
Linealizacion Laplace
32
-
Upload
isaac-zavala -
Category
Documents
-
view
143 -
download
1
description
Teoria de Control 1
Transcript of Linealizacion Laplace

MODELADO MATEMÁTICO DE SISTEMAS DINÁMICOS
Para seguir adelante con el diseño del sistema de control se necesita en primer lugar entender el proceso. Típicamente, el conocimiento del proceso se cristaliza en la forma de un modelo matemático.
Un modelo matemático de un sistema dinámico se define como un conjunto de ecuaciones que representan la dinámica del sistema con precisión o, al menos, bastante bien.
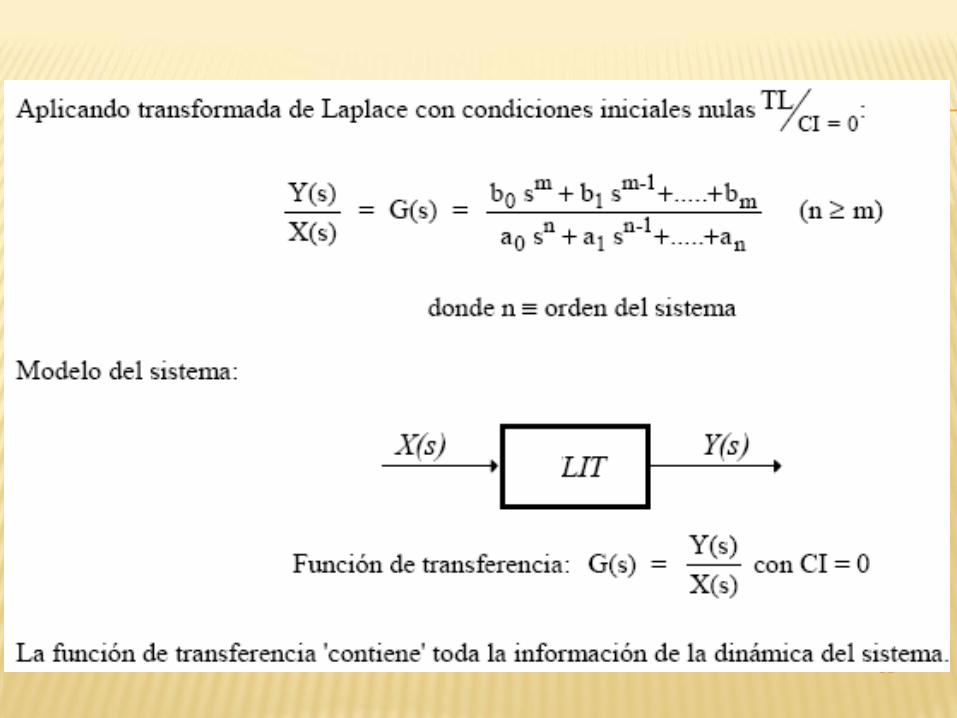
La función transferencia de un sistema descrito mediante una ecuación diferencial lineal e invariante en el tiempo (LTI) se define como el cociente-entre la transformada de Laplace de la salida y la transformada de Laplace de la entrada bajo la suposición de que todas las condiciones iniciales son nulas.
2
MODELADO MATEMÁTICO DE SISTEMAS DINÁMICOS
Como los sistemas considerados son de naturaleza dinámica, las ecuaciones descriptivas son generalmente ecuaciones diferenciales.
Por tanto si estas ecuaciones pueden linealizarse, entonces se puede utilizar la transformada de Laplace para simplificar el método de solución.
En la practica, por la complejidad de los sistemas y el desconocimiento de todos los factores relevantes, es necesario introducir hipótesis sobre la operación del sistema. Por tanto, a veces será útil considerar el sistema físico, delinear algunas hipótesis necesarias y linealizar el sistema.
Luego, empleando las leyes físicas que describen el sistema lineal equivalente, se puede obtener un conjunto de ecuaciones diferenciales lineales.
Obtener la solución usando Laplace
3
MODELADO MATEMÁTICO DE SISTEMAS DINÁMICOS
Sistemas lineales
Un sistema es lineal si se aplica el principio de superposición.
Es decir que la respuesta producida por la aplicación simultanea de dos funciones de entradas diferentes es la suma de las dos respuestas individuales.
Sistemas lineales invariantes y variantes en el tiempo
Una ecuación diferencial es lineal si sus coeficientes son constantes o son función solo de la variable independiente.
Los sistemas que se representan mediante Ec. Dif. Cuyos coeficientes son constantes se llaman Sist. Lineales invariantes en el tiempo.
Los sistemas que se representan mediante Ec. Dif., cuyos coeficientes son función del tiempo se llaman Sist. Lineales variantes en el tiempo.
4
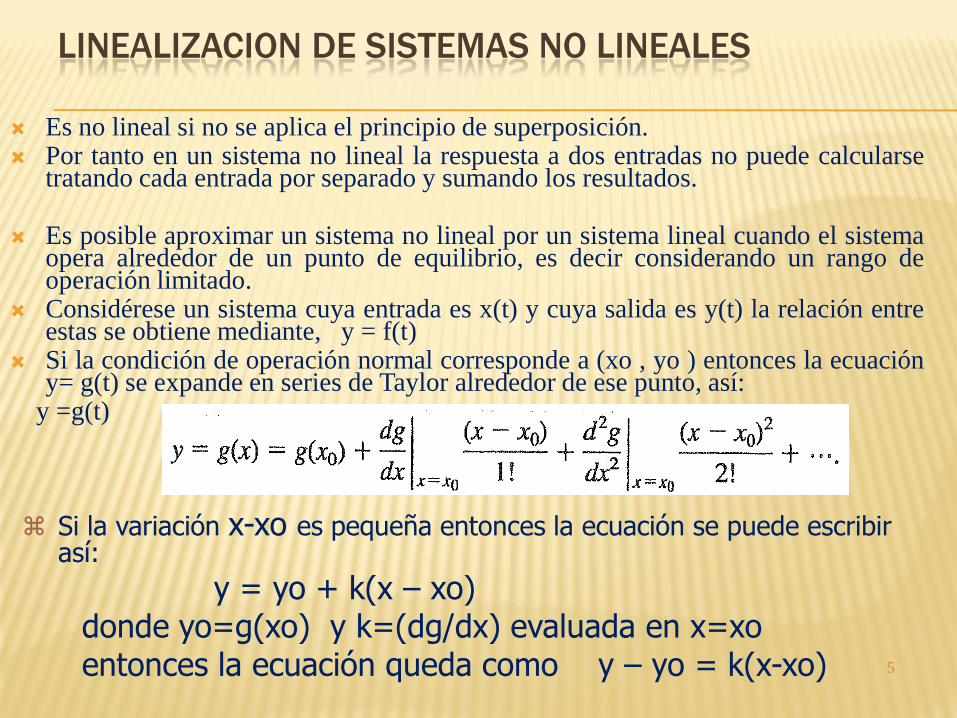
LINEALIZACION DE SISTEMAS NO LINEALES
Es no lineal si no se aplica el principio de superposición. Por tanto en un sistema no lineal la respuesta a dos entradas no puede calcularse
tratando cada entrada por separado y sumando los resultados. Es posible aproximar un sistema no lineal por un sistema lineal cuando el sistema
opera alrededor de un punto de equilibrio, es decir considerando un rango de operación limitado.
Considérese un sistema cuya entrada es x(t) y cuya salida es y(t) la relación entre estas se obtiene mediante, y = f(t)
Si la condición de operación normal corresponde a (xo , yo ) entonces la ecuación y= g(t) se expande en series de Taylor alrededor de ese punto, así:
y =g(t)
5
Si la variación x-xo es pequeña entonces la ecuación se puede escribir así:
y = yo + k(x – xo) donde yo=g(xo) y k=(dg/dx) evaluada en x=xo entonces la ecuación queda como y – yo = k(x-xo)
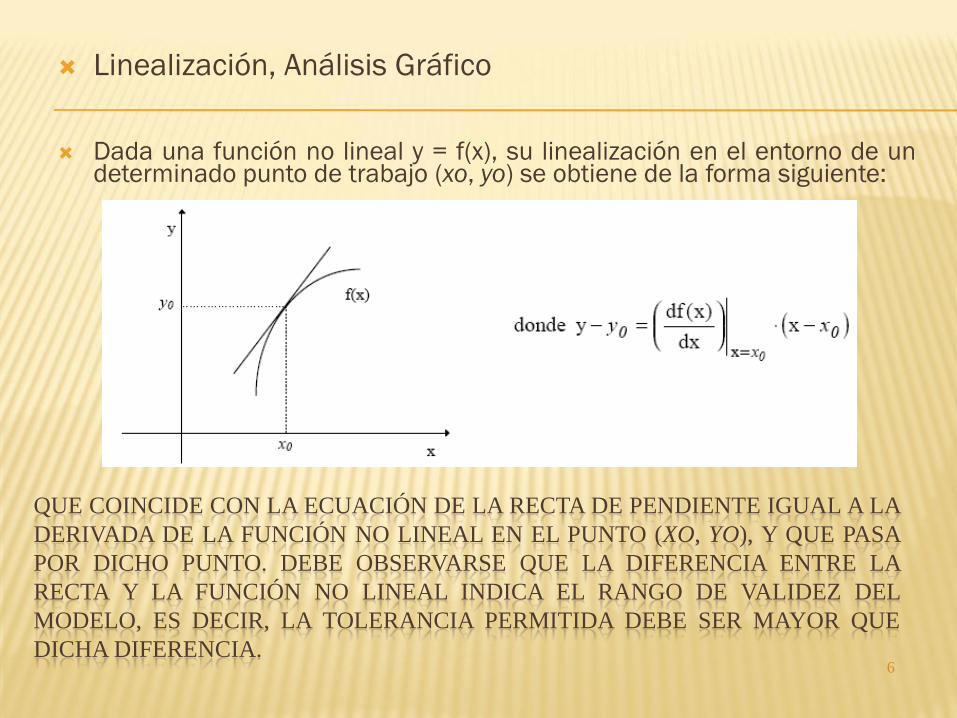
QUE COINCIDE CON LA ECUACIÓN DE LA RECTA DE PENDIENTE IGUAL A LA
DERIVADA DE LA FUNCIÓN NO LINEAL EN EL PUNTO (XO, YO), Y QUE PASA
POR DICHO PUNTO. DEBE OBSERVARSE QUE LA DIFERENCIA ENTRE LA
RECTA Y LA FUNCIÓN NO LINEAL INDICA EL RANGO DE VALIDEZ DEL
MODELO, ES DECIR, LA TOLERANCIA PERMITIDA DEBE SER MAYOR QUE
DICHA DIFERENCIA.
Linealización, Análisis Gráfico
Dada una función no lineal y = f(x), su linealización en el entorno de un determinado punto de trabajo (xo, yo) se obtiene de la forma siguiente:
6
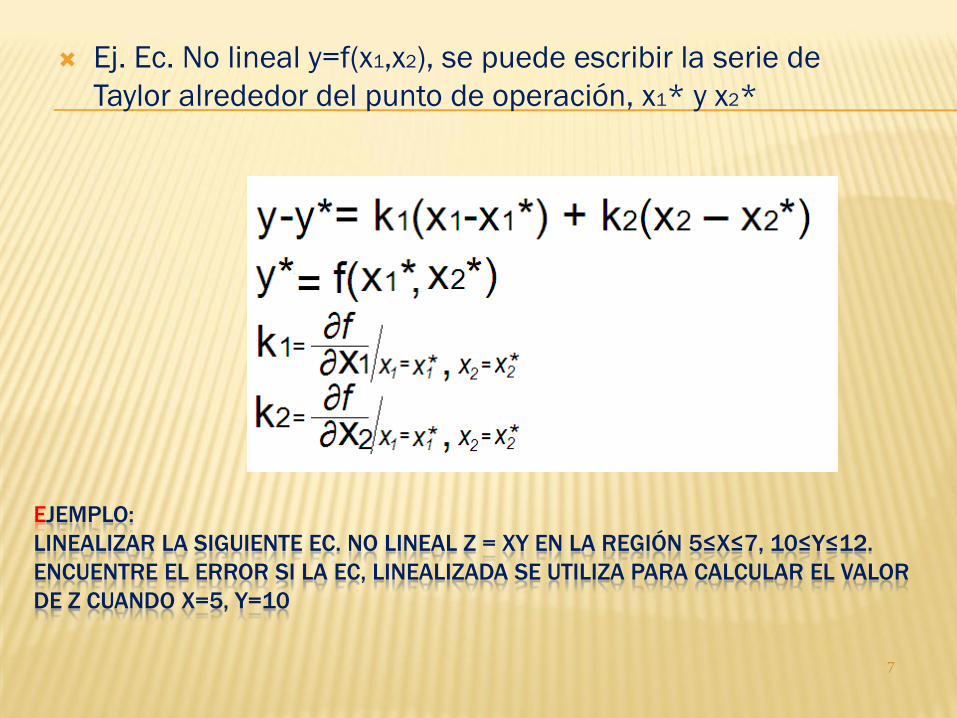
EJEMPLO:
LINEALIZAR LA SIGUIENTE EC. NO LINEAL Z = XY EN LA REGIÓN 5≤X≤7, 10≤Y≤12.
ENCUENTRE EL ERROR SI LA EC, LINEALIZADA SE UTILIZA PARA CALCULAR EL VALOR
DE Z CUANDO X=5, Y=10
Ej. Ec. No lineal y=f(x1,x2), se puede escribir la serie de
Taylor alrededor del punto de operación, x1* y x2*
7
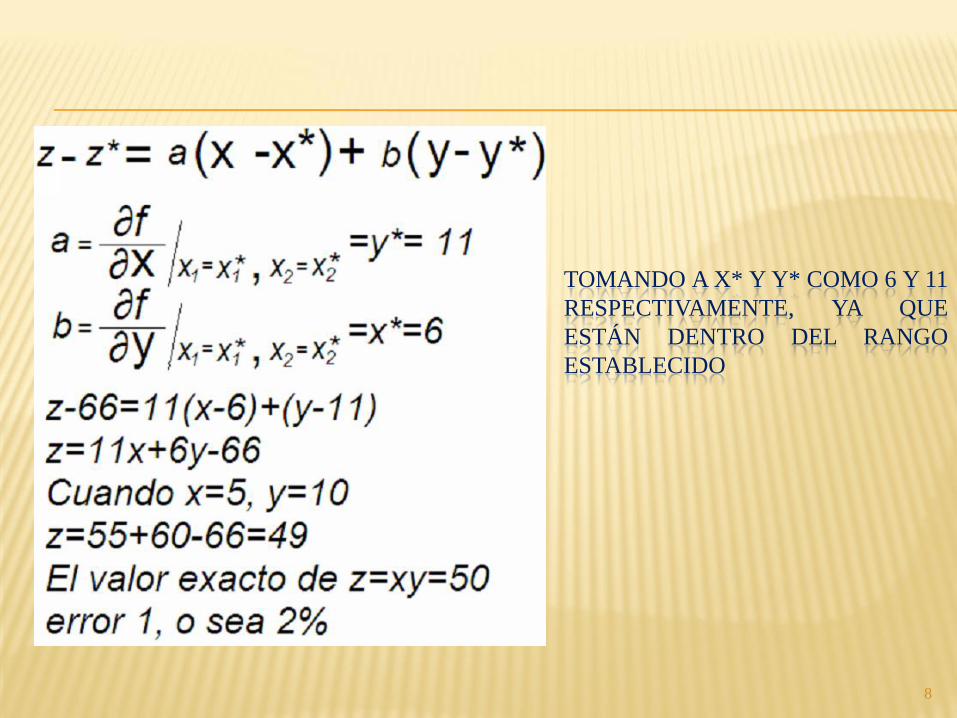
TOMANDO A X* Y Y* COMO 6 Y 11
RESPECTIVAMENTE, YA QUE
ESTÁN DENTRO DEL RANGO
ESTABLECIDO
8
REVISIÓN DE VARIABLES Y FUNCIONES COMPLEJAS
Numero complejo S= σ + jω, donde σ, ω son constantes
Variable compleja S= σ + jω, donde σ, ω son variables
Función compleja G(s) = Gx + jGy donde Gx y Gy son cantidades reales
|G(s)|= √(G²x + G²y)
θG(s) =Tanˉ¹(Gy/Gx) se mide antihorario
Complejo conjugado G*(s)=Gx -jGy
9
Los puntos en el plano s en los cuales G(s) es analítica se denominan
puntos ORDINARIOS
Los puntos en los cuales no es analítica se llaman puntos SINGULARES
Los puntos singulares en los cuales G(s) o sus derivadas tiendan al
infinito son POLOS
Los puntos singulares en los cuales G(s) es cero se llaman CEROS
10
MAPEO DE VALORES SIMPLES DESDE EL PLANO S AL PLANO G(S)
11
Si para cada valor de s existe solo un valor correspondiente de G(s) en el plano
G(s), se dice que G(s) es una función univaluada, y el mapeo de los puntos en
el plano s dentro de los
puntos en el plano G(s) se describe como un solo valor.
Si el mapeo desde el plano G(s) al plano s también es un valor sencillo, el
mapeo se denomina uno a uno.
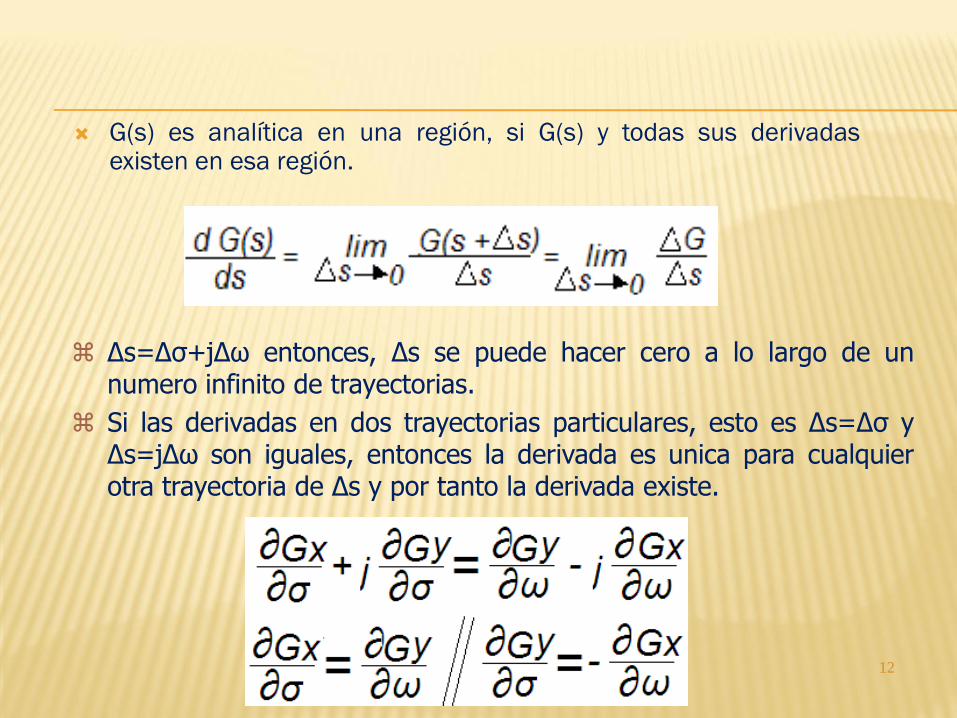
G(s) es analítica en una región, si G(s) y todas sus derivadas existen en esa región.
12
∆s=∆σ+j∆ω entonces, ∆s se puede hacer cero a lo largo de un numero infinito de trayectorias.
Si las derivadas en dos trayectorias particulares, esto es ∆s=∆σ y ∆s=j∆ω son iguales, entonces la derivada es unica para cualquier otra trayectoria de ∆s y por tanto la derivada existe.
EJEMPLO
La ecuación dada es analítica en cada punto en el plano, excepto
en los puntos s=0 y s=-1
13
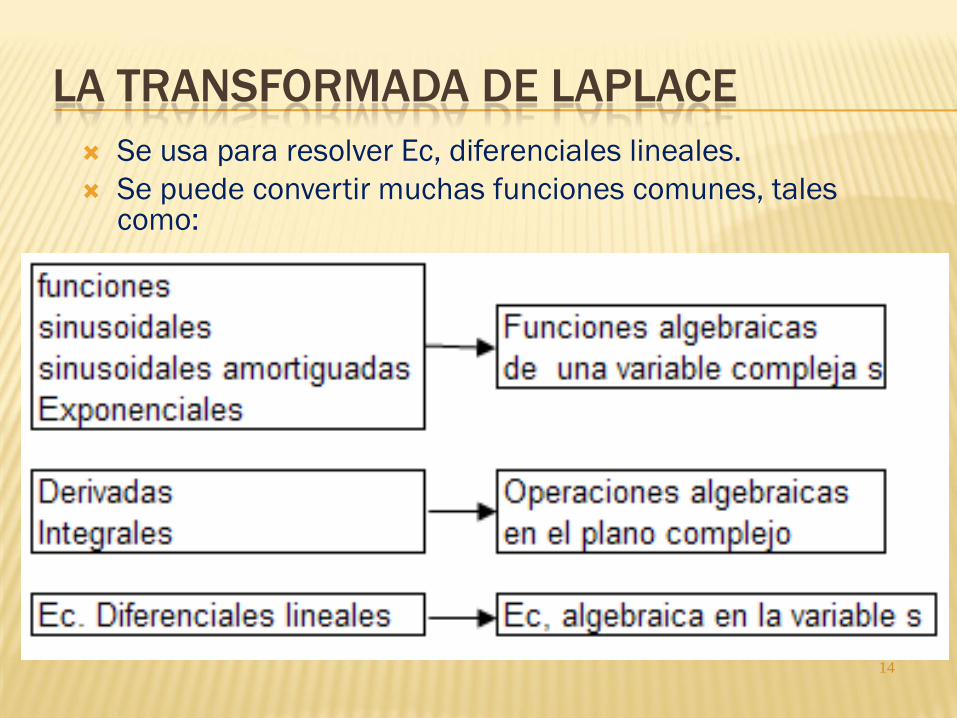
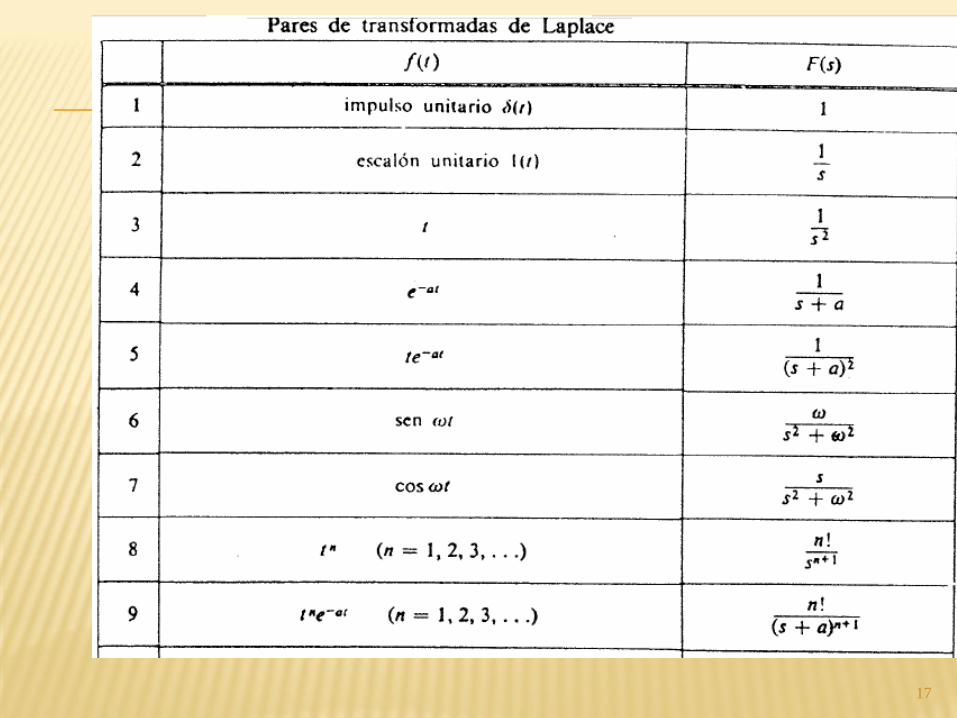
LA TRANSFORMADA DE LAPLACE
Se usa para resolver Ec, diferenciales lineales.
Se puede convertir muchas funciones comunes, tales como:
14
LAPLACE
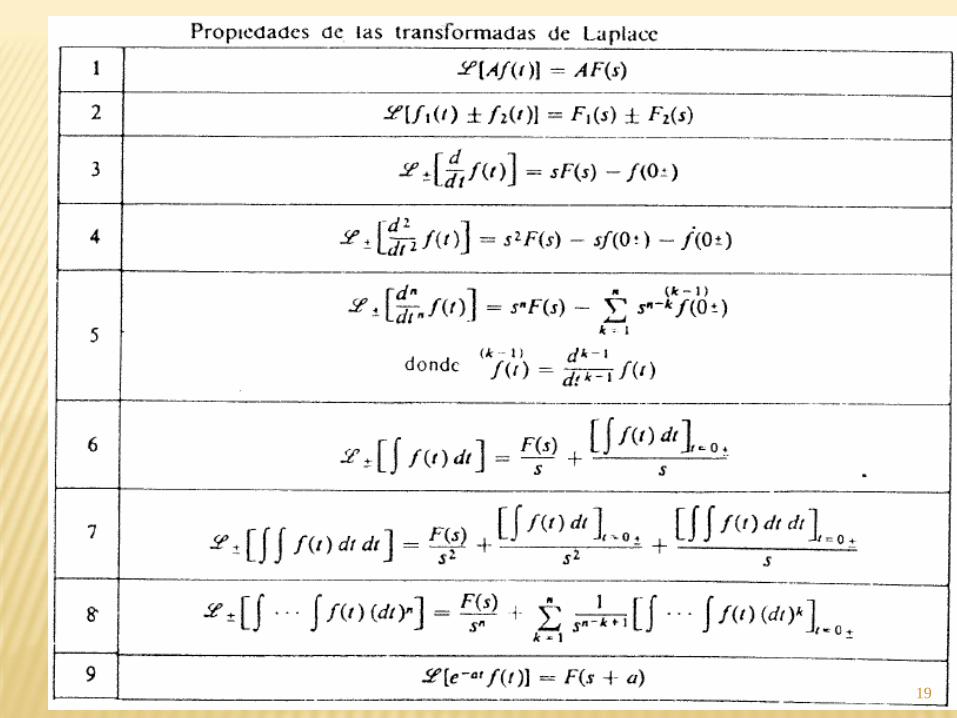
Ventajas del método de Laplace es que permite el uso de técnicas
graficas para predecir el comportamiento del sistema sin resolver la
Ec, diferencial.
Se puede obtener simultáneamente tanto la componente transitoria
como la estacionaria de la solución.
15
TRANSFORMADA DE LAPLACE
Sean:
f(t)= una función del tiempo t tal que f(t)=0 para t<0
s= una variable compleja
F(s) = transformada de Laplace de f(t)
L= un operativo que indica que la cantidad a la que
antecede se va ha transformar, mediante la integral
16
17
18
19
20
21
22

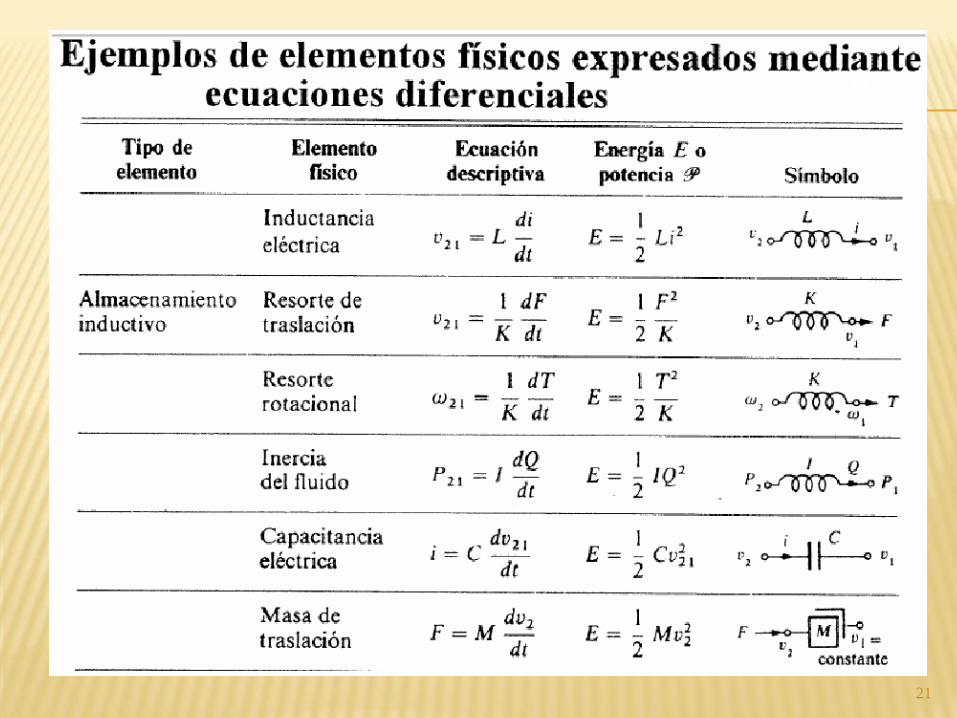
Almacenamiento inductivo:
L=inductancia, 1/k=rigidez reciproca de traslación o rotación, I=inercia del fluido
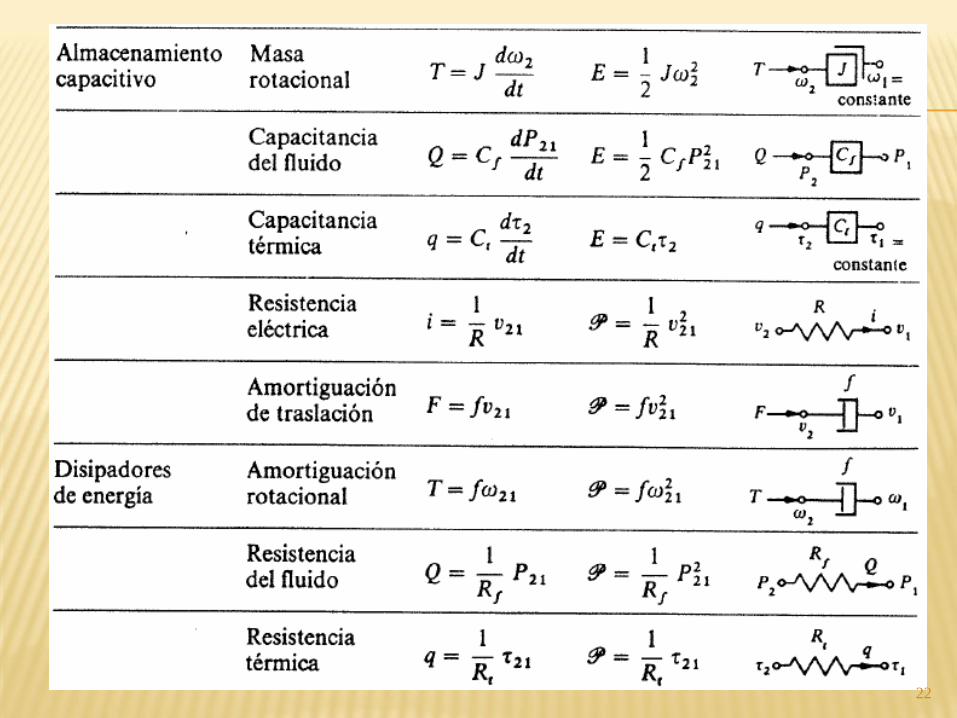
Almacenamiento capacitivo:
C=capacitancia, M=masa, J=momento de inercia, Cf=capacitancia del fluido, Ct=capacitancia térmica.
Disipadores de energía:
R=resistencia, b=friccion viscosa, Rf=resistencia del fluido, Rt=resistencia térmica.
V(t) se usa para voltaje en sistemas eléctricos y para velocidad en sistemas de traslación.
23
24
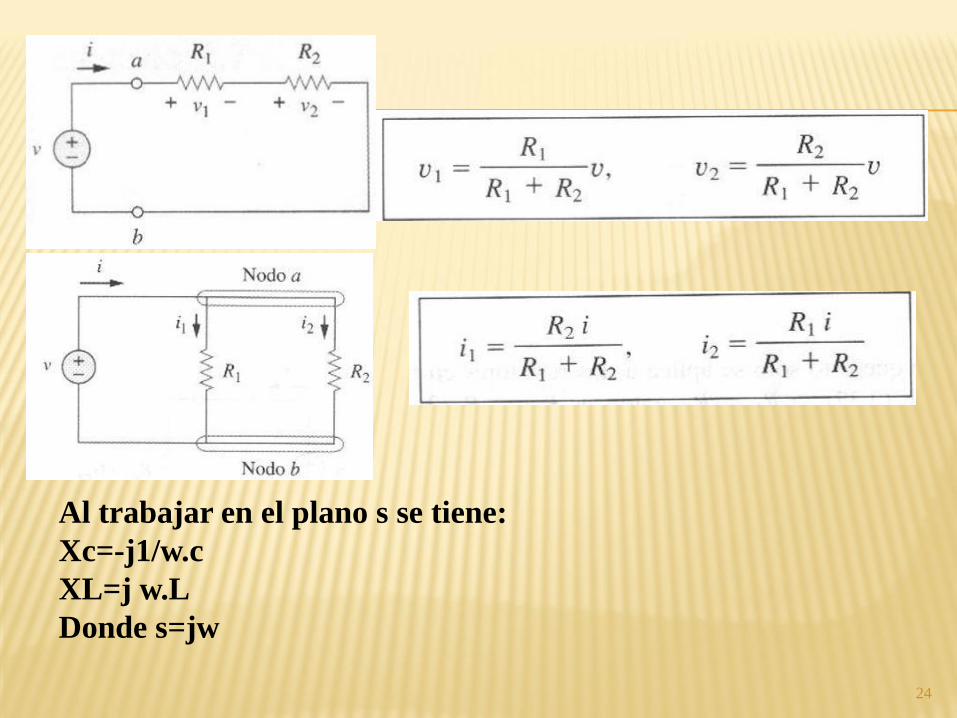
Al trabajar en el plano s se tiene:
Xc=-j1/w.c
XL=j w.L
Donde s=jw
25
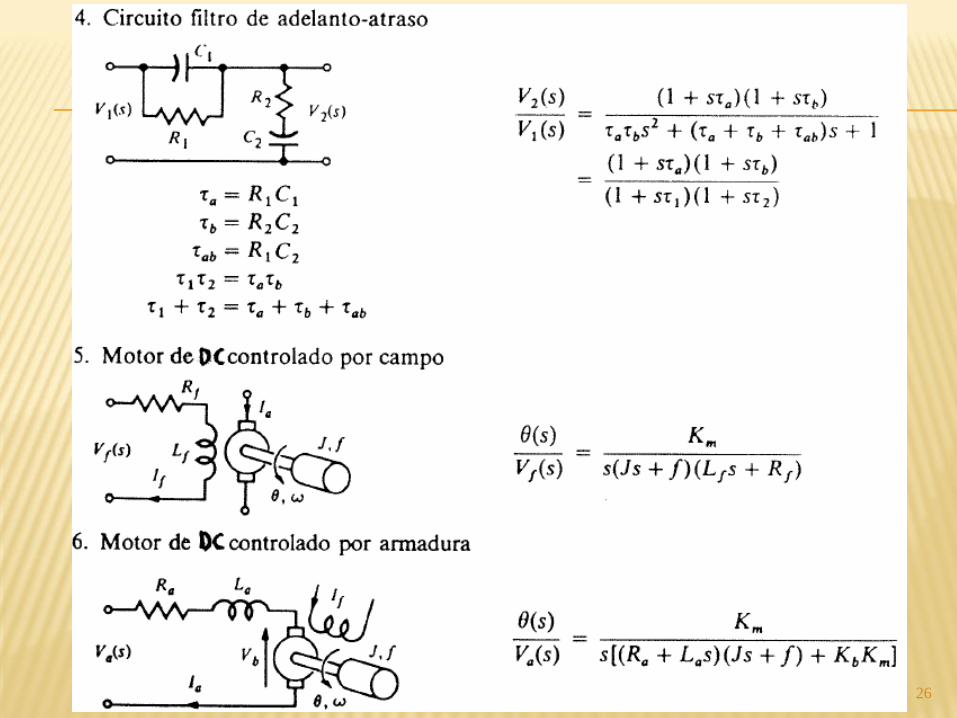
26
27
28
29

FUNCIÓN DE TRANSFERENCIA Y DE RESPUESTA-IMPULSO
Función de transferencia
Se define como el cociente entre la transformada de Laplace de la
salida y la transformada de la Laplace de la entrada, bajo la
suposición de que todas las C.I son cero. (donde n>=m)
30
31
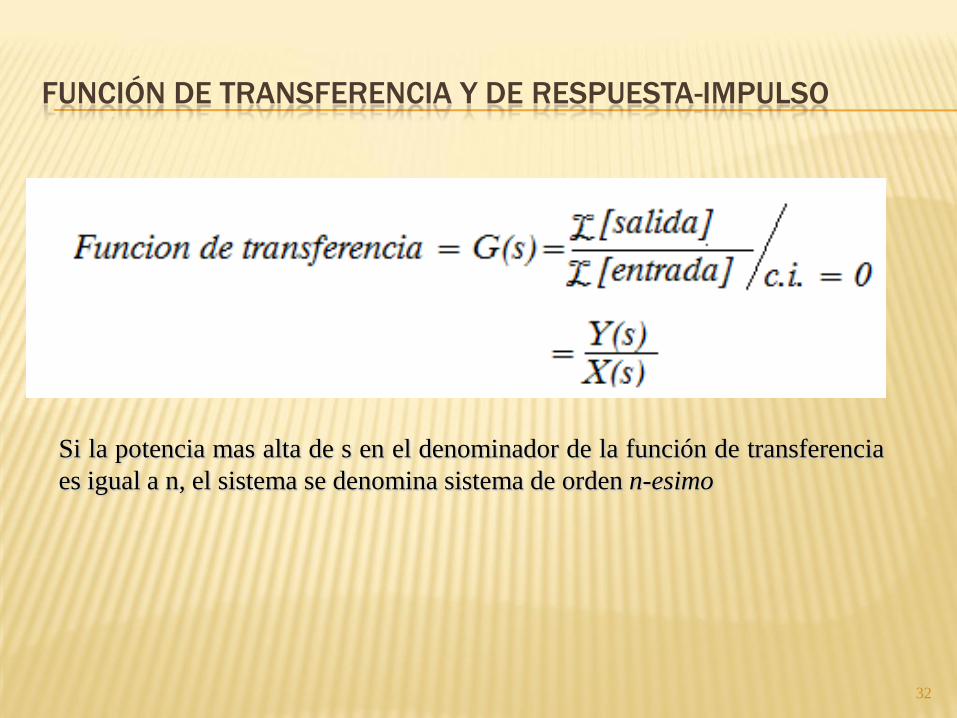
FUNCIÓN DE TRANSFERENCIA Y DE RESPUESTA-IMPULSO
32
Si la potencia mas alta de s en el denominador de la función de transferencia
es igual a n, el sistema se denomina sistema de orden n-esimo