











Idiomas
Páginas
Jurídico


Desarrollo de soluciones basadas en visión artificial.
Visión artificial y análisis de imagen aplicadas a la industria.aplicadas a la industria.
Junio 2013

Centro Tecnológico AIMEN
El Centro Tecnológico AIMEN se estableció en Porriño en 1967, promovidopor un grupo de compañías para proveeer servicios de I+D a la industria.
1967
46 años más tarde…
Uno de los principales centros en Españaen el campo de los Materiales yTecnologías de Unión.
� 109 compañías asociadas.
www.aimen.es | [email protected] 2
� Más de 600 clientes.
� 90.000 informes técnicos.
� 100 proyectos de I+D+i anuales.
“Mejorar la capacidad tecnológica de nuestros miembros para incrementar su
competitividad en mercadosinternacionales”

Centro Tecnológico AIMEN
AUTOMOTIVEAUTOMOTIVE
METALMECHANICSMETALMECHANICSSHIPYARDSSHIPYARDS ENERGYENERGY AERONAUTICSAERONAUTICS
AUTOMOTIVEAUTOMOTIVE
METALMECHANICSMETALMECHANICSSHIPYARDSSHIPYARDS ENERGYENERGY AERONAUTICSAERONAUTICS
AUTOMOCIÓN
ASTILLEROS AERONÁUTICA METAL MECÁNICOENERGÍA
www.aimen.es | [email protected] 3
METALMECHANICSMETALMECHANICSSHIPYARDSSHIPYARDS ENERGYENERGY AERONAUTICSAERONAUTICS
(COASA Composites)
METALMECHANICSMETALMECHANICSSHIPYARDSSHIPYARDS ENERGYENERGY AERONAUTICSAERONAUTICS
(COASA Composites)
ASTILLEROS AERONÁUTICA METAL MECÁNICOENERGÍA

Centro Tecnológico AIMEN
Planta de Tecnologías de Unión
Centro de Procesado Láser
Materiales y Procesos de Fabricación
Ingeniería
Inspección
Gestión Industrial
Centro
www.aimen.es | [email protected] 4
Diseño, Simulación y Automática
Medio Ambiente Formación
Transferencia Tecnológica
Gestión de Proyectos
CentroTecnológico
AIMEN

Departamento de Diseño, Simulación y Automática
www.aimen.es | [email protected] 5
Simulación y Automática

Grupo de Automática
Objetivos Monitorizar la evolución de las tecnologías de robótica y automática.Desarrollar nuevas aplicaciones robotizadas/automatizadas,promoviendo su implementación en la industria.
Actividades
• Robótica
• Automática y diseño de sistemas de control
• Monitorización de procesos en línea
www.aimen.es | [email protected] 6
• Monitorización de procesos en línea
• Procesado y análisis de señal e imagen
• Desarrollo de sistemas de inspección
• Aplicaciones de visión artificial

Software comercial
• Visual Studio 2010 .NET
• National Instruments developer suite
• Matlab development environment
• Sherlock machine vision software
• MVTec Halcon v10 machine vision software
• RobotStudio simulation and offline programming
• Quartus II FPGA design software
Grupo de Automática
www.aimen.es | [email protected] 7
• Quartus II FPGA design software

Software libre
• OpenCV
• PCL
• ROS
• PythonXY, NumPy, PyLab, SciPy, Scikit-learn
Grupo de Automática
www.aimen.es | [email protected] 8

Equipamiento hardware
• Cámaras CMOS y CCD (alta resolución; alta velocidad; alta sensibilidad)
• Kinect
• Cámaras termográficas
• Ópticas: objetivos, filtros
• Escáneres 3D (laser, luz blanca)
• Framegrabbers
Grupo de Automática
www.aimen.es | [email protected] 9
• Framegrabbers
• TAC industrial para piezas de grandes dimensiones de desarrollo propio y patentado

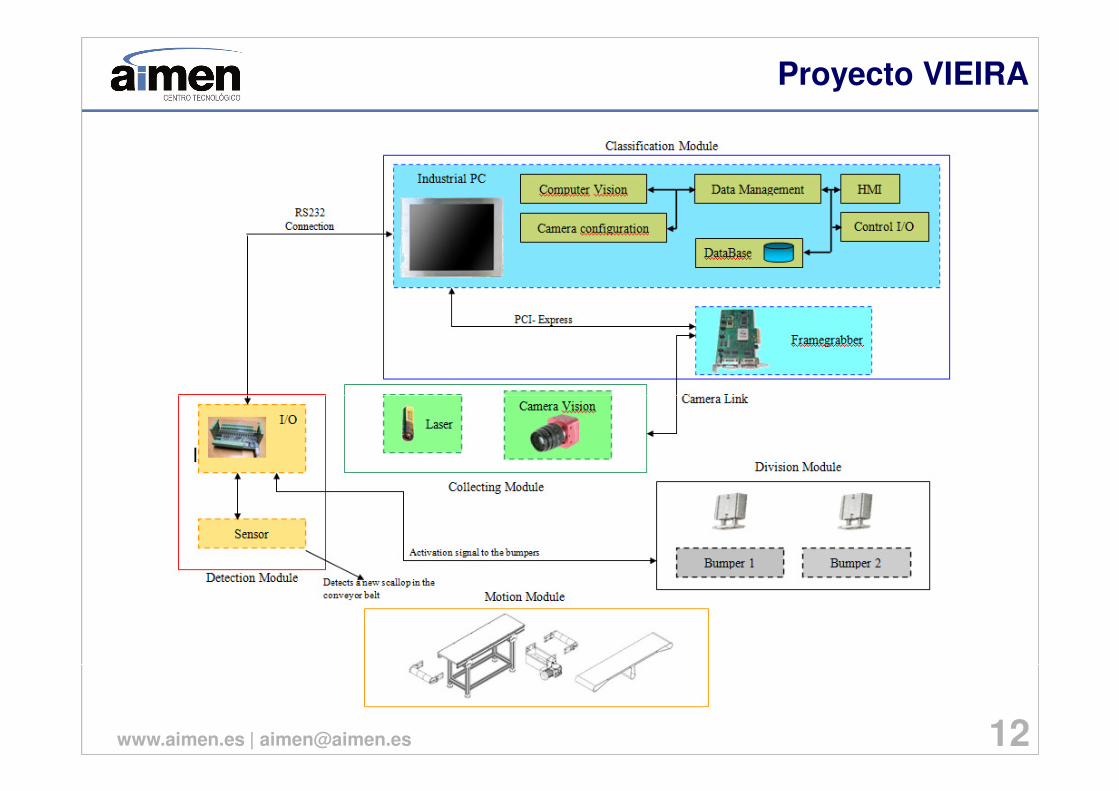
Proyecto VIEIRA
PROYECTO VIEIRA:
DESARROLLO DE UN SISTEMA
www.aimen.es | [email protected] 10
DESARROLLO DE UN SISTEMA DE CLASIFICACIÓN DE VIEIRAS BASADA EN VISIÓN 3D

Proyecto VIEIRA
MOTIVACIÓN
Métodos manuales para laclasificación
• Incertidumbre en los instrumentos demedida.• Inspección visual subjetiva.
OBJETIVOS
www.aimen.es | [email protected] 11
• Reducción del número de personas necesarias para la clasificación.
• Procesamiento más rápido. La cantidad buscada es de poder clasificar dos vieiras por segundo.
• Gran precisión en la clasificación.
• No es necesario manejar manualmente las vieiras para su clasificación.

Proyecto VIEIRA
• Vieiras situadas en una cinta transportadora.• Fotocélula en el inicio de la cinta detecta la vieira.• Envío de señal de trigger a la cámara para adquirir la imagen 3D.
www.aimen.es | [email protected] 13

Proyecto VIEIRA
Se desarrolló una aplicación software que aunaba el HMI del operador, base dedatos y las librerías de visión artificial que incluía la comunicación con la cámaray los algoritmos de procesado.
Algoritmos desarrollados:
• Volumen.
• Eje mayor de la vieira.
www.aimen.es | [email protected] 15
• Eje mayor de la vieira.
• Eje menor de la vieira.
• Superficie.
• Identificación de vieiras.

Proyecto SONIA
PROYECTO SONIA:
SISTEMA ROBOTIZADO
www.aimen.es | [email protected] 16
SISTEMA ROBOTIZADO FLEXIBLE PARA SERIES CORTAS O ÚNICAS

Proyecto SONIA
MOTIVACIÓN
Dificultad en la implantaciónde sistemas robóticos
• No es rentable en las pymes debido a lostamaños de lotes pequeños.• Barrera económica y tecnológica a laautomatización.• Dificultad de encontrar trabajadores concapacidad de trabajar con robots.
• Formas más nuevas e intuitivas de
www.aimen.es | [email protected] 17
• Formas más nuevas e intuitivas deinteracción entre las personas y losrobots.
• Programación más fácil yaccesible.

Proyecto SONIA
Trabajo centrado en el desbastado de cordones de soldadura en toberas debarco.
Características del trabajo
APLICACIÓN PARTICULAR
- Geometría.- Homogeneidad de la superficie.- Especificaciones dimensionales.
Puntos importantes
www.aimen.es | [email protected] 18
Características del trabajo- Proceso laborioso y lento.- Muy dependiente del trabajador.- Involucra la dedicación completa de unamedia de 2-3 trabajadores especializadosdurante el 20-35% de las horas deproducción.

Proyecto SONIA
OBJETIVO
Desarrollo de una celda robótica capaz de realizar operaciones de fresado ypulido en diferentes estructuras de gran tamaño.
•Incrementa la productividad.•Incrementa la competitividad.•Mejora las condiciones de los trabajadores.
DESARROLLO
www.aimen.es | [email protected] 19
•Programacion del robot basada en CAD.•Un sistema para detección y localización de los cordones desoldadura para reajustar las trayectorias,•Un sistema de control de fuerza que garantice la presión decontacto necesarua con la pieza a procesar.
DESARROLLO

Proyecto SONIA
Las trayectorias necesitanreadaptarse
www.aimen.es | [email protected] 20
Sistema de visión 3D (cámara + láser) montado en la muñeca del robot.

Proyecto SONIA
Detectar y cuantificar• Posición• Orientación
• Ancho• Espesor
www.aimen.es | [email protected] 22
La información obtenida por el sistema de visión 3D se une con los datosobtenidos del sistema de programación off-line, corrigiendo los errores deposición.

Proyecto SALMÓN
PROYECTO SALMÓN:
DESARROLLO DE UN SISTEMA
www.aimen.es | [email protected] 25
DESARROLLO DE UN SISTEMA AUTOMATIZADO DE CORTE LÁSER PARA PRENDAS DE LENCERÍA FEMENINA ASISTIDA POR VISIÓN ARTIFICIAL

Proyecto SALMÓN
MOTIVACIÓN
Actual proceso manual en SELMARK
• Posicionamiento manual de los troqueles.
• Operación manual de la máquina de corte.
www.aimen.es | [email protected] 26
Variedad de encajes para cada temporada•Diferentes formas, tamaños, colores,patrones…

Proyecto SALMÓN
Solución propuesta
Programación offline basada en CAD.
• Se usa el CAD del troquel como unamatriz virtual superpuesta sobre la imagende la prenda para cortar.
Localización basada en visión artificial
• Cámara montada en la celda sobre el área
www.aimen.es | [email protected] 27
• Cámara montada en la celda sobre el áreade trabajo.
Proyecto SALMÓN
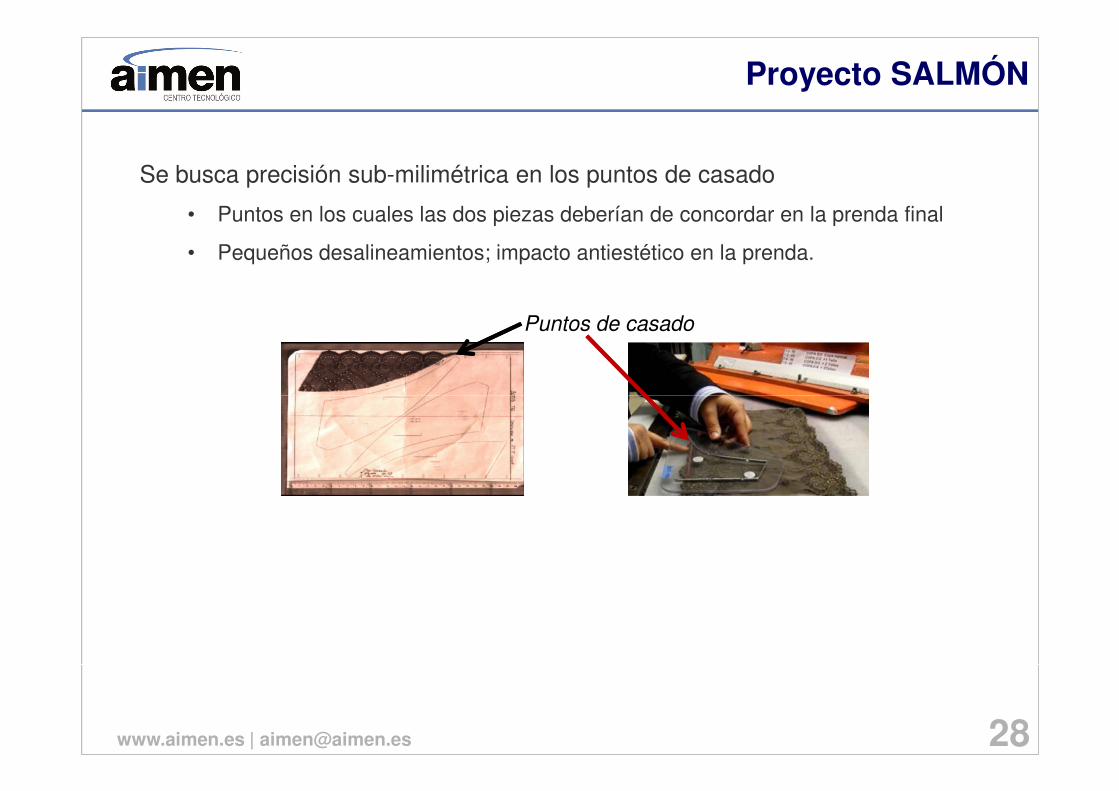
Se busca precisión sub-milimétrica en los puntos de casado
• Puntos en los cuales las dos piezas deberían de concordar en la prenda final
• Pequeños desalineamientos; impacto antiestético en la prenda.
Puntos de casado
www.aimen.es | [email protected] 28

Proyecto SALMÓN
Programación offline basada en CAD
• Definición del origen del CAD de cada pieza en un punto de casado.
• Conversión del CAD a un programa robot ejecutable.
www.aimen.es | [email protected] 29
Procedimiento gráfico
• Posicionamiento del CAD sobre la imagen de la prenda de modo análogo altroquel.
• Extracción de un modelo basado en formas.

Proyecto SONIA
• Localización submilimétrica de los puntos de casado
www.aimen.es | [email protected] 30
• Corte automático

Proyecto SALMÓN
• Automatización del corte láser de la prenda usando visión artificial
• Programación gráfica
• Rápida e intuitiva: programación del robot transparente al operador.
• Supresión de troqueles, sin necesidad de utillajes.
RESULTADOS
www.aimen.es | [email protected] 31

Proyecto CARLOS
PROYECTO CARLOS:VISIÓN DE MANIPULADOR
www.aimen.es | [email protected] 32
VISIÓN DE MANIPULADOR MÓVIL COOPERATIVO EN OPERACIONES DE HABILITACIÓN NAVAL

VISIÓN DE MANIPULADOR MÓVIL COOPERATIVO EN OPERACIONES DE HABILITACIÓN NAVAL
• Localización de área de trabajo mediante visión 3D• Planificación de trabajo• Guiado de brazo durante proceso• Capacidad de interaccionar con operarios humanos para recibir indicacionesy para solicitar información (zona de trabajo, resolución de ambigüedades, etc.)
Proyecto CARLOS
www.aimen.es | [email protected] 33
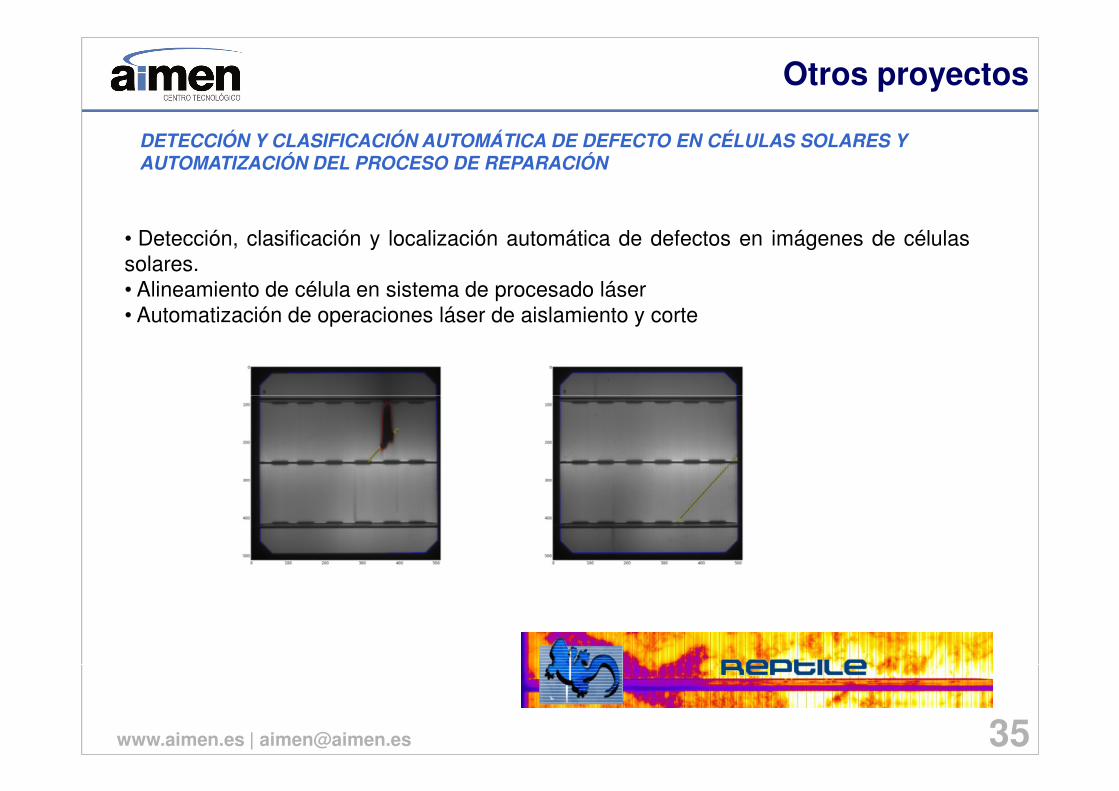
DETECCIÓN Y CLASIFICACIÓN AUTOMÁTICA DE DEFECTO EN CÉLULAS SOLARES Y AUTOMATIZACIÓN DEL PROCESO DE REPARACIÓN
• Detección, clasificación y localización automática de defectos en imágenes de célulassolares.• Alineamiento de célula en sistema de procesado láser• Automatización de operaciones láser de aislamiento y corte
Otros proyectos
www.aimen.es | [email protected] 35

DESARROLLO DE SISTEMAS DE CONTROL EN TIEMPO REAL BASADOS EN VISIÓN ARTIFICIAL
•Control de láser cladding usando un sistema basado en FPGA
OpticalFilters
CMOS Camera
FocusingLenses
OpticalFilters
CMOS Camera
OpticalFilters
CMOS Camera
FocusingLenses
Otros proyectos
www.aimen.es | [email protected] 36
Mirror
BeamSplitter
MirrorMirror
BeamSplitter

ESTUDIO Y DISEÑO EXPERIMENTAL DE UN SISTEMA BASADO EN VISIÓN ARTIFICIAL ORIENTADO AL CONTROL DE CALIDAD Y CONTAJE DE PIZARRAS PALETIZADAS
Otros proyectos
www.aimen.es | [email protected] 37

AIMEN – Central y Laboratoriosc/ Relva 27 A
36410 – O PORRIÑO (Pontevedra)Telf.+34 986 344 000 – Fax. +34 986 337 302
Delegación Tecnológica Santiago de Compostela
C. Univ. Sur – Edif. Feuga – Despacho nº3Rúa Lope Gómez de Marzoa
15705 – SANTIAGO DE COMPOSTELA (A Coruña)Telf.+34 981 525 503 - Fax.+34 981 525 503
Delegación Tecnológica Ourense
Parque Tecnolóxico de Galicia32900 – SAN CIBRAO DAS VIÑAS (Ourense)
Telf. +34 988 548 240Fax. +34 988 548 243
Delegación Tecnológica A Coruña
www.aimen.es | [email protected] 38
Gracias por su atenciónManuel Álvarez Souto | Ingeniero I+D
T +34 986 344 000 | [email protected]
Delegación Tecnológica A Coruña
Fundación Mans – Paideia Pol. Pocomaco - Parcela D-22 - Oficina 20A
15190 – A CORUÑA (A Coruña)Telf. +34 617 395 153
Delegación Tecnológica MadridAvda. del General Perón, 32, 8º H
28020 MADRID (Madrid)Tlf. 687 448 915
Delegación Tecnológica BrasilTelf. (+55) 81 9613 5615
Top Related