
TESIS Algoritmos Genéticos para la Ubicación Óptima de Estaciones de Reinyección de Cloro en...
112
UNIVERSIDAD DE GUANAJUATO División de Ingenierías Ingeniería Hidráulica ALGORITMOS GENÉTICOS PARA LA UBICACIÓN ÓPTIMA DE ESTACIONES DE REINYECCIÓN DE CLORO EN REDES DE ABASTECIMIENTO DE AGUA POTABLE DANIEL HERNÁNDEZ CERVANTES TESIS Que para obtener el grado de INGENIERO HIDRÁULICO Director: Dr. José de Jesús Mora Rodríguez Co-directores: M.I. Martín Rubén Jiménez Magaña. M.I. Josefina Ortiz Medel. Guanajuato, México Julio 2015
-
Upload
danielcervantes -
Category
Documents
-
view
84 -
download
20
description
Presentación completa de una análisis de diferentes escenarios para la determinaci´no de la mejor ubicación de estaciones de reinyección de cloro utilizando la ténica heurística Algoritmos Genéticos. El objetivo principal de éste trabajo es hacer uso eficiente y controlado del desinfectante cloro, utilizando la menor cantidad de estaciones de reinyección distribuídas en zonas estratégicas de la red de abastecimiento de agua potable.
Transcript of TESIS Algoritmos Genéticos para la Ubicación Óptima de Estaciones de Reinyección de Cloro en...
UNIVERSIDAD DE GUANAJUATO
División de Ingenierías
Ingeniería Hidráulica
ALGORITMOS GENÉTICOS PARA LA UBICACIÓN ÓPTIMA DE
ESTACIONES DE REINYECCIÓN DE CLORO EN REDES DE
ABASTECIMIENTO DE AGUA POTABLE
DANIEL HERNÁNDEZ CERVANTES
TESIS
Que para obtener el grado de
INGENIERO HIDRÁULICO
Director:
Dr. José de Jesús Mora Rodríguez
Co-directores:
M.I. Martín Rubén Jiménez Magaña.
M.I. Josefina Ortiz Medel.
Guanajuato, México Julio 2015


Considero a cada hombre como deudor de su profesión,
y ya que de ella recibe sustento y provecho,
así que debe procurar mediante el estudio
servirle de ayuda y ornato.
FRANCIS BACON

Agradecimientos
A Dios, por alcanzar este logro, por concederme el estar con mi familia y encontrar mi
vocación, por permitirme el seguir creyendo en Él.
A mis padres, Fernando y Aurora, por ser un ejemplo de esfuerzo y superación, a mis
hermanos Pablo, Iris, Heber, Fernando y mi sobrino Brayan, a toda mi familia, por
acompañarme en todo momento y ser mí guía, por fortalecer los valores que me integran
como persona y estudiante.
A todos mis amigos y compañeros de la universidad (una lista bastante larga), por todas
esas viviencias y apoyos durante la carrera.
A mi director de tesis, el Dr. José de Jesús Mora Rodríguez, por su valiosa enseñanza
durante este camino, por haberme permitido trabajar con él en diversos congresos y
asignaturas, por fortalecer este tema de investigación y mis expectativas como estudiante.
A mi co-director y sinodal, el M.I. Martín Rubén Jiménez Magaña, por la adquisición de
los profundos conocimientos acerca de esta técnica y su interés y paciencia en todo
momento, por su colaboración y revisión de los artículos académicos y avances de este
trabajo.
A mi co-directora y sinodal, la M.I. Josefina Ortiz Medel, por su ayuda tanto personal
como académicamente, por auxiliarme en el seguimiento a mi formación y esas
oportunidades de participar en los proyectos y disciplinas acerca de este tema, por
trasmitirnos ese sentido de dinamismo y ánimo en su trabajo.
A la Universidad de Guanajuato, al Sistema Municipal de Agua potable y
Alcantarillado de Guanajuato y al proyecto "Aplicación de algoritmos genéticos para la
ubicación de estaciones de reinyección de cloro y optimización del uso del desinfectante en
redes de abastecimiento de agua", financiado por la Universidad de Guanajuato.
En especial agradezco a Michelle y mi hijo Sebastián, por estar conmigo en todo
momento y ser mi motivo a seguir adelante, por hacerme sentir que la vida tiene muchas
grandezas y se pueden vivir en compañía.

TABLA DE CONTENIDO
INTRODUCCIÓN ......................................................................................................................... i
Fundamentos .................................................................................................................................. ii
Aspectos y herramientas para el análisis de la calidad del agua. ...................................................iii
Estructura de la Tesis ...................................................................................................................... iv
Enfoque del estudio ........................................................................................................................ v
1. GENERALIDADES DE LAS REDES DE DISTRIBUCIÓN DE AGUA POTABLE. ............................... 2
1.1. Red de distribución de agua potable. ................................................................................. 2
1.1.1. Tipos de redes de abastecimiento según su uso. ........................................................ 3
1.1.2. Tipos de redes de abastecimiento según su topología. .............................................. 3
1.2. Principales componentes de una red de agua potable. ...................................................... 4
1.2.1. Tubería. ....................................................................................................................... 4
1.2.2. Tipos de tubería en una red de abastecimiento ......................................................... 5
1.2.3. Conexiones. ................................................................................................................. 5
1.2.4. Válvulas. ...................................................................................................................... 5
1.2.5. Componentes especiales. ............................................................................................ 8
1.3. Formas de distribución del agua. ........................................................................................ 8
1.4. Sistemas municipales de agua potable, alcantarillado. .................................................... 10
1.4.1. Alcantarillado. ........................................................................................................... 11
1.4.2. Saneamiento y destino de aguas residuales y pluviales. .......................................... 12
1.4.3. Administración del servicio de agua potable y alcantarillado................................... 12
1.5. Ecuaciones fundamentales. .............................................................................................. 13
1.5.1. Ecuación de continuidad ........................................................................................... 13
1.5.2. Ecuación de la Energía ............................................................................................... 14
1.6. Concepto de disipación de la energía del flujo ................................................................. 15
1.6.1. Pérdidas por fricción ................................................................................................. 15
1.6.2. Pérdidas locales ......................................................................................................... 18
1.7. Análisis de redes por computadora. ................................................................................. 20
1.7.1. Análisis en régimen permanente. ............................................................................. 20
1.7.2. Análisis en régimen no permanente. ........................................................................ 21
1.7.3. Análisis en régimen transitorio. ................................................................................ 21
1.7.4. Programas de cómputo para análisis de redes. ........................................................ 22
2. CALIDAD DEL AGUA EN REDES HIDRÁULICAS .................................................................... 24
2.1. Concepto de calidad del agua ........................................................................................... 24
2.1.1. Problemáticas de calidad del agua. ........................................................................... 25
2.1.2. Microorganismos presentes en el agua. ................................................................... 28
2.2. Desinfección del agua. ...................................................................................................... 30
2.2.1. Desinfección del agua por Cloración. ........................................................................ 31
2.2.2. El Cloro ...................................................................................................................... 31
2.2.3. Uso de Cloro como desinfectante en redes de agua potable. .................................. 31
2.2.4. Límites establecidos de concentración de cloro. ...................................................... 32
2.2.5. Etapas de reacción del cloro en la desinfección. ...................................................... 33
2.2.6. Mecanismos de decaimiento de cloro. ..................................................................... 33
2.2.7. Subproductos de la desinfección con Cloro. ............................................................. 34
2.3. Modelación del decaimiento de cloro en el agua. ............................................................ 35
2.3.1. Coeficiente de reacción del cloro en el seno del flujo kb .......................................... 35
2.3.2. Coeficiente de reacción del cloro en la pared de la tubería kw. ................................ 36
2.3.3. Valores típicos de kb y kw. .......................................................................................... 36
2.4. Estaciones de Reinyección de cloro. ................................................................................. 37
2.4.1. Tanques de cloro. ...................................................................................................... 38
2.4.2. Materiales que se emplean en la construcción. ........................................................ 39
2.4.3. Algunos equipos de dosificación de cloro. ................................................................ 39
2.5. El tema del agua embotellada en México. ........................................................................ 42
3. ALGORITMOS GENÉTICOS ................................................................................................ 45
3.1. Computación Evolutiva, una breve reseña histórica. ........................................................ 45
3.1.1. Surgimiento de los Algoritmos Genéticos. ................................................................ 47
3.2. Análisis de algoritmos. ...................................................................................................... 49
3.3. Técnicas Heurísticas. ......................................................................................................... 50
3.4. Algoritmos Genéticos ........................................................................................................ 51
3.4.1. Algoritmo Genético simple. ....................................................................................... 52
3.4.2. Traducción biológica de los elementos de los AG. .................................................... 53
3.5. Procesos de los AG ............................................................................................................ 54
3.5.1. Codificación ............................................................................................................... 54
3.5.2. Función de Aptitud. ................................................................................................... 57
3.5.3. Proceso de Selección. ................................................................................................ 57
3.5.4. Operador de Cruza. ................................................................................................... 60
3.5.5. Mutación ................................................................................................................... 62
3.6. Ejemplo .............................................................................................................................. 63
4. IMPLEMENTACIÓN DEL AG PARA LA UBICACIÓN ÓPTIMA DE PUNTOS DE REINYECCIÓN Y LA
CANTIDAD ADECUADA DE ESTACIONES SUGERIDAS ................................................................. 68
4.1. Codificación ....................................................................................................................... 68
4.1.1. Representación del cromosoma................................................................................ 69
4.2. Generación de Población inicial. ....................................................................................... 71
4.3. Función de aptitud propuesta ........................................................................................... 72
4.3.1. Descripción de la función de aptitud. ....................................................................... 73
4.3.2. Visualización de valores de la función de aptitud. .................................................... 78
4.4. Selección proporcional ...................................................................................................... 79
4.5. Cruza .................................................................................................................................. 80
4.6. Mutación ........................................................................................................................... 81
5. EJEMPLO Y ANÁLISIS DE APLICACIÓN ............................................................................... 84
5.1. Objetivos generales ........................................................................................................... 84
5.2. Ejemplo de aplicación. ...................................................................................................... 84
5.2.1. Descripción de la red. ................................................................................................ 84
5.2.2. Valores introducidos. ................................................................................................ 86
5.2.3. Resultados ................................................................................................................. 87
DISCUSIÓN ............................................................................................................................. 92
CONCLUSIONES ...................................................................................................................... 93
REFERENCIAS: ......................................................................................................................... 95
i
INTRODUCCIÓN
El agua es un compuesto muy importante para la vida diaria, es indispensable para
casi todas las actividades necesarias y de recreación, así como para procesos industriales,
sin embargo, uno de los principales usos de este vital líquido es para consumo humano.
Para ello, el encargado de disponer del recurso a los consumidores es llamado “sistema de
abastecimiento de agua potable”, el cual debe realizar el servicio con estándares de
cantidad, presión y calidad. En el agua, es altamente probable encontrar compuestos
químicos y tener la presencia de microorganismos que lleguen a resultar nocivos para los
consumidores. La calidad del agua en los sistemas de abastecimiento para consumo
humano está relacionado con todos los elementos que conforman al sistema; desde la
captación, que dependiendo de la fuente, se realizará un tipo de tratamiento para su
posterior potabilización y alcanzar así su nivel óptimo de calidad para su consumo (Ferrer y
Aguado, 2007).
Hoy en día, un gran número de sectores de redes de abastecimiento de agua potable,
como toda obra de ingeniería, terminaron su vida útil, por lo que están expuestas a ciertos
problemas que conllevan a su mal funcionamiento y similarmente problemas con la calidad
del agua. El último punto es el principal enfoque de nuestro trabajo, la necesidad surge
cuando dichas redes tienen presencia de contaminantes en el agua, principalmente
microorganismos patógenos que pueden llegar a alterar el estado de salud de los
consumidores a corto plazo. En este punto, se presenta la posibilidad de que algunos
sectores de la red queden vulnerables frente a la proliferación de microorganismos
patógenos y con ello, un posible riesgo de brote de enfermedades gastrointestinales debidas
al consumo de agua contaminada.
ii
Fundamentos
Desde principios del siglo XIX el agua potable ha sido desinfectada, cuando se
descubrió que los riesgos de enfermedades por contaminación microbiológica eran
probablemente transmitidos por el agua. Nombrando algunas de ellas, el cólera o la fiebre
tifoidea, disminuyeron drásticamente cuando se utilizaron desinfectantes (Castro, 2003).
Sin embargo, también es verdad que la desinfección a base de químicos ha ocasionado
riesgos no deseados pero reales debidos a los subproductos generados por reacciones con
los contaminantes presentes en el agua. Cada uno de los desinfectantes empleados en redes
hidráulicas, como el cloro, el dióxido de cloro, las cloraminas y el ozono, producen sus
propios subproductos en el agua potable (Quirós, 2010).
Debido a que las redes de distribución de agua son a menudo de gran extensión y
para su construcción, requieren una inversión importante de capital, no es fácilmente
posible volver a configurarlas para obtener esquemas hidráulicos favorables que mejoren la
distribución de los desinfectantes. Desde una perspectiva de operaciones simplista, la
solución de un problema de baja concentración de cloro es aumentar la dosis a la fuente de
agua. Estas reinyecciones contrarrestan el problema asociado con los bajos niveles de
desinfectante, pero pueden resultar en ciertas zonas, niveles extremadamente altos de cloro
principalmente para los usuarios cercanos de estas fuentes y promueven la formación de
subproductos nocivos tales como los trihalometanos y ácidos haloacéticos (Lansey, 2007).
Para mantener los niveles adecuados del desinfectante, se llegan a instalar
estaciones de cloración, garantizando que el contenido de cloro mantenga el mínimo
permisible por la normatividad. Las estaciones de cloración son obras de infraestructura
colocadas en ciertos puntos del sistema de agua potable donde el contenido de cloro no es
suficiente para alcanzar la desinfección del agua (Islam et al., 2013). En México y muchos
otros países, se determina la dosis necesaria del desinfectante en fuentes de abastecimiento
y eventuales estaciones de reinyección de cloro, por medio de prueba y error, aplicando
determinada dosis en la fuente y revisando la concentración en diferentes puntos de la red
(CNA, 2007a; Meng et al., 2011). Sin embargo, resulta imposible realizar muestreos en
toda la red, lo que genera incertidumbre en la concentración del desinfectante en muchos
tramos del sistema; la concentración puede estar dentro de los límites permisibles en los
puntos donde se muestrea, pero pueden existir muchos otros puntos de la red donde la
concentración sea insuficiente.
iii
Aspectos y herramientas para el análisis de la calidad del agua.
Las redes que se encuentran en condiciones defavorables de vida útil y operación y
mantenimiento tienen ciertos puntos o ciertos sectores que no alcanzan la cantidad
suficiente de desinfectante. Según Alcocer et al. (2004) los puntos más alarmantes en
cuanto deficiencia de cloro no siempre se encuentran en las zonas más alejadas del tanque
abastecedor o de la fuente de agua, si no que pueden localizarse en puntos donde el agua
fluye con baja velocidad o bien, en tanques de almacenamiento. Realizar la búsqueda de la
mejor locación para emplazar una estación de reinyección de cloro se vuelve un reto, que al
no tener una analogía del comportamiento de la red bien definida, se somete al proceso
antes mencionado: “prueba y error” lo cual es un método para determinar esta locación que
lleva varios proceso, tiempos y costos de pruebas, por lo que contar con una herramienta
que determine el mejor sitio de la cloración adicional puede ahorrar todos estos ensayos que
se hacen para la determinación de dicha locación.
Desde los años 90, los Algoritmos Genéticos (AG) están siendo utilizados para la
resolución de diversos problemas de redes de agua potable (González, 2013), como la
optimización de redes, detección de fugas, y también la ubicación de estaciones de
reinyección. Más concretamente, el estudio de redes con AG comenzó en 1996, en
Australia (Jiménez, 2004). Dicho de otro modo, se puede lograr que la computadora,
mediante el código de un algoritmo, sea capaz de sugerir la solución a un problema de
redes, aprovechando la rapidez con la que realiza cálculos y (en éste caso) simulaciones
hidráulicas. Por todo ello, se considera que, eligiendo las variables que afectan la
concentración de cloro en la red, hará posible encontrar una solución que pueda beneficiar a
los consumidores de agua.
En la actualidad, se cuenta con diferentes programas de cómputo libres y
comerciales que modelan la calidad del agua en redes de abastecimiento, con los que se
verifica la concentración y el desarrollo del desinfectante en el transcurso del agua en la
red. Mencionando a algunos de ellos:
WATER CAD y WATER GEMS (Haestad Methods, EUA)
INFOWORKS WS (Wallingford Software Ltd.)
KYPIPE – PIPE2000 (Universidad de Kentucky, EUA),
H2ONET (Montgomery, EUA),
EPANET (Enviromental Protection Agency EPA, EUA).
Sin embargo, ninguno de ellos tiene la aplicación de determinar el mejor lugar de la
red para reinyectar cloro o indicar la cantidad adecuada sugerida para hacerlo.
iv
Por lo anterior, para los sistemas de abastecimiento de agua potable en México
resulta de gran utilidad conocer la distribución del desinfectante dentro de la red en
relación con las condiciones de operación, de los materiales que conforman las
redes y de las características del agua en la región, con el fin de detectar zonas con
posible déficit y definir las estaciones de reinyección de cloro.
Estructura de la Tesis
Todo este estudio se desglosará en 5 capítulos que contienen, a grandes rasgos, los
temas complementarios para el desarrollo de la técnica de optimización.
En el primer capítulo se describen las generalidades de las redes de distribución de
agua potable, sus principales componentes y diferentes tipos que existen. Se presentan
varios modelos para el análisis hidráulico de las mismas y su comportamiento respecto a
calidad del agua.
El segundo capítulo describe a los desinfectantes utilizados hoy en día.
Principalmente trata sobre el estado del arte del cloro, su función como agente de
desinfección y cómo ha cambiado la manera de usarse para la potabilización o la
desinfección del agua. Los diferentes procesos y reacciones del cloro en el agua y en
función de los contaminantes y el control de la cantidad presente en la red de
abastecimiento.
El tercer capítulo muestra los fundamentos de computación evolutiva. Se estudia
más a fondo el método usado en la presente tesis: Los Algoritmos Genéticos. Se describe su
origen, su funcionamiento y los avances que se han presentado en cuanto a esta herramienta
heurística, sus diferentes estructuras como medio de búsqueda y aplicaciones que se le han
dado.
El cuarto capítulo describe la implementación de los AG a la Ubicación Óptima de
Estaciones de Reinyección de Cloro. La descripción de su funcionamiento y los estándares
que debe preservar para alcanzar los índices adecuados de calidad del agua, refiriéndose a
ésto como la Función objetivo. La cual es la principal cualidad que permite al algoritmo
lograr las restricciones en cuanto a la calidad que debe existir en cada nudo de la red.
En el quinto y último capítulo se ejemplifica la funcionalidad del algoritmo en
redes donde se requiere la instalación de estaciones de reinyección de cloro debido a la falta
e concentración del desinfectante en ciertas áreas del sistema, así como comparaciones con
resultados propuestos en metodologías propuestas por otros autores.
v
Enfoque del estudio
En este trabajo, se propone estudiar la ubicación óptima de estaciones de
reinyección de cloro usando una de las técnicas heurísticas más utilizadas en hidráulica
urbana, Algoritmos Genéticos. Estos algoritmos son procedimientos de búsqueda basados
en la teoría de la selección natural y los mecanismos de población genética, y su eficiencia
de búsqueda en espacios de solución complicados, ha sido probada satisfactoriamente. La
optimización que se planteará será la de satisfacer los límites permisibles del cloro residual
libre, tanto mínimo (0.20 mg/L) como máximo (1.50 mg/L), especificados en la Norma
Oficial Mexicana denominada: “Salud ambiental, Agua para uso y consumo Humano.
Límites permisibles de calidad y tratamientos a que debe someterse el agua para su
potabilización” (NOM-127-SSA1-1994), por lo cual se analizará cada punto de la red para
lograr el uso eficiente del desinfectante en base a las condiciones de la normatividad. En
función del rango que se establece, se buscará satisfacer el uso eficiente del desinfectante
para que esté dentro de los límites en toda la red de distribución.
Los objetivos principales antes mencionados son muy generales, simplemente la
utilización de esta técnica permite sugerir al organismo operador una rápida búsqueda de
solución al problema de bajas concentraciones de cloro en una red de abastecimiento de
agua potable, por lo que pudiera parecer el único interés hacia el organismo. Al mismo
tiempo podemos hacer hincapié en que no sólo se trata de cumplir las normas establecidas,
si no también buscar la conciencia ética de hacer un buen servicio de proveer a la
población, un agua en mejor estado.
Se busca concientizar al organismo operador de entregar a la población un líquido
en mejores condiciones, aún cuando se esté cumpliendo con las normas establecidas. El
hecho de mantener a la red dentro de los límites, no quiere decir que no se puedan mejorar
las propiedades del agua suministrada. Es de suma importancia atender los problemas de
calidad del agua, con el uso necesario de cloro, posibilitándonos usar lo mínimo posible,
haciéndolo dentro de los límites establecidos y que esa concentración pueda hacer su
trabajo de combatir los contaminantes que ponen en cierto riesgo la salud de la población
servida. Tomando las condiciones de consumo y uso del agua en México, este trabajo
propone el mantenimiento de la concentración mínima de cloro mediante la optimización
de la cantidad de cloro utilizado y garantizar así la reducción de los problemas de
generación de trihalometanos y la incidencia de enfermedades gastrointestinales. Este
estudio muestra que el uso de cloro podría disminuir hasta un 37%, y la concentración de
desinfectante permanece más uniforme a lo largo de la red durante las 24 horas de consumo
de agua. En última instancia se reduce el costo de producción de agua potable.
1
CAPÍTULO 1

2
1. GENERALIDADES DE LAS REDES DE
DISTRIBUCIÓN DE AGUA POTABLE.
1.1. Red de distribución de agua potable.
Se denomina red de distribución al conjunto de elementos encargados del transporte
del agua desde los puntos de extracción o almacenamiento hasta los puntos de consumo:
viviendas, comercios, industrias, sistemas de riego sistemas contra incendio, etc. (Jiménez,
2004). Básicamente, la red está constituida por tuberías y elementos especiales: válvulas,
accesorios, tomas contra incendio, elementos de unión, elementos de medición, etc. (Figura
1.1). Las tuberías deben ser seleccionadas adecuadamente para suministrar los gastos
demandados, para lo cual es necesario mantener en la red, una presión entre una mínima y
una máxima aceptables con el menor costo de adquisición posible.
La red debe proporcionar este servicio todo el tiempo, en cantidad suficiente, con la
calidad requerida y a una presión adecuada. Los límites de calidad del agua, para que pueda
ser considerada como potable se establecen en la Norma Oficial Mexicana NOM-127-
SSA1 vigente.
Figura 1.1 Modelo general de una red de abastecimiento de agua potable (Red hidráulica experimental DIGH-UG).
3
1.1.1. Tipos de redes de abastecimiento según su uso.
Según el uso al que vaya destinada el agua suministrada, las redes de abastecimiento
pueden ser:
Redes generales de suministro de agua en zonas urbanas: en estos casos es la
misma red encargada del suministro doméstico, industrial, riego, limpieza de calles,
extinción de incendios, etc.
Redes de abastecimiento para zonas residenciales: donde puede llegar a existir una
red de agua potable y otra para el resto de usos y servicios.
Redes de servicio en polígonos industriales.
Redes exclusivas de riego: cultivo y/jardines.
Redes para su uso exclusivo de extinción de incendios.
1.1.2. Tipos de redes de abastecimiento según su topología.
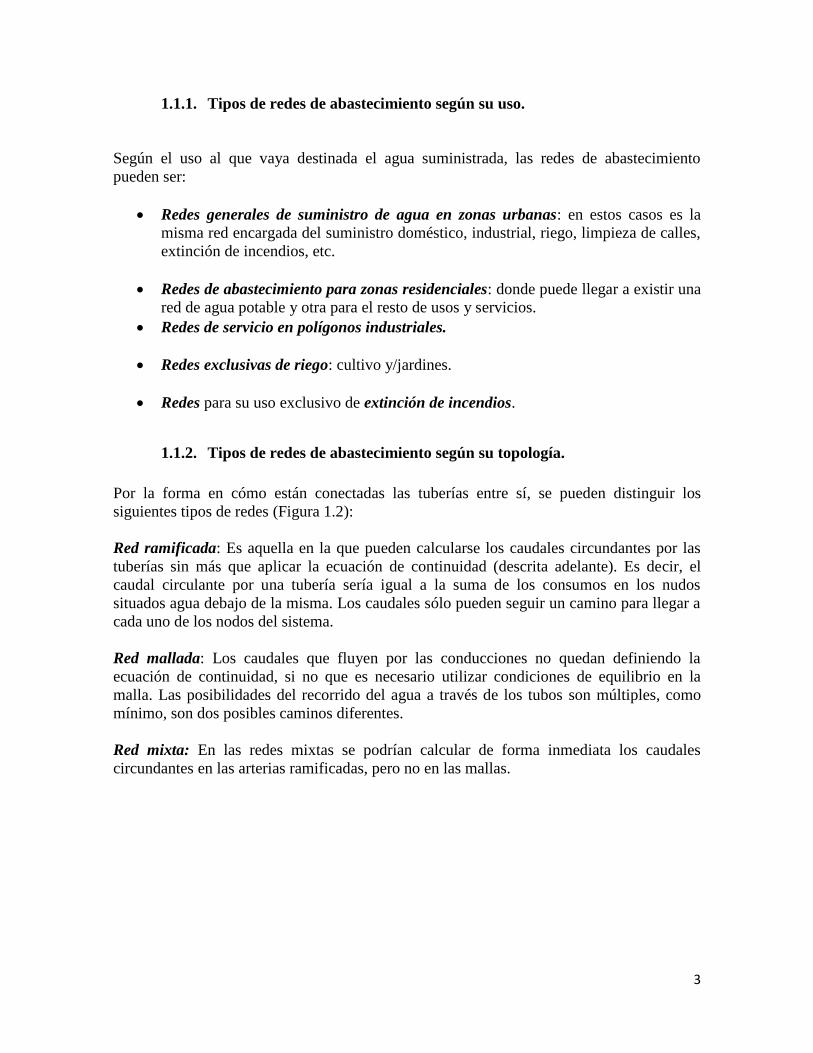
Por la forma en cómo están conectadas las tuberías entre sí, se pueden distinguir los
siguientes tipos de redes (Figura 1.2):
Red ramificada: Es aquella en la que pueden calcularse los caudales circundantes por las
tuberías sin más que aplicar la ecuación de continuidad (descrita adelante). Es decir, el
caudal circulante por una tubería sería igual a la suma de los consumos en los nudos
situados agua debajo de la misma. Los caudales sólo pueden seguir un camino para llegar a
cada uno de los nodos del sistema.
Red mallada: Los caudales que fluyen por las conducciones no quedan definiendo la
ecuación de continuidad, si no que es necesario utilizar condiciones de equilibrio en la
malla. Las posibilidades del recorrido del agua a través de los tubos son múltiples, como
mínimo, son dos posibles caminos diferentes.
Red mixta: En las redes mixtas se podrían calcular de forma inmediata los caudales
circundantes en las arterias ramificadas, pero no en las mallas.
4
Figura 1.2 Tipos de redes según su topología.
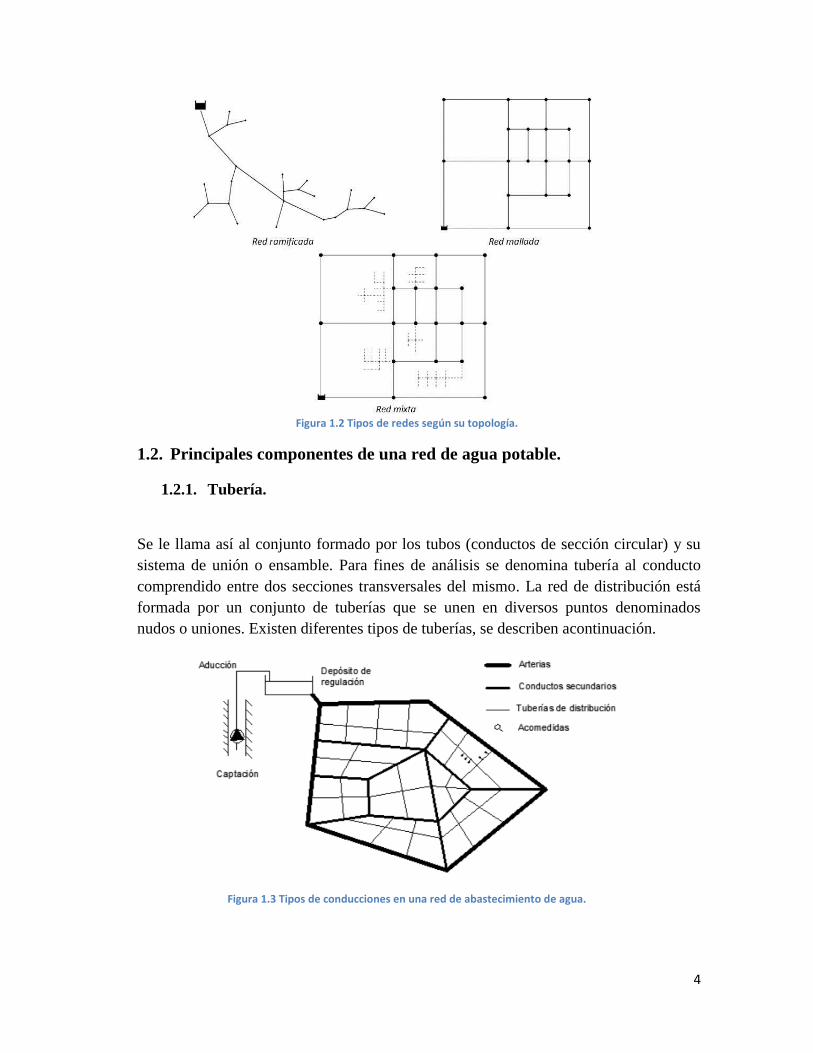
1.2. Principales componentes de una red de agua potable.
1.2.1. Tubería.
Se le llama así al conjunto formado por los tubos (conductos de sección circular) y su
sistema de unión o ensamble. Para fines de análisis se denomina tubería al conducto
comprendido entre dos secciones transversales del mismo. La red de distribución está
formada por un conjunto de tuberías que se unen en diversos puntos denominados
nudos o uniones. Existen diferentes tipos de tuberías, se describen acontinuación.
Figura 1.3 Tipos de conducciones en una red de abastecimiento de agua.
5
1.2.2. Tipos de tubería en una red de abastecimiento
Tuberías de traída o aducciones: Son encargadas del transporte de agua desde las fuentes
de abastecimiento hasta las plantas de tratamiento y/o los depósitos de regulación o
estaciones de bombeo. También se denominan aducciones a aquellas conducciones que
enlazan al depósito de conducción con la red propiamente dicha.
Línea de conducción principal: Son las conducciones de mayor diámetro de la red y
alimentan a conductos secundarios. En ellas no se deben realizar tomas directas a los
usuarios.
Tuberías de distribución o servicio: Están alimentadas desde las secundarias y en ellas se
realizan la mayor parte de acometidas a los usuarios.
Ramales o acometidas: Conjunto de tuberías, válvulas y accesorios que en enlazan la red
pública con las instalaciones anteriores de los edificios, junto al muro de fachada.
Generalmente, el ramal no se considera dentro de la red de distribución.
1.2.3. Conexiones.
Son todos aquellos accesorios que se emplean para llevar a cabo ramificaciones,
intersecciones, cambios de dirección, modificaciones de diámetro, uniones de tuberías de
diferente material o diámetro, y terminales de los conductos, entre otros.
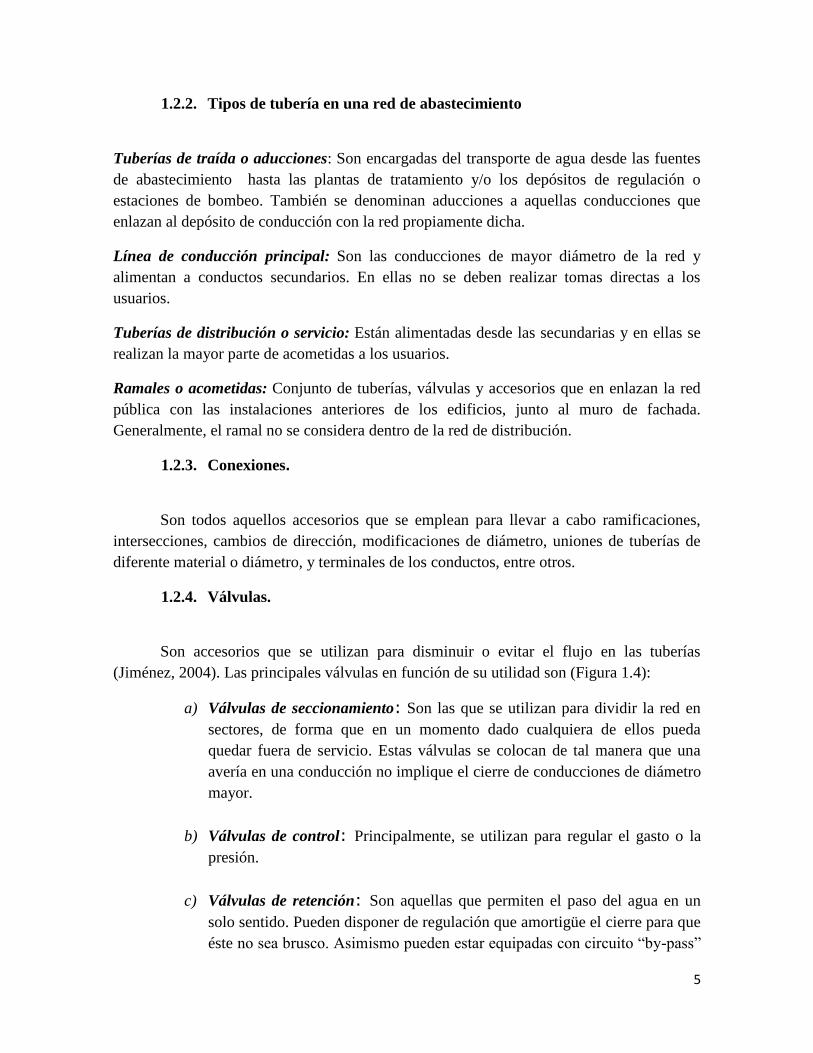
1.2.4. Válvulas.
Son accesorios que se utilizan para disminuir o evitar el flujo en las tuberías
(Jiménez, 2004). Las principales válvulas en función de su utilidad son (Figura 1.4):
a) Válvulas de seccionamiento: Son las que se utilizan para dividir la red en
sectores, de forma que en un momento dado cualquiera de ellos pueda
quedar fuera de servicio. Estas válvulas se colocan de tal manera que una
avería en una conducción no implique el cierre de conducciones de diámetro
mayor.
b) Válvulas de control: Principalmente, se utilizan para regular el gasto o la
presión.
c) Válvulas de retención: Son aquellas que permiten el paso del agua en un
solo sentido. Pueden disponer de regulación que amortigüe el cierre para que
éste no sea brusco. Asimismo pueden estar equipadas con circuito “by-pass”
6
que permita, siempre que se requiera, hacer circular el agua en sentido
contrario al normal.
d) Válvulas de regulación: Son válvulas automáticas de tipo hidráulico y
funcionan como reductora de presión, sostenedora de presión, limitadora de
caudal, etc.
e) Válvulas de admisión-expulsión: Son dispositivos automáticos que se
instalan en los puntos altos y bajos, o en cambios de pendiente de las
tuberías con el fin de facilitar la entrada o salida de aire al vaciar o llenar,
respectivamente.
f) Válvulas de protección: Son válvulas automáticas que se instalan en las
conducciones y estaciones de bombeo como elementos de protección,
generalmente contra transitorios como el golpe de ariete. Dentro de las más
importantes pueden citarse las válvulas de alivio, que se instalan en
derivación con descarga a la atmósfera para limitar los picos de presión que
pudieran producirse durante un transitorio. Las válvulas de sobre-velocidad,
cierran el paso de agua en el caso de que el consumo sea excesivo debido a
una fuga muy importante o una rotura en la conducción, aguas abajo de su
ubicación, evitando que se vacíen los depósitos de la red y que se produzcan
vertidos a la vía pública.
g) Válvulas de control de depósitos: Se utilizan para controlar el nivel de los
depósitos existentes, tanto desde la entrada (control de llenado) como desde
la salida (control de vaciado). Cuando la entrada y salida del agua se realiza
por el mismo lugar, es posible utilizar una sola válvula.
7
Figura 1.4 Algunos tipos de válvulas.

8
1.2.5. Componentes especiales.
Hidrantes: Se le llama de esta manera a una toma o conexión especial instalada en ciertos
puntos de la red con el propósito de abastecer de agua a varias familias (hidrante público) o
conectar una manguera o una bomba destinados a proveer agua para combatir el fuego
(hidrante contra incendio).
Tanques de distribución: Un tanque de distribución es un depósito situado generalmente
entre la captación y la red de distribución que tiene por objeto almacenar el agua
proveniente de la fuente. El almacenamiento permite regular la distribución o simplemente
prever fallas en el suministro, aunque algunos tanques suelen realizar ambas funciones. Una
red de distribución puede ser alimentada por varios tanques correspondientes al mismo
número de fuentes o tener tanques adicionales de regulación dentro de la misma zona de la
red con el fin de abastecer sólo a una parte de la red.
Tomas domiciliarias: Una toma domiciliaria es el conjunto de piezas y tubos que permite
el abastecimiento desde una tubería de la red de distribución hasta el predio del usuario, así
como la instalación de un medidor. Es la parte de la red que demuestra la eficiencia y
calidad del sistema de distribución pues es la que abastece de agua directamente al
consumidor.
Rebombeos: Consisten en instalaciones de bombeo que se ubican generalmente en puntos
intermedios de una línea de conducción y excepcionalmente dentro de la red de
distribución. Tienen el objetivo de elevar la carga hidráulica en el punto de su ubicación
para mantener la circulación del agua en las tuberías.
Cajas rompedoras de presión: Son depósitos con superficie libre del agua y volumen
relativamente pequeño, cuya función es permitir que el flujo de la tubería se descargue en
ésta, eliminando de esta forma la presión hidrostática y estableciendo un nuevo nivel
estático aguas abajo.
1.3. Formas de distribución del agua.
El agua se distribuye a los usuarios en función de las condiciones locales de varias
maneras:
a) Por gravedad. El agua de la fuente se conduce o bombea hasta un tanque elevado
desde el cual fluye por gravedad hacia la población (Figura 1.5). De esta forma se
mantiene una presión suficiente y prácticamente constante en la red para el servicio
a los usuarios. Este es el método más confiable y se debe utilizar siempre que se
9
dispone de cotas de terreno suficientemente altas para la ubicación del tanque, para
asegurar las presiones requeridas en la red.
Figura 1.5 Distribución por gravedad
b) Por bombeo. El bombeo puede ser de dos formas:
i. Bombeo directo a la red, sin almacenamiento.
Las bombas abastecen directamente a la red y la línea de alimentación. Este
es el sistema menos deseable, puesto que una falla en el suministro eléctrico
significa una interrupción completa del servicio de agua. Al variar el
consumo en la red, la presión en la misma cambia también. Así, al
considerar esta variación, se requieren varias bombas para proporcionar el
agua cuando sea necesario. Las variaciones de la presión suministrada por
las bombas se trasmiten directamente a la red, lo que puede aumentar el
gasto de las pérdidas por fugas.
ii. Bombeo directo a la red, con excedencias a tanques de regulación.
En esta forma de distribución el tanque se ubica después de la red en un
punto opuesto a la entrada del agua por bombeo, y las tuberías principales se
conectan directamente con la tubería que une las bombas con el tanque. El
exceso de agua bombeada a la red durante períodos de bajo consumo se
almacena en el tanque, y durante períodos de alto consumo el agua del
tanque se envía hacia la red, para complementar a la distribuida por bombeo.
c) Distribución mixta.
En este caso, parte del consumo de la red se suministra por bombeo con
excedencias a un tanque del cual a su vez se abastece el resto de la red por
gravedad (Figura 1.6). El tanque conviene ubicarlo en el centro de gravedad
10
de la zona de consumo de agua. Debido a que una parte de la red se abastece
por bombeo directo, esta forma de distribución tampoco se recomienda.
Figura 1.6 Distribución mixta.
1.4. Sistemas municipales de agua potable, alcantarillado.
La prestación del servicio público de agua potable y alcantarillado en la actualidad
se estructura y organiza como un sistema, ya que utiliza insumos y, por medio de ciertos
procesos, genera productos que son canalizados hacia la comunidad.
El sistema de agua potable y alcantarillado puede conceptuarse como un conjunto
de elementos íntimamente relacionados que tienen por fin ofrecer a una comunidad el agua
potable que requiera de acuerdo con sus necesidades sociales, productivas e individuales,
así como llevar a otro lugar las aguas utilizadas, pluviales y desechos humanos e
industriales, para que puedan ser tratadas y posteriormente, se les asigne su rehuso o
verterlas en cauces naturales (Figura 1.7). En todo caso debe asegurarse no ocasionar
degradación alguna del sistema ecológico y procurar mantener las condiciones generales
naturales de la zona o lugar que se trate.
El sistema de agua potable y alcantarillado presta los siguientes servicios públicos:
Agua potable:
Captación y conducción de agua.
Tratamiento de aguas.
Distribución de agua potable:
Primaria
Secundaria

11
Alcantarillado:
Establecimiento de drenaje:
Sanitario
Pluvial
Tratamiento de aguas residuales:
Construcción de la red de alcantarillado:
Red primaria
Red secundaria
Desagüe general
Figura 1.7 Esquema de Sistema de Abastecimiento de Agua Potable
1.4.1. Alcantarillado.
Tiene por finalidad la recolección y conducción de aguas usadas o aguas negras, de
los lugares donde el agua se utiliza hacia lugares especiales donde no se provoquen efectos
peligrosos para la comunidad, el medio ambiente y los recursos naturales.
El drenaje pluvial tiene como propósito desalojar el agua de lluvias para evitar
posibles inundaciones. El desalojo y conducción de aguas negras y pluviales puede hacerse
12
separadamente, pero en el caso de no contar con los recursos suficientes, puede recurrirse al
establecimiento de una red mixta. Comúnmente, en los municipios rurales se construyen
redes de este tipo en las cuales se drenan tanto aguas pluviales como usadas.
1.4.2. Saneamiento y destino de aguas residuales y pluviales.
Una parte fundamental del sistema es el abastecimiento de agua potable, la otra
parte esencial del mismo es el alcantarillado. Este consiste en establecer una red de drenaje,
lo más amplia y extensa posible, capaz de desalojar el cúmulo de aguas de desecho,
evitando problemas de salud y de desequilibrio ecológico; capaz también de generar el
fluido necesario para desalojar el agua de lluvias.
Existe un punto de unión entre el abastecimiento y el alcantarillado, y es el que se
relaciona con el tratamiento de aguas, tanto de las que han sido captadas y conducidas hacia
la población, como de aquellas que provienen de las aguas negras y pluviales que pueden
ser tratadas y redistribuidas. El tratamiento de aguas consiste en cierto proceso técnico por
medio del cual se eliminan impurezas, permitiendo ser ingerida por el ser humano o
empleada para usos productivos y sociales. El proceso de tratamiento utiliza componentes
físicos y químicos, pudiendo ser:
Cloración
Filtración biológica
Suavización
Floculación- Coagulación
Luz Ultravioleta
Ósmosis Inversa
Ozonación
La administración del servicio de agua potable integrará y organizará los elementos
necesarios para el cobro adecuado del servicio y control de los ingresos, para satisfacer
necesidades de inversión, operación, mantenimiento y administración.
1.4.3. Administración del servicio de agua potable y alcantarillado
Las estapas de administración del servicio son:
Contratación: Es el acto por medio del cual se da de alta a un predio usuario para
registrarse en el padrón de usuarios del sistema. Ello se realiza por medio de un
acuerdo entre la administración del sistema y el usuario, en el que la primera queda

13
obligada a prestar el servicio al usuario y éste a pagar por el servicio una cuota
determinada, de conformidad con las leyes aplicables.
Medición: La distribución del agua se registra por medio de un medidor que capta
el gasto o volumen consumido que pasa por cada toma pública o domiciliaria. La
medición se hace en metros cúbicos y está a la vista del usuario. En los casos en los
que no se cuente con medidores, el criterio que se considera es obtener promedios
de consumo por calle o zona de distribución.
Cobranza: Por medio de esta etapa se fija la cuota a pagar por el usuario del
servicio, de acuerdo con el volumen consumido y las consideraciones que al
respecto señale la Ley de Ingresos Municipales. Además, dentro de esta etapa se
realiza la recepción del dinero como pago del servicio y su registro correspondiente.
Padrón de usuarios: Consiste en una nómina o lista de personas que pueden
contener datos relativos a éstas. Este instrumento permite administrar
eficientemente el sistema y alcanza los objetivos básicos planteados. El padrón
identifica al poseedor del predio y las modificaciones que puedan existir en la
información.
Planos de población atendida: Es un plano general donde se tiene registrada la
población que hace uso del sistema, para detectar gráficamente el alcance del
mismo y la población que potencialmente demandará el servicio. Además, cada
plano de población se complementa con una serie de planos manzaneros, donde se
describen y grafican las características de cada manzana respecto de redes de
distribución, tomas de agua, medidores, tuberías y drenaje.
1.5. Ecuaciones fundamentales.
1.5.1. Ecuación de continuidad
La ecuación establece que un fluido al pasar por un conducto, mantiene el mismo
caudal de entrada, que de salida (Ecuación 1)
[1]
Donde Q es el gasto que pasa por el conducto (m3/s).
El concepto de gasto o caudal como la cantidad de materia o masa que atraviesa un
lugar en cierta unidad de tiempo (Rodríguez, 2007). En el caso de los líquidos, los cuales se

14
consideran prácticamente incompresibles, la cantidad de materia se puede indicar como el
volumen. Entonces, el gasto se define como el volumen que pasa por un punto en el
espacio, en un determinado tiempo (Ecuación 2)
[2]
Donde:
A = Área transversal del conducto (m2)
Q = Gasto (m3/s)
v = Velocidad del flujo (m/s)
Por lo que [1] puede expresarse de la siguiente manera:
1.5.2. Ecuación de la Energía
Esta ecuación es para conocer el comportamiento de un sistema de abastecimiento
de agua para flujo permanente. La expresión describe la energía específica de un fluido de
densidad () y se representa como energía por unidad de peso en metros de fluido (mca)
(Jiménez, 2004).
Suponiendo que el fluido es incompresible, entonces la energía específica puede
expresarse como:
[3]
Donde:
z → denominada carga de posición, es la cota geométrica del fluido. Representa la
energía potencial por el hecho de tener cierta elevación sobre el nivel de referencia en que
se está trabajando.
→ Se denomina carga de presión, es la energía que ha adquirido el fluido por
estar sometido a una determinada presión. A la suma de la altura de presión y a la cota
geométrica z, se le conoce como altura piezométrica.
→ Llamada carga de velocidad, corresponde a la energía específica del fluido
cuando está en movimiento.
15
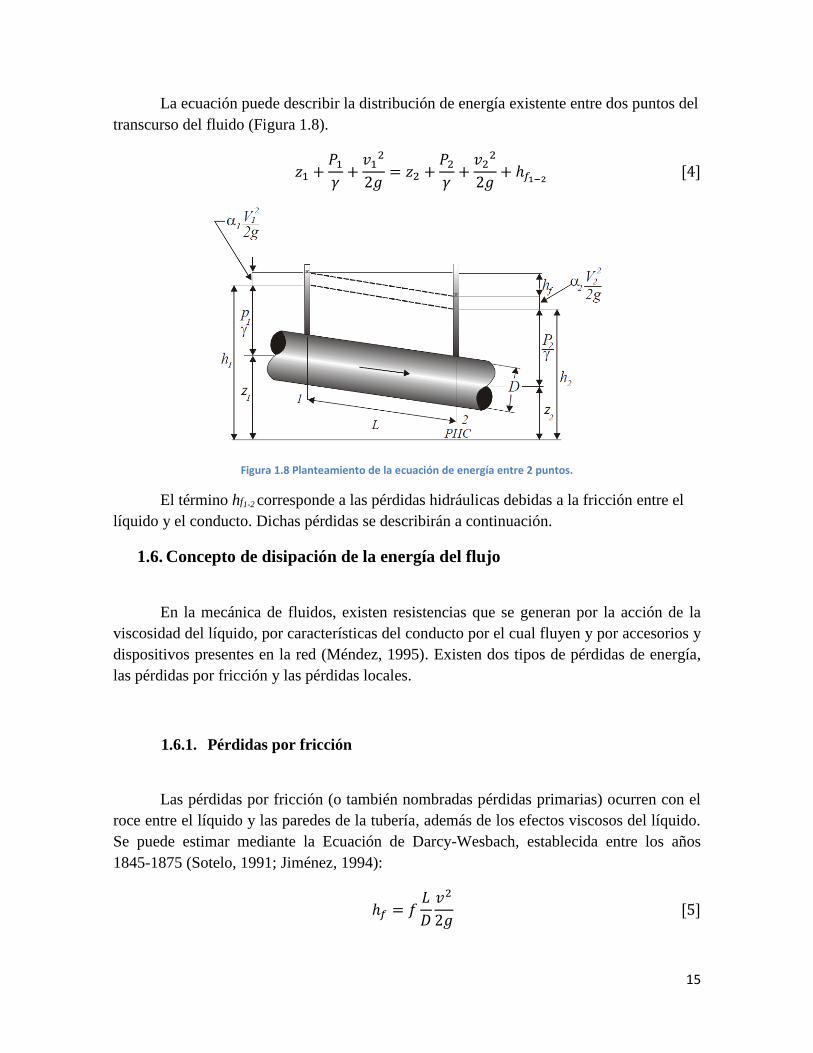
La ecuación puede describir la distribución de energía existente entre dos puntos del
transcurso del fluido (Figura 1.8).
Figura 1.8 Planteamiento de la ecuación de energía entre 2 puntos.
El término hf1-2 corresponde a las pérdidas hidráulicas debidas a la fricción entre el
líquido y el conducto. Dichas pérdidas se describirán a continuación.
1.6. Concepto de disipación de la energía del flujo
En la mecánica de fluidos, existen resistencias que se generan por la acción de la
viscosidad del líquido, por características del conducto por el cual fluyen y por accesorios y
dispositivos presentes en la red (Méndez, 1995). Existen dos tipos de pérdidas de energía,
las pérdidas por fricción y las pérdidas locales.
1.6.1. Pérdidas por fricción
Las pérdidas por fricción (o también nombradas pérdidas primarias) ocurren con el
roce entre el líquido y las paredes de la tubería, además de los efectos viscosos del líquido.
Se puede estimar mediante la Ecuación de Darcy-Wesbach, establecida entre los años
1845-1875 (Sotelo, 1991; Jiménez, 1994):

16
Donde:
= Pérdidas por fricción (mca)
L = Longitud del tramo de tubería (m)
D = Diámetro de la tubería (m)
v = Velocidad media del flujo (m/s)
g = Aceleración de la gravedad ( ≈ 9.81m/s2)
f = Factor de fricción (adimensional)
El factor de fricción f está en función de la rugosidad ε de la tubería y del número de
Reynolds.
La rugosidad ε puede expresarse como la altura media de las asperezas (rugosidad
absoluta), como un promedio obtenido del resultado de un cálculo con las características
del flujo, mas no propiamente por el obtenido como la media de las alturas determinadas
físicamente de la pared de cada conducción (Sotelo, 1991). A la relación de la rugosidad
relativa ε entre el diámetro del tubo D, se le conoce como rugosidad relativa.
Osborne Reynolds, en 1883, en base a sus experimentos, fue el primero en proponer
un criterio para el flujo de un líquido de manera laminar o turbulenta, el cual se hace
mediante un número adimensional que lleva su mismo nombre:
Donde:
Re = Número de Reynolds (adimensional)
v = Velocidad media del flujo (m/s)
D = Diámetro del tubo (m)
= Viscosidad cinemática del fluido (m2/s)
El número de Reynolds, permite evaluar la preponderancia de las fuerzas viscosas
sobre las de inercia (Sotelo, 1991).
Poiseuille, en 1846, fue el primero en determinar matemáticamente el factor de
fricción en flujo laminar y obtuvo una ecuación para determinar dicho factor:

17
Para un flujo en transición laminar-turbulento, Colebrook y White, presentaron la
siguiente fórmula empírica para el cálculo del f:
√ (
⁄
√ )
Es una de las ecuaciones más empleadas para el cálculo del factor de fricción en
tuberías, sin embargo, requiere de iteraciones para encontrar dicho valor, ya que ésta
variable se encuentra implícita dentro de la fórmula. La gráfica de esta expresión se puede
describir mediante el diagrama de Moody (Figura 1.9).
Figura 1.9 Diagrama de Moody.
No obstante, existen fórmulas alternativas con las cuales puede obtenerse el factor
de fricción de forma explícita, sin necesidad de iteraciones; la más popular de ellas es la de
Swamee y Jain (1976):
[ (
)]

18
Válida para 10-6
< εr<10-2
y 103<Re<10
8, con un error relativo de ±1% (Jimenez, 2004).
Otra manera de calcular las pérdidas por fricción en tuberías, fue propuesta por
Hazen-Williams. Es una de las ecuaciones empíricas más utilizadas para evaluar dicha
pérdida de energía, tal vez por la cantidad de información de tipo experimental que se ha
reunido en su publicación en 1902. Su expresión en unidades métricas es (Méndez, 1995):
(
)
Donde:
hf = Pérdidas de carga por fricción. (m)
Q = Gasto del flujo (m3/s)
CH=Coeficiente de fricción de Hazen-Williams (adimensional)
L = Longitud de la tubería (m)
D = Diámetro de la tubería ( m)
La expresión de Manning Strickler Gaukler, más comúnmente conocida como fórmula de
Manning (1890), para el cálculo de pérdidas primarias por fricción se expresa como:
Donde:
n = Factor de rugosidad de Manning.
Q = Gasto del fluido (m3/s)
D = Diámetro de la tubería (m)
L = Longitud de la tubería (m)
1.6.2. Pérdidas locales
Estas pérdidas también son conocidas como pérdidas secundarias. Ocurren debido al
cambio de dirección u obstrucción parcial del flujo del líquido a causa de los accesorios
existentes en de la red, estas pérdidas son diferentes a las pérdidas por fricción en tuberías
(Sotelo, 1991).
La fórmula general para encontrar las pérdidas secundarias se expresa como:
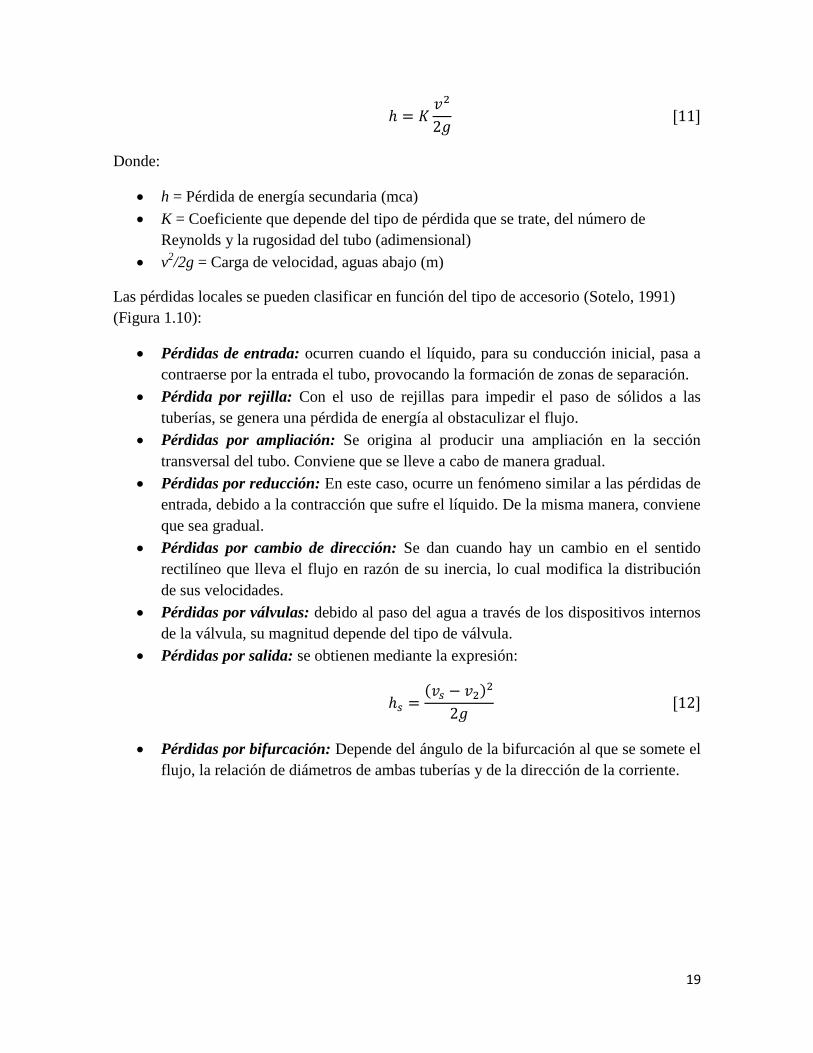
19
Donde:
h = Pérdida de energía secundaria (mca)
K = Coeficiente que depende del tipo de pérdida que se trate, del número de
Reynolds y la rugosidad del tubo (adimensional)
v2/2g = Carga de velocidad, aguas abajo (m)
Las pérdidas locales se pueden clasificar en función del tipo de accesorio (Sotelo, 1991)
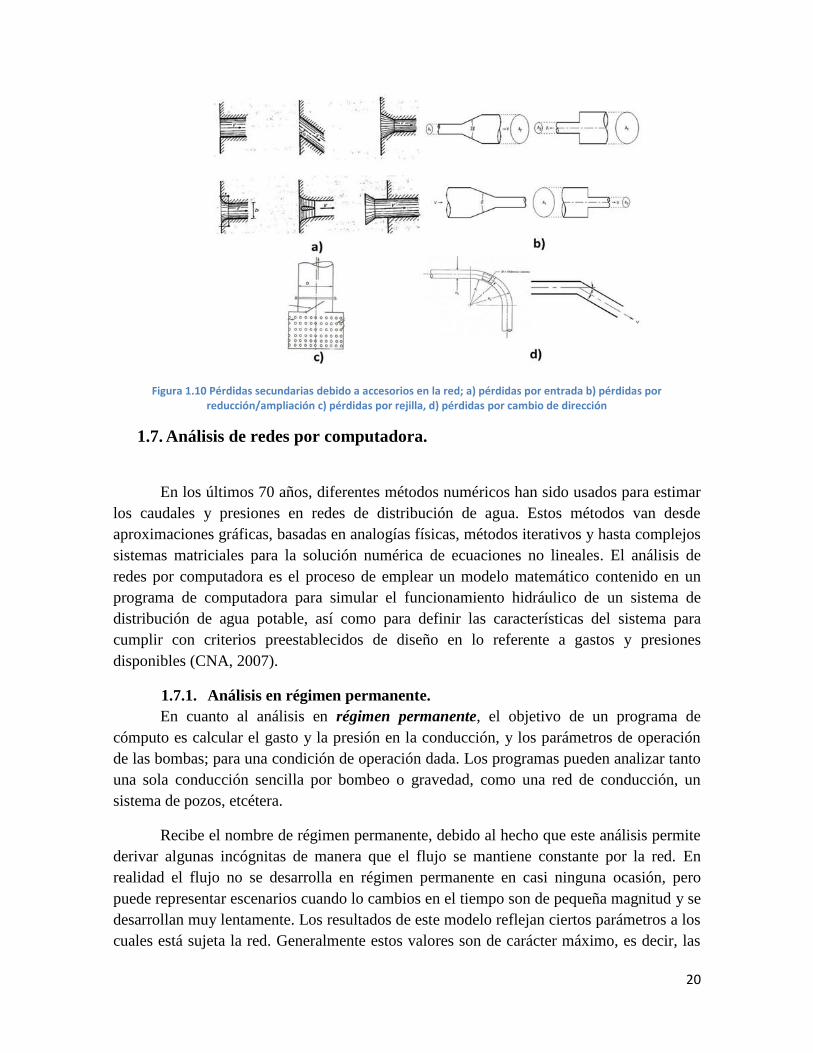
(Figura 1.10):
Pérdidas de entrada: ocurren cuando el líquido, para su conducción inicial, pasa a
contraerse por la entrada el tubo, provocando la formación de zonas de separación.
Pérdida por rejilla: Con el uso de rejillas para impedir el paso de sólidos a las
tuberías, se genera una pérdida de energía al obstaculizar el flujo.
Pérdidas por ampliación: Se origina al producir una ampliación en la sección
transversal del tubo. Conviene que se lleve a cabo de manera gradual.
Pérdidas por reducción: En este caso, ocurre un fenómeno similar a las pérdidas de
entrada, debido a la contracción que sufre el líquido. De la misma manera, conviene
que sea gradual.
Pérdidas por cambio de dirección: Se dan cuando hay un cambio en el sentido
rectilíneo que lleva el flujo en razón de su inercia, lo cual modifica la distribución
de sus velocidades.
Pérdidas por válvulas: debido al paso del agua a través de los dispositivos internos
de la válvula, su magnitud depende del tipo de válvula.
Pérdidas por salida: se obtienen mediante la expresión:
Pérdidas por bifurcación: Depende del ángulo de la bifurcación al que se somete el
flujo, la relación de diámetros de ambas tuberías y de la dirección de la corriente.
20
Figura 1.10 Pérdidas secundarias debido a accesorios en la red; a) pérdidas por entrada b) pérdidas por reducción/ampliación c) pérdidas por rejilla, d) pérdidas por cambio de dirección
1.7. Análisis de redes por computadora.
En los últimos 70 años, diferentes métodos numéricos han sido usados para estimar
los caudales y presiones en redes de distribución de agua. Estos métodos van desde
aproximaciones gráficas, basadas en analogías físicas, métodos iterativos y hasta complejos
sistemas matriciales para la solución numérica de ecuaciones no lineales. El análisis de
redes por computadora es el proceso de emplear un modelo matemático contenido en un
programa de computadora para simular el funcionamiento hidráulico de un sistema de
distribución de agua potable, así como para definir las características del sistema para
cumplir con criterios preestablecidos de diseño en lo referente a gastos y presiones
disponibles (CNA, 2007).
1.7.1. Análisis en régimen permanente.
En cuanto al análisis en régimen permanente, el objetivo de un programa de
cómputo es calcular el gasto y la presión en la conducción, y los parámetros de operación
de las bombas; para una condición de operación dada. Los programas pueden analizar tanto
una sola conducción sencilla por bombeo o gravedad, como una red de conducción, un
sistema de pozos, etcétera.
Recibe el nombre de régimen permanente, debido al hecho que este análisis permite
derivar algunas incógnitas de manera que el flujo se mantiene constante por la red. En
realidad el flujo no se desarrolla en régimen permanente en casi ninguna ocasión, pero
puede representar escenarios cuando lo cambios en el tiempo son de pequeña magnitud y se
desarrollan muy lentamente. Los resultados de este modelo reflejan ciertos parámetros a los
cuales está sujeta la red. Generalmente estos valores son de carácter máximo, es decir, las
21
condiciones de la red se calculan para la conducción de agua a su máximo caudal y presión.
Con ello, el diseño abarca los escenarios medios y mínimos sin preocuparse totalmente de
ellos.
Para desarrollar el análisis en régimen permanente se requiere de los siguientes elementos:
Características de todas las conducciones (longitud, diámetros, rugosidad)
Características en todos los elementos especiales.
Consumo y cota geométrica en los nodos.
Altura piezométrica de referencia.
El análisis permite el conocimiento de las siguientes variables:
Caudales que circulan por la tubería.
Alturas piezométricas y presiones en los nodos.
1.7.2. Análisis en régimen no permanente.
En este caso, el régimen no permanente (o también régimen variable) se realiza
considerado cambios en los caudales y en las demandas de consumo. Estos cambios tienen
su valor en distintos intervalos de tiempo. Se analiza la evolución de las variables del
sistema:
Caudales
Velocidades
Presiones
Calidad del agua
etc.
1.7.3. Análisis en régimen transitorio.
Bajo esta denominación se estudian los fenómenos que acontecen como
consecuencia de un cambio brusco en la velocidad de circulación del fluido, derivado de
maniobras bruscas en la red o a variaciones rápidas de consumo. Las consecuencias de los
escenarios anteriores pueden ser muy negativas, afectando incluso a la integridad física de
la instalación. Las situaciones que son objeto de análisis en régimen transitorio son muy
concretas y en otras ocasiones se trata de situaciones de emergencia o extraordinarias. Por
ejemplo en el arranque y parada de grupos de bombeo. Es de suma importancia realizar
estos ensayos en régimen no permanente, tanto para analizar situaciones transitorias
críticas, con el objeto de establecer los casos en los que puede aparecer riesgo dentro de la
red y estudiar medidas de corrección pertinentes.
22
Para el análisis en régimen transitorio suelen usarse los siguientes modelos:
Modelos rígidos o de oscilación de masa: en los que únicamente se considera el
efecto dinámico inducido por la inercia del fluido.
Modelos elásticos, basados en las ecuaciones de golpe de ariete, en los que
interviene además la compresibilidad del flujo y la elasticidad de las conducciones.
1.7.4. Programas de cómputo para análisis de redes.
EPANET: Desarrollado por la Agencia de Protección al Medio Ambiente (EPA por sus
siglas en inglés) y cuyos procesos pueden seguirse en Rossman (1997). Probablemente es el
programa de análisis de más amplio uso. Resuelve el problema usando el método del
gradiente.
KYPIPE: Desarrollado por la Universidad de Kentucky. Se trata de un programa
implementado mediante la formulación por mallas y la aplicación de la teoría lineal. Es
probablemente de los pocos programas que continúan aplicando la teoría de aplicación
lineal como alternativa clara al método del gradiente.
H2ONET: Desarrollado por la empresa MW Soft Inc. (Montwomery Watson, 1996) y
WATERCAD/WATERGEMS desarrollado por la empresa Haestad Methods. Son dos
programas absolutamente similares distribuidos por dos casas comerciales diferentes.
Basan totalmente sus procesos en el algoritmo desarrollado por la EPA para su programa
EPANET. En la actualidad disponen de dos versiones claramente diferenciadas: una
versión como aplicación independiente y otra versión como aplicación integrada en
programas de diseño gráfico (AutoCAD®).
MIKE NET: Es un modelo desarrollado por el Danish Hydraulic Institute que al igual que
los dos programas anteriores toma como punto de partida el algoritmo desarrollado por la
EPA para EPANET. No obstante, presenta un entorno de trabajo orientado a aplicaciones
con sistemas de información geográfica (SIG). De hecho, dispone en sus versiones
particulares unos módulos de conexión con paquetes de SIG de la familia Arc View®.
SARA (Software de Análisis de Redes de Agua): Desarrollado en la Universidad
Politécnica de Valencia. Los detalles acerca del desarrollo de este modelo utilizan como
punto de partida el modelo de desarrollo de EPANET. Dispone de algunas funciones
específicas, como la gestión en nodos que quedan desconectados debido a mantenimiento o
modificaciones en la red. Incluye así mismo capacidades de modelación de elementos de
protección contra incendios, elementos de riego, etc.

23
CAPÍTULO 2
24
2. CALIDAD DEL AGUA EN REDES
HIDRÁULICAS
2.1. Concepto de calidad del agua
El agua para consumo humano ha sido definida en las Guías para la calidad del
agua potable de la Organización Mundial de la Salud (OMS), como aquella “adecuada
para consumo humano y para todo uso doméstico habitual, incluida la higiene personal”.
En esta definición está implícito que el uso del agua no debería presentar riesgo de
enfermedades a los consumidores (Rojas, 2002).
No obstante, la calidad del agua no es suficiente para asegurar beneficios a la salud
humana; es necesario que adicionalmente se satisfagan tres aspectos: cantidad,
continuidad y costo razonable. Al margen de las responsabilidades del abastecedor, los
consumidores deben tener conocimientos sobre el uso apropiado del agua, de la adecuada
nutrición e higiene de los alimentos, así como de la correcta disposición de excrementos.
Precisamente, los mensajes dirigidos a mejorar los hábitos y costumbres relacionados con
el buen uso del agua, deben realizarse a través de programas educativos y en forma
complementaria a las actividades propias del abastecedor para evitar la creencia de que la
calidad del agua por sí sola, previene las enfermedades.
El agua de calidad apta para consumo humano cuando entra al sistema de
distribución puede deteriorarse antes de llegar al consumidor. En el sistema de distribución,
la contaminación del agua puede ocurrir por conexiones cruzadas, tuberías rotas, grifos
contra incendio, conexiones domiciliarias, cisternas, reservorios defectuosos y durante el
tendido de nuevas tuberías o reparaciones hechas con pocas medidas de seguridad. Otro
factor de recontaminación, de gran importancia en las ciudades o localidades donde existe
déficit de agua, es la interrupción del suministro como resultado de la rotación del servicio
de una a otra área de abastecimiento con el fin de atender la demanda de agua.
De esta manera, en sistemas donde el servicio de abastecimiento de agua es
restringido, las características físicas, químicas y principalmente microbiológicas, al nivel
de las viviendas, es frecuente su deterioro como consecuencia del manipuleo y
almacenamiento inadecuado.

25
2.1.1. Problemáticas de calidad del agua.
La calidad del agua de consumo depende de la integridad de la red de distribución.
Mantener los niveles adecuados de calidad se vuelve una tarea primordial, debido al
impacto que conlleva para la salud de los consumidores (Mora, 2011). El consumo de agua
contaminada se ve reflejado en los casos que son reportados por enfermedades epidémicas;
no obstante en la mayoría, no se tiene conocimiento del origen de la contaminación del
agua, ni del evento que la genera y sobre todo la entrada del contaminante. Es por ello la
importancia de esta línea de investigación, y las aportaciones que se dan para generar más
conocimiento en este tipo de eventos.
El tratamiento del agua ha contribuido a la prevención de las enfermedades
transmitidas por el agua y para proteger la salud humana en el agua potable. El suministro
de agua potable ha desempeñado un papel fundamental en la disminución de la incidencia
de muchas enfermedades infecciosas trasmitidas por el agua o relacionadas con ella (del
Puerto, 1999).
2.1.1.1. Enfermedades transmitidas por distribución de agua con baja
calidad.
Existen diversas enfermedades que pueden ser trasmitidas por el agua. En dichas
enfermedades, los microorganismos patógenos ingresan a través del cuerpo de un ser vivo
por medio del agua ingerida. En otras palabras, pueden categorizarse como aquellas
originadas por organismos microbiológicos y aquellas producidas por sustancias tóxicas
inanimadas suspendidas o disueltas en el agua.
La siguiente tabla 2.1 es un fragmento reducido tomado del libro: “Agua y Salud
Humana” del autor F. Eugene McJunkin, (1988) que resume, en gran parte, algunas de las
enfermedades a causa de la conducción de agua con mala calidad, pero además existen
muchos otros padecimientos sanitarios débitos a éste problema, la mayoría de ellos vienen
descritos detalladamente en dicho documento de la siguiente manera:
Enfermedades relacionadas con la higiene y el agua.
Enfermedades producidas por contacto por el agua.
Enfermedades transmitidas por vectores de hábitat acuático.
Entre otros.
26
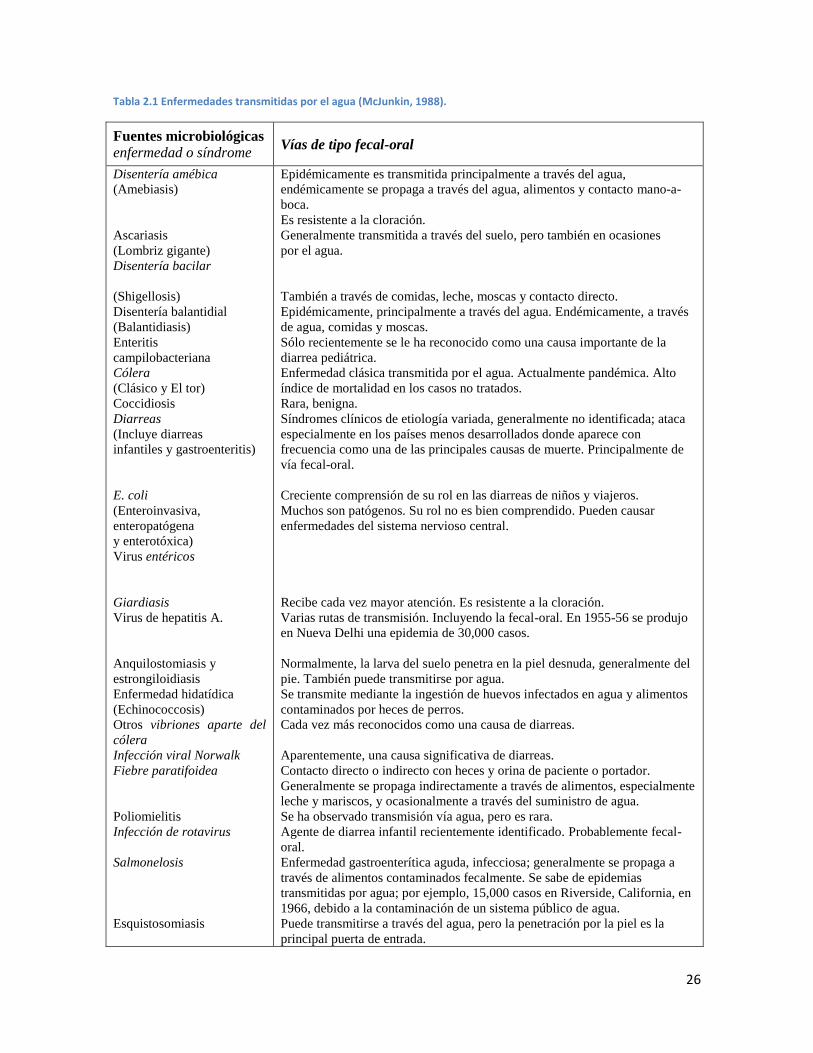
Tabla 2.1 Enfermedades transmitidas por el agua (McJunkin, 1988).
Fuentes microbiológicas
enfermedad o síndrome Vías de tipo fecal-oral
Disentería amébica
(Amebiasis)
Ascariasis
(Lombriz gigante)
Disentería bacilar
(Shigellosis)
Disentería balantidial
(Balantidiasis)
Enteritis
campilobacteriana
Cólera
(Clásico y El tor)
Coccidiosis
Diarreas
(Incluye diarreas
infantiles y gastroenteritis)
E. coli
(Enteroinvasiva,
enteropatógena
y enterotóxica)
Virus entéricos
Giardiasis
Virus de hepatitis A.
Anquilostomiasis y
estrongiloidiasis
Enfermedad hidatídica
(Echinococcosis)
Otros vibriones aparte del
cólera
Infección viral Norwalk
Fiebre paratifoidea
Poliomielitis
Infección de rotavirus
Salmonelosis
Esquistosomiasis
Epidémicamente es transmitida principalmente a través del agua,
endémicamente se propaga a través del agua, alimentos y contacto mano-a-
boca.
Es resistente a la cloración.
Generalmente transmitida a través del suelo, pero también en ocasiones
por el agua.
También a través de comidas, leche, moscas y contacto directo.
Epidémicamente, principalmente a través del agua. Endémicamente, a través
de agua, comidas y moscas.
Sólo recientemente se le ha reconocido como una causa importante de la
diarrea pediátrica.
Enfermedad clásica transmitida por el agua. Actualmente pandémica. Alto
índice de mortalidad en los casos no tratados.
Rara, benigna.
Síndromes clínicos de etiología variada, generalmente no identificada; ataca
especialmente en los países menos desarrollados donde aparece con
frecuencia como una de las principales causas de muerte. Principalmente de
vía fecal-oral.
Creciente comprensión de su rol en las diarreas de niños y viajeros.
Muchos son patógenos. Su rol no es bien comprendido. Pueden causar
enfermedades del sistema nervioso central.
Recibe cada vez mayor atención. Es resistente a la cloración.
Varias rutas de transmisión. Incluyendo la fecal-oral. En 1955-56 se produjo
en Nueva Delhi una epidemia de 30,000 casos.
Normalmente, la larva del suelo penetra en la piel desnuda, generalmente del
pie. También puede transmitirse por agua.
Se transmite mediante la ingestión de huevos infectados en agua y alimentos
contaminados por heces de perros.
Cada vez más reconocidos como una causa de diarreas.
Aparentemente, una causa significativa de diarreas.
Contacto directo o indirecto con heces y orina de paciente o portador.
Generalmente se propaga indirectamente a través de alimentos, especialmente
leche y mariscos, y ocasionalmente a través del suministro de agua.
Se ha observado transmisión vía agua, pero es rara.
Agente de diarrea infantil recientemente identificado. Probablemente fecal-
oral.
Enfermedad gastroenterítica aguda, infecciosa; generalmente se propaga a
través de alimentos contaminados fecalmente. Se sabe de epidemias
transmitidas por agua; por ejemplo, 15,000 casos en Riverside, California, en
1966, debido a la contaminación de un sistema público de agua.
Puede transmitirse a través del agua, pero la penetración por la piel es la
principal puerta de entrada.
27
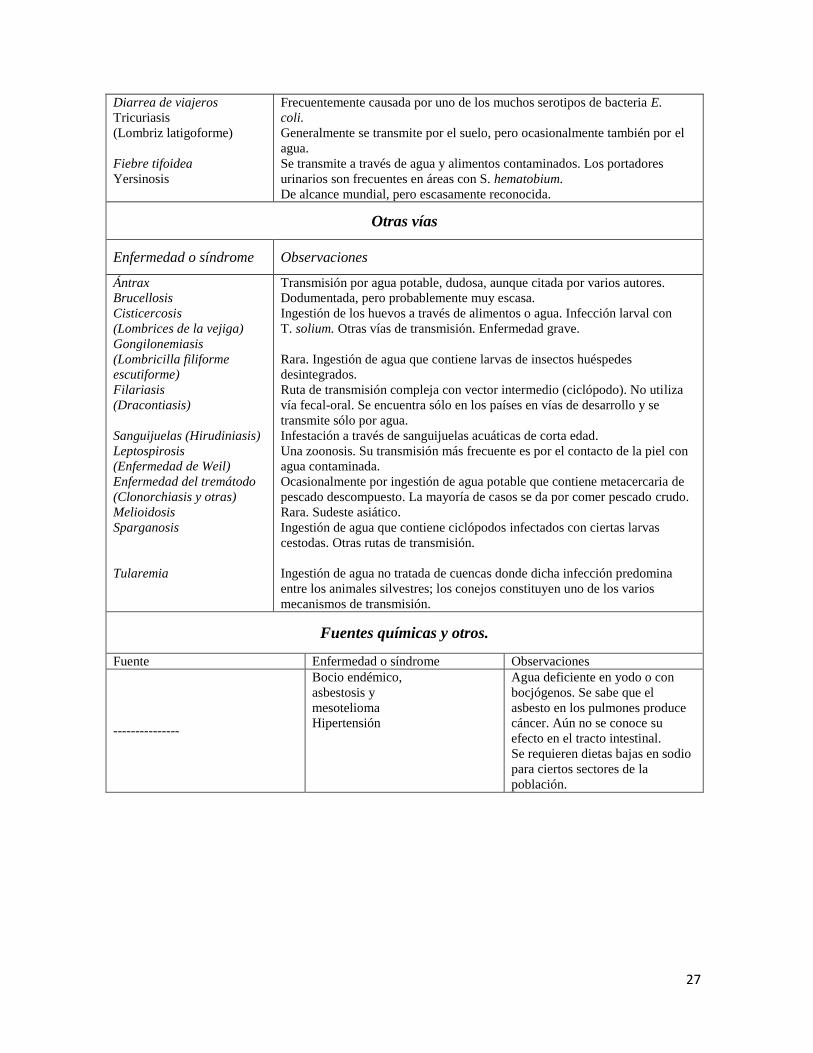
Diarrea de viajeros
Tricuriasis
(Lombriz latigoforme)
Fiebre tifoidea
Yersinosis
Frecuentemente causada por uno de los muchos serotipos de bacteria E.
coli.
Generalmente se transmite por el suelo, pero ocasionalmente también por el
agua.
Se transmite a través de agua y alimentos contaminados. Los portadores
urinarios son frecuentes en áreas con S. hematobium.
De alcance mundial, pero escasamente reconocida.
Otras vías
Enfermedad o síndrome Observaciones
Ántrax
Brucellosis
Cisticercosis
(Lombrices de la vejiga)
Gongilonemiasis
(Lombricilla filiforme
escutiforme)
Filariasis
(Dracontiasis)
Sanguijuelas (Hirudiniasis)
Leptospirosis
(Enfermedad de Weil)
Enfermedad del tremátodo
(Clonorchiasis y otras)
Melioidosis
Sparganosis
Tularemia
Transmisión por agua potable, dudosa, aunque citada por varios autores.
Dodumentada, pero probablemente muy escasa.
Ingestión de los huevos a través de alimentos o agua. Infección larval con
T. solium. Otras vías de transmisión. Enfermedad grave.
Rara. Ingestión de agua que contiene larvas de insectos huéspedes
desintegrados.
Ruta de transmisión compleja con vector intermedio (ciclópodo). No utiliza
vía fecal-oral. Se encuentra sólo en los países en vías de desarrollo y se
transmite sólo por agua.
Infestación a través de sanguijuelas acuáticas de corta edad.
Una zoonosis. Su transmisión más frecuente es por el contacto de la piel con
agua contaminada.
Ocasionalmente por ingestión de agua potable que contiene metacercaria de
pescado descompuesto. La mayoría de casos se da por comer pescado crudo.
Rara. Sudeste asiático.
Ingestión de agua que contiene ciclópodos infectados con ciertas larvas
cestodas. Otras rutas de transmisión.
Ingestión de agua no tratada de cuencas donde dicha infección predomina
entre los animales silvestres; los conejos constituyen uno de los varios
mecanismos de transmisión.
Fuentes químicas y otros.
Fuente Enfermedad o síndrome Observaciones
---------------
Bocio endémico,
asbestosis y
mesotelioma
Hipertensión
Agua deficiente en yodo o con
bocjógenos. Se sabe que el
asbesto en los pulmones produce
cáncer. Aún no se conoce su
efecto en el tracto intestinal.
Se requieren dietas bajas en sodio
para ciertos sectores de la
población.
28
En varios países de América Latina y el Caribe, las enfermedades diarreicas agudas
figuran entre las 10 causas principales de defunción y son responsables de miles de muertes
por año, sin incluir otras similares (del Puerto, 1999). Una enfermedad que constituye un
importante problema de salud en las zonas urbanas y rurales de todo el mundo es la
hepatitis A, la cual es producida por un virus, y se presenta en forma esporádica y
epidémica, con tendencia a recurrencia cíclica, guardando estrecha relación con el
deficiente saneamiento ambiental. El agua contiene frecuentemente cientos de
microorganismos perjudiciales para la salud y la vida de las personas (ARA, 2002).
2.1.2. Microorganismos presentes en el agua.
Las bacterias son los organismos vivos más numerosos que existen, por lo mismo
están presentes casi en todas partes, el agua subterránea no es la excepción, por este motivo
es necesario realizar pruebas bacteriológicas para determinar el grado de contaminación
que tiene la misma (Gramajo, 2004). El agua puede contener pequeñas contaminaciones de
aguas negras, las cuales no pueden ser detectadas mediante análisis físicos o químicos, en
cambio, las pruebas bacteriológicas se han diseñado de tal manera que puedan detectarlas.
Se reconoce que el agua es uno de los principales vehículos transportadores de
microorganismos causante de enfermedades provenientes del aparato digestivo del hombre
y de otros animales. Las coliformes fecales son un grupo grande de microorganismos,
habitantes usuales de los intestinos de los animales superiores. Estos microorganismos son
de fácil identificación comparados con los microorganismos patógenos, que normalmente
se encuentran en mucho menor número y cuya identificación es laboriosa. La presencia de
coliformes en una muestra no siempre indica que el agua está contaminada con
microorganismos patógenos, sino que, en términos estadísticos, su concentración puede y
debe servir como parámetro para alertar sobre la existencia de contaminación fecal y de
microorganismos patógenos (Guimarães, 2001).
Los microorganismos patógenos están relacionados con enfermedades específicas
de transmisión hídrica (Guimarães ,2001). La fiebre tifoidea, las fiebres paratifoideas, la
disentería bacteriana y el cólera son causadas por bacterias, la amibiosis o disentería
amebiana por protozoarios, la esquistosomosis por gusanos (helmintos) y larvas, en tanto
que ciertos virus originan la hepatitis infecciosa y la poliomielitis.
29
2.1.2.1. Crecimiento bacteriano en redes de agua.
El crecimiento bacteriano en los sistemas de almacenamiento y distribución de agua
potable produce un deterioro de la calidad del agua, alterando su sabor y olor, aumentando
su turbiedad e incluso llegando a afectar su conformidad con las normas microbiológicas de
calidad (Knobelsdorf, 1997).
Las fuentes de abastecimiento de agua contienen compuestos orgánicos capaces de
promover el crecimiento bacteriano en el sistema de distribución, incluso después de la
desinfección final a la que se somete al agua durante su potabilización. Este desarrollo
bacteriano depende fundamentalmente del contenido de materia orgánica biodegradable y
de nutrientes inorgánico, de la eficiencia del desinfectante residual.
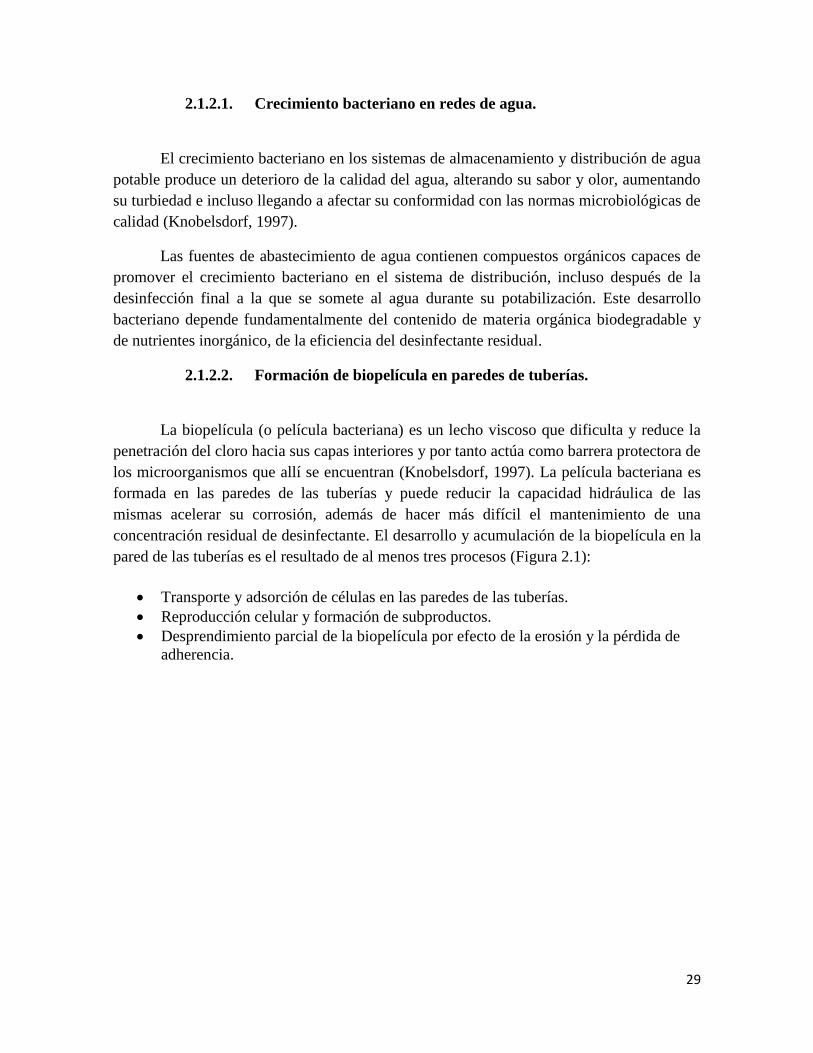
2.1.2.2. Formación de biopelícula en paredes de tuberías.
La biopelícula (o película bacteriana) es un lecho viscoso que dificulta y reduce la
penetración del cloro hacia sus capas interiores y por tanto actúa como barrera protectora de
los microorganismos que allí se encuentran (Knobelsdorf, 1997). La película bacteriana es
formada en las paredes de las tuberías y puede reducir la capacidad hidráulica de las
mismas acelerar su corrosión, además de hacer más difícil el mantenimiento de una
concentración residual de desinfectante. El desarrollo y acumulación de la biopelícula en la
pared de las tuberías es el resultado de al menos tres procesos (Figura 2.1):
Transporte y adsorción de células en las paredes de las tuberías.
Reproducción celular y formación de subproductos.
Desprendimiento parcial de la biopelícula por efecto de la erosión y la pérdida de
adherencia.

30
Figura 2.1 Proliferación y asentamiento de microorganismos en tuberías.
Es importante estudiar la biopelícula en las redes de abastecimiento y buscar la
manera de combatirla debido a la proliferación y formación de bacterias potencialmente
patógenas que han conseguido sobrevivir a los procesos de potabilización (Knobelsdorf,
1997).
2.2. Desinfección del agua.
El agua potable ha sido desinfectada desde principios del siglo XIX, cuando se descubrió
que los riesgos de contaminación microbiológica de las enfermedades de agua sin tratar, a
saber, el cólera o la fiebre tifoidea, disminuyeron drásticamente cuando se utilizaron
desinfectantes (Castro, 2003).
Los desinfectantes más usados son (Propato et al., 2004):
El cloro libre.
Cloraminas.
Ozono.
Dióxido clorhídrico.
Luz ultravioleta.
La desinfección no actúa de manera constante en una red de distribución, por un
lado la actividad del desinfectante puede variar debido al estado en el que se presenten los
microorganismos, la cohesión del mismo, la mezcla con otros sólidos como sedimentos,
material disuelto, etc. (Mora, 2011). La asociación de los microorganismos con cierto tipo
de partículas puede generar una protección contra la acción del desinfectante. Para
contrarrestar esta protección, se establece un límite de turbidez en el tratamiento del agua.
31
2.2.1. Desinfección del agua por Cloración.
La c1oración, agregar cloro al agua, es la práctica universalmente empleada para la
desinfección del agua desde hace mucho tiempo, por su economía y manejabi1idad (Pérez,
2001). La experiencia ha demostrado que el cloro y sus compuestos son potencialmente
activos desinfectantes para la destrucción de la flora bacteriana, especialmente para la de
origen entérico.
La desinfección del agua, y más concretamente, la cloración, están siendo objeto de
polémica en los últimos años como consecuencia, principalmente, de los subproductos de la
desinfección, llegando a cuestionarse la necesidad de la propia desinfección en muchos
casos (Quirós, 2005).
2.2.2. El Cloro
El cloro se descubre en 1774 por el farmacéutico sueco C.W. Scheele, que lo llamó
“ácido muriático deflogistificado” (sin hidrógeno), del latín “muria” ó salmuera, gas de
color amarillo-verdoso brillante, por la reacción del ácido muriático (clorhídrico) con
pirolusita (bióxido de manganeso), (Ara, 2002).
El cloro, elemento número 17 de la tabla periódica, es tan reactivo que no se
encuentra en la naturaleza como elemento aislado, salvo en erupciones volcánicas, y sí en
innumerables compuestos tanto en los minerales como en los seres vivos; es el undécimo
más abundante de la litósfera y el décimo más abundante entre los quince que componen el
99.5% del cuerpo humano; compuestos clorados se encuentran en la sangre, en la piel y en
los dientes, así como el ácido clorhídrico en nuestro aparato digestivo. En 1846 fue usado
por primera vez como material desinfectante (agua clorada), en la maternidad del Hospital
General de Viena, para el lavado de las manos y evitar la fiebre puerperal (Ara, 2002).
2.2.3. Uso de Cloro como desinfectante en redes de agua potable.
El primer uso del cloro en un proceso continuo de cloración de aguas para beber se
realizó en Europa (Bélgica) en 1902. Aunque en 1896 se usó hipoclorito en la base naval
austrohúngara de Pola en el Adriático (Ara, 2002).
El cloro libre es el desinfectante más efectivo para las bacterias y demás
microorganismos patógenos debido al efecto residual de desinfección que puede durar todo
el recorrido del agua a través de la red y es suficiente para combatir estos problemas. No
obstante, la actividad del desinfectante puede variar en función del estado en el que se
32
presenten lo microorganismos, su cohesión y mezcla con material disuelto, además de otros
factores como temperatura y pH (Geldreich, 1996).
Las razones por las cuales es de suma ventaja el uso de cloro son (Pérez, 2001):
Fácil aplicación.
Bajo costo.
Innocuo en las concentraciones necesarias en el agua para consumo humano.
Facilidad para mantener un cloro residual en la red de distribución.
Para prevenir la recontaminación del agua.
El cloro es usado como desinfectante para el control de microorganismos en aguas
de consumo humano. Se puede usar como gas generado a partir de la vaporización de cloro
líquido almacenado bajo presión en cilindros; como líquido, comúnmente hipoclorito de
sodio, NaOCl, y como sólido comúnmente hipoclorito de alto grado, HTH, o hipoclorito de
calcio, Ca(OCl)2. Tanto el cloro elemental gaseoso como el líquido, reaccionan con el agua
de la siguiente forma (Gramajo 2004):
La cloración se lleva a cabo mediante la aplicación de una solución de hipoclorito
de calcio, dosificada con una bomba en la fuente de agua (Si es en un medio subterráneo, la
aplicación se hace en el pozo). La solución se aplica a la tubería de descarga del pozo y
luego es conducida hacia un depósito elevado donde el cloro termina de mezclarse y
reaccionar con el agua; finalmente el agua clorada se distribuye a los usuarios por medio de
la gravedad. (Gramajo, 2004).
La desinfección con cloro es uno de los factores clave en los procesos de
tratamiento de agua potable. Sin embargo, ésta puede provocar sabores y olores
desagradables debido al cloro residual, la corrosión de las tuberías, la formación de
subproductos como los trihalometanos (THM), entre otros (Ahn, 2012).
2.2.4. Límites establecidos de concentración de cloro.
Los límites de concentración de cloro en redes de abastecimiento de agua potable,
están especificados en la Norma Oficial Mexicana denominada: “Salud ambiental, Agua
para uso y consumo Humano. Límites permisibles de calidad y tratamientos a que debe
someterse el agua para su potabilización” (NOM-127-SSA1-1994), con valores dentro del
siguiente rango:
mín - máx = 0.20 – 1.50 mg/l [13]
33
Esta norma está hoy en día vigente en México y dichos límites se establecen como
necesarios y pertinentes para la desinfección del agua. Sin embargo, la Organización
Mundial de la Salud, recomienda que las concentraciones de cloro deben estar entre
0.2mg/l – 0.5mg/l, debido a la suficiencia de cloro libre para hacer la función de
desinfección (0.20 mg/l) y que a su vez nos limitemos al consumo de agua con excesivo
contenido de cloro (0.5mg/l).
2.2.5. Etapas de reacción del cloro en la desinfección.
Cuando el cloro entra en contacto con el agua, se genera reacción con compuestos
reductores, estos pueden ser sustancias disueltas o suspendidas. Los compuestos con los
que actúa el cloro son el ácido sulfhídrico, el manganeso, el hierro y los nitritos. El cloro
adicional comienza a reaccionar con materia orgánica, a partir de la cual se producen
compuestos orgánicos de cloro, estos compuestos prácticamente no tienen la capacidad de
desinfectar y generan un olor y sabor característico.
El cloro que se sigue agregando reacciona con las sustancias reductoras, la materia
orgánica y el amoníaco. Finalmente, el cloro que se añada quedará como cloro residual
libre disponible, el cual es un agente desinfectante muy activo. Una vez alcanzado este
punto, todos los compuestos nitrogenados han sido destruidos y por lo tanto, cualquier
adición posterior de cloro produce un incremento en el nivel de cloro libre del agua
(AEAAS, 1984). Es por ello que el cloro decae una vez introducido en la red y existe el
riesgo de que ciertas partes de ella queden desprotegidas, con el correspondiente riesgo para
la salud de la población.
2.2.6. Mecanismos de decaimiento de cloro.
Una vez que se da el proceso de potabilización y se aplica el desinfectante, la
calidad del agua tiende a disminuir debido a diferentes factores. La pérdida de la
concentración de cloro residual a lo largo del sistema de distribución de agua se procesa
principalmente por diversos mecanismos separados (Castro, 2003):
Por reacción de cloro en el seno del líquido.
Por desinfección de bacterias y otros microorganismos.
Por reacción del cloro con las paredes de la tubería y otros elementos de la red.
Y por evaporación natural.
Una vez suministrado el cloro, éste presenta un proceso en el que se identifican
diferentes etapas antes de que se lleve a cabo la desinfección. Debido a que es un agente
químico muy activo, este conjunto de reacciones se clasifica según la curva de demanda del
cloro, como se muestra en la Figura 2.2, tomada de la Asociación Española de
Abastecimientos de Agua (AEAAS, 1984).

34
Figura 2.2 Curva de decaimiento de cloro (AEAAS, 1984)
2.2.7. Subproductos de la desinfección con Cloro.
Hacia la mitad de los años 70, se descubrió que además de desactivar los
organismos patógenos, como se espera, el cloro reacciona con la materia orgánica presente
en el agua generando subproductos de desinfección. Específicamente compuestos
orgánicos sintéticos como los trihalometanos (THM), aunque se ha identificado a otros
subproductos de la desinfección, tales como los ácidos haloacéticos (AHA) (Rodríguez,
2007). Se han detectado asimismo otros subproductos de la desinfección por cloro, tales
como dicloroacetonitrilo, tricloroacetonitrilo, bromocloroacetonitrilo, dibromoacetonitrilo,
1,1-dicloro-2 propanona, etc. Sobre estos subproductos se hace menor énfasis, ya que los
THM, seguidos de los ácidos haloacéticos, son los subproductos que se encuentran en
mayor cantidad en el agua potable clorada (Rodríguez, 2007).
Algunos parámetros que afectan la formación de subproductos de cloración:
La materia orgánica.
Presencia de iones bromuro.
El pH.
La temperatura.
La dosis de cloro.
El tiempo de contacto.
El tratamiento del agua.
La exposición de la población a los THM representa un riesgo de salud pública, ya
que son considerados potencialmente cancerígenos para el humano (Rodríguez 2007).
35
2.3. Modelación del decaimiento de cloro en el agua.
Los procesos de decaimiento de cloro tienen 2 dimensiones. El primero es la
reacción de cloro en el seno de flujo. El segundo es la reacción con el material de la tubería
y las sustancias adheridas a ella (Kadapia, 1998). El decaimiento en la pared de la tubería
será predominante cuando se tiene un cierto estado corrosivo en las tuberías. Para el
análisis de las concentraciones presentes en los nodos en el tiempo (t) de la simulación, a su
vez, se utilizan las fórmulas de las propiedades del flujo, como número de Reynolds,
velocidad, etc. Sin embargo, la principal condicionante del cálculo de las concentraciones
del cloro depende de dos coeficientes, el coeficiente de reacción en el flujo (kb) y el
coeficiente de reacción en la pared de la tubería, (kw).
2.3.1. Coeficiente de reacción del cloro en el seno del flujo kb
Dentro de la masa del fluido se producen reacciones químicas, que están en función
de la concentración del producto adicionado, de la tasa de reacción y del número de orden
de la reacción:
Donde:
= Variación de concentración ocurrida en el lapso de tiempo dt
C= Magnitud de la concentración (mg/L)
Resolviendo [14]:
∫
∫
Finalmente, despejando C:
36
Donde:
C0 = Concentración inicial de la simulación (mg/L)
C(t) = Concentración en el tiempo t (mg/L)
kb = Coeficiente de reacción en el seno de flujo (adimensional)
t = Intervalo de tiempo (días)
El coeficiente de reacción en el seno del flujo puede estimarse de la siguiente
manera: Se colocan distintas muestras de agua de concentración inicial C0 conocida en
recipientes de vidrio inertes al cloro. Midiendo en diferentes intervalos de tiempo la
concentración Ct, se puede graficar el logaritmo natural de Ct/C0 en función del tiempo. Si
se trata de una reacción de primer orden, se obtendrá una recta cuya pendiente es kb.
2.3.2. Coeficiente de reacción del cloro en la pared de la tubería kw.
La velocidad de las reacciones de calidad del agua que ocurren en o cerca de la
pared de la tubería puede ser considerada dependiente de la concentración en el flujo a
granel mediante el uso de una expresión de la forma:
(
)
Donde el factor (A/V) es el área superficial por unidad de volumen dentro de un tubo
(igual a 4 dividido entre el diámetro de la tubería). Las dimensiones de kw pueden ser
unidades de masa/área/tiempo (1/d) o longitud/tiempo (m/d) debido a su uso en diferentes
modelos que varían entre estos dos tipos de dimensiones. En EPANET se pueden trabajar
con los dos, especificando el orden de magnitud de cada uno. Esto es, el orden para el uso
de kw, en unidades (1/d) es de orden 0, y el orden para unidades (m/d) es 1.
La determinación de kw es más complicada que la de kb, debido a que kw depende de
la temperatura y de las características de la tubería, especialmente del material y la
antigüedad de la misma. En las tuberías metálicas la rugosidad aumenta con su antigüedad,
y relacionado a incrustaciones y a los efectos de los agentes corrosivos.
2.3.3. Valores típicos de kb y kw.
La siguiente Tabla 2.2 resume los valores típicos para los coeficientes kb y kw
(Powell et al., 2000; Hallam et al., 2002; Boccelli et al., 2003; Phillip, 2003; Al-Jasser,
2007).
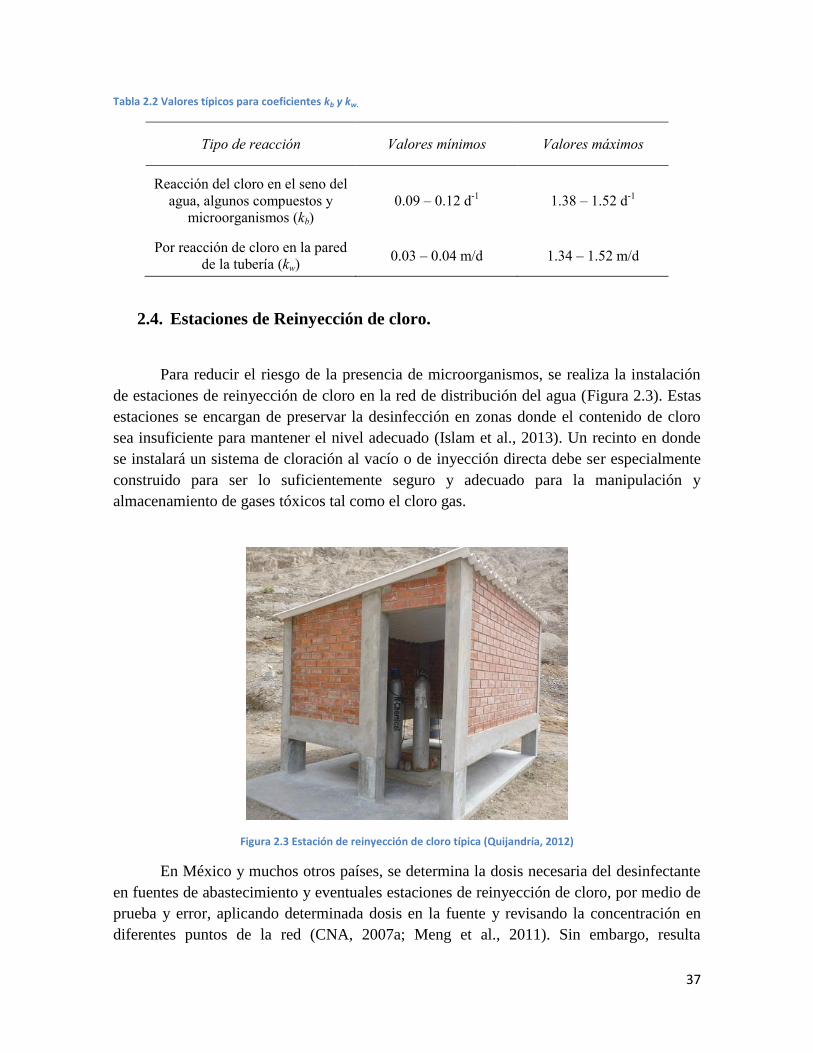
37
Tabla 2.2 Valores típicos para coeficientes kb y kw.
Tipo de reacción Valores mínimos Valores máximos
Reacción del cloro en el seno del
agua, algunos compuestos y
microorganismos (kb)
0.09 – 0.12 d-1
1.38 – 1.52 d-1
Por reacción de cloro en la pared
de la tubería (kw) 0.03 – 0.04 m/d 1.34 – 1.52 m/d
2.4. Estaciones de Reinyección de cloro.
Para reducir el riesgo de la presencia de microorganismos, se realiza la instalación
de estaciones de reinyección de cloro en la red de distribución del agua (Figura 2.3). Estas
estaciones se encargan de preservar la desinfección en zonas donde el contenido de cloro
sea insuficiente para mantener el nivel adecuado (Islam et al., 2013). Un recinto en donde
se instalará un sistema de cloración al vacío o de inyección directa debe ser especialmente
construido para ser lo suficientemente seguro y adecuado para la manipulación y
almacenamiento de gases tóxicos tal como el cloro gas.
Figura 2.3 Estación de reinyección de cloro típica (Quijandría, 2012)
En México y muchos otros países, se determina la dosis necesaria del desinfectante
en fuentes de abastecimiento y eventuales estaciones de reinyección de cloro, por medio de
prueba y error, aplicando determinada dosis en la fuente y revisando la concentración en
diferentes puntos de la red (CNA, 2007a; Meng et al., 2011). Sin embargo, resulta
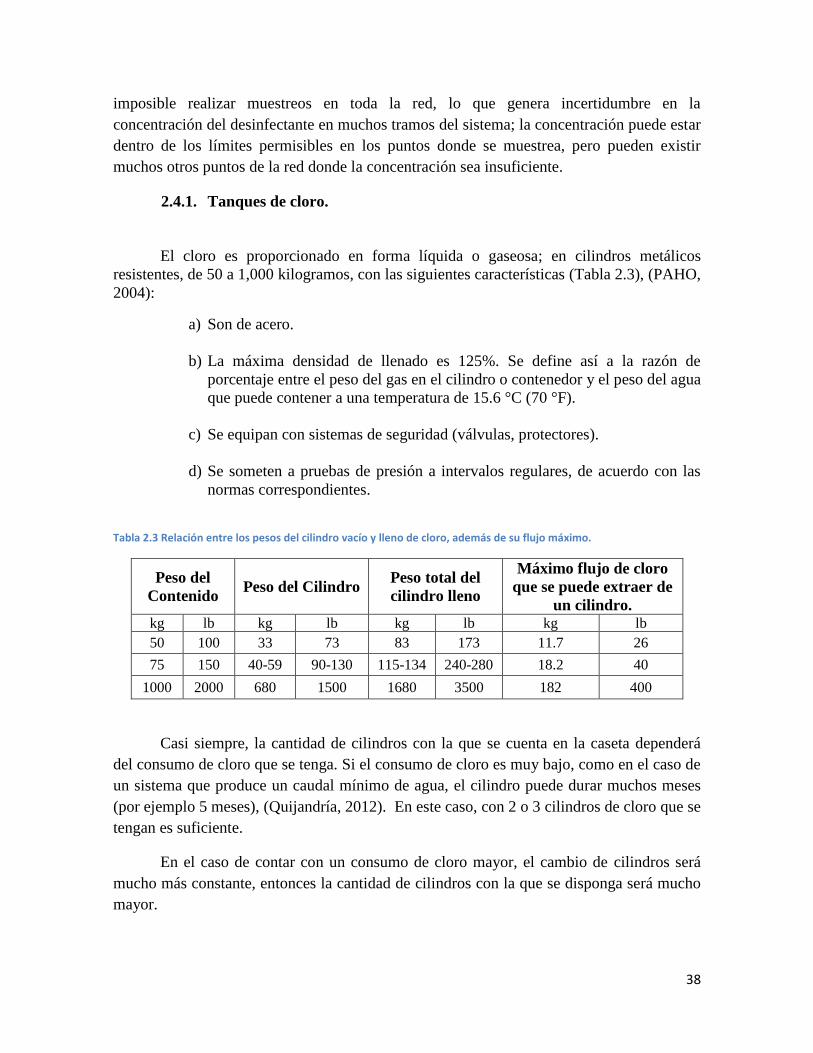
38
imposible realizar muestreos en toda la red, lo que genera incertidumbre en la
concentración del desinfectante en muchos tramos del sistema; la concentración puede estar
dentro de los límites permisibles en los puntos donde se muestrea, pero pueden existir
muchos otros puntos de la red donde la concentración sea insuficiente.
2.4.1. Tanques de cloro.
El cloro es proporcionado en forma líquida o gaseosa; en cilindros metálicos
resistentes, de 50 a 1,000 kilogramos, con las siguientes características (Tabla 2.3), (PAHO,
2004):
a) Son de acero.
b) La máxima densidad de llenado es 125%. Se define así a la razón de
porcentaje entre el peso del gas en el cilindro o contenedor y el peso del agua
que puede contener a una temperatura de 15.6 °C (70 °F).
c) Se equipan con sistemas de seguridad (válvulas, protectores).
d) Se someten a pruebas de presión a intervalos regulares, de acuerdo con las
normas correspondientes.
Tabla 2.3 Relación entre los pesos del cilindro vacío y lleno de cloro, además de su flujo máximo.
Peso del
Contenido Peso del Cilindro
Peso total del
cilindro lleno
Máximo flujo de cloro
que se puede extraer de
un cilindro. kg lb kg lb kg lb kg lb
50 100 33 73 83 173 11.7 26
75 150 40-59 90-130 115-134 240-280 18.2 40
1000 2000 680 1500 1680 3500 182 400
Casi siempre, la cantidad de cilindros con la que se cuenta en la caseta dependerá
del consumo de cloro que se tenga. Si el consumo de cloro es muy bajo, como en el caso de
un sistema que produce un caudal mínimo de agua, el cilindro puede durar muchos meses
(por ejemplo 5 meses), (Quijandría, 2012). En este caso, con 2 o 3 cilindros de cloro que se
tengan es suficiente.
En el caso de contar con un consumo de cloro mayor, el cambio de cilindros será
mucho más constante, entonces la cantidad de cilindros con la que se disponga será mucho
mayor.

39
Se necesita saber con exactitud cuál es el tiempo máximo de espera de recarga de un
cilindro de cloro; desde el momento que sale de la Planta hasta que retorna. De esta
manera, será más sencillo saber cuántos cilindros se deben tener para que no se genere un
desabastecimiento del desinfectante en el proceso de producción de agua.
2.4.2. Materiales que se emplean en la construcción.
El material más usado y recomendado para la elaboración de una caseta de cloración
es el material noble, ya que el cloro, al ser un oxidante por excelencia, corroe todo
accesorio metálico que se pueda encontrar cerca. En una caseta de cloración, existe la
posibilidad de experimentar pequeñas o grandes fugas de cloro, si los marcos de las
ventanas o las puertas son de fierro, éstas podrán sufrir oxidación de una manera acelerada.
Las ventanas pueden ser simples agujeros en el concreto con mallas contra insectos
o marcos de madera con luna. Asimismo la puerta puede ser de madera maciza para evitar
corrosión. La bomba booster (en el caso de la instalación de un sistema de inyección al
vacío) debe estar preferentemente montada sobre un bloque de concreto, a fin de evitar su
movimiento (Quijandría, 2012).
2.4.3. Algunos equipos de dosificación de cloro.
Las características de los equipos dependen de la forma de cloración a realizar, de
las características y dimensiones de la red y de la población abastecida.
2.4.3.1. Bombas dosificadoras y sistemas automáticos.
Puede utilizarse cualquier tipo de dosificador para productos químicos en solución
que sea resistente a la acción corrosiva del hipoclorito. Los más comunes son las bombas
dosificadoras y los sistemas de orificio de carga constante. Para la medición, se utilizan
rotámetros o las escalas del equipo dosificador. Las bombas dosificadoras empleadas son
de tipo diafragma o pistón diafragma, ambas de desplazamiento positivo. En todos estos
equipos debe poder calibrarse la dosificación.
El control automático de la cloración se basa en la medición, por medio de sensores,
de la dosis de cloro residual en el efluente de la planta. El equipo envía una señal que puede
ser interpretada por un receptor de la siguiente manera:
-Accionar una alarma para que el operador corrija manualmente la dosis.
-Accionar el equipo de ajuste automático del rotámetro de acuerdo con la dosis
prefijada en el sistema. Este sería un sistema totalmente automatizado.

40
Los equipos automáticos usualmente incluyen sistemas analógicos, digitales o carta
gráfica para mostrar y almacenar información sobre el proceso de dosificación. Estos
equipos tienen la ventaja de reducir el error humano en la dosificación, pero son de alto
costo y requieren mantenimiento especializado.
2.4.3.2. Sistemas de orificio de carga constante.
El hipoclorito en solución se utiliza principalmente en instalaciones para localidades
pequeñas, donde, por lo general, no hay condiciones apropiadas para operar y mantener un
equipo automático. Sin embargo, en la industria o en el caso de una urbanización o un hotel
de lujo, podría justificarse la inversión. Los sistemas de orificio de carga constante, por su
bajo costo y porque funcionan por gravedad, son muy empleados en localidades pequeñas.
2.4.3.3. Cloradores de aplicación directa.
Este tipo de clorador opera con la presión del cilindro, por lo que adolece de serias
limitaciones (Figura 2.4). Su uso se recomienda solo cuando no hay otra alternativa.
Normalmente se emplean en zonas donde no hay suministro continuo de energía eléctrica.
Figura 2.4 Cloración de aplicación directa.
La principal desventaja de estos equipos es que la dosis varía con la presión del cilindro
(Figura 2.5).

41
Figura 2.5 Diagrama de flujo de un clorador de aplicación directa (PAHO, 2004).
2.4.3.4. Clorador de aplicación al vacío.
Este tipo de equipo es el más confiable y seguro de operar. Un clorador de aplicación al
vacío está integrado por tres componentes fundamentales:
a) Un inyector. El inyector es un Venturi mediante el cual se ejerce una succión
determinada (130 milímetros de agua), por medio del cual se succiona el cloro a
través del equipo. Este inyector también sirve como cámara de mezcla entre el cloro
y el agua que sirvió para ejercer el vacío.
b) Válvula de control. Las válvulas de control requieren un cuidado especial, pues
con facilidad se taponan con las impurezas del cloro. Para garantizar mayor
confiabilidad en la operación, se recomienda especificar orificios o vástagos
ranurados en lugar de las válvulas de aguja convencionales.
c) El medidor de caudal del desinfectante. Es un rotámetro compuesto por un tubo
de vidrio que indicará el paso del gas a través del equipo. Cuando la presión está por
debajo de la atmosférica, como en este caso, el efecto es mayor.
Figura 2.6 diagrama de flujo de un clorador de aplicación al vacío.
42
2.5. El tema del agua embotellada en México.
México consume más agua embotellada per cápita que cualquier otro país del
mundo (Erickson, 2012). Aproximadamente 28.2 mil millones de pesos en agua
embotellada cada año, casi igual a los 36.1 mil millones de pesos que los proveedores de
agua potable recaudan de sus usuarios en el país. Entre las causas que genera este uso
excesivo del agua embotellada es debido a que se ha promovido que existe un riesgo latente
en la calidad del agua que proviene de las redes de distribución, haciendo que los
consumidores la eviten y se vean atraídos por la hábil propaganda de la industria de agua
embotellada. Aún cuando la cobertura y el saneamiento del agua son las adecuadas en
muchas partes de México, la tasa en fugas y pérdidas de agua es alta, el servicio en muchas
ocasiones es intermitente, y el almacenamiento particular de los consumidores aumenta el
riesgo de contaminación.
La confianza en el agua de la red de distribución en México, o por lo menos la
disposición a tomarla, parece que ha disminuido con el tiempo. Según Claudia Campero,
una representante en México de Food & Water Watch (citada por McClatchy Newspapers),
grupo de defensores de los consumidores con sede en Washington, DC, EEUU, menciona
que los bebederos en las escuelas públicas y los parques eran frecuentes hace veinte años,
lo que ya no es el caso para la mayor parte de México (Johnson, 2010).
Esta reducción en el consumo del agua de la red de distribución y el aumento del
agua embotellada, podrían deberse a que la confianza de los consumidores en la calidad del
agua de la llave ha disminuido y/o que la disponibilidad del agua embotellada y la
capacidad para pagarla han aumentado. Mientras que el gasto tan alto de agua embotellada
puede ser visto como un fracaso de los sistemas públicos de agua del país; también se
puede ver como una oportunidad para que el sector público del agua, mejore la calidad del
producto que proporciona. De esta manera, restaure la confianza del consumidor en el agua
de la red de distribución y recaude por lo menos una parte del dinero que se va a las
compañías de agua embotellada.
La cobertura en el suministro de agua es bastante alta y la Comisión Nacional del
Agua (CONAGUA) de México, afirma que casi toda el agua suministrada se desinfecta con
cloro antes de ser enviada a las redes de distribución (Erickson, 2012). Sin embargo, mucha
gente sólo recibe un suministro intermitente de agua, lo que es una molestia y puede
originar su contaminación tanto en las tuberías de distribución como durante su
almacenamiento en las viviendas. Mientras que la cobertura en el suministro de agua es alta
en México, la calidad en el servicio muchas veces es deficiente. Muchos hogares que tienen
un suministro de agua entubada sólo reciben un servicio por unas horas, por lo que no
43
siempre tienen agua disponible en sus llaves (Erickson, 2012). Obligando a que a los
usuarios tengan que almacenar agua.
Este último punto es una de las consecuencias de mayor importancia relacionado
con la operación inconsistente de la red de distribución. La mayoría de las casas tienen al
menos un contenedor de almacenamiento individual (Omisca, 2011). El uso del contenedor
de almacenamiento individual se debe principalmente al servicio intermitente. Sin embargo,
en la mayoría de los casos, nuevas construcciones de casas ya incluyen un contenedor de
almacenamiento individual a pesar de la existencia de un servicio continuo. De esta manera
se garantiza la disponibilidad de agua en las viviendas a costa de la calidad del agua, lo cual
tiene consecuencias para la vida del desinfectante, y por lo tanto, la disminución calidad del
agua potable almacenada en los mismos.
44
CAPÍTULO 3
45
3. ALGORITMOS GENÉTICOS
3.1. Computación Evolutiva, una breve reseña histórica.
El término computación evolutiva o algoritmos evolutivos, realmente engloba una
serie de técnicas inspiradas biológicamente (en los principios de la teoría Neo-Darwiniana
de la evolución natural). En términos generales, para simular el proceso evolutivo en una
computadora se requiere (Coello, 2003):
• Codificar las estructuras que se replicarán.
• Operaciones que afecten a los “individuos”.
• Una función de aptitud.
• Un mecanismo de selección.
Aunque hoy en día es cada vez más difícil distinguir las diferencias entre los
distintos tipos de algoritmos evolutivos existentes, por razones sobre todo históricas, suele
hablarse de tres paradigmas principales:
• Programación Evolutiva
• Estrategias Evolutivas
• Algoritmos Genéticos
Cada uno de estos paradigmas se originó de manera independiente y con
motivaciones muy distintas.
Las primeras ideas de la computación evolutiva, incluso antes del descubrimiento
del ADN, vinieron de Von Neumann, uno de los mayores científicos de siglo XIX. Von
Neumann afirmó que la vida debía de estar apoyada por un código que a la vez describiera
como se puede construir un ser vivo, y tal que ese ser creado fuera capaz de
autorreproducirse. Por tanto, un autómata o máquina autorreproductiva tendría que ser
capaz, aparte de contener las instrucciones para hacerlo, de ser capaz de copiar tales
instrucciones a su descendencia (Merello, 2007).
Sin embargo, no fue hasta mediados de los años 50 cuando Box comenzó a pensar
en imitar esas ideas para, en su caso, mejorar procesos industriales. La técnica de Box,
denominada EVOP (Evolutionary Operation), consistía en elegir una serie de variables que
regían un proceso industrial (Diéguez, 2004). Sobre esas variables se creaban pequeñas
diferenciaciones que formaban un hipercubo, con lo que se cambiaba la magnitud de las
variables hasta alzcanzar un valor fijo en todas. Se probaba entonces con cada una de las
esquinas del hipercubo durante un tiempo, y al final del periodo de pruebas, un comité
humano decidía sobre la calidad del resultado. Es decir, se estaba aplicando mutación y
46
selección a los valores de las variables, con el objeto de mejorar la calidad del proceso. Este
procedimiento se aplicó con éxito a algunas industrias químicas.
Un poco más adelante, en 1958, Friedberg y sus colaboradores pensaron en mejorar
la operación de un programa usando técnicas evolutivas. Para ello diseñaron un código en
una máquina de 8 bits (2 para el código de operación, y 6 para los datos y/o instrucciones);
cada programa, tenía 64 instrucciones. Un programa llamado Herman, ejecutaba los
programas creados, y otro programa, el Teacher o profesor, le mandaba a Herman ejecutar
otros programas y verificaba si los programas ejecutados habían realizado su tarea o no. La
tarea consistía en leer unas entradas, situadas en una posición de memoria, y debían
depositar el resultado en otra posición de memoria, que era examinada al terminarse de
ejecutar la última instrucción.
Para hacer evolucionar los programas, Friedberg hizo que en cada posición de
memoria hubiera dos alternativas; para cambiar un programa, alternaba las dos
instrucciones (que eran una especie de alelos), o bien reemplazaba una de las dos
instrucciones con una totalmente aleatoria. En realidad, lo que estaba haciendo es usar
mutación para generar nuevos programas; al parecer, no tuvo más éxito que si hubiera
buscado aleatoriamente un programa que hiciera la misma tarea. El problema es que la
mutación sola, sin ayuda de la selección, hace que la búsqueda sea prácticamente una
búsqueda aleatoria.
Más o menos simultáneamente, Bremmerman trató de usar la evolución para
"entender los procesos de pensamiento creativo y aprendizaje", y empezó a considerar la
evolución como un proceso de aprendizaje. Para resolver un problema, codificaba las
variables del problema en una cadena binaria de 0s y 1s. Sometía la cadena a mutación,
cambiando un bit de cada vez; de esta forma, estableció que la tasa ideal de mutación debía
de ser tal que se cambiara un bit cada vez. Bremmerman trató de resolver problemas de
minimización de funciones, aunque no está muy claro qué tipo de selección usó, si es que
usó alguna, y el tamaño y tipo de la población. En todo caso, se llegaba a un punto, la
"trampa de Bremmerman", en el cual la solución no mejoraba; en intentos sucesivos trató
de añadir entrecruzamiento entre soluciones, pero tampoco obtuvo buenos resultados.
Una vez más, el simple uso de operadores que creen diversidad no es suficiente para
dirigir la búsqueda genética hacia la solución correcta; y corresponde a un concepto de la
evolución darwiniano clásico, o incluso de libro de comic: por mutación, se puede mejorar
a un individuo; en realidad, la evolución actúa a nivel de población.
El primer uso de procedimientos evolutivos en inteligencia artificial se debe a Reed,
Toombs y Baricelli, que trataron de hacer evolucionar un tahúr que jugaba a un juego de
cartas simplificado. Las estrategias de juego consistían en una serie de 4 probabilidades de
47
apuesta alta o baja con una mano alta o baja, con cuatro parámetros de mutación asociados.
Se mantenía una población de 50 individuos, y aparte de la mutación, había intercambio de
probabilidades entre dos padres. Es de suponer que los perdedores se eliminaban de la
población (tirándolos por la borda). Aparte de, probablemente, crear buenas estrategias,
llegaron a la conclusión de que el entrecruzamiento no aportaba mucho a la búsqueda.
Los intentos posteriores, realizados en los años 60, ya corresponden a los algoritmos
evolutivos modernos, y se han seguido investigando hasta nuestros días. Uno de ellos, la
programación evolutiva de Fogel (Fogel, 1966) se inició como un intento de usar la
evolución para crear máquinas inteligentes, que pudieran prever su entorno y reaccionar
adecuadamente a él. Para simular una máquina pensante, se utilizó un autómata celular. Un
autómata celular es un conjunto de estados y reglas de transición entre ellos, de forma que,
al recibir una entrada, cambia o no de estado y produce una salida. Fogel trataba de hacer
aprender a estos autómatas a encontrar regularidades en los símbolos que se le iban
enviando. Como método de aprendizaje, usó un algoritmo evolutivo: una población de
diferentes autómatas competía para hallar la mejor solución, es decir, predecir cual iba a ser
el siguiente símbolo de la secuencia con un mínimo de errores. Los peores 50% eran
eliminados cada generación, y sustituidos por otros autómatas resultantes de una mutación
de los existentes. En cualquier caso, estos primeros experimentos demostraron el potencial
de la evolución como método de búsqueda de soluciones novedosas.
3.1.1. Surgimiento de los Algoritmos Genéticos.
Un investigador de la Universidad de Michigan llamado John H. Holland (Figura
3.1) estaba consciente de la importancia de la selección natural, y a fines de los años 60
desarrolló una técnica que permitió incorporarla en un programa de computadora. Su
objetivo era lograr que las computadoras aprendieran por sí mismas. La técnica que inventó
Holland se llamó originalmente "planes reproductivos", pero se hizo popular bajo el
nombre "algoritmo genético" tras la publicación de su libro (Holland, 1992).
Figura 3.1 John H. Holland, desarrollador de los AG.
48
De acuerdo con el paradigma Darwiniano de la evolución, toda la vida en nuestro
planeta puede ser explicada a través de una gran cantidad de procesos estadísticos que
actúan en y dentro de las poblaciones y especies: reproducción, mutación, competencia y
selección. John H. Holland se interesó en estudiar los procesos lógicos involucrados en la
adaptación. Se percató de que el uso de reglas simples podría generar comportamientos
flexibles, y visualizó la posibilidad de estudiar la evolución de comportamientos en un
sistema complejo.
En esa universidad, Holland impartía un curso titulado “Teoría de sistemas
adaptativos”. Dentro de este curso, y con una participación activa por parte de sus
estudiantes, fue donde se crearon las ideas que más tarde se convertirían en los AG.Por
tanto, cuando Holland se enfrentó a los AG, los objetivos de su investigación fueron dos:
• imitar los procesos adaptativos de los sistemas naturales
• diseñar sistemas artificiales (normalmente programas) que retengan los mecanismos
importantes de los sistemas naturales.
Unos 15 años más adelante, David Goldberg, actual delfín de los AG, conoció a
Holland, y se convirtió en su estudiante. Goldberg era un ingeniero industrial trabajando en
diseño de tuberías, y fue uno de los primeros que trató de aplicar los AG a problemas
industriales. Aunque Holland trató de disuadirle, porque pensaba que el problema era
excesivamente complicado como para aplicarle AG. Goldberg consiguió lo que quería,
escribiendo un AG en un ordenador personal Apple II y publicó sus avances en este tema
(Figura 3.2).
Figura 3.2 Portada del libro de “Algoritmos Genéticos” publicado por David E. Goldberg, estudiante de
Holland
49
Estas y otras aplicaciones creadas por estudiantes de Holland convirtieron a los AG
en un campo con base suficientemente aceptado para celebrar la primera conferencia en
1985, ICGA´85. Tal conferencia se sigue celebrando bianualmente.
3.2. Análisis de algoritmos.
La palabra algoritmo se deriva del nombre del autor Persa, Abu Ja’far Mohammed
ibn Musa al Khowarizmi (c. 825 A. O.) quien escribió un libro acerca de Matemáticas
puras. Una revisión de la última edición del diccionario de Webster define su significado
como: “Cualquier método especial de solución a un cierto tipo de problema”. Pero esta
palabra ha tomado un significado especial en las ciencias computacionales, donde
algoritmo se ha referido a un método preciso utilizable por una computadora para la
solución de un problema. Esto es lo que diferencia la noción de algoritmo con otras
palabras, tales como proceso, técnica o método (Ellis, 1984).
El análisis de algoritmos comprende 2 etapas: el análisis a priori y el análisis a
posteriori. En el primero de ellos, se obtiene una función que acota el tiempo de cálculo del
algoritmo. En el análisis a posteriori lo que se hace es recolectar estadísticas acerca del
consumo de tiempo y espacio del algoritmo mientras éste se ejecuta (Ellis, 1984). Es
importante tener en mente que durante el análisis a priori de un algoritmo, se ignoran los
detalles que sean dependientes de la arquitectura de una computadora o de un lenguaje de
programación y se analiza el orden de magnitud de la frecuencia de ejecución de las
instrucciones básicas del algoritmo.
Veamos un ejemplo simple de análisis a priori. Considerando los 3 segmentos de
código siguientes:
(1) x = x + y
(2) for i = 1 to n do
x = x + y
end for i
(3) for i = 1 to n do
for j = 1 to n do
x = x + y
end for j
end for i
La frecuencia de ejecución de la sentencia x = x + y es:
50
1 para el segmento (1).
n para el segmento (2).
n2 para el segmento (3).
Una de las notaciones más usadas para expresar la complejidad de un algoritmo es la
denominada función “O” (big-O, en inglés).
Algunos tiempos comunes de los algoritmos son los siguientes:
O(1) < O(log n) < O(n) < O(n log n) < O(n2) < O(n
3) < O(2
n) [17]
Algunos algoritmos conocidos y sus complejidades correspondientes en esta notación
son los siguientes:
Buscar un elemento en una lista no ordenada: O(n)
Buscar un elemento en una lista ordenada: O(log n)
Quicksort: O(n log n)
Calcular el determinante de una matriz: O(n3)
Multiplicación matricial: O(n2.81
)
Bubble Sort: O(n2).
Los problemas cuya complejidad está acotada por un polinomio son los
denominados problemas P. Más detalladamente, podemos decir que un problema pertenece
a la clase si puede ser resuelto en tiempo polinomial en una computadora determinística.
3.3. Técnicas Heurísticas.
Existen problemas que no pueden resolverse usando un algoritmo que requiera
tiempo polinomial (problemas P). De hecho, en muchas aplicaciones prácticas, no podemos
siquiera decir si existe una solución eficiente.
Asimismo, hay muchos problemas para los cuales el mejor algoritmo que se conoce
requiere tiempo exponencial. Cuando se encuentran espacios de búsqueda tan grandes
como en el caso del problema del viajero, y que además los algoritmos más eficientes que
existen para resolver el problema requieren tiempo exponencial. Resulta obvio que las
técnicas clásicas de búsqueda y optimización son insuficientes. Es entonces cuando se
recurre a las "heurísticas". La palabra "heurística" se deriva del griego heuriskein, que
significa "encontrar" o "descubrir".
Por ejemplo, Newell et al., (1959) dice:
51
“A un proceso que puede resolver un cierto problema, pero que no ofrece ninguna garantía
de lograrlo, se le denomina una 'heurística' para ese problema.”
Algunos ejemplos de técnicas heurísticas son los siguientes:
• Búsqueda Tabú
• Recocido Simulado
• Escalando la Colina
La búsqueda tabú (Glover, 1998) es realmente una meta-heurística, porque es un
procedimiento que debe acoplarse a otra técnica, ya que no funciona por sí sola. La
búsqueda tabú usa una “memoria” para guiar la búsqueda, de tal forma que algunas
soluciones examinadas recientemente son “memorizadas” y se vuelven tabú (prohibidas) al
tomar decisiones acerca del siguiente punto de búsqueda. La búsqueda tabú es determinista,
aunque se le pueden agregar elementos probabilísticos.
El recocido simulado está basado en el enfriamiento de los cristales. El algoritmo
requiere de una temperatura inicial, una final y una función de variación de la temperatura.
Dicha función de variación es crucial para el buen desempeño del algoritmo y su definición
es, por tanto, sumamente importante. Este es un algoritmo probabilístico de búsqueda local.
La técnica escalando la colina se aplica a un punto a la vez (es decir, es una técnica
local). A partir de un punto, se generan varios estados posibles y se selecciona el mejor de
ellos. El algoritmo no tiene retroceso ni lleva ningún tipo de registro histórico (aunque estos
y otros aditamentos son susceptibles de ser incorporados). El algoritmo puede quedar
atrapado fácilmente en óptimos locales. Asimismo, el algoritmo es determinista.
3.4. Algoritmos Genéticos
Los AG son métodos adaptativos, los cuales pueden usarse para resolver problemas
especializados de búsquedas y optimización (Besaley, 1993). Están basados en los procesos
genéticos de los organismos biológicos. Por muchas Generaciones, las poblaciones
naturales tienden a evolucionar de acuerdo a los principios de la Selección Natural
siguiendo el patrón: “Supervivencia del más apto”, establecido por primera vez por Charles
Darwin, en su obra “El origen de la especies”. Basándonos en éste proceso, los AG son
capaces de resolver problemas del mundo real, si se hace la codificación adecuada. Por
ejemplo, los AG pueden ser utilizados para el control de proceso en línea, tales como en
una planta química, o el equilibrio de carga en un sistema de ordenador multiprocesador.
En la naturaleza, los individuos de una población compiten entre ellos por recursos
para vivir, como alimentos, agua o refugio. Incluso también los miembros de la misma
especie compiten para atraer a su pareja. Aquellos individuos que son más aptos para

52
conseguir pareja y sobrevivir, dejarán relativamente mayor número de descendientes. Esto
significa que los genes de los individuos más adaptados se propagarán en sucesivas
generaciones hacia un número de individuos creciente en cada generación. La combinación
de buenas características provenientes de diferentes ancestros puede, a veces, producir
descendientes “mucho más aptos”, cuya adaptación es mucho mayor que la de cualquiera
de sus padres. De esta manera, las especies evolucionan logrando características mejor
adaptadas a su medio ambiente.
Los AG usan una analogía directa con el comportamiento natural. Trabajan con una
población de individuos, cada uno de los cuales representa una solución factible a un
problema dado. A cada individuo se le asigna un valor o puntuación en función de que tan
buena solución representan para el problema dado. En la naturaleza, es equivalente a la
efectividad de un organismo para competir por determinados recursos. Cuanto mayor sea la
adaptación de un individuo al problema, mayor será la probabilidad de que él mismo sea
seleccionado para reproducirse, cruzando su material genético con otro individuo
seleccionado de igual forma. Este cruce producirá nuevos individuos (descendientes de los
anteriores) los cuales comparten algunas de las características de sus padres. Cuanto menor
sea la adaptación de un individuo, menor será la probabilidad de que dicho individuo sea
seleccionado para la reproducción, y por lo tanto de que su material genético se propague
en sucesivas generaciones, y entonces morirá.
De esta manera se produce una nueva población de posibles soluciones, la cual
reemplaza a la anterior y verifica la interesante propiedad de que contiene una mayor
proporción de buenas características en comparación con la población anterior. Así, a lo
largo de las generaciones las buenas características se propagan a través de la población.
Favoreciendo el cruce de los individuos mejor adaptados, van siendo exploradas las áreas
más prometedoras del espacio de búsqueda. Si el AG ha sido bien diseñado, la población
convergerá hacia una solución óptima del problema.
3.4.1. Algoritmo Genético simple.
El Algoritmo Genético simple, también llamado Canónico, se representa en la
Figura 3.3. Como se verá a continuación, se necesita una codificación o representación del
problema, que resulte adecuada al mismo. Además se requiere de una función de
evaluación de aptitud o adaptación al problema, la cual asigna un número real a cada
posible solución codificada (Jiménez, 2004). Durante la ejecución del algoritmo, los padres
deben ser seleccionados para la reproducción, a continuación, dichos padres seleccionados
se cruzarán generando dos hijos, sobre cada uno de los cuales actuará un operador de
mutación. El resultado de la combinación de las anteriores funciones será un conjunto de
individuos (posibles soluciones al problema), los cuales en la evolución del AG formarán
parte de la siguiente población.

53
Figura 3.3 Diagrama de flujo de los Algoritmos Genéticos Simple
3.4.2. Traducción biológica de los elementos de los AG.
Para referirse a los diferentes elementos constitutivos de los AG, se utilizan
términos para nombrarlos (Tabla 3.1). Trasladando estos conceptos a la “vida artificial”: en
los algoritmos genéticos, el término cromosoma se refiere a un candidato a solución del
problema, que a menudo se codifica como una cadena de bits (números binarios). Los
genes son tanto un bit como bloques cortos de bits adyacentes que codifican un elemento
particular del candidato a solución. Un alelo es el valor distintivo que le corresponde al gen
(para alfabetos largos cada lugar puede tener más alelos). Muchos organismos tienen varios
cromosomas en cada célula. El genoma del organismo es la colección completa del material
genético. Si bien, el alfabeto utilizado para representar a los individuos no debe
necesariamente estar constituido por {0,1}, sin embargo buena parte de la teoría en la que
se fundamentan los AG utiliza dicho alfabeto.
En términos biológicos, el conjunto de parámetros representando un cromosoma
particular se denomina fenotipo. El fenotipo contiene la información requerida para
construir un organismo, el cual se refiere como genotipo. Los mismos términos se utilizan
en el campo de los AG (Figura 3.4). La aptitud se infiere a través del fenotipo usando la
función de evaluación. La función de aptitud o evaluación debe ser diseñada para cada
problema de manera específica. Dado un cromosoma particular, la función de aptitud le
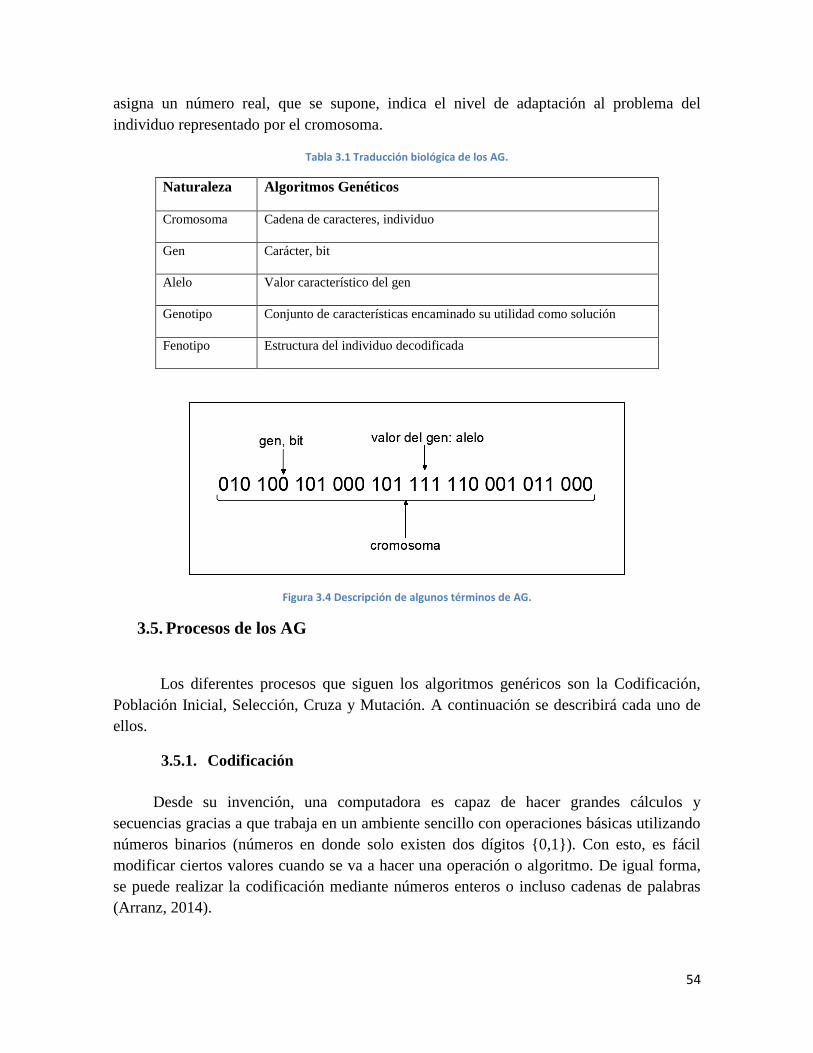
54
asigna un número real, que se supone, indica el nivel de adaptación al problema del
individuo representado por el cromosoma.
Tabla 3.1 Traducción biológica de los AG.
Naturaleza Algoritmos Genéticos
Cromosoma Cadena de caracteres, individuo
Gen Carácter, bit
Alelo Valor característico del gen
Genotipo Conjunto de características encaminado su utilidad como solución
Fenotipo Estructura del individuo decodificada
Figura 3.4 Descripción de algunos términos de AG.
3.5. Procesos de los AG
Los diferentes procesos que siguen los algoritmos genéricos son la Codificación,
Población Inicial, Selección, Cruza y Mutación. A continuación se describirá cada uno de
ellos.
3.5.1. Codificación
Desde su invención, una computadora es capaz de hacer grandes cálculos y
secuencias gracias a que trabaja en un ambiente sencillo con operaciones básicas utilizando
números binarios (números en donde solo existen dos dígitos {0,1}). Con esto, es fácil
modificar ciertos valores cuando se va a hacer una operación o algoritmo. De igual forma,
se puede realizar la codificación mediante números enteros o incluso cadenas de palabras
(Arranz, 2014).

55
3.5.1.1. Codificación binaria.
El problema a tratarse con AG empieza con la codificación del individuo, que es la
estructuración del problema a un lenguaje de computadora. El objetivo es que el ordenador
pueda realizar procedimientos y cálculos para que encuentre la solución al problema. Para
ello, se describe al individuo de una forma que el ordenador realice dichas operaciones de
una manera ágil y fácil de manipular. Desde los primeros trabajos de John H. Holland la
codificación suele hacerse mediante valores binarios. Se asigna un determinado número de
bits a cada parámetro y se realiza una discretización de la variable representada por cada
gen. El número de bits asignados dependerá del grado de ajuste que se desee alcanzar.
Evidentemente no todos los parámetros tienen por qué estar codificados con el mismo
número de bits (GESTAL, 2000).
Un ejemplo sencillo de representación de individuos mediante números binarios
suele ser en problemas donde se requiera encontrar “un número”.Por ejemplo, se tiene un
problema en el cual se requiere encontrar un número dentro del rango (0 – 8191) que
satisfaga una ecuación “f(x)”. Si los primeros individuos de la población fuesen los
números 331, 1077, 4250, 4095 ,4096 y 1, de manera binaria se muestra su representación
en la Tabla 3.2.
Tabla 3.2 Representación binaria de números decimales.
Representación
Decimal Binario 331 0 0 0 0 1 0 1 0 0 1 0 1 1
1077 0 0 1 0 0 0 0 1 1 0 1 0 1
4250 0 1 0 0 0 1 0 0 1 1 0 1 0
4095 0 1 1 1 1 1 1 1 1 1 1 1 1
4096 1 0 0 0 0 0 0 0 0 0 0 0 0
1 0 0 0 0 0 0 0 0 0 0 0 0 1
Se observa que todos los números poseen una cantidad de 13 bits que hace posible
las diferentes funciones del algoritmo genético, como cruza, mutación, etc, debido a que
todos los individuos poseen el mismo número de genes. Es por ello que se establece el
rango (1 – 8191), ya que el número 8192 o cualquier número superior tiene una
representación en números binarios de por lo menos 14 bits (10000000000000), lo cual
excede el número de genes del cromosoma de un individuo y no es posible llevar a cabo
una combinación/cruce/mutación homogéneos.

56
3.5.1.2. Codificación numérica.
En este tipo de codificación se utilizan cadenas de números que representan un
número en una secuencia. Se utiliza en problemas en los que hay que encontrar un valor
numérico específico.Un ejemplo clásico de este tipo de codificación es el problema del
viajante de comercio (Figura 3.5). En este caso se tiene como datos, una serie de ciudades
por las que el comerciante debe pasar y las distancias entre ellas. El objetivo es que el
comerciante, partiendo de una ciudad origen, recorra todas las ciudades y vuelva al punto
de partida pero recorriendo el menor número de kilómetros, por lo que habrá que localizar
la combinación de ciudades que minimice dicho recorrido.
Figura 3.5 Esquema del problema del viajante.
3.5.1.3. Codificación por valor directo.
Este tipo de codificación será el utilizado en caso de resolución de problemas en el
que se requiera del uso de valores de cifrado complicado como podría ser en el uso de
números reales, cuya codificación con números binarios sería muy complejo. En
codificación por valor directo cada cromosoma es una cadena de valores relacionados con
el problema a estudiar, pudiendo ser desde números decimales, cadenas de caracteres o
incluso una combinación de varios de ellos. Su aplicación es muy buena en ciertos
problemas concretos. Por el contrario para la utilización de esta codificación, normalmente
es necesario desarrollar nuevas técnicas de reproducción y mutación específicas hacia la
resolución del problema.
3.5.1.4. Codificación en Árbol.
Este tipo de codificación se utiliza principalmente en el desarrollo de programas o
expresiones para programación genética. Cada cromosoma será en este caso un árbol con
ciertos objetos. En este método, los cambios aleatorios pueden generarse cambiando el
57
operador, alterando el valor de un cierto nodo del árbol o simplemente sustituyendo un
subárbol por otro.
3.5.2. Función de Aptitud.
La función de aptitud (FA; fitness function, en inglés) es la función objetivo del
problema de optimización (Kumar, 2012). El algoritmo genético únicamente maximiza,
pero la minimización puede realizarse fácilmente utilizando el recíproco de la función
maximizante (debe cuidarse, por supuesto, que el recíproco de la función no genere una
división por cero). Una característica que debe tener esta función es, que debe ser capaz de
"castigar" a las soluciones malas, y de "premiar" a las buenas, de forma que éstas últimas
sean las que se propaguen con mayor rapidez.
La codificación más común de las respuestas es a través de cadenas binarias, aunque
se han utilizado también números reales y letras. El primero de estos esquemas ha gozado
de mucha popularidad debido a que es el que propuso originalmente Holland, y además
porque resulta muy sencillo de implementar.
3.5.3. Proceso de Selección.
La selección es la primera operación genética en la fase reproductiva de los AG. Es
el proceso por el cual se determina la cantidad de veces que cada individuo será elegido
para reproducirse y/o para pasar a la generación siguiente (dependiendo de la arquitectura
del algoritmo elegida) (Jiménez, 2004). Más concretamente, es el operador que selecciona
los individuos a reproducir. Este proceso se realiza con repetición, es decir, cada individuo
de la población puede ser elegido más de una vez para reproducirse. El proceso de
selección se basa en elegir una mayor cantidad de veces a los individuos mejor adaptados
(con mayor valor de FA), pero dar cierta probabilidad de ser elegidos a todos los
individuos, incluyendo a aquellos que posean menor valor de FA.
Una vez evaluada la aptitud del individuo, se crea la nueva población teniendo en
cuenta que los buenos rasgos de los mejores se transmitan a esta. Se tendrá el mismo
criterio en cada generación. Existen diversos métodos en el proceso de selección de los
mejores “cromosomas”. Algunos de ellos son: Selección por torneo, Selección de estado
uniforme, Método de la Ruleta, etc. a continuación se describirán los principales métodos.
3.5.3.1. Selección por Torneo.
La selección mediante torneo es computacionalmente más adecuada para
implementarse en paralelo (utilizar menor número de operaciones), (Cortés, 2000). Esta
técnica fue propuesta por Wetzel (Goldberg, 1991) y estudiada en la tesis doctoral de

58
(Brindle, 1979). La idea básica del método es seleccionar con base en comparaciones
directas de los individuos.
El algoritmo de la versión determinística es el siguiente:
1. Barajar los individuos de la población.
2. Escoger un numero p de individuos (típicamente 2).
3. Compararlos con base en su FA.
4. El ganador del “torneo” es el individuo más apto.
5. Debe barajarse la población un total de p veces para seleccionar N padres
(donde N es el tamaño de la población).
En la Tabla 3.3 se muestra un ejemplo de su funcionamiento:
Tabla 3.3 Ejemplo de selección por torneo.
Individuo FA Barajar 1 Ganadores 1 Barajar 2 Ganadores 2
1 254 2 6
4 1
2 47 6 1
3 457 1 3
6 6
4 194 3 5
5 85 5 4
2 3
6 310 4 3
Por lo tanto, los padres a cruzarse resultaron:
6 y 1 3 y 6 4 y 3
3.5.3.2. Selección por ruleta.
Es el usado por Goldberg en su libro: Genetic Algorithms (Goldberg, 2006). Este
método es muy simple, y consiste en crear una ruleta, en la que cada cromosoma tiene
asignada una fracción proporcional a su FA (Coello, 2003).
Cada individuo se le asigna un segmento de la rueda de la ruleta. El tamaño de cada
segmento en la rueda de la ruleta es proporcional al valor del FA del individuo, cuanto más
grande es el valor, mayor es el segmento. Entonces, la rueda de la ruleta virtual se
centrifuga. Una vez detenida la ruleta, el individuo correspondiente al segmento es el que
queda seleccionado. El proceso se repite hasta que se selecciona el número deseado de
individuos. Los individuos con mayor FA tienen más probabilidad de selección. Esto puede
conducir a la selección sesgada hacia los individuos que representan la solución buscada.

59
También puede posiblemente que se pierdan los mejores individuos de una población. No
hay garantía de que las buenas soluciones encontrarán su camino en la próxima generación.
El concepto de la ruleta es el siguiente:
• Calcular la suma de valores esperados T
• Repetir N veces (N es el tamaño de la población):
Generar un número aleatorio r entre 0 y T
Ciclar a través de los individuos de la población, sumando los valores
esperados hasta que la suma sea mayor o igual a r.
El individuo que haga que esta suma exceda el límite es el seleccionado.
Suponiendo que en una generación de tamaño n, se obtienen los valores de FA de todos los
individuos, entonces la probabilidad p de seleccionar al individuo i será:
∑
Describiendo a mayor detalle, se considera una ruleta (Figura 3.6), donde cada fracción del
círculo (wi) será proporcional al valor del FA de cada individuo, entonces se tiene:
Figura 3.6 Distribución del FA en selección por ruleta.
En una selección por rueda de la ruleta, se construye un segmento de línea de
longitud ∑ con los sectores consecutivos de longitud . Después se genera un
número aleatorio r, el cual debe estar dentro del rango 0<r<∑ . Finalmente, r se
localiza en cierto sector de la recta (en éste caso es ), con lo que se selecciona el
respectivo individuo.
3.5.3.2.1. Análisis de la Ruleta
Debido a la simplicidad de la aplicación y la interpretación directa, la selección de
la ruleta ruedas se utiliza con frecuencia en los AG. La selección de un individuo es

60
entonces equivalente a escoger al azar un punto dentro de la rueda y localizar el
correspondiente individuo. Cuando es usada una búsqueda simple, entonces la selección
requiere O(n2) operaciones mientras que la búsqueda binaria requiere O(log(n)) operaciones
(Lipowsky, 2012).
Problemas: El peor individuo puede seleccionarse varias veces.
Complejidad: O(n2). El algoritmo se torna ineficiente conforme crece n (tamaño de la
población).
Mejoras posibles: Uso de búsqueda binaria en vez de búsqueda secuencial para localizar la
posición correcta de la rueda. Esto requiere memoria extra y un recorrido O(n2) para
calcular los totales acumulados por cada segmento de la rueda. Pero, en contraste, la
complejidad total se reduce a O(n log n).
3.5.4. Operador de Cruza.
Consiste en el intercambio de material genético entre dos cromosomas. La cruza es
el principal operador genético, hasta el punto que se puede decir que no es un algoritmo
genético si no tiene cruza. Sin embargo, puede serlo perfectamente sin mutación, según
descubrió Holland. El teorema de los esquemas confía en él para hallar la mejor solución a
un problema, combinando soluciones parciales (Merelo, 2007). La cruza provoca un
intercambio estructurado, pero aleatorizado de material genético entre las soluciones, con la
posibilidad de que las 'buenas' soluciones pueden generar las "mejores".
El proceso de cruza ocurre sometido a una probabilidad de cruza (Pc, factor de cruza).
Existen principalmente 3 tipos de cruza en los AG.
3.5.4.1. Cruza en 1 punto.
El procedimiento es el siguiente (Figura 3.7): Una vez que se tenga la selección de
las parejas a cruzar, se genera un número aleatorio entre 0 y 1. Se compara este número con
la probabilidad de cruza (Pc) y si resulta mayor a éste, la pareja pasa intacta a la siguiente
generación. En el caso contrario, se vuelve a generar un nuevo número aleatorio entero,
entre 1 y la Longitud del Cromosoma -1, con lo que será el punto de cruza. A partir de este
punto, se intercambian los genes (o bits) de la cadena cromosómica y los hijos resultantes
formarán una pareja de la nueva generación. Se realiza lo mismo con cada par de parejas
seleccionadas de toda la población.
Este tipo de cruza es de los más utilizados en los AG, debido a que ayuda a
mantener las características esenciales de un individuo conforme vayan pasando las
generaciones. Evita que la solución se pierda a causa del fuerte quiebre y diverso
intercambio de bits entre ellos. Los estudios empíricos acerca de la comparación entre este
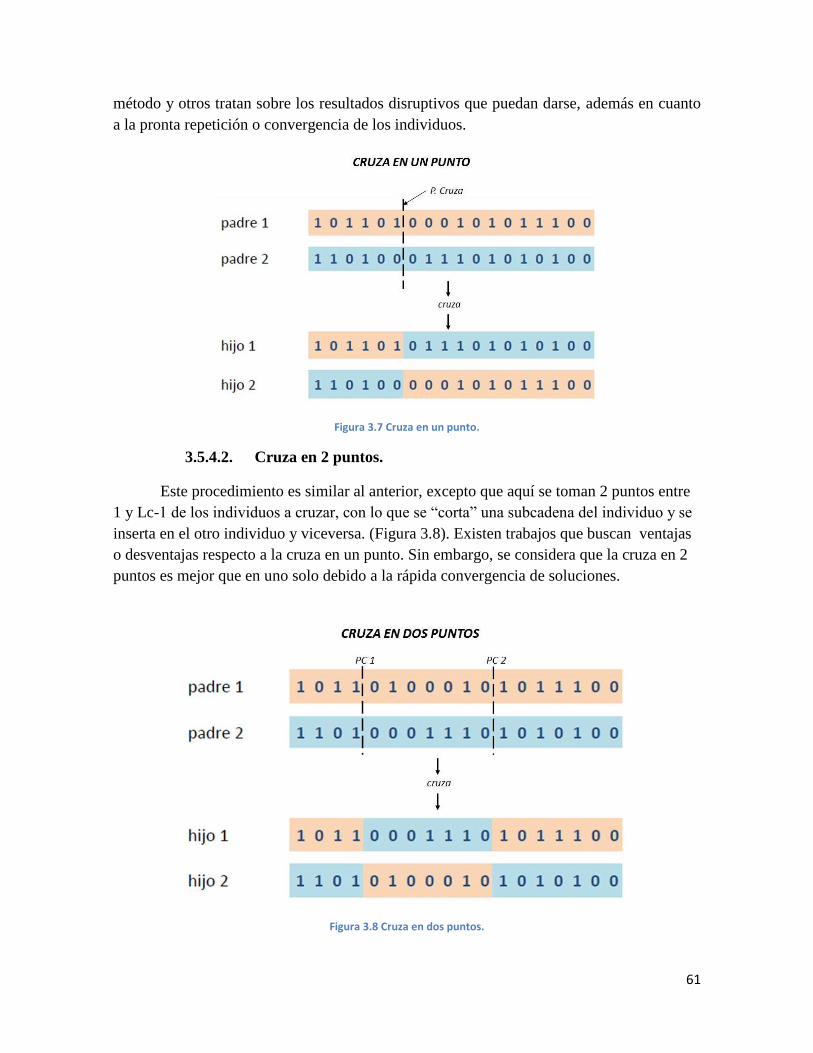
61
método y otros tratan sobre los resultados disruptivos que puedan darse, además en cuanto
a la pronta repetición o convergencia de los individuos.
Figura 3.7 Cruza en un punto.
3.5.4.2. Cruza en 2 puntos.
Este procedimiento es similar al anterior, excepto que aquí se toman 2 puntos entre
1 y Lc-1 de los individuos a cruzar, con lo que se “corta” una subcadena del individuo y se
inserta en el otro individuo y viceversa. (Figura 3.8). Existen trabajos que buscan ventajas
o desventajas respecto a la cruza en un punto. Sin embargo, se considera que la cruza en 2
puntos es mejor que en uno solo debido a la rápida convergencia de soluciones.
Figura 3.8 Cruza en dos puntos.
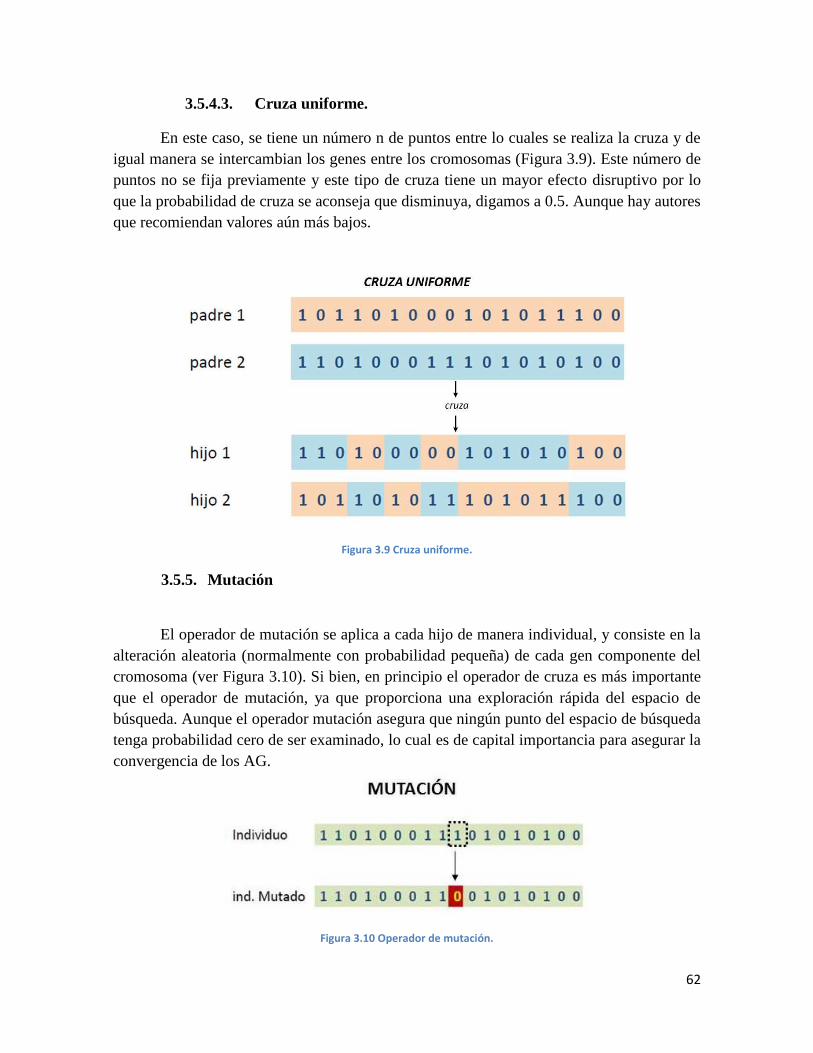
62
3.5.4.3. Cruza uniforme.
En este caso, se tiene un número n de puntos entre lo cuales se realiza la cruza y de
igual manera se intercambian los genes entre los cromosomas (Figura 3.9). Este número de
puntos no se fija previamente y este tipo de cruza tiene un mayor efecto disruptivo por lo
que la probabilidad de cruza se aconseja que disminuya, digamos a 0.5. Aunque hay autores
que recomiendan valores aún más bajos.
Figura 3.9 Cruza uniforme.
3.5.5. Mutación
El operador de mutación se aplica a cada hijo de manera individual, y consiste en la
alteración aleatoria (normalmente con probabilidad pequeña) de cada gen componente del
cromosoma (ver Figura 3.10). Si bien, en principio el operador de cruza es más importante
que el operador de mutación, ya que proporciona una exploración rápida del espacio de
búsqueda. Aunque el operador mutación asegura que ningún punto del espacio de búsqueda
tenga probabilidad cero de ser examinado, lo cual es de capital importancia para asegurar la
convergencia de los AG.
Figura 3.10 Operador de mutación.
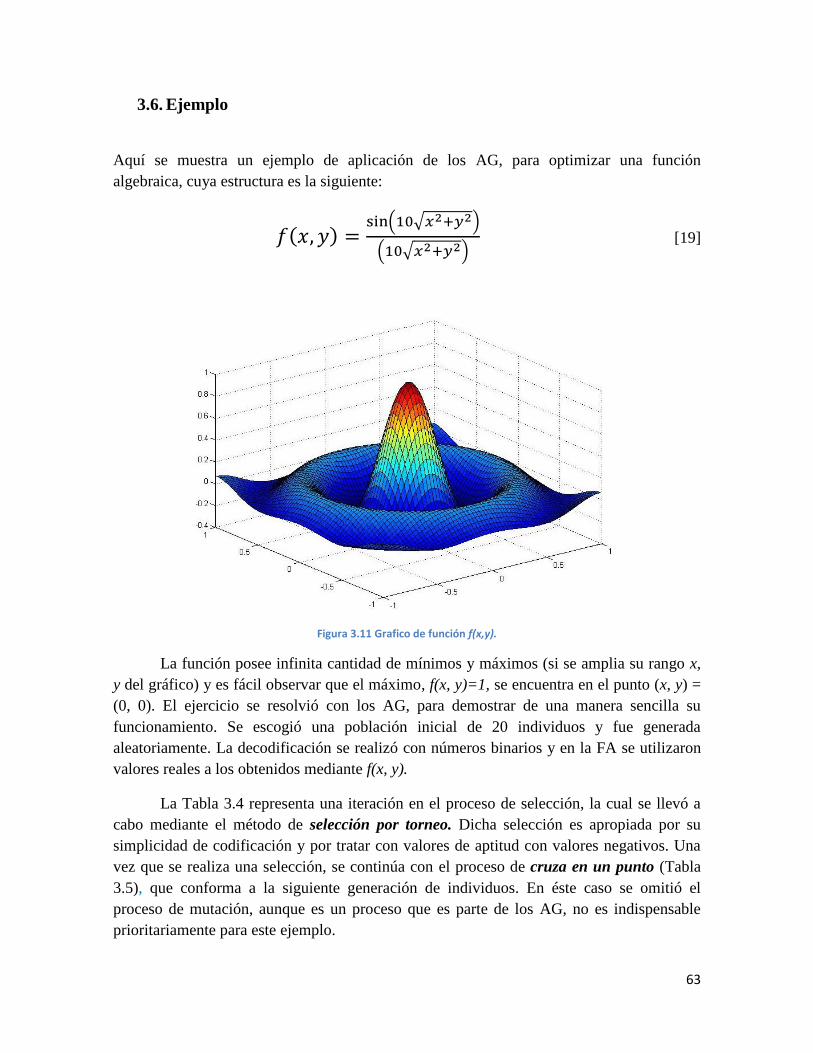
63
3.6. Ejemplo
Aquí se muestra un ejemplo de aplicación de los AG, para optimizar una función
algebraica, cuya estructura es la siguiente:
( √ )
( √ ) [19]
Figura 3.11 Grafico de función f(x,y).
La función posee infinita cantidad de mínimos y máximos (si se amplia su rango x,
y del gráfico) y es fácil observar que el máximo, f(x, y)=1, se encuentra en el punto (x, y) =
(0, 0). El ejercicio se resolvió con los AG, para demostrar de una manera sencilla su
funcionamiento. Se escogió una población inicial de 20 individuos y fue generada
aleatoriamente. La decodificación se realizó con números binarios y en la FA se utilizaron
valores reales a los obtenidos mediante f(x, y).
La Tabla 3.4 representa una iteración en el proceso de selección, la cual se llevó a
cabo mediante el método de selección por torneo. Dicha selección es apropiada por su
simplicidad de codificación y por tratar con valores de aptitud con valores negativos. Una
vez que se realiza una selección, se continúa con el proceso de cruza en un punto (Tabla
3.5), que conforma a la siguiente generación de individuos. En éste caso se omitió el
proceso de mutación, aunque es un proceso que es parte de los AG, no es indispensable
prioritariamente para este ejemplo.
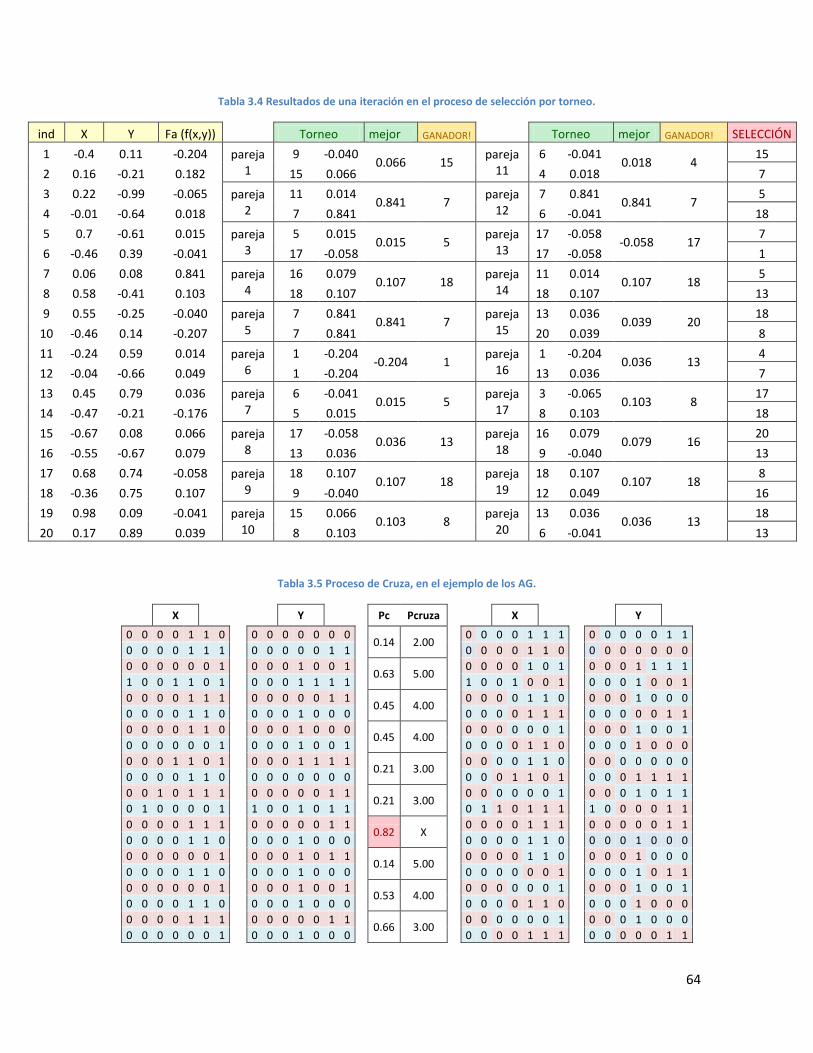
64
Tabla 3.4 Resultados de una iteración en el proceso de selección por torneo.
ind X Y Fa (f(x,y))
Torneo mejor GANADOR!
Torneo mejor GANADOR! SELECCIÓN
1 -0.4 0.11 -0.204 pareja 1
9 -0.040 0.066 15
pareja 11
6 -0.041 0.018 4
15
2 0.16 -0.21 0.182 15 0.066 4 0.018 7
3 0.22 -0.99 -0.065 pareja 2
11 0.014 0.841 7
pareja 12
7 0.841 0.841 7
5
4 -0.01 -0.64 0.018 7 0.841 6 -0.041 18
5 0.7 -0.61 0.015 pareja 3
5 0.015 0.015 5
pareja 13
17 -0.058 -0.058 17
7
6 -0.46 0.39 -0.041 17 -0.058 17 -0.058 1
7 0.06 0.08 0.841 pareja 4
16 0.079 0.107 18
pareja 14
11 0.014 0.107 18
5
8 0.58 -0.41 0.103 18 0.107 18 0.107 13
9 0.55 -0.25 -0.040 pareja 5
7 0.841 0.841 7
pareja 15
13 0.036 0.039 20
18
10 -0.46 0.14 -0.207 7 0.841 20 0.039 8
11 -0.24 0.59 0.014 pareja 6
1 -0.204 -0.204 1
pareja 16
1 -0.204 0.036 13
4
12 -0.04 -0.66 0.049 1 -0.204 13 0.036 7
13 0.45 0.79 0.036 pareja 7
6 -0.041 0.015 5
pareja 17
3 -0.065 0.103 8
17
14 -0.47 -0.21 -0.176 5 0.015 8 0.103 18
15 -0.67 0.08 0.066 pareja 8
17 -0.058 0.036 13
pareja 18
16 0.079 0.079 16
20
16 -0.55 -0.67 0.079 13 0.036 9 -0.040 13
17 0.68 0.74 -0.058 pareja 9
18 0.107 0.107 18
pareja 19
18 0.107 0.107 18
8
18 -0.36 0.75 0.107 9 -0.040 12 0.049 16
19 0.98 0.09 -0.041 pareja 10
15 0.066 0.103 8
pareja 20
13 0.036 0.036 13
18
20 0.17 0.89 0.039 8 0.103 6 -0.041 13
Tabla 3.5 Proceso de Cruza, en el ejemplo de los AG.
X
Y
Pc Pcruza
X
Y
0 0 0 0 1 1 0
0 0 0 0 0 0 0
0.14 2.00
0 0 0 0 1 1 1
0 0 0 0 0 1 1
0 0 0 0 1 1 1
0 0 0 0 0 1 1
0 0 0 0 1 1 0
0 0 0 0 0 0 0
0 0 0 0 0 0 1
0 0 0 1 0 0 1
0.63 5.00
0 0 0 0 1 0 1
0 0 0 1 1 1 1
1 0 0 1 1 0 1
0 0 0 1 1 1 1
1 0 0 1 0 0 1
0 0 0 1 0 0 1
0 0 0 0 1 1 1
0 0 0 0 0 1 1
0.45 4.00
0 0 0 0 1 1 0
0 0 0 1 0 0 0
0 0 0 0 1 1 0
0 0 0 1 0 0 0
0 0 0 0 1 1 1
0 0 0 0 0 1 1
0 0 0 0 1 1 0
0 0 0 1 0 0 0
0.45 4.00
0 0 0 0 0 0 1
0 0 0 1 0 0 1
0 0 0 0 0 0 1
0 0 0 1 0 0 1
0 0 0 0 1 1 0
0 0 0 1 0 0 0
0 0 0 1 1 0 1
0 0 0 1 1 1 1
0.21 3.00
0 0 0 0 1 1 0
0 0 0 0 0 0 0
0 0 0 0 1 1 0
0 0 0 0 0 0 0
0 0 0 1 1 0 1
0 0 0 1 1 1 1
0 0 1 0 1 1 1
0 0 0 0 0 1 1
0.21 3.00
0 0 0 0 0 0 1
0 0 0 1 0 1 1
0 1 0 0 0 0 1
1 0 0 1 0 1 1
0 1 1 0 1 1 1
1 0 0 0 0 1 1
0 0 0 0 1 1 1
0 0 0 0 0 1 1
0.82 X
0 0 0 0 1 1 1
0 0 0 0 0 1 1
0 0 0 0 1 1 0
0 0 0 1 0 0 0
0 0 0 0 1 1 0
0 0 0 1 0 0 0
0 0 0 0 0 0 1
0 0 0 1 0 1 1
0.14 5.00
0 0 0 0 1 1 0
0 0 0 1 0 0 0
0 0 0 0 1 1 0
0 0 0 1 0 0 0
0 0 0 0 0 0 1
0 0 0 1 0 1 1
0 0 0 0 0 0 1
0 0 0 1 0 0 1
0.53 4.00
0 0 0 0 0 0 1
0 0 0 1 0 0 1
0 0 0 0 1 1 0
0 0 0 1 0 0 0
0 0 0 0 1 1 0
0 0 0 1 0 0 0
0 0 0 0 1 1 1
0 0 0 0 0 1 1
0.66 3.00
0 0 0 0 0 0 1
0 0 0 1 0 0 0
0 0 0 0 0 0 1
0 0 0 1 0 0 0
0 0 0 0 1 1 1
0 0 0 0 0 1 1
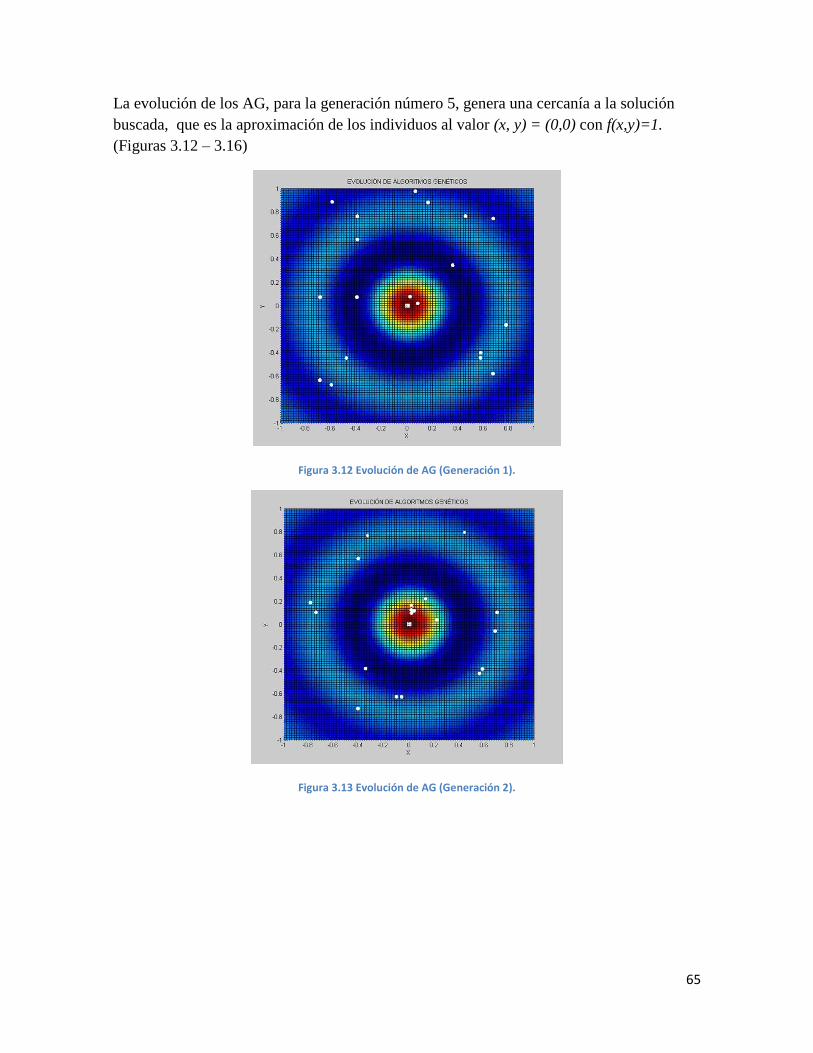
65
La evolución de los AG, para la generación número 5, genera una cercanía a la solución
buscada, que es la aproximación de los individuos al valor (x, y) = (0,0) con f(x,y)=1.
(Figuras 3.12 – 3.16)
Figura 3.12 Evolución de AG (Generación 1).
Figura 3.13 Evolución de AG (Generación 2).
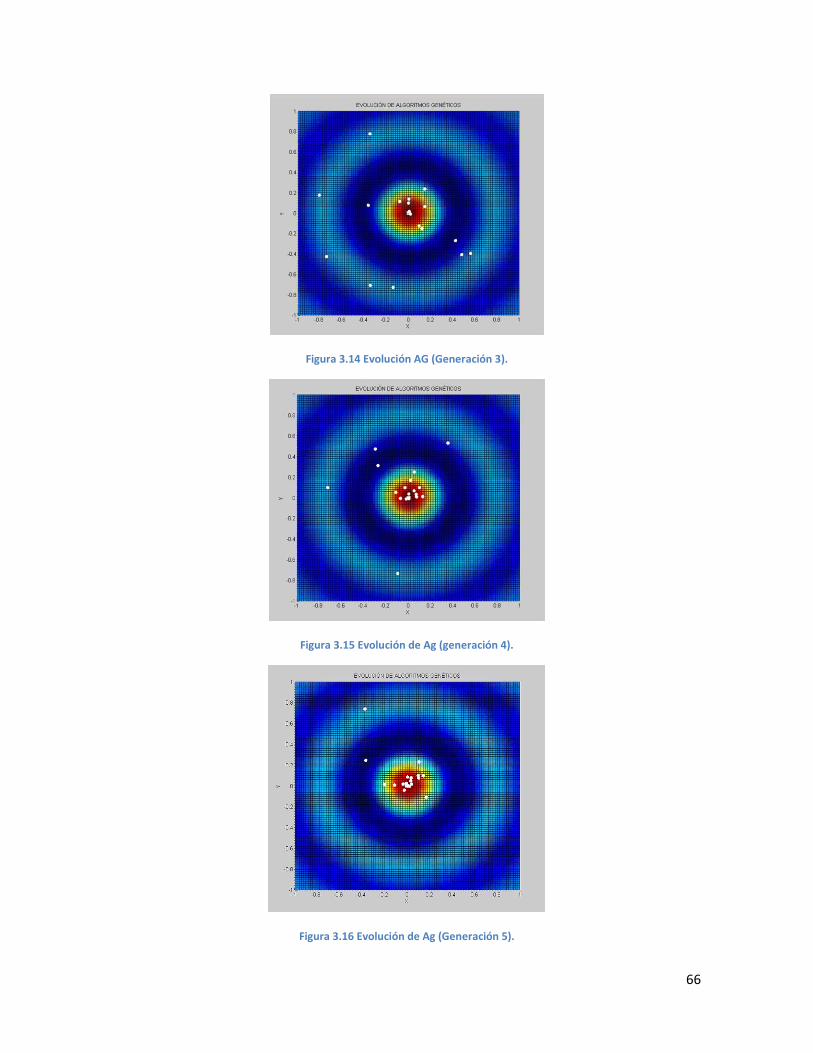
66
Figura 3.14 Evolución AG (Generación 3).
Figura 3.15 Evolución de Ag (generación 4).
Figura 3.16 Evolución de Ag (Generación 5).

67
CAPÍTULO 4
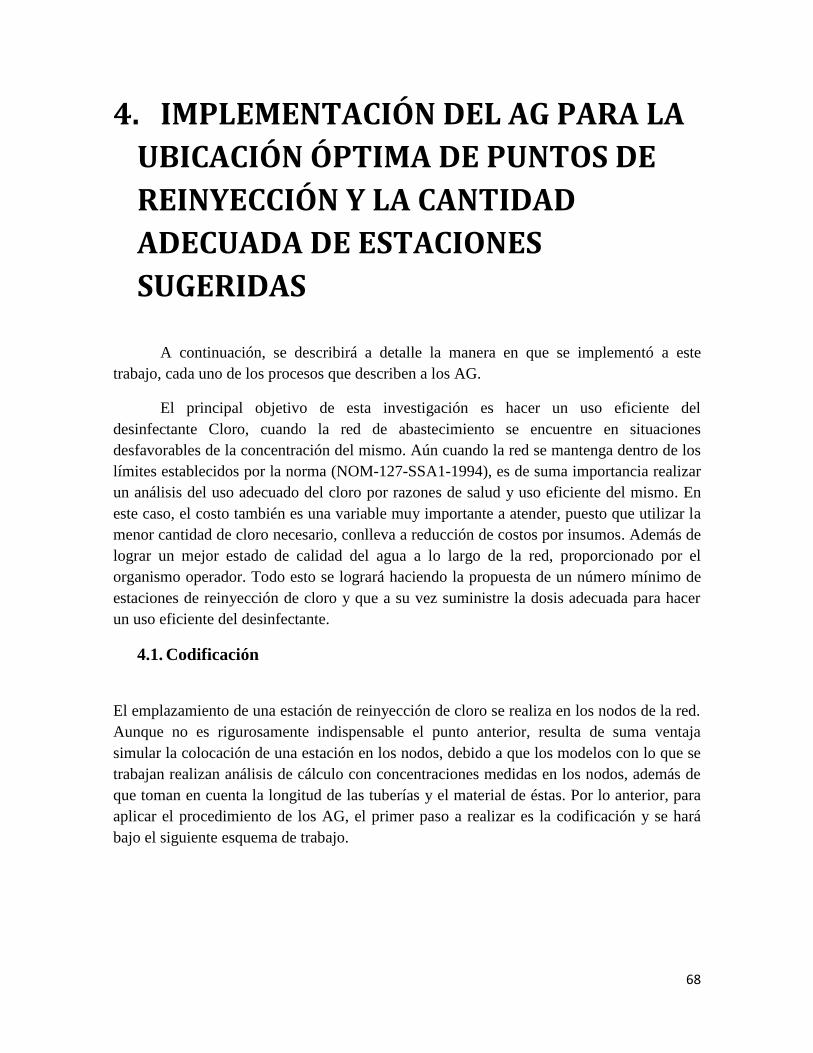
68
4. IMPLEMENTACIÓN DEL AG PARA LA
UBICACIÓN ÓPTIMA DE PUNTOS DE
REINYECCIÓN Y LA CANTIDAD
ADECUADA DE ESTACIONES
SUGERIDAS
A continuación, se describirá a detalle la manera en que se implementó a este
trabajo, cada uno de los procesos que describen a los AG.
El principal objetivo de esta investigación es hacer un uso eficiente del
desinfectante Cloro, cuando la red de abastecimiento se encuentre en situaciones
desfavorables de la concentración del mismo. Aún cuando la red se mantenga dentro de los
límites establecidos por la norma (NOM-127-SSA1-1994), es de suma importancia realizar
un análisis del uso adecuado del cloro por razones de salud y uso eficiente del mismo. En
este caso, el costo también es una variable muy importante a atender, puesto que utilizar la
menor cantidad de cloro necesario, conlleva a reducción de costos por insumos. Además de
lograr un mejor estado de calidad del agua a lo largo de la red, proporcionado por el
organismo operador. Todo esto se logrará haciendo la propuesta de un número mínimo de
estaciones de reinyección de cloro y que a su vez suministre la dosis adecuada para hacer
un uso eficiente del desinfectante.
4.1. Codificación
El emplazamiento de una estación de reinyección de cloro se realiza en los nodos de la red.
Aunque no es rigurosamente indispensable el punto anterior, resulta de suma ventaja
simular la colocación de una estación en los nodos, debido a que los modelos con lo que se
trabajan realizan análisis de cálculo con concentraciones medidas en los nodos, además de
que toman en cuenta la longitud de las tuberías y el material de éstas. Por lo anterior, para
aplicar el procedimiento de los AG, el primer paso a realizar es la codificación y se hará
bajo el siguiente esquema de trabajo.
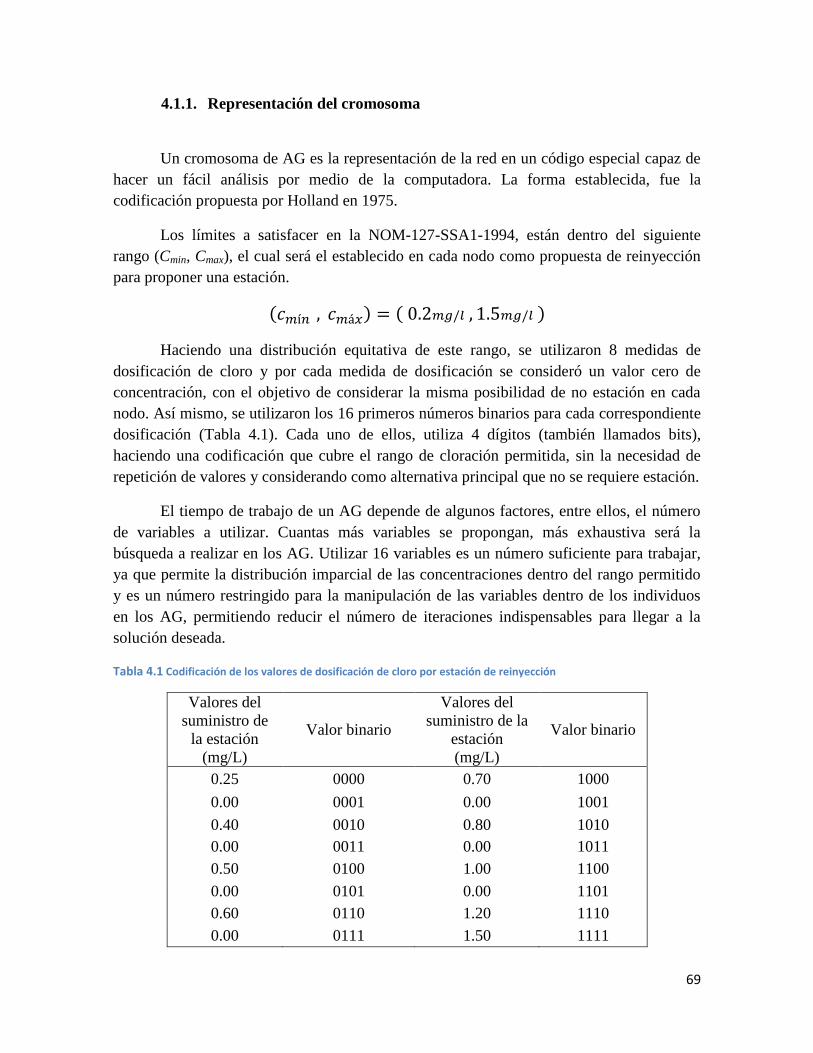
69
4.1.1. Representación del cromosoma
Un cromosoma de AG es la representación de la red en un código especial capaz de
hacer un fácil análisis por medio de la computadora. La forma establecida, fue la
codificación propuesta por Holland en 1975.
Los límites a satisfacer en la NOM-127-SSA1-1994, están dentro del siguiente
rango (Cmin, Cmax), el cual será el establecido en cada nodo como propuesta de reinyección
para proponer una estación.
Haciendo una distribución equitativa de este rango, se utilizaron 8 medidas de
dosificación de cloro y por cada medida de dosificación se consideró un valor cero de
concentración, con el objetivo de considerar la misma posibilidad de no estación en cada
nodo. Así mismo, se utilizaron los 16 primeros números binarios para cada correspondiente
dosificación (Tabla 4.1). Cada uno de ellos, utiliza 4 dígitos (también llamados bits),
haciendo una codificación que cubre el rango de cloración permitida, sin la necesidad de
repetición de valores y considerando como alternativa principal que no se requiere estación.
El tiempo de trabajo de un AG depende de algunos factores, entre ellos, el número
de variables a utilizar. Cuantas más variables se propongan, más exhaustiva será la
búsqueda a realizar en los AG. Utilizar 16 variables es un número suficiente para trabajar,
ya que permite la distribución imparcial de las concentraciones dentro del rango permitido
y es un número restringido para la manipulación de las variables dentro de los individuos
en los AG, permitiendo reducir el número de iteraciones indispensables para llegar a la
solución deseada.
Tabla 4.1 Codificación de los valores de dosificación de cloro por estación de reinyección
Valores del
suministro de
la estación
(mg/L)
Valor binario
Valores del
suministro de la
estación
(mg/L)
Valor binario
0.25 0000 0.70 1000
0.00 0001 0.00 1001
0.40 0010 0.80 1010
0.00 0011 0.00 1011
0.50 0100 1.00 1100
0.00 0101 0.00 1101
0.60 0110 1.20 1110
0.00 0111 1.50 1111

70
Cada una de estas cantidades representa la dosificación que hará una estación de
reinyección. La concentración nula (0mg/l ), describe que no se realizará una cloración
adicional en el nodo.
La estructura de un cromosoma en AG representa a la red estudiada. Al utilizar esta
codificación, cada tercio de bits representa una estación de reinyección de cloro en el nodo i
con la dosificación correspondiente a su valor real. Veamos un ejemplo de un individuo
para una red de 6 nodos (Figura 4.1).
Figura 4.1 Ejemplo del trazo una red compuesta por 6 nodos.
Se toman únicamente los nodos para el cromosoma y se representa mediante
números aleatorios, aquí un ejemplo de un individuo generado con números binarios
aleatorios (Figura 4.2).
Figura 4.2 Codificación de un individuo de la red de ejemplo.
La longitud del cromosoma (Ecuación 20) es igual al número de bits necesarios para
cada nodo, multiplicado por el número de nodos de la red. La expresión puede definirse
como:
[20]
Donde:
Lc=Longitud del cromosoma
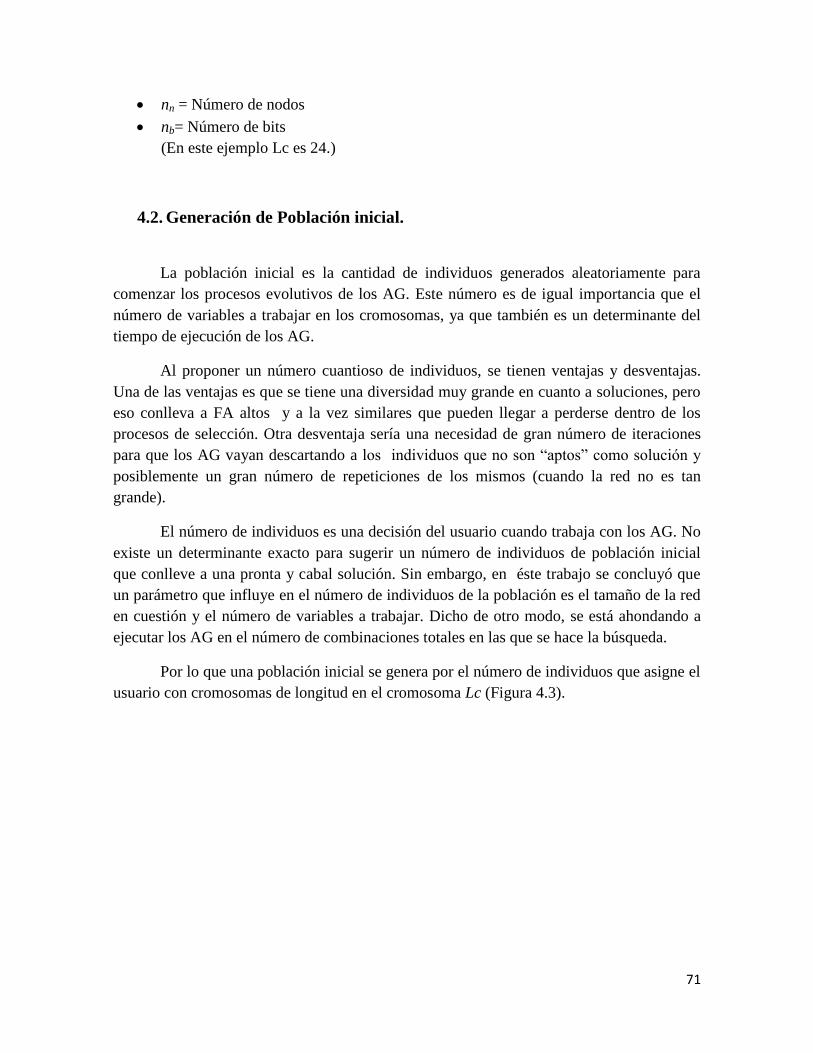
71
nn = Número de nodos
nb= Número de bits
(En este ejemplo Lc es 24.)
4.2. Generación de Población inicial.
La población inicial es la cantidad de individuos generados aleatoriamente para
comenzar los procesos evolutivos de los AG. Este número es de igual importancia que el
número de variables a trabajar en los cromosomas, ya que también es un determinante del
tiempo de ejecución de los AG.
Al proponer un número cuantioso de individuos, se tienen ventajas y desventajas.
Una de las ventajas es que se tiene una diversidad muy grande en cuanto a soluciones, pero
eso conlleva a FA altos y a la vez similares que pueden llegar a perderse dentro de los
procesos de selección. Otra desventaja sería una necesidad de gran número de iteraciones
para que los AG vayan descartando a los individuos que no son “aptos” como solución y
posiblemente un gran número de repeticiones de los mismos (cuando la red no es tan
grande).
El número de individuos es una decisión del usuario cuando trabaja con los AG. No
existe un determinante exacto para sugerir un número de individuos de población inicial
que conlleve a una pronta y cabal solución. Sin embargo, en éste trabajo se concluyó que
un parámetro que influye en el número de individuos de la población es el tamaño de la red
en cuestión y el número de variables a trabajar. Dicho de otro modo, se está ahondando a
ejecutar los AG en el número de combinaciones totales en las que se hace la búsqueda.
Por lo que una población inicial se genera por el número de individuos que asigne el
usuario con cromosomas de longitud en el cromosoma Lc (Figura 4.3).

72
Figura 4.3 Ejemplo de población inicial de la red con 16 individuos generados aleatoriamente.
4.3. Función de aptitud propuesta
La FA es el “alma” de los AG. La FA está diseñada para estimar la eficiencia como
solución que representa el individuo. Se utilizan términos que asignen un puntaje a los
ámbitos que interesan. Es el principal determinante de la búsqueda que realiza el algoritmo.
Para la presente tesis, la FA se definió de la siguiente manera (Ecuación 21).
[21]
Donde:
fa = Valor de aptitud del individuo.
cprom(i) = Concentración promedio de las 16 concentraciones más bajas durante una
simulación en periodo extendido de 24 horas cuando se haya normalizado el flujo y
la calidad en la red.
cmín = Concentración mínima.

73
cmáx = Concentración máxima.
n = Número de nodos de la red.
C#est = Costo por el número de estaciones simuladas.
Δc = Cantidad de cloro presente en el nodo fuera del rango establecido.
Pc = Costo de penalización por cloro fuera del rango establecido.
4.3.1. Descripción de la función de aptitud.
La FA es una fórmula matemática cuya estructura elemental es un cociente entre
una parte creciente (numerador) y una parte penalizadora (denominador).
4.3.1.1. Factor creciente.
La parte del numerador (Ecuación 22) es un factor creciente que depende de los
resultados del análisis de la red en periodo extendido llevado a cabo por EPANET, del cual
se obtienen las concentraciones en cada nodo durante toda la simulación.
[22]
Dentro de la función logarítmica, se tiene una versión similar a la desviación estándar.
Según Schmid (2000) y Willoughby (1969), La desviación estándar (Ecuación 23),
es una medida de dispersión utilizada en Estadística, para asignar un valor numérico que
describe la proximidad de los datos x de x1, x2, x3, …, xn respecto a la media de los datos.
√
∑
[23]
Donde:
σ = Desviación estándar.
n = Tamaño de la muestra de datos.
xi = Dato i de la muestra.
= Media de la muestra.
El valor de la desviación estándar resultará lo más próximo a 0 cuanto más se
aproximen los datos a la media, y un valor más grande a aquellos datos que se alejen de la
misma (Figura 4.4).

74
Figura 4.4 Representación gráfica de la desviación estándar.
Se utilizó esta medida centrándose en obtener el grado de desviación de las
concentraciones promedio (cprom(i)), respecto a la concentración mínima. Por lo cual, la
desviación estándar de la FA se define como:
√
∑( )
Donde:
σ = Desviación estándar de concentraciones respecto a la mínima.
cprom(i) = Concentración promedio en el nodo i.
n = Número de nodos en la red.
cmín = Concentración mínima = 0.20mg/l.
Con lo que se asigna un valor cercano a 0 a aquellas redes con concentraciones
promedio de cloro que se encuentren lo más próximo a la concentración mínima
(0.20mg/l).Esta variable se evalúa mediante el valor absoluto de la función logarítmica
(Ecuación 24) para conformar el factor creciente. Con lo cual se obtiene el gráfico de la
Figura 4.5.
[24]
Figura 4.5 Grafica de la función abs(log(σ)).

75
El valor extremo de un análisis será suponer que en todos los nodos de la red se
coloque una estación de reinyección con el suministro máximo (1.5mg/l ), por lo que si se
evalúa la desviación estándar de dicho escenario, el valor será de:
√
∑(
)
√
∑(
)
Con lo que se puede deducir que la desviación estándar regresará un valor
únicamente entre el intervalo ( 0 , cmáx – cmín ). Dividiendo la variable σ entre el intervalo
cmáx – cmín, en la evaluación de la función log, se obtiene el siguiente gráfico (Figura 4.6):
Figura 4.6 Gráfico del factor creciente (en este caso el rango del intervalo es 1.5 – 0.2 = 1.3).
Utilizar esta relación no contradice el hecho de que se pueda trabajar con redes
donde se requieran cantidades por encima de la concentración máxima, en ciertos nodos
para mantener la calidad dentro de las normas. Por ejemplo, suponiendo que se tiene una
red con problemas de calidad de agua, la cual requiere la cantidad de 2.8mg/l en el tanque
de abastecimiento para alcanzar la concentración mínima en nodos específicos. En este

76
caso, en la codificación de los AG, se cambia la concentración máxima a 2.8mg/l con el fin
de tomar en cuenta la condición del uso de esta concentración.
Este factor creciente propuesto es una evaluación que tenderá a aumentar su puntaje
a aquellos indivoduos que posean concentraciones más próximas a la cantidad mínima de
cloro establecida y similarmente, disminuirá conforme se tengan niveles más lejanos a
0.2mg/l.
4.3.1.2. Factor penalizador.
El factor penalizador, es el denominador de la FA. El cual reduce el valor de la FA
cuando no cumple con dos principios:
Se busca el menor número de estaciones posibles a proponer.
Las concentraciones en el análisis en periodo extendido están en cmáx - cmín.
Por lo que se proponen dos términos (Ecuación 25), los cuales se describen a continuación.
4.3.1.2.1. Costo por el número de estaciones sugeridas.
Es el determinante con mayor peso en el denominador de la FA. Uno de los
objetivos de la investigación es proponer la menor cantidad de estaciones de reinyección
posible, pero que las mismas cumplan con el rumbo de optimizar el uso del desinfectante.
El valor de C#est dependerá del número de estaciones que se esté simulando:
{ { {
El número 100,000 es una tendencia “real” que se escogió para dar el papel de “el
precio de una estación de reinyección de cloro de $100,000 (unidades monetarias)”, por lo
que este número aumentará mientras más estaciones de reinyección se tengan propuestas en
el individuo.
4.3.1.2.2. Concentración fuera del rango cmín - cmáx
La variable Δc es una sencilla función, la cual depende de las concentraciones de cloro en
determinado nodo que se encuentran fuera del rango establecido cmín - cmáx.

77
{
∑
∑
Este parámetro equivale al “desfase” de concentración cuando se sale del rango
(cmín -cmáx), (Figura 4.7). Por ejemplo, cuando un nodo resulta tener una concentración
promedio de 1.9mg/l, que está por encima de 1.5mg/l, entonces Δc valdrá 0.4mg/l, que es la
diferencia en cuanto a su evasiva respecto al rango. Si el nodo en otra evaluación tiene una
concentración de 0.05mg/l, de igual manera es menor que 0.2mg/l (la concentración
mínima) por lo que Δc equivale a 0.15mg/l. Por último, si se tuvo una concentración de
0.6mg/l, Δc valdrá 0 ya que este último valor se encuentra dentro del rango establecido.
Cuando se hayan evaluado todos los nodos de la red en esta función, la suma del total
equivaldrá a .
Figura 4.7 Representación gráfica de Δc.
4.3.1.2.3. Costo de penalización.
Este factor se aplica cuando la red se encuentra fuera de los límites permisibles.
Representa de manera ficticia el costo monetario de pérdida por estar la red fuera de
las normas. Podría decirse que un organismo pierde cerca del costo de 20 estaciones de
reinyección cuando se hizo una mala elección o cuando no fue suficiente para mantener a la
red con la calidad óptima. Este valor puede cambiar en cuanto el usuario determine otra
manera de uso de este Costo de Penalización, pero lo que sí debe preservar es que este valor
sea mucho mayor al costo por estaciones ( C#est ), ya que puede llevar a resultados erróneos
al considerar un número menor de penalización y permitir que los AG consideren buenas
redes a aquellas que no cumplen con las normas.

78
4.3.2. Visualización de valores de la función de aptitud.
La función de aptitud tiene bastantes consideraciones, lo cual hace difícil (o casi
imposible) pensar que pueda graficarse toda la función. Tomando en cuenta el análisis para
el factor creciente (el numerador de fa) se puede igualmente tomar a la desviación estándar
de concentraciones σ para visualizar gráficamente la función abs(log(σ)). Llamando a esta
función (Ecuación 26).
( (
)) [26]
Para la parte del factor penalizador (denominador de fa) se puede dejar por un
momento la penalización hecha por desfase de concentraciones fuera del límite ΔcPc y
tomar como variable a C#est.
Con lo que se reduce a una función de dos variables (Figura 4.8):
( (
))
Graficando se obtiene la siguiente Figura 4.8:
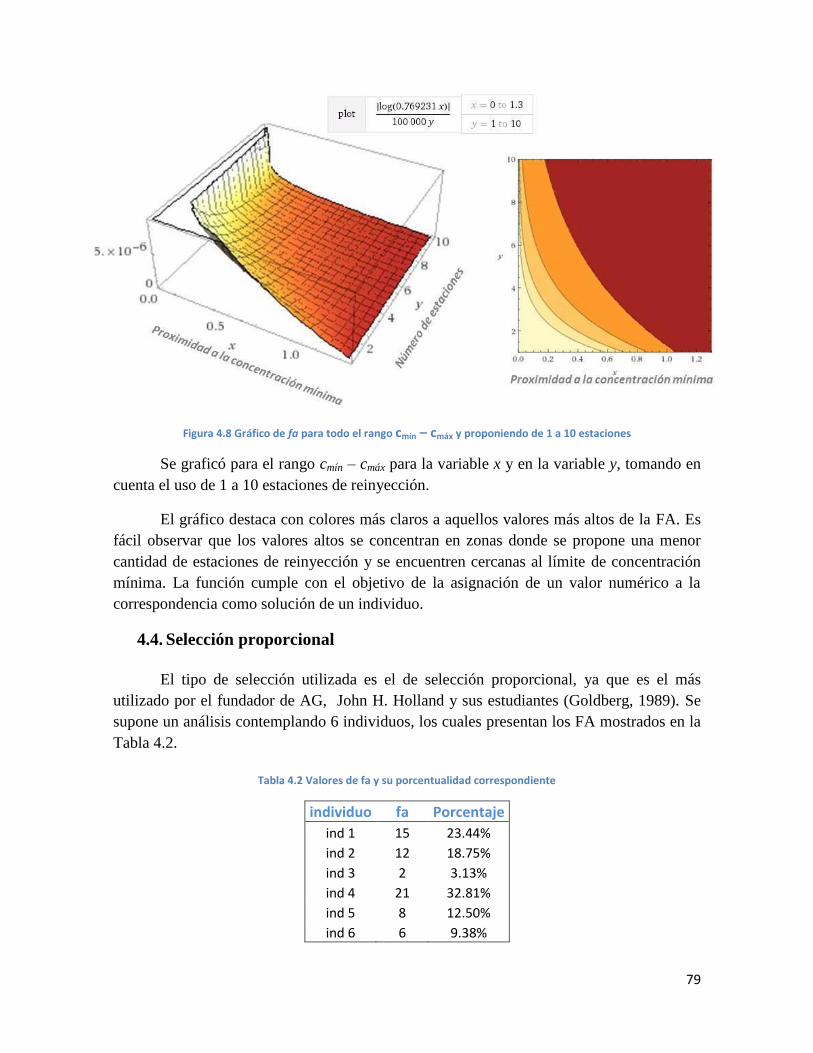
79
Figura 4.8 Gráfico de fa para todo el rango cmín – cmáx y proponiendo de 1 a 10 estaciones
Se graficó para el rango cmín – cmáx para la variable x y en la variable y, tomando en
cuenta el uso de 1 a 10 estaciones de reinyección.
El gráfico destaca con colores más claros a aquellos valores más altos de la FA. Es
fácil observar que los valores altos se concentran en zonas donde se propone una menor
cantidad de estaciones de reinyección y se encuentren cercanas al límite de concentración
mínima. La función cumple con el objetivo de la asignación de un valor numérico a la
correspondencia como solución de un individuo.
4.4. Selección proporcional
El tipo de selección utilizada es el de selección proporcional, ya que es el más
utilizado por el fundador de AG, John H. Holland y sus estudiantes (Goldberg, 1989). Se
supone un análisis contemplando 6 individuos, los cuales presentan los FA mostrados en la
Tabla 4.2.
Tabla 4.2 Valores de fa y su porcentualidad correspondiente
individuo fa Porcentaje
ind 1 15 23.44%
ind 2 12 18.75%
ind 3 2 3.13%
ind 4 21 32.81%
ind 5 8 12.50%
ind 6 6 9.38%
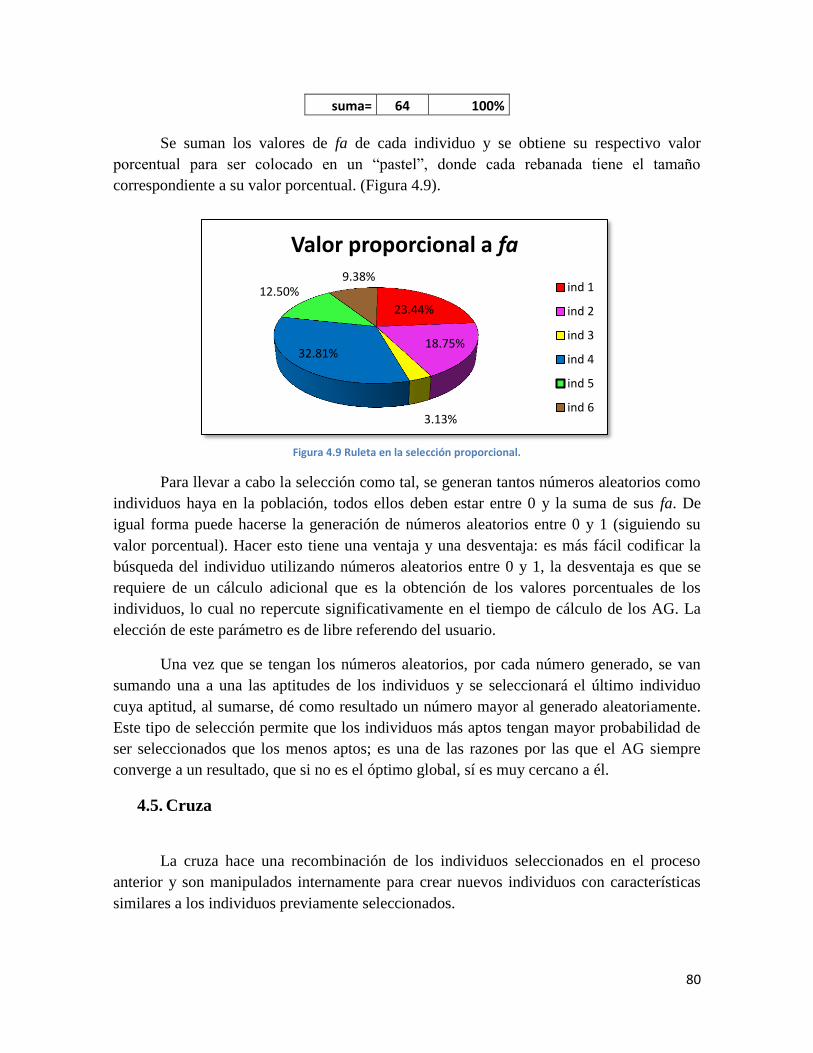
80
suma= 64 100%
Se suman los valores de fa de cada individuo y se obtiene su respectivo valor
porcentual para ser colocado en un “pastel”, donde cada rebanada tiene el tamaño
correspondiente a su valor porcentual. (Figura 4.9).
Figura 4.9 Ruleta en la selección proporcional.
Para llevar a cabo la selección como tal, se generan tantos números aleatorios como
individuos haya en la población, todos ellos deben estar entre 0 y la suma de sus fa. De
igual forma puede hacerse la generación de números aleatorios entre 0 y 1 (siguiendo su
valor porcentual). Hacer esto tiene una ventaja y una desventaja: es más fácil codificar la
búsqueda del individuo utilizando números aleatorios entre 0 y 1, la desventaja es que se
requiere de un cálculo adicional que es la obtención de los valores porcentuales de los
individuos, lo cual no repercute significativamente en el tiempo de cálculo de los AG. La
elección de este parámetro es de libre referendo del usuario.
Una vez que se tengan los números aleatorios, por cada número generado, se van
sumando una a una las aptitudes de los individuos y se seleccionará el último individuo
cuya aptitud, al sumarse, dé como resultado un número mayor al generado aleatoriamente.
Este tipo de selección permite que los individuos más aptos tengan mayor probabilidad de
ser seleccionados que los menos aptos; es una de las razones por las que el AG siempre
converge a un resultado, que si no es el óptimo global, sí es muy cercano a él.
4.5. Cruza
La cruza hace una recombinación de los individuos seleccionados en el proceso
anterior y son manipulados internamente para crear nuevos individuos con características
similares a los individuos previamente seleccionados.
23.44%
18.75%
3.13%
32.81%
12.50% 9.38%
Valor proporcional a fa
ind 1
ind 2
ind 3
ind 4
ind 5
ind 6

81
La cruza que se sigue en esta aplicación, es la cruza en 2 puntos del cromosoma,
descrita en el Capítulo III. La cruza depende de un factor de probabilidad. Generalmente
dicho valor oscila entre 0.6 y 1.0 y se escoge en torno al problema que se está optimizando
y de la cantidad de posibles soluciones que existan en él. Se escogió el valor de 0.7 y se
lleva a cabo de la siguiente manera.
Una vez que se tengan seleccionados los “padres” de la nueva generación, se genera
un número aleatorio entre 0 y 1 por cada par de padres. Si en la población se tiene un
número impar de padres, el último pasa a la siguiente generación para aplicar el
procedimiento de cruza a todos los demás individuos. Si el número aleatorio de la pareja x
resultó por encima de la probabilidad de cruza (0.7), entonces se lleva a cabo el proceso. Si
resulta menor que 0.7, entonces la pareja pasa intacta a la siguiente generación. A las
parejas que resultaron obtuvieron un número aleatorio mayor que 0.7 en la prueba de cruza,
se vuelve a generar un par más de números aleatorios, pero en éste caso son enteros entre 1
y Lc-1.
Suponiendo que se tiene un par de individuos de la población de la de la Figura 4.3.
Este par de individuos, fueron resultantes del proceso de selección y la pareja se conforma
por los individuos 8 y 13. Se generó un par de números aleatorios entre 1 y Lc-1, quedando:
5 y 15, con lo que se realiza el proceso de cruza de la siguiente manera (Figura 4.10):
Figura 4.10 proceso de cruza en 2 puntos.
4.6. Mutación
La mutación mantiene en cierta manera la diversidad entre las poblaciones de lo
AG. No es indispensable este proceso para el buen desarrollo de los AG, pero fue
firmemente propuesto por John H. Holland, debido a su enfoque “natural” inspirado en los
procesos evolutivos de los seres vivos.

82
Se realiza un procedimiento similar al de cruza. Para cada individuo de la
generación, igualmente se genera un número aleatorio entre 0 y 1 y se somete de nuevo
respecto a un factor de mutación. Este factor es un número pequeño, se recomienda menor
que 0.1. Podría decirse que está en función de la longitud del cromosoma, pero en realidad
es de libre albedrío. Se utilizó el factor de mutación de 0.04375, que se obtiene (siguiendo
el ejemplo 1) mediante la relación de:
Donde:
Pm = Probabilidad de mutación.
Pc = Probabilidad de cruza.
Lc = Longitud del cromosoma.
Con esta restricción, se tendrá un bajo número de individuos que serán afectados
por su probabilidad de mutación. Aquellos que pasaron dicha condición, se les asignará un
número aleatorio entre 1 y Lc, (en este caso de aplicación, 1 y 16) y el número que resulte,
es el bit que tendrá que ser cambiado, o mejor dicho “mutado” (Figura 4.11).
Figura 4.11 Mutación.
Una vez mutados los descendientes se comienza un nuevo ciclo, repitiendo los
procedimientos anteriores hasta que se encuentre la solución buscada o se termine un
número finito de generaciones.
La manera más común de detener un AG es al terminarse el número de
generaciones planteado. En el caso de la Ubicación Óptima de Estaciones de reinyección de
Cloro, el número de generaciones a evaluar depende del tamaño de la red.
83
CAPÍTULO 5
84
5. EJEMPLO Y ANÁLISIS DE APLICACIÓN
5.1. Objetivos generales
Para plantear un análisis de la optimización del uso de cloro a base de la colocación de
estaciones de reinyección, es necesario retomar los principales puntos del Capítulo II, se
resumen a continuación:
La eliminación de diversos contaminantes en el agua. Entre ellos, algunos químicos
nocivos provenientes de la naturaleza y de ciertos residuos resultantes de
actividades humanas.
La eliminación de microorganismos patógenos presentes en el agua y evitar la
propagación de enfermedades causadas por éstos.
Hacer uso óptimo del desinfectante cloro.
Cumplir con los límites de concentración de cloro en redes de distribución de agua
potable, establecidos en la NOM-127-SSA1-1994 (0.2mg/l - 1.5mg/l)
Proporcionar a la población agua sin contenido excesivo del desinfectante, pero a su
vez, suficiente para la eliminación de contaminantes que afectan sus estándares de
calidad.
Para un organismo operador, atender todos estos aspectos conlleva a un complejo
análisis que requiere de pruebas y monitoreos costosos, además de tiempos para llevarlos a
cabo. Sin embargo, la Organización Mundial de la Salud (WHO por sus siglas en inglés),
recomienda una concentración residual mínima de 0.5 mg/L de cloro libre de más de 30
minutos de tiempo de contacto a un pH máximo de 8.0 para la cloración terminal. Así
mismo, menciona que la concentración residual de cloro libre debe mantenerse durante toda
la red en un nivel entre 0.2 y 0.5 mg / L en los nodos de consumo (OMS, 1997).
5.2. Ejemplo de aplicación.
La red modelo utilizada en las simulaciones es una red de ejemplo del programa
EPANET, net3.net, la cual se muestra en la Figura 5.1. La red se seleccionó teniendo en
cuenta la complejidad de su estructura y funcionamiento.
5.2.1. Descripción de la red.
El net3.net contiene los siguientes componentes (Rossman 2000):
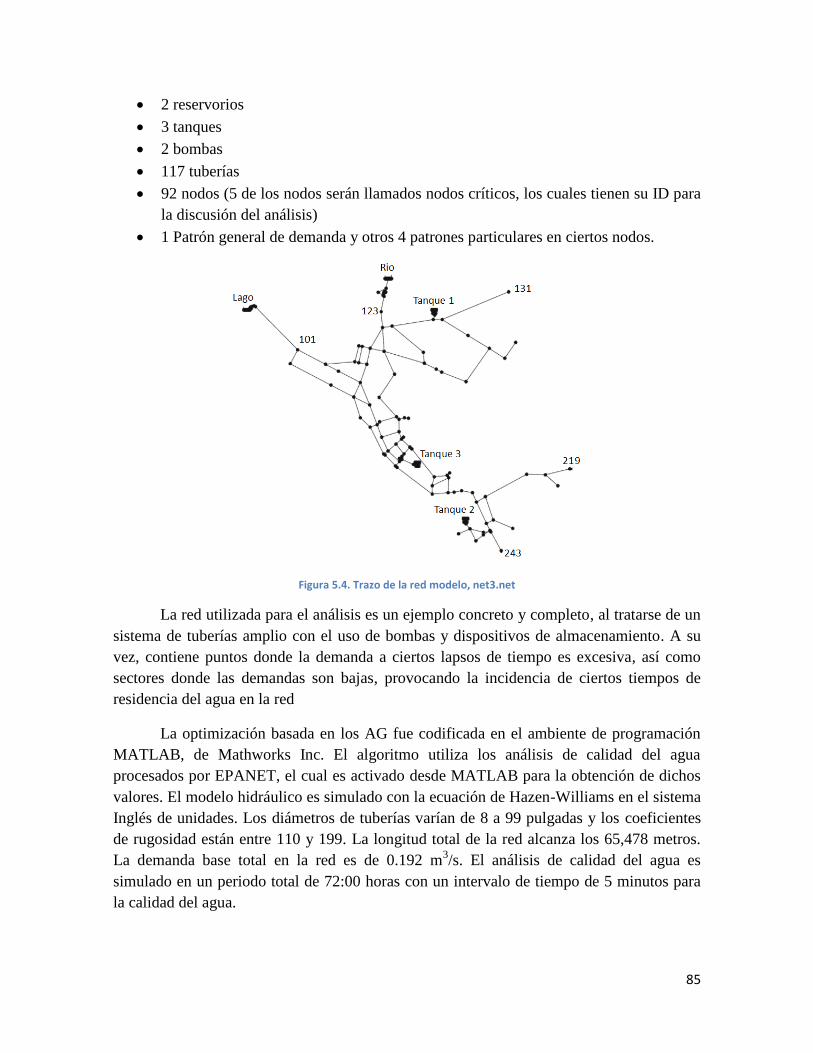
85
2 reservorios
3 tanques
2 bombas
117 tuberías
92 nodos (5 de los nodos serán llamados nodos críticos, los cuales tienen su ID para
la discusión del análisis)
1 Patrón general de demanda y otros 4 patrones particulares en ciertos nodos.
Figura 5.4. Trazo de la red modelo, net3.net
La red utilizada para el análisis es un ejemplo concreto y completo, al tratarse de un
sistema de tuberías amplio con el uso de bombas y dispositivos de almacenamiento. A su
vez, contiene puntos donde la demanda a ciertos lapsos de tiempo es excesiva, así como
sectores donde las demandas son bajas, provocando la incidencia de ciertos tiempos de
residencia del agua en la red
La optimización basada en los AG fue codificada en el ambiente de programación
MATLAB, de Mathworks Inc. El algoritmo utiliza los análisis de calidad del agua
procesados por EPANET, el cual es activado desde MATLAB para la obtención de dichos
valores. El modelo hidráulico es simulado con la ecuación de Hazen-Williams en el sistema
Inglés de unidades. Los diámetros de tuberías varían de 8 a 99 pulgadas y los coeficientes
de rugosidad están entre 110 y 199. La longitud total de la red alcanza los 65,478 metros.
La demanda base total en la red es de 0.192 m3/s. El análisis de calidad del agua es
simulado en un periodo total de 72:00 horas con un intervalo de tiempo de 5 minutos para
la calidad del agua.

86
5.2.2. Valores introducidos.
La simulación de la calidad del agua, depende principalmente (entre otros
parámetros) de los coeficientes de reacción en el seno del flujo y en la pared de la tubería
(kb y kw). Además de la calidad inicial en los reservorios.
Se propone realizar un análisis completo, en el que varíen los estándares del
comportamiento del cloro para diferentes condiciones de la red. Esto es, abarcar los límites
superior e inferior de cloro permisibles en toda la red. Para ello, se describen 3 escenarios
diferentes en cuestión a la calidad del agua. Los escenarios A, B y C se obtienen variando
ambos coeficientes de reacción de cloro, kb y kw, obtenidos de la literatura (Tabla 2.2,
Capítulo II). La calidad inicial en las fuentes se considera a partir de obtener escenarios que
cumplan con la NOM-127, en las diferentes condiciones de estado.
Para visualizar el estado de la red en diversas condiciones de coeficientes de
reacción de cloro, se describen los 3 escenarios como: El escenario A con los coeficientes
de reacción mínimos, escenario B con valores de cerca de 15% de los valores máximos y el
escenario C, con valores de entre 20 a 25% (Tabla 5.1). Sólo el 25% de los valores
máximos se aplicaron porque las simulaciones realizadas con coeficientes de reacción más
elevados generan dosis de cloro por encima de las normas NOM-127 en una gran parte de
la red durante las simulaciones.
Tabla 5.1 Escenarios propuestos para el análisis de los AG.
Concentración
inicial en fuentes
Coeficientes de
reacción
Escenario Río
(mg/L) Lago (mg/L)
kb
(1/d)
kw
(m/d) Descripción
A 1.50 1.50 0.120
0.04 Red con mínimas (A) medias (B) y
criticas (C) condiciones de reacción
de cloro. Los 3 escenarios utilizan
la concentración inicial necesaria
para una operación normal y el
cumplimiento de las normas.
B 1.69 1.62 0.233 0.21
C 1.79 1.68 0.350
0.32
La simulación en periodo extendido tiene una duración total de 3 días, centrando el
análisis de las concentraciones entre las horas 48:00 a 72:00. El propósito de analizar
solamente las últimas 24 horas es para observar que los nodos han alcanzado un equilibrio
en términos de variables de calidad. Por lo anterior se tiene un ajuste a un comportamiento
más “cíclico”.
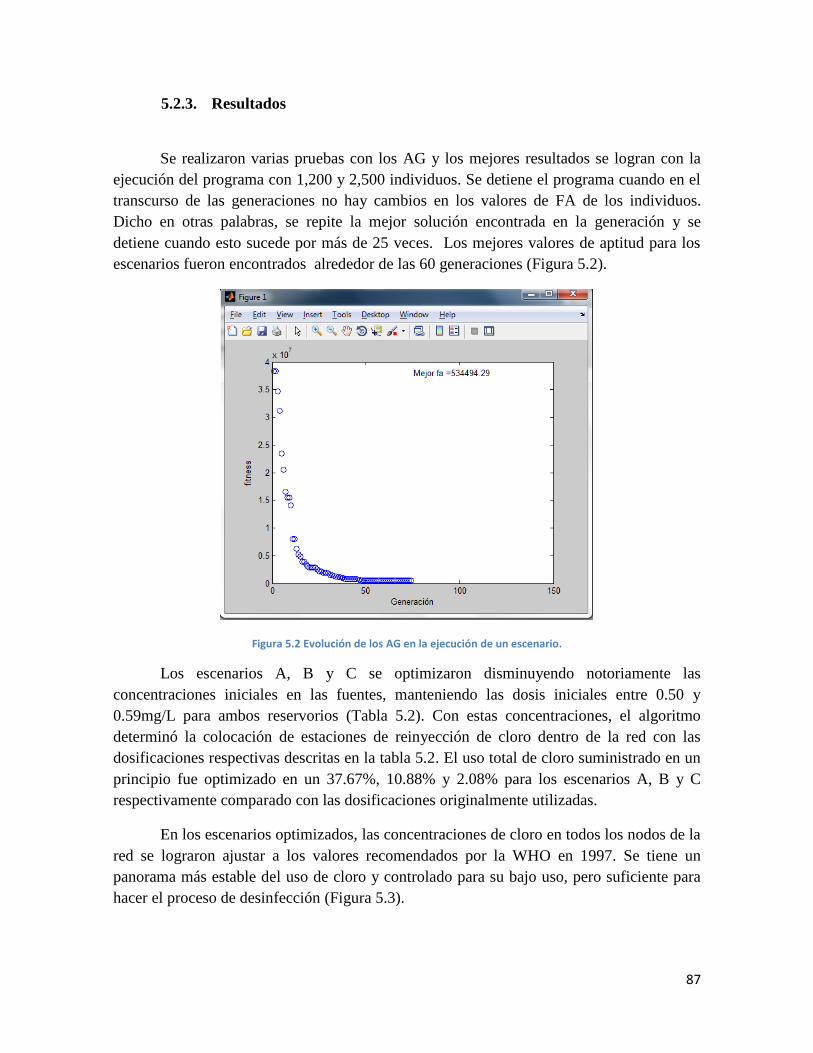
87
5.2.3. Resultados
Se realizaron varias pruebas con los AG y los mejores resultados se logran con la
ejecución del programa con 1,200 y 2,500 individuos. Se detiene el programa cuando en el
transcurso de las generaciones no hay cambios en los valores de FA de los individuos.
Dicho en otras palabras, se repite la mejor solución encontrada en la generación y se
detiene cuando esto sucede por más de 25 veces. Los mejores valores de aptitud para los
escenarios fueron encontrados alrededor de las 60 generaciones (Figura 5.2).
Figura 5.2 Evolución de los AG en la ejecución de un escenario.
Los escenarios A, B y C se optimizaron disminuyendo notoriamente las
concentraciones iniciales en las fuentes, manteniendo las dosis iniciales entre 0.50 y
0.59mg/L para ambos reservorios (Tabla 5.2). Con estas concentraciones, el algoritmo
determinó la colocación de estaciones de reinyección de cloro dentro de la red con las
dosificaciones respectivas descritas en la tabla 5.2. El uso total de cloro suministrado en un
principio fue optimizado en un 37.67%, 10.88% y 2.08% para los escenarios A, B y C
respectivamente comparado con las dosificaciones originalmente utilizadas.
En los escenarios optimizados, las concentraciones de cloro en todos los nodos de la
red se lograron ajustar a los valores recomendados por la WHO en 1997. Se tiene un
panorama más estable del uso de cloro y controlado para su bajo uso, pero suficiente para
hacer el proceso de desinfección (Figura 5.3).
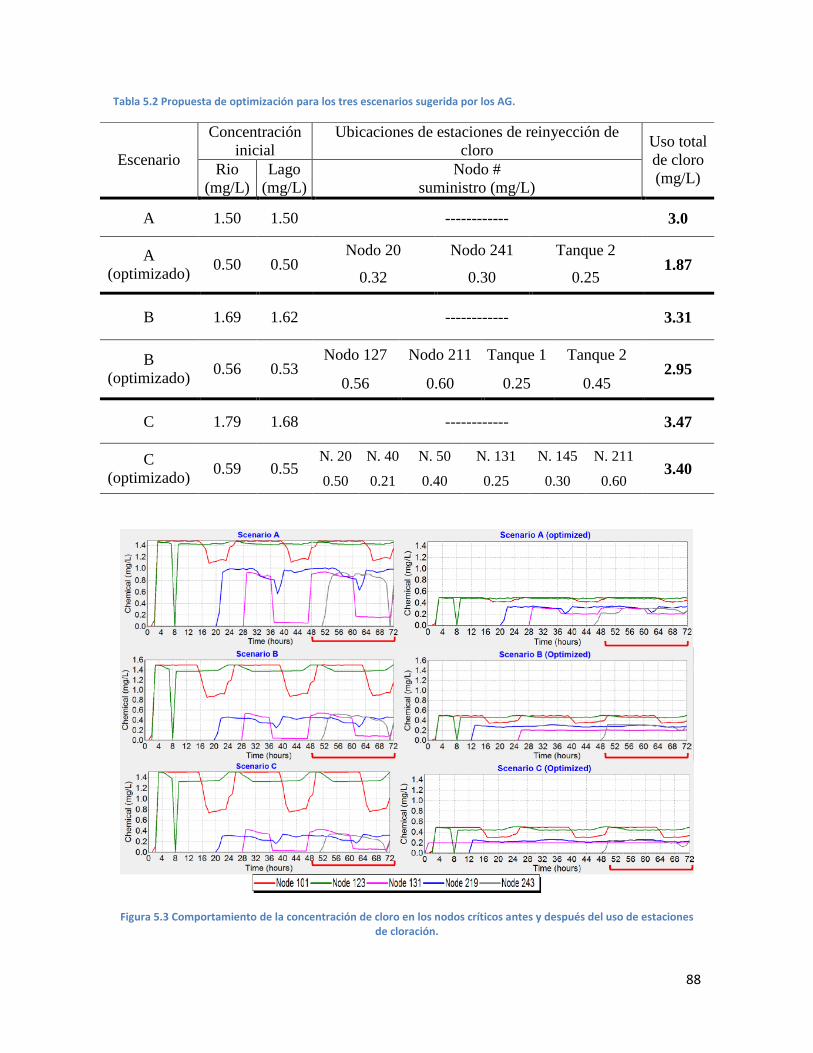
88
Tabla 5.2 Propuesta de optimización para los tres escenarios sugerida por los AG.
Figura 5.3 Comportamiento de la concentración de cloro en los nodos críticos antes y después del uso de estaciones de cloración.
Escenario
Concentración
inicial
Ubicaciones de estaciones de reinyección de
cloro Uso total
de cloro
(mg/L) Rio
(mg/L)
Lago
(mg/L)
Nodo #
suministro (mg/L)
A 1.50 1.50 ------------ 3.0
A
(optimizado) 0.50 0.50
Nodo 20 Nodo 241 Tanque 2 1.87
0.32 0.30 0.25
B 1.69 1.62 ------------ 3.31
B
(optimizado) 0.56 0.53
Nodo 127 Nodo 211 Tanque 1 Tanque 2 2.95
0.56 0.60 0.25 0.45
C 1.79 1.68 ------------ 3.47
C
(optimizado) 0.59 0.55
N. 20 N. 40 N. 50 N. 131 N. 145 N. 211 3.40
0.50 0.21 0.40 0.25 0.30 0.60
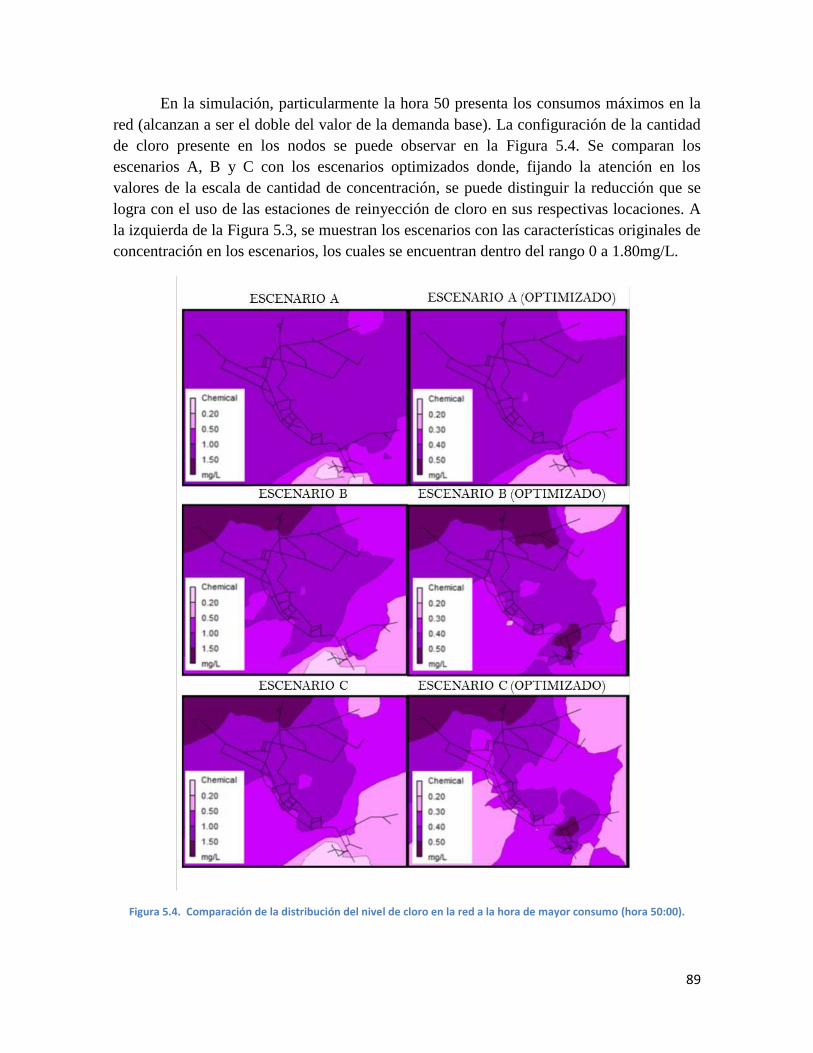
89
En la simulación, particularmente la hora 50 presenta los consumos máximos en la
red (alcanzan a ser el doble del valor de la demanda base). La configuración de la cantidad
de cloro presente en los nodos se puede observar en la Figura 5.4. Se comparan los
escenarios A, B y C con los escenarios optimizados donde, fijando la atención en los
valores de la escala de cantidad de concentración, se puede distinguir la reducción que se
logra con el uso de las estaciones de reinyección de cloro en sus respectivas locaciones. A
la izquierda de la Figura 5.3, se muestran los escenarios con las características originales de
concentración en los escenarios, los cuales se encuentran dentro del rango 0 a 1.80mg/L.
Figura 5.4. Comparación de la distribución del nivel de cloro en la red a la hora de mayor consumo (hora 50:00).
90
Se observa un elevado uso de cloro en las fuentes para que los nodos más próximos
tengan la concentración en el límite máximo y hacer todo el uso posible de cloro para que
los nodos más alejados tengan una concentración suficiente para realizar la desinfección.
Sin embargo, existen periodos de tiempos en los 3 escenarios que no alcanzan la
concentración mínima establecida. En la parte derecha de la Figura 5.4, se presentan los
resultados de los escenarios optimizados, en los cuales, se aprecia un dominio constante del
cloro. Prácticamente todos los escenarios no sólo cumplen con la norma NOM-127, si no
que se mantienen las concentraciones dentro de los recomendados por la WHO, que son de
menor cantidad de uso de cloro que los establecidos por la Secretaría de Salud.
La hora número 68 de la simulación es el tiempo en que se presenta el consumo
mínimo en los nodos. La configuración a lo largo de la red se muestra en la Figura 5.5. A la
izquierda se tienen concentraciones de cloro en una escala comprendida entre 0.2 a
1.80mg/L para los escenarios iniciales. La zona noreste de la red tiene zonas donde no se
alcanza la concentración mínima (0.20mg/L). En esta zona se observa que dicha
concentración es mantenida durante un lapso de 10 horas. Los escenarios optimizados (a la
derecha) utilizando estaciones de cloración se mantienen los niveles dentro de la escala 0 a
0.6mg/L. En la zona noreste, visualizada anteriormente, se elimina la ausencia de cloro
logrando alcanzar la concentración mínima durante toda la simulación (se tiene aún un pico
de concentraciones entre 0.10 y 0.2mg/L en un lapso de 2 horas para el nodo 243, pero
puede atacarse el problema aumentando un poco los suministros del cloro en las
estaciones). Generalmente en los 3 escenarios, de manera similar a la hora con mayor
consumo, se cumple el propósito de tener toda la red con concentraciones promedio
alrededor de 0.2 a 0.5mg/L.
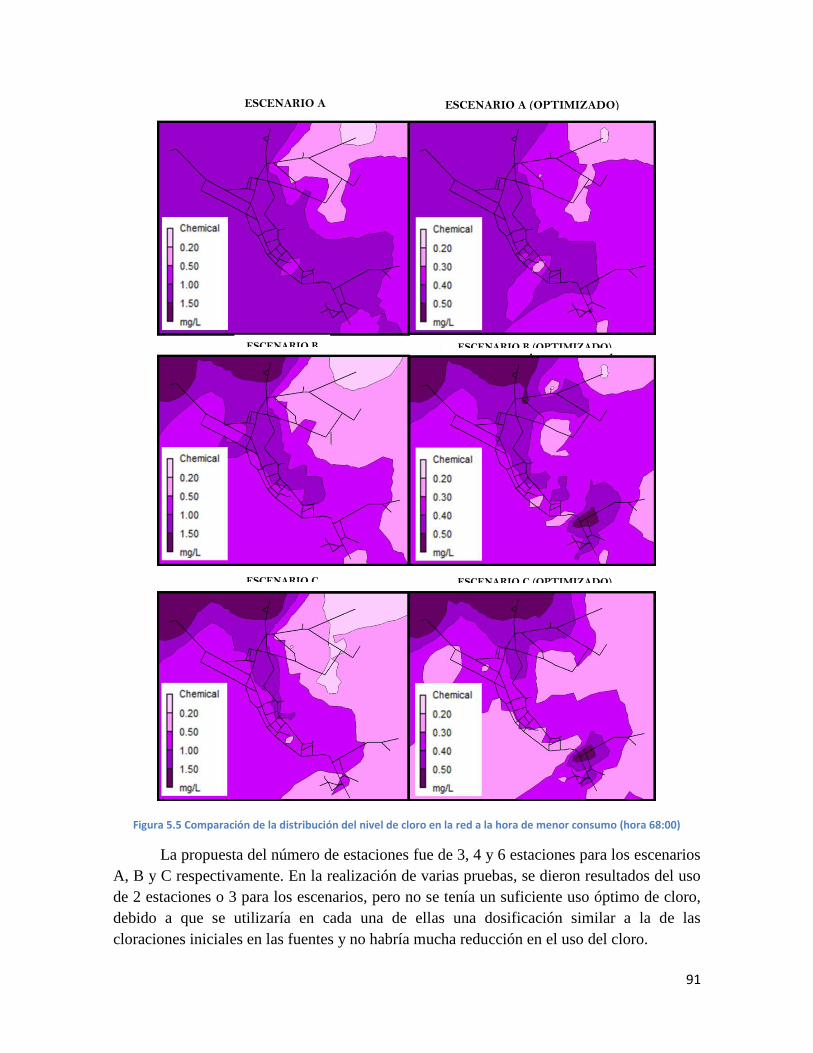
91
Figura 5.5 Comparación de la distribución del nivel de cloro en la red a la hora de menor consumo (hora 68:00)
La propuesta del número de estaciones fue de 3, 4 y 6 estaciones para los escenarios
A, B y C respectivamente. En la realización de varias pruebas, se dieron resultados del uso
de 2 estaciones o 3 para los escenarios, pero no se tenía un suficiente uso óptimo de cloro,
debido a que se utilizaría en cada una de ellas una dosificación similar a la de las
cloraciones iniciales en las fuentes y no habría mucha reducción en el uso del cloro.
ESCENARIO A ESCENARIO A (OPTIMIZADO)
ESCENARIO B
ESCENARIO B (OPTIMIZADO)
ESCENARIO C
ESCENARIO C (OPTIMIZADO)
92
DISCUSIÓN
Refiriendo al tema del consumo del agua en México, en varios puntos se tocó el
aspecto de la “desconfianza de los usuarios” al pensar en consumir agua proporcionada por
los organismos operadores. Esta agua, como ya se describió, no cumple con las
expectativas de una calidad óptima en cuanto a ser agua “para beber”. Es posible tomar en
cuenta que una buena cloración no hace al agua un servicio 100% para consumo humano,
ya que el agua desinfectada, una vez llegada a nuestras casas, tiene un cierto tiempo de
residencia en el almacenamiento. Independientemente del estado del tanque o cisterna,
siempre se tiene el riesgo de recaer al agua en contaminación.
Este estudio puede llegar a utilizarse de apoyo para crear una consciencia en los
organismos operadores y en los sistemas encargados de normalizar el uso del agua, al
contar con una herramienta que nos contribuye esencialmente a poder regresar a la
población servida la confianza de que, a sus casas está llegando agua con mejores
condiciones y, al contar con un sistema más adecuado de almacenamiento, sustituir el
agua embotellada con agua potable de la red de distribución.
La implementación de un sistema integral de desinfección del agua se puede llevar a
cabo considerando las siguientes aplicaciones: Agua desinfectada desde las fuentes y en
toda la red, evitar el agua almacenada en las casas o en caso de que no sea posible, con un
sistema anti-contaminantes, filtros y un fácil mantenimiento de los mismos. Todo esto hace
posible la meta de erradicar la necesidad del consumo de agua embotellada y que regrese la
confianza en el trabajo realizado por los sistemas operadores.
Con la aplicación de esta herramienta se puede contribuir a la visión de tener un
servicio de agua potable íntegro y un ahorro considerable en los gastos que se llevan a cabo
al año para disponer de agua limpia por parte del organismo operador y el gasto excesivo de
agua embotellada por parte de los usuarios.
93
CONCLUSIONES
Los AG resultan un apoyo ventajoso cuando se tiene un problema de gran
dimensión y muchos aspectos a considerar. Los tiempos de ejecución varían con la
configuración de la red, sin embargo, los resultados son alcanzados con el transcurso de una
baja cantidad de generaciones. En los análisis de los escenarios, se obtuvieron los mejores
resultados aplicando la cantidad de 2,500 individuos como máximo en función de la
diversidad de alternativas posibles (las dimensiones de la red) para encontrar la mejor
solución que optimice la red. Se llegaba a una convergencia en los valores de aptitud
alrededor de la generación número 60.
Con el análisis en diferentes estados de reacción en la red se puede visualizar la
efectividad de la optimización del uso del cloro (hasta un 37.67% para el escenario A). El
escenario B optimizado tiene un control más estable del uso del cloro, siendo que
originalmente requería de 3.31 mg/L de cloro entre las dos fuentes para contribuir a la
carencia del desinfectante en las zonas más alejadas, y al hacer uso de las 4 estaciones de
reinyección se reduce esta aplicación del desinfectante en más del 10%. Haciendo
referencia al estado de reacción para el escenario C, se propuso la colocación de 6
estaciones de reinyección de cloro distribuidas en la red, logrando una optimización del
2.08%. Aunque no es un número considerablemente amplio en términos de reducción de
cloro, se lograron estabilizar los niveles de concentración en todos los nodos en la red
(asumiendo que los nodos críticos están dentro del rango propuesto por la WHO de 0.2 a
0.5 mg/L y los mapas de contorno en las horas de mayor y menor consumo mantienen todas
sus zonas dentro de estos límites). De manera similar, en condiciones extremas del estado
de la red en cuanto a tiempo de uso y la reacción con el agua y las tuberías, se logra una
estabilización adecuada de los niveles de cloro.
Entre las diferentes pruebas realizadas en los escenarios, se encontraron soluciones
alternativas, como colocar una o dos estaciones de reinyección, lo cual puede hacer una
expectativa de ser una mejor solución que las mencionadas en los resultados propuestos (3,
4 y 6 estaciones). Sin embargo, en estas soluciones se utiliza una cantidad alta de cloro, con
lo que no se llega a una estabilización adecuada en la simulación de calidad del agua y por
consiguiente, no hay una firme optimización del uso de cloro. Las soluciones alternativas
con pocas estaciones pero alto uso de cloro adquirían un nivel más bajo de FA en
comparación con las soluciones propuestas en la sección de resultados. Por lo que dichas
propuestas fueron más adecuadas para el uso óptimo cloro.
El emplazamiento y la elaboración del proyecto ejecutivo para construir estaciones
de reinyección en la red requieren de una inversión inicial (equipo de cloración, tanques de
cloro, mano de obra de construcción, mantenimiento, etc.), por lo que proponer más de una
94
o dos estaciones de reinyección de cloro hace pensar que es una meta inalcanzable y un
gasto innecesario. A pesar de ello, se puede inferir que al estar proponiendo cierto número
de estaciones que hacen posible una reducción del uso del cloro llegaría a recuperarse dicha
inversión en un futuro. Haciendo un proyecto rentable, que no sólo se enfoca en el bien
económico, si no en la satisfacción del organismo a disponer agua en condiciones benéficas
para los usuarios y que estén brindando un servicio de calidad.
Con los enfoques mencionados en las discusiones y las aportaciones que se hacen en
este trabajo, se tiene un amplio esquema de solución para la problemática de calidad del
agua y consumo de agua embotellada. A fin de que de que el organismo operador reduzca
sus costos de operación y producción del agua, beneficiando a la población servida.
En futuras líneas de trabajo se puede llegar a proponer ante el sistema encargado de
la legislación del recurso hídrico, CONAGUA, a las Comisiónes Estatales del Agua, CEA’s
y los diferentes organismos operadores de agua potable la utilización de esta herramienta en
diferentes redes o sectores que estén en condiciones de baja calidad del agua y se requiera
la incorporación de estaciones de reinyección al sistema. Todo esto con el fín de la
aportación y validación de este trabajo para tener un apoyo en la búsqueda un servicio
adecuado al proporcionar agua con mejores condiciones y beneficiar tanto al sistema
operador como principalmente a la población en cuanto la posibilidad del consumo de agua
de la llave en reemplazo del agua embotellada y un panorama sanitario conveniente.

95
REFERENCIAS:
AEAAS, Manual de la cloración, Asociación Española de Abastecimientos de Agua y
Saneamiento, Editorial A. E. A. A. S., 01 de Enero de 1984, 32p.
Ahn, J. C., Lee, S. W., Choi, K. Y., & Koo, J. Y. (2012). Application of EPANET for the
determination of chlorine dose and prediction of THMs in a water distribution system.
Sustainable Environment Research, 22(1), 31-38.
Alcocer-Yamanaka, V. H., Tzatchkov, V. G., & Arreguín-Cortés, F. I. Modelo de calidad
del agua en redes de distribución. Ingeniería hidráulica en México, 19(2), 2004, 77-88.
Al-Jasser, A. O. (2007). Chlorine decay in drinking-water transmission and distribution
systems: Pipe service age effect. Water Research, 41(2), 387-396.
ARA, L. J. G. (2002). El agua, el cloro y los seres vivos. Monografías de la Real Academia
Nacional de Farmacia.
Arranz de la Peña, J., & Parra Truyol, A. (2014). Algoritmos Genéticos. Universidad Carlos
III.
Barkin, D. (2006). La gestión del agua urbana en México. Universidad de Guadalajara.
Beasley, D., Martin R. R. & Bull, D. R. (1993). An overview of Genetic Algorithms: Part 1.
Fundamentals. University Computing, 15, 58-74.
Boccelli, D. L., Tryby, M. E., Uber, J. G., and Summers, R. S. (2003). A reactive species
model for chlorine decay and THM formation under rechlorination conditions. Water
Research, 37(11), 2654-2666
Castro, P., & Neves, M. (2003). Chlorine decay in water distribution systems case study–
lousada network. Electronic Journal of Environmental, Agricultural and Food Chemistry, 2,
261-266.
Coello, C. A. C. (2003). Introducción a la computación evolutiva (Notas de curso).
CINVESTAV IPN. Instituto Politécnico Nacional México.
COMISIÓN NACIONAL DEL AGUA (2007a). Manual de Agua Potable y Alcantarillado
y Saneamiento. Modelación Hidráulica y de Calidad del Agua en Redes de Agua Potable.
México.
COMISIÓN NACIONAL DEL AGUA (2007b). Manual de Agua Potable, Alcantarillado y
Saneamiento. Datos Básicos. México.
96
Cortés, N. C. (2000). Uso de emulaciones del sistema inmune para manejo de restricciones
en algoritmos evolutivos. Master's thesis, Maestría en Inteligencia Artificial, UV-LANIA,
Xalapa, Veracruz.
Diéguez Alberte, A., Ovejero Málaga, R., & Robledo Ibáñez, A. (2004). Implementación de
juegos usando algoritmos evolutivos. Notas del curso, Universidad complutense de Madrid.
Ellis Horowitz and Sartaj Sahni. Fundamentals of Computer Algorithms. Computer Science
Press, Rockville, Maryland, 1984.
Erickson, J. (2012). Moving Mexico Back to Tap Water: Strategies to Restore Confidence
in the Water System. Policy Matters Journal, 10(1).
Fogel, L. J., Owens, A. J., & Walsh, M. J. (1966). Artificial intelligence through simulated
evolution.
Fuertes, V. S., García-Serra, J., Iglesias, P. L., López, G., Martínez, F. J., & Pérez, R.
(2002). Modelación y diseño de redes de abastecimiento de agua. Grupo Mecánica de
Fluídos. Universidad Politécnica de Valencia, España.
Geldreich, E. E. (1996). Microbial quality of water supply in distribution systems. CRC
Press LLC, ISBN 1-56670-194-5. 504pp.
Gestal Pose, M. G. (2000). Introducción a los Algoritmos Genéticos. Departamento de
Tecnologías de la Información y las Comunicaciones Universidad de Coruña.
Glover F., Laguna M. (1998) Tabu Search. Kluwer Academic Publishers,
Norwell Massachusetts.
Goldberg, D. E. (2006). Genetic algorithms. Pearson Education India.
Goldberg, D. E. (1989). Genetic algorithms in search, optimization, and machine learning.
Addion wesley, 1989.
Goldberg, D. E., & Deb, K. (1991). A comparative analysis of selection schemes used in
genetic algorithms. Foundations of genetic algorithms, 1, 69-93.
González Piñeros, M. A. (2013). “Optimización de redes hidráulicas mediante aplicación
de algoritmos genéticos y de recocido simulado utilizados en programas comerciales”.
Tesis de Especialidad, Escuela Colombiana de Ingeniería “Julio Garavito”, Bogotá,
Colombia.
Gramajo Cifuentes B. M. (2004). “Determinación de la calidad del agua para consumo
humano y uso industrial, obtenida de pozos mecánicos en la zona 11, Mixco, Guatemala”.
Tesis de Licenciatura. Universidad de San Carlos de Guatemala. Guatemala.

97
Guimarães, J. R., Ibáñez, J., Litter, M. I., & Pizarro, R. (2001). Desinfección de agua.
Eliminación de Contaminantes por Fotocatálisis Heterogénea, 305-316.
Hallam, N. B., West, J. R., Forster, C. F., Powell, J. C., and Spencer, I. (2002). The decay
of chlorine associated with the pipe wall in water distribution systems. Water Research,
36(14), 3479-3488.
Islam, N., Sadiq, R., & Rodriguez, M. J. (2013). Optimizing booster chlorination in water
distribution networks: a water quality index approach. Environmental monitoring and
assessment, 1-16.
Holland, J. H. (1992). Algoritmos genéticos. Investigación y Ciencia, 192, 38-45.
Jiménez Magaña, M. R. (2004). “Diseño Óptimo de Redes de Distribución de Agua Potable
Utilizando un Algoritmo Genético”, Tesis de maestría, Universidad Nacional Autónoma de
México.
Johnson T., (2010). McClatchy Newspapers. In Mexico, fear of tap water fuels bottled-
water boom. 27 de mayo de 2010. Recurso en línea (consultado el 05 de Junio del 2015)
http://www.mcclatchydc.com/2010/05/27/94943/in-mexico-fear-of-tap-water-fuels.html
Kapadia, M. K. (1998). Modeling chlorine residuals in Water Distribution Network Using
EPANET 2.0 software.
Knobelsdorf Miranda, J., & Mujeriego Sahuquillo, R. (1997). “Crecimiento bacteriano en
las redes de distribución de agua potable: una revisión bibliográfica”. Ingeniería del agua,
1997, vol. 4, núm. 2.
Kumar, R. (2012). Jyotishree, Blending roulette wheel selection & rank selection in genetic
algorithms. In Proceedings of International Conference on Machine Learning and
Computing (Vol. 4, pp. 197-202).
Lansey, K., Pasha, F., Pool, S., Elshorbagy, W., & Uber, J. (2007). Locating satellite
booster disinfectant stations. Journal of Water Resources Planning and Management,
133(4), 372-376.
Lipowski, A., & Lipowska, D. (2012). Roulette-wheel selection via stochastic acceptance.
Physica A: Statistical Mechanics and its Applications, 391(6), 2193-2196.
Matías Sánchez, A. (2003). “Diseño de redes de distribución de agua contemplando la
fiabilidad, mediante Algoritmos Genéticos”. Tesis doctoral. Universidad Politécnica de
Valencia, España
McJunkin, F. E. (1988). Agua y salud humana. Editorial Limusa, S.A. de C.V.
Méndez, M. V. (1995). Tuberías a presión en los sistemas de abastecimiento de agua.
Universidad Católica Andrés.
98
Merelo, J. J. (2007). Técnicas heurísticas de resolución de problemas: computación
evolutiva y redes neuronales.
Mora Rodríguez, J.J. (2011) “Modelación de la intrusión patógena a través de fallos y su
implicación en la red de distribución de agua”. Tesis doctoral. Universidad Politécnica de
Valencia, España.
Newell, A., Shaw, J. C., & Simon, H. A. (1959). The processes of creative thinking. Santa
Monica, CA: Rand Corporation.
NOM-127-SSA1-1994. Salud ambiental, agua para uso y consumo humano. Límites
permisibles de calidad y tratamiento a que debe someterse para su potabilización. Diario
Oficial de la Federación. 1994.
Omisca, E. (2011). Environmental Health in the Latin American and Caribbean Region:
Use of Water Storage Containers, Water Quality, and Community Perception. PhD Thesis.
University of South Florida.
Ostle, B. (1979). Estadística aplicada. Editorial Limusa.
PAHO (2004) Manual de tratamiento. Biblioteca virtual de Desarrollo Sostenible y Salud
ambiental.
http://www.bvsde.paho.org/bvsatr/fulltext/tratamiento/manualII/ma2_cap6.pdf (accessed on
21 February 2015).
Pérez Pérez, J. A. (2001). “Tratamiento de aguas”. Universidad Nacional, Facultad de
Minas, Págs. 167-173
Phillip Cooper, J. (2003). Development of a chlorine decay and total trihalomethane
formation modeling protocol using initial distribution system evaluation data. Master
Thesis, University of Akron. United States of America.
Powell, J. C., Hallam, N. B., West, J. R., Forster, C. F., and Simms, J. (2000). Factors
which control bulk chlorine decay rates. Water Research, 34(1), 117-126.
Pratap, R. (1998). Getting Started with MATLAB, a quick introduction for scientists and
engineers. pp. 240. Foreword by Rudra Pratap. Oxford University Press, Oct 1998. ISBN-
10: 0195129474. ISBN-13: 9780195129472, 1.
del Puerto Rodríguez, A. M., Concepción Rojas, M., & Iglesias Fernández, A. M. (1999).
Calidad del agua y enfermedades de transmisión digestiva. Revista Cubana de Medicina
General Integral, 15(5), 495-502.
Quijandría Casanova, S, [en línea]. Casetas de cloración. r-chemical.com, 2012 [citado el
20 de de Agosto del 2014]. Disponible para World Wide Web: http://www.r-
chemical.com/blog/author/admin/page/2/
99
Quirós, F. R. (2005). Desinfección del agua con cloro y cloraminas. Técnica Industrial,
260, 55.
Quirós, F. R. (2010). Subproductos generados en la desinfección del agua. Técnica
Industrial, 288, 47.
Rodríguez Castro, J. A., Pérez Morales, G. B. (2007). “Apuntes de hidráulica básica”
Universidad Michoacana de San Nicolás de Hidalgo.
Rodríguez, M. J., Rodríguez, G., Serodes, J., & Sadiq, R. (2007). Subproductos de la
desinfección del agua potable: formación, aspectos sanitarios y reglamentación.
Interciencia: Revista de ciencia y tecnología de América, 32(11), 749-756.
Rojas, R. (2002). Guía para la vigilancia y control de la calidad del agua para consumo
humano. Lima. Centro Panamericano de Ingeniería Sanitaria/Organización Panamericana
de la Salud.
Rossman, L. A. (2000). EPANET 2: users manual. Environmental Protection Agency
(EPA), United States of America.
Sampson, J. R., & Brindle, A. (1979). Genetic algorithms for function optimization. In
Proceedings of the Ninth Manitoba Conference on Numerical Mathematics and Computing
(pp. 31-47).
Schmid, W. A., & Lazos, R. (2000). Guía para estimar la incertidumbre de la medición.
Centro Nacional de Metrología. Querétaro. Universidad Nacional Autónoma de México.
Sotelo Avila, G. (1991). Hidráulica general; fundamentos. Limusa.
Willoughby, S. S., & Vogeli, B. R. (1969). Probabilidad y estadística. Publicaciones
Cultural.
WHO. (1997). Guidelines for drinking-water quality: recommendations (Vol. 3). 2nd Ed.
World Health Organization.


















