
UNIDAD 3y 4 Algebra Lineal
40
INSTITUTO TECNOLOGICO DE CERRO AZUL TRABAJO: Unidad 3 Y 4 DOCENTE: Del Ángel Bautista Carlos MATERIA: Algebra Lineal CARRERA: Ing. Sistemas Computacionales ALUMNO: Diego Omar Castillo Bautista N.C: 14500566
description
Definiciones,ejemplos y ejercicios resueltos
Transcript of UNIDAD 3y 4 Algebra Lineal
INSTITUTO TECNOLOGICO DE CERRO AZUL
TRABAJO: Unidad 3 Y 4
DOCENTE: Del Ángel Bautista Carlos
MATERIA: Algebra Lineal
CARRERA: Ing. Sistemas Computacionales
ALUMNO: Diego Omar Castillo Bautista
N.C: 14500566
UNIDAD 4: Espacios Vectoriales
INTRODUCCIÓN
La idea de vector está tomada de la Física, donde sirven para representar magnitudes vectoriales como fuerzas, velocidades o aceleraciones. Para ello se emplean vectores de dos componentes en el plano, de tres componentes en el espacio... Se supone conocida la representación gráfica y manejo de los vectores de ℜ 2 y de ℜ 3 . En Matemáticas, tratamos de abstraer las propiedades que caracterizan a los vectores para extenderlas también a otro tipo de objetos diferentes de los vectores de la Física. Esencialmente, el comportamiento que caracteriza a los vectores es el siguiente: • Podemos sumar dos vectores y obtenemos otro vector; • Podemos multiplicar un vector por un número (escalar) y obtenemos otro vector. Además estas operaciones cumplen ciertas propiedades, que observamos en los vectores de ℜ 2 y de ℜ 3
4.1 Definición de Espacio VectorialEspacio vectorial real. Un espacio vectorial real V es un conjunto de objetos, denominados vectores, junto con dos operaciones binarias llamadas suma y multiplicación por un escalar y que satisfacen los diez axiomas enumerados a continuación. Notación. Si “x” y “y” están en V y si a es un número real, entonces la suma se escribe como “x + y” y el producto escalar de a y x como ax. Antes de presentar la lista de las propiedades que satisfacen los vectores en un espacio vectorial deben mencionarse dos asuntos de importancia. En primer lugar, mientras que puede ser útil pensar en R2 o R3 al manejar un espacio vectorial, con frecuencia ocurre que el espacio vectorial parece ser muy diferente a estos cómodos espacios (en breve tocaremos este tema). En segunda instancia, la definición 1 ofrece una definición de un espacio vectorial real. La palabra “real” significa que los escalares que se usan son números reales. Sería igualmente sencillo definir un espacio vectorial complejo utilizando números complejos en lugar de reales. Este libro está dedicado principalmente a espacios vectoriales reales, pero las generalizaciones a otros conjuntos de escalares presentan muy poca dificultad. [1]
Axiomas de un espacio vectorial. [1] 1- Si X pertenece a V y Y pertenece a V, entonces X+Y pertenece a V. 2- Para todo X, Y y Z en V, (x+y)+z = x(y+z).
3- Existe un vector |0 pertenece V tal que para todo X pertenece a V, X+0=0+X=X.
4- Si x pertenece a V, existe un vector –x en V tal que x+(-x)=0.
5- Si X y Y están en V, entonces x+y=y+x.
6- Si x pertenece a V y a es un escalar, entonces ax pertenece a V.
7- Si X y Y están en V y a es un ecalar, entonces a(x+y)= ax + ay
8- Si X pertenece a V y a y b son escalares, entonces (a+b) x = ax+ by.
9- Si X pertenece a V y a y b son escalares, entonces a(bx) = (ab)x.
10- Para cada vector X pertenece a V, 1x = x
4.2 Definición de subespacio vectorial y sus propiedades
DEFINICION DE SUB ESPACIO VECTORIAL Sea H un subconjunto no vacío de un espacio vectorial V y suponga que H es en sí un espacio vectorial bajo las operaciones de suma y multiplicación por un escalar definidas en V. Entonces se dice que H es un sub espacio de V. Existen múltiples ejemplos de sub espacio, sin embargo, en primer lugar, se demostrará un resultado que hace relativamente sencillo determinar si un subconjunto de V es en realidad sub espacio de VTeorema de sub espacio
Un subconjunto no vacio de H de un espacio vectorial V es un sub espacio de V si se cumplen las dos reglas de cerradura:Reglas de cerradura para ver si un subconjunto no vació es un sub espacio
i) Si x € H y y € H, entonces x + y € H.
ii) Si x € H, entonces αx € H para todo escalar α.Es obvio que si H es un espacio vectorial, entonces las dos reglas de cerradura se deberán cumplir. De lo contrario, para demostrar que es un espacio vectorial, se deberá demostrar que los axiomas i) a x) de la definición cumplen bajo las operaciones de suma de vectores y multiplicación por un escalar definidas en V. Las dos operaciones de cerradura [axiomas i) y iv)] se cumplen por hipótesis, como los vectores en H son también vectores en V, las identidades asociativa, conmutativa, distributiva y multiplicativa [axiomas ii), v), vii), viii), ix) y x)] se cumplen.Este teorema demuestra que para probar si H es o no es un sub espacio de V, es suficiente
verificar que:x + y y αX están en H cuando x y y están en H y α es un escalar. PROPIEDADES DE SUB ESPACIO VECTORIAL
1). El vector cero de V está en H.2 2). H es cerrado bajo la suma de vectores. Esto es, para cada u y v en H, la suma u + v está en H. 3). H es cerrado bajo la multiplicación por escalares. Esto es, para cada u en H y cada escalar c, el vector cu está en H.
4.3 Combinación lineal
Una combinación lineal de dos o más vectores es el vector que se obtiene al sumar esos vectores multiplicados por escalares.
Cualquier vector se puede poner como combinación lineal de otros que tengan distinta dirección.Esta combinación lineal es única.
Sean v1, v2,…,vn vectores en un espacio vectorial V. Entonces cualquier vector de la forma:α1v1+α2v2+…+αnvn
Donde α1v1+α2v2+…+αnvn son escalares se denomina combinación lineal de v1,v2,…,vn.
Todo vector V = (a, b, c) en R3 se puede expresar como i = (1,0,0);
j = (0,1,0);
k =(0,0,1)
V = (a, b, c) = a(i) + b(j) + c(k)Entonces se dice que V es una combinación lineal de los 3 vectores i,j,k.
Dependencia e Independencia lineal
Los vectores son linealmente independientes si tienen distinta dirección y sus componentes no
son proporcionales.Un conjunto de vectores {v1,v2,…,vk} es un espacio vectorial V es linealmente dependiente si existen escalares c1,c2,…,ck, al menos uno de los cuales no es cero, tales que:c1v1+c2v2+…+ckvk=0
Si los vectores no son linealmente dependientes, se dice que son linealmente independientes.
Criterios de Independencia Lineal
Sean u1, u2, …,uk k vectores en Rn y A la matriz que tiene como columnas a estos vectores, los vectores son linealmente independientes si el sistema Ax = 0 tiene únicamente solución trivial.Los vectores son linealmente dependientes si el sistema Ax=0 tiene soluciones no triviales (solución múltiple).Si k=nLos vectores son linealmente independientes si A es invertibleSi k>nLos vectores son linealmente dependientes.Dos vectores en un espacio vectorial son linealmente dependientes si uno de ellos esmúltiplo escalar del otro.Un conjunto de vectores linealmente independientes en n contiene a lo más n vectores.Tres vectores en 3 son linealmente dependientes si y sólo si son coplanares, esto es, que están en un mismo plano.
Teoremas
1. Cualquier conjunto que contenga al vector 0 es linealmente dependiente.2. Cualquier conjunto que contenga un único vector diferente de cero, v ≠0, es linealmente
independiente.3. Cualquier conjunto formado por dos vectores diferentes de cero, S = {v1, v2}, donde v1 ≠ 0,
v2 ≠ 0, es linealmente dependiente si, y sólo si, uno de los vectores es múltiplo escalar del otro.
4. Cualquier conjunto que contenga un subconjunto linealmente dependiente es linealmente dependiente.
5. Cualquier subconjunto de un conjunto linealmente independiente es linealmente independiente.
4.4 Base y dimensión de un espacio vectorial
Base y dimensión de un espacio vectorial
Un conjunto de vectores S={v1, v2,…, vn} en un espacio vectorial V se denomina base de V si se cumplen las siguientes condiciones.* S genera a V.* S es linealmente independienteUna base posee 2 características que se acaban de ver, debe tener suficientes valores para generar a V, pero no tantos de modo que uno de ellos pueda escribirse como una combinación lineal de los demás vectores en S. Si un espacio vectorial consta de un número finito de vectores, entonces V es de dimensión finita. En caso contrario, V es de dimensión infinita. Base
En términos generales, una “base” para un espacio vectorial es un conjunto de vectores del espacio, a partir de los cuales se puede obtener cualquier otro vector de dicho espacio, haciendo uso de las operaciones en él definidas. La base es natural, estándar o canónica si los vectores v1, v2,…, vn forman base para Rn.Si S={v1, v2,…, vn} es una base para un espacio vectorial V entonces todo vector v en V se puede expresar como:1. V = c1v1+ c2v2+…+ cnvn
2. V = k1v1+ k2v2+…+ knvn
Restar 2-1 0 = (c1- k1) v1+(c2- k2) v2+…+(cn- kn) vn
Ejemplo: demostrar si S = {v1, v2,…, v3} es base de R3, v1 = (1,2,1); v2 = (2,9,0); v3 = (3,3,4)Proponer vector arbitrario, combinación linealb = c1v1+ c2v2+ c3v3
(b1, b2, b3) = c1(1,2,1)+ c2(2,9,0)+ c3(3,3,4)(b1, b2, b3) = c1+2c2+3c3;2c1+9c2+3c3; c1+4c3
c1 + 2c2 + 3c3 = b1 det A = [(1*9*4)+(2*3*1)+0]-[(1*9*3)+0+(4*2*2)]2c1 + 9c2 + 3c3 = b2 = [36+6]-[27+16] c1 + 4c3 = b3 = -1 Si genera a R3
4.5 Espacio vectorial con producto interno
Producto Interno:
Un producto interno sobre un espacio vectorial V es una operación que asigna a cada par de vectores u y v en V un número real <u, v>.Un producto interior sobre V es una función que asocia un número real ‹u, v› con cada par de vectores u y v cumple los siguientes axiomas:Propiedades:
i. (v, v) ≥ 0ii. (v, v) = 0 si y sólo si v = 0.iii, (u, v +w) = (u, v)+ (u, w)iv. (u + v, w) = (u, w)+(v, w)v. (u, v) = (v, u)vi. (αu, v) = α(u, v)vii. (u, αv) = α(u, v)Espacios con producto interior:
El producto interior euclidiano es solo uno más de los productos internos que se tiene que definir en Rn Para distinguir entre el producto interno normal y otros posibles productos internos se usa la siguiente notación.u ●v = producto punto (producto interior euclidiano para Rn)‹u, v› = producto interno general para espacio vectorial V.
Propiedades de los productos interiores:
1. ‹0, v› = ‹v, 0› = 02. ‹u + v, w› = ‹u, w› + ‹v, w›3. ‹u, cv› = c‹u, v›.Un espacio vectorial con producto interno se denomina espacio con producto interno.
4.6 Base ortonormal, proceso de ortonormalización de Gram-Schmidt.
Conjunto ortonormal en Rn
Se dice que un conjunto de vectores S={u1, u2, …, uk} en Rn es un conjunto ortonormal si (1) (2)
Si solo satisface la ecuación (1), se dice que el conjunto es ortogonal.
Si u, v y w en Rn y α es un numero real, entonces (3) (4) (5) (6)(7)
Ahora se presenta otra definición útil
Si vϵRn, entonces la longitud o norma de v, denotada por |v|, esta dada por (8)
Nota. Si entonces v*v= Esto significa que
(9)
De esta forma se puede obtener la raíz cuadrada en (8), y se tiene (10)(11)
TEOREMA: si S= es un conjunto ortogonal de vectores diferentes de cero, entonces S es linealmente independiente.
Suponga que Entonces, para cualquier i=1,2,…,k
Como v≠0 por hipótesis |v|2>0 y se dice que c=0. Esto es cierto para i=1,2,…,k, lo que completa la prueba.
Proceso de ortonormalizacion de Gram-SchmidtSea H un subespacio de dimensión m de Rn. Entonces H tiene una base ortonormal.
Sea S= una base de H. se probara el teorema construyendo una base ortonormal a partir de vectores en S. antes de dar los pasios para esta construccion, se observa el hecho sencillo de que un conjunto de vectores linealmente independiente no contiene al vector cero.
Paso 1. Eleccion del primer vector unitario
Sea (12)
Entonces
De manera que |u|=1.
Paso 2. Eleccion de un segundo vector ortogonal a u
Como anteriormente se ha visto que, en R2, el vector es la ortogonal a v.
en este caso es la proyeccion de u sobre v. esto se ilustra en la siguiente figura.
Resulta que el vector w dado es ortogonal a v cuando w y v están en Rn para cualquier n≥2.
Obsérvese que como u es un vector unitario, para cualquier vector v.
Sea (13) entonces
de manera que v’ es ortogonal a u. mas aun, por el teorema, u y v´son linealmente independientes.
v’≠0 porque de otra manera lo que contradice la independencia de v1 y v2.
Paso 3. Elección de un segundo vector unitario
Sea (14) entonces es evidente que {u1,u2} es un conjunto ortonormal.Suponga que se han construido los vectores u1, u2,…,uk(k<m) y que forman un conjunto ortonormal. Se mostrara como construir uk+1.
Paso 4. Continuación del procesoSea (15)
entonces para i=1,2,…,k
Pero Por lo tanto,
Así, es un conjunto linealmente independiente, ortogonal y v´k+1≠0.
Paso 5
Sea
Entonces es claro que es un conjunto ortonormal y se puede continuar de esta manera hasta que k+1=m con lo que se completa la prueba.
Nota. Como cada u es una combinación lineal de vectores v, gen es un
subespacio de gen y como cada espacio tiene dimensión k, los espacio son iguales.
REFERENCIAS❖ 1) Grossman S, S.I., Álgebra Lineal Sexta Edición, 2007.
UNIDAD 3: SISTEMA DE ESCUACIONES LINEALES
3.1 Definición de sistemas de ecuaciones lineales.
DEFINICIÓN DE SISTEMA DE ECUACIONES LINEALES.
Es un conjunto finito de ecuaciones lineales de las variables
X1, X2,. . . . . . . . . Xn
Por ejemplo un, sistema general de tres ecuaciones lineales en tres incógnitas se escribe así:
Un sistema de m ecuaciones lineales en n incógnitas se puede abreviar escribiendo únicamente el arreglo rectangular de números:
Esto se conoce como Matriz Aumentada del sistema. (El término matriz se emplea en matemáticas para denotar un arreglo rectangular de números, las matrices aparecen en varios contextos).

Coeficientes: aij para i = 1, 2, ....., m j = 1, 2, ..... n Términos independientes: bi para i = 1, 2, ....., m Incógnitas del sistema: x1, x2,.... xn
Diremos que un conjunto de n números ordenados( ) es una solución del sistema si satisfacen todas las ecuaciones del sistema.
Sistemas equivalentes.
Definición
Diremos que dos sistemas de ecuaciones son equivalentes si tienen las mismas soluciones.(Obsérvese que no necesariamente han de tener el mismo número de ecuaciones.)
Clasificación de un sistema de ecuaciones lineales.
Atendiendo a la existencia o no de soluciones, los sistemas lineales se clasifican en:
· Incompatibles: si no tienen solución.
· Compatibles: si tienen al menos una solución.
· A su vez los sistemas de ecuaciones lineales compatibles se clasifican, en función del número de soluciones, en:
o Determinados: si tienen una única solución.
o Indeterminados: si tienen más de una, en cuyo caso tendrán infinitas soluciones.
Notemos que los sistemas homogéneos tienen siempre, al menos, la solución (0, 0,… ,0) que recibe el nombre de solución trivial, por ello siempre son compatibles.
El método básico para resolver un sistema de ecuaciones lineales consiste en reemplazar el sistema dado por un nuevo sistema que tenga el mismo conjunto solución, pero que sea más fácil de resolver. Por lo general, este nuevo sistema se obtiene en una serie de etapas, aplicando los siguientes tres tipos de operaciones.
Pasos para resolver la matriz:
1. Multiplicar una ecuación (o renglón) por una constante diferente de cero.2. Intercambiar dos ecuaciones (renglones).3. Sumar un múltiplo de una ecuación (renglón) a otra.

Dado que los renglones (líneas horizontales) de una matriz aumentada corresponden a las ecuaciones del sistema asociado, estas tres operaciones equivalen a las operaciones con renglones de la matriz aumentada.
3.2 Clasificación de los S.E.L. y tipos de solución.
Los sistemas de ecuaciones se pueden clasificar según el número de soluciones que pueden presentar.
Pueden presentar los siguientes casos:
1. Sistema incompatible si no tiene ninguna solución.2. Sistema compatible si tiene alguna solución, en este caso además puede distinguirse
entre:
o Sistema compatible determinado cuando tiene un número finito de soluciones.o Sistema compatible indeterminado cuando admite un conjunto infinito de
soluciones.
Teniendo así la clasificación:
Sabemos que una ecuación lineal o de primer grado es aquella que involucra solamente sumas y restas de variables elevadas a la primera potencia (elevadas a uno, que no se escribe). Son llamadas lineales por que se pueden representar como rectas en el sistema cartesiano.
Se pueden presentar tres tipos de ecuaciones lineales:
a) Ecuaciones lineales propiamente tales
En este tipo de ecuación el denominador de todas las expresiones algebraicas es igual a 1 y no se presentan como fracción, aunque el resultado sí puede serlo.

Para proceder a la resolución se debe:
Eliminar paréntesis. Dejar todos los términos que contengan a "x" en un miembro y los números en el otro.
Luego despejar "x" reduciendo términos semejantes. Ejemplo:4x – 2(6x – 5) = 3x + 12(2x + 16)
4x – 12x + 10 = 3x + 24x + 192
4x – 12x – 3x – 24x = 192 – 10
–35x = 182
b) Ecuaciones fraccionariasEn este tipo de ecuación lineal el denominador de a lo menos una de las expresiones algebraicas es diferente de 1 (es una fracción).
Para proceder a la resolución se debe:
Llevar a ecuación lineal (eliminar la fracción) multiplicando la ecuación por el mínimo común múltiplo de los denominadores (m.c.m.)
Ejemplo:
c) Ecuaciones literales:
Pueden ser lineales o fraccionarias. Si son fraccionarias, se llevan al tipo lineal, pero en el paso de reducir términos semejantes se factoriza por "x" para despejarla.
Ejemplo:
3.3 Interpretación geométrica de las soluciones.

Los finitos pares ordenados (x; y) que satisfagan a la ecuación lineal a.x + b - y + c=0 corresponden a los infinitos puntos de una recta del plano. Por tanto, el problema de resolver un sistema lineal de dos ecuaciones con dos incógnitas es el problema de estudiar la posición de sendas rectas.
1. Sistema incompatible (carece de solución) rectas paralelas.
2. Sistema compatible y determinado (solución única) rectas secantes.
3. Sistema compatible e indeterminado (infinitas soluciones) rectas coincidentes.
Un sistema de ecuaciones diferenciales son aquellas que tienen varias posibilidades para su solución. Estas son:
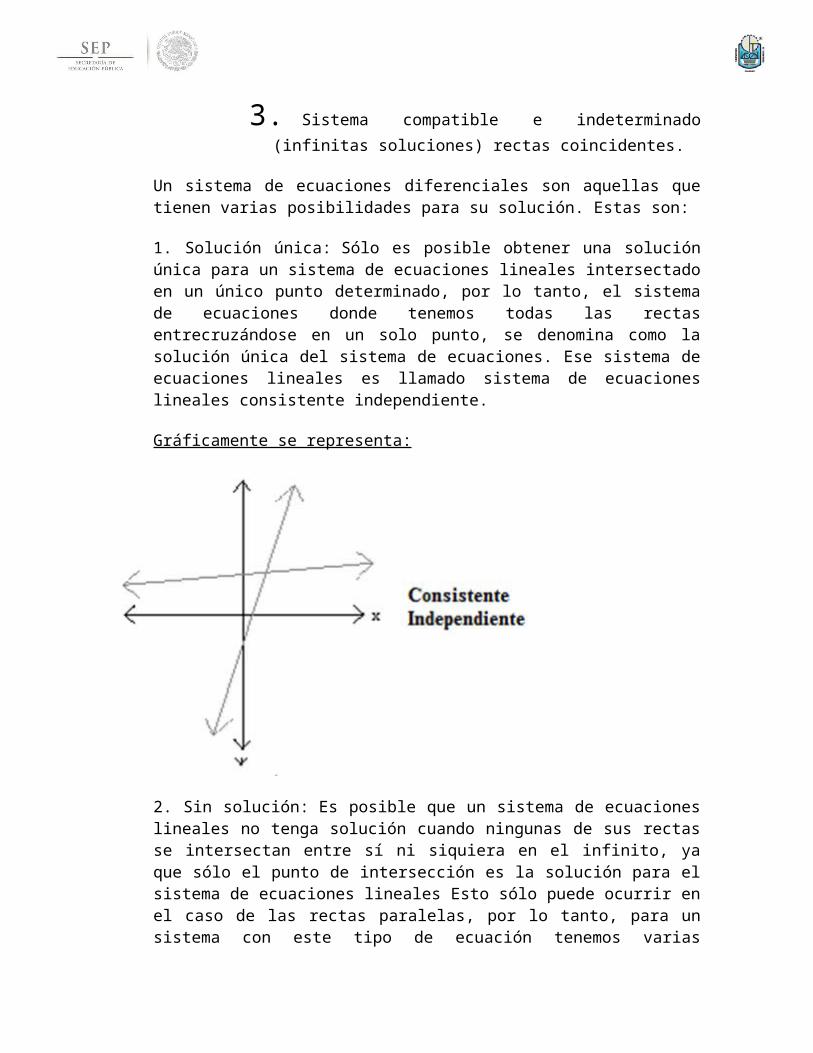
1. Solución única: Sólo es posible obtener una solución única para un sistema de ecuaciones lineales intersectado en un único punto determinado, por lo tanto, el sistema de ecuaciones donde tenemos todas las rectas entrecruzándose en un solo punto, se denomina como la solución única del sistema de ecuaciones. Ese sistema de ecuaciones lineales es llamado sistema de ecuaciones lineales consistente independiente.
Gráficamente se representa:
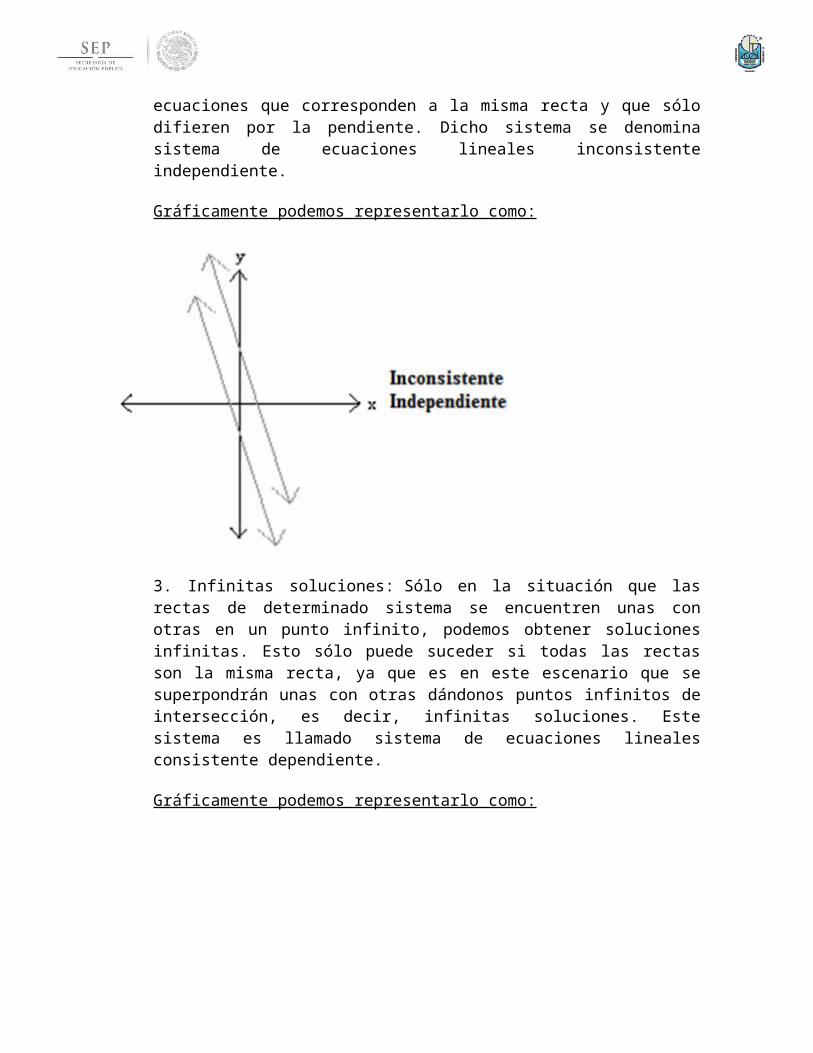
2. Sin solución: Es posible que un sistema de ecuaciones lineales no tenga solución cuando ningunas de sus rectas se intersectan entre sí ni siquiera en el infinito, ya que sólo el punto de intersección es la solución para el sistema de ecuaciones lineales Esto sólo puede ocurrir en el caso de las rectas paralelas, por lo tanto, para un sistema con este tipo de ecuación tenemos varias ecuaciones que corresponden a la misma recta y que sólo difieren por la
pendiente. Dicho sistema se denomina sistema de ecuaciones lineales inconsistente independiente.
Gráficamente podemos representarlo como:
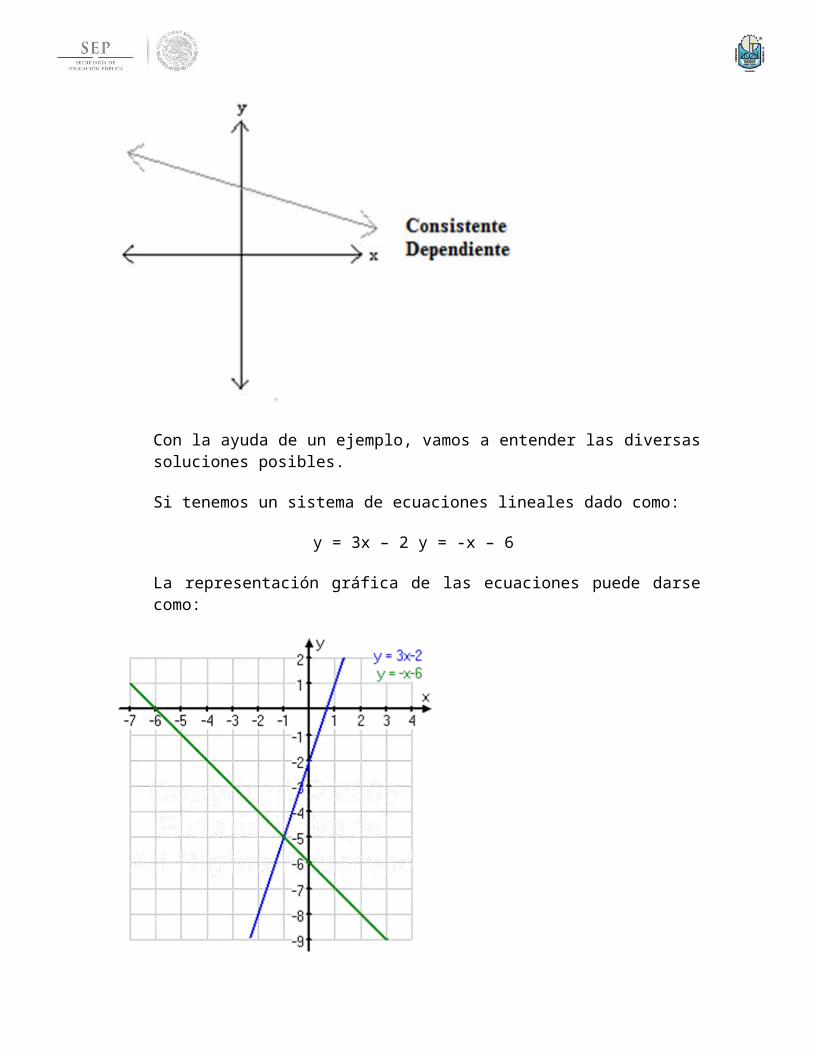
3. Infinitas soluciones: Sólo en la situación que las rectas de determinado sistema se encuentren unas con otras en un punto infinito, podemos obtener soluciones infinitas. Esto sólo puede suceder si todas las rectas son la misma recta, ya que es en este escenario que se superpondrán unas con otras dándonos puntos infinitos de intersección, es decir, infinitas soluciones. Este sistema es llamado sistema de ecuaciones lineales consistente dependiente.
Gráficamente podemos representarlo como:
Con la ayuda de un ejemplo, vamos a entender las diversas soluciones posibles.
Si tenemos un sistema de ecuaciones lineales dado como:
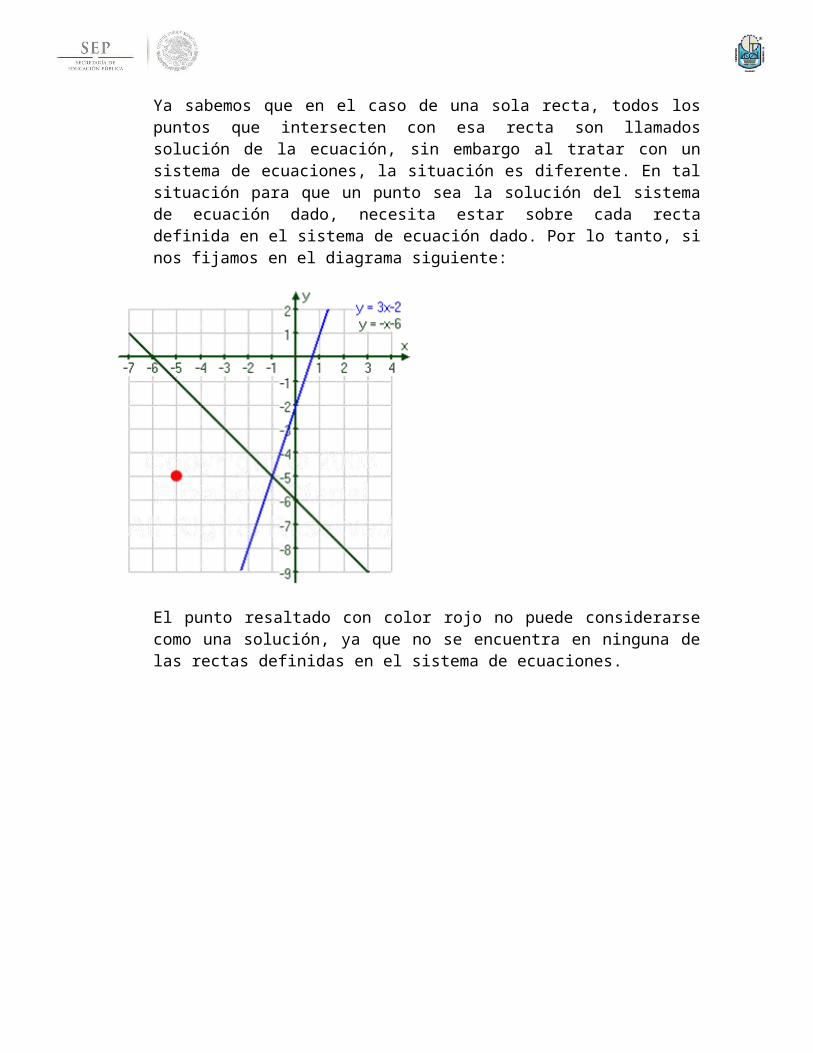
y = 3x – 2 y = -x – 6
La representación gráfica de las ecuaciones puede darse como:
Ya sabemos que en el caso de una sola recta, todos los puntos que intersecten con esa recta son llamados solución de la ecuación, sin embargo al tratar con un sistema de ecuaciones, la situación es diferente. En tal situación para que un punto sea la solución del sistema de ecuación dado, necesita estar sobre cada recta definida en el sistema de ecuación dado. Por lo tanto, si nos fijamos en el diagrama siguiente:
El punto resaltado con color rojo no puede considerarse como una solución, ya que no se encuentra en ninguna de las rectas definidas en el sistema de ecuaciones.

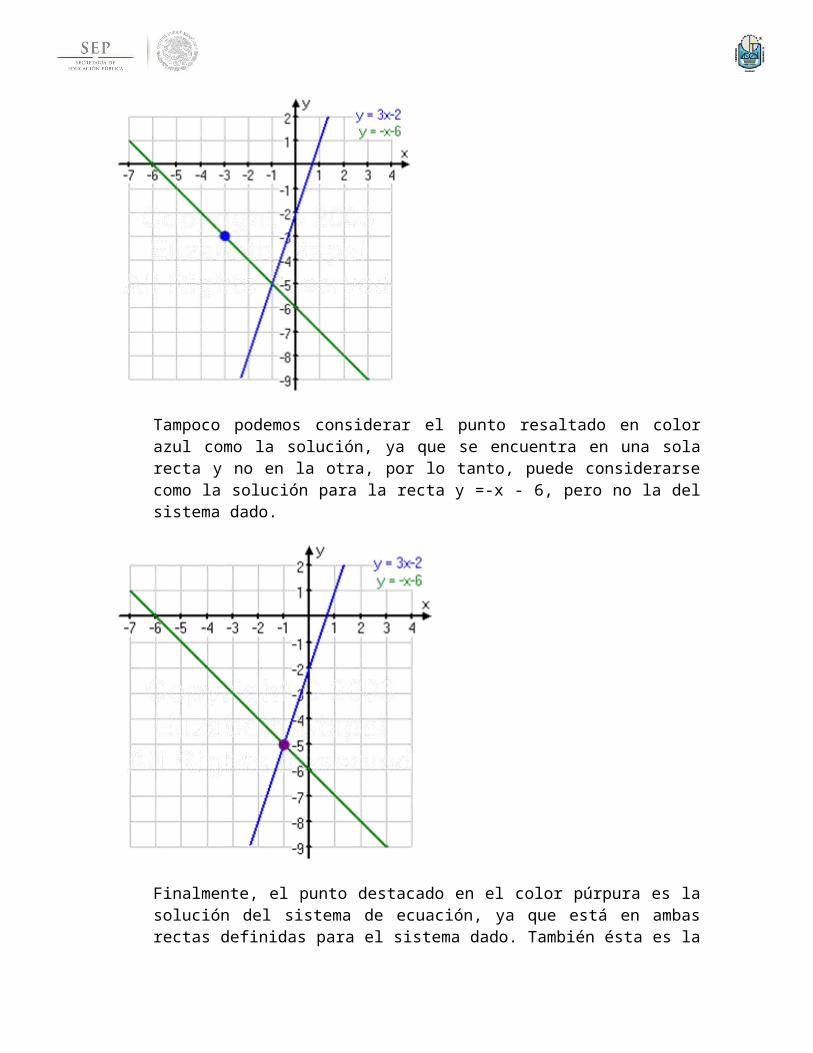
Tampoco podemos considerar el punto resaltado en color azul como la solución, ya que se encuentra en una sola recta y no en la otra, por lo tanto, puede considerarse como la solución para la recta y =-x - 6, pero no la del sistema dado.
Finalmente, el punto destacado en el color púrpura es la solución del sistema de ecuación, ya que está en ambas rectas definidas para el sistema dado. También ésta es la solución única del sistema dado, porque ambas líneas no se intersectan en algún otro punto. Por tanto, llamamos a este sistema un sistema de ecuaciones lineales consistente independiente.
3.4 Métodos de solución de un sistema de ecuaciones lineales.
Métodos de solución de sistemas de ecuaciones lineales:
1. Gauss.2. Gauss Jordán.3. Determinantes o Regla de Cramer.4. Adjunta de una matriz.5. Sustitución.
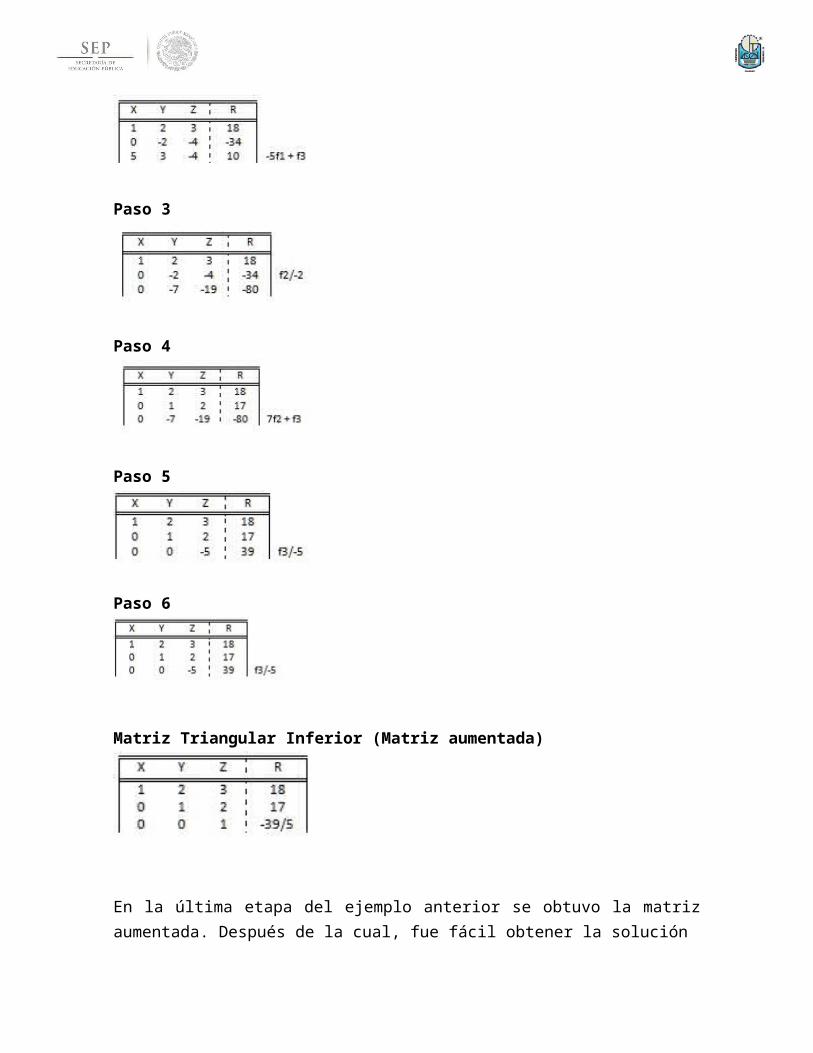
Solución De Sistemas De Ecuaciones Por El Método de Gauss: Este método se basa en la idea de reducir la matriz aumentada a una forma que sea lo suficientemente sencilla como para poder resolver el sistema de ecuaciones a simple vista.
Paso 1
Paso 2
Paso 3
Paso 4
Paso 5
Paso 6
Matriz Triangular Inferior (Matriz aumentada)
En la última etapa del ejemplo anterior se obtuvo la matriz aumentada. Después de la cual, fue fácil obtener la solución X = -23.8, Y = 32.6, Z = -7.8 para el sistema original de ecuaciones. El sistema de ecuaciones correspondientes es:
X + 2Y + 3Z = 18 Y + 2Z = 17 Z = -7.8
Sustituimos las ecuaciones y la solución Z = -7.8, Y = 32.6, X = -23.8 se hace obvia examinando la raíz aumentada.
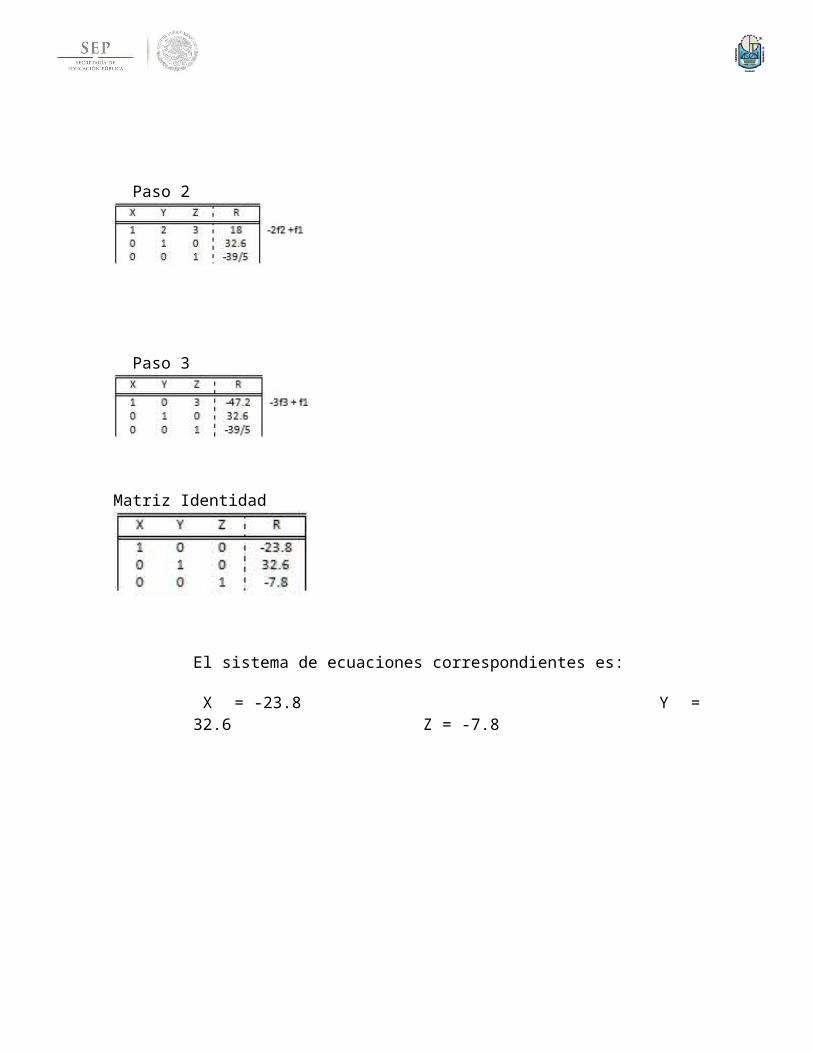
Solución De Sistemas De Ecuaciones Por El Método De Gauss-Jordán: Se definió un poco la forma de solución de un sistema de ecuaciones lineales una vez que su matriz aumentada tiene la forma escalonada reducida. Ahora se dará un procedimiento esquemático, conocido como eliminación de Gauss-Jordán, que puede ser empleado para llevar cualquier matriz a la forma escalonada reducida.
Paso 1
Paso 2
Paso 3
Matriz Identidad
El sistema de ecuaciones correspondientes es:
X = -23.8 Y = 32.6 Z = -7.8
Solución De Sistemas De Ecuaciones Por El Método de determinantes o regla de cramer:Los pasos a seguir para calcular los sistemas de ecuaciones según la regla de Cramer
son los siguientes:
1. Representar las ecuaciones en matrices
2. Calcular la determinante de la matriz A
3. Crear las matrices Δ1, Δ2 y Δ3 y calcular sus determinantes
4. Calculamos X, Y y Z
X = |Δ1|/|A| = -238/10 = -23.8
Y = |Δ2|/|A| = 326/10 = 32.6
Z = |Δ3|/|A| = -78/10 = -7.8
Solución De Sistemas De Ecuaciones Por El Metodo De La Inversa
Sabiendo calcular la matriz inversa y multiplicando matrices también es posible resolver un sistema de ecuaciones lineales, siempre y cuando éste sea de Crámer (es decir, tenga igual número de ecuaciones que de incógnitas y el determinante de la matriz de coeficientes no sea nulo).
Los pasos a seguir para calcular los sistemas de ecuaciones utilizando la inversa son los siguientes:
1. Calcular la inversa de la matriz A:
2.- Multiplicar la inversa de la matriz A por la matriz B
X = 18(-31/10) + 20(17/10) + 10(-1/5) = -23.8Y = 18(37/10) + 20(-19/10) + 10(2/5) = 32.6Z = 18(-11/10) + 20(7/10) + 10(-1/5) = -7.8

Método por sustitución:
El método de sustitución consiste en despejar en una de las ecuaciones cualquier incógnita, preferiblemente la que tenga menor coeficiente, para, a continuación, sustituirla en otra ecuación por su valor.
En la primera ecuación, seleccionamos la incógnita ´y´ por ser la de menor coeficiente y que posiblemente nos facilite más las operaciones, y la despejamos, obteniendo la siguiente ecuación.
El siguiente paso será sustituir cada ocurrencia de la incógnita ´y´ en la otra ecuación, para así obtener una ecuación donde la única incógnita sea la ´x´.
Al resolver la ecuación obtenemos el resultado x=5, y si ahora sustituimos esta incógnita por su valor en alguna de las ecuaciones originales obtendremos y=7, con lo que el sistema queda ya resuelto.
Matriz Inversa:Una matriz inversa es una matriz que multiplicado por la matriz original obtiene la matriz de identidad. El inverso de un cuadrado n x n matriz, es otro n x n matriz denotado por A-1 :
Donde es la n x n matriz identidad. Es decir, multiplicando su inversa una matriz produce una matriz de identidad. No todas las matrices tiene una matriz inversa. Si el determinante de la matriz es cero, entonces no tendrá una inversa y la matriz se dice que es singular. Sólo no singular matrices tienen inversas.
Fórmula para Inversa nxn matriz inverza:
Se puede encontrar la inversa de una matriz nxn general utilizando la siguiente ecuación
3.5 Aplicaciones.Aplicaciones con relación a los sistemas de ecuaciones
Las matrices son utilizadas en aplicaciones de gráficos de geometría, física e informática. La matriz de las cantidades o expresiones definidas por filas y columnas; tratados como un solo elemento y manipulados de acuerdo con las reglas. Cálculos de matriz pueden entenderse como un conjunto de herramientas que incluye el estudio de métodos y procedimientos utilizados para recoger, clasificar y analizar datos. En muchas aplicaciones es necesario calcular la matriz inversa donde esta calculadora en línea matriz inversa puede ayudarle a sin esfuerzo facilitan sus cálculos para las respectivas entradas.
En casos simples, es relativamente fácil resolver una ecuación siempre y cuando se satisfagan ciertas condiciones. Sin embargo, en casos más complicados, es difícil o engorroso obtener expresiones simbólicas para las soluciones, y por ello a veces se utilizan soluciones numéricas aproximadas.
Ejemplos de la aplicación de un método de solución de sistemas de ecuaciones:
1.- En una empresa se fabrica un producto que tiene costo variable de $5 por unidad y costo fijo de $80,000. Cada unidad tiene un precio de venta de $12. Determine el número de unidades que deben venderse para que la compañía obtenga utilidades de $60,000.
Solución: Costo = 5u + 80,000. Venta = 12. Utilidades = 60,000.
Entonces: C = 5u + 80,000. V = 12u. U = 60,000.
U = V - C 60,000 = 12u - (5U+80000) 60,000 = 12u - 5u - 80,000 60,000 + 80,000 = 7u 140,000 = 7u 140,000/7 = u 20,000 = u
Al obtener nuestro coeficiente pasamos a sustituirlo:

C = 5(20,000) + 80,000 = 180,000.
V = 12(20,000) = 240,000.
U = 240,000 - 180,000 = 60,000.
Al terminar nos damos cuenta que por este método de sustitución e igualación se puede llegar al resultado.
2.- La empresa “Organicomputer”, fabrica tres modelos de computadoras personales: cañón, clon, y lenta_pero_segura. Para armar una computadora modelo cañón necesita 12 horas de ensamblado, 2.5 para probarla, y 2 más para instalar sus programas. Para una clon requiere 10 horas de ensamblado, 2 para probarla, y 2 para instalar programas. Y por último, para una lenta_pero_segura requiere 6 para ensamblado, 1.5 para probarla, y 1.5 para instalar programas. Si la fábrica dispone en horas por mes de 556 para ensamble, 120 para pruebas, y 103 horas para instalación de programas, ¿cuántas computadoras se pueden producir por mes?
Solución
En nuestro caso las incógnitas es el número de cada tipo de computadora a producir:
x = número de computadoras cañón y = número de computadoras clon z = número de computadoras lenta_pero_segura
Para determinar las ecuaciones debemos utilizar los tiempos de ensamblado pruebas, e instalación de programas.
Nuestras matrices serán:
En esta ocasión se resolverá por Cramer, pero se puede utilizar cualquiera de los métodos (Gauss, Gauss Jordán, Usando la inversa), el resultado debe ser el mismo.
X = |Δ1|/|A| = -51/-1.5 = 34 Y = |Δ2|/|A| = -6/-1.5 = 4 Z = |Δ3|/|A| = -27/-1.5 = 18
Al resolver este sistema obtenemos:
X = 34, Y = 4, Z = 18
34 computadoras Cañón.4 computadoras Clones.18 computadoras lentas pero seguras.
REFERENCIAS1) Grossman S, S.I., Álgebra Lineal Sexta Edición, 2007.
