Sistemas Computacionales de 32 bits - electron.frba.utn.edu.arafurfaro/descargas/Arquitectura...
62
Autor: Alejandro Furfaro 1 Sistemas Computacionales de 32 bits Universidad Tecnológica Nacional - FRBA Técnicas Digitales III
Transcript of Sistemas Computacionales de 32 bits - electron.frba.utn.edu.arafurfaro/descargas/Arquitectura...
Autor: Alejandro Furfaro 1
Sistemas Computacionales de 32 bits
Universidad Tecnológica Nacional - FRBA Técnicas Digitales III
Autor: Alejandro Furfaro 2
Introducción1 Sistemas Computacional:
2 Conjunto de dispositivos lógicos de Hardware y Software que se utilizan para procesar datos, señales, o cualquier información digital.
2 Dedicados: Cumplen una única función o un grupo determinado de funciones específicas
2 De propósito general: Sirven para ejecutar todo tipo de aplicaciones. El único límite es el número máximo de aplicaciones que pueden albergar en un mismo momento, y la capacidad de procesamiento para poder ejecutar aplicaciones de determinada envergadura.
1 Componentes2 Hardware
i Procesadori PeriféricosiMemoria
2 Softwarei Programas de control aplicado para computadoras dedicadasi Sistemas Operativos para computadoras de propósito general o de tipo
embedded. Su complejidad varía entre ambos casos

Autor: Alejandro Furfaro 3
Ejemplos mas comunes
1Sistemas de propósito General2Antecedentes
iDurante los 70’s aparecen Commodore 64 / 128, Amiga, Talent MSX, etc.4Procesadores de 8 bits. Z80 en el mejor de los casos, 4Cantidad de memoria reducida.4Dispositivos de almacenamiento mínimos.
2Principios de los 80’s i IBM introduce su modelo de Personal Computer PC.
4Procesador de 16 bits: 8088,4Dispositivos de almacenamiento, y cantidad de memoria levemente
mejores a sus antecesores4 Introduce junto con Intel el concepto de diseños escalables por
compatibilidad ascendenteiAl mismo tiempo Apple lanza la Machintosh (“Mac”)

Autor: Alejandro Furfaro 4
Ejemplos mas comunes1Computadoras dedicadas.2Sistemas de tipo Embedded.
iDiseños single board con procesadores compatibles con los de la IBM PC a medida que esta gana popularidad.
iAl principio se desarrollaron versiones de DOS para ROMiEvolución tecnológica => PC-104. Standard IndustrialiSBC => Single Board Computer
4Aprovechan la base instalada de PC’s para integrar módulos muy compactos para aplicaciones dedicadas desarrollables en una PC.
4Tienen los mismos recursos en las mismas direcciones.4Versiones de Linux, QNX, y otros con imágenes mínimas para el
control de las aplicaciones requeridas para cada solución. => Sistemas multitarea dedicados
iSOM =>System On Module4Son CPU’s listas para usar, con firmware embebido. Pueden hostear
una imagen de un Sistema Operativo.4Son una versión mucho mas compacta de un SBC

Autor: Alejandro Furfaro 5
Ejemplos de SOM: IA-321 Procesador Embedded
Pentium M o Dothan1.6 GHz/1.1 GHz con 64KB de memoria cache L1.
1 Memoria DRAM 2 x 200 pin SODIMM sockets, ECC Double Data Rate(DDR)128 MB to 1GB. 1MB de memoria cacheL2.
1 1000Base-T Ethernet 1 Intel 855GME GMCH/
ICH4 Chipset 400 MHzFSB
1 Interfaces PCI & AGP1 6 ports host USB 2.0
144 mm
95 m
m
Autor: Alejandro Furfaro 6
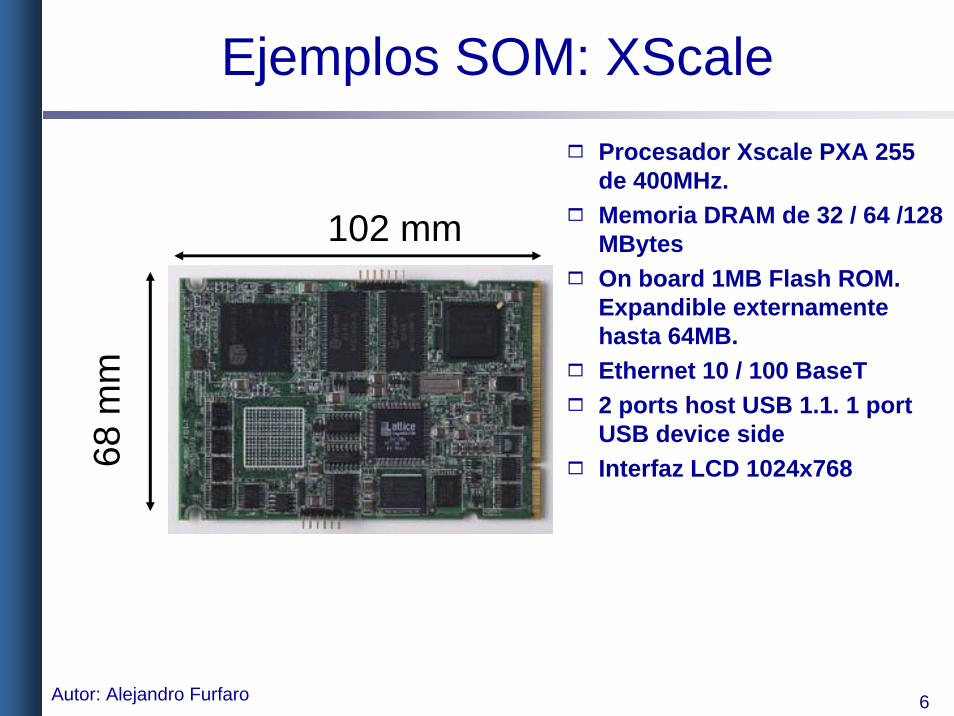
Ejemplos SOM: XScale1 Procesador Xscale PXA 255
de 400MHz.1 Memoria DRAM de 32 / 64 /128
MBytes1 On board 1MB Flash ROM.
Expandible externamente hasta 64MB.
1 Ethernet 10 / 100 BaseT1 2 ports host USB 1.1. 1 port
USB device side1 Interfaz LCD 1024x768
102 mm
68 m
m
Autor: Alejandro Furfaro 7
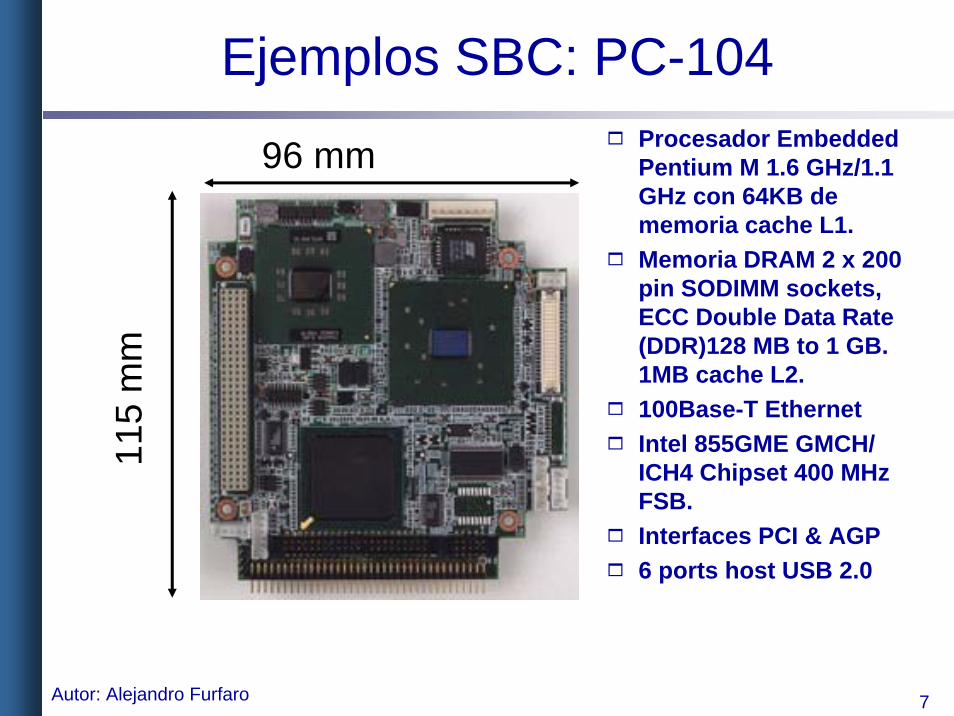
Ejemplos SBC: PC-1041 Procesador Embedded
Pentium M 1.6 GHz/1.1 GHz con 64KB de memoria cache L1.
1 Memoria DRAM 2 x 200 pin SODIMM sockets, ECC Double Data Rate(DDR)128 MB to 1 GB. 1MB cache L2.
1 100Base-T Ethernet 1 Intel 855GME GMCH/
ICH4 Chipset 400 MHzFSB.
1 Interfaces PCI & AGP1 6 ports host USB 2.0
96 mm11
5 m
m
Autor: Alejandro Furfaro 8
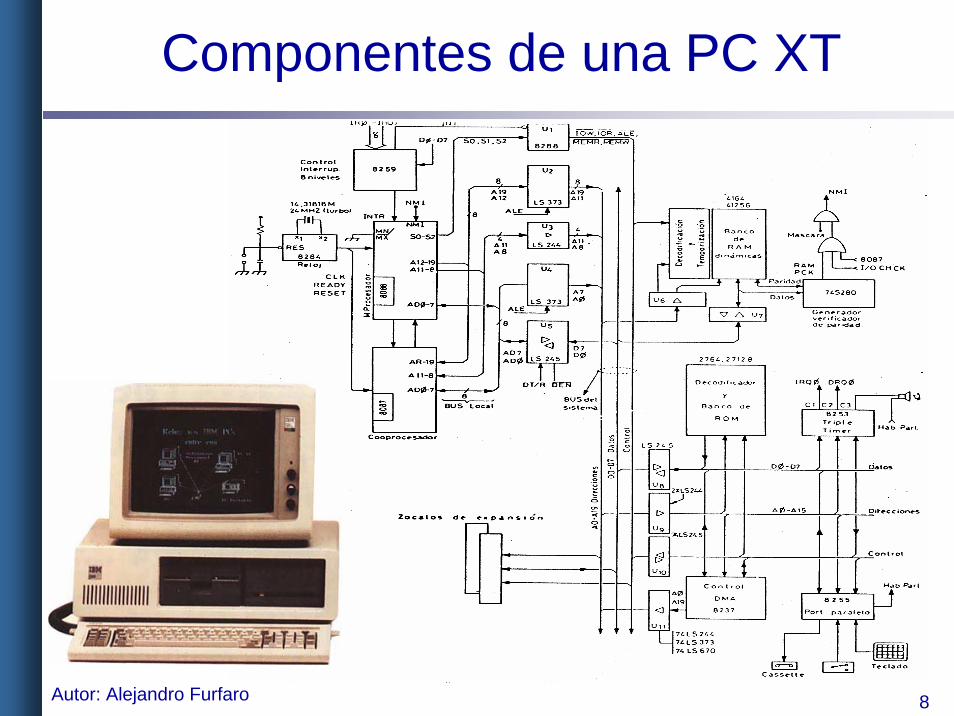
Componentes de una PC XT

Autor: Alejandro Furfaro 9
Mapa de Memoria00000000
0009FFFF000A0000
000BFFFF000C0000
000FFFFF00100000
Vector de IntModo RealBIOS Data Area
Area de datosy programas
1 K
byte
64
0 K
byte
s
FFFFFFFF
Autor: Alejandro Furfaro 10
00000000
0009FFFF000A0000
000BFFFF000C0000
000FFFFF00100000
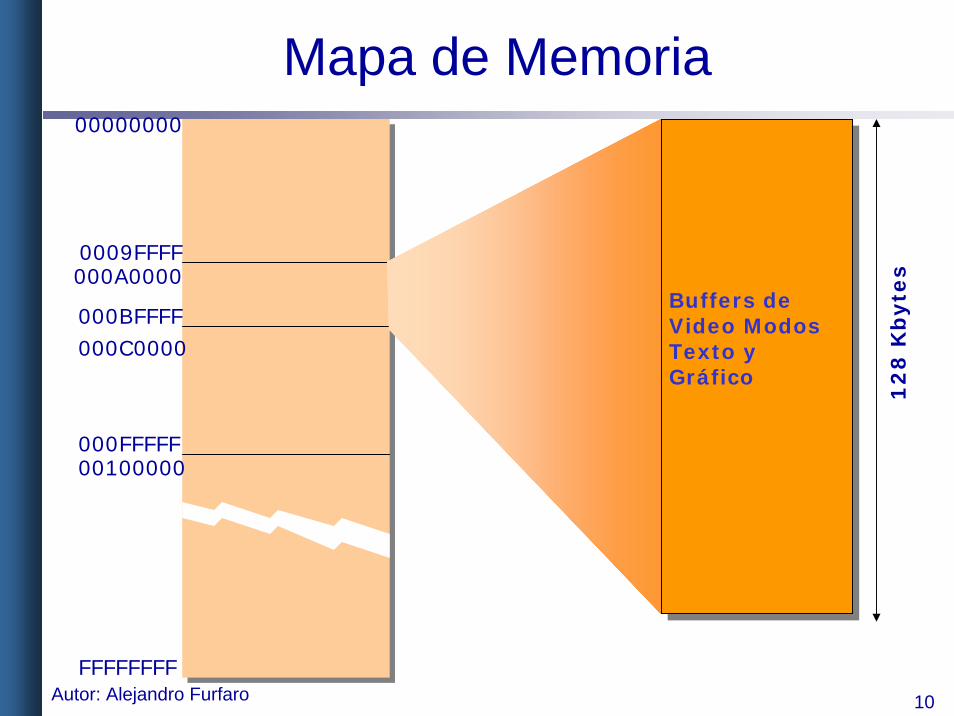
Buffers de Video ModosTexto y Gráfico
12
8 K
byte
s
Mapa de Memoria
FFFFFFFF
Autor: Alejandro Furfaro 11
00000000
0009FFFF000A0000
000BFFFF000C0000
000FFFFF00100000
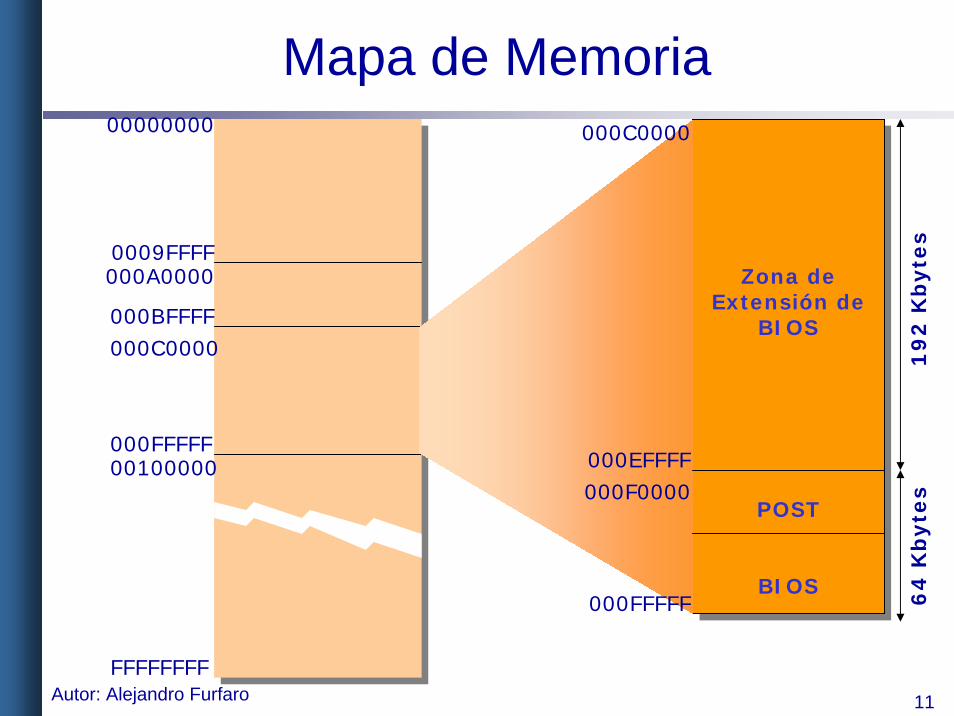
Zona de Extensión de
BIOS
64
Kb
yte
s
POST
BIOS
19
2 K
byte
s
FFFFFFFF
000FFFFF
000C0000
000EFFFF000F0000
Mapa de Memoria
Autor: Alejandro Furfaro 12
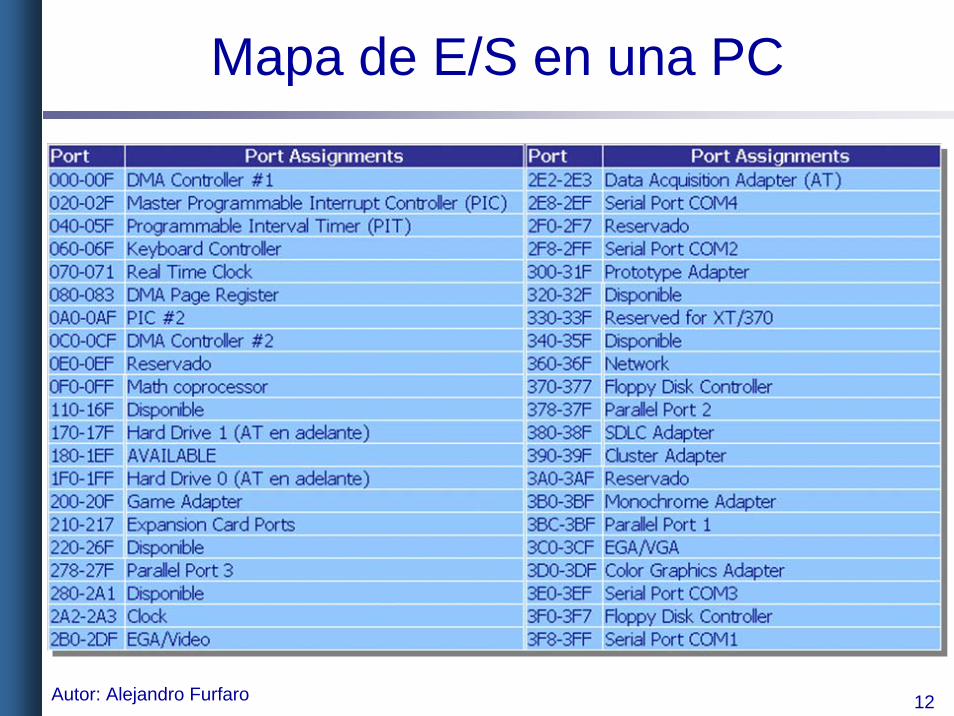
Mapa de E/S en una PC
Autor: Alejandro Furfaro 13
Hardware de Soporte de E/S1 8253 / 8254:
2 Timer 0: Dirección 40h. Base de tiempos del sistema. A la entrada CLK0 se conecta un cristal de 1,193,180 MHz. Se programa para generar por OUT0 un pulso cada 55 mseg. Este pin se conecta a la línea IRQ0 del PIC 8259: así se genera una interrupción a dicho intervalo, o como se refiere en la jerga, “genera 18,2 (¿?) interrupciones por segundo”.
2 Timer 1: Dirección 41h. Se programa del mismo modo que Timer 0 pero se lo utiliza para activar el sistema de refresco de memoria DRAM. Para ello, OUT1 va conectado a la entrada DREQ0 del 8237. A partir del modelo AT 286 se utilizará un hardware dedicado al refresco de memoria.
2 Timer 2: Dirección 42h. Se programa para generar a su salida una señal cuadrada de 50% de duty cycle y OUT2 se conecta al parlante del sistema.
2 Registro de comando y status. Dirección 43h.

Autor: Alejandro Furfaro 14
18255: Fue inmediatamente reemplazado en el modelo siguiente (AT 286). Sin embargo los ports A y B, siguen presentes
2 Port A: Dirección 60h. La lógica de control de teclado al recibir los códigos de las teclas los almacena en este port.
2 Port B: Dirección 61h. Sus líneas trabajan como salidas de control individuales. 2Envío de la salida del Timer0 al parlante de la PC2Envío de un pulso a la línea IRQ1 del PIC 8259 cada vez que se
recibe un código de tecla desde el teclado.2 Port C: Dirección 62h. Cuatro de estas líneas se utilizan como
información de configuración del sistema. El sistema de configuración en los modelos originales PC y PC-XT era sumamente rudimentario (trabajaba con dip switches).
Hardware de Soporte de E/S

Autor: Alejandro Furfaro 15
Interrupciones en los procesadoresx86
Notas:1 La instrucción
UD2 fueintroducida con el procesador Pentium Pro.
1 Los procesadores IA-32 posteriores al Intel386 no generan esta excepción.
1 Esta excepción fue introducida en el procesador Intel486.
1 Esta excepción fue introducida en el procesador Pentium y mejorada en la familia de procesadores P6.
1 Esta excepción fue introducida en el procesador Pentium III.

Autor: Alejandro Furfaro 16
Interrupciones en la PC

Autor: Alejandro Furfaro 17
Controlador de Interrupciones de Hardware: el PIC 8259
DATABUS
BUFFER
D0 - D7
INSERVICE
REGISTER(ISR)
PRIORITYRESOLVER
INTERRUPTREQUESTREGISTER
(IRR)
INTERRUPT MASK REGISTER (IMR)
LOGICA DE CONTROL
INTA INT
IRQ0
IRQ1
IRQ2
IRQ3
IRQ4
IRQ5IRQ6
IRQ7
BUS DE DATOS INTERNO
READWRITELOGIC
RD
WR
A0
CS
CASCADEBUFFER
COMPARA-TOR
CAS0
CAS1
CAS2
SP/EN
Autor: Alejandro Furfaro 18
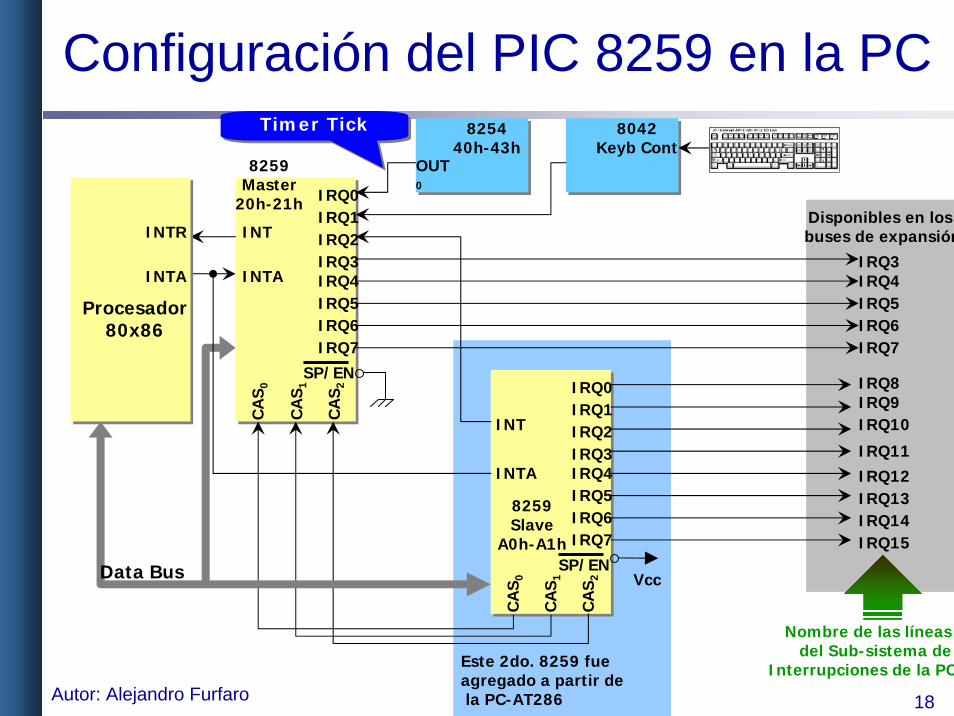
Configuración del PIC 8259 en la PC
INT
INTA
IRQ0IRQ1IRQ2IRQ3IRQ4IRQ5IRQ6IRQ7
Procesador80x86
INTR
INTA
8259Master
20h-21h
8259Slave
A0h-A1h
INT
INTA
IRQ0IRQ1IRQ2IRQ3IRQ4IRQ5IRQ6IRQ7
CA
S 0
CA
S 1
CA
S 2
CA
S 0
CA
S 1
CA
S 2
OUT0
825440h-43h
8042Keyb Cont
SP/EN
SP/ENVcc
IRQ3IRQ4IRQ5IRQ6IRQ7
IRQ8IRQ9IRQ10
IRQ11IRQ12IRQ13IRQ14IRQ15
Nombre de las líneas del Sub-sistema de
Interrupciones de la PC
Disponibles en los buses de expansión
Este 2do. 8259 fue agregado a partir dela PC-AT286
Timer TickTimer Tick
Data Bus

Autor: Alejandro Furfaro 19
Asignación y Tipo de las IRQ’s

Autor: Alejandro Furfaro 20
Interrupción No Enmascarable (NMI)
Error de paridad en MemoriaError de paridad en el Bus
Error del Coprocesador 8087
Port de E/S 0A0h7 6 5 4 3 2 1 0
Error de paridad en Memoria
Error de paridad en el Bus
Port de E/S 070h7 6 5 4 3 2 1 0
NMI
80x86
NMI
80x86

Autor: Alejandro Furfaro 21
Programación del PIC 82591 El 8259, presenta al procesador una interfaz de programación a través
de dos direcciones de E/S.2 La primer PC tenía un solo PIC en las direcciones de port 20h y 21h.2 La PC AT 286, incluyó un segundo PIC, ya que la PC original ya había
agotado la asignación de IRQ’s, y seguían apareciendo nuevos dispositivos: Placas de red, placas de sonido, etc.
2 Este PIC es accesible en las direcciones de port A0h y A1h.
1 Palabras de Comando de Inicialización: 2 Son una secuencia de entre dos y cuatro bytes que envía el procesador al
8259A antes de comenzar la operación normal, a fin de configurarlo.2 A los efectos del PIC 8259, la secuencia de Inicialización es una operación
atómica, es decir, que no puede dividirse2 El 8259 detecta la secuencia de inicialización cuando recibe en la dirección
de port par (A0 = 0), una palabra con el bit D4=1. Palabras de Comando de Operación: Una vez inicializado el 8259A, estas palabras le definen diversas operaciones a realizar. Luego de la inicialización, se pueden enviar en cualquier momento.
Autor: Alejandro Furfaro 22
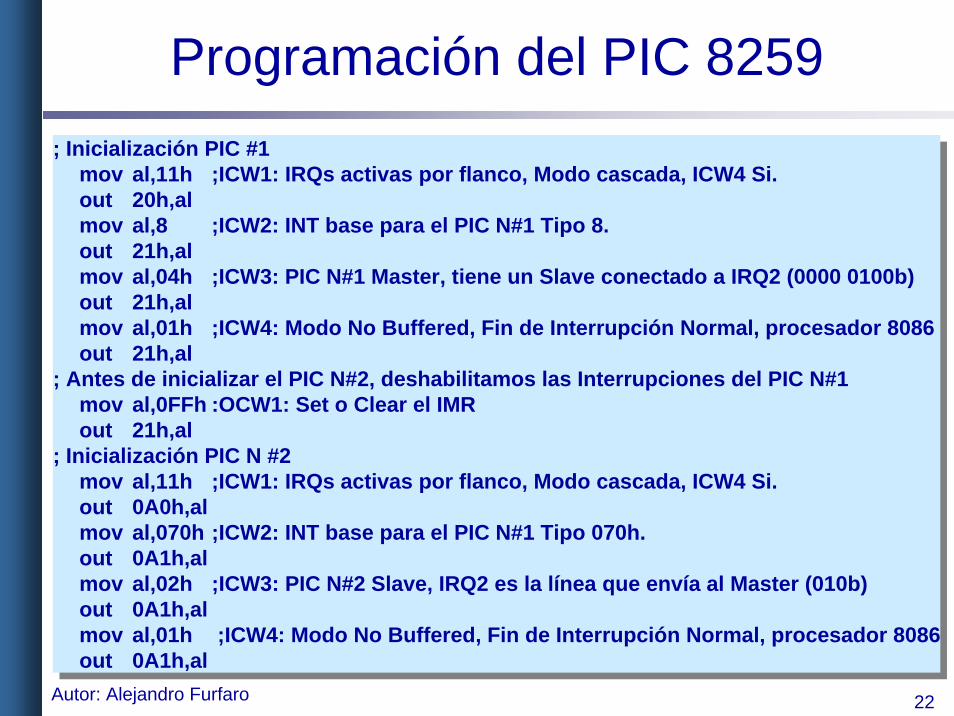
; Inicialización PIC #1 mov al,11h ;ICW1: IRQs activas por flanco, Modo cascada, ICW4 Si.out 20h,almov al,8 ;ICW2: INT base para el PIC N#1 Tipo 8.out 21h,almov al,04h ;ICW3: PIC N#1 Master, tiene un Slave conectado a IRQ2 (0000 0100b)out 21h,almov al,01h ;ICW4: Modo No Buffered, Fin de Interrupción Normal, procesador 8086out 21h,al
; Antes de inicializar el PIC N#2, deshabilitamos las Interrupciones del PIC N#1mov al,0FFh :OCW1: Set o Clear el IMRout 21h,al
; Inicialización PIC N #2mov al,11h ;ICW1: IRQs activas por flanco, Modo cascada, ICW4 Si.out 0A0h,almov al,070h ;ICW2: INT base para el PIC N#1 Tipo 070h.out 0A1h,almov al,02h ;ICW3: PIC N#2 Slave, IRQ2 es la línea que envía al Master (010b)out 0A1h,almov al,01h ;ICW4: Modo No Buffered, Fin de Interrupción Normal, procesador 8086out 0A1h,al
; Inicialización PIC #1 mov al,11h ;ICW1: IRQs activas por flanco, Modo cascada, ICW4 Si.out 20h,almov al,8 ;ICW2: INT base para el PIC N#1 Tipo 8.out 21h,almov al,04h ;ICW3: PIC N#1 Master, tiene un Slave conectado a IRQ2 (0000 0100b)out 21h,almov al,01h ;ICW4: Modo No Buffered, Fin de Interrupción Normal, procesador 8086out 21h,al
; Antes de inicializar el PIC N#2, deshabilitamos las Interrupciones del PIC N#1mov al,0FFh :OCW1: Set o Clear el IMRout 21h,al
; Inicialización PIC N #2mov al,11h ;ICW1: IRQs activas por flanco, Modo cascada, ICW4 Si.out 0A0h,almov al,070h ;ICW2: INT base para el PIC N#1 Tipo 070h.out 0A1h,almov al,02h ;ICW3: PIC N#2 Slave, IRQ2 es la línea que envía al Master (010b)out 0A1h,almov al,01h ;ICW4: Modo No Buffered, Fin de Interrupción Normal, procesador 8086out 0A1h,al
Programación del PIC 8259
Autor: Alejandro Furfaro 23
Power On Self Test1 Antes de iniciar su operación el sistema verificará el correcto
funcionamiento de la CPU1 Chequea si el contenido de la ROM es el correcto (realiza un
checksum del contenido de la ROM completa que en fábrica se ajusta de modo que el resultado del check sea cero).
1 Detecta el tipo de adaptador de video instalado. Lo inicializa en modo texto 80x25. Escribe en la BIOS DATA AREA los principales datos de interés para el sistema que proporciona este controlador.
1 Comprueba la correcta interacción con el 8042 y setea el modo de trabajo con los diferentes ports de E/S que proporciona este chip.
1 Si el Timer 1 funciona correctamente se lo programa para generar un pulso al final de la cuenta, cuenta cíclica, y duración de la misma 15 mseg.

Autor: Alejandro Furfaro 24
6. Comprueba el correcto funcionamiento para el canal de DMA 0. 7. Si los test descriptos indican que el Timer 1 y el canal 0 de
DMA funcionan correctamente, entonces se dispara el refresco de memoria.
8. Comprueba el 8259 y lo inicializa con los valores default de los vectores de Interrupción. A los que usa, los apunta a las rutinas de la ROM correspondientes.
9. Cuenta la memoria RAM y comprueba su funcionamiento10.Una vez finalizada la cuenta de memoria, chequea los restantes
timers y canales de DMA. Si funcionan correctamente los inicializa de acuerdo a la forma en la que van a trabajar cada uno de ellos.
11.Funcionando correctamente el teclado y el timer tick, habilita sus interrupciones en el 8259
Power On Self Test
Autor: Alejandro Furfaro 25
12. Testea el funcionamiento de las unidades de disco flexible y rígido. Una vez comprobado las inicializa, y escribe los resultados y principales parámetros en la BIOS DATA AREA.
13. Chequea si existen ports serie. Inicializa a los que encuentra y guarda resultados en BIOS DATA AREA.
14. Chequea si existen ports paralelo. Inicializa a los que encuentra y guarda resultados en BIOS DATA AREA.
15. Establece si existen extensiones BIOS. Esto es: La ROM BIOS de las PC provee un camino para integrar adaptadores de E/S con su propia ROM on-board.
16. Llama a la rutina Bootstrap loader para la carga del sistema operativo
Power On Self Test
Autor: Alejandro Furfaro 26
Detección de extensiones BIOS
1 El POST busca extensiones de BIOS.1 El rango de direcciones de memoria en las que se pueden
mapear estas ROMs va desde la C0000h hasta la EFFFFh. 1 Se busca dentro de este rango cada 2K una firma fija e igual
a 55AAh. Si la encuentra asume que en esa página de 2k comienza una extensión de BIOS.
1 Si el POST detecta alguna ROM adicional, le transfiere temporariamente el control. La extensión de BIOS:
1 Inicializará el hardware para el que fue diseñada1 Realizará, del mismo modo que el POST de la ROM del
sistema) un checksum, cuyo resultado debe ser 0 para que la ROM se considere de contenido válido.
1 Interceptará las interrupciones que necesite, enganchándose a sí misma en el sistema.
1 Devolverá al POST el control del sistema (RET) dejando al hardware asociado a la extensión BIOS, listo para su uso.

Autor: Alejandro Furfaro 27
Extensiones BIOS: Mapa de Memoria00000000
0009FFFF000A0000
000BFFFF000C0000
000FFFFF00100000
POST
BIOS
FFFFFFFF
000FFFFF
000C0000
000EFFFF000F0000
Extensión de BIOS
Formato del encabezado de la de extensión BIOS:
Encabezado
Código y datos de la extensión
2Kbytes2Kbytes
Autor: Alejandro Furfaro 28
Arranque del sistema operativo1La rutina Boostrap Loader del BIOS solo se limita a 2Leer el primer sector físico del disco. 2Cargar los 512 bytes en memoria RAM (0000h:7C00h)2Saltar al primer byte (debe haber allí una instrucción
válida)1La unidad de disco que lee es la que tiene
configurada el equipo en la secuencia de arranque.1En ese sector debe residir un programa que sepa
cargar al Sistema Operativo.2Debe leer del disco los archivos necesarios para bajar a
la memoria. Para ello deben conocer la forma en que está organizada la información en el disco
2Debe descargarlos en memoria y en algún momento transferirles la ejecución.

Autor: Alejandro Furfaro 29
DREQ0
DREQ1
DREQ2
DREQ3
DACK0
DACK1
DACK2
DACK3
HRQ
HLDA
HOLD
HLDA
CPU
Controladorde DMA(8237A)
Device 1Device 1
Device 2Device 2
Device 3Device 3
Device 4Device 4
Acceso Directo a Memoria (DMA)
AddressBus
Add
ress
Bu
s
DRAM
Data Bus

Autor: Alejandro Furfaro 30
Subsistema de DMA en la PC y PC-XT
RAS0RAS1RAS2RAS3
RAS
74S08
74S08
A0
74LS2441G 2G
A1A2A3A4A5A6A7
74LS670
RDW
D0D1D2D3WAWBRBRA
Q0Q1Q2Q3
A16A17A18A19
Bus d
e D
irecc
ione
s “Bu
ffer
eado
”
A0A1A2A3A4A5A6A7
DACK0DACK1DACK2DACK3
EOP
AEN NC
Bus
de
D
irecc
ione
s
A8
74LS373
OE
LE
A9A10A11A12A13A14 A15
XD0 XD1 XD2 XD3 XD4 XD5 XD6 XD7 Bu
s
d
e
Dat
os
“Bu
ffer
eado
”
DB0DB1DB2DB3DB4DB5DB6DB7
8237A
DACK0 DACK1 DACK2 DACK3
EOP
AEN
Al S
lot I
SA d
el S
istem
a
ADSTB
GND
IOR IOWMEMR MEMW
74LS243XIORXIOWXMEMRXMEMW
Bus de Control
8288
IORIOW MEMR
MEMW
S0 S1 S2
Seña
les d
e St
atus
de
l 808
8
74LS138
CSAEN
G2A G2B
A B C
Y0
Y4
XA5XA6XA7XA8
XA9
RESCLK
RDY
DREQ1DREQ2DREQ3
DREQ0
HLDAHRQ
DREQ1DREQ2DREQ3
HLDA
HRQ
RESCLK
RDY TO DMA
74LS74QCL
D CLS
8253
OUT 1
5Vcc
Fig. 6. Circuito de Control de DMA en una IBM PC XT
DMA AEN
74LS32WRT DMA PG RG

Autor: Alejandro Furfaro 31
Subsistema de DMA: Direcciones de E/S
DMA Page Registers:El 8237 solo direcciona 64 Kbytes (bus de address de 16 bits)En la XT, se agregan estos Registros para llegar al Mbyte de espacio de direccionamiento. Por lo tanto son registros de 4 bits. En las AT286 se extendieron a 8 bits, ya que el 80286 agrega al bus de direcciones las líneas A20 a A23

Autor: Alejandro Furfaro 32
Subsistema de DMA a partir de la PC AT286

Autor: Alejandro Furfaro 33
Subsistema de DMA a partir de la PC AT286

Autor: Alejandro Furfaro 34
Subsistema de DMA PC AT286: Limitaciones
1 Este subsistema introdujo mejoras en la performance de una PC XT con un disco rígido de 10 Mbytes.
1 En las máquinas modernas con discos de 100 Gbytes, la combinación 8237 mas Bus ISA, se transformaría en un cuello de botella.
1 Los chipsets que acompañan a los procesadores Pentium, aún los mas modernos siguen incluyendo la lógica equivalente a este subsistema (8237 like). La única razón: COMPATIBILIDAD. A este montaje se lo denomina DMA de terceras partes.
1 las PCs modernas utilizan DMA de primera parte. Se refiere a controladores de dispositivos de E/S (como disco por ejemplo) capaces de requerir por si solos el DMA y manejarlo. Este concepto se conoce como Bus Mastering y en él se basa la tecnología Ultra DMA (UDMA) de los controladores IDE para discos rígidos.
Autor: Alejandro Furfaro 35
Alternativas al Subsistema de DMA legacy
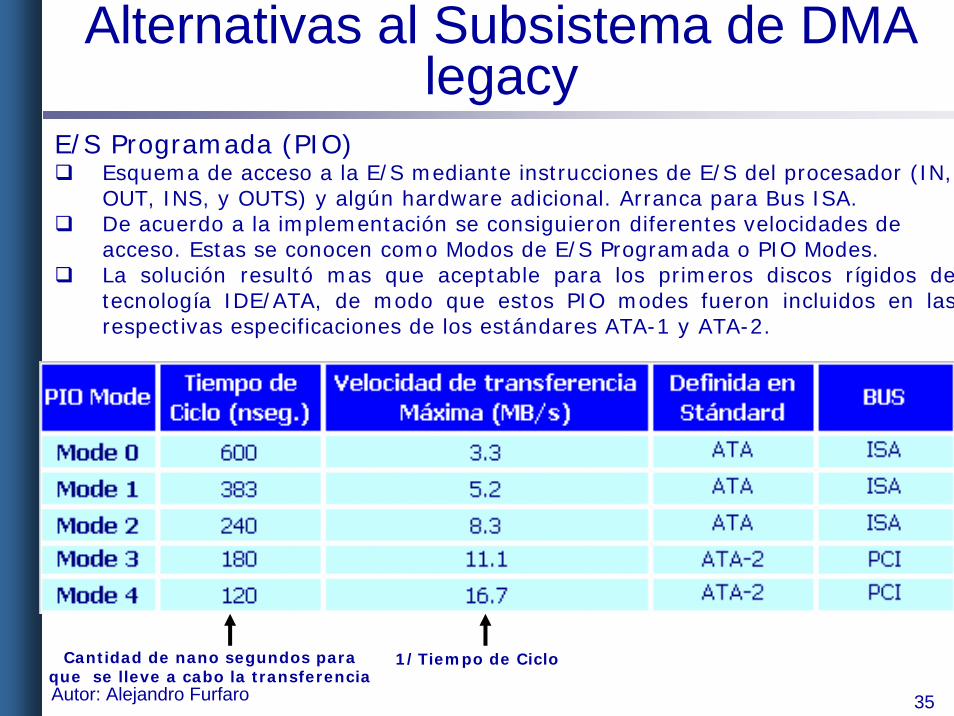
E/S Programada (PIO)Esquema de acceso a la E/S mediante instrucciones de E/S del procesador (IN, OUT, INS, y OUTS) y algún hardware adicional. Arranca para Bus ISA.De acuerdo a la implementación se consiguieron diferentes velocidades de acceso. Estas se conocen como Modos de E/S Programada o PIO Modes.La solución resultó mas que aceptable para los primeros discos rígidos de tecnología IDE/ATA, de modo que estos PIO modes fueron incluidos en las respectivas especificaciones de los estándares ATA-1 y ATA-2.
Cantidad de nano segundos para que se lleve a cabo la transferencia
1/Tiempo de Ciclo

Autor: Alejandro Furfaro 36
Subsistemas de DMA modernos1 Bus Mastering
2 Para los discos rígidos el método PIO, demanda demasiada CPU.2 El Bus PCI aumenta las velocidades de transferencia, y permite acceder al
bus del sistema de manera transparente al procesador. Por este motivo se desarrollo el método de Bus Mastering para reemplazar al PIO en transferencias masivas de datos de modo de liberar al procesador
2 Para habilitar Bus Mastering en un sistema, se requiere que el hardware del chipset, y el BIOS, lo soporten, que el dispositivo periférico soporte Bus Mastering, y trabajar con un sistema operativo de 32 bits: Windows 2000, Windows XP, Linux, etc. En algunas ocasiones se requiere la instalación de un driver.
1 Ultra DMA2 Esta tecnología corresponde al concepto de DMA de primera parte, y se
implementó en los discos rígidos en reemplazo de la PIO.2 Nos referiremos en mas detalle al abordar el tema de Discos Rígidos, ya que
no es un control de DMA abierto a cualquier periférico que lo requiera sino que se encuentra embebido en el hardware del controlador de disco y es exclusivo para éste.

Autor: Alejandro Furfaro 37
TecladoUn Microcontrolador se encarga del barrido de la matriz de teclas con la implementación del control de antirrebote.Una vez detectada la pulsación o liberación de una tecla se transmite por línea serie a la PC el código de la misma.¿Qué código?
Cada tecla se identifica con un código de acuerdo con su posición dentro del layout del teclado. En el caso de la tecla ESC su código es 1.Este valor se denomina SCAN CODE (o código de rastreo en algunastraducciones)
Autor: Alejandro Furfaro 38
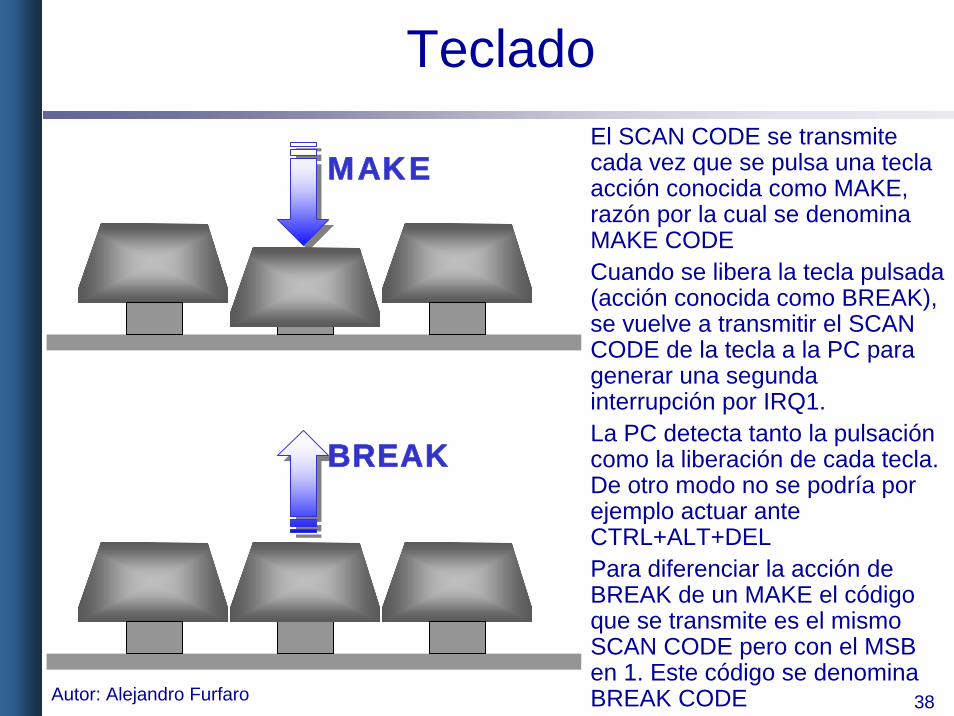
El SCAN CODE se transmite cada vez que se pulsa una tecla acción conocida como MAKE, razón por la cual se denomina MAKE CODECuando se libera la tecla pulsada (acción conocida como BREAK), se vuelve a transmitir el SCAN CODE de la tecla a la PC para generar una segunda interrupción por IRQ1.La PC detecta tanto la pulsación como la liberación de cada tecla. De otro modo no se podría por ejemplo actuar ante CTRL+ALT+DELPara diferenciar la acción de BREAK de un MAKE el código que se transmite es el mismo SCAN CODE pero con el MSB en 1. Este código se denomina BREAK CODE
MAKE
BREAK
Teclado
Autor: Alejandro Furfaro 39
Controlador de Teclado
Registros accesibles desde la PC1 Registro de status (Read) o comandos (Write). Se accede en la
dirección 64h de E/S de la PC1 Output Buffer (Read only), para leer el código de la tecla pulsada o
liberada. Se accede en la dirección 60h de E/S1 Input Buffer (Write only). En la dirección 64h se escribe un comando al
controlador (Command Register, visto anteriormente). En la dirección 60h se escribe un dato, que será enviado al teclado.
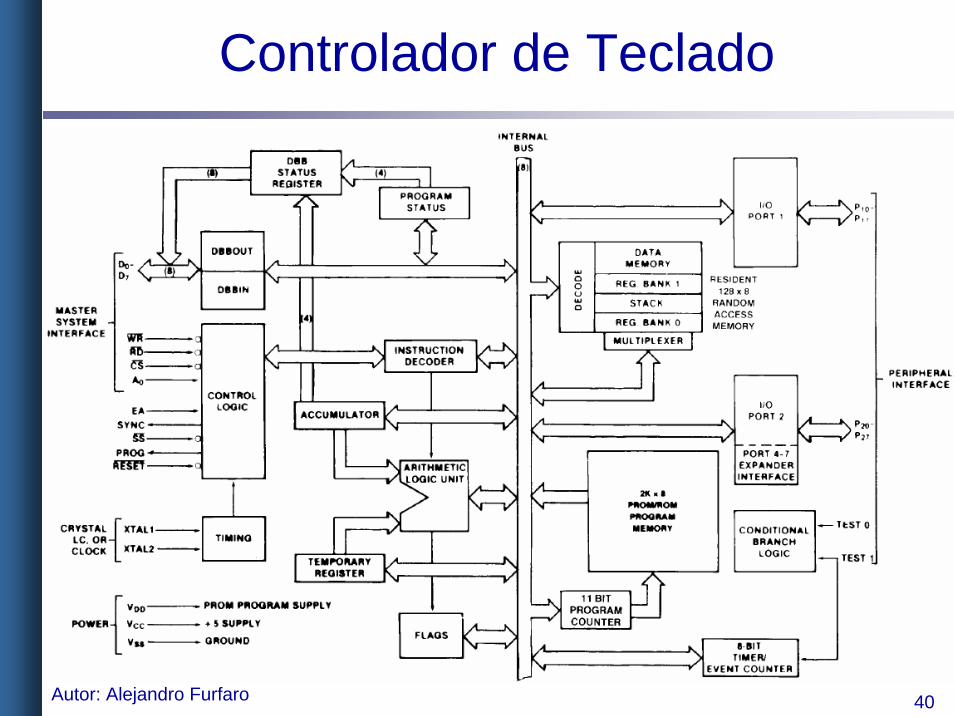
A partir de la AT 286 del lado PC un microcontrolador 8042 es quien se encarga de recibir el Make o el Break code. Es un miembro especial de la familia MCS- 51, denominado Universal Peripheral Interface:Dispone de una interfaz para que sus propios ports integrados sean accesibles desde el exterior por otro microprocesador. En este caso ese microprocesador es el de la PC. Recibe los datos desde el teclado por una interfaz serie, chequea paridad, traduce los scan codes y los deja disponibles en un port interno que visto desde el exterior se accede en la dirección 60h del mapa de E/S de la PC.
Autor: Alejandro Furfaro 40
Controlador de Teclado
Autor: Alejandro Furfaro 41
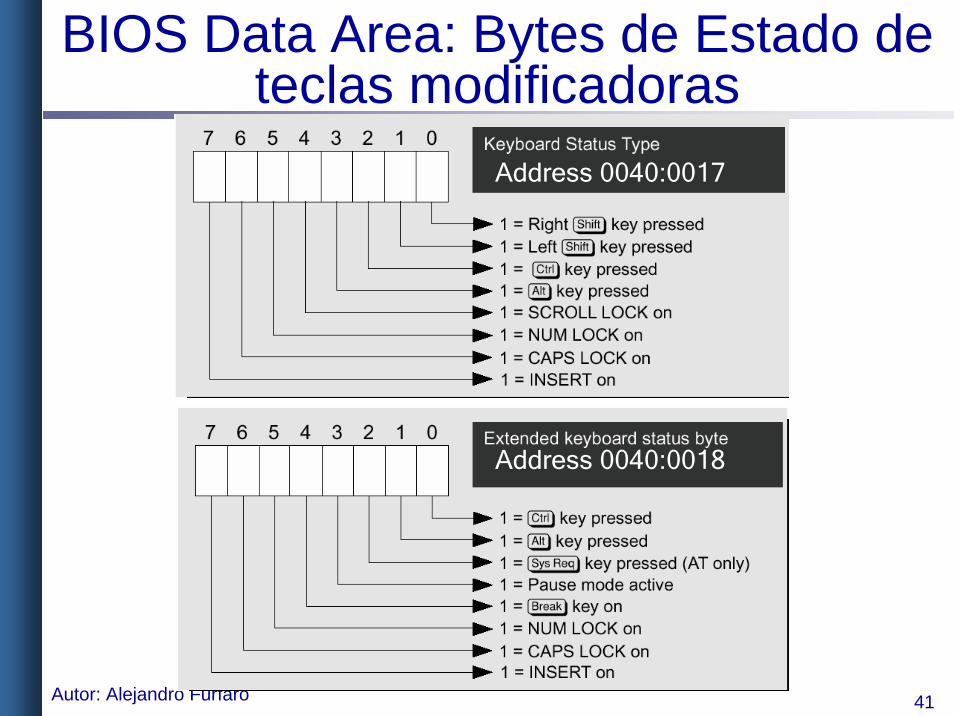
BIOS Data Area: Bytes de Estado de teclas modificadoras
Address 0040:0017
Address 0040:0018
Autor: Alejandro Furfaro 42
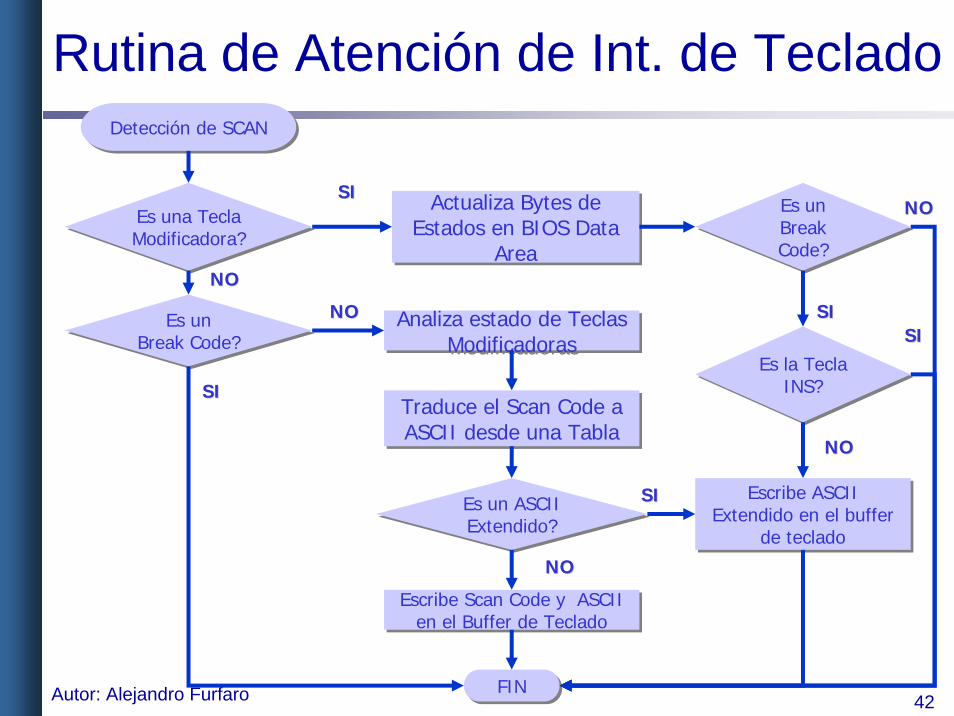
Detección de SCANDetección de SCAN
Actualiza Bytes de Estados en BIOS Data
Area
Actualiza Bytes de Estados en BIOS Data
Area
Es una Tecla Modificadora?Es una Tecla Modificadora?
Analiza estado de Teclas Modificadoras
Analiza estado de Teclas Modificadoras
Traduce el Scan Code a ASCII desde una TablaTraduce el Scan Code a ASCII desde una Tabla
Es un ASCII Extendido?
Es un ASCII Extendido?
Escribe Scan Code y ASCII en el Buffer de Teclado
Escribe Scan Code y ASCII en el Buffer de Teclado
Es un BreakCode?
Es un BreakCode?
Es la Tecla INS?
Es la Tecla INS?
Es un Break Code?
Es un Break Code?
Escribe ASCII Extendido en el buffer
de teclado
Escribe ASCII Extendido en el buffer
de teclado
FINFIN
NONO
NONO
SISI
SISI
NONO
SISISISI
NONO
SISI
NONO
Rutina de Atención de Int. de Teclado

Autor: Alejandro Furfaro 43
BIOS Data Area: Buffer circular de teclado

Autor: Alejandro Furfaro 44
Reloj en Tiempo Real A partir de la AT 286, se incluyó en el diseño un chip de Motorola con un Real Time Clock y una RAM CMOS de 64 bytes: El MC146818.Los registros internos de la RAM CMOS, se detallan a continuación:
Registros del MC 146818 00 Segundos 10 Byte de tipo de drive de disquete (A y B) 01 Segundos de alarma 11 Reservado 02 Minutos 12 Byte de tipo de hard disk (C y D) 03 Minutos de alarma 13 Reservado 04 Horas 14 Byte de equipo 05 Horas de alarma 15 Byte bajo de memoria base 06 Día de la semana 16 Byte alto de memoria base 07 Fecha del Mes 17 Byte bajo de expansión de memoria 08 Mes 18 Byte alto de expansión de memoria 09 Año 19-2D Reservado 0A Status Register A 2E-2F Checksum del CMOS (registros 10h a 2Fh) 0B Status Register B 30 Byte bajo de expansión de memoria 0C Status Register C 31 Byte alto de expansión de memoria 0D Status Register D 32 Byte de siglo de fecha 0E Byte de estados de diagnóstico 33 Flag de información (seteado durante power on) 0F Byte de estado de Shutdown 34-3F Reservado

Autor: Alejandro Furfaro 45
READ:mov al,Memory_locationout 70h, alin al,71h
WRITE:mov al,Memory_locationout 70h,almov al,New_contentsout 71h,al
1 Al tener 64 registros internos, utiliza el modo de direccionamiento indirecto para evitar consumir demasiadas direcciones de E/S.
1 Se muestra al procesador como dos ports: 1 Uno de direcciones (en donde escribimos el número del registro interno
con el cual queremos transaccionar), 1 y otro de datos (en donde realizamos la transacción).
Reloj en Tiempo Real

Autor: Alejandro Furfaro 46
Status Register A
UIPUIP DV0-2DV0-2 RS3-0RS3-0
Update in progress. 1: Indica ciclo de actualización del reloj en proceso. 0: Indica fecha y hora listas para su lectura
7 6 5 4 3 2 1 0
Update in progress. 1: Indica ciclo de actualización del reloj en proceso. 0: Indica fecha y hora listas para su lectura
RS3-0: Rate Selection bits. Seleccionan el divisor de frecuencia de salida. El sistema inicializa este valor en 0110. Esto selecciona una señal cuadrada de salida de 1024 Hz, o lo que es igual un período de 0,976562 mseg.
RS3-0: Rate Selection bits. Seleccionan el divisor de frecuencia de salida. El sistema inicializa este valor en 0110. Esto selecciona una señal cuadrada de salida de 1024 Hz, o lo que es igual un período de 0,976562 mseg.
DV2-0:Divisor de 22 etapas que permite setear la frecuencia de la base de tiempos del sistema. El power on selftest lo coloca en 010 de modo de establecer 32,768 Khz.
DV2-0:Divisor de 22 etapas que permite setear la frecuencia de la base de tiempos del sistema. El power on selftest lo coloca en 010 de modo de establecer 32,768 Khz.
Reloj en Tiempo Real
Autor: Alejandro Furfaro 47
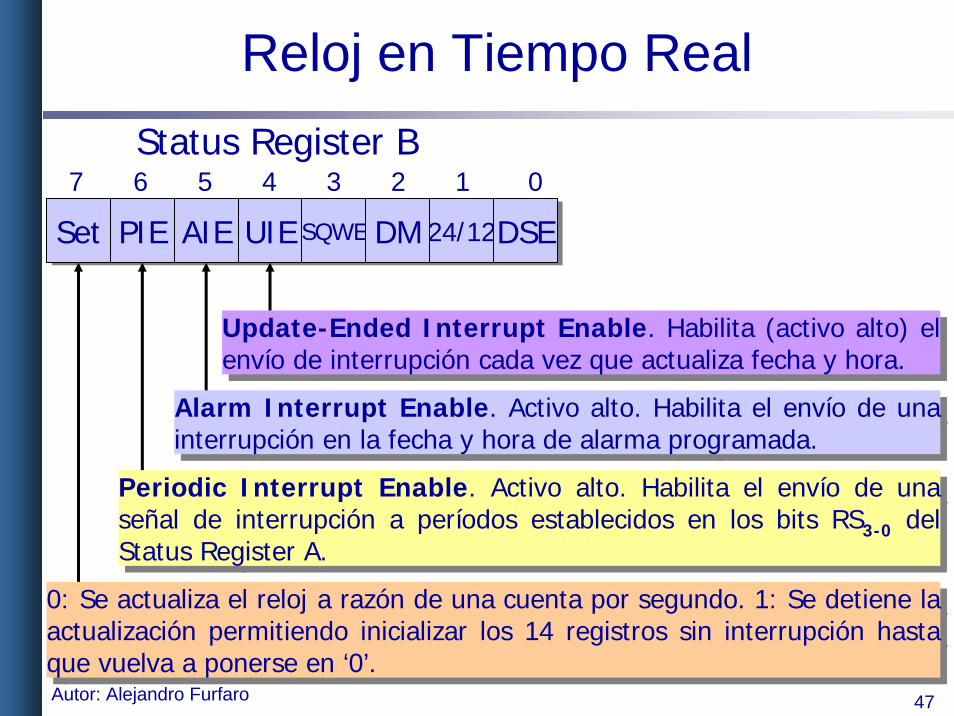
Status Register B7 6 5 4 3 2 1 0
SetSet PIEPIE AIEAIE UIEUIE SQWESQWE DMDM 24/1224/12 DSEDSE
0: Se actualiza el reloj a razón de una cuenta por segundo. 1: Se detiene la actualización permitiendo inicializar los 14 registros sin interrupción hasta que vuelva a ponerse en ‘0’.
0: Se actualiza el reloj a razón de una cuenta por segundo. 1: Se detiene la actualización permitiendo inicializar los 14 registros sin interrupción hasta que vuelva a ponerse en ‘0’.
Periodic Interrupt Enable. Activo alto. Habilita el envío de una señal de interrupción a períodos establecidos en los bits RS3-0 del Status Register A.
Periodic Interrupt Enable. Activo alto. Habilita el envío de una señal de interrupción a períodos establecidos en los bits RS3-0 del Status Register A.
Alarm Interrupt Enable. Activo alto. Habilita el envío de una interrupción en la fecha y hora de alarma programada. Alarm Interrupt Enable. Activo alto. Habilita el envío de una interrupción en la fecha y hora de alarma programada.
Update-Ended Interrupt Enable. Habilita (activo alto) el envío de interrupción cada vez que actualiza fecha y hora. Update-Ended Interrupt Enable. Habilita (activo alto) el envío de interrupción cada vez que actualiza fecha y hora.
Reloj en Tiempo Real

Autor: Alejandro Furfaro 48
Reloj en Tiempo Real
Status Register B7 6 5 4 3 2 1 0
SetSet PIEPIE AIEAIE UIEUIE SQWESQWE DMDM 24/1224/12 DSEDSE
Square Wave Enable. Activo alto. Habilita la generación de una onda cuadrada a intervalos establecidos en el Status Register A.Square Wave Enable. Activo alto. Habilita la generación de una onda cuadrada a intervalos establecidos en el Status Register A.
Date Mode. 0: Fecha y hora se actualizan en BCD (El POST lo inicializa de este modo). 1: Fecha y hora se actualizan en Binario.Date Mode. 0: Fecha y hora se actualizan en BCD (El POST lo inicializa de este modo). 1: Fecha y hora se actualizan en Binario.
0: Modo 12 hs. 1: Modo 24hs. (El POST lo inicializa de este modo)0: Modo 12 hs. 1: Modo 24hs. (El POST lo inicializa de este modo)
Daylight Saving Enable. El POST lo inicializa en 0,indicando que no está habilitadoDaylight Saving Enable. El POST lo inicializa en 0, indicando que no está habilitado
Autor: Alejandro Furfaro 49
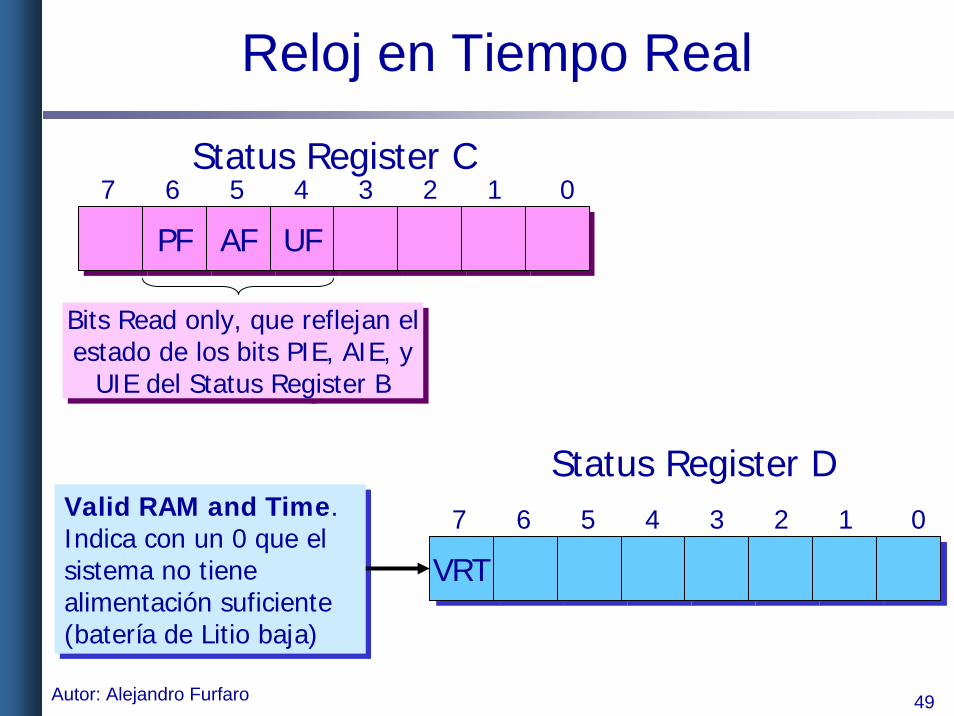
Status Register C7 6 5 4 3 2 1 0
PFPF AFAF UFUF
Bits Read only, que reflejan el estado de los bits PIE, AIE, y
UIE del Status Register B
Bits Read only, que reflejan el estado de los bits PIE, AIE, y
UIE del Status Register B
Status Register D7 6 5 4 3 2 1 0
VRTVRT
Valid RAM and Time.Indica con un 0 que el sistema no tiene alimentación suficiente (batería de Litio baja)
Valid RAM and Time.Indica con un 0 que el sistema no tiene alimentación suficiente (batería de Litio baja)
Reloj en Tiempo Real

Autor: Alejandro Furfaro 50
El Bus de expansión ISA
Vista frontal del conector del bus ISA
Microprocesador
Memoria
Motherboard

Autor: Alejandro Furfaro 51
El Bus de expansión ISA: SeñalesConector Bus PC y PC XT Conector adicional Bus ISA (AT 286 y superiores)
Pin Señal E/S Pin Señal E/S Pin Señal E/S Pin Señal E/S A1 *I/O CH CK E B1 GND P C1 *SBHE S D1 *MEM CS16 E
A2 SD7 E/S B2 *RESET S C2 LA23 E/S D2 *IO16 E A3 SD6 E/S B3 + 5V P C3 LA22 E/S D3 IRQ10 E A4 SD5 E/S B4 IRQ 2 E C4 LA21 E/S D4 IRQ11 E A5 SD4 E/S B5 - 5V P C5 LA20 E/S D5 IRQ12 E A6 SD3 E/S B6 DRQ 2 E C6 LA19 E/S D6 IRQ15 E A7 SD2 E/S B7 - 12V P C7 LA18 E/S D7 IRQ14 E A8 SD1 E/S B8 CRDSEL E C8 LA17 E/S D8 *DACK 0 S A9 SD0 E/S B9 + 12V P C9 *MRDC S D9 DRQ 0 E A10 IO CH RDY E B10 GND P C10 *MWTC S D10 *DACK 5 S A11 AEN S B11 *SMEMW S C11 SD8 E/S D11 DRQ 5 E A12 SA19 E/S B12 *SMEMR S C12 SD9 E/S D12 *DACK 6 S A13 SA18 E/S B13 *IOW E/S C13 SD10 E/S D13 DRQ 6 E A14 SA17 E/S B14 *IOR E/S C14 SD11 E/S D14 *DACK 7 S A15 SA16 E/S B15 *DACK 3 S C15 SD12 E/S D15 DRQ 7 E A16 SA15 E/S B16 DRQ 3 E C16 SD13 E/S D16 + 5V P A17 SA14 E/S B17 *DACK 1 S C17 SD14 E/S D17 *MASTER16 E A18 SA13 E/S B18 DRQ 1 E C18 SD15 E/S D18 GND P A19 SA12 E/S B19 *DACK 0 S A20 SA11 E/S B20 CLK S A21 SA10 E/S B21 IRQ 7 E A22 SA9 E/S B22 IRQ 6 E A23 SA8 E/S B23 IRQ 5 E A24 SA7 E/S B24 IRQ 4 E A25 SA6 E/S B25 IRQ 3 E A26 SA5 E/S B26 *DACK 2 S A27 SA4 E/S B27 T/C S A28 SA3 E/S B28 ALE S A29 SA2 E/S B29 + 5V P A30 SA1 E/S B30 OSC S A31 SA0 E/S B31 GND P
Conectores del BUS ISA. Distribución de señales
Autor: Alejandro Furfaro 52
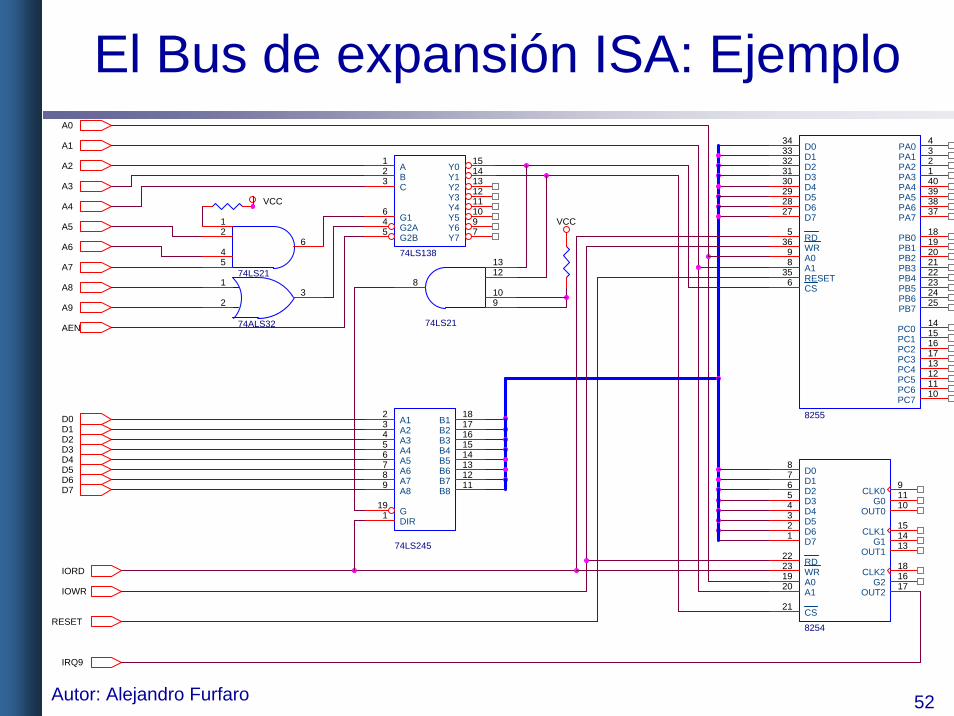
El Bus de expansión ISA: Ejemplo
D1
IOWR
74ALS32
1
23
A4
D5
A0
A6
D2
74LS245
23456789
191
1817161514131211
A1A2A3A4A5A6A7A8
GDIR
B1B2B3B4B5B6B7B8
VCC
AEN
D7
A7
D3
74LS21
910
1213
8
A3
RESET
A9
IRQ9
A1
D6
8254
87654321
22231920
21
91110
151413
181617
D0D1D2D3D4D5D6D7
RDWRA0A1
CS
CLK0G0
OUT0
CLK1G1
OUT1
CLK2G2
OUT2
A5
D0 8255
3433323130292827
53698
356
432140393837
1819202122232425
1415161713121110
D0D1D2D3D4D5D6D7
RDWRA0A1RESETCS
PA0PA1PA2PA3PA4PA5PA6PA7
PB0PB1PB2PB3PB4PB5PB6PB7
PC0PC1PC2PC3PC4PC5PC6PC7
74LS138
123
645
15141312111097
ABC
G1G2AG2B
Y0Y1Y2Y3Y4Y5Y6Y7
VCC
A8
IORD
A2
D4
74LS21
12
45
6

Autor: Alejandro Furfaro 53
Anchos de bus
Un SIMM de 30 contactos soporta ocho bits de datos; un SIMM de 72 contactos soporta 32 bits de datos.
SIMM Single In-Line Memory Module.
Autor: Alejandro Furfaro 54
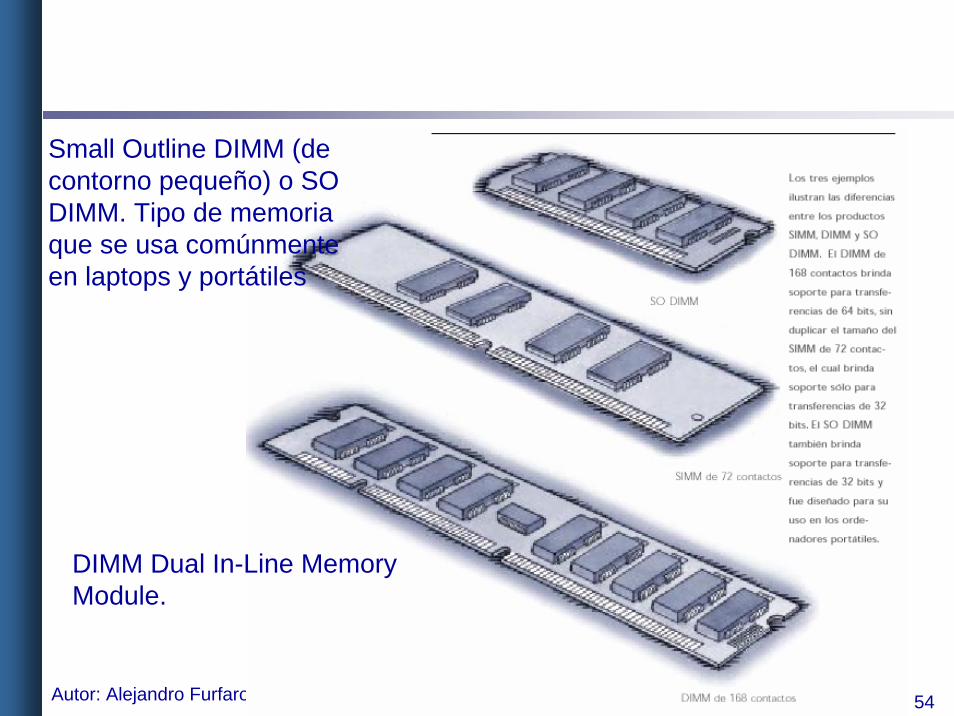
Small Outline DIMM (de contorno pequeño) o SO DIMM. Tipo de memoria que se usa comúnmente en laptops y portátiles
DIMM Dual In-Line MemoryModule.

Autor: Alejandro Furfaro 55
Controlador de memoria1 Microprocesadores dedicados a la supervisión de la
transferencia de datos hacia y desde la memoria. 1 Desempeñan un rol activo en el proceso de corrección de
errores, por medio de ciertos métodos, tales como paridad y ECC(Error Correction Code).
1 La diferencia entre ECC y paridad es que ECC es capaz de detectar y corregir los errores de un bit sin que el usuario se dé cuenta de que se ha producido un error.
1 Ciertos tipos de controladores de memoria implementan algoritmos ECC capaz detectar errores en 2, 3 ó 4 bits de memoria. Sin embargo, aún cuando ECC puede detectar estos errores de múltiples bits, sólo puede corregir los errores de un bit. Si se presenta el caso de un error de múltiples bits, el circuito ECC devuelve un error de paridad.
Autor: Alejandro Furfaro 56
Tecnologías de DRAM
1A fines de los 80’s y principios de los 90`s las CPU 80486 ejecutaban a 33 MHz, velocidad similar a la del bus del sistema.
1Se utilizaban memorias DRAM de Página Rápida (FP = Fast Page), montada en módulos SIMM (Single Inline Memory Modules), cuya latencia o tiempo de acceso era de 100 nseg y su velocidad de 16 MHz, es decir la mitad aproximadamente de la velocidad del bus.

Autor: Alejandro Furfaro 57
Tecnologías de DRAM1 Memoria EDO
2 La memoria de Extended Data Output, o EDO, permite la salida de datos aún cuando la señal CAS haya terminado. De este modo se pudo progresar de velocidades de 33 MHz, a 66 MHz, alcanzando la mitad de la velocidad de los procesadores Pentium que en ese momento trabajaban a 133 MHz. En ancho del bus se llevó a 64 bits, y el tiempo de acceso o latencia standard de esta tecnología fue de 70 nseg. (10 a 15% más rápida que los chips de modalidad de paginación rápida).
1 SDRAM2 La DRAM sincrónica es una tecnología de DRAM que utiliza un reloj para
sincronizar la entrada y la salida de señales en un chip de memoria. El reloj está coordinado con el reloj de la CPU, para que la temporización de los chips de la memoria y de la CPU estén sincronizados.
2 Permite temporizar las address y los datos en un solo ciclo de clock, hecho que redujo el tiempo de acceso a 58 nseg. ( un 20% superior a la de la memoria EDO).
2 La organización de estos subsistemas de memoria pasó del montaje SIMM al DIMM conservando el ancho de bus en 64 bits. Posteriormente llegaron a velocidades de 100 MHz. corriendo detrás de los requerimientos de los procesadores Pentium, y su tiempo de acceso bajó a 56 nseg.

Autor: Alejandro Furfaro 58
Tecnologías de DRAM1 RAMBus
2 En 1999 Intel anunció la tecnología Rambus que permitiría partir de 1,6 Gbps de velocidad de transferencia, y agregando un segundo canal Rambus, llegar a 3,2 Gbps. Sin embargo su elevado costo, la complejidad que introducía en el diseño de los mother boards, y varios problemas en su implementación llevaron a los fabricantes de DRAMs a descartar esta solución, ya que los beneficios de performance no eran significativos cuando se efectuaban benchmarks frente a las otras tecnologías.
2 Esto demostró que la performance del sistema en lo que a la memoria se refiere, no depende tanto del ancho de banda del bus, como de la latencia (tiempo de acceso) que de acuerdo a la práctica es lo que manda.
1 “Ahora que el ancho de banda del bus ha llegado hasta donde queremos y que el caché está en su máximo, ¿qué debemos hacer a continuación?. El siguiente paso natural es acelerar el propio array de DRAM . Dataquest estima que las actuales tecnologías serán reemplazadas por otras de acceso rápido en el largo plazo. En el 2005, la mitad del mercado de u$s50 Billones de DRAM consistirán en DRAMs de acceso rápido” . Jim Handy, Principal Analyst, Dataquest. Dataquest Perspective: “Defining the Market For Low Latency” 15 de Mayo de 2000
Autor: Alejandro Furfaro 59
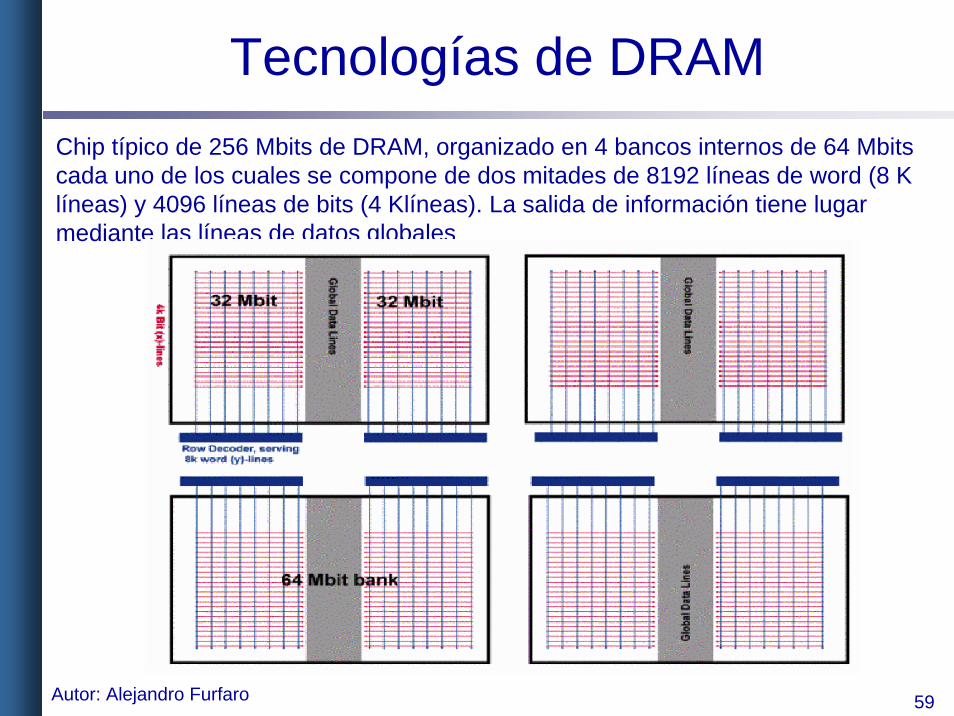
Tecnologías de DRAMChip típico de 256 Mbits de DRAM, organizado en 4 bancos internos de 64 Mbitscada uno de los cuales se compone de dos mitades de 8192 líneas de word (8 K líneas) y 4096 líneas de bits (4 Klíneas). La salida de información tiene lugar mediante las líneas de datos globales
Autor: Alejandro Furfaro 60
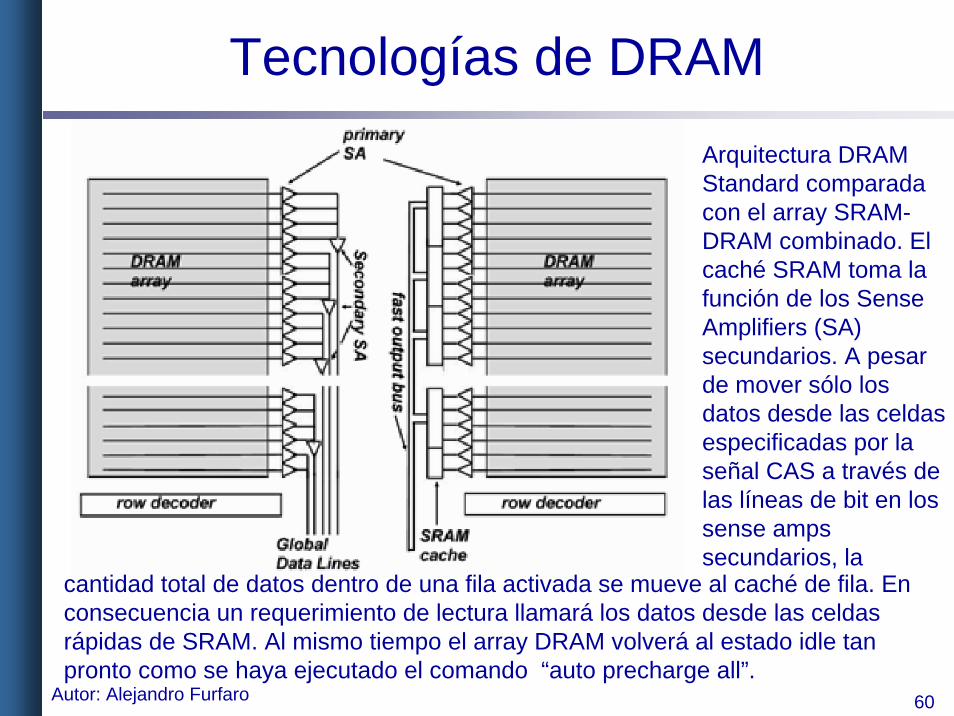
Arquitectura DRAM Standard comparada con el array SRAM-DRAM combinado. El caché SRAM toma la función de los SenseAmplifiers (SA) secundarios. A pesar de mover sólo los datos desde las celdas especificadas por la señal CAS a través de las líneas de bit en los sense ampssecundarios, la
cantidad total de datos dentro de una fila activada se mueve al caché de fila. En consecuencia un requerimiento de lectura llamará los datos desde las celdas rápidas de SRAM. Al mismo tiempo el array DRAM volverá al estado idle tan pronto como se haya ejecutado el comando “auto precharge all”.
Tecnologías de DRAM
Autor: Alejandro Furfaro 61
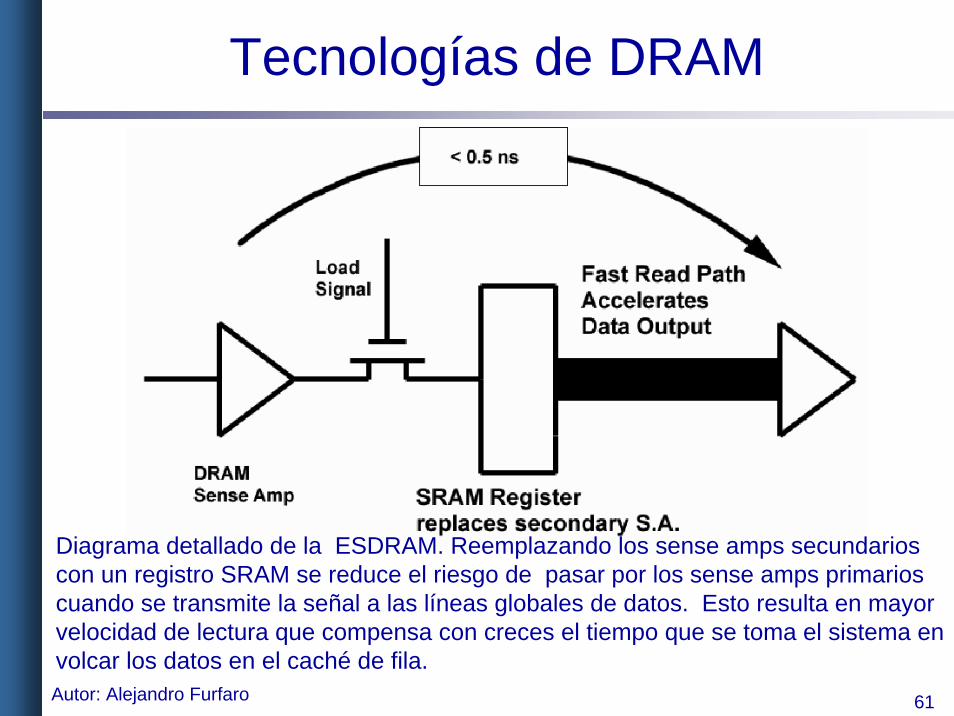
Diagrama detallado de la ESDRAM. Reemplazando los sense amps secundarios con un registro SRAM se reduce el riesgo de pasar por los sense amps primarios cuando se transmite la señal a las líneas globales de datos. Esto resulta en mayor velocidad de lectura que compensa con creces el tiempo que se toma el sistema en volcar los datos en el caché de fila.
Tecnologías de DRAM

Autor: Alejandro Furfaro 62
1 DDR or SDRAM II2 Double Data Rate SDRAM es la siguiente generación a la SDRAM. La DDR
se basa en el diseño de la SDRAM, con mejoras que suponen un aumento de la velocidad de transferencia. Como resultado de esta innovación, la DDR permite la lectura de datos tanto en la fase alta como baja del ciclo del reloj, con lo que se obtiene el doble de ancho de banda que con la SDRAM estándar. La DDR duplica la velocidad respecto a la tecnología SDRAM sin aumentar la frecuencia del reloj.
Tecnologías de DRAM