reporte_práctica_1.docx
13
S.E.P. S.E.S.T.N.M. T.N.M INSTITUTO TECNOLÓGICO DE TOLUCA UNIDAD DE INGENÍERA MECATRÓNICA Reporte práctica 1 MATERIA: Control PRESENTAN: Orihuela Méndez Francisco Manjarrez Palma Marco Antonio
-
Upload
marco-antonio-manjarrez-palma -
Category
Documents
-
view
215 -
download
0
Transcript of reporte_práctica_1.docx
S.E.P. S.E.S.T.N.M. T.N.M INSTITUTO TECNOLGICO DE TOLUCA UNIDAD DE INGENERA MECATRNICA
Reporte prctica 1
MATERIA: Control
PRESENTAN:Orihuela Mndez FranciscoManjarrez Palma Marco Antonio
Metepec, Mxico, 20 de febrero del 2015.
ResumenEn esta prctica se pretende analizar una funcin de transferencia, se hizo primeramente los clculos de Mp y tp de la funcin de transferencia proporcionada, despus se construy el equivalente de dicha funcin con amplificadores operacionales, se realiz la simulacin de este circuito en proteus y tambin se simul la funcin de transferencia en Matlab, con estas simulaciones se pudo comprobar los clculos hechos, finalmente se hizo el circuito en forma real para obtener las mediciones en el osciloscopio y comparar los resultados calculados, simulados y reales .
Objetivo
El objetivo de esta prctica es comprobar la teora vista en clase sobre el anlisis de la respuesta en estado transitorio y estable de una funcin de transferencia, la cual es llevada a la prctica a travs de la construccin de un circuito con amplificadores operacionales, tambin comparar y sacar conclusiones de los resultados arrojados por la medicin de los parmetros del circuito real y compararlo con las simulaciones y los clculos previamente realizados.
TeoraCon frecuencia, las caractersticas de desempeo de un sistema de control se especifican en trminos de la respuesta transitoria para una entrada escaln unitario, puesto que esta es fcil de generar y es suficientemente drstica. La respuesta transitoria de un sistema para una entrada escaln unitario depende de las condiciones iniciales. Por conveniencia al comparar respuestas transitorias de varios sistemas, es una prctica comn usar la condicin inicial estndar de que el sistema est en reposo al inicio, por lo cual la salida y todas las derivadas con respecto al tiempo son cero. De este modo, las caractersticas de respuesta se comparan con facilidad.
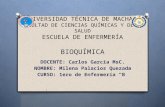
Es comn especificar lo siguiente:1. Tiempo de retardo, td2. Tiempo de subida, tr3. Tiempo pico, tp4. Sobreelongacin, Mp5. Tiempo de asentamiento, ts
Estas especificaciones se definen enseguida y aparecen en forma grfica en la Figura.1. Tiempo de retardo td: el tiempo de retardo es el tiempo requerido para que la respuesta alcance la primera vez la mitad del valor final.2. Tiempo de subida, tr: el tiempo de subida es el tiempo requerido para que la respuesta pase del 10 al 90%, del 5 al 95% o del 0 al 100% de su valor final. Para sistemas subamortiguados de segundo orden, por lo general se usa el tiempo de subida de 0 a 100%.Para sistemas sobreamortiguados, suele usarse el tiempo de levantamiento de 10 a 90%.3. Tiempo pico, tp: el tiempo pico es el tiempo requerido para que la respuesta alcance el primer pico de sobreelongacin.4. Sobreelongacin mxima (porcentaje), Mp: la mxima sobreelongacin es el mximo valor del pico de la curva de respuesta, medido a partir de la unidad. Si el valor final en estado estacionario de la respuesta es diferente de la unidad, es frecuente utilizar el porcentaje de sobreelongacin mxima. Se define mediante:
La cantidad de sobreelongacin mxima (en porcentaje) indica de manera directa la estabilidad relativa del sistema.5. Tiempo de asentamiento, ts: El tiempo de asentamiento es el tiempo que se requiere para que la curva de respuesta alcance un rango alrededor del valor final del tamao especificado por el porcentaje absoluto del valor final (por lo general, de 2 o 5%). El tiempo de asentamiento se relaciona con la mayor constante de tiempo del sistema de control. Los objetivos del diseo del sistema en cuestin determinan qu criterio de error en porcentaje utilizar.Las especificaciones en el dominio del tiempo que se han proporcionado son muy importantes, ya que casi todos los sistemas de control son sistemas en el dominio del tiempo; es decir:
ClculosPrimeramente tenemos la funcin de transferencia:
De la cual sacaremos los polos
La funcin de transferencia es crticamente estable a lazo abierto, ya que uno de los polos se encuentra sobre el eje j.Tambin es observable que esta ecuacin es de tipo 1, para la cual calcularemos Kv
Calcularemos ahora el error en estado estable
Ahora haremos los clculos con esta misma funcin pero a lazo cerrado donde:
Calcularemos n, , Mp , tp y d
SimulacinLa simulacin en Matlab qued de la siguiente manera:
Mp=0.32tp=0.70 segLa simulacin en proteus qued de la siguiente forma:
Mp=0.3tp=0.7 seg
Procedimiento
El primer paso a seguir fue armar el circuito en el simulador proteus de acuerdo al circuito diseado, primeramente se nos dificult el circuito debido a que no nos habamos fijado bien en las polarizaciones de los amplificadores ya que no se estaba en la funcin de transferencia requerida, posteriormente nos dimos cuenta que no se poda simular bien con los amplificadores operacionales que se tenan, por lo cual en la simulacin usamos amplificadores ideales.
Posteriormente armamos el circuito, primeramente nos dimos cuenta que el trimpot no estaba bien conectado y se desestabilizaba mucho, por lo cual usamos arreglos de resistencias para llegar los valores requeridos para el circuito.Despus nos dimos cuenta que no era tan bueno usar capacitores electrolticos ya que tardaban ms en cargarse.
Posteriormente probamos con capacitores de tantalio para l carga no fuera tan difcil por lo que el resultado fue el siguiente.
Mp=0.20Tp=2.7 seg
Resultados
Al final no pudimos llegar al resultado deseado en la prctica pero las simulaciones respondieron muy bien segn lo calculado.ClculosMatlabProteusReal
Mp0.320.30.20
Tp0.70 seg0.70 seg2.7 seg
Conclusiones
Durante la realizacin de esta prctica pudimos concluir que:La prctica no obtuvo el resultado esperado debido a los siguientes posibles factores; uso inadecuado de capacitores electrolticos, posible inestabilidad debido a la configuracin del circuito con amplificadores operacionales, y adems el usos de resistencias de poca precisin.
Se pudo comprobar al menos en la simulacin que los clculos son demasiado cercanos a la realidad.En esta prctica pudimos observar cmo se comporta una funcin de transferencia cuando es excitada con una funcin de escaln, nos dimos cuenta que la funcin de transferencia es estable ya que despus de cierto tiempo la seal se estabiliza.
BibliografaIngeniera de control moderna, Katsuhiko Ogata, PEARSON EDUCACIN, S.A., Madrid, 2010Ingeniera de control, W.Bolton, Alfaomega, Mxico,2001