Transformacionesasignaturas.topografia.upm.es/.../sol-transformaciones.pdfTransformaciones...
178
Transformaciones geométricas Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 1 1.- Sean los giros G y G’, de centros O(0,0) y O’(1,0) y ángulos respectivos 120º y α. Hallar las ecuaciones de GoG’ y sus elementos característicos para: a) α=90º b) α=240º 2.- Clasificar las siguientes transformaciones en el plano y hallar sus elementos principales. 1 3 3 1 1 3 3 1 2 2 2 2 2 2 a)X' X; b) X' X; c) X' X 5 0 3 1 1 3 3 1 2 2 2 2 2 2 = + = + = − − − 2 1 0 2 d)X' X; e)X'= X; 3 0 1 3 − = + + − 3 1 2 f) X ' X 2 1 3 − = + − − − 3.- Clasificar las siguientes transformaciones 1 1 1 1 1 0 0 0 1 2 2 0 0 1 1 x' 1 0 1 0 x 2 1 a)X' 0 0 1 0 X; b) ;c)X' 1 1 1 X y' 1 0 0 1 y 3 2 2 1 0 0 0 1 z' 0 1 0 0 z 1 1 2 − − − = + = = − − − − − − − 1 4 8 2 2 0 0 2 0 5 0 0 1 d) X ' 4 7 4 X; e) X ' 0 3X;f)X' 0 0 2 0 X; g) X ' 5 0 0 5 X 9 8 4 1 1 2 2 0 0 1 0 5 0 − − − − − − = − − = + = + = − + − − − − − 4.- Sea T la transformación geométrica de ℜ 3 de ecuación: 1 0 0 0 1 1 2 1 0 0 x' x 3 1 0 k y' y 2 z' z 3 1 0 0 2 2 = a) Obtener los valores de k para los cuales T es un movimiento b) Clasificar T para aquellos valores de k para los que sea un movimiento
Transcript of Transformacionesasignaturas.topografia.upm.es/.../sol-transformaciones.pdfTransformaciones...

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 1
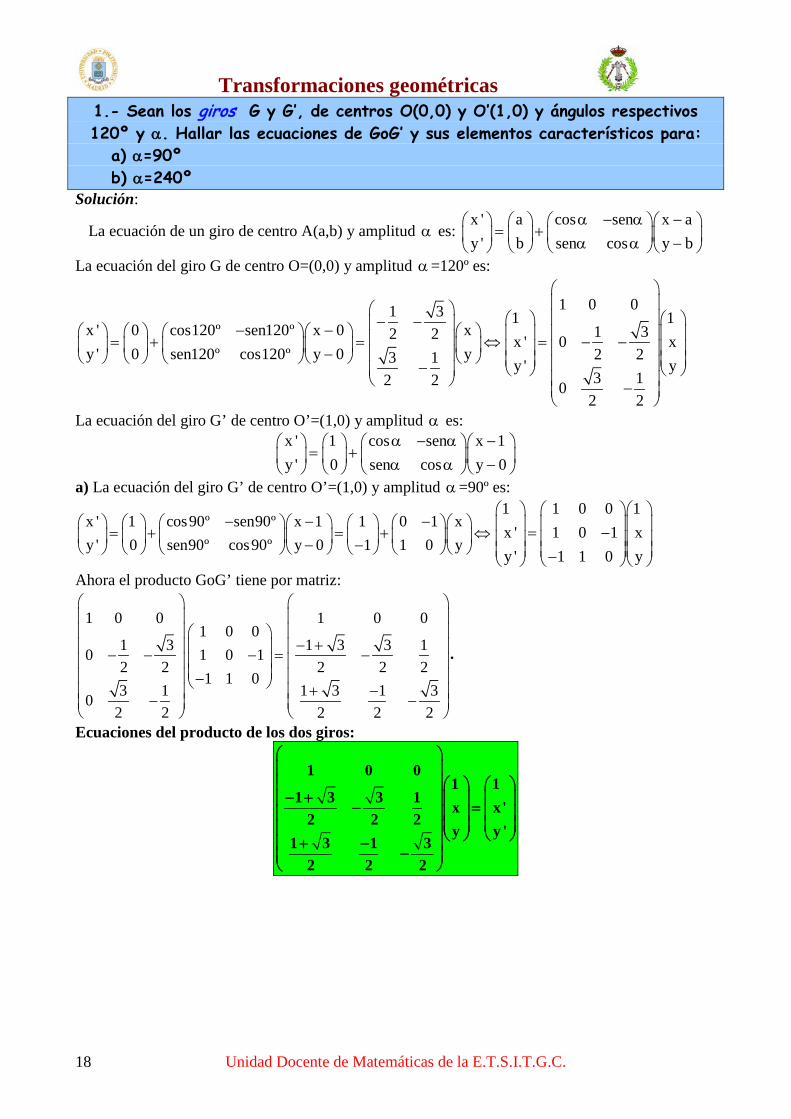
1.- Sean los giros G y G’, de centros O(0,0) y O’(1,0) y ángulos respectivos 120º y α. Hallar las ecuaciones de GoG’ y sus elementos característicos para: a) α=90º b) α=240º
2.- Clasificar las siguientes transformaciones en el plano y hallar sus elementos principales.
1 3 3 1 1 33 12 2 2 2 2 2a)X' X; b) X' X; c) X' X5 03 1 1 3 3 1
2 2 2 2 2 2
= + = + = − − −
2 1 0 2d)X' X; e)X'= X;
3 0 1 3−
= + + −
3 12f) X' X
2 1 3
− = + − − −
3.- Clasificar las siguientes transformaciones
1 1 11 1 0 0 0 1 22 0 0 1 1x' 1 0 1 0 x 2 1a)X' 0 0 1 0 X; b) ; c)X' 1 1 1 Xy' 1 0 0 1 y 3 2
2 1 0 0 0 1z' 0 1 0 0 z 1 12
− − −
= + = = − − − − − − −
1 4 8 2 2 0 0 2 0 5 0 01d) X' 4 7 4 X;e) X' 0 3X;f)X' 0 0 2 0 X;g) X' 5 0 0 5 X9
8 4 1 1 2 2 0 0 1 0 5 0
− − − − − − = − − = + = + = − + − − − − −
4.- Sea T la transformación geométrica de ℜ3 de ecuación:
1 0 0 01 12 1 0 0x' x31 0 ky' y2z' z3 10 0
2 2
=
a) Obtener los valores de k para los cuales T es un movimiento b) Clasificar T para aquellos valores de k para los que sea un movimiento
Administrador
Nota
Todas las palabras en color azul están recogidas en el Vademécum.
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 2
5.- Sean
1 0 0 1 0 01 1 1 1
2 2 1 1T x' 5 x y T' x' 1 x 2 2 2 2
y' y y' y12 2 1 02 22 2
≡ = ≡ = −−
las ecuaciones correspondientes a dos transformaciones T y T’ respectivamente. Se pide: a) Clasificar las transformaciones T y T’ obteniendo sus elementos característicos b) Hallar las ecuaciones de la figura en que se transforma la circunferencia
2 2x y 1+ = mediante las transformaciones T y T’.
6.- Determinar los elementos característicos de la transformación geométrica que transforma el punto A(1,1,2) en A’(2,-2,6) en los siguientes casos: a) traslación b) simetría central c) simetría especular d) homotecia de razón 2
7.- Sea H la homotecia de centro (0,0) y razón 3. Sea A’ el transformado del punto A(0,2). Determinar las ecuaciones de las siguientes transformaciones: a) H(O,3) b) H(A’,1/3) c) H(O,3)oH(A’,1/3). ¿Qué tipo de transformación es? d) H(A’,2)oH(O,3). ¿Qué tipo de transformación es?
8.- Hallar la ecuación de la semejanza directa que transforma los puntos O(0,0) y P(1,2) en O’(15,-1) y P’(-7,-5) respectivamente.
9.- Escribir la ecuación matricial de la semejanza resultante de componer la homotecia de centro A(1,2) y razón k=10 y el giro de centro P(2,-1) y ángulo α tal que senα=3/5 y cos α = -4/5. Hallar los elementos de la semejanza resultante.
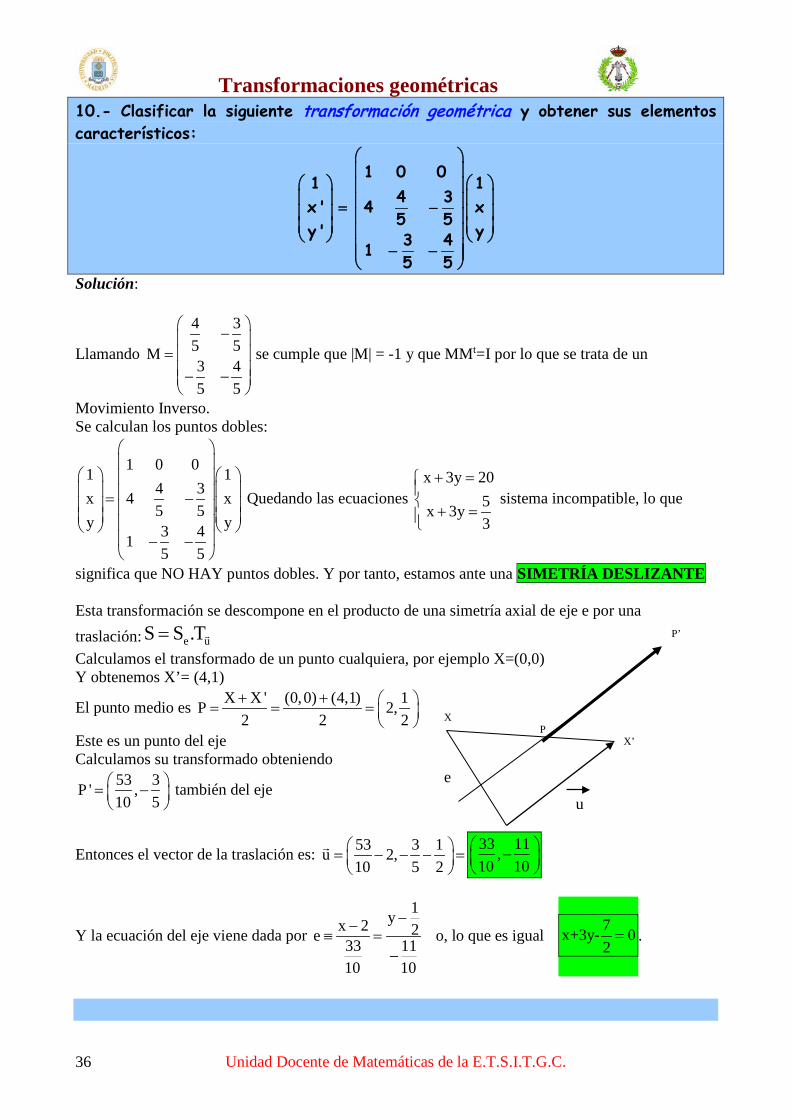
10.- Clasificar la siguiente transformación geométrica y obtener sus elementos característicos:
1 0 01 1
4 3x' 4 x5 5
y' y3 415 5
= −
− −

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 3
11.- Se pide hallar, en el plano euclídeo:
a) La ecuación del giro de centro A (1,-1) y ángulo 4π .
b) La ecuación de la homotecia de centro B(1,1) y razón 2− . c) La ecuación de la semejanza resultante de componer el giro con la homotecia anterior. d) La descomposición canónica de la semejanza obtenida en el apartado c) indicando qué tipo de semejanza es.
12.- Dada la transformación ℜ3 de ecuación:
1 1 0 0 0 1x' 3 0 3 0 xy' 3 0 0 3 yz' 3 3 0 0 z
− − =
− −
a) Clasificarla y hallar sus elementos característicos. b) Hallar el centro y radio de la esfera transformada de la esfera de centro (1,1,1) y radio 2, mediante la transformación anterior.
13.-En el plano vectorial V2, con la base ortonormal { } i , j
se consideran los
vectores u (1,2) y v ( 1,1)= = − y las semirrectas vectoriales u vD y D que éstos
determinan. Hallar en la base { } i , j
las matrices de las transformaciones ortogonales tales que ( )u vf D D=
14.- Sea { } i , j
una base ortonormal de V2.
a) Hallar la matriz que define la simetría ortogonal s, respecto de la recta vectorial engendrada por el vector u (1,2)=
.
b) Clasificar la transformación ortogonal
1 2 23 3f :
2 2 13 3
−
c) Determinar la matriz que define la simetría ortogonal axial s’ tal que f= sos’ y la dirección del eje de s’-
15.- Estudiar las siguientes transformaciones indicando si son ortogonales y en caso de serlo, hallar su tipo y elementos geométricos.
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 4
1 1 11 2 22 2 23 4 3 3 3-1 1 2 2 1 1 1 15 5A ; B= ; C= ; D=
4 3 4 3 3 3 3 2 2 22 1 25 5 1 1 03 3 3 2 2
− − − = − − − − − −
16.- Dadas H1, homotecia de centro C1(1,1,1) y razón k1=1/2, y H2 homotecia de centro C2(-1,1,-1) y razón k2=2. Se pide: a) Hallar las ecuaciones de T=H2oH1, e identificar T. b) Lo mismo para T’=H1oH2. c) Transformada mediante H1 de la recta de ecuación: x+1=-y=z.
17.- Hallar la ecuación del giro de R3 definidos por: la recta que pasa por A(1,1,0) y B(0,0,1), y transforma el punto P(0,1,0) en P’(1,1,1).
18.- Hallar las ecuaciones y los centros de las semejanzas que resultan de componer: a) La homotecia H1 del ejercicio 16 y el giro 17. b) H1 con la simetría especular de plano π: x+y-z-1=0.
19.- Clasificar los movimientos definidos por las siguientes ecuaciones y determinar sus elementos característicos:
a)
1 1 0 0 0 1x' 1 0 1 0 x
1 0 0 1 yy'0 1 0 0 zz'
= − −
; b)
1 1 0 0 0 1x' 1 0 1 0 x
1 0 0 1 yy'0 1 0 0 zz'
= − −
20.- Indicar qué tipo de transformación corresponde a cada una de las siguientes ecuaciones y hallar sus elementos característicos:
a) x' x 2y 2zy' 2x y 2zz' 2x 2y z
= − + +
= − + − = − − +
; b)
x' x y z 1
3 3y' x y2 22 2z' x y 2z 22 2
= − − + − = −
= + + +
; c)x ' x 2y 2zy' 2x y 2zz' 2x 2y z
= + + = + − = − +
21.- Descomponer la traslación de vector (2,1,1) en producto de dos simetrías SoS’, siendo el plano de S: 2x+y+z=1.

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 5
22.- En un plano se consideran 4 simetrías axiales S1, S2, S3, S4, cuyos ejes respectivos son las rectas y=0; y=x; x=0; x=4. Se pide: a) Demostrar que el producto de esas simetrías, en el orden dado, es un giro del que se pide, el centro y el ángulo de giro. b) Hallar la ecuación de la figura C’ transformada de la circunferencia C=x2+y2=25 por dicho giro. c) Si existe alguna homotecia que transforme C en C’, halle su centro y su razón.
23.- a) Hallar las ecuaciones de la composición del giro de ángulo π con respecto a la recta r: (0,0,1) + t (0,1,1) con la traslación de vector v = (1,1,0) y determinar de qué tipo de movimiento se trata. b) Clasificar el movimiento dado por la ecuación matricial:
1 1 12x' 1 x
2 1y' 1 1 1 y3 2
z' 0 z11 12
− = − −
−
24.- A) Calcular la ecuación matricial del giro Ge,α en el espacio cuyo eje es:
x te y t
z 1 t
= −≡ = − = +
y ángulo de giro 12π
α = − .
B) Hallar la ecuación de la homotecia de centro C(2,2,-1) y razón k=3 C) Hallar la ecuación de la transformación e,C,kS H G α= . D) Hallar la razón, el ángulo y el eje de la semejanza S del apartado anterior.
25.- A) Calcular la ecuación matricial del giro en el espacio cuyo
eje es: x z 2 0y 2 0
− + = − =
ángulo es 180º.
B) Hallar la ecuación de la homotecia H de centro (2, 1, 2) y razón k = - 3. C) Hallar la ecuación de la transformación ToH, siendo T el movimiento del apartado A). D) ¿Es ToH una semejanza directa o inversa? E) Hallar la razón, el ángulo y el eje de semejanza.
26.- Dada la transformación geométrica del espacio euclídeo E2:

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 6
187 2425X' X
24 72425
− − = + α −
con 0, Rα ≠ α ∈ , se pide:
Clasificar la transformación, según los valores de α.
Elementos característicos en cada caso.
descomposición canónica de la transformación para 125
α = , indicando la matriz
de la homotecia y la matriz del movimiento.
27.- Dada la transformación geométrica del espacio euclídeo E3:
X’ = N X, siendo
1 0 0 018 7 24- - 025 25 25N24 24 7- 025 25 250 0 0 -1
, se pide:
a) Clasificarla.
b) Elementos característicos.
c) Descomponer la transformación en el producto de 4 simetría especulares.
28.- La gráfica adjunta representa un jardín con lago Se piden las coordenadas de A’ sabiendo que A(1,-3) y ambos puntos A y A’ se encuentran en una circunferencia de centro C(0,-2) y que el arco AA’ es de 210º.
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 7
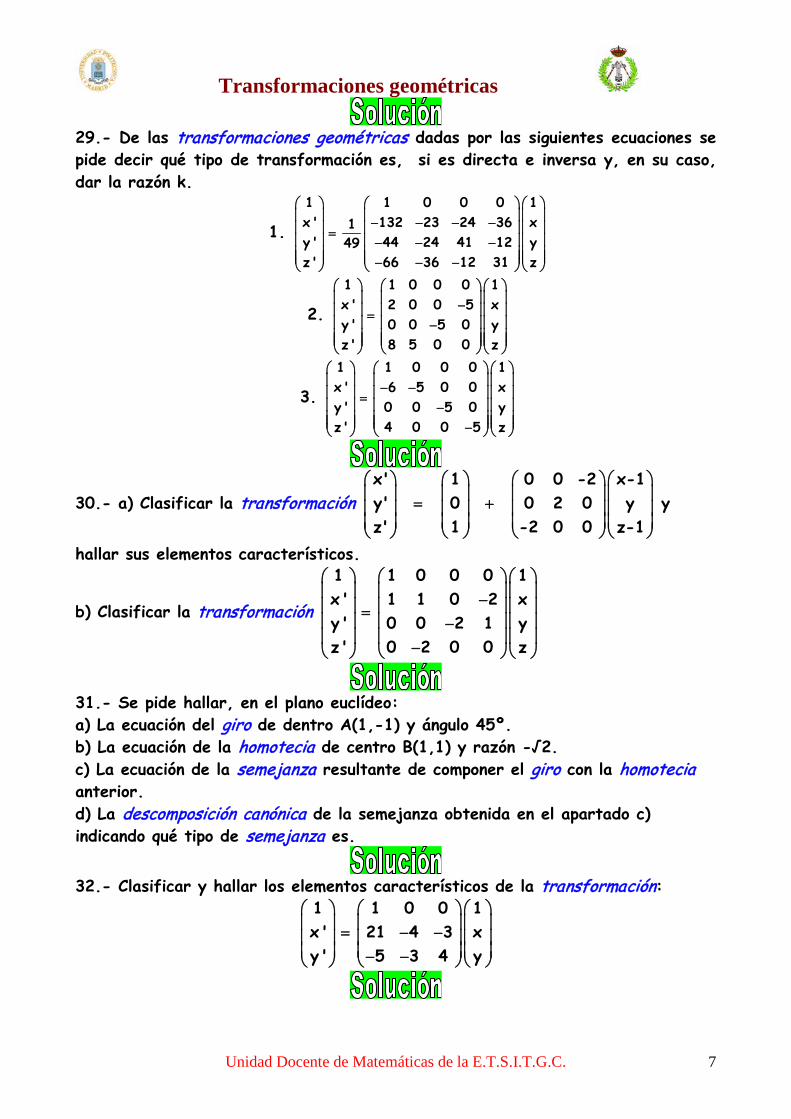
29.- De las transformaciones geométricas dadas por las siguientes ecuaciones se pide decir qué tipo de transformación es, si es directa e inversa y, en su caso, dar la razón k.
1.
1 1 0 0 0 1x' 132 23 24 36 x1y' 44 24 41 12 y49z' 66 36 12 31 z
− − − − = − − − − − −
2.
1 1 0 0 0 1x' 2 0 0 5 xy' 0 0 5 0 yz' 8 5 0 0 z
− = −
3.
1 1 0 0 0 1x' 6 5 0 0 xy' 0 0 5 0 yz' 4 0 0 5 z
− − = − −
30.- a) Clasificar la transformación x' 1 0 0 -2 x-1y' 0 0 2 0 yz' 1 -2 0 0 z-1
= +
y
hallar sus elementos característicos.
b) Clasificar la transformación
1 1 0 0 0 1x' 1 1 0 2 xy' 0 0 2 1 yz' 0 2 0 0 z
− = −
−
31.- Se pide hallar, en el plano euclídeo: a) La ecuación del giro de dentro A(1,-1) y ángulo 45º. b) La ecuación de la homotecia de centro B(1,1) y razón -√2. c) La ecuación de la semejanza resultante de componer el giro con la homotecia anterior. d) La descomposición canónica de la semejanza obtenida en el apartado c) indicando qué tipo de semejanza es.
32.- Clasificar y hallar los elementos característicos de la transformación:
1 1 0 0 1x' 21 4 3 xy' 5 3 4 y
= − − − −

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 8
33.- a) Obtener la ecuación matricial de la simetría deslizante S de plano x+y+1=0 y de vector traslación (0,0,2). b) Obtener la imagen de los puntos O=(0,0,0) y P=(-1,-3,2/3) mediante S.
34.- Se pide hallar en el plano euclídeo: a) La ecuación del giro, G, de centro A (1,0) y ángulo π b) La ecuación de la homotecia, H, de centro B (1,1) y razón k =-2 c) La ecuación de la simetría axial, S, de eje 3x + 4y = 0 d) La ecuación de la semejanza resultante del producto SºHºG e) Los elementos de la semejanza resultante
35.-
a) Calcular la ecuación matricial de un giro en el espacio cuyo eje es: X (1, 2, 3) (0,-1, 1) t= +
y cuyo ángulo es: 180º. b) Hallar la ecuación de la homotecia de centro ( 1, -1, 0 ) y razón k=2 c) Hallar la ecuación de la transformación H°T siendo T el movimiento del
apartado a) d) ¿Es HºT una semejanza directa o inversa? e) Hallar la razón, el ángulo y el eje de semejanza de HºT.
36.- Clasificar las siguientes transformaciones y hallar sus elementos en los casos en que sea posible.
a) 1 1 0 0 1x' 2 3 4 x
6 4 3 yy'
=
−
b) 1 1 0 0 1x' 1 1 1 x
1 1 1 yy'
=
c)
1 0 01 11x' 1 0 x2
yy' 11 02
= − −
37.- Dada la transformación geométrica
1 1 0 0 0 1x' 3 0 3 0 x
3 0 0 3 yy'3 3 0 0 zz'
− − = − −
. Se pide:
a) Clasificar y hallar sus elementos característicos. b) Dada la esfera de centro (1,1,1) y radio 2, hallar el centro y radio de su transformada mediante la transformación anterior.
38.- Dada la transformación geométrica T de R3 de ecuación:

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 9
10 03x' 3 x
1y' 3 0 0 y3
z' 3 z1 0 03
− −
= + −
a) Clasificar y hallar sus elementos característicos. b) Hallar la ecuación de la esfera transformada de la esfera de centro (1, 1,
1) y radio 2, mediante T. c) Hallar la ecuación de la transformación inversa de T.
39.- a) Hallar la ecuación del giro G de centro A (1, -2) y ángulo 150α = .
b) Hallar la ecuación de la curva L transformada de la elipse E22 yx 1
7 3≡ + =
mediante el giro G. c) Sin realizar ningún cálculo, razonar porqué L es una cónica y de qué tipo es. d) Dar la excentricidad y el centro de L.
40.- Sea S la semejanza de centro C y razón k que transforma los puntos
( )A 1, 1, 1− , ( )B 1, 0, 2− , ( )C 2, 1, 1 y ( )D 3, 1, 4− en los puntos ( )A' 15, 4, -12− , ( )B' 20, 6, -7 , ( )C ' 15, -9, -2 y ( )D ' 30, 16, -2 ,
respectivamente. a) Hallar la ecuación de S. b) Hallar el centro C, la razón k y el ángulo de giro α de la descomposición
canónica de S.
41.- a) Sean las simetrías axiales, S1, S2 de ejes e1: y = x; e2: x = 5. Calcular la ecuación matricial de S2° S1 y sus elementos característicos.
b) Clasificar la transformación
1 1 0 0 0 1x' 0 0 0 3 xy' 1 0 3 0 yz' 1 3 0 0 z
= −
−
y hallar sus
elementos característicos y descomposición canónica.
42.- Hallar una ecuación matricial de la simetría axial plana S de eje la recta e x y 1 0≡ − − = .
43.- Sea T una transformación afín definida por sus ecuaciones: x’ = - 2 – 2 x

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 10
y’ = 2 – 2 y z’ = - 2 – 2 z
a) Clasificar T y hallar sus elementos característicos. b) Si un triángulo tiene como área 3 (u2). ¿Cuál es el área de su triángulo
transformado por T?
44.- A) Clasificar la siguiente transformación geométrica. Obtener sus elementos
característicos y la descomposición canónica.1x'y'
=1 0 03 -1 1
1 2 2 -1 -1
+
1xy
B) Determinar los elementos característicos de la transformación geométrica que transforma el punto A(2, 2, 5) en A’ (4, -4, 15) en los siguientes casos:
a) Simetría especular. b) Homotecia de razón 2.
45.- Hallar la ecuación matricial del giro en E3 cuyo eje es la recta determinada por el punto A(1,1,1) y el vector u(0,2,0) siendo el ángulo 45ºα = − .
46.- Componer el giro G de centro A(1,2) y ángulo α = 60º con la traslación de vector u =(3,5). Clasificar y hallar los elementos de la transformación obtenida.
47.- a) Hallar la ecuación matricial del giro G en el espacio, cuyo eje es la recta determinada por el punto A (1, 2, 3) y el vector ( )u 0,0,4=
siendo el ángulo de giro α = - 30º. b) Hallar la ecuación matricial de la homotecia H de centro A (1, 2, 3) y razón k=-3. c) Calcular los elementos característicos del producto G H .
48.- Dados el vector ( )u 3,4=
y el punto ( )A 1, 1− . Se pide: a) Hallar la ecuación del movimiento que resulta de componer la traslación de
vector u y el giro de centro A y ángulo α tal que 3sen5
α = y 4cos5
α = − .
b) Identificar los elementos característicos del movimiento resultante. c) Razonar si el movimiento anterior es conmutativo.
d) Hallar las transformadas de la elipse 22 yx 1
4 2+ = y de la parábola 2y x= .

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 11
49.- Clasificar la transformación
1 1 0 0 0 1x' 12 0 0 3 xy' 0 0 3 0 yz' 12 3 0 0 z
− =
−
y hallar sus
elementos característicos.
50.- Se pide hallar, en el plano euclídeo:
a. La ecuación del giro de Centro A(1,2) y ángulo 4π
b. La ecuación de la traslación de vector u= (1,1)
c. G(A, 4π ) ° T ( u
). ¿Qué tipo de transformación es? Razonar
respuesta.
51.- Clasificar la transformación 1 1 0 0 1x' 2 0 1 xy' 5 1 0 y
= −
y hallar sus elementos
característicos.
52.- Calcular la ecuación matricial del giro respecto la base canónica, sabiendo que le eje de giro es: (x,y,z) = (2,1,0) + t(0,-1,3) y el ángulo de giro es -30º.
53.- a) Hallar la ecuación matricial del giro G que tiene por eje de giro el eje Z de coordenadas y por ángulo de giro α = -60º
b) Hallar la ecuación de la homotecia H de centro C(0,0,10) y razón k = 13
− .
c) Clasificar y hallar tres elementos característicos de H G.
d) Sea 1 0 1 x 1x'0 1 0 y 0y'
− = + −
la ecuación matricial de la simetría S y T
la traslación de vector ( )u 1, 1= − , se pide hallar la ecuación del movimiento
T S.
e) Calcular los elementos característicos del movimiento T S hallado en d).
54.- Dada la transformación geométrica de ecuación: x21 8 6x'y6 6 8y'
− − = + −
a) Clasificarla. b) Calcular sus elementos característicos.

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 12
55.- Estudiar si la siguiente ecuación corresponde a una semejanza del espacio. En caso afirmativo, calcular sus elementos característicos:
1 0 0 01 11 1 2 1x' x
y' y2 2 0 2z' z0 1 2 1
− = − − −
.
56.- Hallar las ecuaciones de la rotación de eje x 0
ez 2
=≡ =
y ángulo 90ºα = − .
57.- Obtener las ecuaciones de la transformación geométrica siguiente: GIRO: eje r ≡ (1,0,0)+(-1,-1,1)t y ángulo: 120º. Y obtener los transformados de los siguientes elementos:
Plano: x+2y+3z=1; Punto: (3,2,1)
58.- Obtener las ecuaciones de la transformación geométrica siguiente: GIRO: eje r ≡ (1,0,0)+(-1,-1,1)t y ángulo: 240º. Y obtener los transformados de los siguientes elementos:
Plano: x+2y+3z=1; Punto: (3,2,1)
59.- Obtener la ecuación matricial de la simetría especular respecto del plano:
40x 60y 40 3z 1− − = Y obtener los transformados de los siguientes elementos:
Plano: x+2y+3z=1; Punto: (3,2,1)
60.- En el espacio euclídeo tridimensional, se pide: a) Hallar las ecuaciones de la semejanza directa de razón k = 4, centro el punto
C(1,1,1), ángulo 2π
α = y cuyo eje es la recta ( ) ( ) ( )e x, y,z 1,1,1 t 1,1,0≡ = + .
b) Hallar las ecuaciones de la transformada de la recta e: c) Hallar la ecuación del transformado del plano z = 0.
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 13
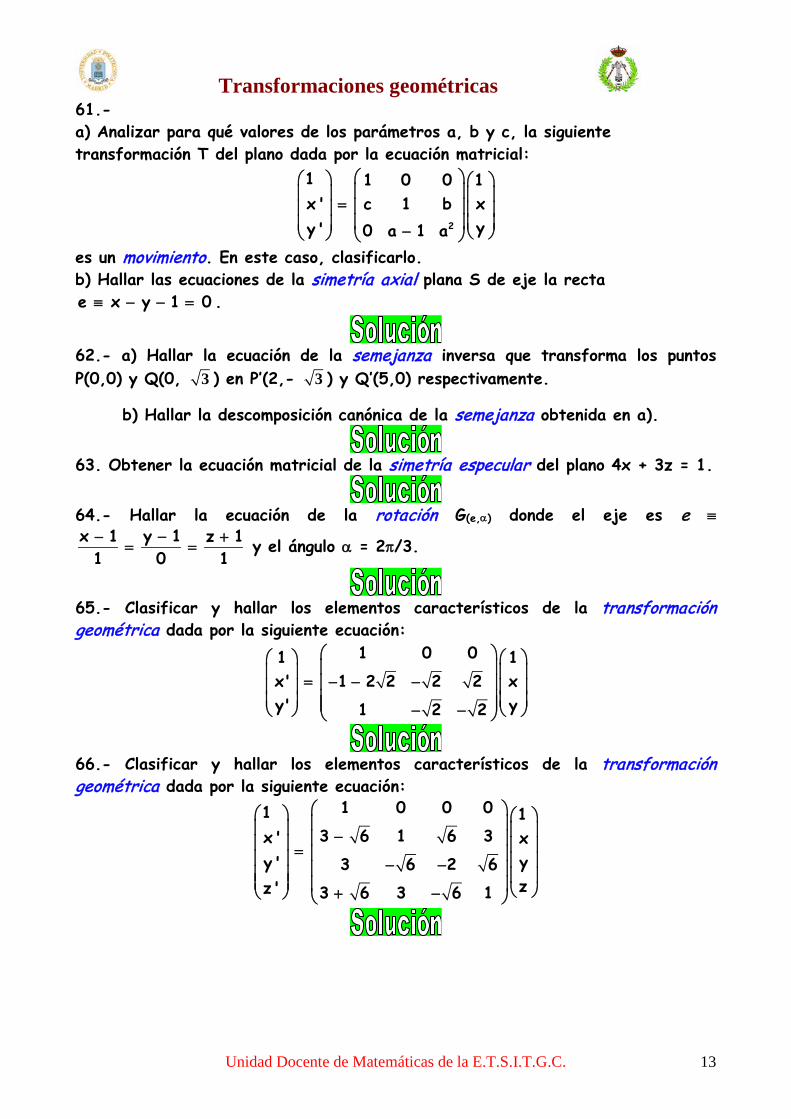
61.- a) Analizar para qué valores de los parámetros a, b y c, la siguiente transformación T del plano dada por la ecuación matricial:
= −
2
1 1 0 0 1x' c 1 b x
yy' 0 a 1 a
es un movimiento. En este caso, clasificarlo. b) Hallar las ecuaciones de la simetría axial plana S de eje la recta e x y 1 0≡ − − = .
62.- a) Hallar la ecuación de la semejanza inversa que transforma los puntos P(0,0) y Q(0, 3 ) en P’(2,- 3 ) y Q’(5,0) respectivamente.
b) Hallar la descomposición canónica de la semejanza obtenida en a).
63. Obtener la ecuación matricial de la simetría especular del plano 4x + 3z = 1.
64.- Hallar la ecuación de la rotación G(e,α) donde el eje es e ≡
y 1x 1 z 11 0 1
−− += = y el ángulo α = 2π/3.
65.- Clasificar y hallar los elementos característicos de la transformación geométrica dada por la siguiente ecuación:
1 0 01 1x' 1 2 2 2 2 xy' y1 2 2
= − − − − −
66.- Clasificar y hallar los elementos característicos de la transformación geométrica dada por la siguiente ecuación:
1 0 0 01 13 6 1 6 3x' x
yy' 3 6 2 6zz' 3 6 3 6 1
− = − − + −

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 14
67.- a) Hallar la ecuación del Giro del plano G(A,α) donde A(-1,2) y el ángulo α=3π/4. b) Hallar la ecuación de la Homotecia H(A,2).
68.- Hallar la ecuación de la rotación G(e,α) donde el eje es e≡
,x 2y 1 Rz 1
= − λ = − λ λ ∈ =
y el ángulo α=3π/4.
69.- Clasificar y hallar los elementos característicos de la transformación geométrica dada por la siguiente ecuación:
1 0 01 1x' 2 2 2 2 x
yy' 4 2 2 2
= − − −
70.- Hallar la ecuación, el centro y la razón de la semejanza directa que transforma los puntos A(1,0) y B( 2 ,-1) en A’(-8 2 ,-1) y B’(-8,7) respectivamente.
71.- Clasificar y hallar los elementos característicos de la transformación geométrica dada por la siguiente ecuación:
1 0 0 0
6 1 6 31 14 4 4 4x' x3 6 1 6 yy'2 4 2 4 zz'6 3 6 14 4 4 4
− = − − −
72.- a) Hallar la ecuación de la transformación resultante de componer el giro G(A;α) con la homotecia H(C; 2), donde A (-1,1), C (1,0) y α= - π/4. b) Razona qué tipo de transformación geométrica es la obtenida en el apartado a) y da los elementos característicos que se deducen sin hacer cálculos. c) Calcula los puntos invariantes de la transformación obtenida en a).
73.- Clasificar y hallar los elementos característicos de la transformación geométrica dada por la siguiente ecuación:
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 15
1 0 0 0
6 1 6 31 14 4 4 4x' x3 6 1 6 yy'2 4 2 4 zz'6 3 6 14 4 4 4
− − = − −
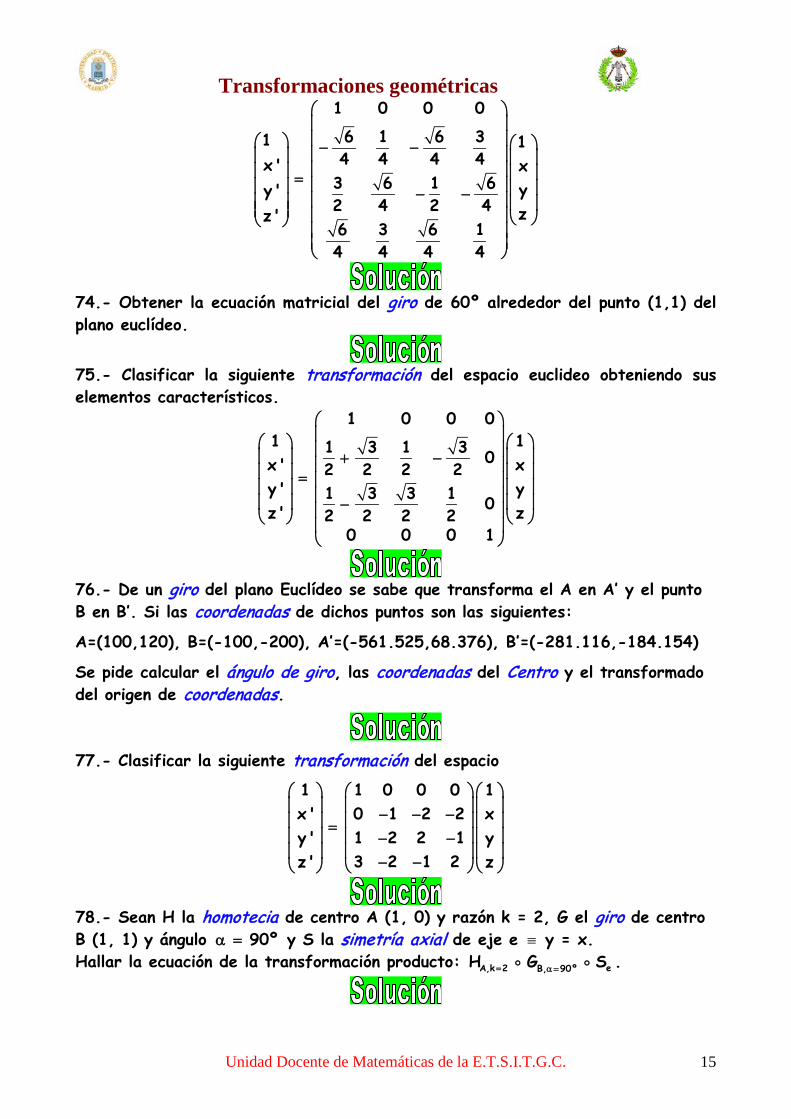
74.- Obtener la ecuación matricial del giro de 60º alrededor del punto (1,1) del plano euclídeo.
75.- Clasificar la siguiente transformación del espacio euclideo obteniendo sus elementos característicos.
1 0 0 01 11 3 1 3 0x' x2 2 2 2y' y1 3 3 1 0z' z2 2 2 2
0 0 0 1
+ − = −
76.- De un giro del plano Euclídeo se sabe que transforma el A en A’ y el punto B en B’. Si las coordenadas de dichos puntos son las siguientes:
A=(100,120), B=(-100,-200), A’=(-561.525,68.376), B’=(-281.116,-184.154)
Se pide calcular el ángulo de giro, las coordenadas del Centro y el transformado del origen de coordenadas.
77.- Clasificar la siguiente transformación del espacio
1 1 0 0 0 1x' 0 1 2 2 xy' 1 2 2 1 yz' 3 2 1 2 z
− − − = − −
− −
78.- Sean H la homotecia de centro A (1, 0) y razón k = 2, G el giro de centro B (1, 1) y ángulo 90ºα = y S la simetría axial de eje e ≡ y = x. Hallar la ecuación de la transformación producto: eA,k 2 B, 90ºH G S= α = .
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 16
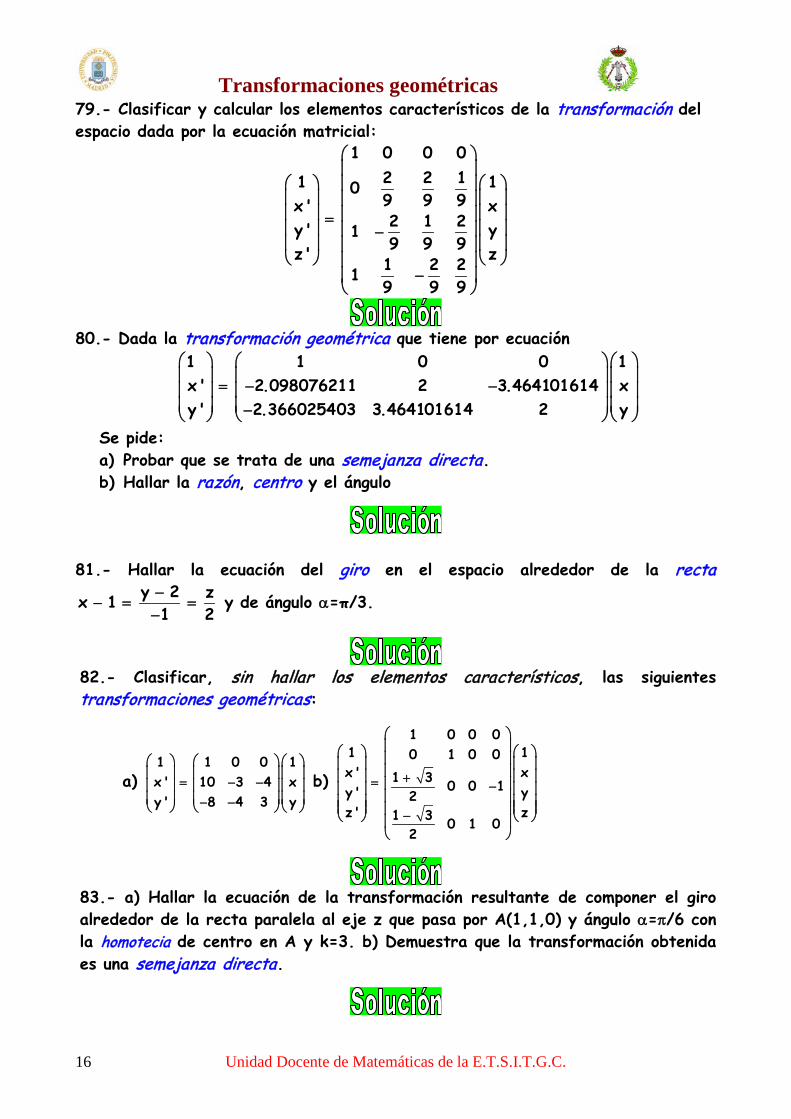
79.- Clasificar y calcular los elementos característicos de la transformación del espacio dada por la ecuación matricial:
1 0 0 02 2 11 109 9 9x' x2 1 2y' y19 9 9z' z1 2 219 9 9
= −
−
80.- Dada la transformación geométrica que tiene por ecuación
1 1 0 0 1x' 2.098076211 2 3.464101614 xy' 2.366025403 3.464101614 2 y
= − − −
Se pide: a) Probar que se trata de una semejanza directa. b) Hallar la razón, centro y el ángulo
81.- Hallar la ecuación del giro en el espacio alrededor de la recta y 2 zx 1
1 2−
− = =−
y de ángulo α=π/3.
82.- Clasificar, sin hallar los elementos característicos, las siguientes transformaciones geométricas:
a) 1 1 0 0 1x' 10 3 4 xy' 8 4 3 y
= − − − −
b)
1 0 0 01 10 1 0 0x' x1 3 0 0 1y' y2z' z1 3 0 1 0
2
+= − −
83.- a) Hallar la ecuación de la transformación resultante de componer el giro alrededor de la recta paralela al eje z que pasa por A(1,1,0) y ángulo α=π/6 con la homotecia de centro en A y k=3. b) Demuestra que la transformación obtenida es una semejanza directa.

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 17
PROBLEMAS PROPUESTOS: P1.-En el espacio afín euclídeo Ε3 se considera la transformación T dada por T(x,y,z) = (z,x,y)
a) Demostrar que T es una isometría b) Hallar los puntos dobles c) ¿Qué clase de transformación geométrica es?
P2.- Un triángulo equilátero tiene un vértice en el origen, y otro en el punto (1,0). Hallar las coordenadas del tercer vértice. P3.- Clasificar las siguientes transformaciones en el plano y hallar sus elementos
principales
1 0 0 1 0 01 1 1 1
1 3 3 1 3 1x' x y x' 0 x 2 2 2 2 2
y' y y' y3 3 1 3 1 30
2 2 2 2 2
− = = −
− − − −
P4.- Dados los puntos A(0,1) y B(-1,-1), calcular las coordenadas del punto C sabiendo que la longitud del segmento AC es la mitad de la del segmento AB y que el ángulo BAC mide 30º P5.- A la circunferencia 2 2C x y 8x 12 0≡ + − + = , de centro A, se le aplica un giro de centro el origen de coordenadas y amplitud 60º, transformándose en C’. Esta circunferencia, mediante la homotecia de centro A y razón 2, se transforma en C’’. Hallar la ecuación de C’’ las coordenadas del centro de la homotecia inversa que transforma C’ en C’’. P6.- El cuadrado ABCD de vértices A(0,0), B(-5/2,2), C(-5/2,5/2), D(0,5/2) se transforma mediante una semejanza directa S de centro O(6,0) en A’B’C’D’ siendo A’(6,3). Se pide:
a) Determinar las ecuaciones de las semejanza b) Determinar un giro G y una homotecia H tal que S = HoG c) La figura transformada del cuadrado
P7.- Escribir la ecuación de la semejanza resultante de componer la homotecia de centro A (1,2) y razón 10 y el giro de centro P(2,-1) y ángulo α tal que sen (α)= 3/5 y cos(α) = -4/5 P8.- Hallar la ecuación de la semejanza directa que transforma los puntos O(0,0) y A(1,2) en O’(15,-1) y A’(-7,-5) respectivamente. P9.- Un rayo luminoso parte del punto F(5,10) y después de reflejarse en la recta r: 3x+4y=30, pasa por el punto P(13,4). Determinar:
a) Coordenadas del punto de la recta r en el que el rayo luminoso cambia de dirección
b) Longitud del camino recorrido por el rayo desde F hasta P y explicar porqué esa longitud es mínima.
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 18
1.- Sean los giros G y G’, de centros O(0,0) y O’(1,0) y ángulos respectivos 120º y α. Hallar las ecuaciones de GoG’ y sus elementos característicos para:
a) α=90º b) α=240º
Solución:
La ecuación de un giro de centro A(a,b) y amplitud α es: x ' a cos sen x ay ' b sen cos y b
α − α − = + α α −
La ecuación del giro G de centro O=(0,0) y amplitud α =120º es:
1 0 01 3 1 1x ' 0 cos120º sen120º x 0 x 1 32 2 x ' 0 xy ' 0 sen120º cos120º y 0 y 2 23 1 y ' y
3 12 2 02 2
− − − − = + = ⇔ = − − − − −
La ecuación del giro G’ de centro O’=(1,0) y amplitud α es: x ' 1 cos sen x 1y ' 0 sen cos y 0
α − α − = + α α −
a) La ecuación del giro G’ de centro O’=(1,0) y amplitud α =90º es:
x ' 1 cos90º sen90º x 1 1 0 1 xy ' 0 sen90º cos90º y 0 1 1 0 y
− − − = + = + ⇔ − −
1 1 0 0 1x ' 1 0 1 xy ' 1 1 0 y
= − −
Ahora el producto GoG’ tiene por matriz:
1 0 0
1 302 23 10
2 2
− − −
1 0 01 0 0
1 3 3 11 0 12 2 2
1 1 01 3 1 3
2 2 2
− + − = − − + − −
.
Ecuaciones del producto de los dos giros:
− + − = + − −
1 0 01 1
1 3 3 1 x x'2 2 2
y y '1 3 1 3
2 2 2
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 19
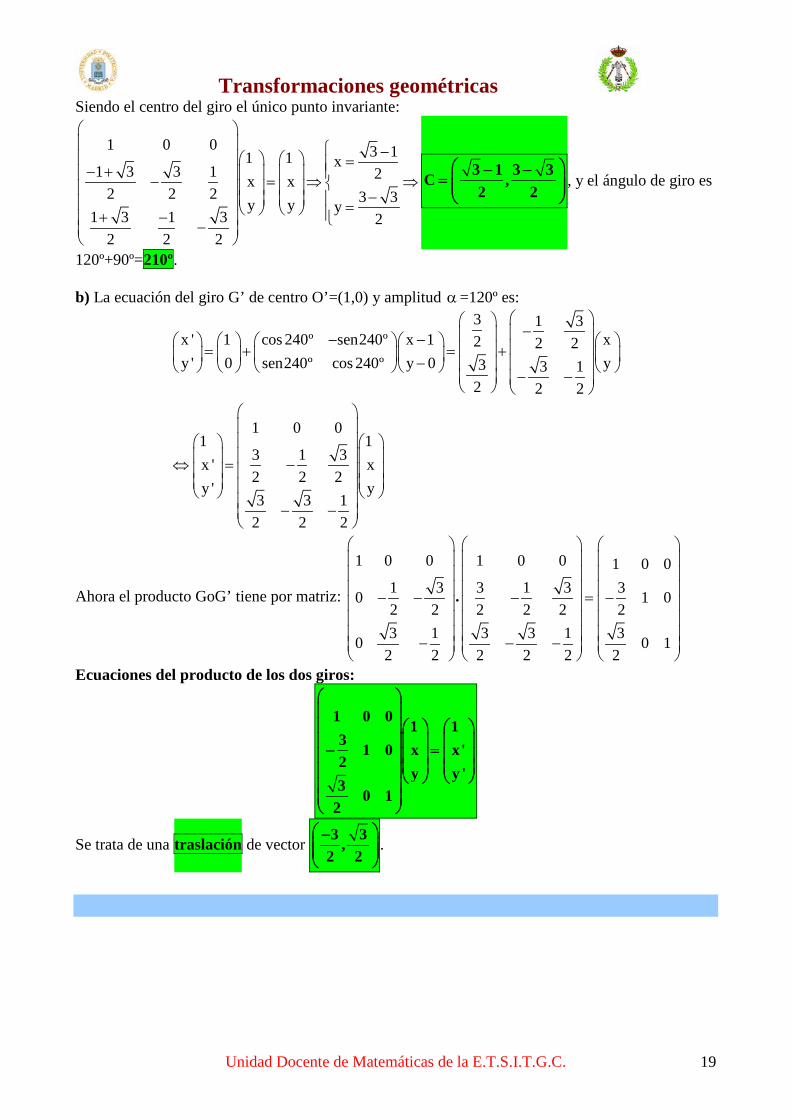
Siendo el centro del giro el único punto invariante:
1 0 0 3 11 1 x1 3 3 1 2x x2 2 2 3 3y y y1 3 1 3 22 2 2
− =− + − = ⇒ ⇒ − = + − −
− −=
3 1 3 3C ,2 2
, y el ángulo de giro es
120º+90º=210º. b) La ecuación del giro G’ de centro O’=(1,0) y amplitud α =120º es:
3 1 3x ' 1 cos 240º sen240º x 1 x2 2 2y ' 0 sen240º cos 240º y 0 y3 3 1
2 2 2
1 0 01 1
3 1 3x ' x2 2 2
y ' y3 3 1
2 2 2
− − − = + = + −
− −
⇔ = − − −
Ahora el producto GoG’ tiene por matriz:
1 0 0
1 302 23 10
2 2
− − −
.
1 0 0 1 0 03 1 3 3 1 02 2 2 23 3 1 3 0 1
2 2 2 2
− = − − −
Ecuaciones del producto de los dos giros: − =
1 0 0 1 13 1 0 x x'2
y y '3 0 1
2
Se trata de una traslación de vector −
3 3,2 2
.

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 20
2.- Clasificar las siguientes transformaciones en el plano y hallar sus elementos principales.
1 3 3 1 1 33 12 2 2 2 2 2a)X' X; b) X' X; c) X' X5 03 1 1 3 3 1
2 2 2 2 2 2
= + = + = − − −
2 1 0 2d)X' X; e)X'= X;
3 0 1 3−
= + + −
3 12f) X' X
2 1 3
− = + − − −
Solución:
a) La matriz ortogonal
1 3cos sen2 2 sen cos3 1
2 2
α − α = α α
−
corresponde a un GIRO de
amplitud -60º y el centro del giro es el único punto invariante: 1 3 1 3 3 5 31 x3 x 32 2 2 2 2X X
5 y 53 1 3 1 5 3 31 y2 2 2 2 2
+− − = = + ⇔ = ⇒ ⇒ − − − =
+ −=
3 5 3 5 3 3C ,2 2
b) La matriz ortogonal
3 1cos sen2 2 sen cos1 3
2 2
α α = α − α
−
corresponde a una simetría ortogonal
vectorial y la transformación geométrica puede ser una simetría axial o una simetría deslizante
dependiendo de los puntos invariantes:
3 1 3 111 x 12 2 2 2X X 0 y 01 3 1 31
2 2 2 2
− − = + ⇔ =
− − +
Sistema incompatible, por lo tanto es una SIMETRÍA DESLIZANTE. Significa que es el producto de una simetría axial por una traslación de vector paralelo al eje de simetría. Para determinar los elementos principales tomamos un punto cualquiera, por ejemplo el O(0,0) y su transformado O’(1,0), entonces el punto medio del segmento OO’ pertenece al eje de simetría y su transformado mediante el movimiento caracterizan al vector de traslación.
En efecto:
3 1 31 1 11O O' O O' 2 2 4T2 202 2 11 30 0
42 2
+ + + = ⇒ = + = −
y el vector de
traslación es 3 1 1 1 3 1v 1 , ,0 ,4 4 2 2 4 4
= + − = +
. Para el eje de simetría tenemos un punto y la

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 21
dirección, luego sus ecuaciones paramétricas son:
1 1 3x t2 2 4
1y t4
= + +
=
, cuya ecuación general es:
( )− + − =1x 2 3 y 02
c) La matriz ortogonal
1 3cos sen2 2 sen cos3 1
2 2
α α = α − α
−
corresponde a una simetría ortogonal
vectorial y la transformación geométrica puede ser una simetría axial o una simetría deslizante dependiendo de los puntos invariantes:
1 3 1 31 x 02 2 2 2X Xy 03 1 3 11
2 2 2 2
− − = ⇔ = ⇒
− − +
− + = ≡x 3y 0 e sistema compatible
indeterminado, por consiguiente una SIMETRÍA AXIAL respecto de e.
d) La matriz ortogonal 1 0
0 1−
− es simétrica y por tanto corresponde a una simetría ortogonal,
pero el determinante es 1, luego es un movimiento directo que no es la identidad ni la traslación. Por consiguiente es un GIRO DE AMPLITUD 180º O UNA SIMETRÍA CENTRAL.
El único punto invariante es el centro del giro o centro de la simetría:
2 1 0X X X
3 0 1−
= + ⇒ = −
132
e) 2
X'= X 3
+
, directamente sabemos que es una TRASLACIÓN de vector (2,3)
f) 2 3 1
X ' X2 1 3
− = + − − −
, de este sistema observamos que la matriz 3 1
1 3
− − −
no es
ortogonal, puesto que 3 1
4 11 3
−= − ≠ ±
− −, sin embargo, la matriz
3 13 11 2 2
2 1 3 1 32 2
− − = − − − −
es una matriz ortogonal que define una simetría axial vectorial de eje ( )x 1 3 y 0+ + = .
Quiere decir que la transformación es una SEMEJANZA INVERSA de razón 2 y de centro el único punto invariante,
2 3 1 1 3 1 x 2X X
2 y 21 3 1 1 3
− − = + ⇒ = ⇒ − −− − +
− −=
− =
4 2 3x3
4 2 3y3

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 22
3.- Clasificar las siguientes transformaciones 1 1 11 1 0 0 0 1 22 0 0 1 1
x' 1 0 1 0 x 2 1a)X' 0 0 1 0 X; b) ; c)X' 1 1 1 Xy' 1 0 0 1 y 3 2
2 1 0 0 0 1z' 0 1 0 0 z 1 12
− − −
= + = = − − − − − − −
1 4 8 2 2 0 0 2 0 5 0 01d) X' 4 7 4 X;e) X' 0 3X;f)X' 0 0 2 0 X;g) X' 5 0 0 5 X9
8 4 1 1 2 2 0 0 1 0 5 0
− − − − − − = − − = + = + = − + − − − − −
Solución:
a) 0 0 10 1 01 0 0
− −
es una matriz ortogonal simétrica cuyo determinante es -1, corresponde a un
movimiento inverso (simetría). Veamos los puntos invariantes:
2 0 0 10 0 1 0 2 02 1 0 0
− − = + ⇒ + + = − −
X X x z un plano, luego se trata de una SIMETRÍA
ESPECULAR.
b) De la matriz
1 0 0 01 0 1 01 0 0 10 1 0 0
−
−
consideramos la submatriz cuadrada 0 1 00 0 11 0 0
− −
ortogonal con
determinante 1, así es un movimiento directo y el sistema
incompatible
1 1 0 0 0 11 0 1 01 0 0 10 1 0 0
= −
−
x x
y yz z
indica un MOVIMIENTO HELICOIDAL.
El movimiento helicoidal se puede descomponer en el producto de una rotación y una traslación cuyo vector es paralelo a la dirección del eje.
De la transformación ortogonal 0 1 0
X ' 0 0 1 X1 0 0
= − −
que es un giro vectorial, obtenemos el eje de
rotación como conjunto de vectores invariantes, 0 1 0 1 1 0 x 0
X 0 0 1 X 0 1 1 y 0 x y z1 0 0 1 0 1 z 0
− = − ⇒ = ⇒ = = − −
. La traslación de vector paralelo al eje
será proporcional al (1,1,-1).

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 23
Si aplicamos la traslación de vector (-t, -t, t) después del movimiento helicoidal resulta un giro. En
efecto, 1 0 1 0 t
X ' 1 0 0 1 X t0 1 0 0 t
− = + − + − −
y si queremos que sea una rotación el rango de la matriz
de los coeficientes debe ser igual al rango de la matriz ampliada. 1 1 0 1 1 0 1 t 1 0 1 t
2r 0 1 1 r 0 1 1 1 t 2 0 1 1 t 0 t3
1 0 1 1 0 1 t 1 1 t
− − − − = − = ⇒ − = ⇒ =
.
Por consiguiente, la traslación es de vector (2/3,2/3,-2/3) y el eje de rotación se obtiene de los puntos invariantes por el giro,
1131 t 0 1 0 1 1 0 x y
1 3X 1 t 0 0 1 X 0 1 1 X13 y zt 1 0 0 1 0 1 2 3
3
− − − = = − + − ⇒ = ⇒ + =−
.
La traza es invariante 11 2cos 0 0 0 arccos 120º2
+ α = + + ⇒ α = − = ±
amplitud del giro o
rotación.
c)
1 2 21 1 13 3 321 1
2 1 2 1 21 1 1 13 2 3 3 3
0 01 2 2 11 12 3 3 3
X' X X
− −− = − − = + − −
− − −
, de aquí la matriz
1 2 23 3 32 1 23 3 32 2 13 3 3
− − = − − − −
M es ortogonal y simétrica con determinante -1, corresponde a un movimiento
inverso (simetría).
Puntos invariantes:
1 2 2 1 2 213 3 3 3 3 31 12 1 2 2 1 21 1 13 3 3 3 3 3
0 02 2 1 2 2 113 3 3 3 3 3
− − − = + − − ⇒ − =
− − −
X X X sistema
incompatible, entonces SIMETRÍA DESLIZANTE, es decir, el producto de una simetría especular por una traslación de vector paralelo al plano de simetría. Dado un punto cualquiera y su transformado; el punto medio del segmento que determinan pertenece al plano de simetría, por ejemplo, el punto O(0,0,0) y homólogo O’(1,1,0) nos indican un punto (O+O’)/2=(1/2,1/2,0) que al aplicarle la simetría deslizante se transforma en el punto

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 24
1 2 2 513 3 3 6212 1 2 1 51
2 3 3 3 2 60 02 2 1 2
3 3 3 3
− −
+ = + − − = − − −
O O'T formando el vector de traslación
1 1 22 2 3 3 3+ + = = −
O O' O O'v T , ,
Vectores invariantes: 1 2 2 1 2 213 3 3 3 3 3 02 1 2 2 1 21 0 03 3 3 3 3 3
02 2 1 2 2 113 3 3 3 3 3
− − − = − − ⇒ − = ⇒ + + =
− − −
X X X x y z , que con el punto
(O+O’)/2=(1/2,1/2,0) da el plano de simetría x+y+z=1
d)
1 4 89 9 91 4 8
1 4 7 44 7 49 9 9 9
8 4 1 8 4 19 9 9
X' X X
− − − −
= − − = − − − − −
− − −
. La matriz es ortogonal simétrica y de
determinante +1, luego es una SIMETRÍA AXIAL o ROTACIÓN VECTORIAL DE 180º. El eje de rotación o eje de simetría es el conjunto de puntos invariantes,
1 4 8 1 4 819 9 9 9 9 9
04 7 4 4 7 419 9 9 9 9 9 2 08 4 1 8 4 119 9 9 9 9 9
− − + −
+ = = − − ⇒ − + = ⇒ + = − − − +
x zX X X O
y z
e) 2 2 3 0 0
0 3 0 0 3 01 1 0 0 3
X' X X− −
= + = +
. En este caso, la matriz 3 0 0 1 0 00 3 0 3 0 1 00 0 3 0 0 1
=
=3 I, y
tenemos una HOMOTECIA directa de razón 3, con centro el único punto invariante.
2 2 110 3 0 02
1 1 12
− − = + ⇒ = − =
−
X X X .
f)2 0 0 2
0 0 2 02 2 0 0
X' X− −
= + − −
,
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 25
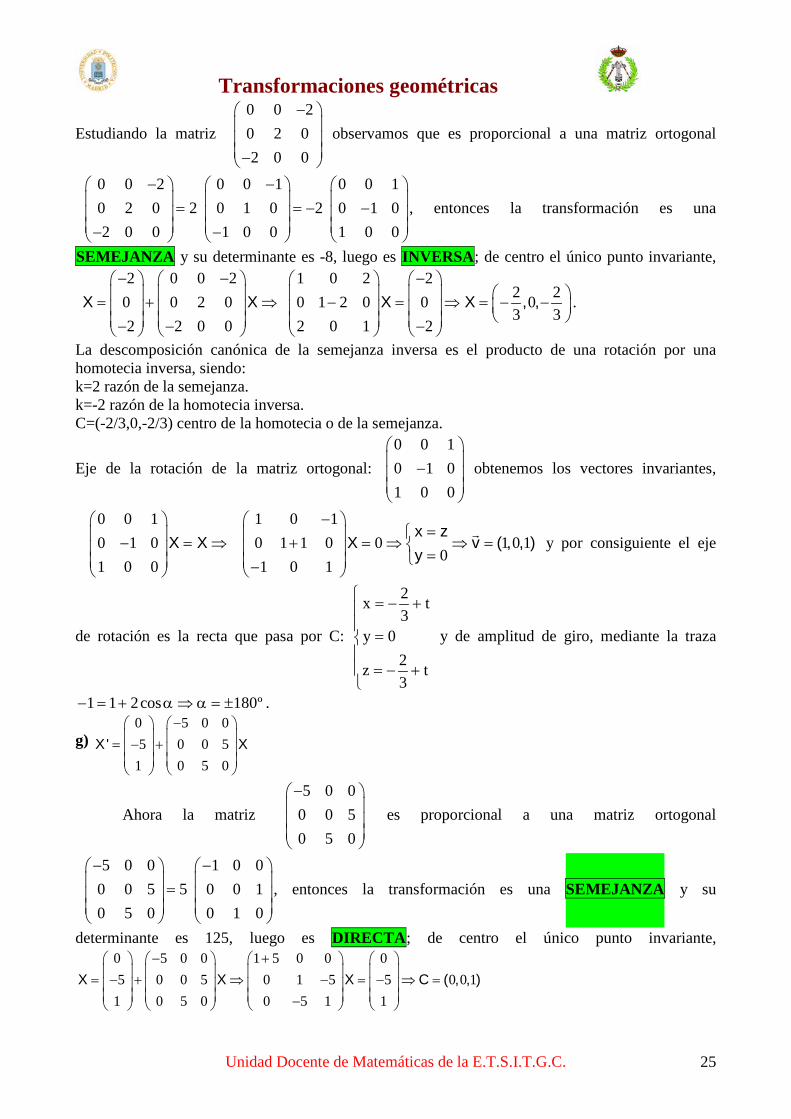
Estudiando la matriz 0 0 20 2 02 0 0
− −
observamos que es proporcional a una matriz ortogonal
0 0 2 0 0 1 0 0 10 2 0 2 0 1 0 2 0 1 02 0 0 1 0 0 1 0 0
− − = = − − − −
, entonces la transformación es una
SEMEJANZA y su determinante es -8, luego es INVERSA; de centro el único punto invariante, 2 0 0 2 1 0 2 2
2 20 0 2 0 0 1 2 0 0 03 3
2 2 0 0 2 0 1 2
− − − = + ⇒ − = ⇒ = − − − − −
X X X X , , .
La descomposición canónica de la semejanza inversa es el producto de una rotación por una homotecia inversa, siendo: k=2 razón de la semejanza. k=-2 razón de la homotecia inversa. C=(-2/3,0,-2/3) centro de la homotecia o de la semejanza.
Eje de la rotación de la matriz ortogonal:0 0 10 1 01 0 0
−
obtenemos los vectores invariantes,
0 0 1 1 0 10 1 0 0 1 1 0 0 1 0 1
01 0 0 1 0 1
− = − = ⇒ + = ⇒ ⇒ = = −
x z X X X v ( , , )
y y por consiguiente el eje
de rotación es la recta que pasa por C:
2x t3
y 02z t3
= − +
= = − +
y de amplitud de giro, mediante la traza
1 1 2cos 180º− = + α ⇒ α = ± .
g) 0 5 0 05 0 0 5
1 0 5 0X' X
− = − +
Ahora la matriz 5 0 0
0 0 50 5 0
−
es proporcional a una matriz ortogonal
5 0 0 1 0 00 0 5 5 0 0 10 5 0 0 1 0
− − =
, entonces la transformación es una SEMEJANZA y su
determinante es 125, luego es DIRECTA; de centro el único punto invariante, 0 5 0 0 1 5 0 0 05 0 0 5 0 1 5 5 0 0 1
1 0 5 0 0 5 1 1
− + = − + ⇒ − = − ⇒ = −
X X X C ( , , )

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 26
La descomposición canónica de la semejanza directa es el producto de una rotación por una homotecia, siendo: k=5 razón de la semejanza o razón de la homotecia C=(0,0,1) centro de la homotecia o de la semejanza.
Eje de la rotación de la matriz ortogonal: 1 0 0
0 0 10 1 0
−
obtenemos los vectores invariantes,
1 0 0 1 1 0 00
0 0 1 0 1 1 0 110 1 0 0 1 1
− + = = ⇒ − = ⇒ ⇒ = = −
x X X X O v ( , , )
y zy por consiguiente el eje
de rotación es la recta que pasa por C: x 0y tz 1 t
= = = +
y de amplitud de giro, mediante la traza
1 1 2cos 180º− = + α ⇒ α = ± .

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 27
4.- Sea T la transformación geométrica de ℜ3 de ecuación: 1 0 0 0
1 12 1 0 0x' x31 0 ky' y2z' z3 10 0
2 2
=
a) Obtener los valores de k para los cuales T es un movimiento b) Clasificar T para aquellos valores de k para los que sea un movimiento Solución: a) Condición necesaria para que T sea un movimiento es que el determinante sea 1 o -1, 1 0 0 02 1 0 0 7
3 23 1 11 0 2 4 1223 10 0
2 2
= ± ⇒ − = ± ⇒ = −
k kk .
Además la matriz
1 0 0
302
3 102 2
k debe ser ortogonal.
• Si k=7/2, tenemos la matriz
1 0 0
7 302 23 10
2 2
=
M que no es ortogonal, puesto que tMM I≠ .
• Si k=-1/2, resulta la matriz
1 0 0
1 302 23 10
2 2
= −
M que es ortogonal, pues se cumple que
tMM I= , y por consiguiente T es un movimiento.

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 28
b) T es un movimiento inverso para k=-1/2. Buscamos los puntos invariantes por T, 1 0 0 0
0 0 01 12 1 0 0 23 31 3 0 11 0 2 22 2 0
3 13 1 00 0 2 22 2
= ⇒ − =− −
xx x
yy y
zz z
sistema incompatible. No hay puntos
invariantes por T, luego es una SIMETRÍA DESLIZANTE

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 29
5.- Sean
1 0 0 1 0 01 1 1 1
2 2 1 1T x' 5 x y T' x' 1 x 2 2 2 2
y' y y' y12 2 1 02 22 2
≡ = ≡ = −−
las ecuaciones correspondientes a dos transformaciones T y T’ respectivamente. Se pide: a) Clasificar las transformaciones T y T’ obteniendo sus elementos característicos b) Hallar las ecuaciones de la figura en que se transforma la circunferencia
2 2x y 1+ = mediante las transformaciones T y T’. Solución:
a) Clasificación de T:
Primer paso: Estudio de la matriz asociada M=
−22
22
22
22
M-1 = Mt =
−22
22
22
22
, luego M es ortogonal y por tanto T es un movimiento.
Segundo paso: Puntos invariante por T:
X=NX⇒
1 0 01 1
2 2x 5 x2 2
y y2 22
2 2
= −
, sistema incompatible, es decir, no hay ningún punto
invariante y como M≠ I2 y simétrica, concluimos que T es una SIMETRÍA DESLIZANTE. Tercer paso: Cálculo de los elementos de T
P=2
'OO +=
1,
25
⇒ P’=T(P)=
++ 2
423,5
427
⇒
La simetría deslizante T tiene por
elementos el vector →
= 'PPu y la recta e = P + u , siendo P el punto medio del segmento OO’.
O
O’
P P’

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 30
→= 'PPu =
++ 1
423,
25
427
e = P + u =
1,
25
+λ
++ 1
423,
25
427
Clasificación de T’
Primer paso: Estudio de la matriz asociada M=
−210
21
21
M-1=
− 2022
, Mt=
−21
21
021
⇒ M-1 ≠ Mt, luego T ‘ no es un movimiento.
Tampoco es una homotecia pues M≠k I2 sea cual sea K y tampoco es una semejanza pues tomando k= )Mdet( = 1/2⇒ Q=1/kM=2M no es ortogonal, pues Q-1 ≠ Qt Es una transformación afín. b) Despejamos x, y en la ecuación de T:
−
=
−
''
1
22
222
22
225
0011
1
yx
yx ⇒
−−
−=
'y'x
1
22
22
223
22
22
227
001
yx1
⇒
−+−=
++−=
'y22'x
22
223y
'y22'x
22
227x
y sustituyendo en x2 + y2= 1
1'y22'x
22
223'y
22'x
22
227
22
=
−+−+
++− ,
Operando y simplificando queda (x-5)2 + (y-2)2 =1 que es una circunferencia de radio 1 (igual al radio de la dada) y centro (5,2).
Análogamente, despejando, x e y en la ecuación de T’:
−−=++−='y22y
'y2'x24x y sustituyendo en x2
+ y2= 1, se obtiene: ( ) ( ) 1'y22'y2'x24 22 =−−+++− .

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 31
En consecuencia, T’ no es un movimiento pues ha deformado la circunferencia (no conserva las distancias)
Operando y simplificando: 4x2 + 8xy + 8y2 -16x -24y + 19 =0 que no corresponde a una circunferencia pues tiene término en xy (hemos suprimido ‘ por comodidad).

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 32
6.- Determinar los elementos característicos de la transformación geométrica que transforma el punto A(1,1,2) en A’(2,-2,6) en los siguientes casos: a) Traslación b) simetría central c) simetría especular d) homotecia de razón 2. Solución: a) T(A)=A’, el vector de traslación será: ( ) ( )AA ' 2, 2,6 1,1,2= − − =
( )1, 3,4− .
b) SO(A)=A’; O es el punto medio del segmento AA’, luego
( ) ( )1,1,2 2, 2,6A A 'O2 2
+ −+= = =
3 1, , 42 2
−
.
c) AA '
S (A) A ' A A 'O2
π
⊥ π= ⇔ +
= ∈ π
. Tenemos el vector ( )AA ' 1, 3,4= −
ortogonal al plano y el
punto 3 1O , ,42 2
= −
del plano, por tanto x-3y+4z=k y que contenga al punto será:
3 3x 3y 4z 3 4.4 192 2
− + = − − + =
. El plano pedido es x-3y+4z=19.
d) HC,k=2(A)=A’, se cumple que: ( ) ( )CA ' 2CA 2 a, 2 b,6 c 2 1 a,1 b,2 b= ⇔ − − − − = − − −
, resultando el centro de la homotecia C=(0,4,-2).

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 33
7.- Sea H la homotecia de centro (0,0) y razón 3. Sea A’ el transformado del punto A(0,2). Determinar las ecuaciones de las siguientes transformaciones: a) H(O,3) b) H(A’,1/3) c) H(O,3)oH(A’,1/3). ¿Qué tipo de transformación es? d) H(A’,2)oH(O,3). ¿Qué tipo de transformación es? Solución: La ecuación de la homotecia de centro C y razón k es: X ' C kCX= +
a) Para O=(0,0) y k=3: 1 1 0 0 1
x ' 0 x 03 x ' 0 3 0 x
y ' 0 y 0y ' 0 0 3 y
− = + ⇔ = −
y el homotético del punto A(0,2) es: x ' 0 0 0 0
3y ' 0 2 0 6
− = + = −
b) Para A’=(0,6) y k=1/3: x ' 0 x 0 0 x1 1y ' 6 y 6 4 y3 3
− = + = + ⇔ −
1 0 01 11x ' 0 0 x3
y ' y14 03
=
.
c) Para H(O,3)oH(A’,1/3) se multiplican las matrices:
1 0 00 3 00 0 3
1 0 0 1 0 010 0 0 1 03
12 0 114 03
=
que es una TRASLACIÓN de vector (0,12).
d) Para A’=(0,6) y k=2 se tiene
1 0 01 1x ' 0 x 0 0 x1 1 1x ' 0 0 xy ' 6 y 6 4 y3 3 3
y ' y14 03
− = + = + ⇔ = −
y el producto H(A’,2)oH(O,3): 1 0 00 2 06 0 2
−
1 0 0 1 0 00 3 0 0 6 00 0 3 6 0 6
= −
es una HOMOTECIA de
razón 6 y de centro el único punto invariante, 1 1 0 0 1 x 0x 0 6 0 x 6yy 6 0 6 y 5
= = ⇔ = −
, C(0,6/5)

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 34
8.- Hallar la ecuación de la semejanza directa que transforma los puntos O(0,0) y P(1,2) en O’(15,-1) y P’(-7,-5) respectivamente. Solución:
Ecuación de la semejanza directa: 1 1 0 0 1x ' e a b xy ' f b a y
= −
y sustituyendo los puntos
1 1 0 0 1
S(O) O ' 15 e a b 01 f b a 0
1 1 0 0 1S(P) P ' 7 e a b 1
5 f b a 2
= ⇔ = − −
= ⇔ − = − −
, obtenemos que:
a 6b 8e 15f 1
= − = = = −
, quedando la ecuación de la
semejanza 1 1 0 0 1x ' 15 6 8 xy ' 1 8 6 y
= − − − −
.

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 35
9.- Escribir la ecuación matricial de la semejanza resultante de componer la homotecia de centro A(1,2) y razón k=10 y el giro de centro P(2,-1) y ángulo α tal que senα=3/5 y cosα=-4/5. Hallar los elementos de la semejanza resultante. Solución: Ecuación de la homotecia de centro A(1,2) y razón k=10: X ' A kAX= +
1 1 0 0 1x ' 1 x 1
10 x ' 9 10 0 xy ' 2 y 2
y ' 18 0 10 y
− = + ⇔ = − − −
.
Ecuación del giro de centro P(2,-1) y amplitud α: 4 3 4 3
x ' 2 cos sen x 2 2 x 2 3 x5 5 5 5y ' 1 sen cos y 1 1 3 4 y 1 -3 3 4 y
5 5 5 5
− − − − α − α − − = + = + = + − α α + − + − −
o bien,
1 0 01 14 3x ' 3 x5 5
y ' y3 435 5
= − −
− −
.
Cálculo de la composición GoH:
1 0 014 3x ' 35 5
y ' 3 435 5
= − −
− −
1 0 09 10 018 0 10
− −
1xy
=1 0 0 1 121 8 6 x x '6 6 8 y y '
− − = −
.
Se trata de una semejanza directa de elementos: Razón de la semejanza: k=10.
Centro de la semejanza:
171 1 0 0 1 x23x 21 8 6 x20yy 6 6 8 y13
= = − − ⇔ ⇒ =−
17 20C ,23 23
=
.
Amplitud de la rotación: ángulo α tal que senα=3/5 y cosα=-4/5
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 36
10.- Clasificar la siguiente transformación geométrica y obtener sus elementos característicos:
1 0 01 1
4 3x' 4 x5 5
y' y3 415 5
= −
− −
Solución:
Llamando
4 35 5M3 45 5
− =
− −
se cumple que |M| = -1 y que MMt=I por lo que se trata de un
Movimiento Inverso. Se calculan los puntos dobles:
1 0 01 14 3x 4 x5 5
y y3 415 5
= −
− −
Quedando las ecuaciones x 3y 20
5x 3y3
+ =
+ =
sistema incompatible, lo que
significa que NO HAY puntos dobles. Y por tanto, estamos ante una SIMETRÍA DESLIZANTE Esta transformación se descompone en el producto de una simetría axial de eje e por una traslación: e uS S .T= Calculamos el transformado de un punto cualquiera, por ejemplo X=(0,0) Y obtenemos X’= (4,1)
El punto medio es X X ' (0,0) (4,1) 1P 2,2 2 2+ + = = =
Este es un punto del eje Calculamos su transformado obteniendo
53 3P ' ,10 5
= −
también del eje
Entonces el vector de la traslación es: 53 3 1u 2,10 5 2
= − − − =
33 11,10 10
−
Y la ecuación del eje viene dada por
1yx 2 2e o, lo que es igual 33 1110 10
−−≡ =
−
7x+3y- 02
= .
X
X’ P
P’
u
e

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 37
11.- Se pide hallar, en el plano euclídeo:
a) La ecuación del giro de centro A (1,-1) y ángulo 4π
b) La ecuación de la homotecia de centro B(1,1) y razón 2− c) La ecuación de la semejanza resultante de componer el giro con la homotecia anterior. d) La descomposición canónica de la semejanza obtenida en el apartado c) indicando qué tipo de semejanza es. Solución: a) La ecuación de un giro de centro A(a,b) y amplitud α es:
x ' a cos sen x ay ' b sen cos y b
α − α − = + α α −
.
Para A(1,-1) y ángulo 4π es:
2 2 2 2cos senx ' 1 x 1 1 x 1 x 1 24 4 2 2 2 2y ' 1 y 1 1 y 1 y 12 2 2 2sen cos
4 4 2 2 2 2
π π − − − − − − = + = + = + − π π + − + −
en una matriz 3x3 resulta:
1 0 01 1
2 2x ' 1 2 x2 2
y ' y2 21
2 2
= − − −
.
b) La ecuación de la homotecia de centro C y razón k es: X ' C kCX= +
Para el centro B(1,1) y razón 2− : 1 0 01 1
x ' 1 x 12 x ' 1 2 2 0 x
y ' 1 y 1y ' y1 2 0 2
− = − ⇔ = + − − + + −
c) El producto de giro por la homotecia es:
1 0 01x ' 1 2 2 0y ' 1 2 0 2
= + −
+ −
1 0 01
2 21 2 x2 2
y2 21
2 2
− − −
=1 0 0 13 1 1 x
y1 2 2 1 1
−
+ − −
.
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 38
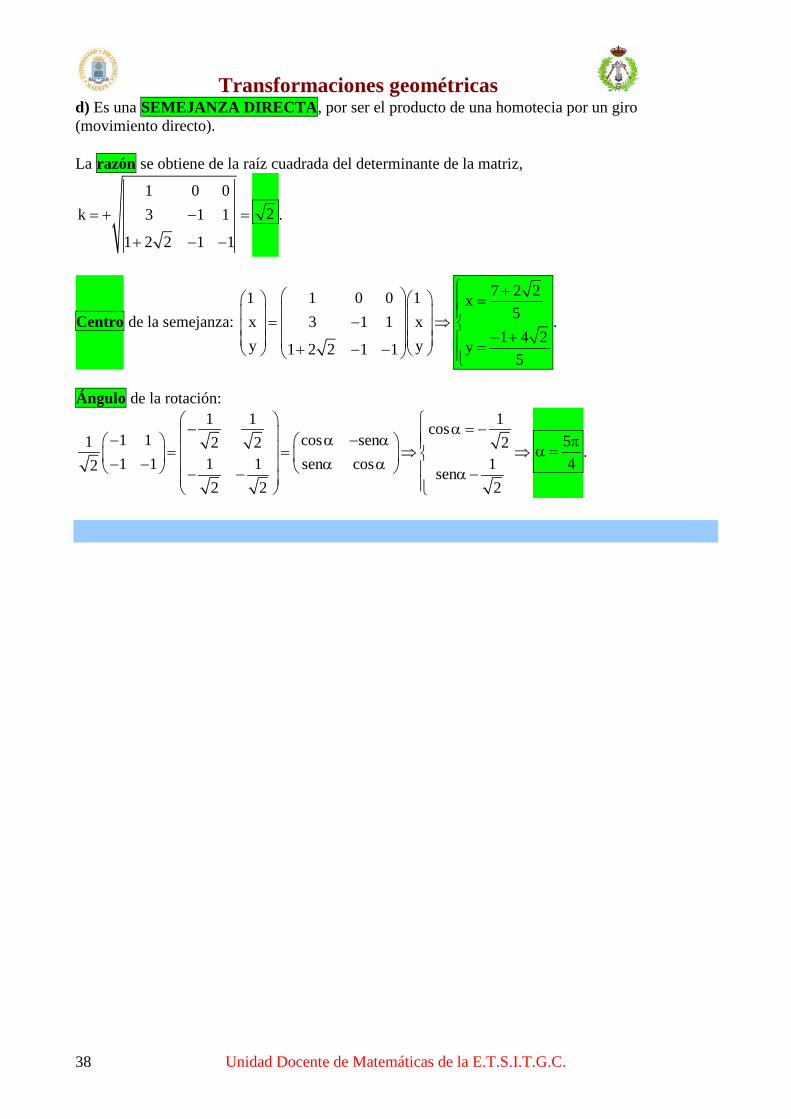
d) Es una SEMEJANZA DIRECTA, por ser el producto de una homotecia por un giro (movimiento directo). La razón se obtiene de la raíz cuadrada del determinante de la matriz,
1 0 0k 3 1 1
1 2 2 1 1
= + − =
+ − −
2 .
Centro de la semejanza: 1 1 0 0 1x 3 1 1 xy y1 2 2 1 1
= − ⇒
+ − −
7 2 2x5
1 4 2y5
+=
− + =
.
Ángulo de la rotación:
1 1 1cos1 1 cos sen1 2 2 21 1 1 1 sen cos 12 sen
2 2 2
− α = − − α − α = = ⇒ ⇒ − − α α − − α −
54π
α = .
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 39
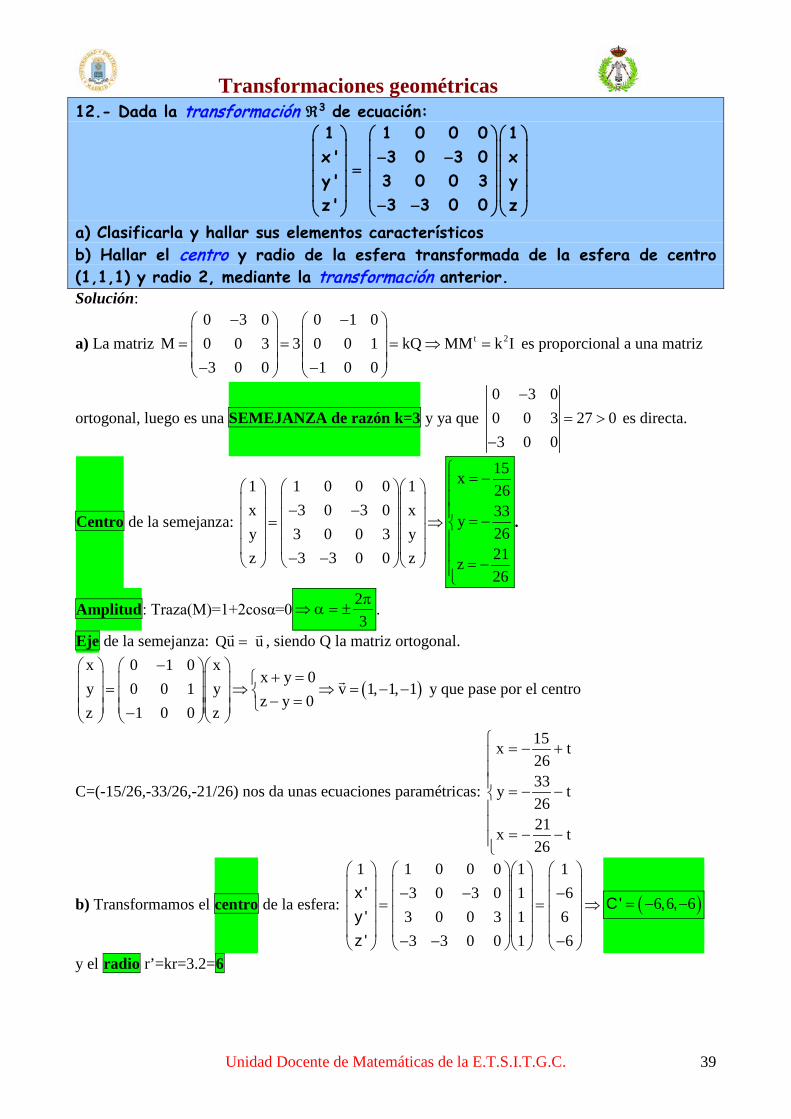
12.- Dada la transformación ℜ3 de ecuación: 1 1 0 0 0 1x' 3 0 3 0 xy' 3 0 0 3 yz' 3 3 0 0 z
− − =
− −
a) Clasificarla y hallar sus elementos característicos b) Hallar el centro y radio de la esfera transformada de la esfera de centro (1,1,1) y radio 2, mediante la transformación anterior. Solución:
a) La matriz t 2
0 3 0 0 1 0M 0 0 3 3 0 0 1 kQ MM k I
3 0 0 1 0 0
− − = = = ⇒ = − −
es proporcional a una matriz
ortogonal, luego es una SEMEJANZA de razón k=3 y ya que 0 3 00 0 3 27 03 0 0
−= >
− es directa.
Centro de la semejanza:
1 1 0 0 0 1x 3 0 3 0 xy 3 0 0 3 yz 3 3 0 0 z
− − = ⇒
− −
15x2633y2621z26
= − = − = −
.
Amplitud: Traza(M)=1+2cosα=023π
⇒ α = ± .
Eje de la semejanza: Qu u= , siendo Q la matriz ortogonal.
( )x 0 1 0 x
x y 0y 0 0 1 y v 1, 1, 1
z y 0z 1 0 0 z
− + = = ⇒ ⇒ = − − − = −
y que pase por el centro
C=(-15/26,-33/26,-21/26) nos da unas ecuaciones paramétricas:
15x t2633y t2621x t26
= − + = − − = − −
b) Transformamos el centro de la esfera:
1 1 0 0 0 1 13 0 3 0 1 6
3 0 0 3 1 63 3 0 0 1 6
x 'y 'z '
− − − = = ⇒
− − −
( )6 6 6C' , ,= − −
y el radio r’=kr=3.2=6

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 40
13.-En el plano vectorial V2, con la base ortonormal { } i , j
se consideran los
vectores u (1,2) y v ( 1,1)= = − y las semirrectas vectoriales u vD y D que éstos
determinan. Hallar en la base { } i , j
las matrices de las transformaciones
ortogonales tales que ( )u vf D D= Solución: Las transformaciones ortogonales pueden ser un giro vectorial o una simetría vectorial. Como las transformaciones ortogonales conservan el módulo la imagen del vector u (1,2)=
no puede ser v ( 1,1)= − , en cambio, si se cumple que para los vectores unitarios:
1 1u v 5 2f M
2 1u v5 2
− = ⇔ =
.
1. GIRO O ROTACIÓN VECTORIAL
1 1
1 1 11 aa b5 5 102M M
2 b a 2 1 3b5 5 2 10
=− − = = ⇒ ⇒ = =
1 310 103 110 10
−
2. SIMETRÍA VECTORIAL
2 2
1 1 31 aa b5 5 102M M
2 b a 2 1 1b5 5 2 10
= −− = = ⇒ ⇒ = − = −
3 110 101 310 10
− − −

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 41
14.- Sea { } i , j
una base ortonormal de V2.
a) Hallar la matriz que define la simetría ortogonal s, respecto de la recta vectorial engendrada por el vector u (1,2)=
b) Clasificar la transformación ortogonal
1 2 23 3f :
2 2 13 3
−
c) Determinar la matriz que define la simetría ortogonal axial s’ tal que f= sos’ y la dirección del eje de s’ Solución: a) El vector que define el eje de simetría ortogonal vectorial tiene por pendiente
22 1 cos 3 4tg cos sen 1 cos2 1 1 cos 5 5α − α
= = ⇒ α = − ⇒ α = − α =+ α
. Por tanto:
2
cos senM
sen cosα α
= = α − α
3 45 5
4 35 5
−
.
b) La matriz ortogonal define un giro vectorial:
1 2 23 3
2 2 13 3
− α − α = α α
cos sen
sen cos y el ángulo
de rotación es 70º31’43’’. c) De la composición f=sos’ podemos despejar s’: sof=sosos’=Ios’=s’. La transformación inversa de la simetría es la propia simetría por ser involutiva.
En nuestro caso: s ' s f
simetría
3 45 5M M M
4 35 5
− ′ = =
1 2 23 3
2 2 13 3
giro
−
=
3 8 2 4 6 215 15
4 6 2 3 8 215 15
− + + + −
Para calcular el eje de simetría buscamos los vectores invariantes por s’: 3 8 2 4 6 2 3 8 2 4 6 21 015 15 15 15
04 6 2 3 8 2 4 6 2 3 8 2115 15 15 15
x x xy y y
− + + − + +− − = ⇔ = ⇒ + − + − − −
( )7 2 5 3 2 0x y− + =

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 42
15.- Estudiar las siguientes transformaciones indicando si son ortogonales y en caso de serlo, hallar su tipo y elementos geométricos.
1 1 11 2 22 2 23 4 3 3 3-1 1 2 2 1 1 1 15 5A ; B= ; C= ; D=
4 3 4 3 3 3 3 2 2 22 1 25 5 1 1 03 3 3 2 2
− − − = − − − − − −
Solución: La matriz asociada a una transformación ortogonal debe ser ortogonal, es decir, Mt=M-1.
Para 1 1
A4 3
=
:
t 1 1 1 4 17 13 1 0AA
4 3 1 3 13 0 0 1
= = ≠
, luego no es una matriz ortogonal.
Para
3 4-5 5B=4 35 5
:
t
3 4 3 4- - 1 05 5 5 5BB = I4 3 4 3 0 15 5 5 5
= =
es una matriz ortogonal que corresponde a una simetría
ortogonal vectorial. Para calcular el eje de simetría buscamos los vectores invariantes:
3 4- x x5 54 3 y y5 5
= ⇒
y 2x= .
Para
1 2 23 3 32 2 1C= 3 3 32 1 23 3 3
− − − − − − −
t
1 2 2 1 2 23 3 3 3 3 3 1 0 02 2 1 2 2 1CC = = 0 1 0 =I 3 3 3 3 3 3
0 0 12 1 2 2 1 23 3 3 3 3 3
− − − − − − − − − −
− − − −
es una matriz ortogonal que corresponden
a una simetría ortogonal vectorial(det(D)=-1). Para saber si es una simetría especular vectorial o
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 43
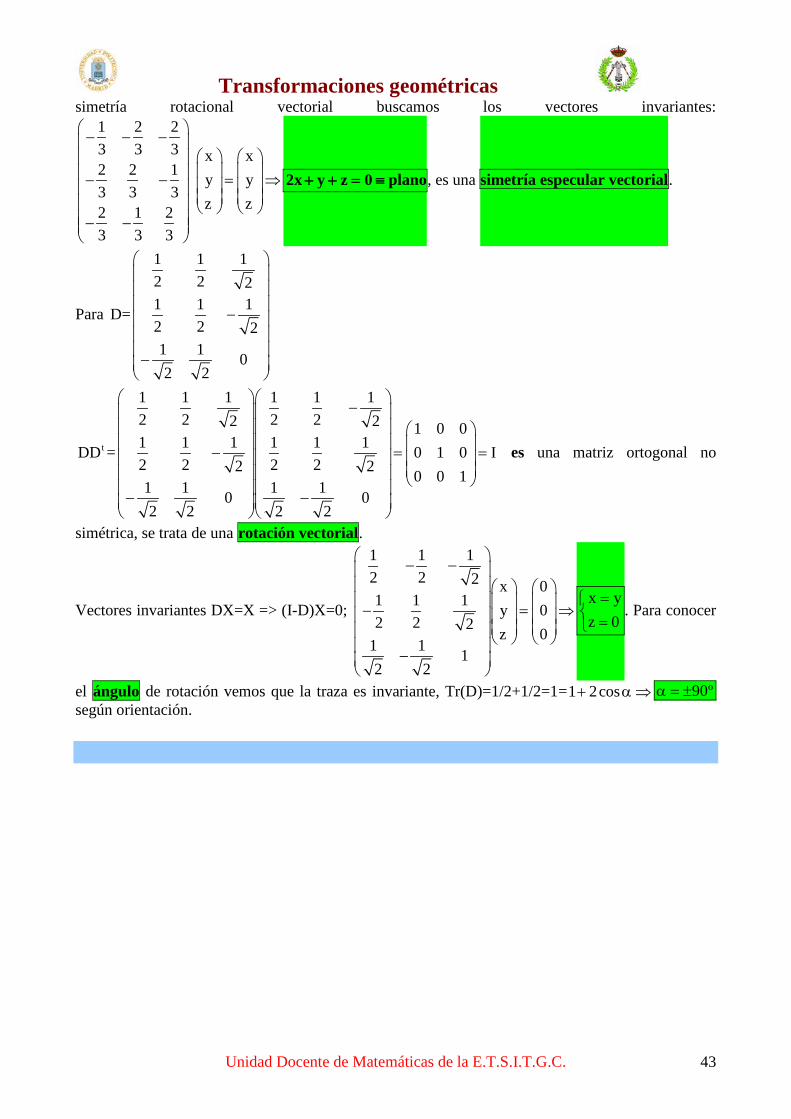
simetría rotacional vectorial buscamos los vectores invariantes: 1 2 23 3 3 x x2 2 1 y y3 3 3
z z2 1 23 3 3
− − − − − = ⇒
− −
+ + = ≡2x y z 0 plano, es una simetría especular vectorial.
Para
1 1 12 2 21 1 1D=2 2 21 1 02 2
− −
t
1 1 1 1 1 12 2 2 22 2 1 0 01 1 1 1 1 1DD = 0 1 0 I2 2 2 22 2 0 0 11 1 1 10 02 2 2 2
− − = =
− −
es una matriz ortogonal no
simétrica, se trata de una rotación vectorial.
Vectores invariantes DX=X => (I-D)X=0;
1 1 12 2 2 x 01 1 1 y 02 2 2 z 0
1 1 12 2
− − − = ⇒
−
x yz 0
= =
. Para conocer
el ángulo de rotación vemos que la traza es invariante, Tr(D)=1/2+1/2=1=1 2cos+ α ⇒ 90ºα = ± según orientación.

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 44
16.- Dadas H1, homotecia de centro C1(1,1,1) y razón k1=1/2, y H2 homotecia de centro C2(-1,1,-1) y razón k2=2. Se pide: a) Hallar las ecuaciones de T=H2oH1, e identificar T. b) Lo mismo para T’=H1oH2. c) Transformada mediante H1 de la recta de ecuación: x+1=-y=z. Solución:
La ecuación de la homotecia de centro C(a,b,c) y razón k es:
1 1 0 0 0 11 0 01 0 01 0 0
x ' ( k)a k xy ' ( k)b k yz ' ( k)c k z
− = −
−
La ecuación de la homotecia H1 de centro C1 (1,1,1) y razón k1=1/2 es: 1 0 0 01 11 10 02 21 10 02 21 10 02 2
x ' xy ' yz ' z
=
La ecuación de la homotecia H2 de centro C2 (-1,1,-1) y razón k2 =2 es: 1 1 0 0 0 1
1 2 0 01 0 2 0
1 0 0 2
x ' xy ' yz ' z
= −
a) T=H2oH1
1 1 0 0 01 2 0 01 0 2 0
1 0 0 2
x 'y 'z '
= −
1 0 0 01 1 10 02 21 10 02 21 10 02 2
xyz
1 0 0 0 12 1 0 00 0 1 02 0 0 1
xyz
=
T es una TRASLACIÓN de vector (2,0,2) ( )2 1 21 k C C= −
.
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 45
b) T’=H1oH2. 1 0 0 01 11 0 02 21 10 02 21 10 02 2
x 'y 'z '
=
1 0 0 0 11 2 0 01 0 2 0
1 0 0 2
xyz
−
1 0 0 0 11 1 0 00 0 1 01 0 0 1
xyz
=
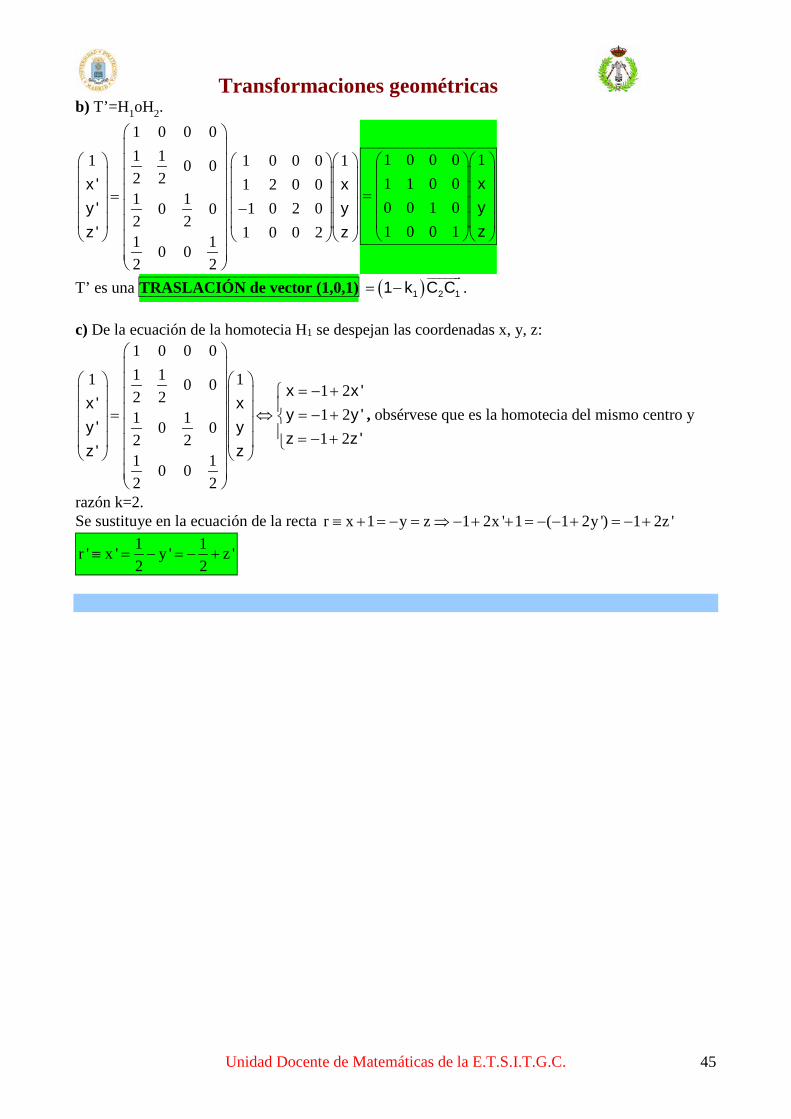
T’ es una TRASLACIÓN de vector (1,0,1) ( )1 2 11 k C C= −
. c) De la ecuación de la homotecia H1 se despejan las coordenadas x, y, z:
1 0 0 01 11 10 0 1 22 2
1 21 10 01 22 2
1 10 02 2
= − + = ⇔ = − + = − +
x x 'x ' x
y y 'y ' y
z z 'z ' z
, obsérvese que es la homotecia del mismo centro y
razón k=2. Se sustituye en la ecuación de la recta r x 1 y z 1 2x ' 1 ( 1 2y ') 1 2z '≡ + = − = ⇒ − + + = − − + = − +
1 1r ' x ' y ' z '2 2
≡ = − = − +

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 46
17.- Hallar la ecuación del giro de R3 definidos por: la recta que pasa por A(1,1,0) y B(0,0,1), y transforma el punto P(0,1,0) en P’(1,1,1). Solución: Primeramente, debemos calcular el ángulo de giro; para ello, buscamos un plano perpendicular a la recta AB y que contiene a los puntos P y P’: ( )AB 1, 1,1 x y z 1 x y z 1= − − ⇒ − − + = − ⇒ + − =
A continuación, la intersección de la recta que pasa por A y B con el plano anterior
x t2 2 2 1r y t ; x y z 1 t t 1 t 1 t O , ,3 3 3 3
z 1 t
= − ≡ = − π ≡ + − = ⇒ − − − − = ⇒ = − ⇒ =
= +
El giro subordinado en el plano de centro O y de ángulo α transforma P(0,1,0) en P’(1,1,1), de tal
forma que los vectores 2 1 1OP , ,3 3 3
= − −
y 1 1 2OP' , ,
3 3 3 =
nos forman el ángulo
OP OP'arccos 120ºOP OP'
⋅ α = =
. Pero, la orientación en el espacio depende del sentido del giro;
considerando el vector ( )AB 1, 1,1= − −
y haciendo el producto vectorial
i j k2 1 1 1 1 1OP OP' , ,3 3 3 3 3 3
1 1 23 3 3
∧ = − − = −
, justamente el opuesto a la dirección del eje de rotación.
Por consiguiente, el ángulo de giro es de -120º. En el sistema de referencia R’ definido por
{ }1 2 3 1 2 3 1 21 1 11 11 1 1 0 11 23 2 6
R' B,u ,u ,u siendo B(0,0,1), u ( , , ),u ( , , ),u u u ( , , )≡ = − − = − = ∧ =
la ecuación del giro es:
( ) ( )( ) ( )
1 0 01 0 0
1 30 120 120 02 2
0 120 1203 10
2 2
x ' x x xy ' G y cos º sen º y yz ' z sen º cos º z z
= = − − − = −
− − − −

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 47
Se pasa al sistema de referencia R definido por { }1 2 3 1 2 31 0 0 0 1 0 0 0 1R O;e ,e ,e siendo O(0,0,0), e ( , , ),e ( , , ),e ( , , )≡ = = =
La matriz del cambio de base es
1 1 13 2 6
1 1 13 2 6
1 203 6
B
−
= − −
1
0 1 00 0 11 0 0
x ' x xy ' BGB y y en Rz ' z z
−
= = − −
La ecuación con el punto B (0,0,1) invariante será:
0 0 1 0 0 0 1 00 0 0 1 1 0 0 11 1 0 0 1 1 1 0 0
x ' x xX' B MBX y ' y y
z ' z z
= + ⇔ = + − = + − − − −

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 48
18.- Hallar las ecuaciones y los centros de las semejanzas que resultan de componer: a) La homotecia H1 del ejercicio 16 y el giro 17. b) H1 con la simetría especular de plano π: x+y-z-1=0. Solución:
a)
1 1 0 0 00 0 1 01 0 0 11 1 0 0
= −
−
x 'y 'z '
1 0 0 01 1 10 02 2 x1 1 y0 02 2
z1 10 02 2
1 0 0 01 1 10 02 2 x1 1 y0 02 2
z1 1 0 02 2
= −
−
Centro de la semejanza es el único punto invariante,
1 0 0 01 11 10 02 2x x1 1y y0 02 2
z z1 1 0 02 2
= ⇒ −
−
5 3 1, ,7 7 7
b) Ecuación de la simetría especular:
En el sistema de referencia R’ definido por { }1 2 3R ' A,u ,u ,u≡ siendo
1 2 3 1 21 1 1A(1,0,0), u (1,1, 1), u (1,0,1), u u u (1, 2, 1)3 2 6
= − = = ∧ = − − la ecuación de la simetría es:
x ' x 1 0 0 xy ' S y 0 1 0 yz ' z 0 0 1 z
− = =
Se pasa al sistema de referencia R definido por { }1 2 3 1 2 3R O;e , e , e siendo O(0,0,0), e (1,0,0), e (0,1,0), e (0,0,1)≡ = = =
La matriz del cambio de base es
1 1 13 2 6
1 2B 03 61 1 13 2 6
= − − −

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 49
1
1 2 23 3 3x ' x x2 1 2y ' BSB y y en R3 3 3
z ' z z2 2 13 3 3
−
− = = −
La ecuación con el punto A (1,0,0) invariante será: 1 2 2 2 1 2 23 3 3 3 3 3 3x ' 1 x 1 x2 1 2 2 2 1 2X ' A MAX y ' 0 y y3 3 3 3 3 3 3
z ' 0 z z2 2 1 2 2 2 13 3 3 3 3 3 3
− − −
= + ⇔ = + − = + − −
Efectuando el producto: 1 0 0 0 1 0 0 02 1 2 2 1 11 10 03 3 3 3 2 2x ' x2 2 1 2 1 1y ' y0 03 3 3 3 2 2
z ' z1 12 2 2 1 0 02 23 3 3 3
− = = −
−
1 0 0 05 1 1 1 16 6 3 3 x5 1 1 1 y6 3 6 3
z1 1 1 16 3 3 6
− −
Centro de la semejanza es el único punto invariante, 1 0 0 05 1 1 11 16 6 3 3x x5 1 1 1y y6 3 6 3
z z1 1 1 16 3 3 6
− = ⇒ −
( )C 1,1,1=

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 50
19.- Clasificar los movimientos definidos por las siguientes ecuaciones y determinar sus elementos característicos:
a)
1 1 0 0 0 1x' 1 0 1 0 x
1 0 0 1 yy'0 1 0 0 zz'
= − −
; b)
1 1 0 0 0 1x' 1 0 1 0 x
1 0 0 1 yy'0 1 0 0 zz'
= − −
Solución:
a) Por ser 0 1 00 0 −1−1 0 0
= 1, se trata de un giro en el espacio ó de un movimiento helicoidal.
Calculemos los puntos dobles: 1xyz
=
1 0 0 01 0 1 01 0 0 −10 −1 0 0
1xyz
⇔
0 0 0 01 −1 1 01 0 −1 −10 −1 0 −1
1xyz
=
0000
⇔1− x + y = 01− y − z = 0−x − z = 0
⇔
⇔x − y = 0x − y = −1
, sistema incompatible.
Al no tener puntos dobles, se trata de un movimiento helicoidal; es decir, es el producto
T
u→ o G(e,α) , con u
→
paralelo a e.
La dirección del eje e viene dada por los vectores invariantes mediante la transformación ortogonal asociada:
0 1 00 0 −1−1 0 0
xyz
=
xyz
⇔
x − y = 0y + z = 0x + z = 0
⇔
x = yz = −y
⇔
x = λ
y = λz = −λ
,λ ∈R .
Por tanto, el vector u→
es de la forma u→
=(k, k, -k) , para algún número real k que hemos de determinar. Llamando T al movimiento helicoidal, T=
T
u→ o G(e,α) , se verifica:
T
− u→ o T = G(e, α) . Por consiguiente,
T
− u→oT tiene una recta e de puntos dobles.
La ecuación de T
− u→oT es :
1x′y′z′
=
1 0 0 0−k 1 0 0−k 0 1 0k 0 0 1
1 0 0 01 0 1 01 0 0 −10 −1 0 0
1xyz
=
1 0 0 0−k + 1 0 1 0−k + 1 0 0 −1
k −1 0 0
1xyz
El sistema para obtener los puntos dobles de este movimiento es: 1xyz
=
1 0 0 0−k +1 0 1 0−k +1 0 0 −1
k −1 0 0
1xyz
⇔
0 0 0 0k − 1 1 −1 0k − 1 0 1 1−k 1 0 1
1xyz
=
0000
Como hay infinitos puntos dobles (los del eje), el sistema anterior ha de ser compatible indeterminado:

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 51
El rango
1 -1 0 1-k0 1 1 1-k1 0 1 k
que tiene que coincidir con el rango de 1 −1 00 1 11 0 1
que es 2; luego, ha de ser 1 −1 1− k0 1 1− k1 0 k
= 0 = 3k − 2 , es decir, k =23
. Por tanto, u→
= (23
,23
, −23
) .
Sustituimos k por 23
en el sistema anterior y hallamos una solución cualquiera que será un punto del
eje:
Hacemos x=0, se obtiene −y = 1−
23
y + z = 1−23
⇔
y = −13
z =23
.
El eje del movimiento tiene de ecuación e ≡x1
=y +
13
1=
z −23
−1 .
El ángulo de la rotación verifica 1 2cos trazaM=0+ α = ; luego 1cos2
α = − ⇔120240
α = °α = °
(según
se elija la dirección positiva del eje). Hallando el transformado de O(0,0,0), O´(1,1,0), mediante el dibujo, se observa que el giro en el sentido de u
→
es de 120°.
O
O´
e
x
y
z
120°•
•
3u
b) Por ser 0 1 00 0 1−1 0 0
= −1, se trata de una simetría especular, deslizante o rotacional. Calculemos
los puntos dobles: 1 1 0 0 0 1 0 0 0 0 1 0
x 0x 1 0 1 0 x 1 1 1 0 x 0
y 1y 1 0 0 1 y 1 0 1 1 y 0
z 0z 0 1 0 0 z 0 1 0 1 z 0
= − = ⇔ = ⇔ = − − − − = − − −
El único punto doble es C(0, -1, 0). Se trata, por tanto, de una simetría rotacional C (e, )S S Gπ α= , donde el plano π es perpendicular al eje e, y C es la intersección π ∩ e . La dirección de e es la de un vector propio asociado al valor propio λ = -1:

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 52
0 1 00 0 1−1 0 0
xyz
= −
xyz
⇔
x = −yz = −y
.
Por consiguiente, e es paralelo al vector u→
= (-1, 1, -1). x t
e y 1 tz t
= − ≡ = − + = −
y el plano x y z 1π ≡ − + =
A partir de u→
, consideramos la siguiente base ortonormal:
B = v1
→ , v2
→
, v3
→ , donde
v1
→
=u→
u→ = (
−13
,13
,−13
)
v2
→
=v→
v→ = (
12
,12
,0)⊥ v1
→
v3
→= w
→
w→ = ( 1
6, −1
6, −2
6), w
→= u
→∧ v = (1,−1, −2)
→
La matriz M B asociada a SC , respecto de la base B, es el producto de las matrices M 1 y M 2 , asociadas a Sπ y Gα respectivamente:
−1 0 00 cosα −senα0 senα cosα
=
−1 0 00 1 00 0 1
1 0 00 cosα −senα0 senα cosα
.
Luego, Sπ es la simetría especular de plano π = C + v2
→
, v3
→
y G(e,α) es el giro alrededor del
eje 1e C v→
≡ + de ángulo α tal que −1+ 2cos α = 0 (igualando las trazas de ambas matrices
asociadas a SC ), es decir, α =
60o
300o
según la orientación del eje.

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 53
20.- Indicar qué tipo de transformación corresponde a cada una de las siguientes ecuaciones y hallar sus elementos característicos:
a) x' x 2y 2zy' 2x y 2zz' 2x 2y z
= − + + = − + − = − − +
; b)
x' x y z 1
3 3y' x y2 22 2z' x y 2z 22 2
= − − + − = −
= + + +
; c)x ' x 2y 2zy' 2x y 2zz' 2x 2y z
= + + = + − = − +
Solución:
a) Estudiando la matriz 1 2 22 1 22 2 1
− − − − −
de la transformación observamos que es proporcional a
una matriz ortogonal 1 2 2 1 2 2
12 1 2 3 2 1 23
2 2 1 2 2 1
− − − − = − − − − − −
, entonces la transformación es una
SEMEJANZA y su determinante es 27, luego es DIRECTA; de centro el único punto invariante,
( )1 2 22 1 2 0 0 02 2 1
− = − − ⇒ = − −
X X X , , .
La descomposición canónica de la semejanza directa es el producto de una rotación por una homotecia, siendo: k=3 razón de la semejanza o razón de la homotecia C=(0,0,0) centro de la homotecia o de la semejanza. Eje de la rotación de la matriz ortogonal: obtenemos los vectores invariantes,
1 1 2 3 2 331 2 2
12 1 2 2 3 1 2 33
2 2 1 12 3 2 3 13
− − −
= − − ⇒ − − − − −
− − −
/ /
1 X X / / X3
/ /
00 11
=⇒ ⇒ = − = −
xv ( , , )
y z y por
consiguiente el eje de rotación es la recta que pasa por C: x 0y tz t
= = − =
y de amplitud de giro, mediante
la traza 1 11 2cos arccos3 3
= + α ⇒ α = − ≈
109º 28'16 '± .
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 54
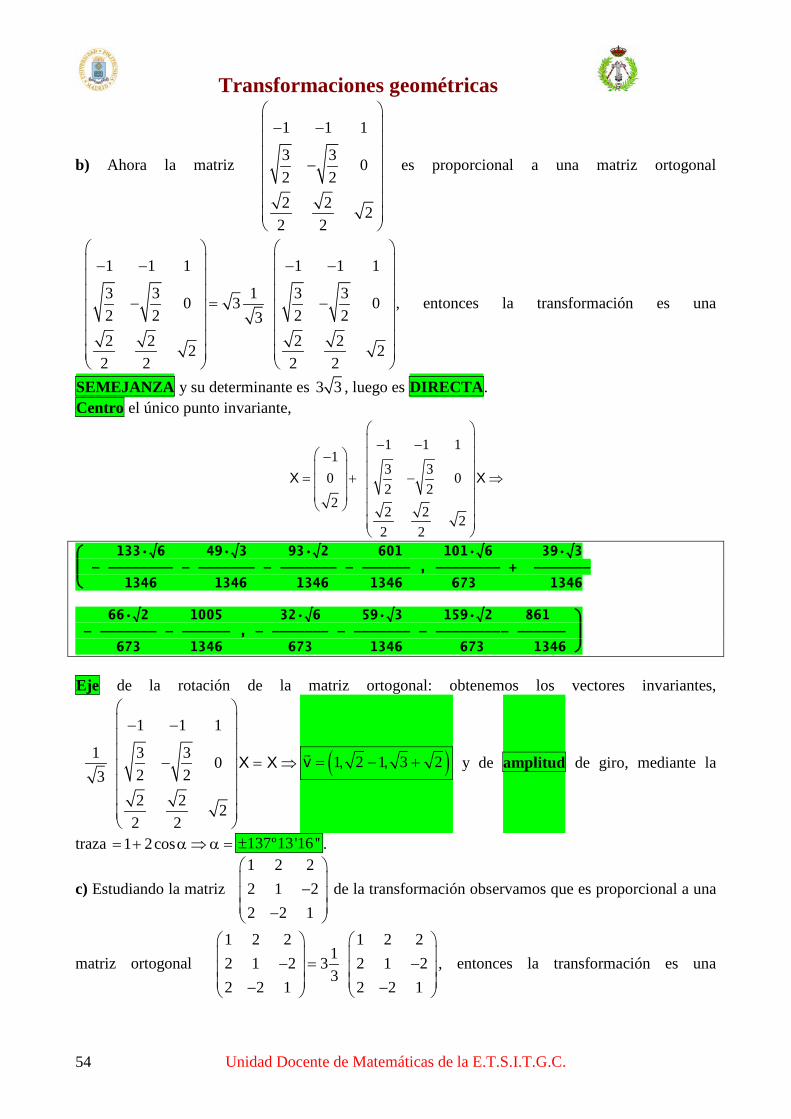
b) Ahora la matriz
1 1 1
3 3 02 22 2 2
2 2
− − −
es proporcional a una matriz ortogonal
1 1 1 1 1 1
3 3 1 3 30 3 02 2 2 232 2 2 22 2
2 2 2 2
− − − − − = −
, entonces la transformación es una
SEMEJANZA y su determinante es 3 3 , luego es DIRECTA. Centro el único punto invariante,
1 1 11
3 30 02 2
2 2 2 22 2
− −
− = + − ⇒
X X
⎛ 133·√6 49·√3 93·√2 601 101·√6 39·√3 ⎜ - ⎯⎯⎯⎯⎯⎯ - ⎯⎯⎯⎯⎯ - ⎯⎯⎯⎯⎯ - ⎯⎯⎯⎯ , ⎯⎯⎯⎯⎯⎯ + ⎯⎯⎯⎯⎯ ⎝ 1346 1346 1346 1346 673 1346 66·√2 1005 32·√6 59·√3 159·√2 861 ⎞ - ⎯⎯⎯⎯⎯ - ⎯⎯⎯⎯ , - ⎯⎯⎯⎯⎯ - ⎯⎯⎯⎯⎯ - ⎯⎯⎯⎯⎯⎯- ⎯⎯⎯⎯ ⎟ 673 1346 673 1346 673 1346 ⎠ Eje de la rotación de la matriz ortogonal: obtenemos los vectores invariantes,
1 1 1
1 3 3 02 232 2 2
2 2
X X
− − − = ⇒
( )1 2 1 3 2v , ,= − +
y de amplitud de giro, mediante la
traza 1 2cos= + α ⇒ α = 137º13'16 ''± .
c) Estudiando la matriz 1 2 22 1 22 2 1
− −
de la transformación observamos que es proporcional a una
matriz ortogonal 1 2 2 1 2 2
12 1 2 3 2 1 23
2 2 1 2 2 1
− = − − −
, entonces la transformación es una

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 55
SEMEJANZA y su determinante es -27, luego es INVERSA; de centro el único punto invariante, 1 2 22 1 22 2 1
X X X = − ⇒ = −
( )0 0 0, , .
La descomposición canónica de la semejanza INVERSA es el producto de una rotación por una homotecia INVERSA, siendo: k=3 razón de la semejanza k=-3 razón de la homotecia C=(0,0,0) centro de la homotecia o de la semejanza. Eje de la rotación de la matriz ortogonal: obtenemos los vectores invariantes,
1 1 2 3 2 331 2 2
12 1 2 2 3 1 2 33
2 2 1 12 3 2 3 13
− − − − = − ⇒ − − − −
− − −
/ /
1 X - X / / X3
/ /
111= −
⇒ ⇒ = − =
x zv ( , , )
y z y por
consiguiente el eje de rotación es la recta que pasa por C: x ty tz t
= − = =
y de amplitud de giro,
mediante la traza ( )1 1 2cos arccos 1− = + α ⇒ α = − ≈ 180º± .

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 56
21.- Descomponer la traslación de vector (2,1,1) en producto de dos simetrías SoS’, siendo el plano de S: 2x+y+z=1. Solución: La ecuación general de una traslación es X' T(A) M XA= +
siendo A un punto cualquiera del
espacio y M la matriz identidad. En concreto, si se toma como punto A el origen del sistema de
referencia, cuyo transformado es 211
T(O) =
se tiene que la ecuación pedida es:
1 1 0 0 0 12 1 0 0
2 1 0 01 0 1 0
1 0 1 01 0 0 1
1 0 0 1
x ' xx ' x
y ' yy ' y
z ' zz ' z
= + ⇔ =
La ecuación de la simetría especular en la base canónica del espacio es X’ = A + M (X-A) siendo A un punto del plano de simetría. Si se toma una referencia tal que el eje X sea perpendicular al plano de simetría se conoce la forma que toma la matriz de la transformación vectorial pues si se llama B a dicha base, entonces,
1 0 00 1 00 0 1
BM−
=
Se puede definir la base { }, ,B u v w=
tomando el primer vector unitario y perpendicular al plano, por
ejemplo, (2,1,1) (2,1,1)) 2 1 1( , , )(2,1,1) 6 6 6 6
= = ⇒ = u u
El segundo vector es un vector cualquiera perpendicular a éste, por ejemplo: 1 10, ,2 2
= −
v y el
tercero es el producto vectorial de ambos 1 1 1 , ,3 3 3
= ∧ ⇒ = − −
w u v w (comprobándose
que 1w =
). La matriz de cambio de base de la base B a la canónica es aquella que tiene por
columnas los vectores de la base B es, por tanto,
2 106 31 1 16 2 31 1 16 2 3
= − −
−
P y la matriz M en la base
canónica, 1c BM PM P −= ⇒
12 1 2 10 06 3 6 31 0 01 1 1 1 1 10 1 06 2 3 6 2 30 0 11 1 1 1 1 16 2 3 6 2 3
− − = − − − −
− −
M =
1 2 23 3 32 2 13 3 32 1 23 3 3
− − − − − − −
Para completar la ecuación se elige un punto invariante, es decir, un punto cualquiera del plano de simetría, por ejemplo, el punto (0,0,1) quedando
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 57
1 2 23 3 3' 02 2 1' ( ) ' 03 3 3
' 1 12 1 23 3 3
− − −
= + − ⇔ = + − − − − −
x xX A M x A y y
z z⇔
2 1 2 23 3 3 3'1 2 2 1'3 3 3 3
' 1 2 1 23 3 3 3
− − −
= + − − − −
x xy yz z
⇔
1 0 0 02 1 2 21 13 3 3 3'1 2 2 1'3 3 3 3
' 1 2 1 23 3 3 3
− − − = − −
− −
x xy yz z
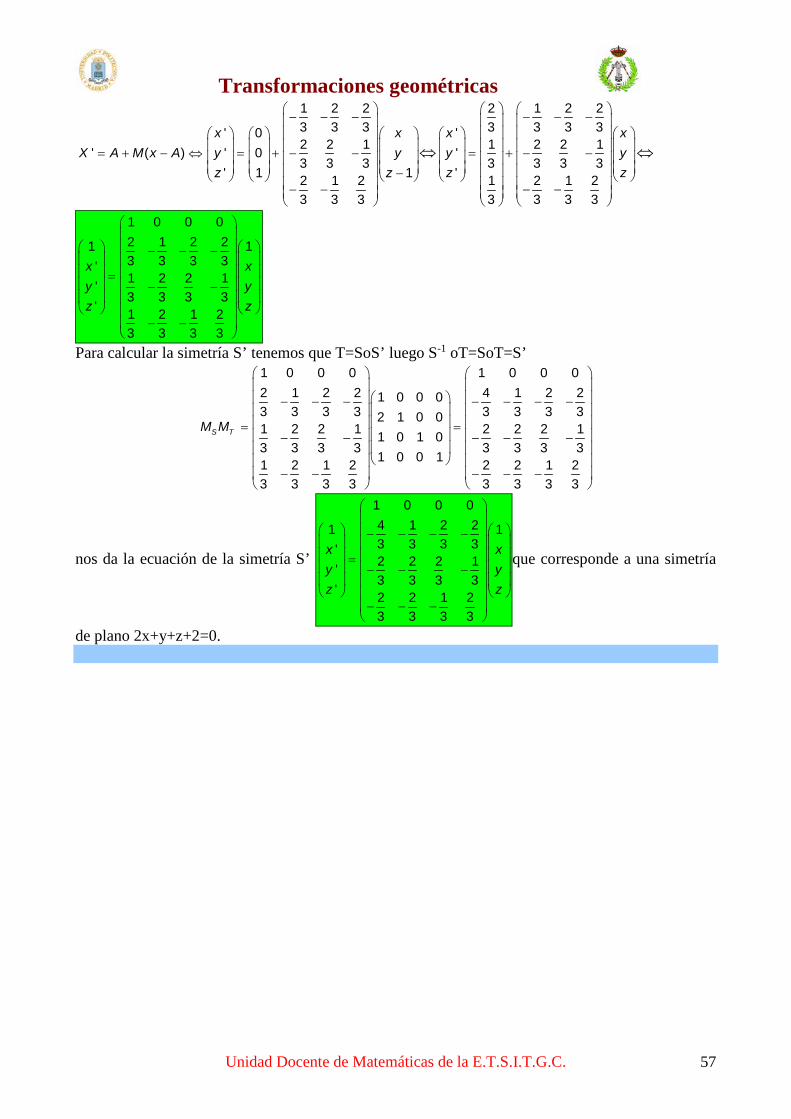
Para calcular la simetría S’ tenemos que T=SoS’ luego S-1 oT=SoT=S’ 1 0 0 0 1 0 0 02 1 2 2 4 1 2 21 0 0 03 3 3 3 3 3 3 32 1 0 01 2 2 1 2 2 2 11 0 1 03 3 3 3 3 3 3 3
1 0 0 11 2 1 2 2 2 1 23 3 3 3 3 3 3 3
− − − − − − − = = − − − − −
− − − − −
S TM M
nos da la ecuación de la simetría S’
1 0 0 04 1 2 21 13 3 3 3'2 2 2 1'3 3 3 3
' 2 2 1 23 3 3 3
− − − − = − − −
− − −
x xy yz z
que corresponde a una simetría
de plano 2x+y+z+2=0.

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 58
22.- En un plano se consideran 4 simetrías axiales S1, S2, S3, S4, cuyos ejes respectivos son las rectas y=0; y=x; x=0; x=4. Se pide: a) Demostrar que el producto de esas simetrías, en el orden dado, es un giro del que se pide, el centro y el ángulo de giro. b) Hallar la ecuación de la figura C’ transformada de la circunferencia C=x2+y2=25 por dicho giro. c) Si existe alguna homotecia que transforme C en C’, halle su centro y su razón. Solución:
a) Ecuación de la simetría x ' a cos sen x ay ' b sen cos y b
α α − = + α − α −
siendo A=(a,b) un punto del eje de
pendiente tg(α/2).
S1 1 1 0 0 1
x ' 0 cos 0º sen0º x 0 0 1 0 xx ' 0 1 0 x
y ' 0 sen0º cos 0º y 0 0 0 1 yy ' 0 0 1 y
− ≡ = + = + ⇔ = − − − −
S2 1 1 0 0 1
x ' 0 cos90º sen90º x 0 0 0 1 xx ' 0 0 1 x
y ' 0 sen90º cos90º y 0 0 1 0 yy ' 0 1 0 y
− ≡ = + = + ⇔ = − −
S3 1 1 0 0 1
x ' 0 cos180º sen180º x 0 0 1 0 xx ' 0 1 0 x
y ' 0 sen180º cos180º y 0 0 0 1 yy ' 0 0 1 y
− − ≡ = + = + ⇔ = − − −
S4 1 1 0 0 1
x ' 4 cos180º sen180º x 4 8 1 0 xx ' 8 1 0 x
y ' 0 sen180º cos180º y 0 0 0 1 yy ' 0 0 1 y
− − ≡ = + = + ⇔ = − − −
El producto de las 4 simetrías axiales: 1 1 0 0x ' 8 1 0y ' 0 0 1
= −
1 0 00 1 00 0 1
−
1 0 00 0 10 1 0
1 0 0 1 1 0 0 10 1 0 x 8 0 1 x0 0 1 y 0 1 0 y
= − −
es un giro.
Centro del giro: Ángulo o amplitud del giro:
1 1 0 0 1
x 4x 8 0 1 x
y 4y 0 1 0 y
= = − ⇒ =
cos 0
90ºsen 1
α =⇒ α = α =
Por tanto, es un giro de centro (4,4) y amplitud 90º b) Por ser una circunferencia de centro (0,0) y radio 5 giramos el centro y queda la circunferencia de centro O’(8,0) y radio igual. ( )2 2C' x 8 y 25≡ − + = . c) Una homotecia de razón k=-1, pues se conserva el radio y de centro A:
( ) ( )a 4
AO' kAO 8 a, b 1 a, bb 0
== ⇔ − − = − − − ⇒ ⇒ =
(4,0)

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 59
23.- a) Hallar las ecuaciones de la composición del giro de ángulo π con respecto a la recta r: (0,0,1) + t (0,1,1) con la traslación de vector v = (1,1,0) y determinar de qué tipo de movimiento se trata. b) Clasificar el movimiento dado por la ecuación matricial:
1 1 12x' 1 x
2 1y' 1 1 1 y3 2
z' 0 z11 12
− = − −
−
Solución: a) En el sistema de referencia R’ definido por
{ }1 2 3 1 2 3 1 21 1R ' Q,u ,u ,u siendo Q(0,0,1), u (0,1,1), u (1,0,0), u u u (0,1, 1)2 2
≡ = = = ∧ = −
la ecuación del giro es: 1 0 00 1 00 0 1
= = − −
x ' x xy ' G y yz ' z z
Se pasa al sistema de referencia R definido por
{ }1 2 3 1 2 3R O;e , e , e siendo O(0,0,0), e (1,0,0), e (0,1,0), e (0,0,1)≡ = = =
La matriz del cambio de base es:
1
0 1 0 0 1 01 1 1 1B 0 cuya inversa es B 02 2 2 2
1 1 1 10 02 2 2 2
−
= − = −
1
x ' x 1 0 0 xy ' BGB y 0 0 1 y en Rz ' z 0 1 0 z
−
− = =
La ecuación con el punto A (0,0,1) invariante será:
x ' 0 1 0 0 x 0 1 0 0 x
X ' A MAX y ' 0 0 0 1 y 1 0 0 1 yz ' 1 0 1 0 z 1 1 0 1 0 z
− − = + ⇔ = + = − + −
Ahora se compone con la traslación T de vector (1,1,0) quedando

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 60
x ' 1 0 1 0 0 xy ' 1 1 0 0 1 y en Rz ' 0 1 0 1 0 z
− = + − +
x ' 1 1 0 0 xy ' 0 0 0 1 y en Rz ' 1 0 1 0 z
− = +
Se trata de un MOVIMIENTO HELICOIDAL
b)
1 1 12x ' 1 x
2 1y ' 1 1 1 y3 2
z ' 0 z11 12
− = − −
−
( )
2 2 2 12 2 23 3 3
3 3 3 2 2 2 12 2 2I M siendo I M | A 3 3 33 3 3 2 2 2 02 2 2
3 3 33 3 3
− = − =
como r(I-M) = 1 y r(I-M|A) = 2 se trata de una SIMETRÍA DESLIZANTE
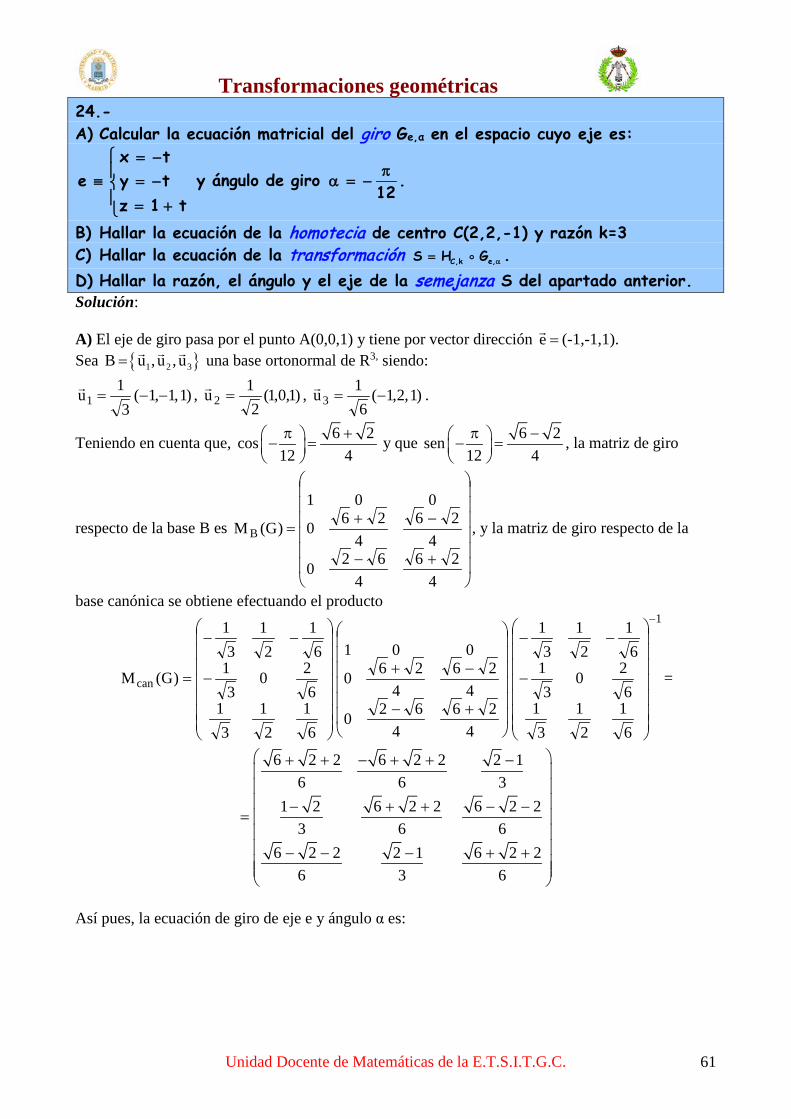
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 61
24.- A) Calcular la ecuación matricial del giro Ge,α en el espacio cuyo eje es:
= −≡ = − = +
x te y t
z 1 t y ángulo de giro π
α = −12
.
B) Hallar la ecuación de la homotecia de centro C(2,2,-1) y razón k=3 C) Hallar la ecuación de la transformación e,C,kS H G α= . D) Hallar la razón, el ángulo y el eje de la semejanza S del apartado anterior. Solución: A) El eje de giro pasa por el punto A(0,0,1) y tiene por vector dirección =e
(-1,-1,1). Sea { }1 2 3B u ,u ,u=
una base ortonormal de R3, siendo:
)1 ,1,1(3
1u1 −−= , )1,0,1(
21u 2 =
, )1 ,2,1(6
1u3 −= .
Teniendo en cuenta que, 6 2cos12 4π + − =
y que 6 2sen
12 4π − − =
, la matriz de giro
respecto de la base B es
+−
−+=
426
4620
426
4260
001
)G(M B , y la matriz de giro respecto de la
base canónica se obtiene efectuando el producto
−
−−
=
61
21
31
620
31
61
21
31
)G(Mcan
+−
−+
426
4620
426
4260
001
1
61
21
31
620
31
61
21
31 −
−
−−
=
6 2 2 6 2 2 2 16 6 3
1 2 6 2 2 6 2 23 6 6
6 2 2 2 1 6 2 26 3 6
+ + − + + − − + + − −
= − − − + +
Así pues, la ecuación de giro de eje e y ángulo α es:
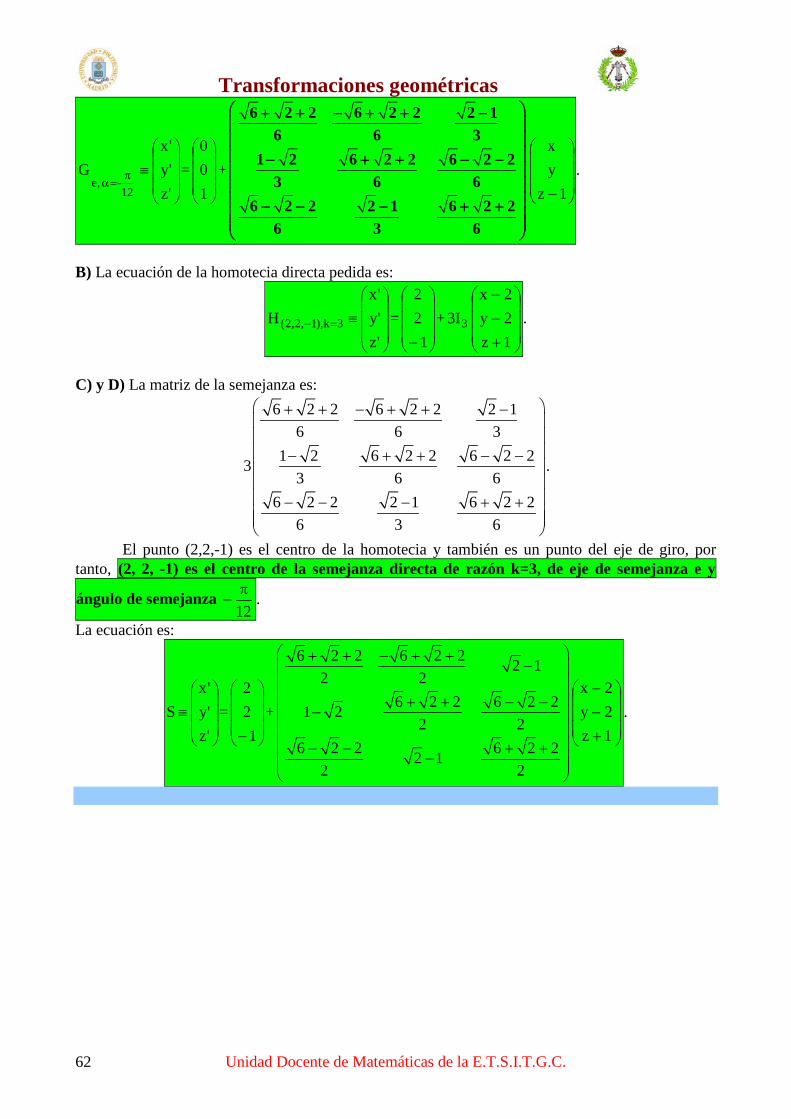
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 62
≡π
=α'z'y'x
G12
- ,e=
100
+
6 2 2 6 2 2 2 16 6 3
1 2 6 2 2 6 2 23 6 6
6 2 2 2 1 6 2 26 3 6
+ + − + + − − + + − − − − − + +
−1zyx
.
B) La ecuación de la homotecia directa pedida es:
≡=−
'z'y'x
H 3k),1,2,2( =
−122
+ 3I3
+−−
1z2y2x
.
C) y D) La matriz de la semejanza es:
6 2 2 6 2 2 2 16 6 3
1 2 6 2 2 6 2 233 6 6
6 2 2 2 1 6 2 26 3 6
+ + − + + − − + + − − − − − + +
.
El punto (2,2,-1) es el centro de la homotecia y también es un punto del eje de giro, por tanto, (2, 2, -1) es el centro de la semejanza directa de razón k=3, de eje de semejanza e y
ángulo de semejanza 12π
− .
La ecuación es:
≡
'z'y'x
S =
−122
+
6 2 2 6 2 2 2 12 2
6 2 2 6 2 21 22 2
6 2 2 6 2 22 12 2
+ + − + +−
+ + − −
− − − + +
−
+−−
1z2y2x
.

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 63
25.- A) Calcular la ecuación matricial del giro en el espacio cuyo
eje es: x z 2 0y 2 0
− + = − =
ángulo es 180º.
B) Hallar la ecuación de la homotecia H de centro (2, 1, 2) y razón k = - 3. C) Hallar la ecuación de la transformación ToH, siendo T el movimiento del apartado A). D) ¿Es ToH una semejanza directa o inversa? E) Hallar la razón, el ángulo y el eje de semejanza. Solución: A) Pasamos la ecuación de la recta a la forma vectorial y nos queda:
x
= (-2, 2, 0) + (1, 0, 1) t P ( 2, 2,0)u (1,0,1)
= −⇒ =
• Construir una base ortonormal B.
Como primer vector de B, tomamos 1v
unitario y paralelo al eje de giro: 11
1
u 1 1v , 0, u 2 2
= =
Segundo vector ha de ser perpendicular a 1v
y unitario: ( )2v 0, 1, 0=
Tercer vector 3 1 2
i j k1 1 1 1v v v 0 - , 0, 2 2 2 2
0 1 0
= ∧ = =
• Matriz de giro asociada a la base B es: M1 = 1 0 0 1 0 00 cos -sen 0 -1 00 sen cos 0 0 -1
α α = α α
• La matriz de cambio de base de B a la base canónica es: P =
1 10 -2 2
0 1 01 102 2
Por tanto, la matriz del giro respecto a la base canónica Bc es:
M = P M1 P1 ; Utilizando Derive = 0 0 10 -1 01 0 0
Ecuación del giro:
1 1 0 0 0 1x' -2 0 0 1 x
y' 4 0 -1 0 yz ' 2 1 0 0 z
=
B) Ecuación de la Homotecia: X’ = C + (kI) (X-C) ⇒
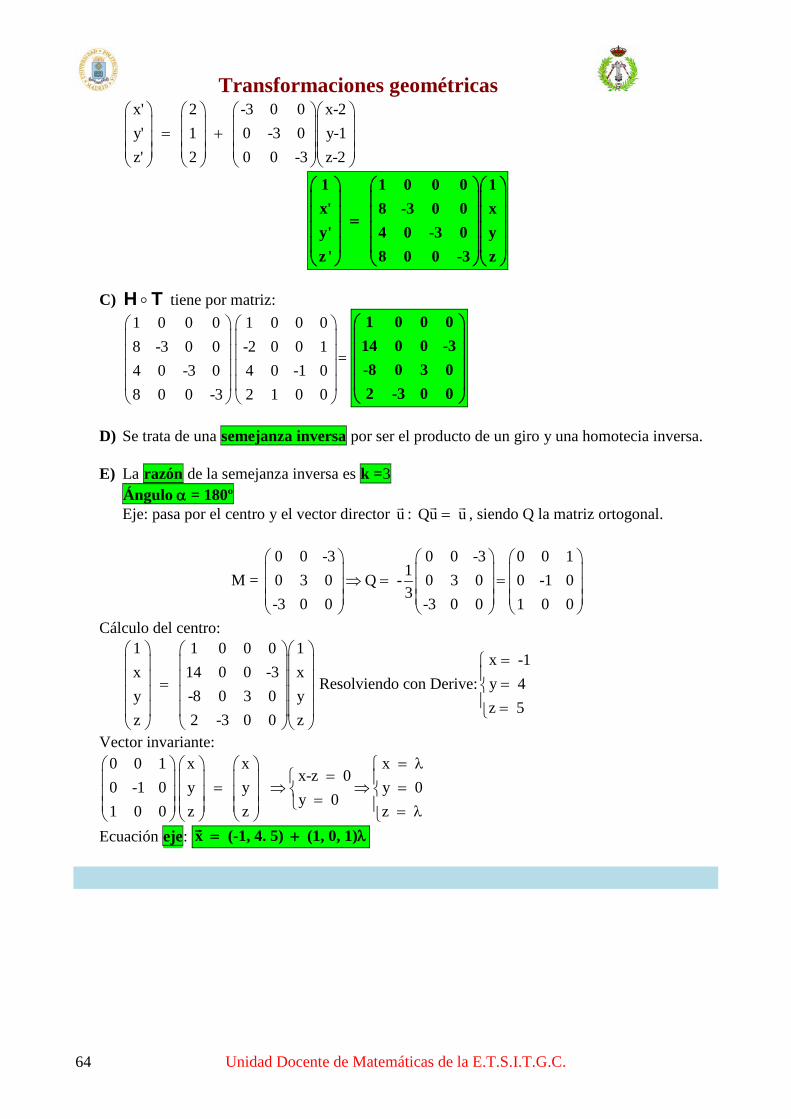
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 64
x' 2 -3 0 0 x-2y' 1 0 -3 0 y-1z' 2 0 0 -3 z-2
= +
1 1 0 0 0 1x' 8 -3 0 0 x
y' 4 0 -3 0 yz ' 8 0 0 -3 z
=
C) T H tiene por matriz:
1 0 0 08 -3 0 04 0 -3 08 0 0 -3
1 0 0 0-2 0 0 14 0 -1 02 1 0 0
=
1 0 0 014 0 0 -3-8 0 3 02 -3 0 0
D) Se trata de una semejanza inversa por ser el producto de un giro y una homotecia inversa. E) La razón de la semejanza inversa es k =3 Ángulo α = 180º Eje: pasa por el centro y el vector director u : Qu u=
, siendo Q la matriz ortogonal.
M = 0 0 -3 0 0 -3 0 0 1
10 3 0 Q - 0 3 0 0 -1 03
-3 0 0 -3 0 0 1 0 0
⇒ = =
Cálculo del centro:
1 1 0 0 0 1x 14 0 0 -3 x
y -8 0 3 0 yz 2 -3 0 0 z
=
Resolviendo con Derive:x -1y 4z 5
= = =
Vector invariante: 0 0 10 -1 01 0 0
x xy yz z
=
x
x-z 0y 0
y 0z
= λ= ⇒ ⇒ = = = λ
Ecuación eje: x (-1, 4. 5) (1, 0, 1)= + λ

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 65
26.- Dada la transformación geométrica del espacio euclídeo E2:
− − = + α
−
187 2425
24 72425
X' X con α ≠ α ∈0, R , se pide:
a) Clasificar la transformación, según los valores de α.
b) Elementos característicos en cada caso.
c) Descomposición canónica de la transformación para α =125
, indicando la
matriz de la homotecia y la matriz del movimiento. Solución: a) Puede ser un movimiento o una semejanza
Tenemos que 27 24 1625 124 7 25−
α = − α = ± ⇒ α = ±
, es un movimiento inverso y una
semejanza inversa en cualquier otro caso 125
α ≠ ±
, puesto que la matriz
7 24 7 2424 7 24 7− − α α
α = α α es proporcional a una matriz ortogonal.
b) Para 125
α = ± resulta
187 24125X ' X
24 24 72525
− − = ±
−
movimiento inverso ya que
7 247 241 25 25
24 7 24 72525 25
± − ± =
± ±
matriz ortogonal cuyo determinante vale -1.
1) Si 125
α = queda
187 24125X ' X
24 24 72525
− − = +
−
, buscamos puntos dobles
187 24125X X
24 24 72525
− − = +
−
y no hay; es una SIMETRÍA DESLIZANTE.
El punto
18 24(0, 0) ,O O ' 9 1225 25 ,
2 2 25 25
+ − − + = = − −
es del eje de simetría y su transformado

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 66
18 9 277 24O O ' 125 25 25T
24 24 7 12 362 2525 25 25
− − − − + = + = − − −
dando lugar al vector de traslación
27 9O O' O O' 25 25v T
36 122 225 25
− − + + = = − = − −
18252425
− −
cuya dirección (3,4) permite formar la recta
4x-3y=k con la condición de contener al punto 9 12 9 12, k 4 3 025 25 25 25
− − ⇒ = − − − = ⇒
4x 3y 0− =
2) Si 125
α = − queda
187 24125X ' X
24 24 72525
− − = −
−
, buscamos puntos dobles
187 24125X X
24 24 72525
− − = − ⇒
−
3x 4y 3+ = − es una SIMETRÍA AXIAL.
3) Si 125
α ≠ ± 27 24625 0
24 7−
⇒ α = − α <
es una SEMEJANZA INVERSA, de razón k=25α,
con un único punto invariante,
187 2425X X
24 24 725
− − = + α ⇒
−
( ) ( )18 24,
25 25 1 25 25 1 α − α −
CENTRO DE LA SEMEJANZA, y por último, de eje vectorial 7 24 7 241 1X X X 4x 3y 0
24 7 24 7k 25− −
= α = α ⇒ − = α
permite formar la recta 4x-3y=k con la condición de contener al centro de la semejanza 18 24 18 24, k 4 3 0
25(25 1) 25(25 1 25(25 1) 25(25 1
⇒ = − = ⇒ α − α − α − α − 4x 3y 0− =
EJE DE SIMETRÍA c) Para α=1 es el producto de una homotecia por una simetría axial.
HOMOTECIA de centro 18 24 18 24, ,25(25 1) 25(25 1 25(25 1) 25(25 1)
= = α − α − − −
3 1,100 25
y razón
k=25.
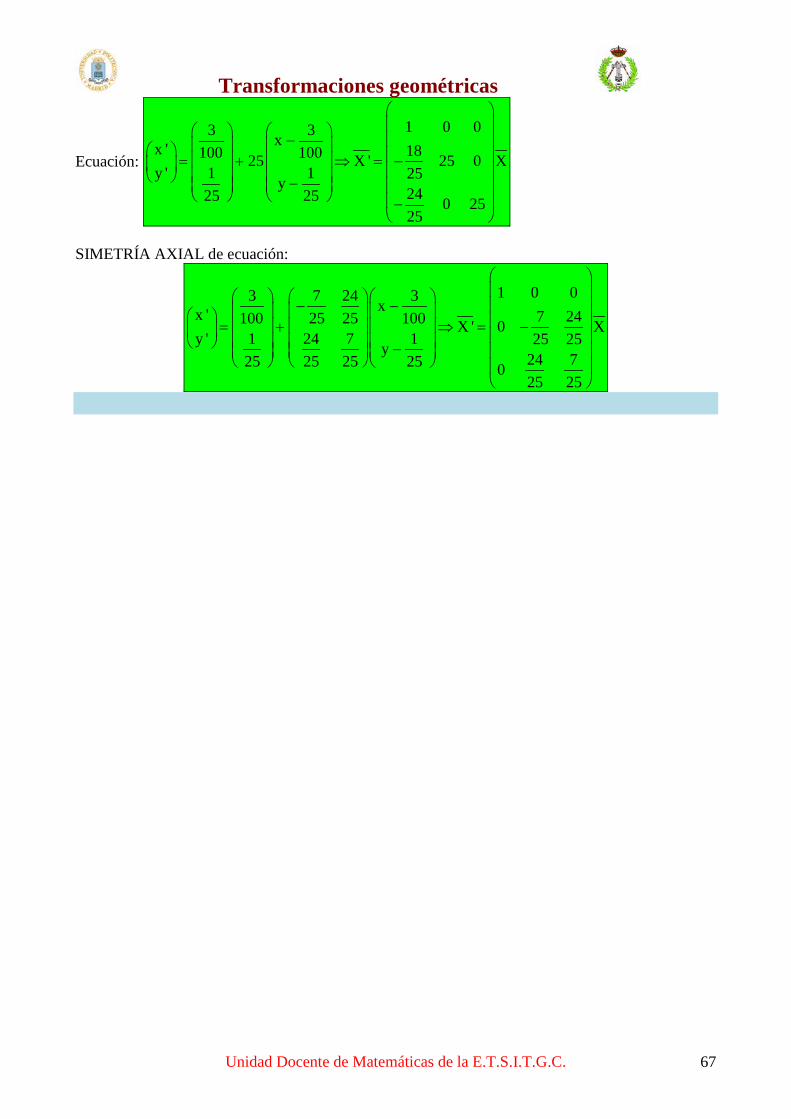
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 67
Ecuación:
1 0 03 3xx ' 18100 10025 X ' 25 0 Xy ' 1 1 25y
2425 25 0 2525
− = + ⇒ = − − −
SIMETRÍA AXIAL de ecuación:
1 0 03 7 24 3xx ' 7 24100 25 25 100 X ' 0 Xy ' 1 24 7 1 25 25y
24 725 25 25 25 025 25
− − = + ⇒ = − −
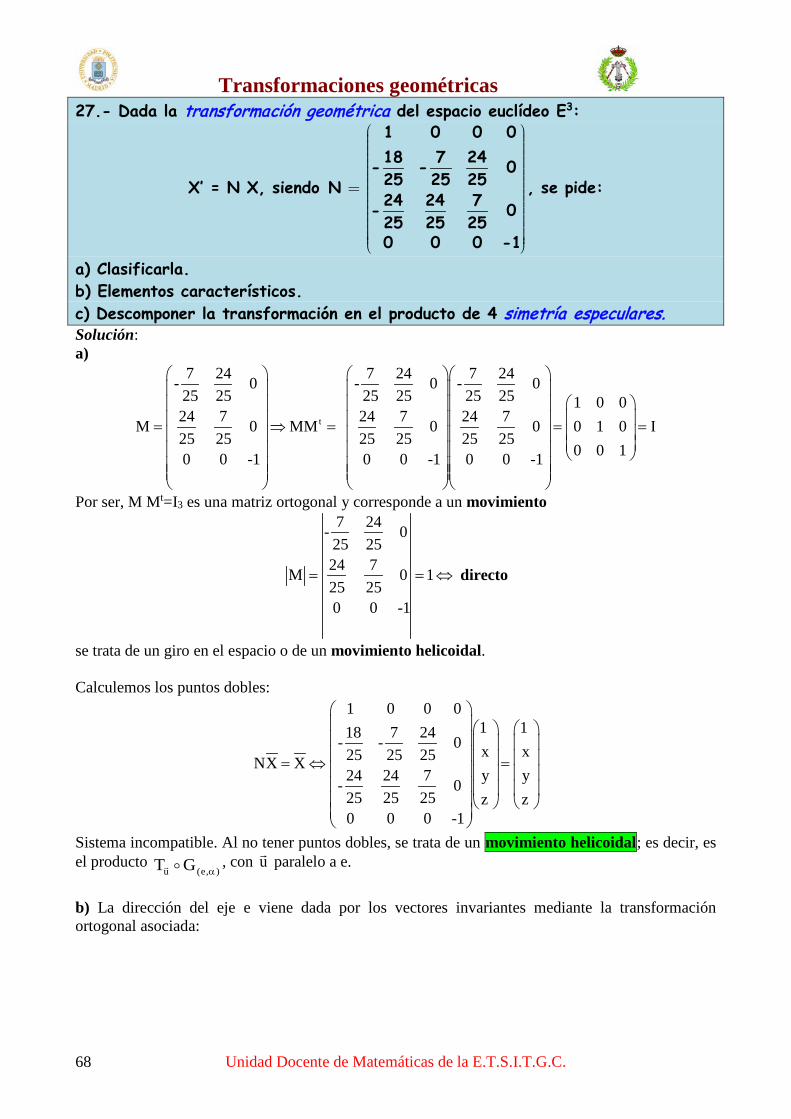
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 68
27.- Dada la transformación geométrica del espacio euclídeo E3:
X’ = N X, siendo
1 0 0 018 7 24- - 025 25 25N24 24 7- 025 25 250 0 0 -1
, se pide:
a) Clasificarla. b) Elementos característicos. c) Descomponer la transformación en el producto de 4 simetría especulares. Solución: a)
t
7 24 7 24 7 24- 0 - 0 - 025 25 25 25 25 25 1 0 024 7 24 7 24 7M 0 MM 0 0 0 1 0 I25 25 25 25 25 25
0 0 10 0 -1 0 0 -1 0 0 -1
= ⇒ = = =
Por ser, M Mt=I3 es una matriz ortogonal y corresponde a un movimiento 7 24- 025 2524 7M 0 125 250 0 -1
= = ⇔ directo
se trata de un giro en el espacio o de un movimiento helicoidal. Calculemos los puntos dobles:
1 0 0 01 118 7 24- - 0 x x25 25 25NX X
24 24 7 y y- 025 25 25 z z0 0 0 -1
= ⇔ =
Sistema incompatible. Al no tener puntos dobles, se trata de un movimiento helicoidal; es decir, es el producto
u (e, )T G α , con u paralelo a e.
b) La dirección del eje e viene dada por los vectores invariantes mediante la transformación ortogonal asociada:

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 69
7 24- 025 25 x x 3x y 024 7MX X 0 y y 425 25 z 0z z0 0 -1
− = = ⇔ = ⇒ =
Por tanto, el vector u es de la forma u =(3k, 4k, 0) , para algún número real k que hemos de determinar. Llamando T al movimiento helicoidal,
u (e, )T=T G α , se verifica:
u (e, )T T G− α= . Por consiguiente, uT T− tiene una recta e de puntos dobles.
La ecuación de uT T− es:
1 0 0 0 1 0 0 01 1 0 0 0 1 118 7 24 18 7 24- - 0 - 3k - 0x 3k 1 0 0 x x25 25 25 25 25 25y 4k 0 1 0 24 24 7 y 24 24 7 y- 0 - 4k - 0
25 25 25 25 25 25z 0 0 0 1 z z0 0 0 -1 0 0 0 1
− ′ − = = ′ − −
′ − El sistema para obtener los puntos dobles de este movimiento es:
1 0 0 031 1 x y 018 7 24- 3k - 0 4x x25 25 25 z 0
y 24 24 7 y- 4k - 0 6k25 25 25z z 250 0 0 1
− = − = ⇒ = − = − −
Como hay infinitos puntos dobles (los del eje), el sistema anterior ha de ser compatible indeterminado:
Por tanto, u (3k, 4k,0)→
= =18 24, ,025 25
− −
es el vector de traslación.
Sustituimos k por 625
− en el sistema anterior y hallamos una solución cualquiera que será un punto
del eje: 3x y 04
z 0
− = =
Hacemos x=0, se obtiene y=z=0. El eje del movimiento tiene de ecuación x 3t
e y 4tz 0
=≡ = =
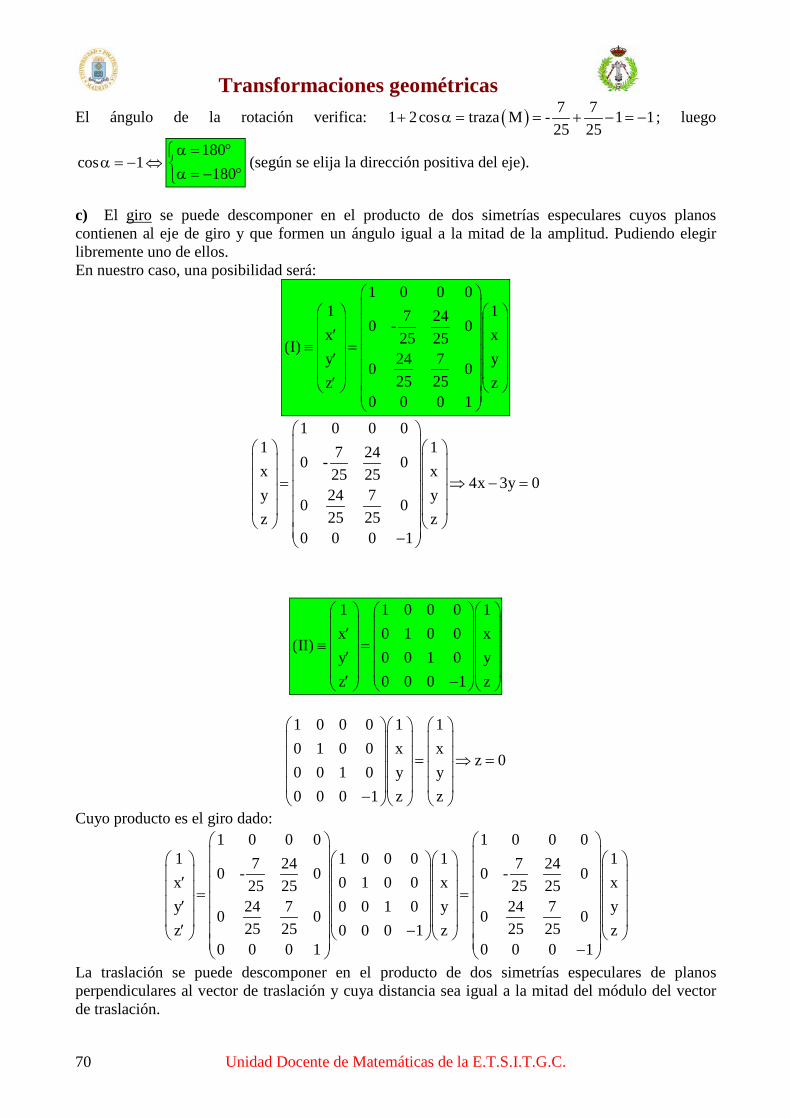
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 70
El ángulo de la rotación verifica: ( ) 7 71 2cos traza M - 1 125 25
+ α = = + − = − ; luego
cos 1α = − ⇔180
180α = °
α = − ° (según se elija la dirección positiva del eje).
c) El giro se puede descomponer en el producto de dos simetrías especulares cuyos planos contienen al eje de giro y que formen un ángulo igual a la mitad de la amplitud. Pudiendo elegir libremente uno de ellos. En nuestro caso, una posibilidad será:
1 0 0 01 17 240 - 0x x25 25(I)y 24 7 y0 0
25 25z z0 0 0 1
′ ≡ = ′
′
1 0 0 01 17 240 - 0x x25 25 4x 3y 0y 24 7 y0 0
25 25z z0 0 0 1
= ⇒ − = −
1 1 0 0 0 1x 0 1 0 0 x
(II)y 0 0 1 0 yz 0 0 0 1 z
′ ≡ = ′
′ −
1 0 0 0 1 10 1 0 0 x x
z 00 0 1 0 y y0 0 0 1 z z
= ⇒ =
−
Cuyo producto es el giro dado: 1 0 0 0 1 0 0 0
1 1 0 0 0 1 17 24 7 240 - 0 0 - 0x 0 1 0 0 x x25 25 25 25y 24 7 0 0 1 0 y 24 7 y0 0 0 0
25 25 25 25z 0 0 0 1 z z0 0 0 1 0 0 0 1
′ = = ′
′ − −
La traslación se puede descomponer en el producto de dos simetrías especulares de planos perpendiculares al vector de traslación y cuya distancia sea igual a la mitad del módulo del vector de traslación.

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 71
En nuestro caso, será: Ecuación de la simetría especular de plano 3x+4y=0:
En el sistema de referencia R’ definido por { }1 2 3R ' A,u ,u ,u≡ siendo
1 2 3 1 21 1A(0,0,0), u (3,4,0), u (0,0,1), u u u (4, 3,0)5 5
= = = ∧ = − la ecuación de la simetría es:
x ' x 1 0 0 xy ' S y 0 1 0 yz ' z 0 0 1 z
− = =
Se pasa al sistema de referencia R definido por { }1 2 3 1 2 3R O;e , e , e siendo O(0,0,0), e (1,0,0), e (0,1,0), e (0,0,1)
≡ = = =
La matriz del cambio de base es
3 405 54 3B 05 50 1 0
= −
1
1
3 4 3 4 7 240 0 05 5 5 5 25 25x ' x 1 0 0 x x4 3 4 3 24 7y ' BSB y 0 0 1 0 0 y 0 y en R5 5 5 5 25 25
z ' z 0 0 1 z z0 1 0 0 1 0 0 0 1
−
−
− −
= = − − = − −
La ecuación con el punto A (0,0,0) invariante será: 7 24 7 240 025 25 25 25x ' 0 x x24 7 24 7X ' A MAX y ' 0 0 y 0 y25 25 25 25
z ' 0 z z0 0 1 0 0 1
− − = + ⇔ = + − − = − −
1 0 0 01 17 240 0x x25 25(III)y 24 7 y0 0
25 25z z0 0 0 1
− ′ ≡ = ′ − −
′
Para encontrar la otra simetría especular debemos calcular el módulo del vector de traslación 18 24 6u , ,025 25 5
= − − =
y trasladar la ecuación de la simetría especular anterior a un plano paralelo y a una distancia de 3/5 resultando el plano 3x+4y=3. La ecuación con el punto C (1,0,0) invariante será:

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 72
7 24 18 7 240 025 25 25 25 25x ' 1 x 1 x24 7 24 24 7X ' C MCX y ' 0 0 y 0 y25 25 25 25 25
z ' 0 z z0 0 1 0 0 0 1
− − −
= + ⇔ = + − − = + − −
1 0 0 01 118 7 24 0x x25 25 25(IV)y 24 24 7 y0
25 25 25z z0 0 0 1
− ′ ≡ = ′ − −
′
Cuyo producto, en el orden correcto, es la traslación: 1 0 0 0 1 0 0 0 1 0 0 0
1 1 17 24 18 7 24 18 7 240 0 0 0x x x25 25 25 25 25 25 25 25y 24 7 24 24 7 y 24 24 7 y0 0 0 0
25 25 25 25 25 25 25 25z z z0 0 0 1 0 0 0 1 0 0 0 1
− − − − ′ = = ′ − − − − − − −
′
Por consiguiente, el producto de las cuatro simetrías I,II,III y IV es el movimiento helicoidal dado.
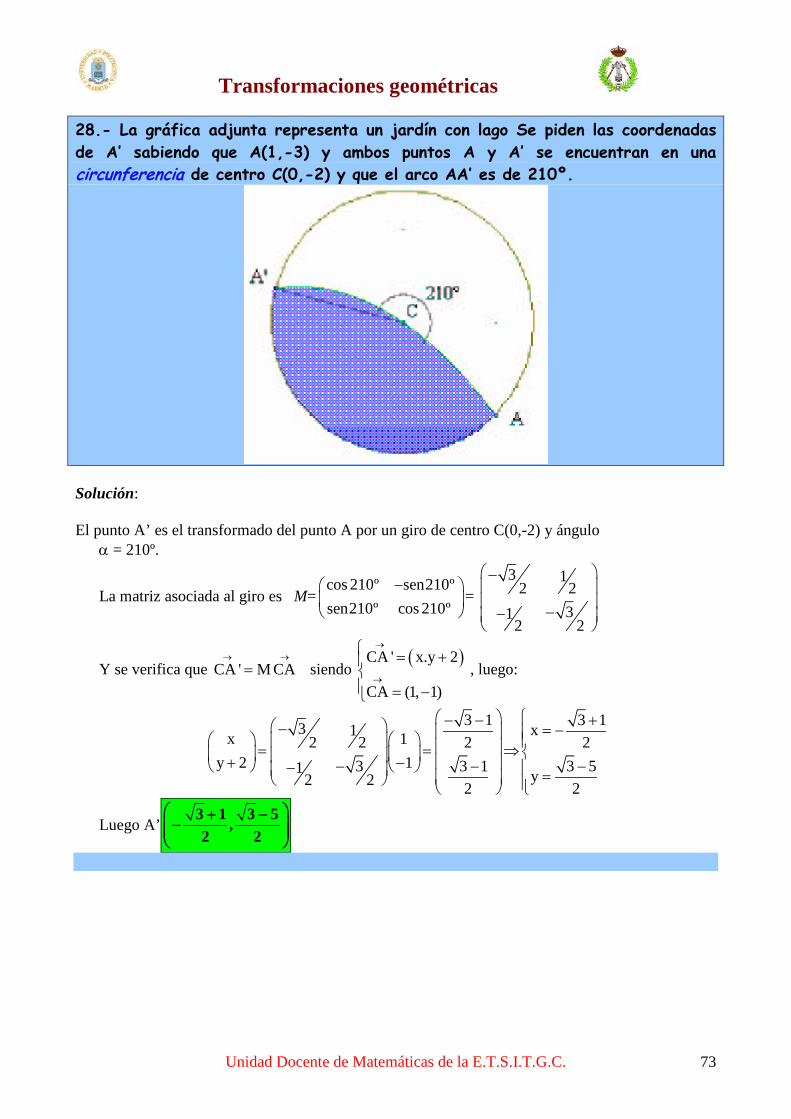
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 73
28.- La gráfica adjunta representa un jardín con lago Se piden las coordenadas de A’ sabiendo que A(1,-3) y ambos puntos A y A’ se encuentran en una circunferencia de centro C(0,-2) y que el arco AA’ es de 210º.
Solución: El punto A’ es el transformado del punto A por un giro de centro C(0,-2) y ángulo
α = 210º.
La matriz asociada al giro es M=cos 210º sen210ºsen210º cos 210º
−
= 3 1
2 231
2 2
− −−
Y se verifica que CA ' M CA→ →
= siendo ( )CA ' x.y 2
CA (1, 1)
→
→
= + = −
, luego:
3 13 1x 12 2 2y 2 13 3 11
2 2 2
− − − = = + − − − −
⇒
3 1x2
3 5y2
+= −
− =
Luego A’3 1 3 5,2 2
+ −−

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 74
29.- De las transformaciones geométricas dadas por las siguientes ecuaciones se pide decir qué tipo de transformación es, si es directa e inversa y, en su caso, dar la razón k.
1.
1 1 0 0 0 1x' 132 23 24 36 x1y' 44 24 41 12 y49z' 66 36 12 31 z
− − − − = − − − − − −
2.
1 1 0 0 0 1x' 2 0 0 5 xy' 0 0 5 0 yz' 8 5 0 0 z
− = −
3.
1 1 0 0 0 1x' 6 5 0 0 xy' 0 0 5 0 yz' 4 0 0 5 z
− − = − −
Solución:
1.
1 0 0 01 1
132 23 362449 49 49 49x ' x
44 24 41 12y ' y49 49 49 49z ' z66 36 3112
49 49 49 49
− − −− = − − − − − −
. Designaremos N1 la matriz anterior.
La matriz asociada es M1 =
−−
−−
−−−
4931
4912
4936
4912
4941
4924
4936
4924
4923
y M1 (M1)t = I3
Luego se trata de un movimiento del espacio E3. Hallamos los puntos dobles para identificarlo: (N1 - I4) X=0 , resolviendo con DERIVE se obtiene como solución el plano 6x + 2y +3z = 0, luego se trata de una simetría especular (movimiento inverso) respecto de dicho plano.
2.
−−
=
zyx
zyx
1
005805005002
0001
'''
1
. Designaremos N2 la matriz anterior.
La matriz asociada es M2 =
−−
−
005050500
y M2 (M2)t = 25I3
Luego se trata de una semejanza del espacio E3. Además det(M2) = -125 < 0, por lo que la semejanza es inversa. La razón es k = 3 125 = 5.
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 75
3.
1 1 0 0 0 1x ' 6 5 0 0 xy ' 0 0 5 0 yz ' 4 0 0 5 z
− − = −
−
. Designaremos N3 la matriz anterior.
La matriz asociada es M3 = 5 0 0
0 5 00 0 5
− − −
= -5 I3.
Luego se trata de una homotecia inversa del espacio E3. La razón es k = 3 125− = -5.

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 76
30.- a) Clasificar la transformación x' 1 0 0 -2 x-1y' 0 0 2 0 yz' 1 -2 0 0 z-1
= +
y
hallar sus elementos característicos.
b) Clasificar la transformación
1 1 0 0 0 1x' 1 1 0 2 xy' 0 0 2 1 yz' 0 2 0 0 z
− = −
−
Solución:
a) Por ser 3
0 0 -2M = 0 2 0 8 1 k 8 2 0
-2 0 0= − ≠ ± ⇒ = − = − < no es un movimiento.
0 0 -2 0 0 11 1Q M= 0 2 0 0 -1 0k -2
-2 0 0 1 0 0
= =
, y por verificarse que Q Qt = I la transformación se trata
de una semejanza inversa de razón k=2. Su centro es el único punto doble y en la ecuación podemos observar que C(1, 0, 1) es el centro de semejanza. El ángulo de semejanza coincide con el ángulo de giro Traza(Q)=1+2cosα ⇒ α=180º El eje de semejanza coincide con el eje de giro, por tanto la ecuación del eje es
( )3
-1 0 -1 x 0x z 0
Q I X= 0 -2 0 y 0y 0
1 0 -1 z 0
− = − = ⇒ ⇒ =
x 1 t
e y 0z 1 t
= +≡ = = +
b) 3
1 0 0 01 1 0 2
N 8 k 8 20 0 2 10 2 0 0
−= = ⇒ = =
−−
⇒ No es un movimiento
1 0 -121 0 -2
1 1 1Q M= 0 -2 1 0 -1k 2 2
-2 0 0 -1 0 0
= =
y por verificarse que Q Qt ≠ I, la transformación no se
trata de una semejanza es una transformación afín.

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 77
31.- Se pide hallar, en el plano euclídeo: a) La ecuación del giro de dentro A(1,-1) y ángulo 45º. b) La ecuación de la homotecia de centro B(1,1) y razón -√2. c) La ecuación de la semejanza resultante de componer el giro con la homotecia anteriores. d) La descomposición canónica de la semejanza obtenida en el apartado c) indicando qué tipo de semejanza es.Solución:
a) La ecuación de un giro de centro A(a,b) y amplitud α es: x ' a cos sen x ay ' b sen cos y b
α − α − = + α α −
La ecuación del giro G de centro A=(1,-1) y amplitud α =45º es: 2 2
x ' 1 cos 45º sen45º x 1 x1 2 2 2y ' 1 sen45º cos 45º y 1 y1 2 2
2 2
− − − − = + = + ⇔ − + −
1 0 01 1
2 2 2x ' 1 x2 2 2
y ' y2 21
2 2
= − − −
b) Ecuación de la homotecia H de centro B(1,1) y razón k=10: X ' B kBX= +
x ' 1 x 12
y ' 1 y 1−
= − ⇔ −
1 0 01 1x ' 1 2 2 0 xy ' y1 2 0 2
= + −
+ −
.
c) Ahora el producto HoG tiene por matriz:
1 0 01 0 0 1 0 02 2 21 2 2 0 1 3 1 1
2 2 21 2 0 2 1 2 2 1 12 21
2 2
+ − − − = − + − + − − −
Ecuación de la semejanza resultante:
1 0 0 1 13 1 1 x x '
y y '1 2 2 1 1
− =
+ − −
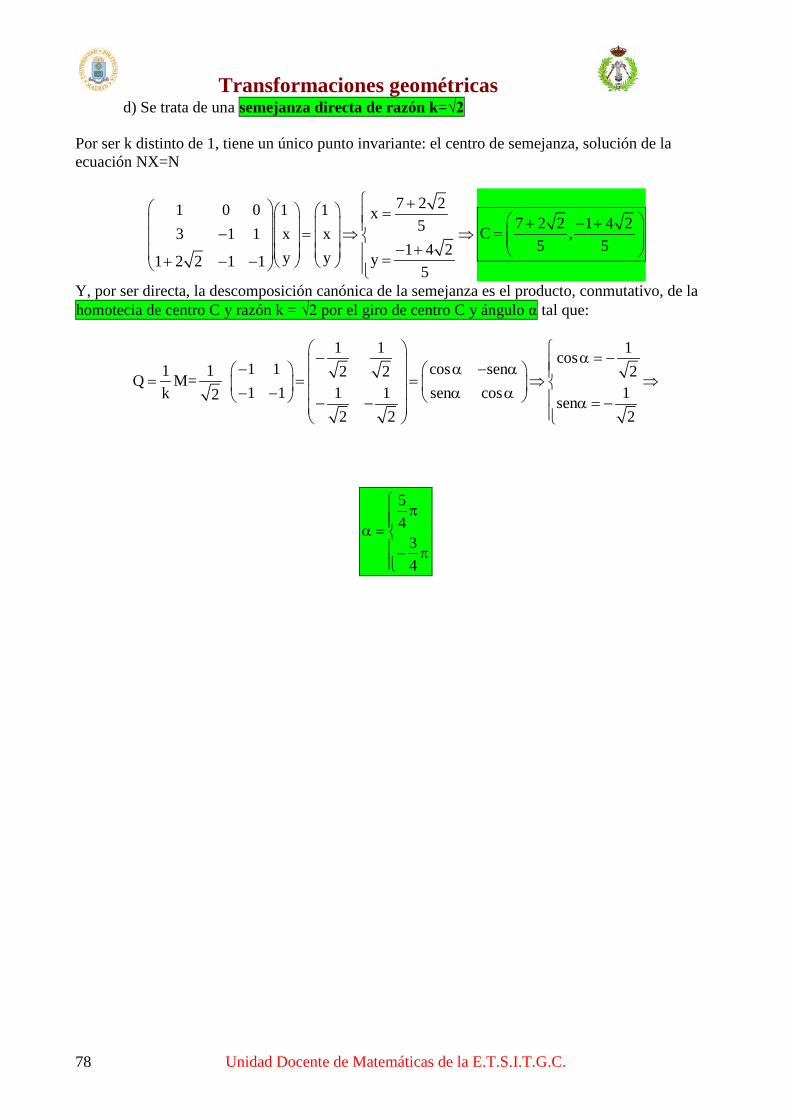
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 78
d) Se trata de una semejanza directa de razón k=√2Por ser k distinto de 1, tiene un único punto invariante: el centro de semejanza, solución de la ecuación NX=N
7 2 21 0 0 1 1 x53 1 1 x x
1 4 2y y y1 2 2 1 15
+ = − = ⇒ ⇒ − + =+ − −
7 2 2 1 4 2C ,5 5
+ − +=
Y, por ser directa, la descomposición canónica de la semejanza es el producto, conmutativo, de la homotecia de centro C y razón k = √2 por el giro de centro C y ángulo α tal que:
1 1 1cos1 1 cos sen1 1 2 2 2Q M= 1 1 1 1 sen cos 1k 2 sen
2 2 2
− α = − − α − α = = = ⇒ ⇒ − − α α − − α = −
54
34
πα = − π

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 79
32.- Clasificar y hallar los elementos característicos de la transformación:
1 1 0 0 1x' 21 4 3 xy' 5 3 4 y
= − − − −
Solución:
x ' 21 4 3 xy ' 5 3 4 y
− − = + − −
, de este sistema observamos que la matriz 4 33 4
− − −
no es ortogonal,
puesto que 4 3
25 13 4
− −= − ≠ ±
−, sin embargo, la matriz
4 34 31 5 53 4 3 45
5 5
− − − − = − −
es una matriz
ortogonal. Quiere decir que la transformación es una SEMEJANZA INVERSA de razón 5 y de centro el único punto invariante,
x ' 21 4 3 xy ' 5 3 4 y
− − = + − −
x 21 4 3 x 21113 1 4 y 5 y3
=+ ⇒ = ⇒ ⇒ − − =
11C 2,3
El eje se puede obtener con la dirección del subespacio vectorial de vectores invariantes por la transformación ortogonal asociada al movimiento inverso de la descomposición canónica de la semejanza inversa,
4 3x ' x5 5y ' 3 4 y
5 5
− − =
−
{4 31 x 05 5 y 3x
3 4 y 015 5
+ ⇒ = ⇒ = −
−
junto con el único punto invariante forman la recta y-11/3=-3(x-2)

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 80
33.- a) Obtener la ecuación matricial de la simetría deslizante S de plano x+y+1=0 y de vector traslación (0,0,2). b) Obtener la imagen de los puntos O=(0,0,0) y P=(-1,-3,2/3) mediante S. Solución: a) Ecuación de simetría deslizante: X’=P+MX+V siendo P un punto del plano, V el vector de traslación y M la matriz de la transformación ortogonal en una base cuyo primer vector es normal al plano.
1
1 0 0M 0 1 0
0 0 1
− =
Esta base puede estar formada por los vectores 1u =(1,1,0) normal al plano, 1v =(0,0,1) normal al anterior y 1 1w u v= ∧
=(1,-1,0) Normalizados los vectores anteriores quedan
1 1u , ,02 2
v (0,0,1)1 1w , ,02 2
=
=
= −
1 102 2
1 1 quedando la matriz de cambio de base P 02 2
0 1 0
= −
La matriz de la transformación en la referencia ortonormal del espacio es PM1P-1
11 1 1 10 02 2 2 21 0 0 0 1 0
1 1 1 1M 0 0 1 0 0 M 1 0 02 2 2 20 0 1 0 0 1
0 1 0 0 1 0
−
− − = − − ⇒ = −
Se toma un punto del plano, por ejemplo, (-1,0,0) Y la ecuación matricial es
x ' 1 0 1 0 z 1 0y ' 0 1 0 0 y 0z ' 0 0 0 1 z 2
− − + = + − +
1 1 0 0 0 1x' 1 0 1 0 xy' 1 1 0 0 yz' 2 0 0 1 z
− − = − −
b) El transformado del origen es (-1,-1,2) , como se obtiene de la ecuación matricial La imagen de P= (-1,-3,2/3) es: (2,0,8/3)

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 81
34.- Se pide hallar en el plano euclídeo: a) La ecuación del giro, G, de centro A (1,0) y ángulo π b) La ecuación de la homotecia, H, de centro B (1,1) y razón k =-2 c) La ecuación de la simetría axial, S, de eje 3x + 4y = 0 d) La ecuación de la semejanza resultante del producto SºHºG e) Los elementos de la semejanza resultante Solución:
a) La ecuación de un giro de centro A(a,b) y amplitud α es: x ' a cos sen x ay ' b sen cos y b
α − α − = + α α −
La ecuación del giro G de centro A=(1,0) y amplitud α =π es:
x ' 1 cos sen x 1 2 1 0 xy ' 0 sen cos y 0 0 1 y
π − π − − = + = + ⇔ π π −
1 1 0 0 1x' 2 1 0 xy ' 0 0 1 y
= − −
b) Ecuación de la homotecia H de centro B(1,1) y razón k=-2: X ' B kBX= +
x ' 1 x 12
y ' 1 y 1−
= − ⇔ −
1 1 0 0 1x' 3 2 0 xy ' 3 0 2 y
= − −
c) Para obtener la ecuación de la simetría axial consideremos el vector (3,4) ortogonal al eje r y
el vector director del eje e:(4,-3), para construir una base ortonormal de V2: 3 4 4 3B* u , ; v ,5 5 5 5
= = = −
siendo la matriz del cambio de base de B* a Bc: 3 45 5P4 35 5
= −
Puesto que la matriz ortogonal que define una simetría axial vectorial respecto del eje de
ordenadas es: 1 0D
0 1−
=
, resulta la matriz ortogonal que define la simetría axial vectorial respecto
del e es:
1M PDP−= =
3 45 54 35 5
−
1 00 1−
3 45 54 35 5
−
7 2425 2524 725 25
− = − −
Por consiguiente la ecuación del movimiento, en nuestro caso, la simetría axial; tomando un punto cualquiera del eje r: 3x+4y=0, por ejemplo O(0,0) es:
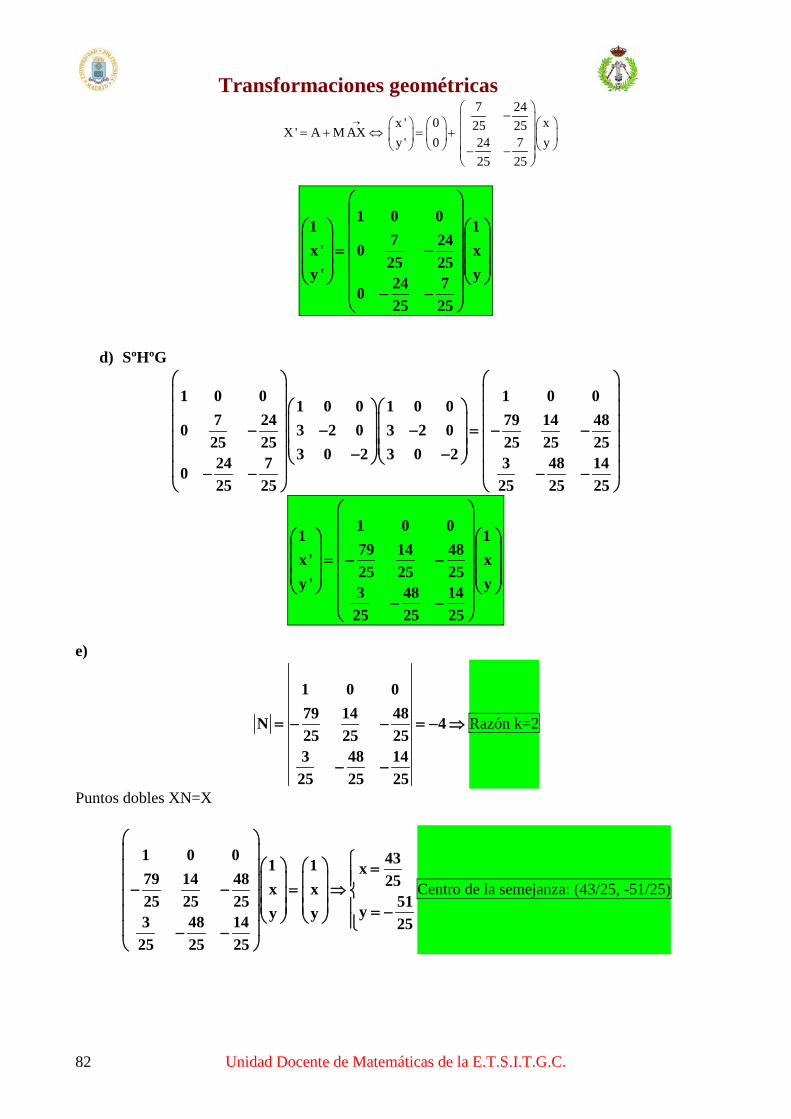
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 82
X ' A M AX→
= + ⇔x ' 0y ' 0
= +
7 24x25 25
24 7 y25 25
− − −
1 0 01 17 24x' 0 x25 25
y ' y24 7025 25
= −
− −
d) SºHºG
1 0 0 1 0 01 0 0 1 0 07 24 79 14 480 3 2 0 3 2 025 25 25 25 25
3 0 2 3 0 224 7 3 48 14025 25 25 25 25
− − − = − − − −
− − − −
1 0 01 179 14 48x' x25 25 25
y ' y3 48 1425 25 25
= − −
− −
e)
1 0 079 14 48N 425 25 253 48 1425 25 25
= − − = − ⇒
− −
Razón k=2
Puntos dobles XN=X
1 0 0 431 1 x79 14 48 25x x25 25 25 51yy y3 48 14 25
25 25 25
= − − = ⇒ = − − −
Centro de la semejanza: (43/25, -51/25)
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 83
Vectores invariantes: Qv v= , siendo Q la matriz ortogonal igual a (1/k)M
14 48
x x1 325 25 y xy 48 14 y2 4
25 25
− = ⇒ = − − −
Eje de la semejanza: y+51/25=(-3/4) (x-43/25)

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 84
35.- a) Calcular la ecuación matricial de un giro en el espacio cuyo eje es: X (1, 2, 3) (0,-1, 1) t= +
y cuyo ángulo es: 180º. b) Hallar la ecuación de la homotecia de centro ( 1, -1, 0 ) y razón k=2 c) Hallar la ecuación de la transformación H°T siendo T el movimiento del apartado a) d) ¿Es HºT una semejanza directa o inversa? e) Hallar la razón, el ángulo y el eje de semejanza de HºT. Solución:
• a) Construir una base ortonormal B. Como primer vector de B, tomamos 1v unitario y paralelo al eje de giro:
11
1
u 1 1v 0, , u 2 2
= = −
Segundo vector ha de ser perpendicular a 1v y unitario: 22
2
u 1 1v 0, , u 2 2
= =
Tercer vector ( )3 1 2
i j k1 1v v v 0 - - 1, 0, 02 2
1 102 2
= ∧ = =
• La matriz de cambio de base de B a la base canónica es:
1 t
0 0 -11 1P - 0 P P2 2
1 1 02 2
−
= ⇒ =
• Matriz de giro asociada a la base B es:
G = 1 0 0 1 0 00 cos -sen 0 -1 00 sen cos 0 0 -1
α α = α α
Por tanto, la matriz del giro respecto a la base canónica Bc es:
M = P G P-1 = -1 0 00 0 -10 -1 0

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 85
Ecuación del giro:
x ' 1 1 0 0 x 1y ' 2 0 0 1 y 2z ' 3 0 1 0 z 3
− − = + − − ⇔ − −
1 1 0 0 0 1x' 2 1 0 0 xy ' 5 0 0 1 yz ' 5 0 1 0 z
− = −
−
b) Ecuación de la Homotecia:
X’ = C + (kI) (X-C) ⇒ x' 1 2 0 0 x-1y' -1 0 2 0 y+1z' 0 0 0 2 z-0
= +
1 1 0 0 0 1x' -1 2 0 0 x
y' 1 0 2 0 yz ' 0 0 0 2 z
=
c) T H tiene por matriz: 1 0 0 0 1 0 0 0 1 0 0 0-1 2 0 0 2 1 0 0 3 -2 0 01 0 2 0 5 0 0 1 11 0 0 -20 0 0 2 5 0 1 0 10 0 -2 0
− = −
−
1 1 0 0 0 1x' 3 -2 0 0 x
y' 11 0 0 -2 yz ' 10 0 -2 0 z
=
d) Se trata de una semejanza directa por ser el producto de un giro y una homotecia directa. e)
1 0 0 03 -2 0 0
N 8 011 0 0 -210 0 -2 0
= = >
La razón de la semejanza directa es k = 2 Cálculo del centro:
1 1 0 0 0 1x 1
x 3 -2 0 0 x y 3
y 11 0 0 -2 yz 4
z 10 0 -2 0 z
=
= ⇒ = ⇒ =
C=(1,3,4)
Eje: pasa por el centro y el vector director u : Qx x= , siendo Q la matriz ortogonal.

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 86
M = -2 0 0 -2 0 0 -1 0 0
10 0 -2 Q 0 0 -2 0 0 -12
0 -2 0 0 -2 0 0 -1 0
⇒ = =
Vectores invariantes: Qv v=
x -1 0 0 xy 0 0 -1 yz 0 -1 0 z
= ⇒
y+z 0x 0
=⇒ =
x 0y z -
= = λ = λ
Ecuación del eje: x (1,3, 4) (0, 1,- 1)= + λ
-1 0 0Traza 0 0 -1 1 2cos cos 1
0 -1 0
= + α ⇒ α = −
Ángulo α =180º ó -180º

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 87
36.- Clasificar las siguientes transformaciones y hallar sus elementos en los casos en que sea posible.
a) 1 1 0 0 1x' 2 3 4 x
6 4 3 yy'
=
−
b) 1 1 0 0 1x' 1 1 1 x
1 1 1 yy'
=
c)
1 0 01 11x' 1 0 x2
yy' 11 02
= − −
Solución:
a) 1 1 0 0 1x ' 2 3 4 xy ' 6 4 3 y
= −
Paso1. Estudio de M:
3 4M
4 3
= −
tt
2
3 4 3 4 25 0MM 25 I
4 3 4 3 0 25
= = = − − , luego es una semejanza S de razón k=5.
Paso2. Tipo de semejanza
23 4M 25 5 0
4 3= = = >
−, luego semejanza directa.
Paso 3. Elementos S(C,k)= H(C,k)o GC,α) Razón: k=5. Centro: es el punto doble NX=X , entonces (N-I)X=0 1 1 0 0 1 0 0 0 1 0
x 1x 2 3 4 x 2 2 4 x 0
y 1y 6 4 3 y 6 4 2 y 0
= = ⇔ = ⇒ = − − −
, por tanto C(1,-1)
Amplitud: Se verifica que
3k cos 3 cos5
4ksen 4 sen5
α = ⇒ α = − α = − ⇒ α =

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 88
b) 1 1 0 0 1x ' 1 1 1 xy ' 1 1 1 y
=
Paso1. Estudio de M: 1 1
M1 1
=
tt 2
2
1 1 1 1 2 2MM k I
1 1 1 1 2 2
= = ≠
, luego M es la matriz asociada a una transformación afín
que no es movimiento, ni homotecia, ni semejanza.
c)
1 0 01 11x ' 1 0 x2
y ' y11 02
= −
−
Paso1. Estudio de M:
2
1 0 1 01 12M I1 0 12 202
= = =
, luego es una homotecia H de razón k=1/2.
Paso2. Tipo de homotecia Por ser k=1/2>0, luego homotecia directa. Paso 3. Elementos H(C,k) Razón: k=1/2. Centro: es el punto doble NX=X , entonces (N-I)X=0
1 0 0 1 0 01 1 1 0x 21 1x 1 0 x 1 0 x 0y 22 2
y y y 01 11 0 1 02 2
= − = − ⇔ − − = ⇒ = −
, por tanto C(-2,2)
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 89
37.- Dada la transformación geométrica
1 1 0 0 0 1x' 3 0 3 0 x
3 0 0 3 yy'3 3 0 0 zz'
− − = − −
. Se pide:
a) Clasificar y hallar sus elementos característicos. b) Dada la esfera de centro (1,1,1) y radio 2, hallar el centro y radio de su transformada mediante la transformación anterior. Solución: a)
3
1 0 0 03 0 3 0
27 k 13 0 0 33 3 0 0
− −= = ≠ ±
− −
No es un movimiento
t
tn 3
0 3 0 0 3 0 9 0 0MM 0 0 3 0 0 3 0 9 0 9I
3 0 0 3 0 0 0 0 9=
− − = = = − −
Se trata de una semejanza directa de razón 3
0 3 0 0 1 01 1Q M 0 0 3 0 0 1k 3
3 0 0 1 0 0
− − = = = − −
0 1 01Traza 0 0 1 1 2cos cos2
1 0 0
− = + α ⇒ α = − −
Ángulo de la semejanza: 120ºα = ±
Centro: es el único punto invariante: NX=X ,
15x1 1 0 0 0 1 26x 3 0 3 0 x 21yy 3 0 0 3 y 26
33z 3 3 0 0 z z26
= − − − = ⇒ = − − − = −
C(-15/26,-21/26,-33/26) Vectores invariantes: Qv v=
, siendo Q la matriz ortogonal igual a (1/k)M 0 1 0 x x x
x y 00 0 1 y y y
z y 01 0 0 z z z
− = α + = = ⇒ ⇒ = −α − = − = −α
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 90
Eje de la semejanza:
15x t2621y t2633z t26
= − + = − − = − −
b) Transformar uma esfera de centro A=(1,1,1) y radio r=2 es equivalente a una esfera de centro A’ y radio r’= k . r = 6
11 1 0 0 0x 6
x 3 0 3 0y 6
y 3 0 0 3z 6
z 3 3 0 0
111
= − − − = ⇒ = = − − −
Se trata de uma esfera de centro (-6,6,-6) y radio 6

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 91
38.- Dada la transformación geométrica T de 3R de ecuación: 10 03x' 3 x
1y' 3 0 0 y3
z' 3 z1 0 03
− −
= + −
a) Clasificar y hallar sus elementos característicos. b) Hallar la ecuación de la esfera transformada de la esfera de centro (1, 1, 1) y radio 2, mediante T. c) Hallar la ecuación de la transformación inversa de T. Solución: a)
3
10 03
1 10 0 k 13 27
1 0 03
−
= − = − ≠ ± No es un movimiento
t
tn 3
1 1 10 0 0 0 0 03 3 9
1 1 1 1MM 0 0 0 0 0 0 I3 3 9 9
1 1 10 0 0 0 0 03 3 9
=
− − = = =
Se trata de una semejanza inversa de razón 1/3
10 03 0 1 0
1 1Q M 3 0 0 0 0 1k 3
1 0 01 0 03
− = = − = − − −
0 1 01Traza 0 0 1 1 2cos cos2
1 0 0
− = + α ⇒ α = − −
Ángulo de la semejanza: 120ºα = ±

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 92
Centro: es el único punto invariante: NX=X ,
1 0 0 099x11 1 283 0 0
3x x 45y1y y 283 0 03 117z z z1 283 0 0
3
= − − − = ⇒ = − = − −
C(-99/28,-45/28,-117/28) Vectores invariantes: Qv v=
, siendo Q la matriz ortogonal igual a (-1/k)M 0 1 0 x x x
x y 00 0 1 y y y
z y 01 0 0 z z z
= α − = − = ⇒ ⇒ = α + = − = −α
Eje de la semejanza:
99x t2845y t28117z t28
= − + = − + = − −
b) Transformar uma esfera de centro A=(1,1,1) y radio r=2 es equivalente a una esfera de centro A’ y radio r’=kr=2/3
11
1 0 0 010x1 11 33 0 0
3x 10y1y 33 0 03 8z z1 33
10 0
3
= − − − = ⇒ = = − −
Se trata de uma esfera de centro (-10/3,10/3,-8/3) y radio 2/3
La esfera transformada es: 2 2 2 210 10 8 2x y z
3 3 3 3 + + − + + =
c) 11 0 0 0
1 1 0 0 03 0 03 9 0 0 3
1 9 3 0 03 0 03
9 0 3 013 0 03
−
− − = ⇒ − − −
−
x' 9 0 0 3 xy ' 9 3 0 0 yz ' 9 0 3 0 z
= − + − −

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 93
39.- a) Hallar la ecuación del giro G de centro A (1, -2) y ángulo 150α = .
b) Hallar la ecuación de la curva L transformada de la elipse E22 yx 1
7 3≡ + =
mediante el giro G. c) Sin realizar ningún cálculo, razonar porqué L es una cónica y de qué tipo es. d) Dar la excentricidad y el centro de L. Solución:
a) La ecuación de un giro de centro A(a,b) y amplitud α es: x ' a cos sen x ay ' b sen cos y b
α − α − = + α α −
La ecuación del giro G de centro A=(1,-2) y amplitud α =150º es: 3 13
x ' 1 cos150º sen150º x 1 x2 22y ' 2 sen150º cos150º y 2 y5 1 33
2 2 2
− − − − = + = + ⇔ − + − − −
1 0 01 1
3 3 1x' x2 2 2
y ' y5 1 332 2 2
= − −
− − −
b) Despejando x e y en la ecuación anterior y sustituyendo en la ecuación de la elipse E
1
1 0 0 1 0 01 1 1
3 3 1 3 3 1x x' 2 x'2 2 2 2 2 2
y y ' y '5 1 3 3 1 33 32 2 2 2 2 2
− = − − = + − ⇒
− − − − − − −
3 3 1x 2 x' y '2 2 2
3 1 3y 3 x' y '2 2 2
= + − +⇒ ⇒
= − − − −
2 23 3 1 3 1 32 x' y ' 3 x' y '
2 2 2 2 2 21
7 3
+ − + − − − −
+ =
c) Porque el giro es un movimiento, luego es una elipse. d) El centro es el origen de coordenadas de la elipse E, luego el centro de la elipse L será el
transformado del origen 3 5, 3
2 2
− −
y que:2
2 2 22
a 7 cc a b 4 eab 3
= ⇒ = − = ⇒ = ==
47

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 94
40.- Sea S la semejanza de centro C y razón k que transforma los puntos ( )A 1, 1, 1− , ( )B 1, 0, 2− , ( )C 2, 1, 1 y ( )D 3, 1, 4− en los puntos ( )A' 15, 4, -12− , ( )B' 20, 6, -7 , ( )C ' 15, -9, -2 y ( )D ' 30, 16, -2 ,
respectivamente. a) Hallar la ecuación de S. b) Hallar el centro C, la razón k y el ángulo de giro α de la descomposición
canónica de S. Solución:
a) Sea la X'=NX la ecuación de la semejanza, debe verificar que
1
1 1 1 1 1 1 1 11 1 2 3 15 20 15 30
N1 0 1 1 4 6 9 16
1 2 1 4 12 7 2 2
1 1 1 1 1 1 1 1 1 0 0 015 20 15 30 1 1 2 3 10 0 0 5
N4 6 9 16 1 0 1 1 1 5 0 012 7 2 2 1 2 1 4 7 0 5 0
−
− − = ⇒ − − −
− − − −
− − = = − − − −
− − − − −
1 1 0 0 0 1x' 10 0 0 5 xy ' 1 5 0 0 yz ' 7 0 5 0 z
= −
−
es la ecuación de la semejanza pedida.
b) C es el único punto doble ( )X'=NX N-I X 0⇔ =
x 5z 10 05x y 1 0
5y z 7 0
− + + =− − + = ⇒ − − =
C=(0,1-2)
La razón verifica que 33
1 0 0 010 0 0 5
k 1251 5 0 07 0 5 0
= = − =−
−
5>0
El ángulo de giro verifica que: Traza(Q)=1+2cosα siendo Q=-1/5M=0 0 11 0 00 1 0
− −
11 2cos 0 arccos2
+ α = ⇒ α = − =
120º± .
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 95
41.- a) Sean las simetrías axiales, S1, S2 de ejes e1: y = x; e2: x = 5. Calcular la ecuación matricial de S2° S1 y sus elementos característicos.
b) Clasificar la transformación
1 1 0 0 0 1x' 0 0 0 3 xy' 1 0 3 0 yz' 1 3 0 0 z
= −
−
y hallar sus
elementos característicos y descomposición canónica. Solución:
a) Para S1 ( y = x) : A(0, 0) ∈ e1; m = tg 2α = 1 ⇒
2α = 45º ⇒ α = 90º
Para S2 ( x = 5) : A(5, 0) ∈ e1; m = tg 2α = 90º ⇒
2α =90º ⇒ α = 180º
Ecuación S1:
+
=
+
=
0-y0-x
0110
00
0-y0-x
cos90º-sen90ºsen90º90º cos
00
y'x'
=
yx1
010100001
y'x'1
Ecuación S2:
+
=
+
=
0-y5-x
1001-
05
0-y5-x
cos180º-sen180ºsen180º180º cos
05
y'x'
−=
yx1
1000110001
y'x'1
Ecuación S2°S1
1 1 0 0 1 0 0 1 1 0 0 1x' 10 1 0 0 0 1 x 10 0 1 xy' 0 0 1 0 1 0 y 0 1 0 y
= − = −
Se trata de un movimiento directo, buscamos los puntos invariantes: 1 1 0 0 1
x 5x 10 0 1 x
y 5y 0 1 0 y
= = − ⇒ =
Giro de centro (5,5) y ángulo 90º.
b)
−−
=
zyx1
0031030130000001
z'y'x'1

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 96
3
1 0 0 00 0 0 3
27 k 11 0 3 01 3 0 0
= − = ≠ ±−
−
No es un movimiento
t
tn 3
0 0 3 0 0 3 9 0 0MM 0 3 0 0 3 0 0 9 0 9I
3 0 0 3 0 0 0 0 9=
= − − = = − −
Se trata de una semejanza inversa de razón 3 Cálculos de sus elementos
0 0 3 0 0 11 1Q M 0 3 0 0 1 0k 3
3 0 0 1 0 0
− = − = − − = −
0 0 1Traza 0 1 0 1 2cos cos 0
1 0 0
− = + α ⇒ α =
Ángulo de la semejanza: 90ºα = ±
Centro: es el único punto invariante: NX=X ,
3x1 1 0 0 0 1 10x 0 0 0 3 x 1yy 1 0 3 0 y 4
1z 1 3 0 0 z z10
= = ⇒ = − − =
C(3/10,1/4,1/10) Vectores invariantes: Qv v=
, siendo Q la matriz ortogonal igual a (-1/k)M 0 0 1 x x x 0
x 00 1 0 y y y
z 01 0 0 z z z 0
− = = = ⇒ ⇒ = α = =
Eje de la semejanza:
3x101y t41z
10
= = + =
Descomposición canónica:
S = H(C, k) °G(e, α) siendo C =
101 ,
41 ,
103 , k = -3 (razón de la Homotecia),
Eje: (x, y z) =
101 ,
41 ,
103 + t (0, 1, 0), α = 90º ó -90º

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 97
42.- Hallar una ecuación matricial de la simetría axial plana S de eje la recta e x y 1 0≡ − − = . Solución: La ecuación del eje puede escribirse en la forma e y x 1≡ = + , observándose que la pendiente del eje es 1.
Llamando / 2α a la inclinación del eje, se verifica, pues, que tg 1 45º 90º2 2α α
= ⇒ = ⇒ α = .
La matriz de la simetría vectorial asociada a S es:
cos sen cos90º s en90º 0 1M
sen cos sen90º cos90º 1 0α α
= = = α − α −
La ecuación de la simetría S es de la forma: X ' A MAX= +
, siendo A un punto del eje. Tomamos
como punto A, por ejemplo el (1,0) y ya queda:
x' 1 0 1 x 1y ' 0 1 0 y 0
− = + −

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 98
43.- Sea T una transformación afín definida por sus ecuaciones: x’ = - 2 – 2 x y’ = 2 – 2 y z’ = - 2 – 2 z a) Clasificar T y hallar sus elementos característicos. b) Si un triángulo tiene como área 3 (u2). ¿Cuál es el área de su triángulo transformado por T? Solución: a) La ecuación que define T es:
1 1 0 0 0 1x 2 2 0 0 xy 2 0 2 0 yz 2 0 0 2 z
− − = −
− −
y 2 0 0 1 0 0
M 0 2 0 2 0 1 00 0 2 0 0 1
− = − = − ⋅ −
así pues, se trata de una homotecia cuyo centro, es la solución del sistema:
3(N I )X 0− = ,
0 0 0 0 1 02 3 0 0 x 0
2 0 3 0 y 02 0 0 3 z 0
− − = −
− −
2x3
2y32z3
= −⇒ = = −
.
Por tanto, T es una homotecia inversa de centro 2 2 2O , ,3 3 3
− −
y razón k 2= − .
b) 2 2
'A 'BC' ABCS 2 S 2 2= = ⋅ = 28 u .

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 99
44.- A) Clasificar la siguiente transformación geométrica. Obtener sus elementos
característicos y la descomposición canónica.1x'y'
=1 0 03 -1 1
1 2 2 -1 -1
+
1xy
B) Determinar los elementos característicos de la transformación geométrica que transforma el punto A(2, 2, 5) en A’ (4, -4, 15) en los siguientes casos:
a) Simetría especular. b) Homotecia de razón 2.
Solución:
A) 1 1 0 0 1
3x 1 1 xx ' 3 -1 1 x
y 1 1 y1 2 2y ' y1 2 2 -1 -1
− = ⇔ = + − −+ +
Realizamos M Mt
tt
n 2
1 1 1 1 2 0MM 2I
1 1 1 1 0 2 =
− − = = = − − − −
obtenemos la matriz escalar de coeficiente 2, luego
es una semejanza de razón k 2= 1 1
M1 1
−= =
− − 2 > 0 semejanza directa
Centro:
7 2 21 1 0 0 1 x5x 3 -1 1 x
1 4 2y y y1 2 2 -1 -15
+ = = ⇒ ⇒ − + =+
7 2 2 1 4 2C ,5 5
+ − +=
Ángulo:
1cos1 1 cos sen1 1 2Q M1 1 sen cos 1k 2 sen
2
α = −− α − α = = = ⇒ ⇒ − − α α α = −
225ºα =
Descomposición canónica Hc,k o GC,225º
B) a) AA '
S (A) A ' A A 'O2
π
⊥ π= ⇔ +
= ∈ π
.
Tenemos el vector AA '
= ( 2, -6, 10) ortogonal al plano y el punto O = 2
15) 4,- (4, 5) 2, (2, + =
(3, -1, 10) del plano, por tanto 2x-6y+10z=k y que contenga al punto será: 2·3 +6·1 +10·10= 112. El plano pedido es: 2 x-6y+4z=112. b) HC,k=2(A)=A’, se cumple que:
a=0CA ' k CA (4 - a, -4 - b, 15 - c) = 2( 2 - a, 2 - b, 5 - c) b=8
c=-5
= ⇒ ⇒
, Centro = C=(0,8,5)

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 100
45.- Hallar la ecuación matricial del giro en E3 cuyo eje es la recta determinada por el punto A(1,1,1) y el vector u(0,2,0) siendo el ángulo 45ºα = − . Solución: La ecuación de la rotación, e,G α , de eje e y ángulo α tal que j (0,1,0)=
sea paralelo al eje e, es:
x ' a cos 0 sen x ay ' b 0 1 0 y bz ' c sen 0 cos z c
α α − = + − − α α −
( ) ( )
( ) ( )
2 20x ' 1 cos 45º 0 sen 45º x 1 1 x 12 2y ' 1 0 1 0 y 1 1 0 1 0 y 1z ' 1 sen 45º 0 cos 45º z 1 1 z 12 20
2 2
− − − − − = + − = + − − − − − −
2 20x' 1 x2 2
y ' 0 0 1 0 yz ' z1 2 2 20
2 2
− = + −

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 101
46.- Componer el giro G de centro A(1,2) y ángulo α = 60º con la traslación de vector u =(3,5). Clasificar y hallar los elementos de la transformación obtenida. Solución:
La ecuación G es de la forma: X ' A MAX= +
para 1 3
cos sen cos 60º s en60º 2 2Msen cos s en60º cos 60º 3 1
2 2
− α − α = = = α α
Sustituyendo en la ecuación de arriba, queda:
11 3 1 33x ' 1 x 1 x22 2 2 2y ' 2 y 2 y33 1 3 11
22 2 2 2
+− − − = + = + − −
La ecuación anterior es equivalente a la siguiente:
1 0 01 1
1 1 3x ' 3 x2 2 2
y ' y3 3 11
2 2 2
= + −
−
. Luego, G
1 0 0
1 1 3N 32 2 2
3 3 112 2 2
= + −
−
La matriz de la traslación de vector u =(3,5)es:
uT
1 0 0N 3 1 0
5 0 1
=
.
Hallemos la matriz uT GN N ·N= ; por tanto,
uT GN N ·N=
1 0 0
7 1 332 2 2
3 3 162 2 2
= + −
−
La transformación producto es un movimiento directo por ser el producto de dos movimientos directos y corresponde a un giro de 60º (algo que se conocía de antemano por la teoría).
El centro será el único punto doble:
1 0 0 1 0 0 5 5 31 1 1 0 x1 1 3 7 1 3 2x 3 x 3 x 02 2 2 2 2 2 9 3 3y y y 0 y3 3 1 3 3 1 21 6
2 2 2 2 2 2
− = = + − ⇔ + − − = ⇒ + = − − −
y por consiguiente, el producto uT ·G es otro giro de centro 5 5 3 9 3 3,2 2
− +
y amplitud la misma
que la de G, es decir, 60º.

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 102
47.- a) Hallar la ecuación matricial del giro G en el espacio, cuyo eje es la recta determinada por el punto A (1, 2, 3) y el vector ( )u 0,0,4=
siendo el ángulo de giro α = - 30º. b) Hallar la ecuación matricial de la homotecia H de centro A (1, 2, 3) y razón k=-3. c) Calcular los elementos característicos del producto G H . Solución:
a) La ecuación del giro G(e,α) es X A M AX→
′ = + , con e paralelo al eje Z, es decir:
( ) ( )( ) ( )
x a cos sen 0 x a 1 cos 30º sen 30º 0 x 1y b sen cos 0 y b 2 sen 30º cos 30º 0 y 2z c 0 0 1 z c 3 0 0 1 z 3
′ α − α − − − − − ′ = + α α − = + − − − =
′ − −
3 1 02 21 x 1 x'1 32 0 y 2 y '2 2
3 z 3 z '0 0 1
− = + − − = −
, ya que el vector ( )0,0,4u = es paralelo al eje OZ y la
dirección de z es invariante.
b) La ecuación de la homotecia (A,k )H es X A k AX→
′ = + , es decir:
x a k 0 0 x a 1 3 0 0 x 1y b 0 k 0 y b 2 0 3 0 y 2z c 0 0 k z c 3 0 0 3 z 3
′ − − − ′ = + − = + − − = ′ − − −
4 3x x8 3y y12 3z z
− ′ − = ′ − ′
.
c) Al ser el producto de un giro por una homotecia inversa el resultado es una semejanza inversa de razón el valor absoluto de la homotecia, en este caso k=3. El centro es el único punto invariante por la semejanza, en este caso el centro es el punto A(1,2,3) que es invariante por el giro y por la rotación y el eje de rotación la recta paralela al eje Z y que pasa por C, es decir, x=1;y=2;z=3+t; y por último, el ángulo de rotación será -30º ó +30º según la orientación del eje.

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 103
48.- Dados el vector ( )u 3,4= y el punto ( )A 1, 1− . Se pide:
a) Hallar la ecuación del movimiento que resulta de componer la traslación de vector u y el giro de centro A y ángulo α tal que 3sen
5α = y 4cos
5α = − .
b) Identificar los elementos característicos del movimiento resultante. c) Razonar si el movimiento anterior es conmutativo.
d) Hallar las transformadas de la elipse 22 yx 1
4 2+ = y de la parábola 2y x= .
Solución: a) Calculemos las matrices asociadas a cada uno de los dos movimientos, para después multiplicarlas. La traslación uT tiene de ecuación:
1 1 0 0 1x x 3
x 3 1 0 xy y 4
y 4 0 1 y
′ = + ⇔ ′ = ′ ′
.
La ecuación del giro G(A,α) es de la forma: 4 3 6 4 3
x 1 x 1 x5 5 5 5 5y 1 3 4 y 1 12 3 4 y
5 5 5 5 5
− − − − ′′ ′ − ′ = + = + ′′ − ′ + ′ − − −
⇔
1 0 01 16 4 3x x5 5 5
y y12 3 45 5 5
⇔ ′′ = − − ′′
− −
.
Por consiguiente, la ecuación de (A, ) uG Tα es:
1 0 01 1 0 0 16 4 3x 3 1 0 x5 5 5
y 4 0 1 y12 3 45 5 5
′′ = − − ′′
− −
.
Multiplicando ambas matrices y utilizando la notación habitual, queda:
1 0 01 118 4 3x x5 5 5
y y19 3 45 5 5
′ = − − − ′
− −
X NX⇔ ′ = .

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 104
b) Por ser
4 35 5 1
3 45 5
− −=
− , la transformación (A, )
uG T→α es un giro del plano cuyo centro es el único
punto doble y ángulo
4cos =-5 tal que 3sen5
αα α =
.
Para calcular las coordenadas del centro, se recomienda usar DERIVE en la resolución del sistema X NX= , obteniéndose:
7 5x - , y=-2 2
= .
b) El producto de una traslación y un giro no es, en general, conmutativo. En el caso particular de este ejercicio, tampoco. Dejamos al alumno la tarea de multiplicar las matrices asociadas a ambos movimientos en el orden contrario al que lo hemos efectuado más arriba y comprobar que se obtiene otro resultado. c) De la ecuación de (A, ) uG Tα
, se obtiene:
1 0 01 13 4 3x x5 5 5
y y26 3 45 5 5
= − − ′ ′
− − −
, ó bien
4 3 3x x y5 5 53 4 26y x y5 5 5
= − ′ + ′ − = − ′ − ′ −
.
Sustituyendo x e y en función de x´ e y´ en las ecuaciones de la elipse, de la parábola y del polinomio, se obtienen, respectivamente:
2 2
2 2
34x 41y 24xy 336x 398y 1261 016x 9y 24xy 39x 2y 139 0
+ + + + + =
+ − + + + =
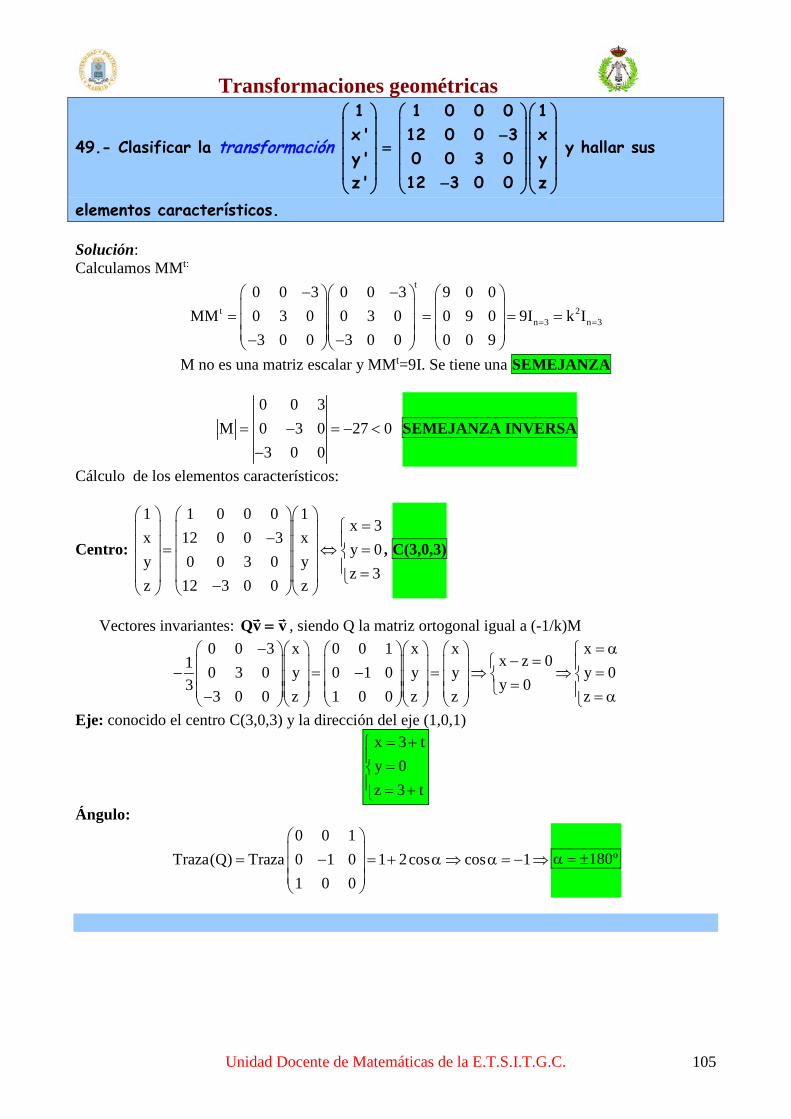
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 105
49.- Clasificar la transformación
1 1 0 0 0 1x' 12 0 0 3 xy' 0 0 3 0 yz' 12 3 0 0 z
− =
−
y hallar sus
elementos característicos. Solución: Calculamos MMt:
t
t 2n 3 n 3
0 0 3 0 0 3 9 0 0MM 0 3 0 0 3 0 0 9 0 9I k I
3 0 0 3 0 0 0 0 9= =
− − = = = = − −
M no es una matriz escalar y MMt=9I. Se tiene una SEMEJANZA
0 0 3M 0 3 0 27 0
3 0 0= − = − <
− SEMEJANZA INVERSA
Cálculo de los elementos característicos:
Centro:
1 1 0 0 0 1x 3
x 12 0 0 3 xy 0
y 0 0 3 0 yz 3
z 12 3 0 0 z
= − = ⇔ = = −
, C(3,0,3)
Vectores invariantes: Qv v=
, siendo Q la matriz ortogonal igual a (-1/k)M 0 0 3 x 0 0 1 x x x
x z 01 0 3 0 y 0 1 0 y y y 0y 03
3 0 0 z 1 0 0 z z z
− = α − = − = − = ⇒ ⇒ = = − = α
Eje: conocido el centro C(3,0,3) y la dirección del eje (1,0,1) x 3 ty 0z 3 t
= + = = +
Ángulo: 0 0 1
Traza(Q) Traza 0 1 0 1 2cos cos 11 0 0
= − = + α ⇒ α = − ⇒
180ºα = ±

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 106
50.- Se pide hallar, en el plano euclídeo:
a) La ecuación del giro de Centro A(1,2) y ángulo 4π
b) La ecuación de la traslación de vector u= (1,1)
c) G(A, 4π ) o T ( u
). ¿Qué tipo de transformación es? Razonar respuesta.
Solución: a) La ecuación del giro de Centro A(1,2) y ángulo π/4
La ecuación de un giro de centro A(a,b) y amplitud α es: x ' a cos sen x ay ' b sen cos y b
α − α − = + α α −
2 2cos senx ' 1 x 1 x4 4 2 2y ' 2 y 2 y2 2sen cos
4 4 2 2
π π − − − = + = ⇔ − π π
1 0 01 1
2 2x ' 1 2 x2 2
y ' y3 2 22 22 2 2
= + − −
b) La ecuación de la traslación de vector u = (1,1) 1 1 0 0 1
x ' 1 xx ' 1 1 0 x
y ' 1 yy ' 1 0 1 y
= + ⇔ =
c) G(A, 4π ) ° T ( u ). ¿Qué tipo de transformación es? Razonar respuesta.
1 0 0 1 0 01 0 0
2 2 2 21 2 1 1 0 1 22 2 2 2
1 0 13 2 2 2 2 22 2 22 2 2 2 2 2
+ − = + − − −
Es un giro, puesto que es un movimiento directo (producto de dos movimientos directos) y no puede ser la traslación ni la identidad
Centro:
1 0 0 21 1 x2 2 41 2 x x2 2 5 3y y y 2
2 2 2 2 422 2 2
= − + − = ⇒ ⇒
= + −
2 5 3, 24 2 4
− +
y ángulo
4π

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 107
51.- Clasificar la transformación 1 1 0 0 1x' 2 0 1 xy' 5 1 0 y
= −
y hallar sus elementos
característicos. Solución:
Llamando 0 1
M1 0
=
se cumple que |M| = -1 y que MMt=I por lo que se trata de un Movimiento
Inverso. Se calculan los puntos dobles o invariantes:
1 1 0 0 1x 2 0 1 xy 5 1 0 y
= −
Quedando las ecuaciones x y 2x y 5
− = − =
sistema incompatible, lo que significa
que NO HAY puntos dobles. Y por tanto, estamos ante una SIMETRÍA DESLIZANTE Esta transformación se descompone en el producto de una simetría axial de eje e por una traslación: e uS S .T= Calculamos el transformado de un punto cualquiera, por ejemplo X=(0,0) Y obtenemos X’= (4,1)
El punto medio es X X ' (0,0) (2, 5) 5P 1,2 2 2+ + − = = = −
Este es un punto del eje Calculamos su transformado obteniendo
1 1 0 0 1x ' 2 0 1 1y ' 5 1 0 5
2
= ⇒
− −
1P ' , 42
= − −
también del eje
Entonces el vector de la traslación es: 1 5u PP ' 1, 42 2
= = − − − + =
3 3,2 2
− −
Y la ecuación del eje viene dada por
5yx 1 2e o, lo que es igual 3 32 2
+−≡ =
− −
7x-y- 02
= .
X
X’ P
P’
u
e

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 108
52.- Calcular la ecuación matricial del movimiento Giro respecto la base canónica, sabiendo que le eje de giro es: (x,y,z) = (2,1,0) + t(0,-1,3) y el ángulo de giro es -30º. Solución: Primeramente calculamos la ecuación de la rotación en el sistema de referencia { }1 2 3R ' Q,u ,u ,u≡
definido por: 1 2 1 3 1 2A(2,1,0) r, u (0,-1,3) // r, u (1,0,0) u ,u u u (0,3,1)∈ = = ⊥ = ∧ =
la ecuación del giro, con el primer vector invariante es:
( ) ( )( ) ( )
1 0 0x ' x 1 0 0 x x
3 1y ' G y 0 cos 30º sen 30º y 0 y2 2
z ' z 0 sen 30º cos 30º z z1 302 2
= = − − − =
− − −
Se pasa al sistema de referencia R definido por:
{ }1 2 3 1 2 3R O,e , e , e siendo O(0,0,0), e (1,0,0), e (0,1,0), e (0,0,1)≡ = = =
La matriz del cambio de base es:
0 1 01 3B 0
10 103 10
10 10
= −
1
3 3 10 102 20 20x ' x x
3 10 9 3 1 3 3 3y ' BGB y y en R20 20 10 20 10
z ' z z10 3 3 3 3 920 20 10 20 10
−
= = − + −
− − +
La ecuación con el punto A (2,1,0) invariante será:
X ' A MAX= + ⇔
3 3 10 102 20 20x ' 0 x
3 10 9 3 1 3 3 3y ' 2 y 220 20 10 20 10
z ' 1 z 110 3 3 3 3 920 20 10 20 10
= + − + − − −
− − +

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 109
53.- a) Hallar la ecuación matricial del giro G que tiene por eje de giro el eje Z de coordenadas y por ángulo de giro α = -60º.
b) Hallar la ecuación de la homotecia H de centro C(0,0,10) y razón k = 13
− .
c) Clasificar y hallar tres elementos característicos de H G.
d) Sea 1 0 1 x 1x'0 1 0 y 0y'
− = + −
la ecuación matricial de la simetría S y T la
traslación de vector ( )u 1, 1= − , se pide hallar la ecuación del movimiento T S.
e) Calcular los elementos característicos del movimiento T S hallado en d).
Solución: a) Ecuación del giro con eje de giro el eje Z de coordenadas es:
( ) ( )( ) ( )
1 3 02 2x ' cos 60º sen 60º 0 x x
3 1y ' sen 60º cos 60º 0 y 0 y2 2
z ' 0 0 1 z z0 0 1
− − − = − − = −
1 0 0 01 11 3x ' x0 02 2y ' y
3 1z ' z0 02 2
0 0 0 1
= −
b) Ecuación de la homotecia de centro (0,0,10) y razón -1/3:
( )( )( )
x
y
z
1 0 0 011 0 0 01 1 10 0 031 k c k 0 0x ' x x
11 k c 0 k 0y ' y y0 0 031 k c 0 0 kz ' z z40 10 0
3 3
− − = = − − −
−
.
c) Clasificación de H·G El producto de un giro por una homotecia es una semejanza

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 110
1 0 0 01 0 0 0 1 0 0 01 1 31 30 0 0 0 00 03 6 62 2
1 3 10 0 0 3 1 0 03 0 0 6 62 240 1 40 10 0 0 0 0 1 0 03 3 3 3
− − − = − − − − −
Elementos Se trata de una semejanza inversa de razón 1/3, ángulo de semejanza -60º, eje de semejanza el eje z d) La ecuación de la simetría es:
1 0 01 1x ' 1 0 1 x 1 1 0 1 x
1 0 1x ' xy ' 0 1 0 y 0 1 1 0 y
1 1 0y ' y
− = + = + ⇔ = − −
Ecuación de la traslación: 1 0 01 1
x ' 1 x 1 1 0 x1 1 0x ' x
y ' 1 y 1 0 1 y1 0 1y ' y
= + = + ⇔ = − − −
Ecuación del movimiento T·S 1 0 0 1 0 0 1 0 01 1 11 1 0 1 0 1 2 0 1x ' x x1 0 1 1 1 0 2 1 0y ' y y
= =
− − −
e) Puntos invariantes:
1 0 01 12 0 1 x y 2x x2 1 0y y
= ⇒ − =
−
Se trata de una simetría de eje x-y =2

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 111
54.- Dada la transformación geométrica de ecuación: x21 8 6x'y6 6 8y'
− − = + −
a) Clasificarla. b) Calcular sus elementos característicos.
Solución:
a) Por ser t8 6 8 6 100 0
100 I6 8 6 8 0 100
− − − − = = ⋅ − −
y 8 6
100 06 8
− −= >
−, se trata de una
semejanza directa, de razón k 100 10= = b)
El ángulo α tal que 10cos 8 y 10sen 6α = − α = ; es decir, 4 3cos y sen5 5
α = − α = y centro el único
punto doble: 1 1 0 0 1 0 0 0 1 0x 21 8 6 x 21 9 6 x 0y 6 6 8 y 6 6 9 y 0
= − − ⇔ − − = − −
; operando se obtiene
17x1320y13
= =
,
C= 17 20,13 13
.
Es, por tanto, una semejanza directa de razón la de la homotecia, ángulo el del giro, y centro el único punto doble.

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 112
55.- Estudiar si la siguiente ecuación corresponde a una semejanza del espacio. En caso afirmativo, calcular sus elementos característicos:
1 0 0 01 11 1 2 1x' x
y' y2 2 0 2z' z0 1 2 1
− = − − −
.
Solución:
Al ser
t1 2 1 1 2 1
2 0 2 2 0 2 4 I
1 2 1 1 2 1
− − = ⋅ − −
y
1 2 1
2 0 2 8 0
1 2 1
− = >
−
, se trata de una
semejanza directa de razón 3k 8 2= = . El centro de esta semejanza es su único ( k 1, 1≠ − ) punto doble:
1 0 0 01 1 x 1 x 2y z1 1 2 1x x
y 2 2x 2zy y2 2 0 2
z x 2y zz z0 1 2 1
= − + + + − = ⇔ = − − + − − = − + −
.
Resolviendo este sistema lineal de tres ecuaciones con tres incógnitas, se obtiene: x = y = 0, z = 1. El centro es, pues, C=(0,0,1). Por tratarse de una semejanza directa de centro C y razón 2, puede descomponerse en producto de un giro, cuyo eje pasa por C, y una homotecia de centro C y razón 2:
(C,2) (C,2) (e, )S H G α= El eje de rotación es la recta de puntos dobles, pero buscaremos vectores invariantes:
Qu u= , siendo Q la matriz ortogonal.
Resolviendo este sistema, se obtiene: 1 2 12 2 2x x
2 2y 0 y2 2
z z1 2 12 2 2
= −
−
xx z 0
y 0y 0
z
= λ− = ⇒ ⇔ = = = λ
, junto con el centro C,
{ }e C (1,0,1) / R≡ + λ λ ∈ . El ángulo α de la rotación ha de verificar:
1 11 2cos traza(N) 0 12 2
+ α = = + + = , luego cos 0α = y por tanto, 90
270
α =
, dependiendo del
sentido positivo del eje.

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 113
56.- Hallar las ecuaciones de la rotación de eje x 0
ez 2
=≡ =
y ángulo 90ºα = − .
Solución: Primeramente calculamos la ecuación de la rotación en el sistema de referencia { }1 2 3R ' Q,u ,u ,u≡
definido por:
1 2 1 3 1 2Q(0,0,2) r, u (0, 1,0) // r, u (1,0,0) u ,u u u (0,0,1)∈ = − = ⊥ = ∧ =
la ecuación del giro, con el primer vector invariante es:
1 0 0x ' x x 1 0 0 xy ' G y 0 cos sen y 0 0 1 y
2 2z ' z z 0 1 0 z
0 sen cos2 2
π π = = − − − = − π π − −
Se pasa al sistema de referencia R definido por:
{ }1 2 3 1 2 3R O,e , e , e siendo O(0,0,0), e (1,0,0), e (0,1,0), e (0,0,1)≡ = = =
La matriz del cambio de base es: 0 1 0
B 1 0 00 0 1
= −
1
x ' x 0 0 1 xy ' BGB y 0 1 0 y en Rz ' z 1 0 0 z
−
= = −
La ecuación con el punto A (0,0,2) invariante será:
X ' A MAX= + ⇔
x ' 0 0 0 1 x 2 0 0 1 xy ' 0 0 1 0 y 0 0 1 0 yz ' 2 1 0 0 z 2 2 1 0 0 z
− = + = + − − −

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 114
57.- Obtener las ecuaciones de la transformación geométrica siguiente: GIRO: eje r ≡ (1,0,0)+(-1,-1,1)t y ángulo: 120º. Y obtener los transformados de los siguientes elementos:
Plano: x+2y+3z=1 Punto: (3,2,1)
Solución: La ecuación de un giro en el espacio viene dada por X’ = A + M (X-A) siendo A un punto del eje de giro, por tanto, un punto invariante de la transformación. Como un punto del eje puede ser A=(1,0,0), queda por obtener la matriz M.
En este caso, un vector unitario director del eje es ( )( )
1, 1,1 1 1 1u , ,1, 1,1 3 3 3
− − = − − − −
. Se elige una
referencia ortonormal del espacio que tenga a este vector como primer vector de la base. Los otros
dos vectores pueden ser (1,0,1) 1 1v ,0,(1,0,1) 2 2
= =
que es perpendicular a u
y el vector
1 6 1w u v ( , , )36 6
= ∧ = − −
.
La ecuación del giro vectorial en la base { }B u, v, w=
es:
B
1 0 01 0 0
1 3M 0 cos120º sen120º 02 2
0 sen120º cos120º3 10
2 2
= − = − −
−
para pasar de esta matriz en la base B a la matriz en la
base canónica se utiliza la matriz del cambio de base de la base B a la canónica del espacio 1 1 13 2 6
1 6P 033
1 1 13 2 6
− −
= −
, matriz que tiene en columnas las coordenadas de los vectores de la base B
respecto de la canónica. 1
1B
1 1 1 1 1 11 0 03 2 6 3 2 6
1 6 1 3 1 6M PM P 0 0 03 2 2 33 3
1 1 1 1 1 13 102 23 2 6 3 2 6
−
−
− − − − = = − − − −
−
⇒0 0 1
M 1 0 00 1 0
− = −
ECUACIÓN MATRICIAL DE LA TRANSFORMACIÓN
La ecuación pedida es, por tanto, x ' 1 0 0 1 x 1
X ' A M(X A) y ' 0 1 0 0 yz ' 0 0 1 0 z
− − = + − ⇔ = + −
o también

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 115
1 1 0 0 0 1x' 1 0 0 1 xy ' 1 1 0 0 yz ' 0 0 1 0 z
− = −
−
COORDENADAS DEL TRANSFORMADO DEL PUNTO (SUSTITUIR x=3;y=2;z=1)
11 1 0 0 0 1x' 1 0 0 1 3y ' 1 1 0 0 2 z ' 0 0 1
0
21
2
0
− = = − − −
(0, 2,-2) TRANSFORMACIÓN INVERSA
11 1 0 0 0 1 1 0 0 0 1x 1 y '
x 1 0 0 1 x' 1 0 1 0 x'y z '
y 1 1 0 0 y ' 0 0 0 1 y 'z 1 x'
z 0 0 1 0 z ' 1 1 0 0 z '
−
= + − = = ⇒ = − − − = − − −
SUSTITUIR x,y,z en la ecuación del plano x+2y+3z=1
(1 + y’) + 2·(-z’) + 3·(1 - x’) = 1 ECUACIÓN DEL TRANSFORMADO DEL PLANO:
- 3·x’ + y’ - 2·z’ + 4 = 1

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 116
58.- Obtener las ecuaciones de la transformación geométrica siguiente: GIRO: eje r ≡ (1,0,0)+(-1,-1,1)t y ángulo: 240º. Y obtener los transformados de los siguientes elementos:
Plano: x+2y+3z=1 Punto: (3,2,1)
Solución: La ecuación de un giro en el espacio viene dada por X’ = A + M (X-A) siendo A un punto del eje de giro, por tanto, un punto invariante de la transformación. Como un punto del eje puede ser A=(1,0,0), queda por obtener la matriz M.
En este caso, un vector unitario director del eje es ( )( )
1, 1,1 1 1 1u , ,1, 1,1 3 3 3
− − = − − − −
. Se elige una
referencia ortonormal del espacio que tenga a este vector como primer vector de la base. Los otros
dos vectores pueden ser (1,0,1) 1 1v ,0,(1,0,1) 2 2
= =
que es perpendicular a u
y el vector
1 6 1w u v ( , , )36 6
= ∧ = − −
.
La ecuación del giro vectorial en la base { }B u, v, w=
es:
B
1 0 01 0 0
1 3M 0 cos 240º sen240º 02 2
0 sen240º cos 240º3 10
2 2
= − = −
− −
para pasar de esta matriz en la base B a la matriz en la
base canónica se utiliza la matriz del cambio de base de la base B a la canónica del espacio 1 1 13 2 6
1 6P 033
1 1 13 2 6
− −
= −
, matriz que tiene en columnas las coordenadas de los vectores de la base B
respecto de la canónica. 1
1B
1 1 1 1 1 11 0 03 2 6 3 2 6
1 6 1 3 1 6M PM P 0 0 03 2 2 33 3
1 1 1 1 1 13 102 23 2 6 3 2 6
−
−
− − − − = = − − − − −
⇒0 1 0
M 0 0 11 0 0
= − −

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 117
ECUACIÓN MATRICIAL DE LA TRANSFORMACIÓN
La ecuación pedida es, por tanto, x ' 1 0 1 0 x 1
X ' A M(X A) y ' 0 0 0 1 yz ' 0 1 0 0 z
− = + − ⇔ = + − −
o también
1 1 0 0 0 1x' 1 0 1 0 xy ' 0 0 0 1 yz ' 1 1 0 0 z
= −
−
x ' y 1y ' z
z ' x 1
= +⇔ = − = − +
COORDENADAS DEL TRANSFORMADO DEL PUNTO (SUSTITUIR x=3;y=2;z=1)
1 1 0 0 0 1 1x' 1 0 1 0y ' 0 0 0 1z ' 1 1
3 32 11 20 0
= = −
−
−
−
(3, -1, -2) TRANSFORMACIÓN INVERSA
11 1 0 0 0 1 1 0 0 0 1x' 1 z '
x 1 0 1 0 x' 1 0 0 1 x'y ' 1 x
y 0 0 0 1 y ' 1 1 0 0 y 'z ' y '
z 1 1 0 0 z ' 0 0 1 0 z '
−
= − − = = ⇒ = − + − − = − − −
SUSTITUIR x,y,z en la ecuación del plano x+2y+3z=1
(1 – z’) + 2·(x’ - 1) + 3·(-y’) = 1 ECUACIÓN DEL TRANSFORMADO DEL PLANO:
2·x’ - 3·y’ – z’ - 1 = 1
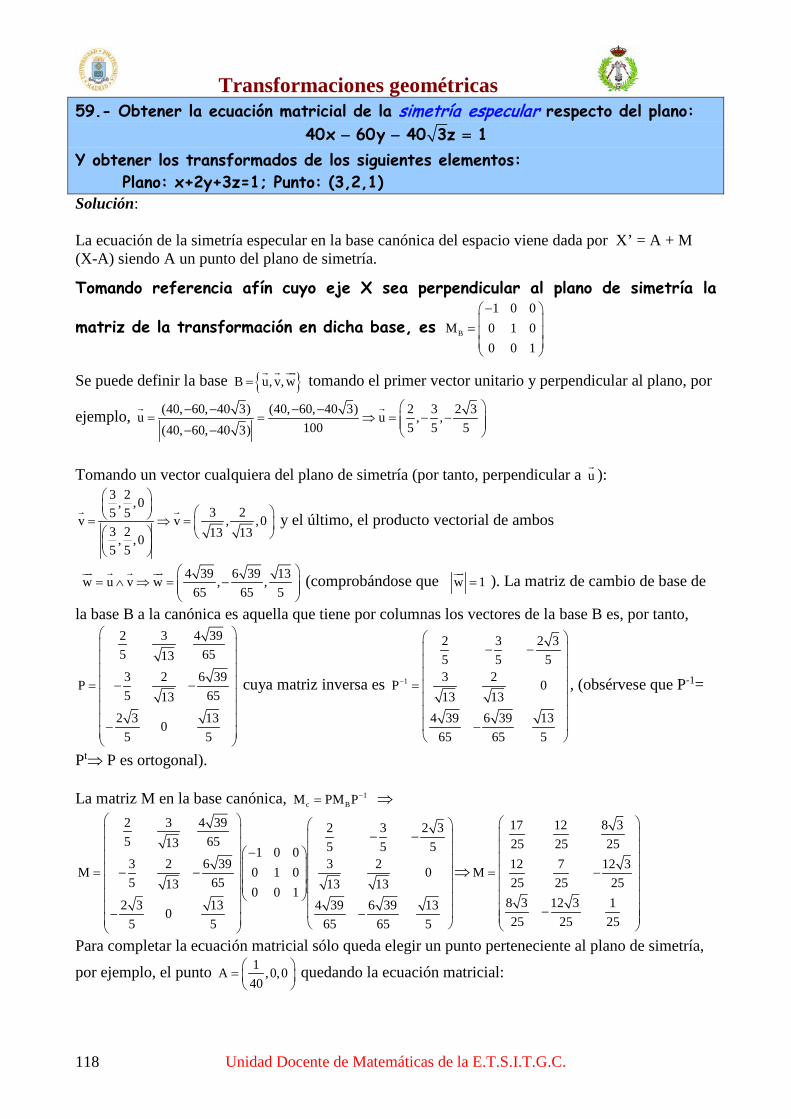
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 118
59.- Obtener la ecuación matricial de la simetría especular respecto del plano: 40x 60y 40 3z 1− − =
Y obtener los transformados de los siguientes elementos: Plano: x+2y+3z=1; Punto: (3,2,1)
Solución: La ecuación de la simetría especular en la base canónica del espacio viene dada por X’ = A + M (X-A) siendo A un punto del plano de simetría.
Tomando referencia afín cuyo eje X sea perpendicular al plano de simetría la
matriz de la transformación en dicha base, es B
1 0 0M 0 1 0
0 0 1
− =
Se puede definir la base { }B u, v, w=
tomando el primer vector unitario y perpendicular al plano, por
ejemplo, (40, 60, 40 3) (40, 60, 40 3) 2 3 2 3u u , ,100 5 5 5(40, 60, 40 3)
− − − −= = ⇒ = − − − −
Tomando un vector cualquiera del plano de simetría (por tanto, perpendicular a u
):
3 2, ,03 25 5v v , ,0
3 2 13 13, ,05 5
= ⇒ =
y el último, el producto vectorial de ambos
4 39 6 39 13 w u v w , ,65 65 5
= ∧ ⇒ = −
(comprobándose que w 1=
). La matriz de cambio de base de
la base B a la canónica es aquella que tiene por columnas los vectores de la base B es, por tanto, 2 3 4 395 65133 2 6 39P5 6513
2 3 1305 5
= − − −
cuya matriz inversa es 1
2 3 2 35 5 53 2P 013 13
4 39 6 39 1365 65 5
−
− −
= −
, (obsérvese que P-1=
Pt⇒ P es ortogonal). La matriz M en la base canónica, 1
c BM PM P−= ⇒ 2 3 4 39 2 3 2 35 6513 5 5 51 0 03 2 6 39 3 2M 0 1 0 05 6513 13 130 0 1
2 3 13 4 39 6 39 1305 5 65 65 5
− − − = − −
− −
⇒
17 12 8 325 25 2512 7 12 3M25 25 25
8 3 12 3 125 25 25
= − −
Para completar la ecuación matricial sólo queda elegir un punto perteneciente al plano de simetría,
por ejemplo, el punto 1A ,0,040
=
quedando la ecuación matricial:

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 119
ECUACIÓN MATRICIAL DE LA TRANSFORMACIÓN 17 12 8 3
1 125 25 25 xx ' 40 4012 7 12 3X ' A M(X A) y ' 0 y25 25 25
z ' 0 z8 3 12 3 125 25 25
− = + − ⇔ = + −
−
⇔
1 0 0 0
1 17 12 8 31 1125 25 25 25x' x
3 12 7 12 3y ' y250 25 25 25z ' z
3 8 3 12 3 1125 25 25 25
= − −
− −
COORDENADAS DEL TRANSFORMADO DEL PUNTO (SUSTITUIR x=3; y=2;z=1)
11 0 0 0
1 17 12 8 3 11125 25 25 25x'
3 12 7 12 3y ' 250 25 25 25z '
3 8 3 12 3
8 3 37625 125
1125 2
3497 12
5 2
32250 2511 325 15 5 252
+
−
= = − − − −
−
8·√3 376 497 12·√3 1 √3 x’ = ⎯⎯⎯⎯ + ⎯⎯⎯ ∧ y’ = ⎯⎯⎯ - ⎯⎯⎯⎯⎯ ∧ z’ = ⎯⎯ - ⎯⎯⎯ 25 125 250 25 25 125 TRANSFORMACIÓN INVERSA
11 0 0 0 1 0 0 0
1 17 12 8 3 1 17 12 8 31 1 1125 25 25 25 125 25 25 25x x' x'
3 12 7 12 3 3 12 7 12 3y y ' y '250 25 25 25 250 25 25 25z z '
3 8 3 12 3 1 3 8 3 12 3 1125 25 25 25 125 25 25 25
− = = − − − −
− − − −
z '
1 17 12 8 3x x' y ' z '125 25 25 25
3 12 7 12 3y x' y ' z '250 25 25 25
3 8 3 12 3 1z x' y ' z '125 25 25 25
⇒
= + + +
= − + + −
= − + − +
SUSTITUIR x, y, z en la ecuación del plano x+2y+3z=1 ECUACIÓN DEL TRANSFORMADO DEL PLANO: 5·x’·(24·√3 + 41) + 10·y’·(13 - 18·√3) + 5·√3·z’·(√3 - 16) - 3·√3 – 2 ⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯⎯ = 1 125

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 120
z
e
u1 y
x
α=π/2 C(1,1,1)
60.- En el espacio euclídeo tridimensional, se pide: a) Hallar las ecuaciones de la semejanza directa de razón k = 4, centro el punto C(1,1,1), ángulo
2π
α = y cuyo eje es la recta ( ) ( ) ( )e x, y,z 1,1,1 t 1,1,0≡ = + .
b) Hallar las ecuaciones de la transformada de la recta e: c) Hallar la ecuación del transformado del plano z = 0. Solución: Una semejanza directa es la composición de un giro y una homotecia, así,
S(C, k, e, ) H(C, K) G(e, ) con C eα = α ∈ La ecuación matricial del giro de eje ( )e x, y, z (1, 1, 1) t(1, 1, 0)≡ = + y ángulo
2π
α =
En el sistema de referencia { }1 2 3≡
R' C,u ,u ,u definido por:
∈ = = ⊥ = ∧ = −
1 2 1 3 1 21 1C(1,1,1) e, u (1,1,0) // e,u (0,0,1) u ,u u u (1, 1,0)2 2
La matriz de cambio de la referencia R’ a la canónica del espacio es 1 0 0 0
1 11 02 2P
1 11 02 2
1 0 1 0
= −
la ecuación del giro en la referencia R’ es π π = = =− − π π
1 0 0 01 1 1 1 0 0 0 10 1 0 0x ' x x 0 1 0 0 x
G' 0 0 cos seny ' y y 0 0 0 1 y2 2z ' z z 0 0 1 0 z
0 0 sen cos2 2
Se pasa al sistema de referencia canónica del espacio R definido por { }1 2 3≡
R O,e ,e ,e siendo 1 2 31 0 0 0 1 0 0 0 1= = =
O(0,0,0), e ( , , ),e ( , , ),e ( , , )
Como la matriz del cambio de referencia es P, queda

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 121
−
− = = = − −
1
1 0 0 0
2 1 1 21 1 1 12 2 2 2x ' x x x
PG'P G 2 1 1 2y ' y y y2 2 2 2z ' z z z
2 21 02 2
La ecuación de la homotecia de centro C=(1,1,1) y de razón k=4 se conoce directamente en la referencia canónica R puesto que la matriz es:
( )( )( )
x
y
z
1 0 0 01 1 1 1 0 0 0 11 k c k 0 0x ' x x 3 4 0 0 x
H1 k c 0 k 0y ' y y 3 0 4 0 y1 k c 0 0 kz ' z z 3 0 0 4 z
− − = = = − − − −
.
La composición S G H H G= = tendrá por ecuación matricial:
1 1 0 0 0x ' 3 4 0 0y ' 3 0 4 0z ' 3 0 0 4
− = −
−
1 0 0 0
2 1 1 2 12 2 2 2 x2 1 1 2 y
2 2 2 2 z2 21 0
2 2
− − −
1 0 0 01 1
2 2 3 2 2 2 2x ' xy ' y2 2 3 2 2 2 2z ' z1 2 2 2 2 0
− − = − − − (… producto conmutativo)
b) Hallar las ecuaciones de la transformada de la recta La transformación inversa es
1 0 0 01 12 3 1 1 2x x '8 4 8 8 8y y '2 3 1 1 2z z '8 4 8 8 8
1 2 2 2 2 0
+ − = − + −
( )( )
( )
1 ' ' 2 ' 2 681 ' ' 2 ' 2 68
1 2 ' 2 ' 88
x x y z
y x y z
z x y
= + − + +⇒ = + + − + = − +
como la recta e tiene por ecuaciones despejando,
por tanto, el eje e es invariante respecto de la semejanza. Esto se podía haber deducido sin calcular, puesto que el eje es el invariante del giro y el centro de la semejanza pertenece al propio eje.
c) Hallar la ecuación del transformado del plano z=0
El plano z=0 se transforma en ( )1 2x' 2y ' 8 0 2x' 2y ' 8 08
− + = ⇒ − + =
1x yz
= =
' '' 1
x yz
=⇒ =
( ), , ( ) (1, 1, 1 1, 1, 0)e x y z t≡ = +

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 122
61.- a) Analizar para qué valores de los parámetros a, b y c, la siguiente transformación T del plano dada por la ecuación matricial:
= −
2
1 1 0 0 1x' c 1 b x
yy' 0 a 1 a
es un movimiento. En este caso, clasificarlo. b) Hallar las ecuaciones de la simetría axial plana S de eje la recta
≡ − − =e x y 1 0 . Solución:
a) La aplicación vectorial asociada a T tiene por matriz 2
1 bM
a 1 a
= − .
T es un movimiento si y sólo si M es una matriz ortogonal, es decir, si tMM I= .
( )
2 2t
22 2 2 4
1 b a 1 ba1 b 1 a 1 1 0MM
a 1 a b a 0 1a 1 a b a 1 a
+ − +− = = = − − + − +
Ha de ser
( )
2
2
2
2 4
1 1 b b 00 a 1 ba a 1 a 10 a 1 ba 0 0 0
1 a 1 a 0 1 1
= + ⇒ =
= − + = − ⇒ = = − + = + = = − + = + =
Luego T es un movimiento para a = 1 y b = 0.
En este caso, queda 1 0 0
N c 1 00 0 1
=
.
Por tanto, T es la transformación identidad del plano cuando c =0.
Si c 0≠ , se trata de la traslación de vector c
u0
→ =
.
b) La ecuación del eje puede escribirse en la forma 1xye −=≡ , observándose que la
pendiente del eje es m = 1.
Llamando 2α a la inclinación del eje, se verifica, pues, que 1
2α
=tg . Luego, 452α
= y 90α = .
La matriz de la simetría vectorial asociada a S es: cos sen 0 1cos 90 sen 90
Msen cos 1 0sen 90 cos 90
α α = = = α − α −
La ecuación de la simetría S es de la forma: X ' A M AX→
= + , siendo A un punto del eje. Tomamos como punto A, por ejemplo el (1, 0) y ya queda:
x ' 1 0 1 x 1 1 0 1 xS
y ' 0 1 0 y 0 1 1 0 y−
≡ = + = + − − .Ó bien:
x' 1 yy ' 1 x
= + = − +
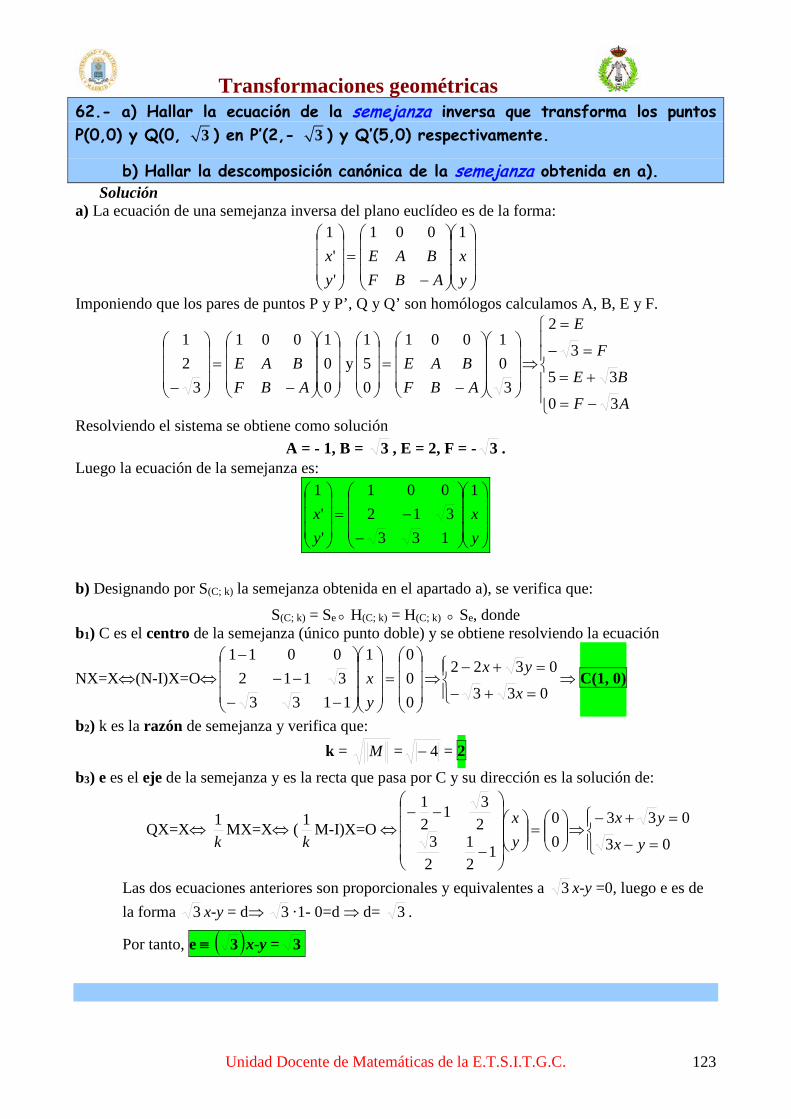
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 123
62.- a) Hallar la ecuación de la semejanza inversa que transforma los puntos P(0,0) y Q(0, 3 ) en P’(2,- 3 ) y Q’(5,0) respectivamente.
b) Hallar la descomposición canónica de la semejanza obtenida en a). Solución
a) La ecuación de una semejanza inversa del plano euclídeo es de la forma:
−=
yx
ABFBAE
yx
1001
''
1
Imponiendo que los pares de puntos P y P’, Q y Q’ son homólogos calculamos A, B, E y F.
−=
− 001001
321
ABFBAE y
−=
301001
051
ABFBAE ⇒
−=
+=
=−
=
AF
BE
F
E
30
35
3
2
Resolviendo el sistema se obtiene como solución A = - 1, B = 3 , E = 2, F = - 3 .
Luego la ecuación de la semejanza es:
−−=
yx
yx
1
133312
001
''
1
b) Designando por S(C; k) la semejanza obtenida en el apartado a), se verifica que:
S(C; k) = Se H(C; k) = H(C; k) Se, donde b1) C es el centro de la semejanza (único punto doble) y se obtiene resolviendo la ecuación
NX=X⇔(N-I)X=O⇔
=
−−−−
−
0001
11333112
0011
yx ⇒
=+−
=+−
033
0322
x
yx⇒ C(1, 0)
b2) k es la razón de semejanza y verifica que: k = M = 4− = 2
b3) e es el eje de la semejanza y es la recta que pasa por C y su dirección es la solución de:
QX=X⇔ k1 MX=X⇔ (
k1 M-I)X=O ⇔
=
−
−−
00
121
23
231
21
yx
⇒
=−
=+−
03
033
yx
yx
Las dos ecuaciones anteriores son proporcionales y equivalentes a 3 x-y =0, luego e es de la forma 3 x-y = d⇒ 3 ·1- 0=d ⇒ d= 3 .
Por tanto, e ≡ ( )3 x-y = 3
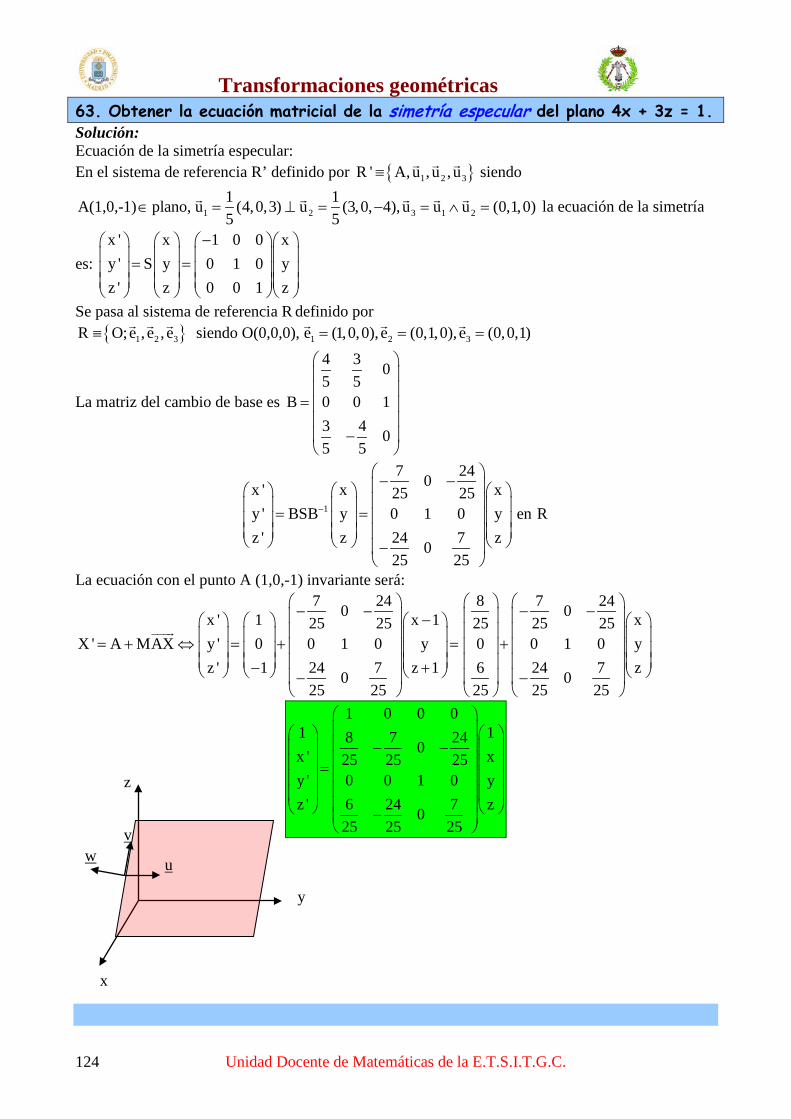
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 124
63. Obtener la ecuación matricial de la simetría especular del plano 4x + 3z = 1. Solución: Ecuación de la simetría especular: En el sistema de referencia R’ definido por { }1 2 3R ' A,u ,u ,u≡
siendo
1 2 3 1 21 1A(1,0,-1) plano, u (4,0,3) u (3,0, 4), u u u (0,1,0)5 5
∈ = ⊥ = − = ∧ = la ecuación de la simetría
es: x ' x 1 0 0 xy ' S y 0 1 0 yz ' z 0 0 1 z
− = =
Se pasa al sistema de referencia R definido por { }1 2 3 1 2 3R O;e , e , e siendo O(0,0,0), e (1,0,0), e (0,1,0), e (0,0,1)≡ = = =
La matriz del cambio de base es
4 3 05 5
B 0 0 13 4 05 5
=
−
1
7 240x ' x x25 25y ' BSB y 0 1 0 y en Rz ' z 24 7 z0
25 25
−
− − = =
−
La ecuación con el punto A (1,0,-1) invariante será: 7 240x ' 1 x 125 25
X ' A MAX y ' 0 0 1 0 yz ' 1 24 7 z 10
25 25
− − − = + ⇔ = + =
− + −
8 7 240 x25 25 250 0 1 0 y6 24 7 z025 25 25
− − +
−
1 0 0 01 18 7 240x ' x25 25 25y ' 0 0 1 0 yz ' 6 24 7 z0
25 25 25
− − = −
x
y
z
w v
u

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 125
64.- Hallar la ecuación de la rotación G(e,α) donde el eje es e ≡ y 1x 1 z 1
1 0 1−− +
= = y el ángulo α = 2π/3.
Solución El eje de rotación e es la recta determinada por el punto A(1,1,-1) y el vector ( )1,0,1 −=u . 1. Construimos una base B = { }321 ,, uuu ortonormal y directa tal que eu1
:
−==
21,0,
21
uu
1u
vvu
=2 siendo uv ⊥ , por ejemplo, ( ) uv
⊥= 1,0,1 pues 0=⋅vu ⇒
==
21,0,
21
2 vvu
( )0,1,0213 −=×= uuu
2. Respecto de B la matriz asociada MB=
−
32cos
32sin0
32sin
32cos0
001
ππ
ππ y la matriz asociada respecto de la
base canónica BC es M=PMBP-1 donde P= PB→Bc=
−
−
02
12
1100
02
12
1
. Operando con Derive se
obtiene que M=
−
−−−
−
41
46
43
46
21
46
43
46
41
3. La ecuación de G(e,α) es de la forma X’=A+M XΑ
donde A es un punto cualquiera de e
+
−=
111
'''
zyx
−
−−−
−
41
46
43
46
21
46
43
46
41
+−−
111
zyx
⇔
'''
1
zyx
=
−−
−−−
−−
41
46
43
46
46
21
46
23
43
46
41
46
0001
zyx1

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 126
65.- Clasificar y hallar los elementos característicos de la transformación geométrica dada por la siguiente ecuación:
1 0 01 1x' 1 2 2 2 2 xy' y1 2 2
= − − − − −
Solución
La matriz asociada es M=
−−−
2222
1. MMt=4I2, luego la transformación geométrica corresponde a una semejanza de razón k= 4+ =2. La designaremos S(C,k)
2. La matriz asociada al movimiento es Q=21 M=
−−
−
22
22
22
22
y su determinante 1=Q , luego es
una semejanza directa por lo que S(C,k)=H(C,k)G(C,α). 3. Cálculo de los elementos característicos: C, α, k=2 (calculado)
C es el punto doble: resolviendo con Derive la ecuación
−−−−−=
yx
yx
1
22122221
0011, se
obtiene C(-1,1)
El ángulo α es el que verifica que cosα=
2cos22sin
2
α = − ⇒
α = −
54π
α =

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 127
66.- Clasificar y hallar los elementos característicos de la transformación geométrica dada por la siguiente ecuación:
1 0 0 01 13 6 1 6 3x' x
yy' 3 6 2 6zz' 3 6 3 6 1
− = − − + −
Solución
La matriz asociada es M=
−−−
163626
361
1. MMt=16I2, luego la transformación geométrica corresponde a una semejanza de razón k= 16+ =4. La designaremos S(C,k)
2. La matriz asociada al movimiento es Q=41 M=
−
−−
41
46
43
46
42
46
43
46
41
y su determinante Q 1= ,
luego es una semejanza directa por lo que S(C,k)=H(C,k)G(e,α). 3. Cálculo de los elementos característicos: C, e, α, k=4 (calculada)
C es el punto doble: resolviendo con Derive la ecuación,
−+−−
−=
zyx1
163636263
361630001
zyx1
, se obtiene C(-1,1,-1)
El eje e es la recta que pasa por C y su dirección es la recta vectorial solución de la ecuación:
−
−−=
zyx
41
46
43
46
42
46
43
46
41
zyx
, se obtiene
=λ==
⇔
==−
0yzx
0y0zx
Luego ex 1 ty 1z 1 t
= − +≡ = = − +
y el ángulo α se obtiene por la invariancia de la traza:
Traza(M)=1+2cosα⇔ 0 =1+2cosα ⇔ cosα=21
− ⇒
π=α
π=α
343
2
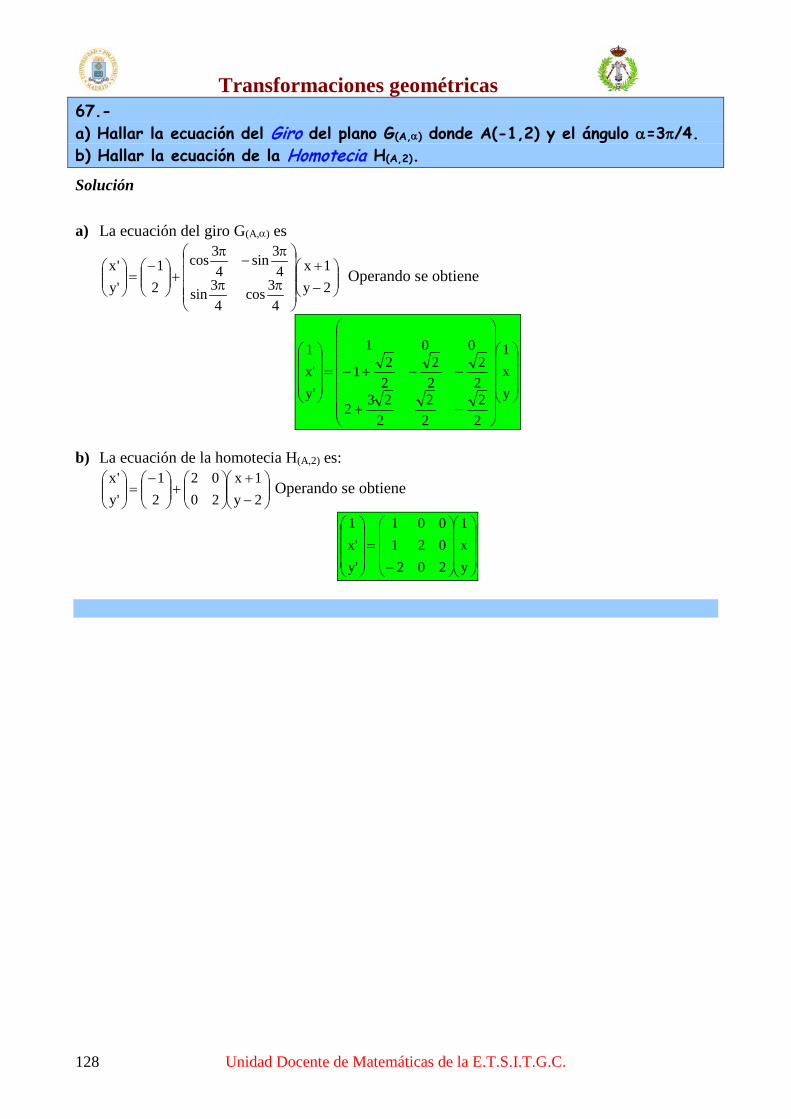
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 128
67.- a) Hallar la ecuación del Giro del plano G(A,α) donde A(-1,2) y el ángulo α=3π/4. b) Hallar la ecuación de la Homotecia H(A,2).
Solución a) La ecuación del giro G(A,α) es
−+
ππ
π−
π
+
−=
2y1x
43cos
43sin
43sin
43cos
21
'y'x
Operando se obtiene
−+
−−+−=
yx1
22
22
2232
22
22
221
001
y'x'1
b) La ecuación de la homotecia H(A,2) es:
−+
+
−=
2y1x
2002
21
'y'x
Operando se obtiene
−=
yx1
202021001
y'x'1
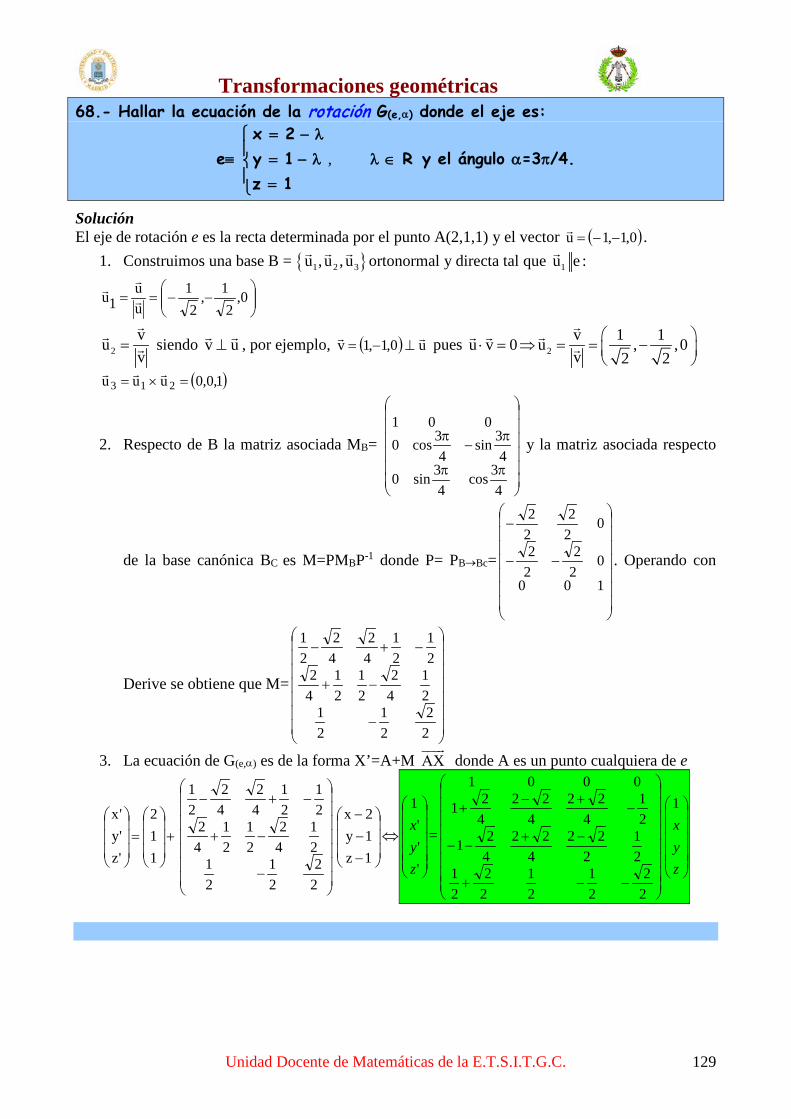
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 129
68.- Hallar la ecuación de la rotación G(e,α) donde el eje es:
e≡ ,x 2y 1 Rz 1
= − λ = − λ λ ∈ =
y el ángulo α=3π/4.
Solución El eje de rotación e es la recta determinada por el punto A(2,1,1) y el vector ( )0,1,1u −−=
. 1. Construimos una base B = { }1 2 3u , u , u ortonormal y directa tal que 1u e :
−−== 0,
21,
21
uu
1u
2vuv
=
siendo v u⊥
, por ejemplo, ( ) u0,1,1v ⊥−= pues u v 0⋅ =
⇒ 2
v 1 1u , ,0v 2 2
= = −
( )1,0,0uuu 213 =×=
2. Respecto de B la matriz asociada MB=
ππ
π−
π
43cos
43sin0
43sin
43cos0
001 y la matriz asociada respecto
de la base canónica BC es M=PMBP-1 donde P= PB→Bc=
−−
−
100
022
22
022
22
. Operando con
Derive se obtiene que M=
−
−+
−+−
22
21
21
21
42
21
21
42
21
21
42
42
21
3. La ecuación de G(e,α) es de la forma X’=A+M XΑ
donde A es un punto cualquiera de e
+
=
112
'z'y'x
−
−+
−+−
22
21
21
21
42
21
21
42
21
21
42
42
21
−−−
1z1y2x
⇔
'''
1
zyx
=
−−+
−+−−
−+−
+
22
21
21
22
21
21
222
422
421
21
422
422
421
0001
zyx1

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 130
69.- Clasificar y hallar los elementos característicos de la transformación geométrica dada por la siguiente ecuación:
1 0 01 1x' 2 2 2 2 x
yy' 4 2 2 2
= − − −
Solución
La matriz asociada es M=
−−−
2222
1. MMt=8I2, luego la transformación geométrica corresponde a una semejanza de razón k= 228 =+ . La designaremos S(C,k)
2. La matriz asociada al movimiento es Q=21 M=
−
−−
22
22
22
22
y su determinante 1=Q ,
luego es una semejanza directa por lo que S(C,k)=H(C,k)G(C,α). 3. Cálculo de los elementos característicos: C, α, k = 22 (calculada) C es el punto doble: resolviendo con Derive la ecuación
−−=
yx1
22242-222
001
yx1
, se obtiene C
−
13216,
1322
El ángulo α es el que verifica que cosα=
2cos22sin
2
α = − ⇒
α =
πα =
34

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 131
70.- Hallar la ecuación, el centro y la razón de la semejanza directa que transforma los puntos A(1,0) y B( 2 ,-1) en A’(-8 2 ,-1) y B’(-8,7) respectivamente.
Solución La ecuación de una semejanza directa S(C,k) es
−=
yx1
abnbam
001
'y'x
1, sustituyendo primero (x,y) por A (x’,y’) por A’ y luego por B y B’
respectivamente se obtiene el sistema de ecuaciones
−=−−
−=++
−=+−=+
7nb2a
8mba2
1nb28ma
Resolviendo con Derive la solución es
−−=
−=
=
−=
124n
24m
24b
24a
, luego la ecuación es:
−−−−−−=
yx1
2424124242424
001
'y'x
1
El centro es el punto doble:
−−−−−−=
yx1
2424124242424
001
yx1
, resolviendo con Derive se obtiene C(0,-1)
La razón es k= det(M) 64= = 8

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 132
71.- Clasificar y hallar los elementos característicos de la transformación geométrica dada por la siguiente ecuación:
1 0 0 0
6 1 6 31 14 4 4 4x' x3 6 1 6 yy'2 4 2 4 zz'6 3 6 14 4 4 4
− = − − −
Solución
La matriz asociada es M=
−
−−
41
46
43
46
21
46
43
46
41
1. MMt =I3, luego la transformación geométrica corresponde a un movimiento. 2. detM=1 y M≠ I3, luego es un movimiento directo que no es una traslación por lo que o es una
rotación G(e,α) o un movimiento helicoidal. 3. Hallamos la variedad lineal de los puntos dobles que es la solución de la ecuación:
−
−−
−
=
zyx1
41
46
43
46
46
21
46
23
43
46
41
46
0001
zyx1
, resolviendo con Derive se obtiene
==−
1y0zx
que es una
recta afín por lo que se trata de una rotación G(e,α) y su eje de rotación e
==−
≡1y
0zx
4. Cálculo de los elementos característicos: e, α El eje e es el que acabamos de calcular El ángulo α se obtiene aplicando que la traza de M es invariante:
trM=1+2cosα⇔ 0 =1+2cosα ⇔ cosα=21
− ⇒
π=α
π=α
343
2

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 133
72.- a) Hallar la ecuación de la transformación resultante de componer el giro G(A;α) con la homotecia H(C; 2), donde A (-1,1), C (1,0) y α= - π/4. b) Razona qué tipo de transformación geométrica es la obtenida en el apartado a) y da los elementos característicos que se deducen sin hacer cálculos. c) Calcula los puntos invariantes de la transformación obtenida en a). Solución:
La ecuación de un giro de centro A(a,b) y amplitud α es: x ' a cos sen x ay ' b sen cos y b
α − α − = + α α −
La ecuación del giro G de centro A(1,.1) y amplitud α =-π/4 es: 2 2cos sen 1x ' 1 x 1 x4 4 2 2
y ' 1 y 1 y1 2 2 2sen cos4 4 2 2
π π − − − − − = + = + ⇔ − + π π − − − −
1 0 01 1
2 2x ' 1 x2 2
y ' y2 21 2
2 2
= − − −
La ecuación de la homotecia de centro C(a,b) y razón k es: x ' a x a
ky ' b y b
− = + −
La ecuación de la homotecia de centro C(1,0) y razón k=2 es: x ' 1 x 1
2y ' 0 y 0
− = + −
1 1 0 0 1x ' 1 2 0 xy ' 0 0 2 y
⇔ = −
a) Giro por homotecia ( )H G
1 0 0 1 0 01 1 0 0 1 12 2x ' 1 2 0 1 x 3 2 2 x
2 2y ' 0 0 2 y y2 2 2 2 22 21 2
2 2
= − − = −
− − − −
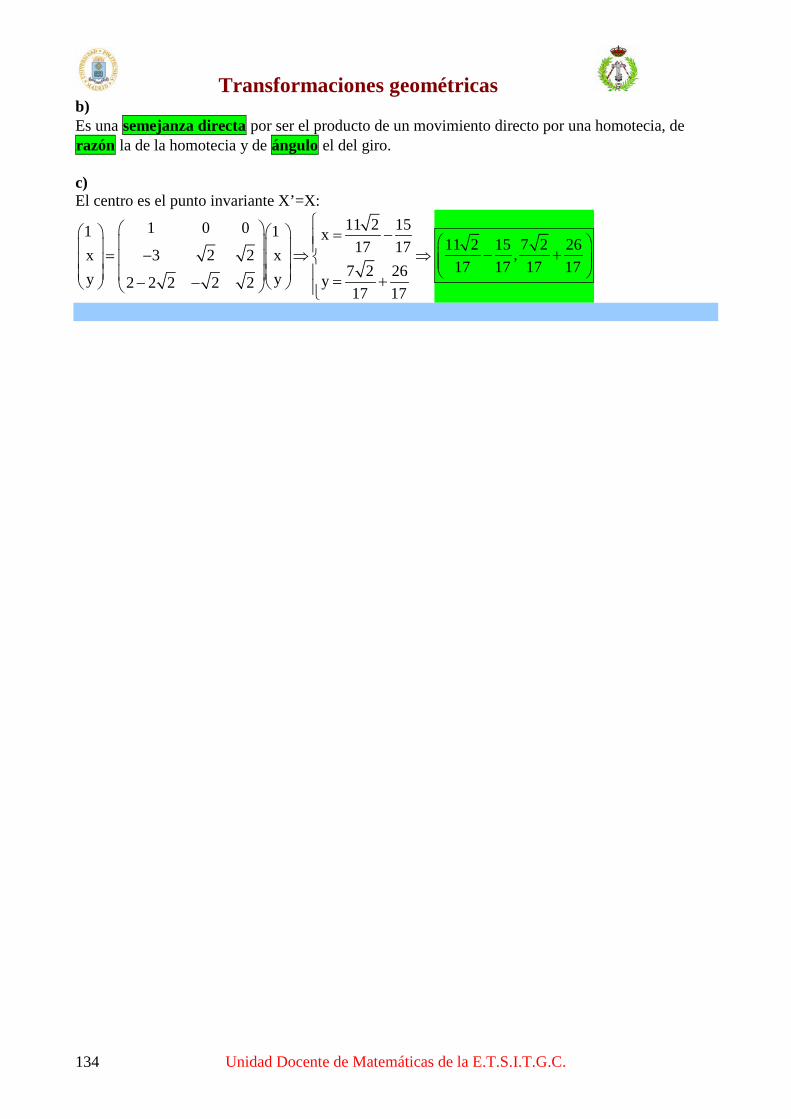
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 134
b) Es una semejanza directa por ser el producto de un movimiento directo por una homotecia, de razón la de la homotecia y de ángulo el del giro. c) El centro es el punto invariante X’=X:
11 2 151 0 01 1 x17 17x 3 2 2 x
7 2 26y y y2 2 2 2 217 17
= − = − ⇒ ⇒ = +− −
11 2 15 7 2 26,17 17 17 17
− +

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 135
73.- Clasificar y hallar los elementos característicos de la transformación geométrica dada por la siguiente ecuación:
1 0 0 0
6 1 6 31 14 4 4 4x' x3 6 1 6 yy'2 4 2 4 zz'6 3 6 14 4 4 4
− − = − −
Solución:
Por ser
1 6 34 4 46 1 6M
4 2 43 6 14 4 4
−
= − −
una matriz ortogonal, ya que MMt=In=3 es un MOVIMIENTO,
y además |M|=1 es DIRECTO. Buscamos los puntos invariantes: X’=X
1 0 0 0
6 1 6 31 14 4 4 4x x
3 6 1 6y y2 4 2 4z z6 3 6 1
4 4 4 4
− − = ⇒ − −
6x z2
1y2
− = −
=
Es una rotación alrededor de la recta de puntos invariantes. Calculamos el ángulo de rotación
1 6 34 4 46 1 6 1Traza(M) Traza 1 2cos cos
4 2 4 23 6 14 4 4
−
= − − = + α ⇒ α = − ⇒
120ºα = ± según la dirección
del eje.

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 136
74.- Obtener la ecuación matricial del giro de 60º alrededor del punto (1,1) del plano euclídeo. Solución: La ecuación de un giro de centro A(a,b) y amplitud α es:
x ' a cos sen x ay ' b sen cos y b
α − α − = + α α −
en nuestro caso:
x ' 1 cos 60º sen60º x 1y ' 1 sen60º cos 60º y 1
− − = + −
quedando:
1 3x ' 1 x 12 2y ' 1 y 13 1
2 2
− − = + −
El transformado del origen:
x
y
1 3 1 3O ' 1 0 12 2 2 2O ' 1 0 13 1 1 3
2 2 2 2
− + − = + = − −
La matriz de un giro del plano tiene la forma1G x
y
1 0 0N O' cos sen
O ' sen cos
= α − α α α
1G
1 0 0
1 3 1 3N2 2 2 21 3 3 12 2 2 2
= + − −
Otra forma de escribir la ecuación matricial es:
1 0 01 1
1 3 1 3x ' x2 2 2 2
y ' y1 3 3 12 2 2 2
= + −
−

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 137
75.- Clasificar la siguiente transformación del espacio euclideo obteniendo sus elementos característicos.
1 0 0 01 11 3 1 3 0x' x2 2 2 2y' y1 3 3 1 0z' z2 2 2 2
0 0 0 1
+ − = −
Solución: Sea N la matriz
3 31 12 2 2 2
3 31 12 2 2 2
1 0 0 0
0N
00 0 0 1
+ − = −
Como la submatriz N(1,1) es ortogonal y como, |N| = 1 esta transformación es un movimiento. Para conocer qué tipo de movimiento es, se calculan los puntos invariantes. Estos puntos se obtienen de la ecuación matricial NX X=
3 31 12 2 2 2
3 31 12 2 2 2
1 0 0 0 1 10 x x
y y0z z0 0 0 1
+ − = −
Esto da como solución la recta x 1y 1
= =
que son las Ecuaciones del eje de giro
Para calcular el ángulo de giro se toma un punto del plano z=0 el P=(0,0,0) y un punto del eje de ese mismo plano, el Q=(1,1,0) Se transforma el primer punto. El transformado del origen está en la primera columna de la matriz N, es el punto P’= 3 31 1
2 2 2 2 0+ −( , , )el ángulo de giro será el ángulo formado por los segmentos QP y
QP’. Si se llama ( )j 1, 1,0= − −
y ( )3 31 12 2 2 2j ' , ,0= + −
Ahora se calcula el ángulo que forman j
y j'
j.j' 1 1cos
22 2j j'−
α = = = −
⇒ α = ± 60º
para ver el signo del giro se calcula el producto vectorial j j '∧
si el producto vectorial tiene el sentido del vector director del eje z, el ángulo es el positivo y en caso contrario, el negativo.
3 31 12 2 2 2
i j kj j' 1 1 0 3k
0
∧ = − − =
+ −
por lo que el ángulo de giro es α = 60º

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 138
76.- De un giro del plano Euclídeo se sabe que transforma el A en A’ y el punto B en B’. Si las coordenadas de dichos puntos son las siguientes:
A=(100,120), B=(-100,-200), A’=(-561.525,68.376), B’=(-281.116,-184.154)
Se pide calcular el ángulo de giro, las coordenadas del Centro y el transformado del origen de coordenadas. Solución: La ecuación de un giro del plano viene dada por:
x' = O’x + x cos α – y sen α
y’= O’y+ x sen α + y cos α
Siendo O’ = (O’x, O’y) el transformado del origen de coordenadas y α el ángulo de giro Con los datos aportados, se formará un sistema de cuatro ecuaciones con cuatro incógnitas
-561.525 = O’x + 100 cosα-120 senα 68.376 = O’y + 120 cosα + 100 senα -281.116 = O’x - 100 cosα + 200 senα -184.154 = O’y -200 cosα -100 senα Cuya solución es:
O’x = -460.713; O’y= -50.943; cosα = 0.17365; senα = 0.98481 por lo tanto, el ángulo de giro es α = 80º y el transformado del origen
O’ (-460.713, -50.943) Para calcular el centro de giro, se sabe que éste es el punto invariante de la transformación y que, por tanto será la solución del sistema
x = O’x + x cos α – y senα
y= O’y+ x senα + y cosα
es decir,
460.713 = (0.17365 – 1) x – 0.98481 y
50.943 = 0.98481x + (0.17365 – 1) y
Lo que da como solución el punto C = (-200, -300)
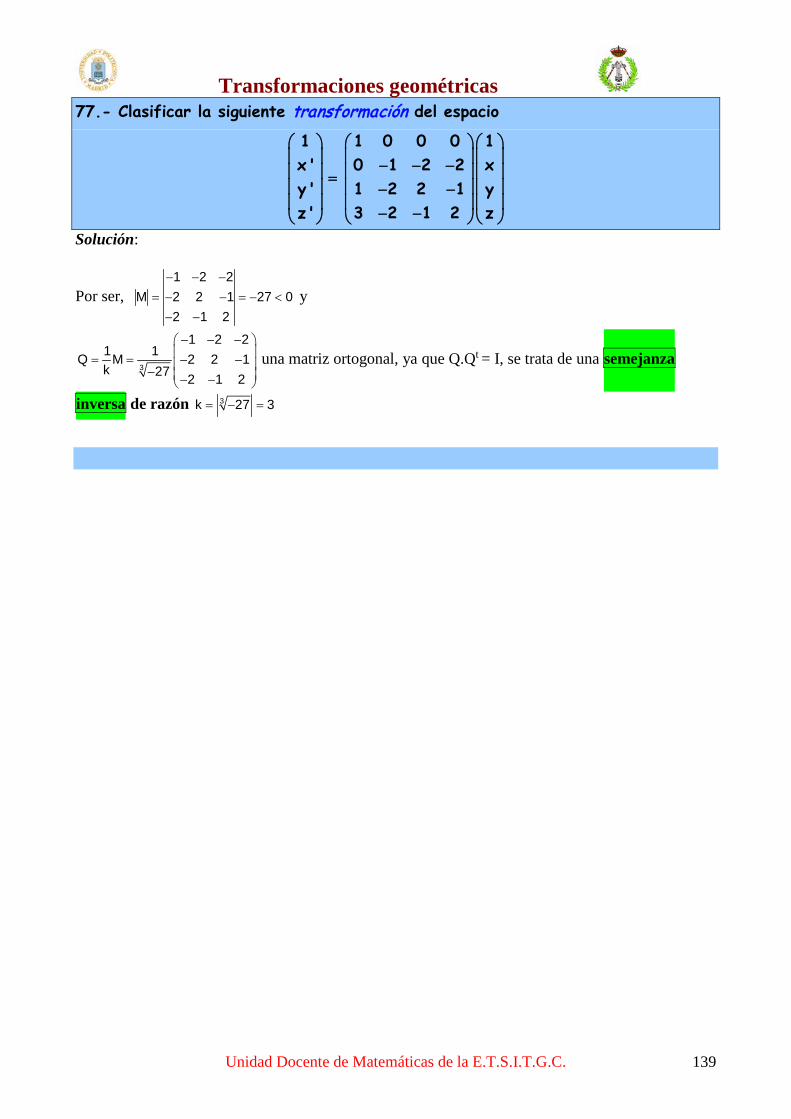
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 139
77.- Clasificar la siguiente transformación del espacio 1 1 0 0 0 1x' 0 1 2 2 xy' 1 2 2 1 yz' 3 2 1 2 z
− − − = − −
− −
Solución:
Por ser, − − −
= − − = − <− −
1 2 2M 2 2 1 27 0
2 1 2 y
− − − = = − − − − −
3
1 2 21 1Q M 2 2 1k 27 2 1 2
una matriz ortogonal, ya que Q.Qt = I, se trata de una semejanza
inversa de razón = − =3k 27 3

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 140
78.- Sean H la homotecia de centro A (1, 0) y razón k = 2, G el giro de centro B (1, 1) y ángulo 90ºα = y S la simetría axial de eje e ≡ y = x. Hallar la ecuación de la transformación producto: eA,k 2 B, 90ºH G S= α = . Solución: La ecuación de la homotecia de centro C y razón k es: X ' C kCX= +
Ecuación de la Homotecia de centro A(1,0) y razón k=2 1 1 0 0 1
x ' 1 x 12 x ' 1 2 0 x
y ' 0 y 0y ' 0 0 2 y
− = + ⇔ = − −
La ecuación de un giro de centro C(a,b) y amplitud α es: x ' a cos sen x ay ' b sen cos y b
α − α − = + α α −
La ecuación de un giro de centro B(1,1) y amplitud α =90º es:
x ' 1 cos90º sen90º x 1 1 0 1 x 1y ' 1 sen90º cos90º y 1 1 1 0 y 1
− − − − = + = + − −
1 1 0 0 1x ' 2 0 1 xy ' 0 1 0 y
⇔ = −
Ecuación de la simetría x ' a cos sen x ay ' b sen cos y b
α α − = + α − α −
siendo A=(a,b) un punto del eje de
pendiente tg(α/2). Si la recta es: y=x, resulta A=(0,0) y α =90º. 1 1 0 0 1
x ' 0 cos90º sen90º x 0 0 0 1 xx ' 0 0 1 x
y ' 0 sen90º cos90º y 0 0 1 0 yy ' 0 1 0 y
− = + = + ⇔ = − −
El producto A(1,0),k 2 B(1,1), 90º e y xH G S= α= ≡ = será:
1 1 0 0x ' 1 2 0y ' 0 0 2
= −
1 0 02 0 10 1 0
−
1 0 0 1 1 0 0 10 0 1 x 3 2 0 x0 1 0 y 0 0 2 y
= −
⇒x ' 3 2xy ' 2x
= − =
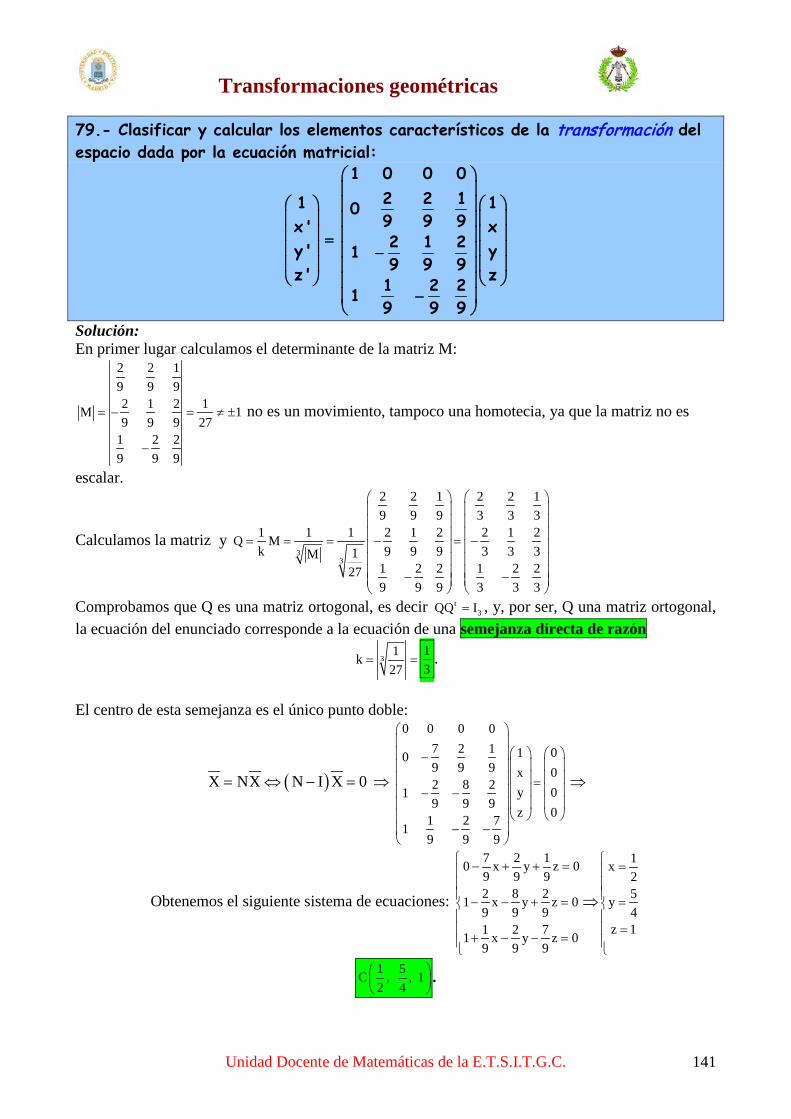
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 141
79.- Clasificar y calcular los elementos característicos de la transformación del espacio dada por la ecuación matricial:
1 0 0 02 2 11 109 9 9x' x2 1 2y' y19 9 9z' z1 2 219 9 9
= −
−
Solución: En primer lugar calculamos el determinante de la matriz M:
2 2 19 9 92 1 2 1M 19 9 9 27
1 2 29 9 9
= − = ≠ ±
−
no es un movimiento, tampoco una homotecia, ya que la matriz no es
escalar.
Calculamos la matriz y 3
3
2 2 1 2 2 19 9 9 3 3 3
1 1 1 2 1 2 2 1 2Q Mk 9 9 9 3 3 31M
1 2 2 1 2 2279 9 9 3 3 3
= = = − = − − −
Comprobamos que Q es una matriz ortogonal, es decir t3QQ I= , y, por ser, Q una matriz ortogonal,
la ecuación del enunciado corresponde a la ecuación de una semejanza directa de razón
31k27
= =13
.
El centro de esta semejanza es el único punto doble:
( )X NX N I X 0= ⇔ − = ⇒
0 0 0 07 2 1 1 009 9 9 x 02 8 2 y 019 9 9
z 01 2 719 9 9
− = − −
− −
⇒
Obtenemos el siguiente sistema de ecuaciones:
7 2 10 x y z 09 9 92 8 21 x y z 09 9 91 2 71 x y z 09 9 9
− + + = − − + =
+ − − =
⇒
1x25y4
z 1
= =
=
1 5C , , 12 4
.

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 142
La matriz ortogonal del giro que compone esta semejanza es la matriz 2 2 13 3 32 1 2Q3 3 3
1 2 23 3 3
= − −
, obtenida anteriormente.
El eje de giro es la recta que pasa por C y tiene como vector dirección, un vector invariante por Q.
( )3Q I X 0− = ⇒
1 2 13 3 3 x 02 2 2 y 03 3 3
z 01 2 13 3 3
− − − =
− −
⇒ x zy 0
= =
y una solución particular del sistema anterior es, ( )u 1, 0, 1= .
Así pues, la ecuación del eje de giro en forma paramétricas es: 1x t25y 4
z 1 t
= + =
= +
El ángulo α de la semejanza es solución de la ecuación:
2 1 2 51 2 cos traza(Q)3 3 3 3
+ α = = + + = ⇒ 5 11 2 cos cos3 3
+ α = ⇒ α = y por tanto, 1arccos3
α = ±
.
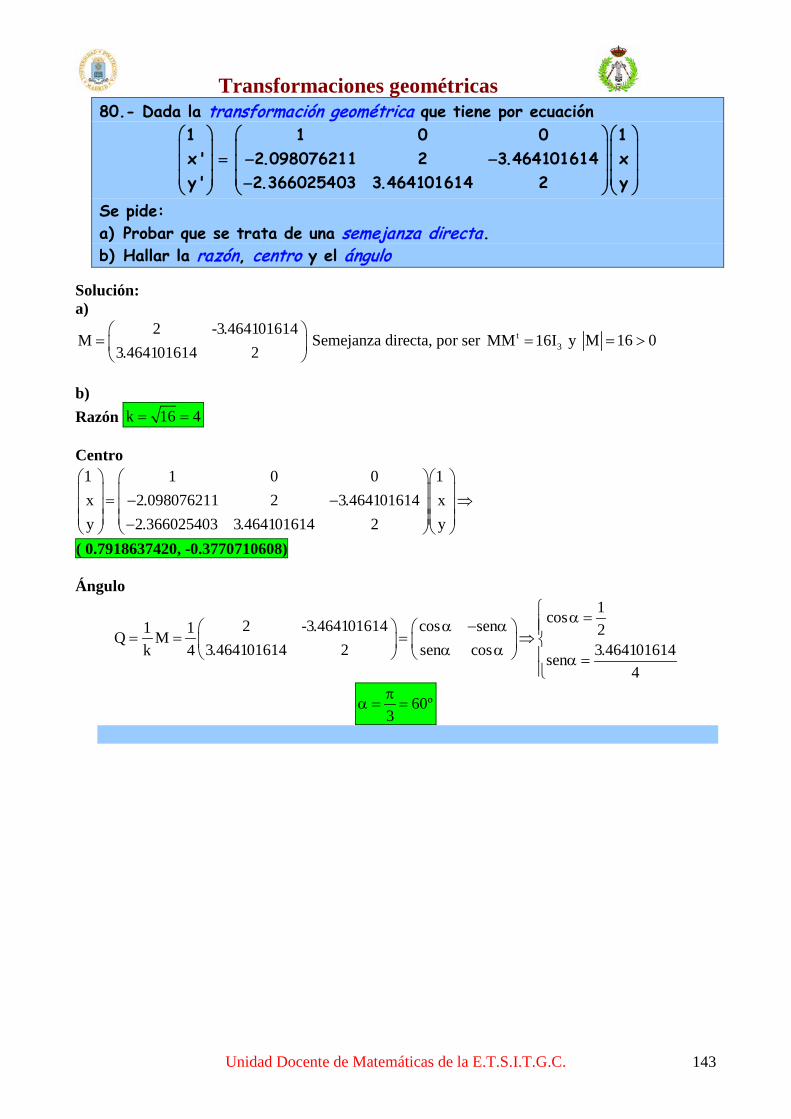
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 143
80.- Dada la transformación geométrica que tiene por ecuación 1 1 0 0 1x' 2.098076211 2 3.464101614 xy' 2.366025403 3.464101614 2 y
= − − −
Se pide: a) Probar que se trata de una semejanza directa. b) Hallar la razón, centro y el ángulo
Solución: a)
2 -3.464101614M
3.464101614 2
=
Semejanza directa, por ser t3MM 16I= y M 16 0= >
b) Razón k 16 4= = Centro
1 1 0 0 1x 2.098076211 2 3.464101614 xy 2.366025403 3.464101614 2 y
= − − ⇒ −
( 0.7918637420, -0.3770710608) Ángulo
1cos2 -3.464101614 cos sen1 1 2Q M3.464101614 2 sen cos 3.464101614k 4 sen
4
α =α − α = = = ⇒ α α α =
60º3π
α = =

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 144
81.- Hallar la ecuación del giro en el espacio alrededor de la recta y 2 zx 11 2
−− = =
− y
de ángulo α=π/3.
Solución: El eje de rotación e es la recta determinada por el punto A(1,2,0) y el vector ( )u 1, 1,2= −
.
1. Construimos una base B = { }1 2 3u , u , u ortonormal y directa tal que 1u e :
u 1 1 2u , ,1 u 6 6 6 = = −
2vuv
=
siendo v u⊥
, por ejemplo, ( )v 1,1,0 u= ⊥ pues u v 0⋅ =
⇒ 2
v 1 1u , ,0v 2 2
= =
( )1 2 3
i j kw 1 1 1w u u 1 1 2 2,2,2 u , ,w 3 3 31 1 0
= × = − = − ⇒ = = −
2. Respecto de B la matriz asociada MB=
1 0 0
0 cos sin3 3
0 sin cos3 3
π π − π π
y la matriz asociada respecto de
la base canónica BC es M=PMBP-1 donde P= PB→Bc=
1 1 16 2 31 1 16 2 3
2 106 3
−
−
. Operando con
Derive se obtiene que M=
7 2 1 2 3 212 2 12 12
2 1 7 2 3 22 12 12 122 1 2 1 5
4 6 4 6 6
−− −
+
− −
+ −
3. La ecuación de G(e,α) es de la forma X’=A+M XΑ
donde A es un punto cualquiera de e

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 145
x ' 1y ' 2z ' 0
= +
7 2 1 2 3 212 2 12 12
2 1 7 2 3 22 12 12 122 1 2 1 5
4 6 4 6 6
−− −
+
− −
+ −
x 1y 2z 0
− − −
⇔
'''
1
zyx
=
1 0 0 0
7 7 2 1 2 3 2212 12 2 12 1211 2 2 1 7 2 3 212 2 2 12 12 121 3 2 1 2 2 1 56 4 6 4 4 6 6
− + − −
+ − − − − + −
zyx1
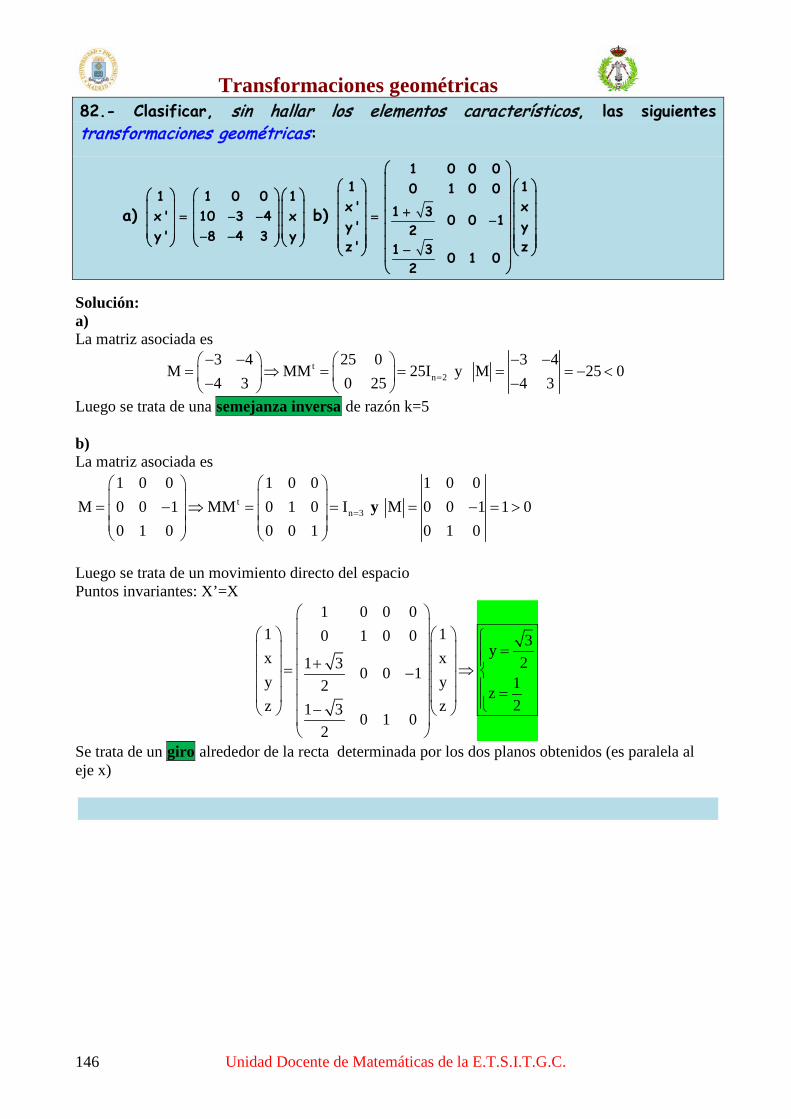
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 146
82.- Clasificar, sin hallar los elementos característicos, las siguientes transformaciones geométricas:
a) 1 1 0 0 1x' 10 3 4 xy' 8 4 3 y
= − − − −
b)
1 0 0 01 10 1 0 0x' x1 3 0 0 1y' y2z' z1 3 0 1 0
2
+= − −
Solución: a) La matriz asociada es
tn 2
3 4 25 0M MM 25I
4 3 0 25 =
− − = ⇒ = = −
y 3 4
M 25 04 3
− −= = − <
−
Luego se trata de una semejanza inversa de razón k=5 b) La matriz asociada es
tn 3
1 0 0 1 0 0M 0 0 1 MM 0 1 0 I
0 1 0 0 0 1=
= − ⇒ = =
y 1 0 0
M 0 0 1 1 00 1 0
= − = >
Luego se trata de un movimiento directo del espacio Puntos invariantes: X’=X
1 0 0 01 10 1 0 0x x1 3 0 0 1y y2z z1 3 0 1 0
2
+ = ⇒− −
3y2
1z2
=
=
Se trata de un giro alrededor de la recta determinada por los dos planos obtenidos (es paralela al eje x)

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 147
83.- a) Hallar la ecuación de la transformación resultante de componer el giro alrededor de la recta paralela al eje z que pasa por A(1,1,0) y ángulo α=π/6 con la homotecia de centro en A y k=3.
b) Demuestra que la transformación obtenida es una semejanza directa.
Solución:
a) La ecuación de G(e,α) es de la forma X’=A+M XΑ
donde A es un punto cualquiera de e
x ' 1y ' 1z ' 0
= +
3 1cos s en 0 06 6 2 2x 1 1 x 1
1 3s en cos 0 y 1 1 0 y 16 6 2 2
z 0 0 z 00 0 10 0 1
π π − − − − π π − = + − − −
Y operando queda
1 0 0 01 13 3 3 1 0x ' x2 2 2y ' y1 3 1 3 0z ' z2 2 2
0 0 0 1
− − = −
La ecuación de la homotecia HC,k de centro C(a, b, c) y razón k es:
1 1 0 0 0 1x ' (1 k)a k 0 0 xy ' (1 k)b 0 k 0 yz ' (1 k)c 0 0 k z
− = −
−
La ecuación de la homotecia de centro (1, 1, 0) y razón k=3 es: 1 1 0 0 0 1x ' 2 3 0 0 xy ' 2 0 3 0 yz ' 0 0 0 3 z
− = −
La composición HC,k oG(e,α) es:

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 148
1 0 0 0 1 0 0 01 1 0 0 0 1 13 3 3 1 5 3 3 3 3 30 0x ' 2 3 0 0 x x2 2 2 2 2 2y ' 2 0 3 0 y y1 3 1 3 1 3 3 3 3 30 0z ' 0 0 0 3 z z2 2 2 2 2 2
0 0 0 1 0 0 0 3
− − − − − = = − − − −
b)
1 0 0 0
5 3 3 3 3 3 02 2 2 27 0
1 3 3 3 3 3 02 2 20 0 0 3
−−
= >− −
La composición de un movimiento y una homotecia es siempre una semejanza y al ser el determinante de la matriz asociada positiva la semejanza es directa.

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 149
SOLUCIONES A LOS PROBLEMAS PROPUESTOS:
P1.-En el espacio afín euclídeo Ε3 se considera la transformación T dada por T(x,y,z) = (z,x,y)
a) Demostrar que T es una isometría b) Hallar los puntos dobles c) ¿Qué clase de transformación geométrica es?
P1.- a) T es una isometría ⇔ A,B E,d(A,B) d(T(A),T(B))∀ ∈ = b) X=Y=Z c) Es una rotación alrededor del eje x=y=z de amplitud 120º ó -120º según la orientación del eje.
P2.- Un triángulo equilátero tiene un vértice en el origen, y otro en el punto (1,0). Hallar las coordenadas del tercer vértice.
P2.- Dos soluciones 1 3,2 2
±
P3.- Clasificar las siguientes transformaciones en el plano y hallar sus elementos
principales
1 0 0 1 0 01 1 1 1
1 3 3 1 3 102 2 2 2 2
3 3 1 3 1 302 2 2 2 2
x ' x y x ' x y ' y y ' y
− = = − − − − −
P3.- a) Es una rotación de centro (1,1) y amplitud -30º b) Es una simetría axial respecto del eje (2 3)x y 0− + =
P4.- Dados los puntos A(0,1) y B(-1,-1), calcular las coordenadas del punto C sabiendo que la longitud del segmento AC es la mitad de la del segmento AB y que el ángulo BAC mide 30º
P4.- El punto 3 1 3 3C ,4 2 4 2
− + −
P5.- A la circunferencia 2 2 8 12 0C x y x≡ + − + = , de centro A, se le aplica un giro de centro el origen de coordenadas y amplitud 60º, transformándose en C’. Esta circunferencia, mediante la homotecia de centro A y razón 2, se transforma en C’’. Hallar la ecuación de C’’ las coordenadas del centro de la homotecia inversa que transforma C’ en C’’.
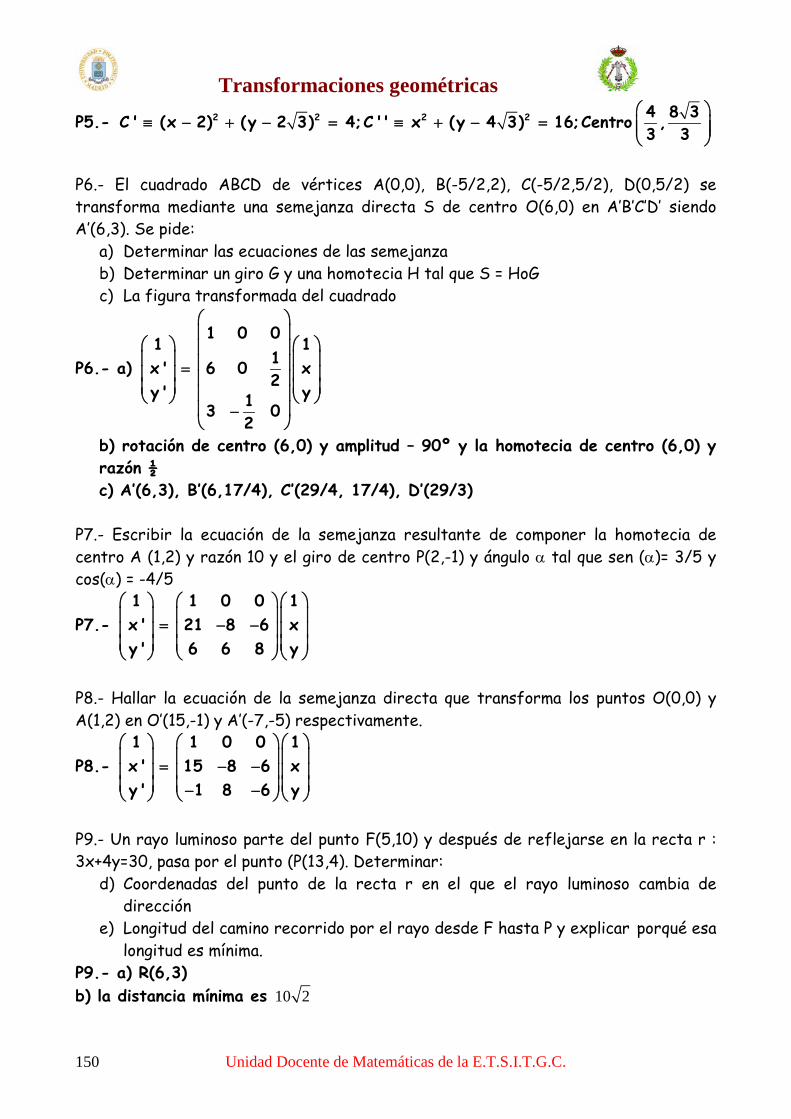
Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 150
P5.- 2 2 2 2 4 8 3C' (x 2) (y 2 3) 4;C'' x (y 4 3) 16;Centro ,3 3
≡ − + − = ≡ + − =
P6.- El cuadrado ABCD de vértices A(0,0), B(-5/2,2), C(-5/2,5/2), D(0,5/2) se transforma mediante una semejanza directa S de centro O(6,0) en A’B’C’D’ siendo A’(6,3). Se pide:
a) Determinar las ecuaciones de las semejanza b) Determinar un giro G y una homotecia H tal que S = HoG c) La figura transformada del cuadrado
P6.- a)
1 0 01 1
1x' 6 0 x 2
y' y13 02
=
−
b) rotación de centro (6,0) y amplitud – 90º y la homotecia de centro (6,0) y razón ½ c) A’(6,3), B’(6,17/4), C’(29/4, 17/4), D’(29/3)
P7.- Escribir la ecuación de la semejanza resultante de componer la homotecia de centro A (1,2) y razón 10 y el giro de centro P(2,-1) y ángulo α tal que sen (α)= 3/5 y cos(α) = -4/5
P7.- 1 1 0 0 1x' 21 8 6 x y' 6 6 8 y
= − −
P8.- Hallar la ecuación de la semejanza directa que transforma los puntos O(0,0) y A(1,2) en O’(15,-1) y A’(-7,-5) respectivamente.
P8.- 1 1 0 0 1x' 15 8 6 x y' 1 8 6 y
= − − − −
P9.- Un rayo luminoso parte del punto F(5,10) y después de reflejarse en la recta r : 3x+4y=30, pasa por el punto (P(13,4). Determinar:
d) Coordenadas del punto de la recta r en el que el rayo luminoso cambia de dirección
e) Longitud del camino recorrido por el rayo desde F hasta P y explicar porqué esa longitud es mínima.
P9.- a) R(6,3) b) la distancia mínima es 10 2

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 166
SOLUCIONES A LOS PROBLEMAS PROPUESTOS:
P1.-En el espacio afín euclídeo 3 se considera la transformación T dada por T(x,y,z) = (z,x,y)
a) Demostrar que T es una isometría b) Hallar los puntos dobles c) ¿Qué clase de transformación geométrica es?
P1.- a) T es una isometría A,B E,d(A,B) d(T(A),T(B)) b) X=Y=Z c) Es una rotación alrededor del eje x=y=z de amplitud 120º ó -120º según la orientación del eje.
P2.- Un triángulo equilátero tiene un vértice en el origen, y otro en el punto (1,0). Hallar las coordenadas del tercer vértice.
P2.- Dos soluciones 1 3,2 2
P3.- Clasificar las siguientes transformaciones en el plano y hallar sus elementos
principales
1 0 0 1 0 01 1 1 1
1 3 3 1 3 102 2 2 2 2
3 3 1 3 1 302 2 2 2 2
x ' x y x ' x y ' y y ' y
P3.- a) Es una rotación de centro (1,1) y amplitud -30º b) Es una simetría axial respecto del eje (2 3)x y 0
P4.- Dados los puntos A(0,1) y B(-1,-1), calcular las coordenadas del punto C sabiendo que la longitud del segmento AC es la mitad de la del segmento AB y que el ángulo BAC mide 30º
P4.- El punto 3 1 3 3C ,4 2 4 2
P5.- A la circunferencia 2 2 8 12 0C x y x , de centro A, se le aplica un giro de centro el origen de coordenadas y amplitud 60º, transformándose en C’. Esta circunferencia, mediante la homotecia de centro A y razón 2, se transforma en C’’. Hallar la ecuación de C’’ las coordenadas del centro de la homotecia inversa que transforma C’ en C’’.

Transformaciones geométricas
Unidad Docente de Matemáticas de la E.T.S.I.T.G.C. 167
P5.- 2 2 2 2 4 8 3C' (x 2) (y 2 3) 4;C '' x (y 4 3) 16;Centro ,3 3
P6.- El cuadrado ABCD de vértices A(0,0), B(-5/2,2), C(-5/2,5/2), D(0,5/2) se transforma mediante una semejanza directa S de centro O(6,0) en A’B’C’D’ siendo A’(6,3). Se pide:
a) Determinar las ecuaciones de las semejanza b) Determinar un giro G y una homotecia H tal que S = HoG c) La figura transformada del cuadrado
P6.- a)
1 0 01 1
1x' 6 0 x 2
y' y13 02
b) rotación de centro (6,0) y amplitud – 90º y la homotecia de centro (6,0) y razón ½ c) A’(6,3), B’(6,17/4), C’(29/4, 17/4), D’(29/3)
P7.- Escribir la ecuación de la semejanza resultante de componer la homotecia de centro A (1,2) y razón 10 y el giro de centro P(2,-1) y ángulo tal que sen ()= 3/5 y cos() = -4/5
P7.- 1 1 0 0 1x' 21 8 6 x y' 6 6 8 y
P8.- Hallar la ecuación de la semejanza directa que transforma los puntos O(0,0) y A(1,2) en O’(15,-1) y A’(-7,-5) respectivamente.
P8.- 1 1 0 0 1x' 15 8 6 x y' 1 8 6 y
P9.- Un rayo luminoso parte del punto F(5,10) y después de reflejarse en la recta r : 3x+4y=30, pasa por el punto (P(13,4). Determinar:
c) Coordenadas del punto de la recta r en el que el rayo luminoso cambia de dirección
d) Longitud del camino recorrido por el rayo desde F hasta P y explicar porqué esa longitud es mínima.
P9.- a) R(6,3) b) la distancia mínima es 10 2

U.D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía 187
Rotación o giro
Las transformaciones ortogonales directas de un espacio vectorial V2 son
rotaciones o giros vectoriales de V2 y su matriz asociada es
cossensencos
La ecuación de la rotación G (A, ) del espacio euclídeo E2, de centro A= ab
y ángulo , es: x '
y '
a
b +
cos sen
sen cos
x a
y b
.•
Rotación vectorial de V3, es toda transformación ortogonal f de V3,
cuyo subespacio F de vectores invariantes sea una recta (dim F= 1). A la recta vectorial F se le denomina eje de la rotación y, el ángulo de la rotación y su
matriz asociada será
cossen0sencos0001
o una semejante a ella.
La ecuación de la rotación G(e,α), considerando la referencia R= 1 2 3O;u , u , u ,
ortonormal, tal que 1u sea paralelo al eje e y A=abc
es un punto cualquiera del
eje, es: x '
y '
z '
a
b
c
1 0 0
0 cos sen
0 sen cos
x a
y b
z c
.

U.D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía 220
Transformación geométrica
Sea En un espacio afín euclídeo de dimensión n. Transformación geométrica de En, es toda aplicación n nT : E E biyectiva.
U.D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía 129
Isometría
Sea V el R-espacio vectorial asociado al espacio afín euclídeo En. Denotando por d la métrica definida en E, la transformación geométrica n nT : E E es una isometría o movimiento si verifica que para todo par de puntos A, B de En: d(T(A),T(B))=d(A,B). Si M es la matriz ortogonal que define f (la aplicación vectorial asociada), respecto de cierta base ortonormal, podemos escribir T(X) T(O) M u
, o bien,
X ' O ' M OX
, expresiones que constituyen las ecuaciones vectoriales de T.

U.D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía 222
Traslación
T es la traslación de vector u AA ' . Se designa T
u
En el plano:
La ecuación de la traslación T u , de vector m
un
es: x ' m xy ' n y
En el espacio:
La ecuación de la traslación T u , de vector
mu n
p
, respecto de cualquier
referencia R, es: x ' m xy ' n yz ' p z
.

U.D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía 183
Simétrico
Simétrico: que tiene simetría, puede ser respecto de un punto (central), de una recta (axial), de un plano (especular) o de otro elemento.
Elemento simétrico: el que, operado con su elemento
correspondiente, da como resultado el elemento neutro. En la suma se llama opuesto y en el producto inverso.
Un endomorfismo f del espacio vectorial euclídeo V es
simétrico cuando se verifica la siguiente igualdad entre productos escalares:
Vy,x , xfyyfx
.

U.D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía 201
Simetría especular
Una transformación ortogonal de V3 es una simetría ortogonal respecto de un plano, si y sólo si, el subespacio F de vectores invariantes tiene dimensión 2, F es el plano base de la simetría. La denotaremos por FS y se denomina simetría especular de V3 de base F. La ecuación de la simetría especular S de plano A F considerando la
referencia R= 1 2 3O;u , u , u , ortonormal, tal que los vectores u 2
, u 3
sean paralelos a , es:
x '
y '
z '
a
b
c
1 0 0
0 1 0
0 0 1
x a
y b
z c
Siendo Aabc
un punto de respecto de R:
U.D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía 119
Homotecia Sea Vn el R-espacio vectorial euclídeo asociado a En, homotecia vectorial
de Vn de razón k≠0 es toda transformación lineal:
n nV V
u u ' k u
. Se designa por hk.
Sea En espacio afín euclídeo de dimensión n cuyo R-espacio vectorial asociado es Vn. Homotecia afín es toda transformación geométrica H de En cuya transformación lineal de Vn asociada sea una homotecia vectorial hk dónde k 0,1. Fijada una referencia ortonormal de Vn, su matriz asociada es, por tanto, de la forma k In.
Si k>0 se dice que la homotecia es directa. Si k<0 se dice que la homotecia es inversa.

U.D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía 194
Semejanza
Semejanza de En es toda transformación geométrica S de En que cumpla la siguiente condición: Para cualesquiera A,B En se cumple que d S(A),S(B) kd A, B siendo k R y k>0.
El número k se denomina razón de la semejanza.
Semejanzas del espacio
Las semejanzas directas del espacio afín tridimensional quedan determinadas por el centro C, la razón k, el eje e y el ángulo de la rotación. (C,k)S = (C,k) (e, )H G = = (e, ) (C,k)G H .
Su ecuación es X ' C kQ CX
donde (e, )
k razón de la semejanza Q matriz de la rotación G
Las semejanzas inversas del espacio afín tridimensional quedan determinadas por el centro C, la razón k, el eje e y el ángulo de la rotación. (C,k)S =
(C, k) (e, )H G = = (e, ) (C, k)G H
Su ecuación es X ' C kQCX
donde (e, )
k razón de la semejanza Q matriz de la rotación G
Semejanzas del plano
Las semejanzas directas del plano afín quedan determinadas por el centro C, la razón k y el ángulo de la rotación. (C,k)S = (C,k) (C, )H G = (C, ) (C,k)G H .
Su ecuación es X ' C kQ CX
donde (C, )
k razón de la semejanza Q matriz de la rotación G
. Respecto de
la referencia canónica R O; i , j
la ecuación sería:
x ' a k cos ksen x ay ' b ksen k cos y b
Las semejanzas inversas del plano afín quedan determinadas por el centro C, la razón k y el eje e de la simetría que recibe el nombre de eje de la semejanza.
(C,k)S = (C,k) eH S = e (C,k)S H
Su ecuación es X ' C kQ CX
donde e
k razón de la semejanza Q matriz de la simetría S . Respecto de
la referencia canónica
j,i;OR la ecuación sería:
x ' a k cos ksen x ay ' b ksen k cos y b

U.D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía 53
Descomposición canónica
En el espacio Las semejanzas directas del espacio afín tridimensional quedan determinadas por el centro C, la razón k, el eje e y el ángulo de la rotación. (C,k)S = (C,k) (e, )H G = = (e, ) (C,k)G H .
Su ecuación es X ' C kQ CX
donde (e, )
k razón de la semejanza Q matriz de la rotación G
Las semejanzas inversas del espacio afín tridimensional quedan determinadas por el centro C, la razón k, el eje e y el ángulo de la rotación. (C,k)S = (C, k) (e, )H G = = (e, ) (C, k)G H
Su ecuación es X ' C kQCX
donde (e, )
k razón de la semejanza Q matriz de la rotación G
En el plano Las semejanzas directas del plano afín quedan determinadas por el centro C, la razón k y el ángulo de la rotación. (C,k)S = (C,k) (C, )H G = (C, ) (C,k)G H .
Su ecuación es X ' C kQ CX
donde (C, )
k razón de la semejanza Q matriz de la rotación G
. Respecto de la
referencia canónica R O; i , j
la ecuación sería:
x ' a k cos ksen x ay ' b ksen k cos y b
Las semejanzas inversas del plano afín quedan determinadas por el centro C, la razón k y el eje e de la simetría que recibe el nombre de eje de la semejanza.
(C,k)S = (C,k) eH S = e (C,k)S H
Su ecuación es X ' C kQ CX
donde e
k razón de la semejanza Q matriz de la simetría S . Respecto de la
referencia canónica
j,i;OR la ecuación sería:
x ' a k cos ksen x ay ' b ksen k cos y b

U.D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía 17
Base ortonormal o métrica
La base 1 2 nB u , u ,..., u es ortonormal o métrica cuando sus vectores son unitarios
( iu 1, i=1,2,...,n ) y ortogonales entre sí (perpendiculares dos a dos).
U.D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía 221
Transformación ortogonal
Las aplicaciones f :V V biyectivas, lineales y que conservan el producto escalar son transformaciones ortogonales. La ecuación es de la forma X’=MX, donde es la matriz asociada a f y tiene por columnas las coordenadas de los transformados de los vectores de la base en cuyo caso M es una matriz ortogonal.

U.D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía 203
Simetría ortogonal de Vn
Sea n nS : V V y nF V un subespacio vectorial del espacio vectoria Vn ; S es una simetría ortogonal respecto de F si S es una simetría respecto de F de dirección F .
n u V como 1 2u x x
con 1x F , 2x F
únicos
entonces 1 2 1 2 S u S x x x x
u x 2 x 1
s(u) -x2

U.D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía 194
Semejanza
Semejanza de En es toda transformación geométrica S de En que cumpla la siguiente condición: Para cualesquiera A,B En se cumple que d S(A),S(B) kd A, B siendo k R y k>0.
El número k se denomina razón de la semejanza.
Semejanzas del espacio
Las semejanzas directas del espacio afín tridimensional quedan determinadas por el centro C, la razón k, el eje e y el ángulo de la rotación. (C,k)S = (C,k) (e, )H G = = (e, ) (C,k)G H .
Su ecuación es X ' C kQ CX
donde (e, )
k razón de la semejanza Q matriz de la rotación G
Las semejanzas inversas del espacio afín tridimensional quedan determinadas por el centro C, la razón k, el eje e y el ángulo de la rotación. (C,k)S =
(C, k) (e, )H G = = (e, ) (C, k)G H
Su ecuación es X ' C kQCX
donde (e, )
k razón de la semejanza Q matriz de la rotación G
Semejanzas del plano
Las semejanzas directas del plano afín quedan determinadas por el centro C, la razón k y el ángulo de la rotación. (C,k)S = (C,k) (C, )H G = (C, ) (C,k)G H .
Su ecuación es X ' C kQ CX
donde (C, )
k razón de la semejanza Q matriz de la rotación G
. Respecto de
la referencia canónica R O; i , j
la ecuación sería:
x ' a k cos ksen x ay ' b ksen k cos y b
Las semejanzas inversas del plano afín quedan determinadas por el centro C, la razón k y el eje e de la simetría que recibe el nombre de eje de la semejanza.
(C,k)S = (C,k) eH S = e (C,k)S H
Su ecuación es X ' C kQ CX
donde e
k razón de la semejanza Q matriz de la simetría S . Respecto de
la referencia canónica
j,i;OR la ecuación sería:
x ' a k cos ksen x ay ' b ksen k cos y b

U.D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía 197
Simetría axial
Las transformaciones ortogonales inversas de un espacio vectorial V2 son
simetrías axiales vectoriales de V2 y su matriz asociada es cos sen
sen cos
La ecuación de la simetría axial Se del espacio euclídeo E2, de eje e (que pasa
por A=a
b
y tiene de inclinación α/2) es:
x '
y '
a
b
cos sen
sen cos
x a
y b
.
La ecuación de la simetría axial Se del espacio euclídeo E3 es la ecuación de la rotación G(e,α=180º), considerando la referencia R= 1 2 3O;u , u , u
,
ortonormal, tal que 1u sea paralelo al eje e y A=
a
b
c
es un punto cualquiera del
eje, es: x ' 1 0 0 x a
y ' 0 1 0 y b
z ' 0 0 1 z c
.

U.D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía 34
Coordenadas cartesianas rectangulares Si 321 u,u,u;OR es un sistema de referencia ortonomal y A, B, y C son puntos
tales que 321 uOC,uOB,uOA
, las rectas OA=i, OB=j, y OC=k se llaman ejes de coordenadas cartesianas rectangulares. Se llaman coordenadas cartesianas rectangulares de un punto a sus coordenadas cartesianas cuando el sistema de referencia es métrico u ortonormal.

U.D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía 198
Simetría deslizante Es el producto de una traslación por una simetría cuya transformación resultante no es una simetría. Puede ser en el plano o en el espacio:
La ecuación de una simetría deslizante eu
T S , de vector m
un
y eje e (que
pasa por A y tiene de inclinación α/2), es: x '
y '
a
b
cos sen
sen cos
x a
y b
m
n
La ecuación de la simetría deslizante u
T S , considerando la referencia
R= 1 2 3O;u , u , u , ortonormal, tal que los vectores u 2
, u 3
sean paralelos a , es.
Si A
a
b
c
un punto cualquiera de y u
m
n
p
, respecto de R, (u
paralelo a )
entonces: x '
y '
z '
a
b
c
1 0 0
0 1 0
0 0 1
x a
y b
z c
m
n
p

U.D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía 31
Cónica
Es la sección producida en una superficie cónica de revolución por un plano que no pase por el vértice.
Es el lugar geométrico de los puntos de un plano cuya razón de distancias a un punto fijo (que llamaremos foco) y a una recta fija (que llamaremos directriz) es constante.
Es el lugar geométrico de los puntos del plano que verifiquen la ecuación general de segundo grado: 2 2
00 01 02 11 22 12a 2 a x 2 a y a x a y 2 a xy 0 donde 11 a , 12 a y 22 a no son simultáneamente nulos y con respecto a una referencia ortonormal del plano.
Ecuación de la cónica en forma matricial: 00 01 02
01 11 12
02 12 22
a a a 11 x y a a a x 0
a a a y

U.D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía 20
Centro
Punto alrededor del cual la figura es simétrica (centro de la elipse o de la
hipérbola).
Las transformaciones geométricas que tienen un único punto invariante se
denomina centro. Así tenemos el centro del giro en el plano, el centro de
homotecia y el centro de semejanza cuando la razón es k 1.
Centro radical de tres circunferencias es un punto del plano que tienen la
misma potencia respecto de las tres circunferencias.
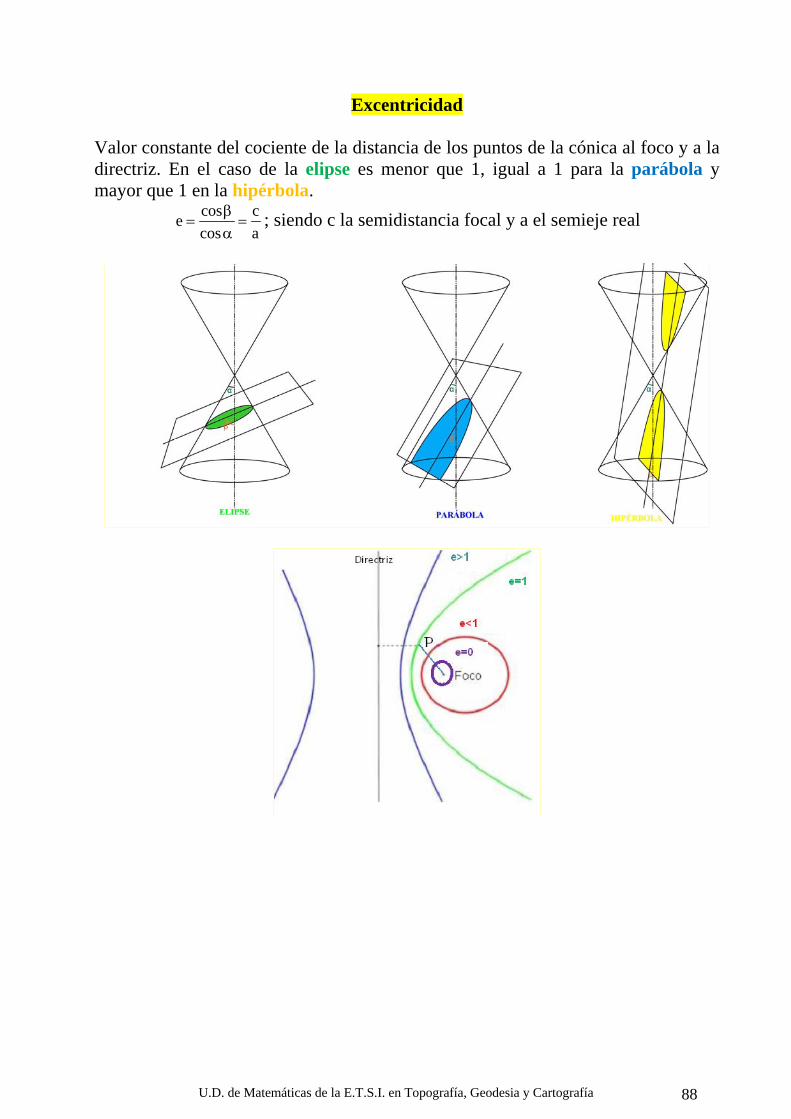
U.D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía 88
Excentricidad
Valor constante del cociente de la distancia de los puntos de la cónica al foco y a la directriz. En el caso de la elipse es menor que 1, igual a 1 para la parábola y mayor que 1 en la hipérbola.
cos cecos a
; siendo c la semidistancia focal y a el semieje real

U.D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía 21
Base canónica
Base canónica, Bc, es la base: c 1 2 nB e (1,0,...,0), e (0,1,0,...,0),..., e (0,0,...,0,1) del
espacio vectorial V.

U.D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía 90
Elipse
La suma de las distancias de un punto cualquiera de la elipse a los focos es igual al doble de su semieje mayor.
Sea la elipse de ecuación reducida 2 2
2 2
x y 1a b
, entonces:
Excentricidad: ce 1a
Vértices: A(a,0); A´(-a,0); B(0,b); B´(0,-b). Semieje mayor: a; semieje menor: b. Focos: F(c,0); F’(-c,0).
Directrices: 2ax
c
Ejes de simetría: x=0; y=0; eje focal o eje mayor: y=0. Centro: O(0,0) punto de intersección de los ejes de simetría. Distancia focal: d(F,F´)=2c. Parámetro focal: 2p b / a

U.D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía 148
Parábola Parábola es el lugar geométrico de los puntos del plano que equidistan de un punto fijo F, llamado foco, y una recta fija r, llamada directriz. Sea la parábola de ecuación reducida 2y 2px , entonces:
Foco: F (p/2,0). Directriz: x= - p/2. Eje de simetría: es la perpendicular del foco a la directriz y=0 Vértice: O(0,0) punto de intersección de la curva con el eje de simetría. Parámetro: es la distancia del foco a la directriz p. Excentricidad: e=1

U.D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía 181
Razón
Razón de una homotecia o una semejanza, dada la matriz cuadrada M que define la transformación geométrica, la razón k es igual a tM M siendo positiva si se trata de la homotecia directa y la semejanza y negativa para la homotecia inversa.

U.D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía 122
La recta en el Espacio Una recta queda determinada por dos puntos P y Q distintos. Si X es un punto cualquiera de la recta y 321 u,u,u;OR un sistema de referencia del espacio afín, la ecuación vectorial de la recta es:
OX OP t PQ
y sus ecuaciones paramétricas para )p,p,p(P 321 ,
)q,q,q(Q 321 , y )x,x,x(X 321 respecto de R,
son:
)pq(tpx)pq(tpx)pq(tpx
3333
2222
1111
Sea )v,v,v(v 321 un vector director de la recta, entonces la ecuación vectorial
es vtPX y las ecuaciones paramétricas:
333
222
111
tvpxtvpxtvpx
. De donde en forma
continua: 3
33
2
22
1
11
vpx
vpx
vpx
.
La recta en el Plano
Siendo m la pendiente; n la ordenada en el origen; P(x0,y0) un punto cualquiera y 1 2v v , v un vector director. Ecuación de la recta en forma explícita: y=mx+n Ecuación de la recta en forma punto pendiente: y-y0=m(x-x0) Ecuación general de la recta en el plano: ax+by+c=0
Ecuaciones paramétricas de la recta: 0 1
0 2
x x tvy y tv
Ecuación de la recta en forma continua: 0 0
1 2
x x y yv v
O
X QP r

U.D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía 175
Punto doble o invariante
Dada T, transformación geométrica de E, si T(A) A , A es un punto doble o invariante. Análogamente, sea F E si T(F) F , el subconjunto F es invariante por T.
U.D. de Matemáticas de la E.T.S.I. en Topografía, Geodesia y Cartografía 197
Triángulo Equilátero
Equilátero si tiene los tres lados iguales.