Señales y Sistemas -...
66
Señales y Sistemas Procesamiento Digital de Imágenes: Operaciones en el dominio espacial y frecuencial Departamento Bioingeniería Facultad de Ingeniería Universidad Nacional de Entre Ríos 5 de octubre de 2010 Procesamiento espaciales y frecuencial – p. 1
Transcript of Señales y Sistemas -...
Señales y Sistemas
Procesamiento Digital de Imágenes:Operaciones en el dominio espacial y frecuencial
Departamento BioingenieríaFacultad de Ingeniería
Universidad Nacional de Entre Ríos
5 de octubre de 2010
Procesamiento espaciales y frecuencial – p. 1
Conceptos básicos
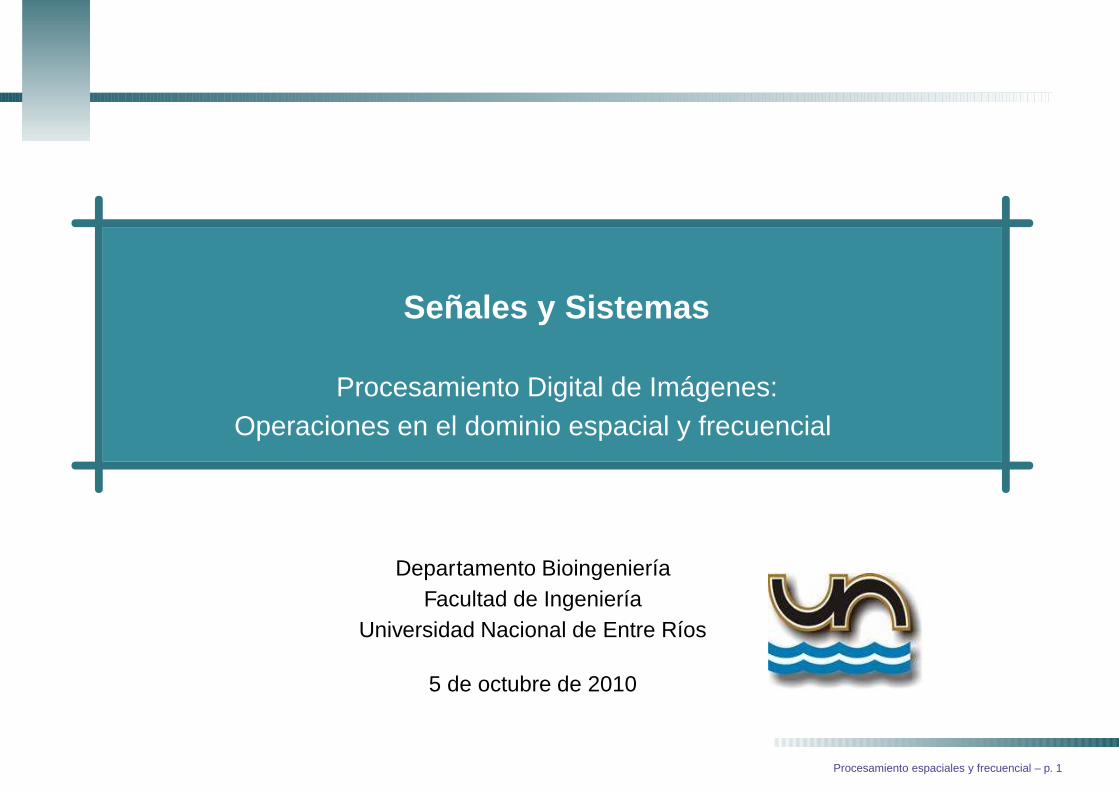
b Las operaciones de mejora de calidad (realce) son las más sencillasy utilizadas en PDI.
b Objetivo general: destacar los detalles de interés, obteniendo unasalida "visualmente mejor" que la entrada.
b Ejemplo: aumento de contraste de una imagen para que tenga"mejor aspecto".
Procesamiento espaciales y frecuencial – p. 2
Conceptos básicos
b Es un concepto muy subjetivo (¿qué procesamiento aplico?, ¿laimagen mejora?), a diferencia de las operaciones de restauración.
b Los algoritmos son concretos y de aplicación directa.b Existen dos categorías:
b Dominio del espacio: modificaciones en el plano de la imagen.
g(m,n) = T [f(m,n)]
b Dominio de la frecuencia: modificaciones en la transformada deFourier de la imagen.
G(u, v) = T [F (u, v)], donde
F (u, v) = F [f(m,n)] y G(u, v) = F [g(m,n)]
Procesamiento espaciales y frecuencial – p. 3

Transformaciones espaciales: clasificación
b Operaciones puntuales: el resultadodepende únicamente del valor deintensidad en el pixel procesado.
b Operaciones locales: el resultado esfunción del nivel de gris del pixelanalizado y de los de su entorno (vecindad).
b Operaciones globales: la imagen se transforma sin considerar lospixeles individualmente.
b Operaciones geométricas: cambio de posición de cada pixel depen-diente de la posición en la imagen original.
f(x,y) g(x,y)
x
y y
x
T
y
(x,y)
y
T
(x,y)
x
Procesamiento espaciales y frecuencial – p. 4
Operaciones locales: conceptos
b Variaciones de los niveles de gris entre pixeles de acuerdo a sudistancia:
b Variaciones rápidas: componentes de altas frecuencias.Corresponde a bordes de los componentes de la escena(aparición de transiciones claro/oscuro).
b Transiciones suaves: componentes de bajas frecuencias.Corresponde al nivel general de iluminación de la escena.
b Las vecindades de un pixel particular puede aportar información útilacerca de los niveles de iluminación o detalles de la escena en lazona.
b Muchas operaciones de realcese efectúan sobre regiones de interésalrededor de cada pixel de la imagen.El resultado es función del nivel de grisdel pixel analizado y de los de su entorno.
y
(x,y)
y
T
(x,y)
x
Procesamiento espaciales y frecuencial – p. 5

Filtrado espacial: concepto
b Modelo de la operación de realce en el dominio espacial:
g(x, y) = T (f)(x, y), con
f(x, y): entrada al sistema (imagen bajo analisis)
T : transformacion aplicada (lineal o no lineal)
g(x, y): salida del sistema (imagen realzada)
b Transformaciones lineales (extensión del concepto 1-D):b Operador T : lineal e invariante al desplazamiento (LSI).b h(x, y): respuesta al impulso del sistema.b Salida del sistema: convolución.
Procesamiento espaciales y frecuencial – p. 6

Filtrado espacial: concepto
b Convolución 2D continua:
f(x, y) ∗ h(x, y) =
∫ ∞
−∞
∫ ∞
−∞f(τx, τy)h(x − τx, y − τy)dτxdτy
b Caso discreto:
f(x, y) ∗ h(x, y) =
∞∑
s=−∞
∞∑
t=−∞
f(s, t)h(x − s, y − t)
=∞
∑
s=−∞
∞∑
t=−∞
h(s, t)f(x − s, y − t)
Procesamiento espaciales y frecuencial – p. 7

Filtrado espacial: concepto
b Para reducir la complejidad computacional:h(s, t) = 0, para (s, t) /∈ ∆, con ∆: conjunto pequeño de mxn(vecindad).
g(x, y) =a∑
s=−a
b∑
t=−b
h(s, t)f(x − s, y − t)
con a = m−12 , b = n−1
2 , x = 0, 1, . . . ,M − 1; y = 0, 1, . . . , N − 1
b Kernel de convolución: ventana de coeficientes que definen h.Tamaño arbitrario, comúnmente de 3x3 ó 5x5.
Procesamiento espaciales y frecuencial – p. 8
Filtrado espacial: concepto
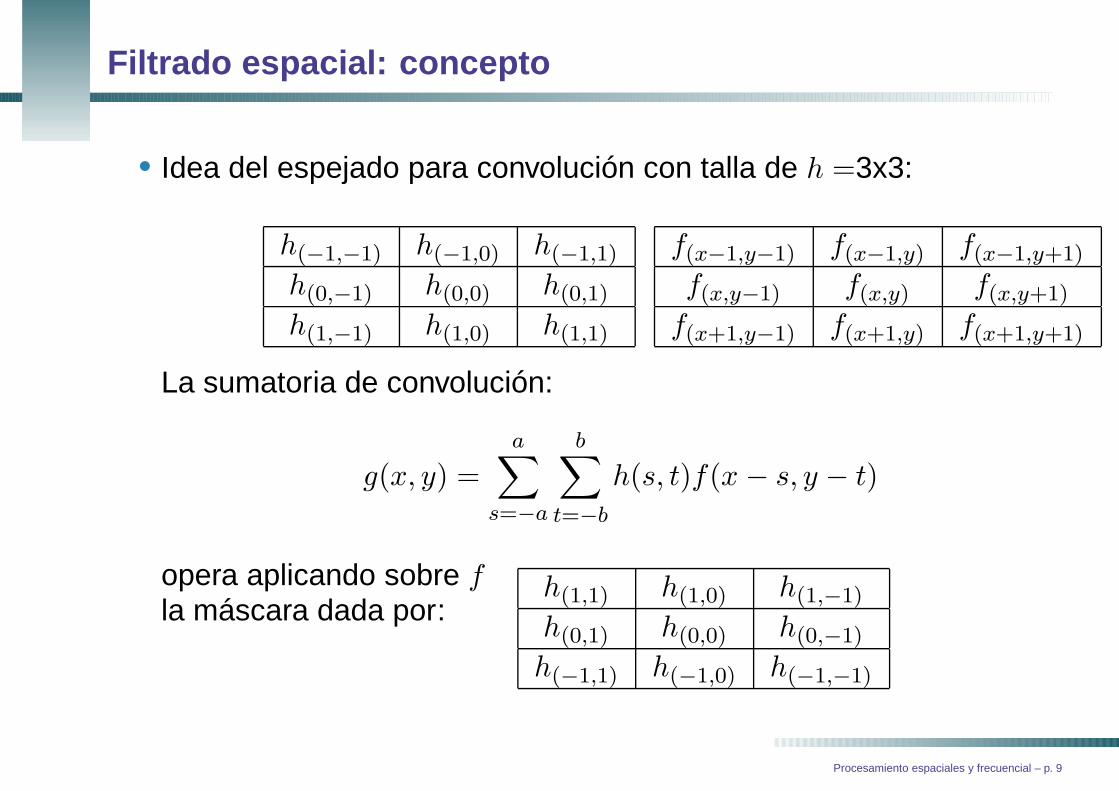
b Idea del espejado para convolución con talla de h =3x3:
h(−1,−1) h(−1,0) h(−1,1)
h(0,−1) h(0,0) h(0,1)
h(1,−1) h(1,0) h(1,1)
f(x−1,y−1) f(x−1,y) f(x−1,y+1)
f(x,y−1) f(x,y) f(x,y+1)
f(x+1,y−1) f(x+1,y) f(x+1,y+1)
La sumatoria de convolución:
g(x, y) =
a∑
s=−a
b∑
t=−b
h(s, t)f(x − s, y − t)
opera aplicando sobre fla máscara dada por:
h(1,1) h(1,0) h(1,−1)
h(0,1) h(0,0) h(0,−1)
h(−1,1) h(−1,0) h(−1,−1)
Procesamiento espaciales y frecuencial – p. 9

Filtrado espacial: concepto
b En vez de operar con el kernel de convolución h, podemos definir loscoeficientes de la máscara de filtrado w (versión rotada de h):
w1 w2 w3
w4 w5 w6
w7 w8 w9
=
w(−1,−1) w(−1,0) w(−1,1)
w(0,−1) w(0,0) w(0,1)
w(1,−1) w(1,0) w(1,1)
=
h(1,1) h(1,0) h(1,−1)
h(0,1) h(0,0) h(0,−1)
h(−1,1) h(−1,0) h(−1,−1)
y operar con la sumatoria de correlación:
g(x, y) = h(x, y)∗f(x, y) = w(x, y)⊛f(x, y) =a
∑
s=−a
b∑
t=−b
w(s, t)f(x+s, y+t)
g(x, y) = w1f(x−1,y−1) + w2f(x,y−1) + w3f(x+1,y−1)
= w4f(x−1,y) + w5f(x,y) + w6f(x+1,y)
= w7f(x−1,y+1) + w8f(x,y+1) + w9f(x+1,y+1)
Procesamiento espaciales y frecuencial – p. 10

Filtrado espacial: concepto
b Filtrado : nombre dado al desplazamiento sucesivo de la máscarapor la imagen, ya que según la elección de coeficientes de w selimitan o amplifican determinadas frecuencias espaciales.
b Para los píxeles del borde se tiene la condición de frontera:b Borde libre: máscara truncada.b Borde fijo: la imagen es extendida mediante repetición de lafila/columna, o poniendo valores de intensidad fijos.
b Borde periódico: se convoluciona agregando la fila/columnaopuesta (toroide).
Pasa-altos Enfasis de altas frecuencias
Mediana Adaptativo Variante
FILTROS
Lineales
No Lineales
de Suavizado
de Acentuado
Promediado Pasa-bajos
Procesamiento espaciales y frecuencial – p. 11

Filtros de suavizado
b El suavizado de la imagen es la reducción de variaciones rápidas(saltos bruscos) de intensidad entre píxeles vecinos.
b Los filtros de suavizado se utilizan para:b Desenfoque: preprocesamiento para eliminar detalles nodeseados (pequeños) antes de la extracción de objetos grandes.Corrección de fragmentos de líneas perdidos.
b Reducción de ruido: mediante filtros lineales o no lineales.b Máscara: kernel con pesos positivos que suman 1, por ej:
w =
0 18 0
18
12
18
0 18 0
g(x, y) = 12
[
f(x, y)+ 14 [f(x−1, y)+f(x+1, y)+f(x, y−1)+f(x, y+1)]
]
Procesamiento espaciales y frecuencial – p. 12

Filtros de suavizado
b Filtros promediadores: pesos iguales
Imagen original1
5
0 1 0
1 1 1
0 1 0
1
9
1 1 1
1 1 1
1 1 1
Procesamiento espaciales y frecuencial – p. 13
Filtros de suavizado
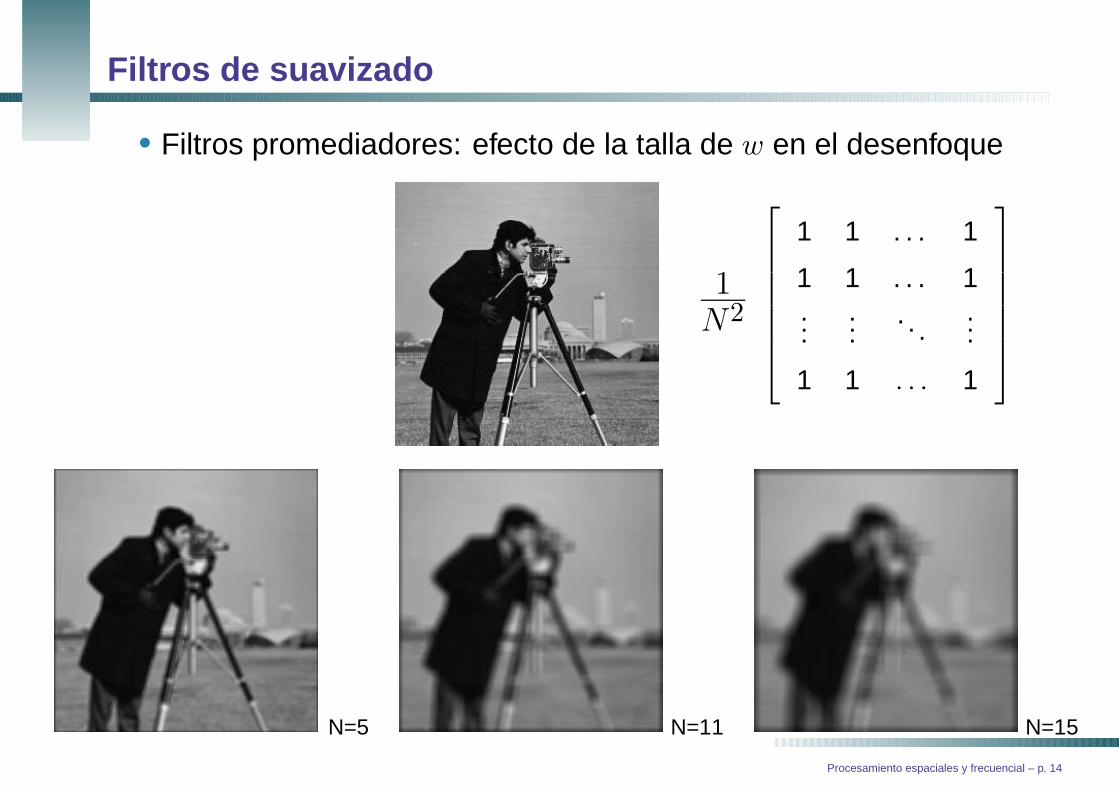
b Filtros promediadores: efecto de la talla de w en el desenfoque
N=5 N=11 N=15
1
N2
1 1 . . . 1
1 1 . . . 1...
.... . .
...
1 1 . . . 1
Procesamiento espaciales y frecuencial – p. 14

Filtros de suavizado
b Filtros promediadores: reducción de ruido
Ruido gaussiano (media=0, var=0.01)
Ruido gaussiano (media=0, var=0.05)
1
25
1 1 1 1 1
1 1 1 1 1
1 1 1 1 1
1 1 1 1 1
1 1 1 1 1
Procesamiento espaciales y frecuencial – p. 15
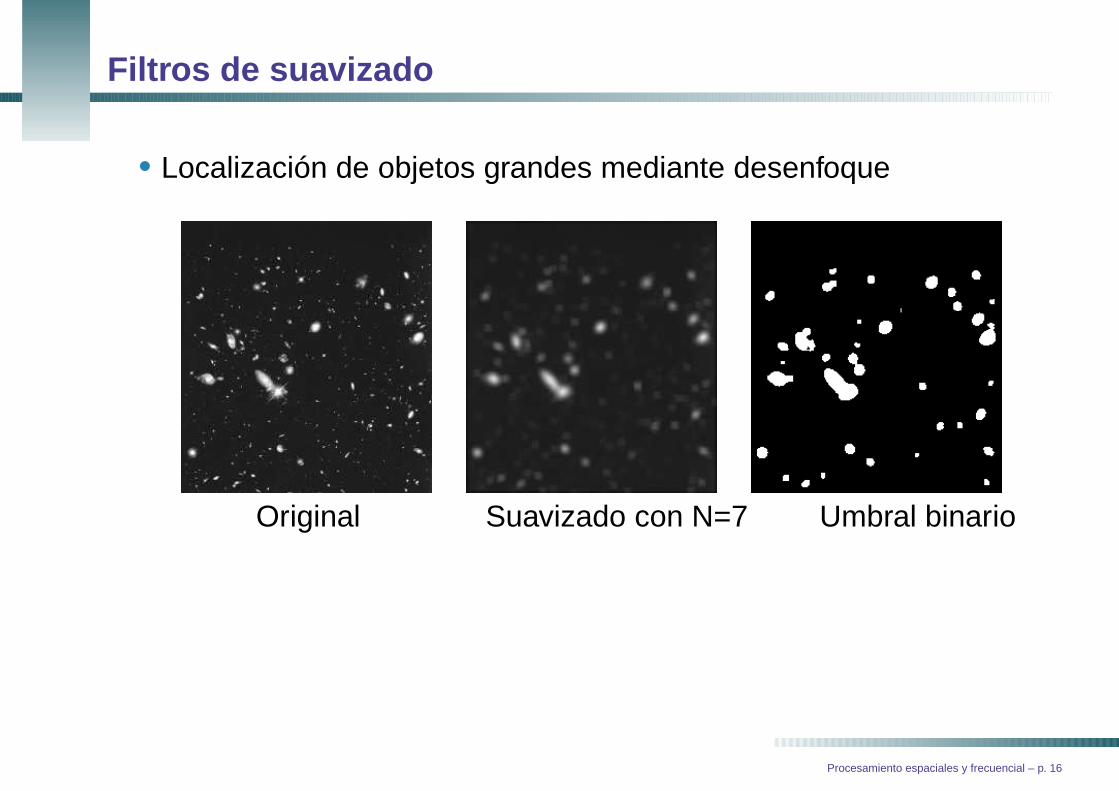
Filtros de suavizado
b Localización de objetos grandes mediante desenfoque
Original Suavizado con N=7 Umbral binario
Procesamiento espaciales y frecuencial – p. 16
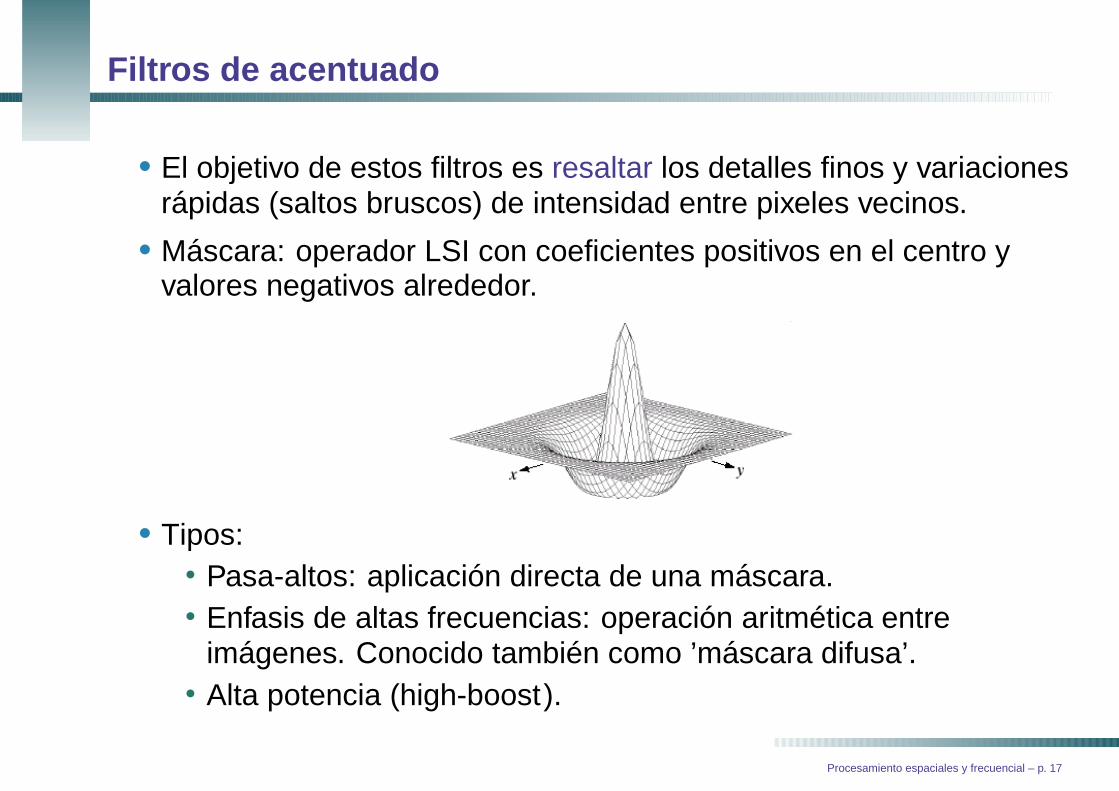
Filtros de acentuado
b El objetivo de estos filtros es resaltar los detalles finos y variacionesrápidas (saltos bruscos) de intensidad entre pixeles vecinos.
b Máscara: operador LSI con coeficientes positivos en el centro yvalores negativos alrededor.
b Tipos:b Pasa-altos: aplicación directa de una máscara.b Enfasis de altas frecuencias: operación aritmética entreimágenes. Conocido también como ’máscara difusa’.
b Alta potencia (high-boost).
Procesamiento espaciales y frecuencial – p. 17
Filtros de acentuado
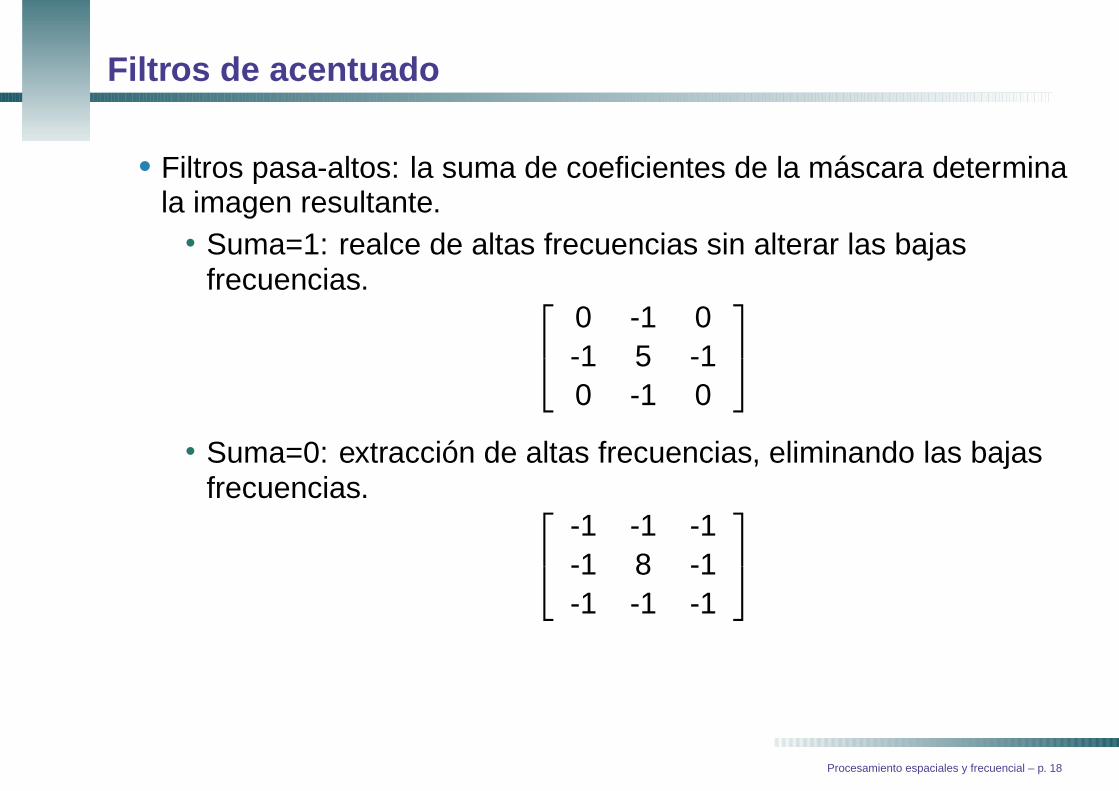
b Filtros pasa-altos: la suma de coeficientes de la máscara determinala imagen resultante.
b Suma=1: realce de altas frecuencias sin alterar las bajasfrecuencias.
0 -1 0-1 5 -10 -1 0
b Suma=0: extracción de altas frecuencias, eliminando las bajasfrecuencias.
-1 -1 -1-1 8 -1-1 -1 -1
Procesamiento espaciales y frecuencial – p. 18
Filtros de acentuado
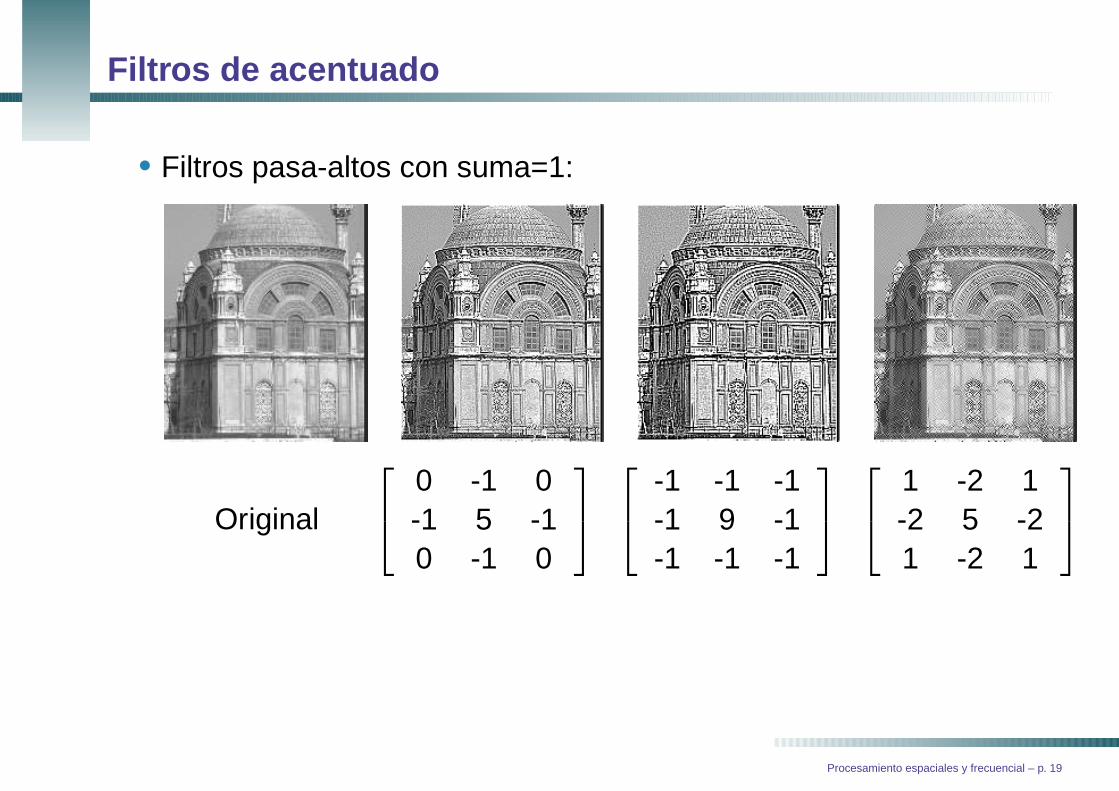
b Filtros pasa-altos con suma=1:
Original
0 -1 0-1 5 -10 -1 0
-1 -1 -1-1 9 -1-1 -1 -1
1 -2 1-2 5 -21 -2 1
Procesamiento espaciales y frecuencial – p. 19

Filtros de acentuado
b Filtros pasa-altos con suma=0: elimina zonas homogéneas
-1 -1 -1-1 9 -1-1 -1 -1
-1 -1 -1-1 8 -1-1 -1 -1
Procesamiento espaciales y frecuencial – p. 20
Filtros de acentuado
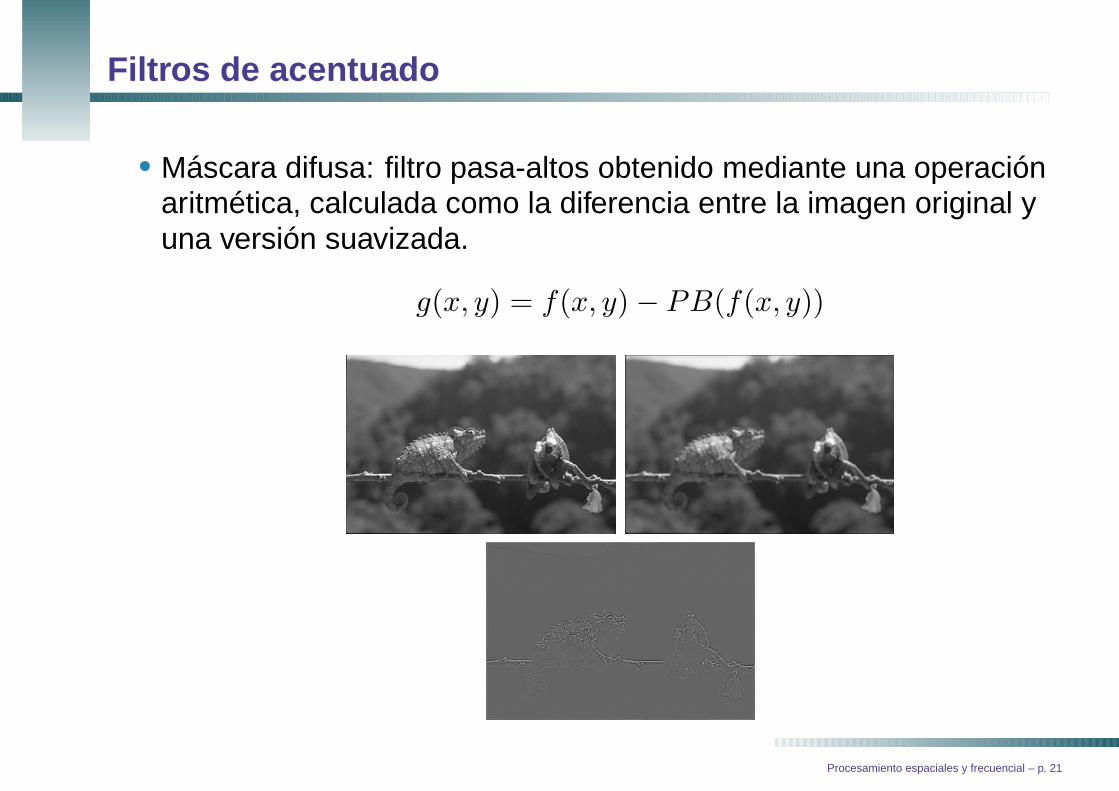
b Máscara difusa: filtro pasa-altos obtenido mediante una operaciónaritmética, calculada como la diferencia entre la imagen original yuna versión suavizada.
g(x, y) = f(x, y) − PB(f(x, y))
Procesamiento espaciales y frecuencial – p. 21
Filtros de acentuado
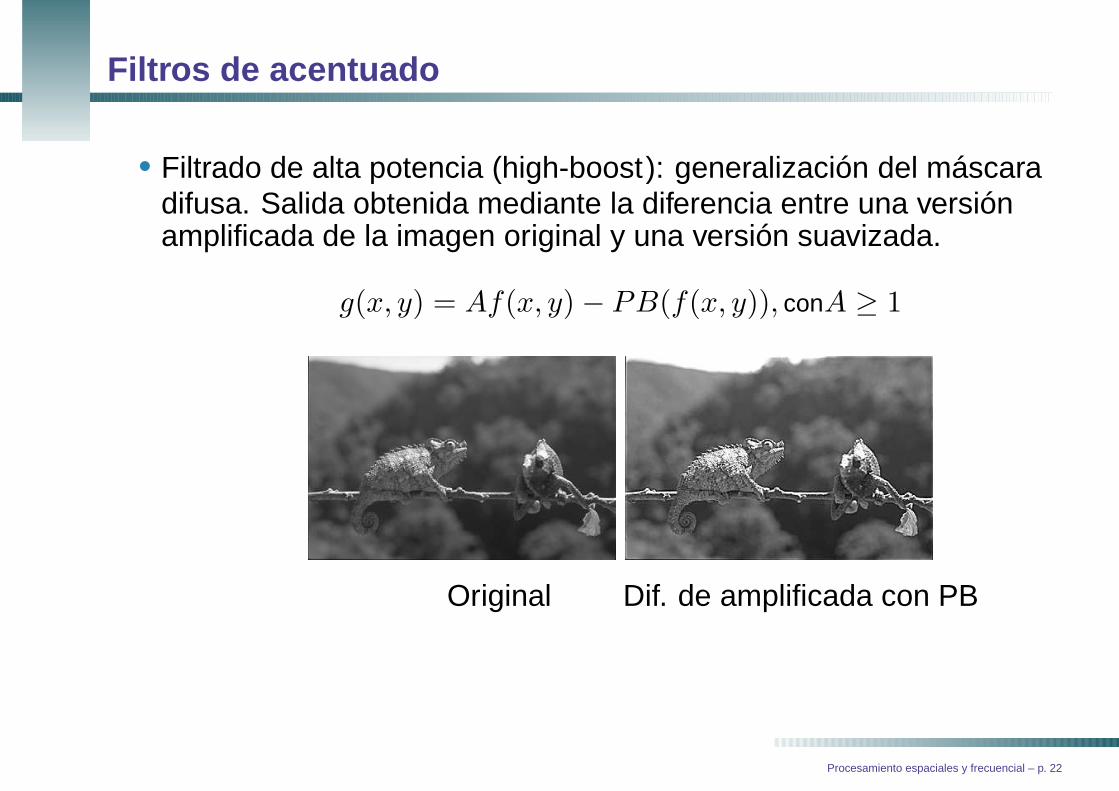
b Filtrado de alta potencia (high-boost): generalización del máscaradifusa. Salida obtenida mediante la diferencia entre una versiónamplificada de la imagen original y una versión suavizada.
g(x, y) = Af(x, y) − PB(f(x, y)), conA ≥ 1
Original Dif. de amplificada con PB
Procesamiento espaciales y frecuencial – p. 22
Temas a desarrollar
b Introducción.b Transformada bidimensional de Fourier y su inversa:
b Definición y propiedades.b Representación gráfica.b Importancia de la magnitud y la fase.
b Filtrado frecuencial:b Filtros de suavizadob Filtros de acentuado
Procesamiento espaciales y frecuencial – p. 23

Introducción
b Operaciones globales: la imagen se transforma sin considerar lospíxeles de forma individual
b Transformadas más conocidas: Fourier, discreta del coseno,Karhunen-Loève, Hough, cambio entre modelos de color.
b
b
b
b
b
b
Procesamiento espaciales y frecuencial – p. 24

Introducción
b Operaciones globales: la imagen se transforma sin considerar lospíxeles de forma individual
b Transformadas más conocidas: Fourier, discreta del coseno,Karhunen-Loève, Hough, cambio entre modelos de color.
b En el dominio espacial:b El cálculo de filtros espaciales se realiza de manera rápidacuando el kernel de convolución es pequeño.
b Al trabajar con un kernel grande, el cálculo se vuelve ineficiente.b En el dominio frecuencial:
b La convolución 2D produce el mismo resultado que lamultiplicación de espectros frecuenciales (Fourier).
b Para evitar ineficiencia en los cálculos, se convierten las señalesal dominio frecuencial y se efectúan multiplicaciones en vez deconvoluciones.
Procesamiento espaciales y frecuencial – p. 24
Transformada de Fourier
b Señales unidimensionales en tiempo discreto:
F (u) =1
M
M−1∑
x=0
f(x)e−j2πux
M , para u = 0, 1, . . . ,M − 1
=1
M
M−1∑
x=0
f(x)[
cos2πux
M− j sin
2πux
M
]
f(x) =
M−1∑
u=0
F (u)ej2πux
M , para x = 0, 1, . . . ,M − 1
Procesamiento espaciales y frecuencial – p. 25
Transformada de Fourier
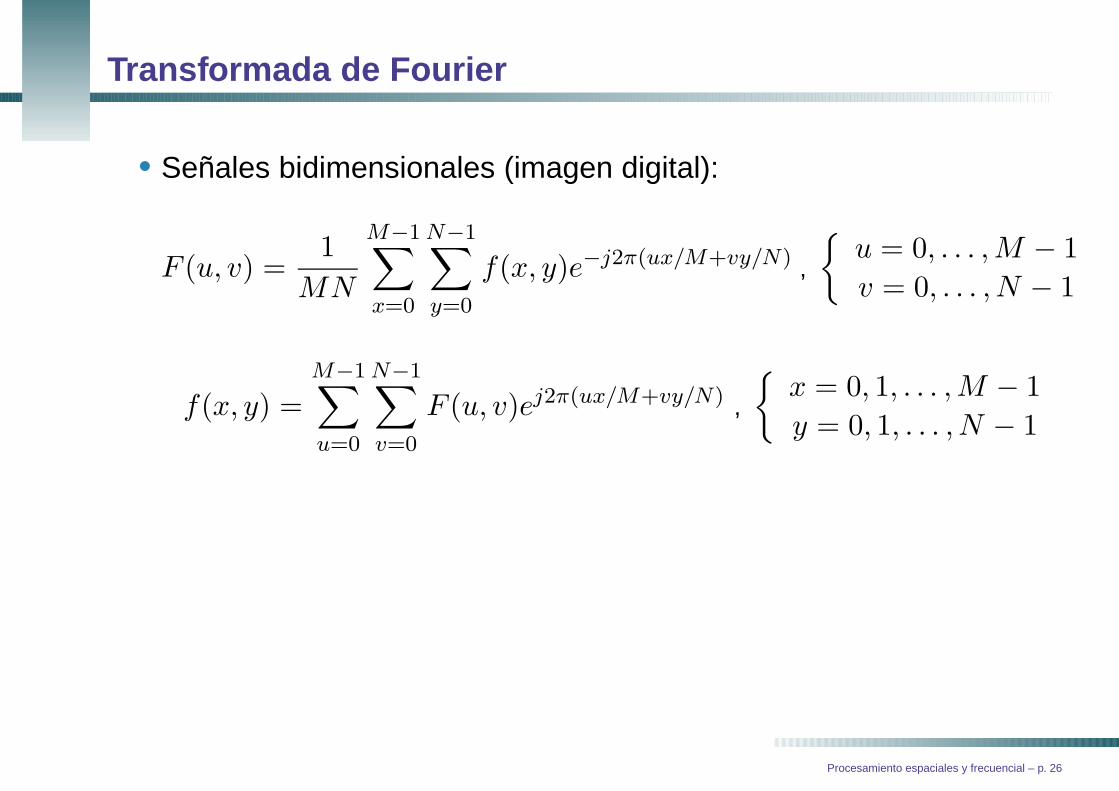
b Señales bidimensionales (imagen digital):
F (u, v) =1
MN
M−1∑
x=0
N−1∑
y=0
f(x, y)e−j2π(ux/M+vy/N) ,
{
u = 0, . . . ,M − 1
v = 0, . . . , N − 1
f(x, y) =M−1∑
u=0
N−1∑
v=0
F (u, v)ej2π(ux/M+vy/N) ,
{
x = 0, 1, . . . ,M − 1
y = 0, 1, . . . , N − 1
Procesamiento espaciales y frecuencial – p. 26

Transformada de Fourier
b Relaciones entre paso espacial y paso frecuencial:
∆u =1
M∆x,∆v =
1
N∆y
b En coordenadas polares:
F (u, v) = |F (u, v)| e−jφ(u)
donde
Magnitud (espectro) : |F (u, v)| =√
R2(u, v) + I2(u, v)
Fase : φ(u, v) = tan−1[ I(u, v)
R(u, v)
]
Procesamiento espaciales y frecuencial – p. 27

Transformada de Fourier
b Imágenes base:
Imagen de 4x4 Imagen de 16x16
Procesamiento espaciales y frecuencial – p. 28
Transformada de Fourier
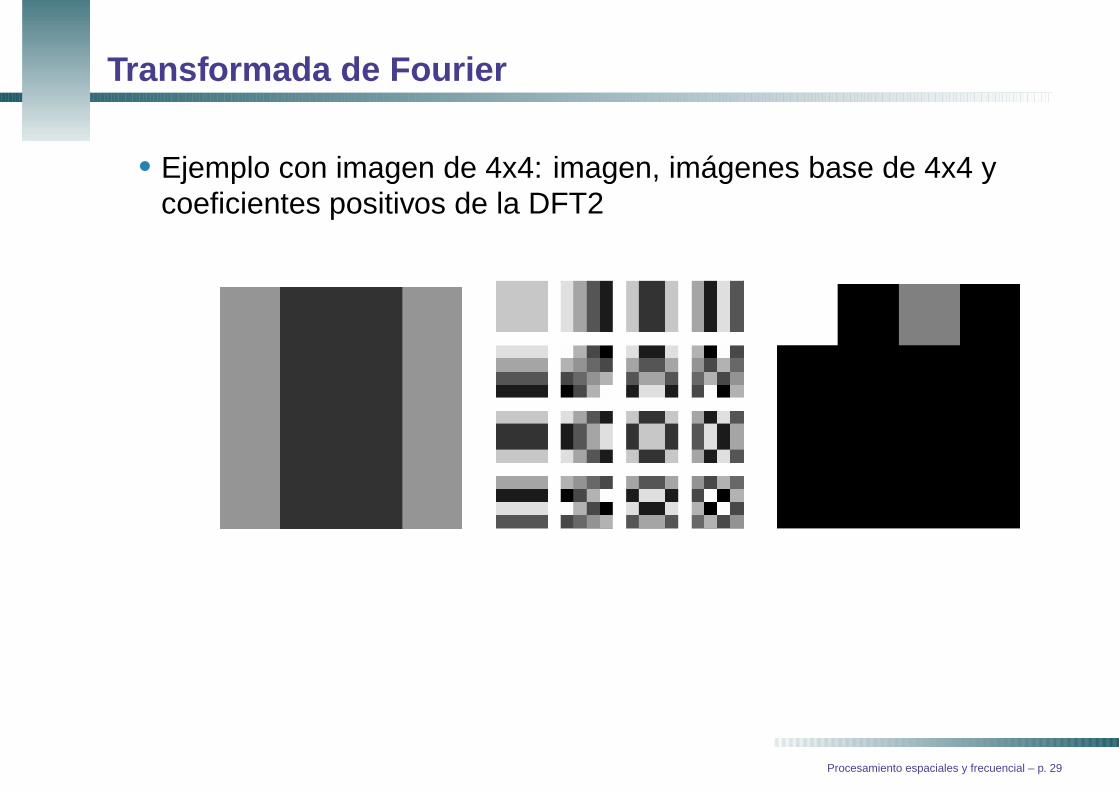
b Ejemplo con imagen de 4x4: imagen, imágenes base de 4x4 ycoeficientes positivos de la DFT2
Procesamiento espaciales y frecuencial – p. 29
Transformada de Fourier
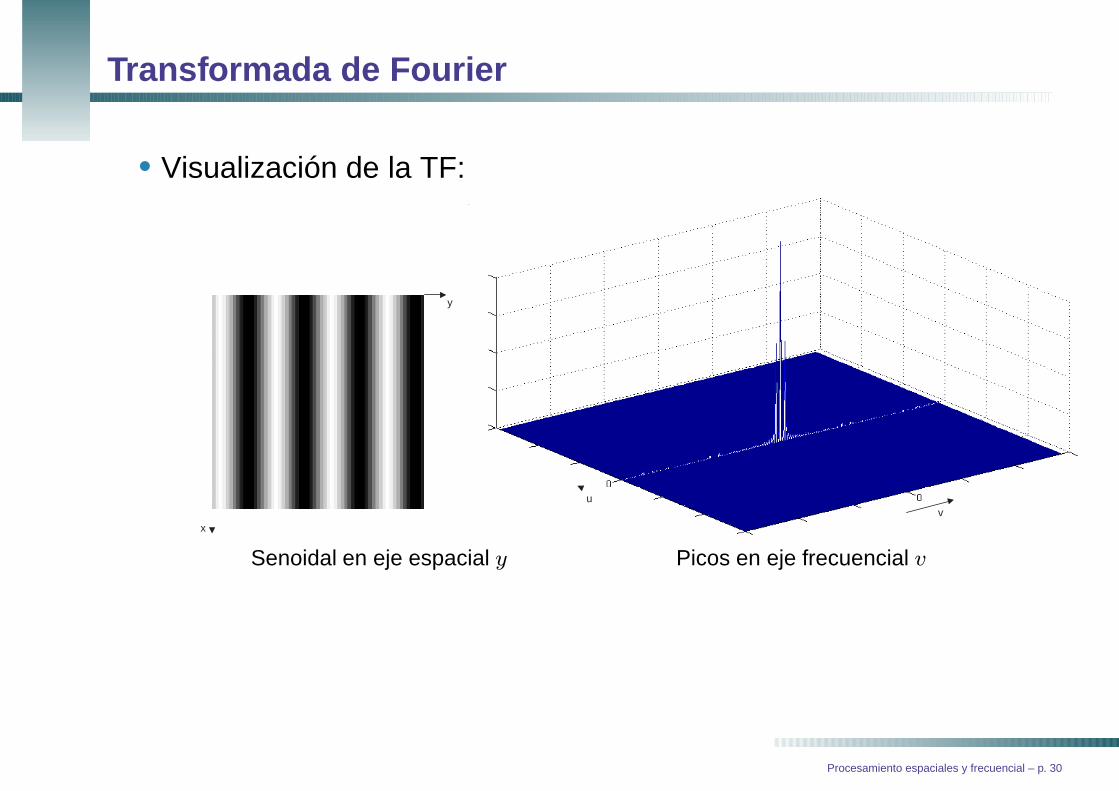
b Visualización de la TF:
x
y
u v
Senoidal en eje espacial y Picos en eje frecuencial v
Procesamiento espaciales y frecuencial – p. 30

Transformada de Fourier
b Visualización de la TF:
x
y
u v
Senoidal en eje espacial y Picos en eje frecuencial v
Procesamiento espaciales y frecuencial – p. 31

Transformada de Fourier
b Representación gráfica 1D:
Procesamiento espaciales y frecuencial – p. 32
Transformada de Fourier
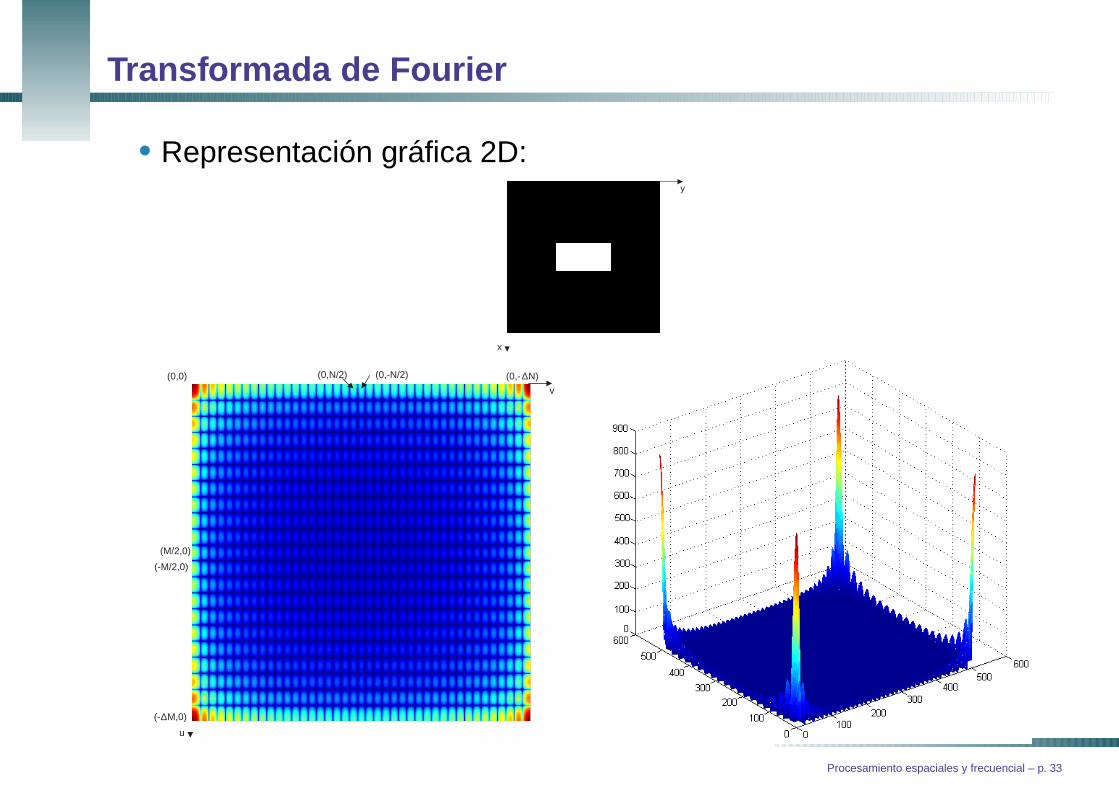
b Representación gráfica 2D:
x
y
(0,0)
(M/2,0)
v
u
(-M/2,0)
(0,N/2) (0,-N/2) (0,- ∆ N)
(- ∆ M,0)
Procesamiento espaciales y frecuencial – p. 33
Propiedades de la transformada de Fourier
b Traslación:
f(x, y)ej2π(u0x/M+v0y/N) ⇔ F (u − u0, v − v0)
f(x − x0, y − y0) ⇔ F (u, v)e−j2π(ux0/M+vy0/N)
Cuando u0 = M/2 y v0 = N/2:
ej2π(u0x/M+v0y/N) = ejπ(x+y)
= (−1)x+y
Por lo tanto:
f(x, y)(−1)x+y ⇔ F (u − M/2, v − N/2)
f(x − M/2, y − N/2) ⇔ F (u, v)(−1)u+v
Procesamiento espaciales y frecuencial – p. 34

Transformada de Fourier
b Centrado de la transformada:
x
y
u
v
Procesamiento espaciales y frecuencial – p. 35
Propiedades de la transformada de Fourier
b Periodicidad: f(x, y) y F (u, v) son funciones periódicas de períodoM y N
F (u, v) = F (u + M,v) = F (u, v + N) = F (u + M,v + N)
f(x, y) = f(x + M,y) = f(x, y + N) = f(x + M,y + N)
b Simetría conjugada: si f(x, y) es real entonces
F (u, v) = F ∗(−u,−v), y
|F (u, v)| = |F (−u,−v)|
lo que dice que el espectro es simétrico respecto al origen.
Procesamiento espaciales y frecuencial – p. 36

Propiedades de la transformada de Fourier
Procesamiento espaciales y frecuencial – p. 37

Propiedades de la transformada de Fourier
b Separabilidad:
F (u, v) =1
MN
M−1∑
x=0
N−1∑
y=0
f(x, y)e−j2π(ux/M+vy/N)
=1
MN
M−1∑
x=0
N−1∑
y=0
f(x, y)e−j2πux/Me−j2πvy/N
=1
M
M−1∑
x=0
[
1
N
N−1∑
y=0
f(x, y) e−j2πvy/N
]
e−j2πux/M
El cálculo de la TF 2D puede realizarse a través de dos operaciones,una horizontal y otra vertical, ambas 1D.
Procesamiento espaciales y frecuencial – p. 38

Propiedades de la transformada de Fourier
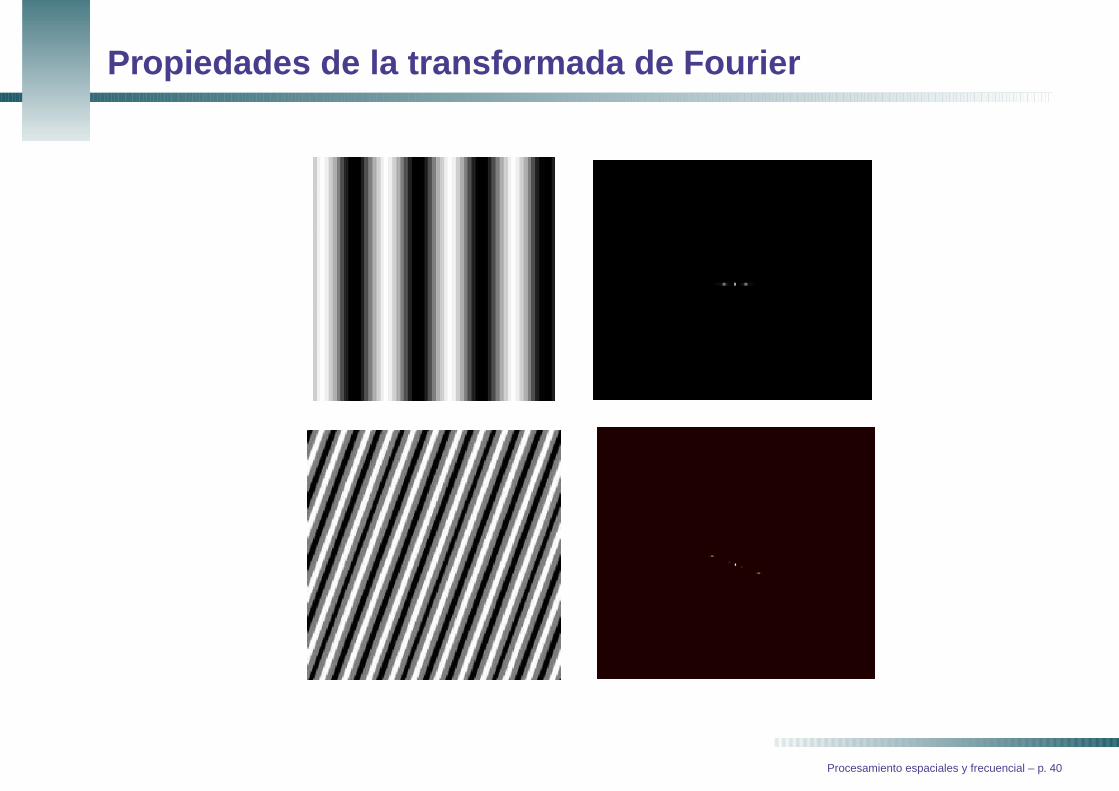
b Rotación:
En coordenadas polares:
x = r cos θ, y = r sin θ, u = ω cos ϕ, v = ω sin ϕ
Substituyendo:
f(r, θ) ⇔ F (ω,ϕ)
f(r, θ + θ0) ⇔ F (ω,ϕ + θ0)
Si f(x, y) se gira un ángulo θ0, su transformada de Fourier F (u, v) segira la misma cantidad.
Procesamiento espaciales y frecuencial – p. 39
Propiedades de la transformada de Fourier
Procesamiento espaciales y frecuencial – p. 40

Propiedades de la transformada de Fourier
b Convolución:
g(x, y) = f(x, y) ∗ h(x, y)
g(x, y) ⇔ G(u, v)
G(u, v) = F (u, v)H(u, v)
f(x, y) ∗ h(x, y) ⇔ F (u, v)H(u, v)
La TF de la salida de un sistema es igual a la multiplicación de laTF de la entrada al sistema por la TF de la respuesta del sistema alimpulso unitario.
Procesamiento espaciales y frecuencial – p. 41

Representación gráfica de la TF
Procesamiento espaciales y frecuencial – p. 42
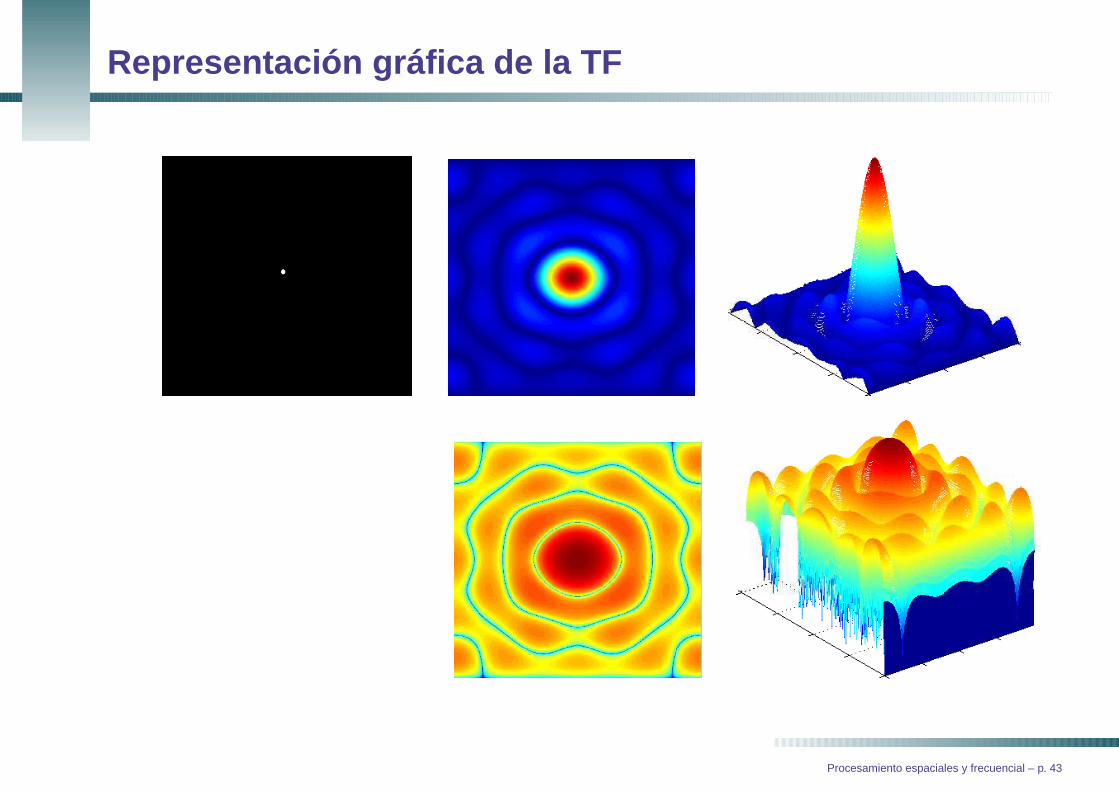
Representación gráfica de la TF
Procesamiento espaciales y frecuencial – p. 43

Representación gráfica de la TF
Procesamiento espaciales y frecuencial – p. 44

Representación gráfica de la TF
Procesamiento espaciales y frecuencial – p. 45

Representación gráfica de la TF
Procesamiento espaciales y frecuencial – p. 46

Representación gráfica de la TF
Procesamiento espaciales y frecuencial – p. 47

Aplicación en OCR
b Algoritmos de búsqueda de línea base horizontal: necesidad de re-orientar pequeñas rotaciones en el escaneado:
Procesamiento espaciales y frecuencial – p. 48
Importancia de la fase
b Consecuencias del análisis de Fourier:b La mayoría de las características más importantes de una señalse preservan sólo si la información de la fase se mantiene.
b Cuando una señal es de longitud finita, la información de la fasees suficiente para reconstruir una señal (podemos ver la imagena grandes rasgos).
b Imagen de sólo módulo: la TF tiene como módulo el de la imagenoriginal, y fase nula.
b Imagen de sólo fase: la TF tiene módulo unidad (o promediado) yfase igual a la de la imagen original.
b Las características de la imagen original son identificables en una im-agen de sólo fase, ya que la inteligibilidad está asociada a los detalles(puntos, bordes, etc.)
Procesamiento espaciales y frecuencial – p. 49

Importancia de la fase
Imagen Módulo Fase
Procesamiento espaciales y frecuencial – p. 50

Importancia de la fase
Imagen Sólo módulo Sólo fase
Procesamiento espaciales y frecuencial – p. 51

Importancia de la fase
Experimento de Oppenheim
f(x, y) g(x, y)
F−1
»
|F (u, v)| ∗ exp“
i∠G(u, v)”
–
F−1
»
|G(u, v)| ∗ exp“
i∠F (u, v)”
–
Procesamiento espaciales y frecuencial – p. 52

Filtrado frecuencial
b En el dominio espacial: la convolución puede secomputacionalmente ineficiente cuando aumenta la talla del filtro.
b Filtrado en frecuencia: utilización de la propiedad decorrespondencia entre convolución espacial y producto de TF
b Proceso:1. Generar una función H(u, v) (función de transferencia del filtro)2. Calcular la TF F (u, v) de la imagen3. Multiplicar elemento a elemento las funciones4. Calcular la TF inversa5. Obtener la parte real
Procesamiento espaciales y frecuencial – p. 53
Filtros de suavizado
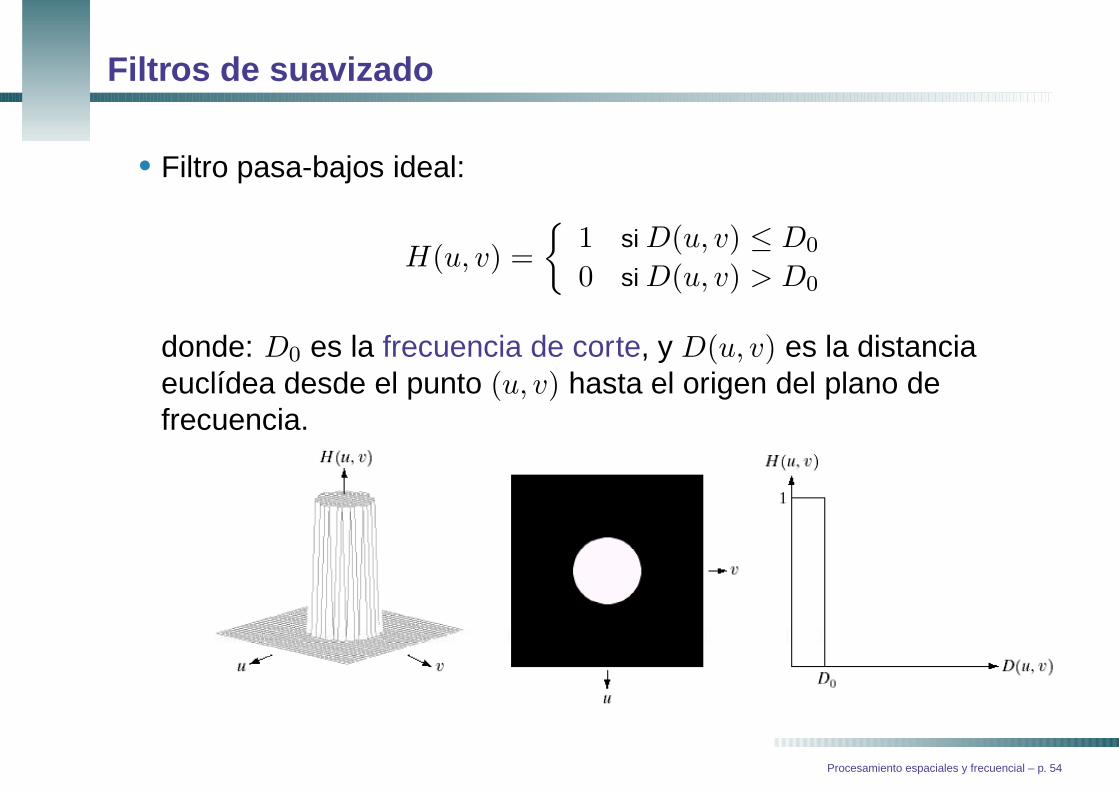
b Filtro pasa-bajos ideal:
H(u, v) =
{
1 si D(u, v) ≤ D0
0 si D(u, v) > D0
donde: D0 es la frecuencia de corte, y D(u, v) es la distanciaeuclídea desde el punto (u, v) hasta el origen del plano defrecuencia.
Procesamiento espaciales y frecuencial – p. 54
Filtros de suavizado
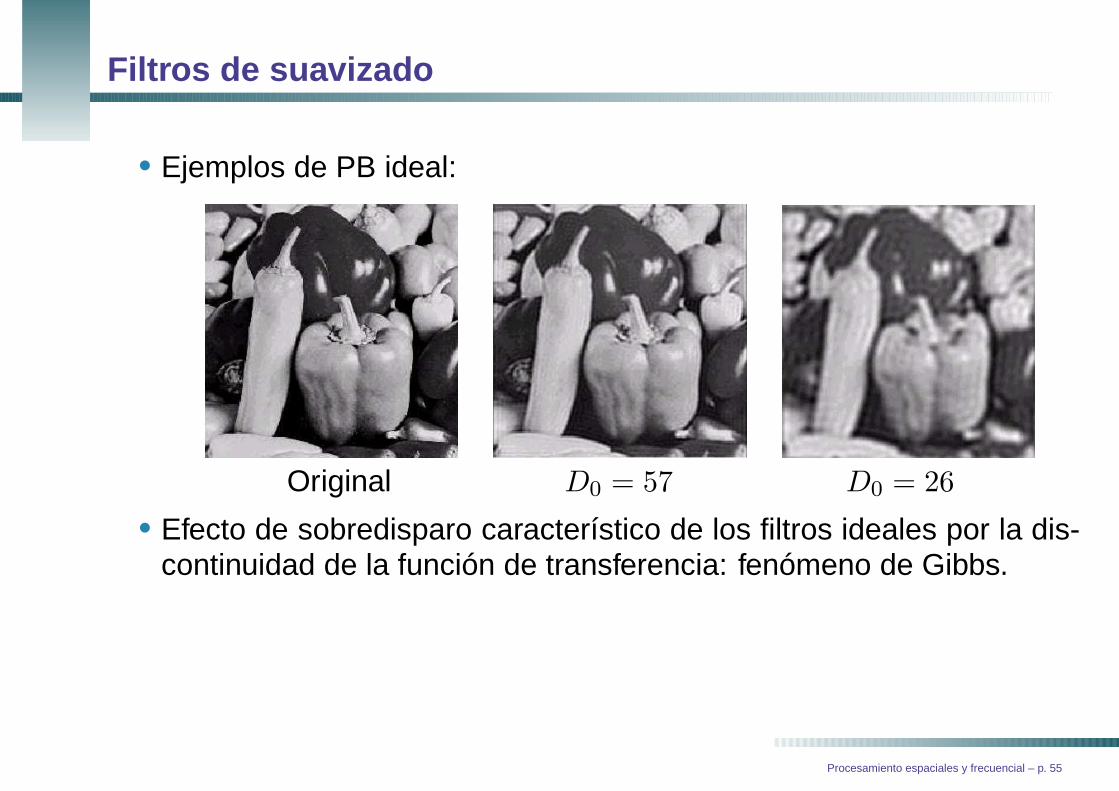
b Ejemplos de PB ideal:
Original D0 = 57 D0 = 26b Efecto de sobredisparo característico de los filtros ideales por la dis-continuidad de la función de transferencia: fenómeno de Gibbs.
Procesamiento espaciales y frecuencial – p. 55

Filtros de suavizado
b Fenómeno de Gibbs: oscilaciones presentes en la imagen filtradaoriginadas en el cálculo de la TF inversa.
b La aparición de oscilaciones se explica claramente en el dominioespacial:
Imagen de H(u, v) h(x, y) Imagen de h(x, y)
b Solución: multiplicación del filtro ideal por una ventana suavizante(Hamming, Kaiser, etc.), o generar una función H(u, v) con caídasuave.
Procesamiento espaciales y frecuencial – p. 56
Filtros de suavizado
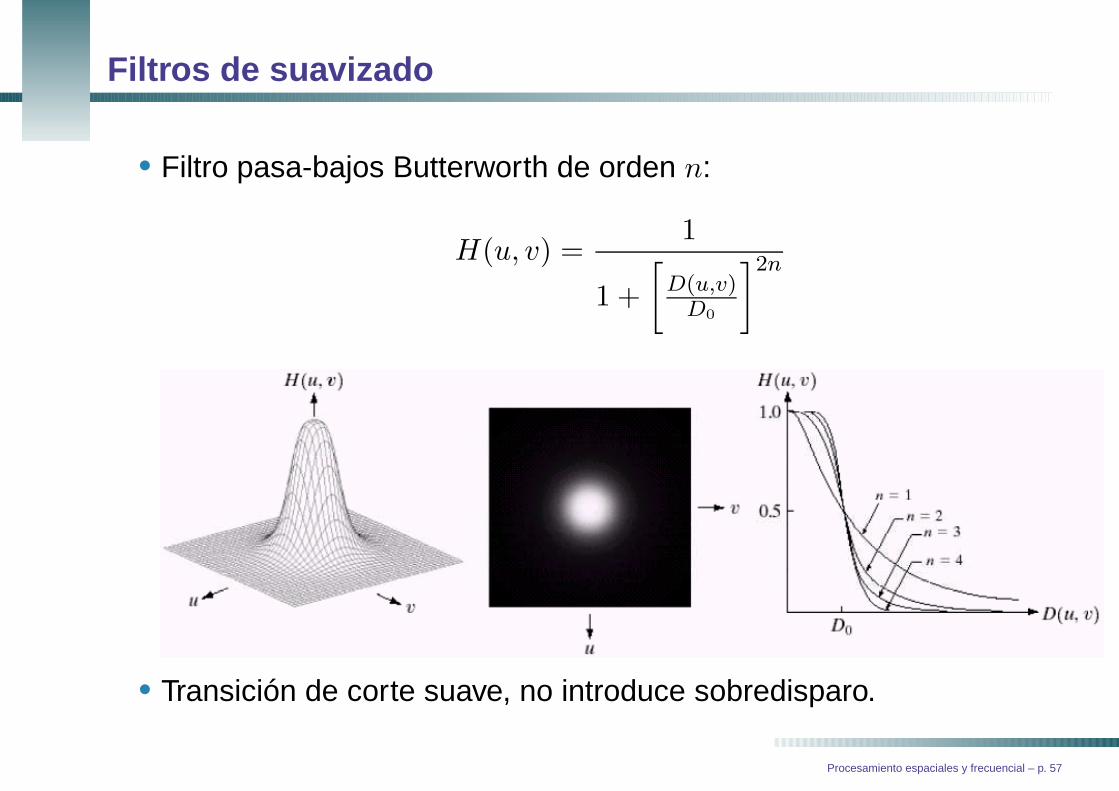
b Filtro pasa-bajos Butterworth de orden n:
H(u, v) =1
1 +
[
D(u,v)D0
]2n
b Transición de corte suave, no introduce sobredisparo.
Procesamiento espaciales y frecuencial – p. 57
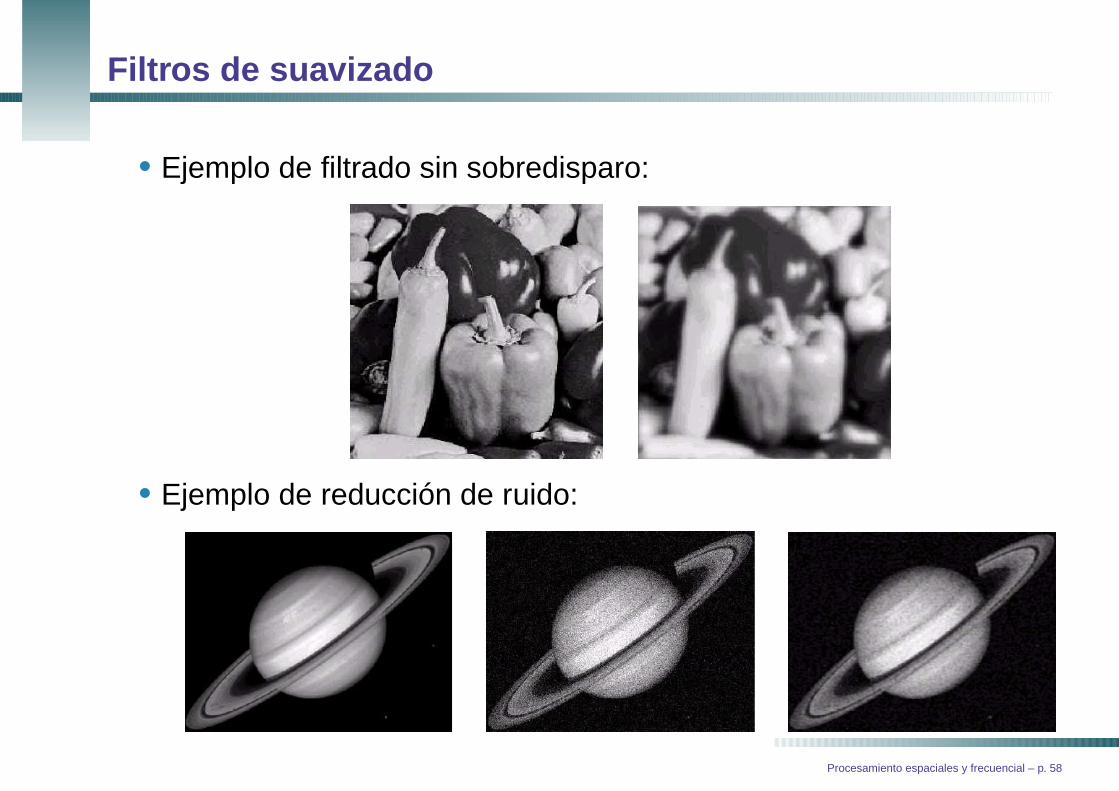
Filtros de suavizado
b Ejemplo de filtrado sin sobredisparo:
b Ejemplo de reducción de ruido:
Procesamiento espaciales y frecuencial – p. 58

Filtros de suavizado
b Filtro pasa-bajos gaussiano:
H(u, v) = e−D2(u,v)/2σ2
b σ: medida de la dispersión de la curva gaussiana.b Propiedad: la TF inversa de un filtro gaussiano también es gaussiana.Ventaja: no tiene sobredisparo.
Procesamiento espaciales y frecuencial – p. 59
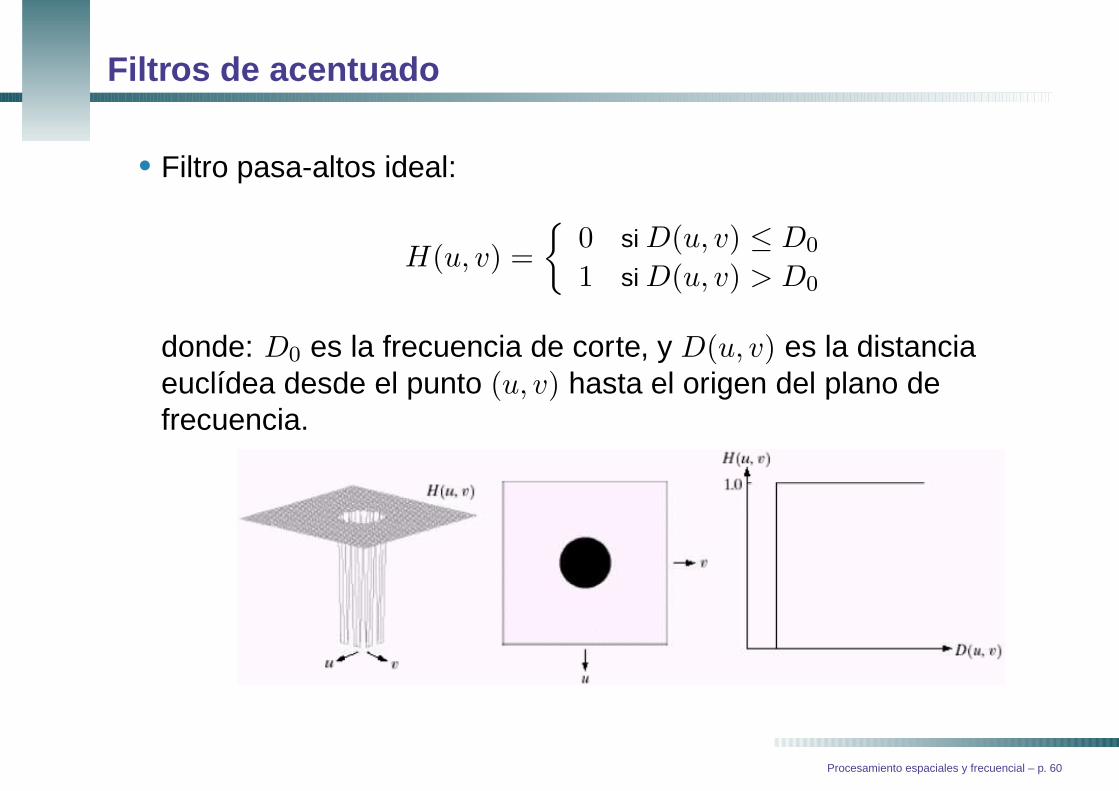
Filtros de acentuado
b Filtro pasa-altos ideal:
H(u, v) =
{
0 si D(u, v) ≤ D0
1 si D(u, v) > D0
donde: D0 es la frecuencia de corte, y D(u, v) es la distanciaeuclídea desde el punto (u, v) hasta el origen del plano defrecuencia.
Procesamiento espaciales y frecuencial – p. 60

Filtros de acentuado
b Ejemplos de PA ideal:
Original D0 = 18 D0 = 26b Al igual que en el filtro pasa-bajos, se observa la aparición del fenó-meno de Gibbs.
Procesamiento espaciales y frecuencial – p. 61

Filtros de suavizado
b Filtro pasa-altos Butterworth de orden n:
H(u, v) =1
1 +
[
D0
D(u,v)
]2n
b Al igual que el filtro PB, para orden bajo no introduce sobredisparo(n < 20).
Procesamiento espaciales y frecuencial – p. 62
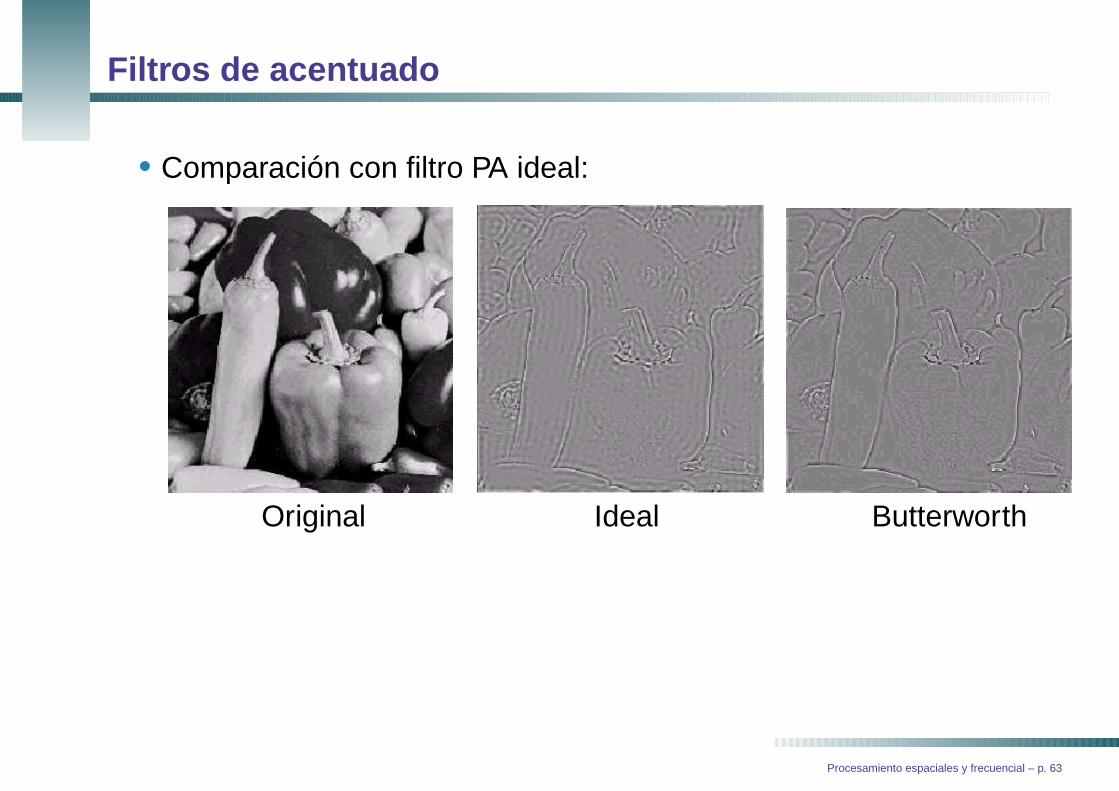
Filtros de acentuado
b Comparación con filtro PA ideal:
Original Ideal Butterworth
Procesamiento espaciales y frecuencial – p. 63
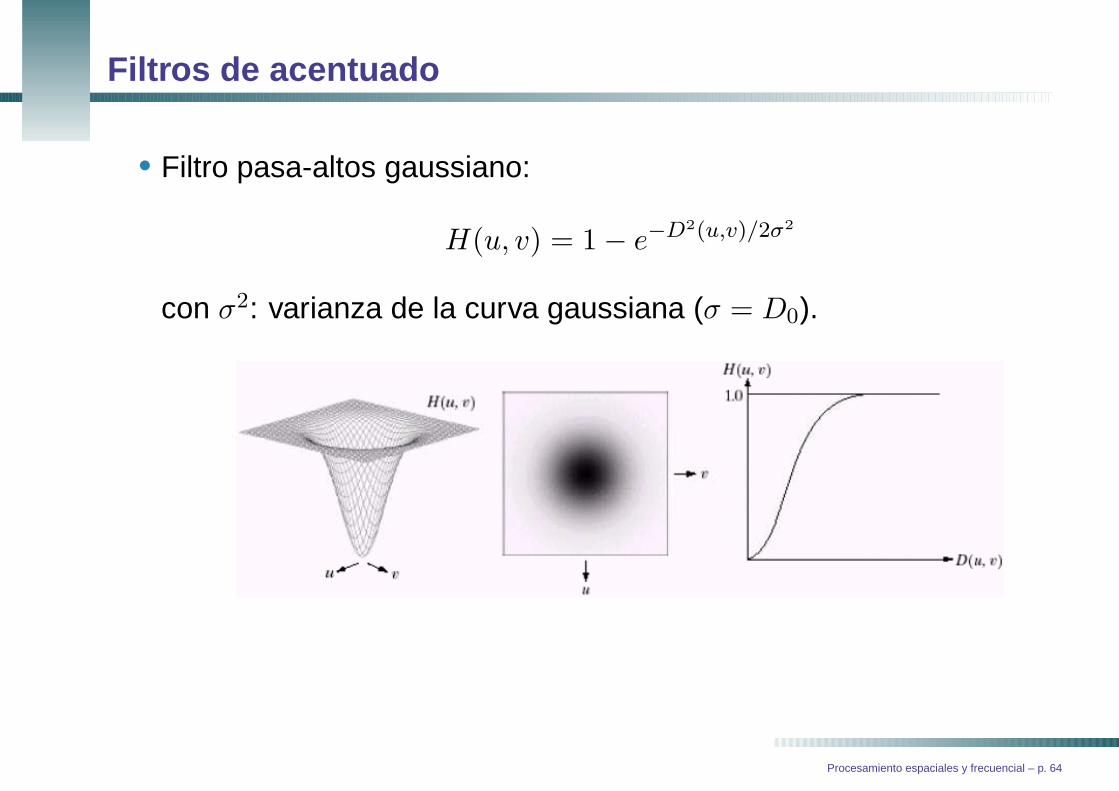
Filtros de acentuado
b Filtro pasa-altos gaussiano:
H(u, v) = 1 − e−D2(u,v)/2σ2
con σ2: varianza de la curva gaussiana (σ = D0).
Procesamiento espaciales y frecuencial – p. 64
Fin de la teoría
Procesamiento espaciales y frecuencial – p. 65