REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L… · Un circuito eléctrico es un ente físico que...
62
Análisis y Síntesis de Circuitos © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-1 Labels E: 1 TEMA 1 REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO 1.1 Análisis y síntesis de circuitos Un circuito eléctrico es un ente físico que soporta campos eléctricos y magnéticos y flujos de corriente, con un conjunto de puntos accesibles (terminales) donde aplicar señales de excitación y/o medir señales respuesta y que puede modelarse en primera aproximación como una interconexión de elementos idealizados que satisfacen las leyes de Kirchoff e imponen a su vez relaciones entre las tensiones e intensidades asociadas a los mismos. C_P.1 El análisis de circuitos consiste en el desarrollo de procedimientos sistemáticos, que permitan obtener la señal de respuesta para cualquier señal de excitación, siguiendo un método unificado (aquí surge la necesidad de introducir señales especiales y el concepto de función de sistema). Otro aspecto importante del análisis de circuitos se refiere al estudio de efectos de segundo orden y a la acotación de los rangos de validez de los resultados proporcionados por los modelos idealizados, consistentes en la interconexión de elementos abstractos. Síntesis y diseño se refieren a la elección de una interconexión de elementos de circuito y de un conjunto de valores de los elementos de
Transcript of REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L… · Un circuito eléctrico es un ente físico que...
Análisis y Síntesis de Circuitos
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-1
Labels E: 1Labels F: 1Labels L: 1Labels T: 1TEMA 1
REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO
CONTINUO
1.1 Análisis y síntesis de circuitos
Un circuito eléctrico es un ente físico que soporta campos eléctricos ymagnéticos y flujos de corriente, con un conjunto de puntos accesibles(terminales) donde aplicar señales de excitación y/o medir señales respuestay que puede modelarse en primera aproximación como una interconexión deelementos idealizados que satisfacen las leyes de Kirchoff e imponen a suvez relaciones entre las tensiones e intensidades asociadas a losmismos.C_P.1
El análisis de circuitos consiste en el desarrollo de procedimientossistemáticos, que permitan obtener la señal de respuesta para cualquierseñal de excitación, siguiendo un método unificado (aquí surge la necesidadde introducir señales especiales y el concepto de función de sistema).
Otro aspecto importante del análisis de circuitos se refiere al estudio deefectos de segundo orden y a la acotación de los rangos de validez de losresultados proporcionados por los modelos idealizados, consistentes en lainterconexión de elementos abstractos.
Síntesis y diseño se refieren a la elección de una interconexión deelementos de circuito y de un conjunto de valores de los elementos de
REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-2 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
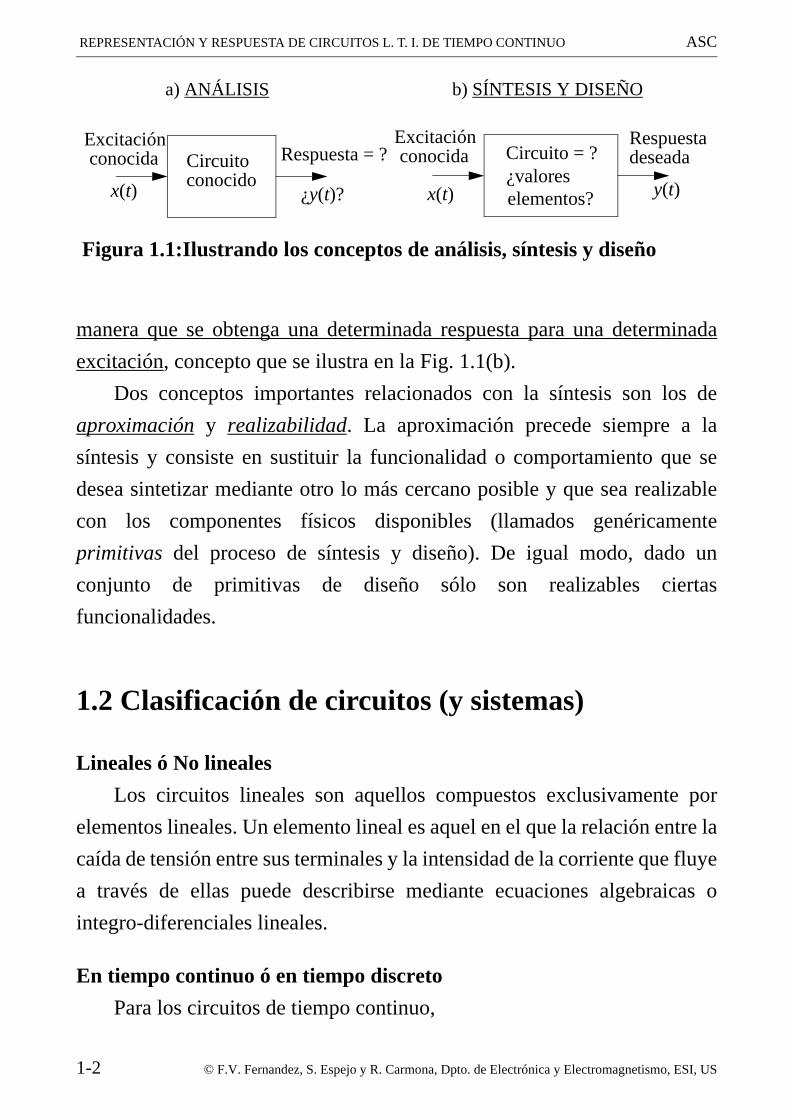
manera que se obtenga una determinada respuesta para una determinadaexcitación, concepto que se ilustra en la Fig. 1.1(b).
Dos conceptos importantes relacionados con la síntesis son los deaproximación y realizabilidad. La aproximación precede siempre a lasíntesis y consiste en sustituir la funcionalidad o comportamiento que sedesea sintetizar mediante otro lo más cercano posible y que sea realizablecon los componentes físicos disponibles (llamados genéricamenteprimitivas del proceso de síntesis y diseño). De igual modo, dado unconjunto de primitivas de diseño sólo son realizables ciertasfuncionalidades.
1.2 Clasificación de circuitos (y sistemas)
Lineales ó No linealesLos circuitos lineales son aquellos compuestos exclusivamente por
elementos lineales. Un elemento lineal es aquel en el que la relación entre lacaída de tensión entre sus terminales y la intensidad de la corriente que fluyea través de ellas puede describirse mediante ecuaciones algebraicas ointegro-diferenciales lineales.
En tiempo continuo ó en tiempo discretoPara los circuitos de tiempo continuo,
Figura 1.1:Ilustrando los conceptos de análisis, síntesis y diseño
Excitaciónconocida Respuesta = ?Circuito
conocidox(t) ¿y(t)?
Respuestadeseada
Excitaciónconocida Circuito = ?
x(t) y(t)¿valoreselementos?
b) SÍNTESIS Y DISEÑOa) ANÁLISIS
ASC 1.2 Clasificación de circuitos (y sistemas)
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-3
(1.1)
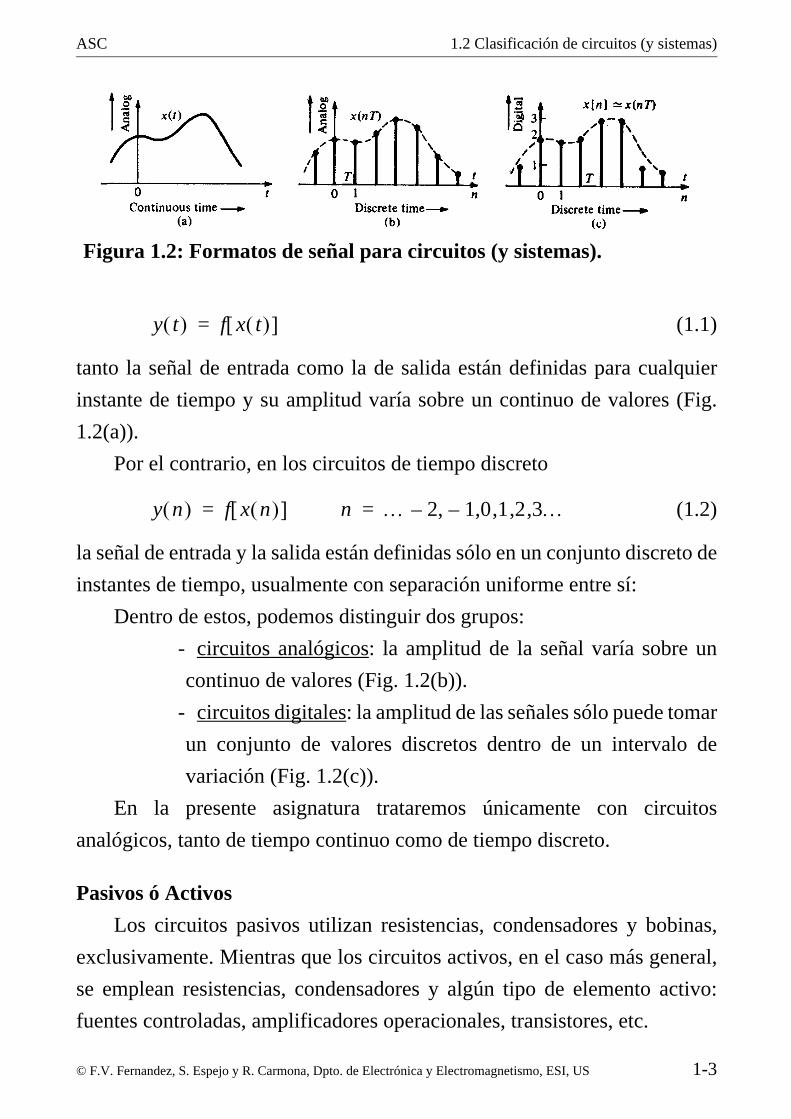
tanto la señal de entrada como la de salida están definidas para cualquierinstante de tiempo y su amplitud varía sobre un continuo de valores (Fig.1.2(a)).
Por el contrario, en los circuitos de tiempo discreto
(1.2)
la señal de entrada y la salida están definidas sólo en un conjunto discreto deinstantes de tiempo, usualmente con separación uniforme entre sí:
Dentro de estos, podemos distinguir dos grupos:- circuitos analógicos: la amplitud de la señal varía sobre uncontinuo de valores (Fig. 1.2(b)).
- circuitos digitales: la amplitud de las señales sólo puede tomarun conjunto de valores discretos dentro de un intervalo devariación (Fig. 1.2(c)).
En la presente asignatura trataremos únicamente con circuitosanalógicos, tanto de tiempo continuo como de tiempo discreto.C_P.2
Pasivos ó ActivosLos circuitos pasivos utilizan resistencias, condensadores y bobinas,
exclusivamente. Mientras que los circuitos activos, en el caso más general,se emplean resistencias, condensadores y algún tipo de elemento activo:fuentes controladas, amplificadores operacionales, transistores, etc.
y t( ) f x t( )[ ]=
Figura 1.2: Formatos de señal para circuitos (y sistemas).
Fig.1.5 Papoulis
y n( ) f x n( )[ ]= n … 2,– 1,0 1 2 3…,,,–=
REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-4 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
Invariantes ó variantes en el tiempoLos circuitos invariantes en el tiempo están formados por elementos
invariantes en el tiempo, es decir, aquellos cuyas características no sonfunción del tiempo. al contrario de los circuitos que varían en el tiempo.
De parámetros concentrados o distribuidosLos circuitos de parámetros concentrados son aquellos en los que las
dimensiones del circuito son pequeñas comparadas con la longitud de ondade las señales que procesan.
1.3 Representación entrada-salida de sistemas LTI
Nos concentraremos en circuitos LTI de tiempo continuo, es decir,"circuitos constituidos por la interconexión de fuentes independientes yelementos lineales invariables en el tiempo". Las fuentes independientes sonelementos no-lineales y/o variables en el tiempo, y sus tensiones y/ointensidades juegan el papel de excitaciones de entrada al circuito.
Consideraremos, sin pérdida de generalidad el caso de una únicaexcitación y una única respuesta, circuitos de una entrada y una salida (porel principio de superposición cualquier otro se puede reducir a éste).
La pregunta básica que surge es ¿cómo se relacionan entrada y salida eneste tipo de circuitos?
Los componentes últimos de estos circuitos pueden modelarse medianteinterconexiones de elementos de circuito (resistencias, condensadores,opamps, etc.). A este nivel la representación de la operación se realizausando las leyes de Kirchoff y las relaciones constitutivas impuestas por loselementos. Sin embargo, en ocasiones será conveniente representar a unnivel de abstracción más alto, identificando un conjunto de bloques según lafunción que realicen y usando técnicas de grafos de flujo de señal, dondeestán implicados distintos operadores analógicos (integración, escalado,
ASC 1.3 Representación entrada-salida de sistemas LTI
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-5
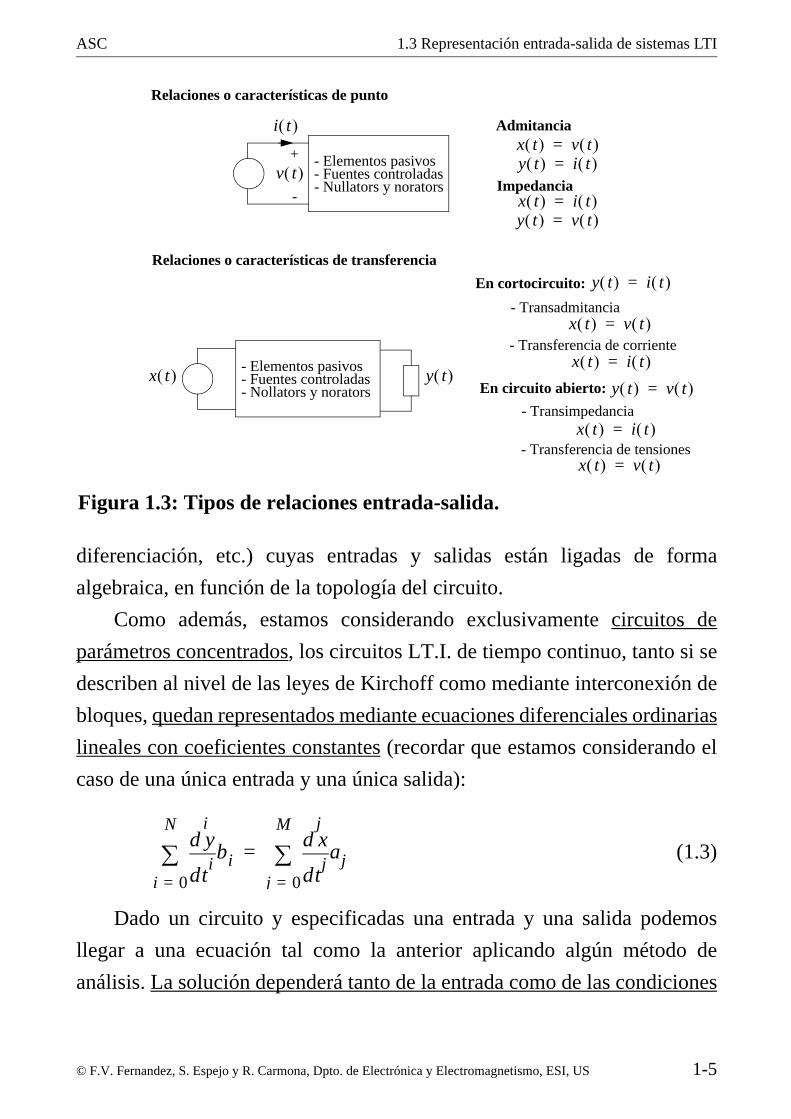
diferenciación, etc.) cuyas entradas y salidas están ligadas de formaalgebraica, en función de la topología del circuito.
Como además, estamos considerando exclusivamente circuitos deparámetros concentrados, los circuitos LT.I. de tiempo continuo, tanto si sedescriben al nivel de las leyes de Kirchoff como mediante interconexión debloques, quedan representados mediante ecuaciones diferenciales ordinariaslineales con coeficientes constantes (recordar que estamos considerando elcaso de una única entrada y una única salida):
(1.3)
Dado un circuito y especificadas una entrada y una salida podemosllegar a una ecuación tal como la anterior aplicando algún método deanálisis. La solución dependerá tanto de la entrada como de las condiciones
Relaciones o características de punto
- Elementos pasivos- Fuentes controladas- Nollators y norators
- Elementos pasivos- Fuentes controladas- Nullators y norators
+
-
Relaciones o características de transferencia
Admitancia
Impedancia
En cortocircuito: - Transadmitancia
- Transferencia de corriente
En circuito abierto:- Transimpedancia
- Transferencia de tensiones
Figura 1.3: Tipos de relaciones entrada-salida.
x t( ) v t( )=y t( ) i t( )=v t( )
i t( )
x t( ) i t( )=y t( ) v t( )=
y t( ) i t( )=
x t( ) v t( )=
x t( ) i t( )=y t( ) v t( )=
x t( ) i t( )=
x t( ) v t( )=
x t( ) y t( )
ti
i
d
d ybii 0=
N
∑tj
j
d
d xajj 0=
M
∑=
REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-6 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
iniciales en los elementos reactivos, lo que dará lugar a la descomposiciónde la respuesta en respuesta a entrada cero y respuesta a estado cero.
Dependiendo de la naturaleza física de la entrada y la salida podemosconsiderar hasta 6 situaciones distintas en el agrupamiento entrada-salida,que se ilustran en la Fig. 1.3.
1.4 Respuesta a entrada cero y estado cero
C_P.3En el dominio del tiempoLa segunda cuestión básica a responder es si puede expresarse la
respuesta a estado cero para una excitación arbitraria a partir de la respuestaa una excitación simple. De donde se obtienen dos cuestiones derivadas: (1)¿puede expresarse una excitación arbitraria como suma de excitacionessimples? y si es así, (2) ¿puede expresarse la respuesta del circuito comosuma de las respuestas a las componentes de la excitación?
La primera pregunta puede responderse afirmativamente recurriendo alconcepto de impulso y respuesta al impulso. Por la propiedad de muestreopodemos expresar una entrada arbitraria en función de impulsos:
(1.4)
Por la linealidad del sistema la salida es la convolución entre la entrada y larespuesta al impulso, a la que hemos llamado :
(1.5)
constituyendo lo que se denomina integral de convolución.C_P.4
La respuesta a la segunda pregunta es claramente afirmativa, puesto quepodemos aplicar el principio de superposición si tenemos en cuenta quetrabajamos con circuitos lineales.
x t( ) x τ( )δ t τ–( ) τd∞–
∞
∫=
h t( )
y t( ) x τ( )h t τ–( ) τd∞–
∞
∫=
ASC 1.4 Respuesta a entrada cero y estado cero
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-7
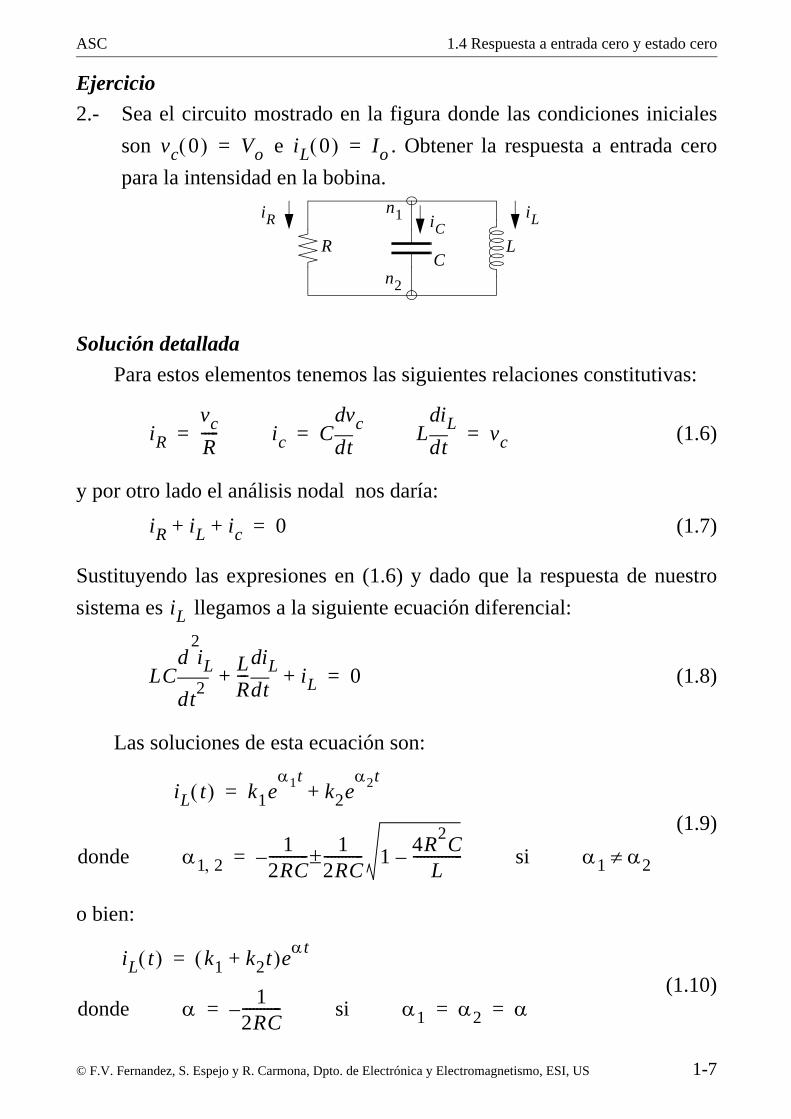
Ejercicio2.- Sea el circuito mostrado en la figura donde las condiciones iniciales
son e . Obtener la respuesta a entrada ceropara la intensidad en la bobina.
Solución detalladaPara estos elementos tenemos las siguientes relaciones constitutivas:
(1.6)
y por otro lado el análisis nodal nos daría:
(1.7)
Sustituyendo las expresiones en (1.6) y dado que la respuesta de nuestrosistema es llegamos a la siguiente ecuación diferencial:
(1.8)
Las soluciones de esta ecuación son:
(1.9)
o bien:
(1.10)
vc 0( ) Vo= iL 0( ) Io=
RC
L
iL
n2
iCn1iR
iRvcR-----= ic C
tddvc= L
tddiL vc=
iR iL ic+ + 0=
iL
LCt2
2
d
d iL LR---
tddiL iL+ + 0=
iL t( ) k1eα1t
k2eα2t
+=
donde α1 2,1
2RC-----------– 1
2RC----------- 1 4R2C
L--------------–±= si α1 α2≠
iL t( ) k1 k2t+( )eαt=
donde α 12RC-----------–= si α1 α2 α= =

REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-8 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
los valores de las constantes y habrán de obtenerse a partir de lascondiciones iniciales, y :
(1.11)
Ejercicio3.- Calcular la respuesta al escalón para el circuito mostrado en la figura.
Solución detalladaEn esta ocasión la ley de Kirchoff de las intensidades nos dice que:
(1.12)
lo que resulta en la siguiente ecuación diferencial:
(1.13)
esta ecuación no es homogénea por lo que su solución será la suma de lasolución de la ecuación diferencial homogénea (la expuesta en la ecuaciones(1.9) y (1.10)) más una solución particular, o sea:
(1.14)
o bien:
k1 k2iL 0( ) Io= diL dt⁄( ) 0( ) Vo L⁄=
k1α– 2Io Vo L⁄+α1 α2–
----------------------------------= y k2α1Io Vo L⁄–α1 α2–
-------------------------------= ó
k1 Io= y k2 α– Io Vo L⁄+= respectivamente
Euo t( ) R C L
iL
vC 0–( ) 0=
iL 0–( ) 0=
iR iL ic+ + Euo t( )=
LCt2
2
d
d iL LR---
tddiL iL+ + Euo t( )=
iL t( ) Euo t( ) k+ 1eα1t
k2eα2t
+=
donde α1 2,1
2RC-----------– 1
2RC----------- 1 4R2C
L--------------–±= si α1 α2≠
ASC 1.4 Respuesta a entrada cero y estado cero
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-9
(1.15)
De nuevo las constantes y se obtienen a partir de las condicionesiniciales, que ahora son y , resultando en:
(1.16)
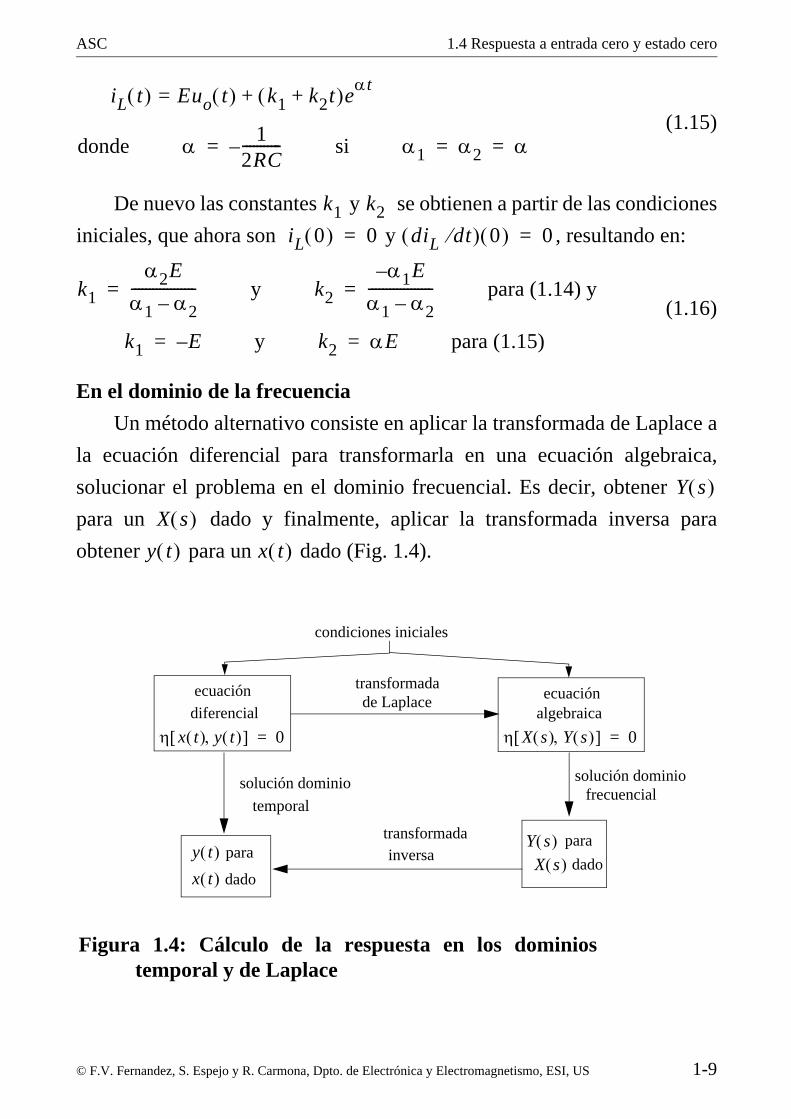
En el dominio de la frecuenciaUn método alternativo consiste en aplicar la transformada de Laplace a
la ecuación diferencial para transformarla en una ecuación algebraica,solucionar el problema en el dominio frecuencial. Es decir, obtener para un dado y finalmente, aplicar la transformada inversa paraobtener para un dado (Fig. 1.4).
iL t( ) Euo t( ) k1 k2t+( )+ eαt=
donde α 12RC-----------–= si α1 α2 α= =
k1 k2iL 0( ) 0= diL dt⁄( ) 0( ) 0=
k1α2E
α1 α2–------------------= y k2
α– 1Eα1 α2–------------------= para (1.14) y
k1 E–= y k2 αE= para (1.15)
Y s( )X s( )
y t( ) x t( )
ecuacióndiferencial
ecuaciónalgebraica
para
dado
paradado
transformadade Laplace
solución dominiofrecuencial
transformadainversa
solución dominiotemporal
condiciones iniciales
Figura 1.4: Cálculo de la respuesta en los dominiostemporal y de Laplace
η x t( ) y t( ),[ ] 0= η X s( ) Y s( ),[ ] 0=
y t( )x t( )
X s( )Y s( )
REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-10 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
Para calcular la respuesta a estado cero en el dominio de la frecuenciaconsideraremos, sin pérdida de generalidad, un circuito LTI con una entraday una salida, descrito por la ecuación:
(1.17)
Tomamos transformadas y como:
(1.18)
obtenemos:
(1.19)
En el dominio de la frecuencia la salida a estado cero se obtienemultiplicando a la entrada por la función de red correspondiente.C_P.5
La función de sistema correspondiente a una entrada y una salida dadases la transformada de Laplace de la respuesta al impulso:
(1.20)
En el dominio de la frecuencia hay dos vías para calcular la respuesta aentrada cero:
1) Introduciendo las condiciones iniciales en la transformada de laderivada:
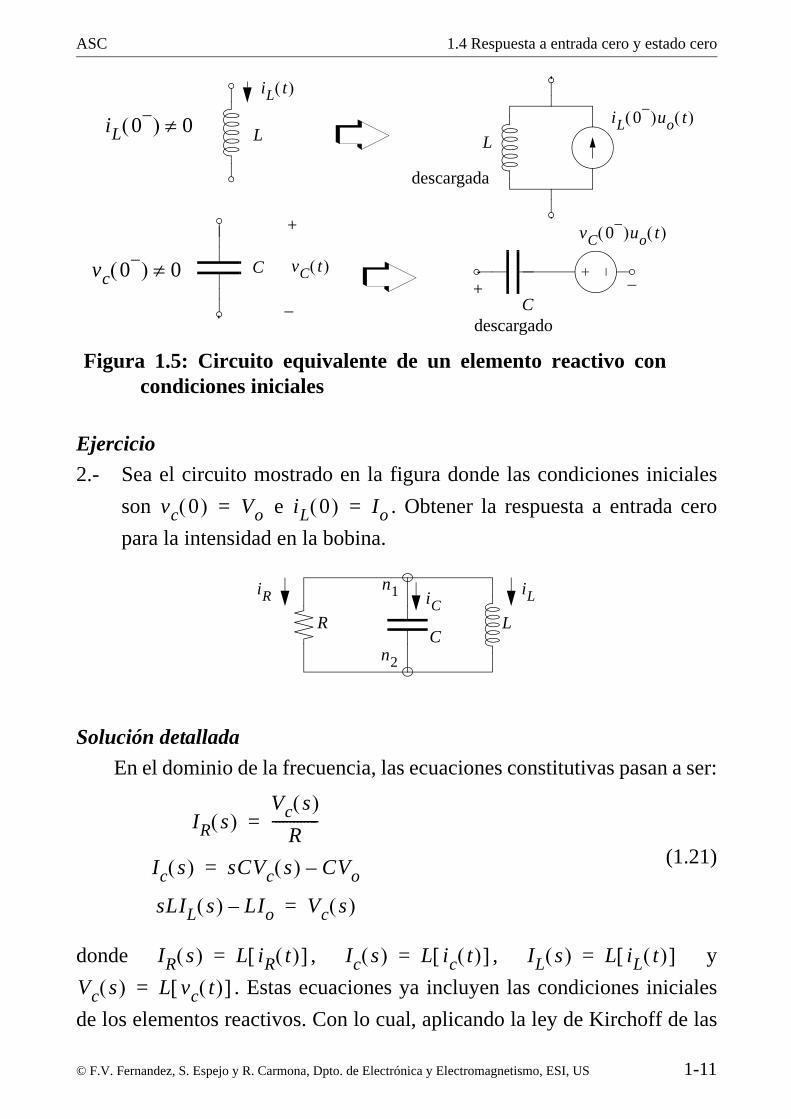
2) Considerando las condiciones iniciales en los elementos reactivoscomo fuentes equivalentes y aplicando el principio de superposición,tal como se ilustra en la Fig. 1.5.
ti
i
d
d ybii 0=
N
∑tj
j
d
d xajj 0=
M
∑=
y 0–( ) y 1( ) 0–( ) … y n 1–( ) 0–( ) 0= = = =
x 0–( ) x 1( ) 0–( ) … x n 1–( ) 0–( ) 0= = = =
Y s( )
ajsj
j 0=
M
∑
bisi
i 0=
N
∑
-------------------X s( ) H s( )X s( )= =
H s( ) L h t( )[ ]=
ASC 1.4 Respuesta a entrada cero y estado cero
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-11
Ejercicio2.- Sea el circuito mostrado en la figura donde las condiciones iniciales
son e . Obtener la respuesta a entrada ceropara la intensidad en la bobina.
Solución detalladaEn el dominio de la frecuencia, las ecuaciones constitutivas pasan a ser:
C_P.6 (1.21)
donde , , y. Estas ecuaciones ya incluyen las condiciones iniciales
de los elementos reactivos. Con lo cual, aplicando la ley de Kirchoff de las
descargada
descargado
+−
iL 0–( ) 0≠
vc 0–( ) 0≠−
+
Figura 1.5: Circuito equivalente de un elemento reactivo concondiciones iniciales
L
iL t( )
C vC t( )
vC 0–( )uo t( )
C
LiL 0–( )uo t( )
vc 0( ) Vo= iL 0( ) Io=
RC
L
iL
n2
iCn1iR
IR s( )Vc s( )
R-------------=
Ic s( ) sCVc s( ) CVo–=
sLIL s( ) LIo– Vc s( )=
IR s( ) L iR t( )[ ]= Ic s( ) L ic t( )[ ]= IL s( ) L iL t( )[ ]=Vc s( ) L vc t( )[ ]=
REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-12 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
intensidades:
(1.22)
llegamos a la siguiente ecuación algebraica:
(1.23)
y resolviendo en , tenemos:
(1.24)
o bien:
(1.25)
Si realizamos ahora la transformada inversa de Laplace de tendremos :
(1.26)
o bien:
(1.27)
IR s( ) Ic s( ) IL s( )+ + 0=
s2LCIL s( ) s LR---IL s( ) LCIo– IL s( ) L
R---Io– CVo–+ + 0=
IL s( )
IL s( )s 1 RC⁄+( )Io Vo L⁄+
s2 s RC⁄ 1 LC⁄+ +-----------------------------------------------------
k1s α1–--------------
k2s α2–--------------+= = si α1 α2≠
donde α1 2,1
2RC-----------– 1
2RC----------- 1 4R2C
L--------------–±=
y por tanto k1α– 2Io Vo L⁄+α1 α2–
----------------------------------= y k2α1Io Vo L⁄–α1 α2–
-------------------------------=
IL s( )s 1 RC⁄+( )Io Vo L⁄+
s2 s RC⁄ 1 LC⁄+ +-----------------------------------------------------
k1s α–------------
k2
s α–( )2-------------------+= =
si α1 α2 α= = , donde α 12RC-----------–=
y por tanto k1 Io= y k2 α– Io Vo L⁄+=
IL s( )iL t( )
iL t( ) k1eα1t
k2eα2t
+= de la ecuación (1.28)
iL t( ) k1 k2t+( )eαt= de la ecuación (1.29)

ASC 1.4 Respuesta a entrada cero y estado cero
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-13
Ejercicio3.- Calcular la respuesta al escalón para el circuito mostrado en la figura.
Solución detalladaEn esta ocasión aplicando la ley de Kirchoff de las intensidades a las
transformadas, y teniendo en cuenta que :
(1.28)
por lo que llegamos a:
(1.29)
dado que en esta ocasión las condiciones iniciales son nulas. Así:
(1.30)
o bien:
(1.31)
Euo t( ) R C L
iL
vC 0–( ) 0=
iL 0–( ) 0=
L Euo t( )[ ] E s⁄=
IR s( ) Ic s( ) IL s( )+ + Es---=
s2 sRC-------- 1
LC-------+ +⎝ ⎠
⎛ ⎞ IL s( ) EsLC----------=
IL s( ) E LC⁄
s s2 s RC⁄ 1 LC⁄+ +( )------------------------------------------------------
kos-----
k1s α1–--------------
k2s α2–--------------+ += =
si α1 α2≠ donde α1 2,1
2RC-----------– 1
2RC----------- 1 4R2C
L--------------–±=
y por tanto k1α2E
α1 α2–------------------= y k2
α– 1Eα1 α2–------------------=
IL s( )kos
-----k1
s α–------------
k2
s α–( )2-------------------+ += si α1 α2 α= =
donde α 12RC-----------–=
y por tanto k1 E–= y k2 αE=
REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-14 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
Si realizamos ahora la transformada inversa de Laplace de en(1.30) y (1.31) tendremos de nuevo (1.26) y (1.27), respectivamente.
1.5 Componentes natural y forzada de la respuestade sistemas
Aunque la respuesta de un sistema es una forma de onda única suestudio es más conveniente mediante su descomposición en dos partes: lacomponente natural debida a los polos del sistema y la componente forzada,relacionada con los polos de la excitación.
La función de sistema relaciona la excitación con larespuesta mediante
(1.32)
Si el circuito es lineal, de parámetros concentrados, invariante en eltiempo, H(s) es una función racional real. En gran parte de las situaciones
es también una función racional. Si y son funcionesracionales entonces la respuesta es también una función racional:
(1.33)
donde son los polos finitos de la respuesta. Supongamos que es de menor orden que . Si suponemos también que todos los
polos son simples, la expansión de en fracciones es,
(1.34)
donde es el residuo del polo , y viene dado por:
(1.35)
IL s( )
H s( ) X s( )Y s( )
Y s( ) H s( )X s( )=
X s( ) H s( ) X s( )Y s( )
Y s( ) N s( )D s( )----------- N s( )
s p1–( ) s p2–( )… s pn–( )---------------------------------------------------------------= =
p1 p2 … pn, , ,N s( ) D s( )
Y s( )
Y s( )K1
s p1–--------------
K2s p2–-------------- …
Kns pn–--------------+ + +
Kis pi–------------
i 1=
n
∑= =
Ki piKi Y s( ) s pi–( )
s pi== i 1 2 … n, , ,=( )
ASC 1.5 Componentes natural y forzada de la respuesta de sistemas
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-15
Si y son complejos, serán complejos conjugados, puesto que es una función racional con coeficientes reales.
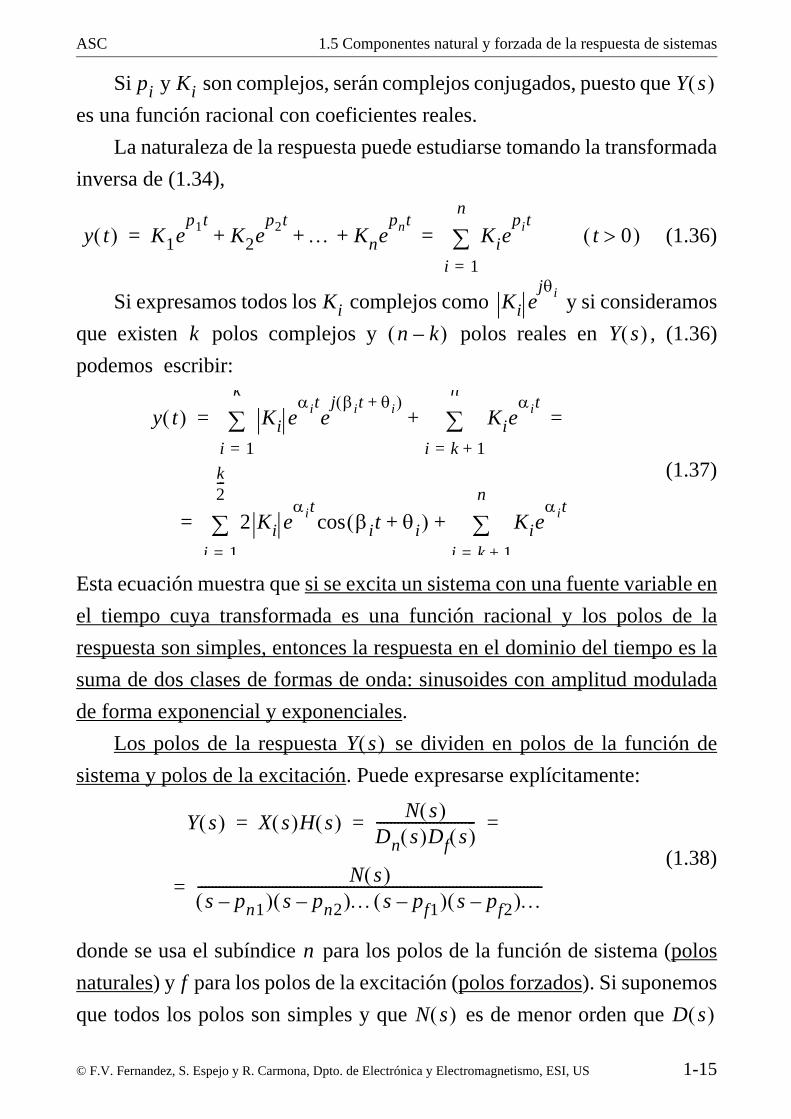
La naturaleza de la respuesta puede estudiarse tomando la transformadainversa de (1.34),
(1.36)
Si expresamos todos los complejos como y si consideramosque existen polos complejos y polos reales en , (1.36)podemos escribir:
(1.37)
Esta ecuación muestra que si se excita un sistema con una fuente variable enel tiempo cuya transformada es una función racional y los polos de larespuesta son simples, entonces la respuesta en el dominio del tiempo es lasuma de dos clases de formas de onda: sinusoides con amplitud moduladade forma exponencial y exponenciales.C_P.8
Los polos de la respuesta se dividen en polos de la función desistema y polos de la excitación. Puede expresarse explícitamente:
(1.38)
donde se usa el subíndice para los polos de la función de sistema (polosnaturales) y para los polos de la excitación (polos forzados). Si suponemosque todos los polos son simples y que es de menor orden que
pi Ki Y s( )
y t( ) K1ep1t
K2ep2t
… Knepnt
+ + + Kiepit
i 1=
n
∑= = t 0>( )
Ki Ki ejθi
k n k–( ) Y s( )
y t( ) Ki eαite
j βit θi+( )
i 1=
k
∑ Kieαit
i k 1+=
n
∑+ = =
2 Ki eαit βit θi+( )cos
i 1=
k2---
∑ Kieαit
i k 1+=
n
∑+=
Y s( )
Y s( ) X s( )H s( ) N s( )Dn s( )Df s( )---------------------------- = = =
N s( )s pn1–( ) s pn2–( )… s pf1–( ) s pf2–( )…
-------------------------------------------------------------------------------------------------=
nf
N s( ) D s( )
REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-16 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
expandiendo parcialmente en fracciones:
(1.39)
se denomina la parte natural de la respuesta dado que los polosasociados con nacen del propio sistema y sus valores no tienen nadaque ver con la excitación; son naturales o característicos del circuito. es la parte forzada de la respuesta, dado que sus polos dependen de los polosde la excitación y no tienen nada que ver con el circuito; los polos de laexcitación fuerzan al sistema a producir la respuesta. En el dominio deltiempo (1.39) corresponde a,
C_P.7 (1.40)
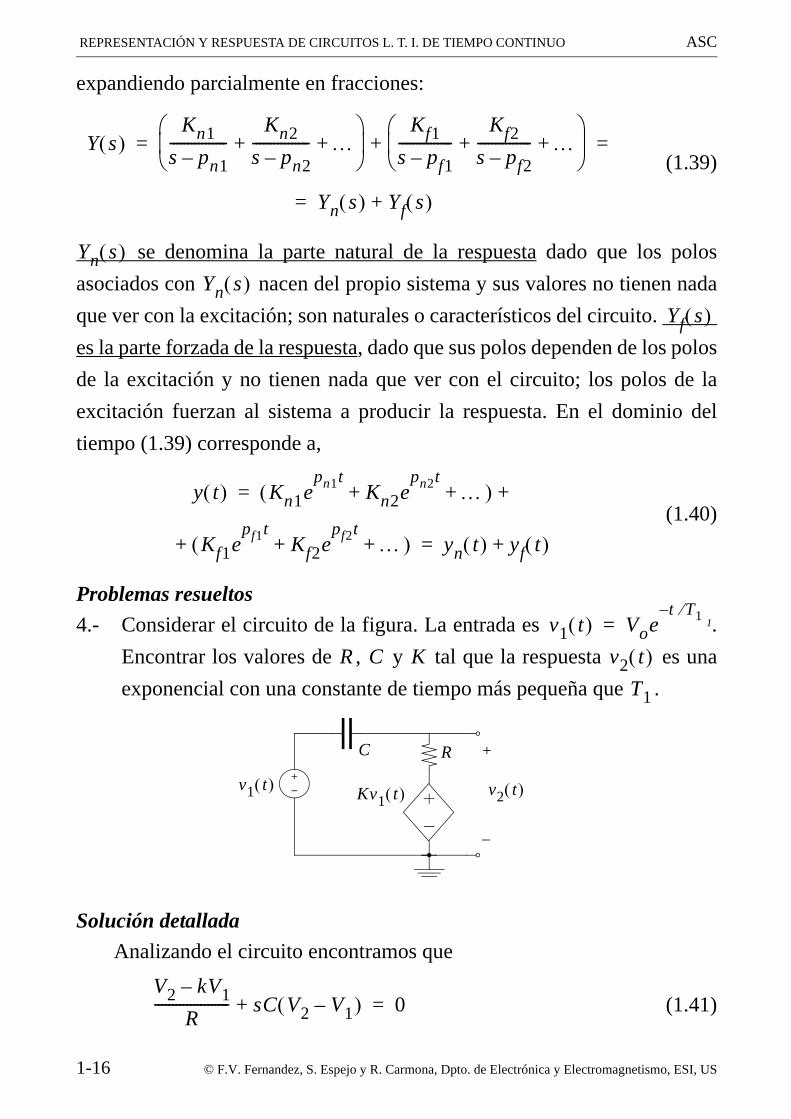
Problemas resueltos4.- Considerar el circuito de la figura. La entrada es 1.
Encontrar los valores de , y tal que la respuesta es unaexponencial con una constante de tiempo más pequeña que .
Solución detalladaAnalizando el circuito encontramos que
(1.41)
Y s( )Kn1
s pn1–----------------
Kn2s pn2–---------------- …+ +
⎝ ⎠⎜ ⎟⎛ ⎞ Kf1
s pf1–---------------
Kf2s pf2–--------------- …+ +
⎝ ⎠⎜ ⎟⎛ ⎞
+ = =
Yn s( ) Yf s( )+=
Yn s( )Yn s( )
Yf s( )
y t( ) Kn1epn1t
Kn2epn2t
…+ +( ) +=
Kf1epf1t
Kf2epf2t
…+ +( )+ yn t( ) yf t( )+=
v1 t( ) Voet T1⁄–
=R C K v2 t( )
T1
+
−
v1 t( ) Kv1 t( )
RC
v2 t( )
V2 kV1–R
--------------------- sC V2 V1–( )+ 0=
ASC 1.5 Componentes natural y forzada de la respuesta de sistemas
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-17
de modo que la función del sistema resulta ser:
(1.42)
mientras que la transformada de la entrada es:
(1.43)
por lo que la transformada de la respuesta queda:
(1.44)
Para que esta respuesta sea una única exponencial, necesitaremos que. Y para que la constante de tiempo de dicha exponencial
sea menor que , , de modo que los valores de , y quenecesitamos son:
(1.45)
5.- Explicar cómo se puede diseñar un circuito que tenga respuesta forzadanula para la señal de excitación . Proponer uncircuito que tenga dicho comportamiento. ¿Cuál es un posible usopráctico de este circuito?
Solución detalladaSi calculamos la transformada de la señal de excitación
(1.46)
vemos que para la respuesta forzada sea nula, necesitaremos ceros detransmisión en .
H s( )V2 s( )V1 s( )------------- s k RC⁄+
s 1 RC⁄+-----------------------= =
V1 s( )Vo
s 1 T1⁄+---------------------=
V2 s( ) H s( )V1 s( ) s k RC⁄+s 1 RC⁄+-----------------------
Vos 1 T1⁄+---------------------⋅= =
k RC⁄ 1 T1⁄=T1 RC T1< R C k
k 1< RCk
-------- T1=
vi t( ) Vo ωotcos=
Vi t( )sVo
s2 ωo2+
------------------=
s jωo±=

REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-18 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
Por ejemplo, el siguiente circuito:
tiene como función de transferencia:
(1.47)
Si seleccionamos y de modo que , los polos de laexcitación se cancelan con los ceros de la función de red, resultando en unarespuesta forzada nula.
Este circuito actúa como un filtro rechazo de banda simétrico de 2o
orden. Vamos a reescribir la función de transferencia como
(1.48)
donde y . Si representamos
vemos que a la frecuencia tenemos cero de transmisión.
+-
+
_L vo t( )vi t( ) R
C
H s( )Vo s( )
Vi s( )------------- s2 1 LC⁄+
s2 s RC⁄ 1 LC⁄+ +----------------------------------------------= =
L C ωo 1 LC⁄=
H s( )s2 ωo
2+
s2 2αωo ωo2+ +
--------------------------------------=
ωo 1 LC⁄= α 1 2RC⁄= H jω( )
1
00 ω
H jω( )
ωo
H jω( )ωo
2 ω2–
ωo2 ω2–( ) 4α2ω2+
---------------------------------------------------=
ωo

ASC 1.5 Componentes natural y forzada de la respuesta de sistemas
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-19
Un circuito alternativo sería:
6.- Construir un circuito y encontrar una excitación tal que la respuesta ala entrada (estado cero) sea:
Solución detalladaEn primer lugar, veamos cual es la transformada de la respuesta:
(1.49)
de modo que:
(1.50)
y como , tenemos varias alternativas:a) Los casos triviales en que ó , para los cualestendremos una respuesta a la entrada totalmente forzada o únicamentenatural, respectivamente.
b) y , o sea
+-
+
_
Lvo t( )
vi t( )
R CH s( )
s2 1LC-------+
s2 RL---s 1
LC-------+ +
--------------------------------=
y t( ) e t– 2⁄ 12
------- t π4---+⎝ ⎠
⎛ ⎞cos–=
L e t–
2------ 1
2--- 1
s 1+-----------⋅=
L 12
------- t π4---+⎝ ⎠
⎛ ⎞cos L 12--- tcos 1
2---sent– 1
2--- s 1–
s2 1+--------------⋅= =
Y s( ) 12--- 1
s 1+-----------⋅ 1
2--- s 1–
s2 1+--------------⋅– 1
s2 1+( ) s 1+( )------------------------------------–= =
Y s( ) H s( )X s( )=H s( ) 1= X s( ) 1=
H s( ) 1 s 1+( )⁄= X s( ) 1 s2 1+( )⁄=
+-
+
_
y t( )x t( ) tsin=
R
CRC 1=
REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-20 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
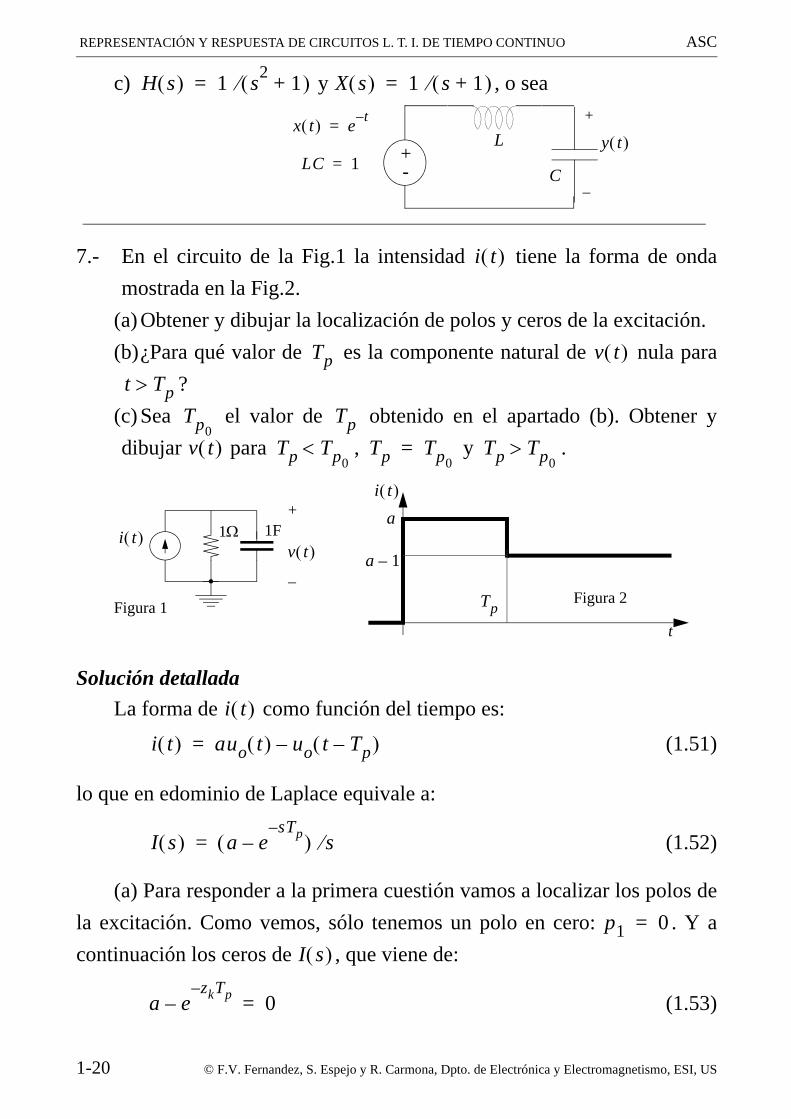
c) y , o sea
7.- En el circuito de la Fig.1 la intensidad tiene la forma de ondamostrada en la Fig.2.
(a) Obtener y dibujar la localización de polos y ceros de la excitación.(b)¿Para qué valor de es la componente natural de nula para
?(c) Sea el valor de obtenido en el apartado (b). Obtener ydibujar para , y .
Solución detalladaLa forma de como función del tiempo es:
(1.51)
lo que en edominio de Laplace equivale a:
(1.52)
(a) Para responder a la primera cuestión vamos a localizar los polos dela excitación. Como vemos, sólo tenemos un polo en cero: . Y acontinuación los ceros de , que viene de:
(1.53)
H s( ) 1 s2 1+( )⁄= X s( ) 1 s 1+( )⁄=
+-
+
_
y t( )x t( ) e t–=
L
CLC 1=
i t( )
Tp v t( )t Tp>
Tp0Tp
v t( ) Tp Tp0< Tp Tp0
= Tp Tp0>
+
−
1F1Ω
tFigura 1 Figura 2
i t( )
Tp
a
a 1–i t( )
v t( )
i t( )
i t( ) auo t( ) uo t Tp–( )–=
I s( ) a esTp–
–( ) s⁄=
p1 0=I s( )
a ezkTp–
– 0=
ASC 1.5 Componentes natural y forzada de la respuesta de sistemas
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-21
y dado que puede ser complejo, :
(1.54)
y de aquí deducimos en primer lugar que, puesto que es real, tiene que ser cero, para lo cual debe ser 0 ó , si es un númeroentero, así que tenemos infinitos ceros cuyas partes imaginarias valen:
(1.55)
Mientras, por otro lado, la parte real de los ceros, viene de hacer:
(1.56)
y dado que es positivo, de los infinitos que tenemos de antes, sólonos valdrán los multiplos pares de , o sea, del conjunto de valores quetenemos en (1.55) tomamos sólo los . Para todos estosvalores, , por lo que:
(1.57)
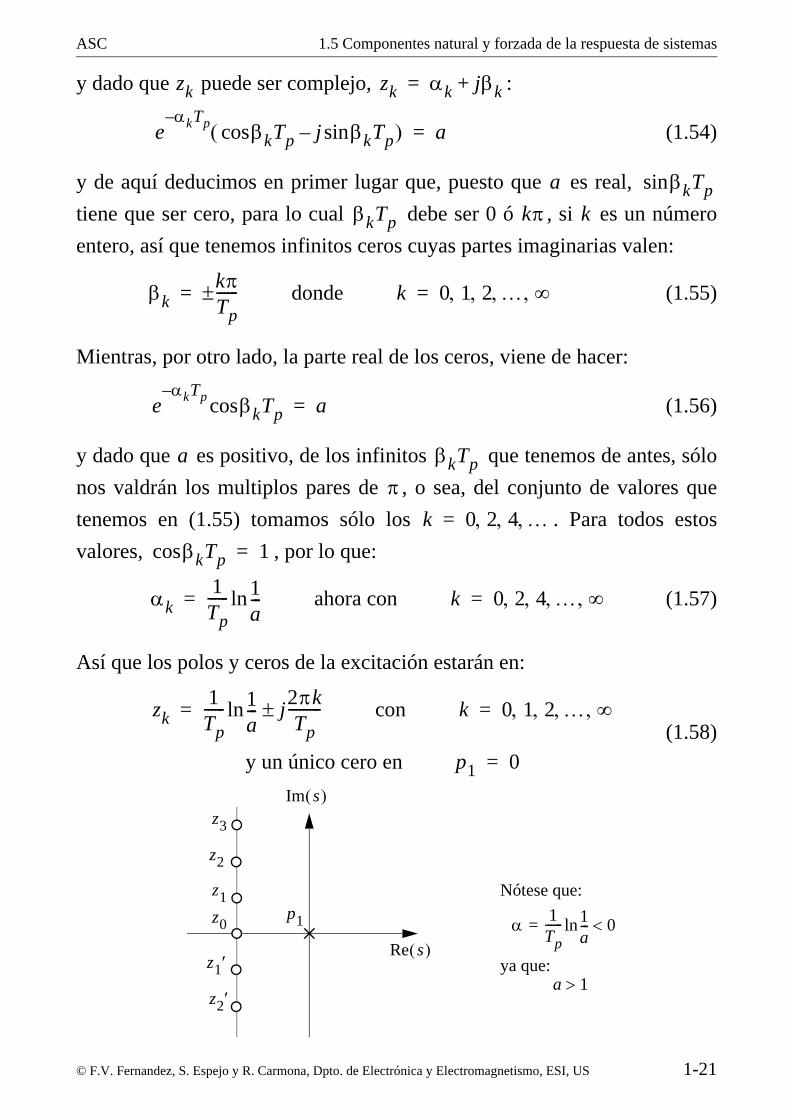
Así que los polos y ceros de la excitación estarán en:
(1.58)
zk zk αk jβk+=
eαkTp–
βkTpcos j βksin Tp–( ) a=
a βkTpsinβkTp kπ k
βkkπTp------±= donde k 0 1 2 … ∞, , , ,=
eαkTp–
βkTpcos a=
a βkTpπ
k 0 2 4 …, , ,=βkTpcos 1=
αk1
Tp------ 1
a---ln= ahora con k 0 2 4 … ∞, , , ,=
zk1Tp------ 1
a---ln j2πk
Tp---------±= con k 0 1 2 … ∞, , , ,=
y un único cero en p1 0=Im s( )
α 1Tp------ 1
a---ln= 0<
Re s( )
p1z0
z1
z2
z3
z1′
z2′
Nótese que:
ya que:a 1>
REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-22 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
(b) Para determinar el valor de que anula la componente natural dela respuesta, , vamos a calcular la función del sistema. Así tenemos, paraeste circuito, la siguiente ecuación diferencial:
(1.59)
que al pasar al dominio de Laplace se convierte en:
(1.60)
Si calculamos la transformada de la respuesta:
(1.61)
de modo que la única forma de cancelar el polo real en es mediante el cero real . Así, si llamamos alvalor de que hace posible esta cancelación, tenemos:
(1.62)
(c) Lo primero que debemos hacer es obtener una expresión de ,para un genérico. Esta es la transformada de la respuesta:
(1.63)
la función del término es la de restrasar la respuesta temporal, asíque estaremos interesados en descomponer :
(1.64)
de este modo, tomando la transformada inversa de , llegamos a:
(1.65)
Tpv t( )
Cdv t( )dt
------------ v t( )R
---------+ i t( )=
sC 1R---+⎝ ⎠
⎛ ⎞V s( ) I s( )= y por tanto H s( ) V s( )I s( )----------- 1 C⁄
s 1 RC⁄+-----------------------= =
V s( ) H s( )I s( ) 1sC s 1 RC⁄+( )----------------------------------- a e
sTp––( )= =
H s( ) s 1 RC⁄–=z0 1 Tp⁄( ) 1 a⁄( )ln= Tp0
Tp1
Tp0
-------- 1a---ln 1
RC--------–= o sea Tp0
RC aln=
v t( )Tp
V s( ) a esTp–
–sC s 1 RC⁄+( )----------------------------------- a C⁄
s s 1 RC⁄+( )------------------------------- 1 C⁄
s s 1 RC⁄+( )-------------------------------e
sTp––= =
esTp–
Tp1 s s 1 RC⁄+( )⁄
1s s 1 RC⁄+( )------------------------------- RC
s-------- RC
s 1 RC⁄+-----------------------–=
V s( )
v t( ) aR 1 e t RC⁄––( )u t( ) R 1 et Tp–( ) RC⁄–
–( )u t Tp–( )–=
ASC 1.5 Componentes natural y forzada de la respuesta de sistemas
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-23
de donde deducimos que:
(1.66)
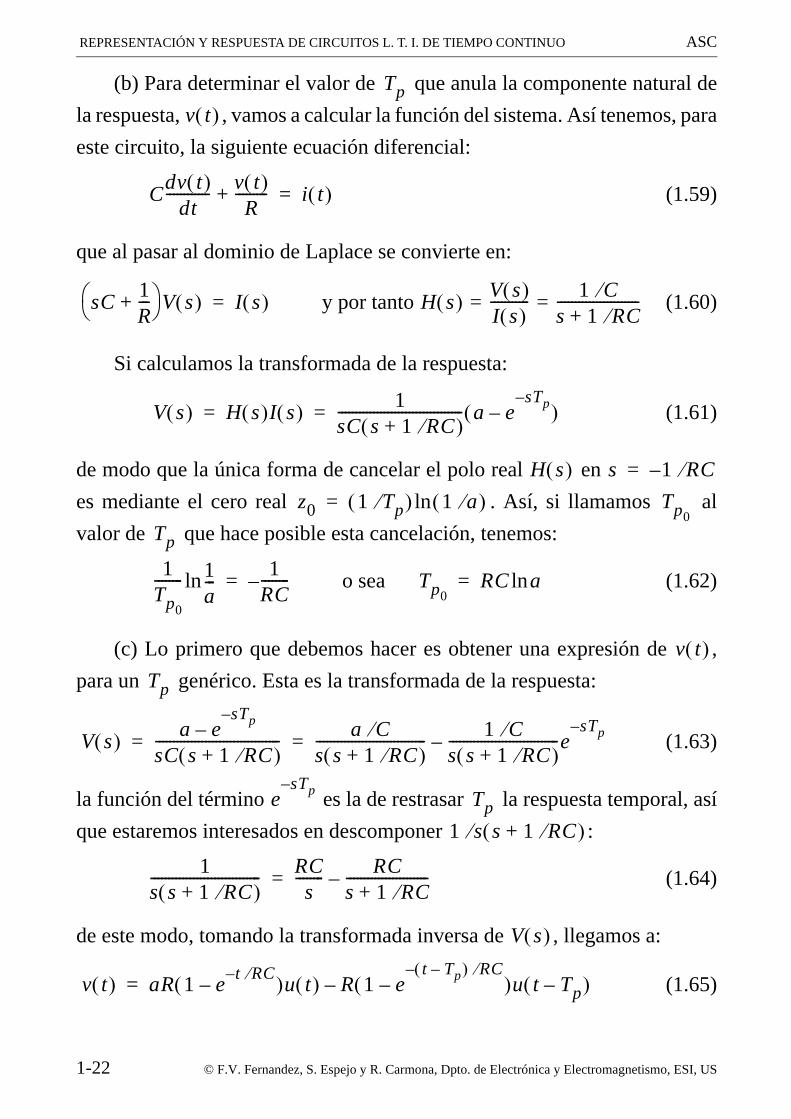
Veamos que forma tiene en cada uno de los casos establecidos enel enunciado. En primer lugar, supongamos que . Recordemos que,según (1.62), . En esta ocasión, dado que , eltérmino es menor que , y, por otro lado, ,por lo que tenemos la forma de onda siguiente:
donde observamos que la exponencial que antes tendía a , dada por laprimera expresión de la ecuación (1.66), cambia de asíntota horizontal alpasar por . Así antes teníamos como valor límite y ahora
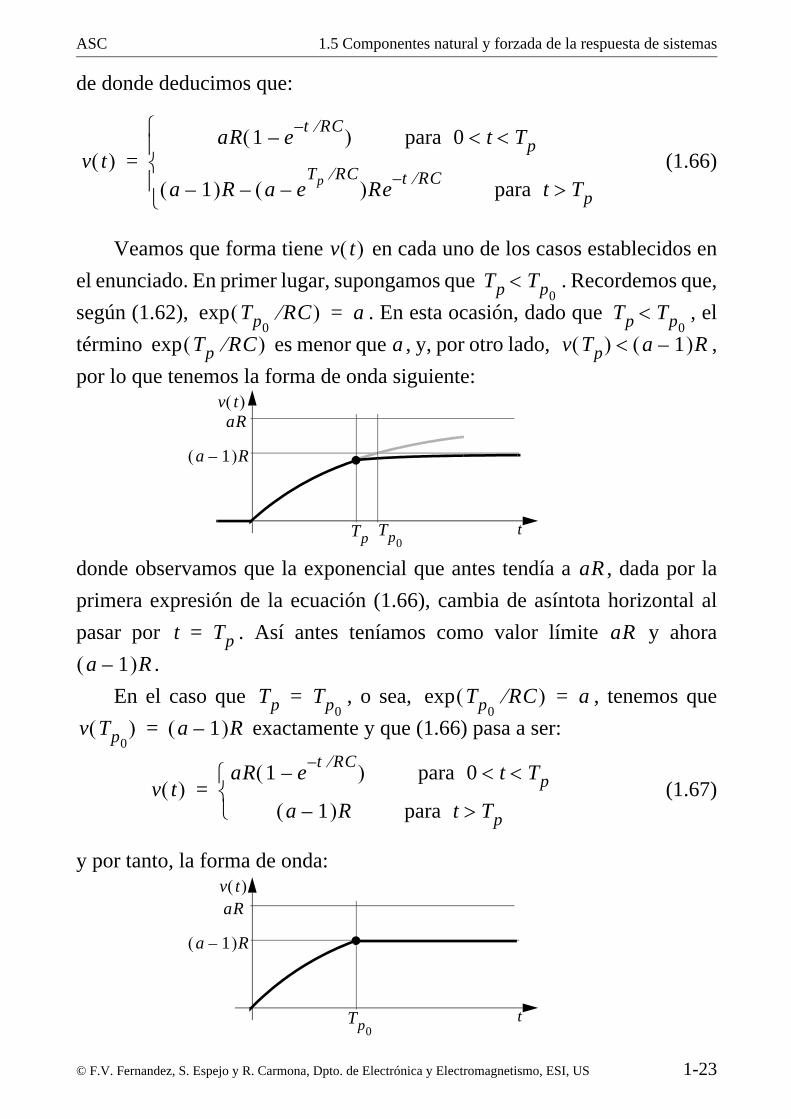
. En el caso que , o sea, , tenemos que
exactamente y que (1.66) pasa a ser:
(1.67)
y por tanto, la forma de onda:
v t( )aR 1 e t RC⁄––( ) para 0 t Tp< <
a 1–( )R a eTp RC⁄
–( )Re t RC⁄–– para t Tp>⎩⎪⎨⎪⎧
=
v t( )Tp Tp0
<Tp0
RC⁄( )exp a= Tp Tp0<
Tp RC⁄( )exp a v Tp( ) a 1–( )R<
t
v t( )
Tp
aR
a 1–( )R
Tp0
aR
t Tp= aRa 1–( )R
Tp Tp0= Tp0
RC⁄( )exp a=v Tp0( ) a 1–( )R=
v t( )aR 1 e t RC⁄––( ) para 0 t Tp< <
a 1–( )R para t Tp>⎩⎨⎧
=
t
v t( )
Tp0
aR
a 1–( )R
REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-24 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
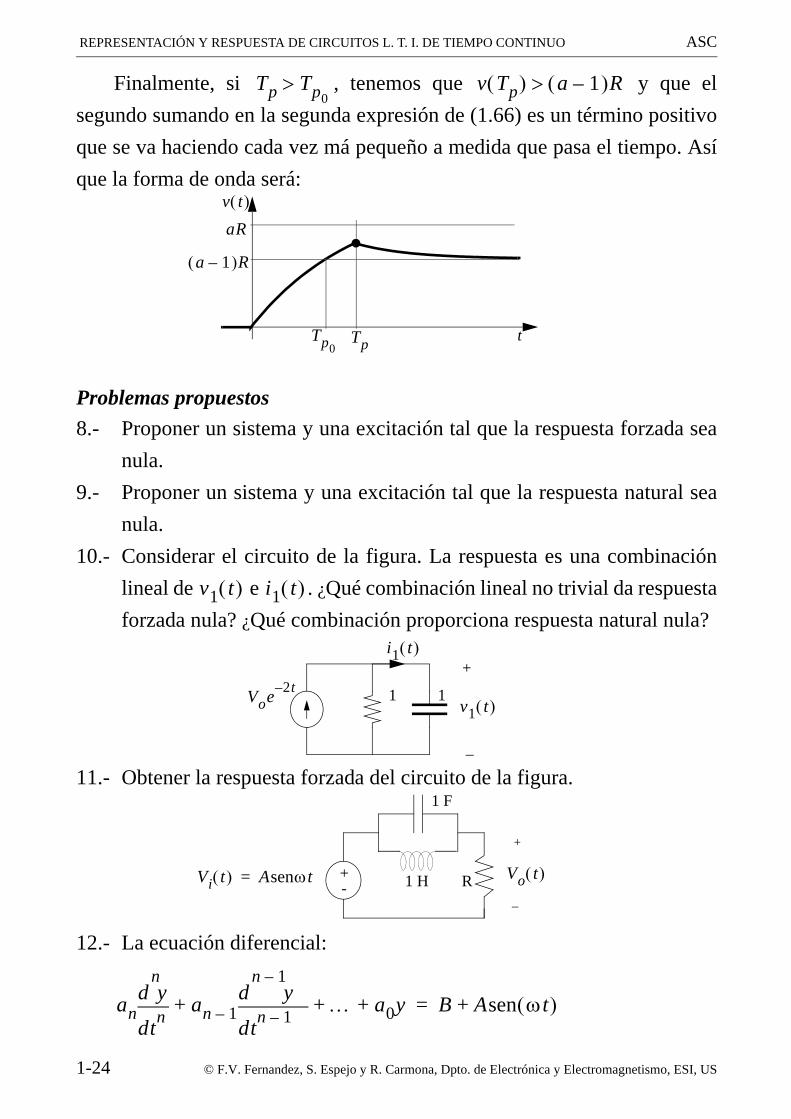
Finalmente, si , tenemos que y que elsegundo sumando en la segunda expresión de (1.66) es un término positivoque se va haciendo cada vez má pequeño a medida que pasa el tiempo. Asíque la forma de onda será:
Problemas propuestos8.- Proponer un sistema y una excitación tal que la respuesta forzada sea
nula.9.- Proponer un sistema y una excitación tal que la respuesta natural sea
nula.10.- Considerar el circuito de la figura. La respuesta es una combinación
lineal de e . ¿Qué combinación lineal no trivial da respuestaforzada nula? ¿Qué combinación proporciona respuesta natural nula?
11.- Obtener la respuesta forzada del circuito de la figura.
12.- La ecuación diferencial:
Tp Tp0> v Tp( ) a 1–( )R>
t
v t( )
Tp
aR
a 1–( )R
Tp0
v1 t( ) i1 t( )
+
−
11v1 t( )
i1 t( )
Voe 2t–
1 H R
1 F
+-
+
_
Vo t( )Vi t( ) Asenωt=
antn
n
d
d y an 1–tn 1–
n 1–
d
d y … a0y+ + + B Asen ωt( )+=
ASC 1.6 Polos y ceros de la función de red
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-25
tiene coeficientes constantes. Las condiciones iniciales son nulas. a) Obtener la función de sistema. Suponer que representa la excitación.
b) Obtener la respuesta forzada.
1.6 Polos y ceros de la función de red
La función de red es una función racional de la frecuencia compleja .Esto es una propiedad general para circuitos lineales, de parámetrosconcentrados invariables en el tiempo. Para estos, las funciones de sistemason cocientes de dos polinomios en s con coeficientes reales
(1.68)
Las raíces del numerador y denominador son las frecuencias críticas delcircuito (las propieades del circuito pueden derivarse del estudio de estasfrecuencias críticas), A los polos nos referimos con el término frecuenciasnaturales del circuito. Conocidos el conjunto de frecuencias críticas delcircuito podemos expresar la función del sistema en forma factorizada:
(1.69)
Aparte de las frecuencias críticas, en el caso de que decimos quela función de sistema presenta polos o ceros en el infinito,
(1.70)
de manera que si , y se dice que la función de sistema
B Asen ωt( )+
s
H s( ) N s( )D s( )-----------
amsm am 1– sm 1– … a1s a0+ + + +
bnsn bn 1– sn 1– … b1s b0+ + + +--------------------------------------------------------------------------------------= =
H s( ) N s( )D s( )----------- K
s zi–( )i 1=
m
∏
s pi–( )i 1=
n
∏
----------------------------= =
m n≠
H s( ) s ∞→
ambn------sm n–→
m n> H s( ) ∞→
REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-26 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
presenta polos en el , y si , entonces y se dice quela función de sistema presenta ceros en el infinito.
Para un circuito activo las frecuencias críticas pueden estar en cualquierposición en el plano complejo y pueden producirse con cualquiermultiplicidad. La única restricción es que las frecuencias críticas complejasdeben aparecer por pares complejos conjugados, lo que es una consecuenciadel hecho de que los coeficientes del numerador y del denominador sonreales.C_P.9
EstabilidadLas posiciones de las frecuencias críticas determinan los
comportamientos cuantitativos y cualitativos de los circuitos. En particular,por lo que se refiere a propiedades cualitativas, una de gran importancia esla estabilidad. Esta propiedad se refiere a que la respuesta del circuitopermanezca acotada bajo la hipótesis de que la excitación permanezcatambién acotada. Una condición necesaria para estabilidad es que larespuesta impulsiva del circuito permanezca acotada, lo cual se puedetraducir en las siguientes condiciones sobre las localizaciones de lasfrecuencias naturales:
a) No pueden existir frecuencias naturales en el semiplano de laderecha del plano s.
b) No pueden existir polos múltiples sobre el eje imaginario.
Criterio de Routh-HurwitzEl criterio de Routh proporciona una condición necesaria (que todos los
coeficientes sean no nulos y del mismo signo) y una suficiente (que no hayacambios de signo en la primera columna de la tabla que confeccionaremos)para la estabilidad. El número de cambios de signo en la primera columnade la tabla indica el número de raíces del polinomio característico que estánsituadas en el semiplano derecho.
m n– ∞ m n< H s( ) 0→n m–
ASC 1.6 Polos y ceros de la función de red
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-27
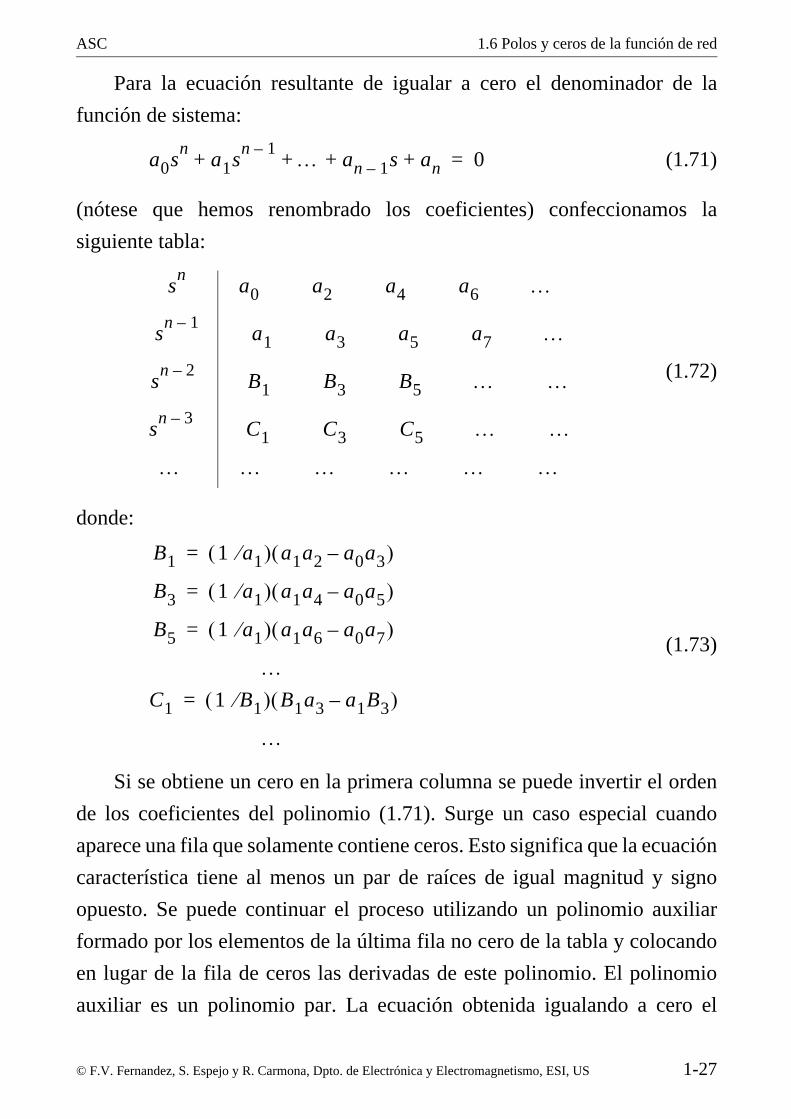
Para la ecuación resultante de igualar a cero el denominador de lafunción de sistema:
(1.71)
(nótese que hemos renombrado los coeficientes) confeccionamos lasiguiente tabla:
(1.72)
donde:
(1.73)
Si se obtiene un cero en la primera columna se puede invertir el ordende los coeficientes del polinomio (1.71). Surge un caso especial cuandoaparece una fila que solamente contiene ceros. Esto significa que la ecuacióncaracterística tiene al menos un par de raíces de igual magnitud y signoopuesto. Se puede continuar el proceso utilizando un polinomio auxiliarformado por los elementos de la última fila no cero de la tabla y colocandoen lugar de la fila de ceros las derivadas de este polinomio. El polinomioauxiliar es un polinomio par. La ecuación obtenida igualando a cero el
a0sn a1sn 1– … an 1– s an+ + + + 0=
sn a0 a2 a4 a6 …
sn 1– a1 a3 a5 a7 …
sn 2– B1 B3 B5 … …
sn 3– C1 C3 C5 … …
… … … … … …
B1 1 a1⁄( ) a1a2 a0a3–( )=
B3 1 a1⁄( ) a1a4 a0a5–( )=
B5 1 a1⁄( ) a1a6 a0a7–( )=
…C1 1 B1⁄( ) B1a3 a1B3–( )=
…

REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-28 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
polinomio auxiliar proporciona las raíces de la ecuación característica deigual magnitud y signo opuesto.
Problemas resueltos13.- Sea el circuito mostrado en la figura donde la fuente de excitación se
aplica entre los terminales a y b; y puede ser bien una tensión bien unaintensidad.
(a) Evaluar la estabilidad del circuito en función de para el caso enque la excitación sea una fuente de tensión.(b) Repetir para el caso que sea una fuente de intensidad.
Solución detalladaPara este circuito tendremos, según el caso
Así que en primer lugar vamos a calcular , que nos servirá enambos casos. De modo que analizando el circuito
gm
a
b +
−
gmVc
Vc
1H 1Ω
0,05Ω2F
0,5F
a
V s( )+-
b
I s( )Y s( )
a
I s( )
+
-b
V s( )Z s( )ó
donde I s( ) Y s( )V s( )= V s( ) Z s( )I s( )=donde
Z s( ) Y s( ) 1–=nótese que
Y s( )
+
−
L1
R1
R2
Vc
gmVcC2
C
Vi
+
−
Ii
I1
I2
ASC 1.6 Polos y ceros de la función de red
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-29
llegamos a:
(1.74)
y sustituyendo los valores de los elementos:
(1.75)
(a) Para este caso, la función de transferencia es la admitancia, ya quela excitación es una tensión, y la salida sería la intensidad que atraviesa elcircuito, de modo que la función del sistema es:
(1.76)
Para discutir la estabilidad de esta función tendremos que determinar lalocalización de sus polos. Los polos de esta función vienen dados por:
(1.77)
según esto, ambos estarían en el semiplano izquierdo del plano si ,y por tanto el sistema sería estable. Si , tendríamos un polo en elsemiplano derecho del plano , por lo que el sistema sería inestable. En elcaso de que el factor del denominador (que supondría un polo en0) se cancelaría con un factor del numerador, haciendo que el sistematenga un único polo en , y por tanto sea estable.
(b) En este caso la discusión es más complicada puesto que eldenominador de la función de transferencia, que ahora es ,es de orden tres, así que aplicamos el criterio de Routh-Hurwitz. Tenemos:
(1.78)
Y s( )1 L1⁄
s R1 L1⁄+-------------------------
s s 1 R2C2⁄+( )s 1 C⁄ 1 C2⁄+( ) 1 R1CC2 gm CC2⁄+⁄+-------------------------------------------------------------------------------------------------+=
Y s( ) 1s 0,05+-------------------ohm 1– s s 2+( )
2,5s 1 gm+ +--------------------------------ohm 1–+=
Y s( )s3 2,05s2 2,6s 1 gm+ + + +
2,5 s 0,05+( ) s1 gm+
2,5----------------+⎝ ⎠
⎛ ⎞------------------------------------------------------------------ohm 1–=
p1 0,05rad/s–= y p2 0,4 1 gm+( )rad/s–=
s gm 1–>gm 1–<
sgm 1= s
sp1 0,05rad/s–=
Z s( ) Y s( ) 1–=
Z s( )2,5 s 0,05+( ) s
1 gm+2,5
----------------+⎝ ⎠⎛ ⎞
s3 2,05s2 2,6s 1 gm+ + + +------------------------------------------------------------------ohm=
REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-30 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
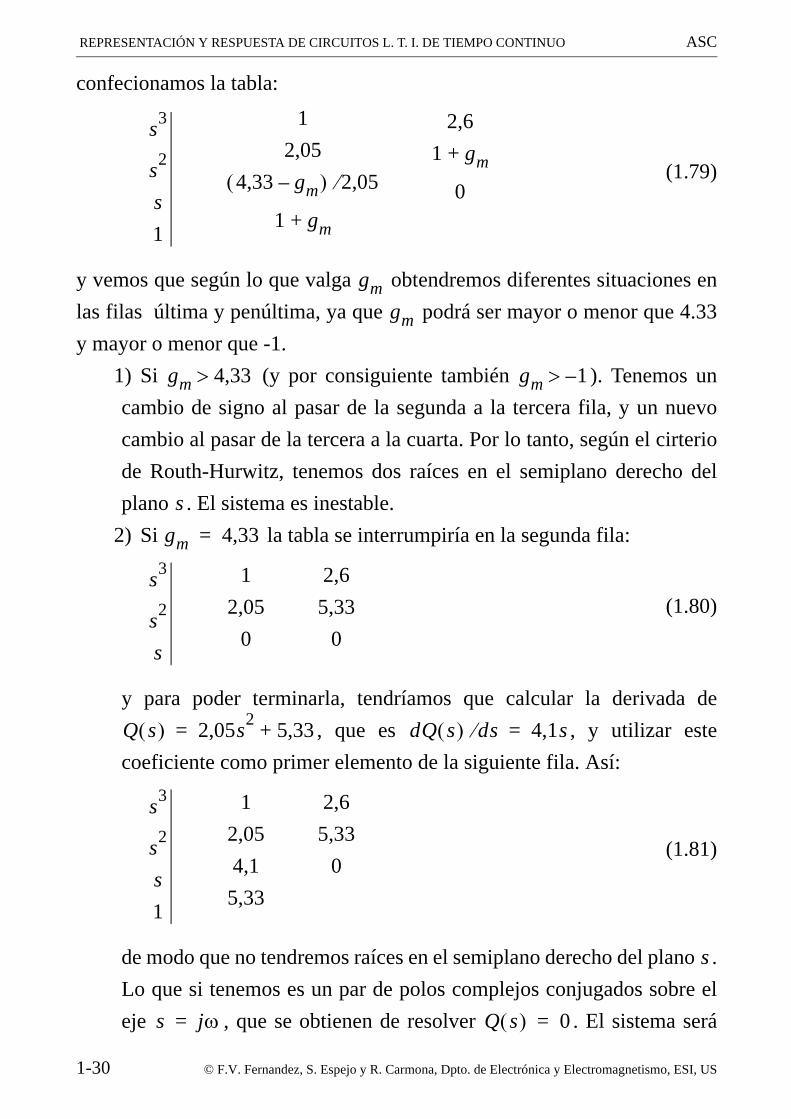
confecionamos la tabla:
(1.79)
y vemos que según lo que valga obtendremos diferentes situaciones enlas filas última y penúltima, ya que podrá ser mayor o menor que 4.33y mayor o menor que -1.
1) Si (y por consiguiente también ). Tenemos uncambio de signo al pasar de la segunda a la tercera fila, y un nuevocambio al pasar de la tercera a la cuarta. Por lo tanto, según el cirteriode Routh-Hurwitz, tenemos dos raíces en el semiplano derecho delplano . El sistema es inestable.
2) Si la tabla se interrumpiría en la segunda fila:
(1.80)
y para poder terminarla, tendríamos que calcular la derivada de, que es , y utilizar este
coeficiente como primer elemento de la siguiente fila. Así:
(1.81)
de modo que no tendremos raíces en el semiplano derecho del plano .Lo que si tenemos es un par de polos complejos conjugados sobre eleje , que se obtienen de resolver . El sistema será
s3
s2
s1
12,05
4,33 gm–( ) 2,05⁄
1 gm+
2,61 gm+
0
gmgm
gm 4,33> gm 1–>
sgm 4,33=
s3
s2
s
12,05
0
2,65,33
0
Q s( ) 2,05s2 5,33+= dQ s( ) ds⁄ 4,1s=
s3
s2
s1
12,054,1
5,33
2,65,33
0
s
s jω= Q s( ) 0=
ASC 1.6 Polos y ceros de la función de red
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-31
críticamente (o marginalmente) estable.3) Si , entonces todos los polos están en el semiplanoizquierdo del plano , dado que la primera columna de la tabla (1.79)no cambia de signo. El sistema es estable.
4) Si , se cancelan los factores en numerador y denominadory nos queda:
(1.82)
si inspeccionamos el denominador de vemos que ahora tenemosun par de polos complejos conjugados, con parte real negativa, o sea,en el semiplano izquierdo del plano . Por tanto el sistema es estable.
5) Si , tenemos un cambio de signo en la primera columna dela tabla, por tanto tendremos un polo en el semiplano derecho del plano
, y el sistema será inestable.
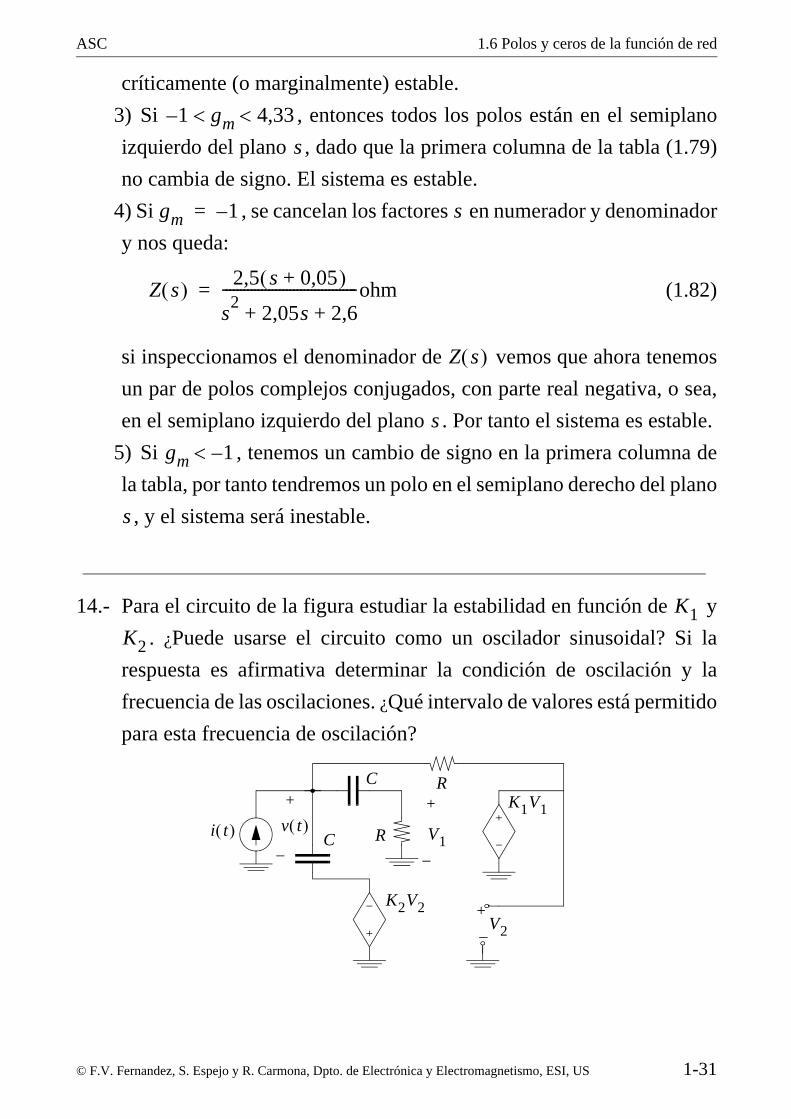
14.- Para el circuito de la figura estudiar la estabilidad en función de y. ¿Puede usarse el circuito como un oscilador sinusoidal? Si la
respuesta es afirmativa determinar la condición de oscilación y lafrecuencia de las oscilaciones. ¿Qué intervalo de valores está permitidopara esta frecuencia de oscilación?
1 gm 4,33< <–s
gm 1–= s
Z s( ) 2,5 s 0,05+( )
s2 2,05s 2,6+ +--------------------------------------ohm=
Z s( )
sgm 1–<
s
K1K2
+−
+
−
+
−
K1V1
V1R
K2V2V2
Cv t( )i t( )
C R
REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-32 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
Solución detalladaLo primero que tenemos que hacer es calcular la función de
transferencia, que en este caso es una impedancia, dado que la excitación esuna intensidad y la salida la tensión . Analizando el circuito llegamos a:
(1.83)
Puesto que se trata de un sistema de 2o orden, podríamos calcular las raícesdel denominador y localizarlas en el plano para los distintos valores de lasconstantes y . También podemos utilizar el criterio de Routh-Hurwitz, para el cual, si el sistema es de 2o orden, la condición necesaria(que todos los coeficientes de las diferentes potencias de desde la mayorhasta 0 aparezcan en el denominador y sean del mismo signo) es tambiénsuficiente (que no haya cambios en la primera columna de la tabla), ya quepara un sistema de 2o orden, la primera columna de la tabla está compuestapor los coeficientes de las diferentes potencias de . Así que para nuestrosistema tenemos:
(1.84)
de modo que, siendo el término independiente positivo, necesitaremos que y para que el sistema sea estable. Necesitamos que
, y por otro lado , esto es, si , entonces, pero si , entonces .Vamos a representar
gráficamente todos los casos diferentes en el plano (ver figura).Empecemos por el punto . Este punto está dentro de la región I, en la
que y , de modo que el primer elemento de la segundafila de la tabla (1.84) es positivo , mientras que el primero es negativo, o sea,
. De modo que el sistema será inestable en la región I.
v t( )
Z s( ) V s( )I s( )----------- R 1 sRC+( )
1 3 K1–( )RCs 1 K1K2+( ) RC( )2s2+ +------------------------------------------------------------------------------------------------= =
sK1 K2
s
s
s2
s1
1 K1K2+( ) RC( )2
3 K1–( )RC
1
10
1 K1K2+ 0> 3 K1– 0>K1 3< K1K2 1–> K1 0>K2 1 K1⁄–> K1 0< K2 1 K1⁄–<
K1-K2a
K1 0< K2 1 K1⁄–>
K1K2 1–<
ASC 1.6 Polos y ceros de la función de red
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-33
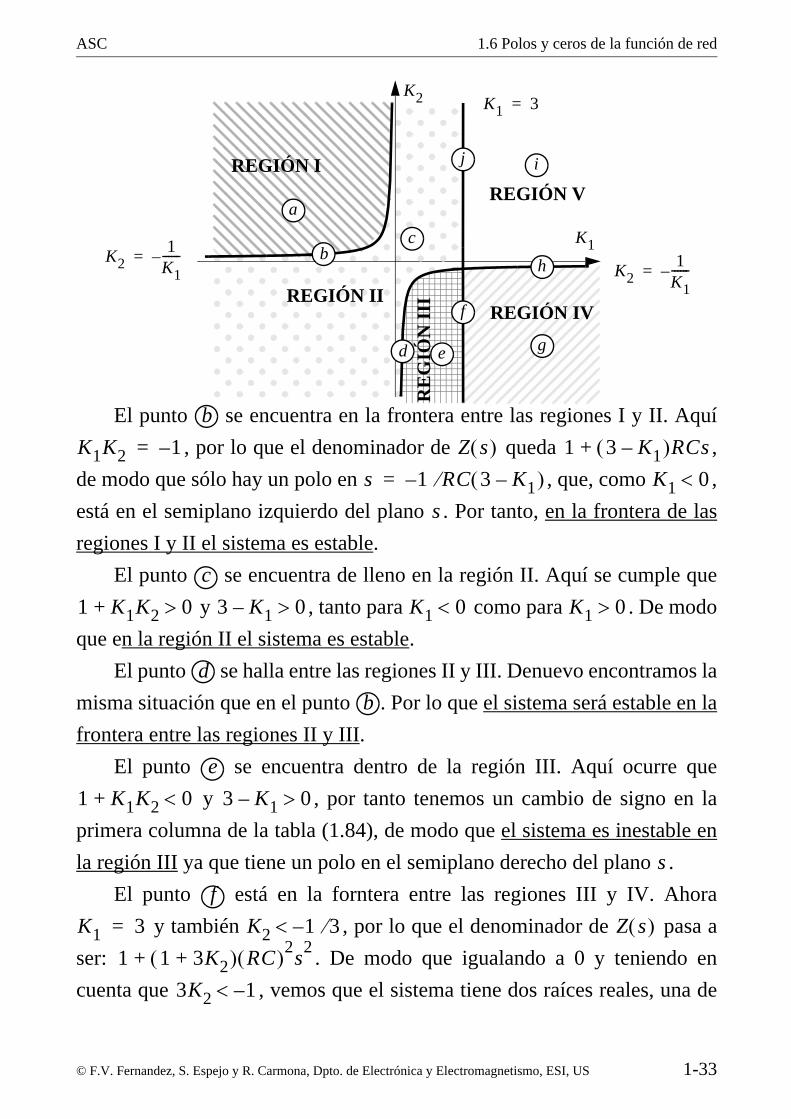
El punto se encuentra en la frontera entre las regiones I y II. Aquí, por lo que el denominador de queda ,
de modo que sólo hay un polo en , que, como ,está en el semiplano izquierdo del plano . Por tanto, en la frontera de lasregiones I y II el sistema es estable.
El punto se encuentra de lleno en la región II. Aquí se cumple que y , tanto para como para . De modo
que en la región II el sistema es estable.El punto se halla entre las regiones II y III. Denuevo encontramos la
misma situación que en el punto . Por lo que el sistema será estable en lafrontera entre las regiones II y III.
El punto se encuentra dentro de la región III. Aquí ocurre que y , por tanto tenemos un cambio de signo en la
primera columna de la tabla (1.84), de modo que el sistema es inestable enla región III ya que tiene un polo en el semiplano derecho del plano .
El punto está en la forntera entre las regiones III y IV. Ahora y también , por lo que el denominador de pasa a
ser: . De modo que igualando a 0 y teniendo encuenta que , vemos que el sistema tiene dos raíces reales, una de
K1
K2
c
i
REGIÓN II
REGIÓN VREGIÓN I
a
b
e
RE
GIÓ
N II
I
f
h
j
REGIÓN IV
d g
K21
K1------–=
K1 3=
K21
K1------–=
bK1K2 1–= Z s( ) 1 3 K1–( )RCs+
s 1 RC 3 K1–( )⁄–= K1 0<s
c1 K1K2+ 0> 3 K1– 0> K1 0< K1 0>
db
e1 K1K2+ 0< 3 K1– 0>
sf
K1 3= K2 1 3⁄–< Z s( )1 1 3K2+( ) RC( )2s2+
3K2 1–<

REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-34 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
ellas en el semiplano deracho del plano . Por lo tanto el sistema es inestableen la frontera entre las regiones III y IV.
En el punto tenemos que y por lo que elsistema tendrá una raíz en el semiplano deracho del plano , de modo que elsistema será inestable en la región IV.
El punto , entre las regiones IV y V, la situación es parecida a la queveíamos en el punto , sólo que ahora y por tanto el sistema tieneuna sola raíz en , que está en el semiplano derecho delplano , y por tanto el sistema es inestable en la frontera entre IV y V.
En el punto , región V, se cemple que y , loque significa que hay dos cambios de signo en la tabla (1.84) y por tanto dosraíces en el semiplano derecho del plano . Por tanto el sistema es inestableen la región V.
Finalmente, en el punto , en la frontera entre las regiones II y V, como antes, pero ahora , de modo que el sistema tiene
dos raíces complejas conjugada en el eje , dadas por:
(1.85)
así que el sistema oscilará (tendrá estabilidad crítica) si se encuentra en lafrontera entre las regiones II y V. La frecuencia de oscilación es
(1.86)
y el rango de frecuencias válidas para tener oscilaciones mantenidas vienedado por , por lo que será .
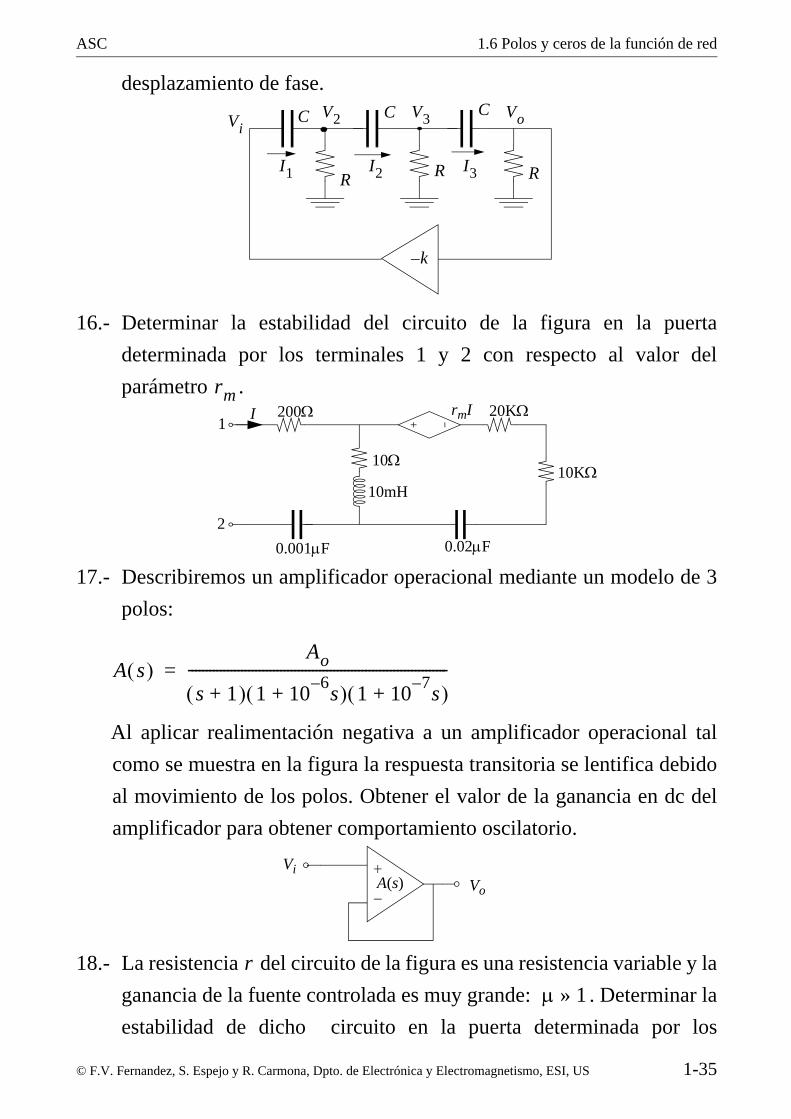
Problemas propuestos15.- Calcular el valor de k que permite obtener comportamiento oscilatorio
en el circuito mostrado en la figura. Se trata de un oscilador de
s
g 1 K1K2+ 0< 3 K1– 0<s
hb K1 3>
s 1 RC 3 K1–( )⁄–=s
i 1 K1K2+ 0> 3 K1– 0<
s
jK1 3= K2 1 3⁄–>
s jω=
s j 1RC 1 3K2+--------------------------------±=
ωo1
RC 1 3K2+--------------------------------=
K2 1 3⁄–> ωo 0 +∞,( )∈
ASC 1.6 Polos y ceros de la función de red
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-35
desplazamiento de fase.
16.- Determinar la estabilidad del circuito de la figura en la puertadeterminada por los terminales 1 y 2 con respecto al valor delparámetro .
17.- Describiremos un amplificador operacional mediante un modelo de 3polos:
Al aplicar realimentación negativa a un amplificador operacional talcomo se muestra en la figura la respuesta transitoria se lentifica debidoal movimiento de los polos. Obtener el valor de la ganancia en dc delamplificador para obtener comportamiento oscilatorio.
18.- La resistencia del circuito de la figura es una resistencia variable y laganancia de la fuente controlada es muy grande: . Determinar laestabilidad de dicho circuito en la puerta determinada por los
ViV2 V3 Vo
I1 I2 I3R R R
C C C
k–
rm1
2
rmII 200Ω 20KΩ
10KΩ
0.02μF0.001μF
10Ω
10mH
A s( )Ao
s 1+( ) 1 10 6– s+( ) 1 10 7– s+( )-------------------------------------------------------------------------=
A(s)Vi
Vo
rμ 1»
REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
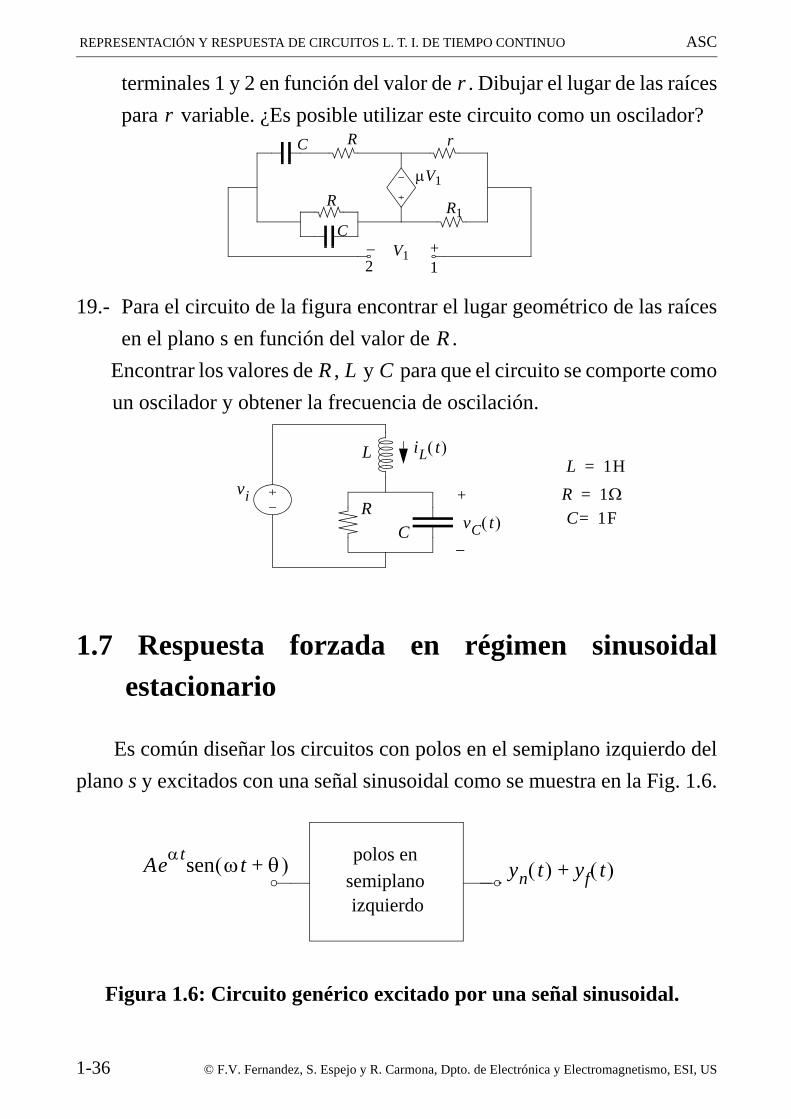
1-36 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
terminales 1 y 2 en función del valor de . Dibujar el lugar de las raícespara variable. ¿Es posible utilizar este circuito como un oscilador?
19.- Para el circuito de la figura encontrar el lugar geométrico de las raícesen el plano s en función del valor de .
Encontrar los valores de , y para que el circuito se comporte comoun oscilador y obtener la frecuencia de oscilación.
1.7 Respuesta forzada en régimen sinusoidalestacionario
Es común diseñar los circuitos con polos en el semiplano izquierdo delplano s y excitados con una señal sinusoidal como se muestra en la Fig. 1.6.
rr
μV1
rRC
C
R R1
12+V1−
RR L C
+
−
vi
L
RC
L 1H=R 1Ω=C 1F=
iL t( )
vC t( )
Figura 1.6: Circuito genérico excitado por una señal sinusoidal.
polos en semiplano izquierdo
Aeαtsen ωt θ+( ) yn t( ) yf t( )+
ASC 1.7 Respuesta forzada en régimen sinusoidal estacionario
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-37
En este caso, la respuesta natural se desvanece y permanece la respuestaforzada. Veamos, la transformada de la excitación es:
(1.87)
La respuesta viene dada por:
(1.88)
Dado que sólo nos interesa la respuesta forzada sólo hay que considerar lostérminos debidos a los polos en :
(1.89)
donde (1.90)
De este modo:
(1.91)
y la respuesta forzada en el dominio del tiempo es:
(1.92)
El sistema procesa la excitación sinusoidal haciendo dos cosas:a) Modifica la amplitud de la señal de entrada en un factor b) Modifica la fase en un factor
Si aplicamos los resultados anteriores a una señal puramente sinusoidal:
(1.93)
la respuesta forzada es: (1.94)
X s( ) Aω θcos
s α–( )2 ω2+-------------------------------- A s α–( )senθ
s α–( )2 ω2+--------------------------------+=
Y s( ) H s( )X s( ) H s( )A s α–( )senθ Aω θcos+
s α–( )2 ω2+-----------------------------------------------------------= =
α jω±
Yf s( ) kAs α– jω–------------------------ kA
s α– jω+------------------------+=
k H α jω+( )ω θ jωsenθ+cos2jω
---------------------------------------- H α jω+( )2
----------------------------ej θ θH+( )
j---------------------= =
Yf s( ) H α jω+( )2
----------------------------A ej θ θH
π2---–+⎝ ⎠
⎛ ⎞
s α– jω–----------------------------- e
j– θ θHπ2---–+⎝ ⎠
⎛ ⎞
s α– jω+--------------------------------+=
yf t( ) A H α jω+( ) eαtsen ωt θ θH+ +( )=
H α jω+( )θH arg H α jω+( )[ ]=
x t( ) Asen ωt θ+( )=
y t( ) A H jω( ) sen ωt θ θH+ +( )=

REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-38 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
Diagrama de BodeUna herramienta gráfica poderosa para la visualización de la respuesta
frecuencial de un sistema es el diagrama de Bode. Si empleamos la formafactorizada de , al hacer :
(1.95)
Consideremos el factor donde puede ser un cero o unpolo . Dado que es en general complejo tendrá parte real e imaginaria,o sea que . El factor es entonces
(1.96)
donde, (1.97)
Por tanto,
(1.98)
donde es la magnitud de y es la fase. La idea es expresar la contribución total de las frecuencias críticas
como una suma de contribuciones. A este respecto, y dado que la fase ya estádada por definición como suma de contribuciones usaremos unarepresentación logarítmica para la magnitud. De manera que nos queda:
H s( ) s jω=
H jω( ) K
jω zi–( )i 1=
n
∏
jω pj–( )j 1=
m
∏
-------------------------------=
jω si–( ) si zipi si
si αi jβi+= jω si–( )
αi– j ω βi–( )+ Miejθi=
Mi αi2 ω βi–( )2+= θi arctg
ω βi–αi–
---------------=
H jω( ) KMz1e
jθz1Mz2ejθz2…Mzme
jθzm
Mp1ejθp1Mp2e
jθp2…Mpnejθpn
------------------------------------------------------------------------- = =
KMz1Mz2…MzmMp1Mp2…Mpn--------------------------------------e
j θz1 θz2 … θzm θp1 θp2 …– θpn–––+ + +( ) = =
M ω( )ejθ ω( )=
M ω( ) H jω( ) θ ω( )
ASC 1.7 Respuesta forzada en régimen sinusoidal estacionario
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-39
(1.99)
El cálculo exacto de los diagramas de magnitud y fase, o diagramas deBode, es un proceso tedioso. Sin embargo, puede obtenerse unarepresentación aproximada con relativa facilidad. En forma factorizada,
y se componen de los siguientes 4 tipos de términos:a) Un término constante K.b) El factor , que representa una raíz en el origen.c) El factor , que representa una raíz real.d) El factor , que representa un par de raíces complejasconjugadas.
Dado que la magnitud en dB de un producto de términos es igual a la sumade las magnitudes de los factores, el problema de representación de lamagnitud de se reduce a la representación de los cuatro términosbásicos. La cuestión ahora es familiarizarse con el tipo de representacionesque se obtienen para cada frecuencia crítica.
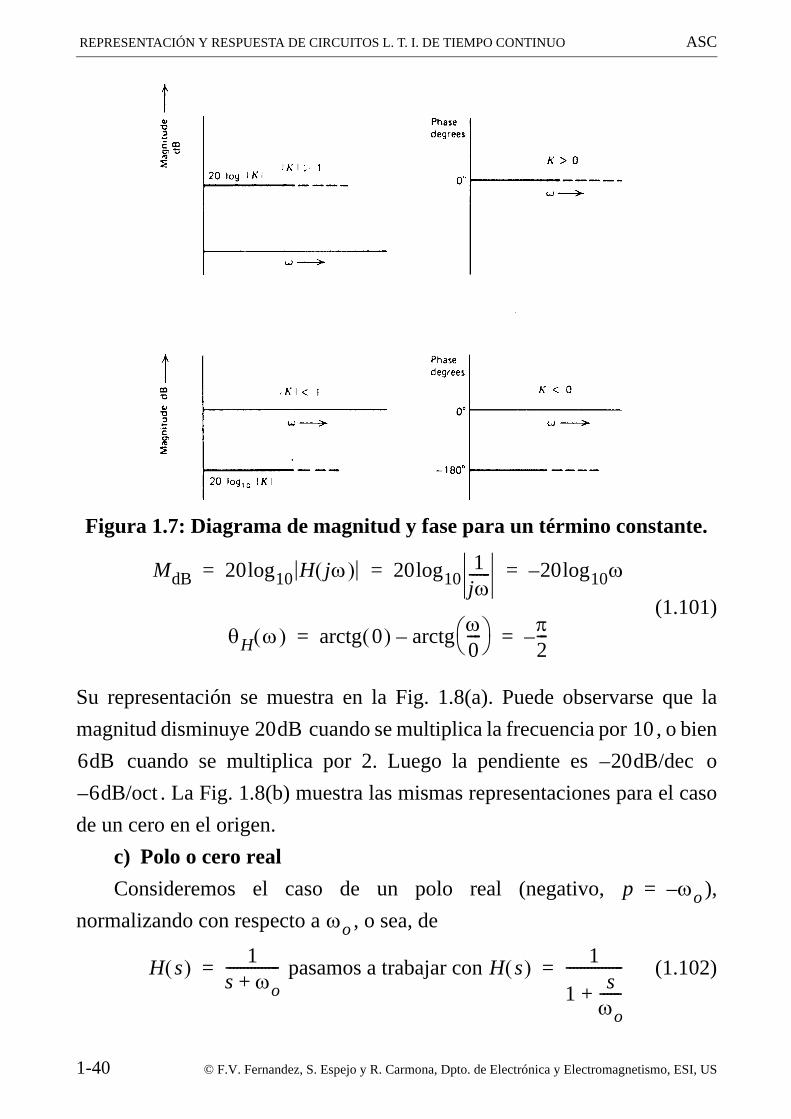
a) El término constante KLa magnitud es positiva para y negativa para
. La función fase es para y para . Ambas semuestran en la Fig. 1.7.
b) Polo o cero en el origenConsideremos el caso de un polo:
(1.100)
La magnitud y fase debidas a un polo en el origen son:
H jω( ) dB 20log10 K 20log10Mzii 1=
M
∑ 20log10Mpii 1=
N
∑–+=
θH θzii 1=
M
∑ θpii 1=
N
∑–=
N s( ) D s( )
ss ωo+s2 as b+ +
H jω( )
20log10 K K 1>K 1< 0° K 0> 180° K 0<
H s( ) 1s---=
REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-40 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
(1.101)
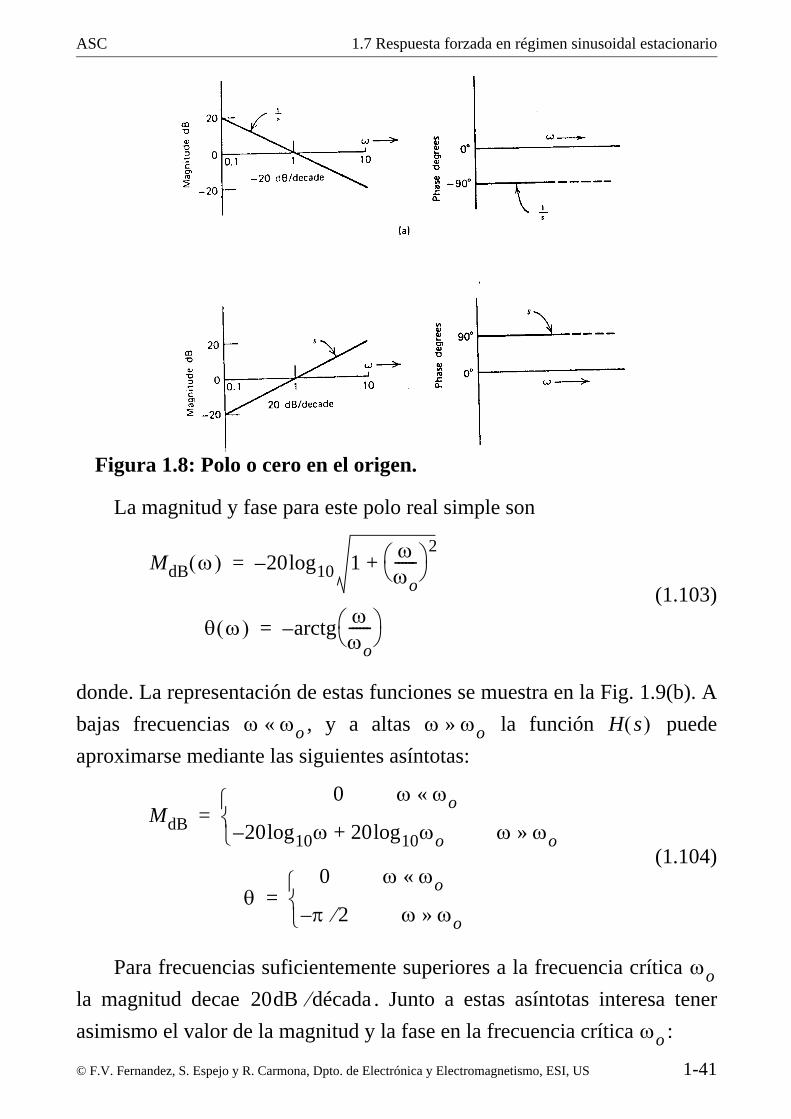
Su representación se muestra en la Fig. 1.8(a). Puede observarse que lamagnitud disminuye cuando se multiplica la frecuencia por , o bien
cuando se multiplica por 2. Luego la pendiente es o. La Fig. 1.8(b) muestra las mismas representaciones para el caso
de un cero en el origen.c) Polo o cero realConsideremos el caso de un polo real (negativo, ),
normalizando con respecto a , o sea, de
pasamos a trabajar con (1.102)
Fig. 2.9 Darianani
Figura 1.7: Diagrama de magnitud y fase para un término constante.
MdB 20log10 H jω( ) 20log101
jω------ 20log10ω–= = =
θH ω( ) arctg 0( ) arctg ω0----⎝ ⎠⎛ ⎞– π
2---–= =
20dB 106dB 20dB/dec–
6dB/oct–
p ωo–=ωo
H s( ) 1s ωo+---------------= H s( ) 1
1 sωo------+
----------------=
ASC 1.7 Respuesta forzada en régimen sinusoidal estacionario
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-41
La magnitud y fase para este polo real simple son
(1.103)
donde. La representación de estas funciones se muestra en la Fig. 1.9(b). Abajas frecuencias , y a altas la función puedeaproximarse mediante las siguientes asíntotas:
(1.104)
Para frecuencias suficientemente superiores a la frecuencia crítica la magnitud decae . Junto a estas asíntotas interesa tenerasimismo el valor de la magnitud y la fase en la frecuencia crítica :
Fig.2.10 Darianani
Figura 1.8: Polo o cero en el origen.
MdB ω( ) 20log10 1 ωωo------⎝ ⎠⎛ ⎞ 2
+–=
θ ω( ) arctg ωωo------⎝ ⎠⎛ ⎞–=
ω ωo« ω ωo» H s( )
MdB
0 ω ωo«
20log10ω 20log10ωo+– ω ωo»⎩⎨⎧
=
θ0 ω ωo«
π 2⁄– ω ωo»⎩⎨⎧
=
ωo20dB década⁄
ωo
REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-42 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
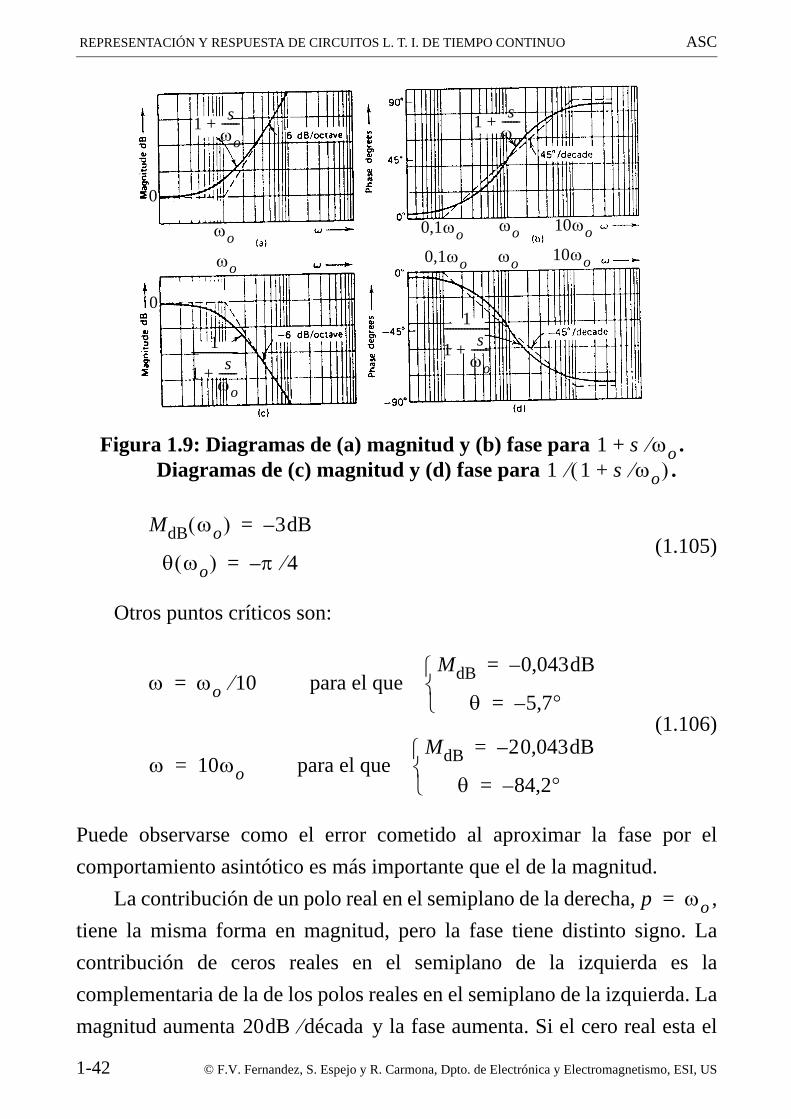
(1.105)
Otros puntos críticos son:
(1.106)
Puede observarse como el error cometido al aproximar la fase por elcomportamiento asintótico es más importante que el de la magnitud.
La contribución de un polo real en el semiplano de la derecha, ,tiene la misma forma en magnitud, pero la fase tiene distinto signo. Lacontribución de ceros reales en el semiplano de la izquierda es lacomplementaria de la de los polos reales en el semiplano de la izquierda. Lamagnitud aumenta y la fase aumenta. Si el cero real esta el
Fig.2.11 Darianani
Figura 1.9: Diagramas de (a) magnitud y (b) fase para .Diagramas de (c) magnitud y (d) fase para .
1 s ωo⁄+1 1 s ωo⁄+( )⁄
Fig.2.11 Darianani
1 sωo------+
0
0
1
1 sωo------+
----------------
1
1 sωo------+
----------------
1 sωo------+
ωoωo
ωoωo0,1ωo
0,1ωo 10ωo10ωo
MdB ωo( ) 3dB–=
θ ωo( ) π 4⁄–=
ω ωo 10⁄= para el que MdB 0,043– dB=
θ 5,7°–=⎩⎨⎧
ω 10ωo= para el que MdB 2– 0,043dB=
θ 84,2°–=⎩⎨⎧
p ωo=
20dB década⁄
ASC 1.7 Respuesta forzada en régimen sinusoidal estacionario
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-43
semiplano de la derecha la fase es la misma que para un polo en el semiplanode la izquierda mientras que la magnitud sigue la misma evolución que la delcero en el semiplano de la izquierda.
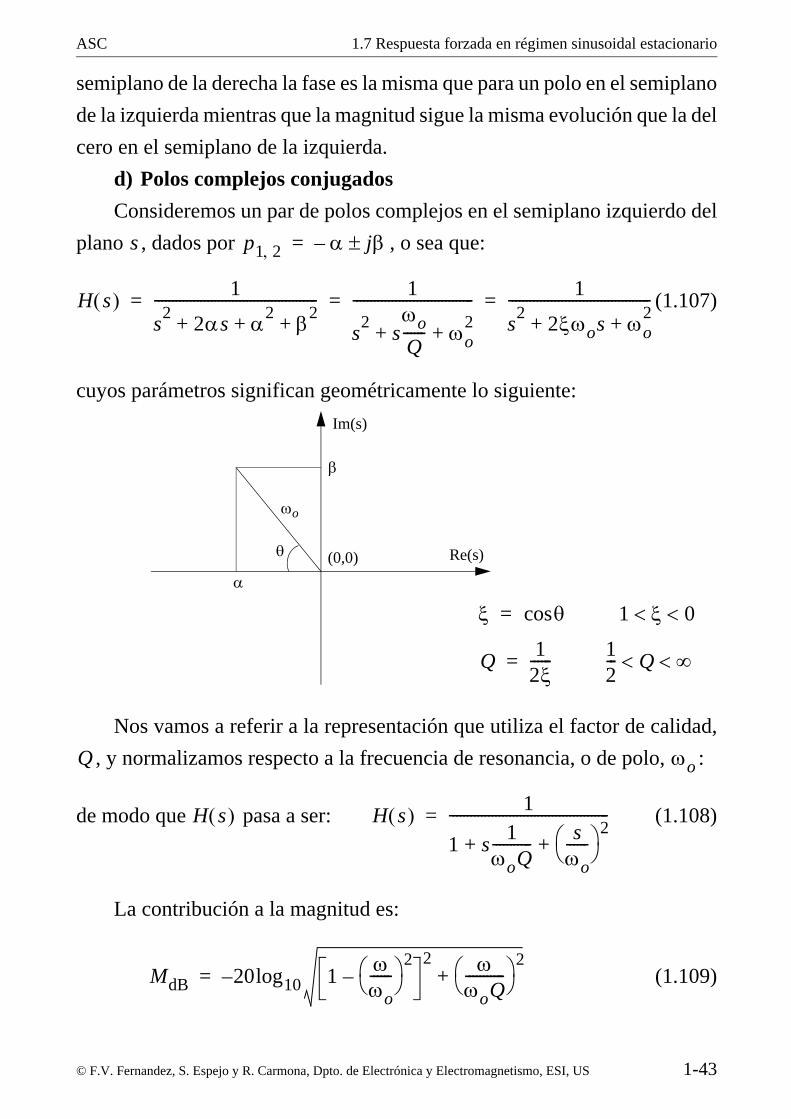
d) Polos complejos conjugadosConsideremos un par de polos complejos en el semiplano izquierdo del
plano , dados por , o sea que:
(1.107)
cuyos parámetros significan geométricamente lo siguiente:
Nos vamos a referir a la representación que utiliza el factor de calidad,, y normalizamos respecto a la frecuencia de resonancia, o de polo, :
de modo que pasa a ser: (1.108)
La contribución a la magnitud es:
(1.109)
s p1 2, α– jβ±=
H s( ) 1
s2 2αs α2 β2+ + +---------------------------------------------- 1
s2 sωoQ------ ωo
2+ +---------------------------------- 1
s2 2ξωos ωo2+ +
----------------------------------------= = =
Im(s)
Re(s)(0,0)
ωo
θ
α
β
ξ θcos= 1 ξ 0< <
Q 12ξ------= 1
2--- Q ∞< <
Q ωo
H s( ) H s( ) 1
1 s 1ωoQ----------- s
ωo------⎝ ⎠⎛ ⎞ 2
+ +---------------------------------------------=
MdB 20– log10 1 ωωo------⎝ ⎠⎛ ⎞ 2
–2 ω
ωoQ-----------⎝ ⎠⎛ ⎞ 2
+=
REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-44 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
Las asíntotas para frecuencias pequeñas y grandes son:
(1.110)
A altas frecuencias la función se aproxima a por lo que la magnituddisminuye a razón de .
La contribución a la fase es:
(1.111)
y las asíntotas de baja y alta frecuencia son:
(1.112)
El máximo de magnitud se obtiene igualando la derivada de a 0:
(1.113)
Resolviendo esta ecuación,
(1.114)
Si entonces (1.115)
A ωo se le denomina frecuencia de polo. A esta frecuencia la magnitud endB viene dada por
(1.116)
MdB
0 ω ωo«
40– log10ω 40log10ωo+ ω ωo»⎩⎨⎧
≅
1 s2⁄40– dB década⁄
θ arctgω ωoQ⁄
1 ω ωo⁄( )2–-------------------------------–=
θ0 ω ωo«
π– ω ωo»⎩⎨⎧
≅
MdB
ωdd 1
1 j ωωoQ----------- ω2
ωo2
------–+
------------------------------------ 0=
ωmáx ωo 1 1
2Q2----------–= si Q 1
2------->
ωmáx 0= en cualquier otro caso
1
2Q2---------- 1« ωmáx ωo≅
MdB ωo( ) 20log10Q=
ASC 1.7 Respuesta forzada en régimen sinusoidal estacionario
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-45
y la fase es (1.117)
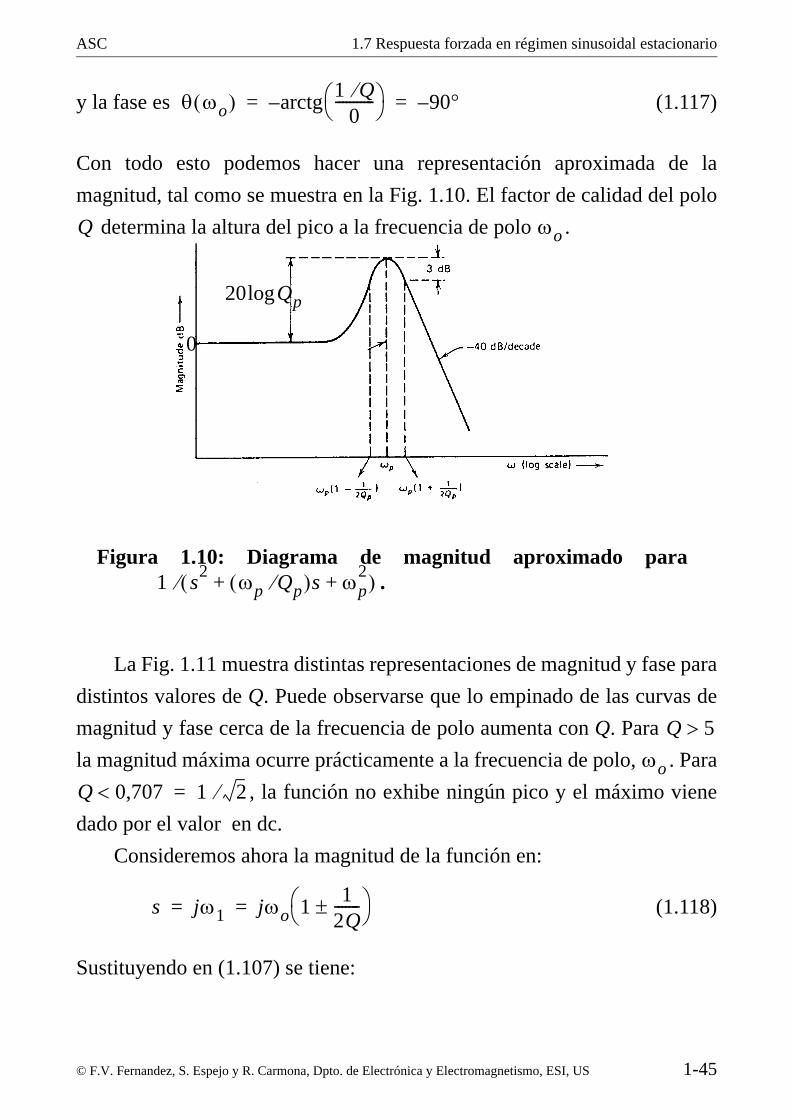
Con todo esto podemos hacer una representación aproximada de lamagnitud, tal como se muestra en la Fig. 1.10. El factor de calidad del polo
determina la altura del pico a la frecuencia de polo .
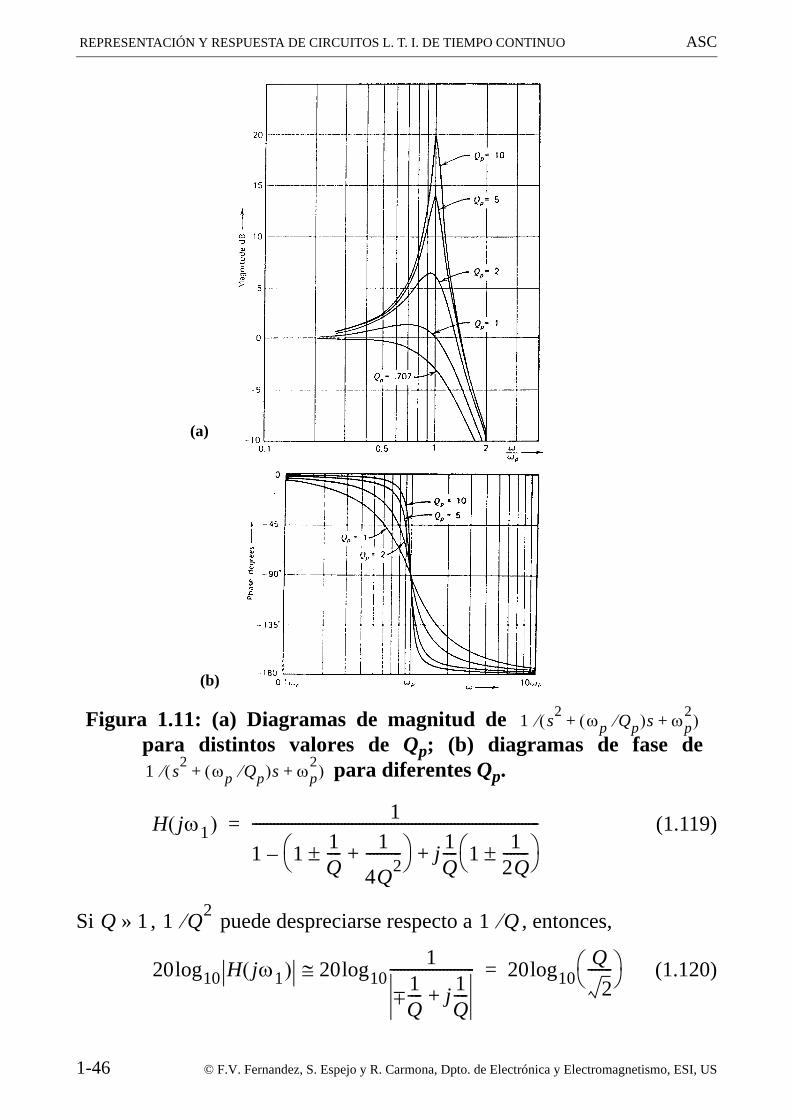
La Fig. 1.11 muestra distintas representaciones de magnitud y fase paradistintos valores de Q. Puede observarse que lo empinado de las curvas demagnitud y fase cerca de la frecuencia de polo aumenta con Q. Para la magnitud máxima ocurre prácticamente a la frecuencia de polo, . Para
, la función no exhibe ningún pico y el máximo vienedado por el valor en dc.
Consideremos ahora la magnitud de la función en:
(1.118)
Sustituyendo en (1.107) se tiene:
θ ωo( ) arctg 1 Q⁄0
-----------⎝ ⎠⎛ ⎞– 90°–= =
Q ωo
Figura 1.10: Diagrama de magnitud aproximado para.1 s2 ωp Qp⁄( )s ωp
2+ +( )⁄
Fig.2.12a Darianani
20 Qplog
0
Q 5>ωo
Q 0,707< 1 2⁄=
s jω1 jωo 1 12Q-------±⎝ ⎠
⎛ ⎞= =
REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-46 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
(1.119)
Si , puede despreciarse respecto a , entonces,
(1.120)
Fig.2.12bc Darianani
Figura 1.11: (a) Diagramas de magnitud de para distintos valores de Qp; (b) diagramas de fase de
para diferentes Qp.
1 s2 ωp Qp⁄( )s ωp2+ +( )⁄
1 s2 ωp Qp⁄( )s ωp2+ +( )⁄
(a)
(b)
H jω1( ) 1
1 1 1Q----± 1
4Q2----------+⎝ ⎠
⎛ ⎞– j 1Q---- 1 1
2Q-------±⎝ ⎠
⎛ ⎞+---------------------------------------------------------------------------------=
Q 1» 1 Q2⁄ 1 Q⁄
20log10 H jω1( ) 20log101
1Q---- j 1
Q----++−
------------------------≅ 20log10Q2
-------⎝ ⎠⎛ ⎞=
ASC 1.7 Respuesta forzada en régimen sinusoidal estacionario
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-47
Comparando esta ecuación con (1.116) puede observarse que la magnitud en(1.118) está por debajo del valor máximo. Luego el coeficiente de en(1.107) puede considerarse el ancho de banda de si el circuito seemplea como un filtro de 2o orden:
(1.121)
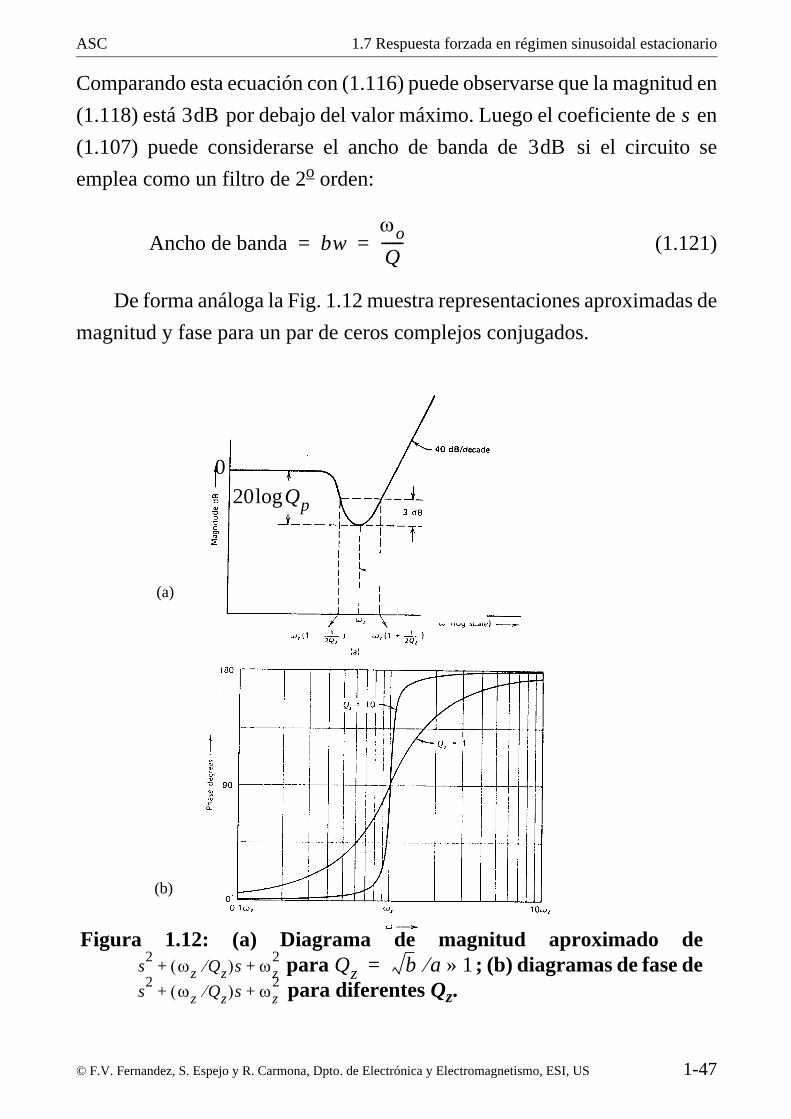
De forma análoga la Fig. 1.12 muestra representaciones aproximadas demagnitud y fase para un par de ceros complejos conjugados.
3dB s3dB
Ancho de banda bwωoQ------= =
Fig. 2.13 Darianani
Figura 1.12: (a) Diagrama de magnitud aproximado de para ; (b) diagramas de fase de para diferentes Qz.
s2 ωz Qz⁄( )s ωz2+ + Qz b a⁄ 1»=
s2 ωz Qz⁄( )s ωz2+ +
(a)
(b)
020 Qplog
REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-48 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
Problemas resueltos20.- Calcular la respuesta frecuencial de un circuito descrito mediante la
siguiente función de sistema:
Solución detalladaPor un lado tenemos un par de ceros en , con factor de calidad
infinito y un par de polos complejos conjugados con frecuencia de polo iguala 1 y factor de calidad . O sea que:
(1.122)
y por tanto, para :
(1.123)
Si calculamos la magnitud de en decibelios:
(1.124)
H s( ) s2 1+
s2 s0,01 1+ +---------------------------------=
s j±=
Q 100=
H s( )s2 ωz
2+
s2 ω0Q------s ω0
2+ +----------------------------------=
s jω=
H jω( )ωz
2 ω2–
ω02 ω–
2jω
ω0Q------+
---------------------------------------ωz
2
ω02
------⎝ ⎠⎜ ⎟⎜ ⎟⎛ ⎞
1 ω2
ωz2
------–
1 ω2
ω02
------– j ωω0Q-----------+
------------------------------------= =
H jω( )
H jω( ) dB 40log10ωzω0------ 20log10 1 ω2
ωz2
------–⎝ ⎠⎜ ⎟⎛ ⎞
–+=
20log10– 1 ω2
ω02
------–⎝ ⎠⎜ ⎟⎛ ⎞ 2 ω
ω0Q-----------⎝ ⎠⎛ ⎞ 2
+
ASC 1.7 Respuesta forzada en régimen sinusoidal estacionario
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-49
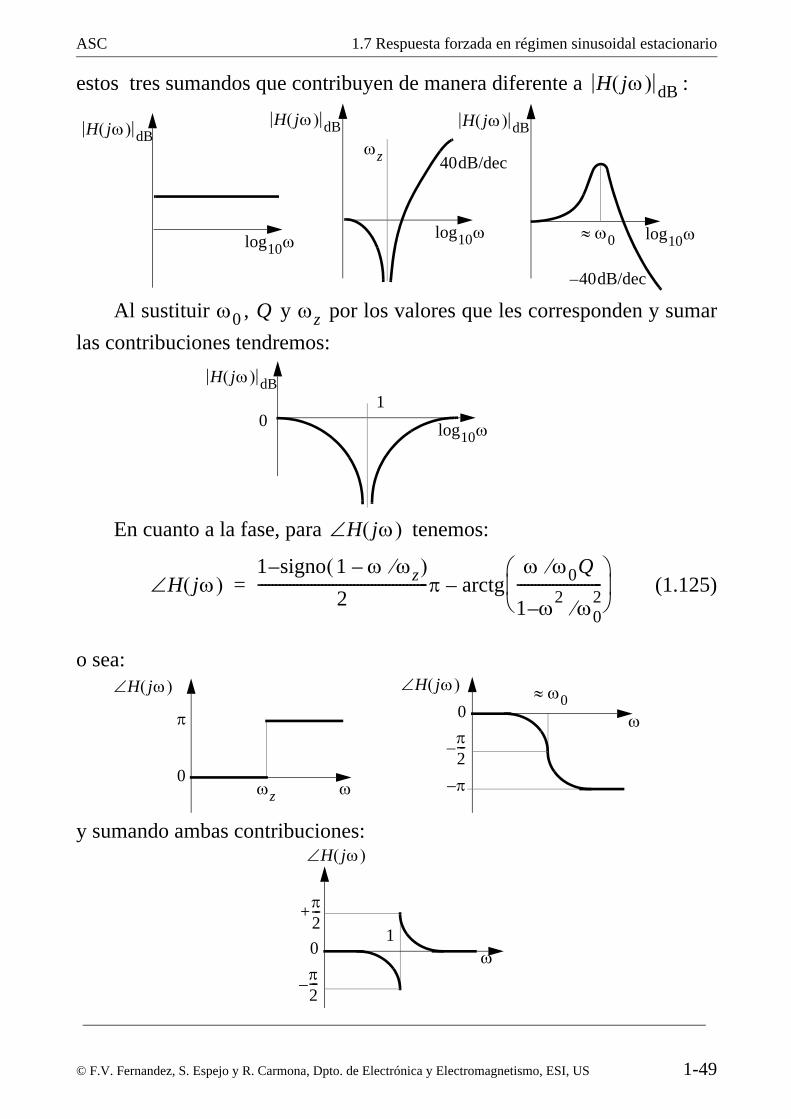
estos tres sumandos que contribuyen de manera diferente a :
Al sustituir , y por los valores que les corresponden y sumarlas contribuciones tendremos:
En cuanto a la fase, para tenemos:
(1.125)
o sea:
y sumando ambas contribuciones:
H jω( ) dB
H jω( ) dB
log10ω
H jω( ) dB
log10ω
H jω( ) dB
log10ω
ωz 40dB/dec
ω≈ 0
40– dB/dec
ω0 Q ωz
H jω( ) dB
log10ω
10
H jω( )∠
H jω( )∠1 signo 1 ω ωz⁄–( )–
2------------------------------------------------π arctg
ω ω0Q⁄
1 ω2 ω02⁄–
------------------------⎝ ⎠⎜ ⎟⎛ ⎞
–=
ωz ω
π
H jω( )∠ ω≈ 0ω
0
π2---–
0
π–
H jω( )∠
H jω( )∠
1ω
π2---–
0
+π2---
REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-50 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
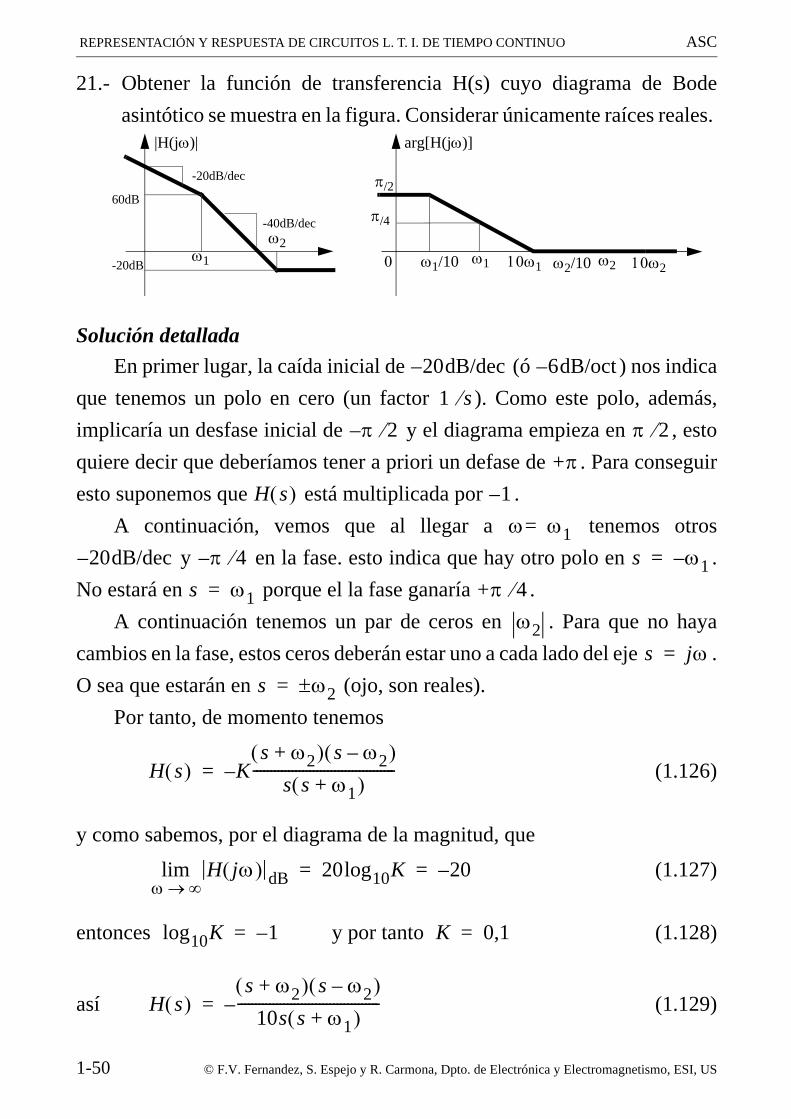
21.- Obtener la función de transferencia H(s) cuyo diagrama de Bodeasintótico se muestra en la figura. Considerar únicamente raíces reales.
Solución detalladaEn primer lugar, la caída inicial de (ó ) nos indica
que tenemos un polo en cero (un factor ). Como este polo, además,implicaría un desfase inicial de y el diagrama empieza en , estoquiere decir que deberíamos tener a priori un defase de . Para conseguiresto suponemos que está multiplicada por .
A continuación, vemos que al llegar a tenemos otros y en la fase. esto indica que hay otro polo en .
No estará en porque el la fase ganaría .A continuación tenemos un par de ceros en . Para que no haya
cambios en la fase, estos ceros deberán estar uno a cada lado del eje .O sea que estarán en (ojo, son reales).
Por tanto, de momento tenemos
(1.126)
y como sabemos, por el diagrama de la magnitud, que
(1.127)
entonces (1.128)
así (1.129)
ω1
60dB
-20dB
-20dB/dec
-40dB/dec
|H(jω)| arg[H(jω)]
ω2ω1 ω2
π/2
0 ω1/10 10ω1 ω2/10 10ω2
π/4
20dB/dec– 6dB/oct–1 s⁄
π 2⁄– π 2⁄+π
H s( ) 1–ω ω= 1
20dB/dec– π 4⁄– s ω1–=s ω1= +π 4⁄
ω2s jω=
s ω2±=
H s( ) Ks ω2+( ) s ω2–( )
s s ω1+( )----------------------------------------–=
H jω( ) dBω ∞→lim 20log10K 20–= =
log10K 1–= y por tanto K 0,1=
H s( )s ω2+( ) s ω2–( )
10s s ω1+( )----------------------------------------–=
ASC 1.7 Respuesta forzada en régimen sinusoidal estacionario
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-51
Si queremos afinar un poco más, podemos observar que hay dediferencia entre y . Si la pendiente de la caída queexiste entre ellos debe ser , podemos afirmar que .De modo que finalmente:
(1.130)
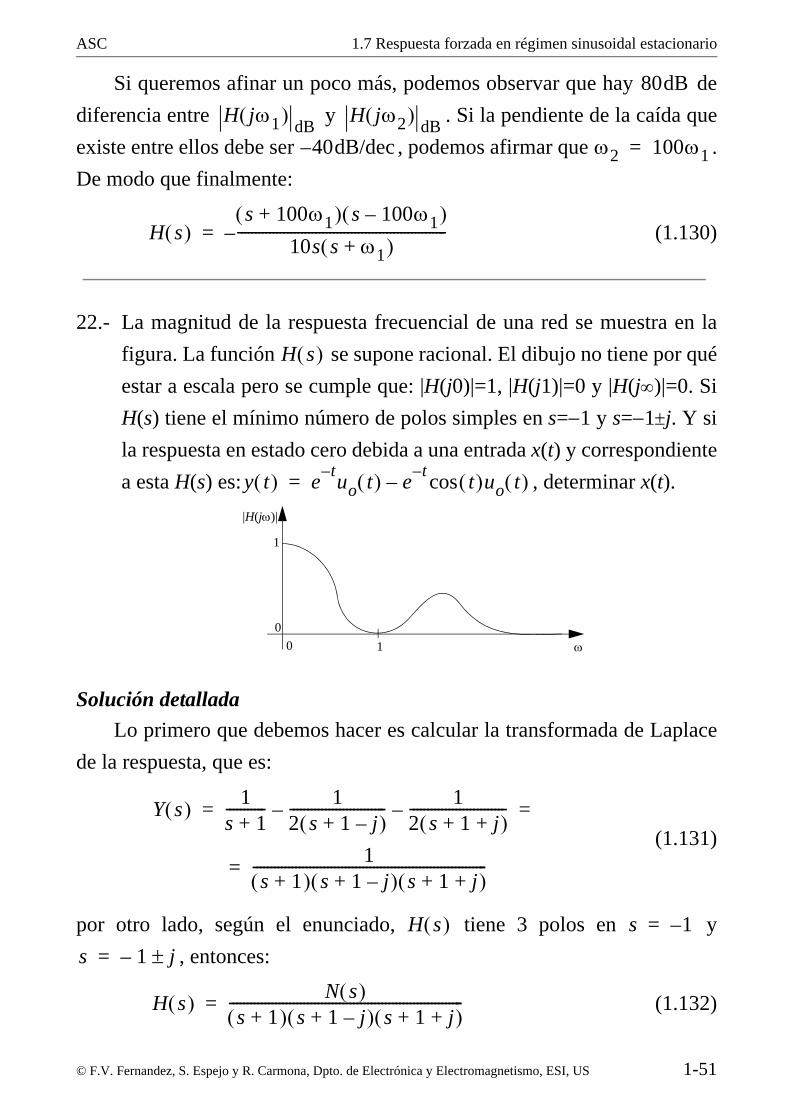
22.- La magnitud de la respuesta frecuencial de una red se muestra en lafigura. La función se supone racional. El dibujo no tiene por quéestar a escala pero se cumple que: |H(j0)|=1, |H(j1)|=0 y |H(j∞)|=0. SiH(s) tiene el mínimo número de polos simples en s=−1 y s=−1±j. Y sila respuesta en estado cero debida a una entrada x(t) y correspondientea esta H(s) es: , determinar x(t).
Solución detalladaLo primero que debemos hacer es calcular la transformada de Laplace
de la respuesta, que es:
(1.131)
por otro lado, según el enunciado, tiene 3 polos en y, entonces:
(1.132)
80dBH jω1( ) dB H jω2( ) dB
40dB/dec– ω2 100ω1=
H s( )s 100ω1+( ) s 100ω1–( )
10s s ω1+( )-----------------------------------------------------------–=
H s( )
y t( ) e t– uo t( ) e t– t( )ucos o t( )–=|H(jω)|
ω1
1
00
Y s( ) 1s 1+----------- 1
2 s 1 j–+( )--------------------------- 1
2 s 1 j+ +( )---------------------------–– = =
1s 1+( ) s 1 j–+( ) s 1 j+ +( )
------------------------------------------------------------------=
H s( ) s 1–=s 1– j±=
H s( ) N s( )s 1+( ) s 1 j–+( ) s 1 j+ +( )
------------------------------------------------------------------=

REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-52 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
y como , entonces . De modo quevamos a averiguar cuánto vale .
Puesto que cuando , podemos deducir que elorden de es menor que el del denominador, o sea que será 0, 1 ó 2.
Por otro lado , para ello necesitaremos en elnumerador. Y finalmente, dado que :
(1.133)
Y de este modo:
(1.134)
y por tanto
(1.135)
Problemas propuestos23.- Dados los diagramas de Bode de amplitud y fase de la figura, calcular
la función de transferencia H(s).
24.- Dibujar aproximadamente los diagramas de Bode de la función detransferencia: para el rango de frecuencias0.1rad/s≤ω≤1000rad/s.
Y s( ) H s( )X s( )= X s( ) 1 N s( )⁄=N s( )
H jω( ) 0→ ω ∞→N s( )
H j1( ) 0= s2 1+H j0( ) 1=
K s2 1+( )
s 1+( ) s2 2s 2+ +( )------------------------------------------------
s j0=
K2---- 1= = de donde K 2=
H s( ) 2 s2 1+( )
s 1+( ) s2 2s 2+ +( )------------------------------------------------= y X s( ) 1
2 s2 1+( )----------------------=
x t( ) 12---sen t( )uo t( )=
|H(jω)|dB
log(ω)
A0
log (ω1)
−40 dB/dec
6 dB
< H(jω)
log(ω)0
H s( ) 20s s 100+( )s 2+( ) s 10+( )
------------------------------------=
ASC Apéndice 1: Evolución tecnológica de los filtros
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-53
Apéndice 1: Evolución tecnológica de los filtros
Es difícil encontrar un sistema de comunicaciones o instrumento demedida que no contenga algún tipo de filtrado de señal. Centrándonos enparticular en el caso de filtros conviene desglosar un poco la clasificaciónanterior, vinculándola a consideraciones tecnológicas. De paso esto nosservirá para introducir el concepto de circuito activo de tiempo discreto.
La Fig. 1.13 es ilustrativa de las consideraciones tecnológicas. En ellase muestra la evolución tecnológica en la producción de filtros deaudiofrecuencia, desde 1920 hasta 1980. Estos filtros de audiofrecuenciason significativos ya que anualmente se producen en el mundo decenas demillones de los mismos. Entre 1920 y 1960 la mayoría de los filtros de audiose realizaban utilizando circuitos discretos RLC. Ya en los años 50 seempezó a pensar que se podría reducir el tamaño y el coste de los filtrosreemplazando los inductores (grandes y caros) por circuitos activos. Estasustitución se basa en la idea de que un circuito constituído por resistencias,condensadores y transistores puede exhibir resonancia tal como lo hacen loscircuitos RLC. Estos circuitos permanecieron dentro del contextoacadémico hasta que a mediados de los años 60 aparecieron los primerosamplificadores operacionales, componentes activos de buena calidad ybaratos. Aunque en ese momento la reducción de tamaño no fue demasiadosignificativa se conseguía filtrado y amplificación simultáneamente. Lareducción en costo comenzó a principios de los años 70 con la aparición delas primeras teconologías integradas (HICs). Esto ya supuso una reducciónde costos por un factor 2. El avance de las tecnologías de circuitos integradossupuso aún mayores reducciones de costo y tamaño. Hoy día conviven larealización de filtros activos en tiempo continuo en tecnologías VLSI con laaparición de técnicas de condensadores en conmutación y filtrado digitalutilizando DSPs.
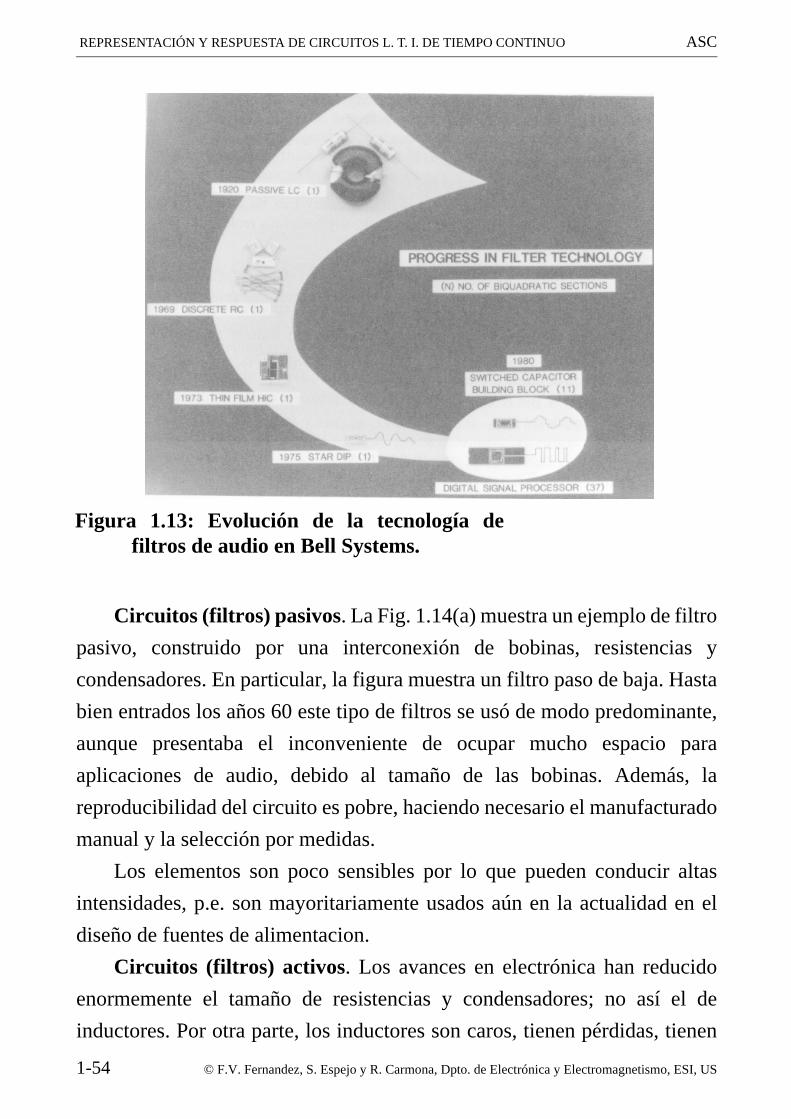
REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-54 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
Circuitos (filtros) pasivos. La Fig. 1.14(a) muestra un ejemplo de filtropasivo, construido por una interconexión de bobinas, resistencias ycondensadores. En particular, la figura muestra un filtro paso de baja. Hastabien entrados los años 60 este tipo de filtros se usó de modo predominante,aunque presentaba el inconveniente de ocupar mucho espacio paraaplicaciones de audio, debido al tamaño de las bobinas. Además, lareproducibilidad del circuito es pobre, haciendo necesario el manufacturadomanual y la selección por medidas.
Los elementos son poco sensibles por lo que pueden conducir altasintensidades, p.e. son mayoritariamente usados aún en la actualidad en eldiseño de fuentes de alimentacion.
Circuitos (filtros) activos. Los avances en electrónica han reducidoenormemente el tamaño de resistencias y condensadores; no así el deinductores. Por otra parte, los inductores son caros, tienen pérdidas, tienen
Figura 1.13: Evolución de la tecnología defiltros de audio en Bell Systems.
Fig.1.1 Schauman
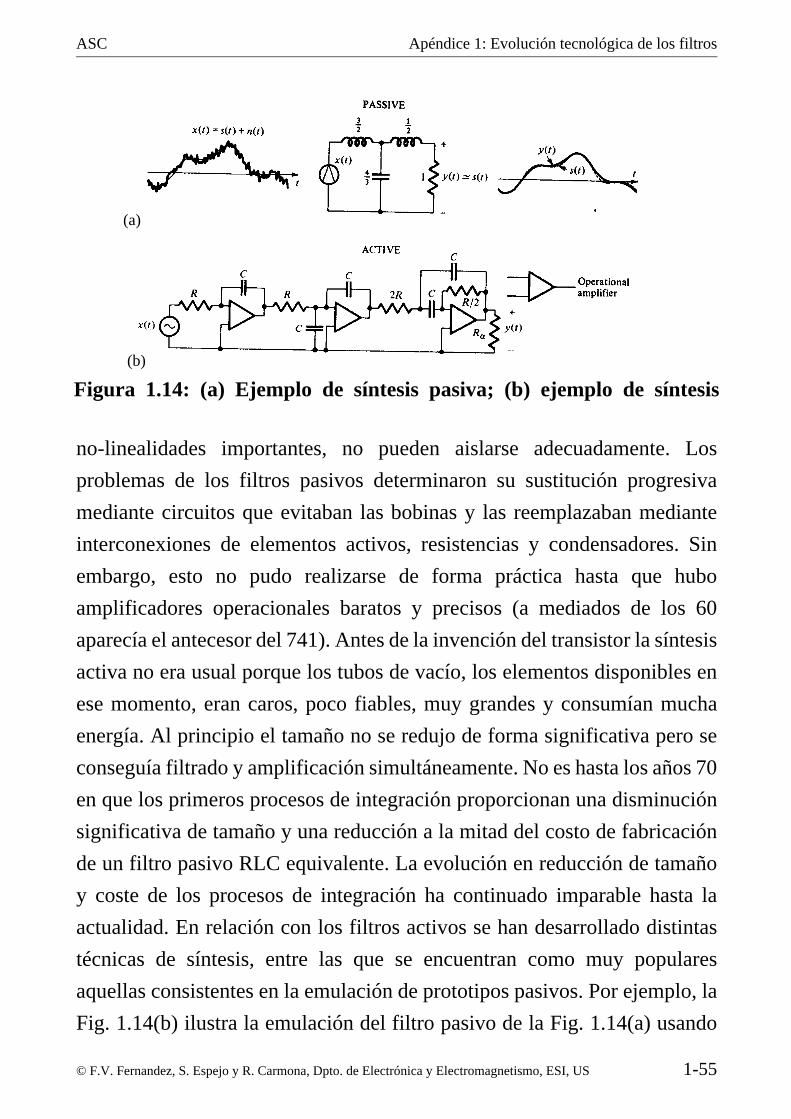
ASC Apéndice 1: Evolución tecnológica de los filtros
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-55
no-linealidades importantes, no pueden aislarse adecuadamente. Losproblemas de los filtros pasivos determinaron su sustitución progresivamediante circuitos que evitaban las bobinas y las reemplazaban medianteinterconexiones de elementos activos, resistencias y condensadores. Sinembargo, esto no pudo realizarse de forma práctica hasta que huboamplificadores operacionales baratos y precisos (a mediados de los 60aparecía el antecesor del 741). Antes de la invención del transistor la síntesisactiva no era usual porque los tubos de vacío, los elementos disponibles enese momento, eran caros, poco fiables, muy grandes y consumían muchaenergía. Al principio el tamaño no se redujo de forma significativa pero seconseguía filtrado y amplificación simultáneamente. No es hasta los años 70en que los primeros procesos de integración proporcionan una disminuciónsignificativa de tamaño y una reducción a la mitad del costo de fabricaciónde un filtro pasivo RLC equivalente. La evolución en reducción de tamañoy coste de los procesos de integración ha continuado imparable hasta laactualidad. En relación con los filtros activos se han desarrollado distintastécnicas de síntesis, entre las que se encuentran como muy popularesaquellas consistentes en la emulación de prototipos pasivos. Por ejemplo, laFig. 1.14(b) ilustra la emulación del filtro pasivo de la Fig. 1.14(a) usando
Figura 1.14: (a) Ejemplo de síntesis pasiva; (b) ejemplo de síntesis
Fig.1.2 Papoulis
Fig.1.3 Papoulis
(a)
(b)
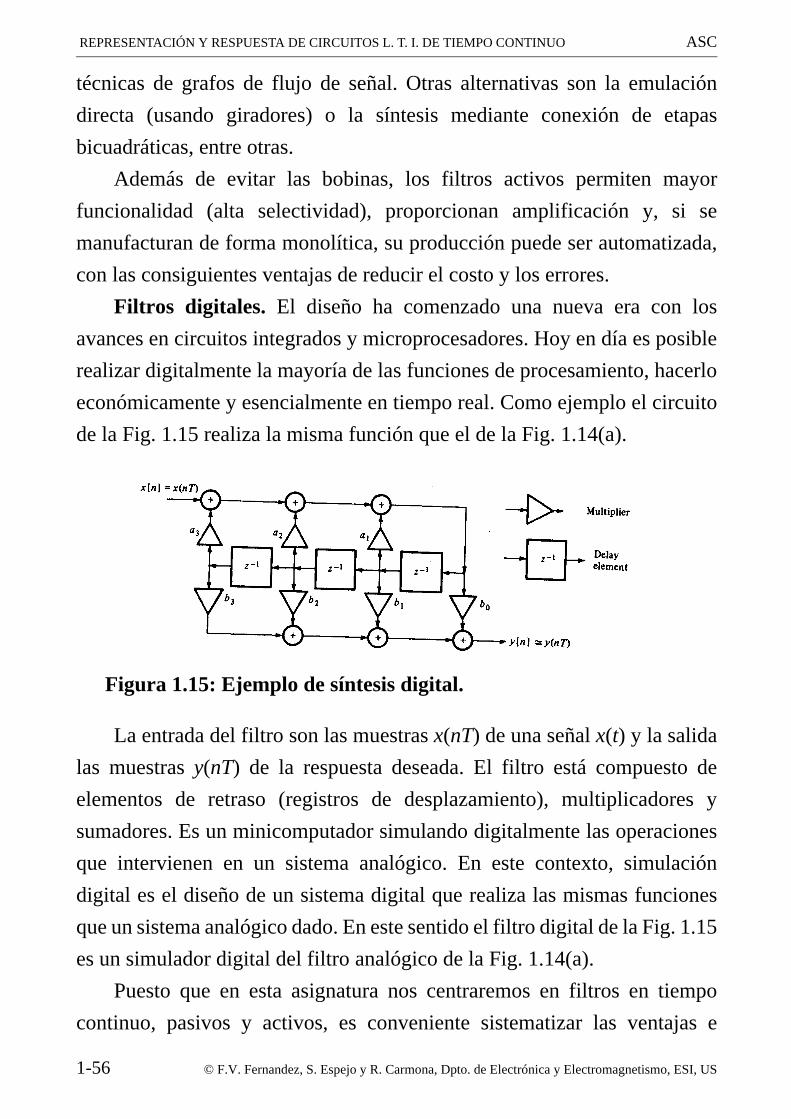
REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-56 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
técnicas de grafos de flujo de señal. Otras alternativas son la emulacióndirecta (usando giradores) o la síntesis mediante conexión de etapasbicuadráticas, entre otras.
Además de evitar las bobinas, los filtros activos permiten mayorfuncionalidad (alta selectividad), proporcionan amplificación y, si semanufacturan de forma monolítica, su producción puede ser automatizada,con las consiguientes ventajas de reducir el costo y los errores.
Filtros digitales. El diseño ha comenzado una nueva era con losavances en circuitos integrados y microprocesadores. Hoy en día es posiblerealizar digitalmente la mayoría de las funciones de procesamiento, hacerloeconómicamente y esencialmente en tiempo real. Como ejemplo el circuitode la Fig. 1.15 realiza la misma función que el de la Fig. 1.14(a).
La entrada del filtro son las muestras x(nT) de una señal x(t) y la salidalas muestras y(nT) de la respuesta deseada. El filtro está compuesto deelementos de retraso (registros de desplazamiento), multiplicadores ysumadores. Es un minicomputador simulando digitalmente las operacionesque intervienen en un sistema analógico. En este contexto, simulacióndigital es el diseño de un sistema digital que realiza las mismas funcionesque un sistema analógico dado. En este sentido el filtro digital de la Fig. 1.15es un simulador digital del filtro analógico de la Fig. 1.14(a).
Puesto que en esta asignatura nos centraremos en filtros en tiempocontinuo, pasivos y activos, es conveniente sistematizar las ventajas e
Figura 1.15: Ejemplo de síntesis digital.
Fig.1.4 Papoulis

ASC Apéndice 1: Evolución tecnológica de los filtros
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-57
inconvenientes que ambos tipos de filtros presentan en la actualidad. Losfiltros activos proporcionan las siguientes ventajas:
1) El tamaño y peso se ha visto enormemente reducido respecto a losequivalentes pasivos.
2) La fiabilidad de los circuitos es mucho mayor ya que los pasos defabricación pueden automatizarse totalmente.
3) En grandes cantidades el costo de los filtros activos integrados esmucho más bajo que el de los equivalentes pasivos.
4) El comportamiento es mejor porque se pueden fabricar componentesde muy alta calidad.
5) Se puede integrar filtros activos y circuitería digital en el mismochip.
6) El diseño y ajuste suele ser más simple.7) Pueden realizar un conjunto más amplio de funciones de filtrado.8) Pueden proporcionar amplificación.
Sin embargo, presentan también algunos inconvenientes respecto a lasrealizaciones pasivas:
1) Los componentes activos tienen un ancho de banda finito lo quelimita su rango de aplicaciones. Por el contrario, los filtros pasivospueden usarse sin problemas hasta altas frecuencias.
2) Los filtros pasivos son menos sensibles a cambios de los procesos defabricación o incluso ambientales.
3) Los filtros activos requieren fuentes de alimentación.4) La amplitud que los dispositivos activos pueden procesar condistorsión aceptable se limita a niveles alrededor de 1 V. Por otra parte,las resistencias y los dispositivos activos generan ruido. Por tanto, elrango dinámico es reducido respecto al de circuitos pasivos.
REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-58 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
Apéndice 2: Respuesta temporal de un sistema conpolos en el semiplano derecho del plano s
Consideremos un polo real. Podemos describir como:
(1.136)
si realizamos la transformada inversa y pasamos al dominio del tiempo:
(1.137)
El primer término no permanece acotado en el caso que .Consideremos ahora un par de polos complejos conjugados. La función
de transferencia:
(1.138)
y antitransformando al dominio del tiempo:
(1.139)
donde el primer término no permanece acotado si .
Apéndice 3: Respuesta temporal de un sistema conpolos múltiples sobre el eje imaginario
Consideremos primero el caso en que se encuentran los polos múltiplesen . La función de transferencia se puede escribir:
(1.140)
y antitransformando al dominio del tiempo:
H s( )
H s( ) ks p–----------- N' s( )
D' s( )------------+=
h t( ) kept h' t( )+=
p 0>
H s( ) kejθ
s α– jβ+----------------------- ke jθ–
s α– jβ–----------------------- N' s( )
D' s( )------------+ +=
h t( ) 2keαt βt θ+( )cos= h' t( )+
α 0>
s 0=
H s( ) k
sq----- H' s( )+=
ASC Apéndice 3: Respuesta temporal de un sistema con polos múltiples sobre el eje imaginario
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-59
(1.141)
que no se mantiene acotado. Si consideramos ahora polos imaginarios lafunción de transferencia se puede escribir:
(1.142)
y antitransformando:
(1.143)
La evaluación numérica de las posiciones de las raíces para determinarsi un sistema es estable o no requiere un ordenador cuando el grado delpolinomio es grande.
h t( ) kq 1–( )!
------------------tq 1– h' t( )+=
H s( ) kejθ
s jω+( )q---------------------- ke jθ–
s jω–( )q---------------------- H' s( )+ +=
h t( ) 2kq 1–( )!
------------------tq 1– ωt θ+( )cos h' t( )+=
REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-60 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
Comentarios Profesor
C_P.1.Es importante diferenciar el circuito eléctrico real, constituido porelementos reales, del modelo abstracto de circuito, consistente en lainterconexión de elementos idealizados. En la implementación real dedicho modelo pueden emplearse entidades físicas de índole muydiversa, y son precisamente los parásitos y los efectos de ordensuperior que pueden detectarse en el comportamiento de dichasentidades físicas los que van a acotar la validez del modelo abstractopara explicar el comportamiento del circuito real.En adelante, y salvo que se indique expresamente lo contrario, vamosa referirnos a los circuitos como interconexiones de elementosabstractos y sólo cuando sea preciso nos referiremos a los fenómenosque limitan el comportamiento de dichas entidades abstractas,tratando de inferir el origen de estos fenómenos en el comportamientode las entidades físicas subyacentes.
C_P.2.Aquí sería conveniente remarcar la necesidad de hacer usoinevitablemente de filtros en tiempo continuo para interaccionar conel mundo real: filtros anti-aliasing a la entrada de sistemas en tiempo-discreto y filtros de smoothing a la salida. Así como explicarles queel origen de lso filtros en tiempo discreto (analógicos y digitales) sehalla en la aproximación e implementación de filtros en tiempocontinuo.
C_P.3.Este apartado deberíamos saltarnoslo.C_P.4.Hacer referencia al Chua-Desoer-Kuh, Linear and Nonlinear
Circuits, para una explicación detallada sobre el teorema deconvolución.
C_P.5.Hay que hacer notar que la función de red depende de los puntos(terminales) en los que consideremos la aplicación de la entrada y la
ASC Comentarios Profesor
© F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US 1-61
detección de la salida. Un mismo circuito puede exhibir, por tanto,distintas funciones de sistema.
C_P.6.Indicar que las dimensiones de la función tranformada son lasdimensiones de la función en el dominio del tiempo multiplicadas porel tiempo:
C_P.7.Las formas de onda de los términos individuales de la componentenatural están únicamente determinadas por el propio sistemamientras que los términos individuales de por la excitación.Para tener alguna respuesta el sistema debe ser excitado. Una vezforzado el sistema responde de dos maneras: revela su propiocomportamiento característico en la forma de la respuesta natural yexhibe las características de la excitación en la forma de la respuestaforzada. Un error común consiste en pensar que un sistema lineal conuna excitación sinusoidal siempre produce una respuesta sinusoidal.La respuesta es sinusoidal sólo cuando los términos correspondientesa los polos del sistema (parte natural de la respuesta) son cero. Estopuede que no ocurra nunca o puede que ocurra después de un ciertotiempo. Por ejemplo, cuando los polos del sistema están en elsemiplano izquierdo del plano s la parte natural se desvanece y sóloentonces la respuesta es realmente sinusoidal.
C_P.8.Para polos en el semiplano de la izquierda la correspondientecomponente tiende a 0 para . Para polos en el semiplano de laderecha la correspondiente componente tiende a para . Así,un polo en el semiplano de la izquierda no influye en el régimenestacionario mientras que uno en el semiplano de la derechadetermina prácticamente dicho régimen estacionario. Respecto a lainfluencia de los ceros, éstos afectan a ki y kiejqi controlando así laamplitud y el valor inicial de las distintas componentes de larespuesta.
si F s( ) L f t( )[ ]= entonces F s( )[ ] f t( )[ ] t⋅=
yn t( )yf t( )
t ∞→∞ t ∞→

REPRESENTACIÓN Y RESPUESTA DE CIRCUITOS L. T. I. DE TIEMPO CONTINUO ASC
1-62 © F.V. Fernandez, S. Espejo y R. Carmona, Dpto. de Electrónica y Electromagnetismo, ESI, US
C_P.9. Para demostrarlo consideremos una raíz compleja s=−a−jb quecorresponde al factor (s+a+jb) en la función de sistema. El término jbharía aparecer coeficientes complejos en el polinomio si no existierauna raíz compleja s=−a+jb. El producto de ambas:
(1.144)
que tiene sólo coeficientes reales.
s a jb+ +( ) s a jb–+( ) s2 2as a2 b2+ + +=