





Idiomas
Páginas
Jurídico

7/31/2019 Clases d Control Discreto
1/91
Haga clic para modificar el estilo de subttulo delpatrn
7/29/12
CONTROL DIGITAL
Julio Rodrguez Gonzlez
Universidad politcnica de Tlaxcala
IngenieraMecatrnica
7/31/2019 Clases d Control Discreto
2/91
7/29/12
Materia: Control Digital
Tema: Sistemas discretos y seales1. Introduccin a los sistemas de control discreto:En la figura 1, se muestra un diagrama a bloques
de un sistema de control digital.
Figura 1.
7/31/2019 Clases d Control Discreto
3/91
7/29/12
Materia: Control Digital
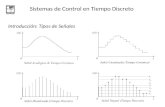
Tema: Sistemas discretos y seales2. Seales en un sistema de control digital
En la figura 2, se muestran las seales que semanejan en un sistema de control digital
Figura 2.
7/31/2019 Clases d Control Discreto
4/91
7/29/12
Materia: Control Digital
Tema: Sistemas discretos y seales3. Elementos de un sistema de control digital
Muestreo o discretizacin: Es la operacinque trasforma las seales de tiempo continuoen datos en tiempo discreto.
Retencin de datos: Es la operacin inversa,trasforma datos en tiempo discreto en unaseal de tiempo continuo.
Circuito de muestreo y retencin( Sampleand Hold) y el convertidos analgico-digital(A/D): Convierten la seal de tiempocontinuo en una seal de palabras binarias
codificadas numricamente. A este proceso sele denomina codificacin
7/31/2019 Clases d Control Discreto
5/91
7/29/12
Materia: Control Digital
Tema: Sistemas discretos y seales4. Elementos de un sistema de control digital
Decodificacin: El proceso de conversin dedigital a analgico(D/A).
Planta o proceso: Cualquier objeto fsico aser controlado
Transductor : Dispositivo que convierte unaseal de entrada en una salida diferente a lade la entrada.
Los Transductores pueden ser analgicos odigitales (transductores de datos
muestreados)
7/31/2019 Clases d Control Discreto
6/91
7/29/12
Materia: Control Digital
Tema: Sistemas discretos y seales5.Tipos de muestreo
Muestreo peridico: Los instantes demuestreo estn espaciados de manerauniforme tk = kT para ( k= 0, 1,2,)
Muestreo de orden mltiple: El patrn tK serepite peridicamente es tk+r-tk.Muestreo de tasa mltiple: Este se utiliza enun sistema que tiene lazos mltiples.Muestreo aleatorio: En este caso la variableque se muestrea es una variable aleatoria.
7/31/2019 Clases d Control Discreto
7/91
7/29/12
Materia: Control Digital
Tema: Sistemas discretos y seales5.Cuantificacin.Las principales funciones involucradas en laconversin analgico a digital son elmuestreo, cuantificacin de la amplitud y lacodificacin.
El proceso de representacin de una sealcontinua o analgica mediante un numerofinito de estados discretos se denominacuantificacin de la amplitud.El proceso de representar una muestramediante un cdigo numrico(binario) sedenomina codificacin y es representado poruna palabra digital.
7/31/2019 Clases d Control Discreto
8/91
7/29/12
Materia: Control Digital
Tema: Sistemas discretos y seales5.Cuantificacin.Nivel de cuantificacin Q: Este esta dado porel intervalo de dos puntos adyacentes dedecisin:
7/31/2019 Clases d Control Discreto
9/91
7/29/12
Materia: Control Digital
Tema: Sistemas discretos y seales6. Error de cuantificacin:
Como el numero de bits en la palabra digitales finito, la conversin A/D entrega comoresultado una resolucin finita .
Por lo tanto, la conversin A/D presenta un
error de cuantificacin , ya que el valoranalgico se debe redondear el nivel digitalmas cercano.
La incertidumbre presente en el proceso decuantificacin se conoce como ruido decuantificacin.
7/31/2019 Clases d Control Discreto
10/91
7/29/12
Tema: Sistemas discretos y sealesError de cuantificacin
7/31/2019 Clases d Control Discreto
11/91
7/29/12
Ejemplo: Suponga que un sensor detemperatura genera una Seal analgicacomo la que se muestra a continuacin. Esta
seal esta bajo la norma ISA-S5( 1 a 5VCD).
7/31/2019 Clases d Control Discreto
12/91
7/29/12
Muestreo : Este se realiza en el eje de las abscisas ,es decir con respecto al tiempo. En este ejemplo setomaron 24 muestras en un segundo(frecuencia de
muestreo) de la seal analgica.
7/31/2019 Clases d Control Discreto
13/91
7/29/12
Cuantificacin: Despus de realizar el muestreo esnecesario realizar la cuantificacin de la seal. Estese realiza en el eje de las ordenadas, es decir en la
amplitud de la seal muestreada. Para este caso seusan 4 bits, esto permite tener 16 combinaciones,lo cual permite tener 16 valores y por lo tanto 16niveles en este eje.
7/31/2019 Clases d Control Discreto
14/91
7/29/12
Cuantificacin de la seal e intervalo decuantificacinTenemos: 2 = 16 niveles.
Es decir, se puede representar valores desde+8 y -8 .
El intervalo de cuantificacin es de:
= 1/ 2 = 1/ 2 = = 1/ 2 = 0.125
Cometer un error de: (1/ 2)/12 =(.125)/12 = 0.0013020
Calculo del error de cuantificacin:
7/31/2019 Clases d Control Discreto
15/91
7/29/12
TCNICAS DECUANTIFICACIN
- Cuantificacin uniforme: la distancia entre los
niveles de reconstruccin es siempre la misma.No hacen ninguna suposicin acerca de la naturalezade la seal a cuantificar, de ah que no proporcionenlos mejores resultados. Sin embargo, tienen comoventaja que son los ms fciles y menos costosos
de implementar.- Cuantificacin logartmica: incrementa ladistancia entre los niveles de reconstruccinconforme aumenta la amplitud de la seal. Muy
usada en seales de voz.
7/31/2019 Clases d Control Discreto
16/91
7/29/12
- Cuantificacin no uniforme: si conocemos lafuncin de la distribucin de probabilidad,
podemos ajustar los niveles de reconstruccin a ladistribucin de forma que se minimice el errorcuadrtico medio. Esto significa que la mayora delos niveles de reconstruccin se den en la vecindad
de las entradas ms frecuentes y,consecuentemente, se minimice el error (ruido).- Cuantificacin vectorial: se basa encuantificar segn las muestras vecinas, resultams eficiente cuantificar los datos en bloques de
N muestras.- Cuantificadores de Vecino Ms Cercano(Voronoi): el proceso de codificacin nonecesita almacenar una descripcin geomtrica
de las celdas, la codificacin es mediante unacomparacin de distancias.
TCNICAS DECUANTIFICACIN
7/31/2019 Clases d Control Discreto
17/91
7/29/12
REGISTROS DEL MODULO DE A/D.PIC16F877
El mdulo de A/Dtiene cuatro registros. Estosregistros son:
ADRESH : Parte alta del resultado de la
conversin ADRESL: Parte baja del resultado de laconversin ADCON0: Registro de Control 0 ;control del
funcionamiento del conversor ADCON1, Registro de Control 1; configuracinde los pines del puerto.
7/31/2019 Clases d Control Discreto
18/91
7/29/12
REGISTRO ADCON0(DIRECCIN LFH)
bit 7-6: ADCS1:ADCS0:
En estos dos bits se hace la seleccin de lafrecuencia de reloj para el Convertidor A/D.00 Fosc/2
01 Fosc /810 Fosc/3211 FRC (Procede del oscilador RC interno)
7/31/2019 Clases d Control Discreto
19/91
7/29/12
bit 5-3: CH2:CH0:Aqu se selecciona el canal analgico por
donde entrar la seal a digitalizar.En este micro controlador tenemos 8 canales deentrada al Conversor A/D000 = Canal 0, (RA0/AN0)001 = Canal 1, (RA1/AN1)
010 = Canal 2, (RA2/AN2)011 = Canal 3, (RA3/AN3)100 = Canal 4, (RA4/AN4)101 = Canal 5, (RA5/AN5)
110 = Canal 6, (RA6/AN6)111 = Canal 7, (RA7/AN7)
7/31/2019 Clases d Control Discreto
20/91
7/29/12
bit 2: GO/#DONE. bit de estado de la conversinA/DSi ADON=1
1=La conversin A/D est en marcha (mientras est a1 se est realizando la conversin)
0 = La conversin ha finalizado. (el bit se pone a cero
automticamente por hardware cuando laconversin A/D finaliza) el resultado de la conversinaparece en
ADRESH:ADRESL
bit 1:No implementado: Se lee como 0bit 0:ADON: bit de puesta en marcha
1 =El convertidor A/D est operativo
0 = El convertidor A/D est apagado y noconsume corriente.
7/31/2019 Clases d Control Discreto
21/91
7/29/12
EL REGISTROADCON1El registro ADCON1es uno de los registros del
convertidor A/D del PIC16F877, se trata de un registro
de configuracin de los pines del puerto, este registrose compone de 8 bits, los cuales describamos sufuncin a continuacin:
Bit 7:ADFM: Selecciona el formato delresultado de la conversin A/D1 = > Pone en el registro ARDESH los seis bitsde mayor peso a 00 = > Pone los 6 bits de menor peso del registroADRESL a 0
Bits 6-4: No implementados: Se leen como cero
7/31/2019 Clases d Control Discreto
22/91
7/29/12
Bit 3-0: PCFG3:PCFG0: bits de configuracin de loscanales de entrada del convertidor A/D. Se utilizanpara configurar las patillas como E/S digital o como
entrada analgica de acuerdo con la siguiente tabla:
A= Entrada Analgica; D =
7/31/2019 Clases d Control Discreto
23/91
7/29/12
LOS REGISTROS ADRESH YADRESL
El par de registros ADRESH:ADRESL se carga conel resultado de 10 bits de la conversin A/D. Estepar de registros se extienden hasta 16 bits.El mdulo A/D tiene la posibilidad de justificar elresultado de 10 bits dentro de los 16 bits de lapareja de registros. La seleccin del formato de
justificacin a la izquierda o derecha se realizacon el bit ADFM(ADCON1). Los bits restantes (alos 10 de la conversin) se llenan con ceros.Estos dos registros cuando el convertidor A/D esten OFF y no se utiliza, pueden utilizarse como dosregistros de 8 bits de propsito general.Cuando se completa la conversin A/D, elresultado se guarda en los registros y se pone acero el bit GO/DONE
7/31/2019 Clases d Control Discreto
24/91
7/29/12
Por lo tanto, los 16 bits que forman el registro ARDESH-ARDESL con ADFM=1 tiene los 6 bits de mayor peso acero y con ADFM=0 los 6 bit de menor peso estn acero, en los 10 bits restantes se almacena el resultadode la conversin.
7/31/2019 Clases d Control Discreto
25/91
7/29/12
TEMPORIZACIN DE LACONVERSIN
Tiempo de conversin por bit(Tad): Estecomienza a funcionar en el tiempo de
adquisicin cuando activamos el bitGO/#DONE(ADCON0).El tiempo de adquisicin: es el tiempo que elmodulo A/D esta conectado a un voltaje
externo.Pero tenemos que tener en cuenta que parauna nueva conversin podemos preparar laconfiguracin del mdulo conversor A/D y si se
desea realizar una interrupcin del moduloconversor A/D, se exige un mnimo de 2*Tadpara realizar una nueva conversin. En lasiguiente figura se puede observar estos
tiempos.
7/31/2019 Clases d Control Discreto
26/91
7/29/12
Tiempo de muestra
de A/D
7/31/2019 Clases d Control Discreto
27/91
7/29/12
7/31/2019 Clases d Control Discreto
28/91
7/29/12
SELECCIN DEL RELOJ DELCONVERTIDOR A/D
El convertidor A/D requiere un mnimo de 12
TAD para la conversin de los 10 bits, Laseal de reloj para la conversin A/D seselecciona por software mediante los bitsADCS1:ADCS02 TOSC8 TOSC32 TOSCOscilador interno RC (2-6 s)
Para realizar conversiones correctas el reloj delconvertidor A/D debe seleccionarse paraasegurar un tiempo mnimo de TAD de 1,6 mS.
7/31/2019 Clases d Control Discreto
29/91
7/29/12
7/31/2019 Clases d Control Discreto
30/91
7/29/12
Fuente del Reloj A/D Frecuencia mxima deldispositivo
Operacin ADCS1:ADCS0 Mxima Frecuencia
FOSC/2 00 1.25 MHz
FOSC/8 01 5 MHz
FOSC/32 10 20 MHz
RC (1,2,3) 11 Nota 1
Nota.-1. Si la fuente es el oscilador RC tiene un TAD tpico de4 s , pero puede variar entre 2 6 s.2. Cuando la frecuencia del dispositivo es mayor de
1MHz, la fuente del oscilador RC para la conversin A/Dse recomienda solo si se trabaja en el modo Sleep.3. Para dispositivos de tensin mayores (LC),comprobar las caractersticas elctricas
7/31/2019 Clases d Control Discreto
31/91
7/29/12
Sugerencia:Una cosa a tener en cuenta, seria mantener lasfrecuencias mximas que se indican en la tabla, yaque, si por ejemplo utilizamos una frecuencia de 10MHz entonces tendramos que dividir por el mismonmero que si utilizamos una frecuencia de 20 MHz,
por lo que estaramos haciendo que el conversortrabajara mas despacio de lo que podra trabajar.
Materia: Control Digital
7/31/2019 Clases d Control Discreto
32/91
7/29/12
Materia: Control Digital
Tema: La transformada Z y su aplicacin ensistemas de control.La transformada z es una herramienta muy
importante cuando se trabaja con sistemas entiempo discreto.
En el curso de procesamiento de seales digitales
usamos la variable n para representar el tiempodiscreto. Sin embargo en control discreto hacemosn= kT, es decir x(n) = x(kT). Donde T es el periodode muestreo y k es el numero de muestras. Loque permite poder pasar de forma directa de
seales en el dominio del tiempo a la trasformadaz.
La transformada z de una funcin en el tiempo
x(t) toma en cuenta solamente los valoresmuestreados : x(0), x(T), x(2T),,x(kT).
7/31/2019 Clases d Control Discreto
33/91
7/29/12
Tema: La transformada Z y su aplicacin ensistemas de control.Trasformada Z Bilateral:
La Trasformada Z de x(t) donde - < t< sedefine como:
Materia: Control Digital
7/31/2019 Clases d Control Discreto
34/91
7/29/12
Materia: Control Digital
Tema: La transformada Z y su aplicacin ensistemas de control.
Una Trasformada Z es unilateral para x(t),cuando t es positivo, es decir si k toma valoresdesde cero hasta infinito en x(kT) . Lo que yaanalizamos en el curso de procesamiento de
seales y son llamados sistemas causales.
Materia: Control Digital
7/31/2019 Clases d Control Discreto
35/91
7/29/12
Materia: Control Digital
Tema: La transformada Z y su aplicacin ensistemas de control.
Para el caso de control no es necesario(casi
siempre) especificar la regin de convergenciade la transformada Z .En Muchas aplicaciones en ingeniera latrasformada Z unilateral tendr una solucinapropiada en forma cerrada en su regin deconvergencia. Es decir converge fuera delcirculo |z|=R, donde R es el radio deconvergencia absoluta. Excepto en los polos deX(z).
Im(z)
Re(z)
Regin de convergenciapara
R
Transformada Z de funciones elementales
7/31/2019 Clases d Control Discreto
36/91
7/29/12
Transformada Z de funciones elementales.
Nota: Se trata de una serieinfinita:
A= zPor lo que la serie converge en
Funcin escaln unitario:
x(k)= { 1, 1, 1, 1, }
t
X(t)
1
k
X(k)
1
X(Z)= 1z + 1z+1z+ 1z +
X(Z)= (z)
Transformada Z de funciones elementales.
7/31/2019 Clases d Control Discreto
37/91
7/29/12
Transformada Z de funciones elementales.
Funcin Rampa Unitaria:
t
X(t)
1
Nota: Recordando delcurso de procesamientotenemos que:
Transformada Z de funciones elementales.
7/31/2019 Clases d Control Discreto
38/91
7/29/12
Transformada Z de funciones elementales.
Funcin Polinomial :
Donde es una constante.
Transformada Z de funciones elementales.
7/31/2019 Clases d Control Discreto
39/91
7/29/12
Transformada Z de funciones elementales.
Funcin Exponencial :
Transformada Z de funciones elementales.
7/31/2019 Clases d Control Discreto
40/91
7/29/12
Transformada Z de funciones elementales.
Funcin Senoidal :
Usando las identidades deEuler:
Sabemos que:
Transformada Z de funciones elementales.
7/31/2019 Clases d Control Discreto
41/91
7/29/12
Transformada Z de funciones elementales.
Funcin Senoidal :
7/31/2019 Clases d Control Discreto
42/91
7/29/12
7/31/2019 Clases d Control Discreto
43/91
7/31/2019 Clases d Control Discreto
44/91
7/29/12
7/31/2019 Clases d Control Discreto
45/91
7/29/12
ka
1. Multiplicacin por una constante
Propiedades y teoremas importantes de latrasformada z
7/31/2019 Clases d Control Discreto
46/91
7/29/12
Propiedades y teoremas importantes de latrasformada z2. Linealidad
7/31/2019 Clases d Control Discreto
47/91
7/29/12
Propiedades y teoremas importantes de latrasformada z2. Multiplicacin porka
7/31/2019 Clases d Control Discreto
48/91
7/29/12
Propiedades y teoremas importantes de latrasformada z2. Teorema del corrimiento en el
tiempo
7/31/2019 Clases d Control Discreto
49/91
7/29/12
Propiedades y teoremas importantes de latrasformada z2. Teorema del corrimiento
P i d d t i t t d l
7/31/2019 Clases d Control Discreto
50/91
7/29/12
Propiedades y teoremas importantes de latrasformada zEjemplo donde se aplica el teorema delcorrimiento
a) y b)
7/31/2019 Clases d Control Discreto
51/91
7/29/12
Propiedades y teoremas importantes de latrasformada z
Solucin a)
Solucin b)
Solucin del Ejemplo:
7/31/2019 Clases d Control Discreto
52/91
7/31/2019 Clases d Control Discreto
53/91
7/29/12
Propiedades y teoremas importantes de latrasformada zEjemplo: Considere la funcin y(k), la cual es
la suma de funciones x(h), donde h= 0,1,2,k tal que:
Obtener la trasformada z de y(k)
Donde y(k)= 0 para k
7/31/2019 Clases d Control Discreto
54/91
7/29/12
Propiedades y teoremas importantes de latrasformada zSolucin
para:Si
y
Restando 1 y 2
.(1 ).(2)
Por lo que latrasformada z
es:Factorizando
tenemos )(]1)[(1 zXzzY =
Solucin:
7/31/2019 Clases d Control Discreto
55/91
7/29/12
Propiedades y teoremas importantes de latrasformada z2. Teorema de Traslacin compleja.
Si x(t) tiene la transformada z X(z), entonces latransformada de z de est dada porX( z ) y es llamado teorema de traslacincompleja
Por lotanto:
Demostracin:
7/31/2019 Clases d Control Discreto
56/91
7/29/12
Propiedades y teoremas importantes de latrasformada z2. Teorema de Traslacin compleja.
Ejemplo:Dadas las trasformadas de sen t y cos t ,obtener la trasformada z mediante el teoremade traslacin compleja de la siguiente funcin:
F(t)=y
F(t)=
7/31/2019 Clases d Control Discreto
57/91
7/29/12
Propiedades y teoremas importantes de latrasformada z2. Solucin de:
Sustituyendo z poratZe
Tenemos la solucin
F(t)
=
Sabemosque :
7/31/2019 Clases d Control Discreto
58/91
7/29/12
Propiedades y teoremas importantes de latrasformada z2. Solucin de :
Sustituyendo z poratZe
Tenemos la solucin
F(t)
=
Sabemos
que :
7/31/2019 Clases d Control Discreto
59/91
7/29/12
Propiedades y teoremas importantes de latrasformada z2. Teorema de Traslacin compleja.
Ejemplo: Obtener la transformada de z de:attetf =)(
Sabemosque
Por lotanto:
7/31/2019 Clases d Control Discreto
60/91
7/29/12
Propiedades y teoremas importantes de latrasformada z
2. Teorema del valor inicial.
Si x(t) tiene la trasformada zX(z) y si elexiste , entonces el valor inicial x(0) de x(t)o x(k) esta dado por:
)(lim zXz
Si hacemos quez
i d d i d l
7/31/2019 Clases d Control Discreto
61/91
7/29/12
Propiedades y teoremas importantes de latrasformada z
2. Teorema del valor inicial.
Si x(t) tiene la trasformada zX(z) y si elexiste , entonces el valor inicial x(0) de x(t)o x(k) esta dado por:
)(lim zXz
El teorema del valor inicial es conveniente paraverificar la incidencia de posibles errores en elcalculo de la transformada z, debido a que X(0)normalmente se conoce. Una verificacin delvalor inicial permite descubrir errores en latrasformada z si estos existes.
P i d d i d l
7/31/2019 Clases d Control Discreto
62/91
7/29/12
Propiedades y teoremas importantes de latrasformada z
2. Teorema del valor inicial.
Determine el valor inicial x(0) si la trasformadaz de x(t) esta dada por:
Lo cual concuerda con el resultado ya que si hacemos
X(t)=x(0) tenemosque:
011)0( ==x
Aplicando el teorema del valor
inicial tenemos:
Este resultado se puede verificar evaluando lafuncin original:
P i d d t i t t d l
7/31/2019 Clases d Control Discreto
63/91
7/29/12
Propiedades y teoremas importantes de latrasformada z
2. Teorema del valor inicial.
Determine el valor inicial x(0) si la trasformadaz de x(t) esta dada por:
Lo cual concuerda con el resultado ya que si hacemosX(t)=x(0) tenemosQue el escaln unitario vale 1:
Aplicando el teorema del valor
inicial tenemos:
Este resultado se puede verificar evaluando lafuncin original:
1)0()0( == ux
Propiedades y teoremas importantes de la
7/31/2019 Clases d Control Discreto
64/91
7/29/12
Teorema del Valor final.
Sea X[n] una secuencia causal. El valor final deX[n], esto es, el valor de X[n] a medida que ntiende a infinito se puede dar por la siguienteexpresin:
siempre que el valor final exista, o sea que existaX[n] cuando n tiende a infinito.
p y ptrasformada z
Propiedades y teoremas importantes de lat f d
7/31/2019 Clases d Control Discreto
65/91
7/29/12
Teorema del Valor final.Suponga que x(t), donde x(k)=0 para k
7/31/2019 Clases d Control Discreto
66/91
7/29/12
Sabemos que: (1)
Restando (1) y(2)
y
(2)
Si tomamos el limite cuando z tiende a 1, setiene
Propiedades y teoremas importantes de latrasformada z
7/31/2019 Clases d Control Discreto
67/91
7/29/12
Teorema del Valor finalEjemplo: Determine el valor final cuandode:
Mediante el uso del teorema de valor final
trasformada z
Tabla de Propiedades y teoremas
importantes de F(z)
7/31/2019 Clases d Control Discreto
68/91
7/29/12
importantes de F(z)
Tabla de Propiedades y teoremas
importantes de F(z)
7/31/2019 Clases d Control Discreto
69/91
7/29/12
importantes de F(z)
Tabla de Propiedades y teoremasimportantes de F(z)
7/31/2019 Clases d Control Discreto
70/91
7/29/12
importantes de F(z)
7/31/2019 Clases d Control Discreto
71/91
7/29/12
Trasformada z Inversa
Mtodo de la divisin
7/31/2019 Clases d Control Discreto
72/91
7/29/12
En este mtodo, la trasformada z inversase obtiene mediante la expansin de X(z) enuna serie infinita de potencias de z. Estemtodo es til cuando es difcil obtener unaexpresin en forma cerrada para latransformada z inversa o se desea encontrar
slo algunos de los primeros trminos de x(k)El mtodo de divisin directa proviene delhecho de que si X(z) esta expandida en unaserie de potencias de z, por ejemplo:
Mtodo de la divisindirecta
Mtodo de la divisin
7/31/2019 Clases d Control Discreto
73/91
7/29/12
directaEjemplo: Encuentre X(k) para k= 0,1,2,3,4,Cuando X(z) esta dada por :
Paso 1: Escribimos a X(z) como un cociente depolinomios en z
2.02.1
510)(
2.12.0510
)2.0)(1(510)(
2
2
+
+=
+
+=
+=
zz
zzx
zzzz
zzzzx
Multiplicando el numerador y denominadorpor Z tenemos:
Mtodo de la divisin
7/31/2019 Clases d Control Discreto
74/91
7/29/12
directaEjemplo: Continuacin de la solucin
Mtodo de la divisin
7/31/2019 Clases d Control Discreto
75/91
7/29/12
directaEjemplo: Continuacin de la solucin
Mtodo computacional
7/31/2019 Clases d Control Discreto
76/91
7/29/12
Hay dos enfoques:
Adecuando la Funcin, tenemos:
7/31/2019 Clases d Control Discreto
77/91
7/29/12
7/31/2019 Clases d Control Discreto
78/91
7/29/12
Numerador
Denominador
7/31/2019 Clases d Control Discreto
79/91
7/29/12
7/31/2019 Clases d Control Discreto
80/91
7/29/12
>> num=[0 0.4673 -0.3393]
num =
7/31/2019 Clases d Control Discreto
81/91
7/29/12
0 0.4673 -0.3393
>> den=[1 -1.5327 0.6607]
den =
1.0000 -1.5327 0.6607
>> x=[1 zero(1,40)];??? Undefined function or method 'zero' for input arguments of type 'double'.>> x=[1 zeros(1,40)];>> y=filter(num, den, x)
y =
Columns 1 through 15
0 0.4673 0.3769 0.2690 0.1632 0.0725 0.0032 -0.0429 -0.0679 -0.0758-0.0712 -0.0591 -0.0436 -0.0277 -0.0137
Columns 16 through 30
-0.0027 0.0050 0.0094 0.0111 0.0108 0.0092 0.0070 0.0046 0.0025 0.0007-0.0005 -0.0013 -0.0016 -0.0016 -0.0014
Columns 31 through 41
-0.0011 -0.0008 -0.0004 -0.0002 0.0000 0.0002 0.0002 0.0002 0.0002 0.00020.0001
>> x=[1 zeros(1,40)];
7/31/2019 Clases d Control Discreto
82/91
7/29/12
7/31/2019 Clases d Control Discreto
83/91
7/29/12
7/31/2019 Clases d Control Discreto
84/91
7/29/12
Tarea: Encontrar la trasformada z inversa mediante MATLAB
7/31/2019 Clases d Control Discreto
85/91
7/29/12
utilizando la delta de Kronecker para visualizar la salida y(k)desde k=0 hasta 50. Si la funcin de trasferencia es :
21
21
321
810)(
+
=
zz
zzzG
32
810)(
2
2
+
=
zz
zzG
zporndoMultiplica
Resultados:
7/31/2019 Clases d Control Discreto
86/91
7/29/12
>> num=[0 10 -8]
num =
0 10 -8
>> den=[1 -2 3]
den =
1 -2 3
>> x=[1 zeros(1,50)];>> y=filter(num, den, x)
y =1.0e+012 *
Columns 1 through 15
0 0.0000 0.0000 -0.0000 -0.0000 -0.0000 -0.0000 0.0000 0.0000 0.0000 -0.0000 -0.0000 -0.00000.0000 0.0000
Columns 16 through 30
0.0000 -0.0000 -0.0000 -0.0000 -0.0000 0.0000 0.0000 0.0000 -0.0000 -0.0000 -0.0000 0.00000.0000 0.0000 0.0000
Columns 31 through 45
-0.0001 -0.0001 -0.0001 0.0002 0.0008 0.0008 -0.0007 -0.0037 -0.0054 0.0004 0.0170 0.03280.0146 -0.0691 -0.1821
Columns 46 through 51
-0.1569 0.2325 0.9357 1.1741 -0.4590 -4.4403
Enfoque por medio de la ecuacin en
7/31/2019 Clases d Control Discreto
87/91
7/29/12
diferenciasLa ecuacin puede convertirse en una ecuacin en diferenciascomo sigue
1. Multiplicamos el numerador y el denominador por z
2. Despejamos X(z) y Y(z) y factorizamos
3. Sustituyendo a z por su posicin temporal
Podemos determinar y(0) y y(1) haciendo
7/31/2019 Clases d Control Discreto
88/91
7/29/12
primero k=-2 y luego k=-1Suponemos las condiciones iniciales:x(0)=1 y x(k)=0 para k0 y y(k)= para k
7/31/2019 Clases d Control Discreto
89/91
7/29/12
7/31/2019 Clases d Control Discreto
90/91
7/29/12
7/31/2019 Clases d Control Discreto
91/91
Top Related