






Idiomas
Páginas
Jurídico


AnAnáálisis, modelado y lisis, modelado y control de Motores de control de Motores de
InducciInduccióónnInforme de actividadesInforme de actividades

ContenidoContenido
IntroducciIntroduccióónnDescripciDescripcióón del proyecton del proyectoModelado de motores de inducciModelado de motores de induccióónnControl en modo deslizanteControl en modo deslizanteconclusionesconclusiones

IntroducciIntroduccióónn

Breve presentaciBreve presentacióónnTitulo del proyecto:Titulo del proyecto:
AnAnáálisis, modelado y control de Motores de Induccilisis, modelado y control de Motores de Induccióónn
Fecha de aprobaciFecha de aprobacióón: Febrero 2005n: Febrero 2005
ParticipantesParticipantes
Carlos Alberto GaviriaJaime O. DiazCarlos GonzalezDiana F. MoralesJorge O. VanegasNicole Portilla

DescripciDescripcióón del n del proyectoproyecto

Planteamiento del ProblemaPlanteamiento del ProblemaLos motores de inducciLos motores de induccióón se han utilizado en n se han utilizado en vastas vastas ááreas de aplicacireas de aplicacióón:n:
•• ServoServo--sistemas,sistemas,•• Elevadores,Elevadores,•• Sistemas de tracciSistemas de traccióón,n,•• MMááquinas herramientas,quinas herramientas,•• Bombas, ventiladores,Bombas, ventiladores,•• Laminadoras, bobinadoras, molinos, compresores, etc. Laminadoras, bobinadoras, molinos, compresores, etc.
La tendencia actual es la introducción del motor de inducción en el automóvil y soluciones para el hogar

Planteamiento del ProblemaPlanteamiento del Problema
Reto actualReto actual
•• Obtener desempeObtener desempeñños dinos dináámicos satisfactorios micos satisfactorios para un motor de induccipara un motor de induccióón.n.
•• Para ello deben emplearse nuevas tPara ello deben emplearse nuevas téécnicas cnicas para el control del motor de induccipara el control del motor de induccióón.n.
El proyecto pretende aportar soluciones novedosas al problema

Objetivo general del proyectoObjetivo general del proyecto
DiseDiseññar e implementar:ar e implementar:
•• sistemas de control de motores de sistemas de control de motores de inducciinduccióón de jaula de ardilla,n de jaula de ardilla,
•• para el seguimiento de un perfil de para el seguimiento de un perfil de posiciposicióón, velocidad y aceleracin, velocidad y aceleracióón,n,
•• utilizando tutilizando téécnicas no convencionales.cnicas no convencionales.

MetodologMetodologíía propuestaa propuestaFase 1: Fase 1: InvestigaciInvestigacióón sobre el estado del arte.n sobre el estado del arte.•• ftpftp://://ftp.unicauca.edu.coftp.unicauca.edu.co/Facultades/FIET/DEIC//Facultades/FIET/DEIC/docsdocs//MateriasMaterias
%20del%20Departamento%20del%20Departamento//Control%20de%20maquinasControl%20de%20maquinas//
Fase 2: Fase 2: Obtener un modelo del motor de Obtener un modelo del motor de inducciinduccióón de la banda transportadora del DEIC.n de la banda transportadora del DEIC.
Fase 3. Fase 3. DiseDiseñño de sistemas de control para o de sistemas de control para motores de induccimotores de induccióón. En particular se estudiarn. En particular se estudiaráán n estrategias de control estrategias de control adaptativoadaptativo basadas en la basadas en la realimentacirealimentacióón del vector de estados.n del vector de estados.
Fase 4. Fase 4. ValidaciValidacióón por medio de simulacin por medio de simulacióón de n de los controladores estudiados.los controladores estudiados.

Resultados del proyectoResultados del proyectoUn modelo computacional del motor de Un modelo computacional del motor de inducciinduccióón de jaula de ardilla para n de jaula de ardilla para simulacisimulacióón.n.
Un esquema de control para el motor.Un esquema de control para el motor.
Reportes tReportes téécnicos de los resultados del cnicos de los resultados del trabajo desarrollado.trabajo desarrollado.

Modelado de motores de Modelado de motores de inducciinduccióónn

Modelado del motorModelado del motor
La etapa del modelado del motor es La etapa del modelado del motor es importante por que:importante por que:
•• PermitiPermitióó conocer al detalle su conocer al detalle su funcionamientofuncionamiento
•• Suministrando datos importantes para el Suministrando datos importantes para el disediseñño del sistema de controlo del sistema de control

Modelado del motorModelado del motorGran parte del modelado se presenta en el Gran parte del modelado se presenta en el proyecto de pregrado:proyecto de pregrado:
Desarrollado por los estudiantes:Desarrollado por los estudiantes:
DiseDiseñño de un controlador de velocidad para un o de un controlador de velocidad para un motor de induccimotor de induccióón utilizando control vectorialn utilizando control vectorial
Diana F. MoralesJorge O. Vanegas

Modelo matemModelo matemáático del motortico del motorFase a
Fase b
Fase c+
− v
vll2
+
− v
vll1
+
− v
vll
−K−
rpm1
−K−
rpm
1s
−C−
Tl1
−C−
Tl0
A
B
C
Tm
m
Motor
va
vb
vc
Wmech
ia
ib
ic
Tem
Modelo Motor
m
wm
Te
MachinesMeasurement
Demux
1/Jeq
Inertia
Start
Double Click toload parameters and initial conditions
ComparaVelocidad
ComparaPar

Modelo matemModelo matemáático del motortico del motor
Actual Motor Model
is_dq
4
Tem
3
ic
2
ib
1
ia
vs_dq
is_dq
Wd
fl_s_dq
stator_flux Eq. 3−71
K*u
lambda −−> iEq. 3−62
inv[M]0
fl_rq
d
q
theta_da
ia
ib
ic
dq −−> abcEq. 3−18
a
b
c
theta_da
vs_dq
abc −−> dqEq. 3−8
Terminator
1s
1s
p/2
[theta_da]
−K−
−K−
−K−
−K−
[theta_da]
emu
emuemu
4
Wmech
3
vc
2
vb
1
va
theta_da
WdA
Torque
fl_rd
Wm
irdq

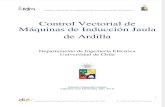
Modelo matemModelo matemáático del motortico del motor
0 0.2 0.4 0.6 0.8 1 1.2 1.4−500
0
500
1000
1500
2000Velocidad Modelo [rev/min]
0 0.2 0.4 0.6 0.8 1 1.2 1.4−500
0
500
1000
1500
2000Velocidad Modelo Matlab [rev/min]
0 0.2 0.4 0.6 0.8 1 1.2 1.4−40
−20
0
20
40
60Par Modelo [rev/min]
0 0.2 0.4 0.6 0.8 1 1.2 1.4−40
−20
0
20
40
60Par Modelo Matlab [rev/min]
Comparación Velocidad Comparación Par

DesempeDesempeñño control PIo control PIRespuesta a la variaciRespuesta a la variacióón del par de n del par de cargacarga
Lazo Abierto Lazo Cerrado

DesempeDesempeñño control PIo control PI
Seguimiento de un perfil de Seguimiento de un perfil de velocidadvelocidad

Control en modo Control en modo deslizantedeslizante

Control en modo deslizanteControl en modo deslizante
El control en modo deslizante es una El control en modo deslizante es una ttéécnica de control no lineal robustacnica de control no lineal robusta
En este proyecto se propone este En este proyecto se propone este esquema para el control del motor esquema para el control del motor del motor.del motor.

Control en modo deslizanteControl en modo deslizanteEl control en modos deslizantes propuesto se El control en modos deslizantes propuesto se presenta en el proyecto de pregrado:presenta en el proyecto de pregrado:
Desarrollado por los estudiantes:Desarrollado por los estudiantes:
Control en modo deslizante de la velocidad de un Control en modo deslizante de la velocidad de un motor de induccimotor de induccióónn
Carlos GonzalezNicole Portilla

RESULTADOS DE SIMULACIRESULTADOS DE SIMULACIÓÓNN
Resultados con Resultados con Control PIControl PI
Resultados con Resultados con Control SlidingControl Sliding

ConclusionesConclusiones

ConclusionesConclusiones
La identificaciLa identificacióón de los parn de los paráámetros metros del modelo del motor no es una del modelo del motor no es una tarea simple. Requiere el uso de tarea simple. Requiere el uso de algoritmos no lineales de estimacialgoritmos no lineales de estimacióón n en len líínea.nea.
Una alternativa vUna alternativa váálida es la lida es la utilizaciutilizacióón de algoritmos de control n de algoritmos de control robustos.robustos.

ConclusionesConclusionesExisten numerosos aportes reportados que Existen numerosos aportes reportados que dan soluciones satisfactorias al problema dan soluciones satisfactorias al problema del control de la dindel control de la dináámica del motor.mica del motor.
La decisiLa decisióón sobre qun sobre quéé mméétodo utilizar debe todo utilizar debe pasar por una valoracipasar por una valoracióón de la simplicidad n de la simplicidad del algoritmo de control utilizado frente a del algoritmo de control utilizado frente a las necesidades de la aplicacilas necesidades de la aplicacióón particular.n particular.

ConclusionesConclusionesEl esquema de control vectorial (SVC) El esquema de control vectorial (SVC) proporciona herramientas matemproporciona herramientas matemááticas ticas para la simplificacipara la simplificacióón del problema de n del problema de control. control.
Dentro de ese esquema, el control de Dentro de ese esquema, el control de posiciposicióón y velocidad se convierte en uno n y velocidad se convierte en uno muy similar al control de motores de DC., muy similar al control de motores de DC., permitiendo el uso de algoritmos simples permitiendo el uso de algoritmos simples como el PI.como el PI.

ConclusionesConclusionesEn el mismo esquema SVC, el control en En el mismo esquema SVC, el control en modos deslizantes ofrece una mejora en el modos deslizantes ofrece una mejora en el desempedesempeñño dino dináámico frente al control PI mico frente al control PI convencional. convencional.
El desempeEl desempeñño del motor se deteriora por o del motor se deteriora por los armlos armóónicos en las corrientes aplicadas nicos en las corrientes aplicadas por el inversor que genera la alimentacipor el inversor que genera la alimentacióón n del motor.del motor.

Trabajo futuroTrabajo futuroSe identificaron tres campos de investigaciSe identificaron tres campos de investigacióón:n:
•• EstimaciEstimacióón de parn de paráámetros del motor a partir de medidas metros del motor a partir de medidas en operacien operacióón de: Potencia, corriente, velocidad y par.n de: Potencia, corriente, velocidad y par.
•• AnAnáálisis del efecto del inversor triflisis del efecto del inversor trifáásico en el lazo de sico en el lazo de control. control.
•• DiseDiseñño de algoritmos digitales o de algoritmos digitales óóptimos para el ptimos para el accionamiento del inversor trifaccionamiento del inversor trifáásico.sico.
Los dos últimos ítems son objeto de estudio en una siguiente fase del proyecto y se involucrarán dos proyectos de maestría
Top Related