![Ventilador [Motorización] - Máquinas Simples | Fischertechnik](https://static.fdocuments.mx/doc/165x107/58831df91a28abe2758b4a89/ventilador-motorizacion-maquinas-simples-fischertechnik.jpg)
Ventilador [Motorización] - Máquinas Simples | Fischertechnik
description


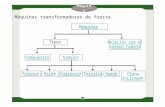
SE DENOMINAN MÁQUINAS SIMPLES A CIERTOSAPARATOS O DISPOSITIVOS QUE SE UTILIZAN PARAFACILITAR EL TRABAJO.
EN LAMAYORÍA DELOS CASOS, LASMÁQUINAS FUNCIONANCOMO MULTIPLICADORASDE FUERZA.
LA FUERZA QUE SE APLICA SOBRE UNA MÁQUINA SESUELE DENOMINAR FUERZA MOTRIZ (F) Y LA FUERZAQUE SE VENCE SE DENOMINA, RESISTENCIA O CARGA(Q)

CLASES DE MÁQUINAS SIMPLES:

PALANCAS:
ES UNA BARRA RÍGIDA INDEFORMABLE QUE PUEDEGIRAR ALREDEDOR DE UN EJE O PUNTO DE APOYO(FULCRO O PIVOTE)
Sobre la palanca actúan dos fuerzas: una es la fuerzaaplicada (F) y la otra es la resistencia vencida (Q), cadauna tiene su propia dirección de acción, la distancia entrela fuerza y el fulcro se denomina brazo de fuerza (a) y ladistancia entre la resistencia y el fulcro se denominabrazo de resistencia (b).

PALANCA DE PRIMER GÉNERO:
En la palanca de primer género, el punto de apoyo estáentre la Fuerza y la Resistencia:
F.a = Q.b

PALANCA DE SEGUNDO GÉNERO:
En la palanca de segundo género, el punto de apoyo estáen un extremo y la Resistencia está entre éste y laFuerza aplicada :
F.a = Q.b
Q
F
a
b

PALANCA DE TERCER GÉNERO:
En la palanca de tercer género, el punto de apoyo está enun extremo y la Fuerza aplicada está entre éste y laResistencia:
F.a = Q.b
Q F
a
b

EJEMPLOS: Primer género
Segundo género
Tercer género

TORNO:
Consiste en un cilindro (eje) dispuestohorizontal o verticalmente que puede girar porla acción de una fuerza aplicada (F) a unmanubrio o manivela de mayor radio que elcilindro. La resistencia (Q) que se desea elevarse aplica mediante una cuerda que se envuelveo enrolla en el cilindro.
F.R = Q.r

Ejemplos de torno:

Engranajes:
Se denomina engranaje o ruedas dentadas al mecanismo utilizado para transmitir potencia de un componente a otro dentro de una máquina. Los engranajes están formados por dos ruedas dentadas, de las cuales la mayor se denomina corona' y la menor 'piñón'

PLANO INCLINADO:
Se denomina plano inclinado a todo plano que formacon la horizontal un ángulo agudo, estableciendo untriángulo rectángulo, en el que la hipotenusacorresponde a la longitud del plano (l), el cateto
opuesto al ángulo la altura (h):
F. l = Q. h
lh
Q
F

Ejemplos:

POLEAS:
La polea es un disco que puede girar librementealrededor de un eje central; es canalada en laperiferia, con la finalidad de la cuerda pase por allíy no resbale.
Se distinguen tres clases: polea fija, polea móvil ylos polipastos:

POLEA FIJA:
Como su nombre lo indica permanece fija en su lugar, esta sólo cambia la dirección de la fuerza
F
Q

POLEA MÓVIL:
Esta se mueve juntamente con la carga, y hace que se reduzca la fuerza aplicada:
F = Q/2

POLIPASTOS O APAREJOS:
Se llaman polipastos a las combinaciones depoleas, las hay de tres clases: aparejopotencial, aparejo factorial y aparejodiferencial:

APAREJO POTENCIAL:COMBINA UN NÚMERO CUALQUIERA DE POLEAS MÓVILES CON UNA FIJA:
F = Q 2n n = poleas móviles

APAREJO FACTORIAL:
COMBINA IGUAL NÚMERO DE POLEAS FIJAS Y MÓVILES
F = Q N N = número total de poleas

APAREJO DIFERENCIAL:
CONSTA DE UNA DOBLE POLEA FIJA, DE RADIOSDESIGUALES Y UNA POLEA MÓVIL, POLEAS QUE SEENCUENTRAN ENLAZADAS POR UNA CADENA SIN FIN OCERRADA:
F = Q(R – r)2R
F

VENTAJA MECÁNICA:
Se denomina ventaja mecánica (VM), a la relación quese establece entre el valor de la fuerza ejercida por lamáquina sobre la resistencia (Q) y el valor de lafuerza (F) que el operador aplica a lamáquina, cuando el dispositivo está en equilibrio:
VM = resistencia vencidafuerza aplicada
VM = QF
La ventaja mecánica puede ser teórica o práctica. Sedenomina ventaja mecánica teórica (VMT) a la quepresenta la máquina. Aquella que se calcula es la realo práctica (VMP).

EFICIENCIA O RENDIMIENTO:
Se denomina rendimiento o eficiencia de unamáquina, a la relación existente, entre suventaja práctica y su ventaja teórica:
eficiencia = ventaja mecánica práctica o realventaja mecánica teórica
E = VMP . 100%VMT