Monitoreo y control en tiempo real de un vehículo aéreo no ...
161
MONITOREO Y CONTROL EN TIEMPO REAL DE UN VEHÍCULO AÉREO NO TRIPULADO MEMORIA DE TESIS Para obtener el Título en: Ingeniería en Robótica Industrial de la ESIME Unidad Azcapotzalco Por Adriana Pérez Pedraza Miguel Alejandro Ruiz de los Santos ESIME Unidad Azcapotzalco 2010 Supervisado por: Dr. Bernardino Benito Salmerón Quiroz
Transcript of Monitoreo y control en tiempo real de un vehículo aéreo no ...
MONITOREO Y CONTROL EN TIEMPO REAL DE UN VEHÍCULO AÉREONO TRIPULADO
MEMORIA DE TESISPara obtener el Título en:
Ingeniería en Robótica Industrial de la ESIME Unidad Azcapotzalco
PorAdriana Pérez Pedraza
Miguel Alejandro Ruiz de los Santos
ESIME Unidad Azcapotzalco2010
Supervisado por:
Dr. Bernardino Benito Salmerón Quiroz

c© Derechos de autor porAdriana Pérez Pedraza
Miguel Alejandro Ruiz de los SantosDecember 6, 2010

RESUMEN
El objetivo es el de diseñar y monitorear un vehículo aéreo no tripulado o robot aéreo, que a
futuro permita el desarrollo de un vehículo autónomo o semiautónomo que cubra diferentes tipos de
misiones desde los sectores de defensa y seguridad a los de agricultura o medio ambiente. Para tal
efecto se realizara una simulación virtual de vuelo así como validación de monitoreo de orientación
a distancia del helicóptero mediante la fusión de datos provenientes de sensores especializados que
permita la ubicación del vehículo en el espacio.
v

A mis abuelos.
A mi mamá y hermanas.
vii

AGRADECIMIENTOS
Agradezco a mi mamá Silvia, a mis hermanas Sonia, Elizabeth, Erendira, Mariana y Andrea
que han estado siempre conmigo apoyandome y motivandome para alcanzar mis metas.
A mis padres Miguel Ángel y Virginia que son la fuente de inspiración y el más grande apoyo
en la realización de todos mis sueños, a Luis Ángel a quien espero le sirva de motivación mi trabajo.
Al Dr. Bernardino Benito Salmerón Quiróz por su tiempo, por compartir sus conocimientos y
su apoyo incondicional sin el cual no hubiera sido posible la realización de este proyecto, así como
al Dr. Gerardo Villegas y al Dr. Salvador Rodríguez por sus enseñanzas.
Gracias a mi compañero de tesis Miguel Alejandro por su ingenio y entusiasmo por desarrollar
este proyecto.
A Adriana gracias por aguantarme tanto tiempo e intentarme comprender así como por ser tan
comprometida en todo lo que hace.
A mis amigos que son la fuente de inspiración en todas mis locuras.
ix


CONTENIDO
Resumen v
Dedicatoria vii
Agradecimientos ix
Contenido xi
Lista de Figuras xv
Lista de Tablas xix
INTRODUCCIÓN xxi
Justificación xxiii
CAPITULO PAGINA
1 Estado del Arte 11.1 Planteamiento del Problema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Antecedentes de la robótica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Vehículos autónomos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3.1 Tipos de vehículos autónomos . . . . . . . . . . . . . . . . . . . . . . . . 41.3.1.1 Vehículos Autónomos Marinos . . . . . . . . . . . . . . . . . . 41.3.1.2 Vehículos Autónomos Aéreos . . . . . . . . . . . . . . . . . . . 151.3.1.3 Clasificación . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.3.1.4 Grado de autonomía . . . . . . . . . . . . . . . . . . . . . . . . 201.3.1.5 UAV funciones . . . . . . . . . . . . . . . . . . . . . . . . . . . 221.3.1.6 Drones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231.3.1.7 Vehículos Autónomos Terrestres . . . . . . . . . . . . . . . . . 29
2 Marco Teórico 352.1 Arquitectura de los robots . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.1.1 Arquitectura reactiva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 362.1.2 Arquitectura deliberada . . . . . . . . . . . . . . . . . . . . . . . . . . . . 372.1.3 Arquitectura híbrida de 3 capas . . . . . . . . . . . . . . . . . . . . . . . 37
2.2 Aspecto mecánico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
xi

2.3 Aspecto de interfaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 392.3.1 Tipo de sensores utilizados en vehículos autónomos . . . . . . . . . . . . . 402.3.2 Tipos de sensores utilizados en la navegación de vehículos aéreos autónomos 43
2.3.2.1 Sensores Inerciales . . . . . . . . . . . . . . . . . . . . . . . . 442.4 Metodología de Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
2.4.1 Redes neuronales artificiales (RNA) . . . . . . . . . . . . . . . . . . . . . 462.4.2 Lógica difusa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
2.4.2.1 Aplicaciones de la Lógica Difusa a un Robot Móvil . . . . . . . 502.5 Parametrización de la orientación en el espacio . . . . . . . . . . . . . . . . . . . 50
2.5.1 Ángulos de Euler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 502.5.1.1 Ángulos de navegación . . . . . . . . . . . . . . . . . . . . . . 52
2.5.2 Cuaterniones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 532.6 Telemetría . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 552.7 Tipos de controladores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
2.7.1 FPGA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 582.7.2 DSP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 582.7.3 Microcontroladores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 592.7.4 Microprocesadores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
2.8 Metodología y lenguajes de programación usadas . . . . . . . . . . . . . . . . . . 612.8.1 Labview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 622.8.2 Programación en LabVIEW . . . . . . . . . . . . . . . . . . . . . . . . . 622.8.3 Lenguaje Ensamblador . . . . . . . . . . . . . . . . . . . . . . . . . . . . 632.8.4 Lenguaje de programación C . . . . . . . . . . . . . . . . . . . . . . . . . 652.8.5 Lenguaje de programación C++ . . . . . . . . . . . . . . . . . . . . . . . 65
2.9 Sistema Scada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 662.9.1 Elementos del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
2.10 Monitoreo Automático . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 682.10.1 Elementos físicos de un sistema de monitoreo por PC . . . . . . . . . . . . 712.10.2 Adquisición y tratamiento de señales . . . . . . . . . . . . . . . . . . . . 74
2.11 Concepto de helicóptero . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 782.11.1 Características de un helicóptero . . . . . . . . . . . . . . . . . . . . . . . 79
2.11.1.1 Geometría del rotor y palas . . . . . . . . . . . . . . . . . . . . 792.11.1.2 Perfiles de palas . . . . . . . . . . . . . . . . . . . . . . . . . . 792.11.1.3 Distribución de presiones y fuerzas en las palas . . . . . . . . . 802.11.1.4 Efecto suelo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 822.11.1.5 Efectos del par motor. El Rotor de cola . . . . . . . . . . . . . . 822.11.1.6 Pilotaje de un helicóptero de radio control . . . . . . . . . . . . 83
3 Diseño Conceptual 853.1 Requerimientos del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 853.2 Descripción del vehículo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 863.3 Elementos del sistema de orientación . . . . . . . . . . . . . . . . . . . . . . . . . 873.4 Dispositivos de adquisición de datos . . . . . . . . . . . . . . . . . . . . . . . . . 893.5 Actuadores del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
xii

3.5.1 Motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 913.5.2 Tarjeta de Sonido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 923.5.3 Central inercial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
4 Arquitectura del sistema 974.1 Adquisición y procesamiento de la orientación . . . . . . . . . . . . . . . . . . . . 974.2 Captura de la orientación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 984.3 Visualización gráfica de la orientación del vehículo en tiempo real . . . . . . . . . 984.4 Algoritmo de conversión de la orientación dada por ángulos de Euler a orientación
Ángulo-Vector . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1054.5 Generación del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
4.5.1 Creación del circuito electrónico para tratamiento de la señal PPM . . . . . 1174.6 Implementación del sistema y resultados . . . . . . . . . . . . . . . . . . . . . . . 118
5 Conclusiones y trabajos posteriores 125
6 Costos y viabilidad 1296.1 Costos de inversión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1296.2 Costos y beneficios de explotación . . . . . . . . . . . . . . . . . . . . . . . . . . 131
Referencias 133
xiii

LISTA DE FIGURAS
Figura Pagina
1.1 Ejemplo de Vehículos Autónomos Marinos . . . . . . . . . . . . . . . . . . . . . . 51.2 Inspección y mantenimiento preventivo de instalaciones submarinas . . . . . . . . 71.3 Ejemplo de imágenes obtenidas por sonar . . . . . . . . . . . . . . . . . . . . . . 91.4 Los científicos recuperan un Seaglider tras su viaje. [Fotografía: University of
Washington Applied Physics Laboratory] . . . . . . . . . . . . . . . . . . . . . . 101.5 Submarinos Autónomos de investigación e inspección para uso alrededor del mundo. 121.6 Vehículo Operado Remotamente (ROV) . . . . . . . . . . . . . . . . . . . . . . . 131.7 Vehículo Autónomo Submarino para estudio del litoral . . . . . . . . . . . . . . . 141.8 Proyecto ESEOO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151.9 Micro UAV (EURO UVS, Georgia Tech) . . . . . . . . . . . . . . . . . . . . . . 171.10 Vehículos de Alcance Cercano. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.11 Vehículos de medio y largo alcance (EURO UVS). . . . . . . . . . . . . . . . . . 191.12 Avión Autónomo "Skat" (raya) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241.13 Esquema de fuerzas quadri-motor y pares de cada motor . . . . . . . . . . . . . . . 261.14 Respuesta inestable del quadri-motor cuando se utiliza el controlador lineal LQR al
sub-sistema (φ, y). a) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281.15 Respuesta del quadri-motor cuando se utiliza el algoritmo de control propuesto,
sujeta a perturbaciones en los ejes x, y y z. Las líneas punteadas representanla trayectoria deseada. Las condiciones iniciales son (x, y, z) = (9, 12, 0) cm y(ψ, θ, φ) = (0o, 0o, 0o). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
1.16 Proyecto AUTOPÍA. Detalle de la ubicación del sistema de medida inercial y de laantena de recepción de la señal GPS . . . . . . . . . . . . . . . . . . . . . . . . . 31
1.17 Auto "Espíritu de Berlín" . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 321.18 Vehículo autónomo aplicado a la minería subterránea . . . . . . . . . . . . . . . . 33
2.1 Arquitectura de las tres capas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 372.2 Software para la estación de tele operación del RMTO I [Cerón, 2008] . . . . . . . 402.3 Estación de control del UAV EFIGENIA.[Cerón, 2008] . . . . . . . . . . . . . . . 412.4 Entrada de información a una neurona y salida dada por funciones . . . . . . . . . 462.5 Esquema de modelización inversa directa . . . . . . . . . . . . . . . . . . . . . . 48
xv

2.6 Esquema de modelización inversa directa . . . . . . . . . . . . . . . . . . . . . . 482.7 Esquema de modelización inversa directa . . . . . . . . . . . . . . . . . . . . . . 492.8 Ángulos de Euler [Gavilán, 2006]. . . . . . . . . . . . . . . . . . . . . . . . . . . 512.9 Representación gráfica de las unidades de producto como cuaternión 90 de rotación
en 4D-espacio, i j = k, ji = −k, i j = − ji . . . . . . . . . . . . . . . . . . . . . . . 542.10 Módulo telemático STD32 de Telic GmbH [Telit] . . . . . . . . . . . . . . . . . . 572.11 Esquema de un microcontrolador. . . . . . . . . . . . . . . . . . . . . . . . . . . . 602.12 Panel frontal de un VI [Butron, 2007] . . . . . . . . . . . . . . . . . . . . . . . . 632.13 Diagrama de bloques de un VI [Butron, 2007] . . . . . . . . . . . . . . . . . . . . 642.14 Elementos del Sistema Scada [Henry] . . . . . . . . . . . . . . . . . . . . . . . . 682.15 Etiquetas triage manual [Abril, 2007] . . . . . . . . . . . . . . . . . . . . . . . . . 702.16 Nodo red de sensores CEI [Abril, 2007] . . . . . . . . . . . . . . . . . . . . . . . 712.17 Componentes de un sistema de monitoreo. . . . . . . . . . . . . . . . . . . . . . . 722.18 Software para monitoreo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 732.19 Control de la posición de una aeronave como ejemplo de proceso físico [Antonio,
2001] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 752.20 Sistema de adquisición de datos y control. [Antonio, 2001] . . . . . . . . . . . . . 752.21 Entorno integrado para la captación de datos. . . . . . . . . . . . . . . . . . . . . 772.22 Clasificación de helicópteros [Baracala, 2007] . . . . . . . . . . . . . . . . . . . . 782.23 Ángulo de ataque e incidencia [del Cerro, 2007] . . . . . . . . . . . . . . . . . . . 802.24 Fuerza aerodinámica [del Cerro, 2007] . . . . . . . . . . . . . . . . . . . . . . . . 812.25 Rotores en un helicóptero Sirkoski 60 [Baracala, 2007] . . . . . . . . . . . . . . . 832.26 Rotor de un helicóptero de radio control [del Cerro, 2007] . . . . . . . . . . . . . . 84
3.1 Raptor 60 V2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 873.2 Giróscopo GY401 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 883.3 Acelerómetro [del Cerro, 2007] . . . . . . . . . . . . . . . . . . . . . . . . . . . . 893.4 Tren de pulsos generado por el control Futaba T7C . . . . . . . . . . . . . . . . . 903.5 Control remoto Futaba T7C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 913.6 Motor OS Hyper 50 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 923.7 Tarjeta de sonido Sound Blaster Live 5.1 . . . . . . . . . . . . . . . . . . . . . . . 93
4.1 Central Inercial 3DM-GX1 de MicroStrain . . . . . . . . . . . . . . . . . . . . . . 984.2 Programa básico en LabVIEW para obtener los ángulos de Euler en la 3DM-GX1 . 994.3 Plano de referencia para la orientación en el vehículo . . . . . . . . . . . . . . . . 994.4 Modelo 3D del motor OS HYPER 50 en VRML . . . . . . . . . . . . . . . . . . . 1004.5 Rotor principal a detalle en VRML . . . . . . . . . . . . . . . . . . . . . . . . . . 1014.6 Rotor de cola en VRML . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1014.7 Escape del vehículo en VRML . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1024.8 Textura aplicada a la cola del vehículo VRML . . . . . . . . . . . . . . . . . . . . 1034.9 Textura aplicada a la central inercial del modelo VRML . . . . . . . . . . . . . . . 1034.10 Textura aplicada a los servomotores del modelo VRML . . . . . . . . . . . . . . . 1044.11 Diagrama general del código VRML . . . . . . . . . . . . . . . . . . . . . . . . . 1044.12 Modelo a escala del vehículo en VRML . . . . . . . . . . . . . . . . . . . . . . . 105
xvi
4.13 Programa básico en LabVIEW para la modificación de la orientación de un modeloVRML . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
4.14 Programa en LabVIEW para la modificación de la orientación de un modelo VRMLcon los datos proporcionados por la central inercial 3DM-GX1 . . . . . . . . . . . 108
4.15 Esquema general del envío de la señal inalámbricamente . . . . . . . . . . . . . . 1094.16 Emisor-Receptor utilizados; de la marca comercial Futaba . . . . . . . . . . . . . . 1104.17 Conector de entrenamiento situado en la parte posterior del radiocontrol . . . . . . 1114.18 Configuración de pines del conector de entrenamiento cuadrado . . . . . . . . . . . 1124.19 PPM generado con el radiocontrol y medido con el osciloscopio para obtener sus
parámetros. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1134.20 Posición máxima y mínima de la palanca correspondiente al canal 1 en el radiocon-
trol y sus efectos en la señal PPM medidos con el osciloscopio. . . . . . . . . . . . 1144.21 Señal PPM generada en LabVIEW y medida directamente de la salida de la tarjeta
de sonido. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1164.22 Circuito de tratamiento de señal PPM. . . . . . . . . . . . . . . . . . . . . . . . . 1174.23 Señal PPM generada en LabVIEW y medida con el osciloscopio a la salida del
circuito de tratamiento de señal. . . . . . . . . . . . . . . . . . . . . . . . . . . . 1194.24 Proceso de comunicación inalámbrica PC - Vehículo de forma esquematizada (Sis-
tema SCADA). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1214.25 Control de canales en LabVIEW. . . . . . . . . . . . . . . . . . . . . . . . . . . . 1224.26 Pantalla de monitoreo de la orientación utilizando el modelo del vehículo en VRML
así como instrumentos virtuales de navegación . . . . . . . . . . . . . . . . . . . . 123
xvii


LISTA DE TABLAS
Tabla Pagina
4.1 Comparación entre los protocolos de orientación ángulos de Euler y ángulo vector . 1054.2 Listado de servomotores, función, y canales que los controla . . . . . . . . . . . . 1154.3 Tabla comparativa; señal obtenida y señal deseada. . . . . . . . . . . . . . . . . . 116
6.1 Costo de adquisición y equipamiento del helicóptero . . . . . . . . . . . . . . . . 1306.2 Costos de herramientas y equipos especiales . . . . . . . . . . . . . . . . . . . . . 1306.3 Costos de ingeniería e implementación. . . . . . . . . . . . . . . . . . . . . . . . 1316.4 Costo Total . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
xix

INTRODUCCIÓN
Los vehículos aéreos no tripulados (UAV’s) han sido empleados durante las últimas dos décadas
para aplicaciones militares en todo el mundo; sin embargo, su aplicación civil apenas ha sido iden-
tificada como potencial área de desarrollo en funciones de carga, vigilancia, supervisión, resguardo
de costas, evaluación de recursos naturales, meteorología, etc. La construcción de estos vehículos
es un reto que trasciende los conocimientos de una sola disciplina, ya que requiere de competencias
y habilidades relacionadas con Ingeniería Mecánica, Aeronáutica, Materiales, Electrónica, Comu-
nicaciones y Tecnologías de Información, entre otras.
El objetivo es el de controlar y monitorear un vehículo aéreo no tripulado o robot aéreo, que a
futuro permita el desarrollo de un vehículo autónomo o semiautónomo que cubra diferentes tipos
de misiones desde los sectores de defensa y seguridad a los de agricultura o medio ambiente. Para
tal efecto se realizará una simulación virtual de vuelo así como validación de monitoreo a distancia
del helicóptero mediante la fusión de datos provenientes de sensores especializados que permita la
ubicación del vehículo en el espacio.
Objetivos Particulares:
• Creación de una interfaz de comunicación inalámbrica entre la PC y el vehículo
• Modelado de orientación utilizando el formalismo ángulos de Euler.
• Implementación y simulación del sistema mecánico usando software especializado (Mecha-
nical Desktop y VRML).
xxi

• Implementación de algoritmos de fusión de sensores inerciales y tratamiento de datos en
LabVIEW.
• La estabilidad global del sistema debe ser probada de manera teórica y en simulación. Cons-
trucción del prototipo.
xxii
JUSTIFICACIÓN
El helicóptero es una aeronave del tipo llamada ala rotativa que posee como ventajas principales
la capacidad de volar en cualquier dirección horizontal y verticalmente así como estacionarse en
el aire y la capacidad de despegar y aterrizar en un espacio reducido debido a que lo hace de ma-
nera vertical; todas estas características lo crean un medio eficaz para la inspección, vigilancia y/o
supervisión de espacios territoriales.
El uso de un UAV que, aun siendo tele-controlado sea fácil de usar, no ha sido desarrollado ple-
namente, por lo que se propone en este trabajo de tesis un vehículo que incorpore la instrumentación
necesaria para su estabilización automática y su guiado de manera simple, con instrucciones de alto
nivel. Para así llevar a cabo ensayos tanto de simulaciones de vuelo como de vuelos reales. Los
principales aspectos del programa son la reducción de riesgos, la evaluación de tecnologías clave
y la generación de conceptos operacionales para futuros sistemas UAV. En este proyecto se desea
implementar técnicas de diseño, control y modelado de realidad virtual para la validación de vuelo
de un vehículo autónomo aéreo.
El presente proyecto de investigación responde a la necesidad de buscar innovaciones en la
robótica móvil y ventajas aplicables a los sectores en donde el ser humano corre riesgos de salud, o
de difícil acceso, etc. Se pretende realizarlo optimizando materiales, costos con lo cual en el sistema
móvil se considera las siguientes ventajas:
1. El diseño del vehículo autónomo móvil (UAV por sus siglas en Inglés) debe ser minimizando
xxiii

los componentes mecánicos que nos permita tener una gran capacidad de navegación y fle-
xibilidad en el momento de realizar alguna maniobra. Cuidando los aspectos de balance y
distribución del peso, y buscando materiales ligeros.
2. El vehículo debe ser capaz de realizar sus tareas de navegación de forma independiente. Éste
se plantea como uno de los objetivos principales del sistema de navegación a desarrollar. La
autonomía a nivel de navegación debe ser completa, es decir, una vez conocido el destino, el
vehículo debe utilizar sus sensores y procesadores para alcanzarlo sin ningún tipo de inter-
vención del usuario, incluso en posibles situaciones de pérdida. Sin embargo, este concepto
de autonomía no debe aislar al UAV de la comunicación y la descripción de la trayectoria
con el usuario, que podrá modificar en cualquier momento puede modificar el objetivo (y por
tanto el destino del sistema de navegación) mediante el uso de las interface usuario-máquina
de que está dotado el vehículo autónomo móvil para facilitar la interacción con el usuario.
3. Fiabilidad de sistema de navegación son objetivos prioritarios frente a la precisión de los
movimientos. Es más importante que el vehículo finalmente llegue a su destino, y de que
disponga de una precisa localización durante su movimiento hacia el mismo. De hecho, las
fuentes de incertidumbre a las que pueden estar sometidos los sistemas sensoriales del robot
son múltiples, especialmente en aplicaciones en las que además existe un grado elevado de
interacción con el usuario, cuyas reacciones u ordenes pueden ser impredecibles, no importa
que el robot pueda perderse durante ciertos espacios de tiempo si es capaz de recuperarse
por sí mismo de dicha situación, evitando de este modo la intervención de un usuario que
supervise sus operaciones.
4. Una característica fundamental para impulsar el robot móvil desde el punto de vista comercial
es que éstos sean fácilmente instalables y configurables en nuevos espacios de movimiento.
Esto permitiría el diseño de robots "en serie", evitando el elevado costo que suponen los
diseños o particularizados para cada entorno de trabajo. Como ya se ha comentado con an-
terioridad, no existen métodos de navegación que puedan ser generalizados y utilizados en
xxiv
cualquier situación. Sin embargo, el sistema de navegación propuesto se orienta a aplica-
ciones de demostración escolar.
5. Considerando nuevamente la integración, en un futuro, de los UAV el factor coste debe tam-
bién ser tenido en cuenta como requisito del sistema de navegación. Por ello, debe recurrirse
al uso de sensores de propósito general, como girómetros, acelerómetros, sensores de tempe-
ratura, etc. La utilización de este tipo de sensores, en lugar de otros con mayores prestaciones
o niveles de precisión, no debe afectar a la funcionalidad del sistema de navegación, que debe
ser capaz de manejar con éxito las incertidumbres propias e inherentes de cualquier sistema
sensorial o de actuación.
6. La arquitectura del programa de monitoreo de la orientación propuesta en este trabajo será
validada mediante simulación de un vehículo aéreo tipo helicóptero raptor y su maniobra en
entornos reales, por lo que otro objetivo fundamental es asegurar que los algoritmos desa-
rrollados puedan ejecutarse en tiempo real con los recursos computacionales y de memoria
propios de las plataformas robótica, y la creación del recorrido en la PC.
Productos o Resultados Esperados:
Además del reporte técnico solicitado del trabajo de investigación realizado, se prevén los si-
guientes productos:
1. Diseño del programa de monitoreo de la orientación en tiempo real.
2. Diseño del programa e interfaz electrónica para enlazar comunicación en tiempo real entre el
vehículo y la PC
3. Diseño de interfaces gráficas.
4. Simulación y validación del sistema en 3D.
5. Implementación del desarrollo tecnológico.
xxv

CAPITULO 1
ESTADO DEL ARTE
1.1 PLANTEAMIENTO DEL PROBLEMA
La seguridad hoy en día es una de las preocupaciones que mas envuelve la mente de las personas
y especialmente la de los mexicanos debido a la situación actual de inseguridad e impunidad que
vivimos. Por tal motivo es de gran importancia contar con herramientas que faciliten la tarea de
velar por la seguridad de las personas. El tiempo transcurrido para intervenir en un siniestro tal
como incendios, derrumbes, inundaciones es vital ya que de ello dependen vidas humanas, así
como grandes costos monetarios, por tal razón es importante detectar dichos siniestros para una
pronta acción con resultados favorables.
Existen espacios de gran importancia para que las personas desarrollen sus actividades, espacios
que permiten la recreación, el abastecimiento de productos, las transacciones monetarias sin hacer a
un lado los lugares de trabajo y aun mas importante el hogar, de tal manera que es primordial contar
con vigilancia que además provea de información acerca de lo que acontece alrededor de dichos
lugares, contando con seguimiento de personas para su propia seguridad o la de la sociedad para la
detección de delincuentes.
Para dar una posible solución a estos problemas se plantea la utilización de un vehículo aéreo no
tripulado, específicamente un helicóptero a escala equipado con una cámara para video-vigilancia,
sin embargo, se limita este proyecto a la creación de la interfaz inalámbrica PC-Vehículo, desarrollo
1
2 1. Estado del Arte
de un programa de monitoreo en tiempo real y la creación de un programa de manipulación de
los servomotores que controlan los diferentes mecanismos del vehículo. Esto con la finalidad de
proporcionar una mayor seguridad a la sociedad en sus lugares de trabajo, hogar y recreación.
1.2 ANTECEDENTES DE LA ROBÓTICA
La historia de la tecnología está formada por tres períodos principales: era agrícola, era indus-
trial y era de la información. El desarrollo de los robots se puede ver como lógica e importante
parte de la historia. A mediados del siglo XVIII, los molinos de agua, la máquina de vapor y
otros transformadores de energía reemplazaron la fuerza humana y animal como fuente principal
de energía. Las nuevas máquinas de fabricación impulsaron el crecimiento de la industria y mucha
gente pasó a estar empleada en las nuevas fábricas como trabajadores. Los bienes se producían más
rápidamente y mejor que antes y la calidad de vida aumentó. A este período se le conoce como
"Revolución Industrial". En la mitad del siglo XX surgen las industrias basadas en la ciencia, las
mejoras tecnológicas en la electrónica hicieron posible el ordenador. Este constituye el desarrollo
más importante, el ordenador revolucionó el modo de procesar y comunicar la información. Como
resultado la información se ha convertido en un bien más del mercado y esta nueva era se conoce
como la era de la información o "post-industrial".
Aunque los robots ocasionen cierto desempleo, también crean puestos de trabajo: Técnicos,
comerciales, ingenieros, programadores, etc. Los países que usen eficazmente los robots en sus
industrias tendrán una ventaja económica en el mercado mundial. [Web Electrónica] Los robots son
usados hoy en día para llevar a cabo tareas sucias, peligrosas, difíciles, repetitivas o embotadas para
los humanos. Esto usualmente toma la forma de un robot industrial usado en las líneas de produc-
ción. Otras aplicaciones incluyen la limpieza de residuos tóxicos, exploración espacial, minería,
búsqueda y rescate de personas y localización de minas terrestres.
La manufactura es el principal mercado donde los robots son utilizados. En particular, robots
1.3. Vehículos autónomos 3
articulados (similares en capacidad de movimiento a un brazo humano) son los más usados común-
mente. Las aplicaciones incluyen soldado, pintado y carga de maquinaria. La Industria automotriz
ha tomado gran ventaja de esta nueva tecnología donde los robots han sido programados para reem-
plazar el trabajo de los humanos en muchas tareas repetitivas.
Recientemente, se ha logrado un gran avance en los robots dedicados a la medicina, con dos
compañías en particular, Computer Motion e Intuitive Surgical, que han recibido la aprobación re-
gulatoria en América del Norte, Europa y Asia para que sus robots sean utilizados en procedimientos
de cirugía invasiva mínima. La automatización de laboratorios también es un área en crecimiento.
Aquí, los robots son utilizados para transportar muestras biológicas o químicas entre instrumentos
tales como incubadoras, manejadores de líquidos y lectores. Otros lugares donde los robots están
reemplazando a los humanos son la exploración del fondo oceánico y exploración espacial. Para
esas tareas, robots de tipo artrópodos son generalmente utilizados. [Wikipedia]
1.3 VEHÍCULOS AUTÓNOMOS
Un vehículo autónomo es cualquier vehículo no tripulado con cierto nivel de autonomía in-
tegrada (ello incluye desde vehículos teleoperados hasta vehículos totalmente inteligentes) [FSC,
2007].
El objetivo del control de vehículos autónomos es que el vehículo ejecute de forma autónoma
movimientos previamente planificados, es decir, seguimiento de trayectoria o ’path following’ o
los que permiten reaccionar de forma apropiada a la percepción del entorno. De hecho, cualquier
sistema autónomo que implique movilidad necesita una planificación de trayectoria. Este problema
esta ampliamente documentado en el campo de los sistemas robóticos y manipuladores, sin embargo
el desarrollo de los vehículos anteriormente comentados ha ampliado su campo de utilización.
Recientes avances tecnológicos, como la miniaturización de sensores (centrales inerciales, GPS,
4 1. Estado del Arte
cámaras, etc), el desarrollo de microcontroladores etc., han permitido realizar sistemas empotra-
dos que permiten la implementación de plataformas experimentales para el desarrollo de sistemas
autónomos.
Los vehículos y robots móviles se utilizan como plataforma para la solución de problemas
planteados en distintos sectores de la industria, en el área militar y si el costo lo permite también en
actividades civiles.
Por otro lado, el uso de vehículos autónomos no tripulados está teniendo un importante creci-
miento en un amplio rango de aplicaciones como pueden ser reconocimiento climático y atmos-
férico, reconocimiento y vigilancia, técnicas de combate convencionales, nuevas tareas que no eran
posibles anteriormente como consecuencia de unas condiciones adversas tareas pesadas, condi-
ciones desfavorables, peligrosas como operaciones en ambientes químicos y biológicos agresivos
[Aranda, 2008].
El trabajo que se requiere para la creación de cualquier vehículo es muy extenso y no esta
exento de algún financiamiento cuantioso. Por esto muchos centros de investigación optan por
adaptar vehículos normalmente diseñados para manejo humano y así enfocarse en el desarrollo de
tecnología de más alto nivel, como el caso es el caso de planeación de trayectorias o tareas mucho
más especificas que solo requieren al vehículo para transportar sistemas más sofisticados [Matchain,
2001] (ver figura 1.1).
1.3.1 TIPOS DE VEHÍCULOS AUTÓNOMOS
Dentro de los vehículos autónomos existes diversos tipos, clasificando estos de acuerdo al medio
físico en el cual se desenvuelven por tal razón se organizan en los siguientes grupos:
1.3.1.1 VEHÍCULOS AUTÓNOMOS MARINOS
Un Vehículo Autónomo Marino (VAM) es aquel equipo mecánico que se pueda mover sobre la
superficie marina o emerger en ella (submarinos) que pueda portar o transportar un objeto o sistema,
denominados también UMV (Unmanned Marine Vehicle).
1.3. Vehículos autónomos 5
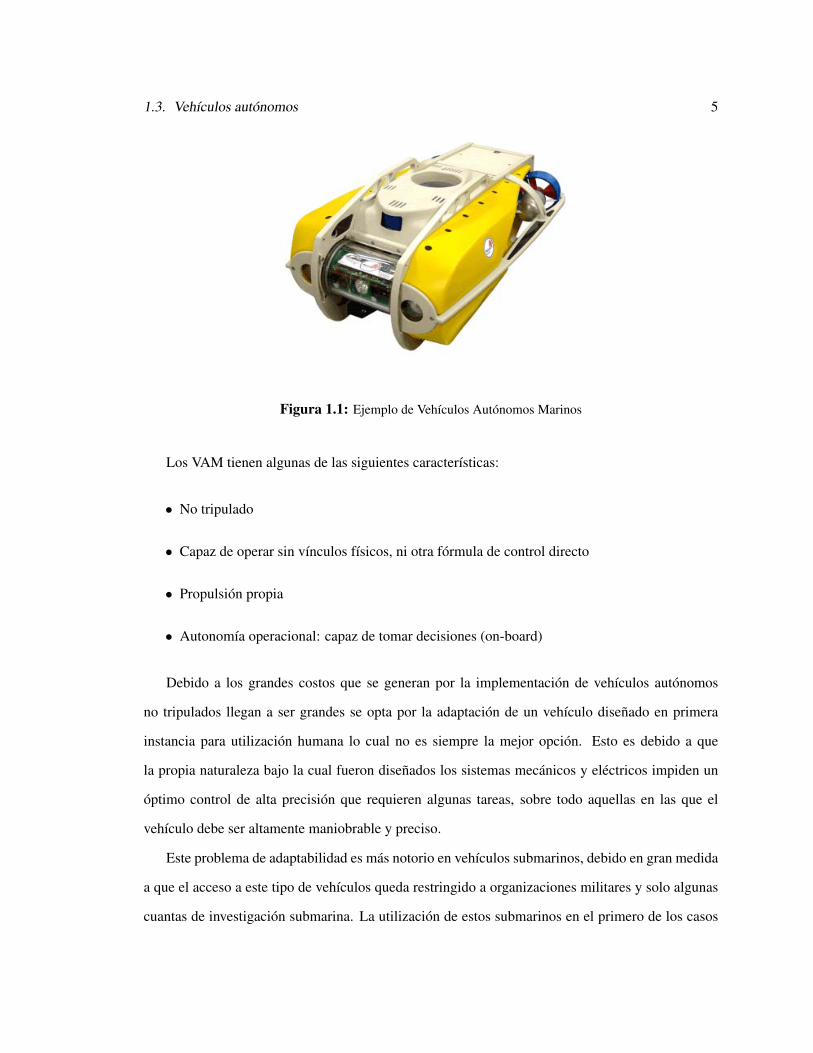
Figura 1.1: Ejemplo de Vehículos Autónomos Marinos
Los VAM tienen algunas de las siguientes características:
• No tripulado
• Capaz de operar sin vínculos físicos, ni otra fórmula de control directo
• Propulsión propia
• Autonomía operacional: capaz de tomar decisiones (on-board)
Debido a los grandes costos que se generan por la implementación de vehículos autónomos
no tripulados llegan a ser grandes se opta por la adaptación de un vehículo diseñado en primera
instancia para utilización humana lo cual no es siempre la mejor opción. Esto es debido a que
la propia naturaleza bajo la cual fueron diseñados los sistemas mecánicos y eléctricos impiden un
óptimo control de alta precisión que requieren algunas tareas, sobre todo aquellas en las que el
vehículo debe ser altamente maniobrable y preciso.
Este problema de adaptabilidad es más notorio en vehículos submarinos, debido en gran medida
a que el acceso a este tipo de vehículos queda restringido a organizaciones militares y solo algunas
cuantas de investigación submarina. La utilización de estos submarinos en el primero de los casos
6 1. Estado del Arte
se restringe a ser utilizados simplemente como plataformas de lanzamiento, y en el segundo su
finalidad es funcionar principalmente como observatorios acuáticos [Matchain, 2001].
Ahora es posible observar e incluso trabajar a distancia debajo del agua sin necesidad de ser
buzos profesionales. Los robots de exploración son capaces de descender a 50 metros, 100m. 150m.
o incluso mayores profundidades. Profundidades a las que es imposible descender con traje de buzo
sin correr un peligro mortal debido a la toxicidad del aire a esas profundidades y a los peligros
derivados de la narcosis y de los ataques de descompresión [Mayer, 2009].
Es importante el desarrollo de tecnologías que mejoren las aplicaciones de los VAM, logrando
con ello éxito en las misiones planteadas para dichos vehículos. El procesamiento de datos es pri-
mordial para obtener información verídica y oportuna, una de las tecnologías para el procesado de
datos son los instrumentos hiperespectrales que suponen un cambio cualitativo en los sistemas de
medida no invasiva y percepción remota. Con la aparición de los sensores hiperespectrales aero-
transportados se han desarrollado diferentes aplicaciones de análisis de imágenes de alta resolución
espectral. Este tipo de aplicaciones permite, por ejemplo, la clasificación más detallada de fondos
marinos someros , la calidad del agua o la identificación de pigmentos [CSIC].
En los últimos años diferentes universidades han apostado por el desarrollo de nuevos sistemas
de instrumentación. A partir de los proyectos SAMPLER (Desarrollo de un Sistema de adquisición
y Análisis de datos oceanográficos de Microestructura y Perfiles hiperespectrales) e HIDRA (Ca-
racterización Hiperespectral del ambiente lumínico en el océano mediante modelos de transferencia
radiativa) se ha iniciado la línea específica de instrumentación hiperespectral que servirá de base
para el proyecto solicitado.
Los VAM cuentan con muchas aplicaciones tales como:
Aplicaciones industriales en el océano:
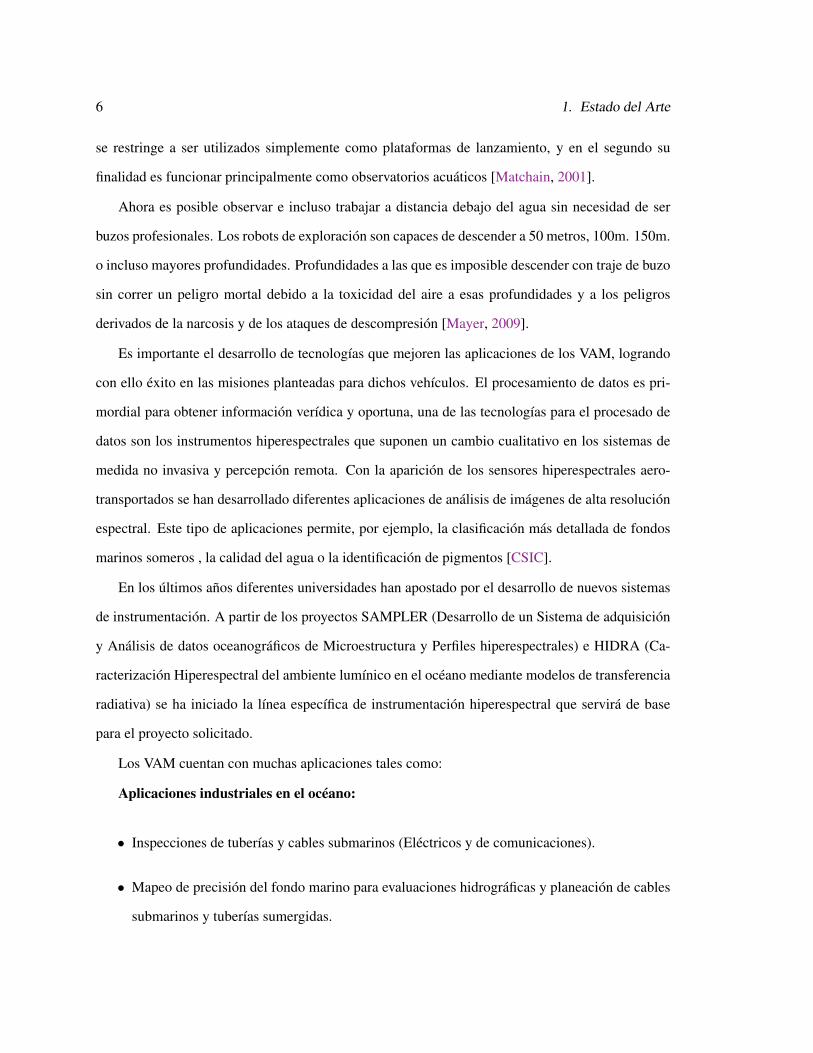
• Inspecciones de tuberías y cables submarinos (Eléctricos y de comunicaciones).
• Mapeo de precisión del fondo marino para evaluaciones hidrográficas y planeación de cables
submarinos y tuberías sumergidas.
1.3. Vehículos autónomos 7
Figura 1.2: Inspección y mantenimiento preventivo de instalaciones submarinas
• Soporte logístico para instalaciones de cable, tubería y construcción submarina.
• Evaluación ambiental de sitios de descarte de desechos críticos ambientales.
• Preparación y ejecución de actividades de rescate y salvamento.
• Preparación fílmica de documentales para cine y televisión.
• Actividades de seguridad y protección de instalaciones costeras y submarinas.
• Evaluaciones de Sonar Naval y Ejercicios Militares.
• Rescate Marino.
• Detección y Neutralización de Minas.
• Identificación/Recuperación de objetos submarinos.
Aplicaciones educacionales y de investigación:

8 1. Estado del Arte
• Biología Marina.
• Arqueología Marina.
• Monitoreo de ecosistemas.
• Tecnologías del fondo del mar.
• Estudios de hábitat marino.
• Estudios de migración.
• Estudios geológicos.
• Muestreo de aguas y sedimentos.
• Muestreo de especies marinas.
Este tipo de vehículos autónomos utilizan sensores como:
• Sensores sonares.
• Rango de sonares.
• Sensores del Snorkel.
• Sensor de velocidad lineal.
• Sensores de presión.
La frecuencia de operación determina la precisión y la amplitud de la zona de barrido.
En la Universidad de Washington (UW) se desarrollaron cuatro vehículos que fueron llamados
"Seagliders" (planeadores subacuáticos) por sus creadores en la Escuela de Oceanografía y el La-
boratorio de Física Aplicada de la UW, son vehículos con forma de torpedo, de casi dos metros
de largo. Se mueven por el agua sin depender de hélices, pasando mucho tiempo bajo el agua
y dedicados a realizar mediciones oceanográficas. Los planeadores son los vehículos de mayor
1.3. Vehículos autónomos 9
Figura 1.3: Ejemplo de imágenes obtenidas por sonar[FSC, 2007]
alcance entre los vehículos subacuáticos autónomos que han sido desarrollados. A diferencia de los
flotadores usados en la oceanografía, que son arrastrados a donde los lleven las corrientes oceánicas,
los planeadores pueden ser manejados por pilotos usando ordenadores en tierra, a veces a miles de
kilómetros de distancia. Los Seagliders usados en el Océano Pacífico fueron liberados en las aguas
a mitad de camino entre California y Hawai en septiembre pasado. Estos viajaron por el Pacífico
durante 191 días, cubriendo unos tres mil kilómetros. Durante ese tiempo, uno de ellos realizó 599
inmersiones, y el otro 559.
Los datos de temperatura, salinidad y oxígeno recopilados por los Seagliders, ayudarán a los
científicos del Laboratorio de Acústica del Pacífico Norte a entender mejor la propagación acústica,
midiendo cómo el sonido es afectado a medida que se mueve a través del océano. La acústica
puede ser usada para probar efectos como el cambio de temperatura a largo plazo de los océanos, la
variabilidad del clima, y el papel de las olas interiores en los lugares donde se mezclan los océanos
[Solo Ciencia, 2009]. Los planeadores podrían usarse para supervisar los cambios en los océanos
ocasionados por tormentas, huracanes y otros eventos naturales como el Niño. Los sonares y otros
10 1. Estado del Arte
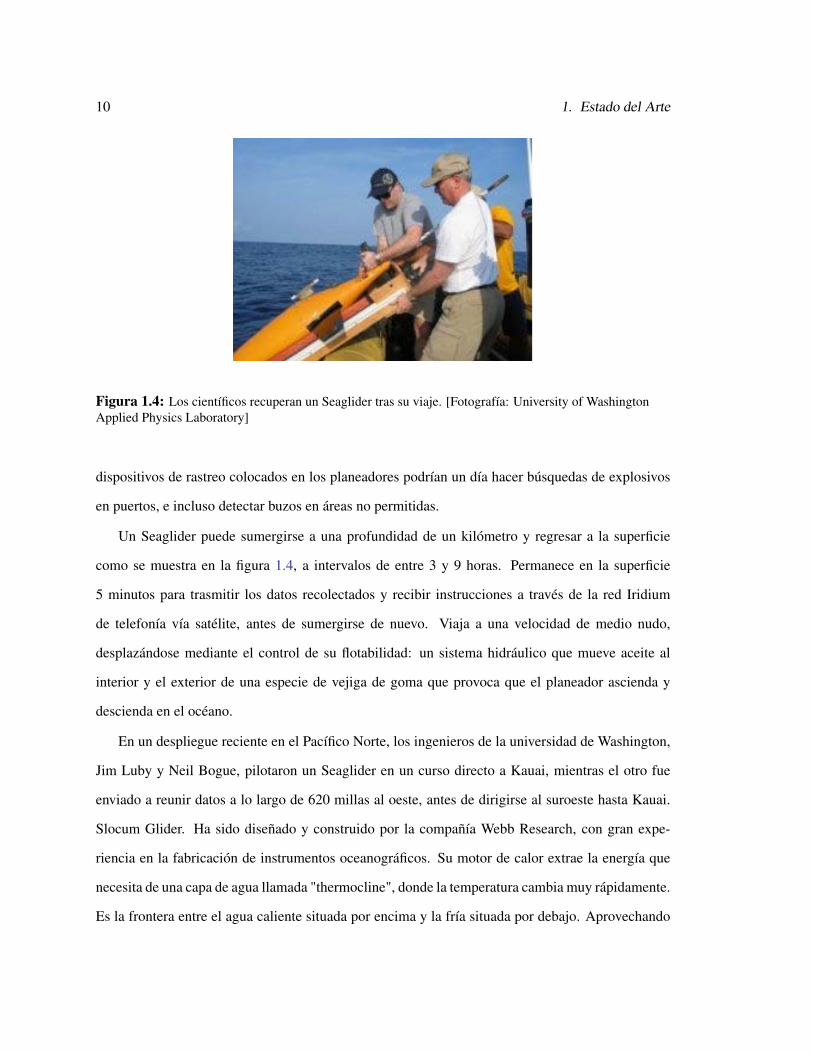
Figura 1.4: Los científicos recuperan un Seaglider tras su viaje. [Fotografía: University of WashingtonApplied Physics Laboratory]
dispositivos de rastreo colocados en los planeadores podrían un día hacer búsquedas de explosivos
en puertos, e incluso detectar buzos en áreas no permitidas.
Un Seaglider puede sumergirse a una profundidad de un kilómetro y regresar a la superficie
como se muestra en la figura 1.4, a intervalos de entre 3 y 9 horas. Permanece en la superficie
5 minutos para trasmitir los datos recolectados y recibir instrucciones a través de la red Iridium
de telefonía vía satélite, antes de sumergirse de nuevo. Viaja a una velocidad de medio nudo,
desplazándose mediante el control de su flotabilidad: un sistema hidráulico que mueve aceite al
interior y el exterior de una especie de vejiga de goma que provoca que el planeador ascienda y
descienda en el océano.
En un despliegue reciente en el Pacífico Norte, los ingenieros de la universidad de Washington,
Jim Luby y Neil Bogue, pilotaron un Seaglider en un curso directo a Kauai, mientras el otro fue
enviado a reunir datos a lo largo de 620 millas al oeste, antes de dirigirse al suroeste hasta Kauai.
Slocum Glider. Ha sido diseñado y construido por la compañía Webb Research, con gran expe-
riencia en la fabricación de instrumentos oceanográficos. Su motor de calor extrae la energía que
necesita de una capa de agua llamada "thermocline", donde la temperatura cambia muy rápidamente.
Es la frontera entre el agua caliente situada por encima y la fría situada por debajo. Aprovechando
1.3. Vehículos autónomos 11
esta característica, el Slocum Glider evoluciona miles de veces entre la superficie y una profundidad
programada, consiguiendo la energía que precisa para cambiar su flotabilidad a partir del flujo de
calor del agua que lo rodea.
Sus ingenieros lo han diseñado para que pueda avanzar sin descanso durante cinco años, siguien-
do un zig-zag vertical, desde la superficie a profundidades de hasta 5.000 pies y viceversa. Durante
este periplo, sus instrumentos medirán la salinidad y la temperatura, levantarán mapas de corrientes,
registrarán sonidos "biológicos" (como los de las ballenas), contabilizarán plantas microscópicas,
etc.
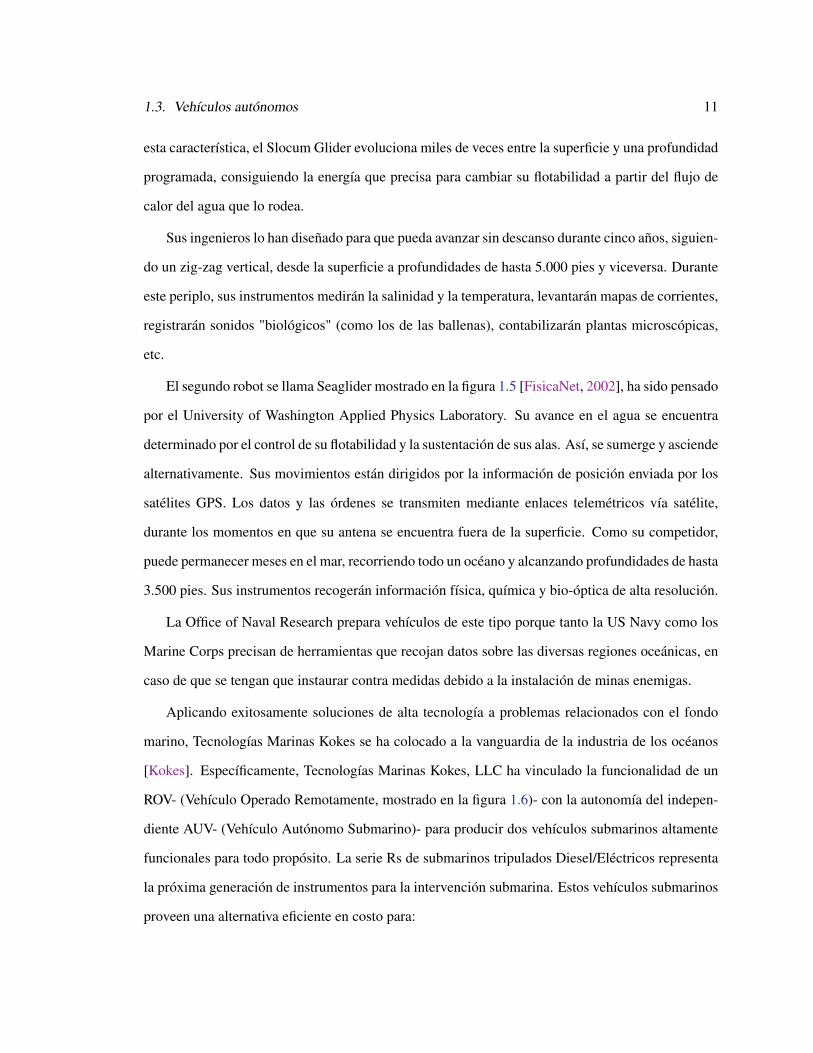
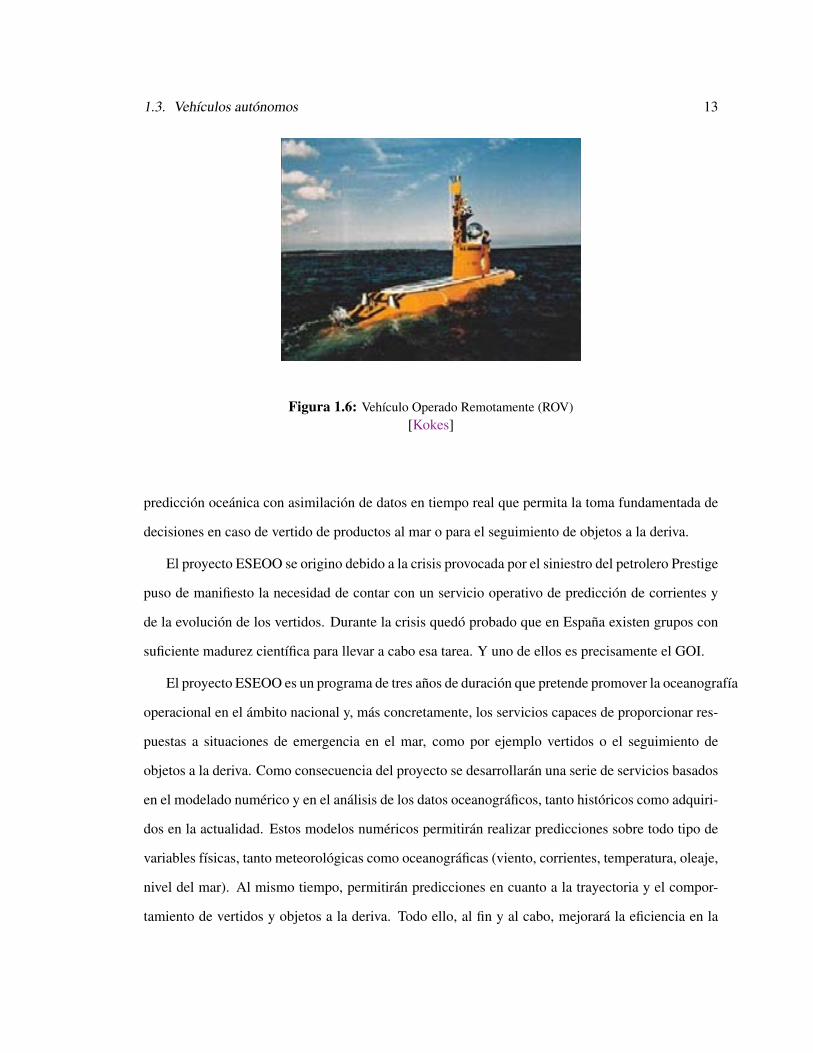
El segundo robot se llama Seaglider mostrado en la figura 1.5 [FisicaNet, 2002], ha sido pensado
por el University of Washington Applied Physics Laboratory. Su avance en el agua se encuentra
determinado por el control de su flotabilidad y la sustentación de sus alas. Así, se sumerge y asciende
alternativamente. Sus movimientos están dirigidos por la información de posición enviada por los
satélites GPS. Los datos y las órdenes se transmiten mediante enlaces telemétricos vía satélite,
durante los momentos en que su antena se encuentra fuera de la superficie. Como su competidor,
puede permanecer meses en el mar, recorriendo todo un océano y alcanzando profundidades de hasta
3.500 pies. Sus instrumentos recogerán información física, química y bio-óptica de alta resolución.
La Office of Naval Research prepara vehículos de este tipo porque tanto la US Navy como los
Marine Corps precisan de herramientas que recojan datos sobre las diversas regiones oceánicas, en
caso de que se tengan que instaurar contra medidas debido a la instalación de minas enemigas.
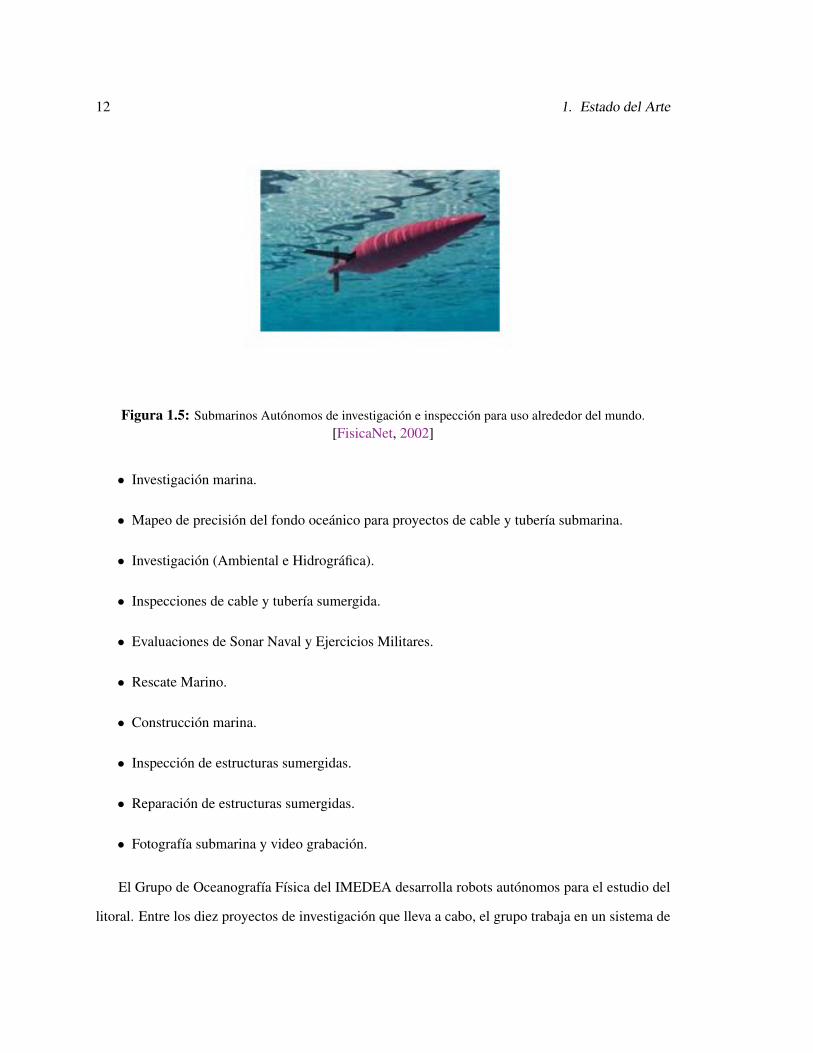
Aplicando exitosamente soluciones de alta tecnología a problemas relacionados con el fondo
marino, Tecnologías Marinas Kokes se ha colocado a la vanguardia de la industria de los océanos
[Kokes]. Específicamente, Tecnologías Marinas Kokes, LLC ha vinculado la funcionalidad de un
ROV- (Vehículo Operado Remotamente, mostrado en la figura 1.6)- con la autonomía del indepen-
diente AUV- (Vehículo Autónomo Submarino)- para producir dos vehículos submarinos altamente
funcionales para todo propósito. La serie Rs de submarinos tripulados Diesel/Eléctricos representa
la próxima generación de instrumentos para la intervención submarina. Estos vehículos submarinos
proveen una alternativa eficiente en costo para:
12 1. Estado del Arte
Figura 1.5: Submarinos Autónomos de investigación e inspección para uso alrededor del mundo.[FisicaNet, 2002]
• Investigación marina.
• Mapeo de precisión del fondo oceánico para proyectos de cable y tubería submarina.
• Investigación (Ambiental e Hidrográfica).
• Inspecciones de cable y tubería sumergida.
• Evaluaciones de Sonar Naval y Ejercicios Militares.
• Rescate Marino.
• Construcción marina.
• Inspección de estructuras sumergidas.
• Reparación de estructuras sumergidas.
• Fotografía submarina y video grabación.
El Grupo de Oceanografía Física del IMEDEA desarrolla robots autónomos para el estudio del
litoral. Entre los diez proyectos de investigación que lleva a cabo, el grupo trabaja en un sistema de
1.3. Vehículos autónomos 13
Figura 1.6: Vehículo Operado Remotamente (ROV)[Kokes]
predicción oceánica con asimilación de datos en tiempo real que permita la toma fundamentada de
decisiones en caso de vertido de productos al mar o para el seguimiento de objetos a la deriva.
El proyecto ESEOO se origino debido a la crisis provocada por el siniestro del petrolero Prestige
puso de manifiesto la necesidad de contar con un servicio operativo de predicción de corrientes y
de la evolución de los vertidos. Durante la crisis quedó probado que en España existen grupos con
suficiente madurez científica para llevar a cabo esa tarea. Y uno de ellos es precisamente el GOI.
El proyecto ESEOO es un programa de tres años de duración que pretende promover la oceanografía
operacional en el ámbito nacional y, más concretamente, los servicios capaces de proporcionar res-
puestas a situaciones de emergencia en el mar, como por ejemplo vertidos o el seguimiento de
objetos a la deriva. Como consecuencia del proyecto se desarrollarán una serie de servicios basados
en el modelado numérico y en el análisis de los datos oceanográficos, tanto históricos como adquiri-
dos en la actualidad. Estos modelos numéricos permitirán realizar predicciones sobre todo tipo de
variables físicas, tanto meteorológicas como oceanográficas (viento, corrientes, temperatura, oleaje,
nivel del mar). Al mismo tiempo, permitirán predicciones en cuanto a la trayectoria y el compor-
tamiento de vertidos y objetos a la deriva. Todo ello, al fin y al cabo, mejorará la eficiencia en la
14 1. Estado del Arte
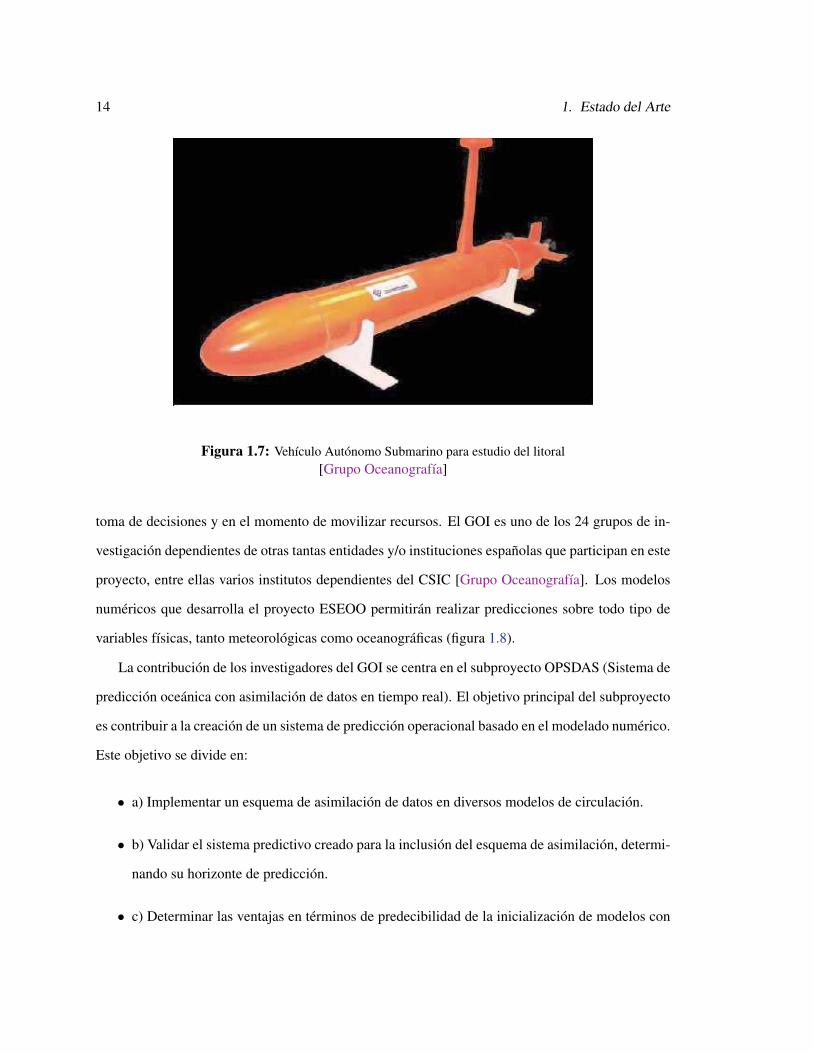
Figura 1.7: Vehículo Autónomo Submarino para estudio del litoral[Grupo Oceanografía]
toma de decisiones y en el momento de movilizar recursos. El GOI es uno de los 24 grupos de in-
vestigación dependientes de otras tantas entidades y/o instituciones españolas que participan en este
proyecto, entre ellas varios institutos dependientes del CSIC [Grupo Oceanografía]. Los modelos
numéricos que desarrolla el proyecto ESEOO permitirán realizar predicciones sobre todo tipo de
variables físicas, tanto meteorológicas como oceanográficas (figura 1.8).
La contribución de los investigadores del GOI se centra en el subproyecto OPSDAS (Sistema de
predicción oceánica con asimilación de datos en tiempo real). El objetivo principal del subproyecto
es contribuir a la creación de un sistema de predicción operacional basado en el modelado numérico.
Este objetivo se divide en:
• a) Implementar un esquema de asimilación de datos en diversos modelos de circulación.
• b) Validar el sistema predictivo creado para la inclusión del esquema de asimilación, determi-
nando su horizonte de predicción.
• c) Determinar las ventajas en términos de predecibilidad de la inicialización de modelos con
1.3. Vehículos autónomos 15
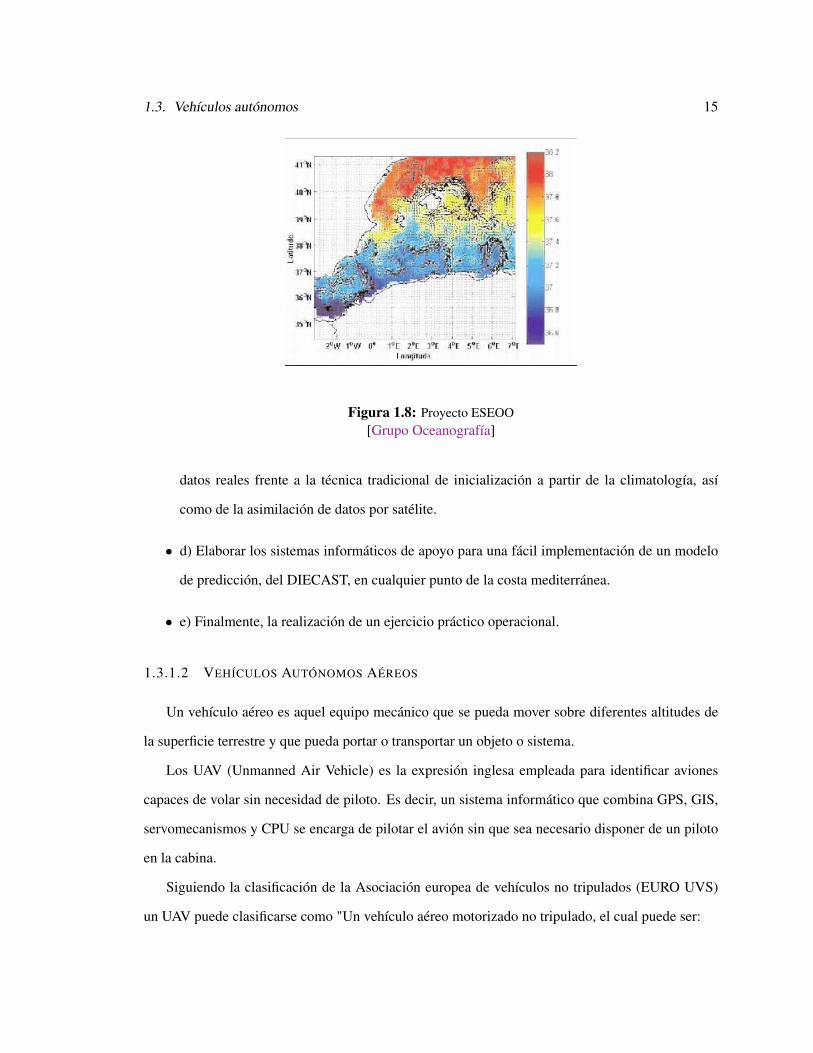
Figura 1.8: Proyecto ESEOO[Grupo Oceanografía]
datos reales frente a la técnica tradicional de inicialización a partir de la climatología, así
como de la asimilación de datos por satélite.
• d) Elaborar los sistemas informáticos de apoyo para una fácil implementación de un modelo
de predicción, del DIECAST, en cualquier punto de la costa mediterránea.
• e) Finalmente, la realización de un ejercicio práctico operacional.
1.3.1.2 VEHÍCULOS AUTÓNOMOS AÉREOS
Un vehículo aéreo es aquel equipo mecánico que se pueda mover sobre diferentes altitudes de
la superficie terrestre y que pueda portar o transportar un objeto o sistema.
Los UAV (Unmanned Air Vehicle) es la expresión inglesa empleada para identificar aviones
capaces de volar sin necesidad de piloto. Es decir, un sistema informático que combina GPS, GIS,
servomecanismos y CPU se encarga de pilotar el avión sin que sea necesario disponer de un piloto
en la cabina.
Siguiendo la clasificación de la Asociación europea de vehículos no tripulados (EURO UVS)
un UAV puede clasificarse como "Un vehículo aéreo motorizado no tripulado, el cual puede ser:
16 1. Estado del Arte
• Desechable o reutilizable
• Remotamente controlado, autónomo, semi-autónomo o cualquier combinación de estas tres
características.
• Capaz de sobrevolar un objetivo
• Capaz de transportas diferentes tipos de cargas, haciéndoles capaces de realizar tareas útiles
en la atmósfera terrestre o mas allá, con una duración de vuelo acorde con a la tarea a realizar.
1.3.1.3 CLASIFICACIÓN
La sociedad europea de UAV’s ha realizado una serie de clasificaciones de dichos sistemas en
función de diferentes aspectos. Atendiendo a una clasificación en función de su alcance se pueden
clasificar como tácticos (<2000km), estratégicos (Hasta 500km) y vehículos para tareas especiales.
Micro-UAV’s.
La Figura 1.9 ilustra ejemplos de micro-UAV’s. En la parte derecha se puede observar un
prototipo del instituto tecnológico de Georgia. En la izquierda el prototipo "Black Widow" que, a
modo de ejemplo, presenta las siguientes características técnicas:
• Masa aproximada: 50 gr
• Vuelo asistido por piloto.
• Sensor de vídeo.
• Velocidad máxima ∼ 20 Millas/hora.
• Tiempo máximo de vuelo ∼ 20 minutos.
• Propulsor de alta eficiencia (> 70 porciento) de 2.6 pulgadas de diámetro y 110 miligramos
de peso.

1.3. Vehículos autónomos 17
Figura 1.9: Micro UAV (EURO UVS, Georgia Tech)[del Cerro, 2007]
Los desarrollos basados en Micro UAV suelen tener carácter experimental y aplicaciones típi-
camente militares. Su mayor restricción suele ser la necesidad de abordar una misión militar bajo
un coste reducido.
Los principales retos planteados en los que se está trabajando actualmente de este tipo de ve-
hículos son:
• Aerodinámica y control.
• Propulsión y peso.
• Navegación autónoma, guiado y control.
• Sensores ultra ligeros y comunicaciones.
Habitualmente son tomados como modelos los insectos y aves. De hecho, la propulsión por
aleteo es considerada una de las más estables para baja velocidad o vuelo estático con una eficiencia
aceptable. No obstante se están desarrollando micro turbinas de gas y pequeños motores diesel en
función de las premisas de potencia / peso, así como células de fuel de oxido solido.
Mini UAV’s
Al contrario de los micro-UAV’s, los sistemas que utilizan como vehículo mini-UAV’s empiezan
18 1. Estado del Arte
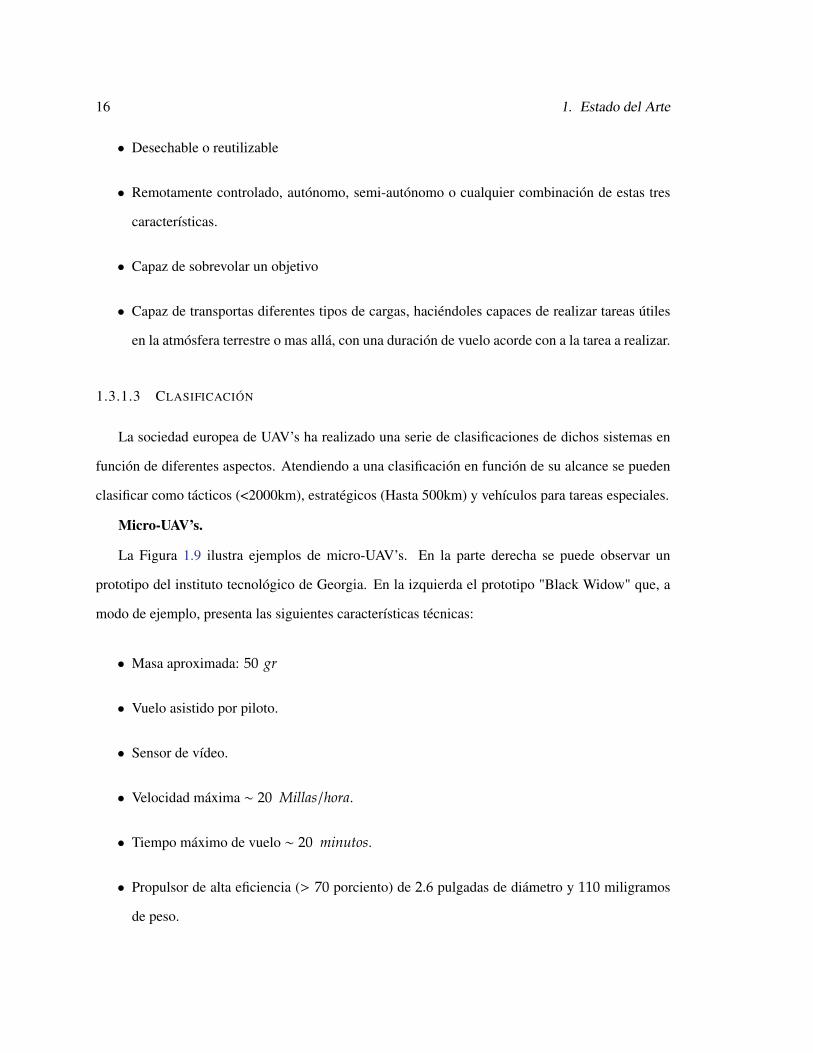
Figura 1.10: Vehículos de Alcance Cercano.[del Cerro, 2007]
a tener una clara utilización comercial, en general basados en helicópteros, aviones y últimamente
quadri-motores.
Distancia Cercana.
Los vehículos de misión cercana, suelen tener una utilización militar o científica, su coste es
más elevado que en el caso de los mini vehículos. Como plataforma a utilizar, los vehículos de
distancia cercana pueden estar basados en la estructura de un helicóptero o un avión. La Figura 1.10
muestra cuatro ejemplos de vehículos para misiones cercanas.
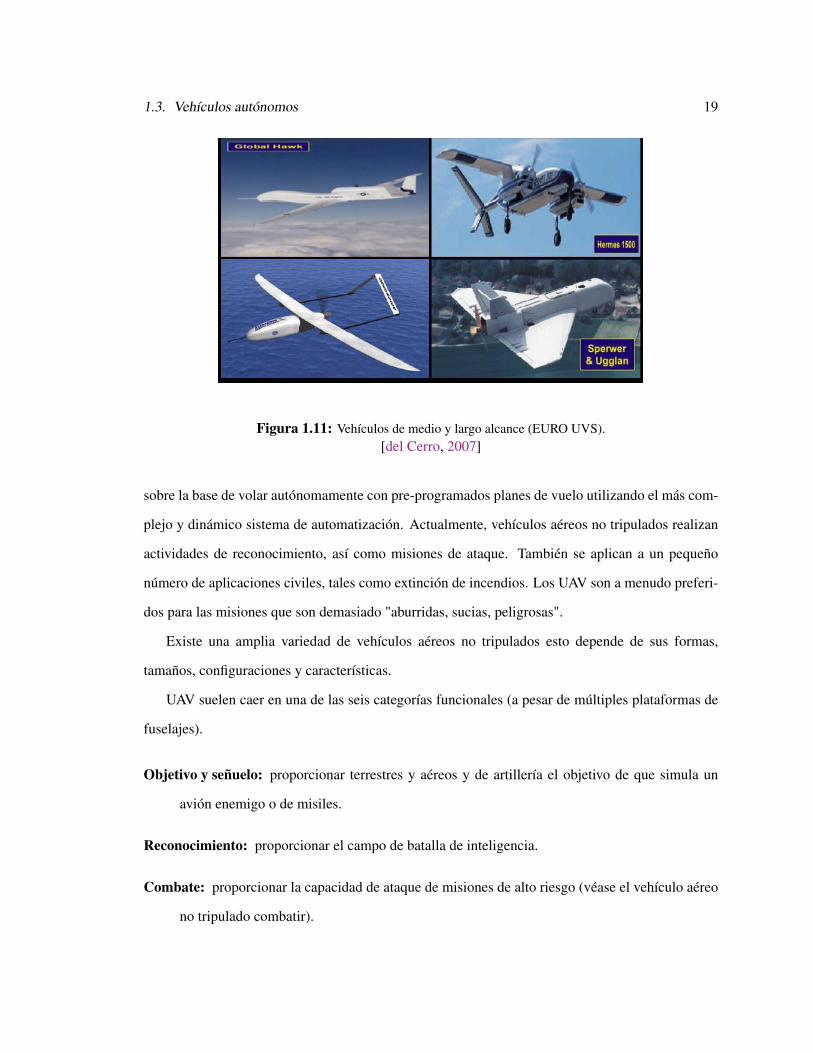
Corta y Media Distancia.
Habitualmente, para vehículos de medio y largo alcance, los helicópteros no suelen ser uti-
lizados, siendo los cohetes o aviones las posibilidades más usadas. La Figura 1.11 muestra varios
vehículos militares de corto, largo alcance y alta y baja altitud. Resulta difícil conocer datos de los
vehículos al ser considerados estratégicos en defensa.
Existen dos variedades de UAV: algunas son controlados desde una ubicación remota, y otros
1.3. Vehículos autónomos 19
Figura 1.11: Vehículos de medio y largo alcance (EURO UVS).[del Cerro, 2007]
sobre la base de volar autónomamente con pre-programados planes de vuelo utilizando el más com-
plejo y dinámico sistema de automatización. Actualmente, vehículos aéreos no tripulados realizan
actividades de reconocimiento, así como misiones de ataque. También se aplican a un pequeño
número de aplicaciones civiles, tales como extinción de incendios. Los UAV son a menudo preferi-
dos para las misiones que son demasiado "aburridas, sucias, peligrosas".
Existe una amplia variedad de vehículos aéreos no tripulados esto depende de sus formas,
tamaños, configuraciones y características.
UAV suelen caer en una de las seis categorías funcionales (a pesar de múltiples plataformas de
fuselajes).
Objetivo y señuelo: proporcionar terrestres y aéreos y de artillería el objetivo de que simula un
avión enemigo o de misiles.
Reconocimiento: proporcionar el campo de batalla de inteligencia.
Combate: proporcionar la capacidad de ataque de misiones de alto riesgo (véase el vehículo aéreo
no tripulado combatir).
20 1. Estado del Arte
Logística: UAV diseñado específicamente para la operación de carga y logística.
Investigación y desarrollo: se usa para seguir desarrollando las tecnologías de vehículos aéreos
no tripulados que se integrarán en campo desplegado aviones UAV.
Civil y Comercial UAV: UAV diseñado específicamente para aplicaciones civiles y comerciales.
También pueden ser categorizados en términos de gama / altitud.
1.3.1.4 GRADO DE AUTONOMÍA
Hoy en día los UAV suelen combinar control remoto y computarizado de automatización. Más
sofisticadas versiones se pueden tener incorporadas en el control y / o sistemas de orientación, con
la intervención de derechos humanos se adoptan reglas tales como la velocidad permitida y la ruta
de vuelo de estabilización y prescriben simples funciones de navegación.
La mayoría de los principios de vehículos aéreos no tripulados no son autónomos en absoluto.
De hecho, el ámbito de la autonomía del vehículo de aire es un campo emergente recientemente,
cuya economía es impulsada principalmente por los militares para desarrollar la tecnología lista
para la batalla. En comparación con la fabricación de vehículos aéreos no tripulados de vuelo de
hardware, el mercado de tecnología de la autonomía es bastante inmadura y subdesarrollada. Debido
a esto, la autonomía ha sido y puede seguir siendo el cuello de botella para los futuros desarrollos
de vehículos aéreos no tripulados, y el valor global y la tasa de expansión del futuro mercado de
vehículos aéreos no tripulados podrían ser en gran medida impulsada por los avances que se hicieron
en el ámbito de la autonomía.
Autonomía que la tecnología es importante para el desarrollo de vehículos aéreos no tripulados
se inscribe en las siguientes categorías:
Fusión de sensores: La combinación de información procedente de diferentes sensores para su uso
a bordo del vehículo Comunicaciones: Manejo de la comunicación y la coordinación entre
múltiples agentes, en presencia de información incompleta e imperfecta
1.3. Vehículos autónomos 21
Ruta de planificación: La determinación de un camino óptimo para el vehículo para ir al tiempo
que se cumplen determinados objetivos y la misión de las limitaciones, tales como los obstá-
culos o las necesidades de combustible
Generación de trayectoria (a veces llamado Movimiento de planificación): La determinación de
un óptimo control de maniobra para llevar a seguir una determinada ruta o para ir de un lugar
a otro
Trayectoria Reglamento: Las estrategias de control necesarias para limitar un vehículo dentro de
una cierta tolerancia a la trayectoria
Asignación y programación de tareas: Determinar la distribución óptima de las tareas entre un
grupo de agentes, con el tiempo y las limitaciones de los equipos
Tácticas de cooperación: La formulación de una secuencia óptima y la distribución espacial de
las actividades entre los agentes con el fin de maximizar la probabilidad de éxito en cualquier
misión de escenario
Autonomía se define como la capacidad de tomar decisiones sin intervención humana. A tal
fin, el objetivo de la autonomía es enseñar a las máquinas "inteligentes" y actuar más como seres
humanos.
Los UAV se emplean principalmente en misiones de reconocimiento y el principal país que los
emplea es EEUU, el cual dispone de diferentes modelos de UAV de reconocimiento.
A medida que la potencia de estos sistemas informáticos va en aumento, las funciones que
realizarán estos robots también aumentará. La lógica indica que la evolución de los UAV ira desde
los aviones de reconocimiento, pasando por los aviones de bombardeo para llegar hasta el empleo
de cazas autónomos y en ultima instancia helicópteros autónomos.
22 1. Estado del Arte
1.3.1.5 UAV FUNCIONES
Los UAV realizan una amplia variedad de funciones. La mayoría de estas funciones son de
alguna forma de percepción remota, lo que es fundamental para el reconocimiento, papel que debe
de cumplir la mayoría de vehículos aéreos no tripulados. Las funciones menos comunes de un UAV
son la interacción y el transporte; algunas de las cuales se describen a continuación:
Teleobservación
Dentro de las funciones de un UAV incluyen espectro electromagnético sensores, sensores bioló-
gicos, químicos y sensores. Un UAV con sensores electromagnéticos suele incluir espectro visual,
infrarrojos, o infrarrojo cercano, cámaras, así como los sistemas de radar. Otros detectores de
onda electromagnética, tales como microondas y sensor de espectro ultravioleta también pueden
utilizarse, pero son poco frecuentes. Sensores biológicos son capaces de detectar aire con presencia
de microorganismos y diversos factores biológicos. Sensores químicos usan la espectroscopía láser
para analizar las concentraciones de cada elemento en el aire.
Transportes
Un UAV puede transportar mercancías utilizando distintos medios basados en la configuración
de los UAV en sí. La mayoría de las cargas útiles se almacenan en el interior de una bahía de carga
en alguna parte de la célula. En muchas configuraciones de helicópteros, cargas externas pueden
ser atados a la parte inferior de la célula. Con ala fija vehículos aéreos no tripulados, la carga útil
también puede atribuirse a la célula, pero la aerodinámica de la aeronave con la carga útil debe ser
evaluada. Para tales situaciones, las cargas útiles son a menudo encerradas en vainas aerodinámicas
para el transporte.
La investigación científica
Aviones no tripulados son singularmente son capaces de penetrar en zonas que pueden ser muy
peligrosas para las embarcaciones a prueba. La Administración Nacional Oceánica y Atmosférica
(NOAA) comenzó a utilizar el Aerosonde aeronaves no tripuladas sistema en 2006, como un cazador
de huracanes. AAI Corporation filial Aerosonde Pty Ltd. De Victoria (Australia), diseña y fabrica
las 35 libras, que puede volar en un huracán y comunicar datos en tiempo casi real directamente
1.3. Vehículos autónomos 23
al Centro Nacional de Huracanes en Florida. Más allá de la norma de la presión barométrica y
la temperatura, generalmente datos sacados de los cazadores de huracanes tripulados, el sistema
proporciona mediciones Aerosonde mucho más cerca de la superficie del agua que previamente
fueron capturadas. Nuevas aplicaciones de aviones no tripulados se pueden explorar una vez que
se hayan desarrollado soluciones para su alojamiento dentro del espacio aéreo nacional, un tema
actualmente en discusión por la Administración Federal de Aviación.
Los ataques de precisión
Existen diferentes proyectos de desarrollo entre las principales empresas de aeronáutica como
BOEING para diseñar y fabricar aviones autónomos. [RoboticSpot, 2007]
Entre otros avances en este ámbito Rusia ha presentado una maqueta de un bombardero sin pi-
loto cuyos constructores afirman que superará a los aviones furtivos estadounidenses al ser más inde-
tectables por los radares y más inalcanzables por las armas antiaéreas. La cadena de televisión NTV
mostró imágenes de un modelo de tamaño natural del aparato, bautizado "Skat" (raya) (mostrado
en la figura 1.9), dichas imágenes fueron grabadas en un salón aéreo en la región de Moscú. Se
trata de la primera presentación pública de este proyecto a cargo del constructor aeronáutico MiG.
Su forma achatada recuerda al bombardero furtivo Northrop Grumman B-2 "Spirit", de la Fuerza
Aérea de Estados Unidos. Incluye una pequeña cabina en forma de burbuja, pero no será pilotado,
precisó NTV.
Según la cadena, los constructores del Skat estiman que su tecnología lo hará menos vulnerable
que los aviones furtivos de Estados Unidos. El director de la oficina de concepción Mikoyan, de
MiG, Vladimir Barkovski, explicó a la agencia Ria Novosti que el aparato será capaz de atacar
objetivos en tierra y mar, incluso si está siendo atacado por artillería antiaérea [La Flecha, 2007](ver
figura 1.12).
1.3.1.6 DRONES
Un drone no es un avión, ni un misil. Un drone se define como un vehículo aéreo no tripulado
controlado a distancia, automático o semi-automático, generalmente recuperable al final de vuelo,
24 1. Estado del Arte
Figura 1.12: Avión Autónomo "Skat" (raya)[La Flecha, 2007]
susceptible a llevar diferentes tipos de cargas, que le servirán para efectuar diversas tareas durante
el vuelo y pueden variar en función de sus capacidades. El drone puede ser un instrumento de
reconocimiento, de observación, de adquisición de objetivos, etc. [P. Castillo, 2007]
Un sistema drone esta compuesta generalmente de dos partes, la estación en tierra y la parte
aérea. La estación en tierra fija o móvil asegura la preparación de la misión, la explotación y
la comunicación de los datos con la parte aérea y los organismos que controlan y coordinan el
drone. Esta parte también esta compuesta de medios de despegue y recuperación, así como de
medios de mantenimiento y de reacondicionamiento. La parte aérea está compuesta por una o
varias plataformas aéreas compuestas de una carga útil adaptada a la misión (cámara, GPS, central
inercial, etc.) y de un sistema de comunicación de información.
Los drones son vehículos aéreos de talla reducida menos caros y mas fáciles de construir que un
avión. También son mas discretos y su perdida no es tan sensible o costosa como la de un vehículo
convencional. El tamaño de los drones puede variar (desde centímetros hasta varios metros), al igual
1.3. Vehículos autónomos 25
que su forma y su tipo de propulsión, por ejemplo algunos están equipados con reactores, otros de
rotores, hélices, etc.
Las aplicaciones de los drones son varias, las cuales abarcan desde las civiles hasta las militares,
siendo estas últimas las mas empleadas o las mas conocidas. Los drones has sido en su mayor
parte desarrollados en conflictos militares. Dentro de sus aplicaciones civiles, las mas deseables,
tenemos la vigilancia de tráfico en carreteras, las operaciones de búsqueda aérea y salvamento, la
recolección de información para la predicción meteorológica, la vigilancia de bosques o la detección
de incendios, etc.
Las configuraciones de drones pueden variar, desde los que utilizan rotores (uno, dos, tres o
múltiples rotores) hasta los que utilizan alas como pájaros. Dentro de las configuraciones que uti-
lizan rotores se encuentran helicópteros a cuatro motores que son vehículos complejos y difíciles de
controlar, poseyendo todas las propiedades aerodinámicas de los helicópteros clásicos. El interés de
estudiar este tipo de helicópteros se deriva de su versatilidad, y de su maniobrabilidad, permitiendo
la ejecución de un gran número de tareas.
Cabe mencionar, que en algunas ocasiones los vehículos aéreos en miniatura se utilizan para
plataformas tecnológicas, útiles para la validación de determinados de conceptos aerodinámicos,
leyes de control o ciertos equipos y/o programas informáticos. Estas plataformas son de gran uti-
lidad ya que permiten observar y analizar los límites del vehículo con la finalidad de verificar su
confiabilidad y desempeño de vuelo.
En la Universidad de Valencia, España se desarrolló un trabajo que presenta una estrategia de
control no lineal para estabilización para un helicóptero de cuatro rotores. El algoritmo de control
se basa en al análisis de Lyapunov y en la técnica de saturaciones anidadas. La estrategia de control
propuesta ha sido implementada sobre un sistema en tiempo real para control de un mini-helicóptero
de cuatro rotores. El trabajo está organizado de la siguiente manera: en la sección 1 se presentan las
características del quadri-motor, en la sección 2 se describe el modelo dinámico y en la sección 3
se desarrolla la estrategia de control para controlar el vehículo. A continuación se desarrollarán las
secciones anteriormente mencionadas.
26 1. Estado del Arte
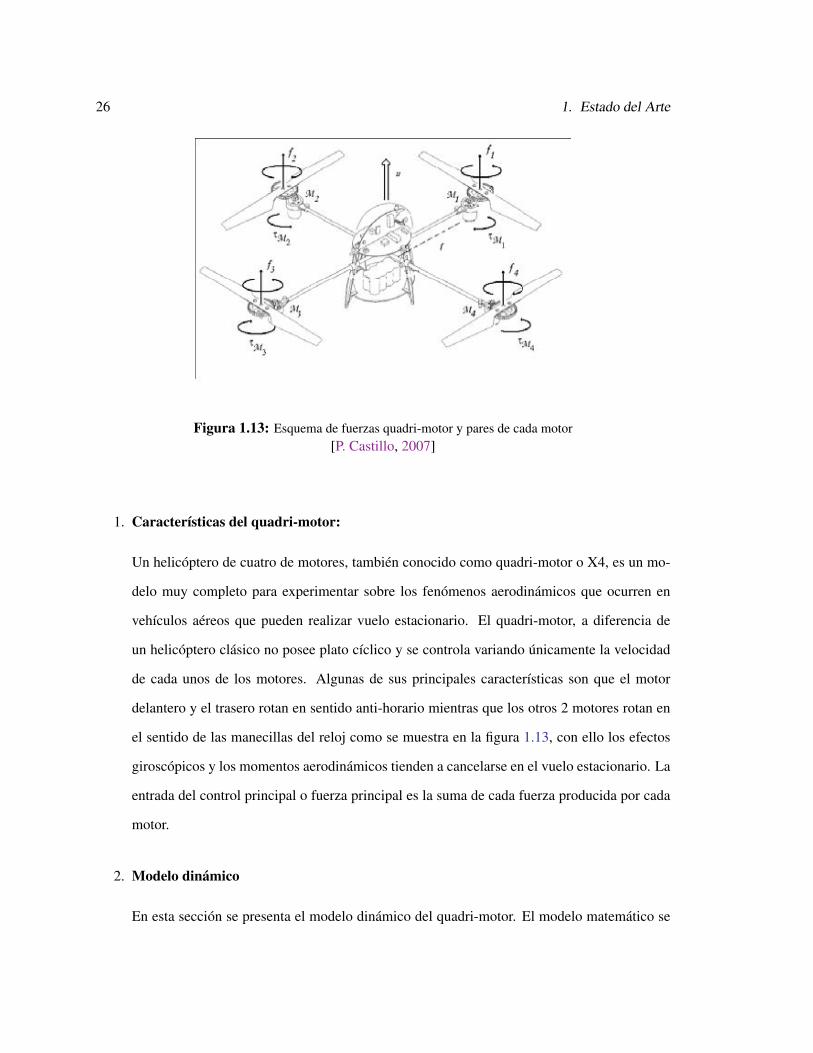
Figura 1.13: Esquema de fuerzas quadri-motor y pares de cada motor[P. Castillo, 2007]
1. Características del quadri-motor:
Un helicóptero de cuatro de motores, también conocido como quadri-motor o X4, es un mo-
delo muy completo para experimentar sobre los fenómenos aerodinámicos que ocurren en
vehículos aéreos que pueden realizar vuelo estacionario. El quadri-motor, a diferencia de
un helicóptero clásico no posee plato cíclico y se controla variando únicamente la velocidad
de cada unos de los motores. Algunas de sus principales características son que el motor
delantero y el trasero rotan en sentido anti-horario mientras que los otros 2 motores rotan en
el sentido de las manecillas del reloj como se muestra en la figura 1.13, con ello los efectos
giroscópicos y los momentos aerodinámicos tienden a cancelarse en el vuelo estacionario. La
entrada del control principal o fuerza principal es la suma de cada fuerza producida por cada
motor.
2. Modelo dinámico
En esta sección se presenta el modelo dinámico del quadri-motor. El modelo matemático se
1.3. Vehículos autónomos 27
ha obtenido representando el vehículo como un cuerpo solido evolucionando en tres dimen-
siones, sujeto a una fuerza principal y tres momentos o pares. El modelo se obtiene a partir
de dos métodos: las ecuaciones de Euler-Lagrange y las Leyes de Newton.
3. Estrategia de control
Se presenta un algoritmo de control no lineal basado en el análisis de Lyapunov y la técnica
de las saturaciones anidadas (Castillo et al., 2005a). Para este algoritmo de control se utilizara
el modelo matemático obtenido utilizando el enfoque de Euler-Lagrange.
El algoritmo propuesto, se basa en una idea de (Teel, 1992) para la estabilización de una ca-
dena de integradores utilizando saturaciones anidadas. Esta idea, se utiliza aquí para controlar
un sistema no lineal. En este trabajo, el algoritmo de control no lineal propuesto es evaluado
tanto por simulaciones, como en experiencias reales. Cabe señalar que la estrategia de control
no lineal es comparada con un algoritmo de control lineal (LQR), con el fin de observar el
desempeño de las leyes de control, probando de esta manera, cual de ellas es mas robusta
ante perturbaciones externas. A continuación se presentan las imágenes de los resultados
obtenidos aplicando el controlador LQR y el control propuesto.
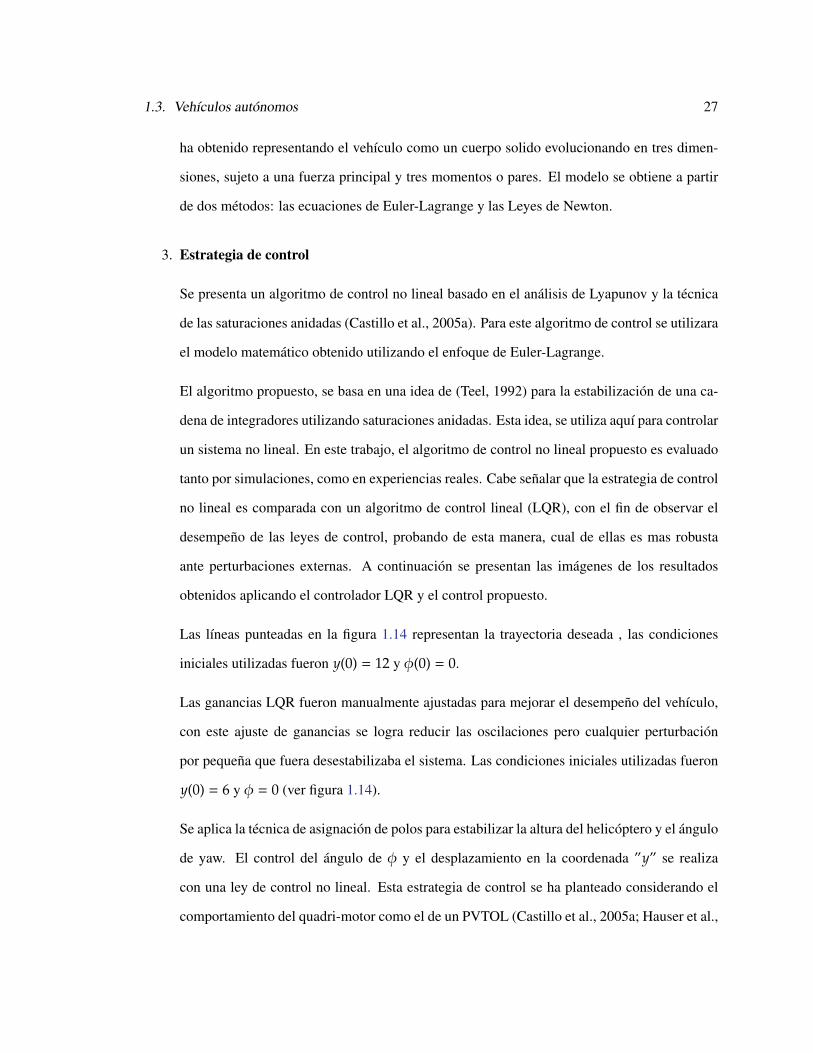
Las líneas punteadas en la figura 1.14 representan la trayectoria deseada , las condiciones
iniciales utilizadas fueron y(0) = 12 y φ(0) = 0.
Las ganancias LQR fueron manualmente ajustadas para mejorar el desempeño del vehículo,
con este ajuste de ganancias se logra reducir las oscilaciones pero cualquier perturbación
por pequeña que fuera desestabilizaba el sistema. Las condiciones iniciales utilizadas fueron
y(0) = 6 y φ = 0 (ver figura 1.14).
Se aplica la técnica de asignación de polos para estabilizar la altura del helicóptero y el ángulo
de yaw. El control del ángulo de φ y el desplazamiento en la coordenada ”y” se realiza
con una ley de control no lineal. Esta estrategia de control se ha planteado considerando el
comportamiento del quadri-motor como el de un PVTOL (Castillo et al., 2005a; Hauser et al.,
28 1. Estado del Arte
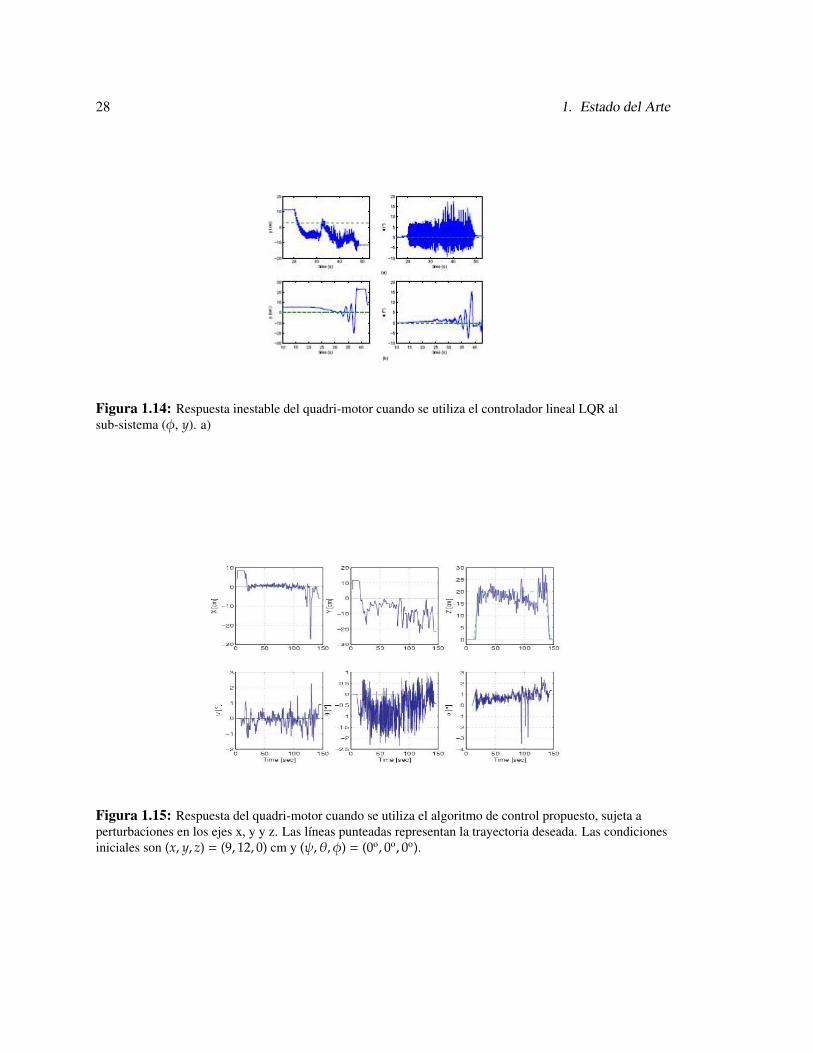
Figura 1.14: Respuesta inestable del quadri-motor cuando se utiliza el controlador lineal LQR alsub-sistema (φ, y). a)
Figura 1.15: Respuesta del quadri-motor cuando se utiliza el algoritmo de control propuesto, sujeta aperturbaciones en los ejes x, y y z. Las líneas punteadas representan la trayectoria deseada. Las condicionesiniciales son (x, y, z) = (9, 12, 0) cm y (ψ, θ, φ) = (0o, 0o, 0o).
1.3. Vehículos autónomos 29
1992). El último elemento del algoritmo de control planteado, consisten en la estabilización
del ángulo de θ y el desplazamiento en "x".
Una de las principales ventajas del algoritmo planteado es que los parámetros o ganancias del
controlador, son muy fáciles de ajustar, por lo que el algoritmo propuesto, se hace relativa-
mente sencillo de implementar en un PC o micro-controlador. Por otro lado, cada entrada de
control se puede implementar y operar de manera independiente, con lo cual el quadri-motor
puede operar de manera semi-automática o automática.
1.3.1.7 VEHÍCULOS AUTÓNOMOS TERRESTRES
Un vehículo terrestre es aquel equipo mecánico que se pueda mover sobre la superficie terrestre
que pueda portar o transportar un objeto o sistema, nombrados también UGV.
La forma del vehículo depende de:
• Tarea o aplicación para la que se diseña
• Razones específicas por las que se selecciona: peligrosidad del medio ambiente, requerimien-
tos de fiabilidad, espacio de trabajo, etc.
• Medio en que ejecutará la tarea: interiores, exteriores, fondo marino, etc.
• Modo de locomoción: Ruedas, esteras, patas.
• Determinación de la trayectoria del vehículo: Técnica de control y navegación, etc.
Para el desarrollo de vehículos autónomos terrestres se utilizan:
• Sensores inerciales, GPS diferencial y sensores de percepción del entorno (sonares, ultra-
sonidos y visión).
• Técnicas de control de movimientos.
• Planificación de caminos y maniobras.
30 1. Estado del Arte
Inicialmente, la ayuda computacional a los vehículos estaba relegada a tareas auxiliares como
la regulación de la temperatura, la apertura de las puertas, el control de combustible o el nivel de
carga de las baterías. Con el paso de los años, diferentes ayudas a la conducción, como el sistema
de ayuda a la frenada (ABS), el regulador de la tracción (ASR) o el control de la estabilidad (ESP)
se han ido añadiendo a las citadas anteriormente [V. Milanés, 2008].
En la actualidad, gracias a la fusión de electrónica y comunicaciones, todos los elementos del
vehículo pueden estar interconectados y la ayuda computacional ha dado un salto cualitativo im-
portante, aumentado su influencia en algunos modelos comerciales. Entre las nuevas ayudas se
encuentran: mantener la velocidad de referencia, guardar la distancia de seguridad con otros ve-
hículos, mejorar la visión nocturna mediante cámaras infrarrojas o suministrar rutas alternativas
para llegar a un destino.
El instituto de Automática Industrial trabaja en el proyecto AUTOPÍA que tiene dos objetivos
esenciales. El primero, implementar una conducción automática de vehículos comerciales sobre
carreteras reales. Aunque este objetivo se puede considerar utópico en este momento, es un punto
de partida importante para explorar el futuro. El segundo objetivo es el desarrollo de un sistema de
guiado automático formado por componentes modulares que pueda incorporarse de manera sencilla
en la industria del automóvil.
Las principales entradas sensoriales al sistema de guiado son una cámara de visión y un GPS
de alta precisión. Mediante ellos, el sistema adquiere los datos para controlar los accionadores del
vehículo, la dirección y los pedales de acelerador y freno. La instrumentación necesaria para el
guiado incluye un PC que aloja el software de control; un receptor de GPS diferencial, una red
inalámbrica LAN, dos servomotores, y una tarjeta de entrada/salida digital. Añadimos un sistema
de visión en otro computador conectado al ordenador de control.
El sistema de guiado del vehículo se modela utilizando reglas y variables borrosas que corrigen
las desviaciones de la trayectoria y velocidad del vehículo. Esto se consigue comparando las medi-
das de posición del receptor GPS embarcado con la posición deseada del vehículo sobre un mapa
cartográfico digital de alta precisión, en el que se fija el objetivo y la ruta hasta el mismo.

1.3. Vehículos autónomos 31
Figura 1.16: Proyecto AUTOPÍA. Detalle de la ubicación del sistema de medida inercial y de la antena derecepción de la señal GPS
[V. Milanés, 2008]
La conducción de vehículos es un problema especial de control porque los modelos matemáti-
cos son complejos y no son fácilmente linealizables. En el programa AUTOPÍA se utiliza lógica
borrosa, que es un buen método para afrontar este tipo de sistemas ya que permite imitar el compor-
tamiento humano en los algoritmos de control.
Un ejemplo de vehículo autónomo terrestre es el presentado en 2007 por el catedrático mexicano
de inteligencia artificial y robótica, Raúl Rojas; el auto es una minivan que, al igual que un robot,
es completamente manejado por una computadora, que trabaja las informaciones procedentes del
sistema de navegación, de los sensores láser y de las video-cámaras con que está equipado. El doctor
en informática, Raúl Rojas, quien es catedrático de inteligencia artificial en la Universidad Libre de
Berlín desde 1997, dijo a Notimex que el vehículo puede transitar sin problemas en el tráfico, pero
que el costo es aún muy alto para lanzarlo al mercado.
Sólo el equipamiento del auto costó 150 mil euros (unos 203 mil dólares), a lo que se sumaron
los fondos para la investigación que destinó la universidad al proyecto.[El Universal, 2007] El "Es-
píritu de Berlín", como se denominó al proyecto y al auto mostrado en la figura 1.10, contiene una

32 1. Estado del Arte
Figura 1.17: Auto "Espíritu de Berlín"[El Universal, 2007]
serie de desarrollos tecnológicos que son útiles para la industria automotriz. El auto también se
puede manejar en forma convencional y su conductor recibirá información sobre los semáforos en
rojo y los letreros con informaciones de tráfico. Si lo desea, puede pasar todo el control del vehículo
a la computadora con sólo oprimir un botón. La computadora puede guiar el auto, frenarlo, acelerar,
así como prender o apagar sus diferentes componentes. Los sensores reconocen a los peatones, los
autos, las bicicletas y cualquier otro vehículo activo en el tráfico de una ciudad. El auto cuenta con
un scanner que lanza rayos láser, que a su vez son reflejados por los objetos alrededor de coche. El
radio de acción del scanner es de 150 metros a la redonda del vehículo. El sistema de navegación
GPS con que está equipada la minivan es mejor que el que usan los conductores para guiar su curso
en ciudades y carreteras. Si se pierde la señal del satélite, inmediatamente entran en funciones toda
una gama de opciones tecnológicas.
1.3. Vehículos autónomos 33
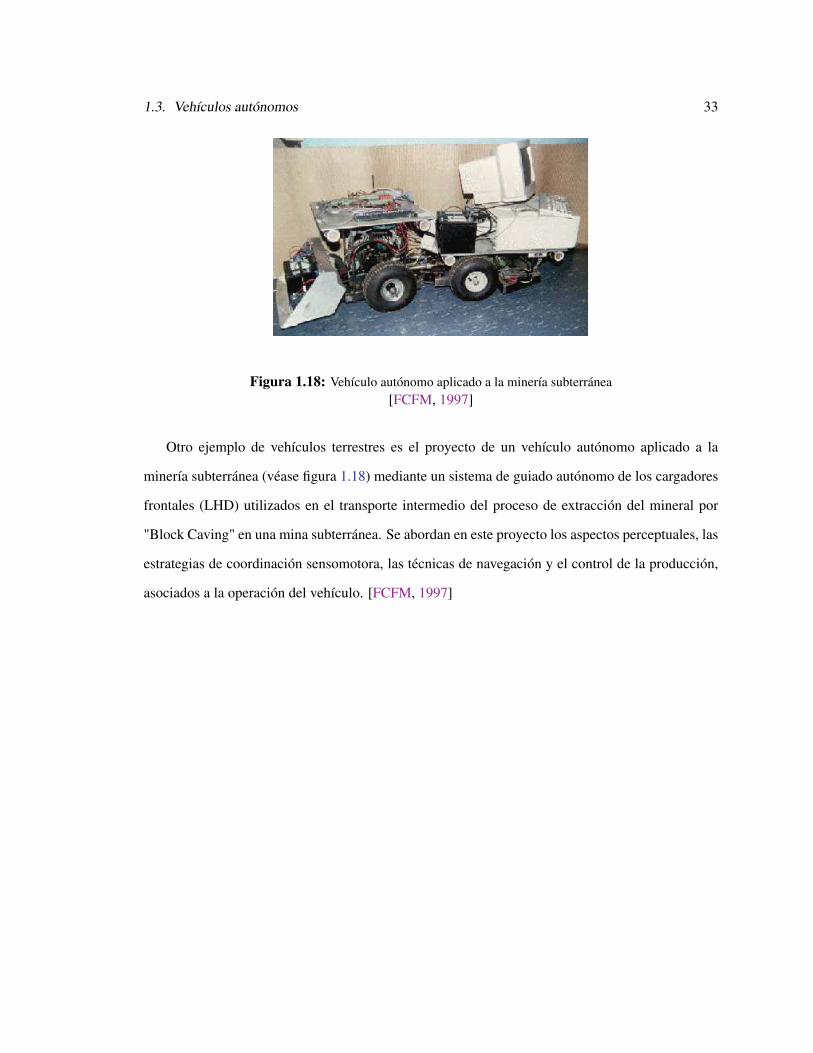
Figura 1.18: Vehículo autónomo aplicado a la minería subterránea[FCFM, 1997]
Otro ejemplo de vehículos terrestres es el proyecto de un vehículo autónomo aplicado a la
minería subterránea (véase figura 1.18) mediante un sistema de guiado autónomo de los cargadores
frontales (LHD) utilizados en el transporte intermedio del proceso de extracción del mineral por
"Block Caving" en una mina subterránea. Se abordan en este proyecto los aspectos perceptuales, las
estrategias de coordinación sensomotora, las técnicas de navegación y el control de la producción,
asociados a la operación del vehículo. [FCFM, 1997]

CAPITULO 2
MARCO TEÓRICO
Los vehículos autónomos son requeridos para realizar tareas en ambientes peligrosos o de difícil
acceso. A diferencia de los robots estacionarios, estos robots pueden trasladarse a un sitio deseado
y ejecutar múltiples tareas como la recopilación de datos y la manipulación de herramientas, entre
otras. A pesar de las ventajas que atrae el uso de estos vehículos, incluyendo razones de seguridad y
de productividad, su uso no es extenso debido a la complejidad del proceso de diseño. La robótica
móvil comenzó en los años 70 como banco de pruebas para estudiar técnicas de Inteligencia Artifi-
cial. En los años 80 se tiene el despliegue definitivo debido al abaratamiento y mejores prestaciones
de los ordenadores.
La robótica móvil cubre muchos campos de aplicación, como son transporte de materiales,
labores de limpieza, vigilancia y prospección, guiado de personas, y aplicaciones militares. Los
robots autónomos son sistemas mecánicos que pueden interactuar con un ambiente, y tienen un
comportamiento individual aunque éste sea socializado. Las dificultades en que se encuentran los
vehículos autónomos son los entornos impredecibles y dinámicamente cambiantes, así como su
limitada autonomía y sobre todo su posicionamiento en un determinado ambiente. Para evitar estos
problemas se suelen utilizar robots guiados, por lo que se establece comunicación con un ordenador
central que dirige sus movimientos e incluso coordina varios robots colaboradores. Este guiado
puede ser por múltiples medios como rieles, laser, balizas, etc. [Vicente, 2003]
El principal problema de los robots guiados es que se restringen a caminos preestablecidos
35
36 2. Marco Teórico
y siempre requieren algún tipo de adaptación en cada reestructuración del entorno. Sin embargo
los robots móviles autónomos no se limitan a caminos preestablecidos, ya que disponen de una
capacidad de percepción. Son capaces de percibir el entorno e incluso de realizar una representación
de él. También se les puede dotar de la capacidad de planificar sus movimientos evitando obstáculos,
así como de detectar marcas o lugares característicos para conseguir una meta. Los robot móviles
deben tener características de maniobrabilidad, controlabilidad, capacidad de tracción, estabilidad,
eficiencia y consideraciones de navegación como la odometría.
El mecanismo de posicionamiento se basa en el sistema de percepción de que disponga. Existen
multitud de sistemas sensores como sonar, láser, infrarrojos, radares, etc., aunque no es el único fin
de estos, ya que la percepción del robot le ha de servir también para interactuar con los elementos
del ambiente. Todo robot móvil se debe plantear las dos preguntas básicas: ¿dónde estoy? ¿Cómo
llego al objetivo? Sin duda para resolver estas cuestiones se debe recurrir a la planificación de
movimientos por medio de los actuadores del sistema y a técnicas de planificación, manteniendo
quizá una representación del ambiente por el que se mueve.
2.1 ARQUITECTURA DE LOS ROBOTS
Una arquitectura es a grandes rasgos, una vista del sistema que incluye los componentes prin-
cipales del mismo, la conducta de esos componentes según se la percibe desde el resto del sistema
y las formas en que los componentes interactúan y se coordinan para alcanzar la misión del sis-
tema. La vista arquitectónica es una vista abstracta, aportando el más alto nivel de comprensión y
la supresión o diferencia del detalle inherente a la mayor parte de las abstracciones.
2.1.1 ARQUITECTURA REACTIVA
La arquitectura reactiva se utiliza principalmente para realizar el seguimiento de la línea, pues
esta actividad demanda una rapidez en la reacción del robot ante el medio ambiente. El robot debe
mantenerse en la línea la mayor parte del tiempo al estar en movimiento, si se realizara un proceso
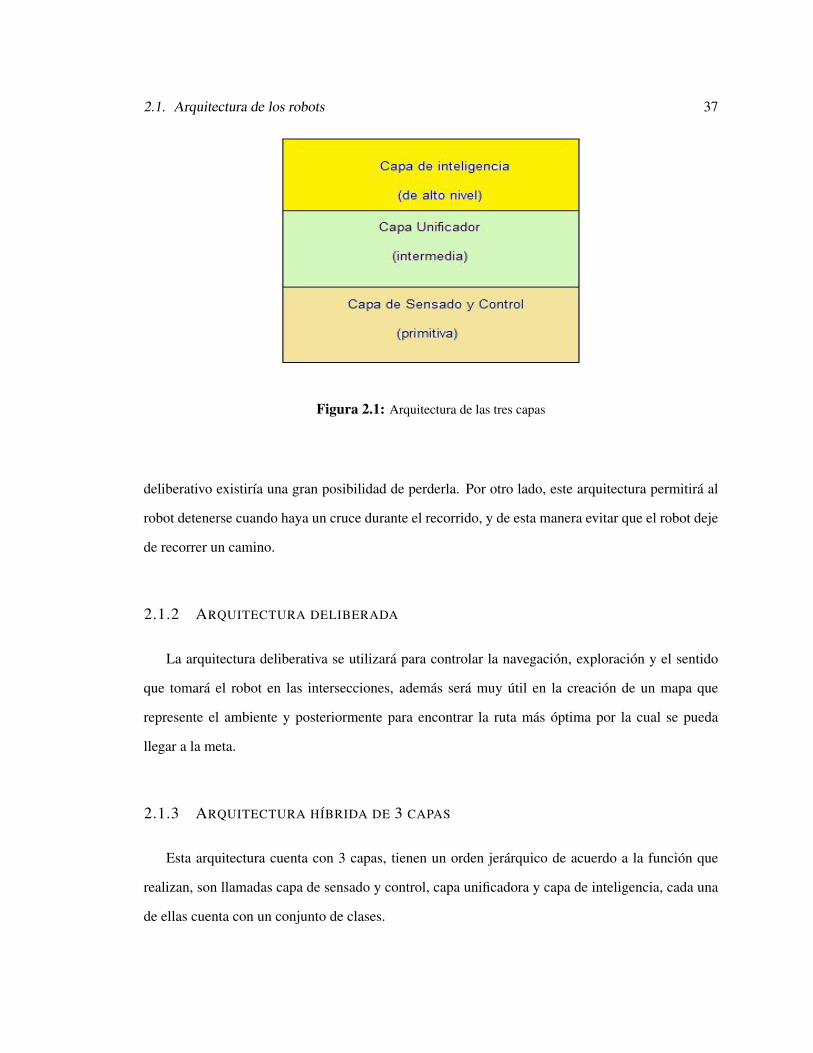
2.1. Arquitectura de los robots 37
Figura 2.1: Arquitectura de las tres capas
deliberativo existiría una gran posibilidad de perderla. Por otro lado, este arquitectura permitirá al
robot detenerse cuando haya un cruce durante el recorrido, y de esta manera evitar que el robot deje
de recorrer un camino.
2.1.2 ARQUITECTURA DELIBERADA
La arquitectura deliberativa se utilizará para controlar la navegación, exploración y el sentido
que tomará el robot en las intersecciones, además será muy útil en la creación de un mapa que
represente el ambiente y posteriormente para encontrar la ruta más óptima por la cual se pueda
llegar a la meta.
2.1.3 ARQUITECTURA HÍBRIDA DE 3 CAPAS
Esta arquitectura cuenta con 3 capas, tienen un orden jerárquico de acuerdo a la función que
realizan, son llamadas capa de sensado y control, capa unificadora y capa de inteligencia, cada una
de ellas cuenta con un conjunto de clases.
38 2. Marco Teórico
La arquitectura en capas es una forma mediante la cual cada capa se encarga de lo que le co-
rresponde sin importar lo que pase en las capas inferiores o superiores, es decir, recibe datos de una
capa, los procesa, y proporciona unos datos de salida a otra capa.
2.2 ASPECTO MECÁNICO
La estructura mecánica dará forma al vehículo, su diseño será importante en la medida que
muchas cualidades del él dependerán de cómo se realice ésta. Interesa que sea resistente, fácilmente
desmontable o por lo menos facilidad de acceso a elementos como baterías, tarjetas de control,
motores, sensores, etc.
La elección de motores en aplicaciones de robótica siempre hay que realizarla cuidadosamente,
hay que tener en cuenta bastantes factores, por ejemplo velocidad, par, inercia, frenos, modo de
control, etc. Interesa tener bien definida la aplicación para calcular correctamente lo anterior.
Además puede ser que el vehículo se amplíe con otras piezas, incluso que necesite ser lo sufi-
cientemente potente como para poder mover objetos, por eso se deben de buscar buenos pares de
salida en los motores. En la elección también se toma cuenta la forma del mismo para poder unirlo
fácilmente a la estructura mecánica, un bajo consumo de energía, calidad y buena precisión. Todo
lo anterior se encuentra en aplicaciones de aeromodelismo, en concreto en los servomecanismos.
La utilización de transmisiones permiten el movimiento del vehículo y tienen diferentes facul-
tades dependiendo de los elementos empleados, como pueden ser engranes, poleas y catarinas. Una
transmisión por engranajes tiene la misión de proporcionar más par (fuerza) de salida en el eje del
motor y reducir la velocidad del mismo. En cualquier tipo de transmisión ya sea por poleas, en-
granes o poleas dentadas es importante evitar rozamientos innecesarios ya que dichos rozamientos
provocan ruido y pérdidas de energía mecánica.
Cabe destacar que la dirección de avance del robot queda definida por la velocidad de cada una
de las dos ruedas, por ello se debe de considerar el material de las ruedas motrices ya que son un
factor importante, pueden contar con diferentes formas de incisiones que dotarán a la rueda de una
2.3. Aspecto de interfaces 39
mayor estabilidad para terrenos irregulares o muy resbaladizos, como puede serlo el suelo de los
edificios. Ofrecen un bajo consumo y una muy buena relación entre su peso y el par generado.
2.3 ASPECTO DE INTERFACES
Una interfaz para teleoperación de vehículos autónomos maneja bastante información en tiempo
real, es decir información que es necesario procesar bajo ciertas restricciones de tiempo para tomar
alguna acción. Para obtener esta información los robots móviles están provistos de una gran cantidad
de sensores los cuales se encargan de detectar magnitudes físicas, estos pueden ser de proximidad,
posición, inclinación y posiblemente de cámaras de video, por tal razón en la construcción del soft-
ware se debe tener en cuenta la optimización del tiempo en cada tarea. Además la interfaz hombre
máquina debe estar diseñada de tal manera que la información sea presentada adecuadamente y se
facilite la ubicación espacial como el acceso del usuario a la información esencial para así evitar
cuellos de botella [Cerón, 2008].
El vehículo autónomo se encuentra en un entorno remoto y se controla a distancia desde una
estación de tele operación. La persona que lo controla obtiene información del ambiente en el que
se encuentra el vehículo autónomo, esta información es obtenida mediante sensores, permitiendo
al usuario interactuar con el medio ambiente a distancia dando la sensación de estar físicamente en
otro lugar (tele presencia).
A continuación se ejemplifica una interfaz con el robot móvil teleoperador I (RMTO I) [Cerón,
2008]. Este robot es controlado a distancia desde una estación de tele operación mediante un enlace
de radio frecuencia, la imagen proveniente de una cámara ubicada en el robot es transmitida de
manera inalámbrica a la estación de tele operación. En la estación de tele operación se encuentra un
software desarrollado en lenguaje C++ que permite observar la visión del robot y enviar comandos
al robot. La interfaz gráfica del software desarrollada para el manejo del robot está compuesta de
dos ventanas, una para el despliegue del video proveniente de la cámara del robot y la otra para
seleccionar los comandos de control. Una característica importante de este software es permitir el

40 2. Marco Teórico
Figura 2.2: Software para la estación de tele operación del RMTO I [Cerón, 2008]
manejo del móvil usando una palanca de juegos (joystick o gamepad), el ratón o el teclado, en la
figura 2.2 se puede observar la interfaz gráfica de usuario del mismo:
Las funciones que tiene que realizar los programas que se ejecutan en la estación remota son
la de configuración del sistema, el control manual del robot móvil y la edición, interpretación y
ejecución de programas en el lenguaje de alto nivel del robot.
En terrenos de UAV´s para helicóptero autónomo llamado EFIGENIA se desarrolla un soft-
ware para mantener las operaciones de vuelo y control de la misión manteniendo comunicación
permanente con el UAV y mostrando toda la información referente al desarrollo de la misión, datos
de vuelo y estado de la aeronave. El software diseñado para dichas labores ofrece una serie de
opciones y ayudas de manera tal que pueda ser muy fácil y amigable.
2.3.1 TIPO DE SENSORES UTILIZADOS EN VEHÍCULOS AUTÓNOMOS
Los sensores utilizados en un vehículo autónomo dependen del tipo de obstáculos que se en-
cuentren y las características del entorno donde se desplace el mismo.
Para la detección de obstáculos se usan principalmente foto celdas, fotodiodos, sensores de
ultrasonido, sensores infrarrojos y cámaras. Cuando se requiere la medición de posición y velocidad
son usados los encoders (codificadores) los cuales están compuestos de un par fotodiodo y foto celda
que permiten registrar posición y velocidad de partes móviles a los cuales se le acopla un disco.
La realimentación de fuerzas es una técnica útil para el control de manipuladores y robots

2.3. Aspecto de interfaces 41
Figura 2.3: Estación de control del UAV EFIGENIA.[Cerón, 2008]
móviles, ya que la información proveniente de los sensores puede ser convertida en fuerzas apli-
cadas en los dispositivos de manipulación de la interfaz de tele operación es decir el usuario puede
sentir las colisiones que se presenten en el manejo del robot [Sangyoon, 2002]. Para esto existen
sensores de fuerza y presión de tipo piezo-eléctrico, resistores de fuerza-sensado o medidores de
fuerza.
En sistemas más sofisticados se hace uso sistemas de visión estereoscópica ubicados en el robot
y cascos de realidad virtual para el operador, en los cuales gráficas por computador se combinan con
las imágenes provenientes de las cámaras el resultado es visualizada en un monitor o en el casco, lo
cual se conoce como realidad aumentada.
La determinación de la posición de un vehículo en ambientes poco estructurados, como son
los entornos naturales, es un problema complejo por la variedad de situaciones e interacciones
imprevisibles que se pueden presentar en el entorno de trabajo; unido a la imprecisión propia de los
dispositivos sensoriales y de control, así como a la de los algoritmos de toma de decisión utilizados.
En los últimos años se han propuesto una gran variedad de técnicas de posicionamiento de robots
móviles. En general, la posición puede determinarse a través de sensores, tanto internos como
externos. Los primeros proporcionan de forma continua e inmediata la localización del robot sin
42 2. Marco Teórico
conocimiento alguno del entorno, calculando la distancia recorrida a través del número de vueltas
dadas por las ruedas en cada ciclo de control de movimiento. Dentro de este grupo se incluyen:
• Sensores basados en la odometría del vehículo (codificadores de posición situados en los ejes
de las ruedas para medir su giro)
• Sistemas de navegación inercial (giróscopos, brújula, inclinómetros y acelerómetros)
En lo que a los sensores externos se refiere, las técnicas de posicionamiento absoluto basan
sus medidas en las relaciones del vehículo con elementos externos como son: sistemas de balizas,
marcas activas o pasivas, o satélites. Cada una de estas técnicas proporciona la posición del vehículo
respecto a un sistema de referencia global, y puede ser implantada utilizando una gran variedad de
métodos y sensores, como:
• Cámara de vídeo.
• Sensores de ultrasonido.
• Láser o sistemas de posicionamiento global, como el GPS.
Las cámaras de vídeo y los sensores de ultrasonido son más adecuados para la detección de
obstáculos próximos en interiores, activando estrategias de navegación local para evitarlos; las cá-
maras de video permiten el control a distancia (visión remota) también sirven como fuente de in-
formación para la toma de decisiones automáticas, esto se realiza por medio de procesamiento de
imágenes. Las operaciones principales que realiza un sistema de procesamiento de imágenes para
proveer mecanismos de visión a un robot móvil son: el promediado, la segmentación de bordes, el
análisis de regiones y la detección de formas. El láser permite un reconocimiento de estructuras
en exteriores así como la localización del vehículo siempre que exista un sistema conocido de ba-
lizas. Finalmente, los sistemas de posicionamiento global son extremadamente útiles en la tarea de
localización de vehículos en exteriores, ya que el error de sus estimaciones se encuentra acotado
2.3. Aspecto de interfaces 43
y no depende de la distancia recorrida por el vehículo ni se ve afectado por cambios en las condi-
ciones ambientales. Además, la información que proporcionan no necesita de un exhaustivo filtrado
y análisis. La localización del vehículo, obtenida con una frecuencia menor o igual a un segundo,
se calcula mediante técnicas de triangulación empleando como balizas un conjunto de satélites en
el espacio, por lo que no requiere modificar el entorno de trabajo. Sin embargo para obtener una
precisión aceptable deben emplearse técnicas diferenciales capaces de reducir el error en la posición
desde 5 hasta 0.1 metros. Por supuesto que cuanto mayor sea la precisión requerida mayor será el
coste del sistema, ascendiendo a varios millones cuando se requiera una precisión de unos pocos
centímetros. No sólo el coste asociado a un receptor GPS puede ser en algunos casos un problema,
además existe el problema de la localización continua del vehículo. Así, para obtener una posi-
ción precisa se necesita recibir señales de un número elevado de satélites y en algunos casos esto
resulta imposible por la presencia de obstáculos (árboles, montañas, edificaciones, y terreno irregu-
lar) que las apantallan. Durante el tiempo en el que se mantienen estas circunstancias se desconoce
la localización del móvil. [Pozo-Ruz]
2.3.2 TIPOS DE SENSORES UTILIZADOS EN LA NAVEGACIÓN DE VEHÍCULOS AÉREOS
AUTÓNOMOS
La estimación del estado (actitud, velocidad y posición) es una necesidad fundamental para los
vehículos autónomos. La precisión que se demanda en la estimación del estado en cualquier caso
depende del tipo de vehículo, del sistema de control usado y de la aplicación.
Para estimar la actitud, se utiliza un inclinómetro de dos ejes, un compás y un giróscopo de
tres ejes. En adición a ello, se usa un filtro de Kalman para realizar la fusión sensorial de los datos
recibidos de los sensores. La clave es la baja dinámica de los inclinómetros que puede compensar
la deriva de los giróscopos usados.
Para estimar la velocidad del helicóptero se usa un sistema de medida inercial en adelante IMU
(Inertial Measurement Unit) que proporciona medidas con un alto ancho de banda de aceleración
y velocidades de rotación y un sistema diferencial de posicionamiento global, en adelante DGPS
44 2. Marco Teórico
(Diferencial Global Position System) que proporciona actualizaciones periódicas de las velocidades
y posiciones sin derivas. En adición a ello, un altímetro sonar proporciona la información de altura
(distancia al suelo) para maniobras de aterrizaje y un compás magnético se utiliza para prevenir las
derivas de la estimación de la guiñada o heading obtenidas a partir de la IMU. También se realiza una
fusión sensorial utilizando un filtro de Kalman extendido para generar una solución de navegación
[del Cerro, 2007].
La solución para estimar el estado del helicóptero se logra mediante la utilización de un GPS
de portadora de fase utilizando cuatro antenas estratégicamente colocadas en el helicóptero que le
permiten determinar la actitud y velocidad del mismo. En adición a esto, se dispone de una antena
fija en tierra para realización de correcciones diferenciales.
Los avances de la visión artificial, han permitido con ayuda de elementos inerciales mantener al
helicóptero estable en vuelo estacionario. No obstante, lo mas habitual en las aplicaciones civiles
es disponer de un sistema IMU, un compás magnético para determinar las derivas del ángulo de
guiñada, un sistema de posicionamiento absoluto, ya sea global o no y un altímetro barométrico.
A continuación se realiza una descripción de algunos de los sistemas más comunes en la actua-
lidad, estudiando los elementos sensores que los posibilitan.
2.3.2.1 SENSORES INERCIALES
Los sistemas inerciales están compuestos por dos grandes grupos de sensores, los giróscopos
y los acelerómetros. Utilizando acelerómetros se consiguen inclinómetros que también son usados
en navegación debido a su buena respuesta en régimen estacionario. Existe una gran variedad de
técnicas constructivas y principios físicos en los que se basan los distintos sensores inerciales. Se
hace notar que todos los acelerómetros utilizan una masa de inercia, el efecto físico indicado en
dicha tabla se refiere a la manera en la que se percibe la aceleración de dicha masa de prueba. Los
sensores como el giróscopo y acelerómetro se mencionan detalladamente en el capítulo siguiente.

2.4. Metodología de Control 45
2.4 METODOLOGÍA DE CONTROL
Constantemente se pretende la incorporación de un mayor número de funciones autónomas en
los robots, a las cuales se les considera habitualmente como básicas.
Las funciones básicas son el servocontrol de las articulaciones y la generación de trayecto-
rias, incluyéndose en ésta tanto la interpolación articular como la cartesiana en espacio de trabajo.
Asimismo, en el caso de la teleoperación, se sustituirá la generación de trayectorias del control au-
tomático por el control manual del operador. Se entiende por funciones inteligentes las que permiten
la realización parcial o totalmente autónoma de operaciones y además que estas funciones no deben
contemplarse de forma aislada, sino integradas en una arquitectura del sistema de control en la cual
se incluya también la posibilidad de teleoperación y las funciones de bajo nivel.
En muchas aplicaciones que involucran control inteligente, el enfoque más adecuado consiste en
una transición entre funciones autónomas y teleoperadas. Normalmente interesa que sean automáti-
cas las funciones en las que la intervención humana es difícil por carecer de la suficiente capacidad
de percepción, o bien por requerirse una respuesta más rápida que la que es capaz de generar un
operador, o de mayor precisión que la que puede alcanzarse manualmente [Ollero, 2007].
Las tendencias actuales en la robótica están enfocadas a dotar de cierta inteligencia a los robots
industriales, haciendo énfasis a las siguientes áreas de investigación:
• Mejor percepción del ambiente.
• Mejor adaptación a las tareas.
• Mejor desempeño dinámico y movilidad.
Siendo el objetivo principal el poder completar una variedad de tareas sin información completa
proporcionada al manipulador. Esta evolución hacia las máquinas inteligentes, hace evidente la
necesidad de fusionar metodologías que reflejen la capacidad del ser humano de tomar decisiones
sensatas, que proporcionen la posibilidad de resolver problemas que no puedan ser descritos fá-
cilmente mediante un enfoque algorítmico tradicional, además de ofrecer soluciones robustas y de
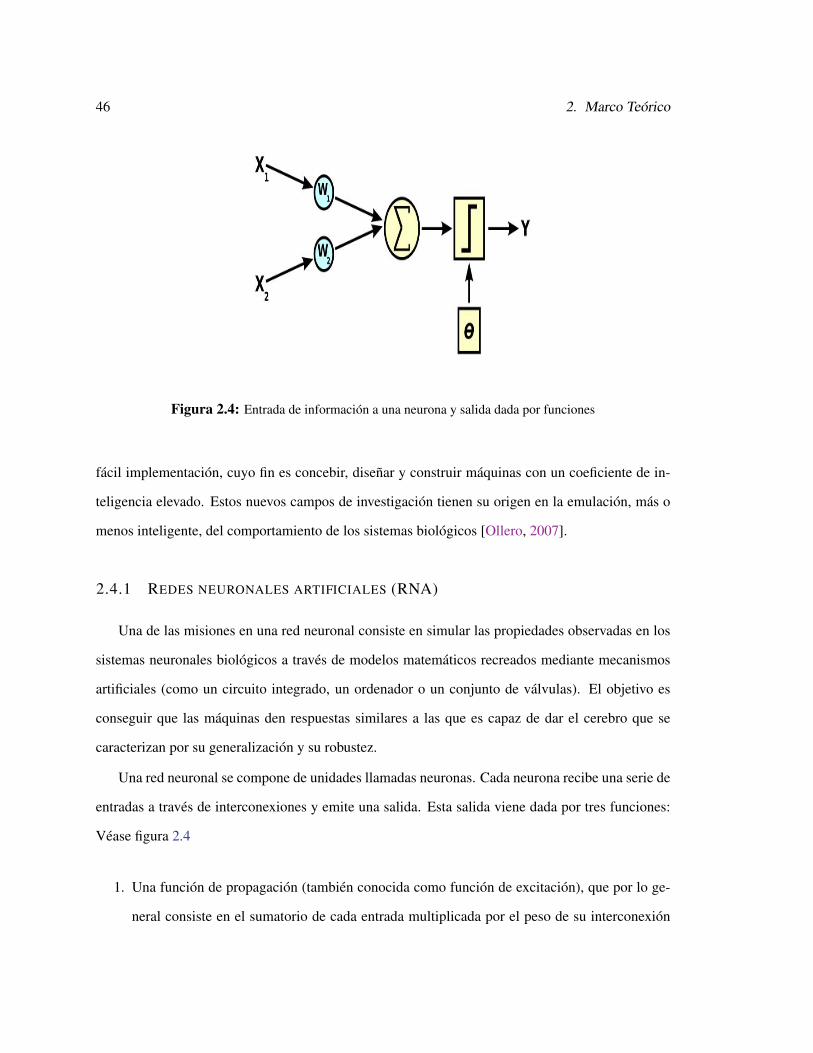
46 2. Marco Teórico
Figura 2.4: Entrada de información a una neurona y salida dada por funciones
fácil implementación, cuyo fin es concebir, diseñar y construir máquinas con un coeficiente de in-
teligencia elevado. Estos nuevos campos de investigación tienen su origen en la emulación, más o
menos inteligente, del comportamiento de los sistemas biológicos [Ollero, 2007].
2.4.1 REDES NEURONALES ARTIFICIALES (RNA)
Una de las misiones en una red neuronal consiste en simular las propiedades observadas en los
sistemas neuronales biológicos a través de modelos matemáticos recreados mediante mecanismos
artificiales (como un circuito integrado, un ordenador o un conjunto de válvulas). El objetivo es
conseguir que las máquinas den respuestas similares a las que es capaz de dar el cerebro que se
caracterizan por su generalización y su robustez.
Una red neuronal se compone de unidades llamadas neuronas. Cada neurona recibe una serie de
entradas a través de interconexiones y emite una salida. Esta salida viene dada por tres funciones:
Véase figura 2.4
1. Una función de propagación (también conocida como función de excitación), que por lo ge-
neral consiste en el sumatorio de cada entrada multiplicada por el peso de su interconexión
2.4. Metodología de Control 47
(valor neto). Si el peso es positivo, la conexión se denomina excitatoria; si es negativo, se
denomina inhibitoria.
2. Una función de activación, que modifica a la anterior. Puede no existir, siendo en este caso la
salida la misma función de propagación.
3. Una función de transferencia, que se aplica al valor devuelto por la función de activación. Se
utiliza para acotar la salida de la neurona y generalmente viene dada por la interpretación que
queramos darle a dichas salidas.
Un sistema que hay que controlar, generalmente tiene una función de transición f y una función
de salida g. Habrá una señal de control u(t) , que con el estado actual x(t) , determina el estado
siguiente x(t + 1):
x(t + 1) = f (u(t), x(t)) (2.1)
En cada estado x(t), se produce una salida y(t) : y(t) = g(x(t))
Un controlador equivale al modelo inverso del sistema a controlar puesto que, dada una salida
deseada y el estado actual, el controlador generará la señal de control que producirá dicha salida.
Esquemas de control:
a) Modelización inversa directa: es el esquema más simple. Usa el propio sistema para generar
pares de entrada-salida y entrena el modelo inverso directamente mediante el intercambio de en-
tradas y salidas. Ver figura 2.5. Este esquema solo es aplicable a sistemas con funciones inyectivas
ya que de lo contrario la inversa no es una función, y su éxito depende del muestreo.
b) Modelización hacia delante: procede en dos etapas. Primero se hace que la red aprenda el
modelo del sistema a partir de pares e/s. En la segunda etapa se antepone dicho modelo a otra
red neuronal y se entrena el sistema formado por ambas para que aproxime la función identidad,
manteniendo los pesos del modelo fijos, ya que serán lo pesos del controlador los que se ajustan.
Véase figura 2.6 .
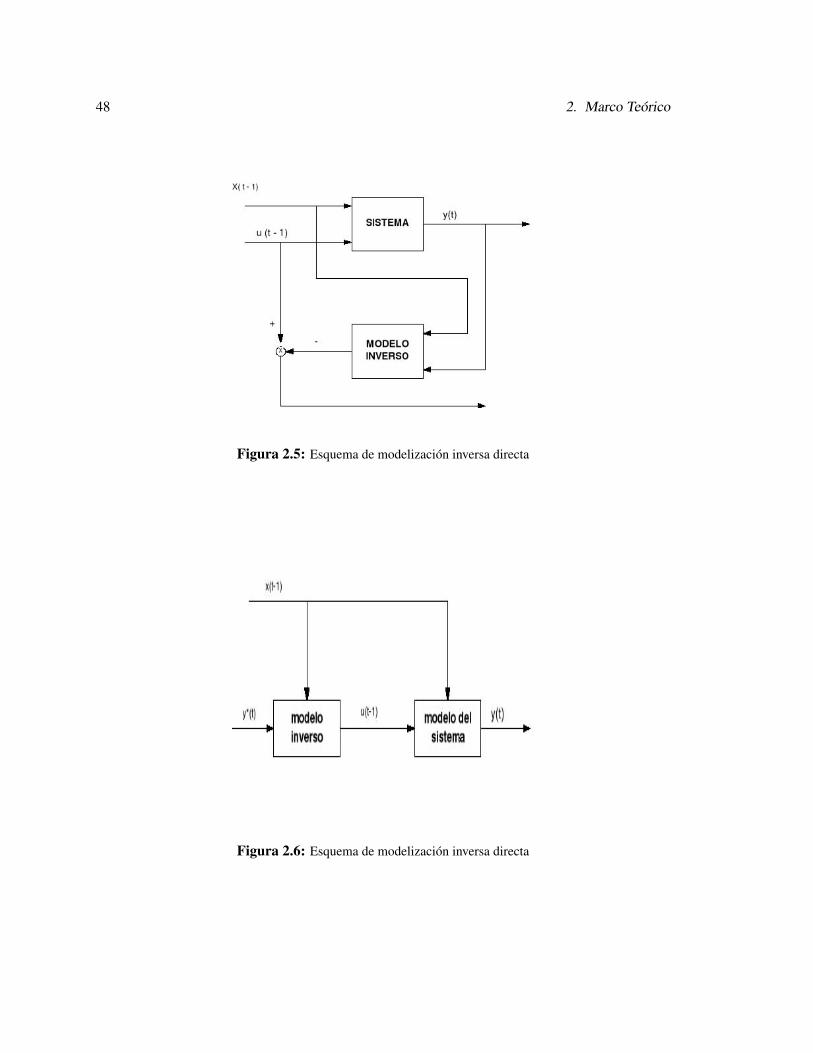
48 2. Marco Teórico
Figura 2.5: Esquema de modelización inversa directa
Figura 2.6: Esquema de modelización inversa directa
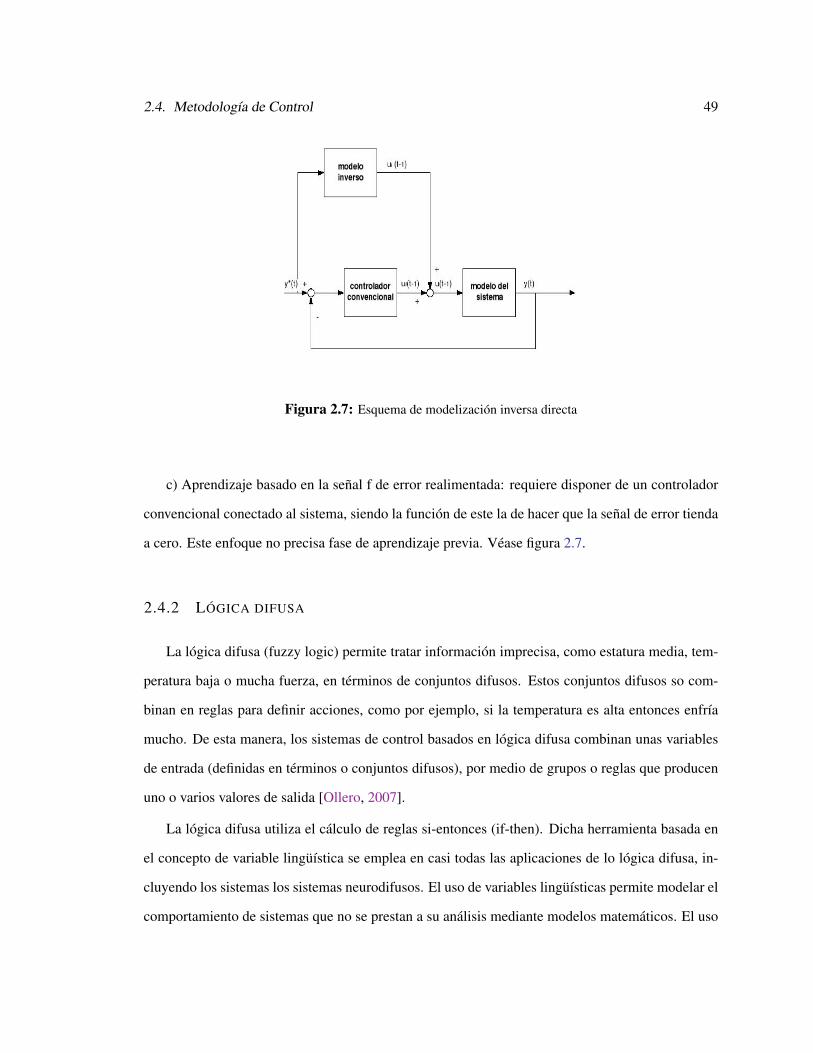
2.4. Metodología de Control 49
Figura 2.7: Esquema de modelización inversa directa
c) Aprendizaje basado en la señal f de error realimentada: requiere disponer de un controlador
convencional conectado al sistema, siendo la función de este la de hacer que la señal de error tienda
a cero. Este enfoque no precisa fase de aprendizaje previa. Véase figura 2.7.
2.4.2 LÓGICA DIFUSA
La lógica difusa (fuzzy logic) permite tratar información imprecisa, como estatura media, tem-
peratura baja o mucha fuerza, en términos de conjuntos difusos. Estos conjuntos difusos so com-
binan en reglas para definir acciones, como por ejemplo, si la temperatura es alta entonces enfría
mucho. De esta manera, los sistemas de control basados en lógica difusa combinan unas variables
de entrada (definidas en términos o conjuntos difusos), por medio de grupos o reglas que producen
uno o varios valores de salida [Ollero, 2007].
La lógica difusa utiliza el cálculo de reglas si-entonces (if-then). Dicha herramienta basada en
el concepto de variable lingüística se emplea en casi todas las aplicaciones de lo lógica difusa, in-
cluyendo los sistemas los sistemas neurodifusos. El uso de variables lingüísticas permite modelar el
comportamiento de sistemas que no se prestan a su análisis mediante modelos matemáticos. El uso
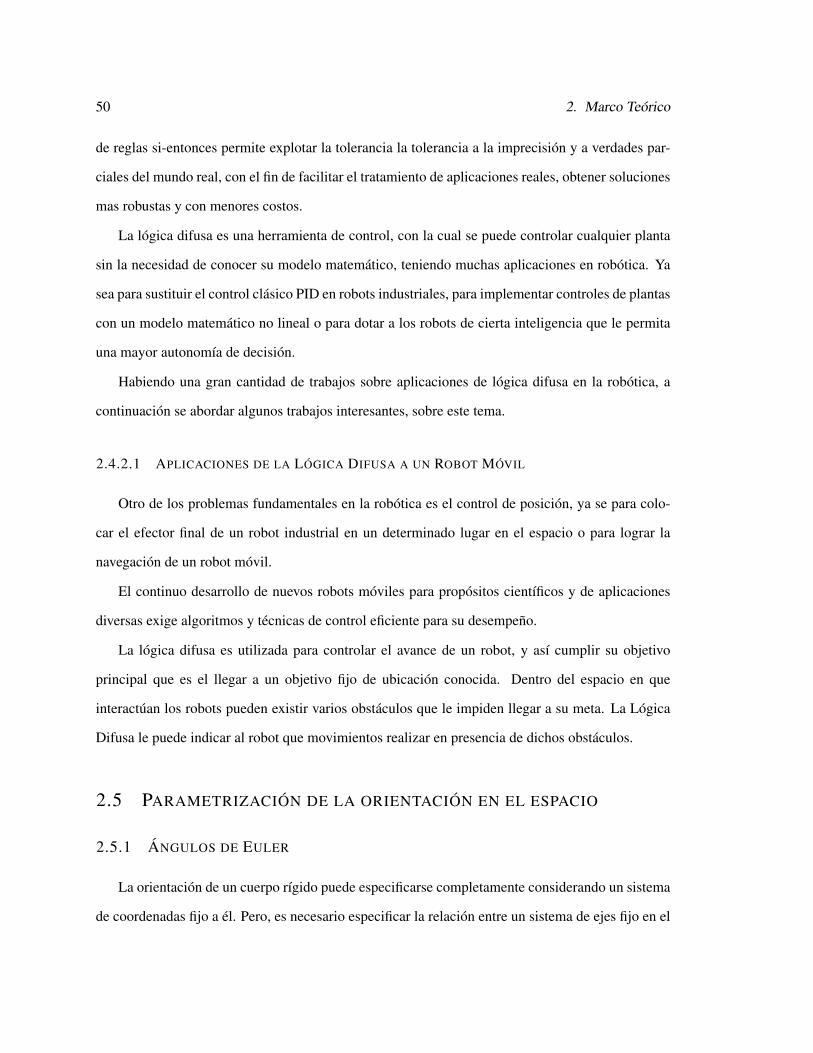
50 2. Marco Teórico
de reglas si-entonces permite explotar la tolerancia la tolerancia a la imprecisión y a verdades par-
ciales del mundo real, con el fin de facilitar el tratamiento de aplicaciones reales, obtener soluciones
mas robustas y con menores costos.
La lógica difusa es una herramienta de control, con la cual se puede controlar cualquier planta
sin la necesidad de conocer su modelo matemático, teniendo muchas aplicaciones en robótica. Ya
sea para sustituir el control clásico PID en robots industriales, para implementar controles de plantas
con un modelo matemático no lineal o para dotar a los robots de cierta inteligencia que le permita
una mayor autonomía de decisión.
Habiendo una gran cantidad de trabajos sobre aplicaciones de lógica difusa en la robótica, a
continuación se abordar algunos trabajos interesantes, sobre este tema.
2.4.2.1 APLICACIONES DE LA LÓGICA DIFUSA A UN ROBOT MÓVIL
Otro de los problemas fundamentales en la robótica es el control de posición, ya se para colo-
car el efector final de un robot industrial en un determinado lugar en el espacio o para lograr la
navegación de un robot móvil.
El continuo desarrollo de nuevos robots móviles para propósitos científicos y de aplicaciones
diversas exige algoritmos y técnicas de control eficiente para su desempeño.
La lógica difusa es utilizada para controlar el avance de un robot, y así cumplir su objetivo
principal que es el llegar a un objetivo fijo de ubicación conocida. Dentro del espacio en que
interactúan los robots pueden existir varios obstáculos que le impiden llegar a su meta. La Lógica
Difusa le puede indicar al robot que movimientos realizar en presencia de dichos obstáculos.
2.5 PARAMETRIZACIÓN DE LA ORIENTACIÓN EN EL ESPACIO
2.5.1 ÁNGULOS DE EULER
La orientación de un cuerpo rígido puede especificarse completamente considerando un sistema
de coordenadas fijo a él. Pero, es necesario especificar la relación entre un sistema de ejes fijo en el
2.5. Parametrización de la orientación en el espacio 51
Figura 2.8: Ángulos de Euler [Gavilán, 2006].
espacio y uno fijo en el cuerpo. Se puede construir la transformación entre estos dos sistemas con
tres rotaciones virtuales sucesivas del cuerpo rígido: de esta manera se introducen los ángulos de
Euler [Gavilán, 2006].
Existen muchas convenciones para elegir el orden de las rotaciones; sin embargo, en este caso
se usa la convención "x", cuyo esquema es el de la Figura 2.8 y cuya secuencia es la siguiente: el
sistema inicial de ejesxyz se rota alrededor del eje z un ángulo φ; luego, este nuevo sistema de ejes se
rota sobre el nuevo eje x un ángulo θ, para producir otro conjunto intermedio de ejes; y finalmente,
alrededor del nuevo eje z, se rota un ángulo ψ; todas las rotaciones son en el sentido contrario a
las manecillas del reloj. Los ángulos de Euler φ, θ, ψ , especifican la orientación del sistema fijo al
cuerpo relativo al sistema fijo al espacio, y por tanto actúan como tres coordenadas generalizadas.
La transformación del sistema del espacio al sistema del cuerpo puede lograrse a través de la matriz
de transformación
A =
cosφcosψ − sinφcosθsinψ sinφcosψ + cosφcosθsinψ sinθsinψ
−cosφsinψ − sinφcosθcosψ −sinφsinψ + cosφcosθcosψ sinθcosψ
sinφsinθ −cosφsinθ cosθ
(2.2)
52 2. Marco Teórico
Los ángulos de Euler constituyen un conjunto de tres coordenadas angulares que sirven para
especificar la orientación de un sistema de referencia de ejes ortogonales, normalmente móvil, res-
pecto a otro sistema de referencia de ejes ortogonales normalmente fijos.
Fueron introducidos por Leonhard Euler en mecánica del sólido rígido para describir la orienta-
ción de un sistema de referencia solidario con un sólido rígido en movimiento.
2.5.1.1 ÁNGULOS DE NAVEGACIÓN
Los ángulos de navegación son un tipo de Ángulos de Euler usados para describir la orientación
de un objeto en tres dimensiones.
Si se tiene un sistema de coordenadas móvil respecto de uno fijo, en tres dimensiones, y se desea
dar la posición del sistema móvil en un momento dado hay varias posibilidades de hacerlo. Una de
ellas son los ángulos de navegación.
Los ángulos de navegación, llamados en matemáticas ángulos de Tait Bryan, son tres coorde-
nadas angulares que definen un triedro rotado desde otro que se considera el sistema de referencia.
Se definen matemáticamente de forma similar a los ángulos de Euler, pero en vez de usar como
linea de nodos el corte entre dos planos homologos (por ejemplo el XY es el homólogo del xy), se
utilizan dos planos no homólogos (por ejemplo XY e yz).
Los ángulos Tait Bryan, llamados así por Peter Guthrie Tait y George Bryan son los ángulos
Yaw, Pitch, y Roll, son un tipo específico de los ángulos de Euler y son utilizados aplicaciones
aeroespaciales definiendo la orientación relativa de un vehículo.
Dado un sistema de tres ejes fijo en el aeroplano, llamados eje de guiñada (yaw en inglés), de
cabeceo (pitch) y de alabeo (roll), existen tres rotaciones principales, normalmente llamadas igual
que el eje sobre el que se producen, que permiten alcanzar el sistema del aeroplano desde el sistema
de referencia. Tienen que venir dadas en ese orden y ser realizadas en ese orden, ya que el resultado
final depende del orden en que se apliquen.
• Cabeceo: es una inclinación del morro del avión, o rotación respecto al eje ala ala.
2.5. Parametrización de la orientación en el espacio 53
• Alabeo: rotación intrínseca alrededor del eje morro cola del avión.
• Guiñada: rotación respecto de un eje vertical.
Son tres rotaciones intrínsecas, es decir, relativos al sistema móvil. Esto es útil por ejemplo
cuando el piloto de un avión quiere describir una maniobra.
Los ángulos de navegación, llamados deriva (normalmente representado por la letra ψ), incli-
nación (normalmente θ) y alabeo φ), corresponden a los valores de éstas tres rotaciones principales
[Wikimedia].
2.5.2 CUATERNIONES
En matemáticas, los cuaterniones son un sistema de numeración no conmutativa que amplía
el número de complejos. Los cuaterniones los describió por primera vez matemático irlandés Sir
William Rowan Hamilton en 1843 y fueron aplicados a la mecánica en el espacio tridimensional.
Encuentran uso en las matemáticas teóricas y aplicadas, en particular para los cálculos de la parti-
cipación de tres rotaciones de dimensiones como en tres dimensiones los gráficos por ordenador y
la geometría epipolar, aunque han sido sustituidos en muchas aplicaciones de vectores y matrices.
En lenguaje moderno, cuaterniones forma de cuatro dimensiones álgebra división normado en
los números reales. El álgebra de cuaterniones a menudo se denota por H (para Hamilton). También
puede ser dada por la clasificación de álgebra de Clifford.
Como conjunto, el H cuaterniones son iguales aR4, cuatro espacios vectoriales bidimensionales
en los números reales. H tiene tres operaciones: suma, multiplicación escalar, y la multiplicación
de cuaterniones. Del mismo modo el producto de un elemento de H por un número real se define
como el mismo que el producto en R4. Para definir la multiplicación en H requiere una elección de
base para la I 4. Los elementos de esta base se suelen designarse como 1, i, j, k. Cada elemento
de H puede ser escrito como una única combinación lineal de estos elementos de base, es decir,
un 1 + bi + cj + dk, donde a, b, c, d son números reales. El elemento base 1 será el elemento de
identidad de la H, es decir, la multiplicación por 1 no hace nada, y por esta razón, los elementos de
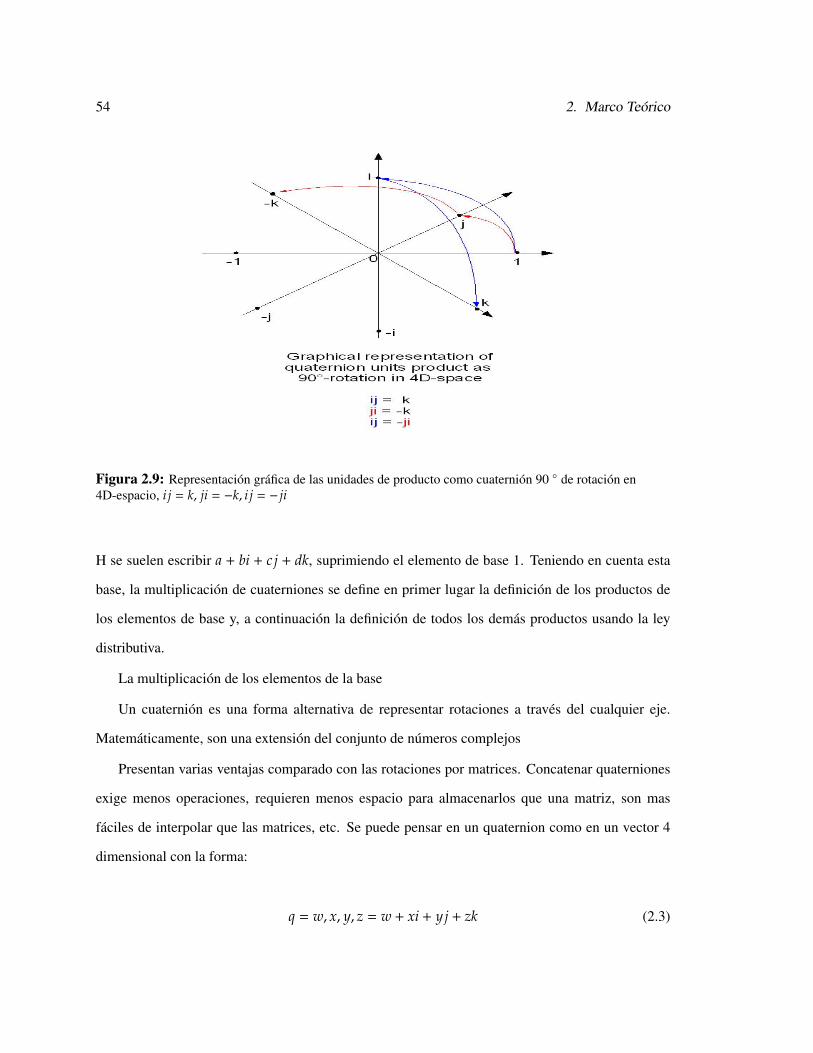
54 2. Marco Teórico
Figura 2.9: Representación gráfica de las unidades de producto como cuaternión 90 de rotación en4D-espacio, i j = k, ji = −k, i j = − ji
H se suelen escribir a + bi + cj + dk, suprimiendo el elemento de base 1. Teniendo en cuenta esta
base, la multiplicación de cuaterniones se define en primer lugar la definición de los productos de
los elementos de base y, a continuación la definición de todos los demás productos usando la ley
distributiva.
La multiplicación de los elementos de la base
Un cuaternión es una forma alternativa de representar rotaciones a través del cualquier eje.
Matemáticamente, son una extensión del conjunto de números complejos
Presentan varias ventajas comparado con las rotaciones por matrices. Concatenar quaterniones
exige menos operaciones, requieren menos espacio para almacenarlos que una matriz, son mas
fáciles de interpolar que las matrices, etc. Se puede pensar en un quaternion como en un vector 4
dimensional con la forma:
q = w, x, y, z = w + xi + yj + zk (2.3)
2.6. Telemetría 55
Los cuaterniones forman un álgebra interesante, donde cada objeto contiene 4 variables es-
calares (a veces conocidos como parámetros de Euler que no debe confundirse con los ángulos de
Euler), estos objetos se pueden sumar y multiplicar como una sola unidad de un modo similar al
álgebra habitual de los números. Los cuaterniones tienen 4 dimensiones (cada cuaternión consta
de 4 números escalares), una dimensión real y 3 dimensiones imaginarias. Cada una de estas di-
mensiones imaginaria tiene un valor unitario de la raíz cuadrada de -1, pero las raíces cuadradas
que son diferentes de -1 a todos perpendiculares el uno al otro, conocido como I, J y K. Así que un
cuaternión se puede representar como sigue:
a + b + i + jckd (2.4)
2.6 TELEMETRÍA
En la actualidad tanto la industria como el comercio y servicios centran sus esfuerzos en la
reducción de costos y eficiencia de procesos mediante la adopción de tecnología. Esta tecnología
debe ser compatible con los procesos actuales y tiene que proveer con oportunidad de información
a los directivos para toma de decisiones asertivas basadas en información confiable y real, razones
por las cuales es empleada la Telemetría en la industria.
La telemetría nace de la fusión de tres especialidades que son: Telecomunicaciones, Electrónica
y Sistemas TI (Tecnologías de información), es decir las aplicaciones centralizadas. Es una tec-
nología que permite la medición remota de magnitudes físicas y el posterior envío de la información
hacia el operador del sistema. Fue desarrollada en 1915, a mediados de la primera guerra mundial,
por el alemán Khris Osterhein y el italiano Franchesco Di Buonanno para medir a qué distancia se
encontraban objetivos de artillería.
La palabra telemetría procede de las palabras griegas Γηλε (tele), que quiere decir a distancia,
y la palabra µεΓρoν (metron), que quiere decir medida.
El envío de información hacia el operador en un sistema de telemetría se realiza típicamente
56 2. Marco Teórico
mediante comunicación inalámbrica, aunque también se puede realizar por otros medios (teléfono,
redes de ordenadores, enlace de fibra óptica, etcétera). Los sistemas de telemetría reciben las ins-
trucciones y los datos necesarios para operar mediante el telecomando grueso.
Aplicaciones
La telemetría se utiliza en grandes sistemas, tales como las naves espaciales o las plantas quími-
cas, debido a que facilita la monitorización automática y el registro de las mediciones, así como
el envío de alertas, con el fin de que el funcionamiento sea seguro y eficiente. Por ejemplo, las
agencias espaciales como la NASA, la Q.K, la ESA y otras, utilizan sistemas de telemetría y de
telecomando grueso para operar con naves espaciales y satélites.
Se utiliza en infinidad de campos, tales como la exploración científica con naves tripuladas o
no (submarinos, aviones de reconocimiento y satélites), diversos tipos de competición (por ejem-
plo, Fórmula 1 y MotoGP), o la operación de modelos matemáticos destinados a dar sustento a la
operación de embalses.
En las fábricas, oficinas y residencias, el monitoreo del uso de energía de cada sección o equipo
y los fenómenos derivados (como la temperatura) en un punto de control por telemetría facilita la
coordinación para un uso más eficiente de la energía, como el caso de Japón.
Una aplicación muy importante de la telemetría es la perforación de pozos petrolíferos; ésta
se utiliza para la medición con herramientas navegables MWD y LWD. Se utiliza básicamente la
telemetría de pulso de lodo, que se transmite a través de la tubería de perforación por medio del
lodo de perforación [Wikimedia].
En el pasado, la aplicación de tales tecnologías se restringía a cierto tipo de instalaciones de gran
tamaño, como por ejemplo edificios de oficinas o naves industriales. Sin embargo, en la actualidad
cada vez se vienen aplicando más a las viviendas privadas.
Los módulos telemétricos vía telefonía móvil están siendo utilizados para abrir la puerta del
garaje de forma automática, encender la calefacción de la casa de vacaciones o proteger una vivienda
ante robos, esta es una aplicación interesante para la vida cotidiana. Funcionan a través de telefonía
móvil, mediante llamada o SMS. Una vez registrado en la red GSM, el sistema envía un mensaje de
2.7. Tipos de controladores 57
Figura 2.10: Módulo telemático STD32 de Telic GmbH [Telit]
alarma al teléfono móvil. Del mismo modo, también es posible controlar mediante llamada ciertos
aparatos domésticos como la calefacción o el aire acondicionado.
También a través de la telemetría se puede obtener información acerca de especies, dándole
seguimiento a las trayectorias de migración, de tal forma que con el monitoreo se pueden obtener
datos también de los lugares en los que se encuentra, área de acción, hábitos y patrón de actividad.
2.7 TIPOS DE CONTROLADORES
Robots, manipuladores, inversores industriales, transportes, celulares, equipos electrodomésti-
cos son tan solo algunos ejemplos de equipos u aparatos que requieren de un control, el cual se
lleva a cabo por medio de dispositivos llamados controladores que permiten la recepción de señales
ya sea de tipo analógico o digital para posteriormente ser interpretadas, procesada obteniendo una
salida que en algunos casos será simulada para verificar que sea la requerida por el usuario.
Existe una variada cantidad de controladores que se diferencian unos a otros por su capacidad
de memoria, velocidad de respuesta, costo, programabilidad, arquitectura; dichas características
determinan las ventajas entre unos y otros de acuerdo a las aplicaciones y requerimientos que el
58 2. Marco Teórico
usuario determine. A continuación se explican algunos controladores empleados en los vehículos
autónomos.
2.7.1 FPGA
Las FPGA’s (Field Programmable Gate Array) Son dispositivos lógicos de propósito general
programable por los usuarios, compuesto de bloques lógicos comunicados por conexiones progra-
mables.
El tamaño, estructura, número de bloques y la cantidad y conectividad de las conexiones varían
en las distintas arquitecturas. (Sánchez, 2004) Es un circuito integrado que contiene celdas lógicas
idénticas (64 hasta 8’000.000) que se puede ver como componentes estándar.
Las celdas lógicas se interconectan por medio de una matriz de cables y switches programables.
• Estructura: arreglo bidimensional de bloques lógicos rodeados por conexiones configurables.
Una familia contiene idénticos bloques lógicos y conexiones, pero difieren en el tamaño del
arreglo.
• Tecnología de programación: se programa por la carga de celdas de memoria de configu-
ración, que controlan la lógica e interconexiones.
• Características: volatilidad, no volatilidad, memoria externa, reprogramabilidad, proceso de
fabricación estándar y bajo consumo.
Existen diversos tipos de FPGAs disponibles en el mercado, de acuerdo a las formas de progra-
mación: Static RAM, Antifusibles y (E) EPROM.
2.7.2 DSP
Un Procesador Digital de Señales (DSP, sigla en inglés de Digital Signal Processor) es un tipo
de microprocesador, increíblemente rápido y poderoso. Un DSP es único porque procesa señales
en tiempo real. Esta capacidad de procesamiento en tiempo real hace a los DSP ideales para apli-
caciones que no toleran ningún retardo. Por ejemplo, no es fácil conversar a través de un teléfono
2.7. Tipos de controladores 59
celular cuando existe un retardo en la línea. Esto lleva a que la señal se corte o a confusión ya
que ambos usuarios hablan a la vez. Con los teléfonos celulares actuales, los cuales usan DSP’s,
es posible hablar normalmente. El DSP dentro del teléfono procesa el sonido (convirtiéndolo de
una señal analógica a digital, filtrando, comprimiendo y realizando otras tareas en forma digital) tan
rápidamente que uno puede hablar y escuchar sin problemas de retardo ni ninguna molestia que ello
implica. O sea, se procesa en tiempo real.
En estricto rigor, digital signal processing se refiere al procesamiento electrónico de señales
tales como sonido, radio y microondas usando técnicas matemáticas para realizar transformaciones
o extraer información. En la práctica, las características que hacen a los DSP’s tan buenos en el
manejo de señales los hacen adecuados para muchos otros propósitos, tales como procesamiento de
gráficos de alta calidad y simulaciones en ingeniería.
Una de las más importantes características de un DSP es su capacidad de realizar operaciones de
multiplicación y acumulación (MACs) en sólo un ciclo de reloj. No obstante ello, es necesario que
el dispositivo posea la característica de manejar aplicaciones críticas en tiempo real. Esto requiere
de una arquitectura que soporte un flujo de datos a alta velocidad hacia y desde la unidad de cálculo
y memoria. Esta ejecución a menudo requiere el uso de unidades DMA (Direct Memory Acess) y
generadores de direcciones duales (DAG’s) que operan en paralelo con otras partes del chip.
2.7.3 MICROCONTROLADORES
Un microcontrolador es un circuito integrado que contiene toda la estructura (arquitectura) de
un microcomputador, o sea CPU, RAM, ROM, memorias y circuitos de entrada y salida, como se
muestra en la figura 2.11. Algunos microcontroladores más especializados poseen además conver-
tidores análogos digital, temporizadores, contadores y un sistema para permitir la comunicación
serial.
Son diseñados para disminuir el coste económico y el consumo de energía de un sistema en par-
ticular. Por eso el tamaño de la CPU, la cantidad de memoria y los periféricos incluidos dependerán
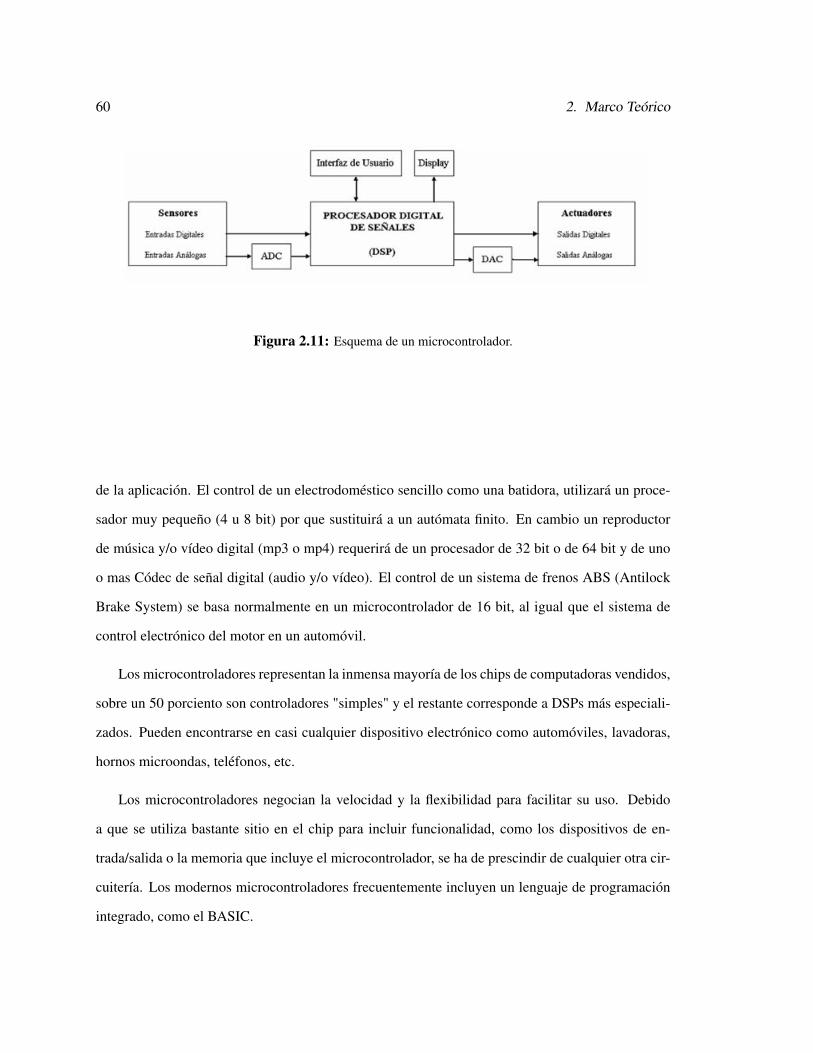
60 2. Marco Teórico
Figura 2.11: Esquema de un microcontrolador.
de la aplicación. El control de un electrodoméstico sencillo como una batidora, utilizará un proce-
sador muy pequeño (4 u 8 bit) por que sustituirá a un autómata finito. En cambio un reproductor
de música y/o vídeo digital (mp3 o mp4) requerirá de un procesador de 32 bit o de 64 bit y de uno
o mas Códec de señal digital (audio y/o vídeo). El control de un sistema de frenos ABS (Antilock
Brake System) se basa normalmente en un microcontrolador de 16 bit, al igual que el sistema de
control electrónico del motor en un automóvil.
Los microcontroladores representan la inmensa mayoría de los chips de computadoras vendidos,
sobre un 50 porciento son controladores "simples" y el restante corresponde a DSPs más especiali-
zados. Pueden encontrarse en casi cualquier dispositivo electrónico como automóviles, lavadoras,
hornos microondas, teléfonos, etc.
Los microcontroladores negocian la velocidad y la flexibilidad para facilitar su uso. Debido
a que se utiliza bastante sitio en el chip para incluir funcionalidad, como los dispositivos de en-
trada/salida o la memoria que incluye el microcontrolador, se ha de prescindir de cualquier otra cir-
cuitería. Los modernos microcontroladores frecuentemente incluyen un lenguaje de programación
integrado, como el BASIC.
2.8. Metodología y lenguajes de programación usadas 61
2.7.4 MICROPROCESADORES
El microprocesador es el cerebro del ordenador. Es un chip, un tipo de componente electrónico
en cuyo interior existen miles (o millones) de elementos llamados transistores, cuya combinación
permite realizar el trabajo que tenga encomendado el chip.
A veces al microprocesador se le denomina "la CPU" aunque este término tiene cierta am-
bigüedad, pues también puede referirse a toda la caja que contiene la placa base, el micro, las
tarjetas y el resto de la circuitería principal del ordenador.
La velocidad de un microprocesador se mide en mega hertzios (MHz) o giga hertzios (1GHz =
1.000 MHz), aunque esto es sólo una medida de la fuerza bruta del microprocesador; un micro-
procesador simple y anticuado a 500 MHz puede ser mucho más lento que uno más complejo y
moderno (con más transistores, mejor organizado) que vaya a 400MHz. Debido a la extrema di-
ficultad de fabricar componentes electrónicos que funcionen a las inmensas velocidades de MHz
habituales hoy en día, todos los microprocesadores modernos tienen 2 velocidades:
• Velocidad interna: la velocidad a la que funciona el micro internamente (200, 333, 450...MHz).
• Velocidad externa o del bus: o también "velocidad del FSB"; la velocidad a la que se comuni-
can el micro y la placa base, para poder abaratar el precio de ésta. Típicamente, 33, 60, 66, 100133MHz.
2.8 METODOLOGÍA Y LENGUAJES DE PROGRAMACIÓN USADAS
En el manejo de los controladores es necesario emplear diversos softwares que tiene sus propios
métodos de programación así mismo los controladores permiten la utilización de diferentes lengua-
jes que van de bajo nivel a alto nivel, lo cual facilita su empleo. A continuación se dan algunos
ejemplos de software, métodos y lenguajes de programación.

62 2. Marco Teórico
2.8.1 LABVIEW
LabVIEW es una plataforma estándar en el área de control e instrumentación, en el campo de la
automatización industrial para la adquisición, análisis, monitorización y registro de datos, así como
para el control y monitorización de procesos, en el área de la visión artificial para el desarrollo de
sistemas de inspección en producción o laboratorio. [Butron, 2007]
Instrumentación Real. Cuando se habla de instrumentos de medición o control, la primera ima-
gen que se tiene, es un modulo o carcasa rígida, con un panel frontal con sus controles e indicadores.
Dentro del panel se encuentra toda la circuitería que soporta el funcionamiento del instrumento.
Instrumentación virtual. Un instrumento virtual (VI) es un programa de computadora que
simula el panel frontal del instrumento de medición o control que realiza una serie de medidas como
si se tratase de un instrumento real apoyándose en elementos de hardware (tarjetas de adquisición
de datos (DACS), tarjetas DSP, instrumentos accesibles vía GPIB, VXI, RS-232, USB, ethernet).
El funcionamiento de un instrumento virtual es análogo al de un instrumento real, se puede
apreciar en la pantalla de la computadora un panel con las mismas funciones que la del instru-
mento físico. Detrás del panel frontal se encuentra el diagrama de bloques que sustenta todo el
funcionamiento del VI, este se puede comparar con la circuitería del instrumento real, ver figura
2.12
2.8.2 PROGRAMACIÓN EN LABVIEW
Cuando se crea un VI en LabVIEW se trabaja en dos ventanas: una contiene todos los controles
e indicadores del VI (panel frontal) y otra que soportara el nivel de programación (diagrama de
bloques). Solo los controles e indicadores se encuentran representados en las dos ventanas, si se
crea un indicador en el panel frontal en el diagrama de bloques se va a crear una terminal que
lo represente, caso contrario, si se crea un bloque funcional en el diagrama de bloques este no se
encontrara representado en el panel frontal.
Un bloque funcional es un icono con una entrada y salida de datos, el bloque funcional entrega
2.8. Metodología y lenguajes de programación usadas 63
Figura 2.12: Panel frontal de un VI [Butron, 2007]
un dato de salida después que ha realizado una operación con el. La programación en LabVIEW
consiste en conectar los indicadores, controles y bloques funcionales mediante cables por lo que
van a fluir los datos hasta obtener el resultado deseado. Aun que la programación en LabVIEW es
gráfica, sigue con los planteamientos generales de programación en cualquier lenguaje de alto nivel.
Un programa siempre se basara en la construcción de un algoritmo que manipule datos de en-
trada y arroje datos de salida, los cuales son la solución a un problema específico.
2.8.3 LENGUAJE ENSAMBLADOR
El lenguaje ensamblador es un lenguaje de programación que es una traducción directa del
código de máquina (Éste código es interpretado por el microprocesador), para que pueda ser en-
tendible por los seres humanos, por lo tanto es un lenguaje de bajo nivel. El lenguaje ensamblador
permite una optimización que no se consigue con lenguajes de medio y alto nivel. Permite la
creación de programas muy rápidos y muy pequeños, además se tiene un control que no se consigue
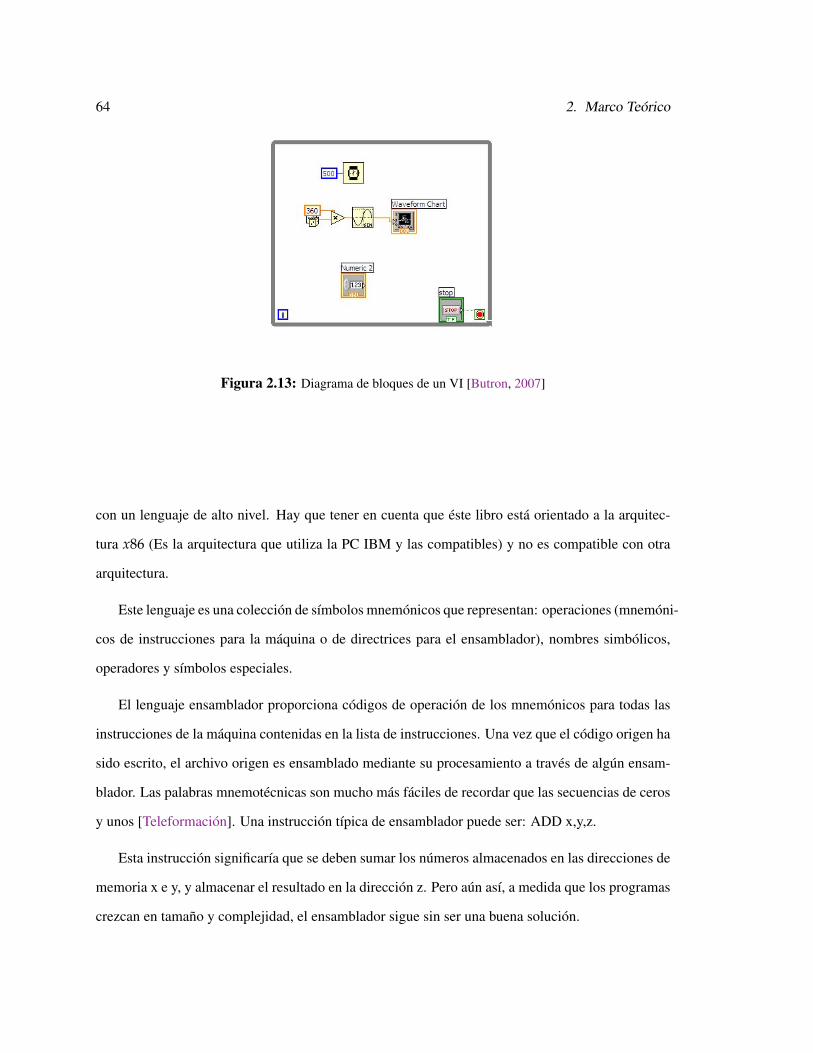
64 2. Marco Teórico
Figura 2.13: Diagrama de bloques de un VI [Butron, 2007]
con un lenguaje de alto nivel. Hay que tener en cuenta que éste libro está orientado a la arquitec-
tura x86 (Es la arquitectura que utiliza la PC IBM y las compatibles) y no es compatible con otra
arquitectura.
Este lenguaje es una colección de símbolos mnemónicos que representan: operaciones (mnemóni-
cos de instrucciones para la máquina o de directrices para el ensamblador), nombres simbólicos,
operadores y símbolos especiales.
El lenguaje ensamblador proporciona códigos de operación de los mnemónicos para todas las
instrucciones de la máquina contenidas en la lista de instrucciones. Una vez que el código origen ha
sido escrito, el archivo origen es ensamblado mediante su procesamiento a través de algún ensam-
blador. Las palabras mnemotécnicas son mucho más fáciles de recordar que las secuencias de ceros
y unos [Teleformación]. Una instrucción típica de ensamblador puede ser: ADD x,y,z.
Esta instrucción significaría que se deben sumar los números almacenados en las direcciones de
memoria x e y, y almacenar el resultado en la dirección z. Pero aún así, a medida que los programas
crezcan en tamaño y complejidad, el ensamblador sigue sin ser una buena solución.
2.8. Metodología y lenguajes de programación usadas 65
2.8.4 LENGUAJE DE PROGRAMACIÓN C
El lenguaje de programación en C, es un lenguaje conocido como de alto nivel, estructurado,
lo que permite generar un código claro y sencillo, ya que esta basado en la modularidad. Tal y
como hacen los lenguajes de alto nivel, contempla la utilización de tipos de datos, es decir, define y
permite definir un conjunto de valores que puede tomar una variable y un conjunto de operaciones
que se pueden realizar sobre ella. De todas formas, C no se caracteriza por ser un lenguaje fuerte-
mente tipado ya que permite casi cualquier conversión entre tipos. Estas conversiones pueden ser
forzadas por el programador o pueden realizarse de forma automática, por ejemplo, en el caso de
los argumentos que recibe una función. Este lenguaje no hace comprobación de errores en tiempo
de ejecución, éste es el caso, por ejemplo, de los tamaños de los vectores (arrays) que utilice el
programador, siendo obligación de éste asegurarse de tener definido un tamaño adecuado para su
aplicación.
Todas estas características han hecho del lenguaje C el lenguaje de programación más utilizado
a la hora de implementar sistemas operativos, compiladores, editores, intérpretes, etc.
2.8.5 LENGUAJE DE PROGRAMACIÓN C++
El lenguaje de programación C++ se basa en 2 lenguajes el primero C y el segundo Simula 67,
C++ absorbió las características de C y adicionó las capacidades de Simula para crear y manipular
objetos. C++ es un lenguaje imperativo orientado a objetos derivado del C. En realidad un súper
conjunto de C, que nació para añadirle cualidades y características de las que carecía. El resultado
es que como su ancestro, sigue muy ligado al hardware subyacente, manteniendo una considerable
potencia para programación a bajo nivel, pero se la han añadido elementos que le permiten también
un estilo de programación con alto nivel de abstracción. Hay tres tipos de mejoras de C++ sobre C:
1. Extensiones propias de la Programación Orientada a Objetos.
2. Extensiones que mejoran el lenguaje.
3. Extensiones a los tipos de datos.
66 2. Marco Teórico
Ambos lenguajes son compilados estáticamente (lo que asegura la robustez del código, y el
correcto tipado y sintaxis del código), con ligadura dinámica (los valores de las variables se calculan
en tiempo de ejecución). Como se puede observar, C++ es más inflexible y eficiente que C.
2.9 SISTEMA SCADA
Los sistemas SCADA (Supervisory Control And Data Adquisition) son aplicaciones de soft-
ware, diseñadas con la finalidad de controlar y supervisar procesos a distancia. Se basan en la
adquisición de datos de los procesos remotos [Henry].
Cada uno de los items de SCADA (Supervisión, Control y Adquisición de datos) involucran
muchos subsistemas, por ejemplo, la adquisición de los datos puede estar a cargo de un PLC (Con-
trolador Lógico Programable) el cual toma las señales y las envía a las estaciones remotas usando
un protocolo determinado, otra forma podría ser que una computadora realice la adquisición vía un
hardware especializado y luego esa información la transmita hacia un equipo de radio vía puerto
serial, y así existen muchas otras alternativas.
Las tareas de Supervisión y Control generalmente están mas relacionadas con el software SCADA,
en él, el operador puede visualizar en la pantalla del computador de cada una de las estaciones re-
motas que conforman el sistema, los estados de ésta, las situaciones de alarma y tomar acciones
físicas sobre algún equipo lejano, la comunicación se realiza mediante "buses" especiales o redes
LAN. Todo esto se ejecuta normalmente en tiempo real, y están diseñados para dar al operador de
planta la posibilidad de supervisar y controlar dichos procesos.
Estos sistemas actúan sobre los dispositivos instalados en la planta, como son los controladores,
autómatas, sensores, actuadores, registradores, etc. Además permiten controlar el proceso desde una
estación remota, para ello el software brinda una interfaz gráfica que muestra el comportamiento del
proceso en tiempo real.
Funciones principales del sistema.
• Supervisión.
2.9. Sistema Scada 67
• Control remoto de instalaciones y equipos.
• Procesamiento de datos.
• Visualización gráfica dinámica.
• Generación de reportes.
• Representación se señales de alarma.
• Almacenamiento de información histórica.
• Programación de eventos.
Transmisión de la información.
Los sistemas SCADA necesitan comunicarse vía red, puertos GPIB, telefónica o satélite, es
necesario contar con computadoras remotas que realicen el envió de datos hacia una computadora
central, esta a su vez será parte de un centro de control y gestión de información.
Para realizar el intercambio de datos entre los dispositivos de campo y la estación central de
control y gestión, se requiere un medio de comunicación, existen diversos medios que pueden ser
cableados (cable coaxial, fibra óptica, cable telefónico) o no cableados (microondas, ondas de radio,
comunicación satelital).
2.9.1 ELEMENTOS DEL SISTEMA
Un sistema SCADA esta conformado por:
Interfaz Operador-Máquinas: Es el entorno visual que brinda el sistema para que el operador se
adapte al proceso desarrollado por la planta. Permite la interacción del ser humano con los medios
tecnológicos implementados.
Unidad Central (MTU): Conocido como Unidad Maestra. Ejecuta las acciones de mando (pro-
gramadas) en base a los valores actuales de las variables medidas. La programación se realiza por
medio de bloques de programa en lenguaje de alto nivel (como C, Basic, etc.). También se encarga
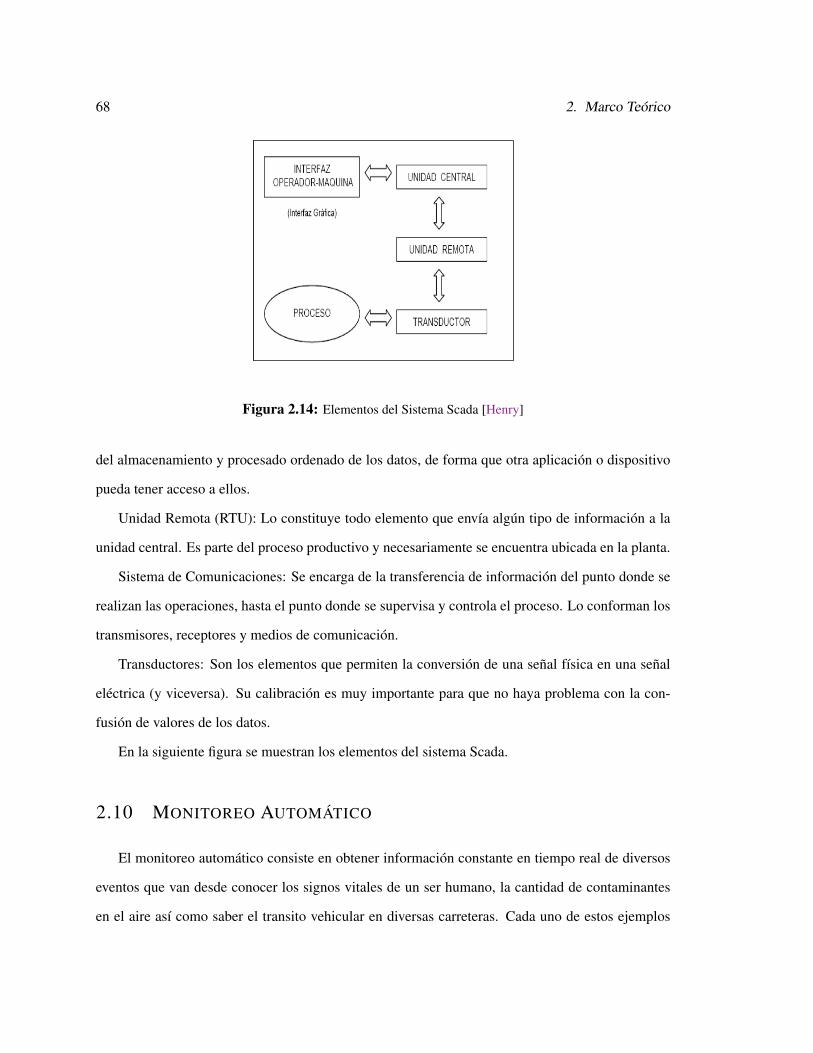
68 2. Marco Teórico
Figura 2.14: Elementos del Sistema Scada [Henry]
del almacenamiento y procesado ordenado de los datos, de forma que otra aplicación o dispositivo
pueda tener acceso a ellos.
Unidad Remota (RTU): Lo constituye todo elemento que envía algún tipo de información a la
unidad central. Es parte del proceso productivo y necesariamente se encuentra ubicada en la planta.
Sistema de Comunicaciones: Se encarga de la transferencia de información del punto donde se
realizan las operaciones, hasta el punto donde se supervisa y controla el proceso. Lo conforman los
transmisores, receptores y medios de comunicación.
Transductores: Son los elementos que permiten la conversión de una señal física en una señal
eléctrica (y viceversa). Su calibración es muy importante para que no haya problema con la con-
fusión de valores de los datos.
En la siguiente figura se muestran los elementos del sistema Scada.
2.10 MONITOREO AUTOMÁTICO
El monitoreo automático consiste en obtener información constante en tiempo real de diversos
eventos que van desde conocer los signos vitales de un ser humano, la cantidad de contaminantes
en el aire así como saber el transito vehicular en diversas carreteras. Cada uno de estos ejemplos
2.10. Monitoreo Automático 69
tienen finalidades y aplicaciones muy particulares pero todas ellas coinciden en mejorar la calidad
de vida del ser humano.
Llevar a cabo el monitoreo automático en tiempo real tiene diversos inconvenientes tales como:
• Grandes cantidades de información.
• Incetidumbre en la información.
• Correlación de múltiples variables complejas.
• Entrenamiento difícil y costoso.
• Dediciencias en las conclusiones sobre la secuencia y detalles del evento por personal inex-
perto.
• Reestablecimiento.
El problema puede ser resuelto por técnicas provistas por la Inteligencia Artificial [Llano, 2006].
Para lograr el monitoreo automático es necesario la utilización de sensores, tal es el caso del
Proyecto MERIS (Monitorización de Emergencia a través de Redes Inalámbricas de Sensores) el
cual tiene como objetivo optimizar los recursos humanos y técnicos en la atención prehospitalaria
en situaciones de emergencia humanitaria, esto por medio de un dispositivo electrónico que permita
al personal de emergencias el acceso a la información en tiempo real sobre el estado de todas las
víctimas recuperables.
Dicho dispositivo consiste en un sistema de monitoreo automático y continuo de las constantes
vitales de todas las víctimas a través de nodos con sensores y que utilizan comunicaciones inalám-
bricas en red para enviar los datos a una unidad base de monitorización global y gestión de los
recursos.
En caso de gran número de víctimas, diversos métodos permiten asignar recursos y jerarquizar
la atención a las víctimas de acuerdo con un sistema de prioridades, etiquetándolas con diferentes
colores según la gravedad, como se observa en la 2.15.
70 2. Marco Teórico
Figura 2.15: Etiquetas triage manual [Abril, 2007]
El incremento de la capacidad de procesamiento de los dispositivos electrónicos, la miniaturi-
zación, el desarrollo de las comunicaciones inalámbricas y la reducción del consumo de energía,
entre otros avances, han posibilitado el desarrollo de una nueva tecnología de redes inalámbricas e
inteligentes de sensores. Esto facilita la observación y el control automático y remoto de distintos
tipos de parámetros del entorno en función de los sensores utilizados. Una excelente aplicación es la
substitución de los tradicionales, grandes y costosos monitores por pequeños sistemas compuestos
por nodos con sensores de las constantes vitales del paciente que envíen de forma inalámbrica los
datos de gran número de víctimas a una estación base, donde el personal sanitario lleve a cabo una
monitorización inteligente del conjunto para facilitar la asignación de recursos y detectar los casos
críticos [Abril, 2007].
El proyecto MERIS ha desarrollado un prototipo de dispositivo de red inalámbrica de sensores
que presenta una alternativa modular de diseño del nodo, de forma que se dispone de una plataforma
fácilmente adaptable a diversos entornos y aplicaciones, tanto en hardware como en software (ver
figura 2.16).

2.10. Monitoreo Automático 71
Figura 2.16: Nodo red de sensores CEI [Abril, 2007]
Se pretende demostrar la viabilidad tecnológica final del prototipo como herramienta de ayuda
para la asistencia sanitaria de emergencia en pruebas en campo con la Cruz Roja Colombiana Sec-
cional Cauca, así como capacitar a su personal sanitario en la utilización de esta tecnología. Se
construirá un demostrador final compuesto por 30 nodos con los sensores necesarios que una vez
instalados en las personas, comuniquen en red los datos de las constantes vitales a un ordenador
portátil o agenda electrónica tipo PDA que recoja y gestione toda la información.
2.10.1 ELEMENTOS FÍSICOS DE UN SISTEMA DE MONITOREO POR PC
Para desarrollar el monitoreo es necesario contar con distintos elementos para lo cual se in-
volucra la electrónica, las comunicaciones, el control, la inteligencia artificial (IA) y la visión por
computador.
El uso de IA se puede apreciar en las decisiones que debe tomar por ejemplo un robot : evitar
obstáculos al ir de un sitio a otro, eligiendo el camino mas corto o cuando se le enseña a reaccionar
frente a ciertos estímulos y responde acertadamente a estímulos nuevos como en el caso de las
redes neuronales. La visión por computador es primordial para visualizar el entorno, involucra
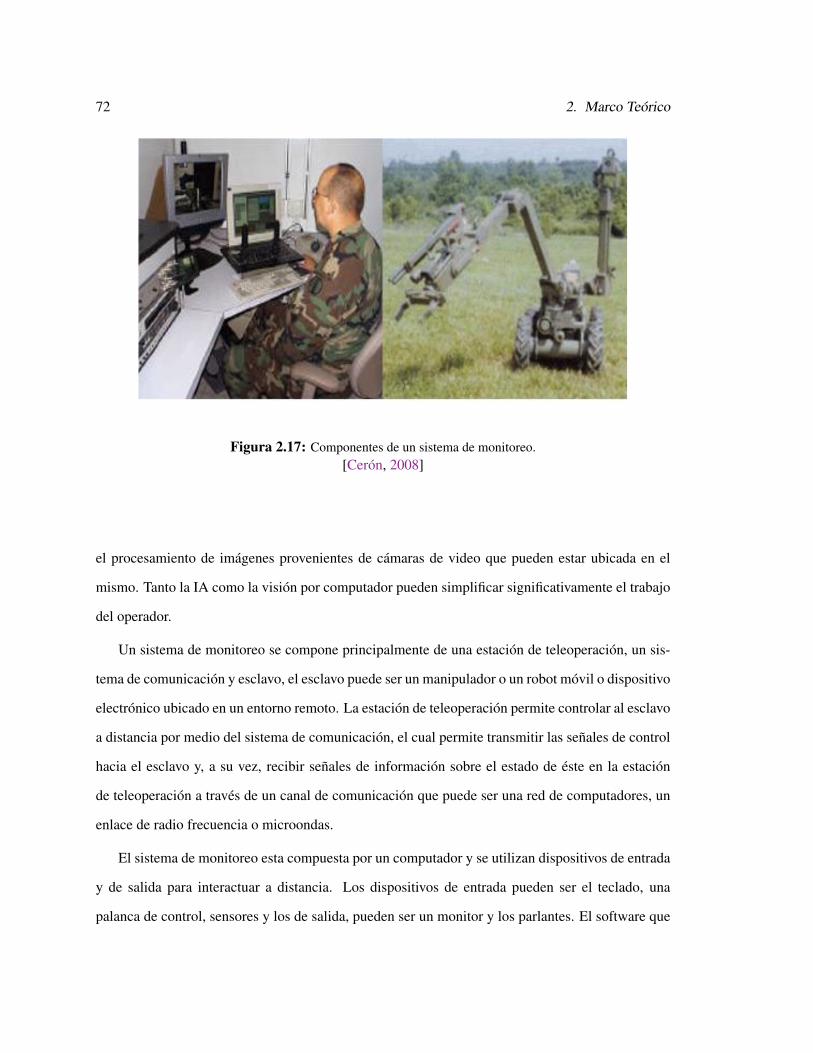
72 2. Marco Teórico
Figura 2.17: Componentes de un sistema de monitoreo.[Cerón, 2008]
el procesamiento de imágenes provenientes de cámaras de video que pueden estar ubicada en el
mismo. Tanto la IA como la visión por computador pueden simplificar significativamente el trabajo
del operador.
Un sistema de monitoreo se compone principalmente de una estación de teleoperación, un sis-
tema de comunicación y esclavo, el esclavo puede ser un manipulador o un robot móvil o dispositivo
electrónico ubicado en un entorno remoto. La estación de teleoperación permite controlar al esclavo
a distancia por medio del sistema de comunicación, el cual permite transmitir las señales de control
hacia el esclavo y, a su vez, recibir señales de información sobre el estado de éste en la estación
de teleoperación a través de un canal de comunicación que puede ser una red de computadores, un
enlace de radio frecuencia o microondas.
El sistema de monitoreo esta compuesta por un computador y se utilizan dispositivos de entrada
y de salida para interactuar a distancia. Los dispositivos de entrada pueden ser el teclado, una
palanca de control, sensores y los de salida, pueden ser un monitor y los parlantes. El software que

2.10. Monitoreo Automático 73
Figura 2.18: Software para monitoreo[FSC, 2007]
se encuentra en el computador tiene una interfaz gráfica de usuario que permite interactuar con el
robot a distancia.
Los sensores empleados dependen del sistema que se vaya a monitorear, las aplicaciones del
monitoreo son diversas, por ejemplo si el dispositivo que va a monitorear es un robot móvil se
provee de distintos tipos de sensores, los cuales cumplen tareas como la detección de proximidad
de obstáculos y medición de posición, velocidad, aceleración e inclinación. Para la detección de
obstáculos se usan principalmente foto celdas, fotodiodos, sensores de ultrasonido, sensores infra-
rrojos y cámaras. Cuando se requiere la medición de posición y velocidad son usados los encoders
(codificadores) que permiten registrar posición y velocidad de partes móviles.
Dentro de los sensores que pueden colocarse se encuentran las cámaras de video, las cuales
además de permitir el control a distancia (visión remota) son fuente de información para la toma
de decisiones automáticas, esto se realiza por medio de procesamiento de imágenes. Las opera-
ciones principales que realiza un sistema de procesamiento de imágenes para proveer mecanismos
de visión a un robot móvil son: el promediado, la segmentación de bordes, el análisis de regiones y
la detección de formas.
En sistemas más sofisticados se hace uso sistemas de visión estereoscópica ubicados en el robot
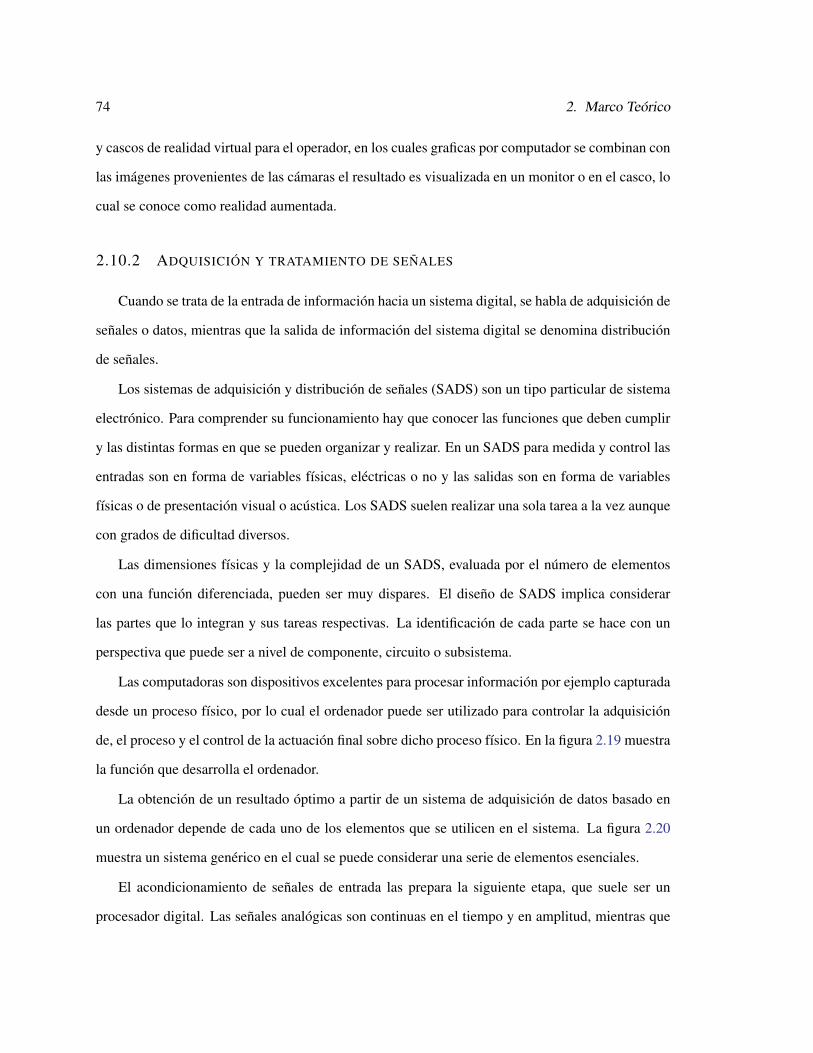
74 2. Marco Teórico
y cascos de realidad virtual para el operador, en los cuales graficas por computador se combinan con
las imágenes provenientes de las cámaras el resultado es visualizada en un monitor o en el casco, lo
cual se conoce como realidad aumentada.
2.10.2 ADQUISICIÓN Y TRATAMIENTO DE SEÑALES
Cuando se trata de la entrada de información hacia un sistema digital, se habla de adquisición de
señales o datos, mientras que la salida de información del sistema digital se denomina distribución
de señales.
Los sistemas de adquisición y distribución de señales (SADS) son un tipo particular de sistema
electrónico. Para comprender su funcionamiento hay que conocer las funciones que deben cumplir
y las distintas formas en que se pueden organizar y realizar. En un SADS para medida y control las
entradas son en forma de variables físicas, eléctricas o no y las salidas son en forma de variables
físicas o de presentación visual o acústica. Los SADS suelen realizar una sola tarea a la vez aunque
con grados de dificultad diversos.
Las dimensiones físicas y la complejidad de un SADS, evaluada por el número de elementos
con una función diferenciada, pueden ser muy dispares. El diseño de SADS implica considerar
las partes que lo integran y sus tareas respectivas. La identificación de cada parte se hace con un
perspectiva que puede ser a nivel de componente, circuito o subsistema.
Las computadoras son dispositivos excelentes para procesar información por ejemplo capturada
desde un proceso físico, por lo cual el ordenador puede ser utilizado para controlar la adquisición
de, el proceso y el control de la actuación final sobre dicho proceso físico. En la figura 2.19 muestra
la función que desarrolla el ordenador.
La obtención de un resultado óptimo a partir de un sistema de adquisición de datos basado en
un ordenador depende de cada uno de los elementos que se utilicen en el sistema. La figura 2.20
muestra un sistema genérico en el cual se puede considerar una serie de elementos esenciales.
El acondicionamiento de señales de entrada las prepara la siguiente etapa, que suele ser un
procesador digital. Las señales analógicas son continuas en el tiempo y en amplitud, mientras que
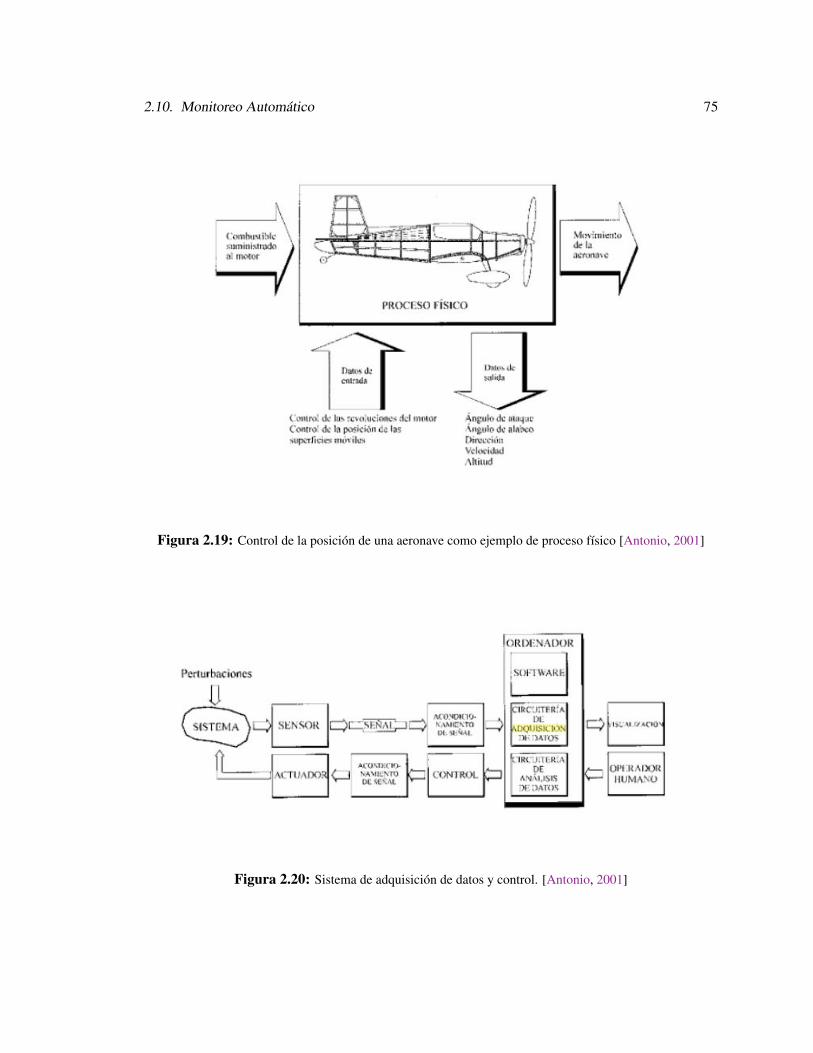
2.10. Monitoreo Automático 75
Figura 2.19: Control de la posición de una aeronave como ejemplo de proceso físico [Antonio, 2001]
Figura 2.20: Sistema de adquisición de datos y control. [Antonio, 2001]
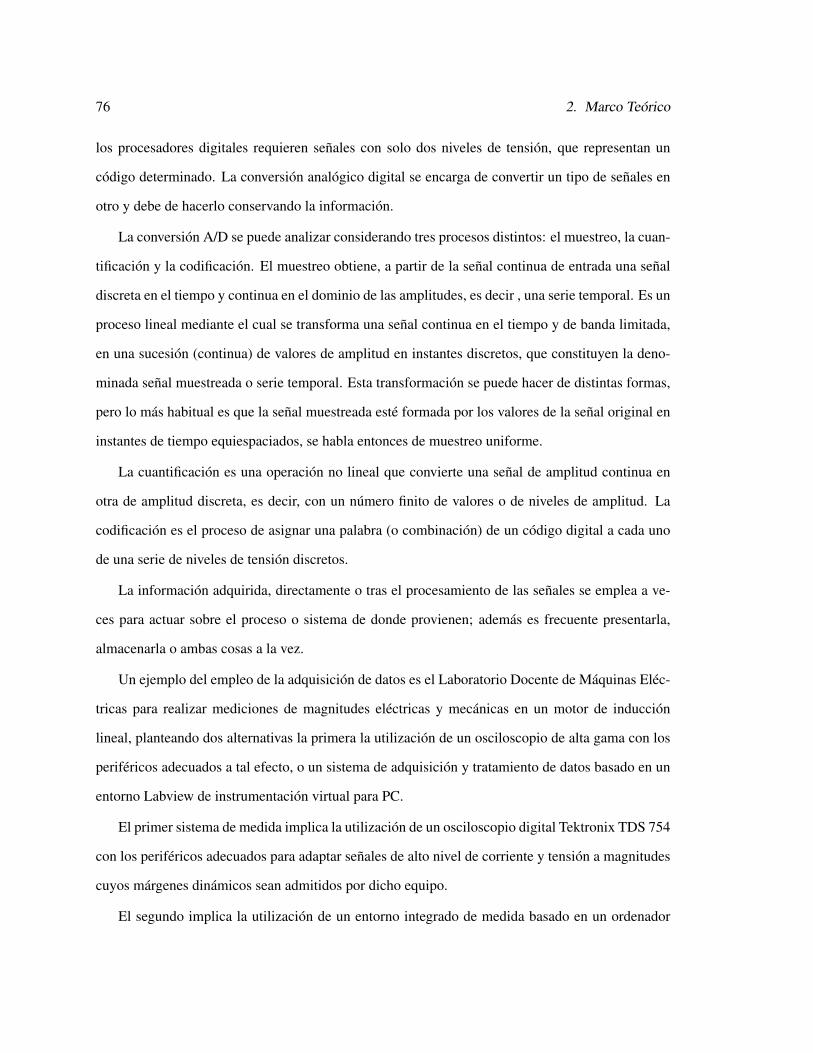
76 2. Marco Teórico
los procesadores digitales requieren señales con solo dos niveles de tensión, que representan un
código determinado. La conversión analógico digital se encarga de convertir un tipo de señales en
otro y debe de hacerlo conservando la información.
La conversión A/D se puede analizar considerando tres procesos distintos: el muestreo, la cuan-
tificación y la codificación. El muestreo obtiene, a partir de la señal continua de entrada una señal
discreta en el tiempo y continua en el dominio de las amplitudes, es decir , una serie temporal. Es un
proceso lineal mediante el cual se transforma una señal continua en el tiempo y de banda limitada,
en una sucesión (continua) de valores de amplitud en instantes discretos, que constituyen la deno-
minada señal muestreada o serie temporal. Esta transformación se puede hacer de distintas formas,
pero lo más habitual es que la señal muestreada esté formada por los valores de la señal original en
instantes de tiempo equiespaciados, se habla entonces de muestreo uniforme.
La cuantificación es una operación no lineal que convierte una señal de amplitud continua en
otra de amplitud discreta, es decir, con un número finito de valores o de niveles de amplitud. La
codificación es el proceso de asignar una palabra (o combinación) de un código digital a cada uno
de una serie de niveles de tensión discretos.
La información adquirida, directamente o tras el procesamiento de las señales se emplea a ve-
ces para actuar sobre el proceso o sistema de donde provienen; además es frecuente presentarla,
almacenarla o ambas cosas a la vez.
Un ejemplo del empleo de la adquisición de datos es el Laboratorio Docente de Máquinas Eléc-
tricas para realizar mediciones de magnitudes eléctricas y mecánicas en un motor de inducción
lineal, planteando dos alternativas la primera la utilización de un osciloscopio de alta gama con los
periféricos adecuados a tal efecto, o un sistema de adquisición y tratamiento de datos basado en un
entorno Labview de instrumentación virtual para PC.
El primer sistema de medida implica la utilización de un osciloscopio digital Tektronix TDS 754
con los periféricos adecuados para adaptar señales de alto nivel de corriente y tensión a magnitudes
cuyos márgenes dinámicos sean admitidos por dicho equipo.
El segundo implica la utilización de un entorno integrado de medida basado en un ordenador
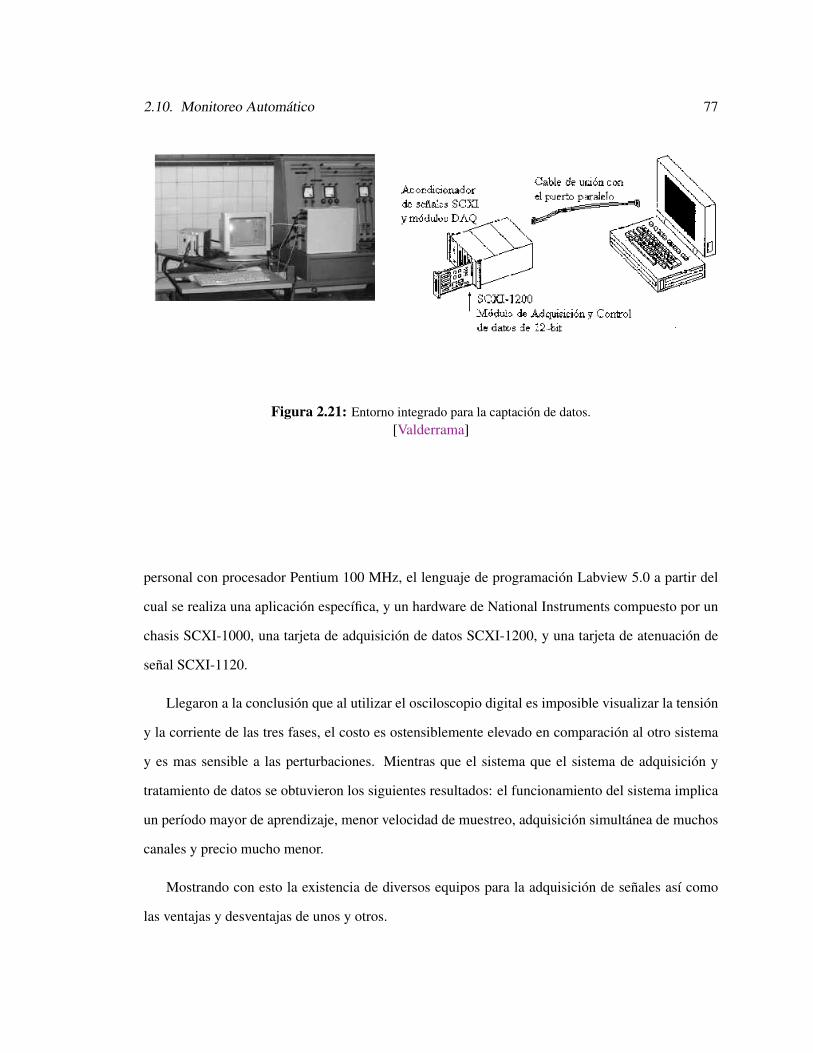
2.10. Monitoreo Automático 77
Figura 2.21: Entorno integrado para la captación de datos.[Valderrama]
personal con procesador Pentium 100 MHz, el lenguaje de programación Labview 5.0 a partir del
cual se realiza una aplicación específica, y un hardware de National Instruments compuesto por un
chasis SCXI-1000, una tarjeta de adquisición de datos SCXI-1200, y una tarjeta de atenuación de
señal SCXI-1120.
Llegaron a la conclusión que al utilizar el osciloscopio digital es imposible visualizar la tensión
y la corriente de las tres fases, el costo es ostensiblemente elevado en comparación al otro sistema
y es mas sensible a las perturbaciones. Mientras que el sistema que el sistema de adquisición y
tratamiento de datos se obtuvieron los siguientes resultados: el funcionamiento del sistema implica
un período mayor de aprendizaje, menor velocidad de muestreo, adquisición simultánea de muchos
canales y precio mucho menor.
Mostrando con esto la existencia de diversos equipos para la adquisición de señales así como
las ventajas y desventajas de unos y otros.
78 2. Marco Teórico
Figura 2.22: Clasificación de helicópteros [Baracala, 2007]
2.11 CONCEPTO DE HELICÓPTERO
Un helicóptero es una aeronave de alas giratorias (rotor) mas pesada que el aire. Cuyo rotor gira
por la acción de una fuente de potencia generando el rotor movimiento y sustentación. Por lo tanto
es una aeronave de despegue y aterrizaje vertical. En el sistema de transmisión de potencia existen
una o varias cajas reductoras que conectan el o los motores cuya salida del eje está girando a una
velocidad entre 6000 y 50000 R.P.M. mientras que rotor principal gira en el orden de las 300 R.P.M.
[Baracala, 2007].
Existen diferentes tipos de helicópteros los cuales se clasifican de acuerdo a su configuración o
por su peso/misión como se muestra en la figura 2.22.
2.11. Concepto de helicóptero 79
2.11.1 CARACTERÍSTICAS DE UN HELICÓPTERO
A continuación se da una breve explicación de los efectos físicos mas destacados en la dinámica
de un helicóptero, así como los fenómenos que definen su comportamiento.
2.11.1.1 GEOMETRÍA DEL ROTOR Y PALAS
Cuerda. Es la línea recta que une el borde de ataque de la pala (parte de la pala que golpea el
aire) con el borde de fuga (parte de la pala opuesto al bode de ataque). Es una dimensión caracterís-
tica del perfil.
Envergadura. Es la distancia punta a punta del ala o pala, independientemente de su forma.
Torsión de la pala (twist).Es una característica de construcción de las palas, de forma que
el ángulo de incidencia en las puntas es menor que en la raíz. Esta torsión ayuda a mantener
la sustentación a lo largo de la misma, incrementando el ángulo de ataque o incidencia donde la
velocidad es menor. El efecto de torsión será ampliado posteriormente.
Conicidad o ángulo cónico. Es el ángulo formado entre el eje longitudinal de la pala y el plano
teórico de rotación y es debido a la influencia de las fuerzas de ascensión y centrífugas sobre las
palas del rotor.
Plano teórico de rotación. Es el plano perpendicular al eje de rotación, al nivel de la articu-
lación de la pala.
2.11.1.2 PERFILES DE PALAS
Atendiendo a su forma, los perfiles se pueden clasificar en simétricos o asimétricos con respecto
a la línea de la cuerda. Los simétricos tienen idénticas superficies tanto en la parte superior o
extrados como en la inferior o intrados, por lo que son más sencillos constructivamente. Se suelen
utilizar en los helicópteros debido a que su centro de presión no varía al variar el ángulo de ataque,
ofreciendo mejor relación sustentación/resistencia para las diferentes velocidades a lo largo de toda
la pala. No obstante, con la utilización de perfiles asimétricos se logra una mayor sustentación y
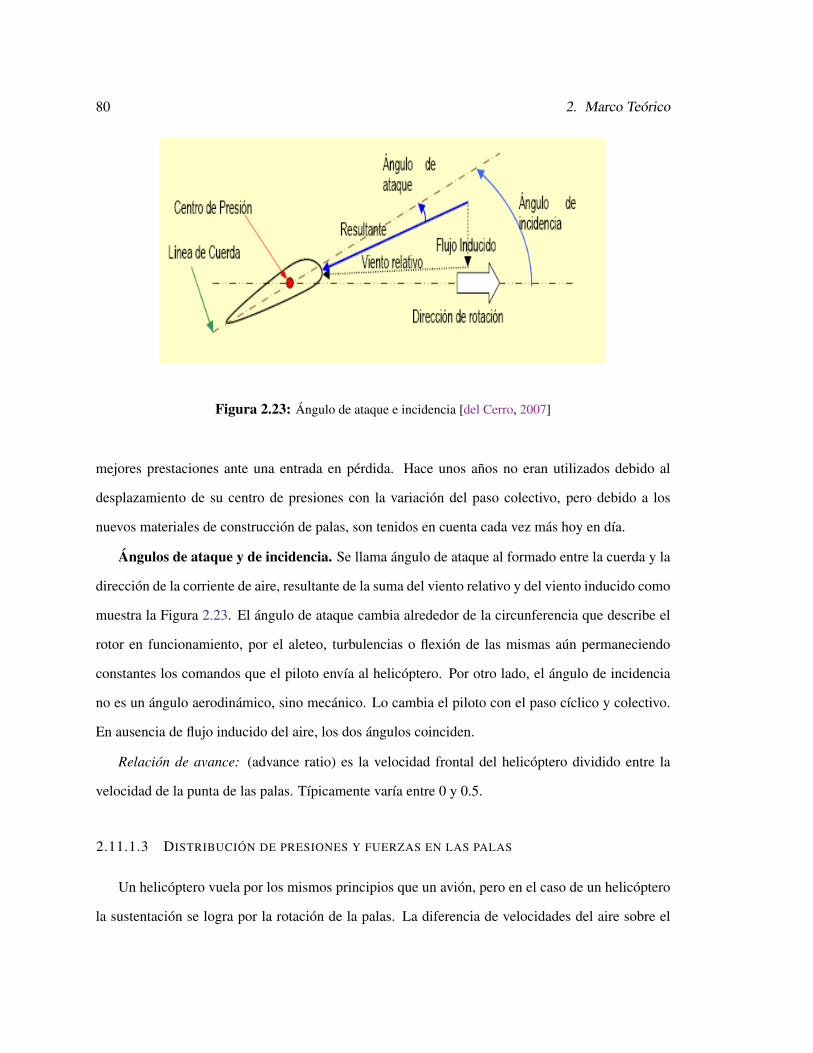
80 2. Marco Teórico
Figura 2.23: Ángulo de ataque e incidencia [del Cerro, 2007]
mejores prestaciones ante una entrada en pérdida. Hace unos años no eran utilizados debido al
desplazamiento de su centro de presiones con la variación del paso colectivo, pero debido a los
nuevos materiales de construcción de palas, son tenidos en cuenta cada vez más hoy en día.
Ángulos de ataque y de incidencia. Se llama ángulo de ataque al formado entre la cuerda y la
dirección de la corriente de aire, resultante de la suma del viento relativo y del viento inducido como
muestra la Figura 2.23. El ángulo de ataque cambia alrededor de la circunferencia que describe el
rotor en funcionamiento, por el aleteo, turbulencias o flexión de las mismas aún permaneciendo
constantes los comandos que el piloto envía al helicóptero. Por otro lado, el ángulo de incidencia
no es un ángulo aerodinámico, sino mecánico. Lo cambia el piloto con el paso cíclico y colectivo.
En ausencia de flujo inducido del aire, los dos ángulos coinciden.
Relación de avance: (advance ratio) es la velocidad frontal del helicóptero dividido entre la
velocidad de la punta de las palas. Típicamente varía entre 0 y 0.5.
2.11.1.3 DISTRIBUCIÓN DE PRESIONES Y FUERZAS EN LAS PALAS
Un helicóptero vuela por los mismos principios que un avión, pero en el caso de un helicóptero
la sustentación se logra por la rotación de la palas. La diferencia de velocidades del aire sobre el

2.11. Concepto de helicóptero 81
Figura 2.24: Fuerza aerodinámica [del Cerro, 2007]
extrados de un perfil con respecto al intrados genera una diferencia de presiones que se denomina
sustentación. Ésta se considera positiva si la presión del extrados es mayor que la del intrados. El
punto de aplicación de dicha sustentación es el denominado centro de presiones.
Fuerza aerodinámica: Cuando una corriente de aire fluye por encima y por debajo de una pala
se genera una fuerza aerodinámica. El punto donde esta corriente de aire se divide en dos se deno-
mina punto de impacto. La fuerza aerodinámica es la resultante de sumar la fuerza de sustentación
que produce la diferencia de presiones entre extrados e intrados y la fuerza de resistencia al aire que
se produce al atravesar la pala la corriente de aire.(Figura 2.24).
La resistencia del aire se opone al movimiento del helicóptero. Considerando el conjunto de la
aeronave, la resistencia total que se opone al movimiento del helicóptero, es la suma de resistencia
del perfil, la resistencia inducida y la resistencia parásita. La resistencia total es función en principio
de la velocidad. La velocidad que teóricamente produce la resistencia total más baja determina la
velocidad óptima para ascender y la máxima autonomía.
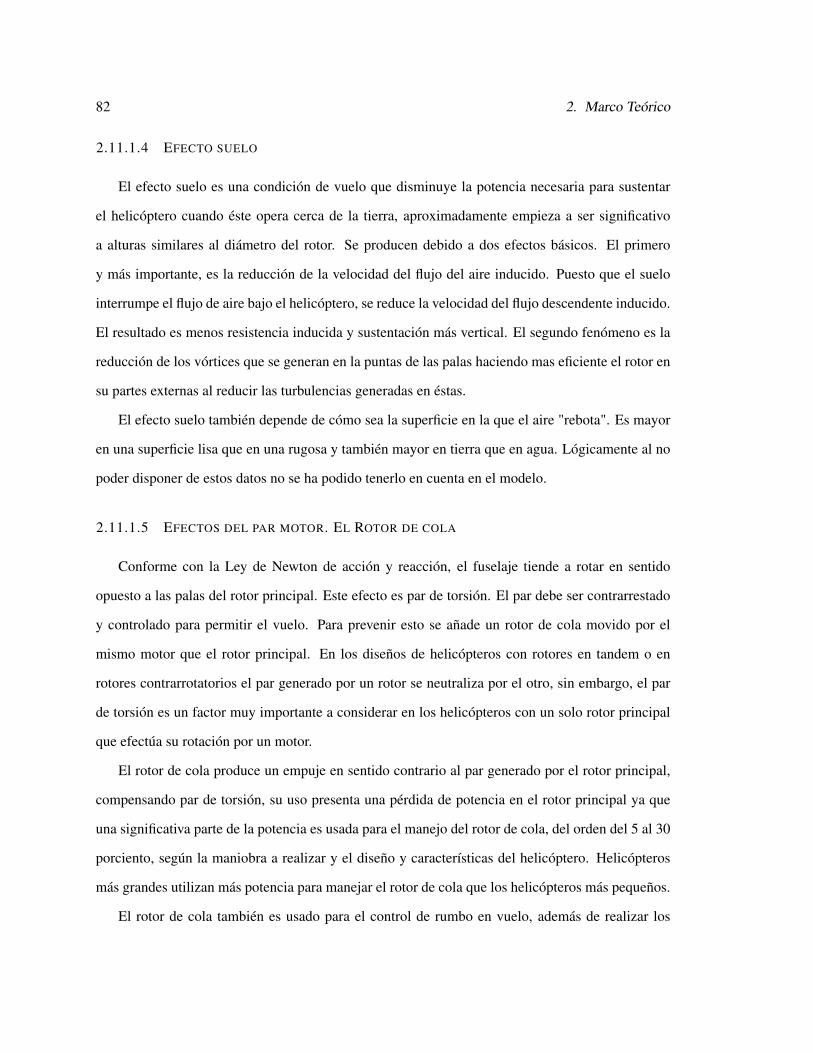
82 2. Marco Teórico
2.11.1.4 EFECTO SUELO
El efecto suelo es una condición de vuelo que disminuye la potencia necesaria para sustentar
el helicóptero cuando éste opera cerca de la tierra, aproximadamente empieza a ser significativo
a alturas similares al diámetro del rotor. Se producen debido a dos efectos básicos. El primero
y más importante, es la reducción de la velocidad del flujo del aire inducido. Puesto que el suelo
interrumpe el flujo de aire bajo el helicóptero, se reduce la velocidad del flujo descendente inducido.
El resultado es menos resistencia inducida y sustentación más vertical. El segundo fenómeno es la
reducción de los vórtices que se generan en la puntas de las palas haciendo mas eficiente el rotor en
su partes externas al reducir las turbulencias generadas en éstas.
El efecto suelo también depende de cómo sea la superficie en la que el aire "rebota". Es mayor
en una superficie lisa que en una rugosa y también mayor en tierra que en agua. Lógicamente al no
poder disponer de estos datos no se ha podido tenerlo en cuenta en el modelo.
2.11.1.5 EFECTOS DEL PAR MOTOR. EL ROTOR DE COLA
Conforme con la Ley de Newton de acción y reacción, el fuselaje tiende a rotar en sentido
opuesto a las palas del rotor principal. Este efecto es par de torsión. El par debe ser contrarrestado
y controlado para permitir el vuelo. Para prevenir esto se añade un rotor de cola movido por el
mismo motor que el rotor principal. En los diseños de helicópteros con rotores en tandem o en
rotores contrarrotatorios el par generado por un rotor se neutraliza por el otro, sin embargo, el par
de torsión es un factor muy importante a considerar en los helicópteros con un solo rotor principal
que efectúa su rotación por un motor.
El rotor de cola produce un empuje en sentido contrario al par generado por el rotor principal,
compensando par de torsión, su uso presenta una pérdida de potencia en el rotor principal ya que
una significativa parte de la potencia es usada para el manejo del rotor de cola, del orden del 5 al 30
porciento, según la maniobra a realizar y el diseño y características del helicóptero. Helicópteros
más grandes utilizan más potencia para manejar el rotor de cola que los helicópteros más pequeños.
El rotor de cola también es usado para el control de rumbo en vuelo, además de realizar los
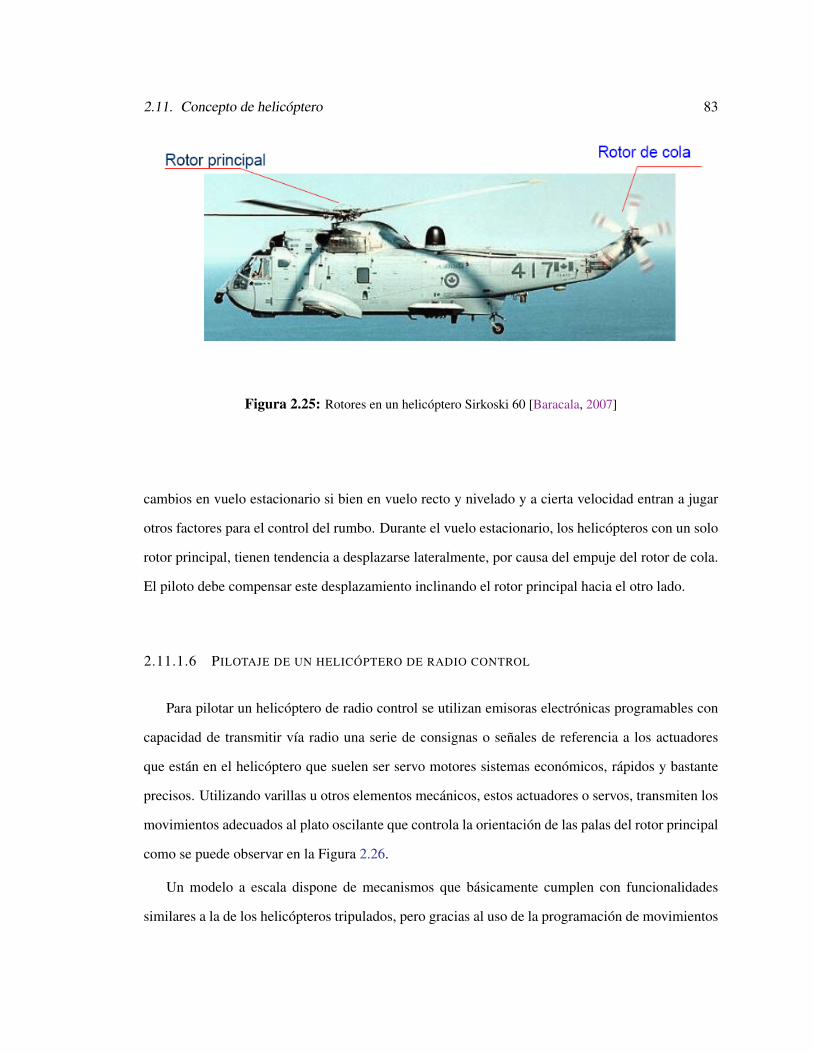
2.11. Concepto de helicóptero 83
Figura 2.25: Rotores en un helicóptero Sirkoski 60 [Baracala, 2007]
cambios en vuelo estacionario si bien en vuelo recto y nivelado y a cierta velocidad entran a jugar
otros factores para el control del rumbo. Durante el vuelo estacionario, los helicópteros con un solo
rotor principal, tienen tendencia a desplazarse lateralmente, por causa del empuje del rotor de cola.
El piloto debe compensar este desplazamiento inclinando el rotor principal hacia el otro lado.
2.11.1.6 PILOTAJE DE UN HELICÓPTERO DE RADIO CONTROL
Para pilotar un helicóptero de radio control se utilizan emisoras electrónicas programables con
capacidad de transmitir vía radio una serie de consignas o señales de referencia a los actuadores
que están en el helicóptero que suelen ser servo motores sistemas económicos, rápidos y bastante
precisos. Utilizando varillas u otros elementos mecánicos, estos actuadores o servos, transmiten los
movimientos adecuados al plato oscilante que controla la orientación de las palas del rotor principal
como se puede observar en la Figura 2.26.
Un modelo a escala dispone de mecanismos que básicamente cumplen con funcionalidades
similares a la de los helicópteros tripulados, pero gracias al uso de la programación de movimientos
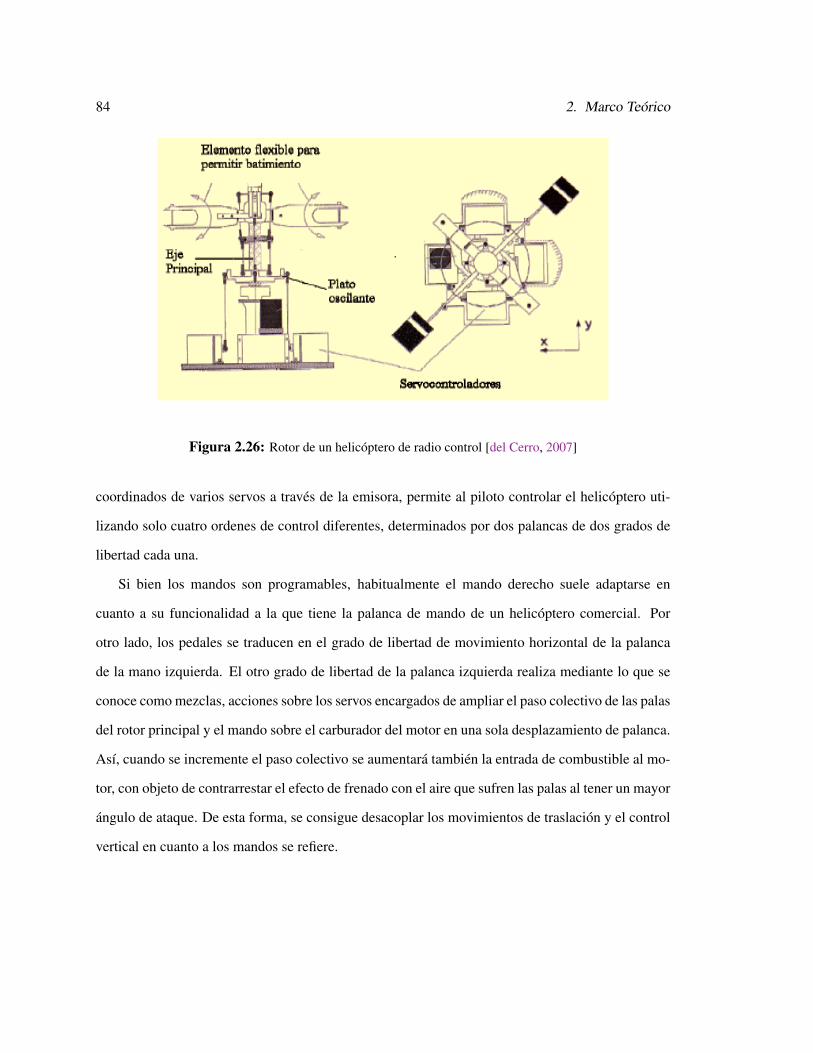
84 2. Marco Teórico
Figura 2.26: Rotor de un helicóptero de radio control [del Cerro, 2007]
coordinados de varios servos a través de la emisora, permite al piloto controlar el helicóptero uti-
lizando solo cuatro ordenes de control diferentes, determinados por dos palancas de dos grados de
libertad cada una.
Si bien los mandos son programables, habitualmente el mando derecho suele adaptarse en
cuanto a su funcionalidad a la que tiene la palanca de mando de un helicóptero comercial. Por
otro lado, los pedales se traducen en el grado de libertad de movimiento horizontal de la palanca
de la mano izquierda. El otro grado de libertad de la palanca izquierda realiza mediante lo que se
conoce como mezclas, acciones sobre los servos encargados de ampliar el paso colectivo de las palas
del rotor principal y el mando sobre el carburador del motor en una sola desplazamiento de palanca.
Así, cuando se incremente el paso colectivo se aumentará también la entrada de combustible al mo-
tor, con objeto de contrarrestar el efecto de frenado con el aire que sufren las palas al tener un mayor
ángulo de ataque. De esta forma, se consigue desacoplar los movimientos de traslación y el control
vertical en cuanto a los mandos se refiere.
CAPITULO 3
DISEÑO CONCEPTUAL
El helicóptero posee dos ventajas principales sobre el avión convencional: la capacidad de volar
lentamente o estacionarse en el aire lo cual facilita la toma de imágenes aéreas y la capacidad de
despegar y aterrizar de manera vertical en un espacio reducido.
Como el helicóptero puede estacionarse en el aire y volar tan despacio como se desee, también
es un medio eficaz para inspección de tuberías, tendidos eléctricos o para la supervisión de espacios
territoriales. Para estas últimas aplicaciones los vehículos aéreos de dimensiones reducidas son
necesarios, en los cuales el piloto no existe, en su lugar se implementan sistemas de navegación
inercial, cámaras y sensores entre otros.
Dadas dichas ventajas mencionadas se decide emplear un helicóptero para el desarrollo de éste
proyecto.
3.1 REQUERIMIENTOS DEL SISTEMA
El desarrollo del proyecto esta regido por diversas especificaciones sin las cuales no se alcan-
zarían los objetivos establecidos, de los cuales se habla a continuación.
Requerimientos generales del sistema
• Mantener un alcance de comunicación de 100 km.
• Una hora de vuelo autónomo como tiempo mínimo.
85
86 3. Diseño Conceptual
Requerimientos obligatorios del sistema
• Comunicación inalámbrica.
• Comunicación en tiempo real.
• Fuente de energía: combustión interna.
Requerimientos deseables del sistema
• Color.
• Modelo del helicóptero.
3.2 DESCRIPCIÓN DEL VEHÍCULO
El vehículo a implementar es el helicóptero de radio control Raptor 60 V2 (ver figura 3.1) ya
que su manejo es dócil, además de ser ágil y estable en vuelo. Su fabricante Thunder Tigger ha
incorporado tecnología de última generación en su diseño y fabricación.
Algunas de sus características son:
• Mayor control en el brazo ascensor para eliminar la flexión.
• Cola de tubo de aluminio y apoyo de plástico, lo cual elimina la fatiga y el agrietamiento.
• Longitud de fuselaje: 137 cm
• Ancho de fuselaje: 19 cm
• Altura: 46.5 cm
• Diámetro del rotor principal: 154 cm
• Diámetro del rotor de cola: 26 cm
• Peso: 4.668 kg
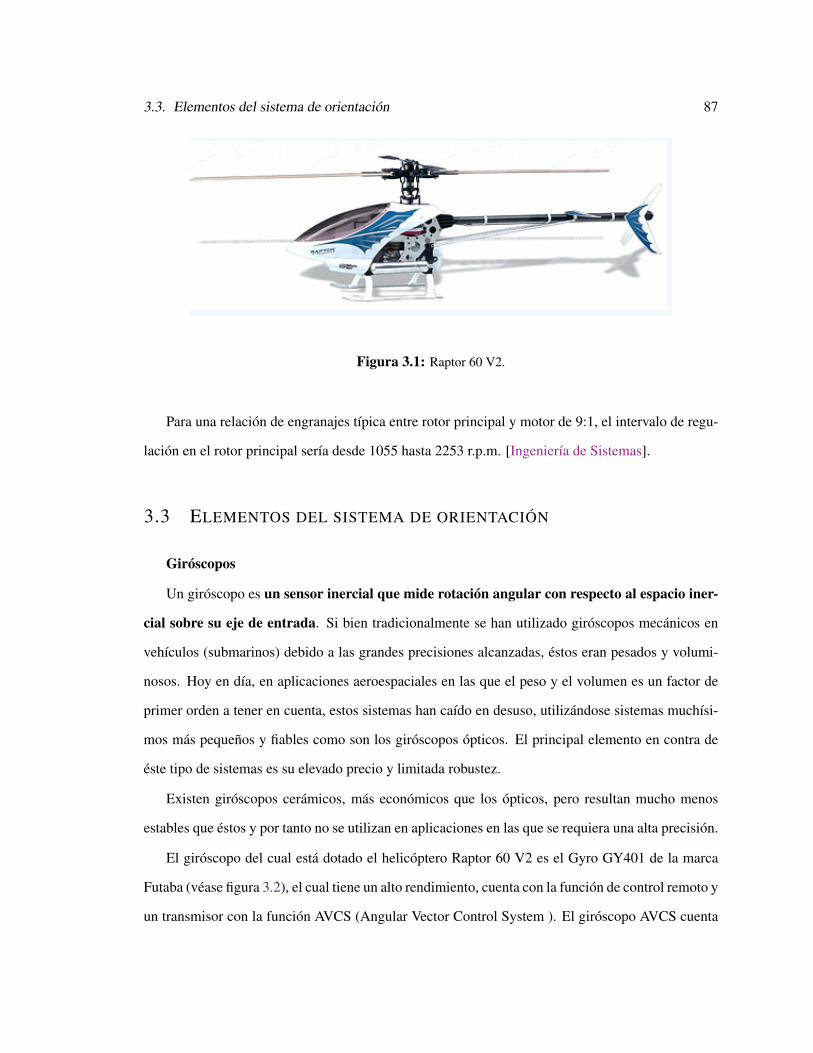
3.3. Elementos del sistema de orientación 87
Figura 3.1: Raptor 60 V2.
Para una relación de engranajes típica entre rotor principal y motor de 9:1, el intervalo de regu-
lación en el rotor principal sería desde 1055 hasta 2253 r.p.m. [Ingeniería de Sistemas].
3.3 ELEMENTOS DEL SISTEMA DE ORIENTACIÓN
Giróscopos
Un giróscopo es un sensor inercial que mide rotación angular con respecto al espacio iner-
cial sobre su eje de entrada. Si bien tradicionalmente se han utilizado giróscopos mecánicos en
vehículos (submarinos) debido a las grandes precisiones alcanzadas, éstos eran pesados y volumi-
nosos. Hoy en día, en aplicaciones aeroespaciales en las que el peso y el volumen es un factor de
primer orden a tener en cuenta, estos sistemas han caído en desuso, utilizándose sistemas muchísi-
mos más pequeños y fiables como son los giróscopos ópticos. El principal elemento en contra de
éste tipo de sistemas es su elevado precio y limitada robustez.
Existen giróscopos cerámicos, más económicos que los ópticos, pero resultan mucho menos
estables que éstos y por tanto no se utilizan en aplicaciones en las que se requiera una alta precisión.
El giróscopo del cual está dotado el helicóptero Raptor 60 V2 es el Gyro GY401 de la marca
Futaba (véase figura 3.2), el cual tiene un alto rendimiento, cuenta con la función de control remoto y
un transmisor con la función AVCS (Angular Vector Control System ). El giróscopo AVCS cuenta
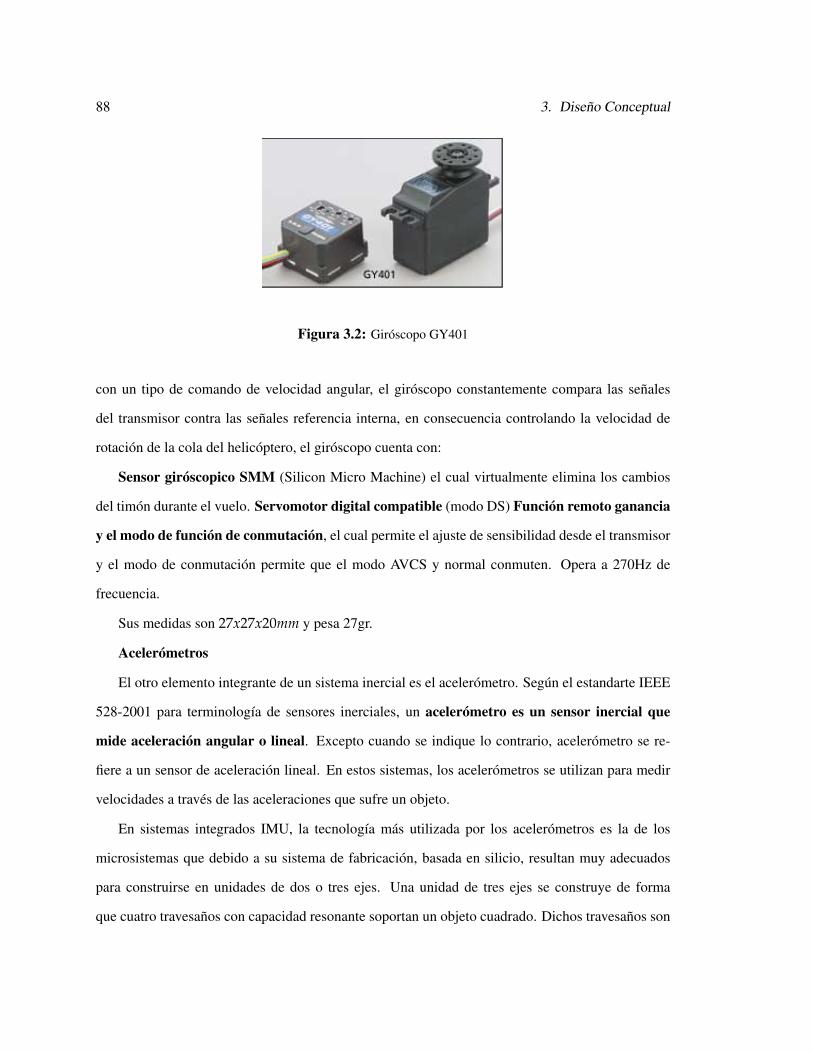
88 3. Diseño Conceptual
Figura 3.2: Giróscopo GY401
con un tipo de comando de velocidad angular, el giróscopo constantemente compara las señales
del transmisor contra las señales referencia interna, en consecuencia controlando la velocidad de
rotación de la cola del helicóptero, el giróscopo cuenta con:
Sensor giróscopico SMM (Silicon Micro Machine) el cual virtualmente elimina los cambios
del timón durante el vuelo. Servomotor digital compatible (modo DS) Función remoto ganancia
y el modo de función de conmutación, el cual permite el ajuste de sensibilidad desde el transmisor
y el modo de conmutación permite que el modo AVCS y normal conmuten. Opera a 270Hz de
frecuencia.
Sus medidas son 27x27x20mm y pesa 27gr.
Acelerómetros
El otro elemento integrante de un sistema inercial es el acelerómetro. Según el estandarte IEEE
528-2001 para terminología de sensores inerciales, un acelerómetro es un sensor inercial que
mide aceleración angular o lineal. Excepto cuando se indique lo contrario, acelerómetro se re-
fiere a un sensor de aceleración lineal. En estos sistemas, los acelerómetros se utilizan para medir
velocidades a través de las aceleraciones que sufre un objeto.
En sistemas integrados IMU, la tecnología más utilizada por los acelerómetros es la de los
microsistemas que debido a su sistema de fabricación, basada en silicio, resultan muy adecuados
para construirse en unidades de dos o tres ejes. Una unidad de tres ejes se construye de forma
que cuatro travesaños con capacidad resonante soportan un objeto cuadrado. Dichos travesaños son
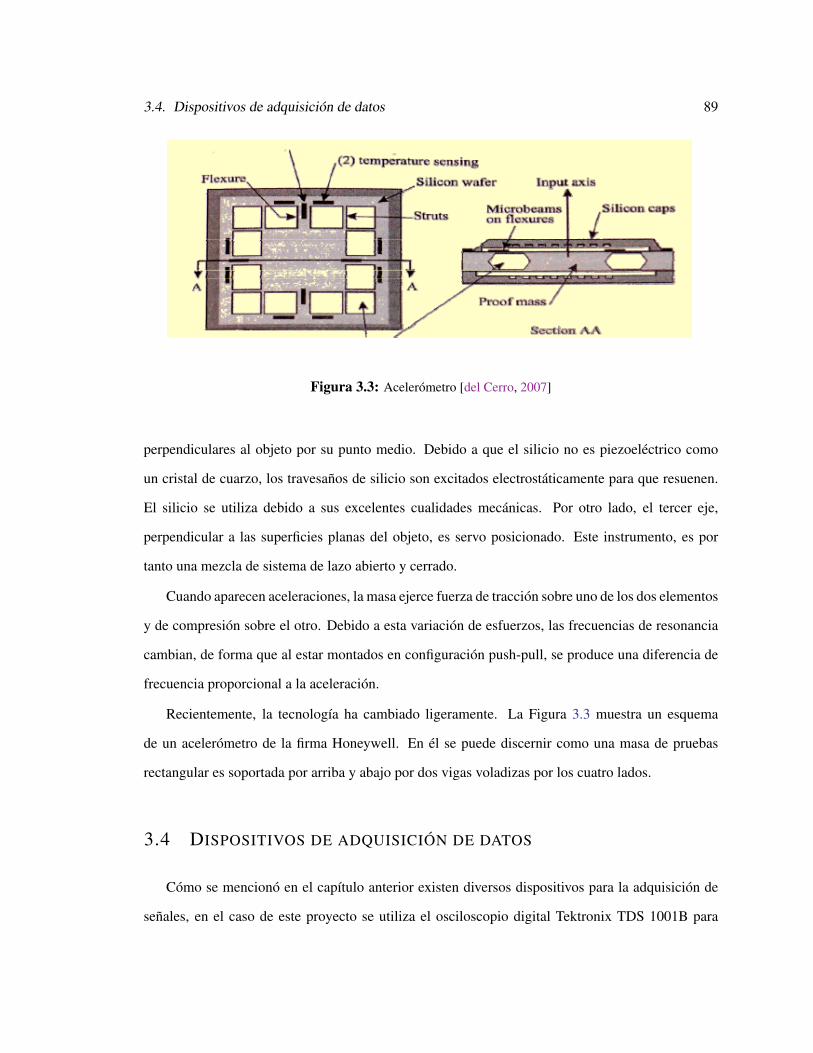
3.4. Dispositivos de adquisición de datos 89
Figura 3.3: Acelerómetro [del Cerro, 2007]
perpendiculares al objeto por su punto medio. Debido a que el silicio no es piezoeléctrico como
un cristal de cuarzo, los travesaños de silicio son excitados electrostáticamente para que resuenen.
El silicio se utiliza debido a sus excelentes cualidades mecánicas. Por otro lado, el tercer eje,
perpendicular a las superficies planas del objeto, es servo posicionado. Este instrumento, es por
tanto una mezcla de sistema de lazo abierto y cerrado.
Cuando aparecen aceleraciones, la masa ejerce fuerza de tracción sobre uno de los dos elementos
y de compresión sobre el otro. Debido a esta variación de esfuerzos, las frecuencias de resonancia
cambian, de forma que al estar montados en configuración push-pull, se produce una diferencia de
frecuencia proporcional a la aceleración.
Recientemente, la tecnología ha cambiado ligeramente. La Figura 3.3 muestra un esquema
de un acelerómetro de la firma Honeywell. En él se puede discernir como una masa de pruebas
rectangular es soportada por arriba y abajo por dos vigas voladizas por los cuatro lados.
3.4 DISPOSITIVOS DE ADQUISICIÓN DE DATOS
Cómo se mencionó en el capítulo anterior existen diversos dispositivos para la adquisición de
señales, en el caso de este proyecto se utiliza el osciloscopio digital Tektronix TDS 1001B para
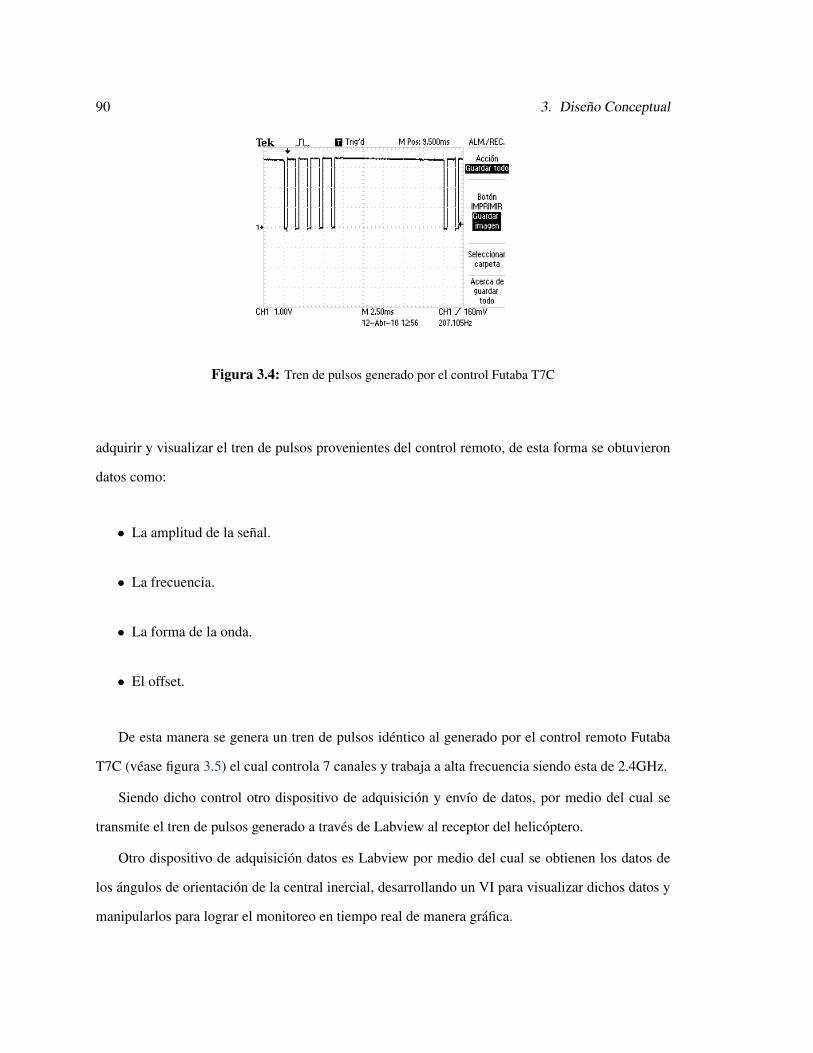
90 3. Diseño Conceptual
Figura 3.4: Tren de pulsos generado por el control Futaba T7C
adquirir y visualizar el tren de pulsos provenientes del control remoto, de esta forma se obtuvieron
datos como:
• La amplitud de la señal.
• La frecuencia.
• La forma de la onda.
• El offset.
De esta manera se genera un tren de pulsos idéntico al generado por el control remoto Futaba
T7C (véase figura 3.5) el cual controla 7 canales y trabaja a alta frecuencia siendo esta de 2.4GHz.
Siendo dicho control otro dispositivo de adquisición y envío de datos, por medio del cual se
transmite el tren de pulsos generado a través de Labview al receptor del helicóptero.
Otro dispositivo de adquisición datos es Labview por medio del cual se obtienen los datos de
los ángulos de orientación de la central inercial, desarrollando un VI para visualizar dichos datos y
manipularlos para lograr el monitoreo en tiempo real de manera gráfica.

3.5. Actuadores del sistema 91
Figura 3.5: Control remoto Futaba T7C
3.5 ACTUADORES DEL SISTEMA
3.5.1 MOTOR
El motor seleccionado es OS Hyper 50, ya que se adapta a la escala del helicóptero, otro tipo
de motores utilizados son los Thunder Tiger, teniendo éstos cómo desventaja soportar solo su peso
y el del helicóptero de tal manera que si se agrega peso extra no lo resiste.
Ésta es la razón principal por la cual es seleccionado el motor OS Hyper 50 (ver figura 3.6) ya
que aporta la potencia necesaria para soportar los pesos fijos mas los que están previstos añadirle.
Dicho motor está en la élite del modelismo a radio control. La mejora de los materiales para
el montaje de sus motores es continua y la fiabilidad de los mismos está fuera de toda duda. El
recubrimiento C.C.D. del cilindro y pistón da una vida duradera al motor a un alto rendimiento.
Sin embargo para los objetivos finales y futuros de éste proyecto se requiere una valoración para
determinar si se requerirá un motor de mayor potencia ya que serán añadidos diversos dispositivos
tales como:
Cámara de video. Elementos electrónicos para la alimentación de energía de la cámara. Ele-
mentos electrónicos para el procesamiento de imágenes, etc.

92 3. Diseño Conceptual
Figura 3.6: Motor OS Hyper 50
Características:
Cilindrada:0.499 cu in (8.17 cc) Peso (aprox.): 406 g. Potencia:1.9 hp @ 17,000 rpm Rango
RPM : 2,000-20,000
El nuevo diseño de la cabeza ofrece una mayor eficiencia de combustión para la estabilidad en
la potencia.
3.5.2 TARJETA DE SONIDO
Una tarjeta de sonido o placa de sonido es una tarjeta de expansión para computadoras que
permite la entrada y salida de audio bajo el control de un programa informático llamado controlador
(en inglés driver). El típico uso de las tarjetas de sonido consiste en proveer mediante un programa
que actúa de mezclador, que las aplicaciones multimedia del componente de audio suenen y puedan
ser gestionadas. Estas aplicaciones multimedia engloban composición y edición de video o audio,
presentaciones multimedia y entretenimiento (video juegos). Algunos equipos tienen la tarjeta ya
integrada, mientras que otros requieren tarjetas de expansión.
Características:

3.5. Actuadores del sistema 93
Figura 3.7: Tarjeta de sonido Sound Blaster Live 5.1
Una tarjeta de sonido típica, incorpora un chip de sonido que por lo general contiene el conversor
digital-analógico, el cual cumple con la importante función de "traducir" formas de ondas grabadas
o generadas digitalmente en una señal analógica y viceversa. Esta señal es enviada a un conector
(para auriculares) en donde se puede conectar cualquier otro dispositivo como un amplificador, un
altavoz, etc. Para poder grabar y reproducir audio al mismo tiempo con la tarjeta de sonido debe
poseer la característica "full-duplex" para que los dos conversores trabajen de forma independiente.
Los diseños más avanzados tienen más de un chip de sonido, y tienen la capacidad de separar en-
tre los sonidos sintetizados (usualmente para la generación de música y efectos especiales en tiempo
real utilizando poca cantidad de información y tiempo del microprocesador y quizá compatibilidad
MIDI) y los sonidos digitales para la reproducción.
Funcionalidades:
Las operaciones básicas que permiten las tarjetas de sonido convencionales son las siguientes:
• Grabación La señal acústica procedente de un micrófono u otras fuentes se introduce en la tar-
jeta por los conectores. Esta señal se transforma convenientemente y se envía al computador
para su almacenamiento en un formato específico.
94 3. Diseño Conceptual
• Reproducción La información de onda digital existente en la máquina se envía a la tarjeta.
Tras cierto procesado se expulsa por los conectores de salida para ser interpretada por un
altavoz u otro dispositivo.
• Síntesis El sonido también se puede codificar mediante representaciones simbólicas de sus
características (tono, timbre, duración...), por ejemplo con el formato MIDI. La tarjeta es
capaz de generar, a partir de esos datos, un sonido audible que también se envía a las salidas.
Aparte de esto, las tarjetas suelen permitir cierto procesamiento de la señal, como compresión o
introducción de efectos. Estas opciones se pueden aplicar a las tres operaciones.
Muestreo de sonido:
Para producir un sonido el altavoz necesita una posición donde golpear, que genera, dependien-
do del lugar golpeado, una vibración del aire diferente que es la que capta el oído humano. Para
determinar esa posición se necesita una codificación. Por lo tanto cuanto mayor número de bits se
tenga, mayor número de posiciones diferentes se es capaz de representar.
Por ejemplo, si la muestra de sonido se codifica con 8 bits se tienen 256 posiciones diferentes
donde golpear. Sin embargo con 16 bits se conseguirían 65536 posiciones. No se suelen necesitar
más de 16 bits, a no ser que se quiera trabajar con un margen de error que impida que la muestra
cambie significativamente.
Frecuencia de muestreo:
Las tarjetas de sonido que incluían los primeros modelos de Apple Macintosh tenían una fre-
cuencia de muestreo de 22050Hz(22, 05KHz) de manera que su banda de frecuencias para grabar
sonido y reproducirlo estaba limitada a 10 KHz con una precisión de 8 bits que proporciona una
relación señal sobre ruido básica de solo 40 dB, las primeras tarjetas estereofónicas tenían una fre-
cuencia de muestreo de 44100 Hz (igual que los reproductores de CD) con lo que la banda útil se
extendió hasta los 20 KHz (alta calidad) pero se obtiene un sonido más claro cuando se eleva un
poco esta frecuencia pues hace que los circuitos de filtrado funcionen mejor, por lo que los DAT
3.5. Actuadores del sistema 95
(digital audio tape) tienen una frecuencia de conversión en sus convertidores de 48 KHz, con lo cual
la banda se extiende hasta los 22 KHz.
Debe recordarse que la audición humana está limitada a los 1617KHz, pero si los equipos se
extienden más allá de este límite se tiene una mejor calidad, también que la frecuencia de muestreo
(del convertidor) debe ser de más del doble que la banda que se pretende utilizar (teorema de Nyquist
en la práctica).
Finalmente los nuevos formatos de alta definición usan frecuencias de muestreo de 96 KHz
(para tener una banda de 40 KHz) y hasta 192 KHz, no porque estas frecuencias se puedan oír, sino
porque así es más fácil reproducir las que sí se oyen.
3.5.3 CENTRAL INERCIAL
Una central inercial, es un sensor orientación giroscópica compuesto por 3 girómetros como
sistema sensor de la velocidad angular, sensando el cabeceo, alabeo y guiñada de un cuerpo en
movimiento.
La central inercial 3DM-GX1 de Marca MicroStrain (véase figura 4.1) es la seleccionada para
implementar en el proyecto, combina tres giroscopios de velocidad angular con tres acelerómetros
ortogonales DC, tres magnetómetros ortogonales, un multiplexor de 16 bits del convertidor A/D. El
dispositivo calibra la alineación de sensores y giroscopios sensibilidad-G.
Mas adelante se habla detalladamente de la central inercial 3DM-GX1.

CAPITULO 4
ARQUITECTURA DEL SISTEMA
4.1 ADQUISICIÓN Y PROCESAMIENTO DE LA ORIENTACIÓN
Debido a que el vehículo volará a distancias que salen de la vista de cualquier persona que
esté encargada de monitorear su orientación y posición, se decidió desarrollar un programa en la
plataforma de LabView para la visualización de la orientación en tiempo real del vehículo utilizando
como sensor para la captura de los datos la 3DM-GX1 de la firma MicroStrain la cual cuenta con
una interfaz directa con el propio LabView y tan solo es necesario descargar el controlador de la
página Web de National Instruments.
El sensor de orientación utilizado es un inclinómetro el cual es la combinación de 3 giróscopos
con tres acelerómetros ortogonales de corriente directa, tres magnetómetros ortogonales, un multi-
plexor, un convertidor analógico/digital de 16 bits y un microcontrolador para mostrar su orientación
en un entorno tanto dinámico como estático.
El sensor trabaja completamente hasta los 360 grados de movimiento angular en los tres ejes
(X, Y, Z), y muestra la orientación en tres formatos: cuaterniones, matriz de orientación y ángulos
de Euler. Las dimensiones y peso del sensor también fueron importantes al momento de su elección
debido a que es muy pequeño y muy ligero, factores indispensables que se deben tener en cuenta
para no dificultar o evitar el vuelo del vehículo.
Cabe comentar que por otra parte, los acelerómetros montados dentro del mismo sensor serán de
97
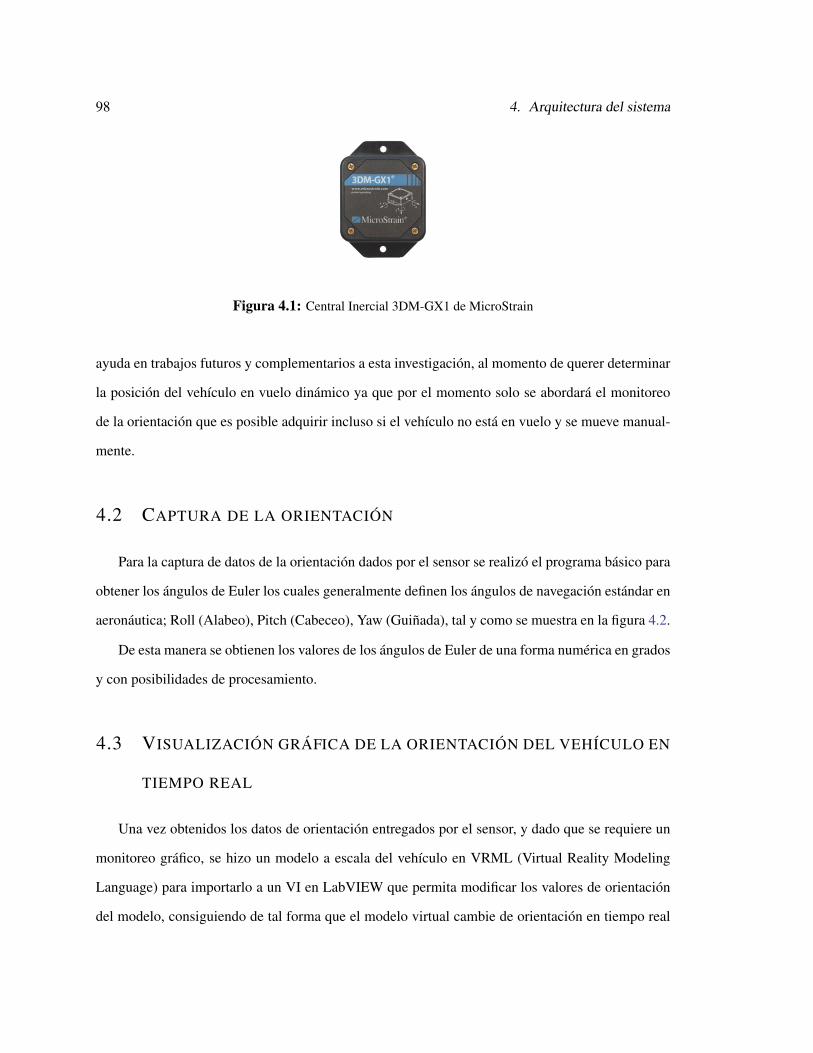
98 4. Arquitectura del sistema
Figura 4.1: Central Inercial 3DM-GX1 de MicroStrain
ayuda en trabajos futuros y complementarios a esta investigación, al momento de querer determinar
la posición del vehículo en vuelo dinámico ya que por el momento solo se abordará el monitoreo
de la orientación que es posible adquirir incluso si el vehículo no está en vuelo y se mueve manual-
mente.
4.2 CAPTURA DE LA ORIENTACIÓN
Para la captura de datos de la orientación dados por el sensor se realizó el programa básico para
obtener los ángulos de Euler los cuales generalmente definen los ángulos de navegación estándar en
aeronáutica; Roll (Alabeo), Pitch (Cabeceo), Yaw (Guiñada), tal y como se muestra en la figura 4.2.
De esta manera se obtienen los valores de los ángulos de Euler de una forma numérica en grados
y con posibilidades de procesamiento.
4.3 VISUALIZACIÓN GRÁFICA DE LA ORIENTACIÓN DEL VEHÍCULO EN
TIEMPO REAL
Una vez obtenidos los datos de orientación entregados por el sensor, y dado que se requiere un
monitoreo gráfico, se hizo un modelo a escala del vehículo en VRML (Virtual Reality Modeling
Language) para importarlo a un VI en LabVIEW que permita modificar los valores de orientación
del modelo, consiguiendo de tal forma que el modelo virtual cambie de orientación en tiempo real
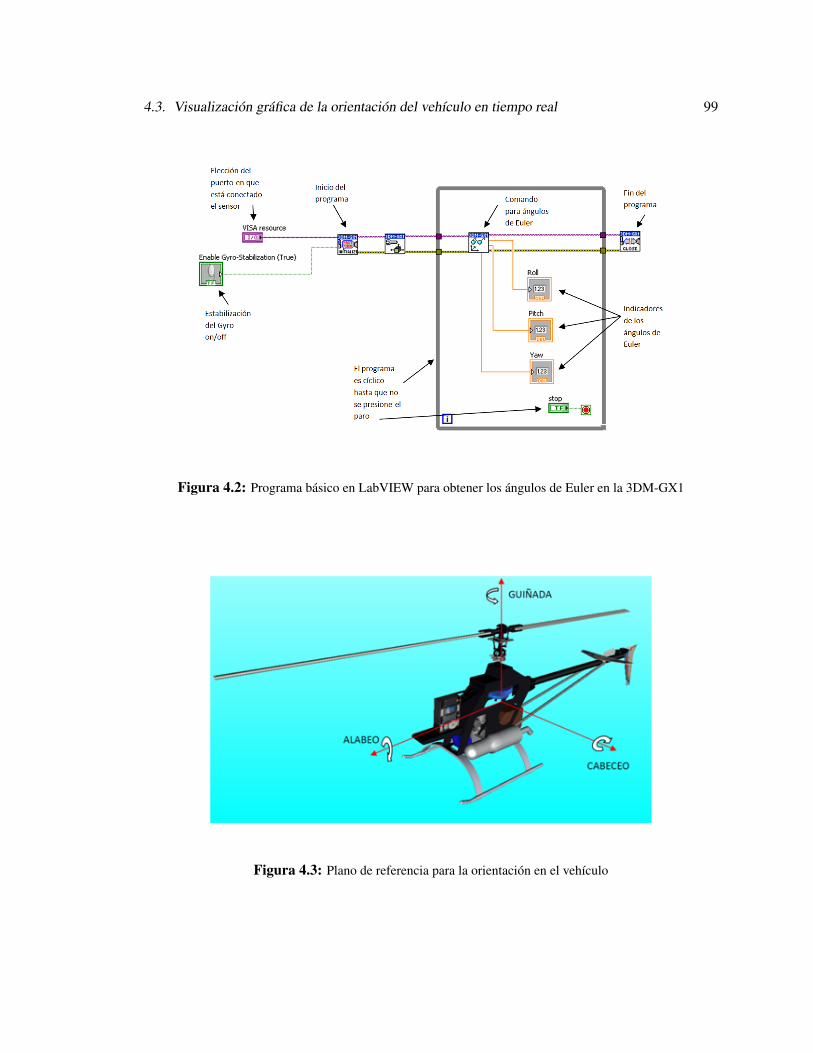
4.3. Visualización gráfica de la orientación del vehículo en tiempo real 99
Figura 4.2: Programa básico en LabVIEW para obtener los ángulos de Euler en la 3DM-GX1
Figura 4.3: Plano de referencia para la orientación en el vehículo

100 4. Arquitectura del sistema
Figura 4.4: Modelo 3D del motor OS HYPER 50 en VRML
igualándose con la orientación del vehículo en los ángulos x,y,z (roll, pitch, yaw) es decir de una
forma interactiva. El diagrama a bloques del código VRML para la realización del modelo se
muestra en la figura 4.11.
El lenguaje VRML fue elegido debido a la facilidad con la que se puede modelar formas directa-
mente o bien exportarlas desde otros programas que permiten la construcción de modelos gráficos en
3D. Para el modelo del vehículo, primero se dibujó en Mechanical Desktop ya que es un programa
que tiene la ventaja de hacer dibujos paramétricos que dependiendo de la habilidad del dibujante
puede ser en pocos minutos y además permite exportar el gráfico a la extensión ".wrl" la cual es el
tipo de archivo que corresponde a VRML.
En primera instancia se desarrolló un modelo completo del vehículo donde tanto el motor como
el rotor principal, el rotor de cola y otros elementos importantes aparecen detallados, sin embargo,
con la finalidad de disminuir el "peso" del archivo para que la velocidad de los gráficos no resulte
perjudicada se hizo otro modelo mas rudimentario pero igualmente a escala para el monitoreo.
La realización del modelado fue editada en VRMLPad 3.0 la cual es una herramienta poderosa y
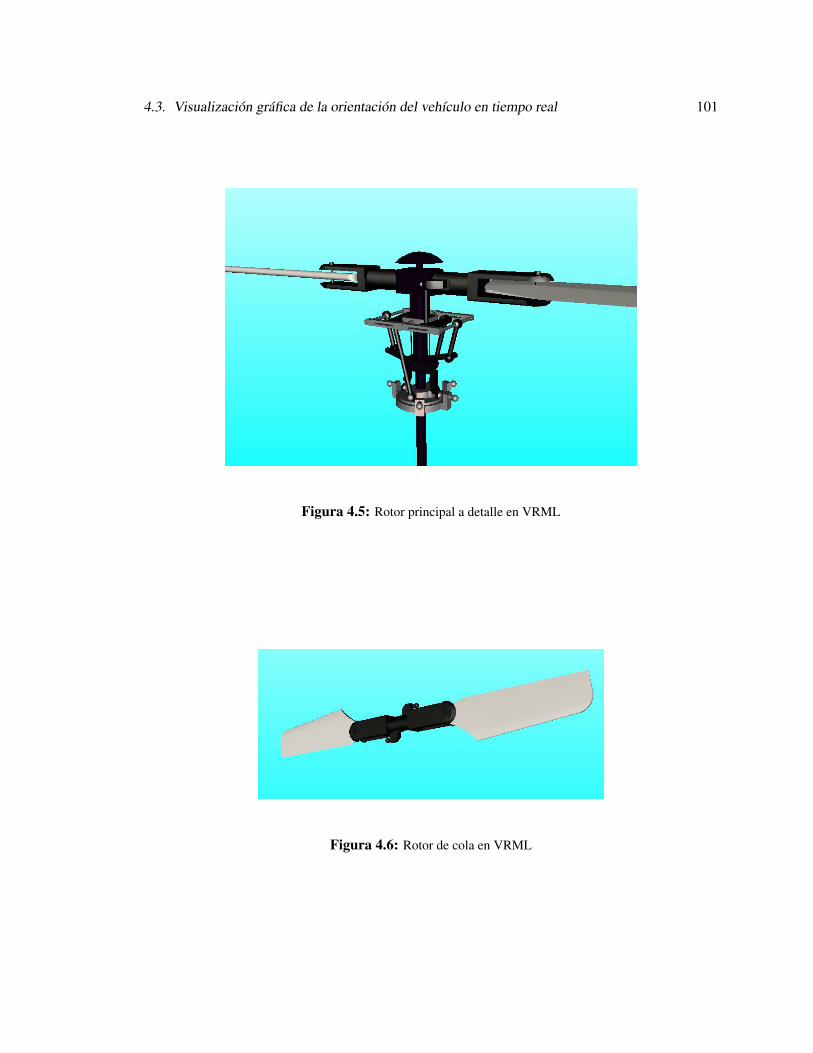
4.3. Visualización gráfica de la orientación del vehículo en tiempo real 101
Figura 4.5: Rotor principal a detalle en VRML
Figura 4.6: Rotor de cola en VRML
102 4. Arquitectura del sistema
Figura 4.7: Escape del vehículo en VRML
flexible de la empresa ParallelGraphics que permite diseñar y crear mundos virtuales en el lenguaje
VRML con las ventajas que se pueden visualizar individualmente y al momento cada uno de los
nodos así como la generación de un árbol de escena en donde se distribuyen los diferentes shapes
y comandos utilizados para así hacer mas fácil su localización y edición, también cuenta con una
herramienta de editor de materiales y de color muy gráfica y que se puede visualizar al momento,
por lo que como se ha explicado con anterioridad, el gráfico fue generado en un programa de dibujo
paramétrico ya que las formas son complejas pero se exportó a VRML para poder hacer una edición
del mismo gráfico con materiales, texturas y colores mas reales y al mismo tiempo poder hacer una
visualización y manipulación del mismo sin necesidad de utilizar mucha memoria ni aceleración de
gráficos en la PC.
Para agregar realismo al modelo, se ocuparon fotos del vehículo real y se añadieron como textura
de tal manera que se pareciera lo más posible al real tal y como se aprecia en las figuras 4.8, 4.9,
4.10.
Como se ha tratado con anterioridad, los formatos de orientación que puede mostrar el sen-
sor son: cuaterniones, matriz de orientación y ángulos de Euler. Sin embargo, el protocolo de
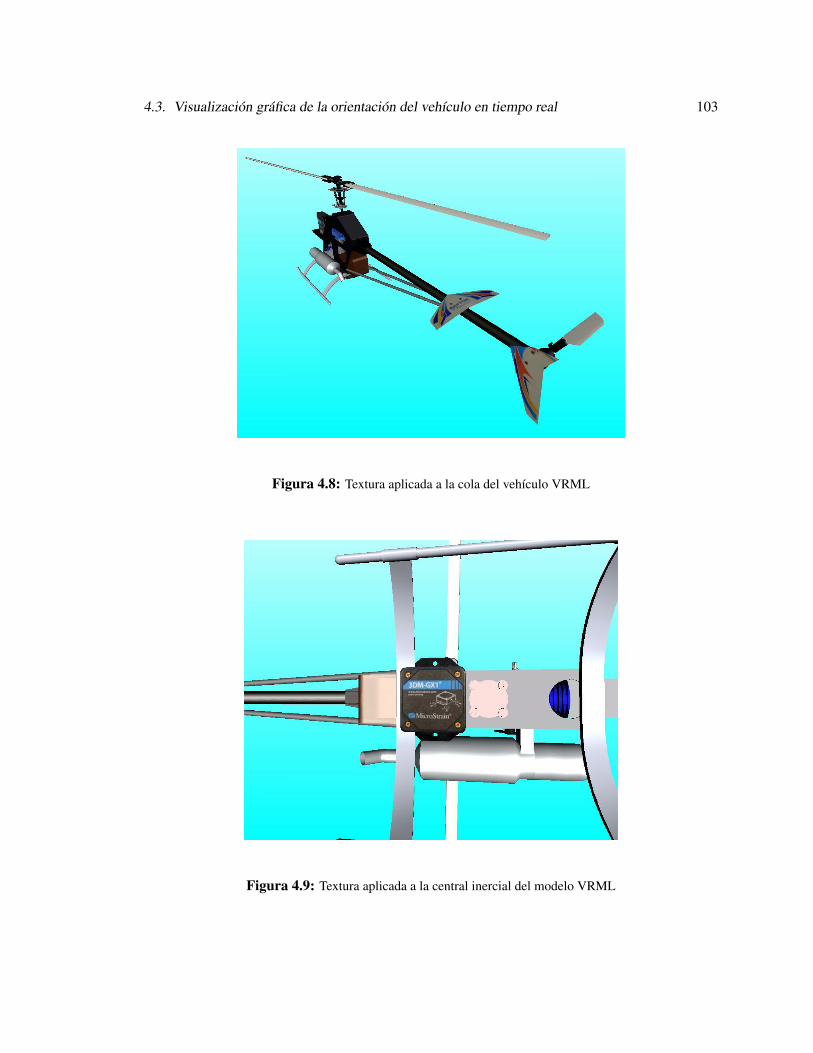
4.3. Visualización gráfica de la orientación del vehículo en tiempo real 103
Figura 4.8: Textura aplicada a la cola del vehículo VRML
Figura 4.9: Textura aplicada a la central inercial del modelo VRML
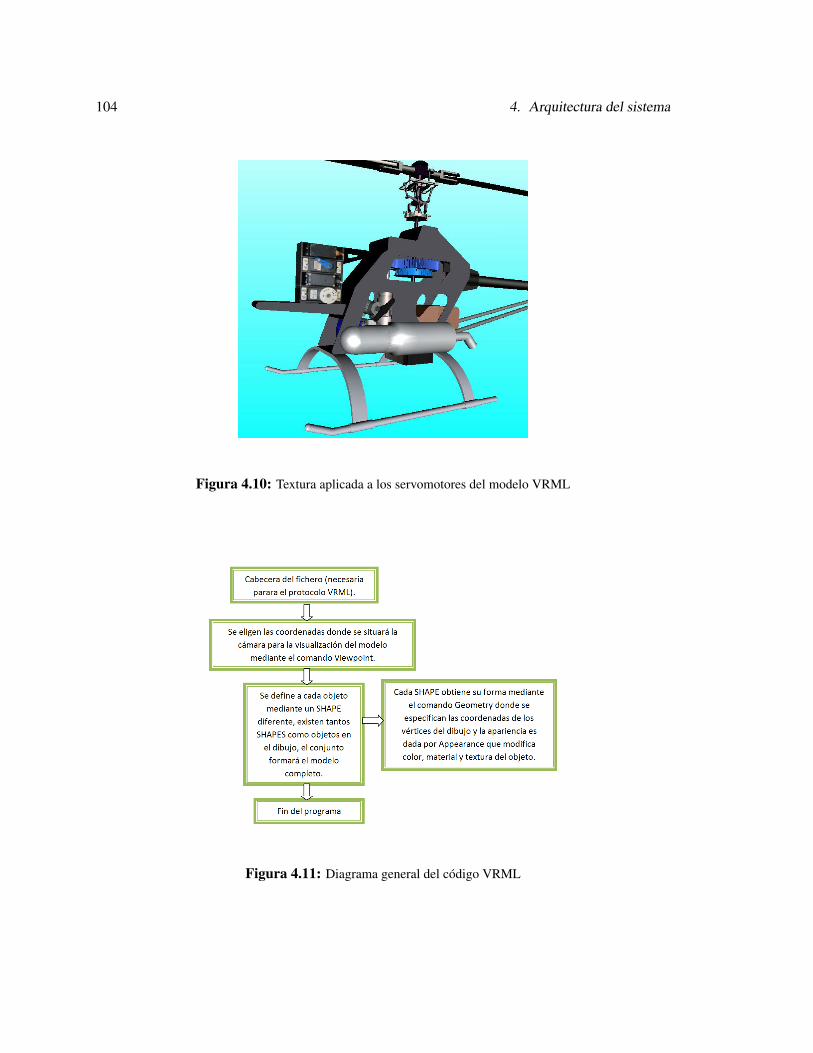
104 4. Arquitectura del sistema
Figura 4.10: Textura aplicada a los servomotores del modelo VRML
Figura 4.11: Diagrama general del código VRML
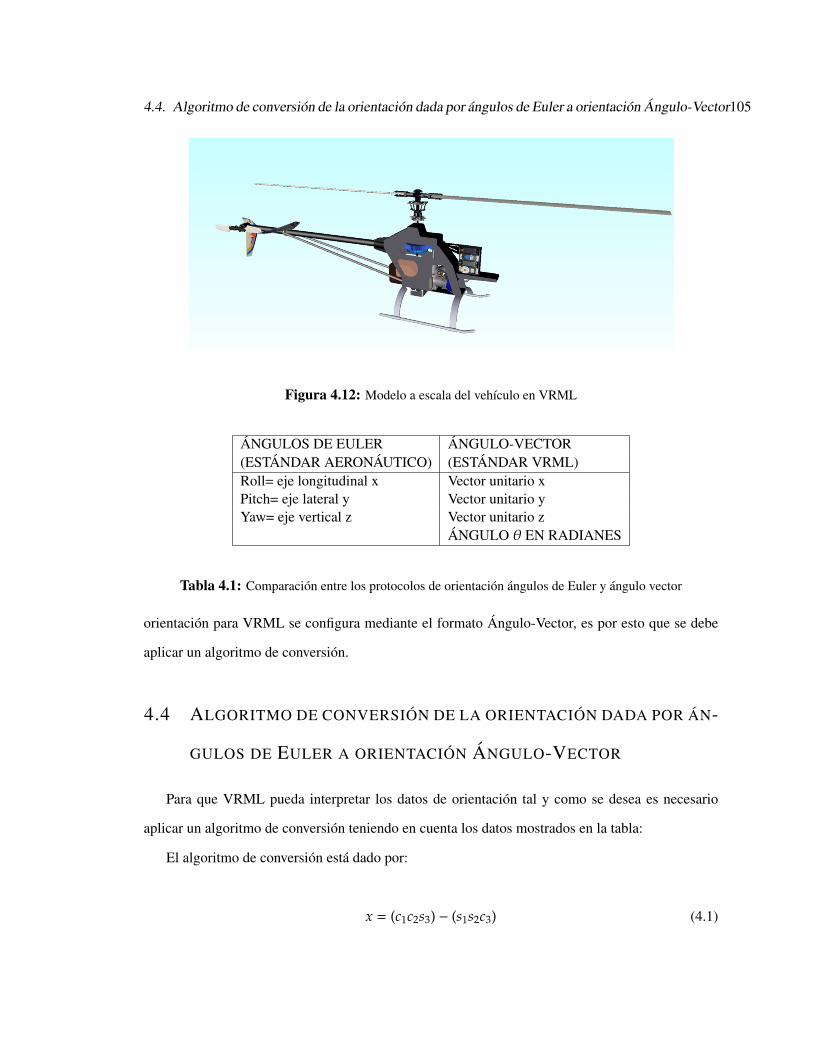
4.4. Algoritmo de conversión de la orientación dada por ángulos de Euler a orientación Ángulo-Vector105
Figura 4.12: Modelo a escala del vehículo en VRML
ÁNGULOS DE EULER ÁNGULO-VECTOR(ESTÁNDAR AERONÁUTICO) (ESTÁNDAR VRML)Roll= eje longitudinal x Vector unitario xPitch= eje lateral y Vector unitario yYaw= eje vertical z Vector unitario z
ÁNGULO θ EN RADIANES
Tabla 4.1: Comparación entre los protocolos de orientación ángulos de Euler y ángulo vector
orientación para VRML se configura mediante el formato Ángulo-Vector, es por esto que se debe
aplicar un algoritmo de conversión.
4.4 ALGORITMO DE CONVERSIÓN DE LA ORIENTACIÓN DADA POR ÁN-
GULOS DE EULER A ORIENTACIÓN ÁNGULO-VECTOR
Para que VRML pueda interpretar los datos de orientación tal y como se desea es necesario
aplicar un algoritmo de conversión teniendo en cuenta los datos mostrados en la tabla:
El algoritmo de conversión está dado por:
x = (c1c2s3) − (s1s2c3) (4.1)

106 4. Arquitectura del sistema
y = (c1s2c3) + (s1c2s3) (4.2)
z = (s1c2c3) − (c1s2s3) (4.3)
θ = 2 × arccos[(c1c2c3) + (s1s2s3)] (4.4)
Debido a que la central inercial entrega los valores de los ángulos de Euler en grados, es nece-
sario primero convertirlos a radianes utilizando la ecuación 4.5
[rad] =[deg] × π
180(4.5)
Una vez convertidos los ángulos de Euler a radianes, las variables son obtenidas mediante:
c1 = cos(yaw
2) (4.6)
c2 = cos(pitch
2) (4.7)
c3 = cos(roll2
) (4.8)
s1 = sin(yaw
2) (4.9)
s2 = sin(pitch
2) (4.10)
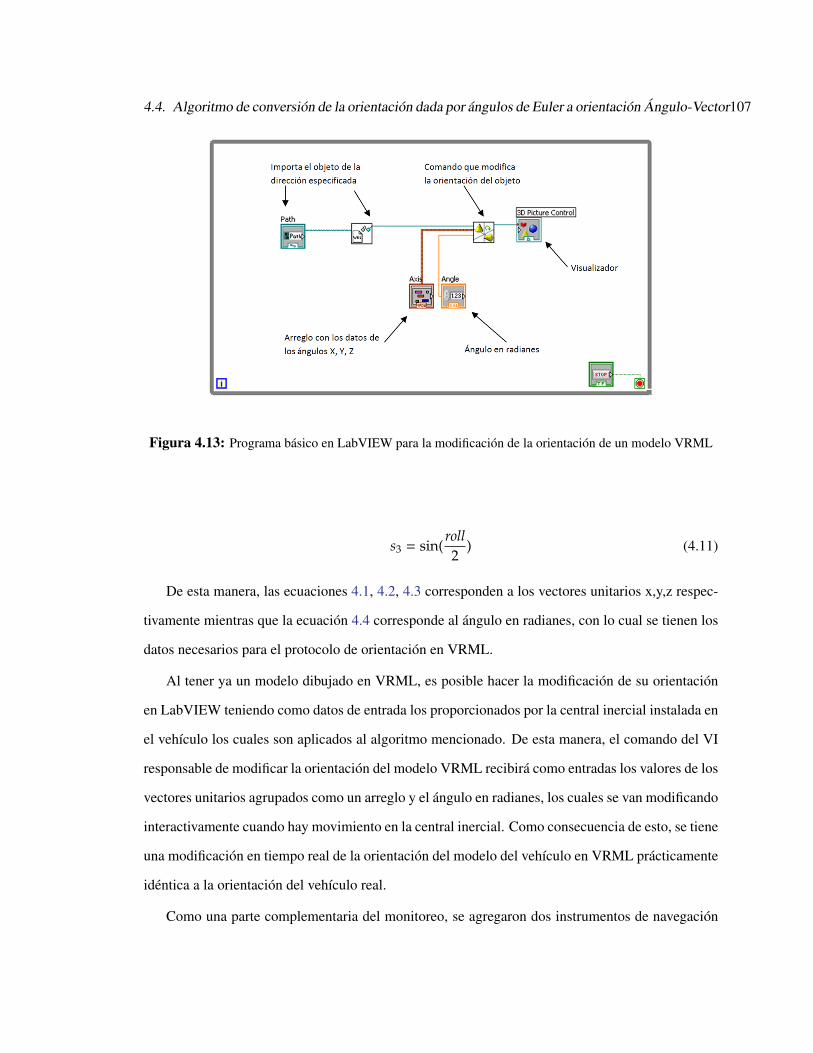
4.4. Algoritmo de conversión de la orientación dada por ángulos de Euler a orientación Ángulo-Vector107
Figura 4.13: Programa básico en LabVIEW para la modificación de la orientación de un modelo VRML
s3 = sin(roll2
) (4.11)
De esta manera, las ecuaciones 4.1, 4.2, 4.3 corresponden a los vectores unitarios x,y,z respec-
tivamente mientras que la ecuación 4.4 corresponde al ángulo en radianes, con lo cual se tienen los
datos necesarios para el protocolo de orientación en VRML.
Al tener ya un modelo dibujado en VRML, es posible hacer la modificación de su orientación
en LabVIEW teniendo como datos de entrada los proporcionados por la central inercial instalada en
el vehículo los cuales son aplicados al algoritmo mencionado. De esta manera, el comando del VI
responsable de modificar la orientación del modelo VRML recibirá como entradas los valores de los
vectores unitarios agrupados como un arreglo y el ángulo en radianes, los cuales se van modificando
interactivamente cuando hay movimiento en la central inercial. Como consecuencia de esto, se tiene
una modificación en tiempo real de la orientación del modelo del vehículo en VRML prácticamente
idéntica a la orientación del vehículo real.
Como una parte complementaria del monitoreo, se agregaron dos instrumentos de navegación
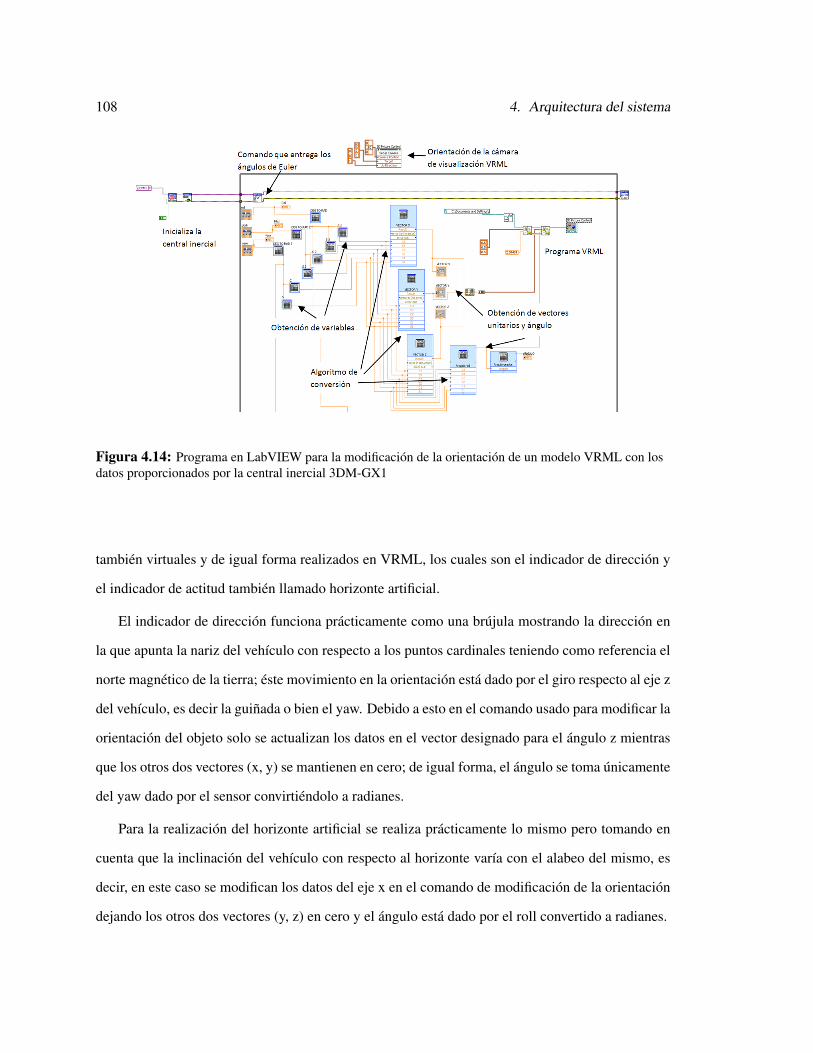
108 4. Arquitectura del sistema
Figura 4.14: Programa en LabVIEW para la modificación de la orientación de un modelo VRML con losdatos proporcionados por la central inercial 3DM-GX1
también virtuales y de igual forma realizados en VRML, los cuales son el indicador de dirección y
el indicador de actitud también llamado horizonte artificial.
El indicador de dirección funciona prácticamente como una brújula mostrando la dirección en
la que apunta la nariz del vehículo con respecto a los puntos cardinales teniendo como referencia el
norte magnético de la tierra; éste movimiento en la orientación está dado por el giro respecto al eje z
del vehículo, es decir la guiñada o bien el yaw. Debido a esto en el comando usado para modificar la
orientación del objeto solo se actualizan los datos en el vector designado para el ángulo z mientras
que los otros dos vectores (x, y) se mantienen en cero; de igual forma, el ángulo se toma únicamente
del yaw dado por el sensor convirtiéndolo a radianes.
Para la realización del horizonte artificial se realiza prácticamente lo mismo pero tomando en
cuenta que la inclinación del vehículo con respecto al horizonte varía con el alabeo del mismo, es
decir, en este caso se modifican los datos del eje x en el comando de modificación de la orientación
dejando los otros dos vectores (y, z) en cero y el ángulo está dado por el roll convertido a radianes.
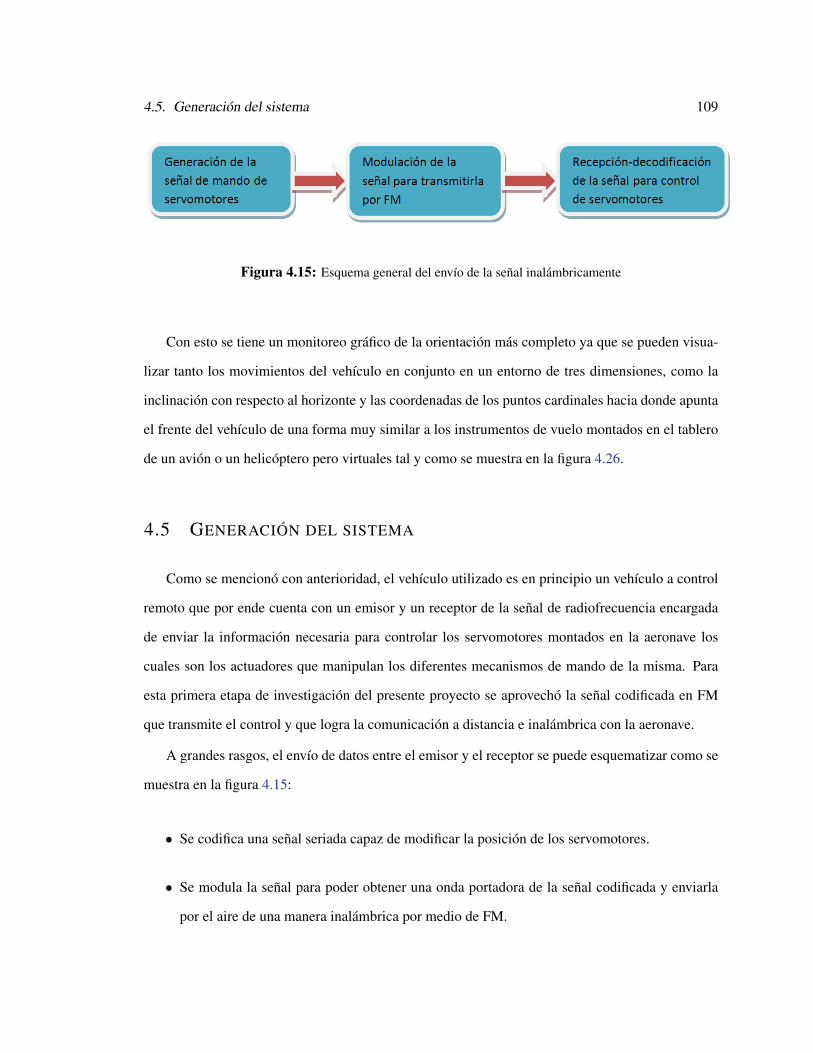
4.5. Generación del sistema 109
Figura 4.15: Esquema general del envío de la señal inalámbricamente
Con esto se tiene un monitoreo gráfico de la orientación más completo ya que se pueden visua-
lizar tanto los movimientos del vehículo en conjunto en un entorno de tres dimensiones, como la
inclinación con respecto al horizonte y las coordenadas de los puntos cardinales hacia donde apunta
el frente del vehículo de una forma muy similar a los instrumentos de vuelo montados en el tablero
de un avión o un helicóptero pero virtuales tal y como se muestra en la figura 4.26.
4.5 GENERACIÓN DEL SISTEMA
Como se mencionó con anterioridad, el vehículo utilizado es en principio un vehículo a control
remoto que por ende cuenta con un emisor y un receptor de la señal de radiofrecuencia encargada
de enviar la información necesaria para controlar los servomotores montados en la aeronave los
cuales son los actuadores que manipulan los diferentes mecanismos de mando de la misma. Para
esta primera etapa de investigación del presente proyecto se aprovechó la señal codificada en FM
que transmite el control y que logra la comunicación a distancia e inalámbrica con la aeronave.
A grandes rasgos, el envío de datos entre el emisor y el receptor se puede esquematizar como se
muestra en la figura 4.15:
• Se codifica una señal seriada capaz de modificar la posición de los servomotores.
• Se modula la señal para poder obtener una onda portadora de la señal codificada y enviarla
por el aire de una manera inalámbrica por medio de FM.

110 4. Arquitectura del sistema
Figura 4.16: Emisor-Receptor utilizados; de la marca comercial Futaba
• El receptor decodifica la señal, primero eliminando la onda portadora (en AM llamado detec-
ción y en FM discriminación) y posteriormente separando la señal seriada en cada uno de los
canales y entregando una señal para cada servomotor.
En primer lugar se hizo un análisis del control remoto adquirido el cual es de la marca Futaba
modelo 7C y que transmite a una frecuencia de 2.4GHZ; este dispositivo puede controlar hasta 7
canales independientes los cuales corresponden a cada uno de los servomotores montados en el
vehículo y que están conectados al receptor correspondiente también de la marca Futaba modelo
R617FS. En el caso del presente trabajo únicamente se utilizaron 5 servomotores los cuales son los
necesarios indispensables para el vuelo de un vehículo con ésta configuración (figura 4.16).
Al momento de estudiar las funciones del control remoto se descubrió la función llamada Trainer
la cual es utilizada por los aficionados al radiocontrol con la finalidad de enseñar o practicar el
vuelo disminuyendo los riesgos de un accidente para un novato dado que se interconectan dos
radiocontroles mediante un cable y una conexión ubicada en la parte trasera a la que se llamará
conector de entrenamiento de tipo cuadrado en el caso del presente dispositivo (figura 4.17). Ésta
conexión permite que los dos usuarios, maestro y aprendiz tengan control del vehículo a la par, con
el beneficio que se puede configurar el mando para restringir o permitir el control a los canales que

4.5. Generación del sistema 111
Figura 4.17: Conector de entrenamiento situado en la parte posterior del radiocontrol
se desee y además se cuenta con un interruptor de seguridad que manipula el maestro y que tiene
que ser activado para permitir adquirir los datos enviados por el aprendiz ya que solo el transmisor
que funciona como maestro hace la modulación de la señal a FM.
Con la finalidad de aprovechar dicha modulación se prosiguió a obtener el protocolo de la señal
que controla cada uno de los servomotores para así generar una señal similar en la PC y entonces
poder conectar la PC con el control remoto en forma esclavo-maestro y mediante la función Trainer
del control utilizar la señal generada en la PC pero siendo modulada y transmitida por el radiocon-
trol en FM. De esta forma se evita la construcción de un sistema emisor-receptor de FM de alta
frecuencia lo cual significaría un arduo trabajo de investigación que no pretende la presente, y se
aprovecha tecnología existente y cuya funcionalidad está comprobada.
Para poder conocer el tipo de señal que generan y emiten los radiocontroles por la vía del
conector de entrenamiento fue necesario en primer lugar caracterizar la configuración de pines del
mismo (figura 4.18).
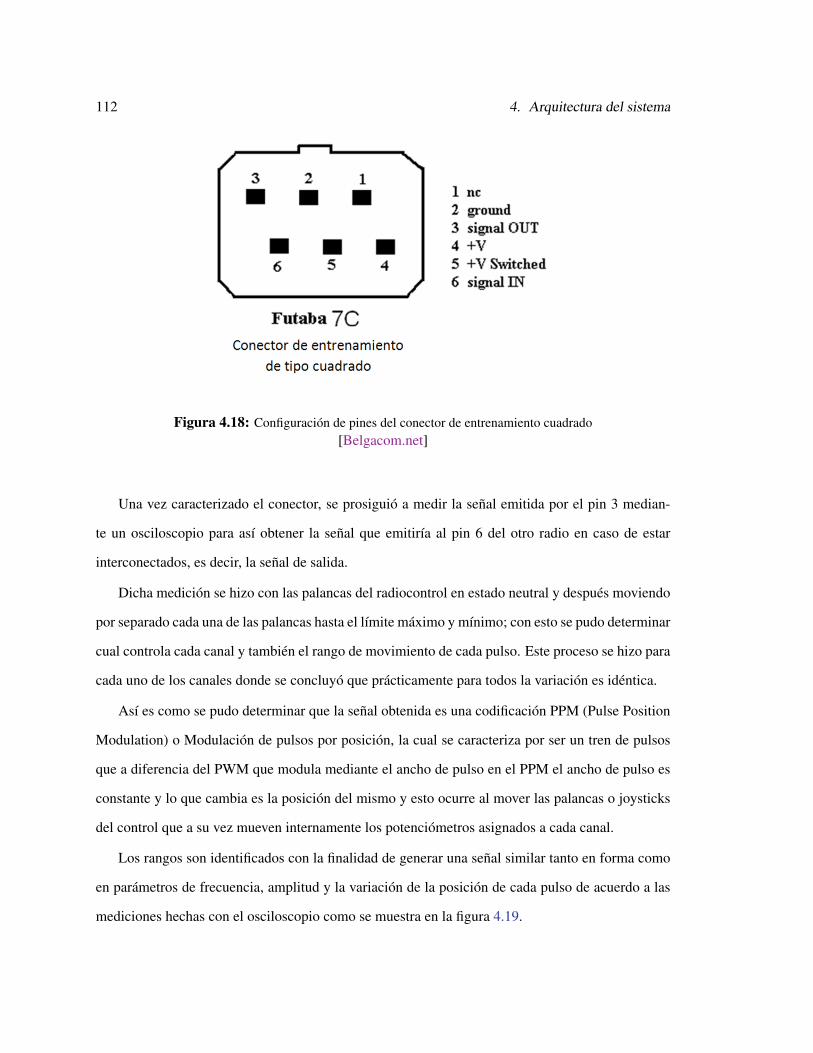
112 4. Arquitectura del sistema
Figura 4.18: Configuración de pines del conector de entrenamiento cuadrado[Belgacom.net]
Una vez caracterizado el conector, se prosiguió a medir la señal emitida por el pin 3 median-
te un osciloscopio para así obtener la señal que emitiría al pin 6 del otro radio en caso de estar
interconectados, es decir, la señal de salida.
Dicha medición se hizo con las palancas del radiocontrol en estado neutral y después moviendo
por separado cada una de las palancas hasta el límite máximo y mínimo; con esto se pudo determinar
cual controla cada canal y también el rango de movimiento de cada pulso. Este proceso se hizo para
cada uno de los canales donde se concluyó que prácticamente para todos la variación es idéntica.
Así es como se pudo determinar que la señal obtenida es una codificación PPM (Pulse Position
Modulation) o Modulación de pulsos por posición, la cual se caracteriza por ser un tren de pulsos
que a diferencia del PWM que modula mediante el ancho de pulso en el PPM el ancho de pulso es
constante y lo que cambia es la posición del mismo y esto ocurre al mover las palancas o joysticks
del control que a su vez mueven internamente los potenciómetros asignados a cada canal.
Los rangos son identificados con la finalidad de generar una señal similar tanto en forma como
en parámetros de frecuencia, amplitud y la variación de la posición de cada pulso de acuerdo a las
mediciones hechas con el osciloscopio como se muestra en la figura 4.19.
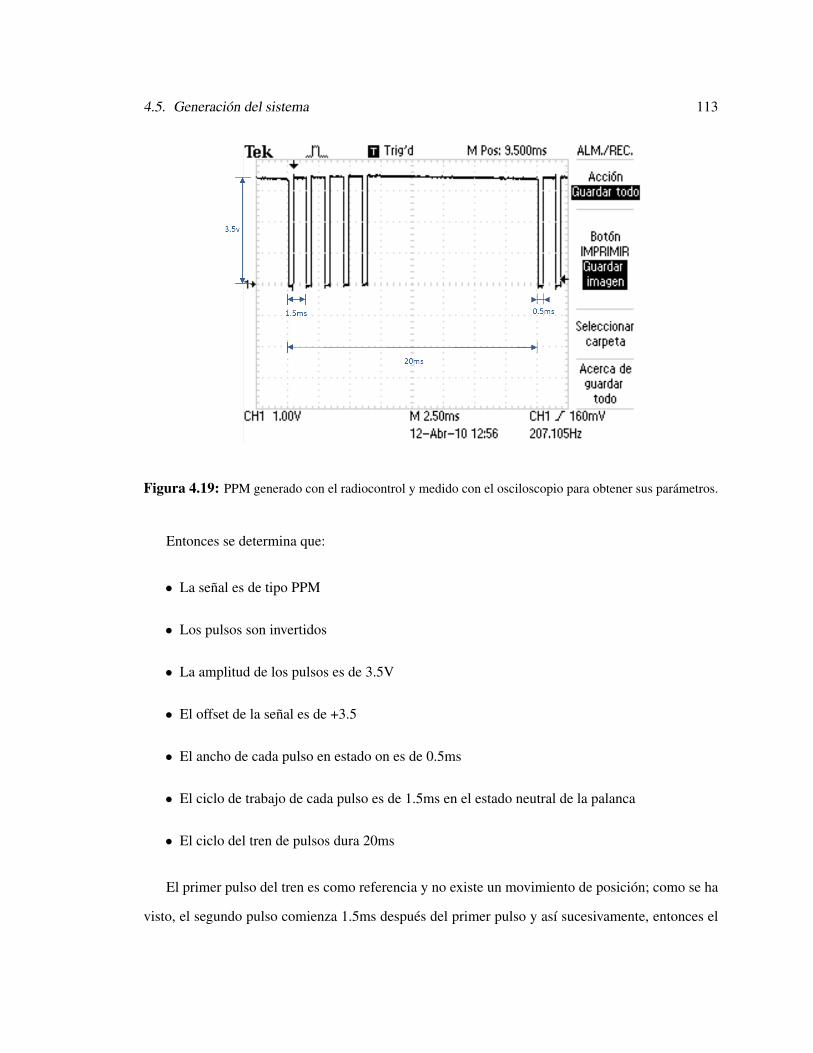
4.5. Generación del sistema 113
Figura 4.19: PPM generado con el radiocontrol y medido con el osciloscopio para obtener sus parámetros.
Entonces se determina que:
• La señal es de tipo PPM
• Los pulsos son invertidos
• La amplitud de los pulsos es de 3.5V
• El offset de la señal es de +3.5
• El ancho de cada pulso en estado on es de 0.5ms
• El ciclo de trabajo de cada pulso es de 1.5ms en el estado neutral de la palanca
• El ciclo del tren de pulsos dura 20ms
El primer pulso del tren es como referencia y no existe un movimiento de posición; como se ha
visto, el segundo pulso comienza 1.5ms después del primer pulso y así sucesivamente, entonces el
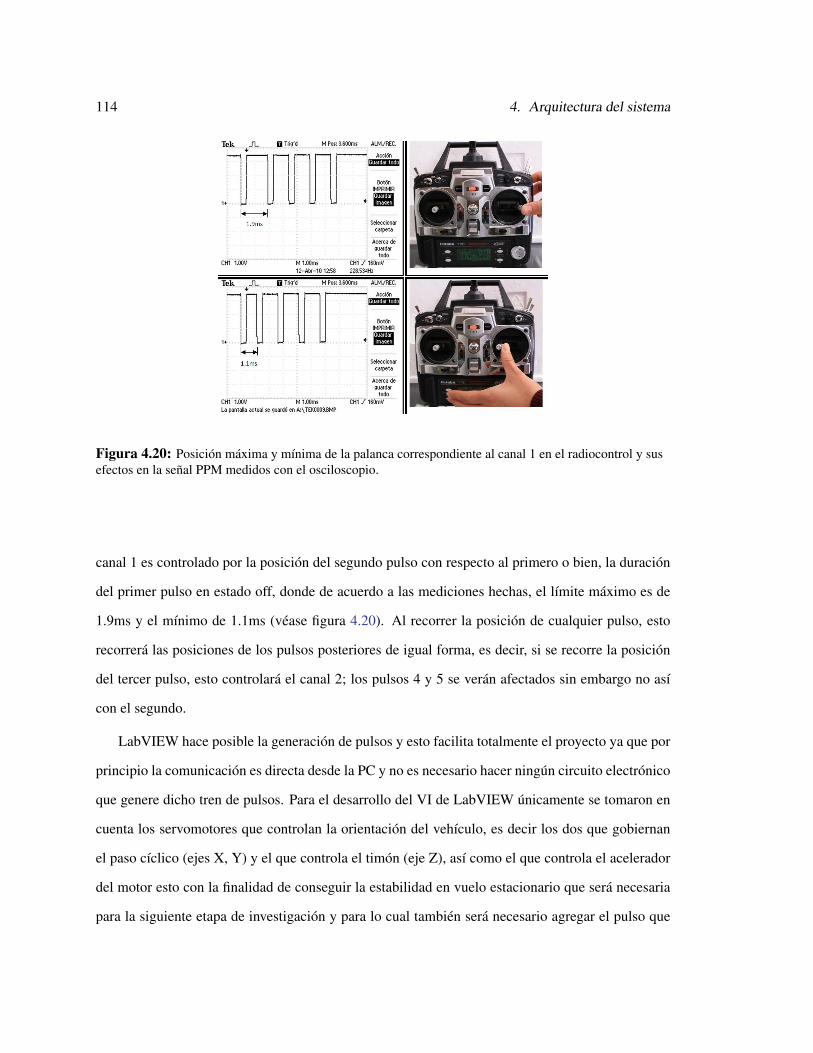
114 4. Arquitectura del sistema
Figura 4.20: Posición máxima y mínima de la palanca correspondiente al canal 1 en el radiocontrol y susefectos en la señal PPM medidos con el osciloscopio.
canal 1 es controlado por la posición del segundo pulso con respecto al primero o bien, la duración
del primer pulso en estado off, donde de acuerdo a las mediciones hechas, el límite máximo es de
1.9ms y el mínimo de 1.1ms (véase figura 4.20). Al recorrer la posición de cualquier pulso, esto
recorrerá las posiciones de los pulsos posteriores de igual forma, es decir, si se recorre la posición
del tercer pulso, esto controlará el canal 2; los pulsos 4 y 5 se verán afectados sin embargo no así
con el segundo.
LabVIEW hace posible la generación de pulsos y esto facilita totalmente el proyecto ya que por
principio la comunicación es directa desde la PC y no es necesario hacer ningún circuito electrónico
que genere dicho tren de pulsos. Para el desarrollo del VI de LabVIEW únicamente se tomaron en
cuenta los servomotores que controlan la orientación del vehículo, es decir los dos que gobiernan
el paso cíclico (ejes X, Y) y el que controla el timón (eje Z), así como el que controla el acelerador
del motor esto con la finalidad de conseguir la estabilidad en vuelo estacionario que será necesaria
para la siguiente etapa de investigación y para lo cual también será necesario agregar el pulso que
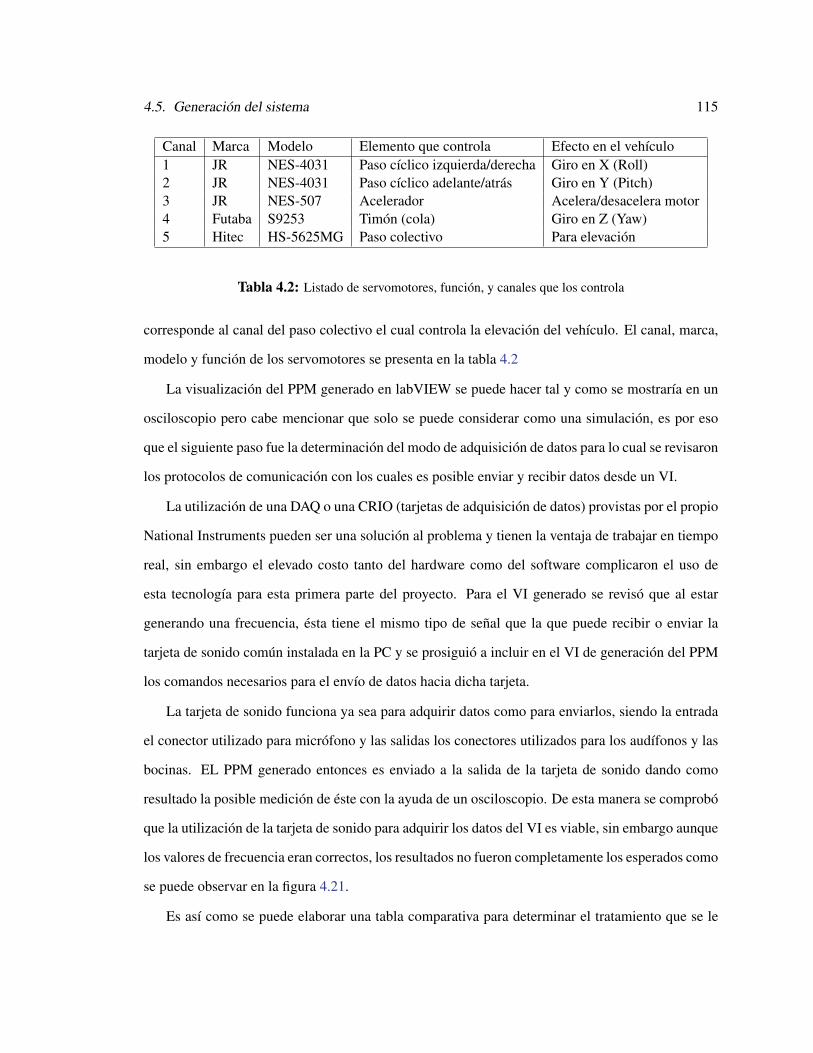
4.5. Generación del sistema 115
Canal Marca Modelo Elemento que controla Efecto en el vehículo1 JR NES-4031 Paso cíclico izquierda/derecha Giro en X (Roll)2 JR NES-4031 Paso cíclico adelante/atrás Giro en Y (Pitch)3 JR NES-507 Acelerador Acelera/desacelera motor4 Futaba S9253 Timón (cola) Giro en Z (Yaw)5 Hitec HS-5625MG Paso colectivo Para elevación
Tabla 4.2: Listado de servomotores, función, y canales que los controla
corresponde al canal del paso colectivo el cual controla la elevación del vehículo. El canal, marca,
modelo y función de los servomotores se presenta en la tabla 4.2
La visualización del PPM generado en labVIEW se puede hacer tal y como se mostraría en un
osciloscopio pero cabe mencionar que solo se puede considerar como una simulación, es por eso
que el siguiente paso fue la determinación del modo de adquisición de datos para lo cual se revisaron
los protocolos de comunicación con los cuales es posible enviar y recibir datos desde un VI.
La utilización de una DAQ o una CRIO (tarjetas de adquisición de datos) provistas por el propio
National Instruments pueden ser una solución al problema y tienen la ventaja de trabajar en tiempo
real, sin embargo el elevado costo tanto del hardware como del software complicaron el uso de
esta tecnología para esta primera parte del proyecto. Para el VI generado se revisó que al estar
generando una frecuencia, ésta tiene el mismo tipo de señal que la que puede recibir o enviar la
tarjeta de sonido común instalada en la PC y se prosiguió a incluir en el VI de generación del PPM
los comandos necesarios para el envío de datos hacia dicha tarjeta.
La tarjeta de sonido funciona ya sea para adquirir datos como para enviarlos, siendo la entrada
el conector utilizado para micrófono y las salidas los conectores utilizados para los audífonos y las
bocinas. EL PPM generado entonces es enviado a la salida de la tarjeta de sonido dando como
resultado la posible medición de éste con la ayuda de un osciloscopio. De esta manera se comprobó
que la utilización de la tarjeta de sonido para adquirir los datos del VI es viable, sin embargo aunque
los valores de frecuencia eran correctos, los resultados no fueron completamente los esperados como
se puede observar en la figura 4.21.
Es así como se puede elaborar una tabla comparativa para determinar el tratamiento que se le
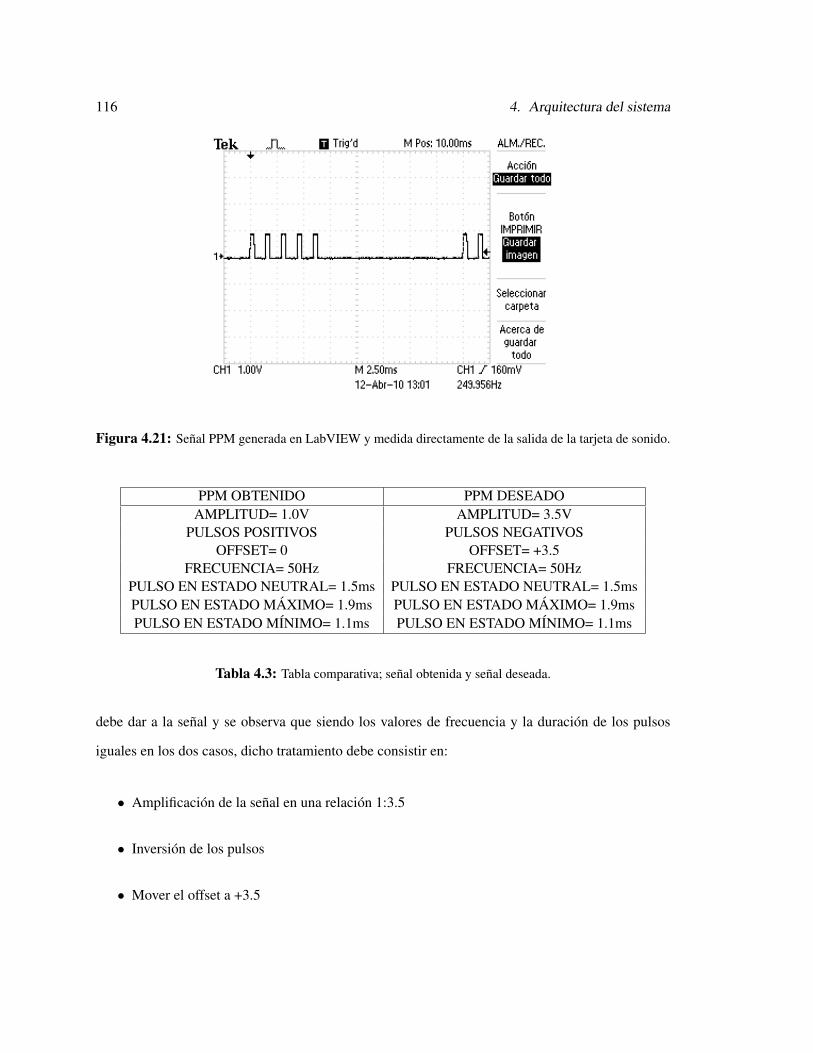
116 4. Arquitectura del sistema
Figura 4.21: Señal PPM generada en LabVIEW y medida directamente de la salida de la tarjeta de sonido.
PPM OBTENIDO PPM DESEADOAMPLITUD= 1.0V AMPLITUD= 3.5V
PULSOS POSITIVOS PULSOS NEGATIVOSOFFSET= 0 OFFSET= +3.5
FRECUENCIA= 50Hz FRECUENCIA= 50HzPULSO EN ESTADO NEUTRAL= 1.5ms PULSO EN ESTADO NEUTRAL= 1.5msPULSO EN ESTADO MÁXIMO= 1.9ms PULSO EN ESTADO MÁXIMO= 1.9msPULSO EN ESTADO MÍNIMO= 1.1ms PULSO EN ESTADO MÍNIMO= 1.1ms
Tabla 4.3: Tabla comparativa; señal obtenida y señal deseada.
debe dar a la señal y se observa que siendo los valores de frecuencia y la duración de los pulsos
iguales en los dos casos, dicho tratamiento debe consistir en:
• Amplificación de la señal en una relación 1:3.5
• Inversión de los pulsos
• Mover el offset a +3.5
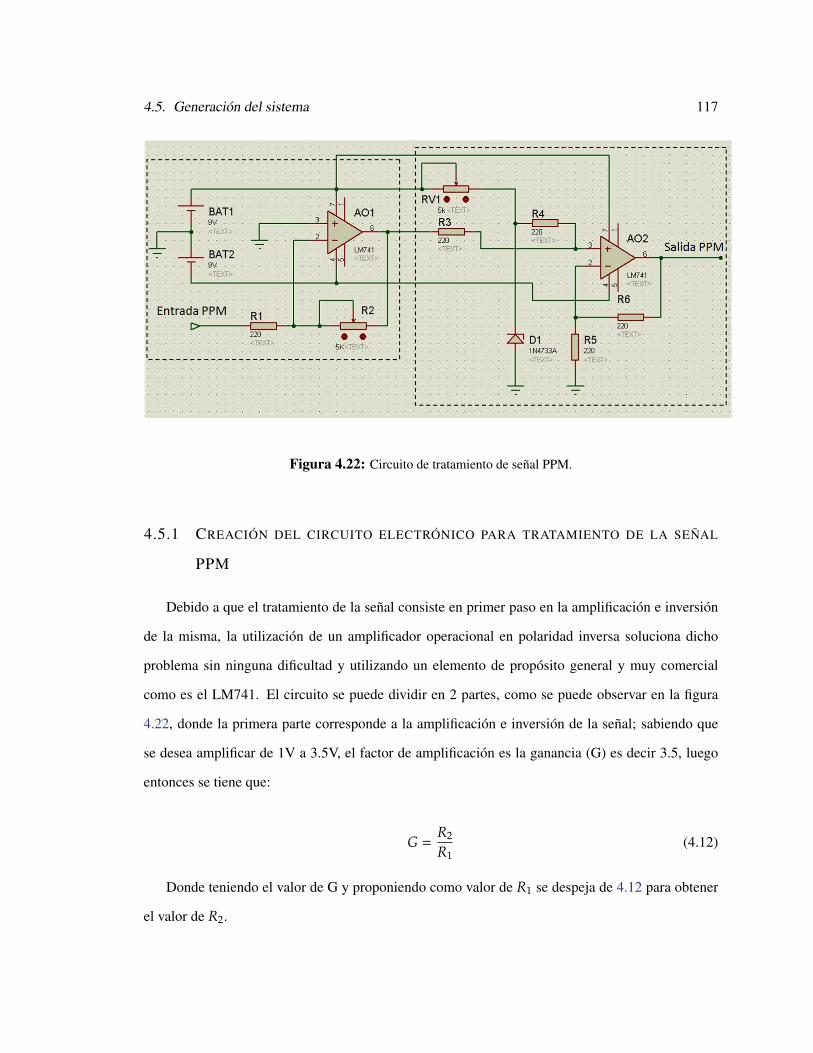
4.5. Generación del sistema 117
Figura 4.22: Circuito de tratamiento de señal PPM.
4.5.1 CREACIÓN DEL CIRCUITO ELECTRÓNICO PARA TRATAMIENTO DE LA SEÑAL
PPM
Debido a que el tratamiento de la señal consiste en primer paso en la amplificación e inversión
de la misma, la utilización de un amplificador operacional en polaridad inversa soluciona dicho
problema sin ninguna dificultad y utilizando un elemento de propósito general y muy comercial
como es el LM741. El circuito se puede dividir en 2 partes, como se puede observar en la figura
4.22, donde la primera parte corresponde a la amplificación e inversión de la señal; sabiendo que
se desea amplificar de 1V a 3.5V, el factor de amplificación es la ganancia (G) es decir 3.5, luego
entonces se tiene que:
G =R2
R1(4.12)
Donde teniendo el valor de G y proponiendo como valor de R1 se despeja de 4.12 para obtener
el valor de R2.

118 4. Arquitectura del sistema
R2 = G(R1) (4.13)
Sustituyendo de 4.13 se tiene:
R2 = 3.5(770Ω) (4.14)
Es importante aclarar que el valor encontrado para R2 es meramente teórico y es tanto por eso
como por las posibles complicaciones para encontrar un valor de resistencia tal en el mercado que
se decide utilizar una resistencia variable, en el presente caso bastante sobrada ya que se utiliza un
minipot que permite variar el valor de resistencia desde 0Ω hasta 5KΩ lo cual da la ventaja de que a
la salida de esta parte del circuito sea conectado el osciloscopio para medir directamente el valor de
la amplitud de la señal y calibrarla al girar la perilla de dicho minipot hasta que la amplitud alcance
los 3.5V requeridos.
Para la segunda parte del circuito, es necesario hacer la modificación del offset de la señal, para
lo cual se decide sumarle un valor de referencia mediante el empleo de otro amplificador operacional
y un zener polarizado a la inversa tal como se muestra en la figura 4.22; la modificación del offset
la realizan el zener y RV1 por lo cual se decidió la utilización de otra resistencia variable para RV1
y así poder medir directamente con el osciloscopio la modificación al girar la perilla de este otro
minipot y calibrar la señal lo mas exacto posible.
Finalmente, a la salida del circuito de tratamiento de señal se pudo generar una señal muy
parecida a la requerida según el protocolo de la señal que admite el radiocontrol tal y como se
muestra en la figura 4.23.
4.6 IMPLEMENTACIÓN DEL SISTEMA Y RESULTADOS
Una vez que se obtiene la señal de acuerdo al protocolo, es posible conectar la salida del cir-
cuito a la entrada del conector de entrenamiento del radiocontrol siempre y cuando éste antes se
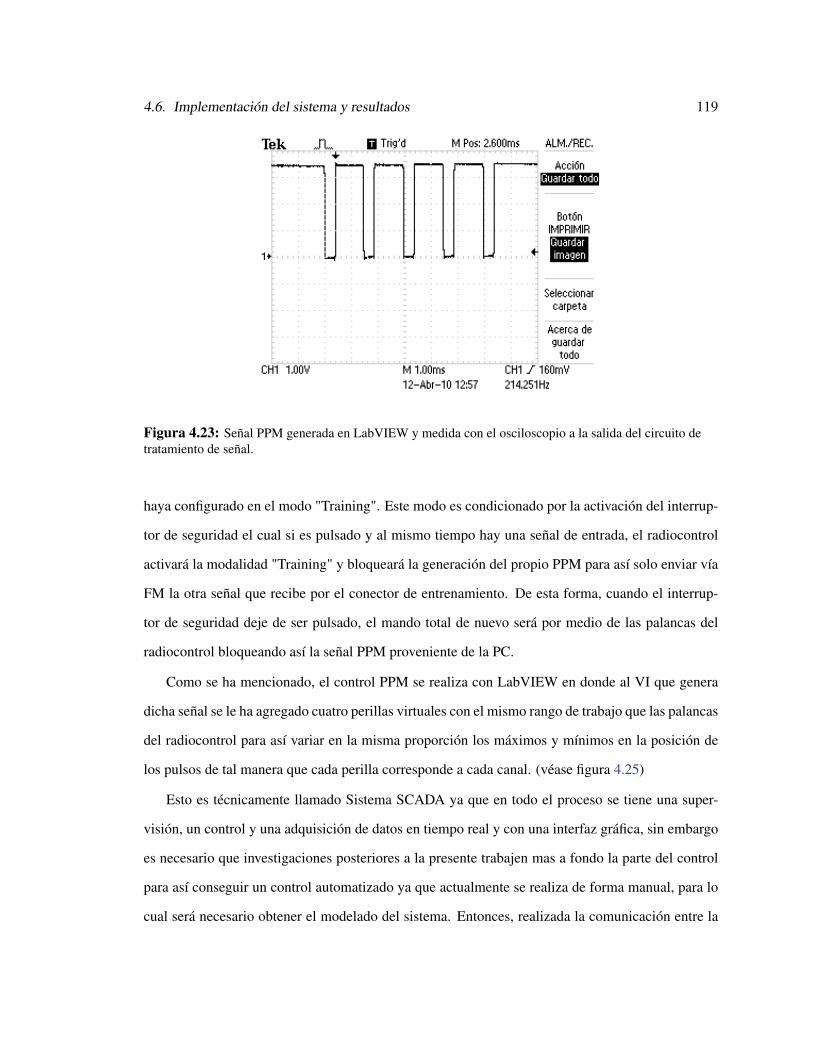
4.6. Implementación del sistema y resultados 119
Figura 4.23: Señal PPM generada en LabVIEW y medida con el osciloscopio a la salida del circuito detratamiento de señal.
haya configurado en el modo "Training". Este modo es condicionado por la activación del interrup-
tor de seguridad el cual si es pulsado y al mismo tiempo hay una señal de entrada, el radiocontrol
activará la modalidad "Training" y bloqueará la generación del propio PPM para así solo enviar vía
FM la otra señal que recibe por el conector de entrenamiento. De esta forma, cuando el interrup-
tor de seguridad deje de ser pulsado, el mando total de nuevo será por medio de las palancas del
radiocontrol bloqueando así la señal PPM proveniente de la PC.
Como se ha mencionado, el control PPM se realiza con LabVIEW en donde al VI que genera
dicha señal se le ha agregado cuatro perillas virtuales con el mismo rango de trabajo que las palancas
del radiocontrol para así variar en la misma proporción los máximos y mínimos en la posición de
los pulsos de tal manera que cada perilla corresponde a cada canal. (véase figura 4.25)
Esto es técnicamente llamado Sistema SCADA ya que en todo el proceso se tiene una super-
visión, un control y una adquisición de datos en tiempo real y con una interfaz gráfica, sin embargo
es necesario que investigaciones posteriores a la presente trabajen mas a fondo la parte del control
para así conseguir un control automatizado ya que actualmente se realiza de forma manual, para lo
cual será necesario obtener el modelado del sistema. Entonces, realizada la comunicación entre la
120 4. Arquitectura del sistema
PC y el radiocontrol, solo es necesario encender el receptor instalado en el vehículo y el proceso de
comunicación es:
• El PPM es generado por medio de LabVIEW y cada canal puede ser manipulado mediante
controles virtuales.
• La señal es obtenida mediante el puerto de salida de la tarjeta de sonido (conector para audí-
fonos).
• La señal es tratada mediante un circuito para acondicionarla a la entrada del conector de
entrenamiento del radiocontrol.
• El radiocontrol es configurado en modo "Training" y al activar el interruptor de seguridad
admitirá la señal entrante.
• La señal es codificada y enviada vía FM al receptor.
• El receptor decodifica la señal y separa cada canal para el control de los servomotores.
• El movimiento de cada servomotor manipula un mecanismo específico que a su vez tiene un
efecto en la posición y orientación del vehículo en caso que el motor esté encendido.
• La orientación del vehículo es sensada por medio de la central inercial que a su vez envía las
coordenadas a la PC.
• La PC por medio de LabVIEW y VRML muestran la orientación del vehículo en tiempo real
y gráficamente.
Es importante mencionar que al hacer las pruebas de control, los resultados fueron satisfactorios
y cada perilla virtual en labVIEW es capaz de mover cada uno de los cuatro servomotores conside-
rados para esta primer etapa y en un rango de operación prácticamente idéntico al que se realizaba
con el radiocontrol, de tal manera que los mandos que gobiernan la orientación en los tres planos así
como la aceleración del motor pueden ser manipulados uno a uno desde la PC (véase figura 4.25).
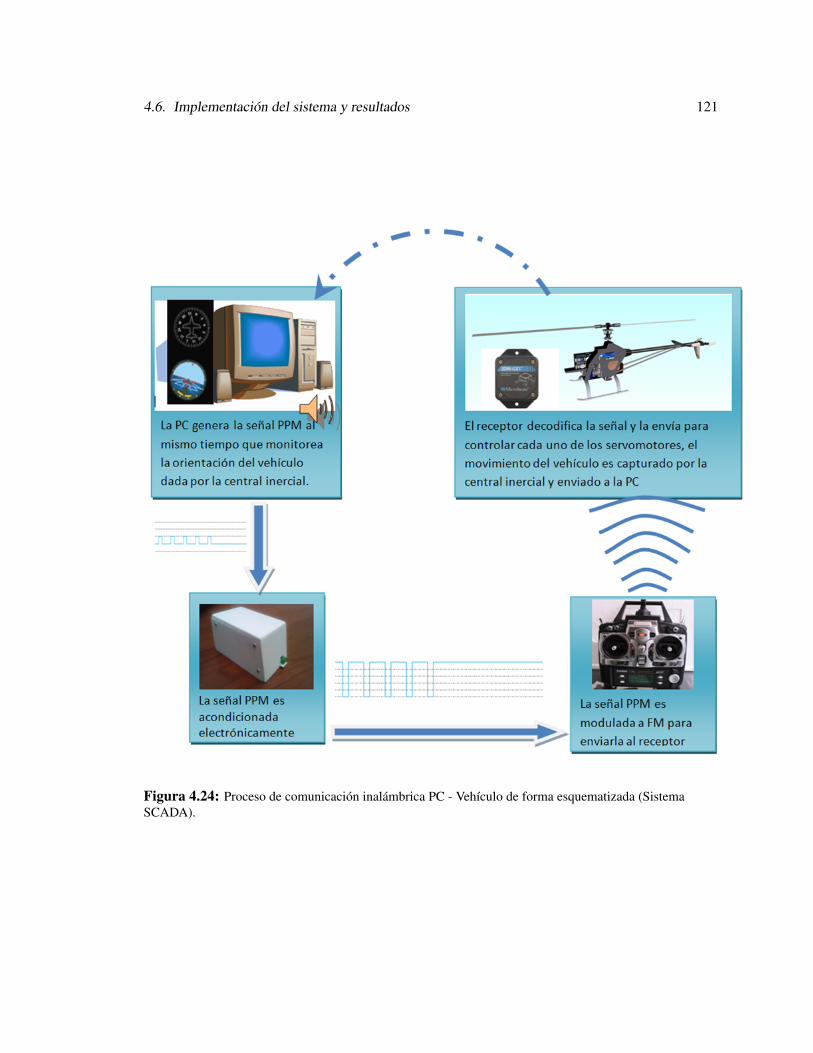
4.6. Implementación del sistema y resultados 121
Figura 4.24: Proceso de comunicación inalámbrica PC - Vehículo de forma esquematizada (SistemaSCADA).
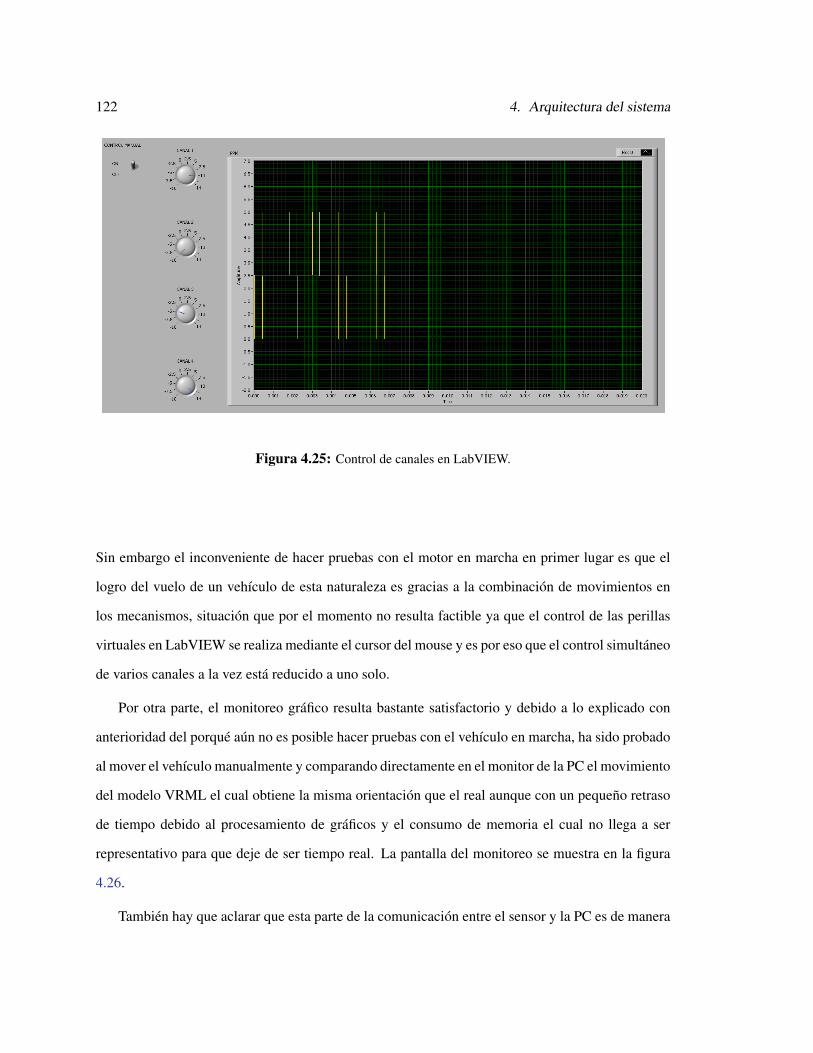
122 4. Arquitectura del sistema
Figura 4.25: Control de canales en LabVIEW.
Sin embargo el inconveniente de hacer pruebas con el motor en marcha en primer lugar es que el
logro del vuelo de un vehículo de esta naturaleza es gracias a la combinación de movimientos en
los mecanismos, situación que por el momento no resulta factible ya que el control de las perillas
virtuales en LabVIEW se realiza mediante el cursor del mouse y es por eso que el control simultáneo
de varios canales a la vez está reducido a uno solo.
Por otra parte, el monitoreo gráfico resulta bastante satisfactorio y debido a lo explicado con
anterioridad del porqué aún no es posible hacer pruebas con el vehículo en marcha, ha sido probado
al mover el vehículo manualmente y comparando directamente en el monitor de la PC el movimiento
del modelo VRML el cual obtiene la misma orientación que el real aunque con un pequeño retraso
de tiempo debido al procesamiento de gráficos y el consumo de memoria el cual no llega a ser
representativo para que deje de ser tiempo real. La pantalla del monitoreo se muestra en la figura
4.26.
También hay que aclarar que esta parte de la comunicación entre el sensor y la PC es de manera

4.6. Implementación del sistema y resultados 123
Figura 4.26: Pantalla de monitoreo de la orientación utilizando el modelo del vehículo en VRML así comoinstrumentos virtuales de navegación
alámbrica ya que el sensor utilizado no transmite la información vía inalámbrica y por lo pronto no
es el objetivo de esta investigación solucionar dicho problema.

CAPITULO 5
CONCLUSIONES Y TRABAJOS POSTERIORES
Como se ha explicado con anterioridad, el presente trabajo ha tenido como objetivo final la
creación de un programa que permita monitorear la orientación del vehículo así como la creación
de una interfaz que permita la comunicación a distancia e inalámbrica desde la PC hasta el vehículo
para poder manipular los diferentes mecanismos controlados por los servomotores, lo cual ha tenido
en un principio resultados positivos y que cumplen las expectativas del proyecto. Sin embargo, ésta
solo es la primera de muchas fases que parcialmente tendrán que irse completando para lograr el
objetivo final el cual es que el vehículo sea autónomo completamente, y pueda volar a distancia por
sí mismo únicamente con la ruta de vuelo especificada por un operador y además haga la captura de
imágenes de video para transmitirlas en tiempo real hacia la PC. Es por eso que aún falta mucho para
desarrollar y al hacer esta investigación y desarrollar el primer objetivo se ha llegado a conclusiones
y propuestas que se piensa son o serán de utilidad para la siguiente investigación.
El primer caso de estudio que se propone es hacer pruebas en vuelo con la comunicación de
la PC al radiocontrol por medio de la tarjeta de sonido ya que esa fue una alternativa que se le ha
dado momentáneamente al problema de obtención de datos a falta de una tarjeta específica para esta
tarea como puede ser la Compact RIO o la DAQ de National Instruments, no obstante, la lógica del
programa de comunicación y de la elaboración del PPM es en general la misma. La utilización de
una tarjeta de adquisición de datos sin duda haría más seguro el sistema y con menor probabilidad
de error lo cual es indispensable si el vehículo estará en pleno vuelo y a distancias a las que un
125
126 5. Conclusiones y trabajos posteriores
operador humano improbablemente pueda evitar un accidente, aunque por lo visto y lo probado
hasta ahora, la tarjeta de sonido nunca presentó falla alguna.
También se considera indispensable la elaboración de un modelo PID de estabilización en vuelo
estacionario el cual permita mantener la misma orientación del vehículo sin modificar aún la posi-
ción del mismo pero impidiendo que salga de control y se desplome. Esta parte se prevé crítica para
el modelo de control final que se deberá hacer. El monitoreo y adquisición de la orientación que se
han elaborado son un punto clave en el desarrollo de esta etapa ya que representan la retroalimenta-
ción del sistema que será controlado desde la PC automáticamente siguiendo el modelo de control
que se genere.
Para hacer estas pruebas se propone la presencia de una persona capacitada para volar el ve-
hículo de forma manual utilizando así el modo Trainer de tal forma que si el vehículo por alguna
razón pierde el control, el operador manual tome los controles y lo estabilice y todo esto en un lugar
despejado y muy amplio, igual que como se hace en los clubs de vuelo de radiocontrol durante el
proceso de aprendizaje donde también el primer paso para el aprendiz es lograr controlar la aeronave
en vuelo estacionario.
Otro aspecto necesario es la creación de una interfaz inalámbrica entre la PC y la central inercial
ya que hasta ahora esta comunicación se realiza por medio de un cable conectado al puerto serial.
Esta labor debe ser atendida con cuidado ya que la adquisición de datos debe ser lo mas precisa
posible en cuanto a la medición de parámetros como también a la velocidad de transmisión de datos
lo cual puede verse afectado dado que el vehículo volará a distancias remotas y un retraso en la señal
significaría una respuesta retardada en el control del vehículo y por ende una posible catástrofe.
De igual manera se propone iniciar el estudio de las posibles soluciones al problema del tiempo
de autonomía del vehículo restringido por el combustible y las baterías que alimentan al receptor
y los servomotores ya que por el momento las baterías brindan un aproximado de 15 minutos en
vuelo y el tanque de combustible tarda en vaciarse aproximadamente 20 minutos. Comercialmente
este problema se resuelve cambiando las baterías que en este caso son de Ni-Cd por unas de Li-Po
las cuales son de las mas duraderas en el mercado y de igual forma se puede agregar un tanque de

127
combustible extra aunque se debe tener en cuenta que si bien es más el volumen de combustible, el
peso incrementa lo que sugiere que el motor consumirá más potencia y por lo tanto también mas
combustible; no obstante se deberá analizar si aún así el tiempo de autonomía será suficiente y es por
eso que se tienen que restringir y especificar los límites del vehículo en vuelo, es decir, la distancia
máxima que se desea pueda recorrer considerando obviamente que el recorrido es de ida y vuelta a
la base, para esto se deberá hacer un profundo análisis de las funciones del vehículo, la ubicación
de la base y los alcances y limitaciones físicas y normativas del mismo, esto último se considera de
prioridad crítica en el avance a las siguientes fases de investigación.

CAPITULO 6
COSTOS Y VIABILIDAD
Como parte del desarrollo de cualquier proyecto es necesario hacer un análisis económico y
un cálculo del costo de los materiales, herramientas, ingeniería, etc., para determinar la inversión
necesaria, así como la rentabilidad y viabilidad.
6.1 COSTOS DE INVERSIÓN
El costo de inversión es el valor total del proyecto, se encuentra integrado por los costos nece-
sarios para realizar la implantación física del sistema. Dichos costos son los siguientes:
• Costo de adquisición: en este costo se incluye el vehículo equipado con aquellas característi-
cas oportunas.
• Costo de equipos especiales: en este apartado son incluidos todos aquellos equipos especiales
que se vayan a utilizar debido a la inclusión del vehículo (cámara, sensores).
• Costos de ingeniería: aquí se incluyen en principio aquellos costos derivados del estudio de
planificación y diseño, así como costos de desarrollo para la utilización del vehículo.
Una vez que ya han quedado explicados los costos de inversión se hace un desglose detallado
de dichos costos.
129
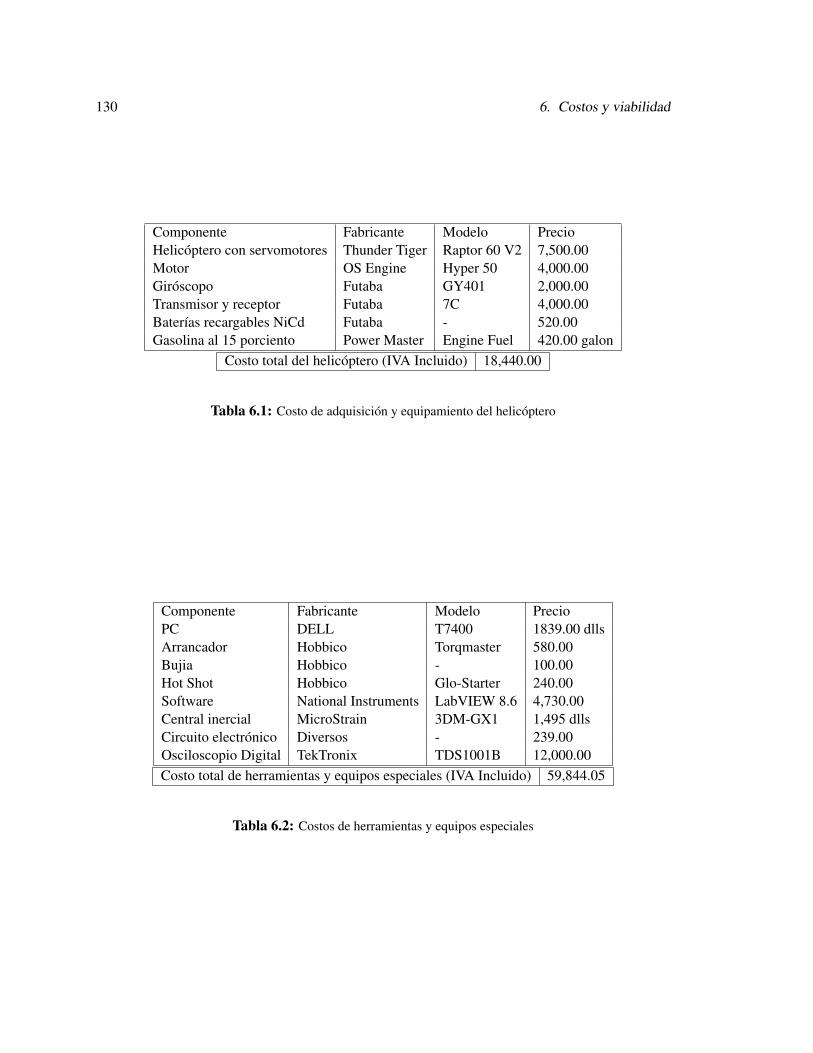
130 6. Costos y viabilidad
Componente Fabricante Modelo PrecioHelicóptero con servomotores Thunder Tiger Raptor 60 V2 7,500.00Motor OS Engine Hyper 50 4,000.00Giróscopo Futaba GY401 2,000.00Transmisor y receptor Futaba 7C 4,000.00Baterías recargables NiCd Futaba - 520.00Gasolina al 15 porciento Power Master Engine Fuel 420.00 galon
Costo total del helicóptero (IVA Incluido) 18,440.00
Tabla 6.1: Costo de adquisición y equipamiento del helicóptero
Componente Fabricante Modelo PrecioPC DELL T7400 1839.00 dllsArrancador Hobbico Torqmaster 580.00Bujia Hobbico - 100.00Hot Shot Hobbico Glo-Starter 240.00Software National Instruments LabVIEW 8.6 4,730.00Central inercial MicroStrain 3DM-GX1 1,495 dllsCircuito electrónico Diversos - 239.00Osciloscopio Digital TekTronix TDS1001B 12,000.00Costo total de herramientas y equipos especiales (IVA Incluido) 59,844.05
Tabla 6.2: Costos de herramientas y equipos especiales

6.2. Costos y beneficios de explotación 131
Actividad Horas por día Días trabajados Costo de actividadEstudio e investigación 8 15 31,560
Diseño e implementación 8 30 63,120Pruebas y correcciones 8 10 21,040
Costo total de ingeniería 115,720
Tabla 6.3: Costos de ingeniería e implementación.
Costo Total del Sistema 194,004.05
Tabla 6.4: Costo Total
Aquí se muestra el costo de la mano de obra de ingeniería, para lo cual se considera el costo por
hora de 263 pesos, según el catálogo de precios del Instituto Politécnico Nacional.
6.2 COSTOS Y BENEFICIOS DE EXPLOTACIÓN
En definición el costo-beneficio se refiere a una técnica empleada para evaluar, en el caso de
un proyecto o propuesta, la conveniencia de un proyecto mediante la enumeración y valoración
posterior en términos monetarios de todos los costes y beneficios derivados directa e indirectamente
de dicho proyecto.
Para realizar la valoración de los costos del proyecto frente a los beneficios es necesario hacer
un análisis acerca de la situación del país en materia de tecnología, dado que, la inversión real-
izada en nuestro país en dicho rubro es poca, dando como resultado poco desarrollo tecnológico,
repercutiendo en la compra de tecnologías a empresas extranjeras lo cual aumenta el costo de las
tecnologías y el rezago en el país.
Por ello el desarrollo del presente proyecto representa tecnología mexicana lo cual se consi-
dera beneficioso para los avances nacionales dejando por el momento a un lado el costo-beneficio
económico.
Otro punto que valorar es el hecho de tener como herramienta de vigilancia a una aeronave no
tripulada, lo cual deja ver a simple vista los beneficios económicos, ya que emplear un helicóptero
132 6. Costos y viabilidad
a escala en vez de uno de tamaño natural reduce mucho la inversión, siendo aún mas beneficioso el
no arriesgar vidas humanas en la supervisión de zonas de alto riesgo, desastres naturales y ahora en
la lucha contra el narcotráfico en la detección de cargamentos de droga.
Para mostrar el beneficio económico es necesario hacer una comparativa del costo del presente
proyecto con una tecnología existente en país, el Sistema de Vigilancia Aéreo no tripulada S-4
Ehécatl, desarrollado por Hydra Technologies, el cual representa una inversión de 2.1 millones de
pesos por operación y mantenimiento de tres aeronaves [El Milenio, 2010].
Esta cantidad supera la inversión hasta hecha por el momento para el desarrollo de este proyecto,
por lo cual los beneficios superan los costos del proyecto, por lo tanto se puede determinar la via-
bilidad de dicho proyecto.
REFERENCIAS
Bibliografía
Web Electrónica, «Curso Programado de Robótica Lección No 1», . http://www.clubse.com.ar 2
Wikimedia Foundation, Inc., «Robot», . http://es.wikipedia.org 3
FSC, «Vehículos Marinos no tripulados», 2007, 3, 9, 73
Aranda Joaquín, Muñoz Rocío, «Control Coordinado de Formaciones de Vehículos Autónomos notripulados», 2008, . http://www.cea-ifac.es 4
Hugo Leonardo Rosano Matchain, «Submarino Autónomo U-47», 2001, . http://www.gsi.dit.upm.es 4, 6
Mayer Cerón Erick, González Fuentes Roberto Carlos, «Robótica en la Investigación Submarina»,2009, . http://hosting.udlap.mx 6
Consejo Superior de Invenstigaciones Científicas, Barcelona, «Proyectos de instrumentación in-teligente en oceanografía», . http://www.cmima.csic.es 6
Solo Ciencia, «Nuevos records de vehículos subacuáticos autónomos», 2009, . http://www.solociencia.com 9
FisicaNet, «Submarinos autónomos», 2002, . http://www.fisicanet.com.ar 11, 12
Kokes, LLC, «Submarinos Autónomos de investigación e inspección para uso alrededor delmundo», . http://www.researchsubmarine.com 11, 13
Grupo de Oceanografía Física, «El Grupo de Oceanografía Física del IMEDEA desarrolla robotsautónomos para el estudio del litoral», . http://www.uib.es 14, 15
133

134 Referencias
Jaime del Cerro Giner, «Arquitectura Abierta para el Control Autonómo y Teleoperado de un Mini-helicóptero»,Universidad Politécnica de Madrid, 2007. xvi, 17, 18, 19, 44, 80, 81, 84, 89
RoboticSpot, «Aviones autónomos o UAV», 2007, . http://www.roboticspot.com 23
La Flecha, «Rusia desvela un ambicioso proyecto de avión furtivo sin piloto», 2007, . http://www.laflecha.net 23, 24
P. Castillo, P. García, «Modelado y estabilización de un helicóptero con cuatro rotores»,UniversidadPolitécnica de Valencia, 2007. 24, 26
V. Milanés, J.E. Naranjo, T. de Pedro, «Sistema de Posicionamiento para Vehícuos Autonó-mos»,Instituto de Automática Industrial, 2008. 30, 31
El Universal, «Presenta mexicano en Alemania auto manejado por computadora», 2007, . http://www.eluniversal.com.mx 31, 32
Facultad de Ciencias Físicas y Matemáticas, «Vehículos autónomos aplicados a la minería subte-rranea», 1997, . http://www.fcfm.uchile.cl 33
Vicente Lober José Andrés, «Técnicas de inteligencia artificial en la construcción de robots móvilesautónomos»,Universidad de Salamanca, 2003. 35
Cerón Correo Alexander, «Sistemas Robóticos Teleoperados»,Universidad Nueva Granada, Bogotá,2008. xv, 39, 40, 41, 72
Sangyoon Lee, Gaurav S. Sukhatme, «Control of a Mobile Robot A User Study», 2002. 41
A.Pozo-Ruz, García-Alegre, A.Ribeiro, «Localización De Vehículos: Fusión De Medi-das GPS Y Odometría», . http://www.iai.csic.es/users/gpa/postscript/Pozo-Ruz00c.pdf 43
Ollero Baturone A., «Robótica: Manipuladores y robots móviles»,Marcombo, 2007. 45, 46, 49
Gavilán María Elena, Muñoz José Daniel, «Simulación por dinámica del movimiento de un trompopesado»,Revista Colombiana de Física, 2006. xvi, 51
Wikimedia Foundation, Inc., «Ángulos de navegación», . http://es.wikipedia.org 53
Wikimedia Foundation, Inc., «Telemetría», . http://es.wikipedia.org 56
Telit, «Telemetría», . http://www.cypsela.es xvi, 57
Butron García Adriana Leticia, «Sistema robótico para la intercepción de objetos enmovimiento»,ESIME Azcapotzalco, 2007. xvi, 62, 63, 64

Referencias 135
Teleformación.edu, «Lenguajes de bajo nivel, ensamblador», . http://teleformacion.edu.aytolacoruna.es 64
Henry Mendiburu Díaz, «Sistema Scada», . http://www.galeon.com/hamd/pdf/scada.pdf xvi, 66, 68
Llano Zuleta Luis Everly, «Monitoreo y análisis automático de eventos en tiempo real en sistemasde tranporte de energía a través del SOE y SCADA»,Universidad Nacional de Colombia, 2006.69
Abril Ana, Potilla Jorge, «Monitoreo de emergencia de víctimas de catástrofes. ProyectoMERIS»,Universidad Politécnica de Madrid, 2007. xvi, 70, 71
Antonio Manuel, «Instrumentación virtual: adquisición, procesado y tratamiento de señales»,UPC,2001. xvi, 75
Hugo Valderrama, Luís Guasch, Lluís Massagués, «Adquisición de Datos e Instrumentación paraun Laboratorio Docente de Máquinas Eléctricas», 1999, . http://sauron.etse.urv.es/DEEEA/lguasch/Lisboa_1999.pdf 77
Baracala Monteja Miguel A., «Helicópteros»,Universidad Politécnica de Madrid, 2007. xvi, 78, 83
Ingeniería de Sistemas y Automática, «Proyecto fin de carrera», . http://bibing.us.es 87
Belgacom.net, «Rc-Flying Training With Buddy Lead And Compatibility Problems BetweenBrands Of Transmitters», . http://users.belgacom.net/TX2TX/tx2tx/english/tx2txgb1.htm 112
El Milenio, «Aviones no tripulados», 2010, . http://impreso.milenio.com/node/8802637 132