
Resumen. - feriadelasciencias.unam.mx · ha alcanzado un nivel de madurez bastante elevado en ... y...
18
Título. El humano necesita mecanismos que le ayuden a descifrar el mundo. Resumen. La robótica ha estado unida a la construcción de "artefactos", que tratan de materializar el deseo humano de crear seres a su semejanza y que lo liberen del trabajo. El ingeniero español Leonardo Torres Quevedo (que construyó el primer mando a distancia para su torpedo automóvil mediante telegrafía sin hilodrecista automático, el primer transbordador aéreo y otros muchos inventos) acuñó el término "automática" en relación con la teoría de la automatización de tareas tradicionalmente asociadas a los humanos. Karel Capek, un escritor checo, acuñó en 1921 el término "Robot" en su obra dramática "Rossum's Universal Robots / R.U.R.", a partir de la palabra checa Robbota, que significa servidumbre o trabajo forzado. El término robótica es acuñado por Isaac Asimov, definiendo a la ciencia que estudia a los robots. Asimov creó también las Tres Leyes de la Robótica. En la ciencia ficción el hombre ha imaginado a los robots visitando nuevos mundos, haciéndose con el poder, o simplemente ayudando en las labores caseras. Román Gubern analiza en su libro “El simio informatizado” los motivos del ser humano para crear seres artificiales a su imagen y semejanza. Algunos robots están diseñados hoy en día para parecerse a los humanos. La robótica ha alcanzado un nivel de madurez bastante elevado en los últimos tiempos, y cuenta con un correcto aparato teórico. Sin embargo, al intentar reproducir algunas tareas que para los humanos son muy sencillas, como andar, correr o tomar un objeto sin romperlo, no se han obtenido resultados satisfactorios, especialmente en el campo de la robótica autónoma. A pesar de ello se espera que el continuo aumento de la potencia de los ordenadores y las investigaciones en inteligencia artificial, visión artificial, la robótica autónoma y otras ciencias paralelas permitan acercarse cada vez más a los milagros soñados por los primeros ingenieros y también a los peligros que adelanta la ciencia ficción.
-
Upload
truonghanh -
Category
Documents
-
view
214 -
download
0
Transcript of Resumen. - feriadelasciencias.unam.mx · ha alcanzado un nivel de madurez bastante elevado en ... y...
Título. El humano necesita mecanismos que le ayuden a descifrar el mundo.
Resumen.
La robótica ha estado unida a la construcción de "artefactos", que tratan de
materializar el deseo humano de crear seres a su semejanza y que lo liberen
del trabajo. El ingeniero español Leonardo Torres Quevedo (que construyó el
primer mando a distancia para su torpedo automóvil mediante telegrafía sin
hilodrecista automático, el primer transbordador aéreo y otros muchos
inventos) acuñó el término "automática" en relación con la teoría de la
automatización de tareas tradicionalmente asociadas a los humanos.
Karel Capek, un escritor checo, acuñó en 1921 el término "Robot" en su obra
dramática "Rossum's Universal Robots / R.U.R.", a partir de la palabra checa
Robbota, que significa servidumbre o trabajo forzado. El término robótica es
acuñado por Isaac Asimov, definiendo a la ciencia que estudia a los robots.
Asimov creó también las Tres Leyes de la Robótica. En la ciencia ficción el
hombre ha imaginado a los robots visitando nuevos mundos, haciéndose con
el poder, o simplemente ayudando en las labores caseras.
Román Gubern analiza en su libro “El simio informatizado” los motivos del ser
humano para crear seres artificiales a su imagen y semejanza. Algunos
robots están diseñados hoy en día para parecerse a los humanos. La robótica
ha alcanzado un nivel de madurez bastante elevado en los últimos tiempos, y
cuenta con un correcto aparato teórico. Sin embargo, al intentar reproducir
algunas tareas que para los humanos son muy sencillas, como andar, correr
o tomar un objeto sin romperlo, no se han obtenido resultados satisfactorios,
especialmente en el campo de la robótica autónoma.
A pesar de ello se espera que el continuo aumento de la potencia de los
ordenadores y las investigaciones en inteligencia artificial, visión artificial, la
robótica autónoma y otras ciencias paralelas permitan acercarse cada vez
más a los milagros soñados por los primeros ingenieros y también a los
peligros que adelanta la ciencia ficción.
Introducción. Un robot rover es un tipo de robot mecánico, normalmente programable, con
funciones parecidas a las de una pinza mecánica capaz de sujetar objetos de
manera lineal; este puede ser la suma total del mecanismo o puede ser parte
de un robot más complejo. Las partes de estos manipuladores están
interconectadas a través de articulaciones que permiten, un movimiento semi
rotacional (tales como los de un robot de la NASA), como un movimiento de
traslación o desplazamiento lineal.
Robot Rover. El efector final, o robot rover, se puede diseñar para realizar tareas de
exploración que se deseen como puede ser recolectar pequeños objetos,
sujetar, etc., dependiendo de la aplicación. Por ejemplo el robot rover de la
NASA en las misiones correspondientes, era el encargado de la exploración y
posterior recaudación de muestras. En algunas circunstancias, lo que se
busca es una simulación de la mano humana, puesto que el humano no
puede hacer presencia en sitios como Marte.
Tipos. Triciclo
Esta arquitectura es similar a la de un triciclo, en donde se emplea una sola
rueda delantera tractora y dos ruedas traseras pasivas. Un problema
asociado con esta arquitectura es que el centro de gravedad del vehículo
tiende a irse hacia las ruedas traseras, lo que provoca una posible pérdida de
estabilidad en una cuesta.
Dirección Ackerman
Se usa en prácticamente en todos los automóviles de la industria.
Se diseña de forma que la rueda delantera interior a la curva se rota un
ángulo mayor que la rueda delantera exterior, de forma que se evita que las
ruedas patinen. Las rectas perpendiculares desde cada una de las ruedas
delanteras y traseras intersecan en un punto que es el centro instantáneo de
rotación del movimiento.
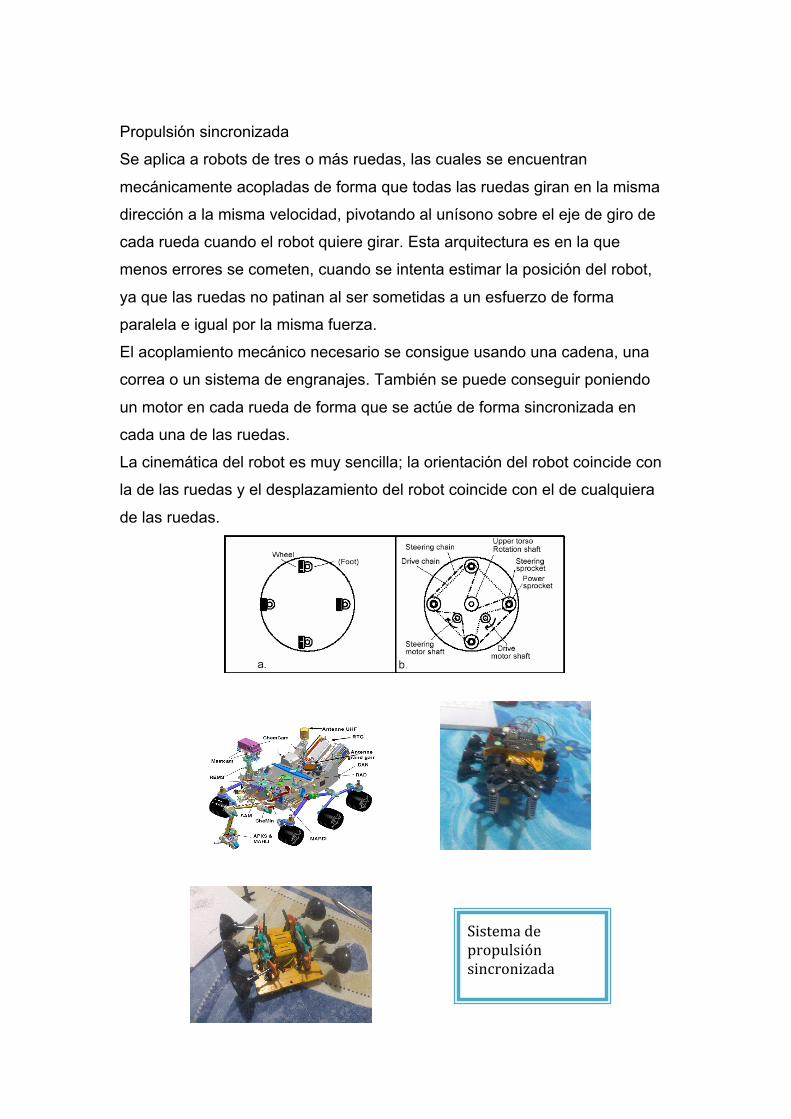
Propulsión sincronizada
Se aplica a robots de tres o más ruedas, las cuales se encuentran
mecánicamente acopladas de forma que todas las ruedas giran en la misma
dirección a la misma velocidad, pivotando al unísono sobre el eje de giro de
cada rueda cuando el robot quiere girar. Esta arquitectura es en la que
menos errores se cometen, cuando se intenta estimar la posición del robot,
ya que las ruedas no patinan al ser sometidas a un esfuerzo de forma
paralela e igual por la misma fuerza.
El acoplamiento mecánico necesario se consigue usando una cadena, una
correa o un sistema de engranajes. También se puede conseguir poniendo
un motor en cada rueda de forma que se actúe de forma sincronizada en
cada una de las ruedas.
La cinemática del robot es muy sencilla; la orientación del robot coincide con
la de las ruedas y el desplazamiento del robot coincide con el de cualquiera
de las ruedas.
Sistemadepropulsiónsincronizada

Objetivo.
Lo que se pretende hacer con este proyecto es dar a conocer el
funcionamiento de un robot Rover modelo a escala a través de un
microcontorolador (pic) además de difundir la forma de elaboración,
elementos necesarios para su fabricación etc.
Otra finalidad de este proyecto es difundir y demostrar a los alumnos de
bachillerato el funcionamiento del robot además de intentar incentivar
a los alumnos a que estudien carreras de corte científico.
Objetivo General.
Comprender el funcionamiento de un microcontrolador y un sistema de
tracción de propulsión sincronizada así como el funcionamiento de un
sistema de engranaje y cuatro motores con funcionamiento independiente.
Objetivos Específicos.
Entender el funcionamiento de un robot Rover y a su vez recordar y utilizar
conceptos básicos de mecánica y robótica para la elaboración del mismo.
Objetivos del Diseño
1. Seguridad: Dado que el entorno de trabajo de este robot manipulador es
un entorno humano, el diseño debe velar por la seguridad de los seres
humanos que cohabitan con dicho robot. Para ello hay que tener en cuenta
diversas consideraciones en cuanto a los materiales empleados, así como
sus formas de manera que el diseño final resulte lo menos agresivo posible.
Este requerimiento condiciona aspectos como la elección de los materiales
de fabricación del robot e incluso la sección de loselementos constitutivos
del mismo.
2. Ligero: Uno de los requisitos indispensables del diseño pasa por obtener
un manipulador lo más ligero posible ya que este requerimiento guarda una
relación directa con otros aspectos como la seguridad con la estabilidad y con
el aumento del ratio carga/peso, a menor peso del robot mayor podrá ser el
peso de los objetos a manipular sin comprometer la estabilidad del robot.
Además existen otros efectos como el impacto que tiene en un consumo
energético menor así como el aumento de la velocidad del movimiento del
robot.
Capacidad de carga: Esta característica es deseable que sea elevada para
así poder manipular un mayor número de objetos. En este diseño se logró
una capacidad máxima de carga de aproximadamente 1 kg
Hipótesis Diseñar y construir un prototipo de un robot Rover que explore las
posibilidades de su utilización para resolver problemas en la exploración de
sitios, así como para la recolección de pequeñas muestras.
Desarrollo. Se desarrollo y fabricó un prototipo de robot Rover controlado por un
PIC16F88, dos tarjetas pc y un sistema de control inalámbrico; para asistir a
los estudiantes en el aprendizaje de materias relacionadas con mecánica
racional, electrónica, programación, física, matemáticas y robótica.
Se podrán utilizar materiales fáciles de mecanizar, aunque no sean los más
idóneos para su producción definitiva sin embargo nos darán una idea para
su futura modificación o diseño.
Para este proyecto se ocuparon los siguientes materiales y componentes los
cuales se detallan en el siguiente aparatado.
1. Plástico : por su facilidad para encontrar, moldear y su bajo costo fue la
opción más viable para ocuparlo como chasis del proyecto, y en otros
componentes del mismo.
2. PIC 16f88: En los últimos años se ha popularizado el uso de este
microcontrolador debido a su bajo costo y tamaño. Se ha utilizado en
numerosas aplicaciones, que van desde los automóviles a decodificadores de
televisión. Es muy popular su uso por los aficionados a la robótica y
electrónica.
Puede ser programado tanto en lenguaje ensamblador como en Basic y
principalmente en C, para el que existen numerosos compiladores, pero
hemos decidido que nos será de mayor facilidad usar lenguaje C.
3. Motores de corriente continua : por la gran precisión y control con la
mínima cantidad de componentes (circuitos) que se necesitan para
controlarlo fue por lo que se eligió entre otros tantos motores, de los cuales
utilizaremos cuatro, dos se utilizarán junto con un circuito de engranaje para
lograr el sistema de propulsión sincronizada que deseamos en las ruedas; y
otros dos que se encargarán de cumplir las funciones básicas del robot.
4. Placa fenólica : se eligió este tipo de estructura ya que es más fácil de
trabajar,nos brinda la practicidad de que el diseño del modelo no perderá
estabilidad, por otra parte minimiza el costo ya que eliminamos el tener que
comprar protoboard frecuentemente.
5. Dos tarjetas electrónicas, las cuales hemos decidido hacer a mano con la
placa fenólica.
1. Base móvil.
Esta base está constituida por una plataforma de plástico o chasis de base
cuadrada y semicurva en el frente y una estructura de movimiento de tipo
lineal. Tiene un área aproximada de 30 cm una altura en torno a 15 cm, del
robot en general .
Lleva integrada una tarjeta controladora PC de a bordo, que permite controlar
conjuntamente los movimientos correspondientes a la base y a la tenaza
manipuladora. Además, está equipada con 6 ruedas dispuestas en línea.
Debido a que se trata de un sistema de propulsión sincronizada las dos
ruedas delanteras le darán soporte en esta parte al robot, las traseras tendrá
la función de darle estabilidad; son ruedas motrices asociadas a dos motores
tipo corriente continua , conreferencia DXA44KP0.
Las ruedas motrices dan lugar al movimiento tipo lineal, que permite al robot

avanzar
La cinemática de la base móvil responde a la siguiente expresión :
Donde v y ω son las velocidades lineales, respectivamente, vr y vl las
velocidades de las ruedas , y d la distancia entre los ejes de ambas ruedas.
2. Una tenaza manipuladora ligera
La tenaza manipuladora constituye el elemento fundamental del robot
Rover. Está compuesto por elementos rígidos conectados por medio
De una tarjeta pc que mandara la señal al resto de los circuitos para que
pueda operar,
Está diseñado para dotar a Rover de una notable agilidad para realizar
tareas de toma y desplazamiento de objetos,combinando los diversos grados
de libertad de los que dispone.
3. Sistema locomotor.
El sistema locomotor del manipulador móvil está constituido por la base móvil
previamente descrita, En la base se ubican los siguientes elementos. Las baterías.
El sistema de control base-manipulador a señal .
El sistema de control de la tenaza sujeta objetos .
El sistema de procesamiento (tarjeta pc) .
Las etapas de potencia para los accionadores (motores de corriente directa).
4. Sistema de alimentación
La base móvil alberga el sistema de alimentación compuesto por las baterías
que dotan de autonomía a todo el robot. Se ha optado por la conexión serie
de 4 baterías de 1.5V. UM 3 AA R6 para proporcionar una tensión de
alimentación de 6V en continua. Ya que deben proporcionar toda la potencia
necesaria para el funcionamiento del sistema robótico, uno de los requisitos

en su elección ha sido la necesidad de utilizar baterías fáciles de conseguir.
En concreto, las baterías seleccionadas son el modelo Ultra Hyper de
Panasonic.
5. ¿Pero cuál cable es cuál?
Los cables de los motores son normalmente codificados en colores como en
el esquemático.
Hitec, Futaba yHobbico usan la misma convención. JR y Graupner tienen el
control de color Naranja(Pero el orden de la instalación eléctrica es igual que
Futaba). Otros como Sanwa (Airtronics) tienen la línea de GND azul. Otros
Sanwa tienen todos los cables negros, con la raya roja a un lado. El alambre
rayado es Vcc, elsiguiente es GND y elúltimo es la señal de control
(clasificación diferente que Futaba). Los Hitec, Futaba o Hobbico y tienen
esta distribución: Señal de control (Amarillo o Blanco)Vcc (Rojo) GND
(Negro).Los números y las posiciones de los cables en el esquemático son
arbitrarias, hay que verificar antes de conectarlo. Una señal de voltaje mal
polarizada puede dañar los motores.
6. Suministro de Voltaje
El voltaje nominal es el que un pack de pilas de 4x1.5V de Panasonic puede
dar. En la práctica, esto puede variar significativamente. Algunas compañías
producen paquetes de pilas de 5 unidades NiCd, con un voltaje nominal de
6.0V, pero tienen entre 6.5 ~ 7V cuando están recién cargadas.
Supongamos que los motores trabajan con un paquete de pilas NiCd de 4
unidades, a 4.4V.
Pero la respuesta sería algo lenta. Así que se puede trabajar entre 4.4 V y 7.0
V,. Eso lo decide cada cual. Recomendamos usar 5V sin problemas. Se
puede usar una fuente de voltaje de 5V, incluso usar integrados reguladores,
como el 7805; sólo no alimenta la tarjeta pc o su circuito impreso con un buen
desempeño, sino que también puede alimentar dos motores .La corriente que
requiere depende del tamaño del motor. Normalmente el fabricante indica
cual es la corriente que consume el motor. Eso no significa mucho si todos
los motores van a estar moviéndose todo el tiempo. La corriente depende
principalmente del torque usado por el motor y puede exceder más de un

amperio si el motor está enclavado. Es mejor seguir las especificaciones del
motor que el fabricante indica cual es.
7. Sistema manipulador
Con objeto de realizar las tareas de manipulación, se equipó al manipulador
móvil
de una tenaza robótica ligera de seis grados de libertad.
Las características principales de este brazo manipulador son:
• Redundancia cinemática similar a los modelos desarrollados por la NASA.
• Masa del conjunto de 20 gramos.
• Capacidad de carga máxima de un kilogramo.
• Relación carga/peso entre 1:3 y 1:4.
• Alcance en torno a 25 milímetros.
El objetivo en lo que al brazo manipulador se refiere ha sido desarrollar un
brazo ligero, basado en el uso de nuevos componentes electromecánicos de
altas prestaciones que permitan disminuir el peso y por lo tanto reducir el par
necesario para mover la tenaza, lo que a su vez permitirá disminuir también
el peso de los componentes y aligerar la estructura. Un requisito
indispensable era la ligereza de la tenaza por lo que se planteó que el peso
de la tenaza no superase los 25 gramos.
Para ello y como elementos constructivos se utilizaron:
• Motores sin escobillas “Brushless” de CC (Corriente Continua), con
materiales magnéticos de tierras raras, que tienen la ventaja de dar mayor
par, para peso equivalente, que los motores de continua convencionales. Se
utilizaron además motores brushless que permiten alimentar directamente en
corriente continua a los accionadores.
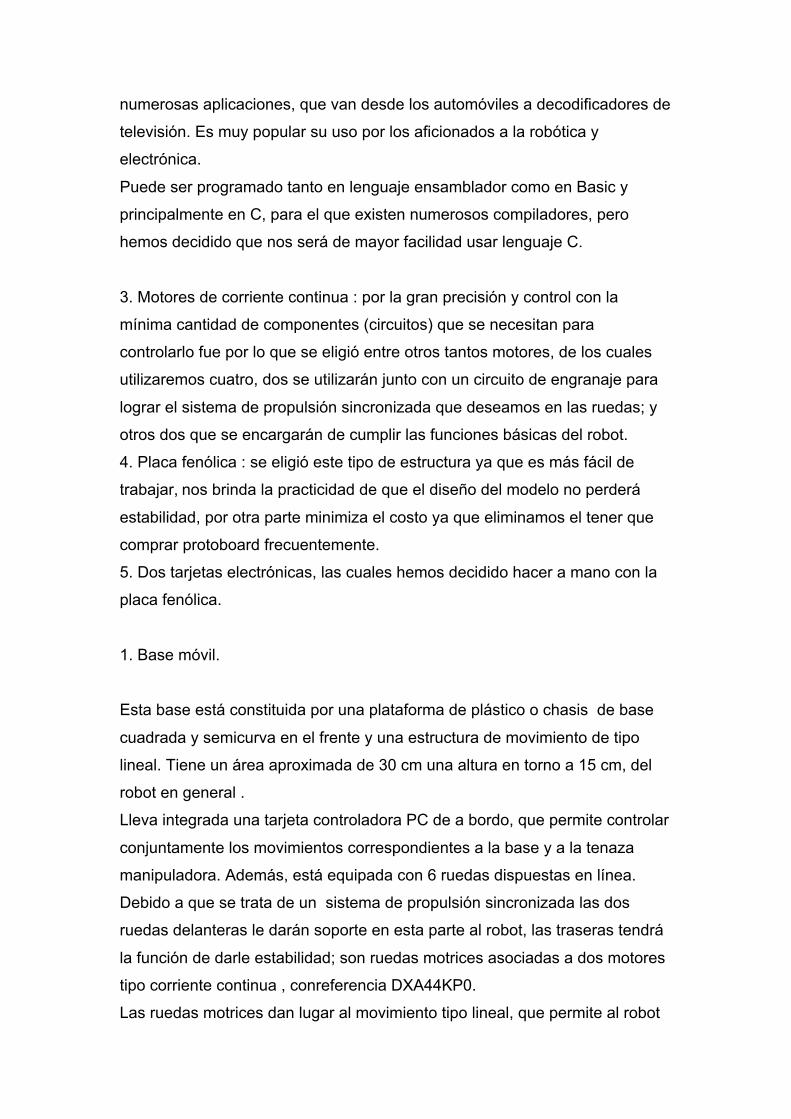
8. Sistema de procesamiento. (Grabado de las placas)
Materiales.
• Papel fotográfico glossy marca EPSON, ref. SO41126
• Placa de circuito impreso (sierra y lija de grano medio)
• Un plancha
• Un par de túpers
• Lija de metal fina
• Papel de cocina o un paño limpio
• Agua oxigenada
• Aguafuerte
• Tijera, alcohol, pinzas y un punzón de punta finito
• Un cepillo de dientes viejo
• Un rotulador permanente (indeleble)
• Y otros materiales que se mencionaran conforme al procedimiento lo
requiera.
Pasos: Preparación de la placa.
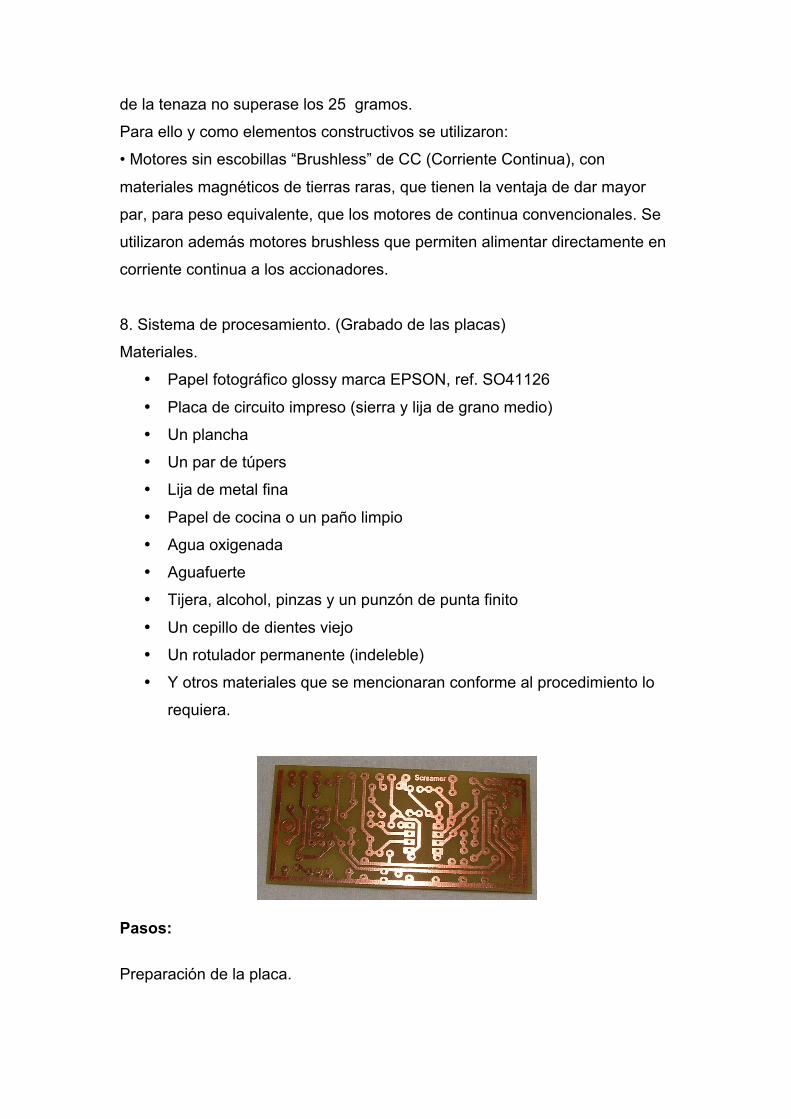
Recortar el circuito que previamente habremos obtenido en una impresora
láser. (Hay que recordar la importancia que tiene usar el papel indicado y
procurar también no tocar la zona impresa con los dedos; se tendrá que
tomar por los bordes).
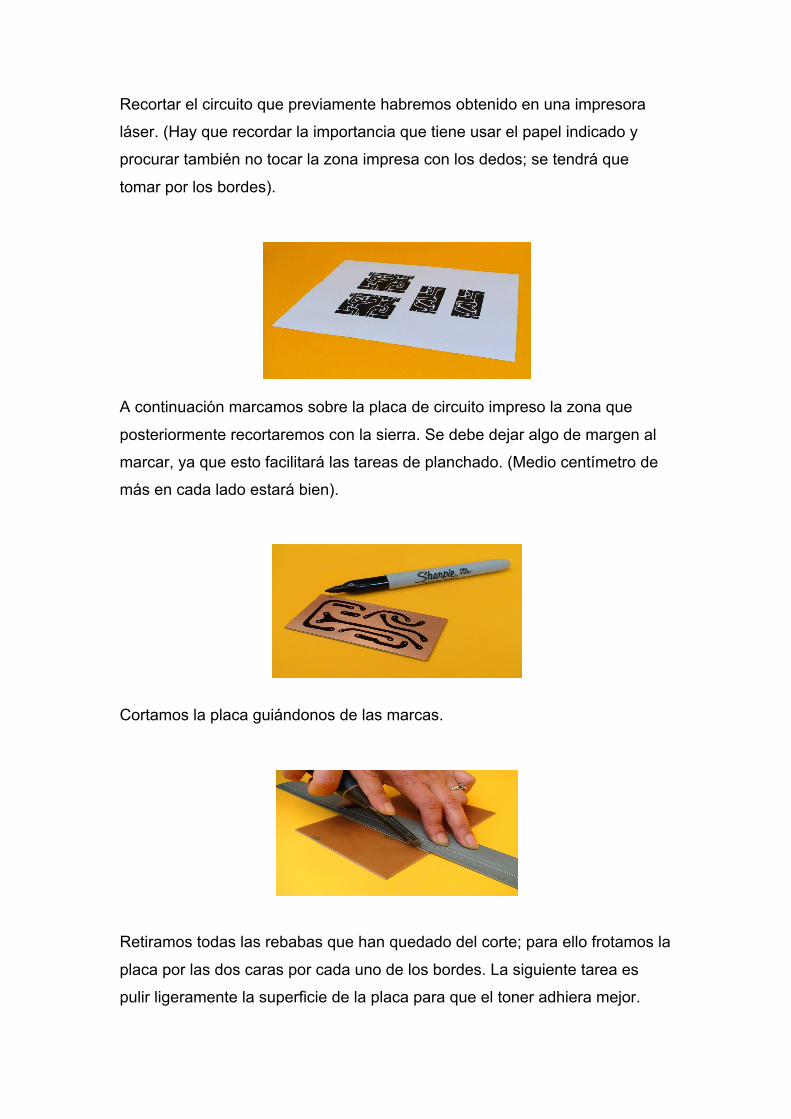
A continuación marcamos sobre la placa de circuito impreso la zona que
posteriormente recortaremos con la sierra. Se debe dejar algo de margen al
marcar, ya que esto facilitará las tareas de planchado. (Medio centímetro de
más en cada lado estará bien).
Cortamos la placa guiándonos de las marcas.
Retiramos todas las rebabas que han quedado del corte; para ello frotamos la
placa por las dos caras por cada uno de los bordes. La siguiente tarea es
pulir ligeramente la superficie de la placa para que el toner adhiera mejor.

Para ello, humedecemos un trozo de lija fina para metal en agua, mojamos la
placa y la lijamos suavemente por toda la superficie.
Se notará que el cobre pierde su aspecto brillante y queda ligeramente
rayado. Hay que procurar pulir bien toda la superficie, especialmente por las
partes laterales.
Al terminar, la mojamos bien de nuevo y la secáis con un paño limpio o un
papel de cocina. Para eliminar bien todas impurezas que pudieran quedar
sobre la placa, apoyamos esta sobre la mesa le echamos unas gotas de
alcohol isopropílico y lo limpiamos bien. También se puede utilizar alcohol
normal, es menos efectivo pero sirve.
A partir de ahora, no se podrá tocar el cobre de la placa con los dedos, si se
necesita tomara, se debe hacer con cuidado por los bordes.
Grabado de la placa. Terminada la fase de pulido y limpieza del cobre, pasamos ahora a la etapa
de planchado, que fijará el tonner sobre la superficie de la placa. Primero
colocamos la hoja recortada boca abajo sobre el cobre, centrada.
Se coloca una tabla vieja debajo de la placa, (si se hace la operación sobre
una mesa de casa, ya que al calentarse la placa podría decolorarse o
levantarse el barniz de la mesa).
A continuación y con la plancha muy caliente -posición de algodón y sin
vapor- se empieza el planchado.
Enseguida el toner empezará a desprenderse y pegará la hoja al cobre. Se
calienta bien la placa. Se deja la plancha un rato encima, y después se
plancha con fuerza por toda la superficie.
Terminado el planchado, con unas pinzas se coloca la placa en agua, al
contacto con ésta crepitará. Eso es buena señal. Se debe dejar reposar
durante un rato.

El papel se desprenderá sin problemas en pocos minutos. Se puede ayudar
moviendo el recipiente haciendo olas, igual que durante el lavado. Debe
despegarse sin ayuda. No se debe forzar. Si no es así se debe dejar un poco
más en remojo. En cuanto seque se observará que tiene pegado trocitos de
papel, los cuales retiraremos en un momento.
Retocando el grabado. El papel que está encima de las pistas no nos molesta, pero el que se
encuentra uniendo pistas distintas hay que eliminarlo. Para ello mojamos de
nuevo la placa y con un cepillo de dientes húmedo frotamos la superficie. Si
el toner está bien fijado no se desprenderá.
Movemos el cepillo en la dirección de las pistas. Secamos y observamos el
resultado.
Lavado de la placa. Pasamos a la fase de lavado. En ella sacaremos el cobre de la placa excepto
de las zonas grabadas. Para ello emplearemos productos químicos: clorídrico
y agua oxigenada. El primero de ellos es tóxico por inhalación o contacto y se
emplea a nivel doméstico para limpieza. Se compra diluido y también se le
llama aguafuerte, comercialmente Salfumant.
Lo encontramos en cualquier súper y es muy barato. El agua oxigenada del
súper es la misma que la de la farmacia y más barata.
Se debe tomar precauciones; las operaciones siguientes se deben llevar a
cabo en un lugar ventilado, utilizar mascarilla de fieltro, guantes, una bata o
ropa vieja y unas gafas plásticas.
Se necesita: aguafuerte, agua oxigenada y un recipiente plástico en el que
quepa la placa. Se debe tener preparado otro recipiente con agua corriente.
También usaremos un vaso plástico para medir las cantidades de los
líquidos. Se le hacen unas marcas con un rotulador, ya que ambos se
emplean en partes iguales.
Medimos cantidades iguales de ambos líquidos y los vaciamos con cuidado
en el recipiente plástico. Seguidamente colocamos la placa y veremos como
el conjunto toma una tonalidad verde, por efecto de la reacción química. No
hace falta llenar el recipiente, basta que la placa nade en un par de dedos de
líquido. Para acelerar el proceso, y acabar antes, se mueve con cuidado el
recipiente, haciendo olas. Despacio para que no desborde y no mojar la
mesa.
Se retira la placa y se coloca en el recipiente que teníamos preparado con
agua limpia. Los productos químicos usados no se deben tirar de golpe por el
fregadero, se deben echar diluidos con agua abundante poco a poco.
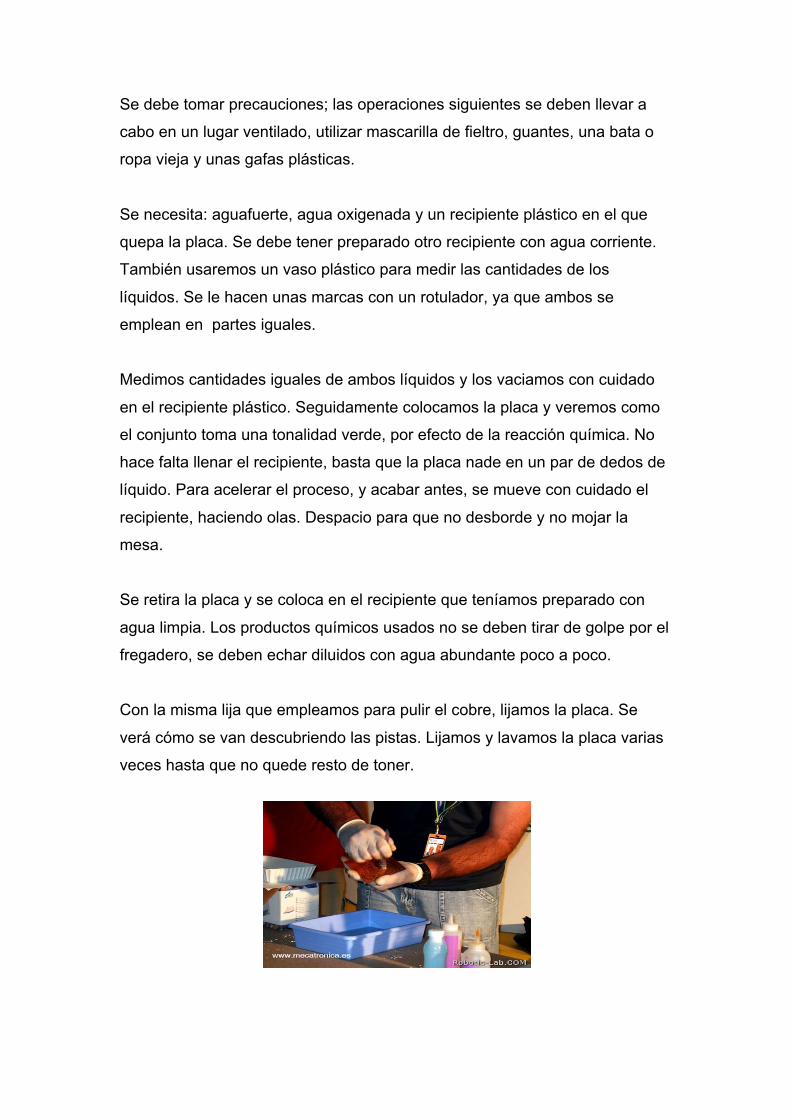
Con la misma lija que empleamos para pulir el cobre, lijamos la placa. Se
verá cómo se van descubriendo las pistas. Lijamos y lavamos la placa varias
veces hasta que no quede resto de toner.
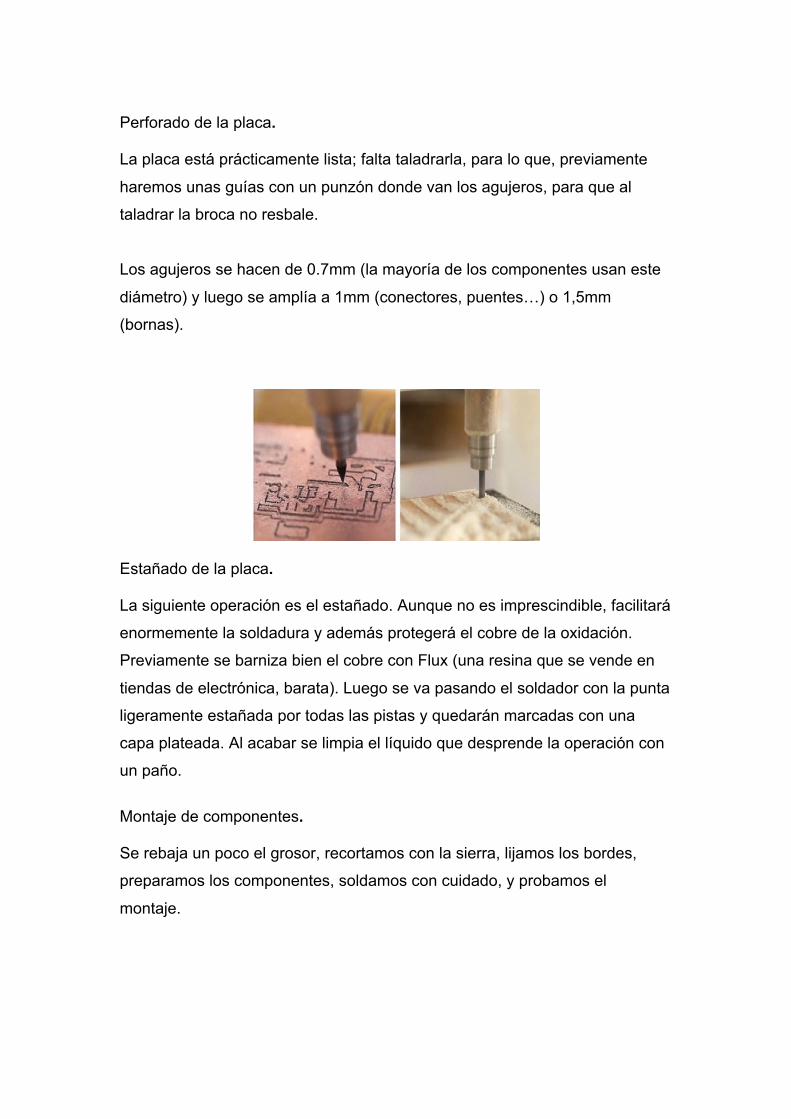
Perforado de la placa. La placa está prácticamente lista; falta taladrarla, para lo que, previamente
haremos unas guías con un punzón donde van los agujeros, para que al
taladrar la broca no resbale.
Los agujeros se hacen de 0.7mm (la mayoría de los componentes usan este
diámetro) y luego se amplía a 1mm (conectores, puentes…) o 1,5mm
(bornas).
Estañado de la placa. La siguiente operación es el estañado. Aunque no es imprescindible, facilitará
enormemente la soldadura y además protegerá el cobre de la oxidación.
Previamente se barniza bien el cobre con Flux (una resina que se vende en
tiendas de electrónica, barata). Luego se va pasando el soldador con la punta
ligeramente estañada por todas las pistas y quedarán marcadas con una
capa plateada. Al acabar se limpia el líquido que desprende la operación con
un paño.
Montaje de componentes. Se rebaja un poco el grosor, recortamos con la sierra, lijamos los bordes,
preparamos los componentes, soldamos con cuidado, y probamos el
montaje.

Las conexiones a la placa serán así:
PIN 8 -> I1
PIN 9 -> I2
PIN 11 -> EA
PIN 6 -> I3
PIN 7 -> I4PIN 10 -> EB
8. Código fuente
No hay mucho que decir acerca del código fuente. Hemos realizado un
pequeño conjunto de funciones que permiten hacer avanzar o retroceder a la
velocidad y el sentido que queramos. Al inicio del programa, en la función
Setup() definimos los pines como salidas y luego en el bucle principal, en la
función Loop(), he puesto una secuencia de avance durante dos segundos,
retroceso durante otros dos segundos, giro izquierda y giro derecha de dos
segundos también.
Luego el programa vuelve a comenzar. Es una buena forma de hacer las
primeras pruebas y ver cómo se comporta el robot. Para girar, se necesita
hacer girar la parte izquierda al contrario de la parte derecha. Es el mismo
sistema que los tanques. Con distintas velocidades podremos girar más o
menos según sea necesario.

Resultados.
Tras mucho pensar y experimentar acerca del diseño del robot rover, se
decidió realizarlo de la forma anteriormente planteada, ya que muestra
perfectamente el funcionamiento del robot.
Se logró analizar y aplicar los conceptos básicos de la industria robótica a su
vez, llevamos a cabo el proceso correspondiente a la obtención de un modelo
robótico móvil funcional.
Bajo costo.
Por último y no por ello menos importante, se ha contemplado durante el
desarrollo del proyecto la elección de elementos que cumpliendo todos los
aspectos anteriormente mencionados supongan el menor costo.
El diseño final ha tratado de satisfacer todos los requerimientos impuestos,
pero teniendo en cuenta que el cumplimiento excelente de todos ellos es una
utopía, por lo que la solución adoptada pasa por la búsqueda de un
compromiso que satisfaga en mayor medida todos los objetivos de diseño.
Conclusiones.
Los robots desde su creación han tenido una gran utilidad para el hombre ya
que se han requerido para suplirlo o ayudarlo en sus tareas diarias, en este
caso, el modelo desarrollado ayudará a la colecta de muestras u objetos.
Para modificar el robot hay que crear otro programa, además de repetir el
proceso de grabado de tarjeta.
El sistema de propulsión sincronizada es muy apto para el desarrollo de un
robot móvil.

BIBLIOGRAFÍA.
Referencias teórico-prácticas.
Stuart J.Russell, Peter Norving. 1996. Inteligencia Artificial: un enfoque
moderno, México, Prentice Hall Hispanoamericana.
Craig John J. 2002. Robótica, España, Person. Formato electrónico.
ISBN: 9786074426021
Peter Norving, 2007. Robótica siglo XXI, Capítulo XXV Robótica, España,
Person España, Formato electrónico
ISBN: 9788490352465
Otros tutoriales complementarios sobre control de motores:
http://www.x-robotics.com/motorizacion.htm#MOTORES%20PaP
http://robot3ejes.galeon.com/
Teoría básica de control de un motor Paso a Paso:
http://www.todorobot.com.ar/informacion/tutorial%20stepper/stepper-
tutorial.htm
http://perso.wanadoo.es/luis_ju/ebasica2/mpp_01.html


















