
PROYECTO FIN DE CARRERA - IIT | Instituto de … · los pasos que se seguirán en el desarrollo de...
127
PROYECTO FIN DE CARRERA DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS ALFONSO MONTELLANO LÓPEZ MADRID, Junio de 2008 UNIVERSIDAD PONTIFICIA COMILLAS ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA (ICAI) INGENIERO INDUSTRIAL
Transcript of PROYECTO FIN DE CARRERA - IIT | Instituto de … · los pasos que se seguirán en el desarrollo de...
PROYECTO FIN DE CARRERA
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS
PRESTACIONES DINÁMICAS
ALFONSO MONTELLANO LÓPEZ
MADRID, Junio de 2008
UNIVERSIDAD PONTIFICIA COMILLAS
ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA (ICAI) INGENIERO INDUSTRIAL
DOCUMENTO NÚMERO 1
MEMORIA
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA
DE ALTAS PRESTACIONES DINÁMICAS
DOCUMENTO NÚMERO 1
MEMORIA
DOCUMENTO NÚMERO 1
MEMORIA
ÍNDICE GENERAL
Parte I. MEMORIA
Parte II. ESTUDIO ECONÓMICO

PARTE I
MEMORIA
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 1 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
ÍNDICE GENERAL
PARTE I. MEMORIA 1. INTRODUCCIÓN………………………………………………. 4
1.1. Estudio de trabajos existentes……………………. 4
1.2. Motivación……………………………………….. 6
1.3. Objetivos…………………………………………. 8
1.4. Metodología………………………………………. 8
1.5. Recursos…………………………………………... 9
2. PLIEGO DE CONDICIONES……………………………….. 11
3. DISEÑO……………………………………………………… 11
3.1. Guías lineales……………………………………… 12
3.2. Husillo de bolas…………………………………… 15
4. MONTAJE……………………………………………………. 19
4.1. Montaje del husillo………………………………… 19
5. CADENA CINEMÁTICA. TIPOS DE MONTAJE………….. 21
5.1. Acoplamiento directo motor-husillo………………. 22
5.2. Piñón-cremallera…………………………………… 23
5.3. Cinta transportadora………………………………… 24
5.4. Reductor de engranajes……………………………….. 24
6. CONSIDERACIONES ESTÁTICAS………………………….. 27
6.1. Motor con correa/polea que debe acelerar una carga… 28
6.2. Subsistema husillo……………………………………. 29
7. CÁLCULO DE MASAS…………………………………………. 30
8. PERFIL DE VELOCIDAD DE LA CARGA……………………. 31
9. CÁLCULO DEL PAR MOTOR…………………………………. 32
10. FUERZA AXIAL MÁXIMA EN EL EJE DEL HUSILLO…….. 40
11. VERIFICAR HUSILLO…………………………………………. 40
11.1. Carga admisible……………………………………… 40
11.2. Velocidad crítica…………………………………….. 41

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 2 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
11.3. Paso del husillo…………………………………….. 43
12. ESTUDIO DINÁMICO DEL SISTEMA…………………....... 44
12.1. Estudio analítico del movimiento de un carro…….. 44
12.2. Modelo dinámico de nuestro sistema……………… 46
12.3. K, rigidez dinámica equivalente…………………… 47
13. CÁLCULOS NUMÉRICOS………………………………….. 48
14. COEFICIENTES DE ROZAMIENTO……………………...... 52
14.1. Coeficiente de rozamiento estático………………… 52
14.2. Coeficiente de rozamiento dinámico………………. 52
15. MÍNIMO AVANCE DEL CARRO…………………………… 53
16. ELECCIÓN DEL SERVOMOTOR…………………………… 53
17. RESPUESTA A UN ESCALÓN……………………………… 54
18. SERVOMOTOR ELEGIDO………………………………….. 56
19. SERVOAMPLIFICADOR……………………………………. 59
20. CIRCUITO DE MEDIDA…………………………………….. 61
20.1. Funcionamiento de un encoder……………………. 61
20.2. Circuito de medida………………………………… 64
21. UNIDAD DE CONTROL DE EJES………………………….. 68
21.1. PMAC - Características principales………..……… 69
21.2. PMAC - Prestaciones………………………………. 69
21.3. PMAC - Algoritmo de regulación………………… 71
21.4. PMAC - Cálculos…………………………………… 72
21.5. PMAC - Tipos de variables………………………… 72
21.6. PMAC - PLC………………………………………. 73
21.7. PMAC - Programación…………………………….. 73
21.8. PMAC - Multiproceso…………………………....... 74
21.9. PMAC - Límites……………………………………. 74
22. OPTIMIZACIÓN DE LA RESPUESTA DINÁMICA……… 75
22.1. Consideraciones Generales………………………. 75
22.2. Modelado de la Planta…………………………… 77
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 3 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
22.3. Diseño de partida………………………………. 78
22.4. Ajuste y simulación……………………………. 78
23. CONCLUSIONES…………………………………………. 83
24. FUTUROS DESARROLLOS……………………………… 84
BIBLIOGRAFÍA………………………………………………. 85
WEBGRAFÍA…………………………………………………. 86
PARTE II. ESTUDIO ECONÓMICO ESTUDIO ECONÓMICO…………………………………….. 87
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 4 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
1. INTRODUCCIÓN
1.1. Estudio de trabajos existentes
Teniendo en cuenta el ángulo desde el que aquí se aborda este estudio de un
sistema servocontrolado, no se ha encontrado en la literatura técnica ningún
trabajo.
Sí se han encontrado estudios anteriores que tratan de forma parcial algunos de
los pasos que se seguirán en el desarrollo de este proyecto, como por ejemplo,
algunas notas técnicas de John Mazurkiewicz, responsable técnico de BALDOR,
donde habla de aplicaciones tipo con servosistemas, y da pautas para dimensionar
accionamientos, describir cómo funcionan, etc.
En la nota técnica “Application Tips” (ver [MAZU93]), habla de aplicaciones
tipos de servosistemas, considerando las diferentes tecnologías de motores
(control vectorial, corriente continua, corriente alterna) y tipo de realimentación
utilizado.
Define los campos de aplicación idóneos para cada una de las tecnologías,
teniendo en cuenta el par necesario, velocidad y momento de inercia del rotor.
Habla también de cómo interpretar una curva par/velocidad de un servomotor, y
hace algunas consideraciones de los diferentes tipos de respuestas que se pueden
obtener de un sistema, en función del ratio de inercia (momento de inercia de la
carga, referida al eje del motor, dividida por el momento de inercia del rotor del
motor).
El profesor François Pruvot, de la École Polytecnique Fédérale de Lausanne
(Suisse) en su tratado “Conception et calcul des Machines-Outils” y en sus
apuntes de clase (polycopiés) (ver [PRUV76]), hace un estudio analítico

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 5 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
detallado del movimiento de un carro de máquina. En este estudio analítico,
resuelve con detalle la ecuación diferencial del movimiento, deduciendo la
fórmula del más pequeño avance.
El mismo profesor hace también un estudio detallado de guías y otros elementos
de máquinas. Estos estudios datan de la década de los setenta, cuando la
utilización de las guías con recirculación de bolas/patines era muy incipiente.
Hace referencia a las guías mecanizadas en el propio bloque del fundido de la
bancada, templadas, y en el mejor de los casos, con recubrimiento de plástico.
Pero, la teoría, evidentemente, sigue siendo válida.
En la revista técnica Automática e Instrumentación, en su número 344, de
Octubre de 2003, se publicó el artículo “Elección y cálculo de accionamientos en
sistemas servocontrolados”, ver [MONT03]. En él, se describen con detalle los
diferentes tipos de accionamientos que se utilizan en un sistema servocontrolado,
así como pautas para dimensionar, tanto desde el punto de vista par necesario,
como desde el punto de vista respuesta dinámica. Se habla del papel de las
reductoras en la mejora del ratio de inercia.
“Handbook of AC Servo System” es un manual, publicado por SANYO DENKY
AMERICA, INC. (ver [SANY06]), que comercializa servos. En una primera
parte de este manual se explica cómo funciona un sistema servocontrolado y cada
uno de los equipos que lo componen. También se explica el funcionamiento de un
servomotor, qué es un regulador y un transductor de medida. De la misma
manera, se habla de cuándo se considera que un sistema es estable, así como de
otros aspectos. Es un manual destinado a usuarios o integradores de estos
equipos, donde las cosas se explican con pocas consideraciones teóricas.
La segunda parte de este manual está dedicada al cálculo de los accionamientos,
teniendo en cuenta los mecanismos utilizados en la cadena cinemática. Al final

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 6 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
también se dan consejos para proteger los equipos dentro de la instalación, evitar
ruidos eléctricos, etc.
En estos documentos se dan directrices sobre cómo dimensionar y cómo
funcionan los equipos, pero en ningún caso se trata el problema teniendo en
cuenta la interacción de la interfase mecánica en las prestaciones finales del
conjunto, tales como precisión de parada y repetitividad.
En este proyecto se ha querido dar un paso más, con dos objetivos:
1. Partiendo de un modelo real, determinar las variables que condicionan el
comportamiento final de un sistema servocontrolado.
2. El segundo objetivo, y no menos importante, cuantificar esas variables y
determinar cómo cuantificarlas, para conocer lo límites reales del sistema.
1.2. Motivación
La industria moderna exige, cada vez más, sistemas de altas prestaciones
dinámicas, cualquiera que sea su ámbito de aplicación. La precisión es una
reivindicación del mercado, por las necesidades del mismo. La flexibilidad es
necesaria para responder con prontitud a un mercado donde la innovación es una
baza fundamental. El precio, una vez cumplidas todas las prestaciones que se
piden, es también determinante.
Además, actualmente, se diseñan muchas instalaciones integrales, específicas
para una necesidad concreta, en las que su diseño, funcionamiento y prestaciones,
responden a una necesidad muy bien definida. En la mayoría de los casos se
hacen instalaciones únicas sin prototipos previos, de ahí la necesidad de que el
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 7 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
ingeniero disponga de herramientas para bien evaluar, desde el proyecto, el
comportamiento de esos sistemas, técnicamente complejos.
La tecnología del bucle cerrado es utilizada desde hace décadas en aplicaciones
industriales, tales como mecanizado, manutención, montaje, navegación, etc., que
actualmente se extiende con notable éxito a otros campos como la investigación,
rehabilitación, medicina, cirugía, etc. En la actualidad, se está en condiciones de
concebir sistemas industriales de grandes prestaciones, y a ello han contribuido,
de una manera decisiva, los grandes avances en electrónica, regulación y
software, realizados en las últimas décadas.
Para aplicaciones servocontroladas, el mercado dispone, en el momento presente,
de una gran variedad de accionamientos, unidades de control de ejes, así como de
sensores de posición. Nadie ignora que son equipos caros, cuyo dimensionado e
integración requieren personal muy cualificado y donde el éxito, tanto técnico
como financiero del proyecto, depende exclusivamente de la elección y diseño
de los equipos que se integren en la aplicación.
Con respecto a los accionamientos, unidad de control y sensores, la misión de la
ingeniería de integración es dimensionar correctamente, para que se cumpla el
pliego de condiciones del proyecto. Sin embargo, la adaptación mecánica, lo que
los anglosajones llaman hardware mecánico, requiere un diseño específico para
cada aplicación.
El diseño de la adaptación mecánica debe hacerse con criterios dinámicos, donde
el manejo de variables, tales como masa, rigidez dinámica, momentos de inercia,
frecuencias propias, así como la interacción entre estas variables, hace menos
evidente poder predecir su comportamiento. Pensar que los errores de diseño se
pueden paliar con “arreglos de software” resulta poco responsable y las
conclusiones de este proyecto deberían conducir a despejar algunas normas de
comportamiento en el diseño de este tipo de sistemas.
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 8 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
1.3. Objetivos
El objetivo fundamental es diseñar un sistema servocontrolado, monoeje y lineal,
cuya misión sea la de controlar el movimiento y la posición de una masa, que se
mueva linealmente, accionada por un servomotor a través de una interfase
mecánica.
El movimiento lo hará a través de unas guías lineales y el movimiento rotativo
del motor se transformará en lineal por medio de un husillo de bolas, rosca
rectificada y doble tuerca, con precarga.
1.4. Metodología
Partiendo de un sistema real, diseñado, se ha hecho un estudio analítico del
comportamiento dinámico de un carro de máquina, habiendo definido
previamente el modelo dinámico de dicho carro.
A continuación se ha hecho un modelo dinámico del sistema diseñado y se han
aplicado los resultados del estudio analítico.
Para dimensionar los accionamientos, especialmente el servomotor, el software
facilitado por BALDOR, ha permitido hacer cálculos iterativos y así elegir el
servomotor que mejor cumpla con su doble condición de suministrar el par
necesario para llevar a cabo el movimiento en las condiciones que se piden y, por
otra parte, optimizar la respuesta dinámica del sistema.
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 9 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
1.5. Recursos
Se señalan como recursos utilizados:
1. AUTOCAD. Ha permitido hacer planos de conjunto y detalle de la interfase
mecánica del sistema diseñado.
2. MATCHED PERFORMANCE. Es un software que BALDOR, el fabricante
de los accionamientos que se han elegido, pone a disposición de los usuarios,
para dimensionar los accionamientos.
3. Documentación técnica detallada de los fabricantes de accionamientos
(BALDOR), de la unidad de control de ejes (DELTA TAU), transductores de
medidas (HEIDENHAIN), guías lineales (INA), rodamientos de contacto
angular (FAG) y husillo de bolas (IPIRANGA).
4. MATLAB. A través del software Simulink y de las diferentes funciones de
Control de Sistemas permite simular la respuesta del sistema, una vez ha sido
modelado.
En el siguiente Diagrama se esquematiza la Metodología y los Recursos
utilizados.
En un tono verde oliva y numeradas se presentan las diferentes etapas de las que
se ramifican otras subetapas, interrelacionándose unas con otras. En un tono azul
claro pueden observarse las condiciones del pliego que tienen mayor incidencia y
en qué parte del proceso influyen. El tono gris perla se reserva para apuntar los
recursos utilizados de mayor importancia (no están reflejadas ni la
documentación ni las referencias bibliográficas que afectan a todo el conjunto).
En rojo se resaltan los puntos críticos para la optimización del diseño.

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 10 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Diagrama de Metodología y Recursos del Proyecto

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 11 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
≤
≤
2. PLIEGO DE CONDICIONES
El pliego de condiciones técnicas se ha definido de la siguiente forma.
Servomecanismo de un grado de libertad, lineal, con las siguientes prestaciones:
Carrera útil 500 mm
Carga máxima a transportar 25 Kg
Velocidad máx. en rég. permanente 30 m/min
Tiempo máximo de ciclo 2 s
Precisión de parada 0,01 mm
Resolución del bucle de medida 0,001 mm
Repetitividad 0,01 mm
Error de seguimiento máximo en rég. perm. Equivalente a 0,3 mm
Sobreoscilación máxima 2%
3. DISEÑO
Se diseña un servomecanismo lineal, de un grado de libertad, cuya misión es
controlar el movimiento y posición de una carga, constituida por una masa de 25
kilogramos más las piezas en movimiento cuando se desplaza dicha carga.
Aunque se diseñe un servomecanismo lineal, el razonamiento y las conclusiones son
extrapolables a cualquier otra configuración.
Este estudio se basa en un caso real, diseñado con elementos y equipos del mercado
y según normas y exigencias para este tipo de aplicaciones.
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 12 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Los principales elementos que integran el conjunto son:
3.1. Guías Lineales
Para alcanzar la máxima precisión en el posicionado, interesa que la diferencia entre
el coeficiente de fricción estático y el dinámico sea la menor posible. De aquí surge
la necesidad de utilizar guías que minimicen al máximo la fricción, como las guías
con patines o bolas, o las que utilizan rodamientos axiales.
Las guías lineales que se han elegido para el diseño utilizarán bolas. Se encuentran
en el mercado varios fabricantes que ofrecen este estilo de guías, tales como: INA,
SAIN Automation Solutions, ROBOLAN Ingeniería Robótica, etc. Dentro de esta
misma tecnología se tienen varios tipos de guías, con recirculación de bolas o
rodillos, etc.
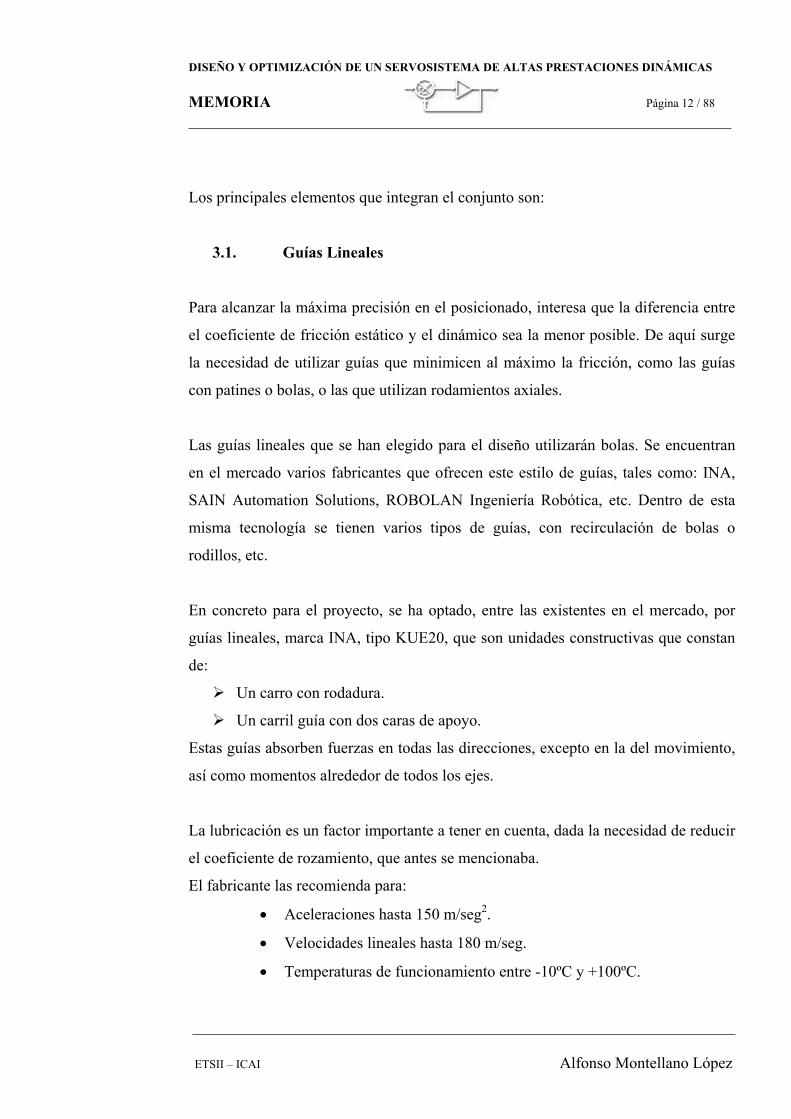
En concreto para el proyecto, se ha optado, entre las existentes en el mercado, por
guías lineales, marca INA, tipo KUE20, que son unidades constructivas que constan
de:
Un carro con rodadura.
Un carril guía con dos caras de apoyo.
Estas guías absorben fuerzas en todas las direcciones, excepto en la del movimiento,
así como momentos alrededor de todos los ejes.
La lubricación es un factor importante a tener en cuenta, dada la necesidad de reducir
el coeficiente de rozamiento, que antes se mencionaba.
El fabricante las recomienda para:
• Aceleraciones hasta 150 m/seg2.
• Velocidades lineales hasta 180 m/seg.
• Temperaturas de funcionamiento entre -10ºC y +100ºC.
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 13 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Las siguientes figuras muestran el aspecto de esas guías
Figura 1. Guías lineales INA
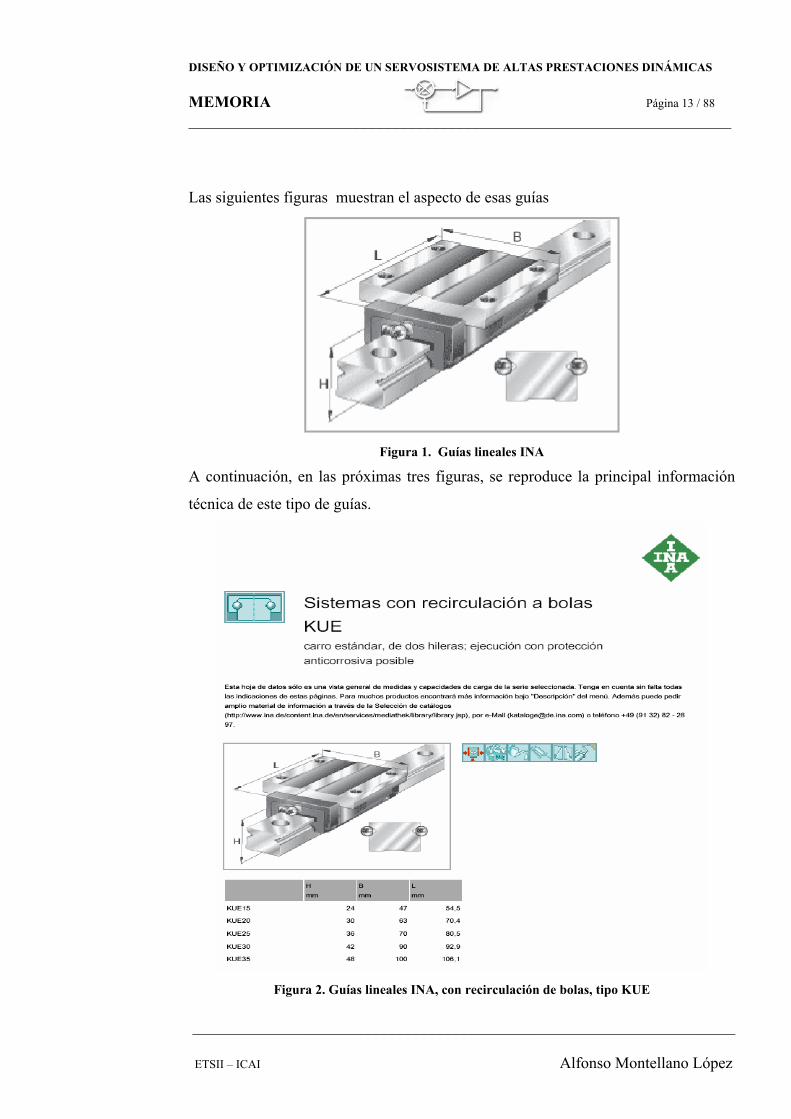
A continuación, en las próximas tres figuras, se reproduce la principal información
técnica de este tipo de guías.
Figura 2. Guías lineales INA, con recirculación de bolas, tipo KUE

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 14 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
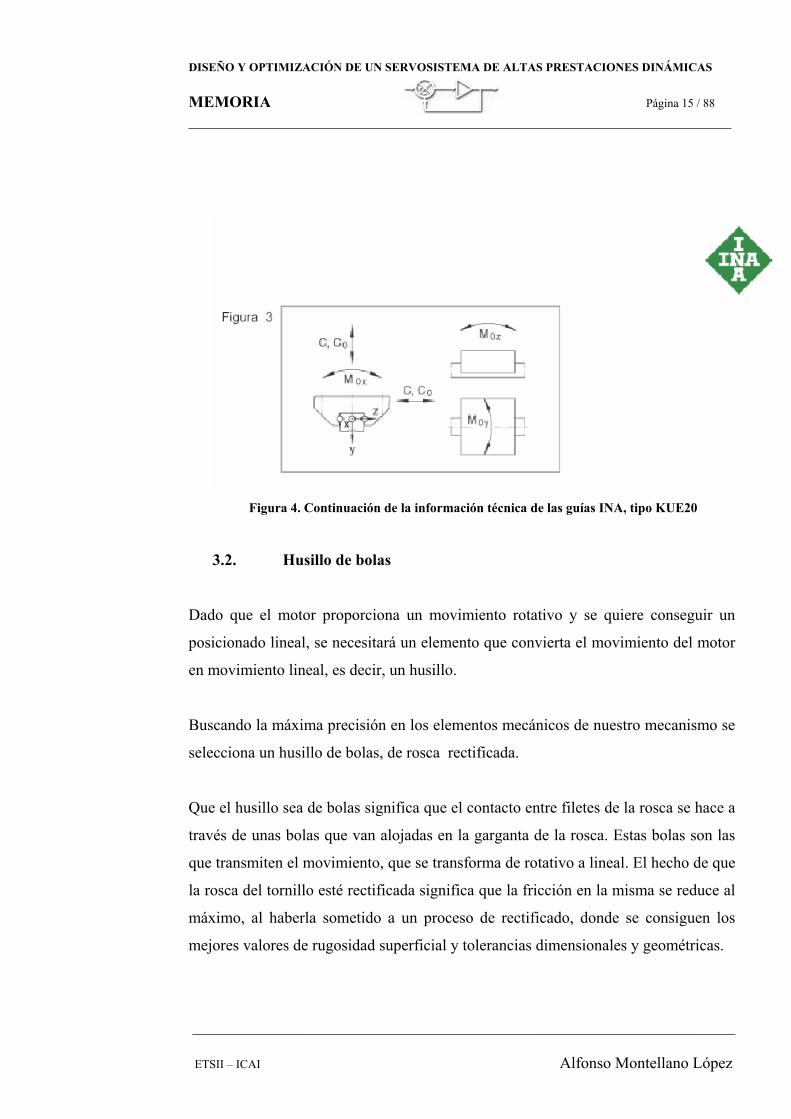
Figura 3. Continuación de la información técnica de las guías INA, tipo KUE20
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 15 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Figura 4. Continuación de la información técnica de las guías INA, tipo KUE20
3.2. Husillo de bolas
Dado que el motor proporciona un movimiento rotativo y se quiere conseguir un
posicionado lineal, se necesitará un elemento que convierta el movimiento del motor
en movimiento lineal, es decir, un husillo.
Buscando la máxima precisión en los elementos mecánicos de nuestro mecanismo se
selecciona un husillo de bolas, de rosca rectificada.
Que el husillo sea de bolas significa que el contacto entre filetes de la rosca se hace a
través de unas bolas que van alojadas en la garganta de la rosca. Estas bolas son las
que transmiten el movimiento, que se transforma de rotativo a lineal. El hecho de que
la rosca del tornillo esté rectificada significa que la fricción en la misma se reduce al
máximo, al haberla sometido a un proceso de rectificado, donde se consiguen los
mejores valores de rugosidad superficial y tolerancias dimensionales y geométricas.
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 16 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
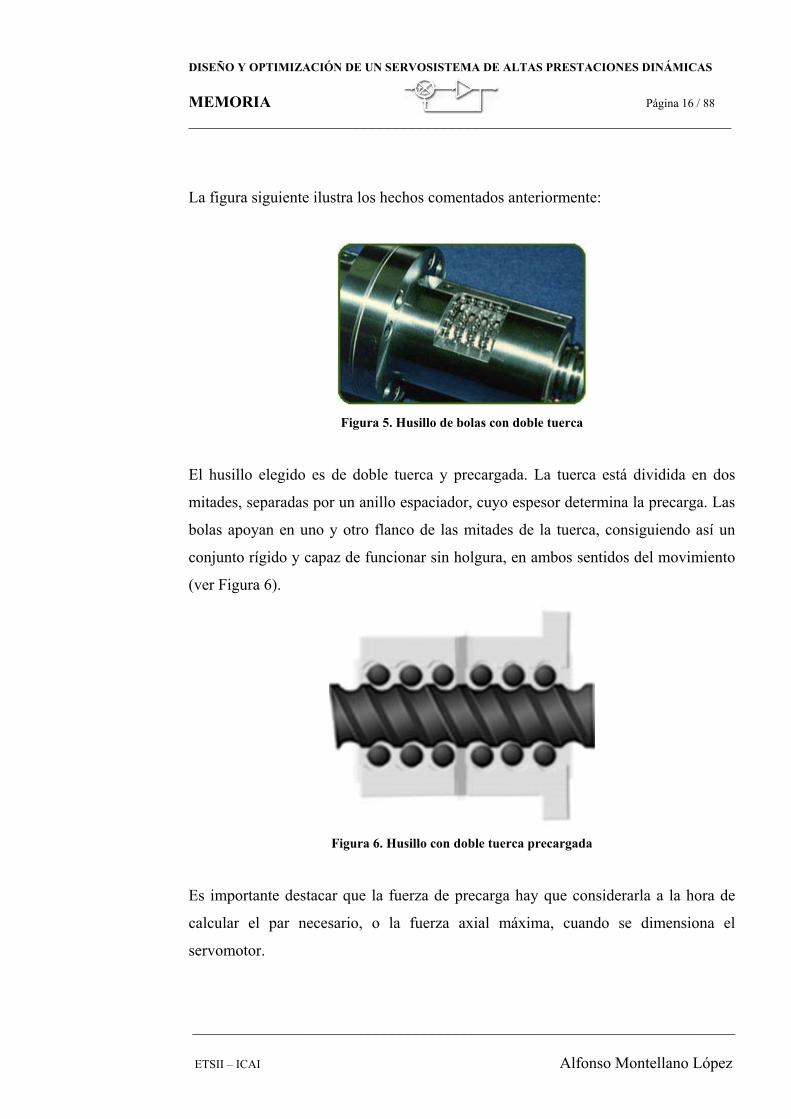
La figura siguiente ilustra los hechos comentados anteriormente:
Figura 5. Husillo de bolas con doble tuerca
El husillo elegido es de doble tuerca y precargada. La tuerca está dividida en dos
mitades, separadas por un anillo espaciador, cuyo espesor determina la precarga. Las
bolas apoyan en uno y otro flanco de las mitades de la tuerca, consiguiendo así un
conjunto rígido y capaz de funcionar sin holgura, en ambos sentidos del movimiento
(ver Figura 6).
Figura 6. Husillo con doble tuerca precargada
Es importante destacar que la fuerza de precarga hay que considerarla a la hora de
calcular el par necesario, o la fuerza axial máxima, cuando se dimensiona el
servomotor.

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 17 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Varios son los fabricantes que ofrecen este tipo de husillos, entre otros, están,
IPIRANGA, KORTA, SHUTON, NIASA, KSK KURIM, etc.
Para el diseño, se elige la marca IPIRANGA. A la hora de elegir husillo son
determinantes características como:
El paso: determina el par del motor necesario.
El diámetro: condiciona la carga admisible.
La longitud del husillo: determina la velocidad crítica (frecuenta propia).
El tipo de montaje que se haga.
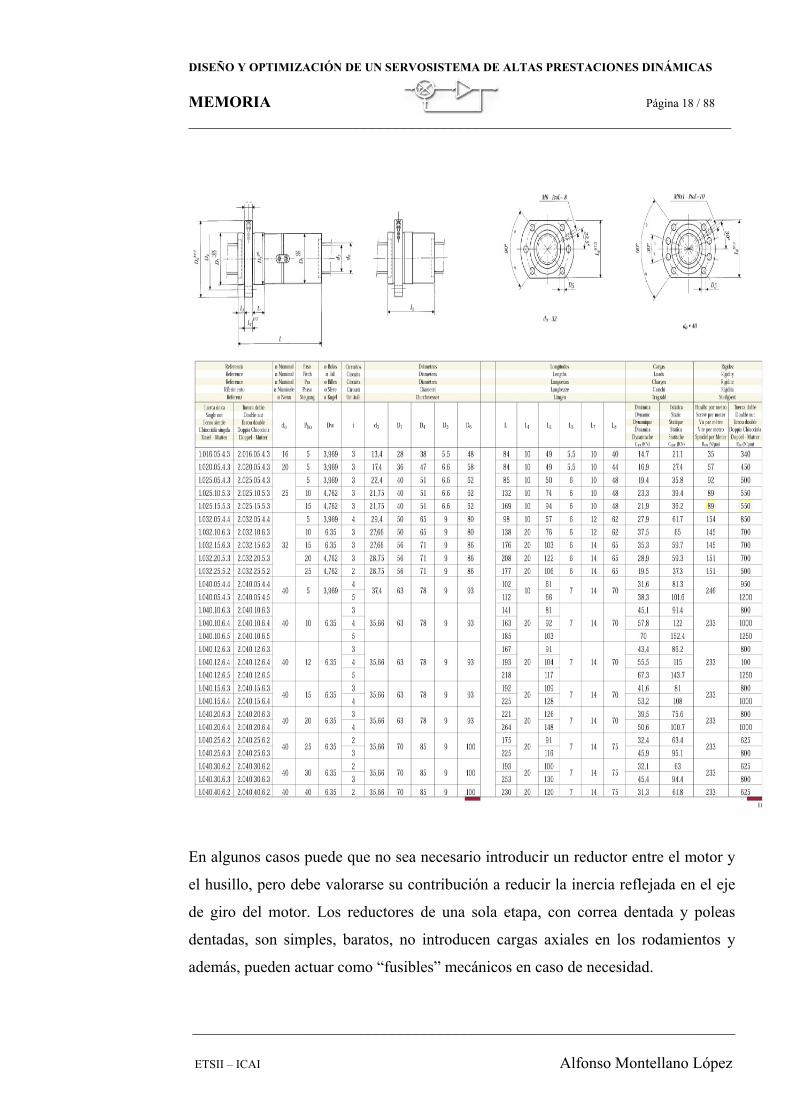
En la siguiente página se incluye la documentación consultada para husillos,
disponible en www.ipirangahusillos.com.
Entre los diferentes sistemas de transmisión del movimiento: piñón-cremallera, cinta
transportadora, piñón-cadena, los husillos con tuerca son más caros. Se utilizan para
carreras más cortas, velocidades de desplazamiento medias (limitadas por la
velocidad de rotación del husillo), pero tienen más precisión, más rigidez dinámica y
un mayor coeficiente de reducción a la hora de transformar el movimiento rotativo en
lineal, par en fuerza axial.
Es importante tener en cuenta que el elemento en movimiento que aporta la mayor
parte de la inercia del conjunto es el husillo, por lo que a la hora de calcular su
diámetro ha de considerarse esta aportación.
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 18 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
En algunos casos puede que no sea necesario introducir un reductor entre el motor y
el husillo, pero debe valorarse su contribución a reducir la inercia reflejada en el eje
de giro del motor. Los reductores de una sola etapa, con correa dentada y poleas
dentadas, son simples, baratos, no introducen cargas axiales en los rodamientos y
además, pueden actuar como “fusibles” mecánicos en caso de necesidad.

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 19 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
4. MONTAJE
Las exigencias de precisión del servomecanismo, obliga a tener una especial
vigilancia en el montaje de los elementos, de manera que se asegure la ausencia de
errores geométricos, deformaciones, desgastes, holguras, hiperestáticos, etc.
A continuación se describe cómo se ha previsto el montaje de los elementos que
juegan un papel determinante en el conjunto diseñado.
4.1. Montaje del husillo de bolas.
El montaje del husillo se debe hacer de tal manera que se eviten juegos, pero también
hiperestáticos en la estructura. Para la aplicación se ha adoptado un montaje de la
manera siguiente.
4.1.1. Un extremo, el que recibe el movimiento, desde el servomotor,
empotrado. Esto queda materializado por un paquete de dos
rodamientos de contacto angular, capaces de absorber esfuerzos tanto
normales como tangenciales/axiales o radiales, montados en “O” (las
líneas que forman los puntos de contacto forman un rombo), con un
casquillo espaciador elástico. Este casquillo tiene la misma función
que el espaciador de la tuerca del husillo: garantiza la precarga y
compensa los eventuales defectos geométricos del mecanizado.
Este tipo de montaje garantiza:
Alta rigidez dinámica.
La posibilidad de absorber esfuerzos, tanto axiales como radiales.
No tener juego durante el funcionamiento, ni axial ni radial.
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 20 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
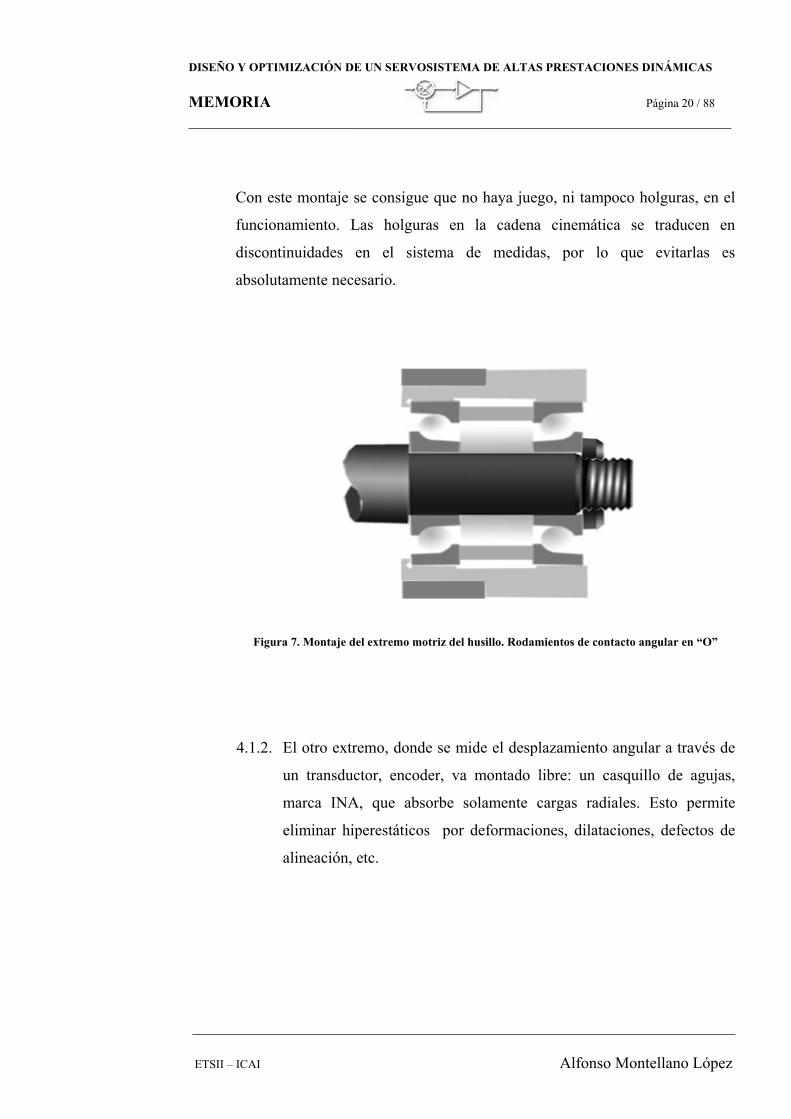
Con este montaje se consigue que no haya juego, ni tampoco holguras, en el
funcionamiento. Las holguras en la cadena cinemática se traducen en
discontinuidades en el sistema de medidas, por lo que evitarlas es
absolutamente necesario.
Figura 7. Montaje del extremo motriz del husillo. Rodamientos de contacto angular en “O”
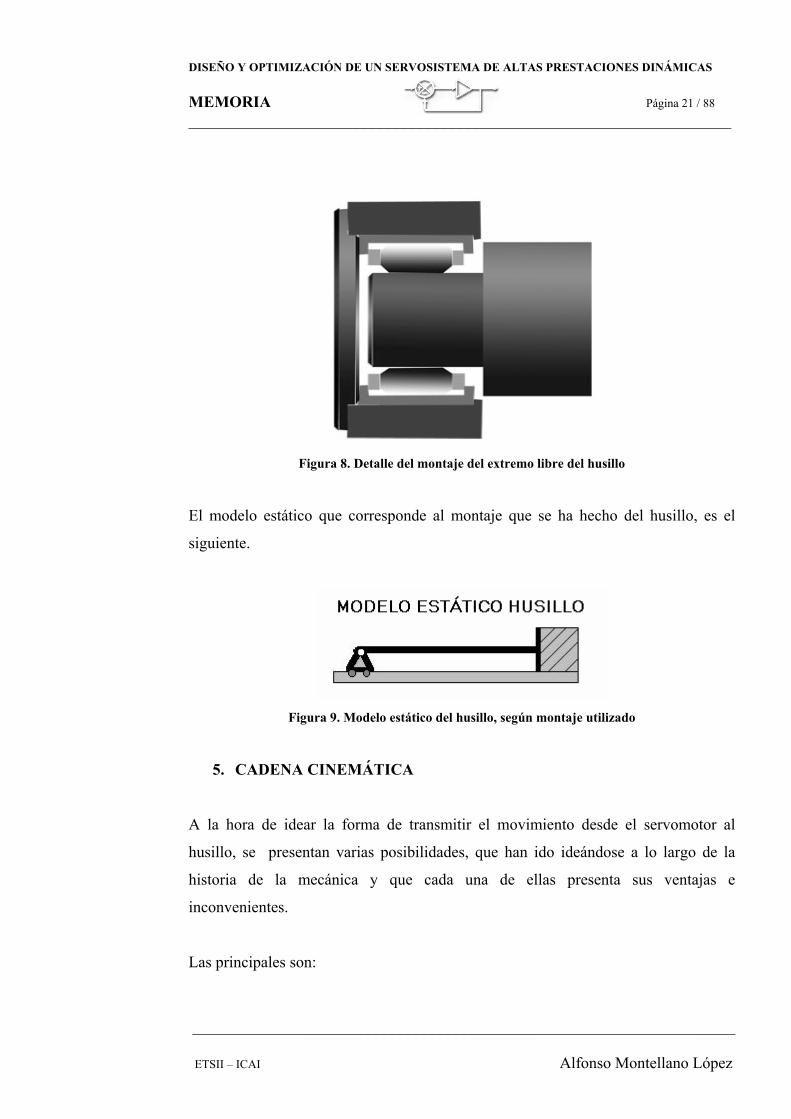
4.1.2. El otro extremo, donde se mide el desplazamiento angular a través de
un transductor, encoder, va montado libre: un casquillo de agujas,
marca INA, que absorbe solamente cargas radiales. Esto permite
eliminar hiperestáticos por deformaciones, dilataciones, defectos de
alineación, etc.
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 21 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Figura 8. Detalle del montaje del extremo libre del husillo
El modelo estático que corresponde al montaje que se ha hecho del husillo, es el
siguiente.
Figura 9. Modelo estático del husillo, según montaje utilizado
5. CADENA CINEMÁTICA
A la hora de idear la forma de transmitir el movimiento desde el servomotor al
husillo, se presentan varias posibilidades, que han ido ideándose a lo largo de la
historia de la mecánica y que cada una de ellas presenta sus ventajas e
inconvenientes.
Las principales son:

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 22 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
5.1. Acoplamiento directo motor-husillo
No cabe duda de que es el más sencillo, pero elimina la posibilidad de utilizar una
reductora, privando al diseño de las ventajas que ello representa.
Las razones para utilizar una reductora de velocidad son las siguientes:
Reducir la inercia de la carga reflejada en el eje de giro del motor.
Se considera que lo ideal para obtener una respuesta excelente, es que la
relación de la inercia de la carga, reflejada en el eje del motor, y la inercia
del rotor del motor, sea igual a 1, aunque relaciones de 5:1 proporcionen
una respuesta aceptable, en aplicaciones de robótica. Para aplicaciones
menos exigentes se pueden considerar ratios de inercia hasta de 100:1.
La conveniencia de introducir una reductora para mejorar el ratio de
inercia, se explica por el hecho de que la inercia de la carga, referida al eje
del motor, se ve disminuida por un factor igual al cuadrado del ratio de
reducción, aunque hay que tener en cuenta que la inercia de la carga se ve
afectada por la inercia de los diferentes elementos que componen la
reductora. De ahí la importancia de elegir la reductora que más conviene a
la aplicación.
Aplicaciones donde se necesita mucho par, a velocidades bajas.
Puesto que la potencia se mantiene constante a lo largo de la cadena
cinemática, si se disminuye la velocidad, el par aumenta en la misma
proporción.
La utilización de una reductora puede ser también la solución si en la
aplicación se necesita minimizar el peso del motor, ya que al disminuir el

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 23 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
par del motor necesario, se disminuye el tamaño del motor. Este es el caso
de los motores ubicados en brazos móviles, en robótica.
Limitación de espacio.
Por las mismas razones que en el caso anterior, se puede disminuir el
tamaño del motor, lo que implica menos espacio necesario.
5.2. Mecanismo con piñón-cremallera
Este tipo de mecanismos no son aconsejable en aplicaciones exigentes, porque no
son precisos ni su comportamiento es bueno cuando se trata de aplicaciones de
altas prestaciones, en aceleraciones y velocidades (ruidosas, desgastes, juegos,
etc.).
Reemplazar el piñón-cremallera por una correa dentada y poleas elimina los
inconvenientes que el primero presenta puesto que es silencioso, sencillo y
barato.
Figura 10. Mecanismo piñón-cremallera

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 24 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
5.3. Cinta transportadora
El sistema de cinta transportadora se utiliza para desplazamientos de cargas
tangenciales y para cargas ligeras con exigencias de precisión mediana. Su campo
de aplicación más frecuente es el de aplicaciones con velocidades de
desplazamiento altas y precisión de posicionado y repetitividad poco exigentes.
Figura 11. Mecanismo cinta trasportadora
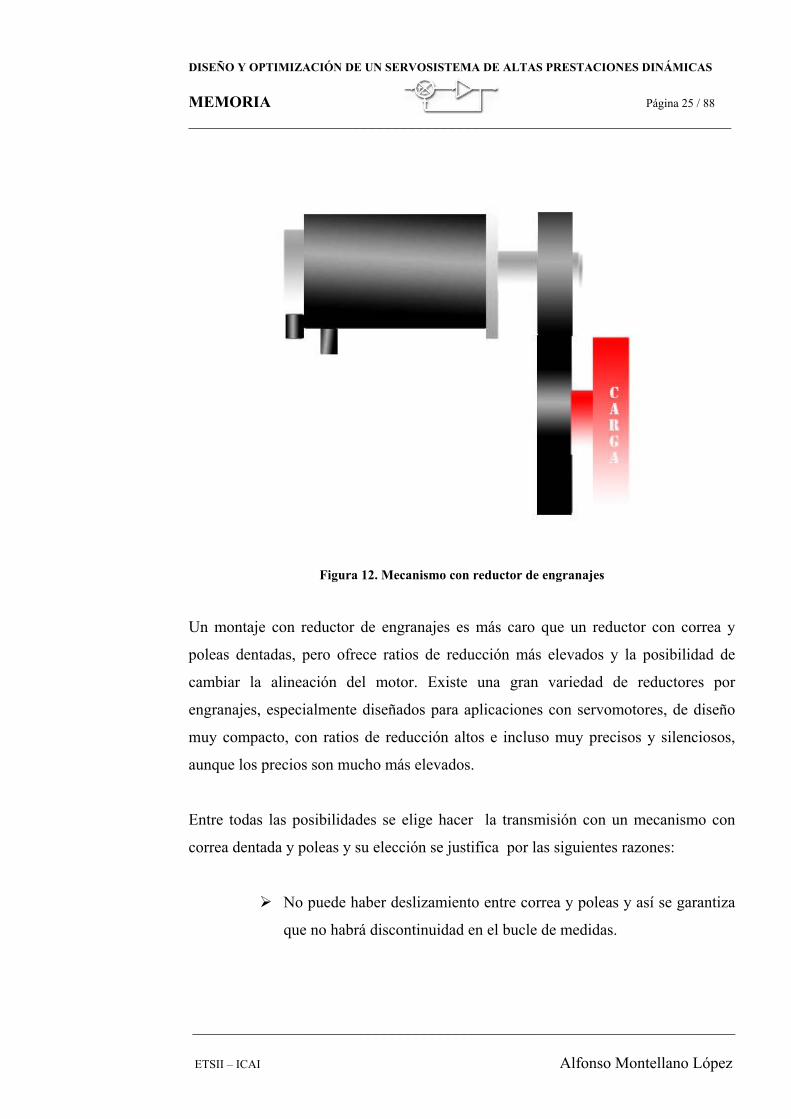
5.4. Mecanismo con reductor de engranajes
Ofrece poca flexibilidad en el montaje, puesto que en cuanto hubiera que
modificar la distancia entre el eje del motor y la carga, habría que cambiar los
engranajes. Sin embargo, ofrece ventajas entre las cuales destacan:
Reducir la velocidad del motor y aumentar el par en la misma
proporción.
Reducir la inercia de la carga reflejada en el eje del motor.
Cambiar la orientación del eje del motor.
Obtener coeficientes de reducción muy elevados
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 25 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Figura 12. Mecanismo con reductor de engranajes
Un montaje con reductor de engranajes es más caro que un reductor con correa y
poleas dentadas, pero ofrece ratios de reducción más elevados y la posibilidad de
cambiar la alineación del motor. Existe una gran variedad de reductores por
engranajes, especialmente diseñados para aplicaciones con servomotores, de diseño
muy compacto, con ratios de reducción altos e incluso muy precisos y silenciosos,
aunque los precios son mucho más elevados.
Entre todas las posibilidades se elige hacer la transmisión con un mecanismo con
correa dentada y poleas y su elección se justifica por las siguientes razones:
No puede haber deslizamiento entre correa y poleas y así se garantiza
que no habrá discontinuidad en el bucle de medidas.

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 26 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
No aparecen esfuerzos axiales en los ejes, tanto de la polea como del
servomotor, característica muy importante para no aumentar la carga
axial de los rodamientos y disminuir su vida.
Este montaje permite también hacer un reductor, eligiendo
convenientemente los diámetros de las poleas.
Es un montaje silencioso en su funcionamiento, de alta rigidez y que
garantiza precisión en el circuito de medida.
Figura 13. Mecanismo con correa/poleas dentadas
Las correas dentadas, que se utilizan en estas aplicaciones, tienen dientes de perfil
curvilíneo y corregido y están armadas con hilos de acero. La correa debe estar
tensada para asegurar una alta rigidez y una excelente respuesta en frecuencia, de lo
contrario obligaría a tener que bajar la ganancia del control produciéndose
oscilaciones. Si la distancia entre los ejes de las poleas es grande, se puede recurrir al
uso de un tensor.
Es conveniente recordar que una tensión excesiva añade cargas radiales a los
rodamientos. También es oportuno recordar que el momento de inercia de un cilindro
(poleas) es función de su radio elevado a la cuarta potencia. Montando poleas de
aluminio también se reduce considerablemente el momento de inercia. Un diseño
racional de la polea, evitando “masas innecesarias”, también contribuye a disminuir
el momento de inercia.
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 27 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
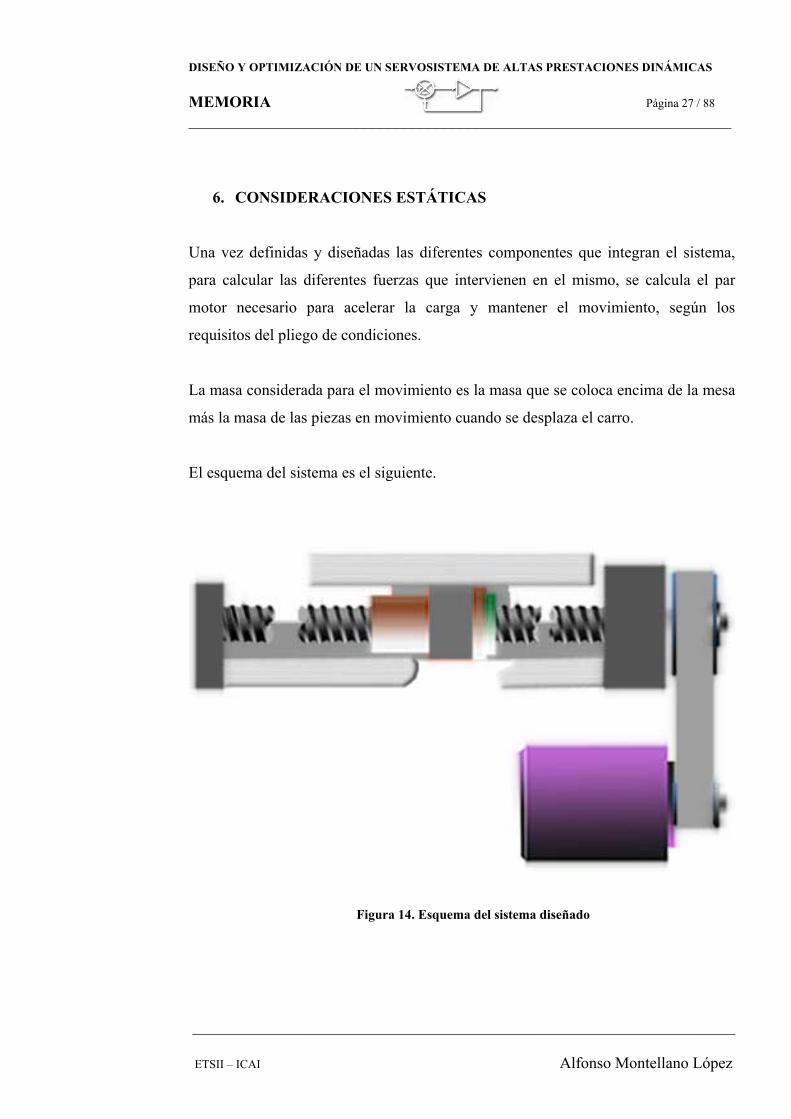
6. CONSIDERACIONES ESTÁTICAS
Una vez definidas y diseñadas las diferentes componentes que integran el sistema,
para calcular las diferentes fuerzas que intervienen en el mismo, se calcula el par
motor necesario para acelerar la carga y mantener el movimiento, según los
requisitos del pliego de condiciones.
La masa considerada para el movimiento es la masa que se coloca encima de la mesa
más la masa de las piezas en movimiento cuando se desplaza el carro.
El esquema del sistema es el siguiente.
Figura 14. Esquema del sistema diseñado
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 28 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
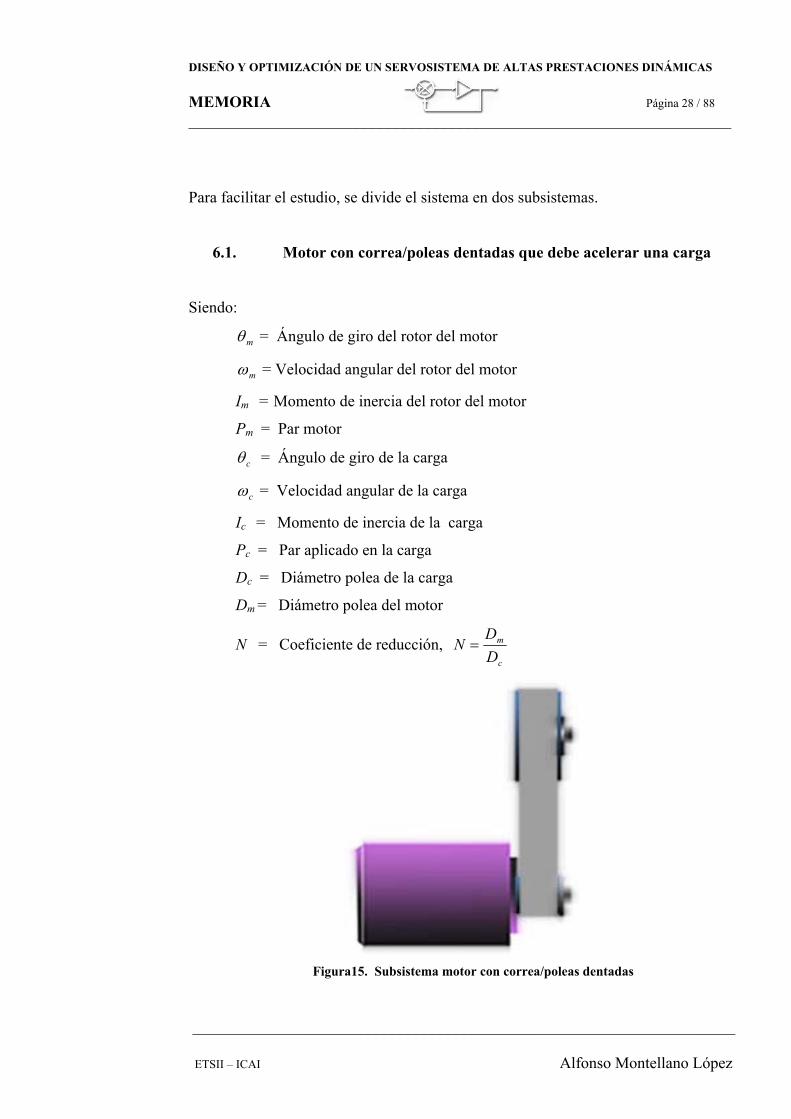
Para facilitar el estudio, se divide el sistema en dos subsistemas.
6.1. Motor con correa/poleas dentadas que debe acelerar una carga
Siendo:
mθ = Ángulo de giro del rotor del motor
mω = Velocidad angular del rotor del motor
Im = Momento de inercia del rotor del motor
Pm = Par motor
cθ = Ángulo de giro de la carga
cω = Velocidad angular de la carga
Ic = Momento de inercia de la carga
Pc = Par aplicado en la carga
Dc = Diámetro polea de la carga
Dm = Diámetro polea del motor
N = Coeficiente de reducción, c
m
DD
N =
Figura15. Subsistema motor con correa/poleas dentadas

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 29 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Las ecuaciones que rigen este movimiento son las siguientes:
2NI
II cmtotal +=
NP
P cm =
6.2. Subsistema husillo, motor acoplado directamente al husillo
Figura 16. Subsistema husillo
Siendo:
p = Paso del husillo de bolas
v = Velocidad lineal en m/s
n = Velocidad de rotación en rpm
x= Distancia lineal en m
P = Par
Pc = Par en la carga
Pac = Par de aceleración
µ= Coeficiente de rozamiento
α= Ángulo de inclinación del sistema (en este caso siempre 90º)
θ = Ángulo de rotación en radianes
Wmesa= Peso de la mesa
Wcarga = Peso de la carga

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 30 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Wtotal = Peso total
Fext = Fuerza externa (Par motor)
Ffricción = Fuerza de rozamiento (se opone al movimiento)
Wtotal = Wmesa+ Wcarga
Fpeso= Wtotal.senα
Ffricción= µFpeso = µWtotalcosα
Las ecuaciones que gobiernan este movimiento son:
actotal
c PpF
P +=π2
,
Siendo:
dtdnp
gWIP total
husilloac
+=
2
2π
pPFaxialπ2
=
7. CÁLCULO DE LAS MASAS
En el siguiente cuadro se indica el valor de las masas calculadas, de los distintos
componentes que intervienen en el movimiento, y que, por consiguiente, hay que
tener en cuenta.
Plano Designación Material Masa en Kg.
1004.03.00 Mesa Aluminio 2,36
1002.02.00 Soporte tuerca Acero 13,49
1002.01.000 Tuerca Acero 3,68
1003.16.00 Husillo Acero 3,85
1003.13.00 Polea diámetro 23 mm. Aluminio 0,04
1003.07.00 Poleas diámetro 69 mm Aluminio 0,33
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 31 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
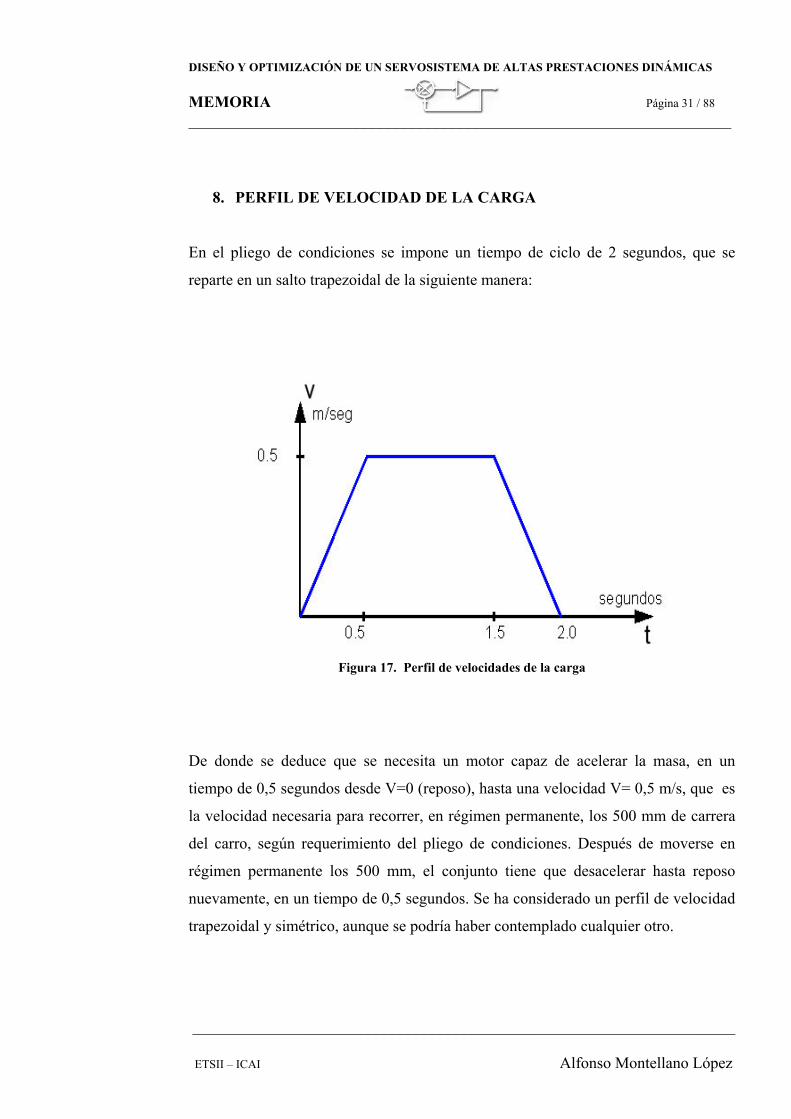
8. PERFIL DE VELOCIDAD DE LA CARGA
En el pliego de condiciones se impone un tiempo de ciclo de 2 segundos, que se
reparte en un salto trapezoidal de la siguiente manera:
Figura 17. Perfil de velocidades de la carga
De donde se deduce que se necesita un motor capaz de acelerar la masa, en un
tiempo de 0,5 segundos desde V=0 (reposo), hasta una velocidad V= 0,5 m/s, que es
la velocidad necesaria para recorrer, en régimen permanente, los 500 mm de carrera
del carro, según requerimiento del pliego de condiciones. Después de moverse en
régimen permanente los 500 mm, el conjunto tiene que desacelerar hasta reposo
nuevamente, en un tiempo de 0,5 segundos. Se ha considerado un perfil de velocidad
trapezoidal y simétrico, aunque se podría haber contemplado cualquier otro.
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 32 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
9. CÁLCULO DEL PAR MOTOR
Una vez definido el perfil de velocidades y calculadas las masas de las piezas que se
mueven, además del husillo, poleas, etc., se calcula el par motor necesario para llevar
a cabo el movimiento en las condiciones establecidas.
Para estos cálculos, basados en el modelo indicado en la Figura 14, así como las
ecuaciones indicadas, se utiliza un software de ayuda del fabricante de
accionamientos BALDOR.
La utilización de este software permite calcular el par motor bajo diferentes
supuestos, así como procurar que el momento de inercia de la carga, referido al eje
de giro del motor, permita una respuesta dinámica óptima, objetivo también del
proyecto.
Con la información derivada del pliego de condiciones y teniendo en cuenta la teoría
expuesta anteriormente, se utiliza el software y se obtiene lo siguiente.
En la pantalla de la página que viene a continuación, se muestra el tipo de
transmisión que se ha elegido y que, en este caso, es una reducción con poleas y
correa y un husillo que transforma el movimiento de rotación del motor en
movimiento lineal del carro.
Es importante precisar, sin embargo, que aunque se utilice este software, la base del
cálculo son las ecuaciones, que se han deducido en el CAPÍTULO 7
CONSIDERACIONES ESTÁTICAS.

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 33 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Figura 18. Pantalla del programa de BALDOR MATCHED PERFORMANCE
En esta pantalla se eligen los mecanismos de los que está compuesta la cadena
cinemática del sistema.

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 34 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
A continuación se introducen los datos de poleas y correa.
Figura 19. Pantalla del programa de BALDOR MATCHED PERFORMANCE
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 35 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
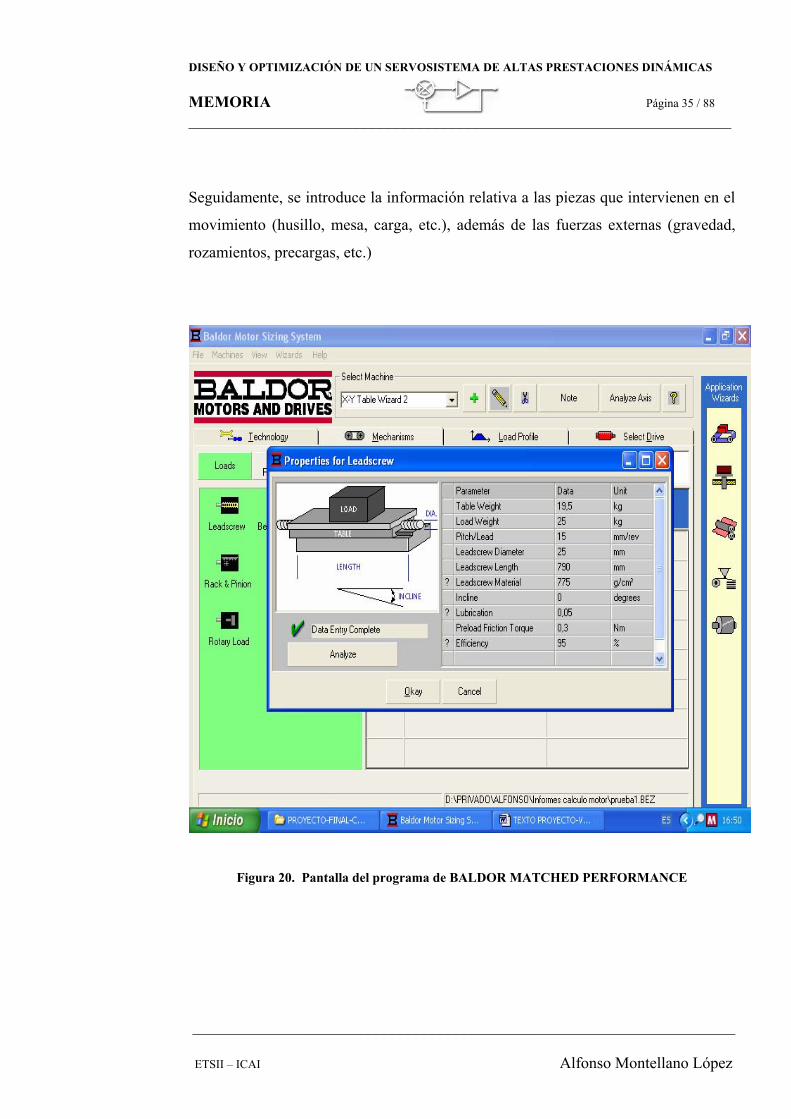
Seguidamente, se introduce la información relativa a las piezas que intervienen en el
movimiento (husillo, mesa, carga, etc.), además de las fuerzas externas (gravedad,
rozamientos, precargas, etc.)
Figura 20. Pantalla del programa de BALDOR MATCHED PERFORMANCE

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 36 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Se introducen, ahora, los datos correspondientes al perfil de velocidad de la carga
que se quiere mover/controlar, impuesto por el tiempo de ciclo que nos dio el pliego
de condiciones.
Figura 21. Pantalla del programa de BALDOR MATCHED PERFORMANCE
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 37 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
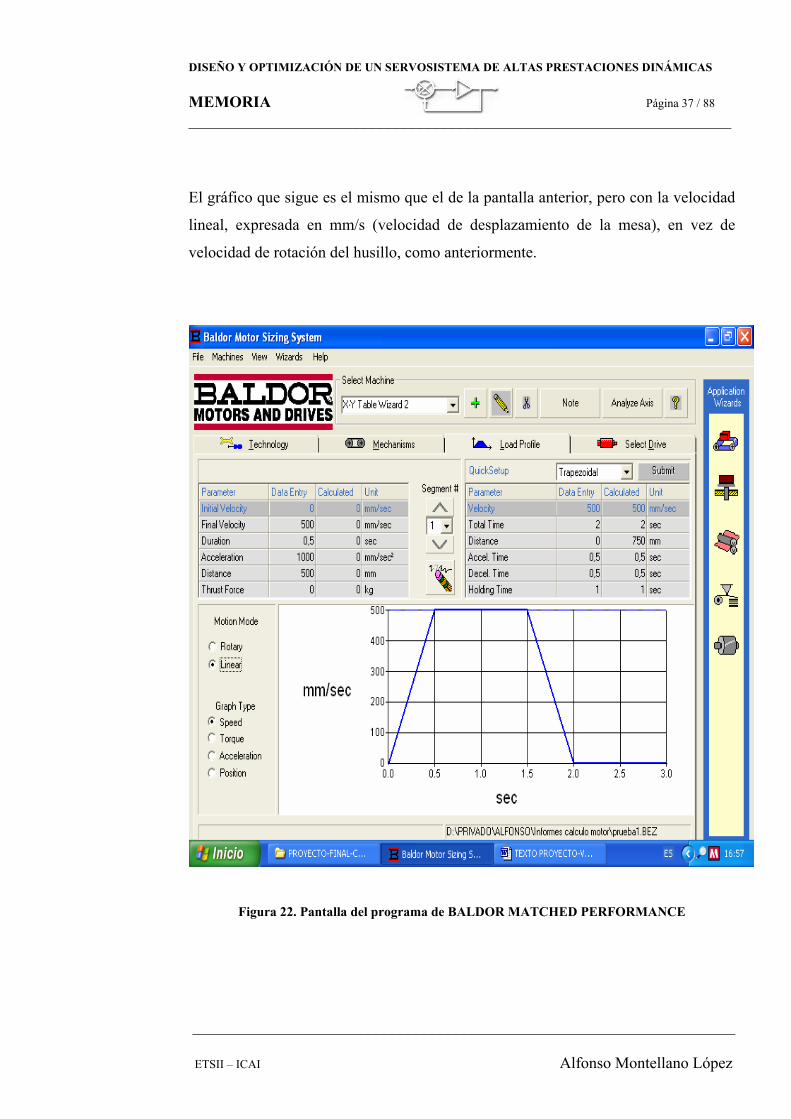
El gráfico que sigue es el mismo que el de la pantalla anterior, pero con la velocidad
lineal, expresada en mm/s (velocidad de desplazamiento de la mesa), en vez de
velocidad de rotación del husillo, como anteriormente.
Figura 22. Pantalla del programa de BALDOR MATCHED PERFORMANCE
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 38 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
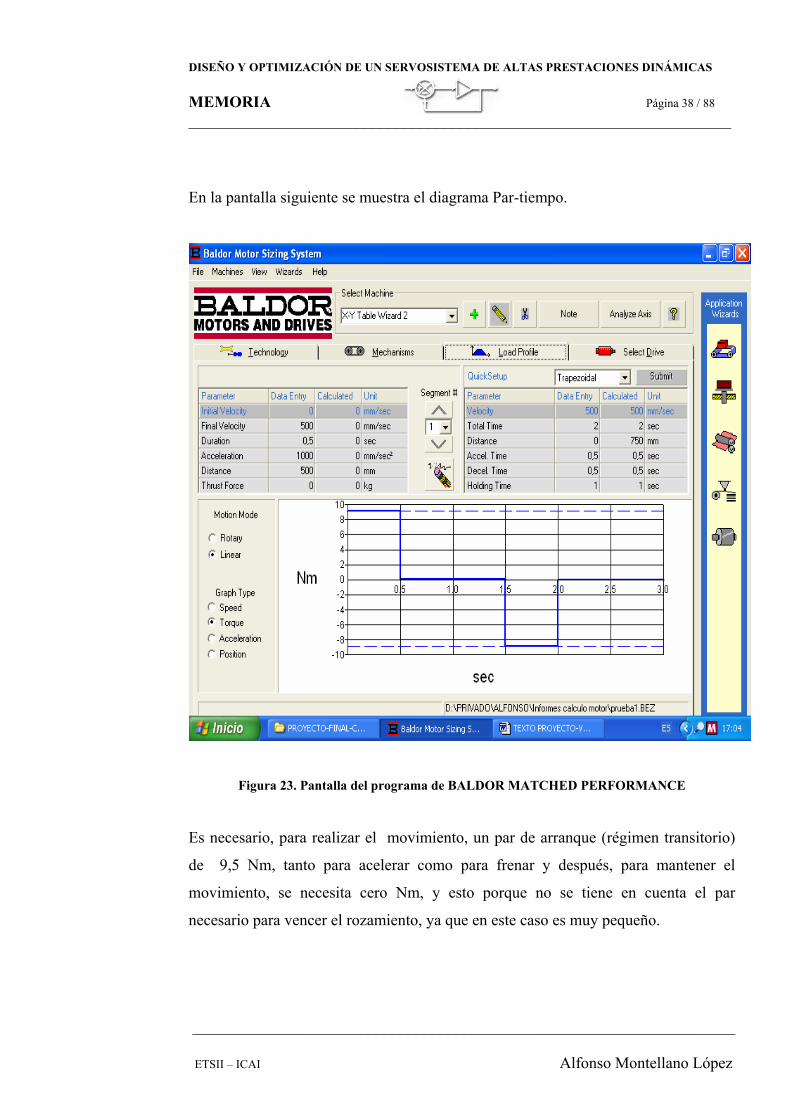
En la pantalla siguiente se muestra el diagrama Par-tiempo.
Figura 23. Pantalla del programa de BALDOR MATCHED PERFORMANCE
Es necesario, para realizar el movimiento, un par de arranque (régimen transitorio)
de 9,5 Nm, tanto para acelerar como para frenar y después, para mantener el
movimiento, se necesita cero Nm, y esto porque no se tiene en cuenta el par
necesario para vencer el rozamiento, ya que en este caso es muy pequeño.

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 39 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Para calcular el par motor que se necesita, se hace un cálculo ponderado del par,
teniendo en cuenta el tiempo necesario, que en este caso es de 0,5 segundos en el
arranque y en el frenado y después 1 segundo en régimen permanente. Así lo calcula
el software que se utiliza y, por esta razón, en la pantalla siguiente se ve que se
necesita un motor capaz de suministrar un par de pico de 6,44 Nm y un par nominal
de 3,65 Nm. La velocidad nominal de rotación del motor que se precisa es de 6000
rpm.
Figura 24. Pantalla del programa de BALDOR MATCHED PERFORMANCE

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 40 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
10. FUERZA AXIAL MÁXIMA EN EL EJE DEL HUSILLO
La fuerza axial máxima con la que empuja el husillo, viene dada por:
pPFaxialπ2
= (10.1)
Siendo P = 9,5 Nm, el par de pico calculado.
Y p ( paso del husillo) igual a 15 mm/revolución.
Así se obtiene que la fuerza axial máxima es de 3.979 Newton. Para cálculos
sucesivos se tomará Faxial máxima = 4.000 Newton.
11. VERIFICAR HUSILLO
Para los cálculos del par necesario y de la fuerza axial, ha sido necesario elegir un
husillo. Se ha elegido uno de las siguientes características:
Diámetro del husillo: 25 mm.
Paso del husillo: 15 mm/revolución.
Longitud del husillo, según plano 1003.16.00 es de 792 mm.

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 41 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
11.1. Carga admisible
La carga admisible del husillo se calcula con la fórmula de Euler, teniendo en cuenta
que trabaja al pandeo. El tipo de montaje utilizado es el de un extremo empotrado y
apoyo libre en el otro.
La carga admisible es:
02
2
. lEJFadm
π=
Siendo
l0=0,7l y (l= longitud del husillo) l= 0.7x0.792 m
E= 210.000 N/mm2
64
4dJ π=
Con estos datos se obtiene una carga admisible de 129.302 Newton,
muy superior a la fuerza axial máxima que se ejerce sobre el husillo.
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 42 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
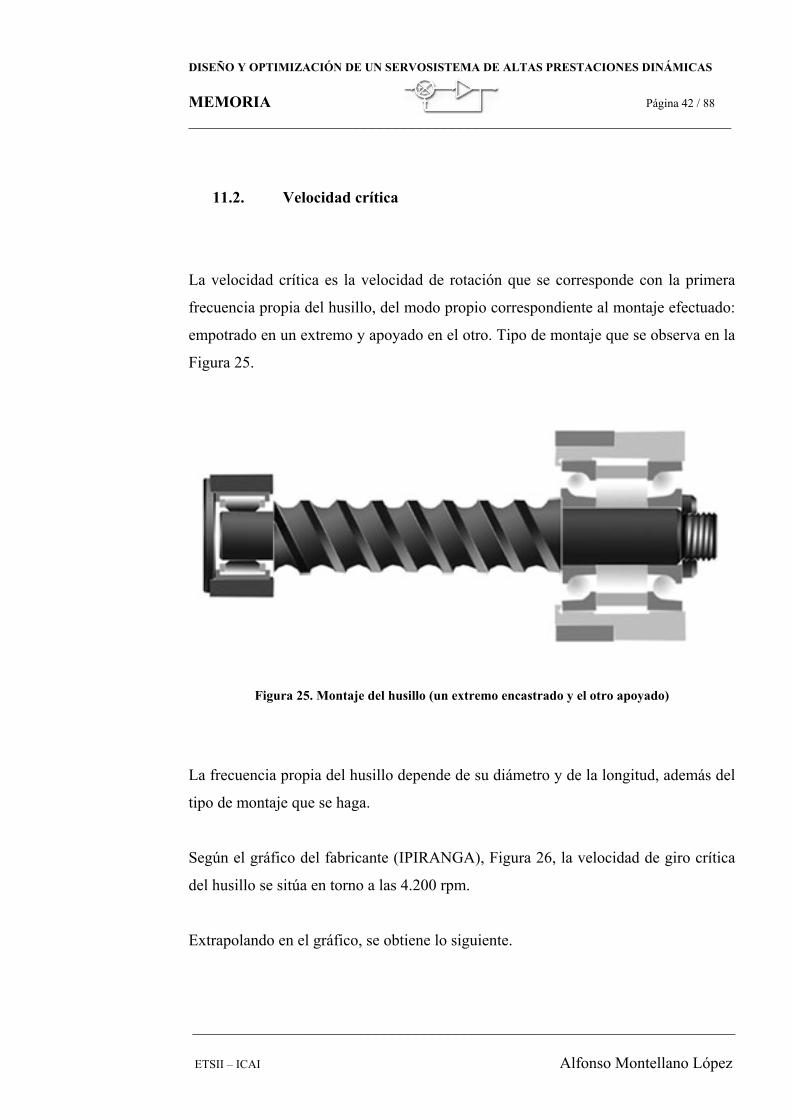
11.2. Velocidad crítica
La velocidad crítica es la velocidad de rotación que se corresponde con la primera
frecuencia propia del husillo, del modo propio correspondiente al montaje efectuado:
empotrado en un extremo y apoyado en el otro. Tipo de montaje que se observa en la
Figura 25.
Figura 25. Montaje del husillo (un extremo encastrado y el otro apoyado)
La frecuencia propia del husillo depende de su diámetro y de la longitud, además del
tipo de montaje que se haga.
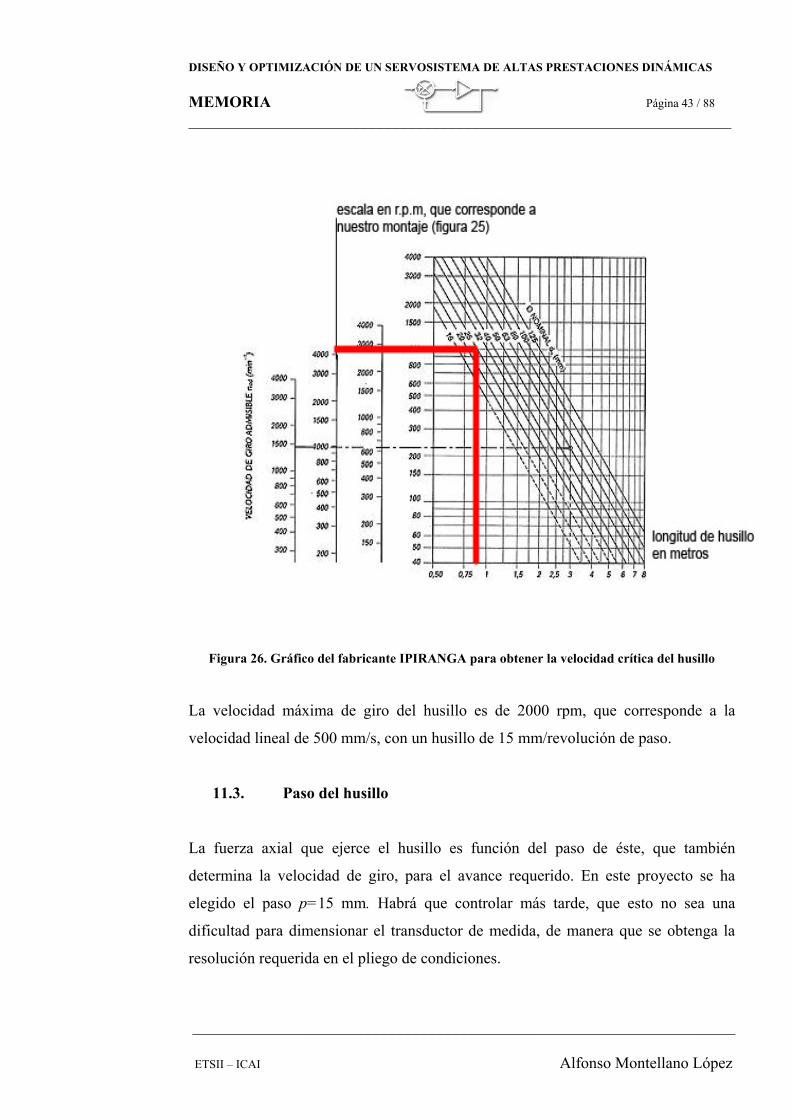
Según el gráfico del fabricante (IPIRANGA), Figura 26, la velocidad de giro crítica
del husillo se sitúa en torno a las 4.200 rpm.
Extrapolando en el gráfico, se obtiene lo siguiente.
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 43 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Figura 26. Gráfico del fabricante IPIRANGA para obtener la velocidad crítica del husillo
La velocidad máxima de giro del husillo es de 2000 rpm, que corresponde a la
velocidad lineal de 500 mm/s, con un husillo de 15 mm/revolución de paso.
11.3. Paso del husillo
La fuerza axial que ejerce el husillo es función del paso de éste, que también
determina la velocidad de giro, para el avance requerido. En este proyecto se ha
elegido el paso p=15 mm. Habrá que controlar más tarde, que esto no sea una
dificultad para dimensionar el transductor de medida, de manera que se obtenga la
resolución requerida en el pliego de condiciones.
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 44 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
12. ESTUDIO DINÁMICO DEL SISTEMA
12.1. Estudio analítico del movimiento de un carro
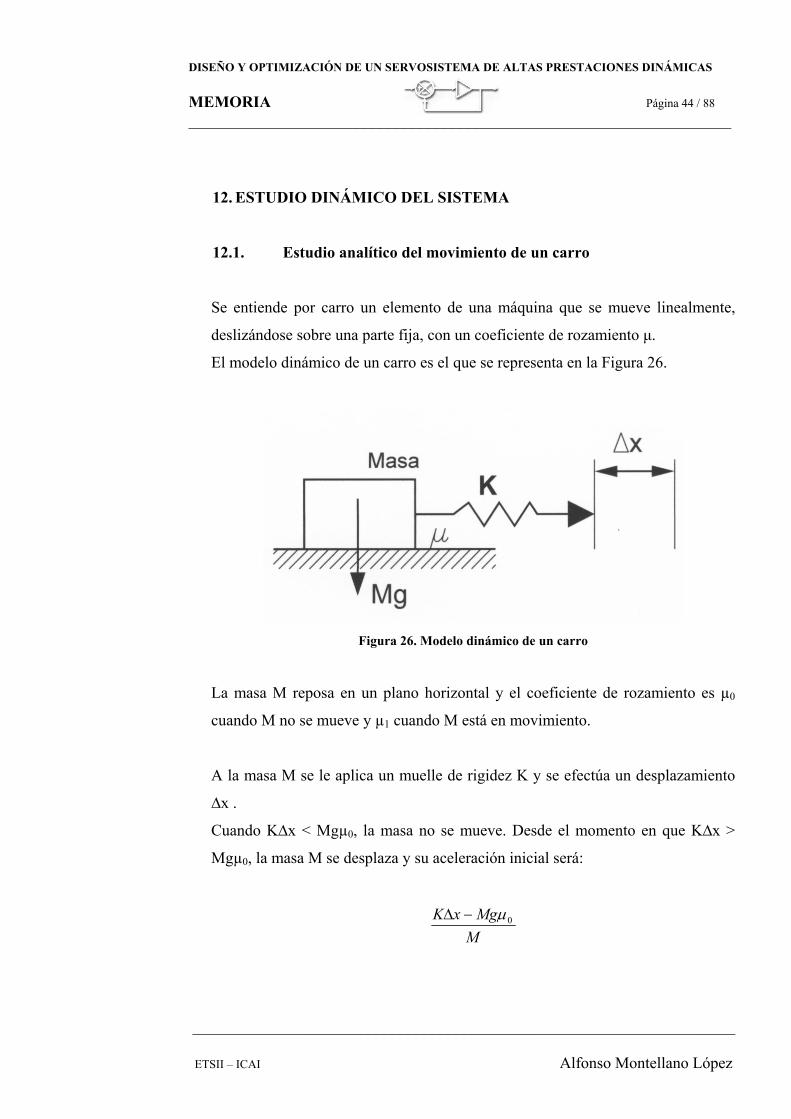
Se entiende por carro un elemento de una máquina que se mueve linealmente,
deslizándose sobre una parte fija, con un coeficiente de rozamiento µ.
El modelo dinámico de un carro es el que se representa en la Figura 26.
Figura 26. Modelo dinámico de un carro
La masa M reposa en un plano horizontal y el coeficiente de rozamiento es µ0
cuando M no se mueve y µ1 cuando M está en movimiento.
A la masa M se le aplica un muelle de rigidez K y se efectúa un desplazamiento
∆x .
Cuando K∆x < Mgµ0, la masa no se mueve. Desde el momento en que K∆x >
Mgµ0, la masa M se desplaza y su aceleración inicial será:
MMgxK 0µ−∆
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 45 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Al desplazarse la masa, el coeficiente de rozamiento pasa de µ0 a µ1 y la masa se
desplaza un incremento de posición ∆x, que será igual a la distancia para que su
velocidad se anule. Este incremento será más pequeño a medida que K sea más
grande, y que la diferencia entre el coeficiente de rozamiento estático µ0, y el
coeficiente de rozamiento dinámico µ1, sea más pequeña.
Estando parado el carro, el desplazamiento más pequeño se efectúa cuando se da
al muelle una elongación xr, tal que se ejerza sobre él una fuerza F0=Mgµ0.
La ecuación diferencial del movimiento de la masa es:
FKxdt
xMd∆=+2
2
(12.1.1)
Integrando esta ecuación diferencial, se obtiene que
)cos1( tKFx ω−
∆= (12.1.2)
tsenKF
dtdx ϖ∆
= (12.1.3)
La velocidad se anula 0=dtdx , para
ϖπ2
=t y para ϖπ
=t
Llevando este valor a (13.1.2), se obtiene que
K
Fx ∆=∆
2min (12.1.4)
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 46 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Siendo ∆F la diferencia entre el esfuerzo estático y el dinámico para mover el
carro, y K la rigidez dinámica del conjunto.
Esto proporciona el avance mínimo que puede hacer el carro, y limita, en
definitiva, la precisión de parada del mismo.
De esta expresión matemática se desprende que el avance mínimo depende
exclusivamente de K y de los coeficientes de rozamiento de nuestras guías.
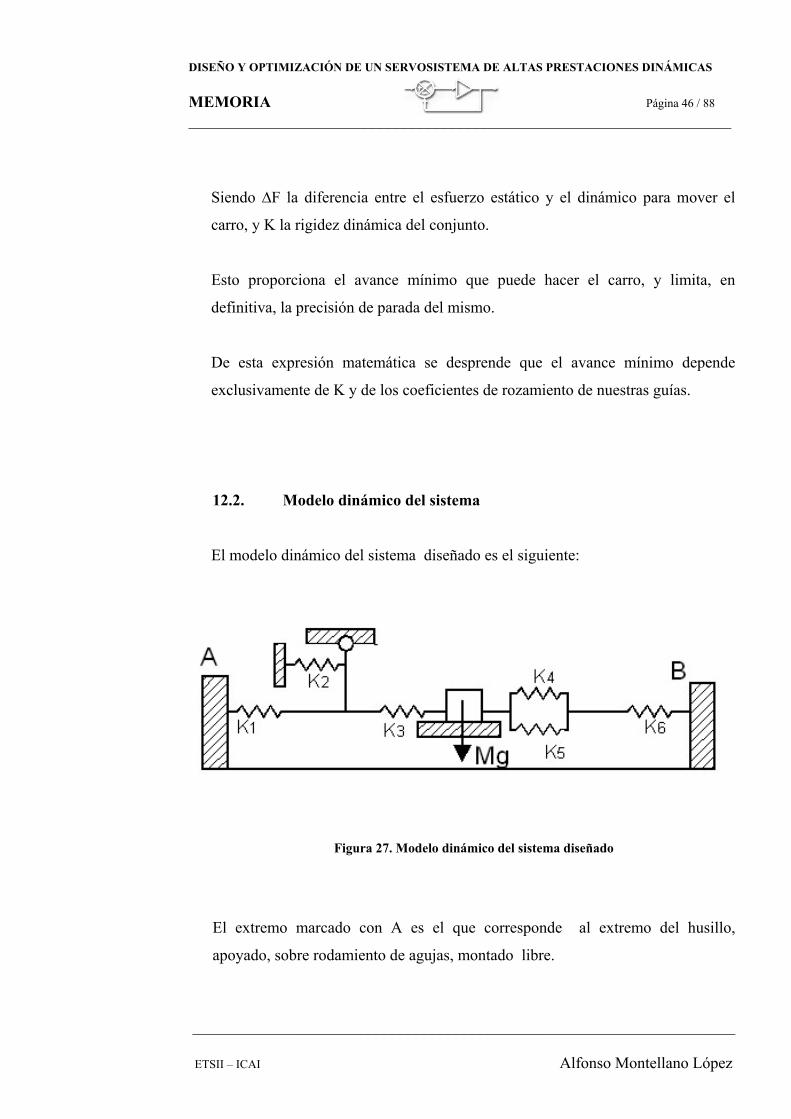
12.2. Modelo dinámico del sistema
El modelo dinámico del sistema diseñado es el siguiente:
Figura 27. Modelo dinámico del sistema diseñado
El extremo marcado con A es el que corresponde al extremo del husillo,
apoyado, sobre rodamiento de agujas, montado libre.
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 47 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
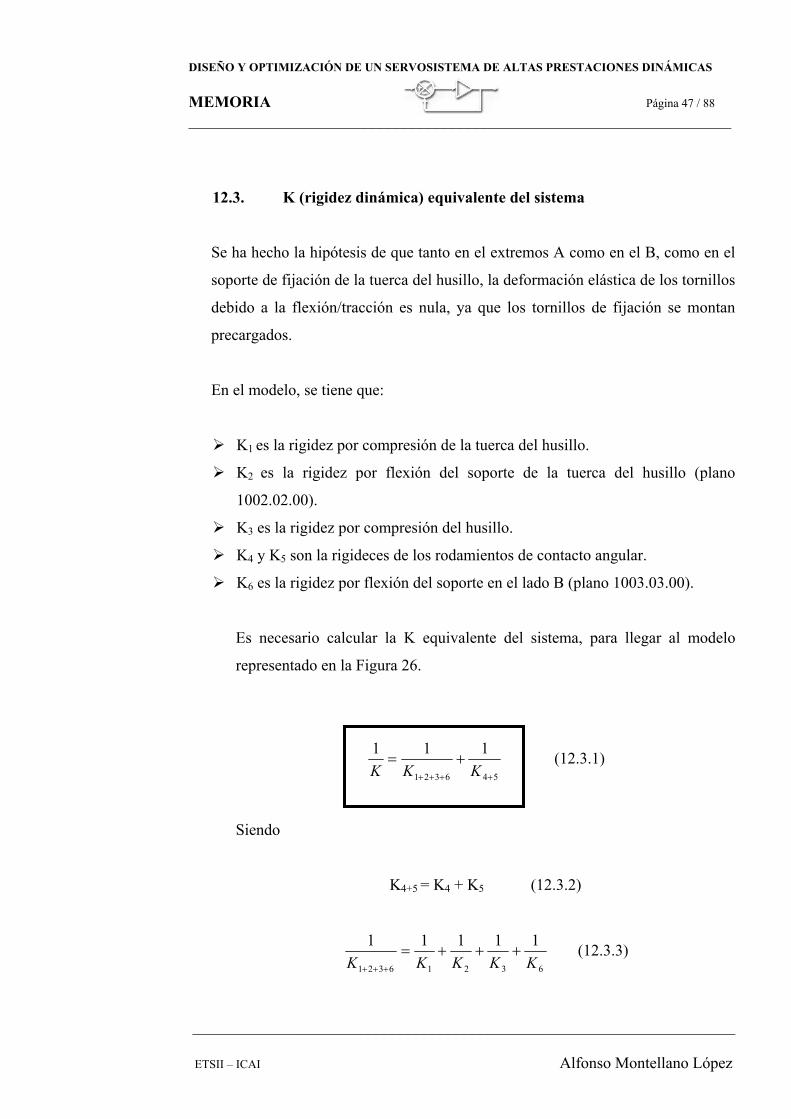
12.3. K (rigidez dinámica) equivalente del sistema
Se ha hecho la hipótesis de que tanto en el extremos A como en el B, como en el
soporte de fijación de la tuerca del husillo, la deformación elástica de los tornillos
debido a la flexión/tracción es nula, ya que los tornillos de fijación se montan
precargados.
En el modelo, se tiene que:
K1 es la rigidez por compresión de la tuerca del husillo.
K2 es la rigidez por flexión del soporte de la tuerca del husillo (plano
1002.02.00).
K3 es la rigidez por compresión del husillo.
K4 y K5 son la rigideces de los rodamientos de contacto angular.
K6 es la rigidez por flexión del soporte en el lado B (plano 1003.03.00).
Es necesario calcular la K equivalente del sistema, para llegar al modelo
representado en la Figura 26.
546321
111
++++
+=KKK
(12.3.1)
Siendo
K4+5 = K4 + K5 (12.3.2)
63216321
11111KKKKK
+++=+++
(12.3.3)

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 48 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
13. CÁLCULOS NUMÉRICOS
K1 es el valor dado por el fabricante del husillo y que en este caso, para el husillo
elegido K1= 89.000 N/mm.
K3 también es dada por el fabricante y su valor, para el husillo elegido, es de
550.000 N/mm.
K2 es la rigidez dinámica, por flexión, del soporte de la tuerca del husillo (plano
número 1002.02.00) y para calcularlo se procede de la siguiente forma:
F = Fuerza axial.
d = Distancia desde el punto de aplicación de la fuerza, hasta la base del soporte.
f = Flecha.
Figura 27. Flexión de una viga en voladizo
La deformación, flecha, viene dada por:
EJFdf3
3
=
Siendo E el módulo elástico y J el momento de inercia de la sección.

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 49 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
K4 y K5 son las rigideces dinámicas de los rodamientos de contacto angular, del
fabricante FAG, quien ha facilitado la curva siguiente que representa la
deformación real en función de la carga.
Como cabía esperar, es, prácticamente, una función lineal.
Figura 29. Curva tipo deformación/carga, dada por el fabricante FAG
El mismo fabricante ha calculado exactamente la deformación elástica que
corresponde al tipo de rodamientos elegido y a nuestra carga axial máxima.
A continuación se presentan los resultados.

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 50 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Figura 30. Hoja de cálculo del fabricante FAG para obtener la rigidez dinámica de los
rodamientos de contacto angular utilizados en el montaje

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 51 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Figura 31. Hoja de cálculo del fabricante FAG para obtener la rigidez dinámica de los
rodamientos de contacto angular utilizados en el montaje
K6 es la rigidez dinámica, por flexión, del soporte 1003.03.00. Por el mismo
razonamiento que el hecho para soporte de la tuerca, su flecha viene dada por:
EJFdf3
3
= Siendo, por consiguiente: 36
3dEJK =
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 52 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Haciendo los cálculos numéricos, se tiene que
K1 = 8.9 104 N/mm
K2 = 4.89 106 N/mm
K3 = 5.5 105 N/mm
K4 = K5 = 1.57 105 N/mm
Y por consiguiente, con (12.3.1), K= 5.09 104 N/mm, que es el valor de la
rigidez dinámica equivalente del sistema.
14. COEFICIENTE DE ROZAMIENTO EN LAS GUÍAS.
Sobre el coeficiente de rozamiento de las guías, se ha consultado al fabricante INA y
los resultados obtenidos han sido los siguientes.
14.1. Coeficiente de rozamiento estático µ0
Resulta imposible dar un valor para el coeficiente de rozamiento estático y, de
hecho, el fabricante no ha facilitado ningún valor. Hay que tener en cuenta que dicho
valor es función de la velocidad, la carga, el lubricante, la temperatura, etc., pero tras
consultar manuales técnicos, se puede aventurar que un valor aproximado podría ser
µ0 = 0,05.
14.2. Coeficiente de rozamiento dinámico µ1
En lo que respecta al valor del coeficiente de rozamiento dinámico µ1, el fabricante
admite que su valor puede oscilar entre 0,002 y 0,004, para el tipo de guías y las
condiciones que se utilizan en este proyecto. Se tomará 0,003.
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 53 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
15. MÍNIMO AVANCE DEL CARRO
Con (10.1) se calcula la fuerza axial máxima.
El coeficiente de rozamiento estático se ha fijado, en 14.1, en 0,05.
El coeficiente de rozamiento dinámico se ha fijado, en 14.3, en 0,003.
La rigidez dinámica equivalente de nuestro sistema se ha calculado en 12.3.1, igual a
5,09 104 N/mm.
Con estos datos y utilizando la fórmula 12.1.4, se calcula el mínimo avance que
puede hacer el carro de nuestro sistema, que es de 0,007 mm.
∆xmin= 0.007 mm
16. ELECCIÓN DEL SERVOMOTOR
Se ha visto que para mover la carga del sistema, en las condiciones que impone el
pliego de condiciones, se necesita un motor de las siguientes características.
Velocidad máxima de 6000 rpm.
Par nominal de 3,65 Nm.
Par de pico, para aceleraciones, 6,44 Nm.
Consultando en la gama del fabricante BALDOR, se ve que hay varios motores que
cumplen estos requisitos. El motor elegido debe satisfacer dos condiciones:
Poder efectuar el movimiento en las condiciones impuestas.
Que la relación entre el momento de inercia de la carga, referida al eje del
motor, y el momento de inercia del rotor del motor sea tal que nos permita
una buena respuesta del sistema, ya que el pliego de condiciones limita la
sobreoscilación a un 2%.
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 54 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
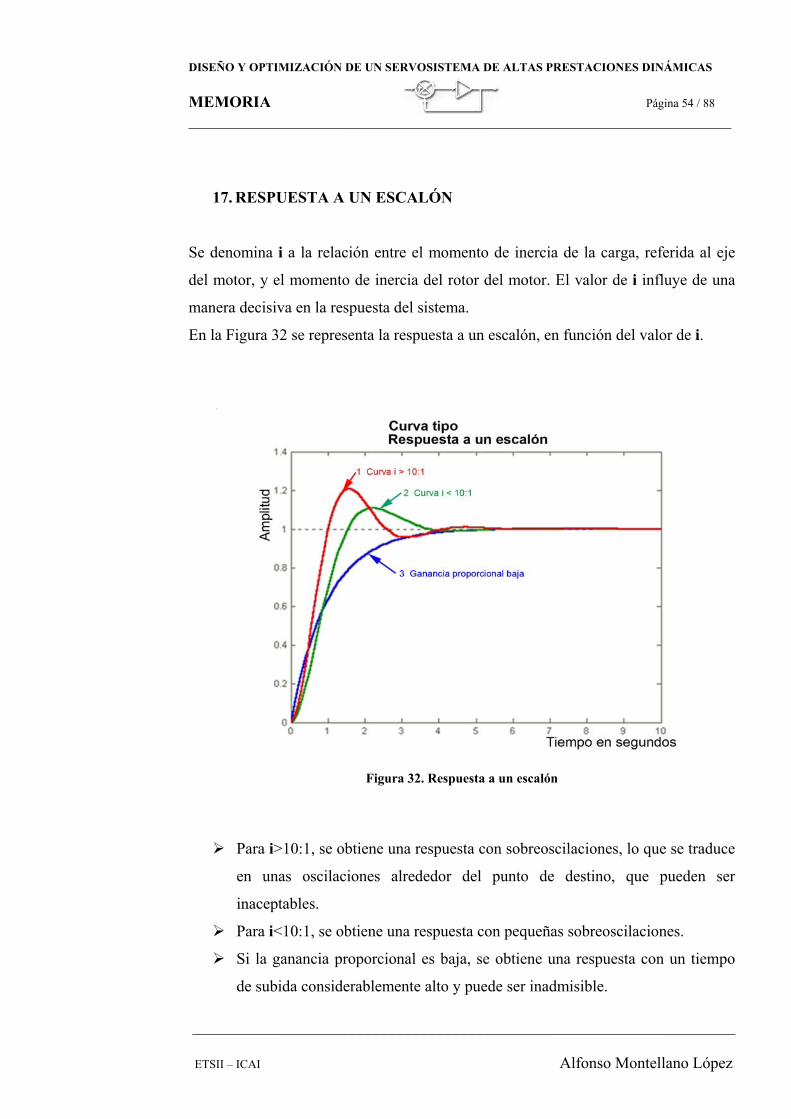
17. RESPUESTA A UN ESCALÓN
Se denomina i a la relación entre el momento de inercia de la carga, referida al eje
del motor, y el momento de inercia del rotor del motor. El valor de i influye de una
manera decisiva en la respuesta del sistema.
En la Figura 32 se representa la respuesta a un escalón, en función del valor de i.
Figura 32. Respuesta a un escalón
Para i>10:1, se obtiene una respuesta con sobreoscilaciones, lo que se traduce
en unas oscilaciones alrededor del punto de destino, que pueden ser
inaceptables.
Para i<10:1, se obtiene una respuesta con pequeñas sobreoscilaciones.
Si la ganancia proporcional es baja, se obtiene una respuesta con un tiempo
de subida considerablemente alto y puede ser inadmisible.
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 55 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Cambiar el valor de la ganancia proporcional es un problema de ajuste, que nada
tiene que ver con el diseño del sistema, pero el valor de i es un asunto
exclusivamente de diseño de la mecánica de adaptación de nuestra aplicación.
El diseño de la mecánica de adaptación, a veces, no es fácilmente modificable más
allá de ciertos límites.
Sin embargo, para obtener una i lo más baja posible, actuar sobre el coeficiente de
reducción (en nuestro caso, sobre los diámetros de las poleas) es una alternativa de
fácil solución. También se puede elegir un motor con un rotor de momento de inercia
elevado.
En la literatura técnica se fija el valor de i, según el tipo de aplicación, de la manera
siguiente:
1. i entre 1:1 y 3:1, para aplicaciones de robótica.
2. i entre 4:1 y 7:1, para máquinas-herramientas, máquinas de embalar,
etc.
3. i entre 8:1 y 10:1, para el resto de aplicaciones.
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 56 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
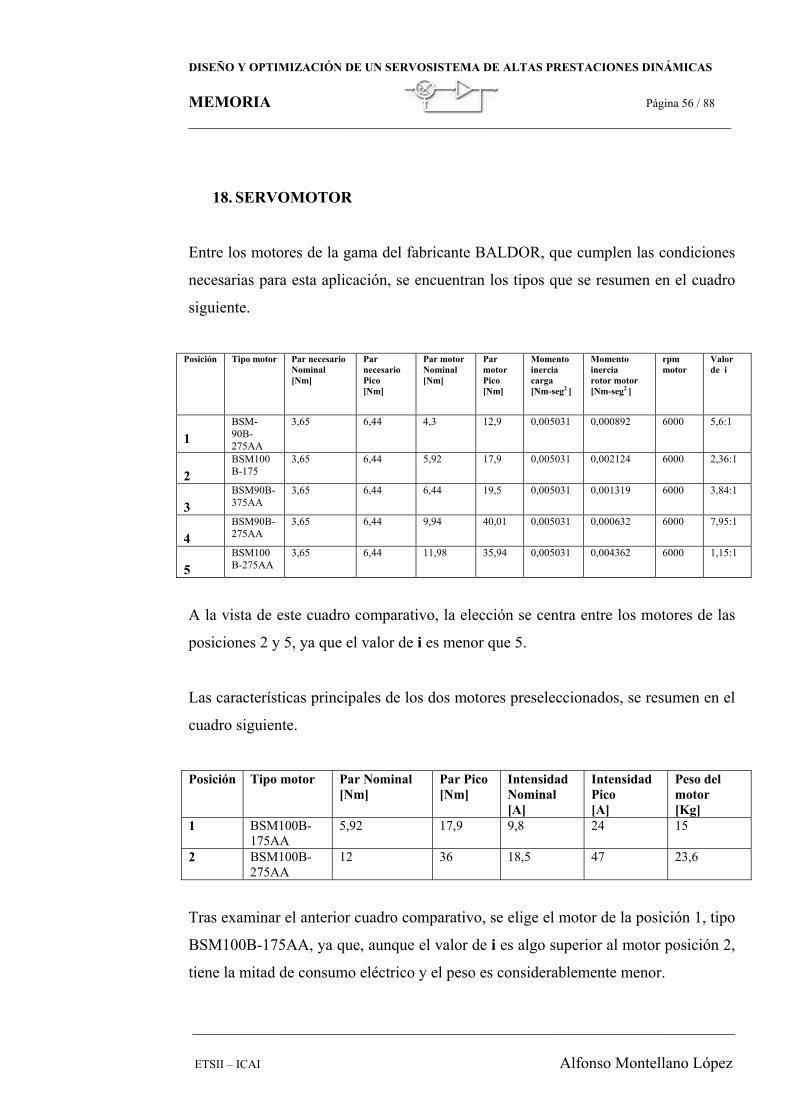
18. SERVOMOTOR
Entre los motores de la gama del fabricante BALDOR, que cumplen las condiciones
necesarias para esta aplicación, se encuentran los tipos que se resumen en el cuadro
siguiente.
Posición Tipo motor Par necesario
Nominal [Nm]
Par necesario Pico [Nm]
Par motor Nominal [Nm]
Par motor Pico [Nm]
Momento inercia carga [Nm-seg2 ]
Momento inercia rotor motor [Nm-seg2 ]
rpm motor
Valor de i
1
BSM-90B-275AA
3,65 6,44 4,3 12,9 0,005031 0,000892 6000 5,6:1
2
BSM100B-175
3,65 6,44 5,92 17,9 0,005031 0,002124 6000 2,36:1
3
BSM90B-375AA
3,65 6,44 6,44 19,5 0,005031 0,001319 6000 3,84:1
4
BSM90B-275AA
3,65 6,44 9,94 40,01 0,005031 0,000632 6000 7,95:1
5
BSM100B-275AA
3,65 6,44 11,98 35,94 0,005031 0,004362 6000 1,15:1
A la vista de este cuadro comparativo, la elección se centra entre los motores de las
posiciones 2 y 5, ya que el valor de i es menor que 5.
Las características principales de los dos motores preseleccionados, se resumen en el
cuadro siguiente.
Posición Tipo motor Par Nominal
[Nm] Par Pico [Nm]
Intensidad Nominal [A]
Intensidad Pico [A]
Peso del motor [Kg]
1 BSM100B-175AA
5,92 17,9 9,8 24 15
2 BSM100B-275AA
12 36 18,5 47 23,6
Tras examinar el anterior cuadro comparativo, se elige el motor de la posición 1, tipo
BSM100B-175AA, ya que, aunque el valor de i es algo superior al motor posición 2,
tiene la mitad de consumo eléctrico y el peso es considerablemente menor.

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 57 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
El servomotor elegido pertenece a la tecnología “brushless”, exento de
mantenimiento, con resolver incorporado, como se ve en la figura siguiente.
Figura 33. Servomotor “brushless” BALDOR tipo BSM
Figura 34. Servomotor BALDOR tipo BSM

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 58 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Las características principales del servomotor elegido son:
Par continuo 5,93 Nm
Par de pico 18,00 Nm
Corriente nominal 9,8 A
Corriente de pico 24,0 A
Constante de tiempo mecánica 5,6 ms
Constante de tiempo eléctrica 6,0 ms
Velocidad nominal 4000 rpm
Tensión nominal 300 V
Momento de inercia del rotor 21,24 Kg cm2
Número de polos 8
Número de velocidades resolver 1
Peso del motor 15 Kg

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 59 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
19. SERVOAMPLIFICADOR
Una vez elegido el motor, en su curva característica (ver Figura 35) se obtiene que
A 6000 rpm, en régimen continuo, se necesita una intensidad de 7 A.
En régimen intermitente, intensidad de pico, se necesitan 10,4 A (ver Figura
35).
Figura 35. Curva característica del servomotor BALDOR, tipo BSM100B-175AA
Con estos datos queda definido el servoamplificador.
En la gama disponible del fabricante BALDOR, se encuentra el modelo FlexDriveII
tipo FDH1A07TR-RN20, que cumple los requisitos mencionados.

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 60 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Figura 36. Servoamplificador BALDOR
Sus principales características son:
Intensidad nominal 7.5 A
Intensidad de pico 15 A
Conexión directa 230 - 400/460 Vca, 3 fases
Feedback posición del rotor por medio de resolver
Salida simulación impulsos de encoder, para circuito de medida
E/S digitales, 8E, 7S
Consigna, ± 10 Vcc
Protecciones
• Sobreintensidad
• Sobretensión
• Cortocircuito
• Fallo resolver
• Sobreintensidad en salida digital
• Motor I2t
Conexión con PC para configuración, por RS232/RS485
Conexiones frontales.

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 61 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
20. CIRCUITO DE MEDIDA
20.1. Funcionamiento de un encoder
El principio de funcionamiento se basa en que un haz luminoso pasa a través de las
ventanas de dos discos, uno móvil y otro fijo, y un fotosensor capta ese haz
luminoso.
Figura 37. Encoder incremental
La intensidad del haz luminoso captada por el fotosensor depende de la posición
relativa de los dos discos. El fotosensor emite una señal de amplitud proporcional a
la intensidad del haz recibido. A continuación, un circuito electrónico conforma esa
señal, obteniéndose a la salida una señal senoidal o bien una cuadrada en forma de
tren de impulsos.
Un encoder incremental proporciona al girar una señal (tren de impulsos o señal
senoidal) y la distancia recorrida se obtiene contando esa información.
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 62 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
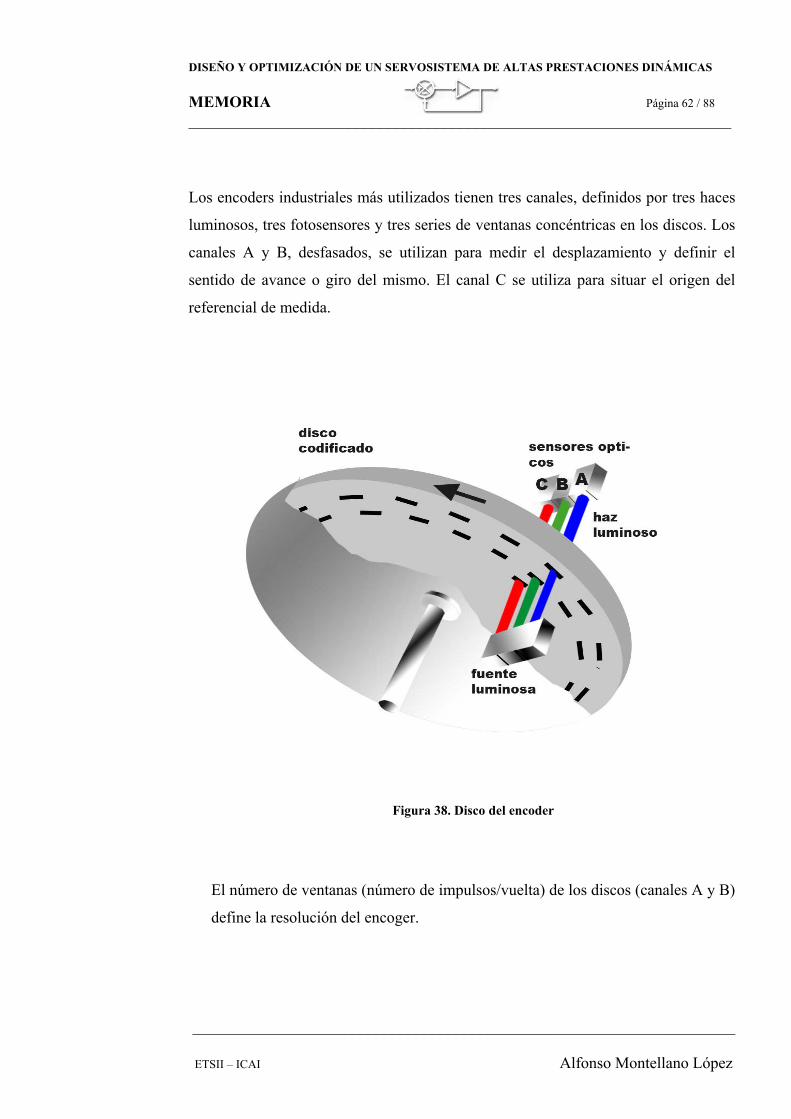
Los encoders industriales más utilizados tienen tres canales, definidos por tres haces
luminosos, tres fotosensores y tres series de ventanas concéntricas en los discos. Los
canales A y B, desfasados, se utilizan para medir el desplazamiento y definir el
sentido de avance o giro del mismo. El canal C se utiliza para situar el origen del
referencial de medida.
Figura 38. Disco del encoder
El número de ventanas (número de impulsos/vuelta) de los discos (canales A y B)
define la resolución del encoger.

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 63 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Figura 39. Señales de salida del encoder
Zona Canal A Canal B Canal C
0 0 0 0
1 1 0 0
2 1 1 0
3 0 1 0
Después de conformada la señal, lo que se obtiene de cada canal es un tren de
impulsos que, codificado su estado en cada momento, da la distancia requerida.
El estado de las señales en los canales A y B permite codificar la distancia
recorrida en cada revolución del encoder.

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 64 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Un encoder queda definido por los siguientes parámetros:
Medida absoluta o incremental.
Número de pulsos por revolución (resolución)
Tipo de señal de salida (senoidal o pulsos, cuadrada).
Los encoders más utilizados son los que proporcionan una señal cuadrada,
TTL.
Número de canales.
Los encoders más utilizados son los de tres canales, pero también existen de
dos e incluso de uno, dependiendo de la aplicación.
Un encoder facilita información sobre desplazamientos, similar a un micrómetro,
con la gran ventaja de que el encoder emite una señal eléctrica, en vez dedisponer
de un tambor rotativo que haría necesario una interpolación. Esto confiere a la
medida una mayor pureza en el proceso.
20.2. Circuito de medida
El pliego de condiciones del presente proyecto impone una resolución de al menos
0.001 mm en el circuito de medida.
El servomotor elegido dispone de un resolver para controlar la posición del rotor,
necesario en la tecnología “brushless” que se utiliza en la aplicación. El fabricante
dota al servoamplificador de la posibilidad de utilizar esa señal, previamente
conformada en señal TTL, como señal de referencia en el circuito de medida. El
número de impulsos máximo de la señal procedente del resolver es de 1024
impulsos/vuelta (10 bit).
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 65 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
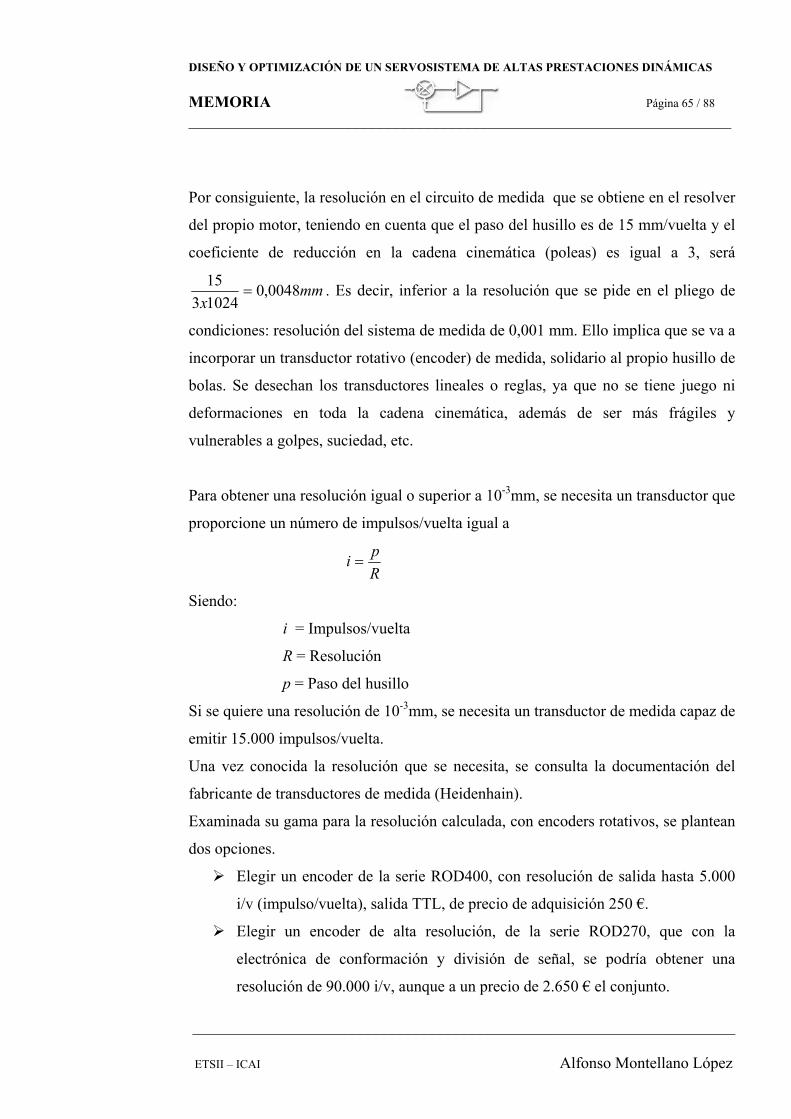
Por consiguiente, la resolución en el circuito de medida que se obtiene en el resolver
del propio motor, teniendo en cuenta que el paso del husillo es de 15 mm/vuelta y el
coeficiente de reducción en la cadena cinemática (poleas) es igual a 3, será
mmx
0048,01024315
= . Es decir, inferior a la resolución que se pide en el pliego de
condiciones: resolución del sistema de medida de 0,001 mm. Ello implica que se va a
incorporar un transductor rotativo (encoder) de medida, solidario al propio husillo de
bolas. Se desechan los transductores lineales o reglas, ya que no se tiene juego ni
deformaciones en toda la cadena cinemática, además de ser más frágiles y
vulnerables a golpes, suciedad, etc.
Para obtener una resolución igual o superior a 10-3mm, se necesita un transductor que
proporcione un número de impulsos/vuelta igual a
Rpi =
Siendo:
i = Impulsos/vuelta
R = Resolución
p = Paso del husillo
Si se quiere una resolución de 10-3mm, se necesita un transductor de medida capaz de
emitir 15.000 impulsos/vuelta.
Una vez conocida la resolución que se necesita, se consulta la documentación del
fabricante de transductores de medida (Heidenhain).
Examinada su gama para la resolución calculada, con encoders rotativos, se plantean
dos opciones.
Elegir un encoder de la serie ROD400, con resolución de salida hasta 5.000
i/v (impulso/vuelta), salida TTL, de precio de adquisición 250 €.
Elegir un encoder de alta resolución, de la serie ROD270, que con la
electrónica de conformación y división de señal, se podría obtener una
resolución de 90.000 i/v, aunque a un precio de 2.650 € el conjunto.

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 66 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
En este caso, que se necesita una resolución de 15000 i/v, se puede elegir la opción
con encoder rotativo, serie ROD400, porque la unidad de control de ejes elegida
(PMAC), permite multiplicar por 4 la resolución del sistema de medida, lo que se
consigue a través de una variable de configuración de la PMAC que permite leer los
flancos de subida/bajada y los positivos/negativos en la señal TTL y contabilizarlos
como impulsos.
Figura 40. Señal TTL emitida por el encoder
Se lee, por lo tanto, como un impulso:
Flanco positivo/subida (1)
Flanco positivo/bajada (2)
Flanco negativo/bajada (3)
Flanco negativo/subida (4)

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 67 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
De esta forma se puede aceptar una solución, que proporcionando la resolución que
se pide en el pliego de condiciones, cuesta la décima parte.
Para tal cometido se elige un encoder rotativo de la marca Heidenhain, modelo
ROD486.
Figura 41. Encoder Heidenhain
Este encoder se monta solidario al husillo de bolas, con un acoplamiento sin juego,
referencia 1001.07.00, capaz de absorber errores geométricos del montaje, según se
muestra en el conjunto 1001.00.00.

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 68 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
21. UNIDAD DE CONTROL DE EJES
Como unidad de control de ejes, se ha elegido una PMAC (Programable Multi-Axis
Controller), fabricada por DELTA TAU DATA SYSTEMS, California, USA
(www.deltau.com).
Según el modelo, se pueden gobernar hasta ocho ejes por tarjeta, aunque para este
proyecto sólo se utiliza uno por lo que se elige una controladora de dos ejes.
Figura 42. PMAC para bus PCI, DELTA TAU DATA SYSTEMS, Inc., California, USA
Se trata de una tarjeta que se inserta en un bus PC, y se pilota con un software
específico.
Además de su enorme potencia de cálculo (micro Motorola DSP 56001), es
importante destacar su gran flexibilidad de configuración, pudiéndose hacer una
perfecta integración entre esta unidad de control de ejes, el resto de los equipos, e
incluso la mecánica de adaptación que incluye el servomecanismo.
Su precio es muy razonable, para un equipo de estas características.
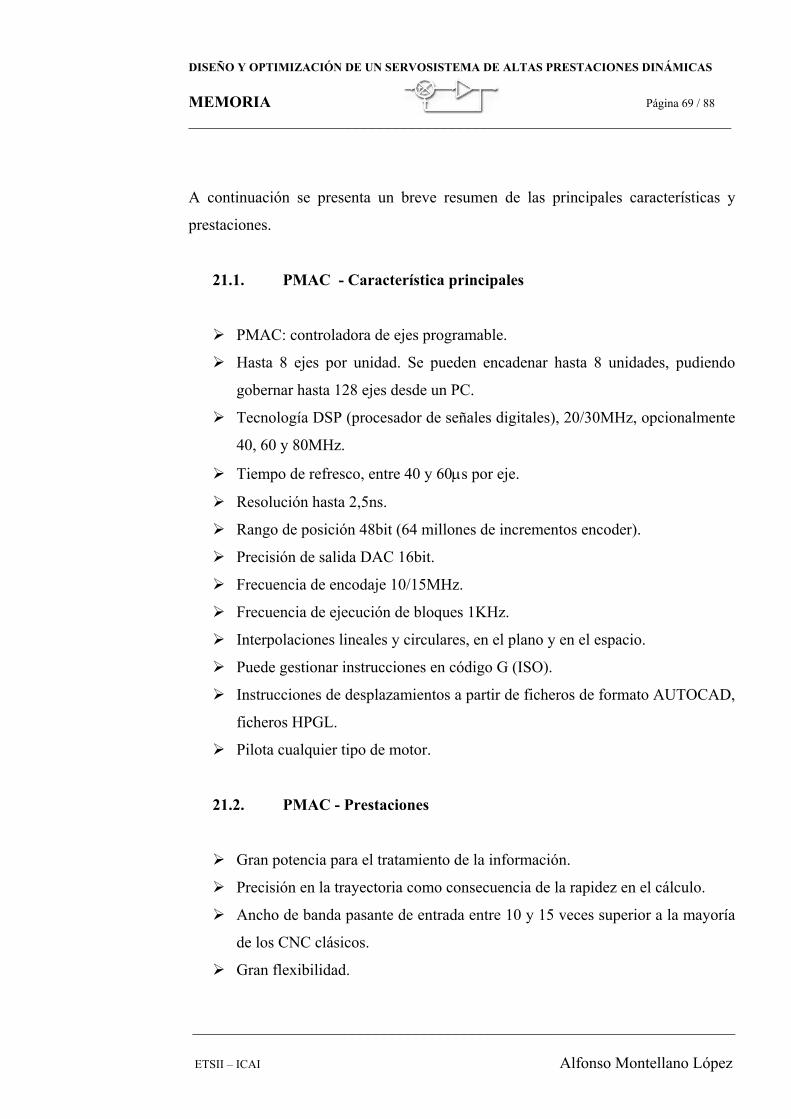
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 69 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
A continuación se presenta un breve resumen de las principales características y
prestaciones.
21.1. PMAC - Característica principales
PMAC: controladora de ejes programable.
Hasta 8 ejes por unidad. Se pueden encadenar hasta 8 unidades, pudiendo
gobernar hasta 128 ejes desde un PC.
Tecnología DSP (procesador de señales digitales), 20/30MHz, opcionalmente
40, 60 y 80MHz.
Tiempo de refresco, entre 40 y 60µs por eje.
Resolución hasta 2,5ns.
Rango de posición 48bit (64 millones de incrementos encoder).
Precisión de salida DAC 16bit.
Frecuencia de encodaje 10/15MHz.
Frecuencia de ejecución de bloques 1KHz.
Interpolaciones lineales y circulares, en el plano y en el espacio.
Puede gestionar instrucciones en código G (ISO).
Instrucciones de desplazamientos a partir de ficheros de formato AUTOCAD,
ficheros HPGL.
Pilota cualquier tipo de motor.
21.2. PMAC - Prestaciones
Gran potencia para el tratamiento de la información.
Precisión en la trayectoria como consecuencia de la rapidez en el cálculo.
Ancho de banda pasante de entrada entre 10 y 15 veces superior a la mayoría
de los CNC clásicos.
Gran flexibilidad.
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 70 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
• Tipos de motores que puede pilotar:
Corriente continua
“Brushless”
Corriente alterna asíncrono
Lineales
Paso a paso
• Realimentación:
Encoders incrementales: lineales, rotativos
Con accesorios disponibles
Interferómetros láser
Encoders absolutos
Resolver
Captadores magnetostristivos de desplazamiento
Transformadores lineales de traslación
• Permite una doble realimentación para casos donde el acoplamiento de la
carga al motor no es la ideal.
• Se puede utilizar un transductor de posición para el bucle de velocidad
(en el motor), y otro transductor para el bucle de posición, en el lugar de
la carga.
• Configuración de referenciales:
8 referenciales de un eje
Un referencial de 8 ejes
Cualquier solución intermedia
• Lenguaje de programación
PMAC
ISO
Ficheros AUTOCAD
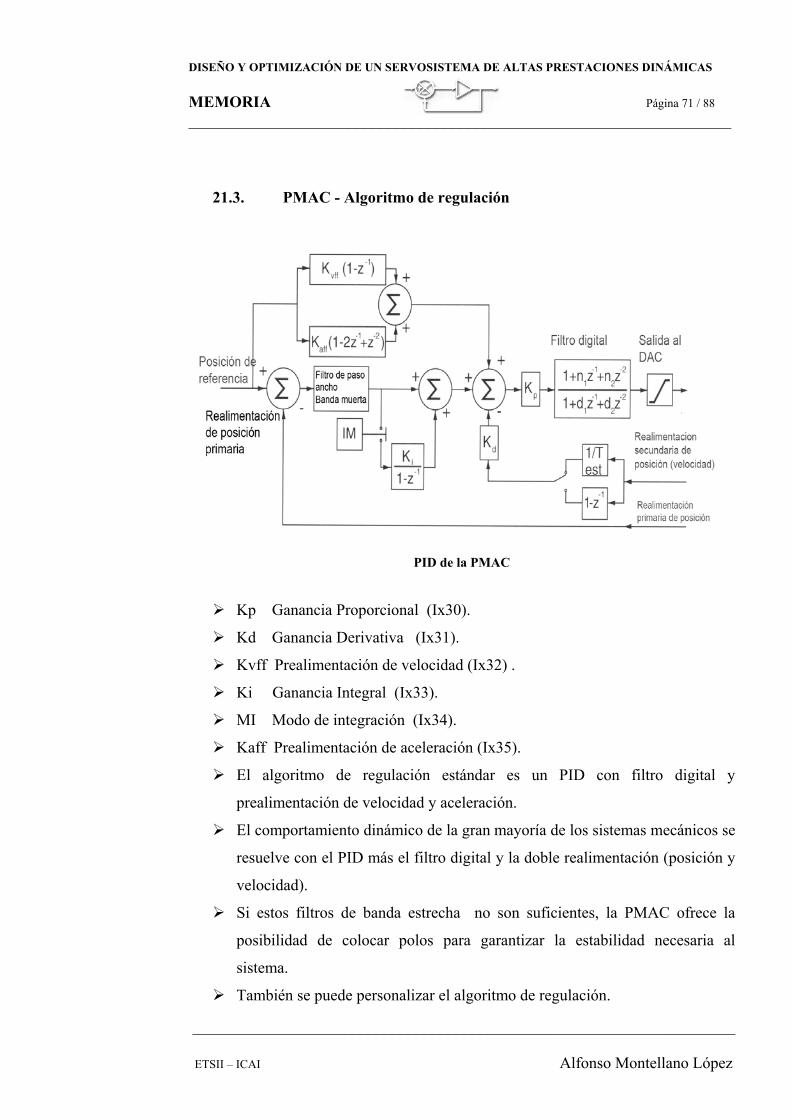
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 71 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
21.3. PMAC - Algoritmo de regulación
PID de la PMAC
Kp Ganancia Proporcional (Ix30).
Kd Ganancia Derivativa (Ix31).
Kvff Prealimentación de velocidad (Ix32) .
Ki Ganancia Integral (Ix33).
MI Modo de integración (Ix34).
Kaff Prealimentación de aceleración (Ix35).
El algoritmo de regulación estándar es un PID con filtro digital y
prealimentación de velocidad y aceleración.
El comportamiento dinámico de la gran mayoría de los sistemas mecánicos se
resuelve con el PID más el filtro digital y la doble realimentación (posición y
velocidad).
Si estos filtros de banda estrecha no son suficientes, la PMAC ofrece la
posibilidad de colocar polos para garantizar la estabilidad necesaria al
sistema.
También se puede personalizar el algoritmo de regulación.

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 72 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
21.4. PMAC - Cálculos
La capacidad de cálculo en aplicaciones complejas puede mejorarse
considerablemente, por medio de la capacidad interna de cálculo del DSP.
De esta manera no es necesario salir fuera para realizar cálculos.
21.5. PMAC - Tipos de variables
La PMAC dispone de 4 tipos de variables:
Variables I (total 1024):
• Son variables de inicialización e instalación, modos, direcciones,
ganancias, tiempos, límites, etc.
Variables P. Son también 1024.
• Son variables de propósito general, empleo polivalente
• Formato 48bit, coma flotante
• Se pueden utilizar en todos los tipos de programas y de sistemas de
coordenadas
Variables Q. También son 1024
• Como las P, pero específicas para un sistema de coordenadas
Variables M, son en total 1024
• Son punteros de registros: entradas, salidas y contadores
• Permiten acceder a posiciones de memoria interna de la PMAC

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 73 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
21.6. PMAC - PLC
La PMAC dispone de un PLC.
En el buffer del PLC corre un programa, en segundo plano, asíncrono, de
estructura lógica idéntica al de movimientos, con tiempos de ciclo de entre 5
y 10ms.
El programa PLC trabaja con frecuencias de muestreo muy elevadas y puede
controlar:
• Entradas
• Definir valores de salidas
• Transmitir mensajes
• Secuencias de marcha, paro, etc.
• La única limitación es que no pueden gobernar desplazamientos de ejes
• Es particularmente útil en control adaptativo y bucle de doble
realimentación gobernado por el usuario.
21.7. PMAC - Programación
Buffer es un espacio de memoria para un programa.
Sistemas de coordenadas: conjunto de ejes asociados a un referencial.
Eje: Un eje (motor) asociado a un sistema de coordenadas.
Se pueden guardar hasta 256 programas de movimientos y 32 de PLC
Cuando se carga un programa de un buffer hay que asociarle un sistema de
coordenadas.
Los programas en los sistemas de coordenadas se ejecutan
independientemente, aunque se pueden relacionar entre sí.
Distintos programas pueden ser guardados en distintos buffers, y pueden ser
ejecutados separada e independientemente, todos a la vez o bien uno
solamente.
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 74 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
21.8. PMAC – Multiproceso
Cualquier programa asociado a un sistema de coordenadas puede ejecutarse.
El número máximo de sistemas definidos determina el número máximo de
programas que se puede ejecutar al mismo tiempo.
El tiempo de refresco depende del número de ejes que intervienen, 55µs para
un eje y 455µs para 8 ejes.
PMAC Programación de trayectorias:
Lineal
• Se define tiempo de movimiento o velocidad máxima.
• TL, TA, TS.
• Si el movimiento se realiza con varios ejes, se especifica la velocidad
máxima y la PMAC calcula el valor de las componentes, para que la
resultante sea el valor programado.
• Se pueden “vectorizar” trayectorias.
Circular.
Rápido.
Splines: se especifica tiempo y posición.
PTV: posición, tiempo y velocidad. PMAC realiza la única trayectoria cúbica
posible.
21.9. PMAC - Límites
Límites de recorrido de ejes, con entradas optoacopladas.
Límites de posición por software, almacenados en la memoria EAROM.
Límites de velocidad y aceleración.
Límite de errores de seguimiento: fatal y de vigilancia.
Límite de velocidad si el servoamplificador está en modo tensión y de par si
está en modo corriente.
Límite de un temporizador “Watchdog”.

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 75 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
22. OPTIMIZACIÓN DE LA RESPUESTA DINÁMICA
22.1. Consideraciones Generales
En la mayoría de sistemas industriales el sistema a modelar es no lineal y, por
tanto, difícil de modelar. En estas ocasiones el método que se presenta como más
sencillo, para ajustar los parámetros del regulador a emplear, es el de prueba y
error. Para realizar dicho ajuste se suelen utilizar métodos empíricos, que se
basan en medir determinados parámetros relacionados con el comportamiento del
sistema y, a partir de los mismos, se calculan los parámetros del regulador, a
través de determinadas fórmulas y tablas. Así pues, pueden utilizarse varios
métodos empíricos, que se diferencian, los unos de los otros, en los datos que hay
que medir del sistema y las especificaciones que se pretenden conseguir.
En el presente caso, con el objeto de optimizar la respuesta dinámica se ajustan
las constantes de la unidad de control de ejes programable, cuyo algoritmo y
parámetros fundamentales se mostraron previamente. Con arreglo a conseguir
una respuesta dinámica suficientemente satisfactoria, los pasos a seguir son los
siguientes.
22.1.1. Modelar la Planta sobre la que actúa el control PID, esto es, conseguir
una función de transferencia que relacione la magnitud que el sistema
mecánico diseñado transformará en posición, que es la variable que se
desea controlar.
22.1.2. Ante una referencia de posición estándar (escalón unidad) se ajusta la
ganancia proporcional hasta conseguir un sobrepaso dentro de
especificaciones.

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 76 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
22.1.3. Se ajusta la ganancia integral para anular el error en régimen
permanente.
22.1.4. Se prueba el efecto de la ganancia proporcional para mejorar el
régimen transitorio de la respuesta.
22.1.5. Se ajustan las prealimentaciones y otros parámetros que pudieran
hacer falta.
En todo momento el límite inamovible es el sobrepaso máximo, por lo que
después de cada ajuste será necesario comprobar que no se rebasa en ningún
momento.
También interesa minimizar los tiempos todo lo posible, principalmente se cuida
el tiempo de alcance y el tiempo de establecimiento a un tanto por ciento de la
referencia, que dependerá de las especificaciones de cada aplicación.
En lo sucesivo se procede a explicar cada uno de estos pasos y su realización
concreta para la presente aplicación. Conviene apuntar que cada uno de estos
puntos puede analizarse con tanto detenimiento como se desee, indagando en sus
efectos y consecuencias de forma amplia y profunda. Sin embargo, en el presente
estudio lo que se pretende es comprobar de forma teórica la funcionalidad de la
controladora de ejes y mostrar cuál es el procedimiento a seguir para llevar a cabo
dicha optimización.
Por todo ello, se han adoptado diversas simplificaciones, en el modelado del
sistema y en el algoritmo de control, que se irán poniendo de manifiesto en los
apartados sucesivos. El software empleado para simular las respuestas es
Simulink de MATLAB.

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 77 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
22.2. Modelado de la Planta
Para conseguir un modelo suficientemente apropiado de la planta que se pretende
controlar (compuesta por motor, sistema de transmisión mecánica y carga a
posicionar), se estudia la ecuación que rige el movimiento de la carga. En esta
ecuación se ha considerado despreciable el efecto del rozamiento en las guías
lineales.
2
2
cos.__2
2
dtxdmFFF
dtxdmF elásticaovisrozejerceseque ⋅=−−→⋅=∑
)()()()( 22
2
sXKsXsBsXsmsFxKdt
xdBdt
xdmF Laplace ⋅+⋅⋅+⋅⋅= →⋅+⋅+⋅=
Por tanto, se modela la Planta como:
mKs
mBsm
sFsXsP
+⋅+==
2
1
)()()(
Donde:
m es la masa total a mover en el sistema Kgm 3.46= .
B es el coeficiente de rozamiento viscoso, proporcionado por el fabricante
para las guías lineales y, en nuestro sistema, toma el valor de
msNB /003.0 ⋅= .
K es la constante de rigidez del sistema, anteriormente calculada como
mmNK /1009.5 4⋅= .

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 78 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
22.3. Diseño de partida
El sobrepaso máximo está especificado para menos del 2%. Consultando en
tablas (ver [PAGO06]) obtenemos que, en un sistema de segundo orden, para un
sobrepaso del 1.5%, necesitamos un margen de fase de unos 70º.
Siguiendo criterios estrictamente de regulación automática, se diseña un control
PID para tal margen de fase, con objeto de tener unos valores iniciales que se
aproximen a la respuesta deseada del sistema.
Los criterios que se siguen están expuestos en las referencias [PAGO06] y
[PAGO05], así como la conversión de tales valores a la configuración paralelo
(control no interactivo) empleada por el algoritmo de la controladora.
Una vez obtenidos estos valores, se procede a ajustarlos en función de la
respuesta, ya que hay que tener en cuenta los errores que introduce la falta de
precisión en el modelado del sistema, así como las simplificaciones que se
asumen para la simulación, excluyendo posibles perturbaciones durante el
funcionamiento del sistema.
22.4. Ajuste y simulación
En la ecuación de la Planta se ve cómo el sistema modelado nos da la posición,
una vez introducida como entrada la fuerza a ejercer.
La controladora proporciona una determinada intensidad, que se corresponderá al
par deseado en el motor, éste se transmite a través de la reductora, llegando al
husillo que lo convierte en la fuerza que siente la carga. Por tanto hace falta una
constante que convierta la intensidad de salida de la controladora en la fuerza de
entrada a la planta modelada.
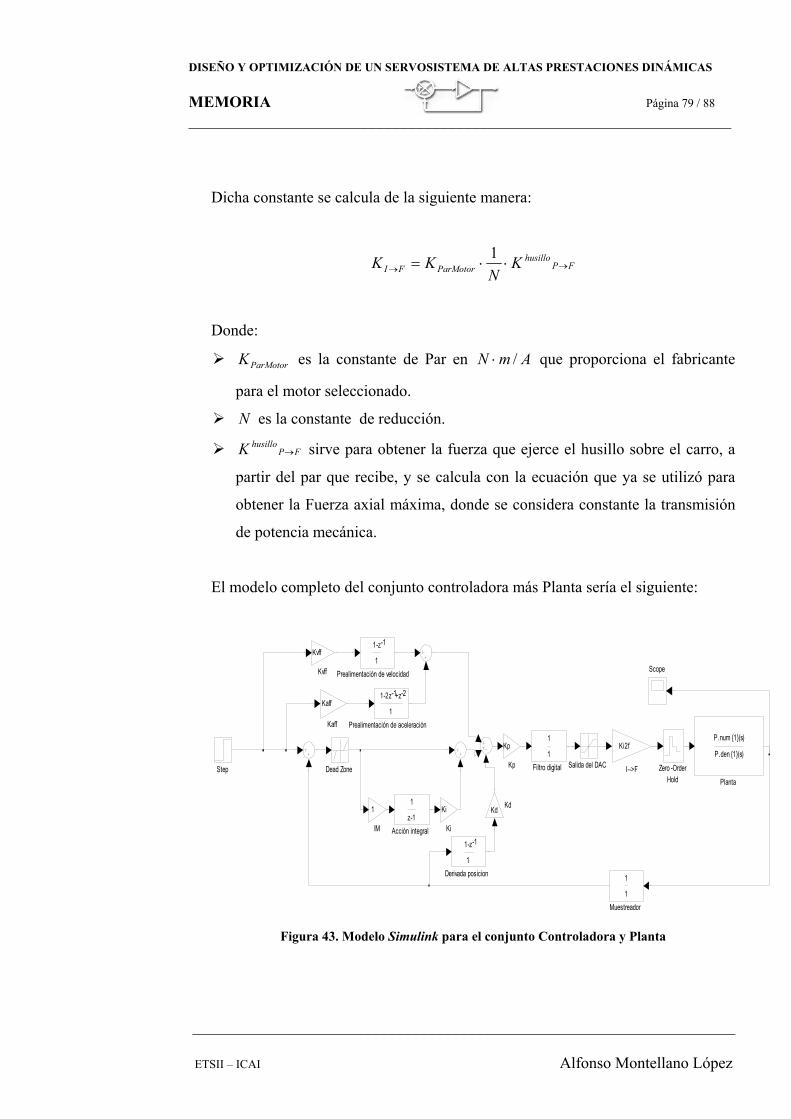
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 79 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Dicha constante se calcula de la siguiente manera:
FPhusillo
ParMotorFI KN
KK →→ ⋅⋅=1
Donde:
ParMotorK es la constante de Par en AmN /⋅ que proporciona el fabricante
para el motor seleccionado.
N es la constante de reducción.
FPhusilloK → sirve para obtener la fuerza que ejerce el husillo sobre el carro, a
partir del par que recibe, y se calcula con la ecuación que ya se utilizó para
obtener la Fuerza axial máxima, donde se considera constante la transmisión
de potencia mecánica.
El modelo completo del conjunto controladora más Planta sería el siguiente:
Zero -OrderHold
Step
Scope
Salida del DAC
Prealimentación de velocidad
1-z -1
1
Prealimentación de aceleración
1-2z +z -1 -2
1
Planta
P.num {1}(s)
P.den {1}(s)
Muestreador
1
1
Kvff
Kvff
Kp
Kp
Ki
Ki KdKd
Kaff
Kaff
IM
1
I-->F
Ki2f
Filtro digital
1
1
Derivada posicion
1-z -1
1
Dead Zone
Acción integral
1
z-1
Figura 43. Modelo Simulink para el conjunto Controladora y Planta

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 80 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Pero para la simulación se utilizará un modelo simplificado, en el que se
prescinde de las prealimentaciones de velocidad y aceleración y se introducen
unas constantes de ajuste, que se superponen a las del diseño inicial para
optimizar la respuesta.
Zero -OrderHold
Step
Simplifico las prealimentaciones
0
Scope
Salida del DAC
Planta
P.num {1}(s)
P.den {1}(s)
Muestreador
1
1
Kp 1
Kap
Kp
Kp
KiaKia
Ki
Ki
KdaKda
Kd
Kd
IM
1
I-->F
Ki2f
Filtro digital
1
1
Derivada posicion1-z -1
1
Dead Zone
Acción integral
1
z-1
Figura 44. Modelo Simulink simplificado para el conjunto controladora y Planta
Una vez ajustada la constante proporcional se observa la siguiente respuesta a un
escalón:

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 81 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Figura 45. Respuesta al escalón con la ganancia proporcional ajustada
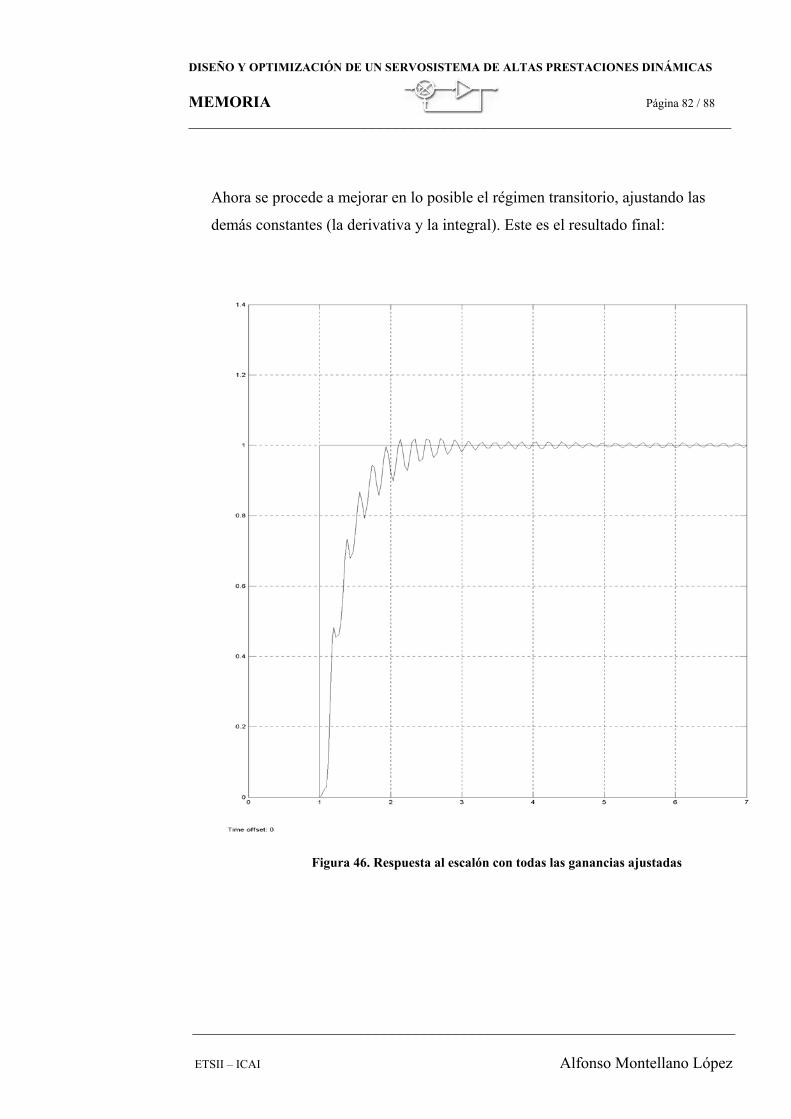
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 82 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Ahora se procede a mejorar en lo posible el régimen transitorio, ajustando las
demás constantes (la derivativa y la integral). Este es el resultado final:
Figura 46. Respuesta al escalón con todas las ganancias ajustadas

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 83 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
23. CONCLUSIONES
Como resultado de todo lo expuesto anteriormente, se llega a las siguientes
conclusiones:
1. A través de un estudio analítico del comportamiento del sistema, se ha podido
valorar la precisión máxima y se ha mostrado cómo hacerlo y las variables
que condicionan su comportamiento.
2. Concluido el estudio, se puede afirmar con rotundidad que el mínimo avance
de un carro, depende exclusivamente del diseño de la mecánica de
adaptación: de los coeficientes de rozamiento y de su rigidez dinámica.
3. La precisión de parada está seriamente limitada por el diseño de la mecánica
de adaptación. Subestimar su papel, en beneficio de sistemas de medidas o
controles de alta resolución (muy caros), resulta irresponsable y oneroso.
4. En el pliego de condiciones se pide una precisión y repetitividad en la parada
de 0,01 mm. Los cálculos efectuados en el sistema diseñado concluyen que el
mínimo avance que se puede efectuar es de 0,007mm, es decir, solamente 1,4
veces menor de lo que se pide, lo que permite concluir que el margen de
tolerancia es muy estrecho, si se considera, además, que se ha diseñado un
sistema con elementos constructivos y un montaje que se puede calificar de
no convencional, precisamente buscando altas prestaciones.
5. La respuesta simulada del sistema diseñado con Simulink de MATLAB
permite subrayar que un buen ajuste de los equipos, tanto de los
accionamientos, como de la unidad de control de ejes, es absolutamente
necesario para optimizar el comportamiento final del sistema.

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 84 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
En este caso, se ha simulado la respuesta dinámica del sistema diseñado y se
ha ajustado, actuando solamente con las ganancias, tanto la proporcional,
como la integral y la derivativa. Los resultados obtenidos son muy aceptables
y cumplen los requisitos impuestos en el pliego de condiciones. Es oportuno
destacar que la unidad de control de ejes elegida dispone de numerosos
recursos para ajustar su comportamiento.
24. FUTUROS DESARROLLOS
El proyecto que aquí se presenta no tiene en sí la idea implícita de un desarrollo en el
futuro inmediato.
No obstante, no resulta aventurado adivinar una implantación real del diseño para
cualquier aplicación que requiera las condiciones del pliego en el que se ha basado el
estudio. El interés tanto técnico como económico que dicha implantación pueda
tener, así como el contexto en el que ésta pueda desarrollarse quedan explicados en la
Introducción (Motivación) y el Estudio Económico de la presente Memoria.
Esta implantación incluiría aspectos tales como:
• Proceso de fabricación de las piezas no disponibles en el mercado.
• Estudio exhaustivo y comparativo de los accionamientos disponibles en el
mercado, con vistas a optimizar los costes de adquisición de los mismos.
• Cálculo y dimensionado de las protecciones y conexiones del armario
eléctrico.
• Protocolo de puesta en marcha y ajuste de la instalación.
Además de otros aspectos particulares de la aplicación a la que se destine el diseño.

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 85 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
BIBLIOGRAFÍA
[MAZU93] Mazurkiewicz, J., “Application Tips”, Baldor Electric Company, Fort
Smith, Arkansas, 1993.
[PRUV76] Pruvot, F., “Conception et Calcul des Machines-Outils” , Presse
Polytecnique Romande, École Polytecnique Fédérale de Lausanne,
Suisse, 1976.
Pruvot, F., “Polycopiés de cours“ , École Polytecnique Fédérale de
Lausanne, Suisse, 1976.
[MONT03] Montellano Fernández, M., “Elección y cálculo de accionamientos en
sistemas servocontrolados”, Automática e Instrumentación, No. 344,
Octubre de 2003.
[SANY06] SANYO DENKI AMERICA, INC., “Handbook of AC ServoSystem”,
Georgia, USA, 2006.
Giménez Fernández, A., Montellano Fernández, M., “Curso sobre
servosistemas, impartido para la Fábrica Nacional de Moneda y
Timbre, Madrid, Departamento de I+D”, Madrid, Junio de 2004.
[PAGO06] Pagola, F.L., “Regulación Automática”, Publicaciones de la
Universidad Pontificia Comillas, Madrid 2006.
DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS MEMORIA Página 86 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
[PAGO05] Pagola, F.L., “Apuntes de Control Digital”, Publicaciones de la
Universidad Pontificia Comillas, Madrid 2005.
WEBGRAFÍA
Schaeffler Group, INA: www.ina.com, FAG: www.fag.com.
IPIRANGA, www.ipirangahusillos.com
BALDOR ELECTRIC COMPANY, www.baldor.com
DELTA TAU, www.deltatau.com
HEIDENAIN, www.heidenhain.com
SANMOTION, Sanyo Denki Motion Control Products,
www.motiononline.com
PARTE II
ESTUDIO ECONÓMICO

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS ESTUDIO ECONÓMICO Página 87 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
ESTUDIO ECONÓMICO
Hoy en día la automatización supone una de las claves para alcanzar los objetivos de
competitividad en casi cualquier sector de la actividad industrial.
En muchas de las aplicaciones automatizadas, cada vez más, la precisión es un
requisito para poder garantizar una determinada calidad del producto o definir una
velocidad satisfactoria del proceso. Un sistema de altas prestaciones como el que se
presenta en este proyecto, permite implementar el control preciso del posicionado de
una masa.
Dicha aplicación puede ponerse en práctica dentro de todo tipo de sectores
(automovilístico, químico-farmacéutico, fabricación, etc.) y, además, sus
conclusiones son transpolables a cualquier otra configuración que pueda ser
necesaria para una aplicación concreta (sistemas con más ejes, control en
coordenadas polares o cilíndricas).
El empresario industrial que necesite mejorar su proceso de fabricación, bien sea
automatizándolo o mejorando la precisión en un sistema ya automatizado, se
encuentra con dos certezas que acompañan tal decisión de mejora.
La primera es que la inversión económica a efectuar será importante, lo
suficientemente importante como para asesorarse con anterioridad
concienzudamente.
La segunda es que, una vez implementado, el sistema automático permitirá disminuir
los tiempos de ciclo (y, por tanto, los costes asociados a los mismos) y agilizar el
proceso de forma que la inversión inicial se vea superada por excelentes beneficios.

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS ESTUDIO ECONÓMICO Página 88 / 88 ____________________________________________________________________
____________________________________________________________________
ETSII – ICAI Alfonso Montellano López
Las exigencias de precisión que muchos sistemas integrados en la industria plantean,
sitúan al ingeniero ante un gran reto, a la vez que una inmensa responsabilidad.
El ingeniero debe ser capaz de dominar aspectos muy diversos, concernientes a
distintos campos de la ingeniería como pueden ser la mecánica, la regulación
automática, la electrónica y la programación. Tales conocimientos deben encontrar
un cauce apropiado para que el resultado sea un proyecto que optimice los recursos
de los que se dispone para integrar todos lo elementos, y así permitir un
funcionamiento conjunto satisfactorio.
Es, precisamente, este funcionamiento el que materializará un éxito económico que
hasta ese momento sólo podía intuirse.
El presente proyecto muestra el proceso de análisis y diseño de un servomecanismo
que cumple con unas condiciones en el movimiento, que están a la altura de las
mayores exigencias en la industria moderna.
El método seguido para hacer frente a tal desafío muestra el rigor con el que debe
abordarse el problema como único camino para lograr los objetivos marcados. A
través de una serie de decisiones y compromisos en el diseño y elección de los
componentes del servomecanismo se consigue optimizar el funcionamiento del
mismo en términos técnicos, lo que se traduce en un ajuste de la cantidad a
desembolsar inicialmente y un ahorro efectivo, a lo largo del tiempo en que se
emplee la aplicación.
El atractivo del estudio que aquí se expone radica en su concreción, verosimilitud y
la generalidad de sus conclusiones, que pueden ser una guía para el ingeniero
involucrado en proyectos de características similares y una garantía de buena
rentabilidad para el empresario que decida invertir en tal proyecto.
DOCUMENTO NÚMERO 2
PLANOS

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS
DOCUMENTO NÚMERO 2
PLANOS

DOCUMENTO NÚMERO 2
PLANOS
ÍNDICE GENERAL
1. LISTA DE DESPIECE Y PLANOS
1.1. LISTA DE DESPIECE
1.2. PLANOS

1.1. LISTA DE DESPIECE

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS DESPIECE Página 1 / 2 ____________________________________________________________________
ETSII - ICAI Alfonso Montellano López
1. LISTA DE DESPIECE Y PLANOS DE CONJUNTOS Y DETALLES
1.1. Lista de despiece
Posic. Referencia Denominación Cantidad Fabricante Referencia
1 1000.00.00 Conjunto general
2 1001.00.00 Conjunto
3 1002.00.00 Conjunto
4 1003.00.00 Conjunto
5 1004.00.00 Conjunto
5 1001.01.00 Escuadra sujeción encoder 1
6 1001.02.00 Tapa para rodamiento 1
8 1001.03.00 Soporte 1
9 1001.04.00 Rodamiento de agujas 1 INA BK1812
10 1001.05.00 Eje de acoplamiento encoder 1
11 1001.06.00 Tornillo cabeza cilíndrica M4x8
12 1001.07.00 Acoplamiento elástico de encoder 1 Heidenhein
13 1001.08.00 Tornillo cabeza cilíndrica según rosca encoder
14 1001.09.00 Encoder 1 Heidenhein ROD486
15 1002.01.00 Tuerca doble de husillo de bolas 1 IPIRANGA 1.025.15.5.3
16 1002.02.00 Soporte tuerca husillo 1
17 1003.01.00 Buje 1
18 1003.02.00 Casquillo de precarga 1
19 1003.03.00 Soporte 1
20 1003.04.00 Rodamiento contacto angular FAG 7004-B-2Rs-TVP
21 1003.05.00 Tuerca 1 SKF M18
22 1003.06.00 Correa dentada 1
23 1003.07.00 Polea dentada aluminio 1
24 1003.08.00 Arandela tope 2
25 1003.09.00 Chaveta 2
26 1003.10.00 Tornillo
27 1003.11.00 Tornillo allen 2 M8x30
28 1003.12.00 Escuadra fijación del servomotor 1
29 1003.13.00 Polea dentada aluminio 1 Aluminio
30 1003.14.00 Servomotor 1 Baldor BSM100B-175AA
31 1003.15.00 Tornillo allen 8 M8x30
32 1003.16.00 Husillo de bolas, rectificado 1 IPIRANGA 1.025.15.5.3
33 1004.01.00 Placa de base 1
34 1004.03.00 Mesa 1

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA DE ALTAS PRESTACIONES DINÁMICAS DESPIECE Página 2 / 2 ____________________________________________________________________
ETSII - ICAI Alfonso Montellano López
35 1004.04.00 Guías lineales 2 INA KUE20
36 1004.05.00 Tornillo Allen 6 M6x25
37 1004.06.00 Tornillo Allen 8 M6x20
38 1004.07.00 Tornillo allen 35 M6x16
39 1004.08.00 Tornillo allen, M8 4 M8x24
40 1004.09.00 Calzo 2
41 1004.10.00 Tornillo allen, M6 14 M6x15

1.2. PLANOS

, - /l \ 'r o-|roo
, =l o
--\ .J-t--{o
t o.A
l br orc )t o
I
t (nl o' o' ol ot f
l l
I r <r o
l'o'o,----+
r . l f, ) 1L"' rO' l o' N
l r b: r or , bt l o
II
I!L
I I r t>r t OI ¡ ' r q )v/////, . ov////a r.,-+. * I% :-J4: w'- I lO
, ' jv,/,t//,tt^\\vlz- a i '
nruffiza1 _-L IV////tR< /721 I IV/A""nj" l%
':**'i- |
^ '--¡ t
t >I
-J
- o F$ :: ] Eo to . $o qo to á
¿ t =r + PO E
F
eá
3 3 9: < i
a B =
atg5H Eg-il =5 c , : !o E 95 8 :
BHHd 8 == o F
o >
*Io
c)oIoob()

()c)o
bc)
c)ob90oO
o()
o:oo
.J
oo
bs¡)c)o
oO
()Io()
ooJ
bFoo
Oo.A
bs¡oo
-¡Oo
osoo()
c)o9^)
bo
Oo¡obo
()ooN)t)o
Oo.-¡
oPoo
ffiH3FRÉÉg= ñ E$ ¡ [a- ¿'t S9 ó gd 3 E
, É{ tO Bc ' BF 3
I
l
t F á 9= < T
á g t: ' o ?4 f , r g !
B q É
iiíc9 o ñó E d
5gñT 9 R
AH;
E
O().J,
c>IoO
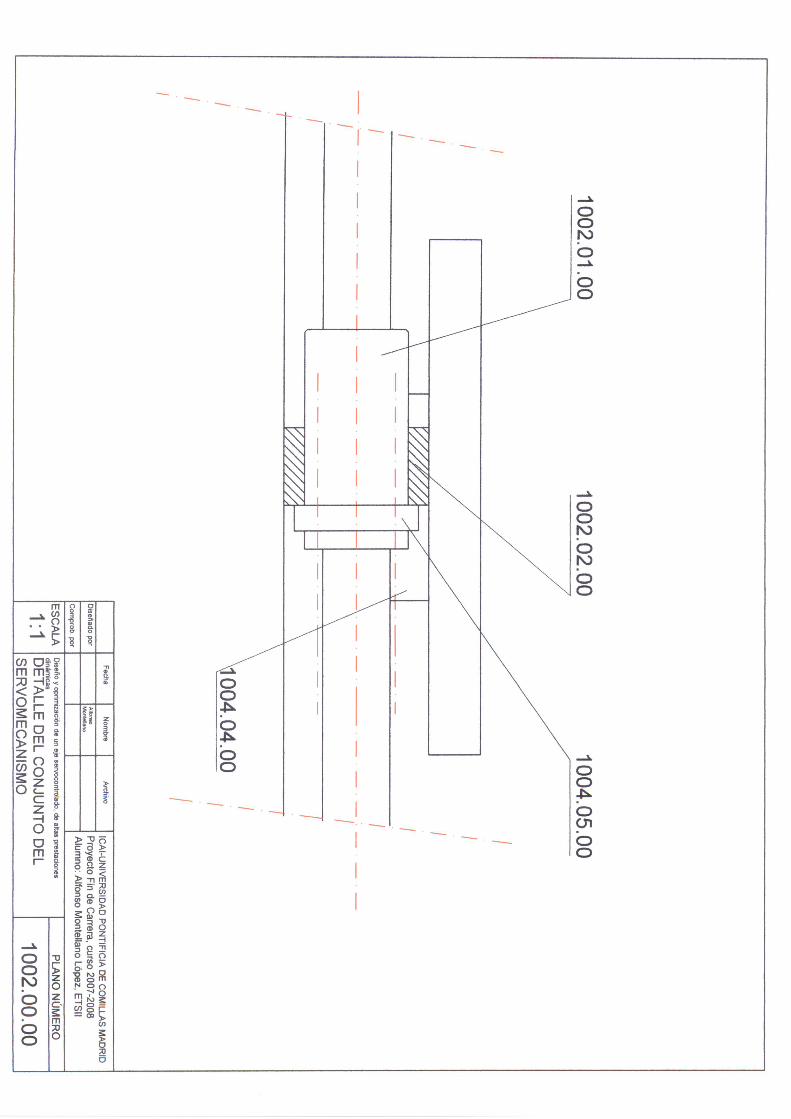
ooNo
bo
ooluoN)L)o
()oFos¡oo
II
II
t l
I It ll l
o()
¡o¡oo
0s8n!$ s-t¡í <> ' 8r =r Ém *
H ir ;o Io 3z gF g2 9{ üo ÉHEr 8
ie'FágzatgqH"E-gF
=B o !o = os s IE B H$ q o
IHñ=ovE

ooS^,o
oo
oostoN)bo
Oof^)ostoc)
oos^)oFoo
ooftos¡Oo
Oos¡)oPoo
oof,ofoo
oOs^)o90oO
oos¡)oIoo
a\t l
L I, l it r+t l l ll l l lt l r l l
oos/J
s)()O
I
\ \
1 \
1 \\ \
oof^)
bo
Oostf¡Oo
oos^)]\)bo
oosts,oo
oos^)Ioo
9 ? 9m 3 9{n . :> ' €r Ír Fm áo +m rr 5o lO Bz gL a( - az i- { óo ñ9 Em 3r 8 .
> 1 r c
5 * =: i 5 m
i6*dq d E8 8 Y= 8 I
* F ió E >s :8 HF Hgm : l 3q 9 ' t
I?
Bo
oOSr)OIoo
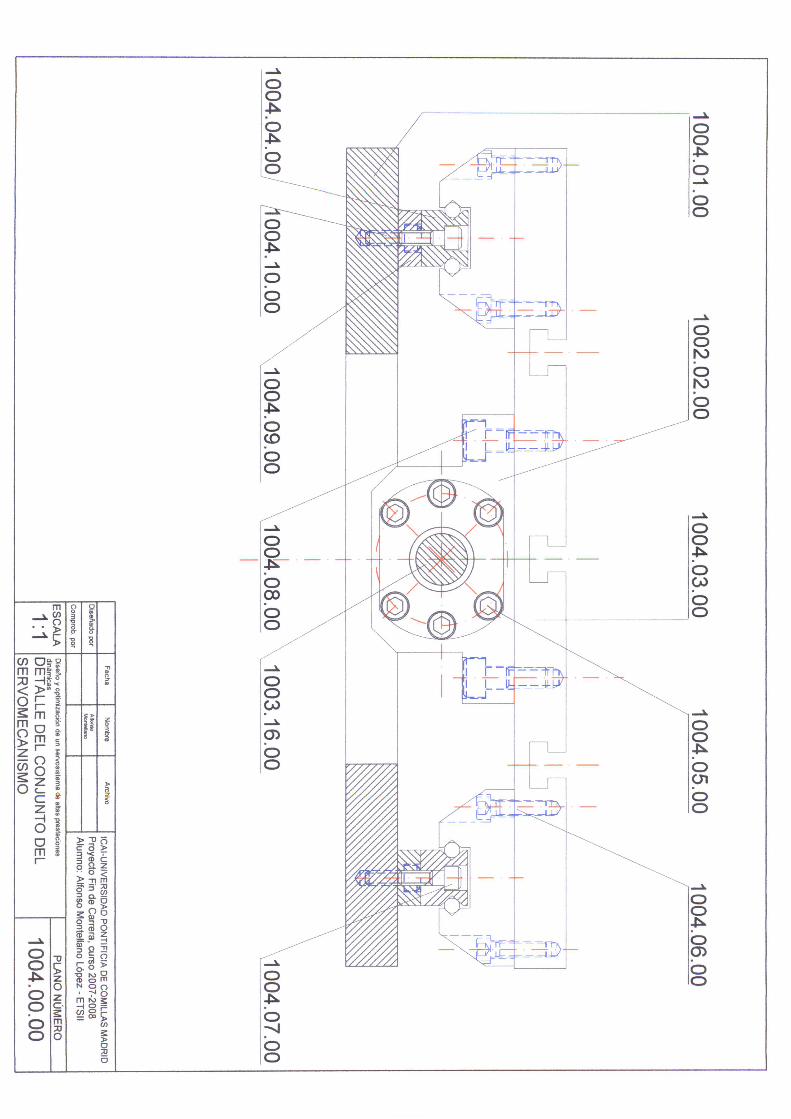
_s,/ ll__y'_IL: _ ! { -
.J
ooFoo()
ooNc)l\)bo
Oo¡of,oo
ooFo(tl
b()
J
oo¡oFoc)
oo¡
s)oo
oo¡osooO
(fOF_o9Doo
-ao()
st9)oo
()oFofoo
c gx . oü <
E
ó
¿
t
r
EP6
Im{
t-mImroozC-Cz{o(fmr
U)mnomoz6=o
3 3 Ft < i
á E El ' o =P n mteÉq5Eg-3 =P o io = c )
FeñN q o' ; { o1 B =g E F
g04
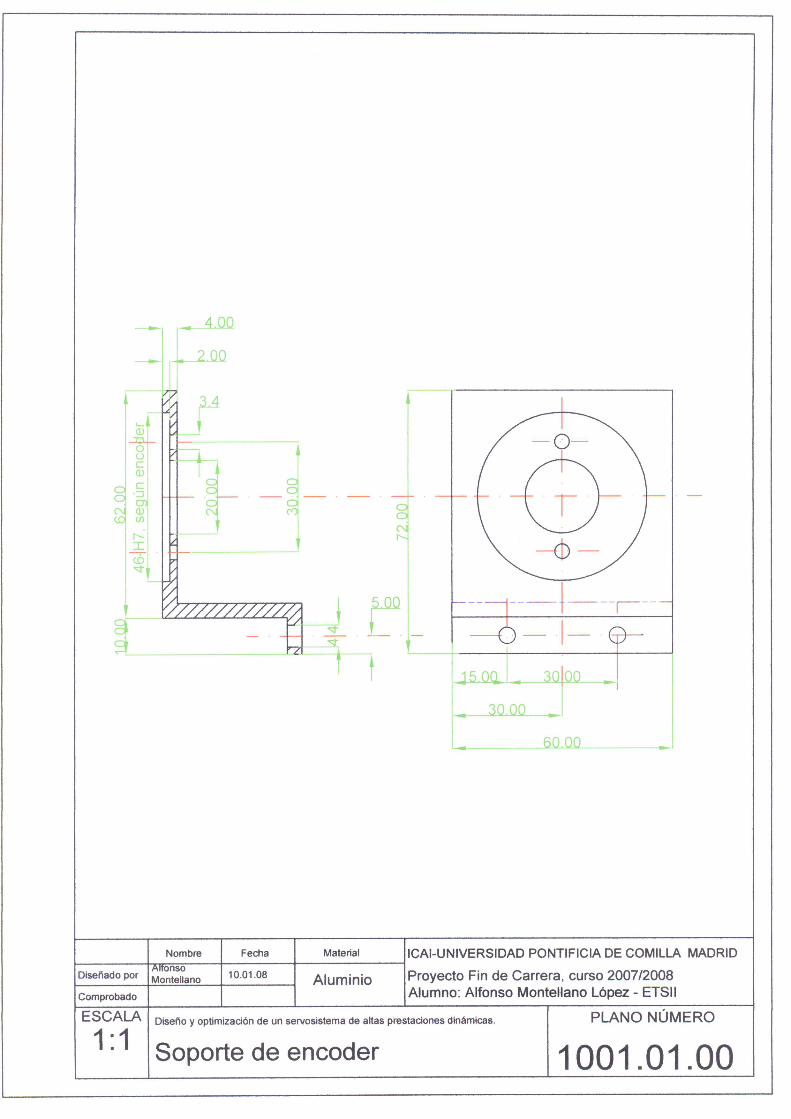
- *l i*-t'*
*i j.*-2-Q0
tj I
I
Nombre Fecha Material ICAI.UN IVERSIDAD PONTIFICIA DE COMILLA MADRID
Disoñado por At|O]XX)Monlellano 10.01.08 Aluminio Proyecto Fin de Carrera, curso 2OO7|2OOB
Alumno:Alfonso Montellano López - ETSIIComprobado
ESCALA
1 : 1Diseño y optimización de un servos¡slema de altas pr€staciones dinámica8.
Soporte de encoderPLANO NUMERO
1 0 0 1 . 0 1 . 0 0
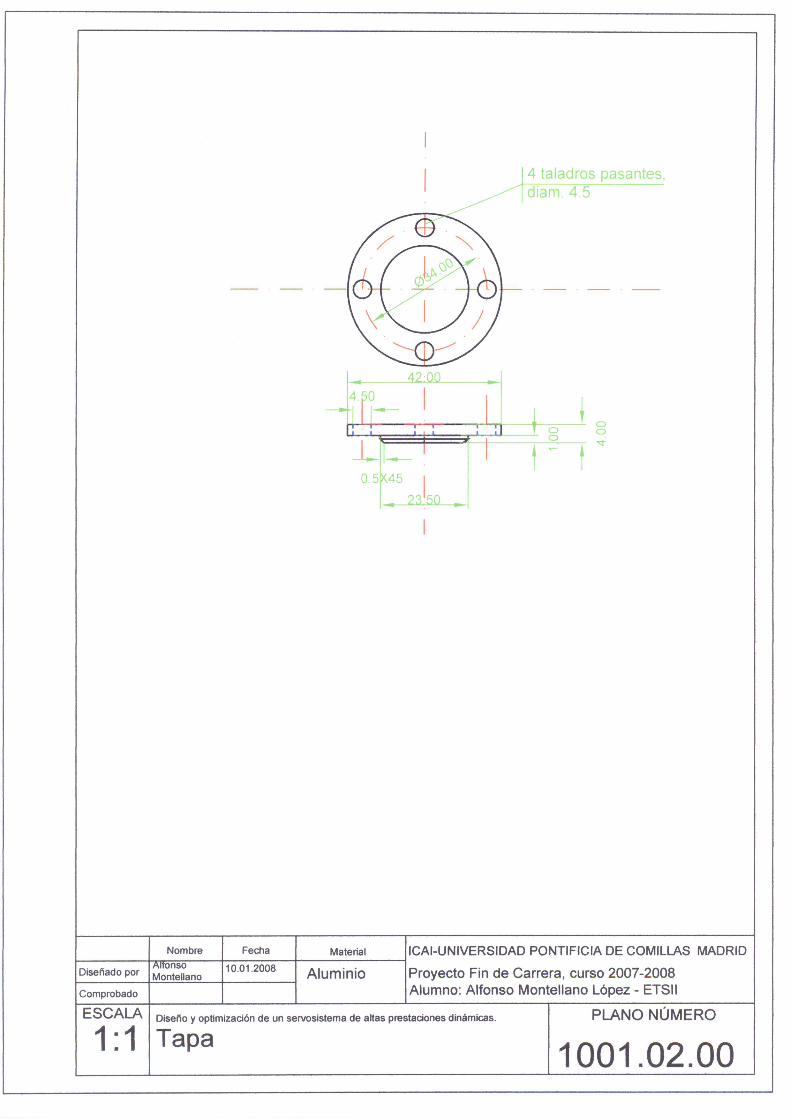
| 4 ta ladros pasantes..4; ; ; *^ i -A --
l L ¡ , ( f i l r a J
C)
.f
Nombre Fecfia Material ICAI.UNIVERSIDAD PONTIFICIA DE COMILLAS MADRID
Diseñaclo por AfiOnSO
Montellano10.01.2008 Aluminio Proyecto Fin de Carrera, curso 2007-2008
Alumno: Alfonso Montellano López - ETS¡|Comprobado
ESCALA
1 . 1Diseño y opümizadón de un senosistema de eltss prestadon€s d¡námicas.
TapaPLANO NI]MERO
100 1.02.00
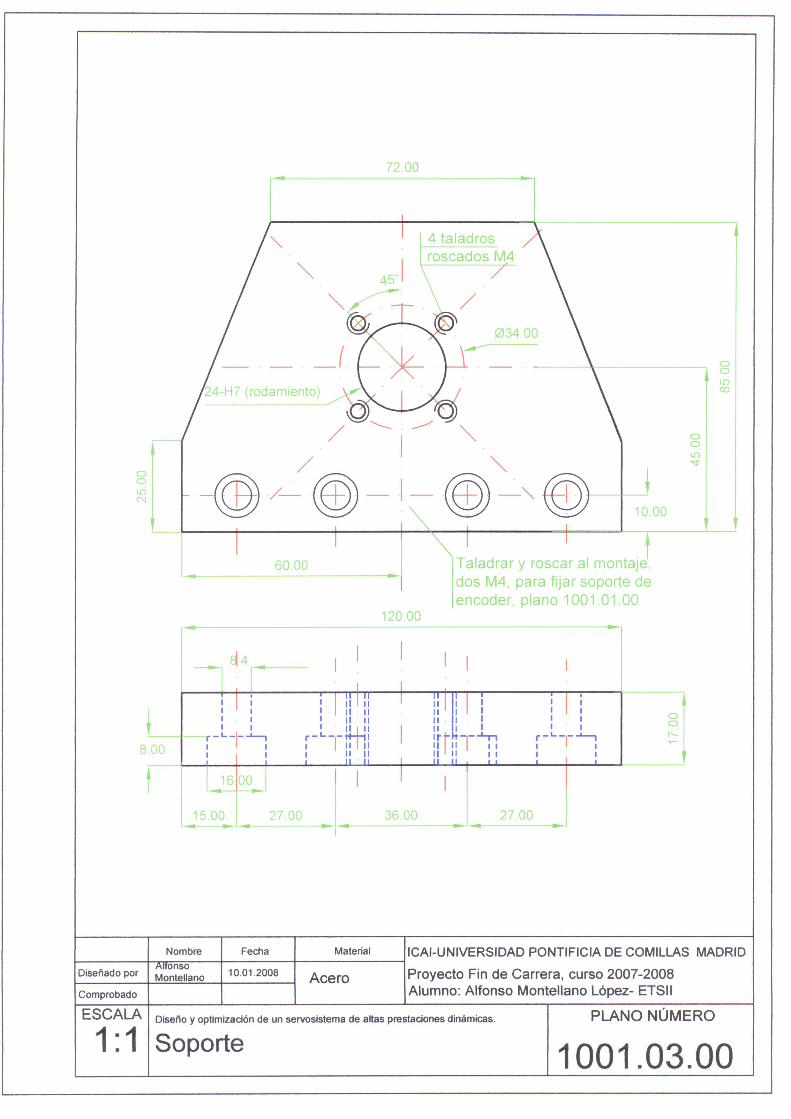
I
tI
, = lñ i: i¡ j l
II
i
t1 0 0 0
60 00
r r lTaladrar y roscar al monta¡edos M4, para frlar soporle deencoder . p lano 1001.01 00
120 00
II
B r-j0
;'--'Il
iO I
3 lI
IIII
r - LI!
IIII
- L
t lt lt lt l
r - Ll lt l
l ll l
I' |
r l
. l
t l I r lt l r lt l r lt l I r lrlfill l I l l| l t l
| | |l r 'l ll lr r lrt Il l I
I¡I
t ll l
Nombre Fecña Material ICAI.UNIVERSIDAD PONTIFICIA DE COMILI.AS MADRID
Diseñado por Al'OnSOMontellano 10.01.2008 Acero Proyecto Fin de Carrera, curso 2OO7-2OO9
Alumno: Alfonso Montellano López- ETSIIComprobado
ESCALA
1 : 1Diseño y opümizedón de un servosistema de altas prestacione6 dinámkns.
SoportePLANO NÚMERO
1001 .03.00
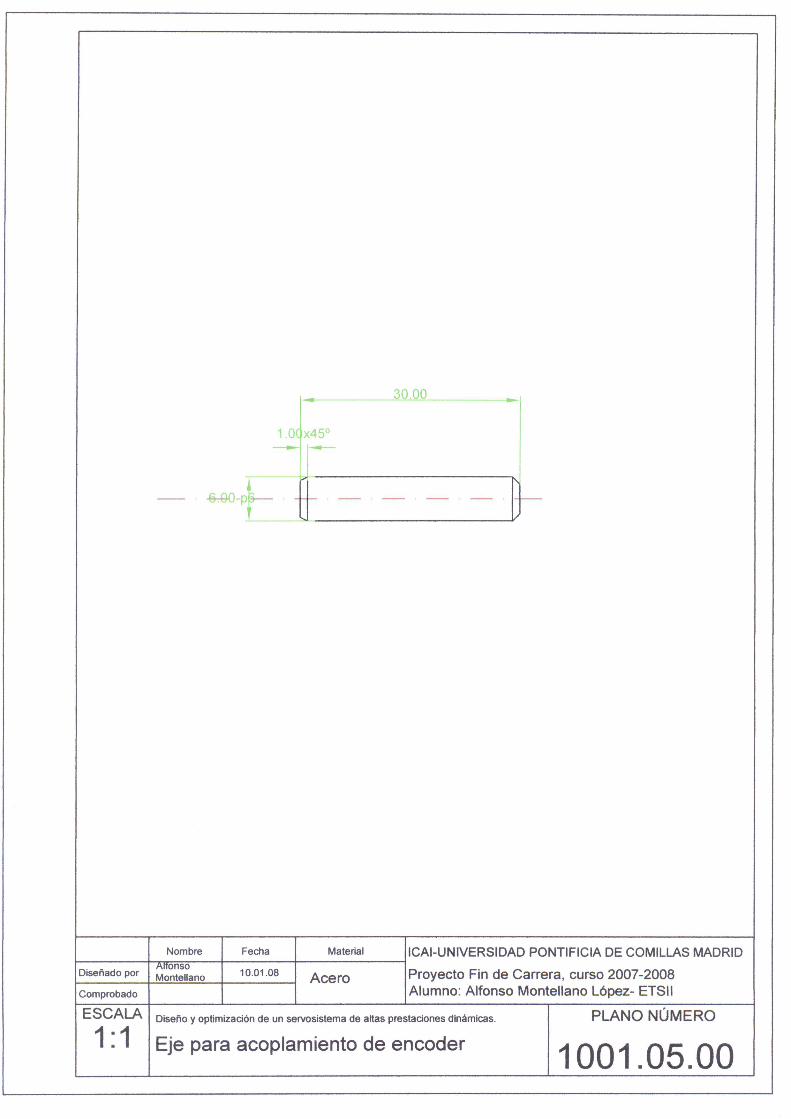
Noñrbre Fecha Material ICAI.UNIVERSIDAD PONTI FIC IA DE COMILLAS MADRID
Proyecto Fin de Carrera, curso 2007-2008Alumno: Alfonso Montellano López- ETSII
Diseñado por ,ttrofi5{,
Mofile[eno 10.01.08 AceroComprobado
ESCALA
1 : 1Dbeño y optlmizadón de un sen,osistema de altas prestadones d¡námicas.
Eje para acoplamiento de encoderPIáNO NUMERO
1001.05 .00

i6 ta ladros roscados
¡¡-J
c:lt\i
tt
I
c)I
óiiI
Ia-
- -_-i
3
¡tlIjIl
I
c)i
\ l liI
II
Nombre Fecha
AceroICAI-UN IVERSI DAD PONTIF ¡CIA DE COMILI.AS MADRID
Proyecto Fin de Carera, curso 2OO7-2OAaAlumno: Alfonso Montellano López - ETSII
Diseñado por AfIOnSOMontelláno 10.01.2008
Comprobado
ESCALA
1 : 1Diseño y opümización de un servos¡stema de altas prestaciones dinámicas.
Soporte tuerca husilloPLANO NÚMERO
1002.02.00

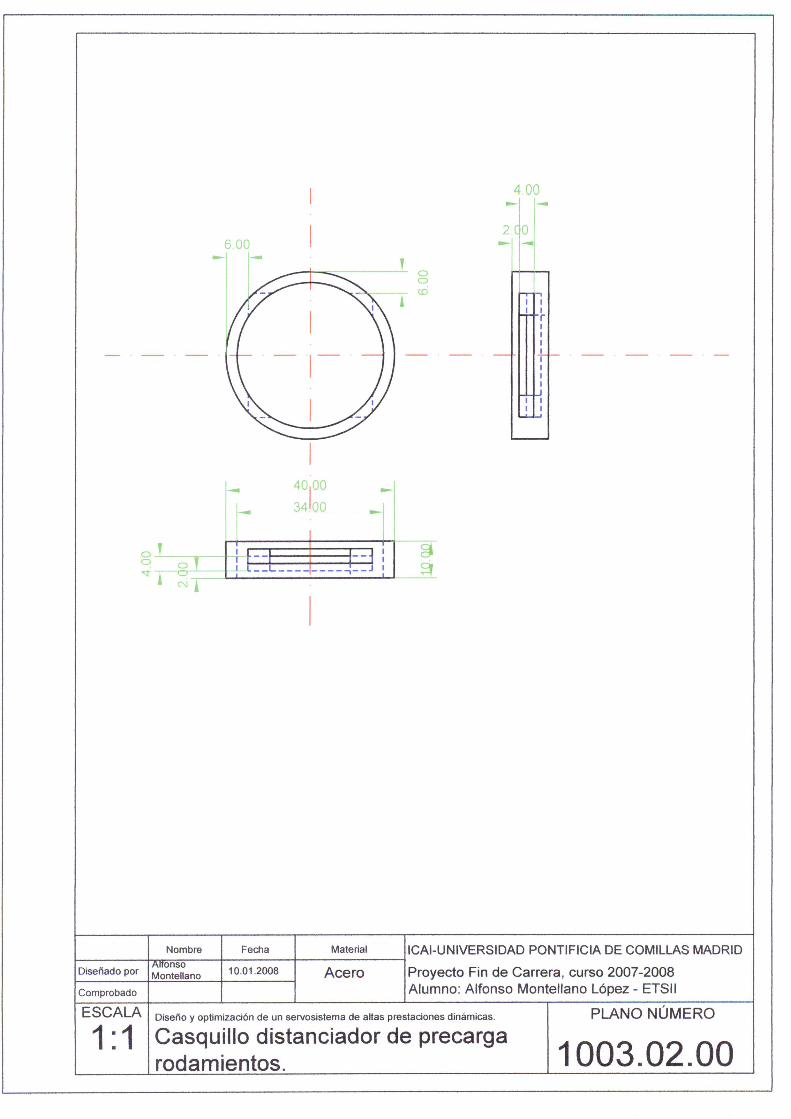
^> i
II
II
Il
I401CI0
34100
Iñ --;Tsr.
¡ a \ l
Nombre Fecha Meterial ICAI-UNIVERSIDAD PONTIFICIA DE COMILLAS MADRID
Proyecto Fin de Carrera, curso 2007-2008Alumno: Alfonso Montellano López - ETSII
Diseñado por A|IOnSOMontellano 10.01.2(n8 Acero
Comprobado
ESCALA
1 : 1Dis€ño y optim¡zación de un sérvos¡stema de altas presladones d¡námicas.
Casquillo distanciador de precargarodamientos.
PLANO NI]MERO
1003.02.00
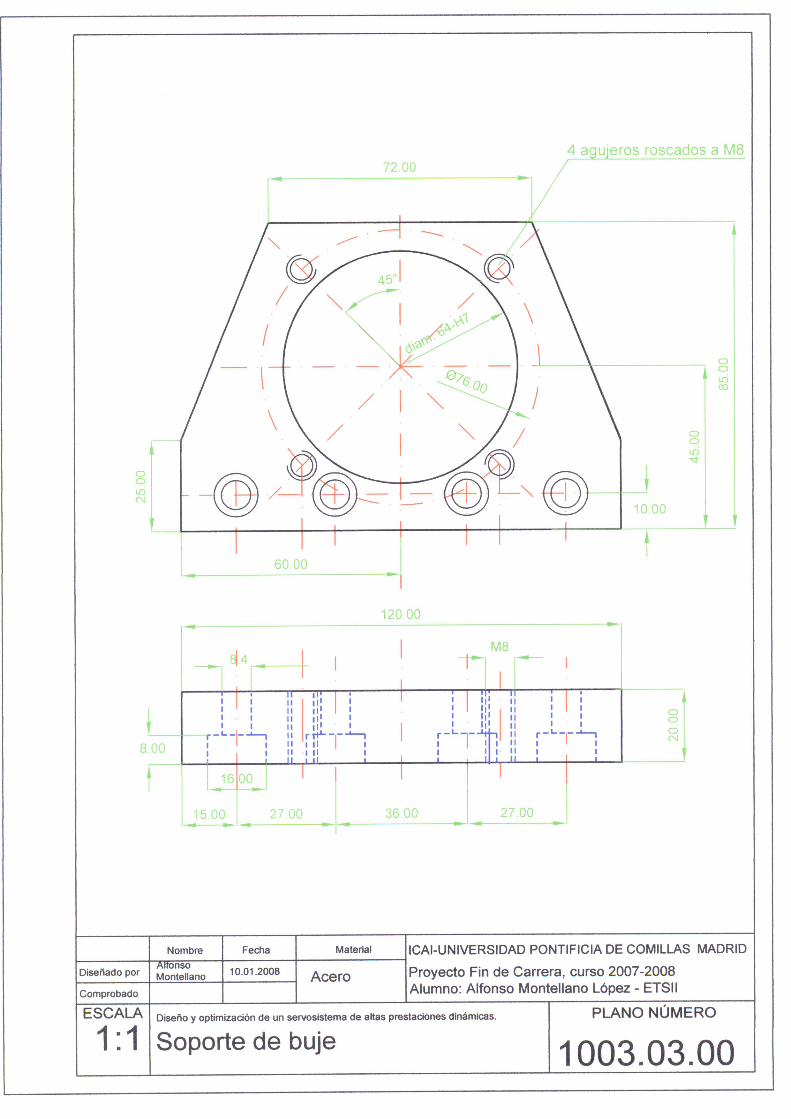
72 üA4 aqureros roscados a IVl8
,r-------
t1 0 0 0
l
120 00
I
t__8 0 0
¡I
- i
a ) l(.t j
i
i i r o l o oi * - ' l - * 'i i c n n \ ; z o t
i * " -¡ +-*--> i +--*.------*.+
3 6 0 0 I 2 7 0 0
/ ' r (\ ' r ' ,^*S; \ :
l ' < - -I
i u q I|
-* t l+-_- f
t r t l
IIII
r - L¡I
lit lr l
IIII
f -r-II
l ll l
I' I
r I. l
III¡
f - LII
l ll r
I' |-l-41
l lI
' ¡ l
r l lI r l| i lI r l' t l. t l
r i i i l. | i l |
t*r ii lr¡ | l l I
Nombre Fecña Material ICAI.UN IVERSIDAD PONTIF ICIA DE COMILI.AS MADRID
Diseñado porA|¡onsoMonte¡lano 10.01.2008 Acero Proyecto Fin de Carrera, curso 2007-2008
Alumno: Alfonso Montellano López - ETSIIComprobado
ESCALA
1 : 1D¡s,eño y optim¡zación de un seri,os¡stemg de altas pr€etacignes dinámicas,
Soporte de bujePLANO NUMERO
1003.03.00

NombÉ Fecñe ICAI-UNIVERSIDAD PONTIFICIA DE COMILLAS MADRID
Proyecto Fin de Carrera, curso 2OO7-2OOBAlumno: Alfonso Montellano López - ETSII
Diseñado por Af¡onsoMóntéllano 10.01.08
Comprobado
ESCAI-A
2 :1Diseño y opümización de un servosistema de alta¡ preÉtadones dinám¡cas.
ArandelaPLANO NUMERO
1003.08.00

----Q6s -\ ¿ ?
1 5 0 0
r ---1 -
T -
| = u o o l ti.-* lg
1 0 0 0 0
l *l út ; .
i é
(113ó()
m 88 g$ 5C L ü
d 52
D ia . áo . e= ¿q g( D F
U , Eo sü9 1J Ig so
F 3 9t < i 'egzárHEiiq9 o io = o
53ñaHF
;EE
ooS^,I\)bo
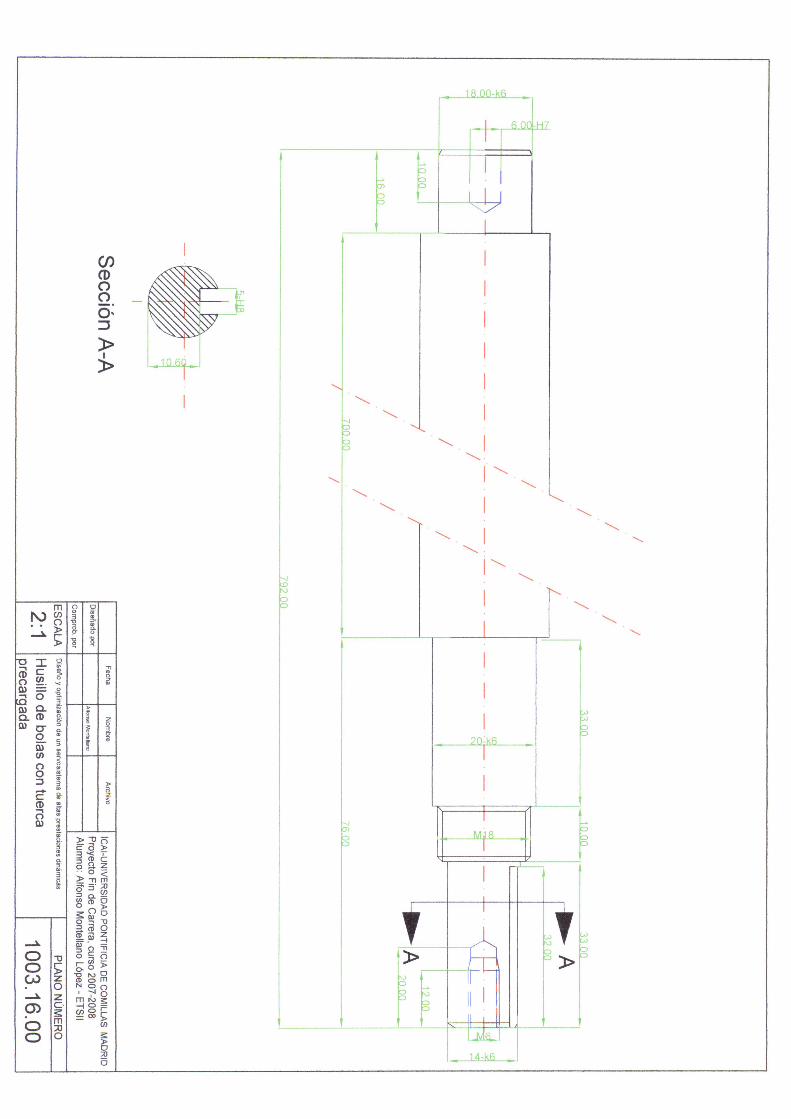
*- I8.00.k6 ,
l>t ,pk)rt
CNooa.o.f
t
T 9
g. .:: üL ' 3
o - Í( D cu i .o :o ;. n lo E .a t: 5É ' $o 2A Eo ) á
sa.
g
6_
F 3 95 < i
á 8 5- o <P f m
áÉHiH Ee-ts =< c ) Tó E ñ
5gñT F 8üsF
2o4
ooS^,Poo
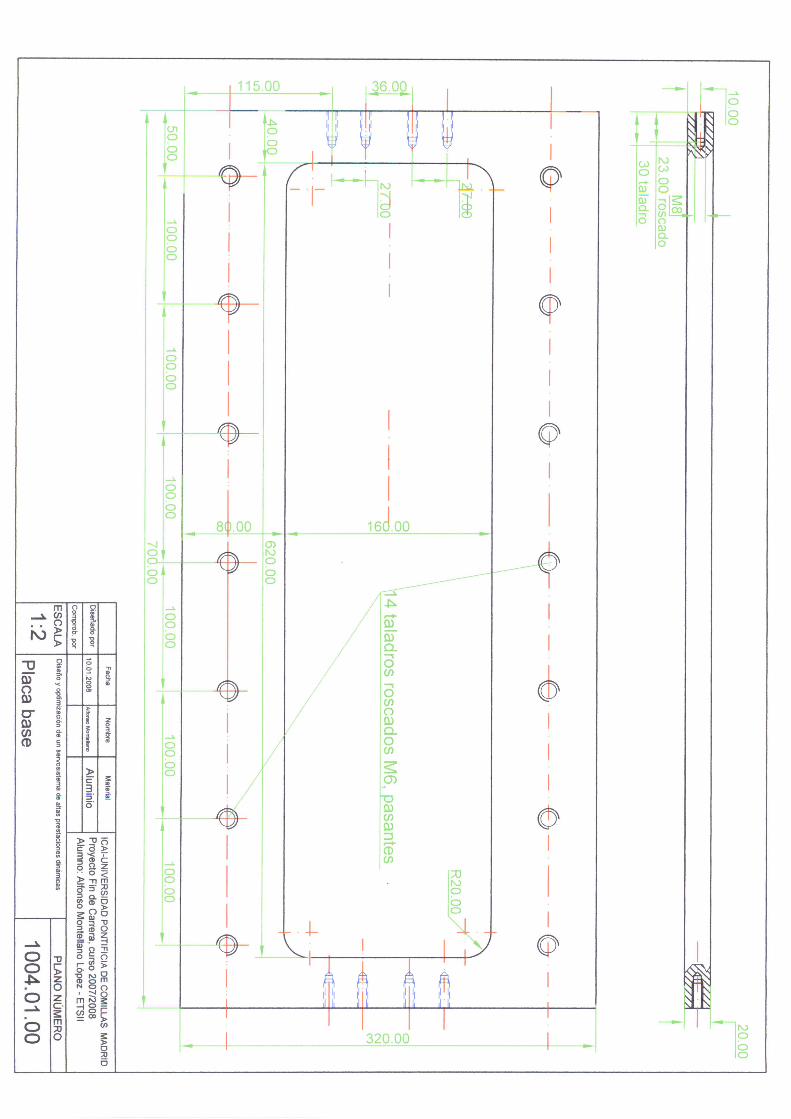
N)
9)O
; 1 3c)0)o-
t +t _ !
q)
Uo_
foiol l
L
tI
l-l Y
Ij
iIIIi r
lo
l"Itt
o lo iIL
I Oi qi ol oIi
tIIls)lcJ
l oI
I
- u F: q
D EO sfti éY : t
so ¡ e@ 3O s
o2.
3
s
!¡
g
ú
3 á 9: l \ < T
e $ =5 + xa q Égiís9 e !o t s o
5eñN q c ), : ! O
AsÉÉo
oo¡O
t)O
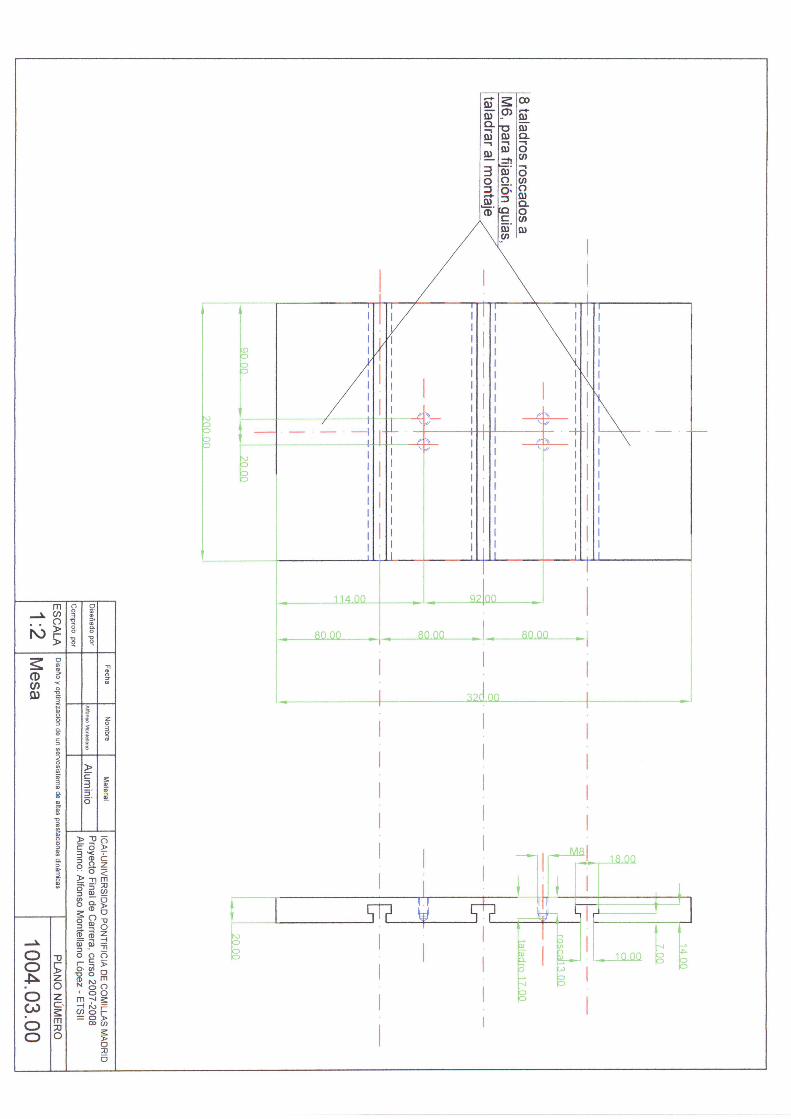
> 9> to 3o ¡ E
It
5eq
5
$o
6
e
-'I
3 3 9: < Ta'82
áHg< x os_ Y8g Q =0 ¡ ¡ ¡ =o 9 95 ; :E &X' ó Om : ¡ <d 8 F= o >
@ g D
=o
3
oo¡oo)bo

II
IIIIIlr¡
b
IIIiII
^ !
s t ul 6* a
= , ús -
o@o
t1
?
t:g
c,'s-o0tr:ft
ff
lf
CNmooóz
t
o 8o ¡ sñ i €o g!r -.o ) sñ $- 89 . 5( o :
6 ^ e¡I
D
Ét
33
F 3 9: \< 'i-
¿g=árgí 58g_il =P o io = o
$ & ñN q o, . : { oT B =g B F
;o
ooIosooo

DOCUMENTO NÚMERO 3
PRESUPUESTO

DISEÑO Y OPTIMIZACIÓN DE UN SERVOSISTEMA
DE ALTAS PRESTACIONES DINÁMICAS
DOCUMENTO NÚMERO 3
PRESUPUESTO
PRESUPUESTO

PRESUPUESTODiseño y optimización de un servosistema de altas prestaciones dinámicasAlfonso Montellano López
A continuación se presenta el presupuesto a considerar para hacer efectivo el diseño del servomencanismo: página 1/4
PLANO DESCRIPCIÓN DEL ARTÍCULO CANTIDAD REFERENCIA FABRICANTE PRECIO/UNID TOTAL €Interase mecánica
1001.01.00 Escuadra sujección encoder 1 10,00 10,00 1001.02.00 Tapa para rodamiento 1 4,00 4,00 1001.03.00 Soporte 1 20,00 20,00 1001.04.00 Rodamiento de agujas 1 BK1812 INA 15,00 15,00 1001.05.00 Eje de acoplamiento encoder 1 2,00 2,00 1001.06.00 Tornillo cabeza cilíndrica 1 M4x8 0,30 0,30 1001.07.00 Acoplamiento elástico de encoder 1 Heidenhein 3,50 3,50 1001.08.00 Tornillo cabeza cilíndrica 1 0,40 0,40 1002.01.00 Tuerca doble de husillo de bolas 1 IPIRANGA 30,00 30,00 1002.02.00 Soporte tuerca husillo 1 6,00 6,00 1003.01.00 Buje 1 10,00 10,00 1003.02.00 Casquillo de precarga 1 8,00 8,00 1003.03.00 Soporte 1 12,00 12,00 1003.04.00 Rodamiento contacto angular 1 7004-B-2RS-TVP FAG 20,00 20,00 1003.05.00 Tuerca 1 M18 SKF 0,50 0,50 1003.06.00 Correa dentada 1 9,00 9,00 1003.07.00 Polea dentada aluminio 1 12,00 12,00 1003.08.00 Arandela tope 2 0,50 1,00 1003.09.00 Chaveta 2 1,00 2,00 1003.10.00 Tornillo 0,30 0,00
Diseño propioDiseño propioDiseño propio
Diseño propioDiseño propioDiseño propioDiseño propio

1003.11.00 Tornillo Allen 2 M8x30 0,30 0,60 página 2/4
1003.12.00 Escuadra fijación del servomotor 1 12,00 12,00 1003.13.00 Polea dentada aluminio 1 12,00 12,00 1003.15.00 Tornillo allen 8 0,30 2,40 1003.16.00 Husillo de bolas, rectificado 1 1.025.15.5.3 IPIRANGA 1.500,00 1.500,00 1004.01.00 Placa de base 1 15,00 15,00 1004.02.00 Soporte tuerca husillo 1 40,00 40,00 1004.03.00 Mesa 1 20,00 20,00 1004.04.00 Guías lineales 2 KUE20 INA 30,00 60,00 1004.05.00 Tornillo Allen 6 M6x25 0,30 1,80 1004.06.00 Tornillo Allen 8 M6x20 0,30 2,40 1004.07.00 Tornillo Allen 35 M6x16 0,30 10,50 1004.08.00 Tornillo Allen 4 M8x24 0,30 1,20 1004.09.00 Calzo 2 5,00 10,00 1004.10.00 Tornillo Allen 14 M6x15 0,30 4,20
TOTAL INTERFASE MECÁNICA 1.857,80 €Accionamientos
1003.14.00 Servomotor 1 BSM100B-175AA Baldor 550,00 € 550,00 €Servoamplificador 1 FlexDriveII FDH4A15TR-RN23 Baldor 300,00 € 300,00 €TOTAL ACCIONAMIENTOS 850,00 €Circuito de medida
1001.09.00 Encoder 1 ROD486 Heidenhein 260,00 € 260,00 €TOTAL CIRCUITO DE MEDIDA 260,00 €Controladora de ejesUnidad de Control de Ejes 1 PMAC PCI Mini Delta Tau 2.500,00 € 2.500,00 €TOTAL CONTROLADORA DE EJES 2.500,00 €
Diseño propio
Diseño propioDiseño propioDiseño propio
Diseño propio

DESGLOSE DE COSTOS
Costes DirectosCoste de los Materiales Total Interfase Mecánica 1.857,80 €
Total Accionamientos 850,00 €Total Circuito de Medida 260,00 €Controladora de ejes 2.500,00 €Total Coste de los Materiales 5.467,80 €
Coste de Mano de Obra Directa Concepto Número de horas Precio/hora Coste totalDocumentación Previa 50 30 € 1.500,00 €Documentación y Estudio Interfase Mecánica 150 40 € 6.000,00 €Diseño mecánico 100 35 € 3.500,00 €Documentación y Estudio Accionamientos 60 40 € 2.400,00 €Documentación y Estudio Circuito de Medida 90 40 € 3.600,00 €Total horas 450 0,00 €
TOTAL COSTES DIRECTOS 17.000,00 €
Costes IndirectosConcepto Coste total
Gastos generales (energía, comunicación, aplicaciones...) 120,00 €Otros gastos 60,00 €
TOAL COSTES INDIRECTOS 180,00 €
Coste del Proyecto (CD+CI) 22.647,80 €

16% de IVA 0,00 €Total Coste del Proyecto 22.647,80 €
Distribución Coste Total del Proyecto
CD Coste Materiales 24,14%MO Coste MOD 75,06%CI Costes Indirectos 0,79%
100,00%
Distribución de costos
24%
75%
1%
123


















