





Idiomas
Páginas
Jurídico


Computadoras
5 generacion.
Computación y
niños
Robotica
Virus
informaticos
Seguridad
informatica

Computadoras y generaciones
Primera Generación (1951-1958)
En esta generación había una gran desconocimiento de las capacidades de las computadoras, puesto que se realizó un estudio en esta época que determinó que con veinte computadoras se saturaría el mercado de los Estados Unidos en el campo de procesamiento de datos. Esta generación abarco la década de los cincuenta. Y se conoce como la primera generación. Estas máquinas tenían las siguientes características:
Usaban tubos al vacío para procesar información.
Usaban tarjetas perforadas para entrar los datos y los programas.
Usaban cilindros magnéticos para almacenar información e instrucciones internas.
Eran sumamente grandes, utilizaban gran cantidad de electricidad, generaban gran cantidad de calor y eran sumamente lentas.
Se comenzó a utilizar el sistema binario para representar los datos.
En esta generación las máquinas son grandes y costosas (de un costo aproximado de 10,000 dólares).
La computadora más exitosa de la primera generación fue la IBM 650, de la cual se produjeron varios cientos. Esta computadora que usaba
un esquema de memoria secundaria llamado tambor magnético, que es el antecesor de los discos actuales.
Segunda Generación (1958-1964)
En esta generación las computadoras se reducen de tamaño y son de menor costo. Aparecen muchas compañías y las computadoras eran bastante avanzadas para su época como la serie 5000 de Burroughs y la ATLAS de la Universidad de Manchester. Algunas computadoras se programaban con cinta perforadas y otras por medio de cableado en un tablero.
Características de está generación:
Usaban transistores para procesar información.
Los transistores eran más rápidos, pequeños y más confiables que los tubos al vacío.
200 transistores podían acomodarse en la misma cantidad de espacio que un tubo al vacío.
Usaban pequeños anillos magnéticos para almacenar información e instrucciones. cantidad de calor y eran sumamente lentas.
Se mejoraron los programas de computadoras que fueron desarrollados durante la primera generación.
Se desarrollaron nuevos lenguajes de programación como COBOL y FORTRAN, los cuales eran comercialmente accsesibles.
Se usaban en aplicaciones de sistemas de reservaciones de líneas aéreas, control del tráfico aéreo y simulaciones de propósito general.
La marina de los Estados Unidos desarrolla el primer simulador de vuelo, "Whirlwind I".
Surgieron las minicomputadoras y los terminales a distancia.
Se comenzó a disminuir el tamaño de las computadoras.
Tercera Generación (1964-1971)

La tercera generación de computadoras emergió con el desarrollo de circuitos integrados (pastillas de silicio) en las que se colocan miles de componentes electrónicos en una integración en miniatura. Las computadoras nuevamente se hicieron más pequeñas, más rápidas, desprendían menos calor y eran energéticamente más eficientes. El ordenador IBM-360 dominó las ventas de la tercera generación de ordenadores desde su presentación en 1965. El PDP-8 de la Digital Equipment Corporation fue el primer miniordenador.
Características de está generación:
Se desarrollaron circuitos integrados para procesar información.
Se desarrollaron los "chips" para almacenar y procesar la información. Un "chip" es una pieza de silicio que contiene los componentes electrónicos en miniatura llamados semiconductores.
Los circuitos integrados recuerdan los datos, ya que almacenan la información como cargas eléctricas.
Surge la multiprogramación.
Las computadoras pueden llevar a cabo ambas tareas de procesamiento o análisis matemáticos.
Emerge la industria del "software".
Se desarrollan las minicomputadoras IBM 360 y DEC PDP-1.
Otra vez las computadoras se tornan más pequeñas, más ligeras y más eficientes.
Consumían menos electricidad, por lo tanto, generaban menos calor.
Cuarta Generación (1971-1988)
Aparecen los microprocesadores que es un gran adelanto de la microelectrónica, son circuitos integrados de alta densidad y con una velocidad impresionante. Las microcomputadoras con base en estos circuitos son extremadamente pequeñas y baratas, por lo que su uso se extiende al mercado industrial. Aquí nacen las computadoras personales que han adquirido proporciones enormes y que han

influido en la sociedad en general sobre la llamada "revolución informática".
Características de está generación:
Se desarrolló el microprocesador.
Se colocan más circuitos dentro de un "chip".
"LSI - Large Scale Integration circuit".
"VLSI - Very Large Scale Integration circuit".
Cada "chip" puede hacer diferentes tareas.
Un "chip" sencillo actualmente contiene la unidad de control y la unidad de aritmética/lógica. El tercer componente, la memoria primaria, es operado por otros "chips".
Se reemplaza la memoria de anillos magnéticos por la memoria de "chips" de silicio.
Se desarrollan las microcomputadoras, o sea, computadoras personales o PC.
Se desarrollan las supercomputadoras.
Quinta Generación (1983 al presente)
En vista de la acelerada marcha de la microelectrónica, la sociedad industrial se ha dado a la tarea de poner también a esa altura el desarrollo del software y los sistemas con que se manejan las computadoras. Surge la competencia internacional por el dominio del mercado de la computación, en la que se perfilan dos líderes que, sin embargo, no han podido alcanzar el nivel que se desea: la capacidad de comunicarse con la computadora en un lenguaje más cotidiano y no a través de códigos o lenguajes de control especializados.
Japón lanzó en 1983 el llamado "programa de la quinta generación de computadoras", con los objetivos explícitos de producir máquinas con innovaciones reales en los criterios mencionados. Y en los Estados Unidos ya está en actividad un programa en desarrollo que persigue objetivos semejantes, que pueden resumirse de la siguiente manera:
Se desarrollan las microcomputadoras, o sea, computadoras personales o PC.
Se desarrollan las supercomputadoras.
Computadora de la niñez
La gran mayoría de los papás que tiene a sus hijos en
un Jardín de Infancia hoy, son los niños que tuvieron
como principal influencia a la televisión, ayer. Pero la
nueva maravilla moderna, punto de interminables debates
en la actualidad, es la computadora.
Con una mayor cantidad de aristas, la computadora y su
carácter de nexo con Internet, la hacen un objeto sobre el
cual debemos establecer mayores cuidados y reglas, pues
su efecto adictivo es muy fuerte; mucho más de lo que
fue la televisión.
En cuanto a la edad, no es aconsejable que un pequeño se
inicie en el mundo de la computación antes de los 3 años.
La razón es que a esta edad ellos tiene otras

necesidades que las computadoras no pueden (o no deben)
satisfacer, como caminar, hablar, socializarse, etc. Esta
es además una edad en la que los niños aprenden a través
del cuerpo, de la mirada, de su capacidad auditiva y
motora. Su habilidad para interactuar con los adultos,
con otros niños, con sus juguetes y en general con su
entorno son parte del proceso de aprendizaje para lograr
su desarrollo integral.
Las computadoras no encajan aun en este proceso. Pero
pasada esta edad, especialmente desde los 4 años, los
niños ya tienen el desarrollo mental suficiente como para
explorar las infinitas alternativas que les brinda esta
tecnología, siempre conmensura.
Igual que nos pasó con la televisión, la "compu" puede
ser una herramienta útil para el niño si la manejamos
adecuadamente y con moderación. Entre sus beneficios se
reconoce que:
Aumenta el razonamiento matemático.
Incentiva la creatividad.
Desarrolla habilidades no verbales (inteligencia,
memoria, coordinación óculo-manual, abstracción y
conceptualización).
A pesar de estos beneficios, a los cuales los niños
accederán adecuadamente si se establecen los parámetros

correctos, la computadora jamás será reemplazo de las
necesidades interactivas y de socialización de los
pequeños. Los niños necesitan el aire libre, el contacto y
la experimentación del mundo con sus propios sentidos.
Activar Internet en la computadora, dependerá de lo
preparados que estemos para ejercer una función
de asesoría y compañía constante, pues hay infinidad de
contenidos útiles, pero también los hay dañinos.
Ejerciendo una correcta supervisión, navegar por
Internet puede ser una experiencia familiar valiosa, pues
cada tema que vaya apareciendo dará pie al intercambio
de opiniones. Para una mayor seguridad, infórmate sobre
los recursos de vetado y censura de los espacios en la
red.
Al igual que la televisión, la computadora necesita
ocupar un tiempo limitado definido en horarios. Los
especialistas recomiendan algunos rangos, de acuerdo con
la edad del niño:
Entre 3 y 7 años: 1 hora como máximo, no más de 3
veces por semana.
Entre 8 y 12 años: El mismo tiempo para los juegos
(de preferencia educativos), y un poco más sólo en caso
de usarse para tareas e investigación escolar.
Durante la sesión, es igualmente
recomendable apagar o retirarse de la computadora cada
cierto tiempo (cada 30 minutos aproximadamente, por 15
o 30 minutos) para que el niño tome aire, salga a jugar,
bailar, cantar, inventar historias, explorar, etc. Es decir,
todo lo que un niño haría si no existiese el aparato.
Se recomienda, en general, seleccionar páginas web que
fomenten valores sociales. Para niños de 3 a 5 años, los
programas que incentiven la creatividad, habilidades del
lenguaje, alfabetización temprana y resolución de
problemas. Evita los que presenten mensajes violentos.
Luego de cada sesión, es bueno aplicar lo visto en los
juegos de la vida real, a través de juegos.
Nunca se debe dejar a los niños solos frente a la
computadora. Es necesario estar ahí, pero no diciéndole
siempre lo que debe hacer, sino simplemente estando
disponibles, en caso requieran ayuda.
Si fuera posible, recomendaríamos apartar a los niños
de la computadora de forma total. Pero esto podría ser
contraproducente pues, tarde o temprano, el pequeño
tendría acceso a ella, incluso a escondidas de sus padres,
lo cual lo expondríadirectamente a contenidos violentos y
deformadores que es necesario evitar. Además, el
desconocimiento de su naturaleza pondría
en desventaja competitiva al futuro profesional. Lo
mejor entonces es la aceptación de esta realidad y su
regulación consiente y responsable.
Como saber si es amor o capricho…
Diferencias entre amor y capricho
Hola a todos!!. Espero que les haya parecido interesante los expuesto en los capítulos
anteriores. Esta vez hablaré sobre el contraste entre amor y capricho, con la finalidad
de resolver un poco más las dudas.
Leyendo un poco encontré que un chico de 24 años reconoce: “El capricho es ciego y eso
prefiere ser. No quiere ver la realidad, se niega ante ella.”. Por mi parte pienso que
cuando uno esta encaprichado con alguien cree, que todo lo que hace esa persona es
perfecto.
El capricho es UN AMOR FALSO. Es irreal y suele ser muy egoísta. Las personas que se
hayan “atrapadas” siempre suele decir: “Me siento realmente importante cuando estoy
con él o (con ella).......Nadie me hace sentir lo que siento cuando estoy con él o (con
ella).....No puedo creer lo genial que es todo esto.....”
Espero que hayas notado lo mucho que esas personas hablan de si mismas y de el placer
que le causa esto. Si lo notaste entenderás que, una relación basada en el egoísmo no
irá más aya del FRACASO.
Intentando buscar un poco el concepto de “amor verdadero”, que mejor que nuestra tan
leída y apreciada....Biblia. Busqué la Biblia y transcribí esto: “El amor es sufrido y
bondadoso. No es celoso, no se vanagloria, no se porta indecente, no busca sus propios
intereses, no se siente provocado. No lleva cuenta del daño” (1 Corintios 13:4, 5)
Analizando un poco esto podríamos decir que el amor verdadero no busca sus propios
intereses y basado en principios bíblicos no es egoísta ni egocéntrico. Es muy cierto que
los jóvenes tenemos sentimientos muy intensos y nos sintamos atraídos por otra persona
mutuamente. Pero utilizando la razón y un profundo respeto hacia la otra persona
ayudaremos a equilibrar esos sentimientos.
Bueno, en esta parte he preparado un listado que deja bien en claro lo que es AMOR
VERDADERO Y UN SIMPLE CAPLRICHO. Sin lugar a dudas, esto te va hacer reflexionar.
EL AMOR VERDADERO:
Es un interés generoso en los intereses de la otra persona y te preguntas ¿Qué puedo
ofrecerle?
UN SIMPLE CAPRICHO:
Es siempre egoísta uno se pregunta ¿Qué puedo obtener de todo esto?
EL AMOR VERDADERO:
Es muy probable que el interés romántico empiece después de unos meses e incluso
años.
UN SIMPLE CAPRICHO:
La atracción romántica empieza instantáneamente, en días, horas o semanas.
EL AMOR VERDADERO:
Uno se siente atraído por la personalidad de la otra persona y por sus característica
espirituales.
UN SIMPLE CAPRICHO:
Aquí te sientes atraído por la apariencia física de la otra persona.
EL AMOR VERDADERO:
El efecto, es que te hace mejor persona o sientes la necesidad de ser mejor y superarte.
UN SIMPLE CAPRICHO:
Es un efecto destructivo, desorganizador.
EL AMOR VERDADERO:
Uno ve a la otra persona tal y como es, nota sus defecto y a pesar de eso la ama.
UN SIMPLE CAPRICHO
No es realista, la otra persona parece perfecta ante ella, se pasan por alto las dudas,
sobre ciertos defectos graves.
EL AMOR VERDADERO:
Hay desacuerdo y discrepancias, pero se considera que se pueden resolver.
UN SIMPLE CAPRICHO:
Los problemas son frecuentes, no se solucionan realmente. Muchas discusiones las
“resuelven” con un beso.
EL AMOR VERDADERO:
Uno desea dar lo mejor a la otra persona y compartirlo con ella.
UN SIMPLE CAPRICHO:
El énfasis solo tiene un fin: una recompensa sexual o satisfacer un impulso sexual.
Antes de terminar con la gran pregunta ¿CÓMO SABER SI ES AMOR VERDADERO O
CAPRICHO?, me gustaría que tuvieras en cuenta estas cosas:
RECUERDA:
* “EL QUE CONFIA EN SU PROPIO CORAZÓN ES ESTÚPIDO”- a veces las respuestas que nos
dice el corazón resultan ser muy erradas y nos llevan por mal camino.
* “La belleza no cuadra con la persona insensata”- sería un adorno inútil.
* “El encaprichamiento es ciego y eso prefiere ser”- no deja ver tal cual es la persona,
te ciega.
* “Nadie te entrega su personalidad con solo decir: „yo soy así‟. Ahora sabes todo lo que
se puede saber de mí”- no, requiere de un proceso para que examines la situación y la
evalúes.
Robótica…
La historia de la robótica va unida a la construcción de "artefactos", que trataban de materializar el
deseo humano de crear seres a su semejanza y que lo descargasen del trabajo. El ingeniero
español Leonardo Torres Quevedo (GAP) (que construyó el primer mando a distancia para su
automóvil mediante telegrafía sin hilo, el ajedrecista automático, el primer transbordador aéreo y
otros muchos ingenios) acuñó el término "automática" en relación con la teoría de la
automatización de tareas tradicionalmente asociadas.
Karel Čapek, un escritor checo, acuñó en 1921 el término "Robot" en su obra dramática Rossum's
Universal Robots / R.U.R., a partir de la palabra checa robota, que significa servidumbre o trabajo
forzado. El término robótica es acuñado por Isaac Asimov, definiendo a la ciencia que estudia a los
robots. Asimov creó también las Tres Leyes de la Robótica. En la ciencia ficción el hombre ha
imaginado a los robots visitando nuevos mundos, haciéndose con el poder, o simplemente
aliviando de las labores caseras.
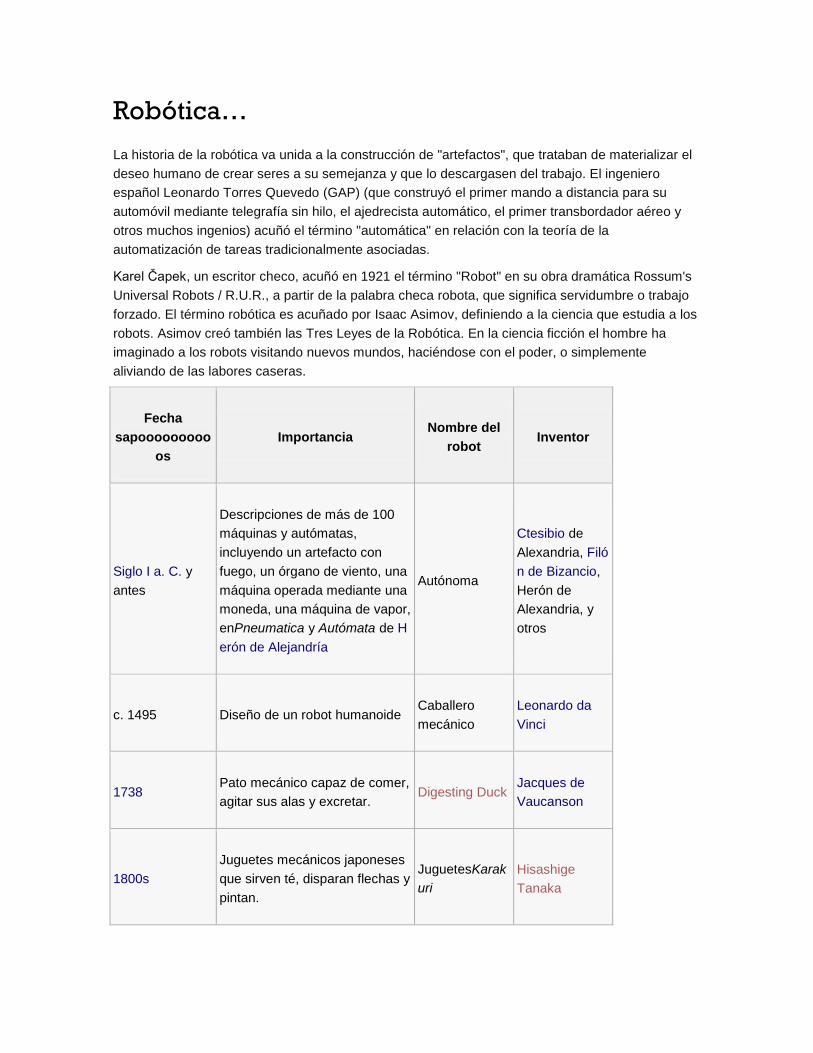
Fecha
sapooooooooo
os
Importancia Nombre del
robot Inventor
Siglo I a. C. y
antes
Descripciones de más de 100
máquinas y autómatas,
incluyendo un artefacto con
fuego, un órgano de viento, una
máquina operada mediante una
moneda, una máquina de vapor,
enPneumatica y Autómata de H
erón de Alejandría
Autónoma
Ctesibio de
Alexandria, Filó
n de Bizancio,
Herón de
Alexandria, y
otros
c. 1495 Diseño de un robot humanoide Caballero
mecánico
Leonardo da
Vinci
1738
Pato mecánico capaz de comer,
agitar sus alas y excretar. Digesting Duck
Jacques de
Vaucanson
1800s
Juguetes mecánicos japoneses
que sirven té, disparan flechas y
pintan.
JuguetesKarak
uri
Hisashige
Tanaka

1921
Aparece el primer autómata de
ficción llamado "robot", aparece
en R.U.R.
Rossum's
Universal
Robots
Karel Čapek
1930s
Se exhibe un robot humanoide
en la Exposición Universal entre
los años 1939 y 1940
Elektro
Westinghouse
Electric
Corporation
1948
Exhibición de un robot con
comportamiento biológico
simple5
Elsie y Elmer William Grey
Walter
1956
Primer robot comercial, de la
compañía Unimation fundada
por George Devol y Joseph
Engelberger, basada en una
patente de Devol6
Unimate George Devol
1961
Se instala el primer robot
industrial Unimate George Devol
1963 Primer robot "palletizing"7 1973
Primer robot
con seis ejes
electromecánic
os
Famulu
s
KUK
A
Robo
t
Grou
p
1975
Brazo manipulador programable
universal, un producto de
Unimation
PUMA
Victor
Scheinman
2000
Robot Humanoide capaz de
desplazarse de forma bípeda e
interactuar con las personas
ASIMO
Honda Motor
Co. Ltd
Según su cronología
La que a continuación se presenta es la clasificación más común:
1ª Generación.
Manipuladores. Son sistemas mecánicos multifuncionales con un sencillo sistema de control, bien
manual, de secuencia fija o de secuencia variable.
2ª Generación.
Robots de aprendizaje. Repiten una secuencia de movimientos que ha sido ejecutada previamente
por un operador humano. El modo de hacerlo es a través de un dispositivo mecánico. El operador
realiza los movimientos requeridos mientras el robot le sigue y los memoriza.
3ª Generación.
Robots con control sensorizado. El controlador es una computadora que ejecuta las órdenes de un
programa y las envía al manipulador para que realice los movimientos necesarios.
4ª Generación.
Robots inteligentes. Son similares a los anteriores, pero además poseen sensores que envían
información a la computadora de control sobre el estado del proceso. Esto permite una toma
inteligente de decisiones y el control del proceso en tiempo real.
Clasificación de los robos
Según su arquitectura
La arquitectura, es definida por el tipo de configuración general del Robot, puede ser metamórfica.
El concepto de metamorfismo, de reciente aparición, se ha introducido para incrementar la
flexibilidad funcional de un Robot a través del cambio de su configuración por el propio Robot. El
metamorfismo admite diversos niveles, desde los más elementales (cambio de herramienta o de
efecto terminal), hasta los más complejos como el cambio o alteración de algunos de sus
elementos o subsistemas estructurales. Los dispositivos y mecanismos que pueden agruparse bajo
la denominación genérica del Robot, tal como se ha indicado, son muy diversos y es por tanto
difícil establecer una clasificación coherente de los mismos que resista un análisis crítico y
riguroso. La subdivisión de los Robots, con base en su arquitectura, se hace en los siguientes
grupos: poliarticulados, móviles, androides, zoomórficos e híbridos.
1. Poliarticulados
En este grupo se encuentran los Robots de muy diversa forma y configuración, cuya característica
común es la de ser básicamente sedentarios (aunque excepcionalmente pueden ser guiados para
efectuar desplazamientos limitados) y estar estructurados para mover sus elementos terminales en
un determinado espacio de trabajo según uno o más sistemas de coordenadas, y con un número
limitado de grados de libertad. En este grupo, se encuentran los manipuladores, los Robots

industriales, los Robots cartesianos y se emplean cuando es preciso abarcar una zona de trabajo
relativamente amplia o alargada, actuar sobre objetos con un plano de simetría vertical o reducir el
espacio ocupado en el suelo.
2. Móviles
Son Robots con gran capacidad de desplazamiento, basados en carros o plataformas y dotados de
un sistema locomotor de tipo rodante. Siguen su camino por telemando o guiándose por la
información recibida de su entorno a través de sus sensores. Estos Robots aseguran el transporte
de piezas de un punto a otro de una cadena de fabricación. Guiados mediante pistas
materializadas a través de la radiación electromagnética de circuitos empotrados en el suelo, o a
través de bandas detectadas fotoeléctricamente, pueden incluso llegar a sortear obstáculos y están
dotados de un nivel relativamente elevado de inteligencia.
3. Androides
Son Robots que intentan reproducir total o parcialmente la forma y el comportamiento cinemática
del ser humano. Actualmente, los androides son todavía dispositivos muy poco evolucionados y sin
utilidad práctica, y destinados, fundamentalmente, al estudio y experimentación. Uno de los
aspectos más complejos de estos Robots, y sobre el que se centra la mayoría de los trabajos, es el
de la locomoción bípeda. En este caso, el principal problema es controlar dinámica y
coordinadamente en el tiempo real el proceso y mantener simultáneamente el equilibrio del Robot.
4. Zoomórficos
Los Robots zoomórficos, que considerados en sentido no restrictivo podrían incluir también a los
androides, constituyen una clase caracterizada principalmente por sus sistemas de locomoción que
imitan a los diversos seres vivos. A pesar de la disparidad morfológica de sus posibles sistemas de
locomoción es conveniente agrupar a los Robots zoomórficos en dos categorías principales:
caminadores y no caminadores. El grupo de los Robots zoomórficos no caminadores está muy
poco evolucionado. Los experimentos efectuados en Japón basados en segmentos cilíndricos
biselados acoplados axialmente entre sí y dotados de un movimiento relativo de rotación. Los
Robots zoomórficos caminadores multípedos son muy numerosos y están siendo objeto de
experimentos en diversos laboratorios con vistas al desarrollo posterior de verdaderos vehículos
terrenos, piloteados o autónomos, capaces de evolucionar en superficies muy accidentadas. Las
aplicaciones de estos Robots serán interesantes en el campo de la exploración espacial y en el
estudio de los volcanes.
5. Híbridos
Corresponden a aquellos de difícil clasificación, cuya estructura se sitúa en combinación con
alguna de las anteriores ya expuestas, bien sea por conjunción o por yuxtaposición. Por ejemplo,
un dispositivo segmentado articulado y con ruedas, es al mismo tiempo, uno de los atributos de los
Robots móviles y de los Robots zoomórficos.

Virus informaticos…
Un virus informático es un malware que tiene por objeto alterar el normal funcionamiento de
la computadora, sin el permiso o el conocimiento del usuario. Los virus, habitualmente,
reemplazan archivos ejecutables por otros infectados con el código de este. Los virus pueden
destruir, de manera intencionada, los datos almacenados en unordenador, aunque también existen
otros más inofensivos, que solo se caracterizan por ser molestos.
Los virus informáticos tienen, básicamente, la función de propagarse a través de un software, no se
replican a sí mismos porque no tienen esa facultad[cita requerida]
como elgusano informático, son muy
nocivos y algunos contienen además una carga dañina (payload) con distintos objetivos, desde una
simple broma hasta realizar daños importantes en los sistemas, o bloquear las redes
informáticas generando tráfico inútil.
El funcionamiento de un virus informático es conceptualmente simple. Se ejecuta un programa que
está infectado, en la mayoría de las ocasiones, por desconocimiento del usuario. El código del
virus queda residente (alojado) en la memoria RAM de la computadora, aun cuando el programa
que lo contenía haya terminado de ejecutarse. El virus toma entonces el control de los servicios
básicos del sistema operativo, infectando, de manera posterior, archivos ejecutables que sean
llamados para su ejecución. Finalmente se añade el código del virus al programa infectado y se
graba en el disco, con lo cual el proceso de replicado se completa.
Los virus informáticos afectan en mayor o menor medida a casi todos los sistemas más conocidos
y usados en la actualidad.
Cabe aclarar que un virus informático mayoritariamente atacará sólo el sistema operativo para el
que fue desarrollado, aunque ha habido algunos casos de virus multiplataforma.
MS-Windows
Las mayores incidencias se dan en el sistema operativo Windows debido, entre otras causas, a:
Su gran popularidad, como sistema operativo, entre los ordenadores personales, PC. Se
estima que, en 2007, un 90% de ellos usaba Windows.[cita requerida]
Esta popularidad basada en
la facilidad de uso sin conocimiento previo alguno, motiva a los creadores de software
malicioso a desarrollar nuevos virus; y así, al atacar sus puntos débiles, aumentar el impacto
que generan.
Falta de seguridad en esta plataforma (situación a la que Microsoft está dando en los últimos
años mayor prioridad e importancia que en el pasado). Al ser un sistema muy permisivo con la
instalación de programas ajenos a éste, sin requerir ninguna autentificación por parte del
usuario o pedirle algún permiso especial para ello en los sistemas más antiguos (en los
Windows basados en NT se ha mejorado, en parte, este problema). A partir de la inclusión
del Control de Cuentas de Usuario en Windows Vista o Windows 7, y siempre y cuando no se
desactive, se ha solucionado este problema.
Software como Internet Explorer y Outlook Express, desarrollados por Microsoft e incluidos de
forma predeterminada en las últimas versiones de Windows, son conocidos por ser vulnerables
a los virus ya que éstos aprovechan la ventaja de que dichos programas están fuertemente
integrados en el sistema operativo dando acceso completo, y prácticamente sin restricciones, a
los archivos del sistema. Un ejemplo famoso de este tipo es el virus ILOVEYOU, creado en el
año 2000 y propagado a través de Outlook.
La escasa formación de un número importante de usuarios de este sistema, lo que provoca
que no se tomen medidas preventivas por parte de estos, ya que este sistema está dirigido de
manera mayoritaria a los usuarios no expertos en informática. Esta situación es aprovechada
constantemente por los programadores de virus.
Unix y derivados
En otros sistemas operativos como las distribuciones GNU/Linux, BSD, OpenSolaris, Solaris, Mac
OS X y otros basados en Unix las incidencias y ataques son prácticamente inexistentes. Esto se
debe principalmente a:
Tradicionalmente los programadores y usuarios de sistemas basados en Unix han considerado
la seguridad como una prioridad por lo que hay mayores medidas frente a virus, tales como la
necesidad de autenticación por parte del usuario como administrador o root para poder instalar
cualquier programa adicional al sistema.
Los directorios o carpetas que contienen los archivos vitales del sistema operativo cuentan con
permisos especiales de acceso, por lo que no cualquier usuario o programa puede acceder
fácilmente a ellos para modificarlos o borrarlos. Existe una jerarquía de permisos y accesos
para los usuarios.
Relacionado al punto anterior, a diferencia de los usuarios de Windows, la mayoría de los
usuarios de sistemas basados en Unix no pueden normalmente iniciar sesiones como usuarios
"administradores' o por el superusuario root, excepto para instalar o configurar software, dando
como resultado que, incluso si un usuario no administrador ejecuta un virus o algún software
malicioso, éste no dañaría completamente el sistema operativo ya que Unix limita el entorno de
ejecución a un espacio o directorio reservado llamado comúnmente home. Aunque a partir de
Windows Vista, se pueden configurar las cuentas de usuario de forma similar.

Estos sistemas, a diferencia de Windows, son usados para tareas más complejas
como servidores que por lo general están fuertemente protegidos, razón que los hace menos
atractivos para un desarrollo de virus o software malicioso.
En el caso particular de las distribuciones basadas en GNU/Linux y gracias al modelo
colaborativo, las licencias libres y debido a que son más populares que otros sistemas Unix, la
comunidad aporta constantemente y en un lapso de tiempo muy corto actualizaciones que
resuelven bugs y/o agujeros de seguridad que pudieran ser aprovechados por algún malware.
: Seguridad informática:
La seguridad informática, es el área de la informática que se enfoca en la protección de la
infraestructura computacional y todo lo relacionado con esta (incluyendo la información
contenida). Para ello existen una serie de estándares, protocolos, métodos, reglas,
herramientas y leyes concebidas para minimizar los posibles riesgos a la infraestructura o a
la información. La seguridad informática comprende software, bases de datos, metadatos,
archivos y todo lo que la organización valore (activo) y signifique un riesgo si ésta llega a
manos de otras personas. Este tipo de información se conoce como información
privilegiada o confidencial.
El concepto de seguridad de la información no debe ser confundido con el de seguridad
informática, ya que este último sólo se encarga de la seguridad en el medio informático,
pudiendo encontrar información en diferentes medios o formas.
La información contenida
Se ha convertido en uno de los elementos más importantes dentro de
una organización. La seguridad informática debe ser administrada
según los criterios establecidos por los administradores y supervisores,
evitando que usuarios externos y no autorizados puedan acceder a ella
sin autorización. De lo contrario la organización corre el riesgo de que
la información sea utilizada maliciosamente para obtener ventajas de
ella o que sea manipulada, ocasionando lecturas erradas o incompletas
de la misma. Otra función de la seguridad informática en esta área es la
de asegurar el acceso a la información en el momento oportuno,
incluyendo respaldos de la misma en caso de que esta sufra daños o
pérdida producto de accidentes, atentados o desastres.
La infraestructura computacional
Una parte fundamental para el almacenamiento y gestión de la
información, así como para el funcionamiento mismo de la
organización. La función de la seguridad informática en esta área es
velar que los equipos funcionen adecuadamente y prever en caso de
falla planes de robos, incendios, boicot, desastres naturales, fallas en el
suministro eléctrico y cualquier otro factor que atente contra la
infraestructura informática.
Los usuarios
Son las personas que utilizan la estructura tecnológica, zona de
comunicaciones y que gestionan la información. La seguridad
informática debe establecer normas que minimicen los riesgos a la
información o infraestructura informática. Estas normas incluyen
horarios de funcionamiento, restricciones a ciertos lugares,
autorizaciones, denegaciones, perfiles de usuario, planes de
emergencia, protocolos y todo lo necesario que permita un buen nivel
de seguridad informática minimizando el impacto en el desempeño de
los funcionarios y de la organización en general y como principal
contribuyente al uso de programas realizados por programadores.







Top Related