Robot Hexapodo Como Plataforma de Investigacion y Desarrollo
12
1 “ROBOT HEXÁPODO COMO PLATAFORMA DE INVESTIGACIÓN Y DESARROLLO” CENTRO DE INVESTIGACIÓN Y DESARROLLO EN INGENIERÍA UNIVERSIDAD TECNOLÓGICA DEL PERÚ ALVARADO RIMAS, CHRISTIAN ASTO MUÑOZ HANS LETTLY CAMPOS RUIZ ROBERTO ESTEBAN RESUMEN Una plataforma de desarrollo de robótica móvil es una herramienta para experimentación e investigación en ambientes reales. Las plataformas robóticas son usadas frecuentemente en el desarrollo de proyectos de investigación aplicada a diversos sistemas como: la prueba y validación de sistemas de control o para examinar algoritmos de navegación autónoma o semi - autónoma con diferentes tipos de sensores, actuadores y dispositivos electrónicos montados sobre un robot. El presente proyecto consiste en la implementación de un Robot Hexápodo usando: una plataforma embebida basado en un dispositivo lógico reconfigurable (FPGA), el cual es configurado mediante un lenguaje de descripción de hardware (VHDL); un terminal de comunicación inalámbrica (Bluetooth), entre el robot y un servidor externo (computador con una interfaz de usuario desarrollado en software libre o un dispositivo móvil); sensores para la detección de obstáculos (de contacto y ultrasonido) y cambios de estabilidad en el cuerpo del robot (acelerómetro); el análisis estático y dinámico de la estructura mecánica del robot y la aplicación de técnicas de control. El objetivo del proyecto es la implementación de una plataforma robótica móvil de investigación y desarrollo de bajo costo y altas prestaciones. Palabras claves: Plataforma de Desarrollo, Robot Hexápodo, FPGA. ABSTRAC A development platform for mobile robotics is a tool for experimentation and research in real environments. The robotic platforms are frequently used in the development of applied research projects to various systems such as the testing and validation of control systems or to examine autonomous navigation algorithms or semi - autonomous with different types of sensors, actuators and electronic devices mounted on a robot. This project involves the implementation of a Hexapod Robot using: an embedded platform based on reconfigurable logic device (FPGA), which is configured by a hardware description language (VHDL), a wireless communication terminal (Bluetooth) between the robot and an external server (computer with a user interface developed in free software or mobile device) sensors to detect obstacles (of contact and ultrasound) and changes of stability in the body of the robot (accelerometer), the static and dynamic analysis of the mechanical structure of the robot and the application of control techniques. The project objective is the implementation of a mobile robotic platform for research and development of low cost and high performance. Keywords: Development Platform, Hexapod Robot, FPGA.
-
Upload
jossy-h-atoche -
Category
Documents
-
view
409 -
download
2
Transcript of Robot Hexapodo Como Plataforma de Investigacion y Desarrollo

1
“ROBOT HEXÁPODO COMO PLATAFORMA DE INVESTIGACIÓN Y DESARROLLO”
CENTRO DE INVESTIGACIÓN Y DESARROLLO EN INGENIERÍA UNIVERSIDAD TECNOLÓGICA DEL PERÚ
ALVARADO RIMAS, CHRISTIAN ASTO MUÑOZ HANS LETTLY CAMPOS RUIZ ROBERTO ESTEBAN
RESUMEN
Una plataforma de desarrollo de robótica móvil es una herramienta para experimentación e investigación en ambientes reales. Las plataformas robóticas son usadas frecuentemente en el desarrollo de proyectos de investigación aplicada a diversos sistemas como: la prueba y validación de sistemas de control o para examinar algoritmos de navegación autónoma o semi - autónoma con diferentes tipos de sensores, actuadores y dispositivos electrónicos montados sobre un robot. El presente proyecto consiste en la implementación de un Robot Hexápodo usando: una plataforma embebida basado en un dispositivo lógico reconfigurable (FPGA), el cual es configurado mediante un lenguaje de descripción de hardware (VHDL); un terminal de comunicación inalámbrica (Bluetooth), entre el robot y un servidor externo (computador con una interfaz de usuario desarrollado en software libre o un dispositivo móvil); sensores para la detección de obstáculos (de contacto y ultrasonido) y cambios de estabilidad en el cuerpo del robot (acelerómetro); el análisis estático y dinámico de la estructura mecánica del robot y la aplicación de técnicas de control. El objetivo del proyecto es la implementación de una plataforma robótica móvil de investigación y desarrollo de bajo costo y altas prestaciones.
Palabras claves: Plataforma de Desarrollo, Robot Hexápodo, FPGA.
ABSTRAC
A development platform for mobile robotics is a tool for experimentation and research in real environments. The robotic platforms are frequently used in the development of applied research projects to various systems such as the testing and validation of control systems or to examine autonomous navigation algorithms or semi -autonomous with different types of sensors, actuators and electronic devices mounted on a robot. This project involves the implementation of a Hexapod Robot using: an embedded platform based on reconfigurable logic device (FPGA), which is configured by a hardware description language (VHDL), a wireless communication terminal (Bluetooth) between the robot and an external server (computer with a user interface developed in free software or mobile device) sensors to detect obstacles (of contact and ultrasound) and changes of stability in the body of the robot (accelerometer), the static and dynamic analysis of the mechanical structure of the robot and the application of control techniques. The project objective is the implementation of a mobile robotic platform for research and development of low cost and high performance.
Keywords: Development Platform, Hexapod Robot, FPGA.

2
INTRODUCCIÓN
La robótica cada vez avanza a pasos agigantados donde podemos ver que casi medio año se muestra un robot el cual tiene movimientos muy autónomos en su funcionamiento propio, sin embargo es necesario tener en cuenta los proyectos de robótica a los cuales se les puede considerar básicos, o bien si se les puede dar alguna otra aplicación. Es importante tener en cuenta que tanto investigadores como alumnos de las diferentes universidades vean interesados en modelos robóticos conocidos para hacer nueva investigación e innovar en métodos ya existentes.
Se ha observado que las plataformas de desarrollo de robótica son utilizadas comúnmente en universidades y centros de investigación nacionales y extranjeras como un lugar donde probar y validar sus algoritmos desarrollados además de buscar aplicaciones de estas plataformas a la sociedad.
PLANTEAMIENTO DE ESTUDIO
En la actualidad, el diseño, la construcción y el control de un robot (móvil o no) está enfocado a la aplicación concreta a la que se desea destinar el mismo. El problema de este tipo de actuación surge cuando la aplicación a la que se destinó originalmente se modifique a otra diferente o bien se desea simplemente que las características del robot cambien. Como consecuencia es necesario hacer modificaciones significativas a la plataforma (robot) lo que significa un costo económico adicional y una posible disminución de la eficiencia del mismo.
En el mercado existen diferentes plataformas de desarrollo, pero que tienen como inconveniente principal el
elevado costo de adquisición y las limitaciones en cuanto a capacidad y rendimiento de sus tarjetas de control.
La solución que se propone es el diseño de una plataforma robótica móvil genérica, útil para labores de enseñanza e investigación de bajo costo y altas prestaciones, basada en una plataforma embebida con un dispositivo lógico reconfigurable (FPGA); el cual (debido a su paralelismo) aporta una alta capacidad y velocidad en desarrollo de algoritmos a medida para el funcionamiento del robot.
PLANTEAMIENTO DE OBJETIVOS
Objetivo general
El objetivo principal del proyecto es el diseño e implementación electrónica y mecánica de un robot hexápodo como una plataforma libre de investigación y desarrollo de robótica móvil con la capacidad de evaluar diferentes algoritmos de control como el usuario sea capaz de plantear.
Objetivos específicos
Diseñar un sistema mecánico preciso y agradable para la adaptación a cualquier área de investigación y/o desarrollo.
Construir un sistema mecánico con un material resistente para el alargue del tiempo de vida del robot.
Usar una FPGA (Field Programmable Gate Array) como controlador del robot; configurado con un lenguaje de descripción de hardware (VHDL).
Implementar una comunicación inalámbrica (Bluetooth) entre el robot y un servidor externo

3
(dispositivo móvil o computador) para el monitoreo o intercambio de información.
Diseñar el hardware electrónico que contenga la tarjeta FPGA, con adaptadores de señal para la comunicación con los servomotores, y sockets de expansión para acoplar otros dispositivos a la tarjeta (sensores, memoria externa, etc.).
Diseñar una interfaz grafica de usuario mediante el uso de un software libre como muestra de la facilidad de comunicación con el robot.
Analizar la cinemática y dinámica de la estructura mecánica del robot.
Realizar aplicaciones como muestra de las capacidades de la plataforma desarrollada.
Poner toda la información en cuanto al proyecto en una pagina web para el libre acceso a los planos, cálculos y procedimientos para la implementación del mismo.
HIPÓTESIS GENERAL
Con base en el planteamiento de estudio, se establece la siguiente hipótesis:
La implementación de un robot hexápodo como plataforma de robótica móvil facilitara el proceso de aprendizaje, investigación y aplicación de las áreas de la robótica a la realidad.
PLANTEAMIENTO DE HIPÓTESIS
Hipótesis específico
Se reducirá el tiempo de implementación de proyecto debido a la existencia de una estructura mecánica y un hardware electrónico.
Facilitará la adaptación a cualquier interfaz grafica por su facilidad de comunicación.
MARCO TEÓRICO
FPGA:
Una FPGA (del inglés Field Programmable Gate Array) es un dispositivo semiconductor que contiene bloques de lógica cuya interconexión y funcionalidad puede ser configurada 'in situ' mediante un lenguaje de descripción especializado. La lógica programable puede reproducir desde funciones tan sencillas como las llevadas a cabo por una puerta lógica o un sistema combinacional hasta complejos sistemas en un chip.
FPGA como controlador:
El uso de una FPGA como controlador se debe a que este dispositivo posee bloques de lógica programable, los cuales son más rápidos, tienen mayor flexibilidad y pueden realizar procesos en simultáneo a compararación de un microntrolador que realiza los procesos secuencialmente.
Para la elección de una placa FPGA se tuvo que tener en cuenta los requerimientos que presentaba el desarrollo del proyecto, dentro de las opciones en el mercado elegimos tarjeta DE0-Nano con FPGA Cyclone IV de Altera (Figura 1).

4
Figura Nº 01: Diagrama FPGA Cyclone IV.
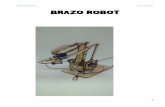
Servomotor:
El servomotor es un dispositivo que combina una parte electrónica y una mecánica para posicionar un eje exterior a una posición angular determinada, ver Figura 2. Una de sus grandes ventajas es entregar un alto torque en comparación con su pequeño tamaño este alto torque es debido a que en su interior está compuesto por un motor DC acoplado a un tren de engranajes y un eje externo, este tren de engranajes es el encargado de multiplicar el torque del motor a cambio de una reducción de la velocidad del mismo hacia el eje externo. Este eje externo esta acoplado a un potenciómetro angular y este potenciómetro a una tarjeta controladora, mediante el potenciómetro lo que se logra es tener una realimentación de la posición entregada para ser comparada con la posición requerida.
Figura Nº 02: Servomotor Tower Pro MG995.
Módulo de comunicación Bluetooth:
Para implementar la comunicación inalámbrica entre el computador (PC) y el robot se uso el módulo bluetooth HC-05 (para la transmisión, Figura 3) y HC-06 (para la recepción), estos módulos fueron elegidos por su bajo precio, la facilidad de uso, gran rango de velocidades de transmisión y por poseer una interfaz UART para la comunicación entre el módulo y el controlador. Durante las pruebas se realizaron envíos de tramas de datos de hasta 1024 bytes (entre una PC y otra) a una velocidad de transmisión de entre 9600 y 115200 baudios a una distancia de aproximadamente 2 metros y recibiendo perfectamente todos los datos enviados.
Figura Nº 03: Modulo Bluetooth para comunicación.
Interfaz de usuario movil:
Una interfaz de usuario facilita la interacción entre el robot y el usuario mediante la presentación visual de una aplicación.
Android, al contrario que otros sistemas operativos como iOS (iPhone) o Windows Phone, se desarrolla de forma abierta y ha sido altamente personalizable, por el cual existen muchas herramientas para la creación de aplicaciones de acuerdo a la necesidad del programador.
Esta interfaz deberá de ser capaz de establecer una comunicación inalámbrica (bluetooth) con el robot o con un computador (PC) para el intercambio de información (PC) o para el control del robot (Figura 4).

5
Figura Nº 04. Comunicación entre el dispositivo móvil, la PC y el robot.
Modelo cinemático de una extremidad:
Mecánicamente, un robot es una cadena cinemática formada de eslabones unidos mediante articulaciones que permiten un movimiento relativo entre cada dos eslabones consecutivos.
Cada eslabón está representado por las longitudes de cada segmento que conforman la extremidad y cada articulación por los puntos 1, 2 y 3 (ver Figura 5) donde se produce un movimiento angular.
Figura 05. Ubicación de los parámetros de la extremidad.
Lo que se quiere con esto es obtener la posición el extremo de la extremidad (P(X, Y, Z)) en función de los ángulos en cada articulación (cinemática directa, 1.1) y los ángulos de cada articulación en función de la posición de la extremidad (cinemática inversa, 1.2).
(X, Y, Z) = F(ϴ1, ϴ2, ϴ3) …(1.1)
(ϴ1, ϴ2, ϴ3) = F(X, Y, Z) …(1.2)
VENTAJAS Y DESVENTAJAS DEL PROYECTO
La ventaja de usar una plataforma de desarrollo radica en:
Alta capacidad y velocidad de procesamiento de información debido al paralelismo que ofrece una FPGA.
Diseño mecánico resistente.
Facilidad de comunicación entre el robot y un servidor mediante Bluetooth.
Posibilidad de funcionar con cualquier interfaz grafica desarrollada por el usuario.
Facilidad de implementación de diferentes algoritmos de control.
Y las desventajas, en:
Se necesita conocimientos en VHDL para la programación de la PFGA.
La inversión de tiempo y esfuerzo en la búsqueda del diseño adecuado.
Necesidad de baterías de media-alta capacidad para su funcionamiento.
PROCEDIMIENTO DE CÁLCULO
Cinemática Directa:
Se hallan los parámetros Dénavit – Hartemberg para el análisis cinemático de una extremidad a partir de los parámetros que conforman la extremidad (Figura 06).

6
Figura Nº 06. Ubicación de los parámetros
de Dénavit – Hartemberg.
Tabla de parámetros Dénavit – Hartemberg:
i ϴ d A α
1 ϴ1 L1 L2 90°
2 ϴ2 0 L3 0°
3 ϴ3 0 L4 0°
Tabla Nº 01. Parámetros Dénavit –
Hartemberg
A partir de los parámetros obtenidos se calcula la matriz de transformación homogénea para cada eslabón.
Obtenemos:
Donde:
_ t1 = ϴ1; t2 = ϴ2; t3 = ϴ3. _ l1 = L1; l2 = L2; l3 = L3; l4 = L4. Hallando los puntos X, Y, Z a partir de la matriz de transformación homogénea general 0A3 = 0A1 * 1A2 * 2A3 , donde el punto X se encuentra en la primera fila, cuarta columna (1,4), el punto Y en la componente (2,4) y Z en la componente (3,4) de la matriz 0A3.
X ( 1)*( 2+ 3 ( 2)+ 4 ( 2+ 3)) … (2)
Y ( 1)*( 2+ 3 ( 2)+ 4 ( 2+ 3)) … (3)
Z 1+ 3 ( 2)+ 4 ( 2+ 3)) … (4)
Cinemática Inversa:
Una vez hallado los puntos X, Y, Z en función de los ángulos de cada articulación, se procede a calcular los ángulos en función de los puntos finales de la posición de la extremidad.
1 (Y/X) …(5)
2 (Z- 1
√X2+ Y
2- 2
) -
(X2 +Y
2+ 3
2- 4
2+ (Z- 1)
2
2 2 3) …(6)
3 (( √X2+ Y2- 2)
2
+(Z- 1)2- 3
2- 4
2
2 3 4)
…(7)
Modelo Dinámico de una extremidad. Como consecuencia del diseño de este mecanismo, una extremidad del robot, el centro de gravedad no está ubicado en las líneas rectas que unen

7
las articulaciones, razón por la que se toman ángulos auxiliares distintos a aquellos que fueron tomadas en el algoritmo de Denavit Hartemberg (mediante el cual se hallaban las ecuaciones de cinemática directa); mas no quiere decir que dichos ángulos están en desuso, como se muestran en la Figura 7.
Figura Nº 1.a: Vista plano YZ de la articulación.
Figura Nº 7.b: Vista plano YX de la articulación.
Eje rotado en momentos de inercia De las observaciones realizadas al primer nodo (donde el servomotor 1 se ve involucrado) se concluye que no es influenciado por la aceleración de gravedad, la velocidad angular esta en dirección diferente respecto a los otros dos eslabones restantes, y la “v i ió d dim i ” d eslabones dos y tres en el plano XY
causado por los movimientos del servomotor dos y tres respectivamente (Figura 8). De esta última observación surge la variación del momento de inercia hacia el eje z.
Figura 8: Ejes principales de Inercia (ejes Z Y) y j uxi i d i i ( j Z’ Y’)
Cálculos de los torques presentes en cada articulación de la extremidad. El cálculo de los torques presentes en cada articulación es de suma importancia para la posterior elección de los servomotores, ya que estos deben soportar o producir el torque necesario para el movimiento de cada articulación que componen la extremidad, este cálculo se hizo mediante el software SolidWorks aprovechando la herramienta de análisis de movimiento que posee. Se considero la acción de la gravedad y se coloco una fuerza F de reacción ente el piso y el extremo de la pata de 16 Newtons que representa el peso total del robot que se distribuye en sus patas más un factor de seguridad, con esto se pudo determinar un máximo torque en la articulación A1 (Figura 9).

8
Figura Nº 09. Ubicación de las variables a considerar.
De las simulaciones podemos concluir lo siguiente: el torque es máximo cuando los segmentos que unen las articulaciones forman entre sí 90º y se produce en la articulación A1, este torque posee una magnitud de 12.79 kg-cm. Con el valor de torque máximo ya se puede hacer la elección del tipo de servomotor a usar, en la articulación A2 se produce un torque máximo de 5.5 kg-cm con el cual se puede hacer la elección de un servomotor con un menor torque en comparación con el utilizado para la articulación A1. En la Figura 10 y en la Figura 11 se pueden observar las graficas de la simulación de torques.
Figura Nº 10. Gráfica del torque en la articulación A1.
Figura Nº 11. Gráfica del torque en la articulación A2.
Elección del material: El material a seleccionar debía de ser resistente a las cargar aplicadas, además de ser liviano para disminuir el
peso total del robot y reducir los torques que se producen en los servos. Dentro de la amplia gama presente en el mercado se escogió al acrílico que además de poseer las características necesarias es fácil de trabajar al momento de la fabricación y no representa un alto costo. Mediante la herramienta de simulación de SolidWorks se puede hacer el análisis de cómo afectan las fuerzas a la extremidad en el momento de ser aplicadas las fuerzas mediante las tensiones de Von Mises la cual indica que un material dúctil comienza a ceder en una ubicación (deformase) cuando la tensión de von Mises es igual al límite de tensión (límite elástico del material), en el indicador se puede apreciar que el modelo de la extremidad posee zonas de color azul y verdes que están permitidas entre los márgenes del diseño (Figura 12 y 13).
Figura Nº 12. Análisis de tensiones Von Mises.
Figura Nº 13. Análisis de tensiones Von Mises.

9
EXPOSICIÓN DE RESULTADOS
Hasta el momento se han logrado los siguientes resultados:
Diseño de la estructura mecánica mediante SolidWorks.
Figura Nº 14. Diseño CAD del robot.
Construccion de la estructura mecanica en base a acrilico.
Figura Nº 15. Estructura construida.
Pruebas de estabilidad de los servomotores y la estructura mediante una secuencia de puesta en pie del robot, obteniendo una gran rigidez por parte de la estructura y buen desempeño por parte de los servomotores.
Figura Nº 16. Pruebas de estabilidad.
Simulación de una secuencia de caminata mediante Matlab (Figura 17) y su posterior implementación dentro del controlador del robot, para una prueba real (Figura 18).
Figura Nº 17. Simulacion caminata en Matlab.
Figura Nº 18. Prueba real de la secuencia de caminata.
Desarrollo de una interfaz de usuario simple para un dispositivo con Android.

10
Figura Nº 19. Interfaz en Android.
CONCLUSIONES
Mediante el uso de software de ingeniería como Matlab, desarrollando una simulación, se puede predecir el comportamiento del robot, reduciendo de esta forma las posibilidades de error al ser probadas directamente sobre el mismo.
Las ecuaciones matemáticas de cinemática (directa en inversa) y dinámica son de mucha importancia para generar las secuencias de movimiento para el robot.
La comunicación bluetooth facilita en intercambio de información entre el robot y el servidor externo (PC o dispositivo movil) por ser inalámbrica y tener un alcance de hasta 10 metros.
La implementación de esta plataforma de desarrollo representa una gran ayuda para
el desarrollo de futuras líneas de investigación por poseer recursos de altas prestaciones, buena calidad y reducido costo.
RECOMENDACIONES DEL PROYECTO
Es importante hacer las pruebas de comprobación del ancho de pulso necesario para el funcionamiento del servomotor para generar el pulso adecuado para determinado ángulo.
Es necesario calibrar todos los servos una vez instalados, para no producir cambios de estabilidad al momento del funcionamiento.
BIBLIOGRAFÍA
BARRIENTOS, Antonio “Fu d m d R b i ”, McGraw Hill, México, 1997.
M XINEZ, D vid “VHDL de Programar Sistemas Digi ”, Edi i i , México, 2002.
R IG, J h “R b i ”, Pearson Educación, México, 2006.
PEDRONI, V i, “ i ui D ig Wi h VHDL”, MI P , USA, 2004.
www.altera.com
www.mathworks.com
www.lynxmotion.com
www.solidworks.com

11
ANEXOS
Datos técnicos de los servomotores Tower Pro MG995:
Weight- 55.0g
Dimension 40.7*19.7*42.9mm
Stall
torque 8.5kg/cm(4.8V),10kg/cm(6V)
Operating
speed 0.20sec/60degree(4.8v),
0.16sec/60degree(6v)
Operating voltage 4.8-7.2V
Temperature range 0℃_ 55℃
Dead band width 5us
Figura 2 para referencia.
Datos técnicos de la tarjeta DE0-
Nano:
Cyclone® IV EP4CE22F17C6N FPGA
22,320 Logic elements (LEs)
594 Embedded memory (Kbits)
66 Embedded 18 x 18
multipliers
4 General-purpose PLLs
153 Maximum FPGA I/O pins
Configuration Status and Set-Up
Elements
On-board USB-Blaster circuit for
programming
FPGA Serial Configuration
Device (EPCS)
Expansion Header
Two 40-pin Headers (GPIOs)
provides 72 I/O pins
Two 5V power pins, two 3.3V
power pins and four ground pins
One 26-pin header provides 16
digital I/O pins and 8 analog
input pins to connect to analog
sensors, etc
Memory Devices
32MB SDRAM
2Kb I2C EEPROM
General User Input/Output
8 green LEDs
2 debounced push-buttons
4 dip switches
G-Sensor
ADI ADXL345, 3-axis
accelerometer with high
resolution (13-bit)
A/D Converter
NS ADC128S022, 8-Channel,
12-bit A/D Converter
50 ksps to 200 ksps
Clock System
On-board 50MHz clock
oscillator
Power Supply
USB Type mini-AB port (5V)
Two DC 5V pins of the GPIO
headers (5V)
2-pin external power header
(3.6-5.7V)
Figura Nº 20. Tarjeta DE0-Nano.

12
Datos técnicos del módulo
bluetooth:
Bluetooth protocol: Bluetooth Specification v2.0 + EDR .
USB protocol: USB v1.1/2.0
Frequency: 2.4GHz ISM band
Modulation: GFSK (Gaussian Frequency Shift Keying)
mi p w : ≤ 4dBm, 2
i ivi y: ≤-84dBm at 0.1% BER
Rate: 2.1Mbps(Max)/160 kbps(Asynchronous); 1Mbps/1Mbps(Synchronous)
Security features: Authentication and encryption
Support profiles: Bluetooth serial port (master & slave)
Power Supply: +3.3 VDC 50mA
Operating temperature: -20 ~ +55 Centigrade
Dimensions: 26.9mm x 13mm x 2.2 mm
Figura 3 para referencia.
Información adicional:
Con la finalidad con la que se creo
este proyecto se pone toda la
información recopilada y desarrollada
hasta el momento para el libre acceso
de cualquier persona interesada en el
tema.
En la página web del Grupo de Micro-
electrónica del Centro de Investigación
y Desarrollo en Ingeniería (CIDI) se
encuentra los vínculos para descargar
la siguiente información:
Planos de la estructura mecánica en Solidworks.
Esquemático de la tarjeta de control desarrollada.
Cálculos en Matlab.
Interfaz de usuario (Android y Matlab).
Otros.
Página web: http://ue.accesus.com/