Optimización De Trayectorias Tipo Y Análisis De...
83
Optimización De Optimización De Trayectorias Tipo Y Trayectorias Tipo Y Análisis De Parámetros Análisis De Parámetros Del Vuelo Del Vuelo Peio Castellano Ugarte 44562425-V 1
Transcript of Optimización De Trayectorias Tipo Y Análisis De...

Optimización DeOptimización De Trayectorias Tipo YTrayectorias Tipo Y
Análisis De ParámetrosAnálisis De Parámetros Del VueloDel Vuelo
Peio Castellano Ugarte44562425-V
1

2

Índice de contenido
1. INTRODUCCIÓN............................................................................................................................7
1.1 Motivación.................................................................................................................................7
1.2 Objetivos....................................................................................................................................7
2. MÉTODO.........................................................................................................................................9
2.1 Presentación del problema.........................................................................................................9
2.2 Simplificaciones a trayectorias tipo...........................................................................................9
2.3 Trayectorias Tipo.....................................................................................................................122.3.1 Trayectoria tipo 1.............................................................................................................122.3.2 Trayectoria tipo 2.............................................................................................................17
2.4 Restricciones............................................................................................................................232.4.1 Restricciones comunes:....................................................................................................232.4.2 Restricciones particulares................................................................................................24
Trayectoria tipo 1.................................................................................................................25Trayectoria tipo 2.................................................................................................................25
2.4.3 Límites.............................................................................................................................26Trayectoria tipo 1:................................................................................................................26Trayectoria tipo 2.................................................................................................................27
2.5 Fmincon...................................................................................................................................292.5.1 Estructura del fmincon.....................................................................................................29
Actualización del Hessiano..................................................................................................29Subproblema QP...................................................................................................................30Método de line-search..........................................................................................................31
2.5.2 Aplicación de las restricciones.........................................................................................31Restricciones no lineales:.....................................................................................................31Restricciones lineales...........................................................................................................33
2.5.3 Obtención del mínimo......................................................................................................33
3. ANÁLISIS......................................................................................................................................37
3.1 Crucero.....................................................................................................................................373.1.1 Trayectoria tipo 1.............................................................................................................37
Análisis de resultados...........................................................................................................44
3
Diferencias entre los valores:...............................................................................................45Evolución de las variables....................................................................................................46Hessiano en diferentes puntos..............................................................................................47Análisis.................................................................................................................................47Valores para el análisis.........................................................................................................49
3.1.2 Trayectoria tipo 2.............................................................................................................50
3.2 Análisis del CI..........................................................................................................................523.2.1 Método de continuación...................................................................................................52
Aplicación del método..........................................................................................................52Problemas del método de continuación................................................................................53Mejora del método................................................................................................................54
3.2.3 Resultados........................................................................................................................54
3.3 Influencia del peso inicial........................................................................................................64
4. CONCLUSIONES..........................................................................................................................69
A: Nomenclatura................................................................................................................................71
B: Cálculo del Hessiano.....................................................................................................................73
C: Ecuaciones.....................................................................................................................................75
C.1 Cálculo del techo máximo.......................................................................................................78
D: Modelo Aeronave..........................................................................................................................81
D.1 Modelo aerodinámico.............................................................................................................81
D.2 Modelo propulsivo..................................................................................................................82
Bibliografía.........................................................................................................................................83
4
Índice de figuras[Fig. 1]: Trayectoria tipo 1..................................................................................................................12[Fig. 2]: Ascenso en la trayectoria tipo 1............................................................................................14[Fig. 3]: Crucero en la trayectoria tipo 1............................................................................................15[Fig. 4]: Descenso en la trayectoria tipo 1..........................................................................................16[Fig. 5]: Trayectoria tipo 2..................................................................................................................17[Fig. 6]: Ascenso en la trayectoria tipo 2............................................................................................19[Fig. 7]: Crucero en la trayectoria tipo 2............................................................................................19[Fig. 8]: Descenso en la trayectoria tipo 2..........................................................................................21[Fig. 9]: Relación TAS/CAS/M..........................................................................................................24[Fig. 10]: Consumo de combustible para distintas etapas y condiciones iniciales.............................38[Fig. 11]: Evolución CAS ascenso con el numero de etapas de crucero............................................39[Fig. 12]: Evolución Mach ascenso con el numero de etapas de crucero...........................................39[Fig. 13]: Evolución Mach de crucero con el numero de etapas de crucero......................................40[Fig. 14]: Evolución Mach de descenso con el numero de etapas de crucero....................................40[Fig. 15]: Evolución CAS descenso con el numero de etapas de crucero..........................................41[Fig. 16]: Evolución de las altitudes de crucero para 3, 4, 5 y 6 etapas de crucero...........................42[Fig. 17]: Evolución de las altitudes de crucero para 7 y 8 etapas de crucero...................................43[Fig. 18] Evolución del consumo con el número de etapas................................................................44[Fig. 19]: Efecto del CAS de ascenso y del Mach de descenso sobre la función objetivo.................48[Fig. 20]: Evolución de la función objetivo con el CI........................................................................54[Fig. 21]: Evolución del CAS de ascenso con el CI...........................................................................56[Fig. 22]: Evolución de los distintos Mach con el CI.........................................................................57[Fig. 23]: Evolución de las altitudes de crucero con el CI.................................................................58[Fig. 24]: Evolución de las distancias de crucero con el CI...............................................................59[Fig. 25]: Evolución del CAS de descenso con el CI.........................................................................59[Fig. 26]: Tiempo de vuelo con el CI.................................................................................................60[Fig. 27]: Altitud de transición de ascenso con el CI.........................................................................61[Fig. 28]: Altitud de transición de descenso con el CI.......................................................................61[Fig, 29]: Evolución de la trayectoria conforme varía el CI...............................................................62[Fig. 30]: Detalle de fin de ascenso....................................................................................................62[Fig. 31]: Detalle inicio de descenso..................................................................................................63[Fig. 32]: Evolución del consumo de combustible con el peso inicial...............................................64[Fig. 33]: Evolución de los números de Mach con el peso inicial.....................................................65[Fig. 34]: Evolución de los CAS con el peso inicial..........................................................................66
5

[Fig. 35]: Evolución de las altitudes de crucero con el peso..............................................................66[Fig. 36]: Evolución de las distancias con el peso inicial...................................................................67[Fig. C.1] : Altitud máxima en función del Mach y del consumo......................................................79
6
1. INTRODUCCIÓN
1.1 MotivaciónEl exceso de aeronaves y el consumo de combustible de estas ha llevado a un aumento de los costes de vuelo (debido a tanto el aumento del precio del combustible como al gasto de tiempo). Debido a esto, y para abaratar costes, se ha propuesto por NextGen y por SESAR el concepto de “Trajecory Based Operations” (TBO, operaciones basadas en trayectorias).Para poder llevarse a cabo este concepto (TBO), en primer lugar han de optimizarse las trayectorias propias de cada aeronave y tratar de obtener el consumo mínimo del vuelo en función de los diferentes parámetros.El problema a la hora de realizar este tipo de análisis es el optimizar trayectorias sujetas a ligaduras. Para poder realizarlo en una primera aproximación, se simplifica el modelo a uno más sencillo (con un mucho menor número de grados de libertad) y se simplifica la trayectoria asumiéndola como una trayectoria tipo (en donde se pueden imponer ciertas ligaduras con un valor constante). En este caso, se han considerado dos trayectorias tipo, descritos en el apartado 2.3. Gracias a esto, se puede reformular el problema de trayectorias con ligaduras en un problema de optimización multivariable sujeto a ligaduras.
1.2 ObjetivosLos objetivos principales del siguiente análisis sujeto a una aeronave predefinida (B767-300ER) son:
• Optimizar teniendo en cuenta una combinación entre el combustible y el tiempo, relacionando ambas variables por un parámetro llamado CI, que sirve para marcar una relación de peso entre el combustible y el tiempo.
• Dentro de los parámetros que pueden afectar a la función objetivo, los dos parámetros principales a analizar son el peso y el CI. Con dichos parámetros se pueden similar dos de las variables que cambian de un vuelo a otro; el efecto del peso (dependiente de la carga) y el CI (dependiente de las aerolíneas y de la densidad del tráfico).
Para poder llevar a cabo los objetivos anteriormente citados, el análisis debe realizarse siguiendo los siguientes pasos:
• Establecer las diferentes condiciones (lineales, no lineales y de contorno) para permitir un análisis del coste de la función objetivo.
• Optimizar las distintas trayectorias para obtener el consumo mínimo de cada una de ellas.
• Analizar las etapas de crucero y determinar el numero de etapas de crucero necesarias para simular, sin un excesivo error, un “cruise climb” (crucero en el que las altitudes varían constantemente).
• Realizar un análisis del vuelo teniendo en cuenta los diferentes parámetros a variar (peso y CI).
7

8
2. MÉTODO
2.1 Presentación del problemaComo se ha mostrado anteriormente, el problema a realizar es un análisis de “Cost Index” (CI) para un vuelo entre dos puntos. La aeronave con la que se plantea el problema es un Boeing 767-300ER. El procedimiento para poder realizar este análisis consiste en realizar diferentes simplificaciones y pasos intermedios que permiten llegar a un problema final a solucionar.Inicialmente, se realizan distintas simplificaciones y se utiliza el modelo de ecuaciones más adelante descrito (junto al Apéndice C). Una vez simplificadas estas ecuaciones mediante distintas consideraciones posteriormente explicadas; se pasa a un modelo de trayectorias tipo creadas a partir de la unión de distintos segmentos de vuelo. Dicha simplificación se realiza para simplificar el problema; ya que resulta mucho más sencillo la aplicación de las ligaduras a cada uno de los segmentos que establecer unas leyes de vuelo para la trayectoria global. En dicho análisis se proponen dos distintas trayectorias tipo; cada una de ellas con diferentes variables que las conformanA continuación; y antes de realizar un análisis de optimización (llevado a cabo mediante el algoritmo fmincon); se deben aplicar las distintas restricciones y condiciones que deben cumplirse para que el vuelo corresponda con una realidad física.Finalmente, el último paso antes de poder realizar un análisis del CI consiste en determinar en número de etapas de crucero necesarias para poder simular un “cruise climb” mediante un “stepped cruise climb” (más detallado a continuación) de la mejor manera posible, tratando de mantener un resultado cercano al “cruise climb” con el menor número de etapas de crucero posibles. Una vez realizado este paso, tan solo queda ver la trayectoria tipo de menor consumo y conducir el análisis del CI.
2.2 Simplificaciones a trayectorias tipoPara poder realizar el análisis se deben obtener primeramente las ecuaciones del movimiento de la aeronave. Las ecuaciones son las correspondientes a la mecánica del vuelo. Estas ecuaciones son las obtenidas mediante el uso de la segunda ley de Newton y la definición de velocidad [apéndice C]. Para simplificar el problema se tomarán en cuenta las siguientes simplificaciones:
– Aeronave: Se considera el avión (Boeing 767-300ER) como una masa puntual. También se considera el avión como un cuerpo rígido (sin tener en cuenta las deformaciones). De esta forma no se analiza el problema aeroelástico. Teniendo en cuenta esto, se reduce todo el problema al movimiento del centro de masas.Además, se considera que la aeronave es simétrica (en el plano vertical), como sucede para la gran mayoría de las aeronaves.
– Fuerzas inerciales causadas por la tierra, coriolis y centrífuga: Dichas fuerzas se consideran insignificantes (ordenes de magnitud inferior) en comparación con el resto de fuerzas. Esto es valido ya que el avión vuela a una velocidad subsónica y la distancia recorrida no es lo suficiente como para verse afectada por la rotación terrestre (es del mismo orden del radio de la tierra).
– Motor: Para los cálculos realizados se ha considerado que la dirección del empuje es siempre en la dirección de la velocidad. Por ello, los ángulos que fijan la dirección del
9

vector del empuje ε y ν [apéndice A] serán nulas (ε = 0; ν = 0).
– Modelo tierra: El trajectory considera un modelo de tierra genérico pudiendo tener en cuenta el efecto de esfericidad de la tierra. Sin embargo, por simplificar los cálculos se ha considerado un modelo de tierra plana.
– Gravedad: se considera que el efecto de la gravedad es constante y no varía con la altitud. Esto es válido ya que la altura de vuelo no sufre grandes variaciones. De hecho, dicha altura siempre se encuentra variando entre un límite inferior de 10000 pies (3048 metros) y siendo siempre inferior a 15 km. Se toma como módulo del vector gravedad el valor de la gravedad a nivel de mar g0.
Con estas simplificaciones, las ecuaciones de la mecánica del vuelo se pueden expresar de la siguiente forma:
Ec. 1
Siendo: L, μ y el empuje T funciones independientes de las variables a integrar (ángulo de ataque, palanca del motor y μ). Para poder resolver el problema habrá que imponer lo que se conocen como ligaduras, “flight constraints” (3) para cerrar el problema. El sistema matemático a resolver se conoce con el nombre de DAE (Differential Algebraic Equations - ecuaciones algebraicas diferenciales-).Al ser ambos problemas de vuelo a optimizar vuelo realizados tan sólo en el plano vertical, las ecuaciones se simplifican al estar el rumbo prefijado con la ligadura: χ = χA. Introduciendo esta ligadura las ecuaciones se simplifican como se puede observar el conjunto de ecuaciones de a continuación [ec. 2]. Cabe destacar que al estar el rumbo fijado, resulta de mayor interés conocer la distancia recorrida en lugar de la latitud y de la longitud.
10
REh d d t
=V cos cos
REhcos d d t
=V cos sin
d hd t =V sin
m d Vd t
=T−D−m g sin
mV cos d d t
=L sin
m V d d t
=L cos−m g cos
d md t
=−c

Ec. 2
Teniendo ya definida una ligadura, tan sólo es necesario el implementar las dos restantes para la resolución del problema. Como se ha expresado anteriormente, la resolución de las DAE resulta muy costosa. Por ello, se realiza otra simplificación que consiste en separar el vuelo en una unión de distintos tramos en donde se realiza el vuelo con las dos condiciones de vuelo (ligaduras) restantes fijas. Esto permite una resolución del problema mucho más sencilla y menos costosa, que resulta muy valida para una primera aproximación.Para ello se ha procedido a separar el vuelo en distintos tramos o segmentos. El vuelo completo constara de la unión de varios segmentos. Esto conllevará a que existan discontinuidades (saltos bruscos) en γ. Dichas discontinuidades son insignificantes en comparación con la trayectoria completa y apenas afectan al resultado final. En este caso se han tomado dos trayectorias tipo (formadas cada una por distintos segmentos); para tratar de simular las dos trayectorias mencionadas anteriormente que podría realizar la aeronave.El análisis final de cada trayectoria se realizara como una suma de todos los segmentos que la componen. Las condiciones de parada en el análisis de cada segmento están determinadas por las condiciones iniciales del siguiente segmento, así todos los segmentos pueden ser unidos. Para el análisis de cada uno de los segmentos se utilizara una herramienta escrita en MatLab llamada Trajectory.El funcionamiento básico del Trajectory es aplicar para cada uno de los distintos segmentos las tres ligaduras de cada segmento a cada una de las ecuaciones expresadas anteriormente [ec. 2]. Además, se imponen las condiciones iniciales de cada uno de los segmentos (que son las condiciones finales del tramo anterior o, en caso de que se trate del primer tramo, las condiciones iniciales del problema), junto con la condición de parada de cada segmento.De esta forma se obtiene un sistema de ecuaciones diferenciales ordinarias (ODE) para cada uno de los segmentos; problema de menor complejidad que se resuelve hasta alcanzar las condiciones de parada impuestas.Finalmente, se agregan sumar los segmentos y se considera como la solución del problema (consumo de combustible) la diferencia entre la masa al inicio de la trayectoria y la masa al finalizar el último segmento.
11
d rd t
=V cosRE
REh≃V cos
d hd t
=V sin
m d Vd t
=T−D−m g0 sin
mV d d t
=L−m g0 cos
d md t
=−c

2.3 Trayectorias TipoLas dos trayectorias tipo a analizar son una de ascenso CAS/Mach seguido de un crucero escalonado (“stepped cruise climb”) y de un descenso Mach/CAS y otra de un ascenso a velocidad vertical (“Rate of Climb”) constante en tres etapas seguido de un crucero escalonado (“stepped cruise climb”) para finalizar en un descenso a “Rate of Descent” (“Rate of Climb” negativo) constante en tres fases. Ambas trayectorias comienzan a 10000 pies y CAS de 250 nudos (3048 m y TAS de 148.5213 m/s).
2.3.1 Trayectoria tipo 1Como se puede observar en la gráfica a continuación [fig. 1], la trayectoria 1 está formada por distintos segmentos, habiendo que definir en cada uno de los tramos las diferentes ligaduras (flight constraints) que permiten convertir el sistema de DAE's en un sistema de ecuaciones diferenciales de primer orden. Cabe destacar que al tratarse de un vuelo en el plano vertical, el rumbo es siempre constante. De esta forma se tiene determinada la primera ligadura para todos los tramos.
Esta trayectoria, al igual que la segunda trayectoria tipo, puede ser dividida en tres tramos (ascenso, crucero y descenso). En esta trayectoria tenemos un tramo de ascenso realizado de forma a CAS/Mach, vuelo de crucero en un modo conocido como “stepped cruise climb” y un tramo de descenso, también construido a modo de Mach/CAS. A su vez cada tramo contiene diferentes segmentos que servirán de nexo entre los diferentes tramos. Cada tramo está subdividido en distintos segmentos donde se impondrán las diferentes ligaduras. Al final de cada tramo se adjuntan diferentes figuras [fig. 2], [fig. 3] y [fig. 4] para facilitar la explicación. En dichas figuras, también se establecen las ligaduras introducidas para cada uno de los segmentos.
12
Figura 1: Trayectoria 1
0 1 2 3 4 5 6 7 8 9 1 0
x 1 06
3 0 0 0
4 0 0 0
5 0 0 0
6 0 0 0
7 0 0 0
8 0 0 0
9 0 0 0
1 0 0 0 0
1 1 0 0 0
d i s t a n c i a r e c o r r i d a [ m ]
altu
ra [
m]
t r a m o d e a s c e n s o
t r a m o s c r u c e r o
t r a m o d e d e s c e n s o

• Ascenso: El tramo de ascenso está compuesto por cuatro segmentos distintos:
◦ Aceleración horizontal desde la velocidad inicial (250 nudos) hasta la velocidad a la que se realiza el siguiente tramo, que a partir de ahora será conocida como CAS de ascenso (o simplemente CASA). Este vuelo se realizará a altitud constante y a un rating de motor de MCLB (Maximum Climb Rating). De esta forma las dos ligaduras restantes serán que la altitud se mantiene constante y el motor se mantiene a un rating de MCLB. La condición de parada vendrá dada cuando se alcance un CASA.
◦ Ascenso a CAS constante. Esta es la primera parte de lo que se podría considerar como ascenso propiamente dicho. Esta parte se realiza a un CAS constante (CASA) y a motor constante. Por lo tanto, las ligaduras correspondientes a este tramo serán el CAS, que permanecerá constante y el rating de motor, que como en el tramo anterior se mantendrá constante en MCLB. La condición de parada para este segmento será cuando se alcance un Mach correspondiente al utilizado en el siguiente tramo.
◦ Acenso a Mach constante. Como su propio nombre indica, se trata de un vuelo a Mach constante, denominado a partir de ahora como MA. Esta podría considerarse como la segunda parte del ascenso. Este segmento, como los anteriores, también se realiza con un rating de motor constante a MCLB. La ligadura restante está relacionada con la velocidad, al imponer que el Mach se mantenga constante. El cálculo de las variables se realizará hasta alcanzar una altitud que corresponde a la primera altitud en los tramos de crucero, dato que se detallará a continuación.
◦ Adaptación del Mach. Este segmento es un segmento de nexo entre el ascenso y el tramo de crucero. La intención de este segmento es adaptar el Mach usado para el ascenso (MA) al Mach en que se realizará el crucero (detalles a continuación). Dicho tramo se realiza a altitud constante, correspondiente a la primera altitud de crucero. La otra ligadura dependerá de la relación entre los números de Mach. Si el Mach de ascenso es inferior al Mach en que se realiza el crucero, las condiciones de motor constante serán de MCLB, lo que se traduce a una aceleración. Si por contra, el MA es superior al Mach de crucero, la condición de motor constante será de IDLE, llevando a una deceleración. La parada de la integración se realizará una vez se alcance el Mach de crucero.
13
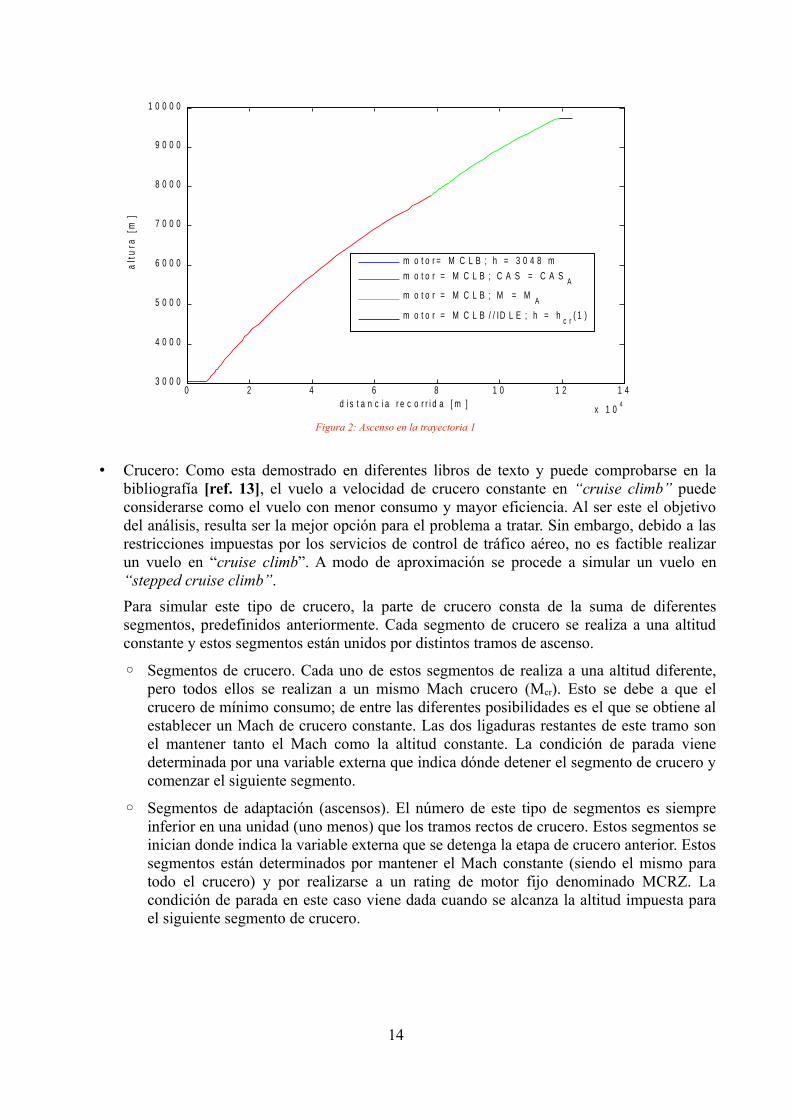
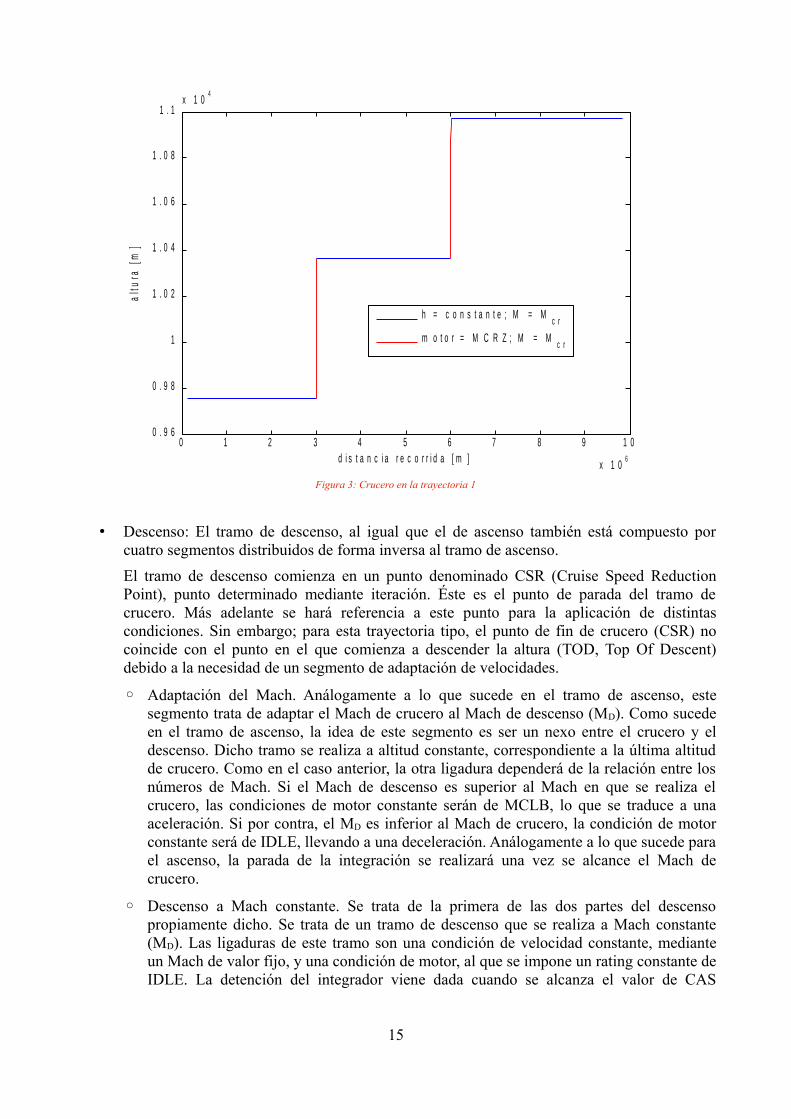
• Crucero: Como esta demostrado en diferentes libros de texto y puede comprobarse en la bibliografía [ref. 13], el vuelo a velocidad de crucero constante en “cruise climb” puede considerarse como el vuelo con menor consumo y mayor eficiencia. Al ser este el objetivo del análisis, resulta ser la mejor opción para el problema a tratar. Sin embargo, debido a las restricciones impuestas por los servicios de control de tráfico aéreo, no es factible realizar un vuelo en “cruise climb”. A modo de aproximación se procede a simular un vuelo en “stepped cruise climb”.Para simular este tipo de crucero, la parte de crucero consta de la suma de diferentes segmentos, predefinidos anteriormente. Cada segmento de crucero se realiza a una altitud constante y estos segmentos están unidos por distintos tramos de ascenso.
◦ Segmentos de crucero. Cada uno de estos segmentos de realiza a una altitud diferente, pero todos ellos se realizan a un mismo Mach crucero (Mcr). Esto se debe a que el crucero de mínimo consumo; de entre las diferentes posibilidades es el que se obtiene al establecer un Mach de crucero constante. Las dos ligaduras restantes de este tramo son el mantener tanto el Mach como la altitud constante. La condición de parada viene determinada por una variable externa que indica dónde detener el segmento de crucero y comenzar el siguiente segmento.
◦ Segmentos de adaptación (ascensos). El número de este tipo de segmentos es siempre inferior en una unidad (uno menos) que los tramos rectos de crucero. Estos segmentos se inician donde indica la variable externa que se detenga la etapa de crucero anterior. Estos segmentos están determinados por mantener el Mach constante (siendo el mismo para todo el crucero) y por realizarse a un rating de motor fijo denominado MCRZ. La condición de parada en este caso viene dada cuando se alcanza la altitud impuesta para el siguiente segmento de crucero.
14
Figura 2: Ascenso en la trayectoria 1
0 2 4 6 8 1 0 1 2 1 4
x 1 04
3 0 0 0
4 0 0 0
5 0 0 0
6 0 0 0
7 0 0 0
8 0 0 0
9 0 0 0
1 0 0 0 0
d i s t a n c i a r e c o r r i d a [ m ]
alt
ura
[m
]
m o t o r = M C L B ; h = 3 0 4 8 m
m o t o r = M C L B ; C A S = C A SA
m o t o r = M C L B ; M = MA
m o t o r = M C L B / / ID L E ; h = hc r
( 1 )
• Descenso: El tramo de descenso, al igual que el de ascenso también está compuesto por cuatro segmentos distribuidos de forma inversa al tramo de ascenso.El tramo de descenso comienza en un punto denominado CSR (Cruise Speed Reduction Point), punto determinado mediante iteración. Éste es el punto de parada del tramo de crucero. Más adelante se hará referencia a este punto para la aplicación de distintas condiciones. Sin embargo; para esta trayectoria tipo, el punto de fin de crucero (CSR) no coincide con el punto en el que comienza a descender la altura (TOD, Top Of Descent) debido a la necesidad de un segmento de adaptación de velocidades.
◦ Adaptación del Mach. Análogamente a lo que sucede en el tramo de ascenso, este segmento trata de adaptar el Mach de crucero al Mach de descenso (MD). Como sucede en el tramo de ascenso, la idea de este segmento es ser un nexo entre el crucero y el descenso. Dicho tramo se realiza a altitud constante, correspondiente a la última altitud de crucero. Como en el caso anterior, la otra ligadura dependerá de la relación entre los números de Mach. Si el Mach de descenso es superior al Mach en que se realiza el crucero, las condiciones de motor constante serán de MCLB, lo que se traduce a una aceleración. Si por contra, el MD es inferior al Mach de crucero, la condición de motor constante será de IDLE, llevando a una deceleración. Análogamente a lo que sucede para el ascenso, la parada de la integración se realizará una vez se alcance el Mach de crucero.
◦ Descenso a Mach constante. Se trata de la primera de las dos partes del descenso propiamente dicho. Se trata de un tramo de descenso que se realiza a Mach constante (MD). Las ligaduras de este tramo son una condición de velocidad constante, mediante un Mach de valor fijo, y una condición de motor, al que se impone un rating constante de IDLE. La detención del integrador viene dada cuando se alcanza el valor de CAS
15
Figura 3: Crucero en la trayectoria 1
0 1 2 3 4 5 6 7 8 9 1 0
x 1 06
0 . 9 6
0 . 9 8
1
1 . 0 2
1 . 0 4
1 . 0 6
1 . 0 8
1 . 1x 1 0
4
d i s t a n c i a r e c o r r i d a [ m ]
alt
ura
[m
]
h = c o n s t a n t e ; M = Mc r
m o t o r = M C R Z ; M = Mc r
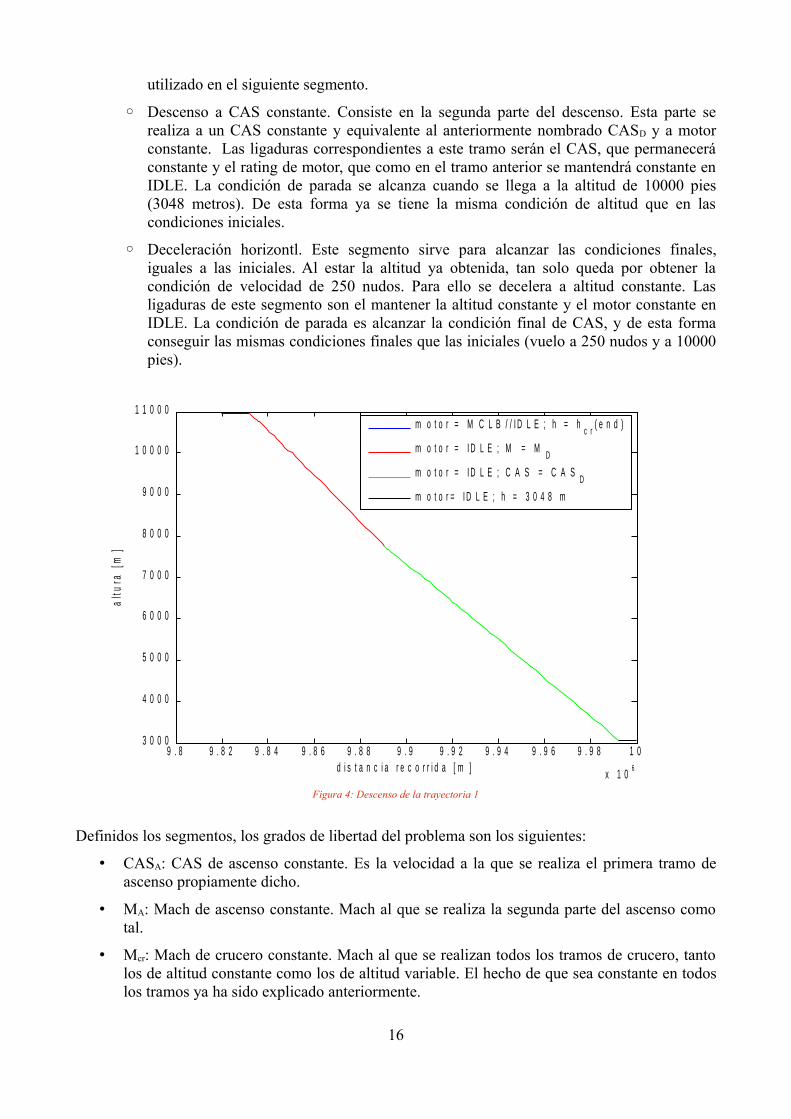
utilizado en el siguiente segmento.
◦ Descenso a CAS constante. Consiste en la segunda parte del descenso. Esta parte se realiza a un CAS constante y equivalente al anteriormente nombrado CASD y a motor constante. Las ligaduras correspondientes a este tramo serán el CAS, que permanecerá constante y el rating de motor, que como en el tramo anterior se mantendrá constante en IDLE. La condición de parada se alcanza cuando se llega a la altitud de 10000 pies (3048 metros). De esta forma ya se tiene la misma condición de altitud que en las condiciones iniciales.
◦ Deceleración horizontl. Este segmento sirve para alcanzar las condiciones finales, iguales a las iniciales. Al estar la altitud ya obtenida, tan solo queda por obtener la condición de velocidad de 250 nudos. Para ello se decelera a altitud constante. Las ligaduras de este segmento son el mantener la altitud constante y el motor constante en IDLE. La condición de parada es alcanzar la condición final de CAS, y de esta forma conseguir las mismas condiciones finales que las iniciales (vuelo a 250 nudos y a 10000 pies).
Definidos los segmentos, los grados de libertad del problema son los siguientes:
• CASA: CAS de ascenso constante. Es la velocidad a la que se realiza el primera tramo de ascenso propiamente dicho.
• MA: Mach de ascenso constante. Mach al que se realiza la segunda parte del ascenso como tal.
• Mcr: Mach de crucero constante. Mach al que se realizan todos los tramos de crucero, tanto los de altitud constante como los de altitud variable. El hecho de que sea constante en todos los tramos ya ha sido explicado anteriormente.
16
Figura 4: Descenso de la trayectoria 1
9 . 8 9 . 8 2 9 . 8 4 9 . 8 6 9 . 8 8 9 . 9 9 . 9 2 9 . 9 4 9 . 9 6 9 . 9 8 1 0
x 1 06
3 0 0 0
4 0 0 0
5 0 0 0
6 0 0 0
7 0 0 0
8 0 0 0
9 0 0 0
1 0 0 0 0
1 1 0 0 0
d i s t a n c i a r e c o r r i d a [ m ]
alt
ura
[m
]
m o t o r = M C L B / / I D L E ; h = h
c r( e n d )
m o t o r = I D L E ; M = MD
m o t o r = I D L E ; C A S = C A SD
m o t o r = I D L E ; h = 3 0 4 8 m
• hcri: Se trata de la altura de crucero constante correspondiente al tramo “i” de crucero. Habrá tantos valores de altura hcri como etapas tenga el crucero. En el caso del ejemplo (de 3 etapas de crucero) habrá los valores hcr1, hcr2 y hcr3 correspondiente cada uno al primer, segundo y tercer tramo de crucero respectivamente.
• rcri: Se trata de la distancia a la que se interrumpe la evolución a altura constante del segmento “i” de crucero. Habrá tantos valores de rcri como etapas de crucero menos una. En el caso del ejemplo (de 3 etapas de crucero) habrá los valores de rcr1 y rcr2 correspondientes a las condiciones de parada del primer y del segundo tramo de crucero respectivamente.
• MD: Mach de descenso constante. Mach al que se realiza la primera parte del descenso como tal.
• CASD: CAS de descenso constante. Es la velocidad a la que se realiza el segundo segmento de descenso propiamente dicho.
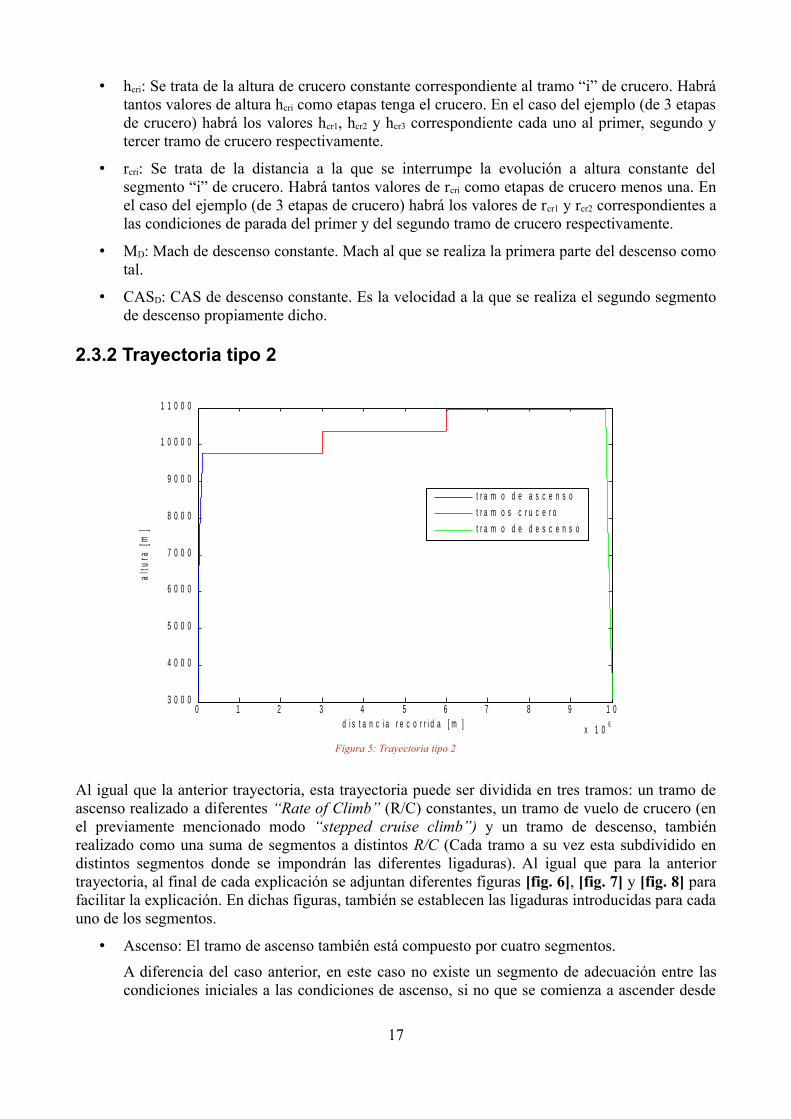
2.3.2 Trayectoria tipo 2
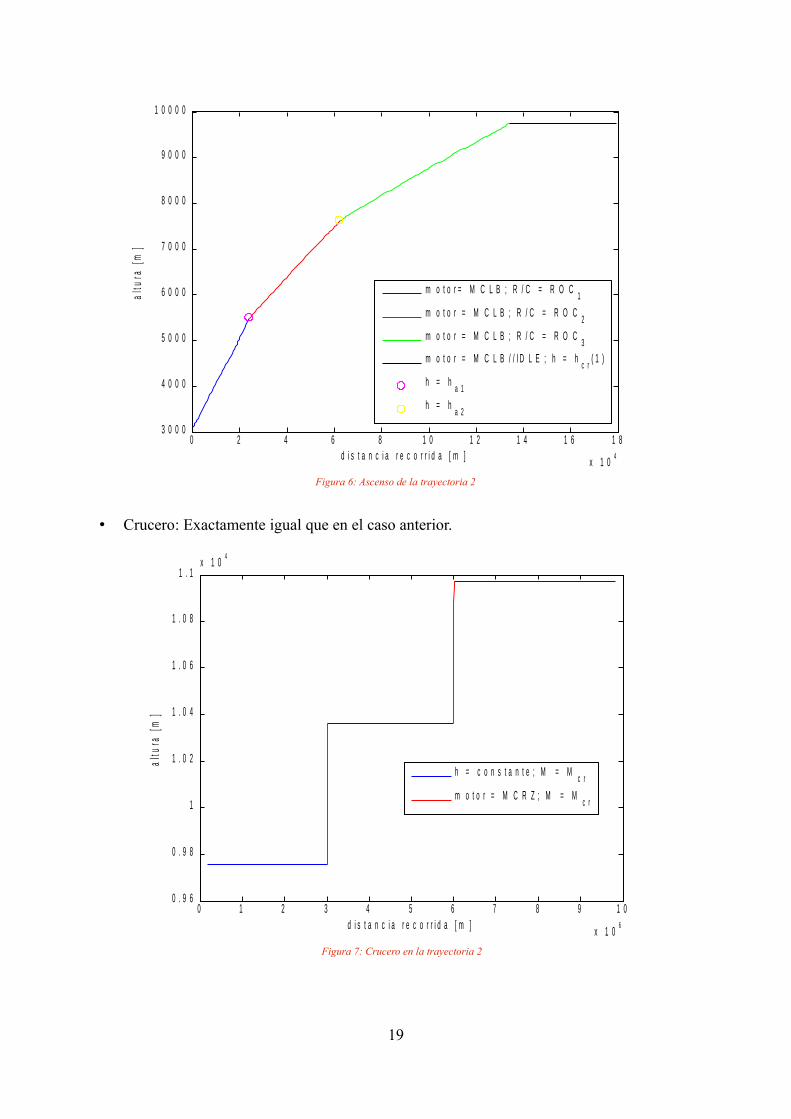
Al igual que la anterior trayectoria, esta trayectoria puede ser dividida en tres tramos: un tramo de ascenso realizado a diferentes “Rate of Climb” (R/C) constantes, un tramo de vuelo de crucero (en el previamente mencionado modo “stepped cruise climb”) y un tramo de descenso, también realizado como una suma de segmentos a distintos R/C (Cada tramo a su vez esta subdividido en distintos segmentos donde se impondrán las diferentes ligaduras). Al igual que para la anterior trayectoria, al final de cada explicación se adjuntan diferentes figuras [fig. 6], [fig. 7] y [fig. 8] para facilitar la explicación. En dichas figuras, también se establecen las ligaduras introducidas para cada uno de los segmentos.
• Ascenso: El tramo de ascenso también está compuesto por cuatro segmentos.A diferencia del caso anterior, en este caso no existe un segmento de adecuación entre las condiciones iniciales a las condiciones de ascenso, si no que se comienza a ascender desde
17
Figura 5: Trayectoria tipo 2
0 1 2 3 4 5 6 7 8 9 1 0
x 1 06
3 0 0 0
4 0 0 0
5 0 0 0
6 0 0 0
7 0 0 0
8 0 0 0
9 0 0 0
1 0 0 0 0
1 1 0 0 0
d i s t a n c i a r e c o r r i d a [ m ]
alt
ura
[m
]
t r a m o d e a s c e n s o
t r a m o s c r u c e r o
t r a m o d e d e s c e n s o

el primer momento. Los diferentes segmentos en este tramo son los siguientes:
◦ Primer segmento de ascenso a R/C constante: Como su propio nombre indica, en este segmento se asciende manteniendo constante la variable R/C. El valor de este R/C de vuelo constante se define ROC1. Teniendo de esta forma una de las dos ligaduras requeridas ya definida (como una velocidad), tan solo queda una ligadura por definir. La ligadura restante se impone al fijar el rating de motor constante en la configuración de 'MCLB'. La condición de parada para finalizar la integración en este segmento es una altitud a la que se finaliza el segmento, ha1.
◦ Segundo segmento de ascenso a R/C constante: Segmento de ascenso análogo al anterior con las mismas ligaduras. Sin embargo, el valor constante de R/C en este caso es ROC2. La condición de parada sigue siendo una altitud, siendo en este caso ha2.
◦ Tercer segmento de ascenso a R/C constante: Último segmento de ascenso a R/C constante, manteniendo el rating de motor 'MCLB' y manteniendo una altitud como condición de parada. En este caso, el R/C constante es ROC3 y la altitud para la parada es la altitud correspondiente a la primera etapa del crucero.
◦ Adaptación de la velocidad: Tal y como sucede en la trayectoria anterior, es posible que la velocidad a la que se finaliza el último segmento de ascenso real no coincida con la velocidad a la que se realiza el crucero. Para acomodar estas dos velocidades se dispone de un segmento a modo de nexo para adaptar estas dos velocidades. Dicho segmento se realiza a altitud constante, correspondiente a la primera altitud de crucero (la altitud final de ascenso). La otra ligadura dependerá de la relación entre los números de Mach. Si el Mach al finalizar el ascenso es inferior al Mach en que se realiza el crucero, las condiciones de motor constante serán de MCLB, lo que se traduce a una aceleración. Si, por contra, este Mach al final del descenso es superior al Mach de crucero, la condición de motor constante será de IDLE, llevando a una deceleración. La parada de la integración se realizará una vez se alcance el Mach de crucero.
18
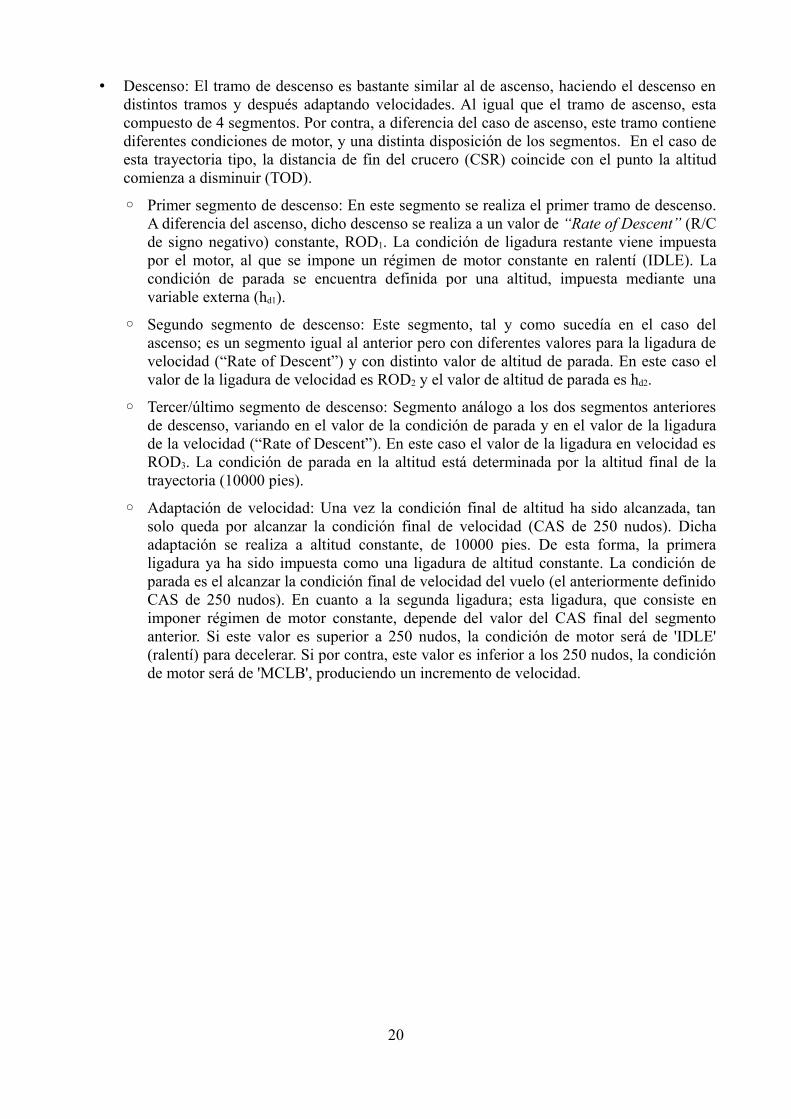
• Crucero: Exactamente igual que en el caso anterior.
19
Figura 6: Ascenso de la trayectoria 2
0 2 4 6 8 1 0 1 2 1 4 1 6 1 8
x 1 04
3 0 0 0
4 0 0 0
5 0 0 0
6 0 0 0
7 0 0 0
8 0 0 0
9 0 0 0
1 0 0 0 0
d i s t a n c i a r e c o r r i d a [ m ]
altu
ra [
m]
m o t o r = M C L B ; R / C = R O C1
m o t o r = M C L B ; R / C = R O C2
m o t o r = M C L B ; R / C = R O C3
m o t o r = M C L B / / I D L E ; h = hc r
( 1 )
h = ha 1
h = ha 2
Figura 7: Crucero en la trayectoria 2
0 1 2 3 4 5 6 7 8 9 1 0
x 1 06
0 . 9 6
0 . 9 8
1
1 . 0 2
1 . 0 4
1 . 0 6
1 . 0 8
1 . 1x 1 0
4
d i s t a n c i a r e c o r r i d a [ m ]
altu
ra [
m]
h = c o n s t a n t e ; M = Mc r
m o t o r = M C R Z ; M = Mc r
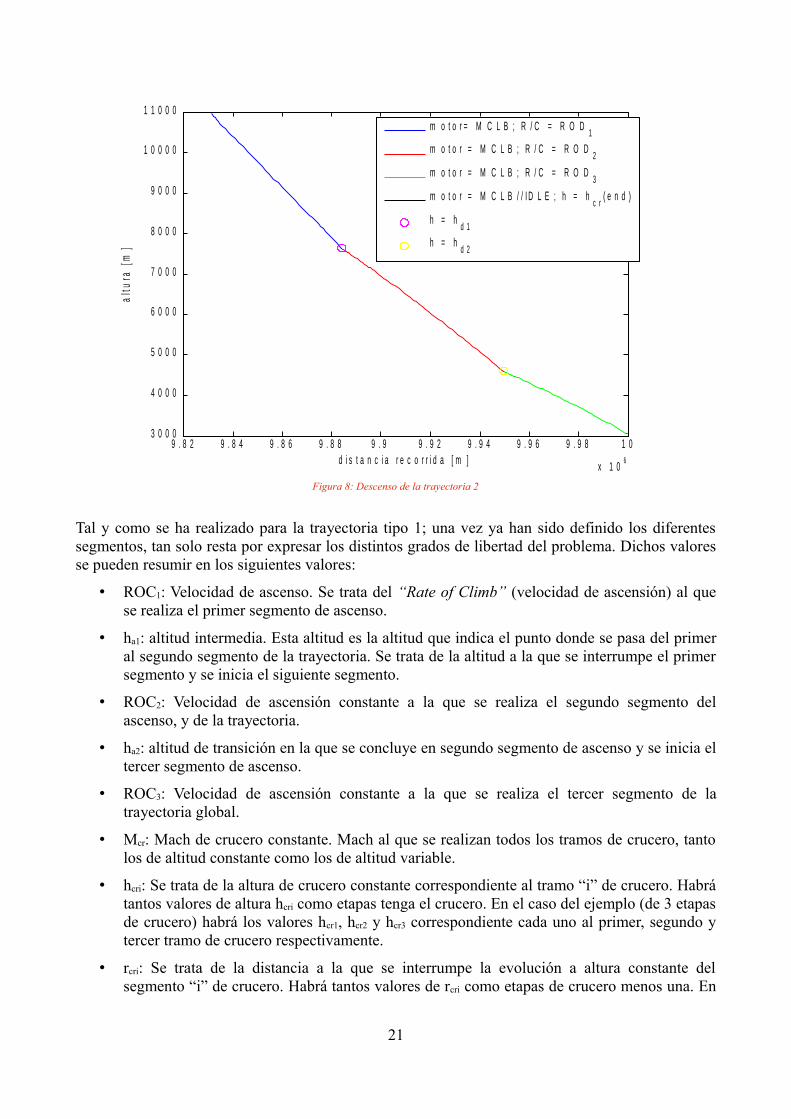
• Descenso: El tramo de descenso es bastante similar al de ascenso, haciendo el descenso en distintos tramos y después adaptando velocidades. Al igual que el tramo de ascenso, esta compuesto de 4 segmentos. Por contra, a diferencia del caso de ascenso, este tramo contiene diferentes condiciones de motor, y una distinta disposición de los segmentos. En el caso de esta trayectoria tipo, la distancia de fin del crucero (CSR) coincide con el punto la altitud comienza a disminuir (TOD).
◦ Primer segmento de descenso: En este segmento se realiza el primer tramo de descenso. A diferencia del ascenso, dicho descenso se realiza a un valor de “Rate of Descent” (R/C de signo negativo) constante, ROD1. La condición de ligadura restante viene impuesta por el motor, al que se impone un régimen de motor constante en ralentí (IDLE). La condición de parada se encuentra definida por una altitud, impuesta mediante una variable externa (hd1).
◦ Segundo segmento de descenso: Este segmento, tal y como sucedía en el caso del ascenso; es un segmento igual al anterior pero con diferentes valores para la ligadura de velocidad (“Rate of Descent”) y con distinto valor de altitud de parada. En este caso el valor de la ligadura de velocidad es ROD2 y el valor de altitud de parada es hd2.
◦ Tercer/último segmento de descenso: Segmento análogo a los dos segmentos anteriores de descenso, variando en el valor de la condición de parada y en el valor de la ligadura de la velocidad (“Rate of Descent”). En este caso el valor de la ligadura en velocidad es ROD3. La condición de parada en la altitud está determinada por la altitud final de la trayectoria (10000 pies).
◦ Adaptación de velocidad: Una vez la condición final de altitud ha sido alcanzada, tan solo queda por alcanzar la condición final de velocidad (CAS de 250 nudos). Dicha adaptación se realiza a altitud constante, de 10000 pies. De esta forma, la primera ligadura ya ha sido impuesta como una ligadura de altitud constante. La condición de parada es el alcanzar la condición final de velocidad del vuelo (el anteriormente definido CAS de 250 nudos). En cuanto a la segunda ligadura; esta ligadura, que consiste en imponer régimen de motor constante, depende del valor del CAS final del segmento anterior. Si este valor es superior a 250 nudos, la condición de motor será de 'IDLE' (ralentí) para decelerar. Si por contra, este valor es inferior a los 250 nudos, la condición de motor será de 'MCLB', produciendo un incremento de velocidad.
20
Tal y como se ha realizado para la trayectoria tipo 1; una vez ya han sido definido los diferentes segmentos, tan solo resta por expresar los distintos grados de libertad del problema. Dichos valores se pueden resumir en los siguientes valores:
• ROC1: Velocidad de ascenso. Se trata del “Rate of Climb” (velocidad de ascensión) al que se realiza el primer segmento de ascenso.
• ha1: altitud intermedia. Esta altitud es la altitud que indica el punto donde se pasa del primer al segundo segmento de la trayectoria. Se trata de la altitud a la que se interrumpe el primer segmento y se inicia el siguiente segmento.
• ROC2: Velocidad de ascensión constante a la que se realiza el segundo segmento del ascenso, y de la trayectoria.
• ha2: altitud de transición en la que se concluye en segundo segmento de ascenso y se inicia el tercer segmento de ascenso.
• ROC3: Velocidad de ascensión constante a la que se realiza el tercer segmento de la trayectoria global.
• Mcr: Mach de crucero constante. Mach al que se realizan todos los tramos de crucero, tanto los de altitud constante como los de altitud variable.
• hcri: Se trata de la altura de crucero constante correspondiente al tramo “i” de crucero. Habrá tantos valores de altura hcri como etapas tenga el crucero. En el caso del ejemplo (de 3 etapas de crucero) habrá los valores hcr1, hcr2 y hcr3 correspondiente cada uno al primer, segundo y tercer tramo de crucero respectivamente.
• rcri: Se trata de la distancia a la que se interrumpe la evolución a altura constante del segmento “i” de crucero. Habrá tantos valores de rcri como etapas de crucero menos una. En
21
Figura 8: Descenso de la trayectoria 2
9 . 8 2 9 . 8 4 9 . 8 6 9 . 8 8 9 . 9 9 . 9 2 9 . 9 4 9 . 9 6 9 . 9 8 1 0
x 1 06
3 0 0 0
4 0 0 0
5 0 0 0
6 0 0 0
7 0 0 0
8 0 0 0
9 0 0 0
1 0 0 0 0
1 1 0 0 0
d i s t a n c i a r e c o r r i d a [ m ]
alt
ura
[m
]
m o t o r = M C L B ; R / C = R O D
1
m o t o r = M C L B ; R / C = R O D2
m o t o r = M C L B ; R / C = R O D3
m o t o r = M C L B / / I D L E ; h = hc r
( e n d )
h = hd 1
h = hd 2
el caso del ejemplo (de 3 etapas de crucero) habrá los valores de rcr1 y rcr2 correspondientes a las condiciones de parada del primer y del segundo tramo de crucero respectivamente.
• ROD1: Velocidad de descenso. Se trata del “Rate of Descent” (velocidad de ascensión negativa) al que se realiza el primer segmento de ascenso.
• hd1: altitud intermedia. Esta altitud es la altitud que delimita el punto donde se pasa del primer al segundo segmento del descenso. Se trata de la altitud a la que se interrumpe el primer segmento y se inicia el siguiente segmento del descenso.
• ROD2: Velocidad de ascensión (negativa) constante a la que se realiza el segundo segmento del descenso.
• hd2: altitud de transición en la que se concluye en segundo segmento de descenso y se inicia el tercer segmento de descenso.
• ROD3: Velocidad de descenso constante a la que se realiza el tercer segmento del descenso.
22

2.4 RestriccionesUna vez definidas las dos posibles trayectorias, deben establecerse las restricciones que rigen cada una de las distintas trayectorias. Al tratarse de un problema real y no uno matemático, donde cualquier condición es válida, las variables deben tener sentido físico y cumplir ciertas restricciones. A modo de un ejemplo simple, las altitudes no pueden ser negativas, ya que aunque matemáticamente se puede obtener una solución con una altitud negativa, dicha solución no es puede conseguirse físicamente.Adicionalmente, estas restricciones son en muchos casos necesarias para el correcto funcionamiento del programa de cálculo de la trayectoria tipo. Debido a la definición de las variables dentro Trajectory y a las uniones entre segmentos, existen ciertas restricciones de parada que marcan tanto el fin de un segmento como el inicio del siguiente. Para poder satisfacer las restricciones de parada y, en algunos casos, permitir que se alcancen, se imponen determinadas restricciones.Al haber dos trayectorias tipo, existen ciertas restricciones que son comunes en ambas trayectorias, mientras que hay otras ciertas restricciones que son propias de cada trayectoria. Las restricciones particulares referidas a cada trayectoria tipo dependen en parte de las variables que diferencian esta trayectoria tipo. Dichas variables son las que definen el ascenso o descenso.
2.4.1 Restricciones comunes:Las restricciones comunes a ambas trayectorias; que deben tenerse en cuenta para la correcta definición del problema son las siguientes.
1. Restricciones de motor. Como era de suponer, para que el problema tenga una realidad física y sea real, el motor debe estar limitado en empuje, como sucede en los motores reales. A pesar de que el motor está definido en casi la totalidad de los segmentos, quedan algunos segmentos en la trayectoria donde queda por determinar la condición de motor (los segmentos de crucero), y comprobar que se encuentra en los límites aceptados por el motor para la condición de vuelo en la que se encuentra (crucero).
2. Restricciones de altitud de crucero Como todas las aeronaves, esta aeronave tiene un techo máximo, dependiente tanto del Mach como del peso. Por ello, aunque se haya determinado el techo máximo, este depende del Mach en cada momento. Este efecto hace que dependiendo al Mach de crucero al que se vuele la altitud máxima varíe. Es por ello que se debe comprobar la altitud de crucero con respecto al Mach (ver [Apéndice C.1]).
3. Restricción de distancia final Al igual que sucede con las altitudes, es necesario limitar la distancia recorrida en los diferentes segmentos a altitud constante a las que se realiza el crucero. Como se explica a continuación, las distancias intermedias se limitan a partir de la distancia final. Por contra, la última distancia de crucero no tiene un límite final y necesita limitarse con un valor anterior al inicio del descenso. Por ello, se debe evitar que la distancia a la que se finaliza la última etapa de crucero se sitúe tras el anteriormente mencionado punto de CSR para no interferir en el descenso. A esta restricción también debe añadírsele una cierta tolerancia.
4. Restricciones de altitud: Ciertas restricciones a implementar están relacionadas con el aumento de altitudes durante el
23

crucero. Como se ha mostrado anteriormente, para que el crucero sea óptimo debe llevarse a cabo en lo que se conoce como “stepped cruise climb”, tal y como está mostrado en la gráfica anterior [fig. 3].Para que este tipo de crucero se de, las altitudes de crucero deben ir incrementando siendo mayores para cada tramo. Al tratarse de una relación para dos altitudes, el numero de restricciones de este tipo tiene que ser el mismo que el numero de tramos a los que se realiza el crucero menos uno, para así poder relacionar todas las altitudes de crucero.
5. Restricciones de distancia Estas restricciones tienen la misma base que las anteriormente citadas. En este caso lo que se intenta limitar es la separación entre las distintas rcri. Para que el problema mantenga su significado físico, debido a la definición que se les ha dado, estos valores deben ir siempre en aumento con respecto al valor anterior.Además de lo anterior, como se puede observar en la definición del problema (o en la gráfica anteriormente mencionada [fig. 3]), entre dos segmentos de vuelo a altitud constante en el crucero existe un segmento de ascenso a Mach constante que sirve de forma de nexo entre las dos altitudes. Dicho segmento recorre una cierta distancia para poder conseguir esa adecuación de altitudes.Debido a ello, no es suficiente con que los valores de las componentes de rcr vayan en aumento, sino que además se tiene que garantizar una separación mínima entre las distancias. A modo de establecer un valor, se puede considerar dicha distancia mínima como un 5% de la distancia total de vuelo.
2.4.2 Restricciones particulares.Como se ha expresado anteriormente, existen ciertas restricciones a aplicar que tan sólo atañen a cada una de las trayectorias. Dichas restricciones se encuentran relacionadas con el ascenso y el
24
Figura 9: Relación TAS/CAS/M
0 . 6 5 0 . 7 0 . 7 5 0 . 8 0 . 8 5 0 . 9 0 . 9 5 1 1 . 0 5 1 . 1 1 . 1 51
1 . 5
2
2 . 5
3
3 . 5
T A S / C A S / M a c h a d i m e n s i o n a l i z a d a [ ]
alt
ura
ad
ime
ns
ion
aliz
ad
a [
]
E v o l u c i ó n T A S
E v o l u c i ó n C A SE v o l u c i ó n M a c h

descenso, que es básicamente lo que diferencia cada una de las 2 trayectorias tipo.
Trayectoria tipo 1.
Las restricciones que se necesitan imponer para la trayectoria tipo 1, son las relacionadas con los valores de CAS o Mach de ascenso/descenso. Las restricciones extra que se imponen pueden agruparse en el siguiente grupo de restricciones:
• Restricciones de altitud de transición: Tanto en el ascenso como en el descenso de vuelo está formado por dos segmentos, uno de CAS constante y otro de Mach constante. De este forma se consigue el ya mencionado ascenso CAS/Mach o descenso Mach/CAS. Para que se puedan mantener las restricciones finales de un segmento como las iniciales del siguiente, la unión de estos segmentos debe darse en un cierto punto. Este punto es el conocido como altitud de transición (transition altitude) y viene determinado por los valores del CAS y del Mach anteriormente mencionados.La evolución de esta altitud de transición con las variables es la siguiente, conforme se aumenta el CAS, la altitud disminuye. Esto se debe a que conforme se asciende a CAS constante el Mach aumenta, en parte debido a la disminución de la velocidad del sonido. (ver figura que muestra la relación de las variables CAS-TAS-Mach cuando una se mantiene constante con el aumento de altitud [fig. 9]). Por tanto, cuanto mayor sea el CAS de ascenso constante, antes se alcanzará un Mach mayor, correspondiente al Mach del segmento de Mach constante, implicando una disminución en la altura de transición. En cuanto a la relación de la altitud de transición con el Mach, conforme el Mach disminuye la altitud de transición desciende, por la misma razón que el caso anterior.
Trayectoria tipo 2.
En este caso, las restricciones a imponer en la trayectoria tipo 2 están relacionadas con los valores de “Rate of Climb/Descent” y a las altitudes que interrumpen los diferentes tramos de ascenso y descenso. Para condicionar este problema (obligando a que las variables cumplan la realidad física) se necesitan imponer los dos siguientes grupos restricciones:
• Restricciones de motor para ascenso/ descenso. La limitación de los valores de “Rate of Climb/ Rate of Descent” se lleva mediante la imposición de restricciones relacionadas con el motor y las alturas de parada (hai y hdi). Esto se debe a que, al ser las altitudes a las que se realizan los diferentes tramos a R/C y R/D constante una variable; dichas altitudes variarán conforme avance la optimización, llevando a la necesidad de incluirlas en las restricciones. Para ambos casos se procederá a una limitación basada en tratar de obtener el empuje para cada punto de la trayectoria. Posteriormente se trata de establecer (mediante distintas simplificaciones) límites para la variación de la velocidad (ya que por ejemplo un R/C excesivo podría llevar a un descenso excesivo de la velocidad, y la posterior entrada en pérdida).
• Restricciones de altitudes intermedias. Como sucede para el caso de la trayectoria tipo 1, las altitudes intermedias a las que se unen las diferentes etapas del ascenso (y descenso) se tienen que limitar. Mientras que en el primer tipo de trayectoria estas variables había que obtenerlas a partir de las variables de entrada; en este caso, las altitudes intermedias son grados de libertad, por lo que pueden ponerse los límites de la misma manera que las altitudes de crucero. En este caso, lo que se
25

debe imponer es que las altitudes intermedias de ascenso siempre vayan en ascenso, pero manteniéndose siempre menores a la primera altitud de crucero. Las altitudes de descenso, por contra, deberán ir disminuyendo pero siendo siempre mayores a la altitud final de 10000 pies.
2.4.3 LímitesPara finalizar con la limitación de las variables, otra forma de limitar los valores que adquieren ciertas variables es fijando sus posibles valores máximos y mínimos. Esto debe realizarse para evitar valores carentes de sentido para que durante la iteración para obtener el mínimo, no se utilicen valores que, por carecer de lógica, lleven a la interrupción del proceso. . Para poder realizarse lo anterior, se deben asegurar el resto de restricciones de forma que ninguna de las restricciones anteriormente citadas haga que los valores de las variables salga del rango definido.El rango permitido para la variación de los grados de libertad es el siguiente:
Trayectoria tipo 1:
• CAS: El CAS se limita de diferente forma dependiendo de si trata del ascenso o del descenso:
◦ CASA: El caso del Mach de ascenso es el más sencillo de limitar. Esto se debe a que el límite inferior se controla mediante la condición de altitud de transición; por al cual se obtienen valores de CASA superiores siempre al valor establecido como mínimo. Aparte de esto, la solución tiende a tomar valores más altos en el caso del ascenso que en el descenso; siendo el límite inferior más difícil de alcanzar en el caso del ascenso. En el caso del límite superior, al estar el motor en un rating que produce mucho empuje ('MCLB'), se tiene empuje suficiente incluso como para vencer a altos valores de resistencia; producidos por un valor elevado de velocidad. Por ello, los valores tomados para limitar el CAS de ascenso son un valor de CAS mínimo de 260 nudos y de CAS máximo de 400 nudos (205,7776 m/s).
◦ CASD: El caso del CAS de descenso es más complicado de limitar que en el ascenso.El límite inferior es complicado de determinar ya que según se aumenta la altitud para un CAS constante, el TAS disminuye, disminuyendo la velocidad hasta llegar a un punto no es suficiente como para mantener el vuelo. Además de esto, al ser la altitud final de crucero mayor a la inicial del crucero, la restricción de la altitud de transición no contribuye a limitar esta variable como en el caso del CASA, por lo que el valor debe limitarse mediante los límites descritos a continuación. Para complicar aún más el problema si cabe, es más probable que esta variable se torne hacia el valor mínimo en ciertas restricciones, haciendo que la limitación de este valor sea mucho más crítica.Considerando la limitación inferior, debido a la definición del problema, el valor mínimo de CASD debería ser el valor de 250 nudos. En este caso, la limitación ha sido una restricción impuesta por la definición del problema; por lo que en caso de que el óptimo se alcance para este punto no implica que la restricción sea incorrecta.En cuanto a la limitación superior, el empuje producido por el motor es mucho menor que en el caso de ascenso; ya que en este caso se tiene el motor en ralentí. Debido a ello, aun y cuando el efecto del peso es favorable (al ser negativo), los valores de velocidad para los cuales se vence a la resistencia aerodinámica son menores. Para la determinación de este valor (altamente dependiente de la altitud de transición), se procede a varias pruebas; obteniendo un límite superior de 380 nudos (195.48872 m/s).
26

• Mach: Las razones para la limitación del Mach de vuelo son análogas a las del CAS. En este caso, el Mach máximo (límite superior) se estima en torno a 0'86, valor máximo de Mach de vuelo según la bibliografía [ref. 1] y también a partir del trajectory.En cuanto al Mach mínimo, la limitación inferior se debe realizar de una forma más precisa. Esto se debe a que, por ejemplo, el Mach de descenso es la variable (dentro de los diferentes Mach) que obtiene valores más bajos; sobretodo en cuanto se realiza el análisis del CI. Por ello, el valor límite considerado como inferior es el de 0,455 (para los distintos valores de Mach); valor que proporciona una altitud de transición ligeramente superior a los 10000 pies iniciales cuando se combina con un CAS de descenso de 250 nudos (CAS mínimo de descenso).
• Altitudes: Las altitudes deben ser limitadas para evitar que mientras se producen las iteraciones, se alcancen valores ilógicos y/o incompatibles con el problema. Estas limitaciones han de afectar tanto a los valores superiores como a los valores inferiores de altitud.
◦ Considerando el límite superior, este se ha limitado usando la altitud máxima anteriormente mencionada. Al tratarse de una limitación que afecta a todos los segmentos de crucero, se ha considerado un consumo de combustible de en torno al 50% del combustible inicial, lo que corresponde a una altura máxima de en torno a 13'5 km.
◦ En cuanto a la altitud mínima, el valor tomado como cota inferior es de 25000 pies (unos 7620 metros).Cabe destacar, como ya se remarca a continuación, que en ningún caso se obtiene la solución para un valor de altitud igual a cualquiera de los límites.
• Distancias: Las limitaciones optadas para las distancias de fin de cada tramo de crucero han sido las siguientes. Como límite inferior se ha impuesto el valor de 106 metros, de esta forma se asegura que el primer segmento de crucero finaliza una vez se ha terminado todo el tramo de ascenso. El límite final ya ha sido impuesto como una restricción común a ambas trayectorias tipo. Los valores intermedios de estas distancias ya vienen denotados por las restricciones no lineales expresadas anteriormente.
Trayectoria tipo 2
En lo referente a los límites de la trayectoria tipo 2, no hay mucho que destacar; ya que la mayoría de las variables que necesitan ser limitadas son las misma que han sido limitadas anteriormente. Las limitaciones utilizadas son las siguientes:
• R/C y R/D: estas variables ya han sido limitadas mediante las restricciones no lineales impuestas anteriormente. Tan solo se deben poner ciertos valores orientativos para el caso en que alguna de las restricciones anteriores fallara en algún punto. Dichos valores vienen expresados en un capítulo más adelante, ya que como se observará, las restricciones mostradas anteriormente limitan mucho la resolución del problema.
• Altitudes de crucero: al ser el mismo crucero que en la trayectoria tipo 1, las limitaciones para las distintas altitudes de crucero se realizarán de la misma forma que para la trayectoria tipo 1.
• Distancias de crucero: análogamente al caso de las altitudes de crucero, las distancias de crucero se limitan con los mismos valores que en la trayectoria tipo 1.
• Mach de crucero: al ser el mismo crucero que la trayectoria tipo 1, el Mach de crucero estará
27

también en este caso entre valores de 0'455 y 0'86.
• Altitudes intermedias: Las altitudes intermedias a las que se inician y paran los diferentes tramos de ascenso/ descenso a los distintos valores de R/C y R/D respectivamente, no necesitan de limitaciones ya que sus valores ya se encuentran controlados por las restricciones particulares.
28

2.5 FminconEstablecidas ya tanto las trayectorias tipo a analizar con las diferentes restricciones que deben cumplir, se procede a realizar la optimización de las trayectorias para las diferentes variables anteriormente mostradas. Para ello, se hace uso del algoritmo fmincon. Fmincon en una función incluida en el programa MatLab. MatLab (abreviatura correspondiente a Matrix Laboratory) es un lenguaje de programación de cuarta generación que permite, entre otras cosas, la implementación de algoritmos, el procesamiento de datos y la representación de gráficas, aspectos necesarios y requeridos para el estudio del problema. Otra razón para el uso de MatLab es que el anteriormente citado Trajectory está implementado en MatLab.De entre los diferentes métodos para optimización que existen, el método requerido para la resolución del problema, ha de ser uno que permita la introducción de restricciones no lineales. Dentro de las posibles herramientas ya existentes en MatLab, una función que cumple los requisitos anteriormente citados es la fmincon. Además de éste, existen otros muchos métodos de optimización, pero teniendo en cuenta las conclusiones extraídas en el documento “Optimización de Trayectorias mediante Trayectorias Tipo” de José Manuel Picón [ref. 1], el algoritmo fmincon es en general mejor para el cálculo de mínimos. La sintaxis del algoritmo es la siguiente:x = fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)Que viene a representar el siguiente problema:
minx fun xsujeto a :
A x≤b ; Aeq x=beq;c x≤0 ;ceq x =0 ;
lb≤x≤ubSiendo el problema que resuelve el cálculo de los valores de x que hacen mínima la función implementada en 'fun', sujetos a las restricciones no lineales (c(x) y ceq(x)) introducidas en las función 'nonlcon' y las opciones especificadas en 'options'. Ademas de lo anterior, los valores mínimos de x deben estar en el intervalos [lb, ub] y cumplir con las restricciones de desigualdad e igualdad expresadas mediante las matrices (A y Aeq) y los vectores (b y beq) respectivamente. x0 es el valor inicial utilizado para la primera iteración. En cuanto las distintas variables, condiciones de contorno y distintas relaciones, todas ellas han sido adimensionalizadas.
2.5.1 Estructura del fminconEn cuanto al algoritmo fmincon, éste contiene diferentes métodos dependiendo del tipo de problema a resolver. El método “line search”, que se trata del método utilizado para este problema, consta de distintas partes pero puede considerarse como un método de optimización englobado en los métodos SQP. En dicho método se tiene que considerar en cada punto lo que se denomina “active constraints”, que se trata de las restricciones activas para cada punto de la iteración. El funcionamiento del método puede dividirse en las tres siguientes partes:
Actualización del Hessiano
El Hessiano para cada punto se actualiza mediante la siguiente expresión [ec. 3]
29

Ec. 3
Siendo:sk=x k1−xk
qk=∇ f xk1∑i∇ g ixk1−[∇ f xk ∑ i∇ g i xk ]
Siendo “f” la función objetivo, gi la componente i del gradiente y λi los multiplicadores de Lagrange. Tal y como se puede observar en la ecuación anterior [ec. 3], el Hessiano se aproxima siempre en función del gradiente.Además de lo anterior, se recomienda que el Hessiano sea semidefinido positivo (para que pueda ser invertido a la hora de resolver un sistema lineal de primer orden); para ello se distorsiona el vector qk hasta que qk
T sk sea igual o mayor que 10-5. Para más información ver la bibliografía [ref. 10].
Subproblema QP
Para cada iteración en la resolución del mínimo de la función objetivo se debe solucionar un problema QP para determinar la dirección d en la que debe orientarse la solución. Dicho problema QP se define de la forma [ec. 4]:
Ec. 4
Siendo Âi la fila de la matriz Âk; matriz que engloba la anteriormente citada matriz Aeq (de las filas 1 a la me), la matriz A (de las filas me+1 hasta la m) así como la linealización de las ligaduras no lineales.La solución mediante el método QP [ref. 11-12] se basa en mantener la matriz Âk como una estimación de las anteriormente citadas “active constraints”, actualizando Âk para cada punto de iteración del problema principal y obteniendo la dirección d'k (para diferenciarla de la dirección d, que es la que buscamos).Para ello, se forma la matriz Zk que corresponde con las últimas m-l (siendo “l” las denominadas “active constraints”) filas de la descomposición QR de la matriz Âk
T; así pues QT ÂkT = [R; 0].Habiendo obtenido Zk y sustituyendo d'k = Zk p; el problema queda expresado como [ec. 5]:
Ec. 5
Diferenciando y sabiendo que buscamos el mínimo, el problema queda expresado como [ec. 6]:
Ec. 6
Por lo que la solución será de la forma:
Z kT H Z k p=−Z k
T c
30
H k1=H kqkqk
T
qkT s k
−H kT H k
skT H k s k
mind q d =12dT H dcT d
 id=b i ; i=1... me
 i d≤b i ; i=me1... m
q d =12pT Z k
T H Z k pcT Z k d
∇ q d =Z kT H Z k pZ k
T c=0

Asumiendo que el Hessiano es definido positivo (suposición correcta debido a como ha sido implementado); y por tanto su proyección Zk
T H Zk; ya se tiene el valor de p; y por tanto de d'k. Después se toma la siguiente iteración como dpaso+1 = dpaso + α' d'k. Definiéndose α' como:
'=min i
−Ai xk−b iAi d ' k
Una vez obtenido el valor de d en el siguiente paso, se continua hasta hallar el mínimo del subproblema hasta alcanzar el mínimo con la suficiente tolerancia; y por tanto el valor de d.Una vez obtenida la dirección d, se procede a actualizar los valores:
x k1=xkd
Donde α se selecciona de forma que produzca un descenso suficiente de la función de mérito, ver bibliografía para más información [ref. 9-10].
Método de line-search
Una vez obtenido xk+1; se actualiza el Hessiano y el resto de variables de la función objetivo y si no se ha alcanzado aún la solución, se procede al cálculo de la siguiente dirección d; y se continua el proceso hasta alcanzar la tolerancia requerida o el número máximo de iteraciones establecido.
2.5.2 Aplicación de las restriccionesLas restricciones expresadas anteriormente, utilizadas para el correcto sentido físico del problema y para simular las limitaciones de la aeronave, son de dos tipos, lineales o no lineales; y dependiendo de lo anterior están introducidas en las matrices o en un vector de restricciones no lineales introducido en una función independiente. Ciertas restricciones (los límites anteriormente mostrados) podrán ser introducidas en los límites 'lb' y 'ub' de la variable 'x'. Cabe destacar que no hay necesidad de imponer ninguna condición de igualdad, ya sea lineal o no lineal, por lo que la matriz Aeq y los vectores beq y ceq serán vacíos ([ ]).Una vez expresadas las diferentes restricciones de vuelo queda por determinar qué tipo de condición será cada una de las anteriormente expresadas; para su correcta aplicación en el algoritmo fmincon.
Restricciones no lineales:
Las restricciones no lineales son aquellas, que como su propio nombre indica, no pueden ser representadas mediante relaciones lineales, o dicho de otra forma, con sistemas de ecuaciones matriciales. Debido a ello, son mucho más complejas de expresar que las demás restricciones. Dichas restricciones quedarán encuadras en un vector c(x) ≤ 0 que englobará todas las relaciones. Estas relaciones vienen expresadas en un algoritmo independiente al que se llama a través del fmincon. De entre las restricciones anteriores, las no lineales son:
• Restricciones de motor: Para podeer determinar el empuje del motor en los segmentos en los que no ha sido impuesto como una ligadura, se debe volver a ejecutar la trayectoria nuevamente. Posteriormente, se debe comprobar el empuje obtenido en los segmentos a analizar y compararlo con el que se obtendría para el caso de máximo empuje, que se obtiene para una configuración del despegue ('TO' Take-Off). Para el cálculo de este empuje se hace uso del algoritmo 'thrust' (función de trajectory que permite calcular el empuje). La relación entre estos empujes tiene que ser menor que 0,95 (correspondiente al empuje de máximo ascenso) y mayor a 0,0146 (correspondiente al empuje en ralentí, idle). Imponiendo que la máxima
31

relación sea menor que el valor anteriormente dado y que la mínima relación sea mayor a 0,0146 se tiene impuesta la condición de motor en sólo dos restricciones no lineales.Considerando esta condición no lineal, como nota de ayuda para la ejecución, conviene multiplicar el valor obtenido por 1000, ya que de esta forma se mantendrá el signo de la condición (nunca mayor que 0) y se tienen valores lejanos a 0, poniendo menos trabas al fmincon, lo que hace que el programa se ejecute con menor tiempo de computación.
• Restricciones de altitud de crucero Para reflejar esta condición, se procede a ver el techo máximo correspondiente al Mach de crucero y comprobar que sea superior a las altitudes de crucero a las que se realiza cada segmento (ver apéndice C para más información del cálculo).Sin embargo, el efecto del peso variará conforme pase el tiempo, la aeronave no tendrá el mismo peso al iniciar el crucero que al finalizarlo. Para tratar de reflejar esto con la mayor veracidad posible, se realizan dos comparaciones: una para el primer tramo de crucero, que se realiza con tan sólo el 20% del combustible consumido; y otra para el último tramo de crucero, con el 50% del combustible consumido. De esta forma, se intenta simular el efecto de la altitud máxima mediante dos restricciones no lineales adicionales.
• Restricciones de distancia final Para poder limitar esta última distancia de crucero a altitud constante, se impondrá una condición no lineal que implique que la última distancia de crucero se encuentre anterior al inicio del descenso. Para ello, se dará uso al CSR (punto final del crucero) y se impondrá que el último valor de la distancia de crucero se sitúe a una distancia anterior al punto donde ocurre al CSR (con una tolerancia añadida).
• Restricciones de altitud de transición (trayectoria tipo 1) Para la implantación de esta condición se debe inicialmente obtener la altitud de transición (tal y como se ha mostrado anteriormente). Una vez determinada esta altitud, y para que el problema tenga lógica y pueda ejecutarse, esta altitud de transición debe situarse entre las altitudes a las que se realiza el ascenso o el descenso. En otras palabras, la altitud de transición debe ser mayor que los 10000 pies (3048 m) de las restricciones iniciales y finales; y menor que la primera altitud de crucero en el caso del ascenso; o menor que la última altitud de crucero en el caso de descenso.
• Restricciones de motor para ascenso/descenso (trayectoria tipo 2) El proceso utilizado para imponer estas restricciones no lineales es el siguiente, se intenta establecer una relación entre la velocidad de vuelo y las distintas velocidades de ascenso y descenso. En el caso del R/C, una posibilidad para establecer este límite sería de asumir un valor máximo de R/C. Utilizando las ecuaciones descritas anteriormente en [ec. 2], dicho valor será el que imponga que:T−D ⋅V −m g V sin = T−D⋅V −m g V a = 0
Para tratar de obtener una estimación de la sustentación, se procede a asumir que la variación del γ es despreciable, por lo que se puede estimar el valor de la velocidad como:
0≃L−m g0 cos
L≃m g cosasin V a
V
Combinando ambas ecuaciones se puede expresar V = V(R/C, ρ, m). Una vez obtenida esta expresión, primeramente se debe tratar de localizar el punto en el cual se obtengan los
32
valores más desfavorables. Al tratarse del R/C, es caso más desfavorable será un ρ mínimo (máxima altitud) y un peso mayor (máximo m). Una vez definidos los límites, se obtiene una aproximación de la variación de la velocidad con el R/C, en donde al limitar la velocidad se limitará el R/C.El caso de descenso se realiza de forma análoga pero el concepto es justo el contrario. En el caso del descenso la condición de motor en este caso es de ralentí (idle), resultando en un empuje mucho menor que el del ascenso, y el valor del R/C (= Va) es negativo, al ser R/C = - R/D. En este caso, lo que se necesita es un “Rate of Descent” lo suficientemente alta como para compensar la falta de empuje derivada de tener en motor al mínimo. Debido a ello en este caso se realizaran los análisis para el valor máximo de densidad (mínima altitud) y para el mínimo valor de peso (estimado como el restante tras consumir el 60% de combustible).
Restricciones lineales
Las restricciones lineales, como se ha mencionado anteriormente, son aquellas que pueden ser expresadas de forma lineal, cosa que se consigue a través de una relación matricial (mediante la aplicación de distintas ecuaciones lineales mediante la matriz A y el vector b). Las restricciones lineales utilizadas para la simulación son las restricciones restantes, y son:
• Restricciones de altitud Tal y como se ha comentado anteriormente en el punto 2.4.1, las distintas altitudes de crucero se han limitado imponiendo que vayan en ascenso (siendo la altitud a la que se realiza cada tramo de crucero superior a la altitud a la que se realiza el tramo anterior).
• Restricciones de distancia Al igual que para el caso de las restricciones de altitud; las distancias a las que se interrumpe cada una de las etapas de crucero es siempre inferior a la distancia de la siguiente etapa.
• Restricciones de altitudes intermedias (trayectoria tipo 2) Tal y como se mencionado anteriormente en el punto 2.4.2; las altitudes intermedias de transición (ver punto 2.3.2) a las que se realiza el ascenso/ descenso para la trayectoria tipo 2 deben ser superiores/ inferiores a la altitud impuesta en el tramo anterior.
2.5.3 Obtención del mínimoUna vez determinado el optimizador a utilizar, lo primero que se debe comprobar es lo bueno que son los resultados obtenidos con el iterador. La mejor forma de observar este fenómeno es realizando distintos análisis para distintas condiciones de contorno y observando los resultados obtenidos para cada una de ellas. Haciendo esto se observa una gran discrepancia entre los valores obtenidos. Esto se debe principalmente a que la función es muy plana con respecto a algunas variables, habiendo poca variación de la masa para grandes variaciones de ciertos parámetros. Los distintos métodos para tratar de evitar este problema son los siguientes:
• Hessiano: Una forma de tratar de obtener mejores resultados es utilizando el hessiano. La idea es calcular la diagonal del Hessiano (matriz H) numéricamente en el punto donde se ha obtenido la solución.Posteriormente, se utilizan los valores obtenidos en la diagonal para la adimensionalización de las variables para, de ese modo; tratar de dar el mismo peso a cada uno de los grados de libertad y así evitar que existan variables con poca dependencia con la solución. Dicho proceso se puede realizar de forma iterativa hasta alcanzar la tolerancia deseada.
33

Una forma de calcular la diagonal del Hessiano numéricamente es mediante diferencias finitas, para ello se parte del desarrollo en serie de Taylor (Apéndice B). Mediante este método, se pueden aproximar el valor de la componente “i” de la diagonal del Hessiano como:
H i=∂2 F∂ x i
2 =F x1 , ... , x ih ,... x N −2 F x1 ,... , x i , ... xN F x1 , ... , x i−h ,... x N
h2
Siendo h un valor de orden infinitesimal (10-6 en este caso). Una vez hecho esto, se observa la dependencia del hessiano con respecto a los puntos es muy elevada. Dependiendo del punto donde se termine la iteración (dependiente este de las condiciones iniciales), el hessiano experimenta grandes variaciones en distintas variables.Esto lleva a desechar la opción del hessiano como método de apoyo para intentar mejorar el resultado.
• Aumentar las tolerancias: Al aumentar las tolerancias, se aumenta también la exactitud de la solución. Por contra, también se aumenta el tiempo necesario. Aumentando la tolerancia, se aumenta la exactitud de la solución, obteniéndose valores menores de combustible. Sin embargo, se llega un punto, en torno a unas tolerancias de 10-7 en donde aun incrementando la tolerancia sigue habiendo discrepancias en los resultados.Una posible razón que puede ocasionar esta discrepancia es la acumulación de errores que se van arrastrando durante todo el proceso. Para tratar de subsanar esto, se realiza lo detallado a continuación.
• Realizar varios análisis en serie. Una posibilidad para tratar de evitar arrastrar errores continuamente es la de realizar la optimización en distintas partes. Para ello, primeramente se realiza una optimización a una tolerancia baja. Con el resultado obtenido en este caso se realiza otro análisis pero con una tolerancia mayor, y así sucesivamente.En el modelo utilizado en este caso, se prueba a realizar el análisis en tres análisis en serie consecutivos incrementando la tolerancia en cada uno de ellos. Mediante este método se consiguen reducir de manera significativa las diferencias obtenidas al variar las condiciones iniciales. No obstante, siempre existe una pequeña variación al variar las condiciones iniciales; como se comprobara a continuación.Este sistema es un intento de simular un método optimización existente en MatLab. Este algoritmo se encuentra en las opciones del fmincon y tiene el nombre de 'lbfgs' (método de iteración en el que se resetea el hessiano cada cierto número de etapas para evitar la acumulación de errores); pero por desgracia, no puede ser utilizado para resolver este problema.
• Cálculo del gradiente: Como se ha expresado anteriormente, el algoritmo fmincon calcula numéricamente un gradiente para después aproximar el hessiano. Dicho método tiene varias formas de calcular el gradiente (en la opción 'FinDiffType'). Entre estas opciones están la diferencia centrada ('Central') o la forma convencional ('Forward'). La diferencia entre ambas es que la diferencia central permite un cálculo con una precisión mucho mayor (acumula menos errores, lo que lleva a arrastrar menos errores con en aumento del número de iteraciones) a costa de un incremento (también mucho mayor) del coste computacional y del número de iteraciones; que puede a llegar a ser excesivo.
Finalmente, para tratar de reducir los errores de cálculo y no aumentar de forma excesiva el tiempo ni las iteraciones se ha optado por una ligera combinación de algunas de las distintas opciones propuestas.
34

Por ello, se ha realizado el análisis en dos partes; la primera de ellas a una tolerancia de 10 -6 con la opción de cálculo del gradiente de 'Forward'. Con este primer análisis la idea es dar un valor más cercano a la solución óptima con un método que tampoco exige un coste computacional excesivo. Con el resultado obtenido, se procede a un análisis mucho más preciso y costoso. Esta segunda optimización se realiza a una tolerancia mucho mayor (10-8) y calculando el gradiente con el método de la diferencia central, lo cual produce unos resultados aceptables.El hecho de realizar el primero de los análisis no solo reduce el tiempo de computación (al dar una condición inicial mucho mas cercana al resultado final, a la hora de realizar el segundo análisis); si no que también reduce en número de iteraciones necesarias para el segundo análisis; que para el caso de cruceros de siete o más etapas eran excesivas.
35

36

3. ANÁLISIS
3.1 Crucero
3.1.1 Trayectoria tipo 1Para poder analizar el efecto del CI (Cost Index) en las variables del problema, primero se debe realizar un análisis del crucero para determinar el número de tramos de crucero a los que se va a analizar el análisis final. El peso inicial (W0) utilizado tanto para este análisis de crucero como para el análisis del CI es de 1'6 106 N y la distancia de la trayectoria (R) es de 107 metros.Como bien se sabe, el resultado óptimo, de mínimo consumo de combustible, para un “stepped cruise climb” se obtiene para un numero infinito de pasos. Sin embargo, eso no es posible simular, y aunque pudiera realizarse, el coste computacional sería muy elevado. A este coste hay que añadir el coste logístico que tendría para los controladores de vuelo si se permitiera volar a numero muy elevado de distintos tramos de crucero. Por ello, se realiza un análisis del combustible empleado para un crucero con diferente número de etapas y se observa en que momento la disminución de combustible es de orden de magnitud inferior al combustible total requerido. El número de etapas para el que se de esta condición será el que posteriormente será utilizado para el análisis del efecto del CI.Para realizar este análisis y ver la dependencia de los resultados con las condiciones iniciales, para así poder ver la bondad del optimizador, se realiza un análisis para 5 condiciones iniciales diferentes. Para la utilización de estas condiciones, el único requisito necesario es que cumplan las condiciones lineales y no lineales impuestas anteriormente. Los valores seleccionados para intentar simular varias de las posibilidades han sido los siguientes:
CASA (nudos) MA Mcr MD CASD (nudos)
Caso 1 320 0,78 0,8 0,7 290
Caso 2 Arrastrando los valores obtenidos anteriormente
Caso 3 300 0,8 0,78 0,8 300
Caso 4 340 0,7 0,83 0,6 290
Caso 5 340 0,78 0,76 0,65 270
Entre los casos anteriores, el caso 2 requiere una pequeña explicación. Para este caso lo que se ha realizado es analizar el caso de un crucero con una etapa. A continuación, se ha tomado como condición inicial para el caso de dos etapas, las condiciones finales usadas para el caso de una etapa (a excepción de los datos de altitud y de distancia de crucero). Posteriormente, se continua de forma análoga según se va incrementando el numero de tramos de crucero.Los resultados obtenidos para las diferentes condiciones iniciales se pueden observar en las siguientes gráficas: [fig. 10-15]
37

Los valores obtenidos para el consumo de masa de combustible también se pueden observar en la siguiente tabla:
Número de etapas de crucero
Masa [kg] 1 2 3 4
Caso 1 48225,97 48026,08 47989,4 47976,59
Caso 2 48225,97 48026,08 47989,4 47976,59
Caso 3 48225,97 48026,08 47989,4 47976,59
Caso 4 48225,97 48026,08 47989,4 47976,59
Caso 5 48226,97 48026,08 47989,4 47976,59
Número de etapas de crucero
Masa [kg] 5 6 7 8
Caso 1 47970,67 47967,45 47965,53 47964,22
Caso 2 47970,67 47967,45 47965,53 47964,24
Caso 3 47970,67 47967,47 47965,55 47964,32
Caso 4 47970,67 47967,46 47965,54 47964,26
Caso 5 47970,67 47967,46 47965,53 47964,26
38
Figura 10: Consumo de combustible en función de las condiciones iniciales y del número de etapas
1 2 3 4 5 6 7 84 . 7 9 5
4 . 8
4 . 8 0 5
4 . 8 1
4 . 8 1 5
4 . 8 2
4 . 8 2 5x 1 0
4
N ú m e r o d e e t a p a s d e c r u c e r o
ma
sa
de
co
mb
us
tib
le [
kg
]
c a s o 1
c a s o 3
c a s o 4c a s o 5
c a s o 2

En dichas gráficas también se muestra la evolución de las diferentes variables en función del número del número de etapas que contiene el crucero, todo ello para cada una de las diferentes condiciones iniciales.Dichas variables a analizar son las que se mantienen comunes para todos los casos. Se trata de los valores de CAS de ascenso, Mach de ascenso, Mach de crucero, Mach de descenso y CAS de descenso.
39
Figura 11: Evolución del CASA con etapas de crucero y con las condiciones iniciales
1 2 3 4 5 6 7 81 3 0
1 4 0
1 5 0
1 6 0
1 7 0
1 8 0
1 9 0
2 0 0
2 1 0
N ú m e r o d e e t a p a s d e c r u c e r o
CA
S d
e a
sc
en
so
[m
/s]
c a s o 1
c a s o 3
c a s o 4
c a s o 5c a s o 2
l í m i t e s u p e r i o r
l í m i t e i n f e r i o r
Figura 12: Evolución del MA con etapas de crucero y con las condiciones iniciales
1 2 3 4 5 6 7 80 . 5
0 . 5 5
0 . 6
0 . 6 5
0 . 7
0 . 7 5
0 . 8
0 . 8 5
0 . 9
N ú m e r o d e e t a p a s d e c r u c e r o
Ma
ch
de
as
ce
ns
o [
]
c a s o 1c a s o 3
c a s o 4
c a s o 5
c a s o 2
l í m i t e s u p e r i o rl í m i t e i n f e r i o r

40
Figura 14: Evolución del MD con etapas de crucero y con las condiciones iniciales
1 2 3 4 5 6 7 80 . 4 5
0 . 5
0 . 5 5
0 . 6
0 . 6 5
0 . 7
0 . 7 5
0 . 8
0 . 8 5
0 . 9
N ú m e r o d e e t a p a s d e c r u c e r o
Ma
ch
de
de
sc
en
so
[ ]
c a s o 1c a s o 3
c a s o 4
c a s o 5
c a s o 2
l í m i t e s u p e r i o rl í m i t e i n f e r i o r
Figura 13: Evolución del Mcr con etapas de crucero y con las condiciones iniciales
1 2 3 4 5 6 7 80 . 7
0 . 7 2
0 . 7 4
0 . 7 6
0 . 7 8
0 . 8
0 . 8 2
0 . 8 4
N ú m e r o d e e t a p a s d e c r u c e r o
Mac
h de
cru
cero
[ ]
c a s o 1
c a s o 3
c a s o 4
c a s o 5c a s o 2
l í m i t e s u p e r i o r
v a l o r ó p t i m o
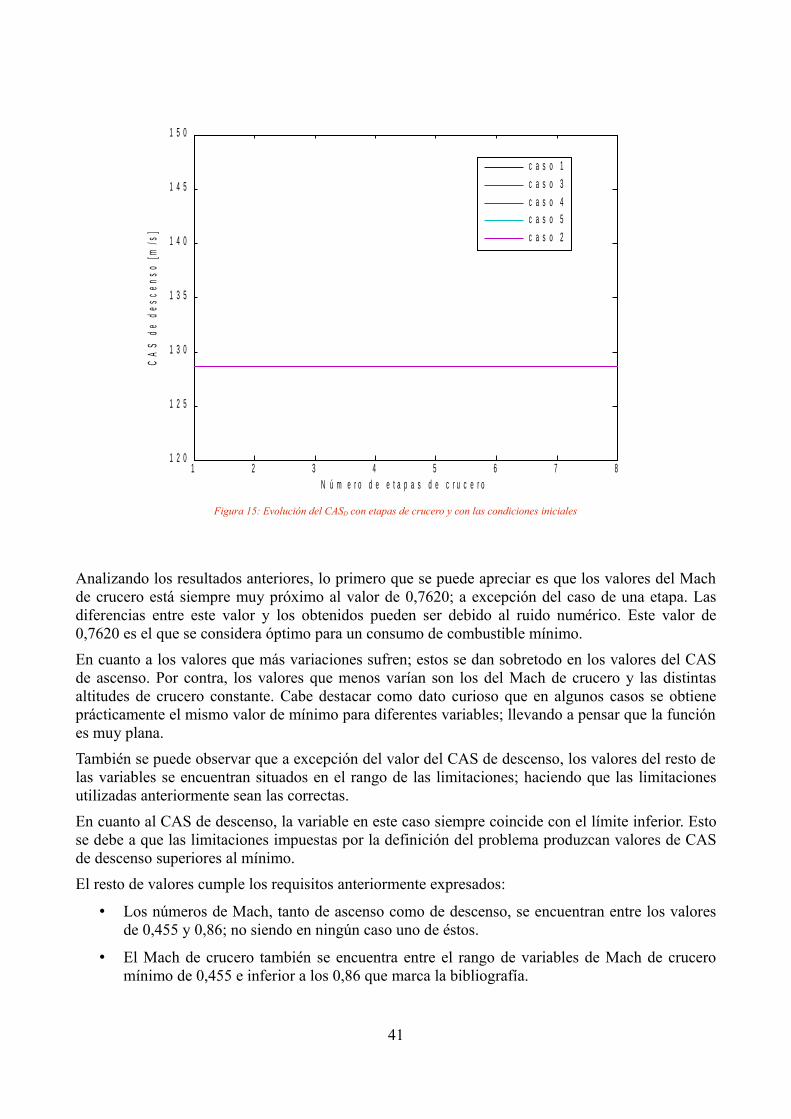
Analizando los resultados anteriores, lo primero que se puede apreciar es que los valores del Mach de crucero está siempre muy próximo al valor de 0,7620; a excepción del caso de una etapa. Las diferencias entre este valor y los obtenidos pueden ser debido al ruido numérico. Este valor de 0,7620 es el que se considera óptimo para un consumo de combustible mínimo.En cuanto a los valores que más variaciones sufren; estos se dan sobretodo en los valores del CAS de ascenso. Por contra, los valores que menos varían son los del Mach de crucero y las distintas altitudes de crucero constante. Cabe destacar como dato curioso que en algunos casos se obtiene prácticamente el mismo valor de mínimo para diferentes variables; llevando a pensar que la función es muy plana.También se puede observar que a excepción del valor del CAS de descenso, los valores del resto de las variables se encuentran situados en el rango de las limitaciones; haciendo que las limitaciones utilizadas anteriormente sean las correctas.En cuanto al CAS de descenso, la variable en este caso siempre coincide con el límite inferior. Esto se debe a que las limitaciones impuestas por la definición del problema produzcan valores de CAS de descenso superiores al mínimo.El resto de valores cumple los requisitos anteriormente expresados:
• Los números de Mach, tanto de ascenso como de descenso, se encuentran entre los valores de 0,455 y 0,86; no siendo en ningún caso uno de éstos.
• El Mach de crucero también se encuentra entre el rango de variables de Mach de crucero mínimo de 0,455 e inferior a los 0,86 que marca la bibliografía.
41
Figura 15: Evolución del CASD con etapas de crucero y con las condiciones iniciales
1 2 3 4 5 6 7 81 2 0
1 2 5
1 3 0
1 3 5
1 4 0
1 4 5
1 5 0
N ú m e r o d e e t a p a s d e c r u c e r o
CA
S d
e de
scen
so [
m/s
]
c a s o 1
c a s o 3
c a s o 4c a s o 5
c a s o 2

• El CAS de ascenso se encuentra entre los límites; representados en la figura anterior [fig.11].Las diferentes altitudes de crucero para los distintos casos vienen representadas en la siguiente tabla y las siguientes gráficas:
Etapas altitudes (m) Caso 1 Caso 2 Caso 3 Caso 4 Caso 5
1 Etapa hcr(1) 10051,83 10051,4 10051,7 10051,76 10051,4
2 Etapashcr(1) 9492,41 9492,16 9492,81 9492,92 9492,54
hcr(2) 10602,42 10601,86 10602,69 10602,64 10602,62
42
Figura 16: Evolución de las altitudes de crucero para 3, 4, 5 y 6 etapas con distintas condiciones iniciales
1 1 . 5 2 2 . 5 30 . 9
0 . 9 5
1
1 . 0 5
1 . 1x 1 0
4
altu
ras
de c
ruce
ro [
m]
N ú m e r o d e e t a p a s1 2 3 4
0 . 9
0 . 9 5
1
1 . 0 5
1 . 1x 1 0
4
altu
ras
de c
ruce
ro [
m]
N ú m e r o d e e t a p a s
1 2 3 4 50 . 9
0 . 9 5
1
1 . 0 5
1 . 1x 1 0
4
altu
ras
de c
ruce
ro [
m]
N ú m e r o d e e t a p a s0 2 4 6
0 . 9
0 . 9 5
1
1 . 0 5
1 . 1x 1 0
4
altu
ras
de c
ruce
ro [
m]
N ú m e r o d e e t a p a s
c a s o 1
c a s o 3
c a s o 4c a s o 5
c a s o 2
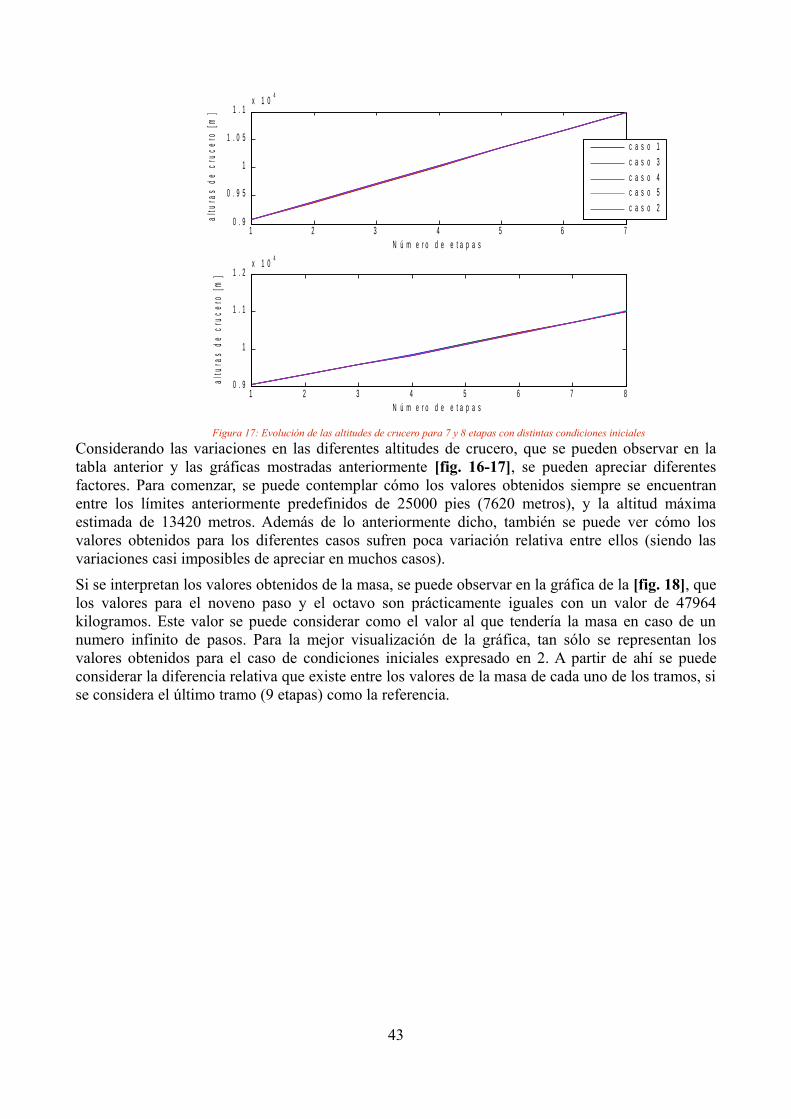
Considerando las variaciones en las diferentes altitudes de crucero, que se pueden observar en la tabla anterior y las gráficas mostradas anteriormente [fig. 16-17], se pueden apreciar diferentes factores. Para comenzar, se puede contemplar cómo los valores obtenidos siempre se encuentran entre los límites anteriormente predefinidos de 25000 pies (7620 metros), y la altitud máxima estimada de 13420 metros. Además de lo anteriormente dicho, también se puede ver cómo los valores obtenidos para los diferentes casos sufren poca variación relativa entre ellos (siendo las variaciones casi imposibles de apreciar en muchos casos).Si se interpretan los valores obtenidos de la masa, se puede observar en la gráfica de la [fig. 18], que los valores para el noveno paso y el octavo son prácticamente iguales con un valor de 47964 kilogramos. Este valor se puede considerar como el valor al que tendería la masa en caso de un numero infinito de pasos. Para la mejor visualización de la gráfica, tan sólo se representan los valores obtenidos para el caso de condiciones iniciales expresado en 2. A partir de ahí se puede considerar la diferencia relativa que existe entre los valores de la masa de cada uno de los tramos, si se considera el último tramo (9 etapas) como la referencia.
43
Figura 17: Evolución de las altitudes de crucero para 7 y 8 etapas con distintas condiciones iniciales
1 2 3 4 5 6 70 . 9
0 . 9 5
1
1 . 0 5
1 . 1x 1 0
4
altu
ras
de c
ruce
ro [
m]
N ú m e r o d e e t a p a s
1 2 3 4 5 6 7 80 . 9
1
1 . 1
1 . 2x 1 0
4
altu
ras
de c
ruce
ro [
m]
N ú m e r o d e e t a p a s
c a s o 1
c a s o 3
c a s o 4c a s o 5
c a s o 2
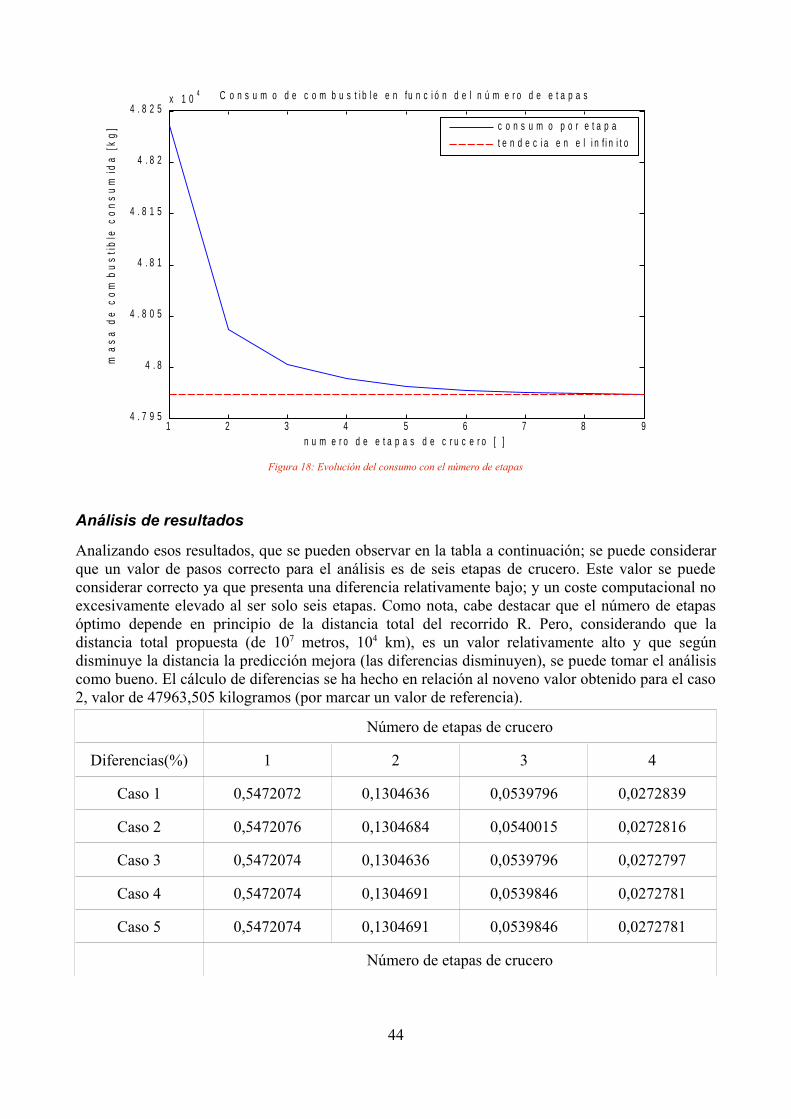
Análisis de resultados
Analizando esos resultados, que se pueden observar en la tabla a continuación; se puede considerar que un valor de pasos correcto para el análisis es de seis etapas de crucero. Este valor se puede considerar correcto ya que presenta una diferencia relativamente bajo; y un coste computacional no excesivamente elevado al ser solo seis etapas. Como nota, cabe destacar que el número de etapas óptimo depende en principio de la distancia total del recorrido R. Pero, considerando que la distancia total propuesta (de 107 metros, 104 km), es un valor relativamente alto y que según disminuye la distancia la predicción mejora (las diferencias disminuyen), se puede tomar el análisis como bueno. El cálculo de diferencias se ha hecho en relación al noveno valor obtenido para el caso 2, valor de 47963,505 kilogramos (por marcar un valor de referencia).
Número de etapas de crucero
Diferencias(%) 1 2 3 4
Caso 1 0,5472072 0,1304636 0,0539796 0,0272839
Caso 2 0,5472076 0,1304684 0,0540015 0,0272816
Caso 3 0,5472074 0,1304636 0,0539796 0,0272797
Caso 4 0,5472074 0,1304691 0,0539846 0,0272781
Caso 5 0,5472074 0,1304691 0,0539846 0,0272781
Número de etapas de crucero
44
Figura 18: Evolución del consumo con el número de etapas
1 2 3 4 5 6 7 8 94 . 7 9 5
4 . 8
4 . 8 0 5
4 . 8 1
4 . 8 1 5
4 . 8 2
4 . 8 2 5x 1 0
4
n u m e r o d e e t a p a s d e c r u c e r o [ ]
ma
sa
de
co
mb
us
tib
le c
on
su
mid
a [
kg
]C o n s u m o d e c o m b u s t i b l e e n fu n c i ó n d e l n ú m e r o d e e t a p a s
c o n s u m o p o r e t a p a
t e n d e c i a e n e l i n f i n i t o
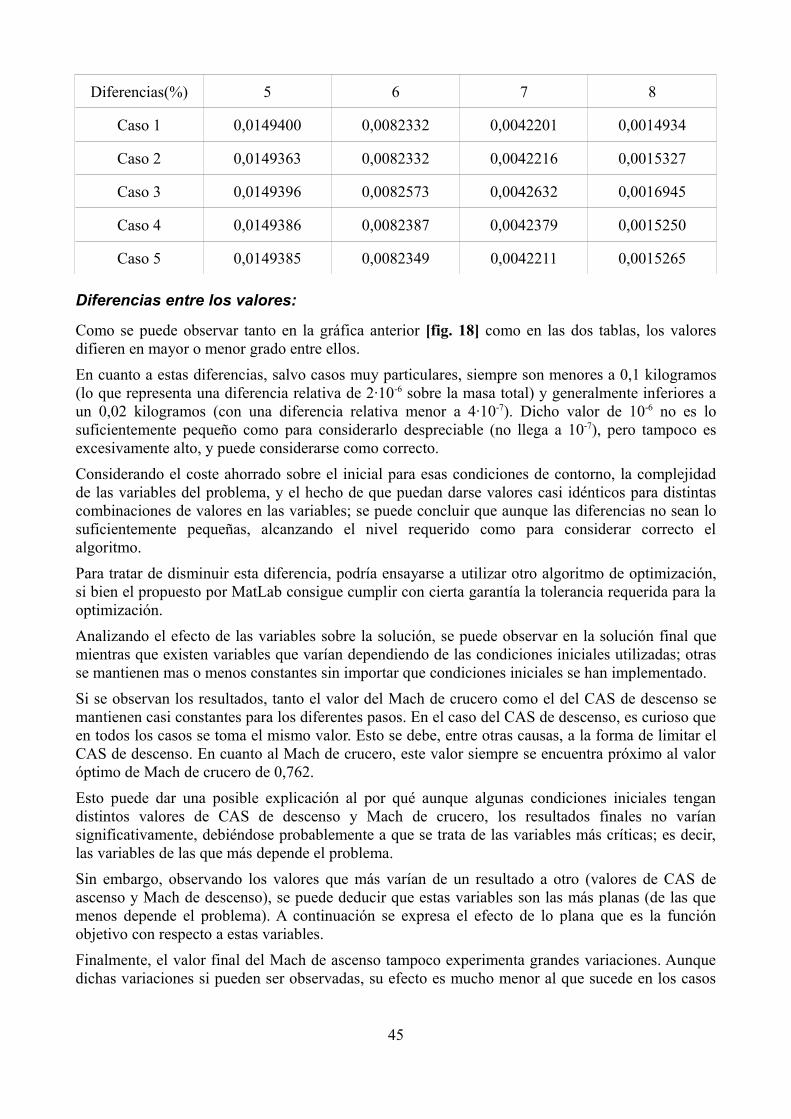
Diferencias(%) 5 6 7 8
Caso 1 0,0149400 0,0082332 0,0042201 0,0014934
Caso 2 0,0149363 0,0082332 0,0042216 0,0015327
Caso 3 0,0149396 0,0082573 0,0042632 0,0016945
Caso 4 0,0149386 0,0082387 0,0042379 0,0015250
Caso 5 0,0149385 0,0082349 0,0042211 0,0015265
Diferencias entre los valores:
Como se puede observar tanto en la gráfica anterior [fig. 18] como en las dos tablas, los valores difieren en mayor o menor grado entre ellos.En cuanto a estas diferencias, salvo casos muy particulares, siempre son menores a 0,1 kilogramos (lo que representa una diferencia relativa de 2·10-6 sobre la masa total) y generalmente inferiores a un 0,02 kilogramos (con una diferencia relativa menor a 4·10-7). Dicho valor de 10-6 no es lo suficientemente pequeño como para considerarlo despreciable (no llega a 10-7), pero tampoco es excesivamente alto, y puede considerarse como correcto.Considerando el coste ahorrado sobre el inicial para esas condiciones de contorno, la complejidad de las variables del problema, y el hecho de que puedan darse valores casi idénticos para distintas combinaciones de valores en las variables; se puede concluir que aunque las diferencias no sean lo suficientemente pequeñas, alcanzando el nivel requerido como para considerar correcto el algoritmo.Para tratar de disminuir esta diferencia, podría ensayarse a utilizar otro algoritmo de optimización, si bien el propuesto por MatLab consigue cumplir con cierta garantía la tolerancia requerida para la optimización.Analizando el efecto de las variables sobre la solución, se puede observar en la solución final que mientras que existen variables que varían dependiendo de las condiciones iniciales utilizadas; otras se mantienen mas o menos constantes sin importar que condiciones iniciales se han implementado.Si se observan los resultados, tanto el valor del Mach de crucero como el del CAS de descenso se mantienen casi constantes para los diferentes pasos. En el caso del CAS de descenso, es curioso que en todos los casos se toma el mismo valor. Esto se debe, entre otras causas, a la forma de limitar el CAS de descenso. En cuanto al Mach de crucero, este valor siempre se encuentra próximo al valor óptimo de Mach de crucero de 0,762.Esto puede dar una posible explicación al por qué aunque algunas condiciones iniciales tengan distintos valores de CAS de descenso y Mach de crucero, los resultados finales no varían significativamente, debiéndose probablemente a que se trata de las variables más críticas; es decir, las variables de las que más depende el problema.Sin embargo, observando los valores que más varían de un resultado a otro (valores de CAS de ascenso y Mach de descenso), se puede deducir que estas variables son las más planas (de las que menos depende el problema). A continuación se expresa el efecto de lo plana que es la función objetivo con respecto a estas variables.Finalmente, el valor final del Mach de ascenso tampoco experimenta grandes variaciones. Aunque dichas variaciones si pueden ser observadas, su efecto es mucho menor al que sucede en los casos
45
del CASA y del MD. Por ello, el efecto de esta variable puede considerarse como algo intermedio.En conclusión, mediante la simple exploración de como varían las variables, se puede observar el efecto de las condiciones iniciales:
• Las variables que menos varían entre ellas son el Mach de crucero y el CAS de descenso. En el caso del Mach de crucero, dicho valor es siempre el valor óptimo (salvo ruido numérico). En cuanto al CAS de descenso, coincide con el límite inferior de las condiciones de contorno (impuesto por la definición del problema).
• Las variables con mayor dispersión entre ellas mismas son el CAS de ascenso y el Mach de descenso. Esto lleva a pensar principalmente que la función objetivo es muy plana con respecto a las variables de CAS de ascenso y Mach de descenso (hipótesis ya corroborada a continuación).
• Para finalizar, en el punto intermedio del efecto de las variables se encuentra el Mach de ascenso, en donde se puede apreciar una muy ligera variación de la variable para las distintas condiciones iniciales (variación más apreciable para el caso de 3 y de 4 etapas).
Evolución de las variables
Conforme aumenta el número de etapas, se puede observar como las diferentes variables sufren distintas variaciones conforme se aumenta el número de etapas. Dichas variaciones son prácticamente insignificantes pero siguen una tendencia apreciable. Para las diferentes variables el efecto que se observa es el siguiente:
• Mcr: Para el Mach de crucero no se observa ningún cambio apreciable. Dicha variable se mantiene para todas la etapas con un valor aproximado de 0,762 (correspondiente al óptimo), salvo para el caso de una etapa, donde el valor es de 0,7605. Esta diferencia puede deberse a que para el caso de una única etapa no se puede considerar como un “stepped cruise climb”; por lo que probablemente el óptimo sea para un valor de Mcr diferente a 0,762.
• CASD: Para dicho valor tampoco se produce ninguna variación del CASD conforme aumenta el número de etapas. Dicho efecto se debe probablemente a que los valores del CASD
adoptan el límite inferior (debido a la definición del problema).
• MA: El Mach de ascenso disminuye muy ligeramente conforme aumenta el número de etapas. Una posible explicación para dicho efecto puede ser que conforme aumentan las etapas, la primera altura de crucero sufre descensos más que apreciables, al tratar de mantenerse siempre la misma media de altitud de crucero. Este descenso de altitud conlleva un aumento del Mach de crucero para la altura de fin de ascenso. Debido a ello, la velocidad de fin de ascenso aumenta de valor. Debido al aumento de la velocidad de fin de ascenso y a la disminución de la altura de fin de ascenso; no resulta descabellado pensar que el MA
disminuya para disminuir el consumo de combustible.
• CASA: La disminución del MA mostrada anteriormente conlleva una muy ligera disminución de la altura de transición. Esto conlleva (debido a la definición de velocidad CAS) a que la velocidad en el punto de la altura de transición disminuya; por lo que se aprecia un ligero aumento del CAS para mantener la misma velocidad en la altura de transición; y así realizar el tramo de ascenso de CAS constante (el de mayor consumo) a una mayor velocidad reduciendo el tiempo en que se realiza este tramo.
• MD: Al aumentar el número de etapas, también se aprecia un aumento de la última altura de la crucero. Siguiendo un razonamiento inverso al realizado para el MA, resulta esperado que
46

el MD aumente. Además, uniendo este aumento de la altura junto con la no variación del CASD y la muy ligera variación del CSR; se deduce que la distancia del descenso ha aumentado, resultando en un aumento de la única variable que varía (el CASD).
Hessiano en diferentes puntos
Mediante el análisis del hessiano en los diferentes puntos se puede apreciar lo anteriormente mencionado. El Hessiano utilizado es el obtenido mediante el comando fmincon del MatLab, ya que este cálculo incluye el efecto de las diferentes restricciones. Gracias a los resultados obtenidos en las diagonales del Hessiano, se puede ver la relación de las diferentes variables con la función objetivo en el punto donde se ha obtenido la solución del óptimo. En esta diagonal cada término representa el efecto correspondiente a cada variable. La diagonal obtenida para cada punto es la siguiente:
Etapas Caso CASA MA Mcr hcr(1) hcr(end) rcr(1) MD CASD
3
Caso 1 0,02 0,07 11,02 1,42 1,84 0,05 0,01 1,05
Caso 3 0,02 0,08 10,83 1,32 2,04 0,32 0,12 0,13
Caso 4 0,79 0,16 12,51 1,09 1,67 0,71 0,02 0,1
Caso 5 0,15 0,08 10,87 1,63 1,89 0,06 0,74 0,05
6
Caso 1 0,05 0,06 11,36 0,85 1,03 0,31 0,75 1,01
Caso 3 0,03 0,09 13,76 0,94 0,13 0,06 1,14 0,13
Caso 4 0,5 0,12 15,65 0,86 1,06 0,8 0,02 0,06
Caso 5 0,15 0,07 14,47 0,84 1,16 0,29 0,64 0,08
Mediante una simple observación de los resultados obtenidos, lo primero que se contempla es que el Mach de crucero tiene valores muy altos, lo que implica una gran dependencia del resultado. Uniendo este fenómeno al hecho de que no existe dispersión en los valores obtenidos (tienen valores semejantes independientemente de las condiciones iniciales) sustenta lo anteriormente mencionado del efecto de las variables en la función objetivo. Además de esto, se confirma el que el valor óptimo del Mach de crucero sea 0'762; al ser el valor obtenido en todos los casos (salvo error numérico) con un valor de Hessiano alto.En cuanto al CAS de ascenso; los valores obtenidos en el Hessiano referentes a este valor son muy dispares; dependiendo tanto de las condiciones iniciales como del número de etapas. Esto puede llevar a pensar en la existencia de diferentes mínimos locales existentes (razonamiento descartado con el futuro análisis) o a que la función es muy plana. Para comprobar si este fenómeno sucede se procede a realizar el siguiente análisis.
Análisis
Tal y como se puede observar en la evolución de los parámetros anteriores existe una ligera disparidad entre los valores del CASA y del MD para las distintas condiciones. Esto puede deberse a las dos razones comentadas anteriormente; que la función objetivo es muy plana (caso más probable); o debida a la existencia de mínimos locales. Para comprobar si este fenómeno se
47
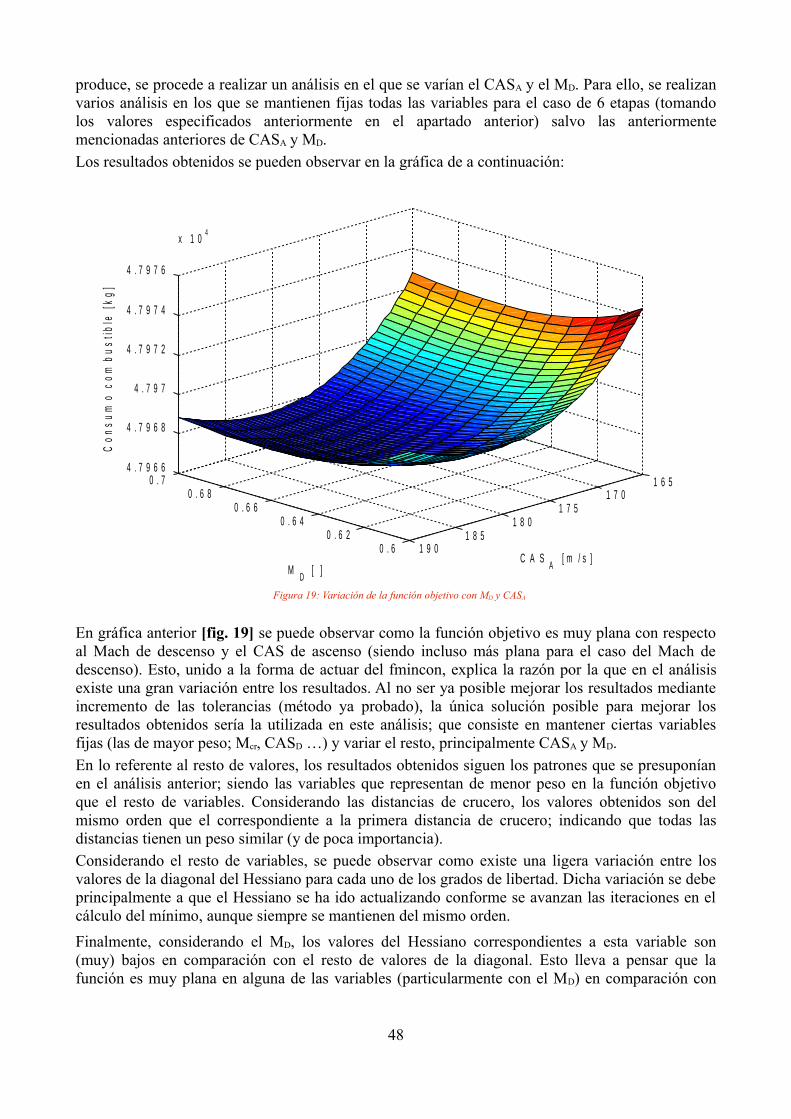
produce, se procede a realizar un análisis en el que se varían el CASA y el MD. Para ello, se realizan varios análisis en los que se mantienen fijas todas las variables para el caso de 6 etapas (tomando los valores especificados anteriormente en el apartado anterior) salvo las anteriormente mencionadas anteriores de CASA y MD.Los resultados obtenidos se pueden observar en la gráfica de a continuación:
En gráfica anterior [fig. 19] se puede observar como la función objetivo es muy plana con respecto al Mach de descenso y el CAS de ascenso (siendo incluso más plana para el caso del Mach de descenso). Esto, unido a la forma de actuar del fmincon, explica la razón por la que en el análisis existe una gran variación entre los resultados. Al no ser ya posible mejorar los resultados mediante incremento de las tolerancias (método ya probado), la única solución posible para mejorar los resultados obtenidos sería la utilizada en este análisis; que consiste en mantener ciertas variables fijas (las de mayor peso; Mcr, CASD …) y variar el resto, principalmente CASA y MD.En lo referente al resto de valores, los resultados obtenidos siguen los patrones que se presuponían en el análisis anterior; siendo las variables que representan de menor peso en la función objetivo que el resto de variables. Considerando las distancias de crucero, los valores obtenidos son del mismo orden que el correspondiente a la primera distancia de crucero; indicando que todas las distancias tienen un peso similar (y de poca importancia).Considerando el resto de variables, se puede observar como existe una ligera variación entre los valores de la diagonal del Hessiano para cada uno de los grados de libertad. Dicha variación se debe principalmente a que el Hessiano se ha ido actualizando conforme se avanzan las iteraciones en el cálculo del mínimo, aunque siempre se mantienen del mismo orden.Finalmente, considerando el MD, los valores del Hessiano correspondientes a esta variable son (muy) bajos en comparación con el resto de valores de la diagonal. Esto lleva a pensar que la función es muy plana en alguna de las variables (particularmente con el MD) en comparación con
48
Figura 19: Variación de la función objetivo con MD y CASA
0 . 60 . 6 2
0 . 6 40 . 6 6
0 . 6 80 . 7 1 6 5
1 7 01 7 5
1 8 01 8 5
1 9 0
4 . 7 9 6 6
4 . 7 9 6 8
4 . 7 9 7
4 . 7 9 7 2
4 . 7 9 7 4
4 . 7 9 7 6
x 1 04
C A SA
[ m / s ]M
D [ ]
Co
ns
um
o c
om
bu
sti
ble
[k
g]
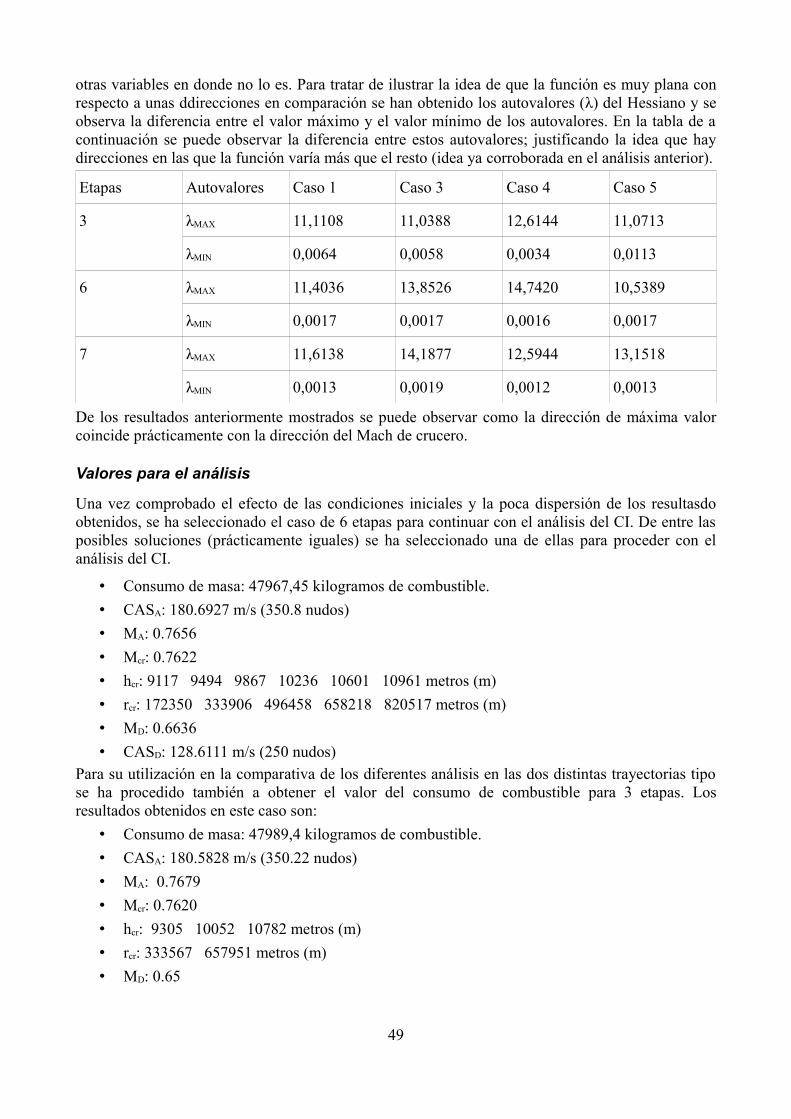
otras variables en donde no lo es. Para tratar de ilustrar la idea de que la función es muy plana con respecto a unas ddirecciones en comparación se han obtenido los autovalores (λ) del Hessiano y se observa la diferencia entre el valor máximo y el valor mínimo de los autovalores. En la tabla de a continuación se puede observar la diferencia entre estos autovalores; justificando la idea que hay direcciones en las que la función varía más que el resto (idea ya corroborada en el análisis anterior).
Etapas Autovalores Caso 1 Caso 3 Caso 4 Caso 5
3 λMAX 11,1108 11,0388 12,6144 11,0713
λMIN 0,0064 0,0058 0,0034 0,0113
6 λMAX 11,4036 13,8526 14,7420 10,5389
λMIN 0,0017 0,0017 0,0016 0,0017
7 λMAX 11,6138 14,1877 12,5944 13,1518
λMIN 0,0013 0,0019 0,0012 0,0013
De los resultados anteriormente mostrados se puede observar como la dirección de máxima valor coincide prácticamente con la dirección del Mach de crucero.
Valores para el análisis
Una vez comprobado el efecto de las condiciones iniciales y la poca dispersión de los resultasdo obtenidos, se ha seleccionado el caso de 6 etapas para continuar con el análisis del CI. De entre las posibles soluciones (prácticamente iguales) se ha seleccionado una de ellas para proceder con el análisis del CI.
• Consumo de masa: 47967,45 kilogramos de combustible.• CASA: 180.6927 m/s (350.8 nudos)• MA: 0.7656• Mcr: 0.7622• hcr: 9117 9494 9867 10236 10601 10961 metros (m)• rcr: 172350 333906 496458 658218 820517 metros (m)• MD: 0.6636• CASD: 128.6111 m/s (250 nudos)
Para su utilización en la comparativa de los diferentes análisis en las dos distintas trayectorias tipo se ha procedido también a obtener el valor del consumo de combustible para 3 etapas. Los resultados obtenidos en este caso son:
• Consumo de masa: 47989,4 kilogramos de combustible.• CASA: 180.5828 m/s (350.22 nudos)• MA: 0.7679• Mcr: 0.7620• hcr: 9305 10052 10782 metros (m)• rcr: 333567 657951 metros (m)• MD: 0.65
49
• CASD: 128.6111 m/s (250 nudos)• Tiempo: 44094 segundos.
Finalmente, se ha procedido a realizar un análisis de la trayectoria considerando un límite inferior del CAS de descenso menor (cambiando la definición del problema) para ver el efecto que tiene este sobre los resultados finales. Los resultados obtenidos para el caso de 6 etapas es un consumo de masa de 47898 kilogramos de combustible unido a un descenso del CAS de descenso de valor de CASD: 121.0448 m/s (235.2923 nudos).
3.1.2 Trayectoria tipo 2Una vez analizada la trayectoria tipo 1; tan sólo queda por analizar la trayectoria tipo 2. Antes de realizar un análisis tan completo como en el caso anterior se pueden tener en cuenta diferentes aspectos. Para comenzar, la única diferencia entre ambas trayectorias es de tan solo el tramo de ascenso y de descenso; siendo el tramo de crucero prácticamente idéntico en ambas trayectorias. Por ello, cabe presuponer que la conclusión extraída anteriormente (de que 6 etapas de crucero son suficientes para simular un crucero); será exactamente la misma para ambas trayectorias.Una vez tomado en cuenta esto, tan sólo queda por determinar con que trayectoria tipo (1 ó 2) se obtienen consumos menores de combustible, para así poder continuar con el análisis de los parámetros. Para ello, se realiza un análisis de la trayectoria tipo 2 de un número suficiente de etapas (3 por ejemplo) y se compara el valor obtenido con los 47989,4 kilogramos obtenidos en el caso anterior para el caso de la trayectoria tipo 1.Realizando un análisis de la trayectoria tipo 2 con las condiciones impuestas anteriormente, se obtienen resultados de consumo mucho mayores, con valores de combustible superiores en todos los casos a 48100 kilogramos . Esto se debe a que las condiciones no lineales impuestas para limitar los valores del “Rate of Climb” y del “Rate of Descent” no limitan los valores de estos tan bien como se podría; llegándose todo el rato a los límites sin finalizar la iteración.Sin embargo, tal y como se ha especificado antes en las limitaciones; se pueden cambiar estas condiciones no lineales por limitaciones en los distintos “Rate of Climb” y “Rate of Descent”. Al realizar este proceso y limitar cada valor de R/C y R/D, se logran obtener resultados menores de consumo.En cuanto a los valores utilizados para este tipo de limitación, estos valores se han determinado por un método básicamente basado en el prueba y error; intentando buscar los valores máximos y mínimos que no producen errores. Esto entraña dos problemas principales:
• Primeramente, al ser las altitudes intermedias variables del problema (que van variando durante las iteraciones) y ser la limitaciones fijas; puede ser que las limitaciones no sean todo lo precisas posibles.
• Además, al realizar un análisis de evolución de parámetros (análisis del CI); es más que probable que se alcancen los límites, en este caso referentes a muchas variables principales, haciendo que el análisis de CI no sea todo lo correcto posible; con la necesidad de ir ajustando estos valores conforme va variando el CI.
Realizando un análisis utilizando límites para los R/C y R/D los resultados obtenidos son para el caso de 3 etapas:
• Coste de combustible: 47998 kilogramosLos valores de las variables para el óptimo obtenido son los siguientes, que vienen representados junto a sus límites:
• ROC1: 12.2345 m/s. Límites entre 7.62 y 15.24 m/s.• ha1: 9265 m.
50

• ROC2: 8.0676 m/s. Límites entre 5.68 y 8.636 m/s• ha2: 9310.6 metros(m)• ROC3: 5.0448 m/s. Límites entre 2.54 y 5.08 m/s• h_cr: 9318 10060 10799 metros (m)• r_cr: 3423965 6671184 metros (m)• ROD1: 7.0746 m/s. Límites entre 6.604 y 15.24 m/s• h_d1: 5671.4 metros (m)• ROD2: 6.8736 m/s. Límites entre 6.604 y 8.636 m/s• h_d2: 3048 m (10000 pies)• ROD3: 5.0871 m/s. Límites entre 2.54 y 7.112 m/s• Tiempo: 44170 segundos
Como puede observarse, los resultados obtenidos para este análisis son valores de consumo y tiempo superiores al caso de la trayectoria tipo 1. Este es el resultado que cabría esperar ya que las aeronaves actuales siguen trayectorias del tipo CAS/Mach, siendo estas las de menor consumo . Debido a ello, el posterior análisis del efecto de los diferentes parámetros será llevado a cabo para la trayectoria tipo 1.El hacer el análisis con la trayectoria tipo 1 soluciona el problema expresado anteriormente, donde se expresaba que las limitaciones impuestas, en forma de condición de contorno, para las variables de R/C y R/D, alcanzarían los límites en caso de un análisis de CI; ya que el análisis de CI se va a llevar a cabo tan solo para la trayectoria tipo 1.En cuanto al análisis de los resultados obtenidos, resulta curioso observar cómo conforme aumenta la altitud el R/C disminuye, fenómeno esperado ya que al aumentar la altitud el empuje del motor disminuye (para un mismo consumo). Otro fenómeno interesante es el valor de la segunda altitud intermedia en el descenso; haciendo que el descenso se realice tan solo en 2 etapas; y que el ascenso prácticamente se realice en una única etapa, al tener la tercera etapa de ascensión tan solo 8 metros de altura.
51

3.2 Análisis del CIUna vez determinado el número de etapas de crucero que minimizan la cantidad de combustible, se procede a realizar el análisis en función del CI (“Cost Index”). Para ello, se modifica la función objetivo a optimizar introduciendo un parámetro nuevo, que afecta al tiempo de vuelo. La función a optimizar (F) queda de la forma:
F=m fCI⋅ t=minicial−m finalCI⋅t final−t inicial
Al introducir el efecto del tiempo, el análisis se vuelve mucho más realista. Añadiendo este efecto, se tiene en cuenta diferentes factores que también son considerados por las aerolíneas.La principal razón por la cual se utilizan las aeronaves para realizar diferentes trayectos es que se trata del sistema de transporte más rápido, por lo que su uso está ligado totalmente al ahorro de tiempo, siendo importante tratar de minimizarlo en la manera de lo posible.Otro factor es más de carácter económico, ya que se intenta encontrar una relación de compromiso entre coste y tiempo. Por una parte se intenta minimizar el coste del combustible, asociada a la disminución de potencia, lo que lleva a un aumento del tiempo de vuelo; y por otro lado se intenta minimizar el tiempo, para tratar de tener la aeronave libre para poder realizar el siguiente trayecto. La búsqueda de esta solución de compromiso se traduce en la inclusión del parámetro CI, cuyo valor dependerá de las necesidades de cada momento.En lo referido al análisis, este se ha realizado para un rango de valores CI, tratando de englobar a todos los valores de CI utilizados comúnmente. El rango utilizado es desde un valor de CI de -0'5, en donde el efecto del tiempo es favorable, hasta un valor máximo de CI de 2,5 (inicialmente se iba a analizar hasta valores de 3, pero debido a la limitación del motor, se alcanza el límite superior del CAS de descenso para valores anteriores de CI (en torno a 2,7)). Para dicho análisis de ha hecho uso de un método conocido como el método de continuación, que permite, ante todo, ahorra coste computacional.
3.2.1 Método de continuaciónLa idea básica del método de continuación es usar los valores obtenidos en análisis anteriores para imponer las condiciones iniciales en el siguiente punto. En este caso, al ser un análisis en el que tan solo varía un parámetro (CI), se pueden aprovechar los valores obtenidos para un valor de CI para el análisis de los siguientes valores de CI. Sin embargo, al tratarse de un análisis en una dirección, debe realizarse de forma ascendente o descendente variando el CI. Para ello primero se debe separar el problema en dos análisis, uno ascendente que parte desde 0 hasta el valor máximo de 2,5; y otro que también parte de un CI de 0 hasta el valor mínimo de -0'5.Posteriormente, se divide cada uno de los distintos análisis (ascendente y descendente) en distintos valores de CI (separados cada uno de ellos por 0,05) y se procede a la optimización para cada uno de los distintos valores de CI con el método de continuación.
Aplicación del método
La aplicación del método se realiza siguiendo el modelo de una recta. Para ello hacen falta los resultados obtenidos para dos valores de CI anteriores al que se desea analizar. Con estos dos valores se traza un recta; y partir de esa recta se proyectan las variables que se utilizarán a continuación como condiciones iniciales.El método utilizado es el siguiente:
52
1. Se parte de dos análisis cuya solución es conocida. Para facilitar la explicación se utiliza la siguiente nomenclatura. A los dos valores de CI de las soluciones conocidas se les denomina como x0 y x1. Las variables para las que se obtiene el mínimo (CASA, MA...) se les agrupa en los vectores y0 e y1 (de igual forma que a los valores de CI).Inicialmente solo se tiene la solución para el caso de CI = 0; asignando el x0 = 0 (CI) e y0 a los valores que dan el óptimo. Para poder utilizar el método se deberá realizar un análisis adicional para el siguiente valor de CI, al que se denomina x1 (= 0'05 para el análisis ascendente y -0'05 para el descendente). Al no poder aplicarse aún el método de continuidad se toma como condiciones iniciales y0. Al conjunto de variables que dan como resultado ese mínimo se les agrupa en el vector y1.
2. Se construye una recta (y = m x + c) a partir de (x0,y0) y de (x1,y1). Dicha recta se construye de la siguiente manera:
y=y1− y0
x1− x0x−x0 y0
3. Asignando el valor x = x2; siendo x2 el siguiente valor de CI, se obtiene el vector y2 que se utiliza como condiciones iniciales para el análisis correspondiente al CI = x2.
4. Se actualizan los valores:x2= x1 ; x1=x0 ;y2= y1 ; y1= y0 ;
Se vuelve al punto 2 hasta que se terminen los valores de CI a analizar.
Problemas del método de continuación
Si bien este método ofrece una gran ventaja en cuanto al ahorro del coste computacional también posee ciertas desventajas. La principal desventaja derivada del uso de este método es también su mayor ventaja: que se posiciona demasiado cerca de la que se cree como solución. Esto puede acarrear el siguiente problema:Al estar el valor inicial tan cerca de una posible solución, puede que el optimizador continúe direccionándose hacia ese punto, cuando tan solo se trata de un mínimo local, y no del mínimo absoluto. Y visto como se ha demostrado antes la discrepancia entre ciertos valores del óptimo (véase el análisis de las condiciones iniciales y su efecto); puede que se escape el mínimo real.Otro posible problema es que; al utilizar como condiciones iniciales valores extrapolados a partir de otras soluciones; las condiciones iniciales se encuentren fuera del rango de análisis. Debido a esto, el fmincon realiza saltos para entrar en el rango de las soluciones. El problema es que al realizar este salto; el fmincon no tiene en cuenta las condiciones no lineales y puede llevar al error de la optimización.Para compensar este efecto; y como se presupone el efecto que van a experimentar las variables; la solución propuesta para compensar este fenómeno es la imponer unos límites más finos dependiendo del análisis a realizar. Así, por ejemplo, si se desea hacer un análisis para valores de CI positivos, se puede presuponer que el Mach de crucero irá en aumento; para intentar minimizar el tiempo. Con ello y sabiendo que el Mcr óptimo para CI nulo es 0'762, se puede imponer como condición de Mach de crucero mínimo el valor de 0'7. De una manera análoga, se puede hacer algo similar para el resto de variables. Sin embargo, se deberá comprobar al final del análisis si alguna de las variables finales coincide con los límites.Tras el análisis, los resultados presentados a continuación en ningún caso coinciden con los límites
53
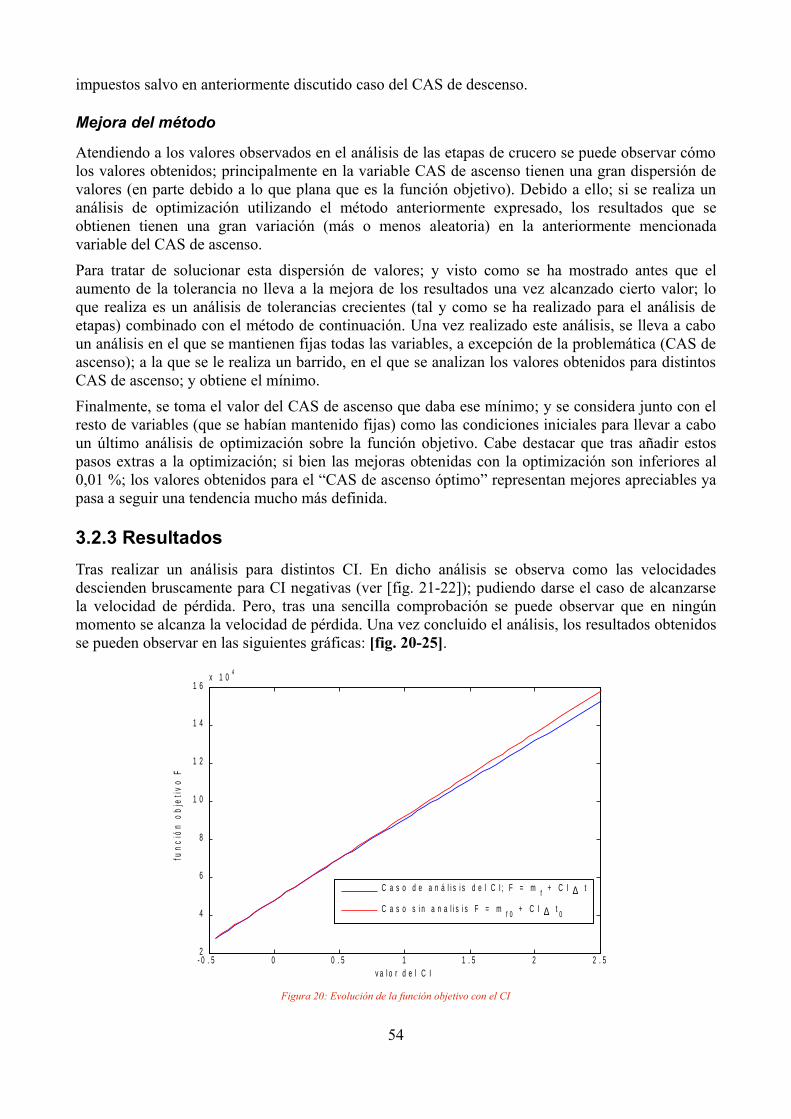
impuestos salvo en anteriormente discutido caso del CAS de descenso.
Mejora del método
Atendiendo a los valores observados en el análisis de las etapas de crucero se puede observar cómo los valores obtenidos; principalmente en la variable CAS de ascenso tienen una gran dispersión de valores (en parte debido a lo que plana que es la función objetivo). Debido a ello; si se realiza un análisis de optimización utilizando el método anteriormente expresado, los resultados que se obtienen tienen una gran variación (más o menos aleatoria) en la anteriormente mencionada variable del CAS de ascenso.Para tratar de solucionar esta dispersión de valores; y visto como se ha mostrado antes que el aumento de la tolerancia no lleva a la mejora de los resultados una vez alcanzado cierto valor; lo que realiza es un análisis de tolerancias crecientes (tal y como se ha realizado para el análisis de etapas) combinado con el método de continuación. Una vez realizado este análisis, se lleva a cabo un análisis en el que se mantienen fijas todas las variables, a excepción de la problemática (CAS de ascenso); a la que se le realiza un barrido, en el que se analizan los valores obtenidos para distintos CAS de ascenso; y obtiene el mínimo.Finalmente, se toma el valor del CAS de ascenso que daba ese mínimo; y se considera junto con el resto de variables (que se habían mantenido fijas) como las condiciones iniciales para llevar a cabo un último análisis de optimización sobre la función objetivo. Cabe destacar que tras añadir estos pasos extras a la optimización; si bien las mejoras obtenidas con la optimización son inferiores al 0,01 %; los valores obtenidos para el “CAS de ascenso óptimo” representan mejores apreciables ya pasa a seguir una tendencia mucho más definida.
3.2.3 ResultadosTras realizar un análisis para distintos CI. En dicho análisis se observa como las velocidades descienden bruscamente para CI negativas (ver [fig. 21-22]); pudiendo darse el caso de alcanzarse la velocidad de pérdida. Pero, tras una sencilla comprobación se puede observar que en ningún momento se alcanza la velocidad de pérdida. Una vez concluido el análisis, los resultados obtenidos se pueden observar en las siguientes gráficas: [fig. 20-25].
54
Figura 20: Evolución de la función objetivo con el CI
- 0 . 5 0 0 . 5 1 1 . 5 2 2 . 52
4
6
8
1 0
1 2
1 4
1 6x 1 0
4
v a l o r d e l C I
fun
ció
n o
bje
tiv
o F
C a s o d e a n á l i s i s d e l C I ; F = mf
+ C I ∆ t
C a s o s i n a n a l i s i s F = mf 0
+ C I ∆ t0
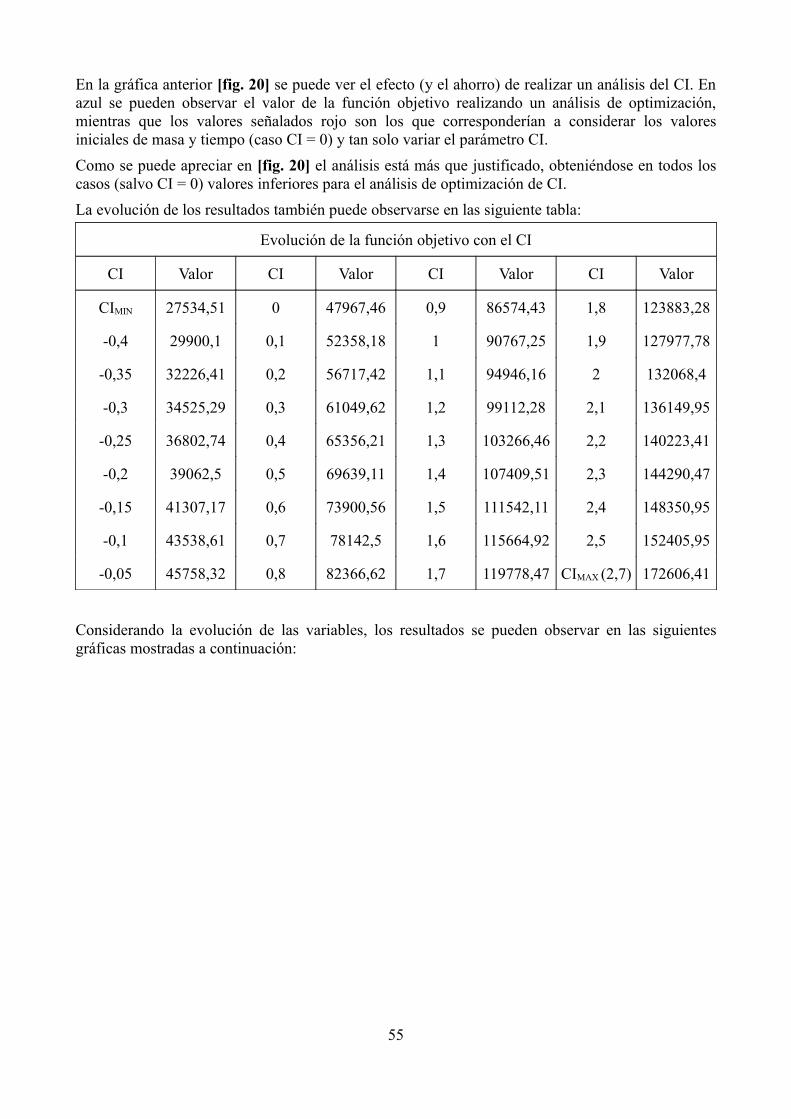
En la gráfica anterior [fig. 20] se puede ver el efecto (y el ahorro) de realizar un análisis del CI. En azul se pueden observar el valor de la función objetivo realizando un análisis de optimización, mientras que los valores señalados rojo son los que corresponderían a considerar los valores iniciales de masa y tiempo (caso CI = 0) y tan solo variar el parámetro CI.Como se puede apreciar en [fig. 20] el análisis está más que justificado, obteniéndose en todos los casos (salvo CI = 0) valores inferiores para el análisis de optimización de CI.La evolución de los resultados también puede observarse en las siguiente tabla:
Evolución de la función objetivo con el CI
CI Valor CI Valor CI Valor CI Valor
CIMIN 27534,51 0 47967,46 0,9 86574,43 1,8 123883,28
-0,4 29900,1 0,1 52358,18 1 90767,25 1,9 127977,78
-0,35 32226,41 0,2 56717,42 1,1 94946,16 2 132068,4
-0,3 34525,29 0,3 61049,62 1,2 99112,28 2,1 136149,95
-0,25 36802,74 0,4 65356,21 1,3 103266,46 2,2 140223,41
-0,2 39062,5 0,5 69639,11 1,4 107409,51 2,3 144290,47
-0,15 41307,17 0,6 73900,56 1,5 111542,11 2,4 148350,95
-0,1 43538,61 0,7 78142,5 1,6 115664,92 2,5 152405,95
-0,05 45758,32 0,8 82366,62 1,7 119778,47 CIMAX (2,7) 172606,41
Considerando la evolución de las variables, los resultados se pueden observar en las siguientes gráficas mostradas a continuación:
55
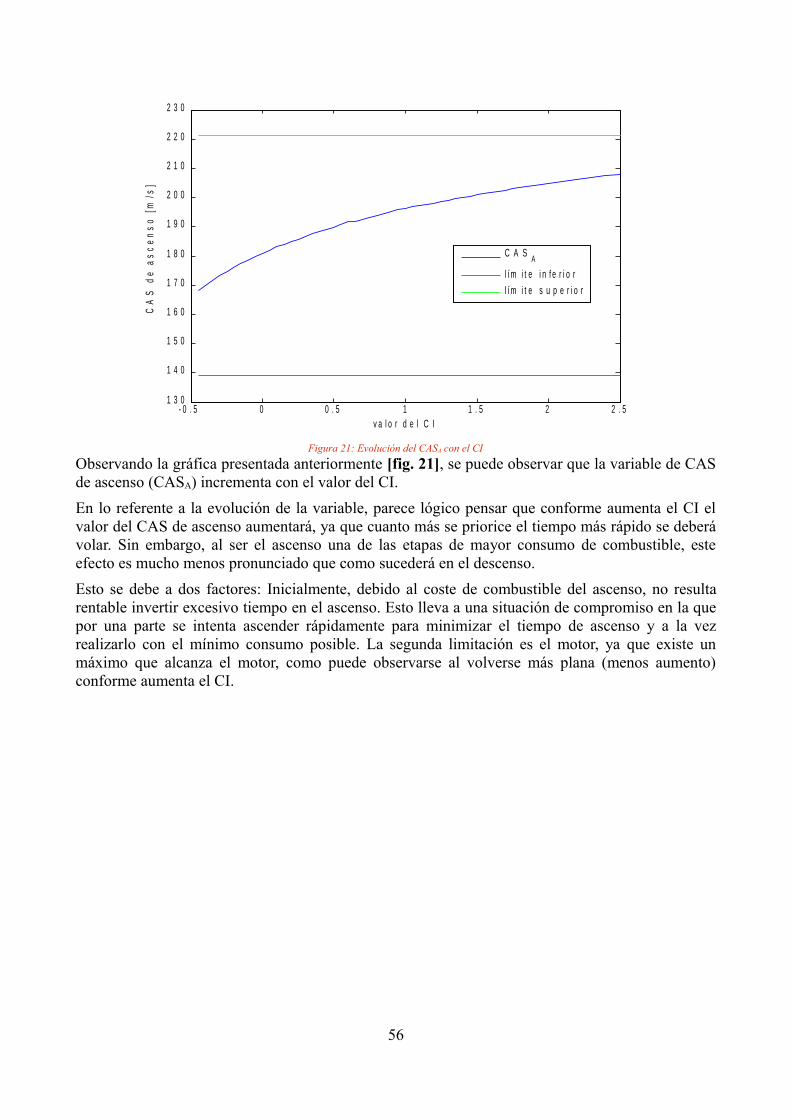
Observando la gráfica presentada anteriormente [fig. 21], se puede observar que la variable de CAS de ascenso (CASA) incrementa con el valor del CI.En lo referente a la evolución de la variable, parece lógico pensar que conforme aumenta el CI el valor del CAS de ascenso aumentará, ya que cuanto más se priorice el tiempo más rápido se deberá volar. Sin embargo, al ser el ascenso una de las etapas de mayor consumo de combustible, este efecto es mucho menos pronunciado que como sucederá en el descenso.Esto se debe a dos factores: Inicialmente, debido al coste de combustible del ascenso, no resulta rentable invertir excesivo tiempo en el ascenso. Esto lleva a una situación de compromiso en la que por una parte se intenta ascender rápidamente para minimizar el tiempo de ascenso y a la vez realizarlo con el mínimo consumo posible. La segunda limitación es el motor, ya que existe un máximo que alcanza el motor, como puede observarse al volverse más plana (menos aumento) conforme aumenta el CI.
56
Figura 21: Evolución del CASA con el CI
- 0 . 5 0 0 . 5 1 1 . 5 2 2 . 51 3 0
1 4 0
1 5 0
1 6 0
1 7 0
1 8 0
1 9 0
2 0 0
2 1 0
2 2 0
2 3 0
v a l o r d e l C I
CA
S d
e a
sc
en
so
[m
/s]
C A SA
l í m i t e i n f e r i o r
l í m i t e s u p e r i o r

En lo referente a la evolución de los distintos Mach, como puede observarse en la gráfica anterior [fig. 22], todos los Mach aumentan con el CI. Además de esto, mediante un simple vistazo a la figura [fig. 22], se pueden observar los siguientes cuatro fenómenos de interés:
1. Si bien el Mach de descenso (MD) aumenta conforme aumenta el CI; se puede observar como este aumento es mucho menos pronunciado a partir del valor de un CI de 0'1. Esto lleva a pensar que un valor en torno a 0'1 puede tratarse de un punto de inflexión en donde el consumo comienza a tener más peso que el tiempo en la variable de MD.Esta interpretación se basa en que al realizarse el descenso en ralentí, el consumo es mínimo. Por ello, para minimizar el consumo de combustible se intenta mantener el mayor tiempo posible la aeronave en el tramo de descenso (ralentí). Debido a esto, se puede interpretar que para valores de CI menores al anteriormente citado valor de 0'1; el efecto del tiempo tiene un mayor peso en la función objetivo (más efecto) que el consumo de combustible; y es por ello que el valor de MD varía tanto con el CI. Por contra, para valores de CI mayores a 0'1, el combustible ahorrado por el descenso en ralentí comienza a tener un mayor peso que el tiempo por lo que el MD sigue creciendo aunque de una manera menos pronunciada que el caso anterior.Otro detalle de interés en lo referente al MD son los picos que se muestran en la gráfica para valores de en torno a un CI de 0'2; efecto interpretado más adelante.
2. El siguiente fenómeno a observar es la relación que existe entre las variables Mach de ascenso MA y Mach de crucero Mcr. Como se puede contemplar en la gráfica anterior, para valores menores de un CI de 0 el MA es mayor al Mcr; mientra que para valores de entre 0 y 0'4 los valores son muy próximos para finalmente ser mayor el MA que el Mcr para valores de CI mayores de 0'4.La explicación para este fenómeno es sencilla; esto se debe a que el Mach de crucero se encuentra más relacionado con el efecto del tiempo de vuelo, efecto debido a que el crucero es el segmento de vuelo de mayor duración y que mayor tiempo requiere (ver [fig. 22]). Por ello, el Mcr es el valor que más afecta al tiempo. El MA de ascenso, por contra; pertenece a la parte del vuelo de mayor consumo de combustible (el ascenso), por lo que el efecto del
57
Figura 22: Evolución de los valores del Mach con el CI
- 0 . 5 0 0 . 5 1 1 . 5 2 2 . 50 . 4 5
0 . 5
0 . 5 5
0 . 6
0 . 6 5
0 . 7
0 . 7 5
0 . 8
0 . 8 5
0 . 9
v a l o r d e l C I
Nú
me
ros
de
Ma
ch
[ ]
Mc r
MA
MD
l í m i t e s u p e r i o r d e l M a c h
l í m i t e i n fe r i o r d e l M a c h

tiempo sobre esta variable es menor que para el resto de variables.Utilizando la interpretación anterior, para CI menor a 0 prima el volar lo más despacio posible, por lo que el MA es mayor que el Mcr, siendo mayor la diferencia conforme baja el CI. Por contra, para CI mayores a 0'4; prima volar lo más rápidamente posible, siendo el Mcr
mayor al MA con la diferencia entre ambos aumentando conforme avanza el CI.3. Finalmente, se puede observar que tanto el MA como el Mcr son siempre mayores al MD. Esto
se debe a que, independientemente del efecto del tiempo, el consumo del descenso es siempre mucho menor al del ascenso y del crucero (al ser en ralentí). Este efecto convierte el descenso en una zona de mínimo consumo de longitud variable dependiente del efecto del tiempo, en donde el aumento del MD, hasta valores excesivos, conlleva un aumento de la distancia de crucero, incrementando el coste de combustible de mayor forma que lo que llega a ahorrar en tiempo; siendo por ello preferible el aumento de las otras variables de Mach antes que la del descenso.
En lo referente a las altitudes a las que se realiza el crucero, como puede observarse en la figura mostrada anteriormente [fig. 23] se pueden observar dos tendencias claramente diferenciables:
• Para valores de CI superiores a un valor aproximado de 0'2-0'5 (en donde debido a las condiciones del problema, la aeronave intenta volar lo más rápido posible) se puede observar cómo las distintas altitudes de crucero van disminuyendo.Una posible explicación para este fenómeno puede ser debido a la relación que existe entre la densidad del aire y el Mach de crucero.Es por ello que el descenso de la altitud es tan poco pronunciado, ya que se trata de buscar la situación de equilibrio entre los efectos de consumo de combustible y tiempo.
• Para el caso de valores de CI menores a -0'1; se puede observar como el las altitudes de crucero también descienden, de forma más pronunciada que en el caso anterior; si bien la
58
Figura 23: Evolución de las altitudes de crucero con el CI
- 0 . 5 0 0 . 5 1 1 . 5 2 2 . 50 . 7
0 . 8
0 . 9
1
1 . 1
1 . 2
1 . 3
1 . 4x 1 0
4
v a l o r d e l C I
Dis
tin
tas
alt
ura
s d
e c
ruc
ero
[m
]
p r i m e r a a l t u r a d e c r ú c e r o
s e g u n d a a l t u r a d e c r ú c e r ot e r c e r a a l t u r a d e c r ú c e r o
c u a r t a a l t u r a d e c r ú c e r o
q u i n t a a l t u r a d e c r ú c e r o
s e x t a a l t u r a d e c r ú c e r ol ím i t e i n fe r i o r d e a l t u r a s
a l t u r a m á x i m a p a r a l a m i t a d d e c o m b u s t i b l e c o n s u m i d o

causa de este efecto es totalmente distinta.
Considerando las distancias de crucero, unas de las últimas variables por analizar, se puede observar en la figura anterior [fig. 24] que las distancias de crucero sufre un comportamiento bastante poco predecible aunque se mantiene sin excesivas variaciones. Por lo demás, el valor permanece prácticamente constante aún sufriendo un ligero ascenso (hasta el valor de CI en torno 0'8). A partir de ese punto, continua plano aproximadamente hasta el CI de 2,5. Estos efectos en las distancias de crucero se encuentran relacionados con las variaciones y efectos ocurridos en las altitudes de crucero; estando ambas causas y efectos relacionados.
Finalmente, en lo referente a la última variables a analizar, el CASD; no hay mucho que aportar. La variable varía según lo previsto; aumentando según aumenta el CI hasta que alcanza el límite
59
Figura 24: Evolución de las distancias de crucero con el CI
- 0 . 5 0 0 . 5 1 1 . 5 2 2 . 51
2
3
4
5
6
7
8
9x 1 0
6
v a l o r d e l C I
Dis
tan
cia
s p
ara
ca
da
alt
ura
de
cru
ce
ro [
m]
d i s t a n c i a d e l a 1 ª a l t u r a
d i s t a n c i a d e l a 2 ª a l t u r a
d i s t a n c i a d e l a 3 ª a l t u r ad i s t a n c i a d e l a 4 ª a l t u r a
d i s t a n c i a d e l a 5 ª a l t u r a
Figura 25: Evolución del CASD con el CI
- 0 . 5 0 0 . 5 1 1 . 5 2 2 . 51 2 0
1 3 0
1 4 0
1 5 0
1 6 0
1 7 0
1 8 0
1 9 0
2 0 0
va l o r d e l C I
CA
S D [
m/s
]
C A SD
l ím i t e i n fe r i o r
l ím i t e s u p e r i o r

máximo que alcanza la aeronave de 380 nudos. Además, se puede observar como el CASD no sufre variación hasta un CI de 0'25 aproximadamente; debido a la definición del problema.En cuanto a otros parámetros a analizar, también resulta interesante el análisis de otras variables como pueden ser la altitud de transición, tanto en el ascenso como en el descenso, y duración del recorrido.
Analizando el efecto del tiempo del vuelo [fig. 26], se puede observar que la variación de este parámetro es más crítica para valores negativos de CI que para los positivos. Adicionalmente, se puede observar la tendencia de este valor hacia un límite al crecer el valor de CI.En cuanto a los valores obtenidos, los resultados siguen la tendencia esperada; descendiendo según aumenta el CI. Esto es lógico ya que según se aumenta el CI, lo que se trata de imponer es que se vuele más rápido.Finalmente, resulta curioso observar que, según aumenta el valor absoluto de CI para valores negativos, la pendiente crece drásticamente tendiendo hacia valores infinitos de tiempo. Este efecto es similar al que sucede en las variables del problema (sobretodo las de altitud y distancias), que sufren cambios bruscos a partir de valores de CI de – 0'3, estando ambos efectos relacionados. Esto puede deberse a que es más sencillo aumentar el tiempo de vuelo que disminuirlo si se intentar mantener en consumo de combustible con la mínima posible variación.Este efecto también lleva a la conclusión de que para realizar análisis para valores inferiores de CI (CI = -0,7 por ejemplo), las limitaciones impuestas anteriormente a las variables deberán ser modificadas ya que siguiendo la tendencia observada, los grados de libertad alcanzarían sus limitaciones. Además, observando la tendencia del tiempo, y teniendo en cuenta que el efecto de este tiempo crece cada vez a un mayor ritmo al aumentar el valor absoluto de CI; se puede deducir que para valores inferiores de CI = -1, se obtendrán valores negativos de la función objetivo.Finalmente, y a modo de curiosidad; resulta curiosos observar que la evolución del tiempo posee
60
Figura 26: Tiempo de vuelo en función del CI
- 0 . 5 0 0 . 5 1 1 . 5 2 2 . 54
4 . 1
4 . 2
4 . 3
4 . 4
4 . 5
4 . 6
4 . 7
4 . 8x 1 0
4
v a l o r d e l C I
Tie
mp
o d
e v
ue
lo [
s]
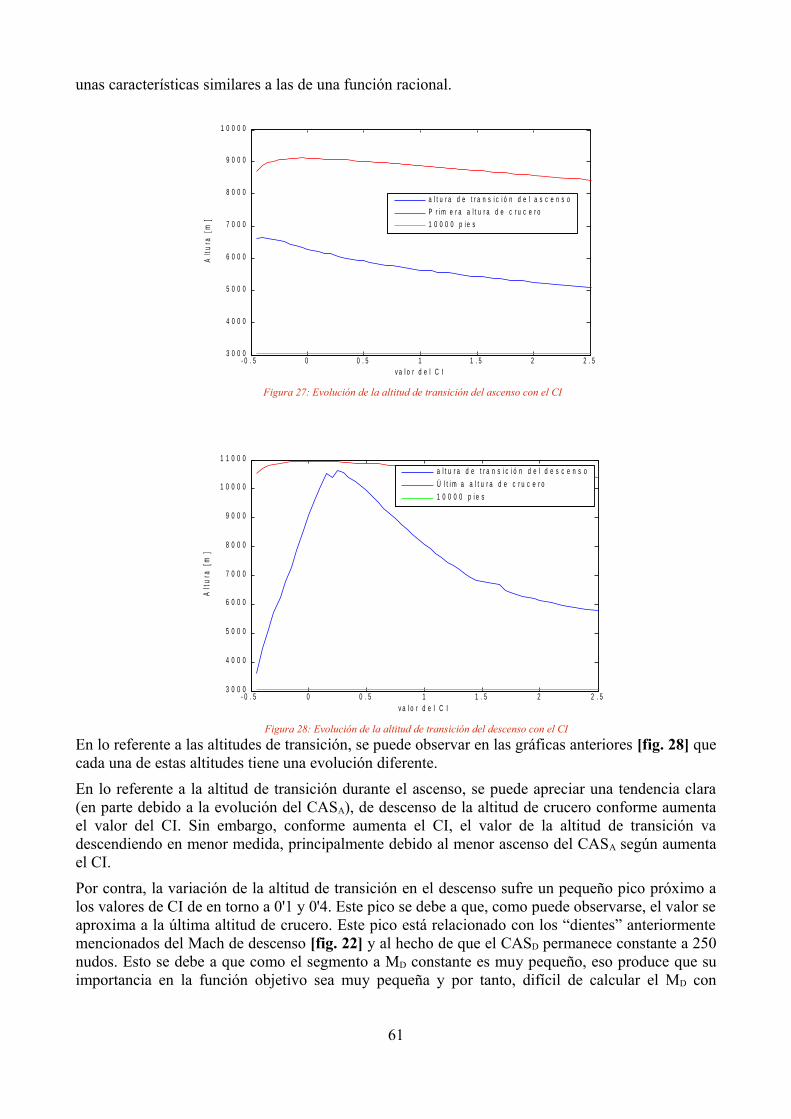
unas características similares a las de una función racional.
En lo referente a las altitudes de transición, se puede observar en las gráficas anteriores [fig. 28] que cada una de estas altitudes tiene una evolución diferente.En lo referente a la altitud de transición durante el ascenso, se puede apreciar una tendencia clara (en parte debido a la evolución del CASA), de descenso de la altitud de crucero conforme aumenta el valor del CI. Sin embargo, conforme aumenta el CI, el valor de la altitud de transición va descendiendo en menor medida, principalmente debido al menor ascenso del CASA según aumenta el CI.Por contra, la variación de la altitud de transición en el descenso sufre un pequeño pico próximo a los valores de CI de en torno a 0'1 y 0'4. Este pico se debe a que, como puede observarse, el valor se aproxima a la última altitud de crucero. Este pico está relacionado con los “dientes” anteriormente mencionados del Mach de descenso [fig. 22] y al hecho de que el CASD permanece constante a 250 nudos. Esto se debe a que como el segmento a MD constante es muy pequeño, eso produce que su importancia en la función objetivo sea muy pequeña y por tanto, difícil de calcular el MD con
61
Figura 27: Evolución de la altitud de transición del ascenso con el CI
- 0 . 5 0 0 . 5 1 1 . 5 2 2 . 53 0 0 0
4 0 0 0
5 0 0 0
6 0 0 0
7 0 0 0
8 0 0 0
9 0 0 0
1 0 0 0 0
v a l o r d e l C I
Alt
ura
[m
]
a l t u r a d e t r a n s i c i ó n d e l a s c e n s o
P r i m e r a a l t u r a d e c r u c e r o
1 0 0 0 0 p i e s
Figura 28: Evolución de la altitud de transición del descenso con el CI
- 0 . 5 0 0 . 5 1 1 . 5 2 2 . 53 0 0 0
4 0 0 0
5 0 0 0
6 0 0 0
7 0 0 0
8 0 0 0
9 0 0 0
1 0 0 0 0
1 1 0 0 0
v a l o r d e l C I
Alt
ura
[m
]
a l t u r a d e t r a n s i c i ó n d e l d e s c e n s o
Ú l t i m a a l t u r a d e c r u c e r o
1 0 0 0 0 p i e s
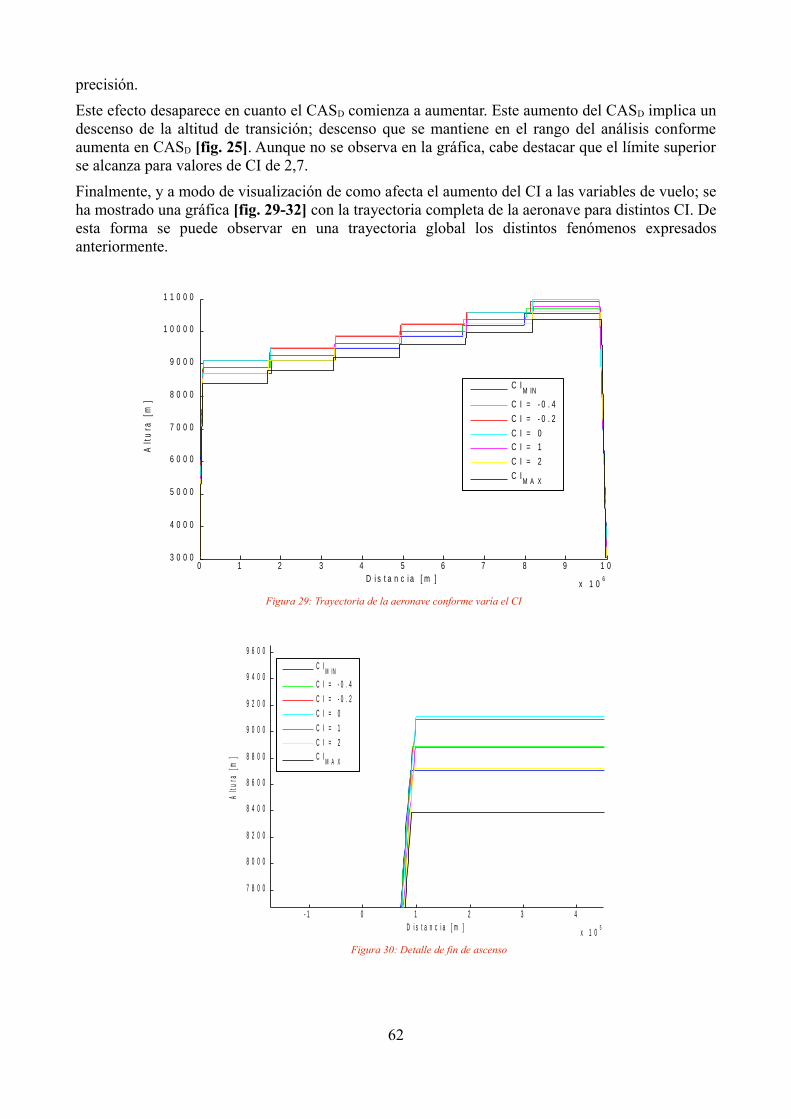
precisión.Este efecto desaparece en cuanto el CASD comienza a aumentar. Este aumento del CASD implica un descenso de la altitud de transición; descenso que se mantiene en el rango del análisis conforme aumenta en CASD [fig. 25]. Aunque no se observa en la gráfica, cabe destacar que el límite superior se alcanza para valores de CI de 2,7.Finalmente, y a modo de visualización de como afecta el aumento del CI a las variables de vuelo; se ha mostrado una gráfica [fig. 29-32] con la trayectoria completa de la aeronave para distintos CI. De esta forma se puede observar en una trayectoria global los distintos fenómenos expresados anteriormente.
62
Figura 29: Trayectoria de la aeronave conforme varía el CI
0 1 2 3 4 5 6 7 8 9 1 0
x 1 06
3 0 0 0
4 0 0 0
5 0 0 0
6 0 0 0
7 0 0 0
8 0 0 0
9 0 0 0
1 0 0 0 0
1 1 0 0 0
D i s t a n c i a [ m ]
Alt
ura
[m
]
C IM IN
C I = - 0 . 4
C I = - 0 . 2
C I = 0C I = 1
C I = 2
C IM A X
Figura 30: Detalle de fin de ascenso
- 1 0 1 2 3 4
x 1 05
7 8 0 0
8 0 0 0
8 2 0 0
8 4 0 0
8 6 0 0
8 8 0 0
9 0 0 0
9 2 0 0
9 4 0 0
9 6 0 0
D i s t a n c i a [ m ]
Altu
ra [
m]
C IM IN
C I = - 0 . 4
C I = - 0 . 2
C I = 0
C I = 1
C I = 2C I
M A X

63
Figura 31: Detalle de inicio de descenso
9 . 2 9 . 4 9 . 6 9 . 8 1 0 1 0 . 2
x 1 06
0 . 9 6
0 . 9 8
1
1 . 0 2
1 . 0 4
1 . 0 6
1 . 0 8
1 . 1
1 . 1 2
x 1 04
D i s t a n c i a [ m ]
Altu
ra [
m]
C I
M IN
C I = - 0 . 4
C I = - 0 . 2
C I = 0
C I = 1
C I = 2C I
M A X
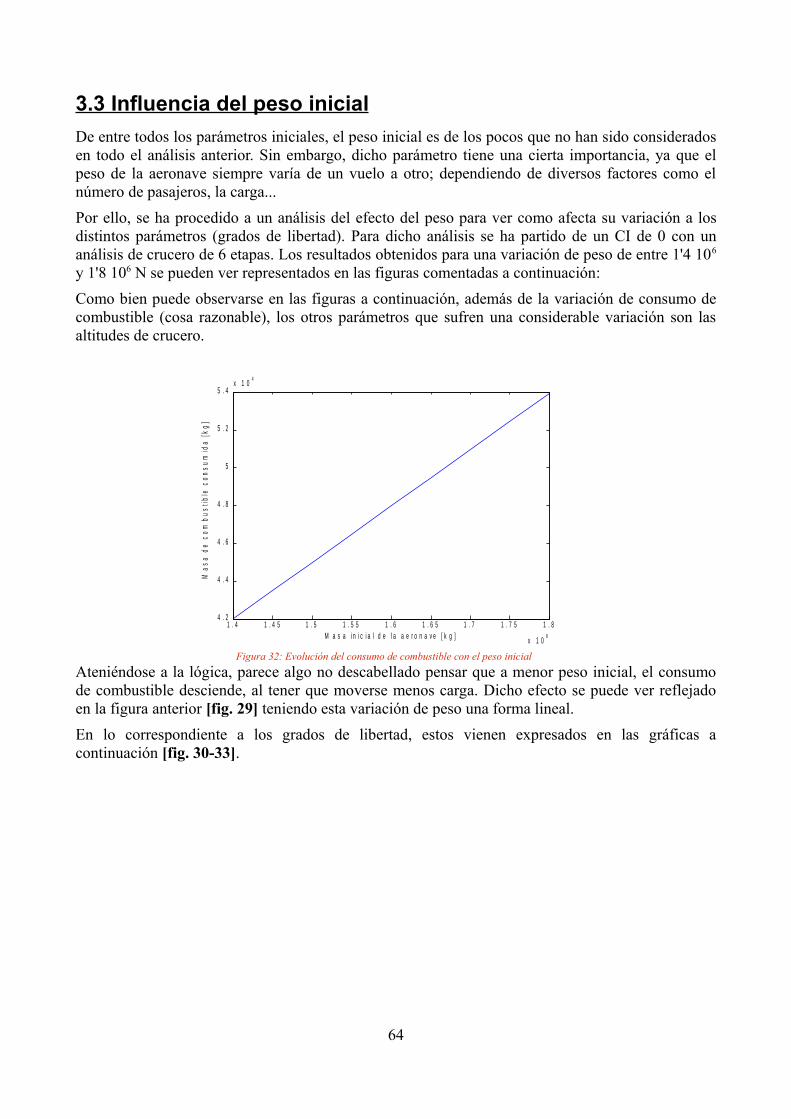
3.3 Influencia del peso inicialDe entre todos los parámetros iniciales, el peso inicial es de los pocos que no han sido considerados en todo el análisis anterior. Sin embargo, dicho parámetro tiene una cierta importancia, ya que el peso de la aeronave siempre varía de un vuelo a otro; dependiendo de diversos factores como el número de pasajeros, la carga...Por ello, se ha procedido a un análisis del efecto del peso para ver como afecta su variación a los distintos parámetros (grados de libertad). Para dicho análisis se ha partido de un CI de 0 con un análisis de crucero de 6 etapas. Los resultados obtenidos para una variación de peso de entre 1'4 106
y 1'8 106 N se pueden ver representados en las figuras comentadas a continuación:Como bien puede observarse en las figuras a continuación, además de la variación de consumo de combustible (cosa razonable), los otros parámetros que sufren una considerable variación son las altitudes de crucero.
Ateniéndose a la lógica, parece algo no descabellado pensar que a menor peso inicial, el consumo de combustible desciende, al tener que moverse menos carga. Dicho efecto se puede ver reflejado en la figura anterior [fig. 29] teniendo esta variación de peso una forma lineal.En lo correspondiente a los grados de libertad, estos vienen expresados en las gráficas a continuación [fig. 30-33].
64
Figura 32: Evolución del consumo de combustible con el peso inicial
1 . 4 1 . 4 5 1 . 5 1 . 5 5 1 . 6 1 . 6 5 1 . 7 1 . 7 5 1 . 8
x 1 06
4 . 2
4 . 4
4 . 6
4 . 8
5
5 . 2
5 . 4x 1 0
4
M a s a i n i c i a l d e l a a e r o n a v e [ k g ]
Ma
sa
de
co
mb
us
tib
le c
on
su
mid
a [
kg
]

En cuanto a la evolución del número de Mach para los distintos tramos; como se puede observar el la figura anterior [fig. 30] los números de Mach evolucionan de la siguiente manera: el Mach de crucero (Mcr), como ha sucedido anteriormente, apenas varía del óptimo (0.762) pudiéndose atribuir las pequeñas variaciones sufridas al ruido numérico.Considerando el Mach de ascenso (MA) y el Mach de descenso (MD), la variación de estos parámetros sí sufre el efecto de la variación del peso, aunque también se pueden apreciar variaciones que se encuentran relacionadas con el hecho de que la función es muy plana (como se podía en el análisis de las etapas). Dicho efecto puede observarse al ser ciertas variaciones un poco aleatorias.Así pues, conforme aumenta el peso de la aeronave los valores de ambas variables aumentan. En el caso del Mach de ascenso, es lógico pensar que esto suceda ya que conforme aumenta el peso, el consumo de combustible en el ascenso aumenta (siendo éste el tramo de mayor consumo). Para tratar de disminuir el efecto de este aumento, se trata de ascender a mayor velocidad para minimizar el tiempo de estancia en el ascenso y compensar el aumento de consumo debido al aumento del peso. Por ello, se busca una solución de compromiso entre consumo y tiempo.En lo referente el Mach de descenso; un aumento del peso facilita el descenso, siendo esta una posible explicación para un aumento del Mach de descenso; ya que de lo contrario podría hacer falta incrementar la resistencia para minimizar el efecto del peso, conllevando a un aumento del consumo.
65
Figura 33: Evolución de los distintos Mach con el peso inicial
1 . 4 1 . 4 5 1 . 5 1 . 5 5 1 . 6 1 . 6 5 1 . 7 1 . 7 5 1 . 8
x 1 06
0 . 5 5
0 . 6
0 . 6 5
0 . 7
0 . 7 5
0 . 8
M a s a i n i c i a l d e l a a e r o n a v e [ k g ]
Ev
olu
ción
del
Mac
h [
]
M a c h A s c e n s o
M a c h c r u c e r o
M a c h d e s c e n s o

En cuanto al efecto del CAS, tanto el de ascenso (CASA) como el de descenso (CASD) los valores siguen una relación muy pareja a lo que sucede en el análisis de la sección 3.2, los valores del CASA
tienen una variación mucho mayor que los valores de CASD. En cuanto al CASD, en este caso siguen manteniéndose los valores del límite inferior de las condiciones de contorno.Sin embargo, sí se puede observar como los valores del CAS de ascenso aumentan conforme aumenta el peso. Una explicación para dicho efecto puede ser el anteriormente citado en el caso del Mach de ascenso. En este caso también, el aumento de peso conlleva un mayor consumo de combustible en el tramo de ascenso. Una forma de recortar ese aumento de consumo es minimizando el tiempo de estancia en el tramo de ascenso.
En situación opuesta se encuentran las altitudes de crucero. Como se puede observar en la gráfica anterior [fig. 35], las altitudes de crucero varían con el peso inicial, siguiendo una pauta claramente diferenciable, descendiendo las altitudes a medida que aumenta el peso inicial de la aeronave.Este efecto se debe mayormente a la relación que existe entre la densidad del aire y el peso de la aeronave, tal y como se puede observar en la referencia [ref 13]. En ella, se puede observar la relación entre densidad y el peso; siendo la densidad de vuelo inferior conforme disminuye el peso
66
Figura 34: Evolución del CAS ascenso y descenso con el peso inicial
1 . 4 1 . 4 5 1 . 5 1 . 5 5 1 . 6 1 . 6 5 1 . 7 1 . 7 5 1 . 8
x 1 06
1 3 0
1 4 0
1 5 0
1 6 0
1 7 0
1 8 0
1 9 0
M a s a i n i c i a l d e l a a e r o n a v e [ k g ]
Ev
olu
ció
n d
el
CA
S [
m/s
]
C A S A s c e n s o
C A S d e s c e n s o
Figura 35: Evolución altitudes de crucero con el peso inicial
1 . 4 1 . 4 5 1 . 5 1 . 5 5 1 . 6 1 . 6 5 1 . 7 1 . 7 5 1 . 8
x 1 06
0 . 8
0 . 8 5
0 . 9
0 . 9 5
1
1 . 0 5
1 . 1
1 . 1 5
1 . 2x 1 0
4
M a s a i n i c i a l d e l a a e r o n a v e [ k g ]
Alt
ura
de
vu
elo
[m
]
A l t u r a d e c r u c e r o d e l a 1 ª e t a p a
A l t u r a d e c r u c e r o d e l a 2 ª e t a p a
A l t u r a d e c r u c e r o d e l a 3 ª e t a p aA l t u r a d e c r u c e r o d e l a 4 ª e t a p a
A l t u r a d e c r u c e r o d e l a 5 ª e t a p a
A l t u r a d e c r u c e r o d e l a 6 ª e t a p a

y siendo la densidad mayor para mayor un mayor peso. Y al ser la atmósfera estándar, para conseguir esa disminución de densidad es necesario un aumento de altura y un aumento de la densidad del aire conllevará una disminución de la altura.Otro parámetro que podría afectar esta variación podría ser que al aumentar la masa inicial, la altitud máxima que se podría obtener disminuye. Pero una vez realizado el análisis, tal y como sucede para todos los análisis previos; se puede observar que la altitud máxima siempre se encuentra en un valor muy superior a las distintas altitudes de crucero. En este caso, a modo de ejemplo la altitud oscila entre el valor de 13990 metros para el caso de mínimo peso y de 12970 metros para el de máximo peso (claramente superiores a los obtenidos).
Finalmente, en lo referente a las distancias de crucero; como puede observarse en la gráfica anterior [fig. 36] no existe una gran variación en las distintas distancias de crucero. Lo único apreciable es un ligero crecimiento conforme aumenta el valor del peso. Cabe destacar que los efectos de las distancias de crucero están relacionados con las altitudes de crucero; estando las causas relacionadas.
67
Figura 36: Distancias de crucero en función del peso inicial
1 . 4 1 . 4 5 1 . 5 1 . 5 5 1 . 6 1 . 6 5 1 . 7 1 . 7 5 1 . 8
x 1 06
1
2
3
4
5
6
7
8
9x 1 0
6
M a s a in ic ia l d e la a e ro n a ve [ k g ]
Dis
tan
cia
de
vu
elo
[m
]
D is t a n c ia d e c ru c e ro d e la 1 ª e t a p a
D is t a n c ia d e c ru c e ro d e la 2 ª e t a p a
D is t a n c ia d e c ru c e ro d e la 3 ª e t a p aD is t a n c ia d e c ru c e ro d e la 4 ª e t a p a
D is t a n c ia d e c ru c e ro d e la 5 ª e t a p a

68
4. CONCLUSIONESConsiderando los objetivos inicialmente considerados; que como se ha destacado anteriormente en la introducción eran los siguientes:
• Análisis de las trayectorias tipo; en donde se trata de localizar un mínimo y probar la bondad del método utilizado.
• Analizar la evolución de los distintos parámetros conforme varía la función objetivo y las condiciones.
Como ha quedado expuesto durante la presentación anterior de resultados y metodología, los distintos objetivos propuestos inicialmente, han sido cubiertos. Para ello se ha realizado primeramente un análisis de optimización para distintas condiciones iniciales (para ver la bondad del método), para lo cual inicialmente había que definir las diferentes condiciones del problema. Una vez analizadas ambas trayectorias tipo, se ha procedido a un análisis para tratar de establecer el número de etapas de crucero suficientes para considerar un análisis “stepped cruise climb” que simule de una forma realista un “cruise climb”. Una vez determinado todo lo anterior, se ha procedido a realizar un análisis de los distintos parámetros que afectan al problema. Por ello, se ha analizado el efecto del tiempo (mediante el anteriormente mencionado CI, “Cost Index”) y el efecto variable de las condiciones iniciales, el peso.Del trabajo, la experiencia adquirida y los resultados obtenidos durante el desarrollo de este proyecto podemos extraer las siguientes conclusiones:
• Conclusiones sobre el optimizador:La principal conclusión que se puede extraer de los distintos análisis realizados anteriormente es que el algoritmo fmincon básico no es lo suficientemente preciso. Esto se puede observar en que si se utiliza el fmincon sin aplicar ningún método adicional o mejora, se obtienen errores máximos de en torno a 25 - 30 kilogramos (mayores al 0'5%). Sin embargo, al utilizar la metodología anteriormente mostrada, se reducen los errores a en torno a 0,02 kilogramos de media (un error relativo de 4·10-7) con errores máximos de 0,1 kilogramos (implicando un error de 2·10-6).Considerando lo anterior, se puede concluir que los resultados pueden mejorarse; pero para ello se debería utilizar otro método de optimización diferente al propuesto. Por desgracia, de entre todos los optimizadores propuestos tanto por la bibliografía como por MatLab, el método utilizado resulta ser el mejor; por lo que sería necesaria la implementación de un nuevo método para la optimización.Sin embargo, el nivel de precisión mostrado se puede considerar suficiente para el tiempo de computación empleado.
• Conclusiones de las trayectoriasLa principal y más clara conclusión que se puede extraer de los análisis a las distintas trayectorias es que la trayectoria tipo 1 tiene un coste mucho menor de combustible que la trayectoria tipo 2. Por esta razón se han realizado los distintos análisis a partir de la trayectoria tipo 1.Esta conclusión es razonable; ya que si se observa como vuelan los aviones en la actualidad, se observa que tratan de seguir un ascenso/ descenso mediante un CAS/Mach.
69

• Conclusiones de las restriccionesEn lo referente a las restricciones, dentro de las diferentes condiciones impuestas lo más relevante a destacar en la trayectoria tipo 1 es la restricción de contorno asociada al CASD. Esta restricción es la única (de entre las lineales, no lineales y las de contorno) en la que se alcanza uno de los límites (tanto superior como inferior en este caso). Para compensar este efecto en límite inferior habría que cambiar la definición del problema (aunque esto no implicaría un gran cambio final en los resultados finales). En lo referente al límite superior, se trata de una limitación del motor, de muy complejo tratamiento, razón por la cual el CI se ha analizado hasta un valor 2'7.En cuanto a la trayectoria tipo 2, el mayor problema reside en las limitaciones del “Rate of Climb”.Este problema viene dado ya que es complicado implementar unas condiciones no lineales para limitar el “Rate of Climb”, sin cerrar los límites.
• Conclusiones del análisis: Las principales conclusiones que se obtienen para los diferentes análisis son las siguientes:
◦ Análisis del CIEn lo referente al análisis del tiempo de vuelo (observado en el análisis del “Cost Index”), los resultados obtenidos son los esperados (aumento de la velocidad con el CI). Otro suceso que también sucede, como cabría esperar, que el efecto del tiempo tiene un efecto mayor sobre el tramo de descenso que sobre el de ascenso.
◦ Análisis del pesoConsiderando el análisis del peso, las conclusión obtenida es que el peso afecta mayormente al tramo de crucero; sobretodo a las altitudes de crucero. También se observa que el Mach de crucero permanece constante para las distintas condiciones de peso; como cabría esperar a tenor de la bibliografía.
• Conclusiones finalesLa principal conclusión a extraer de estos análisis es que se trata de un primer análisis. Debido a ello los resultados obtenidos son validos como una primera aproximación. Para tratar de completar este análisis, se podría analizar otro tipo de parámetros.Sin embargo, los resultados obtenidos dan una primera impresión buena de lo que sucede. Finalmente, en caso de tratar de lograrse unos mejores resultados se debería proceder a utilizar un algoritmo de optimización de mayor precisión.
70

A: NomenclaturaEn el desarrollo de las ecuaciones y de las distintas condiciones (lineales, no lineales y de contorno); se han mencionado diferentes variables. Dichas variables han sido representadas con diferentes letras.Además de lo anterior, se han incluido distintos subíndices que representan diferentes fases del vuelo. Así, las distintas fases del vuelo se encuentran indicadas por los siguientes subíndices: “A” para el caso del ascenso (como en MA); “cr” para el caso del crucero (como en rcr); y “D” para el caso de descenso (como por ejemplo CASD).La nomenclatura para las distintas variables utilizadas durante el escrito es la siguiente:
• λ: latitud (LAT). Marca junto a la longitud la posición de la aeronave en el plano. Representa la distancia angular entre el ecuador y el punto en el que se encuentra la aeronave. Se mide mediante paralelos.
• φ: longitud (LONG). Junto a la latitud, sirve para determinar la posición de la aeronave en el plano. Expresa la distancia angular entre la posición de la aeronave y un meridiano de referencia (habitualmente el meridiano 0º).
• h: altitud (ALT). Representa la altitud a la que se encuentra la aeronave. Marca la distancia en linea recta entre la superficie terrestre y la aeronave.
• V: velocidad aerodinámica. Velocidad de la aeronave en la dirección del viento. Puede ser representada de diferentes formas, siendo la TAS correcta para su análisis en las ecuaciones. Las diferentes formas de expresar la velocidad utilizadas por el momento son las siguientes:
◦ CAS: “Calibrated AirSpeed”. Se trata de la medición de velocidad marcada en los indicadores de velocidad de las aeronaves. El término “Calibrated” indica que la medición obtenida ya incluye las condiciones de calibración de instrumentos, para así diferenciarla de la IAS (“Indicated AirSpeed”).
◦ TAS: “True AirSpeed”. Se trata de la velocidad aerodinámica real. Esta medición se puede obtener por diferentes métodos, todos ellos dependientes de la velocidad a la que se encuentra sobrevolando la aeronave.
• χ: Rumbo/ “Heading” (HDG). Ángulo que junto con γ indica la dirección de la velocidad. El rumbo indica la dirección de la velocidad en el plano horizontal, indicando el ángulo entre la velocidad y el plano perpendicular a la superficie terrestre considerado como la referencia.
• γ: “Path angle” (PTH). Ángulo que junto con el rumbo indica la dirección de la velocidad. El γ se encuentra en el plano vertical, indicando el ángulo entre la dirección de la velocidad y el plano paralelo a la superficie terrestre situado para la misma latitud y longitud a la que se encuentra la aeronave.
• m: masa. Masa total de la aeronave en un momento dado
• r: distancia. Es la distancia total recorrida por la aeronave.
• M: número de Mach. Indica la relación entre la velocidad aerodinámica y la velocidad del sonido.
• L: sustentación/ “Lift”. Fuerza aerodinámica en la dirección perpendicular a la velocidad aerodinámica.
• D: resistencia/ “Drag”. Fuerza aerodinámica en la misma dirección que la velocidad
71
aerodinámica. El sentido de esta fuerza es contrario al de la velocidad.
• T: empuje/ “Thrust”. Fuerza ejercida por el motor.
• c: consumo. Ratio de la cantidad de combustible consumida por el motor en relación con el tiempo.
• ν: Ángulo que define la dirección del empuje junto a ε. Se encuentra entre la dirección del empuje del motor y el vector de la velocidad aerodinámica en el plano vertical.
• ε: Ángulo que define la dirección del empuje junto a ν. Se encuentra entre la dirección del empuje del motor y el vector de la velocidad aerodinámica en el plano horizontal.
• g: gravedad. Se trata la magnitud del efecto de la gravedad. Como se detalla anteriormente se considera de valor constante g0 = 9,8066 m/s2.
• CSR: Punto de fin de crucero. Punto en el que se finaliza la última etapa de crucero. En el caso de la trayectoria tipo 2, al no haber segmento de unión para adaptar el número de Mach; este punto coincide con el inicio del descenso.
• R: distancia total. Se trata de la distancia total de cada trayectoria tipo.Además de lo anterior, en los siguientes apéndices se hace referencia a distintas variables que se detallan a continuación:
• FA: Fuerzas aerodinámicas. Se trata de un vector que contiene todas las fuerzas aerodinámicas a las que se ve afectada la aeronave.
• FT: Fuerzas propulsivas. Se trata de un vector que contiene todas las fuerzas creadas por los sistemas de propulsión a las que se ve afectada la aeronave.
• α: Ángulo de ataque. Junto con β, indica la relación de la velocidad con respecto a la aeronave. Ángulo formado entre la dirección de la velocidad aerodinámica y la dirección x de los ejes cuerpo (ejes ligados a la aeronave) en el plano vertical.
• β: Ángulo de ataque. Junto con el anteriormente mencionado α, indica la relación de la velocidad con respecto a la aeronave. Ángulo formado entre la dirección de la velocidad aerodinámica y la dirección x de los ejes cuerpo (ejes ligados a la aeronave) en el plano horizontal.
• μ: Ángulo de balanceo/ “Bank angle”. Ángulo formado entre la dirección y de los ejes cuerpo (dirección formada por las alas), y el plano paralelo (plano horizontal) a la superficie terrestre situado para la misma latitud y longitud a la que se encuentra la aeronave.
• ρ: densidad. Densidad del aire para la altitud determinada. Se determina a través de la atmósfera estándar internacional.
• ω: velocidad rotacional de la tierra.
• v: Vector de velocidad aerodinámica de la aeronave.
• vw: vector de la velocidad del viento
• vg: velocidad aerodinámica total. Es la suma de los ambos términos de velocidad. vg=v+vw.
72

B: Cálculo del HessianoPara el cálculo de la matriz del Hessiano (H), mencionada en el documento, se ha hecho uso de la diferencias finitas. Al tratarse la función objetivo de una función multivariable (depende de más de una variable) en el cálculo del Hessiano también aparecen los términos cruzados. Para ilustrar de una manera sencilla como se ha llevado el cálculo, la explicación se realiza para una función en dos variables f(x,y). En el caso de haber más variables se puede obtener a partir del de dos variables.El cálculo del Hessiano se hace a partir del desarrollo de Taylor, que para el caso de dos variables es el siguiente:
f x , y = f 0 f x0⋅x− x0 f y0⋅y− y012[ f xx0⋅x− x0
2 f yy0⋅ y− y022 f yx0⋅x−x0 y− y0]
16[ f xxx0⋅x− x0
3 f yyy0⋅ y− y033 f xxy0⋅x− x0
2 y− y03 f xyy0⋅x− x0 y− y02]...
Siendo f0 = f (x0,y0), fx0 = fx (x0,y0)... y así sucesivamente; y siendo (x0,y0) el punto en donde se realiza la linearización. Obteniendo el valor de la función objetivo para diferentes puntos se obtienen los siguientes valores de la función objetivo:
f x0h , y0= f 0 f x0 h12
f xx0 h2... ; f x0−h , y0= f 0− f x0 h12
f xx0 h2...
f x0, y0h= f 0 f y0 h12
f yy0 h2... ; f x0, y0−h= f 0− f y0 h12
f yy0 h2...
f x0h , y0h= f 0 f x0 h f y0 h12 f xx02 f xy0 f yy0h
2...
f x0h , y0h= f 0− f x0 h− f y0 h12 f xx02 f xy0 f yy0h
2...
Combinando las distintas expresiones halladas en [ec A2.2] se pueden obtener los distintos valores de las derivadas, las diagonales y las cruzadas con errores del orden de h4 (despreciables si se considera un h muy bajo).
f xx0≃f x0h , y0−2 f x0, y0 f x0−h , y0
h2 ; f yy0≃f x0, y0h−2 f x0, y0 f x0, y0−h
h2
f xy0≃f x0h , y0h f x0−h , y0−h2 f x0, y0− f x0−h , y0
2h2 ...
...− f x0h , y0− f x0, y0h− f x0, y0−h
2h2
Extrapolando esto a un número mayor de dimensiones, los valores para la diagonal del Hessiano y los términos cruzados pueden aproximarse como:
H i=∂2 F∂ x i
2 =F x1 ,... , x ih , ... xN −2 F x1 , ... , xi , ... xN F x1 , ... , x i−h ,... x N
h2
H ij=∂2 F
∂ x i∂ x j=
F x ih , ... , x jhF xi−h , ... , x j−h2 F xi , ... , x j−F x ih ,... , x j
2h2 −...
...F xi−h , ... , x j−F x i ,... , x jh−F x i , ... , x j−h
2h2
73

74

C: EcuacionesLas ecuaciones del movimiento de la aeronave se obtienen a partir de la evolución de la posición, de la segunda ley de Newton y del balance de masa. En el caso de las fuerzas ejercidas sobre una aeronave, se parte inicialmente de un sistema geocéntrico; sistema centrado en el centro de la tierra, por lo que es un sistema móvil. Las ecuaciones para este sistema de referencia son las siguientes:
Ecuación C.1
A partir de ese sistema se intenta llegar a un sistema centrado en los ejes viento de la aeronave. Inicialmente se intenta pasar a un sistema fijo inercial (ejes tierra), pasando los efectos de la rotación a fuerzas.
Ecuación C.2
Introduciendo los términos de la ecuación [ec. C.2] en la segunda igualdad de [ec C.1], nos queda que la ecuación de las fuerzas es:
Ecuación C.3
Siendo los dos últimos términos de la ecuación [ec C.3] la aceleración de coriolis y la aceleración centrífuga. A continuación se debe comprobar si los efectos de estas fuerzas son despreciables o no frente al resto. Para ello la forma más sencilla es la de ver su efecto frente al de la gravedad, considerada para este caso con el valor de g0. Para ello se debe obtener el valor de ω (considerándolo constante) a partir del periodo orbital siendo ω: 7,292116 · 10-5 rad/s.Caso aceleración centrífuga: en el caso de la aceleración centrífuga, el valor máximo que se puede obtener de ese producto vectorial doble es ω2r. Si se considera un vuelo del orden de r = R= 106
metros, como es un caso común en las trayectorias, el valor obtenido de la relación entre los términos es de:
m2 Rm g0
=2 R
g0=5,42234⋅10−3
Pudiendo considerarse despreciable frente a la gravedad.Caso aceleración Coriolis: en el caso de aceleración de Coriolis. El valor máximo será de 2ωV. Para el caso de un vuelo subsónico, se puede considerar una velocidad máxima de 300 m/s. Siendo la
75
d rd t
I=vI
m d vd t
I=F AF Tm g
d md t
=−c
d rd t
I= d r
d t
E∧r
v I=vg∧r
d vd t I
=dd t [vg∧r ]
I=
dd t [vg∧r ]
E∧[v g∧r ]
d vd t
I=
d vgd t
E2∧v g∧∧r
m d vd t
E=F AF Tm g−2 m∧v gm∧∧r

relación entre las variables la siguiente:2mV g
m g 0=
2V g
g0=4,46⋅10−3
Pudiéndose despreciar también en este caso. También se ha considerado a partir de este punto que el viento es nulo, siendo Vg= V, simplificando la nomenclatura y las ecuaciones..Una vez realizado el paso a ejes tierra, queda pasar de los ejes tierra a ejes velocidad. Para realizar estos cambios de ejes, se realizan distintas rotaciones. Dichas rotaciones se realizan mediante matrices ortogonales. Mediante estos cambios de ángulos se pasa inicialmente de un sistema de ejes tierra a un sistema de referencia geográfico; para después pasar a un sistema de ejes de horizonte local. Finalmente, se pasa del sistema de ejes de horizonte local a un sistema de ejes velocidad.Una vez en ejes velocidad, ya se pueden obtener el sistema de ecuaciones:
Ecuación C.4
Considerando un modelo de tierra plana, se puede considerar el efecto de la gravedad como una constante (g = g0). Además, la posición de la aeronave se puede determinar por escalares en vez de por ángulos.Una vez determinado lo anterior, tan solo queda por determinar el valor de las fuerzas aerodinámicas y propulsivas. Para poder determinar estos valores, se debe pasar a ejes viento. En dichos ejes, las distintas fuerzas aerodinámicas y propulsivas se pueden considerar como:
Ecuaciones C.5
Pudiéndose obtener los valores de (ε, ν) (ángulos del motor) en función de los ángulos de ataque y resbalamiento (α, β) y de los cosenos directores de la aeronave, obtenidos a través de los ejes cuerpo (ligados a la aeronave).Pasando los valores obtenidos en la ecuación [ec. C.5] de ejes viento a ejes velocidad para después introducir los valores obtenidos en las ecuaciones [ec. C4] se obtienen las ecuaciones generales de movimiento:
76
REh d d t
=V cos cos
REhcos d d t
=V cos sin
d hd t =V sin
m d Vd t
=F AxvF T xv
−m g sin
m V cos d d t
=F AyvFT y v
m V d d t
=F AzvF T z v
−m g cos
d md t
=−c
F Axw=−D ; F Ayw
=−Q ; F Az w=−L ;
F T xw=T cos cos ; FT yw
=T cos sin ; F Az w=−T sin ;

Ecuación C.6
Una vez determinado el sistema de ecuaciones, se necesitan las anteriormente mencionadas ligaduras (consumo combustible, empuje del motor, ángulo μ y sustentación.) para poder cerrar el sistema y así poder solucionarlo. Sin embargo, la gran mayoría de las aeronaves son simétricas, simplificando el problema. La simetría de la aeronave, unido a un vuelo simétrico (muy común salvo en casos de viento lateral) implica, además de una simplificación de las variables, el tener ya determinada una ligadura; por lo que solo quedan tres por determinar.Si el problema se considera simétrico, las siguientes variables serán simétricas:
• Velocidad: en caso de que el vector velocidad se encuentre en el plano de simetría, el ángulo de resbalamiento será nulo (β = 0). Debido a ello, el eje yw coincidirá con el eje yb.
• Empuje: en el caso de que el vector del empuje se halle en el plano de simetría, el ángulo ν también será nulo.
• Fuerzas aerodinámicas: para poder cumplir la simetría del problema, el valor de Q también a de ser 0.
• Adicionalmente, el hecho de que el vuelo sea simétrico permite simplificar la relación entre ε y α. Quedando de la forma ε = α + ε0; siendo ε0 función de los cosenos directores de los ejes cuerpo.
Con estas simplificaciones, las ecuaciones para un vuelo simétrico quedan de la forma:
Ecuación C.7
Una vez en este punto, se puede dividir el problema en vuelo entre los dos planos: el plano horizontal y el plano vertical. La simplificación en cualquiera de los dos planos implica el
77
d xd t
=V coscos ; d yd t
=V cossin
d hd t
=V sin
m d Vd t =T coscos−D−m g0 sin
mV cos d d t
=T cos sin−QcosLT sin sin
m V d d t
=−T cossin−Q sin LT sincos−m g0 cos
d md t
=−c
d xd t
=V coscos d yd t
=V cossin
d hd t
=V sin
m d Vd t =T cos cos−D−m g0sin
m V cos d d t
=LT sin sin
mV d d t
=LT sin cos−m g 0cos
d md t
=−c

determinar una ligadura, haciendo que tan solo queden dos ligaduras más por determinar.Vuelo simétrico en el plano vertical:La condición es que χ = χA (constante). Esto implica que μ sea nulo, teniendo ya una ligadura. Salvo que se trate de un problema de navegación, se puede considerar χA como nulo. Quedando las ecuaciones de la siguiente forma:
Ecuaciones C.8: Vuelo simétrico vertical
Siendo estas ecuaciones a partir de donde se ha desarrollado el problema.
C.1 Cálculo del techo máximoComo anteriormente ha sido expuesto, es necesario el cálculo del techo máximo para imponer condiciones de vuelo. Dicho cálculo se realiza a partir de la tercera ecuación de movimiento expresada en [ec. 2]:
m d Vd t
=T−D−m g sin
Para realizar el análisis se define la variable TEX (Excess Thrust) como el empuje restante para un caso en que no se realicen variaciones de velocidad (dV/dt = 0).
0=T EX−m g sin =T−D−m g sin
Una vez realizado esto se multiplican todos los términos por la velocidad y se define la variable SEP (Specific Excess Power), que coincide con la anteriormente mencionada RC (Rate of Climb).
SEP=V sin =T EX V , h⋅V
m gUna vez hecho esto, se puede definir el techo máximo como la altitud máxima a la que el SEP es cero. Cabe destacar que esta función depende de la velocidad y de la altitud, o del Mach y de la altitud, al estar estas dos relacionadas con las anteriores. Por ello, para cada Mach existirá una altitud máxima. Ademas de lo anterior, la altitud máxima depende del peso, relacionado con el combustible consumido. Dicha evolución puede observarse en la figura a continuación. [fig. C.1]
78
d xd t
=V cos ; d hd t
=V sin ;
m d Vd t
=T cos−D−m g0 sin
m V d d t
=LT sin −m g0 cos
d md t
=−c ;

79
Figura C.1: altitud máxima en función del M y del consumo
0 . 5 0 . 5 5 0 . 6 0 . 6 5 0 . 7 0 . 7 5 0 . 8 0 . 8 5 0 . 91
1 . 1
1 . 2
1 . 3
1 . 4
1 . 5x 1 0
4
N ú m e r o d e M a c h [ ]
Alt
ura
má
xim
a [
m]
E v o l u c i ó n d e l a a l t u r a m á x i m a c o n e l n u m e r o d e M a c h y e l p e s o
1 0 % c o m b u s t i b l e c o n s u m i n d o
3 0 % c o m b u s t i b l e c o n s u m i d o
5 0 % c o m b u s t i b l e c o n s u m i d o
8 0 % c o m b u s t i b l e c o n s u m i d o

80

D: Modelo AeronaveLa aeronave utilizada para las aplicaciones es un Boeing 767-300 ER, un avión bimotor comercial de fuselaje ancho. Se trata de un avión que puede llevar entre 181 y 375 y llega a cubrir distancias de entre 9400 a 12200 kilómetros (de ahí el rango establecido). Se trata de una aeronave con una superficie alar de 283,3 m2, y un peso máximo al despegue de 186880 kg y un peso mínimo de 89900 kg. Los motores utilizados para el modelo son motores CF6-80C2. Para modelar dicha aeronave se han realizado dos modelos distintos para tratar de aproximar tanto la aerodinámica de la aeronave como la propulsión de esta.
D.1 Modelo aerodinámicoEl modelo aerodinámico define la resistencia como:
D= 12V 2 S CD
Siendo CD, el coeficiente de resistencia, función del CL (coeficiente de sustentación) y del M. Esta expresión de CD = CD(M, CL) también es conocida como la polar del avión. Se considera la polar en este caso, como la definida por Cavcar y Cavcar [6], dada por:
C D=[C D0∑ j=1
5koj K jM ][C D1∑ j=1
5k1j K
jM ]C L[C D2∑ j=1
5k oj K
jM ]C L2
Siendo K una función para incluir de la compresibilidad cuando se vuela a un Mach suficientemente elevado (superior a 0,4). La expresión para la K es:
K M =0 ; para M 0,4
K M = M −0,42
1−M 2; para M ≥0,4
Los coeficientes incompresibles de la polar parabólica para el modelo utilizado para esta aeronave son: CD0= 0,01322, CD1 = -0,00610 y CD2 = 0,06000. Los coeficientes de compresibilidad vienen expresados en la siguiente tabla:
j 1 2 3 4 5
k0j 0,0067 -0,1861 2,2420 -6,4350 6,3428
k1j 0,0962 -0,7602 -1,2870 3,7925 -2,7672
k2j -0,1317 1,3427 -1,2839 5,0164 0,0000
81

D.2 Modelo propulsivoPara definir el modelo propulsivo hay que definir tanto el empuje como el consumo de combustible. En cuanto al empuje, el empuje disponible ha sido definido como:
T=W TOp
pSLCT M , N C
Siendo WTO el peso de referencia, p la presión en el punto y pSL una presión de referencia (a nivel del mar en la atmósfera ISA) y CT es coeficiente de empuje. Dicho coeficiente es función del Mach y del parámetro de control del motor, Nc. Dicho parámetro de control, Nc; es, para un rating de motor definido (idle, crucero...) función del Mach y de la altitud; lo que lleva a que el empuje sea, para un rating dado, función del Mach y de la altitud.Con respecto al modelo analítico considerado para el coeficiente de empuje (basado en Mattingly [7]) para la dependencia con el Mach y la altitud:
CT=T SL
W TO1−1
2M 2
−1 1−0,49M 1
Siendo γ (relación calores específicos = 1,4) y TSL el valor máximo para empuje a nivel del mar para Mach = 0 y rating de crucero. En este caso se considera TSL = 5 105 Newtons.En lo correspondiente al consumo especifico de combustible, se ha considerado el modelo lineal definido por Mattingly et al. [7] (y aproximación descrita por Miele [8]), que viene dado por:
C=cSL
LH
a SL1,01,2 M
Donde cSL es el consumo específico de combustible de la aeronave a nivel del mar y para M = 0. Para este modelo se considera como valor representativo cSL = 9,0 10-6 kg/(N ·s). Como calor latente del combustible se toma LH = 43 106 J/kg. aSL representa el valor de la velocidad del sonido a nivel del mar.
82
Bibliografía1. José Manuel Picón Tagua. Optimización de trayectorias mediante trayectorias tipo. Sevilla,
2010.2. Etkin och Reid. Dynamics of Flight Stability and Control, 3rd edition, Wiley, 19963. Damian Rivas Rivas. “Mecanica del Vuelo”. Universidad de Sevilla, Sevilla, 20094. Alfonso Valenzuela y Damián Rivas, Conflict Detection and Resolution in Converging Air
Traffic. AIAA paper 2009-7022, AIAA, 2009.5. A. Cavcar and M Cavcar. Approximate solutions of range for constante altitude-constant
high subsonic speed flight of transport aircraft. Aerospace Science Technology, Vol 8, No 6, page 557-567, 2004.
6. J. B. Barlow, W. H. Rae and A. Pope. Low-speed wind tunnel testing, 3rd edition, Wiley
Interscience, 19997. J. D. Mattingly. Aircraft engine design, 2nd ed. AIAA Educational Series, AIAA, Reston, VA,
pages 38,71, 20028. A. Miele. Flight mechanics, theory of flight paths. Addison-Wesley, Reading, MA, pages
107,205, 1962.9. Han, S.P., "A Globally Convergent Method for Nonlinear Programming,"J. Optimization
Theory and Applications, Vol. 22, p. 297, 1977.10. Powell, M.J.D., "A Fast Algorithm for Nonlinearly Constrained Optimization
Calculations,"Numerical Analysis, G.A.Watson ed., Lecture Notes in Mathematics, Springer Verlag, Vol. 630, 1978.
11. Gill, P.E., W. Murray, M.A. Saunders, and M.H. Wright, "Procedures for Optimization Problems with a Mixture of Bounds and General Linear Constraints,"ACM Trans. Math. Software, Vol. 10, pp 282-298, 1984.
12. Gill, P.E., W. Murray, and M.H. Wright, Numerical Linear Algebra and Optimization, Vol. 1, Addison Wesley, 1991.
13. Damián Rivas, Oscar Lopez-Garcia, Sergio Esteban, Eduardo Gallo. “An analysis of maximum range cruise including wind effects”. Aerospace Science and Technology 14 (2010) 38–48.
83