Modelo instrumental didáctico para el aprendizaje de los ... · Distancia objeto lente 2, s. 2’...
8
Modelo instrumental didáctico para el aprendizaje de los vicios de refracción. Héctor Costa, Pablo Abuín, Celina Bratovich y María Susana Perrone Laboratorio de Fisiología y Biofísica Facultad de Ingeniería - Universidad Nacional de Entre Ríos [email protected] Resumen. La naturaleza multidisciplinaria de la Bioingeniería debe traducirse en un abordaje integral en su enseñanza. El uso de modelos didácticos es una herramienta eficaz a la hora de posibilitar al alumno entender cualitativamente el significado de algunas variables de un sistema aun sin poseer un gran conocimiento previo sobre el mismo. En este trabajo se presenta el desarrollo de un modelo físico del ojo humano, con el objetivo de aportar una herramienta didáctica más para la comprensión funcional de la visión y algunas de sus afecciones como son las ametropías y discromatopsias. El modelo físico utilizado es una variación del modelo simplificado del ojo, adaptando ciertos valores para que se ajusten a las posibilidades de realización prácticas (cornea y cristalino como lentes delgadas de potencia 30 [D] e índice de refracción del vidrio). Utilizando herramientas ópticas, electromecánicas y de programación se representó a la retina con un sensor, a la córnea y al cristalino mediante lentes y a las funciones sensitivas con un software desarrollado a tal fin. El dispositivo realizado logra reflejar conceptos centrales de la función visual y las afecciones mencionadas de un modo simple y accesible al uso por parte de los estudiantes, admitiendo la repetición de experiencias para afianzar los conceptos. Se considera que el modelo teórico aplicado de manera fundamentada avala su utilidad como material didáctico. 1. Introducción La Bioingeniería aplica los principios eléctricos, electrónicos, mecánicos, químicos, o cualquier otro principio de la ingeniería, para comprender, modificar o controlar sistemas biológicos [1]. El abordaje integral de su enseñanza, también debe reflejar la multidisciplinariedad y colaborar con los estudiantes a comprender las relaciones y diferentes perspectivas de muchas de sus temáticas. El uso de modelos didácticos es una herramienta eficaz a la hora de posibilitar al alumno entender cualitativamente el significado de algunas variables de un sistema sin poseer un gran conocimiento previo sobre éste. Más aún cuando el desarrollo del modelo didáctico refleja la síntesis de lo aprendido y permite la relación con otras habilidades adquiridas en la carrera. En el presente trabajo se presenta el desarrollo de un modelo físico del ojo humano, con el objeto de aportar una herramienta didáctica más para la comprensión funcional de la visión y algunas de sus afecciones. El desarrollo fue realizado por estudiantes de la asignatura Fisiología y Biofísica, de la carrera de Bioingeniería, con la dirección de docentes de la misma. Este modelo permite simular la función visual normal y algunas afecciones, que pueden clasificarse en dos grupos, ametropías (vicios de refracción) y discromatopsia (deficiencia en la percepción e individualización de los colores, llamada también Daltonismo). 2. Revisión de conceptos A continuación se introducen conceptos básicos de fisiopatología de la visión que, a lo largo del trabajo, se consideraron como vicios de refracción: -Miopía: cuando el diámetro antero-posterior del ojo es mayor al normal y/o la potencia total es mayor a la del ojo emétrope, de manera que en ausencia de acomodación la imagen se forma por delante de la retina. XVIII Congreso Argentino de Bioingeniería SABI 2011 - VII Jornadas de Ingeniería Clínica Mar del Plata, 28 al 30 de septiembre de 2011
Transcript of Modelo instrumental didáctico para el aprendizaje de los ... · Distancia objeto lente 2, s. 2’...
Modelo instrumental didáctico para el aprendizaje de los
vicios de refracción.
Héctor Costa, Pablo Abuín, Celina Bratovich y María Susana Perrone
Laboratorio de Fisiología y Biofísica
Facultad de Ingeniería - Universidad Nacional de Entre Ríos
Resumen. La naturaleza multidisciplinaria de la Bioingeniería debe traducirse en un abordaje
integral en su enseñanza. El uso de modelos didácticos es una herramienta eficaz a la hora de
posibilitar al alumno entender cualitativamente el significado de algunas variables de un
sistema aun sin poseer un gran conocimiento previo sobre el mismo. En este trabajo se presenta
el desarrollo de un modelo físico del ojo humano, con el objetivo de aportar una herramienta
didáctica más para la comprensión funcional de la visión y algunas de sus afecciones como son
las ametropías y discromatopsias. El modelo físico utilizado es una variación del modelo
simplificado del ojo, adaptando ciertos valores para que se ajusten a las posibilidades de
realización prácticas (cornea y cristalino como lentes delgadas de potencia 30 [D] e índice de
refracción del vidrio). Utilizando herramientas ópticas, electromecánicas y de programación se
representó a la retina con un sensor, a la córnea y al cristalino mediante lentes y a las funciones
sensitivas con un software desarrollado a tal fin. El dispositivo realizado logra reflejar
conceptos centrales de la función visual y las afecciones mencionadas de un modo simple y
accesible al uso por parte de los estudiantes, admitiendo la repetición de experiencias para
afianzar los conceptos. Se considera que el modelo teórico aplicado de manera fundamentada
avala su utilidad como material didáctico.
1. Introducción
La Bioingeniería aplica los principios eléctricos, electrónicos, mecánicos, químicos, o cualquier otro
principio de la ingeniería, para comprender, modificar o controlar sistemas biológicos [1]. El abordaje
integral de su enseñanza, también debe reflejar la multidisciplinariedad y colaborar con los estudiantes
a comprender las relaciones y diferentes perspectivas de muchas de sus temáticas.
El uso de modelos didácticos es una herramienta eficaz a la hora de posibilitar al alumno entender
cualitativamente el significado de algunas variables de un sistema sin poseer un gran conocimiento
previo sobre éste. Más aún cuando el desarrollo del modelo didáctico refleja la síntesis de lo aprendido
y permite la relación con otras habilidades adquiridas en la carrera.
En el presente trabajo se presenta el desarrollo de un modelo físico del ojo humano, con el objeto
de aportar una herramienta didáctica más para la comprensión funcional de la visión y algunas de sus
afecciones. El desarrollo fue realizado por estudiantes de la asignatura Fisiología y Biofísica, de la
carrera de Bioingeniería, con la dirección de docentes de la misma.
Este modelo permite simular la función visual normal y algunas afecciones, que pueden clasificarse
en dos grupos, ametropías (vicios de refracción) y discromatopsia (deficiencia en la percepción e
individualización de los colores, llamada también Daltonismo).
2. Revisión de conceptos
A continuación se introducen conceptos básicos de fisiopatología de la visión que, a lo largo del
trabajo, se consideraron como vicios de refracción:
-Miopía: cuando el diámetro antero-posterior del ojo es mayor al normal y/o la potencia total es
mayor a la del ojo emétrope, de manera que en ausencia de acomodación la imagen se forma por
delante de la retina.
XVIII Congreso Argentino de Bioingeniería SABI 2011 - VII Jornadas de Ingeniería Clínica Mar del Plata, 28 al 30 de septiembre de 2011

-Hipermetropía: cuando el diámetro antero-posterior del ojo es menor al normal y/o la potencia
es menor a la del ojo emétrope, de manera que en ausencia de acomodación la imagen se forma por
detrás de la retina.
-Astigmatismo: es un defecto de curvatura de la córnea que genera imágenes poco nítidas y
distorsionadas en la retina.
-Queratocono: es el debilitamiento de las fibras de colágeno del estroma corneal. Provoca una
visión con poca definición y, generalmente, se acompaña de diplopía.
-Cataratas: es el resultado de la desnaturalización de las proteínas del cristalino y su posterior
coagulación. Se manifiesta una opacidad en el cristalino que ocasiona visión borrosa y poco nítida.
Esta afección se considera un vicio de refracción debido a que se produce una alteración del índice de
refracción del cristalino y su consecuente dispersión de los rayos luminosos.
Respecto a las discromatopsias, se seleccionaron diversos tipos:
-Monocromático: se refiere a la visión reducida a un solo color debido a la existencia de un único
tipo de cono (célula fotorreceptora).
-Dicromático: se presenta cuando la retina solo cuenta con dos tipos de conos, quedando la visión
reducida a dos colores.
-Tricromático: se produce cuando aun disponiendo de los tres tipos de conos, alguno de ellos
presenta defectos funcionales provocando deficiencias en la percepción de las tonalidades.
3. Desarrollo del modelo
Con el fin de mostrar las distintas afecciones que puede padecer el ojo, fue necesario desarrollar un
modelo simplificado del mismo, haciendo uso de herramientas ópticas, electromecánicas y de
programación. Se representó a la retina con un sensor CCD (CCD: charge-coupled device), a la córnea
y al cristalino mediante lentes, y a las funciones sensitivas (visión normal y afecciones simuladas) con
un software desarrollado a tal fin.
El usuario tiene la opción de seleccionar, en el software, una de las afecciones mencionadas y en la
pantalla observará la imagen del objeto, colocado en el campo visual del modelo, de una forma
análoga a la percibida por una persona que presenta dicha afección. En la figura 1 se representa el
modelo con un diagrama en bloques.
Figura 1. Diagrama en bloque del modelo del ojo
3.1. Sistema óptico
La modelización del ojo se basó en el sistema óptico centrado, como se muestra en la figura 2,
compuesto por dos lentes, cuya imagen se proyecta sobre un sensor CCD. Con el objetivo de
XVIII Congreso Argentino de Bioingeniería SABI 2011 - VII Jornadas de Ingeniería Clínica Mar del Plata, 28 al 30 de septiembre de 2011
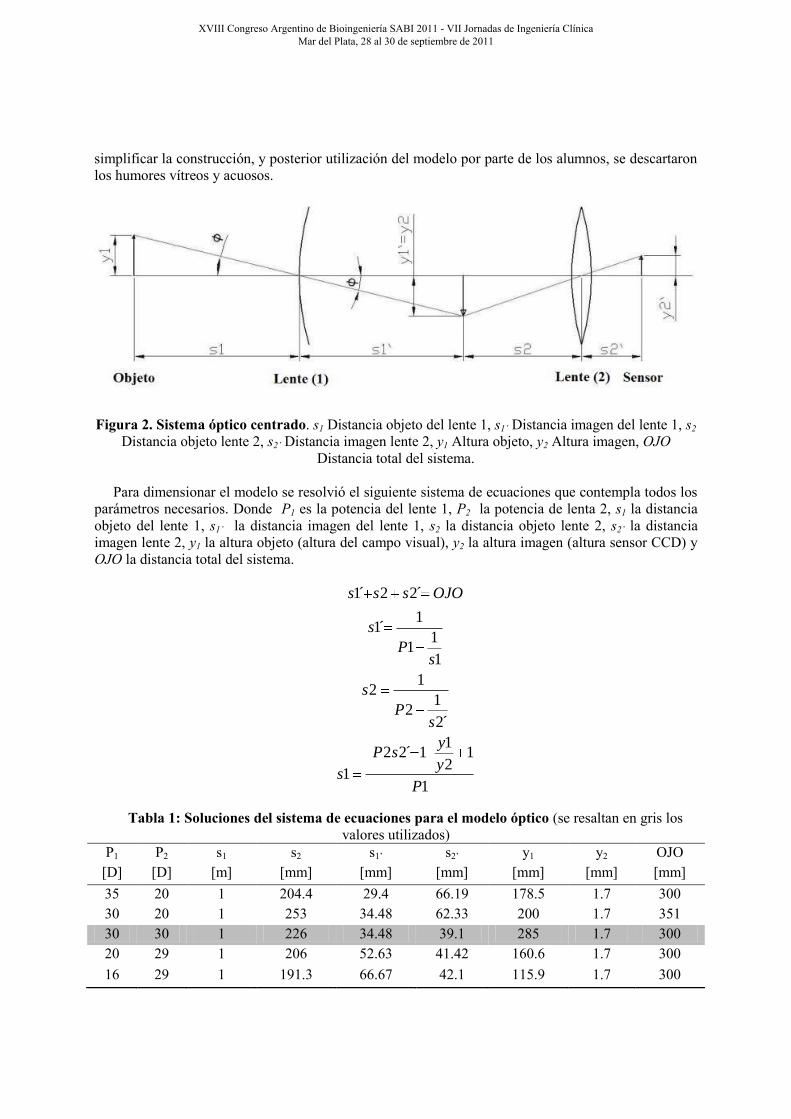
simplificar la construcción, y posterior utilización del modelo por parte de los alumnos, se descartaron
los humores vítreos y acuosos.
Figura 2. Sistema óptico centrado. s1 Distancia objeto del lente 1, s1’ Distancia imagen del lente 1, s2
Distancia objeto lente 2, s2’ Distancia imagen lente 2, y1 Altura objeto, y2 Altura imagen, OJO
Distancia total del sistema.
Para dimensionar el modelo se resolvió el siguiente sistema de ecuaciones que contempla todos los
parámetros necesarios. Donde P1 es la potencia del lente 1, P2 la potencia de lenta 2, s1 la distancia
objeto del lente 1, s1’ la distancia imagen del lente 1, s2 la distancia objeto lente 2, s2’ la distancia
imagen lente 2, y1 la altura objeto (altura del campo visual), y2 la altura imagen (altura sensor CCD) y
OJO la distancia total del sistema.
1́ 2 2́
11́
11
1
12
12
2́
12 2́ 1 1
21
1
s s s OJO
s
Ps
s
Ps
yP s
ys
P
Tabla 1: Soluciones del sistema de ecuaciones para el modelo óptico (se resaltan en gris los
valores utilizados)
P1 P2 s1 s2 s1’ s2’ y1 y2 OJO
[D] [D] [m] [mm] [mm] [mm] [mm] [mm] [mm]
35 20 1 204.4 29.4 66.19 178.5 1.7 300
30 20 1 253 34.48 62.33 200 1.7 351
30 30 1 226 34.48 39.1 285 1.7 300
20 29 1 206 52.63 41.42 160.6 1.7 300
16 29 1 191.3 66.67 42.1 115.9 1.7 300
XVIII Congreso Argentino de Bioingeniería SABI 2011 - VII Jornadas de Ingeniería Clínica Mar del Plata, 28 al 30 de septiembre de 2011
El sistema se resolvió fijando los valores de potencias ópticas disponibles, la distancia total del
sistema (OJO), que está limitada al soporte físico utilizado para el modelo y la altura del sensor CCD,
en la tabla 1 se destacan los valores óptimos para lograr un campo visual y1 adecuado fijando
arbitrariamente la distancia objeto s1.
3.2. Sistema electromecánico
Se realizó un diseño en AutoCAD ® del modelo completo para corroborar que los tamaños calculados
fuesen posibles y comprobar que no existiese interferencia entre los distintos componentes durante el
movimiento del carro porta sensor. Por último, a partir de éste, se dimensionó el soporte y se ubicaron
los soportes necesarios en lugares óptimos.
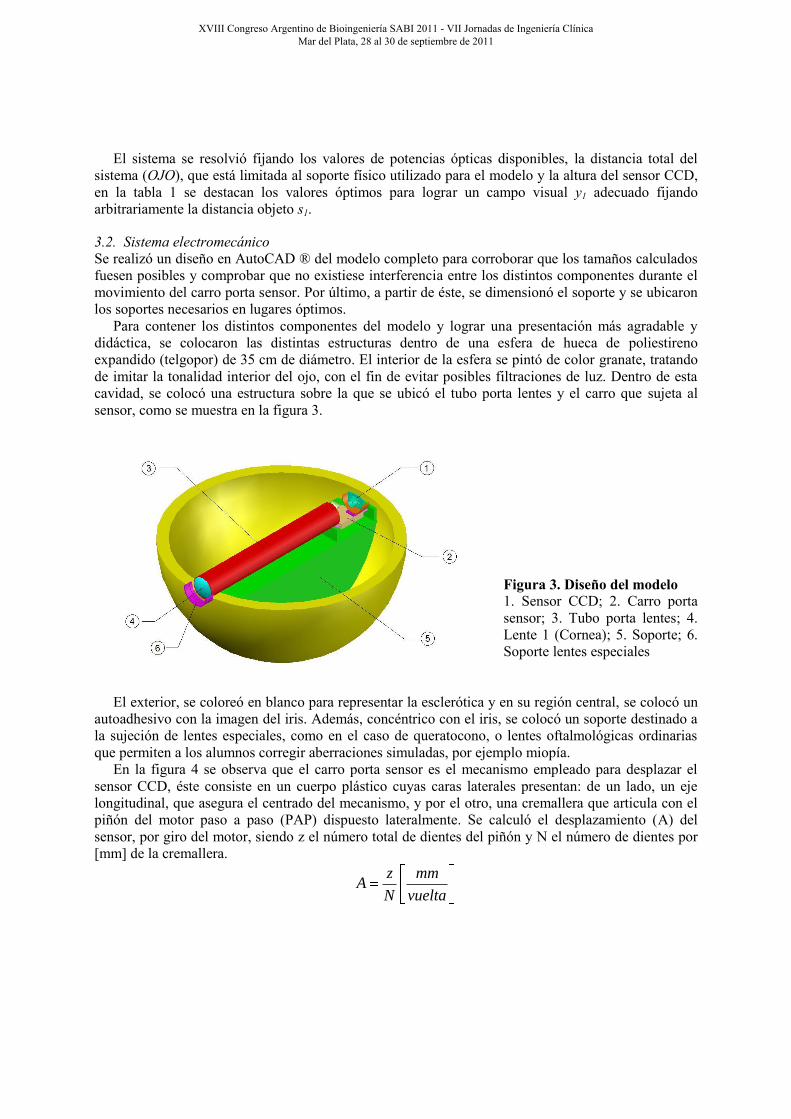
Para contener los distintos componentes del modelo y lograr una presentación más agradable y
didáctica, se colocaron las distintas estructuras dentro de una esfera de hueca de poliestireno
expandido (telgopor) de 35 cm de diámetro. El interior de la esfera se pintó de color granate, tratando
de imitar la tonalidad interior del ojo, con el fin de evitar posibles filtraciones de luz. Dentro de esta
cavidad, se colocó una estructura sobre la que se ubicó el tubo porta lentes y el carro que sujeta al
sensor, como se muestra en la figura 3.
Figura 3. Diseño del modelo
1. Sensor CCD; 2. Carro porta
sensor; 3. Tubo porta lentes; 4.
Lente 1 (Cornea); 5. Soporte; 6.
Soporte lentes especiales
El exterior, se coloreó en blanco para representar la esclerótica y en su región central, se colocó un
autoadhesivo con la imagen del iris. Además, concéntrico con el iris, se colocó un soporte destinado a
la sujeción de lentes especiales, como en el caso de queratocono, o lentes oftalmológicas ordinarias
que permiten a los alumnos corregir aberraciones simuladas, por ejemplo miopía.
En la figura 4 se observa que el carro porta sensor es el mecanismo empleado para desplazar el
sensor CCD, éste consiste en un cuerpo plástico cuyas caras laterales presentan: de un lado, un eje
longitudinal, que asegura el centrado del mecanismo, y por el otro, una cremallera que articula con el
piñón del motor paso a paso (PAP) dispuesto lateralmente. Se calculó el desplazamiento (A) del
sensor, por giro del motor, siendo z el número total de dientes del piñón y N el número de dientes por
[mm] de la cremallera.
z mmA
N vuelta
XVIII Congreso Argentino de Bioingeniería SABI 2011 - VII Jornadas de Ingeniería Clínica Mar del Plata, 28 al 30 de septiembre de 2011

Figura 4. Vista póstero-lateral del carro porta sensor
1. Carro porta sensor; 2. Eje; 3. Cremallera; 4. Motor PAP; 5. Lente 2
(Cristalino); 6. Sensor CCD.
La relación entre el software y el dispositivo la establece una interfaz electrónica que actúa como
etapa de potencia y protección, haciendo uso de un circuito integrado ULN2003 [2].
3.3. Software
Se desarrolló un software de control, en Borland C++ Builder ®, el cual permite mostrar en tiempo
real la imagen captada por el sensor, mediante una interfaz gráfica y didáctica que se puede apreciar en
la figura 5. Además, mediante el uso de botones, le permite al usuario establecer distintos parámetros
en la simulación.
Figura 5. Ventana principal del software diseñado para el modelo. La imagen mostrada es
similar a la percibida por una persona con visión emétrope.
Para el caso de miopía o hipermetropía el software permite simularlas de dos formas, Predefinida
o Gradual. En cualquiera de estas situaciones el programa le ordena al motor PAP que desplace el
XVIII Congreso Argentino de Bioingeniería SABI 2011 - VII Jornadas de Ingeniería Clínica Mar del Plata, 28 al 30 de septiembre de 2011

carro porta sensor hasta la posición necesaria para reproducir, en la pantalla, una imagen similar a la
percibida por una persona que presenta una de estas ametropías.
Para el caso de la simulación de queratocono y astigmatismo deben emplearse lentes especiales; el
software da instrucciones de cómo montarlas en el soporte destinado a tal fin, como pudo observarse
en la figura 3. Para la simulación de cataratas, se empleó un filtro de desenfoque gaussiano, con un
núcleo (kernel) de 25 x 25.
Además de la simulación de ametropías, el programa permite recrear distintos casos de daltonismo,
mediante filtros digitales diseñados en base a la respuesta del CCD a distintas longitudes de onda
(figura 6). Para fundamentar la elección de las distintas bandas de absorción, se comparó el gráfico de
respuesta de CCD con el de absorción de los conos de la retina [3].
Figura 6. Gráfico de respuesta del CCD a diferentes longitudes de onda
En línea con cruz se representa la respuesta al rojo, en estrella la respuesta al verde
y en línea con círculo la respuesta al azul. Modificado de [4]
En la tabla 2 se observan diferencias mínimas, con respecto a los perfiles teóricos de absorción de
la retina, en los colores verde y azul. Se destaca la similitud del canal verde y una diferencia más
acentuada en el canal rojo. Por esta razón los filtros se centraron en el canal verde.
Tabla 2: Picos de absorción a diferentes
longitudes de onda (CCD vs Conos)
CCD [nm] Conos [nm] ∆λ [nm]
Rojo 630 570 60
Verde 535 535 0
Azul 460 445 15
4. Resultados y Discusión
El funcionamiento del ojo de los vertebrados puede asimilarse al de una cámara fotográfica. Siendo
el cristalino el responsable de enfocar la imagen mediante el cambio de su radio de curvatura y su
grosor [5]. Sin embargo la complejidad de sus estructuras y sus funciones requieren para su estudio el
uso de diferentes modelos (ojo esquemático, ojo simplificado y ojo reducido) que facilitan su
comprensión.
El modelo del ojo reducido [6] propone:
La córnea como una lente centrada de potencia 60D
XVIII Congreso Argentino de Bioingeniería SABI 2011 - VII Jornadas de Ingeniería Clínica Mar del Plata, 28 al 30 de septiembre de 2011
Un solo plano principal
Un solo radio de curvatura en reposo (sin acomodación)
Un único índice de refracción (1,33)
De este modo permite simplificar de manera importante la diversidad de sus componentes y sus
interacciones, sin sacrificar significativamente los conceptos centrales de óptica.
El modelo físico utilizado es una variación del modelo reducido, adaptando ciertos valores para que
se ajusten a las posibilidades de realización prácticas. Estas variaciones son: córnea como lente
delgada de potencia 30 [D], cristalino como lente delgada de potencia 30 [D], índice de refracción del
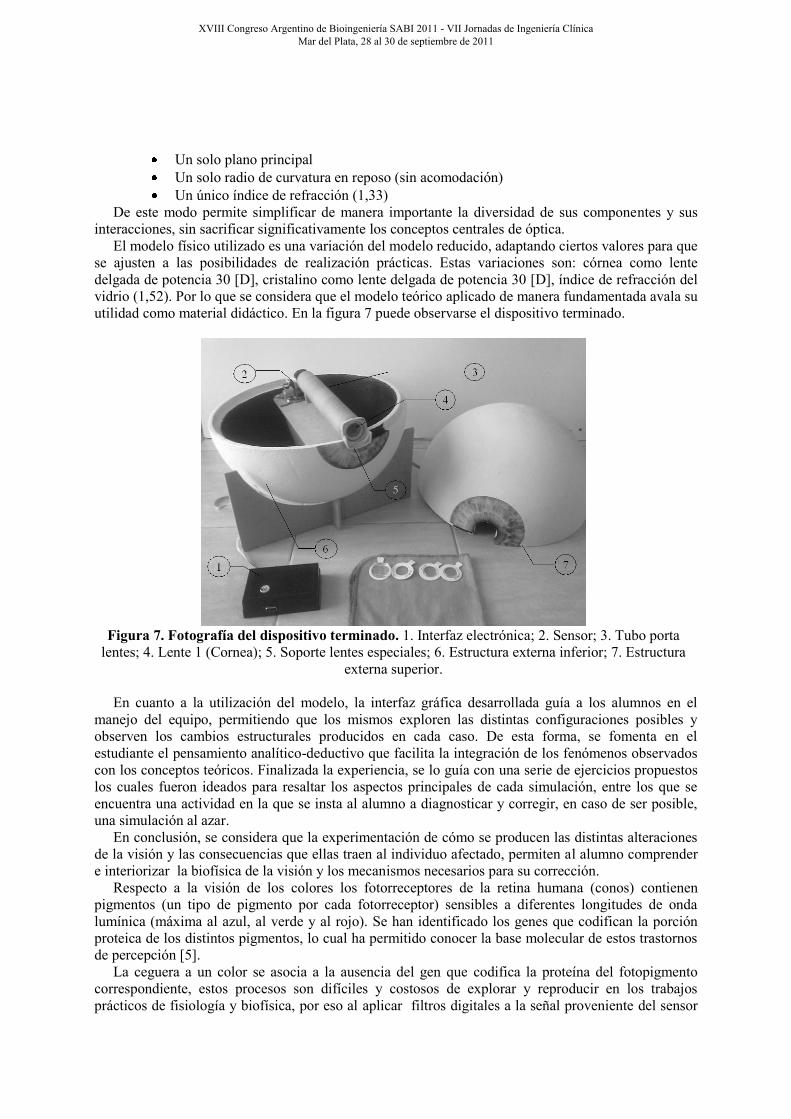
vidrio (1,52). Por lo que se considera que el modelo teórico aplicado de manera fundamentada avala su
utilidad como material didáctico. En la figura 7 puede observarse el dispositivo terminado.
Figura 7. Fotografía del dispositivo terminado. 1. Interfaz electrónica; 2. Sensor; 3. Tubo porta
lentes; 4. Lente 1 (Cornea); 5. Soporte lentes especiales; 6. Estructura externa inferior; 7. Estructura
externa superior.
En cuanto a la utilización del modelo, la interfaz gráfica desarrollada guía a los alumnos en el
manejo del equipo, permitiendo que los mismos exploren las distintas configuraciones posibles y
observen los cambios estructurales producidos en cada caso. De esta forma, se fomenta en el
estudiante el pensamiento analítico-deductivo que facilita la integración de los fenómenos observados
con los conceptos teóricos. Finalizada la experiencia, se lo guía con una serie de ejercicios propuestos
los cuales fueron ideados para resaltar los aspectos principales de cada simulación, entre los que se
encuentra una actividad en la que se insta al alumno a diagnosticar y corregir, en caso de ser posible,
una simulación al azar.
En conclusión, se considera que la experimentación de cómo se producen las distintas alteraciones
de la visión y las consecuencias que ellas traen al individuo afectado, permiten al alumno comprender
e interiorizar la biofísica de la visión y los mecanismos necesarios para su corrección.
Respecto a la visión de los colores los fotorreceptores de la retina humana (conos) contienen
pigmentos (un tipo de pigmento por cada fotorreceptor) sensibles a diferentes longitudes de onda
lumínica (máxima al azul, al verde y al rojo). Se han identificado los genes que codifican la porción
proteica de los distintos pigmentos, lo cual ha permitido conocer la base molecular de estos trastornos
de percepción [5].
La ceguera a un color se asocia a la ausencia del gen que codifica la proteína del fotopigmento
correspondiente, estos procesos son difíciles y costosos de explorar y reproducir en los trabajos
prácticos de fisiología y biofísica, por eso al aplicar filtros digitales a la señal proveniente del sensor
XVIII Congreso Argentino de Bioingeniería SABI 2011 - VII Jornadas de Ingeniería Clínica Mar del Plata, 28 al 30 de septiembre de 2011

CCD, se logra de manera fácil e intuitiva una analogía que colabora en la comprensión de la visión de
los colores.
Sin dudas el proceso de la visión es mucho más complejo que lo expuesto, dado que la
interpretación de las imágenes y la sensación del color ocurre con participación de neuronas de orden
superior quienes integran información de diferente orden y magnitud, pero las experiencias prácticas
con este recurso desarrollado permiten una aproximación conceptual adecuada y una oportunidad para
la discusión de los aspectos más atrayentes y aun en discusión de la fisiología sensorial y la biofísica
de la visión.
Referencias [1] Pere Caminal. 2002. La ingeniería de sistemas y automática en la bioingeniería. Dep. ESAII,
Centre de Recerca en Enginyeria Biomèdica (CREB), Universitat Politècnica de Catalunya.
[2] DatasheetCatalog.com. [En línea] [Citado el: 10 de Febrero de 2011] Disponible en:
http://www.datasheetcatalog.org/datasheet2/f/0c6x6a46ig46qlxf3j2qsaii8o3y.pdf.
[3] Guyton A y Hall J.2006 Tratado de Fisiología Médica. (Madrid, España: Elsevier) p633
[4] Lone Star Digital [En línea] [Citado el: 22 de Febrero de 2011] Disponible en:
http://www.lonestardigital.com/DCS620x.htm.
[5] Burggren W, French K, Randall D. 2002 Eckert. Fisiología Animal. Mecanismo y adaptaciones.
(España: McGraw-Hill / Interamericana)
[6] Gross H. 2008 Handbook of Optical Systems: Vol. 4 Survey of Optical Instruments. (Weinheim,
Alemania: WILEY-VCH Verlag GmbH & Co. KGaA)
XVIII Congreso Argentino de Bioingeniería SABI 2011 - VII Jornadas de Ingeniería Clínica Mar del Plata, 28 al 30 de septiembre de 2011