prac3-PIC
17
Página 1 LSCM-3 1 PRACTICA 3: FILTRADO DE SEÑALES PRACTICA 3: FILTRADO DE SEÑALES DEPARTAMENTO DE SEÑALES, SISTEMAS Y RADIOCOMUNICACIONES ESCUELA TÉCNICA SUPERIOR DE INGENIEROS DE TELECOMUNICACIÓN UNIVERSIDAD POLITÉCNICA DE MADRID LABORATORIO DE SEÑALES Y COMUNICACIONES LSCM-3 2 OBJETIVOS DE LA PRÁCTICA • Revisar la convolución y su aplicación a sistemas lineales. • Observar los efectos de filtrado de una señal sobre la señal de salida. • Destacar las analogías y diferencias entre sistemas lineales en tiempo continuo y en tiempo discreto, con especial interés en los filtros.
-
Upload
gabriel-hi -
Category
Documents
-
view
221 -
download
9
description
Practica Pic
Transcript of prac3-PIC
-
Pgina 1
LSCM-31
PRACTICA 3:FILTRADO DE SEALES
PRACTICA 3:FILTRADO DE SEALES
DEPARTAMENTO DE SEALES, SISTEMAS Y RADIOCOMUNICACIONES
ESCUELA TCNICA SUPERIOR DE INGENIEROS DE TELECOMUNICACIN
UNIVERSIDAD POLITCNICA DE MADRID
LABORATORIO DE SEALES Y COMUNICACIONES
LSCM-32
OBJETIVOS DE LA PRCTICA
Revisar la convolucin y su aplicacin a sistemas lineales.
Observar los efectos de filtrado de una seal sobre la seal de salida.
Destacar las analogas y diferencias entre sistemas lineales en tiempo continuo y en tiempo discreto, con especial inters en los filtros.
-
Pgina 2
LSCM-33
Sistemas Discretos Caracterizacin de entrada a salida (E/S) Convolucin discreta Convolucin discreta mediante FFT
Filtros Discretos Caracterizacin de un filtro discreto Representacin en MATLAB Diagrama de polos y ceros Respuesta al impulso y Respuesta en frecuencia Diseo de filtros discretos
Filtros Analgicos Caracterizacin Analogas entre filtros analgicos y filtros discretos. Funcin de transferencia
Introduccin a los ejercicios de la prctica Utilizacin de fdatool Efectos de la simulacin
NDICE
LSCM-34
SISTEMAS DISCRETOS
En un sistema discreto la relacin e/s viene dada por una Convolucin de secuencias:
x(k)k)-h(n=x(n)h(n)= y(n)-=k
Mientras que en un sistema en tiempo continuo la relacin e/s viene dada por una Convolucin en tiempo continuo:
y(t) = h(t)* x(t) = h(t - ) x( )d-
Caracterizacin de sistemas de entrada a salida (e/s)
h(n)y(n)x(n)
h(n)h(n) (n)Respuesta al impulso
Impulso
x(n) * h(n) = y(n) (n) * h(n) = h(n)
-
Pgina 3
LSCM-35
SISTEMAS DISCRETOS
Anlogamente, en los sistemas continuos el dominio transformado es el Dominio de Laplace, y se cumple:
X(z)H(z) = Y(z)
El dominio transformado en los sistemas discretos es el Dominio Z:
Y(s) = H(s) X(s)
Por la propiedad de la convolucin, la relacin e/s se transforma en un producto en el dominio transformado:
Dominio Z
zh(n) = H(z) n--=k
H(z)Y(z)X(z)
LSCM-36
Convolucin discreta
Ejemplo:Sea h(n)= x(n)= 1, 0n3; h(n)= x(n) = 0 (resto) Entonces h(n)*x(n) es de longitud 7 (ver Fig.)
Si h(n) longitud N, x(n) longitud M,
h(n)*x(n) longitud N+M1
Longitud de la convolucin
-
Pgina 4
LSCM-37
Convolucin discreta
Si h(n) 0, N1 nN2 (longitud N2-N1+1)x(n) 0, M1 n M2 (longitud M2-M1+1),
entonces y(n)=h(n)*x(n)0, N1+M1 n N2+M2 (long. N2+M2-N1-M1+1) Efectos de la convolucin:
Alarga la duracin de las seales (desparrama la seal) Seal resultante ms suave (ms lisa, ms filtrada) Convoluciones reiteradas: seal gaussiana
LSCM-38
Convolucin discreta mediante FFT
Si h(n) tiene slo N valores no nulos (longitud N) se define su DFT como:
1-N0,1,...,=k ; eh(n) = H(z)kH Nkn2j-
1-N
0=nk
ez Nj
= =
2)(~
que tambin sern N valores, pero en el dominio transformado.
Su inversa es (reconstruccin de h(n) a partir de los N valores de la DFT):
1-N0,1,...,=n ; e(k)H N1 = h(n) N
kn2j1-N
=0k
~
1~ N0,1,...,=k ;] h(n) FFT[ = (k)H
1-N0,1,...,=n ;] (k)H [FFT = h(n) -1~
El Algoritmo FFT (Fast Fourier Transform) es simplemente un algoritmo gil para el clculo de la DFT de una secuencia. Simblicamente:
-
Pgina 5
LSCM-39
Convolucin discreta mediante FFT
Puede obtenerse la salida de un sistema mediante FFTs:
1-N0,1,...,=k ; (k)X(k)H=(k)Y ~~~ 1-N0,1,...,=n ];FFT[x(n)] FFT[h(n)] [FFT=y(n) -1
pero hay que tener en cuenta que esta ltima expresin realiza una Convolucin Circular, que slo coincide con la Convolucin lineal si no se producen solapamientos.Es decir, para que el resultado sea correcto todos los vectores que entran en las operaciones (h(n), x(n), y(n)) han de tener la misma longitud.
Mtodo a seguir: A partir de las longitudes de h(n) y x(n), calcular el tamao de su
convolucin lineal (Ny) Rellenar con ceros hasta que long[h(n)] =long[x(n)] = Ny Realizar la convolucin mediante FFT
LSCM-310
FILTROS DISCRETOS
eh(n)H(z)eH nj--=k
ezj
j
=
== )(
|H(ej)| arg{H(ej)}Respuesta en amplitud Respuesta en fase
Un filtro queda caracterizado por su respuesta en frecuencia, que tiene un significado fsico. Obtencin a partir de la transformada Z:
[ ])eargH(dd-=)( j
Retardo de grupo:
Nomenclatura: |H(ej)| |H()| La variable es la pulsacin y su margen de valores distintos es de 0 a ,
debido a que un sistema discreto est asociado a la existencia de un muestreo.
Caracterizacin de un filtro discreto
-
Pgina 6
LSCM-311
Caracterizacin de un filtro discreto
Respuesta en amplitud: indica qu componentes de frecuencia son atenuadas por el filtro
A partir de |H(ej)| puede estimarse el diagrama de polos y ceros del filtro, y viceversa
Respuesta de fase: indica el desfase que sufren las distintas componentes de frecuencia cuando atraviesan el filtro
En los ceros de la respuesta en frecuencia cambia bruscamente (saltos de fase de 180 )
Los filtros que tienen una respuesta de fase lineal, no producen distorsin sobre la seal de entrada
Retardo de grupo: indica el retardo (en muestras o unidades de tiempo) que sufren las distintas componentes de frecuencia cuando atraviesan el filtro
Un retardo de grupo no constante, produce una distorsin sobre las seales Ejemplo: cadena de filtros paso-todo
LSCM-312
Representacin en MATLAB En el paso de continuo a discreto la frecuencia mxima de la
seal muestreada es la mitad de la frecuencia de muestreo: pulsacin de muestreo: s /2 ==== frecuencia de muestreo: fs /2 frecuencia normalizada: f=1
Retardo de grupo:
k() = - d(arg{H(ej)})/d
|H(ej)|
arg{H(ej)}
-
Pgina 7
LSCM-313
Diagrama de polos-ceros: Estabilidad
Supuesto filtro causal, es decir, h(n)=0, n la respuesta al impulso decrece lentamente y la respuesta
al escaln tambin va llegando lentamente a su mximo.
Con sistemas de orden superior (mayor nmero de polos), el tiempo que tarda en decrecer la respuesta al impulso depende de la posicin de los mismos, teniendo mayor influencia los ms cercanos a |z|=1
Los sistemas de orden superior pueden descomponerse en sistemas de orden 1 o 2.
( ) azaz
zaz
zH >
=
= ,11
1
-
Pgina 8
LSCM-315
v2v1
1
a Re
Im
Influencia de los polos en la Respuesta al impulso Polo prximo a |z|=1 (|a|1) => Transitorio largo Polo lejos de |z|=1 (prximo a |z|=0) => Transitorio corto
0 5 1 0 1 5 2 0 2 5 3 0 3 5 4 0 4 5 5 00
0 . 2
0 . 4
0 . 6
0 . 8
1h [n ]
a = 0 .7 5
0 5 1 0 1 5 2 0 2 5 3 0 3 5 4 0 4 5 5 00
1
2
3
4s [n ]
n
0 5 1 0 1 5 2 0 2 5 3 0 3 5 4 0 4 5 5 00
0 .2
0 .4
0 .6
0 .8
1h [n ]
a = 0 .5
0 5 1 0 1 5 2 0 2 5 3 0 3 5 4 0 4 5 5 00
0 .5
1
1 .5
2s [n ]
n
[ ] [ ]
[ ] [ ]nua
ans
nuanhn
n
=
=+
11 1
Respuesta al impulso:
Respuesta al escaln:
filtro paso bajo de orden 1
LSCM-316
Influencia de los polos en la Respuesta en frecuencia
( ) ( )aev
veH
aee
aeeH
jj
j
j
jj
==
=
=
1
11
2
1
v2v1
1
a Re
Im
0 0.5 1 1 .5 2 2 .5 3-2 0
-1 8
-1 6
-1 4
-1 2
-1 0
-8
-6
-4
-2
0
dB
2 0 lo g 1 0 (a b s (H( )))
a = 0 .05a = 0 .75a = 0 .5
|a | d is m inu y e
Polo prximo a |z|=1 (|a|1) => Respuesta en frecuencia abrupta Polo lejos de |z|=1 (prximo a |z|=0) => Respuesta en frecuencia suave
filtro paso bajo de orden 1
-
Pgina 9
LSCM-317
Diseo de filtros discretos
El dato es la mscara de transferencia para el mdulo de la respuesta en frecuencia |H(ej)|
Respuesta frecuencial de filtro discreto paso bajo
Por lo dicho anteriormente, filtros con mscaras muy abruptas rdenes elevados y polos prximosz=1 gran duracin del transitorio
LSCM-318
Diseo de filtros discretos
La respuesta en frecuencia tambin puede representarse mediante la Funcin de Atenuacin (inversa de la ganancia)
|)eH(| 20- = |)eH(|1 20 = )( j
j
loglog
c = atenuacin mxima en la banda de paso rizado(valor tpico: c= 0.5 dB).
a = atenuacin mnima en la banda atenuada(valor tpico: a = 60 dB).
-
Pgina 10
LSCM-319
Filtro paso-bajo ideal
-c c -
H(ej)
c
c
[ ]
= nnh cc
sinc
( )
-
Pgina 11
LSCM-321
-1 -0.5 0 0.5 1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Re al P art
Imaginary Part
Filtro de Butterworth
4
Diagramas de polos-ceros
Butterworth
-1 -0.5 0 0.5 1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Real P art
Imaginary Part
Filtro e lptico
-1 -0.5 0 0.5 1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Real P art
Imaginary Part
Filtro de Chebychef
4
Diseo de filtros discretosFiltros de Butterworth, Chebychef y Elptico.
Elptico
Chebychevdirecto
LSCM-322
0 0.5 1 1.5 2 2.5 3-80
-70
-60
-50
-40
-30
-20
-10
0
10
Am
plitu
d: 2
0*lo
g 10(
abs(
H))
buttercheby1ellip
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9-4
-3
-2
-1
0
1
2
Amplitud: 20*log 1
0(abs(H))
butte rcheby1ellip
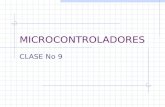
Datos de ejemplo:wn=0.2, paso=1.5 dB, aten=40 dBOrden: 4
Diseo de filtros discretosFiltros de Butterworth, Chebychef y Elptico.Mdulo de la Respuesta en Frecuencia
-
Pgina 12
LSCM-323
Diseo de filtros discretosFiltros de Butterworth, Chebychef y Elptico.Comparacin de caractersticas
Regularidad del retardo de grupo
En banda atenuadaNo tieneNo tieneCeros de transmisin
Orden para selectividad determinada
Deformaciones en rgimen transitorio
En ambas bandas
En banda de paso (tipo 1)No
Rizado de amplitud en las bandas
Baja
Media
Alta
Anchura de la banda de transicin para un orden dado
ElpticoChebychefButterworth
LSCM-324
FILTROS ANALGICOS
Caracterizacin Sistema analgico Convolucin en tiempo continuo
Funcin de red (plano s):
Comportamiento en frecuencia: s=jw (eje imaginario), 0
-
Pgina 13
LSCM-325
FILTROS ANALGICOS
Analogas entre filtros analgicos y discretos
v2v1
1
aRe
Ims=j
v1v2
Rea
FILTRO DISCRETO FILTRO ANALGICO
LSCM-326
Filtros analgicos: Funcin de Transferencia
Ejemplo: |H(s)| a partir del diagrama de polos y ceros
Filtro elptico paso bajo de orden 4
-
Pgina 14
LSCM-327
Filtros analgicos: Funcin de Transferencia (II)
LSCM-328
Filtros analgicos: Funcin de Transferencia (III)
jsH(s)jH ==)(
Deduccin del Mdulo de la Funcin de transferencia a partir de |H(s)|
-
Pgina 15
LSCM-329
Propiedades reconocibles examinando las posiciones de los polos en los filtros paso bajo
A mayor orden, mayor nmero de polos, y por tanto banda de transisin con cada ms abrupta.
La proximidad de los polos al eje jw hace dismunir la velocidad con que se atena la respuesta al impulso (tarda mucho tiempo en atenuarse, es decir, el transitorio del filtro es largo en el tiempo).
La proximidad de los polos al eje real hace dismunir la frecuencia de la oscilacin de la respuesta al impulso (oscilacin lenta).
EXPLICACIN:Si se desarrolla H(s) en torno a los polos: H(s) = A1/(s-s1) +A2(s-s2)+ A3/(s-s3)+...
Como
resulta: h(t) = [A1exp(s1t)+ A2exp(s2t)+ A3exp(s3t)+ ...]u(t)
F (s + ) e f(t)
L- t
1 K
s K u ( t )
L - 1
Influencia de la posicin de los polos
LSCM-330
Influencia de la posicin de los polos
))](Im[)](cos(Im[]Re[)]Im[](Re[
tsjsentseee
iits
tsjtsts
i
iii
+=
== +
Cada polo si influye en con su parte real e imaginaria en la rpidez con queoscila y con la que se atena la respuesta al impulso:
Trmino que se anula en la expresin de h(t) por que los polos de H(s) aparecen por pares conjugados
La parte real del polo es negativa para un filtro estable, por eso la exponencial atena
-
Pgina 16
LSCM-331
Ejercicio 3.1: p31a, p31b. Convolucin de seales- Convolucin lineal y mediante FFT- Convoluciones reiteradas de pulso con vector rectangular- Funciones de Matlab: conv, fft, ifft; whitebg
Ejercicio 3.2: p32. Resp. en frecuencia de filtros discretos- Entrada: datos del filtro (n, wc , c , a)- Resultados: estabilidad, diagrama polos-zero, rizado, ...- Funciones de Matlab: abs, arg, grpdelay, zplane, freqz- Diseo de filtros: butter, cheby1, cheby2, ellip- Herramienta de Matlab: fdatool- Signal Processing (y Filter Design) Toolbox (filtros, transformadas, enventanado, ...)
EJERCICIOS (I)
LSCM-332
Interfazgrficade
fdatool
EJERCICIOS (II)
-
Pgina 17
LSCM-333
Limitaciones:- Intervalo temporal finito: ventana de observacin. Debe ser mayor que el transitorio del filtro.- Ruido de clculo.
N longitud de h(n)>
EJERCICIOS (III)Ejercicio 3.3: p33.p. Respuesta de un filtro a diferentes entradas- Datos del filtro: n, c , a ; wc depender de la seal de entrada- Resultados: seal filtrada, estudio espectros- Funciones de Matlab: filter, freqz, fftshift
LSCM-334
Ejercicio 3.4: p34. Resp. en frecuencia de filtros analgicos- Entrada: datos del filtro (n, wc , c , a)- Resultados: estabilidad, diagrama polos-zero, rizado, respuesta
al impulso, ...- Funciones de Matlab: zplane, freqs, impulse
EJERCICIOS (IV)