Navegación e interpretación de mapas Parte 2ª. · La hora GMT utiliza como referencia u origen...
16
Airpilot Escuela de Vuelo, S.L. (A.T.O. E-207) Av. 25 de Septiembre, 8, 28027 Madrid Tel. 91.116.21.87 www.flyschool.es Curso Básico y Avanzado para pilotos de RPAS Según el artículo 50.5.c, de la Ley 18/2014, de 15 de octubre. Navegación e interpretación de mapas Parte 2ª.
Transcript of Navegación e interpretación de mapas Parte 2ª. · La hora GMT utiliza como referencia u origen...

Airpilot Escuela de Vuelo, S.L. (A.T.O. E-207) Av. 25 de Septiembre, 8, 28027 Madrid
Tel. 91.116.21.87 www.flyschool.es
Curso Básico y Avanzado para pilotos de RPAS
Según el artículo 50.5.c, de la Ley 18/2014, de 15 de octubre.
Navegación e interpretación de mapas
Parte 2ª.

Airpilot Escuela de Vuelo, S.L. (A.T.O. E-207) Av. 25 de Septiembre, 8, 28027 Madrid
Tel. 91.116.21.87 www.flyschool.es

Airpilot Escuela de Vuelo, S.L. (A.T.O. E-207) Av. 25 de Septiembre, 8, 28027 Madrid
Tel. 91.116.21.87 www.flyschool.es
Navegación e interpretación de mapas 3
Índice 1. NAVEGACIÓN.................................................................................................................................5
1.1. TIEMPO UNIVERSAL COORDINADO ............................................................................................5 1.2. ORTO Y OCASO...........................................................................................................................6 1.3. RUTA, RUTA VERDADERA Y RUTA MAGNÉTICA ..........................................................................7 1.4. VELOCIDAD DEL VIENTO, RUMBO Y VELOCIDAD RESPECTO AL SUELO........................................7 1.5. INFLUENCIA DEL VIENTO SOBRE LA AERONAVE..........................................................................8
2. LIMITACIONES DE ALTURA Y DISTANCIA.........................................................................10 3. SISTEMAS GLOBALES DE POSICIONAMIENTO.................................................................11
3.1. ELEMENTOS DE UN SISTEMA DE POSICIONAMIENTO GLOBAL....................................................12 3.2. FUNCIONAMIENTO DEL GPS ....................................................................................................14 3.3. MÉTODOS DE POSICIONAMIENTO..............................................................................................15 3.4. PRECISIÓN DE DATOS GPS .......................................................................................................15 3.5. CORRECCIONES DIFERENCIALES...............................................................................................16 3.6. LIMITACIONES DEL USO DE GPS ..............................................................................................16

Airpilot Escuela de Vuelo, S.L. (A.T.O. E-207) Av. 25 de Septiembre, 8, 28027 Madrid
Tel. 91.116.21.87 www.flyschool.es
Navegación e interpretación de mapas 4

Airpilot Escuela de Vuelo, S.L. (A.T.O. E-207) Av. 25 de Septiembre, 8, 28027 Madrid
Tel. 91.116.21.87 www.flyschool.es
Navegación e interpretación de mapas 5
1. NAVEGACIÓN
1.1. Tiempo Universal Coordinado ! El tiempo es una magnitud física con la que medimos la duración o separación de
acontecimientos sujetos a cambios. Periodo que transcurre entre el estado del sistema cuando éste presentaba el estado X y el instante en el que X registra una variación perceptible para un observador o aparato de medida.
! La unidad básica de medida del tiempo es el segundo (s). Como simple dato en relación con los relojes atómicos, se define como la duración de 9.192.613.770 periodos de la radiación correspondiente a la transición entre dos niveles hiperfinos del estado fundamental del átomo de cesio 133.
! La hora GMT (Greenwich Mean Time) está basada en la posición media del Sol calculada sobre media noche (tiempo de paso inferior del Sol). Debido a que la rotación de la Tierra no es uniforme, hace que ésta sea más imprecisa.
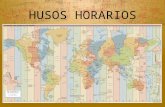
La hora GMT utiliza como referencia u origen el meridiano de Greenwich y divide la Tierra en 24 husos horarios a partir de los meridianos. Cada huso horario es de 15 grados de amplitud o longitud geográfica. Como la Tierra gira 360º en 24 horas, cada incremento de 15º representa una hora de diferencia, estableciéndose 12 zonas o husos horarios hacia el Este y 12 hacia el Oeste. Para simplificar la conversión, a cada zona horaria se le asigna una hora local, positiva hacia el Oeste y negativa hacia el Este.
! El Tiempo Universal Coordinado (UTC) no está definido por el movimiento de la Tierra, sino por el tiempo atómico (Tiempo Atómico Internacional, TAI) con una precisión cercana al nanosegundo. El TAI es un estándar de tiempo calculado a partir de una media ponderada de las señales de los relojes atómicos de varios laboratorios repartidos por todo el mundo. El UTC se sincroniza con el GMT, sumando o restando un segundo intercalar a finales de junio y septiembre, cuando resulta necesario.
Las zonas horarias UTC toman como referencia también el meridiano cero o de Greenwich, El meridiano de 180º es conocido como línea internacional de cambio de fecha (cambio de día).
La hora zulu UTC se utiliza en navegación aérea y se representa con la letra Z en el código Interco (alfabeto fonético OACI). Éste permite usar como referencia una hora en de referencia, común a todos los husos horarios, y no las horas locales, que requieren una transformación.

Airpilot Escuela de Vuelo, S.L. (A.T.O. E-207) Av. 25 de Septiembre, 8, 28027 Madrid
Tel. 91.116.21.87 www.flyschool.es
Navegación e interpretación de mapas 6
! El Tiempo Medio Local (LMT) se determina por la posición del Sol. El día solar medio de 24 horas (dividido en horas, minutos y segundos), es el tiempo que se considera que tarda el Sol en dar la vuelta a la Tierra.
La LMT se determina por la posición media del Sol en relación a un determinado meridiano de referencia para esa zona. La hora media local en todos los puntos de ese meridiano serán las12:00 horas del mediodía.
! En la práctica GMT y UTC son equivalentes. La transformación a LMT sería de la siguiente forma:
GMT = (hora Z o zulú) = LMT + Designador de zona (DZ)
UTC = LMT + Designador de zona (DZ)
Designador de zona (DZ)
1.2. Orto y ocaso ! Las horas de orto y ocaso es un parámetro a tener en cuenta ya que en la normativa
actual vigente solo se permiten los vuelos de día y en condiciones meteorológicas visuales.
! Orto o salida del sol. Momento de la mañana en que el borde superior del Sol, en su momento ascendente, se encuentra en el horizonte astronómico, o en el que la parte superior del disco solar aparece sobre un horizonte hipotético en el que no habría ningún obstáculo (montañas, árboles, casas, etcétera), niebla o nubes.
! Ocaso o puesta de sol. Momento de la tarde en que el borde superior del Sol, en su momento descendente, se encuentra en el horizonte astronómico, o en el que la parte superior del disco solar desaparece por la tarde sobre un horizonte hipotético.

Airpilot Escuela de Vuelo, S.L. (A.T.O. E-207) Av. 25 de Septiembre, 8, 28027 Madrid
Tel. 91.116.21.87 www.flyschool.es
Navegación e interpretación de mapas 7
! No hay que confundir el orto y el ocaso con el crepúsculo civil matutino o vespertino, y que viene definido por el momento en que el sol se encuentra 6º por debajo del horizonte.
Los horarios de salida y puesta del Sol se pueden consultar en la siguiente página web del Ministerio de Fomento o en la AIP de los aeródromos. http://www.fomento.es/MFOM/LANG_CASTELLANO/DIRECCIONES_GENERALES/INSTITUTO_GEOGRAFICO/Astronomia/publico/efemerides/salida_puesta_sol.htm
1.3. Ruta, ruta verdadera y ruta magnética ! La ruta es la dirección de la proyección sobe la superficie terrestre de la trayectoria
del avión medida respecto de una referencia.
! Ruta verdadera o geográfica, utiliza como referencia el norte geográfico.
! Ruta magnética, emplea como referencia el norte magnético.
1.4. Velocidad del viento, rumbo y velocidad respecto al suelo
! El viento se caracteriza por su dirección y velocidad o intensidad. La dirección se expresa en grados sexagesimales (360º) según su origen y se mide respecto al norte geográfico, salvo en los aterrizajes y despegues que toma como referencia el norte magnético. La velocidad del viento viene dada por la distancia recorrida por unidad de tiempo (km/h, nudos, etc).
Escala de Beaufort y manifestaciones visuales para identificar la intensidad del viento.
Nº Velocidad Denominación Características Visuales
0 < 2 km/h Calma Humo Vertical
1 2 a 5 km/h Ventolina El humo se desvía, se mueven las veletas
2 6 a 11km/h Brisa Suave Se siente en la cara, las banderas se levantan
3 12 a 19 km/h Brisa Leve Se mueven las hojas de los árboles, las banderas flamean
4 20 a 28 km/h Brisa Moderada Se levanta polvo, las banderas se agitan
5 29 a 38 km/h Vientos Refrescantes Se agitan las ramas, se levanta polvo
6 39 a 49 km/h Vientos Fuertes Se mueven grandes ramas
7 50 a 61 km/h Vientos muy Fuertes Se agitan las copas de los árboles
8 62 a 74 km/h Temporal Daños en los árboles, se hace muy difícil caminar
9 75 a 88 km/h Temporal Fuerte Arrastra objetos, se hace imposible caminar contra el viento
10 89 a 102 km/h Temporal muy Fuerte Árboles arrancados, daños en construcciones
11 103 a 117 km/h Tempestad Daños y consecuencias variadas
12 > 118 km/h Huracan Vuelan coches, árboles, techos, etcétera

Airpilot Escuela de Vuelo, S.L. (A.T.O. E-207) Av. 25 de Septiembre, 8, 28027 Madrid
Tel. 91.116.21.87 www.flyschool.es
Navegación e interpretación de mapas 8
! La velocidad respecto al suelo representa la velocidad actual de la aeronave sobre la superficie de la tierra.
! El rumbo es la dirección del eje longitudinal de la aeronave medida respecto a una determinada referencia. Hablamos de rumbo magnético cuando la referencia es el norte magnético y de rumbo verdadero o geográfico cuando la referencia utilizada es el norte geográfico.
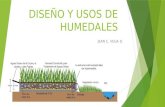
1.5. Influencia del viento sobre la aeronave ! La influencia del viento sobre los laterales de la aeronave van a hacer que el rumbo
y la ruta no coincidan, denominándose deriva a la diferencia entre ambos.
! El ángulo de deriva es el ángulo formado entre el rumbo deseado y la ruta llevada y el ángulo de corrección de deriva el ángulo en que debe modificarse el rumbo para seguir la ruta deseada, corrigiéndose así el efecto del viento.
! El viento se puede descomponer en dos: componente de viento cruzado (perpendicular a la ruta) o componente de viento en cara o cola (en sentido contrario o en el mismo sentido que la ruta, respectivamente).
! El viento cruzado produce la deriva, mientras que los vientos de cola y cara hacen que los tiempos de vuelo y el consumo disminuyan o aumenten, respectivamente.
! Triángulo del viento. Utiliza vectores para determinar el efecto del viento sobre el vuelo de la aeronave.
Triángulo del viento.
! Los parámetros que intervienen en el cálculo son:
• Vector velocidad de la aeronave (respecto al aire), VTAS. Corresponde a un vector cuyo módulo o magnitud es la velocidad de la aeronave a través de la masa de aire y su dirección el rumbo de la aeronave (geográfico o magnético).
• Vector velocidad del viento (respecto a tierra), VW. Corresponde a un vector cuyo módulo o magnitud es la velocidad del viento y su dirección, la dirección del viento.

Airpilot Escuela de Vuelo, S.L. (A.T.O. E-207) Av. 25 de Septiembre, 8, 28027 Madrid
Tel. 91.116.21.87 www.flyschool.es
Navegación e interpretación de mapas 9
• Vector velocidad de la aeronave sobre el terreno, VGS. Corresponde a un vector cuyo módulo o magnitud es la velocidad de la aeronave sobre el terreno y la dirección de la ruta (geográfica o magnética).
Luego la velocidad de la aeronave respecto al suelo, VGS, es la suma a la velocidad de la aeronave, VTAS, más la componente de la velocidad del viento, VW.

Airpilot Escuela de Vuelo, S.L. (A.T.O. E-207) Av. 25 de Septiembre, 8, 28027 Madrid
Tel. 91.116.21.87 www.flyschool.es
Navegación e interpretación de mapas 10
2. LIMITACIONES DE ALTURA Y DISTANCIA
! En la siguiente tabla se resumen las limitaciones de la altura de vuelo y distancia establecida en la normativa legal actual, para los distintos tipos de vuelo, en función de la masa máxima al despegue.
MTOM Ámbito normativo
Régimen administrativo
Condiciones y limitaciones operativas
Cobertura de seguro de r.c.
" VLOS, BVLOS (NOTAM)
" Altura 120 m.
" Alcance: el del enlace de radio.
>= 2 Kg " VLOS
< 20 kg " Alcance 500 m.
>= 20 kg " Altura 120 m.
<= 25 kg
> 25 kg" Según certificado de aeronavegabilidad.
<= 150 kg" Espacio aéreo no controlado
> 150 kg (salvamento, rescate, incendios)
" Según certificado de aeronavegabilidad
" Autorización ATC
Clasificación de los RPAS, según Ley 18/2014, de 15 de octubre
< 2 kg
Nacional
Habilitación
Ley 48/1960
Reglamento (CE) nº. 785/2004
Autorización
> 150 kg (resto de actividades y trabajos
aéreos)Europeo

Airpilot Escuela de Vuelo, S.L. (A.T.O. E-207) Av. 25 de Septiembre, 8, 28027 Madrid
Tel. 91.116.21.87 www.flyschool.es
Navegación e interpretación de mapas 11
3. SISTEMAS GLOBALES DE POSICIONAMIENTO
! Bajo el acrónimo de GNSS (Global Navigation Satellite Systems) se engloban todas las técnicas de posicionamiento mediante satélites.
! Se entiende por Sistemas Globales de Posicionamiento (GNSS) a sistemas pasivos de navegación basado en satélites emisores de radiofrecuencias, que proporcionan un marco de referencia espacio-temporal con cobertura global, independiente de las condiciones atmosféricas, de forma continua en cualquier lugar de la Tierra, y disponible para cualquier número de usuarios.
! Dentro de los sistemas GNSS se encuentran distintos sistemas como el NAVSTAR-GPS de Estados Unidos, el sistema GLONASS de la Federación Rusa o el sistema Galileo de la Unión Europea, Compass o BeiDou de la República China, etcétera.
• El sistema NAVSTAR-GPS o GPS fue desarrollado por el Departamento de Defensa de los Estados Unidos para cubrir las necesidades en materia de radionavegación, de acuerdo a a las necesidades de posicionamiento y navegación de un amplio espectro de usuarios.
Este sistema está constituido por una constelación de 24 satélites, orbitando en seis órbitas diferentes a una distancia aproximada de 20.200 km (10.900 millas náuticas) de la Tierra. Estos satélites dan dos vueltas completas a la Tierra cada 24 horas y la inclinación de su órbita es de 55º respecto al ecuador con el fin de poder dar cobertura a las zonas polares.
Actualmente esta tecnología es universal y ampliamente difundida y utilizada a nivel aéreo, marítimo y terrestre.
• El sistema GLONASS es operado por el Ministerio de Defensa de la Federación Rusa que ofreció el servicio de precisión estándar para cubrir las necesidades de la aviación civil internacional.
Este sistema está formado por 24 satélites que orbitan a una altura de 19.199 km (10.310 millas náuticas) de la Tierra. Su periodo de órbita es de 11 horas y 15 minutos y sus satélites se distribuyen en tres planos orbítales con 8 satélites cada uno. La inclinación del plano orbital es de 64.8º.
• El sistema Galileo de la Unión Europea, todavía en desarrollo, estará formado por 30 satélites situados en una órbita media y distribuidos en tres planos orbítales. Este sistema será compatible e interoperables con el servicio GPS.

Airpilot Escuela de Vuelo, S.L. (A.T.O. E-207) Av. 25 de Septiembre, 8, 28027 Madrid
Tel. 91.116.21.87 www.flyschool.es
Navegación e interpretación de mapas 12
3.1. Elementos de un sistema de posicionamiento global
! Los sistemas de posicionamiento están formados por cuatro segmentos: espacial, terrestre o de control y usuario.
• Segmento espacial. Compuesto por los satélites que forman el sistema, tanto de navegación como de comunicación, así como las diferentes señales que envían y reciben cada uno de los receptores.
• Segmento terrestre o de control. Formado por el conjunto de estaciones en tierra que recogen los datos de los satélites y monitorizan el sistema, enviando correcciones a los satélites si es preciso.
• Segmento usuario. Formado por todos los receptores que reciben la señal del segmento espacial y sus programas de procesado de datos.
3.1.1. Elementos del sistema GPS ! El segmento espacial del sistema GPS está formado por 24 satélites, repartidos en 6
planos orbítales (4 satélites por plano orbital), con el fin de que en cualquier punto de la Tierra, en todo momento, están a la vista, por lo menos 4 satélites.
La información se transmite en dos frecuencias de la banda L, L1 a 1.575,42 MHz y L2 a 1.227,6 MHz. La frecuencia L1, transmite de manera continua, el código aproximado denominado C/A (Coarse Adquisition) y transporta el mensaje de navegación y la señal de posicionamiento estándar para uso civil. Servicio estándar, SPS. Mientras que la frecuencia L2, transmite el código preciso, P (Precision). Este código encriptado proporciona a los usuarios autorizados el servicio de posicionamiento preciso (PPS).
Los datos de navegación contienen información relativa a los datos del reloj (horario, estado de del reloj del satélite, modelo de corrección de los errores del reloj, etcétera), efemérides del satélite (parámetros orbítales del satélite, posición precisa, etcétera), modelo para corregir el retraso ionosférico, diferencia entre el tiempo UTC y el GPS y datos de almanaque del conjunto de satélites de la constelación.
! El segmento tierra o de control está formado por una serie de estaciones de control distribuidas por toda la Tierra, en las que se hace el rastreo y seguimiento de los satélites, de manera que cada satélite pueda ser visto por lo menos por dos estaciones. Estas estaciones reciben de forma continuada, en las dos frecuencias anteriormente citadas L1 y L2, la información necesaria para determinar con precisión sus órbitas.

Airpilot Escuela de Vuelo, S.L. (A.T.O. E-207) Av. 25 de Septiembre, 8, 28027 Madrid
Tel. 91.116.21.87 www.flyschool.es
Navegación e interpretación de mapas 13
Los datos recibidos se procesan en tiempo real en la estación de control donde se determina la hora del reloj y el estado de la órbita y se actualizan los mensajes de navegación de cada satélite. La información resultante es devuelta al satélite a través de las antenas en tierra para su difusión a los usuarios
Esquema de funcionamiento del segmento tierra.
! El segmento usuario está formado por los receptores GPS, cuya finalidad es descifrar la señal para determinar la posición, velocidad y tiempo.
Los receptores GPS están formados por: Sección de radiofrecuencia que permitan seguir a varios satélites (4 ó más), Unidad de proceso y cálculo de la posición, velocidad y tiempo, Sistema de registro de las observaciones efectuadas y de los mensajes de navegación, Pantalla de visualización de datos, Fuente de alimentación, etcétera.

Airpilot Escuela de Vuelo, S.L. (A.T.O. E-207) Av. 25 de Septiembre, 8, 28027 Madrid
Tel. 91.116.21.87 www.flyschool.es
Navegación e interpretación de mapas 14
Esquema completo de funcionamiento del sistema GPS.
3.2. Funcionamiento del GPS ! El cálculo de la posición depende básicamente de dos parámetros que son la
posición del satélite y el reloj del mismo. Dicha información es recogida en la señal enviada por el satélite hasta el receptor, siendo el proceso de cálculo el siguiente:
• La situación de los satélites es conocida por el receptor a partir de las efemérides, transmitidas por los propios satélites.
• El receptor GPS mide la distancia de los satélites, y usa esa información para calcular su posición. Esta distancia se mide calculando el tiempo que la señal tarda en llegar al receptor.
• Cada satélite indica que el receptor se encuentra en un punto en la superficie de la esfera con centro en el propio satélite y de radio la distancia total hasta el receptor.
• Para obtener la posición son necesarios, al menos, cuatro satélites, de manera que se pueda conocer la información relativa a latitud, longitud, altitud y tiempo.
! Para conocer la distancia entre nuestro receptor GPS y el satélite es necesario conocer el tiempo que tarda nuestro receptor en recibir la señal. De manera que compara el código generado por el receptor y el generado por el satélite y mide el retraso en la llegada de la señal.
Omar Abelleira Ferreirós

Airpilot Escuela de Vuelo, S.L. (A.T.O. E-207) Av. 25 de Septiembre, 8, 28027 Madrid
Tel. 91.116.21.87 www.flyschool.es
Navegación e interpretación de mapas 15
3.3. Métodos de posicionamiento ! Se distinguen dos métodos de determinar la posición, en absoluto y en relativo.
• Posicionamiento en absoluto, se calcula la posición a partir de la triangulación de 4 satélites.
• Posicionamiento en relativo, se calcula la posición de un receptor móvil a partir de la posición de uno fijo de coordenadas ya conocidas.
! Posicionamiento absoluto por código. Consiste en la solución de una intersección de todas las distancias satélite-receptor sobre la estación en un período de observación. Su precisión es de 15 a 100 metros.
! Posicionamientos relativos de código y fase. Formado por una estación de referencia fija que rastrea de modo continuo y que permite resolver las ambigüedades en tiempo real y otro receptor en una plataforma móvil. Ambos están enlazados mediante un radio módem. El segundo receptor obtiene su posición en tiempo real. En este caso las precisión son de 1 a 2 cm.
3.4. Precisión de datos GPS ! La precisión alcanzada dependerá del tipo de receptor que se utilice y del campo de
estudio en que se vaya a emplear. Los receptores conocidos como geodésicos alcanzan precisiones del orden del centímetro en la determinación de la posición, mientras que los receptores de navegación tienen una precisión que varía entre 5 y 30 metros.
! Para su funcionamiento, el receptor suele buscar un mínimo de 5 satélites que se encuentran por encima del ángulo de enmascaramiento de 7,5º (evitando así los satélites muy próximos al horizonte que pudieran ser afectados por interferencias producidas por obstáculos o errores atmosféricos).
! Las fuentes de error en las medidas GPS son:
• Error de efemérides, producidas por pequeñas variaciones de la órbita. El error debido a esta causa puede ser de hasta 2 m.
• Error debido a la propagación en la atmósfera, producidas por interferencias de la señal al atravesar la ionosfera o por el vapor de agua presente en la troposfera. Estos errores pueden llegar hasta los 4 m.
• Error de trayectoria múltiple o de ondas reflejadas. El receptor puede recibir las ondas reflejadas por el terreno u obstáculos en lugar de directamente desde el satélite, Normalmente los receptores están diseñados para evitar este tipo de problemas. El error en esta caso no suele superar el metro.

Airpilot Escuela de Vuelo, S.L. (A.T.O. E-207) Av. 25 de Septiembre, 8, 28027 Madrid
Tel. 91.116.21.87 www.flyschool.es
Navegación e interpretación de mapas 16
• Error del reloj. Aunque los relojes atómicos utilizados son muy precisos pueden tener ligeras desviaciones. El error atribuible a esta causa es de aproximadamente 2 m.
• Error del receptor. Debido a interferencias internas. En este caso los errores suelen ser de 0,5 m.
! La señal de posicionamiento GPS estándar para uso civil dispone de una precisión nominal de 13 m, mientras que la precisión nominal del GPS diferencial de código (DGPS) se suele situar en los 2-3 metros y las de fase (RTK) en los decímetros.
! El sistema GPS proporciona los datos utilizando como datum de referencia el WGS 84 (World Geodetic System 1984).
3.5. Correcciones diferenciales ! Las correcciones diferenciales mejoran las precisiones, al permitir corregir los
errores debidos a las imprecisiones del reloj, efemérides o interferencias de la señal GPS por la ionosfera o la troposfera, mejorando sustancialmente las precisiones de las medidas.
! Los GPS diferenciales además de recibir y procesar la información de los satélites, recibe y procesa, simultáneamente, otra información adicional procedente de una estación terrestre situada en un lugar cercano y reconocido por el receptor. La estación terrestre transmite al receptor GPS los ajustes que son necesarios realizar en todo momento, éste los contrasta con su propia información y realiza las correcciones mostrando en su pantalla los datos correctos con una gran exactitud.
3.6. Limitaciones del uso de GPS ! El uso de GPS para la navegación aérea en aviación general está limitado debid,
principalmente, a dos motivos:
# La fuente de datos no es redundante (sólo hay una fuente de señal).
# No se garantiza la consistencia de la señal, ya que esta se puede verse suspendida o alterada por fenómenos naturales (tormentas solares) e intencionadamente por medios tecnológicos.