
MECANICA Y ONDAS Tema 2 - mat.ucm.esrutwig/Mem-Tema2.pdf · Oscilador libre amortiguado ... El p...
45
MECANICA Y ONDAS Tema 2
Transcript of MECANICA Y ONDAS Tema 2 - mat.ucm.esrutwig/Mem-Tema2.pdf · Oscilador libre amortiguado ... El p...
MECANICA Y ONDAS
Tema 2

II

Indice general
2. Fundamentos de la dinamica: Las leyes de Newton 12.1. Movimientos en una dimension . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.2. Caıda libre en campo gravitatorio homogeneo . . . . . . . . . . . . . . . . . . . . 52.3. Rozamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.4. Oscilaciones unidimensionales. El oscilador armonico . . . . . . . . . . . . . . . . 82.5. Oscilador libre amortiguado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.6. Oscilador forzado. Fuerzas periodicas. Resonancia . . . . . . . . . . . . . . . . . . 122.7. Sistemas cuasilineales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.8. Superposicion de oscilaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.8.1. Superposicion de dos oscilaciones con la misma frecuencia . . . . . . . . . 162.8.2. Superposicion de dos oscilaciones con distinta frecuencia . . . . . . . . . . 182.8.3. El fenomeno de pulsacion . . . . . . . . . . . . . . . . . . . . . . . . . . . 192.8.4. Nociones basicas de las series de Fourier . . . . . . . . . . . . . . . . . . . 21
2.9. El pendulo matematico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.10. Osciladores lineales modulados temporalmente . . . . . . . . . . . . . . . . . . . 25
2.10.1. Osciladores de Airy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262.10.2. Osciladores de Bessel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262.10.3. Osciladores de Whittaker . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.10.4. Osciladores de Weber . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.11. Fuerzas dependientes de la posicion. Potencial . . . . . . . . . . . . . . . . . . . . 282.11.1. El lagrangiano en una dimension . . . . . . . . . . . . . . . . . . . . . . . 32
2.12. El problema inverso unidimensional . . . . . . . . . . . . . . . . . . . . . . . . . . 352.13. Diagrama de fases . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.13.1. Oscilador armonico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 372.13.2. La ecuacion de Pinney . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 372.13.3. Fuerza lineal repulsiva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 382.13.4. El pendulo matematico . . . . . . . . . . . . . . . . . . . . . . . . . . . . 392.13.5. Oscilador forzado de tipo Duffing . . . . . . . . . . . . . . . . . . . . . . . 392.13.6. Pulsacion estelar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
III

IV INDICE GENERAL
Capıtulo 2
Fundamentos de la dinamica: Las leyesde Newton
En las secciones anteriores nos hemos limitado a la descripcion geometrica y analıtica del mo-vimiento de una masa puntual en el espacio, sin analizar detalladamente las causas por lascuales tal movimiento se produce. El estudio de estas causas (o fuerzas) corresponde a unaetapa siguiente a la cinematica, la llamada dinamica. En ella encontraremos por primera vezpostulados fısicos, leyes que se derivan de la evidencia experimental, y que no son deduciblesde un razonamiento matematico abstracto. Las leyes fundamentales de Newton constituyen elnucleo de la mecanica clasica, y proporcionan una descripcion adecuada para un ancho espec-tro de movimientos, desde el movimiento de grandes moleculas a los movimientos celestes ygalacticos. Asimismo, se introduciran las nociones de masa y fuerza, que pese a su naturalezaintuitiva, distan de ser conceptos triviales y facilmente definibles. La experiencia diaria muestraque, generalmente, todo desplazamiento o movimiento de un cuerpo requiere de una fuerza. Noobstante, esta afirmacion empırica no es del todo exacta, y por tanto no debe concluirse queuna “fuerza” es la causa de todo movimiento. Como contraejemplo, puede considerarse un discoque se deslice sobre una superficie de hielo. Sin necesidad de una fuerza externa, el disco sedesplazara con velocidad aproximadamente constante. Por otra parte, el estado de movimientode una masa puntual depende tambien del observador, es decir, de la referencia elegida. Estehecho sera de extrema importancia en el estudio de la mecanica, y supone en cierto sentido unaantesala al famoso principio de relatividad.
Primera ley de Newton:1 Existen sistemas de coordenadas (sistemas inerciales) en los cualesuna masa puntual libre de fuerzas se mueve con velocidad constante:
r = cons, r = 0. (2.0.1)
La formulacion funcional de esta ley puede expresarse como: (En un sistema inercial), todocuerpo permanece en estado de reposo o movimiento uniforme salvo que sea vea forzado acambiar su estado por fuerzas ejercidas sobre el.
Cabe destacar que esta ley, que implica la existencia de referencias (sistemas de coordenadas)privilegiados, es imposible de verificar experimentalmente en la Tierra, dado que la atracciongravitatoria no puede anularse. Con el fin de verificar esta primera ley de Newton, toda fuerza
1En ocasiones llamada ley de inercia de Galileo.
1

2
externa debe ser anulada, lo que implica que su comprobacion experimental solo podrıa realizarseadecuadamente en un espacio vacıo. Esta imposibilidad de verificacion muestra, por otra parte,la intuicion fısica de Newton, al enunciar un postulado que escapa a toda comprobacion practica.La segunda pregunta crucial que surge de esta ley es que referencia debe emplearse para laobservacion de una partıcula. Ingenuamente puede sugerirse una referencia fija, pero ha detenerse en cuenta que el reposo absoluto es una nocion inexistente en la naturaleza. Ası como losplanetas giran en torno a una estrella, los sistemas planetarios y las galaxias tambien se muevenunas respecto a otras. Mas adelante veremos que si la primera ley se verifica en una referenciaR, tambien lo hara en cualquier otra referencia R′ que no este acelerada respecto a R.
Definicion 1 Se llama sistema inercial a toda referencia R en la cual se verifica la primera leyde Newton.
El contenido fısico de la primera ley radica exactamente en la existencia de tales sistemas.
Referencias inerciales: Existe una unica clase de referencias mutuamente no aceleradas unasrespecto de otras en las cuales se verifica la primera ley de Newton.
La eleccion de una referencia adecuada constituye por tanto el primer problema importante alque nos enfrentamos en mecanica. Para la mayorıa de los movimientos en la superficie terrestre,la Tierra es una referencia practica, ya que la aceleracion orbital terrestre puede ignorarse, y elefecto de la rotacion puede corregirse facilmente. En este sentido, para observaciones de objetossobre la superficie, problemas de balıstica etc, podemos tomar la Tierra como una buena apro-ximacion a un sistema inercial. La situacion cambia radicalmente para observaciones estelares,tales como el seguimiento de la trayectoria o lanzamiento de satelites artificiales. En este caso,una referencia geocentrica es mas adecuada. Para los movimientos de los planetas en nuestroSistema Solar, la referencia estandar es la heliocentrica.2
Definicion 2 El momento lineal (ımpetu) p de una partıcula de masa m (en kg) se define por
p = mv = mr (2.0.2)
La segunda ley de Newton corresponde propiamente a una ley de movimiento: especıficamente,indica como se mueve una masa puntual bajo el influjo de una fuerza.
Segunda ley de Newton: La variacion del momento lineal de una partıcula es proporcional alefecto de la fuerza motriz, y tiene la misma direccion que la fuerza:
d
dt(mv) =
dp
dt= F (2.0.3)
En esencia, la Mecanica Clasica tiene como objetivo analizar las consecuencias de la ecuaciondiferencial (2.0.3), ası como su aplicacion a los distintos fenomenos macroscopicos observablesen la naturaleza. Esta ecuacion tiene importantes implicaciones que comentamos brevemente:
1. La segunda ley de Newton no solo involucra las propiedades dinamicas de una partıculaa traves de su vector velocidad v, sino que introduce un nuevo parametro, la masa inertem. La ecuacion (2.0.3) expresa la resistencia de una masa puntual al cambio de estadodel movimiento por efecto de la fuerza F. Es importante observar que dicha resistencia nodepende de la magnitud de la fuerza.
2Para las nociones astronomicas elementales, vease por ejemplo la referencia [17].

3
2. La masa inerte3 no tiene que ser forzosamente constante. De (2.0.3) deducimos que
dp
dt= mr +mr = F (2.0.4)
Aunque generalmente la masa m se considerara constante, en multitud de problemas elmovimiento de un cuerpo va acompanado de una perdida o un aumento de masa. Unejemplo ilustrativo de tal situacion lo constituye la dinamica de un cohete. Por tanto, solosi la masa m es constante, obtenemos la expresion clasica
mr = ma = F (2.0.5)
3. En la mecanica no existe una definicion de masa (inerte) independiente de la ecuacion delmovimiento.
4. Observamos que la segunda ley de Newton habla de un factor de proporcionalidad, mientrasen la ecuacion (2.0.3) hemos optado por el signo de igualdad. Esto corresponde a unaeleccion de unidades. En lo sucesivo, la unidades seran aquellas establecidas en el sistemainternacional (S.I).4 La unidad fundamental de fuerza es el Newton, dada por
1 N = 1kg ·m
s2,
y correspondiente a la fuerza necesaria para acelerar en un segundo una masa de 1 kg auna velocidad uniforme de 1 m/s.
5. Segun la ecuacion (2.0.3), la fuerza F ejercida sobre una masa puntual puede dependerde la trayectoria, del momento lineal y del tiempo. Por lo general se considerara que Fno es dependiente de la aceleracion, imposicion no excesivamente restrictiva, aunque hayexcepciones fısicamente importantes a esta regla, como es un electron que radie ondaselectromagneticas.
Las ecuaciones del movimiento en el espacio A3 adoptan la forma de un sistema de ecuaciones di-ferenciales de segundo orden, como ya hemos observado anteriormente.5 Suponiendo que la masaes constante, que la trayectoria viene descrita por r (t) = (x (t) , y (t) , z (t)) y F = (F1, F2, F3),obtenemos de (2.0.3)
mx = F1 (t, r, r) , (2.0.6)
my = F2 (t, r, r) ,
mz = F3 (t, r, r) .
La teorıa de ecuaciones diferenciales establece las condiciones que garantizan la existencia desoluciones a un sistema de este tipo, si bien no existe un metodo universal util para todo tipode fuerzas.6 No obstante, ciertas reducciones o hipotesis externas permiten a menudo simplificar
3En adelante diremos simplemente masa.4Vease el apendice A1 para una lista de las mismas empleadas en este texto.5Siempre atendiendo a la necesidad de considerar un sistema inercial.6En general, para los sistemas de tipo no lineal las soluciones no son expresables de forma cerrada.

4 2.1. MOVIMIENTOS EN UNA DIMENSION
el sistema e integrar de forma efectiva el sistema, o al menos reducirlo a un sistema de pri-mer orden cuya solucion general pueda expresarse en terminos de funciones integrales. A merotıtulo informativo, observamos que el metodo de simetrıas, basado en la teorıa de los gruposde transformaciones de Lie, constituyen una herramienta poderosa para el estudio de sistemasdinamicos, ası como para obtener caracterizaciones intrınsecas de las leyes de conservacion.7
La resolucion del sistema (2.0.6) corresponde a la mision propia de la mecanica clasica.8 Con-viene distinguir la parte meramente matematica de (2.0.6) de la interpretacion fısica de dichaecuacion. En un primer paso ha de hallarse el sistema (2.0.6), es decir, establecer la fuerza F.La resolucion o reduccion del sistema es una operacion puramente matematica, y no tiene encuenta las circunstancias fisico-mecanicas de las que surge el problema. Finalmente, con el finde obtener una solucion unica, las dos constantes de integracion de (2.0.6) correspondientes alas condiciones iniciales, se obtienen a partir de consideraciones fısicas, y permiten interpretaradecuadamente el resultado.
Tercera ley de Newton: Si un cuerpo ejerce una fuerza sobre una partıcula, entonces esta ejerceuna fuerza sobre el cuerpo de la misma magnitud y direccion opuesta:
Faccion = −Freaccion. (2.0.7)
Esta ley, tambien conocida como de accion-reaccion, establece en esencia que una fuerza noconstituye una entidad aislada, sino que va acompanada siempre de otra opuesta a ella. Esimportante observar que las fuerzas actuan no solo sobre un cuerpo, sino sobre ambos. Esta ley,entre otras cosas, explica el porque del fenomeno de retroceso en las armas de fuego, lanzamientode objetos, ası como los fenomenos de colisiones rıgidas, etc. En los sistemas puntuales jugaraun papel relevante para una correcta comprension de la situacion.
2.1. Movimientos en una dimension
El caso del movimiento de una partıcula en una dimension, pese a su aparente simplicidad, cons-tituye un caso importante y no trivial que ilustra tanto conceptos fısicos como procedimientosde integracion que encontraremos en el caso de sistemas en dos o mas dimensiones.
Si una partıcula de masa no necesariamente constante, y supuesto que las ecuaciones del movi-miento vienen descritas por la segunda ley de Newton,9 la segunda de ley de Newton da lugara la ecuacion diferencial de segundo orden
mx+mx = F (t, x, x) . (2.1.1)
Entendemos por movimiento libre (partıcula libre) toda aquella para la cual se satisfaga F = 0.Si la masa es dependiente del tiempo, en ausencia de fuerzas obtenemos la ecuacion
mx+mx = 0 (2.1.2)
7Veanse por ejemplo [5] y [13].8Tecnicamente puede plantearse el mismo problema en n-dimensiones.9Como veremos en la seccion ??, para el caso de masa variable, el segundo postulado de Newton es valido solo en
un caso particular, siendo la ecuacion correcta de la dinamica de masa variable la llamada ecuacion de Meshchersky,que supone una generalizacion natural de los postulados de Newton.
5
Mediante separacion de variables podemos reescribir esta expresion como
m
m= − x
x,
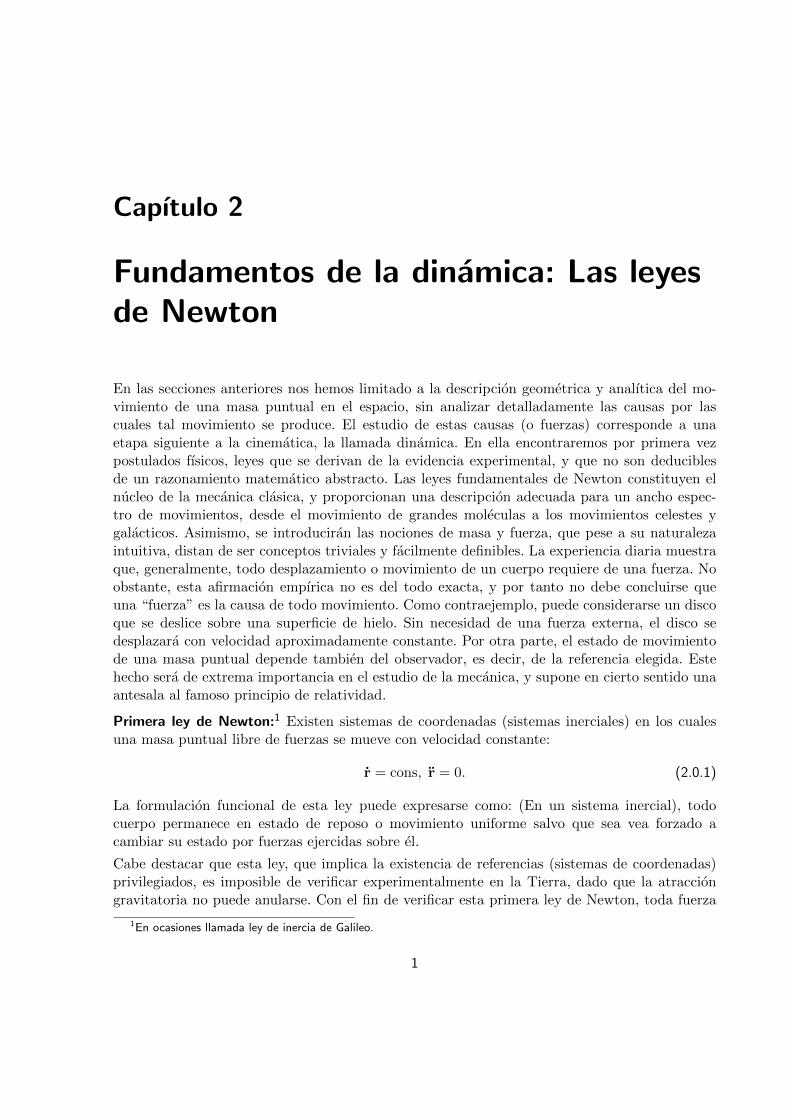
de lo que resulta facilmente que
x (t) = k2 + k1
∫dt
m (t). (2.1.3)
Figura 2.1: Dinamica de una partıcula de masa variable.
Para el caso especial m = const., la ecuacion
mx = 0 (2.1.4)
es trivialmente integrable, dando lugar a x (t) = k1t + k2. Observemos que k2 = x (0), mien-tras k1 = x (t). Sin perdida de generalidad, pueden interpretarse fısicamente las constantes deintegracion como la posicion y la velocidad en tiempo t = 0. Se observa asimismo que ni latrayectoria ni la velocidad dependen en este caso de la masa. Por otra parte, si k1 = 0, la tra-yectoria se reduce a un solo punto, y la partıcula esta en reposo. Este resultado ilustra de formaintuitiva porque la primera ley no distingue el movimiento uniforme del estado de reposo.
2.2. Caıda libre en campo gravitatorio homogeneo
Como aproximacion valida, podemos suponer que la fuerza FG ejercida por un campo gravita-torio sobre una partıcula es independiente de la posicion y la altura sobre la superficie terrestre,proporcional a la masa m y dirigida hacia el centro terrestre.10 Eligiendo una referencia adecua-da, la ecuacion del movimiento puede representarse por
mx = −mg, (2.2.1)
donde g = const. = 9,807ms−2. Antes de resolver esta ecuacion, observamos que la masa maparece en ambos lados; no obstante, el origen de este factor es distinto en cada caso. Mientrasen la parte izquierda m corresponde a un factor de inercia por la accion de una fuerza arbitraria,
10Como cabe esperar, esta simplificacion no es del todo realista. De hecho el campo gravitatorio terrestre no es deltodo uniforme, teniendo su mınimo y maximo en el ecuador y los polos respectivamente.

6 2.3. ROZAMIENTO
el factor a la derecha pone de manifiesto la propiedad de una partıcula de ser acelerada en uncampo gravitatorio. Experimentalmente se justifica que la masa inerte y la masa gravitatoriacoinciden, lo que permite en efecto simplificar la ecuacion (2.2.1). Integrando dos veces sobre tobtenemos facilmente
x (t) = −g2t2 + a1t+ a2 (2.2.2)
Las constantes a1 y a2 pueden identificarse con la velocidad y posicion inicial (t = 0), respecti-vamente. Escribiendo
x1 (t) = −g2t2, x2 (t) = a1t+ a2,
es inmediato comprobar que la trayectoria es la suma de trayectorias correspondientes a unmovimiento acelerado y un movimiento uniforme.
2.3. Rozamiento
Las fuerzas de rozamiento o friccion, en un sentido intuitivo y no preciso, pueden interpretarsecomo una resistencia del medio al movimiento de una partıcula u objeto. El efecto de estasfuerzas es llevar el movimiento a un estado de equilibrio en el cual la energıa cinetica, quetrataremos mas adelante, es nula, por lo que suponen un primer ejemplo de las llamadas fuerzasdisipativas.11 Con caracter general, puede suponerse que una fuerza de rozamiento es opuesta almovimiento y de sentido opuesto a la velocidad de la partıcula. No es infrecuente expresar estasfuerzas mediante series de potencias del tipo
Fr =∞∑s=0
ρsx(t)s, (2.3.1)
donde las ρs son ciertas constantes que se determinan experimentalmente. En la practica, y de-pendiendo del problema que se analice y del tipo de rozamiento que se observe, suele considerarsela mejor aproximacion de Fr tomando un unico termino no nulo en la serie.12
El tipo mas usual de rozamiento es aquel que depende linealmente de la velocidad y esta dirigidaen direccion opuesta al movimiento. Como primera aproximacion de esta observacion empıricapodemos tomar la ecuacion lineal
mx = −ρ x, (2.3.2)
donde ρ > 0 es una constante, llamada constante de rozamiento. Haciendo una sustitucion detipo exponencial x = eαt, esta ecuacion queda reducida a la ecuacion escalar
eαt(mα2 + ρα
)= 0,
de donde se deducen las soluciones para α1 = 0 y α2 = − ρm . Por tanto la solucion general de
(2.3.2) es
x (t) = k1 + k2e−ρmt. (2.3.3)
11Los sistemas sujetos a rozamiento son de gran importancia, entre otros, en la termodinamica, y ponen de manifiestola estrecha relacion de esta con la mecanica [9].
12El estudio sistematico de los fenomenos de rozamiento, mucho mas extenso que los casos especiales aquı analizados,forman una disciplina propia de la ingenierıa, llamada tribologıa.

7
Manipulando la expresion anterior, podemos reescribir esta como
x (t) = a1 + a2
(1− e
− ρmt),
lo que permite identificar la constante de integracion a1 con la posicion inicial. Dado que
v (t) = x(t) =a2ρ
me− ρmt
,
la velocidad decrece de forma continua.Una situacion tıpica donde se considera el rozamiento lineal es la caıda libre.13 En este caso,la fuerza de gravedad −mg se superpone a la de rozamiento, de modo que la ecuacion delmovimiento viene dada por
mx = −mg − ρ x (2.3.4)
Fısicamente, esta ecuacion diferencial es sumamente interesante. La fuerza gravitatoria aumentala velocidad (en valor absoluto) de la partıcula inicialmente en reposo hasta cierto punto, dondees compensada por el rozamiento.14 Llegados a este punto de equilibrio (fuerza y aceleracionnulas), la velocidad final de la partıcula es
xF = −mgρ
(2.3.5)
La funcion f = −mgρ t es una solucion particular de (2.3.4), lo que nos permite obtener la solucion
general con ayuda de la solucion de (2.3.2), correspondiente a la parte homogenea de la ecuacion.En consecuencia
x (t) = k1 + k2e−ρmt − mg
ρt, (2.3.6)
donde las condiciones iniciales son x(0) = k1 + k2 y x(0) = −(ρ2k2 +m2g
)/(mρ).
A partir de la ecuacion (2.3.6), puede dar la falsa impresion de que x(t) se dispara para ρ→ 0.No obstante, si desarrollamos la funcion exponencial como serie,15 resulta que
x(t) = (k1 + k2) + x(0)t+∞∑n=2
k2
n!
(−ρtm
)n, (2.3.7)
y no hay por tanto indeterminacion para valores ρ→ 0.
Figura 2.2: Trayectoria en caıda libre ascendente y descendente con rozamiento lineal.
13Este caso engloba el movimiento tanto ascendente como descendente, dado que un cambio de signo en v implicaasimismo un cambio de signo en la fuerza de rozamiento.
14Este hecho es el que permite que los saltos en paracaıdas sean posibles, dado que implica una velocidad lımite.15Recuerdese que exp(z) =
∑∞n=0
1n!zn.

8 2.4. OSCILACIONES UNIDIMENSIONALES. EL OSCILADOR ARMONICO
Analizemos una situacion semejante, suponiendo que dejamos caer un cuerpo de masa m desdeuna altura h0 = x (0) determinada en un medio que ofrece una resistencia proporcional alcuadrado de la velocidad del cuerpo. La ecuacion del movimiento correspondiente es16
mx = mg − k x2. (2.3.8)
Mediante la sustitucion u = x, reducimos el orden de la ecuacion en una unidad,
mu = mg − k u2. (2.3.9)
Esta ecuacion diferencial de primer orden es una ecuacion de Ricatti,17 cuya solucion generalviene dada por
u =αm
k
(eα(t+C1) − e−α(t+C1)
)(eα(t+C1) + e−α(t+C1)
)−1, α2 =
k g
m. (2.3.10)
Es importante observar que, para t tendiendo al infinito, se alcanza una velocidad lımite
lımt→∞
u =
√gm
k
que depende de la masa y la constante k. La trayectoria se obtiene de (2.3.10) mediante unacuadratura
x (t) =m
kln
(eα(t+mC1) + e−α(t+mC1)
2
)−(m
k
(ln
(mα
gC1
))− h0
). (2.3.11)
La constante de integracion C1 se determina dependiendo de la condicion inicial.
2.4. Oscilaciones unidimensionales. El oscilador armonico
La nocion de oscilacion en una o varias dimensiones, relacionada con la periodicidad en el movi-miento, describe gran cantidad de fenomenos fısicos y supone un modelo de aproximacion valiosopara sistemas cuyo movimiento puede considerarse como un acoplamiento o una superposicionde oscilaciones.
Definimos como oscilacion a toda variacion periodica con respecto al tiempo de una mag-nitud fısica.Una oscilacion puede por tanto ser de tipo mecanico (variacion periodica con respecto al tiempode una partıcula), ası como de tipo no mecanico (oscilacion electromagnetica). Una magnitudoscilatoria puede, por otra parte, ser de tipo vectorial o tensorial.
El ejemplo fundamental de oscilacion viene dado por el llamado oscilador armonico. Imaginemosun muelle o resorte cuya fuerza sea proporcional a la elongacion del resorte (ver la figura).18 Eneste caso, la ecuacion del movimiento, en ausencia de rozamiento, es una ecuacion lineal del tipo
mx = −k x, (2.4.1)
16Conviene observar que en el caso de lanzamiento ascendente, hay un cambio de signos en la ecuacion del movi-miento.
17Vease el apendice para las propiedades basicas de esta y otras ecuaciones diferenciales de primer orden.18Esta es la llamada ley de Hooke.

9
donde k > 0 es la llamada constante elastica o de recuperacion del muelle o resorte.
Figura 2.3: Oscilador armonico
Mediante el cambio x = eλt obtenemos la ecuacion escalar eλt(mλ2 + k
)= 0, con soluciones
complejas
λ1,2 = ± i
√k
m= ± iω0.
La constante ω0 se conoce como la frecuencia angular. La solucion general viene por tanto dadapor
x (t) = a1 cos (ω0t) + a2 sin (ω0t) (2.4.2)
La constante a1 designa la posicion inicial, mientras a2ω0 es la velocidad inicial. No obstante,esta expresion no es la mas adecuada para una interpretacion dinamica del resultado, ni para ladescripcion general de oscilaciones. Para ello reescribimos la solucion como
x (t) =√a2
1 + a22
(a1√a2
1 + a22
cos (ω0t) +a2√a2
1 + a22
sin (ω0t)
)(2.4.3)
Definiendo cosψ = a1
(a2
1 + a22
)− 12 y sinψ = a2
(a2
1 + a22
)− 12 , resulta de (2.4.3)
x (t) =√a2
1 + a22 (cosψ cos (ω0t) + sinψ sin (ω0t)) = A cos (ω0t− ϕ) , (2.4.4)
donde tanϕ = a2a−11 y A =
√a2
1 + a22. El escalar A es la amplitud (diferencia maxima respecto
al estado de equilibrio) y ϕ es la fase inicial. La fase ω0t−ϕ indica la elongacion en tiempo t, esdecir, la distancia del punto de equilibrio. Como propiedad caracterıstica del oscilador armonicopodemos destacar la independencia de la frecuencia angular ω0 de la amplitud A. Como perıodoT de una oscilacion se designa el tiempo necesario para completar una oscilacion. Es inmediatocomprobar que para el oscilador armonico se verifica
T =2π
ω0= 2π
√m
k. (2.4.5)

10 2.5. OSCILADOR LIBRE AMORTIGUADO
De la relacion para la frecuencia19
f T = 1 (2.4.6)
obtenemos que f = ω02π =
√k
2π√m
es la frecuencia de la oscilacion.
Figura 2.4: Oscilador armonico
En un paragrafo posterior comprobaremos que el oscilador armonico esta relacionado de formanatural con el pendulo circular homogeneo, lo que nos proporcionara una forma alternativa deilustrarlo.
2.5. Oscilador libre amortiguado
Todo oscilador armonico real finalmente llega a una posicion de reposo, como consecuenciade las fuerzas de rozamiento. Nuevamente aproximamos la fuerza de rozamiento mediante unplanteamiento lineal20
mx = −k x− ρx, (2.5.1)
donde k > 0 y ρ > 0. Con el fin de simplificar el analisis, podemos suponer sin perdidad degeneralidad que k = mω2
0 y ρ = 2mρ1, lo que reduce la ecuacion (2.5.1) a
x+ 2ρ1x+ ω20 x = 0. (2.5.2)
La ecuacion caracterıstica λ2 + 2ρ1λ+ ω20 = 0 tiene las raıces
λ1,2 = −ρ1 ±√ρ2
1 − ω20. (2.5.3)
Hemos de distinguir tres casos, correspondientes a las distintas posibilidades que se derivan de(2.5.3).
1. Oscilador fuertemente amortiguado (tambien llamado supercrıtico)En este caso ρ1 > ω0, y por tanto las raıces de la ecuacion caracterıstica son ambasnegativas y reales. La trayectoria viene dada por
x (t) = a1eλ1t + a2eλ2t (2.5.4)
19Tomando una adecuada normalizacion en las unidades.20En el caso de circuitos electricos, el rozamiento puede describirse con exactitud. Vease por ejemplo [15].

11
Se observa que la elongacion decrece exponencialmente, y a lo sumo habra un paso por laposicion de equilibrio, por lo que este caso no corresponde realmente a una oscilacion.
Figura 2.5: Osciladores supercrıtico y aperiodico.
2. Oscilador aperiodicoCuando ρ1 = ω0, la ecuacion caracterıstica tiene una raız doble, por lo que la solucionviene dada por
x (t) = e−ρ1t (a1 + a2t) (2.5.5)
La trayectoria en este caso es muy similar a las del oscilador fuertemente amortiguado.Tampoco se trata propiamente de una oscilacion, y la partıcula vuelve al estado de reposo.
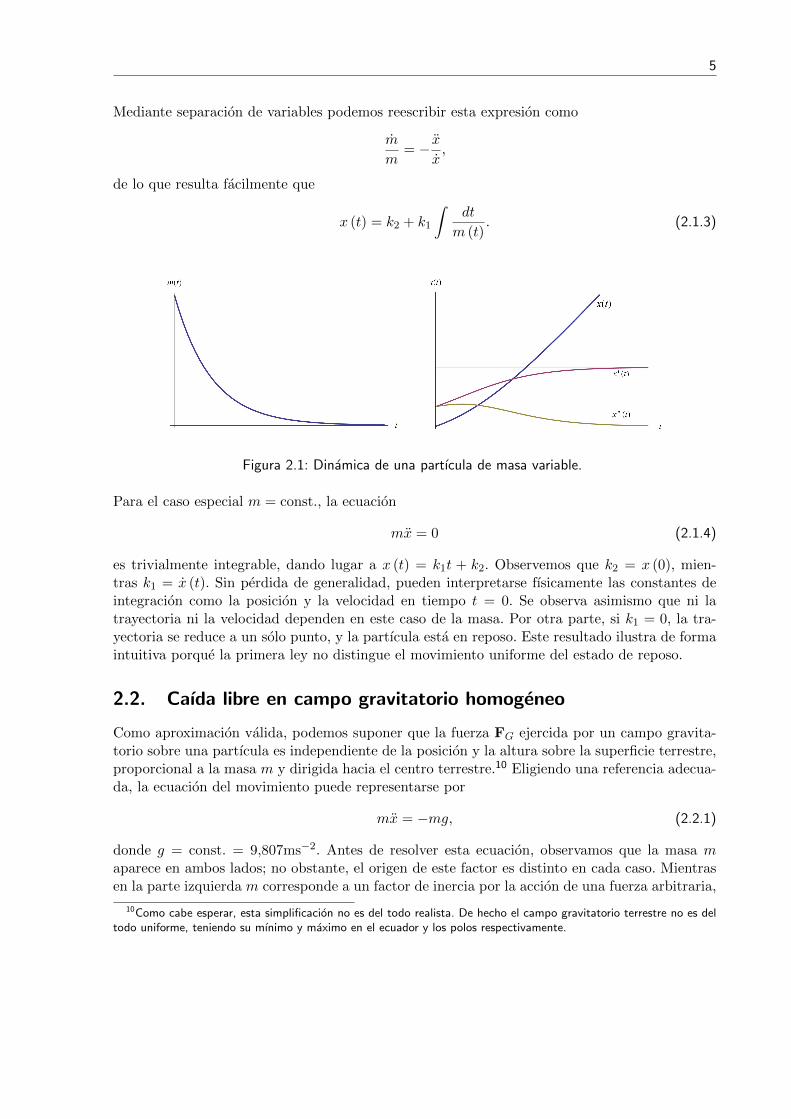
3. Oscilacion debil (subcrıtico)Para ρ1 < ω0, las dos raıces de (2.5.3) son complejas
λ1,2 = −ρ1 ± i√ω2
0 − ρ21.
La solucion general de la ecuacion diferencial es por tanto
x (t) = e−ρ1t(a1 cos
(√ω2
0 − ρ21t
)+ a2 sin
(√ω2
0 − ρ21t
)). (2.5.6)
Repitiendo la misma transformacion que en el caso anterior, simplificamos la expresion dex (t) para representarla de la forma
x (t) =√a2
1 + a22 e−ρ1t cos
(√ω2
0 − ρ21t− ϕ
). (2.5.7)
Se observa que la frecuencia angular√ω2
0 − ρ21 de la oscilacion depende esencialmente de
ρ1, y por tanto del rozamiento. Por otra parte, la amplitud A (t) =√a2
1 + a22 e−ρ1t decrece
exponencialmente con el tiempo. Puesto que |cos θ| ≤ 1, la formula (2.5.7) establece quela trayectoria x (t) tiene como curva envolvente a A (t).
12 2.6. OSCILADOR FORZADO. FUERZAS PERIODICAS. RESONANCIA
Figura 2.6: Oscilador subcrıtico.
En el caso del oscilador subcrıtico ya no se puede hablar propiamente de perıodo T , ya quela frecuencia angular decrece de ω a
√ω2
0 − ρ21. Llamamos tiempo de relajacion del oscilador a
τ = ρ−11 y decremento logarıtmico a ∆ = log x(t)
x(t+T ) = Tτ . Este ultimo sirve como medida del
decrecimiento de la amplitud.
Hay que destacar que el tipo de oscilacion que se observa viene determinado por los valores dem, k y ρ1. Si fijamos las dos primeras constantes y consideramos ρ1 ≥ 0 creciente, el sistemapasa del oscilador armonico al subcrıtico, luego al aperiodico para acabar finalmente en el casosupercrıtico. Este hecho puede ilustrarse experimentalmente sumergiendo paulatinamente unpendulo en un lıquido de alta viscosidad.
2.6. Oscilador forzado. Fuerzas periodicas. Resonancia
El paragrafo anterior pone de manifiesto que, en ausencia de fuerzas externas, toda oscilaciontiende a un estado de reposo debido a la fuerza de rozamiento. En el caso de que actue unafuerza externa, la ecuacion del movimiento, partiendo de la ecuacion simplificada (2.5.2), adoptala forma
x+ 2ρ1x+ ω20 x = F (t, x) (2.6.1)
En principio, F es una funcion arbitraria. No obstante, un caso particularmente interesante vienedado cuando la fuerza F es periodica. Sin perdida de generalidad, sea F = F0 cos (ωt), con loque obtenemos la EDO
x+ 2ρ1x+ ω20 x = F0 cos (ωt) . (2.6.2)
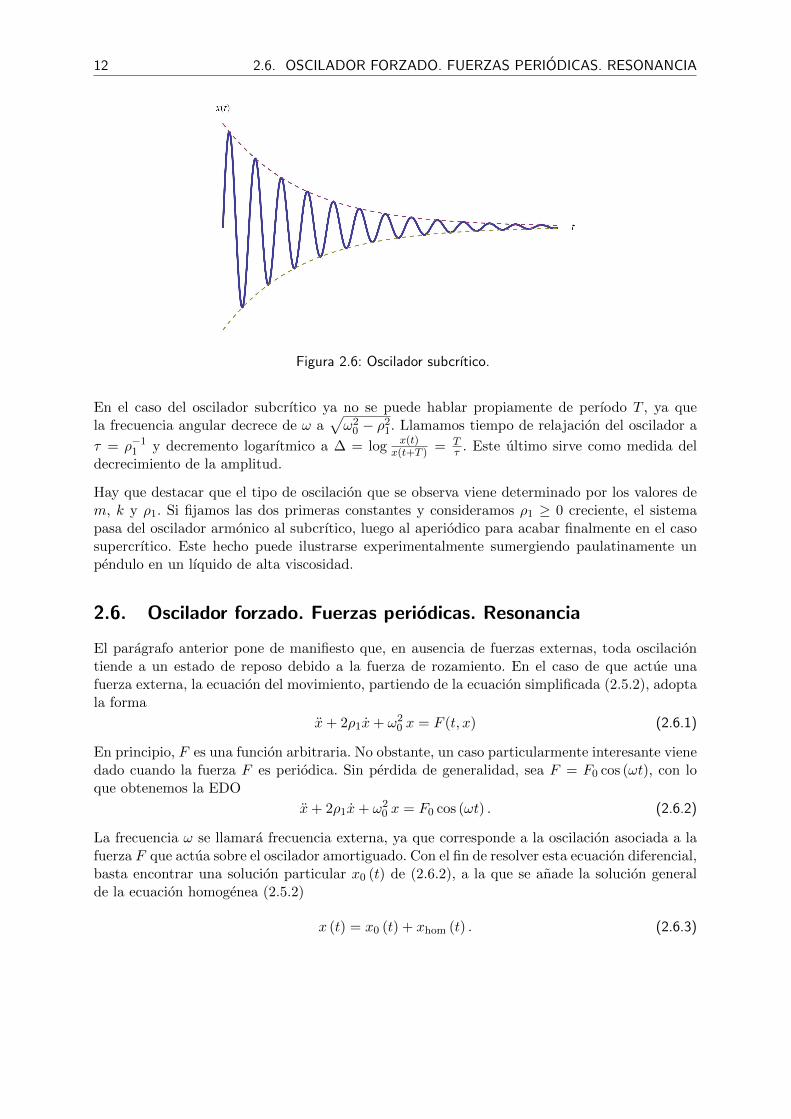
La frecuencia ω se llamara frecuencia externa, ya que corresponde a la oscilacion asociada a lafuerza F que actua sobre el oscilador amortiguado. Con el fin de resolver esta ecuacion diferencial,basta encontrar una solucion particular x0 (t) de (2.6.2), a la que se anade la solucion generalde la ecuacion homogenea (2.5.2)
x (t) = x0 (t) + xhom (t) . (2.6.3)

13
Un calculo elemental muestra que
x0 (t) =F0
((ω2
0 − ω2)
cos (ωt) + 2ρ1ω sin (ωt))((
ω20 − ω2
)2+ 4ρ2
1ω2) (2.6.4)
satisface (2.6.2), por lo que puede tomarse como solucion particular. Utilizando una vez mas lasidentidades trigonometricas, simplificamos x0 (t) a la expresion
x0 (t) =F0 cos (ωt− ϕ)√(ω2
0 − ω2)2
+ 4ρ21ω
2
, (2.6.5)
donde sinϕ = 2ρ1ω((ω2
0 − ω2)2
+ 4ρ2ω2)− 1
2. La parte homogenea xhom (t) de la trayectoria
x (t), correspondiente a un oscilador amortiguado y que recibe el nombre de termino transitorio,decrece exponencialmente con el tiempo, como se ha deducido anteriormente. Esto significa quexhom (t) solo es relevante para un cierto tiempo t0, despues del cual la trayectoria de la partıculavendra dominada por x0 (t). Se trata de un estado estacionario, donde en particular, la frecuenciade la oscilacion vendra esencialmente descrita por la frecuencia externa ω. La amplitud A, porotra parte, depende de tres parametros, la frecuencia externa ω, la frecuencia interna ω0 y elcoeficiente de rozamiento ρ1. Sea
A (ω) =F0√(
ω20 − ω2
)2+ 4ρ2
1ω2
(2.6.6)
la funcion de amplitud-resonancia, donde suponemos que ω0 y ρ1 vienen dados por la oscilacionamortiguada de partida. De (2.6.6) deducimos que
dA
dω= −
2F0 ω(ω2 −
(ω2
0 − 2ρ21
))((ω2
0 − ω2)2
+ 4ρ21ω
2) 3
2
. (2.6.7)
Los extremos de A (ω) se dan por tanto para ω1 = 0 y ωR =√ω2
0 − 2ρ21, siempre que se tenga
ω0 >√
2ρ1.21Si tenemos ω0 ≤√
2ρ, no se da ningun maximo, y la amplitud decrece con elaumento de ω. Si por el contrario se verifica ω0 >
√2ρ1, entonces la amplitud alcanza el maximo
A (ωR) =F 0
2ρ1
√ω2
0 − ρ21
. (2.6.8)
En este caso decimos que las oscilaciones estan en resonancia, y llamamos fR = ωR2π la frecuencia
de resonancia. Observese que para rozamiento pequeno ρ1 → 0, A (ωR) crece descontroladamen-te,22 dando lugar a oscilaciones que pueden destruir el sistema. En estas condiciones puede darselo que se conoce como una catastrofe de resonancia.
21Dado que la fuerza externa es periodica, descartamos el valor ω = 0. Por otra parte, como la frecuencia es positiva,se descarta la raız negativa.
22En la practica, la amplitud nunca tendera a infinito por cuestiones de rozamiento, sino que alcanzara un valormaximo, dado que la energıa anadida al sistema por la fuerza externa es empleada por el trabajo de rozamiento, lo quelleva a un estado estacionario.

14 2.7. SISTEMAS CUASILINEALES
Figura 2.7: Curvas de resonancia para una oscilacion .
Los fenomenos de resonancia son de suma importancia en fenomenos naturales, y aparecenpor tanto en multitud de problemas fısicos. Como ejemplo no mecanico citamos la resonanciaelectrica de circuitos, donde la ecuacion de oscilacion de la carga electrica es formalmente comola ecuacion de un oscilador:23
q +R
Lq +
1
CLq − V0
Leiωt = 0. (2.6.9)
Otros ejemplos usuales vienen dados por un medidor de frecuencias de Frahm, ası como lasresonancias acustica, optica o magnetica nuclear [7].
2.7. Sistemas cuasilineales
Reciben este nombre los sistemas descritos por una ecuacion diferencial del tipo
x+ ω2x = ε F (x, x) , (2.7.1)
siendo ε un parametro pequeno. Mediante el cambio a una variable temporal “adimensional”τ = ωt, la ecuacion se transforma del modo siguiente:
d2x
d τ2+ x =
ε
ω2F (x, x) . (2.7.2)
En esta forma, y dado que el parametro ε es pequeno, es factible buscar soluciones aproximadasde la ecuacion (2.7.2). En analogıa con los osciladores usuales, se consideran dos funciones % (τ)y θ (τ) que juegan el papel analogo a la amplitud y la fase, exigiendo ademas que % y θ varıenlentamente con respecto a τ . Se busca por tanto una solucion aproximada que tenga la forma
x = % cos (τ − θ) . (2.7.3)
23R designa la resistencia, L la autoinduccion, C la capacidad y V0 la tension. Vease el capıtulo 4 de [7] para unanalisis pormenorizado de la resonancia electrica.

15
Calculando las derivadas y teniendo en cuenta que ε es un parametro pequeno, las aproximacioneslineales correspondientes implican que las funciones de amplitud y fase han de satisfacer lascondiciones suplementarias
d%
dτ= εΦ (%) ,
dθ
dτ= εΨ (%) , (2.7.4)
donde Φ y Ψ estan determinadas por las expresiones24
Φ (%) = − 1
2π
∫ 2π
0F (% cos ξ,−% sin ξ) sin ξ dξ, (2.7.5)
Ψ (%) =1
2π%
∫ 2π
0F (% cos ξ,−% sin ξ) cos ξ dξ (2.7.6)
Como ejemplo ilustrativo del procedimiento, consideramos la ecuacion de Van der Pol25
x+ x = ε(1− x2
)x. (2.7.7)
Utilizando las condiciones (2.7.5) y (2.7.6), un sencillo calculo muestra que las funciones Φ (%)y Ψ (%) estan dadas por
Φ (%) =1
8%(4− %2
), Ψ (%) = 0, (2.7.8)
por lo que se obtienen de (2.7.4)
d%
dτ=ε
8%(4− %2
),dθ
dτ= 0. (2.7.9)
Ambas ecuaciones se integran de forma inmediata, de lo que resulta en particular que la funcionde amplitud es
% = 2(1 + C e−ε τ
)− 12 (2.7.10)
con C una constante determinada por las condiciones iniciales, y la solucion aproximada es
x (τ) =2√
1 + C e−ε τcos (τ − θ0) . (2.7.11)
Se observa que lımτ→∞ % = 2, por lo que, para valores de τ crecientes, la solucion aproximadatiende hacia la curva periodica26
x = 2 cos τ. (2.7.12)
2.8. Superposicion de oscilaciones
No es inusual que en un fenomeno fısico intervengan, de forma simultanea, dos o mas osci-laciones armonicas. En este sentido, y dentro de ciertos margenes de aplicacion,27 es de gran
24Este es el llamado metodo de Krylov-Bogolyubov, introducido en 1937 en el contexto general de la dinamica nolineal. Vease por ejemplo [6] para un desarrollo detallado de las condiciones suplementarias.
25El analisis original de esta ecuacion puede encontrarse en B. Van der Pol 1926 Phil Mag. 2, 978-992.26Este hecho indica que, para tiempos grandes, la curva del plano z (τ) = (x (τ) , x (τ)) tiende a aproximarse a una
curva cerrada llamada ciclo lımite. Para una introduccion a las cuestiones de la teorıa de la estabilidad de sistemas deprimer orden, veanse [4] o [6].
27Se entiende que no existe interaccion entre las oscilaciones aisladas.

16 2.8. SUPERPOSICION DE OSCILACIONES
importancia el llamado principio de superposicion: En un sistema sujeto a n oscilaciones armoni-
cas simultaneas xi(t) (1 ≤ i ≤ n) en la misma direccion,28 estas se superponen linealmente sinperturbacion mutua:
x(t) = x1(t) + · · ·+ xn(t). (2.8.1)
Este hecho puede reformularse diciendo que la resultante de las n oscilaciones armonicas es lasuma de las oscilaciones aisladas. En ausencia de terminos de interaccion entre las oscilaciones,para cada una de ellas tenemos la ecuacion diferencial29
xj + ω2jxj(t) = 0, 1 ≤ j ≤ n. (2.8.2)
Tomando la suma de ellas obtenemos la ecuacion
n∑j=1
xj +n∑j=1
ω2jxj(t) = 0. (2.8.3)
Es inmediato ver que solo en el caso donde las frecuencias sean las mismas ω1 = · · · = ωn,la EDO (2.8.3) representa la ecuacion del movimiento de la superposicion x(t), dado que laexpresion simplifica a
x+ ω21x(t) = 0. (2.8.4)
Si ωi 6= ωj para algun par de ındices, el movimiento deja de ser de tipo armonico, y correspondea un oscilador forzado. Para ilustrar este hecho, supongamos que ω1 = · · · = ωn−1 y ω1 6= ωn.Dado que para cada ındice 1 ≤ j ≤ n la solucion de (2.8.2) puede escribirse de la formaxj(t) = Aj cos (ωjt+ φj), la suma x(t) tiene la forma
x(t) =n∑j=1
Aj cos (ωjt+ φj) =n−1∑j=1
Aj cos (ω1t+ φj) +An cos (ωnt+ φj) (2.8.5)
Derivando dos veces con respecto al tiempo y operando en la expresion resultante, obtenemos
x(t) = −ω21
n−1∑j=1
Aj cos (ω1t+ φj)−Anω2n cos (ωnt+ φn) = −ω2
1x(t)+An(ω2
1 − ω2n
)cos (ωnt+ φn)
(2.8.6)Esta ecuacion diferencial es del tipo (2.6.2) en ausencia de rozamiento, y podemos interpretarlapor tanto como una oscilacion forzada por la funcion periodica F = An
(ω2
1 − ω2n
)cos (ωnt+ φn).
2.8.1. Superposicion de dos oscilaciones con la misma frecuencia
El caso mas sencillo es el de dos oscilaciones con la misma frecuencia angular ω:
x(t) = x1(t) + x2(t) = A1 cos (ωt+ ϕ1) +A2 cos (ωt+ ϕ2). (2.8.7)
Es inmediato que x(t) satisface la ecuacion del oscilador armonico x(t) +ω2x(t) = 0. Por tanto,existen escalares A y ϕ tales que x(t) = A cos(ωt + ϕ). Con el fin de hallar dichas cantidades,
28Posteriormente se analizara la superposicion en mas dimensiones.29Como hemos hecho anteriormente, simplificamos la expresion suponiendo que el termino de masa ha sido absorbido
por el de la frecuencia ωi.
17
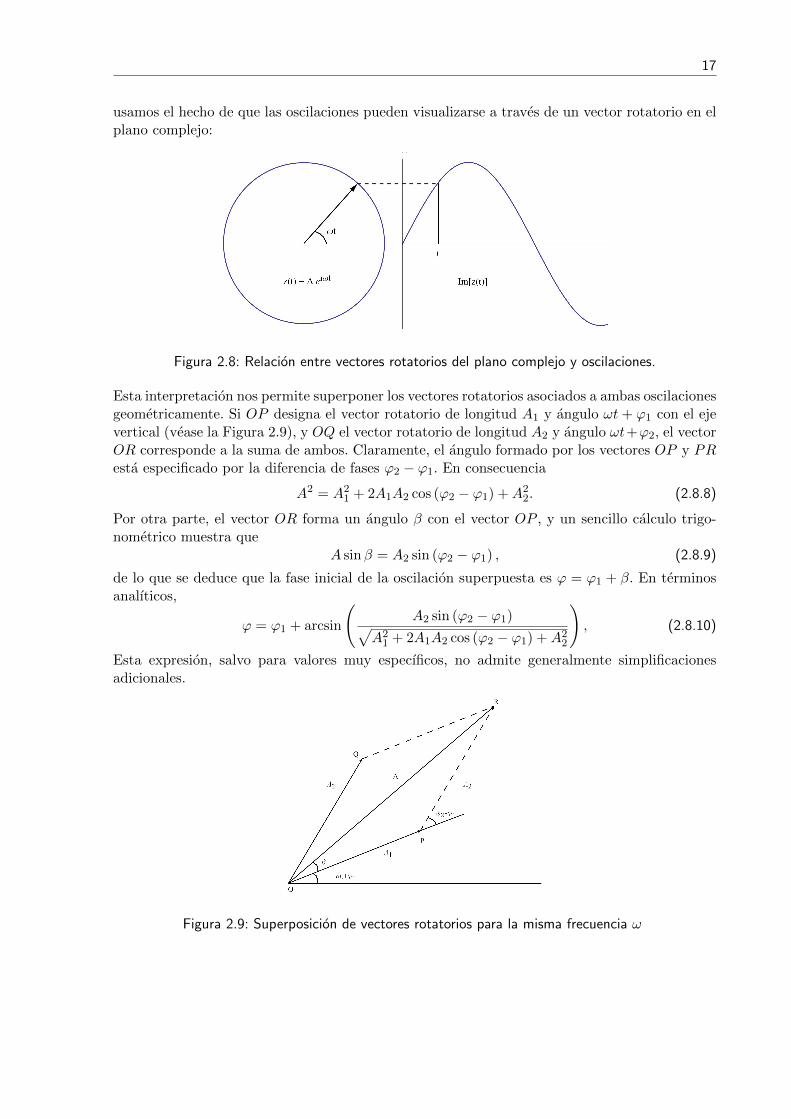
usamos el hecho de que las oscilaciones pueden visualizarse a traves de un vector rotatorio en elplano complejo:
Figura 2.8: Relacion entre vectores rotatorios del plano complejo y oscilaciones.
Esta interpretacion nos permite superponer los vectores rotatorios asociados a ambas oscilacionesgeometricamente. Si OP designa el vector rotatorio de longitud A1 y angulo ωt+ ϕ1 con el ejevertical (vease la Figura 2.9), y OQ el vector rotatorio de longitud A2 y angulo ωt+ϕ2, el vectorOR corresponde a la suma de ambos. Claramente, el angulo formado por los vectores OP y PResta especificado por la diferencia de fases ϕ2 − ϕ1. En consecuencia
A2 = A21 + 2A1A2 cos (ϕ2 − ϕ1) +A2
2. (2.8.8)
Por otra parte, el vector OR forma un angulo β con el vector OP , y un sencillo calculo trigo-nometrico muestra que
A sinβ = A2 sin (ϕ2 − ϕ1) , (2.8.9)
de lo que se deduce que la fase inicial de la oscilacion superpuesta es ϕ = ϕ1 + β. En terminosanalıticos,
ϕ = ϕ1 + arcsin
(A2 sin (ϕ2 − ϕ1)√
A21 + 2A1A2 cos (ϕ2 − ϕ1) +A2
2
), (2.8.10)
Esta expresion, salvo para valores muy especıficos, no admite generalmente simplificacionesadicionales.
Figura 2.9: Superposicion de vectores rotatorios para la misma frecuencia ω
18 2.8. SUPERPOSICION DE OSCILACIONES
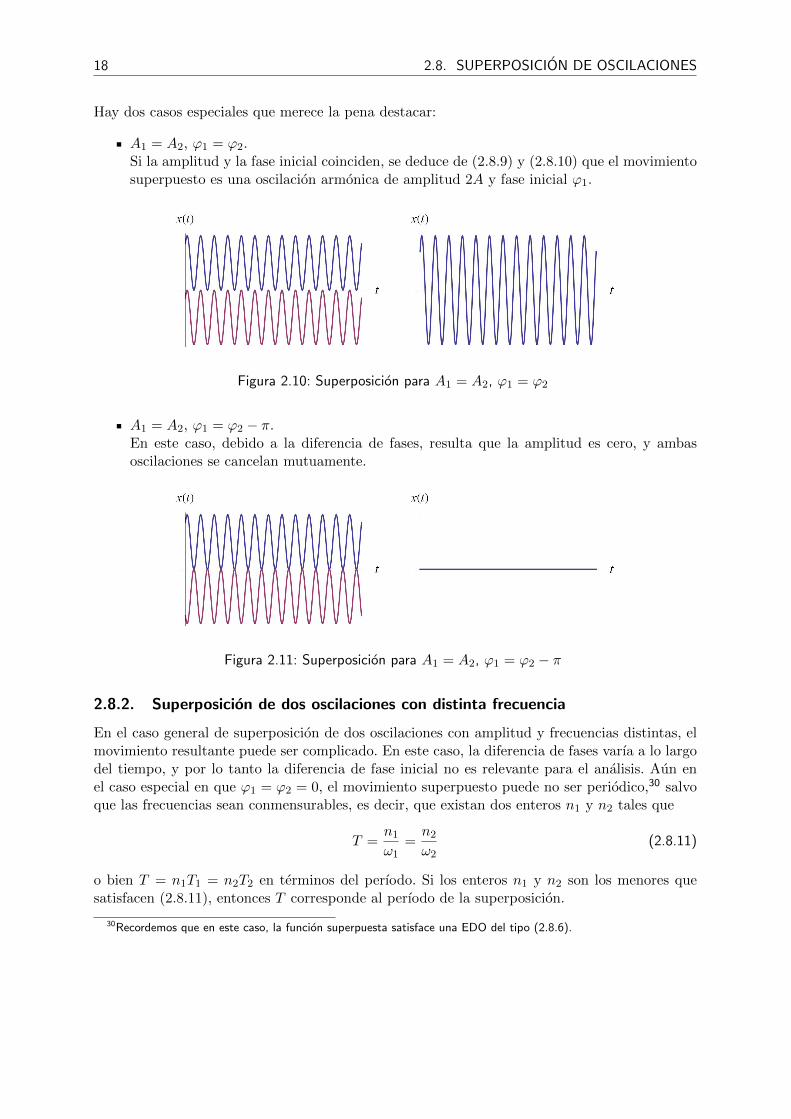
Hay dos casos especiales que merece la pena destacar:
A1 = A2, ϕ1 = ϕ2.Si la amplitud y la fase inicial coinciden, se deduce de (2.8.9) y (2.8.10) que el movimientosuperpuesto es una oscilacion armonica de amplitud 2A y fase inicial ϕ1.
Figura 2.10: Superposicion para A1 = A2, ϕ1 = ϕ2
A1 = A2, ϕ1 = ϕ2 − π.En este caso, debido a la diferencia de fases, resulta que la amplitud es cero, y ambasoscilaciones se cancelan mutuamente.
Figura 2.11: Superposicion para A1 = A2, ϕ1 = ϕ2 − π
2.8.2. Superposicion de dos oscilaciones con distinta frecuencia
En el caso general de superposicion de dos oscilaciones con amplitud y frecuencias distintas, elmovimiento resultante puede ser complicado. En este caso, la diferencia de fases varıa a lo largodel tiempo, y por lo tanto la diferencia de fase inicial no es relevante para el analisis. Aun enel caso especial en que ϕ1 = ϕ2 = 0, el movimiento superpuesto puede no ser periodico,30 salvoque las frecuencias sean conmensurables, es decir, que existan dos enteros n1 y n2 tales que
T =n1
ω1=n2
ω2(2.8.11)
o bien T = n1T1 = n2T2 en terminos del perıodo. Si los enteros n1 y n2 son los menores quesatisfacen (2.8.11), entonces T corresponde al perıodo de la superposicion.
30Recordemos que en este caso, la funcion superpuesta satisface una EDO del tipo (2.8.6).
19
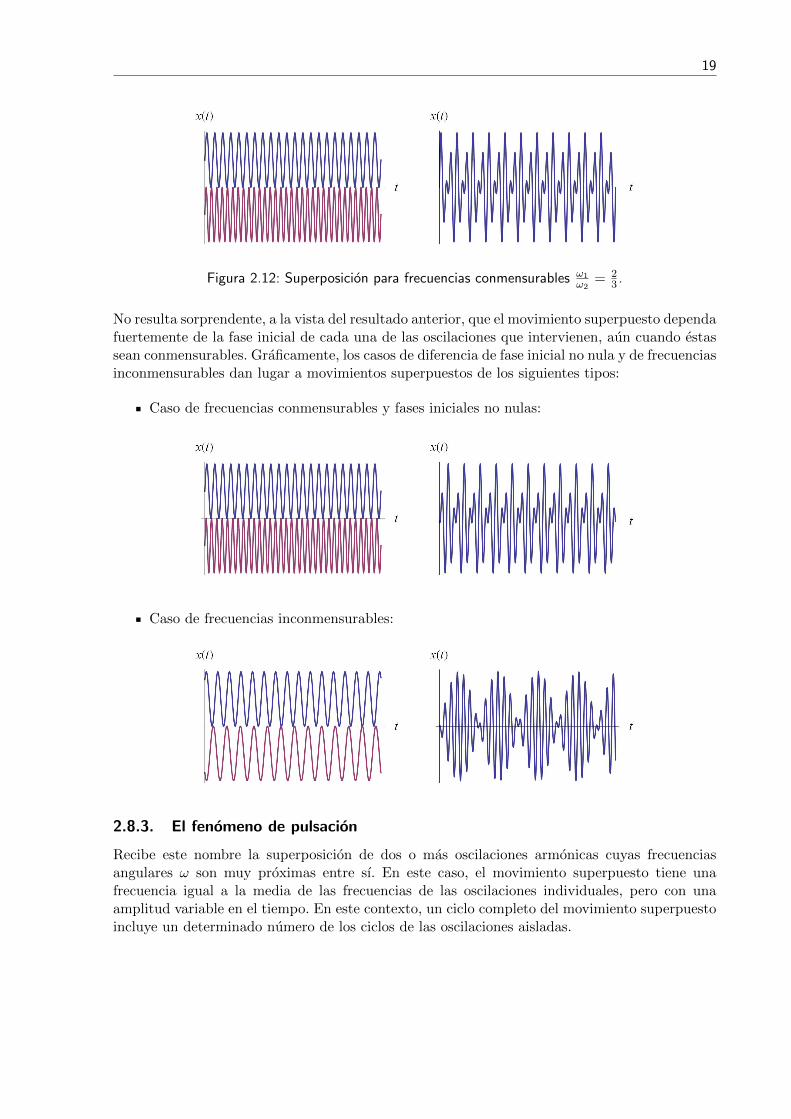
Figura 2.12: Superposicion para frecuencias conmensurables ω1ω2
= 23 .
No resulta sorprendente, a la vista del resultado anterior, que el movimiento superpuesto dependafuertemente de la fase inicial de cada una de las oscilaciones que intervienen, aun cuando estassean conmensurables. Graficamente, los casos de diferencia de fase inicial no nula y de frecuenciasinconmensurables dan lugar a movimientos superpuestos de los siguientes tipos:
Caso de frecuencias conmensurables y fases iniciales no nulas:
Caso de frecuencias inconmensurables:
2.8.3. El fenomeno de pulsacion
Recibe este nombre la superposicion de dos o mas oscilaciones armonicas cuyas frecuenciasangulares ω son muy proximas entre sı. En este caso, el movimiento superpuesto tiene unafrecuencia igual a la media de las frecuencias de las oscilaciones individuales, pero con unaamplitud variable en el tiempo. En este contexto, un ciclo completo del movimiento superpuestoincluye un determinado numero de los ciclos de las oscilaciones aisladas.

20 2.8. SUPERPOSICION DE OSCILACIONES
Supongamos por simplicidad que dos oscilaciones tienen la misma amplitud y frecuencias angu-lares proximas. El movimiento superpuesto viene dado por
x(t) = A (cos (ω1t+ ϕ1) + cos (ω2t+ ϕ2)) . (2.8.12)
Utilizando la relacion trigonometrica cos (α+ β) + cos (α− β) = 2 cos (α) cos (β), obtenemos dela ecuacion (2.8.12)
x(t) = 2A cos
((ω1 + ω2)
2t+
(ϕ1 + ϕ2)
2
)cos
((ω1 − ω2)
2t+
(ϕ1 − ϕ2)
2
). (2.8.13)
Si |ϕ1−ϕ2| � ϕ1 +ϕ2 se observa el fenomeno de pulsacion, es decir, el movimiento superpuesto
se aproxima a la oscilacion y(t) = 2A cos(
(ω1−ω2)2 t+ (ϕ1−ϕ2)
2
). De hecho, la trayectoria x(t)
esta comprendida entre la oscilacion anterior y su opuesta, de modo que ±y(t) es una envolventede x(t).
Figura 2.13: Fenomeno de pulsacion o batido.
Observamos que la funcion y(t) puede interpretarse como un factor que modula la oscilacion
rapida A cos(
(ω1+ω2)2 t+ (ϕ1+ϕ2)
2
). En este contexto, definimos como frecuencia de la pulsacion
ωP = |ϕ1 − ϕ2|, correspondiente al perıodo de tiempo 2πωP
preciso para pasar de un cero de y(t)al consecutivo.
Modulacion de fase en oscilacionesUna oscilacion cuya fase sea periodica, i.e.,
x(t) = A cos (ωt+ ϕ0 cos (∆ϕt)) , (2.8.14)
se denomina oscilacion de fase modulada. La modulacion de la fase tiene como consecuencia uncambio de la frecuencia angular respecto del tiempo, dado que
d
dt(ωt+ ϕ0 cos (∆ϕt)) = ω − ϕ0∆ϕ sin (∆ϕt) . (2.8.15)
Utilizando que cos (α+ β) = cosα cosβ − sinα sinβ, se obtiene que
x (t) = A [cos (ωt) cos (ϕ0 cos (∆ϕt))− sin (ωt) sin (ϕ0 cos (∆ϕt))] . (2.8.16)
Puede demostrarse que esta expresion tambien corresponde a una superposicion de oscilacionesarmonicas, si bien ha de considerarse el analisis de Fourier para obtener x (t) como una serietrigonometrica.31
31Para mas detalles sobre este particular, vease por ejemplo [7], capıtulo 6.

21
2.8.4. Nociones basicas de las series de Fourier
En este paragrafo analizamos brevemente las nociones fundamentales de las series de Fourier,dada su importancia en el estudio de las oscilaciones anarmonicas. Sin entrar en cuestionesteoricas avanzadas, ilustramos meramente el procedimiento practico para determinar la seriecorrespondiente a una funcion periodica.32
Partamos de una funcion periodica f de perıodo 2π
f (x) = f (x+ 2π) . (2.8.17)
Las funciones trogonometricas sinx y cosx obviamente pertenecen a esta clase, por lo que sepuede plantear el problema de expresar f (x) como serie trigonometrica:
f (x) = k0 +
∞∑n=1
(An cos (nx) +Bn sin (nx)) . (2.8.18)
Llamamos a (2.8.18) la serie de Fourier asociada a la funcion f (x). Con el fin de obtener loscoeficientes An y Bn, empleamos la integral definida siguiente:∫ π
−πf (x) dx =
∫ π
−π
[k0 +
∞∑n=1
(An cos (nx) +Bn sin (nx))
]dx (2.8.19)
=
∫ π
−πk0 dx+
∞∑n=1
∫ π
−π(An cos (nx) +Bn sin (nx)) dx.
Usando las relaciones ∫ π
−πcos (nx) dx =
∫ π
−πsin (nx) dx = 0, (2.8.20)
se obtiene de (2.8.19) el valor de la constante k0
k0 =1
2π
∫ π
−πf (x) dx. (2.8.21)
Para calcular los coeficientes An con ındices n ≥ 1, multiplicamos f (x) por cos (mx) para unentero m ≥ 1 e integramos la funcion resultante:∫ π
−πf (x) cos (mx) dx = k0
∫ π
−πcos (mx) dx+
∞∑n=1
∫ π
−π(An cos (nx) +Bn sin (nx)) cos (mx) dx.
(2.8.22)La segunda integral de la parte derecha puede simplificarse mediante el uso de las identidadestrigonometricas usuales. En particular, resulta que∫ π
−πcos (nx) cos (mx) dx =
1
2
∫ π
−πcos ((n−m)x) x dx =
{π, n = m0, n 6= m
. (2.8.23)
Por otra parte,∫ π−π sin (nx) cos (mx) dx = 0, por lo que obtenemos
An =1
π
∫ π
−πf (x) cos (nx) dx, n ≥ 1. (2.8.24)
32Un tratamiento analıtico formal puede encontrarse por ejemplo en [3], capıtulo 11.

22 2.8. SUPERPOSICION DE OSCILACIONES
De forma completamente analoga, multiplicando f (x) por sin (mx), se obtienen los valores delas constantes Bn:
Bn =1
π
∫ π
−πf (x) sin (nx) dx, n ≥ 1. (2.8.25)
Este resultado puede adaptarse facilmente a perıodos arbitrarios. Si h (x) tiene perıodo T , esdecir
h (x+ T ) = h (x) ,
introducimos el cambio de variable x = T2πz y determinamos la serie de Fourier para la funcion
f (z).En particular, para el caso especial de la superposicion de oscilaciones armonicas conviene in-troducir
An = an cos (ϕn) , Bn = an sin (ϕn) , B0 = 0, (2.8.26)
lo que permite reformular (2.8.18) como
f (x) =∞∑n=0
an cos (nx+ ϕn) , (2.8.27)
dondean =
√A2n +B2
n, An tanϕn +Bn = 0. (2.8.28)
Observamos asimismo que una funcion diferenciable a trozos y periodica tambien admite una se-rie de Fourier convergente. No obstante, la conclusion relevante para el estudio de las oscilacioneses la siguiente:
Toda oscilacion anarmonica x (t) = x(t+ 2π
ω
)puede considerarse como superposicion de oscila-
ciones armonicas del tipo
x (t) =∞∑n=0
an cos (nωt+ ϕn) . (2.8.29)
Figura 2.14: Sumas parciales de una serie de Fourier.

23
2.9. El pendulo matematico
El llamado pendulo matematico consiste en una idealizacion de los pendulos ordinarios, y puededescribirse como una masa puntual m que cuelga de un hilo o alambre de masa despreciabley longitud fija l. Un desplazamiento lateral de la masa (cuerpo del pendulo) da lugar a unmovimiento oscilatorio.33
Figura 2.15: Pendulo matematico
En ausencia de rozamiento y fuerzas distinta de la atraccion gravitatoria, la fuerza que actua en
la direccion del vector−−→PQ viene dada por −mg sin θ(t). Por otra parte, puesto que esta fuerza
es igual a
ms(t) = mlθ(t), (2.9.1)
siendo s el arco de circunferencia descrito por la masa m, la ecuacion del movimiento del penduloviene dada por
θ (t) +g
lsin (θ (t)) = 0, (2.9.2)
donde θ designa el angulo que forman el hilo y la vertical. Para angulos arbitrarios, dado sucaracter no lineal, esta ecuacion diferencial no puede resolverse en terminos de funciones ele-mentales, requiriendo del analisis de Fourier para una aproximacion de θ(t).
Para ilustrar este hecho, consideremos el cambio de variable u = θ = dθdt . De ello se deduce
du
dt=du
dθ
dθ
dt= u
du
dθ, (2.9.3)
lo que permite reformular la ecuacion (2.9.2) como
udu
dθ+g
lsin θ = 0. (2.9.4)
33Estrictamente, el sistema esta sujeto a una ligadura, de la que se deduce la ecuacion del movimiento, como veremosmas adelante.

24 2.9. EL PENDULO MATEMATICO
Con la condicion inicial u (θ0) = 0, obtenemos la solucion de esta ecuacion de primer ordenmediante el metodo de separacion de variables como
u (θ) =dθ
dt= ±
√2g
l
√cos θ − cos θ0. (2.9.5)
Reintroduciendo el valor de u, separando las variables e integrando resulta que
t = ±
√l
2g
∫dθ√
cos θ − cos θ0. (2.9.6)
Esta ultima expresion integral no puede resolverse en terminos de funciones elementales, y susvalores deben determinarse utilizando tablas de funciones (vease por ejemplo [2]). Mediante la
sustitucion k = sin(θ02
), k sin v = sin
(θ2
), la formula anterior puede reducirse a
t = ±
√l
g
∫ v
0
dv√1− k2 sin2 v
, (2.9.7)
llamada integral elıptica de primera especie.34 Puede comprobarse facilmente que el perıodo Tviene dado por
T = 4
√l
g
∫ π/2
0
dv√1− k2 sin2 v
, (2.9.8)
No obstante, para oscilaciones pequenas ( 0 ≤ θ ≤ π36), la funcion sin θ puede considerarse como
una funcion lineal,sin θ ≈ θ,
lo que permite aproximar la ecuacion del movimiento mediante una ecuacion lineal
θ (t) +g
lθ (t) = 0. (2.9.9)
Para estos valores de θ se trata por tanto de una oscilacion armonica cuya trayectoria estadescrita por
θ (t) = A cos (ωt− ϕ) , ω2 =g
l. (2.9.10)
Las frecuencias de oscilacion f y el perıodo son, respectivamente
f =1
2π
√g
l, T = 2π
√l
g. (2.9.11)
Escribiendo ω =√
gl y tomando como condicion inicial del pendulo θ(0) = 0, podemos obtener
θ(t) como una serie de Fourier
θ(t) = C1 sin (ωt) + C3 sin (3ωt) + C5 sin (5ωt) + · · · =∞∑j=0
C2j+1 sin ((2j + 1)ωt) . (2.9.12)
En este sentido, el pendulo puede verse como un caso especial del desarrollo en serie de unaoscilacion anarmonica.
34Formalmente, esta es la llamada forma de Legendre de la integral elıptica de primera especie [2].

25
2.10. Osciladores lineales modulados temporalmente
Por un oscilador lineal modulado temporalmente entendemos una oscilacion cuya ecuacion delmovimiento sea del tipo
x+2x
τ (t)+ ω2 (t) x = 0. (2.10.1)
En este caso, tanto la frecuencia interna ω (t) como el tiempo caracterıstico son explıcitamentedependientes del tiempo. Si τ (t) > 0, el sistema esta amortiguado, mientras que para τ (t) < 0,el sistema esta amplificado. Realizando el cambio de variables
x (t) = u (t) exp
(−∫
dt
τ (t)
), (2.10.2)
se sigue de
x (t) =
(u (t)− u (t)
τ (t)2
)exp
(−∫
dt
τ (t)
),
x (t) =
(u (t)− 2u (t)
τ (t)+
u (t)
τ2 (t)+u (t) τ (t)
τ2 (t)
)exp
(−∫
dt
τ (t)
)que la ecuacion (2.10.1) reduce a su forma normal
u+
(ω2 (t) +
τ (t)
τ2 (t)− 1
τ2 (t)
)u = 0. (2.10.3)
La frecuencia modificada
ω20 (t) = ω2 (t) +
τ (t)
τ2 (t)− 1
τ2 (t)(2.10.4)
suele designarse como invariante de la ecuacion (2.10.1). La ecuacion (2.10.3) puede a su vezreducirse a una de Ricatti mediante el cambio de variables u = u v, del que resulta
v + v2 + ω20 (t) = 0. (2.10.5)
Observamos que si u1 (t) y u2 (t) son dos soluciones independientes de (2.10.3), entonces elwronskiano W (t) satisface la ecuacion de primer orden35
W +2
τ (t)W = 0. (2.10.6)
Dependiendo de la forma del invariante ω20 (t), puede establecerse si las soluciones de (2.10.3) co-
rresponden a verdaderas oscilaciones, o dan lugar a comportamientos aperiodicos o supercrıticos.El criterio de comparacion de Sturm proporciona el criterio necesario:
Criterio de Sturm: Si u (t) y v (t) son funciones independientes que sean solucion de lasecuaciones
u+ ω2 (t)u = 0, v + θ2 (t) v = 0,
35Observamos que esta propiedad permite hallar un lagrangiano para los sistemas (2.10.1), por lo que sus propiedadesde simetrıa son comunes. Vease R Campoamor Stursberg 2016 Comm. Nonlinear Sci. Numer. Simulat. 37, 200-211.

26 2.10. OSCILADORES LINEALES MODULADOS TEMPORALMENTE
respectivamente, y se satisfacen las condiciones
ω2 (t) ≥ θ2 (t) , ω2 (t) 6= θ2 (t) ,
entonces existe al menos un cero de u (t) entre cualesquiera dos ceros consecutivos de la funcionv (t).36 En particular, si ω2 (t) ≤ 0, resulta de este criterio que las soluciones de (2.10.3) admitena lo sumo un cero, por lo que no corresponden a un movimiento oscilatorio.
2.10.1. Osciladores de Airy
Corresponden a las soluciones de la ecuacion (2.10.3) para el invariante
ω20 (t) = t. (2.10.7)
La solucion general esta determinada por
u (t) = C1 Ai (−t) + C2 Bi (−t) , (2.10.8)
siendo Ai (t) y Bi (t) las llamadas funciones de Airy.37
Figura 2.16: Oscilador de Airy.
2.10.2. Osciladores de Bessel
Existen varios tipos de este oscilador, dependiente de la forma explıcita del invariante de laecuacin. El llamado tipo I corresponde a
ω20 (t) = ω2
0 −(n2 − 1
4
)t−2. (2.10.9)
La solucion general de la ecuacion (2.10.3) viene dada por
u (t) = C1
√t Jn(ω0t) + C2
√t Yn(ω0t), (2.10.10)
siendo Jn(z) e Yn(z) las funciones de Bessel de primera y segunda especie, respectivamente.38
36Para una demostracion de este resultado, vease [10].37Para las propiedades y extensas tablas de las funciones especiales, recomendamos al lector la referencia [1].38Vease el apendice para la ecuacion de Bessel y las propiedades fundamentales de sus soluciones.
27
Figura 2.17: Oscilador de Bessel de tipo I para n = 3.
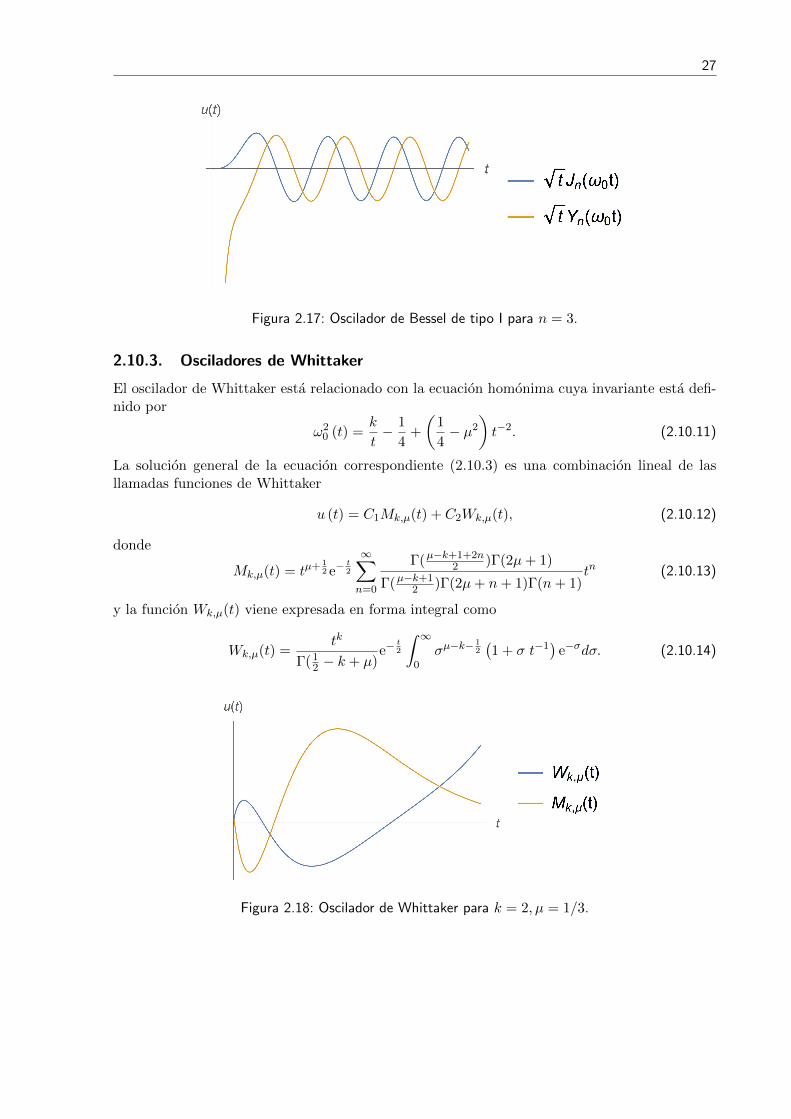
2.10.3. Osciladores de Whittaker
El oscilador de Whittaker esta relacionado con la ecuacion homonima cuya invariante esta defi-nido por
ω20 (t) =
k
t− 1
4+
(1
4− µ2
)t−2. (2.10.11)
La solucion general de la ecuacion correspondiente (2.10.3) es una combinacion lineal de lasllamadas funciones de Whittaker
u (t) = C1Mk,µ(t) + C2Wk,µ(t), (2.10.12)
donde
Mk,µ(t) = tµ+ 12 e−
t2
∞∑n=0
Γ(µ−k+1+2n2 )Γ(2µ+ 1)
Γ(µ−k+12 )Γ(2µ+ n+ 1)Γ(n+ 1)
tn (2.10.13)
y la funcion Wk,µ(t) viene expresada en forma integral como
Wk,µ(t) =tk
Γ(12 − k + µ)
e−t2
∫ ∞0
σµ−k−12(1 + σ t−1
)e−σdσ. (2.10.14)
Figura 2.18: Oscilador de Whittaker para k = 2, µ = 1/3.

28 2.11. FUERZAS DEPENDIENTES DE LA POSICION. POTENCIAL
2.10.4. Osciladores de Weber
El invariante de la ecuacion se define mediante
ω20 (t) =
(n+
1
2− t2
4
), n ∈ Z+ ∪ {0} (2.10.15)
La solucion general de la ecuacion (2.10.3) se expresa mediante las llamadas funciones del cilindroparabolico [1]. Una de las soluciones esta determinada por la funcion
u (t) = e−t2/4Hn
(t√2
), (2.10.16)
siendo Hn (z) los llamados polinomios de Hermite.39 Una segunda solucion de la ecuacion(2.10.15) puede expresarse en terminos de funciones complejas, motivo por el cual la solucionvalida para el oscilador de Weber que se considera es (2.10.16).
Figura 2.19: Oscilador de Weber para n = 7.
Otros tipos de osciladores de este tipo, de frecuente aplicacion en la electronica, son los osci-ladores de Coulomb, Laguerre, Darboux o Forsyth, donde las correspondientes soluciones de laecuacion (2.10.3) estan estrechamente relacionadas con las funciones especiales.40
2.11. Fuerzas dependientes de la posicion. Potencial
Examinamos a continuacion un caso importante que generaliza de forma natural el osciladorarmonico, correspondiente a fuerzas F dependientes solamente de la posicion. La ecuacion dife-rencial del movimiento adopta entonces la forma
mx = F (x) , (2.11.1)
39Vease la ecuacion de Hermite en el apendice.40Un compendio util sobre estas funciones especiales puede encontrarse en J. Kampe de Feriet (Ed.) 1957 Fonctions
de la Physique Mathematique, CNRS, Paris.

29
donde F (x) es una funcion arbitraria. Este caso puede integrarse completamente, ya que puedereducirse con facilidad por cuadraturas. Multiplicando (2.11.1) por x obtenemos41
mx x =d
dt
(m2x2)
= x F (x) . (2.11.2)
Si introducimos la nueva funcion
U (x) = −∫ x(t)
F (x) dx, (2.11.3)
la ecuacion (2.11.2) puede escribirse como una diferencial total con respecto al tiempo
d
dt
(m2x2)
= − d
dtU (x) , (2.11.4)
de lo que resulta facilmented
dt
(m2x2 + U(t)
)= 0, (2.11.5)
y por tanto, para una cierta constante E,
m
2x2 = E − U (x) . (2.11.6)
La funcion U(x) definida en (2.11.3) se conoce como funcion o energıa potencial de la partıcula,mientras que m
2 x2 es el llamado termino o energıa cinetica. 42 La ecuacion (2.11.6) supone el caso
particular de una ley de conservacion fundamental, y permite interpretar al menos parcialmenteel movimiento de una partıcula. Supongamos que E tiene un valor especificado. Dado que eltermino a la izquierda de (2.11.6) es siempre positivo, el termino a la derecha debe verificara su vez esta condicion. Este hecho se traduce en que solo puede haber movimiento si E −U (x) > 0. Provisionalmente decimos que la constante E corresponde a la energıa de la partıcula.Observamos que, como consecuencia de la definicion (2.11.3), el potencial esta definido salvo unaconstante. Los posibles puntos de equilibrio son aquellos para los cuales no hay fuerza, es decir,los extremos del potencial U (x). El punto de equilibrio x0 se dice estable si corresponde a un
mınimo, es decir, si d2Udx2
(x0) > 0, e inestable si se trata de un maximo (d2Udx2
(x0) < 0).43
Para acabar de resolver la ecuacion (2.11.1), y dado que x = dxdt , es facil ver que la ecuacion
(2.11.6) es separable:
dt =dx√
2m (E − U (x))
, (2.11.7)
por lo que una cuadratura permite expresar t en funcion de x:
t− t0 =
∫ x(t)
x(t0)
dx√2m (E − U (x))
. (2.11.8)
41Formalmente, este procedimiento corresponde a tomar factores integrantes en una ecuacion de segundo orden.42Formalmente, la energıa cinetica habrıa de definirse como el trabajo necesario para llevar la masa de un estado de
reposo a la velocidad v, de la cual se deduce la expresion de T .43De anularse d2U
dx2(x0), obtenemos un estado estacionario que no corresponde a un extremo.
30 2.11. FUERZAS DEPENDIENTES DE LA POSICION. POTENCIAL
La funcion x (t) se obtiene calculando la funcion inversa. Es importante observar que las cons-tantes de integracion son solo t0 y E, determinadas por las condiciones iniciales del problema,mientras que x (t0) no constituye una constante de integracion nueva.44 Para fuerzas F (x) de-pendientes solo de la posicion, la ecuacion (2.11.6) nos permite deducir que la suma de losterminos cinetico y potencial es constante a lo largo del movimiento:
T + U =mx2
2+ U (x) = cte. (2.11.9)
De la identificacion de esta suma con la energıa mecanica, se deduce que la energıa E es una can-tidad conservada. Mediante la identidad (2.11.9) se obtiene, por tanto, un primer procedimientopara analizar cualitativamente el movimiento de una partıcula.
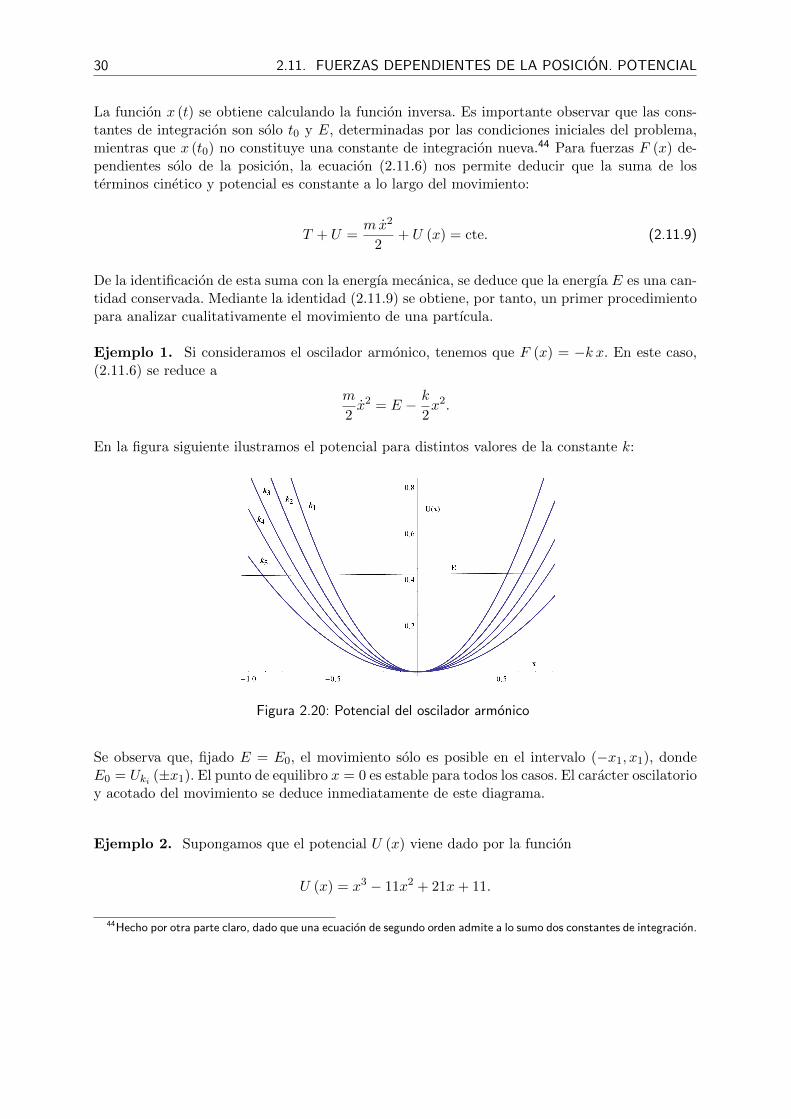
Ejemplo 1. Si consideramos el oscilador armonico, tenemos que F (x) = −k x. En este caso,(2.11.6) se reduce a
m
2x2 = E − k
2x2.
En la figura siguiente ilustramos el potencial para distintos valores de la constante k:
Figura 2.20: Potencial del oscilador armonico
Se observa que, fijado E = E0, el movimiento solo es posible en el intervalo (−x1, x1), dondeE0 = Uki (±x1). El punto de equilibro x = 0 es estable para todos los casos. El caracter oscilatorioy acotado del movimiento se deduce inmediatamente de este diagrama.
Ejemplo 2. Supongamos que el potencial U (x) viene dado por la funcion
U (x) = x3 − 11x2 + 21x+ 11.
44Hecho por otra parte claro, dado que una ecuacion de segundo orden admite a lo sumo dos constantes de integracion.

31
Figura 2.21: Potencial cubico.
Los puntos de equilibrio son las soluciones de
dU
dx= 3x2 − 22x+ 21 = 0,
luego x1 = 11−√
583 , x2 = 11+
√58
3 . El primer punto es inestable, mientras el segundo es estable.De la grafica se deducen los tipos de movimiento posible. Para E < U (x2), solo puede darsemovimiento para x negativo, correspondientes a escapes hacia el infinito o aproximacion a labarrera, colision con la misma y escape al infinito. Para E > U (x1) nuevamente hay escape alinfinito. Si U (x2) < E < U (x1), se produce bien una oscilacion periodica en torno al punto x2
si x > x1 o se reproduce el escape al infinito (o colision con la barrera de potencial) para x < x1.Finalmente, si E = U (x1), el movimiento comienza o finaliza en x1 con velocidad nula.Observamos que, pese a la simplicidad de la funcion potencial, la ecuacion del movimiento noadmite una integracion directa.
Ejemplo 3. Dados dos atomos enlazados en una molecula diatomica, la energıa potencial querepresenta la fuerza del enlace es una funcion de su distancia de separacion. Aunque no existenformulas simples exactas para describir este fenomeno, existe una buena aproximacion debida aMorse,45 y dada por la expresion
U (r) = B(
1− e−β(r−r0))2, (2.11.10)
donde B, β y r0 son parametros que se establecen experimentalmente para cada molecula.
45P. Morse 1929, Phys. Rev. 34 57.

32 2.11. FUERZAS DEPENDIENTES DE LA POSICION. POTENCIAL
Figura 2.22: Potenciales de Morse en moleculas diatomicas para β variable.
Es facil ver de la grafica que, para r → 0, la fuerza −dUdr crece desproporcionadamente hasta
eventualmente deshacer el enlace (disociacion). Para distancia medias, obtenemos un estado deequilibrio.
El ejemplo anterior muestra que, dentro de ciertos lımites, las tecnicas de la mecanica clasicapueden ser de interes para otro tipo de problemas, en particular, ciertas cuestiones de la fısicaatomica. Un ejemplo bien ilustrativo de esta situacion son los experimentos de dispersion deRutherford.46 Aunque cabe esperar divergencias importantes debido a los efectos microscopcos,para la descripcion del fenomeno de dispersion en campos de fuerzas centrales, el formalismo esesencialmente el mismo.
2.11.1. El lagrangiano en una dimension
Para el caso de fuerzas que solo dependen de la posicion, es posible deducir la ecuacion delmovimiento a traves de un formalismo, llamado lagrangiano, que desarrollaremos con generali-dad en capıtulos posteriores, y que, en el caso de sistemas unidimensionales, proporciona unailustracion precisa de la importancia del enfoque variacional en mecanica.
Definimos la funcion lagrangiana L del sistema unidimensional como la diferencia de los terminoscinetico y potencial:
L (x, x) =mx2
2− U (x) (2.11.11)
En esta expresion, consideramos x y x como variables independientes. Tomando derivadas par-ciales respecto de estas variables, observamos que
∂L
∂x= mx,
∂L
∂x= −dU
dx. (2.11.12)
46Aunque es habitual tratar la dispersion en los libros de mecanica, hemos optado por no detallar esta cuestion eneste texto, dado que una buena comprension de la dispersion requiere cierta familiaridad con los modelos atomicos deRutherford y de Bohr, a los que, historicamente, estos experimentos dieron lugar. Para un desarrollo elemental y legiblede este tema, veanse por ejemplo [8] y [14].

33
Por tanto, el momento y la fuerza resultan de las derivadas parciales de L. Como consecuencia,la ecuacion del movimiento se obtiene de L mediante la expresion47
d
d t
(∂L
∂x
)− ∂L
∂x= 0. (2.11.13)
Esta ecuacion condensa una propiedad fundamental de los sistemas mecanicos, cuyo significadofısico se traduce en que la trayectoria de la partıcula corresponde a una trayectoria extrema.
Fijando dos puntos P1 (t0, x0) y P2 (t1, x1) en el plano (t, x), consideramos cualquier funciondiferenciable x (t) sujeta a las condiciones de contorno
x (t0) = x0, x (t1) = x1. (2.11.14)
Figura 2.23: Perturbacion de x(t) y extremo de la accion.
Definimos la ”longitud” de la trayectoria x (t), conocida como accion, como la integral
S [x] =
∫ t1
t0
L (x, x) dt =
∫ t1
t0
mx2
2− U (x) dt (2.11.15)
El funcional S [x] es por tanto un escalar. Definimos una funcion crıtica xc del funcional S [x]como una funcion xc : [t0, t1] → R que satisfaga, para cualquier funcion diferenciable ξ (t) talque ξ (t0) = ξ (t1) = 0, la siguiente condicion
d
d tS [xc + ε ξ]
∣∣∣∣ε=0
= 0. (2.11.16)
Esta estipula que para cada ξ, la velocidad de la perturbacion de la funcion crıtica xc es nula.La estrecha relacion entre el principio de accion (2.11.15) y la ecuacion (2.11.13) viene descritapor el teorema siguiente:
Teorema de Euler-Lagrange: Si x (t) es una funcion crıtica para el funcional S [x] y L (x, x)es una funcion de clase Ck con k ≥ 2,48 entonces x (t) satisface la ecuacion diferencial
d
d t
(∂L
∂x
)− ∂L
∂x= 0.
47Llamada ecuacion de Euler-Lagrange o ecuacion de Lagrange de tipo II. Vease [11].48Es decir, que las derivadas parciales de L sean continuas al menos hasta el orden k.

34 2.11. FUERZAS DEPENDIENTES DE LA POSICION. POTENCIAL
Supuesto que se satisfaga la condicion (2.11.16), tenemos que
d
d tS [x+ ε ξ]
∣∣∣∣ε=0
=d
d ε
∫ t1
t0
L(x+ εξ, x+ εξ
)dt
∣∣∣∣ε=0
=
∫ t1
t0
d
d εL(x+ εξ, x+ εξ
)∣∣∣∣ε=0
dt = 0.
(2.11.17)Desarrollando la ultima expresion obtenemos, en el lımite ε = 0 :
∫ t1
t0
d
d εL(x+ εξ, x+ εξ
)∣∣∣∣ε=0
dt =
∫ t1
t0
∂L
∂ (x+ εξ)ξ +
∂L
∂(x+ εξ
) ξ∣∣∣∣∣∣
ε=0
dt
=
∫ t1
t0
(∂L
∂xξ +
∂L
∂xξ
)dt = 0. (2.11.18)
Puesto que se verifica
∂L
∂xξ =
d
d t
(∂L
∂xξ
)− d
d t
(∂L
∂x
)ξ, (2.11.19)
introduciendo esta expresion en (2.11.18) y teniendo en cuenta que ξ (t0) = ξ (t1) = 0, quedafinalmente
d
d tS [x+ ε ξ]
∣∣∣∣ε=0
=
∫ t1
t0
(∂L
∂x− d
d t
(∂L
∂x
))ξ dt = 0. (2.11.20)
Puesto que ξ es una funcion arbitraria, la unica posibilidad de que se satisfaga esta identidad esque x (t) sea una solucion de la ecuacion (2.11.16).
Observamos que la propiedad no depende en absoluto de la descomposicion de L que se haempleado para su definicion. Este hecho indica que el enfoque variacional es mas general queaquel con el que se ha introducido inicialmente la funcion lagrangiana.49
La reformulacion de la ecuacion del movimiento en funcion de L tiene una consecuencia impor-tante, y es el hecho de aportar un procedimiento para determinar una cantidad conservada delmovimiento: Si x (t) es una solucion a la ecuacion (2.11.16), entonces
d
d t
(x∂L
∂x− L
)= 0. (2.11.21)
En efecto, desarrollando el termino de la izquierda se tiene
d
d t
(x∂L
∂x− L
)= x
∂L
∂x+ x
d
d t
(∂L
∂x
)−(∂L
∂xx+
∂L
∂xx
)= x
(d
d t
(∂L
∂x
)− ∂L
∂x
)= 0.
En particular, para una L de la forma (2.11.11), resulta de nuevo la conservacion de la energıa
d
d t
(x∂L
∂x− L
)=
d
d t
(mx2
2+ U (x)
)= 0.
49Una introduccion intuitiva al calculo de variaciones puede hallarse, por ejemplo, en [12].

35
2.12. El problema inverso unidimensional
Para una ecuacion diferencial ordinaria de segundo orden
x = F (t, x, x) , (2.12.1)
puede plantearse de forma natural el llamado problema inverso de la mecanica lagrangiana,consistente en hallar condiciones de existencia de una funcion lagrangiana L (t, x, x) de modoque la ecuacion de Lagrange
Λ =d
dt
(∂L
∂x
)− ∂L
∂x= 0 (2.12.2)
coincida con (2.12.1).50 A diferencia de lo que ocurre en dimensiones superiores, el caso unidi-mensional siempre admite una respuesta positiva. Considerando la diferencial de Λ con respetoa x y desarrollando, teniendo en cuenta (2.12.1), se obtiene
dΛ
d x=
∂3L
∂t∂x2+
∂2L
∂x∂x+ x
∂3L
∂x∂x2+∂F
∂x
∂2L
∂x2+ F (t, x, x)
∂3L
∂x3− ∂2L
∂x∂x= 0. (2.12.3)
Realizando la sustitucion u (t, x, x) = ∂2L∂x2
, la identidad anterior puede reformularse mediante
dΛ
d x=∂u
∂t+ x
∂u
∂x+ F (t, x, x)
∂u
∂x+∂F
∂xu (t, x, x) = 0, (2.12.4)
correspondiente a una ecuacion en derivadas parciales lineal de primer orden, que puede re-solverse analıticamente por el metodo de las caracterısticas [10]. La funcion lagrangiana L seobtiene finalmente mediante cuadraturas.
2.13. Diagrama de fases
El llamado diagrama de fases de una ecuacion diferencial constituye una geometrizacion delproblema que ayuda a visualizar las propiedades de un sistema mediante el analisis de un campode vectores en el plano.
Dentro de ciertos margenes, toda ecuacion diferencial ordinaria de segundo orden
x = ϕ (t, x, x) (2.13.1)
es equivalente al sistema de ecuaciones de primer orden51
x = y (2.13.2)
y = ϕ (t, x, y) (2.13.3)
Esta reformulacion permite un analisis geometrico de las trayectorias solucion a la ecuacion(2.13.1) sin necesidad de conocer de forma explıcita su solucion. El sistema (2.13.2) descri-be de hecho el campo vectorial tangente u = y ∂
∂x + ϕ (t, x, x) ∂∂y a la curva solucion σ (t) =
50Esta identificacion esta definida modulo multiplos funcionales, es decir,
d
dt
(∂L
∂x
)− ∂L
∂x= ω (t, x, x) (x− F (t, x, x)) .
51Vease por ejemplo [4]. Se dice que (2.13.2) es un sistema dinamico de segundo orden.

36 2.13. DIAGRAMA DE FASES
(x (t) , y (t)) = (x (t) , x (t)) del sistema. El punto (x, y) pertenece al plano E llamado espacio defases, y el punto (x, y) se dice que corresponde a un estado del sistema (2.13.2). En el caso deque ∂ϕ
∂t = 0, el sistema se llama autonomo. La representacion grafica de las trayectorias σ (t) conel vector u se denomina comunmente el diagrama de fases del sistema. El estudio de la evoluciondel campo u corresponde, en cierto modo, a una “integracion” grafica del sistema (2.13.2).
Constantes del movimiento: Se define como tal cualquier funcion F (t, x, y) tal que
F (t, x, y) = cte, (2.13.4)
donde σ (t) = (x (t) , y (t)) es una solucion del sistema.52 En caso de existir una tal constante, elsistema se dice asimismo que es conservativo.53
Para el caso de la ecuacion del movimiento mx = F (t, x, x) de una partıcula de masa m, elsistema (2.13.2) adopta la forma
x = y, (2.13.5)
y =1
mF (t, x, y) (2.13.6)
En este caso, el vector “velocidad” en el espacio de fase esta definido por
u = y∂
∂x+
1
mF (t, x, y)
∂
∂y. (2.13.7)
Este procedimiento nos permite interpretar la segunda ley de Newton como el flujo de un fluido.El analisis geometrico del diagrama de fases posibilita, entre otras propiedades, detectar si dichoflujo es incompresible, cuestion no del todo trivial de dilucidar mediante la solucion directa ala ecuacion del movimiento y la observacion. El diagrama de fases es especialmente ilustrativoen el caso de los sistemas conservativos autonomos, donde se conserva la cantidad (energıa) Edada por la ecuacion (2.11.6), permitiendo un analisis cualitativo de las trayectorias y la relacionentre las coordenadas x e y.
Dado un sistema unidimensional conservativo, el diagrama de fases se construye a partir de laley de conservacion de la energıa
m
2x2 + U (x) = E (2.13.8)
donde E es una constante que adopta distintos valores. La interpretacion geometrica es clara: lastrayectorias de fase corresponden a las curvas de nivel para un valor E0 fijado. Observamos que lastrayectorias no pueden cruzarse por este motivo. Es por tanto posible analizar cualitativamenteel movimiento de la partıcula en funcion del valor energetico.
En los siguientes apartados, analizamos los diagramas de fase para algunos de los sistemasunidimensionales ya considerados.54
52El nombre de cantidad conservada tambien es comun en mecanica, mientras que el termino de integral primera espropio de la teorıa de ecuaciones diferenciales.
53En secciones posteriores se generalizara esta nocion a mas dimensiones.54Para mas ejemplos y un estudio mas estructurado de los diagramas de fase, ası como de las propiedades de
estabilidad que se derivan de los mismos, recomendamos los textos de ecuaciones diferenciables [4] y [6].

37
2.13.1. Oscilador armonico
Partiendo de la ecuacion del movimiento (2.4.1), el sistema (dinamico) viene dado por
x = y, (2.13.9)
y = − kmx. (2.13.10)
Observamos que, si k = m, el vector u = y ∂∂x − x ∂
∂y corresponde al vector tangente a una
circunferencia S1 de centro el origen y determinado radio en el punto (x, y). En consecuencia,para k 6= m, las trayectorias en el plano de fase seran generalmente elipses.
Figura 2.24: Diagrama de fase del oscilador armonico.
2.13.2. La ecuacion de Pinney
Sea ε un parametro y consideremos la siguiente ecuacion, que podemos interpretar como unaperturbacion del oscilador armonico:
x+k
mx+
ε
x3= 0. (2.13.11)
Esta ecuacion,55 pese a ser no lineal, puede resolverse de forma general, siendo la solucion deltipo
x (t) =
√x2
1 (t)− εW−2x2 (t)2,
donde {x1 (t) , x2 (t)} es la solucion general de la ecuacion homogenea (el oscilador armonico)
y W = det
(x1 x2
x1 x2
)es el llamado Wronskiano de la ecuacion. El diagrama de fases para
(2.13.11) corresponde al sistema dinamico descrito por
x = y, (2.13.12)
y = − kmx− ε
x3(2.13.13)
55Esta ecuacion, redescubierta en 1950 por Pinney, se conoce, entre otros nombres, como ecuacion de Ermakov-Pinney, y corresponde a un caso particular de importantes sistemas integrables llamados de Ermakov. Vease p. e.E. Pinney 1950 Proc. Amer. Math. Soc. 1 681.

38 2.13. DIAGRAMA DE FASES
Observamos que para valores de ε muy proximos a cero, la ecuacion es esencialmente un osciladorarmonico. Para valores crecientes de ε, las trayectorias van adoptando una forma mas irregular.Asimismo, dependiendo del signo de ε, las trayectorias se alejan progresivamente del origen otienden al mismo para t creciente.
Figura 2.25: Trayectorias para k/m = 1 y ε = 0,031; 0,75.
2.13.3. Fuerza lineal repulsiva
Para una fuerza de este tipo, la ecuacion del movimiento de la partıcula es
x = αx, α > 0, (2.13.14)
y el sistema correspondiente
x = y, (2.13.15)
y = αx. (2.13.16)
Aquı las trayectorias son hiperbolas del tipo y2 − αx2 = cte, como se deduce inmediatamentede la ecuacion
d
d t
(y2 − αx2
)= 2yy − 2αxx = 0. (2.13.17)
Figura 2.26: Diagrama de fase para una fuerza repulsiva F = αx.
39
2.13.4. El pendulo matematico
De la ecuacion (2.9.2) se obtiene el sistema dinamico
θ = ϑ, (2.13.18)
ϑ = −gl
sin θ. (2.13.19)
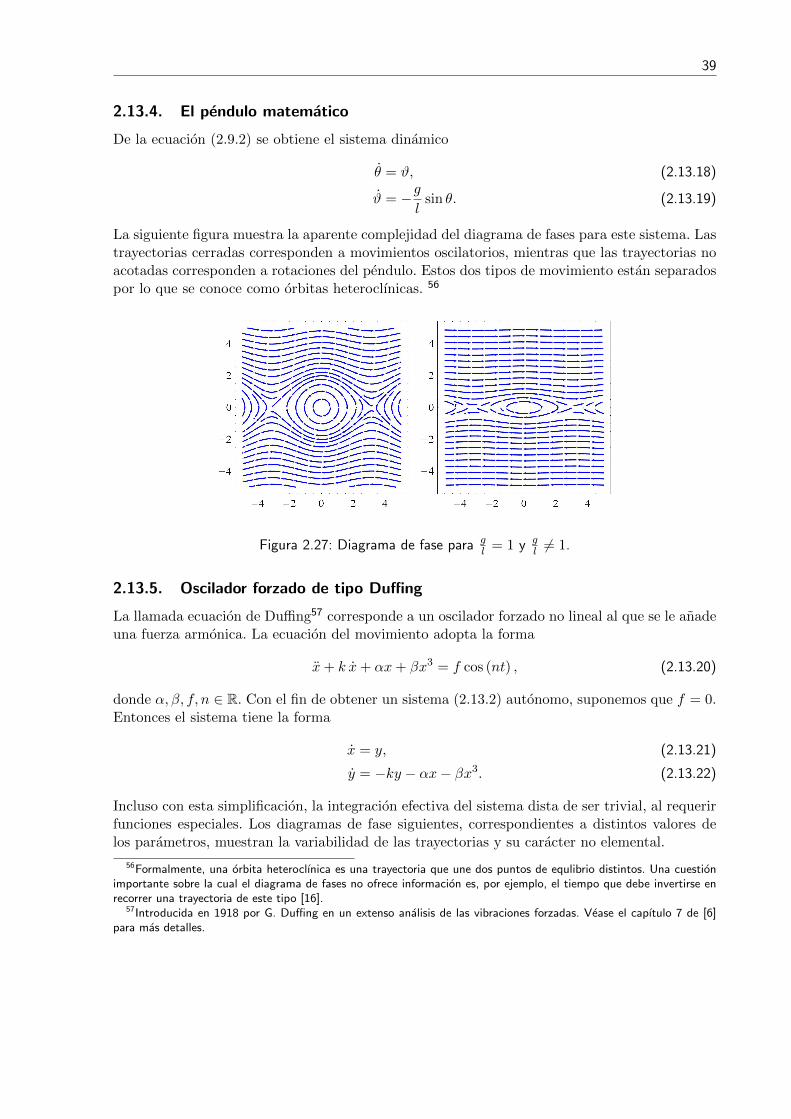
La siguiente figura muestra la aparente complejidad del diagrama de fases para este sistema. Lastrayectorias cerradas corresponden a movimientos oscilatorios, mientras que las trayectorias noacotadas corresponden a rotaciones del pendulo. Estos dos tipos de movimiento estan separadospor lo que se conoce como orbitas heteroclınicas. 56
Figura 2.27: Diagrama de fase para gl = 1 y g
l 6= 1.
2.13.5. Oscilador forzado de tipo Duffing
La llamada ecuacion de Duffing57 corresponde a un oscilador forzado no lineal al que se le anadeuna fuerza armonica. La ecuacion del movimiento adopta la forma
x+ k x+ αx+ βx3 = f cos (nt) , (2.13.20)
donde α, β, f, n ∈ R. Con el fin de obtener un sistema (2.13.2) autonomo, suponemos que f = 0.Entonces el sistema tiene la forma
x = y, (2.13.21)
y = −ky − αx− βx3. (2.13.22)
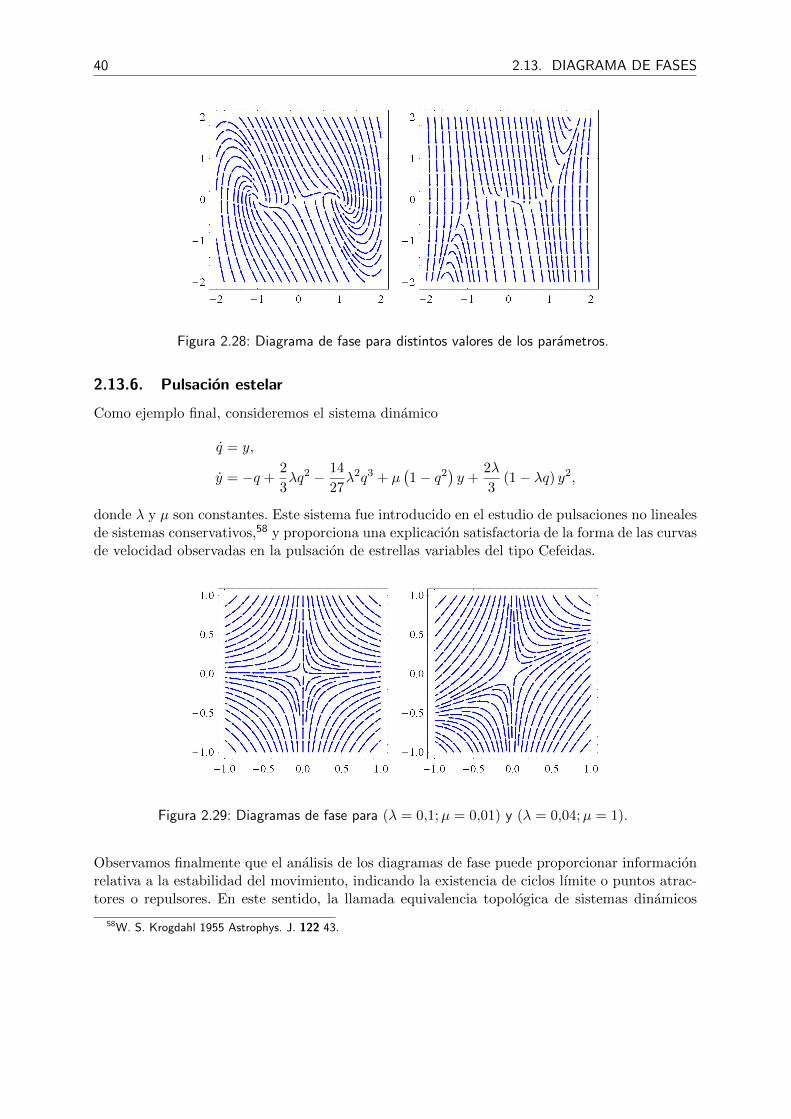
Incluso con esta simplificacion, la integracion efectiva del sistema dista de ser trivial, al requerirfunciones especiales. Los diagramas de fase siguientes, correspondientes a distintos valores delos parametros, muestran la variabilidad de las trayectorias y su caracter no elemental.
56Formalmente, una orbita heteroclınica es una trayectoria que une dos puntos de equlibrio distintos. Una cuestionimportante sobre la cual el diagrama de fases no ofrece informacion es, por ejemplo, el tiempo que debe invertirse enrecorrer una trayectoria de este tipo [16].
57Introducida en 1918 por G. Duffing en un extenso analisis de las vibraciones forzadas. Vease el capıtulo 7 de [6]para mas detalles.
40 2.13. DIAGRAMA DE FASES
Figura 2.28: Diagrama de fase para distintos valores de los parametros.
2.13.6. Pulsacion estelar
Como ejemplo final, consideremos el sistema dinamico
q = y,
y = −q +2
3λq2 − 14
27λ2q3 + µ
(1− q2
)y +
2λ
3(1− λq) y2,
donde λ y µ son constantes. Este sistema fue introducido en el estudio de pulsaciones no linealesde sistemas conservativos,58 y proporciona una explicacion satisfactoria de la forma de las curvasde velocidad observadas en la pulsacion de estrellas variables del tipo Cefeidas.
Figura 2.29: Diagramas de fase para (λ = 0,1;µ = 0,01) y (λ = 0,04;µ = 1).
Observamos finalmente que el analisis de los diagramas de fase puede proporcionar informacionrelativa a la estabilidad del movimiento, indicando la existencia de ciclos lımite o puntos atrac-tores o repulsores. En este sentido, la llamada equivalencia topologica de sistemas dinamicos
58W. S. Krogdahl 1955 Astrophys. J. 122 43.
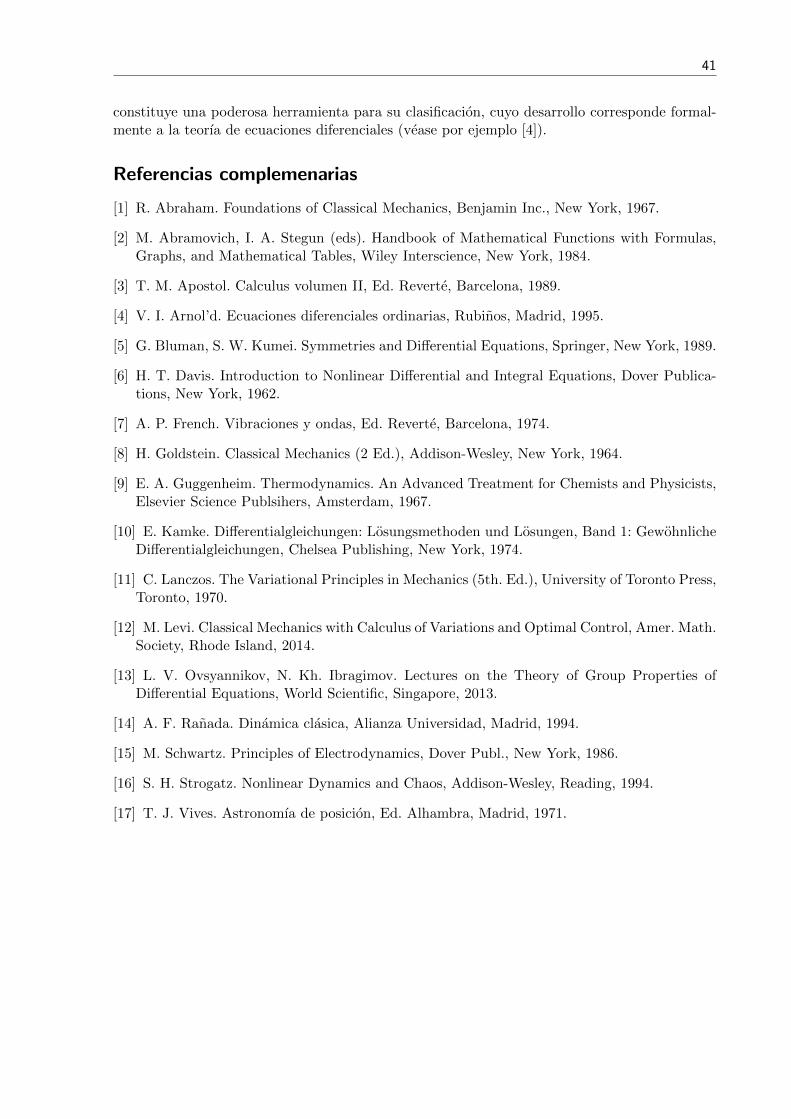
41
constituye una poderosa herramienta para su clasificacion, cuyo desarrollo corresponde formal-mente a la teorıa de ecuaciones diferenciales (vease por ejemplo [4]).
Referencias complemenarias
[1] R. Abraham. Foundations of Classical Mechanics, Benjamin Inc., New York, 1967.
[2] M. Abramovich, I. A. Stegun (eds). Handbook of Mathematical Functions with Formulas,Graphs, and Mathematical Tables, Wiley Interscience, New York, 1984.
[3] T. M. Apostol. Calculus volumen II, Ed. Reverte, Barcelona, 1989.
[4] V. I. Arnol’d. Ecuaciones diferenciales ordinarias, Rubinos, Madrid, 1995.
[5] G. Bluman, S. W. Kumei. Symmetries and Differential Equations, Springer, New York, 1989.
[6] H. T. Davis. Introduction to Nonlinear Differential and Integral Equations, Dover Publica-tions, New York, 1962.
[7] A. P. French. Vibraciones y ondas, Ed. Reverte, Barcelona, 1974.
[8] H. Goldstein. Classical Mechanics (2 Ed.), Addison-Wesley, New York, 1964.
[9] E. A. Guggenheim. Thermodynamics. An Advanced Treatment for Chemists and Physicists,Elsevier Science Publsihers, Amsterdam, 1967.
[10] E. Kamke. Differentialgleichungen: Losungsmethoden und Losungen, Band 1: GewohnlicheDifferentialgleichungen, Chelsea Publishing, New York, 1974.
[11] C. Lanczos. The Variational Principles in Mechanics (5th. Ed.), University of Toronto Press,Toronto, 1970.
[12] M. Levi. Classical Mechanics with Calculus of Variations and Optimal Control, Amer. Math.Society, Rhode Island, 2014.
[13] L. V. Ovsyannikov, N. Kh. Ibragimov. Lectures on the Theory of Group Properties ofDifferential Equations, World Scientific, Singapore, 2013.
[14] A. F. Ranada. Dinamica clasica, Alianza Universidad, Madrid, 1994.
[15] M. Schwartz. Principles of Electrodynamics, Dover Publ., New York, 1986.
[16] S. H. Strogatz. Nonlinear Dynamics and Chaos, Addison-Wesley, Reading, 1994.
[17] T. J. Vives. Astronomıa de posicion, Ed. Alhambra, Madrid, 1971.


















