es una proyección en el hemisferio
superior. El círculo de referencia (plano horizontal) es el círculo punteado. El plano libre
está representado mediante un círculo de líneas intermitentes y los tres planos de
discontinuidad están representados mediante tres círculos de línea continua.
Por ahora, considérese a únicamente a los planos de discontinuidad. Las regiones de
intersección entre estos tres círculos definen a los joint pyramids (Recuérdese que los JP´s
están formados únicamente por las discontinuidades) y a estas regiones se les puede
identificar mediante una cadena de números binarios (en este caso 3 dígitos, por ser tres
discontinuidades) que es:
El número 0 corresponde al símbolo U (del inglés Upper) que define al medio-
espacio arriba del plano.
El número 1 corresponde al símbolo L (del inglés Lower) e identifica al medio-
espacio debajo de un plano.
Con lo anterior, se está en condiciones de crear los códigos de cada JP; estos códigos
están en orden, es decir, el código 100 identifica al joint pyramid 1 2 3, ,o o oL U U , el cual
está (el JP) simultáneamente debajo del plano1, arriba del plano 2 y arriba del plano 3.
Una característica muy importante de la proyección estereográfica con punto focal
inferior, es decir, el hemisferio superior, es que la región arriba de un plano es el área
dentro de su gran círculo.
Consideremos el siguiente ejemplo, para hacer más entendible lo anterior.
2 Estos valores se obtuvieron mediante las formulas del capítulo III y son:
tan , tancos
x y
RC R sen C R sen y r

97
Considérese, la excavación de una abertura subterránea, la cual tiene el anterior plano
libre (de excavación) como su techo. Los bloques en el techo son formados tanto por los
medios-espacios de los planos de discontinuidad como por el medio-espacio arriba del
plano libre (de excavación). En la figura III.6b, la superficie libre ha sido redibujada
mediante un círculo con línea continua y las porciones de los grandes círculos
correspondientes a las discontinuidades han sido removidas, dejando únicamente dos
joint pyramids, el JP 011 y el JP 100, los cuales o yacen enteramente dentro o
enteramente fuera del círculo del plano libre.
El space pyramid (SP) de la excavación con el plano libre como su techo, es la región
debajo del plano libre. Por lo tanto, el SP es la región fuera del círculo del plano libre;
debido a que el JP 100 se encuentra totalmente fuera del círculo del plano libre (círculo
de excavación), está totalmente contenido en el SP. Por lo tanto, por el Teorema de
Finitud JP SP el JP 100 es un bloque finito 1 2 3, ,L U U . Todas las demás regiones
identificadas en la figura III.6a. están al menos en una parte dentro del círculo de
excavación (i.e. en parte dentro del excavation pyramid –EP) y por lo tanto no están
totalmente dentro del SP, por ende, son bloques infinitos.
EP
SP
Space PyramidSP
Suponiendo plano libre en el techo
Figura III. 6.a Interpretación del space pyramid para el techo

98
100011
3
2
1000
Plano Libre
001
010
110
111
101
1
2
3
011 = 100000
321L U U1
2
3
0 = Arriba = Dentro del Círculo1 = Abajo = Fuera del Círculo
Plano Horizontal
ReferenciaCírculo de
ReferenciaCírculo de
a)
b)
Figura III. 7.b Aplicación del teorema de finitud en tres dimensiones

99
Con el mismo argumento, se observará que la región 011, la cual yace enteramente dentro
del círculo del plano libre, determina un bloque finito debajo de una abertura subterránea
que tiene al plano libre como su piso. Esto es, cuando los bloques están formados debajo
del plano libre, el space pyramid (SP) se convierte en la región arriba del plano libre y por
lo tanto dentro del círculo del plano libre. Además se puede observar rápidamente que el
código 011 es el único JP que está totalmente contenido en el SP arriba del plano libre.
EP
SP
Space PyramidSP
Suponiendo plano libre en el piso
Figura III. 8.c Interpretación del space pyramid para un piso
TEOREMA DE LA REMOVILIDAD DE UN BLOQUE CONVEXO Y FINITO
El segundo teorema, parte clave de la teoría de bloque, es el Teorema de la Removilidad, el
cual es utilizado únicamente cuando se han encontrado aquellos bloques que son finitos
(utilizando el Teorema de Finitud).
Aun bloque convexo y finito es removible o no, de acuerdo a su forma relativa a la
excavación. Anteriormente se ha etiquetado como un bloque finito no removible, como
bloque estreñido. Las condiciones necesarias y suficientes para la removilidad o no
removilidad de un bloque finito son establecidas mediante el siguiente teorema:
Un bloque convexo es removible si su block pyramid (BP) se encuentra vacío y su joint
pyramid (JP) no se encuentra vacío. Un bloque convexo es no removible (estreñido) si su
block pyramid se encuentra vacío y su joint pyramid se encuentra, también, vacío.
Es decir;
Bloque Removible
BP= y JP
Bloque No Removible
BP= y JP
Donde significa vacío.

100
Por el Teorema de Finitud, el bloque considerado en ambas partes del Teorema de la
Removilidad debe ser finito. El nuevo teorema establece que un bloque finito, determinado
por una serie de planos de discontinuidades y planos libres, tendrá forma estreñida si los
medios-espacios de los planos de discontinuidades, por si mismos determinan un bloque
finito, es decir, si por únicamente los planos de discontinuidad se forman bloques finitos
(JP), al momento de agregar una superficie libre o de excavación (BP) se agregarían caras
al bloque original. Esto se ve claramente en la figura III.3.a y b.
Un ejemplo bidimensional ayudará a demostrar el Teorema de la Removilidad. En la figura
III.7 se muestra una serie de bloques definidos por varios planos de discontinuidad y por
una superficie libre.
Considérese primeramente al bloque A, figura III.7a, b y c, el cual está formado por
1 2 4 5U U U L . Su block pyramid (BP) es: 1 2 4 5, ,o o o oU U U y L y su JP es:
1 2 4, ,o o oU U U ,
como se observa en la figura III.7, el BP está vacío, por lo que es un bloque finito, y su JP
no está vacío, es decir, entre los planos 1 2 4, ,o o oU U U existe una región común, con lo
anterior y aplicando el Teorema de la Removilidad, se sabe, que el Bloque A es un finito y
removible.
Ahora considérese al bloque B, figuras III.7a, d y e, el cual está formado por los medios-
espacios 1 2 3 5U U L L . Viendo la figura III.7d, su block pyramid está vacío, por lo que al
igual que el bloque A, es un bloque finito, y en su JP no existe una región en común
(excepto el origen) entre los planos 1 2 3, ,o o oU U L , por lo tanto, según el Teorema de la
Removilidad, el Bloque B es finito y no removible, es decir, un bloque estreñido.
Plano 22
U
Plano 4
4U
Plano 1
1U
0
L5
Superficie Libre
1U
2U
4U L
5BP =
Único punto común es el origen,
BP = VACÍO
Plano 22
U
Plano 4
4U
Plano 1
1U
0
1U
2U
4UJP =
Existe una región en común, por lo tanto
JP = NO ESTÁ VACÍO
BLOQUE A
Región común
U1
0
, yU2
0
U3
0
BLOQUE B
Plano 22
U
Plano 1
1L
0
L5
Superficie Libre
1U
2U
3L L
5BP =
Único punto común es el origen,
BP = VACÍO
Plano 3
L3
Plano 2
2U
Plano 11
L
0
1U
2U
3LJP =
Único punto común es el origen,
JP = VACÍO
Plano 3
L3
REMOVIBLE NO REMOVIBLE
Plano 2
L2
2U
Superficie Libre
5L
U5
Plano 5
B
A
Plano 3L3
3U
Plano 1
L11
U
Plano 4 L4
4U
a)
b) c) d) e)
Figura III. 9. Aplicación del Teorema de la Removilidad en dos dimensiones

101
Aplicación del Teorema de la Removilidad en Tres Dimensiones Utilizando la
Proyección Estereográfica
Recuérdese que los JP´s que pertenecen a un block pyramid se dibujan en la proyección
estereográfica como una serie de regiones encerradas dentro de porciones de grandes
círculos. Dados n planos de discontinuidades no paralelas, existen 2nposibles bloques
creados por sus intersecciones de las discontinuidades. Sin embargo, cuando n es mayor a
3, no todas estas posibles regiones aparecen en la proyección estereográfica. Tómese como
verdad, aunque se probará en el capítulo 4, que el número de las regiones que aparecen en
la proyección estereográfica RN está dado por:
1 2RN n n ( II.4)
Como se conoce, la proyección estereográfica puede representar líneas y planos en el
espacio, pero no puede proyectar puntos en el espacio, excepto aquellos que yacen
exactamente en la superficie de la esfera de referencia. Teniendo en cuenta lo explicado en
secciones anteriores, cuando un bloque es finito, su Block Pyramid (BP) es finito y cuando
un bloque está definido únicamente por los medios-espacios de las discontinuidades, su
Joint Pyramid está vacío; y un JP vacío es aquel JP que no tiene bordes; por deducción, si
carece de bordes, no puede representarse en la proyección estereográfica. En otras palabras
el único punto en común de los medios-espacios que definen a un JP vacío es el mismo
origen y el origen está ausente de toda representación estereográfica.
Por lo tanto las regiones que están ausentes de la proyección estereográfica, son JP´s que
corresponden a bloques finitos.
El número TN de este tipo de bloques definidos por n discontinuidades no paralelas es,
por lo tanto:
2 1 2n
TN n n ( II.5)
Para corroborar lo anterior, se procederá a un ejemplo; considérese un conjunto de 4 planos
de discontinuidades (tabla III.3).
Plano Echado
α
Dirección
del Echado
β xC yC r
1 70 10 0.4771 2.7057 2.9238
2 60 110 1.6276 -0.5924 2
3 40 230 -0.6428 -0.5394 1.3054
4 20 330 -0.1820 0.3152 1.0642
Tabla III.3.- Ejemplo de aplicación
La proyección estereográfica de este conjunto de discontinuidades está mostrada en la
figura III.8 (Una proyección en el hemisferio superior)
Como datos tenemos que n = 4, por lo que utilizando a III.4 y III.5, tenemos que:

102
Número posible de bloques 2 16n
Número de Regiones que aparecen en la proyección estereográfica 1 2 14RN n n
Número de Bloques Finitos (que no aparecen en la proyección estereográfica) 2 1 2 2n
TN n n
Para comprobar y saber cuál JP es finito, se procede a realizar lo siguiente: Como se
observa en la figura III.8, cada JP o región es identificado por un código binario de 4
dígitos. Haciendo una lista de todas las regiones que aparecen en la proyección
estereográfica y colocando al lado el símbolo de JP, para aquellas regiones que si aparecen
en la proyección, se tiene que:
0000 JP 0101 JP 1010 JP 1111 JP
0001 0110 JP 1011 JP
0010 JP 0111 JP 1100 JP
0011 JP 1000 JP 1101 JP
0100 JP 1001 JP 1110
Es decir, los códigos que no aparecen en la proyección estereográfica corresponden a los JP
vacío que no tienen bordes y no pueden ser representados en la proyección y que además
por tal característica son JP finitos, todos los demás códigos corresponden a JP´s infinitos.
Los dos bloques finito están determinados por este conjunto de discontinuidades son por lo
tanto 1 2 3 4 1 2 3 4U U U L y L L L U .
1
2
3
4
0011
10111001
1101
0101 0100
0110
0111
0010
10101000
1100
0000
Figura III. 10. Proyección estereográfica con punto focal inferior de las discontinuidades dadas en la tabla III.3

103
El significado de aquellos bloques finitos definidos únicamente mediante los planos de
discontinuidades, está explicado en el capítulo IV. Es de importancia reconocer cuales
bloques son estreñidos ya que son bloques finitos pero no removibles, es decir, no son
cuñas claves. Un ejemplo de esto se muestra en la figura III.9, donde un túnel circular tiene
un bloque finito en el techo, pero como es un bloque estreñido, no puede caer dentro del
espacio del túnel.
Figura III. 11. Bloque estreñido arriba de un túnel

104
Capítulo IV
Joint Blocks (JB’s)
Conócete, acéptate, superáte. San Agustin de Hipona
Los joint blocks son bloques creados enteramente por planos de discontinuidades, es decir,
sin superficies libres (como puede ser, la pendiente de un talud, techo o piso de un túnel,
etc.). En otras palabras, los joint blocks (JB) existen dentro del macizo rocoso, detrás de la
cara visible. En este capítulo se explorará las propiedades geométricas y los tipos de joint
blocks (JB) producidos por un sistema de discontinuidades dado.
Los joint blocks (JB) son los bloques que constituyen a un macizo rocoso y por lo tanto
están enlazados fundamentalmente con el comportamiento del mismo. A la fecha de la
creación de la Teoría de Bloques (1984), los joint blocks (JB) no habían recibido la
atención significativa que merecían, ni tampoco teorías que relacionen al comportamiento
del macizo rocoso con la descripción de los joint blocks.
CC
CC
CC
JBJB
JB
JB
JB = Joint Block
CC = Cuña Clave
Figura IV.1. Diferencia y descripción de JB’s y Cuñas Claves (JP’s)
Cuando se realiza los trabajos de dinamiteo en la matriz rocosa, como se muestra en la
figura IV.1, los joint blocks, al menos en parte, determinan el tamaño y forma del
escombro. Por lo tanto, el diseño del dinamiteo para lograr una determinada forma en la
excavación debe estar influenciado por las formas, tamaños y arreglos de los Joint Blocks
localizados en el sitio.
Por ejemplo, un tipo de roca en particular puede tener bloques de forma tubular o de forma
cúbica, lo cual depende del espaciamiento y orientación de la masa rocosa no manipulada.
Todas las propiedades de la masa rocosa que son afectadas por las discontinuidades, están
probablemente influenciadas por las formas naturales de los bloques de roca. No
únicamente el producto de los trabajos de explosión y las propiedades de la excavación,
sino, además las velocidades de propagación de ondas, la permeabilidad, etc., están
relacionados y dependen de la forma de los joint blocks.

105
Los datos de campo, geológicos, requeridos para determinar el sistema de Joint Blocks son
el espaciamiento, orientación y extensión de cada conjunto de discontinuidades. El
espaciamiento promedio de las discontinuidades en un conjunto dictará las dimensiones
promedio de un bloque perpendicular a dichas discontinuidades. La extensión promedio de
las discontinuidades dictarán los probables tamaños de los bloques más grandes. Todas
estas cantidades son no determinísticas, y por lo tanto es necesario recurrir a las
distribuciones estadísticas para lograr describirlas con la mayor precisión posible. Por
simplicidad, se asumirá, que los valores de espaciamiento, extensión y orientación de las
discontinuidades son asignables.
Existe una importante diferencia entre los joint blocks discutidos en este capítulo y las
cuñas claves, idea de principal interés en los demás capítulos. Las cuñas claves (key blocks)
se presentan en las superficies de una excavación y una o más de sus caras son creadas por
la excavación. Los joint blocks (JB) son bloques de roca que no tienen contacto con la
superficie de excavación, es decir bloques que permanecen intactos al contacto o trabajo
humano.
Como regla general, es muy raro que una cuña clave esté formada por caras paralelas, esto
es, porque las caras paralelas restringen las direcciones de movimiento y generalmente son
estables; en cambio, los joint blocks usualmente tendrán caras paralelas, de hecho, los joint
blocks sin caras paralelas son la excepción.
Principios Empíricos Relacionados con la Ocurrencia de Diferentes Tipos de joint blocks
Los bloques creados con pocos conjuntos de discontinuidades son más recurrentes,
que aquellos que involucran a un gran número de conjuntos de discontinuidades;
esto último requiere de un gran número de planos de discontinuidades, y la
probabilidad de que n planos se intersequen unos a los otros varía inversamente
proporcional con n.
En la figura IV.2 se muestra un bloque formado por cuatro planos no paralelos. Este bloque
es creado por la intersección de 1 2 3 4L L U U , es decir, los medios-espacios, abajo del plano
1, abajo del plano 2, arriba del plano 3 y arriba del plano 4. Utilizando la notación
numérica del capítulo III, se etiquetará a dicho bloque como bloque 1100.
En este cuerpo del trabajo se introducirá el dígito 2 el cual significa la omisión o ausencia
de una o u conjunto de discontinuidad en particular, por lo que el bloque 1120, figura IV.2,
el cual significa que es un bloque formado por las discontinuidades 1, 2 y 4, sin ninguna
cara perteneciente a la discontinuidad 3. Similarmente, el bloque 1200, está formado por
únicamente las discontinuidades 1, 3 y 4.
La intuición dice que los bloques 1120 y 1200 se presentarán en mayor medida que los
bloques del tipo 1100, lo anterior debido a que es más probable encontrar bloque formados
con un menor cantidad de discontinuidades que con un gran número de discontinuidades.

106
Discontin
uidad 1
2
3
4
1U1L
2U2L
3U
3L
4U
4L 1
2
4L L U U
1100
L L U
1120
1
3
4
L U U
1200
a) b) c) Figura IV.2. a) Bloque con 4 caras no paralelas, b) Bloque formado con la ausencia de cara formada por la
discontinuidad 3, c) Bloque formado con la ausencia de cara formada por la discontinuidad 2.
Un bloque cuyas caras opuestas están formadas por dos discontinuidades del mismo
conjunto, tiene más probabilidades de presentarse que un bloque formado sin
discontinuidades paralelas de un mismo conjunto.
En el caso de n discontinuidades no paralelas, el joint pyramid es un polígono esférico. En
el caso de un bloque con un conjunto de discontinuidades repetidas, el joint pyramid (JP)
es representado por un gran círculo (arco de circunferencia en la proyección
estereográfica). Recordando, para crear un bloque infinito en un espacio excavado, el JP
debe estar contenido totalmente en el SP (space pyramid) (Teorema de Finitud, JP SP ),
así, se verá que es más sencillo encontrar o colocar dentro del SP, un arco de un gran
círculo que un polígono esférico. Por lo anterior, se deduce, que los bloques con caras
paralelas tenderán a ser más numerosos en una excavación (aunque dichos bloques sean
más estables que aquellos sin caras paralelas por el hecho de que la dirección de
movimiento es restringida enormemente).
Si los bloques con caras paralelas son más numerosos en una excavación inducida, es muy
probable que también sean más numerosas dentro del macizo rocoso en cuestión.
Ahora, habiéndose explicado lo anterior, se introducirá el dígito 3, el cual indica que un
bloque está formado por ambos medio-espacios de una discontinuidad, es decir, el medio-
espacio superior como inferior de una discontinuidad dada.
Así, en la figura IV.3 el bloque 1120 puede ser transformado en el bloque 3322, formando
dos caras a partir de cada una de las discontinuidades 1 y 2 y omitiendo las
discontinuidades 3 y 4. Figura IV.3b. Similarmente, el bloque 3323 involucra dos caras de
cada discontinuidad 1, 2 y 4 y no tiene cara debido a la discontinuidad 3.

107
1
2
4
L L U
1120
a)
3
1
2
3322
b)
1
2
1
2
3323
c)
1
2
4
Figura IV.3. Ejemplo de bloques con caras repetidas
De acuerdo al segundo principio empírico, los bloques 3323 y 3322 son más recurrentes
que el bloque 1120. Combinando esto, con el principio anterior, se podría predecir que el
bloque 3322 es más recurrente que 3323, y esté último es más recurrente que 1120. Si esto
es así, un sistema de joint blocks formado por un determinado sistema de discontinuidades
es relativamente regular en forma geométrica, sin embargo, las formas de los bloques no
siempre serán prismáticas a menos que las discontinuidades sean mutuamente ortogonales.
JOINT BLOCKS EN TRES DIMENSIONES
Bloques bidimensionales construyen modelos bidimensionales (en el plano) del
comportamiento de la masa rocosa, aunque todos los problemas reales son
tridimensionales.
Debido a que el apartado de los JB’s, no es el tema principal de este trabajo sólo se
facilitará la tabla donde se proporciona el número de joint blocks dependiendo del número
de conjuntos de discontinuidades repetidas en la proyección estereográfica. Se recomienda
al lector interesado leer (Goodman & Shi, 1985), para conocer a detalle el cómo se dedujo
las expresiones matemáticas.
Núm. de Conjuntos
Repetidos
Número de todas las
combinaciones de
medios-planos (Todos los Joint Pyramids – JP)
Número de
Joint Pyramids
no vacíos (Número de Joint
Blocks Infinitos)
Número de Joint
Pyramids vacíos (Número de Joint Blocks
Finitos)
Condición
0 Conjuntos repetidos 2n 2 2n n
22 2n n n 1n
1 único (elegido) conjunto
repetido 12n 2 1n 12 2 1n n 2n
1 conjunto repetido
cualquiera 12nn 2 1n n 12 2 1nn n n 2n
2 conjuntos repetidos elegidos 22n 2 22 2n 3n 2 conjuntos repetidos
cualesquiera
31 2nn n 1n n 31 2 1nn n 3n
m conjuntos repetidos
elegidos 3m 2n m 0 2n m 3n m
Cualesquiera m conjuntos
repetidos 2m 2m n m
nC 0 2m n m
nC 3n m
Tabla IV.1.-Número de JB´s en función del número del conjunto de discontinuidades repetidas

108
SOLUCIÓN ESTEREOGRÁFICA PARA LOS JOINT BLOCKS
Utilizando las formulas contenidas en la tabla IV.1, se encuentra en posición de explorar un
ejemplo tridimensional. El ejemplo está basado en un sistema de cuatro conjuntos de
discontinuidades 4n mostrados en la tabla IV.2. Se discutirá todos los casos de los
JP’s presentados en cada punto de la tabla IV.1.
Conjunto Echado
α
Dirección
del echado β
tanxC R sen
Ecuación 3.10a
tan cosyC R Ecuación 3.10b
cos
Rr
Ecuación 3.9
1 75 80 3.67535 0.64806 3.8637
2 65 330 -1.07225 1.8572 2.3662
3 40 30 0.41955 0.72668 1.3054
4 10 270 -0.17633 0 1.0154
Tabla IV.2.- Ejemplo de aplicación
Joint Blocks Finitos Sin Ningún Conjunto De Discontinuidades Repetido
1. Primero calcúlese el radio y centro de la proyección de los círculos de cada uno de
los 4 conjuntos. Se muestran en la figura IV.4.
2. Enumérese cada región delimitada por los círculos. Por ejemplo, la región 1010 es
la superficie esférica fuera del círculo 1, dentro del círculo 2, fuera del círculo 1 y
dentro del círculo del 4. Debido a que se ha venido utilizando una proyección con
punto focal inferior, así la región 1010 corresponde a la intersección del medio-
espacio inferior del conjunto 1, el medio-espacio superior del conjunto 2, el medio-
espacio inferior del conjunto 3 y el medio-espacio superior del conjunto 4.
3. Identifíquese en orden todas las combinaciones de los medio-espacios inferior como
superior de los 4 conjuntos de discontinuidades e identifíquese mediante las letras
JP a las particulares que se han localizado en la proyección estereográfica.
Haciéndolo se obtiene lo siguiente:
0000 JP 0100 JP 1000 JP 1100 JP
0001 JP 0101 JP 1001 JP 1101 ---
0010 --- 0110 JP 1010 JP 1110 JP
0011 JP 0111 JP 1011 JP 1111 JP
El número de combinaciones de medios-espacios para las 4 discontinuidades es 42 2 16n . El número de JP está dada en la tabla 5.2, como 2 2 14n n y el
número de JP vacíos (finitos) es 16 14 2 .
Considerando la lista binaria realizada anteriormente, los JP vacíos son los que no
aparecen en la proyección estereográfica, por lo que los JP vacíos son: 0010 y 1101.

109
1
0111
3
4
2
0101
0100
01101110
1100
1010
1000
1001
1011
0001
0011
Círculo de Referencia
0000
1111
Figura IV.4. Solución para joint blocks finitos sin ningún conjunto de discontinuidades repetido
Joint Blocks Finitos Con Un Conjunto De Discontinuidades Repetido
1. Primero calcúlese el radio y centro de la proyección de los círculos de cada uno de
los 4 conjuntos del conjunto de discontinuidades presentadas en la tabla IV.2.
2. Etiquétese cada segmento de cada círculo. El dígito 3 en el cada círculo de la
discontinuidad i. Por ejemplo, 1030 identifica al segmento del arco circular a lo
largo del círculo 3 que se encuentra fuera del círculo 1, dentro del círculo 2 y dentro
del círculo 4. Esto se muestra en la figura IV.5.
3. Identifíquese en orden todas las combinaciones de los medios-espacios tanto
superior como inferior con un conjunto de discontinuidades dado e indíquese
mediante las letras JP a aquel segmento de arco que se haya encontrado en la
proyección estereográfica.
Por ejemplo. Asúmase que el conjunto 1 es el repetido. Buscando en la tabla IV.1, el
número de combinaciones de medios-espacios, para el caso de un conjunto repetido
elegido arbitrariamente, se tiene 1 4 1
2 2 8n
. Así la lista de estas 8 combinaciones
es:
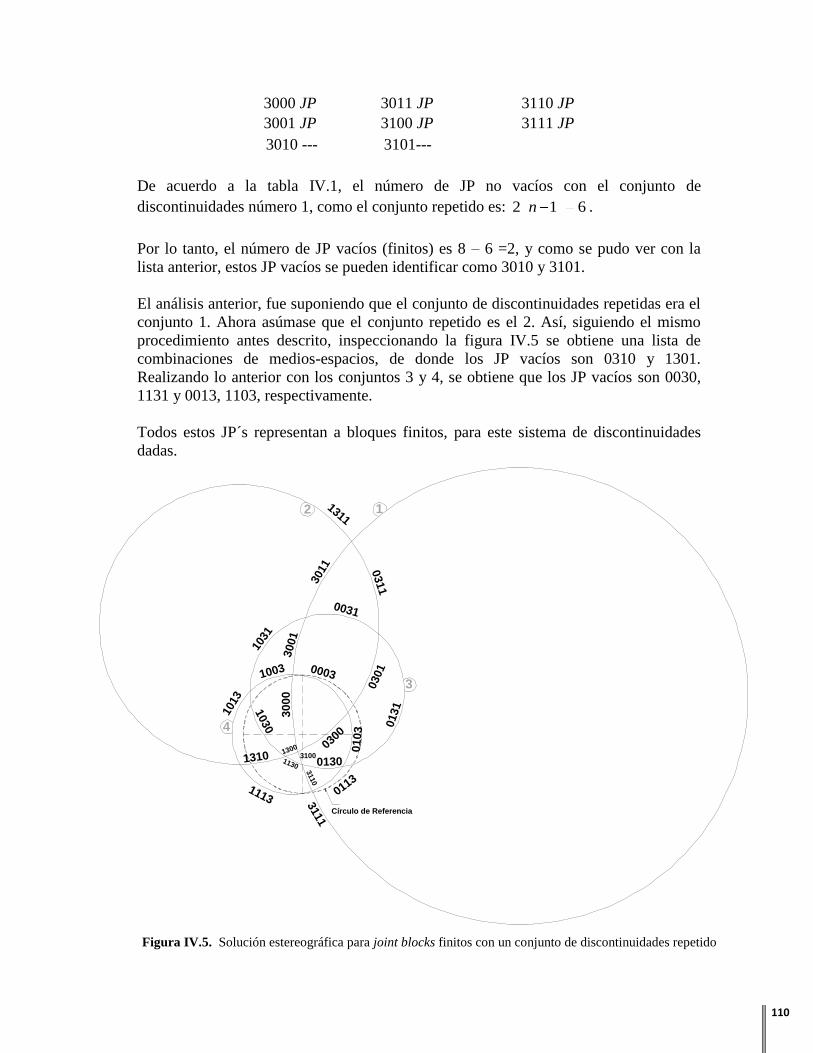
110
3000 JP 3011 JP 3110 JP
3001 JP 3100 JP 3111 JP
3010 --- 3101---
De acuerdo a la tabla IV.1, el número de JP no vacíos con el conjunto de
discontinuidades número 1, como el conjunto repetido es: 2 1 6n .
Por lo tanto, el número de JP vacíos (finitos) es 8 – 6 =2, y como se pudo ver con la
lista anterior, estos JP vacíos se pueden identificar como 3010 y 3101.
El análisis anterior, fue suponiendo que el conjunto de discontinuidades repetidas era el
conjunto 1. Ahora asúmase que el conjunto repetido es el 2. Así, siguiendo el mismo
procedimiento antes descrito, inspeccionando la figura IV.5 se obtiene una lista de
combinaciones de medios-espacios, de donde los JP vacíos son 0310 y 1301.
Realizando lo anterior con los conjuntos 3 y 4, se obtiene que los JP vacíos son 0030,
1131 y 0013, 1103, respectivamente.
Todos estos JP´s representan a bloques finitos, para este sistema de discontinuidades
dadas.
1
3
4
2
Círculo de Referencia
3111
3011
3001
3000
3100
3110
1311
0311
0301
0300
1300
1310
0031
01301130
1030
1031
0003
0103
01131113
1013
1003
0131
Figura IV.5. Solución estereográfica para joint blocks finitos con un conjunto de discontinuidades repetido

111
Joint Blocks Finitos Con Dos Conjuntos De Discontinuidades Repetidos
1. De nuevo prepárese la proyección estereográfica para los cuatro conjuntos de
discontinuidades de la tabla IV.2.
2. Ahora identifíquese a los números correspondientes a cada punto de intersección.
Por ejemplo, 3031 identifica la intersección de los círculos 1 y 3, está dirección se
encuentra dentro del círculo 2 y fuera del círculo 4. Similarmente, 0331 significa
que el punto de intersección del círculo 2 y 3, está dentro del círculo 1 y fuera del
círculo 4.
3. Identifíquese en orden todas las combinaciones de los medios-espacios con dos
planos repetidos y encuentre cuál punto de intersección aparece en la proyección
estereográfica. Los puntos que aparezcan dentro de la proyección estereográfica son
JP no vacíos (finitos). Todos los demás son JP vacíos (finitos).
PLANOS REPETIDOS
1 y 2 1 y 3 1 y 4 2 y 3 2 y 4 3 y 4
3300 JP 3030 --- 3003 JP 0330 --- 0303 JP 0033 ---
3301 --- 3031 JP 3013 --- 0331 JP 0313 --- 0133 JP
3310 --- 3130 JP 3103 --- 1330 JP 1303 --- 1033 JP
3311 JP 3131 --- 3113 JP 1331 --- 1313 JP 1133 --- JP =JP infinito, --- = JP finito
TABLA IV.3.- Resumen de procedimiento para encontrar JB´s con 2 conjuntos de discontinuidades repetidos
1
3
4
2
3300
3311
3031
3130
3113
3003
0331
1330
1313
0303
0133
1033
Figura IV.6. Solución estereográfica para joint blocks finitos con dos conjuntos de discontinuidades repetidos

112
El resumen del procedimiento se muestra en la tabla IV.3. Existe dos JP vacíos (finitos) por
cada elección de dos conjuntos de discontinuidades repetidas y seis de tales casos 2 2
4 6nC C , por lo que existen 12 bloques con dos discontinuidades repetidas.
Joint Blocks Finitos Con Tres ó Más Conjuntos De Discontinuidades Repetidos
Como se menciono en el cuerpo del capítulo, todas las combinaciones de medios-espacios
con tres o más conjuntos de discontinuidades repetidas forman JP vacíos (finitos). La tabla
IV.4, enlista tales combinaciones.
Conjunto de
Discontinuidades
Repetidas
JP vacíos (finitos)
2, 3 y 4 0333 y 1333
1, 3 y 4 3033 y 3133
1, 2 y 4 3303 y 3313
1, 2 y 3 3330 y 3331
Tabla IV.4.- Combinaciones de JP´s con 3 o más conjuntos de discontinuidades repetidos
Como se dijo, el tema de JB’s no es la parte principal del presente trabajo; pero como
introducción al tema, es posible, mediante lo anteriormente expuesto crear un mapa de
trazas en la cual se pueda conocer de manera aproximada la localización de los JB’s en la
masa rocosa y a partir de este mapa, realizar un procedimiento detallado de los trabajos de
dinamiteo y optimizar esta etapa y tipos de trabajos.

113
Capítulo V
Teoría de Bloques Para Excavaciones Superficiales
Nada es más digno de admiración en un hombre noble que el saber aceptar e imitar las virtudes de los demás.
Kung FuTse, Confucio
Conceptos Básicos
n este apartado, se explorará la aplicabilidad de la teoría de bloque al diseño-análisis
de excavaciones superficiales. Cortes en roca para diversos usos, variando desde
pequeñas caras hasta aquellas que rivalizan en tamaño con las impresionantes
estructuras de concreto, presentes en obras tales como: Presas, contrafuertes, etc. La
excavación en roca provee espacio para construcciones, fábricas, etc. (figura V.1.a) y para
rutas de tuberías de transmisión, canales, vías férreas y caminos (figura V.1.b). Las
excavaciones hechas en las laderas de las montañas se realizan para ser utilizadas en
cimentaciones de puentes (figura V.1.c). En estos últimos, el ingeniero diseñador no debe,
únicamente tener en cuenta la estabilidad de la masa rocosa adyacente a una superficie libre
inclinada, sino también la influencia de las fuerzas agregadas y los efectos impuestos por la
acción de la estructura y por la filtración del agua a través de las fracturas existentes en la
roca.
Las excavaciones en roca también se realizan para lograr acceso a aberturas subterráneas,
como se muestra en la figura V.1.d. Los problemas de estabilidad son comunes en los
portales de las estructuras subterráneas, debido a que la intersección de la obra subterránea
y las excavaciones superficiales crean nuevas condiciones de movimiento en los bloques de
roca.
a)b)
c)d)
Túnel
Figura V. 1.- Taludes en roca
E

114
Modos de Falla
Aunque los taludes en roca presentan una infinita variedad de modos de falla, un análisis
detallado, permitirá conocer que estos modos de falla; son la mezcla de unas pocas
combinaciones:
Deslizamiento de un bloque a lo largo de una cara
Deslizamiento de un bloque a lo largo de de dos caras, paralelo a la línea de
intersección de estos planos (caras).
Rotación de un bloque alrededor de un borde; y
Fractura de la roca debido a esfuerzos cortantes o momentos flexionantes.
La figura V.2.a, muestra una típica falla en cuña, en la cual un bloque se desliza
simultáneamente a lo largo de dos planos de discontinuidad, avanzando en dirección de la
línea de intersección de las dos superficies. La dirección del movimiento debe ser paralela a
la línea de intersección de las superficies deslizantes, esto, porque es la única dirección en
el espacio que es compartida por ambas superficies.
Figura V. 2.- Deslizamiento de cuña
Un segundo modo fundamental de falla, es el deslizamiento a través de una única cara, la
cual puede ser plana o curva. No obstante que una única superficie de deslizamiento es
involucrada, el movimiento del bloque puede deslizarse a través de diferentes planos con
esa orientación (figura V.3).

115
Figura V. 3. Bloque “unido”
Otro modo fundamental de falla existente en los taludes de roca, es la rotación de bloque.
Un ejemplo de una falla en un talud en la cual se involucra principalmente a la rotación de
bloque, es la denominada falla por volteo, mostrada en la figura V.4. La falla de esbeltas
columnas de roca ocurre debido a que cada columna recibe el efecto de un momento
flexionante en su base. En la figura V.4, esto ocurre naturalmente debido a que las capas se
inclinan hacia la ladera de la colina. Sin embargo, columnas con otras orientaciones pueden
voltearse como respuesta a las fuerzas inducidas por el agua y/o el hielo, o por fuerzas
transmitidas por masas rocosas adyacentes.
Figura V. 4. Deslizamiento y volteo de múltiples bloques
Las excavaciones en la superficie, también crean mecanismos que inducen nuevas fracturas
en la masa rocosa. Esto puede ocurrir debido a las concentraciones de esfuerzos en los
límites de la excavación o como respuesta a esfuerzos flexionantes que acompañan al
movimiento de los bloques. En la figura V.4, la flexión de las columnas volteadas, fue
facilitada por la abertura de ciertas discontinuidades pre-existentes. En las columnas que no

116
cuentan con discontinuidades pre-existentes, la flexión conlleva a fisuras flexionantes. La
figura V.5, muestra un bloque que ha sido fracturado por el efecto de la flexión, esto
después de haberse iniciado el deslizamiento a lo largo del borde (superficie de
deslizamiento).
Figura V. 5. Efecto de la flexión – fracturamiento interno
Los modos de falla en los taludes en roca, pueden ser el resultado de la combinación de los
modos fundamentales de falla antes vistos y como resultado pueden crearse nuevas formas
de fracturamiento. Por ejemplo, el talud de la figura V.6, ha fallado por el movimiento
sincronizado de 4 bloques, cada uno con un mecanismo diferente. En este caso, es muy
probable que se hubiera prevenido todo el movimiento del talud, si se hubiera restringido el
movimiento del bloque 1. Complejos modos de falla como éste tienden a desarrollarse
progresivamente y pueden ser prevenidos mediante la oportuna retención de la cuña clave.
3
32
1
Figura V. 6. Falla progresiva en talud

117
Análisis de la Cuña Clave
Las potenciales cuñas claves de una excavación difieren en importantes aspectos a las JB
que se encuentran dentro del macizo rocoso. Las cuñas claves, como la 1 en la figura V.7
una de sus caras pertenece al menos a la superficie de excavación, mientras que los joint
blocks, como el 3 de la figura V.7, no lo hace. Si un JB es atravesado mediante una
superficie de excavación, este tiende a producir un bloque constreñido que no es removible
o un bloque removible con uno o más pares de caras paralelas como el JB 2 en la
figura V.7. Un bloque con lados paralelos ofrece menos direcciones de deslizamiento
permisibles que aquellas que ofrece un bloque que no tiene lados paralelos y por lo tanto
tienen más estabilidad contra deslizamiento. Consecuentemente los joint blocks no
producen cuñas claves en las excavaciones.
2
1
3
Figura V. 7. Tipos de bloques en un talud. (1) Cuña Clave; (2) Bloque removible con caras
paralelas; (3) joint block
Los análisis para localizar cuñas claves de una excavación superficial es inicialmente
geométrica; el primer paso es proporcionar el echado, así como la dirección del echado de
cada conjunto de discontinuidades y de cada segmento planar de una superficie de
excavación. El primer resultado de lo anterior es una lista de códigos correspondientes a los
medios-espacios (1010, 1100, etc.). Como se definió en el capítulo III, cada bloque es
identificado por una cadena de de números 0, 1, 2 ó 3, los cuales describen las
características de cada conjunto de discontinuidad. El dígito i-ésimo en DB es 0 si el bloque
está formado por una intersección con iU (el medio-espacio superior del plano i), será 1 si
el bloque está formado por la intersección iL (el medio-espacio inferior del plano i),. El
i-ésimo dígito de DB podría ser 2, si tanto iU como iL intersecan a cualquiera de los otros
medios-espacios (i.e. si la discontinuidad i no es parte de una de las caras del bloque) y por
el i-ésimo dígito 3 si tanto iU como iL son intersecados con los otros medios-espacios del
bloque (i.e. si el bloque tiene caras paralelas que corresponden al conjunto i).

118
Después de identificar los códigos de bloques DB para las potenciales cuñas claves, un
análisis subsiguiente puede identificar las cuñas claves más críticas. El espaciamiento de
cada conjunto de discontinuidades es ingresado como dato y los volúmenes, así como las
formas geométricas son calculados para todos los bloques convexos que corresponden a los
códigos que han sido identificados como potenciales cuñas claves, además si el plano de
trazas de la excavación es conocida, el análisis de cuñas claves puede por lo tanto, conocer
la ubicación actual de los cuñas claves en la superficie
En este procedimiento, el ingreso de datos puede ser del tipo determinístico, pero en
algunos casos el ingreso de datos del tipo estadístico puede ser más conveniente. En esta
etapa inicial, por ejemplo, las orientaciones del conjunto de discontinuidades deberían ser
especificadas en términos de los parámetros de una distribución espacial de los planos
alrededor de una orientación de los planos de discontinuidad media. Para un análisis
determinístico, únicamente la orientación media o un valor extremo seleccionado a partir de
una distribución conocida, debería ser utilizado.
DISEÑO
El resultado del análisis de cuña clave y el subsiguiente análisis de estabilidad para las
cuñas claves determinadas, permiten realizar diseños económicos de los sistemas de
contención (figura V.8). Para un particular código de cuña clave, existe un conjunto
específico de “zonas de peligro” en la excavación. Aunque el refuerzo general de la
excavación completa, con un patrón regular, siempre está bien justificado, en ocasiones es
conveniente tratar las zonas de peligro con soportes adicionales.
1
2
2
Figura V. 8. Refuerzo en Roca: (1) Soporte en zona de cuñas claves; (2) Refuerzo General

119
El saber qué tipo de soporte es el requerido para una superficie de excavación depende
mayoritariamente de la dirección e inclinación de la excavación. La figura V.9, muestra un
corte para una vía férrea, para la cual la misma masa rocosa requiere diferentes ángulos del
talud, para auto-soportarse.
La diferencia está relacionada con el control cinemática de la falla, por el sistema de
bloques. Si el diseñador tiene libertad de elegir la dirección y/o inclinación de la superficie
de excavación, el análisis de las cuñas claves permitirá realizar una elección óptima. Esto
es, probablemente, la aplicación más significativa de la teoría de bloques. La libertad de
cambiar las direcciones no necesita ser extrema, algunas veces con un cambio de 10º a 20°,
es suficiente, para reducir enormemente el número y severidad de las cuñas claves. Como la
dirección e inclinación de un talud es cambiado, grandes y repentinos cambios en el grado
de estabilidad pueden ser realizados mientras los tipos de cuñas claves y las zonas de
peligro cambian.
En este aspecto, los taludes en roca difieren enormemente en los taludes en suelos, en estos
últimos el factor de seguridad varía continuamente en función de cómo la inclinación del
talud es cambiada. En taludes en roca dura y fisurada, el factor de seguridad se mueve de
manera discontinua en función de cómo un bloque cambia de código a otros;
ocasionalmente, un talud empinado puede tener más estabilidad que uno con mucho
desarrollo horizontal.
Figura V. 9. Excavación asimétrica
CONDICIONES PARA LA REMOVILIDAD DE BLOQUES QUE
INTERSECAN A SUPERFICIES DE EXCAVACIÓN
En este apartado, se considera únicamente aquellos bloques que intersecan a una superficie
de excavación. Para iniciar, se asumirá que la excavación está compuesta por un único
plano iP , con una normal jv , la cual se orienta hacia la masa rocosa, como se muestra en la
figura V.10. La nomenclatura ^
i jP quiere decir: “el medio –espacio del plano iP , que
contiene al vector jv ”.

120
^n
Figura V. 10. Bloque constreñido
Asignando el subíndice “i” a la superficie libre, se tiene que el excavation pyramid (EP) y
el space pyramid (SP), se representa por:
i iEP U ó L (V.1)a
y i iSP L o U
Alternativamente
^
i jEP P (V.1b)
^
i jSP P
Recuérdese, que la mayoría de los bloques que intersecan a una superficie libre, son
infinitos o constreñidos.
BLOQUES INFINITOS
Por el Teorema de Finitud, un bloque infinito debe tener un block pyramid (BP) no vacío;
es decir:
BP (V.2)
BP JP EP (V.3)
Donde: , Intersecado conVacío
Por lo que el criterio utilizado para considerara un bloque como infinito es:
JP EP (V.4)
Como se aprecia en la figura V.11, un diagrama planar (no necesariamente una proyección
estereográfica), el excavation pyramid (EP) más el space pyramid (SP), representan a todo
el espacio. Así, cuando la desigualdad (V.4) es verdadera, JP yace parcialmente en el SP, es
decir, que no está totalmente contenido en el SP; se tiene que:
JP SP (V.5)

121
JP
SP
EP
Figura V. 11. Representación de los requerimientos necesarios para que un bloque
convexo, se le considere infinito.
BLOQUES FINITOS
Para ser finito, un bloque convexo con una cara en la superficie libre debe tener un block
pyramid vacío; por el Teorema de Finitud; se tiene que:
BP (V.6)
Introduciendo V.3; tenemos que:
JP EP (V.7)
La ecuación V.7, es verdadera si y únicamente si el JP se encuentra totalmente fuera del
EP, lo cual significa que el JP se encuentra completamente dentro del SP (figura V.12), ó:
JP SP (V.8) Como resumen, se puede decir que:
La ecuación V.7 y V.8 son equivalentes:
JP EP (V.7)
JP SP (V.8)
Así, como las ecuaciones V.4 y V.5.
JP EP (V.4)
JP SP (V.5)
Así, también se puede decir, que las ecuaciones V.7 y V.4, son más convenientes para una
solución a través de un análisis vectorial, mientras que las ecuaciones V.5 y V.8, son
mejores, para obtener una solución mediante el uso de una proyección estereográfica.

122
EP
JP
SP
Figura V. 12. Representación de las condiciones necesarias para que considerar a un
bloque convexo, como finito
BLOQUES CONSTREÑIDOS
La condición para que un bloque finito convexo, sea no removible, fue establecida en el
capítulo III. Debido a su condición finita, su block pyramid está vacío, mientras que su
condición de no removilidad indica que su joint pyramid está también vacío. Por lo tanto
los bloques constreñidos satisfacen:
JP EP
y JP (V.9)
La ecuación V.9 es también la condición de finitud de un joint block. Un bloque
constreñido es mostrado en la figura V.10. Nótese que el bloque sería finito con únicamente
los planos de discontinuidad (es decir sin la superficie de excavación). Eso demuestra la
validez de la ecuación V.9.
BLOQUES REMOVIBLES
Para ser considerado una potencial cuña clave, un bloque convexo deber ser finito y
removible (figura V.13). Así, de acuerdo a la discusión anterior, un bloque finito satisface
V.7 y V.8; es decir:
JP EP (V.7)
y JP SP (V.8)
Y más aún, como no debe ser un bloque constreñido, una potencial cuña clave no debe
satisfacer a V.9 JP . Por lo anterior, las condiciones de removilidad de un bloque
son:
JP
y JP EP (V.10)
ó JP SP
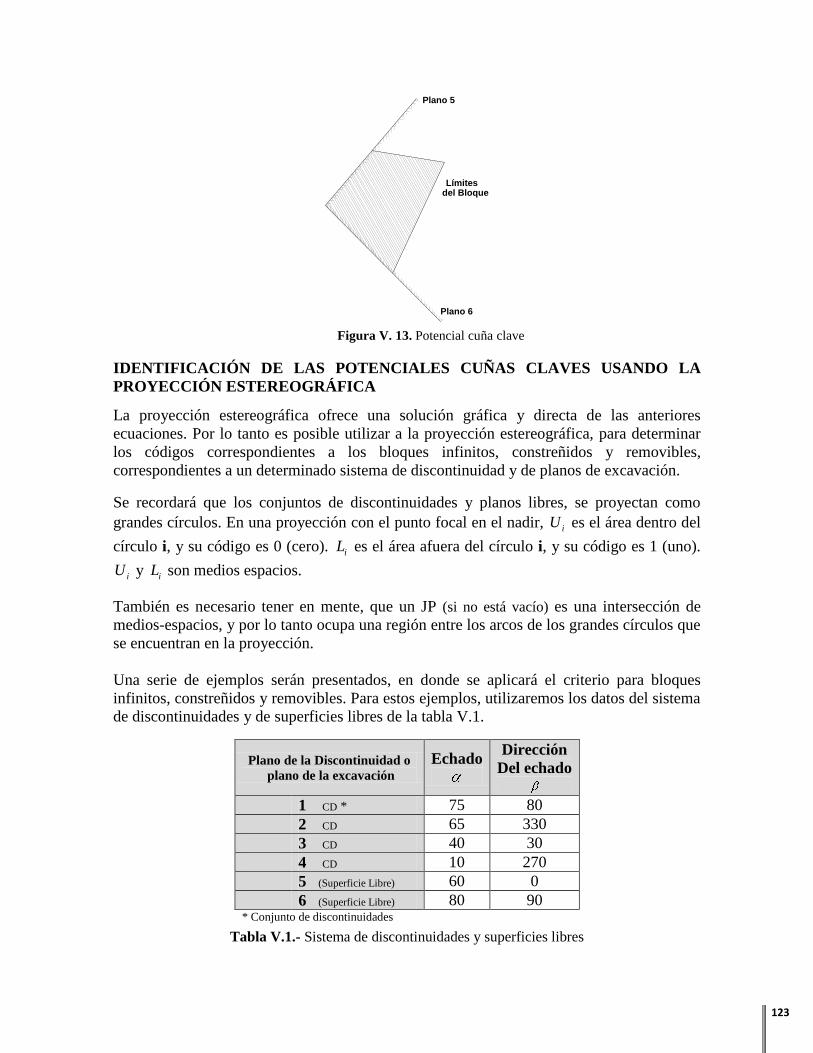
123
Plano 5
Plano 6
Límites del Bloque
Figura V. 13. Potencial cuña clave
IDENTIFICACIÓN DE LAS POTENCIALES CUÑAS CLAVES USANDO LA
PROYECCIÓN ESTEREOGRÁFICA
La proyección estereográfica ofrece una solución gráfica y directa de las anteriores
ecuaciones. Por lo tanto es posible utilizar a la proyección estereográfica, para determinar
los códigos correspondientes a los bloques infinitos, constreñidos y removibles,
correspondientes a un determinado sistema de discontinuidad y de planos de excavación.
Se recordará que los conjuntos de discontinuidades y planos libres, se proyectan como
grandes círculos. En una proyección con el punto focal en el nadir, iU es el área dentro del
círculo i, y su código es 0 (cero). iL es el área afuera del círculo i, y su código es 1 (uno).
iU y iL son medios espacios.
También es necesario tener en mente, que un JP (si no está vacío) es una intersección de
medios-espacios, y por lo tanto ocupa una región entre los arcos de los grandes círculos que
se encuentran en la proyección.
Una serie de ejemplos serán presentados, en donde se aplicará el criterio para bloques
infinitos, constreñidos y removibles. Para estos ejemplos, utilizaremos los datos del sistema
de discontinuidades y de superficies libres de la tabla V.1.
Plano de la Discontinuidad o
plano de la excavación
Echado
Dirección
Del echado
1 CD * 75 80
2 CD 65 330
3 CD 40 30
4 CD 10 270
5 (Superficie Libre) 60 0
6 (Superficie Libre) 80 90 * Conjunto de discontinuidades
Tabla V.1.- Sistema de discontinuidades y superficies libres

124
Talud formado por un único plano
En la figura V.14, los cuatro conjuntos de discontinuidades son proyectados como grandes
círculos, así como el gran círculo que representa a la superficie libre correspondiente a al
plano 5. La masa rocosa se encuentra en el medio-espacio inferior del plano 5. Por lo tanto
sEP L y sSP U . En otras palabras, EP corresponde al área fuera del círculo 5, mientras
que el SP corresponde al área dentro del círculo 5.
En la figura V.14, los cuatro círculos correspondientes a los planos de discontinuidad se
intersecan para crear regiones, de las cuales, cada una representa un JP. Cada una de estas
se encuentra simultáneamente dentro o fuera de los círculos que representan a las
discontinuidades y por lo tanto se puede asignar un código a cada región. En la figura, las
regiones creadas por la intersección de los círculos que representan a los planos de
discontinuidad han sido etiquetadas con su apropiado código.1
De acuerdo a la ecuación V.5, los bloques infinitos satisfacen el criterio de JP SP . Esto
es verdadero para cualquier región que no esté totalmente contenido dentro del círculo
que representa al plano 5. Así por inspección, los bloques infinitos son los JP´s con
códigos:
1111 0110 0100
0111 1010 0000
1110 1100 1000
1011 0101
1 Recuérdese que las regiones están formadas únicamente por los planos de discontinuidad, es decir, el plano
de excavación no infiere en los códigos de cada JP.
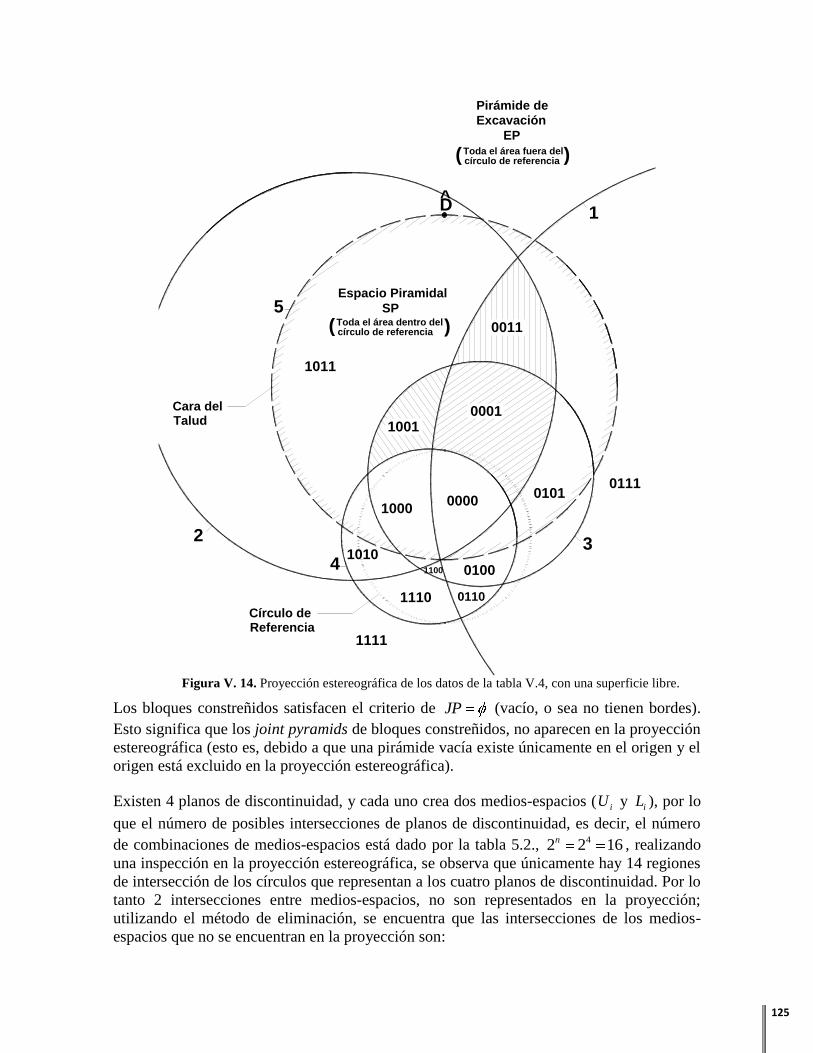
125
ReferenciaCírculo de
4
1
23
Cara delTalud
5
01110101
0001
0011
1011
1001
1000
1010
1110 0110
0100
1111
0000
Espacio Piramidal
SP
Excavación
EPToda el área fuera del círculo de referencia
Pirámide de
( )
)( círculo de referenciaToda el área dentro del
1100
D
Figura V. 14. Proyección estereográfica de los datos de la tabla V.4, con una superficie libre.
Los bloques constreñidos satisfacen el criterio de JP (vacío, o sea no tienen bordes).
Esto significa que los joint pyramids de bloques constreñidos, no aparecen en la proyección
estereográfica (esto es, debido a que una pirámide vacía existe únicamente en el origen y el
origen está excluido en la proyección estereográfica).
Existen 4 planos de discontinuidad, y cada uno crea dos medios-espacios ( iU y iL ), por lo
que el número de posibles intersecciones de planos de discontinuidad, es decir, el número
de combinaciones de medios-espacios está dado por la tabla 5.2., 42 2 16n , realizando
una inspección en la proyección estereográfica, se observa que únicamente hay 14 regiones
de intersección de los círculos que representan a los cuatro planos de discontinuidad. Por lo
tanto 2 intersecciones entre medios-espacios, no son representados en la proyección;
utilizando el método de eliminación, se encuentra que las intersecciones de los medios-
espacios que no se encuentran en la proyección son:

126
1101 y 0010
Método de Eliminación Para Encontrar Bloques Estreñidos
0000 0110 1100
0001 0111 1101 (bloque estreñido)
0010 (bloque estreñido) 1000 1110
0011 1001 1111
0100 1010
0101 1011
Los bloques removibles, (es decir, los que aparecen en la proyección estereográfica),
satisfacen el criterio JP y JP SP . Cada JP con un código en la proyección
estereográfica está no vacío y por lo tanto, satisface el primer criterio. El segundo criterio
requiere que un bloque removible tenga un JP que yazca totalmente dentro del círculo
correspondiente al plano 5. Una inspección a la figura V.14, estable que los códigos que
cumplen este criterio son:
0011, 1001 y 0001
Así, las potenciales cuñas claves son aquellas cuyos JP´s correspondan a uno de los 3
códigos de los medios-espacios.
Resumiendo lo anterior, los pasos para obtener los códigos de los JP infinitos, constreñidos
y finitos, son:
1. Dibújese los planos de discontinuidades en la proyección estereográfica
2. Obténgase los códigos de cada JP que aparece en la proyección estereográfica
3. Enlístese todas las posibilidades de JP´s (0000, 0001, 0010….) de manera ordenada
y ascendente
4. De la anterior lista, vea cuales JP´s aparecen en la proyección estereográfica
5. Indique, cuales JP´s no yacen totalmente dentro del SP, (en taludes, el SP casi
siempre será el área dentro del círculo, las excepciones se manejan en las secciones
posteriores), estos JP´s encontrados serán los bloques infinitos, por el Teorema de
Finitud JP SP .
6. De la lista realizada en el punto 3, vea cuales JP´s no aparecen en la proyección
estereográfica. Estos JP´s representan a los bloques constreñidos, ya que satisfacen
a JP , es decir, no tienen bordes y por ende no pueden ser proyectados en la
proyección estereográfica.
7. Finalmente, vea cuáles JP´s satisfacen a JP (se ven en la proyección, es decir
son finitos) y JP SP (yacen totalmente dentro del SP de la superficie o plano de
excavación.

127
TALUDES CONVEXOS
La proyección estereográfica también ofrece una solución para bloques infinitos y
removibles en taludes formados por más de un simple plano de excavación. Supóngase que
una superficie de excavación está formada por los planos 5 y 6; de la tabla V.1.
Primero consideraremos el caso donde la masa rocosa es la intersección del lado inferior
del plano 5 y el lado superior del plano 6. Como se muestra en la figura V.15, está
intersección crea una superficie rocosa convexa. Estos planos son proyectados como
grandes círculos en la figura V.16, junto con los cuatro planos de discontinuidades Las
regiones de intersección de los planos de discontinuidad han sido etiquetados como en el
ejemplo anterior, téngase en mente que la adición de planos de excavación no cambian los
códigos de los JP, debido a que estos códigos son definidos exclusivamente por los grandes
círculos de los planos de discontinuidad. Plano 5
Plano 6
Límites del Bloque
Figura V. 15. Talud convexo formado por plano 5 y 6
Debido a que la masa rocosa es la intersección de 5L y 6U , tenemos que:
5 6EP L U
Y 5 6SP U L :La intersección de A y B
: La unión de A y B

128
65LU
4
1
23
5
0111
0101
0001
00111011
1001
1000
1010
1110 0110
0100
1111
0000
1100
6
EP65
UL
SP
65LU
SP
65LU
SP
EP65
UL
Figura V. 16. Proyección estereográfica de los datos de la tabla V.1, con las dos superficies libre 5 y 6.
Los bloques infinitos corresponden a las regiones JP que no yacen completamente dentro
del SP (JP’s sin sombrear). Inspeccionando a la figura V.16 se encuentra que son:
0110 0111 0100
0101 1111 1110
0000 1100 1000
Los bloques constreñidos son aquellos cuyos JP no se encuentran en la proyección
estereográfica (como se explicó anteriormente). Debido a que la proyección de las regiones
JP es independiente de la elección de las superficies de excavación, los bloques
constreñidos son los mismos que en el ejemplo anterior, es decir:
1101 y 0010
Los bloques removibles son los formados con los JP’s correspondientes a las regiones
enteramente incluidas en el SP. Ellos son, por lo tanto (BP con sombreado):
1011 1001 0011 0001 1010

129
BLOQUES REMOVIBLES CON UN CONJUNTO DE DISCONTINUIDADES REPETIDO
Los bloques removibles que se deslizan entre discontinuidades paralelas de un mismo
conjunto son más estables que aquellos bloques que carecen de conjuntos repetidos, como
se ha venido mencionando con anterioridad, esto es porque las restricciones de las
direcciones de deslizamiento movilizan un incremento del esfuerzo normal a ellos como
consecuencia de una pequeño movimiento inicial. Sin embargo, en ocasiones, este tipo de
bloques están críticamente localizadas y necesitan ser analizados.
La figura V.17, muestra un bloque convexo localizado entre discontinuidades paralelas.
Como ejemplo, supóngase que el conjunto de discontinuidades repetido es el 1, entonces si
se tiene 4 planos, los posibles códigos de los JP´s son:
3000, 3001, 3010, 3011, 3100, 3101, 3110, 3111
Figura V. 17. Bloque convexo formado por planos de discontinuidad paralelos
Si alguno de estos códigos de JP´s, identifica a alguna región en la proyección, la región
deberá yacer a lo largo del segmento del gran círculo para el plano de discontinuidad 1.
Considérese al plano 5, como el plano libre o de excavación y al 5EP L , entonces se
deduce que el SP es el área dentro del gran círculo correspondiente al plano de
discontinuidad 5. Figura V.18a.
Continuando, con lo anteriormente expuesto, los JP´s correspondientes a la discontinuidad
repetida 1 son no vacíos si aparecen como un segmento del círculo 1. Ahora, un segmento
en particular corresponde a un JP vacío (finito) si y sólo si yace enteramente dentro del SP.
Los códigos que no aparecen como un segmento corresponden a bloques constreñidos y
aquellos que se encuentran parcial o totalmente fuera del SP son bloques infinitos.
En la figura V.18a, todos los segmento del plano de discontinuidad 1 han sido etiquetados
con su correspondiente código de JP. Teniendo lo anterior, los JP´s infinitos, constreñidos y
finitos para 5EP L , han sido determinados inspeccionando la figura V.18a. Así, se
obtiene lo siguiente:
Posibles JP’s
3000, 3001, 3010, 3011, 3100, 3101, 3110, 3111
Bloques Infinitos (Que yacen totalmente dentro del EP, o parcialmente en el SP, el SP es el área dentro
del círculo del plano 5)
3000, 3111, 3110 y 3100

130
Bloques Constreñidos (JP’s que no aparecen en la proyección estereográfica)
3010, 3101
Bloques Removibles (JP’s que yacen totalmente dentro del SP, es decir, dentro del círculo del plano 5)
3011 y 3001
El mismo análisis puede realizarse considerando que el plano que se repite es el conjunto
de discontinuidades 2, después el conjunto 3 y por último el conjunto 4. Los resultados son
presentados en la tabla V.2.
Tabla V.2.- Resultados para distintos conjuntos de discontinuidades repetidos
Conjunto de
Discontinuidades
Repetido
Bloques
Infinitos Constreñidos Removibles
1
3111
3110
3100
3000
3010
3101
3011
3001
2
0300
1300
1310
1311
0310
1301
0301
0311
3
0131
0130
1130
1030
0030
1131
0031
1031
4
0103
0113
1113
1013
0013
1103
0003
1003

131
3011
4
1
23
3001
3000
3100
3110
31111311
1310
1300
0300
0301
0311
01300131
0031
1031
1030
1130
11130113
01
03
00031003
1013
5
3100, 3110, 3111 3000
Bloques Infinitos
y
Bloques Constreñidos
30103101 y
Bloques Finitos
30113001 y
Figura V. 18a. JP’s con un conjunto de discontinuidades repetido
Ahora considérese un bloque que tiene un único conjunto de discontinuidades repetidas, el
cual se desliza en una excavación producida por dos superficies libres. Considérese el caso
de un talud convexo, cuyo EP (Excavation Pyramid) está formado por la intersección de
5 6 5 6L y U EP L U , por lo tanto 5 6SP U L . Como se recordará el etiquetado de
cada JP está en función únicamente los planos de discontinuidad, no de las superficies
libres, entonces los bloques constreñidos serán los mismos que en el ejemplo anterior, sin
embargo la división de los bloques en finitos e infinitos, ha cambiado.
Los resultados son se muestran en la tabla V.3.

132
Conjunto de
Discontinuidades
Repetido
Bloques
Finitos Removibles
1
3111
3110
3100
3011
3001
3000
2 1310
1311
1300
0311
0301
0300
3
1130
0130
0131
0031
1030
1031
4
1113
0113
0103
0003
1003
1013
Tabla V.3.- Resultados
3011
4
1
23
3001
3000
3100
3110
3111
13111310
1300
0300
0301
0311
0130
0131
0031
1031
1030
1130
11130113
0103
00031003
1013
5
Figura V. 18b. JP’s con un conjunto de discontinuidades repetido para un talud
formado por dos superficies libres

133
BLOQUES REMOVIBLES CON DOS CONJUNTOS DE DISCONTINUIDADES
REPETIDOS
Si un bloque con un par de caras paralelas tienden a ser más resistente al deslizamiento que
un bloque que carece de caras paralelas, un bloque con dos conjuntos de caras paralelas
debe ser aún más resistente al deslizamiento, aunque es poco probable que se deslicen este
tipo de bloques, se discutirán debido a que pueden ser potenciales cuñas claves bajo
especiales condiciones Se ha visto que un JP no vacío de un bloque con un conjunto de
discontinuidades repetido es un arco de circunferencia, en cambio, en el caso de dos
conjuntos de discontinuidades repetidos, un JP no vacío, será representado por el punto de
intersección de los arcos de circunferencia de los dos conjuntos de discontinuidades
repetidos; como se recordará un JP de este tipo contiene al dígito 3 en dos posiciones. La
figura V.19 muestra todos los JP’s correspondientes a los bloques de este tipo (para el
sistema de discontinuidades presentada en la tabla V.1).
Asúmase que el plano 5 sea el único plano libre, con el EP igual a 5L y el 5SP U y
examinando la figura V.19 se puede establecer cuales bloques corresponden a la
clasificación de infinitos, constreñidos y removibles. Los resultados se muestran en la tabla
V.4.
Conjunto de
Discontinuidades
Repetidos
Bloques
Infinitos Constreñidos Removibles
1, 2 3300 3301, 3310 3311
1, 3 3130 3030, 3131 3031
1, 4 3113 3013, 3103 3003
2, 3 1330 0330, 1331 0331
2, 4 1313 0313, 1303 0303
3, 4 0133 0033, 1133 1033
Tabla V.4.- Resultados
Ahora considérese a un talud convexo con 5 6EP L U y 5 6SP U L . Debido a que los
código de los JP’s no se afectan por el cambio del SP, la lista de los bloques constreñidos
son los mismos que los de la tabla V.4. La lista de los bloques infinitos es reducida a dos y
la lista de los bloques removibles es aumentada por dos, porque los bloques 1330 y 1313 se
convierten en removibles.

134
4
1
23
5
3300
3311
3131
3031
3113
3003
1330
0331
1313
0303
0133
1033
5
6
Figura V. 19. JP’s con dos conjuntos de discontinuidades repetidos
EVALUACIÓN DE LA FINITUD Y REMOVILIDAD DE LOS BLOQUES UTILIZANDO
MÉTODOS VECTORIALES
En la sección precedente, se desarrollaron métodos para encontrar los bloques potenciales
utilizando la proyección estereográfica, además de este método es posible encontrar la
finitud y removilidad de un bloque utilizando los métodos vectoriales Los procedimientos
matemáticos que permiten conocer la finitud de un JP fueron presentados en el capítulo I.
En este sección se establece un atajo matemático para simplificar y aumentar la rapidez
para encontrará la finitud y removilidad de un bloque. Tabla de los Signos de los Vectores Normales
De nuevo considérese los conjuntos de discontinuidades y planos libres con las
orientaciones listadas en la tabla V.1. Utilizando las ecuaciones (I.7), primero se debe
calcular los cosenos directores para las normales a todos los planos.

135
Plano de la Discontinuidad o
plano de la excavación
Echado
Dirección
Del echado
1 CD * 75 80
2 CD 65 330
3 CD 40 30
4 CD 10 270
5 (Superficie Libre) 60 0
6 (Superficie Libre) 80 90 *Conjunto de discontinuidades **Tabla repetida para facilitar lectura
Tabla V.1. Sistema de discontinuidades y superficies libres**
Los resultados se reportan en la tabla V.5.
Tabla V.5.- Cosenos directores
Plano iX iY iZ
1 0.9512 0.1677 0.2588
2 -0.4531 0.7848 0.4226
3 0.3213 0.5566 0.7660
4 -0.1736 0.0000 0.9848
5 0.0000 0.8660 0.5000
6 0.9848 0.0000 0.1736
Será de utilidad el introducir un índice de ordenamiento direccional i j
kI definido por:
i j
k i j kI signo n n n (V.11)
Donde 1, 0, 1signo F , cuando 0, 0, 0F es .
Un ejemplo de cálculo de i j
kI , es presentado, y realizando todas las posibles combinaciones
de i j
kI se presentan en la tabla V.6 para todas las elecciones de k. Para n planos, existen
2
nnC combinaciones (90 combinaciones para el ejemplo presentado).
Para 1 2, 1y kn n
^ ^ ^
1 2 0.9512 0.1677 0.2588 0.1322, 0.5192,0.8225
0.4531 0.7848 0.4226
i j
x y z
n nn n
0.1322, 0.5192,0.8225 0.9512,0.1677,0.2588 0i j kn n n
12
1
0
0
i j
kI signo
I
Realizando lo anterior para todas las combinaciones, (se recomienda hacer una sencilla hoja
de cálculo o mejor aún, programar), se obtiene:

136
Combinaciones
de i y j k
i j 1 2 3 4 5 6
1 2 0 0 1 1 -1 1
1 3 0 -1 0 1 -1 1
1 4 0 -1 -1 0 -1 1
1 5 0 1 1 1 0 1
1 6 0 -1 -1 -1 -1 0
2 3 1 0 0 -1 1 1
2 4 1 0 1 0 1 1
2 5 -1 0 -1 -1 0 -1
2 6 1 0 -1 -1 1 0
3 4 1 -1 0 0 -1 1
3 5 -1 1 0 1 0 -1
3 6 1 1 0 -1 1 0
4 5 -1 1 -1 0 0 -1
4 6 1 1 1 0 1 0
5 6 1 -1 -1 -1 0 0
Tabla V.6. Valores de i j
k i j kI signo n n n para los planos de la tabla V.1
Esta tabla permitirá, el determinar cuáles combinaciones de medios-espacios determinan
bloques finitos, y también será posible el describir los bordes de los block pyramids.
FINITUD DE UN BLOQUE
Considérese a un bloque en particular definido por la intersección de los medios-espacios
mediante el código de bloque BD , por ejemplo, 1 0 0 1 1 2 . Utilizando la tabla V.6,
la finitud de cualquier bloque similar será conocida mediante los siguientes pasos:
1. Elíjase un código de bloque BD :
1 2 3 ...B nD a a a a (V.12)
2. Para el código BD elegido, determínese un código de bloque “signado” sD ,
obtenido mediante la transferencia de cada elemento ia
1 0
1 1
0 2
1 3
i
i
i
i
i
si a
si aI a
si a
si a
(V.13)
De tal forma que;
1 2 3, , , ... ,s nD I a I a I a I a (V.14)
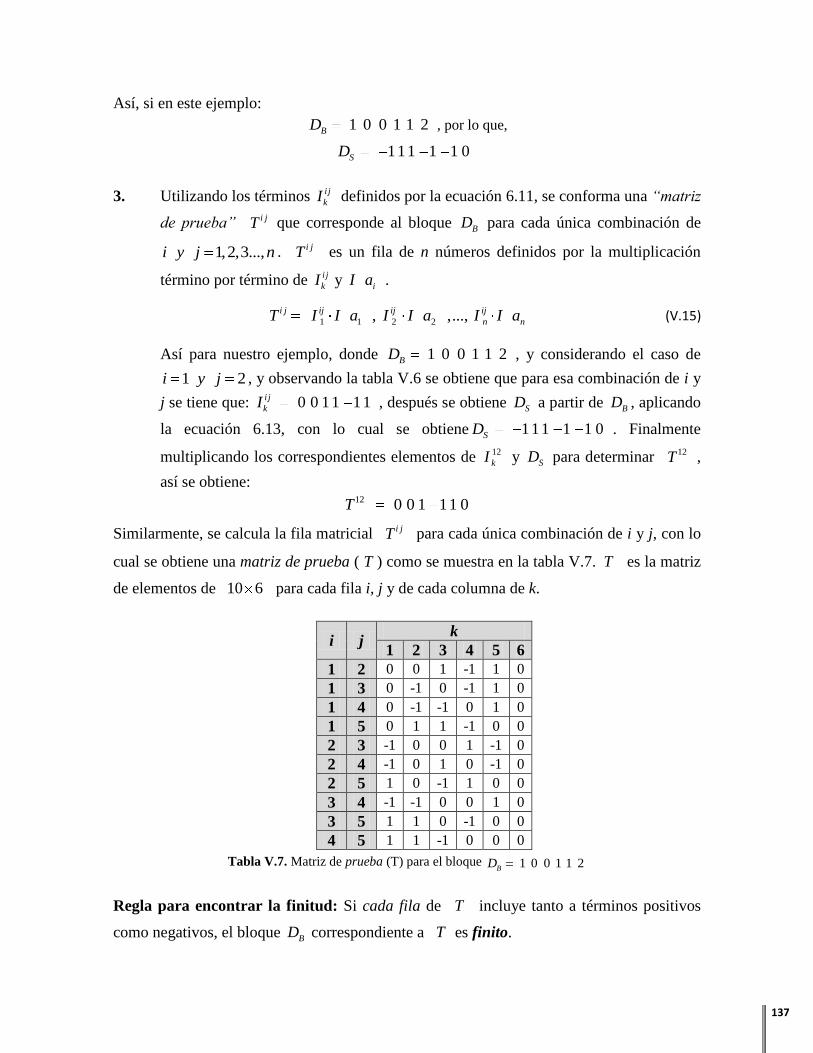
137
Así, si en este ejemplo:
1 0 0 1 1 2BD , por lo que,
111 1 1 0SD
3. Utilizando los términos i j
kI definidos por la ecuación 6.11, se conforma una “matriz
de prueba” i jT que corresponde al bloque BD para cada única combinación de
1,2,3...,i y j n . i jT es un fila de n números definidos por la multiplicación
término por término de i j
kI y iI a .
1 1 2 2, ,...,i j ij ij ij
n nT I I a I I a I I a (V.15)
Así para nuestro ejemplo, donde 1 0 0 1 1 2BD , y considerando el caso de
1 2i y j , y observando la tabla V.6 se obtiene que para esa combinación de i y
j se tiene que: 0 0 11 11i j
kI , después se obtiene SD a partir de BD , aplicando
la ecuación 6.13, con lo cual se obtiene 111 1 1 0SD . Finalmente
multiplicando los correspondientes elementos de 12
kI y SD para determinar 12T ,
así se obtiene: 12 0 0 1 11 0T
Similarmente, se calcula la fila matricial i jT para cada única combinación de i y j, con lo
cual se obtiene una matriz de prueba ( T ) como se muestra en la tabla V.7. T es la matriz
de elementos de 10 6 para cada fila i, j y de cada columna de k.
i j k
1 2 3 4 5 6
1 2 0 0 1 -1 1 0
1 3 0 -1 0 -1 1 0
1 4 0 -1 -1 0 1 0
1 5 0 1 1 -1 0 0
2 3 -1 0 0 1 -1 0
2 4 -1 0 1 0 -1 0
2 5 1 0 -1 1 0 0
3 4 -1 -1 0 0 1 0
3 5 1 1 0 -1 0 0
4 5 1 1 -1 0 0 0
Tabla V.7. Matriz de prueba (T) para el bloque 1 0 0 1 1 2BD
Regla para encontrar la finitud: Si cada fila de T incluye tanto a términos positivos
como negativos, el bloque BD correspondiente a T es finito.

138
De acuerdo a esta regla, el bloque 1 0 0 1 1 2 es finito debido a que cada fila de T ,
dada en la tabla V.7, contiene una mezcla de términos positivos como negativos 1 1y .
Realizando otro ejemplo, piénsese que se debe analizar el bloque con código 1 0 0 1 2 2 ,
siguiendo los mismos pasos como en el ejemplo previo se obtendrá las siguientes
tablas i jT :
i j k
1 2 3 4 5 6
1 2 0 0 1 -1 0 0
1 3 0 -1 0 -1 0 0
1 4 0 -1 -1 0 0 0
1 5 0 1 1 -1 0 0
Tabla V.8.- Resultados plano 1
2 3 -1 0 0 1 0 0
2 4 -1 0 1 0 0 0
2 5 1 0 -1 1 0 0
3 4 -1 -1 0 0 0 0
3 5 1 1 0 -1 0 0
4 5 1 1 -1 0 0 0
Tabla V.9.- Resultados planos 2, 3 y 4
Observando éstas tablas, se verá que la segunda, tercera y octava fila carecen de valores
positivos y por lo tanto el bloque 1 0 0 1 2 2 debe ser infinito.
Regla para encontrar los bordes de un block pyramid. Si un bloque es infinito, su BP no
está vacío, lo que significa que por lo menos tiene un borde. Los bordes de un BP
corresponden a las líneas de intersección de los planos i y j para los cuales ijT carecen de
términos positivos o negativos. Si ijT contiene únicamente términos negativos, un borde
del BP correspondiente a T es i j ijn n I , De manera conversa, si ijT contiene
únicamente términos positivos, un borde del BP correspondiente a T es igual a
i j ijn n I .
Utilizando la regla anterior, los bordes del BP de 100122BD son los vectores paralelos
a:
13 1 3
14 1 4
34 3 4
I n n
I n n
I n n
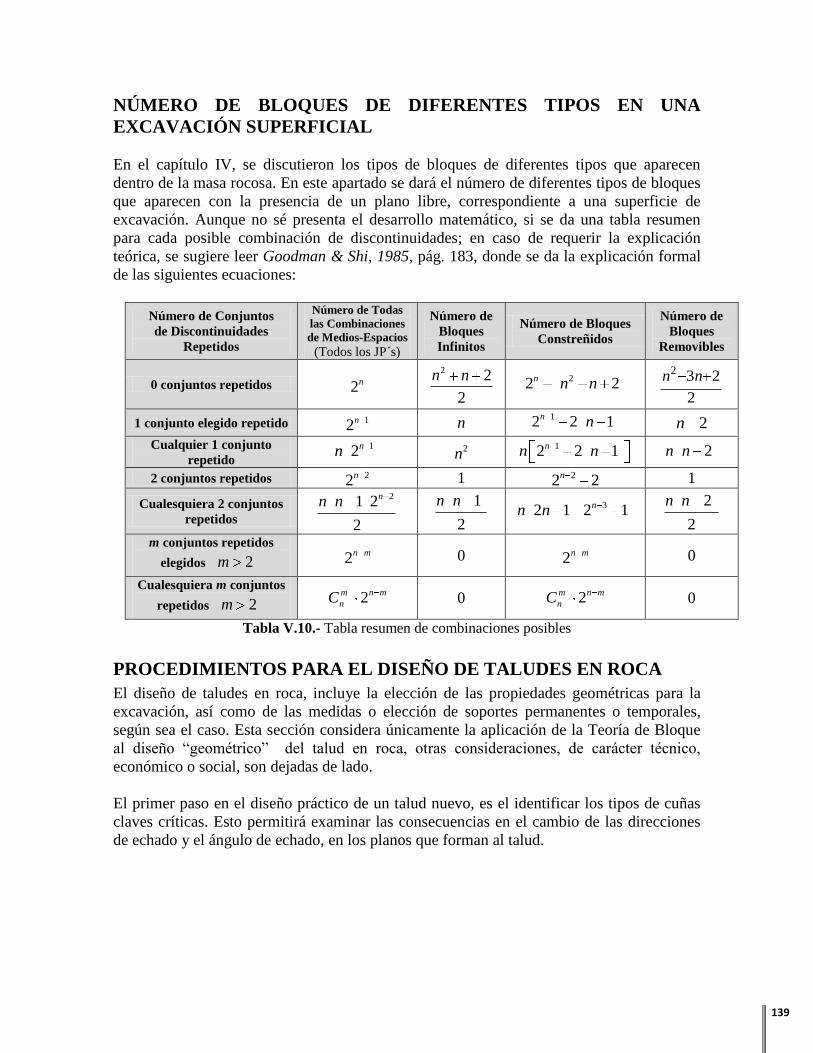
139
NÚMERO DE BLOQUES DE DIFERENTES TIPOS EN UNA
EXCAVACIÓN SUPERFICIAL
En el capítulo IV, se discutieron los tipos de bloques de diferentes tipos que aparecen
dentro de la masa rocosa. En este apartado se dará el número de diferentes tipos de bloques
que aparecen con la presencia de un plano libre, correspondiente a una superficie de
excavación. Aunque no sé presenta el desarrollo matemático, si se da una tabla resumen
para cada posible combinación de discontinuidades; en caso de requerir la explicación
teórica, se sugiere leer Goodman & Shi, 1985, pág. 183, donde se da la explicación formal
de las siguientes ecuaciones:
Número de Conjuntos
de Discontinuidades
Repetidos
Número de Todas
las Combinaciones
de Medios-Espacios
(Todos los JP´s)
Número de
Bloques
Infinitos
Número de Bloques
Constreñidos
Número de
Bloques
Removibles
0 conjuntos repetidos 2n
2 2
2
n n
22 2n n n 2 3 2
2
n n
1 conjunto elegido repetido 12n n 12 2 1n n 2n
Cualquier 1 conjunto
repetido
12nn 2n 12 2 1nn n 2n n
2 conjuntos repetidos 22n 1 22 2n 1
Cualesquiera 2 conjuntos
repetidos
21 2
2
nn n
1
2
n n
32 1 2 1nn n 2
2
n n
m conjuntos repetidos
elegidos 2m 2n m 0 2n m 0
Cualesquiera m conjuntos
repetidos 2m 2m n m
nC 0 2m n m
nC 0
Tabla V.10.- Tabla resumen de combinaciones posibles
PROCEDIMIENTOS PARA EL DISEÑO DE TALUDES EN ROCA
El diseño de taludes en roca, incluye la elección de las propiedades geométricas para la
excavación, así como de las medidas o elección de soportes permanentes o temporales,
según sea el caso. Esta sección considera únicamente la aplicación de la Teoría de Bloque
al diseño “geométrico” del talud en roca, otras consideraciones, de carácter técnico,
económico o social, son dejadas de lado.
El primer paso en el diseño práctico de un talud nuevo, es el identificar los tipos de cuñas
claves críticas. Esto permitirá examinar las consecuencias en el cambio de las direcciones
de echado y el ángulo de echado, en los planos que forman al talud.

140
TIPOS MÁS CRÍTICOS DE CUÑAS CLAVES
En secciones anteriores, se demostró que ciertos números de códigos de BP dictan bloques
finitos y removibles; todos estos bloques son potenciales cuñas críticas en la excavación en
roca, pero no todos son igualmente críticos.
Dos medidas de significativa importancia en las cuñas claves son el tamaño, medido por el
volumen del bloque y su fuerza cortante neta, medida como la diferencia entre las fuerzas
de deslizamiento las resistentes por unidad de volumen. Dado un particular código de una
cuña-clave, el volumen del bloque probable más largo es dependiente de la extensión aérea
de los planos libres y de los planos de discontinuidades que forma a las caras del bloque. La
máxima área probable de un plano de discontinuidad, no puede ser medida; sin embargo, se
le puede asignar una extensión relativa (larga, pequeña, etc.). Los conjuntos de
discontinuidades que tienden a tener largos trazos en las superficies expuestas, se considera
que tienen largas extensiones y viceversa.
La fuerza cortante neta por unidad de volumen, depende de los ángulos de fricción de las
caras donde ocurre el deslizamiento y en la orientación de la dirección de deslizamiento.
Así la manera en que estos factores son ponderizados para conocer el grado de falla de un
conjunto de cuñas claves, se muestra en el ejemplo dado a continuación.
Considérese los siguientes planos de discontinuidad y la superficie libre (plano 5); véase
que estos datos, son los que se han estado utilizando con anterioridad. La última columna
de esta tabla es una estimación de la extensión relativa de cada plano (en este caso
inventadas).
Conjunto de planos (Superficie Libre)
Echado
Dirección
Del echado
Extensión
Relativa
1 CD * 75 80 Larga
2 CD 65 330 Larga
3 CD 40 30 Larga
4 CD 10 270 Pequeña
5 (Superficie Libre) 60 0 Larga
* Conjunto de discontinuidades TABLA V.11. Echados y direcciones de echados de los planos considerados en el ejemplo
La figura V.20, es la proyección estereográfica con el punto focal en el nadir, de los
conjuntos de discontinuidades y el plano libre (plano 5). Asumiendo que la masa rocosa se
encuentra debajo del plano 5, el SP es el área dentro del gran círculo correspondiente al
plano 5. Así, los únicos bloques removibles son, por lo tanto, aquellos correspondientes a
las JP:
0011 1001 0001
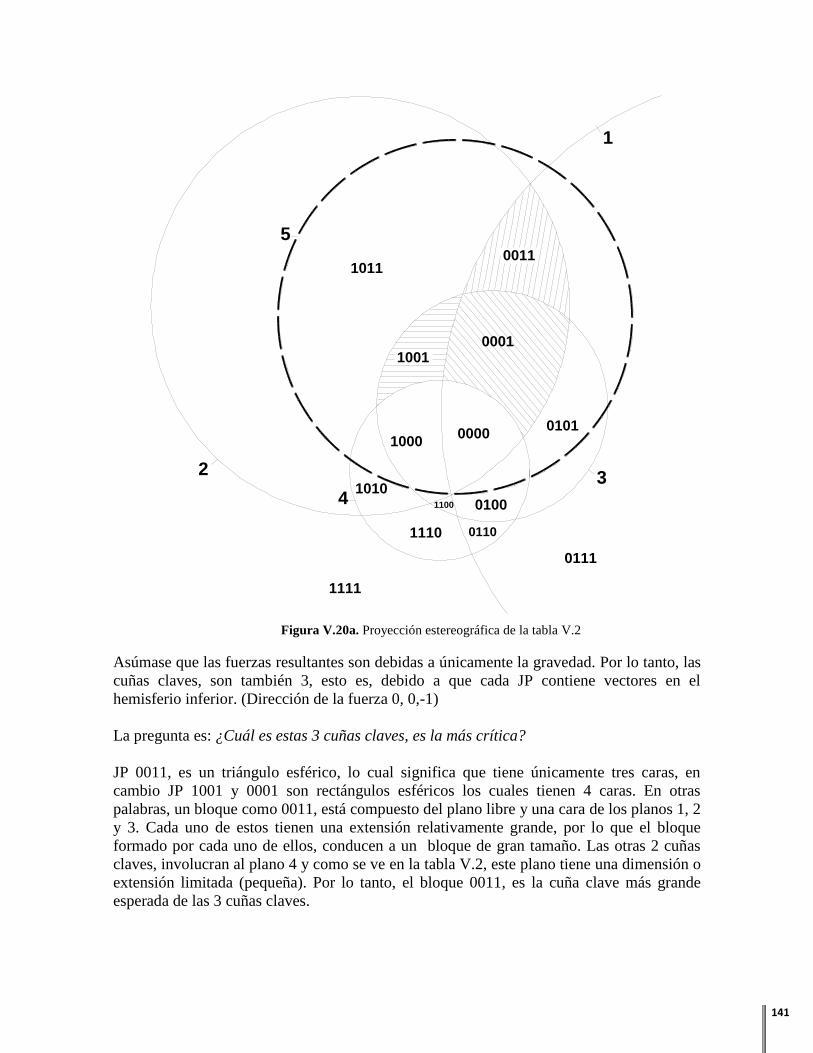
141
1100
0000
1111
0100
01101110
1010
1000
1001
10110011
0001
0101
0111
5
32
1
4
Figura V.20a. Proyección estereográfica de la tabla V.2
Asúmase que las fuerzas resultantes son debidas a únicamente la gravedad. Por lo tanto, las
cuñas claves, son también 3, esto es, debido a que cada JP contiene vectores en el
hemisferio inferior. (Dirección de la fuerza 0, 0,-1)
La pregunta es: ¿Cuál es estas 3 cuñas claves, es la más crítica?
JP 0011, es un triángulo esférico, lo cual significa que tiene únicamente tres caras, en
cambio JP 1001 y 0001 son rectángulos esféricos los cuales tienen 4 caras. En otras
palabras, un bloque como 0011, está compuesto del plano libre y una cara de los planos 1, 2
y 3. Cada uno de estos tienen una extensión relativamente grande, por lo que el bloque
formado por cada uno de ellos, conducen a un bloque de gran tamaño. Las otras 2 cuñas
claves, involucran al plano 4 y como se ve en la tabla V.2, este plano tiene una dimensión o
extensión limitada (pequeña). Por lo tanto, el bloque 0011, es la cuña clave más grande
esperada de las 3 cuñas claves.

142
EL USO DE UNA PROYECCIÓN ESTEREOGRÁFICA PARA LIMITAR LOS
ÁNGULOS DEL TALUD (ECHADO), CUANDO LA DIRECCIÓN DEL TALUD HA
SIGO PREFIJADA.
Ya se ha establecido cuales bloques son los potencialmente críticos para un talud en roca
particular; ahora supóngase que la dirección del talud ha sido fijada con antelación, pero
hay libertad para ajustar el ángulo del talud (echado); este caso sucede con frecuencia en el
diseño de taludes para rutas de transporte o vialidades.
Plano
Horizontal
Dirección del talud
preestablecida
(rumbo)
Plano 1 con
inclinación 1
Plano 2 con
inclinación 2
Figura V.20b. Isométrico de talud
Para cada potencial cuña clave, representada por un JP, y para la orientación del corte de la
roca; es posible construir dos grandes círculos que sirvan como envolventes de los vectores
extremos de un JP dado.
Estos círculos envolventes contienen el rango de ángulos del talud (echado), el cual
corresponde a un conjunto de JP y si este círculo contiene a este (os) JP(s), los mismos
estarán en una clara condición de removilidad.
Para realizar este ejercicio es necesario el construir un gran círculo que pase a través de dos
puntos: un punto dado localizado en cualquier sitio de la proyección estereográfica y un
punto dado en el círculo de referencia (el vector echado para el corte).
El procedimiento para construir este gran círculo envolvente para un JP en particular, es:
1. Se dibuja los puntos A y B, los cuales representan a los vectores opuestos del rumbo
del corte; A y B son los puntos de intersección del círculo de referencia y un círculo
orientado perpendicularmente a la dirección del echado del corte del talud.
2. Localice el punto P, el punto P es un punto extremo de un JP en particular.
3. Siendo R, el radio del círculo de referencia y siendo APB . Entonces C es el
centro del círculo requerido (que pasa por P), 2ACB ; y ACO BCO .
Calcule el radio r del gran círculo requerido, mediante:

143
R
rsen
(V.16)
Si es el ángulo del echado del gran círculo requerido:
cos
Rr (II.9)
Y el ángulo del echado del gran círculo requerido, en función de , es:
90 (V.17)
4. Construir el gran círculo requerido con centro en C y radio r.
BA
P
C
OR R
rr
ReferenciaCírculo de
Figura V.21. Gran círculo con un rumbo asignado que pasa a través de un punto preestablecido
En nuestro ejemplo (figura V.20), se ha establecido que los JP de interés para un corte con
echado correspondiente al plano 5. (Dirección del echado igual a 0º, es decir, rumbo
90EW), son:
0011 1001 0001 2
La figura V.22d, muestra la forma final, después de aplicar el método mostrado
anteriormente, las figuras V.22a, V.22b y V.22c, muestran paso a paso como realizar este
procedimiento para cada punto extremo de los JP’s de interés.
Procedimiento paso a paso para obtener el círculo envolvente para el JP 0011
1. Como se observa en la tabla V.11, la dirección del echado del talud (preestablecido)
es de 0º, por lo tanto es una línea horizontal que une a los puntos de intersección
entre el plano 5 y el círculo de referencia (Puntos A y B).
2 Recuérdese que son aquellos JP’s que yacen en su totalidad dentro del círculo
correspondiente al plano libre 5.
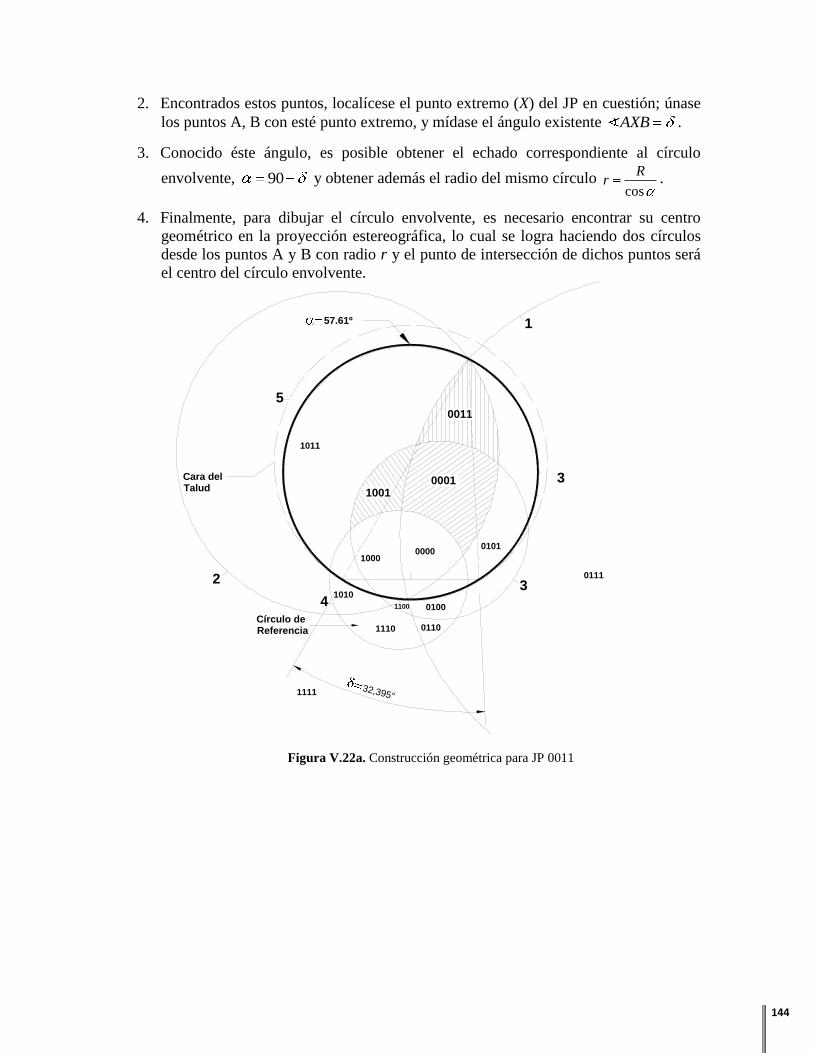
144
2. Encontrados estos puntos, localícese el punto extremo (X) del JP en cuestión; únase
los puntos A, B con esté punto extremo, y mídase el ángulo existente AXB .
3. Conocido éste ángulo, es posible obtener el echado correspondiente al círculo
envolvente, 90 y obtener además el radio del mismo círculo cos
Rr .
4. Finalmente, para dibujar el círculo envolvente, es necesario encontrar su centro
geométrico en la proyección estereográfica, lo cual se logra haciendo dos círculos
desde los puntos A y B con radio r y el punto de intersección de dichos puntos será
el centro del círculo envolvente.
57.61º
3
32,395°
ReferenciaCírculo de
4
1
23
Cara delTalud
5
0111
0101
0001
0011
1011
1001
1000
1010
1110 0110
0100
1111
0000
1100
Figura V.22a. Construcción geométrica para JP 0011
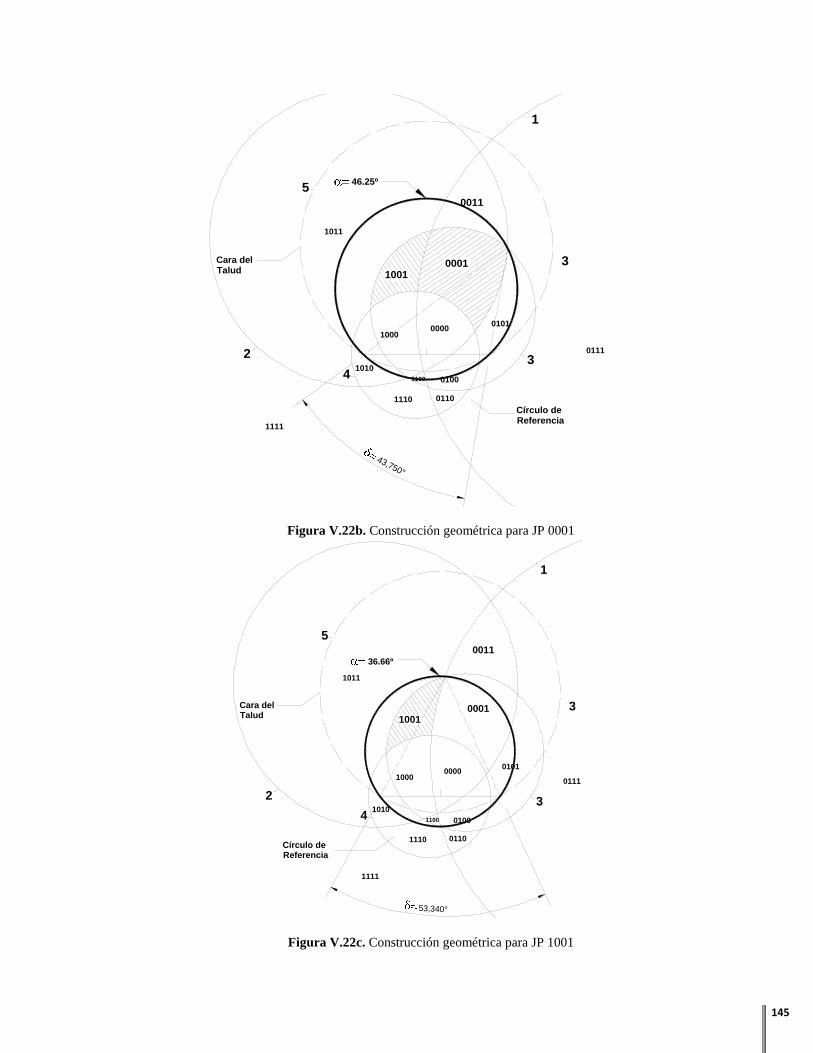
145
1100
0000
1111
0100
01101110
1010
1000
1001
1011
0011
0001
0101
0111
5
TaludCara del
32
1
4
Círculo de Referencia
43,750°
3
46.25º
Figura V.22b. Construcción geométrica para JP 0001
36.66º
3
53,340°
ReferenciaCírculo de
4
1
23
Cara delTalud
5
0111
0101
0001
0011
1011
1001
1000
1010
1110 0110
0100
1111
0000
1100
Figura V.22c. Construcción geométrica para JP 1001

146
Echado =
1100
0000
0100
01101110
1010
1000
1001
1011
0011
0001
0101
0111
3
2
1
4
Círculo de Referencia
57.61º
46.25º
36.66º
Echado =
Echado =
Echado = 90º
Figura V.22d. Figura resumen
Analizando lo anterior, se puede observar que si un corte en el talud se realiza con una
inclinación mayor a 57.7º, los tres JP´s son potenciales cuñas claves, pero si el talud es
realizado con un ángulo menor a 57.7º, el JP 0111 no es más una potencial cuña clave.
Asimismo, si el corte se realiza con menos de 46.25º, el JP 0001 deja de ser un bloque
removible y si el corte se realiza con menos de 36.4º, el JP 1001 igualmente deja de ser un
bloque removible.
La tabla V.12, resume las anteriores condiciones-conclusiones. Este ejemplo muestra que la
seguridad en taludes en roca, medida en términos de la relación entre las fuerzas resistentes
y actuantes, debe ser una función discontinua del ángulo del talud. Este comportamiento
hace del análisis de estabilidad en taludes en roca diferente del análisis para taludes en
suelos.
Finalmente, como se puede ver en la tabla V.15 que no existirá un cambio en la seguridad
del talud en roca si se mantiene el rumbo y el ángulo del echado del talud es movido de 60º
a 90º. Este tipo de conclusiones es de particular valor cuando se elige un método
constructivo.

147
Número Echado Dirección del
Echado
Cuñas
Claves
Bloques
Removibles
1 0.00 – 36.46 0 ------------ 0000, 1000
2 36.66 – 46.25 0 1001 0000
3 46.25 – 57.61 0 1001, 0001 ------------
4 57.61 – 90.00 0 1001, 0001, 0011 ------------ TABLA V.12.- Resumen de resultados
USO DE LOS MÉTODOS VECTORIALES PARA CALCULAR LOS ÁNGULOS
LÍMITES DE LA PENDIENTE EN EL TALUD CUANDO LA DIRECCIÓN DEL
MISMO HA SIDO PREESTABLECIDO
El problema resuelto anteriormente fue el de encontrar el echado de un talud en roca,
cuando su dirección del echado ha sido fijado. Una solución puede además ser obtenido
mediante la utilización de métodos vectoriales.
El procedimiento se basará en calcular los bordes de los JP y para cada borde se calculará el
echado de un plano libre que contenga tanto a la línea del rumbo del plano libre y la línea
del borde del JP. Los bordes son determinados como líneas de intersección de los planos de
discontinuidad, como se ha discutido en el capítulo I (ecuación I.11 y ejemplo I.3).
La solución de este ejemplo, se basará en los datos del conjunto de discontinuidades de la
tabla V.11 y de los planos libres que se echan hacia el norte (rumbo este-oeste).
1. Calcúlese los vectores unitarios normales , , , cos ,cosi i i in X Y Z sen sen sen
para cada conjunto de discontinuidades. Los valores resultantes se dan en la tabla V.13.
Plano i iX iY iZ
1 0.9512 0.1677 0.2588
2 -0.4532 0.7849 -0.4226
3 0.3214 0.5567 0.7660
4 -0.1735 0.0000 0.9848
Tabla V.13.- Cosenos directores
2. Calcúlese la línea de intersección ijI de cada par de planos y convierta cada uno en un vector
unitario ijI .
i jij n nI y i j
ij
i j
n n
n n
I

148
Cálculo de línea de intersección y obtención de vector unitario para los planos 1 y 2
1 2
2 2 2
1 2
0.9512 0.1677 0.2588 0.1322, 0.5192, 0.8225
0.4531 0.7848 0.4226
0.1322 0.5192 0.8225 0.9816
ij
x y z
n n
n n
I
1 2
1 2
0.1347, 0.5289, 0.8379ij
n n
n n
I
Plano ijX ijY ijZ
i j
1 2 -0.2102 0.2847 0.8226
1 3 -0.0194 -0.8049 0.5930
1 4 0.1658 -0.9857 0.0292
2 3 0.4641 0.6125 -0.6398
2 3 0.8895 0.4291 0.1568
3 4 0.7661 -0.6282 -0.1350
Tabla V.14. Líneas de intersección , ,ij ij ij ijX Y ZI
Si los todos planos de corte tienen la misma dirección del echado, la línea de rumbo, S , es
una línea común de intersección de todos los planos de corte. Debido a que el eje x es el
este, en este caso, 1,0,0S . El plano que contiene tanto a S como a ijI tiene una normal
ijn calculada mediante:
, ,ijij ij ij ijS A B Cn I (V.18)
Siendo ijP el plano que tiene a ijn como su vector unitario, y recordando que la ecuación de
un plano ijP es 0ij ij ijA X B Y C Z .
Obtención de los diferentes ijn
1,0,0S
12 1 0 0 0, 0.8378, 0.5289
0.1347 0.5289 0.8378
ij
x y z
Sn I
1313 0, 0.5930, 0.8049Sn I

149
14 0, 0.0292, 0.9857ij Sn I
23 0,0.6398,0.6125ij Sn I
24 0, 0.1568,0.4291ij Sn I
24 0,0.1350, 0.6282ij Sn I
Plano ijA ijB ijC Echado
Dirección
del Echado i j
1 2 0 -0.8456 0.5338 57.73 0
1 3 0 -0.5931 -0.8050 36.38 0
1 4 0 -0.0296 -0.9995 1.69 0
2 3 0 0.7223 0.6915 46.25 0
2 3 0 -0.3433 0.9392 20.07 180
3 4 0 -0.2102 -0.9776 12.13 0
Tabla V.15.- Parámetros de los planos ijP conteniendo a ijI y 1,0,0S
Habiéndose calculado una serie de plano que contienen a cada línea de intersección, el
siguiente paso es el de escoger cada uno de estos como un plano libre, por turno y
utilizando los métodos presentados anteriormente en este capítulo o los del capítulo II,
encontrar las cuñas claves de cada ijP . En este ejemplo, únicamente tres de los ijP generan
cuñas claves y los cuales son: 13 23 12,P P y P . Así se ve que se generará una tabla similar a
la tabla V.12.
EL USO DE LA PROYECCIÓN ESTEREOGRÁFICA PARA LIMITAR LA
DIRECCIÓN DEL TALUD CUANDO EL ÁNGULO DEL TALUD HA SIDO
PREFIJADO
En la sección anterior, se asumió que la dirección del talud había sido pre-establecido y era
posible ajustar el ángulo del talud. En este apartado se analizará el caso alternativo donde el
ángulo del talud (echado) ha sido preestablecido y el corte puede ser orientado en cualquier
dirección.
El problema corresponde a construir un gran círculo de un radio determinado a través de un
punto dado. En la figura V.23, A es un punto por el cual se desea que pase el gran círculo
(es decir, es un punto conocido). El radio del círculo de referencia es R. Si el echado del
talud está dado por , el radio del gran círculo para dicho talud puede ser calculado por la
ya conocida ecuación:
cos
Rr
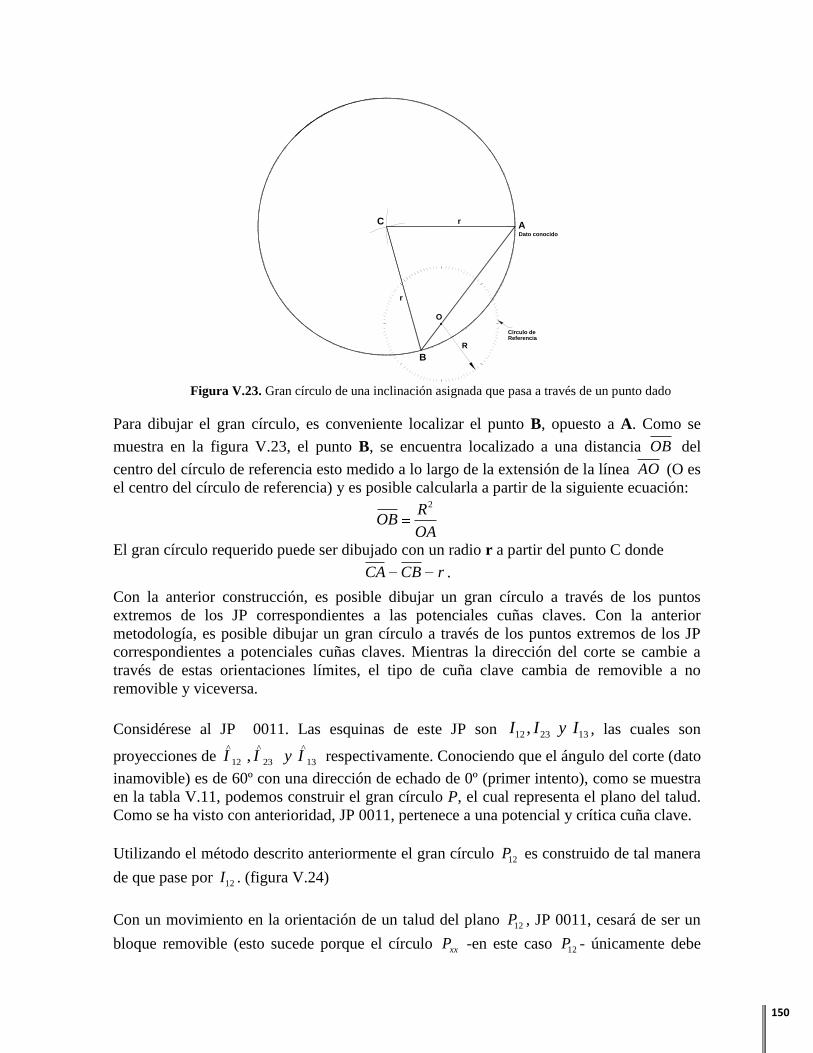
150
R
O
B
AC r
Dato conocido
r
Círculo de Referencia
Figura V.23. Gran círculo de una inclinación asignada que pasa a través de un punto dado
Para dibujar el gran círculo, es conveniente localizar el punto B, opuesto a A. Como se
muestra en la figura V.23, el punto B, se encuentra localizado a una distancia OB del
centro del círculo de referencia esto medido a lo largo de la extensión de la línea AO (O es
el centro del círculo de referencia) y es posible calcularla a partir de la siguiente ecuación: 2R
OBOA
El gran círculo requerido puede ser dibujado con un radio r a partir del punto C donde
CA CB r .
Con la anterior construcción, es posible dibujar un gran círculo a través de los puntos
extremos de los JP correspondientes a las potenciales cuñas claves. Con la anterior
metodología, es posible dibujar un gran círculo a través de los puntos extremos de los JP
correspondientes a potenciales cuñas claves. Mientras la dirección del corte se cambie a
través de estas orientaciones límites, el tipo de cuña clave cambia de removible a no
removible y viceversa.
Considérese al JP 0011. Las esquinas de este JP son 12 23 13,I I y I , las cuales son
proyecciones de ^ ^ ^
12 23 13,I I y I respectivamente. Conociendo que el ángulo del corte (dato
inamovible) es de 60º con una dirección de echado de 0º (primer intento), como se muestra
en la tabla V.11, podemos construir el gran círculo P, el cual representa el plano del talud.
Como se ha visto con anterioridad, JP 0011, pertenece a una potencial y crítica cuña clave.
Utilizando el método descrito anteriormente el gran círculo 12P es construido de tal manera
de que pase por 12I . (figura V.24)
Con un movimiento en la orientación de un talud del plano 12P , JP 0011, cesará de ser un
bloque removible (esto sucede porque el círculo xxP -en este caso 12P - únicamente debe
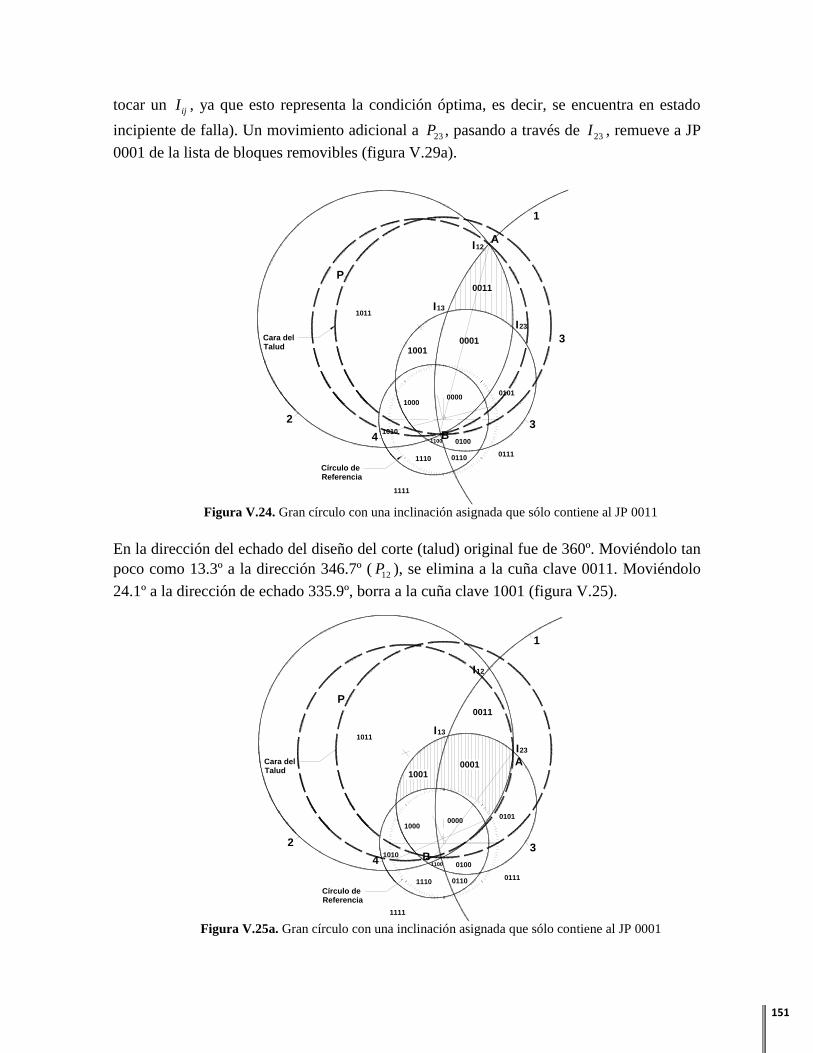
151
tocar un ijI , ya que esto representa la condición óptima, es decir, se encuentra en estado
incipiente de falla). Un movimiento adicional a 23P , pasando a través de 23I , remueve a JP
0001 de la lista de bloques removibles (figura V.29a).
3
ReferenciaCírculo de
4
1
23
Cara delTalud
P
0111
0101
0001
0011
1011
1001
1000
1010
1110 0110
0100
1111
0000
1100
I12
13I
I23
A
B
Figura V.24. Gran círculo con una inclinación asignada que sólo contiene al JP 0011
En la dirección del echado del diseño del corte (talud) original fue de 360º. Moviéndolo tan
poco como 13.3º a la dirección 346.7º ( 12P ), se elimina a la cuña clave 0011. Moviéndolo
24.1º a la dirección de echado 335.9º, borra a la cuña clave 1001 (figura V.25).
B
A23I
I13
12I
1100
0000
1111
0100
01101110
1010
1000
1001
1011
0011
0001
0101
0111
P
TaludCara del
32
1
4
Círculo de Referencia
Figura V.25a. Gran círculo con una inclinación asignada que sólo contiene al JP 0001

152
ReferenciaCírculo de
4
1
23
Cara delTalud
P
0111
0101
0001
0011
1011
1001
1000
1010
1110 0110
0100
1111
0000
1100
I12
13I
I23
A
B
Figura V.25b. Gran círculo con una inclinación asignada que sólo contiene al JP 1001
Se ha visto que estos pequeños movimientos en la orientación es posible mejorar
significativamente la estabilidad.
Ahora, si lo que se desea es eliminar totalmente a las cuñas claves del talud propuesto con
un echado de 60º, será necesario hacer pasar un círculo por la intersección 13I , y medir
únicamente la dirección del echado. Aunque también es posible realizar lo anterior
mediante procedimientos vectorial, se omitirá.
BLOQUES REMOVIBLES EN UNA CARA EXCAVADA, UTILIZANDO UN
LEVANTAMIENTO GEOLÓGICO
Los análisis realizados anteriormente, se han centrado en determinar las combinaciones de
todos los medio-espacios que crean potenciales cuñas claves en una excavación con
orientaciones establecidas. El hecho de que una potencial cuña clave exista una vez
realizada la excavación, depende no solamente depende de las orientaciones de los planos
de discontinuidades pero también de su posición en la cara del talud. Supónganse que un
mapa geológico (levantamiento geológico) se encuentra disponible, el cual muestra las
líneas de intersección de los actuales planos de discontinuidades con respecto a la cara del
talud. De lo anterior se podría preguntar ¿Cómo un análisis de cuña clave puede ser

153
aplicado para identificar a los polígonos que pertenecen a las cuñas claves?, esta pregunta
se resolverá en las siguientes páginas:
Para demostrar el método para localizar a los bloques removibles, se usará de nuevo los
conjuntos de discontinuidades 1 2 3 4, ,P P P y P y la cara del talud 5P de la tabla V.11. La
masa rocosa ocupa el medio-espacio inferior del plano 5P , por lo que el Space Pyramid
(SP), es la región dentro del gran círculo del plano 5. Los JPs que se encuentran totalmente
incluidos dentro del SP son 0011, 1001 y 0001; estos JPs definen a los bloques removibles
debido a la existencia de los 4 conjuntos de discontinuidades.
A partir de la figura V.26, también es posible encontrar a los bloques correspondientes a
cualquier subconjunto de 3 discontinuidades; es decir, cuando el plano 1P se elimina, las
discontinuidades restantes crean un bloque removible con el código 2001, en la siguiente
figura se muestra esta construcción.
ReferenciaCírculo de
5
TaludCara del
32
4
2001
SIN PLANO DE DISCONTINUIDADES 1
Figura V.26. JP con código 2001; se eliminó el conjunto de discontinuidades 1
El mismo procedimiento se realizaría para los siguientes conjuntos de discontinuidades, es
decir, eliminando el segundo, tercer y después el cuarto plano de discontinuidades, con lo
obtendría los siguientes códigos: 1201, 0021 y 0012, a continuación se presentan las
construcciones geométricas correspondientes:

154
ReferenciaCírculo de
5
TaludCara del
3
1
4
1201
SIN PLANO DE DISCONTINUIDADES 2
ReferenciaCírculo de
5
TaludCara del
2
1
4
0021
SIN PLANO DE DISCONTINUIDADES 3
ReferenciaCírculo de
5
TaludCara del
32
1
0012
SIN PLANO DE DISCONTINUIDADES 4
Figura V.27. JPs con códigos 1201, 0021 y 0012; se eliminó los conjuntos de
discontinuidades 2, 3 y 4, respectivamente
La figura V.28 es un mapa geológico de la cara del talud 5P , todas las discontinuidades de la figura
V.28 pertenecen a alguno de los conjuntos de discontinuidades 1 4P al P y los trazos está codificados
mediante un tipo de línea. Utilizando la lista de los JPs críticos, es posible analizar el mapa geológico
para localizar a todos los bloques removibles y todas las combinaciones de bloques removibles. Es
importante recalcar que es necesario el buscar todos los bloques porque en caso de no encontrar
alguno, ese bloque podría ser el que inicia o desencadena el colapso progresivo de la cara entera del
talud. El siguiente procedimiento permitirá localizar todos los bloques removibles de la cara:

155
D^
1
1 1
1
1
1 1
1
1
1
1
1
11
3
3
3
3
3
3
3
3
3
4
4
4
4
4
4
4
4
4
4
4
A
4
2
2
2
2
2
2
22
2
1
2
3
4
B
C
D
E
F
0101
0121
2101
1201
4
4
12
3
3
3
Figura V.28.- Mapa geológico de los trazos de discontinuidades como se ve en el plano 5 de la tabla V.11
1. Establecer la dirección del mapa geológico
La dirección, mostrada como D al margen del mapa, es el echado del plano 5P , es decir de
la cara del talud, en la figura V.14, la dirección D es representada por el punto D en el
círculo 5 y se puede observar que dicho punto se encuentra dentro del círculo 2 y fuera de
los círculos 1, 3 y 4, a lo anterior lo podríamos codificar de la siguiente manera:
Como el mapa geológico está volteado respecto a la dirección del talud, debemos voltear
momentaneamente el levantamiento geológico par identificar para cada trazo, cual es el
medio-espacio superior o inferior:

156
Viendo la figura anterior, es posible deducir que medios-espacios le corresponden a cada
discontinuidad o trazos; hecho esto y revolteando el mapa con las medios-espacios ya
asignados, uno ve, que los medio-planos superiores de las discontinuidades 1, 3 y 4 (visto
el plano en su vista original) corresponden a los medios-espacios superiores de los planos 1,
3 y 4, respectivamente; pero el medio-plano superior del trazo 2 en el mapa corresponde al
medio-espacio inferior de la discontinuidad 2. Lo anterior suguiere crear un código de mapa
especial MC (Map Code) correspondiente a cada JP críticos como se muestra en la
siguiente tabla:
Plano Si le corresponde el
código 0 Se le asignará el código:
Si le corresponde el código 1
Se le asignará el código:
Si le corresponde el código 2
Se le asignará el código: 1 0 1 2 2 1 0 2 3 0 1 2 4 0 1 2
Tabla V.16.- Código de mapa especial correspondiente a cada JP crítico
Por ejemplo, el JP 0001 genera el código de mapa (MC) 0101, la siguiente tabla muestra los
códigos JP y los códigos MC para todos los bloques removibles existentes en este ejemplo.

157
JP Joint Pyramid
MC (Map Code) Código de Mapa
0001 0101 0011 0111 1001 1101 0012 0112 0021 0121 1201 1201 2001 2101
Tabla V.17.- JP y código de mapa correspondiente
2. Localizar las zonas de bloques removibles correspondientes a 4 conjuntos de
discontinuidades
Los códigos de mapa correspondientes, son aquellos que no tienen un 2, estos son 0101,
0111 y 1101. Una zona de bloque removible es una segmento de línea cerrada que satisface
las siguientes condiciones:
a) La zona está integrada por todos los conjuntos de discontinuidades 1 2 3 4, ,P P P y P .
b) Para cualquier trazo de discontinuidad, su área correspondiente es:
Arriba del trazo si el código de mapa (MC) es 0.
Abajo del trazo si el MC es 1.
Por ejemplo, la zona ABCDEFA de la figura V.30 es una zona correspondiente al código
de mapa 0101, los segmentos de esta zona son los siguientes:
El segmento AB se encuentra a lo largo de la discontinuidad 4, el cual le
corresponde el MC 1, por lo tanto la zona debe estar debajo del segmento, la cual
está.
El segmento BC se encuentra a lo largo de la discontinuidad 1. El MC es 0, por lo
que la zona debe estar arriba del segmento para satisfacer la condición para ser una
cuña clave, lo cual se satisface.
El segmento CD está a lo largo de la discontinuidad 3; MC es 0, la zona debe estar
arriba del segmento, lo cumple.
Segmento DF está a lo largo del conjunto de discontinuidad 2, su MC es 1, la zona
debe estar por debajo del trazo.
El segmento EF está a lo largo del conjunto 3, su MC es 0 y la zona debe estar por
arriba del segmento.

158
El segmento FA está a lo largo del conjunto 2, su MC es 1, por lo que la zona debe
estar debajo de dicho segmento, lo cual se cumple.
Debido a que todos los segmentos satisfacen la condición (b), la zona constituye un bloque
removible.
3. Localizar las zonas de bloques removibles correspondientes a los JPs críticos con
3 conjuntos de discontinuidades
Los códigos de mapas para JPs con 3 conjuntos de discontinuidades son, 0112, 0121, 1201
y 2101. Una zona de bloque removible con tres discontinuidades es un segmento cerrado
que satisface las siguientes condiciones:
a) Incluye segmentos de 3 discontinuidades cualquiera de los 4 conjuntos de
discontinuidades
b) Para cualquier trazo, su área correspondiente es arriba o abajo, si su MC es 0 o 1,
respectivamente.
Por ejemplo, considérese el área GHIJKG de la figura V.30 con respecto al MC 0121;
examinándose la figura V.30, es posible establecer las siguientes propiedades para la zona:
El segmento GH está a lo largo del conjunto 1, su MC es 0, por lo que la zona debe
yacer arriba del segmento.
El segmento HI está a lo largo del conjunto 4, su MC es 1, por lo que la zona de
interés debe estar por debajo de dicho segmento, lo cual se cumple.
El segmento IJ está a lo largo del conjunto 1 y su MC es 0, por lo que la zona debe
yacer arriba del segmento.
El segmento JK está a lo largo del conjunto 2, su MC es 1; la zona debe estar debajo
del segmento, lo cual está.
El segmento KG sigue al conjunto 4 y su MC es 1, por lo tanto la zona debe yacer
debajo de dicho segmento, con lo cual se satisface la condición para que dicha zona
sea una cuña clave.
Es posible observar que todos los segmentos satisfacen a la condición (b).
En la siguiente tabla se proporciona el número de zonas cerradas que satisfacen las
condiciones para ser una cuña clave, estos números se pueden verificar en la figura V.28.

159
JP Joint Pyramid
MC (Map Code) Código de Mapa
Número de Zonas en la Figura V.28
0001 0101 3
0011 0111 0
1001 1101 0
0012 0112 2
0021 0121 2
1201 1201 2
2001 2101 2 Tabla V.18.- Tabla resumen
De acuerdo a las suposiciones teóricas de la teoría de bloques, la totalidad de la cara del
talud será estable si todas las zonas delimitadas en la figura V.28, permanecen en su lugar.
Un procedimiento para realizar esto, es el colocar un sistema de contención, que al menos,
mantenga en su lugar a estos bloques/cuñas claves. Sin embargo, algunas de estos bloques
podrían ser estables debido a la fricción que se desarrolla o a su posición relativa a la cara
libre/superficie de excavación; los procedimientos para el análisis cinemático como de
estabilidad se presenta en el último capítulo.

160
Capítulo VI
La Teoría De Bloques Aplicada A Cámaras
Subterráneas
No importa lo que yo diga, sino lo que tú entiendas.
Desconocido
n este capítulo se mostrará cómo aplicar la teoría de bloques para el diseño de
cámaras subterráneas. El espacio subterráneo está siendo utilizado para
almacenamiento, operaciones industriales, generación de energía, minería, defensa y
para otros propósitos, Las cámaras son realizadas para almacenar agua, aire comprimido,
aceite, desperdicios nucleares y otros. Algunas de las ventajas de la utilización del espacio
subterráneo son: Invulnerabilidad a los ataques, deslizamientos de tierra, tormentas o
terremotos; temperatura y humedad constante, gran resistencia a cargas tantas físicas,
químicas o térmicas; además, si el macizo rocoso lo permite, el uso del espacio subterráneo
puede ser más económico que el espacio utilizado para los mismos fines en la superficie.
Una manera, para economizar en el desarrollo del espacio subterráneo, es el escoger un
arreglo para la red tridimensional de las excavaciones, tal que, se requiera sólo el mínimo
soporte artificial. En una abertura subterránea autosoportada (es decir, sin ademe-soporte
artificial), el estado inicial de esfuerzos, se concentrara en la abertura y fluirá a su alrededor
de tal manera, que buscará preservar la continuidad en el macizo, es decir, buscará
mantener continuidad en las discontinuidades. El movimiento de bloques inestables por la
pérdida de cuñas claves, promueven la abertura y pérdida de discontinuidades, los cuales
pueden crear a su manera problemas de estabilidad de gran costo económico.
12
12
10
85
230
230
215
220
225
215
210
205
200
SECCIÓN DESERVICIO
CÁMARA SUBTERRÁNEA
PORTAL DEACCESO
Figura VI. 1. Planta de complejo subterráneo
E

161
La figura VI.1 muestra la vista en planta de un complejo subterráneo utilizado para el
almacenamiento de agua, ubicado en roca volcánica. Aunque cada proyecto subterráneo es
único, la mayoría tiene varios elementos mostrados en la figura, incluyendo grandes
cámaras prismáticas, bifurcaciones, curvas o quiebres, pilares, entradas e intersecciones.
Teniendo lo anterior en cuenta, la teoría de bloque, provee las elecciones óptimas en cuanto
a orientación, forma y el arreglo o configuración de los portales, esto, para minimizar el
peligro por el movimiento de bloques. Además, también es posible, que el diseñador haga
cambios o ajustes en obra, esto en cuanto a las orientaciones de grandes excavaciones.
Finalmente, como se mencionó con anterioridad, la finalidad de este capítulo, es mostrar
cómo es posible determinar las cuñas claves de cualquier tipo, formadas por la intersección
o unión de superficies planas de excavación.
CUÑAS CLAVES EN EL TECHO, PISO Y PAREDES
Siendo a un vector y P a el plano normal a a . P a divide al espacio en dos medios-
espacios; los cuales se les denominará U a y L a (medio-espacio superior normal al
vector a y el medio-espacio inferior normal al vector a , respectivamente). Además se
considera, que el vector a se dirige hacia U a y el vector a apunta hacia L a . Por lo
tanto U La a y U La a . En lo siguiente, se considera ^ 0,0,1z es decir, el
vector unitario que se dirige hacia arriba.
BLOQUES REMOVIBLES EN EL TECHO
Debido a que la roca se encuentran en el “lado superior” del plano del techo, ^EP U z y
^SP L z . Así el criterio de removilidad de un bloque está dado por:
JP
y JP SP (VI.1)
Donde SP L z
el símbolo significa vacío (finito).
Plano del Techo
SP
EP
MACIZO ROCOSO
SP=L( z )^
^EP=U( z )
TECHO
PISO
Figura VI.2.a.- Identificación del SP y el EP para el techo

162
La figura VI.2b, presenta una proyección estereográfica con un punto focal inferior de un
plano horizontal, el cual representa al techo; el SP es la región debajo del techo y por lo
tanto el área fuera del gran círculo que representa al plano horizontal (techo).
EP
TECHO
EP(U)
SP(U)
EP
SP
SP(U)
EP(L)
PISO
Figura VI.3.b.- Proyección del SP y el EP para el techo Figura VI.2.c.- Proyección del SP y el EP para el piso
En la anterior, y en las subsecuentes figuras de este capítulo, la región correspondiente al
EP será sombreada, mientras que la región correspondiente al SP, se dejará sin sombreado.
Así, cualquier JP que esté totalmente incluido en la región sin sombreado, determinará un
bloque removible y por lo tanto, una potencial cuña clave.
BLOQUES REMOVIBLES EN EL PISO
Debido a que la roca, se encuentra en el lado inferior del plano del piso, ^EP L z y
^SP U z . El criterio que rige la movilidad de un bloque, ahora expresa que SP se
encuentra arriba del plano horizontal, por lo tanto es el área dentro del gran círculo figura
VI.2c. Si la fuerza resultante está dada únicamente por el peso, el bloque nunca podrá ser
una cuña clave porque cada vector estará dirigido hacia arriba.
BLOQUES REMOVIBLES EN LAS PAREDES
La figura VI.3, muestra un cuarto rectangular subterráneo. Siendo la “pared i”,
determinada por su vector unitario normal ^iw , el cual se dirige hacia el espacio libre, de
tal manera que:
^ ^
i iEP L w y SP U w (VI.2)

163
PARED 1
PARED 2
PA
RE
D 4
PA
RE
D 3
EP
SP
SP
SP
SP
EP EP
EP
W^
1
2^W
W^
4
W^
3
Figura VI. 4. SP y EP para las paredes de una cámara prismática subterránea
Para cada una de las 4 paredes de una abertura rectangular, la correcta proyección
estereográfica se presenta en la figura VI.3. Debido a que las paredes son planos verticales,
cada una se proyecta como una línea recta a lo largo del diámetro del círculo de referencia,
paralela al rumbo de la pared.
Un bloque es removible, en la “pared i”, si y solo si su JP se proyecta dentro de la región
sin sombrear en la proyección estereográfica de la “pared i”, es decir dentro del SP.
BLOQUES QUE SON REMOVIBLES EN DOS PLANOS
SIMULTÁNEAMENTE: BORDES CÓNCAVOS
Un bloque es removible simultáneamente en dos caras de una excavación subterránea,
puede llegar a tener grandes dimensiones y aún así caber en el espacio excavado, por lo
tanto, un bloque de este tipo, es potencialmente muy peligroso. Sin embargo, es posible
elegir una orientación tal, que reduzca al mínimo el riesgo de encontrar un bloque de tales
características, dado que, el número de cuñas claves de este tipo, son muy limitadas.
A un bloque, que es simultáneamente removible a partir de dos planos
adyacentes/contiguos, se les denominará “removible en el borde” de dos planos. Primero
consideraremos bordes cóncavos, es decir, aquellos en los cuales la masa rocosa es
cóncava. Para una excavación prismática, existen 12 tipos de tales bordes, correspondientes
a las intersecciones de dos paredes (4), una pared y el piso (4), y una pared y el techo (4).
En lo siguiente, el techo y el piso, se les denominará paredes W5 y W6, respectivamente.
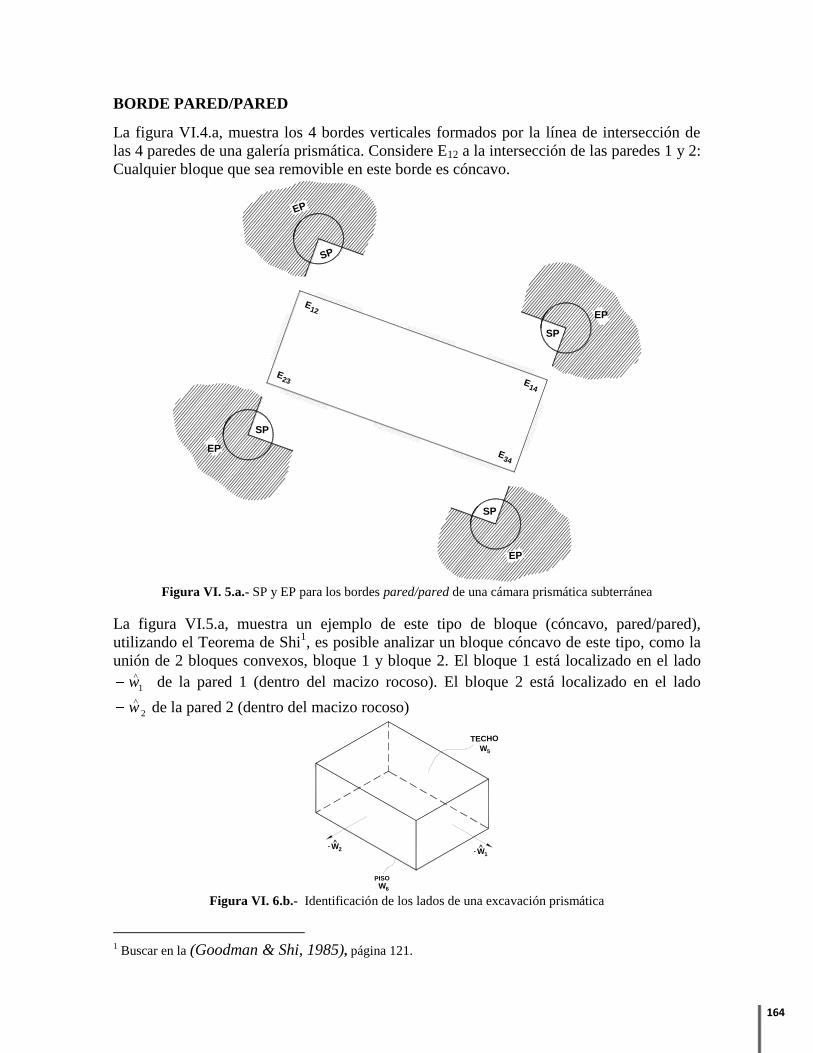
164
BORDE PARED/PARED
La figura VI.4.a, muestra los 4 bordes verticales formados por la línea de intersección de
las 4 paredes de una galería prismática. Considere E12 a la intersección de las paredes 1 y 2:
Cualquier bloque que sea removible en este borde es cóncavo.
E23
34E
E14
12E
EP
SP
SP
EP
EP
SP
SP
EP
Figura VI. 5.a.- SP y EP para los bordes pared/pared de una cámara prismática subterránea
La figura VI.5.a, muestra un ejemplo de este tipo de bloque (cóncavo, pared/pared),
utilizando el Teorema de Shi1, es posible analizar un bloque cóncavo de este tipo, como la
unión de 2 bloques convexos, bloque 1 y bloque 2. El bloque 1 está localizado en el lado ^
1w de la pared 1 (dentro del macizo rocoso). El bloque 2 está localizado en el lado
^
2w de la pared 2 (dentro del macizo rocoso)
W6
5W
--
PISO
TECHO
2W^
^W1
Figura VI. 6.b.- Identificación de los lados de una excavación prismática
1 Buscar en la (Goodman & Shi, 1985), página 121.
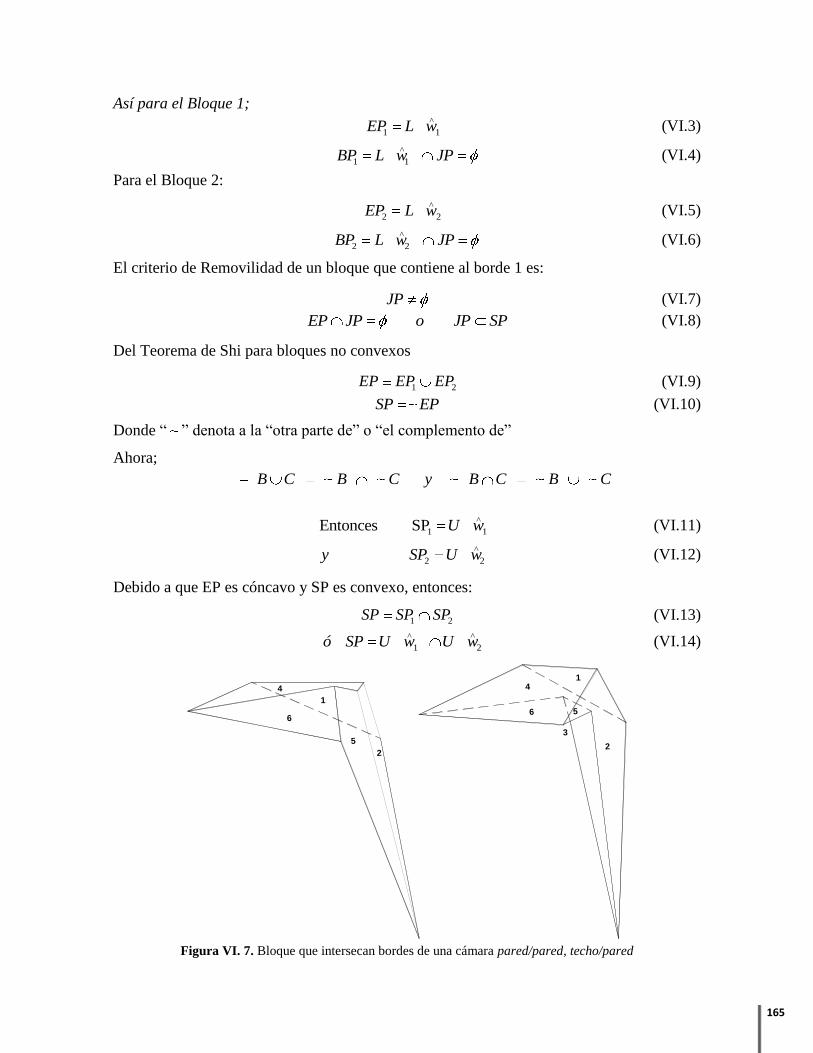
165
Así para el Bloque 1;
^
1 1EP L w (VI.3)
^
1 1BP L w JP (VI.4)
Para el Bloque 2:
^
2 2EP L w (VI.5)
^
2 2BP L w JP (VI.6)
El criterio de Removilidad de un bloque que contiene al borde 1 es:
JP (VI.7)
EP JP o JP SP (VI.8)
Del Teorema de Shi para bloques no convexos
1 2EP EP EP (VI.9)
SP EP (VI.10)
Donde “ ” denota a la “otra parte de” o “el complemento de”
Ahora;
B C B C y B C B C
^
1 1Entonces SP U w (VI.11)
^
2 2y SP U w (VI.12)
Debido a que EP es cóncavo y SP es convexo, entonces:
1 2SP SP SP (VI.13)
^ ^
1 2ó SP U w U w (VI.14)
6
4
1
5
2
6
41
5
3
2
Figura VI. 7. Bloque que intersecan bordes de una cámara pared/pared, techo/pared

166
En general, si un borde es la línea de intersección de las paredes “i” y “j”, y el espacio es
convexo.
^ ^
ij i jSP U w U w (VI.15)
La figura VI.4.a, muestra la solución estereográfica para los bloques removibles de los
4 bordes de intersección pared/pared. Un JP pertenece a un bloque removible en el borde
Eij, si y sólo si se proyecta enteramente dentro de SPij y por lo tanto en el área sin
sombreado.
BORDE TECHO/PARED
Un bloque cóncavo que es removible en el borde común del techo y pared, se muestra en la
figura VI.5.b. Este tipo de bloque debe ser removible simultáneamente en el techo como en
la pared. La figura VI.6, muestra una vista en planta de una abertura rectangular (viendo el
techo). Considérese al borde E15, el cual es la línea de intersección del techo (Pared 5) y la
Pared 1. Cada bloque removible de E15, es la unión del bloque 1 en el sentido ^z del techo y
el bloque 2 en el sentido ^
1w . Así tenemos lo siguiente:
Bloque 1 ^
1EP U z
(VI.16)
y ^
1BP U z JP (VI.17)
Bloque 2 ^
2 1EP L w
(VI.18)
^
2 1BP L w JP (VI.19)
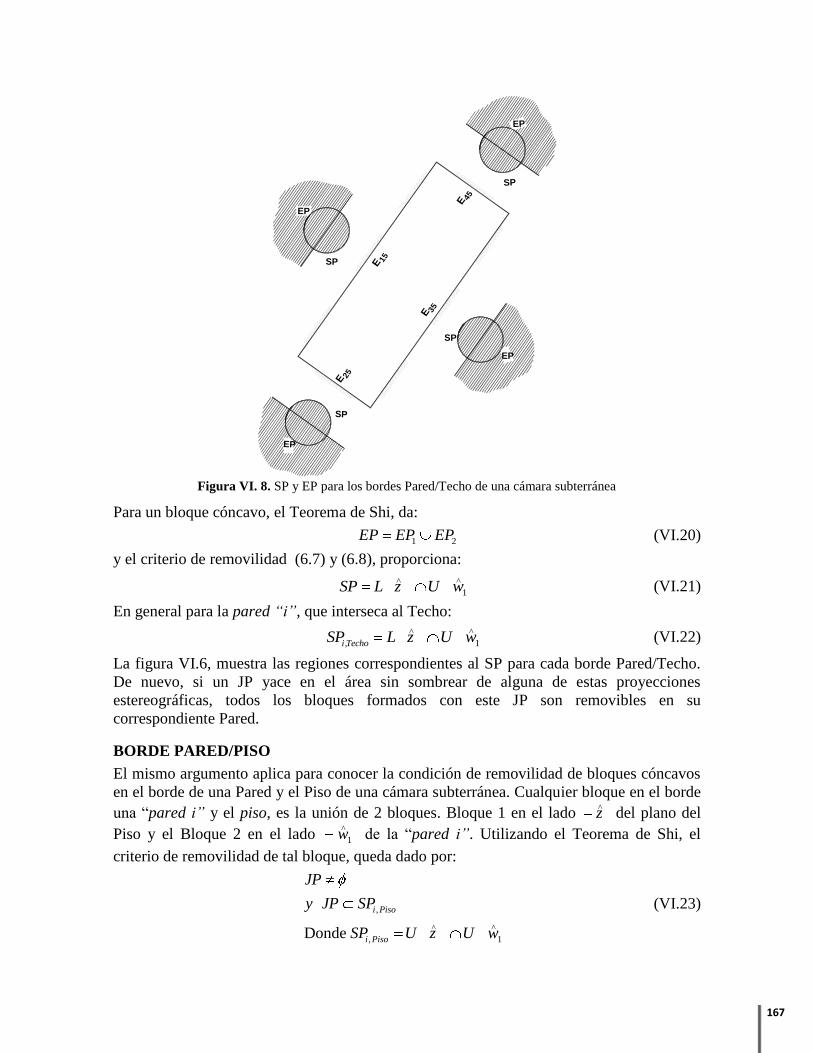
167
E 25
15E
E 35
45E
SP
EP
EP
SP
SP
EP
EP
SP
Figura VI. 8. SP y EP para los bordes Pared/Techo de una cámara subterránea
Para un bloque cóncavo, el Teorema de Shi, da:
1 2EP EP EP (VI.20)
y el criterio de removilidad (6.7) y (6.8), proporciona:
^ ^
1SP L z U w (VI.21)
En general para la pared “i”, que interseca al Techo:
^ ^
, 1i TechoSP L z U w (VI.22)
La figura VI.6, muestra las regiones correspondientes al SP para cada borde Pared/Techo.
De nuevo, si un JP yace en el área sin sombrear de alguna de estas proyecciones
estereográficas, todos los bloques formados con este JP son removibles en su
correspondiente Pared.
BORDE PARED/PISO
El mismo argumento aplica para conocer la condición de removilidad de bloques cóncavos
en el borde de una Pared y el Piso de una cámara subterránea. Cualquier bloque en el borde
una “pared i” y el piso, es la unión de 2 bloques. Bloque 1 en el lado ^z del plano del
Piso y el Bloque 2 en el lado ^
1w de la “pared i”. Utilizando el Teorema de Shi, el
criterio de removilidad de tal bloque, queda dado por:
,
^ ^
, 1Donde
i Piso
i Piso
JP
y JP SP
SP U z U w
(VI.23)

168
La figura VI.7, muestra una vista en planta, a través del nivel de piso de una abertura
rectangular, como los 4 bordes Pared/Piso. Las regiones SP correspondientes a cada una de
estos bordes son las regiones sin sombrear de cada proyección estereográfica.
EP
SP
E 46
36E
E 16
26E
PIS
OW 6
SP
EP
EP
SP
SP
EP
Figura VI. 9. SP y EP para los bordes pared/piso de una cámara prismática subterránea
BLOQUES QUE SON REMOVIBLES SIMULTÁNEAMENTE EN 3 PLANOS:
ESQUINAS CÓNCAVAS
A los bloques que son removibles simultáneamente en 3 superficies que se intersecan, se
les denomina “removibles en una esquina”. Una masa rocosa cóncava es creada en cada
esquina donde 2 paredes intersecan al techo o donde 2 paredes intersecan el piso de la
cámara prismática considerada anteriormente. Por lo tanto, existen 8 esquinas de tales
características. La figura VI.8, muestra las cuatro esquinas techo/pared/pared, en tanto, la
figura VI.9, muestra las esquinas piso/pared/pared.
Primero considere la esquina 1 2 5C de la figura VI.8, formado por la intersección del techo
w5), pared 1 y pared 2. Cada bloque de la esquina 1, es la unión de 3 bloques:
Bloque 1 en el lado ^z del Techo
Bloque 2 en el lado ^
1w de la Pared 1
Bloque 3 en el lado ^
2w de la Pared 2
Teniendo en cuenta lo anterior, las condiciones de removilidad para cada bloque son:
Bloque 1
^
1EP U z (VI.24)
y ^
1BP U z JP (VI.25)
Bloque 2
^
2 1EP L w (VI.26)

169
y 12BP L w JP
(VI.27)
Bloque 3
^
3 2EP L w (VI.28)
^
3 2BP L w JP (VI.29)
El criterio para que un bloque sea removible en la esquina 1 2 5C , es:
JP (VI.7)
y EP JP o JP SP (VI.8)
1 2 3EP EP EP EP (VI.30)
Por lo tanto SP EP
1 2 3
1 2 3
^ ^ ^
1 2
SP EP EP EP
EP EP EP
U z L w L w
^ ^ ^
1 2SP L z U w U w (VI.31)
De manera general, si una esquina cóncava es formado por el techo, plano i y plano j.
^ ^ ^
, ,i j Techo i jSP L z U w U w (VI.32)
Las regiones del SP para cada una de las esquinas del Techo son mostradas en la
proyección estereográfica en la figura VI.8.

170
EPSP
5W
TEC
HO
E 125
235
E
145
E
E 345
SP
EP
EPSP
EP
SP
Esq
uin
a
Figura VI. 10. SP y EP para las esquinas pared/pared/techo en una cámara subterránea prismática

171
Esq
uin
a
346
E
E 146
E 236
126
E
PIS
OW 6
SP
EP
EP
SP
SP
EP
EP
SP
Figura VI. 11. SP y EP para las esquinas pared/pared/piso en una cámara subterránea prismática
Similarmente, para una esquina piso/pared/pared, un bloque es removible si y sólo si
satisface las condiciones (VI.7) y (VI.8) junto con (VI.26) a (VI.30) y:
^
1EP L z (VI.33)
y ^
1BP L z JP (VI.34)
Si la esquina cóncava es formada por las intersecciones de “piso”, “pared i” y “pared j”.
^ ^ ^
, ,i j piso i jSP U z U w U w (VI.35)
Y un bloque finito es removible en la esquina si y sólo si su JP está contenido en el
, ,i j pisoSP . La figura VI.9, muestra las regiones SP correspondientes a las 4 esquinas de Piso.

172
EJEMPLO: ANÁLISIS DE CUÑA CLAVE PARA UNA CÁMARA SUBTERRÁNEA
Los principios mostrados en la sección anterior, serán ilustrados mediante un ejemplo.
Considérese una excavación subterránea, como la mostrada en la figura VI.10.a. Esta
cámara subterránea realizada para ser utilizada como una estación hidroeléctrica, es
aproximadamente una caja plana prismática de 12 47 80m , con su mayor dimensión
orientada verticalmente.
Durante la construcción existe la libertad de rotar la orientación únicamente alrededor del
eje vertical. El conjunto de discontinuidades y los planos de excavación de la cámara están
enlistados en la tabla VI.1.
Plano Echado
α
Dirección del
Echado
β
Extensión
m Espaciamiento
m
Discontinuidad 1 71 163 50 8
Discontinuidad 2 68 243 50 15
Discontinuidad 3 45 280 20 10
Discontinuidad 4 13 343 12 10
Paredes W1, W3 90 118* 47 x 80 ------------------
Paredes W2, W4 90 28* 12 x 80 ------------------
Techo W5 0 0 12 x 47 ------------------
Techo W6 0 0 12 x 47 ------------------
La dirección dada, es la
de la normal a la pared. Tabla VI.1.- Discontinuidades y Superficies de Excavación de la Cámara Mostrada en la figura VI.10
80 m
47 m
12 m
C235
125C
145C
C345
346C
C236
E25
45E
15E
E35
W5
14E
E34
16E
E23
2W
C12636E
W6
C146
46E
1W
W3
W4
Figura VI. 12.a.- Cámara Subterránea Prismática, utilizada en el ejemplo

173
Para ser congruente con lo discutido anteriormente, será de mucha ayuda el establecer las
direcciones de las normales “orientadas hacia adentro” de las paredes. Estos valores están
dados en la tabla VI.2.
Pared Echado de la
Normal
α
Dirección del
Echado de la normal
β
1 0 118
2 0 28
3 0 298
4 0 208
Tabla VI.2. Vectores “orientados hacia adentro” de las paredes
118º
208º
28º
298º
1W
W3
W4
2W
0º
90º
180º
270º
28,000°118º208º
298º
Figura VI. 13.b.- Vista en planta de la cámara subterránea, con las direcciones
de cada cara (dirección z hacia el papel)
CUÑAS CLAVES DEL TECHO, PISO Y PAREDES
El SP del techo es ^SP L z (z se dirige hacia la roca). Los 4 conjuntos de
discontinuidades están proyectados en la figura VI.11a y el círculo de referencia está
representado por una línea punteada. ^L z es la región que se encuentra afuera del círculo
de referencia. Por lo tanto, los JP´s que se encuentran enteramente incluidos en el SP para
cuando el plano de referencia está en el techo son 1101 y 1011; estos JP´s determinan a los
bloques removibles del techo. Entre tanto, los bloques removibles del piso, son aquellos
JP´s que yacen enteramente dentro del ^SP U z y por lo tanto enteramente dentro del
círculo de referencia. En este ejemplo son 0010 y 0100 (Figura VI.11b). Debido a que el
piso y el techo son medios-espacios opuestos, los JP´s de los bloques removibles son
primos. (Ver tipos de bloques primos en el capítulo III)
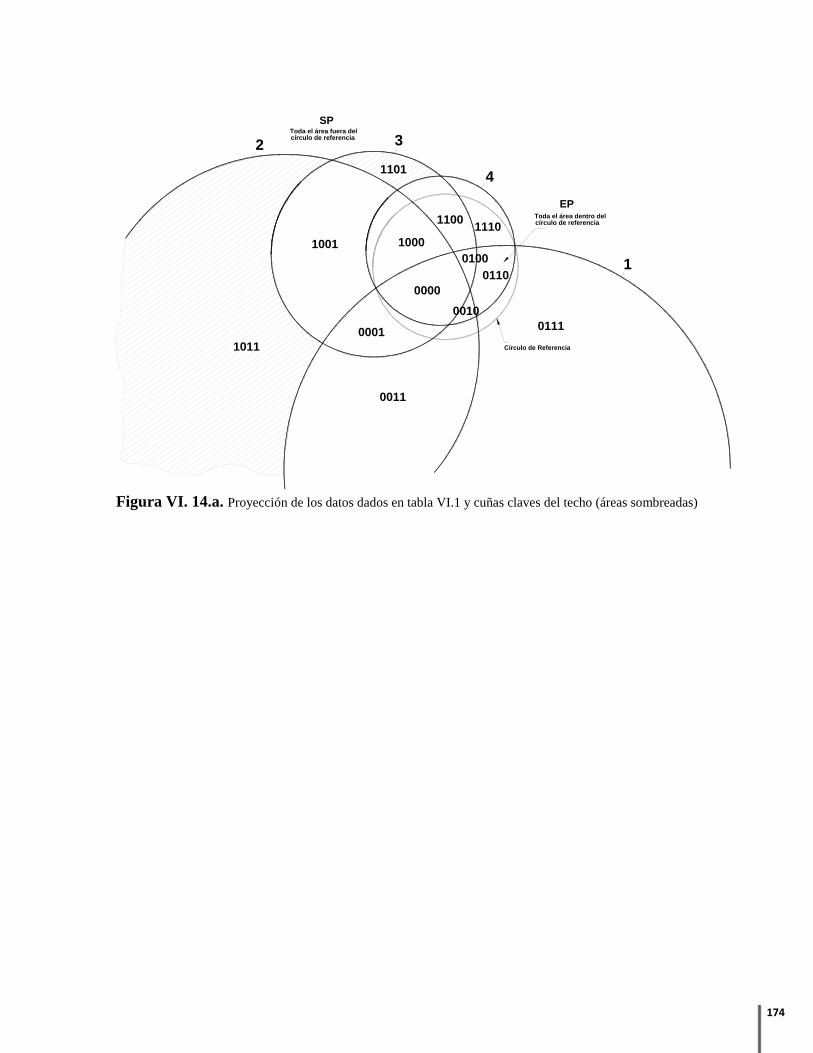
174
2
4
1011
1001
1101
1100
1000
0010
1110
0000
0001
0011
0111
1
3
SP
EPToda el área dentro del círculo de referencia
círculo de referenciaToda el área fuera del
Círculo de Referencia
0100
0110
Figura VI. 14.a. Proyección de los datos dados en tabla VI.1 y cuñas claves del techo (áreas sombreadas)

175
2
4
1011
1001
1101
1100
1000
0010
1110
0000
0001
0011
0111
1
3
SP
EPToda el área dentro del círculo de referencia
círculo de referenciaToda el área fuera del
Círculo de Referencia
0100
0110
Figura VI.11.b. Proyección de los datos dados en tabla VI.1 y cuñas claves del piso (áreas sombreadas)
Por otro lado, el SP de una “Pared i”; es ^
iSP U w . En la figura VI.12.a, la línea
discontinua es la proyección de las Paredes 1 y 3. El SP de la Pared 3 es el lado de la línea
que “contiene un vector horizontal cuya dirección es 298º (ver tabla VI.2). Por lo tanto, el
SP para la pared 3 es la región del lado sin sombrear de la línea discontinua. Los JP’s que
yacen completamente en esta región son: 1001 y 1101. De manera similar, los JP’s que
yacen enteramente en el SP de la pared 1, son las regiones 0110 y 0010, los cuales son
primos de los anteriores JP’s (Figura VI.12.b).

176
1011
1101
1100
1000
0010
1110
0000
0001
0011
0111
1001
W1
W3
E15
E36T
EC
HO
W5
E16
E36
PIS
OW
6
2
4
1
3
SPpara pared 3
01100100
Círculo de Referencia
Figura VI. 15.a. Cuñas claves de la pared 3
1011
1101
1100
1000
0010
1110
0000
0001
0011
0111
1001
W1
W3
E15
E36T
EC
HO
W5
E16
E36
PIS
OW
6
2
4
1
3
0110
0100
SPpara pared 1
Figura VI.12.b. Cuñas claves de la pared 1
La figura VI.13, muestra la proyección estereográfica de las Paredes 2 y 4. El SP para la
Pared 4 es la región debajo de la línea discontinua. Los JP’s que yacen totalmente dentro
del SP son 0001, 0010 y 0011. Para la Pared 2, el SP se encuentra del lado sombreado de la
línea discontinua y los JP’s que yacen totalmente dentro del SP son 1110, 1101 y 1100.

177
1011
1101
1100
1000
0010
1110
0000
0001
0011
0111
1001
W2
W4
TE
CH
OW
5
E26
E46
PIS
OW
6
E26
E46
2
4
1
3
Círculo de Referencia
SPpara pared 4
Figura VI. 16.a. Cuñas claves de la pared 4
1011
1101
1100
1000
0010
1110
0000
0001
0011
0111
1001
W2
W4
TE
CH
OW
5
E26
E46
PIS
OW
6
E26
E46
2
4
1
3
Círculo de Referencia
SPpara pared 2
Figura VI. 13.b. Cuñas claves de la pared 2
Ahora considere bloque removibles con un conjunto de discontinuidades repetidas. El JP de
cualquier bloque de estas características, incluye la intersección de ambos medios-espacios
del conjunto de discontinuidades repetido, por lo tanto, proyecta alrededor de la
circunferencia del gran círculo para dicho conjunto de discontinuidades.
178
En la figura VI.14, se identifica los códigos correspondientes para todos los segmentos de
todos los grandes círculos que representan un conjunto de discontinuidades.
De la misma manera a lo expuesto anteriormente, un bloque es considerado removible si su
JP yace completamente en el SP apropiado. Si consideramos el caso en que el círculo de
referencia se encuentra en el techo, se tiene que los bloques removibles son aquellos que se
encuentran fuera del círculo de referencia, siendo sus códigos los siguientes (encerrados en
un rectángulo): 1131, 1301, 1103, 1311, 1031 y 3011. (Figura VI.14.a.)
Ahora suponiendo que el círculo de referencia se encuentra en el piso, los códigos
correspondientes a bloques removibles son: 3100, 0300, 0310, 0130, 0030, 0013. (Figura
VI.14.b.)
Todos los resultados de esta sección se encuentran concentrados en la tabla VI.3.
1311 13011103
1003
1031
3011
3001
0031
3000
0003
0300
0030
0013
0310
0113
0130
3110
1300
1130
1113
3100
0311
3111
1131
2
4
1
3
Figura VI. 17.a. JP’s con un conjunto de discontinuidades repetidas, para el techo

179
1311 13011103
1003
1031
3011
3001
0031
3000
0003
0300
0030
0013
0310
0113
0130
3110
1300
1130
1113
3100
0311
3111
1131
2
4
1
Figura VI.14.b. JP’s con un conjunto de discontinuidades repetidas, para el piso
CUÑAS CLAVES EN LOS BORDES DE LA CÁMARA SUBTERRÁNEA
Primero considere al borde pared/pared. De la figura VI.15, el SP del borde E23, formado
por los bordes 2 y 3, está dado por la intersección de ^
2U w y ^
3U w . En la figura
VI.15.a, ésta es la región de los lados sin sombrear de las líneas discontinuas. Se observa,
por lo tanto que sólo existe un bloque removible en el borde E23; y es el formado por el JP
1101.
De manera similar el JP 0010 (Fig. VI.15.b) define un bloque removible en el borde E14, el
cual es formado por la intersección de las paredes 1 y 4. Como se puede observar estas
paredes son opuestas a las paredes 2 y 3; por lo tanto el bloque en E14, es un bloque
removible del bloque formado en el borde E23. Los bordes E12 y E34 no tienen bloques
removibles.

180
1011
1101
1100
1000
0010
1110
0000
0001
0011
0111
1001
C 125
TE
CH
OW
5W2
W4
,
W1
W3
,1111
C 235
C 145
C 345
E 12
E 23
E 14
E 34
W1
W3
C 126
PIS
O
W6
C 236
C 146
C 346
BO
RD
ES
2
4
1
3
Figura VI. 18.a. Cuña clave de borde E23
1011
1101
1100
1000
0010
1110
0000
0001
0011
0111
1001
C 125
TE
CH
OW
5W2
W4
,
W1
W3
,1111
C 235
C 145
C 345
E 12
E 23
E 14
E 34
W1
W3
C 126
PIS
O
W6
C 236
C 146
C 346
BO
RD
ES
2
4
1
3
Figura VI. 19.b. Cuña clave de borde E14 (bloque primo de 1101)
Las cuñas claves del borde techo/pared E15, E23, E35 y E45, son potencialmente peligrosos.
No únicamente pueden ser de grandes dimensiones, sino, además pueden ocurrir con
frecuencia en lo alto de la excavación.

181
E 25
15E
E 35
45E
SP
EP
EP
SP
SP
EP
EP
SP
Figura 7.6
1011
1101
1100
1000
0010
1110
0000
0001
0011
0111
1001
W2
W4
,
W1
W3
,1111
2
4
1
3
Figura VI.15.c. Cuña clave del borde E35
Utilizando la figura VI.6 para realizar una prueba con los datos de la figura VI.15.c, los
bloques removibles de cada uno de estos bordes se pueden determinar, lo cual se hizo con
anterioridad. JP 1101 yace en el espacio para ambos bordes E35 (Figura VI.12 ó VI.15.c) y
E25 (Figura VI.13 ó VI.15.c) y por lo tanto determinan bloques removibles en cada borde.
Los bordes E15 y E25 no tienen bloques removibles.
Las cuñas claves de los bordes piso/pared se pueden encontrar de manera similar,
utilizando la figura VI.7 como guía. Pero como todos los vectores de los SP’s de los bordes
del piso están dirigidos hacia arriba; no pueden existir cuñas claves en los bordes del piso si
la gravedad es la única fuerza aplicada. Los bloques removibles de todos los bordes están
condensados en la tabla VI.3.
CUÑAS CLAVES EN LAS ESQUINAS DE LA CÁMARA SUBTERRÁNEA
En este ejemplo, existen ocho esquinas y estás han sido enumeradas como se muestra en las
figuras VI.10 y VI.15 y jerarquizando por importancia en daño producible, se puede decir
que que las esquinas más importantes son las del techo 125 235 345 145, ,C C C y C . Los SP
correspondientes a las esquinas del techo se muestran en la figura VI.8. Así, analizando al
conjunto de discontinuidades de la figura VI.15, se podrá observar que la única esquina con
un bloque removible es la esquina 235C , cuyo código es JP 1101. Y aunque solamente
existe una única potencial cuña clave, esta podría ser crítica (por su ubicación) y será
necesario examinarla a detalle.
Los diagramas de los JP para las esquinas del piso se muestran en la figura VI.9, se podrá
ver que la esquina opuesta a 235C es la esquina 146C . Por lo tanto, los bloques removibles de
235C tienen bloques primos en la esquina 146C , y debido a que 1101 es un bloque removible
de 235C , se determina por simetría que 0010 será un bloque removible de la esquina 146C . Lo
anterior se puede verificar en la proyección estereográfica.

182
POSICIÓN
SIN SISTEMAS DE
DISCONTINUIDADES
REPETIDAS
1 CONJUNTO DE
DISCONTINUIDADES REPETIDO
FIGURA DE
REFERENCIA
Techo 1101, 1011 1131, 1301,1103,1311,1031,3011 VI.11, VI.14
Piso 0010, 0100 3100,0300,0310,0130,0030,0013 VI.11, VI.14
Pared 1 0110, 0010 3110,0130,0310,0113,0030,0013 VI.12, VI.14
Pared 2 1101, 1100, 1110 1103,1300,3100,1130,1301,1131,3110,1113 VI.13, VI.14
Pared 3 1001, 1101 1301,1003,3001,1031,1131,1103 VI.12, VI.14
Pared 4 0001, 0010, 0011 3001,0031,0003,0030,0310,0013,0311,3011 VI.13, VI.14
Borde E12 Ninguno 3110 VI.14, VI.15
Borde E23 1101 1131,1301,1103 VI.14, VI.15
Borde E34 Ninguno 3001 VI.14, VI.15
Borde E14 0010 0013,0030,0310 VI.14, VI.15
Borde E15 Ninguno Ninguno VI.12, VI.14
Borde E25 1101 1131,1301,1103 VI.13, VI.14
Borde E35 1101 1131,1301,1103,1031 VI.13, VI.14
Borde E45 Ninguno 3011 VI.13, VI.14
Borde E16 0010 0030,0013,0310,0130 VI.13, VI.14
Borde E26 Ninguno 3100 VI.13, VI.14
Borde E36 Ninguno Ninguno VI.12, VI.14
Borde E46 0010 0030,0013,0310 VI.13, VI.14
Esquina C235 1101 1131,1301,1103 VI.14, VI.15
Esquina C146 0010 0030,0310,0013 VI.14, VI.15
Todas las demás
esquinas Ninguno Ninguno
Tabla VI.3.- Resumen de los bloques removibles para el ejemplo, considerando Techo, Piso, Paredes, Bordes
cóncavos y esquinas cóncavas.
Elección de la Orientación (Dirección) para la Cámara Subterránea
Adicionalmente a lo descrito anterior, es posible mediante la teoría de bloques, en realizar
ciertas operaciones sencillas para elegir la dirección u orientación óptima para una cámara
subterránea, en el presente trabajo no se toca ese tema por cuestiones de espacio, pero es
posible consultar dichos procedimientos gráficos/numéricos en (Goodman & Shi, 1985).

183
Capítulo VII
TEORÍA DE BLOQUES PARA TÚNELES Y
LUMBRERAS
os túneles se encuentran entre un de los mayores logros de la civilización. Han sido
excavados para utilizarlos en el transporte, defensa, protección, drenaje y minería.
Excepto por los trabajos de inspección visual (levantamientos geológicos
superficiales), los primeros túneles construidos fueron probablemente completados con
muy pocos o nulos cálculos ingenieriles. Aún hoy en día, debido a que el cuerpo principal
de la masa rocosa a penetrar permanece oculta, hasta recién iniciados los trabajos de
excavación; la ingeniería de túneles, demandan una gran cantidad de decisiones in situ. Sin
embargo, las montañas o macizos rocosos siempre tienen una dirección principal respecto a
los túneles proyectados, como se verá, y la dirección elegida afectará de manera importante
los métodos de ataque y los costos del ademe a utilizar.
La dirección del túnel es usualmente determinada antes de iniciar los trabajos de
excavación. En este capítulo se examinará exactamente cómo la teoría de bloques puede ser
utilizada para optimizar dicha dirección. Es de recordar, que las excavaciones con
superficies cóncavas tienen pequeños SP y pocas cuñas claves, mientras que las
excavaciones con superficies convexas tienen grandes SP y muchas cuñas claves.
Los túneles “temporales” utilizados en la minería son usualmente dejados sin revestimiento
y/o ademe. Cuando no se proporciona dichos recubrimientos, el análisis de estabilidad
utilizando la teoría de bloques es aplicable para toda la vida útil del túnel en cuestión; sin
embargo, cuando es colocado algún tipo de ademe, por cuestiones de estabilidad o
rugosidad hidráulica, los cálculos realizados mediante la teoría de bloques son aplicables
únicamente al periodo en que la excavación subterránea permanece sin ademe. El sistema
de bloques por lo tanto puede ser analizado para determinar las posibles cargas y
distribución de cargas en el ademe bajo cargas dinámicas, como podrían ser debido a
explosiones o terremotos.
Aunque es posible realizar la mayoría de las construcciones geométricas (i.e. cortes
transversales con área máxima removible) mediante el uso del algebra vectorial, este se
omitirá para dar cabida al uso del estereored.
PROPIEDADES GEOMÉTRICAS DE LOS TÚNELES
DIRECCIONES DEL TÚNEL. Se utilizará el término túnel para describir el sistema
completo por el cual se obtiene un pasaje a través de la masa rocosa. El sistema más común
incluye dos portales y un cilindro horizontal. Sin embargo, cilindros verticales e inclinados
también son utilizados, particularmente en proyectos hidráulicos. Los túneles horizontales y
verticales son relativamente fáciles de excavar y ademar, pero el tener una completa
libertad en la elección de, tanto la dirección como inclinación del cilindro, permite una
mejor elección de la orientación con respecto a las cuñas claves. Por lo tanto, el caso general de
L

184
sistemas de túneles inclinados será tratado. Sin embargo, en ocasiones, el inclinar un túnel no
es compatible con su propósito, por lo que un cilindro horizontal es necesario; el túnel
horizontal emergerá como un caso especial de la teoría general.
Elementos de un túnel. La figura VII.1 muestra esquemáticamente un túnel bajo
construcción para un proyecto hidroeléctrico. El elemento principal es el cilindro del túnel.
Pero los portales también son una parte muy importante, debido a que si se presentan
dificultades en estos elementos pueden retardar y complicar enormemente al proyecto
entero. Los portales son comúnmente más difíciles que el cilindro del túnel, no únicamente
debido a la roca intemperizada con ángulos de fricción muy bajos a lo largo de las
discontinuidades, sino al hecho de que la superficie de excavación en el portal tiene un SP
(Space Pyramid) más grande que el del túnel. El frente de ataque del túnel es otro elemento,
debido a que en este sitio se localiza una gran concentración de esfuerzos y a que la
superficie de excavación es cóncava, los problemas relacionados con cuñas claves tienden a
ser menos severos que aquellos que se presentan en el cilindro del túnel o el portal.
PORTAL SECCIÓN DE
TRANSICIÓN
INTERSECCIÓN
CILINDRO PRINCIPAL
DEL TÚNEL
LUMBRERA
CÁMARA
SUBTERRÁNEA
AVANCE
DE
EXCAVACIÓN
Figura VII.1.- Elementos geométricos de un túnel
Secciones Transversales.- Las figuras VII.2 a VII.6 muestran varias formas para las
secciones transversales de cilindro del túnel. La figura VII.2 muestra curvas suaves y
cerradas sin ángulos. Tales formas reducen la concentración de esfuerzos y disminuyen el
número de cuñas claves; pero la excavación y el ademado puede resultar más difícil y
costoso.

185
(A) (B) Figura VII.2.- Secciones transversales con curvas continuas
(A) (B) Figura VII.3.- Secciones transversales con lados rectos
(A) (B) (C) Figura VII.4.- Secciones transversales posibles

186
(A) (B) (C)
Figura VII.5.- Secciones transversales poligonales y en forma de herradura
(A) (B) Figura VII.6.- Secciones transversales “vaulted”
Las secciones transversales de las figuras VII.3, VII.4(b) y VII.5(c) representan soluciones
híbridas. La parte superior es una curva suave sin ángulos agudos, esto, para minimizar la
concentración de esfuerzos y reducir el número de cuñas claves, la parte superior es
representada por segmentos rectos, esto, por facilidad constructiva.
Las figuras VII.4(a) y (c), VII.5(a) y (b) y VII.6 muestran secciones transversales
poligonales, que son ocasionalmente encontradas en las secciones de transición. Las
secciones transversales poligonales ideales son creadas por colapsos parciales en secciones
del túnel, es decir, caídos de bloques. El techo de la sección transversal de la figura VII.6,
por ejemplo pudo ser resultado de la perdida de una cuña clave, la forma asimétrica
resultante con esquinas agudas provee una gran concentración de esfuerzos, la cual puede
estabilizar a otros bloques.
BLOQUES CON CARAS CURVAS
Por el hecho de que la superficie de una excavación de un túnel, es cilíndrica, sus
intersecciones con un sistema de discontinuidades, producen bloques con caras curvas. Para
aplicar la teoría de bloques, será de mucha ayuda el introducir un Sistema Coordenado del
Túnel.

187
Sistemas Coordenados
Siendo el eje del cilindro del túnel, representado por el vector unitario a , horizontal para
un túnel horizontal, vertical para una lumbrera, etc. El sistema global coordenado que se ha
estado utilizando a lo largo del texto, ha sido x (horizontal) dirigido hacia el este, y
(horizontal) dirigido hacia el norte y z dirigido hacia arriba.
Para utilizar la teoría de bloques en túneles, se introducirán las coordenadas , oo ox y y z ,
las cuales están relacionadas con la sección transversal del cilindro del túnel, así, tenemos
que:
z
x
y
o
o
o o
a
z a
a x a z a
(VII.1)
Utilizando producto punto, para cada par de , oo ox y y z , es posible establecer que estos
vectores coordenados con mutuamente ortogonales.
El plano perpendicular al eje del túnel es el plano de ,o ox y ; oy se encuentra dirigido hacia
arriba al trazo del vector echado de este plano, mientras ox es su rumbo, dirigido de
acuerdo a z a .
SISTEMAS DE COORDENADAS LOCALES PARA PUNTOS EN EL CILINDRO
DEL TÚNEL
Los planos tangentes a la sección transversal del túnel, son vistos como bordes en el plano
,o ox y . Considérese a una tangente así, en el túnel en el punto Q y cuyos bordes hacen un
ángulo θ con respecto a oy (medido como positivo en la dirección de las manecillas del
reloj) como se muestra en la figura VII.7. La rotación positiva de ,o ox y en el plano
0oz en un ángulo θ alrededor del origen, genera nuevos vectores ,t n , tangente y
normal, respectivamente, a la pared del túnel en el punto Q.
cos sen
sen cos
o
o
t x
n y
(VII.2)

188
QO
Q
n^ ( )
t^
( )
t^
( )
n^ ( )
y^o ,
y^o
x^o
a)
QO
t^
( )
n^ ( )
y^ o ,
y^o
x^o
b)
Q
n^ ( )
t^
( )
O
y^o
x^o
c)
Q
n
t^
( )
Q
t^
( )
n
y^o ,
QO
Q
n^
t
( )
^( )
t^
( )
n^ ( )
y^o ,
y^o
x^
^
^o
( )
( )
a)
Figura VII. 7.- Ángulos de posición y sistemas coordenados locales en la sección transversal del cilindro del
túnel
Supóngase que la forma de la sección transversal es convexa (i.e. una curva continua, sin
restricciones). Por lo tanto, para cualquier ángulo θ entre 0 y 360º, es posible localizar un
punto Q o un segmento recto en la envolvente del túnel tal que:
1. n es el vector normal al plano tangente al punto Q.
2. n apunta hacia fuera del túnel, es decir hacia la masa rocosa.
3. t es el vector tangente de la superficie del túnel en el punto Q.
El ángulo θ es el ángulo de posición en el túnel del punto Q . En todo lo que resta del
documento se adoptará la convención que el vector oz a está apuntando desde la sección
transversal del túnel hacia el observador. El ángulo θ siempre deberá ser medido en
dirección de las manecillas del reloj a partir de ox a t o desde oy a n , como se
muestra en la figura VII.7. El plano de proyección en las proyecciones de los bloques
curvos siempre será el plano de la sección transversal del túnel ,o ox y .

189
EP PARA BLOQUES CURVOS
Para analizar los bloques curvos de los túneles, la envolvente de la sección transversal del
cilindro del túnel será aproximado por m planos tangentes, como se muestra en la figura
VII.8. Primero escójase m puntos a lo largo de la envolvente curva, siendo estos:
1 2, ,..., mQ Q Q y constrúyase una línea tangente a cada punto. La superficie curva
de la sección transversal del túnel, ahora ha sido reemplazada por unos loci multiplanares,
los cuales se pueden apreciar la figura VII.8. En la figura VII.8(a) la sección curva de la
sección transversal del túnel es insatisfactoriamente remplazada por dos tangentes (i.e. m =
2). El caso para m = 3 se observa en la figura VII.8 (b), mientras que m = 4 se muestra
en la figura VII.8(c). El último intento comienza a ser una aproximación a la curva suave de
la sección transversal teórica del cilindro del túnel.
Siendo iB , el punto de intersección de las tangentes que pasan a través de 1i iQ y Q ,
de tal manera que la curva del túnel está determinada por el locus:
1 1 2 2 3 1... m mQ B Q B Q B Q
Un bloque de roca complejo existente entre 1 mQ y Q es la unión de m bloques
convexos con BP:
, 1,...,i iBP U n JP i m (VII.3)
La EP para el bloque complejo es por lo tanto:
1
m
i i
i
EP U n (VII.4)
Y el bloque es removible sí JP y JP EP .

190
n ( )1
n ( )2
Bloque 2
Bloque 1
B1
(a)
n ( )1
n ( )3
B1
(b)
n ( )2
B2
Q( )1
Q( )2
Q( )1
Q( )3
Q( )2
n ( )1
n ( )4
B1
(c)
n ( )3
B3
Q( )1
Q( )4
Q( )3
n ( )2
Q( )4
B2
n ( )1
n ( )3
n ( )2
(d)
Figura VII. 8.- Sección transversal del cilindro del túnel, entre puntos dados por planos tangentes
Con 1Q establecido en el extremo final del segmento curvo (contando en el sentido
contrario a las manecillas del reloj), todos los valores i se incrementan uniformemente
conforme se incrementa i (Si el ángulo θ cruza θ = 0 entre i y 1i , adicione 360º a todos
los i que tengan un índice i+1 o mayor.) Por lo tanto para todo 1i i es un pequeño
ángulo positivo.
Si 1m es mayor o igual a 180º, el EP dado en (VII.4) abarca el espacio completo y
EP JP JP y por lo tanto el JP no puede satisfacer la ecuación (VII.4); por lo tanto
tales bloques no son removibles.
A partir de la figura VII.8(d), es posible observar que si 1m es menor a 180º, entonces:
1
1
m
i m
i
EP U n U n U n (VII.5)
La ecuación VII.5, es verdadera aún si el número m es tan grande que el número de
segmentos tangentes casi se ajusta perfectamente con la envolvente curva convexa de la
excavación. Esto permite asegurar las siguientes preposiciones importantes para bloques
curvos:
Preposición. Los criterios de removilidad para bloques que intersecan una superficie curva
de un túnel son:
JP y EP JP
1 mdonde EP U n U n (VII.6)
1 180ºmy

191
TEOREMA DEL EJE DEL TÚNEL
Un teorema concerniente a las relaciones entre el eje del cilindro del túnel y los JP´s de los
bloques removibles probará ser de mucha utilidad, dicho teorema dice:
Un JP es un bloque removible de un túnel si y sólo si a JP .
Si el eje del túnel a es un elemento del JP, el teorema dicta que el JP no pertenece a ningún
bloque removible del túnel. Esto es porque el eje del túnel pertenece a cada uno de los
medios espacios cuya unión determina el EP y por lo tanto EP JP debe contener a y de
acuerdo a esto, no se encuentra vacío.
Cada JP que no contiene al eje del túnel, tiene un correspondiente bloque removible en el
túnel. Páginas adelante, se demostrará como localizar este bloque.
TIPOS DE BLOQUES EN LOS TÚNELES
En este apartado se presentará el número de bloques de diversos tipos que son creados por
la intersección del cilindro del túnel y la masa rocosa con n conjunto de discontinuidades.
Los números de todas las combinaciones de medios-espacios son las mismas que
presentaron en los capítulos IV y V (tablas IV.1 y V.10). También, el número de JP no
vacíos son los mismos que los presentados en el capítulo IV. Las formulas respectivas han
sido colocadas de nuevo a las columnas 1 y 2 de la tabla VII.1. Como se ha mencionado
previamente, el número de bloques constreñidos es el número de todas las combinaciones
de medios-espacios menos el número de JP no vacíos, esto se reproduce en la columna 3 de
la tabla VII.1.
Como un ejemplo, considérese un caso con conjuntos de discontinuidades no repetidas. Por
lo tanto, a partir de la primera columna de la tabla VII.1, el número de todas las
combinaciones de medios-espacios es igual a 2n y el número de JP no vacíos es 2 2n n .
Por lo tanto el número de bloques constreñidos es igual a 22 2n n n . La figura VII.9
muestra un ejemplo de un bloque constreñido intersecando a un túnel.

192
Número de
Conjuntos
Repetidos
Número de todas
las combinaciones
de medios-espacios
Número de
JP no vacíos
Número de bloques
constreñidos
Número de
bloques
removibles
Número de
bloques
infinitos
Condición
0 conjuntos
repetidos 2n
2 2n n 22 2n n n 2n n 2 1n
1 conjunto
seleccionado
repetido
12n 2 1n
12 2 1n n 2 1n 0 2n
1 conjunto
cualquiera
repetido
12nn 2 1n n 12 2 1nn n n 2 1n n 0 2n
2 conjuntos
seleccionados
repetidos
22n 2 22 2n
2 0 3n
2 conjuntos
cualquiera
repetidos
31 2nn n 1n n 31 2 1nn n 1n n 0 3n
m conjuntos
seleccionados
repetidos 3m 2n m
0 2n m 0 0 3n m
Cualquier m
conjuntos
repetidos 3m 2m n m
nC 0 2m n m
nC 0 0 3n m
Tabla VII.1.- Número de bloques de diferentes tipos en túneles
Figura VII. 9.- Bloque constreñido intersecando a un túnel

193
NÚMERO DE BLOQUES INFINITOS DE UN TÚNEL
A partir del Teorema del Eje del Túnel, un JP pertenece a un bloque infinito de un túnel si y
sólo si a JP ó a JP . Debido a que a es un punto en la proyección estereográfica,
existe un y sólo un JP que contiene a ; su primo simétrico contendrá a . Por lo tanto,
existen exactamente dos bloques infinitos. En el caso de que a yaciera exactamente en la
línea entre JPs, definiría un bloque infinito de un JP que tuviera un conjunto de
discontinuidades repetidas. Si a yaciera exactamente en la línea de intersección de dos
planos, se definiría un bloque infinito de un JP con dos conjuntos de discontinuidades
repetidas. La probabilidad de que esto ocurra es demasiado baja y por lo tanto el número de
bloques infinitos con uno o más conjuntos de discontinuidades repetidas es igual a cero.
NÚMERO DE BLOQUES REMOVIBLES DE UN TÚNEL
El criterio para un bloque sea considerado removible dentro del túnel es que JP y que
tanto a como a no estén contenidos en el JP. El número de bloques removibles es el
número de JP no vacíos menos el número de bloques infinitos; para conjuntos de
discontinuidades no repetidas, esto significa que existen 2n n bloques removibles. (ver
tabla VII.1)
LA CUÑA CLAVE MÁXIMA
De acuerdo a la preposición VII.6 para la removilidad de bloques que intersecan a una
superficie curva del túnel, un bloque no es removible si los límites extremos de su
intersección con la superficie del túnel incluye un ángulo de 1 180ºm . El intervalo
angular sobre el cual un bloque interseca a un túnel depende tanto de la forma como del
tamaño del bloque. Para un tipo de bloque dado, existe un tamaño máximo, el cual más allá
de él, el bloque es no removible, este tamaño límite será denominado como la “máxima
cuña clave”. El bloque removible más grande de un tipo de cuña clave dada es el más
crítico porque requiere la fuerza de soporte más grande, es más, el ángulo de fricción
movilizado en las superficies de deslizamiento varía inversamente proporcional con la
dimensión de la superficie de deslizamiento.
Por otra parte, la distribución estadística de las extensiones de las discontinuidades dicta
que la probabilidad de encontrar un bloque se reduce conforme el tamaño del bloque
aumenta.
Para encontrar este y otros elementos necesarios para cuantificar el problema y resolverlo
mediante la teoría de bloques, primero es necesario, presentar formalmente la teoría.
194
PREPOSICIÓN DE LAS RELACIONES ANGULARES PARA INTERSECCIONES
VACÍAS
En la figura VII.10 un JP es proyectado en el plano perpendicular a a (la sección
transversal del túnel). Sus bordes son 1 2, ,...., lI I I y sus proyecciones ortográficas en la
sección son 1 2´ , ´ ,...., lI I I . Los vectores externos a los bordes de las proyecciones extremas,
1 lI y I encierran al ángulo l i , donde l i . Si se establece que a JP ,
entonces existe un vector 1 2om m m de tal manera que o JPm (ver ecuación
38, del apéndice de Goodman & Shi, 1985).
JP
I1
,
I2
,
Ii
,
Il
,
1 1n
n
nU
ln
l
Figura VII. 10.- Proyección ortográfica de un JP en la sección transversal de un túnel
Lo anterior no podría ser, a menos que el ángulo l i fuera menor a 180º, por lo tanto, la
proyección de dicho JP siempre será así mientras que l i sea menor a 180º. Así a partir
de la figura VII.11, se establece la siguiente proposición:
1, lU n JP si y sólo si (VII.7)
TEOREMA DE LA MÁXIMA ÁREA REMOVIBLE EN LA SECCIÓN DE UN
TÚNEL
1. Siendo la ecuación ,U n Q la que define al medio-espacio que contiene a n
cuya envolvente pasa a través de Q. Entonces si un bloque B es un bloque
removible de un JP en cilindro de un túnel, B pertenece a la “máxima área
removible” de un JP, lo cual significa que:
1 1, ,l lB U n Q U n Q (VII.8)

195
El área máxima removible es la intersección de la sección transversal del túnel y el
espacio fuera del túnel con el lado correcto de (VII.8) (i.e. el término dentro de
).
2. Existe un bloque removible, B, de un JP, de tal manera que la proyección de B en
la sección perpendicular a a es exactamente igual a la proyección del área máxima
removible de un JP. Este bloque es la Cuña Clave Máxima.
La figura VII.11 muestra una sección transversal perpendicular a a . Las direcciones de
1 lI y I (las proyecciones ortográficas de los bordes extremos de un JP, vistos en la
sección del túnel) son tangentes a la sección transversal del túnel en los puntos
1 lQ y Q . El área máxima removible es determinada por la región que se encuentra
entre estas tangentes y el espacio fuera de la sección transversal del túnel.
Considérese a B como un bloque removible; B podría crecer hasta que sus bordes extremos
alcanzarán casi a las proyecciones 1 lI y I . Similarmente, el área A, delimitada por las
líneas paralelas a 1 1´I en Q y 2lI en Q , podría contener un bloque removible
sólo si 1 2y yacen entre 1 ly (i.e., 1 1 2 l .
1Q
I1
,
Il
,
Área Máxima Removible
Q
B(A)
AP2BP1
1
Q2
P2
1n
ln
Figura VII. 11.- Área máxima removible
Un simple JP conlleva un simple intervalo angular sin importar la forma de la sección
transversal del túnel (asumiéndose que la sección transversal a lo largo del cilindro del
túnel es convexa). Sin embargo, el área máxima removible si depende en la forma, como
se muestra en las figuras VII.3 a VII.6. De hecho, es posible elegir la sección transversal
del túnel para la cual el área máxima removible se desvanece. Las figuras VII.4(a) y
VII.6(b) son ejemplos de esto.

196
CÁLCULO DE LA CUÑA CLAVE MÁXIMA UTILIZANDO MÉTODOS
ESTEREOGRÁFICOS
Aunque es posible calcular la cuña clave máxima mediante ciertas manipulaciones
vectoriales, se ha omitido, debido a que su aplicación práctica es algo engorrosa, en cambio
el uso de las proyecciones estereográficas es un método relativamente fácil de entender y
reproducir, para el lector interesado en el método vectorial, se le remite a la (Goodman &
Shi, 1985).
Para demostrar la metodología, utilícese el sistema de conjuntos de discontinuidades
presentados en la tabla VII.2.
tan sen
tan cos
1
cos
x
x
C R
C R
R
Tabla VII.2.- Datos de ejemplo Dibújese los grandes círculos de cada conjunto de discontinuidades y establezca las
regiones JP (códigos).
La figura VII.12 muestra la proyección estereográfica con todos los grandes círculos
correspondientes. A partir de lo hecho anteriormente es posible, dado un JP, dibujar los
planos límites del área máxima removible siguiendo de la siguiente manera.
4
2
13
0111
0011
1011
1001
0001
0110
0010
0100
0000
1000
11001110
1111
Figura VII.12.- Proyección estereográfica con punto focal inferior de los datos de discontinuidades de la tabla VII.2
Conjunto de
Discontinuidades xC yC r
1 0.899109 -2.7773 3.0716
2 -2.20532 -1.12367 2.6695
3 -0.98481 0.17365 1.4142
4 -0.06750 0.22078 1.0263

197
CONSTRUCCIÓN DE LOS PLANOS LÍMITES DE UN JP DADO (ELEGIDO)
1. Dibújese la proyección de A y A´ del vector eje del túnel a , y a , asúmase que a
se dirige hacia arriba. Lo anterior puede ser realizado a partir de los datos dados del
rumbo y echado de eje, o, a partir de las coordenadas del vector eje a , utilizando
para ello alguna de las ecuaciones II.2 a la I.7.
02 2 2
R XX
X Y Z Z;
02 2 2
R YY
X Y Z Z
2. Para cada borde, I , de un JP, dibújese un gran círculo a través de , ´A A y I ; el
radio del gran círculo, r, se calcula como:
´
2 sen
AAr
Como se muestra en la figura VII.13, es el ángulo ´A AI y ´AA es la longitud del
segmento medido desde A hasta A´. La figura VII.15 muestra esta construcción aplicada a
la esquina I del JP 0000 para el vector dirección del túnel 0,0.866,0.5 .
A´
O
A´
A
´AAr
a) b)
A
Figura VII.13.- Grandes círculos a través de A, A´ y I
198
4
2
1
3
0000I
A
A´
99.93°
(0,0.866,0.5)a(0,-0.866,-0.5)-a
VECTORES DIRECCIÓN EJE DEL TÚNEL
(0, 0.577342)a(0,-1.73208)-a
PROYECCIONES ORTOGRÁFICAS
4
2
13
0000I
A
A´
145.68°
a) b)
4
2
1
3
0000
I
A
A´
159.62°
4
2
13
0000
I
A
A´
c) d)

199
4
2
13
0000I
A
A´
e)
Figura VII.14.- Construcciones geométricas de los grandes círculos límites para el JP 0000
3. Para cada JP es posible construir dos grandes círculos a través de , ´A A y un borde
de cada JP, de tal manera que únicamente ese borde toque el gran círculo, es decir
que no “corte” al JP o toque otros bordes. En las figura VII.14 se muestran todos
los posibles grandes círculo para el JP 0000; como es posible observar las figuras
VII.14(c) y (d), “cortan” al JP, por lo que no cumplen lo anterior de tocar
únicamente al borde analizado; en cambio las figuras (a) y (b), si cumplen con esta
condición, por lo que estos son los grandes círculos envolventes (límites) para el JP
0000, figura VII.14(e).
Lo anterior se ha realizado para el JP 1101; en la figura VII.15 se han dibujado los
grandes círculos envolventes (límites) posibles, sin embargo la figura (a) “corta” al
JP, por lo que los grandes círculos límites del JP 1101 son los presentados en las
figuras (b) y (c). La figura d, es la representación conjunta de los grandes círculos
envolventes (límites) del JP 1101.

200
4
2
3
I
A
A´
1101
34.32°
4
2
3
I
A
A´
1101
40.82°
a) b)
4
2
3
I
A
A´
1101
4.23°
4
2
3
I
A
A´
1101
c) d)
Figura VII.15.- Grandes círculos límites del JP 1101
Lo anterior, también es posible realizar para sistemas de discontinuidades repetidas.
En cada uno de estos ejemplos, los grandes círculos envolventes extremos, son los
planos límites del JP, los cuales corresponden a los planos normales a los vectores

201
ij aI , donde ijI son los dos vectores bordes del JP con respecto al eje del túnel
a .
4. Para cada uno de los planos límites de un JP dado (cada uno de los grandes círculos
con línea discontinua, figuras VII.14 (a) y (b), VII.15 (b) y (c), se debe medir el
ángulo de echado así como la dirección del echado, para lo cual es posible utilizar
los métodos presentados en el capítulo relacionado a los métodos estereográficos,
(recuérdese que se está utilizando el hemisferio superior).
A partir del echado, la dirección del echado y la orientación de a ; los intervalos angulares
pueden ser calculados. Alternativamente, utilizando únicamente la proyección
estereográfica, es posible medir las orientaciones de los trazos de los planos envolventes
(límites) en la sección del túnel. Ambos métodos son ilustrados en las secciones siguientes:
Cálculo del intervalo angular a partir del echado y la dirección del echado de los
planos límites
El intervalo angular para la cuña clave máxima correspondiente a un JP va de 1 la con
el entendido de:
1 180ºl (VII.9)
Si 1 180ºl , voltéense los índices 1 y l (letra ele). Los dos valores de son
calculados mediante:
1
1 190 1 sen sen senS (VII.10)
Donde: 1 1
1 Si el JP yace dentro del gran círculo envolvente (límite)
1 Si el JP yace fuera del gran círculo envolvente (límite)
, Echado y dirección del echado para el plano límite (gran círculo envolven
S
te)
=Dirección de a
(Nótese que la fórmula para calcular el intervalo angular es independiente del
buzamiento, , de la sección transversal del túnel; sin embargo, 1 1y fueron
calculados a partir de los grandes círculos límites, cuyas orientaciones dependen
tanto de y , por lo que los resultados así obtenidos incorporan el buzamiento
del túnel.)
Los intervalos angulares han sido calculados utilizando (VII.10) para los JP’s 0000 y 1101,
los resultados se presentan en la tabla 7.3. Cuando el eje del cilindro del túnel es horizontal,
(VII.10) puede ser remplazada por:
1 190 1 senS (VII.11)
202
DETERMINACIÓN DEL ÁREA MÁXIMA REMOVIBLE MEDIANTE EL USO DE
LAS PROYECCIONES ESTEREOGRÁFICAS
Habiéndose encontrado los planos límites que “envuelven” a un JP, el área máxima
removible puede ser determinada gráficamente encontrándose los trazos de los planos
límites en la sección transversal del túnel, esto se logra haciendo tangentes a la sección
transversal del túnel, este plano, es el plano perpendicular al eje del túnel, a .
A continuación se presenta el método paso a paso:
1. Obtener los planos límites envolventes (líneas discontinuas), recuérdese que para
cada JP existen únicamente dos planos de este tipo y que no “cortan” al JP. Es de
recordar que estos planos para que sean válidos para el subsecuente análisis
estereográfico, deben envolver totalmente o yacer totalmente fuera del JP analizado,
pero nunca cortarlo, en caso de cortarlo, ese plano límite no es válido.
2. Aislar los planos límites envolventes, el círculo de referencia, el JP analizado e
insertar la proyección del plano perpendicular al eje del túnel, el cual se proyecta
como un gran círculo más.
Teniéndose las construcciones estereográficas anteriores, es posible medir el ángulo
del plano límite en cuestión respecto al plano horizontal (círculo de referencia,
R=1), por cada JP se obtendrán dos de estos ángulos; para medir estos ángulos es
posible utilizar la proyección estereográfica, trasladando los planos límites y medir
en la estereored el ángulo existente.
Finalmente conociendo estos ángulos, se proyectan líneas con respecto a la
horizontal hacia arriba con la misma medida angular. Además, se debe observar si
el plano límite correspondiente a esa inclinación se encuentra envolviendo al JP, si
es así, la cuña clave yace arriba de ese plano, en cambio, si el plano límite no lo
envuelve, la cuña clave yace debajo del plano en cuestión.

203
Círculo de
Referencia
JP
Plano límite que yace
fuera del JP analizado
Plano límite que
envuelve al JP
analizado
Círculo de
Referencia
1110
Plano límite que yace
fuera del JP analizado
Plano límite que yace
fuera del JP analizado
Figura VII.16.- Ubicación de los planos límites y convención utilizada para conocer de qué lado se encuentra
la cuña clave
En las siguientes figuras se aprecia a detalle el procedimiento gráfico mostrado
anteriormente para encontrar el área máxima removible, aplicado a cada JP existente:
JP 0000
4
2
13
0000I
A
A´
Figura VII.17.- Construcción de planos límites válidos para el JP 0000, los cuales son tangentes a los puntos I, A y A’
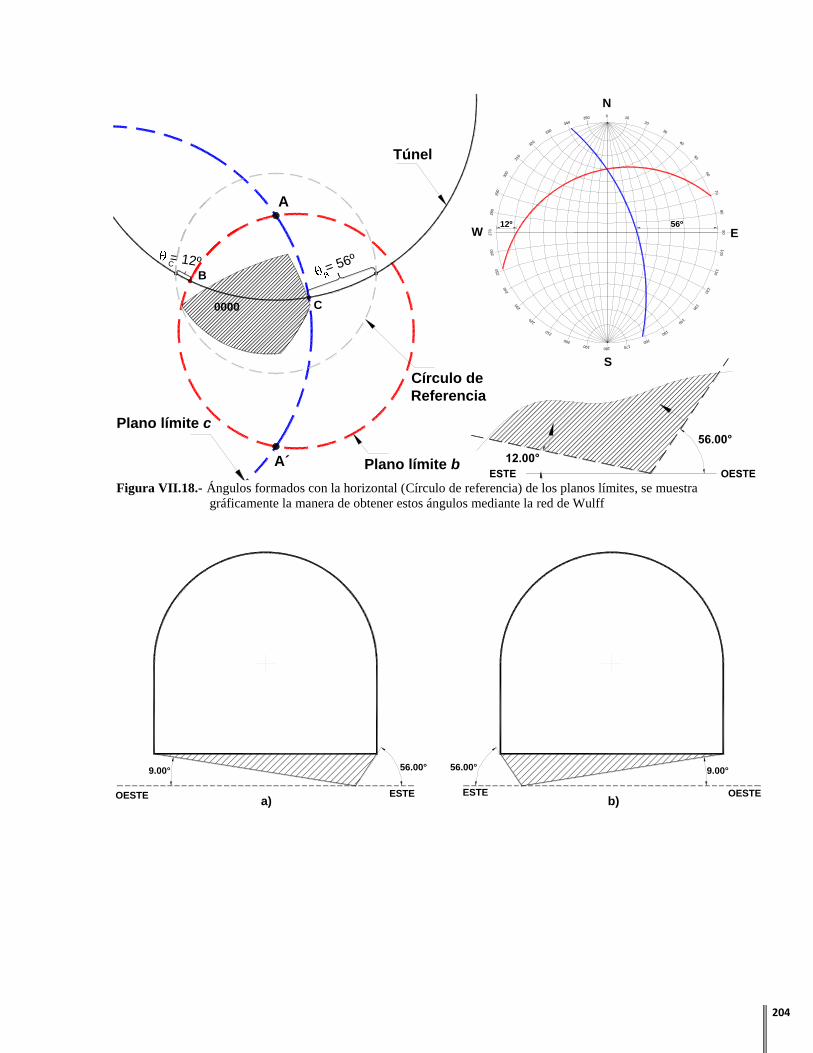
204
Túnel
Círculo de
Referencia
Plano límite c
Plano límite b
0000
A
A´
= 56º= 12ºC
B
C
1020
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0
S
W E
N
12º 56º
Figura VII.18.- Ángulos formados con la horizontal (Círculo de referencia) de los planos límites, se muestra
gráficamente la manera de obtener estos ángulos mediante la red de Wulff
ESTE OESTE
56.00° 9.00°
ESTEOESTE
56.00°9.00°
a) b)
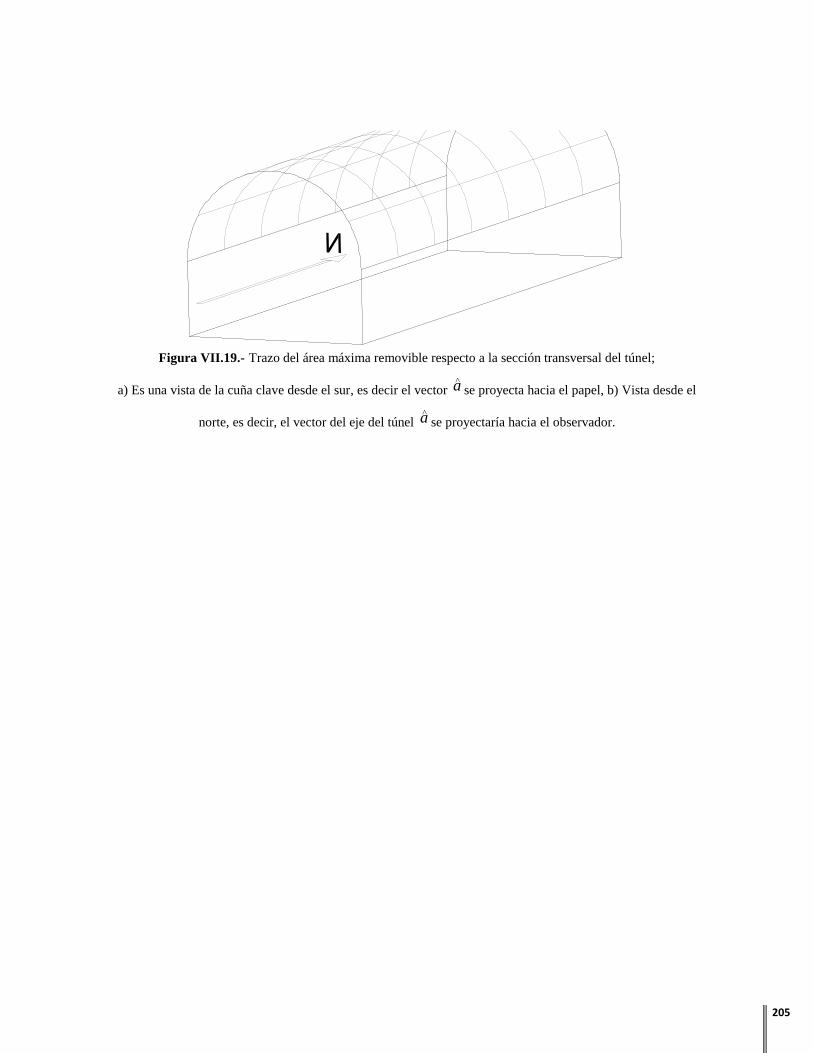
205
Figura VII.19.- Trazo del área máxima removible respecto a la sección transversal del túnel;
a) Es una vista de la cuña clave desde el sur, es decir el vector ^a se proyecta hacia el papel, b) Vista desde el
norte, es decir, el vector del eje del túnel ^a se proyectaría hacia el observador.

206
JP 0001
Como se puede observar en la figura VII.21, no existe una cuña clave correspondiente al JP
0001, esto, debido a la forma del túnel, lo cual demuestra que la sección transversal del
túnel, tiene una gran influencia en el tamaño y forma de las cuñas claves.
Túnel
Círculo de
Referencia0001
A
A´
1020
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0
S
W E
N
94º 26º
Figura VII.20.- Ángulos formados con la horizontal de los planos límites
Figura VII.21.- No es posible hacer tangentes los trazos con la sección transversal del túnel, lo que quiere
decir que no se forma una cuña clave

207
JP 0010
Túnel
Círculo de
Referencia
0010
A
A´
1020
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0
S
W E
N
93º 53º
ESTE OESTE
93.00°53.00°
Figura VII.22.- Trazo del área máxima removible del JP 0010

208
JP 0011
Como la proyección ortográfica del vector opuesto al eje del túnel, ^a yace en este JP, no
existe una cuña clave.
JP 0100
Círculo de
Referencia
0100
A
A´
Túnel
1020
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
27
0280
290
300
310
320
330
340350 0
S
W E
N
108º 28º
Figura VII.23.- Ángulos formados con la horizontal de los planos límites JP 0100
ESTE OESTE
108.00°
28.01°
Figura VII.24.- Trazo del área máxima removible JP 0100

209
JP 0110
Túnel
Círculo de
Referencia
0110
A
A´
1020
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
27
0280
290
300
310
320
330
340350 0
S
W E
N
10º 59º
Figura VII.25.- Ángulos formados con la horizontal de los planos límites JP 0110
ESTE OESTE
121.00°59.00°
Figura VII.26.- Trazo del área máxima removible JP 0110

210
JP 0111
0111
Túnel
Círculo de
Referencia
A
A´
1020
30
4050
60
70
80
90
100
110
120
130
140
150
160
170180190200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0
S
W E
N
107º 53º
Figura VII.27.- Ángulos formados con la horizontal de los planos límites JP 0111
Figura VII.28.- Aunque se forma una cuña clave, ésta es casi imperceptible, por lo que se
puede omitir como estructura de riesgo

211
JP 1000
Al igual al JP 0001, no se forma una cuña clave, esto, debido a la forma del túnel.
Túnel1000
A
A´
1020
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
27
0280
290
300
310
320
330
340350 0
S
W
N
108º 53ºCírculo de
Referencia
Figura VII.29.- Ángulos formados con la horizontal de los planos límites JP 1000
Figura VII.30.- Trazo del área máxima removible JP 1000
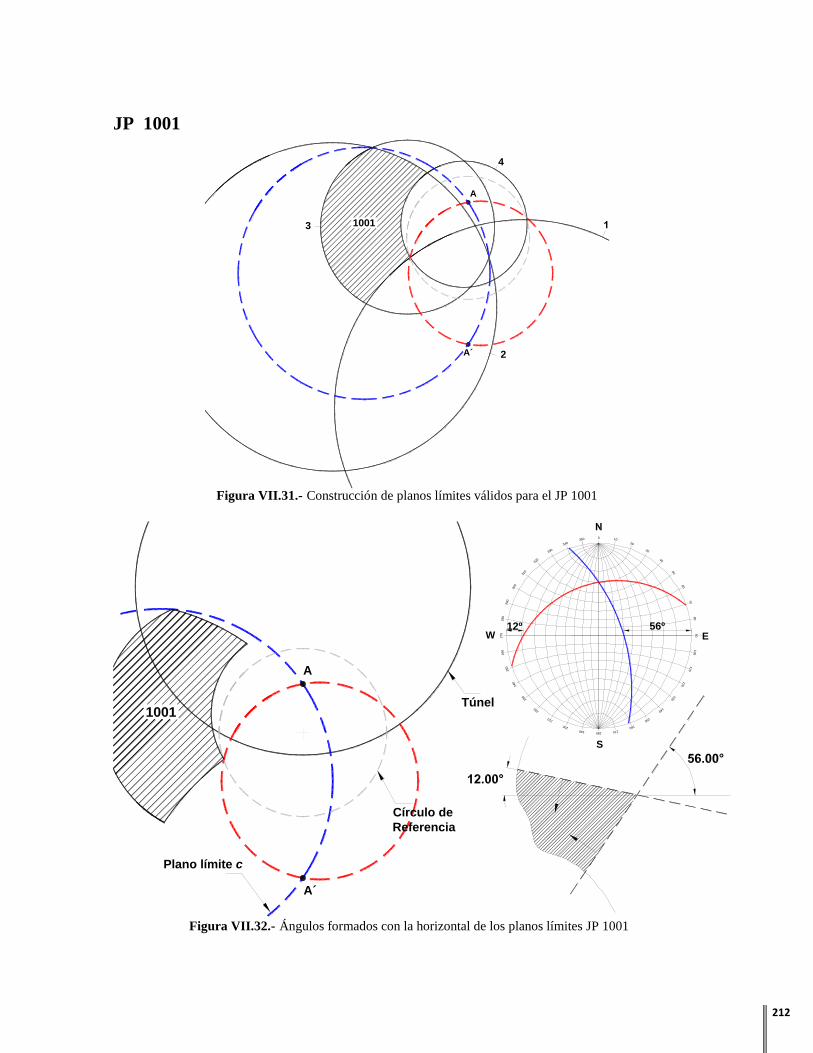
212
JP 1001
4
2
3
A
A´
1001
Figura VII.31.- Construcción de planos límites válidos para el JP 1001
Túnel
Círculo de
Referencia
1001
A
A´
Plano límite c
1020
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0
S
W E56º12º
Figura VII.32.- Ángulos formados con la horizontal de los planos límites JP 1001

213
ESTE OESTE
12.00°56.00°
Figura VII.33.- Trazo del área máxima removible
JP 1011
Túnel
Círculo de
Referencia
1011
A
A´
1020
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0
S
W E
N
107º 26º
Figura VII.34.- Ángulos formados con la horizontal de los planos límites JP 1011

214
ESTE OESTE107.00°
26.00°
Figura VII.35.- Trazo del área máxima removible JP 1011
JP 1100
Como la proyección ortográfica del vector al eje del túnel, ^a yace en este JP y por lo tanto,
no existe una cuña clave.
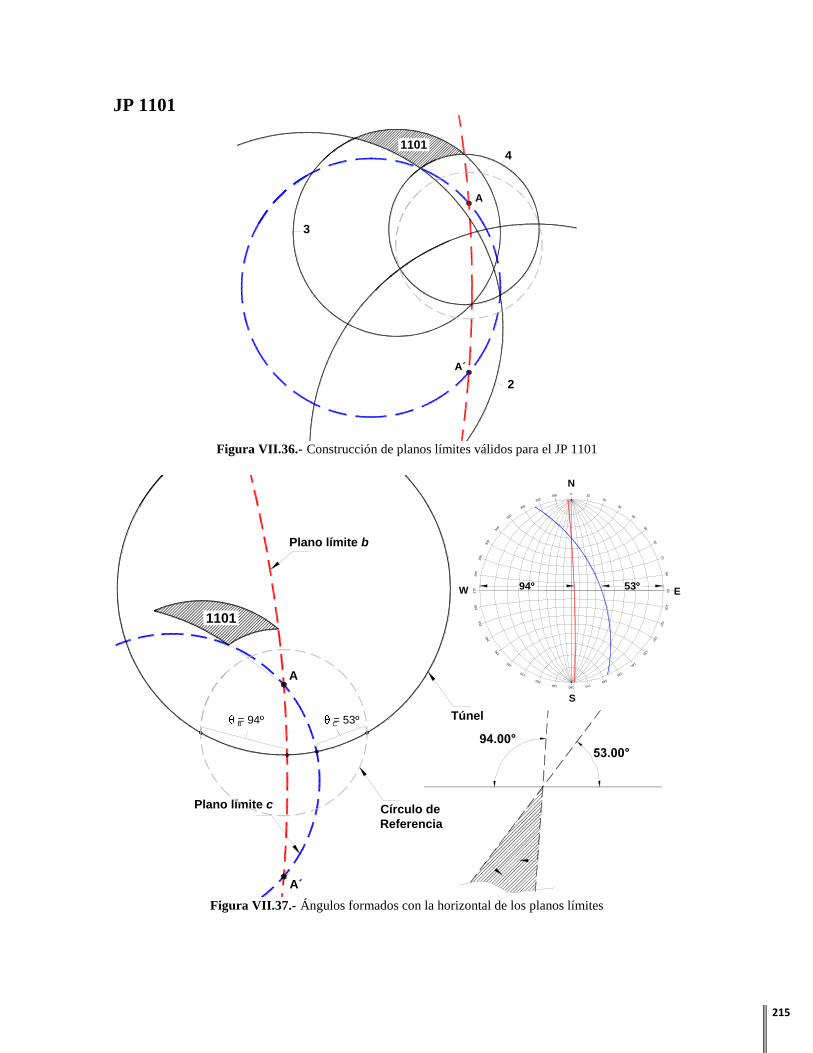
215
JP 1101
4
2
3
A
A´
1101
Figura VII.36.- Construcción de planos límites válidos para el JP 1101
Túnel
Círculo de
Referencia
Plano límite b
Plano límite c
1101
A
A´
= 94ºB = 53ºC
1020
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0
S
W E
N
53º94º
Figura VII.37.- Ángulos formados con la horizontal de los planos límites
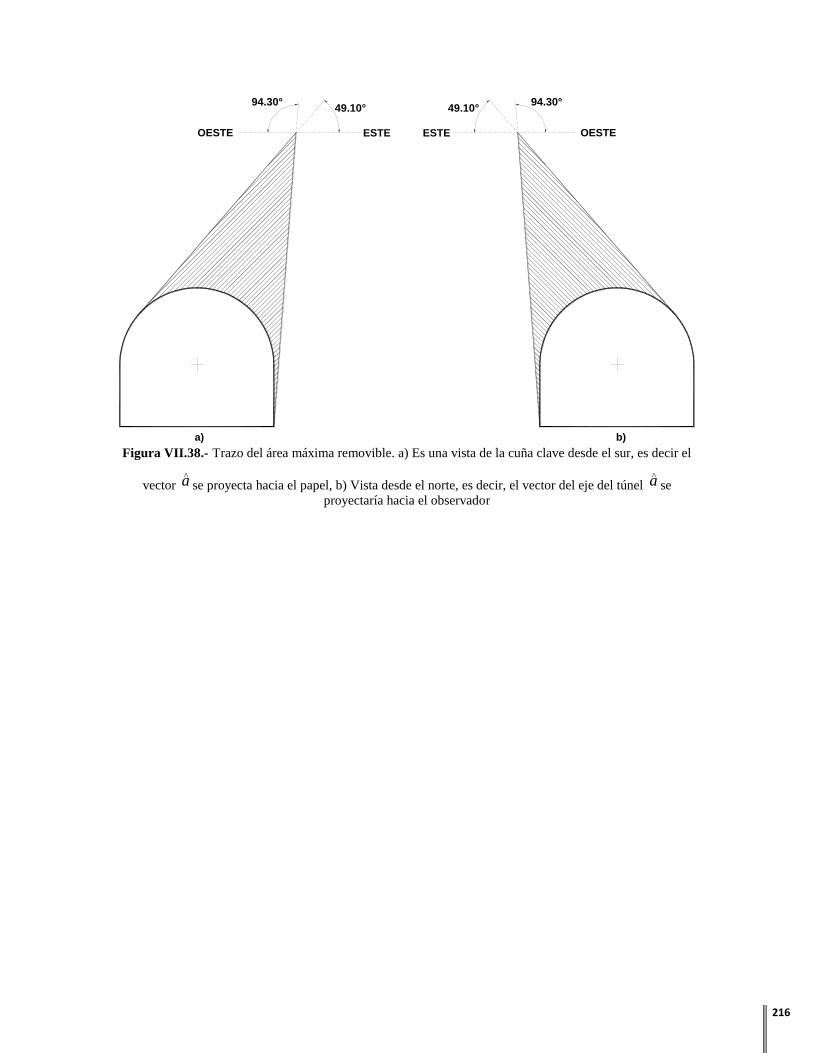
216
ESTEOESTE
49.10°94.30°
ESTE OESTE
49.10°94.30°
a) b) Figura VII.38.- Trazo del área máxima removible. a) Es una vista de la cuña clave desde el sur, es decir el
vector ^a se proyecta hacia el papel, b) Vista desde el norte, es decir, el vector del eje del túnel
^a se
proyectaría hacia el observador

217
JP 1110
Túnel
Círculo de
Referencia
1110A
A´
1020
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0
S
W
N
94º 29º
Figura VII.39.- Ángulos formados con la horizontal de los planos límites JP 1110
94.00°29.00°
ESTE OESTE
Figura VII.40.- Trazo del área máxima removible JP 1110

218
JP 1111
Túnel
Círculo de
Referencia
A
A´
1111
1020
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0
S
W E
N
10º 59º
ESTE OESTE10.00°
59.00°
Figura VII.41.- Trazo del área máxima removible JP 1111

219
Código
del JP
Figura
Mostrando el
Área máxima
removible
Removilidad Cualitativa
e Importancia
0000 VII.19
Bloque removible estable bajo acciones gravitacionales
0001 VII.21
Ausente debido a la sección transversal del túnel
0010 VII.22
Bloque removible estable bajo acciones gravitacionales
0011 Ninguna
Bloque infinito; el eje del túnel yace en la proyección estereográfica del JP
0100 VII.24
Bloque removible estable bajo gravedad
0101 Ninguna
Bloque constreñido, el JP está vacío, es decir no aparece en la proyección
estereográfica.
0110 VII.26
Cuña clave, casi estable bajo acciones gravitacionales
0111 VII.28
Ausente debido a la sección transversal del túnel
1000 VII.30
Ausente debido a la sección transversal del túnel
1001 VII.33
Cuña Clave
1010 Ninguna
Bloque constreñido, el JP está vacío, es decir no aparece en la proyección
estereográfica.
1011 VII.35
Cuña Clave
1100 Ninguna
Bloque infinito; el eje del túnel yace en la proyección estereográfica del JP
1101 VII.38
Cuña Clave
1110 VII.40
Cuña Clave, el volumen es muy pequeño
1111 VII.41
Cuña Clave
Tabla VII.3.- Resumen de cuñas claves

220
Capítulo VIII
ESTABILIDAD Y CINEMÁTICA DE
BLOQUES REMOVIBLES
La honradez es siempre digna de elogio, aun cuando no reporte utilidad, ni recompensa, ni provecho.
Marco Tulio Cicerón
n los capítulos anteriores se conocieron métodos para determinar la removilidad de
un bloque que interseca una superficie libre. Algunos de los bloques creados por la
intersección de discontinuidades y planos de excavación, probaron ser finitos y no
estreñidos. A estos bloques se les ha denominado removibles. Como se observó en el
capítulo III, los bloques removibles se dividen en 3 tipos:
I. CUÑAS CLAVES; las cuales se espera que se muevan, cuando la excavación está
terminada, a menos que se provea el soporte (ademe) necesario.
II. POTENCIALES CUÑAS CLAVES; las cuales están en una posición adecuada para
caerse o deslizarse cuando la excavación se realiza; pero esto no sucederá debido a la
fricción disponible en las caras del bloque, lo cual es suficiente para mantener al
bloque en un estado de equilibrio.
III. BLOQUES ESTABLES; los cuales no pueden deslizarse o caer, aún cuando el
ángulo de fricción en las caras es cero, esto debido a que la orientación de la fuerza
resultante promueve la estabilidad.
Por lo anterior se deduce que únicamente los bloques removibles merecen un análisis de
estabilidad.
Habiendo identificado los bloques removibles como candidatos para un análisis a detalle, es
conveniente encasillar su subdivisión en uno de los dos tipos de posibles análisis
disponibles.
El primero es un análisis de modo, el cual es realizado para distinguir bloques estables
(tipo II) de las potenciales cuñas claves o verdaderas cuñas claves (Tipo II y I). La
dirección de la fuerza resultante deber ser especificado, pero no es necesario proporcionar o
utilizar las propiedades de las discontinuidades, en este momento del análisis.
Finalmente un análisis de estabilidad es realizado, en donde se requiere proporcionar los
ángulos de fricción para cada superficie de discontinuidad en contacto, con el fin de separar
las potenciales cuñas claves (II) y verdaderas cuñas claves (I). Los resultados del análisis
de modo guían al análisis de estabilidad.
E

221
MODOS DE DESLIZAMIENTO
En esta sección se establecerá las relaciones existentes de la dirección de la resultante de
una fuerza en un bloque en un estado incipiente de deslizamiento y la dirección de
deslizamiento. Acopladas con otras constantes cinemáticas y una dirección específica para
la fuerza resultante, estas reglas nos permitirán establecer ¿Cuál, si es el caso, es el modo
de deslizamiento es aplicable a cada JP?
Denotaremos a un bloque removible como B. Ignorando a la rotación, cada parte de B
experimenta un movimiento descrito por el mismo vector. El vector unitario de la dirección
de deslizamiento será representado por s . La discusión imaginará un estado de equilibrio
límite, en el cual el movimiento se produce sin aceleración.
Bajo un conjunto dado de fuerzas, no se puede esperar que B se encuentre exactamente en
una condición de equilibrio límite. Para tener a B en un estado límite, se agregará una
fuerza ficticia F s , como se muestra en la figura VIII.1. Cuando F es positiva, el bloque
tenderá a deslizarse a menos que se agregue un soporte artificial. En el caso contrario, un
valor negativo de F implica que el bloque B es seguro contra el deslizamiento. Por lo tanto
F puede ser utilizado con un vehículo para discutir las condiciones limitantes.
N
r
v
vi
i i
s-F
-Nita
n is
-Ts
Figura VIII.1. Explicación de la fuerza ficticia F y el vector de la dirección de deslizamiento s

222
FUERZAS ACTUANDO EN B
Existen 3 contribuciones a las fuerzas que actúan en el bloque B y son:
1. La resultante (N) de los componentes normales correspondientes a las reacciones en
los planos de deslizamiento. Siendo iv el vector unitario normal al plano de
discontinuidad l , dirigido hacia el bloque B; entonces las reacciones normales son:
ll
N N v (VIII.1)
Se asume que no hay fuerzas de tensión a lo largo de la discontinuidad, por lo tanto
0lN
2. La resultante T de las fuerzas friccionantes tangenciales, es:
tani l lT N s (VIII.2)
y la resultante de esta y la fuerza ficticia es:
tanl ll
T s N s F s (VIII.3)
tanl ll
T N F (VIII.4)
Para una potencial o real cuña clave, por diseño, el deslizamiento ocurrirá si 0l ,
esto debido a que un valor positivo de F implica deslizamiento, 0T .
3. La resultante r de todas las otras fuerzas actuando en el bloque B, incluyendo peso,
fuerzas de infiltración o presión hidráulica externa, fuerzas de inercia y cargas o
fuerzas de soporte debido a anclas o cables. La fuerza r será denominada como:
Resultante Activa.
La condición de equilibrio para una potencial o real cuña clave B es:
0l ll
N v T sr (VIII.5)
con 0 0lT y N
A partir del Teorema de Removilidad capítulo III, la dirección de deslizamiento s del
bloque removible B, pertenece al JP del bloque B; es decir:
s JP (VIII.6)
DESPRENDIMIENTO O LEVANTAMIENTO (Lifting)
La figura VIII.2, muestra una cuña clave trasladándose libremente de su sitio original. A
este fenómeno lo denominaremos desprendimiento, levantamiento, según sea el caso,
debido a que ningún plano de discontinuidad permanece en contacto, s no puede estar
contenido en ningún plano de discontinuidad. Debido a que ninguna discontinuidad está en
contacto, 0lN y (VIII.5) se convierte en:
T sr

223
Para una real o potencial cuña clave, 0T , por lo tanto:
s r (VIII.7)
Los JP han sido definidos como conjuntos cerrados, esto significa que el JP incluye no
únicamente al espacio dentro de la pirámide, sino, además las caras laterales y los bordes.
La condición para levantamiento o desprendimiento es que s debe estar contenido dentro
del JP, pero no en sus límites.
PREPOSICIÓN DEL MODO DE FALLA POR DESPRENDIMIENTO O LEVANTAMIENTO. Si s
no es paralelo a cualquier plano del JP, la condición necesaria suficiente de B, para
satisfacer la ecuación de equilibrio (VIII.5) es que s r .
Figura VIII. 2. Levantamiento o desprendimiento de un bloque (lifting)
DESLIZAMIENTO A TRAVÉS DE UNA CARA O SUPERFICIE DE DESLIZAMIENTO
La figura VIII.3, muestra el ejemplo de un bloque deslizándose a lo largo de una de sus
caras, en este caso, s es paralelo a únicamente un plano de B (plano i) y la dirección de
deslizamiento s es la proyección ortográfica de r en el plano i .
is s
donde i i
i
i
n ns
n
r
r (VIII.8)
Donde:
in : es el vector normal dirigido hacia arriba al plano i , determinado mediante:
( , , ) (sen sen , sen cos , cos )in A B C
En este caso, todos los planos de discontinuidades, excepto el plano i , se abrirán y
is JP P , donde iP representa al plano i .

224
PREPOSICIÓN DEL MODO DE FALLA POR DESLIZAMIENTO EN UNA CARA. Si la dirección
de deslizamiento s yace en un único plano, iP , la condición suficiente y necesaria que el
bloque removible B debe satisfaces para estar en equilibrio es la ecuación (VIII.5), es
decir:
is s y 0iv r
donde is es la proyección ortográfica de r en el plano iP (dada por VIII.8)
Figura VIII. 3. Deslizamiento en una cara o superficie de deslizamiento
DESLIZAMIENTO MEDIANTE DOS CARAS O SUPERFICIES DE DESLIZAMIENTO
Las figuras VIII.4 y VIII.5, muestran ejemplos de deslizamiento de bloques a lo largo de 2
planos, iP y jP (o a lo largo de su línea de intersección), debido a que es la única dirección
común de ambos planos. La dirección de deslizamiento s es la dirección a lo largo de la
línea de intersección que hace un ángulo agudo con la dirección de la resultante activa
(resultante de todas las fuerzas involucradas).
i j
ij i j
i j
n ns s signo n n
n nr (VIII.9)
Además la dirección de deslizamiento es un borde del JP formado por la intersección de los
planos i y j :
i js JP P P (VIII.10)

225
PREPOSICIÓN DEL MODO DE FALLA POR DESLIZAMIENTO EN DOS CARAS. Si la dirección
de deslizamiento es simultánea en dos planos, iP y jP ; las condiciones suficientes y mínimas
para que el bloque B satisfaga la ecuación de equilibrio (8.5), son:
0 0ij jiv s v s
y i j
i j
i j
n ns signo n n
n nr
donde jis y s son las proyecciones ortográficas de r en los planos iP y jP ,
respectivamente, como se dan en (VIII.8).
Figura VIII. 4. Deslizamiento en dos planos
Figura VIII. 5. Deslizamiento en dos planos

226
LA FUERZA DE DESLIZAMIENTO
Las ecuaciones de equilibrio para translación libre, deslizamiento en una o dos caras, han
sido dadas en la sección previa. Utilizando estas ecuaciones, podemos calcular las
ecuaciones correspondientes para la fuerza de deslizamiento F s .
DESPRENDIMIENTO O LEVANTAMIENTO (Lifting)
En este caso, 0lN , para todos los planos de discontinuidades y la ecuación (VIII.4), se
convierte en:
F T (VIII.11)
y la ecuación de equilibrio es:
T s r (VIII.12)
y la combinación con (VIII.11), resulta en:
F r (VIII.13)
Cuando la gravedad es el único contribuidor a la resultante activa, F es simplemente el peso
del bloque.
DESLIZAMIENTO EN UNA CARA O SUPERFICIE DE DESLIZAMIENTO
Debido a que existe un único plano de contacto, la ecuación (VIII.4), se convierte en:
tani iT N F (VIII.14)
i iT s v vr (VIII.15)
Por lo que: iT v r (VIII.16)
y i iN vr (VIII.17)
Sustituyendo (VIII.16) y (VIII.17) en (VIII.14), se tiene que:
tani i iF v v rr (VIII.18)
donde i i iv n signo n r (VIII.19)
Por la proposición de deslizamiento en una cara:
0iv r
Sustituyendo (VIII.19) en (VIII.18), tenemos que:
tani i iF n nr r (VIII.20)
La formula (VIII.20) sirve para obtener la Fuerza de Deslizamiento Neta en una sola cara a
lo largo del plano iP .
Cuando la resultante activa r es dada por únicamente la gravedad.
0,0 , 0W Wr

227
Supóngase que el echado y la dirección del echado del plano iP son i y i ,
respectivamente.
(sen sen , sen cos , cos )in
122 2 2 2 2 2
i
( sen sen , sen cos ,0)
( sen cos sen sen )
sen
cos cos
i i i i i
i i i i
i i i i
n W W
W W
W
n W W
r
r
De la ecuación (VIII.20), tenemos:
sen cos tani i iF W W (VIII.21)
La ecuación (VIII.21), expresa la Fuerza de Deslizamiento Neta cuando la resultante activa
r es debida a únicamente la acción de la gravedad.
DESLIZAMIENTO EN DOS CARAS
En este caso, el bloque removible B, se desliza a lo largo de los planos del conjunto de
discontinuidades i y j , y los demás planos de discontinuidad están abiertos. La fuerza
normal de reacción 0lN para todo l i ó j , y (VIII.4), se convierte en:
tan tan 0, 0, 0i i j j i jT N N F T N N
por lo que tan tani i j jF T N N (VIII.22)
Si i i j i j j i jN v v v v v v vr 1
Se obtiene
j i j
i
i j i j
v v vN
v v v v
r (VIII.23)
Debido a que 0iN , (VIII.23) puede escribirse como:
2
j i j
i
i j
n n nN
n n
r (VIII.24)
Similarmente 2
i i j
j
i j
n n nN
n n
r (VIII.25)
De la ecuación (9) de la sección 1 del apéndice del capítulo 9 de (Goodman & Shi, 1985),
se tiene:
T sr
1 Ver ecuación (5) de la sección 1 del capítulo 9, en Goodman & Shi, 1985.

228
Para una cuña clave o una potencial cuña clave, 0T , por lo que:
i j
i j
n nT
n n
r (VIII.26)
Sustituyendo (VIII.24), (VIII.25) y (VIII.26) en (VIII.22), se obtiene finalmente:
2
1tan tani j i j j i j i i i j j
i j
F n n n n n n n n n nn n
r r r (VIII.27)
La ecuación (VIII.27) proporciona la fuerza de deslizamiento neta para una real o potencial
cuña clave, deslizándose en los planos iP y jP .
EJEMPLO DE CÁLCULO DE LAS FUERZAS DE DESLIZAMIENTO
La tabla VIII.1 proporciona el echado, la dirección del echado y los ángulos de fricción de
4 conjuntos de discontinuidades.
Teniendo las siguientes fuerzas activas:
1 1 1
2 2 2
0,0, 1
0,0.8660,0.5000
W r r
W r r
r
r
Calcular las fuerzas netas de deslizamiento a lo largo de todas las direcciones de
desplazamiento posibles.
Conjunto de
Discontinuidades
Echado
α Dirección del
Echado β
Ángulo de Fricción
°
1 71 163 15
2 68 243 20
3 45 280 40
4 13 343 30 Tabla VIII.1.- Tabla de datos

229
Utilizando las formulas (VIII.13), (VIII.20) y (VIII.27), se calcula las fuerzas netas de
deslizamiento, presentadas en la tabla VIII.2.
Planos de
Deslizamiento
Fuerza de Deslizamiento Neta
Para 1 1
1 0,0, 1
W r
r
r Para 2 2
2 0,0.8660,0.5000
W r
r
r
0 1.00W
1.00W
1 0.86W 0.62W
2 0.79W 0.92W
3 0.11W 0.50W
4 0.34W 0.35W
1, 2 0.72W 0.62W
1, 3 -0.12W 0.16W
1, 4 -0.61W -0.36W
2, 3 -0.45W -1.72W
2, 4 -0.36W -0.03W
3, 4 -0.45W 0.19W Tabla VIII.2.- Fuerza de deslizamiento neta
De la tabla VIII.2, se puede observar que diferentes direcciones de resultantes generan
diferentes fuerzas netas de deslizamiento. Si F es positivo, el bloque se deslizará en caso de
ser un bloque removible, lo que significa que podría ser una cuña clave (Tipo I). SI F es
negativo, el bloque es “seguro”, lo que significa que podría ser una potencial cuña clave
(Tipo II).
Procedimiento de Cálculo
Caso I: Desprendimiento o Levantamiento (Lifting)
0 Planos de Deslizamientos
Formula: F r
Para 1r
1 1 1
1
2 2 2
1
0,0, 1
0 ,0 , 1
0 0 1 1
1
W r r
W W W
W W W W
F W
r
r
r
Para 2r
2 2 2
2
2 2 2
1
2
0,0.8660,0.5000
0 ,0.866 ,0.5
0 0.866 0.5 1
1
W r r
W W W
W W W W
F W
r
r
r
Caso II: Deslizamiento a Través de Un Plano de Contacto
1 Plano de Deslizamiento (Plano # 3)
Formula: tani i iF n nr r

230
Para 2r
3
^
23
2 2 2^
23
3
0.6963, 0.1227, 0.7071
0.6963 0.1227 0.7071 0.5510, 0.3482, 0.6030
0 0.8660 0.500
0.5510 0.3482 0.6030 0.8879
0.6963,0.1227,0.7071 0, 0.866,0.500 0 0.1063 0.3536
n
x y z
n
n
n
r
r
r
3
0.4599
0.4599
0.8879 0.4599 tan 40º
0.50
n
F
F W
r
Caso III: Deslizamiento a Través de Dos Planos de Contactos
2 Planos de Deslizamientos (Planos # 1 y #2)
Formula
2
1tan tani j i j j i j i i i j j
i j
F n n n n n n n n n nn n
r r r
1
2
1
0.2764, 0.9042, 0.3255 15º
0.8261, 0.4209, 0.3746 20º
0, 0, 1
n
n
r
1 2
1 2
2
1 2
0.2764 0.9042 0.3255 0.2017, 0.3724, 0.8633
0.8261 0.4209 0.3746
0.9616
0.9247
x y z
n n
n n
n n
1 2
1 2
1 2 1 2
0 0 0.8633 0.8633
0.8633
0.8633 0.9616 0.8301
r n n
r n n
r n n n n
231
2
2 1 2
2 1 2
2 1 2
0 0 1 0.4209, 0.8261, 0
0.8261 0.4209 0.3746
0.08489 0.3076 0 0.2227
0.2227
tan15º 0.2227 0.2679 0.05966
x y z
r n
r n n n
r n n n
r n n n
1
1 1 2
1 1 2
1 1 2
0 0 1 0.9042, 0.2764, 0
0.2764 0.9042 0.3255
0.1824 0.1029 0 0.2853
0.2853
tan 40º 0.2853 0.3640 0.1038
x y z
r n
r n n n
r n n n
r n n n
10.8301 0.05966 0.1038
0.9247
0.72
F
F W
CONDICIONES CINEMÁTICAS PARA DESPRENDIMIENTO/LEVANTAMIENTO Y
DESLIZAMIENTO
En esta sección se probará que existe únicamente un JP correspondiente a una dirección de
deslizamiento dada y después se establecerán procedimientos para identificarlo. Un
“análisis de modo” determina una lista completa de JP´s correspondientes a todas las
direcciones de deslizamiento. Esto será comprobado en secciones subsecuentes.
Lista Completa de Direcciones de Deslizamiento, Dada Una Fuerza Resultante r.
Para desprendimiento/levantamiento (lifting); s r
Para el deslizamiento en una cara i , las direcciones de deslizamiento is son
determinadas por (VIII.8).
is s i i
i
i
n ns
n
r
r
Para el deslizamiento en dos caras i y j , las direcciones de deslizamiento i js ,
están dadas por (VIII.9)
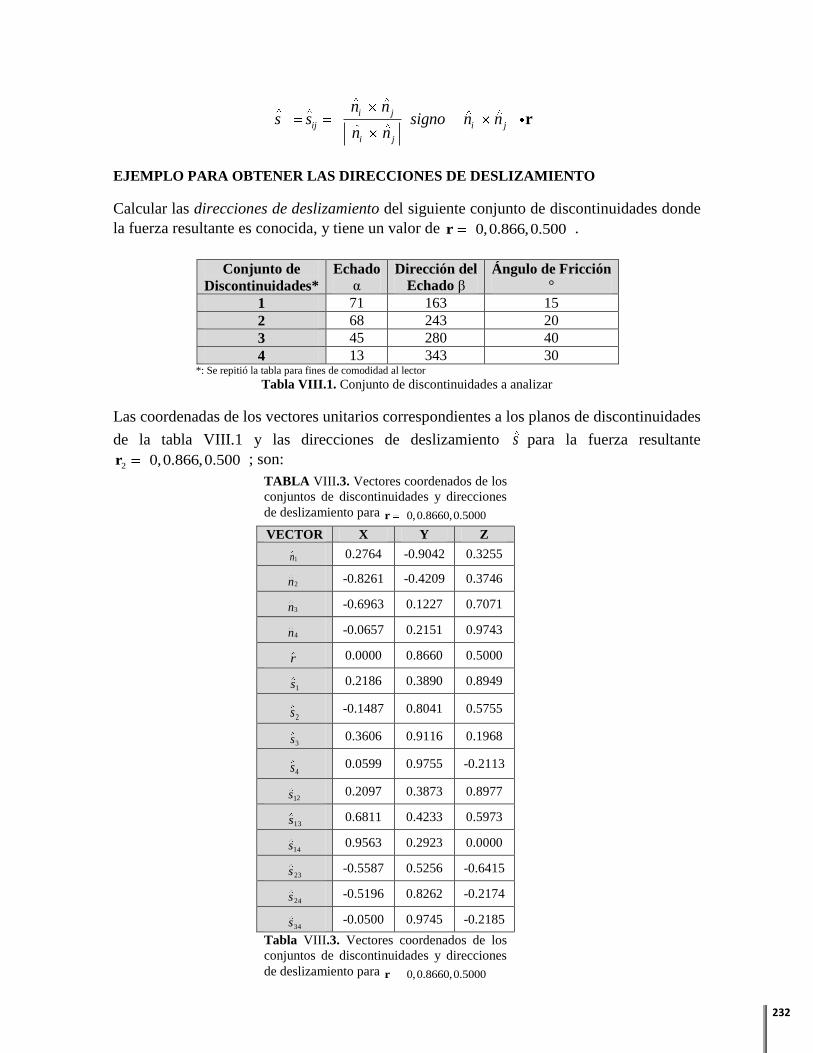
232
i j
ij i j
i j
n ns s signo n n
n nr
EJEMPLO PARA OBTENER LAS DIRECCIONES DE DESLIZAMIENTO
Calcular las direcciones de deslizamiento del siguiente conjunto de discontinuidades donde
la fuerza resultante es conocida, y tiene un valor de 0,0.866,0.500r .
Conjunto de
Discontinuidades*
Echado
α Dirección del
Echado β
Ángulo de Fricción
°
1 71 163 15
2 68 243 20
3 45 280 40
4 13 343 30 *: Se repitió la tabla para fines de comodidad al lector
Tabla VIII.1. Conjunto de discontinuidades a analizar
Las coordenadas de los vectores unitarios correspondientes a los planos de discontinuidades
de la tabla VIII.1 y las direcciones de deslizamiento s para la fuerza resultante
2 0,0.866,0.500r ; son:
TABLA VIII.3. Vectores coordenados de los
conjuntos de discontinuidades y direcciones
de deslizamiento para 0,0.8660,0.5000r
VECTOR X Y Z
1n 0.2764 -0.9042 0.3255
2n -0.8261 -0.4209 0.3746
3n -0.6963 0.1227 0.7071
4n -0.0657 0.2151 0.9743
r 0.0000 0.8660 0.5000
1s 0.2186 0.3890 0.8949
2s -0.1487 0.8041 0.5755
3s 0.3606 0.9116 0.1968
4s 0.0599 0.9755 -0.2113
21s 0.2097 0.3873 0.8977
13s 0.6811 0.4233 0.5973
14s 0.9563 0.2923 0.0000
23s -0.5587 0.5256 -0.6415
24s -0.5196 0.8262 -0.2174
34s -0.0500 0.9745 -0.2185
Tabla VIII.3. Vectores coordenados de los
conjuntos de discontinuidades y direcciones
de deslizamiento para 0,0.8660,0.5000r

233
PROCEDIMIENTO DE CÁLCULO
Deslizamiento en un Plano
Plano: 1 Fuerza Resultante: 2 0,0.866,0.500r
Ecuación is s
i i
i
i
n ns
n
r
r
1 0.2764, 0.9042, 0.3255n
^ ^ ^
0.2764 0.9042 0.3255 0.7340, 0.1382, 0.2394
0.0000 0.8660 0.5000
i
x y z
n r
^ ^ ^
0.7340 0.1382 0.2394 0.1715, 0.3051, 0.7019
0.2764 0.9042 0.3255
i i
x y z
n nr
2 2 20.7340 0.1382 0.2394 0.7843in r
^
1
^
1
0.1715 0.3051 0.7019, ,
0.7843 0.7843 0.7843
0.21867, 0.3890, 0.8949
s
s
Deslizamiento en Dos Planos
Plano: 1 y 2 Fuerza Resultante: 2 0,0.866,0.500r
Ecuación i j
ij i j
i j
n ns s signo n n
n nr
1
2
0.2764, 0.9042, 0.3255
0.8261, 0.4209, 0.3746
n
n
^ ^ ^
0.2764 0.9042 0.3255 0.2017, 0.3724, 0.8633
0.8261 0.4209 0.3746
i j
x y z
n n
2 2 20.2017 0.3724 0.8633 0.9616i jn n
0.2017, 0.3724, 0.8633 0,0.866,0.500 0, 0.3225, 0.4317i jn n r
0.7542i jsigno n n signor
0.2017 0.3724 0.8633, , 0.2098, 0.3873, 0.8978 1
0.9616 0.9616 0.9616
0.2098, 0.3873, 0.8978
ij
ij
s s
s s

234
De acuerdo a la definición de removilidad, cada bloque removible tiene una dirección de
deslizamiento a lo largo del cual puede ser movido sin colisionar con la masa rocosa
adyacente. Por lo que se deduce que:
JPs (VIII.28)
DESPRENDIMIENTO/LEVANTAMIENTO. Cuando un bloque está siendo desprendido,
s no es paralelo a ningún plano iP . Así, como iv es la normal dirigida hacia el bloque,
para cada plano l del bloque
0ls v (VIII.29)
DESPLAZAMIENTO EN UN PLANO. Para el caso de un desplazamiento en el plano iP ,
s es paralelo a iP . Por lo tanto con (VIII.28) y la preposición del deslizamiento en una
cara, se obtiene:
0ls v (VIII.30)
0lvr (VIII.31)
DESPLAZAMIENTO EN DOS PLANOS. Para el deslizamiento en los planos i y j , s es
paralelo a los planos i y j . Utilizando (VIII.28) y la preposición del deslizamiento en dos
caras, se obtiene:
0 ,ls v para toda l l i (VIII.32)
0i js v (VIII.33)
0j is v (VIII.34)
Conociendo s y r, las ecuaciones (VIII.29) a (VIII.34), proveen de suficiente información
para identificar a todas las correspondientes iv y por lo tanto identificar al JP.
Se realizará un ejemplo, donde primeramente se realizará los cálculos vectoriales
(Resumen en tabla VIII.3) y subsecuentemente se realizará un análisis mediante el uso de
las proyecciones estereográficas.
El sistema de discontinuidades para este ejemplo se encuentra en la tabla VIII.1 (la cual por
facilidad se reproduce a continuación).
Dos casos son considerados, correspondientes a:
1
2
0,0,
0 ,0.866 ,0.500
W y
W W W
r
r

235
Conjunto de
Discontinuidades
Echado
α
Dirección
del
Echado β
Ángulo de
Fricción
°
Vector Unitario
ln
1 71 163 15 0.2764, 0.9042,0.3256
2 68 243 20 0.8261, 0.4209,0.3746
3 45 280 40 0.6963,0.1228,0.7071
4 13 343 30 0.0658,0.2151,0.9744
TABLA VIII.1.- Tabla de datos para ejemplo (reproducida para facilitar lectura)
SOLUCIÓN VECTORIAL PARA EL JP CORRESPONDIENTE A UNA
DIRECCIÓN DE DESLIZAMIENTO DADA
DESPRENDIMIENTO/LEVANTAMIENTO (lifting)
Recordando a (VIII.29) ( 0is v ); y si se considera que l lv n se tendrá que 0is n ;
ahora si se considera que llv n , entonces se obtiene que 0is n ; Así de manera
general se tiene que:
para toda i i iv signo s n n l (VIII.35)
Para el modo de falla por desprendimiento/levantamiento, se sabe qué s r y utilizando
los vectores unitario ln de cada plano con 0,0.866 ,0.500W Wr , se obtiene los
siguientes resultados.
1 3 2 41 3 2 4v n v n v n v n
Así, el JP en modo de falla por desprendimiento/levantamiento para la acción de 2r es
1100 .
Deslizamiento en una única cara en el plano i.
En esta caso, ^ ^is s . A partir de (VIII.30) 0is v para toda l i . Por lo tanto,
^ ^ ^^
l llv signo s n n para l i (VIII.36)
También a partir de (VIII.31), ^
0lvr , por lo tanto,
^ ^ ^
i ilv signo n nr (VIII.37)
Por ejemplo, para el deslizamiento en el plano 1 1i y utilizando los datos de la tabla
VIII.3 y a 2r r , se obtiene que:
^ ^ ^ ^1 1 2 2 3 3 4 4v n v n v n v n
Por lo tanto el JP que se desliza en el plano 1 es 0100 .

236
Deslizamiento en dos planos de deslizamiento i y j
A partir de (VIII.32), (VIII.33) y (VIII.34) y siguiendo el razonamiento utilizado para
los casos anteriores, ^
lv es determinado mediante:
^ ^ ^ ^, ,ij l llv signo s n n l i j (VIII.38)
^ ^ ^ ^j i iiv signo s n n (VIII.39)
y ^ ^ ^ ^i j jjv signo s n n (VIII.40)
Considerando, por ejemplo los planos de deslizamiento 1 y 2 y utilizando los datos de la
tabla VIII.3 y 0,0.866,0.500r y considerando a cada ^in , dado en la tabla VIII.3, se
obtiene que,
^ ^1 1 2 2
^ ^3 3 4 4
v n v n
v n v n
Por lo que el JP que tiende a deslizarse en los planos1 y 2 es 0100 .
La tabla VIII.4 proporciona los JP’s para todos los modos de falla para ambas fuerzas
resultantes 0,0.866 ,0.500W Wr y para 0,0 Wr .
Dirección de
deslizamiento 0,0 Wr 0,0.866 ,0.500W Wr
r 1111 1100
1s 0111 0100
2s 1011 1000
3s 1001 1110
4s 1100 1111
21s 0011 0000
13s 0001 0110
14s 0110 0111
23s 1101 0011
24s 1000 1001
34s 1110 1101
Tabla VIII.4. - JP’s correspondientes a cada potencial modo de deslizamiento

237
PROYECCIÓN ESTEREOGRÁFICA PARA EL JP CORRESPONDIENTE A
UNA DIRECCIÓN DE DESLIZAMIENTO DADA
Todos los análisis vectoriales antes presentados pueden ser realizados de manera gráfica.
La figura VIII.6a muestra la proyección de los 4 conjuntos de discontinuidades previamente
consideradas (Se anexa tabla VIII.1 con datos, así como coordenadas de los círculos y sus
respectivos radios). Recuérdese que ^is es la proyección ortográfica de ^r en el plano i.
También, ^ijs es uno de los dos puntos donde los círculos i y j intersecan, esto es, el más
cercano a ^r , esto es, la intersección está inclinada menos de 90º con respecto a ^r .
Coordenadas de los círculos
Conjunto de
Discontinuidades
Echado
α Dirección del
Echado β Cx Cy r
1 71 163 0.8491 -2.7773 3.0716
2 68 243 -2.2053 -1.1237 2.6695
3 45 280 -0.9848 0.1736 1.4142
4 13 343 -0.06750 0.2208 1.0263
TABLA VIII.1.- Datos para ejemplo (repetida para facilitar lectura)
4
2
3
1
1011
0011
0111
1001
1101
1100
1000
0000
0110
1110
0100
1111
Figura VIII.6a. Proyección de los datos de las discontinuidades de la tabla VIII.1

238
Procedimientos Para Obtener Las Direcciones de Deslizamiento en Una y Dos Caras,
Para las siguientes fuerzas activas:
1
2
0,0,
0 ,0.866 ,0.500
W y
W W W
r
r
Deslizamiento en 1 Cara
^11 0 ,0 , 1
71º
163º
3.0716
Plano Para r W W W
r
Transcribiendo párrafos anteriores, ha de recordarse, que en esta condición ^r no puede ser
representada en el plano estereográfico, y el medio-espacio del circulo rP que contiene a ^r
es la región que se encuentra fuera del círculo de referencia.
Además, la normal a P yace a lo largo del diámetro del círculo de referencia extendido
hasta C (el centro del círculo para el plano P) . El plano común a ^r y N es vertical y es por lo tanto
una línea recta en dirección de OC.
La dirección, iS , es la intersección de la extensión de OC y el círculo P. (Figura VIII.6.b)
1P
S1
Círculo de referencia
Centro de P1
Línea de extensión
Figura VIII.6.b. Elección de la dirección de deslizamiento en un plano de
deslizamiento bajo la fuerza resultante debido al peso propio

239
DESLIZAMIENTO EN 1 CARA
^21 0 ,0.866 ,0.500
71º
163º
3.0716
Plano Para r W W W
r
0.7133r R
d ON Rr R
Proyección ortográfica de N
, cos 0.2085, 0.6821N d sen d
Proyección ortográfica de r
2 2 2
2 2 2
0
0.5773
o
o
R XX
X Y Z Z
R YY
X Y Z Z
Obteniendo componente Z de N 2 2 2
0.24562
n
R X YZ
R
^
2
0.2085, 0.6821, 0.2456
0, 0.866, 0.500
N
r
Coordenadas del centro del circulo común
entre N y ^
2r
1 2 2 1
1 2 2 1
2 1 1 2
1 2 2 1
3.07
0.58
x
y
Y Z Y ZC
X X X Y
X Z X ZC
X X X Y
Elementos correspondientes a ^
2r
2 2 2 2
2 2
2 2
2
2 2
0 0.866 0.866
3.07
22.9042
r rd O X Y
R dr R
R d
R dOC
R d
Coordenadas del centro de Pr
0.00
1.73
xr
y r
R XC
Z
R YC
Z
Después de tener todos los elementos necesarios, se procederá a dibujar y a encontrar los
puntos de intersección 1 2S y S .
Ahora la dirección de deslizamiento, será la elección entre los puntos 1 2S y S , que esté
contenida en el mismo medio-espacio de rP que r , o más cercano a r .
DESLIZAMIENTO EN 2 CARAS
Para cualquier conjunto de planos “i” y “j” y ^
1 , ,para r X Y Z , se deberá:
Dibujar el la proyección estereográfica el par de planos,
Después calcular los siguientes elementos.
Proyección ortográfica de ^r
2 2 2 2 2 2o o
R X R YX Y
X Y Z Z X Y Z Z

240
Distancia d Or , mediante;
2 2d Or X Y
Utilizando (III.30) y (III.31), y con d Or , se calcula el rr y la distancia
Or del círculo de proyección del plano rP normal al vector
^r .
2 2
2 2r
R dr R
R d;
2
2 2
2r
R dOC
R d; ,xr xr
R X RYC C
Z Z
La dirección de deslizamiento será la elección entre ij ijI y I , para la cual deberá estar
del mismo medio-espacio de la proyección ortográfica de ^r .
En el caso de que la única fuerza sea el peso propio, la dirección de deslizamiento será la
intersección que es encuentre fuera del círculo de referencia.
EJEMPLO
1
2
0,0,
0 ,0.866 ,0.500
W y
W W W
r
r
Para Planos 1 y 2, para 2 0 ,0.866 ,0.500W W Wr
1. Dibujar los planos en la proyección estereográfica
2. Proyección ortográfica de ^r
a.
2 2 2
2 2 2
0
0.5773
o
o
R XX
X Y Z Z
R YY
X Y Z Z
b. 2 2 2 20 0.5773 0.5773d Or X Y
c. 2 2
2 22.00r
R dr R
R d
d. 2
2 2
21.73r
R dOC
R d
e. 0.00, 1.73xr xr
R X RYC C
Z Z
3. Como se observa en la figura anexa, la dirección de deslizamiento que cumple con
las restricciones anteriores, es 12I (esta nomenclatura se colocó arbitrariamente, ya
que pudo haberse llamado 12I ); es decir, yace en el mismo medio-espacio, que la
proyección ortográfica de ^r .

241
1
2
r^
I12
-I12
Pr
Figura VIII.6.c. Dirección de deslizamiento con
2 0 ,0.866 ,0.500W W Wr
Para Planos 1 y 2, para ^
1 0, 0,r W
Como se mencionó anteriormente, la dirección de deslizamiento,(para la condición de carga
debida únicamente al peso propio) es aquella intersección que se encuentra fuera del círculo
de referencia. (Se anexan las figuras de algunas de las direcciones de deslizamiento)
1
2
I12
Círculo de Referencia
1
3
I13
Círculo de Referencia
Figura VIII.6.d. Algunas direcciones de deslizamiento con ^
1 0, 0,r W
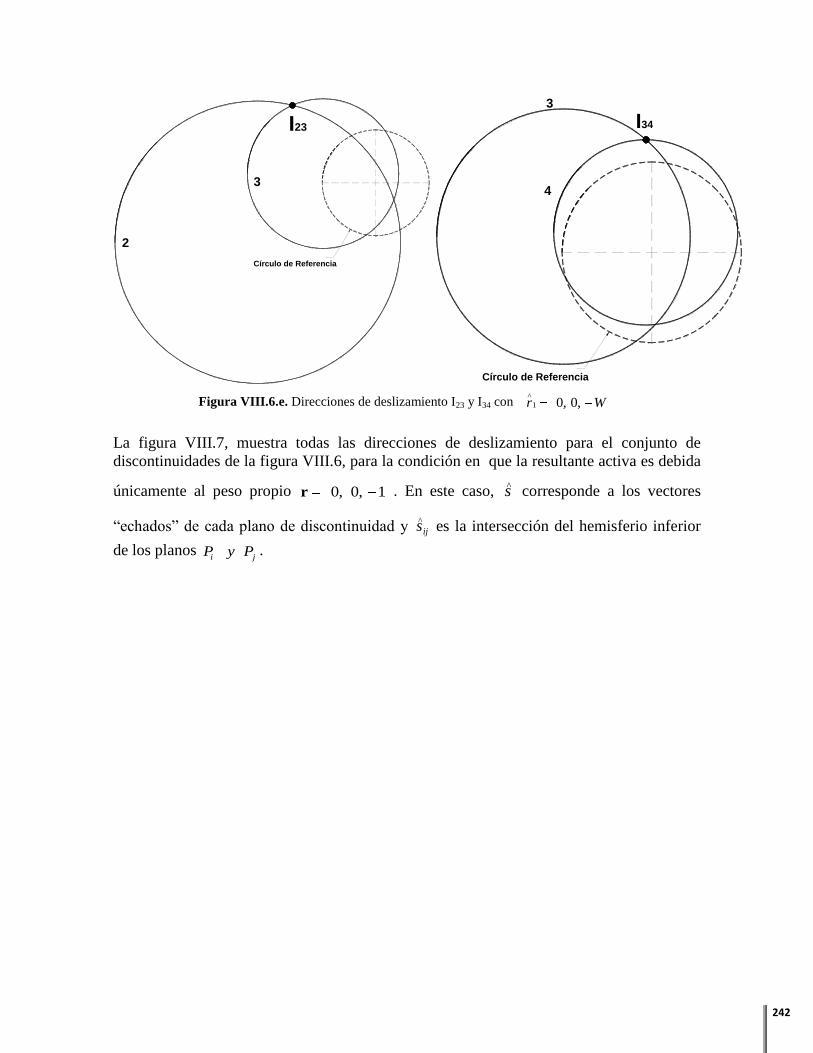
242
I23
2
3
Círculo de Referencia
I34
3
4
Círculo de Referencia
Figura VIII.6.e. Direcciones de deslizamiento I23 y I34 con ^
1 0, 0,r W
La figura VIII.7, muestra todas las direcciones de deslizamiento para el conjunto de
discontinuidades de la figura VIII.6, para la condición en que la resultante activa es debida
únicamente al peso propio 0, 0, 1r . En este caso, ^s corresponde a los vectores
“echados” de cada plano de discontinuidad y ^
ijs es la intersección del hemisferio inferior
de los planos i jP y P .

243
4
2
3
1
s13
s23
s14
s34
s24
s12
2
12
1
13
334
14
4
24
23
0
2 DIRECCIÓN DE DESLIZAMIENTO CORRESPONDIENTE A UN JP
s13 DIRECCIONES DE DESLIZAMIENTO EN DOS PLANOS
s1 DIRECCIÓN DE DESLIZAMIENTO EN UN PLANOS1
S2
S3
S4
Figura VIII. 7. Todas las direcciones y modos de deslizamiento cuando 0, 0, Wr
La figura VIII.8, muestra todas las direcciones de deslizamiento para la resultante
0, 0.866 , 0.5W Wr . Las direcciones ^is no son más “vectores de echado”.

244
2
3
4
S2
S1
S3
S4
S12 S13
S23
S34
2 DIRECCIÓN DE DESLIZAMIENTO CORRESPONDIENTE A UN JP
s13 DIRECCIONES DE DESLIZAMIENTO EN DOS PLANOS
s1 DIRECCIÓN DE DESLIZAMIENTO EN UN PLANO
12
2
r^
3
4
1
23
24
34
14
13
0
23
Figura VIII. 8. Todas las direcciones y modos de deslizamiento cuando 0, 0.866 , 0.5W Wr
LEVANTAMIENTO A LO LARGO DE r: El JP que tiende levantar o desprender es
aquel que contiene a ^r (si la fuerza resultante está contenida en un plano, no existe modo
de deslizamiento). En las figuras VIII.7 y VIII.8, el JP que contiene a ^r ha sido etiquetado
como “0”.
DESLIZAMIENTO EN UN PLANO i: Cuando el plano de deslizamiento es en el plano i,
^i is JP P lo que significa que un lado del JP es el arco circular que contiene a ^
is .
Además, a partir de la preposición del deslizamiento en una cara, ^0iv r .
Esto requiere que el JP se encuentre del lado del plano i que no contiene a ^r . Estas dos
condiciones describen a un único JP.
DESLIZAMIENTO EN LOS PLANOS i y j: Una esquina de un JP es ^
i js .Usualmente
existen cuatro JP compartiendo esta esquina. Las condiciones adicionales están dadas por
(VIII.33) y (VIII.34).
La primera, ^^ 0jis v , requiere que el JP se encuentre del lado del plano “j” que no
contiene a ^
is , esto es, si ^
is está dentro del círculo (medio-espacio) correspondiente al
plano “j”, el JP debe encontrarse fuera del circulo del plano “j”. Similarmente, (VIII.34)
requiere que el JP se encuentre del lado del plano “i” que no contiene a ^
js .
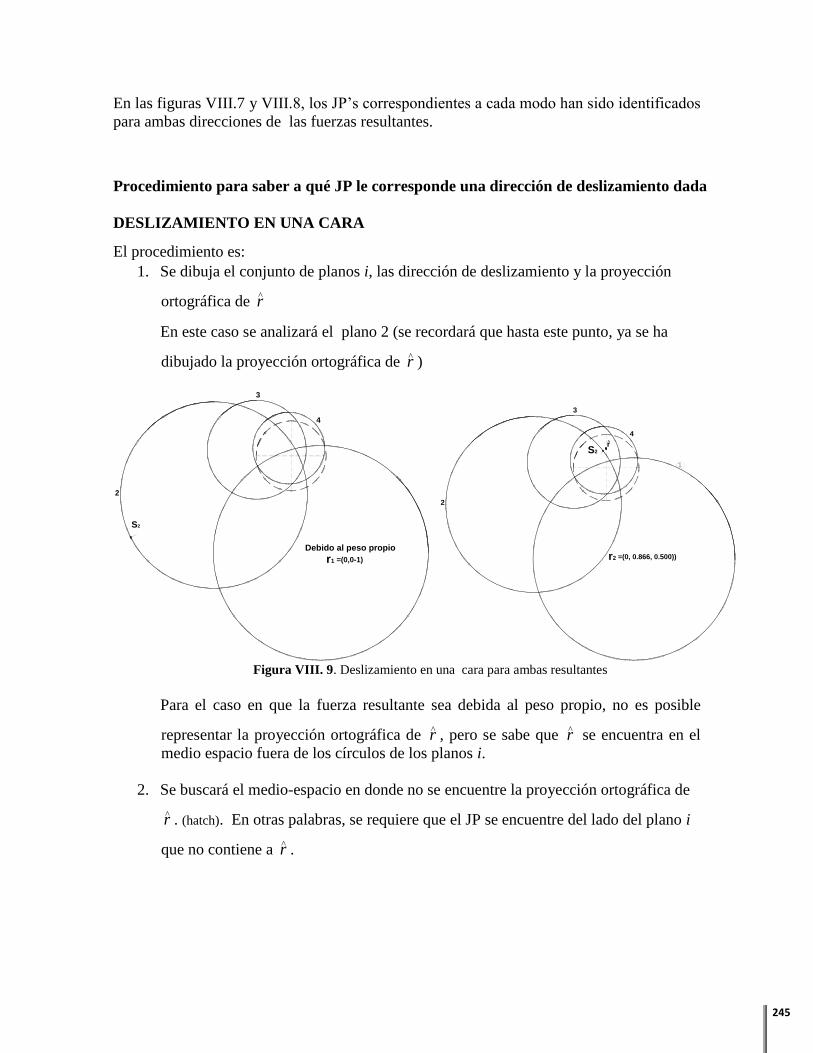
245
En las figuras VIII.7 y VIII.8, los JP’s correspondientes a cada modo han sido identificados
para ambas direcciones de las fuerzas resultantes.
Procedimiento para saber a qué JP le corresponde una dirección de deslizamiento dada
DESLIZAMIENTO EN UNA CARA
El procedimiento es:
1. Se dibuja el conjunto de planos i, las dirección de deslizamiento y la proyección
ortográfica de ^r
En este caso se analizará el plano 2 (se recordará que hasta este punto, ya se ha
dibujado la proyección ortográfica de ^r )
r1 =(0,0-1)
Debido al peso propio
2
3
4
S2
r^
1
r2 =(0, 0.866, 0.500))
2
3
4
S2
Figura VIII. 9. Deslizamiento en una cara para ambas resultantes
Para el caso en que la fuerza resultante sea debida al peso propio, no es posible
representar la proyección ortográfica de ^r , pero se sabe que ^r se encuentra en el
medio espacio fuera de los círculos de los planos i.
2. Se buscará el medio-espacio en donde no se encuentre la proyección ortográfica de
^r . (hatch). En otras palabras, se requiere que el JP se encuentre del lado del plano i
que no contiene a ^r .

246
r1 =(0,0-1)
Debido al peso propio
2
3
4
S2
0
r^
1
r2 =(0, 0.866, 0.500))
2
3
4
S2
0
Figura VIII. 10. Figura con dirección de deslizamiento
3. Se le asignará un número al JP, correspondiente a la dirección de deslizamiento.
DESLIZAMIENTO EN DOS CARAS
1. Se dibuja el conjunto de planos i y j, las direcciones de deslizamiento y la
proyección ortográfica de ^r
En este caso se analizarán los planos 1 y 2 (se recordará que hasta este punto, ya se
ha dibujado la proyección ortográfica de ^r )
r1 =(0,0-1)
Debido al peso propio
2
3
4
S12
S1
S2
r^
1
r2 =(0, 0.866, 0.500))
2
3
4
S12
S2
S1
Figura VIII. 11. Dirección de deslizamiento para dos caras
4. Se realizará el siguiente procedimiento aplicable para todo conjunto de planos i y j.
a. Si ^is está dentro del círculo del plano j, el JP debe estar fuera del círculo
para el plano j; y viceversa, es decir, si ^is está dentro del circulo del plano j,
el JP debe estar dentro del circulo para el plano j.

247
En este caso, el plano j, es el plano 2 y ^is es ^
1s .
r1 =(0,0-1)
Debido al peso propio
23
4
S12
S1
S2
r^
1
r2 =(0, 0.866, 0.500))
2
3
4
S12
S2
S1
Figura VIII. 12. Procedimiento para encontrar deslizamiento
b. Lo anterior, se realiza también para ^js , por lo tanto se tiene al final un
código, refiriéndose al plano de deslizamiento.
r1 =(0,0-1)
Debido al peso propio
23
4
S12
S1
S2
12
r^
1
r2 =(0, 0.866, 0.500))
2
3
4
S12
S2
S1
12
Figura VIII. 13. Códigos de deslizamiento
Comparándose con la tabla VIII.4, se muestra que los métodos vectoriales como los
métodos gráficos, se obtienen los mismos resultados.
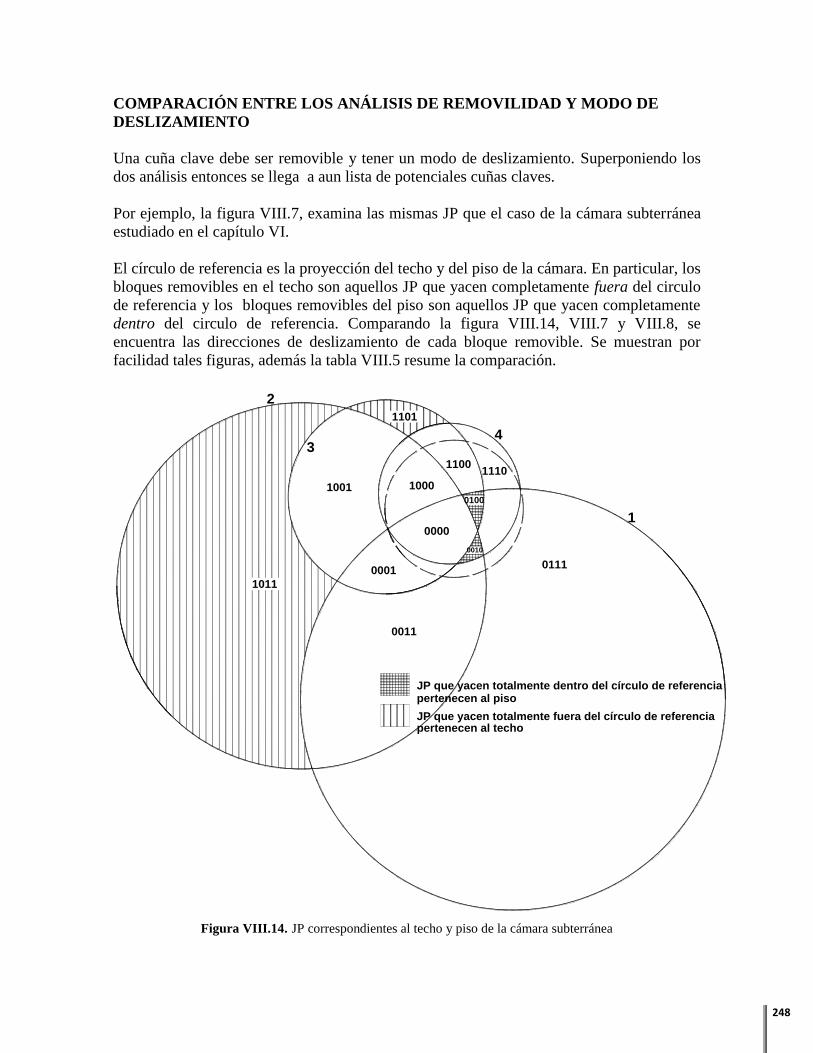
248
COMPARACIÓN ENTRE LOS ANÁLISIS DE REMOVILIDAD Y MODO DE
DESLIZAMIENTO
Una cuña clave debe ser removible y tener un modo de deslizamiento. Superponiendo los
dos análisis entonces se llega a aun lista de potenciales cuñas claves.
Por ejemplo, la figura VIII.7, examina las mismas JP que el caso de la cámara subterránea
estudiado en el capítulo VI.
El círculo de referencia es la proyección del techo y del piso de la cámara. En particular, los
bloques removibles en el techo son aquellos JP que yacen completamente fuera del circulo
de referencia y los bloques removibles del piso son aquellos JP que yacen completamente
dentro del circulo de referencia. Comparando la figura VIII.14, VIII.7 y VIII.8, se
encuentra las direcciones de deslizamiento de cada bloque removible. Se muestran por
facilidad tales figuras, además la tabla VIII.5 resume la comparación.
1011
1001
1101
1100
1000
1110
0000
0001
0011
0111
1
2
34
0010
0100
JP que yacen totalmente dentro del círculo de referencia
JP que yacen totalmente fuera del círculo de referenciapertenecen al techo
pertenecen al piso
Figura VIII.14. JP correspondientes al techo y piso de la cámara subterránea

249
4
2
3
1
s13
s23
s14
s34
s24
s12
2
12
1
13
334
14
4
24
23
0
2 DIRECCIÓN DE DESLIZAMIENTO CORRESPONDIENTE A UN JP
s13 DIRECCIONES DE DESLIZAMIENTO EN DOS PLANOS
s1 DIRECCIÓN DE DESLIZAMIENTO EN UN PLANO
S1
S2
S3
S4
Figura VIII.7. Todas las direcciones y modos de deslizamiento cuando 0, 0, Wr
2
3
4
S2
S1
S3
S4
S12 S13
S23
S34
2 DIRECCIÓN DE DESLIZAMIENTO CORRESPONDIENTE A UN JP
s13 DIRECCIONES DE DESLIZAMIENTO EN DOS PLANOS
s1 DIRECCIÓN DE DESLIZAMIENTO EN UN PLANO
12
2
r^
3
4
1
23
24
34
14
13
0
23
S14
Figura VIII.8. Todas las direcciones y modos de deslizamiento cuando 0, 0.866 , 0.5W Wr

250
Bloques
Removibles
Modo de deslizamiento
bajo la gravedad
0, 0, Wr
Tipo
de
Bloque
Modo de
deslizamiento con
0, 0.866,0.500r
Tipo
de
Bloque
En el Techo
1011 En una cara a lo largo de ^2s I ó II En dos caras a lo largo de ^
23s I ó II
1101 En dos caras a lo largo de ^23s I ó II En dos caras a lo largo de ^
34s I ó II
En el Piso
0100 Ninguno III Ninguno III
0010 Ninguno III En dos caras a lo largo de ^23s I ó II
I: Cuñas claves II: Potenciales cuñas claves III: Bloques estables
Tabla VIII.5.- Resumen de bloques removibles, modos de deslizamiento y tipo de bloque para cada
resultante analizada
Para ser considerado una cuña clave (I) o potencial cuña clave (II), un JP necesita ser
removible y tener una dirección de deslizamiento. Los bloques removibles que carecen de
un modo de deslizamiento son estables (III).
ENCONTRAR LA DIRECCIÓN DE DESLIZAMIENTO PARA UN JP DADO
En la sección precedente, se determinó un único JP dada una fuerza resultante r. En este
apartado, se tratará el caso inverso; es decir encontrar que dirección de deslizamiento le
corresponde a un JP dado. Recuérdese que sólo ciertos JP tienen una dirección de
deslizamiento. Aquellos JP’s que son removibles pero carecen de una dirección de
deslizamiento se les denominan bloques estables, tipo III.
En la sección siguiente se establecerá un criterio para un que un bloque removible sea
estable.
El vector más cercano de un JP respecto a ^r
Dada la fuerza resultante r y un JP, para cualquier vector ^g JP , denotaremos
como ^^,r g al ángulo existente entre
^r y
^g . Si hay un vector ^
g JP de tal manera que ^^,r g
es menor o igual al ángulo existente entre ^r y cualquier vector de JP, entonces a
^g se le
denominará “el vector más cercano de un JP con respecto a ^r ”. El ángulo ^^
,r g será
denominado entonces, “el ángulo más pequeño entre el JP y ^r ”
Las siguientes tres preposiciones determinan los vectores más cercanos de JP’s para todos
los casos.

251
Preposición 1. Si hay un vector ^h JP , tal que ^^
, 90ºr h , entonces existe un y solamente
un vector más cercano de JP con respecto a r.
Preposición 2. Si ^s es la dirección de deslizamiento de JP bajo la resultante activa r,
entonces ^s es vector más cercano de JP con respecto a r y
^0sr .
Preposición 3. Si ^g es el vector más cercano de JP con respecto a r, y
^^0g s , por lo
tanto ^g es la dirección de deslizamiento (e.g. ^ ^
g s )
CRITERIO PARA BLOQUES ESTABLES
Estas preposiciones generan criterios para juzgar cuando o cuando no un JP corresponde a
un bloque estable.
Criterio 1. Un JP corresponde a un bloque estable si para cualquier ^h JP ,
^
0h r (VIII.41)
Criterio 2. Un JP corresponde a una bloque estable si r, todas ^
is y todas las ^
ijs no están
contenidas en el JP.
^r JP (VIII.42)
^para toda is JP i
(VIII.43)
^para toda ijs JP ij
(VIII.44)
El segundo criterio permite calcular los JP estables. Cualquier JP que satisfaga (VIII.42),
(VIII.43) y (VIII.44), se ve en la proyección estereográfica como un polígono que carece de
cualquier dirección de deslizamiento.
Por ejemplo, cuando 0,0, 1r , los JP que satisfacen el criterio 2, son:
0000 0100 0010
Bajo 0,0.866,0.500r , los JP son:
0001 1011 0011

252
Ejemplo: Cálculo de las direcciones de deslizamientos y modos de deslizamiento
Utilizando las preposiciones acerca de los vectores más cercanos, es posible calcular la
dirección y modo de deslizamiento de una JP dado. Esto es demostrado mediante el
siguiente ejemplo, el cual está basado en el mismo sistema de discontinuidades que se ha
venido utilizando en este capítulo y se utilizará como fuerza activa 0,0.866,0.500r .
1. Calcúlese las direcciones de deslizamiento utilizando las ecuaciones (VIII.8) y
(VIII.9) i i
i i
i
n ns s s
n
r
r
y i j
ij i j
i j
n ns s signo n n
n nr ,
respectivamente. Por conveniencia las coordenadas de todos los ^ ^i ijs y s son
repetidos en la tabla VIII.6.
VECTOR X Y Z Angulo con
respecto a r
(º)
1s 0.2186 0.3890 0.8949 38.336
2s -0.1487 0.8041 0.5755 10.21
3s 0.3606 0.9116 0.1968 27.38
4s 0.0599 0.9755 -0.2113 42.34
21s 0.2097 0.3873 0.8977 38.339
13s 0.6811 0.4233 0.5973 48.30
14s 0.9563 0.2923 0 75.333
23s -0.5587 0.5256 -0.6415 82.27
24s -0.5196 0.8262 -0.2174 52.64
34s -0.0500 0.9745 -0.2185 42.72
Tabla VIII.6. Vectores coordenados de los conjuntos de discontinuidades y
direcciones de deslizamiento para 0,0.8660,0.5000r
Ahora calcúlese sus ángulos respecto a r, utilizando (II.26)
1 2 1 2 1 2
2 2 2 2 2 2
1 1 2 2 21
cosX X Y Y Z Z
X Y Z X Y Z.
Los resultados se muestran en la columna a la derecha de la tabla VIII.6.
2. Ahora para un JP en particular, calcúlese cuales de las direcciones de deslizamiento
está contenidas en el JP. Recuérdese que cada JP corresponde al conjunto de
solución de un sistema de desigualdades. Una dirección de deslizamiento pertenece
a un JP si y únicamente si también satisface a todas sus desigualdades.
Haciendo un ejemplo numérico de lo anterior.

253
Para JP 0000, sus desigualdades serían.
0.2764 0.9042 0.3255 0
0.8261 0.4209 0.3746 0
0.6963 0.1227 0.7071 0
0.0657 0.2151 0.9743 0
X Y Z
X Y Z
X Y Z
X Y Z
Verificando una a una las direcciones de deslizamiento que satisfacen (en caso de ser
varias) a este conjunto de desigualdades, tenemos que:
Para 1 0.2186,0.3890,0.8949s , se tiene:
0.2764 0.2186 0.9042 0.3890 0.3255 0.8949 0
0.8261 0.2186 0.4209 0.3890 0.3746 0.8949 0.0091
0.6963 0.2186 0.1227 0.3890 0.7071 0.8949 0.5283
0.0657 0.2186 0.2151 0.3890 0.9743 0.8949
Si Cumple
No Cumple
Si Cumple
0.9412 Si Cumple
Realizando lo anterior con cada dirección de deslizamiento se observará que la única
dirección de deslizamiento que satisface a las desigualdades del JP 0000 es 12s.
Ahora realizando lo anterior con el JP 1100, se obtiene las siguientes desigualdades:
0.2764 0.9042 0.3255 0
0.8261 0.4209 0.3746 0
0.6963 0.1227 0.7071 0
0.0657 0.2151 0.9743 0
X Y Z
X Y Z
X Y Z
X Y Z
Y las direcciones de deslizamiento que satisfacen a estas desigualdades son:
^ ^ ^ ^ ^ ^ ^ ^1 2 3 12 13 24 34, , , , , ,r s s s s s s y s
Realizando lo anterior, para cada uno de los posibles JP’s, se está en posibilidades de hacer
la tabla 8.7. En esta tabla, en la segunda columna, se presentan las diversas direcciones de
deslizamiento contenidas en un JP dado y en la tercera columna se presenta aquella
dirección de deslizamiento que hace el menor ángulo con respecto a r y esta es el modo de
deslizamiento.

254
JP
Direcciones de
deslizamiento contenidas
en el JP
Dirección de
deslizamiento más
cercano a r; modo
de deslizamiento
0000 ^12s
^12s
0001 ------------------ Estable
0010 ------------------ Estable
0011 ------------------ Estable
0100 ^ ^ ^1 12 13, ,s s s ^
1s
0101 ------------------ Bloque Estreñido
0110 ^ ^13 14,s s ^
13s
0111 ^14s ^
14s
1000 ^ ^ ^2 2412, ,s s s ^
2s
1001 ^ ^2423,s s ^
24s
1010 ------------------ Bloque Estreñido
1011 ^23s ^
23s
1100 ^ ^ ^ ^ ^ ^ ^ ^2 24 341 3 12 13, , , , , , ,r s s s s s s s ^
r
1101 ^ ^ ^24 3423 , ,s s s ^
34s
1110 ^ ^ ^ ^ ^343 4 14 13, , , ,s s s s s ^
3s
1111 ^ ^ ^ ^344 14 23, , ,s s s s ^
4s
Tabla VIII.7.- Tabla resumen para cada JP

xvi
ANÁLISIS DE RESULTADOS
n vista de las bondades de la teoría estudiada en el presente trabajo y basándose en
los resultados numéricos y análisis paramétricos obtenidos y presentados en el
Anexo I (Ejemplos de aplicación) es posible fundamentar lo siguiente:
La teoría de bloques, es un enfoque analítico (cimentado en principios básicos
de algebra vectorial y geometría analítica), propicio para encontrar zonas de
peligro, tanto en excavaciones superficiales como profundas.
La aplicación formal de los diversos teoremas, es relativamente fácil de
resolver, utilizando para esto, herramientas disponibles a cualquier estudiante
y/o profesionista, como son programas CAD, hojas de cálculo y es tal la
simplicidad de aplicación que se podría resolver en su totalidad un problema
utilizando únicamente papel, lápiz y una sencilla calculadora portátil.
Comparando los programas computacionales comerciales disponibles en la
actualidad, se obtiene nula discrepancia en los resultados; sin embargo se
observa que no todos los programas comerciales pueden realizar análisis de
cuña clave en taludes en roca con tres o más conjuntos de discontinuidades
persistentes, a lo más que pueden hacer, es un análisis pseudo estadístico para
encontrar la combinación de discontinuidades más desfavorable.
E

xvii
CONCLUSIONES
e realizó un gran esfuerzo de recopilación de información, análisis numérico e
interpretación que culmina en un material inédito de consulta, que puede ser de gran
utilidad tanto para la enseñanza de la teoría de bloque como para la actualización o
consulta del ingeniero especialista en mecánica de rocas.
Se logro crear una aportación bibliográfica referente al tema, pero más importante en
idioma español, con lo cual el autor espera sea de utilidad para el interesado.
Se demostró mediante un sin número de ejemplos prácticos, la facilidad con la que es
posible realizar análisis completos de estabilidad estructural, tanto en excavaciones
subterráneas como superficiales.
S
xviii
RECOMENDACIONES
l estado del arte referente a la teoría de bloques, se ha enfocado principalmente en
minimizar la cantidad de suposiciones teóricas existentes en la presentación original
de la teoría, en especial las enfocadas al número y maneras de fallas, cómo se afirmó
detalladamente en la sección denominada marco teórico.
Se sugiere que próximos estudios referentes al tema, se orienten a los nuevos enfoques
analíticos de diseño, como los que se exponen en:
Matthew, M., & Goodman, R. E. (Diciembre, 1996). Vector Analysis of Keyblock
Rotations. Journal of Geotechnical Engineering , Vol. 122 (Núm. 12), 976-987.
E

BIBLIOGRAFÍA
1. Dips, Graphical and Statistical Analysis of Orientation Data. Rocscience Inc.
Toronto, Ontario, Canadá. (1998). Versión 5.0 .
2. Garrido Uribe, J. L. (1998). Apuntes del curso Introducción a la teoría de bloques
(SMMR). Ciudad de México.
Goodman, R. E., & Shi, G. H. (1985). Block theory and its application to rock
engineering. London: Prentice Hall.
3. Goodman, R. E., & Shi, G. H. (1986). The Application of Block Theory to the
Design of Rock Bolt Supports for Tunnels. Felsbau 5 (no. 2) , pp. 79–86.
4. Goodman, R. E., & Shi, H. G. (1986). The application of block theory to the
design of rock bolt supports for tunnels. Salzvurg, Austria: 35th Geomechanics
colloquy.
5. Hatzor, Y., & Goodman, R. E. (1993). Determination of the ‘Design Block’ for
Tunnel Supports in Highly Jointed Rock. Comprehensive Rock Engineering , Vol. 2,
pp. 263-292.
6. Hoek, E., & Bray, J. (1977). Rock Slope Engineering. The Institute of Mining and
Metallurgy.
7. Lugo Ibarra, T. Análisis estructural para la definición de bloques y cuñas en la
excavación de la casa de máquinas del P.H. Aguamilpa. Comisión Federal de
Electricidad, Geología.
8. Luis, G. U. (1993). Análisis geológico para determinar la orientación de la obra
subterránea de generación del proyecto. Informe VI-LP-10, GEIC - CFE,
Departamento de Geología.
9. Marshak, S., & Mitra, G. (April 4, 1988). Basic Methods of Structural Geology.
Prentice Hall.
10. Matthew, M., & Goodman, R. E. (Diciembre, 1996). Vector Analysis of Keyblock
Rotations. Journal of Geotechnical Engineering , Vol. 122 (Núm. 12), 976-987.
11. Phillips, F. C. (1971). The Use of Stereographic Projection in Structural Geology
(3era ed.). London: Hodder & Stoughton Educational.
12. Priest, S. D. (April 1985). Hemispherical projection methods in rock mechanics.
London: George Allen & Unwin.
xix

13. PT Computational Workshop. iVec Module. Vector Analysis of Geomechanics
and Engineering Design Problems. (1998). Versión 1.0 .
14. Ragan Donald, M. (2009). Structural Geology. An Introduction to Geometrical
Techniques (2da ed.). John Wiley & Sons.
15. Sakellariou, M. G., & Kozanis, S. (Versión 2006). Stereographic Projection of
Joints. School of Surveying Engineering, Laboratory of Structural Mechanics
(www.survey.ntua.gr).
16. Shi, H. G., & Goodman, R. E. (1989). The Key blocks of unrolled joint traces in
developed maps of tunnel walls. International Journal for Numerical and Analytical
Methods in Geomechanics. , Vol. 13, pág.1313.
17. Silva Romo, G., Mendoza Rosales, C., & Castro, A. (2003). (2003) Dispositivo
para Reafirmar la Comprensión de la Proyección Estereográfica (falsilla o red
estereográfica de Wulff). Ingeniería Investigación y Tecnología , IV (Abril - Junio),
101 - 107.
18. Unwedge, Rocscience Inc. Toronto, Ontario, Canadá. (1998). Versión 3.0 .
xx

xxi
Anexo I
Ejemplos De Aplicación
Persigue metas lo suficientemente pequeñas para que las puedas alcanzar,
pero lo bastante grandes para que valgan la pena.
Desconocido
A. DISEÑO DE TALUD
El presente ejemplo es la continuación del ejemplo presentado en la sección de diseño de
excavaciones superficiales (capítulo V), donde únicamente se encontró la lista de
potenciales cuñas claves (ver figura A.1); en el presente apartado se analizará y resolverá lo
referente al análisis cinemático y de estabilidad.
Planos Echado α
Dirección del Echado β
Ángulo de
Fricción
1 75 80 30
2 65 330 20
3 40 30 35
4 10 270 25
5 60 0 N/A
Tabla A.1.- Sistema de discontinuidades y superficies libres
Análisis de Finitud y Removilidad
Realizando lo necesario para encontrar los bloques removibles, ver capítulo V, se obtiene la
siguiente lista de bloques:
Bloques Infinitos
1111 0110 0100 1011
0111 1010 0000 0101
1110 1100 1000
Bloques Constreñidos ( JP )
0010 1101y
Bloques Finitos y Removibles ( JP y JP SP )
0011, 1001 y 0001
Tabla A.2.- Códigos de bloques infinitos, constreñidos y finitos/removibles
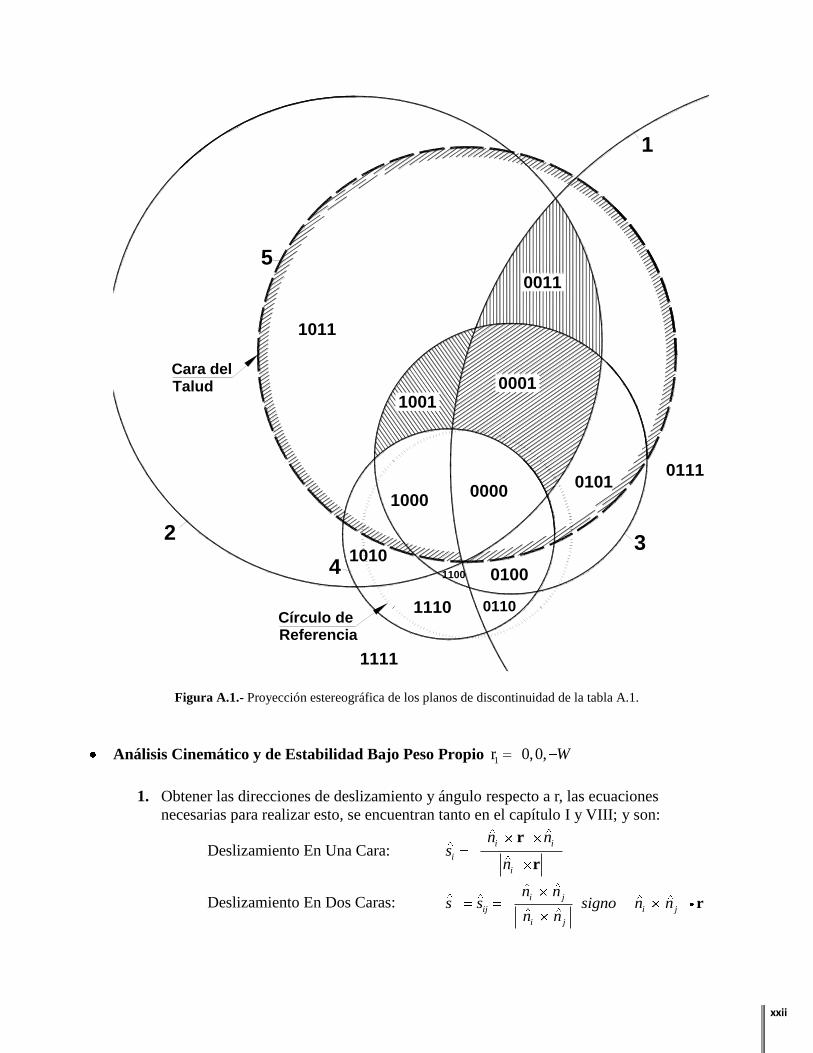
xxii
ReferenciaCírculo de
4
1
23
Cara delTalud
5
01110101
0001
0011
1011
1001
1000
1010
1110 0110
0100
1111
0000
1100
Figura A.1.- Proyección estereográfica de los planos de discontinuidad de la tabla A.1.
Análisis Cinemático y de Estabilidad Bajo Peso Propio 1r 0,0, W
1. Obtener las direcciones de deslizamiento y ángulo respecto a r, las ecuaciones
necesarias para realizar esto, se encuentran tanto en el capítulo I y VIII; y son:
Deslizamiento En Una Cara: i i
i
i
n ns
n
r
r
Deslizamiento En Dos Caras: i j
ij i j
i j
n ns s signo n n
n nr

xxiii
Ángulo de la Dirección de Deslizamiento:
1 2 1 2 1 2
2 2 2 2 2 2
1 1 1 2 2 2
cosi j
i j
n n X X YY Z Z
n n X Y Z X Y Z
Realizando para cada discontinuidad o par de discontinuidades, se obtienen las
siguientes direcciones de deslizamiento, así como su ángulo respecto a la resultante r.
r1 = (0,0,-1) X Y Z r
r 0.0000 0.0000 -1.0000 --------
s1 0.2549 0.0449 -0.9659 15.00
s2 -0.2113 0.3660 -0.9063 25.00
s3 0.3830 0.6634 -0.6428 50.00
s4 -0.9848 0.0000 -0.1736 80.00
s12
0.1347 0.5289 -0.8379 33.08
s13
0.0194 0.8049 -0.5931 53.62
s14
-0.1659 0.9857 -0.0292 88.32
s23
0.4642 0.6125 -0.6398 50.22
s24
-0.8895 -0.4291 -0.1568 80.98
s34
-0.7662 0.6283 -0.1351 82.24 Tabla A.3.- Valores de los vectores de deslizamiento
2. Para cada JP, calcular que direcciones de deslizamiento están contenidas en el JP
Como se mostró en el capítulo I, referente a manipulaciones vectoriales, un JP se
puede representar matemáticamente mediante un sistema de desigualdades; y una
dirección de deslizamiento corresponde a un JP, sólo si también satisface a todas las
desigualdades, cómo se muestra a continuación:
Los bloques finitos y removibles encontrados en el análisis de finitud y removilidad son:
0001, 0011 y 1001
Cómo únicamente estos bloques han demostrado que merecen un análisis de
estabilidad, éste se realizará de la siguiente manera:

xxiv
Para el JP 0001: El sistema de desigualdades que representa a este JP es:
0AX BY CZ ó
0.9513 0.1677 0.2588 0
0.4532 0.7849 0.4226 0
0.3214 0.5567 0.7660 0
0.1736 0 0.9848 0
X Y Z
X Y Z
X Y Z
X Y Z
Las incógnitas X, Y, Z, son los componentes de los vectores de deslizamiento
unitarios posibles, tanto en un plano o en dos, los cuales ya han sido obtenidos con
anterioridad.
Los valores A, B y C, son los vectores unitarios de los planos des discontinuidad
que se obtienen mediante:
( , , ) sen sen sen cos cosn A B C A B C
X Y Z
1n 0.9513 0.1677 0.2588
2n -0.4532 0.7849 0.4226
3n 0.3214 0.5567 0.7660
4n -0.1736 0.0000 0.9848
Tabla A.4.- Vectores unitarios para los planos de discontinuidad
Sustituyendo los valores de las direcciones de deslizamiento, una por una, en la
desigualdad que representa al JP 0001, obtendremos lo siguiente:
Sustituyendo a s1, tenemos:
0.9513 0.2549 0.1677 0.0449 0.2588 0.9659 0
0.4532 0.2549 0.7849 0.0449 0.4226 0.9659 0.4884
0.3214 0.2549 0.5567 0.0449 0.7660 0.9659 0.6330
0.1736 0.2549 0 0.0449 0.9848 0.9659 0.9
SI CUMPLE
NO CUMPLE
NO CUMPLE
950 SI CUMPLE
Debido a que la dirección de deslizamiento s1, no cumple con todas las
desigualdades, la dirección de deslizamiento s1, no corresponde al JP 0001.
Realizando lo anterior con cada una de las direcciones de deslizamiento, de la tabla
A.3, es posible realizar una tabla como la siguiente:

xxv
JP 0001 0011 1001 r
r No No No -----------
s1 No No No 15.00
s2 No No No 25.00
s3 SI SI No 50.00
s4 No No No 80.00
s12 No SI No 33.08
s13 SI SI SI 53.62
s14 SI No SI 88.32
s23 SI SI No 50.22
s24 No No No 80.98
s34 No No SI 82.24
No: La dirección de deslizamiento no cumple con el sistema de desigualdades correspondiente al JP analizado
SI: La dirección de deslizamiento si cumple con el sistema de desigualdades correspondiente al JP analizado
Tabla A.5.- Direcciones de deslizamiento que satisfacen a los sistemas
de desigualdades para cada JP
La tabla A.5, se interpreta como sigue:
Para un JP dado (0001, 0011 y 1001) se pueden tener varias direcciones de
deslizamiento que satisfagan el sistema de desigualdades correspondiente a cada JP
analizado; cuando esto suceda, la dirección de deslizamiento que rige a dicha
potencial cuña clave, será la que tenga el menor ángulo respecto a la resultante
analizada r.
Como ejemplo para el JP 0001, tiene como posibles direcciones de deslizamiento a
s3, s13, s14 y s23; si se observa el menor ángulo respecto a r, lo hace s3, es decir la
potencia cuña clave formada por el JP 0001, tendrá como dirección de
deslizamiento a s3, es decir, se deslizará en el plano 3. En la siguiente tabla se
presenta las direcciones de deslizamiento para cada JP analizado:
JP
Dirección de
Deslizamiento
Contenida en el JP
Modo de
Deslizamiento
0001 s3, s
13, s
14, s
23 s
3
0011 s3, s
12, s
13, s
23 s
12
1001 s13
, s14
, s34 s
13
Tabla A.6.- Modos de Deslizamiento
El resultado del anterior análisis de modo, nos lleva a la conclusión de que todos los
bloques para este talud no pertenecen a la categoría de bloques estables, es decir, es
necesario realizar un análisis de estabilidad para saber si son potenciales cuñas
claves o verdaderas cuñas claves.

xxvi
3. Finalmente se realiza un análisis de estabilidad, el cual necesariamente, requiere de
las características mecánicas de las discontinuidades, en este caso, dichas
propiedades se encuentran en la tabla A.1.
Cómo se menciona en el capítulo VIII, es posible calcular las fuerzas de
deslizamiento para tres casos típicos:
Desprendimiento
Deslizamiento en 1 cara
Deslizamiento a través de 2 caras
Las expresiones para los anteriores casos son:
Desprendimiento: r
s rr
, cuando la gravedad es la única fuerza
involucrada, la fuerza es igual a la masa del bloque.
Deslizamiento en 1 cara: tani i iF n nr r
Deslizamiento en 2 caras:
2
1tan tani j i j j i j i i i j j
i j
F n n n n n n n n n nn n
r r r
Analizando cada una de las posibilidades, es posible llegar a la siguiente tabla:
Plano de
Deslizamiento
Dirección de
Deslizamiento
Contenida en el JP Ninguno 1.00 W
1 0.82 W
2 0.75 W
3 0.11 W
4 -0.29 W
1, 2 0.46 W
1, 3 -0.25 W
1, 4 -0.52 W
2, 3 0.04 W
2, 4 -0.35 W
3, 4 -0.38 W Tabla A.7.- Fuerzas

xxvii
Aunque no era necesario analizar cada una de las posibilidades de deslizamiento, se
realizó con una finalidad didáctica; en nuestro cado, bastaba con analizar las
direcciones de deslizamiento s3, s12 y s13, los cuales corresponden a las potenciales
cuñas claves 0001, 0011 y 1001, respectivamente.
De la tabla anterior, se podrá ver que algunas fuerzas de deslizamiento son
negativas, esto significa, que si existiera un bloque con esa dirección de
deslizamiento, esté sería estable por la fricción generada por sus caras, es decir sería
una potencial cuña clave.
De la tabla A.7, es posible resumir lo siguiente:
JP Modo de
Deslizamiento F V
m3
W tn
Tipo De
Bloque Estabilidad
0001 s3 0.11 W 25.96 69 Cuña Clave Inestable
0011 s12
0.46 W 99.55 264 Cuña Clave Inestable
1001 s
13 -0.25 W 29.90 79
Potencial
Cuña Clave
Estable con fricción
Tabla A.8.- Modos de deslizamiento (γ = 2.65 tn/m3)
Resumiendo, los bloques generados por los códigos 0001 y 0011, son verdaderas
cuñas claves, las cuales deberán de tener un sistema de soporte artificial, que
soporten el peso, mostrado en la tabla A.8. Teóricamente el bloque 1001, es un
bloque estable por las características de fricción de las discontinuidades, en un caso
real, sería pertinente, colocar un sistema de anclaje, no tan detallado como las cuñas
claves.

xxviii
B. DISEÑO DE TÚNEL
El presente ejemplo de aplicación trata de un túnel utilizado como obra de desvío en el
anteproyecto de la presa hidroeléctrica La Yesca, localizada en los estados de Jalisco y
Nayarit (Figura A.2).
Figura A.2.- Plano de proyecto para las obras de desvío
La finalidad del presenta análisis, tiene como único objetivo el mostrar paso a paso la
aplicación de la teoría de bloque a un túnel, las conclusiones presentadas son parciales,
debido a la necesidad de una mayor exactitud en los datos de entrada y del mapeo
geológico.
Los túneles de desvío tienen una cobertura de roca de espesor variable, en los portales de
50 a 60 m y en la parte central de 135 a 150 m, por lo general, estas estructuras se
excavarán en rocas de mala a regular calidad, con algunas zonas de buena calidad, hacia los
portales y tramos intermedios.
Con los datos estructurales de las principales discontinuidades obtenidos sobre la traza de
los túneles de desvío, se determinaron los sistemas de fallas y fracturas y se llevó a cabo el
análisis estereográfico para evaluar las condiciones preliminares de estabilidad de las
excavaciones, adicionalmente se determinaron los sistemas de fallas y fracturas que
aparecen en la figura A.3; sus características más importantes se sintetizan en la tabla A.9.

xxix
1020
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
27
0280
290
300
310
320
330
340350
0
S
W E
N
Sestra
Ff3
Ff2
Ff1
EJE SALIDA
DE TÚNELES
EJE SALIDA
DE TÚNELES
Ff1 = N 31º W / 64ºNE (064 / 059)
Ff2 = N 48º E / 79ºSE (079 / 138)
Ff3 = N 78º E / 57ºNW (057 / 348)
Sestra = N 35º W / 46ºSW (046 / 235)
Echado Dir. Echado/
Figura A.3.- Representación estereográfica de los sistemas estructurales, determinados
sobre la traza de los túneles de desvió (hemisferio inferior)
Las dimensiones y geometría de la sección transversal del túnel, es el siguiente:
14
8.26
5.74
4.1414
Figura A.4.- Sección transversal tipo del túnel
Debido a que en el informe geológico, no se presenta una interpretación geológica por
cadenamiento, se interpretará que a lo largo de los túneles de desvío se puede presentar la
formación de cuñas potencialmente inestables en la bóveda, por medio de la intersección
entre los planos de la seudoestratificación y los tres sistemas de fracturamiento.

xxx
Sistema
Continuidad
de la traza
(m)
Frecuencia
por metro
lineal
Rugosidad y
abertura en cm (ab)
de los planos
Observaciones
Ff1 = N 31º W / 64ºNE 1.4 a 2.00 1 a 3 fracturas Rugosas –Onduladas
Ab= 2.00 La mayoría se encuentran
cerradas
Ff2 = N 48º E / 79ºSE 1.00 a 8.00 2 a 5 fracturas Rugosas –Onduladas
Ab= 0.50 a 1.00 Algunas de las fracturas
presentan arcilla
Ff3 = N 78º E / 57ºNW 0.50 a 7.00 2 a 4 fracturas Rugosas –Onduladas
Ab= 0.50 a 1.00 Algunas de las fracturas
presentan arcilla
Sestra = N 35º W / 46ºSW 25.00 2 a 4 fracturas Rugosas –Onduladas Ab= Abiertas 0.50 a 1.00
Se cierran a profundidad
Tabla A.9.- Características geológicas de las discontinuidades en la zona de túneles
Análisis de Finitud y Removilidad
Con los datos presentados en la tabla A.10, es posible realizar la proyección estereográfica
de estos (hemisferio superior) y encontrar los códigos de cada JP. (Figura A.5).
Planos Echado α
Dirección
del Echado β
Ángulo de
Fricción* Cx Cy r
1 064 059 36 1.75745 1.05598 2.28117
2 079 138 30 3.44238 -3.82315 5.24084
3 057 348 28 -0.320156 1.50622 1.83608
4 046 235 38 -0.848257 -0.593956 1.43956 *: Los ángulos de fricción son estimaciones
Tabla A.10.- Sistema de discontinuidades
1
2
3
Sestra
0011
Sestra = 4
0111
0101
1101
1100
1110
1010
1011
11110100
0000
0010
1000
0001
A
A'
Figura A.5.- Proyección estereográfica (hemisferio superior) e identificación de los JP´s.

xxxi
El túnel tipo, tiene un echado/dirección del echado de: 000 / 069 ; las proyecciones
ortográficas del vector a como de a se obtienen de la siguiente manera:
, cos , cos
0.9336,0.3584,0 0.9336, 0.3584,0
a sen sen sen
a a
La proyección ortográfica de a como de a , se obtienen mediante:
2 2 2 2 2 2o o
RX RyX Y
X Y Z Z X Y Z Z
2 2 22 2 2
2 2 2 2 2 2
1 0.93361 0.9336 0.9336
0.93360.9336 0.3584 0 00.9336 0.3584 0 0
1 0.3584 1 0.35840.3584 0.3584
0.9336 0.3584 0 0 0.9336 0.3584 0 0
XX
a a
Y Y
Las proyecciones se pueden ver en la figura A.4, y estas son:
0.9336,0.3584 0.9336, 0.3584A A
DETERMINACIÓN DEL ÁREA MÁXIMA REMOVIBLE MEDIANTE EL USO
DE LAS PROYECCIONES ESTEREOGRÁFICAS
Se explicará a detalle cómo obtener el área máxima removible del JP 0000, de los demás
JP, se mostrará la figura final.
JP 0000
Se obtienen los planos límites envolventes (líneas discontinuas) los cuales deben unir a las
proyecciones ortográficas (A y –A) con alguna de las esquinas del JP analizado, recuérdese
que para cada JP existen únicamente dos planos envolventes y que no cortan o atraviesan
al JP analizado. Se muestran los cuatro posibles planos envolventes para este JP:

xxxii
1
2
3
Sestra
0000
A
A'= 4
El plano envolvente
corta al JP
1
2
3
Sestra
0000
A
A'
El plano envolvente no
corta o atraviesa al JP
por lo que este plano
es válido
1
2
3
Sestra
0000
A
A'
El plano envolvente no
corta o atraviesa al JP
por lo que este plano
es válido
1
2
3
Sestra
0000
A
A' El plano envolvente
corta al JP
Figura A.6.- Planos límites envolventes válidos como no válidos para el JP 0000
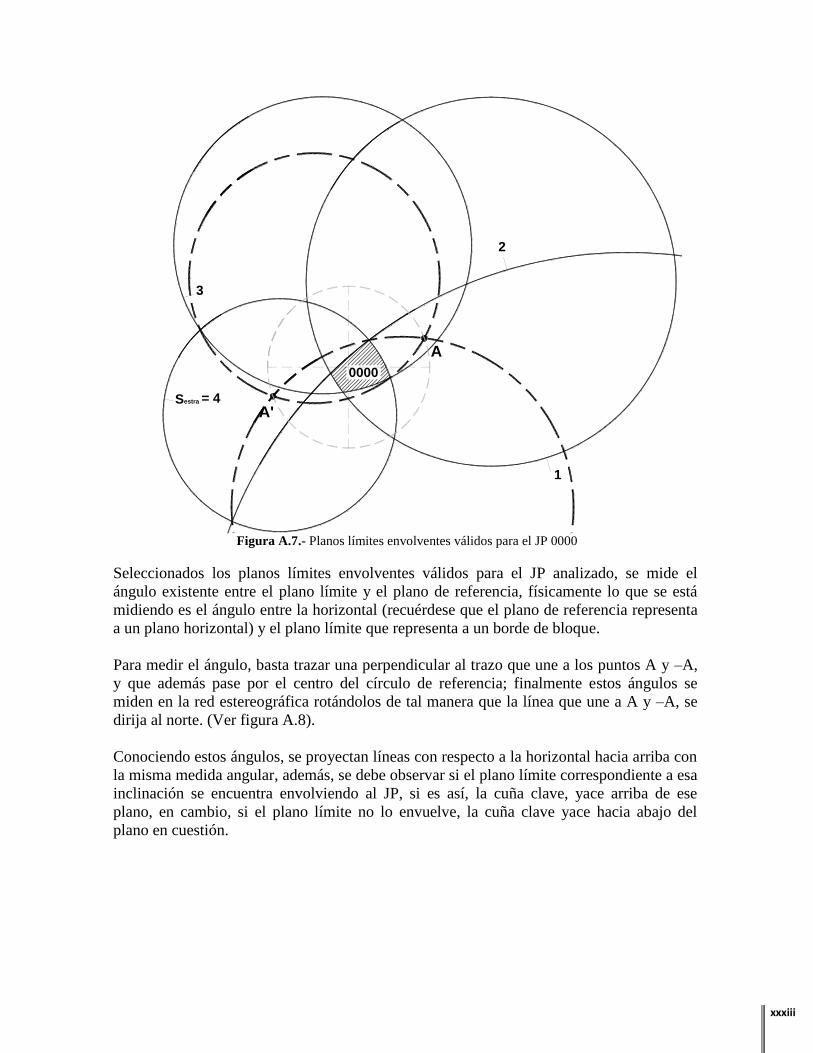
xxxiii
1
2
3
Sestra = 4
0000
A
A'
Figura A.7.- Planos límites envolventes válidos para el JP 0000
Seleccionados los planos límites envolventes válidos para el JP analizado, se mide el
ángulo existente entre el plano límite y el plano de referencia, físicamente lo que se está
midiendo es el ángulo entre la horizontal (recuérdese que el plano de referencia representa
a un plano horizontal) y el plano límite que representa a un borde de bloque.
Para medir el ángulo, basta trazar una perpendicular al trazo que une a los puntos A y –A,
y que además pase por el centro del círculo de referencia; finalmente estos ángulos se
miden en la red estereográfica rotándolos de tal manera que la línea que une a A y –A, se
dirija al norte. (Ver figura A.8).
Conociendo estos ángulos, se proyectan líneas con respecto a la horizontal hacia arriba con
la misma medida angular, además, se debe observar si el plano límite correspondiente a esa
inclinación se encuentra envolviendo al JP, si es así, la cuña clave, yace arriba de ese
plano, en cambio, si el plano límite no lo envuelve, la cuña clave yace hacia abajo del
plano en cuestión.
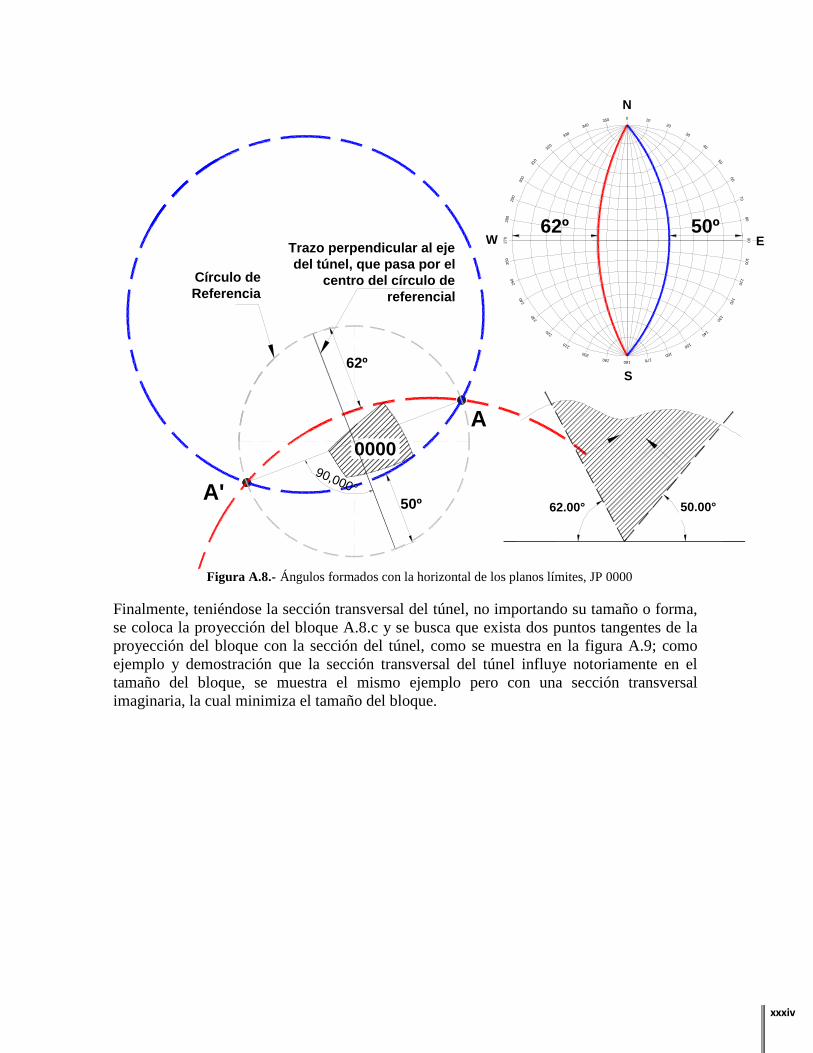
xxxiv
0000
A
A'
Trazo perpendicular al eje
del túnel, que pasa por el
centro del círculo de
referencial
62º
Círculo de
Referencia
50º
1020
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
27
0280
290
300
310
320
330
340350 0
S
W E
N
62º 50º
90,000°
50.00°62.00°
Figura A.8.- Ángulos formados con la horizontal de los planos límites, JP 0000
Finalmente, teniéndose la sección transversal del túnel, no importando su tamaño o forma,
se coloca la proyección del bloque A.8.c y se busca que exista dos puntos tangentes de la
proyección del bloque con la sección del túnel, como se muestra en la figura A.9; como
ejemplo y demostración que la sección transversal del túnel influye notoriamente en el
tamaño del bloque, se muestra el mismo ejemplo pero con una sección transversal
imaginaria, la cual minimiza el tamaño del bloque.

xxxv
0000
Punto de tangencia
0000
Figura A.9.- Izquierda: Bloque formado para el JP 0000, Derecha: ejemplo de cómo la
sección transversal del túnel influyen en el tamaño de un bloque
JP 0001
Como la proyección ortográfica del vector al eje del túnel, ^a yace en este JP y por lo tanto
no existe una cuña clave. (Ver figura A.4).
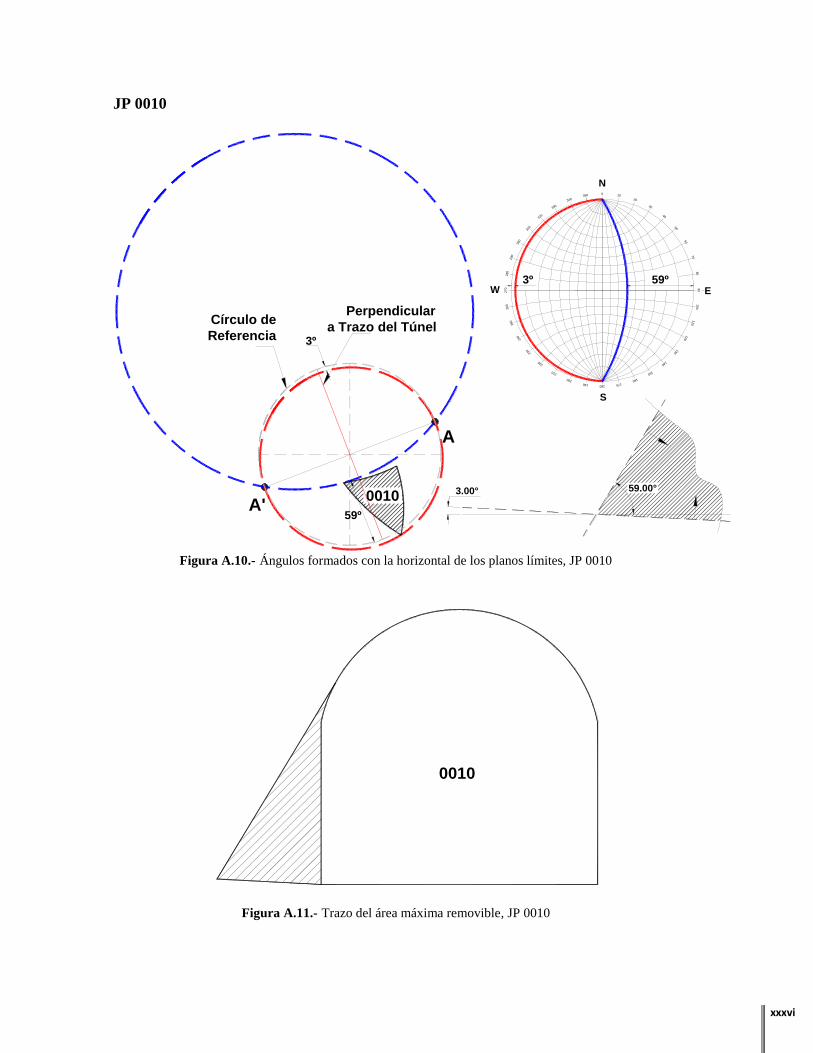
xxxvi
JP 0010
0010
A
A'
3º
Círculo de
Referencia
59º
1020
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0
S
W E
N
3º 59º
Perpendicular
a Trazo del Túnel
3.00° 59.00°
Figura A.10.- Ángulos formados con la horizontal de los planos límites, JP 0010
0010
Figura A.11.- Trazo del área máxima removible, JP 0010

xxxvii
JP 0011
0011A
A'
Círculo de
Referencia
50º
112º
10
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0
S
W E
N
112º 50º
Perpendicular
a Trazo del Túnel
112.00°
50.00°
Figura A.12.- Ángulos formados con la horizontal de los planos límites, JP 0011
0011
Figura A.13.- Trazo del área máxima removible, JP 0011

xxxviii
JP 0100
0100A
A'
3º
Círculo de
Referencia10
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0
S
W E
N
3º 91º
91º
3.00°
91.00°
Perpendicular
a Trazo del Túnel
Figura A.14.- Ángulos formados con la horizontal de los planos límites, JP 0100
0100
Figura A.15.- Trazo del área máxima removible, JP 0100
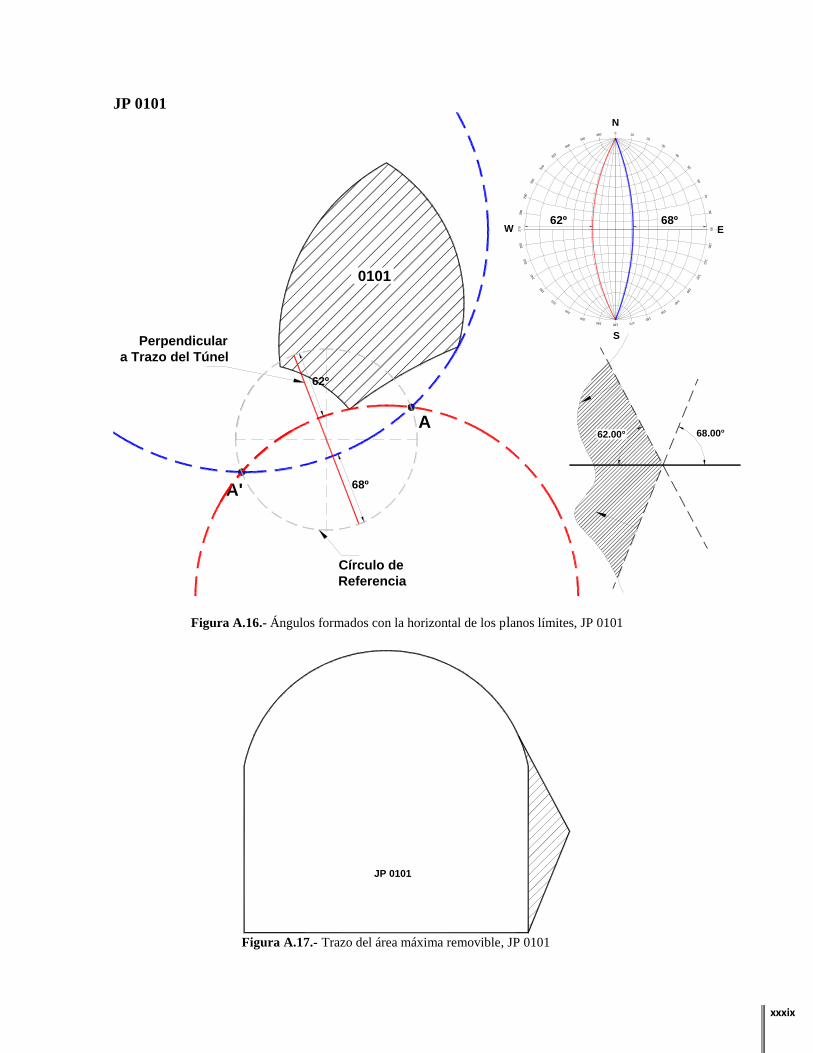
xxxix
JP 0101
0101
A
A'
Círculo de
Referencia
62º
68º
1020
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
27
0280
290
300
310
320
330
340350 0
S
W E
N
62º 68º
62.00° 68.00°
Perpendicular
a Trazo del Túnel
Figura A.16.- Ángulos formados con la horizontal de los planos límites, JP 0101
JP 0101
Figura A.17.- Trazo del área máxima removible, JP 0101
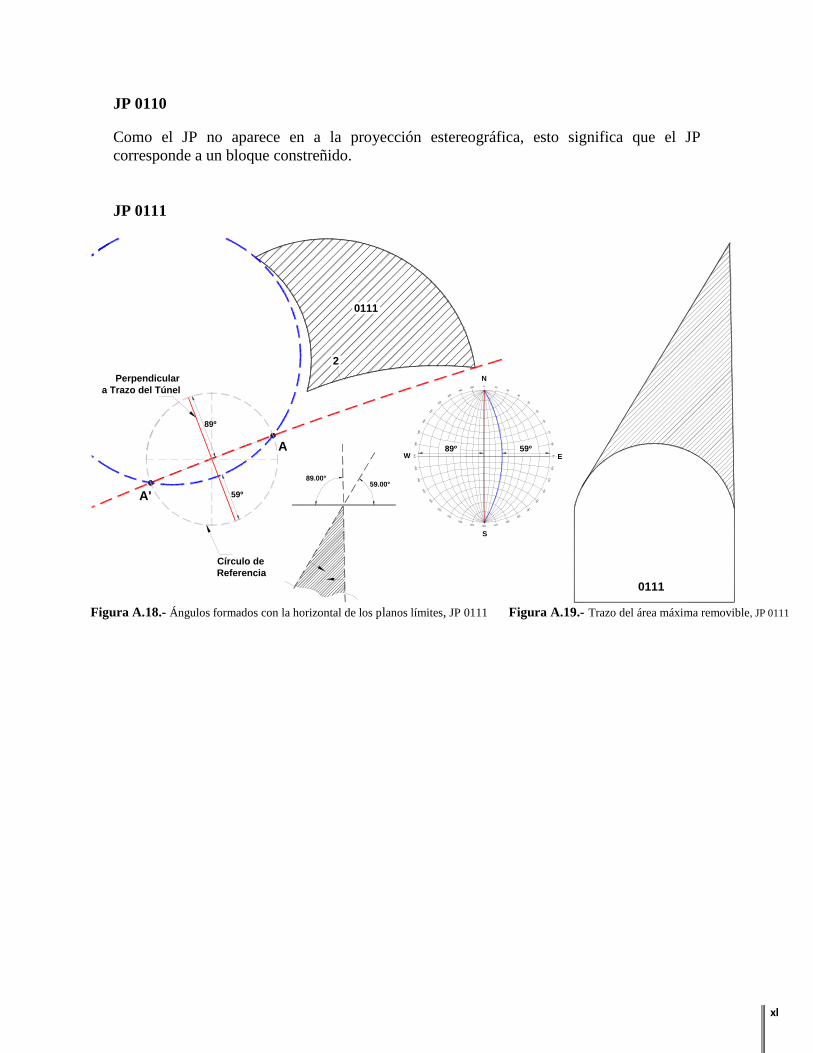
xl
JP 0110
Como el JP no aparece en a la proyección estereográfica, esto significa que el JP
corresponde a un bloque constreñido.
JP 0111
2
0111
A
A'
Círculo de
Referencia
59º
1020
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0
S
W E
N
89º
89º 59º
89.00°59.00°
Perpendicular
a Trazo del Túnel
0111
Figura A.18.- Ángulos formados con la horizontal de los planos límites, JP 0111 Figura A.19.- Trazo del área máxima removible, JP 0111
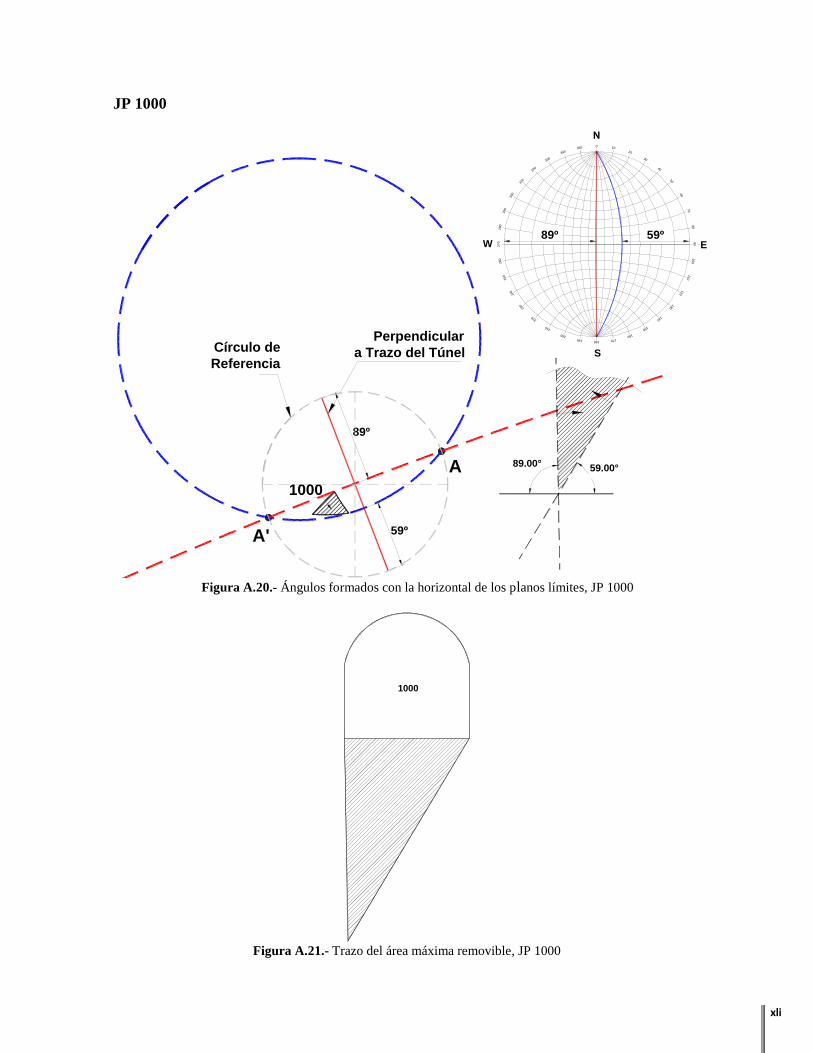
xli
JP 1000
1000
A
A'
89º
Círculo de
Referencia
59º
10
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0
S
W E89º 59º
Perpendicular
a Trazo del Túnel
89.00° 59.00°
Figura A.20.- Ángulos formados con la horizontal de los planos límites, JP 1000
1000
Figura A.21.- Trazo del área máxima removible, JP 1000

xlii
JP 1001
Como el JP no aparece en a la proyección estereográfica, esto significa que el JP
corresponde a un bloque constreñido.
JP 1010
1010
A
A'
Túnel
61º
Círculo de
Referencia
1020
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0
S
W E
N
61º 68º
68º
61.00° 68.00°
Figura A.22.- Ángulos formados con la horizontal de los planos límites, JP 1010
1010
Figura A.23.- Trazo del área máxima removible, JP 1010

xliii
JP 1011
1011
A
A'
1020
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0
S
W E
N
3º
91º
Círculo de
Referencia
3º 91º
Perpendicular
a Trazo del Túnel
3.00°
91.08°
Figura A.24.- Ángulos formados con la horizontal de los planos límites, JP 1011
1011
Figura A.25.- Trazo del área máxima removible, JP 1011

xliv
JP 1100
1100A
A'
Círculo de
Referencia
112º
50º
1020
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
27
0280
290
300
310
320
330
340350 0
S
W E
N
112º 50º
112.00°
Perpendicular
a Trazo del Túnel
Figura A.26.- Ángulos formados con la horizontal de los planos límites, JP 1100
NO TIENE CUÑA CLAVE DEBIDO
A LA FORMA DEL TÚNEL
Figura A.27.- Trazo del área máxima removible, JP 1100
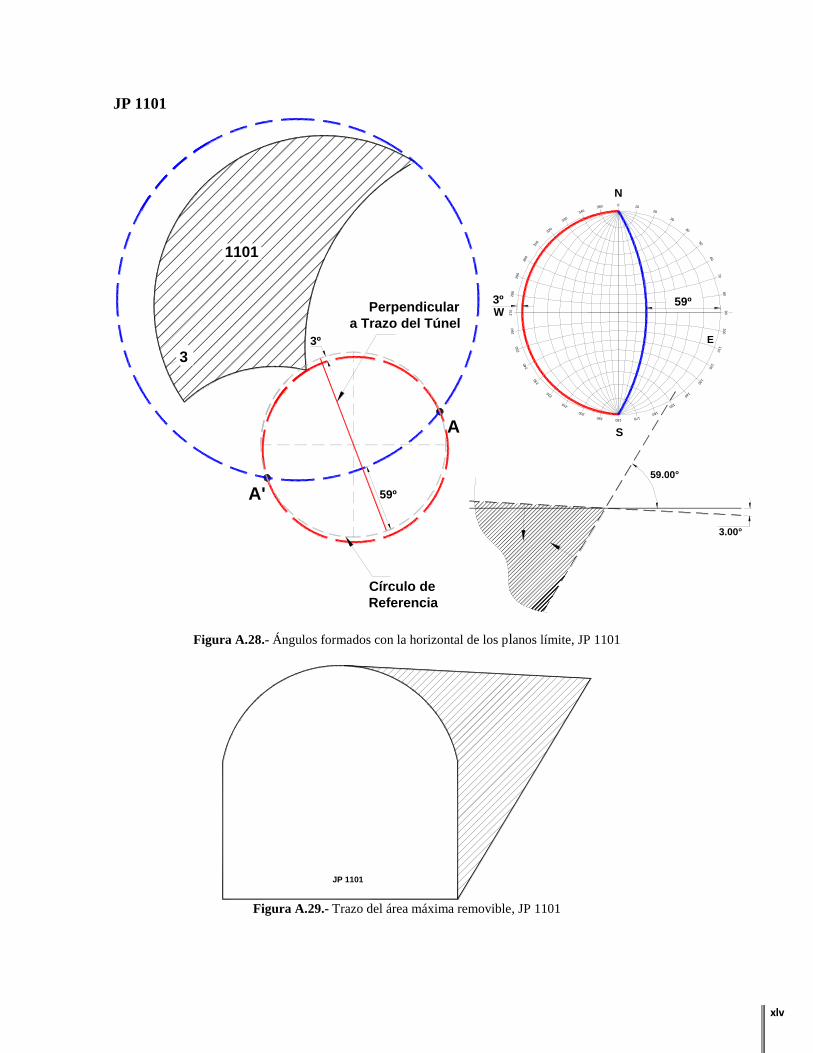
xlv
JP 1101
1020
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
27
0280
290
300
310
320
330
340350 0
S
W
E
N
59º3º
3
1101
A
A'
Círculo de
Referencia
3º
59º
59.00°
3.00°
Perpendicular
a Trazo del Túnel
Figura A.28.- Ángulos formados con la horizontal de los planos límite, JP 1101
JP 1101
Figura A.29.- Trazo del área máxima removible, JP 1101

xlvi
JP 1110
Como la proyección ortográfica del vector al eje del túnel, ^a yace en este JP y por lo
tanto no existe una cuña clave. (Ver figura A.4).
JP 1111
1111A
A'
62º
Círculo de
Referencia
1020
30
40
50
60
70
80
90
100
110
120
130
140
150
160170180190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340350 0
S
W E
N
62º 50º
50.00°62.00°
Perpendicular
a Trazo del Túnel
Figura A.30.- Ángulos formados con la horizontal de los planos límites, JP 1111

xlvii
1111
Figura A.31.- Trazo del área máxima removible, JP 1111

xlviii
La siguiente figura A.32, presenta un resumen en la proyección estereográfica de los
bloques posibles.
1
2
3
Sestra
0111 0101
1101
1100
1110
1011
0100
0000
0010
1000
0001
A
A'
0011
1010
0010
1000
0000
0100
1111
Figura A.32.- Ángulos formados con la horizontal de los planos límites

xlix
Análisis Cinemático y de Estabilidad Bajo Peso Propio 1r 0,0, W
Al igual que el ejemplo del talud, sabiendo cuáles son los bloques finitos y removibles, es
posible hacer un análisis de modo y de estabilidad.
1. Direcciones de deslizamiento y ángulo respecto a r.
r1 = (0,0,-1) X Y Z r
r 0.0000 0.0000 -1.0000 --------
s1 0.3758 0.2258 -0.8988 26.00
s2 0.1277 -0.1418 -0.9816 11.00
s3 -0.1132 0.5327 -0.8387 33.00
s4 -0.5690 -0.3984 -0.7193 44.00
s12
0.4217 0.1456 -0.8950 26.50
s13
0.1229 0.5669 -0.8146 35.46
s14
0.5344 -0.8439 -0.0480 87.25
s23
0.6983 0.4930 -0.5190 58.74
s24
-0.4285 -0.5693 -0.7016 45.44
s34
-0.8028 0.2019 -0.5611 55.87 Tabla A.11.- Valores de los vectores de deslizamiento
2. A cada JP, calcular que dirección (es) de deslizamiento están contenidas en el JP.
Al igual que en el ejemplo del talud, un JP se puede representar matemáticamente
mediante un sistema de desigualdades; y para conocer si una dirección de
deslizamiento corresponde a un JP, lo único que se debe hacer es sustituir las
direcciones de deslizamiento en cada sistema de desigualdades, como se explica en
el ejemplo de los taludes y/o en el capítulo I.

l
Del análisis anterior se obtiene una tabla como la siguiente:
JP 0000 0010 0011 0100 0101 0111 1000 1010 1011 1100 1101 1111 r
r No No No No No No No No No No No SI -----------
s1 No No No No No SI No No No No No SI 26.00º
s2 No No No No No No No No SI No No SI 11.00º
s3 No No No No No No No No No No SI SI 33.00º
s4 No No No No No No No No No No No SI 44.00º
s12 No No SI No No SI No No SI No No SI 26.50º
s13 No No No No SI SI No No No No SI SI 35.46º
s14 No SI SI No No No No SI SI No No No 87.25º
s23 No No SI No SI SI No No No No No No 58.74º
s24 No No No No No No No SI SI No No SI 45.44º
s34 No No No No No No No No No SI SI SI 55.87º
No: La dirección de deslizamiento no cumple con el sistema de desigualdades correspondiente al JP analizado
SI: La dirección de deslizamiento si cumple con el sistema de desigualdades correspondiente al JP analizado
Tabla A.12.- Direcciones de deslizamiento que satisfacen a los sistemas
de desigualdades para cada JP
No se analizaron los bloques 0001 y 1110, debido a que la proyección ortográfica
del eje del túnel yace en la proyección estereográfica del JP, además se omitió el
análisis a los JP´s 0110 y 1001, debido a que estos bloques son constreñidos, es
decir no aparecen en la proyección estereográfica.
La tabla A.12, se interpreta como sigue:
Para un JP dado, se puede tener varias direcciones de deslizamiento que satisfagan
el sistema de desigualdades correspondiente a cada JP analizado; cuando esto
suceda, la dirección de deslizamiento que rige a dicha potencial cuña clave, será la
que tenga el menor ángulo respecto a la resultante analizada r.
En la siguiente tabla se presenta las direcciones de deslizamiento para cada JP
analizado:

li
JP Dirección de Deslizamiento
Contenida en el JP Modo de
Deslizamiento 0000 Ninguno Ninguno
0010 s14 s
14
0011 s12
, s14
, s23 s
12
0100 Ninguno Ninguno
0101 s13
, s23
s13
0111 s1, s
12, s
13, s
23 s
1
1000 Ninguno Ninguno
1010 s14
, s24
s24
1011 s2, s
12, s
14, s
24 s
2
1101 s3, s
13, s
34 s
3
1111 r, s1, s
2, s
3, s
4, s
12, s
13, s
24, s
34 r
Tabla A.13.- Modos de Deslizamiento
Del análisis de modo, realizado y resumido en la tabla A.13, se puede ver que
existen 3 bloques que no tiene ningún modo de deslizamiento, si se ve las áreas
máximas removibles de estos bloques, se dará cuenta que el bloque 0000, es un
bloque en el piso, por lo que no se puede deslizar bajo la acción gravitatoria, lo
mismo ocurre con los bloques 0100 y 1000; estos bloques aunque son finitos y
removibles, no son potenciales cuñas claves.
3. Finalmente se realiza un análisis de estabilidad. Las expresiones para calcular las
fuerzas de deslizamiento se muestran a continuación y son:
Desprendimiento: r
s rr
, cuando la gravedad es la única fuerza
involucrada, la fuerza es igual a la masa del bloque.
Deslizamiento en 1 cara: tani i iF n nr r
Deslizamiento en 2 caras:
2
1tan tani j i j j i j i i i j j
i j
F n n n n n n n n n nn n
r r r
Analizando cada una de las posibilidades, es posible llegar a la siguiente tabla:

lii
Plano de
Deslizamiento
Dirección de
Deslizamiento
Contenida en el JP Ninguno 1.00 W
1 0.58 W
2 0.87 W
3 0.55 W
4 0.18 W
1, 2 0.54 W
1, 3 0.42 W
1, 4 -1.25 W
2, 3 -0.52 W
2, 4 0.07 W
3, 4 -0.17 W Tabla A.14.- Fuerzas
Aunque no era necesario analizar cada una de las posibilidades de deslizamiento, se
realizó con una finalidad didáctica; en nuestro cado, bastaba con analizar las
direcciones de deslizamiento s14
, s12
, s13
, s1, s
24, s
2, s
34, s
3 y r los cuales
corresponden a las potenciales cuñas claves 0010, 0011, 0101, 0111, 1010, 1011,
1100, 1101 y 1111 respectivamente.
De la tabla anterior, se podrá ver que algunas fuerzas de deslizamiento son
negativas, esto significa, que si existiera un bloque con esa dirección de
deslizamiento, esté sería estable por la fricción generada por sus caras, es decir sería
una potencial cuña clave. De las tablas A.13 y A.14, es posible resumir lo siguiente:
JP Modo de
Deslizamiento F V
m3
W tn Tipo De Bloque Estabilidad
0010 s14
-1.25 W 72.29 195 Potencial Cuña Clave Estable con fricción
0011 s12
0.54 W 0.26 0.14 Cuña Clave Inestable
0101 s13
0.41 W 22.57 9.25 Cuña Clave Inestable
0111 s1 0.58 W 700.35 5603 Cuña Clave Inestable
1010 s24
0.07 W 20.97 1.50 Cuña Clave Inestable
1011 s2 0.87 W 16.92 14.72 Cuña Clave Inestable
1101 s3 0.55 W 254.32 139.90 Cuña Clave Inestable
1111 r 1.00 W 91.26 91.26 Cuña Clave Inestable
Tabla A.15.- Modos de deslizamiento (γ = 2.7 tn/m3)

liii
JP Proyección Ortográfica Figura
Tipo de
Bloque y
Estabilidad
0000 0000
Punto de tangencia
A.9
Bloque
removible y
estable
0001
Bloque infinito; el eje del túnel yace en la proyección
estereográfica del JP
0010 0010
A.11
Potencial
cuña clave y
estable por
fricción
0011
0011
A.13 Cuña clave,
inestable
0100 0100
A.15
Bloque
removible y
estable
0101
JP 0101
A.17 Cuña clave,
inestable
0110
Bloque constreñido, el JP está vacío, es decir no aparece
en la proyección estereográfica.
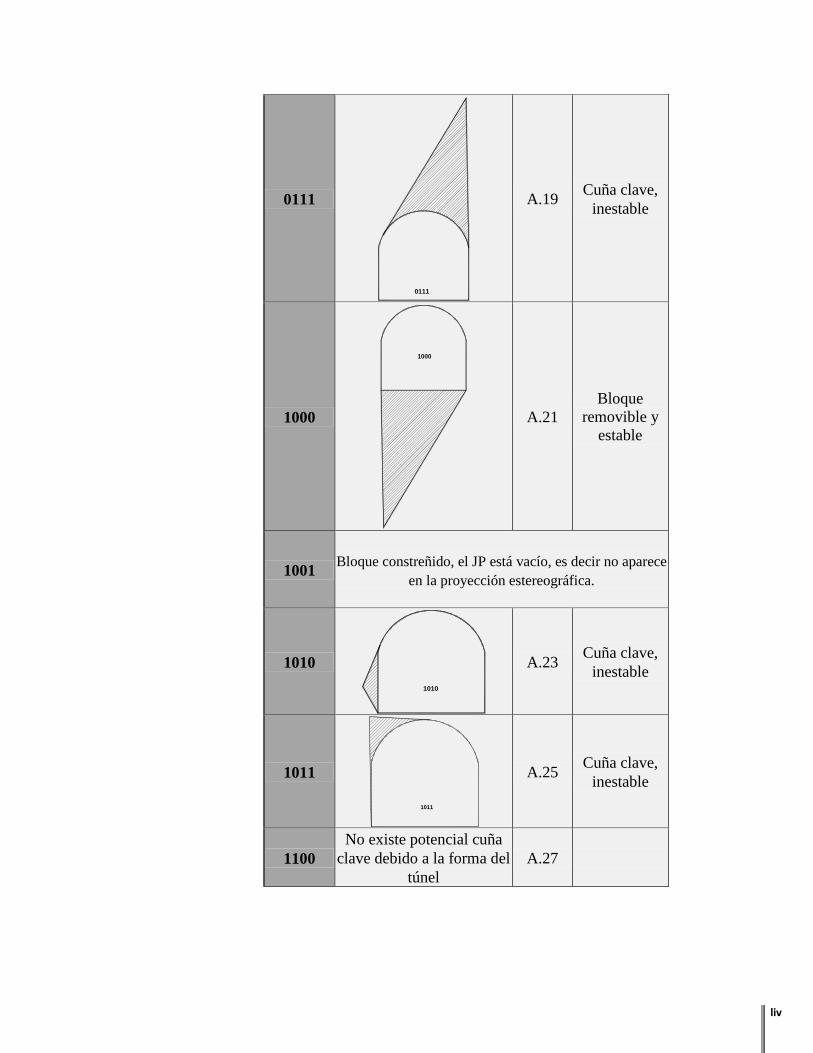
liv
0111
0111
A.19 Cuña clave,
inestable
1000
1000
A.21
Bloque
removible y
estable
1001
Bloque constreñido, el JP está vacío, es decir no aparece
en la proyección estereográfica.
1010
1010
A.23 Cuña clave,
inestable
1011
1011
A.25 Cuña clave,
inestable
1100
No existe potencial cuña
clave debido a la forma del
túnel
A.27

lv
1101
JP 1101
A.29 Cuña clave,
inestable
1110
Bloque infinito; el eje del túnel yace en la
proyección estereográfica del JP
1111
1111
A.31 Cuña clave,
inestable
Tabla A.16.- Resumen de tipos de bloques

ÍNDICE DE TABLAS
Tabla I.1 Datos geométricos de los planos de discontinuidades 24
Tabla I.2 Datos geométricos de los planos 28
Tabla II.1 Coordenadas de los grandes círculos 77
Tabla II.2 Coordenadas de los pequeños círculos 77
Tabla II.3 Datos de ejemplo 78
Tabla II.4 Radios y coordenadas de los grandes círculos 78
Tabla III.1 Clasificación de tipos de bloques 88
Tabla III.2 Ejemplo de aplicación 96
Tabla III.3 Ejemplo de aplicación 101
Tabla IV.1 Número de JB´s en función del número del conjunto de discontinuidades
repetidas 107
Tabla IV.2 Ejemplo de aplicación 108
Tabla IV.3 Resumen de procedimiento para encontrar JB´s con 2 conjuntos de
discontinuidades repetidos 111
Tabla IV.4 Combinaciones de JP´s con 3 o más conjuntos de discontinuidades repetidos 112
Tabla V.1 Sistema de discontinuidades y superficies libres 123
Tabla V.2 Resultados para distintos conjuntos de discontinuidades repetidos 130
Tabla V.3 Resultados 132
Tabla V.4 Resultados 133
Tabla V.5 Cosenos directores 135
Tabla V.6 Valores de i j
k i j kI signo n n n para los planos de la tabla V.1 136
Tabla V.7 Matriz de prueba (T) para el bloque 1 0 0 1 1 2BD 137
Tabla V.8 Resultados plano 1 138
Tabla V.9 Resultados planos 2, 3 y 4 138
Tabla V.10 Tabla resumen de combinaciones posibles 139
Tabla V.11 Echados y direcciones de echados de los planos considerados en el ejemplo 140
Tabla V.12 Resumen de resultados 147
Tabla V.13 Cosenos directores 147
Tabla V.14 Líneas de intersección , ,ij ij ij ijX Y ZI 148
Tabla V.15 Parámetros de los planos ijP conteniendo a ijI y 1,0,0S 149
Tabla V.16 Código de mapa especial correspondiente a cada JP crítico 156
Tabla V.17 JP y código de mapa correspondiente 157
Tabla V.18 Tabla resumen 159
lvi

Tabla VI.1 Discontinuidades y superficies de excavación de la cámara mostrada en la figura
VI.10 172
Tabla VI.2 Vectores “orientados hacia adentro” de las paredes 173
Tabla VI.3 Resumen de los bloques removibles para el ejemplo, considerando Techo, Piso,
Paredes, Bordes cóncavos y esquinas cóncavas. 182
Tabla VII.1 Número de bloques de diferentes tipos en túneles 192
Tabla VII.2 Datos de ejemplo 196
Tabla VII.3 Resumen de cuñas claves 219
Tabla VIII.1 Tabla de datos 227
Tabla VIII.2 Fuerza de deslizamiento neta 228
Tabla VIII.3 Vectores coordenados de los conjuntos de discontinuidades y direcciones de
deslizamiento para 0,0.8660,0.5000r 231
Tabla VIII.4 JP’s correspondientes a cada potencial modo de deslizamiento 235
Tabla VIII.5 Resumen de bloques removibles, modos de deslizamiento y tipo de bloque para
cada resultante analizada 249
Tabla VIII.6 Vectores coordenados de los conjuntos de discontinuidades y direcciones de
deslizamiento para 0,0.8660,0.5000r 251
Tabla VIII.7 Tabla resumen para cada JP 253
Tabla A.1 Sistema de discontinuidades y superficies libres xx
Tabla A.2 Códigos de bloques infinitos, constreñidos y finitos/removibles xx
Tabla A.3 Valores de los vectores de deslizamiento xxii
Tabla A.4 Vectores unitarios para los planos de discontinuidad xxiii
Tabla A.5 Direcciones de deslizamiento que satisfacen a los sistemas de desigualdades para
cada JP xxiv
Tabla A.6 Modos de deslizamiento xxiv
Tabla A.7 Fuerzas xxv
Tabla A.8 Modos de deslizamiento (γ = 2.65 tn/m3) xxvi
Tabla A.9 Características geológicas de las discontinuidades en la zona de túneles xxix
Tabla A.10 Sistema de discontinuidades xxix
Tabla A.11 Valores de los vectores de deslizamiento xlviii
Tabla A.12 Direcciones de deslizamiento que satisfacen a los sistemas de desigualdades para
cada JP xlix
Tabla A.13 Modos de Deslizamiento l
Tabla A.14 Fuerzas li
Tabla A.15 Modos de deslizamiento (γ = 2.7 tn/m3) li
Tabla A.16 Resumen de tipos de bloques liv
lvii

ÍNDICE DE FIGURAS
Figura i. 1 Creación de nuevos bloques por la introducción de nuevas fallas vi
Figura i. 2
Análisis estadístico para encontrar las concentraciones de un conjunto de
datos geológicos, con los cuales puede definirse el conjunto de
discontinuidades principales en un macizo rocoso
vii
Figura i. 3 Representación tridimensional de un bloque para una cámara subterránea
mediante paquetería comercial (Wedge) viii
Figura i. 4 Representación tridimensional de una cuña clave en un túnel circular,
mediante paquetería comercial (Workshop Pantechnica) viii
Figura i. 5 Distribución de desplazamientos verticales utilizando FEM ix
Figura i.6 Arco, donde el principio de cuña clave es aplicable xi
Figura i. 7 Arco donde cada bloque puede ser considerado como una cuña clave xi
Figura i. 8 Diversos modelos donde se aplica el concepto de cuña clave xii
Figura i. 9 Ejemplo tridimensional de una cuña clave xiii
Figura I.1 Términos que describen las características de un plano: echado y dirección
del echado 2
Figura I.2
Sistema de coordenadas y direcciones cosenos de una normal: n, normal de la
discontinuidad; m, proyección de n en el plano OXY; , ángulo del echado; ,
dirección del echado (en el sentido de las manecillas del reloj a partir del norte)
3
Figura I.3 Ecuación de una línea recta 4
Figura I.4 Ecuación de un plano 4
Figura I.5 Línea de intersección de dos planos 5
Figura I.6 Esquinas de un bloque 6
Figura I.7 Medio-espacio determinado por un plano 6
Figura I.8
Subdivisión de un paralelípedo en seis tetraedros de igual volumen. a)
Subdivisión en dos prismas triangulares; b) División de cada primas en tres
tetraedros
7
Figura I.9 Denominación de los vectores para los bordes de un tetraedro 9
Figura I.10 Esquinas reales de un polígono dado 11
Figura I.11 Subdivisión de polígonos en triángulos 12
Figura I.12 Subdivisión del poliedro en tetraedro 13
Figura I.13 Ángulos entre líneas y planos: a) La proyección ortográfica de una línea en
un plano, b) el ángulo entre dos planos 14
Figura I.4 Block Pyramid (BP) 0 0 0 0 0
1 2 3 4 5U U U L L 16
Figura I.15 Fuerzas como vectores: a) la resultante de varias fuerzas, b) Equilibrio bajo
varias fuerzas 18
Figura I.16 Levantamiento o desprendimiento 20
Figura I.17 Deslizamiento en una cara 20
Figura I.18 Dirección de deslizamiento bajo el modo de deslizamiento en una cara 21
Figura I.19 Deslizamiento en dos caras 21
Figura I.20 Dirección de deslizamiento para el modo de deslizamiento en dos caras 21
Figura I.21 Isométrico del bloque 26
lviii
Figura II.1 Proyección ortográfica de un objeto tridimensional utilizando múltiples
vistas 37
Figura II.2 Proyección ortográfica y oblicua 37
Figura II.3 Proyección ortográfica de una esfera de referencia a) Bases para la
proyección b) red de proyección de líneas de longitud y latitud 39
Figura II.4 Proyección de áreas iguales 40
Figura II.5 Proyección ortográfica 40
Figura II.6 Proyección estereográfica de una esfera de referencia a) Bases para la
proyección b) Una red de proyecciones de líneas de longitud y latitud 41
Figura II.7 Proyecciones estereográficas con el punto focal en la parte superior e
inferior, de una línea y un plano 42
Figura II.7.a Vista lateral del concepto de polo y gran círculo 43
Figura II.7.b Vista lateral y en planta del concepto de polo y gran círculo 44
Figura II.7.c Esquema ilustrativo del echado y dirección del echado 44
Figura II.7.d Obtención de un echado y rumbo determinado 45
Figura II.7.e Obtención del polo 46
Figura II.7.f Representación del gran círculo y polo para una dirección dada 47
Figura II.7.g Vista estereográfica de dos planos que intersecan entre sí 48
Figura II.7.h Rotación de la red estereográfica 49
Figura II.7.i Construcción final 49
Figura II.8 Proyección estereográfica de un vector 51
Figura II.9 Proyección estereográfica del vector opuesto de un vector 52
Figura II.10 Proyección estereográfica de un plano 53
Figura II.11 Métodos alternativos para construir grandes círculos 55
Figura II.12 Línea de intersección de dos planos 56
Figura II.13 Proyección estereográfica de un cono 57
Figura II.14 Métodos alternativos para construir un pequeño círculo 59
Figura II.15(a) Estereored 60
Figura II.15(b) Una estereored, mostrando las líneas de longitud y latitud de una esfera de
referencia 61
Figura II.16 Proyección estereográfica con punto focal inferior de los medios-espacio del
plano iP .
63
Figura II.17 Proyección estereográfica de joint pyramids 65
Figura II.18 Normal a un plano 66
Figura II.19 Gran círculo a través de dos puntos 68
Figura II.20 Proyección estereográfica de la proyección ortográfica de una línea en un plano 69
Figura II.21 Ángulos entre planos y líneas 70
Figura II.22 Dirección de deslizamiento para deslizamiento en una cara 71
Figura II.23 Dirección de deslizamiento para deslizamiento en dos caras 72
Figura II.24 Proyección estereográfica de un vector unitario 73
Figura II.25 Proyección estereográfica de un vector 73
Figura II.26 Proyección estereográfica de un plano a partir de su echado y dirección del echado 74
Figura II.27 Proyección estereográfica de un plano a partir de su normal 75
Figura II.28 Pequeño círculo que representa la proyección estereográfica de un cono
alrededor de la normal a un plano
76
lix

Figura II.29 Construcción de una red estereográfica (Red de ángulos iguales) 76
Figura II.30 Proyección estereográfica de un joint pyramid 78
Figura II.31 Un plano común a dos líneas 79
Figura II.32 Normal de un plano dado P en la proyección del plano 80
Figura II.33 Plano P, normal a un vector dado en la proyección estereográfica 81
Figura II.34 Ángulo entre dos planos 84
Figura II.35 Dirección de deslizamiento en una simple cara 86
Figura III. 1 Tipos de bloques: a) Infinito, b) Estreñido, c) Estable, d) Potencial cuña
clave, e) Cuña clave 90
Figura III. 2 La influencia del número de lados paralelos en la forma de un bloque a) Sin lados
paralelos, b) Un conjunto de lados paralelos, c) Todos los lados son paralelos 90
Figura III. 3 Bloques constreñidos bidimensionales 91
Figura III. 4 Aplicación del teorema de la finitud a bloque infinito: Ejemplo bidimensional 93
Figura III. 5 Aplicación del teorema de finitud a un bloque finito: Ejemplo bidimensional 94
Figura III. 6.a Interpretación del space pyramid para el techo 97
Figura III. 7.b Aplicación del teorema de finitud en tres dimensiones 98
Figura III. 8.c Interpretación del space pyramid para un piso 99
Figura III. 9 Aplicación del Teorema de la Removilidad en dos dimensiones 100
Figura III. 10 Proyección estereográfica con punto focal inferior de las discontinuidades 102
Figura III. 11 Bloque estreñido arriba de un túnel 103
Figura IV.1 Diferencia y descripción de JB’s y Cuñas Claves (JP’s) 104
Figura IV.2 a) Bloque con 4 caras no paralelas, b) Bloque formado con la ausencia de
cara formada por la discontinuidad 3, c) Bloque formado con la ausencia de
cara formada por la discontinuidad 2.
106
Figura IV.3 Ejemplo de bloques con caras repetidas 107
Figura IV.4 Solución para joint blocks finitos sin ningún conjunto de discontinuidades repetido 109
Figura IV.5 Solución estereográfica para joint blocks finitos con un conjunto de
discontinuidades repetido 110
Figura IV.6 Solución estereográfica para joint blocks finitos con dos conjuntos de
discontinuidades repetidos 111
Figura V. 1 Taludes en roca 113
Figura V. 2 Deslizamiento de cuña 114
Figura V. 3 Bloque “unido” 115
Figura V. 4 Deslizamiento y volteo de múltiples bloques 115
Figura V. 5 Efecto de la flexión – fracturamiento interno 116
Figura V. 6 Falla progresiva en talud 116
Figura V. 7 Tipos de bloques en un talud. (1) Cuña Clave; (2) Bloque removible con
caras paralelas; (3) joint block 117
Figura V. 8 Refuerzo en Roca: (1) Soporte en zona de cuñas claves; (2) Refuerzo General 118
Figura V. 9 Excavación asimétrica 119
Figura V. 10 Bloque constreñido 120
lx

Figura V. 11 Representación de los requerimientos necesarios para que un bloque
convexo, se le considere infinito. 121
Figura V. 12 Representación de las condiciones necesarias para que considerar a un
bloque convexo, como finito 122
Figura V. 13 Potencial cuña clave 123
Figura V. 14 Proyección estereográfica de los datos de la Tabla 6.4, con una superficie libre 125
Figura V. 15 Talud convexo formado por plano 5 y 6. 127
Figura V. 16 Proyección estereográfica de los datos de la tabla 6.1, con las dos superficies
libre 5 y 6 128
Figura V. 17 Bloque convexo formado por planos de discontinuidad paralelos 129
Figura V. 18a JP’s con un conjunto de discontinuidades repetido 131
Figura V. 18b JP’s con un conjunto de discontinuidades repetido para un talud formado por
dos superficies libres 132
Figura V. 19. JP’s con dos conjuntos de discontinuidades repetidos 134
Figura V.20ª Proyección estereográfica de la tabla V.2 141
Figura V.20b Isométrico de talud 142
Figura V.21 Gran círculo con un rumbo asignado que pasa a través de un punto
preestablecido 143
Figura V.22a Construcción geométrica para JP 0011 144
Figura V.22b Construcción geométrica para JP 0001 145
Figura V.22c Construcción geométrica para JP 1001 145
Figura V.22d Figura resumen 146
Figura V.23 Gran círculo de una inclinación asignada que pasa a través de un punto dado 150
Figura V.24 Gran círculo con una inclinación asignada que sólo contiene al JP 0011 151
Figura V.25a Gran círculo con una inclinación asignada que sólo contiene al JP 0001 151
Figura V.25b Gran círculo con una inclinación asignada que sólo contiene al JP 1001 152
Figura V.26 JP con código 2001; se eliminó el conjunto de discontinuidades 1 153
Figura V.27 JPs con códigos 1201, 0021 y 0012; se eliminó los conjuntos de
discontinuidades 2, 3 y 4, respectivamente 154
Figura V.28 Mapa geológico de los trazos de discontinuidades como se ve en el plano 5
de la tabla V.11 155
Figura VI. 1 Planta de complejo subterráneo 160
Figura VI.2.a Identificación del SP y el EP para el techo 161
Figura VI.3.b Proyección del SP y el EP para el techo 162
Figura VI.2.c Proyección del SP y el EP para el piso 162
Figura VI. 4 SP y EP para las paredes de una cámara prismática subterránea 163
Figura VI. 5.a SP y EP para los bordes pared/pared de una cámara prismática subterránea 164
Figura VI. 6.b Identificación de los lados de una excavación prismática 164
Figura VI. 7 Bloque que intersecan bordes de una cámara pared/pared, techo/pared 165
Figura VI. 8 SP y EP para los bordes Pared/Techo de una cámara subterránea 167
Figura VI. 9 SP y EP para los bordes pared/piso de una cámara prismática subterránea 168
Figura VI. 10 SP y EP para las esquinas pared/pared/techo en una cámara subterránea
prismática 170
Figura VI. 11 SP y EP para las esquinas pared/pared/piso en una cámara subterránea prismática 171
Figura VI. 12.a Cámara subterránea prismática, utilizada en el ejemplo 172
lxi

Figura VI. 13.b Vista en planta de la cámara subterránea, con las direcciones de cada cara
(dirección z hacia el papel) 173
Figura VI. 14.a Proyección de los datos dados en tabla VI.1 y cuñas claves del techo (áreas
sombreadas) 174
Figura VI.11.b Proyección de los datos dados en tabla VI.1 y cuñas claves del piso (áreas
sombreadas) 175
Figura VI. 15.a Cuñas claves de la pared 3 176
Figura VI.12.b Cuñas claves de la pared 1 176
Figura VI. 16.a Cuñas claves de la pared 4 177
Figura VI. 13.b Cuñas claves de la pared 2 177
Figura VI. 17.a JP’s con un conjunto de discontinuidades repetidas, para el techo 178
Figura VI.14.b JP’s con un conjunto de discontinuidades repetidas, para el piso 179
Figura VI. 18.a Cuña clave de borde E23 180
Figura VI. 19.b Cuña clave de borde E14 (bloque primo de 1101) 180
Figura VI.15.c Cuña clave del borde E35 181
Figura VII.1 Elementos geométricos de un túnel 184
Figura VII.2 Secciones transversales con curvas continuas 185
Figura VII.3 Secciones transversales con lados rectos 185
Figura VII.4 Secciones transversales posibles 185
Figura VII.5 Secciones transversales poligonales y en forma de herradura 185
Figura VII.6 Secciones transversales “vaulted” 185
Figura VII. 7 Ángulos de posición y sistemas coordenados locales en la sección transversal
del cilindro del túnel 188
Figura VII. 8 Sección transversal del cilindro del túnel, entre puntos dados por planos tangentes 190
Figura VII. 9 Bloque constreñido intersecando a un túnel 192
Figura VII. 10 Proyección ortográfica de un JP en la sección transversal de un túnel 194
Figura VII. 11 Área máxima removible 195
Figura VII.12 Proyección estereográfica con punto focal inferior de los datos de
discontinuidades de la tabla VII.2. 196
Figura VII.13 Grandes círculos a través de A, A´ y I 197
Figura VII.14 Construcciones geométricas de los grandes círculos límites para el JP 0000 199
Figura VII.15 Grandes círculos límites del JP 1101 200
Figura VII.16 Ubicación de los planos límites y convención utilizada para conocer de qué
lado se encuentra la cuña clave 203
Figura VII.17 Construcción de planos límites válidos para el JP 0000, los cuales son
tangentes a los puntos I, A y A’ 203
Figura VII.18 Ángulos formados con la horizontal (Círculo de referencia) de los planos
límites, se muestra gráficamente la manera de obtener estos ángulos
mediante la red de Wulff
204
Figura VII.19 Trazo del área máxima removible respecto a la sección transversal del túnel;
a) Es una vista de la cuña clave desde el sur, es decir el vector a se proyecta
hacia el papel, b) Vista desde el norte, es decir, el vector del eje del túnel
a se proyectaría hacia el observador
205
Figura VII.20 Ángulos formados con la horizontal de los planos límites 206
lxii

Figura VII.21 No es posible hacer tangentes los trazos con la sección transversal del túnel,
lo que quiere decir que no se forma una cuña clave 206
Figura VII.22 Trazo del área máxima removible del JP 0010 207
Figura VII.23 Ángulos formados con la horizontal de los planos límites JP 0100 208
Figura VII.24 Trazo del área máxima removible JP 0100 208
Figura VII.25 Ángulos formados con la horizontal de los planos límites JP 0110 209
Figura VII.26 Trazo del área máxima removible JP 0110 209
Figura VII.27 Ángulos formados con la horizontal de los planos límites JP 0111 210
Figura VII.28 Aunque se forma una cuña clave, ésta es casi imperceptible, por lo que se
puede omitir como estructura de riesgo 210
Figura VII.29 Ángulos formados con la horizontal de los planos límites JP 1000 211
Figura VII.30 Trazo del área máxima removible JP 1000 211
Figura VII.31 Construcción de planos límites válidos para el JP 1001 212
Figura VII.32 Ángulos formados con la horizontal de los planos límites JP 1001 212
Figura VII.33 Trazo del área máxima removible JP 1001 213
Figura VII.34 Ángulos formados con la horizontal de los planos límites JP 1011 213
Figura VII.35 Trazo del área máxima removible JP 1011 214
Figura VII.36 Construcción de planos límites válidos para el JP 1101 215
Figura VII.37 Ángulos formados con la horizontal de los planos límites JP 1101 215
Figura VII.38 Trazo del área máxima removible. a) Es una vista de la cuña clave desde el
sur, es decir el vector a se proyecta hacia el papel, b) Vista desde el norte,
es decir, el vector del eje del túnel a se proyectaría hacia el observador
216
Figura VII.39 Ángulos formados con la horizontal de los planos límites JP 1110 217
Figura VII.40 Trazo del área máxima removible JP 1110 217
Figura VII.41 Trazo del área máxima removible JP 1111 218
Figura VIII.1 Explicación de la fuerza ficticia F y el vector de la dirección de
deslizamiento s
220
Figura VIII. 2 Levantamiento o desprendimiento de un bloque (lifting) 222
Figura VIII. 3 Deslizamiento en una cara o superficie de deslizamiento 223
Figura VIII. 4 Deslizamiento en dos planos 224
Figura VIII. 5 Deslizamiento en dos planos 224
Figura VIII.6a Proyección de los datos de las discontinuidades de la tabla VIII.1 236
Figura VIII.6.b Elección de la dirección de deslizamiento en un plano de deslizamiento bajo
la fuerza resultante debido al peso propio. 237
Figura VIII.6.c Dirección de deslizamiento 2 0 ,0.866 ,0.500W W Wr 240
Figura VIII.6.d Algunas direcciones de deslizamiento con ^
1 0, 0,r W 240
Figura VIII.6.e Direcciones de deslizamiento I23 y I34 con ^
1 0, 0,r W 241
Figura VIII. 7 Todas las direcciones y modos de deslizamiento cuando 0, 0, W r 242
Figura VIII. 8 Todas las direcciones y modos de deslizamiento cuando 0, 0.866 , 0.5W Wr 243
Figura VIII. 9 Deslizamiento en una cara para ambas resultantes 244
Figura VIII. 10 Figura con dirección de deslizamiento 245
Figura VIII. 11 Dirección de deslizamiento para dos caras 245
lxiii
Figura VIII. 12 Procedimiento para encontrar deslizamiento 246
Figura VIII. 13 Códigos de deslizamiento 246
Figura VIII.14 JP correspondientes al techo y piso de la cámara subterránea 247
Figura A.1 Proyección estereográfica de los planos de discontinuidad de la tabla A.1. xxi
Figura A.2 Plano de proyecto para las obras de desvío xxvii
Figura A.3 Representación estereográfica de los sistemas estructurales, determinados
sobre la traza de los túneles de desvió (hemisferio inferior) xxviii
Figura A.4 Sección transversal tipo del túnel xxviii
Figura A.5 Proyección estereográfica (hemisferio superior) e identificación de los JP´s xxix
Figura A.6 Planos límites envolventes válidos como no válidos para el JP 0000 xxxi
Figura A.7 Planos límites envolventes válidos para el JP 0000 xxxii
Figura A.8 Ángulos formados con la horizontal de los planos límites, JP 0000 xxxiii
Figura A.9 Izquierda: Bloque formado para el JP 0000, Derecha: ejemplo de cómo la
sección transversal del túnel influyen en el tamaño de un bloque xxxiv
Figura A.10 Ángulos formados con la horizontal de los planos límites, JP 0010 xxxv
Figura A.11 Trazo del área máxima removible, JP 0010 xxxv
Figura A.12 Ángulos formados con la horizontal de los planos límites, JP 0011 xxxvi
Figura A.13 Trazo del área máxima removible, JP 0011 xxxvi
Figura A.14 Ángulos formados con la horizontal de los planos límites, JP 0100 xxxvii
Figura A.15 Trazo del área máxima removible, JP 0100 xxxvii
Figura A.16 Ángulos formados con la horizontal de los planos límites, JP 0101 xxxviii
Figura A.17 Trazo del área máxima removible, JP 0101 xxxviii
Figura A.18 Ángulos formados con la horizontal de los planos límites, JP 0111 xxxix
Figura A.19 Trazo del área máxima removible, JP 0111 xxxix
Figura A.20 Ángulos formados con la horizontal de los planos límites, JP 1000 xl
Figura A.21 Trazo del área máxima removible, JP 1000 xl
Figura A.22 Ángulos formados con la horizontal de los planos límites, JP 1010 xli
Figura A.23 Trazo del área máxima removible, JP 1010 xli
Figura A.24 Ángulos formados con la horizontal de los planos límites, JP 1011 xlii
Figura A.25 Trazo del área máxima removible, JP 1011 xlii
Figura A.26 Ángulos formados con la horizontal de los planos límites, JP 1100 xliii
Figura A.27 Trazo del área máxima removible, JP 1100 xliii
Figura A.28 Ángulos formados con la horizontal de los planos límite, JP 1101 xliv
Figura A.29 Trazo del área máxima removible, JP 1101 xliv
Figura A.30 Ángulos formados con la horizontal de los planos límites, JP 1111 xlv
Figura A.31 Trazo del área máxima removible, JP 1111 xlvi
Figura A.32 Ángulos formados con la horizontal de los planos límites xlvii
lxiv

ÍNDICE DE EJEMPLOS
Ejemplo I.1 La ecuación de un plano 22
Ejemplo I.2 La intersección de un plano y una línea 23
Ejemplo I.3 El vector de intersección de 2 planos 23
Ejemplo I.4 Un tetraedro creado por los planos 1 2 3 4, ,P P P y P
23
Ejemplo I.5 El área de cada cara 25
Ejemplo I.6 El ángulo entre dos vectores 26
Ejemplo I.7 El ángulo entre dos planos 27
Ejemplo I.8 El ángulo entre un plano iP y su vector v 27
Ejemplo I.9 Encontrar el block pyramid (BP) con 4 planos 28
Ejemplo I.10 Determinación de que un block pyramid (BP) está “vacío” 31
Ejemplo I.11 Cálculo de la resultante de fuerzas 33
Ejemplo I.12 Cálculo de la dirección de deslizamiento por desprendimiento/levantamiento 33
Ejemplo I.13 Cálculo de la dirección de deslizamiento para el caso de deslizamiento en una cara 34
Ejemplo I.14. Cálculo de la dirección de deslizamiento para el caso de deslizamiento
simultáneo en dos caras 34
Ejemplo II.1 Proyección estereográfica de un vector unitario 73
Ejemplo II.2 Proyección estereográfica de un vector 73
Ejemplo II.3 Proyección estereográfica de un plano a partir de su echado y dirección del echado 74
Ejemplo II.4 Proyección estereográfica de un plano a partir de su normal 75
Ejemplo II.5 Dibuje un pequeño círculo que representa la proyección estereográfica de un
cono alrededor de la normal a un plano 75
Ejemplo II.6 Dibuje un pequeño círculo representando a un cono alrededor del vector v 76
Ejemplo II.7 Construcción de una red estereográfica (Red de ángulos iguales) 76
Ejemplo II.8 Proyección estereográfica de un joint pyramid 78
Ejemplo II.9 Un plano común a dos líneas 79
Ejemplo II.10 Encontrar la normal de un plano dado P en la proyección del plano 80
Ejemplo II.11 Encontrar el plano P, normal a un vector dado en la proyección estereográfica 81
Ejemplo II.12 Proyección estereográfica de la proyección ortográfica de un vector v en un plano 81
Ejemplo II.13 Medición del ángulo existente entre dos vectores 82
Ejemplo II.14 Medición del ángulo entre un vector v y un plano P 83
Ejemplo II.15 Medición del ángulo entre dos planos 83
Ejemplo II.16 Encontrar la dirección de deslizamiento en una simple cara 84
Ejemplo II.17 Encontrar la dirección de deslizamiento en dos caras simultáneamente 87
lxv

s
ZXV
JP SP
BP
JP SP
BP
TEOREMAS FUNDAMENTALES
BLOQUE FINITO
BLOQUE INFINITO
Top Related