Maestría en Ciencias en Ciencias de la Computación · ii Resumen de la tesis que presenta David...
96
Centro de Investigación Científica y de Educación Superior de Ensenada, Baja California Maestría en Ciencias en Ciencias de la Computación Optimización multiobjetivo para la planificación de transporte público aplicando técnicas metaheurísticas Tesis para cubrir parcialmente los requisitos necesarios para obtener el grado de Maestro en Ciencias Presenta: David Peña Morales Ensenada, Baja California, México 2017
Transcript of Maestría en Ciencias en Ciencias de la Computación · ii Resumen de la tesis que presenta David...

CentrodeInvestigaciónCientíficaydeEducaciónSuperiordeEnsenada,BajaCalifornia
MaestríaenCienciasenCienciasdelaComputación
Optimizaciónmultiobjetivoparalaplanificacióndetransportepúblicoaplicandotécnicasmetaheurísticas
Tesisparacubrirparcialmentelosrequisitosnecesariosparaobtenerelgradode
MaestroenCiencias
Presenta:
DavidPeñaMorales
Ensenada,BajaCalifornia,México2017

TesisdefendidaporDavidPeñaMorales
yaprobadaporelsiguienteComité
DavidPeñaMorales©2017Quedaprohibidalareproducciónparcialototaldeestaobrasinelpermisoformalyexplícitodelautorydirectordelatesis.
Dr.AndreyChernykhDirectordetesis
Dr.CarlosAlbertoBrizuelaRodríguez
Dr.JesúsFavelaVara
M.C.JorgeEnriquePreciadoVelasco
Dr.JesúsFavelaVaraCoordinadordelPosgradoenCienciasdela
Computación
Dra.RufinaHernándezMartínezDirectoradeEstudiosdePosgrado

ii
ResumendelatesisquepresentaDavidPeñaMoralescomorequisitoparcialparalaobtencióndelgradodeMaestroenCienciasenCienciasdelaComputación.
Optimizaciónmultiobjetivoparalaplanificacióndetransportepúblicoaplicandotécnicasmetaheurísticas
Resumenaprobadopor:
Dr.AndreyChernykhDirectordetesis
El transporte público es un tema importante para el desarrollo de las ciudades, dado que afectadirectamenteelbienestardelaspersonasquedebentrasladarseportrabajo,estudio,asistenciamédicaoentretenimiento.Lacalidaddelserviciodebegarantizarunaexperienciaquecumplaconcriterioscomodisponibilidad,comodidad,seguridadytiemposdeesperacortos.Porotrolado,lasempresasproveedorasdelserviciobuscanreducir loscostosdeoperación(combustible,mantenimientoopagoalconductor);porloque,unaasignaciónadecuadadelaflotaparaciertademandadepasajerosreducelacirculacióndevehículossemivacíoshaciendomásrentablelaoperación,asimismofavorececonladescongestióndelasvíasyelimpactoambiental,aldisminuirelconsumoinnecesariodecombustible.Eldiseñodehorariosylacalendarizacióndelosvehículosformanpartedeunconjuntodetareasimportantesparalaplanificacióndetransportepúblico;yaqueambosdependendelestudioyoptimizacióndelafrecuenciadecirculación,porconsiguiente,esimportanteparaevitarsobrecostosymejorarlacalidaddelserviciopercibidaporelusuario;locualesesencialalahoradeproponeraltransportepúblicocomounaopciónatractivafrentealtransporteprivado.Enestatesisseproponeunalgoritmoevolutivomultiobjetivoparalacreacióndehorarios utilizando vehículos de diferentes tipos (diferente capacidad y costo de funcionamiento),considerandolasrestriccionesdelasentidadesgubernamentalesparalossistemasdetransportepúblicoenelcontextodeciudadesinteligentes.Losobjetivosenconflictoabordadosson:laminimizacióndelcostototaldecirculación,queafectaaloperador,ylaminimizacióndelnúmerodepasajerosquenopuedentrasladarseenunperiododetiempo, locualsuponeunareducciónen lacongestiónde losvehículosymenortiempodeespera.Unconjuntodesolucionesno-dominadasrepresentadiferentesasignacionesdevehículosaunhorario,quesatisfaceunconjuntodeviajesparaunarutadefinida,enestedocumentosepresentael análisis experimental realizado, asimismo la comparaciónentre los resultadosobtenidos yaquellos generados por el algoritmo evolutivo multiobjetivo NSGA-II, en donde se evidencia unrendimientocompetitivodelalgoritmopropuestoentérminosdeconvergenciaydiversidad.
Palabras clave: algoritmos evolutivos, ciudades inteligentes, metaheurísticas, optimizaciónmultiobjetivo,transportepúblico.

iii
AbstractofthethesispresentedbyDavidPeñaMoralesasapartialrequirementtoobtaintheMasterofSciencedegreeinComputerScience
Multiobjectiveoptimizationforpublictransportplanningusingmetaheuristic
Abstractapprovedby:
Dr.AndreyChernykhThesisDirector
Publictransportisanimportanttopicforthecitiesdevelopment,becauseitaffectsdirectlythepeople’swelfarewhentheymoveforworking,studying,healthcareorentertainment.Thequalityofservicemustguaranteeagoodexperienceintermssuchascomfort,safety,availabilityandshorterwaitingtime.Ontheotherhand,thetransportcompanieslookforreducingtheoperationalcost(e.g.fuel,maintenanceordriver).Therefore,foragivenpassengerdemandanappropriatefleetassignmentcanreducethefluxofempty vehicles, fuel consumption and the associated costs, helping to reduce traffic jams, negativeenvironmentalimpactandoperationcosts.Timetablingandvehicleschedulingareimportantactivitiesinpublictransportplanning.Thetimetablesdependonthestudyandoptimizationinvehicles’frequency;hence,theyareimportanttoavoidadditionalcostsandimprovethequalityofserviceperceivedbyusers,whichisessentialtomakingpublictransportmoreattractive,andtoincreaseitsusecomparedtoprivatetransportmethods. This paper presents a heuristic based onMOCell (a cellular genetic algorithm formultiobjectiveoptimization)tocreatebustimetablesusingmultiplevehicletypes(i.e.differentcapacityandoperatingcost),consideringrestrictionsofgovernmentagenciesforpublictransportsystemsinthecontextofsmartcities,alsoknownasIntelligentTransportSystem(ITS).Theconflictingobjectivestackledin this work are the minimization of the overall cost, that affects the operator's business and theminimizationofthenumberofpassengersthatcannotmoveinatime-period,whichsupposeareductionin vehicles overload and less waiting time. A set of non-dominated solutions represents differentassignments of vehicles covering a given set of trips in a defined route, this document includes theexperimentalanalysisandthecomparisonbetweentheresultsandthenon-dominatedsetsprovidedbyamultiobjectiveevolutionaryalgorithmknownasNSGA-II,thisstudyshowsacompetitiveperformanceoftheproposedalgorithmintermsofconvergenceanddiversity.
Keywords:evolutionaryalgorithms,metaheuristics,multiobjectiveoptimization,publictransportation,smartcities.

iv
Dedicatoria
A Colombia,
Robinson y Alexander
“Educationisthepassporttothefuture,fortomorrow
belongstothosewhoprepareforittoday”
—MalcolmX

v
Agradecimientos
Amispadresyhermano,porsuapoyoincondicionaldesdeladistanciayserunamotivaciónparaalcanzargrandeslogros.
AlDr.AndreyChernykh,porsuapoyoyacompañamientofundamentalparaelaborareltrabajodetesis.
Alosmiembrosdemicomitédetesis,porsusconsejos,indicacionesycolaboraciónesestetrabajo.
Amisamigosqueestuvieronapoyándome,tolerándomeyaconsejándomedurantelaslargassesionesdeestudio.
AlCentrodeInvestigaciónCientíficaydeEducaciónSuperiordeEnsenada(CICESE),enespecialatodoelDepartamentodeCienciasdelaComputación(DCC)quemehabrindadoungranapoyoenmiestanciaenlainstitución.
AlConsejoNacionaldeCienciayTecnología(CONACyT)porbrindarmeelapoyoeconómicopararealizarmisestudiosdemaestría.

vi
Tabladecontenido
Resumen.................................................................................................................................ii
Abstract.................................................................................................................................iii
Dedicatoria............................................................................................................................iv
Agradecimientos.....................................................................................................................v
Listadefiguras......................................................................................................................viii
Listadetablas.........................................................................................................................xi
Capítulo1. Introducción.....................................................................................................11.1 Motivación...........................................................................................................................11.2 Antecedentes.......................................................................................................................3
1.2.1 HeurísticasTempranas............................................................................................................51.2.2 MétodosMatemáticos............................................................................................................61.2.3 MétodosMetaheurísticos.......................................................................................................6
1.3 Objetivos............................................................................................................................111.3.1 Objetivogeneral....................................................................................................................111.3.2 Objetivosespecíficos.............................................................................................................11
1.4 OrganizacióndelaTesis......................................................................................................11
Capítulo2. Transportepúblico..........................................................................................132.1 Introducción.......................................................................................................................132.2 Creacióndehorariosocalendarios......................................................................................152.3 Conceptosbásicos...............................................................................................................162.4 Creacióndehorariosocalendariosconvehículosdediferentestipos..................................182.5 Trabajosrelacionados.........................................................................................................182.6 Definicióndelproblema......................................................................................................20
2.6.1 Planteamientodelproblema.................................................................................................202.6.2 Definiciónformaldelproblema.............................................................................................21
Capítulo3. Optimizaciónmultiobjetivo(OMO).................................................................233.1 Introducción.......................................................................................................................233.2 ConceptosbásicosdeOMO.................................................................................................23
3.2.1 Vectorideal............................................................................................................................263.2.2 ConceptosdedominanciayPareto.......................................................................................27
3.3 Métodosdesolución...........................................................................................................313.3.1 ClasificacióndelosmétodosparaPOMO..............................................................................323.3.2 Métododelcriterioglobal(métodosinpreferencia)............................................................333.3.3 Ordenamientolexicográfico(métodoapriori)......................................................................343.3.4 Restricción−𝝐(métodoaposteriori).....................................................................................343.3.5 Optimizaciónevolutivamultiobjetivo(métodoaposteriori)................................................35
Capítulo4. AlgoritmosevolutivosparaproblemasdeOMO..............................................374.1 Introducción.......................................................................................................................374.2 ConceptosbásicosdeAlgoritmosevolutivos(AE)................................................................38
4.2.1 ComponentesdeunAE.........................................................................................................404.2.2 Representacióndelindividuo................................................................................................424.2.3 Población...............................................................................................................................43

vii
4.2.4 Funciónparaevaluacióndeaptitud(funcióndecalidad)......................................................444.2.5 Mecanismoparalaseleccióndepadres................................................................................444.2.6 Recombinación......................................................................................................................444.2.7 Mutación...............................................................................................................................464.2.8 Mecanismodeseleccióndelossobrevivientes(Reemplazo)................................................47
4.3 AEconenfoquemultiobjetivo(AEMO)................................................................................474.3.1 ClasificacióndelosAEMO......................................................................................................484.3.2 NondominatedSortingGeneticAlgorithmII(NSGA-II).........................................................494.3.3 MultiObjectiveCellulargeneticalgorithm(MOCell).............................................................51
4.4 AEMOpropuesto................................................................................................................534.4.1 Representación(codificación)...............................................................................................534.4.2 Funcionesobjetivoyevaluacióndeaptitud..........................................................................554.4.3 Operadoresgenéticos............................................................................................................56
Capítulo5. Resultadosexperimentales.............................................................................585.1 Indicadoresdecalidad(métricasderendimiento)...............................................................59
5.1.1 Espaciadoypropagación.......................................................................................................595.1.2 Hipervolumen........................................................................................................................615.1.3 Cubrimientoentredosconjuntos..........................................................................................625.1.4 Indicador−𝝐...........................................................................................................................63
5.2 Diseñodeexperimentos.....................................................................................................655.3 Resultadosexperimentales.................................................................................................685.4 Análisisderesultadosydiscusión........................................................................................73
Capítulo6. Conclusionesytrabajofuturo.........................................................................76
Literaturacitada....................................................................................................................78
viii
Lista de figuras
Figura 1. Relaciones importantes entre entidades comprendidas en ciudades inteligentes con los principales retos involucrados. .................................................... 2
Figura 2. Línea de tiempo de la evolución en al ámbito de la investigación de operaciones sobre el estudio de problemas de optimización asociados a sistemas de transporte. ................................................................................................................... 4
Figura 3. Portada y una página de “Bus Scheduling Manual" Agosto de 1947 (Ceder, 2007). ........................................................................................................................... 4
Figura 4. Trazado de la ruta y sus respectivas paradas definidas al momento del diseño topológico de R (izquierda). Tipos vehículos disponibles, calendario propuesto que asigna cada vehículo (i) a un viaje (tk) y su comportamiento para una demanda de pasajeros obtenida en un periodo de tiempo j (derecha). ................... 22
Figura 5. Representación gráfica del espacio de decisión (Ω) y su correspondiente espacio objetivo (Λ). .................................................................................................. 25
Figura 6. Soluciones óptimas de Pareto (frente de Pareto) en el espacio objetivo (Λ), para los cuatro casos posibles con dos funciones objetivo (f1 y f2). a). Minimización-Minimización. b). Minimización-Maximización. c). Maximización-Minimización. d). Maximización-Maximización. ................................ 29
Figura 7. Vector objetivo ideal (z*) y ficticio (z**), frente de Pareto (PF) y dos posibles conjuntos de soluciones P1, y P4 (izquierda). Asimismo, tres vectores objetivo diferentes (P1, P2, P3) y su respectivo PF (derecha), para dos POMO de minimización con dos funciones objetivo f1 y f2. ..................................................... 30
Figura 8. Componentes principales de un genotipo que define los rasgos de un organismo, manifestados, según el ambiente al que está expuesto, como: colores, formas, y demás características visibles del individuo (fenotipo). .............. 39
Figura 9. Ejemplo de una representación binaria para un conjunto de individuos con diferentes características. Analogía entre los conceptos computacionales y su contraparte biológica, estructura de los datos y terminología. ................................ 39
Figura 10. Ciclo evolutivo tradicional para un AG con población panmíctica............................ 41
Figura 11. “One-point crossover” (arriba) con un ρ = 3, “n-point crossover” (medio) para un n = 3, ρ = 1,3,5 y cruzamiento uniforme (abajo) para un arreglo de números aleatorios = 0.1, 0.7, 0.8, 0.2, 0.9, 0.8, 0.2 y ρ = 0.5. ............................... 45
Figura 12. Mutación “swap” (arriba) para un κ = 2,3,7, “random resetting” (abajo) para un cromosoma de con representación binaria. ......................................................... 46

ix
Figura 13. Cuadro esquemático de los pasos que ejecuta NSGA-II para producir una nueva generación Pi + 1. .......................................................................................... 50
Figura 14. Cálculo de la distancia de apiñamiento (“crowding distance”), para los valores extremos del frente se asigna una distancia infinita. ................................................ 51
Figura 15. Diferentes tipos de poblaciones utilizadas en algoritmos evolutivos a) Panmíctica, b) Islas conectadas, c) Vecindarios superpuestos. ................................. 51
Figura 16. Vecindarios diferentes, a) cuatro, b) ocho, c) doce, para dos individuos I1 =(x, y) e I2 = (x-1, y-1)............................................................................................... 52
Figura 17. Ciclo de reproducción para un algoritmo genético celular con cuatro vecinos por individuo y un conjunto no dominado de cuatro individuos. ............................. 52
Figura 18. Representación para dos individuos vecinos y su respectivo comportamiento para un periodo de tiempo y una carga de pajeros definida. ................................... 54
Figura 19. Perfil de carga para una ruta con seis paradas si, i = 1, … ,6, una carga máxima de 250 pasajeros en la tercera parada, una capacidad de vehículos total igual a 200 y un factor de carga LF2 = 75%. LQ3 = 100 indica que en la tercera parada se están perdiendo cien pasajeros ya que no pueden ser transportados por la flota asignada. .................................................................................................. 55
Figura 20. Método de recombinación implementado, modificación del tradicional “one-point crossover”. ........................................................................................................ 56
Figura 21. Método de mutación implementado, con un k = 3 (cantidad de genes que pueden ser modificados). .......................................................................................... 57
Figura 22. Ejemplo de la representación de una solución (cromosoma) para un caso con tres tipos de vehículos diferentes y un total de seis viajes en tres periodos de tiempo. Etapas de reproducción para un algoritmo celular asíncrono. .................... 57
Figura 23. Distancias entre las soluciones de un P. ................................................................... 60
Figura 24. Distancias entre las soluciones de un P, incluidas las distancias entre los extremos del frente de Pareto y las soluciones más cercanas. ................................. 61
Figura 25. El hipervolumen encerrado por las soluciones que pertenecen al conjunto de soluciones no dominado P1 y el punto W (izquierda). Comparación entre el hipervolumen construido por P1 y P2 (derecha). ..................................................... 62
Figura 26. Ejemplo de la interacción de dos conjuntos de soluciones P1 y P2 y sus posibles relaciones de dominancia. ........................................................................... 63
Figura 27. Cada una de las áreas marcadas representa el espacio que es ϵ- dominado al calcular la métrica así: IϵP1, P2 = 0.88, IϵP1, P3 = 1, IϵP1, Pf = 4

x
.Multiplicando a la solución P1 los valores obtenidos para Iϵ se obtienen las áreas que representan cada uno de los tres posibles casos de ϵ. ............................. 64
Figura 28. Mapa digital de la ciudad de Los Ángeles, California EEUU con las paradas de la ruta 217 resaltadas en sentido sur-norte y norte-sur (Esidian, 2017). .................. 66
Figura 29. Carga de prueba utilizada para la ejecución de los algoritmos, representa el promedio de la demanda de pasajeros por cada una de las 59 paradas en intervalos de tiempo de una hora (19 intervalos en total) para la ruta 217 en LA, carga máxima de pasajeros (481) en la parada Fairfax/ Rosewood durante las 17:00 a las 18:00 horas (hora pico). ..................................................................... 66
Figura 30. Mapa de calor para el rendimiento promedio (IHV) de los resultados del algoritmo genético celular basado en MOCell en su versión asíncrona. ................... 68
Figura 31. Degradación del promedio de IHV para las 342 combinaciones de parámetros para el algoritmo genético celular (Pr y Pm). ............................................................ 69
Figura 32. Impacto de la variación de la probabilidad de recombinación con un mismo valor de Pm. ............................................................................................................... 69
Figura 33. Rendimiento del hipervolumen en 30 ejecuciones independientes del algoritmo genético celular para 100 generaciones, es decir, evaluar la malla toroidal completa, individuo por individuo. .............................................................. 70
Figura 34. Mapa de calor para el rendimiento promedio (IHV) de los resultados del algoritmo genético NSGA-II........................................................................................ 71
Figura 35. Conjunto de soluciones obtenido con el algoritmo genético celular, correspondiente a un IHV = 0.4398 en comparación a la población inicial para una ejecución con Pr = 0,95 y Pm = 0,3. ........................................................ 71
Figura 36. Mejor aproximación al frente de Pareto obtenida para MOCell y NSGAII, correspondiente a un IHV= 0.4398 𝑦 0.3866 respectivamente (izquierda). Mejor aproximación al frente de Pareto obtenida, mediante la unión de las 30 soluciones encontradas en cada ejecución de los algoritmos (derecha). ................. 72
Figura 37. Comparación entre un frente de Pareto artificial y dos conjuntos de soluciones no dominadas. .......................................................................................... 74
Figura 38. Ejemplo de tres calendarios diferentes (fenotipo) al interpretar tres cromosomas ubicados en el espacio objetivo (izquierda). Comparación de los tres horarios encontrados versus el costo de operación de una asignación vehicular observada en la ruta 217 en Los Ángeles, California EEUU. ...................... 75
xi
Lista de tablas
Tabla 1. Relaciones de dominancia entre dos soluciones (puntos en el espacio objetivo) y entre dos conjuntos de aproximación al frente de Pareto. .................................. 30
Tabla 2. Resumen general de las métricas binarias Indicador-ϵ y Cubrimiento entre dos conjuntos en términos de las relaciones de dominancia. Los espacios vacíos indican que no hay un método de comparación que permita definir que es completamente compatible con esta relación de dominancia. .............................. 65
Tabla 3. Parámetros de configuración iniciales para el algoritmo genético celular. ............... 67
Tabla 4. Parámetros de configuración iniciales para el algoritmo genético NSGA-II. ............. 70
Tabla 5. Métricas para POMO como indicadores de calidad calculadas para AGC y NSGA-II. ............................................................................................................................... 72
Tabla 6. Comparación de resultados aplicando la métrica ITSCX', X'' donde X'y X''representan el algoritmo en la fila y en la columna respectivamente. ............... 72
Tabla 7. Comparación de resultados aplicando la métrica IϵA, B donde A y B representan el algoritmo en la fila y en la columna respectivamente. ........................................ 73
1
Capítulo1. Introducción
Enunmundocadavezmásinterconectadoyglobalizado,en2014másdelamitaddeloshabitantes(54%)
seencuentraenzonasmetropolitanas,adiferenciadel30%estimadoen1950.Esteabruptocrecimiento
implica cambios importantes tanto en el tamaño como en la densidad de población, este efecto se
acentuaráenlaspróximasdécadas,conuncrecimientoestimadodel70%delapoblaciónmundialviviendo
enlasciudadesenel2050(UnitedNations,2014),locualconllevaaunincrementodelademandadelas
infraestructurasqueinteractúandirectamenteconlaspersonasquesuelenmoversealasáreasurbanas
en busca de oportunidades y una calidad de vidamejor, lo que implica diversos problemas como la
congestión,aumentando lautilizacióndeunacantidad limitadade recursosnaturalesyotrosbieneso
servicioscomo:laenergía,elagua,laeducación,losserviciosdesaludoeltransporte.
1.1 Motivación
Actualmente, las principales dificultades para las ciudades en términos de movilidad urbana suelen
relacionarseconlaincapacidaddelossistemasdetransportepúblicoparasatisfacerlasnecesidadesde
unnúmerocrecientedeusuariosyaunquecadaciudadtieneproblemáticasadicionalesdiferentes, las
autoridadesoentesresponsablesdelamovilidadcompartenretoscomunescomo(Houghtonetal.,2011):
• Reducir la congestión vehicular mejorando el flujo del tráfico, concibiendo un ambiente
sustentableymáslimpio.
• Incentivarelusodeltransportepúblicoyotrasopcionesdedesplazamientomásecológicascomo
labicicleta.
Adicionalmente, es importante impulsar una reducción en el uso del vehículo particular, el cual en
promediotransportamenosdedospersonas,ocupandoelmismoespacioparatrasladaracincopasajeros;
generandomás polución y agravando el efecto invernadero, este uso desmedido del espacio público
aumentaeltráfico,perjudicandonotablementeeltiempodesplazamientodelosciudadanos.

2
Anteestepanorama,sehacenecesarioeldesarrollodemetodologíasparaeldiseñoyplanificacióndelos
sistemasdetransportepúblicoquebrindenunserviciodecalidadalosciudadanos.
"Unaciudadavanzadanoesenlaquelospobrespuedenmoverseencarro,sinounaenla
queinclusolosricosutilizaneltransportepúblico"(Peñalosa,2013).
Lasciudadesinteligentes(“SmartCities”)proponenlaincorporacióndetecnologíasparalacohesiónde
los aspectosque involucranproblemasde tipo social, institucional e infraestructura enunecosistema
urbano(Albinoetal.,2015).Áreastandiversascomolaadministraciónciudadana,educación,serviciosde
salud, seguridadpública,vivienda,energía, transportey logística,puedenmejorarse, interconectarsey
tornarsemáseficientesgraciasalaincorporacióndetecnología(WashburnySindhu,2010).Lasciudades
inteligentespermitenreducircostos,hacerunusoresponsabledelosrecursosyfomentarlaparticipación
activa de los ciudadanos en los procesos de toma de decisiones, con el fin de alcanzar una ciudad
sustentableeinclusiva(verFigura1).
Figura1.Relacionesimportantesentreentidadescomprendidasenciudadesinteligentesconlosprincipalesretosinvolucrados.

3
Paraelcasopuntualdeltransporte,seintroduceelconceptode“SmartMobility”osistemadetransporte
inteligente (ITS: por sus siglas en inglés “Intelligent Transportation System”) en el que se integran
tecnologíasdelainformaciónylacomunicación(TIC),aplicadasalsectordeltransporte(Alametal.,2016).
Losavancestecnológicos,enespecialencienciascomputacionalesysistemasdecomunicación,permiten
recolectarungranvolumendedatosdeltransporteylamovilidaddelaspersonasenlasciudades,delos
cuales se puede extraer información relevante, la cual compromete a los ITS con los usuarios,
organizacionesgubernamentalesyoperadoresdediferentesserviciosacontarconnuevasherramientas
yaplicacionesproductodelarduotrabajodelacomunidadcientífica.
LosobjetivosdelosITS,generalmenteseformulan,mediantelaparametrizacióndemetasestablecidas
porentesinteresados(Gordon,2016):
• Mejorarlaseguridaddelossistemasdetransporte.
• Incrementarlaeficienciaoperativaycapacidaddelossistemasdetransporte.
• Reducirelconsumodeenergíayelimpactoambiental.
• Mejorar laproductividadeconómicatantodeusuarioscomodeoperadoresde lossistemasde
transporte.
• Mejorarlamovilidadindividual,laconvivenciaycomodidadparalospasajerosenlossistemasde
transporte
• CrearunentornoquepermitaeldesarrolloydesplieguedenuevastecnologíasdeITS.
1.2 Antecedentes
Diferentes modelos y algoritmos han sido desarrollados para resolver problemas relacionados con el
transporte, en especial transporte público urbano. Lamayoría de estos trabajos se basan enmodelos
planteadoshacealgunasdécadas,loscualessonabordadoscontécnicasdeinteligenciacomputacional,
buscandoaproximarmejor lasposiblessoluciones,debidoalacomplejidadcomputacionalquepueden
presentaralgunossub-problemascomolacreacióndehorariosolacalendarizacióndelosvehículos.Enla
Figura 2 semuestra una línea de tiempo de los esfuerzos que se están realizando en este campo de
investigación.
4
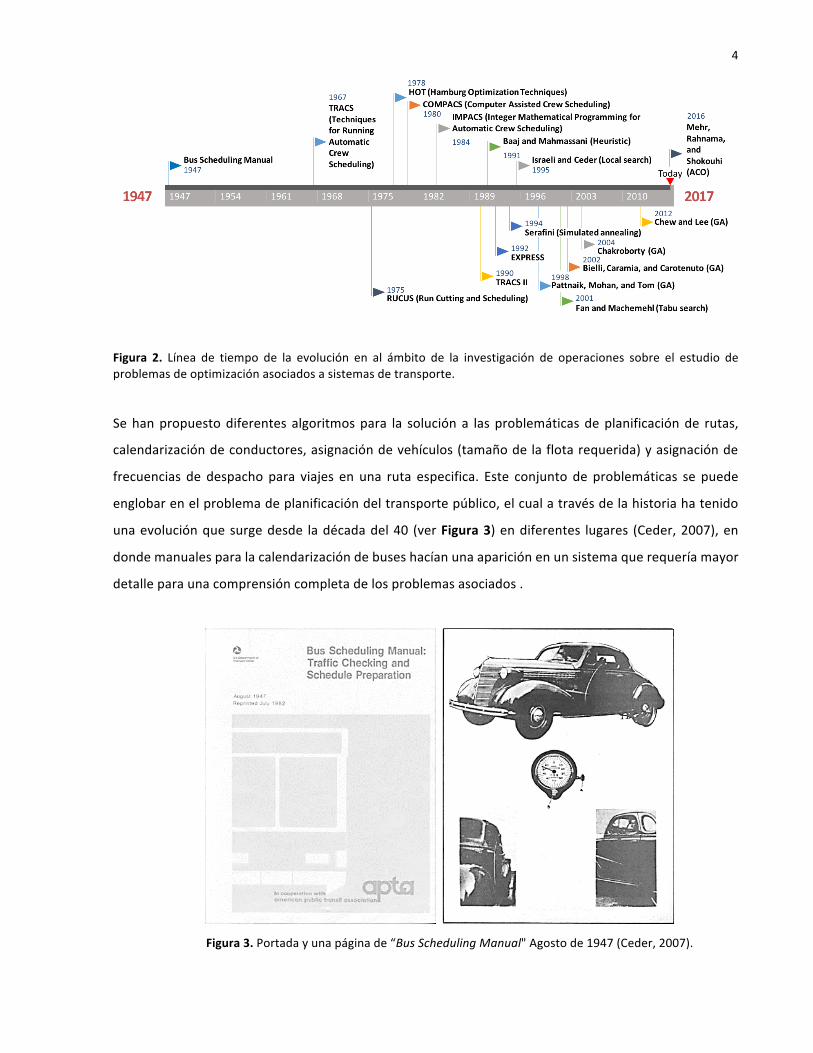
Figura 2. Línea de tiempo de la evolución en al ámbito de la investigación de operaciones sobre el estudio deproblemasdeoptimizaciónasociadosasistemasdetransporte.
Sehanpropuestodiferentes algoritmospara la solucióna lasproblemáticasdeplanificaciónde rutas,
calendarizacióndeconductores,asignacióndevehículos(tamañodelaflotarequerida)yasignaciónde
frecuencias de despacho para viajes en una ruta especifica. Este conjunto de problemáticas se puede
englobarenelproblemadeplanificacióndeltransportepúblico,elcualatravésdelahistoriahatenido
unaevoluciónquesurgedesde ladécadadel40 (verFigura3)endiferentes lugares (Ceder,2007),en
dondemanualesparalacalendarizacióndebuseshacíanunaapariciónenunsistemaquerequeríamayor
detalleparaunacomprensióncompletadelosproblemasasociados.
Figura3.Portadayunapáginade“BusSchedulingManual"Agostode1947(Ceder,2007).
5
En losaños70aparecennuevas ideasbasadasen la intuición,peroaúnnosecontabaconunmodelo
concreto,enladécadadelos80aparecenformulacionesparaalgunasfuncionesobjetivo(p.ej.reducirel
tiempode esperaominimizar el costodeoperación) y algunosparámetros para el cubrimientode la
demanda; luego a inicios de los 90 aparecennuevos enfoques ligados a la exploracióndel espaciode
solucionesylautilizacióndemodelosestocásticos(Ramírezetal.,2015).
Para realizar la planificación de un sistema de transporte público es necesario solucionar todos los
problemasrelacionados,algunosautores(Ceder,2016;Ibarra-Rojasetal.,2015)proponenunaseriede
pasosofasesdelasiguientemanera:
• Diseñoderecorridosparalasrutas.
• Definicióndefrecuenciasdelosvehículos.
• Determinacióndelatabladehorarios,horadesalidayhoradellegada.
• Asignacióndevehículosparacubrirlosviajes.
• Asignacióndelosconductoresydemáspersonalrequeridoparalaoperación.
Todas lasetapasdebenser tratadas simultáneamenteparaasegurarmejores resultados, sinembargo,
debidoalacomplejidaddedesarrollarunsistemacompleto,sedefinenunaseriedesub-problemas,los
cuales se desarrollan de manera individual y secuencial, no obstante, comparten características que
puedensercomparadasyexaminadasendetalle.
1.2.1 HeurísticasTempranas
Llamaremosheurísticastempranasalasprimerasaproximacionesalproblema,lascualesnoteníanalgún
modelomatemáticodesarrolladoysebasabanenbuscarunasolucióninicialeirrefinándolaalmáximo
porexploraciónconalgúnmétodonoriguroso.
El sistema TRACS (“Techniques for Running Automatic Crew Scheduling”) fue desarrollado en la
UniversidaddeLeedsen1967,comounodelosprimerosesquemaspropuestoselcualseenfocabaen
generar la mejor solución inicial posible, debido a que no consideraba la posibilidad de hacer
modificacionesconbuenrendimientousandolastécnicasdisponiblescomoeltanteo;TRACSgenerabael
calendarioinicialparalaasignacióndeconductoresmediantelacombinacióndedistribucionesquecubren
6
las horas de mayor demanda, generando pequeños bloques que podían ser eliminados ya que se
superponíancon laactividaddeotroconductor (J. Li,2002).En los70’ssurgeel sistemaRUCUS (“Run
Cutting and Scheduling”), en Hamburgo se propone el HOT (“HamburgOptimization Techniques”) los
cualesgenerabanalgunaposiblesolucióniniciallacualseexplotabaconunatécnicadebúsquedalocal
buscandomejorarla. En ladécadade losochentase incorporaunpaquetedeprogramaciónconocido
como BUSMAN, el cual contenía un algoritmo de nombre COMPACS (“Computer Assisted Crew
Scheduling”)elcualutilizabalassolucionesinicialesgeneradasporTRACSparaluegomodificarlasenbusca
demejorasmediantelainteracciónentrelasolucióninicialylasposiblesvariaciones(ChamberlainyWren,
1992).
1.2.2 MétodosMatemáticos.
El problemadeasignaciónde autobuseso calendarizaciónde conductorespuedemodelarse comoun
cubrimientode conjuntos (“set covering”) (Chvatal, 1979)oparticiónde conjuntos (“setpartitioning”)
(Biancoetal.,1994),modelosmatemáticosdegrafosampliamenteconocidos.
Afinalesdelosaños70sedesarrollóIMPACS(“IntegerMathematicalProgrammingforAutomaticCrew
Scheduling”) instalado en Londres en 1984. Luego apareció TRACS II como una nueva generación de
software para programación de conductores basado en programación matemática que garantiza un
calendarioóptimo(Foresetal.,1999).En1992sepresentóEXPRESSunsistemadesarrolladoparaNueva
Zelandafundamentadoenelmodelodeparticióndeconjuntos(J.Li,2002).
DadoquelacantidaddecombinacionesesmuyaltayestosproblemassondetipoNP-difícil(Ceder,2007),
sepropusieronimplementacionesencombinaciónconheurísticasparareducirsudimensionalidadypoder
encontrarsolucionesfactiblesentiemposrazonables.
1.2.3 MétodosMetaheurísticos
Variosinvestigadoresutilizandiferentestécnicasdeinteligenciacomputacionalcombinadasconmétodos
propiosdelainvestigacióndeoperacionesparatratardeencontrarsolucionesóptimasalosproblemas
relacionadoscontransportecomolaplanificacióndeltransportepúblico.Estosehacenecesarioenvista
dequelaprogramacióndefrecuenciasparadespachodevehículosolaasignacióndeconductoresson
problemascombinatorios,dondelasvariablesdedecisióndebendefinirsedentrodeunespaciodiscreto

7
yelnúmerodealternativasesequivalenteatodaslascombinacionesposiblesdetodoslosvaloresdelas
variablesinvolucradas.
Sehanrealizadonumerosaspropuestasdemétodosdeoptimizaciónpararesolverlos,loscualespueden
clasificarse en exactos y heurísticos. Los exactos garantizan encontrar el óptimo global, perohaymuy
pocas aplicaciones en la literatura, debido a su ineficiencia por la alta dimensionalidad que debe
manejarse. Los heurísticos ometaheurísticos solo permiten aproximarse a la solución óptima (óptimo
global),perosonmáseficientesy flexiblescon losrecursosnecesariosparasuejecución.Losmétodos
heurísticossiguenengeneralunadelasdosestrategiasbásicas:“divideyvencerás”ymejoraiterativa.Los
primeros,fraccionanapropiadamenteelproblemaensub-problemasdetamañomás“manejable”yluego
enlazanlassolucionesencontradasparacadaunodeellos.Losalgoritmosdemejoraiterativainiciancon
unaposiblesoluciónalproblemalacualdemaneracontinuaesmodificadahastaquesemejorelafunción
objetivo.Estabúsquedapuedeestancarseenunvaloróptimolocalporloqueesrecomendablehacerel
proceso varias veces utilizando diferentes configuraciones generadas aleatoriamente, guardando los
mejoresresultados.Adicionalalacomplejidadantesmencionada,haydiversosproblemasconmúltiples
objetivosquepuedenestarenconflictolocualaumentaelcostoyladificultadcomputacionalalahorade
intentar resolverlos. En el caso del transporte público, como se pudo observar en la Figura 3, se han
implementadodiferentesmétodosheurísticos,metaheurísticosyexactos;algunosdeellosbasadosenel
aporterealizadoporIsraeli,Ceder,BaajyMahmassani.
BaajyMahmassani(1995)proponenvariasrestriccionesalproblemadeplanificacióndetransportecon
parámetrosquetienenencuentadiversosaspectosimportantescomolafrecuenciadelosvehículos,el
tamañodelaflotayelfactordecargadelospasajeros.Elmodeloestádefinidocomo:
Minimizar 𝐶" 𝑑$%𝑡$%'%(" + 𝐶* 𝑓,𝑡,'
%("'$("
Sujetoa 𝑓, ≥ 𝑓.$'∀𝑘 ∈ 𝑅 (1)
𝐿𝐹, =789:;
<8=≤ 𝐿𝐹.?@∀𝑘 ∈ 𝑅 (2)
𝑁,,∈B = 𝑓,𝑡,,∈B ≤ 𝐹𝑆 (3)
Donde:
𝑛 Cantidaddenodosdelared.
𝑑$% Demandaentrelosnodos𝑖y𝑗.
𝑡$% Tiempodeviajeentre𝑖y𝑗.

8
𝑓, Frecuenciadelosvehículosqueoperanlaruta𝑘.
𝑓.$' Frecuenciamínimapermitidaparacualquierruta.
𝑡, Tiempototaldeviajedelaruta𝑘.
𝑄,.?@ Máximoflujoporarcodelaruta𝑘.
𝛼 Capacidaddepasajerosenlosvehículos.
𝐿𝐹, Factordecargaenlaruta.
𝐿𝐹.?@ Factordecargamáximopermitido.
𝑁, Cantidaddebusesoperandolaruta𝑘.
𝐹𝑆 Tamañodelaflotadisponible.
𝑅 Conjuntoderutas.
𝐶"𝑦𝐶* Pesosrelativosparalafunciónaminimizar.
Paraestemodeloseproponeunasoluciónheurísticabasadoen lacombinaciónderutas,enelcual la
poblacióninicialsegeneraapartirdeidentificarloscaminosmáscortosentrelosnodosdealtademanda.
Por otra parte, se propusieron algoritmos de búsqueda local, para un modelo de optimización
multiobjetivo,endondesepretendeminimizareltamañodelaflotayreducirelcostoquerepresentala
cantidaddepasajerosporhora,tiempodeesperadelospasajerosentrecadaparadaytiempodeviajeen
elqueelbusseencuentravacío(IsraeliyCeder,1995).
Minimizar: 𝑓" = 𝐶" 𝑃𝐻$%$,%∈M
+ 𝐶* 𝑊𝐻$%$,%∈M
+ 𝐶O 𝐸𝐻QQ∈B
(4)
y (6)
𝑓* = 𝐹𝑆 (5)
Donde:
𝑃𝐻$% Pasajeros/horaentrelosnodos𝑖y𝑗.
𝑊𝐻$% Tiempodeesperadelospasajerosentrelosnodos𝑖y𝑗.
𝐸𝐻$% Espaciovacíoporhoraenlaruta𝑟.
𝐹𝑆 Tamañodelaflotadisponible.
𝑅 Conjuntoderutas.
𝐶", 𝐶*𝑦𝐶O Pesosrelativosparalafunción𝑓"aminimizar.

9
Elmodeloseresuelveentresmomentos:
• Se generan varios conjuntos de soluciones no dominados, mediante la solución al problema
asociadodecubrimientodeconjuntos.
• Sedeterminalasfrecuenciasdedespachodecadavehículo.
• Para laexploracióndesoluciones,se implementaunmétododebúsqueda local, finalmentese
evalúanyseleccionanlasmejoressolucionesdelconjuntoPareto-óptimo.
Latécnicaconocidacomo“recocidosimulado”secaracterizaporalterarunasoluciónfactibleseleccionada
aleatoriamente. Esta perturbación producirá una nueva alternativa que sustituirá a la anterior. El
reemplazoseráaceptadoonoenfuncióndealgunaregladedecisión.Elprocesoserepiteiterativamente
hastaqueseconsiderequesellegóalóptimooconunaaproximaciónaceptable(Kirkpatricketal.,1983).
Elmétodosebasaenel "recocido simulado" realizadoenmecánicaestadística, La técnica consisteen
calentary luegoenfriarelmaterialcomoelaceroo lascerámicas,variandosuscaracterísticas,elcalor
promueve un cambio en la energía de los átomos alcanzando los valores iniciales (mínimo local del
problema),luegoelenfriamientocontroladopretendealcanzarlosvalorescuyorendimientotengamenor
energíaquelosvaloresiniciales(mínimoglobaldelproblema).Serafini(1994)utilizaalgoritmosbasados
en “recocido simulado” y sugiere su uso en problemas conmúltiples objetivos; empleando reglas de
agregaciónponderadadevaloresdelosobjetivos,diferentealosalgoritmosclásicosderecocidosimulado
para un solo objetivo. Costa et al. (2016), presentan un algoritmo en el campo de los trenes de alta
velocidad,inicializadodemaneraaleatoriayutilizandotécnicasclásicasdeenfriamientoparamejorarla
soluciónyescapardeóptimoslocales.
Algoritmosbasadosen“BúsquedaTabú”,unmétodointroducidoporGloveren1989comounatécnica
iterativaqueescapadeóptimos localesaceptandosolucionesnotanbuenas,moviéndosepasoapaso
haciaunasoluciónlomáscercanaposibleaunóptimoglobal(Gloveretal.,2007).Labúsquedatabú,al
contrario de otrosmétodos que tratan de escapar de los óptimos locales aleatoriamente, utiliza una
exploracióninteligentebasadaenformassistemáticas,estametaheurísticaestábasadaenlapremisade
que para clasificar un procedimiento de solución como “inteligente”, es necesario que éste incorpore
memoriayexploraciónadaptativa.ElsistemaHACS(ShenyKwan,2001)aplicabúsquedatabúalproblema
delaasignacióndeconductores.Unmétododebúsquedatabúfueaplicadoparaeldiseñoderedesde
transportecondemandavariablebasadoeneltrabajodeBaajyMahmassani(1995)conenfoquenolineal
ymultiobjetivo(FanyMachemehl,2008).

10
Losmétodosconocidoscomooptimizaciónporcoloniasdehormigasseinspiraronenlosestudiossobreel
comportamientodelascoloniasdehormigasycomolograndeterminarcaminoscortoshaciafuentesde
alimentos a través de la búsqueda semi-aleatoria de un grupo de hormigas que depositan feromonas
(Dorigoetal.,2006).Laferomonadepositadaconstituyelainformaciónquepermitelacoordinaciónde
losesfuerzosdelenjambreenbuscadecomida,unahormigaestámásinclinadaaseguirunatrayectoria
cuantomásfuerteseaelrastrodeferomonadepositadaenella.¿Cómoayudaestoaencontrarelcamino
más cortoa la comida?Pues resultaque lahormigaqueda con la comidaprimero (presumiblemente
porqueencontróuncaminomásomenoscortohaciaelalimento)tambiéneslaprimeraendepositarel
dobledeferomonasobreunatrayectoriaalseguiréstaensucaminodevueltaalacolonia.Otrashormigas
preferirán ligeramente esta trayectoria en comparación con otras que solo cuentan con la mitad de
feromonaenellas,yalhacerlointensificanelrastrodeferomonahaciendolarutaaúnmásatractivapara
nuevashormigas.Comoalprincipioelrastrodeferomonanoesmuyfuerte,lasprimerashormigasque
siguenelcaminohacialacomidapuedendesviarseyencontraratajos,conloqueseperfeccionalasolución
propuesta.Eventualmentelamayorpartedehormigassiguenelcaminohastaagotarlafuentedealimento
(Quintero,2005).Mehretal.(2016)implementanestetipodemetaheurísticapararesolveralproblema
dediseñodelíneasparatrenesligerosobusesdetránsitorápidoenlaciudaddeMashhadenIrán.
Unatécnicamuyutilizadasonlosalgoritmosgenéticos(AG),inspiradosenlosconceptosdelagenéticay
laselecciónnatural.Sehanrealizadovariosaportespordiferentesinvestigadoresparaeldiseñoderedes
detransporte(topologíaytrayectosdelasrutas)ylacreacióndehorariosocalendarios,desdemediados
delosaños90,porejemploPattnaiketal.(1998)secentranenminimizarelcostoasociadotantoparael
operadorcomoparaelusuario,conunAG,queconstadedosfases:primerosegeneraunapoblación
inicialdecandidatosasersolucionesfactiblesalproblema,luegosehacentorneostípicosenAGcomo
ejemplo de selección natural para podermejorar los individuos, finalizando con un selecto grupo de
posiblessolucionesconunaltodesempeño.Biellietal.(2002)proponenunAGconunafunciónobjetivo
que llaman 𝑓𝑓, la cual se caracteriza por tener una metodología de cómputo que genera nuevas
poblaciones,evaluadasdemanera iterativa conenfoquesmultiobjetivo, conel findediseñar lamejor
infraestructuradebusesquesatisfagaunademandayofertaparadeterminadoscasos.Chakroborty(2003,
2004)mencionalaaltaefectividaddelosalgoritmosgenéticosparasolucionarelproblemadediseñode
redesdetransporteurbano(UTNDPporsussiglaseninglés:“UrbanTransitNetworkDesignProblem”).
ChewyLee(2012)desarrollanunmarcodetrabajo(“framework”)usandoAGcuyafinalidadesreducirel
costo para los pasajeros, resolviendoel problemadediseñode rutas en tránsito urbano.Utilizanuna
estructurabasadaenpermutacióndeenterosyoperacionesclásicasdecruzamientoymutaciónparadicha
representación.
11
1.3 Objetivos
1.3.1 Objetivogeneral
Diseñar e implementar un algoritmo para la planificación táctica en sistemas de transporte público
utilizandovehículosdediferentestiposenelcontextodeciudadesinteligentes;aplicandometaheurísticas
para optimización combinatoriamultiobjetivo, apoyandoen la reducciónde los costos operativos y la
disminucióndelaperdidadelacalidaddelservicio.
1.3.2 Objetivosespecíficos
• Analizar información relevante al transporte público (p.ej. comportamiento de la demanda de
pasajeros),quepermitadetectarlaproblemáticaadesarrollar.
• Modelar el problema con un enfoque de optimización combinatoria (función(es) de costo y
representacióndelindividuo),aplicandométodosestocásticosometaheurísticas(p.ej.algoritmos
genéticos).
• Diseñar e implementar un algoritmo que entregue una solución al problema propuesto con
enfoquemultiobjetivo.
• Encontrarlosparámetrosylasrestriccionesadecuadasquepermitanalalgoritmoentregaruna
solución(es)alproblemacapazdeminimizarelcostodeoperación,disminuyendolaperdidala
calidaddelservicio,considerandolasnormasestablecidasporlasautoridadescompetentes.
1.4 OrganizacióndelaTesis
Este trabajoestádivididoencapítulosquedesglosan la investigacióndesarrollada.EnelCapítulo2 se
presentanalgunosdetalleseinformaciónrelevantealtransportepúblicoysuplanificación,asícomouna
seriedeconceptosbásicosqueseutilizaránalolargodeldocumento,porúltimo,sepresentaladefinición
formal del problema planteado. En el Capítulo 3 se introducen los conceptos teóricos pertinentes a
optimización,particularmenteconmúltiplesobjetivosyalgunosmétodosdesoluciónparaestetipode

12
problemas.EnelCapítulo4sehaceénfasisaunodelosposiblesmétodosdesoluciónparaproblemascon
objetivosenconflictoconocidocomoalgoritmosevolutivos,detallandosufuncionamiento,características
y componentes principales, finalizando con la presentación del algoritmo elegido para resolver el
problemaantesplanteado.EnelCapítulo5 sepresentan los resultadosexperimentalesobtenidosy la
metodología que se utilizó para obtenerlos, describiendo cada una de las métricas utilizadas como
indicadoresdecalidad.Porúltimo,sepresentanalgunasconclusionesyposibletrabajofuturoenelárea.

13
Capítulo2. Transportepúblico
2.1 Introducción
Esposibledividirunproblemadeplanificacióndetransportepúblico(PTP)encuatroetapasprincipales,
ejecutadashabitualmentedemanerasecuencial,iniciandoporladefinicióndelaruta,lacreacióndelos
horarios, la calendarización de los vehículos y por último la calendarización del personal a cargo del
funcionamiento del sistema (Ceder, 2007, 2016). Por otra parte algunos autores sugieren hacer una
divisiónmásespecíficafraccionandoelproblemademaneraqueincluyendecisionestácticas,estratégicas
yoperacionales,manteniendoelconceptodedividirelproblemaensub-problemas,enalgunoscasoscon
complejidad computacionalNP-difícil, lo cual comprueba ladificultadde abordarunproblemadePTP
comountodo(Ceder,2016;HassoldyCeder,2014;Ibarra-Rojasetal.,2015).
DeformagenéricalasfasesnecesariasparaabordarunproblemadePTPson:
A. Diseñodelarutaored(planificaciónestratégica):enestafasesedefinelatopologíayestructura
delasrutas,ademásdelpuntodepartidayllegada,sedefinenlacantidadnecesariadeparadasy
ladistanciaentrelasmismas,paraloqueesnecesarioconocerlademandadepasajeros.Estafase
estáacargodelasentidadesreguladoras,buscandominimizaralgunasfuncionesobjetivocomo
el costo de operación, costos para los pasajeros y tiempos de viaje. Este tipo de procesos
estratégicostienenunhorizontetemporalalargoplazodadolacomplejidaddelainfraestructura
ydemásimplicacionesalahoradeentregarlaslíneasorutasconsusrespectivasparadas.
B. Determinacióndelafrecuencia(planificacióntáctica):sebuscadeterminarlafrecuenciamínima
deoperaciónporperiodosdetiempobasadoenelestudiodelademandadepasajerosdeuna
rutaespecífica.Esimportantetenerencuentadetallescomolashoraspicoylashorasvalle,ya
quemarcanunaseriedepatronescaracterísticosqueenriquecenlaplanificación.Esposibleque
lasentidadesreguladorasacargorealicenestafaseapoyadosconlosproveedoresdelserviciocon
elfindereducirloscostosdeoperación,lostiemposdeviaje,lostiemposdeesperapriorizando
unserviciodecalidadparalosusuarios.Debidoaloscambiosqueseproducenencuantoalclima,
festividades(diferentesencadalugar),eventos,cambiosenlademandaoalgúnacontecimiento,
estetipodeprocesossedefinenamedianoplazo,monitoreandosufuncionamientopararealizar
loscambiospertinentes.

14
C. Construccióndehorarios(planificacióntáctica):enestaetapaseplasmalafrecuenciadeseada
enunatabladehorariosquedefinenlahoradepartidaydellegadadelosvehículos,paracada
parada y las terminales involucradas en cada ruta. Para resolver esta etapa del proceso los
operadoresdelservicio,basadosenlasrestriccionesdelenteregulador,definenelhorariodecada
vehículodetalmaneraquesatisfagaciertademandadepasajeros,maximizandoelconfort(menos
tiempodeespera,menossobrecargaomásseguridad).Usualmenteeloperadorapoyadoenla
capacidaddelvehículoy lospatronesde lademandaconstruye loshorariosamedianoycorto
plazodebidoalavolatilidaddelaoperación,dondeaveríasenlosvehículos,algúnfalloenlared
vialoimprevistoshacennecesariotomarmedidasrápidasyprecisas.
D. Asignacióndelaflotaocalendarizacióndelosvehículos(planificaciónoperacional):enestafase
losoperadoresdelserviciobuscanengranmedidaminimizarelcostodeoperación,reutilizando
al máximo los vehículos, cumpliendo los viajes estipulados en la fase anterior lo que implica
cumplirconlafrecuenciaqueexigelaentidadreguladoraquegarantizaunserviciodecalidadpara
elusuario.Aligualqueenlaconstruccióndehorarios,estafasetieneunhorizontetemporalde
medianoacortoplazo.
E. Asignacióndelosconductoresocalendarizacióndelosconductores(planificaciónoperacional):
estafasepuedeonoincluiralrestodelpersonalnecesarioparalaoperaciónexitosadeunsistema
detransportepúblico,sinembargo,enesenciasebuscadistribuirdemaneraqueelcostototal
sea reducido al personal encargado a cada área, puntualmente los conductores son un ente
importante para el buen funcionamiento del sistema, dado su alto nivel de interacción con el
usuario final o pasajero. Lo anterior sin desconocer las implicaciones legales de cualquier
trabajador,resaltandolaimportanciadenosobrecargaralosconductoresyponerenriesgono
sololaoperacióndelsistemadetransportesinolasvidaseintegridaddelospasajeros.Esunafase
proyectadaamedianoycortoplazoyesejecutadaexclusivamenteporlosoperadores.
En este trabajo nos enfocaremos en la creación de los horarios de los vehículos (planificación táctica
descritaenlasección2.1.C),basadoenunanálisisdelafrecuenciaparaunproblemaqueincluyevehículos
con diferentes capacidades, en este capítulo abordaremos con más detalle las dos etapas que se
pretendenabordar(determinacióndefrecuenciasycreacióndehorarios),definiendoalgunosconceptos
básicosenelcampodeltransportepúblico,posteriormenteseintroducirálasimplicacionesdetrabajar
conlaparticularidaddecontarconvehículosdediferentestipos,finalizandoconladefinicióndetallada
delproblemaquesedesearesolver.
15
2.2 Creacióndehorariosocalendarios
La planeación o planificación táctica, es la encargada de la asignación o distribución de los recursos
necesariosproyectadosenlaplanificaciónestratégica,dondesedefinenlasmetasquesedeseanalcanzar.
Debeserunprocesoconstanteycontinuoquedeberealizareloperadordelservicio.Estatareaserealiza
acortoomedianoplazo,puestoque,altomarunhorizontetemporalmáslargo,seconsideraríapartede
laplanificaciónestratégica (comoeldiseñodel trazadode la ruta). Lasdecisiones tácticas tienenuna
implicacióndirectasobreelfuturodelaoperación,yaqueestablecendetallessobreelcomportamiento
delsistema,tiempoderespuesta,efectividadyeficiencia;porlotanto,debenserestablecidasmediante
unprocesoiterativoyflexiblequepuedaaceptarcorreccionesyajustesdurantesuejecución.
Paraelcasoespecíficodeltransportepúblico,lasdecisionestácticastienenunaimplicacióndirectasobre
elincrementodelacalidaddelservicioylareduccióndeloscostosoperacionales.Esnecesarioconocerel
diseñotopológicode larutayunamatrizdedemandaorigen-destinooporparadas.Enesteordende
ideas, las problemáticas que se pueden abordar en esta etapa de la planificación de un sistema de
transportepúblicoson(Ibarra-Rojasetal.,2015):
• Lafrecuenciayflota(cantidadytipodevehículos)asignadosparacubrirdiferentesrutasenciertosperiodosdetiempo.
• La construcción de los horarios, que incluyan la frecuencia mínima de operación y demásrestricciones que las entidades gubernamentales disponen para un funcionamiento con ciertoniveldecalidad.
• Losposiblesdiseñosdeestrategiasoperacionalespuedenserconsiderados,enprodeaumentarelrendimientodelaplanificación.
Porlotanto,eldiseñodetablasdehorariodebesatisfacerlademandaalmismotiempoquecumplecon
restriccionescomolasregulacionesentemasdeseguridadolafrecuenciadeoperación,contandoconuna
serie de elementos como parámetros de entrada adicionales como: la ruta, tipo y capacidad de los
vehículos, paradas, perfil de la demanda, factor de carga (cantidad deseada de pasajeros a bordo del
vehículo)ytiemposdeduracióndelaruta.
Ceder(2007,2016)proponelossiguientesobjetivos,relevantesalahoradediseñarhorarioscomoparte
delaplanificacióntácticadeunsistemadetransporte:
• Evaluarlasposiblestablasdehorariosentérminosderecursosrequeridos.
16
• Mejorar el ajuste entre los tiempos de partida para cada viaje con la demanda de pasajeros,minimizandolosrecursosnecesariossimultáneamente.
• Incluirexcepcionesparaviajesquenodependendedatosdedemandadepasajeros,peroquetienenotrasrazonesconocidasporelplanificador.
• Proponer diferentes métodos de cálculo de la frecuencia de operación y para la creación dehorarios.
Entoncesesposibleestructurarlasdosfases,determinacióndelafrecuenciaycreacióndehorarios,en
unasolaactividadconocidacomoeldesarrollooconstruccióndehorarios.
2.3 Conceptosbásicos
Algunos conceptos importantes pueden ser necesarios para comprender mejor el problema que se
pretendeabordar,algunosdeestosson:
Red de rutas (líneas): una zona urbana con una demanda de pasajeros específica necesita una red o
conjuntoderutas(paradasyterminales),estaredpuederepresentarsecomoungrafo𝑁(𝑉, 𝐴),dondelos
nodos 𝑉 representan puntos o zonas geográficas y mientras que un conjunto de aristas (𝑖, 𝑗) ∈ 𝐴
representanunconjuntodeposiblesmétodosdetransportequeconectaelnodo𝑖conelnodo𝑗.Esposible
diseñareltrazadodelarutacomounconjuntodearistasqueconectendospuntosdeinterés(terminalde
salida y llegada), por otro lado, las paradas de la ruta pueden ser los lugares con una demanda
potencialmentealtaoqueconecteconotroslugaresdemaneraquesebusquecentralizarellugardonde
sedeseaubicarlaparada,estodebidoaqueentremenosparadasesposiblequeeldesplazamientosea
másrápido.
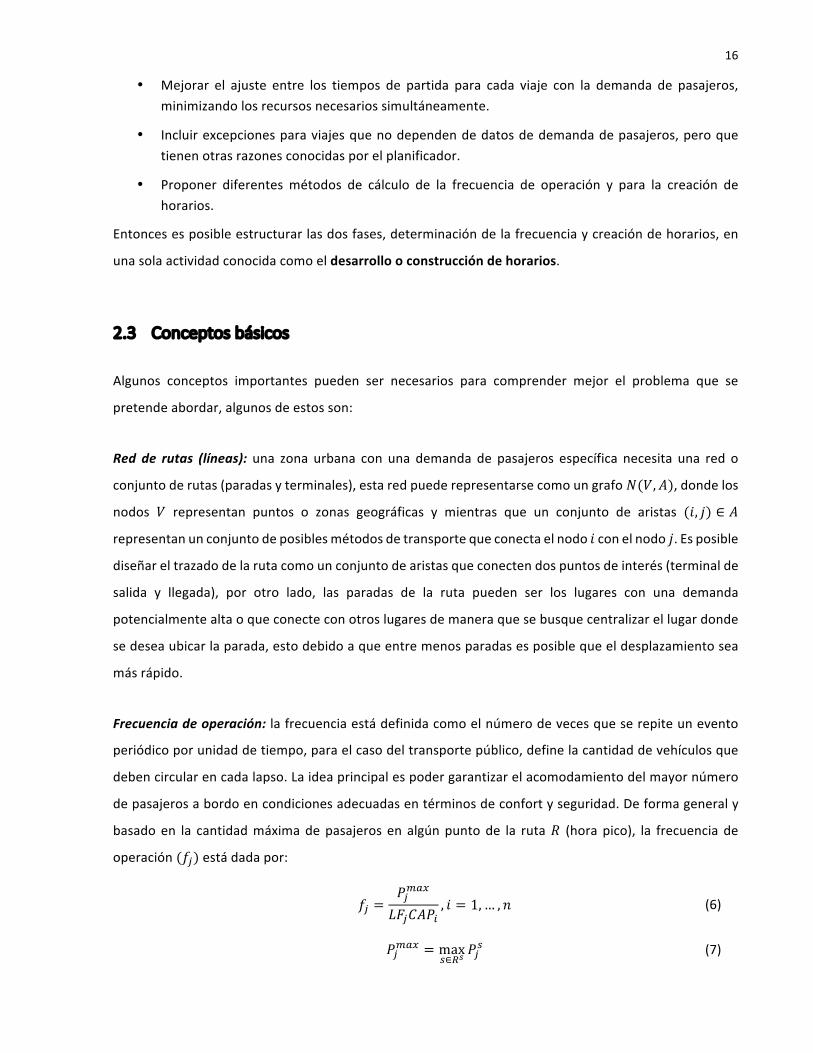
Frecuenciadeoperación:lafrecuenciaestádefinidacomoelnúmerodevecesqueserepiteunevento
periódicoporunidaddetiempo,paraelcasodeltransportepúblico,definelacantidaddevehículosque
debencircularencadalapso.Laideaprincipalespodergarantizarelacomodamientodelmayornúmero
depasajerosabordoencondicionesadecuadasentérminosdeconfortyseguridad.Deformageneraly
basadoen la cantidadmáximadepasajeros en algúnpuntode la ruta𝑅 (horapico), la frecuencia de
operación(𝑓%)estádadapor:
𝑓% =𝑃%.?@
𝐿𝐹%𝐶𝐴𝑃$, 𝑖 = 1, … , 𝑛 (6)
𝑃%.?@ = max\∈B]
𝑃%\ (7)

17
Paracadaperiododetiempo𝑗(p.ej.unahora)secalculaunafrecuenciaenbasealacargamáxima𝑃%.?@,
quepuedeserelmáximoflujodepasajerosenalgunaparada𝑠delconjuntodeparadas𝑅\,eneltiempo
𝑗.𝐶𝐴𝑃$ es lacapacidadmáximadeunvehículodetipo𝑖,esdecir, lacantidaddesillasdisponibleso la
cantidaddepasajerosquepuedensertransportados,ladefineelfabricanteenbasealoscriteriosparalos
que fueron diseñados los𝑛 tipos de vehículos diferentes. 𝐿𝐹% (factor de carga) donde 0 < 𝐿𝐹% ≤ 1,
representaproporcióndelacapacidadmáximadeunvehículopermisibleparalaoperaciónenelperiodo
detiempo𝑗.
Frecuenciamínimadeoperación:escomúnqueporpolíticasgubernamentalessedefinaunafrecuencia
mínimadeoperación𝑓%.$'delosvehículosduranteeldía,estétipodemedidasafectandirectamenteala
definicióndelafrecuencia𝑓%,estableciendolafórmuladelasiguientemanera:
𝑓% = max%(",…,a
𝑃%𝐿𝐹%𝐶𝐴𝑃$
, 𝑓%.$' (8)
𝑃% eselpromediodepasajerosalolargodetodaslasparadasde𝑅\duranteelperiodo𝑗.
Intervalos:denotalosintervalosdetiempoentrecadaviaje,𝐻eselinversodelafrecuencia(cantidadde
vehículosporunidaddetiempo).
𝐻% =1𝑓% (9)
Tiempodeespera:estáasociadoaltiempoqueinviertenlospasajerosenunaparada𝑠 ∈ 𝑅\esperando
la llegada de un vehículo que pueda transportarlo a su destino. Aunque este concepto depende
significativamentedelospatronesdellegadadelospasajerosencadaparada,alconocerselostiempos
desalidayllegadadelosbusesacadaparada,eltiempodeesperaestaríarelacionadoconelmomentoen
elqueelpasajerollegaalaparada(antes,despuésoaltiempo),demaneraquesepuededividirentres
grupos,lospasajerosquelleganaunaparadademaneraquecoincidanconelbus,tienenunaprobabilidad
𝜌c, los que llegan a la parada a la horaóptima (1 − 𝜌c)𝜌e y los que llegandemanera aleatoria (1 −
𝜌c)(1 − 𝜌e)(JolliffeyHutchinson,1975;Luethietal.,2006).
Demandadepasajeros:esunode losconceptoscrucialespara laplanificacióndel transportepúblico,
debidoaqueinteractúaactivamenteencadaunadelasfases,sepuededividirentresniveles:regional,
gruposderutasyrutaespecífica.Lademandaanivelregionalesútilparalaprimerafase(planificación
estratégica)alahoradediseñarlatopologíadelasrutas(trayectosyparadas).Porgruposderutasesútil
para sincronizar horarios y reducir el tiempo de desplazamiento con viajes que incluyen el uso de

18
transferencias.Porúltimoyelconceptomásrelevanteparaestetrabajoeslademandadepasajerospor
rutaespecífica,estosdatospuedenseradquiridosdediferentesmanerascomo:verificadoresenpuntos
geográficos,verificadoresabordodelosviajesoboletoselectrónicos.
2.4 Creacióndehorariosocalendariosconvehículosdediferentestipos
Laplanificacióndel transportepúblico considerael balanceentreel costooperacional y la calidaddel
serviciopara lospasajeros,porotraparte,es importanteconsiderarel impactoambientalypensaren
posiblesmejorasquenosolobrindenunbuenservicio,sinoqueseanamigablesconelambiente.Utilizar
vehículosdegranenvergadurasignificaunagrancantidaddeenergía,porelpesoytamañodelvehículo
ademásdelgrannúmerodepasajerosquepuedetrasladar,estoimplicaqueparaminimizarelconsumo
deenergíaporpasajero-kilometrotrasladado,solosepuedeutilizarestetipodevehículosconunaalta
demandadepasajerosyconunfactordecargaquegaranticelacalidaddelservicio.Enperiodosenlos
quelademandadepasajerosesbaja(p.ej.horasvalle)esrecomendableutilizarvehículospequeños,ya
que tienenunmenorconsumodeenergíay tienen laposibilidaddeutilizarenergías renovablescomo
bateríaseléctricas,siendobeneficiosoparaelambiente,reduciendocostosymanteniendolacalidaddel
servicio(Potter,2003).
Loshorariosestándiseñadosenbasealafrecuenciadeoperaciónmínimarequeridaparasatisfacerun
niveldeservicio,posteriormentealahoradecalendarizarlosvehículosnecesariosseconsideraelcosto
de operación y posibles combinaciones entre diferentes tipos de vehículos, diferentes autores han
abordadoelproblemadecreacióndehorarioscondiferentesenfoquesyestrategiasparaelcálculodela
frecuenciadeoperación.
2.5 Trabajosrelacionados
Unode losprimerosaportesaláreaespecíficade lacreacióndehorariosbasadosen ladeterminación
previadelafrecuenciaen1971,proponeminimizareltiempodeesperadelospasajeros,comparando
unconjunto𝑛devehículos(buses,trenes,etc.)quetienenalgunahoradesalidaasignada𝑡%, 𝑗 = 1, … , 𝑛
conunafunciónsuavizadadellegadadepasajeros,presentandocomoresultadosquelafrecuenciaóptima
paravehículosdegrantamañovariaconeltiempo,aproximadamentecomolaraízcuadradadelatasade

19
llegadadelospasajeros(Newell,1971).FurthyWilson(1981)propusieronunmodeloquemaximizael
beneficiosocialcompleto;elmodelosecomponedelosbeneficiosdelospasajeros,comoladisminución
deltiempodeespera.Elmodeloincorporarestriccionesrelacionadasconeltamañodelaflota,intervalos
deoperaciónpermitidos(máximocasopermitidocomoinversoalafrecuenciamínimaantesdescrita)yel
presupuestototal.ElmodelodeFurthyWilsonfueextendidoporKoutsopoulosyWilson(1985),quienes
simplificaronelproblema,dividiéndoloenintervalosdeoperaciónequidistantes,resolviéndolomediante
programación lineal. Proponen una formulación basada en las implicaciones sociales, dividida en tres
componentes:loscostosdefuncionamiento,lostiemposdeesperaylosinconvenientesdelhacinamiento
delospasajeros.Cederrecopilaydefinecuatrométodosdiferentesparaelcálculodelafrecuenciaque
dependen del perfil de carga de la demanda de pasajeros y las restricciones que estipulen los entes
reguladores,presentandocómoobtenerhorariosóptimosal seleccionar lacargamáximadepasajeros
comopuntodereferencia(Ceder,1984,2007,2016).
HadasyShnaiderman(2012)abordanlaminimizacióndelcostototalbasadoenelespaciovacío(p.ej.los
asientos desocupados) y la demandaqueno es atendida. Los autores definieron las distribuciones de
probabilidadparalostiemposdeviajeylademandadepasajerosconherramientasdegeolocalización.
Basándose en esta información, definieron un enfoque de optimización analítica que determina las
frecuenciasyeltamañodelosvehículos.La implementaciónconelenfoquepropuestomuestraquela
reducción de costos más significativa se obtiene en casos con bajo nivel de servicio. Li et al. (2013)
consideranparámetrosestocásticos talescomodemanda, tiemposdeespera, tiemposdeembarqueo
descensoy tiemposdeviaje. Losautoresdefinenunmétododeoptimizaciónestocásticahíbridopara
encontrarlafrecuenciaqueminimizaeltiempodeesperaparalospasajerosymaximizalasgananciasdel
operador.Lietal.desarrollanunAGpararesolverelproblemaycomparansuenfoqueconlosmodelos
tradicionales(analíticos)paraelajustedelafrecuenciapropuestosporNewell(1971)yCeder(1984b).Los
autoresafirmanquelosintervalosobtenidossongeneralmentemásgrandesquelosqueusanelenfoque
deNewell ymás cortosque losqueusanCeder.Además,mencionanqueestos intervalosmoderados
proporcionanunmejorequilibrioentreloscostosoperativosdelbusylasatisfaccióndelospasajeros.
VerbasyMahmassaniamplíanelmodelopresentadoporFurthyWilson(1981)considerandolavariación
delademandaalolargodeltiempoylarutalineal.Elproblemaseformulaconprogramaciónnolineal
paraminimizarlasumadelospasajerosyeltiempodeesperaentodaslasparadas,rutaseintervalosde
tiempo,sujetoarestriccionestalescomo:presupuesto,tamañodelaflotayfactoresdecarga(Verbas&
Mahmassani,2013;Verbas&Mahmassani,2015).

20
Paraelcasoconenfoquemultiobjetivo,KwanyChang(2008)presentanunaformulaciónparaelproblema
dediseñodehorarioscondosobjetivosenconflicto:minimizarelcostodelacantidaddetransferencias
necesarias y minimizar el costo causado por las desviaciones de un cronograma inicial. Los autores
implementan un algoritmo genético clásico para resolver problemas conmúltiples objetivos conocido
comoNSGA II (Debetal.,2002), combinadoconotrosmétodos (p.ej.búsqueda local)para resolver la
formulacióndelproblema.HassoldyCeder(2014),estudianelproblemadelacreacióndehorariosconel
objetivodeminimizareltiempodeesperaparalospasajeros(comounindicadordecalidaddelservicio)y
unapenalizaciónbasadaenelespacio sinocuparen los vehículos (comoeficienciaoperativa). La idea
principaldelestudioespodercombinardiferentestiposdevehículosbasadosenlaideadePotter(2003)
buscando evitar sobrecargas mejorando la utilización de los vehículos. Los autores implementan una
heurísticabasadaengrafoscon laquecombinandiferenteshorariosenbuscadelconjuntoóptimode
Pareto. Los resultados numéricos para un caso de estudio en Nueva Zelanda muestran un ahorro
significativoenlostiemposdeesperadelospasajeros,perotambiénunacargadepasajerosaceptableen
todoslosvehículos.
2.6 Definicióndelproblema
2.6.1 Planteamientodelproblema
El problema que se aborda en el presente trabajo es: la creación de horarios utilizando vehículos de
diferentestipos(capacidadycostodeoperación)medianteelcálculodelafrecuenciadeoperaciónbasado
en lademandadepasajeros (MVTTPpor sus siglasen inglés: “MultiobjectiveVehicle-TypeTimetabling
Problem”).Seproponeentoncesunaformulacióncomounproblemadeoptimizacióncondosobjetivos
enconflicto: reducirelcostodeoperaciónpara losproveedoresdelservicioyminimizarelnúmerode
pasajerosquenopuedensertransportadosencadaparadacomoindicadordecalidaddeservicio.MVTTP
modelaentoncesunescenariorealistadondeunconjuntodevehículosdediferentestipos(p.ej.buses
articulados,minibuses,colectivos,busesestándar,busesdedosniveles,etc.)esasignadoparacubrirun
conjuntodeviajesdeunarutaespecifica.
Minimizar la función asociada al costo de operación𝑓*, adicionalmente contribuye a la reducción del
impactoambientalocontaminaciónalreducirelusodecombustiblesfósilescomolagasolinaogasóleo
(enmotoresdiésel),mejoraelflujodeltráficoalreducirlaflotanecesariaparacubrirunconjuntodeviajes
oasignarvehículospequeñosqueutilizanmenosespacioenlasvías.

21
Lafunciónparalademandadepasajerosnosatisfecha(𝑓*)tieneefectosadicionalesenelretrasopara
abordar un vehículo (tiempode espera) y el confort asociado al factor de carga y la capacidadde los
vehículos,yaquesebuscaasignarunconjuntodevehículosquepresentenlamenorsobrecargaposible.
2.6.2 Definiciónformaldelproblema
LaformulaciónformalparaelproblemaMVTTPes:Dadounsuperconjuntodevehículosconvehículosde
diferentes tipos𝐵 = {𝑏", … , 𝑏'}, en el que𝑏$ es la cantidad de vehículos de tipo 𝑖,𝑛 la cantidad de
diferentestiposdevehículos 𝑏$'$(" eslaflotadisponible.𝑇esunconjuntode𝑚viajes𝑇 = {𝑡", … , 𝑡.}
deunarutaespecifica𝑅.
MVTTPsedefineapartirdedosfuncionesobjetivo𝑓"y𝑓*asi:
Minimizar 𝑓" = 𝜔$
'
$("
(10)
y 𝑓* = 𝐿𝑄%\
\∈B
mn
%("
(11)
sujetoa: 𝑐$ = 𝑐$pq\ + 𝑐$r?\ + 𝑐$sQ$tuQ (12)
𝜔$ = 𝑐$𝑚$ (13)
𝑓% ≥ 𝑓%.$' (14)
𝐿𝐹% =vw9:;
xyvz×<w≤ 𝐿𝐹%.?@, 𝑖 = 1, … , 𝑛 (15)
𝐿𝑄%\ = 𝑚𝑎𝑥 𝑃%\ − 𝐿𝐹%×𝐶𝐴𝑃$$∈~w , 0 (16)
Donde:
𝑐$r?\ Costodelcombustibleparacadatipodevehículo.
𝑐$sQ$tuQ Costoasociadoalconductorparacadatipodevehículo.
𝑐$pq\ Costoasociadoalaoperacióndelvehículo(p.ej.mantenimiento).
𝑐$ Costototalinvolucradoenunviajeparaunvehículodetipo𝑖.
𝑚$ Cantidaddevehículosdetipo𝑖necesariosparacubrirlosviajesde𝑇.
𝜔$ Costototalalutilizar𝑚$ vehículosdetipo𝑖.
𝑃%.?@ Cantidadmáximadepasajerosencualquierparada𝑠enellapso𝑗.
22
𝑃%\ Cantidaddepasajerosenunaparada𝑠enellapso𝑗.
𝑓% Frecuenciadeoperaciónenellapso𝑗.
𝑓%.$' Frecuenciamínimadeoperaciónenellapso𝑗.
𝐿𝐹% Factordecargaenellapso𝑗.
𝐿𝐹%.?@ Factordecargamáximoenellapso𝑗.
𝑀% Conjuntodevehículosutilizadosenellapso𝑗.
𝐶𝐴𝑃$ Capacidaddelosvehículosdetipo𝑖.
𝐿𝑄%\Demandadepasajerosenlaparadasquesobrepasalacapacidaddelosvehículos𝑖 ∈𝑀% enellapso𝑗.
𝐿𝑝 Últimoperiododetiempo.
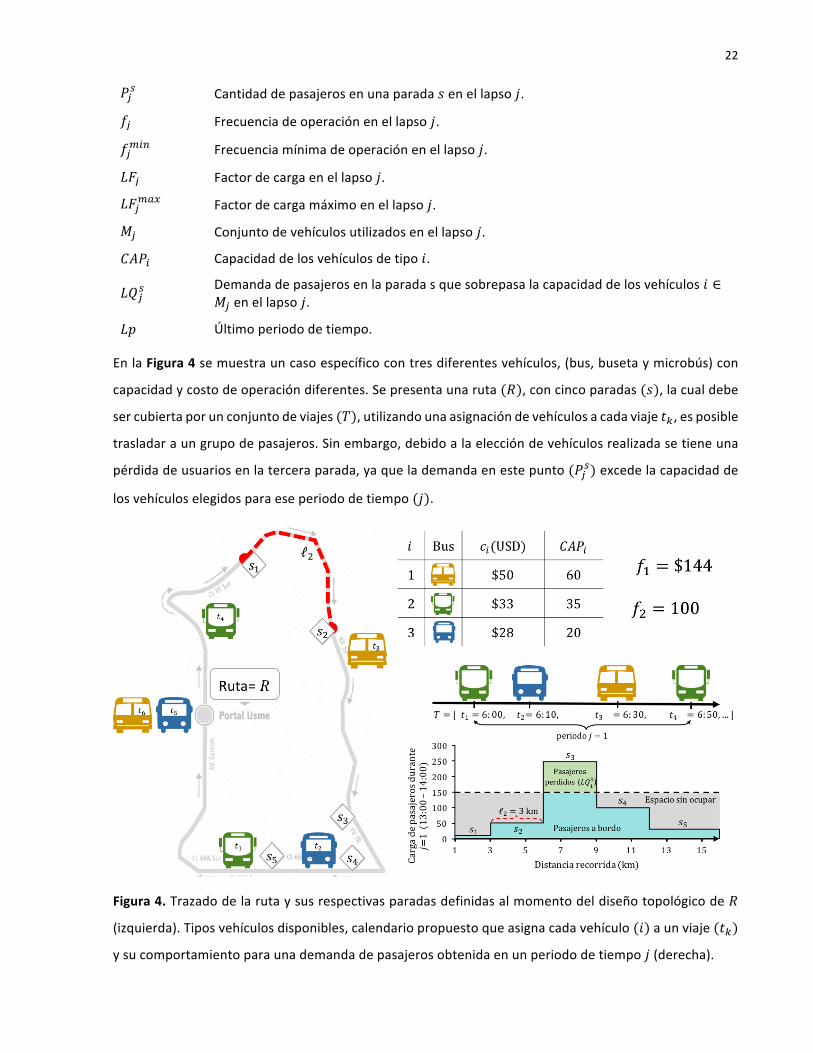
EnlaFigura4semuestrauncasoespecíficocontresdiferentesvehículos,(bus,busetaymicrobús)con
capacidadycostodeoperacióndiferentes.Sepresentaunaruta(𝑅),concincoparadas(𝑠),lacualdebe
sercubiertaporunconjuntodeviajes(𝑇),utilizandounaasignacióndevehículosacadaviaje𝑡,,esposible
trasladaraungrupodepasajeros.Sinembargo,debidoalaeleccióndevehículosrealizadasetieneuna
pérdidadeusuariosenlaterceraparada,yaquelademandaenestepunto(𝑃%\)excedelacapacidadde
losvehículoselegidosparaeseperiododetiempo(𝑗).
Figura4.Trazadodelarutaysusrespectivasparadasdefinidasalmomentodeldiseñotopológicode𝑅
(izquierda).Tiposvehículosdisponibles,calendariopropuestoqueasignacadavehículo(𝑖)aunviaje(𝑡,)
ysucomportamientoparaunademandadepasajerosobtenidaenunperiododetiempo𝑗(derecha).
23
Capítulo3. Optimizaciónmultiobjetivo(OMO)
3.1 Introducción
Diversosproblemasasociadosasistemasrealesenbiología,medicina,economía,industria,ingenieríay
otrasdisciplinasexhibenuncomportamientoenlosquedosomásdesusobjetivosestánenconflictode
maneranatural,porestarazónencontrarunasolucióndecalidad,enunlapsodetiempoaceptable,ha
sidoysiguesiendoobjetodeestudioporpartedelosinvestigadores.Enlainvestigacióndeoperacionesy
otras áreas afines, se han propuesto diferentes técnicas para abordar los problemas de decisión con
múltiplesobjetivosomúltiplescriterios,debidoalacomplejidaddelosmismosserequierendiferentes
enfoquesqueproveanmejoresresultados.
Losproblemasasociadosaoptimizaciónmultiobjetivo(OMO),secomponendedosomásobjetivosque
entranenconflictocasidemaneraevidente,latareaesencontrarelconjuntodesolucionesquesatisfagan
las restricciones y optimicen las funciones objetivo, las cuales deben satisfacerse con un grado de
aceptabilidaddefinidodesdeelpuntodevistadeldiseño,adiferenciadeunproblemaconunsoloobjetivo
enelquesolosebuscaunasoluciónqueoptimicelaúnicafunciónobjetivoycumplaconlasrestricciones
delproblema(Coelloetal.,2007;Debetal.,2016).
Enestecapítulo,sepresentaunabreveintroducciónaOMOypartedelaterminologíaimportantequese
utilizaráalolargodeldocumento.Brevementesepresentaránlasrelacionesdedominanciaysediscutirán
algunosmétodosdesolución,incluidoelusodealgoritmosevolutivos.
3.2 ConceptosbásicosdeOMO
Unproblemadeoptimizaciónmultiobjetivo(POMO)secomponedeunnúmero𝑘defuncionesobjetivo,
lascualesdebenserminimizadasomaximizadassimultáneamenteyaligualqueenlosproblemasdeúnico
objetivo, cualquier solución factible (incluida la solución óptima), debe satisfacer ciertas restricciones
definidas para cada caso particular. Con la finalidad de comprender los detalles de un POMO y las
necesidadesespecíficasquesepretendenabordarconlosmétodosdesoluciónpropuestos,iniciaremos
ladiscusiónpartiendodeunproblemaconunobjetivodefinidoporCoelloetal. (2007)de lasiguiente
forma:

24
Demanerageneralunproblemadeoptimizaciónmono-objetivoestádefinidocomounaminimización(o
maximización)deunafunción𝑓(𝕩)sujetoa𝑔$ 𝕩 ≤ 0,𝑖 = {1, … ,𝑚},yℎ% 𝕩 = 0,𝑗 = 1, … , 𝑝 , 𝕩 ∈ Ω.
Unasoluciónqueminimice (omaximice) la funciónescalar𝑓(𝕩)donde𝕩esunvectordevariablesde
decisióndimensión𝑁,𝕩 = (𝑥", . . . , 𝑥M),paraalgúnuniversoΩ.
Se puede observar que 𝑔$ 𝕩 ≤ 0 y ℎ% 𝕩 = 0 representan las restricciones que se deben satisfacer
mientrasseoptimiza𝑓(𝕩).EluniversoΩcontienetodaslasposiblessolucionesquepuedenserutilizadas
parasatisfacerlafunciónysusrestricciones.
Porlotanto,unmétodoquepermitaencontrarlasoluciónqueproveeunvalorconsideradocomoóptimo
global (que puede no ser única) para un problema con una sola función objetivo, se conoce como
optimizaciónglobal,ysepuededefinirparauncasodeminimización(sinperdergeneralidad)como:Dada
unafunción𝑓:ϕ ⊆ ℝ' → ℝ,ϕ ≠ ∅,paraun𝒙 ∈ ϕelvalorde𝑓∗ ≜ 𝑓 𝕩∗ > −∞seconocecomoóptimo
globalsiysolosi∀𝕩 ∈ ϕ:𝑓 𝕩∗ ≤ 𝑓 𝕩 .Donde𝕩∗eslasoluciónmínimaglobal,𝑓eslafunciónobjetivoy
el conjuntoϕ es la región factible de𝕩 (Coello et al., 2007). Por otraparte, en los POMO, es posible
encontrar un conjunto de soluciones en algunos casos infinito que, al ser evaluados, producen unos
vectorescuyoscomponentesrepresentanlosvaloresdeΩenelespacioasociadoalasfuncionesobjetivo.
Osyczka(1985)defineunPOMOcomo:
“Encontrarunvectordevariablesdedecisiónquesatisfaga lasrestriccionesyoptimice
unafunciónvectorialcuyoselementosrepresentanlasfuncionesobjetivo.Estasfunciones
sonunadescripciónmatemáticadecriteriosderendimientoloscualesusualmenteestán
enconflictounosconotros.”
Entonces,podemosdefinir(matemáticamente)demanerageneralunPOMOdelasiguientemanera:
Minimizar/maximizar
𝑓, 𝕩 ,𝑘 = 1, … , 𝑛 (17) sujetoa:
𝑔$ 𝕩 ≤ 0, 𝑖 = 1, … ,𝑚 (18)
ℎ% 𝕩 = 0, 𝑗 = 1, … , 𝑝 (19)
𝕩 ∈ Ω (20)
Dondeunasolución𝕩esunavariablededecisiónvectorialdedimensión𝑁,𝕩 = [𝑥", . . . , 𝑥M]�,enalgún
universoΩ(espaciodedecisión).Porlogeneral,paraunPOMO,existenvariassolucionescondiferentes

25
niveles de compensación para las 𝑛 funciones objetivo, que satisfacen las 𝑚 + 𝑝 restricciones del
problemaycomponenelconjuntoóptimodePareto,debidoaquesonaquellasquepresentanelmejor
rendimientoposible.EnlamayoríadelosPOMO,sepresentanlimitacionesproducidasporelmanejode
losrecursosdisponiblesparasuejecuciónosituacionesparticularesenelambienteoentornodelmismo,
unasoluciónalproblemadebecumplirconcadaunadeestaslimitanteslascualessonconocidascomo
restricciones y pueden ser representadas matemáticamente como desigualdades, 𝑔$ 𝕩 ≤ 0, o
igualdades,ℎ% 𝕩 = 0.Por lo tanto, secuentacon𝑚 restriccionesdedesigualdady𝑝 restriccionesde
igualdad;siunasolución𝕩satisfacetodaslas𝑚 + 𝑝restriccionesesconocidacomosoluciónfactible,la
cualformapartedeunconjuntooregiónfactible𝒮 ⊆ Ω(espaciodebúsqueda).
Losproblemasconmúltiplesobjetivossonaquellosenlosquelametaesoptimizar𝑛funcionesobjetivo
simultáneamente (Coello et al., 2007). Los objetivos del problema, también conocidos como criterios,
debenserminimizadosomaximizadossegúnlodefinacadaproblema,sinembargo,escomúnabordar
problemasúnicamentedeminimizaciónencadaunodesusobjetivosdadalaposibilidaddemodificarun
problema con objetivos mixtos (minimización y maximización combinados) mediante el teorema de
dualidad(S.S.Rao,2009).Elvectorde𝑛funcionesobjetivo,𝔽 𝕩 = [𝑓" 𝕩 , … , 𝑓' 𝕩 ]�,defineunespacio
coordenado (espacioobjetivoΛ) en el que cada soluciónpuede ser representada; demaneraque, se
cuenta con un espacio de variables de decisión con dimensión 𝑁, en el que cada eje coordenado
correspondea loscomponentesdelvector𝕩,yelespacioobjetivodedimensión𝑛,enelquecadaeje
coordenadocorrespondeauncomponentevectorial𝑓, 𝕩 .Entoncesparacadasolución𝕩enelespacio
dedecisiónexisteunpuntoenelespacioobjetivoelcualesmapeadoatravésdelasfuncionesobjetivo,
laFigura5muestralosdosespaciosdefinidosanteriormenteylarelaciónentreellos.
Figura5.Representacióngráficadelespaciodedecisión(Ω)ysucorrespondienteespacioobjetivo(Λ).𝑓"

26
Porende,esposibledividirelespaciodebúsquedaendoszonasquenosesuperponen,unaendondese
encuentranlassolucionesóptimasdePareto(regiónóptima)yotraconlassolucionesrestantes.Comose
mencionóanteriormente,escomúnencontrarmúltiplessolucionesen laregiónóptima, locual impide
elegirunaúnicasoluciónparaelPOMOcuandonosecuentaconinformaciónadicionalsobreelproblema,
por loquetodas lassolucionesóptimasdeParetosonigualde importantes.Por locual,es importante
encontrarlamayorcantidaddesolucionesParetoóptimascomoseaposible,loquepermiteestructurar
dosmetaspertinentesenOMO,primeroencontrarel conjuntode solucionesmás cercanoa la región
óptimarealdelproblema,conocidacomofrentedeParetoyqueasuvezsealomás“diverso”posible
tantoenel espaciodedecisión comoenel espacioobjetivo, ladiversidadestáasociadaa ladistancia
euclidianaentrelassoluciones.
3.2.1 Vectorideal
UnasoluciónparticularparaunPOMOconocidacomoelvectorideal,consisteenunvectordevariables
queoptimizacadaunodelas𝑛funcionesobjetivo:
𝕩∗(,) = 𝑥"∗(,), 𝑥*
∗(,), … , 𝑥M∗(,) � (21)
Porloquetenemosqueun𝕩∗(,) ∈ Ωeselqueoptimizala𝑘-ésimafunciónobjetivo𝑓, 𝕩 ,esdecir:
𝑓, 𝕩∗(,) = ó𝑝𝑡𝑖𝑚𝑜𝕩 ∈ Ω
𝑓, 𝕩 (22)
Entonceselvectorobjetivoideal𝕫∗es:
𝕫∗ = 𝔽∗ = 𝑓"∗, 𝑓*∗, … , 𝑓'∗ � (23)
𝑓,∗representaelvaloróptimodela𝑘-ésimafunciónobjetivo,elpuntoenℝ'queseobtieneapartirde𝔽∗
seconsideralasoluciónidealparaelproblemapropuesto.Entérminosgenerales,elvectoridealesuna
soluciónquenoexistedebidoaquelasoluciónóptimaparaunPOMOdebeserdiferenteparacadafunción
objetivo y la únicamanera de queun vector ideal sea una solución factible, es cuando las soluciones
óptimassoniguales;enestecaso,lasfuncionesobjetivonoestaríanenconflicto.
Porotraparte,esposibledefinirunvectorobjetivo ficticio𝕫∗∗ cuyoscomponentes sonestrictamente
menores(parauncasodeminimización)queelvectorobjetivoideal,esdecir𝕫,∗∗ = 𝕫,∗ − 𝛽, con𝛽, > 0
paratodo𝑘 = 1,2, … , 𝑛.CuyautilidadradicaenlaimplementacióndealgoritmosparasolucionarPOMO

27
que requieren una solución que sea estrictamente mejor que cualquiera posible en el espacio de
búsqueda,diferentealafuncióndecotainferiordelvectorideal,considerandolaposibilidaddequealguna
solucióncompartaporlomenosunodesuscomponentes.
3.2.2 ConceptosdedominanciayPareto
Algunosde losalgoritmosutilizadosenOMOutilizanelconceptodedominancia (≺)odominanciade
Pareto,permitiendocomparardossolucionesobtenidas(𝑢y𝑣)yconcluircuáldelasdosdominaalotro,
lo que puede implicar cuál de los dos es mejor, podemos definirlo como: dados dos vectores 𝑢 =
(𝑢", … , 𝑢') y 𝑣 = (𝑣", … , 𝑣'), donde 𝑢, = 𝑓, 𝕩′ y 𝑣, = 𝑓, 𝕩 , podemos decir que 𝑢 domina 𝑣,
expresado como𝑢 ≺ 𝑣, si y solo si𝑢 esmenor o igual a𝑣 (para un casodeminimización) pero𝑢 es
estrictamentemenorque𝑣enalmenosunodesuscomponentes,i.e.,∀𝑘 ∈ 1, … , 𝑛 , 𝑢, ≤ 𝑣, ∧ ∃𝑘 ∈
1, … , 𝑛 : 𝑢, < 𝑣,.
Debidoaestopodemosplanteartresposibilidadesalahoradecomparardossoluciones:
• 𝑢dominaa𝑣(𝑢 ≺ 𝑣).
• 𝑢esdominadopor𝑣(𝑣 ≺ 𝑢).
• 𝑢y𝑣nosoncomparables,dadoqueunonodominaalotroyviceversa.
Loanteriorpermiteidentificarunapropiedadinteresantedeladominancia,dondesiunasolución𝑢no
dominaaunasolución𝑣,noimplicaque𝑣dominea𝑢.Debetal.,(2016)proponenalgunaspropiedades
importantesdeloperadordedominancia:
• Reflexividad:larelacióndedominanciaesirreflexivadebidoaquecualquiersolución𝑢nopuede
dominarseasímisma.
• Simetría:larelacióndedominanciaesasimétricadebidoaquesi𝑢dominaa𝑣noimplicaque𝑣
dominea𝑢.Porloqueelcasocontrarioescierto,si𝑢dominaa𝑣entonces𝑣nodominaa𝑢.
• Transitividad: la relacióndedominanciaes transitiva, lo cual significaque si𝑢 dominaa𝑣 y𝑣
dominaa𝑤,entonces𝑢dominaa𝑤.

28
Así entonces se facilita comprender el concepto de un “óptimo”, debido a que como se mencionó
anteriormenteloquesebuscacomosoluciónaunPOMO,esunconjuntodesolucionesóptimasqueno
seandominadasporningunaotrasoluciónenelespaciodebúsqueda.
Propuesto inicialmente por Francis Ysidro Edgeworth en su trabajo relacionado con las curvas de
indiferenciaeneconomíaafinalesdelsigloXIX(Edgeworth,1881)yextendidoen1896porVilfredoPareto
(Pareto,1896),eltérminoóptimodeEdgeworth-Pareto,másconocidocomoóptimodePareto,puede
definirseformalmentecomo:
OptimalidaddePareto:Unasolución𝕩 ∈ ΩesóptimadeParetoconrespectoaΩsiysolosinoexisteun
𝕩′ ∈ Ωtalque𝔽 𝕩′ ≺ 𝔽 𝕩 ,i.e.𝔽 𝕩′ = 𝑓" 𝕩′ , … , 𝑓' 𝕩′ dominea𝔽 𝕩 = 𝑓" 𝕩 , … , 𝑓' 𝕩 .Porlo
quelafrase“óptimodePareto”hacereferenciaalespaciodedecisión.
BasadoenlaoptimalidaddePareto,Coelloetal.(2007)definenalgunosconceptosútilesparalasolución
dePOMOcomoelconjuntoóptimodePareto,tambiénconocidocomoconjuntodePareto(conjuntode
soluciones no dominadas 𝒫¥ en el espacio de decisión) y el conjunto de soluciones no dominadas
representadas a través de la evaluaciónde todas las posibles soluciones enΩmediante las funciones
objetivoquealplasmarseenelespacioobjetivoseconocecomofrentedePareto(𝒫¦).
ConjuntodePareto:ParaunPOMOdado,𝑓 𝕩 ,elconjuntoóptimodePareto,𝒫¥,sedefinecomo:
𝒫¥ = {𝕩 ∈ Ω|∄𝕩© ∈ Ω𝑓(𝕩©) ≺ 𝑓(𝕩)} (24)
FrentedePareto:ParaunPOMOdado,𝑓 𝕩 ,yunconjuntoóptimodePareto,𝒫¥,elfrentedePareto𝒫¦
sedefinecomo:
𝒫¦ = {𝑓 𝕩 ∈ ℝ'|𝕩 ∈ 𝒫¥} (25)
Esimportanteresaltarque,parauncasomono-objetivo,cadaproblematieneunaúnicasoluciónyenlos
POMOnormalmenteelfrentedeParetocontieneunnúmerodesolucionesquepuedeserinfinito,porlo
tanto,enmuchasocasionesnoseconoceel𝒫¦ ysebuscanlasmejoresaproximacionestantoencercanía
comoendiversidaddelmejorconjuntosoluciónencontrado(verFigura6).

29
𝑎) 𝑏) 𝑐) 𝑑)
Figura6.SolucionesóptimasdePareto(frentedePareto)enelespacioobjetivo(Λ),paraloscuatrocasosposiblescon dos funciones objetivo (𝑓" y 𝑓*). 𝑎). Minimización-Minimización. 𝑏). Minimización-Maximización.𝑐).Maximización-Minimización.𝑑).Maximización-Maximización.
La relación de dominancia (≺) presenta una debilidad en el sentido que no permite relacionar dos
conjuntosigualesoqueunconjuntocontengaunmayornúmerodesolucionesnodominadasqueotro,es
necesariootrotipodeenfoquequepermitaplantear larelacióndelosconjuntosnosoloenelespacio
objetivo sino preguntarnos por el comportamiento de los conjuntos en el espacio de decisión, de ahí
algunos autores proponen un par de definiciones adicionales que permite comparar los conjuntos
soluciones para los POMO, garantizando entregar siempre lamejor aproximación al frente de Pareto
(Zitzleretal.,2003;Debetal.,2016).
Dominanciafuerte(≺≺):unasolución𝑣esfuertementedominadaporunasolución𝑢(𝑢 ≺≺ 𝑣),sipara
las𝑛funcionesobjetivo,𝑢tieneunmejorrendimientoque𝑣i.e.∀𝑘 ∈ 1, … , 𝑛 : 𝑢, < 𝑣,.
Dominanciadébil(≼):unconjuntosolución𝒫"esdébilmentedominadoporunconjunto𝒫*(𝒫* ≼ 𝒫"),
siparalas𝑛funcionesobjetivo,ningunadelassolucionesen𝒫*dominafuertementeaalgúnmiembrode
𝒫".
Parahacerclaridaddeladominanciadébil(Zitzleretal.,2003)proponenutilizarlarelación“mejorque”
(⊲),demaneraquesi𝒫*esalmenostanbuenocomo𝒫"pero𝒫"noestanbuenocomo𝒫*,i.e.𝒫* ≼
𝒫" ∧ 𝒫" ⋠ 𝒫*, en otras palabras Deb et al. (2016) sugiere que una dominancia débil es cuando la
cardinalidaddelconjuntodébilmentedominado( 𝒫" )es inferioro iguala lacardinalidaddelconjunto
( 𝒫* ),dadoquedebeconteneralmenoslasmismassoluciones.Porloquepodemosdefinirladominancia
débil(≼)partirdelarelación⊲(mejorque)como:𝒫* ≼ 𝒫" ⟹ 𝒫* ⊲ 𝒫" ∨ 𝒫* = 𝒫",esdecir,si𝒫*domina
débilmentea𝒫",entonces𝒫*esmejorque𝒫"osoniguales.EnlaTabla1sepresentaunresumendelas
relacionesdedominanciapresentadasanteriormente.
0
1
2
3
4
5
6
7
0 1 2 3 4 50
1
2
3
4
5
6
7
0 1 2 3 4 50
1
2
3
4
5
6
7
0 1 2 3 4 50
1
2
3
4
5
6
7
0 1 2 3 4 5𝑓" 𝑓" 𝑓" 𝑓"
𝑓* 𝑓* 𝑓* 𝑓*
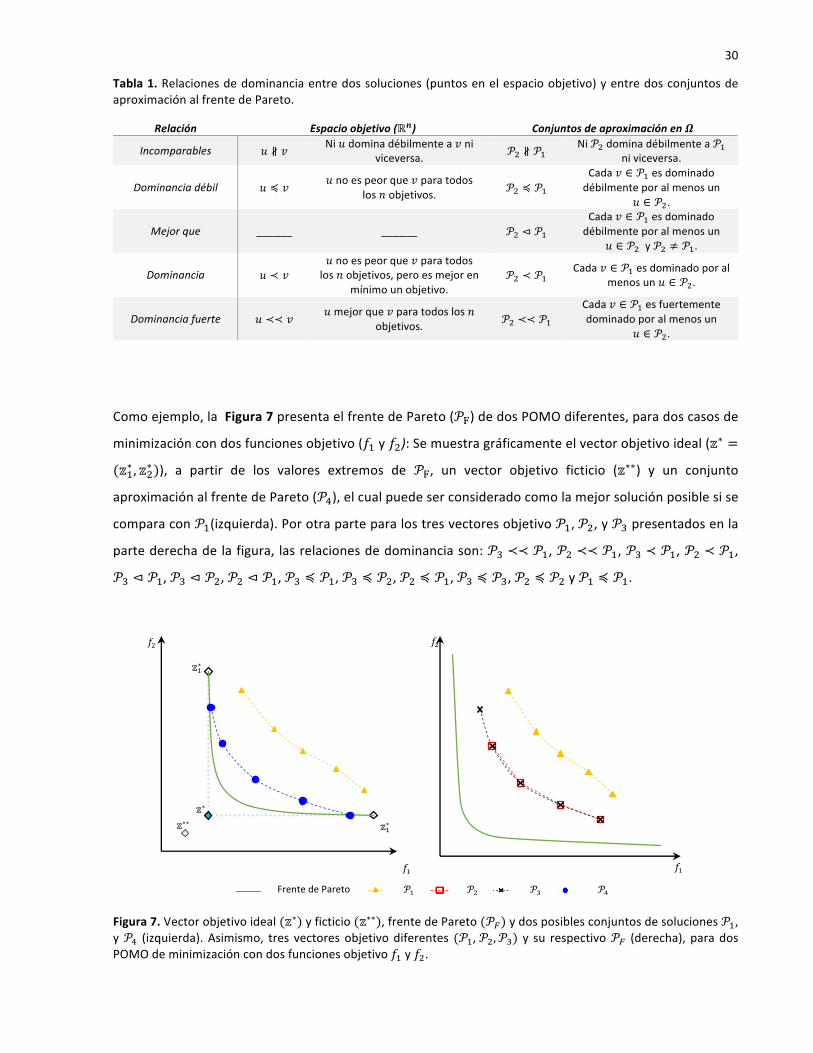
30
Tabla1.Relacionesdedominanciaentredossoluciones(puntosenelespacioobjetivo)yentredosconjuntosdeaproximaciónalfrentedePareto.
Relación Espacioobjetivo(ℝ𝒏) Conjuntosdeaproximaciónen𝜴
Incomparables 𝑢 ∦ 𝑣 Ni𝑢dominadébilmentea𝑣niviceversa. 𝒫* ∦ 𝒫"
Ni𝒫*dominadébilmentea𝒫"niviceversa.
Dominanciadébil 𝑢 ≼ 𝑣 𝑢noespeorque𝑣paratodoslos𝑛objetivos. 𝒫* ≼ 𝒫"
Cada𝑣 ∈ 𝒫"esdominadodébilmenteporalmenosun
𝑢 ∈ 𝒫*.
Mejorque ______ ______ 𝒫* ⊲ 𝒫"Cada𝑣 ∈ 𝒫"esdominadodébilmenteporalmenosun
𝑢 ∈ 𝒫*y𝒫* ≠ 𝒫".
Dominancia 𝑢 ≺ 𝑣𝑢noespeorque𝑣paratodos
los𝑛objetivos,peroesmejorenmínimounobjetivo.
𝒫* ≺ 𝒫"Cada𝑣 ∈ 𝒫"esdominadoporal
menosun𝑢 ∈ 𝒫*.
Dominanciafuerte 𝑢 ≺≺ 𝑣 𝑢mejorque𝑣paratodoslos𝑛objetivos. 𝒫* ≺≺ 𝒫"
Cada𝑣 ∈ 𝒫"esfuertementedominadoporalmenosun
𝑢 ∈ 𝒫*.
Comoejemplo,laFigura7presentaelfrentedePareto(𝒫²)dedosPOMOdiferentes,paradoscasosde
minimizacióncondosfuncionesobjetivo(𝑓"y𝑓*):Semuestragráficamenteelvectorobjetivoideal(𝕫∗ =
(𝕫"∗ , 𝕫*∗)), a partir de los valores extremos de 𝒫², un vector objetivo ficticio (𝕫∗∗) y un conjunto
aproximaciónalfrentedePareto(𝒫³),elcualpuedeserconsideradocomolamejorsoluciónposiblesise
comparacon𝒫"(izquierda).Porotraparteparalostresvectoresobjetivo𝒫",𝒫*,y𝒫Opresentadosenla
partederechadelafigura, lasrelacionesdedominanciason:𝒫O ≺≺ 𝒫",𝒫* ≺≺ 𝒫",𝒫O ≺ 𝒫",𝒫* ≺ 𝒫",
𝒫O ⊲ 𝒫",𝒫O ⊲ 𝒫*,𝒫* ⊲ 𝒫",𝒫O ≼ 𝒫",𝒫O ≼ 𝒫*,𝒫* ≼ 𝒫",𝒫O ≼ 𝒫O,𝒫* ≼ 𝒫*y𝒫" ≼ 𝒫".
FrentedePareto 𝒫" 𝒫* 𝒫O 𝒫³
Figura7.Vectorobjetivoideal(𝕫∗)yficticio(𝕫∗∗),frentedePareto(𝒫¦)ydosposiblesconjuntosdesoluciones𝒫",y𝒫³ (izquierda).Asimismo, tres vectoresobjetivodiferentes(𝒫",𝒫*, 𝒫O) y su respectivo𝒫¦ (derecha), paradosPOMOdeminimizacióncondosfuncionesobjetivo𝑓"y𝑓*.
0
1
2
3
4
5
6
0 1 2 3 4 50
1
2
3
4
5
6
0 1 2 3 4 5 6
𝕫∗𝕫"∗
𝕫"∗
𝑓" 𝑓"
𝑓* 𝑓*
𝕫∗∗

31
3.3 Métodosdesolución
Solucionarproblemasdeoptimizaciónhasidoobjetodeestudiodurantemuchosaños,dondelosmétodos
debúsquedaparaencontrarlamejorsoluciónposibleosencillamentetécnicasdeoptimizaciónpueden
sertansimplescomounaselecciónaleatoriaotancostosos(entérminoscomputacionales)comohacer
unabúsquedaexhaustivaentodoelespaciodedecisión,evaluandounaporunacadasoluciónfactible,
realizando un ranking que permita seleccionar la solución con mejor rendimiento. Sin embargo, es
evidente que para un problema con un espacio de búsqueda muy grande este tipo de técnicas es
ineficiente,oimposibleenalgunoscasos.Conelavanceenmatemáticasysistemascomputacionaleses
posibledividirlastécnicasdeoptimizaciónendosgrupos:losmétodosexactos,p.ej.búsquedaexhaustiva
oprogramaciónlineal,ylasheurísticascomorecocidosimulado,búsquedatabúoalgoritmosgenéticos.
Muchosde losproblemasencienciaso ingenieríatienenobjetivosenconflictoysenecesitaencontrar
soluciones“aceptables”enuntiempo“aceptable”(Coelloetal.,2007),porloquelaimplementaciónde
métodosexactosesinviabledadoquepuedenserproblemasconunadimensionalidadalta,discontinuos
y/o NP-completos. Para abordar estos casos se hace necesario guiar la búsqueda o limitar el espacio
basado en conocimiento previo del problema (heurísticas), diferentes métodos estocásticos han sido
desarrollados gracias a la facilidad de implementación, bajo consumo de recursos computacionales y
velocidad de respuesta aceptable, estos métodos utilizan una función de “fitness” o aptitud, con la
intención de asignar un valor a cada posible solución y una codificación omapeo entre el espacio de
soluciónyelalgoritmo.Estetipodetécnicaseventualmentepuedelograralcanzarelcasoóptimoparaun
problema dado, sin embargo, en la mayoría de los casos no se puede garantizar que en todas las
ejecucionesesposiblealcanzarlasoluciónóptima,peroengenerallassolucionesqueresultanconeste
tipodetécnicassonconsideradas“aceptables”encomparaciónalesfuerzoquedeberealizarunmétodo
determinista.
Técnicassimplescomobúsquedaocaminataaleatoria,dondeencadaiteraciónseseleccionalamejor
opción(unvaloraltoen“fitness”)deciertacantidaddesolucionesaleatorias,otécnicasmásrobustas
comobúsquedatabúorecocidosimulado,dondelabúsquedaserealizadeformaguiadapordiferentes
factoresenprodealcanzarunasoluciónóptima,sinembargo,comosemencionóanteriormenteparaun
POMOnoseencuentraunaúnicasoluciónsinounconjuntodesolucionesnocomparablesentreellas,por
loqueuna técnicade tipopoblacional como losalgoritmosevolutivos (AE)puedepresentarunmejor
rendimiento,yaqueelconjuntosoluciónevolucionaalmismotiempopermitiendoconvergeralfrentede
Paretoconelpasodecadaiteracióndelalgoritmo.
32
Los AE están inspirados en la evolución natural, se basan en el concepto de “selección natural” y la
“supervivenciadelmásapto”,conceptoclásicoenlateoríaevolutivadeCharlesDarwin.Estatécnicaserá
detalladayampliadaenelCapítulo4delpresentedocumento.
3.3.1 ClasificacióndelosmétodosparaPOMO
ParaPOMOsehanpropuestodiferentesestrategiasotécnicas,lascualessepuedenclasificarmediantela
interacciónconeltomadordedecisiones,elcualseencargadeseleccionarodecidir,comosunombrelo
indica,cuáldelassolucionestieneunacompensaciónparacadaunodelosobjetivosenconflictolacual
satisfacelosrequerimientosespecíficosquedependendelconocimientoaprioridelproblema,esdecir,
cuántoseestádispuestoaganaroperderparacadaobjetivoyevaluarlasoluciónquemejorseacomode
aestasrestricciones.EltomadordedecisionesjuegaunrolimportantealahoradesolucionarunPOMO,
por esta razónespopular la clasificaciónbasadaen su aportedurante la búsquedadeuna solución y
consisteenlossiguientesmétodos:
• Método sin preferencias: este tipo de técnicas no considera información del tomador de
decisiones para resolver un POMO, entregando como resultado un conjunto de soluciones
ordenadasporalgúncriteriodecompromisoentreobjetivosde talmaneraqueel tomadorde
decisionespuedeaprobarorechazardichasolución.Estecasosucedecuandonosecuentaconel
tomadordedecisionesoestenocuentaconinformaciónrelevantequeaportealasolucióndel
problema.
• Métodoapriori:paraestetipodemétodosseconsultaaltomadordedecisionesantesderealizar
labúsquedadetalmaneraqueseutilizalainformacióndepreferenciasqueproveeeltomadorde
decisionesconelfindeestructurarlasfuncionesobjetivoyqueelconjuntosoluciónsatisfagaestos
requerimientos,dosde losmétodosapriorimásconocidossonelordenamiento lexicográfico
(Fishburn,1974)y“goalprogramming”(programaciónpormetas)(CharnesyCooper,1961).
• Métodoaposteriori:en losmétodosaposteriori,unconjuntodesolucionesnodominadases
presentadoanteeltomadordedecisioneselcualseleccionaunaovariassolucionesbasadoensus
preferencias,técnicascomo“𝝐 −constraint”(Haimesetal.,1971)olacombinaciónlineal(Zadeh,
1963)sonutilizadoscomométodosaposteriori.

33
• Métodointeractivo:enlosmétodosinteractivos,eltomadordedecisionesactúaencadaunade
lasiteracionesdelalgoritmo,sedefinentresetapasdentrodelmétodo,laprimeraesencontrar
unconjuntodesolucionesno-dominadas,luegoapartirdelareaccióndeltomadordedecisiones
al evaluar el conjunto de soluciones,modificar las preferencias de las funciones objetivo, por
últimorepetirlosdospasosanterioreshastaquenosepresentennuevasmejorasoeltomador
dedecisionesestésatisfecho.
3.3.2 Métododelcriterioglobal(métodosinpreferencia)
Yu (1973) introduce el términode vector utópico (anteriormentemencionado como vector ideal, ver
Capítulo3 sección3.2.1) con la intencióndeencontraruna soluciónóptimadePareto lomás cercana
posiblea𝕫∗,sehanpropuestométricasdiferentesparaevaluaresta“cercanía”,sinembargo,unadelas
másutilizadaseslamétrica𝐿n.
𝐿n 𝔽 = 𝑓,∗ − 𝑓,(𝕩) n'
,("
"/n
(26)
Estemétodoconocidocomométododecriterioglobalo“compromiseprogramming”,buscaminimizarel
valorde𝐿npara1 ≤ 𝑝 ≤ ∞talque𝕩 ∈ Ω,detalmaneraquesepuedeobtenerunasoluciónóptimade
Paretoparacadavalorde𝑝.Estemétodohasidoestudiadofuertementedurantedécadasmodificando
lasmétricasconlafinalidaddeencontrarlasmejoressolucionesparadiferentesproblemas.
La idea básica de no contar con la información del tomador de decisiones para realizar la búsqueda
(métodossinpreferencia)sepuedeobservarenestetipodetécnicas;sinembargoesposiblemodificarlas
detalmaneraquefuncionenigualqueunmétodoaprioricomoloproponeWierzbicki(1980),quienutiliza
unvectorficticio(𝕫∗∗)paradireccionarlabúsqueda.
Por lotanto 𝕫∗∗ = 𝔽∗∗ = 𝑓"∗∗, 𝑓*∗∗, … , 𝑓'∗∗ � eselpuntodereferenciaenelespacioobjetivo,elcuales
elegidoporeltomadordedecisionesyesconsideradoelvectorconvaloresdeseadosoaceptables.

34
3.3.3 Ordenamientolexicográfico(métodoapriori)
Estemétodoutiliza la informacióndel tomadordedecisionesparadefinirun rankingde las funciones
objetivo.Laideaesbuscarunasoluciónquesealamejorposible(oelóptimoenalgunoscasos)parael
primer objetivo del ranking, continuando con cada uno de los objetivos hasta elmenos relevante. La
soluciónalfinaldelaejecución,i.e.𝕩'∗ paraunproblemade𝑛objetivos,espresentadacomolasolución
finalalPOMO(𝕩∗)(S.Rao,1984).
Combinación lineal (método a posteriori): para este método se utiliza un vector de pesos 𝕨 =
(𝑤", … , 𝑤')� tal que 𝑤$ ≥ 0 para todos los 𝑖 = 1, … , 𝑛 y 𝑤$'$(" = 1, con el que se realiza una
combinaciónlinealdelos𝑛objetivos,buscandoresolverelproblemautilizandotécnicasparaproblemas
deunúnicoobjetivo,minimizandolasumaponderadadeloscomponentesdelafunciónvectorialobjetivo
𝔽.
Elproblemadeoptimizacióndeunsoloobjetivo(mono-objetivo)aresolverenelmétododecombinación
lineales:
Minimizar
𝑤$𝑓$(𝕩)'
$("
(27)
sujetoa:
𝕩 ∈ Ω (28)
Una vez que se obtiene una solución, esta es revisada por el tomador de decisiones quien evalúa la
viabilidadde seleccionarlaoporel contrarioprocederaajustar los valoresde𝕨 y volvera realizarel
proceso.
3.3.4 Restricción−𝝐(métodoaposteriori)
UnmétodoquesebasaenlalinealidaddeunPOMOeselmétododerestricciónépsilonmásconocido
como“𝜖 −constraint”eninglés,dondeunodelosobjetivosesseleccionadocomolafunciónaoptimizar
ylosobjetivosrestantespasanaserrestriccionesdelproblemaquedefinencotasespecíficas.

35
Paraunproblemadondesebuscaminimizartodas lasfuncionesobjetivoserepresentade lasiguiente
manera:
Minimizar
𝑓%(𝕩) (29) sujetoa:
𝑓, 𝕩 ≤ 𝝐,∀𝑘 ≠ 𝑗 (30)
𝕩 ∈ Ω (31)
𝝐, representa una cota superior para cada función objetivo; por lo tanto, al variar los valores𝝐, y/o
seleccionarotrafunciónobjetivo𝑓% aoptimizar,esposibleobtenerdiferentessolucionesnodominadas,
hayquesercuidadoso,debidoaquenormalmentenoseconocedeantemanolosvalorespara𝝐, que
puedenproveerlosmejoresresultados.Estemétodo,tambiénconocidocomométododecompensación
(“trade-offmethod”),generalmenteesutilizadocomounmétodoaposteriori,aunqueesposibleutilizar
lainformacióndeltomadordedecisionespreliminarmenteconelfindeestablecerunosvaloresiniciales
para𝝐,.
3.3.5 Optimizaciónevolutivamultiobjetivo(métodoaposteriori)
Schafferesconsideradocomoelprimer investigadorenutilizar losalgoritmosevolutivospararesolver
múltiplesobjetivos(AEMOdeahoraenadelante)ensutesis“Someexperimentsinmachinelearningusing
vectorevaluatedgeneticalgorithms”,sualgoritmoVEGA(siglaseningléspara:“VectorEvaluatedGenetic
Algorithm”)implementabalostresoperadoresgenéticosclásicos(selección,cruzamientoymutación)de
talmaneraquecíclicamenteevolucionabalosindividuosmedianteunmétododeselecciónbasadoenlas
funciones objetivo, por lo que para cada objetivo realizaba una selección y aplicaba cruzamiento y
mutación(Schaffer,1984).
LosAEMOsonunmétodoaposteriorifundamentadoenlosprincipiosdelosalgoritmosevolutivos(AE)
para optimización mono-objetivo, los cuales están descritos en el Capítulo 4 sección 4.2. Como se
mencionó los AE son una estrategia atractiva para abordar POMO dada su capacidad de trabajar
simultáneamenteconunconjuntodeposiblessoluciones,conocidocomopoblación,loscualespueden
perteneceralconjuntoóptimodeParetoyesposiblealcanzarlosenunasolaejecución,adiferenciadeun
métodotradicionaldondeenejecucionesindependientesseencuentranlassoluciones.Adicionalmente

36
losAEsonmenossusceptiblesalaformaycontinuidaddelfrentedePareto,esdecir,puedenoperarcon
frentescóncavosodiscontinuos.
Paraelpresentetrabajo,seproponeabordarelproblemadeMVTTPdefinidoenelCapítulo2sección2.6
conuntipodeAEconocidoscomoalgoritmosgenéticos(AG),puntualmenteAGdetipocelular(AGC)(Alba
yDorronsoro,2008;Nebroetal.,2009a),puestoquevariosautoreshandestacadoelrendimientodeeste
tipodetécnicasparacasosdeoptimizaciónmultiobjetivocomolosdiferentes“benchmark”oproblemas
de referencia propuestos por Deb et al. (2005) y Zitzler et al. (2000), al igual que para posibles
implementaciones reales en ingeniería o calendarización (Guzek et al., 2014; Zavala et al., 2015).
AdicionalmentelosAGCpuedenserimplementadosenparalelo,loquesuponeunareduccióneneltiempo
deejecucióndelmismo,aumentandosuversatilidadyrendimiento.Losdetallesycaracterísticasdelos
AE,ysusdiferentesvariantes,sonpresentadosenelCapítulo4.

37
Capítulo4. AlgoritmosevolutivosparaproblemasdeOMO
4.1 Introducción
El cómputo evolutivo (CE) es un área de investigación dentro de las ciencias computacionales que en
términosgeneralesproponemétodosdebúsquedaestocásticos inspiradosenelprocesodeevolución
natural, el CE propone técnicas como los algoritmos genéticos (AG), programación genética (PG),
estrategiasevolutivas(EE)yprogramaciónevolutiva(PE),queengeneralseconocencomoalgoritmos
evolutivos(AE).EibenySmith(2015)proponenlasiguientemetáfora:
“The fundamental metaphor of evolutionary computing relates this powerful natural
evolutiontoaparticularstyleofproblemsolving–thatoftrial-and-error.”
Lo que supone que la inspiración en procesos naturales proviene de la capacidad de las especies de
evolucionaryesevidentequehoyendíaestosprocesossemantienenfuertesymoldeannuestroentorno,
esinteresantecomoespecies“débiles”oconunnúmeroreducidodeindividuos,hanperduradoatravés
de losañosycontinúanmejorandoconelpasarde lasgeneraciones. Elconceptodeselecciónnatural
dondeprevalecelasupervivenciadelmásapto,propuestoporDarwinen1859ensuobra“Elorigendelas
especies”,complementadoconlanecesidaddeadaptaciónalcambiocomométododesupervivencia,otro
conceptoimportantetambiénprovenientedeldarwinismo,sugierenque,mediantelaherencia,lasnuevas
generaciones tienen en su ADN toda la información que ha permitido que la especie evolucione y
sobreviva.Lainformacióngenéticaheredadapuedesufriralgunoscambiosomutacionesmedianteprueba
y error, generando nuevas características y habilidades, posibilitando que un individuo en la última
generaciónpuedaonoconvertirseenelmásapto.
EntérminosgeneralesunAEestá inspiradoenelprocesodeselecciónnatural,creandounapoblación
inicial(conjuntodeposiblessoluciones)paradespuésmanipularlainformacióngenéticadelosindividuos,
buscandoevolucionarhasta encontrar el individuo conmayornivel de aptitudparaunobjetivodado,
comúnmenteconocidocomofuncióndecalidad,aptitudo“fitness”.Porlotanto,losalgoritmosevolutivos,
resultanunaherramientaútilpararesolverproblemasenloscualeslasoluciónnosepuedeobtenerde
maneraanalíticay/oeltamañodelespaciodesolucionesesmuygrandeparaserabordadoporunmétodo
determinístico,dadasuparticularestrategiabasadaenpoblaciones,dondeesposibleorientarlabúsqueda
endiferentesdireccioneslograndoescapardeóptimoslocalesypermitiendounmejorrendimientoala
horadeaproximarsealasoluciónóptima.

38
En ladécadade los40s,AlanTuringhacereferenciaa labúsquedagenéticaoevolutiva,ensureporte
titulado“IntelligentMachinery”(Turing1948,sección12,página18),aldecir:
“Thereisthegeneticalorevolutionarysearchbywhichacombinationofgenesislookedfor,thecriterionbeingthesurvivalvalue.”
Turingnoespecificabacomorealizaroquéseriedepasosseguirparaestabúsquedagenéticaoevolutiva,
pero sí permitió abstraer la idea de aplicar los principios de darwinismo para resolver problemas de
maneraautónomaantesdelaaparicióndelascomputadoras(EibenySmith,2015;Kozaetal.,2005).
Dosdécadasdespués,tresinvestigacionesdiferentesestabansiendodesarrolladas,basadosenlamisma
idea,entres lugaresdiferentes.EnAlemania,RechenbergySchwefel inventan lasEEmientrasque,en
EEUU,L.Fogel,OwensyWalshproponenlaPEyJohnHollanencolaboraciónconsuscolegasyestudiantes
enlaUniversidaddeMichigandesarrollanlosalgoritmosgenéticos,estastrestécnicasemergentessolose
vieronunidashastaladécadadelos90’s,cuandosurgeelCEyKozaintroducelaprogramacióngenética.
Enestecapítuloapartedelabrevehistoriadelcómputoevolutivo,definiremosalgunosconceptosbásicos
paralosalgoritmosevolutivos(AE),profundizandoenalgoritmosgenéticosysuaplicaciónpararesolver
problemasdeoptimización,particularmente,optimizaciónconmúltiplesobjetivos,describiremosalgunos
delosAEmultiobjetivo(AEMO)clásicosyprecisaremoselAEMOpropuestoparaelpresentetrabajo.
4.2 ConceptosbásicosdeAlgoritmosevolutivos(AE)
Comopunto de partida para entender el proceso de evolución natural, es importante definir algunos
conceptosdesdeunpuntodevistamicroscópico.Lagenética, según ladefiniciónde laRealAcademia
Españolaes:“Partede labiologíaquetratade laherenciayde lo relacionadoconella”,precisavarios
términosimportantesmuyutilizadosenelCE,yaquesussignificadossonanálogos.Lagenéticaaborda
temasrelacionadosconlaherenciadecaracterísticasdeunageneraciónaotraycomoestainformación
estacodificadaenelADN.
Entérminosgeneraleslosrasgosdeunindividuouorganismoanivelexternoovisibles,porejemplo,en
loshumanoselcolordecabelloolaestatura,seconocecomofenotipo,elcualesunarepresentaciónde
ungenotipoenunambienteespecífico,estesecomponedegenesquesolopuedentomarciertosvalores
definidosporlosalelos.LosgenesestáncodificadosencromosomasofilamentosdeADN,cuyonúmero
esconstanteparalascélulasdecadaespecie(verFigura8).
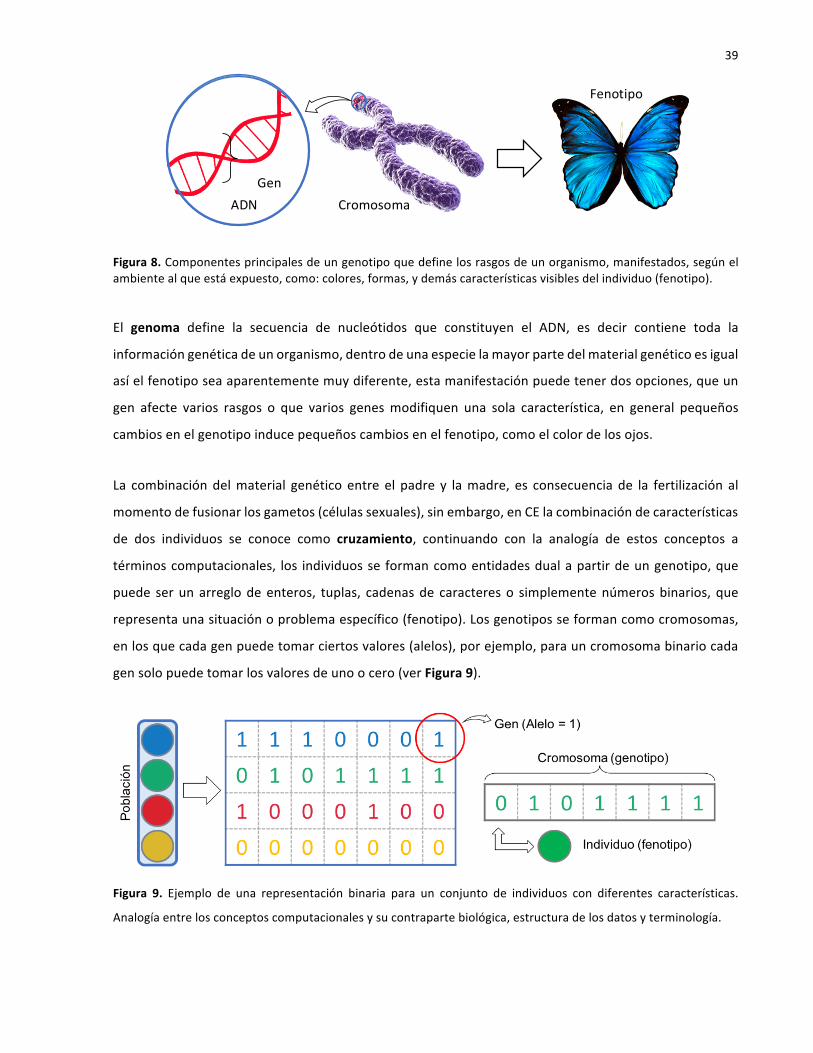
39
Figura8.Componentesprincipalesdeungenotipoquedefinelosrasgosdeunorganismo,manifestados,segúnelambientealqueestáexpuesto,como:colores,formas,ydemáscaracterísticasvisiblesdelindividuo(fenotipo).
El genoma define la secuencia de nucleótidos que constituyen el ADN, es decir contiene toda la
informacióngenéticadeunorganismo,dentrodeunaespecielamayorpartedelmaterialgenéticoesigual
asíelfenotiposeaaparentementemuydiferente,estamanifestaciónpuedetenerdosopciones,queun
gen afecte varios rasgos o que varios genesmodifiquen una sola característica, en general pequeños
cambiosenelgenotipoinducepequeñoscambiosenelfenotipo,comoelcolordelosojos.
La combinacióndelmaterial genético entre el padre y lamadre, es consecuencia de la fertilización al
momentodefusionarlosgametos(célulassexuales),sinembargo,enCElacombinacióndecaracterísticas
de dos individuos se conoce como cruzamiento, continuando con la analogía de estos conceptos a
términoscomputacionales, los individuosse formancomoentidadesdualapartirdeungenotipo,que
puede serunarreglodeenteros, tuplas, cadenasde caractereso simplementenúmerosbinarios, que
representaunasituaciónoproblemaespecífico(fenotipo).Losgenotiposseformancomocromosomas,
enlosquecadagenpuedetomarciertosvalores(alelos),porejemplo,parauncromosomabinariocada
gensolopuedetomarlosvaloresdeunoocero(verFigura9).
Figura 9. Ejemplo de una representación binaria para un conjunto de individuos con diferentes características.
Analogíaentrelosconceptoscomputacionalesysucontrapartebiológica,estructuradelosdatosyterminología.
Gen Cromosoma ADN
Fenotipo
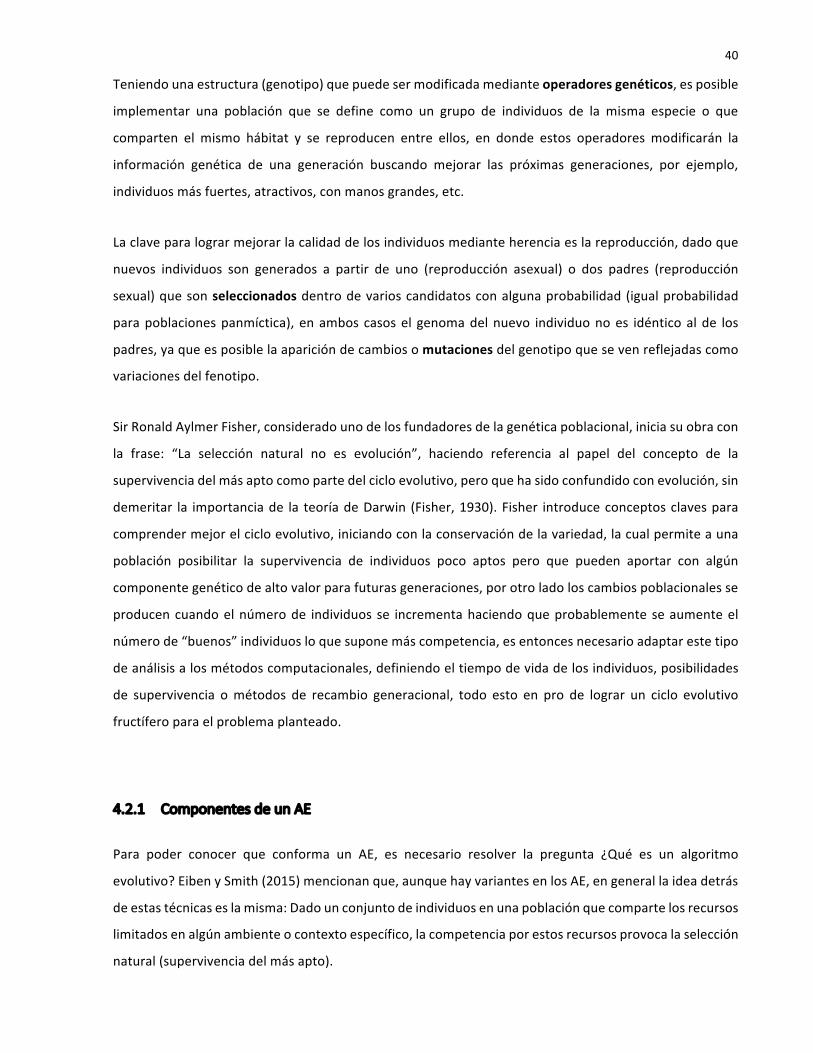
40
Teniendounaestructura(genotipo)quepuedesermodificadamedianteoperadoresgenéticos,esposible
implementar una población que se define como un grupo de individuos de la misma especie o que
comparten el mismo hábitat y se reproducen entre ellos, en donde estos operadores modificarán la
información genética de una generación buscando mejorar las próximas generaciones, por ejemplo,
individuosmásfuertes,atractivos,conmanosgrandes,etc.
Laclaveparalograrmejorarlacalidaddelosindividuosmedianteherenciaeslareproducción,dadoque
nuevos individuos son generados a partir de uno (reproducción asexual) o dos padres (reproducción
sexual)quesonseleccionadosdentrodevarioscandidatosconalgunaprobabilidad(igualprobabilidad
parapoblacionespanmíctica), enambos casosel genomadelnuevo individuonoes idénticoalde los
padres,yaqueesposiblelaaparicióndecambiosomutacionesdelgenotipoquesevenreflejadascomo
variacionesdelfenotipo.
SirRonaldAylmerFisher,consideradounodelosfundadoresdelagenéticapoblacional,iniciasuobracon
la frase: “La selección natural no es evolución”, haciendo referencia al papel del concepto de la
supervivenciadelmásaptocomopartedelcicloevolutivo,peroquehasidoconfundidoconevolución,sin
demeritar la importanciade la teoríadeDarwin (Fisher,1930).Fisher introduceconceptosclavespara
comprendermejorelcicloevolutivo,iniciandoconlaconservacióndelavariedad,lacualpermiteauna
población posibilitar la supervivencia de individuos poco aptos pero que pueden aportar con algún
componentegenéticodealtovalorparafuturasgeneraciones,porotroladoloscambiospoblacionalesse
producencuandoelnúmerode individuos se incrementahaciendoqueprobablemente seaumenteel
númerode“buenos”individuosloquesuponemáscompetencia,esentoncesnecesarioadaptarestetipo
deanálisisalosmétodoscomputacionales,definiendoeltiempodevidadelosindividuos,posibilidades
de supervivencia ométodos de recambio generacional, todo esto en pro de lograr un ciclo evolutivo
fructíferoparaelproblemaplanteado.
4.2.1 ComponentesdeunAE
Para poder conocer que conforma un AE, es necesario resolver la pregunta ¿Qué es un algoritmo
evolutivo?EibenySmith(2015)mencionanque,aunquehayvariantesenlosAE,engenerallaideadetrás
deestastécnicaseslamisma:Dadounconjuntodeindividuosenunapoblaciónquecompartelosrecursos
limitadosenalgúnambienteocontextoespecífico,lacompetenciaporestosrecursosprovocalaselección
natural(supervivenciadelmásapto).

41
Porlotanto,podemosdefinirunAEcomo:
Dadaunafunciónobjetivo(funcióndecalidadoaptitud)quedebesermaximizada,podemoscrearun
conjunto de posibles soluciones (población de individuos) de manera aleatoria, como elementos del
dominiodelafunciónquealserevaluadospermiteobtenerdemaneraabstractaunvalordeaptitud(el
valormásaltoeselmejor individuo).Conbaseenestosvaloresdecalidad, lasmejoressolucionesson
seleccionadascomosemillasparalasiguientegeneración,paraluegoaplicarlesalgúnoperadorgenético
derecombinacióny/omutación.Recombinaciónseaplicaadosomáscandidatosseleccionados(también
conocidos como padres o semillas), produciendo una o más posibles soluciones nuevas (hijos o
descendencia). Lamutación tiene la capacidad demodificar cada posible solución generando nuevos
candidatos(hijosmodificados).
Entonces después de aplicar recombinación y mutación se produce un conjunto de nuevas posibles
soluciones(descendencia),quienestienenunvalordeaptitudquelespermitecompetirporunlugarenla
siguientegeneración(supervivencia).Serepiteesteprocesohastaqueun individuoalcanceelvalorde
aptituddeseado(soluciónóptima)opresentesuficientecalidadcomoparaserconsideradocomosolución,
adicionalesposibledefiniralgúnlimitecomputacionalcomo:máximonúmerodeiteraciones,cantidadde
memoriaoCPUutilizada,elvalormáximodeaptitudsemantieneduranteun largoperiododetiempo
(númerodeiteracionesotiempodeejecución)ocuandoladiversidaddelapoblaciónbajadeunnivel
establecido(verFigura10).
Figura10.CicloevolutivotradicionalparaunAGconpoblaciónpanmíctica.

42
Los algoritmos evolutivos se componen de varios procesos que en su mayoría son estocásticos, por
ejemplo,durante lacreaciónaleatoriade lasposiblessoluciones inicialesoenelprocesodeselección,
teniendoencuentaquelosmejoresindividuosnoseobtienendemaneradeterminística,facilitandoque
los individuos “débiles” conserven alguna oportunidad de ser padres o sobrevivir para la siguiente
generación.
En larecombinaciónymutación, lamagnitudyel lugardondeserealizará lamodificaciónsedefinede
maneraaleatoria.Estetipodedecisionespermitenaumentarladiversidadenlabúsqueda,promoviendo
el proceso de adaptación al entorno por parte de la población. El proceso evolutivo resulta entonces
cuandounapoblaciónpuedeadaptarsedemaneraincrementalalentorno.
ElpseudocódigodeunAEdemaneragenéricapuedeser:
Algoritmo1Algoritmoevolutivo
1: Inicialización:Secrean𝑁posiblesindividuos(𝑥)paraunapoblacióninicial(𝕏).𝑥", … , 𝑥M ∈ 𝕏
2: Evaluación:Seevalúanloscandidatosconlafuncióndeaptitud.𝑥$ → 𝑓?nÏ$Ïqs 𝑥$ , 𝑖 =1, … , 𝑁
3: Mientras(Lacondicióndeterminación≠verdadero)4: Seleccionarlos𝑗padresde𝕏.ℙ = 𝑝", … , 𝑝% 5: Crearlos𝑘hijosmedianterecombinación.ℍ = ℎ", … , ℎ, 6: Mutarℎ$7: Evaluarℎ$ → 𝑓?nÏ$Ïqs ℎ$ , 𝑖 = 1, … , 𝑘8: Seleccionarindividuosdeℎ$ ∪ 𝕏paralanuevageneración𝕏′9: 𝕏 → 𝕏′10: Fin
4.2.2 Representacióndelindividuo
El primer paso para poder diseñar un algoritmo evolutivo (AE) es unir elmundo real con el computo
evolutivo,loquesignificacrearunaestructuradedatosquerepresentelascaracterísticasdelproblemay
sucontexto,lacualdebeestardiseñadadetalmaneraqueunsistemacomputacionalpuedamanipularla,
en otros términos, toda la información inherente al problema y su contexto son los fenotipos y su
codificación,creaunaestructuradedatosenunentornodeAEquecontienelosgenotipos(verFigura9)..
43
Comosehamencionadoanteriormente,existenvariosAE,condiferenciascomolarepresentacióndelos
individuos,particularmenteparalosalgoritmosgenéticos(AG)escomúnutilizarcaracteresdeunalfabeto
finito,enlasestrategiasevolutivasseutilizanvectoresdenúmerosreales,máquinasdeestadofinitopara
laprogramaciónevolutivaclásicay representaciónconárbolespara laprogramacióngenética (Eibeny
Smith,2015;Goldberg,1989).
4.2.3 Población
Unapoblaciónesunconjuntodeindividuosdelamismaespecie,porloqueenelcontextodeAEesun
multiconjuntodecromosomas.Lapoblaciónseconvierteentoncesen launidaddelprocesoevolutivo,
dadoquelosindividuosnopuedenevolucionarporsisolos,necesitanlainteracciónconsusparespara
lograrcambiosoadaptarse.Inicializarunapoblaciónesunatareasimple,teniendoencuentaquesoloes
necesariodefinircuantosindividuoscontieneoeltamaño.
EnlamayoríadelasaplicacionesdeAEeltamañodelapoblaciónpermanececonstantedurantetodoel
proceso evolutivo, aumentando la competencia, dada la necesidad de sobrevivir en el recambio
generacional. En cuanto a tipos de poblaciones, en implementaciones clásicas es común utilizar
poblacionesdetipopanmíctica,enlasqueelapareamientoeslibreyalazar(conigualprobabilidad).Por
otra parte, en algoritmosmás sofisticados, típicamente se utilizan poblaciones distribuidas en islas o
vecindarios, lo que reduce el número de individuos con los que se puede interactuar y se comparte
informacióngenéticaentresubpoblacionescadaciertotiempo.
La idea principal detrás de esta limitación es aumentar la diversificaciónde la población en general e
incrementar la explotación en los grupos de individuos que están distribuidos. La diversidad de la
poblaciónesunconceptomuyutilizadoenAEyrepresentalacantidaddeindividuosdiferentesdentrode
la población, comúnmente asociado a individuos con diferente valor de aptitud, sin embargo, no
necesariamenteesasí,puestoquediferentesgenotipospuedentenerelmismorendimientoentérminos
de calidad. Herramientas estadísticas como la entropía pueden ayudar a medir la diversidad de una
poblaciónespecíficaosimplementeelnúmerodefenotiposy/ogenotiposdiferentes.
44
4.2.4 Funciónparaevaluacióndeaptitud(funcióndecalidad)
Entérminosgeneraleslafunciónobjetivoparaunproblemadeoptimización,quedefinelascondiciones
deoptimalidad,puedeserlamismafuncióndecalidad(eneldominiodelAE)oenalgunoscasosrequerir
algunamodificación, que permite evaluar el rendimiento de los individuos, es decir que tan “bien” el
candidatosatisface lascondiciones,calculandounvalordeaptitudpara losgenotiposquedescribeun
mayor o menor nivel en los fenotipos según sea el caso. La mayoría de problemas de optimización
requierenserminimizados(costos,esfuerzo,distancia,etc.),peroentérminosdecalidad,escomúnmente
asociadoconmaximización,yaqueunvalormásaltosuponeunmejorrendimiento.Sinembargo,pasar
de un problema deminimización amaximización y viceversa es una tarea simple, permitiendo poder
abordarcualquierproblemadeoptimizaciónconAE.
4.2.5 Mecanismoparalaseleccióndepadres
SelecciónportorneoorankingsonlosmecanismosmáspopularesimplementadosenAE,loscualesson
implementados de manera probabilística de tal manera que los mejores individuos tengan una
probabilidadmayordeserelegidoscomopadre,adiferenciadelosindividuosconbajorendimiento,no
obstante,estosindividuossiemprecuentanconlaoportunidad(pequeñaenlamayoríadecasos)deser
seleccionados,denoserasí,ladiversidadenlapoblaciónseveríareducidaylabúsquedaseconvertiría
enunmétodoavaroyelitistaquesoloseevolucionaentornoalaprimermejoraencontrada,loquepuede
ocasionarestancamientosenóptimoslocalesdisminuyendolaposibilidaddelograrlasoluciónóptima.
4.2.6 Recombinación
Eloperadorgenéticoconocidocomorecombinaciónocruzamientocombinalainformacióngenéticade
dosomás individuos(padres)enunoomásdescendientes(hijos).Lamayoríadeestosmétodosestán
restringidosalusodedospadres,aunqueestádemostradoqueelusodemultipadres,asínosetengauna
contrapartebiológica,proveeefectospositivosparaelalgoritmo(Eiben,2003).
Elprocesoderecombinaciónbuscadistribuirlosgenes“buenos”decadapadreenlosnuevosindividuos,
combinandolasmejorescaracterísticasdecadauno,sinembargo,estateoríanosiempresecumple,ya
queenAEserealizademaneraprobabilística,esimportanteresaltarqueparacadarepresentaciónexisten
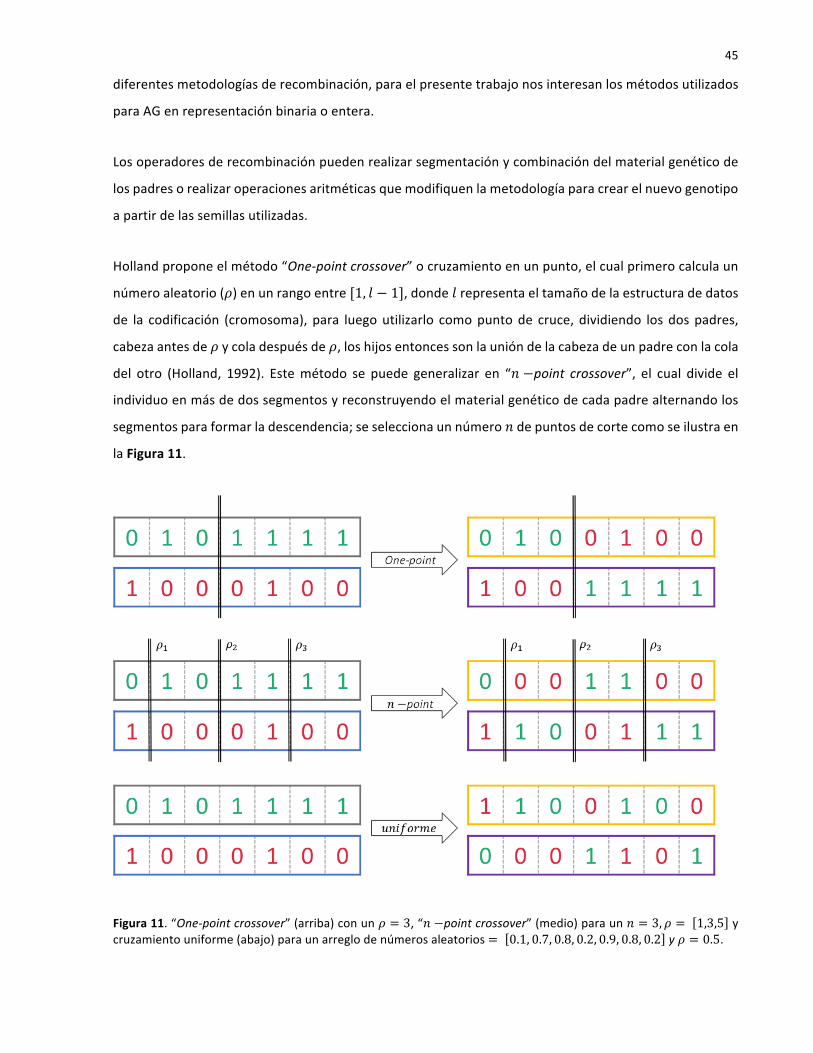
45
diferentesmetodologíasderecombinación,paraelpresentetrabajonosinteresanlosmétodosutilizados
paraAGenrepresentaciónbinariaoentera.
Losoperadoresderecombinaciónpuedenrealizarsegmentaciónycombinacióndelmaterialgenéticode
lospadresorealizaroperacionesaritméticasquemodifiquenlametodologíaparacrearelnuevogenotipo
apartirdelassemillasutilizadas.
Hollandproponeelmétodo“One-pointcrossover”ocruzamientoenunpunto,elcualprimerocalculaun
númeroaleatorio(𝜌)enunrangoentre[1, 𝑙 − 1],donde𝑙representaeltamañodelaestructuradedatos
de la codificación (cromosoma), para luegoutilizarlo comopuntode cruce, dividiendo losdospadres,
cabezaantesde𝜌ycoladespuésde𝜌,loshijosentoncessonlaunióndelacabezadeunpadreconlacola
del otro (Holland, 1992). Estemétodo se puede generalizar en “𝑛 −point crossover”, el cual divide el
individuoenmásdedossegmentosyreconstruyendoelmaterialgenéticodecadapadrealternandolos
segmentosparaformarladescendencia;seseleccionaunnúmero𝑛depuntosdecortecomoseilustraen
laFigura11.
Figura11.“One-pointcrossover”(arriba)conun𝜌 = 3,“𝑛 −pointcrossover”(medio)paraun𝑛 = 3, 𝜌 = 1,3,5 ycruzamientouniforme(abajo)paraunarreglodenúmerosaleatorios= 0.1, 0.7, 0.8, 0.2, 0.9, 0.8, 0.2 y𝜌 = 0.5.

46
Por último el método conocido como cruzamiento uniforme, propone tratar cada gen de manera
independienteyrealizarunaselecciónparacadahijoquedeterminaelvalordelalelo(s)enelcromosoma,
haciendounaelecciónaleatoriaquedeterminaquepadreheredaestevalor,enotraspalabras,sedefine
unvalorpara𝜌entre0y1(comúnmente0,5)luegodemaneraaleatoriaseobtieneotrovalorentre0y1
elcualpuedesermayora𝜌indicandoquedebetomarelmaterialgenéticodelpadre1odelpadre2para
elcasoqueseamenoroiguala𝜌(verFigura11).
Existenvariosmétodosderecombinaciónadicionalestantopararepresentacionesconpermutaciónde
enterosorepresentaciónconnúmerosreales,algunospopularescomoPMXy“Cut-and-crossfill”porlo
queserecomiendarevisar(EibenySmith,2015;Goldberg,1989).
4.2.7 Mutación
El segundométodoprincipaldecambiosevolutivoses lamutación,el cualesunoperadorunarioque
modificadirectamenteelmaterialgenéticodeunhijoodescendencia.Comosalida,un“mutante”siempre
dependedeunaseriedeeleccionesaleatoriaspor lo tanto lamutaciónesunprocesocompletamente
estocástico.EsteoperadorescomúnmenteutilizadoendiferentesáreasdelCE,porejemplo,enPEesel
únicooperadorqueseutilizaoenAGeselencargadodeproporcionarnuevomaterialgenético,útilpara
laexplotaciónyexploracióndelapoblación.Elmétododemutaciónconocidocomo“Bitwise”(similaral
método “swap” en representaciones por permutación de enteros), propone la posibilidad (con
probabilidad𝑝.)de intercambiarelvalorenunoo 𝜅 −genes,determinadodemaneraaleatoriauna
cantidaddevaloresa𝑘$ entre1yeltamañodelcromosomacomoposicionesdelgenamodificar,conun
nuevo valor seleccionado demanera aleatoria de algún conjunto de valores permitidos. Estemétodo
funciona tanto para representaciones enteras como binarias, fácilmente modificable a un método
conocidocomo“randomresetting”o“scramble”(paraunarepresentacióndepermutacióndeenteros),
enelquesiempreseintercambiantodoslosgenesdelcromosoma(verFigura12).
Figura12.Mutación“swap”(arriba)paraun𝜅 = 2,3,7 ,“randomresetting”(abajo)parauncromosoma
deconrepresentaciónbinaria.
47
4.2.8 Mecanismodeseleccióndelossobrevivientes(Reemplazo)
Laestrategiadereemplazofuncionademanerasimilaralmecanismodeseleccióndelospadres,utilizando
ranking o torneo para decidir que individuos deben dejar la población y dar paso al nuevo material
genéticoquecontienenloshijos,seconocecomoseleccióndesobrevivientes,dadoqueparauncasoen
elqueelnúmerodehijosesmásdelamitaddelaantiguapoblación,esnecesarioeliminarungrannúmero
deindividuosquepuedenserseleccionadosporedad,bajodesempeñoodemaneraaleatoria.Cuandose
generandoshijosporgeneración,esposiblehablardereemplazo,yaqueportorneobinariosepuede
definirquiencontinuaonoformandopartedelapoblaciónaevolucionar.
4.3 AEconenfoquemultiobjetivo(AEMO)
Como se mencionó anteriormente los AE son una herramienta útil para problemas de optimización,
utilizandolafunciónobjetivocomofuncióndecalidad(oconalgunamodificación)parauncasoconun
únicoobjetivo,realizandociertacantidaddeiteracionesquepermitanqueunoomásindividuosalcancen
algún valor aproximado aceptable o la solución óptima para el mejor de los casos. La estructura de
funcionamiento de los AE basada en exploración y explotación, facilita escapar de óptimos locales y
direccionarlabúsquedahaciaelóptimoglobal.
El problema entonces surge a partir de la discusión de cómo comparar dos individuos que tienen un
rendimiento diferente para cada una de las funciones de aptitud para un POMO, es decir que
compensaciónproducecadaunode los individuospara losobjetivosenconflicto,porejemplo,parael
problemaclásicodelamochila(“knapsackproblem”)conenfoquemultiobjetivo,enelquelosobjetivos
enconflictosonaumentarlasgananciasydisminuirelpeso,cadaposiblesolucióncodificadabajoalguna
representación(estructuradedatosdelcromosoma)simbolizaunconjuntodeítemsconunpesoyvalor
asociados, por lo tanto algún individuo puede contener el peso mínimo pero no la mejor suma de
ganancias, mientras que otra posible solución maximiza las ganancias pero el peso excede el valor
deseado; cada candidato realiza una compensación entre los objetivos, complicando la decisión que
puede definir cuál es lamejor solución al problema planteado. Es posible buscar una solución a este
problemaconmétodoscomolacombinaciónlinealdeobjetivos,ordenamientolexicográficooalgunode
losdetalladosenelCapítulo3delpresentedocumento,sinembargo,losAEpermitenlidiarconPOMO
gracias a su estrategia de evolución de un multiconjunto de posibles soluciones (población)
simultáneamente. Esta interacción entre candidatos a solución del POMO permite intercambiar las
48
mejores característicasohabilidadesde cada individuo, facilitandocrearunaposible soluciónen cada
recambiogeneracionalqueseaproximealfrentedePareto(verCapítulo3).Schaffersurgeentoncescomo
pionero con el algoritmo “Vector Evaluated Genetic Algorithm” (VEGA) modificando los operadores
genéticosenunAG,realizandociclosdeselecciónindependientesparacadaobjetivo(unoporuno)hasta
obtenerunsubgrupodeindividuosalosqueaplicacruzamientoymutación(Schaffer,1984).
Sinembargo,sehacenecesarioencontrarunamétricaparaevaluarlosindividuosbajomúltiplesfunciones
objetivos,yaquelosAEutilizanlafuncióndecalidadparalareproducciónyevoluciónenelcasomono
objetivo. Goldberg (1989) introduce el término de dominancia (ver Capítulo 3) y “niching” (operador
utilizadoparacontrolarladiversidaddelapoblación)conlaintencióndesubdividirlapoblaciónengrupos
enlosquenoesposibledefinircuálesmejorparatodoslosobjetivosenconflicto,surgeentonceseluso
deconjuntosnodominadoscomometodologíaparadireccionarlabúsquedayevolucióndeunAEpara
POMO.EncontrarelfrentedeParetodeunPOMOesunatareadifícilenlamayoríadecasos,porloque
sepermiteencontraruna“buena”aproximaciónenuntiempodeejecuciónrazonable.Lasmetodologías
basadasenAE (AEMO)presentanunbuen rendimiento y aunquenoesposible considéralas comoun
método universal, “No free lunch theorem” (Wolpert y Macready, 1997), en general poseen una
implementación sencilla que permite guiar la búsqueda con información obtenida en el dominio del
problema,loqueacelerasudesarrollo,ejecución,evaluaciónyentendimiento.
4.3.1 ClasificacióndelosAEMO
En la literatura normalmente se dividen a los AEMO en dos generacionesmarcadas por el uso de un
mecanismodeselecciónconocidocomo“preservaciónelitista”osencillamenteelitismo.Lainclusióndel
elitismoproporcionaunrendimientonodegradante,debidoaquesemantienenalosindividuosconmejor
rendimientodurantecadarecambiogeneracional.Elusoeimplementacióndemetodologíasparaaplicar
elelitismoesladiferenciaprincipalentrelosalgoritmosqueformanpartedelasegundageneración.En
losúltimosañossehanclasificadolosAEMOentrescategorías:losbasadosendominancia,losmétodos
pordescomposiciónylosqueutilizanalgúnindicador.Losprimerosbasadosenelconceptopropuestopor
Goldbergcomo:StrengthParetoEvolutionaryAlgorithm(SPEA,SPEA2),NondominatedSortingGA(NSGA,
NSGA-II)oParetoEnvelope-basedSelectionAlgorithm(PESA,PESAII) (algunosalgoritmospopularesde
segunda generación) utilizan la dominancia como se describió anteriormente, Después encontramos
algoritmoscomoMOEA/D(Multi-objectiveevolutionaryalgorithmbasedondecomposition),queutilizan
elmétododedescomposición,dividiendounPOMOenvariosproblemasconunúnicoobjetivoyqueson
49
resueltossimultáneamente,loscualeshanganadobastanteatenciónporlosinvestigadoresdebidoalas
dificultadesquepresentan losAEMOcuandoseabordanproblemasconcuatroomásobjetivos,estas
complicacionesestándirectamenterelacionasalusodelosconceptosdeParetoalintentardiscriminarun
conjuntodesolucionesúnicamenteutilizandoladominancia(VonLückenetal.,2014).Porúltimolosque
utilizanalgúnindicadorporejemplo,HypE(HipervolumeEstimationBasedMOGA),queutilizalamétrica
hipervolumencomovalordeaptitudparalosindividuosenunAE(Debetal.,2016).Dadaladimensióndel
problemaabordadoenestetrabajo(dosobjetivosenconflicto)sedecideutilizarunaversiónadaptadade
MOCell(MultiObjectiveCellulargeneticalgorithm)(Nebroetal.,2009)comopropuestainicialycomparar
losresultadosobtenidoscontraunAEMOmuypopularendiversostrabajosdeaplicaciónaproblemas
realescomoloesNSGA-II(NondominatedSortingGeneticAlgorithmII)(Debetal.,2002).
4.3.2 NondominatedSortingGeneticAlgorithmII(NSGA-II)
La relación dedominancia descrita en el Capítulo 3 sección 3.2.2 permite relacionar dos soluciones o
individuos,utilizadaporvariosalgoritmoscomounoperadorbinario,enelqueunasolución𝐴dominao
noauna solución𝐵,𝑑𝑜𝑚𝑖𝑛𝑎𝑛𝑐𝑖𝑎(𝐴, 𝐵) = 1 o𝑑𝑜𝑚𝑖𝑛𝑎𝑛𝑐𝑖𝑎(𝐴, 𝐵) = 0, respectivamente.Coelloet al.
(2007)definentresposiblesmétodosqueutilizanelconceptodedominanciaparahacerordenamiento:
• Rankingpordominancia:elmétodosebasaendefinirunnivelparacadaindividuomedianteel
cálculodelacantidaddeindividuosenlapoblaciónactualporlacualestádominado.Algoritmos:
“Multi-ObjectiveGeneticAlgorithm”(MOGA)y“NichedParetoGeneticAlgorithm”(NPGA)
• Dominanciapor conteo: el criterio sebasa en cuántasposibles soluciones sondominadaspor
algúnindividuo.Algoritmos:“StrengthParetoEvolutionaryAlgorithm”(SPEAySPEA2)
• Dominanciaporprofundidad:estemétododistribuyelosindividuosen“frentes”dedominancia,
paraluegoordenarlosdetalmaneraqueelfrenteunocontienelosmejoresindividuos.Quienes
dominanalrestodelapoblación.Algoritmos:“NondominatedSortingGeneticAlgorithm”(NSGA
yNSGA-II).
NSGA-IIesunodelosAEMOmáspopularesdesarrolladoporDebetal.(2002)elcualutilizaelprincipiode
elitismo (AEMO de segunda generación) y la relación de dominancia en profundidad, además de un
mecanismoquepreservaladiversidadconocidocomo“crowdingdistance”odistanciadeapiñamiento.
Paracadageneraciónelalgoritmocombinalapoblaciónactual(𝑃$)detamaño𝑁conladescendencia(𝐷$)
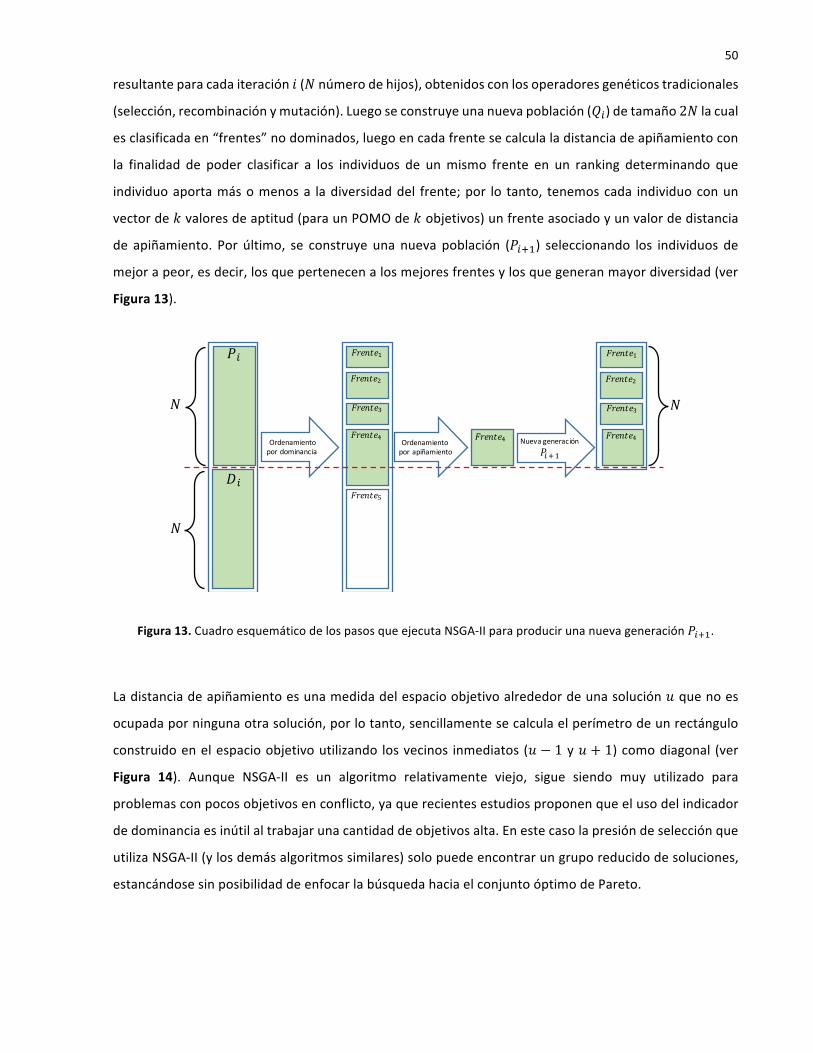
50
resultanteparacadaiteración𝑖(𝑁númerodehijos),obtenidosconlosoperadoresgenéticostradicionales
(selección,recombinaciónymutación).Luegoseconstruyeunanuevapoblación(𝑄$)detamaño2𝑁lacual
esclasificadaen“frentes”nodominados,luegoencadafrentesecalculaladistanciadeapiñamientocon
la finalidad de poder clasificar a los individuos de unmismo frente en un ranking determinando que
individuoaportamásomenosa ladiversidaddel frente;por lo tanto, tenemoscada individuoconun
vectorde𝑘valoresdeaptitud(paraunPOMOde𝑘objetivos)unfrenteasociadoyunvalordedistancia
de apiñamiento. Por último, se construye una nueva población (𝑃$ã") seleccionando los individuos de
mejorapeor,esdecir,losquepertenecenalosmejoresfrentesylosquegeneranmayordiversidad(ver
Figura13).
Figura13.CuadroesquemáticodelospasosqueejecutaNSGA-IIparaproducirunanuevageneración𝑃$ã".
Ladistanciadeapiñamientoesunamedidadelespacioobjetivoalrededordeunasolución𝑢quenoes
ocupadaporningunaotrasolución,porlotanto,sencillamentesecalculaelperímetrodeunrectángulo
construidoenelespacioobjetivoutilizando losvecinos inmediatos (𝑢 − 1y𝑢 + 1)comodiagonal (ver
Figura 14). Aunque NSGA-II es un algoritmo relativamente viejo, sigue siendo muy utilizado para
problemasconpocosobjetivosenconflicto,yaquerecientesestudiosproponenqueelusodelindicador
dedominanciaesinútilaltrabajarunacantidaddeobjetivosalta.Enestecasolapresióndeselecciónque
utilizaNSGA-II(ylosdemásalgoritmossimilares)solopuedeencontrarungruporeducidodesoluciones,
estancándosesinposibilidaddeenfocarlabúsquedahaciaelconjuntoóptimodePareto.
!"#$%#&
!"#$%#'
!"#$%#(
!"#$%#)
!"#$%#*
+,
-,
.
.
!"#$%#)Ordenamientopordominancia
Ordenamientoporapiñamiento
Nuevageneración+,/&
.
!"#$%#&
!"#$%#'
!"#$%#(
!"#$%#)
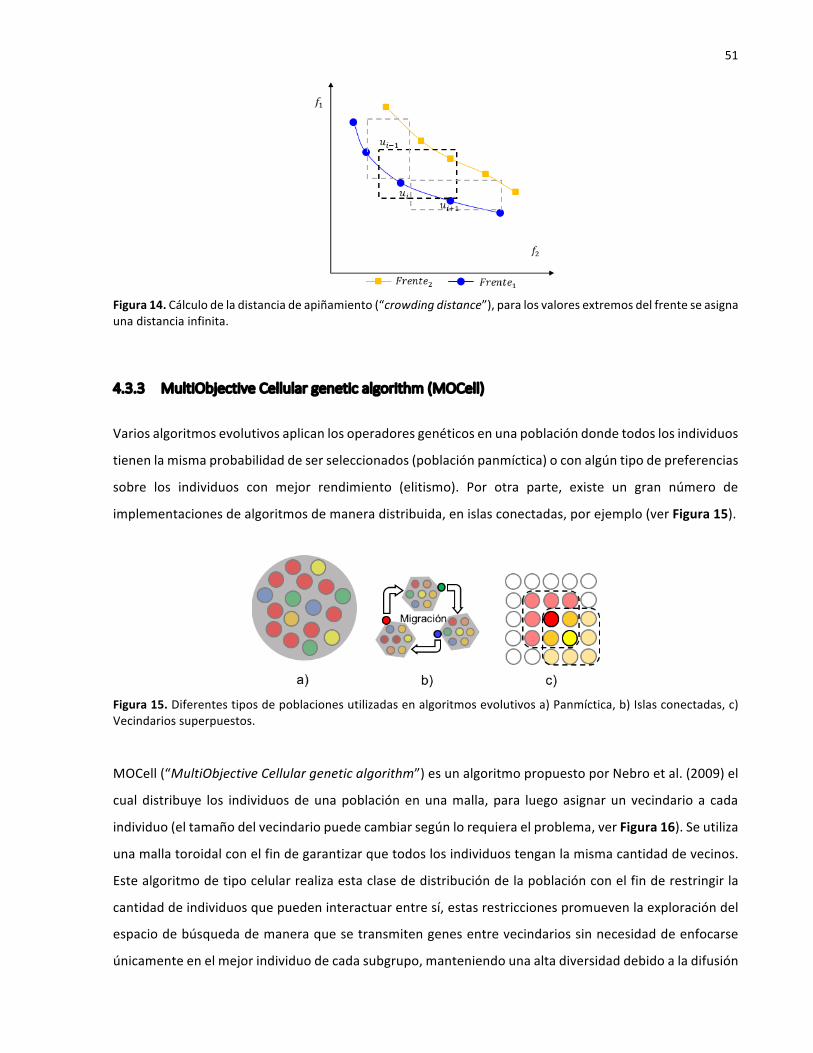
51
Figura14.Cálculodeladistanciadeapiñamiento(“crowdingdistance”),paralosvaloresextremosdelfrenteseasignaunadistanciainfinita.
4.3.3 MultiObjectiveCellulargeneticalgorithm(MOCell)
Variosalgoritmosevolutivosaplicanlosoperadoresgenéticosenunapoblacióndondetodoslosindividuos
tienenlamismaprobabilidaddeserseleccionados(poblaciónpanmíctica)oconalgúntipodepreferencias
sobre los individuos con mejor rendimiento (elitismo). Por otra parte, existe un gran número de
implementacionesdealgoritmosdemaneradistribuida,enislasconectadas,porejemplo(verFigura15).
Figura15.Diferentestiposdepoblacionesutilizadasenalgoritmosevolutivosa)Panmíctica,b)Islasconectadas,c)Vecindariossuperpuestos.
MOCell(“MultiObjectiveCellulargeneticalgorithm”)esunalgoritmopropuestoporNebroetal.(2009)el
cual distribuye los individuosdeunapoblaciónenunamalla, para luegoasignarun vecindario a cada
individuo(eltamañodelvecindariopuedecambiarsegúnlorequieraelproblema,verFigura16).Seutiliza
unamallatoroidalconelfindegarantizarquetodoslosindividuostenganlamismacantidaddevecinos.
Estealgoritmodetipocelularrealizaestaclasededistribucióndelapoblaciónconelfinderestringirla
cantidaddeindividuosquepuedeninteractuarentresí,estasrestriccionespromuevenlaexploracióndel
espaciodebúsquedademaneraquesetransmitengenesentrevecindariossinnecesidaddeenfocarse
únicamenteenelmejorindividuodecadasubgrupo,manteniendounaaltadiversidaddebidoaladifusión

52
“lenta”delmaterialgenético.Porotrapartecomolosindividuossolopuedeninteractuarconunreducido
grupodevecinos,sebuscafomentarlaexplotaciónencadavecindario,utilizandolastécnicasderanking
ydistanciadeapiñamientopropuestasporDebetal.(2002)enNSGA-IIencadavecindarioyasífomentar
elelitismoalahoradeaplicarlosoperadoresgenéticos.
Figura16.Vecindariosdiferentes,a)cuatro,b)ocho,c)doce,paradosindividuos𝐼" = (𝑥, 𝑦)e𝐼* = (𝑥 − 1, 𝑦 − 1).
MOCellconstruyeunconjunto(𝒫Må)de𝑁individuosnodominados(lacardinalidaddelconjuntoimplica
elimpactodelelitismoenelalgoritmo)ordenadospor“crowdingdistance”,conlosqueseretroalimenta
lapoblación.Elalgoritmonoutilizaelconceptoderecambiogeneracionaldelamismamaneraquelos
demásAE,enestealgoritmoesnecesariorevisarindividuoporindividuoparacompletarunageneración
delapoblación,esdecirencadaevaluacióndeunindividuoserealizauntorneoentrelosvecinospara
elegirlospadresosemillas,loscualesseutilizaránenelprocesoderecombinaciónparaluegoemplearel
operadordemutaciónconloshijosresultantes.Unavezfinalizadoesteprocesosehaceunrankingentre
los hijos, los padres seleccionados y el individuo que está siendo evaluado con el fin de definir quién
ocuparáesteespacioenlapoblación(eldemejorrendimiento)ycontinuarconelsiguienteindividuo.Por
último,alfinalizarlarevisióndetodoslosindividuos,demaneraaleatoriaseseleccionan𝑁individuosque
seránintercambiadosporloqueseencuentranalojadosenelconjunto𝒫Må(verFigura17).
Figura17.Ciclodereproducciónparaunalgoritmogenéticocelularconcuatrovecinosporindividuoyunconjuntonodominadodecuatroindividuos.

53
4.4 AEMOpropuesto
ParaabordarelproblemaplanteadoenelCapítulo2sección2.6seproponeunAE,específicamenteun
algoritmogenéticodetipocelular,basadoenMOCellensuversiónasíncrona(verAlgoritmo2).
Algoritmo2.PseudocódigodelametaheurísticabasadaenMOCell.1. 𝑑𝑎𝑡𝑎 =setup();/*Configuracióndeparámetrosdelalgoritmoydatosdeentrada*/2. 𝑝𝑜𝑝 =popGen()/*Crealapoblacióninicial*/3. 𝑝𝑜𝑝 =toroidal(𝑝𝑜𝑝);/*Distribuyelosindividuosenunamallatoroidal*/4. 𝒫Må = [];/*Creaunconjuntoparaalmacenarlosindividuosnodominados*/5. Mientras(condiciónDeterminación==falso)hacer6. Para𝑘 = 1hasta 𝑝𝑜𝑝 hacer7. 𝐼𝑘 = 𝑝𝑜𝑝(𝑘);/*individuo𝑘*/8. 𝑣𝑃𝑜𝑝 =vecindario(𝑝𝑜𝑝,𝐼𝑘);9. 𝑝𝑎𝑑𝑟𝑒𝑠 =selección(𝑣𝑃𝑜𝑝);10. ℎ𝑖𝑗𝑜𝑠 =recombinación(𝑑𝑎𝑡𝑎,𝑝𝑎𝑑𝑟𝑒𝑠);11. ℎ𝑖𝑗𝑜𝑠=mutación(𝑑𝑎𝑡𝑎,ℎ𝑖𝑗𝑜𝑠);12. 𝑝𝑜𝑝(𝑘) =reemplazo(𝑣𝑃𝑜𝑝,ℎ𝑖𝑗𝑜𝑠);13. 𝒫Må =agregar(pop(𝑘),𝒫Må);14. Fin15. 𝑝𝑜𝑝 =retroalimentación(𝒫Må);16. Fin
4.4.1 Representación(codificación)
Larepresentaciónocodificacióndelasposiblessolucionesestáexpresadocomounarreglodenúmeros
enterosquesimbolizaneltipodevehículoasignadoparacubrirunviajeconunahoradepartidaestipulada
porlaposicióndelnúmeroenteroenelarreglo,enotrostérminos,lahoradepartidadelvehículoladefine
laposicióndelgenenelcromosomayeltipodevehículoestádeterminadoporelaleloenestegen.
Eltamañodelarregloestádefinidoapartirdeunestudiopreviodelademandadepasajerosenunaruta
específica, haciendo un análisis preliminar de la frecuencia mínima de operación para la capacidad
promedio de los vehículos disponibles para cubrir la ruta (𝐶𝐴𝑃). El método seleccionado calcula una
frecuenciadeoperación (𝐹%)apartirdelperfildecargaporperiodosde tiempo, fundamentadoen los
mecanismosdiscutidosenelCapítulo2sección2.1paraelcálculodelafrecuenciamínimadeoperación,
losvaloresobtenidosseconsiderancomounacotainferiordelafrecuencia,yaquepuedesermodificados
losintervalosporelAE.

54
Unavezquesetieneelhorariopreliminar,paralacreacióndelosindividuossedivideelcromosomacon
unaseriedegenesconvalorcero(valordelalelo)quesirvenparamarcarlosiniciosdecadaperiodode
tiempoconelfindepoderevaluarelrendimientodelindividuoenintervalosduranteladuracióntotaldel
funcionamientoyasítenerunamejorideadelcomportamientoparalosdosobjetivosenconflicto(costo
deoperaciónypérdidadelacalidaddeservicio),ladistribucióndeloscerospuedesermodificada,pero
nopuedenexistirdoscerosconsecutivosdadalarestriccióndelproblemaqueestableceunafrecuencia
mínima de operación (𝑓.$'), todos los periodos de tiempo tienen lamisma duración y pueden estar
relacionadosconeltiempototalqueutilizaunvehículoparacubrirunviaje(verFigura18).
Elmétodoutilizadoparaconstruirelcromosomaestádefinidopor:
𝐹% = 𝑚𝑎𝑥𝐴%
LFð ∙ CAP ∙ 𝐿,𝑃%.?@
CAP, 𝑓.$' (32)
𝐴% = 𝑃%\×ℓó\∈B
(33)
𝐿 = ℓó\∈B
(34)
Figura18.Representaciónparadosindividuosvecinosysurespectivocomportamientoparaunperiododetiempoyunacargadepajerosdefinida.

55
Donde𝑃%\eselflujoocantidaddepasajerosenlaparada𝑠delaruta𝑅(𝑃%.?@paraelcasomáximo),𝐴% es
eláreabajolacurvaformadaporlacantidaddepasajerosalolargodetodalaruta.𝐿𝐹% eselfactorde
cargadefinidoparaelperiodo 𝑗o lamáximaocupaciónpermitidaenesteperiodode tiempo.ℓóes la
distanciaentrelaparada𝑠ylaparada𝑠 + 1,quealsumarlasentreganladistanciatotalrecorrida𝐿para
laruta𝑅(verFigura19).
4.4.2 Funcionesobjetivoyevaluacióndeaptitud
El POMOes formuladoproponiendoun vector condos funciones objetivo en conflicto𝔽 = 𝑓", 𝑓* , la
primerafunciónrepresentaelcostoasociadoalaoperacióndeunaflotadevehículosdediferentestipos
establecidos para cubrir un conjunto de viajes necesarios en una ruta específica, el cual debe ser
minimizadocomoobjetivodelproblema.Porotrolado,tambiénsedeseaminimizarlafunción𝑓*lacual
evalúalapérdidadelacalidaddelserviciocuandolademandadepasajerosnosepuedesatisfacerencada
periododetiempo.
Figura19.Perfildecargaparaunarutaconseisparadas𝑠$, 𝑖 = 1, … ,6,unacargamáximade250pasajerosen laterceraparada,unacapacidaddevehículostotaliguala200yunfactordecarga𝐿𝐹* = 75%.𝐿𝑄O = 100indicaqueenlaterceraparadaseestánperdiendocienpasajerosyaquenopuedensertransportadosporlaflotaasignada.

56
Laecuaciónpara𝑓" (verCapítulo2sección2.6)consisteenlasumatoriadetodos loscostosparacada
vehículoasignadoaunviaje,elcualescalculadodependiendodelcalendario(horario)yelcostodelas
variablesdependendeltipodevehículo.𝑓*indicalacantidaddepasajerosporkilómetroquenopueden
sertransportadosporlaflotillaquedebecircularencadaperiododetiempo(verFigura19).
Losvaloresdeaptitudqueentreganlasfuncionessonnormalizados,debidoaqueesposibleconocerel
costomáximodeoperaciónalseleccionarúnicamentelosvehículosmáscostososdisponiblesparacubrir
todos los viajes del calendario, por otra parte, cuando se seleccionan solo los vehículos con menor
capacidad,lapérdidadepasajerosserálamásaltaposibleparaunconjuntodevehículosdisponibles.
4.4.3 Operadoresgenéticos
Inicialización de la población: el conjunto de individuos inicial (población) es generado de manera
aleatoria asignando diferentes tipos de vehículos disponibles (proporcionados como parámetro de
entradadelalgoritmo),teniendoencuentaeltamañodelhorariocalculadopreviamenteyladistribución
delosceros,despuésdeestoseprocedeadistribuirlosindividuosenunamallatoroidal.
Selección: se realiza una selección por torneo para cada individuo y su correspondiente vecindario,
obteniendodosindividuosutilizadoscomosemillasparaelnuevomaterialgenético.Estetorneoutilizaun
rankingenfrentesydistanciadeapiñamientodesernecesarioparaelegiralosdosmejores.
Recombinación:seutilizaunaadaptacióndelmétodoclásico“𝑛 −pointcrossover”elcualserestringelos
puntosdondepuedecortareloperadorasololaubicaciónenlaqueseencuentranlosgenesconvalorde
cero.Estarestricciónseproponeconelfindepreservarelordendelosvehículosenperiodosdetiempo
quepresentanunbuenrendimientoyfomentarelelitismo(verFigura20).
Figura20.Métododerecombinaciónimplementado,modificacióndeltradicional“one-pointcrossover”.

57
Mutación:sedefinecomométododemutaciónunmecanismodeintercambio,enelqueseselecciona
𝜅 −genes, determinado de manera aleatoria una cantidad de valores a 𝑘$ entre 1 y el tamaño del
cromosomacomoposicionesenlasqueintercambiaráelvehículoasignadoporotro(dediferentetipo)
disponible(verFigura21).
Figura21.Métododemutaciónimplementado,conun𝑘 = 3(cantidaddegenesquepuedensermodificados).
Reemplazo:paracadaunadelasceldasdelamallatoroidalserealizauntorneoentrelospadres,loshijos
yelindividuo,elquepresenteunmejorrendimientoocuparáestelugarenlapoblaciónyseintegrarácon
𝒫Måendondecompetiráconlosindividuos,queseencuentranalmacenadospreviamente,porunlugar
enel conjuntode individuosnodominados.Porúltimo, cuando seevalué la totalidadde lapoblación
(individuo por individuo) se procede a realizar una selección aleatoria de 𝒫Må individuos que serán
eliminadosyreemplazadosporlosalmacenadosen𝒫Må(verFigura22).
Figura 22. Ejemplo de la representación de una solución (cromosoma) para un caso con tres tipos de vehículosdiferentesyuntotaldeseisviajesentresperiodosdetiempo.Etapasdereproducciónparaunalgoritmocelularasíncrono.

58
Capítulo5. Resultadosexperimentales
Paralograrencontrarunasolución(ouna“buena”aproximación)paraunPOMO,sehandesarrolladoun
número considerabledemétodos y algoritmosdurantedécadas, entre estos se encuentran losAE los
cuálesproducenunconjuntodesolucionesnodominadasqueseaproximanalfrentedePareto(conjunto
desolucionesóptimoparaunPOMO)paraproblemascondosomásobjetivos.Elaumentodelinteréspor
este tipo de métodos incrementó la necesidad de diseñar mecanismos que permitan comparar los
resultados entregados por dos algoritmos y determinar cuál presentó unmejor rendimiento. Esto es
complicadodebidoaquelosAEMOnoproducenunnúmeroescalarcomoindicadordeaptitud,elcual
puedesertratadocondiversosmétodosestadísticos.Encontraparte,entreganunconjuntodesoluciones
nodominadas(puntosenelespacioobjetivo)comoresultado(KnowlesyCorne,2002),porlotantosehan
propuestonumerosasmétricasdecomparaciónderendimientocomoindicadoresdecalidad,permitiendo
lacomparaciónentreconjuntosobtenidosmediantelaimplementacióndeAEMO.
EnelCapítulo3seintroducendosconceptosclavesparaelusodeestetipodemétricas:laproximidadal
frentedeParetoyladiversidaddelconjuntosolución,variosautoresproponentresobjetivosenlosque
debenenfocarselosmétodosdesoluciónparaunPOMO(Okabeetal.,2003;Zitzleretal.,2000):
• MinimizarladistanciaentreelvectordesolucionesnodominadasyelfrentePareto(𝒫¦),enotras
palabras,sebuscaestarlomáscercaposibledelasoluciónóptima(convergencia).
• Obtener una buena (uniforme de preferencia) distribución de las soluciones del conjunto no
dominadoenelespacioobjetivo(diversidad).
• Maximizarlacardinalidaddelconjuntosolución(cantidaddesolucionesnodominadas)
Lasmétricaspuedenserunariasobinarias(m),enfuncióndecuantosconjuntossoluciónpuedenevaluar
simultáneamente,evaluandoalguno(s)de los trescriteriosantesmencionados, (Riquelmeetal.,2015)
listanuntotalde54métricasdiferentes,citadasentre2005y2013.
Lapreguntaquesurgees¿Cuántasocuálesmétricasderendimientosedebenutilizar?apoyadoenel
mismoestudio, se examinó las diezmétricasmásutilizadas conel fin de seleccionarun conjuntoque
evaluélostrescriteriosderendimientoypermitacompararlosresultadosobtenidosdedosalgoritmos
diferentes.

59
Enestecapítulosedescribeeldiseñodelosexperimentosimplementados,asícomolosindicadoresde
calidad (métricasde rendimiento)utilizadosparaevaluareldesempeñodel algoritmogenético celular
(AGC)propuesto.Porúltimo,sepresentanlosresultadosexperimentalesjuntoaunadiscusiónentorno
alanálisisdelosmismos.
5.1 Indicadoresdecalidad(métricasderendimiento)
Antes de describir las métricas utilizadas para evaluar el rendimiento del algoritmo propuesto, es
importanterevisarlosconceptosdescritosenelCapítulo3.
Zitzleretal.(2003)definenunamétricaderendimientocomo:
Unindicadordecalidad𝐼deorden𝑚esunafunción𝐼:ℙ. → ℝ,lacualasignaparacadaconjuntoℙ =
[𝒫", … , 𝒫.]de𝑚conjuntosdeaproximación,unvalorreal𝐼 𝒫", … , 𝒫. .Esposibleclasificarlasmétricas
derendimientoentrescategorías(Okabeetal.,2003;Riquelmeetal.,2015):
• Métricasdecardinalidad:lacardinalidaddeunconjuntosoluciónℙserefierealacantidadde
soluciones𝒫existentes.
• Métricasdeexactitud:estetipodemétodosevalúanelniveldeconvergenciadeun𝒫,esdecir,
indicacuantadistanciasepara𝒫de𝒫¦ siesteúltimoesconocido,delocontrarioseutilizaráun
𝒫B (regularmentecalculadodeformaexperimental)comoreferencia(Hipervolumen,“Twoset
coverage”,indicador−𝜖).
• Métricasdediversidad:estetipodeindicadorevalúaladistribuciónyextensióndelassoluciones
en𝒫,aunquesondostérminosquepuedensonarmuysimilares, ladistribuciónrepresenta la
distancia relativa entre las soluciones no dominadas, mientras que la extensión se refiere al
espacioquecubreunasoluciónen𝒫(“Spacing”,“Spread”,Hipervolumen).
5.1.1 Espaciadoypropagación
Elindicadordecalidadconocidocomoespaciado(Schott,1995),másconocidocomo“spacing”,esuna
métrica evalúa la distribución de las soluciones no dominadas obtenidas mediante un AEMO en un

60
conjunto𝒫,calculandolavarianzadeladistanciarelativaentredossolucionesconsecutivas.Escalculada
enelespacioobjetivo,comounamétricaunaria,delasiguienteforma:
𝐼¥ =1𝒫
(𝑑$ − 𝑑)*𝒫
$(" (35)
𝑑$ = min%
𝑢"$ − 𝑢"% + 𝑢*$ − 𝑢*
% (36)
𝐼¥calculaladesviaciónestándardelosvaloresde𝑑$ (𝑑eselpromediodelasdistanciasmostradasenla
Figura23),porlotanto,unconjunto𝒫conmenor“spacing”esconsideradomejor,debidoaquesupone
unadistribuciónuniformedelassoluciones.
Figura23.Distanciasentrelassolucionesdeun𝒫.
Lamétricadepropagaciónproponelainclusióndelassolucionesqueseubicanenlosextremosdelfrente
Paretoparaevaluarlaextensióndelassolucionessobre𝒫¦ (Deb, 2001; Debetal. , 2002).𝐼∆o“spread”
emplealosmismosvaloresde𝑑$ y𝑑utilizadospor𝐼¥ademásdeladistanciaentrelosextremosdelfrente
deParetoylasoluciónen𝒫máscercana(𝑑,u)paralas𝑛funcionesobjetivo(verFigura24).
𝐼∆ =𝑑,u'
,(" + 𝑑$ − 𝑑𝒫$("
𝑑,u',(" + 𝒫 𝑑
(37)
Elindicadortomaelvalordecero𝐼∆ = 0paraunadistribuciónidealqueincluyelosextremosdelfrente
deParetoenelconjunto𝒫.Porlotanto,cuandounalgoritmocalculaunconjuntoconunvalorpequeño

61
de𝐼∆esposibleencontrarunamejordiversidaddelassolucionesnodominadas,dadoquelaextensión
delasmismasalolargodelfrenteesbuenaencomparaciónconotro𝒫queobtengavaloresaltospara𝐼∆.
Figura24.Distanciasentrelassolucionesdeun𝒫,incluidaslasdistanciasentrelosextremosdelfrentedeParetoylassolucionesmáscercanas.
5.1.2 Hipervolumen
Esteindicadordecalidadcalculalaregión𝑛 −dimensionalencerradaentreelpuntoquerepresentauna
soluciónnodominadaenelespacioobjetivoyunpuntode referencia𝑊 (ZitzleryThiele,1999). Siel
conjuntoaproximaciónestámuycerca(distancia)de𝒫¦ aumentaelvalordeesteindicador.Porotraparte,
siladiversidad(distribuciónydispersión)de𝒫presentaunbuenrendimiento,seincrementael𝐼ö÷.Por
lotanto,unconjuntosolución𝒫queobtengaelvalormásaltode𝐼ö÷ esconsideradomejor,debidoaque
elvalormásalto(valoróptimo)deestamétricaseobtienealevaluarelfrentedePareto.
Paracalcularelhipervolumenesnecesariocolocarlassolucionesenelespacioobjetivoyelegirunpunto
𝑊quenosearebasadoporningunasoluciónfactible(p.Ej.construirunvectorcon lospeoresvalores
posiblesdelasfuncionesobjetivo).Unhipercubo(𝐻𝐶,)esconstruidoparacadasoluciónutilizandocomo
esquinasdereferenciaelpuntodelasoluciónyelpuntodereferencia(verFigura25).Porúltimo,serealiza
launióndeestoshipercubosyseprocedeacalcularelhipervolumen,matemáticamente:
𝐼ö÷ = volumen 𝐻𝐶,
𝒫
,("
(38)

62
Figura25.Elhipervolumenencerradoporlassolucionesquepertenecenalconjuntodesolucionesnodominado𝒫"yelpunto𝑊(izquierda).Comparaciónentreelhipervolumenconstruidopor𝒫"y𝒫*(derecha).
Estamétricaessusceptiblea laescaladelasfuncionesobjetivo,por loqueserecomiendautilizarlaen
espaciosobjetivonormalizados.Paraelcasodedosfuncionesobjetivo(𝑛 = 2)secalculaeláreadeun
rectángulo,construidoalutilizarlalínearectaentreelpuntoy𝑊comodiagonalprincipal(verFigura25).
5.1.3 Cubrimientoentredosconjuntos
ZitzleryThiele(1998)proponenunindicadordecalidadbasadoenelcubrimientodeconjuntos(“Twoset
coverage”),utilizadoparaevidenciarquétantolosresultadosdeunalgoritmodominanalosresultados
deotro,enotraspalabras,puedeestimarelporcentajedesoluciones,calculadoporunalgoritmo,que
dominanalassolucionesdeotro.Estamétricaproveeunacomparaciónrelativaentredosconjuntosde
vectoresdedecisión𝑋©,𝑋©© ∈ Ωbasadoensurelacióndedominanciadelasiguientemanera:
𝐼�¥x 𝑋©, 𝑋©© =𝑎©© ∈ 𝑋©©; ∃𝑎© ∈ 𝑋©: 𝑎© ≽ 𝑎©©
𝑋©© (39)
Elvalorde𝐼�¥x 𝑋©, 𝑋©© = 1representaquetodaslassolucionesen𝑋©©sondominadasosonigualesa𝑋©.
Porotraparte,elcasocuandoningunodelospuntosen𝑋©©soncubiertospor𝑋©,𝐼�¥x 𝑋©, 𝑋©© = 0.Ambos
𝐼�¥x 𝑋©, 𝑋©© y𝐼�¥x 𝑋©©, 𝑋© debenserconsideradosparaunaevaluaciónderendimiento,debidoaque

63
𝐼�¥x 𝑋©, 𝑋©© noesnecesariamenteiguala1 − 𝐼�¥x 𝑋©©, 𝑋© .Esteindicadorbinarioesbastanteaceptado
paracomparardosconjuntos,aunquenoreflejaenquémedidaunoesmejorqueelotro(verFigura26).
Figura26.Ejemplodelainteraccióndedosconjuntosdesoluciones𝒫"y𝒫*ysusposiblesrelacionesdedominancia.
5.1.4 Indicador−𝝐
Zitzleretal.(2003)introducenlamétrica𝐼ú,esteindicadorbinariopermitecalcularunfactor𝜖queinduce
unarelacióndequétantounconjuntodesolucionesespeorqueotro.EntoncesparaunPOMOcon𝑛
objetivosenconficltoaminimizar𝔽(𝑍©) → ℝ',unvectorobjetivo𝑍© = 𝑧"© , … , 𝑧'© sedicequeesdominado
en factor𝜖por𝑍©© = 𝑧"©©, … , 𝑧'©© ,escritode lasiguiente forma:𝑍© ≽ú 𝑍©©, siysolosiparaun𝜖 > 0 se
cumple:
∀1 ≤ 𝑖 ≤ 𝑛: 𝑧$© ≤ 𝜖. 𝑧$©© (40)
Esposibledefinirelindicador−𝜖(𝐼ú)como:
𝐼ú 𝒫", 𝒫* = infú∈ℝ
∀𝑍©© ∈ 𝒫*∃𝑍© ∈ 𝒫": 𝑍© ≽ú 𝑍©© (41)
Entoncesparadosconjuntosdeaproximación𝒫", 𝒫* ∈ Ω,𝐼ú 𝒫", 𝒫* esigualalmínimovalorde𝜖talque
paracualquiersoluciónen𝒫*existealmenosunasoluciónen𝒫",multiplicadapor𝜖,quenoespeoral
considerar todos los𝑛 objetivos. Este tipo demétrica es relativamente simple de calcular en tiempo
𝑂(𝑛 𝒫" 𝒫* )delasiguientemanera(Zitzleretal.,2003):
𝐼ú 𝒫", 𝒫* = maxþÿÿ∈𝒫!
minþÿ∈𝒫"
max"#$#'
𝑧$©
𝑧$©© (42)
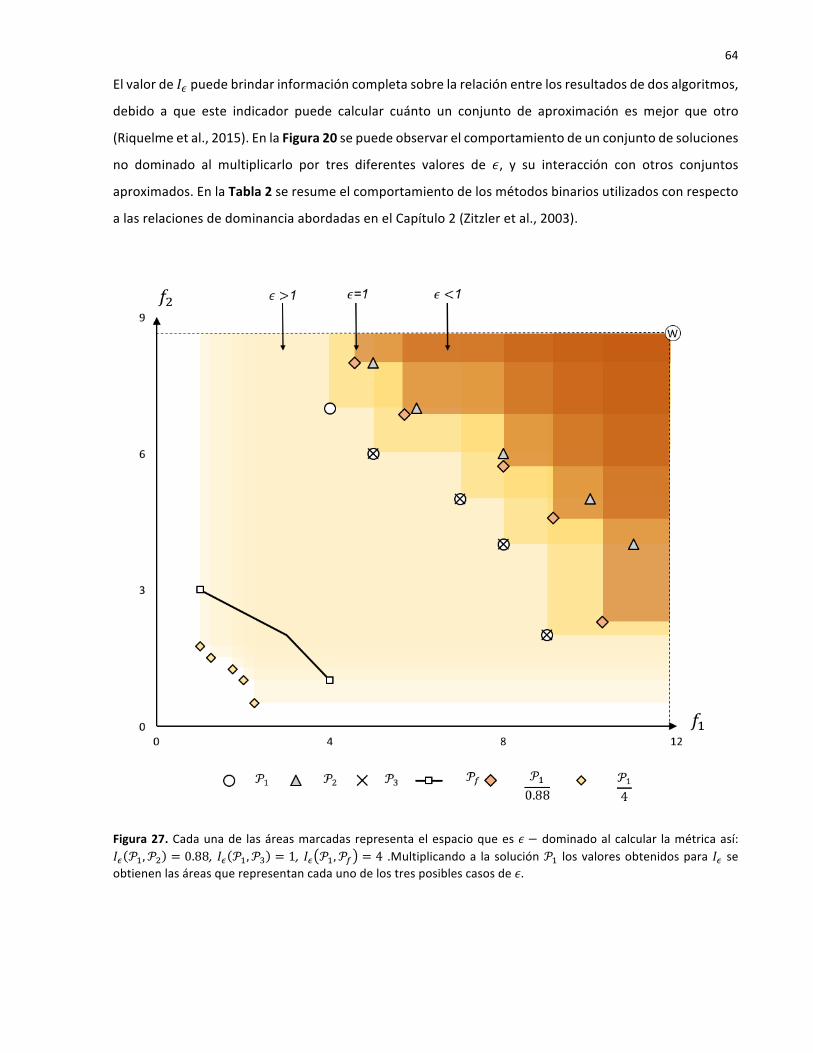
64
Elvalorde𝐼ú puedebrindarinformacióncompletasobrelarelaciónentrelosresultadosdedosalgoritmos,
debido a que este indicador puede calcular cuánto un conjunto de aproximación es mejor que otro
(Riquelmeetal.,2015).EnlaFigura20sepuedeobservarelcomportamientodeunconjuntodesoluciones
no dominado al multiplicarlo por tres diferentes valores de 𝜖, y su interacción con otros conjuntos
aproximados.EnlaTabla2seresumeelcomportamientodelosmétodosbinariosutilizadosconrespecto
alasrelacionesdedominanciaabordadasenelCapítulo2(Zitzleretal.,2003).
Figura27.Cadaunade lasáreasmarcadasrepresentaelespacioquees𝜖 −dominadoalcalcular lamétricaasí:𝐼ú 𝒫", 𝒫* = 0.88,𝐼ú 𝒫", 𝒫O = 1,𝐼ú 𝒫", 𝒫< = 4 .Multiplicandoa la solución𝒫" losvaloresobtenidospara𝐼ú seobtienenlasáreasquerepresentancadaunodelostresposiblescasosde𝜖.
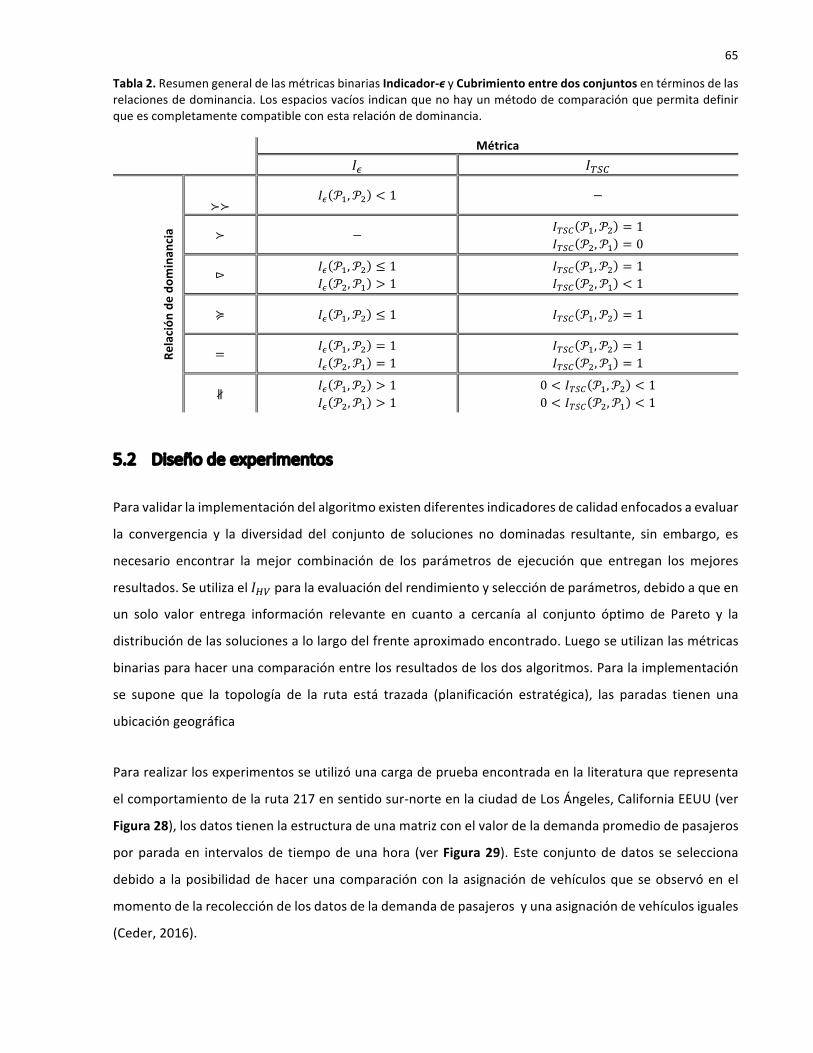
65
Tabla2.ResumengeneraldelasmétricasbinariasIndicador-ϵyCubrimientoentredosconjuntosentérminosdelasrelacionesdedominancia.Losespaciosvacíosindicanquenohayunmétododecomparaciónquepermitadefinirqueescompletamentecompatibleconestarelacióndedominancia.
Métrica
𝐼ú 𝐼�¥x Re
lación
dedo
minan
cia
≻≻𝐼ú 𝒫", 𝒫* < 1 −
≻ − 𝐼�¥x 𝒫", 𝒫* = 1𝐼�¥x 𝒫*, 𝒫" = 0
⊳ 𝐼ú 𝒫", 𝒫* ≤ 1𝐼ú 𝒫*, 𝒫" > 1
𝐼�¥x 𝒫", 𝒫* = 1𝐼�¥x 𝒫*, 𝒫" < 1
≽ 𝐼ú 𝒫", 𝒫* ≤ 1 𝐼�¥x 𝒫", 𝒫* = 1
= 𝐼ú 𝒫", 𝒫* = 1𝐼ú 𝒫*, 𝒫" = 1
𝐼�¥x 𝒫", 𝒫* = 1𝐼�¥x 𝒫*, 𝒫" = 1
∦ 𝐼ú 𝒫", 𝒫* > 1𝐼ú 𝒫*, 𝒫" > 1
0 < 𝐼�¥x 𝒫", 𝒫* < 10 < 𝐼�¥x 𝒫*, 𝒫" < 1
5.2 Diseñodeexperimentos
Paravalidarlaimplementacióndelalgoritmoexistendiferentesindicadoresdecalidadenfocadosaevaluar
la convergencia y la diversidad del conjunto de soluciones no dominadas resultante, sin embargo, es
necesario encontrar la mejor combinación de los parámetros de ejecución que entregan losmejores
resultados.Seutilizael𝐼ö÷ paralaevaluacióndelrendimientoyseleccióndeparámetros,debidoaqueen
un solo valor entrega información relevante en cuanto a cercanía al conjunto óptimo de Pareto y la
distribucióndelassolucionesalolargodelfrenteaproximadoencontrado.Luegoseutilizanlasmétricas
binariasparahacerunacomparaciónentrelosresultadosdelosdosalgoritmos.Paralaimplementación
se supone que la topología de la ruta está trazada (planificación estratégica), las paradas tienen una
ubicacióngeográfica
Pararealizarlosexperimentosseutilizóunacargadepruebaencontradaenlaliteraturaquerepresenta
elcomportamientodelaruta217ensentidosur-norteenlaciudaddeLosÁngeles,CaliforniaEEUU(ver
Figura28),losdatostienenlaestructuradeunamatrizconelvalordelademandapromediodepasajeros
porparadaen intervalosde tiempodeunahora (verFigura29). Esteconjuntodedatos se selecciona
debidoa laposibilidaddehacerunacomparacióncon laasignacióndevehículosqueseobservóenel
momentodelarecoleccióndelosdatosdelademandadepasajerosyunaasignacióndevehículosiguales
(Ceder,2016).
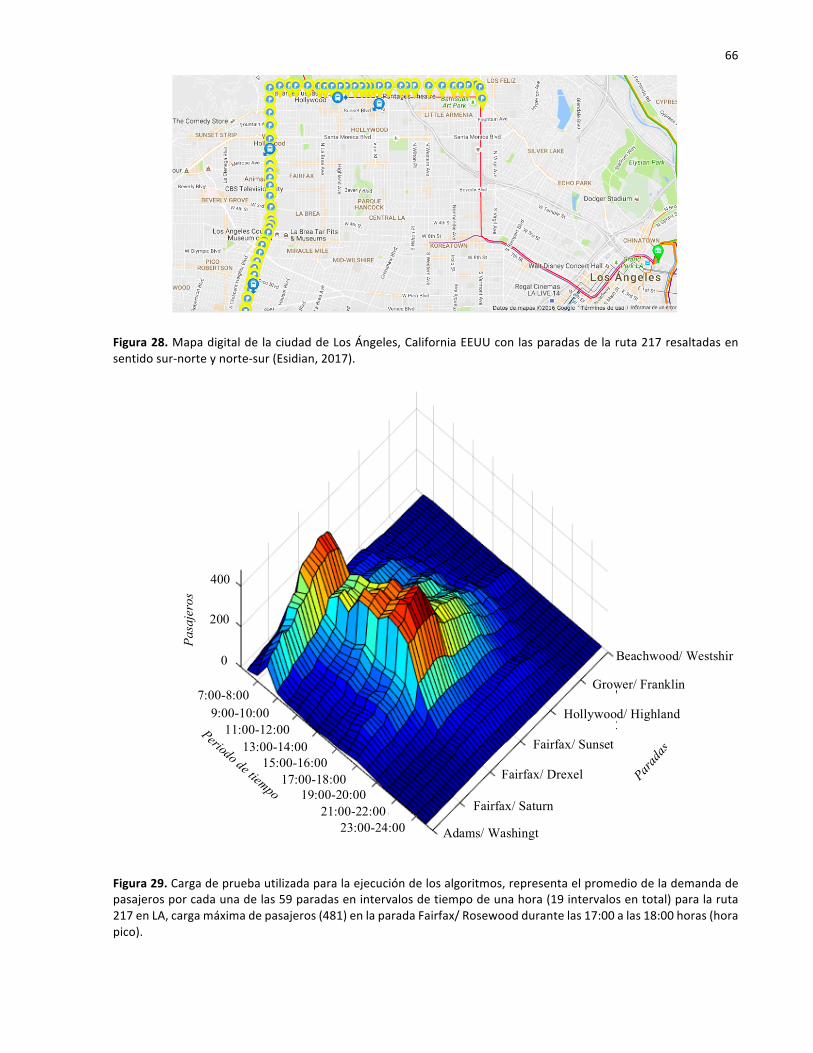
66
Figura28.MapadigitaldelaciudaddeLosÁngeles,CaliforniaEEUUconlasparadasdelaruta217resaltadasensentidosur-norteynorte-sur(Esidian,2017).
Figura29.Cargadepruebautilizadaparalaejecucióndelosalgoritmos,representaelpromediodelademandadepasajerosporcadaunadelas59paradasenintervalosdetiempodeunahora(19intervalosentotal)paralaruta217enLA,cargamáximadepasajeros(481)enlaparadaFairfax/Rosewooddurantelas17:00alas18:00horas(horapico).
Pasajeros
400
200
0
7:00-8:00 9:00-10:00
11:00-12:00 13:00-14:00
15:00-16:00 17:00-18:00
19:00-20:00 21:00-22:00
23:00-24:00 Adams/ Washingt
Fairfax/ Saturn
Fairfax/ Drexel
Fairfax/ Sunset
Hollywood/ Highland
Grower/ Franklin
Beachwood/ Westshir

67
[email protected],4GBRAM1.6GHzDDR3consistema
operativo64bitmacOSSierraversión10.12.1.
Eldesempeñodelaplanificacióntácticadeltransportepúblicodependedelascaracterísticaspropiasdel
problema,losmétodosdesoluciónylosparámetrosdelalgoritmoseleccionado.Porlotanto,esnecesario
realizardiferentescombinacionesyanálisisestadísticosquepermitaninterpretarlosresultados,validando
lashipótesis.ComosedescribióenelCapítulo4losalgoritmosevolutivosconstandeseccionesqueoperan
condiferentesprobabilidadesdeelección(recombinación,mutaciónoselección)ademásdeelementos
de tamaño variable (población, torneo de selección o conjunto de individuos no dominados para
retroalimentación)queafectandirectamenteenelcomportamientodelalgoritmo.
Losprimerosparámetrosparaanalizarsonlaprobabilidadderecombinación𝑃Qymutacion𝑃.,porlocual
dosposiblespadresosemillaspuedenonocrearnuevomaterialgenéticoenfunciónde𝑃Q,delamisma
maneraestadescendenciapuedepresentaronomutacionesestocásticasenfunciónde𝑃..
Paraelalgoritmogenéticocelular(AGC)propuestoserealizan30ejecucionesindependientescon10000
evaluaciones de calidad de los individuos para las combinaciones posibles entre probabilidades de
recombinaciónymutación,en total seobtienen resultados significativosparaun intervalode𝑃B y𝑃.
diferentes, desde 0.15 hasta 1 con incrementos de 0.05, para un total de 324 combinaciones de
parámetrosdiferentes(verTabla3).Seejecutaentoncesuntotalde9720vecescadaalgoritmoyseevalúa
elrendimientodecadafrenteaproximadoresultantemediante𝐼ö÷.
Tabla3.Parámetrosdeconfiguracióninicialesparaelalgoritmogenéticocelular.
Condicióndeparada 10000evaluacionesdecalidaddelindividuoTamañodelapoblación 100individuos(10x10)Tamañodelvecindario 8vecinoscircundantesSelección TorneobinarioRecombinación Cruzamiento(posiblespuntosdecorteúnicamenteenaliniciodecadalapso)𝑃Q [0.15,1]Mutación Intercambioaleatorio𝑃. [0.15,1]Reemplazo Reemplazoporrankingdedominanciay/odistanciadeapiñamientoEstimadordedensidad DistanciadeapiñamientoRetroalimentación 20individuos
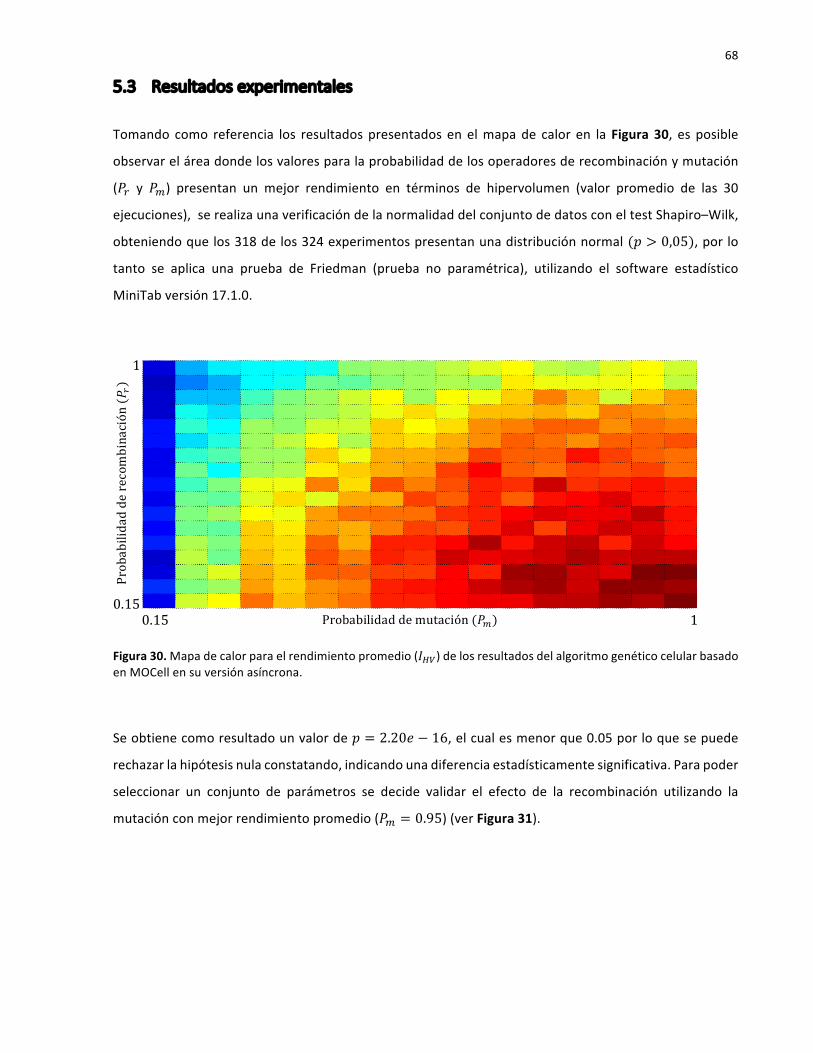
68
5.3 Resultadosexperimentales
Tomando como referencia los resultadospresentados en elmapade calor en laFigura 30, es posible
observareláreadondelosvaloresparalaprobabilidaddelosoperadoresderecombinaciónymutación
(𝑃Q y 𝑃.) presentan un mejor rendimiento en términos de hipervolumen (valor promedio de las 30
ejecuciones),serealizaunaverificacióndelanormalidaddelconjuntodedatosconeltestShapiro–Wilk,
obteniendoquelos318delos324experimentospresentanunadistribuciónnormal(𝑝 > 0,05),porlo
tanto se aplica una prueba de Friedman (prueba no paramétrica), utilizando el software estadístico
MiniTabversión17.1.0.
Figura30.Mapadecalorparaelrendimientopromedio(𝐼ö÷)delosresultadosdelalgoritmogenéticocelularbasadoenMOCellensuversiónasíncrona.
Seobtienecomoresultadounvalorde𝑝 = 2.20𝑒 − 16,elcualesmenorque0.05porloquesepuede
rechazarlahipótesisnulaconstatando,indicandounadiferenciaestadísticamentesignificativa.Parapoder
seleccionar un conjunto de parámetros se decide validar el efecto de la recombinación utilizando la
mutaciónconmejorrendimientopromedio(𝑃. = 0.95)(verFigura31).
Probabilidaddemutación(𝑃.)
Probabilidadderecombinación(𝑃
Q)
1
1 0.15 0.15

69
Figura31.Degradacióndelpromediode𝐼ö÷paralas342combinacionesdeparámetrosparaelalgoritmogenéticocelular(𝑃Qy𝑃.).
DespuésdeverificarlacombinacióndeparámetrosadecuadaparaelAGCseseleccionanuna𝑃𝑚 = 0.95
y𝑃𝑟 = 0.3,dadoquetieneunrendimientopromediodel98.3%enbasealamejorsoluciónencontrada
enelprimerexperimento(verFigura30)yenelsegundo(verFigura32)generóelvalordehipervolumen
máximoencontradoademásdelrendimientopromediomásalto.
Figura32.Impactodelavariacióndelaprobabilidadderecombinaciónconunmismovalorde𝑃..
EnlaFigura33semuestraelrendimientoentérminosde𝐼ö÷ delAGCconlosparámetroselegidospara
30ejecucionesindependientes,sebuscaevidenciaruncomportamientoqueincrementeelvalorde𝐼ö÷
encadaiteración,yaqueestádemostradoqueelvalormáximoposibleeselcorrespondientealfrentede
Pareto(Zitzleretal.,2003).
0,80,820,840,860,880,90,920,940,960,981
Pr=0,2-Pm=0,95
Pr=0,2-Pm=0,7
Pr=0,3-Pm=0,65
Pr=0,1-Pm=0,8
Pr=0,5-Pm=0,75
Pr=0,4-Pm=0,75
Pr=0,1-Pm=0,7
Pr=0,2-Pm=0,55
Pr=0,15-Pm
=0,5
Pr=0,45-Pm
=0,75
Pr=0,3-Pm=0,45
Pr=0,1-Pm=0,45
Pr=0,4-Pm=0,55
Pr=0,2-Pm=0,45
Pr=0,25-Pm
=0,35
Pr=0,6-Pm=0,7
Pr=0,45-Pm
=0,7
Pr=0,4-Pm=0,45
Pr=0,1-Pm=0,25
Pr=0,7-Pm=0,7
Pr=0,65-Pm
=0,65
Pr=0,35-Pm
=0,35
Pr=0,6-Pm=0,45
Pr=0,2-Pm=0,25
Pr=0,75-Pm
=1
Pr=0,15-Pm
=0,3
Pr=0,75-Pm
=0,5
Pr=0,35-Pm
=0,3
Pr=0,4-Pm=0,25
Pr=0,5-Pm=0,25
Pr=0,85-Pm
=0,75
Pr=0,7-Pm=0,4
Pr=0,9-Pm=0,55
Pr=0,9-Pm=0,8
Pr=0,55-Pm
=0,25
Pr=0,15-Pm
=0,2
Pr=0,75-Pm
=0,3
Pr=0,35-Pm
=0,15
Pr=0,85-Pm
=0,4
Pr=0,5-Pm=0,15
Pr=1-Pm=0,9
Pr=0,95-Pm
=0,95
Pr=0,95-Pm
=0,5
Pr=0,9-Pm=0,25
Pr=0,95-Pm
=0,35
Pr=1-Pm=0,3
Pr=1-Pm=0,2
Pr=1-Pm=0,15
Pr=0,8-Pm=0,1
Pm=0.95Pr=0.2
Pm=0.95Pr=0.3
Pm=0.95Pr=0.4 Pm=0.95
Pr=0.5 Pm=0.95Pr=0.6 Pm=0.95
Pr=0.7 Pm=0.95Pr=0.8 Pm=0.95
Pr=0.9
Pm=0.95Pr=1
0,37
0,38
0,39
0,4
0,41
0,42
0,43

70
Figura33.Rendimientodelhipervolumenen30ejecucionesindependientesdelalgoritmogenéticocelularpara100generaciones,esdecir,evaluarlamallatoroidalcompleta,individuoporindividuo.
ParaelalgoritmoNSGA-IIserealizóunprocedimientosimilarconunapoblaciónde100individuosy1000
iteracionesdelalgoritmocomocriteriodeparada,posteriormentesemodificólacantidaddeindividuosy
elnúmerodeiteracionesutilizandolamejorcombinaciónentremutaciónycruzamiento(verTabla4),sin
embargoparaelalgoritmoscelularnopresentómejoras,adiferenciadeNSGA-IIdondeconunapoblación
másgrandey/omayornúmerodeiteracionespresentabaciertamejoraentérminosdediversidad.
Tabla4.ParámetrosdeconfiguracióninicialesparaelalgoritmogenéticoNSGA-II.
Condicióndeparada 1000evaluacionesdecalidadTamañodelapoblación 100individuosSelección TorneobinarioRecombinación Cruzamiento(posiblespuntosdecorteúnicamenteeneliniciodecadalapso)𝑃Q [0.15,1]Mutación Intercambioaleatorio𝑃. [0.15,1]Reemplazo Reemplazoporrankingdedominanciay/odistanciadeapiñamientoEstimadordedensidad Distanciadeapiñamiento
10
20
30
0
20 40 60 80 100
0.44
0.42
0.4
0.38
0.36
0.34
Rendimiento(𝐼𝐻𝑉)

71
Despuésdedefinirlosparámetrosparacadaalgoritmoseestudiasucomportamientoenelespaciodelas
funcionesobjetivo, seanaliza los frentesaproximados resultantes,en términosde𝐼ö÷(convergenciay
dispersión)(verFiguras30y34).EnlaFigura35sepresentaladiferenciaentrelapoblacióninicialyla
últimaparaunaejecucióndelAGC.Conlafinalidaddeevidenciardemaneragráficacómoelalgoritmo
evoluciona la población conforme pasan las generaciones, realizando cambios en los individuos que
representanunamejoraenlacalidaddecadaunadelassolucionesfactiblesparacadafunciónobjetivo.
Figura34.Mapadecalorparaelrendimientopromedio(𝐼ö÷)delosresultadosdelalgoritmogenéticoNSGA-II.
Figura35.Conjuntodesolucionesobtenidoconelalgoritmogenéticocelular,correspondienteaun𝐼ö÷ = 0.4398encomparaciónalapoblacióninicialparaunaejecucióncon𝑃𝑟 = 0,95y𝑃𝑚 = 0,3.
Costodeoperación(01)
Pérdidadelacalidaddelservicio(0 7)
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,45 0,55 0,65 0,75
Lastpopulation FirstpopulationPoblacióninicialUltimapoblación
Probabilidaddemutación(𝑃.)
Probabilidadderecombinación(𝑃
Q)
1
1 0.15 0.15

72
EnlaFigura36sepresentaelconjuntodesolucionesnodominadasresultantesconmejorrendimiento
paralosdosalgoritmos,ademásdeunacomparaciónalunirlosconjuntosdesolucionesde30corridas
diferentesyencontrarlaaproximaciónalfrentedeParetoresultante.
Figura36.MejoraproximaciónalfrentedeParetoobtenidaparaMOCellyNSGAII,correspondienteaun𝐼ö÷=0.4398𝑦0.3866respectivamente(izquierda).MejoraproximaciónalfrentedeParetoobtenida,mediantelaunióndelas30solucionesencontradasencadaejecucióndelosalgoritmos(derecha).
Por último, se realiza una comparación entre los resultados de los dos algoritmos implementados
utilizandotantolasmétricasunariascomolasbinarias(verTabla5-7).
Tabla5.MétricasparaPOMOcomoindicadoresdecalidadcalculadasparaAGCyNSGA-II.Indicadordecalidad AGC NSGA-II
PuntosnodominadosMax 30 39Media 19.066 30.233𝜎 1.4840 3.4209
Spread(𝐼∆)Min 0.6186 0.7415Media 0.8112 1.0547𝜎 0.1097 0.1569
Hipervolumen(𝐼ö÷)Max 0.4398 0.3866Media 0.4193 0.3663𝜎 0.0069 0.0096
Tabla6.Comparaciónderesultadosaplicandolamétrica𝐼�¥x 𝑋©, 𝑋©© donde𝑋©y𝑋©©representanelalgoritmoenlafilayenlacolumnarespectivamente.
NSGA-II AGC
NSGA-II media − 0.0721max − 0.2857
AGC media 0.6613 −max 1 −
0
0,1
0,2
0,3
0,4
0,5
0,6
0,45 0,55 0,65 0,75
MOCell NSGAII
0
0,1
0,2
0,3
0,4
0,5
0,6
0,45 0,5 0,55 0,6 0,65 0,7 0,75
MOCell NSGAII
Costo deoperación (01)
Pérdida
delacalidadde
lservicio(0 7)

73
Tabla7.Comparaciónderesultadosaplicandolamétrica𝐼ú 𝐴, 𝐵 donde𝐴y𝐵representanelalgoritmoenlafilayenlacolumnarespectivamente.
NSGA-II AGC
NSGA-II media − 1.3035min − 1.0653
max − 2.1065
AGC media 1.0167 −min 0.9760 −
max 1.4250 −
5.4 Análisisderesultadosydiscusión
SepuedeobservarenlasFigura30y34unpatróndecomportamientocaracterísticoencadaalgoritmo,
sinembargo,esmásnotorioparaelAGC(verFigura30),enamboscasospredominaunaaltaprobabilidad
paraeloperadorgenéticodemutaciónyporelcontrariolaprobabilidadderecombinaciónquegeneraba
mejores resultados, tenía valores medios o bajos (ver Figura 31). Estos resultados resaltan las
características del problema y la representación utilizada (cromosoma), dado que es más sensible a
cambiosdrásticosproducidosporelmétododerecombinaciónypresentamejorasalintercambiarunoo
varios vehículos, pero dentro del mismo intervalo de tiempo. El AGC implementado presenta un
comportamiento similar en cada ejecución, corroborando que la elección de los parámetros para los
operadores genéticos utilizados afecta positivamente lasmanipulaciones estocásticas del cromosoma,
incrementandoelvalordelhipervolumenpromediodelconjuntoresultanteencadageneración,loque
implica mejores aproximaciones al frente Pareto tanto en convergencia como en diversidad de las
solucionesnodominadas,conformeavanzanlasgeneracionesenelAGC.
EnlaFigura35sepuedeapreciarcomoelAGCtienelacapacidaddemovergranpartedelapoblación
inicialendirecciónalfrentedePareto,aunquelacantidaddeindividuosdiferentessereduce(loqueno
necesariamentesignificaquedosindividuostenganelmismocromosoma).
AdiferenciadelAGCelalgoritmoNSGA-IIpuedeencontrarunnúmeromayordepuntosdiferentes(30%
másindividuosenpromedio).Sinembargo,ladispersiónoextensióndelassolucionesalolargodelfrente
aproximadoentregadoporAGCpresentaunrendimiento31%mejorenelcasopromedio.Paraelcasodel
hipervolumen,elalgoritmogenéticocelularpuedeencontrarunfrenteaproximado14%másgrandeen
promedio que los entregados por NSGA-II (ver Tabla 5), lo cual supone que AGC tiene un mejor
rendimientoentérminosdeconvergenciaalfrentedePareto,yaqueentérminosdediversidadpueden
sersimilares.

74
Paravalidarlainformaciónanterior,enlaTabla6sepresentanlascomparacionesrealizasentérminosde
cubrimientodeconjuntos,dondeseindicaqueAGCcubreodominaenpromedioel66%delassoluciones
deunconjuntocalculadoconNSGA-II(100%paraelcasomáximo),loquesuponeunaventajaentérminos
deconvergencia,aunquenoindicacuántooquétancercaestaACGdelfrentedePareto(Zitzleretal.,
2003).
Paradiscutirloanterior,enlaTabla8sepresentalosvaloresparaelindicador-𝜖demostrandoqueambos
algoritmosentreganresultadosquetienenunadistanciaalfrentedeParetomuysimilar,basadosenel
conceptopresentadoenla
Tabla2alevaluar30resultadosdiferentesparacadaalgoritmo,soloel9%delosresultadosdeAGCson
mejorodominacompletamentealgúnresultadodeNSGA-IIylosfrentesaproximadosrestantesnoson
comparables,estosepuedeevidenciarenlaTabla8,considerandoqueenpromedioambosalgoritmos
tienenun𝐼𝜖 > 1.
ParavisualizarloanteriordeunamaneragráficaenlaFigura37sepresentaunfrentedeParetoartificial,
construidoapartirdelaunióndelos300frentesaproximadosencontradosenelexperimentopresentado
enlaFigura32yelposteriorcálculodelconjuntonodominado,comparadocondosfrentesaproximados
calculadosporlosalgoritmos.
Figura37.ComparaciónentreunfrentedeParetoartificialydosconjuntosdesolucionesnodominadas.
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
0,45
0,5 0,55 0,6 0,65 0,7 0,75
Pérdidadelacalidaddelservicio
Costodeoperacion
AGC NSGA-II Frenteartificial

75
EntérminosdelrendimientodelalgoritmocomosoluciónalproblemaMVTTPpropuesto,secomparacon
losvehículosobservadosporunverificador.EnlaFigura38sepuedeobservarqueutilizandolosextremos
yunpuntointermediodeunfrenteaproximadocalculadoporAGC(valoresmásaltosdel indicadorde
densidad),ningunadelastresasignacionesresultasermáscostosa,aunquelacalidaddelserviciosevea
disminuida entre más económica sea la asignación. Es posible suponer entonces que mediante la
implementación del AE se pueden lograr horarios o calendarios que brinden un servicio de calidad a
diferentes niveles sin elevar los costos. El tomador de decisiones puede seleccionar alguna de las
soluciones no dominadas y evaluar su viabilidad únicamente en términos de la calidad de servicio,
teniendo en cuenta que el máximo costo puede no superar el umbral que tenían previamente
presupuestado.
Figura38.Ejemplodetrescalendariosdiferentes(fenotipo)alinterpretartrescromosomasubicadosenelespacioobjetivo(izquierda).Comparacióndelostreshorariosencontradosversuselcostodeoperacióndeunaasignaciónvehicularobservadaenlaruta217enLosÁngeles,CaliforniaEEUU.

76
Capítulo6. Conclusionesytrabajofuturo
Enresumen,elproblemaMVTTPseformulóconunenfoquedeoptimizaciónmultiobjetivo,estableciendo
dosobjetivosconinteresesconflictivoscomolosonreducirloscostosdeoperaciónyminimizarlapérdida
de la calidad de servicio. Se definieron restricciones basadas en los lineamientos de los ITS como la
frecuenciamínimadeoperaciónyelfactordecargaparacadalapso.
SediseñóeimplementóunalgoritmogenéticocelularbasadoenlaversiónasíncronadeMOCellqueutiliza
unmétodoanalíticoparaeldiseñodelcromosomadelosindividuos.Seutilizóunacargadepasajeroscon
59paradasdeunarutaenLosÁngeles,California,EEUUylospromediosdelflujodepasajeros(perfilde
carga)durante19intervalosdeunahora.Seejecutaronmásde500corridasindependientesdelalgoritmo
conparámetrosdiferentesenbuscadelacombinaciónadecuadadelosmismos,deigualmaneraconla
intención de comparar los resultados con un algoritmo genéticomultiobjetivo clásico se implementó
NSGA-II,realizandounmétododesintonizaciónsimilarparalacombinacióndeparámetros.
Es posible resaltar el buen desempeño del algoritmo genético de tipo celular para las condiciones y
característicasdelproblemapropuesto.Predominandosiempreunrendimientosuperiorenconvergencia
ydiversidadsobreNSGA-II,ambosoperandoconlosparámetrosquemejorrendimientoproporcionaban
paracadaejecución.Loquepermiteafirmarquelosalgoritmosgenéticosdetipocelularpuedenseruna
herramientaútilparaplanificacióntácticaensistemasdetransportepúblico.
El análisis experimental demostró la capacidad del algoritmo propuesto para encontrar diferentes
calendarios con asignación de vehículos diferentes para cubrir los viajes de una ruta especifica.
Encontrandolasmejorescompensacionesentrecalidaddeservicioparalospasajerosycostodeoperación
para los proveedores. Permitiendo el uso de diferentes restricciones y limitantes que pueden ser
implementadasporlostransportadores,yaqueesunmétodoflexiblecontiemposaceptablesenfunción
del horizonte temporal de las decisiones que implican la planificación táctica del transporte público
(mediano/cortoplazo)conlocualsecumpleelobjetivopropuestoparaestatesis.
Esposiblediseñareimplementarotrotipodeestrategiasuoperadoresgenéticosqueexplorenyexploten
elespaciodesolucionesdemejormaneraapartirde laexperienciaobtenidadelpresentetrabajo.Así
comohacermodificacionesdirectamentealoscalendariosquepuedanincrementarlacalidaddeservicio
sindañarelcostodeoperación(p.ej.dividirunintervaloacargodeunvehículograndeendosasignados
aminibuseseléctricos).Demodoquesemodifiqueelestiloaposterioridelalgoritmopropuestoporun
77
estilointeractivoquepuedabrindarsolucionesmáseficientes,calendariosmásefectivosymétodosde
optimizaciónmásrápidos.
Partiendo del trabajo realizado es posible modificar el problema planteado, modificando el objetivo
relacionadoconelcostodeoperación,detalmaneraquecobrerelevanciaelimpactoambientalgenerado
porelusodeenergíasnorenovablescomogasolinaogasóleo(diésel)para lossistemasdetransporte,
estodebidoaquesonunodelosprincipalesgeneradoresdegasesdeefectoinvernadero(GEI),p.ej.27%
deltotaldeGEI,ocupandoelsegundolugardespuésdelageneracióndeenergíaeléctrica(29%)parael
casodeEEUU (Environmental ProtectionAgency, 2017). Por lo tanto,mediantedecisiones logísticas y
operativassepuedereducirlosíndicesdecontaminaciónpartiendodesdeunaplaneacióntácticapensada
paratalfinalidad.
Unodelosposiblestrabajosfuturosbasadosenlapresentetesis,estáencaminadoenlainclusióndela
planificación operativa (calendarización de vehículos y del personal como conductores) dentro de un
mismo sistema, realizando así las cinco etapas completas para la planificación de transporte publico
descritaseneldocumento,suponiendoquelaetapadeplanificaciónestratégicaestáresuelta(trazadoy
todas lascaracterísticas físicasde la redderutas).Esta integraciónelevaríasignificativamenteelcosto
computacional y el reto de encontrar soluciones que satisfagan los objetivos en conflicto con una
compensaciónaceptable.
Comounalíneadetrabajofuturoadicionalseproponelainclusióndeincertidumbrecomoelusodecargas
dinámicasdepasajeros,dadoquelaintegracióndelibreríasjMetalconplataformasdedatosentiempo
realcomo“Spark” (Corderoetal.,2016) facilitanestetipode implementaciones.Esposibleampliarel
vectorobjetivoybuscarotro tipodecompensaciones,dependiendode lasnecesidadeso información
adicionaldeltomadordedecisiones,elcualpuedeimplementarotraheurísticacomobúsquedalocalpara
modificarlaestructuradelcalendarioyaumentarsurendimiento.

78
Literaturacitada
Alam,M.,Ferreira,J.,&Fonseca,J.(2016).IntelligentTransportationSystems.(M.Alam,J.Ferreira,&J.Fonseca,Eds.)(Vol.52).Cham:SpringerInternationalPublishing.https://doi.org/10.1007/978-3-319-28183-4
Alba,E.,&Dorronsoro,B.(2008).CellularGeneticAlgorithms.OperationsResearch/ComputerScienceInterfacesSeries(Vol.42).Boston,MA:SpringerUS.https://doi.org/10.1007/978-0-387-77610-1
Albino,V.,Berardi,U.,&Dangelico,R.M.(2015).SmartCities:Definitions,Dimensions,Performance,andInitiatives.JournalofUrbanTechnology,22(1),3–21.https://doi.org/10.1080/10630732.2014.942092
Baaj,M.H.,&Mahmassani,H.S.(1995).Hybridroutegenerationheuristicalgorithmforthedesignoftransitnetworks.TransportationResearchPartC:EmergingTechnologies,3(1),31–50.https://doi.org/10.1016/0968-090X(94)00011-S
Bianco,L.,Mingozzi,A.,&Ricciardelli,S.(1994).Asetpartitioningapproachtothemultipledepotvehicleschedulingproblem.OptimizationMethodsandSoftware,3(1–3),163–194.https://doi.org/10.1080/10556789408805563
Bielli,M.,Caramia,M.,&Carotenuto,P.(2002).Geneticalgorithmsinbusnetworkoptimization.TransportationResearchPartC:EmergingTechnologies,10(1),19–34.https://doi.org/10.1016/S0968-090X(00)00048-6
Ceder,A.(1984).Busfrequencydeterminationusingpassengercountdata.TransportationResearchPartA:General,18(5–6),439–453.https://doi.org/10.1016/0191-2607(84)90019-0
Ceder,A.(2007).PublicTransitPlanningandOperation.(Taylor&Francis,Ed.),Transport(1sted.).Burlington:Elsevier.https://doi.org/10.3846/16484142.2015.1114968
Ceder,A.(2016).Publictransitplanningandoperation :modeling,practiceandbehavior.(Taylor&Francis,Ed.)(2nded).BocaRaton,FL:CRCPress.
Chakroborty,P.(2003).Geneticalgorithmsforoptimalurbantransitnetworkdesign.Computer-AidedCivilandInfrastructureEngineering,18,184–200.https://doi.org/10.1111/1467-8667.00309
Chakroborty,P.(2004).BricsOptimalRoutingandSchedulinginTransportation :UsingGeneticAlgorithmtoSolveDifficultOptimizationProblems.Directions-IndianInstituteofTech-NologyKanpur,[S.l.].
Chamberlain,M.,&Wren,A.(1992).DevelopmentsandRecentExperiencewiththeBUSMANandBUSMANIISystems.InM.Desrochers&J.-M.Rousseau(Eds.),Computer-AidedTransitScheduling:ProceedingsoftheFifthInternationalWorkshoponComputer-AidedSchedulingofPublicTransportheldinMontréal,Canada,August19--23,1990(pp.1–15).Berlin,Heidelberg:SpringerBerlinHeidelberg.https://doi.org/10.1007/978-3-642-85968-7_1
Charnes,A.,&Cooper,W.W.(1961).ManagementModelsandIndustrialApplicationsofLinearProgramming.ManagementScience,4(1),63–64.https://doi.org/10.1002/nav.3800090109
Chew,J.S.C.,&Lee,L.S.(2012).AGeneticalAlgorithmforUrbanTransitRoutingProblem.International
79
JournalofModernPhysics:ConferenceSeries,9,411–421.https://doi.org/10.1142/S2010194512005491
Chvatal,V.(1979).AGreedyHeuristicfortheSet-CoveringProblem.MathematicsofOperationsResearch,4(3),233–235.https://doi.org/10.1287/moor.4.3.233
Coello,C.aC.,Lamont,G.B.,&Veldhuizen,D.aVan.(2007).EvolutionaryAlgorithmsforSolvingMulti-ObjectiveProblems.Design.Boston,MA:SpringerUS.https://doi.org/10.1007/978-0-387-36797-2
Cordero,J.A.,Nebro,A.J.,Barba-González,C.,Durillo,J.J.,García-Nieto,J.,Navas-Delgado,I.,&Aldana-Montes,J.F.(2016).DynamicMulti-ObjectiveOptimizationwithjMetalandSpark:ACaseStudy.InLectureNotesinComputerScience(includingsubseriesLectureNotesinArtificialIntelligenceandLectureNotesinBioinformatics)(Vol.10122LNCS,pp.106–117).https://doi.org/10.1007/978-3-319-51469-7_9
Costa,A.L.,Cunha,M.C.,Coelho,P.A.L.F.,&Einstein,H.H.(2016).ApplicationoftheSimulatedAnnealingAlgorithmforTransportInfrastructurePlanning.InX.-S.Yang,G.Bekda\cs,&M.S.Nigdeli(Eds.),MetaheuristicsandOptimizationinCivilEngineering(pp.235–253).Cham:SpringerInternationalPublishing.https://doi.org/10.1007/978-3-319-26245-1_11
Deb,K.(2001).Multi-objectiveoptimizationusingevolutionaryalgorithms,1,497.https://doi.org/10.1109/TEVC.2002.804322
Deb,K.,Pratap,A.,Agarwal,S.,&Meyarivan,T.(2002).Afastandelitistmultiobjectivegeneticalgorithm:NSGA-II.IEEETransactionsonEvolutionaryComputation,6(2),182–197.https://doi.org/10.1109/4235.996017
Deb,K.,Sindhya,K.,&Hakanen,J.(2016).Multi-ObjectiveOptimization.InDecisionSciences(Vol.24,pp.145–184).Taylor&FrancisGroup,6000BrokenSoundParkwayNW,Suite300,BocaRaton,FL33487-2742:CRCPress.https://doi.org/10.1201/9781315183176-4
Deb,K.,Thiele,L.,Laumanns,M.,&Zitzler,E.(2005).ScalableTestProblemsforEvolutionaryMultiobjectiveOptimization.InEvolutionaryMultiobjectiveOptimization(pp.105–145).London:Springer-Verlag.https://doi.org/10.1007/1-84628-137-7_6
Dorigo,M.,Birattari,M.,&Stutzle,T.(2006).Antcolonyoptimization.IEEEComputationalIntelligenceMagazine,1(4),28–39.https://doi.org/10.1109/MCI.2006.329691
Edgeworth,F.Y.(1881).MathematicalPsychics:AnEssayontheApplicationofMathematicstotheMoralSciences.(C.KeganPaulandCo,Ed.).Londres.
Eiben,A.E.(2003).MultiparentRecombinationinEvolutionaryComputing(pp.175–192).SpringerBerlinHeidelberg.https://doi.org/10.1007/978-3-642-18965-4_6
Eiben,A.E.,&Smith,J.E.(2015).IntroductiontoEvolutionaryComputing.Berlin,Heidelberg:SpringerBerlinHeidelberg.https://doi.org/10.1007/978-3-662-44874-8
EnriquePeñalosa.(2013).Porquélosautobusesrepresentanlademocraciaenacción|TEDTalk|TED.com.Recuperadoel18dejuliode2017,enhttps://www.ted.com/talks/enrique_penalosa_why_buses_represent_democracy_in_action?language=es
80
EnvironmentalProtectionAgency.(2017).InventoryofU.S.GreenhouseGasEmissionsandSinks:1990–2015.Recuperadodehttps://www.epa.gov/sites/production/files/2017-02/documents/2017_complete_report.pdf
Esidian.(2017).Rideschedules.Recuperadoel1deJuliode2017,enhttps://rideschedules.com/schedule.html?23467
Fan,W.,&Machemehl,R.B.(2008).Tabusearchstrategiesforthepublictransportationnetworkoptimizationswithvariabletransitdemand.Computer-AidedCivilandInfrastructureEngineering,23(7),502–520.https://doi.org/10.1111/j.1467-8667.2008.00556.x
Fishburn,P.C.(1974).ExceptionalPaper—LexicographicOrders,UtilitiesandDecisionRules:ASurvey.ManagementScience,20(11),1442–1471.https://doi.org/10.1287/mnsc.20.11.1442
Fisher,R.A.(1930).Thegeneticaltheoryofnaturalselection.Oxford:ClarendonPress.https://doi.org/10.5962/bhl.title.27468
Fores,S.,Proll,L.,&Wren,A.(1999).AnImprovedILPSystemforDriverScheduling.InN.H.M.Wilson(Ed.),Computer-AidedTransitScheduling:Proceedings,Cambridge,MA,USA,August1997(pp.43–61).Berlin,Heidelberg:SpringerBerlinHeidelberg.https://doi.org/10.1007/978-3-642-85970-0_3
Furth,P.G.,&Wilson,N.H.M.(1981).Settingfrequenciesonbusroutes:Theoryandpractice.TransportationResearchRecord:JournaloftheTransportationResearchBoard,818,1–7.
Glover,F.,Laguna,M.,&Marti,R.(2007).Principlesoftabusearch.ApproximationAlgorithmsandMetaheuristics,23,1–12.https://doi.org/10.1016/j.ejor.2004.08.004
Goldberg,D.(1989).GeneticAlgorithmsinSearch,OptimizationandMachineLearning.Addison-WesleyLongmanPublishingCo.,Inc.
Gordon,R.(2016).IntelligentTransportationSystems.Cham:SpringerInternationalPublishing.https://doi.org/10.1007/978-3-319-14768-0
Guzek,M.,Pecero,J.E.,Dorronsoro,B.,&Bouvry,P.(2014).Multi-objectiveevolutionaryalgorithmsforenergy-awareschedulingondistributedcomputingsystems.AppliedSoftComputing,24,432–446.https://doi.org/10.1016/j.asoc.2014.07.010
Hadas,Y.,&Shnaiderman,M.(2012).Public-transitfrequencysettingusingminimum-costapproachwithstochasticdemandandtraveltime.TransportationResearchPartB:Methodological,46(8),1068–1084.https://doi.org/10.1016/j.trb.2012.02.010
Haimes,Y.Y.,Lasdon,L.S.,&Wismer,D.A.(1971).OnaBicriterionFormulationoftheProblemsofIntegratedSystemIdentificationandSystemOptimization.IEEETransactionsonSystems,Man,andCybernetics,SMC-1(3),296–297.https://doi.org/10.1109/TSMC.1971.4308298
Hassold,S.,&Ceder,A.A.(2014).Publictransportvehicleschedulingfeaturingmultiplevehicletypes.TransportationResearchPartB:Methodological,67,129–143.https://doi.org/10.1016/j.trb.2014.04.009
Holland,J.H.(JohnH.(1992).Adaptationinnaturalandartificialsystems :anintroductoryanalysiswithapplicationstobiology,control,andartificialintelligence.MITPress.
81
Houghton,J.,Reiners,J.,&Lim,C.(2011).TransporteinteligenteCómomejorarlamovilidadenlasciudades.Recuperadodehttp://www-05.ibm.com/services/es/bcs/pdf/transporte-inteligente-como-mejorar-la-movilidad-en-las-ciudades.pdf
Ibarra-Rojas,O.J.,Delgado,F.,Giesen,R.,&Muñoz,J.C.(2015).Planning,operation,andcontrolofbustransportsystems:Aliteraturereview.TransportationResearchPartB:Methodological,77,38–75.https://doi.org/10.1016/j.trb.2015.03.002
Israeli,Y.,&Ceder,A.(1995).TransitRouteDesignUsingSchedulingandMultiobjectiveProgrammingTechniques.InComputer-AidedTransitScheduling:ProceedingsoftheSixthInternationalWorkshoponComputer-aidedSchedulingofPublicTransport(pp.56–75).https://doi.org/10.1007/978-3-642-57762-8_5
Jolliffe,J.K.,&Hutchinson,T.P.(1975).ABehaviouralExplanationoftheAssociationBetweenBusandPassengerArrivalsataBusStop.TransportationScience,9(3),248–282.https://doi.org/10.1287/trsc.9.3.248
Kirkpatrick,S.,Gelatt,C.D.,&Vecchi,M.P.(1983).OptimizationbySimulatedAnnealing.Science,220(4598),671–680.https://doi.org/10.1126/science.220.4598.671
Knowles,J.,&Corne,D.(2002).Onmetricsforcomparingnondominatedsets.InProceedingsofthe2002CongressonEvolutionaryComputation.CEC’02(Cat.No.02TH8600)(Vol.1,pp.711–716).IEEE.https://doi.org/10.1109/CEC.2002.1007013
Koutsopoulos,H.N.,Odoni,A.,&Wilson,N.H.M.(1985).Determinationofheadwaysasfunctionoftimevaryingcharacteristicsonatransitnetwork.ComputerSchedulingofPublicTransport,2(1),391–413.
Koza,J.,Keane,M.,Streeter,M.,Mydlowec,W.,Yu,J.,&Lanza,G.(2005).GeneticProgrammingIV:RoutineHuman-CompetitiveMachineIntelligence.(2006SpringerScience&BusinessMedia,Ed.)(Vol.5).NewYork:Springer-Verlag.https://doi.org/10.1007/b137549
Kwan,C.M.,&Chang,C.S.(2008).TimetableSynchronizationofMassRapidTransitSystemUsingMultiobjectiveEvolutionaryApproach.IEEETransactionsonSystems,Man,andCybernetics,PartC(ApplicationsandReviews),38(5),636–648.https://doi.org/10.1109/TSMCC.2008.923872
Li,J.(2002).FuzzyEvolutionaryApproachesforBusandRailDriverScheduling.TheUniversityofLeeds.
Li,Y.,Xu,W.,&He,S.(2013).Expectedvaluemodelforoptimizingthemultiplebusheadways.AppliedMathematicsandComputation,219(11),5849–5861.https://doi.org/10.1016/j.amc.2012.11.098
Luethi,M.,Weidmann,U.A.,&Nash,A.(2006).PassengerArrivalRatesatPublicTransportStations.InTransportationResearchBoard86thAnnualMeeting.WashingtonDC,UnitedStates:TransportationResearchBoard.
Mehr,H.S.,Rahnama,M.R.,&Shokouhi,M.A.(2016).OptimizationofMainPublicTransportPathsBasedonAccessibility—CaseStudy :Mashhad,Iran,19(1),114–128.
Nebro,A.J.,Durillo,J.J.,Luna,F.,Dorronsoro,B.,&Alba,E.(2009).MOCell:Acellulargeneticalgorithmformultiobjectiveoptimization.InternationalJournalofIntelligentSystems,24(7),726–746.https://doi.org/10.1002/int.20358

82
Newell,G.F.(1971).DispatchingPoliciesforaTransportationRoute.TransportationScience,5(1),91–105.https://doi.org/10.1287/trsc.5.1.91
Okabe,T.,YaochuJin,&Sendhoff,B.(2003).Acriticalsurveyofperformanceindicesformulti-objectiveoptimisation.InThe2003CongressonEvolutionaryComputation,2003.CEC’03.(Vol.2,pp.878–885).IEEE.https://doi.org/10.1109/CEC.2003.1299759
Osyczka,A.(1985).Multicriteriaoptimizationforengineeringdesign.InJ.S.Gero(Ed.),DesignOptimization(pp.193–227).AcademicPress.
Pareto,V.(1896).Coursd’économiepolitique.(F.Rouge,Ed.),Rouge,Lausanne(Vol.IandII).Lausana,Suiza:LibrairiedeI’Université.
Pattnaik,S.B.,Mohan,S.,&Tom,V.M.(1998).UrbanBusTransitRouteNetworkDesignUsingGeneticAlgorithm.JournalofTransportationEngineering,124(4),368–375.https://doi.org/10.1061/(ASCE)0733-947X(1998)124:4(368)
Potter,S.(2003).Transportenergyandemissions:urbanpublictransport.HandbookofTransportandtheEnvironment(HandbooksinTransport),247–262.
Quintero,J.A.(2005).Modelodeoptimizaciónparavehículosdetransportepúblicocolectivourbano.UniversidadNacionaldeColombiaSedeManizales.
Ramírez,S.,Hernandez,L.,&Varela,H.(2015).Diseñosderutasdetransportepúblico,1171–1181.
Rao,S.(1984).Multiobjectiveoptimizationinstructuraldesignwithuncertainparametersandstochasticprocesses.AIAAJournal,22(11),1670–1678.https://doi.org/10.2514/3.8834
Rao,S.S.(2009).Engineeringoptimization :theoryandpractice(4thed.).JohnWiley&Sons,Inc.
Riquelme,N.,VonLucken,C.,&Baran,B.(2015).Performancemetricsinmulti-objectiveoptimization.In2015LatinAmericanComputingConference(CLEI)(pp.1–11).IEEE.https://doi.org/10.1109/CLEI.2015.7360024
Schaffer,D.(1984).Someexperimentsinmachinelearningusingvectorevaluatedgeneticalgorithms.Nashville,Tennessee.
Schott,J.R.(1995).FaultTolerantDesignUsingSingleandMulticriteriaGeneticAlgorithmOptimization.MassachusettsInstituteofTechnology,Boston,MA.
Serafini,P.(1994).SimulatedAnnealingforMultiObjectiveOptimizationProblems.InG.H.Tzeng,H.F.Wang,U.P.Wen,&P.L.Yu(Eds.),MultipleCriteriaDecisionMaking:ProceedingsoftheTenthInternationalConference:ExpandandEnrichtheDomainsofThinkingandApplication(pp.283–292).NewYork,NY:SpringerNewYork.https://doi.org/10.1007/978-1-4612-2666-6_29
Shen,Y.,&Kwan,R.S.K.(2001).TabuSearchforDriverScheduling.InS.Voß&J.R.Daduna(Eds.),Computer-AidedSchedulingofPublicTransport(pp.121–135).Berlin,Heidelberg:SpringerBerlinHeidelberg.https://doi.org/10.1007/978-3-642-56423-9_7
UnitedNations.(2014).WorldUrbanizationProspects:The2014Revision,Highlights(ST/ESA/SER.A/352).NewYork,United.https://doi.org/10.4054/DemRes.2005.12.9
83
Verbas,I.,&Mahmassani,H.(2013).OptimalAllocationofServiceFrequenciesoverTransitNetworkRoutesandTimePeriods.TransportationResearchRecord:JournaloftheTransportationResearchBoard,2334,50–59.https://doi.org/10.3141/2334-06
Verbas,İ.,&Mahmassani,H.(2015).IntegratedFrequencyAllocationandUserAssignmentinMultimodalTransitNetworks.TransportationResearchRecord:JournaloftheTransportationResearchBoard,2498,37–45.https://doi.org/10.3141/2498-05
VonLücken,C.,Barán,B.,&Brizuela,C.(2014).Asurveyonmulti-objectiveevolutionaryalgorithmsformany-objectiveproblems.ComputationalOptimizationandApplications.https://doi.org/10.1007/s10589-014-9644-1
Washburn,D.,&Sindhu,U.(2010).HelpingCIOsUnderstand“SmartCity”Initiatives.Cambridge,MA:ForresterResearch,Inc.
Wierzbicki,A.P.(1980).TheUseofReferenceObjectivesinMultiobjectiveOptimization.MultipleCriteriaDecisionMakingTheoryandApplication,(August),468–486.https://doi.org/10.1007/978-3-642-48782-8_32
Wolpert,D.H.,&Macready,W.G.(1997).Nofreelunchtheoremsforoptimization.IEEETransactionsonEvolutionaryComputation,1(1),67–82.https://doi.org/10.1109/4235.585893
Yu,P.L.(1973).AClassofSolutionsforGroupDecisionProblems.ManagementScience,19(8),936–946.https://doi.org/10.1287/mnsc.19.8.936
Zadeh,L.(1963).Optimalityandnon-scalar-valuedperformancecriteria.IEEETransactionsonAutomaticControl,8(1),59–60.https://doi.org/10.1109/TAC.1963.1105511
Zavala,G.,Nebro,A.J.,Luna,F.,&Coello,C.A.C.(2015).Structuraldesignusingmulti-objectivemetaheuristics.Comparativestudyandapplicationtoareal-worldproblem.StructuralandMultidisciplinaryOptimization,(2016),1–22.https://doi.org/10.1007/s00158-015-1291-3
Zitzler,E.,Deb,K.,&Thiele,L.(2000).ComparisonofMultiobjectiveEvolutionaryAlgorithms:EmpiricalResults.EvolutionaryComputation,8(2),173–195.https://doi.org/10.1162/106365600568202
Zitzler,E.,&Thiele,L.(1998).Multiobjectiveoptimizationusingevolutionaryalgorithms—Acomparativecasestudy(pp.292–301).Springer,Berlin,Heidelberg.https://doi.org/10.1007/BFb0056872
Zitzler,E.,&Thiele,L.(1999).Multiobjectiveevolutionaryalgorithms:acomparativecasestudyandthestrengthParetoapproach.IEEETransactionsonEvolutionaryComputation,3(4),257–271.https://doi.org/10.1109/4235.797969
Zitzler,E.,Thiele,L.,Laumanns,M.,Fonseca,C.M.,&daFonseca,V.G.(2003).Performanceassessmentofmultiobjectiveoptimizers:ananalysisandreview.IEEETransactionsonEvolutionaryComputation,7(2),117–132.https://doi.org/10.1109/TEVC.2003.810758