Respuesta y parametros de Sistemas de 1° y 2° orden

of 33
Transcript of Respuesta y parametros de Sistemas de 1° y 2° orden
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
1/33
SISTEMAS DE PRIMER
ORDEN
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
2/33
Sistemas de primer orden 11111111111111111111111111111111111111111111111111111111111111111111111111111111
Los sistemas de primer orden continuos son aquellos que responden a
una ecuación diferencial de primer orden
)()()(
00 t r bt cadt
t dc=+
La función de transferencia es:
0
0
)(
)(
as
b
s R
sC
+
=
reacomodando términos también se puede escribir como:
1)(
)(
+=
s
K
s R
sC
τ
donde0
0abK = , es la ganancia en estado estable,
0
1
a=τ , es la constante de tiempo del sistema.
el valor τ
1
0 −=−=
as se denomina polo.
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
3/33
Sistemas de primer orden 11111111111111111111111111111111111111111111111111111111111111111111111111111111
Respuesta de un sistemas de primer orden ante una entrada impulso
)()(0
0 s Ras
bsC
+= 1)( =s R
+= −
0
10
1)(
asbt c L
t aebt c 00)( −
=
La salida en Laplace es
Utilizando transformada inversa de Laplace
Se obtiene la salida en función del tiempo
se evalúa la ecuación anterior en tiempos múltiplos de τ
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
4/33
Sistemas de primer orden 11111111111111111111111111111111111111111111111111111111111111111111111111111111
)(t ct
0τ
0367879.0 b
0135335.0 b
0b
τ 2
τ 3
τ 4
0049787.0 b
0018315.0 b
respuesta al impulso
0b
t
0367879.0 b
τ
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
5/33
Sistemas de primer orden 11111111111111111111111111111111111111111111111111111111111111111111111111111111
Respuesta de un sistemas de primer orden ante una entrada escalón de
magnitud A
)()(0
0 s Ras
bsC
+=
s
As R =)(
+= −
)(
1)(
0
10
ass Abt c L
)1()( 0t a
e AK t c −−=
Utilizando transformada inversa de Laplace
La salida en Laplace es
Se obtiene la salida en función del tiempo
Ahora se evalúa la ecuación anterior en tiempos múltiplos de τ
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
6/33
Sistemas de primer orden 11111111111111111111111111111111111111111111111111111111111111111111111111111111
respuesta al escalón
AK
t
AK 632120.0
τ
AK 981684.0
τ 4
)(t ct
0τ AK 632120.0
0
τ 2
τ 3
τ 4
AK 864664.0
AK 950212.0
AK 981684.0
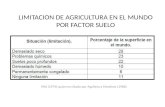
Comentarios:
•La constante de tiempo ( τ ) es igual al tiempo que tarda la salida enalcanza un 63.212% del valor final.
•Matemáticamente la salida alcanza su valor final en un tiempo infinito,
pero en el sistema real lo hace en tiempo finito. Para fines prácticos se
considera que la salida alcanza el estado estable en cierto porcentaje
del valor final. Se usan dos criterios: el del 98%( ) y el del 95% ( )τ 4 τ 5
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
7/33
Sistemas de primer orden 11111111111111111111111111111111111111111111111111111111111111111111111111111111
Respuesta de un sistemas de primer orden ante una entrada rampa de
magnitud A
Utilizando transformada inversa de Laplace
La salida en Laplace es
)()(0
0 s Ras
bsC
+= 2)(
s
As R =
+= −
)(
1)(
02
10
ass Abt c L
t ae AK t AK t c 0)()(
−+−= τ τ
Se obtiene la salida en función del tiempo
At t r =)(
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
8/33
respuesta a la rampa
AKt
t τ
Sistemas de primer orden 11111111111111111111111111111111111111111111111111111111111111111111111111111111
t ae AK t AK t c 0)()( −+−= τ τ
τ AK
τ
error en
estado estable
Nota:
Es importante aclarar que laentrada es de pendiente A,
mientras que la salida presenta
pendiente AK desfasada seg.
En otras palabras siempre que laganancia en estado estable (K) del
sistema no sea igual a uno,
existirá un error en estado estable
infinito.
τ
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
9/33
Sistemas de primer orden 11111111111111111111111111111111111111111111111111111111111111111111111111111111
Ejercicio:
Con lo visto anteriormente se observa que es posible lo siguiente:
1. De la función de transferencia y conociendo la entrada, obtener la salida.
2. De una gráfica (o datos) de respuesta de salida obtener la función detransferencia.
Un circuito RL tiene la siguiente función de transferencia.
L Rs
LsV
s I
+=
1
)(
)(
Desarrollo:
No se necesita usar fracciones parciales o transformada inversa, basta
normalizar la función de transferencia para visualizar la respuesta:
cuando se aplica una entrada escalón de)(t i volt1Determinar la corriente
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
10/33
Sistemas de primer orden 11111111111111111111111111111111111111111111111111111111111111111111111111111111
entonces directamente se obtiene la ecuación:
)1(1
)( t
L
R
e R
t i −
−=
t
R
L
R
1
R
L2
R
L3
R
L4
1
1
)(
)(
+=
s R L
R
sV
s I K R =1 Ganancia en estado
estable
τ = R
L Constante de tiempo
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
11/33
Sistemas de primer orden 11111111111111111111111111111111111111111111111111111111111111111111111111111111
Ejercicio:
Una cautín se conecta a una alimentación de voltaje monofásica 127 volts.
Alcanzar una temperatura estable de 325°C y tarde 130 segundos en
alcanzar un 98% de ese valor. Determine la función de transferencia de
primer orden que represente mejor esta respuesta.
Desarrollo:Se define la ganancia en estado estable:
559.2127
325===
entradadeVoltaje
estableestadoenaTemperatur K
Se determina la constante de tiempo:Usando el criterio del 2% de error, se determina el tiempo que tarda la
salida en alcanzar un 98% de su valor, se divide entre 4 y se obtiene la
constante de tiempo.
5.32
4
130==τ
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
12/33
Sistemas de primer orden 11111111111111111111111111111111111111111111111111111111111111111111111111111111
por último se sustituye en la forma:
1)(
+=
s
K sG
τ
15.32
559.2
)(
)(
+=
ssV
sT
La función de transferencia que relaciona la temperatura con el voltaje es
30769.0
078738.0
)(
)(
+= ssV
sT
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
13/33
SISTEMAS DE SEGUNDO
ORDEN
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
14/33
Sistemas de segundo orden 111111111111111111111111111111111111111111111111111111111111111111111111111
Los sistemas de segundo orden continuos son aquellos que responden a
una ecuación diferencial linea de segundo orden
)()()(
)()()(
212
2
0212
2
0 t r bdt
t dr b
dt
t r d bt ca
dt
t dca
dt
t cd a ++=++
Sin pérdida de generalidad se analizará un caso muy común donde:
.0,,,1 102210 ====== bbK ba paa
Que corresponde al siguiente sistema de segundo orden:
)( pssK +
)(s R )(sC )(s E K
p
donde
es una const.que representa
una ganancia.
es una const. real
representa al polo
del sistema.
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
15/33
Su función de transferencia de lazo cerrado es:
K pss
K
s R
sC
++= 2)(
)(
Como se aprecia, los polos de lazo cerrado pueden ser de tres tipos
Sistemas de segundo orden 111111111111111111111111111111111111111111111111111111111111111111111111111
−−+
−++
=
K p p
sK p p
s
K
s R
sC
4242
)(
)(22
1. Reales diferentes si: K p
>
4
2K
p=
4
2
K p <4
2
, 2. Reales iguales si:
3. Complejos si
Para facilitar el análisis se realiza el siguiente cambio de variables
2nK ω = σ ζω 22 == n p
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
16/33
Sistemas de segundo orden 111111111111111111111111111111111111111111111111111111111111111111111111111
22
2
2)(
)(
nn
n
sss R
sC
ω ζω
ω
++= forma estándar del sistema
de segundo orden.
donde es la frecuencia natural no amortiguada, se denomina
atenuación, es el factor de amortiguamiento. Ahora el comportamiento
dinámico del sistema de segundo orden se describe en términos de los
parámetros y .ζ nω
Se analizará la respuesta transitoria ante una entrada escalón unitario:
(1) Caso subamortiguado : en este caso se escribe)10(
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
17/33
Sistemas de segundo orden 111111111111111111111111111111111111111111111111111111111111111111111111111
Utilizando fracciones parciales
2222 )()(
1
)(d n
n
d n
n
ss
s
ssC ω ζω
ζω
ω ζω
ζω
++−++
+
−=
y conociendo que
t e
s
sd
t
d n
n n ω
ω ζω
ζω ζω cos
)(
22
−=
++
+1 - L
t senes
d t
d n
d n ω ω ζω
ω ζω −=
++ 22)(
1 - L
Se obtiene la salida en el tiempo
)0(1
tan1
1)(2
1
2 ≥
−+
−−= −
−
t t sene
t cd
t n
ζ
ζ ω
ζ
ζω
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
18/33
Sistemas de segundo orden 111111111111111111111111111111111111111111111111111111111111111111111111111
(2) Caso de amortiguamiento crítico :)1( =ζ
)(sC
sssC
n
n
2
2
)()(
ω
ω
+=
)0()1(1)( ≥+−= − t t et cn
t n ω ω
la transformada inversa arroja
en este caso se tienen dos polos reales iguales y ante un escalón es
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
19/33
Sistemas de segundo orden 111111111111111111111111111111111111111111111111111111111111111111111111111
sss
sC
nnnn
n
)1)(1()(
22
2
−−+−++=
ζ ω ζω ζ ω ζω
ω
t
t
n
n
e
et c
ω ζ ζ
ω ζ ζ
ζ ζ ζ
ζ ζ ζ
)1(
22
)1(
22
2
2
)1(12
1
)1(12
11)(
−+−
−+−
−−−−
−+−+=
en este caso se tienen dos polos reales negativos y diferentes. Para unaentrada escalón, es
(3) Caso sobreamortiguado :)1( >ζ
)(sC
La transformada inversa de Laplace de la ecuación anterior es
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
20/33
Sistemas de segundo orden 111111111111111111111111111111111111111111111111111111111111111111111111111
Fig. Curvas de respuesta al escalón unitario.
0 2 4 6 8 10 12
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
sa1>ζ
ca1=ζ
0=ζ
2.0=ζ
4.0=ζ
7.0=ζ 8.0=ζ
Figura. Respuesta
al escalón de
diferentes sistemas
de segundo orden.
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
21/33
Sistemas de segundo orden 111111111111111111111111111111111111111111111111111111111111111111111111111
Respuesta impulsiva de sistemas de segundo orden
22
2
2)(
nn
n
sssC
ω ζω ω
++=
)10( ζ
)0()( 2 ≥= − t tet c t nn
ω ω
Utilizando transformada inversa obtenemos las siguientes soluciones de )(t c
para
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
22/33
Sistemas de segundo orden 111111111111111111111111111111111111111111111111111111111111111111111111111
0 2 4 6 8 10 12
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
sa1>ζ
ca1=ζ
0=ζ 2.0=ζ
4.0=ζ
7.0=ζ
Figura. Respuesta
al impulso de
diferentes sistemas
de segundo orden.
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
23/33
Sistemas de segundo orden 111111111111111111111111111111111111111111111111111111111111111111111111111
Definición de los parámetros de la respuesta transitoria
Las características de desempeño de un sistema de control se comparan
basándose en el tiempo de la repuesta transitoria. La característicatransitoria de los sistemas dinámicos se presenta por la incapacidad de
responder de manera instantánea a las entradas o perturbaciones. La
respuesta transitoria es común clasificarla con base a los siguientes
parámetros.
1. Tiempo de retardo
2. Tiempo de crecimiento
3. Tiempo pico
4. Sobreimpulso máximo
5. Tiempo de establecimiento
r t
d t
pt
p M
st
a continuación se definen…0 2 4 6 8 10 12 14 16 18 20
0
0.2
0.4
0.6
0.8
1
1.2
1.4
t
c(t )
1
0
st
p M
r t
p t
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
24/33
Tiempo de retardo
, . Es el tiempo que tarda la respuesta en alcanzar la mitad del
valor final por primera vez.
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
25/33
Sistemas de segundo orden2.- Tiempo de crecimiento
2.- Tiempo de crecimiento, . Es el tiempo requerido para que la respuesta
aumente de 0 a 100% para sistemas subamortiguados, del 5 al 95% o del
10 al 90% para sistemas críticamente amortiguados o sobreamortiguados.
r t
El tiempo de crecimiento se obtiene dando un valor de uno en la ecuación
de respuesta de un sistema de segundo orden ante una entrada escalón.
1)
1
(cos1)(2
=−
+−= −r d r d
t t sent et c r n ω
ζ
ζ ω
ζω
01
cos2
=−
+ r d r d
t sent ω ζ
ζ ω
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
26/33
Sistemas de segundo orden 111111111111111111111111111111111111111111111111111111111111111111111111111
0tan11costancos1cos 22 =
−+=−+ r d r d r d r d r d t t t t t ω ζ
ζ
ω ω ω ζ
ζ
ω
o bien
σ
ω β
ω
β π
σ
ω
ω d
d
d
d r t
11 tan,tan1 −− =
−=
−
=
σ
ω
ζ
ζ ω d r d t =
−−=
21tan
el tiempo de crecimiento es
β
σ
d ω
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
27/33
Sistemas de segundo orden 111111111111111111111111111111111111111111111111111111111111111111111111111
3.- Tiempo pico, . Es el tiempo requerido para que la respuesta alcance el
primer pico de sobreimpulso. El tiempo pico se obtiene derivando la ecuación
de respuesta c(t) e igualándola a cero, con lo que se obtiene
pt
01
)(2
=−
− pnt n pd et sen
ζω
ζ
ω ω
d
p pd
pd
t t
sosobreimpul primer eleligese
sonecuaciónestasatisfacenquevaloreslost sen
ω
π π ω
π π π
ω
=⇒=
=.,,3,2,,0
,0
SOBREPASO M
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
28/33
Sistemas de segundo ordenSOBREPASO
1)( −= p p t c M
−+−= −
d d
d d sene
d n
ω
π ω
ζ
ζ
ω
π ω
ω π ζω
2
)(
1cos
( ) ( )π ω σ π ω ω ζ d d n
ee
−−
==
π ζ ζ 21−−= e M p
st
4. Es el valor pico máximo de la curva de respuesta medido desde la
unidad o valor deseado. El sobreimpulso máximo se obtiene de la
respuesta evaluada en el tiempo pico.
p M
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
29/33
5.- Tiempo de establecimiento,
5.- Tiempo de establecimiento, . Es el tiempo mínimo donde la curva derespuesta alcanza y se mantiene dentro de un rango de error preestablecido,
generalmente es del 2% o del 5%, el rango más común es el del 2%. Para
sistemas de primer y segundo orden, la respuesta se mantiene dentro del 2%
después de 4 constantes de tiempo:
σ ζω
444 ===
ns T t
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
30/33
Sistemas de segundo orden 111111111111111111111111111111111111111111111111111111111111111111111111111
Ejemplo: Definir los parámetros de respuesta transitoria del sistema
)34(
75
+ss
)(s R )(sC
Desarrollo:
La función de transferencia de lazo cerrado es
7534
75
)(
)(2 ++
=sss R
sC
Se utiliza la siguiente igualdad
22
2
2 27534
75
nn
n
ssss ω ζω
ω
++=
++
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
31/33
Sistemas de segundo orden 111111111111111111111111111111111111111111111111111111111111111111111111111
se obtiene
3752 =nω
342 =nζω
375=nω
877876.03752
34==ζ
17=σ
A partir de aquí se obtienen los parámetros de respuesta transitoria
segundost d
r 2849.0=−
=ω
β π
86=d ω
.499.0tan 1 rad d == −σ
ω β
segundost d
p 33876.0==ω
π
( )%315.000315.0 === − π ω σ d e M
p
segundost s 23529.04==
σ
Nota: Analizar porque pr s t t t
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
32/33
Sistemas de segundo orden 111111111111111111111111111111111111111111111111111111111111111111111111111
Ejemplo: De los siguientes parámetros de respuesta transitoria obtener
la función de transferencia.
0 2 4 6 8 10 12 14 16 18 200
0.2
0.4
0.6
0.8
1
1.2
1.4
t
c(t )
127
0
142
0.75
Desarrollo: de la gráfica
1181.0127
127142=
−= p M segundost s 75.0=
Estos dos
Parámetros
Son suficientes
Si d d d
-
8/16/2019 Respuesta y parametros de Sistemas de 1° y 2° orden
33/33
Sistemas de segundo orden 111111111111111111111111111111111111111111111111111111111111111111111111111
De st
3333.544==→=
s
s
t
t σ
σ De y conociendo p M σ
( )84335.7
ln=
−=→= −
pd p
M e M d
σπ ω
π ω σ
Entonces
3333.5=σ
84335.7=d ω
48486.922 =+= d n ω σ ω
56229.0==→=n
nω
σ ζ σ ζω
96256.89666.10
96256.89
2)(
222
2
++=
++=
sssssG
nn
n
ω ζω
ω