MIRROR MAGAZINE2
26
M A G A Z I N E EDICION DE muestreo RECONSTRUCCIÓN Y CONTROL DIGITAL
-
Upload
claudia-esser -
Category
Documents
-
view
229 -
download
4
description
EDICION DEDICADA A LA TEORIA DE MUESTREO RECONSTRUCCION Y CONTROL DIGIRAL
Transcript of MIRROR MAGAZINE2

M A G A Z I N E
EDICION DE muestreo RECONSTRUCCIÓN Y CONTROL DIGITAL
EDITORIAL
AGOSTO2012
M A G A Z I N E
E D I T O R
Claudia Esser
Un sistema digital es cualquier dispositivo destinado a la generación, transmisión, procesamiento almacenamiento de señales digitales. También un sistema digital es una combinación de dispositivos dise-ñado para manipular cantidades físicas o información que estén repre-sentadas en forma digital; es decir, que sólo puedan tomar valores dis-cretos.
M A G A Z I N E
C O N T E N I D O
M A G A Z I N E
PUBLICIDAD
¿Qué es?
PUBLICIDAD
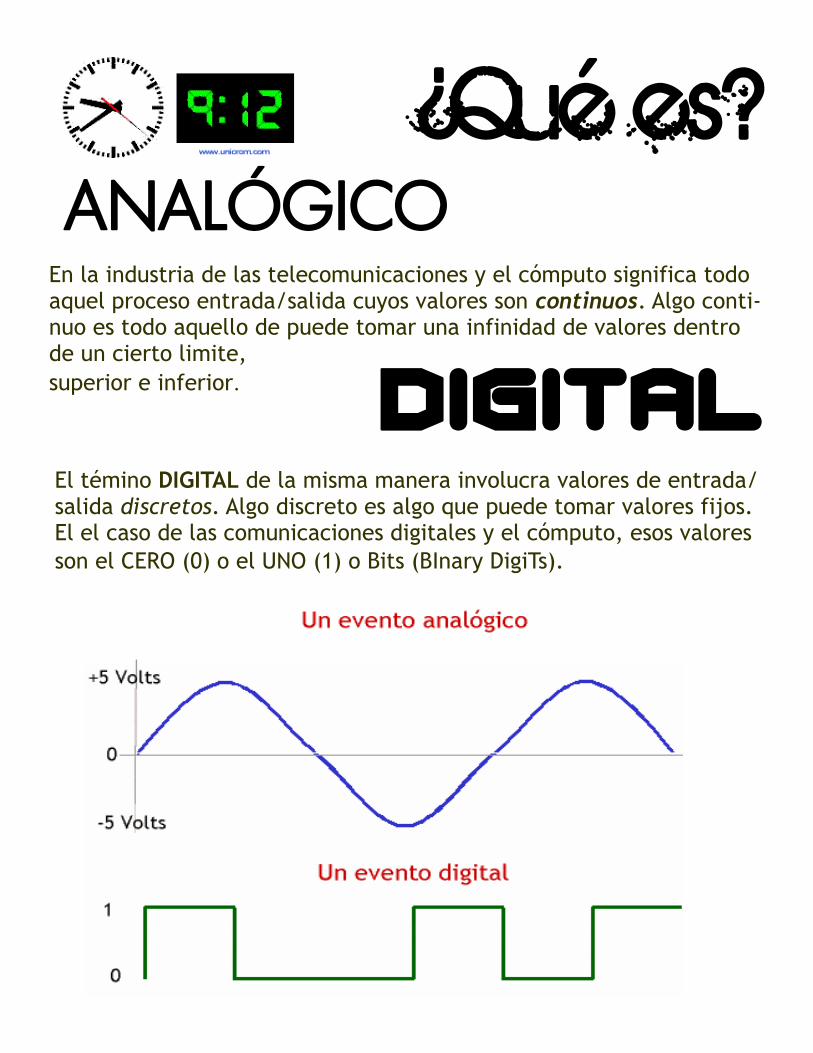
ANALÓGICO En la industria de las telecomunicaciones y el cómputo significa todo aquel proceso entrada/salida cuyos valores son continuos. Algo conti-nuo es todo aquello de puede tomar una infinidad de valores dentro de un cierto limite,
superior e inferior.
DIGITAL El témino DIGITAL de la misma manera involucra valores de entrada/salida discretos. Algo discreto es algo que puede tomar valores fijos. El el caso de las comunicaciones digitales y el cómputo, esos valores
son el CERO (0) o el UNO (1) o Bits (BInary DigiTs).
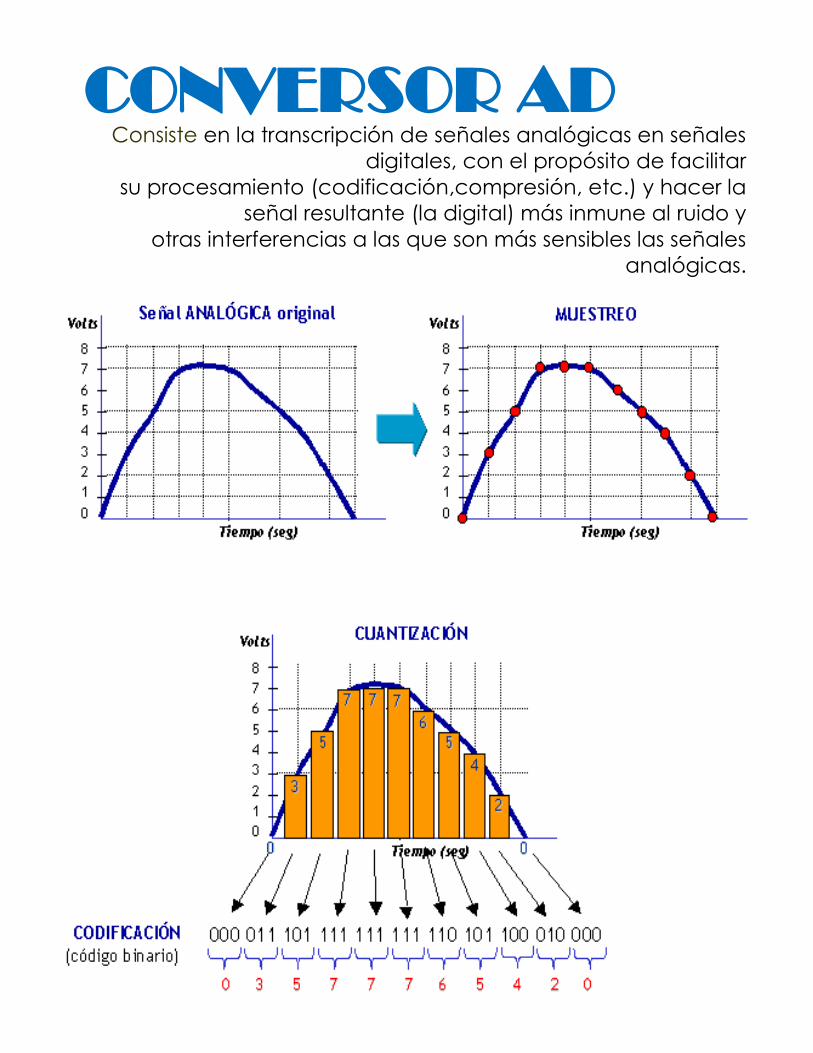
CONVERSOR AD Consiste en la transcripción de señales analógicas en señales
digitales, con el propósito de facilitar
su procesamiento (codificación,compresión, etc.) y hacer la
señal resultante (la digital) más inmune al ruido y
otras interferencias a las que son más sensibles las señales
analógicas.
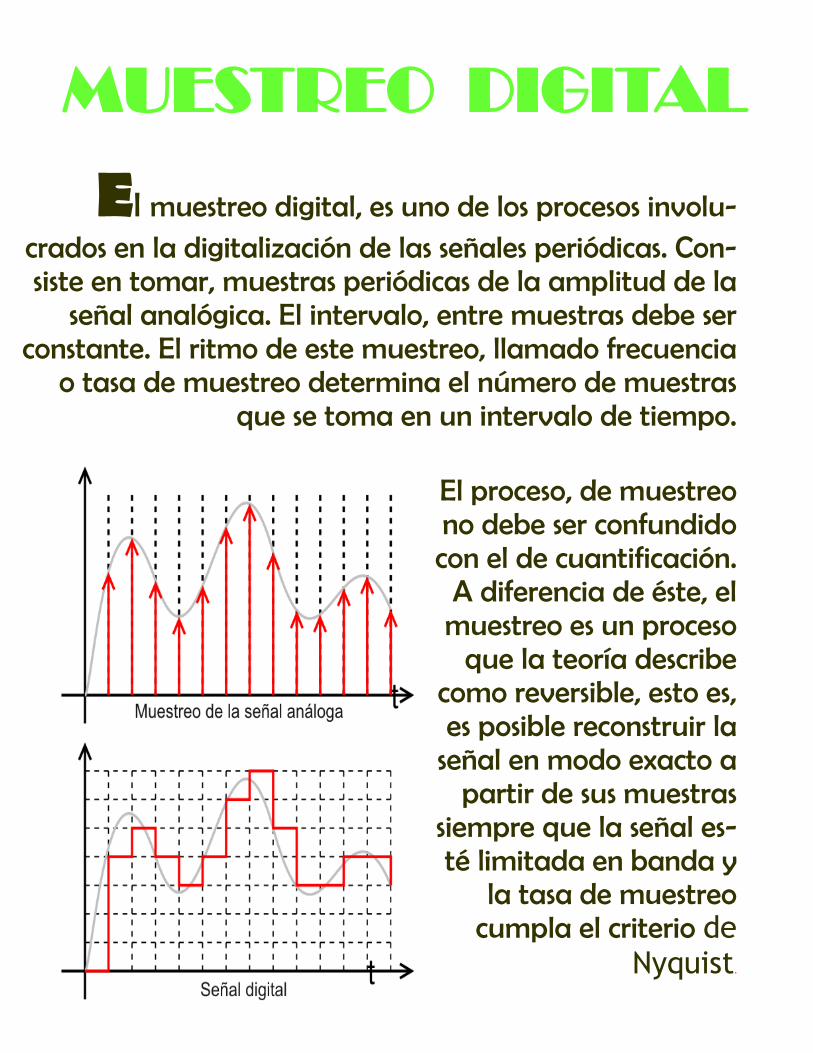
MUESTREO DIGITAL
El muestreo digital, es uno de los procesos involu-crados en la digitalización de las señales periódicas. Con-siste en tomar, muestras periódicas de la amplitud de la
señal analógica. El intervalo, entre muestras debe ser constante. El ritmo de este muestreo, llamado frecuencia
o tasa de muestreo determina el número de muestras que se toma en un intervalo de tiempo.
El proceso, de muestreo no debe ser confundido con el de cuantificación.
A diferencia de éste, el muestreo es un proceso
que la teoría describe como reversible, esto es, es posible reconstruir la
señal en modo exacto a partir de sus muestras
siempre que la señal es-té limitada en banda y
la tasa de muestreo cumpla el criterio de
Nyquist.
*
Toda la tecnología digital (audio, video) está basado en la técnica de
muestreo (sampling en inglés).
En música, cuando una grabadora di-gital toma una muestra, básicamente toma una fotografía fija de la forma
de onda y la convierte en bits, los cua-les pueden ser almacenados y procesa-
dos. Comparado con la grabación analógica, la cual está basada en re-
gistros de voltaje como patrones de magnetización en las partículas de óxi-do de la cinta magnética. El muestreo digital convierte el voltaje en números
(0s y 1s) los cuales pueden ser fácilmen-te representados y vueltos nuevamen-
te a su forma original.
Razón de muestreo
La frecuencia de muestreo de una señal en un segundo es co-nocida como razón de muestreo medida en Hertz (Hz).
1 Hz = 1/seg
La razón de muestreo determina el rango de frecuencias [ANCHO DE BANDA] de un sistema. A mayores razones de
Por ejemplo en audio digital se usan las siguientes razones de muestreo:
24,000 = 24 kHz - 24,000 muestras por segundo. Una muestra cada 1/24,000
de segundo.
30,000 = 30 kHz - 30,000 muestras por segundo. Una muestra cada 1/30,000
de segundo.
44,100 = 44.1 kHz - 44,100 muestras por segundo. Una muestra cada 1/44,000
de segundo. 4
8,000 = 48 kHz - 48,000 muestras por segundo. Una muestra cada 1/48,000 de
segundo.
Una señal de audio muestreada a 48 KHz tiene una mejor cali-dad [el doble], que una señal muestreada a 24 KHz. Pero, una señal muestreada a 48 KHz, ocuparía el doble del ancho de ban-da que la de 24 KHz. Por lo que si queremos mayor calidad, lo perdemos en ancho de banda. Cuando bajan archivos en Inter-net MP3 por ejemplo, éstos tienen diferentes calidades, un ar-chivo MP3 de mejor calidad, ocupará mayor espacio en disco...
PUBLICIDAD
M A G A Z I N E
PUBLICIDAD
M A G A Z I N E
PUBLICIDAD
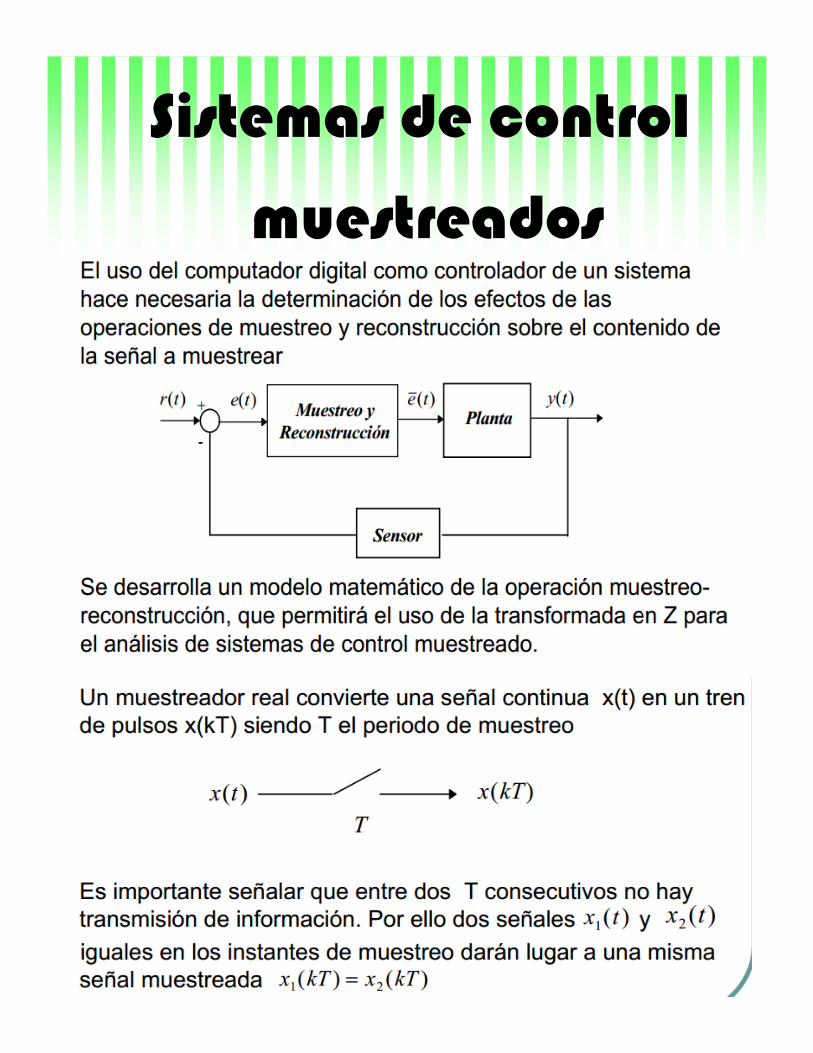
Sistemas de control
muestreados
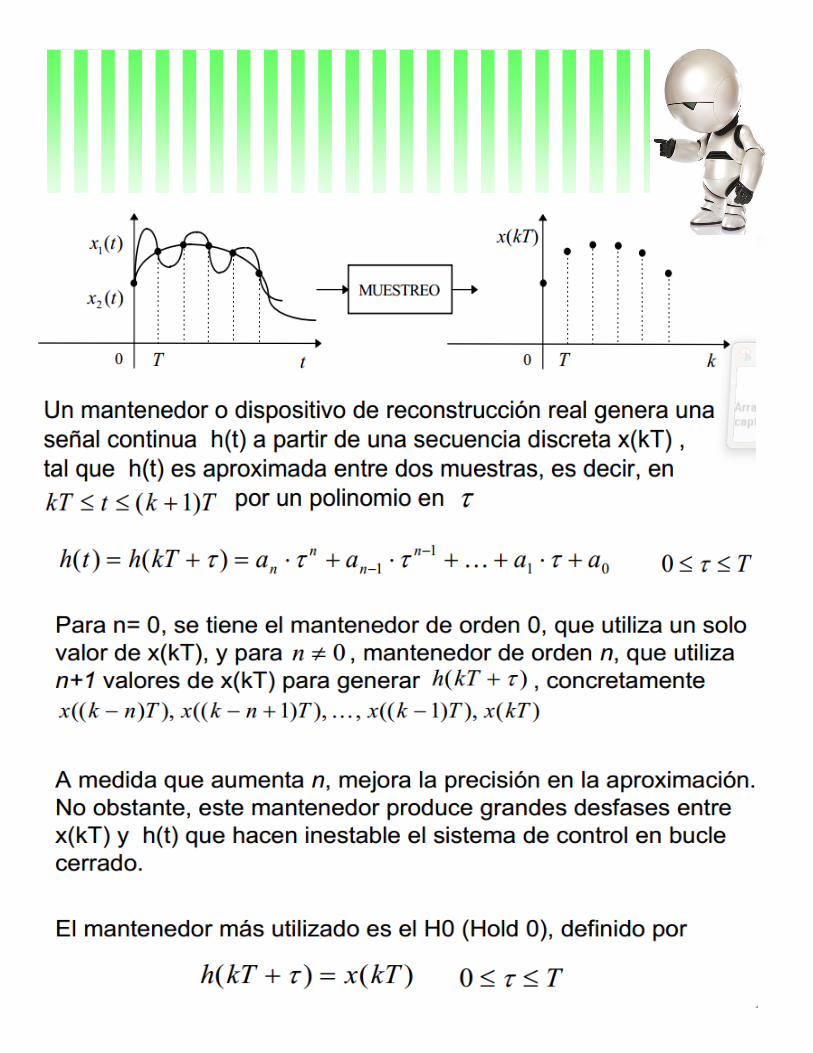
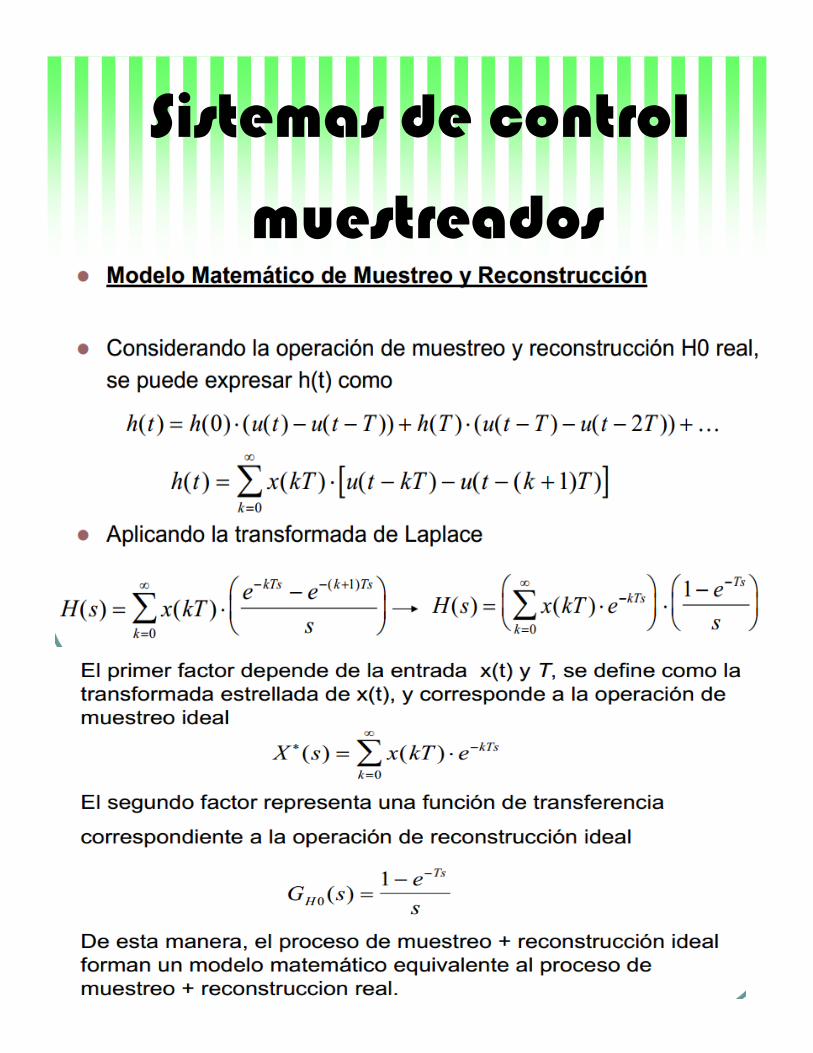
Sistemas de control
muestreados
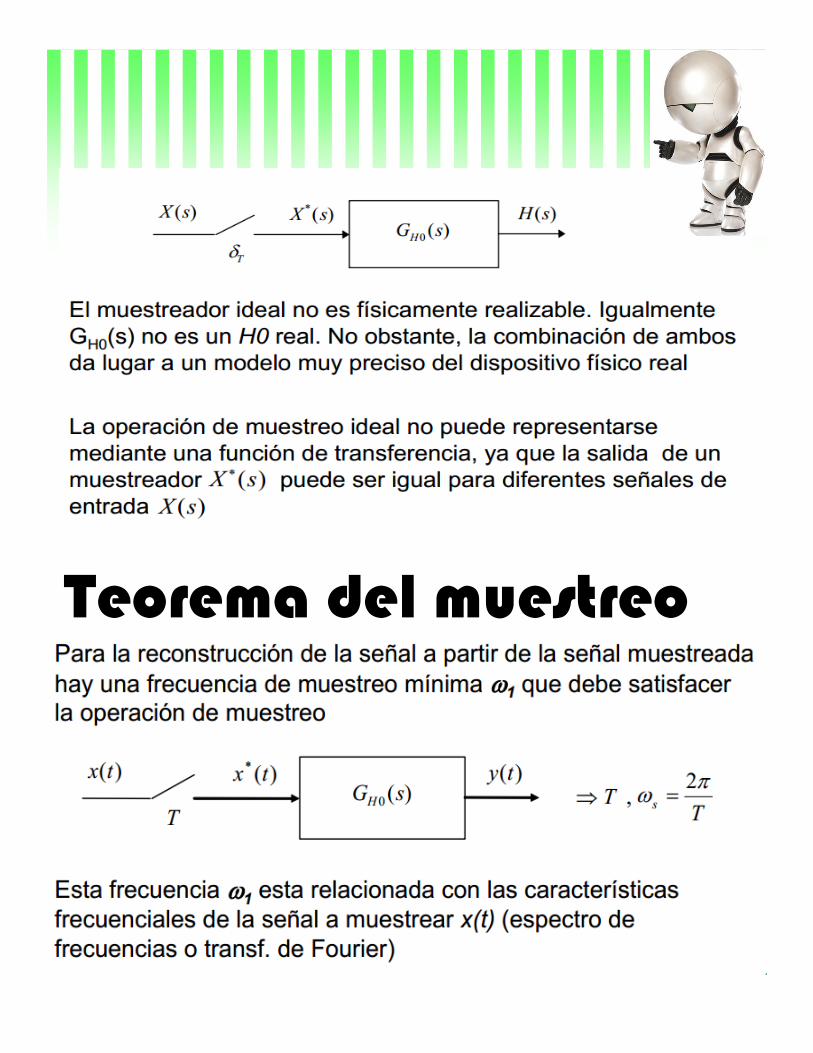
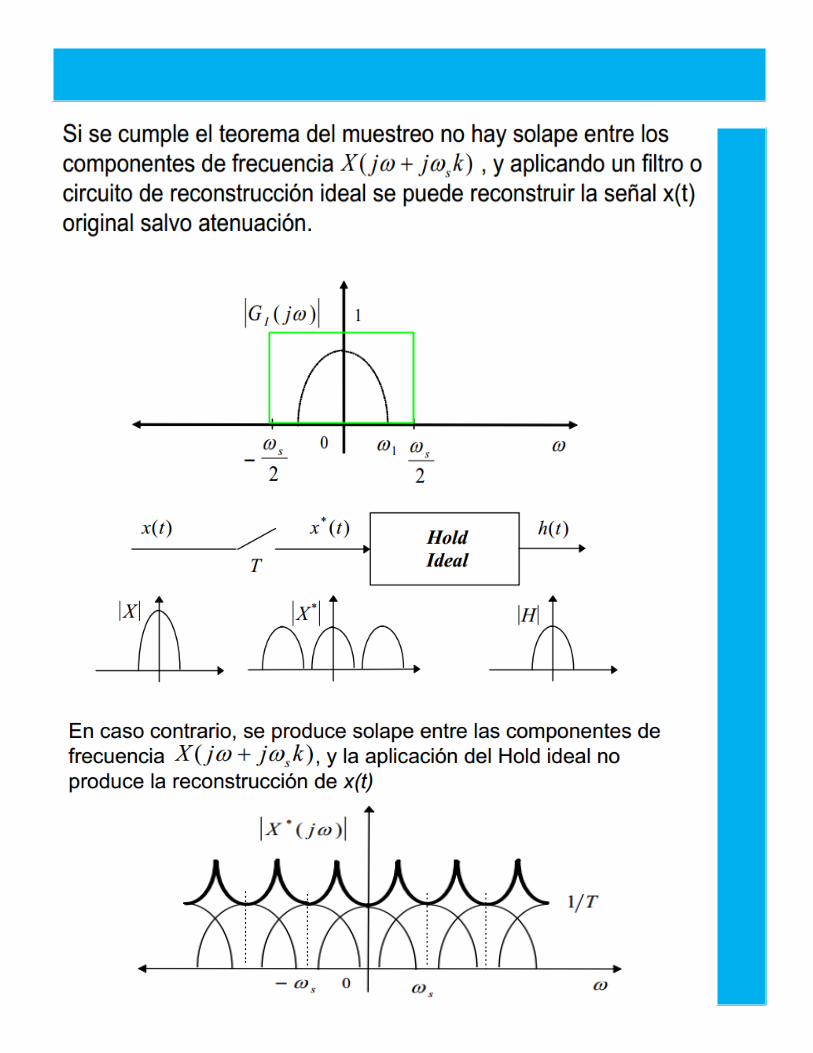
Teorema del muestreo
Ejercicio: Se desea leer con un ADC a 8 bits de resolución una señal
análoga que varia de 0 a 1.5Vdc. Seleccione VREF+ y VREF- para el
ADC.
Solución:
Se deben revisar los 2 valores extremos que podrá tener la señal
análoga de entrada. Vmínimo seria de 0V y Vmáximo seria de 1.5v.
VREF- debería ser conectado a GND y VREF+ debería conectarse a
un voltaje de 1.5V, pero se recomienda por protección subir este vol-
taje a 1.6Vdc. Ahora si predecimos cual seria el valor binario que re-
presentaría la señal análoga cuando este en su máximo valor obten-
dríamos:
Doutput=((Vinput+ - VREF-)/(VREF+ - VREF-))(n^2-1) = ((1.5V - 0)/(1.6-
0))(255) = 239.0625
Doutput= 240 base 10. Pasado a binario obtendríamos:
Doutput=11110000 base 2.
Cuando se usan microcontroladores con ADC interno, es común usar
VREF- de GND y VREF+ de 5V que es el mismo VCC, esto para evitar el uso
de reguladores especiales solo para el ADC. Si intentamos convertir a di-
gital la misma señal del ejercicio anterior con estos datos de VREF+ y VREF
-, encontraríamos que:
Doutput=((Vinput+ - VREF-)/(VREF+ - VREF-))(n^2-1) = ((1.5V - 0)/(5-0))
(255)=76.5
Doutput = 78 base 10. Pasado a binario obtendríamos:
Doutput=1001110 base 2.
De este resultado podemos recalcar que al máximo voltaje en la señal de
entrada, solo se usarían 7 bits para representar la señal, mientras que el
ADC es de 8 bits, lo que se puede llamar perdida de resolución.

El control automático no se habría podido desarrollar sin un paso previo dado por los con-troladores con la aparición de los computadores digitales los que abrieron un campo muy amplio de avance.
Analizando la historia del control digital se puede fijar co-mo momento inicial los años '50 donde aparecen las primeras computadoras dedicadas al control proceso. Eran muy grandes en cuanto a volumen, tenían un gran consumo y generalmente su fiabilidad no era muy grande

Los controladores digitales son pe-
queñas instalaciones inteligentes
que se componen de una entrada
de un sensor, un indicador digital y
una salida de regulación.
Existen controladores digitales para
diferentes trabajos de medición y
regulación. Los controladores digi-
tales se configuran a través de las
teclas del propio controlador. Existe
la posibilidad de establecer valores
nominales para definir así el proce-
so de regulación. Varios controladores digitales disponen, además de la salida
de regulación, salidas para señales normalizadas, a las que puede conectar un
sistema de visualización para controlar el proceso de regulación. Especialmente
en los sistemas de alcantarillado los controladores digitales son imprescindibles
debido a las estrictas leyes que regulan este tema. Un controlador digital verifi-
ca en este caso el valor pH de un desagüe y regula el valor para que no se con-
tamine el medioambiente. Un controlador digital
de pH se usa también en la piscicultura o en
piscinas. Los controladores digitales de tempe-
ratura se usan en los sectores de la climatiza-
ción o en el control de la temperatura del agua.
Gracias al amplio uso los controladores digitales
se usan mucho en la industria y están prepara-
dos para realizar trabajos que normalmente re-
quieren una solución completa de un PLC.
CONTROLADORES DIGITALES
Características del
Control Digital
Como características básicas del control digital se pueden
mencionar las siguientes:
No existe límite en la complejidad del algoritmo. Cosa que sí su-
cedía anteriormente con los sistemas analógicos.
Facilidad de ajuste y cambio. Por el mismo motivo anterior un
cambio en un control analógico implica, en el mejor de los casos,
un cambio de componentes si no un cambio del controlador com-
pleto.
Exactitud y estabilidad en el cálculo debido a que no existen deri-
vas u otras fuentes de error.
Uso del computador con otros fines (alarmas, archivo de datos,
administración, etc.)
Costo vs. número de lazos. No siempre se justifica un control di-
gital ya que existe un costo mínimo que lo hace inaplicable para
un número reducido de variables.
Tendencia al control distribuido o jerárquico. Se ha pasado de la
idea de usar un único controlador o computador para toda una
planta a la de distribuir los dispositivos inteligentes por variable o
grupos de estas e ir formando estructuras jerárquicas
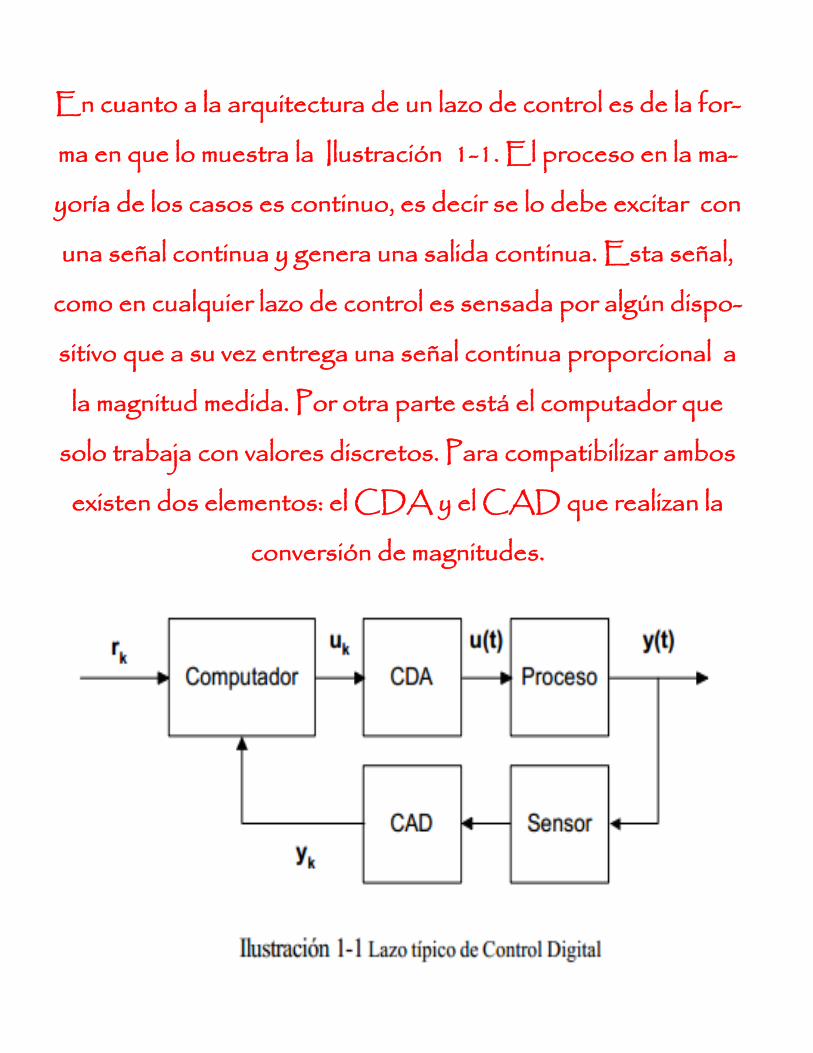
En cuanto a la arquitectura de un lazo de control es de la for-
ma en que lo muestra la Ilustración 1-1. El proceso en la ma-
yoría de los casos es continuo, es decir se lo debe excitar con
una señal continua y genera una salida continua. Esta señal,
como en cualquier lazo de control es sensada por algún dispo-
sitivo que a su vez entrega una señal continua proporcional a
la magnitud medida. Por otra parte está el computador que
solo trabaja con valores discretos. Para compatibilizar ambos
existen dos elementos: el CDA y el CAD que realizan la
conversión de magnitudes.
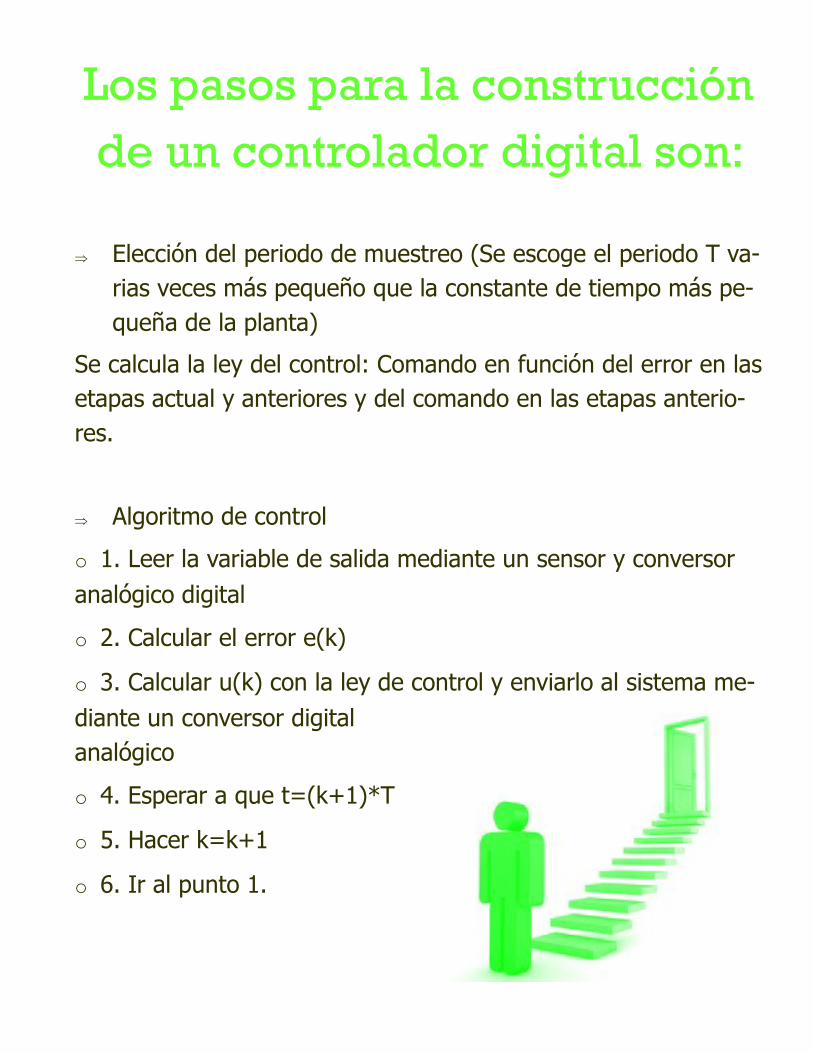
Los pasos para la construcción
de un controlador digital son:
Elección del periodo de muestreo (Se escoge el periodo T va-
rias veces más pequeño que la constante de tiempo más pe-
queña de la planta)
Se calcula la ley del control: Comando en función del error en las
etapas actual y anteriores y del comando en las etapas anterio-
res.
Algoritmo de control
o 1. Leer la variable de salida mediante un sensor y conversor
analógico digital
o 2. Calcular el error e(k)
o 3. Calcular u(k) con la ley de control y enviarlo al sistema me-
diante un conversor digital
analógico
o 4. Esperar a que t=(k+1)*T
o 5. Hacer k=k+1
o 6. Ir al punto 1.
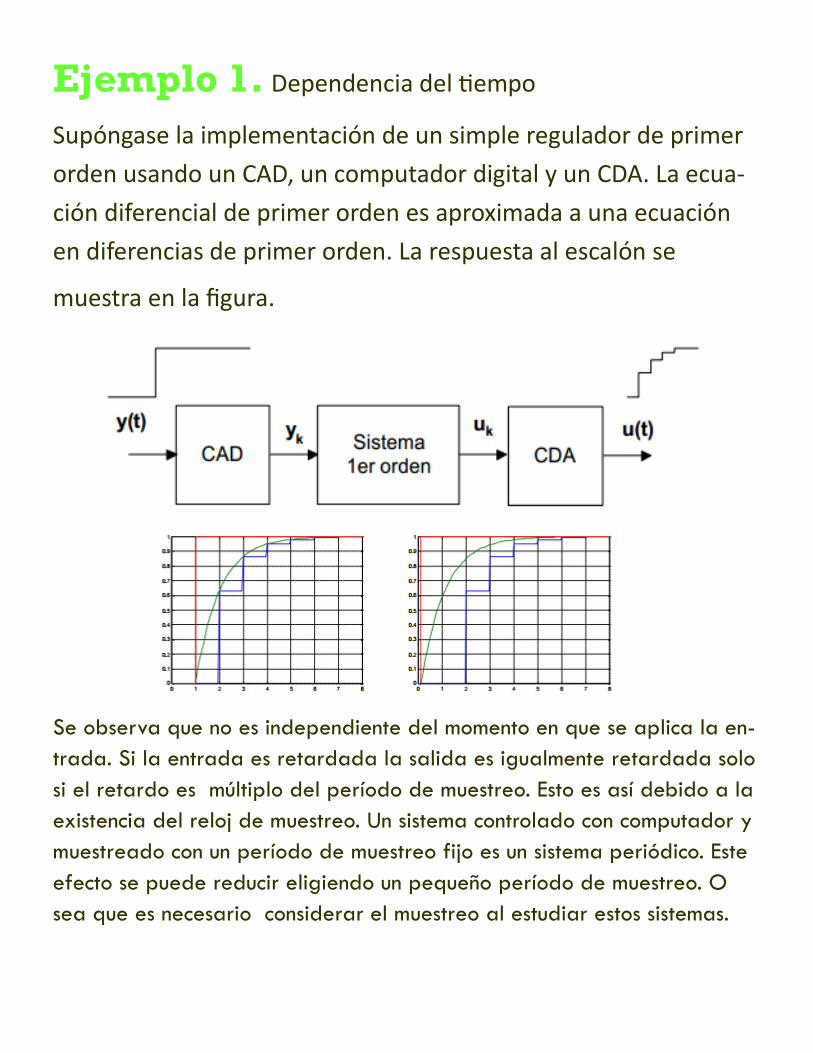
Ejemplo 1. Dependencia del tiempo
Supóngase la implementación de un simple regulador de primer
orden usando un CAD, un computador digital y un CDA. La ecua-
ción diferencial de primer orden es aproximada a una ecuación
en diferencias de primer orden. La respuesta al escalón se
muestra en la figura.
Se observa que no es independiente del momento en que se aplica la en-
trada. Si la entrada es retardada la salida es igualmente retardada solo
si el retardo es múltiplo del período de muestreo. Esto es así debido a la
existencia del reloj de muestreo. Un sistema controlado con computador y
muestreado con un período de muestreo fijo es un sistema periódico. Este
efecto se puede reducir eligiendo un pequeño período de muestreo. O
sea que es necesario considerar el muestreo al estudiar estos sistemas.

M A G A Z I N E M A G A Z I N E