





Idiomas
Páginas
Jurídico


U n i v e r s i d a d N a c i o n a l d e S a n A g u s t í n
Facul tad de Ingenier ía de Producción y Serv ic ios
Escuela Profesional de Ingeniería Electrónica
Seminario de tesis.
Proyecto de investigación
Prototipo de control de velocidad de motores (Avance)
Alumno:
-Amú Jiménez Enrique Aurelio CUI: 20110853
A R E Q U I P A - P E R U
2015

SEMINARIO DE TESIS 2015-ACONTROL DE MOTORES
INDICE1. Tipo de investigación:.............................................................................................................3
2. Problema..................................................................................................................................3
a) Planteamiento del problema..............................................................................................3
b) Objeto de estudio: Control de velocidad de motores......................................................3
c) Descripción del objeto de estudio:....................................................................................3
[3]COMO CONECTAR UN MOSFET DE POTENCIA A UN MICROCONTROLADOR. 7
Símbolos de los Mosfet..........................................................................................................8
Mosfet usado como simple interruptor de potencia............................................................8
Curvas de conducción de un hipotético Mosfet con las dos regiones de trabajo (lineal y saturación) para distintas tensiones de Gate...................................................................9
Ejemplo de conexión de un Mosfet no "logic level" de canal N.......................................10
Ejemplo de conexión de un Mosfet no "logic level" de canal P.......................................11
3. Desarrollo...............................................................................................................................12
SIMULACION.............................................................................................................................12
COMPONENTES......................................................................................................................14
PUENTE H IMPLEMENTADO.................................................................................................17
PLACA PUENTE H...............................................................................................................18
COMPONETES DEL PUENTE H........................................................................................19
PROGRAMACION.....................................................................................................................23
IMPLEMENTACION FINAL......................................................................................................28
4. Alcances.................................................................................................................................28
5. Conclusiones..........................................................................................................................29
6. Referencias............................................................................................................................29
2

SEMINARIO DE TESIS 2015-ACONTROL DE MOTORES
PROYECTO DE INVESTIGACION
1. Tipo de investigación:La presente investigación será del tipo tecnológico ya que se propone el diseño de un prototipo que busca mejorar las tecnologías actuales.
[1]La investigación tecnológica en las ciencias de la ingeniería presenta una serie de características que la vinculan en forma natural con la innovación tecnológica, lo cual indica que las instancias de promoción inicial de los proyectos de investigación y la evaluación de la investigación tecnológica pueden ser utilizadas como un instrumento para fomentar la innovación.
2. Problemaa) Planteamiento del problema: Los sistemas de control de velocidad de
motores son muy costosos, por lo general complicados ya que usan PLC o sistemas de control distribuido para su manejo y de difícil adquisición.
b) Objeto de estudio: Control de velocidad de motores.c) Descripción del objeto de estudio:
[2] Control de motores de CC Control por Ancho de Pulso (PWM)
La Regulación por Ancho de Pulso de un motor de CC está basada en el hecho de que si se recorta la CC de alimentación en forma de una onda cuadrada, la energía que recibe el motor disminuirá de manera proporcional a la relación entre la parte alta (habilita corriente) y baja (cero corriente) del ciclo de la onda cuadrada. Controlando esta relación se logra variar la velocidad del motor de una manera bastante aceptable.
3

SEMINARIO DE TESIS 2015-ACONTROL DE MOTORES
El circuito que se ve a continuación es un ejemplo de un control de Regulación de Ancho de Pulso (PWM, Pulse-Width-Modulated en inglés), que se podría adaptar al circuito del Puente H
Puente H: Circuito para controlar motores de corriente continua. El nombre se refiere a la posición en que quedan los transistores en el diagrama del circuito.Para controlar la velocidad y sentido de marcha de motores de CC. El primer circuito —con el MOSFET de potencia BUZ11— permite controlar motores medianos y grandes, hasta 10 A de corriente. El segundo circuito —con el transistor 2N2222A— es para motores pequeños, que produzcan una carga de hasta 800 mA.
4

SEMINARIO DE TESIS 2015-ACONTROL DE MOTORES
El que sigue es un circuito genérico de generación de pulsos que se puede utilizar en aquellos lugares donde sea necesario un pulso digital de reloj no demasiado preciso. Cambiando los valores de R1 y R2 se ajusta la frecuencia básica. El potenciómetro regula el ancho de pulso.
5

SEMINARIO DE TESIS 2015-ACONTROL DE MOTORES
A continuación el circuito básico y la fórmula para calcular los anchos de pulso generados por el integrado 555.
6

SEMINARIO DE TESIS 2015-ACONTROL DE MOTORES
[3]COMO CONECTAR UN MOSFET DE POTENCIA A UN MICROCONTROLADOR
Los mosfets de potencia (power mosfets) son componentes electrónicos que nos
permiten de controlar corrientes muy elevadas. Como en el caso de los mosfets
comunes, tienen tres terminales de salida que se llaman: Drain, Source y Gate (D,
S y G). La corriente principal pasa entre Source y Drain (ISD) mientras que el
control de esta corriente se obtiene aplicando una tensión sobre el terminal Gate
(respecto al terminal Source), conocida como VGS.
Conexión directa de un Mosfet a un microcontrolador
En condiciones de reposo, la corriente de Gate es prácticamente nula porque al
interno del componente, el terminal Gate se encuentra conectado a una especie
de capacitor. Por lo tanto circula corriente de Gate solo cuando cambiamos el nivel
de tensión de entrada (cambio de estado lógico) y este es el motivo por el cual el
consumo de los Mosfet (como en el caso de todos los circuitos lógicos MOS)
aumenta en proporción a la frecuencia de conmutación.
Existen "power mosfets" de dos tipos: los de canal N y los de canal P. La
diferencia entre estos está en la polaridad de conexión Source-Drain y en el hecho
que la tensión de Gate de los Mosfet de canal P es negativa (las mismas
diferencias que existen entre los transistores NPN y PNP).
7

SEMINARIO DE TESIS 2015-ACONTROL DE MOTORES
Símbolos de los Mosfet
En base a la aplicación, un Mosfet de potencia puede trabajar en la "región lineal"
o en "saturación". En los sistemas analógicos, como por ejemplo en las etapas de
salida de los amplificadores de audio, los mosfets trabajan en la región lineal
mientras que en los sistemas digitales, en los cuales se usan como interruptores
digitales de potencia, estos trabajan en corte (OFF) o saturación (ON). En este
artículo analizaremos solamente los Mosfet usados como interruptores digitales.
Cuando un Mosfet se encuentra en saturación, el valor de resistencia interno entre
Source y Drain (Rsd) es muy bajo y por lo tanto, la disipación de potencia en él
será poco significativa no obstante la corriente que lo atraviesa pueda ser muy
elevada.
Mosfet usado como simple interruptor de potencia
Para llevar un Mosfet a la saturación, es necesario que la tensión de control en el
terminal Gate sea suficientemente alta y esto podría ser un problema si usáramos
directamente la baja tensión de salida de un microcontrolador. Me explico mejor
con un ejemplo. Para saturar un transistor bipolar (tipo BC548) se necesita superar
8

SEMINARIO DE TESIS 2015-ACONTROL DE MOTORES
la tensión de umbral de la base que es solamente de 0,6V. Una tensión de control
de 0,6V se puede obtener con cualquier sistema digital alimentado con 5V, 3,3V y
hasta 1,8V. Por el contrario, la tensión necesaria para poner en conducción un
Mosfet (llamada "tensión de umbral" o Vth) es mucho más elevada (algunos volts) y
depende del modelo de Mosfet. Es más, aunque si alcanzáramos este valor, no
sería suficiente porque deberíamos salir de la región lineal de trabajo para llevarlo
a la saturación. Si no fuera así, la conducción no sería plena y por lo tanto parte de
la potencia se disiparía en el Mosfet en forma de calor porque la potencia disipada
por el Mosfet es el resultado de la multiplicación entre la caída de tensión y la
corriente que pasa por él (Pmosfet = Vsd * Isd).
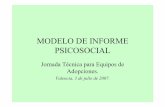
Curvas de conducción de un hipotético Mosfet con las dos regiones de trabajo (lineal y saturación) para distintas tensiones de Gate
En el diseño podemos ver las curvas de conducción de un típico Mosfet de canal
N con distintas tensiones de Gate en las dos regiones de trabajo (región lineal a la
izquierda del gráfico y saturación a la derecha). Como podemos observar, si
quisiéramos obtener una corriente de salida máxima, la tensión de Gate (VGS)
debería ser de 7,5V. Este valor varía en base al modelo de Mosfet usado. Para
resolver este problema existen dos posibilidades: usar un adaptador que aumente
los niveles de salida del microcontrolador o conseguir un Mosfet que trabaje con
tensiones de Gate más bajas. Los mosfets con baja tensión de Gate son
9

SEMINARIO DE TESIS 2015-ACONTROL DE MOTORES
conocidos con el nombre de "logic level power Mosfet" (Mosfet de potencia para
nivel lógico).
Ejemplo de conexión de un Mosfet no "logic level" de canal N
El principio de funcionamiento es muy simple. Cuando la salida del
microcontrolador tiene un nivel lógico bajo (0 volt), el transistor no conduce y por lo
tanto, su colector, que se encuentra conectado al Gate del Mosfet tendrá un
potencial positivo de 12V a través de la resistencia a positivo. Cuando la salida del
microcontrolador pasa a nivel alto, (1,8V, 3,3V o 5V), el transistor conduce y lleva
el Gate del Mosfet a 0V, por lo tanto el Mosfet deja de conducir. Como podrán
observar, este circuito tiene el defecto que trabaja al contrario es decir, se activa
cuando el nivel de salida del micro es bajo. No obstante esto, tiene la ventaja que
la tensión de Gate alcanza la tensión máxima de alimentación garantizando la
completa saturación de cualquier tipo de Mosfet que conectemos. El valor de la
resistencia de gate conectada a positivo modifica la velocidad de conmutación del
Mosfet como explicado en el caso anterior. (Valores altos para conmutaciones
lentas y valores bajos para conmutaciones veloces (modulación PWM).
10

SEMINARIO DE TESIS 2015-ACONTROL DE MOTORES
Ejemplo de conexión de un Mosfet no "logic level" de canal P
Si quisiéramos usar un Mosfet común (no "logic level") con lógica de control no
invertida, podemos cambiarlo por uno de canal P como se observa en la figura.
Noten que la potencia de salida (en el ejemplo, la tira de leds) se conecta hacia
masa (negativo) en lugar del positivo. El único problema que presenta esta última
solución es no se puede usar si quisiéramos controlar una tira de leds RGB con 3
canales porque estas tiras, generalmente tienen el ánodo en común (positivo
único) mientras que a nosotros nos serviría una tira RGB con cátodo común
(negativo común). De cualquier manera, esta solución es muy útil en numerosos
casos. Como en los otros ejemplos, el valor de la resistencia de gate conectada a
positivo modifica la velocidad de conmutación del Mosfet (valores altos para
conmutaciones lentas y valores bajos para conmutaciones veloces (modulación
PWM).
d) Propuesta del objetivo de investigación: Se propone el diseño de un prototipo de control de motores mediante el uso de microcontrolador, ya que este es de fácil acceso y su complejidad de programación no es muy alta.
e) Metodología de la propuesta: Se plantea usar programación en el lenguaje C, un microcontrolador PIC para el control eficiente y fácil de motores.
11

SEMINARIO DE TESIS 2015-ACONTROL DE MOTORES
3. DesarrolloSIMULACIONEsquemático diseñado en programa Proteus 8.0
12

SEMINARIO DE TESIS 2015-ACONTROL DE MOTORES
MOTOR 1 VELOCIDAD 100%
MOTOR 2 VELOCIDAD 100%
13

SEMINARIO DE TESIS 2015-ACONTROL DE MOTORES
COMPONENTESPIC 16f877A
14

SEMINARIO DE TESIS 2015-ACONTROL DE MOTORES
LCD 16x2
.
ReferenciasTECLADO
4x4
15

SEMINARIO DE TESIS 2015-ACONTROL DE MOTORES
DRIVER DE MOTOR l293 o l297
16

SEMINARIO DE TESIS 2015-ACONTROL DE MOTORES
DIAGRAMA DE BLOQUES DEL DRIVER
17

SEMINARIO DE TESIS 2015-ACONTROL DE MOTORES
PUENTE H IMPLEMENTADO
18

SEMINARIO DE TESIS 2015-ACONTROL DE MOTORES
PLACA PUENTE H
COMPONETES DEL PUENTE H
C1 22uF CPOL- EUE2.5-5 E2,5-5 rcl 1
C2 100nF C- EU025-
025X050 C025- 025X050 rcl 1
C3 100nF C- EU025-
025X050 C025- 025X050 rcl 1
C4 22uF CPOL- EUE2.5-5 E2,5-5 rcl 1
C5 100nF C-
EU025-025X050 C025-025X050 rcl 1
19

SEMINARIO DE TESIS 2015-ACONTROL DE MOTORES
C6 22uF CPOL-EUE2.5-5 E2,5-5 rcl 1
C7 100nF C-EU025-025X050 C025-025X050 rcl 1
C8 22uF CPOL-EUE2.5-5 E2,5-5 rcl 1
C9 100uF CPOL-EUE2.5-5 E2,5-5 rcl 1
C10 100uF CPOL-EUE2.5-5 E2,5-5 rcl 1
C11 100nF C-EU025-025X050 C025-025X050 rcl 1
D1 UF4007 BAT81 DO34-7 diode 1
D2 UF4007 BAT81 DO34-7 diode 1
D3 UF4007 BAT81 DO34-7 diode 1
D4 UF4007 BAT81 DO34-7 diode 1
D5 UF4007 BAT81 DO34-7 diode 1
D6 UF4007 BAT81 DO34-7 diode 1
D7 UF4007 BAT81 DO34-7 diode 1
D8 UF4007 BAT81 DO34-7 diode 1
D9 UF4007 BAT81 DO34-7 diode 1
D10 UF4007 BAT81 DO34-7 diode 1
D11 UF4007 BAT81 DO34-7 diode 1
D12 UF4007 BAT81 DO34-7 diode 1
IC1 74LS08N 74LS08N DIL14 74xx-eu 1
IC2 IR2110 IR2110 DIL14 lbr74 1
IC3 IR2110 IR2110 DIL14 lbr74 1
IC4 7805TV 7805TV TO220V linear 1
IC5 IR2110 IR2110 DIL14 lbr74 1
IC6 IR2110 IR2110 DIL14 lbr74 1
Q1 IRF540 IRF540 TO220BV transistor-power 1
Q2 BC548 BC548 TO92-EBC transistor-npn 1
Q3 IRF540 IRF540 TO220BV transistor-power 1
Q4 IRF540 IRF540 TO220BV transistor-power 1
Q5 IRF540 IRF540 TO220BV transistor-power 1
Q6 IRF540 IRF540 TO220BV transistor-power 1
20

SEMINARIO DE TESIS 2015-ACONTROL DE MOTORES
Q7 BC548 BC548 TO92-EBC transistor-npn 1
Q8 IRF540 IRF540 TO220BV transistor-power 1
Q9 IRF540 IRF540 TO220BV transistor-power 1
Q10 IRF540 IRF540 TO220BV transistor-power 1
R1 4k7 R-EU_0204/7 0204/7 rcl 1
R2 4k7 R-EU_0204/7 0204/7 rcl 1
R3 4k7 R-EU_0204/7 0204/7 rcl 1
R4 10 R-EU_0309/10 0309/10 rcl 1
R5 10 R-EU_0309/10 0309/10 rcl 1
R6 10k R-EU_0207/7 0207/7 rcl 1
R7 10k R-EU_0207/7 0207/7 rcl 1
R8 10 R-EU_0309/10 0309/10 rcl 1
R9 10 R-EU_0309/10 0309/10 rcl 1
R10 10k R-EU_0207/7 0207/7 rcl 1
R11 10k R-EU_0207/7 0207/7 rcl 1
R12 4k7 R-EU_0204/7 0204/7 rcl 1
R13 4k7 R-EU_0204/7 0204/7 rcl 1
R14 4k7 R-EU_0204/7 0204/7 rcl 1
R15 10 R-EU_0309/10 0309/10 rcl 1
R16 10 R-EU_0309/10 0309/10 rcl 1
R17 10k R-EU_0207/7 0207/7 rcl 1
R18 10k R-EU_0207/7 0207/7 rcl 1
R19 10 R-EU_0309/10 0309/10 rcl 1
R20 10 R-EU_0309/10 0309/10 rcl 1
R21 10k R-EU_0207/7 0207/7 rcl 1
R22 10k R-EU_0207/7 0207/7 rcl 1
X1 AK500/2-H AK500/2-H con-ptr500 1
X2 AK500/2-H AK500/2-H con-ptr500 1
X3 AK500/2-H AK500/2-H con-ptr500 1
X4 22-23-2041 22-23-2041 22-23-2041 con-molex 1
21

SEMINARIO DE TESIS 2015-ACONTROL DE MOTORES
MEDIO PUENTE H MOSFET
22

SEMINARIO DE TESIS 2015-ACONTROL DE MOTORES
MOTORES CORRIENTE CONTINUA
PROGRAMACION
#include<16f877a.h>#fuses HS,NOWDT,NOPUT,NOBROWNOUT,NOLVP,NOCPD,NODEBUG,NOPROTECT#use delay(clock=4000000)
#define LCD_ENABLE_PIN PIN_A0#define LCD_RW_PIN PIN_A1#define LCD_RS_PIN PIN_A2 #define LCD_DATA4 PIN_D4 #define LCD_DATA5 PIN_D5 #define LCD_DATA6 PIN_D6#define LCD_DATA7 PIN_D7 #use FAST_IO(B)#include <lcd.c>#include <keypad.c>
unsigned char key=' '; //Variable global teclaunsigned char mkey=' '; //Variable global teclaint1 w1=0,m1=0,m2=0;
void clear(void){ lcd_putc('\f');}void intro(void);
23

SEMINARIO DE TESIS 2015-ACONTROL DE MOTORES
// Interrupcion RB4 - RB7 ///////////////////////////////////////////////////// #INT_RBvoid interrupt_keypad(){ key=get_key1(); //Asigna la tecla pulsada if(key=='A'){ unsigned char w1=0; clear();printf(lcd_putc,"Bienvenido al\nMenu"); delay_ms(300); while(w1==0){ clear();printf(lcd_putc,"Motor:1 Motor:2\n3:STOP D:Salir"); mkey=get_key3(); switch(mkey){ case 0 :output_toggle(PIN_D2);m1^=1;clear(); break; case 1 :output_toggle(PIN_D3);m2^=1;clear(); break; case 4 : if(m1==1){ setup_ccp1(CCP_PWM);set_pwm1_duty(20); } if(m2==1){ setup_ccp2(CCP_PWM);set_pwm2_duty(20); } break; case 5 : if(m1==1){ setup_ccp1(CCP_PWM);set_pwm1_duty(40); } if(m2==1){ setup_ccp2(CCP_PWM);set_pwm2_duty(40); } break; case 6 : if(m1==1){ setup_ccp1(CCP_PWM);set_pwm1_duty(80); } if(m2==1){ setup_ccp2(CCP_PWM);set_pwm2_duty(80); } break; case 8 : if(m1==1){ setup_ccp1(CCP_OFF);//apaga pwm } if(m2==1){ setup_ccp2(CCP_OFF); } break;
24

SEMINARIO DE TESIS 2015-ACONTROL DE MOTORES
case 15 :clear();printf(lcd_putc,"salir\0");delay_ms(1000);w1=1;break; default:break; } } clear();printf(lcd_putc,"Cambios\nGuardados\0"); delay_ms(250);clear(); }} // Programa Principal ///////////////////////////////////////////////////////// void main(){ set_tris_d(0x00); output_d(0x00); lcd_init(); intro(); init_keypad(); setup_ccp1(CCP_PWM); // Configure CCP1 as a PWM setup_ccp2(CCP_PWM); // Configure CCP2 as a PWM setup_timer_2(T2_DIV_BY_16, 124, 1); // 500 Hz set_pwm1_duty(62); // 25% duty cycle on pin C2 set_pwm2_duty(62); // 50% duty cycle on pin C1 setup_ccp1(CCP_OFF); setup_ccp2(CCP_OFF); while(true);} void intro(void){ int i; for (i = 10; i > 0; --i){ lcd_putc('\f'); lcd_gotoxy (i, 1); printf (LCD_PUTC, "Amu-Chinchercoma "); lcd_gotoxy (i, 2); printf (LCD_PUTC, "Apaza-Mendoza"); delay_ms (200); } for (i = 10; i > 0; --i){ lcd_putc('\f'); lcd_gotoxy (i, 1); printf (LCD_PUTC, "Gonzales"); delay_ms (200); } clear();}
25

SEMINARIO DE TESIS 2015-ACONTROL DE MOTORES
IMPLEMENTACION FINAL
4. Alcances
El proyecto contempla el control de un motor de mediana potencia suficiente para otras aplicaciones, dado que el control por PWM mantiene el par de motores constante, no desaprovecha la energía y se puede usar tanto para corriente alterna como continua, la modulación por ancho de pulsos también se usa para controlar servomotores, los cuales modifican su posición de acuerdo al ancho del pulso enviado cada un cierto período que depende de cada servo motor.
El uso del PIC permite tener un alcance mayor en cuanto a operación ya que se puede (según la programación), tener infinidades de aplicaciones, formando parte de un sistema más complejo.
Se puede mejorar el proyecto tanto en software (Programación) como en hardware (aumentando la potencia de los motores y/o controlando más motores a la par o motores de mayor tamaño), queda abierta la investigación para que puedan conseguir mayores especificaciones técnicas.
26

SEMINARIO DE TESIS 2015-ACONTROL DE MOTORES
5. Conclusiones Denotamos la importancia de componentes que trabajan con alta potencia,
teniendo en cuenta factores como altas cantidades de corriente, aumento de temperatura debido a potencias altas y otras cualidades necesarias para poder trabajar con corrientes altas.
Diferenciamos componentes para circuitos con corrientes no mayor a 1 Amp y componentes necesarios para potencias mayores.
Conocimos los beneficios de utilizar un variador de velocidad para un par de motores, siendo de mucho beneficio en cuestiones de pérdida de energía.
Usando el pic 16F877a pudimos utilizar el PWM para controlar motores, al poder variar su velocidad.
6. Referencias[1] Ing. Raúl A. Dean Facultad de Ingeniería - U.N.R.C
[2] Eduardo J. Carletti- Ing. Mecánico Eléctrico – UNI Perú[3 ]Atribución-NoComercial-CompartirIgual 3.0 España
27