
UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO · El daño causado por un derrame de petróleo al...
167
i UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO FACULTAD DE INGENIERÍA DIVISIÓN DE ESTUDIOS DE POSGRADO MODELADO NUMÉRICO DE DERRAMES DE HIDROCARBUROS EN CUERPOS DE AGUA TESIS QUE PARA OBTENER EL GRADO DE: MAESTRO EN INGENIERÍA ÁREA AMBIENTAL PRESENTA: FABIÁN OMAR BETANCOURT QUIROGA DIRECTOR DE TESIS: DR. ARTURO PALACIO PÉREZ CIUDAD UNIVERSITARIA, MÉXICO D.F. , OCTUBRE DE 2001
Transcript of UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO · El daño causado por un derrame de petróleo al...
i
UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO
FACULTAD DE INGENIERÍA DIVISIÓN DE ESTUDIOS DE POSGRADO
MODELADO NUMÉRICO DE DERRAMES DE HIDROCARBUROS EN CUERPOS DE AGUA
TESIS QUE PARA OBTENER EL GRADO DE:
MAESTRO EN INGENIERÍA ÁREA AMBIENTAL
PRESENTA:
FABIÁN OMAR BETANCOURT QUIROGA
DIRECTOR DE TESIS: DR. ARTURO PALACIO PÉREZ
CIUDAD UNIVERSITARIA, MÉXICO D.F. , OCTUBRE DE 2001

ii
A mi María, te amo. Es para ti, que con tu amor y dulzura alegras cada instante de mi vida.
A ti angelito de Dios que pronto estarás entre nosotros.
A mis padres, por darme la vida, brindarme su cariño, y enseñarme a ser hombre.
A Nene, Momilla, Pellazo, Tonton y Mano, por soportarme.
A don Domingo, doña José, Teresita y Patito.
A Colombia, para que siga viva.
A México, lugar de encuentros.

iii
AGRADECIMIENTOS A la Coordinación de Procesos de Ingeniería y Ambientales del Instituto de Ingeniaría de la UNAM por brindarme su apoyo para realizar los estudios y la tesis de Maestría en Ingeniería Ambiental A la División de Estudios de Posgrado de la Facultad de Ingeniería – DEFI de la UNAM por apoyarme en la realización de los tramites de ingreso y estudio de la Maestría. Al Gobierno Mexicano, quien a través de la Secretaria de Relaciones Exteriores - SRE me apoyo para realizar los estudios de Maestría en Ingeniería en la UNAM. Al Instituto Mexicano del Petróleo - IMP, por brindarme el apoyo para realizar los estudios de Maestría en Ingeniería Ambiental en la UNAM. Al Dr. Arturo Palacio Pérez, gracias por todo, por los consejos y principalmente por confiar en mi trabajo. Al Dr. Alejandro Rodríguez Valdez, por darme la oportunidad de ingresar al Instituto de Ingeniería Al Dr. William Vicente Rodríguez, al M.I. Alexis Espinosa, al M.I. Raza Sie, al M.I. Salvador Ochoa, al M.S.C Henry Pérez y al Ing. Oscar Martínez, todos compañeros del Instituto de Ingeniería, por ayudarme a construir ese puente invisible entre los problemas y su solución, de verdad gracias. A la M.I. Francis Soler Anguiano, a la M.I. Ann Wellens, a la Dr. Rina Aguirre, al M.I. Augusto Villareal y al el Ing. Enrique Heras, de DEFI por guiarme durante mis estudios de Maestría. A la Lic. María Luisa Simbroni, a la Lic. Maura Carrillo de la SER, por el apoyo y confianza que siempre me brindaron. A la M.I. Ana González Orduño, a la Dr. María Ester Ruiz Santoyo, al Dr. Arturo Quintanar y la Lic. Rosa María Hernández Heros del IMP por su apoyo para realizar esta tesis de Maestría.
iv
A la Pollito, desde siempre, espere estar a tu lado para terminar la tesis y empezar contigo. Abriste la puerta de tu corazón y ya no quise salir, perdí las llaves, en el abismo de la felicidad a tu lado. Pollito siempre a mi lado, mostrico siempre a tu lado, lo logramos juntos, te amo. A doña Jose, gracias por su apoyo en las buenas y en las malas, a don Domingo por echarnos porras, a la Tere y a la Pato, por las risas, la alegría y su calor de hermanas. A doña Nubia, siempre presente, como una muralla indestructible, gracias mamí, a don Omar, mi papi, silencioso y lejano, Jesús te escucho. De menor a mayor, todos van de primeras: Tonton, Nene, Momilla, Pellazo y Mano, se que siempre han estado ahí, gracias, los quiero y necesito siempre. Al padre Jesús y a Marco por abrir las puestas de su casa y brindarme amistad cuando más lo necesitaba. A don Misael, doña Josefina y todas sus niñas y niños, por confiar y permitirme ser parte de ustedes. A Mao, ahora con Yuli, mis amigos gracias por creer y ser quienes son. A Napo, con un buen consejo y animo siempre. Al viejo Hugo, gracias, la gente corrida es necesaria para tomar la vida en serio. Salvador, donde estés, estoy comenzando otra vez, me gustaría llegar. Valentín para cuando aprendas a leer, se necesita ser como un perro arrugado para ser feliz. A Jesús presente en cada detalle, para aprender de ellos, me gusta estar en tus manos.

v
CONTENIDO RESUMEN
1 INTRODUCCIÓN 1
1.1 Justificación 3
1.2 Objetivo 3
1.3 Alcances 4
1.4 Limitaciones 4
1.5 Estructura de la tesis 5
2 COMPORTAMIENTO DEL PETRÓLEO EN EL AGUA 6
2.1 Generalidades del petróleo 6
2.2 Clasificación de los derrames de petróleo 10
2.3 Descripción de los procesos naturales que intervienen en los derrames de petróleo 11 2.3.1 Dispersión mecánica 13 2.3.2 Evaporación 14 2.3.3 Dispersión vertical 15 2.3.4 Disolución 16 2.3.5 Emulsificación 16 2.3.6 Oxidación - reducción 17 2.3.7 Sedimentación 17 2.3.8 Biodegradación 18
3 ESTADO DEL ARTE DEL MODELADO DE DERRAMES DE PETRÓLEO 21
3.1 Descripción de los modelos de simulación de derrames de petróleo en cuerpos de agua 24
3.2 Modelos matemáticos de los procesos involucrados en un derrame de petróleo 26 3.2.1 Advección 26 3.2.2 Escurrimiento 29
vi
3.2.3 Procesos de transferencia de masa 36 3.2.4 Cambio de propiedades 44
4 MODELO NUMÉRICO 47
4.1 La dinámica computacional de fluidos 48
4.2 Ecuaciones de conservación 49
4.3 Método de solución 52
4.4 Evaluación del modelo propuesto 54
5 RESULTADOS 58
5.1 Experimentos de campo 58 5.1.1 Experimento de estimación del área de una mancha de petróleo 58 5.1.2 Experimentos para estimar los fenómenos de pérdida de masa y los cambios de propiedades 63
5.2 Condiciones de la simulación numérica 68
5.3 Resultados y discusión 69 5.3.1. Procesos de transferencia de masa 70 5.3.2. Cambio de propiedades 78 5.3.3 Integración de procesos 81 5.3.4 Estimación del área 84
6 CONCLUSIONES Y RECOMENDACIONES 106
6.1 Conclusiones 107
6.2 Recomendaciones 109
ANEXO 1. ESTADÍSTICAS DE LOS DERRAMES DE PETRÓLEO. 111
ANEXO 2. MÉTODO DE VOLUMEN FINITO. 115
ANEXO 3. ARCHIVOS DE DEFINICIÓN Q1 Y GROUND.F. 122
ANEXO 4. DATOS EXPERIMENTALES. 146
ANEXO 5. DATOS DE MODELACIÓN. 150
ANEXO 6. EVALUACIÓN DEL MODELO PROPUESTO. 157
REFERENCIAS 173
vii
LISTA DE TABLAS 1. Características de los derrames de hidrocarburos. 2. Vida media de petróleo según su densidad. 3. Leyes de escurrimiento para derrames de petróleo. 4. Coeficiente de escurrimiento. 5. Constantes de disolución. 6. Parámetros experimentales de la estimación del área. 7. Datos entrada para la estimación del área.
7
9
25
25
33
57
61
viii
LISTA DE FIGURAS 1. Estructura molecular de los hidrocarburos. 2. Procesos físicos, químicos y biológicos en un derrame de petróleo. 3. Velocidad de evaporación de algunos hidrocarburos. 4. Definición de zonas de ocurrencia de derrames. 5. Importancia relativa de los procesos naturales involucrados en un derrame de
petróleo en el tiempo. 6. Fuerzas que actúan sobre una película de petróleo en un cuerpo de agua. 7. Representación del sistema discretizado en volúmenes finitos. 8. Diagrama esquemático de un volumen de control bidimensional. 9. Malla numérica utilizada. 10. Estimación del área: Comparación Modelo – Experimento 11. Espesor promedia: Comparación Modelo – Experimento. 12. Derrame de petróleo a 25 min. 13. Derrame de petróleo a 90 min. 14. Derrame de petróleo a 160 min 15. Derrame de petróleo a 225 min 16. Derrame de petróleo a 295 min. 17. Campo de velocidades. 18. Efecto de la velocidad de corriente y viento.
6
9
11
15
16
24
43
44
59
62
63
63
64
64
65
65
66
67

ix
19. Estimación del área con el modelo ROSA. 20. Comparación de estimación del área entre modelos. 21. Estimación del área iridiscente. 22. Evaporación crudo Sture Blend medio, Junio-1994, volumen 20 m3,
temperatura 288 °K, viento 7-10 m/s. 23. Evaporación crudo Forties ligero, Julio -1997, volumen 24.31 m3, temperatura
283 °K, viento 10 m/s. 24. Evaporación Gasolina, volumen 0.015 m3, temperatura 288 °K, viento 6.7 m/s. 25. Efecto de la temperatura sobre la evaporación de la Gasolina, volumen 0.015
m3, temperatura 273 a 303 °K, viento 6.7 m/s. 26. Disolución crudo medio Sture Blend, volumen 20 m3, Junio-1994, temperatura
288 °K, viento 7-10 m/s. 27. Disolución crudo pesado Troll (día 2), Agosto - 1995, volumen 15 m3,
temperatura 288 °K, viento 6 - 9 m/s. 28. Dispersión vertical crudo medio Sture Blend, volumen 20 m3, Junio-1994,
temperatura 288 °K, viento 7-10 m/s. 29. Dispersión vertival crudo pesado Troll (día 1), Agosto - 1995, volumen 15 m3,
temperatura 288 °K, viento 6 - 9 m/s. 30. Emulsificación crudo ligero Forties, Julio -1997, volumen 24.31 m3, temperatura
283 °K, viento 10 m/s. 31. Emulsificación crudo pesado Troll (día 1), Agosto - 1995, volumen 15 m3,
temperatura 288 °K, viento 6 - 9 m/s. 32. Emulsificación crudo pesado Troll (día 2), Agosto - 1995, volumen 25 m3,
temperatura 288 °K, viento 2 - 6 m/s. 33. Viscosidad crudo ligero Forties, Julio -1987, volumen 24.31 m3, temperatura
283 °K, viento 10 m/s. 34. Viscosidad crudo medio Sture Blend, volumen 20 m3, Junio-1994, temperatura
288 °K, viento 7-10 m/s. 35. Viscosidad crudo pesado Troll (día 1), Agosto - 1995, volumen 15 m3,
temperatura 288 °K, viento 6 - 9 m/s. 36. Viscosidad crudo pesado Troll (día 2), Agosto - 1995, volumen 25 m3,
temperatura 288 °K, viento 2 - 6 m/s.
68
69
70
71
72
73
74
75
75
76
76
78
78
79
80
80
81
81

x
37. Densidad crudo ligero Forties, Julio -1987, volumen 24.31 m3, temperatura 283 °K, viento 10 m/s.
38. Integración de procesos crudo ligero Arábigo, 1982, volumen 8 m3, temperatura
289 °K, viento 5.1 m/s. 39. Integración de procesos crudo pesado Troll (día 1), Agosto - 1995, volumen 15
m3, temperatura 288 °K, viento 6 - 9 m/s.
83
84
84

xi
RESUMEN Uno de los problemas ambientales que mayores daños ha causado a los ecosistemas acuáticos está relacionado con los derrames de petróleo, accidentales o rutinarios, que ocurren en las actividades de la industria petrolera. El daño causado por un derrame de petróleo al entorno ambiental, esta directamente relacionado con su ubicación, las condiciones ambientales y las propiedades del petróleo derramado, por lo que esta investigación tiene como propósito desarrollar un modelo numérico que permita representar el comportamiento de un derrame de petróleo y la influencia que sobre este tienen los diferentes procesos ambientales relacionados, como la evaporación, la disolución, la emulsificación y la dispersión vertical, entre otros. En esta investigación se logró identificar a los principales parámetros que determinan el comportamiento de una mancha de petróleo y se integró un grupo de expresiones que permiten modelar el fenómeno. La metodología empleada, se basó en realizar una amplia revisión bibliográfica del tema, seguida por la selección de los modelos que mejor representan el comportamiento del derrame, para luego codificarlos empleando el método de solución de volúmenes finitos. Los resultados más importantes del trabajo están relacionados con la identificación del grado de influencia de diferentes procesos ambientales, sobre el comportamiento del derrame de petróleo, así como la determinación de una metodología de cálculo del área y espesor de la mancha de petróleo basada en la solución de las ecuaciones de transporte y continuidad, que al comparar con datos de campo y correlaciones experimentales, arrojaron un índice de ajuste entre 0.81 y 0.95.

1
CAPÍTULO 1 1 INTRODUCCIÓN La frecuente ocurrencia de derrames de petróleo en cuerpos de agua, aunado a sus efectos nocivos, principalmente cuando los derrames ocurren cerca a la costa o a áreas de recursos naturales vulnerables, esto ha hecho de la simulación numérica de los derrames de petróleo uno de los temas ambiental de mayor importancia en las últimas tres décadas. La mayoría de los derrames de petróleo ocurren durante operaciones de perforación (falla o mal funcionamiento de equipos, explosiones o perforación de zonas de gas), producción ( ruptura de las líneas de conducción y accidentes) y almacenamiento (daños en el sistema de almacenamiento) o por sabotaje. Considerando a las facilidades de almacenamiento cercanas a la costa, al transporte y la exploración marítima de petróleo, como las fuentes de derrames de petróleo, el total de petróleo introducido a los océanos varió de 2.6 a 1.7 millones de m3/año, entre 1973 y 1983 (Freedman, 1989), mientras que para el periodo comprendido entre 1988 y 1991, fue en promedio de 0.3 millones de m3/año, sin incluir el petróleo derramado en la guerra del Golfo Pérsico cuya cantidad se estima en 0.14 millones de m3 (NOAA, 1992). En el anexo 1, se encuentra información más detallada acerca de las estadísticas de los derrames de petróleo. Frente a la necesidad de predecir el comportamiento y los posibles impactos ambientales causados por los derrames de petróleo, en los últimos 25 años se han desarrollado un sin número de simuladores con diversos objetivos, que van desde modelos de parámetros concentrados, hasta sofisticados modelos en tres dimensiones, que predicen el comportamiento de la mancha de petróleo. En general los trabajos adolecen de suficiente información de campo que permitan comparar las predicciones echas a través del algoritmo propuesto, debido a la dificultad para reproducir las condiciones reales en laboratorio o en pruebas de campo que requieren el empleo de numerosos recursos. Adicionalmente cuando ocurre un derrame, los encargados de atender la contingencia están más interesados en controlar sus efectos negativos, que en hacer un seguimiento detallado de la evolución de la mancha. Cuando ocurre un derrame es necesario adoptar estrategias de intervención lo más precisas posibles, por lo que el empleo de un modelo numérico de derrames

Introducción
2
de petróleo proporciona información acerca de su curso y evolución, tal como: su velocidad de desplazamiento, dependiendo de las condiciones del mar y el clima; el tiempo disponible para la operación antes de la mancha llegue a la playa; el tamaño de la mancha; la cercanía de áreas protegidas, vulnerables o de importancia socioeconómica. Está información es la base para determinar las estrategias de intervención más apropiadas, las cuales pueden consistir principalmente en: no intervenir, recuperación mecánica, uso de dispersantes o combinación de las estas. En México, se han realizado mayores esfuerzos tendientes a desarrollar la capacidad operativa de atención de derrames, que para la investigación acerca su comportamiento. En 1955 México se adhirió al convenio internacional para la prevención de la contaminación del mar por hidrocarburos y en 1959 se crea Comisión Técnica de la Secretaria de Marina para atender asuntos relacionados con el vertimiento de aceites en el mar, cuya prohibición data de 1961 (Soto, 1996). En 1978 se emite el Reglamento para Prevenir y Controlar la Contaminación del Mar por Vertimiento de Desechos y otras Materias, motivada por los lineamientos propuestos por la Organización Marítima Internacional a la cual México comienza a pertenecer en 1972, a través del Convenio Internacional para Prevenir la Contaminación de Buques Marpol 73 y es justamente en está época que la comunidad internacional se aboca de manera activa a resolver los problemas de contaminación marina (Soto, 1996). Posteriormente tiene lugar una serie de reformas de la administración pública Federal que termina con la creación de la Subcomisión de Prevención y Control de la Contaminación del Mar a cargo de la Secretaria de Marina en 1979, a quien se le encomienda la elaboración del Plan Nacional de Contingencia para Combatir y Controlar Derrames de Hidrocarburos y otras Sustancias Nocivas, publicado el 15 de abril de 1981, a raíz del desastre ambiental provocado por el descontrol de pozo Ixtoc, ubicado en el golfo de Campeche, donde se derramaron aproximadamente 50.000 m3 de petróleo. Como producto del Plan Nacional de Contingencia para Combatir y Controlar Derrames de Hidrocarburos y otras Sustancias Nocivas, se adoptó el Programa de Estudios Ecológicos de la Sonda de Campeche, en el cual intervenían las Secretarias de Marina y Pesca, y PEMEX. Recientemente, en febrero de 2000 se suscribió un convenio de cooperación entre México y Estados Unidos, denominado MEXUS, el cual tiene como objetivo facilitar la Cooperación entre ambos países, basados en los lineamientos de la Organización Marítima Internacional. En cuanto al avance de la investigación sobre el modelado de derrames de petróleo, en México se han elaborado varios planes de contingencia empleando programas comerciales de simulación en la mayoría de los casos. Únicamente se destacan dos esfuerzos por desarrollar un algoritmo de solución por parte de dos

Introducción
3
grupos de investigación de la Universidad Nacional Autónoma de México: el primero de ellos elaborado por el grupo de investigación de la Coordinación de Procesos de Ingeniería y Ambientales, del Instituto de Ingeniería, en el marco del proyecto denominado Plan de Atención a Contingencias por Derrames de Hidrocarburos de PEMEX Refinación (PEMEX, 1988) y el otro por parte del Centro de Ciencias de la Atmósfera, orientado a analizar las ecuaciones de modelado de derrames de petróleo (Skiva y Parra, 1999). Este trabajo de investigación es un primer paso para entender la naturaleza del comportamiento de los derrames de petróleo, ya que brinda un amplio panorama del estado del arte de los modelos que representan los diferentes fenómenos involucrados e integra los modelos seleccionados dentro de un algoritmo que emplea la técnica de solución numérica de volúmenes finitos. Este aporte permite avanzar en la conformación de una sólida base de investigación que permite modelar el fenómeno y en un futuro cercano establecer vínculos de investigación. La investigación tiene la siguiente justificación, objetivos, alcances y limitaciones.
1.1 Justificación
La investigación se justifica por la necesidad de contar con una herramienta de modelación numérica que pueda emplearse para simular las condiciones propias de las áreas de interés de la industria petrolera mexicana, ya que en la actualidad son mínimos los esfuerzos realizados en está temática en México. Además, el modelo propuesto permite observar las relaciones entre el área, el espesor promedio de una mancha de petróleo; los fenómenos de evaporación, disolución, emulsificación y dispersión vertical; y las condiciones ambientales, como la temperatura y la velocidad del viento. Este avance servirá para la estructuración de bases de datos de caracterización de áreas de interés y la identificación de nuevas líneas de investigación.
1.2 Objetivo Definir la influencia relativa que tienen sobre la evolución de una mancha de petróleo los diversos procesos participantes (evaporación, disolución, dispersión vertical y emulsificación, entre otros), así como su relación con las condiciones hidrodinámicas, meteorológicas y climáticas prevalecientes (corrientes, viento y temperatura, principalmente), las cuales determinan el comportamiento del derrame. Para lograr el objetivo propuesto en este trabajo se realizaron las siguientes actividades específicas, que corresponden a su vez a un capítulo del presente trabajo:

Introducción
4
• Describir la naturaleza del fenómeno de un derrame de petróleo en un cuerpo de agua.
• Investigar cuál es el estado del arte de los modelos numéricos empleados para
la representación de los derrames de hidrocarburos en cuerpos de agua. • Proponer un modelo numérico que represente el comportamiento de los
derrames de petróleo en cuerpos de agua y comprobar la viabilidad de su solución, utilizando la técnica de solución numérica de volumen finito.
• Describir el modelo numérico propuesto y la técnica de solución. • Realizar un análisis de los procesos físicos que influencian el comportamiento
de la mancha de petróleo en un cuerpo de agua, a partir del modelo propuesto y comparar los resultados del modelo numérico propuesto con datos experimentales y de campo reportados en la literatura.
1.3 Alcances • Describir la naturaleza del fenómeno de una mancha de petróleo en un cuerpo
de agua. • Identificar los modelos más adecuados que permiten simular los procesos
involucrados en un derrame de petróleo, tales como, el escurrimeinto, la evaporación, la dispersión vertical, la disolución y la emulsificación.
• Proponer un modelo numérico que represente el comportamiento de los
derrames de petróleo, y su solución utilizando la técnica numérica de volumen finito. El cual integra expresiones matemáticas que simulan los fenómenos asociados a su evolución, tales como la evaporación, la disolución, la emulsificación y la dispersión vertical, entre otros.
• Obtener el mejor ajuste, en comparación con otros modelos, entre la estimación
numérica del comportamiento de una mancha de petróleo y los datos experimentales reportados en la literatura.
1.4 Limitaciones • No fue posible determinar con claridad la dependencia entre la forma, tamaño y
espesor de la mancha de petróleo y las condiciones hidrodinámicas y meteorológicas del lugar donde ocurre el derrame.
• No se cuenta con suficiente información experimental que permita adaptar los
modelos identificados a las condiciones propias de las áreas de interés de la
Introducción
5
industria petrolera mexicana, pero la transparencia del modelo propuesto permitirá su fácil modificación cuando se cuente con esta información, ya que la mayoría de las expresiones matemáticas han sido derivadas para condiciones ambientales y crudos de otros países.
1.5 Estructura de la tesis Inicialmente se encuentra la introducción, donde se trata acerca de la problemática social de los derrames de petróleo, las estadísticas mas recientes de los derrames ocurridos, el avance de la modelación de derrames de petróleo en México, como preámbulo a las justificación, objetivos, alcances y limitaciones del estudio. El capítulo 2 presenta una descripción detallada de los diferentes procesos físicos que tiene lugar en un derrame, como son la evaporación, la disolución, la dispersión, la emulsificación y el cambio de propiedades (viscosidad y densidad). Este capítulo sirve de antesala al capítulo 3, estado del arte del modelado de derrames de petróleo, destinado a describir los diversos modelos matemáticos empleados para representar el comportamiento de una macha de petróleo en un cuerpo de agua. En el capítulo 4 describe el modelo numérico propuesto y finalmente, el capítulo 5 describe los resultados obtenidos al emplear el modelo propuesto y comparar con los resultados de campo obtenidos a través de pruebas reportadas por varios autores. Posterior a este capitulo se encuentran las conclusiones y recomendaciones.
6
CAPÍTULO 2 2 COMPORTAMIENTO DEL PETRÓLEO EN EL AGUA
El petróleo crudo puede existir en forma líquida, gaseosa y sólida. Estos estados pueden coexistir y su proporciones depende de su origen. Como es comúnmente conocido, el petróleo es una compleja mezcla de compuestos orgánicos e inorgánicos cuya combinación varia notablemente entre un yacimiento y otro (NOOA, 1995). Su comportamiento en el agua se debe principalmente de sus características fisicoquímicas, a la cantidad de crudo derramado y a la influencia relativa de los procesos que intervienen durante su evolución, tales como: la evaporación, la disolución, la dispersión vertical y la emulsificación, entre otros. Es bajo este contexto que a continuación se desarrollo el presente capítulo.
2.1 Generalidades del petróleo
De acuerdo con NOAA (1995), el petróleo crudo contiene entre 50 y 98% de hidrocarburos y la fracción de no hidrocarburos está generalmente compuesta de nitrógeno, azufre, oxígeno y metales pesados como níquel y vanadio. Esta fracción es considerada como impureza. Las impurezas impiden una utilización directa del petróleo y generalmente son solubles en agua, deteriorando su calidad. Los hidrocarburos presentes en el petróleo, por simplicidad se pueden agrupar en tres grupos, de acuerdo a su estructura molecular (NOAA, 1995), así:
Parafinas: Son también conocidas como alcanos, cuando sus carbonos están unidos por enlaces simples; alquenos, por enlaces dobles, y alquinos por enlaces simples. Se caracterizan por tener sus átomos de carbono unidos en cadenas abiertas. Pueden estar en estado gaseoso, líquido, sólido o coloidal, dependiendo del número de átomos de carbono presentes. Los hidrocarburos parafínicos son siempre menos densos que los hidrocarburos cíclicos con el mismos número de carbonos.
Naftenos: Son conocidos como compuestos alicíclicos y generalmente algunos a todos sus carbonos están organizados en cadenas cíclicas. Los naftenos son resistentes a la degradación y ligeramente más densos que las parafinas con el mismo número de carbonos.

Comportamiento del petróleo en agua
7
Aromáticos: El clásico aromático es el benceno, que posee una fuerte estructura cíclica de 6 carbonos unidos por doble enlace. Los compuestos aromáticos siempre están formados por varias combinaciones de anillos de benceno que posteriormente se ligan a cadenas de parafinas o compuestos no hidrocarburos, como los citados inicialmente. Generalmente, la cantidad de aromáticos presente en el petróleo es pequeña comparada con la de parafinas y naftenos. Los compuestos aromáticos son considerados como altamente cancerígenos y tóxicos. El la figura 2-1, se ejemplifica tres de los diferentes hidrocarburos presentes en el petróleo, cada uno de ellos esta compuesto por seis carbonos, unidos por diferentes tipo de enlaces (sencillos y dobles) o organizados en diferentes estructuras (abiertas y cerradas); por lo que cada uno de los hidrocarburos posee diferente número de átomos.
Figura 2-1. Estructura molecular de los hidrocarburos.
(a) Parafina, (b) Nafteno y (C) Aromático
Dentro de esta simple clasificación también pueden ser incluidas las ceras, los asfaltenos y las resinas, los cuales son la clave del proceso de emulsificación.
Las ceras: son compuestos parafinados de alto peso molecular, los cuales adoptan estructuras cristalinas cuando el petróleo alcanza su punto de ebullición. Los asfaltenos: por definición son sustancias solubles en solventes aromáticos e insolubles en solventes parafínicos. Su comportamiento físico depende principalmente , de la concentración de alcanos y aromáticos.
Las resinas: son compuestos polares que contienen oxigeno, nitrógeno y azufre.

Comportamiento del petróleo en agua
8
Tal como se ha mencionado desde el comienzo la composición del petróleo varia de un yacimiento a otro, lo cual se ilustra en el tabla 2-1. En promedio los tres más importantes grupos de hidrocarburos presentes en los crudos están formados por parafinas de entre 1 y 78 carbonos, naftenos de 5 y seis carbonos y una gran variedad de aromáticos. Los demás compuestos presentes en el petróleo incluyen al azufre en proporciones que varían entre menos de 0.1%, hasta 6%; al nitrógeno en proporción que varía entre menos de 0.1%, hasta 0.9% y a el oxígeno, en proporciones menores a 2%. Las más importantes trazas de metales son el vanadio y el níquel, en concentraciones de hasta 300 ppm, asociados a complejos orgánicos.
Tabla 2-1. Características químicas de algunos petróleos
Proporción en peso Componente Prudhoe Bay South Louisiana Kuwait
Azufre 0.94 0.25 2.44 Nitrógeno 0.23 0.69 0.14 Níquel (ppm) 10 2.2 7.7 Vanadio (ppm) 20 1.9 28 Napta*
Parafina Naftenos Aromáticos
23.2 12.5 7.4 3.2
18.6 8.8 7.7 2.1
22.7 16.2 4.1 2.4
Fracciones pesadas** Saturados Aromáticos Materiales polares Insolubles
76.8 14.4 25.0 2.9 1.2
81.4 56.3 16.5 8.4 0.2
77.3 34.0 21.9 17.9 3.5
Fuente: Freeman (1989). *Punto de burbuja entre 20 y 250 °C. **Punto de burbuja mayor a 250 °C. La tabla 2-2 presenta solo algunos de los compuestos que predominan en el petróleo, pero sirve para entender la complejidad de esta mezcla. Sin embargo, a pesar de esta complejidad, es posible agrupar a los crudos en tres grupos, según su peso molecular a fin de realizar una estimación previa de los impactos ambientales provocados por un derrame (NOAA, 1992). Estos tres grupos se describen a continuación. Hidrocarburos ligeros Se caracterizan por contener compuestos hasta de 10 átomos de carbono y tener un punto de ebullición menor a 150 °C. La mayoría de los componentes de bajo peso molecular son alcanos y cicloalcanos los cuales se evaporan rápida y completamente, usualmente en el primer día, por lo que no son bioacumulables.

Comportamiento del petróleo en agua
9
Tabla 2-2. Hidrocarburos predominantes del petróleo
Constituyente Numero de átomos de carbonoParafinas
Pentano 5 Hexano 6 Heptano 7
Octano-Decano 8 – 10 Undecano-Pentadecano 11 – 15 Hexadecano y mayores 16 y mayores
Isoparafinas 2-Metilpentano 5 3-Metilpentano 5 2-Metilhexano 6 3-Metilhexano 6 2-Metilheptano 7 3-etilheptano 7 2-Metiloctano 8 3-Metiloctano 8 2-Metilnonano 9 3-Metilnonano 9 4-Metilnonano 9
Isopristano 19 Naftenos
Metilciclopentano 6 Ciclohexano 6
Metilciclohexano 7 1-trans-2 Dimetilciclopentano 7 1-cis-3-Dimetilciclopentano 7 1-cis-3-Dimetilciclohexano 8 1-cis-2-Dimetilciclohexano 8 1,1,3-Dimetilciclohexano 9
Aromáticos Benceno 6 Tolueno 7
Etilbenceno 8 m-xileno 8
1-metil-3-etilbenceno 9 1,2,4-trimetillbenceno 9 1,2,3-trimetillbenceno 9
1,2,3,4-Tetrametillbenceno 10 2-Metilnaftaleno 11
2,6-Dimetilnaftaleno 12 Trimetilnaftaleno 13
Comportamiento del petróleo en agua
10
Estos hidrocarburos tienen una alta solubilidad, usualmente contribuyen al 95% de la fracción soluble, pudiendo llegar a tener un efecto tóxico si contienen hidrocarburos monoaromáticos como benceno, tolueno o xileno, esta situación tendría lugar si el hidrocarburo derramado se mezcla rápidamente en aguas frías y condiciones meteorológicas de calma, lo cual ha ocurrido en derrames en ríos. Hidrocarburos medios De peso molecular medio se caracterizan por contener compuestos entre 10 y 22 átomos de carbono y un punto de ebullición entre 150 y 400 °C. Estos hidrocarburos se evaporan en varios días, dejando algunos residuos que no se evaporan a temperatura ambiente. Su fracción soluble es baja, ya que contienen hidrocarburos diaromáticos, como los naftalenos, por lo que son moderadamente tóxicos. Su potencial de bioacumulacióin es moderado, asociado también con la presencia de hidrocarburos diaromáticos. Hidrocarburos pesados Los hidrocarburos de alto peso molecular se caracterizan por contener compuestos de más de 20 átomos de carbón y tener un punto de ebullición mayor a 400 °C. Su fracción evaporable y soluble es mínima. Se bioacumulan vía absorción en los sedimentos y su potencial de toxicidad es elevado debido a la presencia de hidrocarburos aromáticos polinucleares, como los antracenos y fenaltrenos, que a largo plazo por su lenta degradación dan lugar a las conocidas barras flotantes. Otro de los efectos negativos que los hidrocarburos pesados tiene sobre los ecosistemas acuáticos es la interrupción del paso de luz y oxígeno.
2.2 Clasificación de los derrames de petróleo Los derrames de petróleo se pueden clasificar de acuerdo a su volumen inicial en tres grupos: menores cuando el volumen derramado es menor a 30 m3; medianos cuando está entre 30 y 800 m3 y mayores cuando es mayor de 800 m3 (PEMEX, 1988). Esta clasificación se basa en el modelo propuesto por Fay (1971), el cual considera que existen tres fases sucesivas de dispersión mecánica horizontal reguladas por las fuerzas de gravedad, viscosa y tensión superficial. Las características de estos tres tipos de derrames se explican a continuación. Derrames menores Su configuración es variable, casi imprevisible, con grosores que típicamente miden 1.76 mm en la primera fase y 0.023 mm, en su tercera y última fase. Su color cambia desde oscuro a brillo plateado, en función del espesor.
La primera fase tiene una duración de aproximadamente 12 minutos, la segunda de 3 horas y la tercera de 20 horas. Su recuperación no resulta económica porque su espesor es demasiado pequeño y se aconseja propiciar la dispersión rociando agua a presión o empleando dispersantes.
Comportamiento del petróleo en agua
11
Derrames medianos Se observa la formación de manchas compactas de un área que típicamente mide entre 0.26 km2 a los 36 minutos, 1.6 km2 durante el primer día y 15 km2 a los 4 días y espesores varían entre 2.95 mm y 0.0529 mm. Dependiendo de factores como el viento, las corrientes, la temperatura y el tipo de crudo, la mancha toma diferentes formas, como: lunares, listones y telarañas. En la periferia de la mancha se presentan iridiscencias.
Para el control de este tipo de derrames se utilizan fuentes móviles, dispersión con agua para manchas compactas y con dispersante para manchas sueltas o delgadas.
Derrames mayores Los derrames hasta de 1,600 m3 continúan compactos durante 2 días y los de mayor volumen hasta por 8 días, separándose luego en manchas sueltas. Pueden formar manchas hasta de 25 km2 y 141.4 km2, entre los 6 y 19 días, cuando el volumen derramado está entre 1,600 y 16,000 m3 respectivamente. La coloración de la mancha es oscura hasta alcanzar un espesor de 0.45 mm.
En la tabla 2-3 se resumen las características de los derrames, según el volumen de petróleo derramado.
2.3 Descripción de los procesos naturales que intervienen en los derrames de petróleo
Cuando ocurre un derrame de petróleo en un cuerpo de agua, esté normalmente se divide en varias manchas y se disipa en el medio a medida que transcurre el tiempo. La disipación es la suma de procesos físicos, químicos y biológicos que actúan sobre el derrame de hidrocarburo cambiando su extensión y composición inicial. La disipación se puede dividir en dos partes: biodegradación, cuando se refiere a los procesos biológicos; y meteorización, refiriendo a los procesos físicos y químicos. La meteorización a su vez se produce por medio de la dispersión natural, la cual permite que parte del hidrocarburo se precipite o disperse verticalmente, otra se disuelva o evapore y otra forme una emulsión, quedando una fracción de crudo remanente difícil de meteorizar o mineralizar. La biodegradación de los hidrocarburos residuales es lenta, y generalmente tiene lugar luego de los procesos físicos y químicos. La biodegradación de los hidrocarburos residuales está asociada al aprovechamiento de los nutrientes constitutivos por parte de los microorganismos presentes en el medio.

Comportamiento del petróleo en agua
12
Tabla 2-3. Características de los derrames de hidrocarburo
Volumen ( m3 )
Fase Tiempo Área ( km2 )
Espesor ( mm )
Aspecto
32 1a. 12 min. 0.018107
1.76 Colores oscuros
2a.
2.7 hrs. 0.0661 0.48 Colores mate con bandas brillantes
3a. 20 hrs. 1.3 0.023 Colores brillo plateados hasta llegar a tonalidades de arco iris
800 1a. 36 min. 0,269 2.95 2a. 24 hrs. 1.6 0.496 3a. 4 días 15 0.0529
Colores oscuros durante los primeros 4 días, cambiando a colores mate, hasta llegar a tonalidades de arco iris.
1,600 1a. 45 min. 0.47 3.37 2a. 39 hrs. 3.4 0.46 3a. 6 días 25.1 0.063
16,000 1a. 97 min. 3.26 4.86 2a. 179 hrs. 34.6 0.45 3a. 19 días 141.4 0.112
La mancha de petróleo continua oscura hasta alcanzar un espesor de 0.45 mm, a partir de allí el derrame, pasa por coloraciones que como para los casos anteriores van desde mate hasta tonalidades de arco iris.
Fuente: PEMEX (1988) La acción de los procesos físicos, químicos y biológicos, depende del tipo de hidrocarburo derramado (productos como el queroseno se evaporan rápidamente y no requieren de limpieza, mientras que una base parafínica se disipa lentamente, requiriendo de limpieza). Las propiedades físicas como densidad, viscosidad y punto de evaporación, determinan en gran medida la forma como se comporta el derrame (ver figura 2-2).
Por otro lado las condiciones meteorológicas (viento, radiación solar y temperatura, entre otras), hidrodinámicas (oleaje, corrientes y mareas), y las características del área donde ocurre el derrame, deben ser consideradas en el estudio de derrames de petróleo. Los procesos de escurrimiento, evaporación, dispersión, emulsificación y disolución, son muy importantes en las primeras etapas del derrame, mientras que la oxidación - reducción, sedimentación y degradación son más importantes en etapas posteriores; para comprender su interacción es necesario conocer su relación con las condiciones ambientales. Es posible establecer relaciones con base en simples modelos empíricos, que clasifican el petróleo según su densidad y vida media1. Los de baja densidad son menos persistentes, sin embargo algunos livianos pueden comportase de forma parecida a los pesados debido a la presencia de parafinas.
1 Tiempo necesario para que el 50% del petróleo sea disipado en el mar (ITOPF,1999).
Comportamiento del petróleo en agua
13
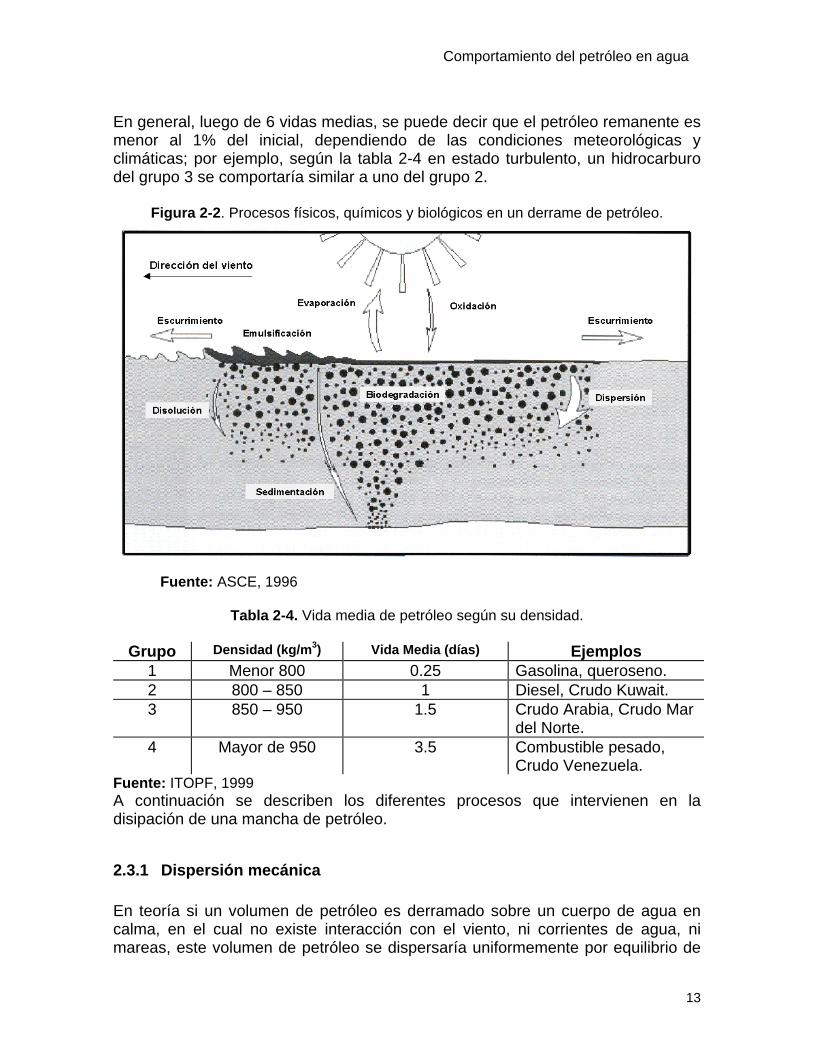
En general, luego de 6 vidas medias, se puede decir que el petróleo remanente es menor al 1% del inicial, dependiendo de las condiciones meteorológicas y climáticas; por ejemplo, según la tabla 2-4 en estado turbulento, un hidrocarburo del grupo 3 se comportaría similar a uno del grupo 2.
Figura 2-2. Procesos físicos, químicos y biológicos en un derrame de petróleo.
Fuente: ASCE, 1996
Tabla 2-4. Vida media de petróleo según su densidad.
Grupo Densidad (kg/m3) Vida Media (días) Ejemplos 1 Menor 800 0.25 Gasolina, queroseno. 2 800 – 850 1 Diesel, Crudo Kuwait. 3 850 – 950 1.5 Crudo Arabia, Crudo Mar
del Norte. 4 Mayor de 950 3.5 Combustible pesado,
Crudo Venezuela. Fuente: ITOPF, 1999 A continuación se describen los diferentes procesos que intervienen en la disipación de una mancha de petróleo.
2.3.1 Dispersión mecánica
En teoría si un volumen de petróleo es derramado sobre un cuerpo de agua en calma, en el cual no existe interacción con el viento, ni corrientes de agua, ni mareas, este volumen de petróleo se dispersaría uniformemente por equilibrio de

Comportamiento del petróleo en agua
14
las fuerzas de gravedad inicialmente, de viscosidad enseguida y finalmente por la de tensión superficial. A este fenómeno de ocurrencia en condiciones ideales se le conoce bajo cualquiera de los siguientes nombres: escurrimiento, dispersión mecánica, expansión o dispersión horizontal.
Tan pronto como el petróleo es derramado, este se comienza a deslizar uniformemente sobre la superficie del cuerpo de agua y posteriormente se ve afectado por las corrientes, el viento y el oleaje generado, fragmentándose en bandas paralelas a la dirección del viento. La velocidad de crecimiento de la mancha depende de las propiedades de los fluidos (densidad, viscosidad y tensión superficial) y las condiciones ambientales (temperatura, corrientes de agua, velocidad del viento y altura de las olas), por lo que los derrames varían en su forma, tamaño y espesor. Esta evolución física es difícil de representar a través de modelos matemáticos; sin embargo, se han logrado interpretar los fenómenos físicos que intervienen en este mecanismo (Blokker, 1964; Fay 1969 y 1971; Hoult, 1972; Mackay, 1980; entre otros).
2.3.2 Evaporación La evaporación junto con la dispersión vertical son los procesos de remoción de masa más importantes de una mancha de petróleo. La evaporación del petróleo es controlada por: el coeficiente de transferencia de masa, la velocidad del viento, la difusividad del petróleo (representado por el número de Schmidt) y su presión de vapor. Los modelos numéricos desarrollados para representar el flujo de evaporación (masa / tiempo - área) se han desarrollado en función del coeficiente de transferencia de masa y la presión de vapor. Sin embargo una de las complicaciones que se presenta es el cambio de la presión de vapor a medida que cambia la composición de la mancha de petróleo, mientras que la difusividad se puede considerar constante (Stiver y Mackay, 1984). Los petróleos crudos ligeros se evaporan entre 20 y 60%, mientras que los petróleos medios pueden perder entre un 20 y 30% en las primeras 24 horas. Por su parte los derivados livianos del petróleo, como el queroseno y la gasolina pueden evaporarse completamente en pocos días, y los derivados pesados, tales como, diesel o bases lubricantes, solo pierden un 5 o 10% de su masa total (NOAA,1993). La figura 2-3, muestra datos acerca de la velocidad de evaporación de algunos hidrocarburos.

Comportamiento del petróleo en agua
15
Figura 2-3. Velocidad de evaporación de algunos hidrocarburos.
Fuente: NOAA, 1992
2.3.3 Dispersión vertical
Las olas y la turbulencia (la turbulencia en los grandes cuerpos de agua es causada principalmente por el viento, mientras que en los ríos es causada principalmente por las orillas y el fondo del cause en mayor proporción), causan parte o toda la ruptura de la mancha, dividiéndola en fragmentos y gotas de diferentes tamaños (ITOPF, 1999). Estas pequeñas gotas pueden llegar a mezclarse en diferentes niveles de la columna de agua. Las gotas pequeñas tienen mayor tendencia a permanecer dispersas en suspensión cuando su diámetro es menor a 70 µm, mientras que para las de mayor diámetro, las fuerzas de cohesión las vuelven a unir, formando una nueva mancha que se esparce en finas películas (NOAA, 1995). La dispersión aumenta el área superficial de la mancha, favoreciendo la disolución, la biodegradación y la sedimentación. La estructura del espectro de gotas de petróleo es independiente del tipo de hidrocarburo y la energía de las olas y está ligada directamente a la turbulencia, que es la que define el diámetro de las gotas suspendidas, mientras que la velocidad de la dispersión depende de la naturaleza del petróleo (viscosidad, tensión superficial, composición de livianos) y la agitación del mar. En ocasiones la adición de dispersantes químicos favorece la dispersión (ITOFP, 1999).
Comportamiento del petróleo en agua
16
2.3.4 Disolución
La disolución usualmente solo representa el 1% de la masa perdida, pero los productos disueltos pueden llegar a ser de gran importancia por sus efectos tóxicos, por lo que en ocasiones se requiere de una descripción detallada del petróleo para sus estimación. La disolución también puede provenir de las gotas de petróleo dispersas en el agua debido a la difusión turbulenta del petróleo en el agua y aunque este fenómeno podría representar un porcentaje similar al disuelto en forma directa, aun no se cuenta con algoritmos que representen este fenómeno (Cohen et al. 1980).
Los compuestos más solubles en el agua son los aromáticos livianos, como el benceno y el tolueno, sin embargo estos también son los primeros en evaporarse. Comparativamente la evaporación es 10 a 100 veces más rápida que la disolución, lo anterior sumado a que el petróleo contiene pocos productos solubles en el agua, hacen de esté proceso poco importante, desde el punto de vista cuantitativo (Spaulding, 1988).
La disolución de los hidrocarburos del petróleo dentro del agua presenta riesgos para los organismos acuáticos, porque generalmente los productos solubles en el agua son bastante tóxicos. Los aromáticos son altamente solubles, 50 veces más que los alcanos del mismo peso molecular, por ejemplo el benceno, el tolueno y el xileno tienen una alta solubilidad en agua dulce igual a 1750, 515 y 100 mg/l respectivamente, comparada con la del ciclohexano que es de 30 mg/l (Cohen et al, 1980). Generalmente el benceno y el tolueno constituyen entre el 70 y 80% de la fracción de aromáticos disueltos y entre el 35 y 80% de la totalidad de hidrocarburos disueltos. La solubilidad de los hidrocarburos disminuye un 70% en el agua de mar (NOAA, 1992).
2.3.5 Emulsificación
Una emulsión es formada por la combinación de dos líquidos, en la cual uno de los dos permanece suspendido en el otro. Las emulsiones agua - petróleo ocurren por medio de la mezcla de pequeñas gotas de agua, que quedan suspendidas en el petróleo, siendo la fase continua el petróleo, mientras que las emulsiones de petróleo - agua ocurre por la mezcla de pequeñas gotas de petróleo en agua, en este caso la fase continua es el agua, ambos tipos de emulsión son provocados por la mezcla física promovida por la turbulencia del mar (ITOPF, 1999).

Comportamiento del petróleo en agua
17
Kullenber (1982), consideró que una buena emulsión se presenta cuando la fase continua es el agua, pues en este caso el tamaño microscópico de las gotas de petróleo proporciona mayor superficie de contacto para su degradación microbiana. El caso contrario se presenta cuando la fase continua es el petróleo y el contenido de agua es del orden del 80%, dado que esta mezcla es capaz de flotar y no se degrada con facilidad, en particular cuando se encuentran presentes los asfáltenos; dando origen a lo que se conoce como barras flotantes.
El petróleo con alto contenido de asfaltenos (mayor de 0.5%), tiende a formar emulsiones estables las cuales pueden permanecer durante meses después de ocurrido el derrame. Los petróleos con bajo contenido de asfaltenos tienen menor tendencia a formar emulsiones, aumentando su tendencia a disiparse. Un factor que contribuye al rompimiento de las emulsiones es el aumento de la temperatura, lo que tiene lugar en el mar en calma y en la playa.
Las emulsiones aumentan la capacidad contaminante del petróleo en 3 o 4 veces, retrasando los procesos de disipación natural. En general se puede decir que las emulsiones estables provienen de:
• Crudos pesados con alta viscosidad. • Crudos y productos refinados con alto contenidos de asfaltenos. • Crudos con alto contenido de impurezas. NOAA (1992), reportó que de acuerdo a experiencias de laboratorio y de campo, la gasolina, el queroseno y el diesel (excepto en condiciones muy frías), no forman emulsiones.
2.3.6 Oxidación - reducción
La oxidación - reducción es activada por la acción de los rayos solares, sobre la superficie expuesta del derrame, desencadenando reacciones con el oxígeno libre. El resultado final de este proceso es el rompimiento de las largas cadenas de hidrocarburos y la formación de compuestos solubles y persistentes llamados alquitranes. La oxidación - reducción es un proceso muy lento y es posible que en películas delgadas de hidrocarburo, tan solo 0.1% del petróleo presente sea oxidado por día.
Los alquitranes se forman a partir de la oxidación de películas de petróleo de alta viscosidad, como las emulsiones. Estos productos forman una capa protectora que aumenta la persistencia del hidrocarburo. Adicionalmente al disiparse en la playa, se mezclan con partículas sólidas, formando una brea de apariencia plástica en la cual la parte interior está poco meteorizada.
2.3.7 Sedimentación

Comportamiento del petróleo en agua
18
Algunos derivados pesados del petróleo tienen densidades mayores de 1,000 kg/m3, de tal manera que se precipitan en agua fresca. Sin embargo el agua salada tiene una densidad aproximada de 1,025 kg/m3 y en muy pocos casos un crudo tiene una densidad tan alta como para precipitase, por lo que la precipitación ocurre en estos casos por la adición de partículas suspendidas o material orgánico. Generalmente las aguas permanecen con muchos sólidos en suspensión que esperan las condiciones propicias para sedimentar.
Cuando el petróleo es depositado en las orillas del cuerpo de agua, se mezcla con la arena y luego de ser lavado por acción del oleaje tiende a sedimentarse.
2.3.8 Biodegradación
Existen muchos microorganismos que pueden parcial o totalmente degradar el aceite en compuestos solubles en el agua y eventualmente a bióxido de carbono y agua. Sin embargo, algunos componentes no son susceptibles a la biodegradación. Los factores que mayor influencia tiene sobre este proceso son el contenido de nutrientes en el agua como el fósforo, el nitrógeno y el contenido de oxígeno disuelto. La presencia del oxígeno es indispensable para este proceso y por lo tanto solo ocurre en la intercara agua-aceite. La dispersión vertical en pequeñas gotas de aceite por acción natural o química, incrementa el área superficial del hidrocarburo y el área disponible para la actividad de los microorganismos. En la tabla 2-5 se resumen las principales características de los procesos descritos en las secciones anteriores, incluyendo una definición básica, el porcentaje de petróleo perdido por el fenómeno y el tiempo en el cual interviene. Está tabla se debe considerar como una guía para la estimación del comportamiento de un derrame, pero como una norma.
Tabla 2-5. Características de los procesos involucrados en un derrame de petróleo
Proceso Descripción Masa perdida Tiempo de
acción Dispersión mecánica
La dispersión mecánica determina el crecimiento de la mancha de petróleo por el equilibrio de fuerzas de gravitación, viscosas y de tensión superficial.
Ninguna. Depende del volumen inicial derramado, variando aproximadamente entre un día y tres semanas.

Comportamiento del petróleo en agua
19
Evaporación La evaporación ocurre debido a la liberación de hidrocarburos ligeros y es regulada principalmente por la presión de vapor de los constituyentes, el área de la mancha, la velocidad del viento y la temperatura.
Un hidrocarburo liviano puede evaporase hasta en un 75%, uno medio hasta un 40% y uno pasado el 10%, en los primeros días
En general la evaporación tiene lugar en las primeras horas después del derrame.
continua Proceso Descripción Masa perdida Tiempo de
acción Dispersión vertical
La dispersión vertical tiene lugar por la acción de la agitación del cuerpo de agua, la cual separa al petróleo en pequeñas gotas que quedan suspendidas en la columna de agua. La permanencia de las gotas de agua en la columna de agua depende de su turbulencia.
El porcentaje de masa perdida puede llegar ha ser del 20% o más dependiendo de las condiciones ambientales En cercanías de un acantilado la dispersión vertical puede llegar a ser total.
La dispersión vertical tiene lugar unas horas después de que ha ocurrido el derrame.
Disolución La disolución se presenta por la solubilización de las facciones de hidrocarburos presentes en el petróleo. Generalmente las mismas fracciones solubles, son las que primero se evaporan.
La cantidad de petróleo disuelta es de aproximadamente 1%, lo cual depende de las características del crudo y de las condiciones ambientales.
La disolución al igual que la dispersión vertical tiene lugar unas horas después de que ha ocurrido el derrame.
Emulsificación La emulsificación ocurre por la suspensión de gotas de agua en el petróleo, aumentando su viscosidad, densidad e impacto ambiental. La estabilidad de una emulsión depende directamente del contenido de asfaltenos.
El contenido de agua en el petróleo puede llegar a ser del 80% en aguas turbulentas. Sin embargo una emulsión estable generalmente es del 55 a 70%.
La formación de emulsiones tiene lugar luego de algunas horas, pero comienza ha ser de interés, luego de las primeras 8 o 15 horas.
Oxidación Reducción
La oxidación reducción es activada por la acción de los rayos solares, generando una película protectora formada por alquitranes difíciles de degradar.
La magnitud del petróleo oxidado y reducido es de aproximadamente 0.1%.
La oxidación reducción tiene lugar luego de la primera semana del derrame.

Comportamiento del petróleo en agua
20
Sedimentación La sedimentación se presenta cuando a las gotas de petróleo suspendidas en la columna de agua se adhiere a material orgánico o partículas en suspensión, provocando su precipitación.
La cantidad de petróleo sedimentado no alcanza grandes proporciones y es muy variable.
La sedimentación tiene lugar luego de la primera semana del derrame.
continua Proceso Descripción Masa perdida Tiempo de
acción Biodegradación La biodegradación tiene
lugar por la acción de los microorganismos presentes en el medio, los cuales transforman las complejas moléculas de hidrocarburos en compuestos fáciles de asimilar por los seres vivos.
La magnitud de la biodegradación depende del tipo de petróleo derramado y del tiempo de residencia de este en el cuerpo de agua.
La biodegradación comienza a ser importante luego de las primeras semanas del derrame.
21
CAPÍTULO 3 3 ESTADO DEL ARTE DEL MODELADO DE DERRAMES
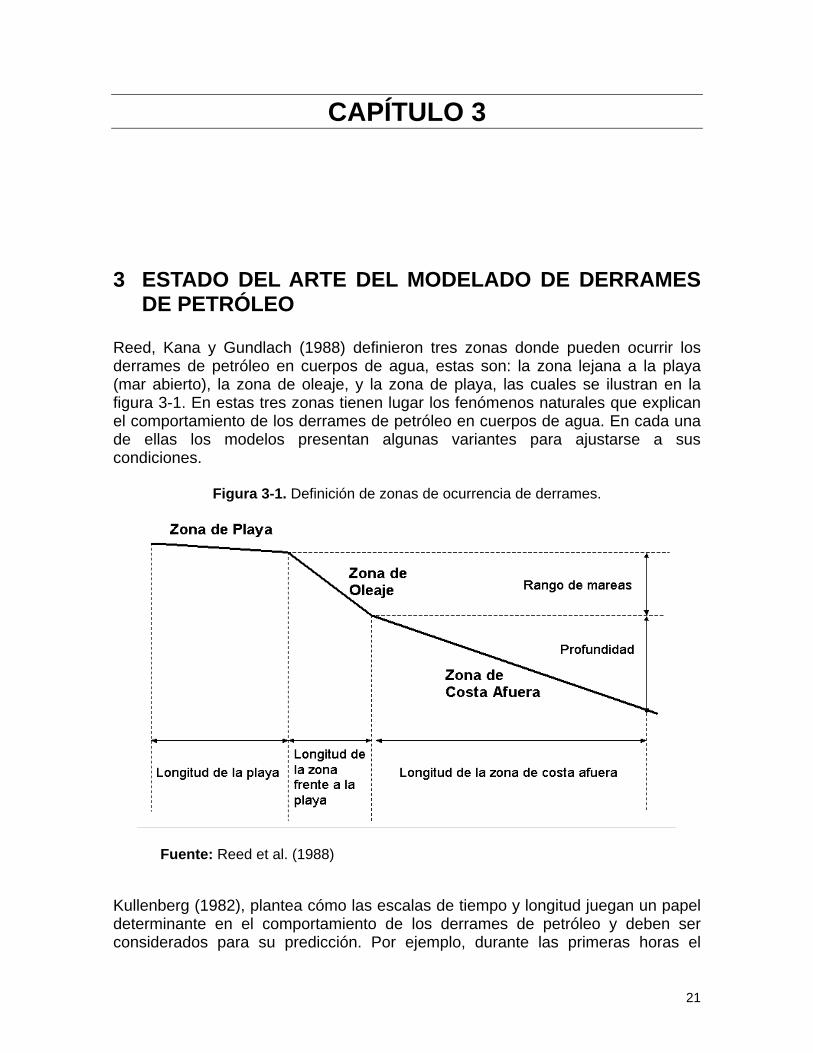
DE PETRÓLEO Reed, Kana y Gundlach (1988) definieron tres zonas donde pueden ocurrir los derrames de petróleo en cuerpos de agua, estas son: la zona lejana a la playa (mar abierto), la zona de oleaje, y la zona de playa, las cuales se ilustran en la figura 3-1. En estas tres zonas tienen lugar los fenómenos naturales que explican el comportamiento de los derrames de petróleo en cuerpos de agua. En cada una de ellas los modelos presentan algunas variantes para ajustarse a sus condiciones.
Figura 3-1. Definición de zonas de ocurrencia de derrames.
Fuente: Reed et al. (1988)
Kullenberg (1982), plantea cómo las escalas de tiempo y longitud juegan un papel determinante en el comportamiento de los derrames de petróleo y deben ser considerados para su predicción. Por ejemplo, durante las primeras horas el

Estado del arte del modelado de derrames de petróleo a
22
escurrimiento, la evaporación y la advección por corrientes marinas son los procesos determinantes; por otro lado si el derrame ocurre en cercanías de la playa, las corrientes de litoral juegan un rol que debe tenerse en cuenta. Al incrementar la escala de longitud o tiempo deben ser consideradas variables ambientales adicionales, como los sistemas de alta y baja presión, mientras que para modelar derrames en una escala de longitud menor a 10 km y tiempo menor a una semana, es necesario considerar los efectos del viento, las mareas, las corrientes y los litorales, ya que fenómenos de gran escala como la circulación de los océanos, sistemas de alta y baja presión, desembocaduras estacionales de ríos y circulación planetaria del viento, entre otros (ver figura 3-2).
Figura 3-2. Dependencias de las escalas de longitud y tiempo de los derrames.
Fuente: modificado de Kullenberg (1982).
El transporte de una mancha está gobernado por la convección debida a las corrientes y el viento; el escurrimiento horizontal por la difusión turbulenta y las fuerzas de gravedad, viscosidad y tensión superficial; la transferencia de masa y el cambio de las propiedades fisicoquímicas por la evaporación, dispersión, disolución y interacción con la playa. Cada uno de los procesos a su vez actúa en diferentes escalas temporales, tal como lo ilustra la figura 3-3.

Estado del arte del modelado de derrames de petróleo a
23
Figura 3-3. Escala temporal de los naturales involucrados en un derrame.
Fuente: ASCE (1997)
Algunos de los procesos como el escurrimiento, la hidrodinámica del cuerpo de agua y la interacción con la playa, determinan la localización y geometría de la macha, mientras que otros procesos como la evaporación, la disolución, la dispersión y la emulsificación, determinan principalmente la composición y propiedades finales del petróleo derramado. Este análisis es simplificado, por que en condiciones reales todos los procesos interactúan entre sí, por ejemplo, la emulsificación y la evaporación provocan cambios en la viscosidad y la densidad, que se ven reflejados en el desplazamiento y escurrimeinto de la mancha de petróleo. A continuación se presenta una descripción de las características de los códigos de simulación de derrames de petróleo que en los últimos tiempos se han elaborado, con el animo de contextualizar el escenario de modelación bajo el cual se realiza la presente investigación, para luego presentar una análisis de las diferentes expresiones matemáticas propuestas para representar cada uno de los procesos naturales involucrados en un derrame. Está secuencia pretende proporcional los elementos de juicio necesarios para la selección y formulación del modelo numérico propuesto en esté trabajo.
Estado del arte del modelado de derrames de petróleo a
24
3.1 Descripción de los modelos de simulación de derrames de petróleo en cuerpos de agua
Los modelos de simulación de derrames de petróleo en agua, generalmente son construidos por medio de la integración de expresiones que representan los diferentes procesos que tienen lugar en un derrame. Los principales fenómenos que son considerados en los modelos son el escurrimiento, la evaporación, la dispersión vertical, la disolución, la emulsificación del agua en aceite, la interacción con la playa y la sedimentación. Cuando se requiere modelar un derrame en tiempos largos, se considera además la oxidación - reducción y la biodegradación. Algunos modelos incluyen expresiones que describen los cambios de la propiedades físicas del hidrocarburo (densidad y viscosidad), y los más sofisticados incluyen balances de masa de los componentes del petróleo, basados en curvas de destilación o puntos de ebullición (Spaulding, 1988). La mayoría de las personas suponen que el objetivo de los modelos de derrames de petróleo es predecir la distribución de la mancha y sus características fisicoquímicas, a partir de sus condiciones iniciales; sin embargo esta es solo una de sus funciones, pues una vez ocurrido el derrame es poco el tiempo disponible para atender una emergencia, por lo que, en la planificación de contingencias el modelado encuentra su mayor aplicación (ASCE, 1997).
La mayoría de los modelos se han elaborado en dos dimensiones y solo unos cuantos se encuentran disponibles en tres dimensiones (ASCE, 1997). Estos modelos han sido muy usados para estimar las probabilidades de riesgo por derrames accidentales ocurridos en plataformas, oleoductos o buques, simulando forma simple el movimiento del centroide de la mancha, ignorando los cambios de tamaño debido a la hidrodinámica, la evaporación, la dispersión y la disolución, entre otros. En estos modelos la velocidad del centroide es estimada por los efectos de las corrientes y el viento. El énfasis en muchos de estos modelos es la predicción del comportamiento de los vientos, los cuales en la mayoría de los casos determinan la trayectoria final. Ejemplo de este tipo de modelos son los desarrollados por United States Geological Survey, que es utilizado tanto para predicciones probabilísticas, como deterministas. Las últimas versiones consideran al viento como un vector estocástico y su comportamiento de acuerdo a las series de Monte Carlo (Findicakis et al. 1998).
Algunos modelos consideran el escurrimiento y las pérdidas de la mancha, basados en la solución de las ecuaciones de continuidad y movimiento. La sencillez de estos modelos está en la solución de las expresiones lineales de las ecuaciones de flujo. Una de las simplificaciones comunes de estos modelos, es suponer una forma circular para el derrame. Los modelos pueden describir el crecimiento de la mancha debido a los efectos inerciales, gravitacionales, de viscosidad y de tensión superficial o debido a la dispersión hidrodinámica superficial por medio del rompimiento en pequeñas gotas y la difusión de las mismas en una columna de agua, Findicakis et al. (1998). Un ejemplo de un
Estado del arte del modelado de derrames de petróleo a
25
modelo combinado para escurrimiento y dispersión hidrodinámica con expresiones de balance de masa por evaporación, disolución y emulsificación es el presentado por Rasmussen (1985); este modelo opera para diferentes componentes de petróleo e incluye funciones que se encargan de calcular las propiedades de la mezcla (viscosidad, densidad y tensión superficial) de acuerdo a la temperatura.
Los modelos que incluyen el cálculo del escurrimiento, las pérdidas de masa y la suposición de un área circular, pueden ser combinados con modelos de trayectoria. Un ejemplo de tales modelos es el de Psaraftis (1983), citado por Findicakis et al. (1998), el cual incluye el cálculo del desplazamiento, la dispersión hidrodinámica, la evaporación, la biodegradación, la oxidación - reducción y la sedimentación.
Yapa et al (1994), proponen el siguiente esquema básico para la estructura de un modelo de simulación:
• Inicio • Datos del cuerpo de agua
o geometría o características de las fronteras
• Datos del derrame o volumen o localización o duración o características del hidrocarburo (físicas, químicas y biológicas)
• Hidráulica o condiciones de flujo o distribución de velocidad
• Datos meteorológicos o velocidad y dirección del viento o temperatura
• Procesos que regulan el derrame o advección o difusión turbulenta horizontal o escurrimiento mecánico o disolución o evaporación o deposición en las costas o mezcla vertical o emulsificación o efectos biológicos
Zhubrin (1997), elaboró un modelo para simular derrames de petróleo denominado ROSA (River Oil Spill Analyser), el cual es empleado en este estudio para comparar los resultados del modelo propuesto, debido a su disponibilidad y ha que ha sido evaluado con base en información de varios derrames de petróleo en ríos. Las principales características del modelo ROSA son:

Estado del arte del modelado de derrames de petróleo a
26
• Es un modelo en 2 dimensiones que emplea las ecuaciones de Fay (1971), para el calculó teórico del área de la mancha y se basa en la determinación de la hidrodinámica del cuerpo de agua para calcular la posición y forma final de la mancha, para lo cual emplea el concepto de vectores de velocidad aditivos (Yapa et al. 1991).
• ROSA resuelve las ecuaciones de transporte, considerando los efectos de
fricción relacionados con la geometría del cause del río, para lo cual posee un modelo matemático que resuelve la hidrodinámica del cuerpo de agua.
• La ecuación de transporte emplea coeficientes de difusión diferenciales en la
dirección X y Y. Está ecuación también incluye un término denominado marcador que sirve para determina la posición final de la mancha, por medio del método Lagrangiano.
• Considera una ecuación de continuidad para el hidrocarburo superficial y otra
para el hidrocarburo suspendido. En la ecuación para el hidrocarburo de la superficie se consideran términos fuente que representan el petróleo suspendido, que regresa a la mancha; el evaporado, y el depositado.
• Para la segunda ecuación de continuidad se consideran los mismos términos
excepto el de evaporación y depositación en la playa, en este caso se resuelve la concentración del hidrocarburo suspendido.
• ROSA utiliza para la evaporación el modelo de Mackay et al (1980), para la
disolución el de Cohen et al (1980), para la emulsificación y sedimentación el de Yapa et al. (1991) y para la depositación en la playa el de Gundlach (1987).
• No considera correcciones para la propiedades del petróleo.
3.2 Modelos matemáticos de los procesos involucrados en un derrame de petróleo
En esta sección se analizan los modelos matemáticas empleados para representar los diferentes proceso involucrados en los derrames. Es sin duda una de las partes más importante de esta investigación, por que es el puente entre la naturaleza del fenómeno que se quiere representar y el algoritmo que lo describe. De acuerdo a lo anterior se espera que luego de la lectura de esté capítulo el lector tenga los suficientes elementos para comprender el proceso de selección de las expresiones matemáticas empleadas en la modelo numérico.
3.2.1 Advección
La advección de una mancha de petróleo en agua se debe al efecto del viento, de las corrientes y del movimiento ondulatorio. El movimiento de la mancha no es

Estado del arte del modelado de derrames de petróleo a
27
solo en dirección horizontal, sino también en dirección vertical debido al rompimiento de las olas, el cual genera corrientes verticales. Una clara evidencia de la relación entre el transporte horizontal y el vertical, fue encontrada en Escocia, donde una fracción de un derrame de petróleo ocurrido cerca de sus costas fue transportada debajo de la superficie del agua, causando la contaminación de sus playas, producto de la gotas de petróleo esparcidas en forma vertical que siguieron viajando luego de que la mancha de petróleo había sido dispersada por la acción de la agitación del mar. La longitud de la columna de gotas de petróleo puede oscilar entre 2.5 y 5 veces la altura de las olas (Reed et al. 1999).
Las corrientes pueden ser modeladas con base en datos estadísticos o por medio de modelos hidrodinámicos, cuyas versiones avanzadas son capaces de considerar la advección en tiempo real. Escalas de transporte de 10 a 100 m, son las más apropiadas para modelar el escurrimiento del petróleo. Se prevé que en la próxima década se tengan importantes avances en este tema (Reed et al. 1999). ASCE (1996), también reconoce la importancia del estudio de la advección como un fenómeno tridimensional que debe ser analizado integralmente, ya que está acompañado por la dispersión vertical, lo que se conoce como transporte por difusión turbulenta. En este tema aun se carece de suficiente desarrollo en: (1) la representación de los gradientes de velocidad en las cercanías de la superficie del agua, (2) la definición de las condiciones de frontera, (3) la validación de modelos en campo y (4) el desarrollo en plataformas computacionales. El modelo convencional para representar el transporte advectivo se expresa como la suma de los efectos de las velocidades de las mareas, VT, las corrientes, VC, el viento y el oleaje, VLS (Yapa et al, 1994; Reed et al. 1988), por lo que el transporte advectivo sería:
1010UCVVVV LScT +++= (3-1)
donde: U10 es el vector de velocidad del viento a 10 metros sobre el nivel del mar, multiplicado por un factor de atenuación característico, C10. Tanto VT, como VC son obtenidas a partir de datos de campo y VLS solo se tiene en cuenta cuando la mancha se encuentra en la zona de oleaje, en donde se calcula como:
( ) bbLS sengHmV α27.20 2
1= (3-2)
donde: VLS la componente de velocidad debida al oleaje en la dirección de la playa, Hb es la altura de la ola en m, αb es el ángulo entre la cresta de la ola y la línea de playa y m es la pendiente de la playa.

Estado del arte del modelado de derrames de petróleo a
28
Para determinar el efecto de arrastre del viento en este trabajo se emplearon las expresiones para el coeficiente de arrastre propuestas a le expresiones Wu (1980). Estás fueron seleccionadas por que hacen distinción del valor del coeficiente de arrastre para diferentes velocidades de viento, lo cual a pesar de ser observado a través de los datos experimentales, solo ha sido considerado en la propuesta de Wu. Su trabajo muestra una amplia comparación de los modelos que propone con los elaborados por otros autores, confirmando que sus resultados se ajustan mejor a los datos experimentales.
Wu (1980), encontró que el coeficiente de arrastre se puede calcular a partir de las siguientes correlaciones: • Cuando 10U esta entre 0 y 1 m/s:
321
1010 10*5.0 −= UC (3-3)
• Cuando 10U esta entre 1 y 15 m/s:
( ) 31010 10*065.08.0 −+= UC (3-4)
• Cuando 10U es mayor de 15 m/s:
3
10 10*26.2 −=C (3-5)
Esta forma de describir los diferentes factores involucrados en proceso de advección, es empleada en la mayoría de los simuladores de derrames de petróleo, por lo que es empleada en este trabajo; excepto en lo relacionado con el efecto del oleaje, ya que en está investigación solamente se modelan derrames de petróleo en mar abierto. Efecto de Coriolis La dirección original de advección es modificada por la fuerza aparente de Coriolis, la cual está relacionada con el movimiento de la tierra, modificando el sentido inicial del vector que define al fenómeno. La fuerza de Coriolis es proporcional a la latitud del lugar y a la velocidad de movimiento de la unidad de masa considerada. En esta tesis se emplea el modelo de Ekman (The Open University Walton Hall, 1989), donde la fuerza aparente generada por el movimiento relativo entre un cuerpo de agua y la tierra está representado por la siguiente expresión:
usenmCoriolisdeFuerza ×Ω×= φ2 (3-6)

Estado del arte del modelado de derrames de petróleo a
29
donde: m es la masa del cuerpo de agua, Ω es la velocidad de rotación de la tierra (7.3x10-5 rad/s), φ es la latitud y u es la velocidad del cuerpo de masa. A la segunda facción de la ecuación 3-6 se le conoce como parámetro de Coriolis y frecuentemente se abrevia con la letra f .
3.2.2 Escurrimiento
El espesor y el área del derrame son la clave para la estimación de la advección, la evaporación, la dispersión, los impactos ambientales y en general para todos los procesos físicos, químicos y biológicos, Reed et al (1999). Las clásicas ecuaciones para representar el escurrimiento de los derrames propuestas por Fay, (1969 y 1971) y Hoult (1972), no reflejan varias de las observaciones de la realidad, tales como: (1) el alargamiento de la mancha, con un espesor que no es homogéneo, (2) la reducción de la tasa de escurrimiento por el cambio de la viscosidad, (3) el rompimiento de la mancha en pequeños parches, (4) la dependencia del escurrimiento y las condiciones de descarga, y (5) los efectos de la hidrodinámica en el tamaño final de la mancha.
Otros investigadores contemporáneos de Fay y Hoult, también realizaron trabajos de la misma naturaleza basados en coeficientes de escurrimiento hallados analíticamente, dentro de los que destacan Blokker (1964), Buckmaster (1973), Di Pietro, Huh y Cox (1977), Di Pietro y Cox (1980) y Foda y Cox (1980). Recientemente, Mackay (1980) propuso una expresión para describir el escurrimeinto de la mancha de petróleo basado en las correlaciones de lo regímenes gravitacional y viscoso, desarrolladas por Fay (1971) y Hoult (1972), considerando un término constante que representa la diferencia de densidades y viscosidades entre el petróleo y el agua, cuyo resultado es una ecuación independiente de los cambios de la densidad y viscosidad.
Por su parte Lehr et al (1984b), modelo el escurrimiento de la mancha de petróleo de acuerdo a las ecuaciones de Fay (1971) en la dirección perpendicular al viento y de acuerdo a los efectos de arrastre en la dirección del viento, considerando un espesor homogéneo. De la misma forma Stolzenbah et al (1977), citado por Rasmussen (1985), Findicakis (1992) y Reed et al (1988), propusieron un modelo para considerar tanto los efectos hidrodinámicos, como los de escurrimeinto, asumiendo un espesor constante y una forma circular para el derrame.
En la última década se ha trabajado con el fin de explicar la relación existente entre la dispersión horizontal y la vertical, para lo cual se han hecho varios experimentos que han permitido comprender mejor las características de la columna de petróleo que viaja junto a la mancha vista en superficie, dentro de estos trabajos se destacan los elaborados por Johansen (1984) y Delvgine et al (1988).
En condiciones naturales el petróleo solamente deja de escurrir cuando alcanza su grosor terminal y luego tiende a dividirse en pequeños fragmentos, debido a la turbulencia oceánica. Esta es la razón por la cual varios autores como Lehr (1996),

Estado del arte del modelado de derrames de petróleo a
30
le han quitado validez a los resultados de Fay, ya que no explican los efectos de las olas, el escurrimiento inducido por las corrientes laminares y la turbulencia oceánica; efectos importantes para describir el comportamiento del derrame a largo plazo. Lehr (1996), también tuvo problemas con la forma de calcular el área inicial de la mancha, pues en ocasiones la fuente del derrame sigue fluyendo por horas a tasas variables. En casos como el anterior las fuerzas de escurrimiento axial se puede despreciar, para que predominen las fuerzas laterales, igual que en un canal. En tales casos la mancha no puede ser considerada como una entidad homogénea y sus propiedades varían no solo con el tiempo, sino con la distancia de la fuente.
Cuando la fuente del derrame esta ubicada en fondo del mar, el crudo tiende a subir a la superficie ayudado por el gas que lo acompaña, más que por el efecto de flotación, por lo que el derrame en superficie esta acompañado de una pluma vertical ligada a una mancha de radial. En estos casos el espesor de la mancha tiende a ser menor que en un derrame en superficie en una relación de 1 a 10.
Existen en la literatura varios modelos que pretenden explicar el escurrimiento de una mancha de petróleo, pero en general todos parten del trabajo echo por Fay (1969 y 1971), bien sea para modificarlo o validar uno nuevo, sin lograr avances sustanciales, por lo que las correlaciones de Fay siguen teniendo validez para explicar el escurrimeinto de una mancha de petróleo, fundamentalmente por su soporte teórico y experimental. A continuación se describen los modelos de escurrimiento más destacados con el fin de proporcional información suficiente acerca de su estado de arte y también considerar a algunos de ellos (Blokker, 1964; Fay, 1969 y 1971; Mackay, 1980) para comparar los resultados obtenidos por medio del modelo propuesto, el cual se describe al final de esta sección. Modelo de Blokker (1964) El modelo de Blokker (1964), plantea la siguiente formulación matemática, donde el radio de la mancha es proporcional al volumen inicial del derramado y a las propiedades del hidrocarburo, así:
( )31
0030)(
3
⎥⎥⎦
⎤
⎢⎢⎣
⎡−⎟⎟
⎠
⎞⎜⎜⎝
⎛+= ow
wt
KtVRR ρρ
πρρ
(3-7)
donde: K, es la constante de Blokker, igual a 216 cm3/gr-s, 0ρ y wρ son las densidades del hidrocarburo y del agua, respectivamente, en gr/cm3, t es el tiempo
Estado del arte del modelado de derrames de petróleo a
31
en s, 0R es el radio inicial de la mancha en cm, )(tR es el radio e función del tiempo en cm y 0V es el volumen inicial del derrame en cm3. El modelo de Blokker (1964) es empleado para comparar los resultados del modelo propuesto, debido a su sencillez y a que fue derivado de observaciones de campo. Modelo de Fay (1971)
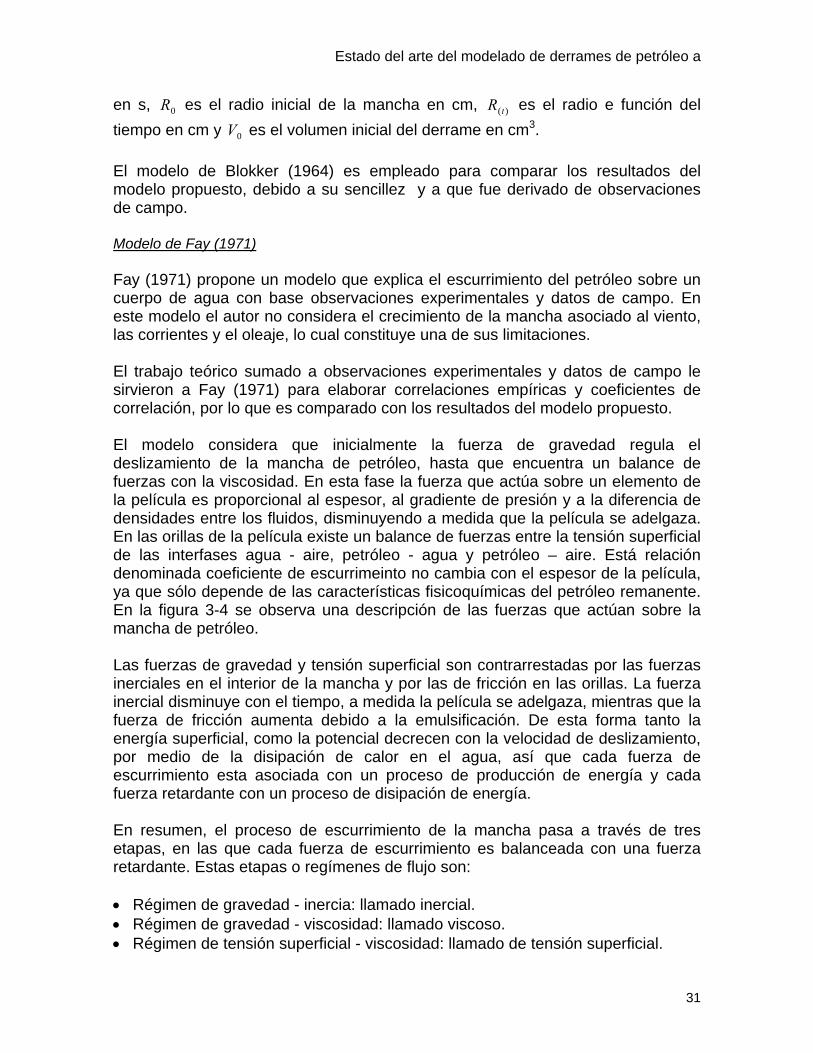
Fay (1971) propone un modelo que explica el escurrimiento del petróleo sobre un cuerpo de agua con base observaciones experimentales y datos de campo. En este modelo el autor no considera el crecimiento de la mancha asociado al viento, las corrientes y el oleaje, lo cual constituye una de sus limitaciones.
El trabajo teórico sumado a observaciones experimentales y datos de campo le sirvieron a Fay (1971) para elaborar correlaciones empíricas y coeficientes de correlación, por lo que es comparado con los resultados del modelo propuesto.
El modelo considera que inicialmente la fuerza de gravedad regula el deslizamiento de la mancha de petróleo, hasta que encuentra un balance de fuerzas con la viscosidad. En esta fase la fuerza que actúa sobre un elemento de la película es proporcional al espesor, al gradiente de presión y a la diferencia de densidades entre los fluidos, disminuyendo a medida que la película se adelgaza. En las orillas de la película existe un balance de fuerzas entre la tensión superficial de las interfases agua - aire, petróleo - agua y petróleo – aire. Está relación denominada coeficiente de escurrimeinto no cambia con el espesor de la película, ya que sólo depende de las características fisicoquímicas del petróleo remanente. En la figura 3-4 se observa una descripción de las fuerzas que actúan sobre la mancha de petróleo. Las fuerzas de gravedad y tensión superficial son contrarrestadas por las fuerzas inerciales en el interior de la mancha y por las de fricción en las orillas. La fuerza inercial disminuye con el tiempo, a medida la película se adelgaza, mientras que la fuerza de fricción aumenta debido a la emulsificación. De esta forma tanto la energía superficial, como la potencial decrecen con la velocidad de deslizamiento, por medio de la disipación de calor en el agua, así que cada fuerza de escurrimiento esta asociada con un proceso de producción de energía y cada fuerza retardante con un proceso de disipación de energía. En resumen, el proceso de escurrimiento de la mancha pasa a través de tres etapas, en las que cada fuerza de escurrimiento es balanceada con una fuerza retardante. Estas etapas o regímenes de flujo son:
• Régimen de gravedad - inercia: llamado inercial. • Régimen de gravedad - viscosidad: llamado viscoso. • Régimen de tensión superficial - viscosidad: llamado de tensión superficial.

Estado del arte del modelado de derrames de petróleo a
32
Figura 3-4. Fuerzas que actúan sobre una película de petróleo en agua.
Fuente: Fay (1971)
Una mancha de petróleo generalmente pasa por estos tres regímenes, sin embargo, cuando el volumen derramado es pequeño, el régimen dominante desde el comienzo puede ser el de tensión superficial o el viscoso.
Fay (1971) propuso el uso de coeficientes de escurrimiento para determinar el crecimiento de la mancha en cada una de las etapas, tanto para el caso unidimensional, como bidimensional, de acuerdo a las tablas 3-1 y 3-2.
Tabla 3-1. Leyes de escurrimiento para derrames de petróleo.
Régimen Unidimensional Bidimensional
Inercial L = Ki ( ∆g A t2 ) 1/3 R = K2i ( ∆g V t2 ) ¼ Viscoso L = KV (∆g A2 t3/2 / µ1/2 ) ¼ R = K2V (∆g V2 t3/2 / µ1/2 ) 1/6 Tensión Superficial L = Kt ( σ2 t3 / ρ2 µ ) ¼ R = K2t ( σ2 t3 / ρ2 µ ) ¼
Fuente: Fay, 1971.
donde: g es la aceleración de la gravedad en m/s2, A es el volumen de petróleo por unidad de longitud normal para X, µ = viscosidad cinemática del agua, en m2/s, σ = coeficiente de escurrimiento o tensión superficial, en dyn/cm, ρ es la densidad del agua en kg/m3 y V es el volumen inicial del petróleo en m3.
Estado del arte del modelado de derrames de petróleo a
33
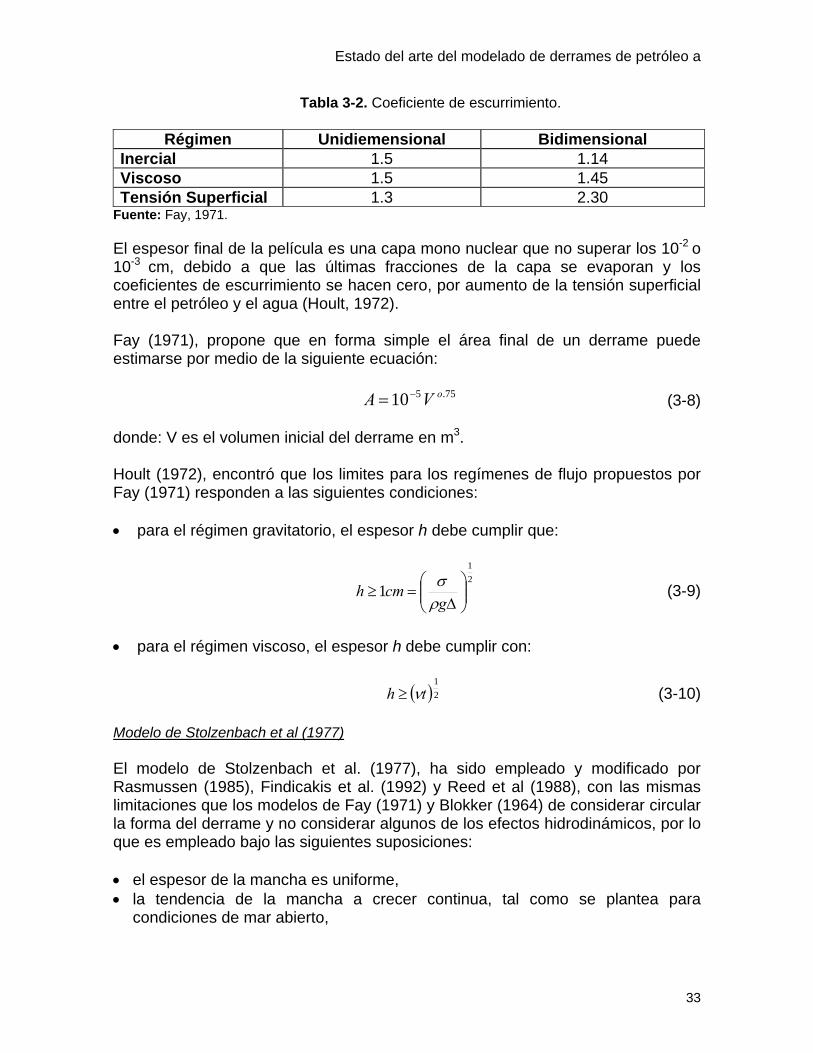
Tabla 3-2. Coeficiente de escurrimiento.
Régimen Unidiemensional Bidimensional Inercial 1.5 1.14 Viscoso 1.5 1.45 Tensión Superficial 1.3 2.30
Fuente: Fay, 1971.
El espesor final de la película es una capa mono nuclear que no superar los 10-2 o 10-3 cm, debido a que las últimas fracciones de la capa se evaporan y los coeficientes de escurrimiento se hacen cero, por aumento de la tensión superficial entre el petróleo y el agua (Hoult, 1972).
Fay (1971), propone que en forma simple el área final de un derrame puede estimarse por medio de la siguiente ecuación:
75.510 oVA −= (3-8)
donde: V es el volumen inicial del derrame en m3.
Hoult (1972), encontró que los limites para los regímenes de flujo propuestos por Fay (1971) responden a las siguientes condiciones:
• para el régimen gravitatorio, el espesor h debe cumplir que:
21
1 ⎟⎟⎠
⎞⎜⎜⎝
⎛∆
=≥g
cmhρσ
(3-9)
• para el régimen viscoso, el espesor h debe cumplir con:
( )21
th ν≥ (3-10) Modelo de Stolzenbach et al (1977)
El modelo de Stolzenbach et al. (1977), ha sido empleado y modificado por Rasmussen (1985), Findicakis et al. (1992) y Reed et al (1988), con las mismas limitaciones que los modelos de Fay (1971) y Blokker (1964) de considerar circular la forma del derrame y no considerar algunos de los efectos hidrodinámicos, por lo que es empleado bajo las siguientes suposiciones:
• el espesor de la mancha es uniforme, • la tendencia de la mancha a crecer continua, tal como se plantea para
condiciones de mar abierto,

Estado del arte del modelado de derrames de petróleo a
34
• la tendencia a la compresión de la mancha es proporcional a la magnitud del viento que sople con dirección a la playa, y
• la circulación del petróleo dentro de la mancha es despreciable. El resultado final es una ecuación que explica el crecimiento de la mancha debido al escurrimeinto y la dispersión hidrodinámica, y describe el fenómeno de compresión en cercanías de la costa, así:
σρρ
o
NDaT UCdt
Rddt
Rd 2
2
2
2
2
−= (3-11)
donde: R es el cambio del radio debido solo al escurrimiento en el régimen gravedad - viscosidad, RT es el cambio neto transversal del radio frente a la playa, ρa y ρo es la densidad del aire y del aceite, σ el espesor de la mancha, y CD es el coeficiente de arrastre de la velocidad del viento, UN en dirección a la playa. El empleo de este modelo limita el estudio del comportamiento de la mancha a la etapa de flujo en régimen gravitacional, lo que puede redundar en la sobreestimación del área de la mancha, más aun cuando se toma en cuenta el efecto del viento sobre el tamaño del derrame, por lo que no es empleado en este estudio.
Modelo de Mackay (1980)
Mackay (1980), dice que el escurrimiento esta gobernado por el balance entre las fuerzas gravitacionales y de viscosidad, puede ser calculado por medio de la siguiente ecuación:
34
31
⎟⎠⎞
⎜⎝⎛=
AVAK
dtdA
A (3-12)
donde: A, es el área cubierta por la mancha de petróleo en m2, t, es el tiempo en, s, V, es el volumen inicial del derrame en m3, KA es una constante, considerada por Mackay et al. (1980) como, 150 en s-1.
Este modelo numérico presenta limitaciones al no considerar procesos de perdida de masa (evaporación, disolución, dispersión vertical, entre otros), lo que cual es una constante en los modelos de escurrimiento hasta aquí considerados. Algunas comparaciones muestran como, el área final del derrame considerando el volumen constante proporcionan resultados con dos ordenes de magnitud por encima de observaciones de campo, por lo que Reed et al. (1988) sugiere que en algunas ocasiones el volumen del derrame se puede mantener constante durante los primeros días de simulación, sin presentar errores significativos, pero para la estimación del área final del derrame se debe usar el 50% del volumen inicial.

Estado del arte del modelado de derrames de petróleo a
35
Este modelo al igual que el de Blokker (1964) y Stolzenbach et al. (1977), tiene limitaciones frente al propuesto por Fay (1971) al solo considerar un régimen de flujo. En este caso la diferencia entre Blokker (1964) y los otros dos modelo (Stolzenbach et al., 1977; Mackay, 1980) radica en que Blokker considero que el régimen viscoso regula el crecimiento de la mancha, mientras que Mackay (1980) y Stolzenbach et al (1977) consideraron al régimen gravitacional, por lo que el modelo de Blokker permite hacer estimaciones más razonables. En este trabajo se emplearan los modelos de Blokker (1964), Fay (1971) y Mackay (1980). Modelo propuesto El modelo propuesto en esté trabajo busca que la estimación del área de la mancha tenga la mayor relación posible con las propiedades del petróleo derramado y los efectos: (1) de expansión mecánica de la mancha, introducido por medio del coeficiente de difusividad, (2) hidrodinámicos de las corrientes de agua, (3) advectivos del viento y (4) transferencia de masa (evaporación, disolución, dispersión vertical y emulsificación); para lo cual se implanto una metodología de sumatoria de áreas. • Coeficiente de difusividad Para el cálculo del coeficiente difusivo, se empleó la expresión propuesta por Sobey y Blaker (1996), obtenida con base en la teoría de escurrimiento propuesta por Fay (1969 y 1971) y Hoult (1972), tal como se muestra a continuación:
• para la primera hora de flujo,
Vgwρρ
α∆
=21
(3-13)
• y entre la primera hora y la primera semana,
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛ ∆
=t
Vgw
ν
ρρ
α
31
2
21
(3-14)
donde: α , es el coeficiente de difusividad en m2/s, g es la aceleración de la gravedad en m/s2, pa ρρρ −=∆ las diferencias de densidades del agua y el petróleo respectivamente, en kg/m3, V es el volumen inicial de petróleo derramado m3, ν la viscosidad cinemática del petróleo en m2/s, y t es el tiempo transcurrido en s.

Estado del arte del modelado de derrames de petróleo a
36
Los coeficientes difusivos propuestos por Sobey y Blaker (1996) han sido plenamente validados, inicialmente por Fay (1971), quien se encargo de comparar los resultados con numerosos datos experimentales, mientras Hoult (1972) logro llegar a los mismos resultados, a partir de las ecuaciones de Navier-Stokes. Yapa et al (1994) citan dos autores que proponen el uso de coeficientes de difusividad constantes. Murray (1972), quien empleó la teoría de Fickan y los mediciones realizadas durante el derrame de Chevron de 1970, obteniendo un valor de 19 m2/s; mientras que Hunter (1980), se baso en observaciones de campo realizadas por Okubo’s (1962) y recomienda un coeficiente de difusividad igual a 5 m2/s. • Metodología de sumatoria de áreas Por medio de la metodología propuesta en cada intervalo de tiempo se determina el área considerando una cierta concentración mínima de petróleo en cada celda, que debe ser determinada por medio de la calibración del modelo con datos experimentales. Esta técnica es aproximada, porque depende de la forma de discretización del dominio y de la mínima concentración de petróleo considerada, pero con una buena calibración del modelo se obtienen buenos resultados, como se muestra en el capítulo 5. Es posible hacer estimaciones razonables del área ocupada por la mancha, simplemente considerando una concentración mínima cercana a cero (entre 10-4 y 10-6 kg/m3), en cuyo caso el área del derrame sería:
01 , >∴=∑ CAA n
Cn (3-15) donde: A es la sumatoria total de áreas en m2, An,c es el área de la celda n que cumple con la condición de concentración, dada en kg/m3. En el modelo se hace una estimación promedio del espesor en relación directa con el volumen remanente y el área del derrame, así:
AV
h R= (3-16)
donde: h es el espesor promedio en m, VR es el volumen remanente en m3 y A es el área del derrame en m2.
3.2.3 Procesos de transferencia de masa
Dentro de los procesos de transferencia de masa se consideran aquellos que representan perdida o ganancia de masa para el derrames de petróleo, tales como la evaporación, la disolución, la dispersión vertical y la emulsificación, entre otros.
Estado del arte del modelado de derrames de petróleo a
37
En general es posible decir que los modelos de transferencia de masa se clasifican en dos grupos: los de pseudocomponentes y los analíticos. Ambos tipos de modelos pueden proporcionar buenos resultados, la diferencia radica en el tipo de información que requieren para su empleo, mientras que los modelos de pseudocomponentes necesitan información de la composición y propiedades de cada uno de los componentes o fracciones de petróleo; los modelos analíticos consideran a cada petróleo como un solo componente. Los resultados de los modelos de pseudocomponentes pueden son más precisos que los analíticos, si se cuenta con suficiente información de caracterización del petróleo, lo que a menudo no es posible, por lo que en estos casos debe emplearse un modelo analítico, que permite obtener resultados promedios, que pueden servir para entender la dinámica de los procesos involucrados.
3.2.3.1. Evaporación La evaporación es el proceso de perdida de masa más importante que sufre un derrame de petróleo, por ejemplo un hidrocarburo liviano puede evaporarse hasta en un 75%, uno medio hasta un 40% y uno pasado el 10%, en los primeros días, por lo que es considerada en la mayoría de los modelos de derrames.
Es posible distinguir dentro de dos tipos de modelos, tal como se menciono antes, los de pseudocomponentes y los analíticos. Los de pseudocomponentes dividen a la mezcla de hidrocarburos en varias fracciones a partir de datos de punto de ebullición. Las limitaciones de estos modelos radican en no considerar el cambio de la presión parcial y en promediar la tasa de evaporación para los hidrocarburos de cada pseudocomponente. En este tipo de modelos la razón de evaporación depende del coeficiente de transferencia de masa, el área superficial, la temperatura y la velocidad del viento Stiver y Mackay (1984). Por otra parte los modelos analíticos como el de Fingas (1997), consideran un comportamiento integral para cada mezcla de hidrocarburos, por lo que también requiere de datos experimentales para representar la evaporación del conjunto de componentes, dependiendo únicamente de la temperatura y el tiempo. Jones (1984), citado por Reed et al. (1999), encontró que los métodos analíticos sobrestiman la evaporación, por lo que sugiere el uso de los modelos de pseudocomponente cuando los datos de caracterización del crudo están disponibles. Está apreciación coincide en parte con los resultados obtenido en este estudio, donde claramente se observa que cuando es posible tener la composición del hidrocarburo los métodos de pseudocomponentes realizan buenas estimaciones, sin embargo los métodos analíticos también permiten representar en buena forma los datos experimentales, siempre y cuando se tenga información de las constantes experimentales. En el caso del modelo de Fingas (1996), en el portal de Internet del Centro de Tecnología Ambiental de Canadá (www.etcentre.org) se cuenta con una extensa lista de constantes experimentales.

Estado del arte del modelado de derrames de petróleo a
38
En el modelo de evaporación de pseudocomponentes usado por el simulador OSCAR (Daling y Strom, 1999), el coeficiente de transferencia de masa está basado en una sencilla relación lineal con la velocidad del viento y un coeficiente de arrastre que sirve como constante de proporcionalidad, el cual depende a su vez de la rugosidad de la superficie y la velocidad del viento. ADIOS (NOAA, 1995), el simulador utilizado por la NOOA, emplea un método de analítico propuesto por Stiver y Mackay (1984) para calcular la evaporación, para lo cual cuenta con una subrutina que se encarga encontrar el punto de ebullición de los componentes a partir de una curva TBP, esta subrutina se encarga de calcular la temperatura a la cual la presión de vapor es igual a la presión atmosférica y contiene los mismos algoritmos usados para la presión de vapor en el modelo de pseudocomponentes.
En resumen ASCE (1996), dice que existen varias propuestas de modelos de pseudocomponentes para medir la evaporación, pero en general todas son modificaciones de los modelos elaborados por Mackay y Matsugu (1973) y Stiver y Mackay (1984). Las propuestas asumen que: (1) el petróleo esta formado por una mezcla de hidrocarburos, (2) luego de estimada la evaporación, la masa perdida es restada por constituyente, según su proporción, (3) la evaporación es una función del: área del derrame, la velocidad del viento, la presión de vapor, el espesor de la mancha y la temperatura. A continuación se presentaran cinco formulaciones para el cálculo de la evaporación, cuatro de ellas emplean el método de pseudocomponentes y una el método analítico. Al compararlos con datos experimentales, el modelo de Fingas (1996) es el que mejor representa la evaporación, seguido por modelo de Findicakis (1993); sin embargo, esté modelo requiere de la composición del hidrocarburo. En esté trabajo se empleara las expresiones obtenidas por Fingas (1996), Findikakis et al (1993) y Reed et al (1988), las cuales se emplean de acuerdo a la disponibilidad de información. Modelos de Pseudocomponentes • Modelo de Stiver y Mackay (1984)
Esté modelo tiene origen en una modificación del trabajo de Mackay y Matsugu (1973), el cual emplea una expresión para el coeficiente de transferencia de masa a partir de datos experimentales. Stiver y Mackay (1984) proponen hallar la fracción de hidrocarburo evaporado en función de constantes experimentales, así:
( )[ ]FCCKKh
Kedtdf
2121exp ++= (3-17)

Estado del arte del modelado de derrames de petróleo a
39
donde: oTK 1147.05.481 −= , 1921.010*5.4 42 −= −
oTK , 78.00
310*5.2 UK e−= , 0T la
temperatura ambiente en °K, h el espesor de la mancha en metros, C1 y C2 son valores experimentales obtenidos mediante la destilación de una muestra del hidrocarburo y F es la fracción de evaporada. • Modelo de Reed et al. (1988) En esté modelo la masa de petróleo transferida al ambiente es calculada para cada uno de los constituyentes de acuerdo a la siguiente expresión:
RTMAfPK
dtdm iivBi i= (3-18)
donde: dmi es la masa transferida por el cada constituyente en gr, dt es el tiempo en s, KB es el coeficiente de transferencia, PVi la presión de vapor del iesimo constituyente en atmósferas, A es el área de la mancha en m2, if es la fracción remanente del constituyente i en la mancha, Mi es el peso molecular del constituyente i en gr/mol, R la constante universal de los gases: 8.206*10 -5 en atm-m3 /mol-ºK y T la temperatura de la superficie del agua en ºK. Es posible que la temperatura del aire cercano a la superficie de la mancha sea adecuada, pero se prefiere siempre la de superficie. Para calcular KB, se utiliza la función propuesta por Mackay y Matsugu (1973), así:
i
iB M
MScDUK
29029.0 67.011.078.0
10
+= −− (3-19)
donde: U es la velocidad del viento a 10 metros sobre el nivel del mar en m/hr, D es el diámetro de la mancha, Sc es el número de Schmidt, comúnmente aceptado como 2.7. • Modelo de Yapa et al (1988) Este modelo emplea una expresión mejorada de Mackay et al. (1980) que permite estimar la fracción de masa perdida de la siguiente forma:
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛++⎟
⎠⎞
⎜⎝⎛=
00
1lnln1P
tCKPC
F E (3-20)
1435.19.1158 −= APIC (3-21)
0
7.00025.0RTV
AUK Eν
= (3-22)

Estado del arte del modelado de derrames de petróleo a
40
610−×=ρ
υ PM (3-23)
⎟⎟⎠
⎞⎜⎜⎝
⎛−=
ETT
P 00 16.10ln (3-24)
432
0 0002604.003439.0565.1275.306.542 APIAPIAPIAPIT +−+−= (3-25)
FF
FF
gsgs
API°°
°°−
= 6060
6060
....5.1315.141
(3-26)
donde: C es una constante de evaporación, KE es el exponente de evaporación, t es el tiempo transcurrido en s, U es la velocidad del viento en m/s medida a 10 metros sobre el nivel del mar, A es el área del derrame de petróleo en m2, υ es el volumen molar en m3/mol, PM el peso molecular del petróleo en gr/mol, ρ es la densidad del petróleo en gr/cm3, R la constante universal de los gases: 8.206*10 -5
en atm-m3 /mol-ºK, T o TE es la temperatura de la superficie en °K, V0 es el volumen inicial derramado en m3, P0 es la presión de vapor inicial en atmósferas a TE, T0 es la temperatura de referencia, API es la gravedad API, s.g. es la gravedad especifica del petróleo medida a 60°F el crudo y el agua. • Modelo de Findicakis et al. (1993) Findicakis et al. (1993) emplea un modelo simplificado en el cual la razón de evaporación es constante durante todo el periodo de evaporación y únicamente es función de la presión de vapor y la velocidad del viento. Esta expresión fué obtenida por una modificación del modelo de Mackay y Matsugu (1975).
( )UPP vaiviii −= λφ (3-27) donde: iφ es la razón evaporación del componente i en gr/cm3s, iλ es el coeficiente de evaporación del componente i, el cual es del orden de 10-12 en 1/cm3 y se puede considerar constante, Pvi es la presión de vapor del componente i dentro de la mezcla en dyn/cm2, Pvai es la presión de vapor del componente i en el aire sobre el derrame y que generalmente se puede considerar como cero y U es la velocidad del viento a 10 metros sobre la superficie del agua en cm/s. Modelo Analítico • Modelo de Fingas (1996) El modelo propuesto por Fingas es de tipo analítico y el más recientemente desarrollado. Fingas (1996), propone que la evaporación se puede calcular como
Estado del arte del modelado de derrames de petróleo a
41
una función del tiempo, la temperatura y el porcentaje de masa evaporada a 180°C, por lo que su cálculo requiere de la caracterización de cada crudo. Fingas (1996) encontró que existe un grupo de crudos que siguen un comportamiento logarítmico y otro uno cuadrático, por lo que formula las siguientes expresiones para el cálculo del porcentaje de masa evaporada. • Forma logarítmica:
( )[ ] tTDE ln15045.0%165.0% −+×= (3-28) • Forma cuadrática:
( )[ ] tTDE 1501.0%0254.0% −+×= (3-29) donde: %E es el porcentaje de masa evaporada, %D es el porcentaje de masa evaporada a 180 °C, T es la temperatura en °C y t es el tiempo en minutos. Este modelo esta bien documentado y es posible obtener acceso a la caracterización de la mayoría de los crudos que son producidos en el mundo (www.etcentre.org), a partir de una correlación simplificada, como la que sigue:
( ) tBTAE ln% += (3-30) donde: A y B son valores experimentales. Por ejemplo para el crudo Arábico Ligero A es 2.51 y B es 0.037, por lo que siguiendo la forma de las expresiones y los criterios expuestos por Fingas (1996), permite determinar que el porcentaje de masa evaporada a 180°C para este crudo es igual 11.2%.
3.2.3.2. Disolución y dispersión vertical
A continuación se presentan los modelos analíticos de disolución y dispersión vertical seleccionados con base en la documentación disponible. En este caso no se encontraron datos experimentales que permitieran comparar las estimaciones, sin embargo todos los modelos muestran una misma tendencia y orden de magnitud. En el modelo propuesto fueron implementadas las expresiones de Cohen et al (1980) y Mackay et al (1980), para la disolución y la dispersión vertical, respectivamente, por ser los que mejor sustento teórico presentan. Al final de está sección se incluye un modelo integrado para el cálculo de la disolución y dispersión vertical empleado con éxito por Reed et al (1988). Modelo de disolución de Cohen et al (1980) Cohen et al (1980), propone que la disolución puede ser estimada en el tiempo en función del área superficial de la mancha, así:

Estado del arte del modelado de derrames de petróleo a
42
t
s eCKAdtdm α−= 0 (3-31)
donde: K es el coeficiente de transferencia de masa en m/hr, As el área superficial de la mancha en m2, Co es la solubilidad del petróleo en agua fresca en gr/m3, ∝ es el exponente de decaimiento en 1/dia y t el tiempo en horas. Lu y Polak (1973), citado por Yapa (1994), encontró los siguientes valores para K, Co y ∝ para dos tipos de crudos, cuyos valores fueron empleados en el estudio y se observan en la siguiente tabla.
Tabla 3-3. Constantes de disolución.
Tipo de Crudo Co K KCo ∝ Pesado 7.88 0.002335 0.0184 0.423 Ligero 21.3 0.041502 0.884 2.380
Modelos de dispersión vertical En general cualquiera de los dos modelos que se presentan a continuación puede ser empleado dependiendo de la disponibilidad de información. Modelo de Mackay et al (1980)
La segunda alternativa es la propuesta por Mackay et al. ( 1980 ) y tambièn citada por Reed (1988), para la cantidad de petróleo en toneladas métricas transferida por hora, así:
( )
δσµ 5.0
2
501111.0
++
=Um
dtdm (3-32)
donde: µ es la viscosidad dinámica del petróleo en centipoises, δ es el espesor de la película en metros, σ es la tensión de la interfase petróleo - agua en dynas/cm y U es la velocidad del viento en m/seg.
• Modelo de Huang (1984) Huang (1984) propone un modelo simplificado para el calculo de la dispersión de acuerdo a una constante de dispersión, así:
tUNVdtdV 2
0= (3-33)
Estado del arte del modelado de derrames de petróleo a
43
donde: N es la constante de dispersión igual a 2*10-8, V0 es el volumen inicial en m3, U es la velocidad del viento en m/s y t es el tiempo en s. Modelo de Audunson (1979) para la disolución y dispersión vertical Audunson (1979), citado por Reed et al (1988), considera que la disolución y la dispersión pueden ser analizadas en conjunto, estos dos fenómenos representan de acuerdo a su modelo las restantes perdidas de masa diferentes a la evaporación.
La propuesta de Adunson (1979), citada por Reed et al (1988), para la cantidad de petróleo disuelto y disperso verticalmente en toneladas métricas por día, es la siguiente:
20
5.02 exp4.0U
mUdtdm t−
= (3-34)
donde: m es la masa de la mancha en toneladas métricas, U es la velocidad del viento en m/s medida a 10 m sobre el nivel del mar, t es el tiempo en días y Uo es una velocidad de referencia, 8.5 m/s.
3.2.3.3. Emulsificación El estudio de la emulsificación tiene importancia debido a que al aumentar el contenido de agua, la viscosidad del petróleo puede llegar a aumentar hasta en dos ordenes de magnitud, retardando el escurrimiento de la mancha y si la emulsión es estable, retarda también los procesos de disipación natural (Reed et al, 1999). Una emulsión estable contiene entre 50 y 80% de agua y genera una expansión de la mancha de 2 a 5 veces su tamaño inicial. La densidad del derrame también se ve afectada alcanzado valores hasta de 1,030 kg/m3, comparada con la inicial de 800 kg/m3 (ASCE, 1996).
Mackay et al. (1980) propuso un modelo analítico para el cálculo de la emulsificación, el cual es utilizada hoy en día por la mayoría de los modelos de derrames de petróleo, como ADIOS (NOAA, 1995) y OSCAR (Muharremi et al, 2000), junto con una correlación para la corrección de la viscosidad y la densidad. Este algoritmo puede ser expresado en forma diferencial, y depende de la cantidad de agua que contiene un crudo y las condiciones del cuerpo de agua. Para el modelo propuesto en esta investigación también se empleó la expresión obtenida por Mackay (1980), junto con las de corrección de viscosidad y densidad, propuestas por el mismo autor, ya que estas expresiones son las que mejor representan el fenómeno. El máximo contenido de agua que puede contener un crudo es variable y depende de sus propiedades iniciales y las condiciones ambientales. Daling y Brandik

Estado del arte del modelado de derrames de petróleo a
44
(1988), elaboraron una correlación entre el máximo contenido de agua y la viscosidad del crudo, encontrado que son proporcionales. Como el contenido de agua varia de acuerdo a sus características químicas (resinas, asfáltenos y ceras), Daling et al. (1990), citado por Reed et al. (1999), recomienda que cada hidrocarburo debe ser sometido a pruebas de laboratorio para determinar su comportamiento particular.
Fingas et al. (1997, 1999), reportado por Reed et al. (1999), sugiere que es posible avanzar en la elaboración de modelos que permitan predecir con exactitud el comportamiento de las emulsiones, ya que las primeras correlaciones únicamente utilizan ecuaciones de primer orden y fueron elaboradas cuando aun no se contaba con suficientes datos experimentales y de campo.
El incremento del contenido de agua empleado en esta investigación es calculado de acuerdo a la propuesta realizada por Mackay et al. (1980), en la cual la cantidad de agua incorporada en la mancha esta dada por:
( ) ⎥⎦
⎤⎢⎣
⎡ −+=
1
210
11
OCF
UKdt
dF WCwc
wc (3-35)
donde: Fwc es la fracción de agua en aceite, Kwc es el coeficiente de emulsificación, 2e-6 para petróleo liviano (Mackay et al 1982, citado por Reed et al, 1988) o 4.5e-6 para petróleos pesados (Cormack, 1985, citado por Rasmussen, 1985), U es la velocidad del viento en m/s, OC1 es 0.7 para petróleo crudo liviano y combustibles pesados (Mackay et al 1982, citado por Reed et al, 1988) y 1.15 para crudos pesados (Cormack, 1985, citado por Rasmussen, 1985).
La gasolina, el queroseno y otros combustibles, como diesel livianos, no se presenta emulsión (Reed et al 1988).
3.2.4 Cambio de propiedades
La viscosidad y la densidad de la mancha de petróleo se consideran como las dos principales propiedades que deben ser tomadas en cuenta para modelar el escurrimeinto de la mancha de petróleo, por lo que a medida que el petróleo pierde componentes livianos, aumenta su contenido de agua o cambia su temperatura deben ser corregidos. A continuación se presentan los modelos matemáticos que fueron considerados para la estimación de los cambios de viscosidad y densidad.

Estado del arte del modelado de derrames de petróleo a
45
Cambio de la viscosidad • Cambio por contenido de agua La viscosidad resultante µ es calculada por medio de la ecuación propuesta por Mooney (1951), citada por Reed et al (1988).
⎥⎦
⎤⎢⎣
⎡−
=WC
WC
FF65.01
5.2exp0µµ (3-36)
donde: µo es la viscosidad inicial del petróleo y Fwc es el contenido de agua. • Cambio por evaporación
El efecto de la evaporación sobre la viscosidad es calculado la siguiente expresión propuesta por Mackay et al (1980):
( )evapFC *exp 20µµ = (3-37) donde: Fevap es la fracción evaporada de la mancha, C2 varia entre 1 y 10, según Reed et al (1988). Para el modelo propuesto por Reed et al.(1988), C2 se considera uno para combustible de aviación y combustibles livianos, y 10 para los demás productos. • Cambio por temperatura La variación de la viscosidad con la temperatura se calcula por medio de la ecuación propuesta por Guzman-Andrade (Perry y Chilton, 1973), así:
( )4.298770exp 1
0 −= −KTµµ (3-38)
donde: TK , temperatura ambiental en ºK.
Cambio de la densidad La corrección de la densidad por emulsificación y evaporación puede ser estimada a partir de la siguiente correlación propuesta por Mackay et al (1980) de la siguiente forma:
( )( )evpdnowcwwc FCFF +−+= ρρρ 1 (3-39)
donde: Fw es el contenido de agua, Fevp es la fracción de masa evaporada, ρ0 y ρw son las densidades del petróleo y el agua respectivamente en kg/m3 y Cdn un valor experimental obtenido en laboratorio para cada crudo. Como no fue posible contar

Estado del arte del modelado de derrames de petróleo a
46
con información experimental para determinar el valor de la constante experimental Cdn, únicamente se consideró la corrección de la densidad por emulsificación, así:
( ) owcwwc FF ρρρ −+= 1 (3-40)
47
CAPÍTULO 4 4 MODELO NUMÉRICO
Este capítulo presenta el método de solución de las ecuaciones que comprenden el modelo de flujo seleccionado presentado en el capítulo 3 para así obtener la información sobre los campos de presiones, velocidad y concentración del petróleo. Como se observó en el capítulo anterior, la integración de las ecuaciones que describen el fenómeno es compleja y hasta la fecha no hay solución analítica; motivo por el cual, es necesario recurrir a los métodos numéricos para encontrar soluciones optimas. El capítulo comprende la presentación de los fundamentos básicos de la dinámica de fluidos computacional - DFC, la descripción de las ecuaciones de conservación, la presentación de la técnica de solución del sistema de ecuaciones y la descripción de la metodología empleada para su evaluación. La Dinámica de Fluidos Computacional - DFC La DFC, es el análisis de sistemas que involucran fluidos, transferencia de calor y fenómenos asociados tales como reacciones químicas por medio de simulaciones basadas en computadora. Los códigos de DFC son estructurados en torno a algoritmos numéricos que pueden abordar problemas de flujo de fluidos, como los derrames de petróleo, a fin de proporcionar acceso fácil a su capacidad de resolución. Todos los paquetes CFD incluyen sofisticadas interfaces de usuario para introducir los parámetros del problema y examinar resultados. Código de Dinámica de Fluidos Computacional - DFC
En esta Tesis, se usa el código PHOENICS – Parabolic, Hyperbolic Or Eliptic Numerical Integration Code Series (Ludwing et. al. 1989) para resolver las ecuaciones que describen la aerodinámica del flujo: continuidad, cantidad de movimiento y turbulencia. Este código se ha manipulado para definir una geometría típica del derrame, generar una malla, es decir, subdividir el dominio en pequeños subdominios (volúmenes de control), definir unas las condiciones de frontera del fenómeno y primordialmente simular las condiciones de flujo (advectivo y difusivo), perdida o ganancia de masa y cambio de las propiedades iniciales del hidrocarburo.
Modelo numéricoa
48
Modelación y solución La ecuación general de transporte sirve como la base para la formulación del modelo, ya que a partir de ella se obtienen una expresión que representa el efecto de la hidrodinámica y la meteorología sobre la mancha de petróleo, y los procesos de transferencia de masa considerados (evaporación, disolución, dispersión vertical y emulsificación). Tanto la ecuación de continuidad como la de movimiento definidas son discretizadas empleando la técnica de volúmenes finitos, luego el sistema de ecuaciones resultante es resuelto empleando el algoritmo de solución SIMPLEST (Patankar y Sapalding, 1972). Evaluación Para la evaluación del modelo propuesto se considera una metodología basada en la comparación de los datos experimentales y los datos de calculados, por medio del análisis del error sistemático y aleatorio. A continuación se describe en cada una de los elementos introducidos arriba con el fin de que el lector tenga una clara idea de la forma como se formuló, resolvió y evaluó el modelo propuesto.
4.1 La dinámica computacional de fluidos Entre las ramas de la Mecánica de Fluidos, la Dinámica de Fluidos Computacional es quizá la que ha experimentado, comparativamente, un mayor desarrollo durante los últimos años. Desde su aparición en los años 60 y su desarrollo en centros especializados en los años 70 y 80, la simulación en computadoras del flujo de fluidos, la transferencia de calor y las reacciones químicas está encontrando rápidamente su camino en un número creciente de unidades de investigación y desarrollo de empresas de ingeniería. A ello, contribuye sin duda el constante incremento de la relación potencia - precio de las computadoras y la aparición de métodos sofisticados de simulación, cada vez más precisos, a menudo atractiva y empaquetados en forma de códigos comerciales. Por tanto, la CFD se está convirtiendo rápidamente en un componente indispensable dentro de la gama de utilerías del ingeniero o investigador interesado en las simulaciones. Los códigos CFD están estructurados en torno a algoritmos numéricos que pueden abordar problemas de fluidos. A fin de proporcionar acceso fácil a sus poderes de resolución, todos los paquetes CFD comerciales incluyen interfases de usuario sofisticadas para introducir los parámetros del problema y examinar los resultados.
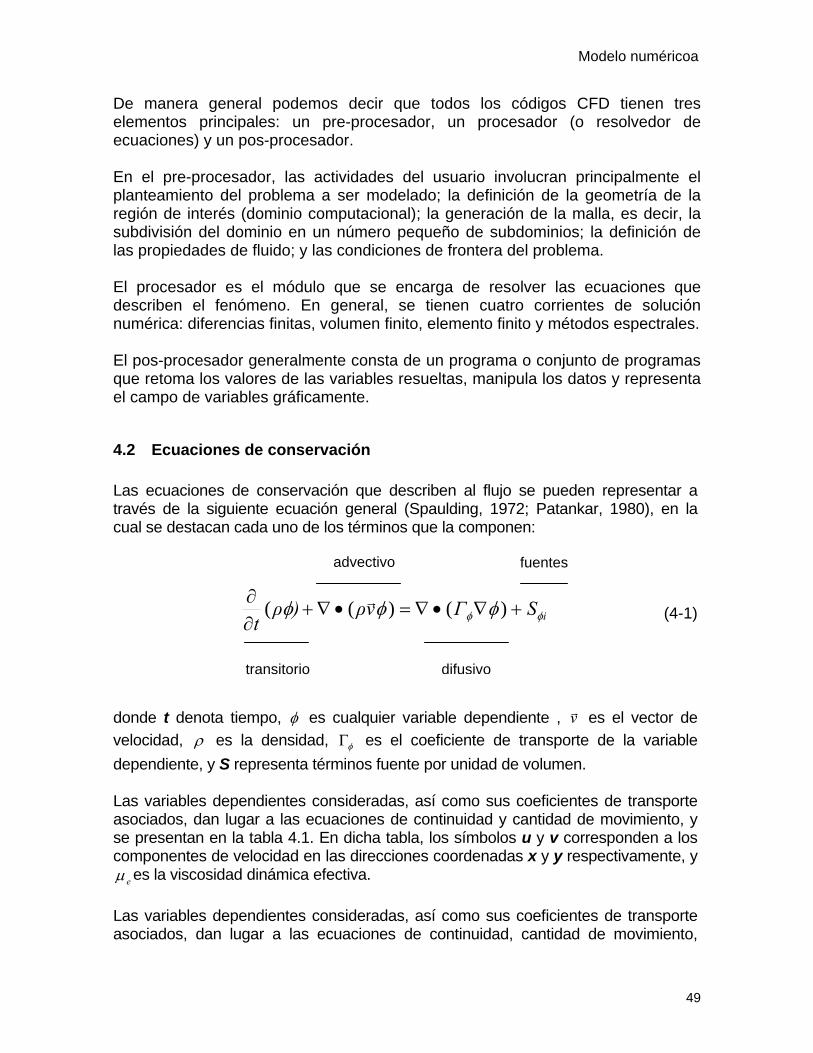
Modelo numéricoa
49
De manera general podemos decir que todos los códigos CFD tienen tres elementos principales: un pre-procesador, un procesador (o resolvedor de ecuaciones) y un pos-procesador. En el pre-procesador, las actividades del usuario involucran principalmente el planteamiento del problema a ser modelado; la definición de la geometría de la región de interés (dominio computacional); la generación de la malla, es decir, la subdivisión del dominio en un número pequeño de subdominios; la definición de las propiedades de fluido; y las condiciones de frontera del problema. El procesador es el módulo que se encarga de resolver las ecuaciones que describen el fenómeno. En general, se tienen cuatro corrientes de solución numérica: diferencias finitas, volumen finito, elemento finito y métodos espectrales. El pos-procesador generalmente consta de un programa o conjunto de programas que retoma los valores de las variables resueltas, manipula los datos y representa el campo de variables gráficamente.
4.2 Ecuaciones de conservación Las ecuaciones de conservación que describen al flujo se pueden representar a través de la siguiente ecuación general (Spaulding, 1972; Patankar, 1980), en la cual se destacan cada uno de los términos que la componen:
iSΓvρ)ρt φφ φφφ +∇•∇=•∇+∂∂ )()(( r
(4-1)
donde t denota tiempo, φ es cualquier variable dependiente , vr es el vector de velocidad, ρ es la densidad, φΓ es el coeficiente de transporte de la variable dependiente, y S representa términos fuente por unidad de volumen. Las variables dependientes consideradas, así como sus coeficientes de transporte asociados, dan lugar a las ecuaciones de continuidad y cantidad de movimiento, y se presentan en la tabla 4.1. En dicha tabla, los símbolos u y v corresponden a los componentes de velocidad en las direcciones coordenadas x y y respectivamente, y µ e es la viscosidad dinámica efectiva. Las variables dependientes consideradas, así como sus coeficientes de transporte asociados, dan lugar a las ecuaciones de continuidad, cantidad de movimiento,
transitorio
advectivo
difusivo
fuentes

Modelo numéricoa
50
conservación y turbulencia, y se presentan en la Tabla 4-1. En dicha tabla, los símbolos u y v corresponden a los componentes de velocidad en las direcciones coordenadas x y y respectivamente; Cp es la concentración del petróleo, en kilogramos por unidad de volumen; k es la energía cinética turbulenta, y ε la rapidez de disipación de la energía cinética; µ l es la viscosidad dinámica laminar, µ t la viscosidad dinámica turbulenta, y la suma de las dos viscosidades se define como la viscosidad dinámica efectiva, µ e ; pρα , es el producto de la densidad del medio continuo, por la difusividad del petróleo en el cuerpo de agua en m/s2; σ k y σ ε son coeficientes de difusión empíricos empleados en el modelo de turbulencia que se describe en la siguiente sección.
Tabla 4.1 Coeficientes de transporte para cada variable
Ecuación φ Γφ
Continuidad 1 0
Cantidad de movimiento u, v µ e
Conservación de petróleo Cp pρα
Energía c. turbulenta K ) / + ( ktl σµµ
Rapidez de disipación ε ) / + ( tl σµµ ε Modelo de turbulencia El modelo de turbulencia utilizado para el caso bidimensional es el k-ε (Harlow y Nakayama, 1968); en donde la energía cinética turbulenta k, y su rapidez de disipación ε , caracterizan la escala de velocidad y de longitud del movimiento turbulento respectivamente. Los términos fuente para la ecuación de conservación de k y ε son:
) - P ( = S kk ερ (4-2)
( ) k C - P C = S 2k1εερεεε (4-3)
donde Pk es la rapidez de producción de k. La viscosidad turbulenta se calcula con los valores locales obtenidos de k y ε empleando la relación:
ερµ µ / k C = 2t (4-4)
La constantes turbulentas se muestran en la tabla 4-2 de acuerdo a Launder y Spaulding (1972) son:

Modelo numéricoa
51
Tabla 4-2. Constantes del modelo k-ε
µC kσ Eσ EC1 EC2 0.09 1.0 1.314 1.44 1.92
Condiciones de frontera Para el caso en cuestión, el flujo presenta condiciones de frontera tanto en el fondo como en la superficie libre, como se ha expuesto en las secciones previas. Se describen en primer término las condiciones empleadas para el fondo del cuerpo de agua, el cual se considera como una superficie sólida sujeta a efectos de fricción; posteriormente se presentan las condiciones de frontera para la superficie libre, las cuales en este caso incluyen el efecto del viento. • Superficies sólidas Como condición de frontera para las superficies sólidas, el efecto de la fricción que se incluye en las ecuaciones de cantidad de movimiento, se calcula a partir del esfuerzo cortante de pared local. Dicho esfuerzo cortante se obtiene siguiendo el procedimiento descrito por Rodi (1993), el cual emplea las funciones de pared típicas para flujos con rozamiento, y consiste básicamente en especificar las condiciones de frontera en un punto externo a la subcapa viscosa, donde la Ley Logarítmica es válida y la turbulencia se puede considerar en equilibrio local. Para tal punto, a una distancia δ de la superficie sólida, la velocidad resultante paralela a dicha superficie se determina como:
) y E ( n L U = U +*
res κ (4-5)
donde κ es la constante de Von Karman igual a 0.435, E es un factor de rugosidad, igual a 9.0 para superficies lisas, y la velocidad de fricción τU está dada por:
) / ( U 1/2 ρττ = (4-6) siendo τ el cortante de pared, y la distancia adimensional y+ se define como:
U
= y+
νδτ (4-7)
donde ν es la viscosidad cinemática. Las condiciones de frontera para la energía cinética turbulenta y su rapidez de disipación también se aplican para el mismo punto y están dadas por:
Modelo numéricoa
52
C U = k 1/2 - µτ
2 (4-8)
) k ( / U = δε τ3 (4-9)
• Superficie libre Por lo que a la superficie libre corresponde, el efecto del viento es introducido a través de un esfuerzo cortante aplicado sobre la superficie de acuerdo a la ecuación:
210U C = ad ρτ (4-10)
donde Cd es el coeficiente de fricción para el cual se asignó el valor propuesto por Wu (1980) descrito en el capítulo 3, aρ es la densidad del aire y 10U es la velocidad del aire a 10 metros sobre el nivel del mar. Términos fuente Dentro de los términos fuente se consideran los efectos de arrastre del viento y los procesos de transferencia de masa, a partir de los modelos matemáticos de evaporación, disolución, dispersión vertical y emulsificación analizados en el capítulo 3, sección 3.2.3. Los procesos de transferencia de masa actúan como sumideros de la concentración de petróleo. Evaluación de Propiedades Para la evaluación de las propiedades del petróleo (densidad y viscosidad), por evaporación y emulsificación, se emplean las expresiones matemáticas descritas en el capítulo anterior en la sección 3.2.4.
4.3 Método de solución Los métodos de solución de ecuaciones son variados, por lo que para discretizar las ecuaciones de conservación pueden emplearse, diferencias finitas (basadas en desarrollos de series de Taylor), volúmenes finitos (basados en integración de volúmenes de control), elementos finitos (basados en principios variacionales) y métodos espectrales (basados en series de Fourier). A favor del método de volúmenes finitos están: la forma conservativa de sus ecuaciones, la facilidad de implementación de los modelos físicos, la sencillez conceptual y la eficacia computacional. Esté es el método empleado en este trabajo.
Modelo numéricoa
53
Método de volúmenes finitos En la técnica de solución de volumen finito el dominio de solución es subdividido en pequeños volúmenes de control, asociando a cada uno de ellos un punto nodal. Las variables escalares y la presión son almacenadas en dichos nodos, mientras que las velocidades son almacenadas en las caras de los volúmenes localizadas entre los puntos nodales. De esta manera, los volúmenes de control para las velocidades quedan desfasados con respecto a los empleados para las variables escalares. Una descripción más amplia del método de volúmenes finitos se encuentra en el anexo 2. Algoritmo de solución El algoritmo de solución se basa en el procedimiento iterativo de Patankar y Spalding (1972), SIMPLE, modificado de acuerdo al algoritmo de Spalding (1982), SIMPLEST. En términos generales, las variables escalares se resuelven utilizando el método implícito de Stone (1968). En seguida, las velocidades se obtienen al resolver las ecuaciones de cantidad de movimiento utilizando los valores de presión de la iteración previa, posteriormente la ecuación de continuidad es ajustada, resolviendo una ecuación de corrección de presión que determina los ajustes requeridos para las velocidades y las presiones. Este procedimiento es repetido varias veces hasta que la solución cumple con un criterio de convergencia especificado. Convergencia de la solución Como todo procedimiento iterativo, la convergencia del método se logra a través de una cuidadosa linealización de los términos fuente, junto con una apropiada relajación de las variables de flujo. Se emplearon 2 tipos de relajación: la inercial y la lineal. La relajación inercial empleada para las velocidades, resulta de agregar al término fuente de la variable φ la expresión:
) - ( = S Ppre P,r , φφλφ (4-12) donde λ es el llamado término de inercia definido por:
t V
= f
pρλ (4-13)
donde Vp es el volumen de la celda, tf es el intervalo de tiempo falso y el subíndice p se refiere al valor de la iteración previa. Para la presión se empleó la relajación lineal dada por:
φαφαφ precalc ) - 1 ( + = (4-14) donde α es el factor de relajación y el subíndice calc se refiere al valor calculado. El criterio de convergencia es tal que para cada variable, la suma de los valores absolutos

Modelo numéricoa
54
de los residuales en todo el dominio sea menor del 1% del valor de referencia asignado a cada variable. Un requerimiento adicional es que los valores de las variables dependientes monitoreados en una localidad del dominio, no cambien en más del 0.1% entre ciclos sucesivos de iteración.
4.4 Evaluación del modelo propuesto En los últimos 30 años, más de 50 modelos de derrames de petróleo han sido implementados, por lo que se ha hecho necesario homogeneizar criterios para evaluar los modelos de acuerdo a su finalidad (García-Martínez, 1999). Un primer paso es responder las siguientes preguntas: 1. ¿Cuáles son las ecuaciones fundamentales o algoritmos que representan los
procesos del derrame de petróleo? 2. ¿Qué precisión tienen los métodos numéricos empleados? 3. ¿Qué tan robusto y libre de error es el modelo computacional? 4. ¿Qué tan sensibles son los resultados del modelo al cambio de los parámetros
del modelo? 5. ¿Qué tan grado de ajuste tiene el modelo para predecir con el evento real? 6. ¿Ha sido calibrado el modelo? 7. ¿Ha sido verificado el modelo luego de ser calibrado, con datos de campo
diferentes a los empleados para su calibración? Considerando lo anterior, es conveniente cumplir con los siguientes requerimientos: 1. Los algoritmos que describen la trayectoria y los procesos deben ser lo
suficientemente precisos. 2. Todos los algoritmos y métodos numéricos deben ser probados
independientemente y estimado el porcentaje de error, a través de comparaciones con datos experimentales.
3. El modelo debe ser lo suficientemente robusto y libre de errores de programación.
4. El modelo debe ser probado con datos de campo, una vez se han satisfecho los requerimientos anteriores.
No se ha escrito mucho sobre la evaluación estadística de modelos de derrames de petróleo. Sin embargo, en el campo de la modelación matemática de la dispersión atmosférica si ha sido estudiado y descrito ampliamente, por lo que se aplicarán las metodologías recomendados para este tipo de modelos. Antes de los ochenta, la metodología que se empleaba para determinar el grado de ajuste que los datos proporcionados por un modelo numérico tenían con los datos experimentales, se limitaba a un análisis de correlación entre los datos observados y los datos predichos por el modelo. Sin embargo, a medida que se fue ampliando la complejidad y el número de modelos, fue necesario desarrollar métodos que permitieran cuantificar con mayor detalle las diferencias entre los dos

Modelo numéricoa
55
grupos de datos y a partir de allí solucionar problemas de modelación bajo criterios específicos (Zannetti, 1990). Desde comienzos de los años ochenta, se han desarrollado índices de evaluación estadística que pretenden determinar qué tan bien se ajusta el modelo a los datos experimentales, basados en la comparación del valor promedio de los datos observados y los predichos, su desviación estándar, coeficientes de correlación, errores normalizados y distribuciones del error, entre otros (Canepa y Builtjes, 1999; Oleson, 1995; , Demerjian, 1985; Fox, 1981; Wilmott, 1981). Una visión estadística del proceso de evaluación de un modelo para predecir el comportamiento de un fenómeno es presentada por Vekatram (1982, 1983 y 1999), el cual explica la diferencia entre los valores observados y los valores predichos por el modelo de la siguiente manera:
( )βαα ,eeeeOO pmpo ++==− (4-15)
donde: Oo, es el valor observado, OP, el valor predicho por el modelo, me , el error total, Pe , el error asociado a la formulación del modelo propuesto, αe , el error asociado al modelo de los datos de entrada y ( )βα ,e , error relativo al azar, una parte explicado por la medición de los parámetros de entrada y otra parte a la medición de los datos observados. Una técnica de comparación que permite obtener suficiente información acerca de los grupos de datos es la de Willmott (1981), cuyo uso se ha generalizado (Battaglia, 1999; Cooper, 1999 y Hill et al., 1999), ya que permite distinguir entre las diferencias sistemáticas y no sistemáticas entre los datos observados y simulados. Su aplicación es sencilla, siguiendo los siguientes pasos: 1. Se calcula del coeficiente de ajuste, d
( )
[ ]2
1
''
1
2
1
∑
∑
=
=
+
−−=
N
iii
N
iii
OP
OPd (4-16)
donde: Pi, es el dato modelado, Oi, es el datos observado, N, es el número de datos, OPP ii −=' y OOO ii −=' .
2. Posteriormente, se halla la pendiente (b) y la intersección con las ordenadas (a) de línea recta esperada entre los datos observados (variable independiente) y los datos simulados.
3. Luego se calcula iP)
, en función de la pendiente e intersección calculados, así:
ii bOaP +=)
(4-17)

Modelo numéricoa
56
4. Con base en a, b, iP
), Pi, Oi, se calculan los errores cuadráticos total,
sistemático, aditivo, proporcional, interdependiente y aleatorio, tal como sigue:
SA MSEMSEMSE += (4-18)
IPaS MSEMSEMSEMSE ++= (4-19)
( )∑=
−=N
iii OP
NMSE
1
21 (4-20)
( )∑=
−=N
iiiA PP
NMSE
1
21 ) (4-21)
( )∑=
−=N
iiiS OP
NMSE
1
21 ) (4-22)
2aMSEa = (4-23)
( ) ∑=
−=N
iiP O
NbMSE
1
22 11 (4-24)
( )ObaMSEI 12 −= (4-25)
donde: MSE, es el error cuadrático total, MSES, es el error cuadrático sistemático, MSEA, es el error aleatorio, MSEa, es el error cuadrático aditivo, MSEp, es el error cuadrático proporcional y MSEI, es el error cuadrático interdependiente.
La interpretación de cada uno de los errores cuadráticos permite explicar las diferencias entre los datos experimentales y los datos simulados. Si la proporción de MSEs es más grande que la de MSEA, la diferencia entre los datos se debe principalmente a las características del modelo; en caso contrario la diferencia de los datos se debe al azar de los datos experimentales. MSES se puede explicar con detalle con base en MSEa, MSEp y MSPI, sin embargo la interdependencia entre estos tres valores no permite determinar con facilidad la relación que existe entre su magnitud y el error cuadrático sistemático y por el contrario pueden confundir, por lo que Willmott (1981) sugiere que su cálculo se realice a discreción del experimentador y con fines específicos. En este trabajo se empleo la técnica de Willmott (1981), presentada anteriormente, con el fin de determinar proporción de las diferencias entre los datos

Modelo numéricoa
57
experimentales y los simulados se debe al modelo (error sistemático) y al azar (error aleatorio), acompañada de la estimación del coeficiente de ajuste que permite integrar el análisis por medio de un indicador que varia de 0 a 1, siendo 1, cuando no existe diferencias entre el modelo y la realidad.

58
CAPÍTULO 5 5 RESULTADOS Para evaluar los modelos propuestos en el presente trabajo, se comparó la solución numérica del modelo propuesto con resultados de pruebas de campo (Lerh, 1984; Daling et al, 1999; Li Zhi-Wei, 2000). Por lo tanto, primero se describen los datos experimentales de referencia y luego se presentan las comparaciones con el modelo propuesto, el cual fue descrito en el capítulo 4, pasando por la definición de las condiciones de simulación. El capítulo se debe leer acompañado de los anexos 4 a 6, donde se encuentra una descripción detallada de los experimentos de campo, las condiciones de simulación y los resultados de la evaluación del modelo propuesto, respectivamente.
5.1 Experimentos de campo El principal criterio empleado para la selección de los datos de campo, fue la disponibilidad de información de los resultados de las pruebas realizadas y las condiciones experimentales, por lo cual se seleccionaron tres trabajos: Lerh et al. (1984, 1984a), quienes estimaron el área y espesor de tres derrames de petróleo en el Golfo de Arabia por medio de fotografías aéreas, y Daling et al (1999) y Li Zhi-Wei et al (2000), quienes reportaron resultados experimentales de dos pruebas de derrames de petróleo en el mar del Norte, en las cuales se midió la evaporación, la emulsificación y el cambio de la viscosidad (ver anexo 4).
5.1.1 Experimento de estimación del área de una mancha de petróleo
Lerh et al (1984, 1984a) realizaron un experimento en el Golfo de Arabia para determinar cuál era la forma de evolución del área de tres derrames de petróleo (ver figura 5-1). Primero se liberaron 2.06 m3 de crudo arábico pesado, después 3.02 m3 de crudo arábico ligero y finalmente 8.11 m3 del mismo crudo, en las fechas y condiciones indicadas en el tabla 5-1. A estos derrames provocados se les realizó un seguimiento por medio de fotografías aéreas que posteriormente fueron analizadas dando como resultado una serie de correlaciones polinomiales
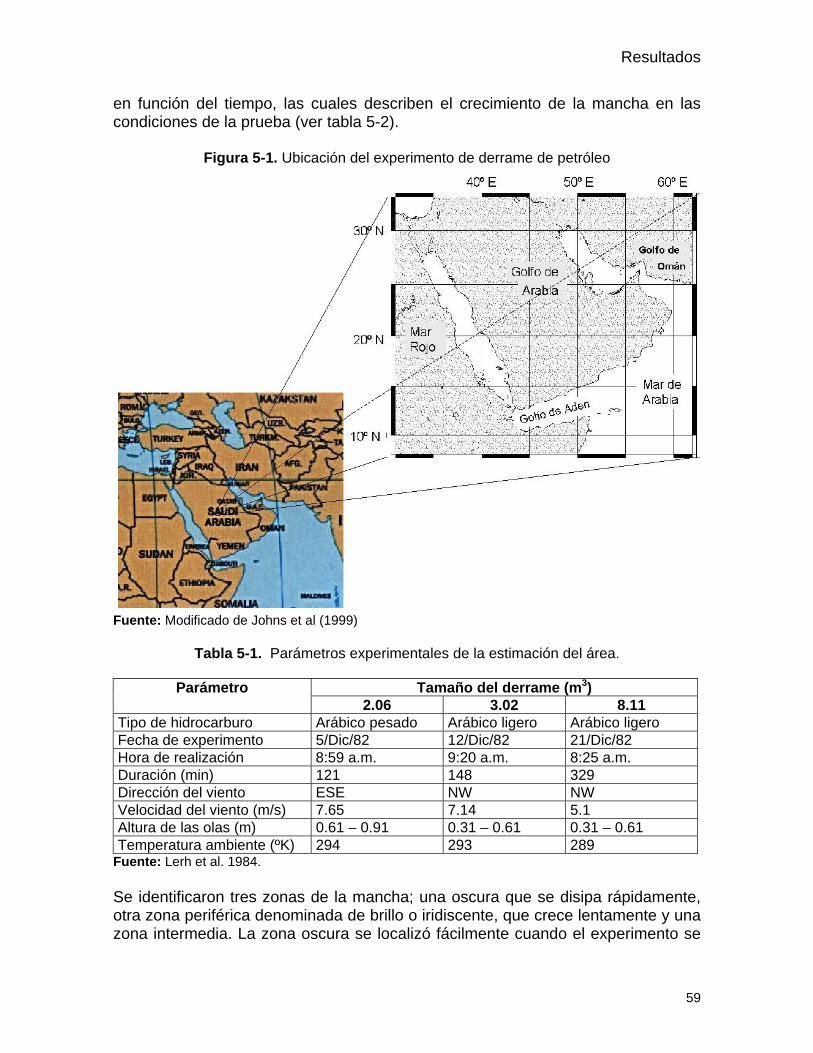
Resultados
59
en función del tiempo, las cuales describen el crecimiento de la mancha en las condiciones de la prueba (ver tabla 5-2).
Figura 5-1. Ubicación del experimento de derrame de petróleo
Fuente: Modificado de Johns et al (1999)
Tabla 5-1. Parámetros experimentales de la estimación del área.
Tamaño del derrame (m3) Parámetro 2.06 3.02 8.11
Tipo de hidrocarburo Arábico pesado Arábico ligero Arábico ligero Fecha de experimento 5/Dic/82 12/Dic/82 21/Dic/82 Hora de realización 8:59 a.m. 9:20 a.m. 8:25 a.m. Duración (min) 121 148 329 Dirección del viento ESE NW NW Velocidad del viento (m/s) 7.65 7.14 5.1 Altura de las olas (m) 0.61 – 0.91 0.31 – 0.61 0.31 – 0.61 Temperatura ambiente (ºK) 294 293 289
Fuente: Lerh et al. 1984. Se identificaron tres zonas de la mancha; una oscura que se disipa rápidamente, otra zona periférica denominada de brillo o iridiscente, que crece lentamente y una zona intermedia. La zona oscura se localizó fácilmente cuando el experimento se

Resultados
60
realizó con crudo pesado; esta zona se encarga de alimentar a las otras dos zonas del derrame. Lehr et al (1984), sugieren que la dificultad para poder encontrar una correlación que se ajuste a todas las zonas de la mancha se debe a los regímenes de flujo en los cuales se encuentran, tal como se describió en el capítulo 3 de acuerdo a Fay (1971). Encontraron que el crecimiento de la mancha de 3.02 m3 y 8.11 m3 se explica mejor por medio de una lineal, ya que su crecimiento es más rápido debido a las propiedades del hidrocarburo (viscosidad y densidad menores), y a las condiciones experimentales (como la velocidad del viento), las cuales se presentan en la tabla 5-1.
Tabla 5-2. Ecuaciones para determinar el área de los derrames de petróleo
Volumen (m3) Área Ecuación*
Oscura A=0.148+0.439t-0.005t2 2.06 Iridiscente A=-8.32+2.27t
Oscura A=0.485+0.183t 3.02 Iridiscente A=-0.549+0.638t Oscura A=0.308+0.336t-0.00405t2 8.11 Iridiscente A=-21.0+2.81t
Fuente: Lerh et al. 1984. *: A es el área en miles de metros cuadrados y t es el tiempo en minutos.
Los resultados de los experimentos de campo de Lerh et al (1984) se pueden observar en la tabla 5-3, en la cual no se incluyen datos para los derrames de 2.06 y 3.02 m3, debido a que en estos casos los autores solo presentaron las ecuaciones halladas para el cálculo del área.
Tabla 5-3. Resultados de la estimación del área para el derrame de 8.11 m3.
Tiempo (min) Zona oscura (m2) Área Zona iridiscente (m2) 25 11,428 50,000 30 10,714 64,285 40 14,000 85,714 60 15,714 128,571 80 25,714 200,000
100 26,429 250,000 280 73,571 742,857 295 55,714 828,571
Fuente: Lerh et al. 1984. La tabla 5-4 presenta los valores experimentales del espesor medidos para los derrames de 3.02 y 8.11 m3, hallados con base en el análisis de fotografías aéreas, los cuales confirman que el espesor de la mancha de petróleo es variable no solo en el tiempo, sino a lo largo de la mancha, por lo que hallar una función de espesor promedio es solo una aproximación de la realidad, tal como lo presenta en la tabla 5-5 (Lerh et al, 1984a). Los espesores de los derrames de 3.02 y 8.11 m3 fueron agrupados a criterio del autor, ya que estas pruebas fueron realizadas

Resultados
61
bajo condiciones similares y con el mismo tipo de crudo (ver tabla 5-1), por lo que se explica que para un mismo tiempo se encuentren varios valores de espesor, no solo debido a la variación longitudinal de la mancha.
Tabla 5-4. Espesores experimentales de la zona oscura
para los derrames de 3.02 y 8.11 m3
Tiempo (min) Espesor Experimental (m e–4) 15 1.75 25 5.25 30 2.50 30 4.20 30 5.90 30 9.70 30 10.25 30 8.70 30 2.50 35 4.30 40 0.50 50 2.30 50 0.40 55 1.50 60 19.50 60 1.00 65 9.20 75 1.40
100 1.50 145 6.30 295 0.30 320 2.00 320 0.50 325 0.40
Fuente: Lerh et al. 1984a.
Tabla 5-5. Espesores promedios calculados para la zona oscura de los derrames de 3.02 y 8.11 m3
Tiempo (min) Espesor promedio calculado (m e–4
) 10 3.00 60 2.25
110 2.00 160 1.50 210 1.25 260 1.00 310 0.50 360 0.40
Fuente: Lerh et al. 1984a.

Resultados
62
Lerh et al. (1984) no determinaron algunas de las variables hidrodinámicas necesarias para la modelación numérica del experimento, por lo que fue necesario consultar información secundaria para determinar las velocidades de las corrientes de agua y el ángulo relativo con respecto a la dirección del viento. En las figuras 5-2 a 5-4 se presenta en forma general el comportamiento de la batimetría, meteorología e hidrodinámica del área del experimento de acuerdo a Johns et al (1999).
Figura 5-2. Batimetría del experimento de derrame de petróleo
Fuente: Modificado de Johns et al (1999)
Figura 5-3. Dirección de las corrientes marinas modificadas por los efectos del viento en el mes de enero en el área de los experimento de derrames de petróleo
Fuente: Modificado de Johns et al (1999)

Resultados
63
Figura 5-4. Hidrodinámica general del área del
experimento de derrame de petróleo
Fuente: Modificado de Johns et al (1999)
5.1.2 Experimentos para estimar los fenómenos de pérdida de masa y los cambios de propiedades
Para la comparación de los fenómenos de pérdida de masa y los cambios de propiedades se emplearon los experimentos reportados por Daling et al (1999) y Li Zhi-Wei et al (2000), cuyas condiciones experimentales y resultados se describen a continuación. Pruebas de campo de Daling et al (1999) En la zona noruega del mar del Norte se realizaron dos pruebas de campo, con el fin de determinar cómo se comportaba un derrame de petróleo bajo diferentes condiciones ambientales, según lo reportaron Daling et al (1999). Estos estudios de campo fueron realizados con la colaboración de la Asociación de Empresas Petroleras de Noruega (NOFO) y la Autoridad Ambiental Noruega (NPCA). Las pruebas de campo se realizaron en Junio de 1994 y Agosto de 1995, con las siguientes características:

Resultados
64
1. La prueba de junio de 1994 comprendió 2 derrames de 20 m3, de crudo parafinado tipo Sture Blend. Las condiciones de viento variaron entre 7 y 10 m/s y la temperatura promedio fue de 283 K, durante los 2.5 días que duró el ensayo (ver tabla 5-6).
Los resultados de la evaporación fueron tratados en forma separada para cada uno de los derrames, mientras que la viscosidad se reportó de manera conjunta, tal como se observa en la tabla 5-7.
Tabla 5-6. Características de los experimentos de Junio de 1994
Características Tipo de crudo Sture Blend Volumen 20 m3
Número de derrames 2 Velocidad del viento 7 – 10 m/s Densidad 840 kg/m3 Temperatura 283 K
Fuente: Daling et al. 1999.
Tabla 5-7. Resultados experimentales de junio de 1994 (a) evaporación
Tiempo (min) % Evaporación Derrame Charlie
15 5% 36 15% 63 20%
180 26% 390 30% 780 34%
Derrame Tango 60 19%
120 25% 240 23% 300 24% 330 27% 420 29% 480 30%
(b) viscosidad Tiempo (min) Viscosidad (m2/s)
0 4.76E-05 15 9.52E-05 36 1.43E-04 60 4.76E-04
180 9.52E-04 348 4.76E-03 708 7.14E-03
1,560 1.07E-02 Fuente: Daling et al. 1999.

Resultados
65
2. En agosto de 1995 las pruebas se realizaron con crudo nafténico tipo Troll. Durante el primer día se provocaron tres derrames de 15 m3 cada uno, con unas condiciones de viento que variaron entre 6 y 9 m/s y una temperatura promedio de 288 K. Para el segundo día se provocaron dos derrames de 25 m3, en condiciones de relativa calma (la velocidad del viento varió entre 2 y 6 m/s), y la misma temperatura promedio del día anterior (ver tabla 5-8).
Tabla 5-8. Características de los experimentos de agosto de 1995
(a) primer día Características
Tres derrames iguales Tipo de crudo Troll Blend Volumen 15 m3 Número de derrames 3 Velocidad del viento 6 a 9 m/s Densidad 893 kg/m3 Temperatura 288 K
(b) segundo día Características
Dos derrames iguales Tipo de crudo Troll Blend Volumen 25 m3 Número de derrames 2 Velocidad del viento 2 a 6 m/s Densidad 893 kg/m3 Temperatura 288 K
Fuente: Daling et al. 1999. Los resultados experimentales de las pruebas realizadas en cada uno de los dos días de pruebas de agosto de 1995, fueron agrupados de forma conjunta tal como se presentan en las siguientes tablas.
Tabla 5-7. Resultados experimentales de agosto de 1995
(a) contenido de agua primer día Tiempo (min) % Contenido de
agua 15 5% 30 30%
132 56% 210 58% 420 73% 660 78%
1500 73% 1800 78%
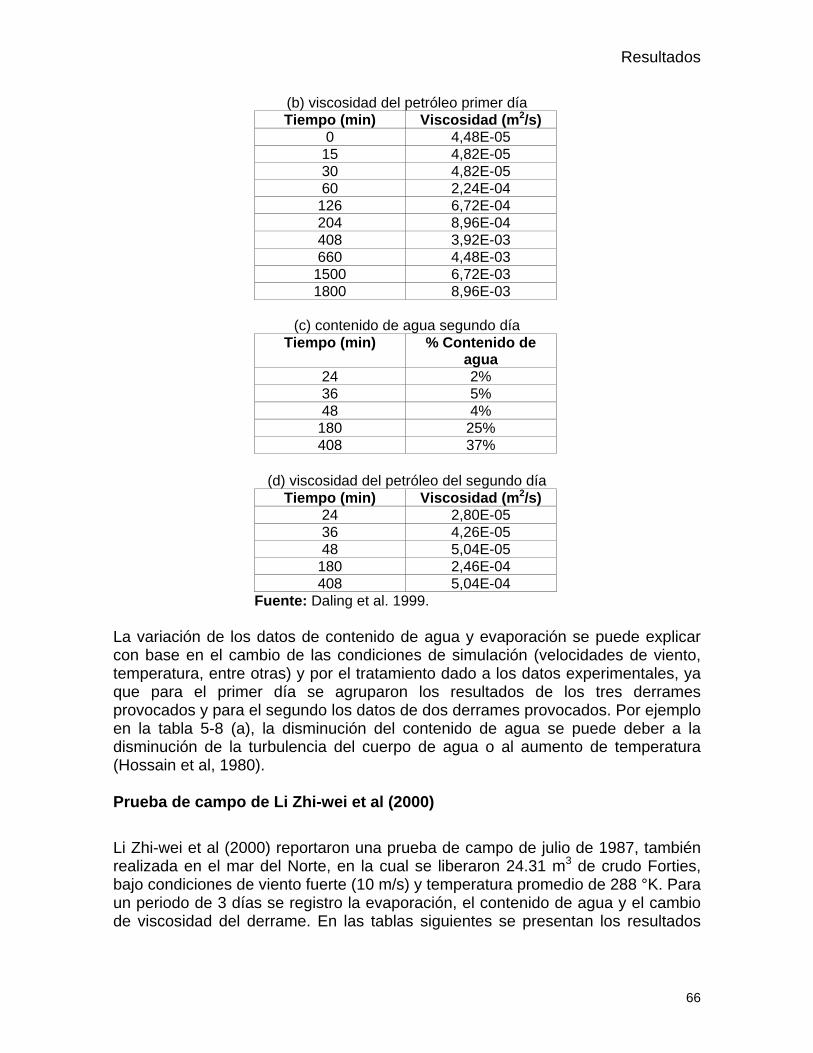
Resultados
66
(b) viscosidad del petróleo primer día Tiempo (min) Viscosidad (m2/s)
0 4,48E-05 15 4,82E-05 30 4,82E-05 60 2,24E-04
126 6,72E-04 204 8,96E-04 408 3,92E-03 660 4,48E-03
1500 6,72E-03 1800 8,96E-03
(c) contenido de agua segundo día
Tiempo (min) % Contenido de agua
24 2% 36 5% 48 4%
180 25% 408 37%
(d) viscosidad del petróleo del segundo día
Tiempo (min) Viscosidad (m2/s) 24 2,80E-05 36 4,26E-05 48 5,04E-05
180 2,46E-04 408 5,04E-04
Fuente: Daling et al. 1999. La variación de los datos de contenido de agua y evaporación se puede explicar con base en el cambio de las condiciones de simulación (velocidades de viento, temperatura, entre otras) y por el tratamiento dado a los datos experimentales, ya que para el primer día se agruparon los resultados de los tres derrames provocados y para el segundo los datos de dos derrames provocados. Por ejemplo en la tabla 5-8 (a), la disminución del contenido de agua se puede deber a la disminución de la turbulencia del cuerpo de agua o al aumento de temperatura (Hossain et al, 1980). Prueba de campo de Li Zhi-wei et al (2000) Li Zhi-wei et al (2000) reportaron una prueba de campo de julio de 1987, también realizada en el mar del Norte, en la cual se liberaron 24.31 m3 de crudo Forties, bajo condiciones de viento fuerte (10 m/s) y temperatura promedio de 288 °K. Para un periodo de 3 días se registro la evaporación, el contenido de agua y el cambio de viscosidad del derrame. En las tablas siguientes se presentan los resultados

Resultados
67
reportados por Li Zhi-wei, tal como se menciono antes las variaciones de los datos experimentales son explicadas por el cambio de las condiciones de simulación.
Tabla 5-8. Características de los experimentos de julio de 1987
Características
Tipo de crudo Forties Masa 20 Ton Volumen 24,31 m3 Velocidad del viento ND m/s Densidad 822,7 kg/m3 Temperatura ND K Fuente: Li Zhi-wei et al (2000)
Tabla 5-9. Resultados experimentales de julio de 1987
(a) evaporación
Tiempo (min) % Evaporación 86 28%
171 30% 557 34% 300 38%
1,371 40% 1,714 42% 2,014 42% 2,931 47% 3,214 49% 3,429 50% 4,543 46%
(b) contenido de agua Tiempo (min) % Contenido Agua
86 23% 129 50% 300 55%
1,371 58% 1,629 72% 1,971 67% 3,000 67% 3,086 62% 3,343 60% 4,371 58% 4,457 57% 4,500 60%

Resultados
68
(c) viscosidad del petróleo Tiempo (min) Viscosidad m2/s
0 1,82E-04 86 2,43E-04
171 6,08E-04 343 4,25E-03 600 1,82E-03
1,457 3,65E-03 1,671 1,22E-02 1,971 1,22E-02 3,000 1,22E-02 3,471 2,43E-02 4,586 1,22E-02
Fuente: Li Zhi-wei et al (2000)
5.2 Condiciones de la simulación numérica Para la simulación del experimento se utilizó un dominio bidimensional de 1,000 x 350 m (350,000 m2) en las direcciones Este – Oeste y Norte –Sur, respectivamente, con un espesor unitario (figura 5-5). Para comprobar la independencia de los resultados de la discretización del dominio, se realizaron varias corridas con diferentes números de celdas (500, 1,750 y 3,750) y se optó por emplear una división de 50 celdas en la dirección Este-Oeste (X) y 35 celdas en la dirección Norte-Sur (Y), con el fin de lograr una buena precisión de los resultados, ya que el cálculo del área depende de la discretización del dominio. También se encontró que la relación entre el tamaño de las celdas en la dirección Este-Oeste y Norte-Sur debe ser de 1 a 2, y que el tamaño de los intervalos especiales del dominio deben oscilar entre 10 y 50 metros. Con respecto a los intervalos de tiempo se observo que los resultados no dependen del intervalo seleccionado, sin embargo con el fin de comparar los resultados experimentales y los de simulación se emplearon intervalos de tiempo de 300 s. Los derrames simulados ocurren en condiciones de mar abierto en las cuales no se considera ningún impedimento de flujo debido a la costa, por lo que no hay condiciones de frontera para impedir su flujo. El inicio del derrame tiene lugar cerca del límite Oeste de la malla a 100 m de esta frontera y en el punto medio (175 m) en la dirección Norte – Sur.

Resultados
69
Figura 5-5. Malla numérica utilizada.
Para la simulación de las manchas de petróleo se prepararon dos archivos de definición de las condiciones del derrame, los cuales se pueden apreciar en el anexo 3. En el primero de ellos se define lo relacionado con la hidrodinámica del cuerpo de agua y en el segundo se definen las características de flujo del hidrocarburo, los procesos que se desean modelar (evaporación, disolución, dispersión vertical y emulsificación), así como la evaluación de los cambios de las propiedades del hidrocarburo (viscosidad y densidad).
5.3 Resultados y discusión En esta sección se presentan los resultados de la simulación de los experimentos de campo descritos al comienzo del capítulo. Inicialmente se describen los resultados de los modelos empleados para representar los diferentes procesos involucrados en un derrame (evaporación, disolución, dispersión y emulsificación), seguido de la estimación del cambio de propiedades del petróleo (densidad y viscosidad); posteriormente se muestra un análisis integrado de la evolución de los procesos, para finalizar con la presentación de los resultados de la estimación del área y espesor de la mancha. Los resultados del área y espesor involucran un análisis de la influencia que sobre estos tienen las condiciones de la zona donde ocurre el derrame (hidrodinámica y meteorología) y los procesos de transferencia de masa. Vale la pena aclarar que aún cuando la presentación de los resultados se hace en forma separada, existe una estrecha dependencia entre ellos, por lo que únicamente es posible su modelado considerándolos de manera conjunta. Los archivos de datos empleados para la simulación numérica se encuentra en el anexo 4 (archivo q1 y ground.f). La comparación entre las datos experimentales y

Resultados
70
de modelación se acompañan de la evaluación de su ajuste, la cual se hace empleando la técnica descrita en la sección 4.4 (ver el anexo 5).
5.3.1. Procesos de transferencia de masa
5.3.1.1. Evaporación Discusión de los resultados de estimación de la evaporación Con el fin de evaluar los modelos de Mackay (1980), Reed et al (1988), Findikakis et al (1993) y Fingas (1996), se simuló el experimento de laboratorio realizado por Mackay et al (1975), donde se reportan resultados de la evaporación de la gasolina, para la cual se conoce su composición. Los parámetros empleados en la simulación se observan en el anexo 4, sección 1. En la figura 5-6 se observan los resultados de la comparación de los modelos, los cuales muestran diferentes grados de ajuste. Sin embargo los modelos de pseudocomponentes solo pueden emplearse cuando se conozca la composición del crudo y los analíticos cuando estén disponibles las constantes experimentales de caracterización del crudo, esta observación se comprueba cuando se requiere modelar datos experimentales de crudos para los cuales no se conoce su composición, en cuyo caso los modelos de pseudocomponentes no pueden ser usados. Figura 5-6. Evaporación Gasolina, volumen 0.015 m3, temperatura 288 °K, viento 6.7 m/s
Fuente: Mackay et al, 1975.

Resultados
71
De los modelos de pseudocomponentes probados, los de Reed et al (1988) y Mackay et al (1980), presenta un ajuste similar, igual a 0.96 y el de Findikakis (1993), tiene un ajuste de 0.986. En cuanto al modelo analítico de Fingas (1996) se obtuvo un ajuste de 0.989 (ver tabla 5-10).
Tabla 5-10. Evaluación de los modelos de evaporación
Modelo de evaporación Ajuste MSEs % MSEs MSEu %MSEu MSE
Mackay 0.960 8.4 x 10-2 43 9.6 x 10-2 57 1.3 x 10-1
Reed 0.961 1.0 x 10-1 71 6.5 x 10-2 29 1.2 x 10-1
Findikakis 0.986 4.6 x 10-2 38 5.9 x 10-2 62 7.4 x 10-2
Fingas 0.989 5.5 x 10-2 80 2.8 x 10-2 20 6.2 x 10-2
Fuente: Anexo 6. La tabla 5-10, elaborada con respecto a los criterios de evaluación presentados en la sección 4.5, no permite tener claridad sobre cual de los modelos es el que mejor representa a los datos experimentales, ya que con ajustes mayores a 0.95 se podría pensar las expresiones usadas son adecuadas. Una simple observación de los datos graficados no concuerda parcialmente con los resultados de la evaluación de los modelos, ya que Findikakis et al (1993) y el de Fingas (1996) son los mas adecuados y de estos dos el de Findikakis sería el que menor porcentaje de error sistemático presenta, es decir es el modelo que mejor representa a los datos experimentales, pero los modelos de Mackay et al (1980) y Reed et al (1988), no son adecuados para la modelación de la evaporación. En está investigación se emplea principalmente la expresión propuesta por Fingas (1996), ya que es la única que cuenta con información disponible acerca de las constantes experimentales necesarias para la modelación de la evaporación. Relación de la evaporación y temperatura Como es de esperarse, la evaporación depende directamente de la temperatura del medio donde ocurre el derrame. Como ejemplo y a manera de ilustración en la siguiente figura se muestra cómo el porcentaje de masa evaporada es mayor a mayor temperatura; igualmente permite verificar la sensibilidad al cambio de temperatura del modelo analítico de Fingas (1996), empleado en esta investigación. Esta comparación se realizó con base en las condiciones experimentales de Mackay et al (1975), los cuales emplearon una temperatura de 288 K. Después de 10 minutos una diferencia de temperatura de 15 grados Kelvin conduce a un aumento del porcentaje de evaporación igual al 7% de la masa inicial; esté porcentaje tiene a estabilizarse en 18% a partir de la primera hora de evaporación.

Resultados
72
Simulación de los experimentos de campo de Daling et al (1999) y Li Zhi-Wei et al (2000) En la sección 5.1.2 se encuentran los datos experimentales obtenidos por los autores, los cuales fueron complementados con los valores de los coeficientes analíticos de evaporación para el modelo de Fingas (1996) suministrados por el Centro de Tecnología Ambiental de Canadá – CTAC (www.etcentre.org). De acuerdo a la información reportada por el CTAC los valores de los coeficientes de la ecuación 3-30 más adecuados para los crudos Forties y Sture Blend son: 4 y 3.8 para A y 0.1 y 0.08 para B, respectivamente. Los datos experimentales de la evaporación únicamente fueron medidos en los experimentos de Junio de 1994, realizado con crudo Sture Blend y Julio de 1987, realizado con crudo Forties (Dalliing y Strom, 1999; Li Zi-wei et al, 2000). En la figura 5-8 se observa la comparación de los datos experimentales y los resultados de su simulación empleando el modelo de evaporación Fingas (1996). Tanto el crudo Forties como el crudo Sture Blend son petróleos ligeros, cuyas densidades y viscosidades cinemáticas son 822, 840 kg/m3 y 1.82e-4, 4.76e-5 m2/s respectivamente. Figura 5-7. Efecto de temperatura sobre la evaporación de Gasolina, volumen 0.015 m3,
temperatura 273 a 303 °K, viento 6.7 m/s.
Fuente: Mackay et al, 1975.
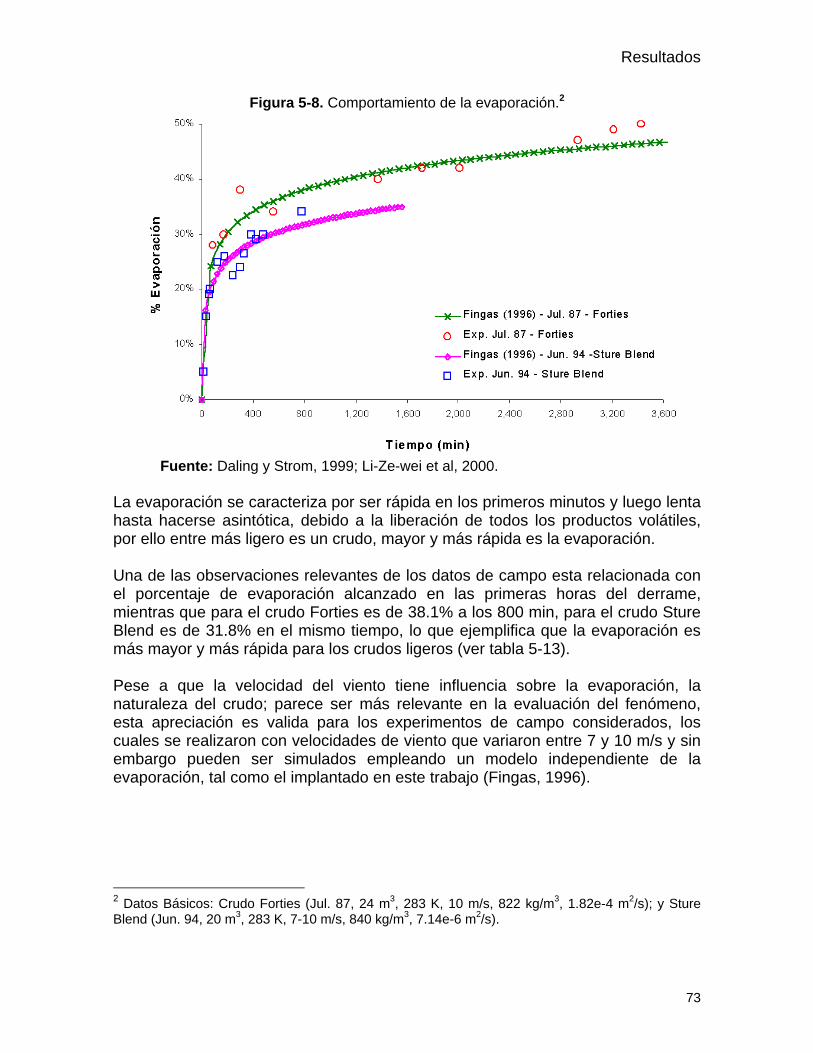
Resultados
73
Figura 5-8. Comportamiento de la evaporación.2
Fuente: Daling y Strom, 1999; Li-Ze-wei et al, 2000. La evaporación se caracteriza por ser rápida en los primeros minutos y luego lenta hasta hacerse asintótica, debido a la liberación de todos los productos volátiles, por ello entre más ligero es un crudo, mayor y más rápida es la evaporación. Una de las observaciones relevantes de los datos de campo esta relacionada con el porcentaje de evaporación alcanzado en las primeras horas del derrame, mientras que para el crudo Forties es de 38.1% a los 800 min, para el crudo Sture Blend es de 31.8% en el mismo tiempo, lo que ejemplifica que la evaporación es más mayor y más rápida para los crudos ligeros (ver tabla 5-13). Pese a que la velocidad del viento tiene influencia sobre la evaporación, la naturaleza del crudo; parece ser más relevante en la evaluación del fenómeno, esta apreciación es valida para los experimentos de campo considerados, los cuales se realizaron con velocidades de viento que variaron entre 7 y 10 m/s y sin embargo pueden ser simulados empleando un modelo independiente de la evaporación, tal como el implantado en este trabajo (Fingas, 1996).
2 Datos Básicos: Crudo Forties (Jul. 87, 24 m3, 283 K, 10 m/s, 822 kg/m3, 1.82e-4 m2/s); y Sture Blend (Jun. 94, 20 m3, 283 K, 7-10 m/s, 840 kg/m3, 7.14e-6 m2/s).

Resultados
74
5.3.1.2. Disolución y dispersión vertical Para estos fenómenos no se encontraron datos de campo que permitieran comparar los resultados obtenidos; sin embargo de acuerdo a las estimaciones de los fenómenos (Spaulding, 1988; NOAA, 1992), presentadas en los capítulos 2 y 3, es posible inferir que los resultados obtenidos son adecuados, basados en el hecho de que la disolución no representa un porcentaje mayor al 5% y la dispersión vertical por su parte es aproximadamente del 40% o mayor, luego de los primeros días del derrame, ambas en condiciones normales, tal como se ilustra en las figuras 5-9 y 5-10. Tanto para la disolución como para la dispersión se modelaron los cuatro experimentos descritos al comienzo del capítulo (sección 5.1.2), los cuales corresponden a pruebas con crudo liviano (Forties y Sture Blend) y crudo pesado (Troll), con densidades de 822, 840 y 890 kg/m3, respectivamente, en condiciones de viento que variaron entre 7 y 10 m/s para los dos primeros crudos y entre 6 – 9 y 2- 6 m/s para el crudo Troll; mientras la temperatura variaron entre 283 y 288 K. En la figura 5-9 se observa que la disolución es mayor para los crudos livianos y cómo está crece rápidamente para los primeros 1,000 minutos y posteriormente tiende a hacerse constante debido a la pérdida de los productos ligeros; después del primer día el cálculo de la disolución deja de ser importante. Por su parte la figura 5-10 enseña que la dispersión vertical es mayor para los crudos más densos, tal como sucede si comparamos los resultados de la dispersión vertical de los crudos Forties y Sture Blend, cuyas densidades corresponden a 822 y 840 kg/m3, respectivamente; los cuales se encontraban a la misma velocidad de viento (10 m/s). A 1600 min la dispersión vertical del crudo Forties es de 8%, mientras que para el crudo Sture Blend es de 14%. De otra parte también es posible identificar una dependencia entre la dispersión vertical y la velocidad del viento, ya que la simulación de los experimentos con crudo Troll (días uno y dos), realizados con velocidades de viento que variaron de 9 a 6 m/s, respectivamente se observa que la dispersión es mayor para el caso del día primero, cuando la velocidad del viento fue mayor. A 450 min la dispersión vertical del crudo Troll primer día fue de 2.34%, mientras que para el segundo día fue de 2.15%. Ambos procesos están influenciados por el área superficial del derrame de petróleo, lo que hace más complejo su análisis; sin embargo la parametrización de las ecuación 3-31 y 3-32 permite concluir que el área de la mancha es proporcional a la disolución y a la dispersión vertical.

Resultados
75
Figura 5-9. Comportamiento de la disolución.3
Fuente: Daling y Strom, 1999. La dispersión vertical se refleja en el crecimiento vertical de la mancha a través de una nube de gotas de diferentes tamaños que se forman por la turbulencia generada por el oleaje y que se transportan junto con la mancha. La dispersión puede propicia y favorecer otros fenómenos de pérdida de masa; si se tiene en cuenta que a raíz de esta nube de gotas se incrementa la disolución, se activa la sedimentación por la coalescencia de las gotas con partículas suspendidas y se facilita la biodegradación. Sin embargo, estos fenómenos no representan una fracción considerable de la masa perdida y por otra parte aún no es clara su modelación.
5.3.1.3. Contenido de agua El contenido de agua o emulsificación fue medido en tres de las pruebas de campo reportadas, las realizadas en julio de 1987 con crudo Forties y en agosto de 1995, con crudo Troll (días 1 y 2), todas en el mar del Norte. La comparación entre los datos experimentales y los resultados de su modelación se puede observan en la figura 5-11.
3 Datos Básicos: Crudo Forties (Jul. 87, 24 m3, 283 K, 10 m/s, 822 kg/m3, 1.82e-4 m2/s); Crudo Troll Blend (Agos. 95, 15 y 25 m3, 288 K, 6-9 y 2-6 m/s, 893 kg/m3, 3.36e-5 m2/s, para primer y segundo día) y Sture Blend (Jun. 94, 20 m3, 283 K, 7-10 m/s, 840 kg/m3, 7.14e-6 m2/s).

Resultados
76
Figura 5-10. Comportamiento de la dispersión vertical.4
Fuente: Daling y Strom, 1999. El grado de ajuste del modelo de contenido de agua empleado es satisfactorio tal como se observa en la tabla 5-11 donde se destaca la capacidad de las expresiones utilizadas para representar el proceso de emulsificación de los experimentos realizados con crudo Troll; arrojando un grado de ajuste del 0.98 y 0.99, para el primero y segundo día respectivamente. En el caso del crudo Forties el grado de ajuste es menor (0.58) explicado principalmente por las limitación del modelo empleado; sin embargo es posible predecir el comportamiento de la emulsión a largo plazo con bastante precisión, ya que el problema es notorio únicamente en los primeros 800 minutos (ver tabla 5-13).
Tabla 5-11. Evaluación del modelo de contenido de agua
Tipo de Crudo Ajuste MSEs % MSEs MSEu %MSEu MSE
Troll (día 1) 0.98 3.6 x 10-2 31 5.3 x 10-2 69 6.4 x 10-2
Troll (día 2) 0.99 2.9 x 10-2 72 1.8 x 10-2 28 3.4 x 10-2
Forties 0.58 2.1 x 10-1 76 1.2 x 10-2 24 2.4 x 10-2
Fuente: Anexo 6.
Figura 5-11. Comportamiento del contenido de agua.5 4 Datos Básicos: Crudo Forties (Jul. 87, 24 m3, 283 K, 10 m/s, 822 kg/m3, 1.82e-4 m2/s); Crudo Troll Blend (Agos. 95, 15 y 25 m3, 288 K, 6-9 y 2-6 m/s, 893 kg/m3, 3.36e-5 m2/s, para primer y segundo día) y Sture Blend (Jun. 94, 20 m3, 283 K, 7-10 m/s, 840 kg/m3, 7.14e-6 m2/s).
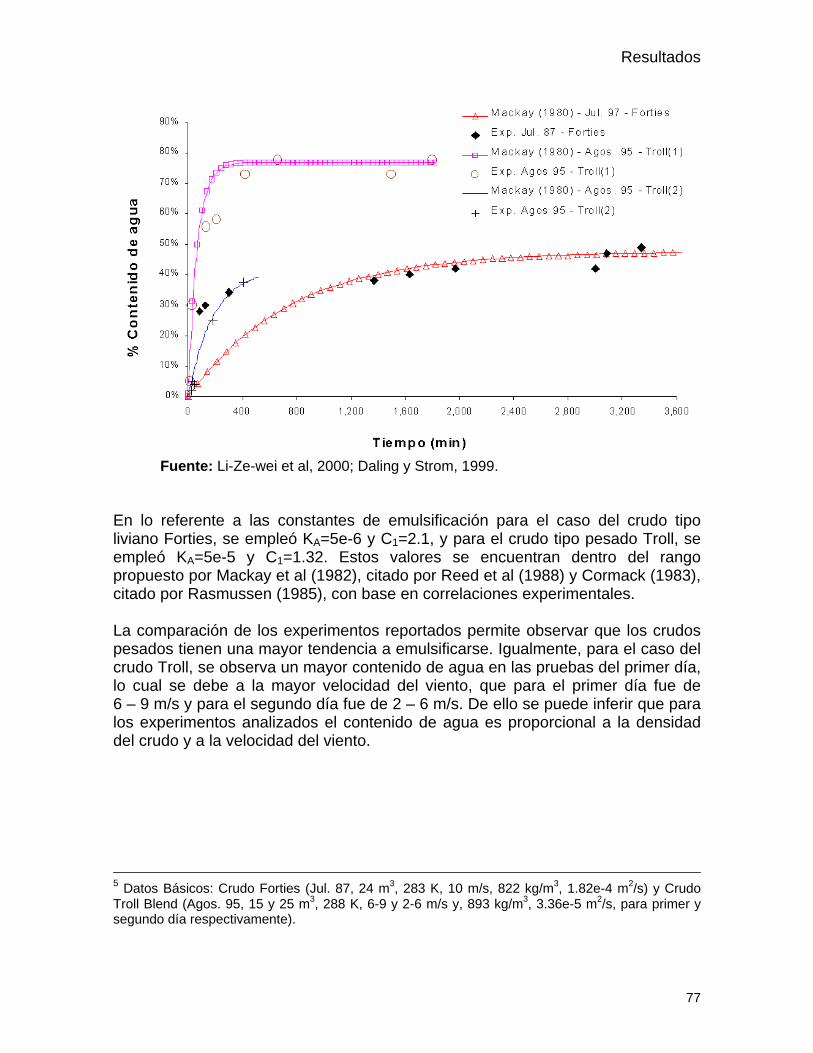
Resultados
77
Fuente: Li-Ze-wei et al, 2000; Daling y Strom, 1999. En lo referente a las constantes de emulsificación para el caso del crudo tipo liviano Forties, se empleó KA=5e-6 y C1=2.1, y para el crudo tipo pesado Troll, se empleó KA=5e-5 y C1=1.32. Estos valores se encuentran dentro del rango propuesto por Mackay et al (1982), citado por Reed et al (1988) y Cormack (1983), citado por Rasmussen (1985), con base en correlaciones experimentales. La comparación de los experimentos reportados permite observar que los crudos pesados tienen una mayor tendencia a emulsificarse. Igualmente, para el caso del crudo Troll, se observa un mayor contenido de agua en las pruebas del primer día, lo cual se debe a la mayor velocidad del viento, que para el primer día fue de 6 – 9 m/s y para el segundo día fue de 2 – 6 m/s. De ello se puede inferir que para los experimentos analizados el contenido de agua es proporcional a la densidad del crudo y a la velocidad del viento.
5 Datos Básicos: Crudo Forties (Jul. 87, 24 m3, 283 K, 10 m/s, 822 kg/m3, 1.82e-4 m2/s) y Crudo Troll Blend (Agos. 95, 15 y 25 m3, 288 K, 6-9 y 2-6 m/s y, 893 kg/m3, 3.36e-5 m2/s, para primer y segundo día respectivamente).
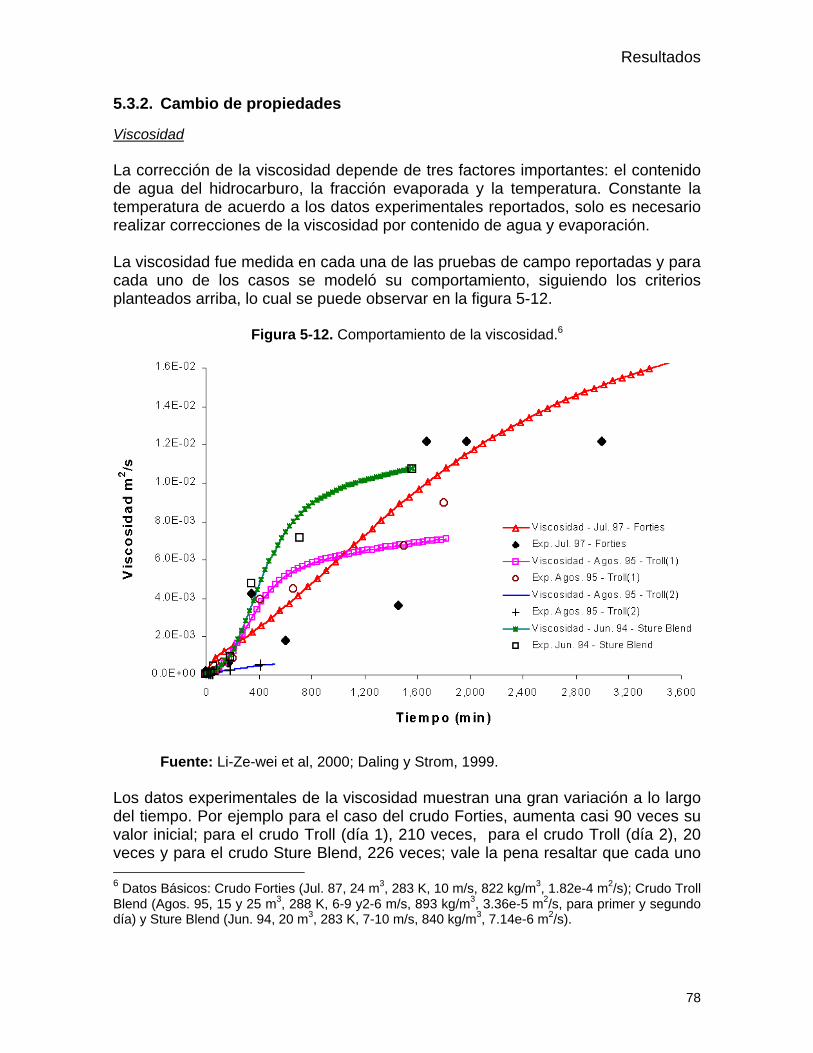
Resultados
78
5.3.2. Cambio de propiedades
Viscosidad La corrección de la viscosidad depende de tres factores importantes: el contenido de agua del hidrocarburo, la fracción evaporada y la temperatura. Constante la temperatura de acuerdo a los datos experimentales reportados, solo es necesario realizar correcciones de la viscosidad por contenido de agua y evaporación. La viscosidad fue medida en cada una de las pruebas de campo reportadas y para cada uno de los casos se modeló su comportamiento, siguiendo los criterios planteados arriba, lo cual se puede observar en la figura 5-12.
Figura 5-12. Comportamiento de la viscosidad.6
Fuente: Li-Ze-wei et al, 2000; Daling y Strom, 1999.
Los datos experimentales de la viscosidad muestran una gran variación a lo largo del tiempo. Por ejemplo para el caso del crudo Forties, aumenta casi 90 veces su valor inicial; para el crudo Troll (día 1), 210 veces, para el crudo Troll (día 2), 20 veces y para el crudo Sture Blend, 226 veces; vale la pena resaltar que cada uno 6 Datos Básicos: Crudo Forties (Jul. 87, 24 m3, 283 K, 10 m/s, 822 kg/m3, 1.82e-4 m2/s); Crudo Troll Blend (Agos. 95, 15 y 25 m3, 288 K, 6-9 y2-6 m/s, 893 kg/m3, 3.36e-5 m2/s, para primer y segundo día) y Sture Blend (Jun. 94, 20 m3, 283 K, 7-10 m/s, 840 kg/m3, 7.14e-6 m2/s).

Resultados
79
de los experimentos tuvo diferente duración (3,600 min, caso Forties; 1,600, caso Sture, 1,800 min, caso Troll, día1 y 450 min, caso Troll, día 2). Si se considera un tiempo común para los cuatro casos (400 min), la variación de la viscosidad seria de 14 veces para el crudo Forties, 93 para el crudo Sture, 113 para el crudo Troll, primer día y 17 para el crudo Troll, segundo día, lo cual permite concluir que para los experimentos analizados el cambio de la viscosidad es mayor cuando la velocidad del viento es mayor, tal como lo muestra los experimentos con crudo Troll, primero y segundo día; igualmente, se puede observar que el cambio de la viscosidad es mayor para los crudos ligeros, como es el caso del crudo Sture Blend (ver tabla 5-13). Para la simulación de las pruebas de campo se emplearon diferentes valores del coeficiente de corrección de la viscosidad por evaporación, así: 6 para el crudo Forties, 4.5 para crudo Sture Blend y 8.5 para el crudo Troll. Según Reed et al (1988), el coeficiente de corrección de la viscosidad por evaporación puede variar desde 1 hasta 10, para crudos de ligeros a pesados, tal como se explico en la sección 3.2.4. En la tabla 5-12 se concentran los resultados de la evaluación del modelo de corrección de la viscosidad, a través de los cuales se infiere que las expresiones empleadas para la evaluación de la viscosidad son apropiadas, ya que en todos los casos el coeficiente de ajuste esta por encima de 0.9; sin embargo los modelos matemáticos utilizados requieren de coeficientes que deben ser hallados experimentalmente, por lo que para predecir el comportamiento de derrames se recomienda realizar previamente pruebas de laboratorio.
Tabla 5-12. Evaluación del modelo de corrección de viscosidad
Tipo de Crudo Ajuste MSEs % MSEs MSEu %MSEu MSE
Sture Blend 0.99 1.3 x 10-4 5 5.6 x 10-4 95 5.7 x 10-4
Troll (día 1) 0.99 3.8 x 10-4 32 5.6 x 10-4 68 6.7 x 10-4
Troll (día 2) 0.98 4.5 x 10-5 80 2.3 x 10-5 20 5.1 x 10-5
Forties 0.92 1.8 x 10-3 25 3.2 x 10-3 75 3.6 x 10-3
Fuente: Anexo 6. Densidad El cambio de la densidad depende del contenido del agua y de la evaporación de los hidrocarburos más ligeros, sin embargo en los resultados de la figura 5-13 únicamente se considera su variación con respecto al contenido de agua, ya que en el caso de la evaporación es necesario hallar una constante experimental que depende de la composición del petróleo. Aunque no se cuenta con datos experimentales para comparar los resultados de la modelación, es posible apreciar una dependencia directa entre el contenido de agua, la evaporación y el cambio de la densidad, lo cual se ilustra en la tabla 5-13.

Resultados
80
Figura 5-13. Comportamiento de la densidad.7
Fuente: Li-Ze-wei et al, 2000; Daling y Strom, 1999.
Tabla 5-13. Relación de la densidad y la viscosidad con el contenido de agua y la evaporación
(a) Crudo Sture Blend
Tiempo
(min) Densidad
(kg/m3) Viscosidad
(m2/s) Evaporación
(%) Contenido de
Agua (%) 0 840 4.76 x 10-5 0 0
60 878 2.37 x 10-4 19.5 24.4 600 958 7.46 x 10-3 30.45 30.4
(b) Crudo Troll (día 1)
Tiempo (min)
Densidad (kg/m3)
Viscosidad (m2/s)
Evaporación (%)
Contenido de Agua (%)
0 893 3.36 x 10-5 0 0 60 925 2.21 x 10-4 12.2 24.4
600 971 5.12 x 10-3 18.4 74.8
7 Datos Básicos: Crudo Forties (Jul. 87, 24 m3, 283 K, 10 m/s, 822 kg/m3, 1.82e-4 m2/s); Crudo Troll Blend (Agos. 95, 15 y 25 m3, 288 K, 6-9 y 2-6 m/s, 893 kg/m3, 3.36e-5 m2/s, para primer y segundo día) y Sture Blend (Jun. 94, 20 m3, 283 K, 7-10 m/s, 840 kg/m3, 7.14e-6 m2/s).
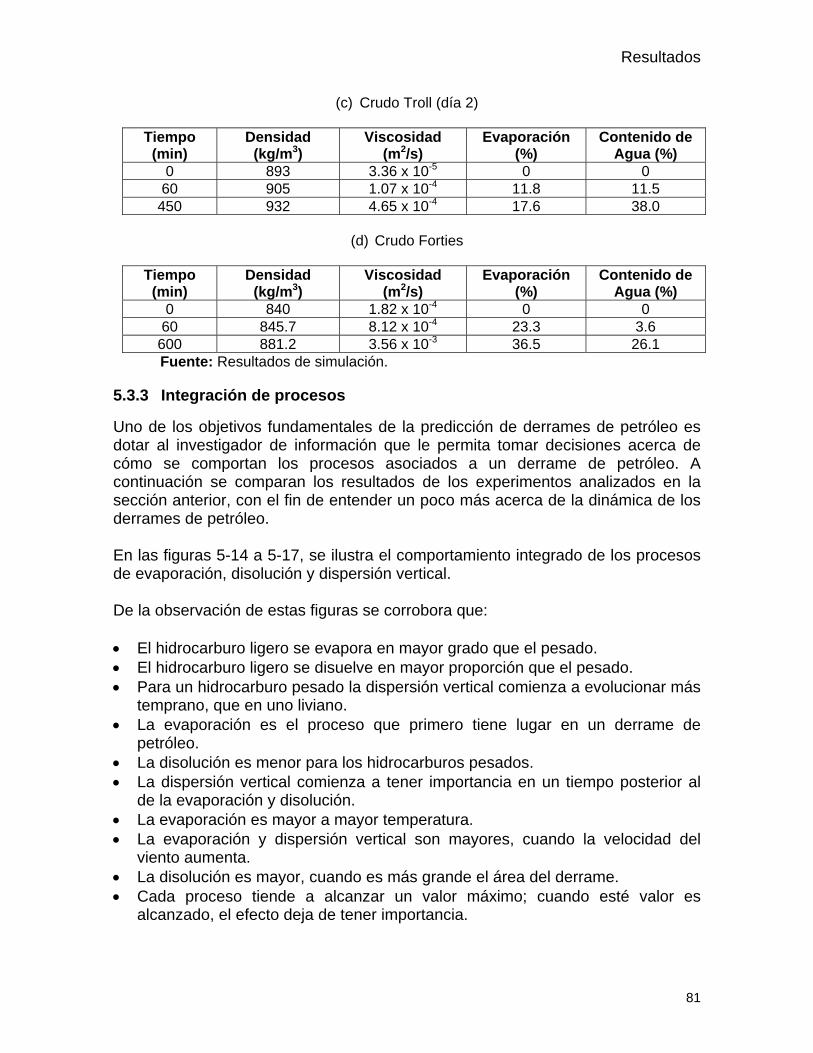
Resultados
81
(c) Crudo Troll (día 2)
Tiempo (min)
Densidad (kg/m3)
Viscosidad (m2/s)
Evaporación (%)
Contenido de Agua (%)
0 893 3.36 x 10-5 0 0 60 905 1.07 x 10-4 11.8 11.5
450 932 4.65 x 10-4 17.6 38.0
(d) Crudo Forties
Tiempo (min)
Densidad (kg/m3)
Viscosidad (m2/s)
Evaporación (%)
Contenido de Agua (%)
0 840 1.82 x 10-4 0 0 60 845.7 8.12 x 10-4 23.3 3.6
600 881.2 3.56 x 10-3 36.5 26.1 Fuente: Resultados de simulación.
5.3.3 Integración de procesos
Uno de los objetivos fundamentales de la predicción de derrames de petróleo es dotar al investigador de información que le permita tomar decisiones acerca de cómo se comportan los procesos asociados a un derrame de petróleo. A continuación se comparan los resultados de los experimentos analizados en la sección anterior, con el fin de entender un poco más acerca de la dinámica de los derrames de petróleo. En las figuras 5-14 a 5-17, se ilustra el comportamiento integrado de los procesos de evaporación, disolución y dispersión vertical. De la observación de estas figuras se corrobora que: • El hidrocarburo ligero se evapora en mayor grado que el pesado. • El hidrocarburo ligero se disuelve en mayor proporción que el pesado. • Para un hidrocarburo pesado la dispersión vertical comienza a evolucionar más
temprano, que en uno liviano. • La evaporación es el proceso que primero tiene lugar en un derrame de
petróleo. • La disolución es menor para los hidrocarburos pesados. • La dispersión vertical comienza a tener importancia en un tiempo posterior al
de la evaporación y disolución. • La evaporación es mayor a mayor temperatura. • La evaporación y dispersión vertical son mayores, cuando la velocidad del
viento aumenta. • La disolución es mayor, cuando es más grande el área del derrame. • Cada proceso tiende a alcanzar un valor máximo; cuando esté valor es
alcanzado, el efecto deja de tener importancia.

Resultados
82
Figura 5-14. Procesos integrados crudo Forties.8
Figura 5-15. Procesos integrados crudo Sture Blend.9
8 Crudo Forties (Jul. 87, 24 m3, 283 K, 10 m/s, 822 kg/m3, 1.82e-4 m2/s). 9 Sture Blend (Jun. 94, 20 m3, 283 K, 7-10 m/s, 840 kg/m3, 7.14e-6 m2/s).

Resultados
83
Figura 5-16. Procesos integrados crudo Troll primer día.10
Figura 5-17. Procesos integrados crudo Troll Blend segundo día.11
10 Crudo Troll Blend (Agos. 95, 15 m3, 288 K, 6-9 m/s, 893 kg/m3, 3.36e-5 m2/s. 11 Crudo Troll Blend (Agos. 95, 25 m3, 288 K, 2-6 m/s, 893 kg/m3, 3.36e-5 m2/s).
Resultados
84
5.3.4 Estimación del área
Determinar la forma en que evoluciona el área de un derrame de petróleo es el objetivo fundamental de este trabajo, entre otras cosas porque es necesario para estimar su impacto ambiental. En esta sección se describe inicialmente la metodología empleada para determinar el área de la mancha de petróleo, luego se presentan los resultados de su estimación, seguido de un análisis de sensibilidad que muestra la dependencia de los resultados con los principales parámetros de simulación, y se finaliza con la comparación de los resultados con otros modelos descritos anteriormente (ver sección 3.2.2). Vale la pene anotar que todas las conclusiones y comentarios que se realizan a lo largo de esta sección se refieren los experimentos realizados por Lerh et al (1984, 1984a) y la estructuración de un caso base a partir de ellos, por lo que no pueden ser extrapolados a menos que se cuente con nuevas evidencias experimentales.
5.3.4.1. Metodología La metodología empleada para la determinación del área y el espesor consistió en tres pasos fundamentales: (1) inicialmente se configuró un caso base, en el cual se definieron las condiciones de simulación descritas en el experimento reportado por Lerh et al (1984), para el derrame de 8.11 m3 (ver tabla 5-1); (2) luego siguiendo el mismo procedimiento y variando únicamente las condiciones iniciales, se simularon los derrames de 2.06 y 3.02 m3, con el fin de evaluar la validez del procedimiento, y finalmente, (3) se realizó un análisis de sensibilidad sobre los parámetros que controlan la evolución de una mancha de petróleo, tales como, el área, la hidrodinámica, el coeficiente de difusión y los fenómenos de transferencia de masa (ver figura 5-18). Definición del caso base La definición del caso base es tal vez la parte más compleja y dispendiosa de la modelación de derrames de petróleo y en general de todos los fenómenos relacionados con la Dinámica de Fluidos Computacional. Es compleja, porque requiere de la integración de los conocimientos vinculados con los derrames de petróleo a fin de determinar la interdependencia de las principales variables del problema y es dispendiosa, porque requiere de la prueba de múltiples configuraciones de simulación, hasta encontrar aquella que permite representar adecuadamente las situaciones experimentales, cuyas condiciones iniciales y de frontera son generalmente desconocidas. Inicialmente fue necesario definir la geometría del dominio donde ocurrió el derrame que se quiere simular, de tal forma que está permitiera monitorear la evolución de la mancha durante todo su tiempo de vida, lo cual requiere de una adecuada combinación de las propiedades del hidrocarburo derramado, las condiciones hidrodinámicas de flujo y las características iniciales de la mancha.

Resultados
85
Para definir las propiedades de los hidrocarburos derramados se empleó información secundaria extraída del Centro de Tecnología Ambiental de Canadá (www.etcentre.org); para las condiciones hidrodinámicas de flujo fue necesario combinar la información suministrada por Lehr et al (1984), acerca de la meteorología, y la citada en la investigación acerca de la dinámica y circulación de aguas en el golfo de Arabia reportada por Johns et al (1999). Para las condiciones iniciales de la mancha se emplearon los criterios del comportamiento de una mancha de petróleo descritos por Fay (1969 y 1971), principalmente en lo referente al área inicial, la cual se puede determinar con base en un espesor inicial de 2 mm, observado por Fay (1971) para derrames menores a 30 m3 y reportado dentro del conjunto de datos experimentales presentados por Lerh et al (1984b).
Figura 5-18. Metodología de estimación del área y espesor de un derrame de petróleo.
Un criterio genérico para la definición de la malla de modelación es el citado por Reed et al (1999), el cual se recomienda que los intervalos espaciales en el plano horizontal no deben superar 100 m, por lo que partiendo de este criterio se decidió emplear divisiones de 50 y 35 m en el eje Este - Oeste y Norte – Sur, respectivamente; luego de verificar que los resultados eran independientes de la malla. Estas dimensiones permiten lograr un buen detalle del fenómeno estudiado. Por otro lado, se seleccionaron intervalos de tiempo de 5 min, igualmente, luego de determinar que los resultados son independientes del intervalo de tiempo, con

Resultados
86
el fin de realizar comparaciones directas con los datos experimentales que fueron medidos para tiempos múltiplos de 5 min. Se encontró que para representar las condiciones experimentales analizadas (meteorología e hidrodinámica) en cuanto a la evolución de la mancha de petróleo, una velocidad equivalente de corriente de agua en un rango de 0.02 y 0.015 m/s era apropiada; este intervalo representó en buena forma el comportamiento de los derrames de 2.06, 3.02 y 8.11 m3 considerados. De acuerdo a lo anterior, en el golfo de Arabia una corriente de agua de aproximadamente 0.003 la velocidad del viento medida a 10 m, representa su efecto sobre un derrame de petróleo. El concepto de una velocidad de corriente equivalente permite seguir el comportamiento natural del área oscura de una mancha hasta que está desaparece, dándole paso a una mancha iridiscente. Validación del caso base Para validar el procedimiento empleado para la definición del caso base, se simularon los experimentos de los derrames de 2.06 y 3.02 m3, lográndose ajustes de 0.47 y 0.95 respectivamente; por lo que se consideró adecuado el procedimiento seguido, a pesar del ajuste de 0.47 para el derrame de 2.06 m3, ya que durante esta prueba se presentaron condiciones de canalización del viento que aún no pueden ser modeladas empleando el modelo propuesto. Igualmente, se verificó que la metodología empleada para definir las condiciones iniciales del derrame resultó apropiada. Descripción del análisis de sensibilidad Durante el proceso de estructuración del caso base, fue posible identificar que los parámetros de simulación más sensibles se pueden agrupar en 4 categorías: los relacionados con la hidrodinámica, la geometría, la difusión y los procesos de transferencia de masa, por lo que para tener una mejor comprensión del fenómeno se realizaron varias corridas considerando la variación de las variables que representan a cada una de las categorías conformadas, cuyos resultados se describen adelante.
5.3.4.2. Resultados y discusión Para calcular el área se alimentó al programa con los datos presentados en el anexo 3, cuyo archivo corresponde a las condiciones de simulación establecidas para el denominado caso base. En la determinación del área fue necesario considerar un cierto límite de concentración normalizada, con base en la concentración inicial de petróleo, a partir del cual se consideró que las celdas estaban siendo ocupadas por el derrame y correspondían a la denominada zona oscura de la mancha (Lerh et al
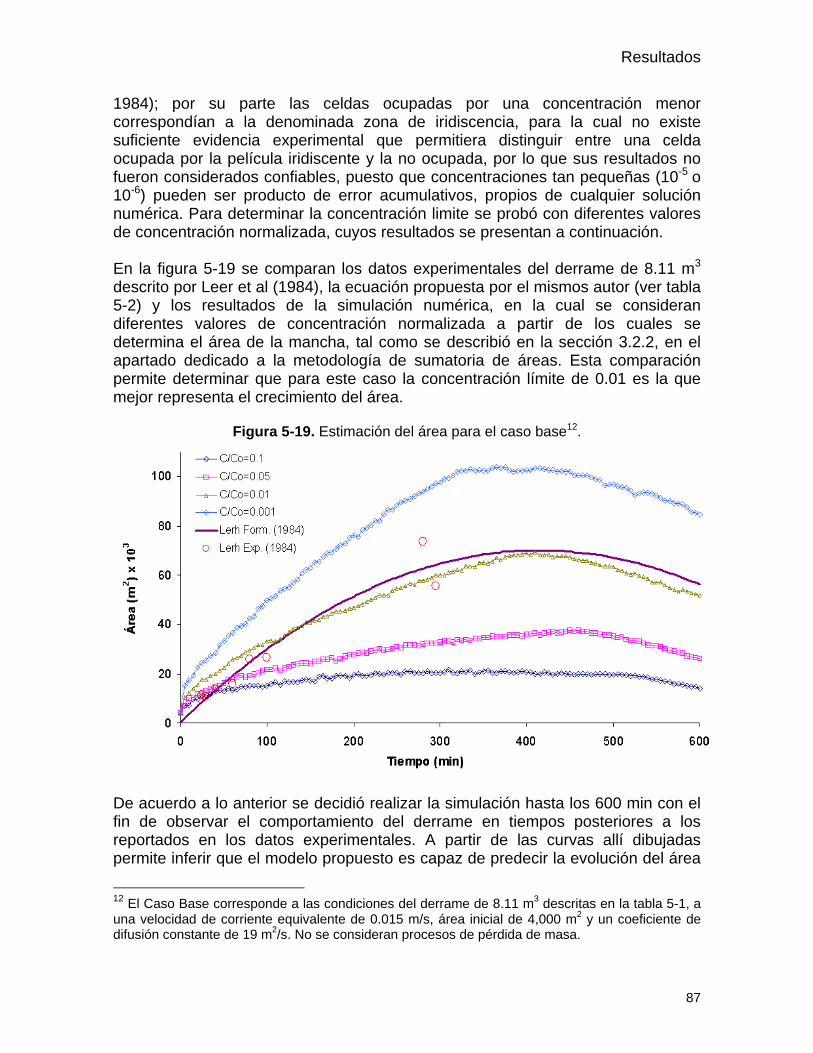
Resultados
87
1984); por su parte las celdas ocupadas por una concentración menor correspondían a la denominada zona de iridiscencia, para la cual no existe suficiente evidencia experimental que permitiera distinguir entre una celda ocupada por la película iridiscente y la no ocupada, por lo que sus resultados no fueron considerados confiables, puesto que concentraciones tan pequeñas (10-5 o 10-6) pueden ser producto de error acumulativos, propios de cualquier solución numérica. Para determinar la concentración limite se probó con diferentes valores de concentración normalizada, cuyos resultados se presentan a continuación. En la figura 5-19 se comparan los datos experimentales del derrame de 8.11 m3 descrito por Leer et al (1984), la ecuación propuesta por el mismos autor (ver tabla 5-2) y los resultados de la simulación numérica, en la cual se consideran diferentes valores de concentración normalizada a partir de los cuales se determina el área de la mancha, tal como se describió en la sección 3.2.2, en el apartado dedicado a la metodología de sumatoria de áreas. Esta comparación permite determinar que para este caso la concentración límite de 0.01 es la que mejor representa el crecimiento del área.
Figura 5-19. Estimación del área para el caso base12.
De acuerdo a lo anterior se decidió realizar la simulación hasta los 600 min con el fin de observar el comportamiento del derrame en tiempos posteriores a los reportados en los datos experimentales. A partir de las curvas allí dibujadas permite inferir que el modelo propuesto es capaz de predecir la evolución del área
12 El Caso Base corresponde a las condiciones del derrame de 8.11 m3 descritas en la tabla 5-1, a una velocidad de corriente equivalente de 0.015 m/s, área inicial de 4,000 m2 y un coeficiente de difusión constante de 19 m2/s. No se consideran procesos de pérdida de masa.

Resultados
88
oscura de la mancha hasta el momento en que esta desaparece, dando paso a la existencia de una mancha en su totalidad iridiscente. La figura 5-19 permite observar que los resultados obtenidos en la simulación numérica describen el comportamiento experimental y son del mismo orden de magnitud. Empleando la metodología de evaluación propuesta en la sección 4.5, se obtiene un grado de ajuste de 0.95, la diferencia entre los datos observados y los simulados se atribuye en un 75% a las dificultades del modelo para representar la prueba de campo y en un 25% a el error aleatorio de los datos experimentales (para detalle ver anexo 6); estos resultados se vuelven a retomar en la sección dedicada a la comparación del modelo propuesto con otros modelos de estimación del área. Con base en los resultados presentados en la figura 5-19, se consideró la posibilidad de elaborar una función compuesta para el cálculo del área de manera tal que se aprovecharan los intervalos de tiempo bajo los cuales cada concentración limite permite representar mejor la evolución de la mancha; como resultado de esto se elaboró la figura 5-20. Este concepto puede ser empleado para la construcción de una expresión que permita estimar la concentración límite en función del tiempo cuando se cuente con mayor información experimental.
Figura 5-20. Estimación del área a parir de una función compuesta de la concentración
limite normalizada para el caso base.
En la figura 5-21 se observa la evolución del derrame modelado para el Caso Base, la cual permite ver cómo los contornos de la mancha van creciendo al mismo tiempo que su forma elíptica inicial da paso a una forma achatada producto de los efectos hidrodinámicos. Igualmente, se visualiza como las dimensiones de
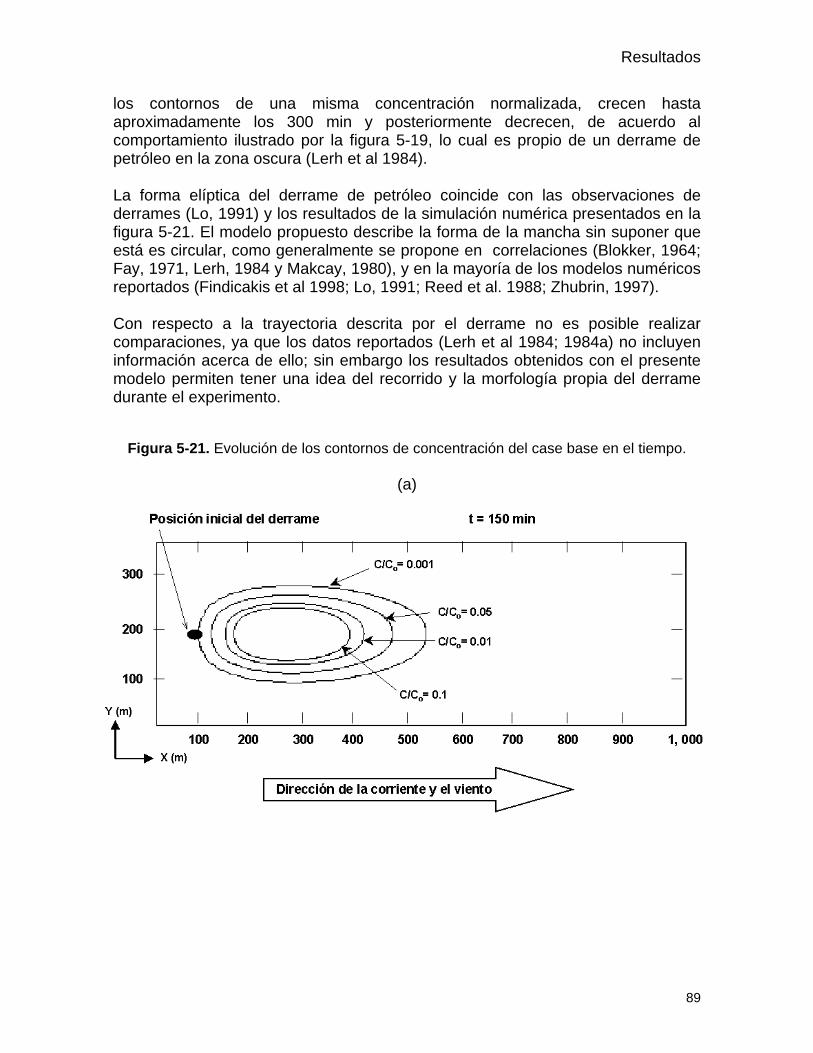
Resultados
89
los contornos de una misma concentración normalizada, crecen hasta aproximadamente los 300 min y posteriormente decrecen, de acuerdo al comportamiento ilustrado por la figura 5-19, lo cual es propio de un derrame de petróleo en la zona oscura (Lerh et al 1984). La forma elíptica del derrame de petróleo coincide con las observaciones de derrames (Lo, 1991) y los resultados de la simulación numérica presentados en la figura 5-21. El modelo propuesto describe la forma de la mancha sin suponer que está es circular, como generalmente se propone en correlaciones (Blokker, 1964; Fay, 1971, Lerh, 1984 y Makcay, 1980), y en la mayoría de los modelos numéricos reportados (Findicakis et al 1998; Lo, 1991; Reed et al. 1988; Zhubrin, 1997). Con respecto a la trayectoria descrita por el derrame no es posible realizar comparaciones, ya que los datos reportados (Lerh et al 1984; 1984a) no incluyen información acerca de ello; sin embargo los resultados obtenidos con el presente modelo permiten tener una idea del recorrido y la morfología propia del derrame durante el experimento.
Figura 5-21. Evolución de los contornos de concentración del case base en el tiempo.
(a)
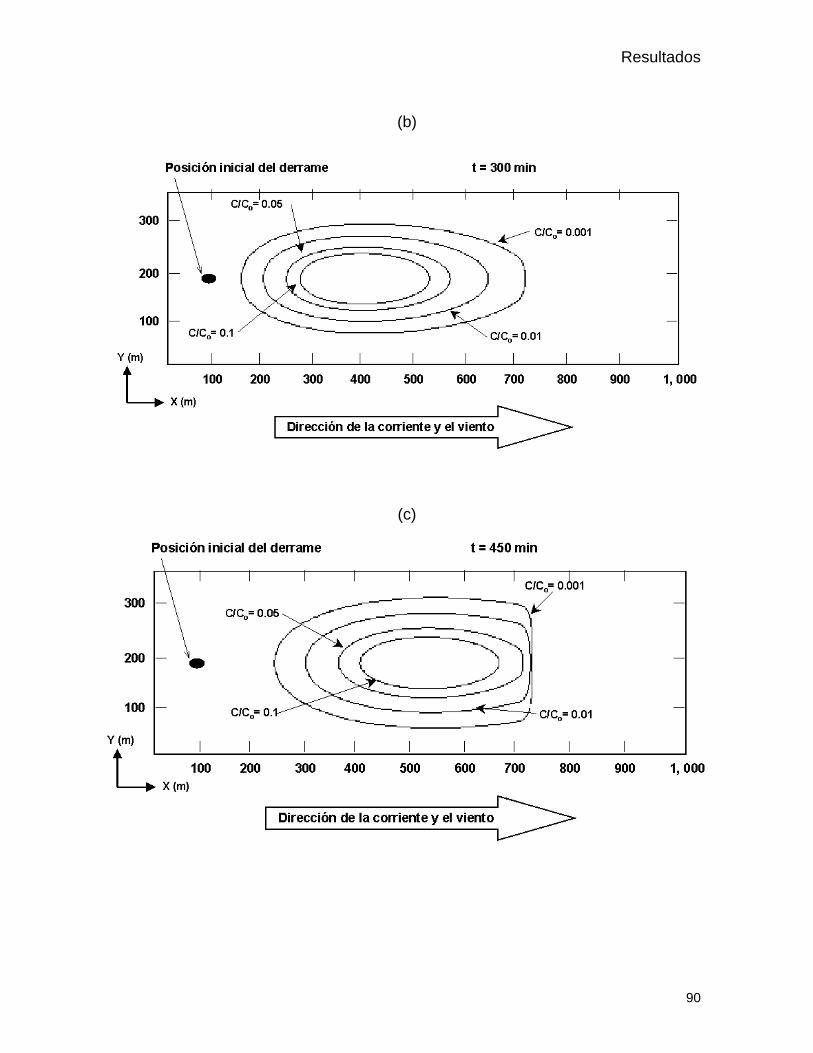
Resultados
90
(b)
(c)

Resultados
91
(d)
Validación del procedimiento Con el fin de validar el procedimiento empleado para la determinación del área del derrame de 8.11 m3, se modelaron los dos restantes ensayos de campo reportados por Lerh et al (1984) y descritos al comienzo del capítulo (ver tabla 5-1). De acuerdo con lo anterior se consideró un espesor inicial de 2 mm para cada uno de los derrames y una velocidad de corriente equivalente igual a 0.003 veces la velocidad del viento a 10 m sobre el nivel del mar; dando como resultado las curvas de las figuras 5-22 y 5-23 para los derrames de 3.02 y 2.06 m3 respectivamente. Para los dos casos analizados se careció de datos experimentales, debido a que los autores que reportaron las pruebas solo reportaron las ecuaciones obtenidas con base en ellos, por lo que fue necesario emplear las formulas que describen la evolución del derrame (ver tabla 5-2). Con base en esta información se obtuvieron coeficientes de ajuste de 0.95 y 0.47 para los derrames de 3.02 m3 y 2.06 m3 respectivamente. El pobre ajuste de los resultados de la modelación del derrame de 2.06 m3 se debe principalmente a que durante las pruebas de campo coincidieron fuertes corrientes de agua en la misma dirección del viento, lo cual produjo una mancha alargada de área pequeña (Lerh et al 1984a). Estos efectos conocidos como Langmuir Circulation - LC no han sido incluidos en el modelo propuesto y su omisión da como resultado una sobre estimación del área.

Resultados
92
Figura 5-22. Estimación del área para el derrame de 3.0213.
Figura 5-23. Estimación del área para el derrame de 2.0614.
13 Las condiciones de simulación del derrame de 3.02 m3 corresponden a las descritas en la tabla 5-1, velocidad de corriente equivalente de 0.02 m/s, área inicial de 1,500 m2 y un coeficiente de difusión constante de 19 m2/s. No se consideran los procesos de pérdida de masa. 14 Las condiciones de simulación del derrame de 2.06 m3 corresponden a las descritas en la tabla 5-1, velocidad de corriente equivalente de 0.02 m/s, área inicial de 1,000 m2 y un coeficiente de difusión constante de 19 m2/s. No se consideran los procesos de pérdida de masa.

Resultados
93
De análisis anterior se puede inferir que el procedimiento empleado para la modelación de derrames es válido por lo menos para los experimentos estudiados y que puede ser empleado para predecir derrames de petróleo que ocurran en condiciones parecidas, a reserva de ser comparado y validado con una mayor cantidad de datos experimentales. Efecto de la velocidad equivalente de corriente de agua Al comienzo del capítulo se explicó el motivo por el cual fue necesario introducir el concepto de velocidad equivale; sin embargo vale la pena recordar que este tiene como finalidad armar una caso base que permita analizar el efecto de los múltiples parámetros que intervienen sobre la estimación del área del derrame, ya que si se introducen directamente las condiciones meteorológicas e hidrodinámicas es imposible representar el comportamiento de la mancha de petróleo y lo que se ha denominado como área oscura por Lerh et al (1984), desaparece en un tiempo menor del real (ver figura 5-24). Por otro lado, este idea coincide con lo planteado por Wu (1980) e implementado por Findikakis et al (1998) y Yapa et al (1994) acerca de introducir el efecto del viento sobre el comportamiento de la mancha a partir de los valores medidos en campo multiplicados por un coeficiente de atenuación, que para el caso del primer grupo de investigadores es una función de la velocidad y para el segundo grupo es una constante igual a 0.03 (ver sección 3.2.1). Aplicando el criterio de la velocidad de corriente equivalente desarrollado en este trabajo se encontró que para el denominado Caso Base se debía emplear una velocidad de 0.015 m/s, a través de la cual se representa el comportamiento mostrado por la formulación propuesta por Lerh et al (1984), tal como se ilustra en la figura 5-24. El aumento de la velocidad equivalente de corriente de agua a 0.02 m/s tiene dos efectos sobre el crecimiento de la mancha del derrame simulado (Caso Base): el primero relacionado con la sobre estimación en los primeros 250 minutos y el segundo manifestado en el decrecimiento anticipado de su tamaño a partir aproximadamente de los 250 minutos. Por otro lado al disminuir la velocidad equivalente a 0.01 m/s se experimenta un efecto contrario, ya que la curva que describe la evolución del área de la mancha sigue creciendo tiempo después de lo que la evidencia experimental muestra. De acuerdo al análisis anterior se pudo inferir que para el caso de estudiado es posible representar los efectos hidrodinámicos y meteorológicos a partir de la velocidad del viento medida a 10 metros sobre el nivel del agua multiplicada por un coeficiente de atenuación de 0.003. De los resultados de la figura 5-24 se desprende que la velocidad de la corriente le otorga al derrame una energía adicional de escurrimeinto horizontal, diferente a la dispersión mecánica o expansión horizontal, el cual es el crecimiento experimentado por un derrame en condiciones de calma y explicado ampliamente por Fay,1971 (ver sección 3.2.2).

Resultados
94
Figura 5-24. Efecto de la velocidad equivalente de corriente de agua15.
Efecto del coeficiente de difusión En el modelo propuesto el coeficiente de difusión representa lo que Fay (1971) denominó como escurrimiento o expansión horizontal; este depende de las propiedades físicas y químicas del fluido que se escurre y del medio continuo en el cual se escurre, en este caso el agua (ver sección 3.2.2). Con el fin de comparar los resultados de los tres coeficientes de difusión reportados en la literatura, se realizaron simulaciones del derrame de petróleo considerado en el caso base variando únicamente el coeficiente, cuyos resultados se visualizan en la figura 5-25. Los tres coeficientes de difusión describen el crecimiento de la mancha de petróleo, pero entre menor es el coeficiente menor es el valor del área. Por ejemplo, para los cuatrocientos minutos el área de la mancha es 68,800 m2 para el coeficiente de difusión de 19 m2/s, 51,000 m2 para el coeficiente de difusión de 5 m2/s y 37,800 m2 para el coeficiente de difusión obtenido en función del tiempo y las propiedades del petróleo (ver figura 5-26). Una observación particular es la relacionada con el comportamiento de las curvas de la figura 5-25, en donde entre menor es el coeficiente de difusión más rápidamente se alcanza el valor del área máxima de cada uno de los casos; así, para el coeficiente de difusión de 19 m2/s el área máxima es 69,200 m2 a los 410 15 Se consideran las condiciones del caso base.

Resultados
95
minutos, para el coeficiente de difusión de 5 m2/s el área máxima es 51,600 m2 a los 370 minutos y para el coeficiente de difusión en función del tiempo y las propiedades del petróleo el área máxima es 39,200 m2 a los 360 minutos, lo cual se puede explicar debido a la menor rapidez de crecimiento inicial de la mancha.
Figura 5-25. Efecto del coeficiente de difusión 16.
La figura 5-26 muestra el comportamiento del coeficiente de difusión en función del tiempo y las propiedades del petróleo, considerando a estas últimas constantes, tal como se definió para el caso base. En este caso el valor máximo (2.3 m2/s) se alcanza durante los primeros 60 minutos, y a partir de este momento el coeficiente disminuye su valor, a 0.21 m2/s, luego a 0.07 m2/s a los 600 minutos, hasta hacerse 0 m2/s aproximadamente en 3 días, debido a que es función del tiempo, de acuerdo a las ecuaciones 3.13 y 3.14 (ver sección 3.2.2). El cambio tan pronunciado del coeficiente de difusión a los 60 minutos se explica debido a que según Sobey y Barker (1997), existe una función constante que no depende del tiempo antes de los 60 minutos y para tiempos posteriormente el coeficiente de difusión es calculado a partir de una función que depende del tiempo. Efecto del área inicial El área inicial fue definida con base en los criterios expuestos al inicio de la sección, en donde se planteó que de acuerdo a las observaciones de Fay (1971) para los derrames de petróleo menores de 30 m3, se había observado que el 16 Se consideran las condiciones del caso base.
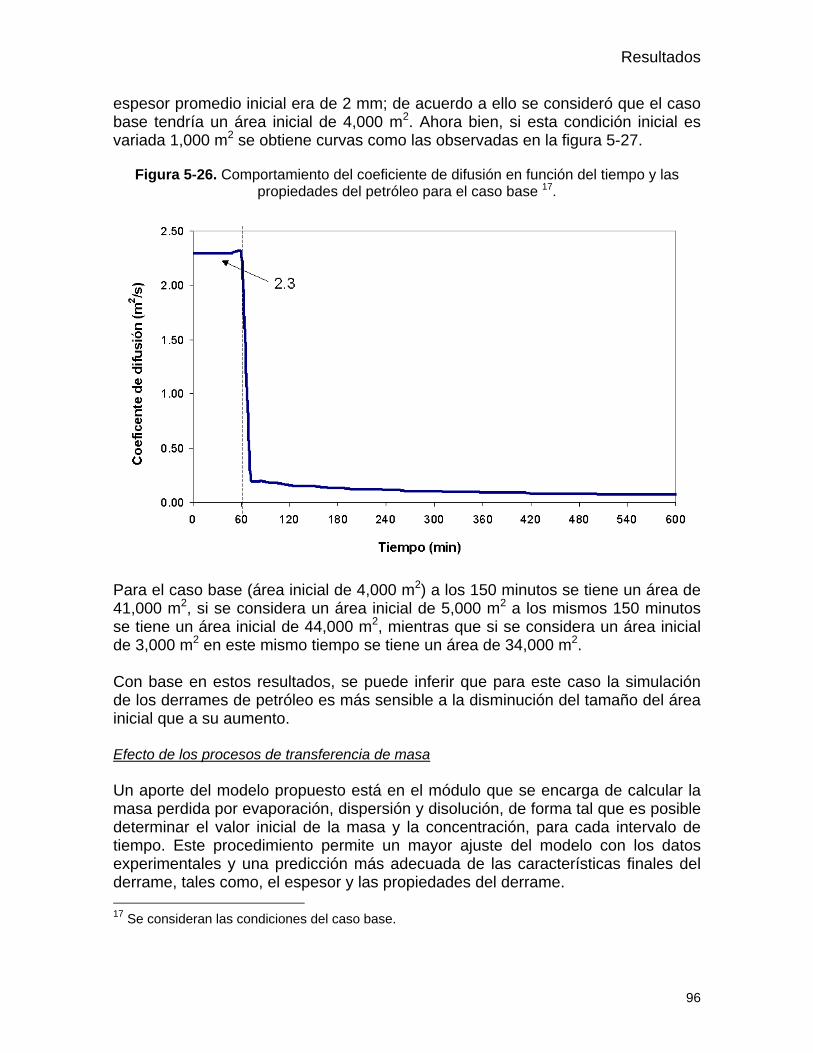
Resultados
96
espesor promedio inicial era de 2 mm; de acuerdo a ello se consideró que el caso base tendría un área inicial de 4,000 m2. Ahora bien, si esta condición inicial es variada 1,000 m2 se obtiene curvas como las observadas en la figura 5-27.
Figura 5-26. Comportamiento del coeficiente de difusión en función del tiempo y las propiedades del petróleo para el caso base 17.
Para el caso base (área inicial de 4,000 m2) a los 150 minutos se tiene un área de 41,000 m2, si se considera un área inicial de 5,000 m2 a los mismos 150 minutos se tiene un área inicial de 44,000 m2, mientras que si se considera un área inicial de 3,000 m2 en este mismo tiempo se tiene un área de 34,000 m2. Con base en estos resultados, se puede inferir que para este caso la simulación de los derrames de petróleo es más sensible a la disminución del tamaño del área inicial que a su aumento. Efecto de los procesos de transferencia de masa Un aporte del modelo propuesto está en el módulo que se encarga de calcular la masa perdida por evaporación, dispersión y disolución, de forma tal que es posible determinar el valor inicial de la masa y la concentración, para cada intervalo de tiempo. Este procedimiento permite un mayor ajuste del modelo con los datos experimentales y una predicción más adecuada de las características finales del derrame, tales como, el espesor y las propiedades del derrame. 17 Se consideran las condiciones del caso base.

Resultados
97
Figura 5-27. Efecto del área inicial18
En la figura 5-28 se observa el comportamiento de la masa perdida debido a cada uno de los procesos considerados (evaporación, dispersión y disolución), al igual que incluye el comportamiento del caso base, lo cual sirve sólo como referencia considerando que en este no tomaron en cuenta los efectos de transferencia de masa. El proceso de transferencia de masa más importante es la evaporación, mientras que la disolución y la dispersión son menos representativos cuantitativamente hablando; por ejemplo a los 360 minutos el total de la masa perdida es 1,495 kg (el 21% de la masa inicial), de los cuales el 85.7% corresponde a la evaporación, el 9.8% a la disolución y el 4.6% a la dispersión vertical. El efecto de la pérdida de masa se ve reflejado en la disminución del espesor de la mancha, ya que el área permanece constante. Esta situación se explica debido a que los procesos de transferencia de masa analizados tienen lugar a lo largo de todo el derrame y afectan por igual a toda el área superficial de la mancha. En la figura 5-29 se observa el comportamiento del espesor promedio, comparado con respecto a los datos experimentales de espesor presentados al inicio del capítulo en la sección 5.1 (Lerh et al 1884a) y a los datos de una curva de ajuste propuesta por el mismo equipo de trabajo, para la cual no se proporcionó una función.
18 Se consideran las condiciones del caso base.

Resultados
98
Figura 5-28. Efecto de los procesos de pérdida de masa para el caso base 19.
Figura 5-29. Efecto de los procesos de pérdida de masa sobre el espesor
promedio para el caso base20.
19 Se consideran las condiciones del caso base y en este caso si se consideran los procesos de pérdida de masa. 20 Se consideran las condiciones del caso base y en este caso si se consideran los procesos de pérdida de masa.
Resultados
99
Los datos experimentales del espesor son bastante dispersos (desviación estándar 4.4 x 10-4 m), es decir se encuentran dentro de un intervalo de confianza del 100% que va desde 0.3 a 20.0 x 10-4 m y no tienen una tendencia determinada, pues por ejemplo el valor máximo del espesor corresponde a los 60 min y este tipo de caso se repite en varias ocasiones. La dispersión y la poca claridad para determinar un comportamiento característico de los datos experimentales se puede explicar debido a que en la realidad el espesor de la mancha no es uniforme, tal como lo explica Fay (1971), descrito en la sección 3.2.2, y por otro lado es importante recordar que Lerh et al (1984a) agruparon los datos experimentales de los espesor medidos para los derrames de 8.11 y 3.02 m3 en un solo conjunto de datos; sin embargo estas explicaciones no son suficientes y bien valdría la pena una revisión más a fondo de los datos experimentales (Lerh et al, 1984a). Vale la pena resaltar que después de los 300 minutos de la prueba los datos experimentales muestran un mejor ajuste con los datos de la simulación. La figura 5-29 no permite ver con suficiente detalle el efecto diferenciado de cada uno de los fenómenos de transferencia de masa, por lo que se decidió incluir la figura 5-30 en la cual se brinda una mejor evidencia del efecto de la evaporación, la disolución y la dispersión. El ajuste del modelo propuesto con los datos experimentales (0.34) es escaso como era de esperarse debido a su dispersión, mientras que el ajuste con la curva propuesta por los mismos autores es mejor (0.77). Tomando como referencia dicha formulación, se puede inferir que el modelo propuesto es capaz de representar el comportamiento global del derrame analizado y que la inclusión de todos los fenómenos de pérdida de masa dentro del modelo propuesto permite determinar mejor su comportamiento. Otros resultados interesantes son los presentados en las figuras 5-31 a 5-33, en las cuales se muestra el comportamiento de la evaporación y la emulsificación que son los dos parámetros necesarios para la evaluación de la densidad y la viscosidad en cada uno de los intervalos de tiempo. La evaporación por su parte alcanza un valor cercano al 20% a los 360 minutos, mientras que la emulsificación tan solo se acerca al 3%; por ello el efecto de la evaporación sobre la evaluación de las propiedades del petróleo es más significativo, tal como lo enseña la figura 5-32 para el caso de la viscosidad. En la evaluación de la densidad (figura 5-33), sólo se considera el efecto de la emulsificación, debido a que no se contó con suficiente información para evaluar su cambio por evaporación, ya que es necesaria una caracterización de su composición. Esté tipo de análisis son bastante útiles para planear las tareas de atención de derrames, y para determinar el tipo de equipo requerido para la recolección y contención del petróleo derramado, el cual depende entre otras cosas de las propiedades de la mancha (área, espesor, viscosidad y densidad, principalmente). Para el caso estudiado la viscosidad aumenta aproximadamente 3 veces su valor inicial, pasando de 1.5 a 3.5 x 10-5 m2/s en 360 minutos, mientras que la densidad cambia de 866 kg/m3 a casi 870 kg/m3, en el mismo tiempo.

Resultados
100
Figura 5-30. Detalle del efecto de los procesos de pérdida de masa sobre
el espesor promedio para el caso base21.
Figura 5-31. Comportamiento de la evaporación y la emulsificación para el caso base
21 Se consideran las condiciones del caso base y en este caso si se consideran los procesos de pérdida de masa.
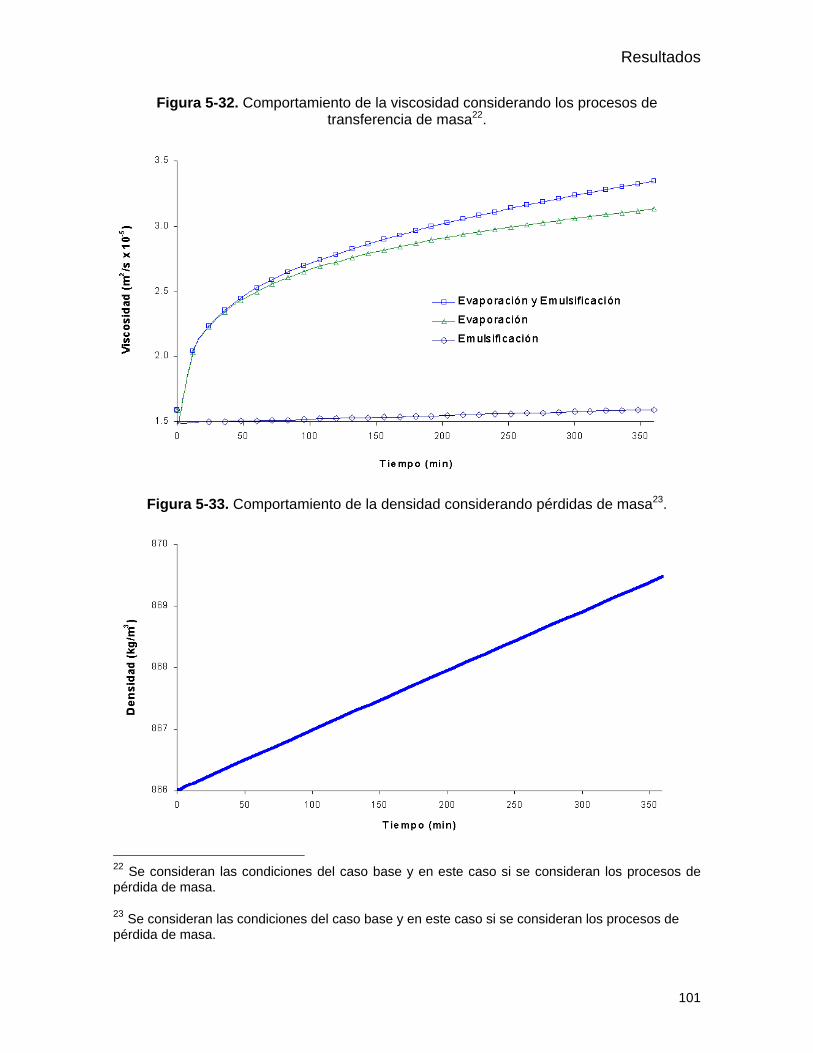
Resultados
101
Figura 5-32. Comportamiento de la viscosidad considerando los procesos de transferencia de masa22.
Figura 5-33. Comportamiento de la densidad considerando pérdidas de masa23.
22 Se consideran las condiciones del caso base y en este caso si se consideran los procesos de pérdida de masa. 23 Se consideran las condiciones del caso base y en este caso si se consideran los procesos de pérdida de masa.
Resultados
102
Comparación entre el modelo propuesto, el modelo ROSA y correlaciones empíricas En esta sección se trata de ver cómo se comporta el modelo propuesto al compararlo con el modelo ROSA (Zhubrin, 1997) y las correlaciones de escurrimeinto de Blokker, 1964 y Fay, 1971; tanto el modelo ROSA como las correlaciones de escurrimiento están descritas en la sección 3.1 y 3.2.2, respectivamente. Inicialmente se modificaron las condiciones de simulación del modelo ROSA para simular las condiciones experimentales de la prueba de Lerh et al (1984), obteniendo resultados que permiten inferir que en este modelo no ven reflejados los cambios de la velocidad de la corriente y el viento, sobre la evolución del área de la mancha, ya que para todas las corridas realizadas el valor del área fue la misma, y era de esperarse que al variar las condiciones iniciales del derrame se obtuvieran resultados diferentes, parecidos al análisis paramétricos expuesto a lo largo del capítulo. Por otra parte también se programaron las correlaciones experimentales de Blokker, 1969 y Fay, 1971 (ecuaciones 3-7 y tabla 3-1), cuyos resultados se organizaron junto con los obtenidos por el modelo ROSA, el modelo propuesto y los datos experimentales reportados por Lerh et al (1984), en las figuras 5-34 y 5-35, de tal forma que las escalas de las figuras permitiera tener suficiente detalle de los mismos. En la figura 5-34 se graficaron las correlaciones de Blokker, de Fay (régimen viscoso) y el modelo propuesto, junto con los datos experimentales del área oscura (ver tabla 5-3); mientras en la figura 5-35 se graficaron las correlaciones de Fay (régimen inercial y de tensión superficial) y los de la simulación con el modelo ROSA, junto con los datos experimentales del área de la zona iridiscente (ver tabla 5-3). La figura 5-34 permite hacer un acercamiento al grado de ajuste que los diferentes modelos tienen con datos experimentales, lo cual se detalla en la tabla 5-13; de allí se puede inferir que bajo las condiciones empleadas en el modelo propuesto, este es capaz de predecir el comportamiento del derrame de petróleo, ya que un ajuste de 0.95 se puede considerar apropiado. Por otra parte, el modelo propuesto tiene como característica adicional que es capaz de predecir la trayectoria del derrame, igual que el modelo ROSA y los cambios en los principales parámetros hidrodinámicos y meteorológicos, se ven reflejados en el área final del derrame, lo cual no puede ser realizado empleando las correlaciones analizadas o el modelo ROSA. La tabla 5-13 muestra que la expresión propuesta por Blokker (1969) proporciona un ajuste del 0.97; sin embargo, si se considera el comportamiento del derrame tiempo después de que cesaron las pruebas de campo y a partir de allí se considera la expresión propuesta por Lerh et al (1984), presentada en la tabla 5-2, queda claro que sólo el modelo propuesto es capaz de seguir el comportamiento del derrame, tal como lo enseña la figura 5-36.
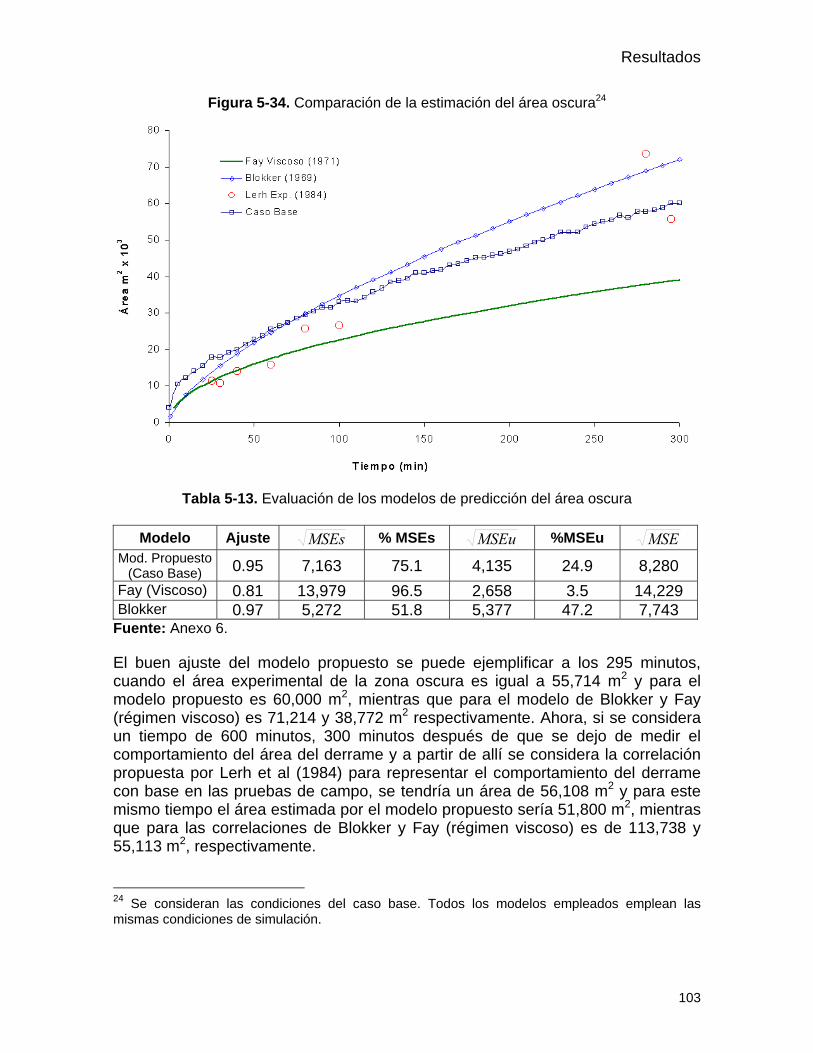
Resultados
103
Figura 5-34. Comparación de la estimación del área oscura24
Tabla 5-13. Evaluación de los modelos de predicción del área oscura
Modelo Ajuste MSEs % MSEs MSEu %MSEu MSE
Mod. Propuesto (Caso Base) 0.95 7,163 75.1 4,135 24.9 8,280
Fay (Viscoso) 0.81 13,979 96.5 2,658 3.5 14,229 Blokker 0.97 5,272 51.8 5,377 47.2 7,743
Fuente: Anexo 6. El buen ajuste del modelo propuesto se puede ejemplificar a los 295 minutos, cuando el área experimental de la zona oscura es igual a 55,714 m2 y para el modelo propuesto es 60,000 m2, mientras que para el modelo de Blokker y Fay (régimen viscoso) es 71,214 y 38,772 m2 respectivamente. Ahora, si se considera un tiempo de 600 minutos, 300 minutos después de que se dejo de medir el comportamiento del área del derrame y a partir de allí se considera la correlación propuesta por Lerh et al (1984) para representar el comportamiento del derrame con base en las pruebas de campo, se tendría un área de 56,108 m2 y para este mismo tiempo el área estimada por el modelo propuesto sería 51,800 m2, mientras que para las correlaciones de Blokker y Fay (régimen viscoso) es de 113,738 y 55,113 m2, respectivamente.
24 Se consideran las condiciones del caso base. Todos los modelos empleados emplean las mismas condiciones de simulación.

Resultados
104
Figura 5-35. Comparación de la estimación del área iridiscente25
Tabla 5-14. Evaluación de los modelos de predicción del área iridiscente
Modelo Ajuste MSEs % MSEs MSEu %MSEu MSE
Fay (Tensión) 0.98 81,248 87.7 30,497 12.3 86,816 Fay (Inercial) 0.60 292,134 99.99 3,432 0.01 292,154 Modelo ROSA 0.83 198,747 99.5 13,876 0.5 199,231
Fuente: Anexo 6. La figura 5-35 enseña el comportamiento del modelo de Fay (régimen inercial y de tensión) y el ROSA con relación a los datos experimentales del área iridiscente reportados por Lerh et al (1984), ya que su escala no permite realizar comparaciones con los datos de área oscura citados por el mismo autor (ver tabla 5-3). De la observación de estas curvas y con la ayuda de los resultados de la evaluación del modelo presentados en la tabla 5-14, se puede inferir que él modelo de régimen de tensión superficial propuesto por Fay (1971), es el que mejor representa el comportamiento de esta zona del derrame de petróleo con un ajuste de 0.98. En general, se puede afirmar que el modelo propuesto es el más versátil de los modelos comparados ya que como se anotó antes permite determinar el efecto que los principales parámetros de simulación tienen sobre el área final y hacer un seguimiento de la trayectoria seguida por el derrame (igual que ROSA).
25 Se consideran las condiciones del caso base. Todos los modelos empleados emplean las mismas condiciones de simulación.
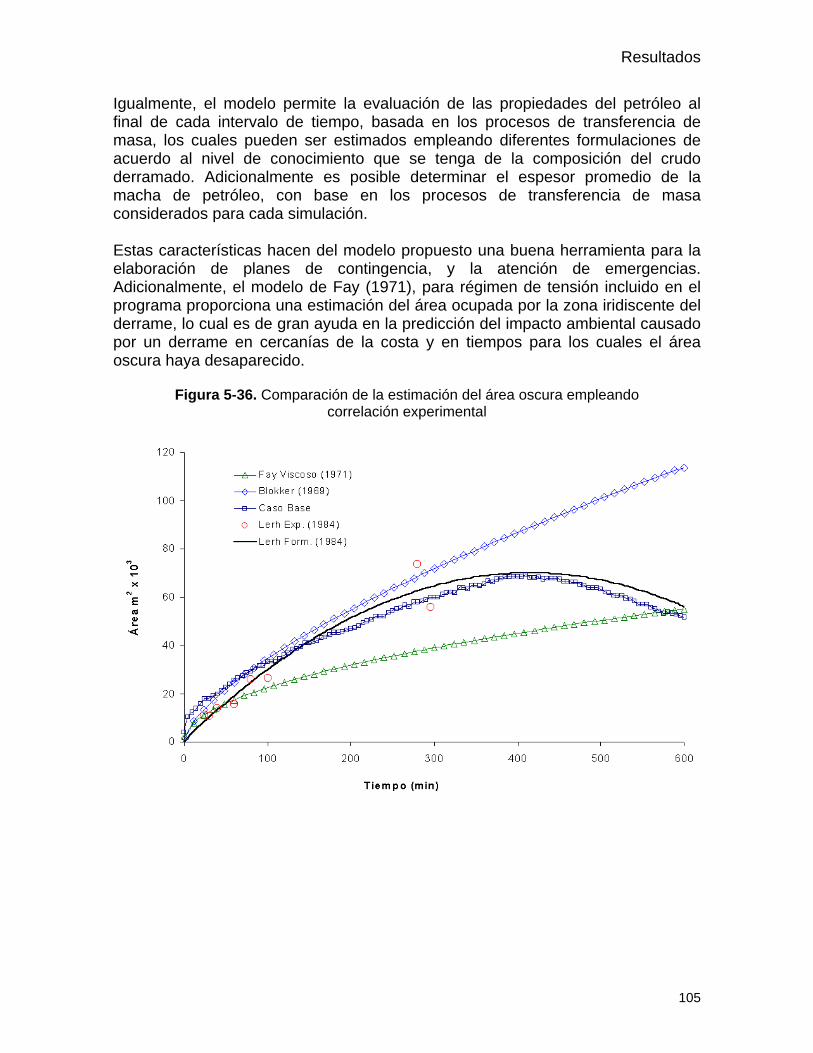
Resultados
105
Igualmente, el modelo permite la evaluación de las propiedades del petróleo al final de cada intervalo de tiempo, basada en los procesos de transferencia de masa, los cuales pueden ser estimados empleando diferentes formulaciones de acuerdo al nivel de conocimiento que se tenga de la composición del crudo derramado. Adicionalmente es posible determinar el espesor promedio de la macha de petróleo, con base en los procesos de transferencia de masa considerados para cada simulación. Estas características hacen del modelo propuesto una buena herramienta para la elaboración de planes de contingencia, y la atención de emergencias. Adicionalmente, el modelo de Fay (1971), para régimen de tensión incluido en el programa proporciona una estimación del área ocupada por la zona iridiscente del derrame, lo cual es de gran ayuda en la predicción del impacto ambiental causado por un derrame en cercanías de la costa y en tiempos para los cuales el área oscura haya desaparecido.
Figura 5-36. Comparación de la estimación del área oscura empleando correlación experimental
106
CAPÍTULO 6 6 CONCLUSIONES Y RECOMENDACIONES Debido a los escasos datos experimentales confiables, el modelo numérico elaborado se calibró y adaptó a los datos experimentales reportados por Lerh et al (1984, 1984a) y a partir de ellos se estructuró un caso base, que permitió determinar que parámetros influyen más en el comportamiento de los derrames de petróleo. Por lo que las conclusiones y recomendaciones que expuestas a continuación corresponden a las condiciones bajo las cuales se realizaron las pruebas de campo, descritas ampliamente en el capítulo anterior y solamente pueden ser extrapoladas en la medida en que se cuente con mayor información del nuevo caso que se quiera modelar. Por otra parte, el análisis paramétrico también puede ser empleado como la base para el diseño de experimentos que permitan entender mejor la dinámica de los derrames de petróleo bajo diferentes condiciones (por ejemplo las regiones de influencia de la industria petrolera mexicana), y de esta forma emplear el modelo propuesto de forma cada vez más confiable como herramienta de predicción de derrames de petróleo. Antes de pasar a presentar las conclusiones y recomendaciones de esta investigación bien vale la pena resumir en las siguientes líneas el eje central de este trabajo y de esta manera contextualizar mejor el marco de referencia bajo el cual se desarrolla este importante capítulo. El estudio de la evolución de los derrames de petróleo en cuerpos de agua, es una compleja relación entre las condiciones de la zona donde ocurre, y la magnitud y las propiedades del petróleo derramado, ya que dentro de la mancha de petróleo coexisten tres regímenes de escurrimiento (inercial, viscoso y de tensión superficial), cada uno de ellos dominado por el equilibrio entre las fuerzas mecánicas (inercia, gravedad, rozamiento y tensión superficial) que actúan sobre él. Cada una de las zonas es caracterizada por una coloración particular de la mancha (la zona en régimen inercial o viscoso es oscura, y la zona en régimen de tensión es iridiscente), un espesor y una rapidez de escurrimiento (Fay, 1971), por lo que es necesario contar con un modelo que pueda integrar estás condiciones, a la vez que sea sensible a los diferentes parámetros empleados para definirlas.

107
6.1 Conclusiones Se propuso un modelo de predicción de la evolución de derrames de petróleo basado en la solución numérica de las ecuaciones de transporte y conservación de masa, que sirve para estimar el área, el espesor, la trayectoria, y las propiedades del derrame de petróleo. El modelo propuesto es sensible al cambio en los principales parámetros de modelación (condiciones hidrodinámicas y meteorológicas, propiedades del petróleo, área inicial del derrame y procesos de transferencia de masa), y presenta un ajuste de 0.95 con los datos experimentales (Lerh, 1984, 1984a) de la zona oscura del derrame, tanto en su fase de crecimiento, como en su fase de decaimiento, por lo cual se concluye que el modelo propuesto puede ser utilizado para predecir el comportamiento de un derrame de petróleo bajo las condiciones experimentales consideradas en el estudio. Se propuso un método para la estimación del área oscura de la mancha relacionado con su evolución, el cual se basa en la sumatoria de áreas que ocupa esta y en una cierta concentración límite normalizada, la cual puede variar entre aproximadamente 0.1 y 0.01, siendo 0.01 la más apropiada para el experimento simulado (Lerh et al 1984, 1984a), por lo cual se concluye que es posible contar con un modelo numérico para predecir el comportamiento experimental del área del caso estudiado con base en las condiciones finales de la simulación y que no es necesario valerse de correlaciones experimentales para determinar este parámetro, para el caso estudiado. Se revisaron y analizaron varios modelos empíricos para calcular la evolución del área de una mancha de petróleo durante un derrame ( Blokker, 1964; Fay 1969 y 1971; Hoult, 1972; Lerh, 1984; Mackay, 1980) y se compararon con datos de campo reportados por Lerh et al (1984, 1984a), dentro de los cuales únicamente los modelos de Blokker y Fay arrojaron resultados de estimación del área que están dentro del mismo orden de magnitud de los resultados experimentales. Con base en lo anterior se concluye que solamente los modelos de Blokker (1969) y Fay - régimen viscoso (1971), pueden ser empleados con muy buen grado de confiabilidad para estimar el área de la zona oscura del derrame en su fase de crecimiento, ya que mostraron un ajuste de 0.91 y 0.87, respectivamente. Sin embargo, aparentemente no pueden representar el comportamiento del área de la zona oscura en el periodo de decrecimiento, ya que luego de alcanzar el valor del área máxima tienden a tener un comportamiento asintótico, lo que infiere que a partir de este momento el régimen dominante es el de tensión superficial. Igualmente, se concluye que el modelo de Fay - régimen de tensión es capaz de predecir el comportamiento del área de la mancha de petróleo en su zona iridiscente, ya que mostró un ajuste del 0.98. Se encontró que la velocidad de la corriente y del viento provocan, como era de esperarse, variación en el crecimiento de la mancha de petróleo, y que este efecto

108
puede ser introducido por medio de una velocidad de corriente equivalente calculada en función de la velocidad del viento a 10 metros sobre el agua. Por ejemplo, para los casos estudiados se encontró que un factor de 0.003 que multiplicado por la velocidad del viento es capaz de integrar los diferentes efectos de las condiciones hidrodinámicas y meteorológicas sobre los derrames analizados. Luego de un análisis paramétrico, se identificó que en el modelo aquí desarrollado y para los experimentos simulados (Lerh et al 1984, 1984a), las variables más sensibles en la predicción de derrames de petróleo en agua son la velocidad equivalente de corriente (termino descrito arriba), la concentración limite normalizada para determinar el área de la mancha, el área inicial de la mancha y los procesos de transferencia de masa. De acuerdo a las observaciones anteriores se concluye lo siguiente: • Al aumentar la velocidad equivalente de corriente el área del derrame crece
más rápidamente y su decrecimiento se ve anticipado; y al disminuir la velocidad equivalente, la mancha experimenta un crecimiento más y comienza a decrecer tiempo después del reportado experimentalmente (ver figura 5-24).
• Al disminuir en un 25% el área inicial, el área final simulada decrece respecto al caso base en un 17%; y si por el contrario el área inicial se incrementa en el mismo 25%, el área final se ve incrementada en un 7% con respecto al caso base. De lo que se concluye que la predicción del área es más sensible a una subestimación del área inicial.
• Al variar el coeficiente de difusión de 19 a 5 m2/s, el área máxima del derrame se ve subestimada en un 25%.
• Al considerar los procesos de transferencia de masa la evolución del área de la mancha no se ve afectada significativamente, pero el espesor promedio de la misma se ve reducido en un 21%. Lo que permite mejorar el ajuste con la formulación para el espesor propuesta por Lerh et al (1984) de 0.7 a casi 0.8.
El procedimiento empleado para definir las condiciones de simulación de derrames de petróleo es adecuado, ya que luego de ser usado para predecir el comportamiento de tres experimentos se obtuvo un ajuste promedio de 0.95 para dos de los casos y 0.47 para el tercer caso. La diferencia en este caso se puede explicar por la presencia de corrientes paralelas a la dirección del viento durante la realización de la prueba, efecto que aún no ha sido incorporado en el modelo propuesto. Para estimar la masa perdida por la evaporación se analizó un modelo reciente (Fingas,1996 y 1997), que requiere del conocimiento de datos experimentales para cada hidrocarburo, suministrados por el Centro de Tecnología Ambiental de Canadá (www.etecentre.com). A partir de este modelo se obtiene un ajuste mayor a 0.98 con relación a datos experimentales, por lo cual se concluye que de los modelos aquí probados (Mackay et al 1980; Reed et al 1988 y Findikakis et al
109
1993), el de Fingas (1996, 1997) es el que mejor representar el proceso de evaporación. Se compararon los datos experimentales de evaporación de la gasolina (Mackay et al, 1975), con los valores calculados por los métodos de pseudocomponentes (Mackay et al 1980; Reed et al 1988 y Findikakis et al 1993), basados en la teoría del coeficiente de transferencia de masa propuesto por el mismo Mackay et al, 1975, observándose un ajuste de 0.96, 0.961 y 0.986, respectivamente, por lo que se comprobó que cuando es posible tener la caracterización del hidrocarburo estas formulaciones pueden ser usadas. Se encontró un modelo de disolución (Mackay et al, 1980), basado en fenómenos de transferencia de masa superficial, el cual emplea un coeficiente de disolución característico para diferentes grupos de crudos, en función de su gravedad API, siendo la versión modificada por Yapa y Shen (1994), la que ofrece valores de coeficientes de transferencia de masa que mejor se ajustan a los estimativos de pérdida de masa reportados experimentalmente (Cohen et al., 1980). Por lo cual se sugiere que el modelo de Yapa y Shen (1994), es el más apropiado para el cálculo de la disolución. El proceso de dispersión fue modelado a partir de correlaciones propuestas por tres diferentes autores (Audunso, 1979; Mackay, 1980; Huang, 1984) obteniéndose resultados que se encuentran dentro de los rangos reportados (NOAA, 1992), principalmente en el caso del modelo de Mackay (1980), por lo que al no contarse con datos experimentales para evaluar los modelos, se usó este último, por ser adicionalmente el que mayor número de parámetros considera, a la vez que ha sido implementado en la mayoría de los modelos reportados (Zhi-wei et al, 2000; Reed et al, 1988; Findikakis et al, 1988, Rasmusen, 1985, entre otros). Los modelos empleados para calcular el aumento de la viscosidad por evaporación y emulsificación (Reed et al, 1988 y Mackay, 1980) representan adecuadamente el comportamiento experimental, obteniéndose coeficientes de ajuste mayores a 0.92, por lo que se concluye que los modelos empleados para determinar la variación de la viscosidad, el cual puede llegar a ser del orden del 2,000 por ciento. De acuerdo con los resultados del modelo que representa la emulsificación (Reed et al, 1988), el cual depende de una constante que varía de 1 a 10, las condiciones ambientales y el tipo de hidrocarburo, se encontró que usando valores entre 6 y 10 para el coeficiente de emulsificación se obtienen ajustes mayores a 0.98 para los experimentos realizados por Daling y Strom (1999).
6.2 Recomendaciones Se recomienda realizar experimentos de campo bajo condiciones controladas con

110
el fin de mejorar la predicción de la evolución de los derrames de petróleo bajo las condiciones de los cuerpos de agua y crudos manejados en México, recolectando la suficiente información acerca de las condiciones iniciales de los derrames de petróleo, el efecto de las condiciones hidrodinámicas y meteorológicas típicas, la trayectoria de la mancha, el cambio de las propiedades y los efectos de la costa, entre otros. Un trabajo adicional se debe enfocar a mejorar los resultados de la predicción del comportamiento de los derrames de hidrocarburos, en particular en lo concerniente al uso de los modelos numéricos determinísticos, ya que estos permitirían tener un mayor control sobre los resultados de la simulación, ya que se ajustaran a las condiciones del área donde ocurre el derrame. Actualmente se cuenta con modelos que consideran mezclas entre modelos empíricos y numéricos, que no permiten predecir con suficiente precisión y realidad los fenómenos físicos y químicos asociados a los derrames de petróleo, por lo que se debe buscar avanzar en investigaciones que permitan reducir el grado de incertidumbre de los resultados. Es necesario tener disponible una base de datos meteorológicos e hidrodinámicos de los zonas costeras mexicanas donde se realiza la exploración y explotación de petróleos. Igualmente, es necesaria una base de datos acerca de los crudos, mezclas y derivados que son manejados en estas zonas, para lo cual se podrían seleccionar algunos estudios de caso. Para futuras investigaciones se recomienda trabajar en las siguientes temáticas: Modelos que permitan predecir con mayor exactitud los fenómenos advectivos y su interacción con la dispersión turbulenta, en particular la formación de una pluma de gotas de petróleo en la dirección vertical (Reed et al., 1999; ASCE, 1996 y Spaulding, 1988). En lo que respecta al estudio de las interacciones con las líneas de costa se requiere de la formulación de modelos que permitan predecir con mayor precisión la advección y la dinámica de escurrimiento de la mancha de petróleo en las cercanías de la playa, Spaulding (1988), Reed et al (1988). Para entender el escurrimiento, se requiere explicar: (1) el alargamiento de la mancha, con un espesor no homogéneo, (2) la reducción de la tasa de escurrimiento por cambio de la viscosidad, (3) el rompimiento de la mancha en pequeños parches, (4) la dependencia de la razón de escurrimiento con las condiciones de descarga (ASCE, 1996). Se debe estudiar el fenómeno de disolución asociado a las gotas de petróleo dispersas en ella debido a la difusión turbulenta, ya que este fenómeno podría representar un porcentaje similar al disuelto en forma directa, el cual es de aproximadamente 5% del petróleo inicial Cohen et al. (1980).

111
Anexo 1. Estadísticas de los derrames de petróleo.
Al analizar las estadísticas de derrames de petróleo ocurridos a partir de 1970, con base en la información suministrada por ITOPF (2000), es fácil identificar que el número de derrames de petróleo de proporciones significativas (mayores de 7 m3) ha descendido considerablemente en la última década y en especial en los últimos tres años, sin embargo no es posible relacionar esta observación con estimaciones de los daños causados por los derrames al entorno ambiental, pues dependen de la ubicación del accidente y las condiciones ambientales. En la tabla 1 se observa un resumen de las estadísticas disponibles de los accidentes de derrames de petróleo.
Son pocos los derrames responsables de la mayoría del petróleo introducido en el mar. Por ejemplo en el periodo de 1990 – 1999 se presentaron 346 derrames mayores de 7 m3, los que sumados corresponden a 1,153 m3, de estos solo 10 accidentes suman 346 m3. Los derrames más grandes de petróleo ocurrieron en los 1979 (Atlantic Empres – 302.105 m3), 1983 (Castillo de Bellever – 265.263 m3) y 1991 (ABT Summer 273.684 m3). Los derrames de petróleo accidentales son conocidos debido a los daños que estos ocasionan, como es el caso del accidente del Exxon Valdez (1989) que a pesar de ocupar el puesto 34 en magnitud es uno de los más estudiados. En la tabla 2 se encuentra una lista de los 21 más grandes derrames de petróleo que han ocurrido desde la década de los 70 y en el figura 1 se observa un mapa con la ubicación de estos incidentes.
Muchos de los accidentes son el resultado de la combinación de acciones y circunstancias, que contribuyen en diferente medida a los resultados finales. Un análisis de los derrames de petróleo de diferentes tamaños en función de las causas, concluye que existen dos grandes grupos: los de origen accidental y los de origen operacional. La tabla 3 agrupa los derrames de acuerdo a su causa, incluyendo un conjunto de los casos en los que se desconoce la causa la misma.
De la tabla 3 se concluye que:
• Muchos de los derrames de petróleo provienen de operaciones de carga,
descarga y almacenamiento, las cuales normalmente se realizan en puertos o en terminales petroleras.
• La mayoría de los derrames de origen operacional son pequeños, ya que el 92% involucran cantidades menores a 7 m3.
• Los derrames de origen accidental generalmente se deben a colisiones o
encallado de barcos y su tamaño es de cantidades que exceden las 700 m3.
Tabla 1. Frecuencia de derrames de petróleo mayores.

Anexos
112
Año Entre 7 y 700 m3 Mayores de 700 m3 1970 6 29 1971 18 14 1972 49 24 1973 25 32 1974 91 26 1975 97 19 1976 67 25 1977 65 16 1978 54 23 1979 59 34 1980 51 13 1981 49 6 1982 44 3 1983 52 11 1984 25 8 1985 29 8 1986 25 7 1987 27 10 1988 11 10 1989 32 13 1990 50 13 1991 27 8 1992 31 9 1993 30 11 1994 27 7 1995 20 3 1996 20 3 1997 27 10 1998 22 4 1999 19 5
Fuente: ITOPF, 2000
Tabla 2. Mayores derrames de petróleo en cuerpos de agua

Anexos
113
Nombre Año Ubicación Magnitud m3
Atlantic empress 1979 Tabogo, Este de la India 302.105 ABT Summer 1991 700 millas náuticas en el mar de Angola 273.684 Castillo de Bellver
1983 En el mar cerca de la Bahía de Saldanha, Sur Africa
265.263
Amoco Cadiz 1978 En el mar Británico, frente a Francia 234.737 Haven 1991 En Genoa, Italia 151.579 Odyssey 1988 700 millas nauticas frente a Nueva
Escoci, Canada 138.947
Torrey Canyon 1967 Islas Scilly, Reino Unido 125.263 Urquiola 1976 La Coruña, España 105.263 Hawaiian Patriot 1977 300 millas nauticas en el Mar de
Honolulu 100.000
Independenta 1979 Bosforo, Turquia 100.000 Jakob Maersk 1975 Oporto, Portugal 92.632 Braer 1993 Islas Shetland, Reino Unido 89.474 Khark 5 1989 120 millas nauticas en el mas Atlantico,
frente a las costas de Moroco 84.211
Aegean Sea 1992 La Coruña, España 77.895 Sea Empress 1996 Milford Haven, Reino Unido 75.789 Katia P. 1992 Maputo, Mozambique 75.789 Assimi 1983 55 millas nauticas en el mar frente a
Muscat, Oman 55.789
Metula 1974 Estrecho de Magallanes, Chile 52.632 Ixtoc I 1979 Bahia de Campeche, México 47.926 Wafra 1971 En el mar frente a Cape Agulhas, Sur
Africa 42.105
Exxon Valdez 1989 Prince Willian Sound, Alaska, Estados Unidos
38.947
Fuentes: ITOPF, 2000, NOAA, 1992 y Oil Spill Intelligence Report, 1997.
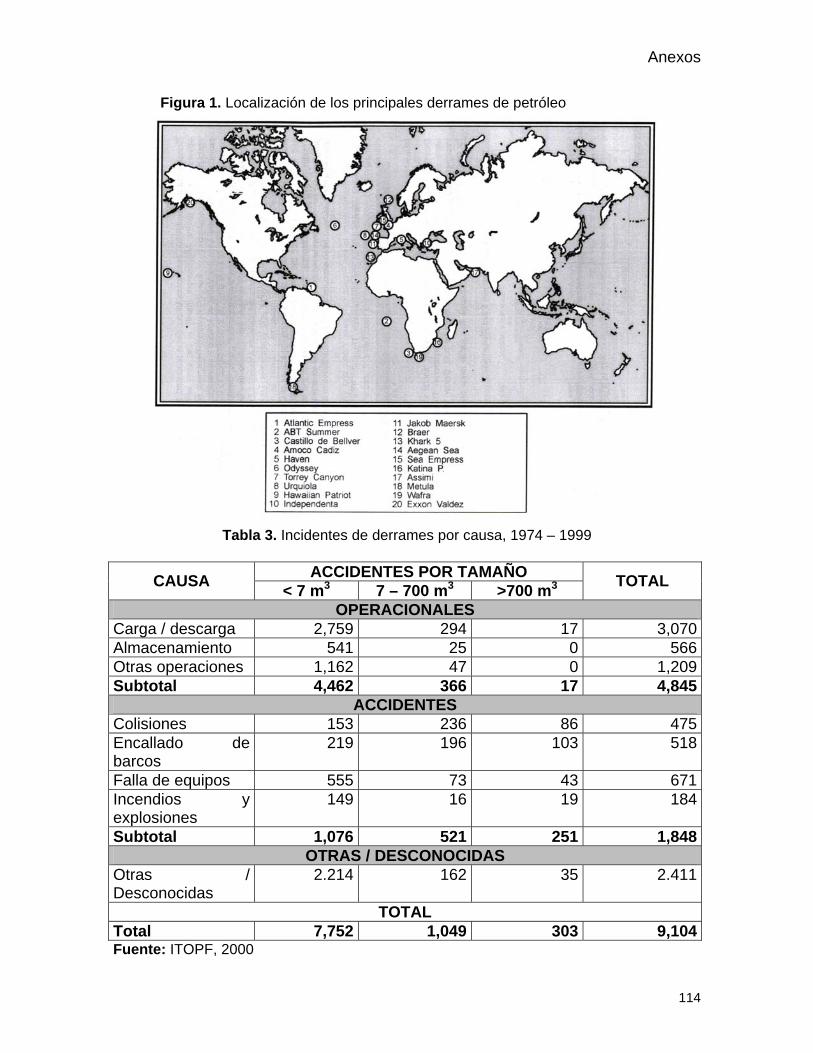
Anexos
114
Figura 1. Localización de los principales derrames de petróleo
Tabla 3. Incidentes de derrames por causa, 1974 – 1999
ACCIDENTES POR TAMAÑO CAUSA < 7 m3 7 – 700 m3 >700 m3 TOTAL
OPERACIONALES Carga / descarga 2,759 294 17 3,070Almacenamiento 541 25 0 566Otras operaciones 1,162 47 0 1,209Subtotal 4,462 366 17 4,845
ACCIDENTES Colisiones 153 236 86 475Encallado de barcos
219 196 103 518
Falla de equipos 555 73 43 671Incendios y explosiones
149 16 19 184
Subtotal 1,076 521 251 1,848OTRAS / DESCONOCIDAS
Otras / Desconocidas
2.214 162 35 2.411
TOTAL Total 7,752 1,049 303 9,104Fuente: ITOPF, 2000
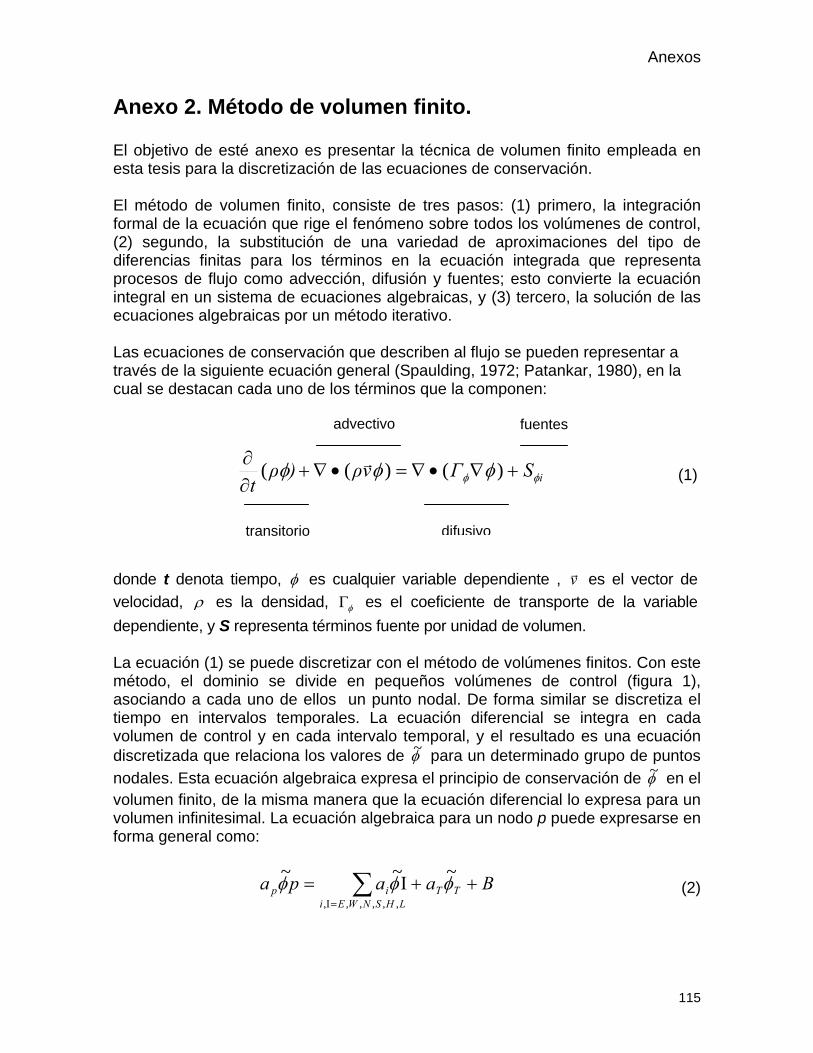
Anexos
115
Anexo 2. Método de volumen finito. El objetivo de esté anexo es presentar la técnica de volumen finito empleada en esta tesis para la discretización de las ecuaciones de conservación. El método de volumen finito, consiste de tres pasos: (1) primero, la integración formal de la ecuación que rige el fenómeno sobre todos los volúmenes de control, (2) segundo, la substitución de una variedad de aproximaciones del tipo de diferencias finitas para los términos en la ecuación integrada que representa procesos de flujo como advección, difusión y fuentes; esto convierte la ecuación integral en un sistema de ecuaciones algebraicas, y (3) tercero, la solución de las ecuaciones algebraicas por un método iterativo. Las ecuaciones de conservación que describen al flujo se pueden representar a través de la siguiente ecuación general (Spaulding, 1972; Patankar, 1980), en la cual se destacan cada uno de los términos que la componen:
iSΓvρ)ρt φφ φφφ +∇•∇=•∇+∂∂ )()(( r
(1)
donde t denota tiempo, φ es cualquier variable dependiente , vr es el vector de velocidad, ρ es la densidad, φΓ es el coeficiente de transporte de la variable dependiente, y S representa términos fuente por unidad de volumen. La ecuación (1) se puede discretizar con el método de volúmenes finitos. Con este método, el dominio se divide en pequeños volúmenes de control (figura 1), asociando a cada uno de ellos un punto nodal. De forma similar se discretiza el tiempo en intervalos temporales. La ecuación diferencial se integra en cada volumen de control y en cada intervalo temporal, y el resultado es una ecuación discretizada que relaciona los valores de φ~ para un determinado grupo de puntos nodales. Esta ecuación algebraica expresa el principio de conservación de φ~ en el volumen finito, de la misma manera que la ecuación diferencial lo expresa para un volumen infinitesimal. La ecuación algebraica para un nodo p puede expresarse en forma general como:
∑=Ι
++Ι=LHSNWEi
TTip Baapa,,,,,,
~~~ φφφ (2)
transitorio
advectivo
difusivo
fuentes

Anexos
116
donde: el subíndice Ι representa las celdas vecinas, i la cara entre las celdas, T el valor correspondiente en el intervalo temporal anterior y B el término fuente. La deducción detallada de la ecuación 2 puede consultarse en numerosos textos de mecánica de fluidos computacional, por ejemplo en Patankar (1980), Fletcher C. (1988), Versteeg H., Malalasekera W., (1995) y Espinosa y Pech (1997). A continuación, se proporciona un somero resumen, con el objetivo fundamental de servir de base para la formulación del modelo matemático que describe los derrames de petróleo en cuerpos de agua.
Figura 1. Representación del sistema discretizado en volúmenes finitos.
Fuente: Vicente (2000)
En el caso de una malla cartesiana, desplazada y uniforme (celdas de iguales dimensiones espaciales), un volumen de control bidimensional (por sencillez) es como el mostrado en la figura 2 (El espesor de la celda en la dirección z puede considerarse la unidad). En una malla desplazada, las variables escalares como por ejemplo, la presión, entalpía o las fracciones másicas, se encuentran definidas en el centro de la celda, mientras que las componentes de velocidad correspondientes a la celda se encuentran desplazadas en cada dirección a las caras de la celda.
En la figura 2 se muestra la notación de la celda y de sus vecinas. Dada una celda P, sus vecinas se notarán según las iniciales de los puntos cardinales (en inglés) en las direcciones x, y y como Low y High en la dirección z. Las caras de la celda se notan con la misma nomenclatura, pero con letras minúsculas. El tiempo también se discretiza. Las celdas en la dirección temporal se llaman intervalos temporales. La celda P en el paso temporal se nota como T. A continuación, se presentan los términos de la ecuación discretizada (2). Definiendo los símbolos F, D y Pe como:
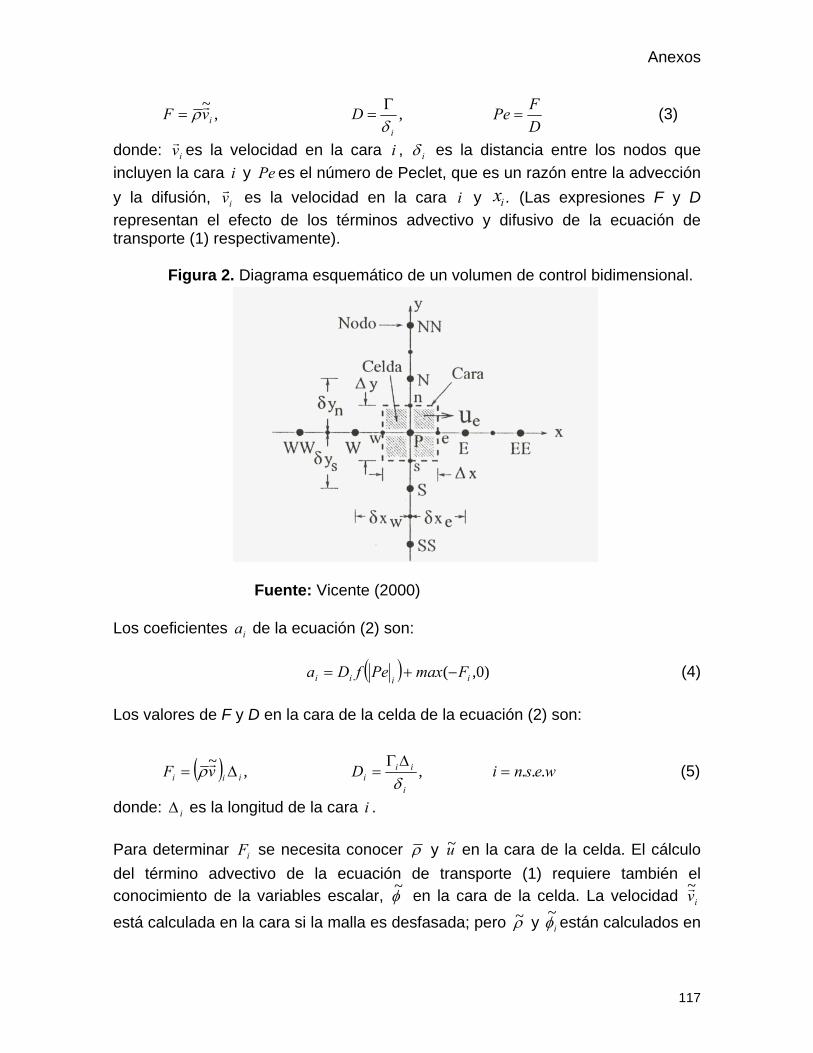
Anexos
117
,~ivF rρ= ,
i
DδΓ
= DFPe = (3)
donde: ivr es la velocidad en la cara i , iδ es la distancia entre los nodos que incluyen la cara i y Pe es el número de Peclet, que es un razón entre la advección y la difusión, ivr es la velocidad en la cara i y ix . (Las expresiones F y D representan el efecto de los términos advectivo y difusivo de la ecuación de transporte (1) respectivamente).
Figura 2. Diagrama esquemático de un volumen de control bidimensional.
Fuente: Vicente (2000)
Los coeficientes ia de la ecuación (2) son:
( ) )0,( iiii FmaxPefDa −+= (4)
Los valores de F y D en la cara de la celda de la ecuación (2) son:
( ) ,~iii vF ∆=
rρ ,i
iiiD
δ∆Γ
= wesni ...= (5)
donde: i∆ es la longitud de la cara i . Para determinar iF se necesita conocer ρ y u~ en la cara de la celda. El cálculo del término advectivo de la ecuación de transporte (1) requiere también el conocimiento de la variables escalar, φ~ en la cara de la celda. La velocidad iv~r
está calculada en la cara si la malla es desfasada; pero ρ~ y iφ~ están calculados en

Anexos
118
el nodo y necesitan ser interpolados en la cara para calcular los coeficientes ia de la ecuación discretizada (2). La obtención de estas variables en la cara de la celda es importante en la precisión y convergencia de la solución. El cálculo de ρ~ y iφ
~ da lugar a los llamados esquemas de discretización. La función ( )Pef de la
ecuación (4) depende del esquema de interpolación. Por ejemplo, en el esquema de diferencias desplazadas, ( ) 1=Pef , y para el sistema híbrido, por medio de la siguiente función (Patankar, 1980):
( ) ( )PePef 5.01.0max −= (6)
A continuación se presentan los esquemas lineales que se usan en la discretización del término convectivo de la ecuación general (1). En la formulación de la ecuación discretizada (2), se requiere conocer la densidad ρ y la variable escalar φ en la cara de la celda. Estas variables se calculan en el nodo de la celda, por lo que es necesario interpolar entre celdas para conocer su valor en la cara. Este cálculo de φ y de la ρ en la cara de la celda da lugar a los llamados esquemas de discretización. La determinación de los valores de estas variables en la cara es importante para la precisión y convergencia de la solución numérica. Los esquemas se describirán con base al sistema de celdas que se ilustra en la figura 3. Como ejemplo, se obtendrá el valor de φ en la cara e de la celda P. La velocidad en la cara e se considerará, sin pérdida de generalidad, positiva ( eu > O).
Figura 3. Diagrama esquemático de celdas.

Anexos
119
Diferencias desplazadas de primer orden – aguas arriba
Con este esquema se supone que el valor de la variable φ en la cara e es igual al del nodo adyacente aguas arriba, es decir, para eu > O, Patankar (1980):
Pe φφ = (7)
Esta alternativa es de implementación sencilla, acotada y altamente estable casi bajo cualquier situación pero tiene los inconvenientes de su precisión, que es de de primer orden y de presentar problemas de difusión numérica. Esta falsa difusión es mayor si en el flujo hay un desalineamiento en la dirección del flujo y las líneas de la malla, como por ejemplo en flujos con recirculación. Diferencias centradas
Este esquema supone una variación lineal de φ entre los nodos P y E; por tanto, el valor en la cara e es:
2PE
eφφ
φ+
= (8)
Este esquema tiene una precisión de segundo orden pero tiene el inconveniente de no estar acotado, por lo que puede presentar inestabilidades numéricas. El límite de estabilidad de este esquema viene dado en función del número de Peclet (ecuación 10), que es un parámetro comparativo entre los procesos advectivo y difusivo. Para situaciones en que los procesos convectivos dominan sobre los difusivos (Pe > 2), por ejemplo flujos con números de Reynolds altos, el esquema presenta oscilaciones numéricas.
Híbrido Este esquema fue introducido por Spalding (1972) y consiste en combinar los esquemas de diferencias desplazas y centradas para calcular el valor de la propiedad φ en la cara del volumen de control. La selección del esquema se hace en función del número de Peclet de la celda:
• Si Pe ≤ 2, se usan diferencias centradas.
• Si Pe > 2, se usan diferencias desplazadas.
Para flujos con bajo número de Reynolds/Peclet el esquema utilizado es el de diferencias centradas, y por tanto resulta de orden 2; sin embargo, el esquema presenta los problemas asociados al esquema de diferencias desplazadas cuando el flujo esta dominado por los procesos de advección (Pe > 2).

Anexos
120
El coeficiente para el término transitorio es:
ta yxT
T ∆
∆∆=ρ
(9)
Para el cálculo del término iD (5) se necesita obtener el coeficiente de difusión, Γ en la cara de la celda. El coeficiente Γ no es necesariamente una constante, sino probablemente función de valores variables que se conocen en los nodos (por ejemplo, la temperatura), y por lo tanto es necesario interpolarlo a la cara. Esta interpolación puede ser aritmética o armónica. Para la cara e, por ejemplo, estás interpolaciones son:
( ),
2 xe
EPxe δ
Γ+Γ∆=Γ ,
11
2
⎟⎟⎠
⎞⎜⎜⎝
⎛
Γ+
Γ∆
=Γ
ppx
xee
δ (10)
El término fuente de la ecuación general (1), φS , se linealiza como:
Puc SSS φφφφ~
,, += (11)
donde: el término uS ,φ se elige de acuerdo con la relación existente entre φS y φ~ , en caso de depender el primero del segundo. El objetivo de la linealización del término fuente es mejorar la convergencia de la solución.
Con esta suposición, los términos B y pa de la ecuación (2) son:
TTyxc aSB φφ~
, +∆∆= (12)
yxvTsnweP Saaaaaa ∆∆−++++= ,φ (13)
La ecuación (2) se aplica en cada celda del dominio, para cada φ~ y para cada paso temporal t∆ , por lo que se tiene un sistema de ecuaciones lineales (los
coeficientes a pueden depender, directa o indirectamente de φ~ , por lo que el sistema es realmente pseudo-lineal).
Para resolver este sistema de ecuaciones se puede utilizar cualquier método de resolución de ecuaciones lineales.

Anexos
121
En el cálculo de las velocidades, a partir de las ecuaciones de cantidad de movimiento, se tiene el inconveniente de que la presión, cuyo gradiente aparece como término fuente en estas ecuaciones de cantidad de movimiento, no tiene una ecuación propia con la que calcularla. Una solución ampliamente utilizada es transformar la ecuación de continuidad en una ecuación para la presión. Entre los algoritmos iterativos que se basan en este procedimiento están los de la familia SIMPLE (Semi Implicid Method for Pressure-Linked Equations) (Patankar, 1980; Versteeg, 1995; Spalding, 199 y Fueyo (1996). El algoritmo utilizado en esta Tesis para resolver el problema de acoplamiento velocidad-presión pertenece a esta familia. El proceso de solución de este sistema de ecuaciones es iterativo y durante éste, las ecuaciones del sistema, en general, no se cumplen; el desbalance entre la parte izquierda y derecha de la ecuación se denomina residuo. La convergencia del proceso iterativo se da cuando los residuos disminuyen. Para procurar o acelerar esta convergencia se utiliza un método de relajación de algunas de las variables dependientes y propiedades. Se emplean dos tipos de relajación: la inercial y la lineal. La relajación inercial se emplea para la velocidades, y aumenta la dominancia diagonal de la matriz de coeficientes al agregar a la ecuación de cualquier variable φ~ el término fuente:
( ) ( )( )nP
nP
Pr tf
VS φφ
ρφ
~~ 1 −∆
= − (14)
donde: Vp es el volumen de la celda P, tf∆ es el intervalo de tiempo falso y el superíndice n se refiere al número de iteración. Para la presión y la densidad se emplea la relajación lineal dada por:
( ) ( ) ( )1~1~~ −−+= nP
SOLP
nP φαφαφ (15)
donde: α es el factor de relajación, el superíndice sol se refiere al valor de la propiedad proporcionado por la solución de la iteración actual. El factor de relajación, α normalmente toma valores entre 0 y 1. El criterio de convergencia utilizado para detener el proceso iterativo para un paso temporal dado y pasar al siguiente es tal que, para cada variable, la suma de los valores absolutos de los residuos en todo el dominio sea menor que un determinado porcentaje de un valor de referencia.

Anexos
122
Anexo 3. Archivos de definición q1 y ground.f.
En este anexo se lista el archivo q1, el cual corresponde a la definición del problema resuelto y a las condiciones de solución, para lo cual se empleó el lenguaje propio del código PHOENICS. Este archivo corresponde a la simulación del denominado caso base. Posteriormente se lista el archivo ground.f, que es archivo en donde se programan las subrutinas del usuario para ser incluidas en el algoritmo del código. El lenguaje utilizado es Fortran 77. Archivo de definición q1 TALK=f;RUN( 1, 1);VDU=X11-TERM GROUP 1. Run title and other preliminaries text(MODELO NUMERICO DE DERRAMES DE PETROLEO) REAL(DAG,VAG,DPET,VPET,DIFDEN,VOLIN,CONAG,PMOL) REAL(FMOL,PREVAP,UWIND,VWIND,TAMB,GV,NSCH,KGAS) REAL(PROC,CV,THC,AREA,TSAA,minCON,DENAIR) REAL(UCOR,VCOR,HORA,ModEv,KFingas,CFingas) REAL(CoefDiso,ExpDiso,Kemul,Cemul,Linc,Linc2) REAL(CD,DENEvp,TimAdd,PIEvp,FIEvp,VOLREF) REAL(keINIT,epINIT,ALFA,ANGLE,HIDE,FCAI) INTEGER(XP,DX,DX2,YP,DY,DY2) DATOS DE ENTRADA HIDE - ¿Correr hidrodinámica o derrame? - RG(45) 1 = Hidrodinámica 2 = Derrame Petróleo HIDE=2 DAG - Densidad del agua, kg/m^3 - RG(1) DAG=998.0 VAG - Viscosidad cinemática del agua, m^2/sg - RG(2) VAG=1.00401e-6 DPET - Densidad del petróleo, kg/m^3 - RG(3) DPET=866.0 VPET - Viscosidad cinemática del petróleo, m^2/sg - RG(4) VPET=1.59e-5 DIFDEN - Fracción de diferencia de densidades, adim - RG(18) DIFDEN=((DAG-DPET)/DAG) TSAA - Tensión superficial agua aceite, dyn/cm - RG(23) TSAA=26.6 VOLIN - Volumen inicial de petróleo derramado, m^3 - RG(5) VOLIN=8.11 VOLREF - Volumen inicial de referencia (restall), m^3 - RG(40) VOLREF=8.11 CONAG - Contenido inicial de agua del petróleo, fracción - RG(7) CONAG=0.0 XP - Celda de ubicación inicial de la mancha en dirección X - RG(16) XP=5 YP - Celda de ubicación inicial de la mancha en dirección Y - RG(17) YP=15 PMOL - Peso molecular del petróleo mol/kg - RG(9) PMOL=180.0

Anexos
123
FMOL - Fracción molar del petróleo evaporable - RG(10) FMOL=0.25 PREVAP - Presión de vapor del petróleo atm - RG(11) PREVAP=0.3250 UWIN - Velocidad del viento en la dirección X a 10 m sobre el nivel del mar m/s - RG(14) UWIND=5.1 UCOR - Velocidad corriente de agua m/s - RG(26) UCOR=0.015 ALFA - Angulo relativo entre la dirección del viento y la dirección de la corriente en
grados sexagecimales ALFA=0.0 ANGLE - Angulo relativo entre la dirección del viento y la dirección de la corriente en radianes ANGLE=ALFA*1.74533e-2 DENAIR - Densidad del aire, kg/m^3 - RG(25) DENAIR=1.0 TAMB - Temperatura k - RG(13) TAMB=290.0 GV- Aceleración de la gravedad m/sg^2 - RG(6) GV=9.8 NSCH - Numero de schmidt - RG(8) NSCH=2.7 KGAS - Constante universal de gases (atm-m^3/mol-k) - RG(12) KGAS=8.21e-5 PROC - ¿Que procesos de perdida de masa considera incluir? - RG(19) 1 = ningún proceso 2 = solo evaporación 3 = solo disolución 4 = solo dispersión 5 = evaporación, disolución y dispersión PROC=1.0 ModEv -¿Que modelo de evaporación utilizar? - RG(29) 1 = Mackay and Matsugu (1975) 2 = Findikakis et al. (1993) 3 = Fingas (1996) ModEv=3.0 CONSTANTES DE LOS MODELOS DE PROCESOS Coeficiente de disolución - RG(32) CoefDiso=0.884 Exponente de disolución - RG(33) ExpDiso=2.38 Constante de evaporación de Fingas - RG(30) KFingas=2.52 Coeficiente de evaporación de Fingas - RG(31) CFingas=0.037 Masa evaporada al inicio, porcentaje - RG(39) PIEvp=0.0 Masa evaporada al inicio, fracción - RG(41) FIEvp=(PIEvp/100.0) CV - ¿Que correcciones de viscosidad considerar? - RG(20) 1 = ninguna 2 = por evaporación 3 = por emulsificación (no aplica para gasolina, kerosene o diesel ligero) 4 = por evaporación y emulsificación CV=4.0 CONSTANTES DE LOS MODELOS DE CORRECION DE LA VISCOSISDAD
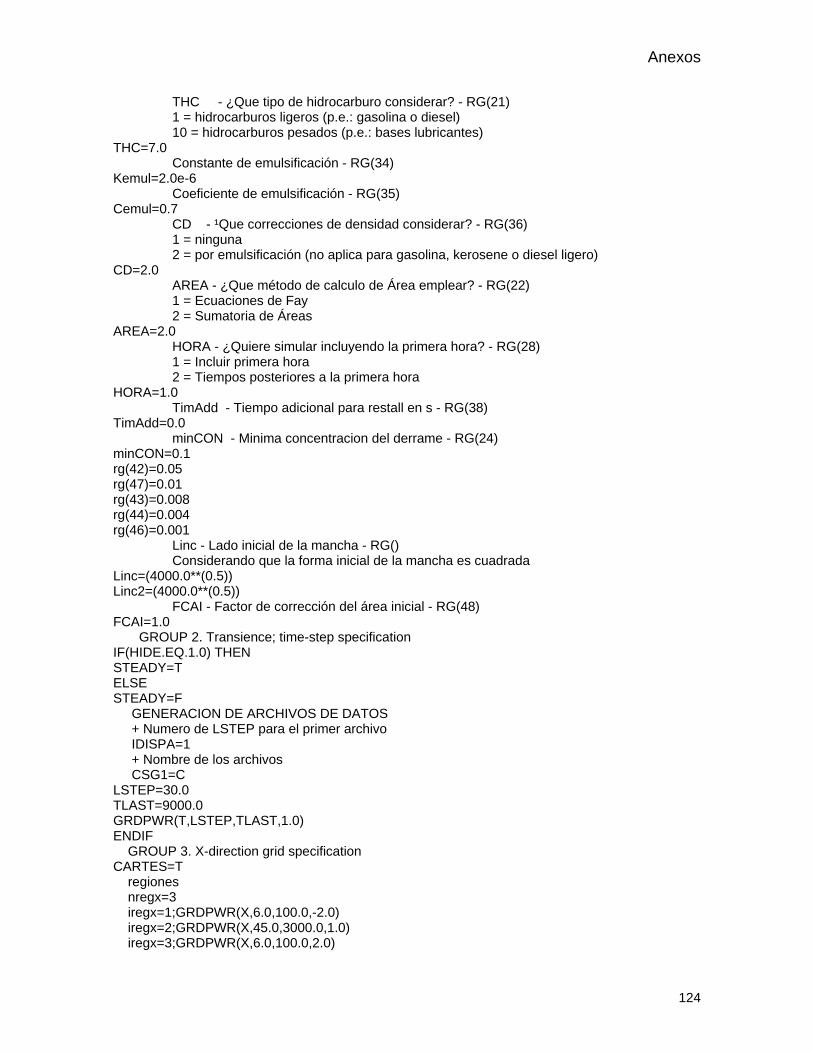
Anexos
124
THC - ¿Que tipo de hidrocarburo considerar? - RG(21) 1 = hidrocarburos ligeros (p.e.: gasolina o diesel) 10 = hidrocarburos pesados (p.e.: bases lubricantes) THC=7.0 Constante de emulsificación - RG(34) Kemul=2.0e-6 Coeficiente de emulsificación - RG(35) Cemul=0.7 CD - ¹Que correcciones de densidad considerar? - RG(36) 1 = ninguna 2 = por emulsificación (no aplica para gasolina, kerosene o diesel ligero) CD=2.0 AREA - ¿Que método de calculo de Área emplear? - RG(22) 1 = Ecuaciones de Fay 2 = Sumatoria de Áreas AREA=2.0 HORA - ¿Quiere simular incluyendo la primera hora? - RG(28) 1 = Incluir primera hora 2 = Tiempos posteriores a la primera hora HORA=1.0 TimAdd - Tiempo adicional para restall en s - RG(38) TimAdd=0.0 minCON - Minima concentracion del derrame - RG(24) minCON=0.1 rg(42)=0.05 rg(47)=0.01 rg(43)=0.008 rg(44)=0.004 rg(46)=0.001 Linc - Lado inicial de la mancha - RG() Considerando que la forma inicial de la mancha es cuadrada Linc=(4000.0**(0.5)) Linc2=(4000.0**(0.5)) FCAI - Factor de corrección del área inicial - RG(48) FCAI=1.0 GROUP 2. Transience; time-step specification IF(HIDE.EQ.1.0) THEN STEADY=T ELSE STEADY=F GENERACION DE ARCHIVOS DE DATOS + Numero de LSTEP para el primer archivo IDISPA=1 + Nombre de los archivos CSG1=C LSTEP=30.0 TLAST=9000.0 GRDPWR(T,LSTEP,TLAST,1.0) ENDIF GROUP 3. X-direction grid specification CARTES=T regiones nregx=3 iregx=1;GRDPWR(X,6.0,100.0,-2.0) iregx=2;GRDPWR(X,45.0,3000.0,1.0) iregx=3;GRDPWR(X,6.0,100.0,2.0)

Anexos
125
INDEPENDENCIA DE LA MALLA máximo XULAST=600.0 NX=120 GRDPWR(X,NX,XULAST,1.0) medio XULAST=600.0 NX=90 GRDPWR(X,NX,XULAST,1.0) mínimo XULAST=600.0 NX=60 GRDPWR(X,NX,XULAST,1.0) prueba XULAST=1000.0 NX=50 GRDPWR(X,NX,XULAST,1.0) xcycle=t DX=(Linc/(XULAST/NX)) DX2=(Linc2/(XULAST/NX)) GROUP 4. Y-direction grid specification regiones nregy=3 iregy=1;GRDPWR(Y,4.0,200.0,-1.0) iregy=2;GRDPWR(Y,15.0,1100.0,1.0) iregy=3;GRDPWR(Y,4.0,200.0,1.0) INDEPENDENCIA DE LA MALLA máximo YVLAST=400.0 NY=60 GRDPWR(Y,NY,YVLAST,1.0) medio YVLAST=400.0 NY=48 GRDPWR(Y,NY,YVLAST,1.0) mínimo YVLAST=400.0 NY=36 GRDPWR(Y,NY,YVLAST,1.0) prueba YVLAST=350.0 NY=35 GRDPWR(Y,NY,YVLAST,1.0) DY=(Linc/(YVLAST/NY)) DY2=(Linc2/(YVLAST/NY)) GROUP 5. Z-direction grid specification GROUP 6. Body-fitted coordinates or grid distortion GROUP 7. Variables stored, solved & named STORE(C11,C12,C13,C14,C15,C16,C17,C18,C19,C20) STORE(C21,C22,C23,C24,C25,C26,C27,C28,C29,C30,LAMPR) STORE(C31,C32,C33,C34,C35,C36,C37,C38,C39,C40) IF(HIDE.EQ.1.0) then SOLVE(U1,V1,P1) SOLUTN(P1,Y,Y,Y,N,N,N) ENDIF IF(HIDE.EQ.2.0) THEN

Anexos
126
SOLVE(C2,C3,C4) STORE(U1,V1,P1,KE,EP) Calculó del coeficiente de difusión según: Murray(1972) = 19.0 PRNDTL(C2)=-19.0 Hunter (1980) = 5.0 PRNDTL(C3)=-5.0 Sobey et al (1997) = GRND PRNDTL(C4)=-GRND ENDIF GROUP 8. Terms (in differential equations) & devices GROUP 9. Properties of the medium (or media) RHO1=DAG ENUL=VAG IF(HIDE.EQ.1.0) THEN turmod(kemodl) ENDIF keINIT y epINIT segun Fueyo (1996) keINIT = 0.05*UCOR**2 epINIT = (0.1/0.05)*keINIT**1.5 Las propiedades del medio son determinadas junto con los datos de entrada GROUP 10. Inter-phase-transfer processes and properties GROUP 11. Initialization of variable or porosity fields FIINIT(U1)=UCOR*COS(ANGLE) FIINIT(V1)=UCOR*SIN(ANGLE) FIINIT(ke)=keINIT FIINIT(ep)=epINIT IF(HIDE.EQ.2.0) then PATCH(UBMAN, INIVAL, XP, (XP+DX), YP, (YP+DY), 1.0, 1.0, 1.0,1.0) INIT(UBMAN, C1, 0.0, ((VOLIN*DPET)/(Linc*Linc))) INIT(UBMAN, C2, 0.0, 1.0) INIT(UBMAN, C4, 0.0, 1.0) ubman=skip PATCH(UBMAN2, INIVAL, XP, (XP+DX2), YP, (YP+DY2), 1.0, 1.0, 1.0,1.0) INIT(UBMAN2, C1, 0.0, ((VOLIN*DPET)/(Linc2*Linc2))) INIT(UBMAN2, C3, 0.0, 1.0) ubman2=skip endif PATCH(VALINIC, INIVAL, 1, NX, 1, NY , 1.0, 1.0, 1.0,1.0) INIT(VALINIC, P1, 0.0, 0.0) INIT(VALINIC, U1, 0.0, UCOR*COS(ANGLE)) INIT(VALINIC, V1, 0.0, UCOR*SIN(ANGLE)) valinic=skip IF(HIDE.EQ.2.0) THEN IF(HORA.EQ.1.0) THEN RESTRT(P1,U1,V1,KE,EP) ELSE RESTRT(all) ENDIF ENDIF GROUP 12. Patchwise adjustment of terms (in differential equatio GROUP 13. Boundary conditions and special sources CORIOL=6.7351E-5 EFECTO DEL VIENTO SOBRE LA SUPERFICIE LIBRE (por velocidad) PATCH(WINDar, HWALL,1,1,1,NY,1,1,1,TLAST) velocidad programada en GRND1
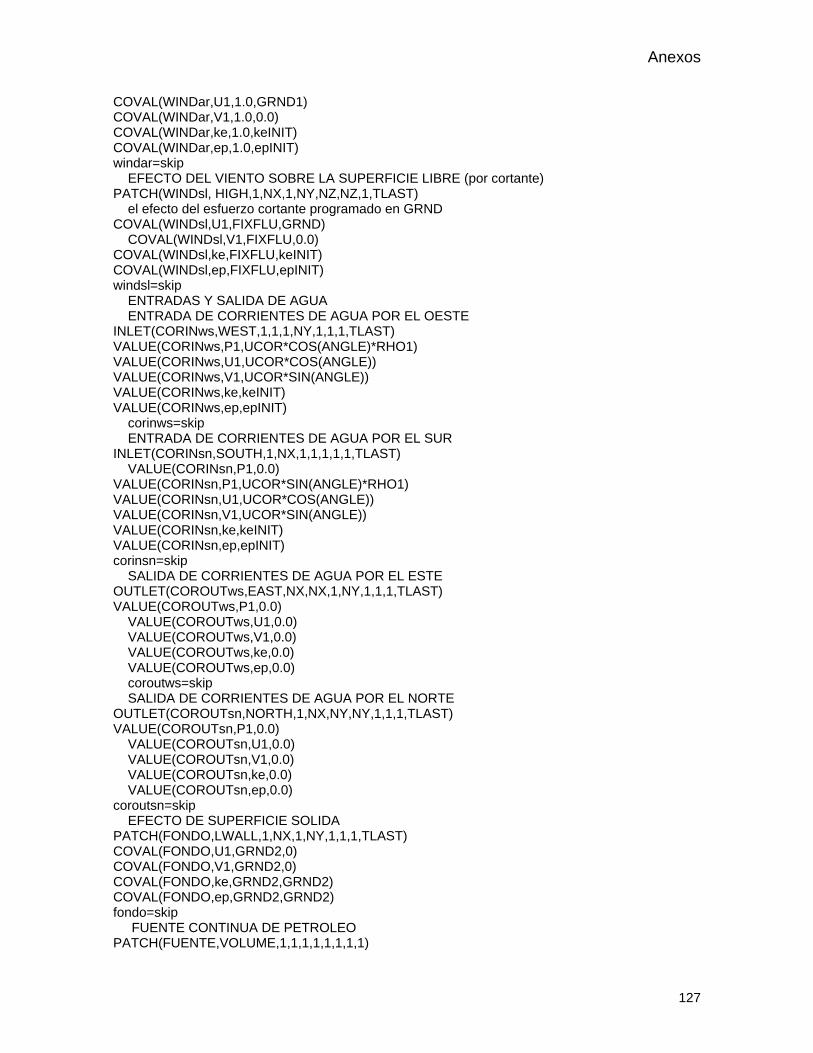
Anexos
127
COVAL(WINDar,U1,1.0,GRND1) COVAL(WINDar,V1,1.0,0.0) COVAL(WINDar,ke,1.0,keINIT) COVAL(WINDar,ep,1.0,epINIT) windar=skip EFECTO DEL VIENTO SOBRE LA SUPERFICIE LIBRE (por cortante) PATCH(WINDsl, HIGH,1,NX,1,NY,NZ,NZ,1,TLAST) el efecto del esfuerzo cortante programado en GRND COVAL(WINDsl,U1,FIXFLU,GRND) COVAL(WINDsl,V1,FIXFLU,0.0) COVAL(WINDsl,ke,FIXFLU,keINIT) COVAL(WINDsl,ep,FIXFLU,epINIT) windsl=skip ENTRADAS Y SALIDA DE AGUA ENTRADA DE CORRIENTES DE AGUA POR EL OESTE INLET(CORINws,WEST,1,1,1,NY,1,1,1,TLAST) VALUE(CORINws,P1,UCOR*COS(ANGLE)*RHO1) VALUE(CORINws,U1,UCOR*COS(ANGLE)) VALUE(CORINws,V1,UCOR*SIN(ANGLE)) VALUE(CORINws,ke,keINIT) VALUE(CORINws,ep,epINIT) corinws=skip ENTRADA DE CORRIENTES DE AGUA POR EL SUR INLET(CORINsn,SOUTH,1,NX,1,1,1,1,1,TLAST) VALUE(CORINsn,P1,0.0) VALUE(CORINsn,P1,UCOR*SIN(ANGLE)*RHO1) VALUE(CORINsn,U1,UCOR*COS(ANGLE)) VALUE(CORINsn,V1,UCOR*SIN(ANGLE)) VALUE(CORINsn,ke,keINIT) VALUE(CORINsn,ep,epINIT) corinsn=skip SALIDA DE CORRIENTES DE AGUA POR EL ESTE OUTLET(COROUTws,EAST,NX,NX,1,NY,1,1,1,TLAST) VALUE(COROUTws,P1,0.0) VALUE(COROUTws,U1,0.0) VALUE(COROUTws,V1,0.0) VALUE(COROUTws,ke,0.0) VALUE(COROUTws,ep,0.0) coroutws=skip SALIDA DE CORRIENTES DE AGUA POR EL NORTE OUTLET(COROUTsn,NORTH,1,NX,NY,NY,1,1,1,TLAST) VALUE(COROUTsn,P1,0.0) VALUE(COROUTsn,U1,0.0) VALUE(COROUTsn,V1,0.0) VALUE(COROUTsn,ke,0.0) VALUE(COROUTsn,ep,0.0) coroutsn=skip EFECTO DE SUPERFICIE SOLIDA PATCH(FONDO,LWALL,1,NX,1,NY,1,1,1,TLAST) COVAL(FONDO,U1,GRND2,0) COVAL(FONDO,V1,GRND2,0) COVAL(FONDO,ke,GRND2,GRND2) COVAL(FONDO,ep,GRND2,GRND2) fondo=skip FUENTE CONTINUA DE PETROLEO PATCH(FUENTE,VOLUME,1,1,1,1,1,1,1,1)
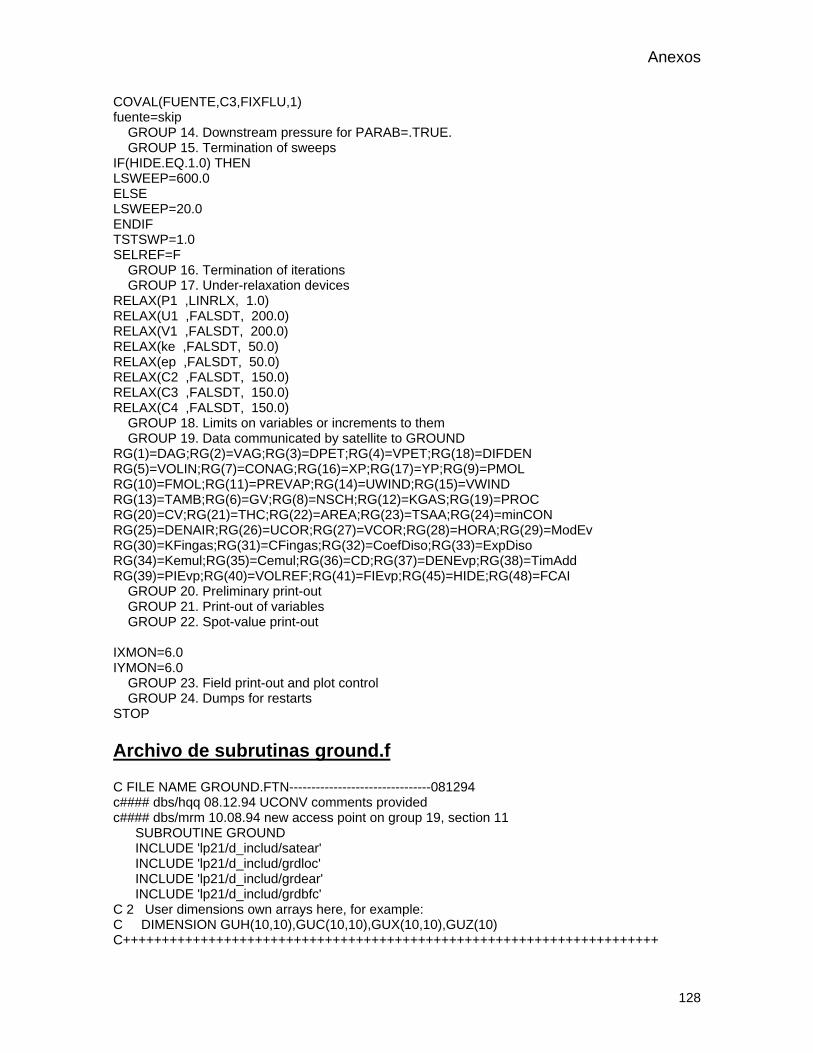
Anexos
128
COVAL(FUENTE,C3,FIXFLU,1) fuente=skip GROUP 14. Downstream pressure for PARAB=.TRUE. GROUP 15. Termination of sweeps IF(HIDE.EQ.1.0) THEN LSWEEP=600.0 ELSE LSWEEP=20.0 ENDIF TSTSWP=1.0 SELREF=F GROUP 16. Termination of iterations GROUP 17. Under-relaxation devices RELAX(P1 ,LINRLX, 1.0) RELAX(U1 ,FALSDT, 200.0) RELAX(V1 ,FALSDT, 200.0) RELAX(ke ,FALSDT, 50.0) RELAX(ep ,FALSDT, 50.0) RELAX(C2 ,FALSDT, 150.0) RELAX(C3 ,FALSDT, 150.0) RELAX(C4 ,FALSDT, 150.0) GROUP 18. Limits on variables or increments to them GROUP 19. Data communicated by satellite to GROUND RG(1)=DAG;RG(2)=VAG;RG(3)=DPET;RG(4)=VPET;RG(18)=DIFDEN RG(5)=VOLIN;RG(7)=CONAG;RG(16)=XP;RG(17)=YP;RG(9)=PMOL RG(10)=FMOL;RG(11)=PREVAP;RG(14)=UWIND;RG(15)=VWIND RG(13)=TAMB;RG(6)=GV;RG(8)=NSCH;RG(12)=KGAS;RG(19)=PROC RG(20)=CV;RG(21)=THC;RG(22)=AREA;RG(23)=TSAA;RG(24)=minCON RG(25)=DENAIR;RG(26)=UCOR;RG(27)=VCOR;RG(28)=HORA;RG(29)=ModEv RG(30)=KFingas;RG(31)=CFingas;RG(32)=CoefDiso;RG(33)=ExpDiso RG(34)=Kemul;RG(35)=Cemul;RG(36)=CD;RG(37)=DENEvp;RG(38)=TimAdd RG(39)=PIEvp;RG(40)=VOLREF;RG(41)=FIEvp;RG(45)=HIDE;RG(48)=FCAI GROUP 20. Preliminary print-out GROUP 21. Print-out of variables GROUP 22. Spot-value print-out IXMON=6.0 IYMON=6.0 GROUP 23. Field print-out and plot control GROUP 24. Dumps for restarts STOP Archivo de subrutinas ground.f
C FILE NAME GROUND.FTN--------------------------------081294 c#### dbs/hqq 08.12.94 UCONV comments provided c#### dbs/mrm 10.08.94 new access point on group 19, section 11 SUBROUTINE GROUND INCLUDE 'lp21/d_includ/satear' INCLUDE 'lp21/d_includ/grdloc' INCLUDE 'lp21/d_includ/grdear' INCLUDE 'lp21/d_includ/grdbfc' C 2 User dimensions own arrays here, for example: C DIMENSION GUH(10,10),GUC(10,10),GUX(10,10),GUZ(10) C+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
Anexos
129
C FAB parameter(nxdim=800.0,nydim=800.0) dimension c1aux(NYDIM,NXDIM), c2aux(NYDIM,NXDIM) dimension c3aux(NYDIM,NXDIM), c4aux(NYDIM,NXDIM) DATA A/0.0/ DATA B/0.0/ DATA C/0.0/ DATA D/0.0/ DATA E/0.0/ DATA G/0.0/ DATA ESFcor/0.0/ DATA COEfri/0.0/ DATA FMasa/0.0/ DATA Evp/0.0/ DATA DD/0.0/ DATA DISO/0.0/ DATA VIS/0.0/ DATA VOL/0.0/ DATA CD/0.0/ DATA AREA/0.0/ DATA RMasa/0.0/ DATA RVOL/0.0/ DATA FCC/0.0/ DATA ESP/0.0/ DATA Vadv/0.0/ DATA PEvF/0.0/ DATA EvFk/0.0/ DATA FMC/0.0/ DATA aux1/0.0/ DATA aux2/0.0/ DATA aux3/0.0/ DATA aux4/0.0/ DATA aux5/0.0/ DATA aux6/0.0/ DATA aux7/0.0/ DATA FEvp/0.0/ DATA FEvp1/0.0/ DATA FEvp2/0.0/ DATA DIFDEN/0.0/ DATA EvpMI/0.0/ DATA EvpMR/0.0/ C+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ C--- GROUP 1. Run title and other preliminaries C 1 GO TO (1001,1002),ISC 1001 CONTINUE C C User may here change message transmitted to the VDU screen IF(IGR.EQ.1.AND.ISC.EQ.1.AND..NOT.NULLPR) 1 CALL WRYT40('GROUND file is GROUND.F of: 081294 ') C C++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ C FAB call make(grsp1) call make(grsp2) call make(grsp3)

Anexos
130
call make(GRSP4) call make(grsp5) call make(grsp6) call make(grsp7) call make(grsp8) call make(grsp9) call make(grsp10) C+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ RETURN 1002 CONTINUE RETURN C***************************************************************** C--- GROUP 9. Properties of the medium (or media) C C The sections in this group are arranged sequentially in their C order of calling from EARTH. Thus, as can be seen from below, C the temperature sections (10 and 11) precede the density C sections (1 and 3); so, density formulae can refer to C temperature stores already set. 9 GO TO (91,92,93,94,95,96,97,98,99,900,901,902,903,904,905),ISC C***************************************************************** 900 CONTINUE C * ------------------- SECTION 7 --------------------------- C For PRNDTL( ).LE.GRND--- laminar PRANDTL nos., or diffusivity C Index LAMPR C+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ C FAB C 1. CORRECCION DEL VOLUMEN Y VISCOSIDAD POR PERDIDAS IF(ISTEP.LT.2) THEN CALL FN1(GRSP4,RG(5)) CALL FN1(GRSP8,RG(4)) call fn1(grsp2,rg(1)) call fn1(grsp1,rg(3)) call fn25(grsp1,-1.0) call fn60(grsp2,grsp1) call fn0(C21,grsp2) ELSE CALL FN1(GRSP4,RVOL) CALL FN0(GRSP8,C19) call fn1(grsp2,rg(1)) call fn0(grsp1,C28) call fn25(grsp1,-1.0) call fn60(grsp2,grsp1) call fn0(C21,grsp2) END IF write(6,*) 'EN INICIO' call getyx(GRSP4, c4aux, nydim, nxdim) VOL=c4aux(1,1) write(6,*) 'VOL=',VOL call getyx(GRSP8, c4aux, nydim, nxdim) VIS=c4aux(1,1) write(6,*) 'VIS=',VIS call getyx(GRSP2, c4aux, nydim, nxdim) DIFDEN=c4aux(1,1) write(6,*) 'DIFDEN=',DIFDEN

Anexos
131
C 2. CALCULO DEL COEFICIENTE DE DIFUSIVIDAD C SOBEY AND BARKER (1997) if(rg(28).EQ.1.0) then if(tim.LE.3601.0) then call fn1(lampr,rg(18)) call fn25(lampr,RG(5)) call fn25(lampr,rg(6)) call fn51(lampr,0.5) call fn25(lampr,0.5) call fn0(c11,lampr) else call fn1(grsp5,RG(5)) call fn50(grsp5,2) call fn1(grsp3,tim) call fn51(grsp3,-0.5) call fn0(grsp9,GRSP8) call fn51(grsp9,(-1.0/6.0)) call fn1(lampr,rg(18)) call fn26(lampr,grsp5) call fn25(lampr,rg(6)) call fn51(lampr,(1.0/3.0)) call fn25(lampr,0.5) call fn26(lampr,grsp9) call fn26(lampr,grsp3) call fn0(c12,lampr) end if else call fn1(grsp5,RG(5)) call fn50(grsp5,2) call fn1(grsp3,tim) call fn33(grsp3,rg(38)) call fn51(grsp3,-0.5) call fn0(grsp9,GRSP8) call fn51(grsp9,(-1.0/6.0)) call fn1(lampr,rg(18)) call fn26(lampr,grsp5) call fn25(lampr,rg(6)) call fn51(lampr,(1.0/3.0)) call fn25(lampr,0.5) call fn26(lampr,grsp9) call fn26(lampr,grsp3) call fn0(c12,lampr) end if call getyx(lampr, c4aux, nydim, nxdim) CD=c4aux(1,1) write(6,*) 'CD=',CD C++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ RETURN 98 CONTINUE C--- GROUP 13. Boundary conditions and special sources C Index for Coefficient - CO C Index for Value - VAL 13 CONTINUE GO TO (130,131,132,133,134,135,136,137,138,139,1310, 11311,1312,1313,1314,1315,1316,1317,1318,1319,1320,1321),ISC

Anexos
132
130 CONTINUE C------------------- SECTION 12 ------------------- value = GRND C++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ C FAB C 1. CALCULO DEL ESFUERZO CORTANTE DEL VIENTO SOBRE EL PETROLEO C DIRECCION OESTE - ESTE C 1.1 calculo del coeficiente de friccion if(rg(14).LE.1.0) then call fn1(grsp2,rg(14)) call fn51(grsp2,0.5) call fn25(grsp2,0.5) call fn25(grsp2,1.0E-3) else if(rg(14).LE.15.0) then call fn1(grsp2,rg(14)) call fn25(grsp2,0.065) call fn33(grsp2,0.8) call fn25(grsp2,1.0E-3) else call fn1(grsp2,2.6E-3) end if end if call getyx(grsp2, c4aux, nydim, nxdim) COEfri=c4aux(1,1) write(6,*) 'COEfri=',COEfri C 1.2 calculo del esfuerzo cortante call fn1(grsp1,rg(14)) call fn25(grsp1,rg(14)) call fn25(grsp1,rg(25)) call fn26(grsp1,grsp2) call fn0(val,grsp1) call getyx(grsp1, c4aux, nydim, nxdim) ESFcor=c4aux(1,1) write(6,*) 'ESFcor=',ESFcor C++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ RETURN 1312 CONTINUE C------------------- SECTION 13 ------------------- value = GRND1 C++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ C FAB C 1. CALCULO DEL COEFICIENTE DE VELOCIDAD DEL VIENTO SOBRE EL PETROLEO C DIRECCION OESTE - ESTE C 1.1 calculo del coeficiente call fn1(grsp2,rg(14)) call fn25(grsp2,0.14) call fn33(grsp2,1.03) call getyx(grsp2, c4aux, nydim, nxdim) E=2.7183**c4aux(1,1) call fn1(grsp2,E) call fn25(grsp2,0.01) call fn25(grsp2,rg(14)) call fn0(val,grsp2) call getyx(grsp2, c4aux, nydim, nxdim) Vadv=c4aux(1,1) write(6,*) 'Vadv=',Vadv C++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++

Anexos
133
RETURN 1313 CONTINUE C--- GROUP 19. Special calls to GROUND from EARTH C 19 GO TO (191,192,193,194,195,196,197,198,199,1910,1911),ISC 191 CONTINUE C * ------------------- SECTION 8 ---- Finish of time step. IF(RG(45).EQ.2.0) then C +++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ C FAB C 2. CALCULO DEL AREA IF(RG(22).EQ.1.0) THEN C 2.1 CALCULO DEL AREA USANDO LAS FUNCIONES DESCRITAS POR FAY (1969) write(6,*) 'AREA FAY' if(rg(28).EQ.1.0) then if(tim.LE.3601.0) then C 2.1.1 CALCULO DEL AREA ANTES DE 1 HRS, CONSIDERANDO REGIMEN C INERCIAL DURANTE LA PRIMERA HORA call fn1(grsp1,rg(18)) call fn25(grsp1,rg(6)) call fn25(grsp1,RG(5)) call fn1(grsp2,(TLAST/LSTEP)) call fn50(grsp2,2) call fn26(grsp1,grsp2) call fn51(grsp1,(1.0/4.0)) call fn25(grsp1,1.14) call fn50(grsp1,2) call fn25(grsp1,3.1416) call getyx(grsp1, c4aux, nydim, nxdim) B=B+c4aux(1,1) write(6,*) 'AREA=',B call fn1(c22,B) else C 2.1.2 CALCULO DEL AREA DESPUES DE 1 HRS, CONSIDERANDO REGIMEN C VISCOSO DESPUES DE LA PRIMERA HORA call fn1(grsp1,rg(18)) call fn25(grsp1,rg(6)) call fn1(grsp3,RG(5)) call fn50(grsp3,2) call fn26(grsp1,grsp3) call fn1(grsp2,(TIM-3600.0)) call fn51(grsp2,(3.0/2.0)) call fn26(grsp1,grsp2) call fn0(grsp2,GRSP8) call fn51(grsp2,(1.0/2.0)) call fn27(grsp1,grsp2) call fn51(grsp1,(1.0/6.0)) call fn25(grsp1,1.45) call fn50(grsp1,2) call fn25(grsp1,3.1416) call fn0(grsp7,grsp1) call getyx(grsp1, c4aux, nydim, nxdim) AREA=B+c4aux(1,1) write(6,*) 'AREA=',AREA call fn1(c22,AREA) endif

Anexos
134
else C 2.1.3 CALCULO DEL AREA CONSIDERANDO REGIMEN VISCOSO C DESDE EL INICIO call fn0(grsp1,C21) call fn25(grsp1,rg(6)) call fn0(grsp3,RG(5)) call fn50(grsp3,2) call fn26(grsp1,grsp3) call fn1(grsp2,TIM) call fn51(grsp2,(3.0/2.0)) call fn26(grsp1,grsp2) call fn0(grsp2,GRSP8) call fn51(grsp2,(1.0/2.0)) call fn27(grsp1,grsp2) call fn51(grsp1,(1.0/6.0)) call fn25(grsp1,1.45) call fn50(grsp1,2) call fn25(grsp1,3.1416) call fn0(grsp7,grsp1) call getyx(grsp1, c4aux, nydim, nxdim) AREA=B+c4aux(1,1) write(6,*) 'AREA=',AREA call fn1(c22,AREA) endif ELSE write(6,*) 'AREA MALLA' C 2.2 CALCULO DEL AREA DE LA MANCHA UTILIZANDO DATOS DE LA MALLA call getyx(c2, c4aux, nydim, nxdim) call getyx(AHIGH, c1aux, nydim, nxdim) A1=0.0 A2=0.0 A3=0.0 A4=0.0 A5=0.0 A6=0.0 do ij=1, nx do ii=1, ny if(c4aux(ij,ii).GT.rg(24)) then A1=A1+c1aux(ij,ii) end if if(c4aux(ij,ii).GT.rg(42)) then A2=A2+c1aux(ij,ii) end if if(c4aux(ij,ii).GT.rg(47)) then A3=A3+c1aux(ij,ii) end if if(c4aux(ij,ii).GT.rg(43)) then A4=A4+c1aux(ij,ii) end if if(c4aux(ij,ii).GT.rg(44)) then A5=A4+c1aux(ij,ii) end if if(c4aux(ij,ii).GT.rg(46)) then A6=A6+c1aux(ij,ii) end if end do
Anexos
135
end do call fn1(c22,A3) call fn0(grsp7,c22) call fn0(grsp1,c22) call fn1(grsp2,A3) call getyx(grsp7, c4aux, nydim, nxdim) AREA=c4aux(1,1) write(6,*) 'AREA(C2-1)=',AREA write(6,*) 'AREA(C2-2)=',A2 write(6,*) 'AREA(C2-3)=',A3 write(6,*) 'AREA(C2-4)=',A4 write(6,*) 'AREA(C2-5)=',A5 write(6,*) 'AREA(C2-6)=',A6 call getyx(c3, c4aux, nydim, nxdim) call getyx(AHIGH, c1aux, nydim, nxdim) A1=0.0 A2=0.0 A3=0.0 A4=0.0 A5=0.0 A6=0.0 do ij=1, nx do ii=1, ny if(c4aux(ij,ii).GT.rg(24)) then A1=A1+c1aux(ij,ii) end if if(c4aux(ij,ii).GT.rg(42)) then A2=A2+c1aux(ij,ii) end if if(c4aux(ij,ii).GT.rg(47)) then A3=A3+c1aux(ij,ii) end if if(c4aux(ij,ii).GT.rg(43)) then A4=A4+c1aux(ij,ii) end if if(c4aux(ij,ii).GT.rg(44)) then A5=A4+c1aux(ij,ii) end if if(c4aux(ij,ii).GT.rg(46)) then A6=A6+c1aux(ij,ii) end if end do end do write(6,*) 'AREA(C3-1)=',A1 write(6,*) 'AREA(C3-2)=',A2 write(6,*) 'AREA(C3-3)=',A3 write(6,*) 'AREA(C3-4)=',A4 write(6,*) 'AREA(C3-5)=',A5 write(6,*) 'AREA(C3-6)=',A6 call getyx(c4, c4aux, nydim, nxdim) call getyx(AHIGH, c1aux, nydim, nxdim) A1=0.0 A2=0.0 A3=0.0 A4=0.0

Anexos
136
A5=0.0 A6=0.0 do ij=1, nx do ii=1, ny if(c4aux(ij,ii).GT.rg(24)) then A1=A1+c1aux(ij,ii) end if if(c4aux(ij,ii).GT.rg(42)) then A2=A2+c1aux(ij,ii) end if if(c4aux(ij,ii).GT.rg(47)) then A3=A3+c1aux(ij,ii) end if if(c4aux(ij,ii).GT.rg(43)) then A4=A4+c1aux(ij,ii) end if if(c4aux(ij,ii).GT.rg(44)) then A5=A4+c1aux(ij,ii) end if if(c4aux(ij,ii).GT.rg(46)) then A6=A6+c1aux(ij,ii) end if end do end do write(6,*) 'AREA(C4-1)=',A1 write(6,*) 'AREA(C4-2)=',A2 write(6,*) 'AREA(C4-3)=',A3 write(6,*) 'AREA(C4-4)=',A4 write(6,*) 'AREA(C4-5)=',A5 write(6,*) 'AREA(C4-6)=',A6 END IF C 3. PROCESOS DE PERDIDA DE MASA C Cálculo de la masa inicial call fn0(grsp5,GRSP4) call fn25(grsp5,rg(3)) call fn0(grsp2,grsp5) call fn0(c26,grsp5) if(ISTEP.EQ.1.0) then call getyx(grsp5, c4aux, nydim, nxdim) FMasa=c4aux(1,1) call fn0(grsp1,grsp5) call fn25(grsp1,rg(10)) call getyx(grsp1, c4aux, nydim, nxdim) EvpMI=c4aux(1,1) end if write(6,*) 'FMasa=',FMasa write(6,*) 'EvpMI=',EvpMI C 3.1 CALCULO DE LA EVAPORACION if(rg(29).EQ.1.0) then C 3.1.1 Modelo de Mackay and Matsugu (1975), modificado por C Paney et al. (1984), citado por Reed et al. (1988) C cálculo del diámetro call fn0(grsp1,c22) call fn25(grsp1,(4/3.1416)) call fn51(grsp1,0.5) call fn0(c27,grsp1)

Anexos
137
C cálculo de Kb call fn1(grsp6,(rg(14)*3600)) call fn51(grsp6,0.78) call fn51(grsp1,-0.11) call fn1(grsp5,rg(8)) call fn51(grsp5,-0.67) call fn1(grsp9,rg(9)) call fn33(grsp9,29.0) call fn51(grsp9,0.5) call fn25(grsp9,(1/rg(9))) call fn26(grsp9,grsp5) call fn26(grsp9,grsp1) call fn26(grsp9,grsp6) call fn25(grsp9,0.029) C calculo dm/dt call fn25(grsp9,rg(11)) call fn26(grsp9,c22) call fn25(grsp9,rg(10)) call fn25(grsp9,rg(9)) call fn25(grsp9,(1/rg(12))) call fn25(grsp9,(1/rg(13))) call fn25(grsp9,(1/3600000.0)) call fn0(c29,grsp9) C masa evaporada call fn25(grsp9,(TLAST/LSTEP)) call getyx(grsp9, c4aux, nydim, nxdim) aux7=c4aux(1,1) if(ISTEP.EQ.1.0) then if(EvpMI.GE.aux7) then call fn0(c30,grsp9) call getyx(grsp9, c4aux, nydim, nxdim) Evp=Evp+c4aux(1,1) write(6,*) 'EvpMakay=',Evp call fn1(grsp3,EvpMI) call fn1(grsp1,Evp) call fn25(grsp1,-1.0) call fn60(grsp3,grsp1) call getyx(grsp3, c4aux, nydim, nxdim) EvpMR=c4aux(1,1) write(6,*) 'EvpMR=',EvpMR else call fn1(grsp1,EvpMI) call fn0(c30,grsp1) call getyx(grsp1, c4aux, nydim, nxdim) Evp=Evp+c4aux(1,1) write(6,*) 'EvpMakay=',Evp call fn1(grsp3,EvpMI) call fn1(grsp1,Evp) call fn25(grsp1,-1.0) call fn60(grsp3,grsp1) call getyx(grsp3, c4aux, nydim, nxdim) EvpMR=c4aux(1,1) write(6,*) 'EvpMR=',EvpMR end if else if(EvpMR.GE.aux7) then

Anexos
138
call fn0(c30,grsp9) call getyx(grsp9, c4aux, nydim, nxdim) Evp=Evp+c4aux(1,1) write(6,*) 'EvpMakay=',Evp call fn1(grsp3,EvpMI) call fn1(grsp1,Evp) call fn25(grsp1,-1.0) call fn60(grsp3,grsp1) call getyx(grsp3, c4aux, nydim, nxdim) EvpMR=c4aux(1,1) write(6,*) 'EvpMR=',EvpMR else call fn1(grsp1,EvpMR) call fn0(c30,grsp1) call getyx(grsp1, c4aux, nydim, nxdim) Evp=Evp+c4aux(1,1) write(6,*) 'EvpMakay=',Evp call getyx(grsp1, c4aux, nydim, nxdim) aux8=c4aux(1,1) call fn1(grsp3,0.0) call getyx(grsp3, c4aux, nydim, nxdim) EvpMR=c4aux(1,1) write(6,*) 'EvpMR=',EvpMR end if end if else if(rg(29).EQ.2.0) then C 3.1.2 Modelo de Findikakis et al. (1993) call fn1(grsp1,1.0e-12) call fn25(grsp1,rg(14)) call fn25(grsp1,100.0) call fn25(grsp1,rg(11)) call fn25(grsp1,1.0e6) call fn25(grsp1,(TLAST/LSTEP)) call fn25(grsp1,EvpMI/rg(3)) call fn25(grsp1,1.0e3) call getyx(grsp1, c4aux, nydim, nxdim) aux7=c4aux(1,1) if(ISTEP.EQ.1.0) then if(EvpMI.GE.aux7) then call fn0(c30,grsp1) call getyx(grsp1, c4aux, nydim, nxdim) Evp=Evp+c4aux(1,1) write(6,*) 'EvpFindikakis=',Evp call fn1(grsp3,EvpMI) call fn1(grsp1,Evp) call fn25(grsp1,-1.0) call fn60(grsp3,grsp1) call getyx(grsp3, c4aux, nydim, nxdim) EvpMR=c4aux(1,1) write(6,*) 'EvpMR=',EvpMR else call fn1(grsp1,EvpMI) call fn0(c30,grsp1) call getyx(grsp1, c4aux, nydim, nxdim)

Anexos
139
Evp=Evp+c4aux(1,1) call fn1(grsp3,EvpMI) call fn1(grsp1,Evp) call fn25(grsp1,-1.0) call fn60(grsp3,grsp1) call getyx(grsp3, c4aux, nydim, nxdim) EvpMR=c4aux(1,1) write(6,*) 'EvpMR=',EvpMR end if else if(EvpMR.GE.aux7) then call fn0(c30,grsp1) call getyx(grsp1, c4aux, nydim, nxdim) Evp=Evp+c4aux(1,1) write(6,*) 'EvpFindikakis=',Evp call fn1(grsp3,EvpMI) call fn1(grsp1,Evp) call fn25(grsp1,-1.0) call fn60(grsp3,grsp1) call getyx(grsp3, c4aux, nydim, nxdim) EvpMR=c4aux(1,1) write(6,*) 'EvpMR=',EvpMR else call fn1(grsp1,EvpMR) call fn0(c30,grsp1) call getyx(grsp1, c4aux, nydim, nxdim) Evp=Evp+c4aux(1,1) write(6,*) 'EvpFindikakis=',Evp call fn1(grsp3,0.0) call getyx(grsp3, c4aux, nydim, nxdim) EvpMR=c4aux(1,1) write(6,*) 'EvpMR=',EvpMR end if end if else C 3.1.3 Modelo de Fingas (1996), citado por etcentre.com (2000) call fn1(grsp7,rg(13)) call fn33(grsp7,-273.0) call fn2(grsp2,grsp7,rg(30),rg(31)) call fn1(grsp7,TIM) call fn33(grsp7,rg(38)) call fn25(grsp7,1.0/60.0) call fn43(grsp3,grsp7,1.0,0.0) call fn26(grsp3,grsp2) call fn1(grsp1,rg(39)) call fn34(grsp3,grsp1,-1.0) call fn25(grsp3,1.0e-2) call fn25(grsp3,rg(40)) call fn25(grsp3,rg(3)) call fn33(grsp3,-Evp) call fn0(c30,grsp3) call getyx(grsp3, c4aux, nydim, nxdim) Evp=Evp+c4aux(1,1) write(6,*) 'EvpFingas=',Evp end if

Anexos
140
end if C 3.2 CALCULO DE LA DISOLUCION C Modelo de Mackay, Cohen and Shin (1980), citado por C Yapa (1994) C masa disuelta call fn1(grsp1,TIM) call fn33(grsp1,rg(38)) call fn25(grsp1,-1.0/86400.0) call fn25(grsp1,rg(33)) call getyx(grsp1, c4aux, nydim, nxdim) E=2.7183**c4aux(1,1) call fn1(grsp1,E) call fn25(grsp1,rg(32)) call fn26(grsp1,c22) call fn1(grsp2,(TLAST/LSTEP)) call fn25(grsp2,(1.0/3600.0)) call fn26(grsp1,grsp2) call fn25(grsp1,(1/1000.0)) call fn0(c16,grsp1) call getyx(grsp1, c4aux, nydim, nxdim) DISO=DISO+c4aux(1,1) write(6,*) 'DISO=',DISO C 4. PROCESO DE DISPERSION DE MASA C Mackay et al. (1980), citado por Reed (1988) C cálculo del espesor de la mancha call fn0(grsp1,c22) call fn0(grsp2,GRSP4) call fn27(grsp2,grsp1) call fn0(c17,grsp2) call getyx(grsp2, c4aux, nydim, nxdim) ESP=c4aux(1,1) write(6,*) 'ESP=',ESP C cálculo de dm/dt call fn1(grsp1,rg(14)) call fn33(grsp1,1.0) call fn50(grsp1,2) call fn25(grsp1,0.11) call fn26(grsp1,c26) call fn0(grsp5,GRSP8) call fn25(grsp5,rg(3)) call fn25(grsp5,1000.0) call fn51(grsp5,0.5) call fn25(grsp5,50.0) call fn26(grsp5,c17) call fn25(grsp5,rg(23)) call fn33(grsp5,1.0) call fn27(grsp1,grsp5) call fn25(grsp1,(1.0/1000.0)) call fn0(c18,grsp1) C masa dispersa call fn25(grsp1,(TLAST/LSTEP)) call fn25(grsp1,(1.0/3600.0)) call fn0(c33,grsp1) call getyx(grsp1, c4aux, nydim, nxdim) DD=DD+c4aux(1,1)
Anexos
141
write(6,*) 'DD=',DD C 5. MASA PERDIDA (EVAPORACION, DISOLUCION Y DISPERSION) if(rg(19).EQ.1.0) then C 5.1 sin considerar perdidas de masa call fn1(c34,0.0) else if(rg(19).EQ.2.0) then C 5.2 masa perdidad con solo evaporación call fn0(c34,c30) else if(rg(19).EQ.3.0) then C 5.3 masa perdida con solo disolución call fn0(c34,c16) else if(rg(19).EQ.4.0) then C 5.4 masa perdida con solo dispersión call fn0(c34,c33) else if(rg(19).EQ.5.0) then C 5.5 masa perdida considerando evaporación, disolución y dispersión call fn0(grsp9,c30) call fn0(grsp1,c16) call fn0(grsp2,c33) call fn60(grsp9,grsp1) call fn60(grsp9,grsp2) call fn0(c34,grsp9) end if end if end if end if end if C 6. CORRECCION DE LA CONCENTRACION POR PERDIDAS DE MASA C 6.1 masa remanente call fn0(grsp9,c34) call getyx(grsp9, c4aux, nydim, nxdim) SMP=SMP+c4aux(1,1) write(6,*) 'SMP=',SMP call fn25(grsp9,-1.0) call fn0(grsp5,c26) call fn60(grsp5,grsp9) call fn0(c23,grsp5) call getyx(grsp5, c4aux, nydim, nxdim) RMasa=c4aux(1,1) write(6,*) 'RMasa=',RMasa C 6.2 volumen remanente call fn0(grsp7,c23) call fn25(grsp7,(1/rg(3))) call fn0(C32,grsp7) call getyx(grsp7, c4aux, nydim, nxdim) RVOL=c4aux(1,1) write(6,*) 'RVOL=',RVOL C 6.3 factor de corrección de la concentración call fn0(grsp5,c23) call fn0(grsp3,c26) call fn27(grsp5,grsp3)

Anexos
142
call fn0(c31,grsp5) call getyx(grsp5, c4aux, nydim, nxdim) FCC=c4aux(1,1) write(6,*) 'FCC=',FCC C 6.4 corrección de concentración C Corrección para C2 call getyx(c31, c1aux, nydim, nxdim) call getyx(c2, c4aux, nydim, nxdim) do ij=1, nx do ii=1, ny c3aux(ij,ii)=c4aux(ij,ii)*c1aux(ij,ii) end do end do call setyx(c2, c3aux, nydim, nxdim) C Correccion para C3 call getyx(c31, c1aux, nydim, nxdim) call getyx(c3, c4aux, nydim, nxdim) do ij=1, nx do ii=1, ny c3aux(ij,ii)=c4aux(ij,ii)*c1aux(ij,ii) end do end do call setyx(c3, c3aux, nydim, nxdim) C Correccion para C4 call getyx(c31, c1aux, nydim, nxdim) call getyx(c4, c4aux, nydim, nxdim) do ij=1, nx do ii=1, ny c3aux(ij,ii)=c4aux(ij,ii)*c1aux(ij,ii) end do end do call setyx(c4, c3aux, nydim, nxdim) C 7. CORRECCION DE LA VISCOSIDAD INICIAL POR PERDIDA DE MASA C EVAPORADA O POR EMULSIFICACION C 7.1 corrección por evaporación call fn0(grsp1,c30) call fn33(grsp1,rg(39)) call fn25(grsp1,(1.0/FMasa)) call getyx(grsp1, c4aux, nydim, nxdim) FEvp=FEvp+c4aux(1,1) write(6,*) 'FEvp=',FEvp call fn1(grsp1,FEvp) call fn33(grsp1,rg(41)) call fn25(grsp1,rg(21)) call getyx(grsp1, c4aux, nydim, nxdim) C=2.7183**c4aux(1,1) call fn1(grsp1,C) write(6,*) 'FCVEvp=',C C 7.2 corrección por emulsificación if(ISTEP.EQ.1.0) then C cálculo de dFwc/dt call fn1(grsp1,rg(7)) call fn25(grsp1,rg(35)) call fn25(grsp1,-1.0) call fn1(grsp2,1.0) call fn60(grsp2,grsp1)
Anexos
143
call fn1(grsp3,1.0) call fn33(grsp3,rg(14)) call fn50(grsp3,2) call fn25(grsp3,rg(34)) call fn26(grsp2,grsp3) call fn25(grsp2,(TLAST/LSTEP)) call fn25(grsp2,1.0/60.0) call getyx(grsp2, c4aux, nydim, nxdim) D=D+rg(7)+c4aux(1,1) write(6,*) 'Fwc=',D call fn1(grsp2,D) C cálculo del factor de corrección call fn6(grsp6,grsp2,1.0,(-0.65)) call fn26(grsp6,grsp2) call fn25(grsp6,2.5) call getyx(grsp6, c4aux, nydim, nxdim) E=2.7183**c4aux(1,1) call fn1(grsp3,E) write(6,*) 'FCVEm=',E else write(6,*) 'FwcInc=',D C cálculo de dFwc/dt call fn1(grsp5,D) call fn25(grsp5,rg(35)) call fn25(grsp5,-1.0) call fn1(grsp2,1.0) call fn60(grsp2,grsp5) call fn1(grsp3,1.0) call fn33(grsp3,rg(14)) call fn50(grsp3,2) call fn25(grsp3,rg(34)) call fn26(grsp2,grsp3) call fn25(grsp2,(TLAST/LSTEP)) call fn25(grsp2,1.0/60.0) call getyx(grsp2, c4aux, nydim, nxdim) D=D+c4aux(1,1) write(6,*) 'Fwc=',D call fn1(grsp2,D) C cáculo del factor de correccion call fn6(grsp6,grsp2,1.0,(-0.65)) call fn26(grsp6,grsp2) call fn25(grsp6,2.5) call getyx(grsp6, c4aux, nydim, nxdim) E=2.7183**c4aux(1,1) call fn1(grsp3,E) write(6,*) 'FCVEm=',E end if if(rg(20).EQ.1.0) then C 7.2 no corrección de la viscosidad call fn1(c19,RG(4)) else if(rg(20).EQ.2.0) then C 7.3 viscosidad corregida considerando solo evaporación call fn1(GRSP8,RG(4)) call fn25(GRSP8,C) call fn0(c19,GRSP8)

Anexos
144
else if(rg(20).EQ.3.0) then C 7.4 viscosidad corregida considerando solo emulsificación call fn1(GRSP8,RG(4)) call fn25(GRSP8,E) call fn0(c19,GRSP8) else C 7.5 viscosidad corregida considerando evaporación, y emulsificación call fn1(GRSP8,RG(4)) call fn25(GRSP8,E) call fn25(GRSP8,C) call fn0(c19,GRSP8) end if end if end if C 8. CORRECCION DE LA DENSIDAD INICIAL POR PERDIDA DE MASA C EVAPORADA O POR EMULSIFICACION C 8.1 corrección por emulsificación call fn1(grsp3,rg(3)) call fn1(grsp1,1.0) call fn33(grsp1,-D) call fn26(grsp3,grsp1) call fn1(grsp2,rg(1)) call fn25(grsp2,D) call fn60(grsp2,grsp3) call getyx(grsp2, c4aux, nydim, nxdim) aux3=c4aux(1,1) write(6,*) 'DCEm=',aux3 if(rg(36).EQ.1.0) then C 8.2 no corrección de la densidad call fn1(C28,RG(3)) call fn0(GRSP7,C28) else C 8.3 densidad corregida considerando solo emulsificación call fn1(C28,aux3) call fn0(GRSP7,C28) end if write(6,*) 'AL FINAL' call fn1(grsp4,RVOL) call getyx(grsp4, c4aux, nydim, nxdim) VOL=c4aux(1,1) write(6,*) 'VOL=',VOL call getyx(GRSP8, c4aux, nydim, nxdim) VIS=c4aux(1,1) write(6,*) 'VISF=',VIS call getyx(GRSP7, c4aux, nydim, nxdim) aux5=c4aux(1,1) write(6,*) 'DPETC=',aux5 C++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ end if RETURN C*************************************************************** C C--- GROUP 20. Preliminary print-out C 20 CONTINUE
Anexos
145
RETURN C*************************************************************** C* Make changes to data for GROUPS 21 and 22 only in GROUP 19. C*************************************************************** C--- GROUP 23. Field print-out and plot control 23 CONTINUE RETURN C*************************************************************** C--- GROUP 24. Dumps for restarts C 24 CONTINUE END

Anexos
146
Anexo 4. Datos experimentales.
150
Anexo 5. Datos de modelación.

157
Anexo 6. Evaluación del modelo propuesto.

173
Referencias ASCE. (1996). ”State-Of-The-Art Review of Modeling Transport and Fate of Oil Spills”. American Society of Civil Engineers. Journal of Hydraulic Engineering. 122- 11: 594–609. Bassin J. y Ichiye T. (1977). “Flocculation Behavior of Suspended Sediment and Oil Emulsions”. Journal of Sedimentary Petrology. 47-2:671-677. Battaglia C. (1999). “Calpuff and Safe Air: Comparison and Against Fields Experiments above Hilly Terrain”. Sixth International Conference on Harmonization within Atmospheric Dispersion Modeling for Regulatory Purposes. October 11-14. INSA of Rouen. France. Bertin J. (1984). Mecánica de Fluidos para Ingenieros. Prentice Hall. México. Bird B., Stewart W. y Lightfoot E. (1976). Transport Phenomena. Wiley International Edition. Singapur. Blokker P. C. (1964). “Spreading and evaporation of petroleum product on water”. Proc. Ninth Int. Harbor Conf. Antwerp. Buckmaster J. (1973). “Viscous-Gravity Spreading of Oil Slick”. Journal Fluid Mechanics. 59-3:481–491. Cenepa E. y Builjes P. (1999). “Methodology of Model Testing and Application to Dispersion Simulation above Complex Terrain”. Sixth International Conference on Harmonization within Atmospheric Dispersion Modeling for Regulatory Purposes. October, 11-14. INSA of Rouen. Francia. Cooper N. (1999). “A Review of the Model Validation Kit (Boot) and the Draft ASTM Validation Procedures”. Sixth International Conference on Harmonization within Atmospheric Dispersion Modeling for Regulatory Purposes. October, 11-14. INSA of Rouen. France. Cohen Y., Mackay D. y Shiu W. (1980). “Mass Transfer Rates between Oil Slicks and Water”. The Canadian Journal of Chemical Engineering. 58:569–575. Daling P., Brandvik P., Mackay D. y Johansen O. (1991). “Characterization of Crude Oils for Environmental Purposes”. Oil and Chemical Pollution. 7:199-224. Inglaterra. Dalling P. S. y Strom T. (1999). “Weathering of Oil at Sea: Model/Field Data Comparisons”. Spill Science and Technology Bulletin. 5-1:63-74.

Referencias
174
Devigne G.A.L. y Sweeney C.E. (1988). “Natural Dispersion of Oil”. Oil and Chemical Pollution. 4:281-310. DI Pietro N. y Cox R. (1980). “The Containment of Oil Slick by a Boom Placed Across a Uniform Stream”. Journal Fluid Mechanics. 96-3:613–640. Di Pietro N., Huh C. y Cox R. (1978). “The Hydrodynamics of the Spreading of One Liquid on the Surface of Another”. Journal Fluid Mechanics. 84-3:529–549. Drivas P. (1982), “Calculation of Evaporative Emissions from Multicomponent Liquid Spills”, Environmental Science Technology, 6:726–728. Espinosa H. (2000), Simulación Numérica del Flujo en Tanques Agitados Mecánicamente. Facultad de Ingeniería. División de Estudios de Posgrado. Tesis de Maestría. México. Espinosa H. y Pech R. (1997). Método de Volumen Finito. Instituto de Ingeniería, Compilación, México. Fay J. A. (1969). In: D.P. Hoult (editor). Oil on the Sea. Plenum Publication. New York. 53-63. Fay J. (1971). “Physical Processes in the Spread of Oil on the Water Surface”. American Petroleum Institute. proc. joint conf. on Preventing and Control of Oil Spills. 463-467. Findikakis A. y Law A. Papadimitrakis Y. (1998). “Assessment of the Risk of Shore Contamination by Offshore Oil Spills”. Model Formulation Oil and Hydrocarbon. Spills, Modeling, Analysis and Control, Computational Mechanics Public as Hurts, 209–220. Fingas M. (1996). “The Evaporation of Oil Spills: Prediction of Equations Using Distillation Data”. Spill Science and Technology Bulletin. 3-4:191–192. Fingas M. (1997). “The Evaporation of Oil Spills: Prediction of Equations using Distillation Data”, Proceedings of the 20th Artic and Marine Oil Spill Program (AMOP) Technical Seminar, Environment Canada, 1–20. Fingas M., Fieldhouse B. y Mullin J. (1999). “Water-in-oil Emusions Result of Formation Studies and Applicability to Oil Spill Modelling”. Spill Sciences and Tecnhnology Bulletin. 5-1:81-91. Fletcher C. (1988). Computational Techniques for Fluid Dynamics, Springer-Verlag, Australia. Foda M. y Cox R. (1980). “The Spreading of Thin Liquid Films on a Water-Air Interface”. Journal Fluid Mechanics. 101-1, 33–51.

Referencias
175
Freedman B. (1989). Oil Pollution Environmental Ecology. The Impacts of Pollution and Other Stresses on Ecosystem Structure and Function. Academic Press inc. Harcourt Brace Jovanovich Publishers. Nova Scotia. Canadá. Fueyo N. (1996). Mecánica de Fluidos Computacional para Ingeniería. Universidad de Zaragoza, España. Galt J. (1988). “Uncertainty Analysis Related to Oil Spill Modeling”. Spill Science and Technology Bulletin. 4-4:231–238. Seattle. Estados Unidos. Garcia R. (1998). “Some Recommendations for Testing Oil Spill Computer Models”. Oil and Hydrocarbon Spills, Modeling, Analysis and Control. 97–105. Harlow F.H. y Nakayama P.I. (1968). Transport of Turbulence Energy Decay Rate. LA-3854, Los Alamos Science Lab., U. California, USA. Hill R., Lowles I., Teasdale I., Chambers N., Puxley C. y Parker T. (1999). Comparison between Field Measurements of 85-KR around the BNFL Sellafield Reprocesing Plant and the Preditions of the NRPB R-91 and UK-ADMS Atmospheric Dispersion Models”. Sixth International Conference on Harmonization within Atmospheric Dispersion Modeling for Regulatory Purposes. October, 11-14. INSA of Rouen. Francia. Hoult D. (1972). “Oil Spreading on the Sea”. Annual Review Fluid Mechanics. 4:341–367. Hossain K., Mackay D. (1980). “Demoussifier – A New Chemical for Oil Spill Countermeasures”. Spill Technology Newsletter, Noviembre. ITOPF. (1998). “Effects of Marine Oil Spills Fate and Effects”. International Tanker Owners Pollution Federation. http://www.itopf.com/effects.html. ITOPF. (1999). “Fate of Marine Oil Spills”. International Tanker Owners Pollution Federation. http://www.itopf.com/fate.html ITOPF. (2000). “Historical Data”. International Tanker Owners Pollution Federation. http://www.itopf.com/pstspn.html. Jokuty P., Whiticar S., Wang Z., Fingas M., Lambert P., Fieldhouse B. y Mullin J. (2000). A Catalogue of Crude Oil and Oil Product Properties. Environmental Technology Center, http://www.etcentre.org/spills/oil_intr.html. Johns W., Jacobs G., Kindle J., Murray S. y Carron M. (1999), Arabian Marginal Seas and Gulfs, University of Miami, RSMAS Technical Report 2000-01.

Referencias
176
Jones W.P. y Launder B.E. (1972). “The Prediction of Laminarisation with a Two-Equation Model of Turbulence”. International Journal of Heat and Heat and Mass Transfer. 15:301-314. Kiebala L. (1985). “Applied Risk Control for Oil Spills”. Oil and Petrochemical Pollution. 2:293–299. Kullenberg G. (1982). Pollutant Transfer and Transport in the Sea. CRC Press. Inc. 1-2, Estados Unidos. Launder B.E. y Spaulding D.B. (1972). Mathematical Models of Turbulence. Academic Press. Lehr W., Cekirge H., Fraga R. y Belen M. (1984). “Empirical Studies of the Spreading of Oil Spills”. Oil and Petrochemical Pollution. 2:1. Lehr W., Fraga J., Bellen M. y Cekirge H. (1984a). “A New Technique to Estimate Initial Spill Size Using a Modified Fay-type Spreading Formula”, Marine Pollution Bulletin, 15-9:326-329. Lo J. (1991). “Oil Spill Risk Simulation Model”. Journal of Waterway. Coastal and Ocean Engineering, 117-3:285-300. Ludwing J. C., Qin H. Q. y Spalding D. B. (1989). The PHOENICS Reference Manual. Tecnical Report CHAM TR/200. CHAM Ltd. Inglaterra. Lyman W. J., Reehl W. y Rosenblatt D. H. (1982). Handbook of Chemical propertly Estimation Methods. Mac Graw-Hill Book Co. New York. Mackay D. y Matsugu R., (1975), “Evaporation Rates of Liquid Hydrocarbon Spills on Land and Water”, The Canadian Journal of Chemical Engineering, 51:434–439. Mackay, D., Buist I., Mascarenhas, y Paterson S. (1980). Oil Spill Processes and Models. Environment Canada Report EE–8. Nihoul J. (1984). “A Non-Linear Mathematical Model for the Transport on Spreading of Oil Slicks”. Ecological Modeling. 22:325–339. NOAA. (1992). “Oil Spill – Case Histories”. National Oceanic and Atmospheric Administration. Report HMRAD 92-11. Seattle. Washington. NOAA. (1995). Overstreet R. y Galt J. “Physical Processes Affecting the Movement and Spreading of Oils in Inland Waters”. National Oceanic and Atmospheric Administration. 1–45. Seattle. Washington.

Referencias
177
NOAA. (2000). Hates M., Hoff R., Michel J., Sholz D. y Shigenaka G., “An Introduction to Coastal Habitats and Biological Resources for oil Spill Response”. National Oceanic and Atmospheric Administration. 1–9. Seattle. Washington. OSIR. (2000). “Oil Spill Intelligence Report”. Oil Spill Intelligence Report. http://www.cutter.com/osir/orgirst.html. Patankar S. (1980). Numerical Heat Transfer and Fluid Flow. Hemisphere Publishing Corporation. PEMEX. (1998). Manual de Operación para Control de Derrames de Hidrocarburos. Sonda Campeche. Norma GPTA – III – 5. primera versión. PEMEX REFINACION. (1988). Plan de Contingencia. Instituto de Ingeniería. México. Perry C. (1973). Manual del Ingeniero Químico. PHOENICS. (1994). Introductory Course on PHOENICS. Inglaterra. Psarafits H., Nyhart J. y Betts D. (1983). First Experiences with the Massachusetts Institute of Technology Oil Spill Model. Proceedings Oil Spil Conference 1983. American Petroleum Institute. 301–305. Rasmusen D. (1985). “Oil Spill Modeling – A Tool for Cleanup Operations”. Proceedings of the 1985 Oil Spill Conference. American petroleum Institute. Washington. 243–249. Reed M., Johansen O., Brandvik P., Daling P., Lewis A., Fiocco R., Mackay D. y Prentki R. (1999). “Oil Spill Modelling towards the Close of 20th Century: Overview of the State of the Art”. Spill Science and Technology. 5-1:3–16. Reed M. y Ekrol N. (1998). “Quantifying Environmental Implications of Alternative Oil Spill Contingency and Response Plans”. Oil and Hydrocarbon Spills, Modeling, Analysis and Control. 3-22. Reed M., Kana T. y Gundlach E. (1988), “Testing and Verification of an Spill Surf Zone Mass Transport Model, Alaska”, OCS Region, Minerals Management Service, 949 east 36th avenue, room 110 anchorage, ak 99508-4302. Reed M., Buffagni R., Puletti M. y Daling P. (2000). “Application of the Oil Spill Contingency and Response (OSCAR 2000) Model to on Offshore Field in the Adriatic Sea”. International Marine Environmental Conference 2000 on numerical and physical modeling of environmental processes. Atenas. Grecia. Rodi W. (1993). Turbulence Models and their Application in Hydraulics. A state-of-the-art review. 3rd Ed. IAHR Monograph, Balkema, Rotterdam NL.
Referencias
178
Sann A. y Wayment E. (1985). “Protection of the Marine Environmental from Hydrocarbon Pollution - an Integrated Planning Approach for Oil Terminals”. Oil and Petrochemical Pollution, 2:193-205. Shen H., Yapa P. y Ha A. (1994). Modeling Oil Spills in a River-Lake System. Journal of Marine System. 4-6:453–471. Shen H. y Yapa P. (1988). “Oil Slick Transport in Rivers”. Journal of Hydraulic Engineering. 114-5:529-543. Shiu W., Bobra M., Bobra A., Maijamen A., Suntio l. y Mackay D. (1990). “The Water Solubility of Crude Oils and Petroleum”. Oil and Chemical Pollution. 7:57-84. SINTEF. (2000). Oil Weathering Manuals. The Foundation for Scientific and Industrial Research at the Norwegian Institute of Technology. http://www.sintef.no/units/chem/environment/main_OVM.htm. Skiba Y., y Parra G. (1999). “Mathematics of Oil Spills: Existence, Uniqueness, and Stability of Solutions” Geofísica Internacional, 38-2:117-124. Sobey R. y Barker C. (1997). “Wave-Driven Transport of Surface Oil”. Journal of Coastal Research. 3-2:490–496. Sobey R. (1983). “Fractional Step Algorithm for Estuarine Mass Transport”. International Journal for Numerical Methods in Fluid. 3:567–581. Soto J. (1996). “Plan Nacional de Contingencia”. Boletín del Programa Yum-Kaax. Universidad Autónoma de Campeche. 2-5: . Spaulding D.B. (1972). A Novel Finite-Difference Formulation for Differential Expressions Involving Both First and Second Derivatives. Int. Journal Numerical Methods Engineering, 4:551. Spalding D.B. (1982). “Four lectures on the PHOENICS computer code”. CFD/82/5. CFD Unit. Imperial College. University of London. Spaulding D.B. (1994). The PHOENICS reference manual V2.0. Spaulding M. (1988). “A State-of-the-art Review of Oil Spill Trajectory and Fate Modeling”. Oil and Chemical Pollution. 4:39 – 55. Stiver W. y Mackay D. (1984). “Evaporation Rate of Spills of Hydrocarbons and Petroleum Mixtures”, Environmental Science Technology, 18:834–840. Stolsenbach, K., Madsen, O. S., Adams, E. E., Pollack, A. M. y Cooper, C. (1977). “A Review and Evaluation of Basic Techniques for Predicting the Behavior

Referencias
179
of Surface Oil Slicks”. Report 222. Dep. Civil Engineering. Massachusetts Institute of Technology. Cambridge, Mass. Stone, H.L. (1968). Iterative Solution of Implicit Approximation of Multidimensional Partial Differential Equations. SIAM J. Num. Analysis 5. Streeter V. y Wylie B. (1985). Mecánica de los Fluidos, Mc Graw Hill, 6ta ed., México. The Open University Walton Hall. (1989). Ocean Circulation. Milton Keynes. MK7 6AA. England. Venkatram A. (1982). “A Framework for Evaluating Air Quality Models”. Boundary-Layer Meteorology. 24:371-385. Venkatram A. (1983). “Uncertainty in Predictions from Air Quality Models”. Boundary-Layer Meteorology. 27:185-196. Venkatram A. (1999). “Applying a Framework for Evaluating the Performance of Air Quality Models”. Sixth International Conference on Harmonization within Atmospheric Dispersion Modeling for Regulatory Purposes. October, 11-14. INSA of Rouen. Francia. Versteeg H. y Malalasekera W. (1995). An Introduction to Computational Fluid Dynamics – The Finite Volume Method. Longman Scientific and Technical. Malacia. Vicente y Rodríguez W. (2000). Simulación Numérica de la Combustión y Formación de Contaminantes en Llamas Turbulentas Premezcladas Pobres. Tesis Doctoral. Universidad de Zaragoza. España. Villarreal A. y Anguiano F. (1996). Diseños Experimentales: Conceptos y Aplicaciones. DEPFI. UNAM. Vongvisessomjai S., Fuh Y. y Yin A. (1993). “A Mathematical Model of an Oil Spill in the Uppergulf of Thailand”. Oil and Petrochemical Pollution. 1:2. Willmott C. (1981). “On the Validation of Models”. Physical Geography, 2:2,184-194. Wu J. (1975). “Wind-Induced Drift Currents”. Journal Fluid Mechanics. 68-1:49– 70. Wu J. (1980). “Wind-Stress Coefficients over Sea Surface near Neutral Conditions – A Revisit”. Journal of Physical Oceanography. 10:727–740.

Referencias
180
Yapa P. y Shen H. (1994). “Modeling River Oil Spills: a Review, Journal of Hydraulic Research. 32-5:765–782. Zannetti P. (1990). Air Pollution Modeling: Theories, Computational Methods and Available Software. IBM Scientific Centre, Noruega. Zhi-wei L., Shu-Shen, Z. y Mead C. (2000). “Modeling of the Behavior of Marine Oil Spills: Applications Based on Random Walk Techniques”. Journal of Environmental Sciences. 12-1:1–6. Zhubrin S. (1997). “ROSA: Mathematical Background and Applications”, VII International PHOENICS User Conference. Sevilla. España.






