Localización Óptima de Generación Distribuida en MEMORIA · Configuracion de circuitos...
86
MEMORIA Autor: Luis Gerardo Guerra Sánchez Director: Juan Antonio Martínez Velasco Convocatòria: Semestre Primavera Curso 2011-2012 Màster Interuniversitari UB-UPC d’Enginyeria en Energia Localización Óptima de Generación Distribuida en Sistemas de Distribución Trifásicos con Carga Variable en el Tiempo Utilizando el Método de Monte Carlo
Transcript of Localización Óptima de Generación Distribuida en MEMORIA · Configuracion de circuitos...

MEMORIA
Autor: Luis Gerardo Guerra Sánchez
Director: Juan Antonio Martínez Velasco
Convocatòria: Semestre Primavera Curso 2011-2012
Màster Interuniversitari UB-UPC
d’Enginyeria en Energia
Localización Óptima de Generación Distribuida en Sistemas de Distribución Trifásicos con Carga Variable en
el Tiempo Utilizando el Método de Monte Carlo
Màster Interuniversitari UB-UPC d’Enginyeria en Energia
Sol·licitud d’acceptació de presentació del Projecte Final de Màster i sol·licitud de defensa pública.
Alumne: Luis Gerardo Guerra Sánchez
DNI: 02545885
Títol: Localización óptima de generación distribuida en sistemas de distribución
trifásicos con carga variable en el tiempo utilizando el método de Monte Carlo
Director: Juan Antonio Martínez Velasco
Acceptació de la presentació del projecte:
Confirmo l’acceptació de la presentació del Projecte Final de Màster.
Per a que consti,
Martínez Velasco, Juan Antonio Cognoms, nom (director del Projecte)
Sol·licito:
La defensa pública del meu Projecte Final de Màster.
Per a que consti,
Guerra Sánchez, Luis Gerardo Cognoms, nom (Alumne)
Barcelona, 24 de Febrero de 2012

Resumen
En el presente trabajo se desarrolla un metodo para determinar la localizacion optima de ungenerador distribuido que inyecta unicamente potencia activa en un alimentador radial con cargauniformemente distribuida. El algoritmo desarrollado se basa en el metodo de Monte Carlo ypermite obtener los valores optimos de potencia y posicion del generador. El algoritmo tambiensirve para determinar la localizacion optima de bancos de condensadores con el objetivo deobtener una reduccion optima de las perdidas.
Indice general
1. Introduccion 31.1. Objetivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.2. Estructura del documento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2. Sistemas de distribucion de energıa electrica 62.1. Transporte y distribucion de energıa electrica . . . . . . . . . . . . . . . . . . 62.2. Estructura del sistema de distribucion . . . . . . . . . . . . . . . . . . . . . . 82.3. Configuracion de circuitos primarios de distribucion . . . . . . . . . . . . . . . 10
2.3.1. Alimentador unico . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.3.2. Lazo abierto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.4. Configuracion de circuitos secundarios de distribucion . . . . . . . . . . . . . 112.4.1. Configuracion tipo spot . . . . . . . . . . . . . . . . . . . . . . . . . . 122.4.2. Configuracion tipo red . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.5. Configuracion de subestaciones de distribucion . . . . . . . . . . . . . . . . . 132.5.1. Subestaciones de distribucion rurales . . . . . . . . . . . . . . . . . . 132.5.2. Subestaciones de distribucion suburbanas . . . . . . . . . . . . . . . . 142.5.3. Subestaciones de distribucion urbanas . . . . . . . . . . . . . . . . . . 14
2.6. Equipos presentes en los sistemas de distribucion . . . . . . . . . . . . . . . . 162.7. Recursos energeticos distribuidos . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.7.1. Generacion distribuida . . . . . . . . . . . . . . . . . . . . . . . . . . 192.7.2. Almacenamiento de energıa . . . . . . . . . . . . . . . . . . . . . . . 19
3. OpenDSS 213.1. OpenDSS como aplicacion independiente . . . . . . . . . . . . . . . . . . . . 23
3.1.1. Simulacion de caso ejemplo desde la aplicacion independiente . . . . . 233.2. Acceso a OpenDSS desde Matlab . . . . . . . . . . . . . . . . . . . . . . . . 27
3.2.1. COM Server . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 283.2.2. Control de OpenDSS desde Matlab . . . . . . . . . . . . . . . . . . . 28
4. Localizacion optima de generacion distribuida 324.1. Metodos de localizacion optima de generacion distribuida . . . . . . . . . . . . 33
4.1.1. Regla de los 2/3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
1

4.1.2. Metodos analıticos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 334.1.3. Flujo de carga optimo . . . . . . . . . . . . . . . . . . . . . . . . . . 364.1.4. Algoritmos geneticos . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.1.5. Algoritmos metaheurısticos . . . . . . . . . . . . . . . . . . . . . . . 39
5. Localizacion optima de un generador distribuido utilizando el metodo de MonteCarlo 455.1. Implementacion del metodo . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
5.1.1. Entrada de datos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 475.1.2. Simulacion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 495.1.3. Salida de datos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.2. Red de estudio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 505.2.1. Transformador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 505.2.2. Definicion de las lıneas . . . . . . . . . . . . . . . . . . . . . . . . . . 515.2.3. Cargas del sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . 515.2.4. Definicion del sistema en OpenDSS . . . . . . . . . . . . . . . . . . . 51
5.3. Procedimiento matematico para determinar la localizacion optima de un gene-rador distribuido . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.4. Localizacion optima de un generador distribuido con carga constante . . . . . . 615.4.1. Caso base sin generacion distribuida . . . . . . . . . . . . . . . . . . . 615.4.2. Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 625.4.3. Simulacion de caso optimo . . . . . . . . . . . . . . . . . . . . . . . . 63
5.5. Localizacion optima de un generador distribuido con carga variable en el tiempo 655.5.1. Caso base sin generacion distribuida . . . . . . . . . . . . . . . . . . . 655.5.2. Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 665.5.3. Simulacion de caso optimo . . . . . . . . . . . . . . . . . . . . . . . . 685.5.4. Impacto de la restriccion de flujo inverso . . . . . . . . . . . . . . . . 695.5.5. Localizacion optima de dos generadores distribuidos . . . . . . . . . . 71
5.6. Localizacion optima de bancos de condensadores . . . . . . . . . . . . . . . . 725.6.1. Localizacion optima teorica de bancos de condensadores . . . . . . . . 725.6.2. Localizacion optima de un banco de condensadores . . . . . . . . . . . 735.6.3. Localizacion optima de dos bancos de condensadores . . . . . . . . . . 74
6. Conclusiones 776.1. Conclusiones sobre la implementacion del metodo . . . . . . . . . . . . . . . . 776.2. Conclusiones sobre los resultados obtenidos . . . . . . . . . . . . . . . . . . . 786.3. Objetivos futuros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
2
Capıtulo 1
Introduccion
En la actualidad existe una tendencia marcada que indica que la construccion de grandesplantas generadoras ya no es la mejor opcion para atender el aumento de demanda electrica. Losaltos costos que implica la construccion de dichas plantas, la actual preocupacion por reducirla emision de gases de efecto invernadero y otros problemas de tipo legal, por ejemplo obtenerpermisos medio ambientales para la construccion de nuevas lıneas, ha causado que la industriavuelva sus ojos a un sector que tiene una gran capacidad de crecimiento y que presenta grandesbeneficios para el sistema, la generacion distribuida y en un marco mas amplio, los recursosenergeticos distribuidos.
Como ya fue mencionado, la introduccion de los recursos distribuidos puede traer consigograndes beneficios al sector. Sin embargo, la construccion y conexion de generadores distribui-dos no puede ser hecha sin antes considerar cual sera el impacto real. Estudios de planificaciondeben de ser llevados a cabo para garantizar el completo aprovechamiento de los beneficiosde la generacion distribuida y prever cualquier complicacion que pueda surgir de esta. En estesentido los paquetes de simulacion representan una herramienta valiosa al momento de realizarla planificacion a futuro de un sistema de distribucion de energıa electrica que desee expandirsee incluir recursos distribuidos.
La localizacion optima de un generador distribuido es un aspecto clave para garantizar quela introduccion de generacion distribuida en los sistemas electricos de potencia tenga exito.Hasta la fecha se ha desarrollado una gran variedad de metodologıas para determinar dichalocalizacion optima. Algunos de estos metodos utilizan enfoques analıticos que incluyen sim-plificaciones, mientras que otros utilizan algoritmos de gran complejidad. La exactitud de losresultados obtenidos depende mucho del metodo utilizado, por lo que todavıa hoy es necesariomejorar los metodos desarrollados de forma que se mejoren su precision, sean relativamentesimples de implementar, y eficientes.
3
1.1. ObjetivoEl objetivo del presente Proyecto de Fin de Master es el desarrollo e implementacion de un
metodo de localizacion optima de generadores distribuidos utilizando varias herramientas desimulacion ası como otros paquetes de software que permitan el post-procesamiento de datos.El metodo deberıa ser exacto, manejar sistemas que incluyan modelos reales, y ademas eficientepor lo que respecta al tiempo necesario para obtener resultados.
El metodo desarrollado en este trabajo ha sido previamente presentado en el artıculo:
J.A. Martinez and G. Guerra,“Optimum Placement of Distributed Generation in Three-Phase Distribution Systems with Time Varying Load Using a Monte Carlo Approach”.Aprobado para su presentacion en el IEEE PES GM a celebrarse en San Diego C.A.,Julio 2012.
1.2. Estructura del documentoSegundo capıtulo
En el segundo capıtulo se desarrolla una introduccion a los sistemas de distribucion deenergıa electrica. Se presentan las diferentes caracterısticas y configuraciones propias de lossistemas de distribucion de energıa electrica reales.
Tercer capıtulo
En el tercer capıtulo se introduce el software de simulacion OpenDSS, presentandose sus ca-pacidades y caracterısticas como una herramienta de analisis y planeacion de sistemas de distri-bucion. Se desarrolla un ejemplo a traves del cual es explicado el funcionamiento de OpenDSScomo aplicacion independiente y como una aplicacion controlada desde un paquete de softwareexterno, en este caso Matlab.
Cuarto capıtulo
En el cuarto capıtulo se presenta un resumen con distintos metodos de localizacion optimade generadores distribuidos utilizados por otros autores; ademas se desarrolla un ejemplo quedemuestra la filosofıa detras de cada uno de los metodos presentados.
Quinto capıtulo
En el quinto capıtulo se presenta el metodo de localizacion optima de generadores distribui-dos desarrollado para el presente Proyecto de Fin de Master. La implementacion del metodo esexplicada a detalle y se muestran los resultados obtenidos a partir de las simulaciones llevadas
4
a cabo, las cuales comprenden la localizacion optima de un generador distribuido con cargaconstante y con carga variable en el tiempo.
Sexto capıtulo
En el sexto capıtulo se discuten las conclusiones alcanzadas a partir de la implementaciondel metodo y de los resultados obtenidos a traves de las simulaciones. Ademas, se discutenmejoras futuras al metodo presentado.
5
Capıtulo 2
Sistemas de distribucion de energıaelectrica
2.1. Transporte y distribucion de energıa electricaLos sistemas de entrega de energıa electrica han sido disenados para poder llevar la energıa
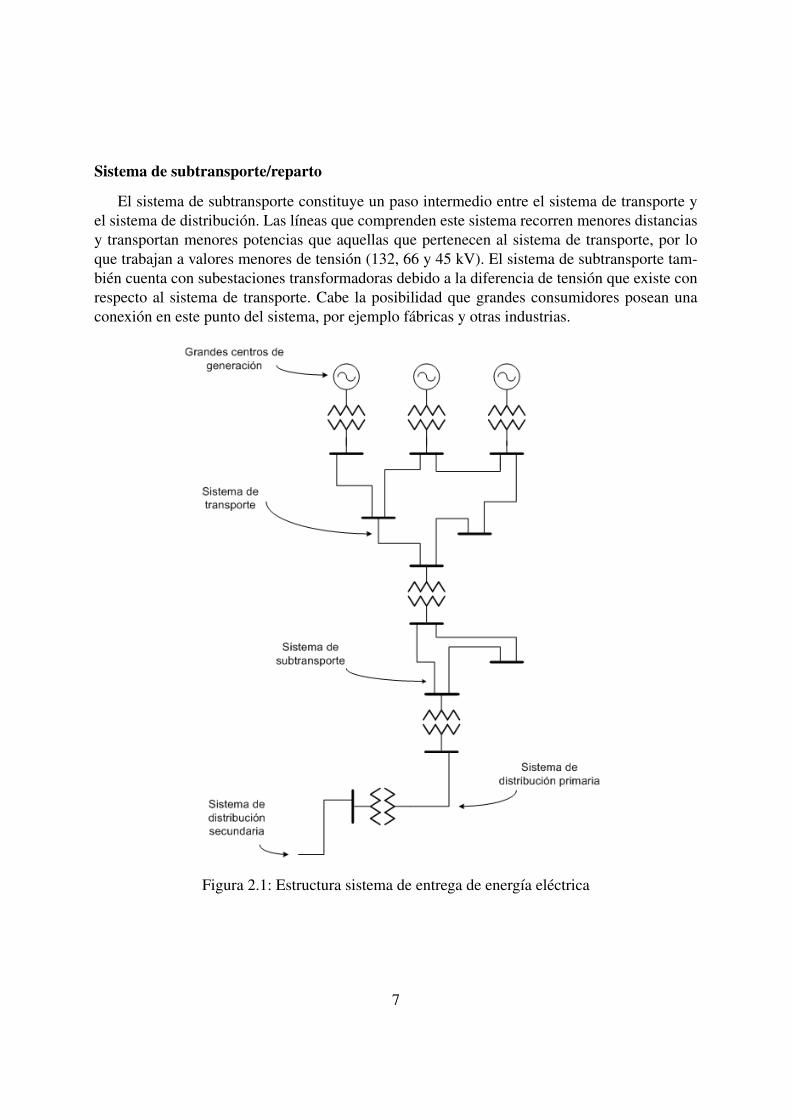
electrica que se produce en los centros de generacion hasta los puntos donde los consumidoresfinales hacen uso de ella. Estos sistemas estan formados por otros subsistemas, los cuales enun mercado liberalizado no pertenencen a un mismo propetario y cada uno representa un mer-cado independiente donde la libre competencia esta permitida. En la Figura 2.1 se presenta elesquema general de los sistemas de entrega de energıa electrica.
Grandes centros de generacion
La mayor parte de la energıa electrica es producida en centros que cuentan con unidadesgeneradoras de gran potencia. Dichos centros se encuentran alejados de los puntos de consumoy utilizan diferentes tecnologıas para producir energıa electrica tales como energıa nuclear,carbon, gas, hidroelectrica, etc. Muchas de estas plantas fueron construidas en el pasado cuandola totalidad del sistema de entrega de energıa electrica se encontraba bajo el control de unasola entidad, la cual aprovechaba las ventajas ofrecidas por la economıa de escala para poderconstruir grandes plantas de generacion que fuesen rentables.
Sistema de transporte
El sistema de transporte comprende el conjunto de lıneas, subestaciones y equipos encar-gados de conectar los grandes centros de generacion con los grandes nucleos de demanda, loscuales se encuentran localizados en las ciudades y en zonas industriales. Las lıneas pertene-cientes al sistema de transporte recorren grandes distancias y transportan grandes cantidades deenergıa, por lo que estas deben de trabajar a valores de tension muy altos (220 y 400 kV).
6
Sistema de subtransporte/reparto
El sistema de subtransporte constituye un paso intermedio entre el sistema de transporte yel sistema de distribucion. Las lıneas que comprenden este sistema recorren menores distanciasy transportan menores potencias que aquellas que pertenecen al sistema de transporte, por loque trabajan a valores menores de tension (132, 66 y 45 kV). El sistema de subtransporte tam-bien cuenta con subestaciones transformadoras debido a la diferencia de tension que existe conrespecto al sistema de transporte. Cabe la posibilidad que grandes consumidores posean unaconexion en este punto del sistema, por ejemplo fabricas y otras industrias.
Figura 2.1: Estructura sistema de entrega de energıa electrica
7

Sistema de distribucion primaria
El sistema de distribucion primaria recibe la energıa de los sistemas de transporte o sub-transporte en las subestaciones de distribucion donde se produce una nueva reduccion del valorde tension. De dichas subestaciones parten lıneas o alimentadores a media tension (25 y 11 kV)y que llevan la energıa un paso mas cerca de los centros de consumo. Al igual que en el sis-tema de subtransporte pueden existir clientes que esten conectados directamente al sistema dedistribucion primaria.
Sistema de distribucion secundaria
El sistema de distribucion secundaria comprende las estaciones transformadoras y lıneas debaja tension (400, 230 V) que suministran la energıa a los clientes con poca potencia instalada,por ejemplo consumos domesticos..
2.2. Estructura del sistema de distribucionEn un sistema de distribucion de energıa electrica el elemento que funciona como enlace
entre este y el resto del sistema es la subestacion de distribucion. A las subestaciones lleganlas lıneas de alta tension provenientes del sistema de subtransporte. El transformador reductortoma la tension proveniente del sistema aguas arriba y la reduce al nivel de tension de los cir-cuitos primarios de distribucion. La subestacion cuenta con todos los equipos de proteccion,maniobra y medida necesarios para garantizar una operacion segura. Los circuitos primarios dedistribucion parten de la subestacion y se dirigen a las diferentes zonas de consumo. Los circui-tos primarios se conocen tambien como alimentadores y de estos nacen circuitos laterales, sinexistir ninguna reduccion de tension; los circuitos laterales se extienden hasta encontrar los cen-tros de transformacion, en los cuales tiene lugar la ultima reduccion para obtener los niveles detension adecuados para el funcionamiento de los equipos de los usuarios finales (400, 230 V).De las estaciones de transformacion surgen los circuitos secundarios de distribucion, los cualestransportan la energıa hasta el punto de conexion con la instalacion de los usuarios; general-mente se trata de circuitos monofasicos, aunque tambien pueden existir circuitos trifasicos. Enambientes rurales la construccion de los circuitos de distribucion es de tipo aerea, mientras queen las zonas urbanas son mayoritariamente subterraneas; en sistemas suburbanos se encuentrauna combinacion de lıneas aereas y subterraneas. Las zonas industriales representan grandesconsumos, por lo que usualmente cuentan con circuitos propios para el suministro de energıa.La Figura 2.2 muestra una configuracion habitual de una subestacion de distribucion de energıaelectrica y el trazado de un alimentador que parte de dicha subestacion.
8
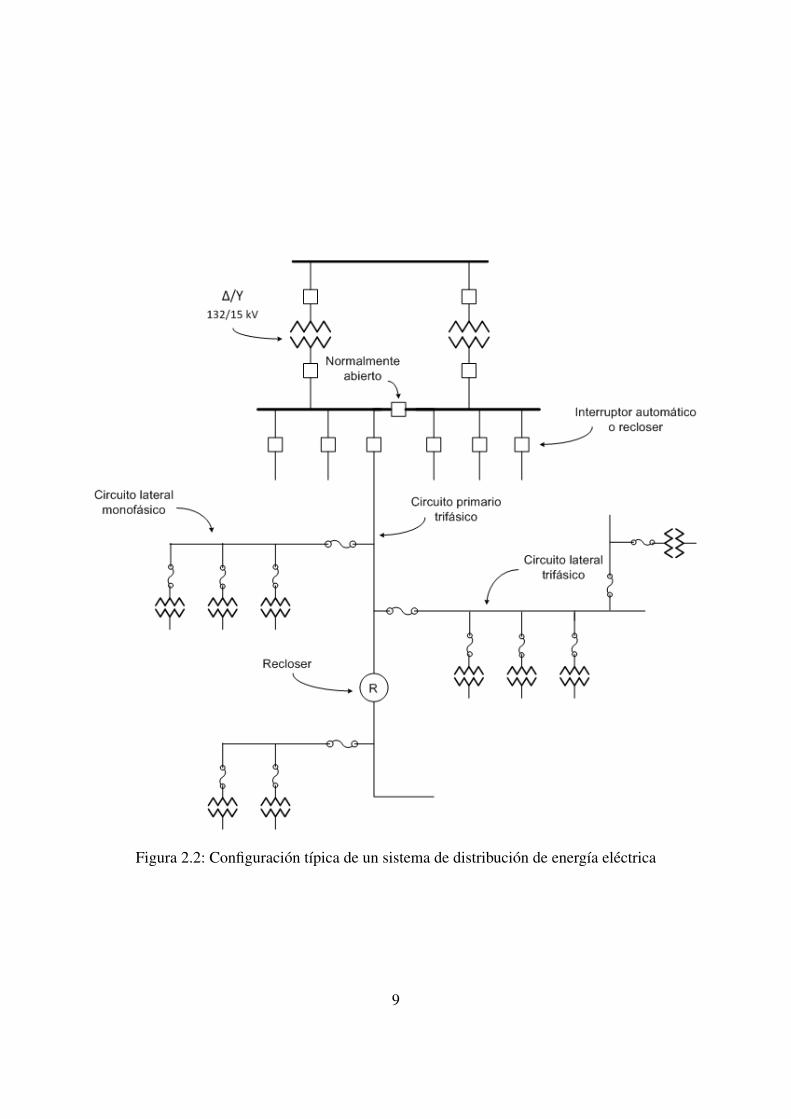
Figura 2.2: Configuracion tıpica de un sistema de distribucion de energıa electrica
9

2.3. Configuracion de circuitos primarios de distribucionLa configuracion mas habitual para un circuito primario de distribucion es la de un circuito
radial. Esta configuracion presenta ciertas ventajas ante los circuitos mallados.
La proteccion contra fallas es mas sencilla.
Los niveles de corriente de falla son menores.
La regulacion de tension es mas simple de implementar.
El control del flujo de potencia es mas sencillo.
El sistema resulta menos costoso.
La configuracion de circuito radial puede presentar diversas variantes:
Alimentador unico.
Lazo abierto.
2.3.1. Alimentador unicoEn esta configuracion tal como su nombre lo indica toda la energıa requerida por los circui-
tos laterales y secundarios es suministrada por un unico alimentador que parte desde la subes-tacion. Si por alguna razon dicho alimentador quedara fuera de servicio (falla, mantenimiento,etc.), todas las cargas alimentadas se quedarıan sin servicio. Aunque solo exista un alimentadorque parte de la subestacion, este puede ramificarse para poder cubrir una mayor area; estas rami-ficaciones no deben de ser confundidas con los circuitos laterales, ya que los circuitos lateralesposeen una capacidad inferior a la del alimentador principal, mientras que las ramificacionesposeen la misma capacidad. En la Figura 2.3 se muestra la configuracion de alimentador unicosimple y ramificado.
Figura 2.3: Configuracion alimentador unico (simple y ramificado)
10

2.3.2. Lazo abiertoEn la configuracion de lazo abierto existen dos alimentadores que parten de la misma sub-
estacion y que estan unidos en sus extremos por un seccionador que se encuentra normalmenteabierto. Cada alimentador posee un cierto numero de circuitos a los cuales suministra energıaen condiciones normales pero tiene la capacidad de suministrar la potencia requerida por loscircuitos asigandos al otro alimentador. En caso de que uno de los alimentadores salga de servi-cio el seccionador sera operado, ya sea vıa manual o automatica, y las cargas suministradas porel alimentador fuera de servicio seran transferidas al alimentador activo. La Figura 2.4 muestraun ejemplo de la configuracion de lazo abierto.
Figura 2.4: Configuracion lazo abierto
2.4. Configuracion de circuitos secundarios de distribucionLos circuitos secundarios pueden presentar diferentes configuraciones en funcion del tipo
de cargas que deben de alimentar. En este caso presentaremos dos configuraciones que estanpresentes en sistemas urbanos, ya que en sistemas suburbanos y rurales la configuracion mashabitual sera la radial. En la primera configuracion la carga a alimentar es un gran consumoque se encuentra concentrado en un solo punto, como podrıa ser un edificio de apartamentos deun tamano considerable, por lo que se le conocera como configuracion tipo spot. La segunda
11
configuracion se presenta cuando los circuitos secundarios alimentan un gran numero de cargasy forman una red mallada, esta sera conocida como configuracion tipo red.
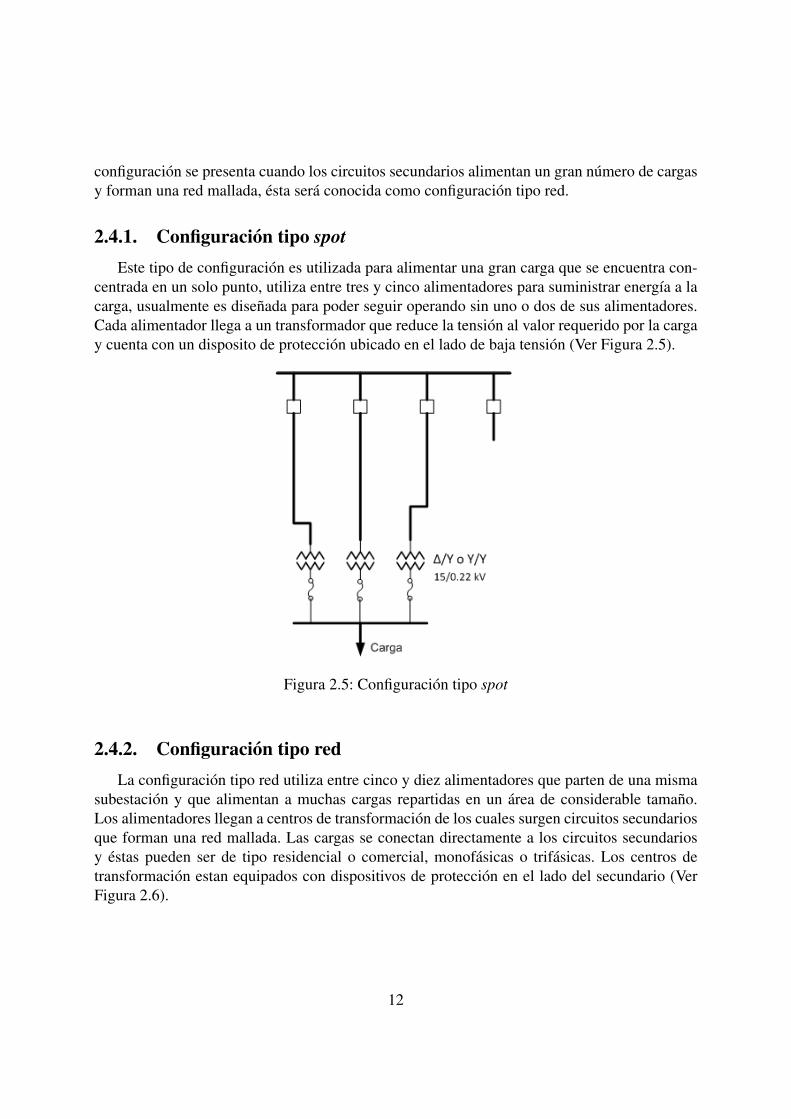
2.4.1. Configuracion tipo spotEste tipo de configuracion es utilizada para alimentar una gran carga que se encuentra con-
centrada en un solo punto, utiliza entre tres y cinco alimentadores para suministrar energıa a lacarga, usualmente es disenada para poder seguir operando sin uno o dos de sus alimentadores.Cada alimentador llega a un transformador que reduce la tension al valor requerido por la cargay cuenta con un disposito de proteccion ubicado en el lado de baja tension (Ver Figura 2.5).
Figura 2.5: Configuracion tipo spot
2.4.2. Configuracion tipo redLa configuracion tipo red utiliza entre cinco y diez alimentadores que parten de una misma
subestacion y que alimentan a muchas cargas repartidas en un area de considerable tamano.Los alimentadores llegan a centros de transformacion de los cuales surgen circuitos secundariosque forman una red mallada. Las cargas se conectan directamente a los circuitos secundariosy estas pueden ser de tipo residencial o comercial, monofasicas o trifasicas. Los centros detransformacion estan equipados con dispositivos de proteccion en el lado del secundario (VerFigura 2.6).
12
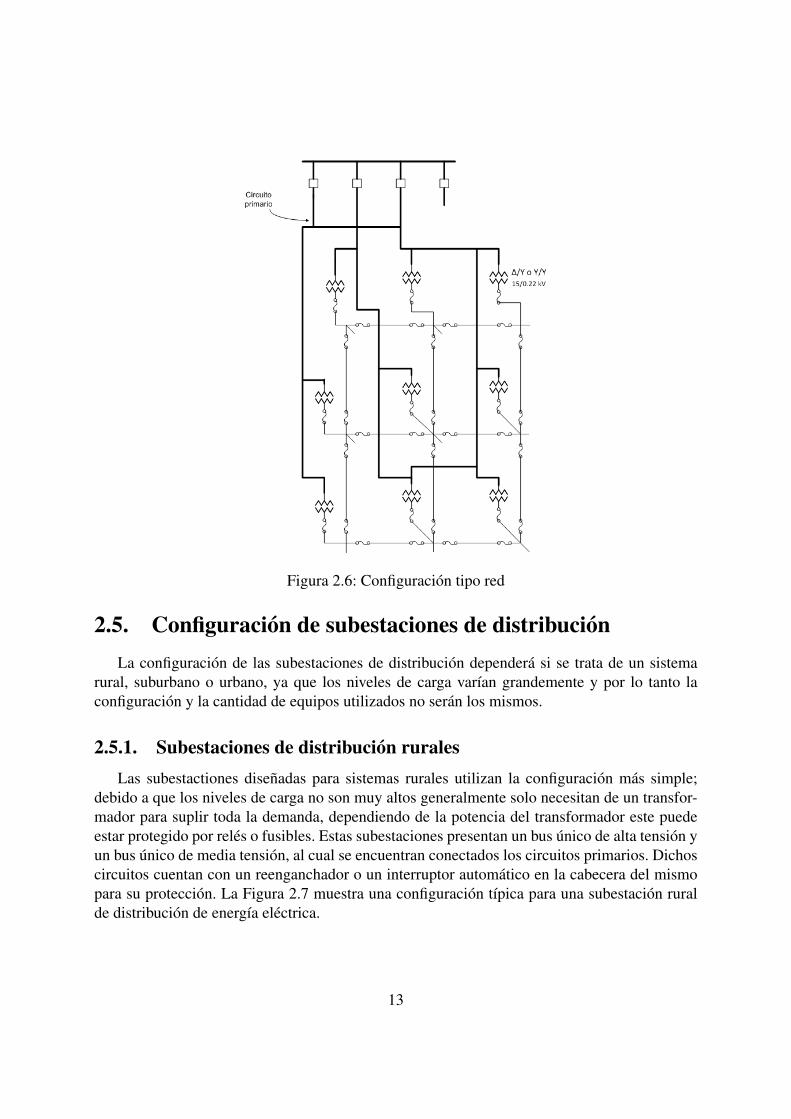
Figura 2.6: Configuracion tipo red
2.5. Configuracion de subestaciones de distribucionLa configuracion de las subestaciones de distribucion dependera si se trata de un sistema
rural, suburbano o urbano, ya que los niveles de carga varıan grandemente y por lo tanto laconfiguracion y la cantidad de equipos utilizados no seran los mismos.
2.5.1. Subestaciones de distribucion ruralesLas subestactiones disenadas para sistemas rurales utilizan la configuracion mas simple;
debido a que los niveles de carga no son muy altos generalmente solo necesitan de un transfor-mador para suplir toda la demanda, dependiendo de la potencia del transformador este puedeestar protegido por reles o fusibles. Estas subestaciones presentan un bus unico de alta tension yun bus unico de media tension, al cual se encuentran conectados los circuitos primarios. Dichoscircuitos cuentan con un reenganchador o un interruptor automatico en la cabecera del mismopara su proteccion. La Figura 2.7 muestra una configuracion tıpica para una subestacion ruralde distribucion de energıa electrica.
13
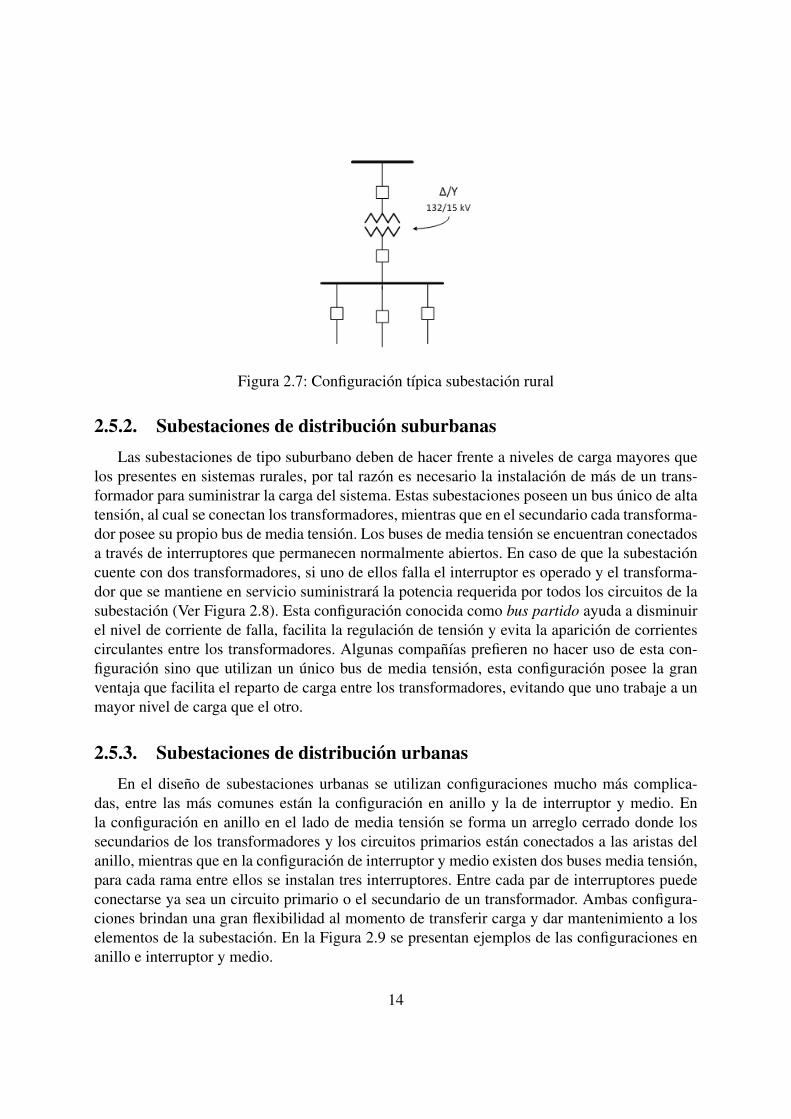
Figura 2.7: Configuracion tıpica subestacion rural
2.5.2. Subestaciones de distribucion suburbanasLas subestaciones de tipo suburbano deben de hacer frente a niveles de carga mayores que
los presentes en sistemas rurales, por tal razon es necesario la instalacion de mas de un trans-formador para suministrar la carga del sistema. Estas subestaciones poseen un bus unico de altatension, al cual se conectan los transformadores, mientras que en el secundario cada transforma-dor posee su propio bus de media tension. Los buses de media tension se encuentran conectadosa traves de interruptores que permanecen normalmente abiertos. En caso de que la subestacioncuente con dos transformadores, si uno de ellos falla el interruptor es operado y el transforma-dor que se mantiene en servicio suministrara la potencia requerida por todos los circuitos de lasubestacion (Ver Figura 2.8). Esta configuracion conocida como bus partido ayuda a disminuirel nivel de corriente de falla, facilita la regulacion de tension y evita la aparicion de corrientescirculantes entre los transformadores. Algunas companıas prefieren no hacer uso de esta con-figuracion sino que utilizan un unico bus de media tension, esta configuracion posee la granventaja que facilita el reparto de carga entre los transformadores, evitando que uno trabaje a unmayor nivel de carga que el otro.
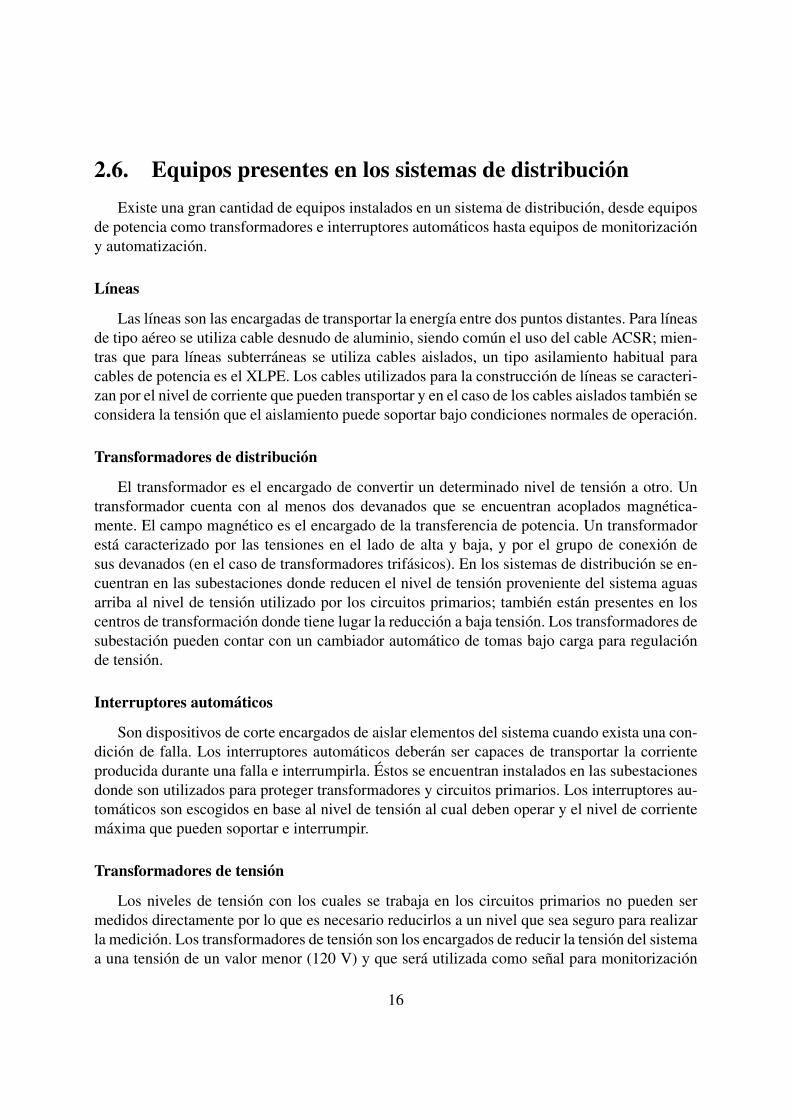
2.5.3. Subestaciones de distribucion urbanasEn el diseno de subestaciones urbanas se utilizan configuraciones mucho mas complica-
das, entre las mas comunes estan la configuracion en anillo y la de interruptor y medio. Enla configuracion en anillo en el lado de media tension se forma un arreglo cerrado donde lossecundarios de los transformadores y los circuitos primarios estan conectados a las aristas delanillo, mientras que en la configuracion de interruptor y medio existen dos buses media tension,para cada rama entre ellos se instalan tres interruptores. Entre cada par de interruptores puedeconectarse ya sea un circuito primario o el secundario de un transformador. Ambas configura-ciones brindan una gran flexibilidad al momento de transferir carga y dar mantenimiento a loselementos de la subestacion. En la Figura 2.9 se presentan ejemplos de las configuraciones enanillo e interruptor y medio.
14
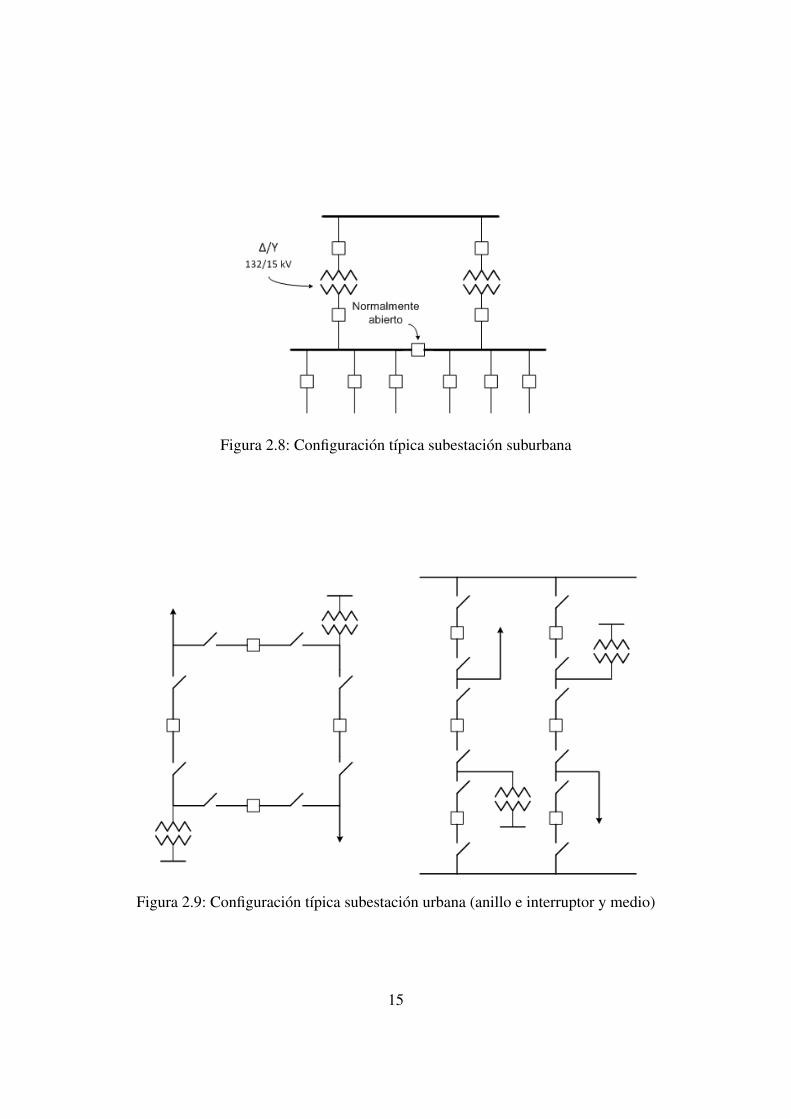
Figura 2.8: Configuracion tıpica subestacion suburbana
Figura 2.9: Configuracion tıpica subestacion urbana (anillo e interruptor y medio)
15
2.6. Equipos presentes en los sistemas de distribucionExiste una gran cantidad de equipos instalados en un sistema de distribucion, desde equipos
de potencia como transformadores e interruptores automaticos hasta equipos de monitorizaciony automatizacion.
Lıneas
Las lıneas son las encargadas de transportar la energıa entre dos puntos distantes. Para lıneasde tipo aereo se utiliza cable desnudo de aluminio, siendo comun el uso del cable ACSR; mien-tras que para lıneas subterraneas se utiliza cables aislados, un tipo asilamiento habitual paracables de potencia es el XLPE. Los cables utilizados para la construccion de lıneas se caracteri-zan por el nivel de corriente que pueden transportar y en el caso de los cables aislados tambien seconsidera la tension que el aislamiento puede soportar bajo condiciones normales de operacion.
Transformadores de distribucion
El transformador es el encargado de convertir un determinado nivel de tension a otro. Untransformador cuenta con al menos dos devanados que se encuentran acoplados magnetica-mente. El campo magnetico es el encargado de la transferencia de potencia. Un transformadoresta caracterizado por las tensiones en el lado de alta y baja, y por el grupo de conexion desus devanados (en el caso de transformadores trifasicos). En los sistemas de distribucion se en-cuentran en las subestaciones donde reducen el nivel de tension proveniente del sistema aguasarriba al nivel de tension utilizado por los circuitos primarios; tambien estan presentes en loscentros de transformacion donde tiene lugar la reduccion a baja tension. Los transformadores desubestacion pueden contar con un cambiador automatico de tomas bajo carga para regulacionde tension.
Interruptores automaticos
Son dispositivos de corte encargados de aislar elementos del sistema cuando exista una con-dicion de falla. Los interruptores automaticos deberan ser capaces de transportar la corrienteproducida durante una falla e interrumpirla. Estos se encuentran instalados en las subestacionesdonde son utilizados para proteger transformadores y circuitos primarios. Los interruptores au-tomaticos son escogidos en base al nivel de tension al cual deben operar y el nivel de corrientemaxima que pueden soportar e interrumpir.
Transformadores de tension
Los niveles de tension con los cuales se trabaja en los circuitos primarios no pueden sermedidos directamente por lo que es necesario reducirlos a un nivel que sea seguro para realizarla medicion. Los transformadores de tension son los encargados de reducir la tension del sistemaa una tension de un valor menor (120 V) y que sera utilizada como senal para monitorizacion
16
del sistema. Estos transformadores poseen unicamente la potencia suficente para alimentar a losequipos de medicion conectados a el. Los transformadores de tension se encuentran instaladosmayormente dentro de las subestaciones.
Transformadores de corriente
Los transformadores de corriente cumplen una funcion analoga a la de los transformadoresde tension, estos toman la corriente que circula por un circuito y la reducen a un nivel muchomenor que puede ser registrado por los aparatos de medida (5 A). La construccion mas habitualpara este tipo de transformadores es la toroidal, en ella el conductor que transporta la corrienteatraviesa un toroide donde se encuentran alojados los devanados, aprovechando el efecto deinduccion se generara una corriente en el secundario cuyo valor dependera de la relacion detransformacion. Al igual que los transformadores de tension, los transformadores de corrientesolo poseen la potencia suficiente para alimentar a los equipos de medicion.
Reles
Son dispositivos basados en electronica y cuyo objetivo es recoger las senales provenientesde los equipos de medicion con el objetivo de determinar si existe alguna condicion de falla enel sistema. En sistemas de distribucion los reles utilizados son de sobrecorriente, es decir, antela presencia de una sobrecorriente peligrosa generan una senal que es enviada a los interruptoresautomaticos que seran los encargados de interrumpir dicha corriente de falla.
Reenganchadores
Son dispositivos de corte capaces de interrumpir corrientes bajo condicion de falla, ademasposeen la capacidad de realizar un recierre automatico con la finalidad de verficar si la falladetectada ha sido una falla temporal o permanente. Los reenganchadores pueden efectuar hasta3 intentos de recierre antes de quedar en posicion abierta. Son normalmente utilizados paraproteger circuitos laterales y en algunos casos a los circuitos primarios. Los reenganchadorespueden ser controlados por reles o por otro tipo de sistema mecanico.
Fusibles
El fusible es un elemento utilizado para proteger circuitos laterales, secundarios y transfor-madores de baja potencia. Esta constituido por un filamento el cual se derrite debido al calorgenerador por el paso de un corriente excesiva. Los fusibles estan disenados de tal manera queel tiempo en el cual se derrite depende del valor de la corriente, dicho tiempo sigue una curvaespecıfica para cada tipo de fusible. Los tipos de fusibles mas comunes son los de tipo K y T.
17
Seccionadores
Son instrumentos de maniobra que permiten aislar elementos del sistema para su reparaciono mantenimiento. Pueden ser operados de forma manual o automatica y deben de ser capacesde transportar sin problemas la corriente normal de operacion y la producida durante un fallo,sin embargo por seguridad solo deben ser operados cuando estan sometidos a un nivel bajo decarga. Los seccionadores son instalados principalmente en las subestaciones y en los circuitosprimarios.
Reguladores de tension
Los reguladores de tension son transformadores con una relacion de transformacion de 1 a1 y que se encuentran equipados con un cambiador de tomas bajo carga. Los reguladores detension son instalados en puntos intermedios de alimentadores que deben de recorrer grandesdistancias y su tarea es la de compensar la caıda de tension producida a lo largo del alimenta-dor, mejorando el nivel de tension entregado a los usuarios que se encuentran aguas abajo delregulador.
Bancos de condensadores
Los bancos de condensadores son utilizados para aportar potencia reactiva al sistema, lacual tiene como objetivo la regulacion de tension y la reduccion de perdidas. Los bancos decondensadores son generalmente trifasicos con conexion estrella, pueden ser instalados en lassubestaciones o en un puntos intermedios de un circuito primario.
SCADA
Control del sistema y adquisicion de datos (SCADA por sus siglas en ingles) es un sistemaque permite monitorear en tiempo real el estado completo del sistema. Este recoge informacionde los equipos de medida instalados a traves de toda la red y la presenta de tal forma que es po-sible conocer tension en buses, corriente que circula por un circuito e incluso si un seccionadorse encuentra en posicion abierta o cerrada. Tambien incluye funciones de control que permitenoperar remotamente seccionadores e interruptores, aportando una gran flexibilidad al sistema ymejorando los tiempos de respuesta al momento de realizar maniobras.
2.7. Recursos energeticos distribuidosLos recursos energeticos distribuidos son tecnologıas desarrolladas para el suministro, al-
macenamiento y control de la energıa electrica que se encuentran conectadas a un sistema dedistribucion de energıa electrica. Los continuos avances tecnologicos en este campo ası como enel de las telecomunicaciones y el control abren un panorama en el cual los recursos energeticos
18

distribuidos pueden jugar un papel importante en el futuro. El exito de esta tecnologıa depen-dera en gran medida de la creacion de polıticas que fomenten su desarrollo y de la disposicionde las empresas a apostar por ella.
2.7.1. Generacion distribuidaEl termino generacion distribuida se refiere a centros de generacion que se encuentran dise-
minados a traves de la red y que se interconectan directamente con las companıas distribuidorasa niveles de tension de distribucion. Usualmente las potencias generadas no sobrepasan los 10MW y se encuentran cerca de los puntos de consumo a los que sirven.
El origen de la generacion distribuida se encuentra en la cogeneracion, es decir, plantasindustriales que generan energıa para su consumo interno y en el caso de existir un excedentede energıa, este es inyectado a la red. Este modelo es muy comun en plantas donde se utilizael vapor residual de diferentes procesos para producir la energıa o en otras donde los desechosproducidos sirven como combustible para los motores utilizados en la generacion de energıa, elcual es el caso de los ingenios azucareros.
Durante los ultimos anos la generacion distribuida ha ido captando mayor atencion ya quepresenta muchos beneficios para las empresas electricas. Debido a que los centros de generacionse encuentran cerca de los puntos de consumo existe una reduccion de las perdidas debido aque la energıa ya no debe viajar largas distancias desde las grandes centrales generadoras hastalos puntos donde sera consumida. Ademas, su presencia puede ayudar a palear deficiencias degeneracion en momentos de maxima demanda y retrasar inversiones de ampliacion de la red dedistribucion, ya que ayuda a descongestionar lıneas que usualmente trabajan bajo sobrecarga.
Existen muchos tipos de tecnologıa que pueden ser utilizadas dentro de la generacion distri-buida y actualmente hay grandes esfuerzos en el desarrollo de tecnologıas que utilicen fuentesrenovables para la produccion de energıa, ya que de esta manera ademas de brindar los bene-ficios antes mencionados tambien ayudan la disminucion de la produccion de gases de efectoinvernadero.
2.7.2. Almacenamiento de energıaLos sistemas de almacenamiento de energıa tal como su nombre lo indica tienen la funcion
de almacenar energıa electrica para utilizarla en el momento que esta sea requerida.Existen diferentes tecnologıas utilizadas en el almacenamiento de energıa tales como los
volantes de inercia, baterıas, condensadores electroquımicos, centrales de bombeo, centrales deaire comprimido, etc. La seleccion de la tecnologıa a utilizar dependera de la aplicacion para lacual ha sido escogida.
Las aplicaciones de los sistemas de almacenamiento de energıa pueden ser divididas en tresgrandes grupos:Calidad de suministro: la energıa almacenada es inyectada al sistema en perıodos muy cortosde tiempo, durante algunos segundos o menos, y tiene como objetivo garantizar la calidad delsuministro de energıa electrica durante eventos tales como interrupciones cortas de servicio y
19
caıdas de tension.Potencia de transicion: la energıa almacenada debe ser suficiente para asegurar el suministrode la demanda por perıodos de tiempo que pueden comprender desde segundos hasta minutos.Su funcion sera garantizar la continuidad del servicio durante la transferencia de una fuente dealimentacion a otra.Gestion energetica: esta aplicacion requiere del almacenamiento de grandes cantidades deenergıa. En los sistemas de energıa electrica debe existir en todo momento un balance entregeneracion y demanda; esta condicion obliga a que el exceso de generacion presente durantehoras de baja demanda sea desaprovechado. Sin embargo, con la ayuda de los sistemas de alma-cenamiento de energıa es posible almacenar el exceso de generacion para luego inyectar dichaenergıa a la red durante los picos de demanda, evitando de esta manera recurrir a fuentes degeneracion mas costosas.
En la actualidad la eficiencia de transformacion de las tecnologıas utilizadas en el almacena-miento de energıa es todavıa muy baja, ya que se trata de tecnologıas que se encuentran aun endesarrollo. Sin embargo, hay grandes esfuerzos de investigacion para lograr que las tecnologıasde almacenamiento de energıa sean mas eficientes y economicamente rentables.
20
Capıtulo 3
OpenDSS
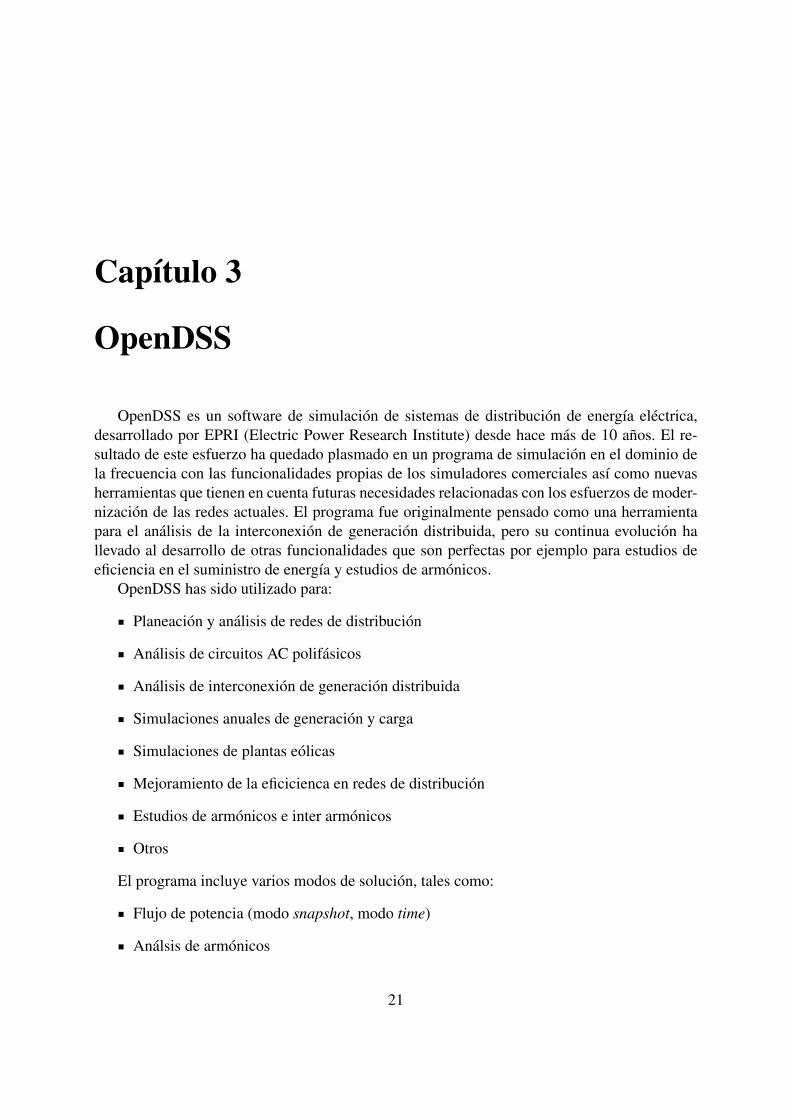
OpenDSS es un software de simulacion de sistemas de distribucion de energıa electrica,desarrollado por EPRI (Electric Power Research Institute) desde hace mas de 10 anos. El re-sultado de este esfuerzo ha quedado plasmado en un programa de simulacion en el dominio dela frecuencia con las funcionalidades propias de los simuladores comerciales ası como nuevasherramientas que tienen en cuenta futuras necesidades relacionadas con los esfuerzos de moder-nizacion de las redes actuales. El programa fue originalmente pensado como una herramientapara el analisis de la interconexion de generacion distribuida, pero su continua evolucion hallevado al desarrollo de otras funcionalidades que son perfectas por ejemplo para estudios deeficiencia en el suministro de energıa y estudios de armonicos.
OpenDSS has sido utilizado para:
Planeacion y analisis de redes de distribucion
Analisis de circuitos AC polifasicos
Analisis de interconexion de generacion distribuida
Simulaciones anuales de generacion y carga
Simulaciones de plantas eolicas
Mejoramiento de la eficicienca en redes de distribucion
Estudios de armonicos e inter armonicos
Otros
El programa incluye varios modos de solucion, tales como:
Flujo de potencia (modo snapshot, modo time)
Analsis de armonicos
21
Analisis dinamico
Calculo de cortocircuito
Otros
OpenDSS esta disenado para recibir instrucciones en forma de texto permitiendo mayorflexibilidad al usuario. Puede accederse al programa tanto a traves de una aplicacion indepen-diente como del COM server. La aplicacion independiente cuenta con una interfaz de usuariobasica, aunque completamente funcional, que permite interactuar con el programa; mientras queel COM server permite conectar el OpenDSS con otros programas tales como Matlab de Math-works, proporcionando de esa manera una gran capacidad de analisis de la informacion. La Fi-gura 3.1 muestra como interactuan los diferentes modulos dentro de la estructura de OpenDSS.
Figura 3.1: Estructura OpenDSS
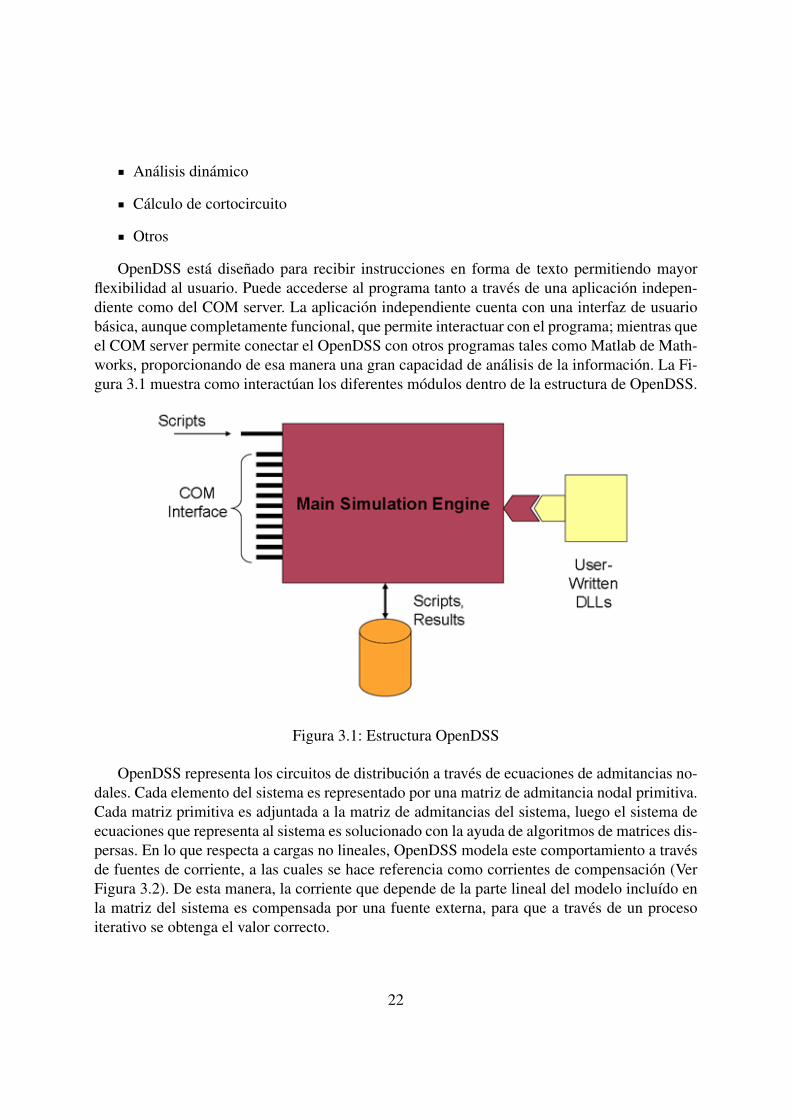
OpenDSS representa los circuitos de distribucion a traves de ecuaciones de admitancias no-dales. Cada elemento del sistema es representado por una matriz de admitancia nodal primitiva.Cada matriz primitiva es adjuntada a la matriz de admitancias del sistema, luego el sistema deecuaciones que representa al sistema es solucionado con la ayuda de algoritmos de matrices dis-persas. En lo que respecta a cargas no lineales, OpenDSS modela este comportamiento a travesde fuentes de corriente, a las cuales se hace referencia como corrientes de compensacion (VerFigura 3.2). De esta manera, la corriente que depende de la parte lineal del modelo incluıdo enla matriz del sistema es compensada por una fuente externa, para que a traves de un procesoiterativo se obtenga el valor correcto.
22
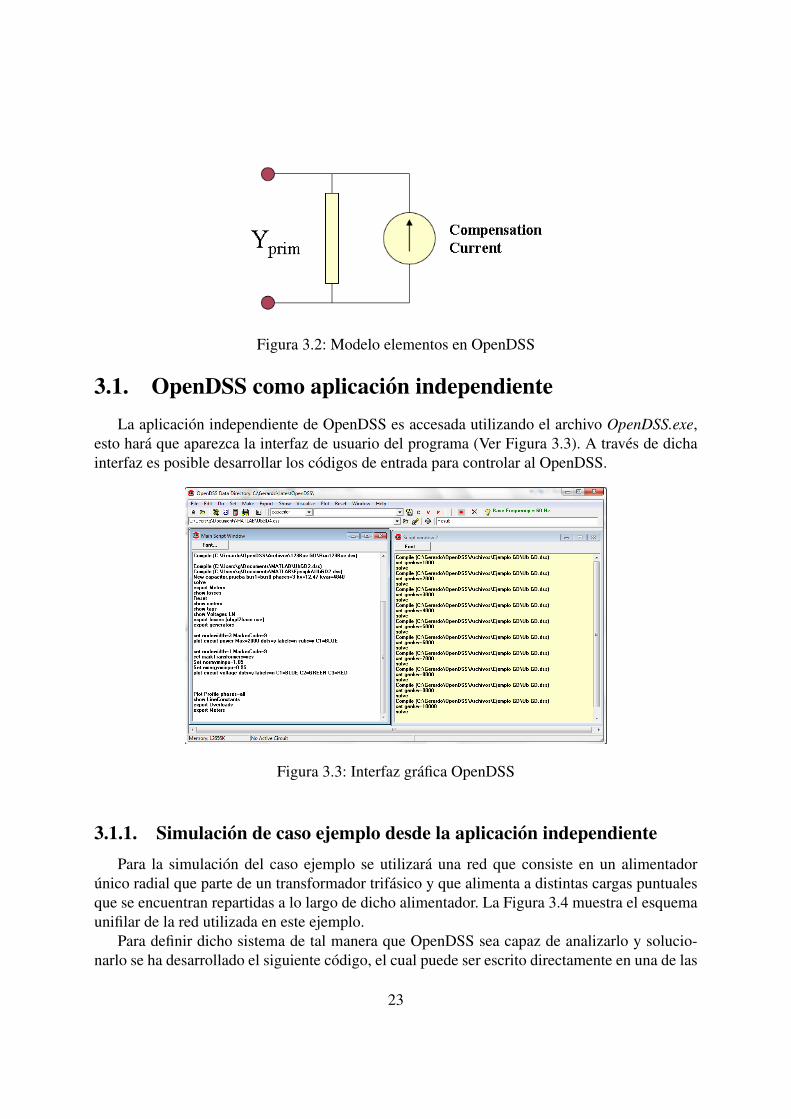
Figura 3.2: Modelo elementos en OpenDSS
3.1. OpenDSS como aplicacion independienteLa aplicacion independiente de OpenDSS es accesada utilizando el archivo OpenDSS.exe,
esto hara que aparezca la interfaz de usuario del programa (Ver Figura 3.3). A traves de dichainterfaz es posible desarrollar los codigos de entrada para controlar al OpenDSS.
Figura 3.3: Interfaz grafica OpenDSS
3.1.1. Simulacion de caso ejemplo desde la aplicacion independientePara la simulacion del caso ejemplo se utilizara una red que consiste en un alimentador
unico radial que parte de un transformador trifasico y que alimenta a distintas cargas puntualesque se encuentran repartidas a lo largo de dicho alimentador. La Figura 3.4 muestra el esquemaunifilar de la red utilizada en este ejemplo.
Para definir dicho sistema de tal manera que OpenDSS sea capaz de analizarlo y solucio-narlo se ha desarrollado el siguiente codigo, el cual puede ser escrito directamente en una de las
23
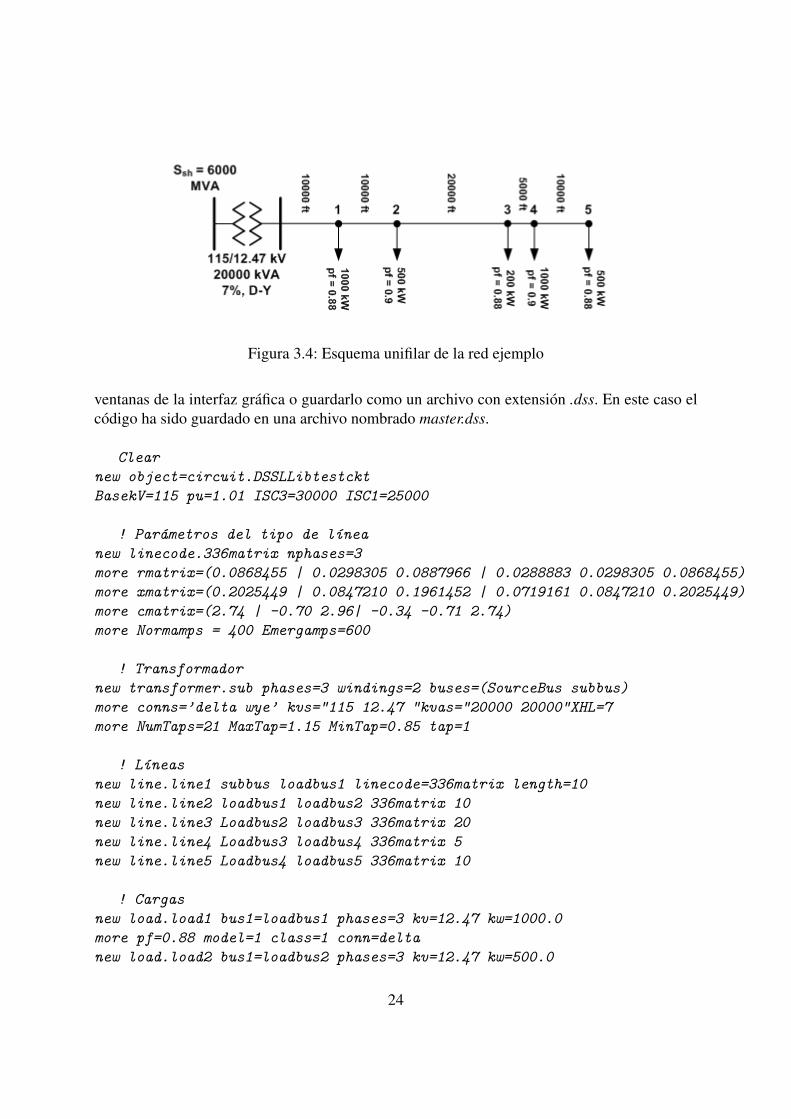
Figura 3.4: Esquema unifilar de la red ejemplo
ventanas de la interfaz grafica o guardarlo como un archivo con extension .dss. En este caso elcodigo ha sido guardado en una archivo nombrado master.dss.
Clear
new object=circuit.DSSLLibtestckt
BasekV=115 pu=1.01 ISC3=30000 ISC1=25000
! Parametros del tipo de lınea
new linecode.336matrix nphases=3
more rmatrix=(0.0868455 | 0.0298305 0.0887966 | 0.0288883 0.0298305 0.0868455)
more xmatrix=(0.2025449 | 0.0847210 0.1961452 | 0.0719161 0.0847210 0.2025449)
more cmatrix=(2.74 | -0.70 2.96| -0.34 -0.71 2.74)
more Normamps = 400 Emergamps=600
! Transformador
new transformer.sub phases=3 windings=2 buses=(SourceBus subbus)
more conns=’delta wye’ kvs="115 12.47 "kvas="20000 20000"XHL=7
more NumTaps=21 MaxTap=1.15 MinTap=0.85 tap=1
! Lıneas
new line.line1 subbus loadbus1 linecode=336matrix length=10
new line.line2 loadbus1 loadbus2 336matrix 10
new line.line3 Loadbus2 loadbus3 336matrix 20
new line.line4 Loadbus3 loadbus4 336matrix 5
new line.line5 Loadbus4 loadbus5 336matrix 10
! Cargas
new load.load1 bus1=loadbus1 phases=3 kv=12.47 kw=1000.0
more pf=0.88 model=1 class=1 conn=delta
new load.load2 bus1=loadbus2 phases=3 kv=12.47 kw=500.0
24
more pf=0.90 model=1 class=1 conn=delta
new load.load3 bus1=loadbus3 phases=3 kv=12.47 kw=200.0 pf=0.88
more model=1 class=1 conn=delta
new load.load4 bus1=loadbus4 phases=3 kv=12.47 kw=1000.0
more pf=0.90 model=1 class=1 conn=delta
new load.load5 bus1=loadbus5 phases=3 kv=12.47 kw=500.0
more pf=0.88 model=1 class=1 conn=delta
! Meters
New EnergyMeter.Feeder Line.line1 1
! Define voltage bases so voltage reports come out in per unit
Set voltagebases="115 12.47 .48"
Calcv
! Coordenadas buses
Buscoords list.dss
El archivo list.dss es utilizado para definir las coordenadas fısicas de los diferentes buses quecomponen el sistema, de esta manera sera posible utilizar algunas de las herramientas graficasque posee OpenDSS.
! Coordenadas buses
SourceBus, 900, 1000
Subbus, 1000, 1000
LoadBus1, 11000, 1000
LoadBus2, 21000, 1000
LoadBus3, 41000, 1000
LoadBus4, 46000, 1000
LoadBus5, 56000, 1000
Con el sistema definido en forma tal que puede ser analizado por el programa es posiblerealizar los diferentes estudios que OpenDSS es capaz de llevar a cabo. Para el presente ejem-plo se realizara un flujo de cargas instantaneo, para lo cual sera necesario introducir el siguientecodigo en una de las ventanas de la interfaz grafica.
Compile master.dss
set mode=snapshot
solve
Una vez introducido el codigo, este debera ser seleccionado, luego se debe hacer clic dere-cho sobre el y seleccionar la opcion Do. Al realizar esta accion se resolvera el sistema realizan-
25
do un flujo de carga instantaneo. Cuando el sistema ha sido resuelto es posible generar un grannumero de archivos de salida que contienen informacion acerca del estado del sistema, ademasde otras salidas de tipo grafico.
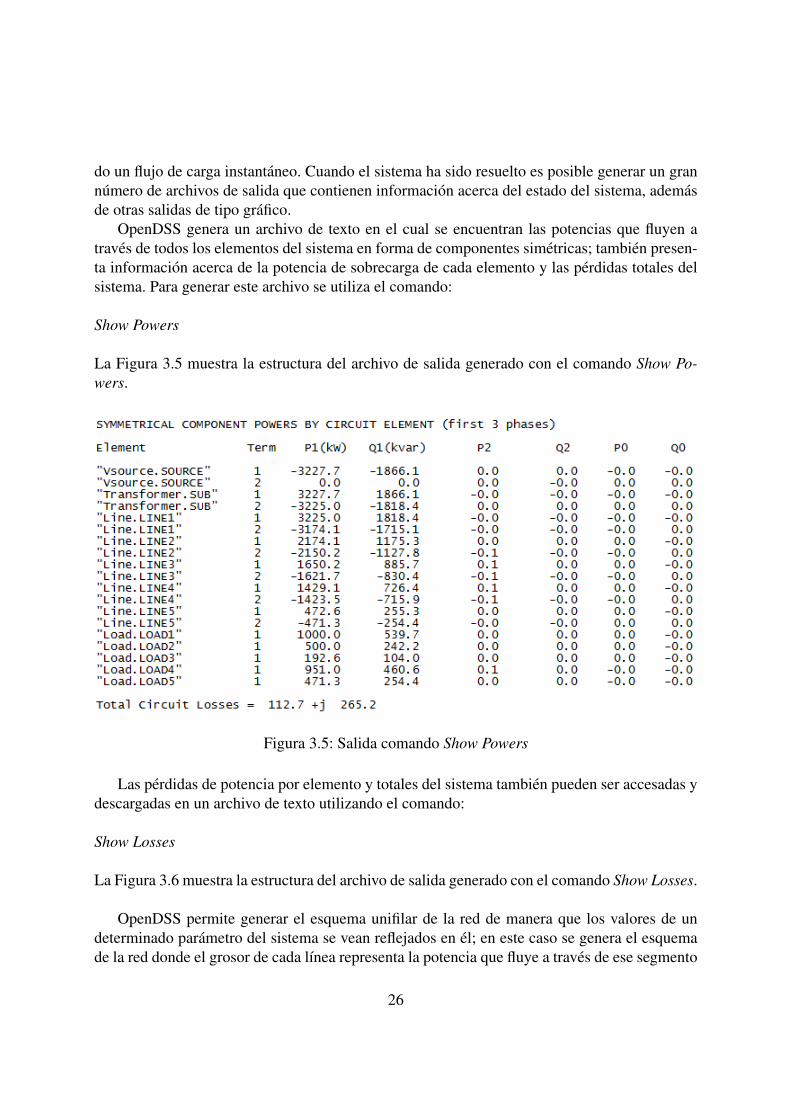
OpenDSS genera un archivo de texto en el cual se encuentran las potencias que fluyen atraves de todos los elementos del sistema en forma de componentes simetricas; tambien presen-ta informacion acerca de la potencia de sobrecarga de cada elemento y las perdidas totales delsistema. Para generar este archivo se utiliza el comando:
Show Powers
La Figura 3.5 muestra la estructura del archivo de salida generado con el comando Show Po-wers.
Figura 3.5: Salida comando Show Powers
Las perdidas de potencia por elemento y totales del sistema tambien pueden ser accesadas ydescargadas en un archivo de texto utilizando el comando:
Show Losses
La Figura 3.6 muestra la estructura del archivo de salida generado con el comando Show Losses.
OpenDSS permite generar el esquema unifilar de la red de manera que los valores de undeterminado parametro del sistema se vean reflejados en el; en este caso se genera el esquemade la red donde el grosor de cada lınea representa la potencia que fluye a traves de ese segmento
26
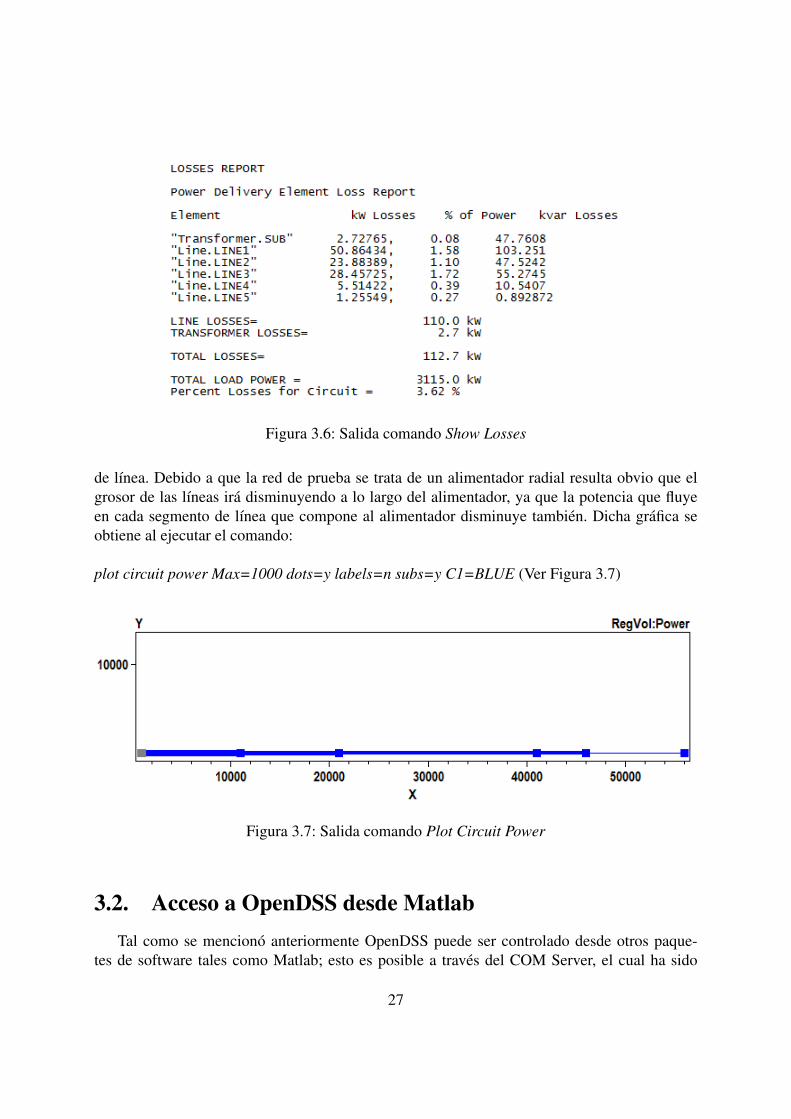
Figura 3.6: Salida comando Show Losses
de lınea. Debido a que la red de prueba se trata de un alimentador radial resulta obvio que elgrosor de las lıneas ira disminuyendo a lo largo del alimentador, ya que la potencia que fluyeen cada segmento de lınea que compone al alimentador disminuye tambien. Dicha grafica seobtiene al ejecutar el comando:
plot circuit power Max=1000 dots=y labels=n subs=y C1=BLUE (Ver Figura 3.7)
Figura 3.7: Salida comando Plot Circuit Power
3.2. Acceso a OpenDSS desde MatlabTal como se menciono anteriormente OpenDSS puede ser controlado desde otros paque-
tes de software tales como Matlab; esto es posible a traves del COM Server, el cual ha sido
27
desarrollado como una aplicacion DLL.
3.2.1. COM ServerAntes de trabajar en la interconexion de OpenDSS con Matlab, el COM Server debe ser
registrado en el ambiente Windows. El registro del COM Server se realiza a traves de la consolade comandos de DOS. Primero es necesario ubicarse en el directorio en el cual se encuentranlos archivos de OpenDSS y luego ejecutar el siguiente comando:
Regsvr32 OpenDSSEngine.DLL
Ejecutado este paso ya es posible enlazar OpenDSS con otros paquetes de software.
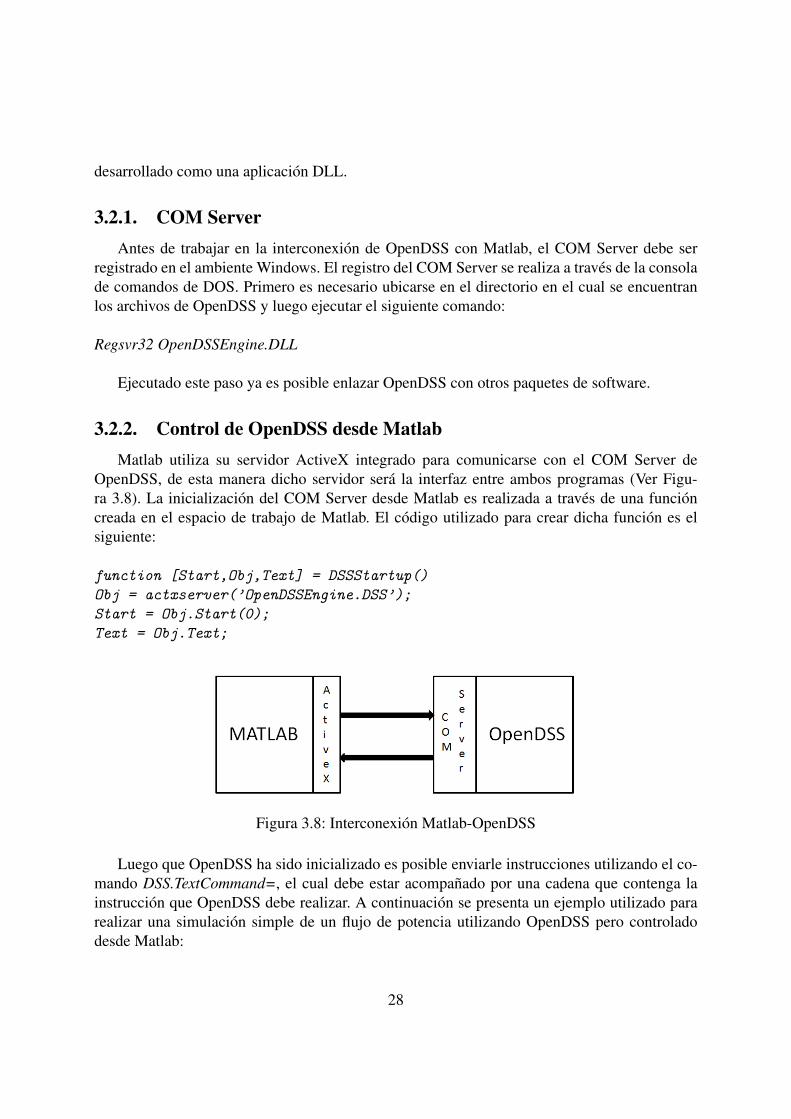
3.2.2. Control de OpenDSS desde MatlabMatlab utiliza su servidor ActiveX integrado para comunicarse con el COM Server de
OpenDSS, de esta manera dicho servidor sera la interfaz entre ambos programas (Ver Figu-ra 3.8). La inicializacion del COM Server desde Matlab es realizada a traves de una funcioncreada en el espacio de trabajo de Matlab. El codigo utilizado para crear dicha funcion es elsiguiente:
function [Start,Obj,Text] = DSSStartup()
Obj = actxserver(’OpenDSSEngine.DSS’);
Start = Obj.Start(0);
Text = Obj.Text;
Figura 3.8: Interconexion Matlab-OpenDSS
Luego que OpenDSS ha sido inicializado es posible enviarle instrucciones utilizando el co-mando DSS.TextCommand=, el cual debe estar acompanado por una cadena que contenga lainstruccion que OpenDSS debe realizar. A continuacion se presenta un ejemplo utilizado pararealizar una simulacion simple de un flujo de potencia utilizando OpenDSS pero controladodesde Matlab:
28
[DSSStartOK, DSSObj, DSSText] = DSSStartup();
DSSText.Command = ’compile master.dss’;
DSSCircuit = DSSObj.ActiveCircuit;
DSSText.Command = ’solve’;
Para el ejemplo presentado el archivo master.dss contiene tanto la definicion del sistema aresolver como las opciones que han sido habilitadas para dicha solucion.
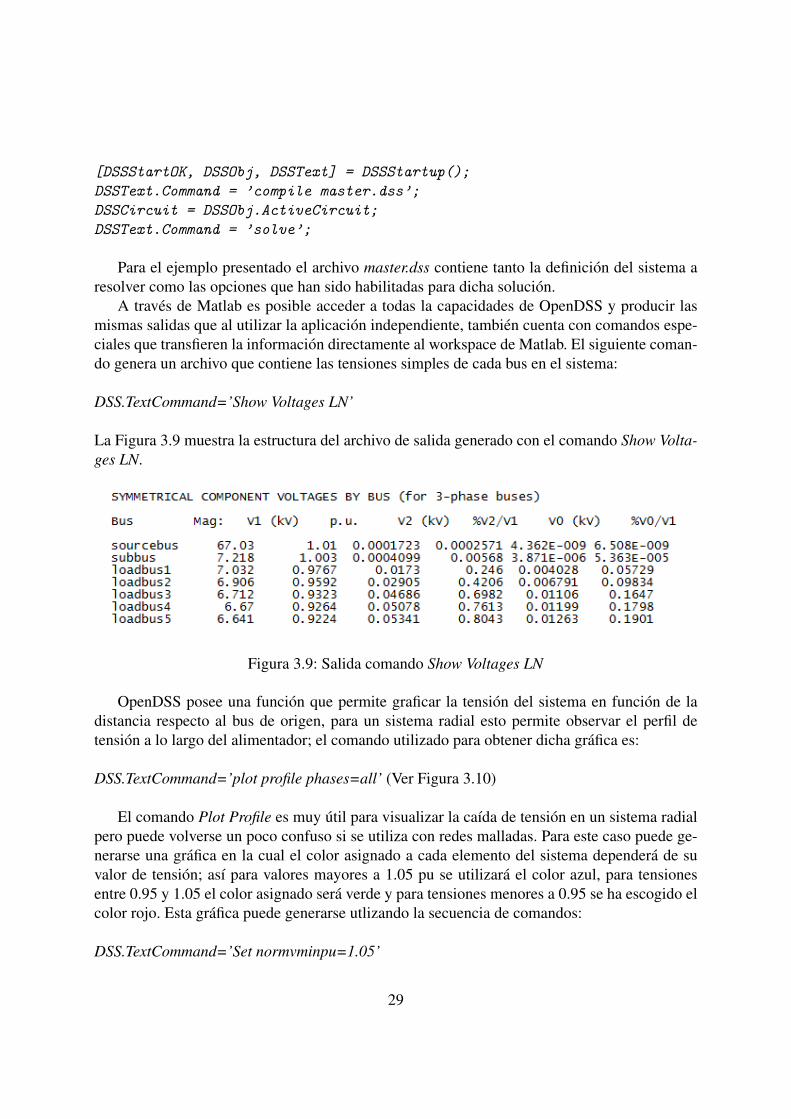
A traves de Matlab es posible acceder a todas la capacidades de OpenDSS y producir lasmismas salidas que al utilizar la aplicacion independiente, tambien cuenta con comandos espe-ciales que transfieren la informacion directamente al workspace de Matlab. El siguiente coman-do genera un archivo que contiene las tensiones simples de cada bus en el sistema:
DSS.TextCommand=’Show Voltages LN’
La Figura 3.9 muestra la estructura del archivo de salida generado con el comando Show Volta-ges LN.
Figura 3.9: Salida comando Show Voltages LN
OpenDSS posee una funcion que permite graficar la tension del sistema en funcion de ladistancia respecto al bus de origen, para un sistema radial esto permite observar el perfil detension a lo largo del alimentador; el comando utilizado para obtener dicha grafica es:
DSS.TextCommand=’plot profile phases=all’ (Ver Figura 3.10)
El comando Plot Profile es muy util para visualizar la caıda de tension en un sistema radialpero puede volverse un poco confuso si se utiliza con redes malladas. Para este caso puede ge-nerarse una grafica en la cual el color asignado a cada elemento del sistema dependera de suvalor de tension; ası para valores mayores a 1.05 pu se utilizara el color azul, para tensionesentre 0.95 y 1.05 el color asignado sera verde y para tensiones menores a 0.95 se ha escogido elcolor rojo. Esta grafica puede generarse utlizando la secuencia de comandos:
DSS.TextCommand=’Set normvminpu=1.05’
29
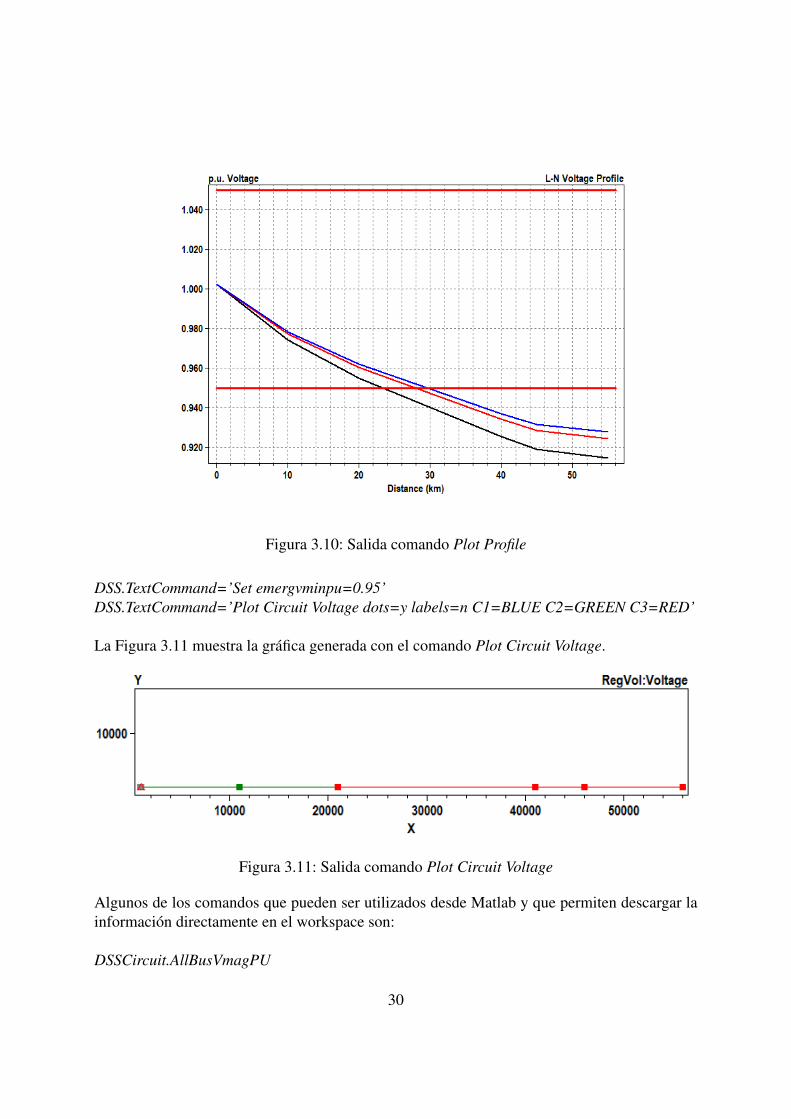
Figura 3.10: Salida comando Plot Profile
DSS.TextCommand=’Set emergvminpu=0.95’DSS.TextCommand=’Plot Circuit Voltage dots=y labels=n C1=BLUE C2=GREEN C3=RED’
La Figura 3.11 muestra la grafica generada con el comando Plot Circuit Voltage.
Figura 3.11: Salida comando Plot Circuit Voltage
Algunos de los comandos que pueden ser utilizados desde Matlab y que permiten descargar lainformacion directamente en el workspace son:
DSSCircuit.AllBusVmagPU
30

DSSCircuit.AllElementLossesDSSCircuit.ActiveElement.PowersDSSCircuit.ActiveElement.YprimDSSCircuit.ActiveElement.seqCurrentsDSSCircuit.AllNodeDistancesByPhase(1)DSSCircuit.AllBusNames
31

Capıtulo 4
Localizacion optima de generaciondistribuida
La introduccion de generacion distribuida en redes de distribucion electrica trae consigomuchos beneficios tales como la reduccion de perdidas, mejora de la calidad del suministrode energıa, descongestion de lıneas, aumento de la confiabilidad del sistema, etc. Debido a sutamano relativamente pequeno los generadores distribuidos pueden ser instalados facilmenteen casi cualquier punto de la red, siendo posible llevarlos a lugares cercanos a los centros deconsumo. Sin embargo, la seleccion incorrecta de su ubicacion puede tener consecuencias comoel aumento de perdidas del sistema, problemas de tension, sobrecarga de lıneas y otras; estasrepresentan el efecto contrario de lo que se espera lograr con la introduccion de generaciondistribuida. Por esta razon es necesario analizar y cuantificar el impacto real que la generaciondistribuida puede tener en una determinada red.
Los diferentes metodos de localizacion optima de un generador distribuido tienen comoobjetivo maximizar uno o varios de los siguientes parametros:
La reduccion de perdidas en el sistema
La mejora del perfil de tension
La mejora de los ındices de confiabilidad del sistema
La reduccion de los costes de operacion
La reduccion de emision de gases de efecto invernadero
Otros
Los metodos que buscan optimizar mas de un parametro utilizan funciones multi-objetivo, lascuales evaluan la mejora de las condiciones del sistema asignando un factor de peso a cadaparametro. De esta forma es posible alcanzar un balance entre los beneficios que se deseanobtener a partir de la introduccion de generacion distribuida, ya que en muchas ocasiones noresulta posible maximizar todos los parametros considerados.
32
4.1. Metodos de localizacion optima de generacion distribui-da
En los ultimos anos se ha realizado un gran esfuerzo dentro del sector electrico por desarro-llar metodos que permitan determinar la ubicacion optima de generadores distribuidos dentrouna red de distribucion. Se trata de un problema de optimizacion multi-objetivo con multiplesrestricciones, para el que se han desarrollado un elevado numero de metodos, entre las cualesmerecen especial mencion:
Regla de los 2/3
Metodos analıticos
Flujo de carga optimo
Algoritmos geneticos
Algoritmos metaheurısticos
4.1.1. Regla de los 2/3La regla de los 2/3 es un metodo derivado de la conocida regla de los 2/3 para la ubicacion
de bancos de condensadores. Segun esta regla para minimizar las perdidas en un alimentadorradial con carga uniformemente distribuida debe de instalarse un generador con una potenciaigual a 2/3 de la carga activa total del sistema a una distancia de 2/3 de la longitud total delalimentador. A pesar de que esta regla ha sido deducida a partir de algunas simplificaciones enel calculo, su resultado brinda una muy buena aproximacion para escoger tanto la capacidadcomo la ubicacion de un generador distribuido. Sin embargo, debe de tenerse en cuenta quedicha regla solo es valida para un alimentador radial con carga uniformemente distribuida, porlo que posee muy poca aplicacion practica.
4.1.2. Metodos analıticosLos metodos analıticos tienen como objetivo comun la reduccion de perdidas, para lograr
este objetivo se basan en analisis y calculos matematicos. Como estrategia general se desarro-llan ecuaciones que definen las perdidas del sistema en funcion de la potencia y ubicacion delgenerador distribuido; luego encontrando el mınimo de dicha ecuacion es posible determinarla ubicacion y capacidad optima para el generador distribuido. Dichos metodos pueden ser uti-lizados tanto para redes radiales como malladas. Entre sus ventajas es posible mencionar queson relativamente faciles de utilizar, proveen resultados rapidamente y no requieren de proce-sos iterativos; mientras que entre sus desventajas se encuentran que pueden entregar solucioneserroneas para sistemas reales y algunos de ellos solo son capaces de optimizar la ubicacion
33
Ano deTıtulo artıculo Autores publicacion
Analytical approaches for optimal C. Wang 2004placement of distributed generation M. H. Nehrir
in power systemsAn analytical approach for DG allocation N. Acharya 2006
in primary distribution networks P. MahatN. Mithulananthan
An analytical method for the sizing and T. Gozel 2009siting of distributed generator in radial M.H. Hocaoglu
systemsOptimal placement of wind turbine DG P. Mahat 2006in primary distribution systems for real W. Ongsakul
loss reduction N. MithulananthanOptimal DG unit placement for loss A.L. Devi
reduction in radial distribution system-A B. Subramanyam 2007case study
Tabla 4.1: Metodos analıticos
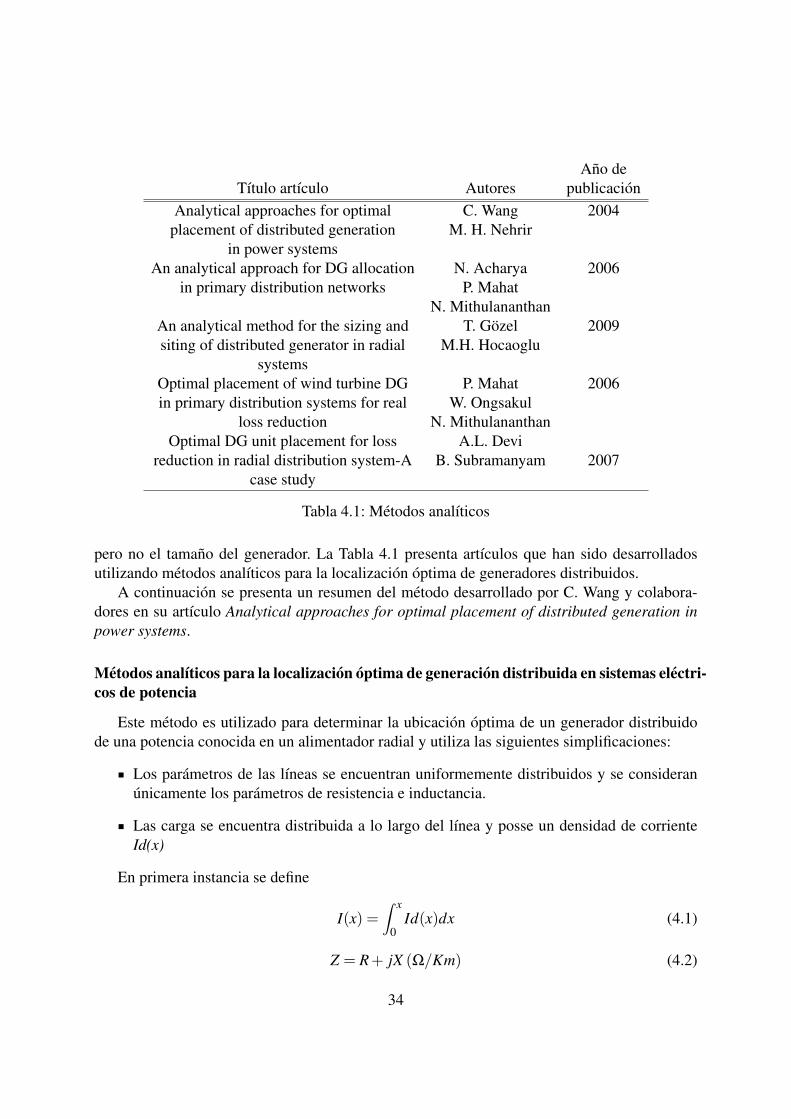
pero no el tamano del generador. La Tabla 4.1 presenta artıculos que han sido desarrolladosutilizando metodos analıticos para la localizacion optima de generadores distribuidos.
A continuacion se presenta un resumen del metodo desarrollado por C. Wang y colabora-dores en su artıculo Analytical approaches for optimal placement of distributed generation inpower systems.
Metodos analıticos para la localizacion optima de generacion distribuida en sistemas electri-cos de potencia
Este metodo es utilizado para determinar la ubicacion optima de un generador distribuidode una potencia conocida en un alimentador radial y utiliza las siguientes simplificaciones:
Los parametros de las lıneas se encuentran uniformemente distribuidos y se consideranunicamente los parametros de resistencia e inductancia.
Las carga se encuentra distribuida a lo largo del lınea y posse un densidad de corrienteId(x)
En primera instancia se define
I(x) =∫ x
0Id(x)dx (4.1)
Z = R+ jX (Ω/Km) (4.2)
34

x: Distancia respecto al final de la lınea
A partir de las ecuaciones anteriores es posible calcular las perdidas totales del sistema y lacaıda de tension
Ploss =∫ u
0
(∣∣∣∣∫ x
0Id(x)dx
∣∣∣∣)2
.Rdx (4.3)
Vdrop(x) =∫ x
0
∫ x
0Id(x)dx.Zdx (4.4)
u: Distancia total de la lınea
La Figura 4.1 muestra el perfil de corriente en un alimentador radial de longitud l con unadensidad de corriente arbitraria Id(x).
Figura 4.1: Alimentador con carga distribuida
Si un generador distribuido es agregado al sistema, y dicho generador se encuentra ubicadoa una distancia x0 del extremo final de la lınea e inyecta una corriente Idg, la distribucion decorriente a lo largo de la lınea se define como:
I(x) =∫ x
0Id(x)dx 0≤ x≤ x0 (4.5)∫ x
0Idx(x)− Idg x0≤ x≤ u
Las perdidas del sistema y la caıda de tension deben ser calculadas de nuevo luego de haberintroducido al generador distribuido.
Ploss =∫ x0
0
(∣∣∣∣∫ x
0Id(x)dx
∣∣∣∣)2
.Rdx+∫ u
x0
(∣∣∣∣∫ x
0Id(x)dx− Idg
∣∣∣∣)2
.Rdx (4.6)
Vdrop(x) =∫ x
0
∫ x
0Id(x)dx.Zdx 0≤ x≤ x0 (4.7)∫ x0
0
∫ x
0Id(x)dx.Zdx+
∫ x
x0
(∫ x
0Id(x)dx− Idg
)Zdx x0≤ x≤ u
35

Debido a que el metodo esta orientado a la reduccion de perdidas totales del sistema sedebera de cumplir la condicion impuesta por la siguiente ecuacion para lograr dicho objetivo:
ddx0
Ploss =d
dIdgPloss = 0 (4.8)
Luego de encontrar la posicion x0 que reduce a un mınimo las perdidas se debera calcularla caıda de tension a traves de la lınea para asegurar que el sistema se encuentra dentro decondiciones de operacion aceptables.
4.1.3. Flujo de carga optimoUn flujo de carga optimo puede ser descrito como un problema de programacion no lineal,
en el cual la solucion optima para la funcion objetivo es calculada considerando las restriccionesdel sistema. Los metodos basados en flujos de carga optimos tienen en cuenta aspectos tantotecnicos como economicos, por lo que su objetivo sera encontrar la ubicacion del generadordistribuido para la cual se cumplan objetivos tales como maximizar la ganancia y el beneficiosocial, reducir las perdidas del sistema, entre otros, tomando en cuenta restricciones tambien decaracter tecnico y economico. Entre las ventajas de estos metodos se puede mencionar que soncapaces de trabajar con sistemas grandes y complejos, pueden resolver problemas que incluyenmuchas variables y son relativamente rapidos. Respecto a los problemas encontrados al trabajarcon dichos metodos se puede mencionar que tienen problemas para encontrar la solucion optimasi la funcion objetivo es muy compleja, pueden volverse computacionalmente menos eficientesal aumentar la cantidad de elementos, algunos metodos unicamente son capaces de optimizarla ubicacion pero no el tamano del generador distribuido, etc. La Tabla 4.2 presenta artıculosque han sido desarrollados utilizando el flujo de carga optimo para la localizacion optima degeneradores distribuidos.
A continuacion se presenta un resumen del metodo desarrollado por W. Rosehart y colabo-radores en su artıculo Optimal placement of distributed generation.
Localizacion optima de generacion distribuida
En el metodo presentado se plantea una tecnica para determinar la ubicacion optima de ungenerador distribuido teniendo como objetivo la reduccion del costo de la electricidad. Para al-canzar dicho objetivo el metodo realiza un flujo de carga optimo basado en multiplicadores deLagrange.
Se define la funcion objetivo
G(xp,ρ,λp,λ∗) = ∑i∈η
CiPi (4.9)
C: Precio de oferta de la energıaP: Potencia programada
36

Ano deTıtulo artıculo Autores publicacion
Optimal placement of distributed W. Rosehart 2002generation E. Nowicki
Optimal sizing and placement of S. Ghosh 2010distributed generation in a network S.P. Ghoshal
systemOptimal DG placement in deregulated D. Gautam 2007
electricity market N. MithulananthanDispersed generation planning using J.O. Kim 1998improved Hereford Ranch algorithm S.W. Nam
S.K ParkC. Singh
Tabla 4.2: Metodos flujo de carga optimo
Las ecuaciones que rigen las restricciones de la solucion son establecidas
F (xp,ρ,λp) = 0 (Ecuaciones de f lu jo de potencia) (4.10)
HT (xp,ρ)≤ HT(Limites de las lineas de transmision
)HB ≤ HB (xp,ρ)
(Limite in f erior de o f erta de generador
)HB (xp,ρ)≤ HB
(Limite superior de o f erta de generador
)HR (xp,ρ)≤ HR (Margen de reserva de potencia activa)
xp ≤ xp ≤ xp(Limites de las variables dependientes
)ρ ≤ ρ ≤ ρ
(Limites de las variables independientes
)A continuacion con la ayuda de un software de optimizacion se procede a calcular los mul-
tiplicadores de Lagrange (λ ) asociados con las ecuaciones de flujo de potencia activos paracada bus del sistema, siendo los buses mas adecuados para la instalacion de generacion distri-buida aquellos que presenten multiplicadores de Lagrange de mayor valor. La instalacion degeneracion distribuida en dichos buses conducira a una reduccion en el costo de la electricidad.
4.1.4. Algoritmos geneticosLos algoritmos geneticos son un metodo de optimizacion basado en la aplicacion de la
seleccion natural y la genetica. En este tipo de metodos se crea una poblacion inicial cuyas ca-racterısticas son definidas aleatoriamente y que es evaluada en funcion de su idoneidad, la cuales determinada en base a los parametros que se desean optimizar. A partir de esta primera eva-luacion se seleccionan los individuos mas idoneos y una nueva poblacion es creada utilizandodichos individuos como base. Este proceso se repite hasta que la solucion optima es alcanzada.
37

Los metodos basados en algoritmos geneticos poseen ventajas tales como robustez, la posibili-dad de explorar todas las soluciones posibles al problema, la capacidad de trabajar con variablesdiscretas y continuas, entre otras. Sin embargo presentan desventajas como un tiempo excesi-vo de convergencia, falta de precision cuando se require una respuesta de alta calidad, etc. LaTabla 4.3 presenta artıculos que han sido desarrollados utilizando algoritmos geneticos para lalocalizacion optima de generadores distribuidos.
Ano deTıtulo artıculo Autores publicacion
Distributed generator placement in N. Mithulananthan 2004power distribution system using genetic T. Oo
algorithm to reduce losses L.V. OhuA multiobjective evolutionary algorithm G. Celli 2005
for the sizing and siting of distributed E. Ghianigeneration S. Mocci
F. PiloOptimal distributed generation allocation C.L.T. Borges 2006
for reliability, losses, and voltage D.M. Falcaoimprovement
Risk-based distributed generation M.R. Haghifam 2008placement H. Falaghi
O.P. MalikMaximal optimal benefits of distributed A.A. Abou El-Ela 2010
generation using genetic algorithms S.M. AllamM. Shatla
Tabla 4.3: Metodos algoritmos geneticos
A continuacion se presenta un resumen del metodo desarrollado por N. Mithulananthany colaboradores en su artıculo Distributed generator placement in power distribution systemusing genetic algorithm to reduce losses.
Localizacion de generadores distribuidos en sistemas de distribucion de energıa utilizandoalgoritmos geneticos para la reduccion de perdidas
El metodo consiste en determinar con ayuda de algoritmos geneticos el tamano y la ubica-cion optima de un generador distribuido para reducir las perdidas totales del sistema. La funcionutilizada para evaluar la idoneidad de cada individuo de la poblacion generado sera las perdi-das del sistema, las cuales son calculadas luego de resolver las ecuaciones de flujo de cargasutilizando el metodo de Newton-Raphson utilizando las siguientes formulas:
Ploss = PT [B]P+BT0 P+B00 (4.11)
38

Ploss =n
∑i=1
n
∑j=1
PiBi jPj +n
∑i=1
PiBi0 +B00 (4.12)
Bi j: Matriz de dimension nxnBi0: Vector adimensional con coeficientes lineares de perdidasB00: Coeficientes de perdidas constantes
La inicializacion de la poblacion, evaluacion de su idoneidad y creacion de nuevas pobla-ciones puede ser realizada a traves del GA Optimization Toolbox (GAOT) de Matlab.
EL uso de algoritmos geneticos para determinar la ubicacion optima de un generador distri-buido puede resumirse en 6 pasos:
1. Representacion: Se define como el problema esta estructurado en el algoritmo geneticoy se determinan los operadores que seran utilizados.
2. Inicializacion de la poblacion: Una poblacion inicial es creada cuyas caracterısticas sondeterminadas aleatoriamente.
3. Seleccion: Se realiza una seleccion de los individuos utilizando una funcion geometricanormalizada.
4. Reproduccion: Se crea una nueva poblacion a partir de la anterior.
5. Evaluacion de la idoneidad: Las perdidas totales del sistema son utilizadas para evaluarla idoneidad de cada individuo de la poblacion.
6. Terminacion: La simulacion termina cuando se ha creado un numero determinado degeneraciones de individuos.
La Figura 4.2 muestra el diagrama de flujo que representa al algoritmo de solucion.El tamano y ubicacion optimos para el generador distribuido seran aquellos que correspon-
dan al individuo que sea considerado como el mas idoneo al terminar la simulacion.
4.1.5. Algoritmos metaheurısticosLos algoritmos metaheurısticos son algoritmos aproximados de optimizacion; son procedi-
mientos iterativos que combinan distintos conceptos para explorar y explotar adecuadamenteel espacio de busqueda. Estos algoritmos son capaces de manejar funciones multi-objetivo,ademas de ser intuitivos, relativamente faciles de entender e implementar y eficaces al encon-trar soluciones cercanas al optimo real, lo cual tambien representa una desventaja ya que nosiempre es posible encontrar soluciones exactas; otra desventaja radica en que algunos algo-ritmos solo son capaces de encontrar soluciones en sistemas que no presentan restricciones.Existen diferentes algoritmos que utilizan conceptos metaheurısticos tales como Optimizacionbasada en colonias de hormigas, Busqueda tabu, Busqueda local, Optimizacion de enjambrede partıculas, entre otros. Debido a que los algoritmos metaheurısticos son capaces de trabajar
39
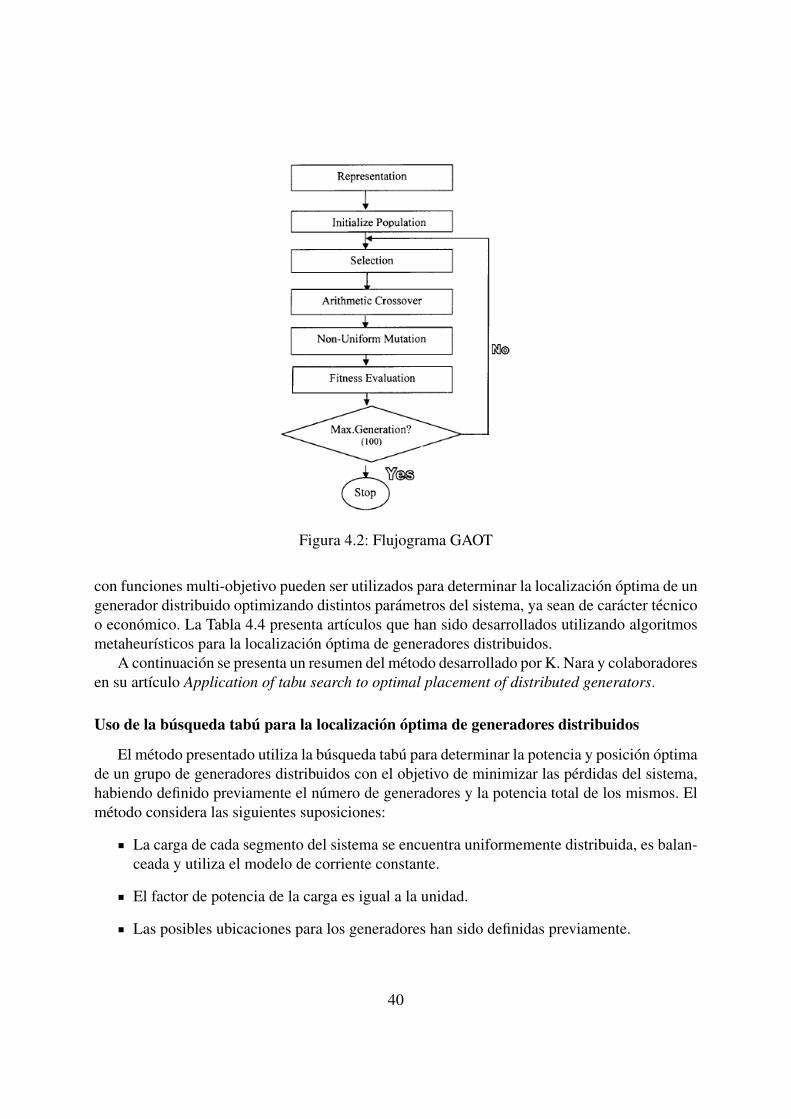
Figura 4.2: Flujograma GAOT
con funciones multi-objetivo pueden ser utilizados para determinar la localizacion optima de ungenerador distribuido optimizando distintos parametros del sistema, ya sean de caracter tecnicoo economico. La Tabla 4.4 presenta artıculos que han sido desarrollados utilizando algoritmosmetaheurısticos para la localizacion optima de generadores distribuidos.
A continuacion se presenta un resumen del metodo desarrollado por K. Nara y colaboradoresen su artıculo Application of tabu search to optimal placement of distributed generators.
Uso de la busqueda tabu para la localizacion optima de generadores distribuidos
El metodo presentado utiliza la busqueda tabu para determinar la potencia y posicion optimade un grupo de generadores distribuidos con el objetivo de minimizar las perdidas del sistema,habiendo definido previamente el numero de generadores y la potencia total de los mismos. Elmetodo considera las siguientes suposiciones:
La carga de cada segmento del sistema se encuentra uniformemente distribuida, es balan-ceada y utiliza el modelo de corriente constante.
El factor de potencia de la carga es igual a la unidad.
Las posibles ubicaciones para los generadores han sido definidas previamente.
40

Ano deTıtulo artıculo Autores publicacion
Placement of dispersed generation T. Griffin 2001systems for reduced losses K. Tomsovic
D. SecrestA. Law
An integrated distributed generation W. El-Khattam 2005optimization model for distribution Y.G. Hegazy
system planning M.M.A. SalamaApplication of tabu search to optimal K. Nara 2001
placement of dispersed generators Y. HayashiK. Ikeda
T. AshizawaSiting and sizing of distributed generation A.J. Ardakani 2007
for loss reduction A.K. KavyaniS.A. Pourmousavi
Optimal operation of distribution system T. Niknam 2005with regard to distributed generation: A.M. Ranjbar
A comparison of evolutionary methods A.R. ShiraniB. MozafariA. Ostadi
Tabla 4.4: Metodos algoritmos metaheurısticos
La potencia de cada generador debe ser seleccionada de un grupo de valores escogidos deantemano (valores discretos).
Unicamente puede asignarse un generador a cada ubicacion posible.
El numero maximo de unidades generadoras es conocido.
La potencia total del grupo de generadores es conocida.
La funcion objetivo a minimizar sera:
Z =tmax
∑t=1
SC
∑h=1
Loss(t)h
(I(t)DG jk
)(4.13)
I(t)DG jk=
N
∑g=1
B(t)jkgn(k)jk (4.14)
( j = 1,2, . . . ,SC,k = 1,2, . . . ,M, t = 1,2, . . . , tmax)
41

Las restricciones para el problema son definidas a traves de ecuaciones.Potencia total del grupo de generadores:
SC
∑j=1
M
∑k=1
N
∑g=1
Cgn(g)jk ≤ G (4.15)
Numero maximo de unidades generadoras:
SC
∑j=1
M
∑k=1
N
∑g=1
n(g)jk ≤ H (4.16)
Una unidad por ubicacion posible:N
∑g=1
n(g)jk ≤ 1 (4.17)
( j = 1,2, . . . ,SC,k = 1,2, . . . ,M)
Condiciones de operacion de generadores:
B(t)jkg ≤Cg (4.18)
( j = 1,2, . . . ,SC,k = 1,2, . . . ,M, t = 1,2, . . . , tmax)
f(
B(t)jkg,Cg
)≤ 0 (4.19)
( j = 1,2, . . . ,SC,k = 1,2, . . . ,M, t = 1,2, . . . , tmax)
Loss(t)h : Perdidas en la seccion h para el tiempo t.
I(t)DG jk: Corriente inyectada por el generador en la k-esima posicion en la seccion j para el tiempo
t.n(g)jk : Variable booleana utilizada para determinar si un generador de g-esima potencia es asig-nado a la k-esima ubicacion en la seccion j.SC: Numero total de secciones.N: Numero total de valores posibles de potencia para los generadores.M: Numero total de ubicaciones posibles para cada seccion.tmax: Valor maximo para el tiempo t.Cg: Potencia del g-esimo generador (valor discreto).H: Numero maximo de generadores instalables.G: Potencia maxima del grupo de generadores.B(t)
jkg: Potencia inyectada por el generador de la g-esima potencia instalado en la k-esima posi-cion de la seccion j para el tiempo t.
Por simplicidad se asume que cada generador inyectara su potencia nominal en todo mo-mento:
B(t)jkg =Cg (4.20)
42

Luego de incluir la simplificacion que dicta que cada generador inyectara su potencia nomi-nal en todo momento es posible obtener los valores de I(t)DG jk
al discretizar los valores encontra-dos al resolver la siguientes ecuaciones simultaneas:
∂
tmax
∑t=1
SC
∑h=1
Loss(t)h
(I(t)DG jk
)/∂ I(t)DG jk
= 0 (4.21)
(( j,k) ∈ Q)
Q: Grupo de valores de (j,k) a los cuales hay un generador conectado.
Para obtener la solucion al problema planteado se utiliza un algoritmo el cual como pri-mer paso determina posiciones para todos los generadores a analizar utilizando la busquedatabu; para dichas posiciones se determinan, utilizando nuevamente la busqueda tabu, las poten-cias de los generadores que minimizaran las perdidas del sistema. A continuacion el algoritmodefinira nuevas posiciones que se encuentran en la “vecindad” de las posiciones originales ycalculara las potencias de los generadores que reducen al maximo las perdidas, ası hasta haberanalizado los alrededores de dichas posiciones originales. Luego se definiran nuevas posicio-nes o una nueva “vecindad” repitiendo el proceso hasta que el numero maximo de iteracionesconsideradas haya sido alcanzado. Al final del analisis de cada “vecindad” se determinara cuales la solucion optima segun la evaluacion de la funcion objetivo (las perdidas del sistema); dela misma manera al alcanzar el numero maximo de iteraciones se escogera la solucion optimautilizando el mismo criterio. La Figura 4.3 muestra el diagrama de flujo que representa al al-goritmo de solucion. Debe de tomarse en cuenta que los valores de potencias asignadas a losgeneradores solo pueden tomar valores discretos definidos al comienzo del problema, por lo quelos valores de potencias encontrados utilizando la busqueda tabu deben de ser discretizados paraajustarse a dichos valores. Con el objetivo de evitar crear “vecindades” que han sido analizadasanteriormente se hace uso de la lista tabu, en la cual se lleva el registro de las “vecindades”creadas y un clasificacion segun la idoenidad de la solucion optima encontrada para la misma,de esta manera el algoritmo se vuelve mas eficiente.
43
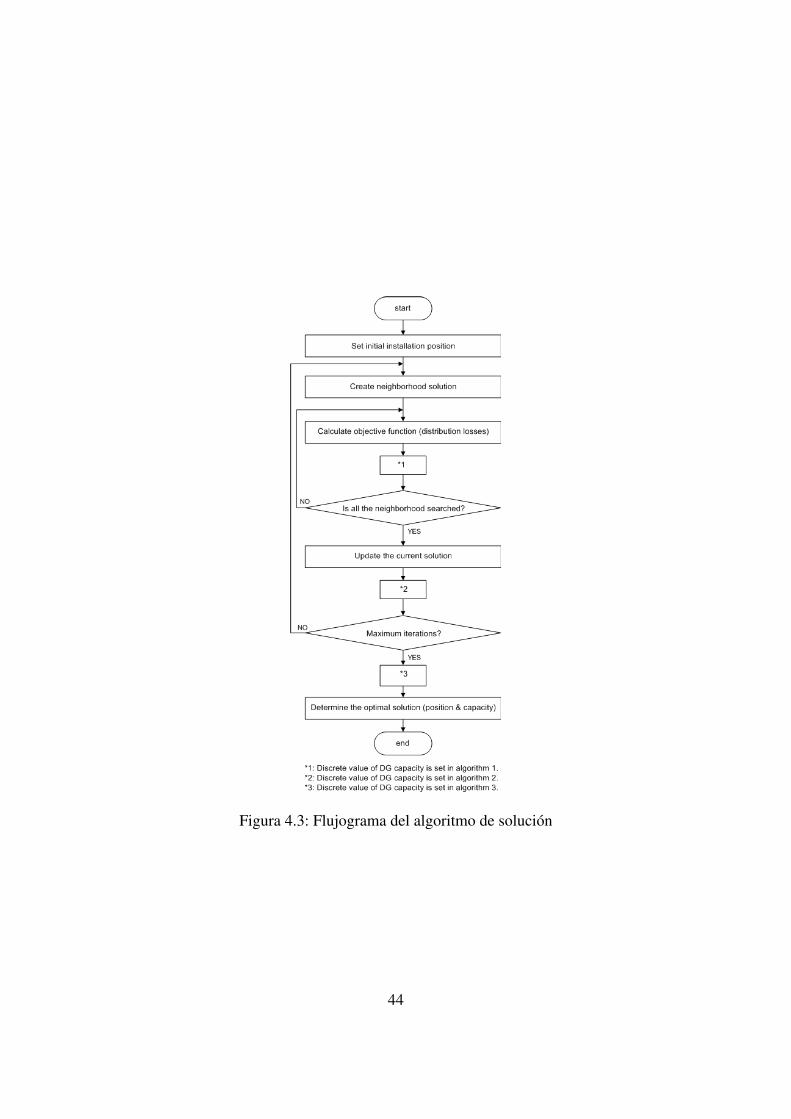
Figura 4.3: Flujograma del algoritmo de solucion
44
Capıtulo 5
Localizacion optima de un generadordistribuido utilizando el metodo de MonteCarlo
El estudio desarrollado en este trabajo esta basado en el metodo de Monte Carlo, y buscaoptimizar tanto la ubicacion como la potencia de un generador distribuido, el cual inyecta uni-camente potencia activa con el objetivo de minimizar las perdidas del sistema. La idea detrasde este metodo consiste en generar aleatoriamente valores para la posicion y la potencia delgenerador distribuido, resolver el sistema y calcular las perdidas totales para cada caso. Con elanalisis de un numero determinado de casos serıa posible, utilizando algoritmos de interpola-cion multivariable, encontrar la combinacion de posicion y potencia que reduzca las perdidasa un mınimo. Se deberıa generar un numero suficiente de pares posicion-potencia para que lasconclusiones obtenidas fueran realistas. Una de las ventajas del metodo desarrollado es la utili-zacion de OpenDSS como herramienta de simulacion; lo que permite no solo realizar estudiostipo snapshot sino tambien estudios que utilicen curvas de carga que varıan con el tiempo, per-mitiendo de esta forma optimizar la potencia y la ubicacion del generador para que las perdidastotales de energıa a lo largo de un periodo de tiempo sean mınimas. Los estudios que utilizancurvas de carga que varıan a lo largo del tiempo presentan un mayor valor que aquellos quesolo consideran cargas constantes, ya que resulta obvio que en los sistemas reales las cargaspresentan un comportamiento variable en el tiempo. Por otro lado, el post-procesamiento de lainformacion generada por OpenDSS permite descartar casos que no cumplan con restriccionesde caracter tecnico. El procedimiento seguido por el metodo es el siguiente:
1. Se generan valores aleatorios de posicion y potencia para el generador, asignandole ademasuna curva de carga al mismo.
2. Se calcula el flujo de cargas para cada caso. Se descartan aquellos casos que no cumplancon alguna de las siguientes restricciones:
La tension en al menos un bus se encuentra fuera de los lımites aceptables
45
Uno o mas elementos del sistema trabajan por encima de su capacidad nominal.
Adicionalmente puede considerarse la no presencia de flujo inverso como una condicionque debe ser cumplida en todo momento.
3. Se termina el proceso al alcanzar un numero determinado de simulaciones.
4. Se crean los archivos personalizados para el post-procesamiento de la informacion.
5. Se generan curvas basadas en la informacion obtenida de los archivos personalizados, yse determinan los valores optimos de posicion y potencia.
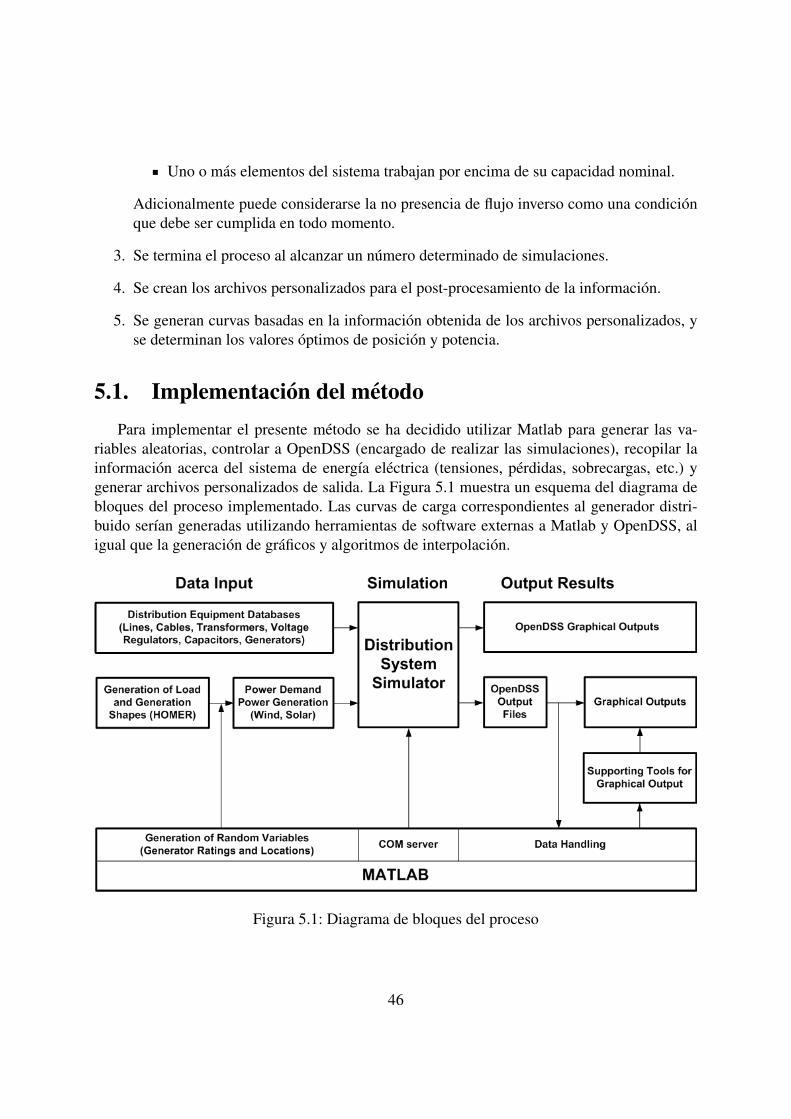
5.1. Implementacion del metodoPara implementar el presente metodo se ha decidido utilizar Matlab para generar las va-
riables aleatorias, controlar a OpenDSS (encargado de realizar las simulaciones), recopilar lainformacion acerca del sistema de energıa electrica (tensiones, perdidas, sobrecargas, etc.) ygenerar archivos personalizados de salida. La Figura 5.1 muestra un esquema del diagrama debloques del proceso implementado. Las curvas de carga correspondientes al generador distri-buido serıan generadas utilizando herramientas de software externas a Matlab y OpenDSS, aligual que la generacion de graficos y algoritmos de interpolacion.
Figura 5.1: Diagrama de bloques del proceso
46
5.1.1. Entrada de datosSe requiere de cierta informacion de entrada para poder desarrollar el metodo, dicha infor-
macion puede dividirse en:
Informacion tecnica del sistema bajo estudio
Determinacion de curvas de carga
Generacion aleatoria de los valores de potencia y posicion del generador distribuido
Informacion tecnica del sistema bajo estudio
Ver seccion Red de estudio
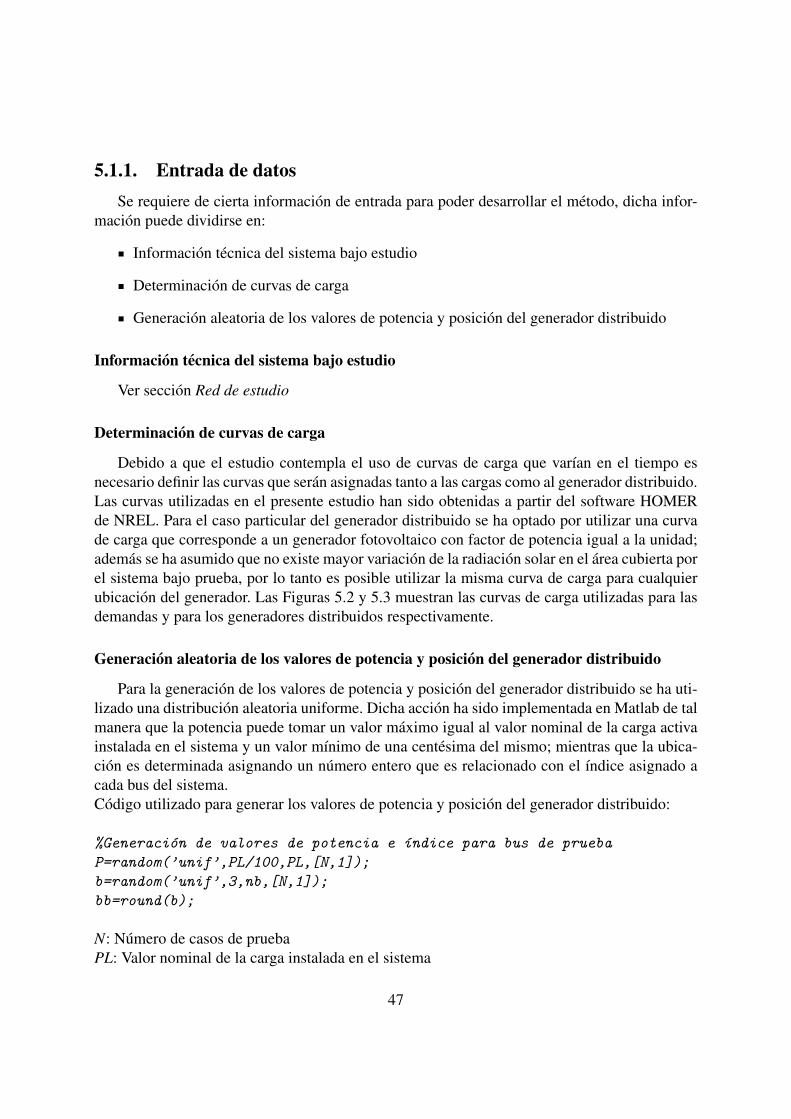
Determinacion de curvas de carga
Debido a que el estudio contempla el uso de curvas de carga que varıan en el tiempo esnecesario definir las curvas que seran asignadas tanto a las cargas como al generador distribuido.Las curvas utilizadas en el presente estudio han sido obtenidas a partir del software HOMERde NREL. Para el caso particular del generador distribuido se ha optado por utilizar una curvade carga que corresponde a un generador fotovoltaico con factor de potencia igual a la unidad;ademas se ha asumido que no existe mayor variacion de la radiacion solar en el area cubierta porel sistema bajo prueba, por lo tanto es posible utilizar la misma curva de carga para cualquierubicacion del generador. Las Figuras 5.2 y 5.3 muestran las curvas de carga utilizadas para lasdemandas y para los generadores distribuidos respectivamente.
Generacion aleatoria de los valores de potencia y posicion del generador distribuido
Para la generacion de los valores de potencia y posicion del generador distribuido se ha uti-lizado una distribucion aleatoria uniforme. Dicha accion ha sido implementada en Matlab de talmanera que la potencia puede tomar un valor maximo igual al valor nominal de la carga activainstalada en el sistema y un valor mınimo de una centesima del mismo; mientras que la ubica-cion es determinada asignando un numero entero que es relacionado con el ındice asignado acada bus del sistema.Codigo utilizado para generar los valores de potencia y posicion del generador distribuido:
%Generacion de valores de potencia e ındice para bus de prueba
P=random(’unif’,PL/100,PL,[N,1]);
b=random(’unif’,3,nb,[N,1]);
bb=round(b);
N: Numero de casos de pruebaPL: Valor nominal de la carga instalada en el sistema
47
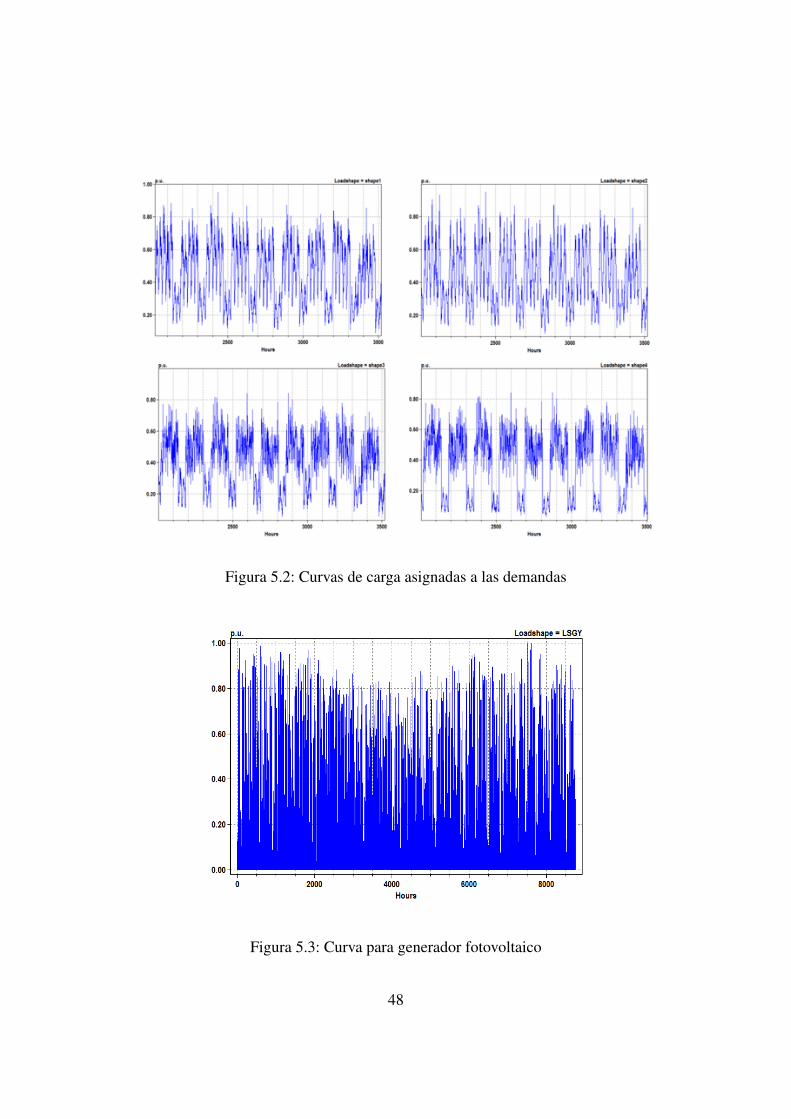
Figura 5.2: Curvas de carga asignadas a las demandas
Figura 5.3: Curva para generador fotovoltaico
48

bb: Numero entero utilizado como ındiceLa Figura 5.4 muestra la distribucion de los pares de potencia e ındice de bus de prueba para1000 casos.
Figura 5.4: Combinaciones Potencia-Indice bus para 1000 casos
5.1.2. SimulacionLa simulacion de cada caso de prueba sera llevada a cabo por OpenDSS y sera inicializada
desde Matlab. Los pasos a seguir para desarrollar la simulacion son:
1. Se compila el archivo con la informacion del sistema.
2. Se incluye al generador distribuido en el sistema, utilizando los parametros determina-dos aleatoriamente. Esta accion se realiza desde Matlab, ya que dicho generador no seencuentra definido en el archivo base.
3. Se ejecuta el comando Solve.
4. Se recopila informacion del sistema.
5. Se termina la simulacion cuando se ha alcanzado la cantidad definida de casos.
49

5.1.3. Salida de datosAl termino de la simulacion se crearan archivos personalizados con la informacion recopi-
lada de cada caso. La informacion contenida en dichos archivos sera utilizada para alcanzar lossiguientes objetivos:
Generar graficas que permitan observar la variacion de las perdidas totales del sistemacon respecto a la potencia y la ubicacion del generador distribuido.
Determinar los valores de potencia y ubicacion del generador distribuido que minimicenlas perdidas totales del sistema.
Ambos objetivos seran alcanzados utilizando el software TableCurve3D, el cual nos permitegenerar superficies utilizando la informacion generada a partir de las simulaciones, adicional-mente cuenta con algoritmos que permiten encontrar el punto mınimo de dicha superficie. Dichacaracterıstica sera la que nos permita encontrar la combinacion potencia-ubicacion optima parael generador distribuido.
5.2. Red de estudioLa red de potencia utilizada en este estudio consiste en un alimentador unico que parte de
un transformador trifasico, y que esta formado por tramos de lınea uniformemente espaciados,encontrandose una carga puntual al final de cada tramo; todas las cargas que se encuentran alo largo del alimentador son identicas. De esta forma el circuito aproximadamente se comportacomo una red con carga uniformemente distribuida. La Figura 5.5 muestra el esquema unifilarde la red estudiada en este trabajo.
Figura 5.5: Esquema unifilar de la red radial con carga distribuida
5.2.1. TransformadorEl transformador que alimenta al sistema se trata de un transformador trifasico que permite
reducir la tension proveniente del sistema aguas arriba del alimentador al nivel de tension reque-
50
rido por las cargas. La Tabla 5.1 presenta las caracterısticas mas importantes del transformadorutilizado en este trabajo.
kVA kV-high kV-low XHL%20000 115 D 12.47 Y 7
Tabla 5.1: Parametros del transformador
5.2.2. Definicion de las lıneasDebido a que se trata de un sistema radial, este utiliza un unico tipo de lınea, es decir, la
disposicion geometrica y capacidad es la misma en todo el alimentador. El alimentador tieneuna longitud total de 10000 pies. Las caracterısticas de las lıneas se presentan en la Tabla 5.2.
Capacidad Numero totalConductor (A) Long (pie) de tramos
336 MCM ACSR 400 100 100
Tabla 5.2: Informacion de lıneas
5.2.3. Cargas del sistemaLas cargas definidas para el presente sistema se encuentran ubicadas a lo largo del alimenta-
dor, todas ellas son cargas trifasicas, balanceadas y se encuentran concentradas al final de cadatramo de lınea. El sistema tiene una carga total de 7.5 MW y 3.63 Mvar. La Tabla 5.3 presentalas caracterısticas principales de las cargas del sistema.
kW kvar PF Conexion75 36.3 0.90 Y
Tabla 5.3: Cargas de la red
Las curvas de carga utilizadas han sido definidas como: Dload1, Dload2, Dload3 y Dload4.La Tabla 5.4 muestra la asignacion de las curvas de carga a las distintas demandas del sistema.
5.2.4. Definicion del sistema en OpenDSSArchivo principal UbGD2.dss
Clear
new object=circuit.DSSLLibtestckt
51

Carga Curva Carga Curva Carga CurvaLoad1 Dload1 Load36 Dload3 Load71 Dload1Load2 Dload1 Load37 Dload3 Load72 Dload2Load3 Dload3 Load38 Dload4 Load73 Dload1Load4 Dload1 Load39 Dload2 Load74 Dload2Load5 Dload4 Load40 Dload1 Load75 Dload3Load6 Dload1 Load41 Dload2 Load76 Dload4Load7 Dload2 Load42 Dload1 Load77 Dload1Load8 Dload4 Load43 Dload1 Load78 Dload2Load9 Dload2 Load44 Dload4 Load79 Dload3
Load10 Dload3 Load45 Dload1 Load80 Dload1Load11 Dload3 Load46 Dload3 Load81 Dload2Load12 Dload2 Load47 Dload2 Load82 Dload1Load13 Dload2 Load48 Dload4 Load83 Dload4Load14 Dload4 Load49 Dload2 Load84 Dload4Load15 Dload2 Load50 Dload2 Load85 Dload2Load16 Dload1 Load51 Dload2 Load86 Dload4Load17 Dload4 Load52 Dload1 Load87 Dload3Load18 Dload3 Load53 Dload3 Load88 Dload3Load19 Dload3 Load54 Dload4 Load89 Dload1Load20 Dload2 Load55 Dload2 Load90 Dload2Load21 Dload3 Load56 Dload3 Load91 Dload2Load22 Dload1 Load57 Dload1 Load92 Dload1Load23 Dload4 Load58 Dload4 Load93 Dload4Load24 Dload2 Load59 Dload4 Load94 Dload4Load25 Dload1 Load60 Dload4 Load95 Dload3Load26 Dload4 Load61 Dload3 Load96 Dload2Load27 Dload3 Load62 Dload2 Load97 Dload1Load28 Dload1 Load63 Dload3 Load98 Dload3Load29 Dload3 Load64 Dload1 Load99 Dload2Load30 Dload2 Load65 Dload2 Load100 Dload4Load31 Dload4 Load66 Dload1Load32 Dload2 Load67 Dload4Load33 Dload1 Load68 Dload3Load34 Dload4 Load69 Dload3Load35 Dload2 Load70 Dload4
Tabla 5.4: Asignacion de curvas de carga a las demandas del sistema
52
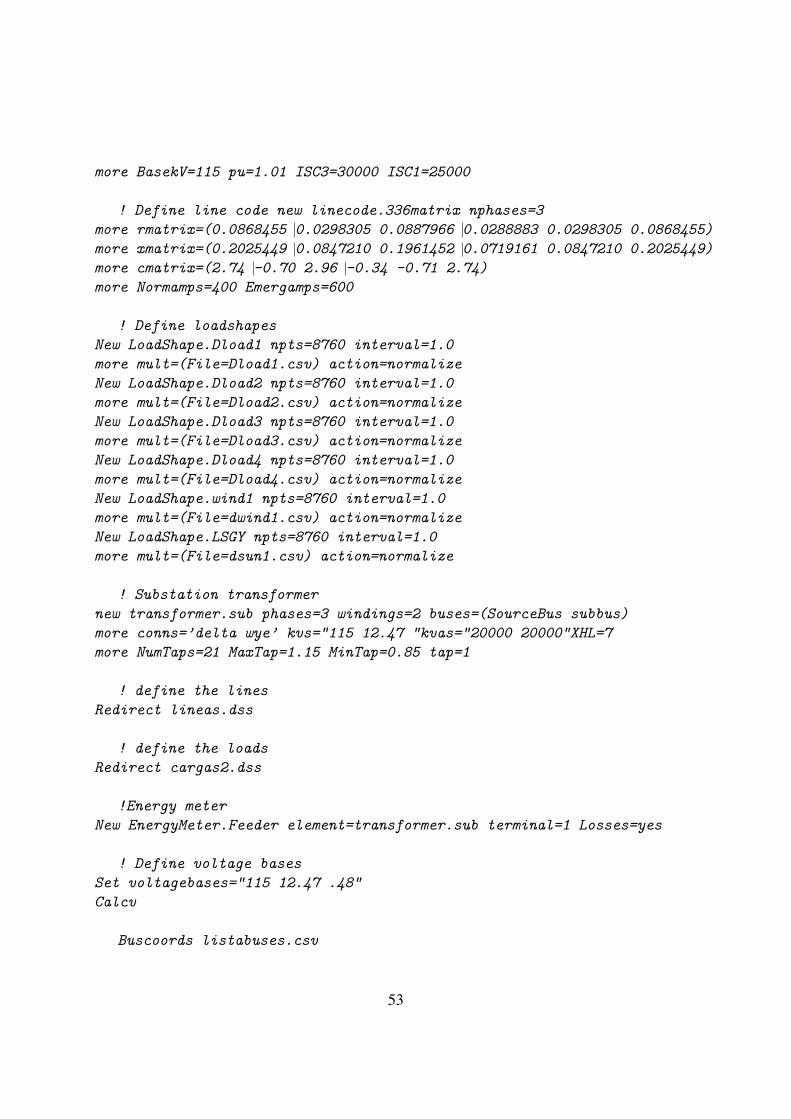
more BasekV=115 pu=1.01 ISC3=30000 ISC1=25000
! Define line code new linecode.336matrix nphases=3
more rmatrix=(0.0868455 0.0298305 0.0887966 0.0288883 0.0298305 0.0868455)
more xmatrix=(0.2025449 0.0847210 0.1961452 0.0719161 0.0847210 0.2025449)
more cmatrix=(2.74 -0.70 2.96 -0.34 -0.71 2.74)
more Normamps=400 Emergamps=600
! Define loadshapes
New LoadShape.Dload1 npts=8760 interval=1.0
more mult=(File=Dload1.csv) action=normalize
New LoadShape.Dload2 npts=8760 interval=1.0
more mult=(File=Dload2.csv) action=normalize
New LoadShape.Dload3 npts=8760 interval=1.0
more mult=(File=Dload3.csv) action=normalize
New LoadShape.Dload4 npts=8760 interval=1.0
more mult=(File=Dload4.csv) action=normalize
New LoadShape.wind1 npts=8760 interval=1.0
more mult=(File=dwind1.csv) action=normalize
New LoadShape.LSGY npts=8760 interval=1.0
more mult=(File=dsun1.csv) action=normalize
! Substation transformer
new transformer.sub phases=3 windings=2 buses=(SourceBus subbus)
more conns=’delta wye’ kvs="115 12.47 "kvas="20000 20000"XHL=7
more NumTaps=21 MaxTap=1.15 MinTap=0.85 tap=1
! define the lines
Redirect lineas.dss
! define the loads
Redirect cargas2.dss
!Energy meter
New EnergyMeter.Feeder element=transformer.sub terminal=1 Losses=yes
! Define voltage bases
Set voltagebases="115 12.47 .48"
Calcv
Buscoords listabuses.csv
53
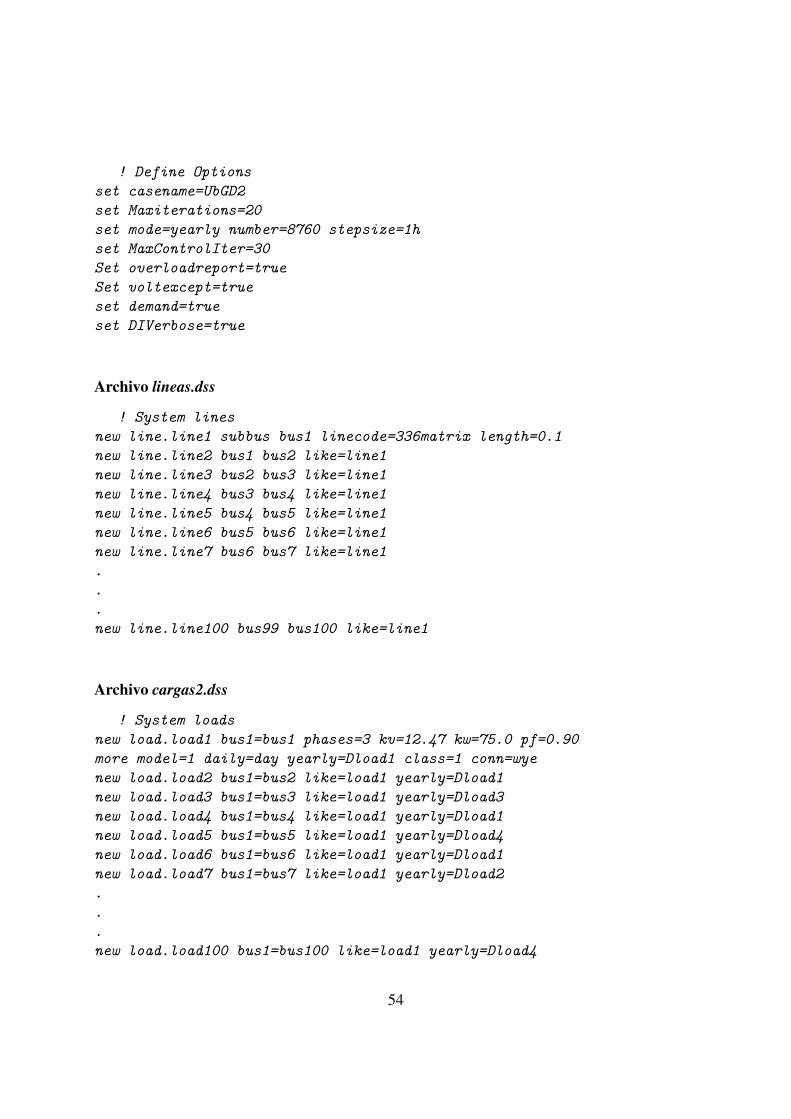
! Define Options
set casename=UbGD2
set Maxiterations=20
set mode=yearly number=8760 stepsize=1h
set MaxControlIter=30
Set overloadreport=true
Set voltexcept=true
set demand=true
set DIVerbose=true
Archivo lineas.dss
! System lines
new line.line1 subbus bus1 linecode=336matrix length=0.1
new line.line2 bus1 bus2 like=line1
new line.line3 bus2 bus3 like=line1
new line.line4 bus3 bus4 like=line1
new line.line5 bus4 bus5 like=line1
new line.line6 bus5 bus6 like=line1
new line.line7 bus6 bus7 like=line1
.
.
.
new line.line100 bus99 bus100 like=line1
Archivo cargas2.dss
! System loads
new load.load1 bus1=bus1 phases=3 kv=12.47 kw=75.0 pf=0.90
more model=1 daily=day yearly=Dload1 class=1 conn=wye
new load.load2 bus1=bus2 like=load1 yearly=Dload1
new load.load3 bus1=bus3 like=load1 yearly=Dload3
new load.load4 bus1=bus4 like=load1 yearly=Dload1
new load.load5 bus1=bus5 like=load1 yearly=Dload4
new load.load6 bus1=bus6 like=load1 yearly=Dload1
new load.load7 bus1=bus7 like=load1 yearly=Dload2
.
.
.
new load.load100 bus1=bus100 like=load1 yearly=Dload4
54
5.3. Procedimiento matematico para determinar la localiza-cion optima de un generador distribuido
La localizacion optima de un generador distribuido en un alimentador radial con carga uni-formemente distribuida puede ser determinada planteando las ecuaciones que definen las perdi-das de potencia del sistema en funcion de la potencia y la ubicacion del generador en dichoalimentador. Para realizar dicho analisis se asumen las siguientes simplificaciones:
Unicamente se consideran los parametros de resistencia e inductancia del alimentador
El generador inyecta solo potencia activa
La longitud total del alimentador sera de 1.0 por unidad
Las perdidas de potencia producidas por la corriente que fluye a traves de una resistencia puedendividirse en dos componentes, cada una es generada por la componente activa y reactiva de lacorriente respectivamente.
I2R = (Icosφ)2 R+(Isinφ)2 R (5.1)
Al introducir un generador que inyecta unicamente potencia activa solamente se veran afec-tadas las perdidas producidas por la componente activa.
I21 R =
(Icosφ − Idg
)2 R+(Isinφ)2 R (5.2)
Debido a esto las perdidas producidas por la componente reactiva de la corriente no serantomadas en cuenta, ya que la reduccion de perdidas es debida unicamente a la componenteactiva.
∆PLS = I2R− I21 R (5.3)
∆PLS = 2(Icosφ) IdgR− I2dgR (5.4)
Para un alimentador radial con una carga uniformemente distribuida y una carga concentradaal final de la lınea la ecuacion de corriente a lo largo del alimentador se define como:
I (x) = I1− (I1− I2)x (5.5)
I1: Corriente activa total del sistemaI2: Corriente activa concentrada al final de la lıneax: Distancia en por unidad medida desde el comienzo del alimentador
La Figura 5.6 muestra el perfil de corriente de un alimentador con carga uniformementedistribuida y una carga concentrada al final del mismo.
55

Figura 5.6: Perfil de corriente alimentador con carga uniformemente distribuida y una cargaconcentrada al final de la lınea
El diferencial de perdidas para un segmento diferencial de la lınea puede definirse como:
dPLS = 3 [I1− (I1− I2)x]2 Rdx (5.6)
R: Resistencia total del alimentador
Las perdidas totales en el alimentador seran
PLS =∫ 1
x=0dPLS (5.7)
= 3∫ 1
x=0[I1− (I1− I2)x]2 Rdx
=(I21 + I1I2 + I2
2)
R
Al introducir un generador que inyecta una corriente Idg y que se encuentra a una distanciax1 del origen del alimentador, la nueva ecuacion de corriente sera:
I(x) = I1− (I1− I2)x− Idg 0≤ x≤ x1 (5.8)I1− (I1− I2)x x1 ≤ x≤ 1
La Figura 5.7 muestra el nuevo perfil de corriente en el alimentador luego de la introduccionde un generador distribuido.
Por lo tanto las nuevas perdidas del sistema pueden calcularse como:
P′LS = 3
∫ x1
x=0
[I1− (I1− I1)x− Idg
]2 Rdx+3∫ 1
x=x1
[I1− (I1− I2)x]2 Rdx (5.9)
=(I21 + I1I2 + I2
2)
R+3x1
[(x1−2) I1Idg− x1I2Idg + I2
dg
]R
56

Figura 5.7: Nuevo perfil de corriente alimentador con generacion distribuida
La reduccion de perdidas de potencia en por unidad debida a la introduccion de un generadordistribuido es:
∆PLS =PLS−P
′LS
PLS(5.10)
=−3x1
[(x1−2) I1Idg− x1I2Idg + I2
dg
]I21 + I1I2 + I2
2
Se define c como la relacion entre la potencia en kW del generador distribuido y la potencianominal, tambien en kW, de la carga instalada en el sistema; λ es definido como la relacion entrela corriente de la carga concentrada al final de la lınea y la corriente total al principio del ali-mentador; manipulando la ecuacion anterior se obtendra una nueva ecuacion para la reduccionde perdidas de potencia en funcion del factor de compensacion c y λ .
c =Idg
I1(5.11)
λ =I2
I1(5.12)
∆PLS =3x1c
1+λ +λ 2 [2− x1 + x1λ − c] (5.13)
Las Figuras 5.8, 5.9 y 5.10 muestran la reduccion de perdidas en funcion de x1 y c paradiferentes valores de λ . Se observa que para λ=0 es posible encontrar una distancia que reduceal maximo las perdidas para todos los valores de c. Sin embargo, a medida que λ aumenta lascurvas de perdidas no presentan un maximo para valores pequenos de c sino que siguen cre-ciendo, lo que implica que para obtener la maxima reduccion de perdidas posibles el generadordistribuido debe ser instalado al final de la lınea, ya que matematicamente la distancia optimase encuentra mas alla del final del alimentador. Si el valor de λ sigue aumentando, entonces losvalores de c para los cuales no sera posible encontrar la distancia optima tambien aumentaran.
57
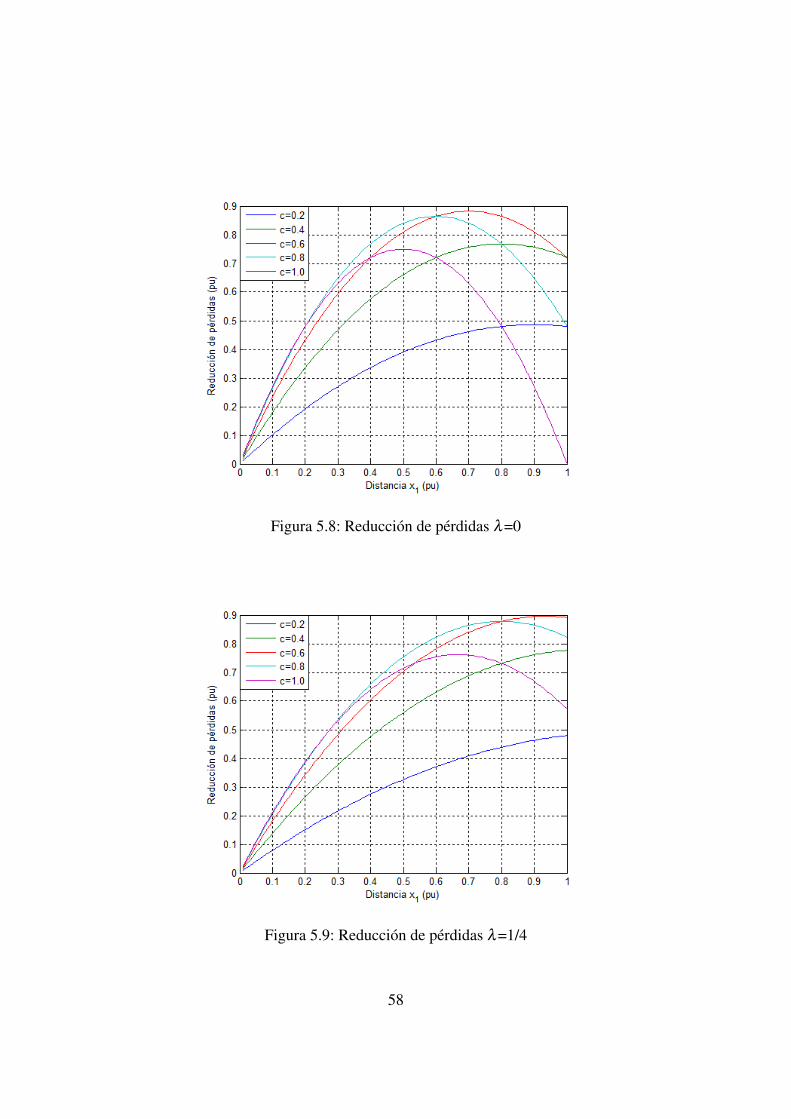
Figura 5.8: Reduccion de perdidas λ=0
Figura 5.9: Reduccion de perdidas λ=1/4
58
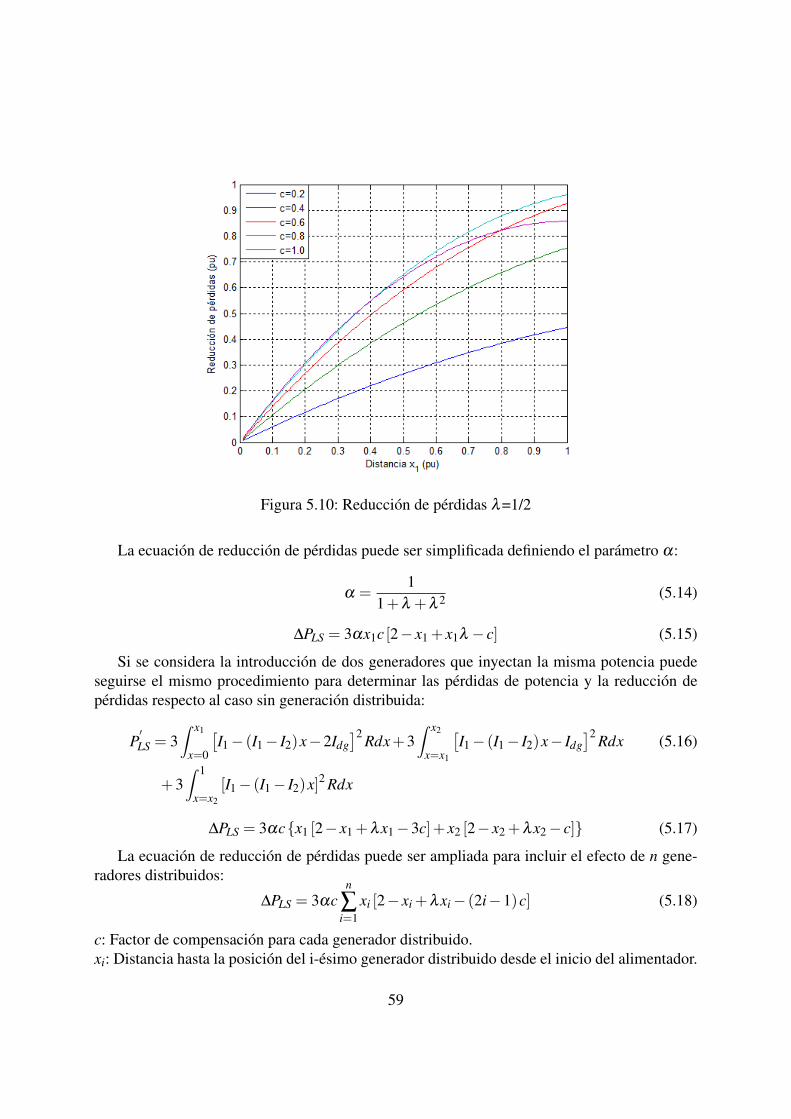
Figura 5.10: Reduccion de perdidas λ=1/2
La ecuacion de reduccion de perdidas puede ser simplificada definiendo el parametro α:
α =1
1+λ +λ 2 (5.14)
∆PLS = 3αx1c [2− x1 + x1λ − c] (5.15)
Si se considera la introduccion de dos generadores que inyectan la misma potencia puedeseguirse el mismo procedimiento para determinar las perdidas de potencia y la reduccion deperdidas respecto al caso sin generacion distribuida:
P′LS = 3
∫ x1
x=0
[I1− (I1− I2)x−2Idg
]2 Rdx+3∫ x2
x=x1
[I1− (I1− I2)x− Idg
]2 Rdx (5.16)
+3∫ 1
x=x2
[I1− (I1− I2)x]2 Rdx
∆PLS = 3αcx1 [2− x1 +λx1−3c]+ x2 [2− x2 +λx2− c] (5.17)
La ecuacion de reduccion de perdidas puede ser ampliada para incluir el efecto de n gene-radores distribuidos:
∆PLS = 3αcn
∑i=1
xi [2− xi +λxi− (2i−1)c] (5.18)
c: Factor de compensacion para cada generador distribuido.xi: Distancia hasta la posicion del i-esimo generador distribuido desde el inicio del alimentador.
59

n: Numero total de generadores distribuidos.
La distancia optima para el i-esimo generador distribuido puede ser encontrada al derivar laecuacion de reduccion de perdidas e igualandola a cero:
xi,opt =1
1−λ− (2i−1)c
2(1−λ )(5.19)
xi,opt : Distancia optima para el i-esimo generador distribuido.
El valor de xi,opt es sustituido en la ecuacion original, de tal manera que la ecuacion depen-dera unicamente de c:
∆PLS,opt = 3αcn
∑i=1
[1
1−λ− (2i−1)c
1−λ+
i2c2
1−λ− c2
4(1−λ )− ic2
1−λ
](5.20)
Las siguientes igualdades seran utilizadas para simplificar la ecuacion de reduccion de perdi-das optima:
n
∑i=1
(2i−1) = n2 (5.21)
n
∑i=1
i =n(n+1)
2(5.22)
n
∑i=1
i2 =n(n+1)(2n+1)
6(5.23)
n
∑i=1
11−λ
=n
1−λ(5.24)
Al utilizar las igualdades presentadas se obtiene una nueva ecuacion para la reduccion deperdidas optima:
∆PLS,opt =3αc
1−λ
[n− cn2 +
c2n(4n2−1
)12
](5.25)
El factor de compensacion para cada generador distribuido puede ser encontrado derivandola ecuacion de reduccion de perdidas optima e igualandola a cero:
c =2
2n+1(5.26)
Para el caso particular de un generador distribuido resulta:
c =23
(5.27)
60
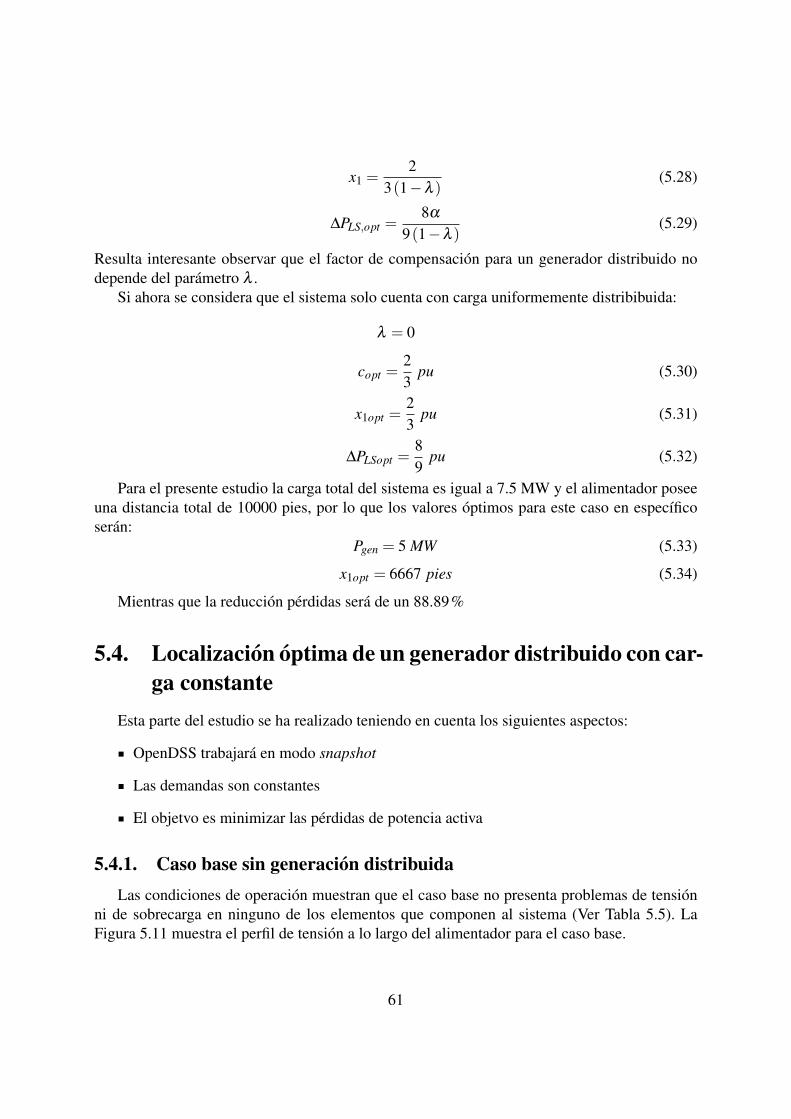
x1 =2
3(1−λ )(5.28)
∆PLS,opt =8α
9(1−λ )(5.29)
Resulta interesante observar que el factor de compensacion para un generador distribuido nodepende del parametro λ .
Si ahora se considera que el sistema solo cuenta con carga uniformemente distribibuida:
λ = 0
copt =23
pu (5.30)
x1opt =23
pu (5.31)
∆PLSopt =89
pu (5.32)
Para el presente estudio la carga total del sistema es igual a 7.5 MW y el alimentador poseeuna distancia total de 10000 pies, por lo que los valores optimos para este caso en especıficoseran:
Pgen = 5 MW (5.33)
x1opt = 6667 pies (5.34)
Mientras que la reduccion perdidas sera de un 88.89%
5.4. Localizacion optima de un generador distribuido con car-ga constante
Esta parte del estudio se ha realizado teniendo en cuenta los siguientes aspectos:
OpenDSS trabajara en modo snapshot
Las demandas son constantes
El objetvo es minimizar las perdidas de potencia activa
5.4.1. Caso base sin generacion distribuidaLas condiciones de operacion muestran que el caso base no presenta problemas de tension
ni de sobrecarga en ninguno de los elementos que componen al sistema (Ver Tabla 5.5). LaFigura 5.11 muestra el perfil de tension a lo largo del alimentador para el caso base.
61

Tension Perdidas Potencia activa Sobrecargamınima (pu) potencia (kW) secundario Tx (kW) (kW)
0.961 107.7 7592.9 0
Tabla 5.5: Condiciones de operacion caso base con carga constante
Figura 5.11: Perfil de tension caso base con carga constante
5.4.2. ResultadosEn la implementacion del metodo se han simulado 1000 casos con el fin de alcanzar el
objetivo propuesto; se considera un numero suficientemente grande como para proporcionar re-sultados correctos. La Figura 5.12 muestra los resultados obtenidos; concretamente la variacionde las perdidas de potencia activa del sistema en funcion de la potencia nominal del generadory de la distancia respecto al origen del alimentador donde se encuentra localizado dicho genera-dor. La superficie muestra la existencia de una combinacion unica de potencia-distancia para lacual las perdidas del sistema son mınimas. Ademas, se puede observar que si se asume un valorde potencia determinado existe una distancia especıfica para la cual las perdidas son reducidasa un mınimo para dicha potencia; de la misma forma para cada valor de distancia existirıa unvalor de potencia para el cual las perdidas serıan mınimas.
Los valores optimos de potencia y distancia se presentan en la Tabla 5.6.El valor de potencia optima encontrado por el metodo representa el 70.4% de la carga total
del sistema, mientras que la distancia optima es aproximadamente el 65% de la distancia totaldel alimentador. Dichos valores corroboran los resultados esperados a partir de la regla de los2/3, aun cuando dichos valores no se ajustan perfectamente a los valores teoricos, ya que de-
62

Figura 5.12: Perdidas de potencia en funcion de Potencia-Distancia (1000 casos)
Potencia Distancia Perdidasoptima (kW) optima (pies) optimas (kW)
5280 6504 29.37
Tabla 5.6: Valores optimos con carga constante
bemos de recordar que dicho analisis es realizado teniendo en cuenta modelos monofasicos yalgunas simplificaciones.
5.4.3. Simulacion de caso optimoSe ha decidido comprobar que los valores optimos obtenidos efectivamente producen la re-
duccion de perdidas esperadas en el sistema y que las condiciones de operacion del mismo semantienen dentro de parametros aceptables luego de la introduccion del generador distribui-do. La potencia del generador de prueba sera de 5280 kW y se encontrara ubicado en el busdesginado como bus65 (Ver Figura 5.13).
Tension Perdidas Potencia activa Sobrecargamınima (pu) potencia (kW) secundario Tx (kW) (kW)
0.979 29.4 2245.7 0
Tabla 5.7: Condiciones de operacion caso optimo con carga constante
Las condiciones del sistema para el caso optimo se presentan en la Tabla 5.7, dichas con-diciones se consideran aceptables y las perdidas obtenidas a traves de la simulacion son las
63

Figura 5.13: Esquema unifilar caso optimo carga constante
esperadas. Sin embargo, es importante identificar que la introduccion de la generacion distri-buida ha traıdo consigo un beneficio adicional, la mejora del perfil de tension. Dicho efectopuede observarse en la elevacion del valor mınimo de tension, este hecho puede no parecer tanimportante ya que desde un comienzo no se existıan problemas con la tension pero lo hubie-se sido si el caso base presentara una tension mınima inaceptable. Ademas, la reduccion de lapotencia entregada desde el secundario del transformador implica un aumento de la capacidaddel sistema de suministrar potencia, ya que los segmentos de lınea que se encuentran al prin-cipio del alimentador trabajaran a un nivel de carga menor que en el caso base. La Figura 5.14muestra el perfil del tension a lo largo del alimentador para el caso donde se utilizan los valoresoptimos de potencia y distancia para el generador distribuido.
Figura 5.14: Perfil de tension caso optimo con carga constante
64

5.5. Localizacion optima de un generador distribuido con car-ga variable en el tiempo
El procedimiento seguido para determinar la localizacion optima de un generador distribui-do con carga dependiente del tiempo varıa ligeramente respecto al utilizado con carga constante.Varios aspectos se deben de tener en cuenta:
OpenDSS trabajara en modo time
Se utilizaran las curvas de carga en todos los nudos del sistema
Se minimizaran las perdidas de energıa en kWh
Se tendran en cuenta restricciones tecnicas de tension y sobrecarga para descartar combi-naciones potencia-distancia
En el estudio presentado anteriormente la unica informacion recogida al termino de la simu-lacion de cada caso era las perdidas de potencia totales del sistema, sin embargo en esta ocasionpara poder aplicar las restricciones tecnicas definidas sera necesario recopilar una mayor canti-dad de informacion, la informacion registrada sera:
La tension mınima anual.
La tension maxima anual.
Las perdidas anuales de energıa en kWh.
La energıa anual entregada desde el sistema aguas arriba hacia la red de prueba.
Los kWh de sobrecarga
El valor mınimo de energıa por hora entregada por el sistema aguas arriba. Dicho parame-tro sera utilizado para determinar la presencia de flujo inverso desde la red de prueba haciael sistema aguas arriba.
5.5.1. Caso base sin generacion distribuidaLa informacion obtenida a partir de la simulacion del caso base sin generacion distribuida
se presenta en la Tabla 5.8.
Energıa Perdidas Tension Sobrecargaanual (kWh) anuales (kWh) mınima (pu) (kWh)
27781333 185253 0.9682 0
Tabla 5.8: Condiciones de operacion caso base con carga variable en el tiempo
65
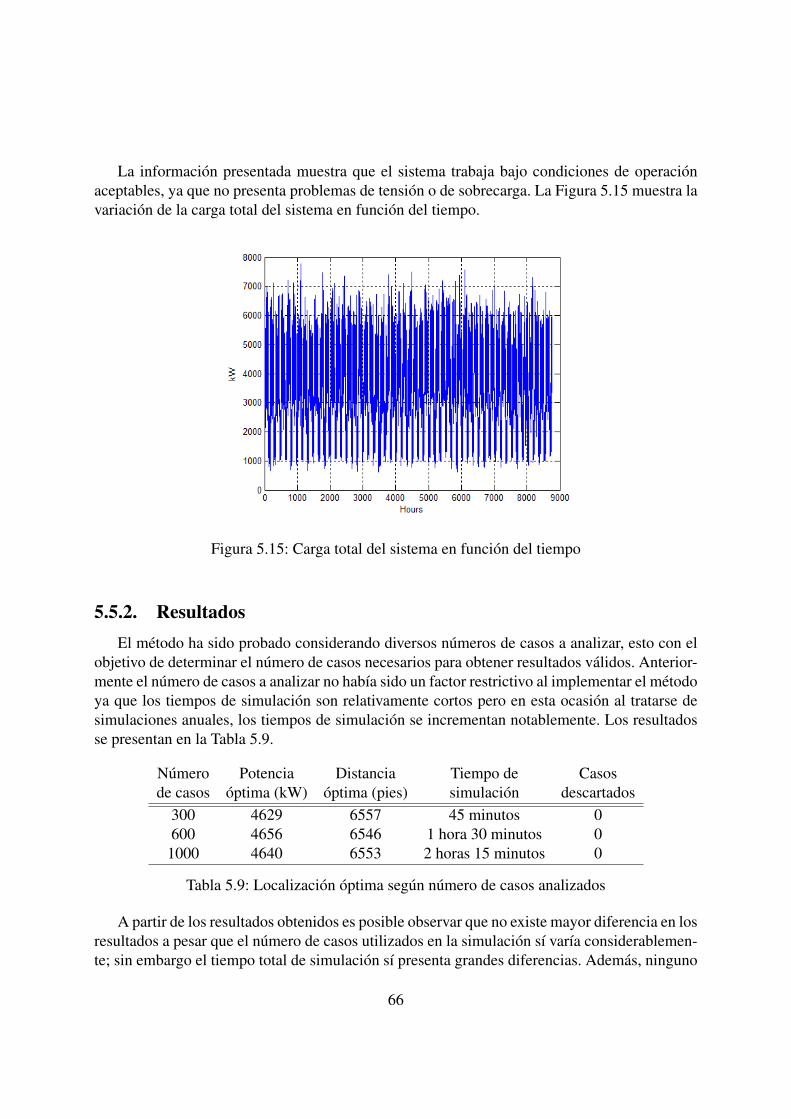
La informacion presentada muestra que el sistema trabaja bajo condiciones de operacionaceptables, ya que no presenta problemas de tension o de sobrecarga. La Figura 5.15 muestra lavariacion de la carga total del sistema en funcion del tiempo.
Figura 5.15: Carga total del sistema en funcion del tiempo
5.5.2. ResultadosEl metodo ha sido probado considerando diversos numeros de casos a analizar, esto con el
objetivo de determinar el numero de casos necesarios para obtener resultados validos. Anterior-mente el numero de casos a analizar no habıa sido un factor restrictivo al implementar el metodoya que los tiempos de simulacion son relativamente cortos pero en esta ocasion al tratarse desimulaciones anuales, los tiempos de simulacion se incrementan notablemente. Los resultadosse presentan en la Tabla 5.9.
Numero Potencia Distancia Tiempo de Casosde casos optima (kW) optima (pies) simulacion descartados
300 4629 6557 45 minutos 0600 4656 6546 1 hora 30 minutos 01000 4640 6553 2 horas 15 minutos 0
Tabla 5.9: Localizacion optima segun numero de casos analizados
A partir de los resultados obtenidos es posible observar que no existe mayor diferencia en losresultados a pesar que el numero de casos utilizados en la simulacion sı varıa considerablemen-te; sin embargo el tiempo total de simulacion sı presenta grandes diferencias. Ademas, ninguno
66

de los casos simulados ha presentado condiciones de operacion que lo llevasen a ser descartadopor haber incumplido alguna de las restricciones tecnicas impuestas al comienzo del estudio.Respecto al numero optimo de casos a utilizar con el metodo, dependera de la disponibilidad detiempo para llevar a cabo el estudio, porque aun cuando el tiempo de simulacion aumenta conel numero de casos, no es menos cierto que utilizar un mayor numero de casos permite obtenerresultados mas exactos y repetibles, por lo que en el presente estudio se tomara como base lasimulacion que comprende los 1000 casos.
La Figura 5.16 muestra la variacion de las perdidas anuales de energıa en funcion de lapotencia y la distancia respecto al origen del alimentador donde se encuentra instalado el gene-rador utilizando la informacion generada en una simulacion que ha tenido en cuenta 1000 casosde prueba. La forma de la superficie presenta un comportamiento muy parecido a la encontradapara el caso con carga constante, por lo que algunas de las caracterısticas discutidas anterior-mente tambien son validas. Por ejemplo, existe una unica combinacion potencia-distancia queminimiza las perdidas. A pesar de esto, la superficie de perdidas de energıa presenta una di-ferencia respecto a la de perdidas de potencia: a medida que la potencia aumenta a un nivelcercano a la potencia nominal de la carga instalada y la distancia se acerca a la distancia totaldel alimentador, la curva deja de crecer y presenta un comportamiento aproximadamente cons-tante, lo que implica que para valores cercanos a los valores maximos permitidos tanto parapotencia como distancia las diferencias en las perdidas son casi despreciables. Para el presentecaso la uniformidad de la curva tambien se debe a que se ha utilizado el mismo patron de ge-neracion para todas las posiciones posibles, ya que si consideraramos cambios en dicho patronsegun la posicion del generador serıa muy probable que la curva presentara irregularidades ensu comportamiento. La Tabla 5.10 muestra un resumen de los resultados mas importantes deesta parte del estudio.
Figura 5.16: Perdidas de energıa en funcion de Potencia-Distancia (1000 casos)
67
Potencia Distancia Perdidasoptima (kW) optima (pies) optimas (kWh)
4640 6553 134740
Tabla 5.10: Valores optimos con carga variable en el tiempo
El uso de curvas de carga implica que para cada momento existe una potencia y distanciadiferentes que reducen las perdidas a un mınimo. Sin embargo, debido a que es imposible cam-biar la potencia nominal y la posicion del generador distribuido, la potencia y posicion optimasserıan aquellas que en promedio reduzcan al maximo las perdidas de energıa. Respecto a losvalores obtenidos a partir de las simulaciones se observa una diferencia notable en el valor depotencia nominal del generador distribuido respecto a los obtenidos con carga constante, mien-tras que la distancia optima no presenta mayor diferencia. Los valores optimos de potencia ydistancia obtenidos utilizando curvas de carga prueban que para dicho caso la regla de los 2/3no es valida, precisandose por tanto de un estudio especıfico para cada sistema en estudio.
5.5.3. Simulacion de caso optimo
Figura 5.17: Esquema unifilar caso optimo carga variable en el tiempo
Se llevara a cabo una simulacion utilizando los valores optimos de potencia y distancia paracomprobar que dicha combinacion proporciona la reduccion de perdidas esperadas y que efec-tivamente cumple con las restricciones tecnicas planteadas. Para dicha simulacion la potencianominal del generador distribuido sera de 4640 kW y se encontrara ubicado en el bus designadocomo bus65 (Ver Figura 5.17).
Energıa Perdidas Tension Tension Sobrecargaanual (kWh) anuales (kWh) mınima (pu) maxima (pu) (kWh)
20280156 134737 0.9696 1.015 0
Tabla 5.11: Condiciones de operacion caso optimo con carga variable en el tiempo
68
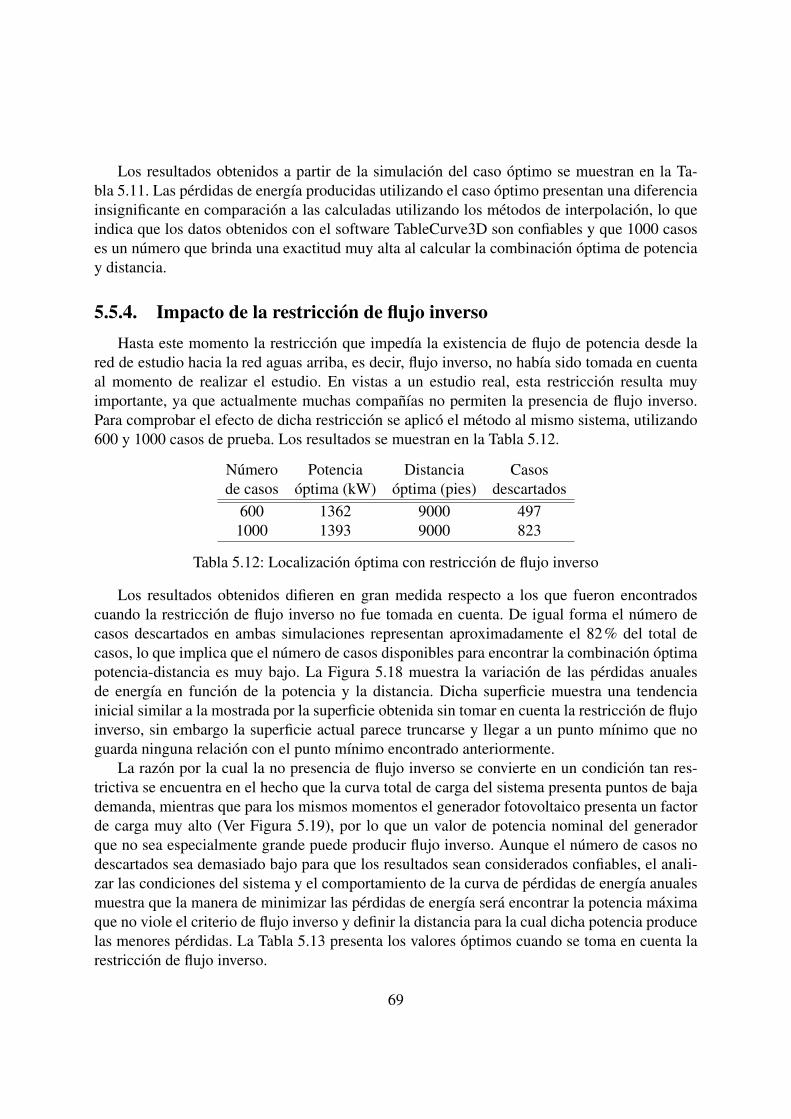
Los resultados obtenidos a partir de la simulacion del caso optimo se muestran en la Ta-bla 5.11. Las perdidas de energıa producidas utilizando el caso optimo presentan una diferenciainsignificante en comparacion a las calculadas utilizando los metodos de interpolacion, lo queindica que los datos obtenidos con el software TableCurve3D son confiables y que 1000 casoses un numero que brinda una exactitud muy alta al calcular la combinacion optima de potenciay distancia.
5.5.4. Impacto de la restriccion de flujo inversoHasta este momento la restriccion que impedıa la existencia de flujo de potencia desde la
red de estudio hacia la red aguas arriba, es decir, flujo inverso, no habıa sido tomada en cuentaal momento de realizar el estudio. En vistas a un estudio real, esta restriccion resulta muyimportante, ya que actualmente muchas companıas no permiten la presencia de flujo inverso.Para comprobar el efecto de dicha restriccion se aplico el metodo al mismo sistema, utilizando600 y 1000 casos de prueba. Los resultados se muestran en la Tabla 5.12.
Numero Potencia Distancia Casosde casos optima (kW) optima (pies) descartados
600 1362 9000 4971000 1393 9000 823
Tabla 5.12: Localizacion optima con restriccion de flujo inverso
Los resultados obtenidos difieren en gran medida respecto a los que fueron encontradoscuando la restriccion de flujo inverso no fue tomada en cuenta. De igual forma el numero decasos descartados en ambas simulaciones representan aproximadamente el 82% del total decasos, lo que implica que el numero de casos disponibles para encontrar la combinacion optimapotencia-distancia es muy bajo. La Figura 5.18 muestra la variacion de las perdidas anualesde energıa en funcion de la potencia y la distancia. Dicha superficie muestra una tendenciainicial similar a la mostrada por la superficie obtenida sin tomar en cuenta la restriccion de flujoinverso, sin embargo la superficie actual parece truncarse y llegar a un punto mınimo que noguarda ninguna relacion con el punto mınimo encontrado anteriormente.
La razon por la cual la no presencia de flujo inverso se convierte en un condicion tan res-trictiva se encuentra en el hecho que la curva total de carga del sistema presenta puntos de bajademanda, mientras que para los mismos momentos el generador fotovoltaico presenta un factorde carga muy alto (Ver Figura 5.19), por lo que un valor de potencia nominal del generadorque no sea especialmente grande puede producir flujo inverso. Aunque el numero de casos nodescartados sea demasiado bajo para que los resultados sean considerados confiables, el anali-zar las condiciones del sistema y el comportamiento de la curva de perdidas de energıa anualesmuestra que la manera de minimizar las perdidas de energıa sera encontrar la potencia maximaque no viole el criterio de flujo inverso y definir la distancia para la cual dicha potencia producelas menores perdidas. La Tabla 5.13 presenta los valores optimos cuando se toma en cuenta larestriccion de flujo inverso.
69
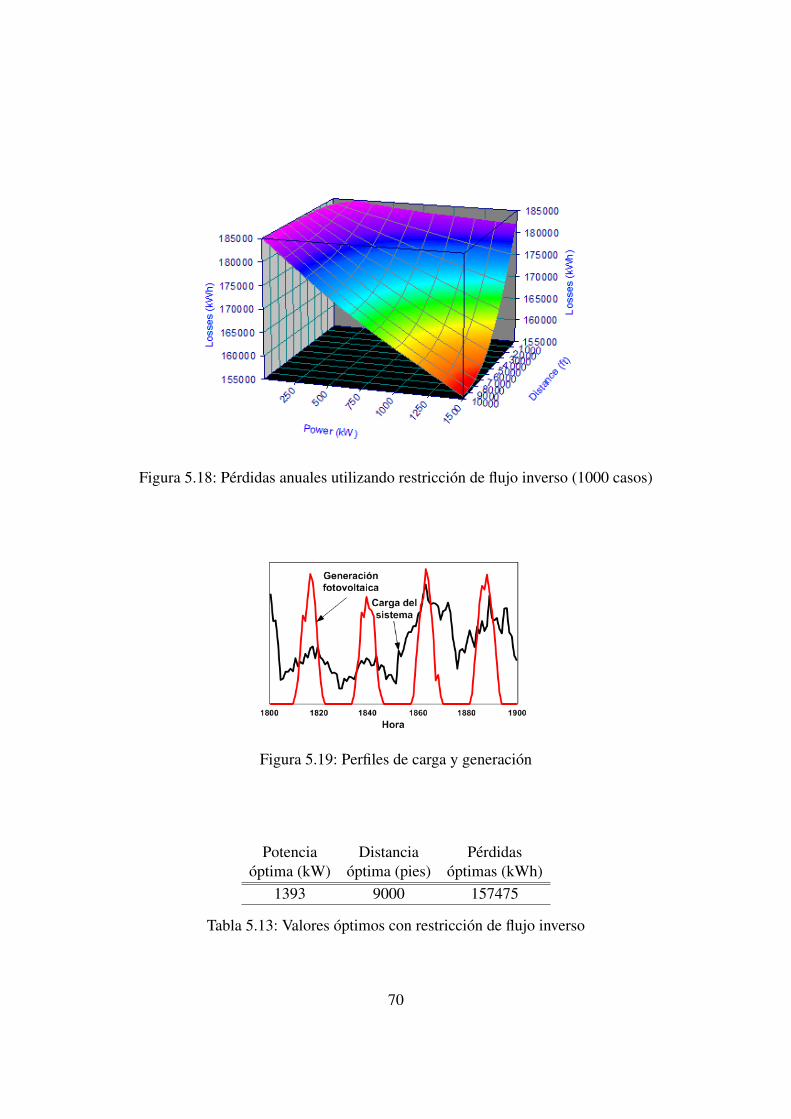
Figura 5.18: Perdidas anuales utilizando restriccion de flujo inverso (1000 casos)
Figura 5.19: Perfiles de carga y generacion
Potencia Distancia Perdidasoptima (kW) optima (pies) optimas (kWh)
1393 9000 157475
Tabla 5.13: Valores optimos con restriccion de flujo inverso
70
5.5.5. Localizacion optima de dos generadores distribuidosEl metodo presentado ha sido desarrollado para determinar la localizacion optima de un
generador distribuido, sin embargo el proceso de simulacion basado en Monte Carlo puede serextendido para simular dos o mas generadores distribuidos. Los aspectos a tomar en cuenta aldeterminar la localizacion optima de dos generadores distribuidos seran:
Se generaran de forma independiente los parametros de potencia e ındice del bus de prue-ba para cada generador
Se utilizaran las curvas de carga en todos los nudos del sistema
Ambos generadores utilizaran el mismo perfil de generacion.
Se minimizaran las perdidas de energıa en kWh
Se tendran en cuenta restricciones tecnicas de tension y sobrecarga para descartar combi-naciones potencia-distancia
Resultados
El metodo fue probado utilizando diferentes numeros de casos de prueba y los resultadosmuestran una evidente disparidad en los valores optimos segun el numero de casos de pruebautilizados, lo cual se debe a que a diferencia de los estudios anteriores en esta ocasion se cuentacon cuatro variables aleatorias y no dos, por lo que se necesita un mayor numero de casos deprueba para poder obtener una muestra representativa de todas las combinaciones posibles. De-bido a la dificultad que implica interporlar y optimizar un grupo de datos con cuatro variablesaleatorias, se presentan como casos optimos aquellas combinaciones que produjeron las meno-res perdidas en cada una de las simulaciones realizadas. La Tabla 5.14 presenta un resumen delos resultados obtenidos.
Potencia Distancia Potencia DistanciaNumero optima optima optima optima Casosde casos unidad 1 (kW) unidad 1 (pies) unidad 2 (kW) unidad 2 (pies) descartados
300 2350 3200 3164 8200 66600 3343 4100 2175 9200 134
1000 2817 3000 3032 7600 211
Tabla 5.14: Localizacion optima 2 generadores
Para poder lograr obtener resultados que sean validos debera aumentarse el numero de casosde prueba hasta el punto que dichos combinaciones sean una representacion valida de las com-binaciones posibles, lo anterior implica un incremento en el tiempo de simulacion necesariopara llevar a cabo el estudio. Cabe mencionar que los tiempos de simulacion dependen unica-mente del numero de casos a simular y no del numero de generadores distribuidos tomados en
71

cuenta, por lo que resulta indiferente incluir uno, dos o mas generadores; de igual forma paraOpenDSS no representa mayor carga computacional la inclusion de mas de un generador en elsistema para su simulacion.
5.6. Localizacion optima de bancos de condensadoresEl metodo de localizacion optima de generadores distribuidos puede ser utilizado tambien
para determinar la localizacion de bancos de condensadores. Conceptualmente el metodo novarıa ya que el objetivo sera generar valores aleatorios para la potencia y la posicion del bancode condensadores y a partir de la informacion generada, tras analizar cada caso, con la ayudade los mismos algoritmos de interpolacion multivariable encontrar la combinacion potencia-posicion que reduzca al mınimo las perdidas del sistema. Los aspectos a tomar en cuenta alllevar a cabo el estudio son:
El banco de condesadores sera simulado a traves de un generador de prueba que inyec-tara unicamente potencia reactiva.
La potencia maxima que podra adoptar el generador de prueba sera el total de la cargareactiva instalada en el sistema.
OpenDSS trabajara en modo snapshot
Las demandas son constantes
Se minimizaran las perdidas de potencia en kW
Se realizaran las simulaciones utilizando 1000 casos de prueba
5.6.1. Localizacion optima teorica de bancos de condensadoresLa localizacion optima de n bancos de condensadores en un alimentador radial puede ser
deducida utilizando el mismo procedimiento que el mostrado para generadores distribuidos conla diferencia de que se trababajara con potencias y corrientes reactivas; a partir de este enfoquees posible determinar la localizacion optima de bancos de condensadores en un sistema radialque alimenta una carga uniformemente distribuida con las siguientes formulas:
c =2
2n+1(5.35)
xi,opt = 1− (2i−1)c2
(5.36)
ctot = nc (5.37)
n: numero de bancos de condensadoresc: factor de compensacion optimo individual
72
i: i-esimo banco de condensadoresxi,opt : distancia optima respecto al inicio del alimentador del i-esimo banco de condensadoresctot : factor de compensacion total de los n bancos de condensadores
5.6.2. Localizacion optima de un banco de condensadoresLa localizacion optima teorica de un banco de condensadores puede ser calculada utili-
zando las formulas presentadas en la seccion anterior, los valores obtenidos se muestran en laTabla 5.15.
Compensacion Compensacion Distanciaindividual (pu) total (pu) optima (pu)
2/3 2/3 2/3
Tabla 5.15: Localizacion optima teorica de un banco de condensadores
El sistema bajo estudio tiene un carga reactiva total de 3.63 Mvar y el alimentador tiene unalongitud total de 10000 pies por lo que los valores optimos seran 2420 kvar y 6667 pies.
Resultados
La Figura 5.20 describe la dependencia de las perdidas de potencia en funcion de la potenciay la distancia asignadas al banco de condensadores. La superficie presenta el mismo patron quela superficie generada para la localizacion optima de un generador distribuido pero al observarla escala se observa que la reduccion de las perdidas es menor que la producida con el generadordistribuido; esto es debido a que la potencia reactiva que fluye por el alimentador es menor quela potencia activa por lo que las perdidas producidas por la componente reactiva tambien sonmenores, debido a esto al introducir un banco de condensadores que compensa unicamentepotencia reactiva la reduccion de las perdidas sera menor que cuando se introduce un generadordistribuido que compensa potencia activa. Los valores optimos encontrados para la localizacionoptima de un banco de condensadores se muestran en la Tabla 5.16.
Potencia Distancia Perdidasoptima (kvar) optima (pies) optimas (kW)
2892 6177 85.84
Tabla 5.16: Valores optimos para un banco de condensadores
Los resultados obtenidos muestran una diferencia importante respecto a los obtenidos teori-camente, que corresponden a la regla de los 2/3, ya que el valor optimo de potencia correspondea un 79.67% de la carga reactiva total del sistema y la distancia optima equivale aproximada-mente a un 62% de la longitud total del alimentador. Aunque la distancia optima encontrada a
73
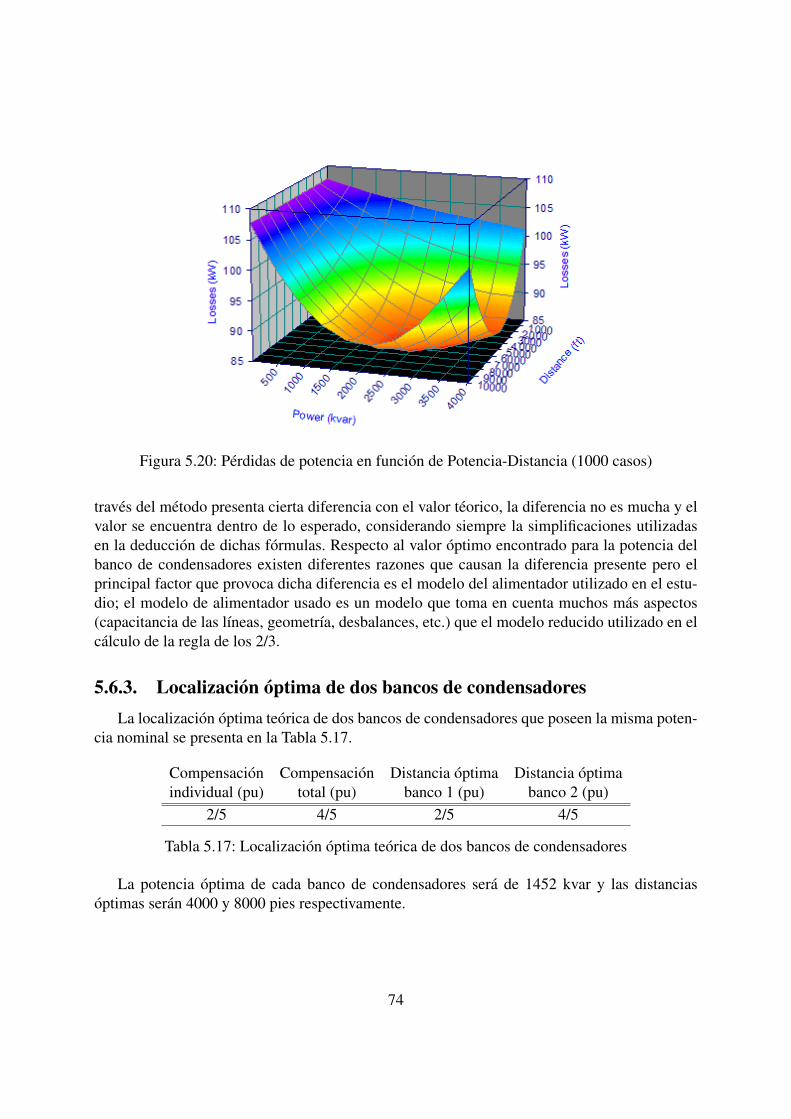
Figura 5.20: Perdidas de potencia en funcion de Potencia-Distancia (1000 casos)
traves del metodo presenta cierta diferencia con el valor teorico, la diferencia no es mucha y elvalor se encuentra dentro de lo esperado, considerando siempre la simplificaciones utilizadasen la deduccion de dichas formulas. Respecto al valor optimo encontrado para la potencia delbanco de condensadores existen diferentes razones que causan la diferencia presente pero elprincipal factor que provoca dicha diferencia es el modelo del alimentador utilizado en el estu-dio; el modelo de alimentador usado es un modelo que toma en cuenta muchos mas aspectos(capacitancia de las lıneas, geometrıa, desbalances, etc.) que el modelo reducido utilizado en elcalculo de la regla de los 2/3.
5.6.3. Localizacion optima de dos bancos de condensadoresLa localizacion optima teorica de dos bancos de condensadores que poseen la misma poten-
cia nominal se presenta en la Tabla 5.17.
Compensacion Compensacion Distancia optima Distancia optimaindividual (pu) total (pu) banco 1 (pu) banco 2 (pu)
2/5 4/5 2/5 4/5
Tabla 5.17: Localizacion optima teorica de dos bancos de condensadores
La potencia optima de cada banco de condensadores sera de 1452 kvar y las distanciasoptimas seran 4000 y 8000 pies respectivamente.
74
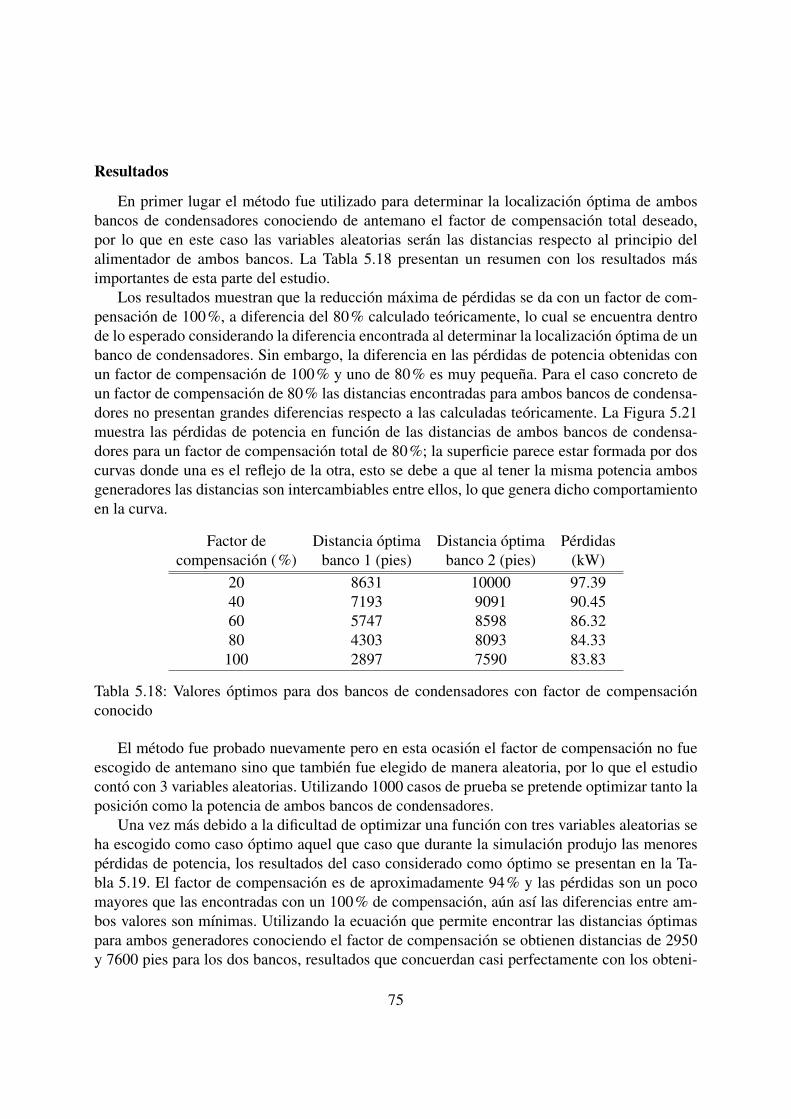
Resultados
En primer lugar el metodo fue utilizado para determinar la localizacion optima de ambosbancos de condensadores conociendo de antemano el factor de compensacion total deseado,por lo que en este caso las variables aleatorias seran las distancias respecto al principio delalimentador de ambos bancos. La Tabla 5.18 presentan un resumen con los resultados masimportantes de esta parte del estudio.
Los resultados muestran que la reduccion maxima de perdidas se da con un factor de com-pensacion de 100%, a diferencia del 80% calculado teoricamente, lo cual se encuentra dentrode lo esperado considerando la diferencia encontrada al determinar la localizacion optima de unbanco de condensadores. Sin embargo, la diferencia en las perdidas de potencia obtenidas conun factor de compensacion de 100% y uno de 80% es muy pequena. Para el caso concreto deun factor de compensacion de 80% las distancias encontradas para ambos bancos de condensa-dores no presentan grandes diferencias respecto a las calculadas teoricamente. La Figura 5.21muestra las perdidas de potencia en funcion de las distancias de ambos bancos de condensa-dores para un factor de compensacion total de 80%; la superficie parece estar formada por doscurvas donde una es el reflejo de la otra, esto se debe a que al tener la misma potencia ambosgeneradores las distancias son intercambiables entre ellos, lo que genera dicho comportamientoen la curva.
Factor de Distancia optima Distancia optima Perdidascompensacion (%) banco 1 (pies) banco 2 (pies) (kW)
20 8631 10000 97.3940 7193 9091 90.4560 5747 8598 86.3280 4303 8093 84.33
100 2897 7590 83.83
Tabla 5.18: Valores optimos para dos bancos de condensadores con factor de compensacionconocido
El metodo fue probado nuevamente pero en esta ocasion el factor de compensacion no fueescogido de antemano sino que tambien fue elegido de manera aleatoria, por lo que el estudioconto con 3 variables aleatorias. Utilizando 1000 casos de prueba se pretende optimizar tanto laposicion como la potencia de ambos bancos de condensadores.
Una vez mas debido a la dificultad de optimizar una funcion con tres variables aleatorias seha escogido como caso optimo aquel que caso que durante la simulacion produjo las menoresperdidas de potencia, los resultados del caso considerado como optimo se presentan en la Ta-bla 5.19. El factor de compensacion es de aproximadamente 94% y las perdidas son un pocomayores que las encontradas con un 100% de compensacion, aun ası las diferencias entre am-bos valores son mınimas. Utilizando la ecuacion que permite encontrar las distancias optimaspara ambos generadores conociendo el factor de compensacion se obtienen distancias de 2950y 7600 pies para los dos bancos, resultados que concuerdan casi perfectamente con los obteni-
75
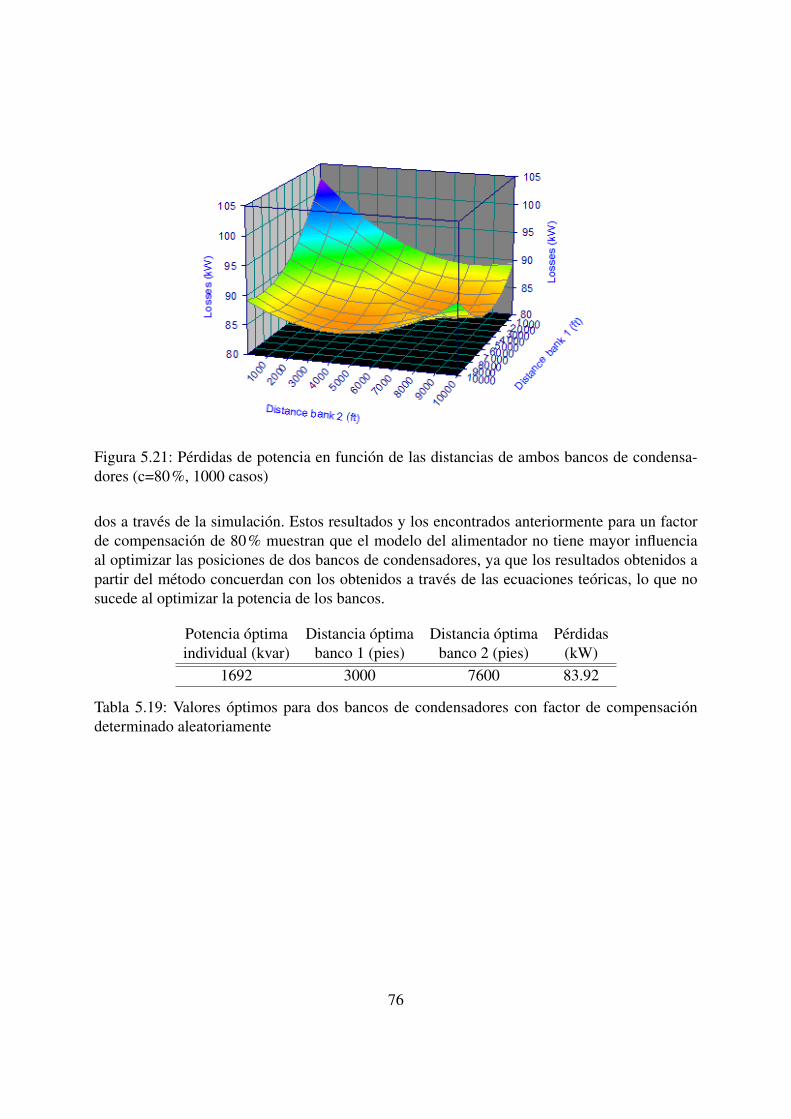
Figura 5.21: Perdidas de potencia en funcion de las distancias de ambos bancos de condensa-dores (c=80%, 1000 casos)
dos a traves de la simulacion. Estos resultados y los encontrados anteriormente para un factorde compensacion de 80% muestran que el modelo del alimentador no tiene mayor influenciaal optimizar las posiciones de dos bancos de condensadores, ya que los resultados obtenidos apartir del metodo concuerdan con los obtenidos a traves de las ecuaciones teoricas, lo que nosucede al optimizar la potencia de los bancos.
Potencia optima Distancia optima Distancia optima Perdidasindividual (kvar) banco 1 (pies) banco 2 (pies) (kW)
1692 3000 7600 83.92
Tabla 5.19: Valores optimos para dos bancos de condensadores con factor de compensaciondeterminado aleatoriamente
76
Capıtulo 6
Conclusiones
6.1. Conclusiones sobre la implementacion del metodoLa utilizacion del metodo de Monte Carlo ha permitido optimizar tanto la potencia nomi-nal del generador distribuido como su posicion dentro del sistema estudiado.
La seleccion de OpenDSS como herramienta de simulacion presenta ventajas evidentes,ya que ha permitido por un lado llevar a cabo estudios con carga constante (tipo snapshot),y por otro, estudios que tienen en cuenta cargas que varıan con el tiempo (anuales), loque proporciona un valor agregado al contemplar condiciones mas reales para el sistema.Ademas, los modelos de los elementos de red utilizados por OpenDSS permiten analizarsistemas complejos con caracterısticas reales.
El metodo ha sido utilizado unicamente para la localizacion optima de un generador dis-tribuido en un alimentador radial, sin embargo este puede ser expandido facilmente y uti-lizado en redes mucho mas complejas; para ello es necesario que la definicion del sistemay la asignacion de los buses en OpenDSS sean hechas de forma ordenada y separadas porzonas, segun las configuracion de la red.
El metodo puede ser utilizado para determinar la localizacion optima de mas de un gene-rador distribuido, ya que generar los parametros aleatorios de potencia y ubicacion paramas de un generador distribuido e incluirlo en el sistema para su simulacion no representamayor reto, de la misma manera para OpenDSS la inclusion de mas generadores no pre-senta un aumento de carga computacional representativo. De igual manera, los tiempossimulacion totales no dependen del numero de generadores a analizar sino del numero decasos de prueba simulados, por lo que tampoco implica un aumento en los tiempos de tra-bajo. El mayor reto se presenta al momento de definir algoritmos que permitan optimizarun sistema que depende de mas de dos variables aleatorias.
El metodo puede ser utilizado tambien para determinar la localizacion optima de un ban-co de condensadores; el procedimiento general no presenta mayores cambios, la mayor
77

diferencia radica que en lugar de incluir un generador en el sistema se incluira un bancode condensadores o un generador que inyecta unicamente potencia reactiva, el resto delprocedimiento sera el mismo.
6.2. Conclusiones sobre los resultados obtenidosLa determinacion de la localizacion optima de un generador distribuido ha permitidocomprobar que la regla de los 2/3 es valida cuando se trabaja con alimentadores radialescon carga uniformemente distribuida y que no varıa con el tiempo. Sin embargo, losresultados obtenidos utilizando cargas dependientes del tiempo muestran que para esteescenario dicha regla no es valida y que es necesario llevar a cabo un estudio individualpara cada sistema con el objetivo de determinar la localizacion optima de un generadordistribuido.
Las curvas generadas para las perdidas de potencia (carga constante) y perdidas anualesde energıa (curvas de carga) presentan un comportamiento similar. Dicho comportamien-to muestra que existe un unica combinacion potencia-distancia que reduce las perdidasdel sistema al maximo. Ademas, se observa que para cada valor de potencia existe unadistancia para la cual las perdidas se reducen a un mınimo y que a medida dicho valor depotencia aumenta, la distancia respecto al inicio del alimentador se reduce. Igualmente,para cada valor de distancia existe un valor unico de potencia para el cual las perdidas seminimizan.
Para el sistema bajo estudio la condicion de no flujo inverso probo ser altamente restric-tiva. Dicha restriccion no fue tomada en cuenta durante el desarrollo del resto de estudio,ya que dicha limitacion en los valores de potencia no permitıa determinar los valores opti-mos de potencia y distancia para el generador con el fin de reducir al maximo las perdidasde energıa del sistema
Los resultados obtenidos al utilizar 1000 casos de prueba muestran que dicho numeroofrece una excelente exactitud y permite alcanzar resultados validos. La exactitud alcan-zada con 1000 casos es tal que las diferencias entre las perdidas calculadas como el puntomınimo de la curva de perdidas y las obtenidas a traves de la simulacion del caso optimoson muy pequenas.
Al determinar la localizacion optima de un banco de condensadores en un alimentadorradial con carga uniformemente distribuida y que no varıa con el tiempo los resultados noconcuerdan con los esperados a partir de la regla de los 2/3. Esto se debe principalmente ala influencia del modelo de alimentador utilizado en la simulacion y a las simplificacionesutilizadas en la deduccion de dicha regla.
Los resultados obtenidos al determinar la localizacion optima de dos bancos de conden-sadores muestran que las distancias optimas encontradas con el metodo varıan poco con
78
respecto a las calculadas utilizando las ecuaciones teoricas. Dichas resultados indicanque el modelo del alimentador afecta la determinacion de la potencia optima del bancode condensadores pero en el caso de que el factor de compensacion sea conocido de ante-mano, el modelo del alimentador no introduce mayor diferencia al momento de calcularlas distancias optimas de los bancos.
6.3. Objetivos futurosExpandir el metodo para que sea capaz de analizar redes mas grandes y complejas queincluyan circuitos tanto trifasicos como monofasicos.
Llevar a cabo estudios que comprendan un analisis para varios anos y que contemplen lavariacion anual de carga.
Utilizar las prestaciones de Matlab para generar las salidas graficas necesarias y determi-nar la localizacion optima de un generador distribuido, lo que harıa innecesario el uso deotras herramientas externas de software.
Utilizar Matlab u otra herramienta externa para optimizar casos que involucren mas dedos variables aleatorias.
Definir una nueva funcion multi-objetivo que permita optimizar otros parametros de lared y no unicamente las perdidas totales del sistema.
79
Bibliografıa
[1] H.L. Willis, Analytical Methods and Rules of Thumb for Modeling DG-Distribution Inter-action. IEEE PES Summer Meeting, 3: 1643-1644, 2000.
[2] K. Nara, Y. Hayashi, K. Ikeda, and T. Ashizawa, Application of Tabu Search to OptimalPlacement of Distributed Generators. IEEE PES Winter Meeting, 2: 918-923, 2001.
[3] T. Ackerman, G. Anderson, and L. Soder, Distributed Generation: A Definition. ElectricPower Systems Research, Elsevier, 2001.
[4] W. Rosehart and E. Nowicki, Optimal Placement of Distributed Generation. Proceedingsof 14th Power Systems Computation Conference, June 14-28, Sevilla, pp. 1-5, 2002.
[5] B.M. Buchholz and C. Boese, The Impact of Dispersed Power Generation in DistributionSystems. CIGRE/IEEE International Symposium, pp. 198-203, 2003.
[6] L.T. Borges and D.M. Falcao, Impact of Distributed Generation Allocation and Sizing onReliability, Losses and Voltage Profile. IEEE Power Tech Conference Proceedings, June23-26, Bologna, 2: 5, 2003.
[7] Y.G. Hegazi, M.M.A. Salama, and A.Y. Chikhani, Adequacy Assesment of Distributed Ge-neration Systems Using Monte Carlo Simulation. IEEE Trans. on Power Systems, vol. 18,no. 1, pp. 48-52, February 2003.
[8] P. Chiradeja and R. Ramakumar, An Approach to Quantify the Technical Benefits of Distri-buted Generation. IEEE Trans. on Energy Conversion, vol. 19, no. 4, pp. 764-773, 2004.
[9] C. Wang and M.H. Nehrir, Analytical Approaches for Optimal Placement of DistributedGeneration Sources in Power Systems. IEEE Trans. on Power Systems, vol. 19, no. 4, pp.2068-2076, November 2004.
[10] N. Mithulananthan, T. Oo, and L. Van Phu, Distributed Generator Placement in PowerDistribution System Using Genetic Algorithm to Reduce Losses. TIJSAT, 9: 55-62, 2004.
[11] T.A. Short, Electric Power Distribution Handbook. CRC Press, 2004.
80
[12] T. Gozel, M.H. Hocaoglu, U. Eminoglu, and A. Balicki, Optimal Placement and Sizing ofDistributed generation on Radial Feeder with Different Static Load Models. Proceedings ofInternational Conference Future Power Systems, Nov. 18, Amsterdam, pp. 2-6, 2005.
[13] M.A. Kashem, M. Negnevitsky, and G. Ledwich, Distributed Generation for Minimizationof Power Losses in Distribution Systems. Proceedings of IEEE PES General Meeting, June18-22, Montreal, pp. 8-8, 2006.
[14] A. Barin, L. Pozzatti, L. Canha, R. Machado, A. Abaide, F. Farret, and C. Carvalho, Analy-sis of Multi-Objective Methods Applied to Distributed Generation Systems. IEEE Interna-tional Conference on Energy and Electrical Drives, April 12-14, pp. 243-248, 2007.
[15] T. Gonen, Electric Power Distribution System Engineering. 2nd Edition, CRC Press, 2008.
[16] D. Xiaoqun, W. Jiahong, and Z. Feng, Optimal Location and Capacity of Distributed Ge-neration Bases on Scenario Probability. IEEE International Conference on Sustainable Po-wer Generation and Supply, April 6-7, pp. 1-5, 2009.
[17] D. Thukaram, C. Vyjayanthi, and S. Surenda, Optimal Placement of Distributed Gene-ration for a Projected Load Increase Using Relative Electrical Distance Approach. IEEEInternational Conference on Power Systems, December 27-29, pp. 1-6, 2009.
[18] A. Hadian, M.R. Haghifam, J. Zohverand, and E. Akhavan-Rezai, Probabilistic Approachfor Renewable DG Placement in Distribution Systems with Uncertain and Time VaryingLoads. IEEE PES General Meeting, Calgary, July 2009.
[19] K. Abookazemi, M.Y. Hassan, and S. Majid, A Review on Optimal Placement Methods ofDistributed Generation Sources. IEEE International Conference on Power and Energy, Nov29 - Dec 1, Kuala Lumpur, pp. 712-716, 2010.
[20] M.F. Akorede, H. Hizam, I. Aris, and M.Z.A. Ab Kadir, A Review of Strategies for OptimalPlacement of Distributed Generation in Power Distribution Systems. Research Journal ofApplied Sciences, vol. 5, no. 2, pp. 137-145, 2010.
[21] R.C. Dugan, Reference Guide. The Open Distribution System SImulator (OpenDSS).EPRI, 2010.
[22] J.A. Martinez, F. de Leon, A. Mehrizi-Sani, M.H. Nehrir, C. Wang, and V. Dinavahi, Toolsfor Analysis and Design of Distributed Resources-Part II: Tools for Planning, Analysisand Design of Distribution Networks with Distributed Resources. IEEE Trans. on PowerDelivery, vol. 26, no. 3, pp. 1653-1662, July 2011.
[23] R.C. Dugan and T.E. McDermott, An Open Source Platform for Collaborating on SmartGrid Research. IEEE PES General Meeting, Detroit, July 2011.
81
[24] J.A. Martinez and J. Martin-Arnedo, Distribution Load Flow Calculations Using TimeDriven and Probabilistic Approaches. IEEE PES General Meeting, Detroit, July 2011.
[25] J.A. Martinez and G. Guerra, Optimum Placement of Distributed Generation in Three-Phase Distribution Systems with Time Varying Load Using a Monte Carlo Approach. Apro-bado para su presentacion en el IEEE PES GM a celebrarse en San Diego C.A., Julio 2012.
[26] Y.M. Atwa and E.F. El-Saadany, Probabilistic approach for Optimal Allocation of Wind-based Distributed Generation in Distribution Systems. IET Renewable Power Generation,vol. 5, no. 1, pp. 79-88, January 2011.
[27] OpenDSS Program, [Online] Available through SourceForge.nethttp://sourceforge.net/projects/electricdss.
[28] HOMER Software, National Renewable Energy Laboratory (NREL), Available athttp://www.nrel.gov/homer.
82

Màster Interuniversitari UB-UPC d’Enginyeria en Energia
Acta d’Avaluació de Projecte
Curs:
Codi UPC: 33563
Data defensa: Qualificació:
Alumne: Luis Gerardo Guerra Sánchez
DNI: 02545885
Títol: Localización óptima de generación distribuida en sistemas de distribución
trifásicos con carga variable en el tiempo utilizando el método de Monte Carlo
Director: Juan Antonio Martínez Velasco
Director:
Ponent:
Tribunal
President:
Vocals:
Suplents:
Observacions
Signatura
Convocatòria Ordinària,
Cognoms, nom (President)
Cognoms, nom (Vocal)
Cognoms, nom (Vocal)
Convocatòria Extraordinària,
Cognoms, nom (President)
Cognoms, nom (Vocal)
Cognoms, nom (Vocal)