







Idiomas
Páginas
Jurídico


INSTRUMENTOS DE TOPOGRAFIA
1.1. Instrumentos simples1.1.1. Cintas métricas y accesorios1.1.2. Escuadras1.1.3. Clisímetro1.1.4. Brújula1.1.5. Miras Verticales1.1.6. Miras Horizontales1.1.7. Planímetro
1.2. Instrumentos principales1.2.1. Teodolitos1.2.2. Teodolitos Electrónicos1.2.3. Estación total electrónica1.2.4. Estaciones robóticas1.2.5. Niveles1.2.6. Distanciómetros electrónicos
INSTRUMENTOS TOPOGRAFICOS
1.1 INSTRUMENTOS SIMPLES
1.1.1 CINTAS MÉTRICAS Y ACCESORIOS
Medir una longitud consiste en determinar, por comparación, el número de veces que una unidad patrón es contenida en dicha longitud.
La unidad patrón utilizada en la mayoría de los países del mundo es el metro, definido(después de la Conferencia Internacional de Pesos y Medidas celebrada en París en 1889) comola longitud a 0ºC del prototipo internacional de platino e iridio que se conserva en Sèvres(Francia).
Esta definición se mantuvo hasta la Conferencia General de Pesos y Medidas celebrada enla misma ciudad en 1960, en donde se definió al metro como 1’650.763,73 veces la longitud de onda en el vacío de radiación anaranjada del criptón 86.
En octubre 20 de 1983 el metro fue redefinido en función de la velocidad de la luz(c=299'792.792 m/s) como la longitud del trayecto recorrido por la luz en el vacío durante un intervalo de tiempo de 1/299’792.458 de segundo.
Una cinta métrica es la reproducción de un número determinado de veces (3,5,30,50,100)de la unidad patrón.
En el proceso de medida, las cintas son sometidas a diferentes tensiones y temperaturas, por lo que dependiendo del material con el que han sido construidas, su tamaño original variará. Por esta razón, las cintas vienen calibradas de fábrica para que a una temperatura, tensión y condiciones de apoyo dadas, su longitud sea igual a la longitud nominal.
Las cintas métricas empleadas en trabajos topográficos deben ser de acero, resistentes a esfuerzos de tensión y a la corrosión. Comúnmente, las cintas métricas vienen en longitudes de30, 50 y 100 m, con una sección transversal de 8 mm x 0,45 mm para trabajos fuertes en condiciones severas o de 6 mm x 0,30 mm para trabajos en condiciones normales.
En cuanto a su graduación para la lectura, las cintas métricas se pueden clasificar en:
Cintas continuas, divididas en toda su longitud en metros, decímetros, centímetros y milímetros como se muestra en la figura 2.1.a.
Para medir una distancia AB con cinta continua, se hace coincidir el cero con un extremo“A” y se toma la lectura de la coincidencia de la graduación con el otro extremo “B” (11,224 m),tal y como se muestra en la figura 2.2.a. Luego la distancia entre A y B es:
DAB
11,224m
B
b
0 10 20 30 1 METRO
a. Cinta continua
0 10 20 30 1 METRO
b. Cinta por defecto
10 0 10 20 1 METRO
c. Cinta por exceso
Figura 2.1. Diferentes tipos de cintas
0 10 20 1120
A B
1120
a DetalleLectura en B
0 10 20 1130
A B
0 10
Detalle ALectura en A
10 0 10
A1120
B
10 0
Detalle Ac Lectura en A
Figura 2.2. Mediciones con diferentes tipos de cintas

Cintas por defecto (substracción), divididas al milímetro solamente en el primero yúltimo decímetro, el resto de la longitud está dividido en metros y decímetros, tal y como se muestra en la figura 2.1.b.
Para medir una distancia AB con una cinta por defecto, se hace coincidir el extremo“B”con el decímetro entero superior mas próximo a la longitud a medir (11,300 m en la figura2.2.b ), y se toma la lectura en el extremo “A” con el primer decímetro, el cual esta dividido en centímetros y milímetros (0,076 m en la figura 2.2.b), luego, la distancia entre AB es:
DAB 11,300 0,076 11,224m
Cintas por exceso, al igual que las cintas por defecto, están divididas en toda su longituden metros y decímetros, y sólo el último decímetro está dividido en centímetros y milímetros. Este tipo de cintas posee un decímetro adicional graduado en centímetros y milímetros, colocado anterior al cero de la misma y con graduación creciente en sentido contrario a las graduaciones dela cinta tal y como se muestra en la figura 2.1.c.
Para medir una distancia AB con una cinta por exceso, se hace coincidir el extremo “B”con el decímetro entero inferior mas próximo a la longitud a medir (11,200 m en la figura 2.2.c),y se toma la lectura en el extremo “A” con el decímetro adicional, dividido en centímetros y milímetros (0,024 m en la figura 2.2.c), luego, la distancia entre AB es:
D
AB
11,200 0,024 11,224m
Para poder hacer uso correcto y preciso de las cintas de acero en la determinación de lasdistancias, es necesario que las medidas se realicen bajo ciertas condiciones ideales de calibración, especificadas estas por los diferentes fabricantes.
Generalmente las condiciones ideales para medición con cintas de acero son las siguientes:
Temperatura de 20ºC Tensión aplicada a la cinta de 5 Kg. (10 lb) Cinta apoyada en toda su extensión
Difícilmente estas condiciones se logran en la medición de distancias, por lo que se hace necesario la utilización de diferentes accesorios, bien sea para hacer cumplir alguna de las condiciones o para medir y estimar la variabilidad de la cinta al ser utilizadas en condiciones diferentes a las ideales.
A continuación se describen algunos de los accesorios utilizados en la medición de distancias con cintas métricas.

Plomada metálica. Instrumento con forma de cono, construido generalmente en bronce,con un peso que varia entre 225 y 500 gr, que al dejarse colgar libremente de la cuerda sigue la dirección de la vertical del lugar, por lo que con su auxilio podemos proyectar el punto de terreno sobre la cinta métrica.
Cuerda Proyección delpunto A sobrela cinta.
Cinta métrica
Plomada metálica
Punto AFigura 2.3. Plomada metálica
Figura 2.4. Termómetro para cinta
Termómetro. Como se mencionópreviamente, las cintas métricas vienen calibradas por los fabricantes, para que a una temperatura y tensión dada su longitud sea igual a la longitud nominal. En el proceso de medida de distancias, las cintas son sometidas a condiciones diferentes de tensión y temperatura, por lo que se hace necesario medir la tensión y temperatura a las cuales se hacen las mediciones para poder aplicar las correcciones correspondientes.
El termómetro utilizado en la medición de distancias con cinta viene graduado en gradoscentígrados, con lecturas que varian entre – 40 a + 50 ºC de grado en grado, colocado, para su protección, en una estructura metálica de aproximadamente 14 cm de largo, la cual se ajusta a la cinta mediante dos sujetadores. Figura 2.4.
Figura 2.5. Tensiómetro
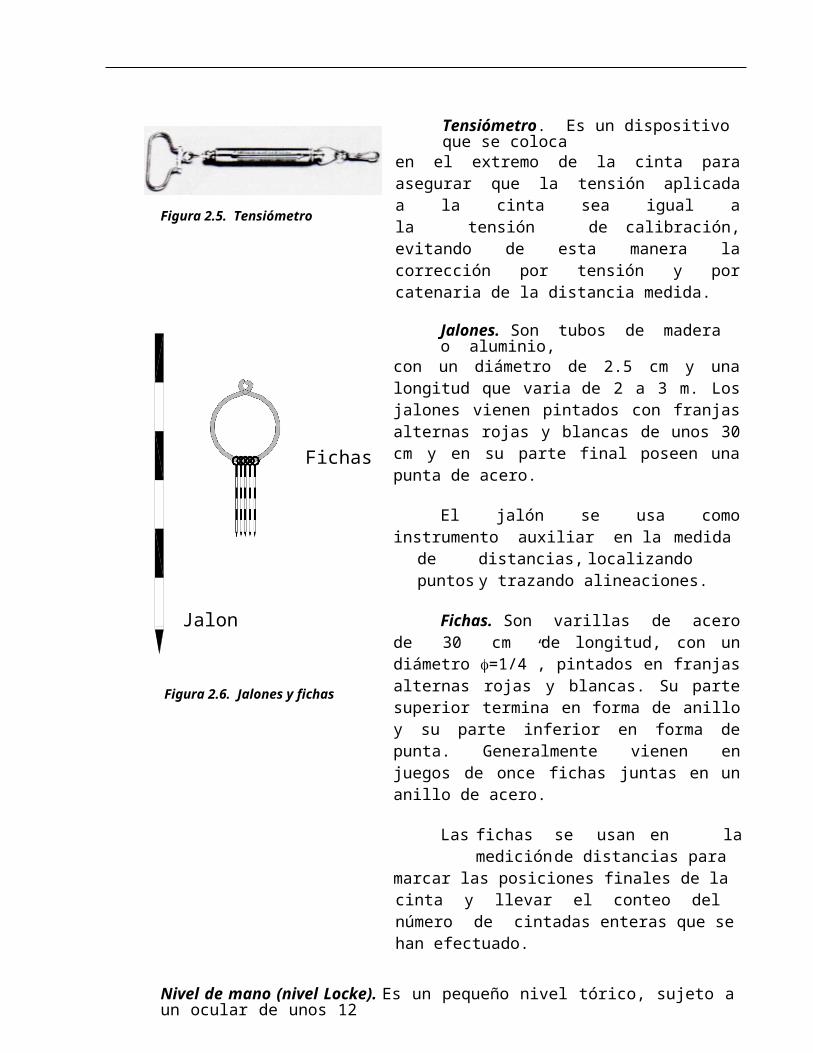
Tensiómetro. Es un dispositivo que se colocaen el extremo de la cinta para asegurar que la tensión aplicada a la cinta sea igual a la tensión de calibración, evitando de esta manera la corrección por tensión y por catenaria de la distancia medida.
Fichas
Jalon
Figura 2.6. Jalones y fichas
Jalones. Son tubos de madera o aluminio,con un diámetro de 2.5 cm y una longitud que varia de 2 a 3 m. Los jalones vienen pintados con franjas alternas rojas y blancas de unos 30 cm y en su parte final poseen una punta de acero.
El jalón se usa como instrumento auxiliar en la medida de
distancias, localizando puntos y trazando alineaciones.
Fichas. Son varillas de acero de 30 cm de longitud, con un diámetro =1/4”, pintados en franjas alternas rojas y blancas. Su parte superior termina en forma de anillo y su parte inferior en forma de punta. Generalmente vienen en juegos de once fichas juntas en un anillo de acero.
Las fichas se usan en la medición de distancias para marcar las posiciones finales de lacinta y llevar el conteo del número de cintadas enteras que se han efectuado.
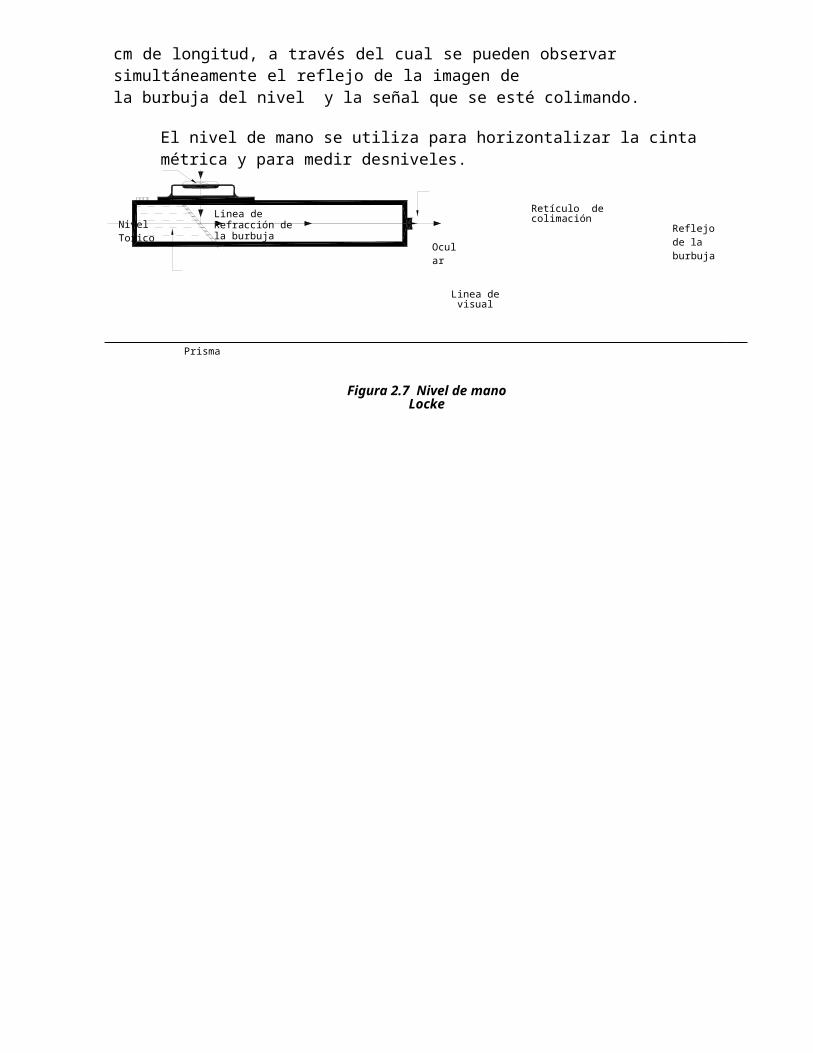
Nivel de mano (nivel Locke). Es un pequeño nivel tórico, sujeto a un ocular de unos 12cm de longitud, a través del cual se pueden observar simultáneamente el reflejo de la imagen dela burbuja del nivel y la señal que se esté colimando.
El nivel de mano se utiliza para horizontalizar la cinta métrica y para medir desniveles.
Nivel ToricoLinea de Refracción de la burbuja
Ocular
Retículo de colimación
Reflejo de la burbuja
Linea de visual
Prisma
Figura 2.7 Nivel de mano Locke
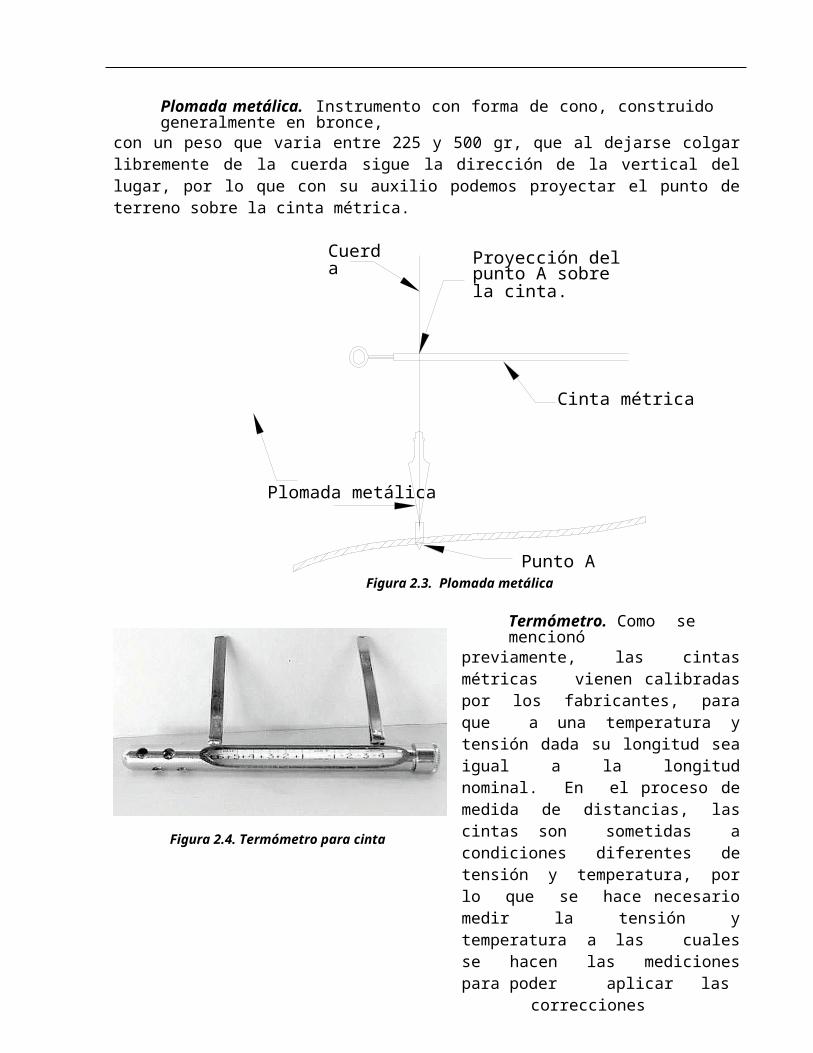
Figura 2.8 . Nivel Abney
1.1.2 ESCUADRAS
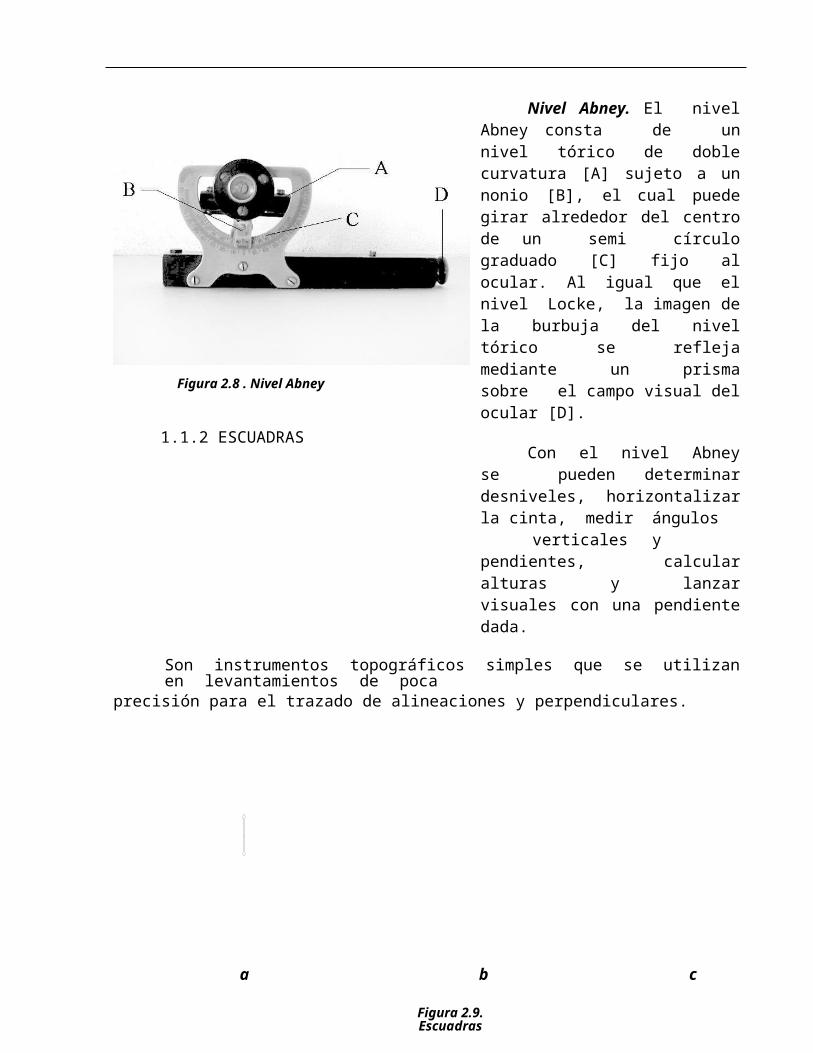
Nivel Abney. El nivel Abney consta de un nivel tórico de doble curvatura [A] sujeto a un nonio [B], el cual puede girar alrededor del centro de un semi círculo graduado [C] fijo al ocular. Al igual que el nivel Locke, la imagen de la burbuja del nivel tórico se refleja mediante un prisma sobre el campo visual del ocular [D].
Con el nivel Abney se pueden determinar desniveles, horizontalizar la cinta,medir ángulos verticales y pendientes, calcular alturas y lanzar visuales con una pendiente dada.
Son instrumentos topográficos simples que se utilizan en levantamientos de pocaprecisión para el trazado de alineaciones y perpendiculares.
a b c
Figura 2.9. Escuadras
Escuadra de agrimensor (figura 2.9.a), consta de un cilindro de bronce de unos 7 cm de alto por 7 cm de diámetro, con ranuras a 90º y 45º para el trazado de alineamientos con ángulosde 90º y 45º entre si. El cilindro se apoya sobre un bastón de madera que termina en forma de punta.
Escuadra de prisma (figura 2.9.b), está constituida por un prisma triangular cuyo ángulode refracción es de 90º. Puede apoyarse sobre un bastón metálico o utilizarse con plomada.

Escuadra de doble prisma (figura 2.9.c), consta de dos prismas pentagonales ajustadosfirmemente entre si para asegurar visuales perpendiculares. Se utiliza para el trazado de perpendiculares a alineaciones definidas por dos puntos.
1.1.3 CLISIMETRO
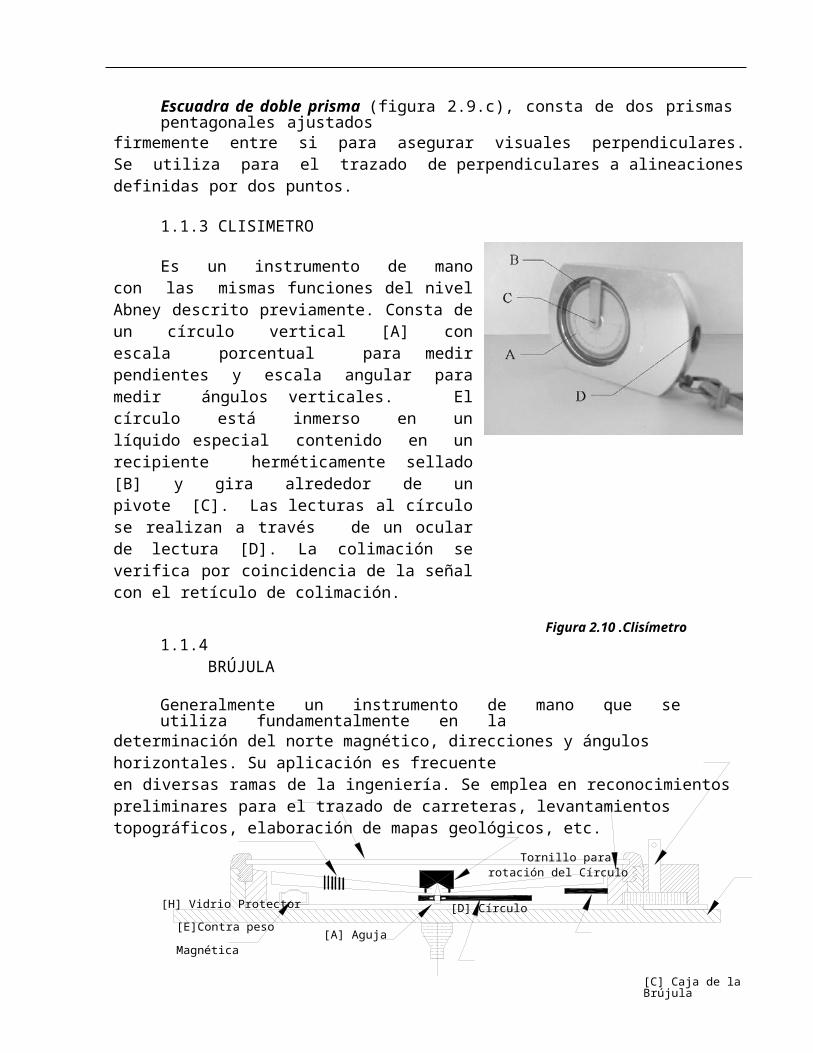
Es un instrumento de mano con las mismas funciones del nivel Abney descrito previamente. Consta de un círculo vertical [A] con escala porcentual para medir pendientes y escala angular para medir ángulos verticales. El círculo está inmerso en un líquido especial contenido en un recipiente herméticamente sellado [B] y gira alrededor de un pivote [C]. Las lecturas al círculo se realizan a través de un ocular de lectura [D]. La colimación se verifica por coincidencia de la señal con el retículo de colimación.
1.1.4 BRÚJULAFigura 2.10 .Clisímetro
Generalmente un instrumento de mano que se utiliza fundamentalmente en ladeterminación del norte magnético, direcciones y ángulos horizontales. Su aplicación es frecuenteen diversas ramas de la ingeniería. Se emplea en reconocimientos preliminares para el trazado de carreteras, levantamientos topográficos, elaboración de mapas geológicos, etc.
Tornillo pararotación del Círculo
[H] Vidrio Protector
[E]Contra peso[A] Aguja Magnética
[D] Círculo
[C] Caja de la Brújula
[G] Nivel Esférico [B] Pivote[J] Arco Declinatorio
[F] Elevador de Aguja
Figura 1.11. Corte esquemático de una brújula
La figura 1.11 muestra el corte esquemático de una brújula. La brújula consiste de una aguja magnética [A] que gira sobre un pivote agudo de acero duro [B] apoyado sobre un soporte cónico ubicado en el centro de la aguja. La aguja magnética esta ubicada dentro de una caja [C],la cual, para medir el rumbo, contiene un circulo graduado [D] generalmente dividido en cuadrantes de 0o a 90o , marcando los cuatro puntos cardinales; teniendo en cuenta que debido al movimiento aparente de la aguja los puntos Este y Oeste estén intercambiados (figura 2.12).
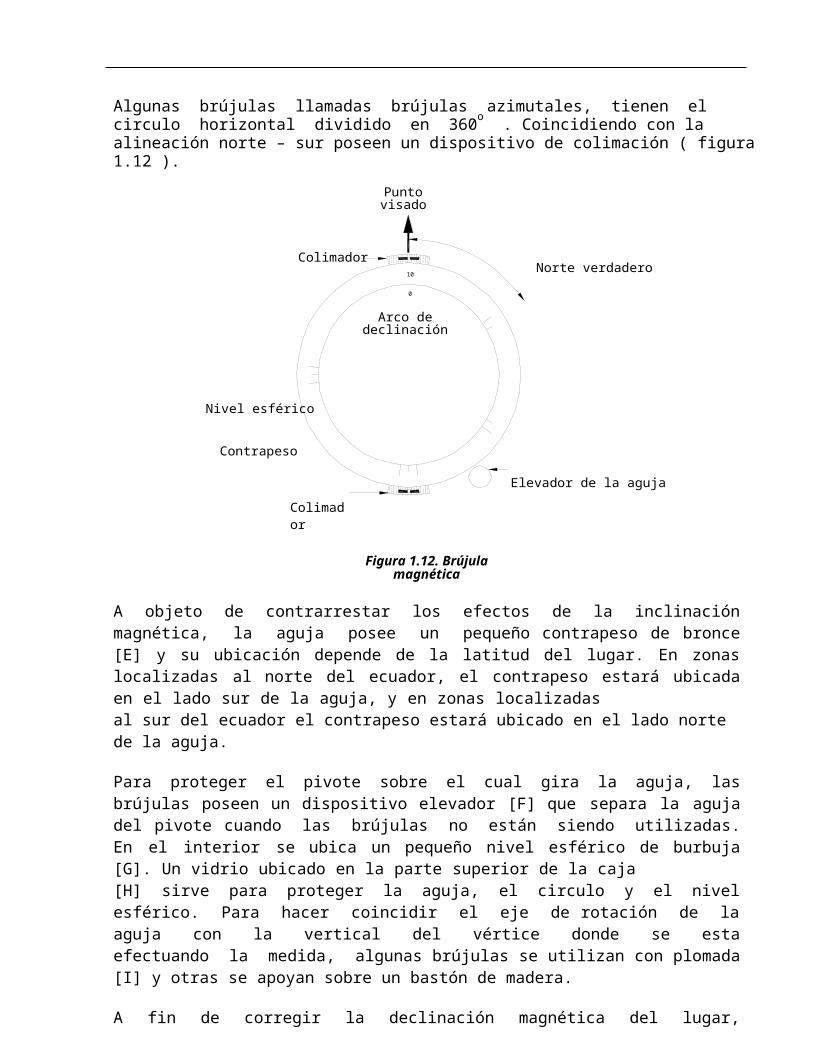
Algunas brújulas llamadas brújulas azimutales, tienen el circulo horizontal dividido en 360o . Coincidiendo con la alineación norte – sur poseen un dispositivo de colimación ( figura 1.12 ).
Punto visado
Colimador10
Norte verdadero
0
Arco de declinación
Nivel esférico
Contrapeso
Colimador
Elevador de la aguja
Figura 1.12. Brújula magnética
A objeto de contrarrestar los efectos de la inclinación magnética, la aguja posee un pequeño contrapeso de bronce [E] y su ubicación depende de la latitud del lugar. En zonas localizadas al norte del ecuador, el contrapeso estará ubicada en el lado sur de la aguja, y en zonas localizadasal sur del ecuador el contrapeso estará ubicado en el lado norte de la aguja.
Para proteger el pivote sobre el cual gira la aguja, las brújulas poseen un dispositivo elevador [F] que separa la aguja del pivote cuando las brújulas no están siendo utilizadas. En el interior se ubica un pequeño nivel esférico de burbuja [G]. Un vidrio ubicado en la parte superior de la caja[H] sirve para proteger la aguja, el circulo y el nivel esférico. Para hacer coincidir el eje de rotación de la aguja con la vertical del vértice donde se esta efectuando la medida, algunas brújulas se utilizan con plomada [I] y otras se apoyan sobre un bastón de madera.
A fin de corregir la declinación magnética del lugar, algunas brújulas poseen un arco de declinación [J] graduado en grados, cuyo cero coincide con la alineación norte, de manera que conociendo la declinación del lugar, mediante un dispositivo especial, se puede hacer girar el circulo horizontal hasta hacer coincidir la lectura con el valor de la declinación del lugar; de esta manera, el rumbo medido con la brújula es el rumbo real.
Es importante mencionar, debido a su popularidad, el Teodolito – Brújula Wild T0 (figura 2-20)por ser un instrumento muy utilizado tanto en la determinación de acimutes magnéticos como enla medición de ángulos en levantamientos de puntos de relleno por taquimetría.
En el capítulo correspondiente a mediciones angulares, se explicará la determinación de rumbos y acimutes mediante el uso de la brújula.
1.1.5 MIRAS VERTICALES
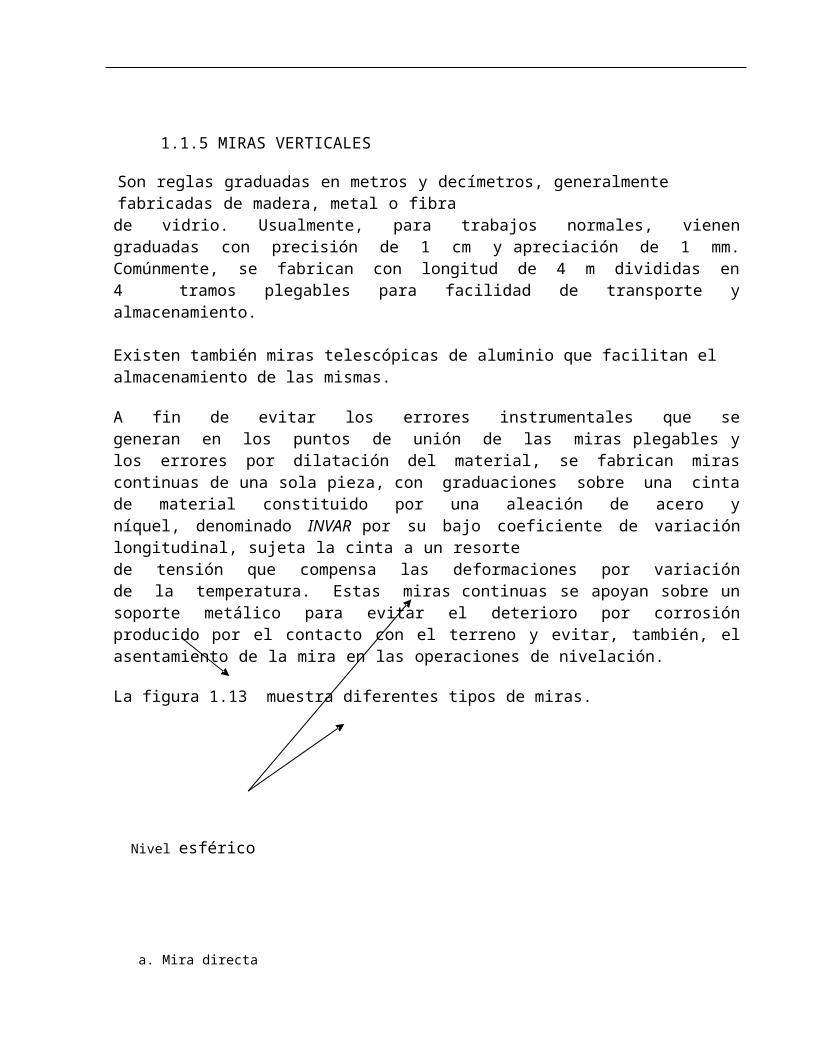
Son reglas graduadas en metros y decímetros, generalmente fabricadas de madera, metal o fibrade vidrio. Usualmente, para trabajos normales, vienen graduadas con precisión de 1 cm y apreciación de 1 mm. Comúnmente, se fabrican con longitud de 4 m divididas en 4 tramos plegables para facilidad de transporte y almacenamiento.
Existen también miras telescópicas de aluminio que facilitan el almacenamiento de las mismas.
A fin de evitar los errores instrumentales que se generan en los puntos de unión de las miras plegables y los errores por dilatación del material, se fabrican miras continuas de una sola pieza, con graduaciones sobre una cinta de material constituido por una aleación de acero y níquel, denominado INVAR por su bajo coeficiente de variación longitudinal, sujeta la cinta a un resortede tensión que compensa las deformaciones por variación de la temperatura. Estas miras continuas se apoyan sobre un soporte metálico para evitar el deterioro por corrosión producido por el contacto con el terreno y evitar, también, el asentamiento de la mira en las operaciones de nivelación.
La figura 1.13 muestra diferentes tipos de miras.
Nivel esférico
a. Mira directa
Articulación para el pliegue
b. Mira invertida c. Mira vertical de INVAR
Figura 1.13. Diferentes tipos de miras verticales

Las miras verticales se usan en el proceso de nivelación y en la determinación indirecta dedistancias. Las miras deben ser verticalizadas con el auxilio de un nivel esférico generalmente sujeto en la parte posterior de la mira.
1.1.6 Miras horizontales
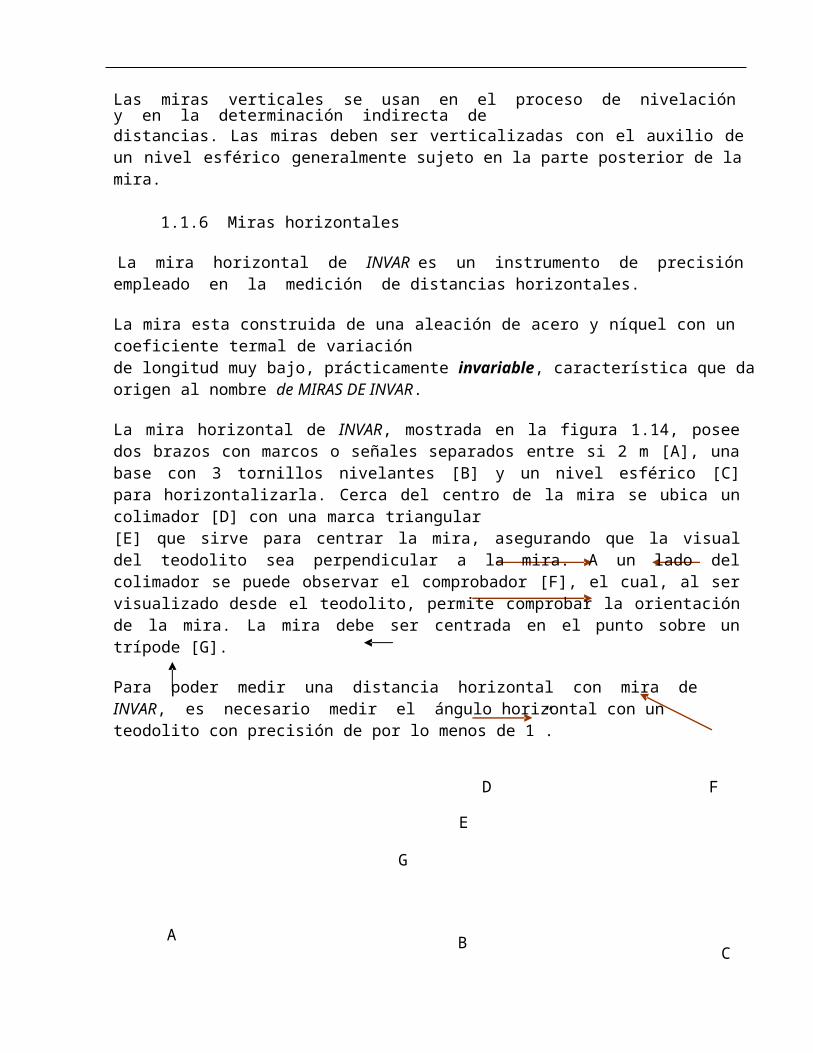
La mira horizontal de INVAR es un instrumento de precisión empleado en la medición de distancias horizontales.
La mira esta construida de una aleación de acero y níquel con un coeficiente termal de variaciónde longitud muy bajo, prácticamente invariable, característica que da origen al nombre de MIRAS DE INVAR.
La mira horizontal de INVAR, mostrada en la figura 1.14, posee dos brazos con marcos o señales separados entre si 2 m [A], una base con 3 tornillos nivelantes [B] y un nivel esférico [C] para horizontalizarla. Cerca del centro de la mira se ubica un colimador [D] con una marca triangular[E] que sirve para centrar la mira, asegurando que la visual del teodolito sea perpendicular a la mira. A un lado del colimador se puede observar el comprobador [F], el cual, al ser visualizado desde el teodolito, permite comprobar la orientación de la mira. La mira debe ser centrada en el punto sobre un trípode [G].
Para poder medir una distancia horizontal con mira de INVAR, es necesario medir el ángulo horizontal con un teodolito con precisión de por lo menos de 1”.
D F
E
G
A BC
Figura 1.14. Mira horizontal de INVAR
La aparición de los distanciometros electrónicos, mas rápidos y precisos en la medición de distancias, ha ido desplazando el uso de las miras INVAR.
Más adelante, en el capítulo correspondiente a medición de distancias, se explicara el proceso de medición de distancias con miras de INVAR.
1.1.7 PLANÍMETRO
Es un instrumento manual utilizado en la determinación del área de figuras planas con forma irregular.
DK
C
I EA B
F
H G
J
Figura 1.15. Planímetro polar mecánico
El planímetro polar, que se muestra en la figura 1.15, consta de un brazo trazador con graduaciónen cm y mm [A] en cuyo extremo va colocado el punto trazador dentro de una lupa [B] que aumenta la imagen del perímetro que se esta recorriendo; un brazo polar [C] sujeto en un extremoal anclaje [D] y en su otro extremo un pivote [E]; un vernier [F] para tomar las lecturas del brazo trazador; un disco graduado [G] para contar el numero de revoluciones enteras del tambor graduado [H] y un vernier [I] para determinar con mayor precisión una revolución parcial; un dispositivo [J] para colocar en cero las lecturas del tambor y del disco; un calibrador [K] para determinar la constante de proporcionalidad.
El área de una figura cualquiera se determina con el planímetro fijando el anclaje en un punto externo a la figura y recorriendo en sentido horario con el punto trazador su perímetro. Finalmente, se toman las lecturas del número de revoluciones y se multiplica por las constante de proporcionalidad, la cual depende de la longitud del brazo trazador y de la escala de la figura. La constante de proporcionalidad es suministrada por el fabricante del instrumento o puede ser determinada directamente por comparación.
Una descripción del fundamento teórico del planímetro polar se puede consultar en Kissan1.
En la figura 1.16 se muestra un planímetro polar electrónico con pantalla digital donde se puede leer directamente el área de la figura en diferentes unidades.
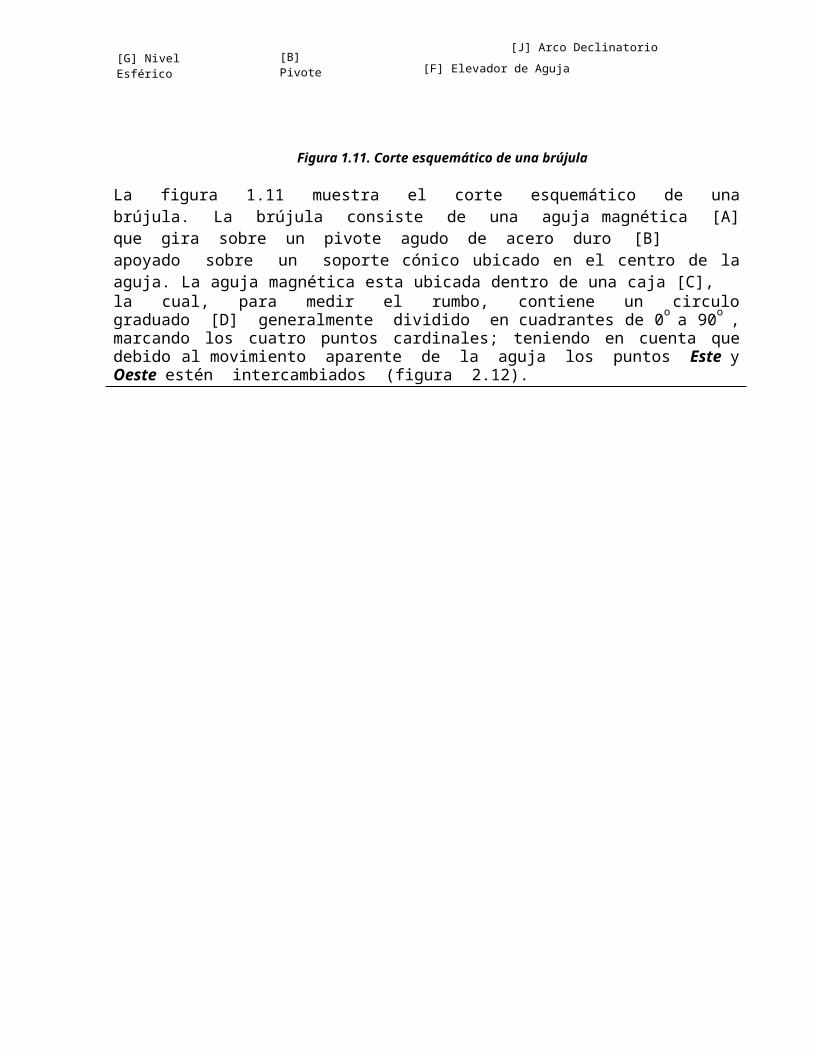
Figura 1.16. Planímetro polar digital
1.2 INSTRUMENTOS PRINCIPALES
1.2.1 TEODOLITOS
El teodolito es un instrumento utilizado en la mayoría de las operaciones que se realizan en los trabajos topográficos.
Directa o indirectamente, con el teodolito se pueden medir ángulos horizontales, ángulos verticales, distancias y desniveles.
28080
LECTURA=72°22'
Figura 1.17. Teodolito Sokkia con lectura directa de nonio
Los teodolitos difieren entre si en cuanto a los sistemas y métodos de lectura. Existen teodolitoscon sistemas de lectura sobre vernier y nonios de visual directa (figura 2.17), microscopios lectores de escala (figura 2.18), micrómetros ópticos (figuras 2.19 y 2.20), sistemas de lectura de coincidencia (1.21).
360°
95 940 10 20 30 40 50 60
102 10360 50 40 30 20 10 0
0 10 20 30 40 50 60
257 256
V: 95°4'H: 103° 2'40"
256°57'20"
Figura 1.18. Teodolito Sokkia con microscopio lector de escala
V92 9
59'36"
327Hz
Lectura del círculo Hz: 327°59'36
Figura 1.19. Teodolito Wild con micrómetro óptico
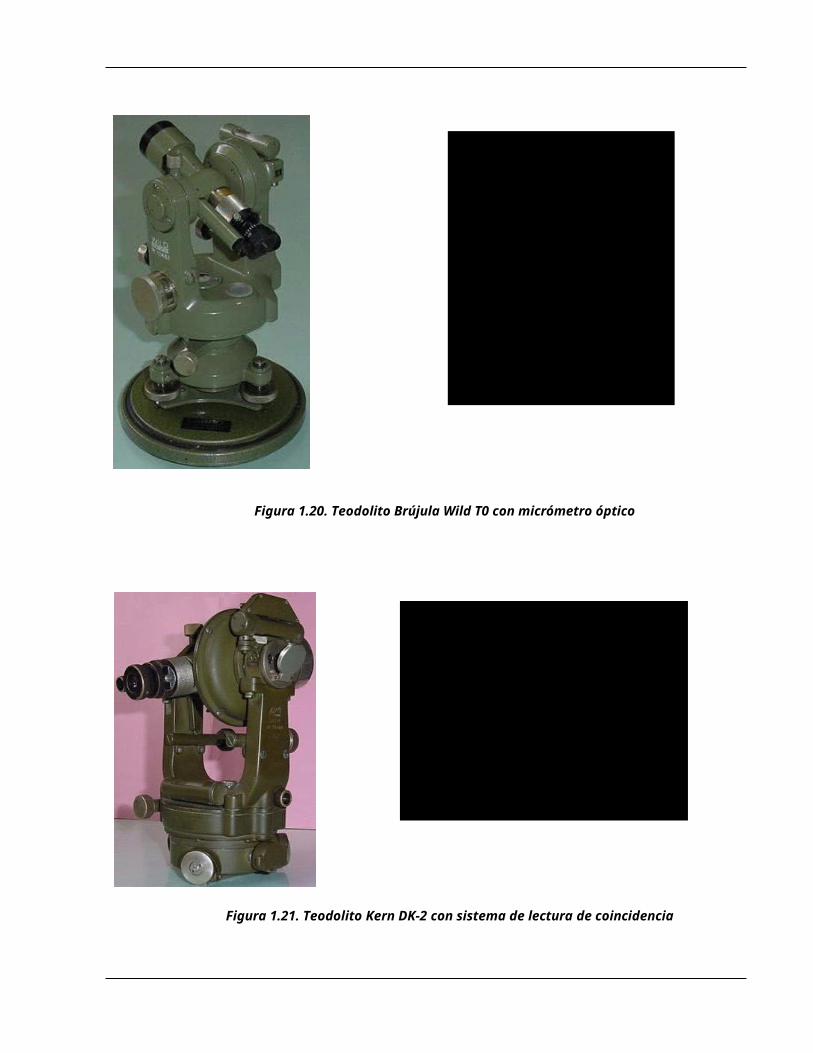
Figura 1.20. Teodolito Brújula Wild T0 con micrómetro óptico
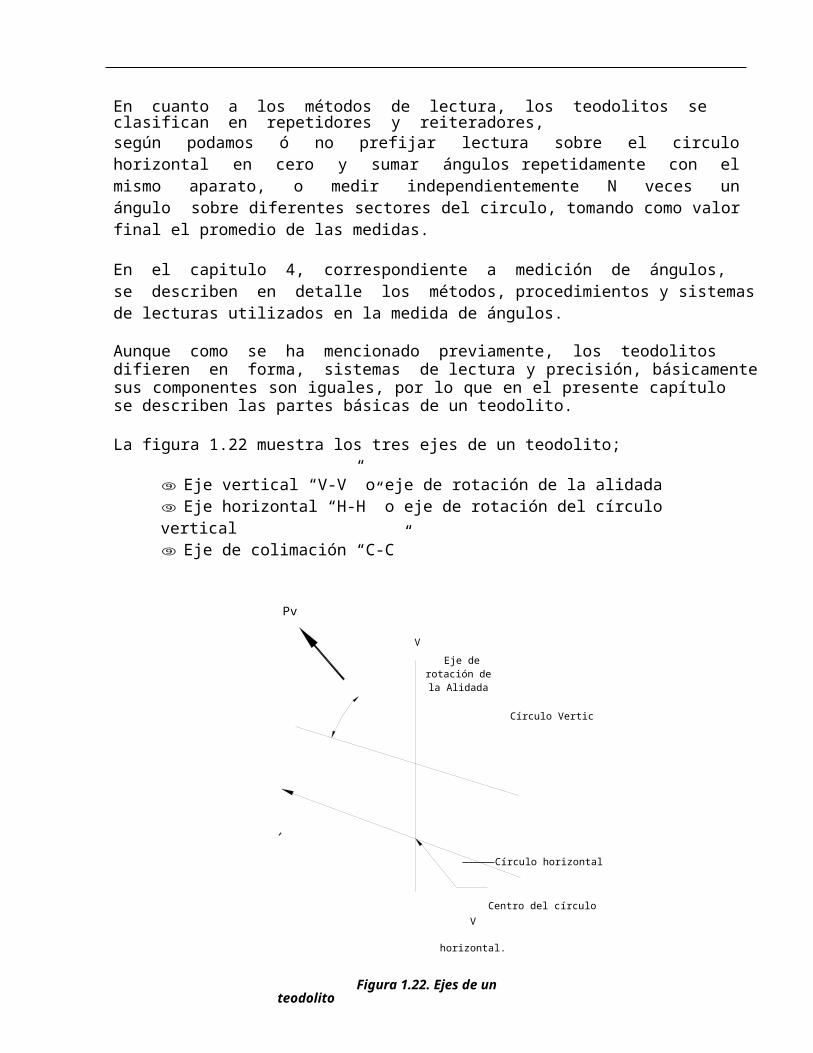
Figura 1.21. Teodolito Kern DK-2 con sistema de lectura de coincidencia
En cuanto a los métodos de lectura, los teodolitos se clasifican en repetidores y reiteradores,según podamos ó no prefijar lectura sobre el circulo horizontal en cero y sumar ángulos repetidamente con el mismo aparato, o medir independientemente N veces un ángulo sobre diferentes sectores del circulo, tomando como valor final el promedio de las medidas.
En el capitulo 4, correspondiente a medición de ángulos, se describen en detalle los métodos, procedimientos y sistemas de lecturas utilizados en la medida de ángulos.
Aunque como se ha mencionado previamente, los teodolitos difieren en forma, sistemas de lectura y precisión, básicamente sus componentes son iguales, por lo que en el presente capítulose describen las partes básicas de un teodolito.
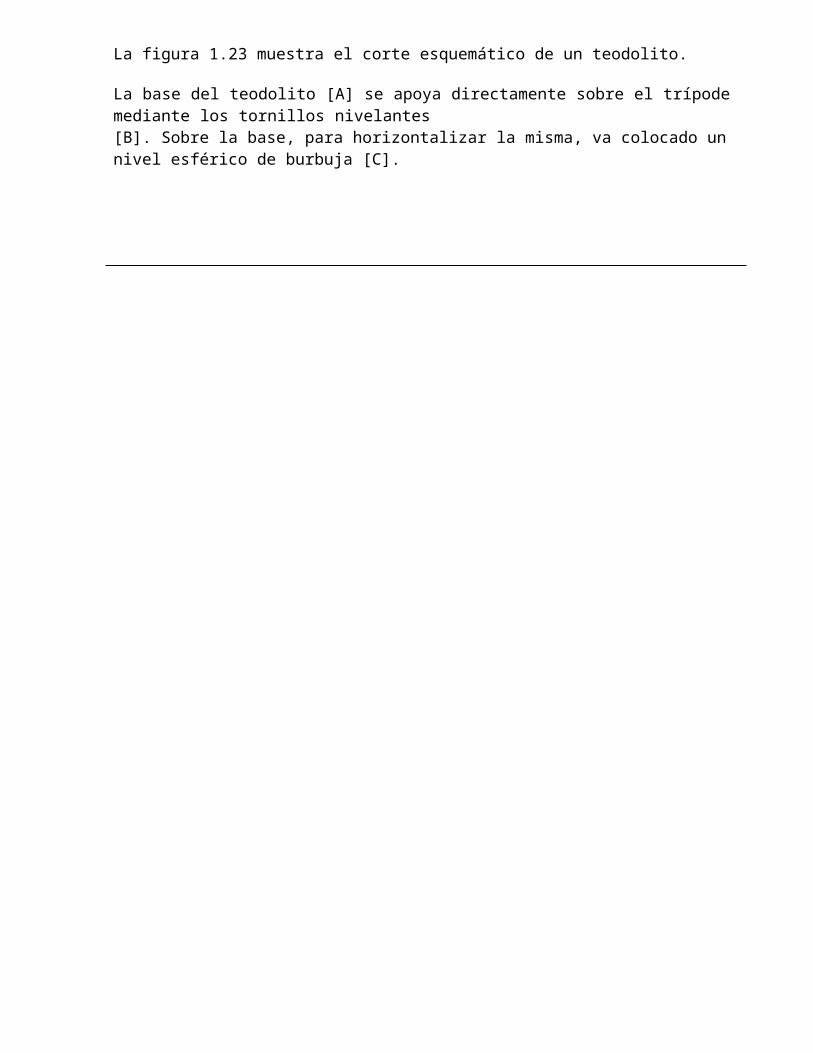
La figura 1.22 muestra los tres ejes de un teodolito;
Eje vertical “V-V” o eje de rotación de la alidada Eje horizontal “H-H” o eje de rotación del círculo vertical Eje de colimación “C-C”
Pv
V
Eje de rotación de la Alidada
Círculo Vertic
Círculo horizontal
Centro del círculo
V horizontal.
Figura 1.22. Ejes de un teodolito
La figura 1.23 muestra el corte esquemático de un teodolito.
La base del teodolito [A] se apoya directamente sobre el trípode mediante los tornillos nivelantes[B]. Sobre la base, para horizontalizar la misma, va colocado un nivel esférico de burbuja [C].

V V
Eje de Rotaciónde la Alidada
Eje de Rotaciónde la Alidada
[M] Circulo Vertical
Eje de Rotación
[N] Anteojo
[O] Tornillo de fijación
[M] Circulo Vertical
[Q] Nivel tórico de C.V.
del Círculo Vertical H H C C Eje de Colimacion
[O] Tornillo de fijación
[L] Nivel Tórico
[J] Alidada
[K] Indice de lectura
[D]Circulo horizontal
[F] Tornillo de coincidencia
[E] Tornillo de presión
[A] Base
[P] Tornillo de coincidencia
[G] Tornillo de corrimiento del circulo horizontal
[I] Tornillo de coincidencia
[H] Tornillo de fijación
[C] Nivel esférico
[P] Tornillo de coincidencia
[J] Alidada
[G] Tornillo de corrimiento del circulo horizontal
[I] Tornillo de coincidencia
[H] Tornillo de fijación
[B]Tornillo nivelante
V
Base delTripode
Base delTripode
V
a. Teodolito repetidor b. Teodolito reiterador
Figura 1.23. Representación esquemática de un teodolito
En los teodolitos repetidores, el circulo horizontal [D] puede girar alrededor del eje vertical. Parala fijación del círculo a la base se dispone del tornillo de presión [E], y para pequeños movimientos de colimación se utiliza el tornillo de coincidencia [F].
En los teodolitos reiteradores, el círculo horizontal está fijo a la base y pude ser deslizado ó rotado mediante un tornillo de corrimiento [G].
Para la fijación del círculo a la alidada y para los pequeños movimientos de colimación, existenlos tornillos de fijación [H] y coincidencia [I]. La alidada [J] gira alrededor del eje vertical de rotación. Sobre la alidada van los índices de lectura [K] y el nivel tórico [L] del círculo horizontal.
Sobre los montantes de la alidada se apoyan el círculo vertical [M] y el anteojo [N]. El anteojo se fija a la alidada mediante el tornillo de fijación [O], y los pequeños movimientos de colimaciónse realizan con el tornillo de coincidencia [P].
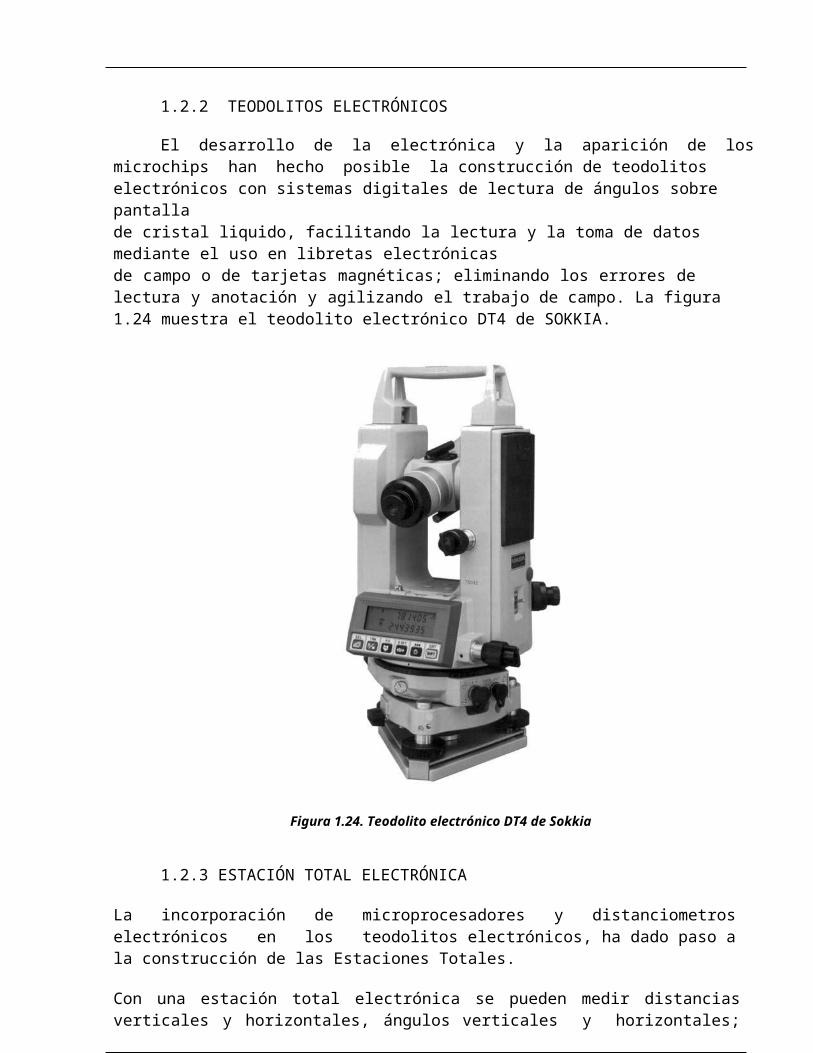
1.2.2 TEODOLITOS ELECTRÓNICOS
El desarrollo de la electrónica y la aparición de los microchips han hecho posible la construcción de teodolitos electrónicos con sistemas digitales de lectura de ángulos sobre pantallade cristal liquido, facilitando la lectura y la toma de datos mediante el uso en libretas electrónicasde campo o de tarjetas magnéticas; eliminando los errores de lectura y anotación y agilizando el trabajo de campo. La figura 1.24 muestra el teodolito electrónico DT4 de SOKKIA.
Figura 1.24. Teodolito electrónico DT4 de Sokkia
1.2.3 ESTACIÓN TOTAL ELECTRÓNICA
La incorporación de microprocesadores y distanciometros electrónicos en los teodolitos electrónicos, ha dado paso a la construcción de las Estaciones Totales.
Con una estación total electrónica se pueden medir distancias verticales y horizontales, ángulos verticales y horizontales; e internamente, con el micro procesador programado, calcular las coordenadas topográficas (norte, este, elevación) de los puntos visados. Estos instrumentos poseen también tarjetas magnéticas para almacenar datos, los cuales pueden ser cargados en el computador y utilizados con el programa de aplicación seleccionado. La figura 2.25 muestra la
estación total Wild T-1000 con pantalla de cristal liquido, tarjeta de memoria magnética para latoma de datos y programas de aplicación incorporados para cálculo y replanteo.
Una de las características importantes tanto los teodolitos electrónicos como las estaciones totales, es que pueden medir ángulos horizontales en ambos sentidos y ángulos verticales con el cero en el horizonte o en el zenit.
Figura 1.25. Estación total Wild T-1000
1.2.4 ESTACIONES ROBÓTICAS
A principios de los años noventa, Geotronics AB introdujo en el mercado el GeodimeterSystem 4000, primer modelo de estación total robótica.
El sistema consiste en una estación total con servo motor de rastreo y una unidad de control remoto de posicionamiento que controla la estación total y funciona como emisor y recolector de datos. Tanto la estación como la unidad de control remoto se conectan por medio de ondas de radio, por lo que es posible trabajar en la oscuridad.
Una vez puesta en estación, la estación total es orientada colimando un punto de referencia conocido y por medio de un botón se transfiere el control de la estación a la unidad de control

remoto de posicionamiento. A partir de este momento, el operador se puede desplazar dentro delárea de trabajo con la unidad de control remoto recolectando los datos. Las estaciones robóticas vienen con programas de aplicación incorporados, que junto con las características mencionadas previamente, permiten, tanto en los trabajos de levantamiento como en los de replanteo, la operación del sistema por una sola persona
1.2.5 NIVELES
El nivel tubular o nivel tórico, es un trozo de tubo de vidrio de sección circular, generadoal hacer rotar un círculo alrededor de un centro O, tal y como se muestra en la figura 2.26. La superficie es sellada en sus extremos y su interior se llena parcialmente con un líquido muy volátil (como éter sulfúrico, alcohol etc.) que al mezclarse con el aire del espacio restante formauna burbuja de vapores cuyo centro coincidirá siempre con la parte mas alta del nivel.
Superficie tórica
Burbuja centradaDivisiones @ 2 mm
Eje del nivel
Circulo
S"
[B]
[A]
[C]
OFigura 1.26. Nivel tórico
La parte superior de un nivel tórico viene dividida generalmente en intervalos de 2 mm de amplitud.
La sensibilidad S de un nivel se define como el ángulo central, en segundos, que subtiende el arco correspondiente a una división. La ecuación 2.1 , derivada de la definición anterior, se utiliza parael cálculo de la sensibilidad.
S" 2mm
*
"Rmm
(2.1)
En donde,
S” Sensibilidad en seg” Valor del radian en seg (206.265”)
Rmm Radio del nivel en mm

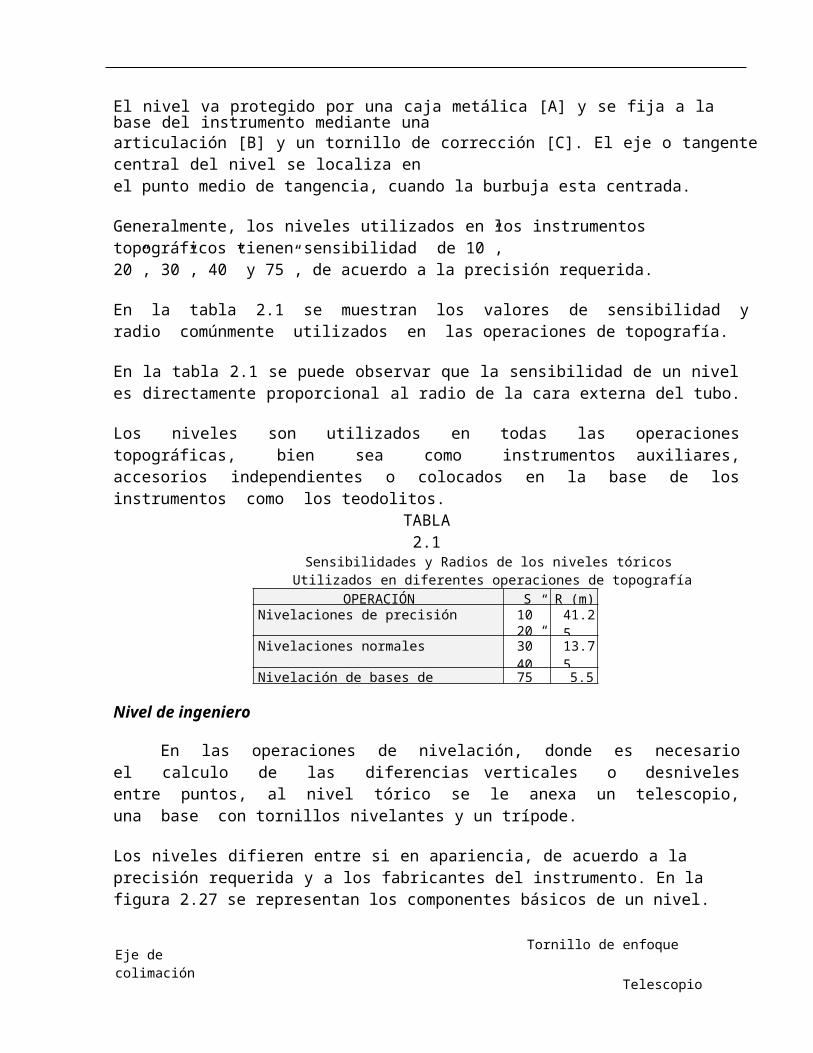
El nivel va protegido por una caja metálica [A] y se fija a la base del instrumento mediante unaarticulación [B] y un tornillo de corrección [C]. El eje o tangente central del nivel se localiza enel punto medio de tangencia, cuando la burbuja esta centrada.
Generalmente, los niveles utilizados en los instrumentos topográficos tienen sensibilidad de 10”,20”, 30”, 40” y 75”, de acuerdo a la precisión requerida.
En la tabla 2.1 se muestran los valores de sensibilidad y radio comúnmente utilizados en las operaciones de topografía.
En la tabla 2.1 se puede observar que la sensibilidad de un nivel es directamente proporcional al radio de la cara externa del tubo.
Los niveles son utilizados en todas las operaciones topográficas, bien sea como instrumentos auxiliares, accesorios independientes o colocados en la base de los instrumentos como los teodolitos.
TABLA 2.1Sensibilidades y Radios de los niveles tóricos
Utilizados en diferentes operaciones de topografíaOPERACIÓN S” R (m)
Nivelaciones de precisión 10”20”
41.2520.63
Nivelaciones normales 30”40”
13.7510.31
Nivelación de bases de teodolitos (esféricos) 75” 5.50
Nivel de ingeniero
En las operaciones de nivelación, donde es necesario el calculo de las diferencias verticales o desniveles entre puntos, al nivel tórico se le anexa un telescopio, una base con tornillos nivelantes y un trípode.
Los niveles difieren entre si en apariencia, de acuerdo a la precisión requerida y a los fabricantes del instrumento. En la figura 2.27 se representan los componentes básicos de un nivel.
Eje de colimaciónTornillo de enfoque
Telescopio
Proyección de la burbuja Ocular de la burbuja
Nivel tubular
Tornillos nivelantes Círculo horizontal
Figura 1.27. Nivel de ingeniero
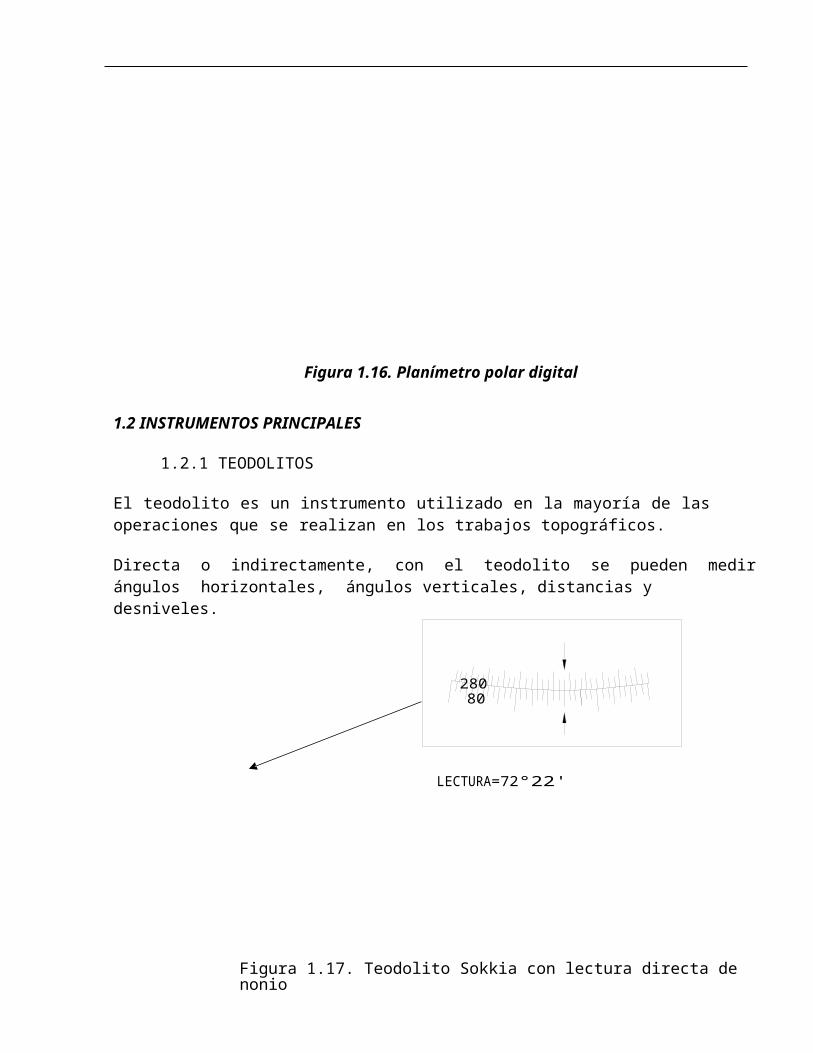
Figura 1.28. Nivel Wild N2 con nivel tórico de doble curvatura
En la figura 2.28 se muestra el nivel Wild N2 con nivel tórico de doble curvatura. La figura 2.29 a. muestra el nivel de alta precisión PL1 de Sokkia, empleado en nivelaciones de primer orden. Este tipo de nivel posee un prisma de placas plano paralelas y un micrómetro óptico que permiten, conel empleo de una mira INVAR, aumentar la precisión de las lecturas a la mira a 1/ 10 de mm. Un ejemplo de lectura con nivel de placas plano paralelas y micrómetro óptico se muestra en la figura 2.29 b
Tornillobasculante
MicrómetroLectura de mira = 148,000 cm. Lectura del micrómetro = 0,653 cm. Lectura definitiva = 148,653 cm.
(a) (b)
Figura 1.29. Nivel de precisión PL1 de Sokkia de placas plano paralelas con micrómetro óptico

En todas la operaciones de nivelación es necesario, antes de efectuar las lecturas a la mira,chequear la horizontalidad del eje de colimación.
En algunos niveles, este proceso se realiza ópticamente proyectando la burbuja del nivel tórico sobre el lente de colimación, como se muestra en la figura 2.30, de manera de hacer la verificación al momento de tomar la lectura. En caso de que no se verifique la coincidencia de la burbuja, se usa un tornillo basculante que permite, mediante pequeños movimientos, corregir una eventual inclinación del eje de colimación.
8122
8223
8324
8425
2685
8627
87Burbuja no Burbujacoincidente coincidente
a. Proyección de la burbuja b.- Coincidencia de la burbuja
Figura 2.30. Comprobación óptica de la coincidencia de la burbuja
1. Cintas de suspensión2. Línea de puntería3. Prisma4. Soporte5. Péndulo con prisma6. Muelle elástico7. Botón de control de
funcionamiento8. Amortiguador9. Tubo de amortiguación
Figura 2.31. Compensador óptico mecánico Wild NA-2

Algunos niveles automáticos mas sofisticados, poseen un compensador óptico mecánico a fin degarantizar la puesta en horizontal del eje de colimación.
Existen también niveles automáticos con compensador de amortiguación magnética. En la figura2.32 se muestra el nivel automático C40 de Sokkisha y el esquema de funcionamiento del compensador de amortiguación magnética.
PENDULO
DIRECCION DEL MOVIMIENTO
IMAN
CONDUCTORb. Compensador de amor-
tiguación magnética
a. Nivel C40
Figura 1.32. Nivel C40 Sokkisha
El imán del compensador produce un campo magnético cuando el conductor colocado en el campo magnético, se mueve como consecuencia de una falta de horizontalidad del nivel, y se genera una inducción electromagnética que produce una corriente giratoria en el conductor creando una fuerza que compensa el movimiento del conductor.Recientemente se han introducido en el mercado, niveles electrónicos con los cuales el procesode nivelación en el campo puede ser realizado por una sola persona. Estos niveles constan básicamente de un emisor de rayos láser con un barrido de 360º y un receptor o detector de rayos,tal y como se muestra en la figura 1.33.

a. Emisor de rayos láser b. Detector de rayos
Figura 1.33. Nivel electrónico LP3A Sokkisha
2.2.6 DISTANCIOMETROS ELECTRONICOS
Aunque parezca un proceso sencillo, la medición distancias con cintas métricas es una operaciónno solo complicada sino larga, tediosa y costosa.
Como se mencionó previamente, las cintas se fabrican con longitudes de hasta 100 m, siendo lasde 50 m las de mayor uso en los trabajos de topografía.
Cuando las longitudes a medir exceden la longitud de la cinta métrica utilizada, se hace necesario dividir la longitud total en tramos menores o iguales a la longitud de la cinta, incrementando la probabilidad de cometer errores de procedimiento tales como errores de alineación, de lectura, de transcripción, etc.
Diferentes métodos y equipos se han implementado a lo largo de los años para mediciones de distancias rápidas y precisas.
A finales de la década del 40, se desarrollo en Suecia el GEODÍMETRO, primer instrumento de medición electrónico de distancias capaz de medir distancias de hasta 40 Km mediante la transición de ondas luminosas, con longitudes de onda conocida modulados con energía electromagnética.
Unos diez años más tarde, en sur Africa, se desarrollo el TELUROMETRO, capaz de medirdistancias de hasta 80 Kms mediante la emisión de micro ondas.
Recientemente, con la introducción de los microprocesadores se han desarrollado nuevos instrumentos, mas pequeños y livianos, capaces de medir rápidamente distancias de hasta 4 Km con precisión de [ 1mm + 1 parte por millón ( ppm)] en donde 1 mm corresponde al error instrumental el cual es independiente de la distancia media.
Los distanciómetros electrónicos se pueden clasificar en
Generadores de micro ondas (ondas de radio). Generadores de ondas luminosas (rayos láser e infrarrojos).
Los distanciómetros de micro ondas requieren transmisores y receptores de onda en ambos extremos de la distancia a medir mientras que los instrumentos basados en la emisión de ondas luminosas requieren un emisor en un extremo y un prisma reflector en el extremo contrario.
Figura 2.3. Distanciómetros electrónicos de Sokkisha
En el capítulo 3-7, correspondiente a la medición de distancias con distanciómetros electrónicos, estudiaremos más en detalle los fundamentos y tipos de distanciómetros utilizados actualmente en la medición de distancias.
Tipos de dispositivos
1.3 TIPOS DE GPS
1.3.1 Int r o d ucción
Existen varios tipos de receptores GPS, dependiendo de sus características
se pueden generalizar en receptores geodésicos de doble frecuencia, receptores geodésicos con
medición de fase sobre L1, receptores de código avanzados y los navegadores convencionales. El
programa (GEORAP), generado para este proyecto final de carrera, está orientado para ser utilizado
con equipos GPS navegadores, por lo que se ha profundizado en el estudio de los diversos tipos de
receptores de código que podemos encontrar en el mercado.
1.3.2. Rece p tores g e o d ésicos de d o ble fre c uenc i a
Trabajan con la portadora L1 y también con la L2, lo cual permite disminuir los errores
derivados de la propagación desigual de la señal a través de las distintas capas atmosféricas (sobre todo
la ionosfera) y resolver la ambigüedad del número de ciclos de la portadora.
Con este tipo de equipos se pueden llegar a precisiones por debajo del centímetro con
postprocesado para distancias de hasta 10 km, y por debajo del metro para distancias de hasta 500
km.
Además de con técnicas de postprocesado en gabinete, los receptores bifrecuencia
también se usan con correcciones en tiempo real. Para este último caso, lo normal es usarlos
junto con algoritmos RTK (Real Time Kinematic), que permiten precisiones centimétricas en
tiempo real en combinación con estaciones de referencia.
Algunos de ellos son compatibles con sistemas DGPS vía satélite; los servicios de
corrección de última generación vía satélite junto con lectores de doble frecuencia permiten llegar hasta
precisiones decimétricas en tiempo real, si bien no
es muy normal ver este tipo de metodologías junto este tipo de receptores.
El precio de un receptor bifrecuencia de última generación está entorno a
20.000 Euros (incluyendo un receptor adicional para operar como estación base, un emisor de radio
para enviar la corrección de la señal y tecnología RTK de inicialización instantánea).
Figura 4.1 Equipo GPS e doble frecuencia
1.3.3 Rece p tores g e o d ésicos con medic i ón de fase sobre L1
Son receptores que trabajan con la onda portadora L1 acumulando información que,
con postprocesado, en gabinete permite obtener precisiones relativas centimétricas en el mejor de
los casos para distancias de hasta 25 ó 30 km y submétricas para distancias de hasta 50 km. Permiten
el cálculo de vectores con su evaluación estadística y son aptos para el ajuste de redes, aunque se trata
de una tecnología obsoleta hoy en día.
Este tipo de receptores suelen ser usados con métodos relativos estáticos, con el uso de
estaciones de referencia complementarias. Muchos de ellos son también compatibles con los
servicios DGPS vía satélite trabajando en lectura de
de dispositivoscódigo exclusivamente, mediante la incorporación de una tarjeta electrónica de expansión y la
suscripción al sistema.
Su precio suele estar entorno a 4.000 Euros (sin incluir estación base de referencia ni otro
tipo de suscripciones a corrección DGPS vía satélite).
1.3.4 Rec eptores de código C/A avanz a dos
Son receptores que además de analizar el código C/A disponen de lectura
(con ciertas limitaciones) de la fase portadora L1.
Estos receptores permiten el uso de metodologías diferenciales, en ocasiones bajo la forma de
suscripciones a servicios vía satélite como OmniStar® o LandStar®, consiguiendo bajo esta metodología
precisiones entorno a 1 m. en tiempo real. Este tipo de servicio tiene la enorme ventaja de que se
dispone de corrección instantánea sin necesidad de montar ninguna estación de referencia, y para
casi para cualquier parte del globo en tiempo real. Dicha suscripción suele tener un precio anual
de alrededor de 1.400 Euros para precisión métrica y un solo país; también se puede contratar
por períodos limitados de semanas, meses o incluso por días avisando por adelantado.
El precio aproximado de un equipo de estas características, incluyendo una
PDA y la suscripción al sistema DGPS vía satélite por un año está entorno a los
6.000 Euros.
1.3.5 N a v e g a d o r e s c o n v enci o nales
Los navegadores son los tipos de receptores GPS más extendidos, dados su bajo coste y
multiplicidad de aplicaciones. Consisten en receptores capaces de leer
el código C/A, que pueden tener incluso capacidad para leer señales diferenciales vía radio o
conexión software y también capacidad para representar cartografía sencilla en una pantalla de cristal
líquido.

Permiten conocer las coordenadas en varios formatos y conversión de baja precisión a datum
locales desde WGS84 (Word Geodetic System 1984), sistema geodésico de referencia en GPS.
También permiten la navegación asistida con indicación de rumbos, direcciones y señales audibles
de llegada en rutas definidas por el usuario a través de puntos de referencia (waypoints).Tipos de dispositivos
GPS
Los precios de este tipo de navegadores pueden ir de los noventa a los 600
Euros aproximadamente, y sus precisiones pueden ir de los 25 m a los 7 m en planimetría (sin
Disposición Selectiva), y un error de al menos 16 m en altimetría, dependiendo de la visibilidad de
satélites y de la geometría que presenten los mismos. Con DGPS pueden tener precisiones por debajo
de 5m.
4.5.1 Tipos de Navegadores
Los navegadores GPS se pueden clasificar en dos grupos: dispositivos basados en GPS
dedicado; y equipos GPS que necesitan utilizarse conjuntamente con PDA, ordenador ó móvil.
a) Navegadores basados en un GPS dedicado.
Estos dispositivos proporcionan una interfaz gráfica al usuario, proporcionan datos de
navegación (latitud, longitud, altitud, velocidad, satélites en vista, hora o brújula electrónica). Una de
las características más importantes de estos receptores
es la de poder grabar o marcar una determinada posición a través de la función
waypoint (punto de camino), la cual generalmente podremos asociar un nombreanterior función se pueden crear rutas
(agrupación en secuencia de waypoints): una ruta contiene una posición de partiday una final, así como toda una serie de localizaciones intermedias a lo largo del trayecto. También podemos hacer que sea el propio GPS el que grabe
(o incluso un icono). A partir de la automáticamente nuestra ruta o "huella" a través de la
función track (nuestro receptor grabará un punto cada vez que cambiemos de dirección), para
que podamos volver, sin ningún problema, a nuestro punto de partida. Muchos de estos equipos
incorporan ó dan la posibilidad de importar cartografía, haciendo que su utilización sea más
atrayente.
Figura 4.2. Pantallas del Garmin GPSMAP 60C
Tipos de dispositivos GPS
Dependiendo del servicio que prestan se pueden dividir en dos grupos: el primer grupo
esta formado por los GPS para uso en senderismo, BTT (Bicicletas Todo Terreno), motos, atletas o
marítimos. En el otro grupo están los GPS para uso en vehículos y tienen su función principal es la de
guiar al conductor por carreteras
y calles, hasta un lugar de destino.
Senderismo, BTT, atletas o deportes marítimos.
Las marcas líderes en este sector son Garmin® y Magellan®. El desarrollo de
estas marcas es tan amplio que incluso poseen su propio protocolo de transmisión de datos.
Magellan eXplorist™ 100 Magellan eXplorist™ XL GPS Meridian Gold
Figura 4.3. Tipos de dispositivos Magellan
eTrex eTrex Camo eTrex Venture CX Etrex Vista CX Edge 305 (HR/CAD)
Figura 4.4. Tipos de dispositivos Garmin
Las características generales de estos equipos son:
Antena integrada.
Receptor de 12 canales paralelos, compatible con la tecnología WAAS
(EGNOS en Europa) de corrección de errores, que permite precisiones de 5
metros e inferiores.
Batería de pilas.
Pantalla en blanco y negro, ó a color.
Estado de satélites: Muestran datos de los satélites GPS que detectan su posición y obtienen
información sobre su estado.
Capacidad de almacenar hasta 500 waypoints de usuario con nombre y símbolo, 20 rutas
reversibles, 50 puntos por ruta.

m m
Tipos de dispositivos GPS
Las características específicas que suelen incluir algunos de estos equipos son:
Permiten inserción de tarjetas externas.
Resistente al agua.
Incluye altímetro barométrico y un compás electrónico.
Algunos más especializados para uso BTT, como el Edge 305 es capaz de medir la
cadencia de pedaleo, el ritmo cardíaco, la velocidad, la distancia, el tiempo, las calorías
quemadas, la altitud, las subidas y pendientes y muchos datos más.
Muchos de ellos poseen ó dan la posibilidad de incorporar datos de ciudades,
autopistas, carreteras principales, parques, principales vías
fluviales, aeropuertos, etc. Así como mapas topográficos y callejeros.
Interfaz con PC, a través del puerto serie, ó en el caso de los más sofisticados con
puerto USB. Utilizando protocolos propietarios como en el caso de Garmin, NMEA y RTCM.
Los dispositivos más evolucionados traen el chip SiRF Star 3 GPS, que hace que sean receptores
hipersensibles, encontrando rápidamente la señal GPS
y garantiza una recepción óptima y precisa.
Vehículos:
Las marcas más comerciales de estos equipos son TomTom® y Garmin®.
TomTo ®
GP 510/710/910 TomTo ®
ONE España V2
Figura 4.5. Tipos de dispositivos TomTom®
Garmin®
Nuvi
300/310/350
Garmin®
Nuvi 360/610/660 -
Europa-
GARMIN®
StreetPilot
7200/7500
GARMIN®
GPSMap
296
Figura 4.6. Tipos de dispositivos Garmin®

Tipos de dispositivos GPS
Las cualidades generales de los receptores GPS para vehículos, más modernos el mercado son:
Pantalla indicando el rumbo, velocidad y distancia.
Intrega el chipset SiRF Star III de alta sensibilidad.
Brújula: La brújula aparece en la pantalla, para que se oriente todavía mejor.
Permiten calcular rutas, ver y elegir el camino deseado. Así como búsqueda de lugares (calle y
número) ó puntos de interés (aparcamientos, gasolineras
y otros).
Instrucciones habladas y en varios idiomas.
Pantalla táctil
Pantalla LCD extra ancha.
Baterías de Ion-Litio, recargables con el cable del mechero.
Mapas detallados de toda Europa, EE. UU. y Canadá. Posibilidad de cambiar mapas
reemplazando la tarjeta externa.
Conectividad: Bluetooth, puerto serie y USB.
También nos los podemos encontrar con estas características particulares:
Incorpora reproductor MP3, reproductor audio book, visor de imágenes en
JPEG, reloj mundial (horas por zonas), conversor de moneda y medidas, y calculadora.
Kit de Manos libres para el coche.
Algunos más sofisticados como el GPSMAP, se le pueden incorporar opcionalmente
un kit náutico, con una tarjeta de memoria de 64 Mb y un CD-ROM MapSource
BlueChart®, el GPS muestra información tal como contornos de profundidad, zonas de
marea, ayudas a la navegación, zonas restringidas, boyas, etc.
Algunos de ellos son compatibles con el receptor RDS (Radio Data System) GTM 10,
que permiten recibir información del tráfico y poder así
proporcionar rutas evitando atascos, obras, restricciones, sin gastos de funcionamiento
porque usan la subportadora RDS de forma gratuita para obtener esa información.
Servicios como TomTom® Plus que permiten descargarse vía GPRS
información sobre el tráfico, condiciones de las carreteras (atascos, cámaras de seguridad fijas y
móviles), localizador de contactos.
Ranura de expansión de memoria.

Tipos de dispositivos GPS
b) Navegadores GPS para usar conjuntamente con PDA, ordenador o móvil.
Este es un nuevo concepto de navegador que se apoya en tres pilares fundamentales: Un
receptor GPS con interfaz de comunicación; una PDA (Personal Digital Assistant), ordenador o móvil,
y un programa para comunicarlos y tratar los datos del GPS. Las ventajas que se obtienen son las
siguientes:
Total versatilidad, en un mismo sistema pueden estar instalados distintos
programas que aunque compartan la PDA y el receptor GPS, tengan usos totalmente
distintos, Por ejemplo: un programa navegador, un programa para uso en todo terreno o un
programa medir distancias jugando al golf.
La PDA conserva todas sus capacidades y puede ser usada para otras
aplicaciones ajenas al Navegador. Como por ejemplo: Agenda, Editor de textos, Juegos o un
reproductor de música MP3.
Posibilidad de conexión vía TCP/IP, GSM o GPRS para utilizar el dispositivo
en modo diferencial.
Facilidad para el intercambio de información entre usuarios. Ya existen sitios
en Internet donde, por ejemplo se publican puntos de interés creados por los propios usuarios,
como lugares de tapas, paradas de taxi ó empresas.
Fácilmente actualizable, tanto los programas como la cartografía que utiliza.
Constante renovación al poder instalar los nuevos programas que vayan
surgiendo.
Sistema de bolsillo de muy reducido tamaño, permitiendo su fácil transporte.
No cabe duda que la maquina más versátil que existe actualmente es un
ordenador, es precisamente esta circunstancia la que hace que este tipo de navegadores sea una de
las mejores opciones.
En el mercado podemos encontrar una gran variedad de equipos que han sido construidos
para ser utilizados con PDAs, ordenadores ó móviles, entre ellos se pueden hacer varias grupos según
sea su forma de conexión, podemos encontrar de tarjeta (Compact Flash, tarjeta SD), Bluetooth, USB,
RS232 y PS/2.

p m
Tipos de dispositivos GPS
Tarjeta (receptor GPS Compact Flash, tarjeta SD)
SysOnChi ®
CF PLUS Sirf III GPS Haico ®
305III + Slot SD
Figura 4.7. Receptores GPS de tarjeta
Las caracte r ísticas de estos equip os :
Suelen tener incorporado el chip SiRF Star III.
Utilizan 12 ó 20 canales paralelos para búsqueda de satélites.
Sólo proporcionan datos en el datum WGS-84.
Antena: Antena Helicoidal Incorporada y antena externa opcional.
Mensaje de Salida: NMEA 0183 (GGA, GSA, GSV, RMC y VTG) convertible en
SiRF.
Utilizan la tarjeta Compact Flash Tipo 1 o 2/ Mini-1394 como interfaz hardware.
Suelen ser alimentados con 3.3 voltios a corriente continua.
Formas de conexión:
Figura 4.8. Formas de conexión
1.- Como un receptor GPS Compact Flash.
2.- Como una tarjeta SD.
3.- Como un receptor GPS tipo "ratón" conectado a una PDA.
®
Tipos de dispositivos GPS
Bluetooth
SysOnChip SMART
® BT-TRACER100
®® Qstarz BT-Q810 / i-
BLUE Blue 737
Figura 4.9. Algunos receptores GPS Bluetooth
Estos dispositivos tienen las siguientes características:
La mayoría traen incorporado el chip SiRF Star III.
Utilizan 12 ó 20 canales paralelos para búsqueda de satélites.
Tienen un consumo aproximado de 115 mA con baterías de 3,3 voltios.
Batería del Litio recargable.
Los protocolos utilizados para transmitir los datos son NMEA-0183, SIRF.
Sólo proporcionan datos en el datum WGS-84.
Algunos de ellos son compatible con WASS/EGNOS.
USB, RS232 ó PS/2
®® GPS USB HAICOM
SANAV GM-48UB GM-44UBDUAL HI-
Figura 4.10. Algunos receptores GPS USB
204III
Suelen tener las siguientes características:
La mayoría traen incorporado el chip SiRF Star III ó Antaris4 de ATMEL.
Utilizan 12 ó 20 canales paralelos para búsqueda de satélites.
Tienen un consumo aproximado de 60 mA.
Los protocolos utilizados para transmitir los datos son NMEA-0183, SIRF. Con las sentencias:
GPGGA, GPGLL, GPGSA, GPGSV, GPRMC, PVTG y GPZDA.
Sólo proporcionan datos en el datum WGS-84.
Algunos de ellos son compatible con WASS/EGNOS.
Velocidad de datos: 2400/4800/9600/38400/57600/115200 seleccionable.
c
Tipos de dispositivos GPS
c) GPS Localizadores
Localizador TrackStar III®
Localizador GPRS WebTra ®
Figura 4.11. GPS localizadores
Estos localizadores están dotados de un GPS con ChipSet SiRF Star III de última generación y un módulo GSM
con capacidad de GPRS, SMS y voz que permite enviar la posición a un servidor Web, a un e-mail o a un teléfono
móvil y monitorizar el sonido ambiente.
Se utiliza principalmente para las siguientes aplicaciones:
Control de Flotas, seguridad y recuperación de vehículos.
Localización de vehículos de una empresa.
Vigilancia de mercancías valiosas.
Seguimiento en tiempo real y seguimiento de incógnito.
Observación de Yates.
Seguridad personal.
Vigilancia de enfermos y adolescentes.
Sistema de localización para colectivos de riesgo.
Láser Escáner Terrestre
Herramientas topográficas: Láser Escáner 3D (HDS3000 Leica) Escáner Láser de impulsos con cámara fotográfica incorporada y resolución máx. 2mm Rango de trabajo: Objetos/espacios medianos y grandes Puede medir superficies que se encuentran desde 1m hasta 300m Capacidad de captura: máx.1 punto cada 2mm Obtienes nubes de puntos 1 posición: entre 1-2 h de captura de datos en campo.